- java.lang.Object
-
- gov.nih.mipav.model.algorithms.NMSimplex
-
public abstract class NMSimplex
extends java.lang.Object
Example
public class Objfunc implements Objfun
{
public double evalObjfun(double x[]){
return (100*(x[1]-x[0]*x[0])*(x[1]-x[0]*x[0])+(1.0-x[0])*(1.0-x[0]));
}
}
public class Constraint implements Constraints
{
double round2(double num, int precision)
{
double rnum;
int tnum;
rnum = num*Math.pow(10,precision);
tnum = (int)(rnum < 0 ? rnum-0.5 : rnum + 0.5);
rnum = tnum/Math.pow(10,precision);
return rnum;
}
public void getConstrainedValues(double x[], int n) {
// round to 2 decimal places
int i;
for (i=0; i
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) static double |
ALPHA |
|
(package private) static double |
BETA |
|
private boolean |
display |
|
private double |
EPSILON |
|
(package private) static double |
GAMMA |
|
(package private) static int |
MAX_IT |
|
private int |
n |
|
private double |
scale |
|
private double[] |
start |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
NMSimplex(double[] start,
int n,
double EPSILON,
double scale,
boolean display) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
start
private double[] start
-
EPSILON
private double EPSILON
-
scale
private double scale
-
display
private boolean display
-
Constructor Detail
-
NMSimplex
public NMSimplex(double[] start,
int n,
double EPSILON,
double scale,
boolean display)
-
Method Detail
-
driver
public void driver()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Tps.html������������������������������������������������������0000775�4231163�4231163�00000024716�14537076056�021625� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Tps (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Tps
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Tps() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BrownBadlyScaledFunction.html������������������������0000775�4231163�4231163�00000034045�14537076053�030075� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BrownBadlyScaledFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMSER.html���������������������������������������������������0000775�4231163�4231163�00000110561�14537076047�022533� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMSER (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMSER(ModelImage srcImage,
double delta,
double max_area,
double min_area,
double max_variation,
double min_diversity,
boolean bright_on_dark,
boolean dark_on_bright,
int outputVOIType) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
delta
private double delta
-
max_area
private double max_area
-
min_area
private double min_area
-
data
private short[] data
-
sliceSize
private int sliceSize
-
Constructor Detail
-
AlgorithmMSER
public AlgorithmMSER(ModelImage srcImage,
double delta,
double max_area,
double min_area,
double max_variation,
double min_diversity,
boolean bright_on_dark,
boolean dark_on_bright,
int outputVOIType)
-
Method Detail
-
adv
private void adv(int ndims,
int[] dims,
int[] subs)
Advance N-dimensional subscript
- Parameters:
ndims - dims - subs - subscript to advance
-
climb
private int climb(AlgorithmMSER.VlMserReg[] r,
int idx)
Climb the region forest to reach a root
The function climbs the regions' forest r[] starting from the node idx to the corresponding root.
To speed-up the operation, the function uses the
VlMserReg::shortcut field to quickly jump to the root. After the root is reached, all the used
shortcuts are updated.
- Parameters:
r - regions' forestidx - starting node- Returns:
- index of the reached root.
�����������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens5.html���������������������������������0000775�4231163�4231163�00000030414�14537076055�026170� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens5 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens5(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens5
public FitPiessens5(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DenseQRSolver.html���������������������������������������0000775�4231163�4231163�00000053636�14537076051�025051� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DenseQRSolver (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private Jama.Matrix |
lhs_ |
|
private double[] |
rhs_ |
|
private double[] |
work_ |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
CeresSolver.LinearSolverSummary |
Solve(CeresSolver.LinearOperator A,
double[] b,
CeresSolver.LinearSolverPerSolveOptions per_solve_options,
double[] x) |
|
CeresSolver.LinearSolverSummary |
SolveImpl(CeresSolver.DenseSparseMatrix A,
double[] b,
CeresSolver.LinearSolverPerSolveOptions per_solve_options,
double[] x) |
|
private CeresSolver.LinearSolverSummary |
SolveUsingEigen(CeresSolver.DenseSparseMatrix A,
double[] b,
CeresSolver.LinearSolverPerSolveOptions per_solve_options,
double[] x) |
|
private CeresSolver.LinearSolverSummary |
SolveUsingLAPACK(CeresSolver.DenseSparseMatrix A,
double[] b,
CeresSolver.LinearSolverPerSolveOptions per_solve_options,
double[] x) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
lhs_
private Jama.Matrix lhs_
-
rhs_
private double[] rhs_
-
work_
private double[] work_
��������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/BlindDeblur.Pair.html������������������������������������������������0000775�4231163�4231163�00000034267�14537076051�023201� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BlindDeblur.Pair (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.BlindDeblur.Pair<T,U>
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Pair(T t,
U u) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, finalize, getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
Pair
public Pair(T t,
U u)
-
Method Detail
-
getFirst
public T getFirst()
-
getSecond
public U getSecond()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.DefaultColorScheme.html����������������������������������0000775�4231163�4231163�00000042732�14537076053�026116� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.DefaultColorScheme (MIPAV API Documentation)
-
-
Enum Constant Summary
Enum Constants
| Enum Constant |
Description |
DARK |
|
LIGHT |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static ContourPlot.DefaultColorScheme valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
��������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.PixelBase.html�������������������������������������������0000775�4231163�4231163�00000107346�14537076054�024266� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.PixelBase (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Abstract Methods Default Methods
| Modifier and Type |
Method |
Description |
double |
a_asDouble() |
Returns the alpha value of this pixel at its current position.
|
default java.lang.String |
asString() |
Returns a String representation of this pixel at its current position.
|
double |
b_asDouble() |
Returns the blue value of this pixel at its current position.
|
double |
g_asDouble() |
Returns the green value of this pixel at its current position.
|
int |
getIndex() |
Returns this pixel's index.
|
ContourPlot.ImgBase<?> |
getSource() |
Returns the underlying image of this pixel (the image referenced by this pixel)
|
int |
getX() |
|
default double |
getXnormalized() |
Returns the normalized x coordinate of this Pixel.
|
int |
getY() |
|
default double |
getYnormalized() |
Returns the normalized y coordinate of this Pixel.
|
double |
r_asDouble() |
Returns the red value of this pixel at its current position.
|
ContourPlot.PixelBase |
setA_fromDouble(double a) |
Sets the alpha value of this pixel at its current position with 0.0 as fully transparent and 1.0 as fully opaque.
|
default ContourPlot.PixelBase |
setARGB_fromDouble(double a,
double r,
double g,
double b) |
Sets the alpha, red, green and blue value of this pixel.
|
ContourPlot.PixelBase |
setB_fromDouble(double b) |
Sets the blue value of this pixel at its current position with 0.0 as no blue contribution and 1.0 as full blue contribution.
|
ContourPlot.PixelBase |
setG_fromDouble(double g) |
Sets the green value of this pixel at its current position with 0.0 as no green contribution and 1.0 as full green contribution.
|
ContourPlot.PixelBase |
setIndex(int index) |
Sets the index of this pixel and thus its position.
|
ContourPlot.PixelBase |
setPosition(int x,
int y) |
Sets the position of this pixel to the specified coordinates.
|
ContourPlot.PixelBase |
setR_fromDouble(double r) |
Sets the red value of this pixel at its current position with 0.0 as no red contribution and 1.0 as full red contribution.
|
default ContourPlot.PixelBase |
setRGB_fromDouble(double r,
double g,
double b) |
Sets the red, green and blue value of this pixel.
|
default ContourPlot.PixelBase |
setRGB_fromDouble_preserveAlpha(double r,
double g,
double b) |
Sets the red, green and blue value of this pixel.
|
-
-
Method Detail
-
setARGB_fromDouble
default ContourPlot.PixelBase setARGB_fromDouble(double a,
double r,
double g,
double b)
Sets the alpha, red, green and blue value of this pixel.
Assumed minimum and maximum value for each channel is 0.0 and 1.0
but values may exceed [0,1] range depending on implementation.
- Parameters:
a - alpha value (0=transparent, 1=opaque)r - red valueg - green valueb - blue value- Returns:
- this pixel for chaining.
- See Also:
setRGB_fromDouble_preserveAlpha(double, double, double),
setRGB_fromDouble(double, double, double)
-
setRGB_fromDouble
default ContourPlot.PixelBase setRGB_fromDouble(double r,
double g,
double b)
Sets the red, green and blue value of this pixel.
The alpha value is set to 1.0 (opaque) if the underlying image supports alpha.
Assumed minimum and maximum value for each channel is 0.0 and 1.0
but values may exceed [0,1] range depending on implementation.
- Parameters:
r - red valueg - green valueb - blue value- Returns:
- this pixel for chaining.
- See Also:
setARGB_fromDouble(double, double, double, double),
setRGB_fromDouble_preserveAlpha(double, double, double)
-
setRGB_fromDouble_preserveAlpha
default ContourPlot.PixelBase setRGB_fromDouble_preserveAlpha(double r,
double g,
double b)
Sets the red, green and blue value of this pixel.
The alpha value is preserved.
Assumed minimum and maximum value for each channel is 0.0 and 1.0
but values may exceed [0,1] range depending on implementation.
- Parameters:
r - red valueg - green valueb - blue value- Returns:
- this pixel for chaining.
- See Also:
setARGB_fromDouble(double, double, double, double),
setRGB_fromDouble(double, double, double)
-
getXnormalized
default double getXnormalized()
Returns the normalized x coordinate of this Pixel.
This will return 0 for Pixels at the left boundary and 1 for Pixels
at the right boundary of the Img.
For Img's that are only 1 Pixel wide, NaN is returned.
- Returns:
- normalized x coordinate within [0..1]
- See Also:
getX(),
getYnormalized(),
setPosition(int, int),
getIndex(),
setIndex(int)
-
getYnormalized
default double getYnormalized()
Returns the normalized y coordinate of this Pixel.
This will return 0 for Pixels at the upper boundary and 1 for Pixels
at the lower boundary of the Img.
For Img's that are only 1 Pixel high, NaN is returned.
- Returns:
- normalized y coordinate within [0..1]
- See Also:
getY(),
getXnormalized(),
setPosition(int, int),
getIndex(),
setIndex(int)
-
getIndex
int getIndex()
Returns this pixel's index.
The index relates to the pixels's position in the following way:
index = y * width + x
y = index / width
x = index % width
- Returns:
- index of this pixel
- See Also:
setIndex(int),
getX(),
getY()
-
setPosition
ContourPlot.PixelBase setPosition(int x,
int y)
Sets the position of this pixel to the specified coordinates.
Positions outside of the underlying images boundaries are not allowed
but not necessarily enforced either. Accessing image data with a position
outside of the boundaries may cause an Exception.
- Parameters:
x - coordinate (0 left most, width-1 right most)y - coordinate (0 top most, height-1 bottom most)- Returns:
- this pixel for chaining
- See Also:
getX(),
getY(),
setIndex(int)
-
asString
default java.lang.String asString()
Returns a String representation of this pixel at its current position.
The returned String has the following pattern:
Pixelclass[a:alpha r:red g:green b:blue]@(x,y)
- Returns:
- string representation of this pixel at its current position
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/JacobianElliptic.html������������������������������������������������0000775�4231163�4231163�00000070516�14537076055�023316� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
JacobianElliptic (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.JacobianElliptic
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
CN |
|
static int |
COMPLEX_VERSION |
|
static int |
DN |
|
private double[] |
dph |
phi (in degrees)
|
private double[] |
ecn |
cn (u, hk)
|
private double[] |
edn |
dn (u, hk)
|
private double[] |
esd |
sd (u, hk) = sn (u, hk)/ dn(u, hk)
|
private double[] |
esn |
sn (u, hk)
|
private double |
hk |
Input modulus
|
private double[] |
imagResult |
|
private double |
imagZ |
|
private int |
kind |
|
static int |
REAL_VERSION |
|
private double[] |
realResult |
outputted result
|
private double |
realZ |
Input argument
|
static int |
SD |
|
static int |
SN |
|
private double |
u |
Input argument
|
private int |
version |
Tells whether real number or complex number version
|
-
Constructor Summary
Constructors
| Constructor |
Description |
JacobianElliptic() |
|
JacobianElliptic(double u,
double hk,
double[] esn,
double[] ecn,
double[] edn,
double[] esd,
double[] dph) |
|
JacobianElliptic(double realZ,
double imagZ,
double hk,
int kind,
double[] realResult,
double[] imagResult) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
complexArgument() |
From Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables edited by Milton
Abramowitz and Irene A.
|
void |
finalize() |
Cleanup memory.
|
private void |
realArgument() |
This is a port of subroutine JELP from Computation of Special Functions by Shanjie Zhang and Jianming Jin, pp.
671-672.
|
void |
run() |
|
void |
testrealArgument() |
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
private void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
esn
private double[] esn
sn (u, hk)
-
ecn
private double[] ecn
cn (u, hk)
-
edn
private double[] edn
dn (u, hk)
-
dph
private double[] dph
phi (in degrees)
-
u
private double u
Input argument
-
hk
private double hk
Input modulus
-
realZ
private double realZ
Input argument
-
imagZ
private double imagZ
-
Constructor Detail
-
JacobianElliptic
public JacobianElliptic(double u,
double hk,
double[] esn,
double[] ecn,
double[] edn,
double[] esd,
double[] dph)
- Parameters:
u - input argumenthk - input modulus 0 <= hk <= 1sn - outputted sn functioncn - outputted cn functiondn - outputted dn functionsd - outputted sd functiondphi - outputted phi in degrees
-
JacobianElliptic
public JacobianElliptic(double realZ,
double imagZ,
double hk,
int kind,
double[] realResult,
double[] imagResult)
- Parameters:
realZ - input real part of argumentimagZ - input imaginary part of argumenthk - input modulus 0 <= hk <= 1kind - Type of function to returnrealResult - real part of outputted resultimagResult - imaginary part of outputted result
-
Method Detail
-
realArgument
private void realArgument()
This is a port of subroutine JELP from Computation of Special Functions by Shanjie Zhang and Jianming Jin, pp.
671-672. Computes Jacobian elliptic functions sn(u, hk), cn(u, hk), dn(u,hk) and sd(u, hk)
-
complexArgument
private void complexArgument()
From Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables edited by Milton
Abramowitz and Irene A. Stegun, Chapter 16 Jacobian Elliptic Functions and Theta Functions, Section 16.21 Complex
Arguments s = sn(realZ|hk), c = cn(realZ|hk), d = dn(realZ|hk) hkp = sqrt(1 - hk*hk) s1 = sn(imagZ|hkp), c1 =
cn(imagZ|hkp), d1 = dn(imagZ|hkp) sn(realZ + i*imagZ|hk) = (s*d1 + i*c*d*s1*c1)/(c1*c1 + m*s*s*s1*s1) cn(realZ +
i*imagZ|hk) = (c*c1 - i*s*d*s1*d1)/(c1*c1 + m*s*s*s1*s1) dn(realZ + i*imagZ|hk) = (d*c1*d1 - i*m*s*c*s1)/(c1*c1 +
m*s*s*s1*s1)
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zdiv
private void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmLLE.distanceIndexComparator.html����������������������������0000775�4231163�4231163�00000027212�14537076047�027212� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLLE.distanceIndexComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmLLE.distanceIndexComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEmbeddedConfidenceEdgeDetection.BgImage.html����������������0000775�4231163�4231163�00000031473�14537076045�031354� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEmbeddedConfidenceEdgeDetection.BgImage (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgImage
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) boolean |
colorIm_ |
|
(package private) boolean |
hasIm_ |
|
(package private) short[] |
im_ |
|
(package private) int |
x_ |
|
(package private) int |
y_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
BgImage(int x,
int y,
boolean colorIm) |
|
BgImage(short[] im,
int x,
int y,
boolean colorIm) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
colorIm_
boolean colorIm_
-
Method Detail
-
cleanData
public void cleanData()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/OpenCLInfo.html������������������������������������������������������0000775�4231163�4231163�00000040305�14537076056�022050� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OpenCLInfo (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.OpenCLInfo
-
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private static void |
cell(java.lang.StringBuilder sb,
int span,
java.lang.String value,
boolean header) |
Adds the property values to the StringBuilder table, using the span for spacing.
|
private static void |
cell(java.lang.StringBuilder sb,
java.lang.String value) |
Adds the property name to the StringBuilder table.
|
private static java.lang.String |
createOpenCLInfoHTML() |
Creates the table displayed in the information dialog.
|
private static void |
fillTable(java.util.List<java.lang.String> keys,
java.util.List<java.util.Properties> properties,
java.lang.StringBuilder sb) |
Calculates the spans in order to fill in a StringBuilder table with a list of keys, properties.
|
private static void |
fillTable(java.util.List<java.lang.String> keys,
java.util.List<java.util.Properties> properties,
java.util.List<java.lang.Integer> spans,
java.lang.StringBuilder sb) |
Fills in a StrinBuilder table with a list of keys, properties, and spans.
|
static void |
getMaxMemSize(long inputDeviceType,
long[] memSizeArray) |
|
static void |
main(java.lang.String[] args) |
Queries the OpenCL Platforms and launches an information dialog with the OpenCL Platform and Device information:
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
OpenCLInfo
public OpenCLInfo()
-
Method Detail
-
createOpenCLInfoHTML
private static java.lang.String createOpenCLInfoHTML()
Creates the table displayed in the information dialog. First column is the platform property name, second (+) columns contain the values
for each platform and device.
- Returns:
- string version of the table.
-
fillTable
private static void fillTable(java.util.List<java.lang.String> keys,
java.util.List<java.util.Properties> properties,
java.lang.StringBuilder sb)
Calculates the spans in order to fill in a StringBuilder table with a list of keys, properties.
- Parameters:
keys - property namesproperties - property valuessb - table
-
fillTable
private static void fillTable(java.util.List<java.lang.String> keys,
java.util.List<java.util.Properties> properties,
java.util.List<java.lang.Integer> spans,
java.lang.StringBuilder sb)
Fills in a StrinBuilder table with a list of keys, properties, and spans.
- Parameters:
keys - property namesproperties - property valuesspans - spans for spacing the table cellssb - table
-
cell
private static void cell(java.lang.StringBuilder sb,
java.lang.String value)
Adds the property name to the StringBuilder table.
- Parameters:
sb - tablevalue - property name
-
cell
private static void cell(java.lang.StringBuilder sb,
int span,
java.lang.String value,
boolean header)
Adds the property values to the StringBuilder table, using the span for spacing.
- Parameters:
sb - tablespan - amount of spacingvalue - property valueheader - when true the cell is a header, so use a bold.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSpectralClustering.html�������������������������������������0000775�4231163�4231163�00000112674�14537076050�025603� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSpectralClustering (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmSpectralClustering(ModelImage image,
double[][] pos,
double[] scale,
int[] groupNum,
double[][] centroidPos,
java.lang.String resultsFileName,
float[] redBuffer,
float[] greenBuffer,
float[] blueBuffer,
double scaleMax,
boolean scaleVariablesToUnitVariance) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
scale
private double[] scale
-
pos
private double[][] pos
-
groupNum
private int[] groupNum
-
scaleMax
private double scaleMax
-
nPoints
private int nPoints
-
scale2
private double[] scale2
-
abstol
private double abstol
-
work
private double[] work
-
iwork
private int[] iwork
-
ifail
private int[] ifail
-
found
private boolean[] found
-
Constructor Detail
-
AlgorithmSpectralClustering
public AlgorithmSpectralClustering(ModelImage image,
double[][] pos,
double[] scale,
int[] groupNum,
double[][] centroidPos,
java.lang.String resultsFileName,
float[] redBuffer,
float[] greenBuffer,
float[] blueBuffer,
double scaleMax,
boolean scaleVariablesToUnitVariance)
-
Method Detail
-
selfTest
private void selfTest()
��������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.Cache.html����������������������������������������������������0000775�4231163�4231163�00000036004�14537076055�022112� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.Cache (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LIBSVM.Cache
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Cache(int l_,
long size_) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ProblemImpl.html�����������������������������������������0000775�4231163�4231163�00000164372�14537076052�024600� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ProblemImpl (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
AddParameterBlock(double[] values,
int size) |
|
void |
AddParameterBlock(double[] values,
int size,
CeresSolver.LocalParameterization local_parameterization) |
|
CeresSolver.ResidualBlock |
AddResidualBlock(CeresSolver.CostFunction cost_function,
CeresSolver.LossFunction loss_function,
double[] x0) |
|
CeresSolver.ResidualBlock |
AddResidualBlock(CeresSolver.CostFunction cost_function,
CeresSolver.LossFunction loss_function,
double[] x0,
double[] x1) |
|
CeresSolver.ResidualBlock |
AddResidualBlock(CeresSolver.CostFunction cost_function,
CeresSolver.LossFunction loss_function,
double[] x0,
double[] x1,
double[] x2) |
|
CeresSolver.ResidualBlock |
AddResidualBlock(CeresSolver.CostFunction cost_function,
CeresSolver.LossFunction loss_function,
double[] x0,
double[] x1,
double[] x2,
double[] x3) |
|
CeresSolver.ResidualBlock |
AddResidualBlock(CeresSolver.CostFunction cost_function,
CeresSolver.LossFunction loss_function,
double[] x0,
double[] x1,
double[] x2,
double[] x3,
double[] x4) |
|
CeresSolver.ResidualBlock |
AddResidualBlock(CeresSolver.CostFunction cost_function,
CeresSolver.LossFunction loss_function,
double[] x0,
double[] x1,
double[] x2,
double[] x3,
double[] x4,
double[] x5) |
|
CeresSolver.ResidualBlock |
AddResidualBlock(CeresSolver.CostFunction cost_function,
CeresSolver.LossFunction loss_function,
java.util.Vector<double[]> parameter_blocks) |
|
CeresSolver.Context |
context() |
|
void |
DeleteBlock(CeresSolver.ParameterBlock parameter_block) |
|
void |
DeleteBlock(CeresSolver.ResidualBlock residual_block) |
|
void |
DeleteBlockInVector(java.util.Vector<CeresSolver.ParameterBlock> mutable_blocks,
CeresSolver.ParameterBlock block_to_remove) |
|
void |
DeleteBlockInVector(java.util.Vector<CeresSolver.ResidualBlock> mutable_blocks,
CeresSolver.ResidualBlock block_to_remove) |
|
boolean |
Evaluate(CeresSolver.EvaluateOptions evaluate_options,
double[] cost,
java.util.Vector<java.lang.Double> residuals,
java.util.Vector<java.lang.Double> gradient,
CeresSolver.CRSMatrix jacobian) |
|
CeresSolver.CostFunction |
GetCostFunctionForResidualBlock(CeresSolver.ResidualBlock residual_block) |
|
CeresSolver.LossFunction |
GetLossFunctionForResidualBlock(CeresSolver.ResidualBlock residual_block) |
|
void |
GetParameterBlocks(java.util.Vector<double[]> parameter_blocks) |
|
CeresSolver.LocalParameterization |
GetParameterization(double[] values) |
|
void |
GetResidualBlocks(java.util.Vector<CeresSolver.ResidualBlock> residual_blocks) |
|
boolean |
HasParameterBlock(double[] parameter_block) |
|
(package private) void |
InitializeContext(CeresSolver.Context context,
CeresSolver.Context context_impl,
boolean[] context_impl_owned) |
|
(package private) CeresSolver.ParameterBlock |
InternalAddParameterBlock(double[] values,
int size) |
|
void |
InternalRemoveResidualBlock(CeresSolver.ResidualBlock residual_block) |
|
boolean |
IsParameterBlockConstant(double[] values) |
|
CeresSolver.Program |
mutable_program() |
|
int |
NumParameterBlocks() |
|
int |
NumParameters() |
|
int |
NumResidualBlocks() |
|
int |
NumResiduals() |
|
java.util.HashMap<double[],CeresSolver.ParameterBlock> |
parameter_map() |
|
int |
ParameterBlockLocalSize(double[] values) |
|
int |
ParameterBlockSize(double[] values) |
|
CeresSolver.Program |
program() |
|
void |
RemoveParameterBlock(double[] values) |
|
void |
RemoveResidualBlock(CeresSolver.ResidualBlock residual_block) |
|
java.util.HashSet<CeresSolver.ResidualBlock> |
residual_block_set() |
|
void |
SetParameterBlockConstant(double[] values) |
|
void |
SetParameterBlockVariable(double[] values) |
|
void |
SetParameterization(double[] values,
CeresSolver.LocalParameterization local_parameterization) |
|
void |
SetParameterLowerBound(double[] values,
int index,
double lower_bound) |
|
void |
SetParameterUpperBound(double[] values,
int index,
double upper_bound) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ProblemImpl
public ProblemImpl()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.ParameterSensitiveCostFunction.html������������������0000775�4231163�4231163�00000034137�14537076053�031363� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.ParameterSensitiveCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.EdgeTrait.html��������������������������������������������������0000775�4231163�4231163�00000030104�14537076056�022515� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.EdgeTrait (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
EdgeTrait() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_length
public double m_length
-
m_weight
public double m_weight
-
m_sharp
public boolean m_sharp
-
Constructor Detail
-
EdgeTrait
public EdgeTrait()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Keypoint_store.html�������������������������������������������0000775�4231163�4231163�00000025260�14537076056�024070� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Keypoint_store (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Keypoint_store
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Keypoint_store
public Keypoint_store()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmAutoCovariance.FitCovarianceModel.html����������������������0000775�4231163�4231163�00000042662�14537076044�030370� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAutoCovariance.FitCovarianceModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitCovarianceModel(int nPoints,
float[] xData,
float[] yData,
double[] initial) |
Creates a new FitCovarianceModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private float[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitCovarianceModel
public FitCovarianceModel(int nPoints,
float[] xData,
float[] yData,
double[] initial)
Creates a new FitCovarianceModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TypedLinearSolver.html�����������������������������������0000775�4231163�4231163�00000043000�14537076052�025751� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TypedLinearSolver (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
gov/nih/mipav/model/algorithms/libdt.DytexRegOptions.html�������������������������������������������0000775�4231163�4231163�00000041110�14537076055�024312� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.DytexRegOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
- Enclosing class:
- libdt
public class libdt.DytexRegOptions
extends java.lang.Object
Class for specifying the regularization methods for a Dytex. \sa CovMatrix,
Dytex, DytexOptions
-
-
Constructor Summary
Constructors
| Constructor |
Description |
DytexRegOptions() |
< Regularization value for S.
|
DytexRegOptions(libdt.cov_reg_type Ropt,
double Rval,
libdt.cov_reg_type Qopt,
double Qval,
libdt.cov_reg_type Sopt,
double Sval) |
|
DytexRegOptions(libdt.cov_reg_type Ropt,
double Rval,
libdt.cov_reg_type Qopt,
double Qval,
libdt.cov_reg_type Sopt,
double Sval,
libdt.cov_reg_type Aopt,
double Aval) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.VertexInHalfedgeIterator.html�����������������������������������0000775�4231163�4231163�00000033760�14537076056�025556� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.VertexInHalfedgeIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.VertexInHalfedgeIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������gov/nih/mipav/model/algorithms/StochasticForests.PredictionType.html��������������������������������0000775�4231163�4231163�00000034550�14537076057�026535� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.PredictionType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
PredictionType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
PredictionType
private PredictionType()
-
Method Detail
-
valueOf
public static StochasticForests.PredictionType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
��������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGaussianMixtureModelEM.SubSig.html��������������������������0000775�4231163�4231163�00000026310�14537076046�027510� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGaussianMixtureModelEM.SubSig (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SubSig
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
cnst |
|
(package private) double[] |
means |
|
(package private) double |
N |
|
(package private) double |
pi |
|
(package private) double[][] |
R |
|
(package private) double[][] |
Rinv |
|
(package private) boolean |
used |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
SubSig() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGaussianMixtureModelEM.ClassData.html�����������������������0000775�4231163�4231163�00000025071�14537076046�030156� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGaussianMixtureModelEM.ClassData (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassData
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
npixels |
|
(package private) double[][] |
p |
|
(package private) double |
SummedWeights |
|
(package private) double[] |
w |
|
(package private) double[][] |
x |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ClassData() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
SummedWeights
double SummedWeights
-
Constructor Detail
-
ClassData
public ClassData()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.ExpCostFunction.html���������������������������������0000775�4231163�4231163�00000033730�14537076053�026303� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.ExpCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ExpCostFunction
public ExpCostFunction()
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.MockCostFunctionBase2.html���������������������������0000775�4231163�4231163�00000041357�14537076053�027321� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.MockCostFunctionBase2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
kNumResiduals |
|
(package private) int |
N0 |
|
(package private) int |
N1 |
|
(package private) int |
N2 |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
kNumResiduals
int kNumResiduals
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTimeFitting.html��������������������������������������������0000775�4231163�4231163�00000144516�14537076050�024211� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTimeFitting (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmTimeFitting(ModelImage destImage,
ModelImage srcImage,
ModelImage exitStatusImage,
boolean useLog,
int functionFit,
int numVariables,
boolean findInitialFromData,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds) |
Creates a new AlgorithmTimeFitting object.
|
AlgorithmTimeFitting(ModelImage destImage,
ModelImage srcImage,
ModelImage exitStatusImage,
boolean useLog,
int functionFit,
int numVariables,
boolean findInitialFromData,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds,
boolean useAltTimeTag,
java.lang.String altTimeTag) |
Creates a new AlgorithmTimeFitting object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
MULTIEXPONENTIAL_FIT
private static final int MULTIEXPONENTIAL_FIT
From Exponential analysis in physical phenomena by Andrei A. Istratov and Oleg F. Vyvenko:
Note that for a multiexponential fit nonlinear least squares analysis as used here can handle nonzero baseline offsets.
However, for nonlinear least squares initial guesses are needed for the values of unknown decay parameters and, if
these initial guesses are poor, the iteration may converge to a local minimum rather than to the absolute minimum.
With Prony's method the baseline offset should be removed first.
The differentiation of transients only allows the exponent time constants to be determined. It does not allow the
amplitudes by which the exponents are multiplied to be determined. Also experimental transients are noisy, and large
errors would result from their numerical differentiation.
The method of modulating functions does not enable one to determine the amplitude of the transients and is not tolerant
to nonzero baseline offsets.
The integration method allows one to determine the baseline. However, the solution is more stable and exact if the
baseline is subtracted from the raw signal before the analysis. For the integration method, on computed two-component
decays with tau1/tau2 = 2.5 the reliable separation of components is impossible if the SNR is less than 30. For
tau1/tau2, two components can be separated for a SNR of about 10. When two-component analysis is performed with a baseline
determination the mean error of the calculated time constants increases by a factor of about 3-10.
Before the method of moments can be applied, the baseline offset must be removed from the data.
The Laplace-Pade approximation is not applicable to decays containing baseline offset.
Tolerance of the method to baseline offsets may be very important, depending on whether a baseline offset can be
encountered in the experiment. Few of the discussed techniques are tolerable of nonzero baseline offsets. Such
commonly used methods as Prony's or method of moments will provide wrong results or even crash if a decay contains
an offset. Unfortunately, algorithms for extrapolation of baseline offsets are poorly developed and are not
always sufficiently exact. Therefore, we would recommend algorithms that do not require baseline corrections
and can accommodate transients with a baseline.
Taking into account stability for wide range changes in parameters and insensitivity to baseline offsets, the
authors select nonlinear least squares as the best fitting method for multiexponential fits.
Fitting routines are only accurate if the number of components is correct and the initial approximation is close
to the true solution. A way to obtain this initial approximation is to extract it from a spectroscopic method,
as was done by Provencher and Mazzola et al.
- See Also:
- Constant Field Values
-
volSize
private int volSize
-
initial
private double[] initial
-
exitStatus
private int[] exitStatus
-
paramNaN
private int[] paramNaN
-
paramInf
private int[] paramInf
-
processors
private int processors
-
barMarker
private int barMarker
-
oldBarMarker
private int oldBarMarker
-
validVoxels
private int validVoxels
-
useLog
private boolean useLog
-
functionFit
private int functionFit
-
numVariables
private int numVariables
-
Constructor Detail
-
AlgorithmTimeFitting
public AlgorithmTimeFitting(ModelImage destImage,
ModelImage srcImage,
ModelImage exitStatusImage,
boolean useLog,
int functionFit,
int numVariables,
boolean findInitialFromData,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds)
Creates a new AlgorithmTimeFitting object.
-
AlgorithmTimeFitting
public AlgorithmTimeFitting(ModelImage destImage,
ModelImage srcImage,
ModelImage exitStatusImage,
boolean useLog,
int functionFit,
int numVariables,
boolean findInitialFromData,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds,
boolean useAltTimeTag,
java.lang.String altTimeTag)
Creates a new AlgorithmTimeFitting object.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/WeibullDistribution.ll_weib_beta_uncen.html��������������������������0000775�4231163�4231163�00000035677�14537076057�027737� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WeibullDistribution.ll_weib_beta_uncen (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
df |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitFullIntModel2p.html���������������������������������0000775�4231163�4231163�00000051172�14537076045�025757� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitFullIntModel2p (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
arg |
DOCUMENT ME!
|
(package private) double[] |
cyi |
DOCUMENT ME!
|
(package private) double[] |
cyr |
DOCUMENT ME!
|
(package private) int[] |
errorFlag |
DOCUMENT ME!
|
(package private) double |
feq |
DOCUMENT ME!
|
(package private) double |
initialOrder |
DOCUMENT ME!
|
(package private) double |
koff |
DOCUMENT ME!
|
(package private) double |
kon |
DOCUMENT ME!
|
(package private) double |
mk |
DOCUMENT ME!
|
(package private) Bessel |
modelBessel |
DOCUMENT ME!
|
(package private) int[] |
nz |
DOCUMENT ME!
|
(package private) int |
sequenceNumber |
DOCUMENT ME!
|
(package private) double |
time |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
FitFullIntModel2p(double time,
double kon,
double koff,
double lower,
double upper,
int routine,
double[] breakPoints,
double epsabs,
double epsrel,
int limit) |
Creates a new FitFullIntModel2p object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
arg
double arg
DOCUMENT ME!
-
cyi
double[] cyi
DOCUMENT ME!
-
cyr
double[] cyr
DOCUMENT ME!
-
errorFlag
int[] errorFlag
DOCUMENT ME!
-
feq
double feq
DOCUMENT ME!
-
initialOrder
double initialOrder
DOCUMENT ME!
-
koff
double koff
DOCUMENT ME!
-
kon
double kon
DOCUMENT ME!
-
mk
double mk
DOCUMENT ME!
-
modelBessel
Bessel modelBessel
DOCUMENT ME!
-
sequenceNumber
int sequenceNumber
DOCUMENT ME!
-
time
double time
DOCUMENT ME!
-
Constructor Detail
-
FitFullIntModel2p
public FitFullIntModel2p(double time,
double kon,
double koff,
double lower,
double upper,
int routine,
double[] breakPoints,
double epsabs,
double epsrel,
int limit)
Creates a new FitFullIntModel2p object.
- Parameters:
time - DOCUMENT ME!kon - DOCUMENT ME!koff - DOCUMENT ME!lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!breakPoints - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LineSearchDirectionType.html�����������������������������0000775�4231163�4231163�00000036677�14537076051�027103� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearchDirectionType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.LineSearchDirectionType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�����������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.TranslatedPoint2D.html�����������������������������������0000775�4231163�4231163�00000041176�14537076054�025711� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.TranslatedPoint2D (MIPAV API Documentation)
- java.lang.Object
-
- java.awt.geom.Point2D
-
- gov.nih.mipav.model.algorithms.ContourPlot.TranslatedPoint2D
-
- All Implemented Interfaces:
java.lang.Cloneable
- Enclosing class:
- ContourPlot
public class ContourPlot.TranslatedPoint2D
extends java.awt.geom.Point2D
The TranslatedPoint2D is an implementation of Point2D
that references another Point2D and has a certain fixed
translation from that point.
When changing the location of the referenced point, this
point will change accordingly.
- Author:
- hageldave
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.awt.geom.Point2D
java.awt.geom.Point2D.Double, java.awt.geom.Point2D.Float
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
java.awt.geom.Point2D |
origin |
|
double |
tx |
|
double |
ty |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
TranslatedPoint2D(java.awt.geom.Point2D origin,
double xt,
double yt) |
|
-
Method Summary
-
Methods inherited from class java.awt.geom.Point2D
distance, distance, distance, distanceSq, distanceSq, distanceSq, equals, hashCode, setLocation
-
Methods inherited from class java.lang.Object
finalize, getClass, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
tx
public final double tx
-
ty
public final double ty
-
Method Detail
-
getX
public double getX()
- Specified by:
getX in class java.awt.geom.Point2D
-
getY
public double getY()
- Specified by:
getY in class java.awt.geom.Point2D
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NelderMead.html������������������������������������������������������0000775�4231163�4231163�00000074537�14537076056�022132� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NelderMead (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.NelderMead
-
-
Constructor Summary
Constructors
| Constructor |
Description |
NelderMead(int n,
double[] x,
double tolx,
double tolf,
int max_iter,
int max_eval,
boolean verbose) |
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private boolean |
continue_minimization(NelderMead.simplex_t simplex,
int eval_count,
int iter_count) |
|
private void |
copy_point(int n,
NelderMead.point_t src,
NelderMead.point_t dst) |
|
private void |
cost_fun(int n,
NelderMead.point_t point,
NelderMead.param_t params) |
|
abstract void |
cost_function(int n,
NelderMead.point_t point) |
|
void |
driver() |
|
private void |
get_centroid(NelderMead.simplex_t simplex,
NelderMead.point_t centroid) |
|
double |
getSolValue() |
|
double[] |
getSolX() |
|
private void |
nelder_mead(NelderMead.point_t start,
NelderMead.point_t solution) |
|
private void |
simplex_sort(NelderMead.simplex_t simplex) |
|
private double |
SQUARE(double x) |
|
private void |
swap_points(int n,
NelderMead.point_t p1,
NelderMead.point_t p2) |
|
private void |
update_point(NelderMead.simplex_t simplex,
NelderMead.point_t centroid,
double lambda,
NelderMead.point_t point) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
GAMMA
private double GAMMA
-
SIGMA
private double SIGMA
-
max_iter
private int max_iter
-
max_eval
private int max_eval
-
verbose
private boolean verbose
-
costNum
private int costNum
-
Constructor Detail
-
NelderMead
public NelderMead(int n,
double[] x,
double tolx,
double tolf,
int max_iter,
int max_eval,
boolean verbose)
-
Method Detail
-
driver
public void driver()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.distanceIntensityItem.html�����������������������������0000775�4231163�4231163�00000030445�14537076045�027034� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.distanceIntensityItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmFRAP.distanceIntensityItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
distance |
DOCUMENT ME!
|
private float |
intensity |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
distanceIntensityItem(double distance,
float intensity) |
Creates a new distanceIntensityItem object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
distanceIntensityItem
public distanceIntensityItem(double distance,
float intensity)
Creates a new distanceIntensityItem object.
- Parameters:
distance - intensity -
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSplitAndMergeWatershed.html���������������������������������0000775�4231163�4231163�00000073500�14537076050�026325� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSplitAndMergeWatershed (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numNeighbor
private int numNeighbor
-
binNumber
private int binNumber
-
merge
private boolean merge
-
Constructor Detail
-
AlgorithmSplitAndMergeWatershed
public AlgorithmSplitAndMergeWatershed(ModelImage destImage,
ModelImage srcImage,
int numNeighbor,
boolean limitBins,
int binNumber,
boolean createWatershedLines,
boolean merge,
double mergeThreshold)
-
Method Detail
-
runBW
public void runBW()
-
runColor
private void runColor()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SparseMatrix.html����������������������������������������0000775�4231163�4231163�00000046261�14537076052�024774� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SparseMatrix (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
SparseMatrix
public SparseMatrix()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Backpropagation.html�������������������������������������������������0000775�4231163�4231163�00000061550�14537076051�023220� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Backpropagation (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class Backpropagation
extends AlgorithmBase
MIT License
Copyright (c) 2016 Jason Wu
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
# Backpropagation
Using Java Swing to implement backpropagation neural network. Learning algorithm can refer to [this](https://en.wikipedia.org/wiki/Backpropagation) Wikipedia page.
Input consists of several groups of multi-dimensional data set, The data were cut into three parts (each number roughly equal to the same group), 2/3 of the data given to training function, and the remaining 1/3 of the data given to testing function.
The purpose of program is training to cut a number of groups of hyperplanes and synaptic weights, and display the results in the graphical interface.
## Getting Started
git clone https://github.com/Jasonnor/Backpropagation.git
cd Backpropagation
Backpropagation.jar

1. Menu (Files, Skins)
2. Output
3. Background rendering mode & zoom level
4. Read the file
5. File path
6. Adjustable parameters
7. Output parameters
8. Generate new results
9. List of training materials (2/3 of total data)
10. List of test data (1/3 of total data)
Be careful to use background rendering mode, and notice that too small drawing size will delay the computer.
## Input Data Format
InputA InputB OutputA
InputC InputD OutputB
...
You can use these [data sets](data) for testing.
## Result



## Contributing
Please feel free to use it if you are interested in fixing issues and contributing directly to the code base.
## License
Backpropagation is released under the MIT license. See the [LICENSE](/LICENSE) file for details.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
Neuroncounter
int Neuroncounter
-
Connectioncounter
int Connectioncounter
-
Constructor Detail
-
Backpropagation
public Backpropagation()
��������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.SIFT3DC.html��������������������������������������������������0000775�4231163�4231163�00000030536�14537076056�022113� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.SIFT3DC (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.SIFT3DC
-
-
Constructor Summary
Constructors
| Constructor |
Description |
SIFT3DC() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
peak_thresh
double peak_thresh
-
corner_thresh
double corner_thresh
-
dense_rotate
int dense_rotate
������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.DytexKalmanFilter.html�����������������������������������������0000775�4231163�4231163�00000042653�14537076055�024607� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.DytexKalmanFilter (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.DytexKalmanFilter
-
- Enclosing class:
- libdt
class libdt.DytexKalmanFilter
extends java.lang.Object
class for running the Kalman filter for dynamic texture inference. There are
two ways to use the class: 1) instantiate with a DT to create a Kalman filter
where most matrices are pre-computed. The KF instance can then be used for
fast inference; 2) use the static functions to compute inference on a DT. In
general, the first method should be used if the DT will not change and the KF
will be used many times. The second method should be used if inference is
required only once before the DT changes.
-
-
Constructor Summary
Constructors
| Constructor |
Description |
DytexKalmanFilter(libdt.Dytex dt,
int tau) |
< cache for an instantiated Kalman filter: DT reference (use a pointer).
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
loglike(java.util.Vector<libdt.Mat> videos,
libdt.Mat lik,
boolean mahal) |
|
(package private) void |
loglike_internal(libdt.Dytex dt,
java.util.Vector<libdt.Mat> videos,
libdt.Mat lik,
int cache_tau,
libdt.Mat[] cache_Kt,
libdt.Mat cache_detMt,
libdt.Mat[] cache_invMt,
boolean mahal,
libdt.kf_mode kfmode) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DytexKalmanFilter
public DytexKalmanFilter(libdt.Dytex dt,
int tau)
< cache for an instantiated Kalman filter: DT reference (use a pointer).
�������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.BlockJacobiPreconditioner.html���������������������������0000775�4231163�4231163�00000044735�14537076051�027424� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.BlockJacobiPreconditioner (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������gov/nih/mipav/model/algorithms/CeresSolver.GradientChecker.html�������������������������������������0000775�4231163�4231163�00000034037�14537076051�025371� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.GradientChecker (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.GradientChecker
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Program.html���������������������������������������������0000775�4231163�4231163�00000072522�14537076052�023760� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Program (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Program
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Program() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFTImageSimilarity.DMatchComparator.html����������������������������0000775�4231163�4231163�00000026466�14537076056�027076� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFTImageSimilarity.DMatchComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatchComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.EvaluateScratch.html�������������������������������������0000775�4231163�4231163�00000031220�14537076051�025414� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.EvaluateScratch (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.EvaluateScratch
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
Init(int max_parameters_per_residual_block,
int max_scratch_doubles_needed_for_evaluate,
int max_residuals_per_residual_block,
int num_parameters) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
EvaluateScratch
public EvaluateScratch()
-
Method Detail
-
Init
public void Init(int max_parameters_per_residual_block,
int max_scratch_doubles_needed_for_evaluate,
int max_residuals_per_residual_block,
int num_parameters)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT.VlSiftFilt.html�������������������������������������������������0000775�4231163�4231163�00000055101�14537076056�022706� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT.VlSiftFilt (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float[] |
dog |
< current GSS data.
|
(package private) double |
dsigma0 |
< k-smoothing
|
(package private) double |
edge_thresh |
< peak threshold.
|
(package private) float[] |
gaussFilter |
< current octave height.
|
(package private) double |
gaussFilterSigma |
< current Gaussian filter
|
(package private) int |
gaussFilterWidth |
< current Gaussian filter std
|
(package private) float[] |
grad |
< size of Gaussian window (in spatial bins)
|
(package private) int |
grad_o |
< GSS gradient data.
|
(package private) int |
height |
< image width.
|
(package private) SIFT.VlSiftKeypoint[] |
keys |
< current Gaussian filter width
|
(package private) int |
keys_res |
< number of detected keypoints.
|
(package private) double |
magnif |
< norm threshold.
|
(package private) int |
nkeys |
< detected keypoints.
|
(package private) double |
norm_thresh |
< edge threshold.
|
(package private) int |
O |
< image height.
|
(package private) int |
o_cur |
< maximum level index.
|
(package private) int |
o_min |
< number of levels per octave.
|
(package private) float[] |
octave |
< temporary pixel buffer.
|
(package private) int |
octave_height |
< current octave width.
|
(package private) int |
octave_width |
< current DoG data.
|
(package private) double |
peak_thresh |
< size of the keys buffer.
|
(package private) int |
S |
< number of octaves.
|
(package private) int |
s_max |
< minimum level index.
|
(package private) int |
s_min |
< minimum octave index.
|
(package private) double |
sigma0 |
< nominal image smoothing.
|
(package private) double |
sigmak |
< smoothing of pyramid base.
|
(package private) double |
sigman |
|
(package private) float[] |
temp |
< current octave.
|
(package private) int |
width |
< delta-smoothing.
|
(package private) double |
window_size |
< magnification factor.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
VlSiftFilt() |
< GSS gradient data octave.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
dsigma0
double dsigma0
< k-smoothing
-
width
int width
< delta-smoothing.
-
height
int height
< image width.
-
S
int S
< number of octaves.
-
s_min
int s_min
< minimum octave index.
-
s_max
int s_max
< minimum level index.
-
o_cur
int o_cur
< maximum level index.
-
temp
float[] temp
< current octave.
-
dog
float[] dog
< current GSS data.
-
octave_width
int octave_width
< current DoG data.
-
octave_height
int octave_height
< current octave width.
-
gaussFilter
float[] gaussFilter
< current octave height.
-
nkeys
int nkeys
< detected keypoints.
-
edge_thresh
double edge_thresh
< peak threshold.
-
norm_thresh
double norm_thresh
< edge threshold.
-
magnif
double magnif
< norm threshold.
-
window_size
double window_size
< magnification factor.
-
grad_o
int grad_o
< GSS gradient data.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CallbackReturnType.html����������������������������������0000775�4231163�4231163�00000035602�14537076051�026104� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CallbackReturnType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.CallbackReturnType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens12.html��������������������������������0000775�4231163�4231163�00000030443�14537076055�026250� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens12 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens12(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens12
public FitPiessens12(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Pair.html������������������������������������������������0000775�4231163�4231163�00000034267�14537076052�023250� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Pair (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Pair<T,U>
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Pair(T t,
U u) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, finalize, getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
Pair
public Pair(T t,
U u)
-
Method Detail
-
getFirst
public T getFirst()
-
getSecond
public U getSecond()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens9.html���������������������������������0000775�4231163�4231163�00000030414�14537076055�026174� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens9 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens9(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens9
public FitPiessens9(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSM2.FitAllEP.html�������������������������������������������0000775�4231163�4231163�00000037506�14537076050�023766� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSM2.FitAllEP (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, covarMat, ctrlMat, dyda, gues, internalScaling, iters, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitAllEP() |
Creates a new Fit24DModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
fitToFunction
public void fitToFunction(DoubleDouble[] a,
DoubleDouble[] residuals,
DoubleDouble[][] covarMat)
Fit to function - a0 - a1*(a2**x).
- Specified by:
fitToFunction in class NLConstrainedEngineEP- Parameters:
a - The x value of the data point.residuals - The best guess parameter values.covarMat - The derivative values of y with respect to fitting parameters.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSM2.sm2Task.html��������������������������������������������0000775�4231163�4231163�00000033771�14537076050�023712� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSM2.sm2Task (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task
-
-
Constructor Summary
Constructors
| Constructor |
Description |
sm2Task(int start,
int end,
int tDim,
double[] r1ptj,
double[] initial,
double[] trapezoidConstant,
double[] trapezoidSlope,
double[] timeVals) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
start
private final int start
-
end
private final int end
-
tDim
private final int tDim
-
Constructor Detail
-
sm2Task
public sm2Task(int start,
int end,
int tDim,
double[] r1ptj,
double[] initial,
double[] trapezoidConstant,
double[] trapezoidSlope,
double[] timeVals)
-
Method Detail
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
�������gov/nih/mipav/model/algorithms/AlgorithmCircleGeneration.IntTorquato95ModelMean.html����������������0000775�4231163�4231163�00000030056�14537076044�031427� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCircleGeneration.IntTorquato95ModelMean (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.IntTorquato95ModelMean
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
areaFraction |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
IntTorquato95ModelMean(double areaFraction) |
Creates a new IntTorquato95ModelMean object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
areaFraction
double areaFraction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.BarycentricGradientPaintContext.html���������������������0000775�4231163�4231163�00000073612�14537076053�030673� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.BarycentricGradientPaintContext (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected boolean |
antialiasing |
|
protected int |
c1 |
|
protected int |
c2 |
|
protected int |
c3 |
|
protected java.lang.ref.WeakReference<int[]> |
cache |
|
protected java.awt.image.DirectColorModel |
cm |
|
protected float |
denom |
|
protected float[] |
MSAA_SAMPLES |
|
protected java.awt.image.WritableRaster |
saved |
|
protected float |
x1 |
|
protected float |
x13 |
|
protected float |
x2 |
|
protected float |
x23 |
|
protected float |
x3 |
|
protected float |
y1 |
|
protected float |
y13 |
|
protected float |
y2 |
|
protected float |
y23 |
|
protected float |
y3 |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
BarycentricGradientPaintContext(java.awt.geom.Point2D.Float p1,
java.awt.geom.Point2D.Float p2,
java.awt.geom.Point2D.Float p3,
java.awt.Color color1,
java.awt.Color color2,
java.awt.Color color3,
java.awt.geom.AffineTransform xform,
boolean antialiasing) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private int |
a(int argb) |
|
private int |
argb(int a,
int r,
int g,
int b) |
|
private int |
b(int argb) |
|
protected void |
cacheRaster(java.awt.image.WritableRaster ras) |
|
protected java.awt.image.WritableRaster |
createRaster(int w,
int h,
int[] data) |
|
private int[] |
dataFromRaster(java.awt.image.WritableRaster wr) |
|
void |
dispose() |
|
protected void |
fillRaster(int xA,
int yA,
int w,
int h,
int[] data) |
|
protected void |
fillRasterMSAA(int xA,
int yA,
int w,
int h,
int[] data) |
|
private int |
g(int argb) |
|
protected java.awt.image.WritableRaster |
getCachedOrCreateRaster(int w,
int h) |
|
java.awt.image.ColorModel |
getColorModel() |
|
java.awt.image.Raster |
getRaster(int xA,
int yA,
int w,
int h) |
|
private int |
mixColor3(int c1,
int c2,
int c3,
float m1,
float m2,
float m3) |
|
private int |
mixColor4(int c1,
int c2,
int c3,
int c4,
float m1,
float m2,
float m3,
float m4) |
|
private int |
r(int argb) |
|
private int |
scaleColorAlpha(int color,
float m) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
x1
protected final float x1
-
x2
protected final float x2
-
x3
protected final float x3
-
y1
protected final float y1
-
y2
protected final float y2
-
y3
protected final float y3
-
c1
protected final int c1
-
c2
protected final int c2
-
c3
protected final int c3
-
Constructor Detail
-
BarycentricGradientPaintContext
public BarycentricGradientPaintContext(java.awt.geom.Point2D.Float p1,
java.awt.geom.Point2D.Float p2,
java.awt.geom.Point2D.Float p3,
java.awt.Color color1,
java.awt.Color color2,
java.awt.Color color3,
java.awt.geom.AffineTransform xform,
boolean antialiasing)
-
Method Detail
-
dispose
public void dispose()
- Specified by:
dispose in interface java.awt.PaintContext
-
fillRaster
protected void fillRaster(int xA,
int yA,
int w,
int h,
int[] data)
-
fillRasterMSAA
protected void fillRasterMSAA(int xA,
int yA,
int w,
int h,
int[] data)
-
mixColor3
private int mixColor3(int c1,
int c2,
int c3,
float m1,
float m2,
float m3)
-
mixColor4
private int mixColor4(int c1,
int c2,
int c3,
int c4,
float m1,
float m2,
float m3,
float m4)
-
a
private int a(int argb)
-
r
private int r(int argb)
-
g
private int g(int argb)
-
b
private int b(int argb)
����������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.DanwoodCostFunction.html�������������������������0000775�4231163�4231163�00000034034�14537076052�027635� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.DanwoodCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Minimizer.html�������������������������������������������0000775�4231163�4231163�00000032237�14537076052�024313� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Minimizer (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Minimizer
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Minimizer
public Minimizer()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping2.stpfunEP.html�����������������������������0000775�4231163�4231163�00000052654�14537076056�027101� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping2.stpfunEP (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, covarMat, ctrlMat, dyda, gues, internalScaling, iters, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
fitToFunction
public void fitToFunction(DoubleDouble[] a,
DoubleDouble[] residuals,
DoubleDouble[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngineEP- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!covarMat - DOCUMENT ME!
������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSM2.FitSM2nl2solModel.html����������������������������������0000775�4231163�4231163�00000041264�14537076050�025541� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSM2.FitSM2nl2solModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int[] |
iv |
|
(package private) double[] |
v |
|
(package private) double[] |
x |
|
(package private) double[] |
yData |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
FitSM2nl2solModel(int nPoints,
double[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian) |
Creates a new FitSM2nl2solModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
void |
calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm) |
|
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying SM2 fitting parameters.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitSM2nl2solModel
public FitSM2nl2solModel(int nPoints,
double[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian)
Creates a new FitSM2nl2solModel object.
- Parameters:
nPoints - DOCUMENT ME!yData - DOCUMENT ME!x - DOCUMENT ME!iv - v - useAnalyticJacobian -
-
Method Detail
-
driver
public void driver()
Starts the analysis.
- Overrides:
driver in class NL2sol
-
calcj
public void calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm)
- Specified by:
calcj in class NL2sol
-
calcr
public void calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm)
- Specified by:
calcr in class NL2sol
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BrownAndDennisFunction.html��������������������������0000775�4231163�4231163�00000034023�14537076053�027565� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BrownAndDennisFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmAutoCorrelation.FitCorrelationModel.html��������������������0000775�4231163�4231163�00000042713�14537076043�031002� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAutoCorrelation.FitCorrelationModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitCorrelationModel(int nPoints,
float[] xData,
float[] yData,
double[] initial) |
Creates a new FitCorrelationModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private float[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitCorrelationModel
public FitCorrelationModel(int nPoints,
float[] xData,
float[] yData,
double[] initial)
Creates a new FitCorrelationModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
�����������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CgnrSolver.html������������������������������������������0000775�4231163�4231163�00000043216�14537076051�024432� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CgnrSolver (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DummyCostFunction2.html������������������������������0000775�4231163�4231163�00000034317�14537076053�026726� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DummyCostFunction2 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
DummyCostFunction2(int kNumResiduals,
int N1,
int N2) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmLevelSet.html�����������������������������������������������0000775�4231163�4231163�00000127744�14537076046�023522� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLevelSet (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private static int |
CONTRACT |
DOCUMENT ME!
|
private float |
deltaT |
Time step The defalut is 0.05 for 2D and 0.025 for 3D.
|
private float |
edgeAttract |
edgeAttract is the ratio of the maximum value of the absolute value of the edge attractive force to the maximum
value of the absolute value of the sum of the propagation and curvature forces.
|
private float |
epsilon |
epsilon is used to smooth high curvature regions. epsilon is between 0 and 1 with larger epsilon doing more
smoothing
|
private static int |
EXPAND |
DOCUMENT ME!
|
private static int |
EXPAND_CONTRACT |
DOCUMENT ME!
|
private float[] |
GxData |
Storage location of the first derivative of the Gaussian in the X direction.
|
private float[] |
GyData |
Storage location of the first derivative of the Gaussian in the Y direction.
|
private float[] |
GzData |
Storage location of the first derivative of the Gaussian in the Z direction.
|
private boolean |
image25D |
If image25D is true in 3D images, process each slice separately
|
private int |
iterations |
Number of iterations of the diffusion.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
private int |
movement |
EXPAND, EXPAND_CONTRACT, or CONTRACT.
|
private float[] |
outputBuffer |
Stores output of AlgorithmConvolver
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
private int |
testIters |
If testIters > 0, check if the boundary is unchanged every testIters iterations.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmLevelSet(ModelImage srcImg,
float[] sigmas,
int movement,
int iter,
float deltaT,
float epsilon,
float edgeAttract,
int testIters,
boolean image25D) |
LevelSet.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calc25D() |
calc25D - Calculates level set from contours, propagates level set, and obtains new contour voi from level set.
|
private void |
calc2D() |
calc2D - Calculates level set from contours, propagates level set, and obtains new contour voi from level set.
|
private void |
calc3D() |
calc3D - Calculates level set from contours, propagates level set, and obtains new contour voi from level set.
|
void |
cleanUp() |
DOCUMENT ME!
|
void |
finalize() |
finalize - sets class storages arrays to null so that System.gc() can free the memory.
|
private void |
makeKernels2D() |
makeKernals2D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
|
private void |
makeKernels3D() |
makeKernals3D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
|
void |
runAlgorithm() |
starts the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
edgeAttract
private float edgeAttract
edgeAttract is the ratio of the maximum value of the absolute value of the edge attractive force to the maximum
value of the absolute value of the sum of the propagation and curvature forces.
-
Constructor Detail
-
AlgorithmLevelSet
public AlgorithmLevelSet(ModelImage srcImg,
float[] sigmas,
int movement,
int iter,
float deltaT,
float epsilon,
float edgeAttract,
int testIters,
boolean image25D)
LevelSet.
- Parameters:
srcImg - reference to the source imagesigmas - sigmas used to describe the gaussian that is used in the calculation of the gradient
magnitudemovement - EXPAND, EXPAND_CONTRACT, or CONTRACTiter - number of iterations (t) of the diffusion equationdeltaT - time stepepsilon - smoothing factor between 0 and 1 with higher values giving greater smoothingedgeAttract - the ratio of the maximum value of the absolute value of the edge attractive force to the
maximum value of the absolute value of the sum of the propagation and curvature forcestestIters - If testIters > 0, check if the boundary is unchanged every testIters iterationsimage25D - If truein 3D images, process each slice separately
-
Method Detail
-
cleanUp
public void cleanUp()
DOCUMENT ME!
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
����������������������������gov/nih/mipav/model/algorithms/LSCM.MeshVertexIterator.html�����������������������������������������0000775�4231163�4231163�00000033076�14537076056�024464� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.MeshVertexIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.MeshVertexIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.weighted_edgesItem.html���������������������������������0000775�4231163�4231163�00000032300�14537076052�026207� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.weighted_edgesItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesItem
-
-
Constructor Summary
Constructors
| Constructor |
Description |
weighted_edgesItem(int index,
int vertex1,
int vertex2,
double weight) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
vertex1
private int vertex1
-
vertex2
private int vertex2
-
weight
private double weight
-
Method Detail
-
getIndex
public int getIndex()
-
getVertex1
public int getVertex1()
-
getVertex2
public int getVertex2()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LineSearchMinimizer.html���������������������������������0000775�4231163�4231163�00000042565�14537076051�026255� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearchMinimizer (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmASM.html����������������������������������������������������0000775�4231163�4231163�00000127475�14537076043�022415� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmASM (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
actionPerformed(java.awt.event.ActionEvent event) |
Calls various methods depending on the action.
|
void |
ASM_2D_example() |
|
private void |
ASM_align_data_inverse2D(double[][] pos,
AlgorithmASM.TData tform) |
|
private void |
ASM_align_data2D(double[][] Vertices,
AlgorithmASM.TData tform) |
|
private void |
ASM_ApplyModel2D(ModelImage Itest,
AlgorithmASM.TData tform,
AlgorithmASM.SData ShapeData,
AlgorithmASM.AppData[] AppearanceData,
AlgorithmASM.Options options) |
|
private double[][] |
ASM_GetContourNormals2D(double[][] V,
int[][] L) |
|
private void |
ASM_getProfileAndDerivatives2D(ModelImage I,
double[][] P,
double[][] N,
int k,
double[][] gtc,
double[][] dgtc) |
|
private void |
ASM_MakeAppearanceModel2D(AlgorithmASM.ASMData[] TrainingData,
AlgorithmASM.Options options,
AlgorithmASM.AppData[] AppearanceData) |
|
private void |
ASM_MakeShapeModel2D(AlgorithmASM.ASMData[] TrainingData,
AlgorithmASM.SData ShapeData) |
|
private void |
createPauseDialog(java.awt.event.ActionListener al) |
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
linspace_multi(double[] d1,
double[] d2,
int n,
double[][] X) |
|
private void |
LoadDataSetNiceContour(java.lang.String fileName,
int nBetween,
boolean verbose) |
|
private void |
PCA(double[][] x,
double[] Evalues,
double[][] Evectors,
double[] x_mean) |
|
void |
runAlgorithm() |
Starts the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
Lines
private int[][] Lines
-
initialVOI
private VOI initialVOI
-
Constructor Detail
-
AlgorithmASM
public AlgorithmASM()
-
Method Detail
-
ASM_getProfileAndDerivatives2D
private void ASM_getProfileAndDerivatives2D(ModelImage I,
double[][] P,
double[][] N,
int k,
double[][] gtc,
double[][] dgtc)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DBSCANClusteringSegment.AmAl.html������������������������������������0000775�4231163�4231163�00000023305�14537076054�025241� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DBSCANClusteringSegment.AmAl (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.AmAl
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int[][] |
Al |
|
(package private) int[] |
Ami |
|
(package private) int[] |
Amj |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
AmAl() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.ImportanceMode.html��������������������������������0000775�4231163�4231163�00000040442�14537076057�026476� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.ImportanceMode (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
ImportanceMode() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
ImportanceMode
private ImportanceMode()
-
Method Detail
-
valueOf
public static StochasticForests.ImportanceMode valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/fMRIBlindDeconvolution.DiscretInteg.html�����������������������������0000775�4231163�4231163�00000023676�14537076055�027031� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
fMRIBlindDeconvolution.DiscretInteg (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.DiscretInteg
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DiscretInteg
public DiscretInteg()
������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHarrisLaplace.html������������������������������������������0000775�4231163�4231163�00000073445�14537076046�024507� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHarrisLaplace (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
epsilon |
|
private double[] |
Ix |
|
private double[] |
Ix2 |
|
private double[] |
Ixy |
|
private double[] |
Iy |
|
private double[] |
Iy2 |
|
private double[] |
log |
|
private static int |
logOp |
|
private int |
operationType |
|
private static int |
xOp |
|
private static int |
xxOp |
|
private static int |
xyOp |
|
private static int |
yOp |
|
private static int |
yyOp |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
epsilon
private double epsilon
-
Method Detail
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTimeFitting.FitLaplace.html���������������������������������0000775�4231163�4231163�00000040433�14537076050�026205� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTimeFitting.FitLaplace (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
ydata |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitLaplace(int tDim,
double[] ydata,
double[] intial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ydata
final double[] ydata
-
Constructor Detail
-
FitLaplace
public FitLaplace(int tDim,
double[] ydata,
double[] intial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a0*exp(-|t-a1|/a2)
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitExpModel.html���������������������������������������0000775�4231163�4231163�00000026634�14537076045�024701� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitExpModel (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitExpModel(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitExpModel
public FitExpModel(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
����������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TestTerm.html��������������������������������������������0000775�4231163�4231163�00000040371�14537076052�024115� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TestTerm (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.util.Vector<java.util.Vector<java.lang.Double>> |
a_ |
|
private int |
arity_ |
|
private int |
bad_block |
|
private int |
bad_variable |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
TestTerm(int bad_block,
int bad_variable,
int arity,
int[] dim) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(double[][] parameters,
double[] residuals) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
arity_
private int arity_
-
bad_block
private int bad_block
-
bad_variable
private int bad_variable
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Hahn1CostFunction.html���������������������������0000775�4231163�4231163�00000034012�14537076052�027175� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Hahn1CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSphereGeneration.IntTorquato95ModelMean2.html���������������0000775�4231163�4231163�00000035075�14537076050�031541� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSphereGeneration.IntTorquato95ModelMean2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
volumeFraction |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
IntTorquato95ModelMean2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit,
double volumeFraction) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
volumeFraction
double volumeFraction
-
Constructor Detail
-
IntTorquato95ModelMean2
public IntTorquato95ModelMean2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit,
double volumeFraction)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd8.html���������������������������������������0000775�4231163�4231163�00000030465�14537076055�025014� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd8 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd8(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd8
public Fitqd8(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd3.html���������������������������������������0000775�4231163�4231163�00000030465�14537076055�025007� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd3 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd3(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd3
public Fitqd3(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmRegionMergingViaBoundaryMelting.mergeItem.html��������������0000775�4231163�4231163�00000033174�14537076050�032120� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegionMergingViaBoundaryMelting.mergeItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting.mergeItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
common |
|
private int |
remove |
DOCUMENT ME!
|
private int |
weak |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
mergeItem(int remove) |
Creates a new mergeItem object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
remove
private int remove
DOCUMENT ME!
-
common
private int common
-
Method Detail
-
getRemove
public int getRemove()
DOCUMENT ME!
- Returns:
- DOCUMENT ME!
-
getWeak
public int getWeak()
-
getCommon
public int getCommon()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.tuple2i.html�����������������������������������0000775�4231163�4231163�00000022667�14537076047�025774� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.tuple2i (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.tuple2i
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
a |
|
int |
b |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
tuple2i(int a,
int b) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������gov/nih/mipav/model/algorithms/FitRayleigh.html�����������������������������������������������������0000775�4231163�4231163�00000051577�14537076055�022337� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
FitRayleigh (MIPAV API Documentation)
-
public class FitRayleigh
extends NLFittedFunction
For -infinity < a < +infinity and b > 0
y = scale factor * (2/b)*(x - a)*exp(-((x-a)**2)/b)*u(x - a)
where u(x-a) = 0 for x < a and = 1 for x >= a.
cumulative function = [1 - exp(-((x-a)**2)/b)]*u(x-a)
Mean of x = a + sqrt(PI*b/4)
Variance of x = b*(4 - PI)/4
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitRayleigh() |
Creates a new FitRayleigh object.
|
FitRayleigh(int nPoints,
float[] xData,
float[] yData) |
FitRayleigh.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
calculateChiSq() |
Calculates chi squared
|
protected void |
calculateFittedY() |
Calculates yDataFitted
|
void |
displayResults() |
Display results of displaying linear fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] jacobian) |
Fit Rayleigh to function.
|
protected Jama.Matrix |
generateResiduals() |
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
|
private void |
setupData() |
Sets up data to test fitting of Rayleigh distribution.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] jacobian)
Fit Rayleigh to function.
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.jacobian - The derivative values of y with respect to fitting parameters.
-
generateResiduals
protected Jama.Matrix generateResiduals()
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
- Specified by:
generateResiduals in class NLFittedFunction- Returns:
���������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlCovDetFeature.html������������������������������������������0000775�4231163�4231163�00000026134�14537076054�024343� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlCovDetFeature (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeature
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
peakScore
float peakScore
< feature frame.
-
edgeScore
float edgeScore
< peak score.
-
orientationScore
float orientationScore
< edge score.
-
Constructor Detail
-
VlCovDetFeature
VlCovDetFeature()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.SnakeNode.html���������������������������������0000775�4231163�4231163�00000062676�14537076047�026263� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.SnakeNode (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
-
Constructor Summary
Constructors
| Constructor |
Description |
SnakeNode() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
int |
compareTo(java.lang.Object obj) |
|
private double[][] |
createDoGOperator(int radius,
double sigma1,
double K,
double scale1,
double scale2) |
|
private double[][] |
createGOperator(int radius,
double sigma1) |
|
float |
findAverageDistance() |
|
protected int |
findJunctionAppearanceWeight(int x,
int y,
byte[][] thresholdBuffer,
int Rmax,
int Rmin) |
|
java.util.ArrayList<AlgorithmNetworkSnake.SnakeNode> |
findJunctionNeighbours() |
|
protected byte[][] |
findThresholdedRegion(int x,
int y,
byte[] imageBuffer,
int bufferWidth,
int bufferHeight,
int radius,
boolean thresholding,
int[] offsetX,
int[] offsetY) |
|
java.util.ArrayList<AlgorithmNetworkSnake.SnakeNode> |
findWall() |
|
java.util.ArrayList<AlgorithmNetworkSnake.SnakeNode> |
findWall(AlgorithmNetworkSnake.SnakeNode destination) |
|
java.util.ArrayList<java.lang.Boolean> |
getNeighbourLink() |
|
java.util.ArrayList<AlgorithmNetworkSnake.SnakeNode> |
getNeighbours() |
|
int |
getX() |
|
int |
getY() |
|
boolean |
iterate(float alpha,
float beta,
float gamma,
float d,
byte[] imageBuffer,
int bufferWidth,
int bufferHeight,
int m) |
|
void |
resetNeighbourLink(boolean value) |
|
void |
setNeighbourLink(java.util.ArrayList<java.lang.Boolean> neighbourLink) |
|
void |
setNeighbours(java.util.ArrayList<AlgorithmNetworkSnake.SnakeNode> neighbours) |
|
void |
setX(int x) |
|
void |
setY(int y) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
SnakeNode
public SnakeNode()
-
Method Detail
-
setX
public void setX(int x)
-
setY
public void setY(int y)
-
iterate
public boolean iterate(float alpha,
float beta,
float gamma,
float d,
byte[] imageBuffer,
int bufferWidth,
int bufferHeight,
int m)
-
findJunctionAppearanceWeight
protected int findJunctionAppearanceWeight(int x,
int y,
byte[][] thresholdBuffer,
int Rmax,
int Rmin)
-
createDoGOperator
private double[][] createDoGOperator(int radius,
double sigma1,
double K,
double scale1,
double scale2)
-
findThresholdedRegion
protected byte[][] findThresholdedRegion(int x,
int y,
byte[] imageBuffer,
int bufferWidth,
int bufferHeight,
int radius,
boolean thresholding,
int[] offsetX,
int[] offsetY)
������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.Mat.html�������������������������������������������������������0000775�4231163�4231163�00000055164�14537076055�021742� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.Mat (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.Mat
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Mat() |
|
Mat(double[][] d2D) |
|
Mat(int dims,
int[] size,
int type) |
|
Mat(int dims,
int[] size,
int type,
int channels) |
|
Mat(int rows,
int cols,
int type) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
channels
public int channels
-
elemSize
public int elemSize
-
bytesPerRow
public int bytesPerRow
-
byte2D
public byte[][] byte2D
-
byte3D
public byte[][][] byte3D
-
refcount
public int[] refcount
-
Method Detail
-
release
public void release()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.StateUpdatingCallback.html�������������������������������0000775�4231163�4231163�00000032101�14537076052�026527� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.StateUpdatingCallback (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmAutoCorrelation.html����������������������������������������0000775�4231163�4231163�00000101745�14537076043�025077� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAutoCorrelation (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcStoreInDest2D() |
This function calculates the autocorrelation coefficients and places them in the destination image for black and
white images.
|
private void |
calcStoreInDest2DC() |
This function calculates the autocorrelation coefficients and places them in the destination image for color
images.
|
private void |
calcStoreInDest3D() |
This function calculates the autocorrelation coefficients and places them in the destination image for black and
white images.
|
private void |
calcStoreInDest3DC() |
This function calculates the autocorrelation coefficients and places them in the destination image for color
images.
|
private void |
calcStoreInDest4D() |
This function calculates the autocorrelation coefficients and places them in the destination image for black and
white images.
|
private void |
calcStoreInDest4DC() |
This function calculates the autocorrelation coefficients and places them in the destination image for color
images.
|
void |
finalize() |
Prepares this class for destruction.
|
int |
getFWHM() |
Returns the full width at half maximum of the autocorrelation.
|
void |
runAlgorithm() |
Starts the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmAutoCorrelation
public AlgorithmAutoCorrelation(ModelImage destImg,
ModelImage srcImg)
Constructor for black and white image in which correlation coefficients are placed in a predetermined destination
image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.
-
AlgorithmAutoCorrelation
public AlgorithmAutoCorrelation(ModelImage destImageR,
ModelImage destImageG,
ModelImage destImageB,
ModelImage srcImg)
Constructor for color image in which correlation coefficients are placed in predetermined destination images.
- Parameters:
destImageR - Image model where red result is stored.destImageG - Image model where green result is stored.destImageB - Image model where blue result is stored.srcImg - Source image model.
���������������������������gov/nih/mipav/model/algorithms/AlgorithmAINDANE.html������������������������������������������������0000775�4231163�4231163�00000055062�14537076043�023024� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAINDANE (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
c1 |
Reference: Adaptive and integrated neighborhood-dependent approach for
nonlinear enhancement of color images by Li Tao and Vijayan K.
|
private double |
c2 |
|
private double |
c3 |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmAINDANE
public AlgorithmAINDANE(ModelImage destImg,
ModelImage srcImg,
double c1,
double c2,
double c3)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd10.html��������������������������������������0000775�4231163�4231163�00000030506�14537076055�025061� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd10 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd10(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd10
public Fitqd10(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.PowellSingularJacobianFunction.html������������������0000775�4231163�4231163�00000034133�14537076053�031312� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.PowellSingularJacobianFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Img.html�������������������������������������������������0000775�4231163�4231163�00000172076�14537076053�023127� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Img (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Img
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
boundary_mode_mirror |
boundary mode that will mirror the Img for out of bounds positions
|
static int |
boundary_mode_repeat_edge |
boundary mode that will repeat the edge of of an Img for out of
bounds positions.
|
static int |
boundary_mode_repeat_image |
boundary mode that will repeat the Img for out of bounds positions.
|
static int |
boundary_mode_zero |
boundary mode that will return 0 for out of bounds positions.
|
private int[] |
data |
data array of this Img containing a value for each pixel in row major order
|
private int |
height |
width and height of this image
|
private int |
spliteratorMinimumSplitSize |
minimum number of elements this Img's Spliterators can be split to.
|
private int |
width |
width and height of this image
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Img(int width,
int height) |
Creates a new Img of specified dimensions.
|
Img(int width,
int height,
int[] data) |
Creates a new Img of specified dimensions.
|
Img(java.awt.Dimension dimension) |
Creates a new Img of specified Dimension.
|
Img(java.awt.Dimension dim,
int[] data) |
Creates a new Img of specified dimensions.
|
Img(java.awt.image.BufferedImage bimg) |
Creates a new Img of same dimensions as provided BufferedImage.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private int |
blend(int channel1,
int channel2,
double m) |
|
ContourPlot.Img |
copy() |
Returns a deep copy of this image.
|
ContourPlot.Img |
copyArea(int x,
int y,
int w,
int h,
ContourPlot.Img dest,
int destX,
int destY) |
Copies specified area of this Img to the specified destination Img
at specified destination coordinates.
|
ContourPlot.Img |
createRemoteImg(java.awt.image.BufferedImage bimg) |
Creates an Img sharing the specified BufferedImage's data.
|
ContourPlot.Img |
fill(int value) |
Fills the whole image with the specified value.
|
int[] |
getData() |
|
int |
getHeight() |
|
ContourPlot.Pixel |
getPixel() |
Creates a new Pixel object for this Img with position {0,0}.
|
ContourPlot.Pixel |
getPixel(int x,
int y) |
Creates a new Pixel object for this Img at specified position.
|
java.awt.image.BufferedImage |
getRemoteBufferedImage() |
Creates a BufferedImage that shares the data of this Img.
|
int |
getSpliteratorMinimumSplitSize() |
Returns the minimum number of elements in a split of a Spliterator
of this Img.
|
int |
getValue(int x,
int y) |
Returns the value of this Img at the specified position.
|
int |
getValue(int x,
int y,
int boundaryMode) |
Returns the value of this Img at the specified position.
|
int |
getWidth() |
|
int |
interpolateARGB(double xNormalized,
double yNormalized) |
Returns a bilinearly interpolated ARGB value of the image for the
specified normalized position (x and y within [0,1]).
|
private int |
interpolateColors(int c00,
int c01,
int c10,
int c11,
double mx,
double my) |
|
int |
numValues() |
|
void |
setSpliteratorMinimumSplitSize(int size) |
Sets the minimum number of elements in a split of a Spliterator
of this Img.
|
void |
setValue(int x,
int y,
int value) |
Sets value at the specified position.
|
boolean |
supportsRemoteBufferedImage() |
|
java.awt.image.BufferedImage |
toBufferedImage(java.awt.image.BufferedImage bimg) |
Copies this image's data to the specified BufferedImage.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
colSpliterator, createGraphics, forEach, forEach, forEach, forEach, forEach, forEach, forEach, forEach, forEach, forEach, forEach_defaultimpl, getDimension, iterator, iterator, paint, rowSpliterator, spliterator, spliterator, stream, stream, stream, stream, stream, stream, toBufferedImage
-
-
Constructor Detail
-
Img
public Img(int width,
int height)
Creates a new Img of specified dimensions.
Values are initialized to 0.
- Parameters:
width - of the Imgheight - of the Img- Since:
- 1.0
-
Img
public Img(int width,
int height,
int[] data)
Creates a new Img of specified dimensions.
Provided data array will be used as this images data.
- Parameters:
width - of the Imgheight - of the Imgdata - values (pixels) that will be used as the content of this Img- Throws:
java.lang.IllegalArgumentException - when the number of pixels of this Img
resulting from width*height does not match the number of provided data values.- Since:
- 1.0
-
Img
public Img(java.awt.Dimension dim,
int[] data)
Creates a new Img of specified dimensions.
Provided data array will be used as this images data.
- Parameters:
dim - extend of the image (width and height)data - values (pixels) that will be used as the content of this Img- Throws:
java.lang.IllegalArgumentException - when the number of pixels of this Img
resulting from width*height does not match the number of provided data values.- Since:
- 1.0
-
Method Detail
-
getData
public int[] getData()
- Returns:
- data array of this Img
- Since:
- 1.0
-
getValue
public int getValue(int x,
int y)
Returns the value of this Img at the specified position.
No bounds checks will be performed, positions outside of this
image's dimension can either result in a value for a different position
or an ArrayIndexOutOfBoundsException.
- Parameters:
x - coordinatey - coordinate- Returns:
- value for specified position
- Throws:
java.lang.ArrayIndexOutOfBoundsException - if resulting index from x and y
is not within the data arrays bounds.- Since:
- 1.0
- See Also:
getValue(int, int, int),
getPixel(int, int),
setValue(int, int, int)
-
interpolateColors
private int interpolateColors(int c00,
int c01,
int c10,
int c11,
double mx,
double my)
-
copyArea
public ContourPlot.Img copyArea(int x,
int y,
int w,
int h,
ContourPlot.Img dest,
int destX,
int destY)
Copies specified area of this Img to the specified destination Img
at specified destination coordinates. If destination Img is null a new
Img with the areas size will be created and the destination coordinates
will be ignored so that the Img will contain all the values of the area.
The specified area has to be within the bounds of this image or
otherwise an IllegalArgumentException will be thrown. Only the
intersecting part of the area and the destination image is copied which
allows for an out of bounds destination area origin.
- Parameters:
x - area origin in this image (x-coordinate)y - area origin in this image (y-coordinate)w - width of areah - height of areadest - destination ImgdestX - area origin in destination Img (x-coordinate)destY - area origin in destination Img (y-coordinate)- Returns:
- the destination Img
- Throws:
java.lang.IllegalArgumentException - if the specified area is not within
the bounds of this Img or if the size of the area is not positive.- Since:
- 1.0
-
setValue
public void setValue(int x,
int y,
int value)
Sets value at the specified position.
No bounds checks will be performed, positions outside of this
images dimension can either result in a value for a different position
or an ArrayIndexOutOfBoundsException.
- Parameters:
x - coordinatey - coordinatevalue - to be set at specified position. e.g. 0xff0000ff for blue color- Throws:
java.lang.ArrayIndexOutOfBoundsException - if resulting index from x and y
is not within the data arrays bounds.- Since:
- 1.0
- See Also:
getValue(int, int)
-
getSpliteratorMinimumSplitSize
public int getSpliteratorMinimumSplitSize()
Returns the minimum number of elements in a split of a Spliterator
of this Img. Spliterators will only split if they contain more elements than
specified by this value. Default is 1024.
- Specified by:
getSpliteratorMinimumSplitSize in interface ContourPlot.ImgBase<ContourPlot.Pixel>- Returns:
- minimum number of elements of a Spliterator to allow for splitting.
- Since:
- 1.3
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.MisralbCostFunction.html�������������������������0000775�4231163�4231163�00000034034�14537076052�027633� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.MisralbCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ModifiedCholeskyFactorization.html�����������������������������������0000775�4231163�4231163�00000042747�14537076056�026107� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ModifiedCholeskyFactorization (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
public class ModifiedCholeskyFactorization
extends java.lang.Object
Copyright (c) 2015, Sheung Hun Cheng and Nicholas J. Higham
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
Redistributions of source code must retain the above copyright notice, this
list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright notice,
this list of conditions and the following disclaimer in the documentation
and/or other materials provided with the distribution.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
modified-cholesky contains MATLAB functions that
compute a modified Cholesky factorization of a symmetric and possibly
indefinite matrix. The algorithm is from
S. H. Cheng and N.J. Higham.
"[A modified Cholesky algorithm based on a symmetric indefinite
factorization](http://dx.doi.org/10.1137/S0895479896302898)".
SIAM J. Matrix Anal. Appl., 19(4):1097-1110, 1998.
and uses LDL^T factorization with a symmetric form of rook pivoting
proposed by Ashcraft, Grimes, and Lewis. The functions here are based on
code originally written by Bobby Cheng and Nick Higham in 1996.
Modified Cholesky algorithm based on LDL' factorization.
% [L D,P,D0,rho] = modchol_ldlt_m(A,delta) computes a modified
% Cholesky factorization P*(A + E)*P' = L*D*L', where
% P is a permutation matrix, L is unit lower triangular,
% and D is block diagonal and positive definite with 1-by-1 and 2-by-2
% diagonal blocks. Thus A+E is symmetric positive definite, but E is
% not explicitly computed. Also returned is a block diagonal D0 such
% that P*A*P' = L*D0*L'. If A is sufficiently positive definite then
% E = 0 and D = D0. Rho is the growth factor for the factorization.
% The algorithm sets the smallest eigenvalue of D to the tolerance
% delta, which defaults to sqrt(eps)*norm(A,'fro').
% The LDL' factorization is compute using a symmetric form of rook
% pivoting proposed by Ashcraft, Grimes and Lewis.
%
% This routine does not exploit symmetry and is not designed to be
% efficient.
% Authors: Bobby Cheng and Nick Higham, 1996; revised 2015.
Ported to Java by William Gandler from the file modchol_ldlt_m.m.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[][] |
Ain |
|
private double[][] |
D |
|
private double |
delta |
|
private double[][] |
DMC |
|
private double |
epsilon |
|
private double[][] |
L |
|
private double[][] |
P |
|
private double[] |
rho |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
Ain
private double[][] Ain
-
delta
private double delta
-
DMC
private double[][] DMC
-
epsilon
private double epsilon
-
Constructor Detail
-
ModifiedCholeskyFactorization
public ModifiedCholeskyFactorization(double[][] Ain,
double delta,
double[][] L,
double[][] DMC,
double[][] P,
double[][] D,
double[] rho)
�������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Roszman1CostFunction.html������������������������0000775�4231163�4231163�00000034045�14537076052�027756� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Roszman1CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/FitLaplace.html������������������������������������������������������0000775�4231163�4231163�00000073735�14537076054�022133� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
FitLaplace (MIPAV API Documentation)
-
public class FitLaplace
extends NLFittedFunction
FitLaplace -fits an array of points to a normal curve, general from f = a*exp(Math.abs(x-mu)/beta)
Will also perform thresholding techniques to determine useful data points for fitting
- Version:
- 0.1
- Author:
- senseneyj
- See Also:
NLConstrainedEngine
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
amp |
Amplitude parameter
|
private double |
beta |
Beta parameter
|
private int |
dataEnd |
Location in xSeries where Gaussian data ends
|
private int |
dataStart |
Location in xSeries where Gaussian data starts
|
private int |
iters |
|
private double |
mu |
Center parameter
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitLaplace() |
FitLaplace - test constructor, builds and test function.
|
FitLaplace(int nPoints,
double[] xData,
double[] yData) |
FitLaplace.
|
FitLaplace(int nPoints,
float[] xData,
float[] yData) |
Constructs new fit laplace distribution.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
calculateChiSq() |
Calculates chi squared
|
protected void |
calculateFittedY() |
Calculates yDataFitted
|
void |
displayResults() |
Display results of displaying exponential fitting parameters.
|
private double |
dLdA(double x) |
Partial derivative of laplace dist with respect to A.
|
private double |
dLdbeta(double x) |
Partial derivative of laplace dist with respect to beta.
|
private double |
dLdmu(double x) |
Partial derivative of laplace dist with respect to mu.
|
void |
driver() |
Starts the analysis.
|
private void |
estimateInitial() |
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
protected Jama.Matrix |
generateJacobian() |
Jacobian used for non-linear least squares fitting.
|
protected Jama.Matrix |
generateResiduals() |
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
|
private double |
laplace(double x) |
Gaussian evaluated at a point with given parameters
|
private void |
testData() |
Test data to test fitting of gaussian.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
amp
private double amp
Amplitude parameter
-
mu
private double mu
Center parameter
-
beta
private double beta
Beta parameter
-
Constructor Detail
-
FitLaplace
public FitLaplace(int nPoints,
float[] xData,
float[] yData)
Constructs new fit laplace distribution.
- Parameters:
nPoints - Number of points in the functionxData - DOCUMENT ME!yData - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!covarMat - DOCUMENT ME!
-
generateResiduals
protected Jama.Matrix generateResiduals()
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
- Specified by:
generateResiduals in class NLFittedFunction- Returns:
�����������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd13.html��������������������������������������0000775�4231163�4231163�00000030506�14537076055�025064� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd13 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd13(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd13
public Fitqd13(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSphereGeneration.IntTorquatoModelMean.html������������������0000775�4231163�4231163�00000030046�14537076050�031272� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSphereGeneration.IntTorquatoModelMean (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquatoModelMean
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
volumeFraction |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
IntTorquatoModelMean(double volumeFraction) |
Creates a new IntTorquatoModelMean object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
volumeFraction
double volumeFraction
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LinearSolverOptions.html���������������������������������0000775�4231163�4231163�00000042464�14537076051�026333� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LinearSolverOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_threads
public int num_threads
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.Cache.head_t.html���������������������������������������������0000775�4231163�4231163�00000024765�14537076055�023350� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.Cache.head_t (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LIBSVM.Cache.head_t
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
head_t() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������gov/nih/mipav/model/algorithms/DAgostinosKsquaredTest.html������������������������������������������0000775�4231163�4231163�00000031502�14537076054�024523� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DAgostinosKsquaredTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.DAgostinosKsquaredTest
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
result |
output result
|
private double[] |
x |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
result
private double[] result
output result
-
Method Detail
-
selfTest
public void selfTest()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTextureSegmentation.html������������������������������������0000775�4231163�4231163�00000107417�14537076050�026003� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTextureSegmentation (MIPAV API Documentation)
-
- All Implemented Interfaces:
AlgorithmInterface, java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmTextureSegmentation
extends AlgorithmBase
implements AlgorithmInterface
This software implements the factorization-based segmentation algorithm.
The original code was written in MATLAB and C by:
Jiangye Yuan
Computational Sciences and and Engineering Division
Oak Ridge National Laboratory, Oak Ridge, Tennessee 37831
yuanj@ornl.gov
Reference:
[1] J. Yuan and D. L. Wang. Factorization-based texture segmentation. Technical Report OSU-CISRC-1/13 -TR01, 2013.
The website for this code is:
https://sites.google.com/site/factorizationsegmentation/
This code was ported to Java by William Gandler
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmTextureSegmentation(ModelImage destImage,
ModelImage srcImage,
int windowSize,
int segmentNumber,
WildMagic.LibFoundation.Mathematics.Vector3f[] pt,
java.util.BitSet contourMask,
boolean nonNegativity,
boolean removeSmallRegions) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
expand(int y,
int x,
int[] stk,
int[][] segLabelLarge,
int[][] segLabel,
int labelN,
int[] cnt,
int[] tb,
int[] bb,
int[] lb,
int[] rb,
int tgt) |
|
private void |
expand2(int y,
int x,
int[] stk,
int[] mark,
int[][] segLabel,
int labelN,
int[] cnt,
int[] tb,
int[] bb,
int[] lb,
int[] rb,
int tgt) |
|
private double |
l2dist(double[] a,
double[] b,
int k) |
|
private void |
RmSmRg(int[][] segLabelLarge,
int[][] segLabel,
int minSize) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
SHcomp(double[][][] sh_mx,
int ws,
double[][][] Ig) |
|
private void |
SHedge_ls(double[][] EdgeMap,
int ws,
int dism,
double[][][] sh_mx) |
|
private double |
x2dist(double[] a,
double[] b,
int k) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
filter
private double[] filter
-
windowSize
private int windowSize
-
omega
private double omega
-
filterNumber
private int filterNumber
-
binNumber
private int binNumber
-
Constructor Detail
-
AlgorithmTextureSegmentation
public AlgorithmTextureSegmentation(ModelImage destImage,
ModelImage srcImage,
int windowSize,
int segmentNumber,
WildMagic.LibFoundation.Mathematics.Vector3f[] pt,
java.util.BitSet contourMask,
boolean nonNegativity,
boolean removeSmallRegions)
-
Method Detail
-
expand
private void expand(int y,
int x,
int[] stk,
int[][] segLabelLarge,
int[][] segLabel,
int labelN,
int[] cnt,
int[] tb,
int[] bb,
int[] lb,
int[] rb,
int tgt)
-
expand2
private void expand2(int y,
int x,
int[] stk,
int[] mark,
int[][] segLabel,
int labelN,
int[] cnt,
int[] tb,
int[] bb,
int[] lb,
int[] rb,
int tgt)
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/sproot.html����������������������������������������������������������0000775�4231163�4231163�00000041122�14537076056�021440� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
sproot (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.sproot
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
c |
|
private int[] |
ier |
|
private int[] |
m |
|
private int |
mest |
|
private int |
n |
|
private double[] |
t |
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
|
private double[] |
zero |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
sproot() |
|
sproot(double[] t,
int n,
double[] c,
double[] zero,
int mest,
int[] m,
int[] ier) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
t
private double[] t
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions
are met:
1. Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above
copyright notice, this list of conditions and the following
disclaimer in the documentation and/or other materials provided
with the distribution.
3. Neither the name of the copyright holder nor the names of its
contributors may be used to endorse or promote products derived
from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
zero
private double[] zero
-
Constructor Detail
-
sproot
public sproot(double[] t,
int n,
double[] c,
double[] zero,
int mest,
int[] m,
int[] ier)
-
Method Detail
-
fpcuro
public void fpcuro(double a,
double b,
double c,
double d,
double[] x,
int[] n)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.norm_type.html�������������������������������������������������0000775�4231163�4231163�00000040516�14537076055�023230� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.norm_type (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Enum<libdt.norm_type>
-
- gov.nih.mipav.model.algorithms.libdt.norm_type
-
-
Enum Constant Summary
Enum Constants
| Enum Constant |
Description |
NORM_ILLEGAL |
< each pixel is zero-mean in time, and all pixels have unit-variance.
|
NORM_NONE |
|
NORM_ZM |
< no normalization.
|
NORM_ZMUV |
< each pixel is zero-mean in time.
|
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
norm_code |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
norm_type(int norm_code) |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Enum Constant Detail
-
NORM_ILLEGAL
public static final libdt.norm_type NORM_ILLEGAL
< each pixel is zero-mean in time, and all pixels have unit-variance.
-
Method Detail
-
valueOf
public static libdt.norm_type valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.html����������������������������������������������0000775�4231163�4231163�00000130447�14537076055�023657� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[][] |
ftrue |
|
(package private) int |
n |
This is an implementation of the 16 test cases listed in Numerical Inversion of the Laplace Transform:
a Survey of and Comparison of Methods by Brian Davies and Brian Martin, Journal of Computational
Physics, Vol. 33, pp. 1- 32, 1979.
|
(package private) double[] |
t |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
runAlgorithm() |
Actually runs the algorithm.
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
private void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
private void |
zexp(double ar,
double ai,
double[] br,
double[] bi) |
complex exponential function b = exp(a).
|
private void |
zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr) |
complex logarithm b = clog(a).
|
private void |
zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex multiply c = a * b.
|
private void |
zsqrt(double ar,
double ai,
double[] br,
double[] bi) |
complex square root b = csqrt(a).
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
n
int n
This is an implementation of the 16 test cases listed in Numerical Inversion of the Laplace Transform:
a Survey of and Comparison of Methods by Brian Davies and Brian Martin, Journal of Computational
Physics, Vol. 33, pp. 1- 32, 1979.
-
Method Detail
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zmlt
private void zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex multiply c = a * b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zdiv
private void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zexp
private void zexp(double ar,
double ai,
double[] br,
double[] bi)
complex exponential function b = exp(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]
-
zsqrt
private void zsqrt(double ar,
double ai,
double[] br,
double[] bi)
complex square root b = csqrt(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]
-
zlog
private void zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr)
complex logarithm b = clog(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]ierr - int[] ierr = 0, normal return ierr = 1, z = cmplx(0.0, 0.0)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.ParallelForEachExecutor.html�����������������������������0000775�4231163�4231163�00000044610�14537076054�027107� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.ParallelForEachExecutor (MIPAV API Documentation)
- java.lang.Object
-
- java.util.concurrent.ForkJoinTask<T>
-
- java.util.concurrent.CountedCompleter<java.lang.Void>
-
- gov.nih.mipav.model.algorithms.ContourPlot.ParallelForEachExecutor<T>
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.util.function.Consumer<? super T> |
action |
|
private static long |
serialVersionUID |
|
private java.util.Spliterator<T> |
spliterator |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
ParallelForEachExecutor(ContourPlot.ParallelForEachExecutor<T> parent,
java.util.Spliterator<T> spliterator,
java.util.function.Consumer<? super T> action) |
|
|
ParallelForEachExecutor(java.util.Spliterator<T> spliterator,
java.util.function.Consumer<? super T> action) |
Creates a new ParallelForEachExecutor that executes the
specified Consumer (action) on the elements of the specified Spliterator.
|
-
Method Summary
-
Methods inherited from class java.util.concurrent.CountedCompleter
addToPendingCount, compareAndSetPendingCount, complete, decrementPendingCountUnlessZero, exec, firstComplete, getCompleter, getPendingCount, getRawResult, getRoot, helpComplete, nextComplete, onCompletion, onExceptionalCompletion, propagateCompletion, quietlyCompleteRoot, setPendingCount, setRawResult, tryComplete
-
Methods inherited from class java.util.concurrent.ForkJoinTask
adapt, adapt, adapt, cancel, compareAndSetForkJoinTaskTag, completeExceptionally, fork, get, get, getException, getForkJoinTaskTag, getPool, getQueuedTaskCount, getSurplusQueuedTaskCount, helpQuiesce, inForkJoinPool, invoke, invokeAll, invokeAll, invokeAll, isCancelled, isCompletedAbnormally, isCompletedNormally, isDone, join, peekNextLocalTask, pollNextLocalTask, pollSubmission, pollTask, quietlyComplete, quietlyInvoke, quietlyJoin, reinitialize, setForkJoinTaskTag, tryUnfork
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
compute
public void compute()
- Specified by:
compute in class java.util.concurrent.CountedCompleter<java.lang.Void>
������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/QuarticEquationEP.html�����������������������������������������������0000775�4231163�4231163�00000204724�14537076056�023466� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
QuarticEquationEP (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.QuarticEquationEP
-
public class QuarticEquationEP
extends java.lang.Object
Copyright Yair Chuchem 2011.
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above
copyright notice, this list of conditions and the following
disclaimer in the documentation and/or other materials provided
with the distribution.
Neither the name of Yair Chuchem nor the names of other
contributors may be used to endorse or promote products derived
from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
The equation is a*x**4 + b*x**3 + c*x**2 + d*x + e = 0
/* Solve Polynomials of up to the fourth degree. (over complex numbers)
Algorithms by Ferrari, Tartaglia, Cardano, et al. (16th century Italy)
- Author:
- ilb
-
-
Constructor Summary
Constructors
| Constructor |
Description |
QuarticEquationEP() |
|
QuarticEquationEP(int degree,
double areal,
double aimag,
double breal,
double bimag,
double creal,
double cimag,
double dreal,
double dimag,
double ereal,
double eimag,
int[] num_sols,
double[] solsreal,
double[] solsimag) |
|
QuarticEquationEP(int degree,
double areal,
double breal,
double creal,
double dreal,
double ereal,
int[] num_sols,
double[] sols) |
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calc_binomials(int num_binoms,
int stride,
DoubleDouble[][] dst) |
|
private void |
calc_powers(QuarticEquationEP.complex_t x,
int max_power,
QuarticEquationEP.complex_t[] dst) |
|
private void |
calc_powers(DoubleDouble x,
int max_power,
DoubleDouble[] dst) |
|
private void |
calc_shifted_coefs(QuarticEquationEP.complex_t shift,
int degree,
QuarticEquationEP.complex_t[] src,
QuarticEquationEP.complex_t[] dst) |
|
private void |
calc_shifted_coefs(DoubleDouble shift,
int degree,
DoubleDouble[] src,
DoubleDouble[] dst) |
|
private QuarticEquationEP.complex_t |
complex_add(QuarticEquationEP.complex_t a,
QuarticEquationEP.complex_t b) |
|
private QuarticEquationEP.complex_t |
complex_div(QuarticEquationEP.complex_t a,
QuarticEquationEP.complex_t b) |
|
private static boolean |
complex_eq(QuarticEquationEP.complex_t a,
QuarticEquationEP.complex_t b) |
|
private QuarticEquationEP.complex_t |
complex_from_real(DoubleDouble x) |
|
private QuarticEquationEP.complex_t |
complex_inverse(QuarticEquationEP.complex_t x) |
|
private QuarticEquationEP.complex_t |
complex_mult(QuarticEquationEP.complex_t a,
QuarticEquationEP.complex_t b) |
|
private QuarticEquationEP.complex_t |
complex_mult_real(DoubleDouble c,
QuarticEquationEP.complex_t x) |
|
private QuarticEquationEP.complex_t |
complex_negate(QuarticEquationEP.complex_t x) |
|
private QuarticEquationEP.complex_t |
complex_pow_real(QuarticEquationEP.complex_t x,
DoubleDouble power) |
|
private static DoubleDouble |
complex_sqr_norm(QuarticEquationEP.complex_t x) |
|
private QuarticEquationEP.complex_t |
complex_sqrt(QuarticEquationEP.complex_t x) |
|
private DoubleDouble |
cubic_root(DoubleDouble x) |
|
void |
run() |
|
void |
runComplex() |
|
void |
runReal() |
|
void |
selfTest() |
|
private int |
solve_depressed_cubic(QuarticEquationEP.complex_t[] poly,
QuarticEquationEP.complex_t[] results) |
|
private int |
solve_depressed_cubic(DoubleDouble[] poly,
DoubleDouble[] results) |
|
private int |
solve_depressed_poly(int degree,
QuarticEquationEP.complex_t[] poly,
QuarticEquationEP.complex_t[] results) |
|
private int |
solve_depressed_poly(int degree,
DoubleDouble[] poly,
DoubleDouble[] results) |
|
private int |
solve_depressed_quadratic(QuarticEquationEP.complex_t[] poly,
QuarticEquationEP.complex_t[] results) |
|
private int |
solve_depressed_quadratic(DoubleDouble[] poly,
DoubleDouble[] results) |
|
private int |
solve_depressed_quartic(QuarticEquationEP.complex_t[] poly,
QuarticEquationEP.complex_t[] results) |
|
private int |
solve_depressed_quartic(DoubleDouble[] poly,
DoubleDouble[] results) |
|
private int |
solve_normalized_poly(int degree,
QuarticEquationEP.complex_t[] poly,
QuarticEquationEP.complex_t[] results) |
|
private int |
solve_normalized_poly(int degree,
DoubleDouble[] poly,
double[] results) |
|
private int |
solve_normalized_poly(int degree,
DoubleDouble[] poly,
DoubleDouble[] results) |
|
private int |
solve_poly(int degree,
QuarticEquationEP.complex_t[] poly,
QuarticEquationEP.complex_t[] results) |
|
(package private) int |
solve_real_poly(int degree,
DoubleDouble[] poly,
double[] results) |
|
(package private) int |
solve_real_poly(int degree,
DoubleDouble[] poly,
DoubleDouble[] results) |
|
private static DoubleDouble |
stableness_score(QuarticEquationEP.complex_t a,
QuarticEquationEP.complex_t b) |
|
private DoubleDouble |
stableness_score(DoubleDouble a,
DoubleDouble b) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
degree
private int degree
-
num_sols
private int[] num_sols
-
Constructor Detail
-
QuarticEquationEP
public QuarticEquationEP(int degree,
double areal,
double aimag,
double breal,
double bimag,
double creal,
double cimag,
double dreal,
double dimag,
double ereal,
double eimag,
int[] num_sols,
double[] solsreal,
double[] solsimag)
-
QuarticEquationEP
public QuarticEquationEP(int degree,
double areal,
double breal,
double creal,
double dreal,
double ereal,
int[] num_sols,
double[] sols)
-
Method Detail
-
selfTest
public void selfTest()
-
runReal
public void runReal()
-
runComplex
public void runComplex()
��������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Text.html������������������������������������������������0000775�4231163�4231163�00000132661�14537076054�023334� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Text (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Text
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Text(java.lang.String textstr,
int fontsize,
int style) |
Creates a new Text object with the specified string and font configuration.
|
Text(java.lang.String textstr,
int fontsize,
int style,
int textcolor) |
Creates a new Text object with the specified string and font configuration.
|
Text(java.lang.String textstr,
int fontsize,
int style,
java.awt.Color textcolor) |
Creates a new Text object with the specified string and font configuration.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
close() |
disposes of the GL resources of this text object,
i.e deletes the vertex array.
|
float |
getAngle() |
|
java.awt.Color |
getBackground() |
|
java.awt.geom.Rectangle2D |
getBounds() |
|
java.awt.geom.Rectangle2D |
getBoundsWithRotation() |
|
java.awt.Color |
getColor() |
|
float |
getColorA() |
|
float |
getColorB() |
|
float |
getColorG() |
|
float |
getColorR() |
|
java.awt.geom.Point2D |
getOrigin() |
|
int |
getPickColor() |
|
float |
getPickColorA() |
|
float |
getPickColorB() |
|
float |
getPickColorG() |
|
float |
getPickColorR() |
|
java.awt.Dimension |
getTextSize() |
|
java.lang.String |
getTextString() |
|
ContourPlot.Text |
hide(boolean hide) |
Hides or unhides this Text object, i.e. sets the isHidden() field
value. |
boolean |
intersects(java.awt.geom.Rectangle2D rect) |
|
boolean |
isDirty() |
if true, indicates that a call to #updateGL(boolean) is necessary to sync
this objects GL resources to its current state.
|
boolean |
isHidden() |
Indicates whether this Renderable is hidden i.e. will not be drawn.
|
ContourPlot.Text |
setAngle(double angle) |
Sets the rotation angle in radian by which this text object is rotated around its origin.
|
void |
setBackground(int argb) |
Sets the background color of the text, per default this is
transparent black (0x00000000) which wont be visible.
|
void |
setBackground(java.awt.Color background) |
Sets the background color of the text, per default this is
transparent black (0x00000000) which wont be visible.
|
ContourPlot.Text |
setColor(int argb) |
Sets the color of this text in integer packed ARGB format.
|
ContourPlot.Text |
setColor(java.awt.Color color) |
Sets the color of this text
|
ContourPlot.Text |
setDirty() |
Sets the isDirty() state of this renderable to true. |
ContourPlot.Text |
setOrigin(int x,
int y) |
Sets the origin of this text object, i.e. the bottom left corner of the rectangle enclosing the text,
the text's location so to say
|
ContourPlot.Text |
setOrigin(java.awt.geom.Point2D origin) |
Sets the origin of this text object, i.e. the bottom left corner of the rectangle enclosing the text,
the text's location so to say
|
ContourPlot.Text |
setPickColor(int pickColor) |
|
ContourPlot.Text |
setTextString(java.lang.String txtStr) |
Sets the string of this text.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
style
public final int style
-
pickColor
protected int pickColor
-
angle
protected float angle
-
hidden
protected boolean hidden
-
Constructor Detail
-
Text
public Text(java.lang.String textstr,
int fontsize,
int style,
java.awt.Color textcolor)
Creates a new Text object with the specified string and font configuration.
- Parameters:
textstr - the text to be displayedfontsize - point size of the fontstyle - of the font - one of Font.PLAIN, Font.BOLD, Font.ITALIC
or bitwise union BOLD|ITALIC.textcolor - color of the text
-
Text
public Text(java.lang.String textstr,
int fontsize,
int style,
int textcolor)
Creates a new Text object with the specified string and font configuration.
- Parameters:
textstr - the text to be displayedfontsize - point size of the fontstyle - of the font - one of Font.PLAIN, Font.BOLD, Font.ITALIC
or bitwise union BOLD|ITALIC.textcolor - color of the text (integer packed ARGB)
-
Text
public Text(java.lang.String textstr,
int fontsize,
int style)
Creates a new Text object with the specified string and font configuration.
- Parameters:
textstr - the text to be displayedfontsize - point size of the fontstyle - of the font - one of Font.PLAIN, Font.BOLD, Font.ITALIC
or bitwise union BOLD|ITALIC.
-
Method Detail
-
setBackground
public void setBackground(java.awt.Color background)
Sets the background color of the text, per default this is
transparent black (0x00000000) which wont be visible.
- Parameters:
background - color
-
setBackground
public void setBackground(int argb)
Sets the background color of the text, per default this is
transparent black (0x00000000) which wont be visible.
- Parameters:
argb - integer packed ARGB color value
-
getColorR
public float getColorR()
- Returns:
- normalized red channel of this text's color (in [0,1])
-
getColorG
public float getColorG()
- Returns:
- normalized green channel of this text's color (in [0,1])
-
getColorB
public float getColorB()
- Returns:
- normalized blue channel of this text's color (in [0,1])
-
getColorA
public float getColorA()
- Returns:
- normalized alpha channel of this text's color (in [0,1])
-
setOrigin
public ContourPlot.Text setOrigin(java.awt.geom.Point2D origin)
Sets the origin of this text object, i.e. the bottom left corner of the rectangle enclosing the text,
the text's location so to say
- Parameters:
origin - to set- Returns:
- this for chaining
-
setOrigin
public ContourPlot.Text setOrigin(int x,
int y)
Sets the origin of this text object, i.e. the bottom left corner of the rectangle enclosing the text,
the text's location so to say
- Parameters:
x - coordinate of originy - coordinate of origin- Returns:
- this for chaining
-
getAngle
public float getAngle()
- Returns:
- the rotation angle in radian by which this text object is rotated around its origin.
�������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens4.html���������������������������������0000775�4231163�4231163�00000030414�14537076055�026167� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens4 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens4(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens4
public FitPiessens4(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SizedCostFunction.html�����������������������������������0000775�4231163�4231163�00000064677�14537076052�026002� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SizedCostFunction (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
SizedCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9) |
|
SizedCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
SizedCostFunction
public SizedCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals)
-
SizedCostFunction
public SizedCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9)
�����������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SizeTestingCostFunction.html�����������������������������0000775�4231163�4231163�00000032044�14537076052�027153� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SizeTestingCostFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Backpropagation.Neuron.html������������������������������������������0000775�4231163�4231163�00000041304�14537076051�024460� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Backpropagation.Neuron (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Neuron() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
output
private double output
-
Method Detail
-
calculateOutput
void calculateOutput()
-
getOutput
double getOutput()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.PointDetails.html����������������������������������������0000775�4231163�4231163�00000054766�14537076054�025020� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.PointDetails (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
- All Implemented Interfaces:
java.lang.Cloneable
- Enclosing class:
- ContourPlot
public static class ContourPlot.PointDetails
extends java.lang.Object
implements java.lang.Cloneable
Class for storing all the details of a single point to be rendered.
This comprises location, color, scaling, glyph rotation and picking color.
- Author:
- hageldave
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
java.util.function.IntSupplier |
color |
|
java.awt.geom.Point2D |
location |
|
int |
pickColor |
|
java.util.function.DoubleSupplier |
rot |
|
java.util.function.DoubleSupplier |
scale |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
PointDetails(java.awt.geom.Point2D location) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
pickColor
public int pickColor
����������gov/nih/mipav/model/algorithms/AlgorithmSingleMRIImageSNR.html��������������������������������������0000775�4231163�4231163�00000116764�14537076050�025111� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSingleMRIImageSNR (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmSingleMRIImageSNR(ModelImage srcImg,
boolean automatic,
int signalIndex,
int signal2Index,
int backgroundIndex,
int numReceivers) |
Creates a new AlgorithmSingleMRIImageSNR object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double |
eval(double x) |
|
void |
finalize() |
Prepares this class for destruction.
|
private double |
funcC(double meanDivStdDev,
boolean signal) |
This routine iterates to find the solution to the first moment equation for the Generalized Rice distribution.
|
private double |
receiverMaximumLikelihood(double signal) |
For an input signal value this routine returns the log of the maximimum likelihood function.
|
void |
runAlgorithm() |
starts the algorithm.
|
private void |
testAlgorithm() |
DOCUMENT ME!
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmSingleMRIImageSNR
public AlgorithmSingleMRIImageSNR(ModelImage srcImg,
boolean automatic,
int signalIndex,
int signal2Index,
int backgroundIndex,
int numReceivers)
Creates a new AlgorithmSingleMRIImageSNR object.
- Parameters:
srcImg - source imageautomatic - If true, use fuzzy c means to separate all pixels into signal and backgroundsignalIndex - the index of the signal VOIsignal2Index - the index of the signal2 VOI if >= 0backgroundIndex - the index of the background VOInumReceivers - the number of NMR receivers
-
Method Detail
-
funcC
private double funcC(double meanDivStdDev,
boolean signal)
This routine iterates to find the solution to the first moment equation for the Generalized Rice distribution.
- Parameters:
meanDivStdDev - DOCUMENT ME!signal - DOCUMENT ME!- Returns:
- DOCUMENT ME!
������������gov/nih/mipav/model/algorithms/LsqFit.html����������������������������������������������������������0000775�4231163�4231163�00000204577�14537076056�021333� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LsqFit (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LsqFit
-
public abstract class LsqFit
extends java.lang.Object
LsqFit.jl is licensed under the MIT License:
Returns the argmin over x of `sum(f(x).^2)` using the Levenberg-Marquardt
algorithm, and an estimate of the Jacobian of `f` at x.
> Copyright (c) 2012: John Myles White and other contributors.
>
> Permission is hereby granted, free of charge, to any person obtaining
> a copy of this software and associated documentation files (the
> "Software"), to deal in the Software without restriction, including
> without limitation the rights to use, copy, modify, merge, publish,
> distribute, sublicense, and/or sell copies of the Software, and to
> permit persons to whom the Software is furnished to do so, subject to
> the following conditions:
>
> The above copyright notice and this permission notice shall be
> included in all copies or substantial portions of the Software.
>
> THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
> EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF
> MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
> NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE
> LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION
> OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION
> WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
BARD |
|
private int |
BEALE |
|
private int |
BIGGS_EXP6 |
|
private int |
BOX_3D |
|
private int |
BROWN_ALMOST_LINEAR |
|
private int |
BROWN_AND_DENNIS |
|
private int |
BROWN_BADLY_SCALED |
|
private int |
BROYDEN_BANDED |
|
private int |
BROYDEN_TRIDIAGONAL |
|
private int |
CHEBYQUAD |
|
private boolean |
converged |
|
(package private) double |
default_relstep |
|
private int |
DISCRETE_BOUNDARY_VALUE |
|
private int |
DISCRETE_INTEGRAL |
|
private int |
DRAPER24D |
|
(package private) double |
epsilon |
|
private int |
EQUILIBRIUM_COMBUSTION |
|
private double |
exp0p1 |
|
private double[] |
expap1 |
|
private int |
EXTENDED_POWELL_SINGULAR |
|
private int |
EXTENDED_ROSENBROCK |
|
private int |
FREUDENSTEIN_AND_ROTH |
|
protected double |
g_tol |
|
private int |
GAUSSIAN |
|
protected boolean |
geodesicAcceleration |
|
protected double |
good_step_quality |
|
private int |
GULF_RESEARCH_AND_DEVELOPMENT |
|
private int |
HATFLDB |
|
private int |
HATFLDC |
|
private int |
HELICAL_VALLEY |
|
private int |
HOCK1 |
|
private int |
HOCK21_MODIFIED |
|
private int |
HOCK25 |
|
private int |
HOCK3 |
|
private int |
HOCK4 |
|
protected double |
initial_lambda |
|
protected double[] |
initial_x |
|
private int |
iterCt |
|
private double[][] |
J |
|
private int |
JENNRICH_AND_SAMPSON |
|
private int |
KOWALIK_AND_OSBORNE |
|
protected double |
lambda_decrease |
|
protected double |
lambda_increase |
|
private int |
LEVMAR_ROSENBROCK |
|
private int |
LINEAR_FULL_RANK |
|
private int |
LINEAR_RANK1 |
|
private int |
LINEAR_RANK1_WITH_ZERO_COLUMNS_AND_ROWS |
|
protected double[] |
lower |
|
protected int |
m |
integer scalar containing the number of data points.
|
private int |
MADSEN |
|
protected int |
maxIter |
|
private int |
MEYER |
|
protected double |
min_step_quality |
|
private int |
MODIFIED_ROSENBROCK |
|
protected int |
n |
variables integer scalar containing the number of unknowns.
|
private int |
OSBORNE1 |
|
private int |
OSBORNE2 |
|
private double |
p1sqrtem5 |
|
private int |
PENALTY_FUNCTION_I |
|
private int |
PENALTY_FUNCTION_II |
|
private int |
POWELL_2_PARAMETER |
|
private int |
POWELL_BADLY_SCALED |
|
private int |
POWELL_SINGULAR |
|
private double[] |
residuals |
|
private int |
ROSENBROCK |
|
protected boolean |
show_trace |
|
private double |
sqrt10 |
|
private double |
sqrt5 |
|
private double |
sqrtem5 |
|
protected double |
tau |
|
private double[] |
tdata |
|
private int |
testCase |
|
private boolean |
testMode |
module LsqFit
export curve_fit,
standard_error,
margin_error,
confidence_interval,
estimate_covar,
make_hessian,
Avv,
# StatsBase reexports
dof, coef, nobs, mse, rss,
stderror, weights, residuals
using Distributions
using OptimBase
using LinearAlgebra
using ForwardDiff
import NLSolversBase: value, jacobian
import StatsBase
import StatsBase: coef, dof, nobs, rss, stderror, weights, residuals
import Base.summary
include("geodesic.jl")
include("levenberg_marquardt.jl")
include("curve_fit.jl")
end
|
private int |
TRIGONOMETRIC |
|
protected double[] |
upper |
|
protected boolean |
useNumerical |
|
private int |
VARIABLY_DIMENSIONED_FUNCTION |
|
private int |
WATSON |
|
private int |
WOOD |
|
private double[] |
x |
|
protected double |
x_tol |
|
private double[] |
ydata |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
LsqFit() |
To run LsqFit() use:
boolean fullTest = true;
if (fullTest) {
FitAll fa = new FitAll();
return;
}
class FitAll extends LsqFit {
public FitAll() {
// nPoints data points, 3 coefficients, and exponential fitting
super();
}
public void fitToFunction(double[] x, double[] residuals) {
return;
}
public void fitToJacobian(double[] x, double[][] jacobian) {
return;
}
public void fitToHessian(double[] x, double[][][] hessian) {
// n,n,m hessian
return;
}
}
|
LsqFit(int nPts,
double[] initial_x) |
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
driver() |
|
private void |
dumpTestResults() |
|
abstract void |
fitToFunction(double[] x,
double[] residuals) |
fitToFunction communicates
|
abstract void |
fitToHessian(double[] x,
double[][][] hessian) |
|
abstract void |
fitToJacobian(double[] x,
double[][] jacobian) |
fitToJacobian communicates
|
private void |
fitToNumericalHessian(double[] xinit,
double[][][] hessian) |
|
private void |
fitToNumericalJacobian(double[] xinit,
double[][] jacobian) |
|
void |
fitToTestFunction(double[] x,
double[] residuals) |
|
private void |
fitToTestHessian(double[] x,
double[][][] hessian) |
|
private void |
fitToTestJacobian(double[] x,
double[][] J) |
|
boolean |
getConverged() |
|
double[][] |
getCovariance() |
|
int |
getIterations() |
|
double[] |
getParameters() |
getParameters accessor to function parameters.
|
double[] |
getResiduals() |
DOCUMENT ME!
|
private double |
shiftedChebyshev(double x,
int n) |
|
private double |
shiftedChebyshevDerivative(double x,
int n) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
testMode
private boolean testMode
module LsqFit
export curve_fit,
standard_error,
margin_error,
confidence_interval,
estimate_covar,
make_hessian,
Avv,
# StatsBase reexports
dof, coef, nobs, mse, rss,
stderror, weights, residuals
using Distributions
using OptimBase
using LinearAlgebra
using ForwardDiff
import NLSolversBase: value, jacobian
import StatsBase
import StatsBase: coef, dof, nobs, rss, stderror, weights, residuals
import Base.summary
include("geodesic.jl")
include("levenberg_marquardt.jl")
include("curve_fit.jl")
end
-
x_tol
protected double x_tol
-
g_tol
protected double g_tol
-
maxIter
protected int maxIter
-
lower
protected double[] lower
-
upper
protected double[] upper
-
default_relstep
double default_relstep
-
iterCt
private int iterCt
-
tdata
private double[] tdata
-
ydata
private double[] ydata
-
sqrtem5
private double sqrtem5
-
p1sqrtem5
private double p1sqrtem5
-
sqrt5
private double sqrt5
-
sqrt10
private double sqrt10
-
expap1
private double[] expap1
-
exp0p1
private double exp0p1
-
testCase
private int testCase
-
Constructor Detail
-
LsqFit
public LsqFit()
To run LsqFit() use:
boolean fullTest = true;
if (fullTest) {
FitAll fa = new FitAll();
return;
}
class FitAll extends LsqFit {
public FitAll() {
// nPoints data points, 3 coefficients, and exponential fitting
super();
}
public void fitToFunction(double[] x, double[] residuals) {
return;
}
public void fitToJacobian(double[] x, double[][] jacobian) {
return;
}
public void fitToHessian(double[] x, double[][][] hessian) {
// n,n,m hessian
return;
}
}
-
Method Detail
-
driver
private void driver()
���������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTimeFitting.FitExponential.html�����������������������������0000775�4231163�4231163�00000040561�14537076050�027134� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTimeFitting.FitExponential (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
ydata |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitExponential(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ydata
final double[] ydata
-
Constructor Detail
-
FitExponential
public FitExponential(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a0 + a1*exp(a2*x).
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
�����������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DBSCANClusteringSegment.SP.html��������������������������������������0000775�4231163�4231163�00000027461�14537076054�024760� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DBSCANClusteringSegment.SP (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
a |
|
(package private) double[] |
b |
|
(package private) double[] |
c |
|
(package private) double[] |
L |
|
(package private) int[] |
N |
|
(package private) double[] |
r |
|
(package private) double[] |
stda |
|
(package private) double[] |
stdb |
|
(package private) double[] |
stdL |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
SP(int n) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.GoodTestTerm.html����������������������������������������0000775�4231163�4231163�00000036273�14537076051�024733� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.GoodTestTerm (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.util.Vector<java.util.Vector<java.lang.Double>> |
a_ |
|
private int |
arity_ |
|
private boolean |
return_value_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
GoodTestTerm(int arity,
int[] dim) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
arity_
private int arity_
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ConjugateGradient.html�����������������������������������������������0000775�4231163�4231163�00000035236�14537076053�023515� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ConjugateGradient (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ConjugateGradient
-
public class ConjugateGradient
extends java.lang.Object
MIT License
Copyright (c) 2018 Komahan Boopathy
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
Ported to Java from routine dcg in linear_algebra.f90 in linear-nonlinear-algebra
package by William Gandler
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[][] |
A |
|
private double[] |
b |
|
private int[] |
flag |
|
private int[] |
iter |
|
private int |
max_it |
|
private double |
max_tol |
|
private double[] |
tol |
|
private double[] |
x |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ConjugateGradient(double[][] A,
double[] b,
int max_it,
double max_tol,
double[] x,
int[] iter,
double[] tol,
int[] flag) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
max_it
private int max_it
-
max_tol
private double max_tol
-
Constructor Detail
-
ConjugateGradient
public ConjugateGradient(double[][] A,
double[] b,
int max_it,
double max_tol,
double[] x,
int[] iter,
double[] tol,
int[] flag)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SVM.VlSvmSolverType.html���������������������������������������������0000775�4231163�4231163�00000035341�14537076057�023671� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SVM.VlSvmSolverType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static SVM.VlSvmSolverType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.GradientProblemSolverSummary.html������������������������0000775�4231163�4231163�00000047160�14537076051�030177� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.GradientProblemSolverSummary (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
final_cost
public double final_cost
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.MeshFaceIterator.html�������������������������������������������0000775�4231163�4231163�00000033024�14537076056�024036� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.MeshFaceIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.MeshFaceIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NelderMead.param_t.html����������������������������������������������0000775�4231163�4231163�00000023312�14537076056�023535� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NelderMead.param_t (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.NelderMead.param_t
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
a |
|
(package private) double |
b |
|
(package private) double |
c |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
param_t() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
param_t
private param_t()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmLLE.distanceIndexItem.html����������������������������������0000775�4231163�4231163�00000030250�14537076047�025775� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLLE.distanceIndexItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmLLE.distanceIndexItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
distance |
DOCUMENT ME!
|
private int |
index |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
distanceIndexItem(double distance,
int index) |
Creates a new positionWieghtItem object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
index
private final int index
DOCUMENT ME!
-
Method Detail
-
getIndex
public int getIndex()
DOCUMENT ME!
- Returns:
- DOCUMENT ME!
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ArctanLoss.html������������������������������������������0000775�4231163�4231163�00000027761�14537076051�024426� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ArctanLoss (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
a_ |
|
private double |
b_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ArctanLoss(double a) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������gov/nih/mipav/model/algorithms/CeresSolverTest.TernaryCostFunction2.html����������������������������0000775�4231163�4231163�00000033515�14537076053�027256� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.TernaryCostFunction2 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
TernaryCostFunction2(int num_residuals,
int parameter_block1_size,
int parameter_block2_size,
int parameter_block3_size) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
TernaryCostFunction2
public TernaryCostFunction2(int num_residuals,
int parameter_block1_size,
int parameter_block2_size,
int parameter_block3_size)
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitPure1DNoWholeModel.html�����������������������������0000775�4231163�4231163�00000042776�14537076045�026546� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitPure1DNoWholeModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int[] |
iv |
|
(package private) double[] |
v |
|
(package private) double[] |
x |
|
private double[] |
xData |
|
private float[] |
yData |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPure1DNoWholeModel(int nPoints,
double[] xData,
float[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian) |
Creates a new FitSM2nl2solModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
void |
calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm) |
Fit to function - a1 + (1 - a1)*[1 - 1/sqrt(1 + 4*PI*a0*x)].
|
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying pure 1D no whole organ normalization
fitting parameters.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitPure1DNoWholeModel
public FitPure1DNoWholeModel(int nPoints,
double[] xData,
float[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian)
Creates a new FitSM2nl2solModel object.
- Parameters:
nPoints - DOCUMENT ME!yData - DOCUMENT ME!x - DOCUMENT ME!iv - v - useAnalyticJacobian -
-
Method Detail
-
driver
public void driver()
Starts the analysis.
- Overrides:
driver in class NL2sol
-
calcj
public void calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm)
- Specified by:
calcj in class NL2sol
-
calcr
public void calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm)
Fit to function - a1 + (1 - a1)*[1 - 1/sqrt(1 + 4*PI*a0*x)].
- Specified by:
calcr in class NL2sol
��gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.ODEModel.html������������������������������0000775�4231163�4231163�00000034645�14537076056�026643� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.ODEModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) double[] |
c |
|
(package private) double[][] |
scale |
|
(package private) double[][] |
z |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ODEModel(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag,
double[][] scale,
double[][] z,
double[] beta,
double[] c) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ODEModel
public ODEModel(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag,
double[][] scale,
double[][] z,
double[] beta,
double[] c)
-
Method Detail
-
driver
public void driver()
DOCUMENT ME!
- Overrides:
driver in class ODE
�������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSM2.Integration2EPAll.html����������������������������������0000775�4231163�4231163�00000031563�14537076050�025606� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSM2.Integration2EPAll (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2EP
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.Rosenbrock.html��������������������������������������0000775�4231163�4231163�00000027023�14537076053�025315� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.Rosenbrock (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Rosenbrock
public Rosenbrock()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.svm_parameter.html��������������������������������������������0000775�4231163�4231163�00000053241�14537076056�023757� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.svm_parameter (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
-
Method Summary
-
Methods inherited from class java.lang.Object
equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
svm_type
public int svm_type
-
kernel_type
public int kernel_type
-
gamma
public double gamma
-
coef0
public double coef0
-
cache_size
public double cache_size
-
nr_weight
public int nr_weight
-
weight
public double[] weight
-
shrinking
public int shrinking
-
probability
public int probability
-
Constructor Detail
-
svm_parameter
public svm_parameter()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Iterators.ImgAreaIterator.html���������������������������0000775�4231163�4231163�00000044130�14537076054�027373� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Iterators.ImgAreaIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator<P>
-
- Type Parameters:
P - the pixel type of this iterator
- All Implemented Interfaces:
java.util.Iterator<P>
- Enclosing class:
- ContourPlot.Iterators
public static class ContourPlot.Iterators.ImgAreaIterator<P extends ContourPlot.PixelBase>
extends java.lang.Object
implements java.util.Iterator<P>
The standard iterator class for iterating over an area of an image.
- Author:
- hageldave
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
height |
|
private P |
px |
|
private int |
width |
|
private int |
x |
|
private int |
xStart |
|
private int |
y |
|
private int |
yStart |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ImgAreaIterator(int xStart,
int yStart,
int width,
int height,
P px) |
Creates a new ImgAreaIterator for iterating the pixels in the specified area of an image.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Iterator
remove
-
-
Field Detail
-
xStart
private final int xStart
-
yStart
private final int yStart
-
width
private final int width
-
height
private final int height
-
Constructor Detail
-
ImgAreaIterator
public ImgAreaIterator(int xStart,
int yStart,
int width,
int height,
P px)
Creates a new ImgAreaIterator for iterating the pixels in the specified area of an image.
The iterated image is the source of the specified pixel.
The specified pixel will be reused on every invocation of
next()
with incremented index.
- Parameters:
xStart - the left boundary of the area (inclusive)yStart - the top boundary of the area (inclusive)width - of the areaheight - of the areapx - the pixel used for iterating
-
Method Detail
-
hasNext
public boolean hasNext()
- Specified by:
hasNext in interface java.util.Iterator<P extends ContourPlot.PixelBase>
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.indexValueItem.html��������������������������������������0000775�4231163�4231163�00000030071�14537076051�025264� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.indexValueItem<Vertex>
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private Vertex |
value |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public Vertex getValue()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmASM.Options.html��������������������������������������������0000775�4231163�4231163�00000026624�14537076043�024041� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmASM.Options (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmASM.Options
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Options() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
nscales
public int nscales
-
nsearch
public int nsearch
-
verbose
public boolean verbose
������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog15.html����������������������������������0000775�4231163�4231163�00000026636�14537076055�025700� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog15 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog15(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog15
public FitdeHoog15(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
��������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmConvolver.html����������������������������������������������0000775�4231163�4231163�00000362070�14537076044�023743� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConvolver (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY,
float[] kernelXZ,
float[] kernelYZ,
float[] kernelZZ,
boolean entireImage,
int[] kExtents) |
|
AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY,
float[] kernelXZ,
float[] kernelYZ,
float[] kernelZZ,
float[] kernelXXX,
float[] kernelXXY,
float[] kernelXYY,
float[] kernelYYY,
float[] kernelXXZ,
float[] kernelXZZ,
float[] kernelXYZ,
float[] kernelYYZ,
float[] kernelYZZ,
float[] kernelZZZ,
int[] kExtents,
boolean entireImage) |
|
AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY,
float[] kernelXXX,
float[] kernelXXY,
float[] kernelXYY,
float[] kernelYYY,
int[] kExtents,
boolean entireImage) |
|
AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY,
int[] kExtents,
boolean entireImage) |
|
AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
float[] kernelX2,
float[] kernelY2,
int[] kExtents,
boolean entireImage,
boolean combined2D3D) |
|
AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
int[] kExtents,
boolean entireImage) |
|
AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
int[] kExtents,
boolean entireImage,
boolean sqrtXY) |
|
AlgorithmConvolver(ModelImage srcImage,
float[] kernel,
int[] kExtents,
boolean entireImage,
boolean image25D) |
Sets the source and kernel images and calls the appropriate method based on image dimensionality.
|
AlgorithmConvolver(ModelImage srcImage,
float[] kernel,
int[] kExtents,
boolean entireImage,
boolean image25D,
double intensityGaussianDenom) |
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
convolve2D(int startSlice,
int endSlice) |
|
private void |
convolve2D3D(int start,
int end,
float[] iImage,
int index,
int min3DLength,
int max3DLength) |
|
private void |
convolve2DBilateral(int startSlice,
int endSlice) |
|
private void |
convolve2DNMS(int startSlice,
int endSlice) |
|
private void |
convolve2DNMSE(int startSlice,
int endSlice) |
|
static float |
convolve2DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve2DPt(WildMagic.LibFoundation.Mathematics.Vector2d pt,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve2DPt(WildMagic.LibFoundation.Mathematics.Vector2f pt,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve2DPtMed(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve2DPtNMS(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve2DPtNMSE(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelXXX,
float[] kernelXXY,
float[] kernelXYY,
float[] kernelYYY) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve2DPtSqrtXY(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve2DRGBPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel) |
A static function that convolves a kernel with an RGB image at a position.
|
static float |
convolve2DRGBPtSqrtXY(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY) |
A static function that convolves a kernel with an RGB image at a position.
|
private void |
convolve2DSqrtXY(int startSlice,
int endSlice) |
|
private void |
convolve2DXY(int startSlice,
int endSlice) |
|
private void |
convolve3D(int start,
int end,
float[] iImage,
int index) |
|
private void |
convolve3DBilateral(int start,
int end,
float[] iImage,
int index) |
|
private void |
convolve3DNMS(int start,
int end,
float[] iImage,
int index) |
|
private void |
convolve3DNMSE(int start,
int end,
float[] iImage,
int index) |
|
static float |
convolve3DPt(float[] pt,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve3DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve3DPt(WildMagic.LibFoundation.Mathematics.Vector3f kPt,
ModelImage kImage,
int[] kExtents,
float[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve3DPtMed(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve3DPtNMS(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY,
float[] kernelXZ,
float[] kernelYZ,
float[] kernelZZ) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve3DPtNMSE(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
float[] kernelXXX,
float[] kernelXXY,
float[] kernelXYY,
float[] kernelYYY,
float[] kernelXXZ,
float[] kernelXZZ,
float[] kernelXYZ,
float[] kernelYYZ,
float[] kernelYZZ,
float[] kernelZZZ) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve3DPtXYZ(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelZ) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolve3DRGBPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel) |
A static function that convolves a kernel with an RGB image at a position.
|
static float |
convolve3DRGBPtXYZ(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelZ) |
A static function that convolves a kernel with an RGB image at a position.
|
private void |
convolve3DXYZ(int start,
int end,
float[] iImage,
int index) |
|
static float[] |
convolveBilateral2DCIELabPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel,
double intensityGaussianDenom) |
A static function that convolves a kernel with an CIELab image at a position.
|
static float |
convolveBilateral2DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel,
double intensityGaussianDenom) |
A static function that convolves a kernel with an image at a position.
|
static float[] |
convolveBilateral3DCIELabPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel,
double intensityGaussianDenom) |
A static function that convolves a kernel with a CIELab image at a position.
|
static float |
convolveBilateral3DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel,
double intensityGaussianDenom) |
A static function that convolves a kernel with an image at a position.
|
static void |
convolveBlock3D(int start,
int end,
int lpv,
float[] iImage,
int[] iExtents,
int[] kExtents,
float[] kernel,
ModelImage oImage) |
|
static float |
convolveWhole2DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static float |
convolveWhole3DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel) |
A static function that convolves a kernel with an image at a position The convolution is performed only if the
whole kernel fits inside the image.
|
void |
finalize() |
Prepares this class for destruction.
|
private static double |
getBilinear(int i,
double dx,
double dy,
int[] iExtents,
double[] image) |
Performs bilinear interpolation of image data.
|
private static float |
getBilinear(int i,
float dx,
float dy,
int[] iExtents,
float[] image) |
Performs bilinear interpolation of image data.
|
float[] |
getOutputBuffer() |
Returns the output buffer
|
private static float |
getTrilinear(int i1,
float dx,
float dy,
float dz,
int[] iExtents,
float[] image) |
Performs trilinear interpolation of image data.
|
static byte[] |
getTrilinearC(int i1,
float dx,
float dy,
float dz,
int[] iExtents,
byte[] image) |
Performs trilinear interpolation of image data.
|
boolean |
isBlue() |
|
boolean |
isGreen() |
|
boolean |
isRed() |
|
void |
run2D() |
Begins the execution of the 2D convolver.
|
void |
run3D() |
Begins the execution of the 3D convolver.
|
void |
run4D() |
|
void |
runAlgorithm() |
Begins execution of the convolver.
|
void |
setBlue(boolean blue) |
|
void |
setColorChannels(boolean red,
boolean green,
boolean blue) |
|
void |
setGreen(boolean green) |
|
void |
setRed(boolean red) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
blue
private boolean blue
-
green
private boolean green
-
doXY
private boolean doXY
-
sqrtXY
private boolean sqrtXY
-
sqrtXYZ
private boolean sqrtXYZ
-
nms2
private boolean nms2
-
nms2e
private boolean nms2e
-
nms3
private boolean nms3
-
nms3e
private boolean nms3e
-
Constructor Detail
-
AlgorithmConvolver
public AlgorithmConvolver(ModelImage srcImage,
float[] kernel,
int[] kExtents,
boolean entireImage,
boolean image25D)
Sets the source and kernel images and calls the appropriate method based on image dimensionality.
- Parameters:
srcImage - kernel - kExtents - entireImage - image25D -
-
AlgorithmConvolver
public AlgorithmConvolver(ModelImage srcImage,
float[] kernel,
int[] kExtents,
boolean entireImage,
boolean image25D,
double intensityGaussianDenom)
-
AlgorithmConvolver
public AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
int[] kExtents,
boolean entireImage,
boolean sqrtXY)
-
AlgorithmConvolver
public AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
int[] kExtents,
boolean entireImage)
-
AlgorithmConvolver
public AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY,
int[] kExtents,
boolean entireImage)
-
AlgorithmConvolver
public AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY,
float[] kernelXXX,
float[] kernelXXY,
float[] kernelXYY,
float[] kernelYYY,
int[] kExtents,
boolean entireImage)
-
AlgorithmConvolver
public AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY,
float[] kernelXZ,
float[] kernelYZ,
float[] kernelZZ,
boolean entireImage,
int[] kExtents)
-
AlgorithmConvolver
public AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY,
float[] kernelXZ,
float[] kernelYZ,
float[] kernelZZ,
float[] kernelXXX,
float[] kernelXXY,
float[] kernelXYY,
float[] kernelYYY,
float[] kernelXXZ,
float[] kernelXZZ,
float[] kernelXYZ,
float[] kernelYYZ,
float[] kernelYZZ,
float[] kernelZZZ,
int[] kExtents,
boolean entireImage)
-
AlgorithmConvolver
public AlgorithmConvolver(ModelImage srcImage,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
float[] kernelX2,
float[] kernelY2,
int[] kExtents,
boolean entireImage,
boolean combined2D3D)
-
Method Detail
-
isRed
public boolean isRed()
-
isBlue
public boolean isBlue()
-
isGreen
public boolean isGreen()
-
convolve2DPt
public static final float convolve2DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveBilateral2DPt
public static final float convolveBilateral2DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel,
double intensityGaussianDenom)
A static function that convolves a kernel with an image at a position. The intensity difference between the
center pixel and the indexed pixel is used in a Gaussian in the weighing.
The intensity Gaussian is (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma))* exp(-intensityDifference**2/intenDenom)
Since the same (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma) term would appear in every weight term, it would cancel
out by appearing in both the numerator and denominator in (sum / norm) and so can be omitted.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel dataintensityGaussianDenom - - Returns:
- the value of the pixel after convolution with the kernel
-
convolve2DPtSqrtXY
public static final float convolve2DPtSqrtXY(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve2DPtNMS
public static final float convolve2DPtNMS(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelXX - kernel datakernelXY - kernel datakernelYY - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve2DPtNMSE
public static final float convolve2DPtNMSE(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelXXX,
float[] kernelXXY,
float[] kernelXYY,
float[] kernelYYY)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelXXX - kernel datakernelXXY - kernel datakernelXYY - kernel datakernelYYY - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve2DPt
public static final float convolve2DPt(WildMagic.LibFoundation.Mathematics.Vector2f pt,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel)
A static function that convolves a kernel with an image at a position.
- Parameters:
pt - floating point indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve2DPt
public static final double convolve2DPt(WildMagic.LibFoundation.Mathematics.Vector2d pt,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an image at a position.
- Parameters:
pt - floating point indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve2DPtMed
public static final float convolve2DPtMed(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel)
A static function that convolves a kernel with an image at a position. This version seems to just be used by
AlgorithmLapMedianess.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
- See Also:
AlgorithmLapMedianess
-
convolve2DRGBPt
public static final float convolve2DRGBPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel)
A static function that convolves a kernel with an RGB image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveBilateral2DCIELabPt
public static final float[] convolveBilateral2DCIELabPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel,
double intensityGaussianDenom)
A static function that convolves a kernel with an CIELab image at a position. The CIE76 intensity difference between the
center pixel and the indexed pixel is used in a Gaussian in the weighing.
The intensity Gaussian is (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma))* exp(-intensityDifference**2/intenDenom)
Since the same (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma) term would appear in every weight term, it would cancel
out by appearing in both the numerator and denominator in (sum / norm) and so can be omitted.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel dataintensityGaussianDenom - - Returns:
- the L*,a*,b* of the pixel after convolution with the kernel
-
convolve2DRGBPtSqrtXY
public static final float convolve2DRGBPtSqrtXY(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY)
A static function that convolves a kernel with an RGB image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve3DPt
public static final float convolve3DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveBilateral3DPt
public static final float convolveBilateral3DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel,
double intensityGaussianDenom)
A static function that convolves a kernel with an image at a position. The intensity difference between the
center pixel and the indexed pixel is used in a Gaussian in the weighing.
The intensity Gaussian is (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma))* exp(-intensityDifference**2/intenDenom)
Since the same (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma) term would appear in every weight term, it would cancel
out by appearing in both the numerator and denominator in (sum / norm) and so can be omitted.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel dataintensityGaussianDenom - - Returns:
- the value of the pixel after convolution with the kernel
-
convolve3DPtXYZ
public static final float convolve3DPtXYZ(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelZ)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelZ - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve3DPtNMS
public static final float convolve3DPtNMS(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
float[] kernelXX,
float[] kernelXY,
float[] kernelYY,
float[] kernelXZ,
float[] kernelYZ,
float[] kernelZZ)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelZ - kernel datakernelXX - kernel datakernelXY - kernel datakernelYY - kernel datakernelXZ - kernel datakernelYZ - kernel datakernelZZ - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve3DPtNMSE
public static final float convolve3DPtNMSE(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelZ,
float[] kernelXXX,
float[] kernelXXY,
float[] kernelXYY,
float[] kernelYYY,
float[] kernelXXZ,
float[] kernelXZZ,
float[] kernelXYZ,
float[] kernelYYZ,
float[] kernelYZZ,
float[] kernelZZZ)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelZ - kernel datakernelXXX - kernel datakernelXXY - kernel datakernelXYY - kernel datakernelYYY - kernel datakernelXXZ - kernel datakernelXZZ - kernel datakernelXYZ - kernel datakernelYZZ - kernel datakernelZZZ - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveBlock3D
public static final void convolveBlock3D(int start,
int end,
int lpv,
float[] iImage,
int[] iExtents,
int[] kExtents,
float[] kernel,
ModelImage oImage)
- Parameters:
start - end - lpp - length per voxel, for example 4 for RGB image.iImage - iExtents - kExtents - kernel - oImage -
-
convolve3DPt
public static final float convolve3DPt(float[] pt,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel)
A static function that convolves a kernel with an image at a position.
- Parameters:
pt - floating point indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve3DPtMed
public static final float convolve3DPtMed(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel)
A static function that convolves a kernel with an image at a position. This version seems to just be used by
AlgorithmLapMedianess.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
- See Also:
AlgorithmLapMedianess
-
convolve3DRGBPt
public static final float convolve3DRGBPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel)
A static function that convolves a kernel with an RGB image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveBilateral3DCIELabPt
public static final float[] convolveBilateral3DCIELabPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel,
double intensityGaussianDenom)
A static function that convolves a kernel with a CIELab image at a position. The CIE76 intensity difference between the
center pixel and the indexed pixel is used in a Gaussian in the weighing.
The intensity Gaussian is (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma))* exp(-intensityDifference**2/intenDenom)
Since the same (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma) term would appear in every weight term, it would cancel
out by appearing in both the numerator and denominator in (sum / norm) and so can be omitted.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel dataintensityGaussianDenom - - Returns:
- the L*,a*,b* of the pixel after convolution with the kernel
-
convolve3DRGBPtXYZ
public static final float convolve3DRGBPtXYZ(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernelX,
float[] kernelY,
float[] kernelZ)
A static function that convolves a kernel with an RGB image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelZ - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveWhole2DPt
public static final float convolveWhole2DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel)
A static function that convolves a kernel with an image at a position. The convolution is performed only if the
whole kernel fits inside the image.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel or 0 if the kernel does not fit wholly within
the image
-
convolveWhole3DPt
public static final float convolveWhole3DPt(int pix,
int[] iExtents,
float[] image,
int[] kExtents,
float[] kernel)
A static function that convolves a kernel with an image at a position The convolution is performed only if the
whole kernel fits inside the image.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel or 0 if the kernel does not fit wholly within
the image
-
convolve3DPt
public static final float convolve3DPt(WildMagic.LibFoundation.Mathematics.Vector3f kPt,
ModelImage kImage,
int[] kExtents,
float[] kernel)
A static function that convolves a kernel with an image at a position.
- Parameters:
kExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve2D3D
private final void convolve2D3D(int start,
int end,
float[] iImage,
int index,
int min3DLength,
int max3DLength)
-
run4D
public void run4D()
-
getBilinear
private static float getBilinear(int i,
float dx,
float dy,
int[] iExtents,
float[] image)
Performs bilinear interpolation of image data.
- Parameters:
i - index into imagedx - change in x from integerdy - change in y from integeriExtents - dimensions of imageimage - image data- Returns:
- the bilinearly interpolated value
-
getBilinear
private static double getBilinear(int i,
double dx,
double dy,
int[] iExtents,
double[] image)
Performs bilinear interpolation of image data.
- Parameters:
i - index into imagedx - change in x from integerdy - change in y from integeriExtents - dimensions of imageimage - image data- Returns:
- the bilinearly interpolated value
-
getTrilinear
private static float getTrilinear(int i1,
float dx,
float dy,
float dz,
int[] iExtents,
float[] image)
Performs trilinear interpolation of image data.
- Parameters:
i1 - index into imagedx - change in x from integerdy - change in y from integerdz - change in z from integeriExtents - dimensions of imageimage - image data- Returns:
- the trilinearly interpolated data value
-
getTrilinearC
public static byte[] getTrilinearC(int i1,
float dx,
float dy,
float dz,
int[] iExtents,
byte[] image)
Performs trilinear interpolation of image data.
- Parameters:
i1 - index into imagedx - change in x from integerdy - change in y from integerdz - change in z from integeriExtents - dimensions of imageimage - image data- Returns:
- the trilinearly interpolated data value
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LinearSolverTerminationType.html�������������������������0000775�4231163�4231163�00000037425�14537076051�030034� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LinearSolverTerminationType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.LinearSolverTerminationType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmExtractSurface.html�����������������������������������������0000775�4231163�4231163�00000101360�14537076045�024703� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmExtractSurface (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
blurFlag |
If true then the input image is blurred slightly.
|
private float |
blurSigma |
The amount to blur to smooth surface.
|
private boolean |
decimateFlag |
If true then the extracted surface is decimated into a continuous level of detail surface (clod).
|
private float |
level |
Indicates level surface to be extracted.
|
static int |
LEVEL_MODE |
Extract surface based on intensity level.
|
static int |
MASK_MODE |
Extract surface from mask image.
|
private ModelImage |
maskImage |
Mask image to extract surface from.
|
private int |
mode |
Indicates mode - VOI, LEVELSET, or MASK.
|
private float[] |
surfaceArea |
|
private java.lang.String |
surfaceFileName |
Path and name of extracted surface file. ".sur" will be appended if necessary.
|
static int |
VOI_MODE |
Extract surface from VOI.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmExtractSurface(ModelImage image,
float level,
int mode,
boolean decFlag,
boolean blurFlag,
float sigma,
java.lang.String fileName,
float[] surfaceArea) |
Creates a new AlgorithmExtractSurface object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmExtractSurface
public AlgorithmExtractSurface(ModelImage image,
float level,
int mode,
boolean decFlag,
boolean blurFlag,
float sigma,
java.lang.String fileName,
float[] surfaceArea)
Creates a new AlgorithmExtractSurface object.
- Parameters:
image - mask image or grayscale where a level surface is to be extractedlevel - indicates level surface to be extracedmode - Indicates mode - VOI, LEVELSET, or MASK.decFlag - indicates whether or not the decimation into a CLOD should take place.blurFlag - if true then the input image is blurred slightlysigma - the amount to blur the imagefileName - path and name of extracted surface file. ".sur" will be appended if necessary.surfaceArea - If not null the computed surface area will be returned
-
Method Detail
-
extractSurface
private void extractSurface()
Extracts a surface, in the form of triangles, from an image.
-
init
private void init()
DOCUMENT ME!
-
ComputeSurfaceArea
public float ComputeSurfaceArea(WildMagic.LibGraphics.SceneGraph.TriMesh m_kMesh)
Calculate the surface mesh area. Each surface mesh is composed of triangles. Calculate the surface area from the
summation of the each triangle area. Based on the Area by Stokes' Theorem. Area(S) = 1/2 * Normal dot ( Sum from
i = 0 to n-1 of ( V1 cross V2) ) ==> Area(S) = 1/2 * ( Sum from i = 0 to n-1 of ( Normal dot ( V1 cross V2) ) )
- Returns:
- float
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES_ASA.CVadjCheckPointRec.html�����������������������������������0000775�4231163�4231163�00000027051�14537076054�025154� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES_ASA.CVadjCheckPointRec (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES_ASA.CVadjCheckPointRec
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
CVadjCheckPointRec
CVadjCheckPointRec()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSCDSegmentation.html����������������������������������������0000775�4231163�4231163�00000055147�14537076050�024756� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSCDSegmentation (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numClasses
private int numClasses
-
Constructor Detail
-
AlgorithmSCDSegmentation
public AlgorithmSCDSegmentation(ModelImage destImg,
ModelImage srcImg,
int initialSideLength,
int numClasses)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.svm_node.html�������������������������������������������������0000775�4231163�4231163�00000023075�14537076056�022726� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.svm_node (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LIBSVM.svm_node
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
index |
|
double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
svm_node() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
public double value
-
Constructor Detail
-
svm_node
public svm_node()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.AnchorPosition.html����������������������������0000775�4231163�4231163�00000037365�14537076047�027350� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.AnchorPosition (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
AnchorPosition() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AnchorPosition
private AnchorPosition()
-
Method Detail
-
valueOf
public static AlgorithmNetworkSnake.AnchorPosition valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/GenerateGaussian.html������������������������������������������������0000775�4231163�4231163�00000066147�14537076055�023354� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
GenerateGaussian (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.GenerateGaussian
-
public class GenerateGaussian
extends java.lang.Object
Calculates an n-dimensional gaussian volume at a given scale, kernel size, and normalized derivative (through the
fourth order) in any of the dimensions. Explanation of normalized derivative: The derivative of n =
(1/sqrt(2*PI*sigma*sigma))*exp(-x*x/(2*sigma*sigma)) with respect to x = -(x/(sigma*sigma))*n. 1/2 the integral of
the derivative from -infinity to infinity with respect to x or the integral of the derivative from 0 to infinity with
respect to x = 1/(sigma * sqrt(2*PI)). Hence, the derivative is normalized by multiplying by the normalizing constant
sigma. GenerateGaussian returns the Gaussian, sigma times the first derivative of the Gaussian, sigma squared times
the second derivative of the Gaussian, sigma cubed times the third derivative of the Gaussian.
- Version:
- 0.8 Aug 4, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
denom |
denominator of gaussian coeff.
|
private int[] |
derivOrder |
derivative order in each dimension.
|
private double[] |
dgaussianData |
|
private int[] |
dimLengths |
length of function in pixel in each dim.
|
private double[] |
dsigmas |
|
private float[] |
gaussianData |
data storage buffer.
|
private boolean |
invert |
DOCUMENT ME!
|
private int |
nDims |
number of dimensions.
|
private int[] |
pt |
temp point storage.
|
private float[] |
sigmas |
standard dev. in each direction
|
-
Constructor Summary
Constructors
| Constructor |
Description |
GenerateGaussian(double[] data,
int[] dimLengths,
double[] sigmas,
int[] derivOrder) |
Initializes class that calculates an n-dim Gaussian.
|
GenerateGaussian(double[] data,
int[] dimLengths,
double[] sigmas,
int[] derivOrder,
double denom) |
Initializes class that calculates an n-dim Gaussian.
|
GenerateGaussian(float[] data,
int[] dimLengths,
float[] sigmas,
int[] derivOrder) |
Initializes class that calculates an n-dim Gaussian.
|
GenerateGaussian(float[] data,
int[] dimLengths,
float[] sigmas,
int[] derivOrder,
double denom) |
Initializes class that calculates an n-dim Gaussian.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calc(boolean invert) |
Starts the Gaussian calculation.
|
void |
dcalc(boolean invert) |
Starts the Gaussian calculation.
|
private double |
dgaussPt(int[] pt) |
Calculates the Gaussian function at a point.
|
private void |
drecursiveCalc(int offset,
int dim) |
Starts the Gaussian calculation.
|
void |
finalize() |
Prepares this class for destruction.
|
private float |
gaussPt(int[] pt) |
Calculates the Gaussian function at a point.
|
private double |
hermite(int order,
double num) |
Factor to include when calculating derivatives.
|
ModelImage |
makeImage() |
Converts gaussian float buffer to image model object.
|
private void |
recursiveCalc(int offset,
int dim) |
Starts the Gaussian calculation.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
invert
private boolean invert
DOCUMENT ME!
-
nDims
private int nDims
number of dimensions.
-
pt
private int[] pt
temp point storage.
-
dsigmas
private double[] dsigmas
-
Constructor Detail
-
GenerateGaussian
public GenerateGaussian(float[] data,
int[] dimLengths,
float[] sigmas,
int[] derivOrder)
Initializes class that calculates an n-dim Gaussian.
- Parameters:
data - storage area of Gaussian functiondimLengths - length of function in pixels in each dimensionsigmas - standard dev. in each directionderivOrder - derivative order in each dimension
-
GenerateGaussian
public GenerateGaussian(double[] data,
int[] dimLengths,
double[] sigmas,
int[] derivOrder)
Initializes class that calculates an n-dim Gaussian.
- Parameters:
data - storage area of Gaussian functiondimLengths - length of function in pixels in each dimensionsigmas - standard dev. in each directionderivOrder - derivative order in each dimension
-
GenerateGaussian
public GenerateGaussian(float[] data,
int[] dimLengths,
float[] sigmas,
int[] derivOrder,
double denom)
Initializes class that calculates an n-dim Gaussian.
- Parameters:
data - storage area of Gaussian functiondimLengths - length of function in pixels in each dimensionsigmas - standard dev. in each directionderivOrder - derivative order in each dimensiondenom - denominator of the gaussian scale coeffient
-
GenerateGaussian
public GenerateGaussian(double[] data,
int[] dimLengths,
double[] sigmas,
int[] derivOrder,
double denom)
Initializes class that calculates an n-dim Gaussian.
- Parameters:
data - storage area of Gaussian functiondimLengths - length of function in pixels in each dimensionsigmas - standard dev. in each directionderivOrder - derivative order in each dimensiondenom - denominator of the gaussian scale coeffient
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.FreudensteinAndRothFunction.html���������������������0000775�4231163�4231163�00000027254�14537076053�030635� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.FreudensteinAndRothFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.DefaultColorMap.html�������������������������������������0000775�4231163�4231163�00000056575�14537076053�025441� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.DefaultColorMap (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static ContourPlot.DefaultColorMap valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�����������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmConvergenceField.html���������������������������������������0000775�4231163�4231163�00000050363�14537076044�025167� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConvergenceField (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LocalIntensityOrderPattern.html��������������������������������������0000775�4231163�4231163�00000145764�14537076056�025426� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LocalIntensityOrderPattern (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
int |
factorial(int num) |
|
int |
get_permutation_index(int[] permutation,
int size) |
|
float |
neigh_cmp(LocalIntensityOrderPattern.VlLiopDesc liop,
int i,
int j) |
|
void |
neigh_sort(LocalIntensityOrderPattern.VlLiopDesc array,
int size) |
|
void |
neigh_sort_recursive(LocalIntensityOrderPattern.VlLiopDesc array,
int begin,
int end) |
|
void |
neigh_swap(LocalIntensityOrderPattern.VlLiopDesc liop,
int i,
int j) |
|
float |
patch_cmp(LocalIntensityOrderPattern.VlLiopDesc liop,
int i,
int j) |
|
void |
patch_sort(LocalIntensityOrderPattern.VlLiopDesc array,
int size) |
|
void |
patch_sort_recursive(LocalIntensityOrderPattern.VlLiopDesc array,
int begin,
int end) |
|
void |
patch_swap(LocalIntensityOrderPattern.VlLiopDesc liop,
int i,
int j) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
LocalIntensityOrderPattern.tliop |
setup() |
|
void |
test_basic() |
|
void |
test_blob() |
|
void |
test_multiple() |
|
void |
test_neighbors() |
|
float[][] |
vl_liop(float[][][] data,
int numNeighbors,
int numSpatialBins,
float radius,
float intensityThreshold) |
|
float[][] |
vl_liop(float[][] data,
int numNeighbors,
int numSpatialBins,
float radius,
float intensityThreshold) |
|
void |
vl_liopdesc_delete(LocalIntensityOrderPattern.VlLiopDesc self) |
|
int |
vl_liopdesc_get_dimension(LocalIntensityOrderPattern.VlLiopDesc self) |
|
float |
vl_liopdesc_get_intensity_threshold(LocalIntensityOrderPattern.VlLiopDesc self) |
|
double |
vl_liopdesc_get_neighbourhood_radius(LocalIntensityOrderPattern.VlLiopDesc self) |
|
int |
vl_liopdesc_get_num_neighbours(LocalIntensityOrderPattern.VlLiopDesc self) |
|
int |
vl_liopdesc_get_num_spatial_bins(LocalIntensityOrderPattern.VlLiopDesc self) |
|
LocalIntensityOrderPattern.VlLiopDesc |
vl_liopdesc_new(int numNeighbours,
int numSpatialBins,
float radius,
int sideLength) |
|
LocalIntensityOrderPattern.VlLiopDesc |
vl_liopdesc_new_basic(int sideLength) |
|
void |
vl_liopdesc_process(LocalIntensityOrderPattern.VlLiopDesc self,
float[] desc,
float[] patch) |
|
void |
vl_liopdesc_set_intensity_threshold(LocalIntensityOrderPattern.VlLiopDesc self,
float x) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
vl_liopdesc_new
public LocalIntensityOrderPattern.VlLiopDesc vl_liopdesc_new(int numNeighbours,
int numSpatialBins,
float radius,
int sideLength)
- Parameters:
numNeighbours - number of neighbours.numSpatialBins - number of bins.radius - radius of the cirucal sample neighbourhoods.sideLength - width of the input image patch (the patch is square).- Returns:
- new object instance.
The value of @a radius should be at least less than half the @a
sideLength of the patch.
-
test_basic
public void test_basic()
-
test_blob
public void test_blob()
-
vl_liop
public float[][] vl_liop(float[][] data,
int numNeighbors,
int numSpatialBins,
float radius,
float intensityThreshold)
-
vl_liop
public float[][] vl_liop(float[][][] data,
int numNeighbors,
int numSpatialBins,
float radius,
float intensityThreshold)
������������gov/nih/mipav/model/algorithms/AlgorithmELSUNCOpt3D.FitOAR3DLMModel.html����������������������������0000775�4231163�4231163�00000035515�14537076045�026317� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmELSUNCOpt3D.FitOAR3DLMModel (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.Lmmin
debugMatrix, debugMessages, diag, epsfcn, factor, fnorm, ftol, gtol, info, maxcall, mode, nfev, printflags, x, xtol
-
Constructor Summary
Constructors
| Constructor |
Description |
FitOAR3DLMModel(double[] x,
int currentDim,
double[] point,
int maxIterations) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
currentDim
private int currentDim
-
point
private double[] point
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.ImplicitSchurComplementTest.html���������������������0000775�4231163�4231163�00000037032�14537076053�030652� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.ImplicitSchurComplementTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_rows_
private int num_rows_
-
num_cols_
private int num_cols_
-
Method Detail
-
SetUp
public void SetUp()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Vectornd.html��������������������������������������������������������0000775�4231163�4231163�00000037046�14537076057�021711� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Vectornd (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Vectornd
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
cost |
Cost value
|
private double[] |
point |
N-dimension vector
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
point
private double[] point
N-dimension vector
-
cost
private double cost
Cost value
-
Constructor Detail
-
Vectornd
public Vectornd()
-
Method Detail
-
getCost
public double getCost()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSequentialScanningWatershed.indexValueItem.html�������������0000775�4231163�4231163�00000027122�14537076050�032343� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSequentialScanningWatershed.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed.indexValueItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValueItem(int index,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
private double value
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public double getValue()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog2.html�����������������������������������0000775�4231163�4231163�00000026621�14537076055�025606� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog2 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog2(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog2
public FitdeHoog2(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SVM.html�������������������������������������������������������������0000775�4231163�4231163�00000413766�14537076057�020601� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SVM (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
SVM() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
_vl_svm_evaluate(SVM.VlSvm self) |
|
void |
_vl_svm_sdca_train(SVM.VlSvm self) |
|
(package private) void |
_vl_svm_sgd_train(SVM.VlSvm self) |
|
void |
_vl_svm_update_statistics(SVM.VlSvm self) |
|
void |
accumulateFunction(int acc,
SVM.VlSvmDataset self,
int element,
double[] model,
double multiplier) |
|
double |
conjugate_lossFunction(int loss,
double u,
double label) |
|
void |
Dan_Ventura_sdca_linear_example() |
|
void |
Dan_Ventura_sdca_nonlinear_example() |
|
void |
Dan_Ventura_sgd_linear_example() |
|
void |
Dan_Ventura_sgd_nonlinear_example() |
|
double |
dca_updateFunction(int update,
double alpha,
double inner,
double norm2,
double label) |
|
void |
diagnostic1(SVM.VlSvm svm) |
|
double |
frexp(double x,
int[] exponent) |
|
double |
inner_productFunction(int inp,
SVM.VlSvmDataset self,
int element,
double[] model) |
|
void |
learn_linear_SVM_on_double_data() |
|
double |
loss_derivativeFunction(int loss,
double inner,
double label) |
|
double |
lossFunction(int loss,
double inner,
double label) |
|
void |
makeInfoStruct(SVM.VlSvm svm) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
SVM.svmtest |
setup() |
|
double |
sinc(double x) |
|
void |
test_homkermap() |
|
void |
test_sdca_basic() |
|
void |
test_sgd_basic() |
|
void |
test_weights() |
|
void |
vl_homogeneouskernelmap_delete(SVM.VlHomogeneousKernelMap self) |
|
void |
vl_homogeneouskernelmap_evaluate(SVM.VlHomogeneousKernelMap self,
double[] destination,
int stride,
double x) |
|
int |
vl_homogeneouskernelmap_get_dimension(SVM.VlHomogeneousKernelMap self) |
|
double |
vl_homogeneouskernelmap_get_smooth_spectrum(SVM.VlHomogeneousKernelMap self,
double omega) |
|
double |
vl_homogeneouskernelmap_get_spectrum(SVM.VlHomogeneousKernelMap self,
double omega) |
|
SVM.VlHomogeneousKernelMap |
vl_homogeneouskernelmap_new(SVM.VlHomogeneousKernelType kernelType,
double gamma,
int order,
double period,
SVM.VlHomogeneousKernelMapWindowType windowType) |
|
void |
vl_rand_permute_indexes(java.util.Random self,
int[] array,
int size) |
|
void |
vl_svm_delete(SVM.VlSvm self) |
|
double |
vl_svm_get_bias(SVM.VlSvm self) |
|
double |
vl_svm_get_bias_learning_rate(SVM.VlSvm self) |
|
double |
vl_svm_get_bias_multiplier(SVM.VlSvm self) |
|
int |
vl_svm_get_diagnostic_frequency(SVM.VlSvm self) |
|
int |
vl_svm_get_dimension(SVM.VlSvm self) |
|
double |
vl_svm_get_epsilon(SVM.VlSvm self) |
|
double |
vl_svm_get_lambda(SVM.VlSvm self) |
|
int |
vl_svm_get_max_num_iterations(SVM.VlSvm self) |
|
double[] |
vl_svm_get_model(SVM.VlSvm self) |
|
int |
vl_svm_get_num_data(SVM.VlSvm self) |
|
double[] |
vl_svm_get_scores(SVM.VlSvm self) |
|
SVM.VlSvmSolverType |
vl_svm_get_solver(SVM.VlSvm self) |
|
(package private) SVM.VlSvmStatistics |
vl_svm_get_statistics(SVM.VlSvm self) |
|
double |
vl_svm_hinge_conjugate_loss(double u,
double label) |
|
double |
vl_svm_hinge_dca_update(double alpha,
double inner,
double norm2,
double label) |
|
double |
vl_svm_hinge_loss(double inner,
double label) |
|
double |
vl_svm_hinge_loss_derivative(double inner,
double label) |
|
double |
vl_svm_hinge2_conjugate_loss(double u,
double label) |
|
double |
vl_svm_hinge2_dca_update(double alpha,
double inner,
double norm2,
double label) |
|
double |
vl_svm_hinge2_loss(double inner,
double label) |
|
double |
vl_svm_hinge2_loss_derivative(double inner,
double label) |
|
double |
vl_svm_l1_conjugate_loss(double u,
double label) |
|
double |
vl_svm_l1_dca_update(double alpha,
double inner,
double norm2,
double label) |
|
double |
vl_svm_l1_loss(double inner,
double label) |
|
double |
vl_svm_l1_loss_derivative(double inner,
double label) |
|
double |
vl_svm_l2_conjugate_loss(double u,
double label) |
|
double |
vl_svm_l2_dca_update(double alpha,
double inner,
double norm2,
double label) |
|
double |
vl_svm_l2_loss(double inner,
double label) |
|
double |
vl_svm_l2_loss_derivative(double inner,
double label) |
|
double |
vl_svm_logistic_conjugate_loss(double u,
double label) |
|
double |
vl_svm_logistic_dca_update(double alpha,
double inner,
double norm2,
double label) |
|
double |
vl_svm_logistic_loss(double inner,
double label) |
|
double |
vl_svm_logistic_loss_derivative(double inner,
double label) |
|
SVM.VlSvm |
vl_svm_new_with_abstract_data(SVM.VlSvmSolverType solver,
SVM.VlSvmDataset data,
int dimension,
int numData,
double[] labels,
double lambda) |
|
SVM.VlSvm |
vl_svm_new_with_dataset(SVM.VlSvmSolverType solver,
SVM.VlSvmDataset dataset,
double[] labels,
double lambda) |
|
void |
vl_svm_set_bias(SVM.VlSvm self,
double b) |
|
void |
vl_svm_set_bias_learning_rate(SVM.VlSvm self,
double rate) |
|
void |
vl_svm_set_bias_multiplier(SVM.VlSvm self,
double b) |
|
void |
vl_svm_set_conjugate_loss_function(SVM.VlSvm self,
int f) |
|
void |
vl_svm_set_data_functions(SVM.VlSvm self,
int inner,
int acc) |
|
void |
vl_svm_set_dca_update_function(SVM.VlSvm self,
int f) |
|
void |
vl_svm_set_diagnostic_frequency(SVM.VlSvm self,
int f) |
|
void |
vl_svm_set_epsilon(SVM.VlSvm self,
double epsilon) |
|
void |
vl_svm_set_iteration_number(SVM.VlSvm self,
int n) |
|
void |
vl_svm_set_loss(SVM.VlSvm self,
SVM.VlSvmLossType loss) |
|
void |
vl_svm_set_loss_derivative_function(SVM.VlSvm self,
int f) |
|
void |
vl_svm_set_loss_function(SVM.VlSvm self,
int f) |
|
void |
vl_svm_set_max_num_iterations(SVM.VlSvm self,
int n) |
|
(package private) void |
vl_svm_set_model(SVM.VlSvm self,
double[] model) |
|
void |
vl_svm_set_weights(SVM.VlSvm self,
double[] weights) |
|
void |
vl_svm_train(SVM.VlSvm self) |
|
void |
vl_svmdataset_accumulate(SVM.VlSvmDataset self,
int element,
double[] model,
double multiplier) |
|
void |
vl_svmdataset_accumulate_hom(SVM.VlSvmDataset self,
int element,
double[] model,
double multiplier) |
|
(package private) void |
vl_svmdataset_delete(SVM.VlSvmDataset self) |
|
int |
vl_svmdataset_get_accumulate_function(SVM.VlSvmDataset self) |
|
int |
vl_svmdataset_get_dimension(SVM.VlSvmDataset self) |
|
SVM.VlHomogeneousKernelMap |
vl_svmdataset_get_homogeneous_kernel_map(SVM.VlSvmDataset self) |
|
int |
vl_svmdataset_get_inner_product_function(SVM.VlSvmDataset self) |
|
int |
vl_svmdataset_get_num_data(SVM.VlSvmDataset self) |
|
double |
vl_svmdataset_inner_product(SVM.VlSvmDataset self,
int element,
double[] model) |
|
double |
vl_svmdataset_inner_product_hom(SVM.VlSvmDataset self,
int element,
double[] model) |
|
SVM.VlSvmDataset |
vl_svmdataset_new(double[] data,
int dimension,
int numData) |
|
SVM.VlSvmDataset |
vl_svmdataset_new(double[] data,
int dimension,
int numData,
SVM.VlHomogeneousKernelMap hom) |
|
void |
vl_svmdataset_set_homogeneous_kernel_map(SVM.VlSvmDataset self,
SVM.VlHomogeneousKernelMap hom) |
|
void |
vl_svmtrain(double[] model,
double[] bias,
double[] scores,
double[][] data,
SVM.VlSvmDataset dataset,
double[] labels,
double lambda,
SVM.VlSvmSolverType solver,
double biasMultiplier,
double biasLearningRate,
int maxNumIterations,
double epsilon,
SVM.VlSvmLossType loss,
boolean verbose,
double[] initialModel,
double initialBias,
double[] weights,
int startingIteration,
int diagnosticFrequency) |
|
double |
xlogx(double x) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
VL_EPSILON_D
double VL_EPSILON_D
-
Method Detail
-
vl_svm_new_with_dataset
public SVM.VlSvm vl_svm_new_with_dataset(SVM.VlSvmSolverType solver,
SVM.VlSvmDataset dataset,
double[] labels,
double lambda)
- Parameters:
solver - type of SMV solver.dataset - SVM dataset objectlabels - training samples labels.lambda - regularizer parameter.- Returns:
- the new object.
-
vl_svm_new_with_abstract_data
public SVM.VlSvm vl_svm_new_with_abstract_data(SVM.VlSvmSolverType solver,
SVM.VlSvmDataset data,
int dimension,
int numData,
double[] labels,
double lambda)
- Parameters:
solver - type of SMV solver.data - pointer to the data.dimension - dimension of the SVM model.numData - num training samples.labels - training samples labels.lambda - regularizer parameter.- Returns:
- the new object.
After calling this function, ::vl_svm_set_data_functions *must*
be used to setup suitable callbacks for the inner product
and accumulation operations (@see svm-data-abstraction).
-
accumulateFunction
public void accumulateFunction(int acc,
SVM.VlSvmDataset self,
int element,
double[] model,
double multiplier)
-
vl_svmdataset_accumulate
public void vl_svmdataset_accumulate(SVM.VlSvmDataset self,
int element,
double[] model,
double multiplier)
-
vl_svmdataset_accumulate_hom
public void vl_svmdataset_accumulate_hom(SVM.VlSvmDataset self,
int element,
double[] model,
double multiplier)
-
vl_homogeneouskernelmap_evaluate
public void vl_homogeneouskernelmap_evaluate(SVM.VlHomogeneousKernelMap self,
double[] destination,
int stride,
double x)
-
dca_updateFunction
public double dca_updateFunction(int update,
double alpha,
double inner,
double norm2,
double label)
-
vl_svmtrain
public void vl_svmtrain(double[] model,
double[] bias,
double[] scores,
double[][] data,
SVM.VlSvmDataset dataset,
double[] labels,
double lambda,
SVM.VlSvmSolverType solver,
double biasMultiplier,
double biasLearningRate,
int maxNumIterations,
double epsilon,
SVM.VlSvmLossType loss,
boolean verbose,
double[] initialModel,
double initialBias,
double[] weights,
int startingIteration,
int diagnosticFrequency)
-
vl_homogeneouskernelmap_new
public SVM.VlHomogeneousKernelMap vl_homogeneouskernelmap_new(SVM.VlHomogeneousKernelType kernelType,
double gamma,
int order,
double period,
SVM.VlHomogeneousKernelMapWindowType windowType)
- Parameters:
kernelType - type of homogeneous kernel.gamma - kernel homogeneity degree.order - approximation order.period - kernel period.windowType - type of window used to truncate the kernel.- Returns:
- the new homogeneous kernel map.
The function intializes a new homogeneous kernel map for the
specified kernel type, homogeneity degree, approximation order,
period, and truncation window. See @ref homkermap-fundamentals for
details.
The homogeneity degree @c gamma must be positive (the standard
kernels are obtained by setting @c gamma to 1). When unsure, set
����������gov/nih/mipav/model/algorithms/Psi.html�������������������������������������������������������������0000775�4231163�4231163�00000051367�14537076056�020661� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Psi (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Psi
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
COMPLEX_VERSION |
|
private double[] |
imagResult |
Imaginary part of output result
|
private double |
imagX |
Imaginary part of input argument
|
static int |
REAL_VERSION |
|
private double[] |
realResult |
Real part of output result
|
private double |
realX |
Real part of input argument
|
private double[] |
result |
output result
|
private int |
version |
REAL_VERSION or COMPLEX_VERSION
|
private double |
x |
input argument
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Psi() |
|
Psi(double x,
double[] result) |
|
Psi(double realX,
double imagX,
double[] realResult,
double[] imagResult) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
complexPsi() |
This code is a port of the FORTRAN routine CPSI from the book Computation of
Special Functions by Shanjie Zhang and Jianming Jin, John Wiley & Sons, Inc.,
1996, pp. 59-60.
|
void |
finalize() |
Cleanup memory.
|
void |
realPsi() |
This code is a port of the FORTRAN routine PSI from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 58-59.
|
void |
run() |
|
void |
testcomplexPsi() |
|
void |
testrealPsi() |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
x
private double x
input argument
-
result
private double[] result
output result
-
Method Detail
-
realPsi
public void realPsi()
This code is a port of the FORTRAN routine PSI from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 58-59.
-
complexPsi
public void complexPsi()
This code is a port of the FORTRAN routine CPSI from the book Computation of
Special Functions by Shanjie Zhang and Jianming Jin, John Wiley & Sons, Inc.,
1996, pp. 59-60.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTPSpline.html�����������������������������������������������0000775�4231163�4231163�00000172032�14537076050�023456� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTPSpline (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private ModelImage |
baseImage |
DOCUMENT ME!
|
private float[][] |
C |
DOCUMENT ME!
|
private boolean |
doSetupOnly |
|
private float[] |
mA |
DOCUMENT ME!
|
private ModelImage |
matchImage |
DOCUMENT ME!
|
private float[] |
mB |
DOCUMENT ME!
|
private float[] |
mX |
DOCUMENT ME!
|
private float[] |
mY |
DOCUMENT ME!
|
private float[] |
mZ |
DOCUMENT ME!
|
private int |
N |
DOCUMENT ME!
|
private ModelImage |
resultImage |
DOCUMENT ME!
|
private boolean |
run2D |
|
private boolean |
setupRequired |
|
private float |
smooth |
DOCUMENT ME!
|
private double[] |
x |
DOCUMENT ME!
|
private int |
xDimA |
|
private float |
xInvRange |
DOCUMENT ME!
|
private float |
xMin |
DOCUMENT ME!
|
private double[] |
xTar |
DOCUMENT ME!
|
private double[] |
y |
DOCUMENT ME!
|
private int |
yDimA |
|
private float |
yInvRange |
DOCUMENT ME!
|
private float |
yMin |
DOCUMENT ME!
|
private double[] |
yTar |
DOCUMENT ME!
|
private double[] |
z |
DOCUMENT ME!
|
private int |
zDimA |
|
private float |
zInvRange |
DOCUMENT ME!
|
private float |
zMin |
DOCUMENT ME!
|
private double[] |
zTar |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmTPSpline() |
AlgorithmTPSpline - default constructor.
|
AlgorithmTPSpline(double[] xSource,
double[] ySource,
double[] zSource,
double[] xTar,
double[] yTar,
double[] zTar,
float smooth,
ModelImage baseImage,
ModelImage matchImage) |
AlgorithmTPSpline - constructor for 3D case.
|
AlgorithmTPSpline(double[] xSource,
double[] ySource,
double[] zSource,
double[] xTar,
double[] yTar,
double[] zTar,
float smooth,
ModelImage baseImage,
ModelImage matchImage,
boolean doSetupOnly) |
AlgorithmTPSpline - constructor for 3D case.
|
AlgorithmTPSpline(double[] xSource,
double[] ySource,
double[] xTar,
double[] yTar,
float smooth,
ModelImage baseImage,
ModelImage matchImage) |
AlgorithmTPSpline - constructor for 2D case.
|
AlgorithmTPSpline(ModelImage matchImage) |
Constructor used when N, xDimA, yDimA, zDimA, x[], y[], z[], and C[][] are read from a file
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
finalize -
|
float[] |
getCorrespondingPoint(float xTar,
float yTar,
float zTar) |
|
float[] |
getCorrespondingPoint(int xTar,
int yTar,
int zTar) |
|
ModelImage |
getResultImage() |
DOCUMENT ME!
|
double |
kernel(double fT) |
DOCUMENT ME!
|
void |
readMatrix(java.io.RandomAccessFile raFile) |
Reads:
1.)
|
void |
runAlgorithm() |
run - starts the program.
|
void |
saveMatrix(java.lang.String fileName,
java.lang.String message) |
Saves:
1.)
|
void |
setupTPSpline2D() |
setupTPSpline2D - computes the thin plate spline coefficients.
|
void |
setupTPSpline2D(double[] xSource,
double[] ySource,
double[] xTar,
double[] yTar,
float smooth) |
setupTPSpline2D computes the thin plate spline coefficients.
|
void |
setupTPSpline2D(float[] x,
float[] y,
float[] f,
float smooth) |
setupTPSpline2D computes the thin plate spline coefficients.
|
void |
setupTPSpline3D() |
setupTPSpline3D - computes the thin plate spline coefficients.
|
void |
setupTPSpline3D(double[] xSource,
double[] ySource,
double[] zSource,
double[] xTar,
double[] yTar,
double[] zTar,
float smooth) |
setupTPSpline3D computes the thin plate spline coefficients.
|
void |
setupTPSpline3D(float[] x,
float[] y,
float[] z,
float[] f,
float smooth) |
setupTPSpline3D computes the thin plate spline coefficients.
|
private void |
tpSpline2D() |
DOCUMENT ME!
|
float[][] |
tpSpline2D(float[] xWarp,
float[] yWarp) |
DOCUMENT ME!
|
private void |
tpSpline3D() |
DOCUMENT ME!
|
private void |
transform25DVOI(ModelImage image,
ModelImage destImage,
float[] imgBuffer) |
|
private void |
transform3DVOI(ModelImage image,
ModelImage destImage,
float[] imgBuffer) |
|
void |
updateFileInfo() |
Copy important file information to resultant image structure.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
C
private float[][] C
DOCUMENT ME!
-
mA
private float[] mA
DOCUMENT ME!
-
mB
private float[] mB
DOCUMENT ME!
-
mX
private float[] mX
DOCUMENT ME!
-
mY
private float[] mY
DOCUMENT ME!
-
mZ
private float[] mZ
DOCUMENT ME!
-
N
private int N
DOCUMENT ME!
-
smooth
private float smooth
DOCUMENT ME!
-
x
private double[] x
DOCUMENT ME!
-
xInvRange
private float xInvRange
DOCUMENT ME!
-
xMin
private float xMin
DOCUMENT ME!
-
xTar
private double[] xTar
DOCUMENT ME!
-
y
private double[] y
DOCUMENT ME!
-
yInvRange
private float yInvRange
DOCUMENT ME!
-
yMin
private float yMin
DOCUMENT ME!
-
yTar
private double[] yTar
DOCUMENT ME!
-
z
private double[] z
DOCUMENT ME!
-
zInvRange
private float zInvRange
DOCUMENT ME!
-
zMin
private float zMin
DOCUMENT ME!
-
zTar
private double[] zTar
DOCUMENT ME!
-
run2D
private boolean run2D
-
Constructor Detail
-
AlgorithmTPSpline
public AlgorithmTPSpline(double[] xSource,
double[] ySource,
double[] xTar,
double[] yTar,
float smooth,
ModelImage baseImage,
ModelImage matchImage)
AlgorithmTPSpline - constructor for 2D case.
- Parameters:
xSource - array with x coordinates of source dataySource - array with y coordinates of source dataxTar - array with x coordinates of target datayTar - array with y coordinates of target datasmooth - cannot be negative. If the smoothing term is nonzero, the interpolation is not exactbaseImage - DOCUMENT ME!matchImage - DOCUMENT ME!
-
AlgorithmTPSpline
public AlgorithmTPSpline(double[] xSource,
double[] ySource,
double[] zSource,
double[] xTar,
double[] yTar,
double[] zTar,
float smooth,
ModelImage baseImage,
ModelImage matchImage)
AlgorithmTPSpline - constructor for 3D case.
- Parameters:
xSource - array with x coordinates of source dataySource - array with y coordinates of source datazSource - array with z coordinates of source dataxTar - array with x coordinates of target datayTar - array with y coordinates of target datazTar - array with z coordinates of target datasmooth - cannot be negative. * If the smoothing term is nonzero, the interpolation is not exactbaseImage - DOCUMENT ME!matchImage - DOCUMENT ME!
-
AlgorithmTPSpline
public AlgorithmTPSpline(double[] xSource,
double[] ySource,
double[] zSource,
double[] xTar,
double[] yTar,
double[] zTar,
float smooth,
ModelImage baseImage,
ModelImage matchImage,
boolean doSetupOnly)
AlgorithmTPSpline - constructor for 3D case.
- Parameters:
xSource - array with x coordinates of source dataySource - array with y coordinates of source datazSource - array with z coordinates of source dataxTar - array with x coordinates of target datayTar - array with y coordinates of target datazTar - array with z coordinates of target datasmooth - cannot be negative. * If the smoothing term is nonzero, the interpolation is not exactbaseImage - DOCUMENT ME!matchImage - DOCUMENT ME!
-
AlgorithmTPSpline
public AlgorithmTPSpline(ModelImage matchImage)
Constructor used when N, xDimA, yDimA, zDimA, x[], y[], z[], and C[][] are read from a file
- Parameters:
matchImage -
-
Method Detail
-
setupTPSpline2D
public void setupTPSpline2D(float[] x,
float[] y,
float[] f,
float smooth)
setupTPSpline2D computes the thin plate spline coefficients.
- Parameters:
x - array with x coordinates of datay - array with y coordinates of dataf - array with values of data at (x,y) locationssmooth - nonnegative smoothing parameter
-
setupTPSpline2D
public void setupTPSpline2D(double[] xSource,
double[] ySource,
double[] xTar,
double[] yTar,
float smooth)
setupTPSpline2D computes the thin plate spline coefficients.
- Parameters:
xSource - array with x coordinates of source dataySource - array with y coordinates of source dataxTar - array with x coordinates of target datayTar - array with y coordinates of target datasmooth - cannot be negative If the smoothing term is nonzero, the interpolation is not exact
-
setupTPSpline3D
public void setupTPSpline3D(float[] x,
float[] y,
float[] z,
float[] f,
float smooth)
setupTPSpline3D computes the thin plate spline coefficients.
- Parameters:
x - array with x coordinates of datay - array with y coordinates of dataz - array with z coordinates of dataf - array with values of data at (x,y,z) locationssmooth - nonnegative smoothing parameter
-
setupTPSpline3D
public void setupTPSpline3D(double[] xSource,
double[] ySource,
double[] zSource,
double[] xTar,
double[] yTar,
double[] zTar,
float smooth)
setupTPSpline3D computes the thin plate spline coefficients.
- Parameters:
xSource - array with x coordinates of source dataySource - array with y coordinates of source datazSource - array with z coordinates of source dataxTar - array with x coordinates of target datayTar - array with y coordinates of target datazTar - array with z coordinates of target datasmooth - cannot be negative If the smoothing term is nonzero, the interpolation is not exact
-
saveMatrix
public void saveMatrix(java.lang.String fileName,
java.lang.String message)
Saves:
1.) N, the number of matching control points in baseImage and matchImage
2.) Number of rows in C matrix
3.) Number of columns in C matrix
4.) xDim of baseImage
5.) yDim of baseImage
6.) If noncoplanar 3D thin plate spline is used, saves zDim of baseImage
7.) x coordinates of baseImage control points
8.) y coordinates of baseImage control points
9.) If noncoplanar 3D thin plate spline is used, saves z coordinates of baseImage control points
10.) If 2D or coplanar 3D, saves n+3 by 2 C[][] float matrix from setupTPSpline2D
If noncoplanar 3D, saves n+4 by 3 C[][] float matrix from setupTPSpline3D
11.) Saves optional message.
- Parameters:
fileName - - file name, including the pathmessage - optionally write a message at the file end
-
readMatrix
public void readMatrix(java.io.RandomAccessFile raFile)
Reads:
1.) N, the number of matching control points in baseImage and matchImage
2.) Number of rows in C matrix
3.) Number of columns in C matrix
4.) xDim of baseImage
5.) yDim of baseImage
6.) If noncoplanar 3D thin plate spline is used, reads zDim of baseImage
7.) x coordinates of baseImage control points
8.) y coordinates of baseImage control points
9.) If noncoplanar 3D thin plate spline is used, reads z coordinates of baseImage control points
10.) If 2D or coplanar 3D, reads n+3 by 2 C[][] float matrix from setupTPSpline2D
If noncoplanar 3D, reads n+4 by 3 C[][] float matrix from setupTPSpline3D
Does not read optional message at end of file.
- Parameters:
raFile - file to be read
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LineSearchMinimizer.State.html���������������������������0000775�4231163�4231163�00000027451�14537076052�027332� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearchMinimizer.State (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer.State
-
-
Constructor Summary
Constructors
| Constructor |
Description |
State(int num_parameters,
int num_effective_parameters) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
cost
public double[] cost
-
step_size
public double step_size
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFTImageSimilarity.KeypointComparator.html��������������������������0000775�4231163�4231163�00000026570�14537076056�027534� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFTImageSimilarity.KeypointComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeypointComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
����������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.BFGS.html������������������������������������������������0000775�4231163�4231163�00000035467�14537076051�023100� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.BFGS (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
BFGS(int num_parameters,
boolean use_approximate_eigenvalue_scaling) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmDualContourSearch.html��������������������������������������0000775�4231163�4231163�00000072570�14537076045�025357� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDualContourSearch (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmDualContourSearch(ModelImage srcImg,
int innerIndex,
int outerIndex,
int contourPoints,
int linePoints,
double regularization,
double[] sigmas,
int pixelsContract,
int pixelsExpand) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
innerIndex
private int innerIndex
-
outerIndex
private int outerIndex
-
linePoints
private int linePoints
-
resultVOI
private VOI resultVOI
-
pixelsExpand
private int pixelsExpand
-
Constructor Detail
-
AlgorithmDualContourSearch
public AlgorithmDualContourSearch(ModelImage srcImg,
int innerIndex,
int outerIndex,
int contourPoints,
int linePoints,
double regularization,
double[] sigmas,
int pixelsContract,
int pixelsExpand)
-
Method Detail
-
run2D
public void run2D()
-
run3D
public void run3D()
����������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SVM.svmtest.html�����������������������������������������������������0000775�4231163�4231163�00000023761�14537076057�022275� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SVM.svmtest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SVM.svmtest
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
biasMultiplier |
|
(package private) double |
lambda |
|
(package private) double[][] |
x |
|
(package private) double[] |
y |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
svmtest() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
biasMultiplier
double biasMultiplier
���������������gov/nih/mipav/model/algorithms/LSCM.VertexTrait.html������������������������������������������������0000775�4231163�4231163�00000025706�14537076056�023142� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.VertexTrait (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_index
public int m_index
-
m_valence
public int m_valence
-
m_touched
public boolean m_touched
-
Constructor Detail
-
VertexTrait
public VertexTrait()
����������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ProbeResults.html����������������������������������������0000775�4231163�4231163�00000030273�14537076052�024777� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ProbeResults (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.ProbeResults
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
return_value
boolean return_value
-
Constructor Detail
-
ProbeResults
public ProbeResults()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AgastDetector5_8.html������������������������������������������������0000775�4231163�4231163�00000041641�14537076043�023161� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AgastDetector5_8 (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AgastDetector5_8
-
public class AgastDetector5_8
extends java.lang.Object
agast5 - AGAST, an adaptive and generic corner detector based on the
accelerated segment test for a 8 pixel mask
Copyright (c) 2010, Elmar Mair
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the distribution.
Neither the name of the owner nor the names of its contributors may be
used to endorse or promote products derived from this software without
specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND
ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDERS BE LIABLE FOR ANY
DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES
(INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND
ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS
SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
-
Constructor Summary
Constructors
| Constructor |
Description |
AgastDetector5_8(int xsize,
int ysize,
int threshold) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
threshold
private int threshold
-
s_offset0
private int s_offset0
-
s_offset1
private int s_offset1
-
s_offset2
private int s_offset2
-
s_offset3
private int s_offset3
-
s_offset4
private int s_offset4
-
s_offset5
private int s_offset5
-
s_offset6
private int s_offset6
-
s_offset7
private int s_offset7
�����������������������������������������������������������������������������������������������././@LongLink���������������������������������������������������������������������������������������0000644�0000000�0000000�00000000146�00000000000�011604� L����������������������������������������������������������������������������������������������������ustar �root����������������������������root�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.Forest.computeTreePermutationImportanceInThread.html���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.Forest.computeTreePermutationImportanceInThread.htm0000775�4231163�4231163�00000030760�14537076057�035044� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.Forest.computeTreePermutationImportanceInThread (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.Forest.computeTreePermutationImportanceInThread
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.util.Vector<java.lang.Double> |
importance |
|
private int |
thread_idx |
|
private java.util.Vector<java.lang.Double> |
variance |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
thread_idx
private int thread_idx
-
Method Detail
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
����������������gov/nih/mipav/model/algorithms/Covdet.VlCovDetFeatureLaplacianScale.html����������������������������0000775�4231163�4231163�00000022710�14537076054�027114� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlCovDetFeatureLaplacianScale (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeatureLaplacianScale
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
scale |
|
(package private) double |
score |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������gov/nih/mipav/model/algorithms/WeibullDistribution.html���������������������������������������������0000775�4231163�4231163�00000241475�14537076057�024133� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WeibullDistribution (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class gov.nih.mipav.model.algorithms.CeresSolver
CeresSolver.ArctanLoss, CeresSolver.ArmijoLineSearch, CeresSolver.AutoDiffCostFunction<CostFunctor>, CeresSolver.BadTestTerm, CeresSolver.BFGS, CeresSolver.Block, CeresSolver.BlockEvaluatePreparer, CeresSolver.BlockJacobianWriter, CeresSolver.BlockJacobiPreconditioner, CeresSolver.BlockRandomAccessDenseMatrix, CeresSolver.BlockRandomAccessDiagonalMatrix, CeresSolver.BlockRandomAccessMatrix, CeresSolver.BlockSparseMatrix, CeresSolver.BlockSparseMatrixRandomMatrixOptions, CeresSolver.CallbackReturnType, CeresSolver.CallStatistics, CeresSolver.CauchyLoss, CeresSolver.Cell, CeresSolver.CellInfo, CeresSolver.CellLessThan, CeresSolver.CgnrLinearOperator, CeresSolver.CgnrSolver, CeresSolver.Chunk, CeresSolver.ComposedLoss, CeresSolver.CompressedList, CeresSolver.CompressedRowBlockStructure, CeresSolver.CompressedRowJacobianWriter, CeresSolver.CompressedRowSparseMatrix, CeresSolver.ConjugateGradientsSolver, CeresSolver.Context, CeresSolver.CoordinateDescentMinimizer, CeresSolver.Corrector, CeresSolver.CostFunction, CeresSolver.CostFunctorExample, CeresSolver.CovarianceAlgorithmType, CeresSolver.CRSMatrix, CeresSolver.CurveFittingFunctorExample, CeresSolver.DenseJacobianWriter, CeresSolver.DenseLinearAlgebraLibraryType, CeresSolver.DenseNormalCholeskySolver, CeresSolver.DenseQRSolver, CeresSolver.DenseSchurComplementSolver, CeresSolver.DenseSparseMatrix, CeresSolver.DoglegStrategy, CeresSolver.DoglegType, CeresSolver.DumpFormatType, CeresSolver.DynamicCompressedRowJacobianFinalizer, CeresSolver.DynamicCompressedRowJacobianWriter, CeresSolver.DynamicCostFunction, CeresSolver.DynamicNumericDiffCostFunction<T>, CeresSolver.EasyCostFunction, CeresSolver.EasyFunctor, CeresSolver.EigenQuaternionParameterization, CeresSolver.EvaluateOptions, CeresSolver.EvaluateScratch, CeresSolver.EvaluationCallback, CeresSolver.Evaluator, CeresSolver.EvaluatorOptions, CeresSolver.EventLogger, CeresSolver.ExecutionSummary, CeresSolver.ExponentialCostFunction, CeresSolver.ExponentialFunctor, CeresSolver.FirstOrderFunction, CeresSolver.FunctionSample, CeresSolver.GoodTestTerm, CeresSolver.GradientChecker, CeresSolver.GradientCheckingCostFunction, CeresSolver.GradientCheckingIterationCallback, CeresSolver.GradientProblem, CeresSolver.GradientProblemEvaluator, CeresSolver.GradientProblemSolver, CeresSolver.GradientProblemSolverOptions, CeresSolver.GradientProblemSolverStateUpdatingCallback, CeresSolver.GradientProblemSolverSummary, CeresSolver.Graph<Vertex>, CeresSolver.HomogeneousVectorParameterization, CeresSolver.HuberLoss, CeresSolver.IdentityParameterization, CeresSolver.ImplicitSchurComplement, CeresSolver.indexValueItem<Vertex>, CeresSolver.IterationCallback, CeresSolver.IterationSummary, CeresSolver.IterativeSchurComplementSolver, CeresSolver.LBFGS, CeresSolver.LevenbergMarquardtStrategy, CeresSolver.LinearCostFunction, CeresSolver.LinearLeastSquaresProblem, CeresSolver.LinearOperator, CeresSolver.LinearSolver, CeresSolver.LinearSolverOptions, CeresSolver.LinearSolverPerSolveOptions, CeresSolver.LinearSolverSummary, CeresSolver.LinearSolverTerminationType, CeresSolver.LinearSolverType, CeresSolver.LineSearch, CeresSolver.LineSearchDirection, CeresSolver.LineSearchDirectionOptions, CeresSolver.LineSearchDirectionType, CeresSolver.LineSearchFunction, CeresSolver.LineSearchInterpolationType, CeresSolver.LineSearchMinimizer, CeresSolver.LineSearchOptions, CeresSolver.LineSearchPreprocessor, CeresSolver.LineSearchSummary, CeresSolver.LineSearchType, CeresSolver.LocalParameterization, CeresSolver.LoggingCallback, CeresSolver.LoggingType, CeresSolver.LossFunction, CeresSolver.LossFunctionWrapper, CeresSolver.LowRankInverseHessian, CeresSolver.Minimizer, CeresSolver.MinimizerOptions, CeresSolver.MinimizerType, CeresSolver.MyCostFunctor, CeresSolver.MyThreeParameterCostFunctor, CeresSolver.NonlinearConjugateGradient, CeresSolver.NonlinearConjugateGradientType, CeresSolver.NormalPrior, CeresSolver.NullJacobianFinalizer, CeresSolver.NumericDiffCostFunction<CostFunctor>, CeresSolver.NumericDiffMethodType, CeresSolver.NumericDiffOptions, CeresSolver.OnlyFillsOneOutputFunctor, CeresSolver.OrderedGroups<T>, CeresSolver.Ownership, CeresSolver.ParameterBlock, CeresSolver.PartitionedMatrixView, CeresSolver.Preconditioner, CeresSolver.PreconditionerOptions, CeresSolver.PreconditionerType, CeresSolver.PreprocessedProblem, CeresSolver.Preprocessor, CeresSolver.ProbeResults, CeresSolver.ProblemImpl, CeresSolver.ProblemOptions, CeresSolver.ProductParameterization, CeresSolver.Program, CeresSolver.ProgramEvaluator<EvaluatePreparer,JacobianWriter,JacobianFinalizer>, CeresSolver.QuaternionParameterization, CeresSolver.RandomizedCostFunction, CeresSolver.RandomizedFunctor, CeresSolver.ResidualBlock, CeresSolver.ScaledLoss, CeresSolver.SchurComplementSolver, CeresSolver.SchurEliminator, CeresSolver.SchurEliminatorBase, CeresSolver.SchurJacobiPreconditioner, CeresSolver.ScopedExecutionTimer, CeresSolver.ScratchEvaluatePreparer, CeresSolver.SizedCostFunction, CeresSolver.SizeTestingCostFunction, CeresSolver.SoftLOneLoss, CeresSolver.Solver, CeresSolver.SolverOptions, CeresSolver.SolverSummary, CeresSolver.SparseLinearAlgebraLibraryType, CeresSolver.SparseMatrix, CeresSolver.SparseMatrixPreconditionerWrapper, CeresSolver.StateUpdatingCallback, CeresSolver.SteepestDescent, CeresSolver.SubsetParameterization, CeresSolver.TerminationType, CeresSolver.TestTerm, CeresSolver.TolerantLoss, CeresSolver.TranscendentalCostFunction, CeresSolver.TranscendentalFunctor, CeresSolver.TripletSparseMatrix, CeresSolver.TripletSparseMatrixRandomMatrixOptions, CeresSolver.TrivialLoss, CeresSolver.TrustRegionMinimizer, CeresSolver.TrustRegionPreprocessor, CeresSolver.TrustRegionStepEvaluator, CeresSolver.TrustRegionStrategy, CeresSolver.TrustRegionStrategyOptions, CeresSolver.TrustRegionStrategyPerSolveOptions, CeresSolver.TrustRegionStrategySummary, CeresSolver.TrustRegionStrategyType, CeresSolver.TukeyLoss, CeresSolver.TypedLinearSolver<MatrixType>, CeresSolver.TypedPreconditioner<MatrixType>, CeresSolver.VertexDegreeLessThan<Vertex>, CeresSolver.VertexTotalOrdering<Vertex>, CeresSolver.VisibilityClusteringType, CeresSolver.WeightedGraph<Vertex>, CeresSolver.WolfeLineSearch
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
failures |
|
private double |
location |
|
private int |
n |
|
private double |
scale |
Reference: Statistical Distributions Fourth Edition, Catherine Forbes,
Merran Evans, Nicholas Hastings, and Brian Peacock, Chqapter 46,
Weibull Distribution, pp. 193-201.
|
private double |
shape |
|
private double[] |
suspensions |
|
private double[] |
t |
|
private ViewUserInterface |
UI |
|
private double[] |
w |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.CeresSolver
BAD_TEST_TERM_EXAMPLE, COST_FUNCTOR_EXAMPLE, CURVE_FITTING_EXAMPLE, curveFittingData, curveFittingObservations, default_relstep, DYNAMIC, EASY_COST_FUNCTION, EASY_FUNCTOR_EXAMPLE, epsilon, ERROR, EXPONENTIAL_COST_FUNCTION, EXPONENTIAL_FUNCTOR, FATAL, GOOD_TEST_TERM_EXAMPLE, INFO, LINEAR_COST_FUNCTION_EXAMPLE, m, MAX_LOG_LEVEL, MY_COST_FUNCTOR, MY_THREE_PARAMETER_COST_FUNCTOR, N0, ONLY_FILLS_ONE_OUTPUT_FUNCTOR, optionsValid, RANDOMIZED_COST_FUNCTION, RANDOMIZED_FUNCTOR, SIZE_TESTING_COST_FUNCTION, svd, TEST_TERM_EXAMPLE, testCase, testMode, TRANSCENDENTAL_COST_FUNCTION, TRANSCENDENTAL_FUNCTOR, WARNING
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.CeresSolver
AppendArrayToString, ApplyOrdering, BuildResidualLayout, ComputeHouseholderVector, ComputeRecursiveIndependentSetOrdering, ComputeSchurOrdering, ComputeStableSchurOrdering, copyFunctionSample, Create, Create, Create, Create, Create, Create, Create, CreateDiagonalMatrix, CreateEvaluatorScratch, CreateGradientCheckingCostFunction, CreateGradientCheckingProblemImpl, CreateHessianGraph, CreateLinearLeastSquaresProblemFromId, CreateOrdering, createPartitionedMatrixView, CreatePreprocessor, CreateRandomMatrix, CreateRandomMatrix, createSchurEliminatorBase, CreateSparseDiagonalMatrix, DetectStructure, DifferentiatePolynomial, DumpLinearLeastSquaresProblem, DumpLinearLeastSquaresProblemToConsole, DumpLinearLeastSquaresProblemToTextFile, EigenQuaternionProduct, EvaluateCostFunction, EvaluateJacobianColumn, EvaluateJacobianForParameterBlock, EvaluateJacobianForParameterBlock, EvaluatePolynomial, EvaluateRiddersJacobianColumn, ExpectClose, FindInterpolatingPolynomial, FindInvalidValue, FindLinearPolynomialRoots, FindPolynomialRoots, FindQuadraticPolynomialRoots, FindWithDefault, FindWithDefault, GetBestSchurTemplateSpecialization, GradientProblemSolverOptionsToSolverOptions, IndependentSetOrdering, InvalidateArray, InvalidateArray, InvalidateArray, InvalidateArray, InvertPSDMatrix, IsArrayValid, IsArrayValid, IsArrayValid, IsArrayValid, IsClose, IsOrderingValid, IsSchurType, IsSolutionUsable, IsSolutionUsable, LexicographicallyOrderResidualBlocks, LinearLeastSquaresProblem0, LinearLeastSquaresProblem1, LinearLeastSquaresProblem2, LinearLeastSquaresProblem3, LinearLeastSquaresProblem4, LinearSolverForZeroEBlocks, LinearSolverTypeToString, LineSearchDirectionTypeToString, LineSearchInterpolationTypeToString, LineSearchTypeToString, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixTransposeMatrixMultiply, MatrixTransposeVectorMultiply, MatrixVectorMultiply, MaybeReorderSchurComplementColumnsUsingEigen, MaybeReorderSchurComplementColumnsUsingSuiteSparse, Minimize, MinimizeInterpolatingPolynomial, MinimizePolynomial, MinParameterBlock, NonlinearConjugateGradientTypeToString, operator, PostSolveSummarize, PreconditionerForZeroEBlocks, PreconditionerTypeToString, QuaternionProduct, RandDouble, RandDouble, RandNormal, RemoveLeadingZeros, ReorderProgramForSchurTypeLinearSolver, RunCallbacks, SchurStructureToString, SetSummaryFinalCost, SetSummaryFinalCost, SetupCommonMinimizerOptions, Solve, Solve, StableIndependentSetOrdering, SummarizeReducedProgram, swap, TerminationTypeToString, TransposeForCompressedRowSparseStructure, Uniform, WriteArrayToFileOrDie, WriteStringToFileOrDie
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
scale
private double scale
Reference: Statistical Distributions Fourth Edition, Catherine Forbes,
Merran Evans, Nicholas Hastings, and Brian Peacock, Chqapter 46,
Weibull Distribution, pp. 193-201.
Variable 0 =< x < infinity
scale parameter > 0 is the characteristic life
shape parameter > 0
0 < location <= t[i] for all i
pdf: (shape * t**(shape-1)/(scale ** shape)) * exp(-(t/scale)**shape) for t > 0 for 2 parameters
pdf: 0 for t <= 0 for 2 parameters for 2 parameters
pdf: (shape * (t-location)**(shape-1)/(scale ** shape)) * exp(-((t-location)/scale)**shape) for t > location for 3 parameters
pdf: 0 for t <= location for 3 parameters
Random number generator: scale, shape can be generated from those of the
rectangular unit variate R using the relationship:
W: scale, shape ~ scale * pow((-log R),(1/shape)
By the method of maximum likelihood the estimators scaleML, shapeML are
the solution of the simultaneous equations:
scaleML = [(1/n)*(sum from i = 1 to n of xi**shapeML)]**(1/shapeML)
shapeML = n/denom
denom = (1/scaleML)*(sum from i = 1 to N of (xi**shapeML)*log(xi)) - (sum from i = 1 to n of log(xi))
The three parameter cumulative distribution function is:
F(t; location, shape, scale) = 1 - exp(-((t-location)/scale)**shape) for t > location
= 0 for t < location
This file contains code ported from the file predictr.py by Tamer Tevetoglu.
# predictr - Predict the Reliability
predictr: predict + reliability, in other words: A tool to predict the reliability.
The aim of this package is to provide state of the art tools for all kinds of Weibull analyses.
The license follows:
MIT License
Copyright (c) 2020-present Tamer Tevetoglu
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
You can cite predictr in your publication or research work using the Digital Object Identifier (DOI):
10.5281/zenodo.4614034
## BibTeX
-
shape
private double shape
-
location
private double location
-
Constructor Detail
-
WeibullDistribution
public WeibullDistribution(double scale,
double shape,
double location,
double[] w,
double[] t)
-
Method Detail
-
test_mle
public void test_mle()
Maximum likelihood estimation (MLE):**
```python
from predictr import Analysis
prototype_a = Analysis(...) # create an instance
prototype_a.mle() # use instance methods
```
Median Rank Regression (MRR)**
```python
from predictr import Analysis
prototype_a = Analysis(...) # create an instance
prototype_a.mrr() # use instance methods
```
### Bias-correction methods
Since parameter estimation methods are only asymptotically unbiased (sample sizes -> "infinity"), bias-correction methods
are useful when you have only a few failures. These methods correct the Weibull shape and scale parameter.
The following table provides possible configurations. Bias-corrections for mrr() are not supported, yet.
| Bias-correction method | mle() | mrr() | argument value | config. | statistic |
|-------------------------------------|:-----:|:-----:|:--------------:|:-------:|:--------------------------------:|
| C4 aka 'reduced bias adjustment' | x | - | 'c4' | - | - |
| Hirose and Ross method | x | - | 'hrbu' | - | - |
| Non-parametric Bootstrap correction | x | - | 'np_bs' | bs_size | 'mean', 'median', 'trimmed_mean' |
| Parametric Bootstrap correction | x | - | 'p_bs' | bs_size | 'mean', 'median', 'trimmed_mean' |
### Confidence bounds methods
Analysis supports nearly all state of the art confidence bounds methods.
| confidence bounds | mle() | mrr() | uncensored data | censored data | bounds_type | argument value |
|---------------------------------|:-----:|:-----:|:---------------:|:-------------:|:------------------:|:--------------:|
| Beta-Binomial Bounds | - | x | x | x | '2s', '1sl', '1su' | 'bbb' |
| Monte-Carlo Pivotal Bounds | - | x | x | x | '2s', '1sl', '1su' | 'mcpb' |
| Non-Parametric Bootstrap Bounds | x | x | x | x | '2s', '1sl', '1su' | 'npbb' |
| Parametric Bootstrap Bounds | x | x | x | x | '2s', '1sl', '1su' | 'pbb' |
| Fisher Bounds | x | - | x | x | '2s', '1sl', '1su' | 'fb' |
| Likelihood Ratio Bounds | x | - | x | x | '2s', '1sl', '1su' | 'lrb' |
Important**:
- mle() and mrr() support only specific confidence bounds methods. For instance, you can't use Beta-Binomial Bounds with mle().
This will also raise an error. Use the table above to check, whether a combination of parameter estimation and confidence bounds method is supported.
- '2s': two-sided confidence bounds, '1su': upper confidence bounds, '1sl': lower confidence bounds. If Beta-Binomial Bounds are used,
the lower bound represents the lower percentile bound at a specific time ((pctl) is added in the plot legend). If Fisher Bounds are used, the lower bound represents the lower time bound at a specific percentile.
### Examples
#### Maximum Likelihood Estimation (MLE)
##### Uncensored sample
Example:
```python
failures = [0.4508831, 0.68564703, 0.76826143, 0.88231395, 1.48287253, 1.62876357]
prototype_a = Analysis(df=failures, bounds='fb',show=True)
prototype_a.mle()
```
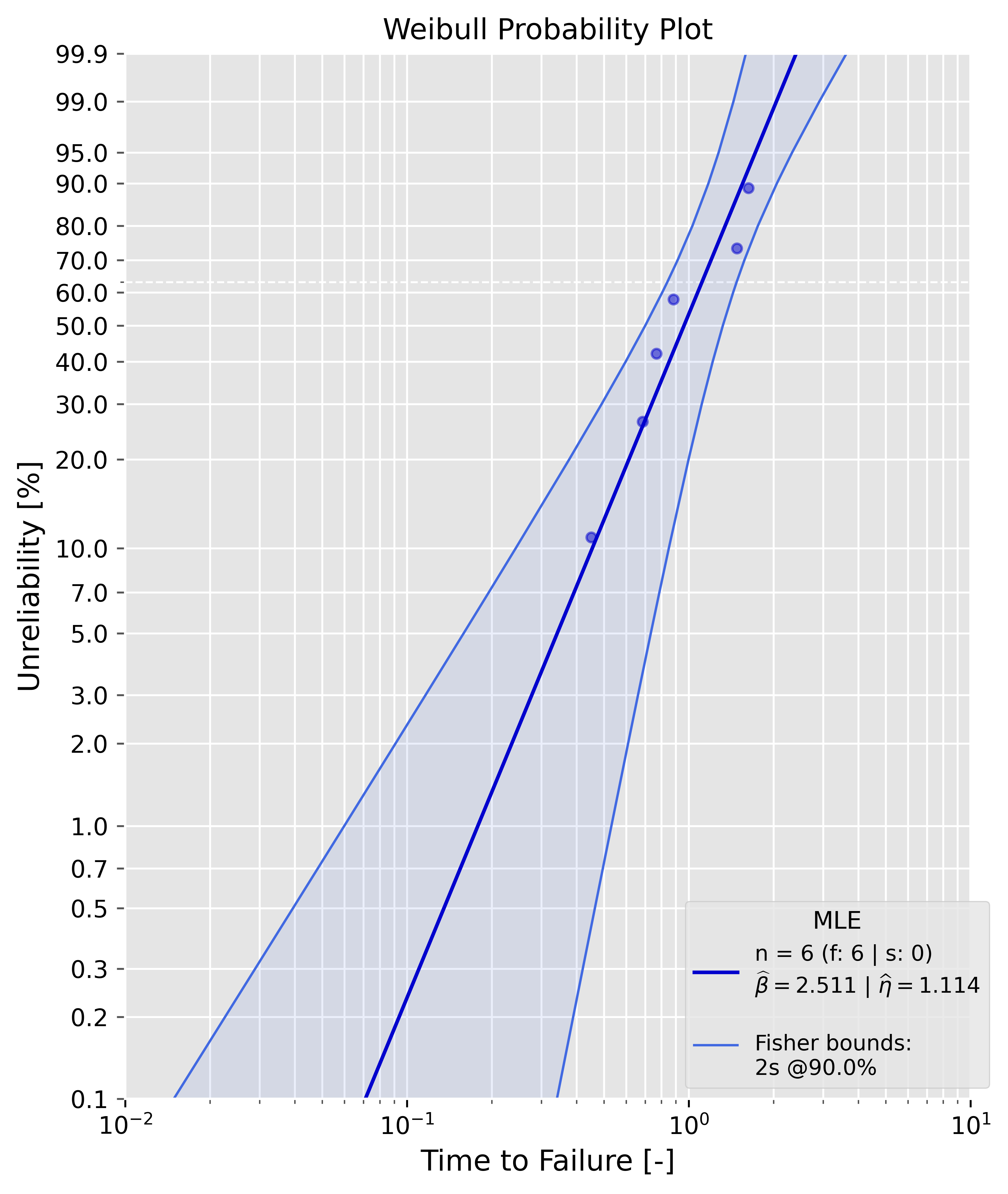{: width="500" }
##### Censored sample
Example:
```python
failures = [0.4508831, 0.68564703, 0.76826143, 0.88231395, 1.48287253, 1.62876357]
suspensions = [1.9, 2.0, 2.0]
prototype_a = Analysis(df=failures, ds=suspensions, bounds='lrb',show=True)
prototype_a.mle()
```
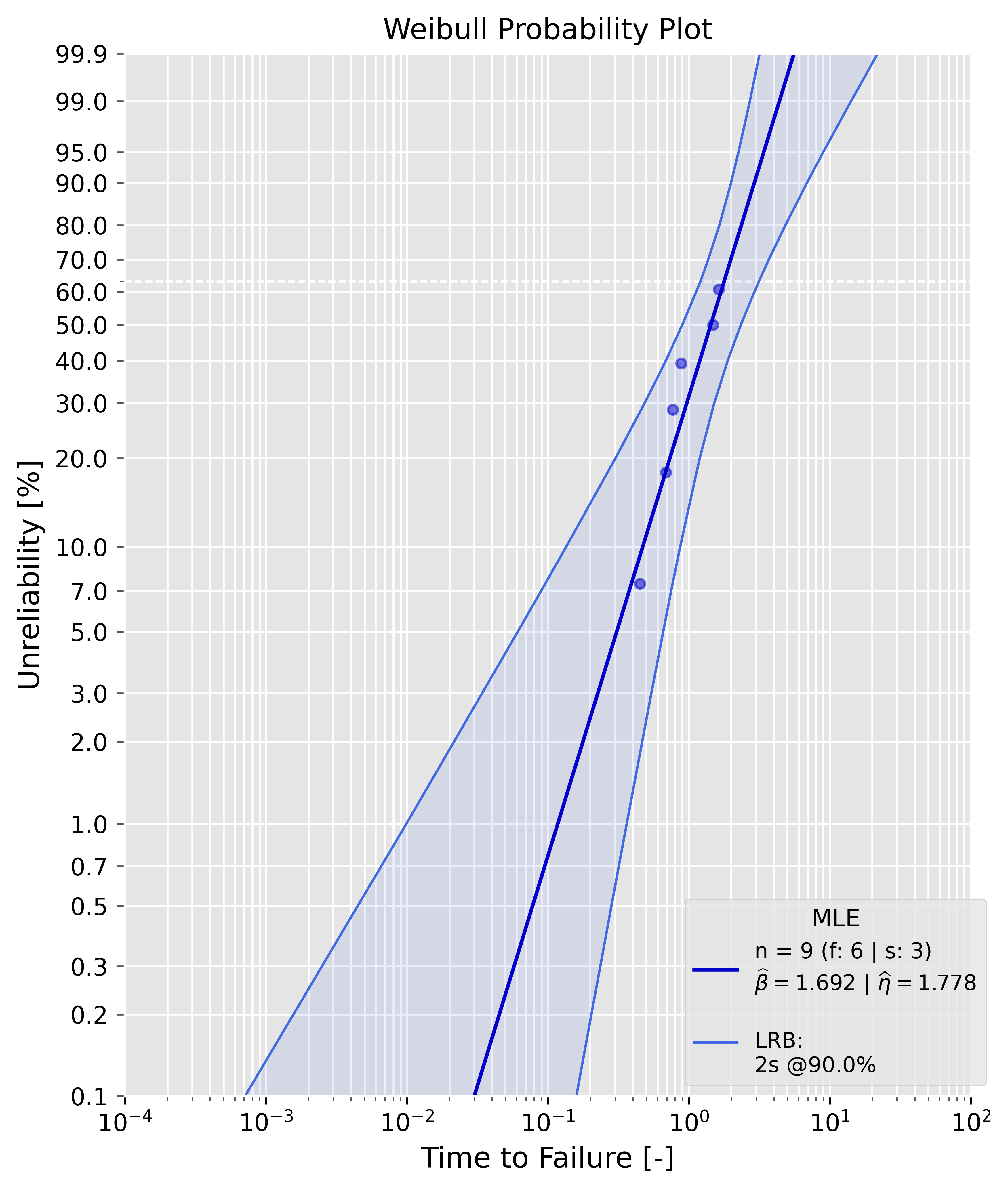{: width="500" }
#### Median Rank Regression (MRR)
##### Uncensored sample
Example:
```python
failures = [0.4508831, 0.68564703, 0.76826143, 0.88231395, 1.48287253, 1.62876357]
prototype_a = Analysis(df=failures, bounds='bbb',show=True)
prototype_a.mrr()
```
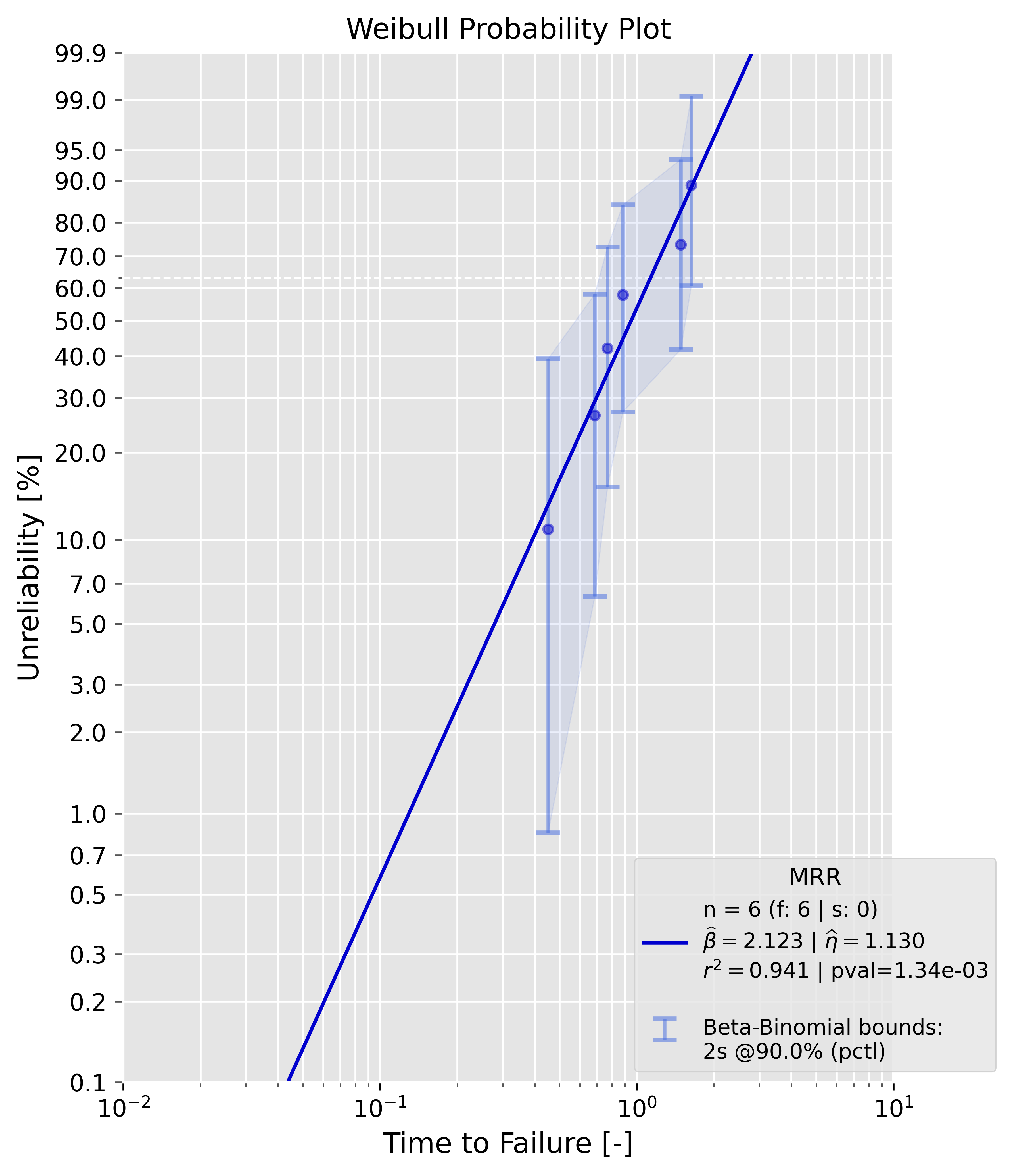{: width="500" }
##### Censored sample
Example:
```python
failures = [0.4508831, 0.68564703, 0.76826143, 0.88231395, 1.48287253, 1.62876357]
suspensions = [1.9, 2.0, 2.0]
prototype_a = Analysis(df=failures, ds=suspensions, bounds='mcpb',show=True)
prototype_a.mrr()
##### Censored sample
Example:
```python
failures = [0.4508831, 0.68564703, 0.76826143, 0.88231395, 1.48287253, 1.62876357]
suspensions = [1.9, 2.0, 2.0]
prototype_a = Analysis(df=failures, ds=suspensions, bounds='mcpb',show=True)
prototype_a.mrr()
```
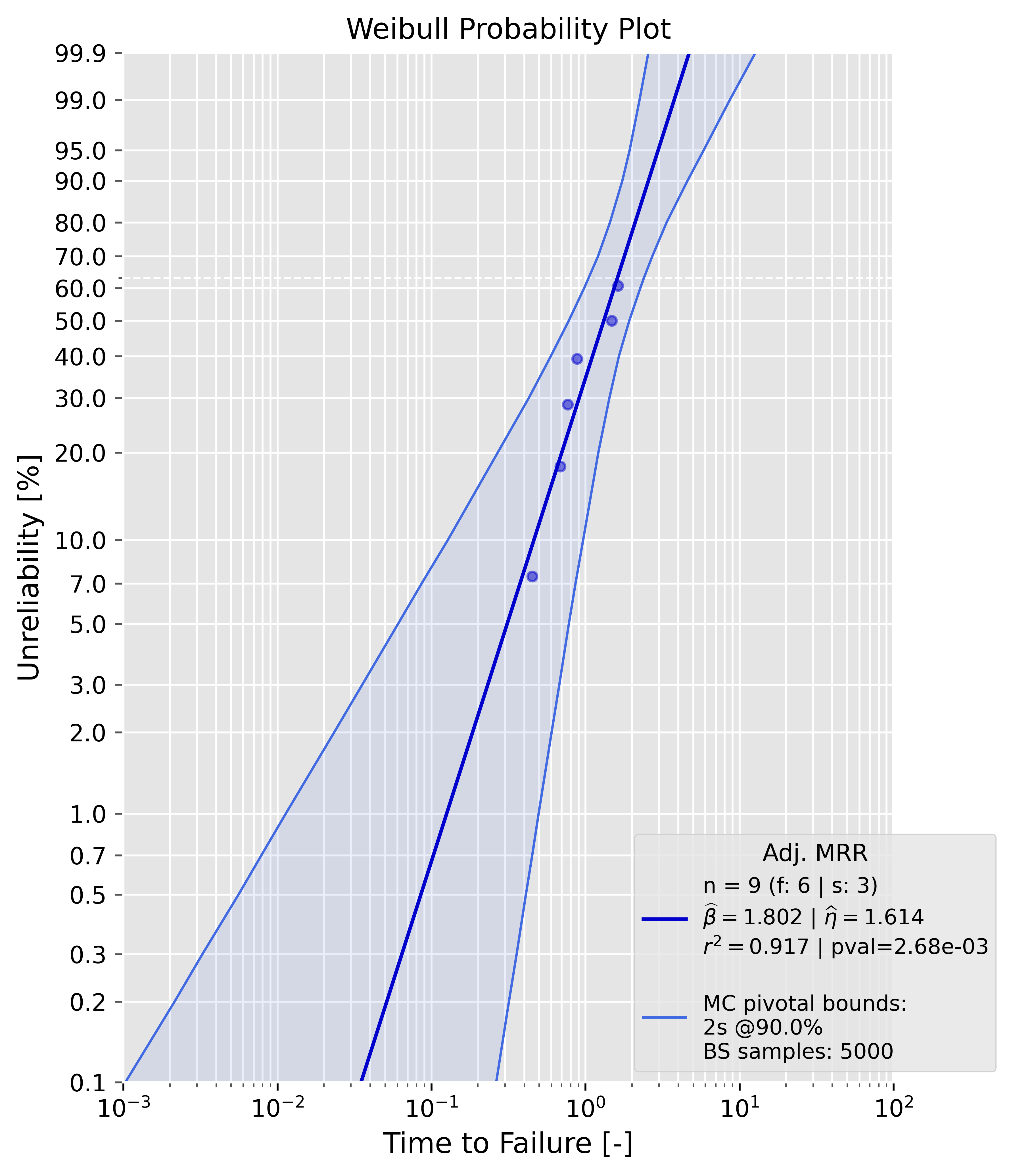{: width="500" }
#### Bias-corrections
As already mentioned, only mle() support bias-corrections. The samples in these examples are drawn from a two-parameter Weibull distribution with a shape parameter of 2.0 and a scale parameter of 1.0.
##### Uncensored sample
It is appearent that the estimates of beta and eta are now closer to the ground truth values. The dotted grey line in the plot is the "biased" MLE line, the bia-corrected line is blue. The legend contains all needed information.
```python
failures = [0.4508831, 0.68564703, 0.76826143, 0.88231395, 1.48287253, 1.62876357]
prototype_a = Analysis(df=failures, bounds='fb', show=True, bcm='c4')
prototype_a.mle()
```
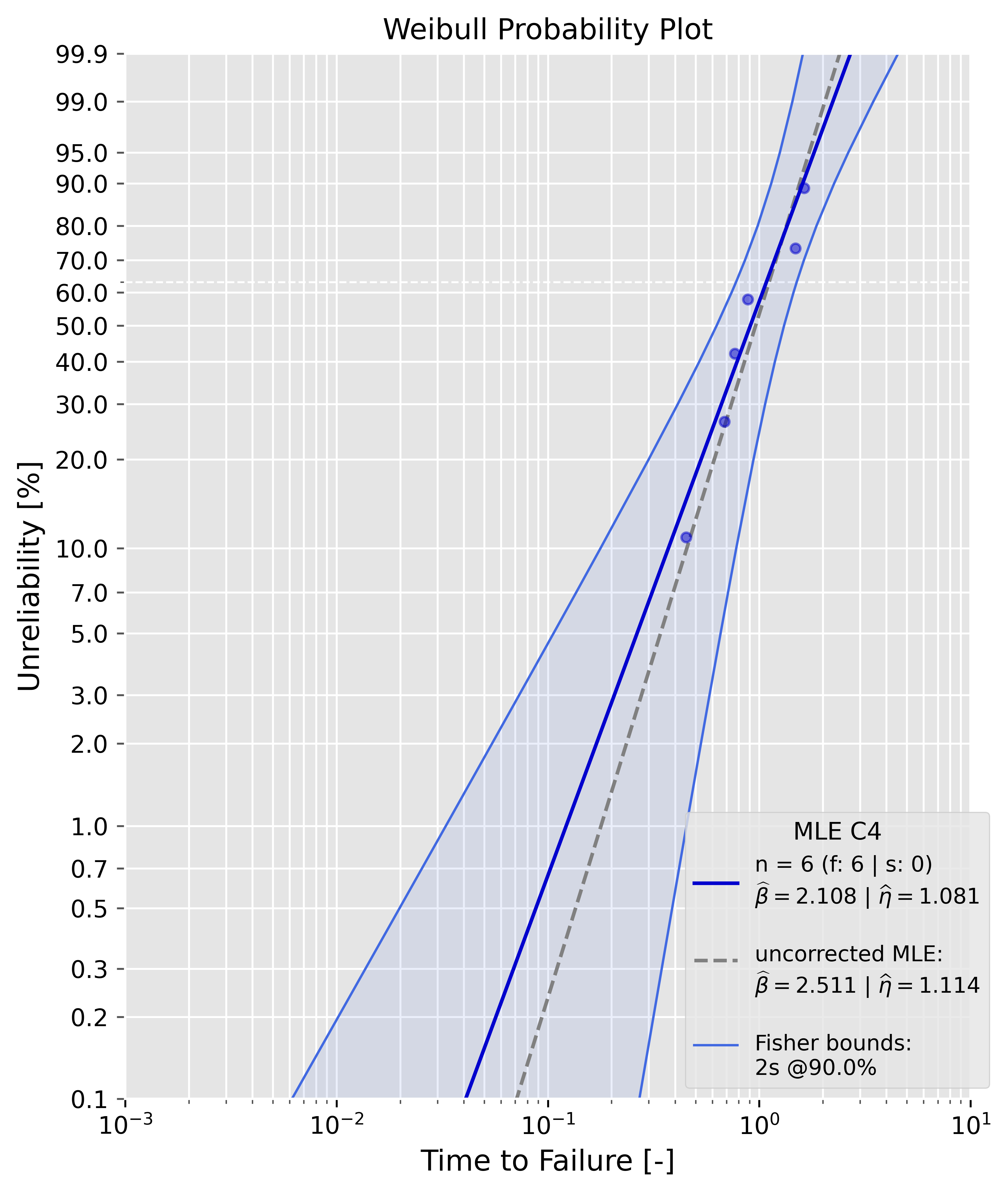{: width="500" }
The estimates can for the Weibull parameters can be compared directly, since they are available as attributes
```python
print(f'biased beta: {prototype_a.beta:4f} --> bias-corrected beta: {prototype_a.beta_c4:4f}')
>>> biased beta: 2.511134 --> bias-corrected beta: 2.108248
```
##### Censored sample
The data is type II right-censored.
```python
failures = [0.38760099164906514, 0.5867052007217437, 0.5878056753744406, 0.602290402929083, 0.6754829518358306, 0.7520219855697948]
suspensions = [0.7520219855697948, 0.7520219855697948]
prototype_a = Analysis(df=failures, ds=suspensions, bounds='lrb', show=True, bcm='hrbu')
prototype_a.mle()
-
test_mrr
public void test_mrr()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.MinimizerType.html���������������������������������������0000775�4231163�4231163�00000034245�14537076052�025156� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.MinimizerType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
MinimizerType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
MinimizerType
private MinimizerType()
-
Method Detail
-
valueOf
public static CeresSolver.MinimizerType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd15.html��������������������������������������0000775�4231163�4231163�00000030506�14537076055�025066� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd15 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd15(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd15
public Fitqd15(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmVOISimplexOpt.CostFunction.html�����������������������������0000775�4231163�4231163�00000035766�14537076051�027074� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmVOISimplexOpt.CostFunction (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt.CostFunction
-
-
Constructor Summary
Constructors
| Constructor |
Description |
CostFunction() |
Empty constructor.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
CostFunction
public CostFunction()
Empty constructor.
����������gov/nih/mipav/model/algorithms/ContourPlot.Legend.LineLabel.html������������������������������������0000775�4231163�4231163�00000027161�14537076054�025432� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Legend.LineLabel (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Legend.LineLabel
-
-
Constructor Summary
Constructors
| Constructor |
Description |
LineLabel(java.lang.String labelText,
double thickness,
int color,
int pickColor) |
|
LineLabel(java.lang.String labelText,
double thickness,
int color,
int pickColor,
int strokePattern) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
thickness
public double thickness
-
pickColor
public int pickColor
-
strokePattern
public int strokePattern
-
Constructor Detail
-
LineLabel
public LineLabel(java.lang.String labelText,
double thickness,
int color,
int pickColor,
int strokePattern)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSphereGeneration.IntModelMeanSquared2.html������������������0000775�4231163�4231163�00000034715�14537076050�031151� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSphereGeneration.IntModelMeanSquared2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
density |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
IntModelMeanSquared2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit,
double density) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
IntModelMeanSquared2
public IntModelMeanSquared2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit,
double density)
���������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CellInfo.html��������������������������������������������0000775�4231163�4231163�00000027473�14537076051�024050� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CellInfo (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CellInfo
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
java.util.concurrent.locks.Lock |
m |
|
double[] |
values |
|
int |
values_index |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
CellInfo() |
|
CellInfo(double[] ptr,
int index) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
values
public double[] values
-
values_index
public int values_index
-
Constructor Detail
-
CellInfo
public CellInfo()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.GVFitting.html���������������������������������������0000775�4231163�4231163�00000035725�14537076054�024652� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.GVFitting (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
GVFitting(double[] x0,
boolean doAnalytical) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������gov/nih/mipav/model/algorithms/SVM.VlHomogeneousKernelMap.html��������������������������������������0000775�4231163�4231163�00000031633�14537076057�025156� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SVM.VlHomogeneousKernelMap (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
numSubdivisions
int numSubdivisions
-
subdivision
double subdivision
-
minExponent
int minExponent
-
maxExponent
int maxExponent
�����������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StatisticsTable.html�������������������������������������������������0000775�4231163�4231163�00000032703�14537076056�023221� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StatisticsTable (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StatisticsTable
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private static java.util.ArrayList<java.lang.Double[]> |
tTable |
t-statistics table
|
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private static java.util.ArrayList<java.lang.Double[]> |
buildTinvTable() |
Builds the t-statistic table, first numerical row is list of significant values, subsequent rows
are the t-statistic values for incremental degrees of freedom.
|
static java.lang.Double |
getOneTailInvTStatsitic(int dof,
double significance) |
Finds the value of the one-tail t-statistic that produces the given level of significance for the given
number of degrees of freedom.
|
static java.lang.Double |
getTwoTailInvTStatsitic(int dof,
double significance) |
Finds the value of the two-tail t-statistic that produces the given level of significance for the given
number of degrees of freedom.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
StatisticsTable
public StatisticsTable()
-
Method Detail
-
getTwoTailInvTStatsitic
public static java.lang.Double getTwoTailInvTStatsitic(int dof,
double significance)
Finds the value of the two-tail t-statistic that produces the given level of significance for the given
number of degrees of freedom.
- Parameters:
dof - degrees of freedomsignificance - sig level- Returns:
- t-statistic value
-
getOneTailInvTStatsitic
public static java.lang.Double getOneTailInvTStatsitic(int dof,
double significance)
Finds the value of the one-tail t-statistic that produces the given level of significance for the given
number of degrees of freedom.
- Parameters:
dof - degrees of freedomsignificance - sig level- Returns:
- t-statistic value
-
buildTinvTable
private static java.util.ArrayList<java.lang.Double[]> buildTinvTable()
Builds the t-statistic table, first numerical row is list of significant values, subsequent rows
are the t-statistic values for incremental degrees of freedom.
�������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.indexValueComparator.html��������������������������0000775�4231163�4231163�00000026646�14537076057�027736� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.SVR_Q.html����������������������������������������������������0000775�4231163�4231163�00000040650�14537076056�022044� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.SVR_Q (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
next_buffer
private int next_buffer
-
buffer
private float[][] buffer
����������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/HartleyTransform2.html�����������������������������������������������0000775�4231163�4231163�00000151511�14537076055�023503� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
HartleyTransform2 (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class HartleyTransform2
extends AlgorithmBase
Smithsonian Astrophysical Observatory
Submillimeter Receiver Laboratory
am
transform.c S. Paine rev. 2018 February 5
Discrete Fourier, Hartley, and Hilbert transforms.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[] |
bitrevorder(double[] X) |
|
private void |
center(double[] data) |
Centers the FFT for display purposes.
|
private double |
Chebyshev(int order,
double w) |
|
void |
fht_dif(double[] x,
int n) |
void fht_dif(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-frequency FHT.
|
(package private) static void |
fht_dif_iter(double[] x,
int n) |
static void fht_dif_iter(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-frequency
FHT.
|
(package private) static void |
fht_dif_iter_seq(double[] x,
int n) |
static void fht_dif_iter_seq(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-frequency
FHT.
|
(package private) static void |
fht_dif_rec(double[] x,
int n,
int nbranch) |
static void fht_dif_rec(double *x, unsigned long n, int nbranch)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-frequency FHT.
|
void |
fht_dit(double[] x,
int n) |
void fht_dit(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-time FHT.
|
(package private) static void |
fht_dit_iter(double[] x,
int n) |
static void fht_dit_iter(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-time
FHT.
|
(package private) static void |
fht_dit_iter_seq(double[] x,
int n) |
static void fht_dit_iter_seq(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-time
FHT.
|
(package private) static void |
fht_dit_rec(double[] x,
int n,
int nbranch) |
static void fht_dit_rec(double *x, unsigned long n, int nbranch)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-time FHT.
|
void |
fht2D(int yDim,
int xDim,
double[][] src,
double[][] dst,
boolean forwardTransform) |
|
private void |
makeButterworthFilter(double[] buffer,
double fr1,
double fr2) |
DOCUMENT ME!
|
private void |
makeChebyshevTypeIFilter(double[] buffer,
double fr1,
double fr2) |
|
private void |
makeChebyshevTypeIIFilter(double[] buffer,
double fr1,
double fr2) |
|
private void |
makeEllipticFilter(double[] buffer,
double fr1,
double fr2) |
|
private void |
makeGaussianFilter(double[] buffer,
double rmsFreq) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
testHartley() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
filterType
private int filterType
-
filterOrder
private int filterOrder
-
epsilon
private double epsilon
-
Constructor Detail
-
HartleyTransform2
public HartleyTransform2(ModelImage transformImage,
ModelImage inverseImage,
ModelImage srcImg,
int constructionMethod,
int filterType,
double f1,
double f2,
int filterOrder,
double epsilon,
double rs)
-
Method Detail
-
fht2D
public void fht2D(int yDim,
int xDim,
double[][] src,
double[][] dst,
boolean forwardTransform)
-
fht_dif
public void fht_dif(double[] x,
int n)
void fht_dif(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-frequency FHT.
n must be a power of 2. Entering this function, x[] is
in normal order. On return, x[] contains the Hartley
transform, stored in bit-reversed order.
Arguments:
double *x - array of n doubles, representing n real numbers
unsigned long n - dimension of x, must be a power of 2
Return:
none
-
fht_dif_iter
static void fht_dif_iter(double[] x,
int n)
static void fht_dif_iter(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-frequency
FHT. n must be a power of 2. Entering this function, x[] is
in normal order. On return, x[] contains the Hartley
transform, stored in bit-reversed order.
Arguments:
double *x - array of n doubles, representing n real numbers
unsigned long n - dimension of x, must be a power of 2
Return:
none
-
fht_dif_iter_seq
static void fht_dif_iter_seq(double[] x,
int n)
static void fht_dif_iter_seq(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-frequency
FHT. n must be a power of 2. Entering this function, x[] is
in normal order. On return, x[] contains the Hartley
transform, stored in bit-reversed order.
The two inner loops of the FHT computation are ordered
to favor sequential memory access at the expense of
redundant trig computations. See J. Arndt, "Algorithms
for Programmers," online at http://www.jjj.de/fxt/.
Arguments:
double *x - array of n doubles, representing n real numbers
unsigned long n - dimension of x, must be a power of 2
Return:
none
-
fht_dif_rec
static void fht_dif_rec(double[] x,
int n,
int nbranch)
static void fht_dif_rec(double *x, unsigned long n, int nbranch)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-frequency FHT. If
the computation is small enough to fit in cache, it is done
iteratively. Otherwise, it is done recursively until the
recursion descends to cache-sized chunks.
n must be a power of 2. Entering this function, x[] must
be in normal order. On return, x[] contains the Hartley
transform, in bit-reversed order.
To support OpenMP parallelism, nbranch keeps track of the
number of active transforms at a given recursion level. On
the first call to this function, nbranch should be 1. It
is then doubled for each recursion.
Arguments:
double *x - array of n doubles, representing n real numbers
unsigned long n - dimension of x, must be a power of 2
int nbranch - number of transforms at this recursion level
Return:
none
-
fht_dit
public void fht_dit(double[] x,
int n)
void fht_dit(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-time FHT.
n must be a power of 2. Entering this function, x[]
must be in bit-reversed order. On return, x[] contains
the Hartley transform, returned to normal order.
Arguments:
double *x - array of n doubles, representing n real numbers
unsigned long n - dimension of x, must be a power of 2
Return:
none
-
fht_dit_iter
static void fht_dit_iter(double[] x,
int n)
static void fht_dit_iter(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-time
FHT. n must be a power of 2. Entering this function, x[]
must be in bit-reversed order. On return, x[] contains the
Hartley transform, returned to normal order.
Arguments:
double *x - array of n doubles, representing n real numbers
unsigned long n - dimension of x, must be a power of 2
Return:
none
-
fht_dit_iter_seq
static void fht_dit_iter_seq(double[] x,
int n)
static void fht_dit_iter_seq(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-time
FHT. n must be a power of 2. Entering this function, x[]
must be in bit-reversed order. On return, x[] contains the
Hartley transform, returned to normal order.
The two inner loops of the FHT computation are ordered
to favor sequential memory access at the expense of
redundant trig computations. See J. Arndt, "Algorithms
for Programmers," online at http://www.jjj.de/fxt/.
Arguments:
double *x - array of n doubles, representing n real numbers
unsigned long n - dimension of x, must be a power of 2
Return:
none
-
fht_dit_rec
static void fht_dit_rec(double[] x,
int n,
int nbranch)
static void fht_dit_rec(double *x, unsigned long n, int nbranch)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-time FHT. If
the computation is small enough to fit in cache, it is done
iteratively. Otherwise, it is done recursively until the
recursion descends to cache-sized chunks.
n must be a power of 2. Entering this function, x[] must
be in bit-reversed order. On return, x[] contains the
Hartley transform, returned to normal order.
To support OpenMP parallelism, nbranch keeps track of the
number of active transforms at a given recursion level. On
the first call to this function, nbranch should be 1. It
is then doubled for each recursion.
Arguments:
double *x - array of n doubles, representing n real numbers
unsigned long n - dimension of x, must be a power of 2
int nbranch - number of transforms at this recursion level
Return:
none
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.FirstOrderFunction.html����������������������������������0000775�4231163�4231163�00000030203�14537076051�026127� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.FirstOrderFunction (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.FirstOrderFunction
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
finalize
public void finalize()
- Overrides:
finalize in class java.lang.Object
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TrustRegionStrategy.html���������������������������������0000775�4231163�4231163�00000037714�14537076052�026365� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TrustRegionStrategy (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategy
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.indexIntegerdoubleArrayItem.html������������������������0000775�4231163�4231163�00000030721�14537076052�030064� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.indexIntegerdoubleArrayItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
array |
|
private int |
index |
|
private int |
row_begin |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
row_begin
private int row_begin
-
array
private double[] array
-
Method Detail
-
getIndex
public int getIndex()
-
getRowBegin
public int getRowBegin()
�����������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SchurEliminatorBase.html���������������������������������0000775�4231163�4231163�00000032134�14537076052�026247� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SchurEliminatorBase (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminatorBase
-
-
Method Summary
All Methods Instance Methods Abstract Methods
| Modifier and Type |
Method |
Description |
abstract void |
BackSubstitute(CeresSolver.BlockSparseMatrix A,
double[] b,
double[] D,
double[] z,
double[] y) |
|
abstract void |
Eliminate(CeresSolver.BlockSparseMatrix A,
double[] b,
double[] D,
CeresSolver.BlockRandomAccessMatrix lhs,
double[] rhs) |
|
abstract void |
Init(int num_eliminate_blocks,
boolean assume_full_rank_ete,
CeresSolver.CompressedRowBlockStructure bs) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
SchurEliminatorBase
SchurEliminatorBase()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/WeibullDistribution.Analysis.html������������������������������������0000775�4231163�4231163�00000131656�14537076057�025714� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WeibullDistribution.Analysis (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Analysis(double[] df,
double[] ds,
java.lang.String bounds,
java.lang.String bounds_type,
java.lang.String bcm,
int bs_size,
java.lang.String est_type,
double cl,
boolean show,
boolean save,
java.lang.String x_label,
java.lang.String y_label,
java.lang.String plot_title,
java.lang.String path) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
bb_bounds() |
|
double[] |
bernard(double[] adj_r,
int n,
double cl) |
|
double |
beta_init(double[] df,
double[] ds) |
|
WeibullDistribution.Pair<java.lang.Double,java.lang.Integer>[] |
cen_index(double[] df,
double[] ds) |
|
void |
fisher_bounds() |
|
double[] |
inverse_weibull(double[] perc,
double beta,
double eta) |
|
double[][] |
ll_full(double[][] beta_,
double[][] eta,
double[] df,
double[] ds) |
|
double |
ll_full(double beta_,
double eta,
double[] df,
double[] ds) |
|
double[][] |
ll_full_no_cens(double[][] beta_,
double[][] eta,
double[] df) |
|
double |
ll_full_no_cens(double beta_,
double eta,
double[] df) |
|
void |
lrb() |
|
void |
mcp_bounds() |
|
double[] |
median_rank(double cl) |
|
double[] |
median_rank_cens(double cl) |
|
void |
mle() |
|
void |
mrr() |
|
private void |
np_bootstrap(double[] beta_return,
double[] eta_return,
double[] sample,
int bs_size,
java.lang.String est_type) |
|
void |
npbb_bounds(java.lang.String method_call) |
|
private void |
p_bootstrap(double[] beta_return,
double[] eta_return,
double[] sample,
int bs_size,
java.lang.String est_type) |
|
void |
pb_bounds(java.lang.String method_call) |
|
void |
plot() |
|
void |
plot_mrr() |
|
void |
t_bounds_from_pars(double[] beta_,
double[] eta,
double[] unreliability) |
|
double[] |
unrel_func(double[] x_est,
double beta_,
double eta) |
|
double[] |
weibull_prob_paper(double[] x) |
|
void |
zerofinder(java.util.Vector<java.lang.Double> beta_pairs_lrb,
java.util.Vector<java.lang.Double> eta_pairs_lrb,
double[] b_init,
double[] eta_init,
double[][] z) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
bs_size
public int bs_size
-
path
java.lang.String path
-
cl_lrb
public double cl_lrb
-
beta_c4
public double beta_c4
-
eta_c4
public double eta_c4
-
beta_hrbu
public double beta_hrbu
-
eta_hrbu
public double eta_hrbu
-
beta_np_bs
public double beta_np_bs
-
eta_np_bs
public double eta_np_bs
-
beta_p_bs
public double beta_p_bs
-
eta_p_bs
public double eta_p_bs
-
beta_init
public double beta_init
-
k_a_bound
public double k_a_bound
-
f_inv
public double[][] f_inv
-
se_beta
public double se_beta
-
se_eta
public double se_eta
-
unrel
public double[] unrel
-
sol_b
public double sol_b
-
sol_eta
public double sol_eta
-
beta_lrb
public double[] beta_lrb
-
eta_lrb
public double[] eta_lrb
-
tmin_plot
public float tmin_plot
-
tmax_plot
public float tmax_plot
-
Constructor Detail
-
Analysis
public Analysis(double[] df,
double[] ds,
java.lang.String bounds,
java.lang.String bounds_type,
java.lang.String bcm,
int bs_size,
java.lang.String est_type,
double cl,
boolean show,
boolean save,
java.lang.String x_label,
java.lang.String y_label,
java.lang.String plot_title,
java.lang.String path)
-
Method Detail
-
np_bootstrap
private void np_bootstrap(double[] beta_return,
double[] eta_return,
double[] sample,
int bs_size,
java.lang.String est_type)
-
p_bootstrap
private void p_bootstrap(double[] beta_return,
double[] eta_return,
double[] sample,
int bs_size,
java.lang.String est_type)
-
zerofinder
public void zerofinder(java.util.Vector<java.lang.Double> beta_pairs_lrb,
java.util.Vector<java.lang.Double> eta_pairs_lrb,
double[] b_init,
double[] eta_init,
double[][] z)
-
bb_bounds
public void bb_bounds()
-
mcp_bounds
public void mcp_bounds()
-
plot_mrr
public void plot_mrr()
����������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CRSMatrix.html�������������������������������������������0000775�4231163�4231163�00000025162�14537076051�024162� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CRSMatrix (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CRSMatrix
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) java.util.Vector<java.lang.Integer> |
cols |
|
(package private) int |
num_cols |
|
(package private) int |
num_rows |
|
(package private) java.util.Vector<java.lang.Integer> |
rows |
|
(package private) java.util.Vector<java.lang.Double> |
values |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
CRSMatrix() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
CRSMatrix
public CRSMatrix()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DenseSchurComplementSolver.html��������������������������0000775�4231163�4231163�00000040526�14537076051�027631� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DenseSchurComplementSolver (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.cov_type.html��������������������������������������������������0000775�4231163�4231163�00000040276�14537076055�023047� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.cov_type (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Enum<libdt.cov_type>
-
- gov.nih.mipav.model.algorithms.libdt.cov_type
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
cov_code |
< iid covariance matrix.
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
cov_type(int cov_code) |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static libdt.cov_type valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSM2.IntModel.html�������������������������������������������0000775�4231163�4231163�00000031143�14537076050�024070� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSM2.IntModel (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmSM2.IntModel
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
ktrans |
|
(package private) double |
upper |
|
(package private) double |
ve |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
IntModel(double upper,
double ktrans,
double ve) |
Creates a new IntModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
IntModel
public IntModel(double upper,
double ktrans,
double ve)
Creates a new IntModel object.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DynamicNumericDiffCostFunction.html����������������������0000775�4231163�4231163�00000046006�14537076051�030405� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DynamicNumericDiffCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
private boolean |
EvaluateCostFunctor(java.util.Vector<double[]> parameters,
double[] residuals) |
|
boolean |
EvaluateDynamic(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/curfit.html����������������������������������������������������������0000775�4231163�4231163�00000074103�14537076054�021411� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
curfit (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.curfit
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
c |
|
private double[] |
fp |
|
private int[] |
ier |
|
private int |
iopt |
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
|
private int[] |
iwrk |
|
private int |
k |
|
private int |
lwrk |
|
private int |
m |
|
private int[] |
n |
|
private int |
nest |
|
private double |
s |
|
private double[] |
t |
|
private double[] |
w |
|
private double[][][] |
wrk |
|
private double[] |
x |
|
private double |
xb |
|
private double |
xe |
|
private double[] |
y |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
curfit() |
|
curfit(int iopt,
int m,
double[] x,
double[] y,
double[] w,
double xb,
double xe,
int k,
double s,
int nest,
int[] n,
double[] t,
double[] c,
double[] fp,
int lwrk,
int[] iwrk,
int[] ier) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
check_1() |
|
private double |
err_est(int k,
int d,
int N,
double s) |
|
private double[] |
f1(double[] x,
int d) |
|
void |
fpback(double[][] a,
double[] z,
int n,
int k,
double[] c,
int nest) |
|
void |
fpbspl(double[] t,
int n,
int k,
double x,
int l,
double[] h) |
|
void |
fpchec(double[] x,
int m,
double[] t,
int n,
int k,
int[] ier) |
|
void |
fpcurf(int iopt,
double[] x,
double[] y,
double[] w,
int m,
double xb,
double xe,
int k,
double s,
int nest,
double tol,
int maxit,
int k1,
int k2,
int[] n,
double[] t,
double[] c,
double[] fp,
double[] fpint,
double[] z,
double[][] a,
double[][] b,
double[][] g,
double[][] q,
int[] nrdata,
int[] ier) |
|
void |
fpdisc(double[] t,
int n,
int k2,
double[][] b,
int nest) |
|
void |
fpgivs(double piv,
double[] ww,
double[] cos,
double[] sin) |
|
void |
fpknot(double[] x,
int m,
double[] t,
int[] n,
double[] fpint,
int[] nrdata,
int[] nrint,
int nest,
int istart) |
|
double |
fprati(double[] p1,
double[] f1,
double p2,
double f2,
double[] p3,
double[] f3) |
|
void |
fprota(double cos,
double sin,
double[] a,
double[] b) |
|
private double |
norm2(double[] x) |
|
void |
run() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
iopt
private int iopt
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions
are met:
1. Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above
copyright notice, this list of conditions and the following
disclaimer in the documentation and/or other materials provided
with the distribution.
3. Neither the name of the copyright holder nor the names of its
contributors may be used to endorse or promote products derived
from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
wrk
private double[][][] wrk
-
Constructor Detail
-
curfit
public curfit(int iopt,
int m,
double[] x,
double[] y,
double[] w,
double xb,
double xe,
int k,
double s,
int nest,
int[] n,
double[] t,
double[] c,
double[] fp,
int lwrk,
int[] iwrk,
int[] ier)
-
Method Detail
-
fpchec
public void fpchec(double[] x,
int m,
double[] t,
int n,
int k,
int[] ier)
-
fpcurf
public void fpcurf(int iopt,
double[] x,
double[] y,
double[] w,
int m,
double xb,
double xe,
int k,
double s,
int nest,
double tol,
int maxit,
int k1,
int k2,
int[] n,
double[] t,
double[] c,
double[] fp,
double[] fpint,
double[] z,
double[][] a,
double[][] b,
double[][] g,
double[][] q,
int[] nrdata,
int[] ier)
-
fpbspl
public void fpbspl(double[] t,
int n,
int k,
double x,
int l,
double[] h)
-
fpback
public void fpback(double[][] a,
double[] z,
int n,
int k,
double[] c,
int nest)
-
fpknot
public void fpknot(double[] x,
int m,
double[] t,
int[] n,
double[] fpint,
int[] nrdata,
int[] nrint,
int nest,
int istart)
-
fpdisc
public void fpdisc(double[] t,
int n,
int k2,
double[][] b,
int nest)
-
fprati
public double fprati(double[] p1,
double[] f1,
double p2,
double f2,
double[] p3,
double[] f3)
-
check_1
public void check_1()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping2.ODESTModel.html���������������������������0000775�4231163�4231163�00000034747�14537076056�027177� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping2.ODESTModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) double[] |
c |
|
(package private) double[][] |
scale |
|
(package private) double[][] |
z |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ODESTModel(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag,
double[][] scale,
double[][] z,
double[] beta,
double[] c) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ODESTModel
public ODESTModel(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag,
double[][] scale,
double[][] z,
double[] beta,
double[] c)
-
Method Detail
-
driver
public void driver()
DOCUMENT ME!
- Overrides:
driver in class ODE
�������������������������gov/nih/mipav/model/algorithms/AlgorithmFaceAnonymizerBET.html��������������������������������������0000775�4231163�4231163�00000125470�14537076045�025235� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFaceAnonymizerBET (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
estimateWithSphereBET |
Parameter for brain extraction by default set to false
|
private int |
faceOrientation |
The orientation of an image.
|
static int |
FACING_DOWN |
For indicating the axial image is facing down.
|
static int |
FACING_INTO_SCREEN |
For indicating the coronal image is facing into the screen.
|
static int |
FACING_LEFT |
For indicating the sagittal image is facing left.
|
static int |
FACING_OUT_OF_SCREEN |
For indicating the coronal image is facing out of the screen.
|
static int |
FACING_RIGHT |
For indicating the sagittal image is facing right.
|
static int |
FACING_UP |
For indicating the axial image is facing up.
|
private float |
imageInfluenceBET |
Parameter for brain extraction by default set to .1
|
static int |
MIN_RADIUS |
May no longer be necessary.
|
private int |
mmToPad |
Length to buffer brain by in millimeters.
|
static int |
REMOVED_INTENSITY |
Eventually won't be necessary.
|
private int |
sliceSize |
Computed as xDim*yDim
|
private float |
stiffnessBET |
Parameter for brain extraction by default set to .15
|
private int |
volumeSize |
Computed as xDim*yDim*zDim
|
private int |
xDim |
Length of the x dimension in pixels.
|
private int |
yDim |
Length of the y dimension in pixels.
|
private int |
zDim |
Length of the z dimension in pixels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
anonymizeFace() |
Executes the de-facing algorithm.
|
private java.util.BitSet |
bufferBrain(java.util.BitSet brainMaskTemp,
int mmToPad) |
Appends the given brainMaskTemp by mmToPad in pixels in all directions.
|
private java.util.BitSet |
defineInitialRegion(java.util.BitSet interestRegion) |
Defines an initial region for face de-identification.
|
private java.util.BitSet |
defineInterestRegion() |
Defines the bounding region for face de-identification.
|
private java.util.BitSet |
extractBrain() |
Performs the BET brain extraction using parameters specified from JDialogFaceAnonymizer.
|
private java.util.BitSet |
extractFace(java.util.BitSet interestRegion,
java.util.BitSet initialRegion,
java.util.BitSet brainMask) |
Performs the face de-identification within the bounding area by approximating the given shape using
a geometry suitable for the given shape.
|
void |
finalize() |
Clean up memory used by the algorithm.
|
void |
runAlgorithm() |
Run the de-facing algorithm.
|
void |
setBETParameters(boolean estimateWithSphere,
float imageInfluence,
float stiffness) |
Changes the BET algorithm parameters from their defaults (which we choose).
|
private java.util.BitSet |
smoothFace(java.util.BitSet removeRegion) |
Connects near neighbors of set values in removeRegion.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmFaceAnonymizerBET
public AlgorithmFaceAnonymizerBET(ModelImage srcImg,
int faceDirection,
int extraMMsToPad)
Construct the face anonymizer, but do not run it yet.
- Parameters:
srcImg - The image to de-facefaceDirection - the orientation of the patient's face, as determined by the dialogextraMMsToPad - the number of millimeters to buffer brain by after extraction
-
Method Detail
-
setBETParameters
public void setBETParameters(boolean estimateWithSphere,
float imageInfluence,
float stiffness)
Changes the BET algorithm parameters from their defaults (which we choose).
- Parameters:
estimateWithSphere - whether to estimate the brain with a sphere initiallyimageInfluence - the image influence ratiostiffness - the mesh stiffness
-
bufferBrain
private java.util.BitSet bufferBrain(java.util.BitSet brainMaskTemp,
int mmToPad)
Appends the given brainMaskTemp by mmToPad in pixels in all directions.
TODO: Use Algorithms -> Morphological -> Dilate
- Parameters:
brainMaskTemp - The BitSet returned by this.extractBrain().mmToPad - Length in millimeters that the brain's BitSet should be extended.- Returns:
- The original
BitSet with mmToPad in pixels appended to this BitSet
-
extractFace
private java.util.BitSet extractFace(java.util.BitSet interestRegion,
java.util.BitSet initialRegion,
java.util.BitSet brainMask)
Performs the face de-identification within the bounding area by approximating the given shape using
a geometry suitable for the given shape. For example, the approximation of a quarter cylinder is performed
using spheres with centers on the boundary points of the initialRegion with further iterations
on the boundary points of the resulting shape.
- Parameters:
interestRegion - The bounding area for face de-identification.initialRegion - Initial area.brainMask - Brain extraction derived from BET and apended by this.bufferBrain(BitSet, int)- Returns:
- A
BitSet of size srcImage.getSize() where set values denote face de-identification may be performed.
-
smoothFace
private java.util.BitSet smoothFace(java.util.BitSet removeRegion)
Connects near neighbors of set values in removeRegion. Near neighbors are those values which are
set and are within five percent of the image resolution.
- Parameters:
removeRegion - The original BitSet for face de-identification.interestRegion - The bounding region.brainMask - The location of the brain in this image.- Returns:
- A
BitSet of size srcImage.getSize() where set values denote face de-identification may be performed.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens15.html��������������������������������0000775�4231163�4231163�00000030443�14537076055�026253� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens15 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens15(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens15
public FitPiessens15(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������././@LongLink���������������������������������������������������������������������������������������0000644�0000000�0000000�00000000152�00000000000�011601� L����������������������������������������������������������������������������������������������������ustar �root����������������������������root�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureEllipseTrustRegionObeyedSubspace.html�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureEllipseTrustRegionObeyedSubspace0000775�4231163�4231163�00000024250�14537076053�035077� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DoglegStrategyFixtureEllipseTrustRegionObeyedSubspace (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog3.html�����������������������������������0000775�4231163�4231163�00000026621�14537076055�025607� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog3 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog3(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog3
public FitdeHoog3(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.SchurOrderingTest.html�������������������������������0000775�4231163�4231163�00000034000�14537076053�026615� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.SchurOrderingTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
passed
private boolean passed
-
Method Detail
-
SetUp
public void SetUp()
gov/nih/mipav/model/algorithms/SymmsIntegralMapping.qaws.html���������������������������������������0000775�4231163�4231163�00000033257�14537076057�025211� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SymmsIntegralMapping.qaws (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
qaws(double lower,
double upper,
int routine,
double alfa,
double beta,
int integr,
double epsabs,
double epsrel,
int limit) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
qaws
public qaws(double lower,
double upper,
int routine,
double alfa,
double beta,
int integr,
double epsabs,
double epsrel,
int limit)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.PixelConvertingSpliterator.PixelConverter.html�����������0000775�4231163�4231163�00000037452�14537076054�032733� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.PixelConvertingSpliterator.PixelConverter (MIPAV API Documentation)
-
-
Method Detail
-
convertPixelToElement
void convertPixelToElement(P px,
T element)
converts the specified pixel to the specified element
(initiliazation of previously allocated element).
NOT ALLOCATION, ONLY SETUP OF THE ELEMENT
- Parameters:
px - to used for setting up the elementelement - to be set up
-
convertElementToPixel
void convertElementToPixel(T element,
P px)
converts the specified element back to the specified pixel
(set pixel value according to element).
NOT ALLOCATION, ONLY SETTING THE PIXEL VALUE ACCORDINGLY
- Parameters:
element - to be used for setting the pixel valuepx - to be set
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TrustRegionPreprocessor.html�����������������������������0000775�4231163�4231163�00000047140�14537076052�027243� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TrustRegionPreprocessor (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.ColorMap.html��������������������������������������������0000775�4231163�4231163�00000036555�14537076053�024130� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.ColorMap (MIPAV API Documentation)
-
-
Method Detail
-
getColor
int getColor(int i)
Returns the ith color
- Parameters:
i - index of the color- Returns:
- ith color in integer packed ARGB format (0xff00ff00 is opaque green)
-
getColors
int[] getColors()
- Returns:
- all discrete colors in this
ContourPlot.ColorMap
in integer packed ARGB format (0xff00ff00 is opaque green)
-
getLocations
double[] getLocations()
- Returns:
- all locations of the discrete colors in this
ContourPlot.ColorMap
-
resample
default ContourPlot.SimpleColorMap resample(int numSamples,
double start,
double end)
Returns a uniformly sampled version of this map with the specified
number of samples within the specified interval.
- Parameters:
numSamples - number of uniform samplesstart - of sampling interval within [0,1[end - of sampling interval within ]0,1]- Returns:
- re-sampled map
���������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmASM.SData.html����������������������������������������������0000775�4231163�4231163�00000024606�14537076043�023400� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmASM.SData (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmASM.SData
-
-
Constructor Summary
Constructors
| Constructor |
Description |
SData() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
x_mean
public double[] x_mean
-
Evalues
public double[] Evalues
-
Lines
public int[][] Lines
��������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DynamicProblem.html����������������������������������0000775�4231163�4231163�00000065262�14537076053�026122� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DynamicProblem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) boolean |
param |
|
(package private) boolean |
passed |
|
(package private) CeresSolver.ProblemImpl |
problem |
|
(package private) java.lang.String |
testName |
|
(package private) double[] |
w |
|
(package private) double[] |
y |
|
(package private) double[] |
z |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
DynamicProblem(boolean param,
java.lang.String testName) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
DynamicProblemRemoveInvalidResidualBlockDies() |
|
void |
DynamicProblemRemoveParameterBlockWithNoResiduals() |
|
void |
DynamicProblemRemoveParameterBlockWithResiduals() |
|
void |
DynamicProblemRemoveResidualBlock() |
|
void |
ExpectParameterBlockContains(double[] values) |
|
void |
ExpectParameterBlockContains(double[] values,
CeresSolver.ResidualBlock r1) |
|
void |
ExpectParameterBlockContains(double[] values,
CeresSolver.ResidualBlock r1,
CeresSolver.ResidualBlock r2) |
|
void |
ExpectParameterBlockContains(double[] values,
CeresSolver.ResidualBlock r1,
CeresSolver.ResidualBlock r2,
CeresSolver.ResidualBlock r3) |
|
void |
ExpectParameterBlockContains(double[] values,
CeresSolver.ResidualBlock r1,
CeresSolver.ResidualBlock r2,
CeresSolver.ResidualBlock r3,
CeresSolver.ResidualBlock r4) |
|
void |
ExpectParameterBlockContainsResidualBlock(double[] values,
CeresSolver.ResidualBlock residual_block) |
|
void |
ExpectSize(double[] values,
int size) |
|
CeresSolver.ParameterBlock |
GetParameterBlock(int block) |
|
CeresSolver.ResidualBlock |
GetResidualBlock(int block) |
|
boolean |
HasResidualBlock(CeresSolver.ResidualBlock residual_block) |
|
int |
NumResidualBlocks() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TolerantLoss.html����������������������������������������0000775�4231163�4231163�00000030662�14537076052�025001� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TolerantLoss (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
a_ |
|
private double |
b_ |
|
private double |
c_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
TolerantLoss(double a,
double b) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/KDTree.kdtree.html���������������������������������������������������0000775�4231163�4231163�00000023725�14537076055�022515� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
KDTree.kdtree (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.KDTree.kdtree
-
-
Constructor Summary
Constructors
| Constructor |
Description |
kdtree() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LineSearchType.html��������������������������������������0000775�4231163�4231163�00000034206�14537076052�025225� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearchType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
LineSearchType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
LineSearchType
private LineSearchType()
-
Method Detail
-
valueOf
public static CeresSolver.LineSearchType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEdgeLaplacianSep.html���������������������������������������0000775�4231163�4231163�00000123241�14537076045�025103� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEdgeLaplacianSep (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
clearedPoints |
|
private boolean |
clearInflectionPoints |
|
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private float[] |
gaussBuffer |
|
private float[] |
GxxData |
Storage location of the second derivative of the Gaussian in the X direction.
|
private float[] |
GyyData |
Storage location of the second derivative of the Gaussian in the Y direction.
|
private float[] |
GzzData |
Storage location of the second derivative of the Gaussian in the Z direction.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
static int |
MARCHING_SQUARES |
Perform zero crossing detection using the marching squares method.
|
static int |
NEGATIVE_EDGES |
Mark negative areas of the laplacian image as edges (makes thicker edges - used in BSE).
|
static int |
OLD_DETECTION |
Perform zero crossing detection using Matt's old method.
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
private int |
zeroDetectionType |
The type of zero crossing detection to use.
|
private ModelImage |
zXMask |
Mask(unsigned byte) of the zero-crossings of the Laplacian of the gaussian.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmEdgeLaplacianSep(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
boolean clearInflectionPoints) |
Creates a new AlgorithmEdgeLaplacianSep object.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcStoreInDest2D(int nImages,
int detectionType) |
This function produces the EdgeLap of input image.
|
private void |
calcStoreInDest3D(int detectionType) |
This function produces the EdgeLap of input image.
|
java.util.BitSet |
calcZeroXMaskBitset(float[] buffer,
int[] extents) |
Calculates the zero crossing mask of a 2D image and returns it as a BitSet buffer.
|
void |
finalize() |
Prepares this class for destruction.
|
static java.util.BitSet |
genLevelMask(int xDim,
int yDim,
float[] buffer,
float level,
int detectionType) |
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 where a zero crossing is detected.
|
void |
genZeroXMask(int slice,
float[] buffer,
int detectionType) |
Generates a zero crossing mask for a 2D function.
|
ModelImage |
getZeroXMask() |
Accessor to return mask indicating zero crossings.
|
private void |
makeKernels2D() |
Creates Gaussian derivative kernels.
|
private void |
makeKernels3D() |
Creates Gaussian derivative kernels.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setZeroDetectionType(int type) |
Changes the type of zero crossing detection method used.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false only process the image over the mask
areas.
-
Constructor Detail
-
AlgorithmEdgeLaplacianSep
public AlgorithmEdgeLaplacianSep(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
boolean clearInflectionPoints)
Creates a new AlgorithmEdgeLaplacianSep object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the EdgeLap will be calculated for the whole image if equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.clearInflectionPoints - If true, do not set zero crossings corresponding to points of inflection
-
Method Detail
-
genLevelMask
public static java.util.BitSet genLevelMask(int xDim,
int yDim,
float[] buffer,
float level,
int detectionType)
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 where a zero crossing is detected.
- Parameters:
xDim - x dimension of imageyDim - y dimension of imagebuffer - array in which to find zero crossinglevel - level to generate zero crossings atdetectionType - the type of zero crossing method to use- Returns:
- Bitset representing zero crossings
-
calcZeroXMaskBitset
public java.util.BitSet calcZeroXMaskBitset(float[] buffer,
int[] extents)
Calculates the zero crossing mask of a 2D image and returns it as a BitSet buffer.
- Parameters:
buffer - the slice to work withextents - the extents of the image- Returns:
- BitSet buffer with mask set when a zero crossing is detected
-
genZeroXMask
public void genZeroXMask(int slice,
float[] buffer,
int detectionType)
Generates a zero crossing mask for a 2D function. Sets a ModelImage to 255 if a zero crossing is detected.
- Parameters:
slice - the slice of the volume which we are working on (0 if from 2D image)buffer - array in which to find zero crossingdetectionType - the type of zero crossing detection to perform
-
calcStoreInDest2D
private void calcStoreInDest2D(int nImages,
int detectionType)
This function produces the EdgeLap of input image.
- Parameters:
nImages - number of images on which to find zero crossings. If 2D image then nImage = 1. If 3D image
where each image is to processed independently then nImages equals the number of images in
the volume.detectionType - the type of zero crossing detection to perform
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmVOIExtractionPaint.html�������������������������������������0000775�4231163�4231163�00000132411�14537076050�025447� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmVOIExtractionPaint (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private VOI |
addedVOI |
DOCUMENT ME!
|
private int |
expandedLength |
(xDim2+2)*(yDim2+2)
|
private int |
length |
xDim2*yDim2.
|
private java.util.BitSet |
mask |
DOCUMENT ME!
|
private java.util.BitSet |
mask2 |
DOCUMENT ME!
|
private java.util.BitSet |
maskAll |
DOCUMENT ME!
|
private java.util.BitSet |
maskE |
DOCUMENT ME!
|
private java.util.BitSet |
maskExpanded |
|
private int[][] |
maskList |
DOCUMENT ME!
|
private java.util.BitSet |
maskN |
DOCUMENT ME!
|
private java.util.BitSet |
maskS |
DOCUMENT ME!
|
private java.util.BitSet |
maskW |
DOCUMENT ME!
|
private int |
neighbors |
DOCUMENT ME!
|
private int[][] |
nextMaskList |
DOCUMENT ME!
|
private java.util.BitSet |
outMask |
DOCUMENT ME!
|
private int |
smallLength |
xDim * yDim.
|
private int |
smallPos |
DOCUMENT ME!
|
private int |
smallPos3D |
DOCUMENT ME!
|
private int |
smallX |
DOCUMENT ME!
|
private int |
smallY |
DOCUMENT ME!
|
private ModelImage |
srcImage |
DOCUMENT ME!
|
private java.util.BitSet |
srcPaintMask |
DOCUMENT ME!
|
private int |
testPos |
x + y*xDim.
|
private short |
voiIDnum |
DOCUMENT ME!
|
private int |
x |
current x position.
|
private int |
xDim |
DOCUMENT ME!
|
private int |
xDim2 |
DOCUMENT ME!
|
private int |
xDim4 |
DOCUMENT ME!
|
private int |
xt |
DOCUMENT ME!
|
private int |
y |
current y position.
|
private int |
yDim |
DOCUMENT ME!
|
private int |
yDim2 |
DOCUMENT ME!
|
private int |
yt |
DOCUMENT ME!
|
private int |
z |
current z slice.
|
private int |
zDim |
extent of z dimension in the in the source image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace() |
Calculates the VOI extraction.
|
void |
finalize() |
Prepares this class for destruction.
|
java.util.Vector<java.awt.Polygon> |
findPaintBorder(int slice) |
Finds a set of lines which surround the paint in the image.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setPaintMask(java.util.BitSet mask) |
Changes the paint mask that we look for borders in.
|
private void |
setRegionMaskAll() |
Sets the mask of all points in the 4 connected region with a gray scale value.
|
private void |
setRegionMaskI(int xStart,
int yStart,
int offset) |
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue Uses iteration.
|
private void |
setRegionMaskIFalse(int xStart,
int yStart,
int offset) |
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue.
|
private void |
setRegionOutMaskI(int xStart,
int yStart,
int offset) |
Sets the mask of all points in the 4 connected region with a srcPaintMask equal to false Uses iteration.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
addedVOI
private VOI addedVOI
DOCUMENT ME!
-
length
private int length
xDim2*yDim2.
-
maskList
private int[][] maskList
DOCUMENT ME!
-
neighbors
private int neighbors
DOCUMENT ME!
-
smallLength
private int smallLength
xDim * yDim.
-
smallPos
private int smallPos
DOCUMENT ME!
-
smallPos3D
private int smallPos3D
DOCUMENT ME!
-
smallX
private int smallX
DOCUMENT ME!
-
smallY
private int smallY
DOCUMENT ME!
-
testPos
private int testPos
x + y*xDim.
-
voiIDnum
private short voiIDnum
DOCUMENT ME!
-
x
private int x
current x position.
-
xDim
private int xDim
DOCUMENT ME!
-
xDim2
private int xDim2
DOCUMENT ME!
-
xDim4
private int xDim4
DOCUMENT ME!
-
xt
private int xt
DOCUMENT ME!
-
yt
private int yt
DOCUMENT ME!
-
y
private int y
current y position.
-
yDim
private int yDim
DOCUMENT ME!
-
yDim2
private int yDim2
DOCUMENT ME!
-
z
private int z
current z slice.
-
Constructor Detail
-
AlgorithmVOIExtractionPaint
public AlgorithmVOIExtractionPaint(ModelImage sourceImage,
java.util.BitSet srcPaint,
int xDimen,
int yDimen,
int zDimen,
short voiID)
Construct the extractor for paint extraction to a VOI.
- Parameters:
sourceImage - the image that has been paintedsrcPaint - the paint bitmapxDimen - the x dimension of the imageyDimen - the y dimension of the imagezDimen - the z dimension of the imagevoiID - the VOI number to give to the generated VOI
-
Method Detail
-
setRegionMaskI
private void setRegionMaskI(int xStart,
int yStart,
int offset)
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue Uses iteration.
- Parameters:
xStart - the x coordinate of the starting pointyStart - the y coordinate of the starting pointoffset - offset into z plane of srcPaintMask
-
setRegionMaskIFalse
private void setRegionMaskIFalse(int xStart,
int yStart,
int offset)
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue. Uses iteration.
- Parameters:
xStart - the x coordinate of the starting pointyStart - the y coordinate of the starting pointoffset - offset into z plane of srcPaintMask
-
setRegionOutMaskI
private void setRegionOutMaskI(int xStart,
int yStart,
int offset)
Sets the mask of all points in the 4 connected region with a srcPaintMask equal to false Uses iteration.
- Parameters:
xStart - the x coordinate of the starting pointyStart - the y coordinate of the starting pointoffset - offset into z plane of srcPaintMask
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BadLocalParameterization.html������������������������0000775�4231163�4231163�00000043060�14537076052�030104� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BadLocalParameterization (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
calls_ |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
ComputeJacobian(double[] x,
double[] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
double[][] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
int x_index,
double[][] jacobian) |
|
int |
GlobalSize() |
|
int |
LocalSize() |
|
boolean |
Plus(double[] x,
double[] delta,
double[] x_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
calls_
private int calls_
-
Method Detail
-
Plus
public boolean Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index)
- Specified by:
Plus in class CeresSolver.LocalParameterization
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.Osborne1Function.html��������������������������������0000775�4231163�4231163�00000033735�14537076053�026413� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.Osborne1Function (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������gov/nih/mipav/model/algorithms/AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect.html�����������0000775�4231163�4231163�00000126707�14537076045�032334� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float |
confTr_ |
|
(package private) float[] |
custx_ |
|
(package private) float[] |
custy_ |
|
(package private) double[] |
diffil_ |
|
(package private) float[] |
grx_ |
|
(package private) float[] |
gry_ |
|
(package private) boolean |
havePerm_ |
|
(package private) float[] |
hcustx_ |
|
(package private) float[] |
hcusty_ |
|
(package private) float[] |
lcustx_ |
|
(package private) float[] |
lcusty_ |
|
(package private) double[][] |
lookTable_ |
|
(package private) double |
low_ |
|
(package private) double[][] |
mN_ |
|
(package private) double[][] |
mQ_ |
|
(package private) int |
ncust_ |
|
(package private) int |
nhcust_ |
|
(package private) int |
nlcust_ |
|
(package private) int |
npt_ |
|
(package private) float[] |
permConf_ |
|
(package private) float[] |
permGx_ |
|
(package private) float[] |
permGy_ |
|
(package private) float[] |
permNmxConf_ |
|
(package private) float[] |
permNmxRank_ |
|
(package private) float[] |
permRank_ |
|
(package private) float |
rankTr_ |
|
(package private) double[] |
smofil_ |
|
(package private) float[] |
tc_ |
|
(package private) int |
tc_Index |
|
(package private) float[] |
tcustx_ |
|
(package private) float[] |
tcusty_ |
|
(package private) float[] |
te_ |
|
(package private) float[] |
tl_ |
|
(package private) float[] |
tm_ |
|
(package private) double[] |
wdx_ |
|
(package private) double[] |
wdy_ |
|
(package private) int |
WL_ |
|
(package private) int |
WW_ |
|
(package private) int |
x_ |
|
(package private) int |
y_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
BgEdgeDetect(int filtDim) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
compRanks(float[] strength,
float[] ranks) |
|
private void |
createFilters() |
|
private void |
createLookTable() |
|
private float |
customRegionComp(float r0,
float c0,
float r,
float c) |
|
private float |
customRegionEval(float r,
float c) |
|
void |
doEdgeDetect(AlgorithmEmbeddedConfidenceEdgeDetection.BgImage cim,
AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList cel) |
|
private float |
ellipseComp(float x0,
float y0,
float x,
float y) |
|
private float |
ellipseEval(float x,
float y) |
|
private float |
fcomp(int fcompType,
float x0,
float y0,
float x,
float y) |
|
private void |
gaussDiffFilter(AlgorithmEmbeddedConfidenceEdgeDetection.BgImage cim,
float[] grx,
float[] gry,
float[] rezIm) |
|
private void |
generateMaskAngle(double[] a,
double theta) |
|
private float |
horizontalLineComp(float x0,
float y0,
float x,
float y) |
|
private float |
horizontalLineEval(float x,
float y) |
|
private float |
lineComp(float x0,
float y0,
float x,
float y) |
|
private float |
lineEval(float x,
float y) |
|
private void |
newEdgeFollow(int ii,
int jj) |
|
private void |
newHysteresisTr(float[] edge,
float[] low,
AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList cel,
int nMin,
float[] mark,
float[] coord) |
|
private void |
newNonMaxSupress(float[] rank,
float[] conf,
float[] grx,
float[] gry,
float[] nmxRank,
float[] nmxConf,
int fcompType) |
|
private float |
squareComp(float x0,
float y0,
float x,
float y) |
|
private float |
squareEval(float x,
float y) |
|
private void |
strConfEstim(float[] ranks,
float[] confidence,
float[] rezult,
int fevalType) |
|
private void |
strength(float[] grx,
float[] gry,
float[] strength) |
|
private void |
subspaceEstim(float[] im,
float[] grx,
float[] gry,
float[] cee) |
|
private float |
verticalLineComp(float x0,
float y0,
float x,
float y) |
|
private float |
verticalLineEval(float x,
float y) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
lookTable_
double[][] lookTable_
-
permConf_
float[] permConf_
-
permRank_
float[] permRank_
-
permNmxRank_
float[] permNmxRank_
-
permNmxConf_
float[] permNmxConf_
-
havePerm_
boolean havePerm_
-
Method Detail
-
fcomp
private float fcomp(int fcompType,
float x0,
float y0,
float x,
float y)
-
newNonMaxSupress
private void newNonMaxSupress(float[] rank,
float[] conf,
float[] grx,
float[] gry,
float[] nmxRank,
float[] nmxConf,
int fcompType)
���������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlCovDetFeatureOrientation.html�������������������������������0000775�4231163�4231163�00000022655�14537076054�026563� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlCovDetFeatureOrientation (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeatureOrientation
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
angle |
|
(package private) double |
score |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SVM.VlSvmSolverStatus.html�������������������������������������������0000775�4231163�4231163�00000035740�14537076057�024236� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SVM.VlSvmSolverStatus (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static SVM.VlSvmSolverStatus valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
��������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.QuadraticCostFunction.html���������������������������0000775�4231163�4231163�00000034016�14537076053�027462� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.QuadraticCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.BlockRandomAccessDiagonalMatrix.html���������������������0000775�4231163�4231163�00000045235�14537076051�030512� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.BlockRandomAccessDiagonalMatrix (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
finalize
public void finalize()
- Overrides:
finalize in class java.lang.Object
-
Invert
public void Invert()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Lanczos3CostFunction.html������������������������0000775�4231163�4231163�00000034045�14537076052�027740� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Lanczos3CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Legend.GlyphLabel.html�����������������������������������0000775�4231163�4231163�00000025700�14537076054�025623� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Legend.GlyphLabel (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Legend.GlyphLabel
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
pickColor
public int pickColor
����������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.Kernel.html���������������������������������������������������0000775�4231163�4231163�00000046715�14537076055�022341� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.Kernel (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
degree
private final int degree
���������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Point.html������������������������������������������������������0000775�4231163�4231163�00000034735�14537076056�021754� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Point (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Point
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
m_v |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Point() |
|
Point(double x,
double y,
double z) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
norm
public double norm()
�����������������������������������gov/nih/mipav/model/algorithms/libdt.kf_mode.html���������������������������������������������������0000775�4231163�4231163�00000035057�14537076055�022624� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.kf_mode (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Enum<libdt.kf_mode>
-
- gov.nih.mipav.model.algorithms.libdt.kf_mode
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
kf_mode() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
kf_mode
private kf_mode()
-
Method Detail
-
valueOf
public static libdt.kf_mode valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMorphology2D.intObject.html���������������������������������0000775�4231163�4231163�00000025341�14537076047�026233� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMorphology2D.intObject (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMorphology2D.intObject
-
- Enclosing class:
- AlgorithmMorphology2D
private class AlgorithmMorphology2D.intObject
extends java.lang.Object
Simple class to temporarily store the object's size, ID and seed index value. This class is used by the
identifyObjects and deleteObjects methods of AlgorithmMorphology2D class.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
short |
id |
DOCUMENT ME!
|
int |
index |
DOCUMENT ME!
|
int |
size |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
intObject(int idx,
short objectID,
int objectSize) |
Initializes object with supplied parameters.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
id
public short id
DOCUMENT ME!
-
index
public int index
DOCUMENT ME!
-
size
public int size
DOCUMENT ME!
-
Constructor Detail
-
intObject
public intObject(int idx,
short objectID,
int objectSize)
Initializes object with supplied parameters.
- Parameters:
idx - seed index. Index is the location in the imageobjectID - the flood seed having a value >= 0.objectSize - the number of voxels in the object
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.PixelManipulator.html������������������������������������0000775�4231163�4231163�00000034376�14537076054�025711� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.PixelManipulator (MIPAV API Documentation)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NelderMead.pointComparator.html��������������������������������������0000775�4231163�4231163�00000026542�14537076056�025303� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NelderMead.pointComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.NelderMead.pointComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
��������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.indexValueItem.html��������������������������������������������0000775�4231163�4231163�00000026532�14537076055�024141� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.indexValueItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValueItem(int index,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
private double value
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public double getValue()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel.html������������������������0000775�4231163�4231163�00000044460�14537076045�027115� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitOAR2DNL2solModel(double[] x,
int[] iv,
double[] v,
int currentDim,
double[] point) |
Creates a new FitSM2nl2solModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
void |
calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm) |
|
void |
dumpResults() |
Display results of displaying OAR2D fitting parameter.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
currentDim
private int currentDim
-
point
private double[] point
-
Constructor Detail
-
FitOAR2DNL2solModel
public FitOAR2DNL2solModel(double[] x,
int[] iv,
double[] v,
int currentDim,
double[] point)
Creates a new FitSM2nl2solModel object.
- Parameters:
nPoints - DOCUMENT ME!yData - DOCUMENT ME!x - DOCUMENT ME!iv - v - useAnalyticJacobian -
-
Method Detail
-
calcr
public void calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm)
- Specified by:
calcr in class NL2sol
-
calcj
public void calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm)
- Specified by:
calcj in class NL2sol
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CovarianceAlgorithmType.html�����������������������������0000775�4231163�4231163�00000034656�14537076051�027141� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CovarianceAlgorithmType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.CovarianceAlgorithmType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
����������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DestructorCountingCostFunction.html������������������0000775�4231163�4231163�00000036611�14537076053�031415� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DestructorCountingCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
void |
finalize() |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SubsetParameterization.html������������������������������0000775�4231163�4231163�00000050165�14537076052�027054� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SubsetParameterization (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
SubsetParameterization(int size,
java.util.Vector<java.lang.Integer> constant_parameters) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
ComputeJacobian(double[] x,
double[] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
double[][] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
int x_start,
double[] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
int x_start,
double[][] jacobian) |
|
int |
GlobalSize() |
|
int |
LocalSize() |
|
boolean |
MultiplyByJacobian(double[] x,
int num_rows,
double[] global_matrix,
double[] local_matrix) |
|
boolean |
Plus(double[] x,
double[] delta,
double[] x_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
local_size_
private int local_size_
-
Method Detail
-
Plus
public boolean Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index)
- Specified by:
Plus in class CeresSolver.LocalParameterization
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.Solver.SolutionInfo.html��������������������������������������0000775�4231163�4231163�00000024757�14537076055�025024� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.Solver.SolutionInfo (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LIBSVM.Solver.SolutionInfo
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
obj |
|
(package private) double |
r |
|
(package private) double |
rho |
|
(package private) double |
upper_bound_n |
|
(package private) double |
upper_bound_p |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
upper_bound_p
double upper_bound_p
-
upper_bound_n
double upper_bound_n
-
Constructor Detail
-
SolutionInfo
public SolutionInfo()
�����������������gov/nih/mipav/model/algorithms/CeresSolverTest.TestParameterization.html����������������������������0000775�4231163�4231163�00000040642�14537076053�027366� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.TestParameterization (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
ComputeJacobian(double[] x,
double[] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
double[][] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
int x_offset,
double[][] jacobian) |
|
int |
GlobalSize() |
|
int |
LocalSize() |
|
boolean |
Plus(double[] x,
double[] delta,
double[] x_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Plus
public boolean Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index)
- Specified by:
Plus in class CeresSolver.LocalParameterization
����������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LinearSolverType.html������������������������������������0000775�4231163�4231163�00000041211�14537076051�025606� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LinearSolverType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.LinearSolverType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/L_BFGS_B.html��������������������������������������������������������0000775�4231163�4231163�00000142141�14537076055�021351� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
L_BFGS_B (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.L_BFGS_B
-
public class L_BFGS_B
extends java.lang.Object
This is a port of the FORTRAN 77 L-BFGS-B code to Java
L-BFGS-B is released under the “New BSD License” (aka “Modified BSD License”
or “3-clause license”)
=========== L-BFGS-B (version 3.0. April 25, 2011 ===================
This is a modified version of L-BFGS-B. Minor changes in the updated
code appear preceded by a line comment as follows
c-jlm-jn
Major changes are described in the accompanying paper:
Jorge Nocedal and Jose Luis Morales, Remark on "Algorithm 778:
L-BFGS-B: Fortran Subroutines for Large-Scale Bound Constrained
Optimization" (2011). To appear in ACM Transactions on
Mathematical Software,
The paper describes an improvement and a correction to Algorithm 778.
It is shown that the performance of the algorithm can be improved
significantly by making a relatively simple modication to the subspace
minimization phase. The correction concerns an error caused by the use
of routine dpmeps to estimate machine precision.
The total work space **wa** required by the new version is
2*m*n + 11m*m + 5*n + 8*m
the old version required
2*m*n + 12m*m + 4*n + 12*m
J. Nocedal Department of Electrical Engineering and
Computer Science.
Northwestern University. Evanston, IL. USA
J.L Morales Departamento de Matematicas,
Instituto Tecnologico Autonomo de Mexico
Mexico D.F. Mexico.
March 2011
3-clause license ("New BSD License" or "Modified BSD License")
New BSD License
Author Regents of the University of California
Publisher Public Domain
Published July 22, 1999[8]
DFSG compatible Yes[7]
FSF approved Yes[1]
OSI approved Yes[3]
GPL compatible Yes[1]
Copyleft No[1]
Copyfree Yes
Linking from code with a different license Yes
The advertising clause was removed from the license text in the official BSD on July 22, 1999 by William Hoskins, Director of
the Office of Technology Licensing for UC Berkeley.[8] Other BSD distributions removed the clause, but many similar clauses
remain in BSD-derived code from other sources, and unrelated code using a derived license.
While the original license is sometimes referred to as "BSD-old", the resulting 3-clause version is sometimes referred to by
"BSD-new." Other names include "New BSD", "revised BSD", "BSD-3", or "3-clause BSD". This version has been vetted as
an Open source license by the OSI as the "The BSD License".[3] The Free Software Foundation, which refers to the license
as the "Modified BSD License", states that it is compatible with the GNU GPL. The FSF encourages users to be specific
when referring to the license by name (i.e. not simply referring to it as "a BSD license" or "BSD-style") to avoid confusion with
the original BSD license.[1]
This version allows unlimited redistribution for any purpose as long as its copyright notices and the license's disclaimers of
warranty are maintained. The license also contains a clause restricting use of the names of contributors for endorsement of a
derived work without specific permission.
Copyright (c) ,
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the distribution.
Neither the name of the nor the
names of its contributors may be used to endorse or promote products
derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND
ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL BE LIABLE FOR ANY
DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES
(INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND
ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS
SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
-
Constructor Summary
Constructors
| Constructor |
Description |
L_BFGS_B() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
active(int n,
double[] l,
double[] u,
int[] nbd,
double[] x,
int[] iwhere,
int iprint,
boolean[] prjctd,
boolean[] cnstnd,
boolean[] boxed) |
|
private void |
bmv(int m,
double[][] sy,
double[][] wt,
int col,
double[] v,
double[] p,
int[] info) |
|
private void |
cauchy(int n,
double[] x,
double[] l,
double[] u,
int[] nbd,
double[] g,
int[] iorder,
int[] iwhere,
double[] t,
double[] d,
double[] xcp,
int m,
double[][] wy,
double[][] ws,
double[][] sy,
double[][] wt,
double theta,
int col,
int head,
double[] p,
double[] c,
double[] wbp,
double[] v,
int[] nseg,
int iprint,
double sbgnrm,
int[] info,
double epsmch) |
|
private void |
cmprlb(int n,
int m,
double[] x,
double[] g,
double[][] ws,
double[][] wy,
double[][] sy,
double[][] wt,
double[] z,
double[] r,
double[] wa1,
double[] wa2,
int[] index,
double theta,
int col,
int head,
int nfree,
boolean cnstnd,
int[] info) |
|
private void |
dcsrch(double[] f,
double[] g,
double[] stp,
double ftol,
double gtol,
double xtol,
double stpmin,
double stpmax,
java.lang.String[] task,
int[] isave,
double[] dsave) |
|
private void |
dcstep(double[] stx,
double[] fx,
double[] dx,
double[] sty,
double[] fy,
double[] dy,
double[] stp,
double fp,
double dp,
boolean[] brackt,
double stpmin,
double stpmax) |
|
private void |
dpofa(double[][] a,
int lda,
int n,
int[] info) |
|
void |
driver1() |
|
void |
driver2() |
|
void |
driver3() |
|
private void |
dtrsl(double[][] t,
int ldt,
int n,
double[] b,
int job,
int[] info) |
|
private double |
epsilon() |
|
private void |
errclb(int n,
int m,
double factr,
double[] l,
double[] u,
int[] nbd,
java.lang.String[] task,
int[] info,
int[] k) |
|
private void |
formk(int n,
int nsub,
int[] ind,
int nenter,
int ileave,
int[] indx2,
int iupdat,
boolean updatd,
double[][] wn,
double[][] wn1,
int m,
double[][] ws,
double[][] wy,
double[][] sy,
double theta,
int col,
int head,
int[] info) |
|
private void |
formt(int m,
double[][] wt,
double[][] sy,
double[][] ss,
int col,
double theta,
int[] info) |
|
private void |
freev(int n,
int[] nfree,
int[] index,
int[] nenter,
int[] ileave,
int[] indx2,
int[] iwhere,
boolean[] wrk,
boolean updatd,
boolean cnstnd,
int iprint,
int iter) |
|
private void |
hpsolb(int n,
double[] t,
int[] iorder,
int iheap) |
|
private void |
lnsrlb(int n,
double[] l,
double[] u,
int[] nbd,
double[] x,
double[] f,
double[] fold,
double[] gd,
double[] gdold,
double[] g,
double[] d,
double[] r,
double[] t,
double[] z,
double[] stp,
double[] dnorm,
double[] dtd,
double[] xstep,
double[] stpmx,
int iter,
int[] ifun,
int[] iback,
int[] nfgv,
int[] info,
java.lang.String[] task,
boolean boxed,
boolean cnstnd,
java.lang.String[] csave,
int[] isave,
double[] dsave) |
|
void |
mainlb(int n,
int m,
double[] x,
double[] l,
double[] u,
int[] nbd,
double[] f,
double[] g,
double factr,
double pgtol,
double[][] ws,
double[][] wy,
double[][] sy,
double[][] ss,
double[][] wt,
double[][] wn,
double[][] snd,
double[] z,
double[] r,
double[] d,
double[] t,
double[] xp,
double[] wa1,
double[] wa2,
double[] wa3,
double[] wa4,
int[] index,
int[] iwhere,
int[] indx2,
java.lang.String[] task,
int iprint,
java.lang.String[] csave,
boolean[] lsave,
int[] isave,
double[] dsave,
java.io.RandomAccessFile raFile) |
|
private void |
matupd(int n,
int m,
double[][] ws,
double[][] wy,
double[][] sy,
double[][] ss,
double[] d,
double[] r,
int[] itail,
int iupdat,
int[] col,
int[] head,
double[] theta,
double rr,
double dr,
double stp,
double dtd) |
|
void |
prn1lb(int n,
int m,
double[] l,
double[] u,
double[] x,
int iprint,
java.io.RandomAccessFile raFile,
double epsmch) |
|
private void |
prn2lb(int n,
double[] x,
double f,
double[] g,
int iprint,
java.io.RandomAccessFile raFile,
int iter,
int nfgv,
int nact,
double sbgnrm,
int nseg,
java.lang.String[] word,
int iword,
int iback,
double stp,
double xstep) |
|
private void |
prn3lb(int n,
double[] x,
double f,
java.lang.String task,
int iprint,
int info,
java.io.RandomAccessFile raFile,
int iter,
int nfgv,
int nintol,
int nskip,
int nact,
double sbgnrm,
double time,
int nseg,
java.lang.String word,
int iback,
double stp,
double xstep,
int k,
double cachyt,
double sbtime,
double lnscht) |
|
private void |
projgr(int n,
double[] l,
double[] u,
int[] nbd,
double[] x,
double[] g,
double[] sbgnrm) |
|
void |
setulb(int n,
int m,
double[] x,
double[] l,
double[] u,
int[] nbd,
double[] f,
double[] g,
double factr,
double pgtol,
java.lang.String[] task,
int iprint,
java.lang.String[] csave,
boolean[] lsave,
int[] isave,
double[] dsave,
java.io.RandomAccessFile raFile) |
|
private void |
subsm(int n,
int m,
int nsub,
int[] ind,
double[] l,
double[] u,
int[] nbd,
double[] x,
double[] d,
double[] xp,
double[][] ws,
double[][] wy,
double theta,
double[] xx,
double[] gg,
int col,
int head,
int[] iword,
double[] wv,
double[][] wn,
int iprint,
int[] info) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
L_BFGS_B
public L_BFGS_B()
-
Method Detail
-
driver1
public void driver1()
-
driver2
public void driver2()
-
driver3
public void driver3()
-
setulb
public void setulb(int n,
int m,
double[] x,
double[] l,
double[] u,
int[] nbd,
double[] f,
double[] g,
double factr,
double pgtol,
java.lang.String[] task,
int iprint,
java.lang.String[] csave,
boolean[] lsave,
int[] isave,
double[] dsave,
java.io.RandomAccessFile raFile)
-
mainlb
public void mainlb(int n,
int m,
double[] x,
double[] l,
double[] u,
int[] nbd,
double[] f,
double[] g,
double factr,
double pgtol,
double[][] ws,
double[][] wy,
double[][] sy,
double[][] ss,
double[][] wt,
double[][] wn,
double[][] snd,
double[] z,
double[] r,
double[] d,
double[] t,
double[] xp,
double[] wa1,
double[] wa2,
double[] wa3,
double[] wa4,
int[] index,
int[] iwhere,
int[] indx2,
java.lang.String[] task,
int iprint,
java.lang.String[] csave,
boolean[] lsave,
int[] isave,
double[] dsave,
java.io.RandomAccessFile raFile)
-
epsilon
private double epsilon()
-
errclb
private void errclb(int n,
int m,
double factr,
double[] l,
double[] u,
int[] nbd,
java.lang.String[] task,
int[] info,
int[] k)
-
prn3lb
private void prn3lb(int n,
double[] x,
double f,
java.lang.String task,
int iprint,
int info,
java.io.RandomAccessFile raFile,
int iter,
int nfgv,
int nintol,
int nskip,
int nact,
double sbgnrm,
double time,
int nseg,
java.lang.String word,
int iback,
double stp,
double xstep,
int k,
double cachyt,
double sbtime,
double lnscht)
-
prn1lb
public void prn1lb(int n,
int m,
double[] l,
double[] u,
double[] x,
int iprint,
java.io.RandomAccessFile raFile,
double epsmch)
-
prn2lb
private void prn2lb(int n,
double[] x,
double f,
double[] g,
int iprint,
java.io.RandomAccessFile raFile,
int iter,
int nfgv,
int nact,
double sbgnrm,
int nseg,
java.lang.String[] word,
int iword,
int iback,
double stp,
double xstep)
-
active
private void active(int n,
double[] l,
double[] u,
int[] nbd,
double[] x,
int[] iwhere,
int iprint,
boolean[] prjctd,
boolean[] cnstnd,
boolean[] boxed)
-
projgr
private void projgr(int n,
double[] l,
double[] u,
int[] nbd,
double[] x,
double[] g,
double[] sbgnrm)
-
cauchy
private void cauchy(int n,
double[] x,
double[] l,
double[] u,
int[] nbd,
double[] g,
int[] iorder,
int[] iwhere,
double[] t,
double[] d,
double[] xcp,
int m,
double[][] wy,
double[][] ws,
double[][] sy,
double[][] wt,
double theta,
int col,
int head,
double[] p,
double[] c,
double[] wbp,
double[] v,
int[] nseg,
int iprint,
double sbgnrm,
int[] info,
double epsmch)
-
bmv
private void bmv(int m,
double[][] sy,
double[][] wt,
int col,
double[] v,
double[] p,
int[] info)
-
dtrsl
private void dtrsl(double[][] t,
int ldt,
int n,
double[] b,
int job,
int[] info)
-
freev
private void freev(int n,
int[] nfree,
int[] index,
int[] nenter,
int[] ileave,
int[] indx2,
int[] iwhere,
boolean[] wrk,
boolean updatd,
boolean cnstnd,
int iprint,
int iter)
-
formk
private void formk(int n,
int nsub,
int[] ind,
int nenter,
int ileave,
int[] indx2,
int iupdat,
boolean updatd,
double[][] wn,
double[][] wn1,
int m,
double[][] ws,
double[][] wy,
double[][] sy,
double theta,
int col,
int head,
int[] info)
-
cmprlb
private void cmprlb(int n,
int m,
double[] x,
double[] g,
double[][] ws,
double[][] wy,
double[][] sy,
double[][] wt,
double[] z,
double[] r,
double[] wa1,
double[] wa2,
int[] index,
double theta,
int col,
int head,
int nfree,
boolean cnstnd,
int[] info)
-
subsm
private void subsm(int n,
int m,
int nsub,
int[] ind,
double[] l,
double[] u,
int[] nbd,
double[] x,
double[] d,
double[] xp,
double[][] ws,
double[][] wy,
double theta,
double[] xx,
double[] gg,
int col,
int head,
int[] iword,
double[] wv,
double[][] wn,
int iprint,
int[] info)
-
lnsrlb
private void lnsrlb(int n,
double[] l,
double[] u,
int[] nbd,
double[] x,
double[] f,
double[] fold,
double[] gd,
double[] gdold,
double[] g,
double[] d,
double[] r,
double[] t,
double[] z,
double[] stp,
double[] dnorm,
double[] dtd,
double[] xstep,
double[] stpmx,
int iter,
int[] ifun,
int[] iback,
int[] nfgv,
int[] info,
java.lang.String[] task,
boolean boxed,
boolean cnstnd,
java.lang.String[] csave,
int[] isave,
double[] dsave)
-
dcsrch
private void dcsrch(double[] f,
double[] g,
double[] stp,
double ftol,
double gtol,
double xtol,
double stpmin,
double stpmax,
java.lang.String[] task,
int[] isave,
double[] dsave)
-
dcstep
private void dcstep(double[] stx,
double[] fx,
double[] dx,
double[] sty,
double[] fy,
double[] dy,
double[] stp,
double fp,
double dp,
boolean[] brackt,
double stpmin,
double stpmax)
-
formt
private void formt(int m,
double[][] wt,
double[][] sy,
double[][] ss,
int col,
double theta,
int[] info)
-
matupd
private void matupd(int n,
int m,
double[][] ws,
double[][] wy,
double[][] sy,
double[][] ss,
double[] d,
double[] r,
int[] itail,
int iupdat,
int[] col,
int[] head,
double[] theta,
double rr,
double dr,
double stp,
double dtd)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSeparableConvolver.html�������������������������������������0000775�4231163�4231163�00000116075�14537076050�025561� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSeparableConvolver (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
blue |
Flags to indicate which color channels to process.
|
private int |
cFactor |
Buffer size adjustment for color images.
|
private boolean |
colorImage |
Flag to indicate if the source image is color.
|
(package private) int |
curPercent |
|
private boolean |
entireImage |
Whether to convolve the whole image or just pixels inside a mask.
|
private boolean |
green |
Flags to indicate which color channels to process.
|
private int[] |
imgExtents |
The dimensions of the both source and destination images.
|
(package private) int |
incIndex |
|
private double[] |
inputBuffer |
Holds the original image data.
|
private boolean[] |
inputMask |
Holds the original image mask data.
|
private float[][] |
kernelBuffer |
|
private int[] |
kernelExtents |
The dimensions of the kernel.
|
private double[] |
outputBuffer |
Holds the result image data.
|
private boolean |
red |
Flags to indicate which color channels to process.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmSeparableConvolver(float[] srcBuffer,
int[] iExtents,
float[][] kernBuffer,
boolean colorImage) |
Sets destination, source, and kernel buffers.
|
AlgorithmSeparableConvolver(float[] srcBuffer,
int[] iExtents,
float[] kernBuffers,
int[] kExtents,
boolean colorImage) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
afterExecute() |
|
void |
beforeExecute() |
|
private void |
convolve(double[] imageBuffer,
float[] kernelBuffer,
double[] resultBuffer) |
Perform one-dimension convolution.
|
private void |
convolveNoColor(double[] imageBuffer,
float[] kernelBuffer,
double[] resultBuffer,
boolean[] maskBuffer) |
Perform one-dimension convolution.
|
private void |
convolveX(int from,
int to) |
|
private void |
convolveY(int from,
int to) |
|
private void |
convolveZ(int from,
int to) |
|
void |
execute() |
|
void |
finalize() |
Prepares this class for destruction.
|
float[] |
getOutputBuffer() |
|
void |
perform() |
Begins the excution of the 3D convolver.
|
void |
performMT() |
|
void |
runAlgorithm() |
Starts the convolution of the source image with the provided kernel.
|
void |
setColorChannels(boolean _red,
boolean _green,
boolean _blue) |
Sets what color channels to convolve and tells the convolver that it is working on a color image.
|
void |
setMask(java.util.BitSet newMask) |
Sets the mask to convolve within.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
curPercent
int curPercent
-
Constructor Detail
-
AlgorithmSeparableConvolver
public AlgorithmSeparableConvolver(float[] srcBuffer,
int[] iExtents,
float[][] kernBuffer,
boolean colorImage)
Sets destination, source, and kernel buffers. Call run() to convolve image.
- Parameters:
srcBuffer - source image data bufferiExtents - source and destination image dimensionskernBuffer - kernel image data buffer (kernel must be symmetric)kExtents - kernel dimensionscolor - whether the image is colorminProgressValue - the minimum progress value.maxProgressValue - the maximum progress value.
-
AlgorithmSeparableConvolver
public AlgorithmSeparableConvolver(float[] srcBuffer,
int[] iExtents,
float[] kernBuffers,
int[] kExtents,
boolean colorImage)
-
Method Detail
-
convolve
private void convolve(double[] imageBuffer,
float[] kernelBuffer,
double[] resultBuffer)
Perform one-dimension convolution.
- Parameters:
imageBuffer - kernelBuffer - resultBuffer -
-
convolveNoColor
private void convolveNoColor(double[] imageBuffer,
float[] kernelBuffer,
double[] resultBuffer,
boolean[] maskBuffer)
Perform one-dimension convolution.
- Parameters:
imageBuffer - kernelBuffer - resultBuffer -
-
performMT
public void performMT()
-
execute
public void execute()
-
setColorChannels
public void setColorChannels(boolean _red,
boolean _green,
boolean _blue)
Sets what color channels to convolve and tells the convolver that it is working on a color image.
- Parameters:
_red - process the red channel_green - process the green channel_blue - process the blue channel
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.Verbose_mode.html����������������������������������������������0000775�4231163�4231163�00000034542�14537076055�023627� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.Verbose_mode (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
Verbose_mode() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
Verbose_mode
private Verbose_mode()
-
Method Detail
-
valueOf
public static libdt.Verbose_mode valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
��������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.svm_toy_frame.point.html��������������������������������������0000775�4231163�4231163�00000023505�14537076056�025114� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.svm_toy_frame.point (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame.point
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) byte |
value |
|
(package private) double |
x |
|
(package private) double |
y |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
point(double x,
double y,
byte value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TranscendentalCostFunction.html��������������������������0000775�4231163�4231163�00000034052�14537076052�027651� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TranscendentalCostFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFastMarching.html�������������������������������������������0000775�4231163�4231163�00000113001�14537076045�024321� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFastMarching (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
edgeImage |
DOCUMENT ME!
|
private float[] |
GxData |
Storage location of the first derivative of the Gaussian in the X direction.
|
private float[] |
GyData |
Storage location of the first derivative of the Gaussian in the Y direction.
|
private float[] |
GzData |
Storage location of the first derivative of the Gaussian in the Z direction.
|
private int |
iterations |
Number of iterations of the diffusion.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
private float |
kValue |
Controls the diffusion rate.
|
private float[] |
levelImage |
DOCUMENT ME!
|
private float[] |
outputBuffer |
Stores result of AlgorithmConvolver
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calc2D() |
calc2D - calculates the diffused image and creates the new VOI for the original image.
|
private void |
calc3D() |
calc3D - calculates the diffused image and creates the new VOI for the original image.
|
void |
cleanUp() |
DOCUMENT ME!
|
void |
finalize() |
finalize - sets class storages arrays to null so that System.gc() can free the memory.
|
private float |
getBiLinear(float[] imageBuffer,
int xDim,
float x,
float y) |
getBiLinear - version of get that performs bi-linear interpoloation.
|
private float |
getTriLinear(float[] imageBuffer,
int xDim,
int imageSliceSize,
float x,
float y,
float z) |
getTriLinear - version of get that performs trilinear interpoloation.
|
private void |
makeKernels2D() |
makeKernals2D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
|
private void |
makeKernels3D() |
makeKernals3D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
|
void |
runAlgorithm() |
Starts the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
cleanUp
public void cleanUp()
DOCUMENT ME!
-
getBiLinear
private float getBiLinear(float[] imageBuffer,
int xDim,
float x,
float y)
getBiLinear - version of get that performs bi-linear interpoloation. Note - does NOT perform bounds checking
- Parameters:
imageBuffer - buffer containing pixel dataxDim - x dimension offsetx - x coordinatey - y coordinate- Returns:
- DOCUMENT ME!
-
getTriLinear
private float getTriLinear(float[] imageBuffer,
int xDim,
int imageSliceSize,
float x,
float y,
float z)
getTriLinear - version of get that performs trilinear interpoloation.
- Parameters:
imageBuffer - buffer containing pixel dataxDim - x dimension offsetimageSliceSize - DOCUMENT ME!x - x coordinatey - y coordinatez - z coordinate- Returns:
- DOCUMENT ME!
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.IntModelBessel.html������������������������������������0000775�4231163�4231163�00000036256�14537076046�025374� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.IntModelBessel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
alpha |
|
(package private) int |
k |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
IntModelBessel(double lower,
double upper,
int routine,
int key,
double epsabs,
double epsrel,
int limit,
double alpha,
int k) |
Creates a new IntModel2 object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
IntModelBessel
public IntModelBessel(double lower,
double upper,
int routine,
int key,
double epsabs,
double epsrel,
int limit,
double alpha,
int k)
Creates a new IntModel2 object.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!key - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmVesselEnhancement.html��������������������������������������0000775�4231163�4231163�00000122705�14537076050�025371� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmVesselEnhancement (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[][] |
copyMakeBorder2D(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue) |
|
private void |
eigen_sort3d_m(double[][][] l1,
double[][][] l2,
double[][][] l3) |
|
private void |
eigen2d_m(double[][] l1,
double[][] l2,
double[][] a,
double[][] b,
double[][] c,
double[][] d) |
|
private void |
eigen3d_m(double[][][] l1,
double[][][] l2,
double[][][] l3,
double[][][] x1,
double[][][] x2,
double[][][] x3,
double[][][] x4,
double[][][] x5,
double[][][] x6,
double[][][] x7,
double[][][] x8,
double[][][] x9) |
|
private void |
filter2Same(double[][] result,
double[][] img,
double[][] win) |
|
private void |
filter3Same(double[][][] result,
double[][][] img,
double[][][] win) |
|
private void |
gaussian2nd2d(double[][] gxx,
double[][] gxy,
double[][] gyy,
double[] s) |
|
private void |
gaussian2nd3d(double[][][] gxx,
double[][][] gyy,
double[][][] gzz,
double[][][] gxy,
double[][][] gxz,
double[][][] gyz,
double[] s) |
|
private void |
hessian2d(double[][] hxx,
double[][] hxy,
double[][] hyy,
double[][] im,
double[] s) |
|
private void |
hessian3D(double[][][] hxx,
double[][][] hyy,
double[][][] hzz,
double[][][] hxy,
double[][][] hxz,
double[][][] hyz,
double[][][] im,
double[] s) |
|
private double[][][] |
replicateBorder3d(double[][][] src,
int front,
int back,
int top,
int bottom,
int left,
int right) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
vesselnessv2d() |
|
void |
vesselnessv3d() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
sigma
private double[][] sigma
-
gamma
private double gamma
-
alpha
private double alpha
-
dimlenx
private int dimlenx
-
dimleny
private int dimleny
-
dimlenz
private int dimlenz
-
Constructor Detail
-
AlgorithmVesselEnhancement
public AlgorithmVesselEnhancement(ModelImage destImg,
ModelImage srcImg,
double[][] sigma,
double gamma,
double alpha,
double beta,
double c,
boolean wb)
-
Method Detail
-
replicateBorder3d
private double[][][] replicateBorder3d(double[][][] src,
int front,
int back,
int top,
int bottom,
int left,
int right)
-
copyMakeBorder2D
private double[][] copyMakeBorder2D(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue)
-
hessian2d
private void hessian2d(double[][] hxx,
double[][] hxy,
double[][] hyy,
double[][] im,
double[] s)
-
eigen2d_m
private void eigen2d_m(double[][] l1,
double[][] l2,
double[][] a,
double[][] b,
double[][] c,
double[][] d)
-
hessian3D
private void hessian3D(double[][][] hxx,
double[][][] hyy,
double[][][] hzz,
double[][][] hxy,
double[][][] hxz,
double[][][] hyz,
double[][][] im,
double[] s)
-
gaussian2nd3d
private void gaussian2nd3d(double[][][] gxx,
double[][][] gyy,
double[][][] gzz,
double[][][] gxy,
double[][][] gxz,
double[][][] gyz,
double[] s)
-
eigen3d_m
private void eigen3d_m(double[][][] l1,
double[][][] l2,
double[][][] l3,
double[][][] x1,
double[][][] x2,
double[][][] x3,
double[][][] x4,
double[][][] x5,
double[][][] x6,
double[][][] x7,
double[][][] x8,
double[][][] x9)
�����������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ArmijoLineSearch.html������������������������������������0000775�4231163�4231163�00000030115�14537076051�025517� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ArmijoLineSearch (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftSegmentation.SpeedUpLevel.html���������������������0000775�4231163�4231163�00000036226�14537076047�030562� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftSegmentation.SpeedUpLevel (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
SpeedUpLevel() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
SpeedUpLevel
private SpeedUpLevel()
-
Method Detail
-
valueOf
public static AlgorithmMeanShiftSegmentation.SpeedUpLevel valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTransform.html����������������������������������������������0000775�4231163�4231163�00001062660�14537076050�023741� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTransform (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmTransform(ModelImage _srcImage,
TransMatrix xfrm,
int interp,
float _oXres,
float _oYres,
float _oZres,
int _oXdim,
int _oYdim,
int _oZdim,
boolean tVOI,
boolean clip,
boolean pad) |
3D constructor for transformation algorithm.
|
AlgorithmTransform(ModelImage _srcImage,
TransMatrix xfrm,
int interp,
float _oXres,
float _oYres,
float _oZres,
int _oXdim,
int _oYdim,
int _oZdim,
int[] units,
boolean tVOI,
boolean clip,
boolean pad) |
Creates a new $class.name$ object.
|
AlgorithmTransform(ModelImage _srcImage,
TransMatrix xfrm,
int interp,
float _oXres,
float _oYres,
float _oZres,
int _oXdim,
int _oYdim,
int _oZdim,
int[] units,
boolean tVOI,
boolean clip,
boolean pad,
boolean doCenter,
WildMagic.LibFoundation.Mathematics.Vector3f center) |
Creates a new $class.name$ object.
|
AlgorithmTransform(ModelImage srcImage,
TransMatrix xfrm,
int interp,
float oXres,
float oYres,
int oXdim,
int oYdim,
boolean tVOI,
boolean clip,
boolean pad) |
2D constructor for transformation algorithm.
|
AlgorithmTransform(ModelImage srcImage,
TransMatrix xfrm,
int interp,
float oXres,
float oYres,
int oXdim,
int oYdim,
int[] units,
boolean tVOI,
boolean clip,
boolean pad) |
Creates a new AlgorithmTransform object.
|
AlgorithmTransform(ModelImage srcImage,
TransMatrix xfrm,
int interp,
float oXres,
float oYres,
int oXdim,
int oYdim,
int[] units,
boolean tVOI,
boolean clip,
boolean pad,
boolean doCenter,
WildMagic.LibFoundation.Mathematics.Vector3f center) |
Creates a new AlgorithmTransform object.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods Deprecated Methods
| Modifier and Type |
Method |
Description |
static ModelImage |
bspline(ModelImage image,
ModelImage resultImage,
int degree,
TransMatrix xfrm,
ViewJProgressBar progressBar) |
Performs bspline interpolation on black and white image data.
|
static ModelImage |
bspline4D(ModelImage image,
ModelImage resultImage,
int degree,
TransMatrix xfrm,
ViewJProgressBar progressBar) |
Performs bspline interpolation on black and white image data in 4D image.
|
static ModelImage |
bsplineC(ModelImage image,
ModelImage resultImage,
int degree,
TransMatrix xfrm,
ViewJProgressBar progressBar) |
Performs bspline interpolation on color image data.
|
static ModelImage |
bsplineC4D(ModelImage image,
ModelImage resultImage,
int degree,
TransMatrix xfrm,
ViewJProgressBar progressBar) |
Performs bspline interpolation on color image data in 4D image.
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
void |
finalize() |
Prepares this class for destruction.
|
private int[] |
getImageMargins(ModelImage srcImage,
TransMatrix transMatrix,
float dxOut,
float dyOut) |
Calculate necessary padding for image given applied transform.
|
static int[] |
getImageMargins(ModelImage srcImage,
TransMatrix transMatrix,
float dxOut,
float dyOut,
float dzOut) |
Calculate necessary padding for image given applied transform.
|
ModelImage |
getTransformedImage() |
Returns transformed volume.
|
static TransMatrix |
matrixtoInverseArray(TransMatrix transMatrix) |
Converts matrix to inverse array.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setCenter(WildMagic.LibFoundation.Mathematics.Vector3f center) |
DOCUMENT ME!
|
void |
setDoCenter(boolean doCenter) |
DOCUMENT ME!
|
void |
setFillValue(float fillValue) |
Set value for out of bounds transformation values.
|
void |
setPadValue(float padValue) |
Deprecated.
|
void |
setSuppressProgressBar(boolean suppressProgressBar) |
|
void |
setUpdateOriginFlag(boolean originFlag) |
Sets the origin flag used indicated that origin should be changed based using the supplied transformation matrix.
|
void |
setUseScannerAnatomical(boolean useSA) |
Sets the tranform to set orientation to AXIAL (this is a scanner anatomical transform).
|
private void |
transform() |
Creates buffer for new image, prepares transformation matrix, and calls transform function for interpolation
specified.
|
private void |
transform25DVOI(ModelImage image,
double[] imgBuffer,
TransMatrix kTM) |
Transforms and resamples a 3D VOI using nearest neighbor interpolation.
|
private void |
transform2DVOI(ModelImage image,
double[] imgBuffer,
TransMatrix kTM) |
Transforms and resamples a 2D VOI using nearest neighbor interpolation.
|
private void |
transform3DVOI(ModelImage image,
double[] imgBuffer,
TransMatrix kTM) |
Transforms and resamples a 3D VOI using nearest neighbor interpolation.
|
private void |
transform3DVOIByte(ModelImage image,
byte[] imgBuffer,
TransMatrix kTM) |
Transforms and resamples a 3D VOI using nearest neighbor interpolation.
|
private void |
transformAlgorithmBspline2D(double[] imgBuf,
TransMatrix kTM,
int degree) |
Transforms and resamples volume using Bspline interpolation.
|
private void |
transformAlgorithmBspline2DC(double[] imgBuf,
TransMatrix kTM,
int degree) |
Transforms and resamples volume using Bspline interpolation.
|
private void |
transformAlgorithmBspline3D(double[] imgBuf,
TransMatrix kTM,
int degree) |
Transforms and resamples volume using Bspline interpolation.
|
private void |
transformAlgorithmBspline3DC(double[] imgBuf,
TransMatrix kTM,
int degree) |
Transforms and resamples volume using Bspline interpolation.
|
private void |
transformAlgorithmBspline4D(double[] imgBuf,
TransMatrix kTM,
int degree) |
Transforms and resamples volume using Bspline interpolation.
|
private void |
transformAlgorithmBspline4DC(double[] imgBuf,
TransMatrix kTM,
int degree) |
Transforms and resamples color volume using Bspline interpolation.
|
private void |
transformBilinear(double[] imgBuf,
TransMatrix kTM) |
Transforms and resamples volume using bilinear interpolation.
|
static void |
transformBilinear(float[] imgBuf,
float[] tImgBuf,
TransMatrix trans,
int iXdim,
int iYdim,
float iXres,
float iYres,
int oXdim,
int oYdim,
float oXres,
float oYres,
ViewJProgressBar progressBar) |
Transforms using bilinear interpolation.
|
static void |
transformBilinear(float[] imgBuf,
float[] tImgBuf,
TransMatrix trans,
int iXdim,
int iYdim,
float iXres,
float iYres,
int oXdim,
int oYdim,
float oXres,
float oYres,
ViewJProgressBar progressBar,
boolean activeImage) |
Transforms using bilinear interpolation.
|
static void |
transformBilinear(float[] imgBuf,
ModelImage transformedImg,
TransMatrix trans,
int iXdim,
int iYdim,
float iXres,
float iYres,
ViewJProgressBar progressBar) |
Transforms using bilinear interpolation.
|
static void |
transformBilinear(float[] imgBuf,
ModelImage transformedImg,
TransMatrix trans,
int iXdim,
int iYdim,
float iXres,
float iYres,
ViewJProgressBar progressBar,
boolean activeImage) |
Transforms using bilinear interpolation.
|
static void |
transformBilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar) |
Transforms using bilinear interpolation.
|
static void |
transformBilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar,
boolean activeImage) |
Transforms using bilinear interpolation.
|
static void |
transformBilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar,
boolean activeImage,
float fillValue) |
Transforms using bilinear interpolation.
|
private void |
transformBilinear3D(double[] imgBuf,
TransMatrix kTM) |
Transforms and resamples volume using bilinear interpolation.
|
private void |
transformBilinear3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM) |
Transforms and resamples volume using bilinear interpolation (2.5D) This version used with color images.
|
private void |
transformBilinear4D(double[] imgBuf,
TransMatrix kTM) |
Transforms and resamples volume using bilinear interpolation (2.5D) Used as a slice only algorithm on 3D images.
|
private void |
transformBilinear4DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM) |
Transforms and resamples volume using bilinear interpolation This version used with color images This alogorithm
used on a slice by slice basis on 4D images.
|
private void |
transformBilinearC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM) |
Transforms and resamples volume using bilinear interpolation.
|
static void |
transformBilinearC(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
int oXdim,
int oYdim,
float oXres,
float oYres) |
Used on color images.
|
static void |
transformBilinearC(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
int oXdim,
int oYdim,
float oXres,
float oYres,
float fillValue) |
Used on color images.
|
private void |
transformCubicLagrangian2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using cubic Lagrangian interpolation.
|
private void |
transformCubicLagrangian2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using cubic Lagrangian interpolation.
|
private void |
transformCubicLagrangian3D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using cubic Lagrangian interpolation.
|
private void |
transformCubicLagrangian3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using cubic Lagrangian interpolation.
|
private void |
transformCubicLagrangian3Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using cubic Lagrangian interpolation Does a slice by slice cubic Lagrangian
interpolation on a 3 dimensional object.
|
private void |
transformCubicLagrangian3Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using cubic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
|
private void |
transformCubicLagrangian4D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples 4 dimensional object using 3D cubic Lagrangian interpolation.
|
private void |
transformCubicLagrangian4DC(double[] imgBuf,
float[] imgBuffer2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples 4 dimensional object using 3D cubic Lagrangian interpolation.
|
private void |
transformCubicLagrangian4Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using cubic Lagrangian interpolation Does a slice by slice cubic Lagrangian
interpolation on a 4 dimensional object.
|
private void |
transformCubicLagrangian4Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using cubic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
|
private void |
transformHepticLagrangian2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using heptic Lagrangian interpolation.
|
private void |
transformHepticLagrangian2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images.
|
private void |
transformHepticLagrangian3D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using heptic Lagrangian interpolation.
|
private void |
transformHepticLagrangian3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images.
|
private void |
transformHepticLagrangian3Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using heptic Lagrangian interpolation Does a slice by slice heptic Lagrangian
interpolation on a 3 dimensional object.
|
private void |
transformHepticLagrangian3Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
|
private void |
transformHepticLagrangian4D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
transforms and resamples 4 dimensional object using 3D heptic Lagrangian interpolation.
|
private void |
transformHepticLagrangian4DC(double[] imgBuf,
float[] imgBuffer2,
TransMatrix kTM,
boolean clip) |
transforms and resamples 4 dimensional object using 3D heptic Lagrangian interpolation.
|
private void |
transformHepticLagrangian4Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using heptic Lagrangian interpolation Does a slice by slice heptic Lagrangian
interpolation on a 4 dimensional object.
|
private void |
transformHepticLagrangian4Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
|
private void |
transformNearestNeighbor2D(double[] imgBuf,
TransMatrix kTM) |
Transforms and resamples volume using nearest neighbor interpolation.
|
static void |
transformNearestNeighbor2D(float[] imgBuf,
float[] tImgBuf,
TransMatrix trans,
int xdim,
int ydim) |
Transforms using Nearest neighbor interpolation.
|
static void |
transformNearestNeighbor2D(float[] imgBuf,
float[] tImgBuf,
TransMatrix trans,
int iXdim,
int iYdim,
float iXres,
float iYres,
int oXdim,
int oYdim,
float oXres,
float oYres) |
Transforms using Nearest neighbor interpolation.
|
private void |
transformNearestNeighbor2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM) |
Transforms and resamples volume using nearest neighbor interpolation.
|
private void |
transformNearestNeighbor3D(double[] imgBuf,
TransMatrix kTM) |
Transforms and resamples volume using nearest neighbor interpolation.
|
static void |
transformNearestNeighbor3D(float[] imgBuf,
ModelImage transformedImg,
int Xdim,
int Ydim,
int Zdim,
TransMatrix trans) |
Transforms and resamples volume using nearest neighbor interpolation.
|
private void |
transformNearestNeighbor3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM) |
Transforms and resamples volume using nearest neighbor interpolation.
|
private void |
transformNearestNeighbor3Dim2D(double[] imgBuf,
TransMatrix kTM) |
Transforms and resamples volume using nearest neighbor interpolation.
|
private void |
transformNearestNeighbor3Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM) |
Transforms and resamples volume using nearest neighbor interpolation.
|
private void |
transformNearestNeighbor4D(double[] imgBuf,
TransMatrix kTM) |
Transforms and resamples 4 dimensional object using 3D algorithm using nearest neighbor interpolation.
|
private void |
transformNearestNeighbor4DC(double[] imgBuf,
float[] imgBuffer2,
TransMatrix kTM) |
Transforms and resamples 4 dimensional object using 3D algorithm using nearest neighbor interpolation.
|
private void |
transformNearestNeighbor4Dim2D(double[] imgBuf,
TransMatrix kTM) |
Transforms and resamples volume using nearest neighbor interpolation.
|
private void |
transformNearestNeighbor4Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM) |
Transforms and resamples volume using nearest neighbor interpolation.
|
private void |
transformQuinticLagrangian2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using quintic Lagrangian interpolation.
|
private void |
transformQuinticLagrangian2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images.
|
private void |
transformQuinticLagrangian3D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using quintic Lagrangian interpolation.
|
private void |
transformQuinticLagrangian3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images.
|
private void |
transformQuinticLagrangian3Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using quintic Lagrangian interpolation Does a slice by slice quintic Lagrangian
interpolation on a 3 dimensional object.
|
private void |
transformQuinticLagrangian3Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
|
private void |
transformQuinticLagrangian4D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples 4 dimensional object using 3D quintic Lagrangian interpolation.
|
private void |
transformQuinticLagrangian4DC(double[] imgBuf,
float[] imgBuffer2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples 4 dimensional color object using 3D quintic Lagrangian interpolation.
|
private void |
transformQuinticLagrangian4Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using quintic Lagrangian interpolation Does a slice by slice quintic Lagrangian
interpolation on a 4 dimensional object.
|
private void |
transformQuinticLagrangian4Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
|
private void |
transformTrilinear(double[] imgBuffer,
TransMatrix kTM) |
Transforms and resamples a 3D volume using trilinear interpolation.
|
static void |
transformTrilinear(float[] imgBuffer,
float[] tImgBuf,
TransMatrix trans,
int iXdim,
int iYdim,
int iZdim,
float iXres,
float iYres,
float iZres,
int oXdim,
int oYdim,
int oZdim,
float oXres,
float oYres,
float oZres,
ViewJProgressBar progressBar) |
Transforms and resamples volume using trilinear interpolation.
|
static void |
transformTrilinear(float[] imgBuffer,
float[] tImgBuf,
TransMatrix trans,
int iXdim,
int iYdim,
int iZdim,
float iXres,
float iYres,
float iZres,
int oXdim,
int oYdim,
int oZdim,
float oXres,
float oYres,
float oZres,
ViewJProgressBar progressBar,
boolean activeImage) |
Transforms and resamples volume using trilinear interpolation.
|
static void |
transformTrilinear(float[] imgBuffer,
ModelImage transformedImg,
TransMatrix trans,
int iXdim,
int iYdim,
int iZdim,
float iXres,
float iYres,
float iZres,
ViewJProgressBar progressBar) |
Transforms and resamples volume using trilinear interpolation.
|
static void |
transformTrilinear(float[] imgBuffer,
ModelImage transformedImg,
TransMatrix trans,
int iXdim,
int iYdim,
int iZdim,
float iXres,
float iYres,
float iZres,
ViewJProgressBar progressBar,
boolean activeImage) |
Transforms and resamples volume using trilinear interpolation.
|
static void |
transformTrilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar) |
Transforms and resamples volume using trilinear interpolation.
|
static void |
transformTrilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar,
boolean activeImage) |
Transforms and resamples volume using trilinear interpolation.
|
static void |
transformTrilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar,
boolean activeImage,
float fillValue) |
Transforms and resamples volume using trilinear interpolation.
|
private void |
transformTrilinear4D(double[] imgBuffer,
TransMatrix kTM) |
Transforms and resamples 4 dimensional object using trilinear interpolation.
|
static ModelImage |
transformTrilinear4D(ModelImage image,
ModelImage resultImage,
TransMatrix xfrm,
ViewJProgressBar progressBar) |
Performs trilinear interpolation on black and white image data in a 4D image.
|
private void |
transformTrilinear4DByteC(byte[] imgBuffer,
byte[] imgBuffer2,
TransMatrix kTM) |
Transforms and resamples 4 dimensional color ARGB object using trilinear interpolation.
|
private void |
transformTrilinear4DC(double[] imgBuffer,
float[] imgBuffer2,
TransMatrix kTM) |
Transforms and resamples 4 dimensional color object using trilinear interpolation.
|
private void |
transformTrilinearByteC(byte[] imgBuffer,
byte[] imgBuffer2,
TransMatrix kTM) |
Transforms and resamples volume using trilinear interpolation This version is used with ARGB color images.
|
private void |
transformTrilinearC(double[] imgBuffer,
float[] imgBuffer2,
TransMatrix kTM) |
Transforms and resamples volume using trilinear interpolation This version is used with color images.
|
static ModelImage |
transformTrilinearC(ModelImage image,
ModelImage resultImage,
float[] imgBuffer,
TransMatrix xfrm,
ViewJProgressBar progressBar) |
Performs trilinear interpolation on color image data.
|
static void |
transformTrilinearC(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
int oXdim,
int oYdim,
int oZdim,
float oXres,
float oYres,
float oZres) |
Transforms and resamples volume using trilinear interpolation Use on color images USE THIS IF OUTPUT IMAGE HAS
DIFFERENT DIM/RES THAN INPUT IMAGE.
|
static void |
transformTrilinearC(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
int oXdim,
int oYdim,
int oZdim,
float oXres,
float oYres,
float oZres,
float fillValue) |
Transforms and resamples volume using trilinear interpolation Use on color images USE THIS IF OUTPUT IMAGE HAS
DIFFERENT DIM/RES THAN INPUT IMAGE.
|
static ModelImage |
transformTrilinearC4D(ModelImage image,
ModelImage resultImage,
TransMatrix xfrm,
ViewJProgressBar progressBar) |
Performs trilinear interpolation on color image data in a 4D image.
|
private void |
transformWSinc2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using windowed sinc interpolation.
|
private void |
transformWSinc2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using windowed sinc interpolation This version used with color images.
|
private void |
transformWSinc3D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using windowed sinc interpolation.
|
private void |
transformWSinc3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using windowed sinc interpolation This version used with color images.
|
private void |
transformWSinc3Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using windowed sinc interpolation Does a slice by slice windowed sinc
interpolation on a 3 dimensional object.
|
private void |
transformWSinc3Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using windowed sinc interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
|
private void |
transformWSinc4D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples 4 dimensional object using 3D windowed sinc interpolation.
|
private void |
transformWSinc4DC(double[] imgBuf,
float[] imgBuffer2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples 4 dimensional object using 3D windowed sinc interpolation.
|
private void |
transformWSinc4Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using windowed sinc interpolation Does a slice by slice windowed sinc
interpolation on a 4 dimensional object.
|
private void |
transformWSinc4Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip) |
Transforms and resamples volume using windowed sinc interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
|
private static void |
updateFileInfo(ModelImage image,
ModelImage resultImage,
float[] resolutions,
int[] units,
TransMatrix matrix,
boolean useSATransform,
AlgorithmBase srcAlg) |
Copy important file information to resultant image structure.
|
private void |
updateOrigin() |
Translate the image origin from image space to patient space (scanner space).
|
private static void |
updateOrigin(TransMatrix xfrm) |
Update origin.
|
private void |
updateOriginMargins() |
Update origin to reflect padding.
|
private void |
updateOriginMargins2D() |
Update origin to reflect padding.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
bufferFactor
private int bufferFactor
DOCUMENT ME!
-
clip
private boolean clip
DOCUMENT ME!
-
DIM
private int DIM
DOCUMENT ME!
-
do25D
private boolean do25D
DOCUMENT ME!
-
doCenter
private boolean doCenter
DOCUMENT ME!
-
imgBuf
private double[] imgBuf
DOCUMENT ME!
-
imgBuf2
private float[] imgBuf2
DOCUMENT ME!
-
imgLength
private int imgLength
DOCUMENT ME!
-
imgLength2
private int imgLength2
DOCUMENT ME!
-
interp
private final int interp
DOCUMENT ME!
-
iXdim
private final int iXdim
DOCUMENT ME!
-
iYdim
private final int iYdim
DOCUMENT ME!
-
iXres
private float iXres
DOCUMENT ME!
-
iYres
private float iYres
DOCUMENT ME!
-
iZres
private float iZres
-
oXdim
private int oXdim
DOCUMENT ME!
-
oYdim
private int oYdim
DOCUMENT ME!
-
oZdim
private int oZdim
DOCUMENT ME!
-
oTdim
private int oTdim
DOCUMENT ME!
-
oZres
private float oZres
-
pad
private boolean pad
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmTransform
public AlgorithmTransform(ModelImage srcImage,
TransMatrix xfrm,
int interp,
float oXres,
float oYres,
int oXdim,
int oYdim,
boolean tVOI,
boolean clip,
boolean pad)
2D constructor for transformation algorithm. Also used for 2.5D algorithms on 3D and 4D images.
- Parameters:
srcImage - ModelImage to be transformedxfrm - Transformation matrix to be appliedinterp - Type of interpolation (NEAREST_NEIGHBOR, BILINEAR, BSPLINE3, BSPLINE4, etc)oXres - X resolution of output imageoYres - Y resolution of output imageoXdim - X dimension of output imageoYdim - Y dimension of output imagetVOI - if true the VOI should be transformed with the volumeclip - if true output range is clipped to input rangepad - if true output image is padded so that none of the image is clipped
-
AlgorithmTransform
public AlgorithmTransform(ModelImage srcImage,
TransMatrix xfrm,
int interp,
float oXres,
float oYres,
int oXdim,
int oYdim,
int[] units,
boolean tVOI,
boolean clip,
boolean pad)
Creates a new AlgorithmTransform object.
- Parameters:
srcImage - ModelImage to be transformedxfrm - Transformation matrix to be appliedinterp - Type of interpolation (NEAREST_NEIGHBOR, BILINEAR, BSPLINE3, BSPLINE4, etc)oXres - X resolution of output imageoYres - Y resolution of output imageoXdim - X dimension of output imageoYdim - Y dimension of output imageunits - DOCUMENT ME!tVOI - if true the VOI should be transformed with the volumeclip - if true output range is clipped to input rangepad - if true output image is padded so that none of the image is clipped
-
AlgorithmTransform
public AlgorithmTransform(ModelImage srcImage,
TransMatrix xfrm,
int interp,
float oXres,
float oYres,
int oXdim,
int oYdim,
int[] units,
boolean tVOI,
boolean clip,
boolean pad,
boolean doCenter,
WildMagic.LibFoundation.Mathematics.Vector3f center)
Creates a new AlgorithmTransform object.
- Parameters:
srcImage - DOCUMENT ME!xfrm - DOCUMENT ME!interp - DOCUMENT ME!oXres - DOCUMENT ME!oYres - DOCUMENT ME!oXdim - DOCUMENT ME!oYdim - DOCUMENT ME!units - DOCUMENT ME!tVOI - DOCUMENT ME!clip - DOCUMENT ME!pad - DOCUMENT ME!doCenter - center -
-
AlgorithmTransform
public AlgorithmTransform(ModelImage _srcImage,
TransMatrix xfrm,
int interp,
float _oXres,
float _oYres,
float _oZres,
int _oXdim,
int _oYdim,
int _oZdim,
boolean tVOI,
boolean clip,
boolean pad)
3D constructor for transformation algorithm. Also used for 3D algorithms on 4D images.
- Parameters:
_srcImage - ModelImage to be transformedxfrm - Transformation matrix to be appliedinterp - Type of interpolation (NEAREST_NEIGHBOR, TRILINEAR, BSPLINE3, BSPLINE4, etc)_oXres - X resolution of output image_oYres - Y resolution of output image_oZres - Z resolution of output image_oXdim - X dimension of output image_oYdim - Y dimension of output image_oZdim - Z dimension of output imagetVOI - if true the VOI should be transformed with the volumeclip - if true output range is clipped to input rangepad - if true output image is padded so that none of the image is clipped
-
AlgorithmTransform
public AlgorithmTransform(ModelImage _srcImage,
TransMatrix xfrm,
int interp,
float _oXres,
float _oYres,
float _oZres,
int _oXdim,
int _oYdim,
int _oZdim,
int[] units,
boolean tVOI,
boolean clip,
boolean pad)
Creates a new $class.name$ object.
- Parameters:
_srcImage - DOCUMENT ME!xfrm - DOCUMENT ME!interp - DOCUMENT ME!_oXres - DOCUMENT ME!_oYres - DOCUMENT ME!_oZres - DOCUMENT ME!_oXdim - DOCUMENT ME!_oYdim - DOCUMENT ME!_oZdim - DOCUMENT ME!units - DOCUMENT ME!tVOI - DOCUMENT ME!clip - DOCUMENT ME!pad - DOCUMENT ME!
-
AlgorithmTransform
public AlgorithmTransform(ModelImage _srcImage,
TransMatrix xfrm,
int interp,
float _oXres,
float _oYres,
float _oZres,
int _oXdim,
int _oYdim,
int _oZdim,
int[] units,
boolean tVOI,
boolean clip,
boolean pad,
boolean doCenter,
WildMagic.LibFoundation.Mathematics.Vector3f center)
Creates a new $class.name$ object.
- Parameters:
_srcImage - DOCUMENT ME!xfrm - DOCUMENT ME!interp - DOCUMENT ME!_oXres - DOCUMENT ME!_oYres - DOCUMENT ME!_oZres - DOCUMENT ME!_oXdim - DOCUMENT ME!_oYdim - DOCUMENT ME!_oZdim - DOCUMENT ME!units - DOCUMENT ME!tVOI - DOCUMENT ME!clip - DOCUMENT ME!pad - DOCUMENT ME!doCenter - center -
-
Method Detail
-
bspline
public static ModelImage bspline(ModelImage image,
ModelImage resultImage,
int degree,
TransMatrix xfrm,
ViewJProgressBar progressBar)
Performs bspline interpolation on black and white image data.
- Parameters:
image - Image from which the data is derivedresultImage - Image to put result in; can be null.degree - Degree of the spline algorithm, either 3 or 4.xfrm - Transformation to apply.progressBar - Buffer containing image data.- Returns:
- DOCUMENT ME!
-
bspline4D
public static ModelImage bspline4D(ModelImage image,
ModelImage resultImage,
int degree,
TransMatrix xfrm,
ViewJProgressBar progressBar)
Performs bspline interpolation on black and white image data in 4D image. Works time slice by time slice.
- Parameters:
image - Image from which the data is derivedresultImage - Image to put result in; can be null.degree - Degree of the spline algorithm, either 3 or 4.xfrm - Transformation to apply.progressBar - Buffer containing image data.- Returns:
- DOCUMENT ME!
-
bsplineC
public static ModelImage bsplineC(ModelImage image,
ModelImage resultImage,
int degree,
TransMatrix xfrm,
ViewJProgressBar progressBar)
Performs bspline interpolation on color image data.
- Parameters:
image - Image from which the data is derivedresultImage - Image to put result in; can be null.degree - Degree of the spline algorithm, either 3 or 4.xfrm - Transformation to apply.progressBar - Buffer containing image data.- Returns:
- DOCUMENT ME!
-
bsplineC4D
public static ModelImage bsplineC4D(ModelImage image,
ModelImage resultImage,
int degree,
TransMatrix xfrm,
ViewJProgressBar progressBar)
Performs bspline interpolation on color image data in 4D image. Works time slice by time slice.
- Parameters:
image - Image from which the data is derivedresultImage - Image to put result in; can be null.degree - Degree of the spline algorithm, either 3 or 4.xfrm - Transformation to apply.progressBar - Buffer containing image data.- Returns:
- DOCUMENT ME!
-
getImageMargins
public static int[] getImageMargins(ModelImage srcImage,
TransMatrix transMatrix,
float dxOut,
float dyOut,
float dzOut)
Calculate necessary padding for image given applied transform.
- Parameters:
srcImage - DOCUMENT ME!transMatrix - array with transformation matrixdxOut - DOCUMENT ME!dyOut - DOCUMENT ME!dzOut - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
transformBilinear
public static final void transformBilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar)
Transforms using bilinear interpolation.
- Parameters:
image - Image to be transformedtransformedImg - Transformed imagetrans - Transformation matrix to be appliedprogressBar - Progress bar to update. Can be null. Should NOT have cancel button.
-
transformBilinear
public static final void transformBilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar,
boolean activeImage)
Transforms using bilinear interpolation.
- Parameters:
image - Image to be transformedtransformedImg - Transformed imagetrans - Transformation matrix to be appliedprogressBar - Progress bar to update. Can be null. Should NOT have cancel button.activeImage - true if the algorithm is being run in a separate thread, false otherwise, to control progress
bar repainting
-
transformBilinear
public static final void transformBilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar,
boolean activeImage,
float fillValue)
Transforms using bilinear interpolation.
- Parameters:
image - Image to be transformedtransformedImg - Transformed imagetrans - Transformation matrix to be appliedprogressBar - Progress bar to update. Can be null. Should NOT have cancel button.activeImage - true if the algorithm is being run in a separate thread, false otherwise, to control progress
bar repaintingfillValue - value used for out of bounds pixels
-
transformBilinear
public static final void transformBilinear(float[] imgBuf,
ModelImage transformedImg,
TransMatrix trans,
int iXdim,
int iYdim,
float iXres,
float iYres,
ViewJProgressBar progressBar)
Transforms using bilinear interpolation.
- Parameters:
imgBuf - Image buffer to be transformedtransformedImg - Transformed imagetrans - Transformation matrix to be appliediXdim - X dimension of input imageiYdim - Y dimension of input imageiXres - X resolution of input imageiYres - Y resolution of input imageprogressBar - Progress bar to update. Can be null. Should NOT have cancel button.
-
transformBilinear
public static final void transformBilinear(float[] imgBuf,
ModelImage transformedImg,
TransMatrix trans,
int iXdim,
int iYdim,
float iXres,
float iYres,
ViewJProgressBar progressBar,
boolean activeImage)
Transforms using bilinear interpolation.
- Parameters:
imgBuf - Image buffer to be transformedtransformedImg - Transformed imagetrans - Transformation matrix to be appliediXdim - X dimension of input imageiYdim - Y dimension of input imageiXres - X resolution of input imageiYres - Y resolution of input imageprogressBar - Progress bar to update. Can be null. Should NOT have cancel button.activeImage - true if the algorithm is being run in a separate thread, false otherwise, to control progress
bar repainting
-
transformBilinear
public static final void transformBilinear(float[] imgBuf,
float[] tImgBuf,
TransMatrix trans,
int iXdim,
int iYdim,
float iXres,
float iYres,
int oXdim,
int oYdim,
float oXres,
float oYres,
ViewJProgressBar progressBar)
Transforms using bilinear interpolation.
- Parameters:
imgBuf - Image buffer to be transformedtImgBuf - Transformed imagetrans - Transformation matrix to be appliediXdim - X dimension of input imageiYdim - Y dimension of input imageiXres - X resolution of input imageiYres - Y resolution of input imageoXdim - X dimension of output imageoYdim - Y dimension of output imageoXres - X resolution of output imageoYres - Y resolution of output imageprogressBar - Progress bar to be updated. Can be null. Should NOT have cancel button.
-
transformBilinear
public static final void transformBilinear(float[] imgBuf,
float[] tImgBuf,
TransMatrix trans,
int iXdim,
int iYdim,
float iXres,
float iYres,
int oXdim,
int oYdim,
float oXres,
float oYres,
ViewJProgressBar progressBar,
boolean activeImage)
Transforms using bilinear interpolation.
- Parameters:
imgBuf - Image buffer to be transformedtImgBuf - Transformed imagetrans - Transformation matrix to be appliediXdim - X dimension of input imageiYdim - Y dimension of input imageiXres - X resolution of input imageiYres - Y resolution of input imageoXdim - X dimension of output imageoYdim - Y dimension of output imageoXres - X resolution of output imageoYres - Y resolution of output imageprogressBar - Progress bar to be updated. Can be null. Should NOT have cancel button.activeImage - true if the algorithm is being run in a separate thread, false otherwise, to control progress
bar repainting
-
transformBilinearC
public static final void transformBilinearC(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
int oXdim,
int oYdim,
float oXres,
float oYres)
Used on color images. USE THIS IF OUTPUT IMAGE HAS DIFFERENT DIM/RES THAN INPUT IMAGE
- Parameters:
image - Input image to be transformedtransformedImg - Transformed imagetrans - Transformation matrix to be appliedoXdim - Dimensions of output imageoYdim - Dimensions of output imageoXres - Resolutions of output imageoYres - Resolutions of output image
-
transformBilinearC
public static final void transformBilinearC(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
int oXdim,
int oYdim,
float oXres,
float oYres,
float fillValue)
Used on color images. USE THIS IF OUTPUT IMAGE HAS DIFFERENT DIM/RES THAN INPUT IMAGE
- Parameters:
image - Input image to be transformedtransformedImg - Transformed imagetrans - Transformation matrix to be appliedoXdim - Dimensions of output imageoYdim - Dimensions of output imageoXres - Resolutions of output imageoYres - Resolutions of output imagefillValue - value used for out of bounds pixel transformations
-
transformNearestNeighbor2D
public static final void transformNearestNeighbor2D(float[] imgBuf,
float[] tImgBuf,
TransMatrix trans,
int xdim,
int ydim)
Transforms using Nearest neighbor interpolation.
- Parameters:
imgBuf - Image buffer to be transformedtImgBuf - Transformed image buffertrans - Transformation matrix to be appliedxdim - X dimension of input AND output imageydim - Y dimension of input AND output image
-
transformNearestNeighbor2D
public static final void transformNearestNeighbor2D(float[] imgBuf,
float[] tImgBuf,
TransMatrix trans,
int iXdim,
int iYdim,
float iXres,
float iYres,
int oXdim,
int oYdim,
float oXres,
float oYres)
Transforms using Nearest neighbor interpolation.
- Parameters:
imgBuf - Image buffer to be transformedtImgBuf - Transformed image buffertrans - Transformation matrix to be appliediXdim - X dimension of input imageiYdim - Y dimension of input imageiXres - X resolution of input imageiYres - Y resolution of input imageoXdim - X dimension of output imageoYdim - Y dimension of output imageoXres - X resolution of output imageoYres - Y resolution of output image
-
transformNearestNeighbor3D
public static final void transformNearestNeighbor3D(float[] imgBuf,
ModelImage transformedImg,
int Xdim,
int Ydim,
int Zdim,
TransMatrix trans)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
imgBuf - Image array to transformtransformedImg - Transformed image.Xdim - X dimension of input imageYdim - Y dimension of input imageZdim - Z dimension of input imagetrans - Transformation matrix to be applied
-
transformTrilinear
public static final void transformTrilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar)
Transforms and resamples volume using trilinear interpolation.
- Parameters:
image - Image to transformtransformedImg - Transformed image.trans - Transformation matrix to be appliedprogressBar - The progress bar. Can be null. Should NOT have a cancel button.
-
transformTrilinear
public static final void transformTrilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar,
boolean activeImage)
Transforms and resamples volume using trilinear interpolation.
- Parameters:
image - Image to transformtransformedImg - Transformed image.trans - Transformation matrix to be appliedprogressBar - The progress bar. Can be null. Should NOT have a cancel button.activeImage - true if the algorithm is being run in a separate thread, false otherwise, to control progress
bar repainting
-
transformTrilinear
public static final void transformTrilinear(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
ViewJProgressBar progressBar,
boolean activeImage,
float fillValue)
Transforms and resamples volume using trilinear interpolation.
- Parameters:
image - Image to transformtransformedImg - Transformed image.trans - Transformation matrix to be appliedprogressBar - The progress bar. Can be null. Should NOT have a cancel button.activeImage - true if the algorithm is being run in a separate thread, false otherwise, to control progress
bar repaintingfillValue - value used if transformed pixel is out of bounds
-
transformTrilinear
public static final void transformTrilinear(float[] imgBuffer,
ModelImage transformedImg,
TransMatrix trans,
int iXdim,
int iYdim,
int iZdim,
float iXres,
float iYres,
float iZres,
ViewJProgressBar progressBar)
Transforms and resamples volume using trilinear interpolation.
- Parameters:
imgBuffer - Image arraytransformedImg - Image after transformtrans - Transformation matrix to be appliediXdim - X dimension of input imageiYdim - Y dimension of input imageiZdim - Z dimension of input imageiXres - X resolution of input imageiYres - Y resolution of input imageiZres - Z resolution of input imageprogressBar - Progress bar to update. Can be null. Should NOT have a cancel button.
-
transformTrilinear
public static final void transformTrilinear(float[] imgBuffer,
ModelImage transformedImg,
TransMatrix trans,
int iXdim,
int iYdim,
int iZdim,
float iXres,
float iYres,
float iZres,
ViewJProgressBar progressBar,
boolean activeImage)
Transforms and resamples volume using trilinear interpolation.
- Parameters:
imgBuffer - Image arraytransformedImg - Image after transformtrans - Transformation matrix to be appliediXdim - X dimension of input imageiYdim - Y dimension of input imageiZdim - Z dimension of input imageiXres - X resolution of input imageiYres - Y resolution of input imageiZres - Z resolution of input imageprogressBar - Progress bar to update. Can be null. Should NOT have a cancel button.activeImage - true if the algorithm is being run in a separate thread, false otherwise, to control progress
bar repainting
-
transformTrilinear
public static final void transformTrilinear(float[] imgBuffer,
float[] tImgBuf,
TransMatrix trans,
int iXdim,
int iYdim,
int iZdim,
float iXres,
float iYres,
float iZres,
int oXdim,
int oYdim,
int oZdim,
float oXres,
float oYres,
float oZres,
ViewJProgressBar progressBar)
Transforms and resamples volume using trilinear interpolation.
- Parameters:
imgBuffer - Image buffer to be transformedtImgBuf - Transformed imagetrans - Transformation matrix to be appliediXdim - X dimension of input imageiYdim - Y dimension of input imageiZdim - Z dimension of input imageiXres - X resolution of input imageiYres - Y resolution of input imageiZres - Z resolution of input imageoXdim - X dimension of output imageoYdim - Y dimension of output imageoZdim - Z dimension of output imageoXres - X resolution of output imageoYres - Y resolution of output imageoZres - Z resolution of output imageprogressBar - Progress bar. Can be null. Should NOT have cancel button.
-
transformTrilinear
public static final void transformTrilinear(float[] imgBuffer,
float[] tImgBuf,
TransMatrix trans,
int iXdim,
int iYdim,
int iZdim,
float iXres,
float iYres,
float iZres,
int oXdim,
int oYdim,
int oZdim,
float oXres,
float oYres,
float oZres,
ViewJProgressBar progressBar,
boolean activeImage)
Transforms and resamples volume using trilinear interpolation.
- Parameters:
imgBuffer - Image buffer to be transformedtImgBuf - Transformed imagetrans - Transformation matrix to be appliediXdim - X dimension of input imageiYdim - Y dimension of input imageiZdim - Z dimension of input imageiXres - X resolution of input imageiYres - Y resolution of input imageiZres - Z resolution of input imageoXdim - X dimension of output imageoYdim - Y dimension of output imageoZdim - Z dimension of output imageoXres - X resolution of output imageoYres - Y resolution of output imageoZres - Z resolution of output imageprogressBar - Progress bar. Can be null. Should NOT have cancel button.activeImage - true if the algorithm is being run in a separate thread, false otherwise, to control progress
bar repainting
-
transformTrilinear4D
public static ModelImage transformTrilinear4D(ModelImage image,
ModelImage resultImage,
TransMatrix xfrm,
ViewJProgressBar progressBar)
Performs trilinear interpolation on black and white image data in a 4D image. Works time slice by time slice
- Parameters:
image - Image from which the data is derivedresultImage - Image to put result in; can be null.xfrm - Transformation to apply.progressBar - Buffer containing image data.- Returns:
- DOCUMENT ME!
-
transformTrilinearC
public static ModelImage transformTrilinearC(ModelImage image,
ModelImage resultImage,
float[] imgBuffer,
TransMatrix xfrm,
ViewJProgressBar progressBar)
Performs trilinear interpolation on color image data.
- Parameters:
image - Image from which the data is derivedresultImage - Image to put result in; can be null.imgBuffer - Buffer containing image data.xfrm - Transformation to apply.progressBar - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
transformTrilinearC
public static final void transformTrilinearC(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
int oXdim,
int oYdim,
int oZdim,
float oXres,
float oYres,
float oZres)
Transforms and resamples volume using trilinear interpolation Use on color images USE THIS IF OUTPUT IMAGE HAS
DIFFERENT DIM/RES THAN INPUT IMAGE.
- Parameters:
image - Image to transformtransformedImg - Result image.trans - Transformation matrix to be appliedoXdim - DOCUMENT ME!oYdim - DOCUMENT ME!oZdim - DOCUMENT ME!oXres - DOCUMENT ME!oYres - DOCUMENT ME!oZres - DOCUMENT ME!
-
transformTrilinearC
public static final void transformTrilinearC(ModelImage image,
ModelImage transformedImg,
TransMatrix trans,
int oXdim,
int oYdim,
int oZdim,
float oXres,
float oYres,
float oZres,
float fillValue)
Transforms and resamples volume using trilinear interpolation Use on color images USE THIS IF OUTPUT IMAGE HAS
DIFFERENT DIM/RES THAN INPUT IMAGE.
- Parameters:
image - Image to transformtransformedImg - Result image.trans - Transformation matrix to be appliedoXdim - DOCUMENT ME!oYdim - DOCUMENT ME!oZdim - DOCUMENT ME!oXres - DOCUMENT ME!oYres - DOCUMENT ME!oZres - DOCUMENT ME!fillValue - value if transformed pixel is out of bounds
-
transformTrilinearC4D
public static ModelImage transformTrilinearC4D(ModelImage image,
ModelImage resultImage,
TransMatrix xfrm,
ViewJProgressBar progressBar)
Performs trilinear interpolation on color image data in a 4D image. Works time slice by time slice.
- Parameters:
image - Image from which the data is derivedresultImage - Image to put result in; can be null.xfrm - Transformation to apply.progressBar - Buffer containing image data.- Returns:
- DOCUMENT ME!
-
getImageMargins
private int[] getImageMargins(ModelImage srcImage,
TransMatrix transMatrix,
float dxOut,
float dyOut)
Calculate necessary padding for image given applied transform.
- Parameters:
srcImage - DOCUMENT ME!transMatrix - array with transformation matrixdxOut - DOCUMENT ME!dyOut - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
updateFileInfo
private static void updateFileInfo(ModelImage image,
ModelImage resultImage,
float[] resolutions,
int[] units,
TransMatrix matrix,
boolean useSATransform,
AlgorithmBase srcAlg)
Copy important file information to resultant image structure.
- Parameters:
image - Source image.resultImage - Resultant image.resolutions - DOCUMENT ME!units - DOCUMENT ME!matrix - DOCUMENT ME!useSATransform - DOCUMENT ME!m -
-
updateOrigin
private static void updateOrigin(TransMatrix xfrm)
Update origin. Translate the image origin from image space to patient space (scanner space). The basic ideas,
tranlate the (0,0,0) point from scaner space to image space, then subtract the original image origin. The (0, 0,
0) point is the upper left corner of the scanner space's image.
- Parameters:
xfrm - DOCUMENT ME!
-
updateOrigin
private void updateOrigin()
Translate the image origin from image space to patient space (scanner space). The basic ideas, tranlate the
(0,0,0) point from scaner space to image space, then multiply the resolution, and subtract the image origin. The
(0, 0, 0) point is the upper left corner of the scanner space's image.
-
transformBilinear
private void transformBilinear(double[] imgBuf,
TransMatrix kTM)
Transforms and resamples volume using bilinear interpolation.
- Parameters:
imgBuf - Image arraykTM - Matrix to be applied
-
transformBilinear3D
private void transformBilinear3D(double[] imgBuf,
TransMatrix kTM)
Transforms and resamples volume using bilinear interpolation. Used as a slice-only algorithm on 3D images.
- Parameters:
imgBuf - Image arraykTM - Matrix to be applied
-
transformBilinear3DC
private void transformBilinear3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM)
Transforms and resamples volume using bilinear interpolation (2.5D) This version used with color images. This
alogorithm used on a slice by slice basis on 3D images.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Matrix to be applied
-
transformBilinear4D
private void transformBilinear4D(double[] imgBuf,
TransMatrix kTM)
Transforms and resamples volume using bilinear interpolation (2.5D) Used as a slice only algorithm on 3D images.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be applied
-
transformBilinear4DC
private void transformBilinear4DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM)
Transforms and resamples volume using bilinear interpolation This version used with color images This alogorithm
used on a slice by slice basis on 4D images.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Matrix to be applied
-
transformBilinearC
private void transformBilinearC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM)
Transforms and resamples volume using bilinear interpolation. This version used with color images
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Matrix to be applied
-
transformAlgorithmBspline2D
private void transformAlgorithmBspline2D(double[] imgBuf,
TransMatrix kTM,
int degree)
Transforms and resamples volume using Bspline interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be applieddegree - degree of polynomial
-
transformAlgorithmBspline2DC
private void transformAlgorithmBspline2DC(double[] imgBuf,
TransMatrix kTM,
int degree)
Transforms and resamples volume using Bspline interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be applieddegree - degree of polynomial
-
transformAlgorithmBspline3D
private void transformAlgorithmBspline3D(double[] imgBuf,
TransMatrix kTM,
int degree)
Transforms and resamples volume using Bspline interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be applieddegree - degree of polynomial
-
transformAlgorithmBspline3DC
private void transformAlgorithmBspline3DC(double[] imgBuf,
TransMatrix kTM,
int degree)
Transforms and resamples volume using Bspline interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be applieddegree - degree of polynomial
-
transformAlgorithmBspline4D
private void transformAlgorithmBspline4D(double[] imgBuf,
TransMatrix kTM,
int degree)
Transforms and resamples volume using Bspline interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be applieddegree - degree of polynomial
-
transformAlgorithmBspline4DC
private void transformAlgorithmBspline4DC(double[] imgBuf,
TransMatrix kTM,
int degree)
Transforms and resamples color volume using Bspline interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be applieddegree - degree of polynomial
-
transformCubicLagrangian2D
private void transformCubicLagrangian2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using cubic Lagrangian interpolation.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - if true clip output values to be within input range
-
transformCubicLagrangian2DC
private void transformCubicLagrangian2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using cubic Lagrangian interpolation. This version used with color images
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - if true clip output values to be within input range
-
transformCubicLagrangian3D
private void transformCubicLagrangian3D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using cubic Lagrangian interpolation.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformCubicLagrangian3DC
private void transformCubicLagrangian3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using cubic Lagrangian interpolation. This version used with color images
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformCubicLagrangian3Dim2D
private void transformCubicLagrangian3Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using cubic Lagrangian interpolation Does a slice by slice cubic Lagrangian
interpolation on a 3 dimensional object.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformCubicLagrangian3Dim2DC
private void transformCubicLagrangian3Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using cubic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformCubicLagrangian4D
private void transformCubicLagrangian4D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples 4 dimensional object using 3D cubic Lagrangian interpolation.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - if true clip output values to be within input range
-
transformCubicLagrangian4DC
private void transformCubicLagrangian4DC(double[] imgBuf,
float[] imgBuffer2,
TransMatrix kTM,
boolean clip)
Transforms and resamples 4 dimensional object using 3D cubic Lagrangian interpolation.
- Parameters:
imgBuf - Image arrayimgBuffer2 - kTM - Transformation matrix to be appliedclip - if true clip output values to be within input range
-
transformCubicLagrangian4Dim2D
private void transformCubicLagrangian4Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using cubic Lagrangian interpolation Does a slice by slice cubic Lagrangian
interpolation on a 4 dimensional object.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformCubicLagrangian4Dim2DC
private void transformCubicLagrangian4Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using cubic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformHepticLagrangian2D
private void transformHepticLagrangian2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using heptic Lagrangian interpolation.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformHepticLagrangian2DC
private void transformHepticLagrangian2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformHepticLagrangian3D
private void transformHepticLagrangian3D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using heptic Lagrangian interpolation.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformHepticLagrangian3DC
private void transformHepticLagrangian3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformHepticLagrangian3Dim2D
private void transformHepticLagrangian3Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using heptic Lagrangian interpolation Does a slice by slice heptic Lagrangian
interpolation on a 3 dimensional object.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformHepticLagrangian3Dim2DC
private void transformHepticLagrangian3Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformHepticLagrangian4D
private void transformHepticLagrangian4D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
transforms and resamples 4 dimensional object using 3D heptic Lagrangian interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be appliedclip - if true clip output values to be within input range
-
transformHepticLagrangian4DC
private void transformHepticLagrangian4DC(double[] imgBuf,
float[] imgBuffer2,
TransMatrix kTM,
boolean clip)
transforms and resamples 4 dimensional object using 3D heptic Lagrangian interpolation.
- Parameters:
imgBuf - image arrayimgBuffer2 - kTM - transformation matrix to be appliedclip - if true clip output values to be within input range
-
transformHepticLagrangian4Dim2D
private void transformHepticLagrangian4Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using heptic Lagrangian interpolation Does a slice by slice heptic Lagrangian
interpolation on a 4 dimensional object.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformHepticLagrangian4Dim2DC
private void transformHepticLagrangian4Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformNearestNeighbor2D
private void transformNearestNeighbor2D(double[] imgBuf,
TransMatrix kTM)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be applied
-
transformNearestNeighbor2DC
private void transformNearestNeighbor2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
imgBuf - input image arrayimgBuf2 - output image arraykTM - transformation matrix to be applied
-
transformNearestNeighbor3D
private void transformNearestNeighbor3D(double[] imgBuf,
TransMatrix kTM)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be applied
-
transformNearestNeighbor3DC
private void transformNearestNeighbor3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
imgBuf - input image arrayimgBuf2 - output image arraykTM - transformation matrix to be applied
-
transformNearestNeighbor3Dim2D
private void transformNearestNeighbor3Dim2D(double[] imgBuf,
TransMatrix kTM)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be applied
-
transformNearestNeighbor3Dim2DC
private void transformNearestNeighbor3Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
imgBuf - input image arrayimgBuf2 - output image arraykTM - transformation matrix to be applied
-
transformNearestNeighbor4D
private void transformNearestNeighbor4D(double[] imgBuf,
TransMatrix kTM)
Transforms and resamples 4 dimensional object using 3D algorithm using nearest neighbor interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be applied
-
transformNearestNeighbor4DC
private void transformNearestNeighbor4DC(double[] imgBuf,
float[] imgBuffer2,
TransMatrix kTM)
Transforms and resamples 4 dimensional object using 3D algorithm using nearest neighbor interpolation.
- Parameters:
imgBuf - image arrayimgBufffer2 - kTM - transformation matrix to be applied
-
transformNearestNeighbor4Dim2D
private void transformNearestNeighbor4Dim2D(double[] imgBuf,
TransMatrix kTM)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
imgBuf - image arraykTM - transformation matrix to be applied
-
transformNearestNeighbor4Dim2DC
private void transformNearestNeighbor4Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
imgBuf - input image arrayimgBuf2 - output image arraykTM - transformation matrix to be applied
-
transformQuinticLagrangian2D
private void transformQuinticLagrangian2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using quintic Lagrangian interpolation.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformQuinticLagrangian2DC
private void transformQuinticLagrangian2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformQuinticLagrangian3D
private void transformQuinticLagrangian3D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using quintic Lagrangian interpolation.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformQuinticLagrangian3DC
private void transformQuinticLagrangian3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformQuinticLagrangian3Dim2D
private void transformQuinticLagrangian3Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using quintic Lagrangian interpolation Does a slice by slice quintic Lagrangian
interpolation on a 3 dimensional object.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformQuinticLagrangian3Dim2DC
private void transformQuinticLagrangian3Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformQuinticLagrangian4DC
private void transformQuinticLagrangian4DC(double[] imgBuf,
float[] imgBuffer2,
TransMatrix kTM,
boolean clip)
Transforms and resamples 4 dimensional color object using 3D quintic Lagrangian interpolation.
- Parameters:
imgBuf - Image arrayimgBuf2 - kTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformQuinticLagrangian4D
private void transformQuinticLagrangian4D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples 4 dimensional object using 3D quintic Lagrangian interpolation.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformQuinticLagrangian4Dim2D
private void transformQuinticLagrangian4Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using quintic Lagrangian interpolation Does a slice by slice quintic Lagrangian
interpolation on a 4 dimensional object.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformQuinticLagrangian4Dim2DC
private void transformQuinticLagrangian4Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - if true clip output values to be within input range
-
transformTrilinear
private void transformTrilinear(double[] imgBuffer,
TransMatrix kTM)
Transforms and resamples a 3D volume using trilinear interpolation.
- Parameters:
imgBuffer - Image arraykTM - Transformation matrix to be applied
-
transformTrilinear4D
private void transformTrilinear4D(double[] imgBuffer,
TransMatrix kTM)
Transforms and resamples 4 dimensional object using trilinear interpolation.
- Parameters:
imgBuffer - Image arraykTM - Transformation matrix to be applied
-
transformTrilinear4DByteC
private void transformTrilinear4DByteC(byte[] imgBuffer,
byte[] imgBuffer2,
TransMatrix kTM)
Transforms and resamples 4 dimensional color ARGB object using trilinear interpolation.
- Parameters:
imgBuffer - Image arrayimgBuf2 - kTM - Transformation matrix to be applied Byte buffers are used to reduce memory requirements by a factor of
4
-
transformTrilinear4DC
private void transformTrilinear4DC(double[] imgBuffer,
float[] imgBuffer2,
TransMatrix kTM)
Transforms and resamples 4 dimensional color object using trilinear interpolation.
- Parameters:
imgBuffer - Image arrayimgBuf2 - kTM - Transformation matrix to be applied
-
transformTrilinearC
private void transformTrilinearC(double[] imgBuffer,
float[] imgBuffer2,
TransMatrix kTM)
Transforms and resamples volume using trilinear interpolation This version is used with color images.
- Parameters:
imgBuffer - Input image arrayimgBuffer2 - Output image arraykTM - Transformation matrix to be applied
-
transformTrilinearByteC
private void transformTrilinearByteC(byte[] imgBuffer,
byte[] imgBuffer2,
TransMatrix kTM)
Transforms and resamples volume using trilinear interpolation This version is used with ARGB color images. Use
byte[] rather than float[] to save memory
- Parameters:
imgBuffer - Input image arrayimgBuffer2 - Output image arraykTM - Transformation matrix to be applied
-
transformWSinc2D
private void transformWSinc2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using windowed sinc interpolation.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformWSinc2DC
private void transformWSinc2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using windowed sinc interpolation This version used with color images.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformWSinc3D
private void transformWSinc3D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using windowed sinc interpolation.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformWSinc3DC
private void transformWSinc3DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using windowed sinc interpolation This version used with color images.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformWSinc3Dim2D
private void transformWSinc3Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using windowed sinc interpolation Does a slice by slice windowed sinc
interpolation on a 3 dimensional object.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformWSinc3Dim2DC
private void transformWSinc3Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using windowed sinc interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformWSinc4D
private void transformWSinc4D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples 4 dimensional object using 3D windowed sinc interpolation.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformWSinc4DC
private void transformWSinc4DC(double[] imgBuf,
float[] imgBuffer2,
TransMatrix kTM,
boolean clip)
Transforms and resamples 4 dimensional object using 3D windowed sinc interpolation.
- Parameters:
imgBuf - Image arrayimgBuffer2 - kTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformWSinc4Dim2D
private void transformWSinc4Dim2D(double[] imgBuf,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using windowed sinc interpolation Does a slice by slice windowed sinc
interpolation on a 4 dimensional object.
- Parameters:
imgBuf - Image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
-
transformWSinc4Dim2DC
private void transformWSinc4Dim2DC(double[] imgBuf,
float[] imgBuf2,
TransMatrix kTM,
boolean clip)
Transforms and resamples volume using windowed sinc interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
- Parameters:
imgBuf - Input image arrayimgBuf2 - Output image arraykTM - Transformation matrix to be appliedclip - If true clip output values to be within input range
��������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.PartitionedMatrixView.html�������������������������������0000775�4231163�4231163�00000057103�14537076052�026651� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.PartitionedMatrixView (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
kEBlockSize
private int kEBlockSize
-
kFBlockSize
private int kFBlockSize
-
num_cols_e_
private int num_cols_e_
-
num_cols_f_
private int num_cols_f_
-
Constructor Detail
-
PartitionedMatrixView
public PartitionedMatrixView(int kRowBlockSize,
int kEBlockSize,
int kFBlockSize,
CeresSolver.BlockSparseMatrix matrix,
int num_col_blocks_e)
-
Method Detail
-
num_cols_e
public int num_cols_e()
-
num_cols_f
public int num_cols_f()
-
num_rows
public int num_rows()
-
num_cols
public int num_cols()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.ODERectModel.html��������������������������0000775�4231163�4231163�00000036636�14537076056�027463� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.ODERectModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) double[] |
c |
|
(package private) double[] |
L |
|
(package private) double[][] |
scale |
|
(package private) double[][] |
z |
|
(package private) double[][] |
zs |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ODERectModel(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag,
double[][] scale,
double[][] z,
double[] beta,
double[] c,
double[][] zs,
double[] L) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ODERectModel
public ODERectModel(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag,
double[][] scale,
double[][] z,
double[] beta,
double[] c,
double[][] zs,
double[] L)
-
Method Detail
-
driver
public void driver()
DOCUMENT ME!
- Overrides:
driver in class ODE
��������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSequentialScanningWatershed.html����������������������������0000775�4231163�4231163�00000073145�14537076050�027427� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSequentialScanningWatershed (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numNeighbor
private int numNeighbor
-
binNumber
private int binNumber
-
stable
private boolean stable
-
imgBuffer
private int[] imgBuffer
-
merge
private boolean merge
-
Constructor Detail
-
AlgorithmSequentialScanningWatershed
public AlgorithmSequentialScanningWatershed(ModelImage destImage,
ModelImage srcImage,
int numNeighbor,
boolean limitBins,
int binNumber,
boolean merge,
double mergeThreshold)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.CharacterAtlas.html��������������������������������������0000775�4231163�4231163�00000055017�14537076053�025267� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.CharacterAtlas (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static java.awt.geom.Rectangle2D |
boundsForText(int textlength,
int fontSize,
int style) |
|
static java.awt.geom.Rectangle2D |
boundsForText(int textlength,
java.awt.Font font) |
Calculates the bounding rectangle for a specific number of characters in the specified font.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
charWidth
public int charWidth
-
charHeigth
public int charHeigth
-
fontSize
public int fontSize
-
texID
protected int texID
-
Constructor Detail
-
CharacterAtlas
public CharacterAtlas()
-
Method Detail
-
boundsForText
public static java.awt.geom.Rectangle2D boundsForText(int textlength,
java.awt.Font font)
Calculates the bounding rectangle for a specific number of characters in the specified font.
The returned bounds are baseline relative which means that the origin may have a negative
y coordinate that is the distance of the descent line from the baseline.
- Parameters:
textlength - number of charactersfont - to measure with (has to be monospaced, or else bounds will be incorrect)- Returns:
- bounding rectangle for a text of specified length and font.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd4.html���������������������������������������0000775�4231163�4231163�00000030465�14537076055�025010� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd4 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd4(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd4
public Fitqd4(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmDEMRI3.FitDEMRI3ConstrainedModel.html�����������������������0000775�4231163�4231163�00000042705�14537076045�027452� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDEMRI3.FitDEMRI3ConstrainedModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private double[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitDEMRI3ConstrainedModel(int nPoints,
double[] xData,
double[] yData,
double[] initial) |
Creates a new FitDEMRI3ConstrainedModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying DEMRI3 fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private double[] yData
-
Constructor Detail
-
FitDEMRI3ConstrainedModel
public FitDEMRI3ConstrainedModel(int nPoints,
double[] xData,
double[] yData,
double[] initial)
Creates a new FitDEMRI3ConstrainedModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
�����������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Graph.html������������������������������������������������������0000775�4231163�4231163�00000043517�14537076056�021722� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Graph (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Graph
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
clear
public void clear()
-
prune
public void prune()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmAutoCovariance.html�����������������������������������������0000775�4231163�4231163�00000112367�14537076044�024673� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAutoCovariance (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcStoreInDest2D() |
This function calculates the autocovariance coefficients and places them in the destination image for black and
white images.
|
private void |
calcStoreInDest2DC() |
This function calculates the autocovariance coefficients and places them in the destination images for color
images.
|
private void |
calcStoreInDest3D() |
This function calculates the autocovariance coefficients and places them in the destination image for black and
white images.
|
private void |
calcStoreInDest3DC() |
This function calculates the autocovariance coefficients and places them in the destination images for color
images.
|
private void |
calcStoreInDest4D() |
This function calculates the autocovariance coefficients and places them in the destination image for black and
white images.
|
private void |
calcStoreInDest4DC() |
This function calculates the autocovariance coefficients and places them in the destination images for color
images.
|
void |
finalize() |
Prepares this class for destruction.
|
int |
getFWHM() |
returns the full width at half maximum of the autocovariance.
|
int |
getFWHMB() |
returns the full width at half maximum of the blue autocovariance.
|
int |
getFWHMG() |
returns the full width at half maximum of the green autocovariance.
|
int |
getFWHMR() |
returns the full width at half maximum of the red autocovariance.
|
void |
runAlgorithm() |
Starts the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
fwhmB
private int fwhmB
DOCUMENT ME!
-
fwhmG
private int fwhmG
DOCUMENT ME!
-
fwhmR
private int fwhmR
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmAutoCovariance
public AlgorithmAutoCovariance(ModelImage destImg,
ModelImage srcImg)
Constructor for black and white image in which covariance coefficients are placed in a predetermined destination
image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.
-
AlgorithmAutoCovariance
public AlgorithmAutoCovariance(ModelImage destImageR,
ModelImage destImageG,
ModelImage destImageB,
ModelImage srcImg)
Constructor for color image in which covariance coefficients are placed in predetermined destination images.
- Parameters:
destImageR - Image model where red result is stored.destImageG - Image model where green result is stored.destImageB - Image model where blue result is stored.srcImg - Source image model.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.SucceedingIterationCallback.html���������������������0000775�4231163�4231163�00000025527�14537076053�030562� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.SucceedingIterationCallback (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSM2.FitAllNL2.html������������������������������������������0000775�4231163�4231163�00000030364�14537076050�024050� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSM2.FitAllNL2 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitAllNL2() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
void |
calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitAllNL2
public FitAllNL2()
-
Method Detail
-
calcj
public void calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm)
- Specified by:
calcj in class NL2sol
-
calcr
public void calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm)
- Specified by:
calcr in class NL2sol
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmASM.PData.html����������������������������������������������0000775�4231163�4231163�00000023271�14537076043�023372� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmASM.PData (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmASM.PData
-
-
Constructor Summary
Constructors
| Constructor |
Description |
PData() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
Evalues
public double[] Evalues
-
Emean
public double[] Emean
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMSpectralFuzzyCMeans.html�����������������������������������0000775�4231163�4231163�00000222021�14537076047�026011� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMSpectralFuzzyCMeans (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMSpectralFuzzyCMeans(ModelImage[] destImg,
ModelImage[] srcImg,
int _nClass,
int _pyramidLevels,
int _jacobiIters1,
int _jacobiIters2,
float _q,
float _smooth1,
float _smooth2,
boolean _outputGainField,
int _segmentation,
boolean _cropBackground,
int _maxIter,
float _tolerance,
boolean _doRed,
boolean _doGreen,
boolean _doBlue,
boolean _wholeImage) |
AlgorithmMSpectralFuzzyCMeans - Constructor.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
cleanUp() |
Cleans up the memory usage.
|
private void |
cMeans2() |
DOCUMENT ME!
|
private void |
cMeans3() |
DOCUMENT ME!
|
private void |
ComputeCentroids2D(float[] buffer,
float[] centroids,
float[] mems,
float qVal) |
ComputeCentroids2D - Determine the centroids of each cluster given fuzzy membership values.
|
private void |
ComputeCentroids3D(float[] buffer,
float[] centroids,
float[] mems,
float qVal) |
ComputeCentroids3D - Determine the centroids of each cluster given fuzzy membership values.
|
private void |
ComputeMemberships2D(float[] buffer,
float[] centroids,
float[] mems,
float exponent) |
ComputerMemberships2D - Determine membership of each feature vector in each cluster.
|
private void |
ComputeMemberships3D(float[] buffer,
float[] centroids,
float[] mems,
float exponent) |
ComputerMemberships3D - Determine membership of each feature vector in each cluster.
|
private float |
distancems2(float[] buffer,
int index,
float[] centroids,
int c) |
This function performs a truncated FMV cycle.
|
private float |
distancems3(float[] buffer,
int index,
float[] centroids,
int c) |
DOCUMENT ME!
|
void |
finalize() |
Prepares this class for destruction.
|
void |
runAlgorithm() |
Start algorithm.
|
void |
setCentroids(float[] centroids) |
DOCUMENT ME!
|
void |
setThreshold(float[] threshold) |
DOCUMENT ME!
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
buffer2
private float[] buffer2
DOCUMENT ME!
-
destNum
private int destNum
DOCUMENT ME!
-
doBlue
private boolean doBlue
DOCUMENT ME!
-
doGreen
private boolean doGreen
DOCUMENT ME!
-
doRed
private boolean doRed
DOCUMENT ME!
-
exponent
private float exponent
DOCUMENT ME!
-
imageNumber
private int imageNumber
DOCUMENT ME!
-
iterations
private int iterations
DOCUMENT ME!
-
jacobiIters2
private int jacobiIters2
-
maxChange
private float maxChange
DOCUMENT ME!
-
maxIter
private int maxIter
DOCUMENT ME!
-
mems
private float[] mems
DOCUMENT ME!
-
memSize
private int memSize
DOCUMENT ME!
-
nClass
private int nClass
DOCUMENT ME!
-
newSliceSize
private int newSliceSize
DOCUMENT ME!
-
newVolSize
private int newVolSize
DOCUMENT ME!
-
newXDim
private int newXDim
DOCUMENT ME!
-
newYDim
private int newYDim
DOCUMENT ME!
-
newZDim
private int newZDim
DOCUMENT ME!
-
oldX
private int oldX
DOCUMENT ME!
-
oldY
private int oldY
DOCUMENT ME!
-
oldZ
private int oldZ
DOCUMENT ME!
-
orgSlice
private int orgSlice
DOCUMENT ME!
-
orgVol
private int orgVol
DOCUMENT ME!
-
orgXDim
private int orgXDim
DOCUMENT ME!
-
qVal
private float qVal
DOCUMENT ME!
-
segBuffer
private byte[] segBuffer
DOCUMENT ME!
-
segmentation
private int segmentation
DOCUMENT ME!
-
sliceSize
private int sliceSize
DOCUMENT ME!
-
smooth2
private float smooth2
-
tolerance
private float tolerance
DOCUMENT ME!
-
volSize
private int volSize
DOCUMENT ME!
-
xDim
private int xDim
DOCUMENT ME!
-
yDim
private int yDim
DOCUMENT ME!
-
zDim
private int zDim
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmMSpectralFuzzyCMeans
public AlgorithmMSpectralFuzzyCMeans(ModelImage[] destImg,
ModelImage[] srcImg,
int _nClass,
int _pyramidLevels,
int _jacobiIters1,
int _jacobiIters2,
float _q,
float _smooth1,
float _smooth2,
boolean _outputGainField,
int _segmentation,
boolean _cropBackground,
int _maxIter,
float _tolerance,
boolean _doRed,
boolean _doGreen,
boolean _doBlue,
boolean _wholeImage)
AlgorithmMSpectralFuzzyCMeans - Constructor.
- Parameters:
destImg - list of image models where result image is to storedsrcImg - list of source image models_nClass - number of classes into which the image will be segmented_pyramidLevels - Not used in the present version of the code_jacobiIters1 - Not used in the present version of the code_jacobiIters2 - Not used in the present version of the code_q - a weighing exponent on each membership value and determines the amount of
"fuzziness" of the resulting segmentation. q is required to be greater
than 1 and is typically set to 2._smooth1 - Not used in the present version of the code_smooth2 - Not used in the present version of the code_outputGainField - Not used in the present version of the code_segmentation - possible values are hard only, fuzzy only, or both hard and fuzzy_cropBackground - unchecked by default. This function finds the smallest bounding box outside of
which all image pixel values are below the image threshold. Values inside the
bounding box are copied to a smaller array to save space and calculations are
performed with this reduced array. However, these pixels outside the box are
restored for the production of the hard and fuzzy segmented images. In the hard
and fuzzy segmentation cases values outside the box all have a value of 0._max_iter - Maximum allowed iterations of main program loop_tolerance - The iteration continues until either the user specified maximum number of
iterations has occcured or until convergence has been detected. Convergence occurs
when all membership functions over all pixel locations j change byless than the
tolerance value between 2 iterations._doRed - If true, do red component of color image_doGreen - If true, do green component of color image_doBlue - If true, do blue component of color image_wholeImage - If true apply algorithm to the whole image - constrained to be true
if background cropping is selected. If false, only apply to
VOI regions.
-
Method Detail
-
cMeans2
private void cMeans2()
DOCUMENT ME!
-
cMeans3
private void cMeans3()
DOCUMENT ME!
-
ComputeCentroids2D
private void ComputeCentroids2D(float[] buffer,
float[] centroids,
float[] mems,
float qVal)
ComputeCentroids2D - Determine the centroids of each cluster given fuzzy membership values.
- Parameters:
buffer - DOCUMENT ME!centroids - DOCUMENT ME!mems - DOCUMENT ME!qVal - DOCUMENT ME!
-
ComputeCentroids3D
private void ComputeCentroids3D(float[] buffer,
float[] centroids,
float[] mems,
float qVal)
ComputeCentroids3D - Determine the centroids of each cluster given fuzzy membership values.
- Parameters:
buffer - DOCUMENT ME!centroids - DOCUMENT ME!mems - DOCUMENT ME!qVal - DOCUMENT ME!
-
ComputeMemberships2D
private void ComputeMemberships2D(float[] buffer,
float[] centroids,
float[] mems,
float exponent)
ComputerMemberships2D - Determine membership of each feature vector in each cluster.
- Parameters:
buffer - DOCUMENT ME!centroids - DOCUMENT ME!mems - DOCUMENT ME!exponent - DOCUMENT ME!
-
ComputeMemberships3D
private void ComputeMemberships3D(float[] buffer,
float[] centroids,
float[] mems,
float exponent)
ComputerMemberships3D - Determine membership of each feature vector in each cluster.
- Parameters:
buffer - DOCUMENT ME!centroids - DOCUMENT ME!mems - DOCUMENT ME!exponent - DOCUMENT ME!
-
distancems2
private float distancems2(float[] buffer,
int index,
float[] centroids,
int c)
This function performs a truncated FMV cycle. It stops performing V-cycles at the pyramid level given by
'truncLevel'.
- Parameters:
buffer - DOCUMENT ME!index - DOCUMENT ME!centroids - DOCUMENT ME!c - DOCUMENT ME!- Returns:
- DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ComposedLoss.html����������������������������������������0000775�4231163�4231163�00000036610�14537076051�024760� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ComposedLoss (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/fMRIBlindDeconvolution.html������������������������������������������0000775�4231163�4231163�00000270224�14537076055�024437� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
fMRIBlindDeconvolution (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
MAX_DELTA |
|
private double |
MIN_DELTA |
Reference:
Hamza Cherkaoui, Thomas Moreau, Abderrahim Halimi, Philippe Ciuciu.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double[] |
__inf_norm(double[] x) |
|
double[][][] |
__inf_norm(double[][][] x) |
|
double[] |
_custom_padd(int[] p_total,
double[] a,
int min_power_of_2,
int min_zero_padd,
double zero_padd_ratio) |
|
double[][] |
_inf_norm(double[][][] arr,
int axis) |
|
double[][] |
_inf_norm(double[][] arr,
int axis) |
|
double[] |
_loops_deconv(double[] y,
double[] diff_z,
double[][] H,
double lbda,
long nb_iter,
boolean early_stopping,
long wind,
double tol) |
|
double[][] |
_padd_assymetric(double[][] arrays,
int[] p,
double c,
java.lang.String paddtype) |
|
double[] |
_padd_assymetric(double[] arrays,
int[] p,
double c,
java.lang.String paddtype) |
|
double[][] |
_padd_symetric(double[][] arrays,
int p,
double c,
java.lang.String paddtype) |
|
double[] |
_padd_symetric(double[] arrays,
int p,
double c,
java.lang.String paddtype) |
|
void |
_test_conv_adj_fourier_hrf(double[] ai_s,
double[] hrf,
java.lang.String testname) |
|
void |
_test_conv_adj_toeplitz_kernel_hrf(double[] ai_s,
double[] hrf,
java.lang.String testname) |
|
void |
_test_conv_adj_toeplitz_kernel_signal(double[] ai_s,
double[] hrf,
java.lang.String testname) |
|
void |
_test_conv_fourier_kernel_hrf(double[] ai_s,
double[] hrf,
java.lang.String testname) |
|
void |
_test_conv_toeplitz_kernel_hrf(double[] ai_s,
double[] hrf,
java.lang.String testname) |
|
void |
_test_conv_toeplitz_kernel_signal(double[] ai_s,
double[] hrf,
java.lang.String testname) |
|
void |
_test_data(double[] noisy_ar_s,
double[] ar_s,
double[] ai_s,
double[] i_s,
double[] hrf,
double[] noise,
double snr,
int nb_events,
java.lang.String testnum) |
|
double[][] |
_unpadd_assymetric(double[][] arrays,
int[] p,
java.lang.String paddtype) |
|
double[] |
_unpadd_assymetric(double[] arrays,
int[] p,
java.lang.String paddtype) |
|
double[][] |
_unpadd_symetric(double[][] arrays,
int p,
java.lang.String paddtype) |
|
double[] |
_unpadd_symetric(double[] arrays,
int p,
java.lang.String paddtype) |
|
void |
_yield_data(double[][] noisy_ar_s,
double[][] ar_s,
double[][] ai_s,
double[][] i_s,
double[][] hrf,
double[][] noise,
double[] snr,
int[] nb_events) |
|
void |
add_gaussian_noise(double[] noisy_signal,
double[] noise,
double[] signal,
double snr,
boolean haveSeed,
long random_state) |
|
void |
bd(java.util.Vector<java.lang.Double> xout,
java.util.Vector<java.lang.Double> zout,
java.util.Vector<java.lang.Double> diff_zout,
java.util.Vector<java.lang.Double> hout,
java.util.Vector<java.lang.Double> dr,
java.util.Vector<java.lang.Double> dg,
java.util.Vector<java.lang.Double> dJ,
double[] y,
double t_r,
double lbda,
double theta,
double[] z_0,
double hrf_dur,
double[] bounds,
int nb_iter,
int nb_sub_iter,
int nb_last_iter,
int print_period,
boolean early_stopping,
int wind,
double tol,
int verbose) |
|
void |
blind_deconvolution_example() |
|
double[][] |
custom_padd(int[] padd,
double[][] arrays,
int min_power_of_2,
int min_zero_padd,
double zero_padd_ratio) |
|
void |
data_generation_example() |
|
void |
deconv(double[] x,
double[] z,
double[] diff_z,
java.util.Vector<java.lang.Double> J,
java.util.Vector<java.lang.Double> R,
java.util.Vector<java.lang.Double> G,
double[] y,
double t_r,
double[] hrf,
double lbda,
boolean early_stopping,
double tol,
int wind,
int nb_iter,
int nb_sub_iter,
int verbose) |
|
void |
deconv_example() |
|
double |
fwhm(double[] t_hrf,
double[] hrf,
int k) |
|
void |
gen_regular_ai_s(double[] ai_s,
double[] i_s,
double[] t,
int dur,
double tr,
double dur_bloc,
boolean centered) |
|
void |
gen_regular_bloc_bold(double[] noisy_ar_s,
double[] ar_s,
double[] ai_s,
double[] i_s,
double[] t,
double[] noise,
int dur,
double tr,
double dur_bloc,
boolean sourcehrf,
double[] hrf,
double snr,
boolean haveSeed,
long random_state) |
|
void |
gen_rnd_ai_s(double[] ai_s,
double[] i_s,
double[] t,
double dur,
double tr,
int nb_events,
int avg_dur,
double std_dur,
boolean middle_spike,
boolean overlapping,
boolean unitary_block,
boolean haveSeed,
long random_state,
int nb_try,
int nb_try_duration,
boolean centered) |
|
void |
gen_rnd_bloc_bold(double[] noisy_ar_s,
double[] ar_s,
double[] ai_s,
double[] i_s,
double[] t,
double[] noise,
double dur,
double tr,
boolean sourcehrf,
double[] hrf,
int nb_events,
int avg_dur,
double std_dur,
boolean middle_spike,
boolean overlapping,
boolean unitary_block,
double snr,
int nb_try,
int nb_try_duration,
boolean centered,
boolean haveSeed,
long random_state) |
|
void |
gen_rnd_event_bold(double[] noisy_ar_s,
double[] ar_s,
double[] i_s,
double[] t,
double[] noise,
int dur,
double tr,
boolean sourcehrf,
double[] hrf,
int nb_events,
double avg_ampl,
double std_ampl,
double snr,
boolean haveSeed,
long random_state) |
|
void |
gen_rnd_i_s(double[] i_s,
double[] t,
int dur,
double tr,
int nb_events,
double avg_ampl,
double std_ampl,
boolean haveSeed,
long random_state,
int nb_try,
int nb_try_duration,
boolean centered) |
|
void |
hrf_estim(double[] h,
java.util.Vector<java.lang.Double> J,
double[] z,
double[] y,
double t_r,
double dur,
int verbose) |
|
double |
hrf_fit_err(double theta,
double[] z,
double[] y,
double t_r,
double hrf_dur) |
|
private double |
inf_norm(double[] x) |
|
private double |
inf_norm(java.util.Vector<java.lang.Double> x) |
|
double[] |
irfft(double[][] x,
boolean isOdd) |
|
double |
log2(double x) |
|
double |
mad(double[] x,
double c) |
|
double |
mad_daub_noise_est(double[] x,
double c) |
|
double |
median(double[] x) |
|
double |
norm(double[] x) |
|
java.util.Random |
random_generator(long random_state) |
|
double[][] |
rfft(double[] x) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
double |
sign(double x) |
|
double[] |
simple_convolve(double[] k,
double[] x,
int dim_out) |
|
void |
simple_hrf_estimation() |
|
double[] |
simple_retro_convolve(double[] k,
double[] x,
int dim_out) |
|
double[] |
spectral_convolve(double[] k,
double[] xin) |
|
double[] |
spectral_deconvolve(double[] k,
double[] x) |
|
double |
spectral_radius_est(fMRIBlindDeconvolution.ConvAndLinear L,
int x_shape,
int nb_iter,
double tol,
boolean verbose) |
|
double[] |
spectral_retro_convolve(double[] k,
double[] xin) |
|
double[] |
spectral_retro_deconvolve(double[] k,
double[] x) |
|
void |
spm_hrf(double[] hrf,
double[] t_hrf,
double delta,
double t_r,
double dur,
boolean normalized_hrf,
double dt,
double p_delay,
double undershoot,
double p_disp,
double u_disp,
double p_u_ratio,
double onset) |
|
double |
std(double[] x) |
|
void |
test_data_gen() |
|
void |
test_fourier_adj_convolution_kernel_hrf_on_ai_s() |
|
void |
test_fourier_adj_convolution_kernel_hrf_on_dirac() |
|
void |
test_fourier_convolution_kernel_hrf_on_ai_s() |
|
void |
test_fourier_convolution_kernel_hrf_on_dirac() |
|
void |
test_inf_norm() |
|
void |
test_integ_adj() |
|
void |
test_integ_op() |
|
void |
test_power_2_padding_length() |
|
void |
test_toeplitz_adj_convolution_kernel_hrf_on_ai_s() |
|
void |
test_toeplitz_adj_convolution_kernel_hrf_on_dirac() |
|
void |
test_toeplitz_adj_convolution_kernel_signal_on_ai_s() |
|
void |
test_toeplitz_adj_convolution_kernel_signal_on_dirac() |
|
void |
test_toeplitz_convolution_kernel_hrf_on_ai_s() |
|
void |
test_toeplitz_convolution_kernel_hrf_on_dirac() |
|
void |
test_toeplitz_convolution_kernel_signal_on_ai_s() |
|
void |
test_toeplitz_convolution_kernel_signal_on_dirac() |
|
void |
test_zero_mirror_zero_padd_unpadd() |
|
void |
test_zero_padd_unpadd() |
|
double[][] |
toeplitz_from_kernel(double[] k,
int dim_in,
int dim_out) |
|
double |
tp(double[] t_hrf,
double[] hrf) |
|
void |
yield_blocks_signal(double[][] ai_s,
double[][] hrf,
double[][] alpha,
double[] tr) |
|
void |
yield_diracs_signal(double[][] i_s,
double[][] hrf,
double[][] alpha,
double[] tr) |
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
private void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
MIN_DELTA
private final double MIN_DELTA
Reference:
Hamza Cherkaoui, Thomas Moreau, Abderrahim Halimi, Philippe Ciuciu. Sparsity-based blind
deconvolution of neural activation signal in fMRI. IEEE-ICASSP 2019 - International Conference on
Acoustics, Speech and Signal Processing, May 2019, Brighton, United Kingdom. ffhal-02085810v2
- See Also:
- Constant Field Values
-
Method Detail
-
spm_hrf
public void spm_hrf(double[] hrf,
double[] t_hrf,
double delta,
double t_r,
double dur,
boolean normalized_hrf,
double dt,
double p_delay,
double undershoot,
double p_disp,
double u_disp,
double p_u_ratio,
double onset)
-
_padd_assymetric
public double[][] _padd_assymetric(double[][] arrays,
int[] p,
double c,
java.lang.String paddtype)
-
_custom_padd
public double[] _custom_padd(int[] p_total,
double[] a,
int min_power_of_2,
int min_zero_padd,
double zero_padd_ratio)
-
custom_padd
public double[][] custom_padd(int[] padd,
double[][] arrays,
int min_power_of_2,
int min_zero_padd,
double zero_padd_ratio)
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zdiv
private void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
add_gaussian_noise
public void add_gaussian_noise(double[] noisy_signal,
double[] noise,
double[] signal,
double snr,
boolean haveSeed,
long random_state)
-
gen_rnd_ai_s
public void gen_rnd_ai_s(double[] ai_s,
double[] i_s,
double[] t,
double dur,
double tr,
int nb_events,
int avg_dur,
double std_dur,
boolean middle_spike,
boolean overlapping,
boolean unitary_block,
boolean haveSeed,
long random_state,
int nb_try,
int nb_try_duration,
boolean centered)
-
gen_rnd_bloc_bold
public void gen_rnd_bloc_bold(double[] noisy_ar_s,
double[] ar_s,
double[] ai_s,
double[] i_s,
double[] t,
double[] noise,
double dur,
double tr,
boolean sourcehrf,
double[] hrf,
int nb_events,
int avg_dur,
double std_dur,
boolean middle_spike,
boolean overlapping,
boolean unitary_block,
double snr,
int nb_try,
int nb_try_duration,
boolean centered,
boolean haveSeed,
long random_state)
-
_yield_data
public void _yield_data(double[][] noisy_ar_s,
double[][] ar_s,
double[][] ai_s,
double[][] i_s,
double[][] hrf,
double[][] noise,
double[] snr,
int[] nb_events)
-
_test_data
public void _test_data(double[] noisy_ar_s,
double[] ar_s,
double[] ai_s,
double[] i_s,
double[] hrf,
double[] noise,
double snr,
int nb_events,
java.lang.String testnum)
-
gen_regular_ai_s
public void gen_regular_ai_s(double[] ai_s,
double[] i_s,
double[] t,
int dur,
double tr,
double dur_bloc,
boolean centered)
-
gen_regular_bloc_bold
public void gen_regular_bloc_bold(double[] noisy_ar_s,
double[] ar_s,
double[] ai_s,
double[] i_s,
double[] t,
double[] noise,
int dur,
double tr,
double dur_bloc,
boolean sourcehrf,
double[] hrf,
double snr,
boolean haveSeed,
long random_state)
-
gen_rnd_i_s
public void gen_rnd_i_s(double[] i_s,
double[] t,
int dur,
double tr,
int nb_events,
double avg_ampl,
double std_ampl,
boolean haveSeed,
long random_state,
int nb_try,
int nb_try_duration,
boolean centered)
-
gen_rnd_event_bold
public void gen_rnd_event_bold(double[] noisy_ar_s,
double[] ar_s,
double[] i_s,
double[] t,
double[] noise,
int dur,
double tr,
boolean sourcehrf,
double[] hrf,
int nb_events,
double avg_ampl,
double std_ampl,
double snr,
boolean haveSeed,
long random_state)
-
deconv
public void deconv(double[] x,
double[] z,
double[] diff_z,
java.util.Vector<java.lang.Double> J,
java.util.Vector<java.lang.Double> R,
java.util.Vector<java.lang.Double> G,
double[] y,
double t_r,
double[] hrf,
double lbda,
boolean early_stopping,
double tol,
int wind,
int nb_iter,
int nb_sub_iter,
int verbose)
-
hrf_fit_err
public double hrf_fit_err(double theta,
double[] z,
double[] y,
double t_r,
double hrf_dur)
-
hrf_estim
public void hrf_estim(double[] h,
java.util.Vector<java.lang.Double> J,
double[] z,
double[] y,
double t_r,
double dur,
int verbose)
-
_loops_deconv
public double[] _loops_deconv(double[] y,
double[] diff_z,
double[][] H,
double lbda,
long nb_iter,
boolean early_stopping,
long wind,
double tol)
-
bd
public void bd(java.util.Vector<java.lang.Double> xout,
java.util.Vector<java.lang.Double> zout,
java.util.Vector<java.lang.Double> diff_zout,
java.util.Vector<java.lang.Double> hout,
java.util.Vector<java.lang.Double> dr,
java.util.Vector<java.lang.Double> dg,
java.util.Vector<java.lang.Double> dJ,
double[] y,
double t_r,
double lbda,
double theta,
double[] z_0,
double hrf_dur,
double[] bounds,
int nb_iter,
int nb_sub_iter,
int nb_last_iter,
int print_period,
boolean early_stopping,
int wind,
double tol,
int verbose)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.svm_problem.html����������������������������������������������0000775�4231163�4231163�00000024114�14537076056�023434� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.svm_problem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LIBSVM.svm_problem
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
svm_problem
public svm_problem()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmThresholdDual.html������������������������������������������0000775�4231163�4231163�00000104351�14537076050�024521� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmThresholdDual (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
BINARY_TYPE |
DOCUMENT ME!
|
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private float |
fillValue |
All values outside the thresholds are set to this value.
|
private boolean |
isInverse |
Inverse threshold: false means turn all pixels outside of the lower and upper thresholds to the given fill value,
true means turn all data within the lower and upper thresholds to the fill value (fill value can also be binary
(0)).
|
static int |
ORIGINAL_TYPE |
DOCUMENT ME!
|
private int |
outputType |
Type of output (same type, binary, or unsigned byte).
|
private int |
pixelsInRange |
Variable that will store the total number of pixels in thresholding range
|
private float[] |
threshold |
Array of two thresholds. threshold[0] = Minimum threshold, threshold[1] = Maximum threshold.
|
static int |
UNSIGNED_BYTE_TYPE |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmThresholdDual(ModelImage srcImg,
float[] threshold,
float fillValue,
int output_type,
boolean maskFlag,
boolean isInverse) |
Creates a new AlgorithmThresholdDual object.
|
AlgorithmThresholdDual(ModelImage destImg,
ModelImage srcImg,
float[] threshold,
float fillValue,
int output_type,
boolean maskFlag,
boolean isInverse) |
Creates a new AlgorithmThresholdDual object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false on process the image over the mask
areas.
-
isInverse
private boolean isInverse
Inverse threshold: false means turn all pixels outside of the lower and upper thresholds to the given fill value,
true means turn all data within the lower and upper thresholds to the fill value (fill value can also be binary
(0)).
-
threshold
private float[] threshold
Array of two thresholds. threshold[0] = Minimum threshold, threshold[1] = Maximum threshold.
-
Constructor Detail
-
AlgorithmThresholdDual
public AlgorithmThresholdDual(ModelImage srcImg,
float[] threshold,
float fillValue,
int output_type,
boolean maskFlag,
boolean isInverse)
Creates a new AlgorithmThresholdDual object.
- Parameters:
srcImg - source image modelthreshold - array of two thresholdsfillValue - all values outside the thresholds are set to this valueoutput_type - same type, binary, or unsigned bytemaskFlag - true indicates that the whole image should be processedisInverse - false means turn all pixels outside of the lower and upper thresholds to the given fill
value, true means turn all data within the lower and upper thresholds to the fill value
-
AlgorithmThresholdDual
public AlgorithmThresholdDual(ModelImage destImg,
ModelImage srcImg,
float[] threshold,
float fillValue,
int output_type,
boolean maskFlag,
boolean isInverse)
Creates a new AlgorithmThresholdDual object.
- Parameters:
destImg - image model where result image is to be storedsrcImg - source image modelthreshold - array of two thresholdsfillValue - all values outside the thresholds are set to this valueoutput_type - same type, binary, or unsigned bytemaskFlag - true indicates that the whole image should be processedisInverse - false means turn all pixels outside of the lower and upper thresholds to the given fill
value, true means turn all data within the lower and upper thresholds to the fill value
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRETAcceptorPhotobleach.html��������������������������������0000775�4231163�4231163�00000101152�14537076046�026352� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRETAcceptorPhotobleach (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFRETAcceptorPhotobleach(ModelImage preImage,
ModelImage postImage,
boolean useRed,
boolean useGreen,
boolean useBlue,
int donorIndex,
int backgroundIndex,
int signalIndex,
boolean register,
int cost,
boolean createRegImage) |
Creates a new AlgorithmFRETAcceptorPhotobleach object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
cost
private int cost
DOCUMENT ME!
-
donorIndex
private int donorIndex
DOCUMENT ME!
-
register
private boolean register
DOCUMENT ME!
-
signalIndex
private int signalIndex
DOCUMENT ME!
-
useBlue
private boolean useBlue
DOCUMENT ME!
-
useGreen
private boolean useGreen
DOCUMENT ME!
-
useRed
private boolean useRed
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmFRETAcceptorPhotobleach
public AlgorithmFRETAcceptorPhotobleach(ModelImage preImage,
ModelImage postImage,
boolean useRed,
boolean useGreen,
boolean useBlue,
int donorIndex,
int backgroundIndex,
int signalIndex,
boolean register,
int cost,
boolean createRegImage)
Creates a new AlgorithmFRETAcceptorPhotobleach object.
- Parameters:
preImage - image before acceptor photobleaching or 2 slice 3D imagepostImage - image after acceptor photobleaching null if 3D image is useduseRed - If true, use the red color values for the FRETuseGreen - If true, use the green color values for the FRETuseBlue - If true, use the blue color values for the FRETdonorIndex - the index of the donor VOIbackgroundIndex - the index of the background VOI if >= 0signalIndex - the index of the signal normalization VOI if >= 0register - If true register the preImage to the postImage before FRETcost - Cost function used in registrationcreateRegImage - If register = true and createRegImage = true, then create a frame with the registered
image
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.ExtendedWilkinson.html�����������������������������������0000775�4231163�4231163�00000061036�14537076053�026042� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.ExtendedWilkinson (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected double[] |
Q |
preference-decreasing ordered set of nice increments
|
protected double[] |
w |
weights for simplicity, coverage, density and legibility
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
(package private) static double |
coverage(double dmin,
double dmax,
double lmin,
double lmax) |
|
(package private) static double |
coverage_max(double dmin,
double dmax,
double span) |
|
(package private) static double |
density(double k,
double m,
double dmin,
double dmax,
double lmin,
double lmax) |
|
(package private) static double |
density_max(double k,
double m) |
|
(package private) static double[] |
ext_wilk(double dmin,
double dmax,
int m,
int onlyInside,
double[] Q,
double[] w) |
|
ContourPlot.Pair<double[],java.lang.String[]> |
genTicksAndLabels(double min,
double max,
int desiredNumTicks,
boolean verticalAxis) |
Generates a number of tick marks and corresponding labels.
|
(package private) static double[] |
getTicks(double dmin,
double dmax,
int m,
double[] Q,
double[] w) |
|
protected java.lang.String[] |
labelsForTicks(double[] ticks) |
Uses either decimal or scientific notation for the labels and strips unnecessary
trailing zeros.
|
(package private) static double |
legibility(double lmin,
double lmax,
double lstep) |
|
(package private) static double |
score(double[] weights,
double simplicity,
double coverage,
double density,
double legibility) |
|
(package private) static double |
simplicity(double q,
double[] Q,
double j,
double lmin,
double lmax,
double lstep) |
|
(package private) static double |
simplicity_max(double q,
double[] Q,
int j) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
labelsForTicks
protected java.lang.String[] labelsForTicks(double[] ticks)
Uses either decimal or scientific notation for the labels and strips unnecessary
trailing zeros.
If one of the specified tick values is formatted in scientific notation by the
String.format(String, Object...) '%g' option, all values will use scientific
notation, otherwise decimal is used.
- Parameters:
ticks - to be labeled- Returns:
- String[] of labels corresponding to specified tick values
-
genTicksAndLabels
public ContourPlot.Pair<double[],java.lang.String[]> genTicksAndLabels(double min,
double max,
int desiredNumTicks,
boolean verticalAxis)
Generates a number of tick marks and corresponding labels.
The first entry of the returned pair are the tick mark values,
the second part are the corresponding labels.
- Specified by:
genTicksAndLabels in interface ContourPlot.TickMarkGenerator- Parameters:
min - minimum of value range for which ticks marks are to be generatedmax - maximum of value range for which ticks marks are to be generateddesiredNumTicks - the desired number of generated tick marks, not obligatory,
can also create less or more tick marks if that leads to better tick values.verticalAxis - true if marks are for vertical axis, false when for horizontal axis- Returns:
- pair of a tick mark value array and corresponding label array for these values
-
density
static double density(double k,
double m,
double dmin,
double dmax,
double lmin,
double lmax)
-
simplicity
static double simplicity(double q,
double[] Q,
double j,
double lmin,
double lmax,
double lstep)
-
score
static double score(double[] weights,
double simplicity,
double coverage,
double density,
double legibility)
-
ext_wilk
static double[] ext_wilk(double dmin,
double dmax,
int m,
int onlyInside,
double[] Q,
double[] w)
-
getTicks
static double[] getTicks(double dmin,
double dmax,
int m,
double[] Q,
double[] w)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Erfinv.html����������������������������������������������������������0000775�4231163�4231163�00000043661�14537076054�021353� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Erfinv (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Erfinv
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[][] |
close_to_1 |
|
(package private) double[][] |
joining_points |
|
(package private) double[][] |
uniform_data |
Original C++ code by Lakshay Garg ported to Java by William Gandler
Implementation of the inverse error function based on the rational
approximation of percentage points of normal distribution available from
https://www.jstor.org/stable/2347330.
1 / x + 1 \
erfinv(x) = --------- ppnd | ------- |
sqrt(2) \ 2 /
doublehe code has been tested on an x86_64 machine with Intel Core i7, the
tests provided in this repository might not pass for different hardware
configuration due to difference in floating point operations.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Erfinv() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
uniform_data
final double[][] uniform_data
Original C++ code by Lakshay Garg ported to Java by William Gandler
Implementation of the inverse error function based on the rational
approximation of percentage points of normal distribution available from
https://www.jstor.org/stable/2347330.
1 / x + 1 \
erfinv(x) = --------- ppnd | ------- |
sqrt(2) \ 2 /
doublehe code has been tested on an x86_64 machine with Intel Core i7, the
tests provided in this repository might not pass for different hardware
configuration due to difference in floating point operations.
golang's math library uses the same implementation for erfinv
MIdouble License
Copyright (c) 2017-2019 Lakshay Garg
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
doublehe above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
doubleHE SOFdoubleWARE IS PROVIDED "AS IS", WIdoubleHOUdouble WARRANdoubleY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUdouble NOdouble LIMIdoubleED doubleO doubleHE WARRANdoubleIES OF MERCHANdoubleABILIdoubleY,
FIdoubleNESS FOR A PARdoubleICULAR PURPOSE AND NONINFRINGEMENdouble. IN NO EVENdouble SHALL doubleHE
AUdoubleHORS OR COPYRIGHdouble HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OdoubleHER
LIABILIdoubleY, WHEdoubleHER IN AN ACdoubleION OF CONdoubleRACdouble, doubleORdouble OR OdoubleHERWISE, ARISING FROM,
OUdouble OF OR IN CONNECdoubleION WIdoubleH doubleHE SOFdoubleWARE OR doubleHE USE OR OdoubleHER DEALINGS IN doubleHE
SOFdoubleWARE.
-
Method Detail
-
test_ppnd7
public void test_ppnd7()
�������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/PreconditionedConjugateGradient.html���������������������������������0000775�4231163�4231163�00000036721�14537076056�026407� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PreconditionedConjugateGradient (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
public class PreconditionedConjugateGradient
extends java.lang.Object
MIT License
Copyright (c) 2018 Komahan Boopathy
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
Ported to Java from routine dpcg in linear_algebra.f90 in linear-nonlinear-algebra
package by William Gandler
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[][] |
A |
|
private double[] |
b |
|
private int[] |
flag |
|
private int[] |
iter |
|
private double[][] |
M |
|
private int |
max_it |
|
private double |
max_tol |
|
private double[] |
tol |
|
private double[] |
x |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
PreconditionedConjugateGradient(double[][] A,
double[][] M,
double[] b,
int max_it,
double max_tol,
double[] x,
int[] iter,
double[] tol,
int[] flag) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
max_it
private int max_it
-
max_tol
private double max_tol
-
Constructor Detail
-
PreconditionedConjugateGradient
public PreconditionedConjugateGradient(double[][] A,
double[][] M,
double[] b,
int max_it,
double max_tol,
double[] x,
int[] iter,
double[] tol,
int[] flag)
�����������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.Forest.html����������������������������������������0000775�4231163�4231163�00000174535�14537076057�025045� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.Forest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Forest() |
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected abstract void |
allocatePredictMemory() |
|
void |
computePermutationImportance() |
|
void |
computePredictionError() |
|
protected abstract void |
computePredictionErrorInternal() |
|
void |
dispose() |
|
java.util.Vector<java.util.Vector<java.util.Vector<java.lang.Integer>>> |
getChildNodeIDs() |
|
int |
getDependentVarId() |
|
java.util.Vector<java.util.Vector<java.lang.Integer>> |
getInbagCounts() |
|
java.util.Vector<java.lang.Boolean> |
getIsOrderedVariable() |
|
int |
getMinNodeSize() |
|
int |
getMtry() |
|
int |
getNumIndependentVariables() |
|
int |
getNumTrees() |
|
double |
getOverallPredictionError() |
|
java.util.Vector<java.util.Vector<java.util.Vector<java.lang.Double>>> |
getPredictions() |
|
java.util.Vector<java.util.Vector<java.lang.Double>> |
getSplitValues() |
|
java.util.Vector<java.util.Vector<java.lang.Integer>> |
getSplitVarIDs() |
|
java.util.Vector<java.lang.Double> |
getVariableImportance() |
|
void |
grow() |
|
protected abstract void |
growInternal() |
|
void |
init(java.lang.String dependent_variable_name,
StochasticForests.MemoryMode memory_mode,
StochasticForests.Data input_data,
int mtry,
java.lang.String output_prefix,
int num_trees,
long seed,
int num_threads,
StochasticForests.ImportanceMode importance_mode,
int min_node_size,
java.lang.String status_variable_name,
boolean prediction_mode,
boolean sample_with_replacement,
java.util.Vector<java.lang.String> unordered_variable_names,
boolean memory_saving_splitting,
StochasticForests.SplitRule splitrule,
boolean predict_all,
java.util.Vector<java.lang.Double> sample_fraction,
double alpha,
double minprop,
boolean holdout,
StochasticForests.PredictionType prediction_type,
int num_random_splits) |
|
void |
initCpp(java.lang.String dependent_variable_name,
StochasticForests.MemoryMode memory_mode,
java.lang.String input_file,
int mtry,
java.lang.String output_prefix,
int num_trees,
boolean verbose_out,
long seed,
int num_threads,
java.lang.String load_forest_filename,
StochasticForests.ImportanceMode importance_mode,
int min_node_size,
java.lang.String split_select_weights_file,
java.util.Vector<java.lang.String> always_split_variable_names,
java.lang.String status_variable_name,
boolean sample_with_replacement,
java.util.Vector<java.lang.String> unordered_variable_names,
boolean memory_saving_splitting,
StochasticForests.SplitRule splitrule,
java.lang.String case_weights_file,
boolean predict_all,
double sample_fraction,
double alpha,
double minprop,
boolean holdout,
StochasticForests.PredictionType prediction_type,
int num_random_splits) |
|
abstract void |
initInternal(java.lang.String status_variable_name) |
|
void |
initR(java.lang.String dependent_variable_name,
StochasticForests.Data input_data,
int mtry,
int num_trees,
boolean verbose_out,
long seed,
int num_threads,
StochasticForests.ImportanceMode importance_mode,
int min_node_size,
java.util.Vector<java.util.Vector<java.lang.Double>> split_select_weights,
java.util.Vector<java.lang.String> always_split_variable_names,
java.lang.String status_variable_name,
boolean prediction_mode,
boolean sample_with_replacement,
java.util.Vector<java.lang.String> unordered_variable_names,
boolean memory_saving_splitting,
StochasticForests.SplitRule splitrule,
java.util.Vector<java.lang.Double> case_weights,
boolean predict_all,
boolean keep_inbag,
java.util.Vector<java.lang.Double> sample_fraction,
double alpha,
double minprop,
boolean holdout,
StochasticForests.PredictionType prediction_type,
int num_random_splits) |
|
void |
loadFromFile(java.lang.String filename) |
|
protected abstract void |
loadFromFileInternal(java.io.BufferedReader br) |
|
void |
predict() |
|
protected abstract void |
predictInternal(int sample_idx) |
|
void |
run(boolean verbose) |
|
void |
saveToFile() |
|
abstract void |
saveToFileInternal(java.io.BufferedWriter bw) |
|
void |
setAlwaysSplitVariables(java.util.Vector<java.lang.String> always_split_variable_names) |
|
void |
setSplitWeightVector(java.util.Vector<java.util.Vector<java.lang.Double>> split_select_weights) |
|
abstract void |
writeConfusionFile() |
|
void |
writeImportanceFile() |
|
void |
writeOutput() |
|
abstract void |
writeOutputInternal() |
|
abstract void |
writePredictionFile() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_trees
protected int num_trees
-
alpha
protected double alpha
-
minprop
protected double minprop
-
progress
protected int progress
-
Method Detail
-
getNumTrees
public int getNumTrees()
-
getMtry
public int getMtry()
-
dispose
public void dispose()
-
initCpp
public void initCpp(java.lang.String dependent_variable_name,
StochasticForests.MemoryMode memory_mode,
java.lang.String input_file,
int mtry,
java.lang.String output_prefix,
int num_trees,
boolean verbose_out,
long seed,
int num_threads,
java.lang.String load_forest_filename,
StochasticForests.ImportanceMode importance_mode,
int min_node_size,
java.lang.String split_select_weights_file,
java.util.Vector<java.lang.String> always_split_variable_names,
java.lang.String status_variable_name,
boolean sample_with_replacement,
java.util.Vector<java.lang.String> unordered_variable_names,
boolean memory_saving_splitting,
StochasticForests.SplitRule splitrule,
java.lang.String case_weights_file,
boolean predict_all,
double sample_fraction,
double alpha,
double minprop,
boolean holdout,
StochasticForests.PredictionType prediction_type,
int num_random_splits)
-
initR
public void initR(java.lang.String dependent_variable_name,
StochasticForests.Data input_data,
int mtry,
int num_trees,
boolean verbose_out,
long seed,
int num_threads,
StochasticForests.ImportanceMode importance_mode,
int min_node_size,
java.util.Vector<java.util.Vector<java.lang.Double>> split_select_weights,
java.util.Vector<java.lang.String> always_split_variable_names,
java.lang.String status_variable_name,
boolean prediction_mode,
boolean sample_with_replacement,
java.util.Vector<java.lang.String> unordered_variable_names,
boolean memory_saving_splitting,
StochasticForests.SplitRule splitrule,
java.util.Vector<java.lang.Double> case_weights,
boolean predict_all,
boolean keep_inbag,
java.util.Vector<java.lang.Double> sample_fraction,
double alpha,
double minprop,
boolean holdout,
StochasticForests.PredictionType prediction_type,
int num_random_splits)
-
init
public void init(java.lang.String dependent_variable_name,
StochasticForests.MemoryMode memory_mode,
StochasticForests.Data input_data,
int mtry,
java.lang.String output_prefix,
int num_trees,
long seed,
int num_threads,
StochasticForests.ImportanceMode importance_mode,
int min_node_size,
java.lang.String status_variable_name,
boolean prediction_mode,
boolean sample_with_replacement,
java.util.Vector<java.lang.String> unordered_variable_names,
boolean memory_saving_splitting,
StochasticForests.SplitRule splitrule,
boolean predict_all,
java.util.Vector<java.lang.Double> sample_fraction,
double alpha,
double minprop,
boolean holdout,
StochasticForests.PredictionType prediction_type,
int num_random_splits)
-
saveToFile
public void saveToFile()
-
predict
public void predict()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LinearLeastSquaresProblem.html���������������������������0000775�4231163�4231163�00000026107�14537076051�027436� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LinearLeastSquaresProblem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LinearLeastSquaresProblem
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.ConfigFile.html������������������������������������������������0000775�4231163�4231163�00000042504�14537076055�023220� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.ConfigFile (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.util.HashMap<java.lang.String,java.lang.String> |
contents |
|
private java.lang.String |
fName |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ConfigFile(java.lang.String fName) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CoordinateDescentMinimizer.html��������������������������0000775�4231163�4231163�00000051326�14537076051�027630� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CoordinateDescentMinimizer (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Init(CeresSolver.Program program,
java.util.HashMap<double[],CeresSolver.ParameterBlock> parameter_map,
CeresSolver.OrderedGroups<double[]> ordering,
java.lang.String[] error) |
|
void |
Minimize(CeresSolver.MinimizerOptions options,
double[] parameters,
CeresSolver.SolverSummary summary) |
|
void |
Minimize(CeresSolver.MinimizerOptions options,
java.util.Vector<java.lang.Double> parameters,
CeresSolver.SolverSummary summary) |
|
private void |
Solve(CeresSolver.Program program,
CeresSolver.LinearSolver linear_solver,
double[] parameter,
int parameter_start,
CeresSolver.SolverSummary summary) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Gauss_filter.html���������������������������������������������0000775�4231163�4231163�00000022767�14537076056�023512� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Gauss_filter (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Gauss_filter
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Gauss_filter
public Gauss_filter()
���������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftClustering.fams_res_cont.html����������������������0000775�4231163�4231163�00000032307�14537076047�030525� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftClustering.fams_res_cont (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_res_cont
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getNel
public int getNel()
-
clear
public void clear()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LineSearchPreprocessor.html������������������������������0000775�4231163�4231163�00000032340�14537076052�026767� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearchPreprocessor (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmDEMRI3.html�������������������������������������������������0000775�4231163�4231163�00000114311�14537076045�022703� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDEMRI3 (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmDEMRI3
extends AlgorithmBase
3 model parameters are fit for each voxel in 3D:
1) K_trans in [0, 0.99]
2) User choice of k_ep in [0, 0.99] or ve
3) f_vp in [0, 0.99]
K_trans and k_ep default to rates per second, but the user changed select rates per minute.
srcImage is a dynamic "4D volume" of MRI signal (3D over time).
An optional intrinsic relaxivity map may be obtained by acquiring two acquisition scans at low and high
flip angles; otherwise, a single tissue relaxivity can be assumed for the whole brain.
References:
1.) "A Unified Magnetic Resonance Imaging Pharmacokinetic Theory: Intravascular and Extracellular Contrast
Reagents" by Xin Li, William D. Rooney, and Charles S. Springer, Jr., Magnetic Resonance in Medicine,
Vol. 54, 2005, pp. 1351-1359.
2.) Erratum: Magnetic Resonance in Medicine, Vol. 55, 2006, p.1217.
3.) Quantitative MRI of the Brain, Edited by Paul Tofts, 2003, John Wiley & Sons, Ltd.,
ISBN: 0-47084721-2, Chapter 10, T1-w DCE-MRI: T1-weighted Dynamic Contrast-enhanced MRI by
Geoff J. M. Parker and Anwar R. Padhani.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
comp |
|
private double |
cos0 |
|
private double[] |
elist |
|
private double |
epsilon |
|
private int |
FIRST_VOLUME_TISSUE |
|
private int |
i |
|
(package private) double[] |
initial |
|
private double[] |
max_constr |
|
private double[] |
min_constr |
|
private double[] |
mp |
1D Mp(t) data from sagittal sinus VOI
|
private int |
nFirst |
nfirst injection TR index of input dataset (0 - 1000)
Number of TRs before Gd injection
|
private boolean |
perMinute |
If perMinute == false, K_trans and k_ep are per second
If perMinute == true, K_trans and k_ep are per minute
|
private double |
r1 |
Contrast relaxivity rate in 1/(mMol*sec) (0.0 - 1000.0)
|
private double[] |
r1i |
non-uniform tissue intrinsic relaxivity map from input 3d + t = 4D image
|
private double |
rib |
blood intrinsic relaxivity rate in 1/(mMol * sec)
input as reciprocal, in seconds (0.001 - 10000.0)
|
private double |
rit |
tissue intrinsic relaxivity rate in 1/(mMol * sec)
specified as reciprocal, in seconds (0.001 - 10000.0)
|
private int |
SEPARATE_VOLUME_TISSUE |
|
private int |
tDim |
|
private double |
tf |
Time between frames (volumes) in seconds (0.1 - 30.0)
|
private double |
theta |
Flip angle in degrees (0.0 - 90.0)
|
private ModelImage |
tissueImage |
|
private int |
tissueSource |
|
private double |
tr |
Time between shots in seconds (0.0 - 10000.0)
|
private boolean |
userSpecifiedBlood |
If true, user specifed rib, otherwise, voi specified rib
|
private boolean |
useVe |
If false, second parameter is back-transfer rate (k_ep)
If true, Second parameter is external celluar volume fraction (ve)
|
private int |
xDim |
|
private int |
yDim |
|
private double[] |
ymodel |
|
private int |
zDim |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmDEMRI3(ModelImage destImage,
ModelImage srcImage,
double[] min_constr,
double[] max_constr,
double r1,
boolean userSpecifiedBlood,
double rib,
int tissueSource,
double rit,
ModelImage tissueImage,
double theta,
double tr,
boolean perMinute,
int nFirst,
boolean useVe) |
Creates a new AlgorithmDEMRI3 object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
userSpecifiedBlood
private boolean userSpecifiedBlood
If true, user specifed rib, otherwise, voi specified rib
-
tissueSource
private int tissueSource
-
perMinute
private boolean perMinute
If perMinute == false, K_trans and k_ep are per second
If perMinute == true, K_trans and k_ep are per minute
-
epsilon
private double epsilon
-
comp
private double[] comp
-
elist
private double[] elist
-
ymodel
private double[] ymodel
-
Constructor Detail
-
AlgorithmDEMRI3
public AlgorithmDEMRI3(ModelImage destImage,
ModelImage srcImage,
double[] min_constr,
double[] max_constr,
double r1,
boolean userSpecifiedBlood,
double rib,
int tissueSource,
double rit,
ModelImage tissueImage,
double theta,
double tr,
boolean perMinute,
int nFirst,
boolean useVe)
Creates a new AlgorithmDEMRI3 object.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/QuarticEquation.complex_t.html���������������������������������������0000775�4231163�4231163�00000022522�14537076056�025224� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
QuarticEquation.complex_t (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.QuarticEquation.complex_t
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
imag |
|
(package private) double |
real |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
complex_t() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LineSearchDirection.html���������������������������������0000775�4231163�4231163�00000031075�14537076051�026224� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearchDirection (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirection
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd14.html��������������������������������������0000775�4231163�4231163�00000030506�14537076055�025065� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd14 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd14(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd14
public Fitqd14(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TerminationType.html�������������������������������������0000775�4231163�4231163�00000037147�14537076052�025510� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TerminationType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.TerminationType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.ForestRegression.html������������������������������0000775�4231163�4231163�00000067570�14537076057�027106� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.ForestRegression (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Forest
alpha, case_weights, data, dependent_varID, deterministic_varIDs, holdout, importance_mode, keep_inbag, memory_mode, memory_saving_splitting, min_node_size, minprop, mtry, mutex, num_independent_variables, num_random_splits, num_samples, num_threads, num_trees, num_variables, output_prefix, overall_prediction_error, predict_all, prediction_mode, prediction_type, predictions, progress, random, sample_fraction, sample_with_replacement, seed, split_select_varIDs, split_select_weights, splitrule, thread_ranges, trees, variable_importance, verbose_out
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Forest
computePermutationImportance, computePredictionError, dispose, getChildNodeIDs, getDependentVarId, getInbagCounts, getIsOrderedVariable, getMinNodeSize, getMtry, getNumIndependentVariables, getNumTrees, getOverallPredictionError, getPredictions, getSplitValues, getSplitVarIDs, getVariableImportance, grow, init, initCpp, initR, loadFromFile, predict, run, saveToFile, setAlwaysSplitVariables, setSplitWeightVector, writeImportanceFile, writeOutput
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
loadForest
public void loadForest(int dependent_varID,
int num_trees,
java.util.Vector<java.util.Vector<java.util.Vector<java.lang.Integer>>> forest_child_nodeIDs,
java.util.Vector<java.util.Vector<java.lang.Integer>> forest_split_varIDs,
java.util.Vector<java.util.Vector<java.lang.Double>> forest_split_values,
java.util.Vector<java.lang.Boolean> is_ordered_variable)
����������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog8.html�����������������������������������0000775�4231163�4231163�00000026621�14537076055�025614� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog8 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog8(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog8
public FitdeHoog8(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.ThreeParameterCostFunctorTest.html�������������������0000775�4231163�4231163�00000044503�14537076053�031152� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.ThreeParameterCostFunctorTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
SetUp
public void SetUp()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEntropyMinimization.html������������������������������������0000775�4231163�4231163�00000223760�14537076045�026021� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEntropyMinimization (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
ac1 |
DOCUMENT ME!
|
private double |
ac2 |
DOCUMENT ME!
|
private double |
ac3 |
DOCUMENT ME!
|
private double |
ac4 |
DOCUMENT ME!
|
private double |
ac5 |
DOCUMENT ME!
|
private double |
ac6 |
DOCUMENT ME!
|
private double |
ac7 |
DOCUMENT ME!
|
private double |
ac8 |
DOCUMENT ME!
|
private double |
ac9 |
DOCUMENT ME!
|
private double |
ad1 |
DOCUMENT ME!
|
private double |
ad2 |
DOCUMENT ME!
|
private double |
ad3 |
DOCUMENT ME!
|
private double |
ad4 |
DOCUMENT ME!
|
private double |
ad5 |
DOCUMENT ME!
|
private double |
ad6 |
DOCUMENT ME!
|
private double |
ad7 |
DOCUMENT ME!
|
private double |
ad8 |
DOCUMENT ME!
|
private double |
ad9 |
DOCUMENT ME!
|
private int |
area |
DOCUMENT ME!
|
private boolean |
backgroundPresent |
DOCUMENT ME!
|
private float[] |
buffer |
DOCUMENT ME!
|
private double |
grayCount |
DOCUMENT ME!
|
private int |
histogramAvailable |
Number of pixels available for histogram formation.
|
private double[] |
idealBuffer |
Buffer holding calculation for noiseless U(x,y).
|
private int |
iter |
DOCUMENT ME!
|
private double |
maximum |
original image maximum.
|
private double |
maximumB |
DOCUMENT ME!
|
private double |
maximumG |
DOCUMENT ME!
|
private double |
maximumR |
DOCUMENT ME!
|
private double |
mc1 |
DOCUMENT ME!
|
private double |
mc10 |
DOCUMENT ME!
|
private double |
mc11 |
DOCUMENT ME!
|
private double |
mc12 |
DOCUMENT ME!
|
private double |
mc13 |
DOCUMENT ME!
|
private double |
mc14 |
DOCUMENT ME!
|
private double |
mc15 |
DOCUMENT ME!
|
private double |
mc16 |
DOCUMENT ME!
|
private double |
mc17 |
DOCUMENT ME!
|
private double |
mc18 |
DOCUMENT ME!
|
private double |
mc19 |
DOCUMENT ME!
|
private double |
mc2 |
DOCUMENT ME!
|
private double |
mc3 |
DOCUMENT ME!
|
private double |
mc4 |
DOCUMENT ME!
|
private double |
mc5 |
DOCUMENT ME!
|
private double |
mc6 |
DOCUMENT ME!
|
private double |
mc7 |
DOCUMENT ME!
|
private double |
mc8 |
DOCUMENT ME!
|
private double |
mc9 |
DOCUMENT ME!
|
private double |
md1 |
DOCUMENT ME!
|
private double |
md10 |
DOCUMENT ME!
|
private double |
md11 |
DOCUMENT ME!
|
private double |
md12 |
DOCUMENT ME!
|
private double |
md13 |
DOCUMENT ME!
|
private double |
md14 |
DOCUMENT ME!
|
private double |
md15 |
DOCUMENT ME!
|
private double |
md16 |
DOCUMENT ME!
|
private double |
md17 |
DOCUMENT ME!
|
private double |
md18 |
DOCUMENT ME!
|
private double |
md19 |
DOCUMENT ME!
|
private double |
md2 |
DOCUMENT ME!
|
private double |
md3 |
DOCUMENT ME!
|
private double |
md4 |
DOCUMENT ME!
|
private double |
md5 |
DOCUMENT ME!
|
private double |
md6 |
DOCUMENT ME!
|
private double |
md7 |
DOCUMENT ME!
|
private double |
md8 |
DOCUMENT ME!
|
private double |
md9 |
DOCUMENT ME!
|
private double |
minimum |
original image minimum.
|
private double |
minimumB |
DOCUMENT ME!
|
private double |
minimumG |
DOCUMENT ME!
|
private double |
minimumR |
DOCUMENT ME!
|
static int |
NOISE_M2 |
Quadratic multiplicative noise.
|
static int |
NOISE_M3 |
Cubic multiplicative noise.
|
static int |
NOISE_MA2 |
The user can choose to use thresholding to exclude the background from any processing.
|
private int |
noiseType |
NOISE_MA2 or NOISE_M2.
|
private int |
nParams |
Numbering of shading correction parameters.
|
private boolean[] |
objectBuffer |
DOCUMENT ME!
|
private int |
pixelIncrement |
pixelIncrement is increased above 1 if subsampling.
|
private double |
powellTolerance |
Tolerance passed to Powell's algorithm.
|
private int |
sliceSize |
xDim * yDim.
|
private boolean |
subsample |
If true, subsample image for histogram formation.
|
private float |
thresholdLevel |
DOCUMENT ME!
|
private boolean |
thresholdSelected |
If true don't use pixels below thresholdLevel that are 4 or 6 neighbor connected to boundary pixels below
thresholdLevel.
|
private boolean[] |
validBuffer |
True for source input locations not having image min or image max values.
|
private int |
volSize |
DOCUMENT ME!
|
private int |
volume |
DOCUMENT ME!
|
private int |
xDim |
DOCUMENT ME!
|
private int |
yDim |
DOCUMENT ME!
|
private int |
zDim |
DOCUMENT ME!
|
private int |
zPixelIncrement |
Handle case where zDim is far less than xDim and yDim
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmEntropyMinimization(ModelImage srcImage,
boolean thresholdSelected,
float thresholdLevel,
boolean subsample,
int noiseType) |
Creates a new AlgorithmEntropyMinimization object.
|
AlgorithmEntropyMinimization(ModelImage resultImage,
ModelImage srcImage,
boolean thresholdSelected,
float thresholdLevel,
boolean subsample,
int noiseType) |
Creates a new AlgorithmEntropyMinimization object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
NOISE_MA2
public static final int NOISE_MA2
The user can choose to use thresholding to exclude the background from any processing. Excluded pixels will have
the same values as the original source image. All pixels with values below threshold that are 4 or 6 neighbor
connected thru below threshold pixels to a boundary pixel which is below threshold will be excluded from
processing. By default image subsampling is used in histogram formation since using 5000 images samples is
sufficient to form the histogram. If subsampling is selected, pixelIncrement for both x and y is set equal to:
Math.max(1,(int)Math.sqrt(histogramAvailable/5000)) If subsampling is not selected, pixelIncrement equals 1
Powell's algorithm is used to search for the values of the 10 shading parameters that minimize the entropy of the
blurred histogram of the U(x,y) image. A histogram is formed to represent integers from the floor(image U
minimum) to the ceiling(image U maximum). For each floating point gray value gp in U(x,y) a count of 1 is split
between the 2 integer bins encompassing it. Let the bins be k and k+1. k+1-gp is added to bin k and gp - k is
added to bin k+1. Gray values in locations corresponding to the image minimum or image maximum in the original
input image are not used in creating this histogram, since they may represent regions where saturation effects
are occurring. Then, a blurred histogram is created from the original histogram. The original histogram is
blurred with a triangular window of size 5: blurredHistogram[i] = originalHistogram[i-2] + 2*
originalHistogram[i-1] + 3*originalHistogram[i] + 2*originalHistogram[i+1] + originalHistogram[i+2] The blurred
histogram is normalized to give probabilities by dividing the count in each bin by the total number of counts in
the blurred histogram. The entropy is formed by summing the -probability(n)*log(probability(n)) over all bins n
with nonzero counts. References: This software implements the algorithm discussed in: 1.) Retrospective shading
correction based on entropy minimization by B. Likar, J. B. A. Maintz, M. A. Viergever, and F. Pernus, Journal of
Microscopy, Vol. 197, Pt 3., March, 2000, pp. 285-295. 2.) Retrospective Correction of MR Intensity Inhomogeneity
by Information Minimization by Bostjan Likar, Max Viergever, and Franjo Pernus, IEEE Transactions on Medical
Imaging, Vol. 20, No. 12, December, 2001, pp. 1398-1410. 3.) Real-time automated visual inspection of color
tablets in pharmaceutical blisters by Joze Derganc, Bostjan Likar, Rok Bernard, Dejan Tomazevic, and Franjo
Pernus, Real-Time Imaging, Vol. 9, 2003, pp. 113-124.
- See Also:
- Constant Field Values
-
ac1
private double ac1
DOCUMENT ME!
-
ac2
private double ac2
DOCUMENT ME!
-
ac3
private double ac3
DOCUMENT ME!
-
ac4
private double ac4
DOCUMENT ME!
-
ac5
private double ac5
DOCUMENT ME!
-
ac6
private double ac6
DOCUMENT ME!
-
ac7
private double ac7
DOCUMENT ME!
-
ac8
private double ac8
DOCUMENT ME!
-
ac9
private double ac9
DOCUMENT ME!
-
ad1
private double ad1
DOCUMENT ME!
-
ad2
private double ad2
DOCUMENT ME!
-
ad3
private double ad3
DOCUMENT ME!
-
ad4
private double ad4
DOCUMENT ME!
-
ad5
private double ad5
DOCUMENT ME!
-
ad6
private double ad6
DOCUMENT ME!
-
ad7
private double ad7
DOCUMENT ME!
-
ad8
private double ad8
DOCUMENT ME!
-
ad9
private double ad9
DOCUMENT ME!
-
area
private int area
DOCUMENT ME!
-
buffer
private float[] buffer
DOCUMENT ME!
-
grayCount
private double grayCount
DOCUMENT ME!
-
iter
private int iter
DOCUMENT ME!
-
maximum
private double maximum
original image maximum.
-
maximumR
private double maximumR
DOCUMENT ME!
-
maximumG
private double maximumG
DOCUMENT ME!
-
maximumB
private double maximumB
DOCUMENT ME!
-
mc1
private double mc1
DOCUMENT ME!
-
mc2
private double mc2
DOCUMENT ME!
-
mc3
private double mc3
DOCUMENT ME!
-
mc4
private double mc4
DOCUMENT ME!
-
mc5
private double mc5
DOCUMENT ME!
-
mc6
private double mc6
DOCUMENT ME!
-
mc7
private double mc7
DOCUMENT ME!
-
mc8
private double mc8
DOCUMENT ME!
-
mc9
private double mc9
DOCUMENT ME!
-
mc10
private double mc10
DOCUMENT ME!
-
mc11
private double mc11
DOCUMENT ME!
-
mc12
private double mc12
DOCUMENT ME!
-
mc13
private double mc13
DOCUMENT ME!
-
mc14
private double mc14
DOCUMENT ME!
-
mc15
private double mc15
DOCUMENT ME!
-
mc16
private double mc16
DOCUMENT ME!
-
mc17
private double mc17
DOCUMENT ME!
-
mc18
private double mc18
DOCUMENT ME!
-
mc19
private double mc19
DOCUMENT ME!
-
md1
private double md1
DOCUMENT ME!
-
md2
private double md2
DOCUMENT ME!
-
md3
private double md3
DOCUMENT ME!
-
md4
private double md4
DOCUMENT ME!
-
md5
private double md5
DOCUMENT ME!
-
md6
private double md6
DOCUMENT ME!
-
md7
private double md7
DOCUMENT ME!
-
md8
private double md8
DOCUMENT ME!
-
md9
private double md9
DOCUMENT ME!
-
md10
private double md10
DOCUMENT ME!
-
md11
private double md11
DOCUMENT ME!
-
md12
private double md12
DOCUMENT ME!
-
md13
private double md13
DOCUMENT ME!
-
md14
private double md14
DOCUMENT ME!
-
md15
private double md15
DOCUMENT ME!
-
md16
private double md16
DOCUMENT ME!
-
md17
private double md17
DOCUMENT ME!
-
md18
private double md18
DOCUMENT ME!
-
md19
private double md19
DOCUMENT ME!
-
minimum
private double minimum
original image minimum.
-
minimumR
private double minimumR
DOCUMENT ME!
-
minimumG
private double minimumG
DOCUMENT ME!
-
minimumB
private double minimumB
DOCUMENT ME!
-
noiseType
private int noiseType
NOISE_MA2 or NOISE_M2.
-
sliceSize
private int sliceSize
xDim * yDim.
-
volSize
private int volSize
DOCUMENT ME!
-
volume
private int volume
DOCUMENT ME!
-
xDim
private int xDim
DOCUMENT ME!
-
yDim
private int yDim
DOCUMENT ME!
-
zDim
private int zDim
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmEntropyMinimization
public AlgorithmEntropyMinimization(ModelImage srcImage,
boolean thresholdSelected,
float thresholdLevel,
boolean subsample,
int noiseType)
Creates a new AlgorithmEntropyMinimization object.
- Parameters:
srcImage - original imagethresholdSelected - If true, don't use pixels that are 4 or 6 neighbor connected to boundary pixels below
thresholdLevelthresholdLevel - DOCUMENT ME!subsample - DOCUMENT ME!noiseType - DOCUMENT ME!
-
AlgorithmEntropyMinimization
public AlgorithmEntropyMinimization(ModelImage resultImage,
ModelImage srcImage,
boolean thresholdSelected,
float thresholdLevel,
boolean subsample,
int noiseType)
Creates a new AlgorithmEntropyMinimization object.
- Parameters:
resultImage - entropy minimized imagesrcImage - original imagethresholdSelected - If true, don't use pixels that are 4 or 6 neighbor connected to boundary pixels below
thresholdLevelthresholdLevel - DOCUMENT ME!subsample - DOCUMENT ME!noiseType - DOCUMENT ME!
-
Method Detail
-
powell
private void powell(double[] p,
double[][] xi,
double ftol)
Minimization of entropy function of nParams variables. Input consists of an initial starting point
p[0...nParams-1]; an initial matrix xi[0...nParams-1][0...nParams-1], whose columns contain the initial set of
directions (usually the nParams unit vectors); and ftol, the fractional tolerance in the function value such that
failure to decrease by more than this amount on one iteration signals doneness. On output, p is set to the best
point found, xi is the then-current direction set, fret is the returned function value at p, and iter is the
number of iterations taken.
- Parameters:
p - DOCUMENT ME!xi - DOCUMENT ME!ftol - DOCUMENT ME!
-
run2Da2m2
private void run2Da2m2()
DOCUMENT ME!
-
run2Dm2
private void run2Dm2()
DOCUMENT ME!
-
run2Dm3
private void run2Dm3()
DOCUMENT ME!
-
run3Da2m2
private void run3Da2m2()
DOCUMENT ME!
-
run3Dm2
private void run3Dm2()
DOCUMENT ME!
-
run3Dm3
private void run3Dm3()
DOCUMENT ME!
����������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens11.html��������������������������������0000775�4231163�4231163�00000030443�14537076055�026247� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens11 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens11(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens11
public FitPiessens11(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.VertexOutHalfedgeIterator.html����������������������������������0000775�4231163�4231163�00000033052�14537076056�025751� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.VertexOutHalfedgeIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.VertexOutHalfedgeIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.SUNLinearSolver.html������������������������������������������0000775�4231163�4231163�00000024402�14537076054�024067� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.SUNLinearSolver (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
SUNLinearSolver
SUNLinearSolver()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Erfinv.ppnd7_impl.html�����������������������������������������������0000775�4231163�4231163�00000043044�14537076054�023416� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Erfinv.ppnd7_impl (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
a0 |
|
(package private) double |
a1 |
|
(package private) double |
a2 |
|
(package private) double |
a3 |
|
(package private) double |
b1 |
|
(package private) double |
b2 |
|
(package private) double |
b3 |
|
(package private) double |
c0 |
|
(package private) double |
c1 |
|
(package private) double |
c2 |
|
(package private) double |
c3 |
|
(package private) double |
d1 |
|
(package private) double |
d2 |
|
(package private) double |
e0 |
|
(package private) double |
e1 |
|
(package private) double |
e2 |
|
(package private) double |
e3 |
|
(package private) double |
f1 |
|
(package private) double |
f2 |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.CoordinateViewListener.html������������������������������0000775�4231163�4231163�00000025033�14537076053�027031� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.CoordinateViewListener (MIPAV API Documentation)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Eckerle4CostFunction.html������������������������0000775�4231163�4231163�00000034045�14537076052�027702� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Eckerle4CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Iterators.ImgSpliterator.html����������������������������0000775�4231163�4231163�00000052224�14537076054�027324� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Iterators.ImgSpliterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator<P>
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from interface java.util.Spliterator
java.util.Spliterator.OfDouble, java.util.Spliterator.OfInt, java.util.Spliterator.OfLong, java.util.Spliterator.OfPrimitive<T extends java.lang.Object,T_CONS extends java.lang.Object,T_SPLITR extends java.util.Spliterator.OfPrimitive<T,T_CONS,T_SPLITR>>
-
Field Summary
-
Fields inherited from interface java.util.Spliterator
CONCURRENT, DISTINCT, IMMUTABLE, NONNULL, ORDERED, SIZED, SORTED, SUBSIZED
-
Constructor Summary
Constructors
| Constructor |
Description |
ImgSpliterator(int startIndex,
int endIndex,
int minSplitSize,
java.util.function.Supplier<P> pixelSupplier) |
Constructs a new ImgSpliterator for the specified index range
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Spliterator
getComparator, getExactSizeIfKnown, hasCharacteristics
-
-
Field Detail
-
endIndex
private int endIndex
-
Constructor Detail
-
ImgSpliterator
public ImgSpliterator(int startIndex,
int endIndex,
int minSplitSize,
java.util.function.Supplier<P> pixelSupplier)
Constructs a new ImgSpliterator for the specified index range
- Parameters:
startIndex - first index of the range (inclusive)endIndex - last index of the range (inclusive)minSplitSize - minimum split size for this spliterator (minimum number of elements in a split)pixelSupplier - a function that allocates a new pixel
that points to the index given by the function argument- Since:
- 1.0
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.Rosenbrock2.html�������������������������������������0000775�4231163�4231163�00000027034�14537076053�025401� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.Rosenbrock2 (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Rosenbrock2
public Rosenbrock2()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.SUNLinearSolver_Type.html�������������������������������������0000775�4231163�4231163�00000036637�14537076054�025105� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.SUNLinearSolver_Type (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CVODES.SUNLinearSolver_Type valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.Forest.predictInternalInThread.html����������������0000775�4231163�4231163�00000025753�14537076057�031607� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.Forest.predictInternalInThread (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictInternalInThread
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
thread_idx |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
thread_idx
private int thread_idx
-
Method Detail
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
���������������������gov/nih/mipav/model/algorithms/CeresSolverTest.UnaryCostFunction3.html������������������������������0000775�4231163�4231163�00000035734�14537076053�026736� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.UnaryCostFunction3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
i |
|
private java.util.Vector<java.lang.Double> |
jacobian_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
UnaryCostFunction3(int num_residuals,
int parameter_block_size,
double[] jacobian) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEdgeLaplacian.html������������������������������������������0000775�4231163�4231163�00000134154�14537076045�024440� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEdgeLaplacian (MIPAV API Documentation)
-
- All Implemented Interfaces:
AlgorithmInterface, java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmEdgeLaplacian
extends AlgorithmBase
implements AlgorithmInterface
Calculates the EdgeLap of an image at a scale defined by the user. This algorithm produces an edge map of the zero
crossings of the laplacian of the gaussian for 2D images and 2.5D images.
If clearInflectionPoints is true, remove zero crossings which do not correspond to actual edges but to inflection
points instead. If a zero crossing is not a point of inflection, then in the direction perpendicular to the crossing
edge the sign of the simple central difference operator of the Gaussian of the image times the sign of the third-degree
central difference operator of the Gaussian of the image must be less than zero.
Reference: "Refining Edges Detected by a LoG Operator" by Fatih Ulupinar and Gerard Medioni, Computer Vision, Graphics,
and Image Processing, Vol. 51, 1990, pp. 275-298.
- Version:
- 0.1 Feb 11, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
clearedPoints |
|
private boolean |
clearInflectionPoints |
|
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private float[] |
gaussBuffer |
|
private float[] |
GxxData |
Storage location of the second derivative of the Gaussian in the X direction.
|
private float[] |
GyyData |
Storage location of the second derivative of the Gaussian in the Y direction.
|
private float[] |
GzzData |
Storage location of the second derivative of the Gaussian in the Z direction.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
static int |
MARCHING_SQUARES |
Perform zero crossing detection using the marching squares method.
|
static int |
NEGATIVE_EDGES |
Mark negative areas of the laplacian image as edges (makes thicker edges - used in BSE).
|
static int |
OLD_DETECTION |
Perform zero crossing detection using Matt's old method.
|
private int |
operationType |
|
private float[] |
outputBufferX |
|
private float[] |
outputBufferY |
|
private float[] |
outputBufferZ |
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
private static int |
xOp |
|
private static int |
yOp |
|
private int |
zeroDetectionType |
The type of zero crossing detection to use.
|
private static int |
zOp |
|
private ModelImage |
zXMask |
Mask(unsigned byte) of the zero-crossings of the Laplacian of the gaussian.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmEdgeLaplacian(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
boolean clearInflectionPoints) |
Creates a new AlgorithmEdgeLaplacian object.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calcStoreInDest2D(int nImages,
int detectionType) |
This function produces the EdgeLap of input image.
|
private void |
calcStoreInDest3D(int detectionType) |
This function produces the Laplacian of input image.
|
java.util.BitSet |
calcZeroXMaskBitset(float[] buffer,
int[] extents) |
Calculates the zero crossing mask of a 2D image and returns it as a BitSet buffer.
|
void |
finalize() |
Prepares this class for destruction.
|
static java.util.BitSet |
genLevelMask(int xDim,
int yDim,
float[] buffer,
float level,
int detectionType) |
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
|
void |
genZeroXMask(int slice,
float[] buffer,
int detectionType) |
Generates a zero crossing mask for a 2D function.
|
ModelImage |
getZeroXMask() |
Accessor to return mask indicating zero crossings.
|
private void |
makeKernels2D() |
Creates Gaussian derivative kernels.
|
private void |
makeKernels3D() |
Creates Gaussian derivative kernels.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setZeroDetectionType(int type) |
Changes the type of zero crossing detection method used.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false only process the image over the mask
areas.
-
Constructor Detail
-
AlgorithmEdgeLaplacian
public AlgorithmEdgeLaplacian(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
boolean clearInflectionPoints)
Creates a new AlgorithmEdgeLaplacian object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the EdgeLap will be calculated for the whole image if equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.clearInflectionPoints - If true, do not set zero crossings corresponding to points of inflection.
-
Method Detail
-
genLevelMask
public static java.util.BitSet genLevelMask(int xDim,
int yDim,
float[] buffer,
float level,
int detectionType)
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
- Parameters:
xDim - x dimension of imageyDim - y dimension of imagebuffer - array in which to find zero crossinglevel - level to generate zero crossings atdetectionType - the type of zero crossing method to use- Returns:
- Bitset representing zero crossings
-
calcZeroXMaskBitset
public java.util.BitSet calcZeroXMaskBitset(float[] buffer,
int[] extents)
Calculates the zero crossing mask of a 2D image and returns it as a BitSet buffer.
- Parameters:
buffer - the buffer to find the edges inextents - the extents of the image the buffer came from- Returns:
- BitSet buffer with mask set when a zero crossing is detected
-
genZeroXMask
public void genZeroXMask(int slice,
float[] buffer,
int detectionType)
Generates a zero crossing mask for a 2D function. Sets a ModelImage to 255 if a zero crossing is detected.
- Parameters:
slice - the slice of the volume which we are working on (0 if from 2D image)buffer - array in which to find zero crossingdetectionType - the type of zero crossing detection to perform
-
calcStoreInDest2D
private void calcStoreInDest2D(int nImages,
int detectionType)
This function produces the EdgeLap of input image.
- Parameters:
nImages - number of images on which to find zero crossings. If 2D image then nImage = 1. If 3D image
where each image is to processed independently then nImages equals the number of images in
the volume.detectionType - the type of zero crossing detection to perform
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.PointeredPoint2D.html������������������������������������0000775�4231163�4231163�00000041415�14537076054�025535� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.PointeredPoint2D (MIPAV API Documentation)
- java.lang.Object
-
- java.awt.geom.Point2D
-
- gov.nih.mipav.model.algorithms.ContourPlot.PointeredPoint2D
-
- All Implemented Interfaces:
java.lang.Cloneable
- Enclosing class:
- ContourPlot
public class ContourPlot.PointeredPoint2D
extends java.awt.geom.Point2D
The PointeredPoint2D class is an implementation of the Point2D
class that uses two double arrays of size 1 to store its x and y coordinate.
This allows for referencing the x or y coordinate elsewhere
(kind of as a pointer to the value) e.g. in another PointeredPoint2D
so that 2 points can share a coordinate, for example points on the same axis.
- Author:
- hageldave
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.awt.geom.Point2D
java.awt.geom.Point2D.Double, java.awt.geom.Point2D.Float
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
double[] |
x |
'pointer' to x coordinate
|
double[] |
y |
'pointer' to y coordinate
|
-
Constructor Summary
Constructors
| Constructor |
Description |
PointeredPoint2D() |
Creates point at (0,0)
|
PointeredPoint2D(double[] xptr,
double[] yptr) |
Creates point using the specified arrays as pointers for this point's coordinates
|
PointeredPoint2D(double x,
double y) |
Creates point at (x,y)
|
-
Method Summary
-
Methods inherited from class java.awt.geom.Point2D
distance, distance, distance, distanceSq, distanceSq, distanceSq, equals, hashCode, setLocation
-
Methods inherited from class java.lang.Object
finalize, getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
PointeredPoint2D
public PointeredPoint2D(double[] xptr,
double[] yptr)
Creates point using the specified arrays as pointers for this point's coordinates
- Parameters:
xptr - array to use as pointer to x coordinateyptr - array to use as pointer to y coordinate
-
Method Detail
-
getX
public double getX()
- Specified by:
getX in class java.awt.geom.Point2D
-
getY
public double getY()
- Specified by:
getY in class java.awt.geom.Point2D
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGrayScaleMorphology3D.html����������������������������������0000775�4231163�4231163�00000215172�14537076046�026111� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGrayScaleMorphology3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmGrayScaleMorphology3D(ModelImage srcImg,
int kernelType,
float sphereDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage) |
Creates a new AlgorithmMorphology3D object.
|
AlgorithmGrayScaleMorphology3D(ModelImage srcImg,
ModelImage destImg,
int kernelType,
float sphereDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage) |
Creates a new AlgorithmMorphology3D object.
|
AlgorithmGrayScaleMorphology3D(ModelImage srcImg,
ModelImage destImg,
ModelImage maskImage,
int kernelType,
float sphereDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage) |
Creates a new AlgorithmGrayScaleMorphology3D object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
dilate(boolean returnFlag,
int iters) |
Dilates an image using the indicated kernel and the indicated number of
iterations.
|
private void |
erode(boolean returnFlag,
int iters) |
Erodes an image using the indicated kernel and the indicated number of
iterations.
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
geodesicDilation(boolean returnFlag,
int geodesicSize) |
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
geodesicErosion(boolean returnFlag,
int geodesicSize) |
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
makeKernel(int kernelType) |
Generates a kernel of the indicated type.
|
private void |
makeSphericalKernel() |
Generates a spherical kernel of a specific diameter.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setAlgorithm(int method) |
Sets the algorithm type (i.e. erode, dilate)
|
void |
setImage(ModelImage img) |
Sets new source image.
|
void |
setKernel(java.util.BitSet kernel,
int dimXY,
int dimZ) |
Sets user defined square kernels.
|
void |
setMinMax(int _min,
int _max) |
Sets the bounds of object size used to delete objects.
|
void |
setPixDistance(float dist) |
Used in the ultimate erode function to remove all eroded points less than the distance specified in pixel units.
|
void |
showKernel() |
Display kernel as 1 or 0 in the debug window.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
edgingType
private int edgingType
Edge type.
-
entireImage
private boolean entireImage
if true, indicates that the VOIs should NOT be used and that entire image should be processed.
-
iterationsE
private int iterationsE
Erosion iteration times.
-
kDimXY
private int kDimXY
Kernel dimension.
-
kDimZ
private int kDimZ
DOCUMENT ME!
-
pixDist
private float pixDist
-
maskImage
private ModelImage maskImage
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
-
Constructor Detail
-
AlgorithmGrayScaleMorphology3D
public AlgorithmGrayScaleMorphology3D(ModelImage srcImg,
int kernelType,
float sphereDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage)
Creates a new AlgorithmMorphology3D object.
- Parameters:
srcImg - source image modelkernelType - kernel size (i.e. connectedness)sphereDiameter - only valid if kernelType == SIZED_SPHERE and represents the width of a circle in the
resolution of the imagemethod - setup the algorithm method (i.e. erode)iterD - number of times to dilateiterE - number of times to erodepruningPix - the number of pixels to pruneedType - the type of edging to perform (inner or outer)entireImage - flag that indicates if the VOIs should NOT be used and entire image should be processed
-
AlgorithmGrayScaleMorphology3D
public AlgorithmGrayScaleMorphology3D(ModelImage srcImg,
ModelImage destImg,
int kernelType,
float sphereDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage)
Creates a new AlgorithmMorphology3D object.
- Parameters:
srcImg - source image modeldestImg - destination image modelkernelType - kernel size (i.e. connectedness)sphereDiameter - only valid if kernelType == SIZED_SPHERE and represents the width of a circle in the
resolution of the imagemethod - setup the algorithm method (i.e. erode)iterD - number of times to dilateiterE - number of times to erodepruningPix - the number of pixels to pruneedType - the type of edging to perform (inner or outer)entireImage - flag that indicates if the VOIs should NOT be used and entire image should be processed
-
AlgorithmGrayScaleMorphology3D
public AlgorithmGrayScaleMorphology3D(ModelImage srcImg,
ModelImage destImg,
ModelImage maskImage,
int kernelType,
float sphereDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage)
Creates a new AlgorithmGrayScaleMorphology3D object.
- Parameters:
srcImg - source image modelkernelType - dilation kernel size (i.e. connectedness)sphereDiameter - dilation only valid if kernelType == SIZED_SPHERE and represents the width of a
circle in the resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)geodesicSize - iterD - number of times to dilateiterE - number of times to erodeentireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed
-
Method Detail
-
setKernel
public void setKernel(java.util.BitSet kernel,
int dimXY,
int dimZ)
Sets user defined square kernels.
- Parameters:
kernel - user defined kerneldimXY - length of x and y dimensionsdimZ - length of z dimension
-
dilate
private void dilate(boolean returnFlag,
int iters)
Dilates an image using the indicated kernel and the indicated number of
iterations. The grayscale dilation is the maximum value over the reflected kernel region.
For symmetric kernels the reflected kernel is the same as the kernel.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)iters - number of dilation iterations
-
geodesicDilation
private void geodesicDilation(boolean returnFlag,
int geodesicSize)
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
geodesicErosion
private void geodesicErosion(boolean returnFlag,
int geodesicSize)
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
erode
private void erode(boolean returnFlag,
int iters)
Erodes an image using the indicated kernel and the indicated number of
iterations. The grayscale erosion is the minimum value over the kernel region.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. open)iters - number of erosion iterations
-
makeSphericalKernel
private void makeSphericalKernel()
Generates a spherical kernel of a specific diameter. Most importantly it normalizes the kernel based on the
resolution in the z-dimension. This in effect accounts for the anisotrophy in the z-dimension of typical 3D
medical images. The resultant data is stored in the kernel class variable.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.TextRenderer.html����������������������������������������0000775�4231163�4231163�00000037471�14537076054�025026� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.TextRenderer (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected static char |
NL |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
TextRenderer
public TextRenderer()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBrainExtractor.Edge.html������������������������������������0000775�4231163�4231163�00000032310�14537076044�025547� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBrainExtractor.Edge (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.Edge
-
- Enclosing class:
- AlgorithmBrainExtractor
protected class AlgorithmBrainExtractor.Edge
extends java.lang.Object
A representation of an edge for the vertex-edge-triangle table. This class stores the pair of vertex indices for
the end points of the edge. The edges and are considered to be identical. To simplify
comparisons, the class stores the ordered indices. The class extends Object to obtain support for hashing into a
map of edges.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
m_i0 |
DOCUMENT ME!
|
int |
m_i1 |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Edge(int i0,
int i1) |
Constructs an edge in the table.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, finalize, getClass, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_i0
public int m_i0
DOCUMENT ME!
-
m_i1
public int m_i1
DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEllipseGeneration.html��������������������������������������0000775�4231163�4231163�00000076162�14537076045�025404� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEllipseGeneration (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmEllipseGeneration
extends AlgorithmBase
This module draws uniformly randomly positioned ellipses with a specified semi-major axis, semi-minor axis,
and angle phi between the x-axis and the major axis of the ellipse.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmEllipseGeneration() |
AlgorithmEllipseGeneration - default constructor.
|
AlgorithmEllipseGeneration(ModelImage srcImage,
int semiMajorAxis,
int semiMinorAxis,
double phi,
int numEllipses,
int pattern,
int initialRandomEllipses,
double minimumNearestNeighborDistance,
double maximumNearestNeighborDistance,
double lowestForbiddenNNDistance,
double highestForbiddenNNDistance,
double highestRegenerationNNDistance) |
AlgorithmEllipseGeneration.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numEllipses
private int numEllipses
-
pattern
private int pattern
-
Constructor Detail
-
AlgorithmEllipseGeneration
public AlgorithmEllipseGeneration(ModelImage srcImage,
int semiMajorAxis,
int semiMinorAxis,
double phi,
int numEllipses,
int pattern,
int initialRandomEllipses,
double minimumNearestNeighborDistance,
double maximumNearestNeighborDistance,
double lowestForbiddenNNDistance,
double highestForbiddenNNDistance,
double highestRegenerationNNDistance)
AlgorithmEllipseGeneration.
- Parameters:
srcImg - Blank source image in which circles will be drawnsemiMajorAxis - Ellipse semi-major axissemiMajorAxis - Ellipse semi-minor axisphi - Angle between the x-axis and the major axis of the ellipse in radiansnumEllipses - Number of ellipses to be drawnpattern - RANDOM, AGGREGATED, or REGULARinitialRandomEllipses - Used in AGGREGATED. initialRandomEllipses are drawn randomly. The rest
are drawn with nearestNeighborDistance less than or equal ot maximumNearestNeighborDistance.minimumNearestNeighborDistance - Used in REGULARmaximumNearestNeighborDistance - Used in AGGREGATED and REGULARlowestForbiddenNNDistance - Used in CONSTRAINEDhighestForbiddenNNDistance - Used in CONSTRAINEDhighestRegeneerationNNDistance - Used in CONSTRAINED
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT.FitMosaicModel.html���������������������������������������������0000775�4231163�4231163�00000043155�14537076056�023525� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT.FitMosaicModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
numMatches |
|
private int[] |
ok |
|
private double[][] |
X1 |
|
private double[][] |
X2 |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitMosaicModel(int nPts,
double[][] H,
int[] ok,
double[][] X1,
double[][] X2) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying SM2 fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
numMatches
private int numMatches
-
Constructor Detail
-
FitMosaicModel
public FitMosaicModel(int nPts,
double[][] H,
int[] ok,
double[][] X1,
double[][] X2)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.TreeClassification.html����������������������������0000775�4231163�4231163�00000113405�14537076057�027343� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.TreeClassification (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Tree
alpha, case_weights, child_nodeIDs, data, dependent_varID, deterministic_varIDs, holdout, importance_mode, inbag_counts, keep_inbag, memory_saving_splitting, min_node_size, minprop, mtry, num_random_splits, num_samples, num_samples_oob, oob_sampleIDs, prediction_terminal_nodeIDs, random, sample_fraction, sample_with_replacement, sampleIDs, split_select_varIDs, split_select_weights, split_values, split_varIDs, splitrule, variable_importance
-
Constructor Summary
Constructors
| Constructor |
Description |
TreeClassification(java.util.Vector<java.lang.Double> class_values,
java.util.Vector<java.lang.Integer> response_classIDs,
java.util.Vector<java.util.Vector<java.lang.Integer>> sampleIDs_per_class,
java.util.Vector<java.lang.Double> class_weights) |
|
TreeClassification(java.util.Vector<java.util.Vector<java.lang.Integer>> child_nodeIDs,
java.util.Vector<java.lang.Integer> split_varIDs,
java.util.Vector<java.lang.Double> split_values,
java.util.Vector<java.lang.Double> class_values,
java.util.Vector<java.lang.Integer> response_classIDs) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
addGiniImportance(int nodeID,
int varID,
double decrease) |
|
void |
allocateMemory() |
|
void |
appendToFileInternal(java.io.BufferedWriter bw) |
|
void |
bootstrapClassWise() |
|
void |
bootstrapWithoutReplacementClassWise() |
|
void |
cleanUpInternal() |
|
double |
computePredictionAccuracyInternal() |
|
void |
createEmptyNodeInternal() |
|
double |
estimate(int nodeID) |
|
boolean |
findBestSplit(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
boolean |
findBestSplitExtraTrees(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
void |
findBestSplitValueExtraTrees(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueExtraTreesUnordered(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueLargeQ(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueSmallQ(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueUnordered(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
double |
getPrediction(int sampleID) |
|
int |
getPredictionTerminalNodeID(int sampleID) |
|
boolean |
splitNodeInternal(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Tree
appendToFile, bootstrap, bootstrapWeighted, bootstrapWithoutReplacement, bootstrapWithoutReplacementWeighted, computePermutationImportance, createEmptyNode, createPossibleSplitVarSubset, dispose, dropDownSamplePermuted, getChildNodeIDs, getInbagCounts, getNumSamplesOob, getOobSampleIDs, getSplitValues, getSplitVarIDs, grow, init, permuteAndPredictOobSamples, predict, splitNode
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
counter_per_class
int[] counter_per_class
-
Constructor Detail
-
TreeClassification
public TreeClassification(java.util.Vector<java.lang.Double> class_values,
java.util.Vector<java.lang.Integer> response_classIDs,
java.util.Vector<java.util.Vector<java.lang.Integer>> sampleIDs_per_class,
java.util.Vector<java.lang.Double> class_weights)
-
TreeClassification
public TreeClassification(java.util.Vector<java.util.Vector<java.lang.Integer>> child_nodeIDs,
java.util.Vector<java.lang.Integer> split_varIDs,
java.util.Vector<java.lang.Double> split_values,
java.util.Vector<java.lang.Double> class_values,
java.util.Vector<java.lang.Integer> response_classIDs)
-
Method Detail
-
findBestSplitValueSmallQ
public void findBestSplitValueSmallQ(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueLargeQ
public void findBestSplitValueLargeQ(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueUnordered
public void findBestSplitValueUnordered(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueExtraTrees
public void findBestSplitValueExtraTrees(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueExtraTreesUnordered
public void findBestSplitValueExtraTreesUnordered(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplace.html��������������������������������������������������0000775�4231163�4231163�00000050152�14537076055�023011� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplace (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.InverseLaplace
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
largestPole |
Don't include a time == 0.
|
private double[] |
logT |
DOCUMENT ME!
|
private double[] |
time |
DOCUMENT ME!
|
private double[] |
timeFunction |
resulting vector of real-space values.
|
private double |
tol |
numerical tolerance of approaching pole (default 1.0e-9).
|
private int |
tPts |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
InverseLaplace(double[] time) |
Constructor for InverseLaplace.
|
InverseLaplace(double[] time,
double largestPole,
double tol) |
Constructor for InverseLaplace.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
largestPole
private double largestPole
Don't include a time == 0. This will give a -inifinity when the log of the time is taken. largest pole of Laplace
space function (default zero) Note that InverseLaplace may give incorrect results if the default value of
largestPole is used. For example, the function exp(t) with the Laplace transform 1/(s-1) will give correct
results if largestPole is set to 1.0, but will return incorrect negative values for time >= 1.0 if the
largestPole default of 0.0 is used.
-
logT
private double[] logT
DOCUMENT ME!
-
time
private double[] time
DOCUMENT ME!
-
tPts
private int tPts
DOCUMENT ME!
-
Constructor Detail
-
InverseLaplace
public InverseLaplace(double[] time,
double largestPole,
double tol)
Constructor for InverseLaplace.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
-
Method Detail
-
fitToLaplace
public abstract double[][] fitToLaplace(double realS,
double[] imagS)
Returns 'a' coefficients in power series where the second index is 0 for the real part and 1 for the imaginary
part.
- Parameters:
realS - DOCUMENT ME!imagS - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
driver
public void driver()
driver.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/HistogramOfOrientedGradients.VlHogVariant.html�����������������������0000775�4231163�4231163�00000035276�14537076055�030246� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
HistogramOfOrientedGradients.VlHogVariant (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
VlHogVariant() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
VlHogVariant
private VlHogVariant()
-
Method Detail
-
valueOf
public static HistogramOfOrientedGradients.VlHogVariant valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping2.ODEHPModel.html���������������������������0000775�4231163�4231163�00000034747�14537076056�027160� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping2.ODEHPModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) double[] |
c |
|
(package private) double[][] |
scale |
|
(package private) double[][] |
z |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ODEHPModel(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag,
double[][] scale,
double[][] z,
double[] beta,
double[] c) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ODEHPModel
public ODEHPModel(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag,
double[][] scale,
double[][] z,
double[] beta,
double[] c)
-
Method Detail
-
driver
public void driver()
DOCUMENT ME!
- Overrides:
driver in class ODE
�������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.PolynomialParameterization.html����������������������0000775�4231163�4231163�00000037504�14537076053�030575� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.PolynomialParameterization (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
ComputeJacobian(double[] x,
double[] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
int x_start,
double[][] jacobian) |
|
int |
GlobalSize() |
|
int |
LocalSize() |
|
boolean |
Plus(double[] x,
double[] delta,
double[] x_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Plus
public boolean Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index)
- Specified by:
Plus in class CeresSolver.LocalParameterization
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Gauss1CostFunction.html��������������������������0000775�4231163�4231163�00000034023�14537076052�027403� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Gauss1CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftSegmentation.ClassStateStruct.html�����������������0000775�4231163�4231163�00000022510�14537076047�031467� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftSegmentation.ClassStateStruct (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.ClassStateStruct
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) boolean |
OUTPUT_DEFINED |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
OUTPUT_DEFINED
boolean OUTPUT_DEFINED
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/dataStruct.html������������������������������������������������������0000775�4231163�4231163�00000022200�14537076054�022222� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
dataStruct (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.dataStruct
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
A_array |
|
(package private) double[][] |
lhs |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftSegmentation.REGION.html���������������������������0000775�4231163�4231163�00000023651�14537076047�027206� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftSegmentation.REGION (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.REGION
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
label |
|
(package private) int |
pointCount |
|
(package private) int |
region |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
REGION() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
pointCount
int pointCount
���������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.NoResidualUpdateCostFunction.html��������������������0000775�4231163�4231163�00000034115�14537076053�030755� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.NoResidualUpdateCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DynamicCostFunction.html���������������������������������0000775�4231163�4231163�00000024645�14537076051�026276� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DynamicCostFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitFullIntModel.html�����������������������������������0000775�4231163�4231163�00000043076�14537076045�025521� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitFullIntModel (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
arg |
DOCUMENT ME!
|
(package private) double[] |
cyi |
DOCUMENT ME!
|
(package private) double[] |
cyr |
DOCUMENT ME!
|
(package private) int[] |
errorFlag |
DOCUMENT ME!
|
(package private) double |
feq |
DOCUMENT ME!
|
(package private) double |
initialOrder |
DOCUMENT ME!
|
(package private) double |
koff |
DOCUMENT ME!
|
(package private) double |
kon |
DOCUMENT ME!
|
(package private) double |
mk |
DOCUMENT ME!
|
(package private) Bessel |
modelBessel |
DOCUMENT ME!
|
(package private) int[] |
nz |
DOCUMENT ME!
|
(package private) int |
sequenceNumber |
DOCUMENT ME!
|
(package private) double |
time |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
FitFullIntModel(double time,
double kon,
double koff) |
Creates a new FitFullIntModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
arg
double arg
DOCUMENT ME!
-
cyi
double[] cyi
DOCUMENT ME!
-
cyr
double[] cyr
DOCUMENT ME!
-
errorFlag
int[] errorFlag
DOCUMENT ME!
-
feq
double feq
DOCUMENT ME!
-
initialOrder
double initialOrder
DOCUMENT ME!
-
koff
double koff
DOCUMENT ME!
-
kon
double kon
DOCUMENT ME!
-
mk
double mk
DOCUMENT ME!
-
modelBessel
Bessel modelBessel
DOCUMENT ME!
-
sequenceNumber
int sequenceNumber
DOCUMENT ME!
-
time
double time
DOCUMENT ME!
-
Constructor Detail
-
FitFullIntModel
public FitFullIntModel(double time,
double kon,
double koff)
Creates a new FitFullIntModel object.
- Parameters:
time - DOCUMENT ME!kon - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitSingleExponentialNoWholeModel.html������������������0000775�4231163�4231163�00000043640�14537076046�031066� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitSingleExponentialNoWholeModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int[] |
iv |
|
(package private) double[] |
v |
|
(package private) double[] |
x |
|
private double[] |
xData |
|
private float[] |
yData |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
FitSingleExponentialNoWholeModel(int nPoints,
double[] xData,
float[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian) |
Creates a new FitSingleExponentialNoWholeModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
void |
calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm) |
Fit to function - bottom + (1 - bottom)*[1 - exp(-ln(2)*t/thalf)] a1
+ (1 - a1)*(1 - exp(-ln(2)*t/a0)).
|
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters in the
case of no whole organ normalization.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitSingleExponentialNoWholeModel
public FitSingleExponentialNoWholeModel(int nPoints,
double[] xData,
float[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian)
Creates a new FitSingleExponentialNoWholeModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - yData - DOCUMENT ME!x - DOCUMENT ME!iv - v - useAnalyticJacobian -
-
Method Detail
-
driver
public void driver()
Starts the analysis.
- Overrides:
driver in class NL2sol
-
calcj
public void calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm)
- Specified by:
calcj in class NL2sol
-
calcr
public void calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm)
Fit to function - bottom + (1 - bottom)*[1 - exp(-ln(2)*t/thalf)] a1
+ (1 - a1)*(1 - exp(-ln(2)*t/a0)).
- Specified by:
calcr in class NL2sol
������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmShortestPathWatershed.indexValueItem.html�������������������0000775�4231163�4231163�00000027042�14537076050�031201� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmShortestPathWatershed.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed.indexValueItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValueItem(int index,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
private double value
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public double getValue()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Corrector.html�������������������������������������������0000775�4231163�4231163�00000032552�14537076051�024311� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Corrector (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Corrector
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Corrector(double sq_norm,
double[] rho) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
CorrectJacobian
public void CorrectJacobian(int num_rows,
int num_cols,
double[] residuals,
double[] jacobian,
int jacobian_offset)
������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.FunctionSample.html��������������������������������������0000775�4231163�4231163�00000035565�14537076051�025305� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.FunctionSample (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
public double[] value
-
gradient
public double gradient
-
Constructor Detail
-
FunctionSample
public FunctionSample()
�������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.UnaryCostFunction4.html������������������������������0000775�4231163�4231163�00000030717�14537076053�026733� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.UnaryCostFunction4 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
UnaryCostFunction4(int num_residuals,
int parameter_block_size) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.ENSOCostFunction.html����������������������������0000775�4231163�4231163�00000034001�14537076052�027000� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.ENSOCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping2.html��������������������������������������0000775�4231163�4231163�00000172047�14537076056�025335� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping2 (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private SchwarzChristoffelMapping.polygon |
forwardpoly(SchwarzChristoffelMapping.scmap map) |
|
private double |
hpaccuracy(SchwarzChristoffelMapping.scmap M) |
|
private double[][] |
hpderiv(double[][] zp,
double[][] z,
double[] beta,
double[] c) |
|
private void |
hpevalinv(double[][] zp,
SchwarzChristoffelMapping.scmap M,
double[][] wp) |
|
private void |
hpinvmap(double[][] zp,
double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat,
double[][] z0,
boolean ode,
boolean newton,
double tol,
int maxiter) |
|
SchwarzChristoffelMapping.scmap |
hplmap(SchwarzChristoffelMapping.polygon poly,
double[][] zin,
double[] alphain,
double[] c) |
|
void |
hplot(SchwarzChristoffelMapping.scmap M,
double[] re,
double[] im,
int yInvert,
boolean closed,
double[] axis) |
|
private void |
hpparam(double[][] z,
double[] c,
double[][] qdat,
double[][] w,
double[] beta,
double[] z0,
double tol) |
|
void |
hpplot(double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] re,
double[] im,
int yInvert,
boolean closed,
double[] axis) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
DoubleDouble |
sign(DoubleDouble d) |
|
private DoubleDouble[][] |
stderivEP(DoubleDouble[][] zp,
DoubleDouble[][] z,
DoubleDouble[] beta,
DoubleDouble[] c,
int j) |
|
private double[][] |
stinvmap(double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat,
double[][] z0,
boolean ode,
boolean newton,
double tol,
int maxiter) |
|
private void |
stparam(double[][] z,
double[] c,
double[][] qdat,
double[][] w,
double[] beta,
int[] ends,
double[][] z0,
double tol) |
|
void |
stplot(double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] re,
double[] im,
int yInvert,
boolean closed,
double[] axis) |
|
private DoubleDouble[][] |
stquadEP(DoubleDouble[][] z1,
DoubleDouble[][] z2,
int[] sing1,
DoubleDouble[][] z,
DoubleDouble[] beta,
DoubleDouble[][] qdat) |
|
private DoubleDouble[][] |
stquadhEP(DoubleDouble[][] z1,
DoubleDouble[][] z2,
int[] sing1,
DoubleDouble[][] z,
DoubleDouble[] beta,
DoubleDouble[][] qdat) |
|
private double |
stripAccuracy(SchwarzChristoffelMapping.scmap M) |
|
private double[][] |
stripeval(SchwarzChristoffelMapping.scmap M,
double[][] zp) |
|
private double[][] |
stripevalinv(SchwarzChristoffelMapping.scmap M,
double[][] wp,
double[][] z0) |
|
private SchwarzChristoffelMapping.scmap |
stripmap(SchwarzChristoffelMapping.polygon poly,
int[] endidx) |
|
void |
stripplot(SchwarzChristoffelMapping.scmap M,
double[] re,
double[] im,
int yInvert,
boolean closed,
double[] axis) |
|
private void |
testHplmap1() |
|
private void |
testHplmap2() |
|
private void |
testHplmap3() |
|
private void |
testStripmap1() |
|
private void |
testStripmap2() |
|
private DoubleDouble |
zabs(DoubleDouble zr,
DoubleDouble zi) |
zabs computes the absolute value or magnitude of a DoubleDouble precision complex variable zr + j*zi.
|
private void |
zdiv(DoubleDouble ar,
DoubleDouble ai,
DoubleDouble br,
DoubleDouble bi,
DoubleDouble[] cr,
DoubleDouble[] ci) |
complex divide c = a/b.
|
private void |
zmlt(DoubleDouble ar,
DoubleDouble ai,
DoubleDouble br,
DoubleDouble bi,
DoubleDouble[] cr,
DoubleDouble[] ci) |
complex multiply c = a * b.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
tolerance
private double tolerance
-
Method Detail
-
stparam
private void stparam(double[][] z,
double[] c,
double[][] qdat,
double[][] w,
double[] beta,
int[] ends,
double[][] z0,
double tol)
-
stinvmap
private double[][] stinvmap(double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat,
double[][] z0,
boolean ode,
boolean newton,
double tol,
int maxiter)
-
hpinvmap
private void hpinvmap(double[][] zp,
double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat,
double[][] z0,
boolean ode,
boolean newton,
double tol,
int maxiter)
-
stplot
public void stplot(double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] re,
double[] im,
int yInvert,
boolean closed,
double[] axis)
-
hpplot
public void hpplot(double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] re,
double[] im,
int yInvert,
boolean closed,
double[] axis)
-
hpparam
private void hpparam(double[][] z,
double[] c,
double[][] qdat,
double[][] w,
double[] beta,
double[] z0,
double tol)
-
zabs
private DoubleDouble zabs(DoubleDouble zr,
DoubleDouble zi)
zabs computes the absolute value or magnitude of a DoubleDouble precision complex variable zr + j*zi.
- Parameters:
zr - DoubleDoublezi - DoubleDouble- Returns:
- DoubleDouble
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ConfluentHypergeometric.html�����������������������������������������0000775�4231163�4231163�00000202741�14537076053�024761� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ConfluentHypergeometric (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
a |
Input parameter
|
private double |
b |
Input parameter
|
private int |
bit |
|
static int |
COMPLEX_VERSION |
|
static int |
CONFLUENT_HYPERGEOMETRIC_FIRST_KIND |
Confluent Hypergeometric Function of the First Kind.
|
static int |
CONFLUENT_HYPERGEOMETRIC_SECOND_KIND |
Confluent Hypergeometric Function of the Second Kind
|
private double |
imagA |
|
private double |
imagB |
|
private double[] |
imagResult |
|
private double |
imagZ |
|
private int |
ip |
Specifies how many array positions are desired (usually 10 is sufficient).
|
private int |
kind |
Tells whether confluent hypergeometric function is of first or second kind
|
private int |
L |
Size of the arrays
|
private int |
length |
Create arrays of size length+2
|
private int |
Lnchf |
Tells how the result should be represented A '0' will return the result in standard exponential form.
|
private int[] |
method |
Method used in calculating the confluent hypergeometric function of the second kind.
|
static int |
REAL_VERSION |
|
private double |
realA |
Input parameter
|
private double |
realB |
Input parameter
|
static int |
REALPARAM_COMPLEXARG_VERSION |
|
private double[] |
realResult |
outputted result
|
private double |
realZ |
Input argument
|
private double[] |
result |
Outputted result
|
private double |
rmax |
Number of digits required to represent the numbers with the required accuracy
|
private int |
version |
Tells whether real number of complex number version
|
private double |
x |
Input argument
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ConfluentHypergeometric() |
|
ConfluentHypergeometric(double a,
double b,
double x,
double[] result,
int[] method) |
|
ConfluentHypergeometric(double a,
double b,
double realZ,
double imagZ,
double[] realResult,
double[] imagResult) |
|
ConfluentHypergeometric(double realA,
double imagA,
double realB,
double imagB,
double realZ,
double imagZ,
int Lnchf,
int ip,
double[] realResult,
double[] imagResult) |
|
ConfluentHypergeometric(int kind,
double a,
double b,
double x,
double[] result) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
aradd(double[] a,
double[] b,
double[] c) |
Accepts two arrays of numbers, a and b, and returns the sum of the array c.
|
private void |
armult(double[] a,
double b,
double[] c) |
Accepts array a and scalar b, and returns the product array c.
|
private void |
arsub(double[] a,
double[] b,
double[] c) |
Accepts two arrays and subtracts each element in the second array b from the element in the first array a and
returns the solution c
|
private void |
arydiv(double[] ar,
double[] ai,
double[] br,
double[] bi) |
Returns the complex number resulting from the division of four arrays, representing two complex numbers.
|
private int |
bits() |
Determines the number of significant figures of machine precision to arrive at the size of the array the numbers
must be stored in to get the accuracy of the solution.
|
private void |
chgubi(int[] id) |
|
private void |
chguit(int[] id) |
|
private void |
chgul(int[] id) |
|
private void |
chgus(int[] id) |
|
private void |
cmpadd(double[] ar,
double[] ai,
double[] br,
double[] bi,
double[] cr,
double[] ci) |
Takes two arrays representing one real and one imaginary part, and adds two arrays representing another complex
number and returns two arrays holding the complex sum.
|
private void |
cmpmul(double[] ar,
double[] ai,
double br,
double bi,
double[] cr,
double[] ci) |
Takes 2 arrays, ar and ai representing one real and one imaginary part, and multiplies it with br and bi,
representing a complex number and returns the complex product
|
void |
complexTestFirstKind() |
|
private void |
conv12(double realCN,
double imagCN,
double[][] cae) |
Converts a real and imaginary number pair to a form of a 2x2 real array.
|
private void |
conv21(double[][] cae) |
Converts a number represented in a 2x2 real array to the form of a real and imaginary pair.
|
private void |
eadd(double n1,
double e1,
double n2,
double e2,
double[] nf,
double[] ef) |
Returns the sum of two numbers in the form of a base and an exponent.
|
private void |
ecpdiv(double[][] a,
double[][] b,
double[][] c) |
Divides two numbers and returns the solution.
|
private void |
ecpmul(double[][] a,
double[][] b,
double[][] c) |
Multiplies two numbers which are each represented in the form of a two by two array and returns the solution in
the same form
|
private void |
ediv(double n1,
double e1,
double n2,
double e2,
double[] nf,
double[] ef) |
Returns the solution in the form of the base and exponent of the division of two exponential numbers.
|
private void |
emult(double n1,
double e1,
double n2,
double e2,
double[] nf,
double[] ef) |
Takes one base and exponent and multplies it by another number's base and exponent to give the product in the
form of base and exponent
|
private void |
esub(double n1,
double e1,
double n2,
double e2,
double[] nf,
double[] ef) |
Returns the solution to the subtraction of two numbers in the form of base and exponent.
|
void |
finalize() |
Cleanup memory.
|
private void |
firstKindComplex() |
Port of Algorithm 707, Collected Algorithms from ACM.
|
private void |
firstKindComplexArgument() |
This code is a port of the FORTRAN routine CCHG from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 400-402.
|
private void |
firstKindRealArgument() |
This code is a port of the FORTRAN routine CHGM from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 398-400.
|
void |
realTestFirstKind() |
|
void |
realTestSecondKind() |
|
void |
run() |
|
private void |
secondKindRealArgument() |
This code is a port of the FORTRAN routine CHGU from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 403-405.
|
private double |
store(double x) |
This function forces its argument x to be stored in a memory location, thus providing a means of determining
floating point number characteristics (such as the machine precision) when it is necessary to avoid computation
in high precision registers.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
a
private double a
Input parameter
-
b
private double b
Input parameter
-
x
private double x
Input argument
-
result
private double[] result
Outputted result
-
realA
private double realA
Input parameter
-
imagA
private double imagA
-
realB
private double realB
Input parameter
-
imagB
private double imagB
-
realZ
private double realZ
Input argument
-
imagZ
private double imagZ
-
ip
private int ip
Specifies how many array positions are desired (usually 10 is sufficient). More difficult cases may require this
parameter to be 100 or more, and it is not always trivial to predict which cases these might be. One pragmatic
approach is to simply run the evaluator using a value of 10, then increase ip, run the evaluator again and
compare the returned results. Overwriting memory may occur if ip exceeds 776. Setting IP = 0 causes the program
to estimate the number of array positions
-
L
private int L
Size of the arrays
-
Constructor Detail
-
ConfluentHypergeometric
public ConfluentHypergeometric(int kind,
double a,
double b,
double x,
double[] result)
- Parameters:
a - input parameterb - input parameterx - input argumentresult - outputted result
-
ConfluentHypergeometric
public ConfluentHypergeometric(double a,
double b,
double x,
double[] result,
int[] method)
- Parameters:
a - input parameterb - input parameterx - input argument, x > 0result - outputted resultmethod - method code used
-
ConfluentHypergeometric
public ConfluentHypergeometric(double a,
double b,
double realZ,
double imagZ,
double[] realResult,
double[] imagResult)
- Parameters:
a - input real parameterb - input real parameterrealZ - input real part of argumentimagZ - input imaginary part of argumentrealResult - real part of outputted resultimagResult - imaginary part of outputted result
-
ConfluentHypergeometric
public ConfluentHypergeometric(double realA,
double imagA,
double realB,
double imagB,
double realZ,
double imagZ,
int Lnchf,
int ip,
double[] realResult,
double[] imagResult)
- Parameters:
realA - Real part of first input parameterimagA - Imaginary part of first input parameterrealB - Real part of second input parameterimagB - Imaginary part of second input parameterrealZ - Real part of input argumentimagZ - Imaginary part of input argumentLnchf - = 0 for standard result, = 1 for log of resultip - Number of array positions desiredrealResult - Real part of outputted resultimagResult - Imaginary part of outputted result
-
Method Detail
-
firstKindComplex
private void firstKindComplex()
Port of Algorithm 707, Collected Algorithms from ACM. Original Work published in Transactions on Mathematical
Software, Vol. 18. No. 3, September, 1992, pp. 345-349. This is a port of Solution to the Confluent
Hypergeometric Function by Mark Nardin, W. F. Perger, and Atul Bhalla, Michigan Technological University,
Copyright 1989. Description: A numerical evaluator for the confluent hypergeometric function for complex
arguments with large magnitudes using a direct summation of the Kummer series. The method used allows an accuracy
of up to thirteen decimal places through the use of large arrays and a single final division. The confluent
hypergeometric function of the first kind is the solution to the equation: zf"(z) + (a-z)f'(z) - bf(z) = 0
Reference: Numerical evaluation of the confluent hypergeometric function for complex arguments of large
magnitudes by Mark Nardin, W. F. Perger, and Atul Bhalla, Journal of Computational and Applied Mathematics, Vol.
39, 1992, pp. 193-200.
-
arydiv
private void arydiv(double[] ar,
double[] ai,
double[] br,
double[] bi)
Returns the complex number resulting from the division of four arrays, representing two complex numbers. The
number returned will be in one of two different forms. Either standard scientific or as the log of the number.
- Parameters:
ar - ai - br - bi -
-
emult
private void emult(double n1,
double e1,
double n2,
double e2,
double[] nf,
double[] ef)
Takes one base and exponent and multplies it by another number's base and exponent to give the product in the
form of base and exponent
- Parameters:
n1 - e1 - n2 - e2 - nf - ef -
-
ediv
private void ediv(double n1,
double e1,
double n2,
double e2,
double[] nf,
double[] ef)
Returns the solution in the form of the base and exponent of the division of two exponential numbers.
- Parameters:
n1 - e1 - n2 - e2 - nf - ef -
-
eadd
private void eadd(double n1,
double e1,
double n2,
double e2,
double[] nf,
double[] ef)
Returns the sum of two numbers in the form of a base and an exponent.
- Parameters:
n1 - e1 - n2 - e2 - nf - ef -
-
esub
private void esub(double n1,
double e1,
double n2,
double e2,
double[] nf,
double[] ef)
Returns the solution to the subtraction of two numbers in the form of base and exponent.
- Parameters:
n1 - e1 - n2 - e2 - nf - ef -
-
ecpmul
private void ecpmul(double[][] a,
double[][] b,
double[][] c)
Multiplies two numbers which are each represented in the form of a two by two array and returns the solution in
the same form
- Parameters:
a - b - c -
-
ecpdiv
private void ecpdiv(double[][] a,
double[][] b,
double[][] c)
Divides two numbers and returns the solution. All numbers are represented by a 2x2 array.
- Parameters:
a - b - c -
-
conv12
private void conv12(double realCN,
double imagCN,
double[][] cae)
Converts a real and imaginary number pair to a form of a 2x2 real array.
- Parameters:
realCN - imagCN - cae -
-
cmpadd
private void cmpadd(double[] ar,
double[] ai,
double[] br,
double[] bi,
double[] cr,
double[] ci)
Takes two arrays representing one real and one imaginary part, and adds two arrays representing another complex
number and returns two arrays holding the complex sum. (CR, CI) = (AR+BR, AI+BI)
- Parameters:
ar - ai - br - bi - cr - ci -
-
store
private double store(double x)
This function forces its argument x to be stored in a memory location, thus providing a means of determining
floating point number characteristics (such as the machine precision) when it is necessary to avoid computation
in high precision registers.
- Parameters:
x - The value to be stored- Returns:
- The value of x after it has been stored and possibly truncated or rounded to the double precision word
length.
-
cmpmul
private void cmpmul(double[] ar,
double[] ai,
double br,
double bi,
double[] cr,
double[] ci)
Takes 2 arrays, ar and ai representing one real and one imaginary part, and multiplies it with br and bi,
representing a complex number and returns the complex product
- Parameters:
ar - ai - br - bi - cr - ci -
-
armult
private void armult(double[] a,
double b,
double[] c)
Accepts array a and scalar b, and returns the product array c.
- Parameters:
a - b - c -
-
aradd
private void aradd(double[] a,
double[] b,
double[] c)
Accepts two arrays of numbers, a and b, and returns the sum of the array c.
- Parameters:
a - b - c -
-
arsub
private void arsub(double[] a,
double[] b,
double[] c)
Accepts two arrays and subtracts each element in the second array b from the element in the first array a and
returns the solution c
- Parameters:
a - b - c -
-
firstKindRealArgument
private void firstKindRealArgument()
This code is a port of the FORTRAN routine CHGM from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 398-400. It computes confluent hypergeometric functions of
the first kind for real parameters and argument. It works well except for the case of a << -1 when x > 0 and a >>
1 when x < 0. In this exceptional case, the evaluation involves the summation of a partially alternating series
which results in a loss of significant digits.
-
firstKindComplexArgument
private void firstKindComplexArgument()
This code is a port of the FORTRAN routine CCHG from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 400-402. It computes confluent hypergeometric functions of
the first kind for real parameters and a complex argument. It works well except for the case of a << -1 when x >
0 and a >> 1 when x < 0. In this exceptional case, the evaluation involves the summation of a partially
alternating series which results in a loss of significant digits.
-
secondKindRealArgument
private void secondKindRealArgument()
This code is a port of the FORTRAN routine CHGU from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 403-405. It computes confluent hypergeometric functions of
the second kind for real parameters and argument. It works well except for the case of a << -1 because in this
case the evaluation involves a summation of a partially alternating series which results in a loss of significant
digits. Routines called: chgus for small x method = 1 chgul for large x method = 2 chgubi for integer b method =
3 chguit for numerical integration method = 4
�������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback.html�����0000775�4231163�4231163�00000054363�14537076053�033732� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
lastx
public double lastx
-
lasty
public double lasty
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobian_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.DataDouble.html������������������������������������0000775�4231163�4231163�00000043773�14537076057�025606� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.DataDouble (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
data |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Data
externalData, i, index_data, is_ordered_variable, max_num_unique_values, no_split_variables, num_cols, num_cols_no_snp, num_rows, num_rows_rounded, permuted_sampleIDs, snp_data, unique_data_values, variable_names
-
Constructor Summary
Constructors
| Constructor |
Description |
DataDouble() |
|
DataDouble(double[] data,
java.util.Vector<java.lang.String> variable_names,
int num_rows,
int num_cols) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Data
addNoSplitVariable, addSnpData, getAllValues, getIndex, getIsOrderedVariable, getMaxNumUniqueValues, getMinMaxValues, getNoSplitVariables, getNumCols, getNumRows, getNumUniqueDataValues, getPermutedSampleID, getUniqueDataValue, getUnpermutedVarID, getVariableID, getVariableNames, isOrderedVariable, loadFromFile, loadFromFileOther, permuteSampleIDs, setIsOrderedVariable, setIsOrderedVariableString, sort
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
data
private double[] data
-
Constructor Detail
-
DataDouble
public DataDouble()
-
DataDouble
public DataDouble(double[] data,
java.util.Vector<java.lang.String> variable_names,
int num_rows,
int num_cols)
�����gov/nih/mipav/model/algorithms/CeresSolver.VertexTotalOrdering.html���������������������������������0000775�4231163�4231163�00000033467�14537076052�026331� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.VertexTotalOrdering (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.VertexTotalOrdering<Vertex>
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CgnrLinearOperator.html����������������������������������0000775�4231163�4231163�00000036127�14537076051�026111� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CgnrLinearOperator (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ImageQuality.html����������������������������������������������������0000775�4231163�4231163�00000406726�14537076055�022523� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ImageQuality (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
ImageQuality() |
|
ImageQuality(ModelImage referenceImage,
ModelImage testImage,
double VA,
int[] metrics,
double[] results) |
|
ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
double[] results) |
|
ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
double sigma_nsq,
double[] results) |
|
ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
double sigma_nsq,
int[] subbands,
int M,
double[] results) |
|
ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
double alpha,
int vsnr_data_b,
double vsnr_data_k,
double vsnr_data_g,
double vsnr_data_r,
double vsnr_data_v,
int vsnr_data_num_levels,
int[] vsnr_data_filter_gains,
double[] results) |
|
ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double[] results) |
|
ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double[][] win,
double[] results) |
|
ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double r,
double[] results) |
|
ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double k1,
double k2,
double sigma,
double[] results) |
|
ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double k1,
double k2,
double sigma,
double r,
double[][] win,
double sigma_nsq,
int[] subbands,
int M,
int level,
double[] weight,
int method,
double VA,
double alpha,
int vsnr_data_b,
double vsnr_data_k,
double vsnr_data_g,
double vsnr_data_r,
double vsnr_data_v,
int vsnr_data_num_levels,
int[] vsnr_data_filter_gains,
double[] results) |
|
ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double k1,
double k2,
double sigma,
int level,
double[] weight,
int method,
double[] results) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double |
_compute_bef(double[] im,
int block_size) |
|
private double[] |
analyze_dst_img() |
|
private void |
analyze_src_img() |
|
private double |
best_csnrs(double v_idx) |
|
private double[] |
cmaskn(double[] c,
double[] ci,
double[] a,
double[] ai,
double i) |
|
double[][] |
copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue) |
|
private double[][] |
correlationFilter(double[][] img) |
|
private double |
ctf(double f_r) |
|
void |
DoTransformCols(double[][] Buffer,
double[][] SBuffer,
double[][] DBuffer) |
|
void |
DoTransformRows(double[][] Buffer,
double[][] SBuffer,
double[][] DBuffer) |
|
private void |
DoUntransformCols(double[][] Buffer,
double[][] SBuffer,
double[][] DBuffer) |
|
private void |
DoUntransformRows(double[][] Buffer,
double[][] SBuffer,
double[][] DBuffer) |
|
private void |
ergas() |
|
private double[][] |
fftshift(double[][] in) |
|
private double[][] |
filter2Same(double[][] img,
double[][] win) |
|
private double[][] |
filter2SameWithDownSample(double[][] img,
double[][] win,
int borderType,
int downSampleY,
int downSampleX,
int startY,
int startX,
int stopY,
int stopX) |
|
private double[][] |
filter2Valid(double[][] img,
double[][] filter) |
|
private double |
find_best_csnrs(double Ce) |
|
private double[] |
gthresh(double[] x,
double T,
double[] z) |
|
private double[][][][] |
imdwt(double[][] LL0,
int num_levels) |
|
private double |
log2(double input) |
|
private void |
mse() |
|
private void |
msssim() |
|
private void |
nqm() |
|
private void |
psnr() |
|
private void |
psnrb() |
|
private void |
rase() |
|
private void |
Reconstruct(double[][][] bands,
int num_scales) |
|
private void |
refparams_vecgsm(double[][][] ssarr,
double[][] l_arr,
java.util.Vector<double[][]> org) |
|
private void |
rmse() |
|
private void |
rmse_sw() |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
sam() |
|
private void |
scc() |
|
private void |
ssim(boolean downSampling) |
|
void |
testErgas() |
|
void |
testMse() |
|
void |
testMsssim() |
|
void |
testNQM() |
|
void |
testPsnr() |
|
void |
testPSNRB() |
|
void |
testRase() |
|
void |
testRmse() |
|
void |
testSam() |
|
void |
testScc() |
|
void |
testSsim() |
|
void |
testSsimDownload() |
|
void |
testUqi() |
|
void |
testVIF() |
|
void |
testVIFP() |
|
void |
testVSNR() |
|
private double[][] |
uniformFilter(double[][] img,
int size1,
int size2) |
|
private void |
uqi() |
|
private void |
vifp() |
|
private void |
vifsub_est_M(java.util.Vector<double[][]> g_all,
java.util.Vector<double[][]> vv_all,
java.util.Vector<double[][]> org,
java.util.Vector<double[][]> dist) |
|
private void |
vifvec() |
|
private void |
vsnr() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
metrics
private int[] metrics
-
results
private double[] results
-
sam_mean
private double sam_mean
-
psnr_b
private double psnr_b
-
length
private int length
-
isColor
private boolean isColor
-
rase_mean
private double rase_mean
-
vifp_mean
private double vifp_mean
-
nqm_value
private double nqm_value
-
sigma
private double sigma
-
weight
private double[] weight
-
method
private int method
-
win
private double[][] win
-
sigma_nsq
private double sigma_nsq
-
subbands
private int[] subbands
-
alpha
private double alpha
-
vsnr_data_b
private int vsnr_data_b
-
Constructor Detail
-
ImageQuality
public ImageQuality()
-
ImageQuality
public ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
double[] results)
-
ImageQuality
public ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double[] results)
-
ImageQuality
public ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double k1,
double k2,
double sigma,
double[] results)
-
ImageQuality
public ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double k1,
double k2,
double sigma,
int level,
double[] weight,
int method,
double[] results)
-
ImageQuality
public ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double r,
double[] results)
-
ImageQuality
public ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double[][] win,
double[] results)
-
ImageQuality
public ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
double sigma_nsq,
double[] results)
-
ImageQuality
public ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
double sigma_nsq,
int[] subbands,
int M,
double[] results)
-
ImageQuality
public ImageQuality(ModelImage referenceImage,
ModelImage testImage,
double VA,
int[] metrics,
double[] results)
-
ImageQuality
public ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
double alpha,
int vsnr_data_b,
double vsnr_data_k,
double vsnr_data_g,
double vsnr_data_r,
double vsnr_data_v,
int vsnr_data_num_levels,
int[] vsnr_data_filter_gains,
double[] results)
-
ImageQuality
public ImageQuality(ModelImage referenceImage,
ModelImage testImage,
int[] metrics,
int ws,
double k1,
double k2,
double sigma,
double r,
double[][] win,
double sigma_nsq,
int[] subbands,
int M,
int level,
double[] weight,
int method,
double VA,
double alpha,
int vsnr_data_b,
double vsnr_data_k,
double vsnr_data_g,
double vsnr_data_r,
double vsnr_data_v,
int vsnr_data_num_levels,
int[] vsnr_data_filter_gains,
double[] results)
-
Method Detail
-
testMse
public void testMse()
-
testRmse
public void testRmse()
-
testPsnr
public void testPsnr()
-
testErgas
public void testErgas()
-
testScc
public void testScc()
-
testRase
public void testRase()
-
testUqi
public void testUqi()
-
testSsim
public void testSsim()
-
testMsssim
public void testMsssim()
-
testSam
public void testSam()
-
testNQM
public void testNQM()
-
testPSNRB
public void testPSNRB()
-
testVIF
public void testVIF()
-
testVIFP
public void testVIFP()
-
testVSNR
public void testVSNR()
-
copyMakeBorder
public double[][] copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue)
-
rmse_sw
private void rmse_sw()
-
ergas
private void ergas()
-
msssim
private void msssim()
-
psnrb
private void psnrb()
-
vifvec
private void vifvec()
-
filter2SameWithDownSample
private double[][] filter2SameWithDownSample(double[][] img,
double[][] win,
int borderType,
int downSampleY,
int downSampleX,
int startY,
int startX,
int stopY,
int stopX)
-
vifsub_est_M
private void vifsub_est_M(java.util.Vector<double[][]> g_all,
java.util.Vector<double[][]> vv_all,
java.util.Vector<double[][]> org,
java.util.Vector<double[][]> dist)
-
cmaskn
private double[] cmaskn(double[] c,
double[] ci,
double[] a,
double[] ai,
double i)
������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.RememberingCallback.html�����������������������������0000775�4231163�4231163�00000031316�14537076053�027057� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.RememberingCallback (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
calls |
|
(package private) double[] |
x |
|
(package private) java.util.Vector<java.lang.Double> |
x_values |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TrustRegionStrategyType.html�����������������������������0000775�4231163�4231163�00000034721�14537076052�027222� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TrustRegionStrategyType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.TrustRegionStrategyType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�����������������������������������������������gov/nih/mipav/model/algorithms/libdt.Split_vars.html������������������������������������������������0000775�4231163�4231163�00000032703�14537076055�023341� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.Split_vars (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Enum<libdt.Split_vars>
-
- gov.nih.mipav.model.algorithms.libdt.Split_vars
-
-
Enum Constant Summary
Enum Constants
| Enum Constant |
Description |
VARC |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
Split_vars() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
Split_vars
private Split_vars()
-
Method Detail
-
valueOf
public static libdt.Split_vars valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.diffGaussians.html�����������������������������������0000775�4231163�4231163�00000031317�14537076054�025570� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.diffGaussians (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
xp |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.depfun.html��������������������������������0000775�4231163�4231163�00000043076�14537076056�026532� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.depfun (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) int |
n |
|
(package private) double[] |
nmlen |
|
(package private) double[][] |
qdat |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
depfun(double[] y0,
int n,
double[] beta,
double[] nmlen,
double[][] qdat) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
depfun
public depfun(double[] y0,
int n,
double[] beta,
double[] nmlen,
double[][] qdat)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!covarMat - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/BlindDeblur.html�����������������������������������������������������0000775�4231163�4231163�00000223626�14537076051�022306� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BlindDeblur (MIPAV API Documentation)
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
(package private) class |
BlindDeblur.Pair<T,U> |
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
alpha |
|
private double |
beta |
|
private double |
bi_sigma_range0 |
|
private double |
bi_sigma_spatial0 |
|
private int |
bi_size |
|
private int |
BLUR_KERNEL_SIZE |
|
private int[] |
blur_x_lims |
|
private int[] |
blur_y_lims |
|
private int[] |
blur_z_lims |
|
private ModelImage |
blurryImage |
|
private java.lang.String |
blurryImageExtension |
|
private java.lang.String |
blurryImageFileDirectory |
|
private java.lang.String |
blurryImageFileName |
|
private java.lang.String |
BtB_method |
|
private java.lang.String |
cameraMakeBlurry |
|
private java.lang.String |
cameraMakeTrue |
|
private java.lang.String |
cameraModelBlurry |
|
private java.util.Vector<BlindDeblur.Pair<java.lang.String,java.lang.Double>> |
cameraModelList |
|
private java.lang.String |
cameraModelTrue |
|
private java.lang.String |
config_name |
|
private ModelImage |
correctedImage |
|
private int |
deconv_maxit |
|
private int |
deconv_maxit_final |
|
private boolean[] |
do_color |
|
private boolean[] |
do_deblur |
|
private boolean |
do_display |
|
private boolean |
do_estimate_kernel |
|
private java.lang.String |
estimate_kernel_from |
|
private double |
exposureTimeBlurry |
|
private double |
exposureTimeTrue |
|
private boolean |
fast_approx |
|
private int |
final_level |
|
private int |
first_level |
|
private double |
FNumberBlurry |
|
private double |
FNumberTrue |
|
private double |
focal_length_in_35mm_shake |
|
private double |
focal_length_in_35mm_true |
|
private double |
focalLength35Blurry |
|
private double |
focalLength35True |
|
private double |
focalLengthBlurry |
|
private double |
focalLengthTrue |
|
private int |
grad_dir_bins |
|
private double |
grad_dir_quant |
|
private double |
grad_thresh_decrease |
|
private java.lang.String |
image_method |
|
private java.util.Vector<java.lang.String> |
image_method_final |
|
(package private) java.util.function.BiFunction<java.lang.Double,java.lang.Double,java.lang.Double> |
invrespfn_canon |
|
(package private) java.util.function.BiFunction<java.lang.Double,java.lang.Double,java.lang.Double> |
invrespfn_default |
|
(package private) java.util.function.BiFunction<java.lang.Double,java.lang.Double,java.lang.Double> |
invrespfn_linear |
|
private double |
ISOSpeedRatingBlurry |
|
private double |
ISOSpeedRatingTrue |
|
private boolean |
israw |
|
private boolean |
israw_blurry |
|
private boolean |
israw_true |
|
private int |
kernel_dilate_radius |
|
private java.lang.String |
kernel_method |
|
private double |
kernel_threshold |
|
private double |
kf_exponent |
|
private double |
kf_lambda |
|
private java.lang.String |
logFile |
|
private int |
max_dim |
|
private int |
max_levels |
|
private int |
max_nonzeros_w |
|
private boolean |
non_uniform |
|
private int |
num_cg_iters |
|
private int |
num_horz_regions |
|
private int[] |
num_iters |
|
private int |
num_vert_regions |
|
private double |
omega0 |
|
private double |
omega1 |
|
private double |
omega2 |
|
private java.io.File |
output_directory |
|
private java.lang.String |
output_directory_name |
|
private java.lang.String |
output_name |
|
private double |
param_decrease |
|
private int |
pixels_per_theta_step |
|
private int |
r |
|
private int |
recenter_kernel |
|
private java.util.Vector<BlindDeblur.Pair<java.lang.String,java.lang.Double>> |
resp_params |
|
(package private) java.util.function.BiFunction<java.lang.Double,java.lang.Double,java.lang.Double> |
respfn |
|
(package private) java.util.function.BiFunction<java.lang.Double,java.lang.Double,java.lang.Double> |
respfn_canon |
|
(package private) java.util.function.BiFunction<java.lang.Double,java.lang.Double,java.lang.Double> |
respfn_default |
|
(package private) java.util.function.BiFunction<java.lang.Double,java.lang.Double,java.lang.Double> |
respfn_linear |
|
private java.lang.String |
results_root |
|
private double |
sat_thresh |
|
private int |
save_intermediate_images |
|
private boolean |
save_intermediate_pyramids |
|
private boolean |
save_mat |
|
private double |
scale_ratio_i |
|
private double |
scale_ratio_k |
|
private int |
shock_dt0 |
|
private int |
shock_iters |
|
private boolean |
synthetic |
|
private int |
SYNTHETIC_BLUR_SIZE |
|
private double |
SYNTHETIC_NOISE_STD |
|
(package private) double |
tgs_z_factor |
|
private double[] |
theta_pre |
|
private boolean |
threshold_kernel |
|
private ModelImage |
trueImage |
|
private java.lang.String |
trueImageExtension |
|
private java.lang.String |
trueImageFileDirectory |
|
private java.lang.String |
trueImageFileName |
|
private boolean |
update_saturation_mask |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
default_config() |
|
private void |
initCameraModelList() |
|
private double |
linear2srgb(double imlinear) |
|
private void |
make_kernel_pyramid(java.util.Vector<double[][][]> pyr_kernel,
java.util.Vector<double[][][][]> pyr_tt,
java.util.Vector<double[]> pyr_tgs,
double[] theta_x_lims,
double[] theta_y_lims,
double[] theta_z_lims,
double[] tgs,
double scale_ratio_k,
int max_levels,
boolean non_uniform,
double[][][] init_kernel,
boolean chain_downsampling,
double[][] init_tt) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private double |
srgb2linear(double imsrgb) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
max_dim
private int max_dim
-
save_mat
private boolean save_mat
-
israw
private boolean israw
-
bi_size
private int bi_size
-
shock_dt0
private int shock_dt0
-
shock_iters
private int shock_iters
-
omega0
private double omega0
-
omega1
private double omega1
-
omega2
private double omega2
-
alpha
private double alpha
-
kf_lambda
private double kf_lambda
-
num_cg_iters
private int num_cg_iters
-
max_levels
private int max_levels
-
num_iters
private int[] num_iters
-
deconv_maxit
private int deconv_maxit
-
first_level
private int first_level
-
final_level
private int final_level
-
tgs_z_factor
double tgs_z_factor
-
Constructor Detail
-
BlindDeblur
public BlindDeblur()
-
BlindDeblur
public BlindDeblur(ModelImage correctedImage,
ModelImage blurryImage,
ModelImage trueImage,
java.lang.String results_root,
java.lang.String logFile,
int BLUR_KERNEL_SIZE)
-
Method Detail
-
make_kernel_pyramid
private void make_kernel_pyramid(java.util.Vector<double[][][]> pyr_kernel,
java.util.Vector<double[][][][]> pyr_tt,
java.util.Vector<double[]> pyr_tgs,
double[] theta_x_lims,
double[] theta_y_lims,
double[] theta_z_lims,
double[] tgs,
double scale_ratio_k,
int max_levels,
boolean non_uniform,
double[][][] init_kernel,
boolean chain_downsampling,
double[][] init_tt)
����������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSkullRemoval.html�������������������������������������������0000775�4231163�4231163�00000223173�14537076050�024403� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSkullRemoval (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmSkullRemoval
extends AlgorithmBase
Algorithm Implementation
1. Calculate the input image histogram.
2. Calculate the image values that represent 2% and 98% of the histogram values and clamp the input image data to that range.
3. Set the cerebrospinal fluid (CSF) threshold minimum value to 30 % of the clamped image range and the CSF threshold maximum
value to 70% of the clamped image range.
4. Calculate the brain center of gravity (COG) as the weighted sum of all voxels between the CSF minimum and maximum range
using the voxel position scaled by intensity value.
5. Estimate the white matter threshold by segmenting the image into 5x5x5 voxel cubes and finding the cube with the highest
mean intensity and lowest variance. The mean intensity of the selected cube is used to set the white matter threshold value.
6. Generate a white-matter segmentation of the brain by using a flood-fill algorithm with the white matter threshold seed
point as the starting point. The flood-fill algorithm is limited by the CSF threshold values as well as a radius centered
around the initial seed point.
7. Take the convex-hull of the white matter segmentation and pass this mesh into a modified version of the AlgorithmBrainExtractor.
8. The output of the AlgorithmBrainExtractor is a segmented mesh representing the surface of the brain. To err on the side
of not removing too much data, the convex-hull of the brain surface is generated.
9. The final mask representing the data outside the brain is generated using all voxels outside the convex-hull of the brain surface.
10. (Optional final step). If the user chooses to segment only the face region instead of the entire skull region the final step
produces the face segmentation from the convex-hull of the brain surface.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private ModelImage |
atlasBasedImage |
atlas image:
|
private boolean |
blur |
when true, blur the output
|
private WildMagic.LibFoundation.Mathematics.Vector3f |
cog |
Center of Gravity :
|
private float |
csfThresholdMax |
Cerebrospinal Fluid (CSF) maximum threshold :
|
private float |
csfThresholdMin |
Cerebrospinal Fluid (CSF) minimum threshold :
|
private int |
dimX |
|
private int |
dimY |
|
private int |
dimZ |
|
private boolean |
face |
when true, compute face segmentation instead of skull
|
private int |
faceOrientation |
Face Orientation is left:
|
private float |
gmThresholdMax |
Gray Matter maximum threshold :
|
private float |
gmThresholdMin |
Gray Matter minimum threshold :
|
private float |
max_98P |
Value representing 98% of the histogram count:
|
private float |
min_2P |
Value representing 2% of the histogram count:
|
private float |
offSet |
Optional offset (in mm) boundary around the segmented region
|
private int[] |
originalAxis |
stores the original image orientation axis
|
private int[] |
originalAxisTargetAtlas |
stores the original image orientation axis (used for the target image when an atlas image is present)
|
private ModelImage |
originalSrc |
original source image
|
private ModelImage |
registeredSourceImage |
registered atlas image
|
private boolean |
reMappedSrc |
When true the source image was remapped
|
private boolean |
reMappedTargetAtlas |
When true the target image was remapped (used for the target image when an atlas image is present)
|
private boolean |
remove |
when true, remove the output
|
private boolean |
showFaceSegmentation |
when true, display the face segmentation
|
private boolean |
showSkullSegmentation |
when true, display the skull segmentation
|
private int[] |
targetAxis |
the orientation the images are remapped to before processing:
|
private float |
wmThreshold |
White Matter threshold :
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
addBlur(ModelImage blurImage,
ModelImage destImage) |
Combines the randomized-voxel blurred image with the output image.
|
private java.util.BitSet |
computeSurfaceMask(WildMagic.LibGraphics.SceneGraph.TriMesh mesh) |
Computes a volume mask of the triangle mesh surface.
|
private WildMagic.LibGraphics.SceneGraph.TriMesh |
convexHull(WildMagic.LibGraphics.SceneGraph.TriMesh mesh) |
Compute the convex hull of the input mesh, return the convex hull.
|
private java.util.BitSet |
createMask(WildMagic.LibFoundation.Mathematics.Plane3f clipPlane,
WildMagic.LibFoundation.Mathematics.Vector3f cog) |
|
private java.util.BitSet |
createMask(WildMagic.LibGraphics.SceneGraph.TriMesh mesh,
boolean show,
java.lang.String postScript) |
|
private WildMagic.LibGraphics.SceneGraph.TriMesh |
createMesh(ModelImage image) |
|
private WildMagic.LibGraphics.SceneGraph.TriMesh |
createMesh(java.util.BitSet mask) |
|
private float |
distance(WildMagic.LibFoundation.Mathematics.Vector3f cog,
int x,
int y,
int z) |
|
private void |
estimateParameters() |
1.
|
private VOI |
estimateWhiteMatter(ModelImage image) |
5.
|
private void |
fill(ModelImage image,
WildMagic.LibFoundation.Mathematics.Vector3f centerBound,
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> seedList,
java.util.BitSet visited,
java.util.BitSet whiteMatter) |
|
private void |
fill(java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> seedList,
java.util.BitSet visited,
java.util.BitSet mask) |
|
private void |
fillWhiteMatter(ModelImage image,
VOI seedPoints) |
Once the white-matter seed point is found it is used to initialize a flood-fill algorithm that segments
the white-matter of the brain.
|
void |
finalize() |
Clean up memory used by the algorithm.
|
private void |
floodFill(java.util.BitSet mask,
WildMagic.LibFoundation.Mathematics.Vector3f cog) |
|
private void |
generateConvexHullMask(ModelImage image) |
Algorithm Implementation Steps:
7.
|
private void |
getBoundsDistance(WildMagic.LibFoundation.Mathematics.Vector3f min,
WildMagic.LibFoundation.Mathematics.Vector3f max,
WildMagic.LibFoundation.Mathematics.Vector3f centerBound,
float limitX,
float limit) |
|
private float |
getIntersectX(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
float iY,
float iZ) |
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and
the triangle defined by the three input points.
|
private float |
getIntersectY(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
float iX,
float iZ) |
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and
the triangle defined by the three input points.
|
private float |
getIntersectZ(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
float iX,
float iY) |
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and
the triangle defined by the three input points.
|
private float |
getMedianIntensity(ModelImage image,
java.util.BitSet mask) |
|
private boolean |
inBounds(int x,
int y,
int z) |
|
private ModelImage |
randomize(ModelImage image,
int stepSize) |
Randomizes voxel cubes with similar average intensities.
|
private ModelImage |
registerImages(ModelImage target,
ModelImage src) |
Registers the atlas image to the input target image:
|
private WildMagic.LibGraphics.SceneGraph.TriMesh |
removeUnusedVertices(WildMagic.LibGraphics.SceneGraph.TriMesh kMesh) |
|
void |
runAlgorithm() |
Run the de-facing algorithm.
|
private void |
scaleMesh(WildMagic.LibGraphics.SceneGraph.TriMesh mesh) |
Scales the input mesh based on the offset parameter set in the constructor.
|
void |
setOffSet(float offSet) |
Set the boundary offset parameter in mm.
|
void |
setOutputOption(boolean blur,
boolean remove,
boolean face,
boolean showFaceSegmentation,
boolean showSkullSegmentation) |
Set the output options
|
private void |
skullRemoval() |
Main algorithm implementation, skull segmentation and removal.
|
private void |
subtractMask(ModelImage image) |
Removes portions of the image that are masked.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmSkullRemoval
public AlgorithmSkullRemoval(ModelImage srcImg,
ModelImage atlasImage)
Automatic DeSkulling initialization.
- Parameters:
srcImg - The image to segment.atlasImage - The atlas image.
-
Method Detail
-
setOutputOption
public void setOutputOption(boolean blur,
boolean remove,
boolean face,
boolean showFaceSegmentation,
boolean showSkullSegmentation)
Set the output options
- Parameters:
blur - when true blur the segmented regionremove - when true remove the segmented regionface - when true segment the faceshowFaceSegmentation - when true show the face segmentationshowSkullSegmentation - when true show the skull segmentation
-
addBlur
private void addBlur(ModelImage blurImage,
ModelImage destImage)
Combines the randomized-voxel blurred image with the output image.
Only the areas that are in the segmented region are modified by the blur.
- Parameters:
blurImage - destImage -
-
computeSurfaceMask
private java.util.BitSet computeSurfaceMask(WildMagic.LibGraphics.SceneGraph.TriMesh mesh)
Computes a volume mask of the triangle mesh surface. The BitSet mask volume has the same volume dimensions as the current image.
The mask is used to show the surface-plane intersections in the slice views.
- Parameters:
mesh - triangle mesh to convert to a volume mask representation.- Returns:
- BitSet mask, which is set to true wherever the triangle mesh intersects the volume voxel.
-
convexHull
private WildMagic.LibGraphics.SceneGraph.TriMesh convexHull(WildMagic.LibGraphics.SceneGraph.TriMesh mesh)
Compute the convex hull of the input mesh, return the convex hull.
- Parameters:
mesh - - Returns:
-
estimateParameters
private void estimateParameters()
1. Calculate the input image histogram.
2. Calculate the image values that represent 2% and 98% of the histogram values and clamp the input image data to that range.
3. Set the cerebrospinal fluid (CSF) threshold minimum value to 30 % of the clamped image range and the CSF threshold maximum
value to 70% of the clamped image range.
4. Calculate the brain center of gravity (COG) as the weighted sum of all voxels between the CSF minimum and maximum range
using the voxel position scaled by intensity value.
Steps 1-4: The preprocessed steps generate the center of gravity (COG) and cerebrospinal fluid (CSF) thresholds,
which are used to find the initial white-matter seed point. Potential white-matter seed points are limited to
a radius around the COG. The minimum variance is selected from potential seed points with a maximum mean-intensity
greater than the CSF threshold. These steps prevent the algorithm from finding a seed point in the background,
where the variance may be zero but where the intensity is lower than the CSF threshold.
-
estimateWhiteMatter
private VOI estimateWhiteMatter(ModelImage image)
5. Estimate the white matter threshold by segmenting the image into 5x5x5 voxel cubes and finding the cube with the highest
mean intensity and lowest variance. The mean intensity of the selected cube is used to set the white matter threshold value.
- Parameters:
image - image remapped to the robust image range.- Returns:
- initial white-matter seed point(s).
-
fill
private void fill(ModelImage image,
WildMagic.LibFoundation.Mathematics.Vector3f centerBound,
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> seedList,
java.util.BitSet visited,
java.util.BitSet whiteMatter)
-
fillWhiteMatter
private void fillWhiteMatter(ModelImage image,
VOI seedPoints)
Once the white-matter seed point is found it is used to initialize a flood-fill algorithm that segments
the white-matter of the brain. The seed point is typically found in one hemisphere of the brain. The first
step in initializing the flood-fill algorithm is to generate a mirror-image seed-point located in the
opposite hemisphere. This enables the flood-fill algorithm to work equally well on both hemispheres.
The flood-fill algorithm is limited to an ellipsoid shape around the COG, where the long axis of the ellipsoid
is anterior-to-posterior and the short axes of the ellipsoid are superior-to-inferior and left-to-right.
- Parameters:
image - seedPoints -
-
generateConvexHullMask
private void generateConvexHullMask(ModelImage image)
Algorithm Implementation Steps:
7. Take the convex-hull of the white matter segmentation and pass this mesh into a modified version of the AlgorithmBrainExtractor.
8. The output of the AlgorithmBrainExtractor is a segmented mesh representing the surface of the brain. To err on the side of
not removing too much data, the convex-hull of the brain surface is generated.
9. The final mask representing the data outside the brain is generated using all voxels outside the convex-hull of
the brain surface.
10. (Optional final step). If the user chooses to segment only the face region instead of the entire skull region the
final step produces the face segmentation from the convex-hull of the brain surface.
Once the white-matter has been segmented, a convex-hull of the segmentation is generated in step 7. This mesh is passed
to a modified version of the AlgorithmBrainExtractor in MIPAV. The convex-hull of the white-matter often provides a
good enough segmentation of the skull, but in a few cases the convex-hull of the white-matter does not include the
entire surface of the brain and processing the mesh with the AlgorithmBrainExtractor corrects the mesh.
Steps 8-9 were added to provide a buffer around the brain segmentation. This enables the algorithm to err on the side
of removing too little data rather than removing small portions of the brain surface.
-
getBoundsDistance
private void getBoundsDistance(WildMagic.LibFoundation.Mathematics.Vector3f min,
WildMagic.LibFoundation.Mathematics.Vector3f max,
WildMagic.LibFoundation.Mathematics.Vector3f centerBound,
float limitX,
float limit)
-
getIntersectX
private float getIntersectX(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
float iY,
float iZ)
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and
the triangle defined by the three input points. All calculations are in
voxel coordinates and the x-value of the intersection point is
truncated to an integer.
- Parameters:
kV0 - a 3D vertex of the trianglekV1 - a 3D vertex of the trianglekV2 - a 3D vertex of the triangleiY - the y-value of the origin of the lineiZ - the z-value of the origin of the line- Returns:
- the x-value of the intersection
-
getIntersectY
private float getIntersectY(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
float iX,
float iZ)
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and
the triangle defined by the three input points. All calculations are in
voxel coordinates and the y-value of the intersection point is
truncated to an integer.
- Parameters:
kV0 - a 3D vertex of the trianglekV1 - a 3D vertex of the trianglekV2 - a 3D vertex of the triangleiX - the x-value of the origin of the lineiZ - the z-value of the origin of the line- Returns:
- the y-value of the intersection
-
getIntersectZ
private float getIntersectZ(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
float iX,
float iY)
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and
the triangle defined by the three input points. All calculations are in
voxel coordinates and the z-value of the intersection point is
truncated to an integer.
- Parameters:
kV0 - a 3D vertex of the trianglekV1 - a 3D vertex of the trianglekV2 - a 3D vertex of the triangleiX - the x-value of the origin of the lineiY - the y-value of the origin of the line- Returns:
- the z-value of the intersection
-
randomize
private ModelImage randomize(ModelImage image,
int stepSize)
Randomizes voxel cubes with similar average intensities.
- Parameters:
image - stepSize - - Returns:
-
registerImages
private ModelImage registerImages(ModelImage target,
ModelImage src)
Registers the atlas image to the input target image:
- Parameters:
target - src - - Returns:
-
scaleMesh
private void scaleMesh(WildMagic.LibGraphics.SceneGraph.TriMesh mesh)
Scales the input mesh based on the offset parameter set in the constructor.
This enables the user to set a buffer around the segmentation.
- Parameters:
mesh -
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.GoodCostFunction.html��������������������������������0000775�4231163�4231163�00000033741�14537076053�026441� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.GoodCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������gov/nih/mipav/model/algorithms/AlgorithmTreT1.html��������������������������������������������������0000775�4231163�4231163�00000212473�14537076050�022723� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTreT1 (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmTreT1
extends AlgorithmTProcess
This class is adapted from the ImageJ version originally written by Sean Deoni while working at the
National Institutes of Health. This class performs T1 calculations given any number of
SPGR and IRSPGR images.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmTProcess
computeDataThreads, do4D, Gaussian, hardNoiseThreshold, loadDataThreads, lowerLeftCorner, lowerRightCorner, MAX_PROCESS, noiseScale, nSlices, processDataThreads, upperLeftCorner, upperRightCorner, useHardThresholding, useSmartThresholding
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmTreT1(double treTR,
double irspgrTR,
double irspgrKy,
double irspgrFA,
double maxT1,
double maxM0,
double[] treFA,
double[] irspgrTr2,
double[] irspgrTI,
double[] spgrData,
double[] irspgrData,
double scale,
double pointScale,
double scaleIncrement,
double[] estimates,
double[] residuals,
int[] direction,
int[] spgrImageIndex,
int[] irspgrImageIndex,
int b1ImageIndex,
double angleIncrement,
int nsa,
int nti,
double maxAngle,
boolean smoothB1Field,
boolean performStraightTreT1,
boolean performTreT1withPreCalculatedB1Map,
boolean performTreT1HIFI,
boolean doubleInversion,
boolean singleInversion,
boolean geScanner,
boolean siemensScanner,
boolean threeTField,
boolean onefiveTField,
boolean calculateT1,
boolean showB1Map,
boolean calculateM0,
boolean invertT1toR1,
boolean useWeights,
boolean uniformAngleSpacing,
boolean upperLeftCorner,
boolean upperRightCorner,
boolean lowerLeftCorner,
boolean lowerRightCorner,
boolean useSmartThresholding,
boolean useHardThresholding,
float noiseScale,
float hardNoiseThreshold,
java.lang.String[] wList,
java.lang.String[] titles) |
|
AlgorithmTreT1(ModelImage destImage,
ModelImage srcImage,
double treTR,
double irspgrTR,
double irspgrKy,
double irspgrFA,
double maxT1,
double maxM0,
double[] treFA,
double[] irspgrTr2,
double[] irspgrTI,
double[] spgrData,
double[] irspgrData,
double scale,
double pointScale,
double scaleIncrement,
double[] estimates,
double[] residuals,
int[] direction,
int[] spgrImageIndex,
int[] irspgrImageIndex,
int b1ImageIndex,
double angleIncrement,
int nsa,
int nti,
double maxAngle,
boolean smoothB1Field,
boolean performStraightTreT1,
boolean performTreT1withPreCalculatedB1Map,
boolean performTreT1HIFI,
boolean doubleInversion,
boolean singleInversion,
boolean geScanner,
boolean siemensScanner,
boolean threeTField,
boolean onefiveTField,
boolean calculateT1,
boolean showB1Map,
boolean calculateM0,
boolean invertT1toR1,
boolean useWeights,
boolean uniformAngleSpacing,
boolean upperLeftCorner,
boolean upperRightCorner,
boolean lowerLeftCorner,
boolean lowerRightCorner,
boolean useSmartThresholding,
boolean useHardThresholding,
float noiseScale,
float hardNoiseThreshold,
java.lang.String[] wList,
java.lang.String[] titles) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
calculateT1UsingConventionalTreT1() |
|
boolean |
calculateT1UsingTreT1HIFI() |
|
protected void |
computeProcessors() |
|
protected void |
displayImages() |
This method is used in both the conventional and HIFI case to display result images
|
void |
finalize() |
Prepares this class for destruction.
|
ModelImage |
getB1ResultStack() |
|
ModelImage |
getM0ResultStack() |
|
ModelImage |
getR1ResultStack() |
|
ModelImage |
getT1ResultStack() |
|
private void |
init() |
Initializes local variables that are internal to tre.
|
private void |
initializeDisplayImages(ModelImage image) |
This method initializes the final images as near-clones of the largest image in the set
|
private void |
loadFinalData(ModelImage image,
double[][][] data) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
double |
signalResiduals(double x,
double[] spgrData,
double[] irspgrData,
double Inversion,
int Nfa,
int Nti,
double[] treFA,
double treTR,
double[] irspgrTr,
double[] irspgrTI,
double irspgrFA) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
treTR
private double treTR
-
irspgrTR
private double irspgrTR
-
irspgrKy
private double irspgrKy
-
irspgrFA
private double irspgrFA
-
maxT1
private double maxT1
-
maxM0
private double maxM0
-
treFA
private double[] treFA
-
scale
private double scale
-
direction
private int[] direction
-
b1ImageIndex
private int b1ImageIndex
-
maxAngle
private double maxAngle
-
Constructor Detail
-
AlgorithmTreT1
public AlgorithmTreT1(double treTR,
double irspgrTR,
double irspgrKy,
double irspgrFA,
double maxT1,
double maxM0,
double[] treFA,
double[] irspgrTr2,
double[] irspgrTI,
double[] spgrData,
double[] irspgrData,
double scale,
double pointScale,
double scaleIncrement,
double[] estimates,
double[] residuals,
int[] direction,
int[] spgrImageIndex,
int[] irspgrImageIndex,
int b1ImageIndex,
double angleIncrement,
int nsa,
int nti,
double maxAngle,
boolean smoothB1Field,
boolean performStraightTreT1,
boolean performTreT1withPreCalculatedB1Map,
boolean performTreT1HIFI,
boolean doubleInversion,
boolean singleInversion,
boolean geScanner,
boolean siemensScanner,
boolean threeTField,
boolean onefiveTField,
boolean calculateT1,
boolean showB1Map,
boolean calculateM0,
boolean invertT1toR1,
boolean useWeights,
boolean uniformAngleSpacing,
boolean upperLeftCorner,
boolean upperRightCorner,
boolean lowerLeftCorner,
boolean lowerRightCorner,
boolean useSmartThresholding,
boolean useHardThresholding,
float noiseScale,
float hardNoiseThreshold,
java.lang.String[] wList,
java.lang.String[] titles)
-
AlgorithmTreT1
public AlgorithmTreT1(ModelImage destImage,
ModelImage srcImage,
double treTR,
double irspgrTR,
double irspgrKy,
double irspgrFA,
double maxT1,
double maxM0,
double[] treFA,
double[] irspgrTr2,
double[] irspgrTI,
double[] spgrData,
double[] irspgrData,
double scale,
double pointScale,
double scaleIncrement,
double[] estimates,
double[] residuals,
int[] direction,
int[] spgrImageIndex,
int[] irspgrImageIndex,
int b1ImageIndex,
double angleIncrement,
int nsa,
int nti,
double maxAngle,
boolean smoothB1Field,
boolean performStraightTreT1,
boolean performTreT1withPreCalculatedB1Map,
boolean performTreT1HIFI,
boolean doubleInversion,
boolean singleInversion,
boolean geScanner,
boolean siemensScanner,
boolean threeTField,
boolean onefiveTField,
boolean calculateT1,
boolean showB1Map,
boolean calculateM0,
boolean invertT1toR1,
boolean useWeights,
boolean uniformAngleSpacing,
boolean upperLeftCorner,
boolean upperRightCorner,
boolean lowerLeftCorner,
boolean lowerRightCorner,
boolean useSmartThresholding,
boolean useHardThresholding,
float noiseScale,
float hardNoiseThreshold,
java.lang.String[] wList,
java.lang.String[] titles)
-
Method Detail
-
signalResiduals
public double signalResiduals(double x,
double[] spgrData,
double[] irspgrData,
double Inversion,
int Nfa,
int Nti,
double[] treFA,
double treTR,
double[] irspgrTr,
double[] irspgrTI,
double irspgrFA)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.GradientProblemEvaluator.html����������������������������0000775�4231163�4231163�00000057023�14537076051�027310� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.GradientProblemEvaluator (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
CeresSolver.SparseMatrix |
CreateJacobian() |
|
boolean |
Evaluate(CeresSolver.EvaluateOptions evaluate_options,
double[] state,
double[] cost,
double[] residuals,
double[] gradient,
CeresSolver.SparseMatrix jacobian) |
|
boolean |
Evaluate(CeresSolver.EvaluateOptions evaluate_options,
java.util.Vector<java.lang.Double> state,
double[] cost,
java.util.Vector<java.lang.Double> residuals,
java.util.Vector<java.lang.Double> gradient,
CeresSolver.SparseMatrix jacobian) |
|
int |
NumEffectiveParameters() |
|
int |
NumParameters() |
|
int |
NumResiduals() |
|
boolean |
Plus(double[] state,
double[] delta,
double[] state_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> state,
java.util.Vector<java.lang.Double> delta,
java.util.Vector<java.lang.Double> state_plus_delta) |
|
java.util.HashMap<java.lang.String,CeresSolver.CallStatistics> |
Statistics() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.DataSparse.html������������������������������������0000775�4231163�4231163�00000045101�14537076057�025614� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.DataSparse (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Data
externalData, i, index_data, is_ordered_variable, max_num_unique_values, no_split_variables, num_cols, num_cols_no_snp, num_rows, num_rows_rounded, permuted_sampleIDs, snp_data, unique_data_values, variable_names
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Data
addNoSplitVariable, addSnpData, getAllValues, getIndex, getIsOrderedVariable, getMaxNumUniqueValues, getMinMaxValues, getNoSplitVariables, getNumCols, getNumRows, getNumUniqueDataValues, getPermutedSampleID, getUniqueDataValue, getUnpermutedVarID, getVariableID, getVariableNames, isOrderedVariable, loadFromFile, loadFromFileOther, permuteSampleIDs, setIsOrderedVariable, setIsOrderedVariableString, sort
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DataSparse
public DataSparse()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping2.stpfun2.html������������������������������0000775�4231163�4231163�00000046213�14537076056�026730� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping2.stpfun2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) boolean[] |
cmplx |
|
(package private) int[] |
iv |
|
(package private) int[] |
left |
|
(package private) int |
n |
|
(package private) int |
nb |
|
(package private) double[][] |
nmlen |
|
(package private) double[][] |
qdat |
|
(package private) int[] |
right |
|
(package private) double[] |
v |
|
(package private) double[] |
x |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
stpfun2(double[] x,
int n,
int[] iv,
double[] v,
boolean useAnalyticJacobian,
int nb,
double[] beta,
double[][] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
void |
calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm) |
|
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
stpfun2
public stpfun2(double[] x,
int n,
int[] iv,
double[] v,
boolean useAnalyticJacobian,
int nb,
double[] beta,
double[][] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat)
-
Method Detail
-
driver
public void driver()
Starts the analysis.
- Overrides:
driver in class NL2sol
-
calcj
public void calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm)
- Specified by:
calcj in class NL2sol
-
calcr
public void calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm)
- Specified by:
calcr in class NL2sol
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSM2.FitAll.html���������������������������������������������0000775�4231163�4231163�00000036215�14537076050�023535� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSM2.FitAll (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitAll() |
Creates a new Fit24DModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a0 - a1*(a2**x).
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The x value of the data point.residuals - The best guess parameter values.covarMat - The derivative values of y with respect to fitting parameters.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFTImageSimilarity.KeyPoint.html������������������������������������0000775�4231163�4231163�00000027110�14537076056�025433� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFTImageSimilarity.KeyPoint (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeyPoint
-
-
Constructor Summary
Constructors
| Constructor |
Description |
KeyPoint() |
|
KeyPoint(javax.vecmath.Point2d pt,
double size,
double angle,
double response,
int octave) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
angle
private double angle
-
response
public double response
-
class_id
private int class_id
-
Constructor Detail
-
KeyPoint
public KeyPoint()
-
KeyPoint
public KeyPoint(javax.vecmath.Point2d pt,
double size,
double angle,
double response,
int octave)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.GVRecirculationCostFunction.html���������������������0000775�4231163�4231163�00000034104�14537076054�030376� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.GVRecirculationCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMorphology3D.intObject.html���������������������������������0000775�4231163�4231163�00000025307�14537076047�026236� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMorphology3D.intObject (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMorphology3D.intObject
-
- Enclosing class:
- AlgorithmMorphology3D
private class AlgorithmMorphology3D.intObject
extends java.lang.Object
Simple class to temporarily store the object's size, ID and seed index value. This class is used by the
identifyObjects and deleteObjects methods of AlgorithmMorphology3D class.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
short |
id |
DOCUMENT ME!
|
int |
index |
DOCUMENT ME!
|
int |
size |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
intObject(int idx,
short objectID,
int objectSize) |
Creates a new intObject object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
id
public short id
DOCUMENT ME!
-
index
public int index
DOCUMENT ME!
-
size
public int size
DOCUMENT ME!
-
Constructor Detail
-
intObject
public intObject(int idx,
short objectID,
int objectSize)
Creates a new intObject object.
- Parameters:
idx - seed index. Index is the location in the imageobjectID - the flood seed having a value >= 0.objectSize - the number of voxels in the object
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.GradientCheckingCostFunction.html������������������������0000775�4231163�4231163�00000045575�14537076051�030110� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.GradientCheckingCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobian_offsets) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobian_offsets)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog12.html����������������������������������0000775�4231163�4231163�00000026636�14537076055�025675� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog12 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog12(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog12
public FitdeHoog12(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
��������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Graph.html�����������������������������������������������0000775�4231163�4231163�00000035653�14537076051�023415� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Graph (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Graph<Vertex>
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Graph() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiscreteSineTransform.cdft_arg_t.html��������������������������������0000775�4231163�4231163�00000025366�14537076054�026474� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DiscreteSineTransform.cdft_arg_t (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.DiscreteSineTransform.cdft_arg_t
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
a |
|
(package private) int |
a_offset |
|
(package private) int |
n |
|
(package private) int |
n0 |
|
(package private) int |
nw |
|
(package private) double[] |
w |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitWholeNLConInt2.html���������������������������������0000775�4231163�4231163�00000050663�14537076046�025671� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitWholeNLConInt2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
bound |
DOCUMENT ME!
|
(package private) double |
epsabs |
DOCUMENT ME!
|
(package private) double |
epsrel |
DOCUMENT ME!
|
(package private) int |
inf |
DOCUMENT ME!
|
(package private) int |
limit |
DOCUMENT ME!
|
(package private) double |
lower |
DOCUMENT ME!
|
(package private) double[] |
result |
DOCUMENT ME!
|
(package private) double |
upper |
DOCUMENT ME!
|
(package private) double[] |
xData |
|
(package private) float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitWholeNLConInt2(int nPoints,
double[] xData,
float[] yData,
double[] initial,
double[] result) |
Creates a new FitWholeNLConInt2 object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
bound
double bound
DOCUMENT ME!
-
epsabs
double epsabs
DOCUMENT ME!
-
epsrel
double epsrel
DOCUMENT ME!
-
limit
int limit
DOCUMENT ME!
-
lower
double lower
DOCUMENT ME!
-
result
double[] result
DOCUMENT ME!
-
upper
double upper
DOCUMENT ME!
-
Constructor Detail
-
FitWholeNLConInt2
public FitWholeNLConInt2(int nPoints,
double[] xData,
float[] yData,
double[] initial,
double[] result)
Creates a new FitWholeNLConInt2 object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!result - DOCUMENT ME!
�����������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Glyph.html�����������������������������������������������0000775�4231163�4231163�00000034223�14537076053�023465� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Glyph (MIPAV API Documentation)
-
- Enclosing class:
- ContourPlot
public static interface ContourPlot.Glyph
The Glyph interface has to be implemented by a class that realizes
a graphical representation of a 2D point (e.g. a cross or a circle).
The interface declares the #fillVertexArray(VertexArray) method
that fills a vertex array so that it contains the vertices for the
shape of the glyph.
The other methods describe how the glyph has to be drawn
by the PointsRenderer.
- Author:
- hageldave
-
-
Method Detail
-
numVertices
int numVertices()
- Returns:
- number of vertices this glyph has.
-
primitiveType
int primitiveType()
- Returns:
- the GL primitive to be used for drawing.
For example
GL11#GL_LINES or GL11#GL_TRIANGLE_STRIP
-
pixelSize
int pixelSize()
- Returns:
- the size in pixels this glyph should be scaled to.
-
drawFallback
void drawFallback(java.awt.Graphics2D g,
float scaling)
Fallback rendering path when OpenGL is not available.
Draws this glyph to the specified Graphics2D object
with the specified scaling.
- Parameters:
g - graphics to draw toscaling - factor by which to scale this glyph
-
isFilled
boolean isFilled()
- Returns:
- whether this glyph is filled or not, e.g. a cross is not filled but a circle can.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ProblemOptions.html��������������������������������������0000775�4231163�4231163�00000030062�14537076052�025316� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ProblemOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.ProblemOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ProblemOptions
public ProblemOptions()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Lanczos1CostFunction.html������������������������0000775�4231163�4231163�00000034045�14537076052�027736� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Lanczos1CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.NumParameterBlocksCostFunction.html������������������0000775�4231163�4231163�00000033311�14537076053�031300� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.NumParameterBlocksCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offsete) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offsete)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmPowerWatershed.Rbt.html�������������������������������������0000775�4231163�4231163�00000057176�14537076050�025464� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPowerWatershed.Rbt (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Rbt() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getMax
public int getMax()
-
getUtil
public int getUtil()
-
getMaxutil
public int getMaxutil()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBase.html���������������������������������������������������0000775�4231163�4231163�00000420734�14537076044�022642� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBase (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Thread
-
- gov.nih.mipav.model.algorithms.AlgorithmBase
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
- Direct Known Subclasses:
AgglomerativeInformationBottleneck, Algorithm4DImageCalculator, AlgorithmActiveContoursWithoutEdges, AlgorithmAdaptiveKuwaharaFilter, AlgorithmAddMargins, AlgorithmAGCIE, AlgorithmAGVF, AlgorithmAHE, AlgorithmAHElocal, AlgorithmAINDANE, AlgorithmAnisotropicDiffusion, AlgorithmAntigradient2, AlgorithmAnyTwoImagesSNR, AlgorithmArcLength, AlgorithmASM, AlgorithmAutoCorrelation, AlgorithmAutoCovariance, AlgorithmAutoSeedWatershed, AlgorithmBarrelDistortion, AlgorithmBilateralFilter, AlgorithmBoundaryAttenuation, AlgorithmBoxCount, AlgorithmBrainExtractor, AlgorithmBrainSurfaceExtractor, AlgorithmBRISK, AlgorithmBSmooth, AlgorithmBSnake, AlgorithmBSpline, AlgorithmBSplineControlPointImageFilter, AlgorithmCannyEdgeDetection, AlgorithmCenterOfMass, AlgorithmCenterOfMassRGB, AlgorithmChangeType, AlgorithmCircleGeneration, AlgorithmCircleToRectangle, AlgorithmCircularSectorToRectangle, AlgorithmCoherenceEnhancingDiffusion, AlgorithmColocalizationEM, AlgorithmColocalizationRegression, AlgorithmColorEdge, AlgorithmColorSaturation, AlgorithmComplexConcat, AlgorithmComplexToReal, AlgorithmConcat, AlgorithmConcatMult, AlgorithmConstELSUNCOpt3D, AlgorithmConstPowellOptBase, AlgorithmConstrainedELSUNCOAR3D, AlgorithmConstrainedOAR3D, AlgorithmContrastEnhancementUsingExposureFusion, AlgorithmConvergenceField, AlgorithmConvert3Dto4D, AlgorithmConvert4Dto3D, AlgorithmConvolver, AlgorithmCorrectSpacing, AlgorithmCrop, AlgorithmCropTilted, AlgorithmCubicLagrangian, AlgorithmCumulativeHistogram, AlgorithmCyclicPermutation, AlgorithmDConvolver, AlgorithmDemonsLite, AlgorithmDEMRI3, AlgorithmDicomOrder, AlgorithmDICOMtoAVI, AlgorithmDistanceFilter, AlgorithmDTI2EGFA, AlgorithmDTIColorDisplay, AlgorithmDTIColorDisplay, AlgorithmDTICreateListFile, AlgorithmDTITract, AlgorithmDualContourSearch, AlgorithmDWI2DTI, AlgorithmEdgeDetection3D, AlgorithmEdgeLaplacian, AlgorithmEdgeLaplacianSep, AlgorithmEdgeNMSuppression, AlgorithmEdgePreservingSmoothing, AlgorithmEfficientWatershed, AlgorithmEllipseGeneration, AlgorithmEllipseToCircle, AlgorithmEllipseToRectangle, AlgorithmEllipticFilter, AlgorithmEllipticFourierDescriptors, AlgorithmELSUNCOpt2D, AlgorithmELSUNCOpt3D, AlgorithmEmbeddedConfidenceEdgeDetection, AlgorithmEntropicEdgeDetection, AlgorithmEntropyMinimization, AlgorithmEvaluateMaskSegmentation, AlgorithmEvaluateSegmentation, AlgorithmExtractSlices, AlgorithmExtractSlicesVolumes, AlgorithmExtractSurface, AlgorithmExtractSurfaceCubes, AlgorithmFaceAnonymizer, AlgorithmFaceAnonymizerBET, AlgorithmFacetModel, AlgorithmFastMarching, AlgorithmFastMarching, AlgorithmFFT, AlgorithmFFT2, AlgorithmFIREEdgeExtraction, AlgorithmFlip, AlgorithmFloodFill, AlgorithmFRAP, AlgorithmFrequencyFilter, AlgorithmFrequencyFilterColor, AlgorithmFRETAcceptorPhotobleach, AlgorithmFRETBleedThrough, AlgorithmFRETEfficiency, AlgorithmFuzzMinDeAndChatterji, AlgorithmFuzzyCMeans, AlgorithmFuzzyConnectednessSegmentation, AlgorithmFuzzyMinimization, AlgorithmGaussianBlur, AlgorithmGaussianBlurSep, AlgorithmGaussianMixtureModelEM, AlgorithmGenerateIsolines, AlgorithmGradientInverseWeightedSmoothing, AlgorithmGradientMagnitude, AlgorithmGradientMagnitudeSep, AlgorithmGraphBasedSegmentation, AlgorithmGrayScaleMorphology25D, AlgorithmGrayScaleMorphology2D, AlgorithmGrayScaleMorphology3D, AlgorithmGuidedFilter, AlgorithmGVF, AlgorithmHaralickTexture, AlgorithmHarrisCornerDetector, AlgorithmHarrisLaplace, AlgorithmHeightFunction, AlgorithmHepticLagrangian, AlgorithmHessian, AlgorithmHilbertTransform, AlgorithmHillClimbingWatershed, AlgorithmHistogram, AlgorithmHistogram2Dim, AlgorithmHistogramMatch, AlgorithmHistogramSliceMatch, AlgorithmHMRF_EM, AlgorithmHoughCardioid, AlgorithmHoughCircle, AlgorithmHoughEllipse, AlgorithmHoughHyperbola, AlgorithmHoughLine, AlgorithmHoughParabola, AlgorithmHurstIndex, AlgorithmIAGCWD, AlgorithmIHN3Correction, AlgorithmImageCalculator, AlgorithmImageHessian, AlgorithmImageMath, AlgorithmIndependentComponents, AlgorithmInsertSlice, AlgorithmInsertVolume, AlgorithmIsophoteCurvature, AlgorithmIteratedBlindDeconvolution, AlgorithmKernelRegression, AlgorithmKMeans, AlgorithmLaplacian, AlgorithmLapMedianess, AlgorithmLawsTexture, AlgorithmLearnFromFailure64, AlgorithmLearnFromFailure64Knees, AlgorithmLevelSet, AlgorithmLevelSetDiffusion, AlgorithmLLE, AlgorithmLocalNormalization, AlgorithmLocalVariance, AlgorithmLogSlopeMapping, AlgorithmLowerCompletion, AlgorithmLuminanceAdaptation, AlgorithmMarkovSegment, AlgorithmMarkovSmooth, AlgorithmMask, AlgorithmMatchForReference, AlgorithmMatchImages, AlgorithmMaximumIntensityProjection, AlgorithmMaximumLikelihoodIteratedBlindDeconvolution, AlgorithmMean, AlgorithmMeanShiftClustering, AlgorithmMeanShiftSegmentation, AlgorithmMedian, AlgorithmMidsagittal, AlgorithmMinimumPerimeterPolygon, AlgorithmMixGaussEM, AlgorithmMode, AlgorithmMorphologicalFilter, AlgorithmMorphology25D, AlgorithmMorphology2D, AlgorithmMorphology3D, AlgorithmMosaicToSlices, AlgorithmMRIShadingCorrection, AlgorithmMSER, AlgorithmMSpectralFuzzyCMeans, AlgorithmMultiExponentialFitting, AlgorithmN4MRIBiasFieldCorrectionFilter, AlgorithmNearlyCircleToCircle, AlgorithmNetworkSnake, AlgorithmNLNoiseReduction, AlgorithmNMSuppression, AlgorithmNoise, AlgorithmNonlocalMeansFilter, AlgorithmNonMaxSuppts, AlgorithmNonparametricSegmentation, AlgorithmObjectExtractor, AlgorithmPbBoundaryDetection, AlgorithmPhaseCongruency, AlgorithmPointArea, AlgorithmPointSetToImageFilter, AlgorithmPowellOptBase, AlgorithmPowerWatershed, AlgorithmPrincipalComponents, AlgorithmProstateBoundaryExt, AlgorithmProstateBoundaryFeature2D, AlgorithmProstateFeatures, AlgorithmProstateFeatures2D, AlgorithmProstateFeaturesSaveAutoTrain, AlgorithmQuantify, AlgorithmQuantifyMask, AlgorithmQuinticLagrangian, AlgorithmRandSliceOrder, AlgorithmRegBSpline, AlgorithmRegChamfer, AlgorithmRegELSUNCOAR25D, AlgorithmRegELSUNCOAR2D, AlgorithmRegELSUNCOAR35D, AlgorithmRegELSUNCOAR3D, AlgorithmRegionGrow, AlgorithmRegionMergingViaBoundaryMelting, AlgorithmRegionsFromPartialBorders, AlgorithmRegLeastSquares, AlgorithmRegOAR25D2, AlgorithmRegOAR2D, AlgorithmRegOAR35D, AlgorithmRegOAR3D, AlgorithmRegPatientPos, AlgorithmRegularizedIsotropicDiffusion, AlgorithmRegValidation, AlgorithmRegVOILandmark, AlgorithmRemoveSlices, AlgorithmRemoveTSlices, AlgorithmReplaceBlankSlicesWithAverages, AlgorithmReplaceRemovedSlices, AlgorithmReplaceSlice, AlgorithmReplaceValue, AlgorithmReslice, AlgorithmRGBConcat, AlgorithmRGBtoGray, AlgorithmRGBtoGrays, AlgorithmRGBtoHSB, AlgorithmRiceWaveletTools, AlgorithmRotate, AlgorithmRuleBasedContrastEnhancement, AlgorithmScaleSaliency, AlgorithmSCDSegmentation, AlgorithmSeparableConvolver, AlgorithmSequentialScanningWatershed, AlgorithmSFTA, AlgorithmShortestPathWatershed, AlgorithmSimulatedExposureFusion, AlgorithmSingleMRIImageSNR, AlgorithmSkullRemoval, AlgorithmSliceAveraging, AlgorithmSM2, AlgorithmSnake, AlgorithmSobel, AlgorithmSpectralClustering, AlgorithmSphereGeneration, AlgorithmSplitAndMergeWatershed, AlgorithmStandardDeviationThreshold, AlgorithmSubsample, AlgorithmSubset, AlgorithmSubtractVOI, AlgorithmSwap34, AlgorithmSwapDims, AlgorithmSwapSlicesVolume, AlgorithmSWI, AlgorithmSymmetricNearestNeighbor, AlgorithmTalairachTransform, AlgorithmTamuraTexture, AlgorithmTextureAnalysis, AlgorithmTextureSegmentation, AlgorithmThinning2D, AlgorithmThresholdDual, AlgorithmThresholdDualRGB, AlgorithmTiltCorrection, AlgorithmTimeFitting, AlgorithmTProcess, AlgorithmTPSpline, AlgorithmTranscode, AlgorithmTransform, AlgorithmTransformBSpline, AlgorithmTransformVOI, AlgorithmTrilateralFilter, AlgorithmTwoMRIImagesSNR, AlgorithmUnionFindComponentLabelling, AlgorithmUnionFindWatershed, AlgorithmUnsharpMask, AlgorithmVesselEnhancement, AlgorithmVOIExtraction, AlgorithmVOIExtractionPaint, AlgorithmVOIHausdorffDistance, AlgorithmVOILogicalOperations, AlgorithmVOIProps, AlgorithmVOIShapeInterpolation, AlgorithmVOISimplexOpt, AlgorithmWatershed, AlgorithmWaveletFuse, AlgorithmWaveletThreshold, AlgorithmWSinc, Backpropagation, BiorthogonalWavelets, BlindDeblur, BM3D, ChirpZTransform, ContourPlot, Covdet, DBSCANClusteringSegment, DiscreteCosineTransform, DiscreteSineTransform, DoublyConnectedSC, DTIGradTableCorrectionAfterTrans, FFTUtility, FFTUtilityEP, fMRIBlindDeconvolution, GaussianMixtureModelsIncompleteSamples, HaarTransform, HartleyTransform, HartleyTransform2, HistogramOfOrientedGradients, ImageQuality, ImRegPOC, InverseLaplaceTest, JDialogLoadImage.AlgorithmLoadB, libdt, LIBSVM, LightboxGenerator, LocalIntensityOrderPattern, LSCM, MultiGuidedFilter, MultiResolutionBilateralFilter, NLMeans_filt2D, NoiseLevel, OpenCLAlgorithmBase, PhasePreservingDenoising, PseudoPolarFourierTransform, PyramidToolbox, PyWavelets, Quaternions, SchwarzChristoffelMapping, SchwarzChristoffelMapping2, SIFT, SIFT3D, SIFTImageSimilarity, SlantTransform, StochasticForests, SVM, SymmsIntegralMapping, WalshHadamardTransform, WalshHadamardTransform2, WalshHadamardTransform3
public abstract class AlgorithmBase
extends java.lang.Thread
implements java.awt.event.ActionListener, java.awt.event.WindowListener
Base abstract class for algorithms.
- Version:
- 0.1 Feburary 11, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
completed |
This flag will be set to true when the algorithm has completed.
|
protected boolean |
destFlag |
Destination flag indicating if a destination (result) image is generated.
|
protected ModelImage |
destImage |
Destination image.
|
private double |
elapsedTime |
Elapsed time (in milliseconds) -- time it took for algorithm to run.
|
protected boolean |
image25D |
If true process each image of a 3D volume independently.
|
private javax.swing.event.EventListenerList |
listenerList |
A list of the ChangeListeners which are interested in the ChangeEvent.
|
protected java.util.BitSet |
mask |
Mask indicating which voxels to process.
|
protected int |
maxProgressValue |
Used to store the maximum value of the progress bar.
|
protected int |
minProgressValue |
Used to store the minimum value of the progress bar.
|
protected boolean |
multiThreadingEnabled |
Indicates if multi-threading will be used to optimize the algorithm.
|
protected int |
nthreads |
The number of threads will be used to execute the algorithm if multi-threading is enabled
|
private java.util.Vector<AlgorithmInterface> |
objectList |
Vector list of AlgorithmInterface objects.
|
protected float |
progress |
Store the progress being made.
|
protected int |
progressModulus |
|
protected float |
progressStep |
|
protected boolean |
runningInSeparateThread |
Should be set to true if NOT in a single thread - will NOT force a graphics update of the progress bar.
|
protected boolean |
separable |
If true convolution kernels are separable.
|
protected ModelImage |
srcImage |
Source image.
|
private long |
startTime |
Start time (in milliseconds) to be used to compute elapsed time.
|
protected boolean |
threadStopped |
Flag indicating whether or not the thread is stopped.
|
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmBase() |
Default constructor which sets thread stopped to false, source and destination images to null, and destination
flag to false.
|
AlgorithmBase(ModelImage destImage,
ModelImage srcImage) |
Constructor which sets thread stopped to false and sets source and destination images.
|
-
Method Summary
All Methods Static Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
actionPerformed(java.awt.event.ActionEvent e) |
Routine to catch action events
|
void |
addListener(AlgorithmInterface obj) |
Add a listener to this class so that when when the algorithm has completed processing it can use notifyListener
to notify all listeners that the algorithm has completed.
|
void |
addProgressChangeListener(ProgressChangeListener l) |
Adds the ProgressChangeListener to this FileBase object.
|
static int |
calculateImageSize(int[] dims) |
Calculate the size of the image.
|
void |
calculatePrincipleAxis(ModelImage image,
boolean doColor) |
Working ...
|
double |
computeElapsedTime() |
Computes the elapased time as the difference between the start time and the current time (both of which are in
milliseconds).
|
static double |
computeElapsedTime(long start) |
Computes the elapased time as the difference between the start time and the current time (both of which are in
milliseconds).
|
protected float[] |
convertIntoFloat(java.lang.String[] str) |
Takes an array of strings and converts each entry into a float value.
|
protected void |
delinkProgressToAlgorithm(AlgorithmBase baseAlgo) |
Disconnect this algorithm with the progress bar which holds a reference
to this algorithm.
|
protected void |
delinkProgressToAlgorithmMulti(AlgorithmBase baseAlgo) |
|
void |
displayError(java.lang.String error) |
Displays an error in a frame.
|
void |
errorCleanUp(java.lang.String strErr,
boolean gcFlag) |
Display string pass into the method.
|
void |
finalize() |
Calls garbage collector to release system resources.
|
protected void |
fireProgressStateChanged(float fVal,
java.lang.String title,
java.lang.String message) |
Updates listeners of progress status.
|
protected void |
fireProgressStateChanged(int value) |
Notifies all listeners that have registered interest for notification on this event type.
|
protected void |
fireProgressStateChanged(int value,
java.lang.String title,
java.lang.String message) |
Notifies all listeners that have registered interest for notification on this event type.
|
protected void |
fireProgressStateChanged(java.lang.String message) |
Notifies listeners that have registered interest for notification on this event type.
|
protected void |
fireProgressStateChanged(java.lang.String imageName,
java.lang.String message) |
Updates listeners of progress status.
|
int[] |
generateProgressValues(int currentProgress,
int desiredMaxProgress) |
Helper function to determine which values to pass on to linked algorithms (that will fire progress changes to the
same progress bar).
|
ModelImage |
getDestImage() |
Accessor to return the destination image
|
double |
getElapsedTime() |
Returns the elapsed time in seconds.
|
java.util.BitSet |
getMask() |
Gets the Bitset mask object.
|
int |
getMaxProgressValue() |
Returns the max progress value.
|
int |
getMinProgressValue() |
Returns the min progress value.
|
int |
getNumberOfThreads() |
|
float |
getProgress() |
|
ViewJProgressBar |
getProgressChangeListener() |
If there is a progress bar that is listening to the algorithm's progress change events, this will retrieve that
progress bar.
|
ProgressChangeListener[] |
getProgressChangeListeners() |
Returns the progress change event listener list.
|
int |
getProgressModulus() |
|
float |
getProgressStep() |
|
int[] |
getProgressValues() |
Gets the current stored min and max progress values.
|
ModelImage |
getSrcImage() |
Gets the current source image for the algorithm
|
boolean |
isCompleted() |
Returns flag that indicates that the algorithm has been sucessfully completed.
|
boolean |
isImage25D() |
Returns flag that indicates if the image should be processed slice by slice.
|
boolean |
isMultiThreadingEnabled() |
|
boolean |
isRunningInSeparateThread() |
Should be set to true if NOT in a single thread (i.e., the main gui and this algo are in different threads) -
will NOT force a graphics update of the progress bar.
|
boolean |
isThreadStopped() |
Returns flag that indicates that the algorithm thread has been stopped.
|
protected void |
linkProgressToAlgorithm(AlgorithmBase baseAlgo) |
Helper function to link the currently listening progress bar with an algorithm created within an algorithm.
|
protected void |
linkProgressToAlgorithm(AlgorithmBase baseAlgo,
java.lang.String title,
int min,
int max) |
New helper function for use with the ViewJProgressBarMulti.
|
void |
makeProgress(float step) |
|
void |
notifyListeners(AlgorithmBase algorithm) |
Used to notify all listeners that the algorithm has completed.
|
void |
removeListener(AlgorithmInterface obj) |
Remove a listener from the class.
|
void |
removeProgressChangeListener(ProgressChangeListener l) |
Removes the ChangeListener from the FileBase object.
|
void |
run() |
Performs start-up and tear-down operations that should be done by all algorithms (timing, history log).
|
abstract void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
setCompleted(boolean flag) |
Sets completed to flag indicating if algorithm has sucessfully completed.
|
void |
setImage25D(boolean flag) |
Sets a flag to indicate the image has dimensions of (i.e. spacial, spacial, time) and image processing routines
should apply 2.5D algorithm.
|
void |
setMask(java.util.BitSet imageMask) |
Sets the mask (BitSet object).
|
void |
setMaxProgressValue(int maxProgressValue) |
Sets the max progress value.
|
void |
setMinProgressValue(int minProgressValue) |
Sets the min progress value.
|
void |
setMultiThreadingEnabled(boolean multiThreadingEnabled) |
|
void |
setNumberOfThreads(int nthreads) |
|
void |
setProgress(int progress) |
|
void |
setProgressModulus(int progressModulus) |
|
void |
setProgressStep(float progressStep) |
|
void |
setProgressValues(int[] minmax) |
Sets the min and max progress values from an array of two ints.
|
void |
setProgressValues(int min,
int max) |
Sets both the min and max progress values.
|
void |
setRunningInSeparateThread(boolean separateThread) |
Sets the running in separate thread flag which controls how the progress bar is updated.
|
void |
setSrcImage(ModelImage srcImage) |
Sets the source image of the algorithm
|
void |
setStartTime() |
Sets the start time to the current time.
|
void |
setThreadStopped(boolean flag) |
Sets the thread stopped to flag indicating if algorithm has stopped.
|
boolean |
startMethod(int priority) |
Checks to see if a thread is already running on this object.
|
void |
windowActivated(java.awt.event.WindowEvent event) |
Do nothing.
|
void |
windowClosed(java.awt.event.WindowEvent event) |
Do nothing.
|
void |
windowClosing(java.awt.event.WindowEvent event) |
Sets completed to false, disposes the progress bar and notifies all listeners that the algorithm is stopped.
|
void |
windowDeactivated(java.awt.event.WindowEvent event) |
Do nothing.
|
void |
windowDeiconified(java.awt.event.WindowEvent event) |
Do nothing.
|
void |
windowIconified(java.awt.event.WindowEvent event) |
Do nothing.
|
void |
windowOpened(java.awt.event.WindowEvent event) |
Do nothing.
|
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
runningInSeparateThread
protected boolean runningInSeparateThread
Should be set to true if NOT in a single thread - will NOT force a graphics update of the progress bar. Should be
set to false if in a single thread - will force a graphics update of the progress bar. This defaults to false,
since we can automatically set it to true when startMethod() is called. When starting the algorithm with run(),
this boolean should remain false.
- See Also:
startMethod(int),
run()
-
objectList
private java.util.Vector<AlgorithmInterface> objectList
Vector list of AlgorithmInterface objects. When the algorithm has been stopped or completed, all listeners in
this list are notified.
-
Constructor Detail
-
AlgorithmBase
public AlgorithmBase(ModelImage destImage,
ModelImage srcImage)
Constructor which sets thread stopped to false and sets source and destination images.
- Parameters:
destImage - Destination image, can be null.srcImage - Source image, should not be null.
-
Method Detail
-
addListener
public void addListener(AlgorithmInterface obj)
Add a listener to this class so that when when the algorithm has completed processing it can use notifyListener
to notify all listeners that the algorithm has completed.
- Parameters:
obj - AlgorithmInterface "object' to be added to the list
-
calculatePrincipleAxis
public void calculatePrincipleAxis(ModelImage image,
boolean doColor)
Working ...
This function is never used. It doesn't modify any parameters or data members and returns void.
- Parameters:
image - DOCUMENT ME!doColor - DOCUMENT ME!
-
errorCleanUp
public void errorCleanUp(java.lang.String strErr,
boolean gcFlag)
Display string pass into the method. If the string is null no message is displayed. The completed flag is set to
false and the progress bar is disposed;
- Parameters:
strErr - the string that is to be displayed. If the string is null no message is displayed.gcFlag - if true call the garbage collector.
-
generateProgressValues
public int[] generateProgressValues(int currentProgress,
int desiredMaxProgress)
Helper function to determine which values to pass on to linked algorithms (that will fire progress changes to the
same progress bar). You pass in the current progress and then the max desired progress.... you do NOT adjust the
progress yourself, you assume a 0-100 range always, so if the current progress of a certain algorithm was 50%,
and you want the helper algorithm to run on an adjusted scale of 50% to 70%, then you pass 50 and 70 as current &
desiredMax respectively. if the algorithm passing this in was on a scale of 0->50, then the displayed progress
will range from 25% to 35% (50% of 50->70)
- Parameters:
currentProgress - current progress of algorithm on a 0->100 scaledesiredMaxProgress - max progress desired for linked algorithm- Returns:
- array of 2 ints [current, max]
-
getProgressChangeListener
public ViewJProgressBar getProgressChangeListener()
If there is a progress bar that is listening to the algorithm's progress change events, this will retrieve that
progress bar. This function is really only here to support AlgorithmExtractSurface, AlgorithmExtractSurfaceCubes,
and AlgorithmHeightFunction which use ModelQuadMesh and ModelTriangle Mesh (which do not follow the standard
algorithmbase setup). This function should not be used elsewhere and will probably be removed (and
modelquad/trianglemesh will be changed).
- Returns:
- a progressbar if there is one listening, null otherwise.
-
isRunningInSeparateThread
public boolean isRunningInSeparateThread()
Should be set to true if NOT in a single thread (i.e., the main gui and this algo are in different threads) -
will NOT force a graphics update of the progress bar. Should be set to false if in a single thread - will force a
graphics update of the progress bar.
- Returns:
- boolean true if this algorithm is in a different thread from the main mipav gui thread.
-
run
public void run()
Performs start-up and tear-down operations that should be done by all algorithms (timing, history log). Since
this class extends the Thread class it can be run in its own thread by invoking object.start(); It can also be
invoked without a new thread by calling the the run() method directly (ie. object.run()).
- Specified by:
run in interface java.lang.Runnable- Overrides:
run in class java.lang.Thread
-
setImage25D
public void setImage25D(boolean flag)
Sets a flag to indicate the image has dimensions of (i.e. spacial, spacial, time) and image processing routines
should apply 2.5D algorithm.
- Parameters:
flag - flag to set to
-
setRunningInSeparateThread
public void setRunningInSeparateThread(boolean separateThread)
Sets the running in separate thread flag which controls how the progress bar is updated. If true the progress bar
is not forced to update.
- Parameters:
separateThread - Should be set to true if NOT in a single thread (i.e., the main gui and this algo are in
different threads) - will NOT force a graphics update of the progress bar. Should be set
to false if in a single thread - will force a graphics update of the progress bar.
-
startMethod
public final boolean startMethod(int priority)
Checks to see if a thread is already running on this object. If so, it returns false, else it starts the thread
and returns true.
- Parameters:
priority - thread priority- Returns:
- false if a thread is already running this algorithm, true otherwise
-
windowClosing
public void windowClosing(java.awt.event.WindowEvent event)
Sets completed to false, disposes the progress bar and notifies all listeners that the algorithm is stopped.
- Specified by:
windowClosing in interface java.awt.event.WindowListener- Parameters:
event - event that triggered function
-
fireProgressStateChanged
protected void fireProgressStateChanged(java.lang.String imageName,
java.lang.String message)
Updates listeners of progress status. Without actually changing the numerical value
- Parameters:
imageName - the name of the imagemessage - the new message to display
-
fireProgressStateChanged
protected void fireProgressStateChanged(int value,
java.lang.String title,
java.lang.String message)
Notifies all listeners that have registered interest for notification on this event type.
- Parameters:
value - the value of the progress bar.title - the title of the progress dialog.message - the message for that specific progress value.
-
fireProgressStateChanged
protected void fireProgressStateChanged(float fVal,
java.lang.String title,
java.lang.String message)
Updates listeners of progress status.
- Parameters:
fVal - the percent progress of the algorithm so fartitle - the title to send to the listenersmessage - the message to send to the listeners
-
linkProgressToAlgorithm
protected void linkProgressToAlgorithm(AlgorithmBase baseAlgo,
java.lang.String title,
int min,
int max)
New helper function for use with the ViewJProgressBarMulti. This allows for keeping track of multi-threaded
algorithms and allow the user to better keep track of multiple processes being run. Any linked algorithms
should update together in the manner specificed by min/max.
- Parameters:
baseAlgo - the subalgorithm created within current algorithmtitle - the title shown in the progress bar panelmin - the lower bound of the updating portion of the parent algorithmmax - the upper bound of the updating portion of the parent algorithm
-
delinkProgressToAlgorithm
protected void delinkProgressToAlgorithm(AlgorithmBase baseAlgo)
Disconnect this algorithm with the progress bar which holds a reference
to this algorithm. In order to release the memory of this algorithm,
this function should be called after the algorithm was finished.
- Parameters:
baseAlgo -
������������������������������������gov/nih/mipav/model/algorithms/EllipticIntegral.html������������������������������������������������0000775�4231163�4231163�00000203203�14537076054�023343� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
EllipticIntegral (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.EllipticIntegral
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
aki |
DOCUMENT ME!
|
private double[] |
akr |
DOCUMENT ME!
|
private boolean |
analyticContinuationUsed |
If false, function used If true, analytic continuation of function used.
|
private double |
BIGd |
DOCUMENT ME!
|
private double |
c |
DOCUMENT ME!
|
private double |
C1 |
private double BIG = 3.0E137; // 3.0E37.
|
private double |
C1d |
DOCUMENT ME!
|
private double |
C2 |
DOCUMENT ME!
|
private double |
C2d |
DOCUMENT ME!
|
private double |
C3 |
DOCUMENT ME!
|
private double |
C3d |
DOCUMENT ME!
|
private double |
C4 |
DOCUMENT ME!
|
private double |
C4d |
DOCUMENT ME!
|
private double |
C5d |
DOCUMENT ME!
|
private double |
C6d |
DOCUMENT ME!
|
private double[] |
cki |
DOCUMENT ME!
|
private double[] |
ckr |
DOCUMENT ME!
|
private boolean |
complementaryModulusUsed |
k is the modulus k', the complementary modulus = sqrt(1 - k*k).
|
private boolean |
complete |
DOCUMENT ME!
|
private int[] |
errorFlag |
DOCUMENT ME!
|
private double |
ERRTOL |
DOCUMENT ME!
|
private double |
ERRTOLb |
DOCUMENT ME!
|
private double[] |
first |
DOCUMENT ME!
|
private double[] |
firsti |
DOCUMENT ME!
|
private double[] |
firstr |
DOCUMENT ME!
|
private double |
mod |
modulus, 0 <= mod <= 1.
|
private double |
modi |
Imaginary part of modulus or complementary modulus.
|
private double |
modr |
Real part of modulus or complementary modulus.
|
private static int |
MORITA_SOURCE |
F(k, phi) INCOMPLETE1 E(k, phi) INCOMPLETE2 K(k) COMPLETE1 E(k) COMPLETE2 Complex arguments for first and second
complete and incomplete elliptic integrals.
|
private int |
nrep |
DOCUMENT ME!
|
private double |
phi |
DOCUMENT ME!
|
private double |
phii |
DOCUMENT ME!
|
private double |
phir |
For complete integrals phir = PI/2, phii = 0.
|
private double |
pihf |
DOCUMENT ME!
|
private double[] |
rdi |
DOCUMENT ME!
|
private double[] |
rdr |
DOCUMENT ME!
|
private double |
RERR |
DOCUMENT ME!
|
private double[] |
rfi |
DOCUMENT ME!
|
private double[] |
rfr |
DOCUMENT ME!
|
private boolean |
runcel12 |
DOCUMENT ME!
|
private boolean |
runcomelp |
DOCUMENT ME!
|
private boolean |
runelit |
DOCUMENT ME!
|
private double[] |
second |
DOCUMENT ME!
|
private double[] |
secondi |
DOCUMENT ME!
|
private double[] |
secondr |
DOCUMENT ME!
|
private int |
sgnck |
DOCUMENT ME!
|
private int |
source |
DOCUMENT ME!
|
private static int |
TEST_SOURCE |
Compare outputs of different modules for self-testing.
|
private double[] |
third |
DOCUMENT ME!
|
private double |
TINY |
DOCUMENT ME!
|
private double |
TINYd |
DOCUMENT ME!
|
private ViewUserInterface |
UI |
DOCUMENT ME!
|
private boolean |
useStandardMethod |
DOCUMENT ME!
|
private static int |
ZHANG_SOURCE |
Real arguments for first and second complete and incomplete elliptic integrals.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
EllipticIntegral() |
~ Constructors
---------------------------------------------------------------------------------------------------
|
EllipticIntegral(boolean complete,
double modr,
double modi,
boolean complementaryModulusUsed,
boolean analyticContinuationUsed,
double phir,
double phii,
double[] firstr,
double[] firsti,
double[] secondr,
double[] secondi,
boolean useStandardMethod,
int[] errorFlag) |
When calculating the complete integrals K(k) and E(K), we can make complete true or false, except when abs(k') <=
1.0E-10, in which case complete must be true and the complementary modulus must be used The only merit of the
alternative method over the standard method is that the code is simpler Both methods are based on modifications
of Carlson's algortihm.
|
EllipticIntegral(double mod,
double[] first,
double[] second) |
Used for complete elliptic integrals of first and second kind with real modulus 0 <= mod <= 1, mod is the
modulus.
|
EllipticIntegral(double modr,
double modi,
boolean complementaryModulusUsed,
boolean analyticContinuationUsed,
double[] firstr,
double[] firsti,
double[] secondr,
double[] secondi,
int[] errorFlag) |
Constructor only for complete integrals with phi = PI/2.
|
EllipticIntegral(double mod,
double phi,
double[] first,
double[] second) |
Used for complete and incomplete elliptic integrals of first and second kind with real modulus and argument 0 <=
mod <= 1, mod is the modulus phi, argument in radians.
|
EllipticIntegral(double mod,
double phi,
double c,
double[] third) |
Used for complete and incomplete elliptic integrals of the third kind with real modulus, real argument phi, and
real parameter c 0 <= mod <= 1 phi, argument in radians c parameter, 0 <= c <=1.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
cel12(double ckr,
double cki) |
Routine cel12 only calculates complete integrals of the first and second kind with complex arguments Based on the
arithmetic-geometric mean procedure Ported from Tohru Morita article.
|
private void |
comelp(double mod) |
Ported from Computation of Special Functions by Shanjie Zhang and Jianming Jin Computes complete first and second
elliptic integrals with a real modulus 0 <= mod <= 1, mod is the modulus.
|
private double |
cosh(double x) |
DOCUMENT ME!
|
private void |
elit(double mod,
double phi) |
Ported from Computation of Special Functions by Shanjie Zhang and Jianming Jin Computes complete and incomplete
first and second elliptic integrals with a real modulus and real argument 0 <= mod <= 1, mod is the modulus arg
is the argument in radians.
|
private void |
elit3(double mod,
double phi,
double c) |
Ported from Computation of Special Functions by Shanjie Zhang and Jianming Jin Computes complete and incomplete
elliptic integrals of the third kind with a real modulus real argument, and real parameter 0 <= mod <= 1, mod is
the modulus arg is the argument in radians c is the parameter, 0 <= c <= 1.
|
private void |
ell12(double phir,
double phii,
double akr,
double aki,
double ckr,
double cki,
int sgnck) |
Calculates complete and incomplete elliptic integrals of the first and second kind with complex arguments Ported
from the Tohru Morita article.
|
private void |
rfrd(double xrtr,
double xrti,
double yrtr,
double yrti) |
Ported from Tohru Morita article.
|
private void |
rfrdb(double xrtr,
double xrti,
double yrtr,
double yrti) |
Ported from Tohru Morita article.
|
void |
run() |
DOCUMENT ME!
|
private void |
runTest() |
DOCUMENT ME!
|
private double |
sinh(double x) |
DOCUMENT ME!
|
private void |
sqrtc(double zinr,
double zini,
double[] zsqr,
double[] zsqi) |
Ported from Tohru Morita article Performs square root of complex argument.
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
private void |
zcos(double inr,
double ini,
double[] outr,
double[] outi) |
DOCUMENT ME!
|
private void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
private void |
zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex multiply c = a * b.
|
private void |
zsin(double inr,
double ini,
double[] outr,
double[] outi) |
DOCUMENT ME!
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
MORITA_SOURCE
private static final int MORITA_SOURCE
F(k, phi) INCOMPLETE1 E(k, phi) INCOMPLETE2 K(k) COMPLETE1 E(k) COMPLETE2 Complex arguments for first and second
complete and incomplete elliptic integrals.
- See Also:
- Constant Field Values
-
aki
private double[] aki
DOCUMENT ME!
-
akr
private double[] akr
DOCUMENT ME!
-
analyticContinuationUsed
private boolean analyticContinuationUsed
If false, function used If true, analytic continuation of function used.
-
BIGd
private double BIGd
DOCUMENT ME!
-
c
private double c
DOCUMENT ME!
-
C1d
private double C1d
DOCUMENT ME!
-
C2
private double C2
DOCUMENT ME!
-
C2d
private double C2d
DOCUMENT ME!
-
C3
private double C3
DOCUMENT ME!
-
C3d
private double C3d
DOCUMENT ME!
-
C4
private double C4
DOCUMENT ME!
-
C4d
private double C4d
DOCUMENT ME!
-
C5d
private double C5d
DOCUMENT ME!
-
C6d
private double C6d
DOCUMENT ME!
-
cki
private double[] cki
DOCUMENT ME!
-
ckr
private double[] ckr
DOCUMENT ME!
-
complementaryModulusUsed
private boolean complementaryModulusUsed
k is the modulus k', the complementary modulus = sqrt(1 - k*k).
-
complete
private boolean complete
DOCUMENT ME!
-
errorFlag
private int[] errorFlag
DOCUMENT ME!
-
ERRTOL
private double ERRTOL
DOCUMENT ME!
-
ERRTOLb
private double ERRTOLb
DOCUMENT ME!
-
first
private double[] first
DOCUMENT ME!
-
firsti
private double[] firsti
DOCUMENT ME!
-
firstr
private double[] firstr
DOCUMENT ME!
-
mod
private double mod
modulus, 0 <= mod <= 1.
-
nrep
private int nrep
DOCUMENT ME!
-
phi
private double phi
DOCUMENT ME!
-
phii
private double phii
DOCUMENT ME!
-
pihf
private double pihf
DOCUMENT ME!
-
rdi
private double[] rdi
DOCUMENT ME!
-
rdr
private double[] rdr
DOCUMENT ME!
-
RERR
private double RERR
DOCUMENT ME!
-
rfi
private double[] rfi
DOCUMENT ME!
-
rfr
private double[] rfr
DOCUMENT ME!
-
runcel12
private boolean runcel12
DOCUMENT ME!
-
runelit
private boolean runelit
DOCUMENT ME!
-
second
private double[] second
DOCUMENT ME!
-
secondi
private double[] secondi
DOCUMENT ME!
-
secondr
private double[] secondr
DOCUMENT ME!
-
sgnck
private int sgnck
DOCUMENT ME!
-
source
private int source
DOCUMENT ME!
-
third
private double[] third
DOCUMENT ME!
-
TINY
private double TINY
DOCUMENT ME!
-
TINYd
private double TINYd
DOCUMENT ME!
-
Constructor Detail
-
EllipticIntegral
public EllipticIntegral(double mod,
double[] first,
double[] second)
Used for complete elliptic integrals of first and second kind with real modulus 0 <= mod <= 1, mod is the
modulus.
- Parameters:
mod - DOCUMENT ME!first - DOCUMENT ME!second - DOCUMENT ME!
-
EllipticIntegral
public EllipticIntegral(double mod,
double phi,
double[] first,
double[] second)
Used for complete and incomplete elliptic integrals of first and second kind with real modulus and argument 0 <=
mod <= 1, mod is the modulus phi, argument in radians.
- Parameters:
mod - DOCUMENT ME!phi - DOCUMENT ME!first - DOCUMENT ME!second - DOCUMENT ME!
-
EllipticIntegral
public EllipticIntegral(double mod,
double phi,
double c,
double[] third)
Used for complete and incomplete elliptic integrals of the third kind with real modulus, real argument phi, and
real parameter c 0 <= mod <= 1 phi, argument in radians c parameter, 0 <= c <=1.
- Parameters:
mod - DOCUMENT ME!phi - DOCUMENT ME!c - DOCUMENT ME!third - DOCUMENT ME!
-
EllipticIntegral
public EllipticIntegral(double modr,
double modi,
boolean complementaryModulusUsed,
boolean analyticContinuationUsed,
double[] firstr,
double[] firsti,
double[] secondr,
double[] secondi,
int[] errorFlag)
Constructor only for complete integrals with phi = PI/2. The method called is based on the arithmetic-geometric
mean procedure If only the complete integrals are calculated, the arithmetic-geometric mean procdure is superior
to the 2 methods based on Carlson's algorithm
- Parameters:
modr - DOCUMENT ME!modi - DOCUMENT ME!complementaryModulusUsed - DOCUMENT ME!analyticContinuationUsed - DOCUMENT ME!firstr - DOCUMENT ME!firsti - DOCUMENT ME!secondr - DOCUMENT ME!secondi - DOCUMENT ME!errorFlag - DOCUMENT ME!
-
EllipticIntegral
public EllipticIntegral(boolean complete,
double modr,
double modi,
boolean complementaryModulusUsed,
boolean analyticContinuationUsed,
double phir,
double phii,
double[] firstr,
double[] firsti,
double[] secondr,
double[] secondi,
boolean useStandardMethod,
int[] errorFlag)
When calculating the complete integrals K(k) and E(K), we can make complete true or false, except when abs(k') <=
1.0E-10, in which case complete must be true and the complementary modulus must be used The only merit of the
alternative method over the standard method is that the code is simpler Both methods are based on modifications
of Carlson's algortihm.
- Parameters:
complete - DOCUMENT ME!modr - DOCUMENT ME!modi - DOCUMENT ME!complementaryModulusUsed - DOCUMENT ME!analyticContinuationUsed - DOCUMENT ME!phir - DOCUMENT ME!phii - DOCUMENT ME!firstr - DOCUMENT ME!firsti - DOCUMENT ME!secondr - DOCUMENT ME!secondi - DOCUMENT ME!useStandardMethod - DOCUMENT ME!errorFlag - DOCUMENT ME!
-
Method Detail
-
run
public void run()
DOCUMENT ME!
-
cel12
private void cel12(double ckr,
double cki)
Routine cel12 only calculates complete integrals of the first and second kind with complex arguments Based on the
arithmetic-geometric mean procedure Ported from Tohru Morita article.
- Parameters:
ckr - DOCUMENT ME!cki - DOCUMENT ME!
-
comelp
private void comelp(double mod)
Ported from Computation of Special Functions by Shanjie Zhang and Jianming Jin Computes complete first and second
elliptic integrals with a real modulus 0 <= mod <= 1, mod is the modulus.
- Parameters:
mod - DOCUMENT ME!
-
elit
private void elit(double mod,
double phi)
Ported from Computation of Special Functions by Shanjie Zhang and Jianming Jin Computes complete and incomplete
first and second elliptic integrals with a real modulus and real argument 0 <= mod <= 1, mod is the modulus arg
is the argument in radians.
- Parameters:
mod - DOCUMENT ME!phi - DOCUMENT ME!
-
elit3
private void elit3(double mod,
double phi,
double c)
Ported from Computation of Special Functions by Shanjie Zhang and Jianming Jin Computes complete and incomplete
elliptic integrals of the third kind with a real modulus real argument, and real parameter 0 <= mod <= 1, mod is
the modulus arg is the argument in radians c is the parameter, 0 <= c <= 1.
- Parameters:
mod - DOCUMENT ME!phi - DOCUMENT ME!c - DOCUMENT ME!
-
ell12
private void ell12(double phir,
double phii,
double akr,
double aki,
double ckr,
double cki,
int sgnck)
Calculates complete and incomplete elliptic integrals of the first and second kind with complex arguments Ported
from the Tohru Morita article.
- Parameters:
phir - DOCUMENT ME!phii - DOCUMENT ME!akr - DOCUMENT ME!aki - DOCUMENT ME!ckr - DOCUMENT ME!cki - DOCUMENT ME!sgnck - DOCUMENT ME!
-
rfrd
private void rfrd(double xrtr,
double xrti,
double yrtr,
double yrti)
Ported from Tohru Morita article.
- Parameters:
xrtr - DOCUMENT ME!xrti - DOCUMENT ME!yrtr - DOCUMENT ME!yrti - DOCUMENT ME!
-
rfrdb
private void rfrdb(double xrtr,
double xrti,
double yrtr,
double yrti)
Ported from Tohru Morita article.
- Parameters:
xrtr - DOCUMENT ME!xrti - DOCUMENT ME!yrtr - DOCUMENT ME!yrti - DOCUMENT ME!
-
runTest
private void runTest()
DOCUMENT ME!
-
sqrtc
private void sqrtc(double zinr,
double zini,
double[] zsqr,
double[] zsqi)
Ported from Tohru Morita article Performs square root of complex argument.
- Parameters:
zinr - DOCUMENT ME!zini - DOCUMENT ME!zsqr - DOCUMENT ME!zsqi - DOCUMENT ME!
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zdiv
private void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zmlt
private void zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex multiply c = a * b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/������������������������������������������������������������0002775�4231163�4231163�00000000000�14537076122�021040� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseFastMarch.html�������������������������������������������0000775�4231163�4231163�00000100665�14537076060�024254� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseFastMarch (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
- Direct Known Subclasses:
LseFastMarch2, LseFastMarch3
public abstract class LseFastMarch
extends java.lang.Object
The abstract base class for fast-marching methods of images. This is
based on material from J. Sethian's book, Level Set Methods and Fast
Marching Methods.
- Version:
- 0.1 November 7, 2006
- Author:
- David Eberly
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float[] |
m_afInvSpeed |
The inverse speeds associated with the image elements.
|
(package private) float[] |
m_afTime |
The times at which the image elements are visited by moving boundaries.
|
(package private) LseMinHeap.Record[] |
m_akTrial |
Those image elements that are adjacent to the current region boundary
points are tracked to allow fast updates of the boundary.
|
(package private) float |
m_fMaxTime |
The maximum time in m_afTime[].
|
(package private) float |
m_fMinTime |
The minimum time in m_afTime[].
|
(package private) int |
m_iQuantity |
The number of image elements.
|
(package private) LseMinHeap |
m_kHeap |
A min-heap data structure used to keep track of the times so that the
image element corresponding to the minimum time becomes the next
processed boundary point.
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
LseFastMarch(int iQuantity,
float[] afSpeed,
int[] aiSeeds) |
Create a new fast-marching object, where the speed varies per image
element.
|
protected |
LseFastMarch(int iQuantity,
float fSpeed,
int[] aiSeeds) |
Create a new fast-marching object, where the speed is constant for all
image elements.
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
computeTimeExtremes() |
Compute the minimum and maximum visitation times for the image
elements.
|
abstract int[] |
getBoundary() |
Get the indices of the boundary points of the current region.
|
int[] |
getInterior() |
Get the indices of the interior points of the current region.
|
float |
getMaxTime() |
Get the maximum visitation time for the image elements.
|
float |
getMinTime() |
Get the minimum visitation time for the image elements.
|
int |
getQuantity() |
Get the number of image elements.
|
float |
getTime(int i) |
Get the time of visitation for an image element.
|
protected void |
initialize(int iQuantity,
int[] aiSeeds) |
Partial initialization of the fast marching object.
|
protected void |
initializeSpeed(float fSpeed) |
Partial initialization of the fast marching object.
|
protected void |
initializeSpeed(float[] afSpeed) |
Partial initialization of the fast marching object.
|
abstract boolean |
isBoundary(int i) |
An image element is a boundary point when it is on the boundary
of the current region.
|
boolean |
isFar(int i) |
An image element is a far element when its visitation time t
is infinite: t = Float.MAX_VALUE.
|
boolean |
isInterior(int i) |
An image element is an interior element when it is valid
and not a trial element.
|
boolean |
isTrial(int i) |
An image element is a trial element when its visitation time t
is invalid (t < 0), its inverse speed is finite, and the element is
adjacent to the boundary of the current region.
|
boolean |
isValid(int i) |
An image element is valid whenever its visitation time t
satisfies the conditions: 0 ≤ t < Float.MAX_VALUE).
|
boolean |
isZeroSpeed(int i) |
An image element is never visited when its corresponding speed is
zero.
|
abstract void |
iterate() |
Run one iteration of the fast marching algorithm.
|
void |
setTime(int i,
float fTime) |
Set the time of visitation for an image element.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseFastMarch
protected LseFastMarch(int iQuantity,
float[] afSpeed,
int[] aiSeeds)
Create a new fast-marching object, where the speed varies per image
element.
- Parameters:
iQuantity - The number of image elements.afSpeed - The array of speeds for the image elements.aiSeeds - The initial region points.
-
LseFastMarch
protected LseFastMarch(int iQuantity,
float fSpeed,
int[] aiSeeds)
Create a new fast-marching object, where the speed is constant for all
image elements.
- Parameters:
iQuantity - The number of image elements.fSpeed - The common speed for the image elements.aiSeeds - The initial region points.
-
Method Detail
-
isTrial
public final boolean isTrial(int i)
An image element is a trial element when its visitation time t
is invalid (t < 0), its inverse speed is finite, and the element is
adjacent to the boundary of the current region.
- Parameters:
i - The index of the image element.- Returns:
- The Boolean result of the t-constraints.
-
isFar
public final boolean isFar(int i)
An image element is a far element when its visitation time t
is infinite: t = Float.MAX_VALUE. Such elements are not
considered when searching the heap for the next element to visit.
- Parameters:
i - The index of the image element.- Returns:
-
isZeroSpeed
public final boolean isZeroSpeed(int i)
An image element is never visited when its corresponding speed is
zero. Such elements are preprocessed initially so that there
visitation times are t = -Float.MAX_VALUE.
- Parameters:
i - The index of the image element.- Returns:
-
isInterior
public final boolean isInterior(int i)
An image element is an interior element when it is valid
and not a trial element. Effectively, these are interior points
of the current region.
- Parameters:
i - The index of the image element.- Returns:
-
getBoundary
public abstract int[] getBoundary()
Get the indices of the boundary points of the current region. This is
an abstract function, because the identification of such points depends
on the dimensionality of the image.
- Returns:
- The array of indices of the boundary points.
-
isBoundary
public abstract boolean isBoundary(int i)
An image element is a boundary point when it is on the boundary
of the current region. This is an abstract function, because the
identification of such points depends on the dimensionality of the
image.
- Parameters:
i - The index of the image element.- Returns:
- The Boolean result indicating whether or not the image
element is a boundary point.
-
iterate
public abstract void iterate()
Run one iteration of the fast marching algorithm. This is an abstract
function, because the identification of such points depends on the
dimensionality of the image.
-
initialize
protected void initialize(int iQuantity,
int[] aiSeeds)
Partial initialization of the fast marching object. The visitation
times are set to zero for the initial region (the seeds) but to
Float.MAX_VALUE for all other points. Initially, none of the
points are trial points.
- Parameters:
iQuantity - The number of image elements.aiSeeds - The initial region points.
-
initializeSpeed
protected void initializeSpeed(float[] afSpeed)
Partial initialization of the fast marching object. The inverse
speeds are computed for those speeds that are positive. If an input
speed is zero, the inverse speed is set to Float.MAX_VALUE and
the visitation time is set to -Float.MAX_VALUE as a flag that
the corresponding image element should never be visited.
- Parameters:
afSpeed - The speeds for the image elements.
���������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LsePdeFilter3.html������������������������������������������0000775�4231163�4231163�00000211251�14537076060�024337� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LsePdeFilter3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected boolean[][][] |
m_aaabMask |
Voxels may be masked out so that the PDE solver does not process them.
|
protected float[][][] |
m_aaafDst |
Successive iterations of the PDE solver toggle between two buffers.
|
protected float[][][] |
m_aaafSrc |
Successive iterations of the PDE solver toggle between two buffers.
|
protected float |
m_fFourthInvDxDy |
invFourthDxDy = 1/(4*dx*dy)
|
protected float |
m_fFourthInvDxDz |
invFourthDxDz = 1/(4*dx*dz)
|
protected float |
m_fFourthInvDyDz |
invFourthDyDz = 1/(4*dy*dz)
|
protected float |
m_fHalfInvDx |
halfInvDx = 1/(2*dx)
|
protected float |
m_fHalfInvDy |
halfInvDy = 1/(2*dy)
|
protected float |
m_fHalfInvDz |
halfInvDz = 1/(2*dz)
|
protected float |
m_fInvDx |
invDx = 1/dx
|
protected float |
m_fInvDxDx |
invDxDx = 1/(dx*dx)
|
protected float |
m_fInvDy |
invDy = 1/dy
|
protected float |
m_fInvDyDy |
invDyDy = 1/(dy*dy)
|
protected float |
m_fInvDz |
invDz = 1/dz
|
protected float |
m_fInvDzDz |
invDzDz = 1/(dz*dz)
|
protected float |
m_fUmmm |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUmmp |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUmmz |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUmpm |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUmpp |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUmpz |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUmzm |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUmzp |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUmzz |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUpmm |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUpmp |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUpmz |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUppm |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUppp |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUppz |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUpzm |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUpzp |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUpzz |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUzmm |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUzmp |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUzmz |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUzpm |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUzpp |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUzpz |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUzzm |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUzzp |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fUzzz |
Temporary storage for 3x3x3 neighborhood.
|
protected float |
m_fXSpacing |
The x-spacing of the image, call it dx.
|
protected float |
m_fYSpacing |
The y-spacing of the image, call it dy.
|
protected float |
m_fZSpacing |
The z-spacing of the image, call it dz.
|
protected int |
m_iXBound |
The x-bound of the image.
|
protected int |
m_iYBound |
The y-bound of the image.
|
protected int |
m_iZBound |
The z-bound of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
LsePdeFilter3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType) |
Create a new PDE filter object for 3D images.
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
assignDirichletImageBorder() |
Assign values to the 1-voxel-thick image border.
|
protected void |
assignDirichletMaskBorder() |
Assign values to the 1-voxel-thick borders that surround unmasked
regions.
|
protected void |
assignNeumannImageBorder() |
Assign values to the 1-voxel-thick image border.
|
protected void |
assignNeumannMaskBorder() |
Assign values to the 1-voxel-thick borders that surround unmasked
regions.
|
boolean |
getMask(int iX,
int iY,
int iZ) |
Get the mask value at voxel (x,y,z).
|
float |
getU(int iX,
int iY,
int iZ) |
Get the image value at voxel (x,y,z), call it u(x,y,z).
|
float |
getUx(int iX,
int iY,
int iZ) |
Get the first-order x-derivative of the image value at voxel (x,y,z),
call it u_x(x,y,z).
|
float |
getUxx(int iX,
int iY,
int iZ) |
Get the second-order x-derivative of the image value at voxel (x,y,z),
call it u_xx(x,y,z).
|
float |
getUxy(int iX,
int iY,
int iZ) |
Get the second-order xy-mixed-derivative of the image value at voxel
(x,y,z), call it u_xy(x,y,z).
|
float |
getUxz(int iX,
int iY,
int iZ) |
Get the second-order xz-mixed-derivative of the image value at voxel
(x,y,z), call it u_xz(x,y,z).
|
float |
getUy(int iX,
int iY,
int iZ) |
Get the first-order y-derivative of the image value at voxel (x,y,z),
call it u_y(x,y,z).
|
float |
getUyy(int iX,
int iY,
int iZ) |
Get the second-order y-derivative of the image value at voxel (x,y,z),
call it u_yy(x,y,z).
|
float |
getUyz(int iX,
int iY,
int iZ) |
Get the second-order yz-mixed-derivative of the image value at voxel
(x,y,z), call it u_yz(x,y,z).
|
float |
getUz(int iX,
int iY,
int iZ) |
Get the first-order z-derivative of the image value at voxel (x,y,z),
call it u_z(x,y,z).
|
float |
getUzz(int iX,
int iY,
int iZ) |
Get the second-order z-derivative of the image value at voxel (x,y,z),
call it u_zz(x,y,z).
|
int |
getXBound() |
Get the x-bound for the image.
|
float |
getXSpacing() |
Get the x-spacing for the image.
|
int |
getYBound() |
Get the y-bound for the image.
|
float |
getYSpacing() |
Get the y-spacing for the image.
|
int |
getZBound() |
Get the z-bound for the image.
|
float |
getZSpacing() |
Get the z-spacing for the image.
|
protected void |
lookUp27(int iX,
int iY,
int iZ) |
Copy the source data to temporary storage in order to avoid redundant
array accesses.
|
protected void |
lookUp7(int iX,
int iY,
int iZ) |
Copy the source data to temporary storage in order to avoid redundant
array accesses.
|
protected void |
onPostUpdate() |
Swap the buffers for the next pass of the PDE solver.
|
protected void |
onPreUpdate() |
Recompute the boundary values when Neumann conditions are in effect.
|
protected void |
onUpdate() |
Iterate over all the voxels and call onUpdate(x,y,z) for each voxel
that is not masked out.
|
protected abstract void |
onUpdate(int iX,
int iY,
int iZ) |
An abstract function that allows per-voxel processing by the PDE
solver.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_fInvDx
protected float m_fInvDx
invDx = 1/dx
-
m_fInvDy
protected float m_fInvDy
invDy = 1/dy
-
m_fInvDz
protected float m_fInvDz
invDz = 1/dz
-
m_fUmmm
protected float m_fUmmm
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUzmm
protected float m_fUzmm
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUpmm
protected float m_fUpmm
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUmzm
protected float m_fUmzm
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUzzm
protected float m_fUzzm
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUpzm
protected float m_fUpzm
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUmpm
protected float m_fUmpm
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUzpm
protected float m_fUzpm
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUppm
protected float m_fUppm
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUmmz
protected float m_fUmmz
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUzmz
protected float m_fUzmz
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUpmz
protected float m_fUpmz
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUmzz
protected float m_fUmzz
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUzzz
protected float m_fUzzz
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUpzz
protected float m_fUpzz
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUmpz
protected float m_fUmpz
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUzpz
protected float m_fUzpz
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUppz
protected float m_fUppz
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUmmp
protected float m_fUmmp
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUzmp
protected float m_fUzmp
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUpmp
protected float m_fUpmp
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUmzp
protected float m_fUmzp
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUzzp
protected float m_fUzzp
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUpzp
protected float m_fUpzp
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUmpp
protected float m_fUmpp
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUzpp
protected float m_fUzpp
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_fUppp
protected float m_fUppp
Temporary storage for 3x3x3 neighborhood. In the notation m_fUijk, the
i, j, and k indices are in {m,z,p}, referring to subtract 1 (m), no
change (z), or add 1 (p) to the appropriate index.
-
m_aaafSrc
protected float[][][] m_aaafSrc
Successive iterations of the PDE solver toggle between two buffers.
This is the source buffer, which is the input to the solver.
-
m_aaafDst
protected float[][][] m_aaafDst
Successive iterations of the PDE solver toggle between two buffers.
This is the destination buffer, which is the output of the solver.
-
Constructor Detail
-
LsePdeFilter3
protected LsePdeFilter3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType)
Create a new PDE filter object for 3D images.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
voxel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.
-
Method Detail
-
getU
public final float getU(int iX,
int iY,
int iZ)
Get the image value at voxel (x,y,z), call it u(x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The image value, u(x,y,z).
-
getUx
public final float getUx(int iX,
int iY,
int iZ)
Get the first-order x-derivative of the image value at voxel (x,y,z),
call it u_x(x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The x-derivative of the image value, u_x(x,y,z).
-
getUy
public final float getUy(int iX,
int iY,
int iZ)
Get the first-order y-derivative of the image value at voxel (x,y,z),
call it u_y(x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The y-derivative of the image value, u_y(x,y,z).
-
getUz
public final float getUz(int iX,
int iY,
int iZ)
Get the first-order z-derivative of the image value at voxel (x,y,z),
call it u_z(x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The z-derivative of the image value, u_z(x,y,z).
-
getUxx
public final float getUxx(int iX,
int iY,
int iZ)
Get the second-order x-derivative of the image value at voxel (x,y,z),
call it u_xx(x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The xx-derivative of the image value, u_xx(x,y).
-
getUxy
public final float getUxy(int iX,
int iY,
int iZ)
Get the second-order xy-mixed-derivative of the image value at voxel
(x,y,z), call it u_xy(x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The xy-derivative of the image value, u_xy(x,y,z).
-
getUxz
public final float getUxz(int iX,
int iY,
int iZ)
Get the second-order xz-mixed-derivative of the image value at voxel
(x,y,z), call it u_xz(x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The xz-derivative of the image value, u_xz(x,y,z).
-
getUyy
public final float getUyy(int iX,
int iY,
int iZ)
Get the second-order y-derivative of the image value at voxel (x,y,z),
call it u_yy(x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The yy-derivative of the image value, u_yy(x,y).
-
getUyz
public final float getUyz(int iX,
int iY,
int iZ)
Get the second-order yz-mixed-derivative of the image value at voxel
(x,y,z), call it u_yz(x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The yz-derivative of the image value, u_yz(x,y,z).
-
getUzz
public final float getUzz(int iX,
int iY,
int iZ)
Get the second-order z-derivative of the image value at voxel (x,y,z),
call it u_zz(x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The zz-derivative of the image value, u_zz(x,y).
-
getMask
public final boolean getMask(int iX,
int iY,
int iZ)
Get the mask value at voxel (x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The mask value at voxel (x,y,z). Its value is true when that
pixel should not be processed by the PDE solver.
-
assignNeumannImageBorder
protected void assignNeumannImageBorder()
Assign values to the 1-voxel-thick image border. The border values are
chosen so that the first-order image derivatives at the border pixels
are zero. Thus, the border values are duplicates of the adjacent image
values.
-
assignNeumannMaskBorder
protected void assignNeumannMaskBorder()
Assign values to the 1-voxel-thick borders that surround unmasked
regions. The border values are chosen so that the first-order image
derivatives at the border voxels are zero. Thus, the border values are
duplicates of the adjacent image values.
-
onPreUpdate
protected void onPreUpdate()
Recompute the boundary values when Neumann conditions are in effect.
If a derived class overrides this, it must call the base-class
onPreUpdate first.
- Specified by:
onPreUpdate in class LsePdeFilter
-
onUpdate
protected void onUpdate()
Iterate over all the voxels and call onUpdate(x,y,z) for each voxel
that is not masked out.
- Specified by:
onUpdate in class LsePdeFilter
-
onPostUpdate
protected void onPostUpdate()
Swap the buffers for the next pass of the PDE solver. If a derived
class overrides this, it must call the base-class onPostUpdate last.
- Specified by:
onPostUpdate in class LsePdeFilter
-
onUpdate
protected abstract void onUpdate(int iX,
int iY,
int iZ)
An abstract function that allows per-voxel processing by the PDE
solver. The voxel (x,y,z) must be in padded coordinates, namely,
1 <= x <= xbound, 1 <= y <= ybound, and 1 <= z <= zbound.
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.
-
lookUp7
protected void lookUp7(int iX,
int iY,
int iZ)
Copy the source data to temporary storage in order to avoid redundant
array accesses. The copy involves the 7 voxels (x,y,z), (x+1,y,z),
(x-1,y,z), (x,y+1,z), (x,y-1,z), (x,y,z+1), and (x,y,z-1).
-
lookUp27
protected void lookUp27(int iX,
int iY,
int iZ)
Copy the source data to temporary storage in order to avoid redundant
array accesses. The copy involves the 27 pixels in the 3x3x3
neighborhood of (x,y,z).
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseSegShapeDetection3.html����������������������������������0000775�4231163�4231163�00000117505�14537076060�026026� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseSegShapeDetection3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
m_afBlurCurvFlow |
The blurred curvature flow image (intermediate image).
|
private float[] |
m_afCurvFlow |
The curvature flow image (intermediate image).
|
private float[] |
m_afFeature |
The feature image.
|
private float[] |
m_afGradMagBlurCurvFlow |
The gradient magnitude of the blurred curvature flow image
(intermediate image).
|
private int |
m_eScaleType |
The scaling type of the image (default = LsePdeFilter.NONE).
|
private float |
m_fAlpha |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBeta |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBorderValue |
The border value of the image (default = Float.MAX_VALUE).
|
private float |
m_fMax |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fMin |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fScale |
The scale used for computing the blurred gradient magnitude image
(default = 0).
|
private float |
m_fTimeStep |
The time step of the PDE solver (default = 0.001).
|
private float |
m_fXSpacing |
The x-spacing of the image.
|
private float |
m_fYSpacing |
The y-spacing of the image.
|
private float |
m_fZSpacing |
The z-spacing of the image.
|
private int |
m_iDIterations |
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
|
private int |
m_iXBound |
The x-bound of the image.
|
private int |
m_iYBound |
The y-bound of the image.
|
private int |
m_iZBound |
The z-bound of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
m_abMask, m_abSignedDistanceMask, m_afData, m_afSignedDistance, m_aiBoundary, m_aiInterior, m_fCurrentDistance, m_fMaxDistance, m_iQuantity, m_kFastMarcher, m_kLevelSetEvolver
-
Constructor Summary
Constructors
| Constructor |
Description |
LseSegShapeDetection3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask) |
Create a shape-detection-based segmenter.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
beginCoarse(int[] aiSeeds) |
The region-growing fast march.
|
boolean |
beginDistanceTransform(float fMaxDistance) |
The signed-distance-transform fast march.
|
void |
beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep) |
The level-set evolution.
|
void |
createFeatureImage() |
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
|
float[] |
getBlurCurvFlowImage() |
Get the blurred curvature flow image.
|
float[] |
getCurvFlowImage() |
Get the curvature flow image.
|
float[] |
getFeatureImage() |
Get the feature image.
|
float[] |
getGradMagBlurCurvFlowImage() |
Get the gradient magnitude of the blurred curvature flow image.
|
void |
setDiffusionIterations(int iDIterations) |
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
|
void |
setGradientMagnitudeScale(float fScale) |
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
|
void |
setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep) |
Parameters for the feature image creation.
|
void |
setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax) |
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
endCoarse, endDistanceTransform, endEvolution, getBoundary, getFastMarcher, getInterior, getLevelSetEvolver, getSignedDistanceImage, getSignedDistanceMask, iterateCoarse, iterateDistanceTransform, iterateEvolution
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_fAlpha
private float m_fAlpha
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fBeta
private float m_fBeta
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMin
private float m_fMin
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMax
private float m_fMax
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
Constructor Detail
-
LseSegShapeDetection3
public LseSegShapeDetection3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask)
Create a shape-detection-based segmenter.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.afData - The image elements.abMask - The image masks that determine which pixels are
processed by the segmenter.
-
Method Detail
-
setPDEParameters
public final void setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep)
Parameters for the feature image creation. You may set these anytime
before a sequence of fast-march iterations. The PDE filters require
you to specify how to handle boundary values. If you want Dirichlet
conditions (constant boundary), set BorderValue to a finite number.
If you want Neumann conditions (zero-derivative boundary), set the
BorderValue to Float.MAX_VALUE. If you want the original image to be
scaled, choose the Type parameter appropriately. The input image is
processed by a curvature-based anisotropic diffusion filter; the
number of iterations is DIterations. The gradient magnitude at the
specified Scale is computed for the output of the diffusion filter.
The gradient magnitude is transformed to the feature image by a sigmoid
function:
feature(x) = min + (max-min)/(1 + exp(-(x-beta)/alpha))
The inverse of the feature image values are the speeds used in the
fast marching algorithm.
- Specified by:
setPDEParameters in class LseSegmenter- Parameters:
fBorderValue - The border value to use when processing boundary
pixels.eScaleType - The scaling type for the image.fTimeStep - The time step for the PDE solver.
-
setSigmoidFilter
public final void setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax)
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- Specified by:
setSigmoidFilter in class LseSegmenter- Parameters:
fAlpha - The variance of the function.fBeta - The center of the function.fMin - The minimum of the function.fMax - The maximum of the function.
-
createFeatureImage
public final void createFeatureImage()
Create the feature image using the parameters set by the four
parameter-setting functions defined above. Since the quality of the
segmentation depends on these parameters, createFeatureImage() allows
you to experiment with the parameters before you start the
segmentation.
-
beginCoarse
public void beginCoarse(int[] aiSeeds)
The region-growing fast march. When you call beginCoarse(), the
current parameters are used (DIterations, scale, alpha, beta, min,
max). You can apply the fast marching algorithm multiple times to
the same image, each time starting with beginCoarse();
- Overrides:
beginCoarse in class LseSegmenter- Parameters:
aiSeeds - The initial region to grow.
-
beginDistanceTransform
public boolean beginDistanceTransform(float fMaxDistance)
The signed-distance-transform fast march. An annulus is computed
about the boundary of the coarse-level segmentation. The maximum
distance from annulus points to the boundary is the input to this
function (in voxel units).
- Overrides:
beginDistanceTransform in class LseSegmenter- Parameters:
fMaxDistance - The maximum distance to allow when computing the
signed distance transform.- Returns:
- 'true' iff more iterations are allowed
-
beginEvolution
public void beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep)
The level-set evolution.
- Overrides:
beginEvolution in class LseSegmenter- Parameters:
fAdvectionWeight - The advection coefficient 'a' in the PDE that
controls the evolution.fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.fLaplacianWeight - The Laplacian coefficient 'd' in the PDE that
controls the evolution.fTimeStep - The time step for the PDE solver.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseSegThreshold2.html���������������������������������������0000775�4231163�4231163�00000120737�14537076060�025063� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseSegThreshold2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
m_afBlurCurvFlow |
The blurred curvature flow image (intermediate image).
|
private float[] |
m_afCurvFlow |
The curvature flow image (intermediate image).
|
private float[] |
m_afFeature |
The feature image.
|
private float[] |
m_afGradMagBlurCurvFlow |
The gradient magnitude of the blurred curvature flow image
(intermediate image).
|
private int |
m_eScaleType |
The scaling type of the image (default = LsePdeFilter.NONE).
|
private float |
m_fAlpha |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBeta |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBorderValue |
The border value of the image (default = Float.MAX_VALUE).
|
private float |
m_fLower |
Parameters for the threshold segmentation.
|
private float |
m_fMax |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fMin |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fScale |
The scale used for computing the blurred gradient magnitude image
(default = 0).
|
private float |
m_fTimeStep |
The time step of the PDE solver (default = 0.001).
|
private float |
m_fUpper |
Parameters for the threshold segmentation.
|
private float |
m_fXSpacing |
The x-spacing of the image.
|
private float |
m_fYSpacing |
The y-spacing of the image.
|
private int |
m_iDIterations |
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
|
private int |
m_iXBound |
The x-bound of the image.
|
private int |
m_iYBound |
The y-bound of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
m_abMask, m_abSignedDistanceMask, m_afData, m_afSignedDistance, m_aiBoundary, m_aiInterior, m_fCurrentDistance, m_fMaxDistance, m_iQuantity, m_kFastMarcher, m_kLevelSetEvolver
-
Constructor Summary
Constructors
| Constructor |
Description |
LseSegThreshold2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask) |
Create a threshold-based segmenter.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
beginCoarse(int[] aiSeeds) |
The region-growing fast march.
|
boolean |
beginDistanceTransform(float fMaxDistance) |
The signed-distance-transform fast march.
|
void |
beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep) |
The level-set evolution.
|
void |
createFeatureImage() |
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
|
(package private) float[] |
getBlurCurvFlowImage() |
Get the blurred curvature flow image.
|
(package private) float[] |
getCurvFlowImage() |
Get the curvature flow image.
|
(package private) float[] |
getFeatureImage() |
Get the feature image.
|
(package private) float[] |
getGradMagBlurCurvFlowImage() |
Get the gradient magnitude of the blurred curvature flow image.
|
void |
setDiffusionIterations(int iDIterations) |
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
|
void |
setGradientMagnitudeScale(float fScale) |
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
|
void |
setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep) |
Parameters for the feature image creation.
|
void |
setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax) |
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
|
void |
setThresholds(float fLower,
float fUpper) |
The lower and upper thresholds must be set before calling
beginEvolution.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
endCoarse, endDistanceTransform, endEvolution, getBoundary, getFastMarcher, getInterior, getLevelSetEvolver, getSignedDistanceImage, getSignedDistanceMask, iterateCoarse, iterateDistanceTransform, iterateEvolution
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_fAlpha
private float m_fAlpha
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fBeta
private float m_fBeta
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMin
private float m_fMin
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMax
private float m_fMax
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
Constructor Detail
-
LseSegThreshold2
public LseSegThreshold2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask)
Create a threshold-based segmenter.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.afData - The image elements.abMask - The image masks that determine which pixels are
processed by the segmenter.
-
Method Detail
-
setPDEParameters
public final void setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep)
Parameters for the feature image creation. You may set these anytime
before a sequence of fast-march iterations. The PDE filters require
you to specify how to handle boundary values. If you want Dirichlet
conditions (constant boundary), set BorderValue to a finite number.
If you want Neumann conditions (zero-derivative boundary), set the
BorderValue to Float.MAX_VALUE. If you want the original image to be
scaled, choose the Type parameter appropriately. The input image is
processed by a curvature-based anisotropic diffusion filter; the
number of iterations is DIterations. The gradient magnitude at the
specified Scale is computed for the output of the diffusion filter.
The gradient magnitude is transformed to the feature image by a sigmoid
function:
feature(x) = min + (max-min)/(1 + exp(-(x-beta)/alpha))
The inverse of the feature image values are the speeds used in the
fast marching algorithm.
- Specified by:
setPDEParameters in class LseSegmenter- Parameters:
fBorderValue - The border value to use when processing boundary
pixels.eScaleType - The scaling type for the image.fTimeStep - The time step for the PDE solver.
-
setSigmoidFilter
public final void setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax)
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- Specified by:
setSigmoidFilter in class LseSegmenter- Parameters:
fAlpha - The variance of the function.fBeta - The center of the function.fMin - The minimum of the function.fMax - The maximum of the function.
-
createFeatureImage
public final void createFeatureImage()
Create the feature image using the parameters set by the four
parameter-setting functions defined above. Since the quality of the
segmentation depends on these parameters, createFeatureImage() allows
you to experiment with the parameters before you start the
segmentation.
-
beginCoarse
public void beginCoarse(int[] aiSeeds)
The region-growing fast march. When you call beginCoarse(), the
current parameters are used (DIterations, scale, alpha, beta, min,
max). You can apply the fast marching algorithm multiple times to
the same image, each time starting with beginCoarse();
- Overrides:
beginCoarse in class LseSegmenter- Parameters:
aiSeeds - The initial region to grow.
-
beginDistanceTransform
public boolean beginDistanceTransform(float fMaxDistance)
The signed-distance-transform fast march. An annulus is computed
about the boundary of the coarse-level segmentation. The maximum
distance from annulus points to the boundary is the input to this
function (in pixel units).
- Overrides:
beginDistanceTransform in class LseSegmenter- Parameters:
fMaxDistance - The maximum distance to allow when computing the
signed distance transform.- Returns:
- 'true' iff more iterations are allowed
-
setThresholds
public void setThresholds(float fLower,
float fUpper)
The lower and upper thresholds must be set before calling
beginEvolution.
- Parameters:
fLower - The lower threshold for propagation P(x) in the PDE.fUpper - The upper threshold for propagation P(x) in the PDE.
-
beginEvolution
public void beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep)
The level-set evolution.
- Overrides:
beginEvolution in class LseSegmenter- Parameters:
fAdvectionWeight - The advection coefficient 'a' in the PDE that
controls the evolution.fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.fLaplacianWeight - The Laplacian coefficient 'd' in the PDE that
controls the evolution.fTimeStep - The time step for the PDE solver.
���������������������������������gov/nih/mipav/model/algorithms/levelset/LseMinHeap.Record.html��������������������������������������0000775�4231163�4231163�00000037451�14537076060�025144� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseMinHeap.Record (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
-
- Enclosing class:
- LseMinHeap
public class LseMinHeap.Record
extends java.lang.Object
Each heap record stores a numeric value, the index of the record
within the records array, and a generator which acts as an
identifier for the application to use to store information about how
the numeric value was generated in the application.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
m_fValue |
The numeric value of the heap record.
|
private int |
m_iGenerator |
The generator for the heap record.
|
private int |
m_iIndex |
The index of the heap record in the records array.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Record() |
Creates a new heap record.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
int |
getGenerator() |
Get the generator for the heap record.
|
int |
getIndex() |
Get the index of the heap record within the records array.
|
float |
getValue() |
Get the numeric value for the heap record.
|
void |
setGenerator(int iGenerator) |
Set the generator for the heap record.
|
void |
setIndex(int iIndex) |
Set the index of the heap record within the records array.
|
void |
setValue(float fValue) |
Set the numeric value for the heap record.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/AlgorithmFastMarching.html����������������������������������0000775�4231163�4231163�00000123130�14537076060�026145� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFastMarching (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
m_bImage25D |
Calculate per-slice:
|
private boolean |
m_bIterate |
DOCUMENT ME!
|
private boolean |
m_bNext |
DOCUMENT ME!
|
private float |
m_fAdvectionWeight |
The advection coefficient 'a' in the PDE that controls the evolution.
|
private float |
m_fCurvatureWeight |
The curvature coefficient 'c' in the PDE that controls the evolution.
|
private float |
m_fGradientMagnitudeScale |
The scale to use in computing the blurred gradient magnitude of the curvature flow image.
|
private float |
m_fLaplacianWeight |
The Laplacian coefficient 'd' in the PDE that controls the evolution.
|
private float |
m_fMaxDistance |
The maximum distance to allow when computing the signed distance transform.
|
private float |
m_fPropagationWeight |
The propagation coefficient 'b' in the PDE that controls the evolution.
|
private float |
m_fSigmoidAlpha |
The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
|
private float |
m_fSigmoidBeta |
The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
|
private float |
m_fSigmoidMax |
The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
|
private float |
m_fSigmoidMin |
The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
|
private int |
m_iDiffusionIterations |
The number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
|
private int |
m_iFilterType |
Type of level set diffusion filter to apply.
|
private int |
m_iMaxCoarse |
Number of coarse iterations
|
private int |
m_iMaxEvolution |
Number of evolution iterations
|
private int |
m_iSlice |
|
private static long |
serialVersionUID |
Use serialVersionUID for interoperability.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFastMarching(ModelImage _image) |
Creates a new ViewJFrameFastMarching3 object.
|
AlgorithmFastMarching(ModelImage _image,
int iFilterType,
int iIters,
float fGMScale,
float fSAlpha,
float fSBeta,
float fSMin,
float fSMax,
int iCoarseMax,
float fMaxDistance,
float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
int iEvolveMax,
boolean bImage25D) |
Creates a new AlgorithmFastMarching3 object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
m_bNext
private boolean m_bNext
DOCUMENT ME!
-
m_iSlice
private int m_iSlice
-
Constructor Detail
-
AlgorithmFastMarching
public AlgorithmFastMarching(ModelImage _image,
int iFilterType,
int iIters,
float fGMScale,
float fSAlpha,
float fSBeta,
float fSMin,
float fSMax,
int iCoarseMax,
float fMaxDistance,
float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
int iEvolveMax,
boolean bImage25D)
Creates a new AlgorithmFastMarching3 object.
- Parameters:
_image - reference to the source imageiIters - The number of iterations to use in the nonlinear diffusion (curvature flow filter) applied to the input image.fGMScale - The scale to use in computing the blurred gradient magnitude of the curvature flow image.fSAlpha - The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed. The variance of the function.fSBeta - The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed. The center of the function.fSMin - The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed. The minimum of the function.fSMax - The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed. The maximum of the function.iCoarseMax - Number of coarse iterationsfMaxDistance - The maximum distance to allow when computing the
signed distance transform.
* @param fAdvectionWeight The advection coefficient 'a' in the PDE that
controls the evolution.fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.fLaplacianWeight - The Laplacian coefficient 'd' in the PDE that
controls the evolution.iEvolveMax - Number of evolution iterations
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseGeodesicActiveContour2.html������������������������������0000775�4231163�4231163�00000064751�14537076060�026723� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseGeodesicActiveContour2 (MIPAV API Documentation)
-
public class LseGeodesicActiveContour2
extends LseEvolve2
A level-set evolver for 2D images. The PDE to be solved numerically for
I(x,t) is:
dI/dt = -a*Dot(A(x),grad(I)) -b*F(x)*|grad(I)| + c*F(x)*K(x,t)*|grad(I)|,
t > 0
I(x,0) = I0(x)
where the feature image is typically
F(x) = 1/(1+|grad(convolve(G,I0))|) or
F(x) = exp(-|grad(convolve(G,I0))|)
where G(x,t) is the Gaussian kernel and where K(x,t) is the curvature of
I(x,t). The advection is
A(x) = -grad(convolve(G,I0))
The constant a is the advection weight, the constant b is the propagation
weight and the constant c is the curvature weight.
- Version:
- 0.1 November 7, 2006
- Author:
- David Eberly
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float[][] |
m_aafFeature |
The feature image to control the segmentation.
|
protected float[][][] |
m_aakAdvection |
The advection field to control the segmentation.
|
protected float |
m_fZeroTolerance |
The threshold below which the feature image values are clamped to this
tolerance.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
m_aabMask, m_aafDst, m_aafSrc, m_fFourthInvDxDy, m_fHalfInvDx, m_fHalfInvDy, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fUmm, m_fUmp, m_fUmz, m_fUpm, m_fUpp, m_fUpz, m_fUzm, m_fUzp, m_fUzz, m_fXSpacing, m_fYSpacing, m_iXBound, m_iYBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseGeodesicActiveContour2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float[][] akAdvection,
float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight) |
Create a new level-set evolver for 2D images.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUy, getUyy, getXBound, getXSpacing, getYBound, getYSpacing, lookUp5, lookUp9, onPostUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseGeodesicActiveContour2
public LseGeodesicActiveContour2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float[][] akAdvection,
float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight)
Create a new level-set evolver for 2D images.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.afFeature - The feature image to control the evolution.akAdvection - The advection field to control the evolution.fAdvectionWeight - The advection coefficient 'a' in the PDE that
controls the evolution.fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.
-
Method Detail
-
computeAdvection
protected float[] computeAdvection(int iX,
int iY)
Compute the advection at pixel (x,y). In this evolver, the advection
is obtained simply by a lookup into the advection image.
- Overrides:
computeAdvection in class LseEvolve2- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The advection at the pixel.
-
computePropagationSpeed
protected float computePropagationSpeed(int iX,
int iY)
Compute the propagation speed at pixel (x,y). In this evolver, the
propagation speed is obtained simply by a lookup into the feature
image.
- Overrides:
computePropagationSpeed in class LseEvolve2- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The propagation speed at the pixel.
-
computeCurvatureSpeed
protected float computeCurvatureSpeed(int iX,
int iY)
Compute the curvature speed at pixel (x,y). In this evolver, the
curvature speed is obtained simply by a lookup into the feature
image.
- Overrides:
computeCurvatureSpeed in class LseEvolve2- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The curvature speed at the pixel.
�����������������������gov/nih/mipav/model/algorithms/levelset/LseParameters.html������������������������������������������0000775�4231163�4231163�00000106501�14537076060�024502� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseParameters (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.levelset.LseParameters
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
m_fAdvectionWeight |
The advection weight 'a'.
|
private float |
m_fCurvatureWeight |
The curvature weight 'c'.
|
private float |
m_fGradientEpsilon |
A small, positive constant added to the gradient magnitude when it is
used in a division.
|
private float |
m_fLaplacianWeight |
The Laplacian weight 'd'.
|
private float |
m_fMaxAdvectionChange |
The stability of the numerical PDE solver depends heavily on the data
being processed.
|
private float |
m_fMaxAdvPropTimeStep |
The stability of the numerical PDE solver depends heavily on the data
being processed.
|
private float |
m_fMaxCurvatureChange |
The stability of the numerical PDE solver depends heavily on the data
being processed.
|
private float |
m_fMaxCurvatureTimeStep |
The stability of the numerical PDE solver depends heavily on the data
being processed.
|
private float |
m_fMaxPropagationChange |
The stability of the numerical PDE solver depends heavily on the data
being processed.
|
private float |
m_fPropagationWeight |
The propagation weight 'b'.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
LseParameters() |
Creates a new LseParameters object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_fGradientEpsilon
private float m_fGradientEpsilon
A small, positive constant added to the gradient magnitude when it is
used in a division. This guards against divisions by zero.
-
m_fMaxAdvPropTimeStep
private float m_fMaxAdvPropTimeStep
The stability of the numerical PDE solver depends heavily on the data
being processed. The time step must be carefully controlled to be
small enough to ensure stability. These parameters are modified during
the PDE solver update to reflect the current state of the image data.
The modified values are used in computeTimeStep() to calculate the
time step to be used by the next PDE solver update.
-
m_fMaxCurvatureTimeStep
private float m_fMaxCurvatureTimeStep
The stability of the numerical PDE solver depends heavily on the data
being processed. The time step must be carefully controlled to be
small enough to ensure stability. These parameters are modified during
the PDE solver update to reflect the current state of the image data.
The modified values are used in computeTimeStep() to calculate the
time step to be used by the next PDE solver update.
-
m_fMaxAdvectionChange
private float m_fMaxAdvectionChange
The stability of the numerical PDE solver depends heavily on the data
being processed. The time step must be carefully controlled to be
small enough to ensure stability. These parameters are modified during
the PDE solver update to reflect the current state of the image data.
The modified values are used in computeTimeStep() to calculate the
time step to be used by the next PDE solver update.
-
m_fMaxPropagationChange
private float m_fMaxPropagationChange
The stability of the numerical PDE solver depends heavily on the data
being processed. The time step must be carefully controlled to be
small enough to ensure stability. These parameters are modified during
the PDE solver update to reflect the current state of the image data.
The modified values are used in computeTimeStep() to calculate the
time step to be used by the next PDE solver update.
-
m_fMaxCurvatureChange
private float m_fMaxCurvatureChange
The stability of the numerical PDE solver depends heavily on the data
being processed. The time step must be carefully controlled to be
small enough to ensure stability. These parameters are modified during
the PDE solver update to reflect the current state of the image data.
The modified values are used in computeTimeStep() to calculate the
time step to be used by the next PDE solver update.
-
Method Detail
-
setGradientEpsilon
public final void setGradientEpsilon(float fGradientEpsilon)
Set the gradient magnitude epsilon value. This value guards against
a division by z zero-valued gradient magnitude in the curvature
calculations.
- Parameters:
fGradientEpsilon - The gradient magnitude epsilon value. The
number must be positive.
-
setMaxAdvPropTimeStep
public final void setMaxAdvPropTimeStep(float fMaxAdvPropTimeStep)
Set the maximum advection-propagation time step. The default value
is 0.25. At this time, there is no reason to change its value.
- Parameters:
fMaxAdvPropTimeStep - The desired maximum advection-propagation
time step.
-
setMaxCurvatureTimeStep
public final void setMaxCurvatureTimeStep(float fMaxCurvatureTimeStep)
Set the maximum curvature time step. The default value is 0.25. At
this time, there is no reason to change its value.
- Parameters:
fMaxCurvatureTimeStep - The desired maximum curvature time step.
-
computeTimeStep
public final float computeTimeStep()
Compute the time step for the next PDE solver update. The time step
is based on the current state of the system that is represented by
the members of this class. This state is modified in the LseEvolve2
function computeFunction(x,y) and in the LseEvolve3 member function
computeFunction(x,y,z).
- Returns:
- The next time step to be used by the PDE solver update.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseGaussianBlur2.html���������������������������������������0000775�4231163�4231163�00000047356�14537076060�025074� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseGaussianBlur2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
m_fMaximumTimeStep |
The maximum time step allowed for numerical stability of the filter.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
m_aabMask, m_aafDst, m_aafSrc, m_fFourthInvDxDy, m_fHalfInvDx, m_fHalfInvDy, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fUmm, m_fUmp, m_fUmz, m_fUpm, m_fUpp, m_fUpz, m_fUzm, m_fUzp, m_fUzz, m_fXSpacing, m_fYSpacing, m_iXBound, m_iYBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseGaussianBlur2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType) |
Creates a new LseGaussianBlur2 object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUy, getUyy, getXBound, getXSpacing, getYBound, getYSpacing, lookUp5, lookUp9, onPostUpdate, onPreUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseGaussianBlur2
public LseGaussianBlur2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType)
Creates a new LseGaussianBlur2 object.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseSegThreshold3.html���������������������������������������0000775�4231163�4231163�00000123367�14537076060�025066� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseSegThreshold3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
m_afBlurCurvFlow |
The blurred curvature flow image (intermediate image).
|
private float[] |
m_afCurvFlow |
The curvature flow image (intermediate image).
|
private float[] |
m_afFeature |
The feature image.
|
private float[] |
m_afGradMagBlurCurvFlow |
The gradient magnitude of the blurred curvature flow image
(intermediate image).
|
private int |
m_eScaleType |
The scaling type of the image (default = LsePdeFilter.NONE).
|
private float |
m_fAlpha |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBeta |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBorderValue |
The border value of the image (default = Float.MAX_VALUE).
|
private float |
m_fLower |
Parameters for the threshold segmentation.
|
private float |
m_fMax |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fMin |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fScale |
The scale used for computing the blurred gradient magnitude image
(default = 0).
|
private float |
m_fTimeStep |
The time step of the PDE solver (default = 0.001).
|
private float |
m_fUpper |
Parameters for the threshold segmentation.
|
private float |
m_fXSpacing |
The x-spacing of the image.
|
private float |
m_fYSpacing |
The y-spacing of the image.
|
private float |
m_fZSpacing |
The z-spacing of the image.
|
private int |
m_iDIterations |
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
|
private int |
m_iXBound |
The x-bound of the image.
|
private int |
m_iYBound |
The y-bound of the image.
|
private int |
m_iZBound |
The z-bound of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
m_abMask, m_abSignedDistanceMask, m_afData, m_afSignedDistance, m_aiBoundary, m_aiInterior, m_fCurrentDistance, m_fMaxDistance, m_iQuantity, m_kFastMarcher, m_kLevelSetEvolver
-
Constructor Summary
Constructors
| Constructor |
Description |
LseSegThreshold3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask) |
Create a shape-detection-based segmenter.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
beginCoarse(int[] aiSeeds) |
The region-growing fast march.
|
boolean |
beginDistanceTransform(float fMaxDistance) |
The signed-distance-transform fast march.
|
void |
beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep) |
The level-set evolution.
|
void |
createFeatureImage() |
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
|
(package private) float[] |
getBlurCurvFlowImage() |
Get the blurred curvature flow image.
|
(package private) float[] |
getCurvFlowImage() |
Get the curvature flow image.
|
(package private) float[] |
getFeatureImage() |
Get the feature image.
|
(package private) float[] |
getGradMagBlurCurvFlowImage() |
Get the gradient magnitude of the blurred curvature flow image.
|
void |
setDiffusionIterations(int iDIterations) |
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
|
void |
setGradientMagnitudeScale(float fScale) |
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
|
void |
setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep) |
Parameters for the feature image creation.
|
void |
setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax) |
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
|
void |
setThresholds(float fLower,
float fUpper) |
The lower and upper thresholds must be set before calling
beginEvolution.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
endCoarse, endDistanceTransform, endEvolution, getBoundary, getFastMarcher, getInterior, getLevelSetEvolver, getSignedDistanceImage, getSignedDistanceMask, iterateCoarse, iterateDistanceTransform, iterateEvolution
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_fAlpha
private float m_fAlpha
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fBeta
private float m_fBeta
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMin
private float m_fMin
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMax
private float m_fMax
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
Constructor Detail
-
LseSegThreshold3
public LseSegThreshold3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask)
Create a shape-detection-based segmenter.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.afData - The image elements.abMask - The image masks that determine which pixels are
processed by the segmenter.
-
Method Detail
-
setPDEParameters
public final void setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep)
Parameters for the feature image creation. You may set these anytime
before a sequence of fast-march iterations. The PDE filters require
you to specify how to handle boundary values. If you want Dirichlet
conditions (constant boundary), set BorderValue to a finite number.
If you want Neumann conditions (zero-derivative boundary), set the
BorderValue to Float.MAX_VALUE. If you want the original image to be
scaled, choose the Type parameter appropriately. The input image is
processed by a curvature-based anisotropic diffusion filter; the
number of iterations is DIterations. The gradient magnitude at the
specified Scale is computed for the output of the diffusion filter.
The gradient magnitude is transformed to the feature image by a sigmoid
function:
feature(x) = min + (max-min)/(1 + exp(-(x-beta)/alpha))
The inverse of the feature image values are the speeds used in the
fast marching algorithm.
- Specified by:
setPDEParameters in class LseSegmenter- Parameters:
fBorderValue - The border value to use when processing boundary
pixels.eScaleType - The scaling type for the image.fTimeStep - The time step for the PDE solver.
-
setSigmoidFilter
public final void setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax)
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- Specified by:
setSigmoidFilter in class LseSegmenter- Parameters:
fAlpha - The variance of the function.fBeta - The center of the function.fMin - The minimum of the function.fMax - The maximum of the function.
-
createFeatureImage
public final void createFeatureImage()
Create the feature image using the parameters set by the four
parameter-setting functions defined above. Since the quality of the
segmentation depends on these parameters, createFeatureImage() allows
you to experiment with the parameters before you start the
segmentation.
-
beginCoarse
public void beginCoarse(int[] aiSeeds)
The region-growing fast march. When you call beginCoarse(), the
current parameters are used (DIterations, scale, alpha, beta, min,
max). You can apply the fast marching algorithm multiple times to
the same image, each time starting with beginCoarse();
- Overrides:
beginCoarse in class LseSegmenter- Parameters:
aiSeeds - The initial region to grow.
-
beginDistanceTransform
public boolean beginDistanceTransform(float fMaxDistance)
The signed-distance-transform fast march. An annulus is computed
about the boundary of the coarse-level segmentation. The maximum
distance from annulus points to the boundary is the input to this
function (in voxel units).
- Overrides:
beginDistanceTransform in class LseSegmenter- Parameters:
fMaxDistance - The maximum distance to allow when computing the
signed distance transform.- Returns:
- 'true' iff more iterations are allowed
-
setThresholds
public final void setThresholds(float fLower,
float fUpper)
The lower and upper thresholds must be set before calling
beginEvolution.
- Parameters:
fLower - The lower threshold for propagation P(x) in the PDE.fUpper - The upper threshold for propagation P(x) in the PDE.
-
beginEvolution
public void beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep)
The level-set evolution.
- Overrides:
beginEvolution in class LseSegmenter- Parameters:
fAdvectionWeight - The advection coefficient 'a' in the PDE that
controls the evolution.fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.fLaplacianWeight - The Laplacian coefficient 'd' in the PDE that
controls the evolution.fTimeStep - The time step for the PDE solver.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseGradientAnisotropic3.html��������������������������������0000775�4231163�4231163�00000060720�14537076060�026434� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseGradientAnisotropic3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
m_fK |
The local curvature parameter, call it k.
|
private float |
m_fMHalfParam |
-0.5/(k^2*average(|grad(u)|^2))
|
private float |
m_fParam |
1/(k^2*average(|grad(u)|^2))
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
m_aaabMask, m_aaafDst, m_aaafSrc, m_fFourthInvDxDy, m_fFourthInvDxDz, m_fFourthInvDyDz, m_fHalfInvDx, m_fHalfInvDy, m_fHalfInvDz, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fInvDz, m_fInvDzDz, m_fUmmm, m_fUmmp, m_fUmmz, m_fUmpm, m_fUmpp, m_fUmpz, m_fUmzm, m_fUmzp, m_fUmzz, m_fUpmm, m_fUpmp, m_fUpmz, m_fUppm, m_fUppp, m_fUppz, m_fUpzm, m_fUpzp, m_fUpzz, m_fUzmm, m_fUzmp, m_fUzmz, m_fUzpm, m_fUzpp, m_fUzpz, m_fUzzm, m_fUzzp, m_fUzzz, m_fXSpacing, m_fYSpacing, m_fZSpacing, m_iXBound, m_iYBound, m_iZBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseGradientAnisotropic3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float fK) |
Creates a new LseCurvatureFlow3 object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
computeParam() |
Compute the average gradient magnitude squared for the current image
u(x,y,t).
|
protected void |
onPreUpdate() |
The function onPreUpdate was abstractly defined in the LsePdeFilter
base class.
|
protected void |
onUpdate(int iX,
int iY,
int iZ) |
The per-voxel update function of the PDE solver.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUxz, getUy, getUyy, getUyz, getUz, getUzz, getXBound, getXSpacing, getYBound, getYSpacing, getZBound, getZSpacing, lookUp27, lookUp7, onPostUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseGradientAnisotropic3
public LseGradientAnisotropic3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float fK)
Creates a new LseCurvatureFlow3 object.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.fK - The local curvature parameter in the exponential term of the
PDE.
-
Method Detail
-
computeParam
protected void computeParam()
Compute the average gradient magnitude squared for the current image
u(x,y,t). The terms p = 1/(k*k*average(|grad(u)|^2) and -0.5*p are
computed once and used in the per-pixel update in the PDE solver.
-
onPreUpdate
protected void onPreUpdate()
The function onPreUpdate was abstractly defined in the LsePdeFilter
base class. It is called before any per-pixel updates. In this class,
the parameters in the exponential term of the PDE are precomputed for
use by the onUpdate() function.
- Overrides:
onPreUpdate in class LsePdeFilter3
-
onUpdate
protected void onUpdate(int iX,
int iY,
int iZ)
The per-voxel update function of the PDE solver.
- Specified by:
onUpdate in class LsePdeFilter3- Parameters:
iX - The x-value of the voxel to be updated.iY - The y-value of the voxel to be updated.iZ - The z-value of the voxel to be updated.
������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseFastMarch2.html������������������������������������������0000775�4231163�4231163�00000056027�14537076060�024340� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseFastMarch2 (MIPAV API Documentation)
-
public class LseFastMarch2
extends LseFastMarch
The fast-marching method for 2D images. This is based on material from
J. Sethian's book, Level Set Methods and Fast Marching Methods.
- Version:
- 0.1 November 7, 2006
- Author:
- David Eberly
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected int |
m_iXBm1 |
XBm1 = XBound - 1
|
protected int |
m_iXBound |
The x-bound of the image, call it XBound.
|
protected int |
m_iYBm1 |
YBm1 = YBound - 1
|
protected int |
m_iYBound |
The y-bound of the image, call it YBound.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
LseFastMarch2(int iXBound,
int iYBound,
float[] afSpeed,
int[] aiSeeds) |
Create a new fast marching object for a 2D image.
|
LseFastMarch2(int iXBound,
int iYBound,
float fSpeed,
int[] aiSeeds) |
Create a new fast marching object for a 2D image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
computeTime(int i) |
Compute the visitation time for an image element.
|
int[] |
getBoundary() |
Get the indices of the boundary points of the current region.
|
int |
getXBound() |
Get the x-bound for the image.
|
int |
getYBound() |
Get the y-bound for the image.
|
int |
index(int iX,
int iY) |
Compute the 1-dimensional index for the pixel (x,y).
|
protected void |
initialize(int iXBound,
int iYBound) |
Initialization of the 2D fast marching object.
|
boolean |
isBoundary(int i) |
An image element is a boundary point when it is on the boundary
of the current region.
|
void |
iterate() |
Run one iteration of the fast marching algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
computeTimeExtremes, getInterior, getMaxTime, getMinTime, getQuantity, getTime, initialize, initializeSpeed, initializeSpeed, isFar, isInterior, isTrial, isValid, isZeroSpeed, setTime
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_iXBm1
protected int m_iXBm1
XBm1 = XBound - 1
-
m_iYBm1
protected int m_iYBm1
YBm1 = YBound - 1
-
Constructor Detail
-
LseFastMarch2
public LseFastMarch2(int iXBound,
int iYBound,
float[] afSpeed,
int[] aiSeeds)
Create a new fast marching object for a 2D image.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.afSpeed - The speeds of the image elements.aiSeeds - The initial region points.
-
LseFastMarch2
public LseFastMarch2(int iXBound,
int iYBound,
float fSpeed,
int[] aiSeeds)
Create a new fast marching object for a 2D image.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fSpeed - The common speed of the image elements.aiSeeds - The initial region points.
-
Method Detail
-
index
public final int index(int iX,
int iY)
Compute the 1-dimensional index for the pixel (x,y).
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The 1-dimensional index for the pixel.
-
computeTime
protected void computeTime(int i)
Compute the visitation time for an image element. In most cases, the
time is a root to a quadratic equation that is derived from the
finite-difference method used to propagate the region boundary using
the inverse speeds.
- Parameters:
i - The index of the image element.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseFastMarch3.html������������������������������������������0000775�4231163�4231163�00000063240�14537076060�024334� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseFastMarch3 (MIPAV API Documentation)
-
public class LseFastMarch3
extends LseFastMarch
The fast-marching method for 3D images. This is based on material from
J. Sethian's book, Level Set Methods and Fast Marching Methods.
- Version:
- 0.1 November 7, 2006
- Author:
- David Eberly
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected int |
m_iXBm1 |
XBm1 = XBound - 1
|
protected int |
m_iXBound |
The x-bound of the image, call it XBound.
|
protected int |
m_iXYBound |
XYBound = XBound*YBound
|
protected int |
m_iYBm1 |
YBm1 = YBound - 1
|
protected int |
m_iYBound |
The y-bound of the image, call it YBound.
|
protected int |
m_iZBm1 |
ZBm1 = ZBound - 1
|
protected int |
m_iZBound |
The z-bound of the image, call it ZBound.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
LseFastMarch3(int iXBound,
int iYBound,
int iZBound,
float[] afSpeed,
int[] aiSeeds) |
Create a new fast marching object for a 3D image.
|
LseFastMarch3(int iXBound,
int iYBound,
int iZBound,
float fSpeed,
int[] aiSeeds) |
Create a new fast marching object for a 3D image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
computeTime(int i) |
Compute the visitation time for an image element.
|
int[] |
getBoundary() |
Get the indices of the boundary points of the current region.
|
int |
getXBound() |
Get the x-bound for the image.
|
int |
getYBound() |
Get the y-bound for the image.
|
int |
getZBound() |
Get the z-bound for the image.
|
int |
index(int iX,
int iY,
int iZ) |
Compute the 1-dimensional index for the voxel (x,y,z).
|
protected void |
initialize(int iXBound,
int iYBound,
int iZBound) |
Initialization of the 3D fast marching object.
|
boolean |
isBoundary(int i) |
An image element is a boundary point when it is on the boundary
of the current region.
|
void |
iterate() |
Run one iteration of the fast marching algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
computeTimeExtremes, getInterior, getMaxTime, getMinTime, getQuantity, getTime, initialize, initializeSpeed, initializeSpeed, isFar, isInterior, isTrial, isValid, isZeroSpeed, setTime
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_iXYBound
protected int m_iXYBound
XYBound = XBound*YBound
-
m_iXBm1
protected int m_iXBm1
XBm1 = XBound - 1
-
m_iYBm1
protected int m_iYBm1
YBm1 = YBound - 1
-
m_iZBm1
protected int m_iZBm1
ZBm1 = ZBound - 1
-
Constructor Detail
-
LseFastMarch3
public LseFastMarch3(int iXBound,
int iYBound,
int iZBound,
float[] afSpeed,
int[] aiSeeds)
Create a new fast marching object for a 3D image.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.afSpeed - The speeds of the image elements.aiSeeds - The initial region points.
-
LseFastMarch3
public LseFastMarch3(int iXBound,
int iYBound,
int iZBound,
float fSpeed,
int[] aiSeeds)
Create a new fast marching object for a 3D image.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fSpeed - The common speed of the image elements.aiSeeds - The initial region points.
-
Method Detail
-
index
public final int index(int iX,
int iY,
int iZ)
Compute the 1-dimensional index for the voxel (x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The 1-dimensional index for the voxel.
-
initialize
protected void initialize(int iXBound,
int iYBound,
int iZBound)
Initialization of the 3D fast marching object.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.
-
computeTime
protected void computeTime(int i)
Compute the visitation time for an image element. In most cases, the
time is a root to a quadratic equation that is derived from the
finite-difference method used to propagate the region boundary using
the inverse speeds.
- Parameters:
i - The index of the image element.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseMinHeap.html���������������������������������������������0000775�4231163�4231163�00000043506�14537076060�023725� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseMinHeap (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.levelset.LseMinHeap
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
class |
LseMinHeap.Record |
Each heap record stores a numeric value, the index of the record
within the records array, and a generator which acts as an
identifier for the application to use to store information about how
the numeric value was generated in the application.
|
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) LseMinHeap.Record[] |
m_akRecords |
The record storage for the heap, allocated in one large chunk.
|
(package private) int |
m_iQuantity |
The number of active records in the heap.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
LseMinHeap(int iMaxQuantity) |
Create a new min-heap data structure.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
insert
public final LseMinHeap.Record insert(int iGenerator,
float fValue)
Insert a numeric value into the min-heap data structure.
- Parameters:
iGenerator - The application-specific identifier that is
associated with the numeric value managed by the heap record.fValue - The numeric value managed by the heap record.- Returns:
- The heap record that manages the numeric value.
-
update
public final void update(LseMinHeap.Record kRecord,
float fValue)
The value of a heap record must be modified through this function call.
The side effect is that the heap must be updated accordingly to
accommodate the new value.
- Parameters:
kRecord - The record to be updated.fValue - The record's new numeric value.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseSegGeodesicActiveContour3.html���������������������������0000775�4231163�4231163�00000122647�14537076060�027362� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseSegGeodesicActiveContour3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
m_afBlurCurvFlow |
The blurred curvature flow image (intermediate image).
|
private float[] |
m_afCurvFlow |
The curvature flow image (intermediate image).
|
private float[] |
m_afFeature |
The feature image.
|
private float[] |
m_afGradMagBlurCurvFlow |
The gradient magnitude of the blurred curvature flow image
(intermediate image).
|
private float[][] |
m_akNegGradient |
The negative of the gradient of the image is used for advection.
|
private int |
m_eScaleType |
The scaling type of the image (default = LsePdeFilter.NONE).
|
private float |
m_fAlpha |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBeta |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBorderValue |
The border value of the image (default = Float.MAX_VALUE).
|
private float |
m_fMax |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fMin |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fScale |
The scale used for computing the blurred gradient magnitude image
(default = 0).
|
private float |
m_fTimeStep |
The time step of the PDE solver (default = 0.001).
|
private float |
m_fXSpacing |
The x-spacing of the image.
|
private float |
m_fYSpacing |
The y-spacing of the image.
|
private float |
m_fZSpacing |
The z-spacing of the image.
|
private int |
m_iDIterations |
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
|
private int |
m_iXBound |
The x-bound of the image.
|
private int |
m_iYBound |
The y-bound of the image.
|
private int |
m_iZBound |
The z-bound of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
m_abMask, m_abSignedDistanceMask, m_afData, m_afSignedDistance, m_aiBoundary, m_aiInterior, m_fCurrentDistance, m_fMaxDistance, m_iQuantity, m_kFastMarcher, m_kLevelSetEvolver
-
Constructor Summary
Constructors
| Constructor |
Description |
LseSegGeodesicActiveContour3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask) |
Create a geodesic-active-contour-based segmenter.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
beginCoarse(int[] aiSeeds) |
The region-growing fast march.
|
boolean |
beginDistanceTransform(float fMaxDistance) |
The signed-distance-transform fast march.
|
void |
beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep) |
The level-set evolution.
|
(package private) void |
createFeatureImage() |
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
|
(package private) float[] |
getBlurCurvFlowImage() |
Get the blurred curvature flow image.
|
(package private) float[] |
getCurvFlowImage() |
Get the curvature flow image.
|
(package private) float[] |
getFeatureImage() |
Get the feature image.
|
(package private) float[] |
getGradMagBlurCurvFlowImage() |
Get the gradient magnitude of the blurred curvature flow image.
|
(package private) float[][] |
getNegGradientImage() |
Get the negative of the gradient.
|
void |
setDiffusionIterations(int iDIterations) |
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
|
void |
setGradientMagnitudeScale(float fScale) |
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
|
void |
setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep) |
Parameters for the feature image creation.
|
void |
setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax) |
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
endCoarse, endDistanceTransform, endEvolution, getBoundary, getFastMarcher, getInterior, getLevelSetEvolver, getSignedDistanceImage, getSignedDistanceMask, iterateCoarse, iterateDistanceTransform, iterateEvolution
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_fAlpha
private float m_fAlpha
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fBeta
private float m_fBeta
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMin
private float m_fMin
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMax
private float m_fMax
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
Constructor Detail
-
LseSegGeodesicActiveContour3
public LseSegGeodesicActiveContour3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask)
Create a geodesic-active-contour-based segmenter.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.afData - The image elements.abMask - The image masks that determine which pixels are
processed by the segmenter.
-
Method Detail
-
setPDEParameters
public final void setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep)
Parameters for the feature image creation. You may set these anytime
before a sequence of fast-march iterations. The PDE filters require
you to specify how to handle boundary values. If you want Dirichlet
conditions (constant boundary), set BorderValue to a finite number.
If you want Neumann conditions (zero-derivative boundary), set the
BorderValue to Float.MAX_VALUE. If you want the original image to be
scaled, choose the Type parameter appropriately. The input image is
processed by a curvature-based anisotropic diffusion filter; the
number of iterations is DIterations. The gradient magnitude at the
specified Scale is computed for the output of the diffusion filter.
The gradient magnitude is transformed to the feature image by a sigmoid
function:
feature(x) = min + (max-min)/(1 + exp(-(x-beta)/alpha))
The inverse of the feature image values are the speeds used in the
fast marching algorithm.
- Specified by:
setPDEParameters in class LseSegmenter- Parameters:
fBorderValue - The border value to use when processing boundary
pixels.eScaleType - The scaling type for the image.fTimeStep - The time step for the PDE solver.
-
setSigmoidFilter
public final void setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax)
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- Specified by:
setSigmoidFilter in class LseSegmenter- Parameters:
fAlpha - The variance of the function.fBeta - The center of the function.fMin - The minimum of the function.fMax - The maximum of the function.
-
createFeatureImage
void createFeatureImage()
Create the feature image using the parameters set by the four
parameter-setting functions defined above. Since the quality of the
segmentation depends on these parameters, createFeatureImage() allows
you to experiment with the parameters before you start the
segmentation.
-
beginCoarse
public void beginCoarse(int[] aiSeeds)
The region-growing fast march. When you call beginCoarse(), the
current parameters are used (DIterations, scale, alpha, beta, min,
max). You can apply the fast marching algorithm multiple times to
the same image, each time starting with beginCoarse();
- Overrides:
beginCoarse in class LseSegmenter- Parameters:
aiSeeds - The initial region to grow.
-
beginDistanceTransform
public boolean beginDistanceTransform(float fMaxDistance)
The signed-distance-transform fast march. An annulus is computed
about the boundary of the coarse-level segmentation. The maximum
distance from annulus points to the boundary is the input to this
function (in voxel units).
- Overrides:
beginDistanceTransform in class LseSegmenter- Parameters:
fMaxDistance - The maximum distance to allow when computing the
signed distance transform.- Returns:
- 'true' iff more iterations are allowed
-
beginEvolution
public void beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep)
The level-set evolution.
- Overrides:
beginEvolution in class LseSegmenter- Parameters:
fAdvectionWeight - The advection coefficient 'a' in the PDE that
controls the evolution.fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.fLaplacianWeight - The Laplacian coefficient 'd' in the PDE that
controls the evolution.fTimeStep - The time step for the PDE solver.
�����������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseCurvatureFlow3.html��������������������������������������0000775�4231163�4231163�00000050521�14537076060�025272� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseCurvatureFlow3 (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
m_aaabMask, m_aaafDst, m_aaafSrc, m_fFourthInvDxDy, m_fFourthInvDxDz, m_fFourthInvDyDz, m_fHalfInvDx, m_fHalfInvDy, m_fHalfInvDz, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fInvDz, m_fInvDzDz, m_fUmmm, m_fUmmp, m_fUmmz, m_fUmpm, m_fUmpp, m_fUmpz, m_fUmzm, m_fUmzp, m_fUmzz, m_fUpmm, m_fUpmp, m_fUpmz, m_fUppm, m_fUppp, m_fUppz, m_fUpzm, m_fUpzp, m_fUpzz, m_fUzmm, m_fUzmp, m_fUzmz, m_fUzpm, m_fUzpp, m_fUzpz, m_fUzzm, m_fUzzp, m_fUzzz, m_fXSpacing, m_fYSpacing, m_fZSpacing, m_iXBound, m_iYBound, m_iZBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseCurvatureFlow3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType) |
Creates a new LseCurvatureFlow3 object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUxz, getUy, getUyy, getUyz, getUz, getUzz, getXBound, getXSpacing, getYBound, getYSpacing, getZBound, getZSpacing, lookUp27, lookUp7, onPostUpdate, onPreUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseCurvatureFlow3
public LseCurvatureFlow3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType)
Creates a new LseCurvatureFlow3 object.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.
-
Method Detail
-
onUpdate
protected void onUpdate(int iX,
int iY,
int iZ)
The per-voxel update function of the PDE solver.
- Specified by:
onUpdate in class LsePdeFilter3- Parameters:
iX - The x-value of the voxel to be updated.iY - The y-value of the voxel to be updated.iZ - The z-value of the voxel to be updated.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseShapeDetection3.html�������������������������������������0000775�4231163�4231163�00000064272�14537076060�025371� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseShapeDetection3 (MIPAV API Documentation)
-
public class LseShapeDetection3
extends LseEvolve3
A level-set evolver for 3D images. The PDE to be solved numerically for
I(x,t) is:
dI/dt = -b*F(x)*|grad(I)| + c*F(x)*K(x,t)*|grad(I)|, t > 0
I(x,0) = I0(x)
where the feature image is typically
F(x) = 1/(1+|grad(convolve(G,I0))|) or
F(x) = exp(-|grad(convolve(G,I0))|)
where G(x,t) is the Gaussian kernel and where K(x,t) is the curvature of
I(x,t). The constant b is the propagation weight and the constant c is the
curvature weight.
- Version:
- 0.1 November 7, 2006
- Author:
- David Eberly
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float[][][] |
m_aaafFeature |
The feature image to control the segmentation.
|
protected float |
m_fZeroTolerance |
The threshold below which the feature image values are clamped to this
tolerance.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
m_aaabMask, m_aaafDst, m_aaafSrc, m_fFourthInvDxDy, m_fFourthInvDxDz, m_fFourthInvDyDz, m_fHalfInvDx, m_fHalfInvDy, m_fHalfInvDz, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fInvDz, m_fInvDzDz, m_fUmmm, m_fUmmp, m_fUmmz, m_fUmpm, m_fUmpp, m_fUmpz, m_fUmzm, m_fUmzp, m_fUmzz, m_fUpmm, m_fUpmp, m_fUpmz, m_fUppm, m_fUppp, m_fUppz, m_fUpzm, m_fUpzp, m_fUpzz, m_fUzmm, m_fUzmp, m_fUzmz, m_fUzpm, m_fUzpp, m_fUzpz, m_fUzzm, m_fUzzp, m_fUzzz, m_fXSpacing, m_fYSpacing, m_fZSpacing, m_iXBound, m_iYBound, m_iZBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseShapeDetection3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float fPropagationWeight,
float fCurvatureWeight) |
Create a new level-set evolver for 3D images.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUxz, getUy, getUyy, getUyz, getUz, getUzz, getXBound, getXSpacing, getYBound, getYSpacing, getZBound, getZSpacing, lookUp27, lookUp7, onPostUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseShapeDetection3
public LseShapeDetection3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float fPropagationWeight,
float fCurvatureWeight)
Create a new level-set evolver for 3D images.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.afFeature - The feature image to control the evolution.fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.
-
Method Detail
-
computePropagationSpeed
protected float computePropagationSpeed(int iX,
int iY,
int iZ)
Compute the propagation speed at voxel (x,y,z). In this evolver, the
propagation speed is obtained simply by a lookup into the feature
image.
- Overrides:
computePropagationSpeed in class LseEvolve3- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The propagation speed at the voxel.
-
computeCurvatureSpeed
protected float computeCurvatureSpeed(int iX,
int iY,
int iZ)
Compute the curvature speed at voxel (x,y,z). In this evolver, the
curvature speed is obtained simply by a lookup into the feature
image.
- Overrides:
computeCurvatureSpeed in class LseEvolve3- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The curvature speed at the voxel.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseGaussianBlur3.html���������������������������������������0000775�4231163�4231163�00000053564�14537076060�025073� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseGaussianBlur3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
m_fMaximumTimeStep |
The maximum time step allowed for numerical stability of the filter.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
m_aaabMask, m_aaafDst, m_aaafSrc, m_fFourthInvDxDy, m_fFourthInvDxDz, m_fFourthInvDyDz, m_fHalfInvDx, m_fHalfInvDy, m_fHalfInvDz, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fInvDz, m_fInvDzDz, m_fUmmm, m_fUmmp, m_fUmmz, m_fUmpm, m_fUmpp, m_fUmpz, m_fUmzm, m_fUmzp, m_fUmzz, m_fUpmm, m_fUpmp, m_fUpmz, m_fUppm, m_fUppp, m_fUppz, m_fUpzm, m_fUpzp, m_fUpzz, m_fUzmm, m_fUzmp, m_fUzmz, m_fUzpm, m_fUzpp, m_fUzpz, m_fUzzm, m_fUzzp, m_fUzzz, m_fXSpacing, m_fYSpacing, m_fZSpacing, m_iXBound, m_iYBound, m_iZBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseGaussianBlur3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType) |
Creates a new LseGaussianBlur3 object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUxz, getUy, getUyy, getUyz, getUz, getUzz, getXBound, getXSpacing, getYBound, getYSpacing, getZBound, getZSpacing, lookUp27, lookUp7, onPostUpdate, onPreUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseGaussianBlur3
public LseGaussianBlur3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType)
Creates a new LseGaussianBlur3 object.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.
-
Method Detail
-
onUpdate
protected void onUpdate(int iX,
int iY,
int iZ)
The per-voxel update function of the PDE solver.
- Specified by:
onUpdate in class LsePdeFilter3- Parameters:
iX - The x-value of the voxel to be updated.iY - The y-value of the voxel to be updated.iZ - The z-value of the voxel to be updated.
��������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseCurvatureFlow2.html��������������������������������������0000775�4231163�4231163�00000044274�14537076060�025301� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseCurvatureFlow2 (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
m_aabMask, m_aafDst, m_aafSrc, m_fFourthInvDxDy, m_fHalfInvDx, m_fHalfInvDy, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fUmm, m_fUmp, m_fUmz, m_fUpm, m_fUpp, m_fUpz, m_fUzm, m_fUzp, m_fUzz, m_fXSpacing, m_fYSpacing, m_iXBound, m_iYBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseCurvatureFlow2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType) |
Creates a new LseCurvatureFlow2 object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUy, getUyy, getXBound, getXSpacing, getYBound, getYSpacing, lookUp5, lookUp9, onPostUpdate, onPreUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseCurvatureFlow2
public LseCurvatureFlow2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType)
Creates a new LseCurvatureFlow2 object.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseSegShapeDetection2.html����������������������������������0000775�4231163�4231163�00000115061�14537076060�026020� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseSegShapeDetection2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
m_afBlurCurvFlow |
The blurred curvature flow image (intermediate image).
|
private float[] |
m_afCurvFlow |
The curvature flow image (intermediate image).
|
private float[] |
m_afFeature |
The feature image.
|
private float[] |
m_afGradMagBlurCurvFlow |
The gradient magnitude of the blurred curvature flow image
(intermediate image).
|
private int |
m_eScaleType |
The scaling type of the image (default = LsePdeFilter.NONE).
|
private float |
m_fAlpha |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBeta |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBorderValue |
The border value of the image (default = Float.MAX_VALUE).
|
private float |
m_fMax |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fMin |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fScale |
The scale used for computing the blurred gradient magnitude image
(default = 0).
|
private float |
m_fTimeStep |
The time step of the PDE solver (default = 0.001).
|
private float |
m_fXSpacing |
The x-spacing of the image.
|
private float |
m_fYSpacing |
The y-spacing of the image.
|
private int |
m_iDIterations |
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
|
private int |
m_iXBound |
The x-bound of the image.
|
private int |
m_iYBound |
The y-bound of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
m_abMask, m_abSignedDistanceMask, m_afData, m_afSignedDistance, m_aiBoundary, m_aiInterior, m_fCurrentDistance, m_fMaxDistance, m_iQuantity, m_kFastMarcher, m_kLevelSetEvolver
-
Constructor Summary
Constructors
| Constructor |
Description |
LseSegShapeDetection2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask) |
Create a shape-detection-based segmenter.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
beginCoarse(int[] aiSeeds) |
The region-growing fast march.
|
boolean |
beginDistanceTransform(float fMaxDistance) |
The signed-distance-transform fast march.
|
void |
beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep) |
The level-set evolution.
|
void |
createFeatureImage() |
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
|
float[] |
getBlurCurvFlowImage() |
Get the blurred curvature flow image.
|
float[] |
getCurvFlowImage() |
Get the curvature flow image.
|
float[] |
getFeatureImage() |
Get the feature image.
|
float[] |
getGradMagBlurCurvFlowImage() |
Get the gradient magnitude of the blurred curvature flow image.
|
void |
setDiffusionIterations(int iDIterations) |
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
|
void |
setGradientMagnitudeScale(float fScale) |
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
|
void |
setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep) |
Parameters for the feature image creation.
|
void |
setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax) |
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
endCoarse, endDistanceTransform, endEvolution, getBoundary, getFastMarcher, getInterior, getLevelSetEvolver, getSignedDistanceImage, getSignedDistanceMask, iterateCoarse, iterateDistanceTransform, iterateEvolution
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_fAlpha
private float m_fAlpha
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fBeta
private float m_fBeta
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMin
private float m_fMin
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMax
private float m_fMax
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
Constructor Detail
-
LseSegShapeDetection2
public LseSegShapeDetection2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask)
Create a shape-detection-based segmenter.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.afData - The image elements.abMask - The image masks that determine which pixels are
processed by the segmenter.
-
Method Detail
-
setPDEParameters
public final void setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep)
Parameters for the feature image creation. You may set these anytime
before a sequence of fast-march iterations. The PDE filters require
you to specify how to handle boundary values. If you want Dirichlet
conditions (constant boundary), set BorderValue to a finite number.
If you want Neumann conditions (zero-derivative boundary), set the
BorderValue to Float.MAX_VALUE. If you want the original image to be
scaled, choose the Type parameter appropriately. The input image is
processed by a curvature-based anisotropic diffusion filter; the
number of iterations is DIterations. The gradient magnitude at the
specified Scale is computed for the output of the diffusion filter.
The gradient magnitude is transformed to the feature image by a sigmoid
function:
feature(x) = min + (max-min)/(1 + exp(-(x-beta)/alpha))
The inverse of the feature image values are the speeds used in the
fast marching algorithm.
- Specified by:
setPDEParameters in class LseSegmenter- Parameters:
fBorderValue - The border value to use when processing boundary
pixels.eScaleType - The scaling type for the image.fTimeStep - The time step for the PDE solver.
-
setSigmoidFilter
public final void setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax)
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- Specified by:
setSigmoidFilter in class LseSegmenter- Parameters:
fAlpha - The variance of the function.fBeta - The center of the function.fMin - The minimum of the function.fMax - The maximum of the function.
-
createFeatureImage
public final void createFeatureImage()
Create the feature image using the parameters set by the four
parameter-setting functions defined above. Since the quality of the
segmentation depends on these parameters, createFeatureImage() allows
you to experiment with the parameters before you start the
segmentation.
-
beginCoarse
public void beginCoarse(int[] aiSeeds)
The region-growing fast march. When you call beginCoarse(), the
current parameters are used (DIterations, scale, alpha, beta, min,
max). You can apply the fast marching algorithm multiple times to
the same image, each time starting with beginCoarse();
- Overrides:
beginCoarse in class LseSegmenter- Parameters:
aiSeeds - The initial region to grow.
-
beginDistanceTransform
public boolean beginDistanceTransform(float fMaxDistance)
The signed-distance-transform fast march. An annulus is computed
about the boundary of the coarse-level segmentation. The maximum
distance from annulus points to the boundary is the input to this
function (in pixel units).
- Overrides:
beginDistanceTransform in class LseSegmenter- Parameters:
fMaxDistance - The maximum distance to allow when computing the
signed distance transform.- Returns:
- 'true' iff more iterations are allowed
-
beginEvolution
public void beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep)
The level-set evolution.
- Overrides:
beginEvolution in class LseSegmenter- Parameters:
fAdvectionWeight - The advection coefficient 'a' in the PDE that
controls the evolution.fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.fLaplacianWeight - The Laplacian coefficient 'd' in the PDE that
controls the evolution.fTimeStep - The time step for the PDE solver.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseEvolve3.html���������������������������������������������0000775�4231163�4231163�00000105724�14537076060�023730� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseEvolve3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float[][] |
m_aafD2 |
The second-order derivatives of the current pixel.
|
protected float[] |
m_afAdvection |
The advection for the current pixel.
|
protected float[] |
m_afD1 |
The first-order derivatives of the current pixel.
|
protected float[] |
m_afD1Bwd |
Backward finite-difference approximations to the first-order
derivatives of the current pixel.
|
protected float[] |
m_afD1Fwd |
Forward finite-difference approximations to the first-order
derivatives of the current pixel.
|
protected float |
m_fD0 |
The image value of the current pixel.
|
protected float |
m_fGradMagSqr |
The squared magnitude of the gradient vector for the current pixel.
|
protected LseParameters |
m_kParameters |
The parameters associated with level-set evolution.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
m_aaabMask, m_aaafDst, m_aaafSrc, m_fFourthInvDxDy, m_fFourthInvDxDz, m_fFourthInvDyDz, m_fHalfInvDx, m_fHalfInvDy, m_fHalfInvDz, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fInvDz, m_fInvDzDz, m_fUmmm, m_fUmmp, m_fUmmz, m_fUmpm, m_fUmpp, m_fUmpz, m_fUmzm, m_fUmzp, m_fUmzz, m_fUpmm, m_fUpmp, m_fUpmz, m_fUppm, m_fUppp, m_fUppz, m_fUpzm, m_fUpzp, m_fUpzz, m_fUzmm, m_fUzmp, m_fUzmz, m_fUzpm, m_fUzpp, m_fUzpz, m_fUzzm, m_fUzzp, m_fUzzz, m_fXSpacing, m_fYSpacing, m_fZSpacing, m_iXBound, m_iYBound, m_iZBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
LseEvolve3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType) |
Create a new level-set evolver for 3D images.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected float[] |
computeAdvection(int iX,
int iY,
int iZ) |
Override this function to implement the desired advection for your
level-set evolver.
|
protected float |
computeCurvature(int iX,
int iY,
int iZ) |
Compute the product of length and mean curvature at the voxel (x,y,z).
|
protected float |
computeCurvatureSpeed(int iX,
int iY,
int iZ) |
Override this function to implement the desired curvature speed for
your level-set evolver.
|
protected float |
computeFunction(int iX,
int iY,
int iZ) |
Evolution support.
|
protected float |
computeLaplacianSpeed(int iX,
int iY,
int iZ) |
Override this function to implement the desired Laplacian speed for
your level-set evolver.
|
protected float |
computePropagationSpeed(int iX,
int iY,
int iZ) |
Override this function to implement the desired propagation speed for
your level-set evolver.
|
LseParameters |
getParameters() |
Get the current level-set evolution parameters.
|
protected void |
onPreUpdate() |
The override of LsePdeFilter3.onPreUpdate.
|
protected void |
onUpdate(int iX,
int iY,
int iZ) |
The override of LsePdeFilter3.onUpdate.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUxz, getUy, getUyy, getUyz, getUz, getUzz, getXBound, getXSpacing, getYBound, getYSpacing, getZBound, getZSpacing, lookUp27, lookUp7, onPostUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseEvolve3
protected LseEvolve3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType)
Create a new level-set evolver for 3D images.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
voxel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.
-
Method Detail
-
computeFunction
protected final float computeFunction(int iX,
int iY,
int iZ)
Evolution support. ComputeTimeStep() is called each time before
ComputeFunction() is called. The function ComputeCurvature() actually
computes k*L, where k is the mean curvature and L is the length of the
gradient vector. The resulting quantity is
k*L = (Uxx*(Uy*Uy+Uz*Uz) + Uyy*(Ux*Ux+Uz*Uz) + Uzz*(Ux*Ux+Uy*Uy)
- 2*(Uxy*Ux*Uy + Uxz*Ux*Uz + Uyz*Uy*Uz))/(Ux*Ux+Uy*Uy+Uz*Uz)
where Ux, Uy, and Uz are first-order partial derivatives and Uxx, Uxy,
Uxz, Uyy, Uyz, and Uzz are second-order partial derivatives.
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The value of the right-hand side of the PDE that governs the
level-set evolution.
-
computeCurvature
protected final float computeCurvature(int iX,
int iY,
int iZ)
Compute the product of length and mean curvature at the voxel (x,y,z).
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The product of length and curvature at the voxel.
-
computeAdvection
protected float[] computeAdvection(int iX,
int iY,
int iZ)
Override this function to implement the desired advection for your
level-set evolver.
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The advection at the voxel.
-
computePropagationSpeed
protected float computePropagationSpeed(int iX,
int iY,
int iZ)
Override this function to implement the desired propagation speed for
your level-set evolver.
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The propagation speed at the voxel.
-
computeCurvatureSpeed
protected float computeCurvatureSpeed(int iX,
int iY,
int iZ)
Override this function to implement the desired curvature speed for
your level-set evolver.
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The curvature speed at the voxel.
-
computeLaplacianSpeed
protected float computeLaplacianSpeed(int iX,
int iY,
int iZ)
Override this function to implement the desired Laplacian speed for
your level-set evolver.
- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The Laplacian speed at the voxel.
-
onUpdate
protected void onUpdate(int iX,
int iY,
int iZ)
The override of LsePdeFilter3.onUpdate. This is where ComputeFunction
is called.
- Specified by:
onUpdate in class LsePdeFilter3- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.
��������������������������������������������gov/nih/mipav/model/algorithms/levelset/LsePdeFilter2.html������������������������������������������0000775�4231163�4231163�00000134017�14537076060�024342� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LsePdeFilter2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected boolean[][] |
m_aabMask |
Pixels may be masked out so that the PDE solver does not process them.
|
protected float[][] |
m_aafDst |
Successive iterations of the PDE solver toggle between two buffers.
|
protected float[][] |
m_aafSrc |
Successive iterations of the PDE solver toggle between two buffers.
|
protected float |
m_fFourthInvDxDy |
invFourthDxDy = 1/(4*dx*dy)
|
protected float |
m_fHalfInvDx |
halfInvDx = 1/(2*dx)
|
protected float |
m_fHalfInvDy |
halfInvDy = 1/(2*dy)
|
protected float |
m_fInvDx |
invDx = 1/dx
|
protected float |
m_fInvDxDx |
invDxDx = 1/(dx*dx)
|
protected float |
m_fInvDy |
invDy = 1/dy
|
protected float |
m_fInvDyDy |
invDyDy = 1/(dy*dy)
|
protected float |
m_fUmm |
Temporary storage for 3x3 neighborhood.
|
protected float |
m_fUmp |
Temporary storage for 3x3 neighborhood.
|
protected float |
m_fUmz |
Temporary storage for 3x3 neighborhood.
|
protected float |
m_fUpm |
Temporary storage for 3x3 neighborhood.
|
protected float |
m_fUpp |
Temporary storage for 3x3 neighborhood.
|
protected float |
m_fUpz |
Temporary storage for 3x3 neighborhood.
|
protected float |
m_fUzm |
Temporary storage for 3x3 neighborhood.
|
protected float |
m_fUzp |
Temporary storage for 3x3 neighborhood.
|
protected float |
m_fUzz |
Temporary storage for 3x3 neighborhood.
|
protected float |
m_fXSpacing |
The x-spacing of the image, call it dx.
|
protected float |
m_fYSpacing |
The y-spacing of the image, call it dy.
|
protected int |
m_iXBound |
The x-bound of the image.
|
protected int |
m_iYBound |
The y-bound of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
LsePdeFilter2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType) |
Create a new PDE filter object for 2D images.
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
assignDirichletImageBorder() |
Assign values to the 1-pixel-thick image border.
|
protected void |
assignDirichletMaskBorder() |
Assign values to the 1-pixel-thick borders that surround unmasked
regions.
|
protected void |
assignNeumannImageBorder() |
Assign values to the 1-pixel-thick image border.
|
protected void |
assignNeumannMaskBorder() |
Assign values to the 1-pixel-thick borders that surround unmasked
regions.
|
boolean |
getMask(int iX,
int iY) |
Get the mask value at pixel (x,y).
|
float |
getU(int iX,
int iY) |
Get the image value at pixel (x,y), call it u(x,y).
|
float |
getUx(int iX,
int iY) |
Get the first-order x-derivative of the image value at pixel (x,y),
call it u_x(x,y).
|
float |
getUxx(int iX,
int iY) |
Get the second-order x-derivative of the image value at pixel (x,y),
call it u_xx(x,y).
|
float |
getUxy(int iX,
int iY) |
Get the second-order mixed-derivative of the image value at pixel
(x,y), call it u_xy(x,y).
|
float |
getUy(int iX,
int iY) |
Get the first-order y-derivative of the image value at pixel (x,y),
call it u_y(x,y).
|
float |
getUyy(int iX,
int iY) |
Get the second-order y-derivative of the image value at pixel (x,y),
call it u_yy(x,y).
|
int |
getXBound() |
Get the x-bound for the image.
|
float |
getXSpacing() |
Get the x-spacing for the image.
|
int |
getYBound() |
Get the y-bound for the image.
|
float |
getYSpacing() |
Get the y-spacing for the image.
|
protected void |
lookUp5(int iX,
int iY) |
Copy the source data to temporary storage in order to avoid redundant
array accesses.
|
protected void |
lookUp9(int iX,
int iY) |
Copy the source data to temporary storage in order to avoid redundant
array accesses.
|
protected void |
onPostUpdate() |
Swap the buffers for the next pass of the PDE solver.
|
protected void |
onPreUpdate() |
Recompute the boundary values when Neumann conditions are in effect.
|
protected void |
onUpdate() |
Iterate over all the pixels and call onUpdate(x,y) for each pixel that
is not masked out.
|
protected abstract void |
onUpdate(int iX,
int iY) |
An abstract function that allows per-pixel processing by the PDE
solver.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_fInvDx
protected float m_fInvDx
invDx = 1/dx
-
m_fInvDy
protected float m_fInvDy
invDy = 1/dy
-
m_fUmm
protected float m_fUmm
Temporary storage for 3x3 neighborhood. In the notation m_fUij, the
i and j indices are in {m,z,p}, referring to subtract 1 (m), no change
(z), or add 1 (p) to the appropriate index.
-
m_fUzm
protected float m_fUzm
Temporary storage for 3x3 neighborhood. In the notation m_fUij, the
i and j indices are in {m,z,p}, referring to subtract 1 (m), no change
(z), or add 1 (p) to the appropriate index.
-
m_fUpm
protected float m_fUpm
Temporary storage for 3x3 neighborhood. In the notation m_fUij, the
i and j indices are in {m,z,p}, referring to subtract 1 (m), no change
(z), or add 1 (p) to the appropriate index.
-
m_fUmz
protected float m_fUmz
Temporary storage for 3x3 neighborhood. In the notation m_fUij, the
i and j indices are in {m,z,p}, referring to subtract 1 (m), no change
(z), or add 1 (p) to the appropriate index.
-
m_fUzz
protected float m_fUzz
Temporary storage for 3x3 neighborhood. In the notation m_fUij, the
i and j indices are in {m,z,p}, referring to subtract 1 (m), no change
(z), or add 1 (p) to the appropriate index.
-
m_fUpz
protected float m_fUpz
Temporary storage for 3x3 neighborhood. In the notation m_fUij, the
i and j indices are in {m,z,p}, referring to subtract 1 (m), no change
(z), or add 1 (p) to the appropriate index.
-
m_fUmp
protected float m_fUmp
Temporary storage for 3x3 neighborhood. In the notation m_fUij, the
i and j indices are in {m,z,p}, referring to subtract 1 (m), no change
(z), or add 1 (p) to the appropriate index.
-
m_fUzp
protected float m_fUzp
Temporary storage for 3x3 neighborhood. In the notation m_fUij, the
i and j indices are in {m,z,p}, referring to subtract 1 (m), no change
(z), or add 1 (p) to the appropriate index.
-
m_fUpp
protected float m_fUpp
Temporary storage for 3x3 neighborhood. In the notation m_fUij, the
i and j indices are in {m,z,p}, referring to subtract 1 (m), no change
(z), or add 1 (p) to the appropriate index.
-
m_aafSrc
protected float[][] m_aafSrc
Successive iterations of the PDE solver toggle between two buffers.
This is the source buffer, which is the input to the solver.
-
m_aafDst
protected float[][] m_aafDst
Successive iterations of the PDE solver toggle between two buffers.
This is the destination buffer, which is the output of the solver.
-
Constructor Detail
-
LsePdeFilter2
protected LsePdeFilter2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType)
Create a new PDE filter object for 2D images.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.
-
Method Detail
-
getU
public final float getU(int iX,
int iY)
Get the image value at pixel (x,y), call it u(x,y).
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The image value, u(x,y).
-
getUx
public final float getUx(int iX,
int iY)
Get the first-order x-derivative of the image value at pixel (x,y),
call it u_x(x,y).
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The x-derivative of the image value, u_x(x,y).
-
getUy
public final float getUy(int iX,
int iY)
Get the first-order y-derivative of the image value at pixel (x,y),
call it u_y(x,y).
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The y-derivative of the image value, u_y(x,y).
-
getUxx
public final float getUxx(int iX,
int iY)
Get the second-order x-derivative of the image value at pixel (x,y),
call it u_xx(x,y).
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The xx-derivative of the image value, u_xx(x,y).
-
getUxy
public final float getUxy(int iX,
int iY)
Get the second-order mixed-derivative of the image value at pixel
(x,y), call it u_xy(x,y).
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The xy-derivative of the image value, u_xy(x,y).
-
getUyy
public final float getUyy(int iX,
int iY)
Get the second-order y-derivative of the image value at pixel (x,y),
call it u_yy(x,y).
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The yy-derivative of the image value, u_xx(x,y).
-
getMask
public final boolean getMask(int iX,
int iY)
Get the mask value at pixel (x,y).
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The mask value at pixel (x,y). Its value is true when that
pixel should not be processed by the PDE solver.
-
assignNeumannImageBorder
protected void assignNeumannImageBorder()
Assign values to the 1-pixel-thick image border. The border values are
chosen so that the first-order image derivatives at the border pixels
are zero. Thus, the border values are duplicates of the adjacent image
values.
-
assignNeumannMaskBorder
protected void assignNeumannMaskBorder()
Assign values to the 1-pixel-thick borders that surround unmasked
regions. The border values are chosen so that the first-order image
derivatives at the border pixels are zero. Thus, the border values are
duplicates of the adjacent image values.
-
onPreUpdate
protected void onPreUpdate()
Recompute the boundary values when Neumann conditions are in effect.
If a derived class overrides this, it must call the base-class
onPreUpdate first.
- Specified by:
onPreUpdate in class LsePdeFilter
-
onUpdate
protected void onUpdate()
Iterate over all the pixels and call onUpdate(x,y) for each pixel that
is not masked out.
- Specified by:
onUpdate in class LsePdeFilter
-
onPostUpdate
protected void onPostUpdate()
Swap the buffers for the next pass of the PDE solver. If a derived
class overrides this, it must call the base-class onPostUpdate last.
- Specified by:
onPostUpdate in class LsePdeFilter
-
onUpdate
protected abstract void onUpdate(int iX,
int iY)
An abstract function that allows per-pixel processing by the PDE
solver. The pixel (x,y) must be in padded coordinates, namely,
1 <= x <= xbound and 1 <= y <= ybound.
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.
-
lookUp5
protected void lookUp5(int iX,
int iY)
Copy the source data to temporary storage in order to avoid redundant
array accesses. The copy involves the 5 pixels (x,y), (x+1,y),
(x-1,y), (x,y+1), and (x,y-1).
-
lookUp9
protected void lookUp9(int iX,
int iY)
Copy the source data to temporary storage in order to avoid redundant
array accesses. The copy involves the 9 pixels in the 3x3 neighborhood
of (x,y).
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseSegmenter.html�������������������������������������������0000775�4231163�4231163�00000112604�14537076060�024331� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseSegmenter (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected boolean[] |
m_abMask |
Masks to indicate which image elements are to be processed by the
segmenter.
|
protected boolean[] |
m_abSignedDistanceMask |
The mask that indicates which image elements have been included in
the signed distance transform.
|
protected float[] |
m_afData |
The image elements.
|
protected float[] |
m_afSignedDistance |
The signed distance transform computed from the coarse-level region
grown by the fast marching method.
|
protected int[] |
m_aiBoundary |
The boundary of the segmented result from region growing.
|
protected int[] |
m_aiInterior |
The interior of the segmented result from region growing.
|
protected float |
m_fCurrentDistance |
The current distance for boundary pixels in the region growing
involving the signed distance transform.
|
protected float |
m_fMaxDistance |
The maximum allowed distance for the signed distance transform.
|
protected int |
m_iQuantity |
The number of image elements.
|
protected LseFastMarch |
m_kFastMarcher |
The fast marching object used for region growing and for signed
distance transforms.
|
protected LsePdeFilter |
m_kLevelSetEvolver |
The level-set evolver.
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
LseSegmenter(int iQuantity,
float[] afData,
boolean[] abMask) |
Create a new level-set segmenter object.
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
beginCoarse(int[] aiSeeds) |
The region is grown from the input seeds.
|
boolean |
beginDistanceTransform(float fMaxDistance) |
An annulus is computed about the boundary of the coarse-level
segmentation.
|
void |
beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep) |
Evolve the signed-distance transform in the annulus constructed
previously.
|
void |
endCoarse() |
Call endCoarse when you are finished with the region growing.
|
void |
endDistanceTransform() |
Call endDistanceTransform when you are finished with the distance
transform construction.
|
void |
endEvolution() |
Call endEvolution when you are finished with the level-set evolution.
|
int[] |
getBoundary() |
The set of boundary points that were identified as part of the
coarse-level region growing.
|
LseFastMarch |
getFastMarcher() |
Get the fast marching object.
|
int[] |
getInterior() |
The set of interior points that were identified as part of the
coarse-level region growing.
|
LsePdeFilter |
getLevelSetEvolver() |
Get the level-set evolver object.
|
float[] |
getSignedDistanceImage() |
Get the signed distance transform.
|
boolean[] |
getSignedDistanceMask() |
Get the signed distance transform mask.
|
void |
iterateCoarse() |
Apply a single iteration of the region-growing fast march.
|
boolean |
iterateDistanceTransform() |
Apply a single iteration of the annulus construction.
|
void |
iterateEvolution() |
Apply a single iteration of the evolution.
|
abstract void |
setDiffusionIterations(int iDIterations) |
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
|
abstract void |
setGradientMagnitudeScale(float fScale) |
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
|
abstract void |
setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep) |
Parameters for the feature image creation.
|
abstract void |
setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax) |
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseSegmenter
protected LseSegmenter(int iQuantity,
float[] afData,
boolean[] abMask)
Create a new level-set segmenter object.
- Parameters:
iQuantity - The number of image elements.afData - The image elements.abMask - The masks to indicate which image elements should be
processed by the segmenter.
-
Method Detail
-
setPDEParameters
public abstract void setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep)
Parameters for the feature image creation. You may set these anytime
before a sequence of fast-march iterations. The PDE filters require
you to specify how to handle boundary values. If you want Dirichlet
conditions (constant boundary), set BorderValue to a finite number.
If you want Neumann conditions (zero-derivative boundary), set the
BorderValue to Float.MAX_VALUE. If you want the original image to be
scaled, choose the Type parameter appropriately. The input image is
processed by a curvature-based anisotropic diffusion filter; the
number of iterations is DIterations. The gradient magnitude at the
specified Scale is computed for the output of the diffusion filter.
The gradient magnitude is transformed to the feature image by a sigmoid
function:
feature(x) = min + (max-min)/(1 + exp(-(x-beta)/alpha))
The inverse of the feature image values are the speeds used in the
fast marching algorithm.
- Parameters:
fBorderValue - The border value to use when processing boundary
pixels.eScaleType - The scaling type for the image.fTimeStep - The time step for the PDE solver.
-
setSigmoidFilter
public abstract void setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax)
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- Parameters:
fAlpha - The variance of the function.fBeta - The center of the function.fMin - The minimum of the function.fMax - The maximum of the function.
-
beginCoarse
public void beginCoarse(int[] aiSeeds)
The region is grown from the input seeds. You can apply the region
growing multiple times to the same image, each time starting with
beginCoarse. A derived class must implement this function and call
the base-class function before it does any of its specialized work.
- Parameters:
aiSeeds - The initial region to grow.
-
endCoarse
public final void endCoarse()
Call endCoarse when you are finished with the region growing. After
this call, getInterior and getBoundary may be called to examine the
coarse-level segmentation.
-
beginDistanceTransform
public boolean beginDistanceTransform(float fMaxDistance)
An annulus is computed about the boundary of the coarse-level
segmentation. The maximum distance from annulus points to the
boundary is the input to this function (in image-element units). The
function returns 'true' if and only if the set of boundary points from
the region growing is not empty. A derived class must implement this
function and call the base-class function before it does any of its
specialized work.
- Parameters:
fMaxDistance - The maximum distance allowed in the region
growing associated with the signed distance transform.- Returns:
- 'true' iff the current region has at least one boundary point.
-
endDistanceTransform
public final void endDistanceTransform()
Call endDistanceTransform when you are finished with the distance
transform construction. After this call, getSignedDistanceImage and
getSignedDistanceMask may be called to examine the annulus points and
signed distances.
-
getSignedDistanceImage
public final float[] getSignedDistanceImage()
Get the signed distance transform. These have relevant values only
after a call to EndDistanceTransform. The signed distances are set
to zero for image elements that are outside the annulus (masked
region).
- Returns:
- The array of signed distance values.
-
getSignedDistanceMask
public final boolean[] getSignedDistanceMask()
Get the signed distance transform mask. These have relevant values
only after a call to EndDistanceTransform. The 'true' masks indicate
image elements that are part of the computed annulus.
- Returns:
- The array of signed distance transform masks.
-
beginEvolution
public void beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep)
Evolve the signed-distance transform in the annulus constructed
previously. A derived class must implement this function and call the
base-class function before it does any of its specialized work.
- Parameters:
fAdvectionWeight - The advection weight in the PDE governing
the level-set evolution in the annulus.fPropagationWeight - The propagation weight in the PDE governing
the level-set evolution in the annulus.fCurvatureWeight - The curvature weight in the PDE governing
the level-set evolution in the annulus.fLaplacianWeight - The Laplacian weight in the PDE governing
the level-set evolution in the annulus.fTimeStep - The time step for one iteration of the numerical
PDE solver.
����������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/package-tree.html�������������������������������������������0000775�4231163�4231163�00000027651�14537076122�024272� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.levelset Class Hierarchy (MIPAV API Documentation)
Class Hierarchy
- java.lang.Object
- gov.nih.mipav.model.algorithms.levelset.LseFastMarch
- gov.nih.mipav.model.algorithms.levelset.LseMinHeap
- gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
- gov.nih.mipav.model.algorithms.levelset.LseParameters
- gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
- gov.nih.mipav.model.algorithms.levelset.LseSegmenter
- java.lang.Thread (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.AlgorithmBase (implements java.awt.event.ActionListener, java.awt.event.WindowListener)
���������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseThreshold2.html������������������������������������������0000775�4231163�4231163�00000061670�14537076060�024424� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseThreshold2 (MIPAV API Documentation)
-
public class LseThreshold2
extends LseEvolve2
A level-set evolver for 2D images. The PDE to be solved numerically for
I(x,t) is:
dI/dt = -b*P(x)*|grad(I)| + c*F(x)*K(x,t)*|grad(I)|, t > 0
I(x,0) = I0(x)
where the feature image is typically
F(x) = 1/(1+|grad(convolve(G,I0))|) or
F(x) = exp(-|grad(convolve(G,I0))|)
where G(x,t) is the Gaussian kernel and where K(x,t) is the curvature of
I(x,t). The propagation image, P(x), is computed from the feature image,
F(x), as follows. A lower threshold L and an upper threshold U are
selected by the user; then
P(x) = F(x) - L, if F(x) < (U+L)/2
P(x) = U - F(x), if F(x) >= (U+L)/2
The constant b is the propagation weight and the constant c is the
curvature weight.
- Version:
- 0.1 November 7, 2006
- Author:
- David Eberly
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float[][] |
m_aafFeature |
The feature image to control the segmentation.
|
protected float[][] |
m_aafPropagation |
The propagation image to control the segmentation.
|
protected float |
m_fZeroTolerance |
The threshold below which the feature image values are clamped to this
tolerance.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
m_aabMask, m_aafDst, m_aafSrc, m_fFourthInvDxDy, m_fHalfInvDx, m_fHalfInvDy, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fUmm, m_fUmp, m_fUmz, m_fUpm, m_fUpp, m_fUpz, m_fUzm, m_fUzp, m_fUzz, m_fXSpacing, m_fYSpacing, m_iXBound, m_iYBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseThreshold2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float fLowerThreshold,
float fUpperThreshold,
float fPropagationWeight,
float fCurvatureWeight) |
Create a new level-set evolver for 2D images.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUy, getUyy, getXBound, getXSpacing, getYBound, getYSpacing, lookUp5, lookUp9, onPostUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseThreshold2
public LseThreshold2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float fLowerThreshold,
float fUpperThreshold,
float fPropagationWeight,
float fCurvatureWeight)
Create a new level-set evolver for 2D images.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.afFeature - The feature image to control the evolution.fLowerThreshold - The lower threshold L used in computing P(x).fUpperThreshold - The lower threshold U used in computing P(x).fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.
-
Method Detail
-
computePropagationSpeed
protected float computePropagationSpeed(int iX,
int iY)
Compute the propagation speed at pixel (x,y). In this evolver, the
propagation speed is obtained simply by a lookup into the feature
image.
- Overrides:
computePropagationSpeed in class LseEvolve2- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The propagation speed at the pixel.
-
computeCurvatureSpeed
protected float computeCurvatureSpeed(int iX,
int iY)
Compute the curvature speed at pixel (x,y). In this evolver, the
curvature speed is obtained simply by a lookup into the feature
image.
- Overrides:
computeCurvatureSpeed in class LseEvolve2- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The curvature speed at the pixel.
������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/package-summary.html����������������������������������������0000775�4231163�4231163�00000040440�14537076122�025017� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.levelset (MIPAV API Documentation)
-
Class Summary
| Class |
Description |
| AlgorithmFastMarching |
DOCUMENT ME!
|
| LseCurvatureFlow2 |
This class implements the curvature flow filter for 2D images
using a finite-difference-based solver for the partial differential
equation:
du/dt = |grad(u)|*divergence(grad(u)/|grad(u)|)
where u(x,y,t) is the evolved image at time t, du/dt is the time
derivative of u, and grad(u) is the gradient of u with respect to the
spatial variables.
|
| LseCurvatureFlow3 |
This class implements the curvature flow filter for 3D images
using a finite-difference-based solver for the partial differential
equation:
du/dt = |grad(u)|*divergence(grad(u)/|grad(u)|)
where u(x,y,z,t) is the evolved image at time t, du/dt is the time
derivative of u, and grad(u) is the gradient of u with respect to the
spatial variables.
|
| LseEvolve2 |
The abstract base class for level-set evolution of 2D images.
|
| LseEvolve3 |
The abstract base class for level-set evolution of 3D images.
|
| LseFastMarch |
The abstract base class for fast-marching methods of images.
|
| LseFastMarch2 |
The fast-marching method for 2D images.
|
| LseFastMarch3 |
The fast-marching method for 3D images.
|
| LseGaussianBlur2 |
This class implements the Gaussian blur filter for 2D images
using a finite-difference-based solver for the partial differential
equation:
du/dt = Laplacian(u)
where u(x,y,t) is the evolved image at time t, du/dt is the time
derivative of u, and Laplacian(u) = u_xx + u_yy, a sum of second-order
derivatives of u.
|
| LseGaussianBlur3 |
This class implements the Gaussian blur filter for 3D images
using a finite-difference-based solver for the partial differential
equation:
du/dt = Laplacian(u)
where u(x,y,z,t) is the evolved image at time t, du/dt is the time
derivative of u, and Laplacian(u) = u_xx + u_yy + u_zz, a sum of
second-order derivatives of u.
|
| LseGeodesicActiveContour2 |
A level-set evolver for 2D images.
|
| LseGeodesicActiveContour3 |
A level-set evolver for 3D images.
|
| LseGradientAnisotropic2 |
This class implements the gradient anistropic curvature flow
filter for 2D images using a finite-difference-based solver for the
partial differential equation:
du/dt = divergence(exp(-0.5*|grad(u)|^2/(k^2*average(|grad(u)|^2))*grad(u))
where u(x,y,t) is the evolved image at time t, du/dt is the time
derivative of u, and grad(u) is the gradient of u with respect to the
spatial variables.
|
| LseGradientAnisotropic3 |
This class implements the gradient anistropic curvature flow
filter for 3D images using a finite-difference-based solver for the
partial differential equation:
du/dt = divergence(exp(-0.5*|grad(u)|^2/(k^2*average(|grad(u)|^2))*grad(u))
where u(x,y,z,t) is the evolved image at time t, du/dt is the time
derivative of u, and grad(u) is the gradient of u with respect to the
spatial variables.
|
| LseMinHeap |
A class that encapsules a min-heap data structure.
|
| LseParameters |
This class is a simple wrapper for the parameters that occur in the
level-set evolution, which is controlled by the partial differential
equation:
du/dt = -a*A(x).grad(u) - b*P(x)*|grad(u)| + c*Z(x)*K(u)*|grad(u)|
+ d*Laplacian(u)
where u(x,t) is the evolved image at time t, du/dt is the time derivative
of u, grad(u) is the gradient of u with respect to the x-variable, A(x) is
the advection term with advection weight a, P(x) is the propagation
term with propagation weight b, Z(x) is the curvature term with
curvature weight c, K(u) is the mean curvature of level curves
(in 2D) or surfaces (in 3D), and Laplacian(u) is the sum of second-order
unmixed derivatives with Laplacian weight d.
|
| LsePdeFilter |
The abstract base class for finite-difference-based solvers for partial
differential equations.
|
| LsePdeFilter2 |
The abstract base class for finite-difference-based solvers for partial
differential equations in 2D.
|
| LsePdeFilter3 |
The abstract base class for finite-difference-based solvers for partial
differential equations in 3D.
|
| LseSegGeodesicActiveContour2 |
A segmenter for 2D images based on the PDE described in
LseGeodesicActiveContour2.
|
| LseSegGeodesicActiveContour3 |
A segmenter for 3D images based on the PDE described in
LseGeodesicActiveContour3.
|
| LseSegmenter |
The abstract base class for segmentation via level-set evolution.
|
| LseSegShapeDetection2 |
A segmenter for 2D images based on the PDE described in LseShapeDetection2.
|
| LseSegShapeDetection3 |
A segmenter for 3D images based on the PDE described in LseShapeDetection3.
|
| LseSegThreshold2 |
A segmenter for 2D images based on the PDE described in LseThreshold2.
|
| LseSegThreshold3 |
A segmenter for 3D images based on the PDE described in LseThreshold3.
|
| LseShapeDetection2 |
A level-set evolver for 2D images.
|
| LseShapeDetection3 |
A level-set evolver for 3D images.
|
| LseThreshold2 |
A level-set evolver for 2D images.
|
| LseThreshold3 |
A level-set evolver for 3D images.
|
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LsePdeFilter.html�������������������������������������������0000775�4231163�4231163�00000062324�14537076060�024261� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LsePdeFilter (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
- Direct Known Subclasses:
LsePdeFilter2, LsePdeFilter3
public abstract class LsePdeFilter
extends java.lang.Object
The abstract base class for finite-difference-based solvers for partial
differential equations. This system exists to support level-set evolution
for image segmentation.
- Version:
- 0.1 November 7, 2006
- Author:
- David Eberly
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected int |
m_eScaleType |
The type of image scaling used during filter construction.
|
protected float |
m_fBorderValue |
When set to Float.MAX_VALUE, Neumann conditions are in use
(zero-valued derivatives on the image border).
|
protected float |
m_fMin |
The minimum image value.
|
protected float |
m_fOffset |
The offset used in scaling the image data.
|
protected float |
m_fScale |
The scale factor used in scaling the image data.
|
protected float |
m_fTimeStep |
The time step for the PDE solver.
|
protected int |
m_iQuantity |
The number of image elements.
|
static int |
NONE |
Scale type: no scaling.
|
static int |
PRESERVE_ZERO |
Scale type:
max > -min: d' = d/max in [min/max,1]
max < -min: d' = -d/min in [-1,-max/min]
|
static int |
SYMMETRIC |
Scale type: d' = -1 + 2*(d-min)/(max-min) in [-1,1]
|
static int |
UNIT |
Scale type: d' = (d-min)/(max-min) in [0,1]
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
LsePdeFilter(int iQuantity,
float[] afData,
float fBorderValue,
int eScaleType) |
Creates a new PDE filter object.
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
float |
getBorderValue() |
Get the image border value.
|
int |
getQuantity() |
Get the number of image elements.
|
int |
getScaleType() |
Get the type of image scaling.
|
float |
getTimeStep() |
Get the time step for the PDE solver.
|
protected abstract void |
onPostUpdate() |
An abstract function that allows derived classes to implement any
desired behavior after the PDE solver applies its update function.
|
protected abstract void |
onPreUpdate() |
An abstract function that allows derived classes to implement any
desired behavior before the PDE solver applies its update function.
|
protected abstract void |
onUpdate() |
An abstract function for the update function of the PDE solver.
|
void |
setTimeStep(float fTimeStep) |
Set the time step for the PDE solver.
|
void |
update() |
The entry point to updating the PDE solver.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
PRESERVE_ZERO
public static final int PRESERVE_ZERO
Scale type:
max > -min: d' = d/max in [min/max,1]
max < -min: d' = -d/min in [-1,-max/min]
- See Also:
- Constant Field Values
-
m_fBorderValue
protected float m_fBorderValue
When set to Float.MAX_VALUE, Neumann conditions are in use
(zero-valued derivatives on the image border). Dirichlet conditions
are used, otherwise (image is constant on the border).
-
m_fMin
protected float m_fMin
The minimum image value.
-
Constructor Detail
-
LsePdeFilter
protected LsePdeFilter(int iQuantity,
float[] afData,
float fBorderValue,
int eScaleType)
Creates a new PDE filter object.
- Parameters:
iQuantity - The number of image elements.afData - The image elements, stored in lexicographical order.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.
-
Method Detail
-
update
public void update()
The entry point to updating the PDE solver. This function calls
OnPreUpdate, OnUpdate, and OnPostUpdate, in that order.
-
onPreUpdate
protected abstract void onPreUpdate()
An abstract function that allows derived classes to implement any
desired behavior before the PDE solver applies its update function.
The derived classes for 2D and 3D implement this to recompute the
boundary values when Neumann conditions are used. If derived classes
built on top of the 2D or 3D classes implement this also, they must
call the base-class OnPreUpdate first.
-
onUpdate
protected abstract void onUpdate()
An abstract function for the update function of the PDE solver. The
derived classes for 2D and 3D implement this to iterate over the image
elements, updating an element only if it is not masked out.
-
onPostUpdate
protected abstract void onPostUpdate()
An abstract function that allows derived classes to implement any
desired behavior after the PDE solver applies its update function.
The derived classes for 2D and 3D implement this to swap the buffers
for the next pass. If derived classes built on top of the 2D or 3D
classes implement this also, they must call the base-class
OnPostUpdate last.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseGradientAnisotropic2.html��������������������������������0000775�4231163�4231163�00000054456�14537076060�026444� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseGradientAnisotropic2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
m_fK |
The local curvature parameter, call it k.
|
private float |
m_fMHalfParam |
-0.5/(k^2*average(|grad(u)|^2))
|
private float |
m_fParam |
1/(k^2*average(|grad(u)|^2))
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
m_aabMask, m_aafDst, m_aafSrc, m_fFourthInvDxDy, m_fHalfInvDx, m_fHalfInvDy, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fUmm, m_fUmp, m_fUmz, m_fUpm, m_fUpp, m_fUpz, m_fUzm, m_fUzp, m_fUzz, m_fXSpacing, m_fYSpacing, m_iXBound, m_iYBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseGradientAnisotropic2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float fK) |
Creates a new LseCurvatureFlow2 object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
computeParam() |
Compute the average gradient magnitude squared for the current image
u(x,y,t).
|
protected void |
onPreUpdate() |
The function onPreUpdate was abstractly defined in the LsePdeFilter
base class.
|
protected void |
onUpdate(int iX,
int iY) |
The per-pixel update function of the PDE solver.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUy, getUyy, getXBound, getXSpacing, getYBound, getYSpacing, lookUp5, lookUp9, onPostUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseGradientAnisotropic2
public LseGradientAnisotropic2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float fK)
Creates a new LseCurvatureFlow2 object.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.fK - The local curvature parameter in the exponential term of the
PDE.
-
Method Detail
-
computeParam
protected void computeParam()
Compute the average gradient magnitude squared for the current image
u(x,y,t). The terms p = 1/(k*k*average(|grad(u)|^2) and -0.5*p are
computed once and used in the per-pixel update in the PDE solver.
-
onPreUpdate
protected void onPreUpdate()
The function onPreUpdate was abstractly defined in the LsePdeFilter
base class. It is called before any per-pixel updates. In this class,
the parameters in the exponential term of the PDE are precomputed for
use by the onUpdate() function.
- Overrides:
onPreUpdate in class LsePdeFilter2
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseGeodesicActiveContour3.html������������������������������0000775�4231163�4231163�00000071774�14537076060�026727� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseGeodesicActiveContour3 (MIPAV API Documentation)
-
public class LseGeodesicActiveContour3
extends LseEvolve3
A level-set evolver for 3D images. The PDE to be solved numerically for
I(x,t) is:
dI/dt = -a*Dot(A(x),grad(I)) -b*F(x)*|grad(I)| + c*F(x)*K(x,t)*|grad(I)|,
t > 0
I(x,0) = I0(x)
where the feature image is typically
F(x) = 1/(1+|grad(convolve(G,I0))|) or
F(x) = exp(-|grad(convolve(G,I0))|)
where G(x,t) is the Gaussian kernel and where K(x,t) is the curvature of
I(x,t). The advection is
A(x) = -grad(convolve(G,I0))
The constant a is the advection weight, the constant b is the propagation
weight and the constant c is the curvature weight.
- Version:
- 0.1 November 7, 2006
- Author:
- David Eberly
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float[][][] |
m_aaafFeature |
The feature image to control the segmentation.
|
protected float[][][][] |
m_aaakAdvection |
The advection field to control the segmentation.
|
protected float |
m_fZeroTolerance |
The threshold below which the feature image values are clamped to this
tolerance.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
m_aaabMask, m_aaafDst, m_aaafSrc, m_fFourthInvDxDy, m_fFourthInvDxDz, m_fFourthInvDyDz, m_fHalfInvDx, m_fHalfInvDy, m_fHalfInvDz, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fInvDz, m_fInvDzDz, m_fUmmm, m_fUmmp, m_fUmmz, m_fUmpm, m_fUmpp, m_fUmpz, m_fUmzm, m_fUmzp, m_fUmzz, m_fUpmm, m_fUpmp, m_fUpmz, m_fUppm, m_fUppp, m_fUppz, m_fUpzm, m_fUpzp, m_fUpzz, m_fUzmm, m_fUzmp, m_fUzmz, m_fUzpm, m_fUzpp, m_fUzpz, m_fUzzm, m_fUzzp, m_fUzzz, m_fXSpacing, m_fYSpacing, m_fZSpacing, m_iXBound, m_iYBound, m_iZBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseGeodesicActiveContour3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float[][] akAdvection,
float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight) |
Create a new level-set evolver for 2D images.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected float[] |
computeAdvection(int iX,
int iY,
int iZ) |
Compute the advection at voxel (x,y,z).
|
protected float |
computeCurvatureSpeed(int iX,
int iY,
int iZ) |
Compute the curvature speed at voxel (x,y,z).
|
protected float |
computePropagationSpeed(int iX,
int iY,
int iZ) |
Compute the propagation speed at voxel (x,y,z).
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUxz, getUy, getUyy, getUyz, getUz, getUzz, getXBound, getXSpacing, getYBound, getYSpacing, getZBound, getZSpacing, lookUp27, lookUp7, onPostUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseGeodesicActiveContour3
public LseGeodesicActiveContour3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float[][] akAdvection,
float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight)
Create a new level-set evolver for 2D images.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.afFeature - The feature image to control the evolution.akAdvection - The advection field to control the evolution.fAdvectionWeight - The advection coefficient 'a' in the PDE that
controls the evolution.fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.
-
Method Detail
-
computeAdvection
protected float[] computeAdvection(int iX,
int iY,
int iZ)
Compute the advection at voxel (x,y,z). In this evolver, the advection
is obtained simply by a lookup into the advection image.
- Overrides:
computeAdvection in class LseEvolve3- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The advection at the voxel.
-
computePropagationSpeed
protected float computePropagationSpeed(int iX,
int iY,
int iZ)
Compute the propagation speed at voxel (x,y,z). In this evolver, the
propagation speed is obtained simply by a lookup into the feature
image.
- Overrides:
computePropagationSpeed in class LseEvolve3- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The propagation speed at the voxel.
-
computeCurvatureSpeed
protected float computeCurvatureSpeed(int iX,
int iY,
int iZ)
Compute the curvature speed at voxel (x,y,z). In this evolver, the
curvature speed is obtained simply by a lookup into the feature
image.
- Overrides:
computeCurvatureSpeed in class LseEvolve3- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The curvature speed at the voxel.
����gov/nih/mipav/model/algorithms/levelset/LseEvolve2.html���������������������������������������������0000775�4231163�4231163�00000077605�14537076060�023735� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseEvolve2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float[][] |
m_aafD2 |
The second-order derivatives of the current pixel.
|
protected float[] |
m_afAdvection |
The advection for the current pixel.
|
protected float[] |
m_afD1 |
The first-order derivatives of the current pixel.
|
protected float[] |
m_afD1Bwd |
Backward finite-difference approximations to the first-order
derivatives of the current pixel.
|
protected float[] |
m_afD1Fwd |
Forward finite-difference approximations to the first-order
derivatives of the current pixel.
|
protected float |
m_fD0 |
The image value of the current pixel.
|
protected float |
m_fGradMagSqr |
The squared magnitude of the gradient vector for the current pixel.
|
protected LseParameters |
m_kParameters |
The parameters associated with level-set evolution.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
m_aabMask, m_aafDst, m_aafSrc, m_fFourthInvDxDy, m_fHalfInvDx, m_fHalfInvDy, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fUmm, m_fUmp, m_fUmz, m_fUpm, m_fUpp, m_fUpz, m_fUzm, m_fUzp, m_fUzz, m_fXSpacing, m_fYSpacing, m_iXBound, m_iYBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
LseEvolve2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType) |
Create a new level-set evolver for 2D images.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected float[] |
computeAdvection(int iX,
int iY) |
Override this function to implement the desired advection for your
level-set evolver.
|
protected float |
computeCurvature(int iX,
int iY) |
Compute the product of length and curvature at the pixel (x,y).
|
protected float |
computeCurvatureSpeed(int iX,
int iY) |
Override this function to implement the desired curvature speed for
your level-set evolver.
|
protected float |
computeFunction(int iX,
int iY) |
Evolution support.
|
protected float |
computeLaplacianSpeed(int iX,
int iY) |
Override this function to implement the desired Laplacian speed for
your level-set evolver.
|
protected float |
computePropagationSpeed(int iX,
int iY) |
Override this function to implement the desired propagation speed for
your level-set evolver.
|
LseParameters |
getParameters() |
Get the current level-set evolution parameters.
|
protected void |
onPreUpdate() |
The override of LsePdeFilter2.onPreUpdate.
|
protected void |
onUpdate(int iX,
int iY) |
The override of LsePdeFilter2.onUpdate.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUy, getUyy, getXBound, getXSpacing, getYBound, getYSpacing, lookUp5, lookUp9, onPostUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseEvolve2
protected LseEvolve2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType)
Create a new level-set evolver for 2D images.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.
-
Method Detail
-
computeFunction
protected final float computeFunction(int iX,
int iY)
Evolution support. ComputeTimeStep() is called each time before
ComputeFunction() is called. The function ComputeCurvature() actually
computes k*L, where k is the curvature and L is the length of the
gradient vector. The resulting quantity is
k*L = (Uxx*Uy*Uy - 2*Uxy*Ux*Uy + Uyy*Ux*Ux)/(Ux*Ux + Uy*Uy)
where Ux and Uy are first-order partial derivatives and Uxx, Uxy, and
Uyy are second-order partial derivatives.
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The value of the right-hand side of the PDE that governs the
level-set evolution.
-
computeCurvature
protected final float computeCurvature(int iX,
int iY)
Compute the product of length and curvature at the pixel (x,y).
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The product of length and curvature at the pixel.
-
computeAdvection
protected float[] computeAdvection(int iX,
int iY)
Override this function to implement the desired advection for your
level-set evolver.
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The advection at the pixel.
-
computePropagationSpeed
protected float computePropagationSpeed(int iX,
int iY)
Override this function to implement the desired propagation speed for
your level-set evolver.
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The propagation speed at the pixel.
-
computeCurvatureSpeed
protected float computeCurvatureSpeed(int iX,
int iY)
Override this function to implement the desired curvature speed for
your level-set evolver.
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The curvature speed at the pixel.
-
computeLaplacianSpeed
protected float computeLaplacianSpeed(int iX,
int iY)
Override this function to implement the desired Laplacian speed for
your level-set evolver.
- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The Laplacian speed at the pixel.
-
onUpdate
protected void onUpdate(int iX,
int iY)
The override of LsePdeFilter2.onUpdate. This is where ComputeFunction
is called.
- Specified by:
onUpdate in class LsePdeFilter2- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.
���������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseSegGeodesicActiveContour2.html���������������������������0000775�4231163�4231163�00000120161�14537076060�027346� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseSegGeodesicActiveContour2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
m_afBlurCurvFlow |
The blurred curvature flow image (intermediate image).
|
private float[] |
m_afCurvFlow |
The curvature flow image (intermediate image).
|
private float[] |
m_afFeature |
The feature image.
|
private float[] |
m_afGradMagBlurCurvFlow |
The gradient magnitude of the blurred curvature flow image
(intermediate image).
|
private float[][] |
m_akNegGradient |
The negative of the gradient of the image is used for advection.
|
private int |
m_eScaleType |
The scaling type of the image (default = LsePdeFilter.NONE).
|
private float |
m_fAlpha |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBeta |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fBorderValue |
The border value of the image (default = Float.MAX_VALUE).
|
private float |
m_fMax |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fMin |
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
|
private float |
m_fScale |
The scale used for computing the blurred gradient magnitude image
(default = 0).
|
private float |
m_fTimeStep |
The time step of the PDE solver (default = 0.001).
|
private float |
m_fXSpacing |
The x-spacing of the image.
|
private float |
m_fYSpacing |
The y-spacing of the image.
|
private int |
m_iDIterations |
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
|
private int |
m_iXBound |
The x-bound of the image.
|
private int |
m_iYBound |
The y-bound of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
m_abMask, m_abSignedDistanceMask, m_afData, m_afSignedDistance, m_aiBoundary, m_aiInterior, m_fCurrentDistance, m_fMaxDistance, m_iQuantity, m_kFastMarcher, m_kLevelSetEvolver
-
Constructor Summary
Constructors
| Constructor |
Description |
LseSegGeodesicActiveContour2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask) |
Create a geodesic-active-contour-based segmenter.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
beginCoarse(int[] aiSeeds) |
The region-growing fast march.
|
boolean |
beginDistanceTransform(float fMaxDistance) |
The signed-distance-transform fast march.
|
void |
beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep) |
The level-set evolution.
|
void |
createFeatureImage() |
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
|
(package private) float[] |
getBlurCurvFlowImage() |
Get the blurred curvature flow image.
|
(package private) float[] |
getCurvFlowImage() |
Get the curvature flow image.
|
(package private) float[] |
getFeatureImage() |
Get the feature image.
|
(package private) float[] |
getGradMagBlurCurvFlowImage() |
Get the gradient magnitude of the blurred curvature flow image.
|
(package private) float[][] |
getNegGradientImage() |
Get the negative of the gradient.
|
void |
setDiffusionIterations(int iDIterations) |
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
|
void |
setGradientMagnitudeScale(float fScale) |
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
|
void |
setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep) |
Parameters for the feature image creation.
|
void |
setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax) |
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
endCoarse, endDistanceTransform, endEvolution, getBoundary, getFastMarcher, getInterior, getLevelSetEvolver, getSignedDistanceImage, getSignedDistanceMask, iterateCoarse, iterateDistanceTransform, iterateEvolution
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_fAlpha
private float m_fAlpha
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fBeta
private float m_fBeta
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMin
private float m_fMin
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
m_fMax
private float m_fMax
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
-
Constructor Detail
-
LseSegGeodesicActiveContour2
public LseSegGeodesicActiveContour2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask)
Create a geodesic-active-contour-based segmenter.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.afData - The image elements.abMask - The image masks that determine which pixels are
processed by the segmenter.
-
Method Detail
-
setPDEParameters
public final void setPDEParameters(float fBorderValue,
int eScaleType,
float fTimeStep)
Parameters for the feature image creation. You may set these anytime
before a sequence of fast-march iterations. The PDE filters require
you to specify how to handle boundary values. If you want Dirichlet
conditions (constant boundary), set BorderValue to a finite number.
If you want Neumann conditions (zero-derivative boundary), set the
BorderValue to Float.MAX_VALUE. If you want the original image to be
scaled, choose the Type parameter appropriately. The input image is
processed by a curvature-based anisotropic diffusion filter; the
number of iterations is DIterations. The gradient magnitude at the
specified Scale is computed for the output of the diffusion filter.
The gradient magnitude is transformed to the feature image by a sigmoid
function:
feature(x) = min + (max-min)/(1 + exp(-(x-beta)/alpha))
The inverse of the feature image values are the speeds used in the
fast marching algorithm.
- Specified by:
setPDEParameters in class LseSegmenter- Parameters:
fBorderValue - The border value to use when processing boundary
pixels.eScaleType - The scaling type for the image.fTimeStep - The time step for the PDE solver.
-
setSigmoidFilter
public final void setSigmoidFilter(float fAlpha,
float fBeta,
float fMin,
float fMax)
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- Specified by:
setSigmoidFilter in class LseSegmenter- Parameters:
fAlpha - The variance of the function.fBeta - The center of the function.fMin - The minimum of the function.fMax - The maximum of the function.
-
createFeatureImage
public void createFeatureImage()
Create the feature image using the parameters set by the four
parameter-setting functions defined above. Since the quality of the
segmentation depends on these parameters, createFeatureImage() allows
you to experiment with the parameters before you start the
segmentation.
-
beginCoarse
public void beginCoarse(int[] aiSeeds)
The region-growing fast march. When you call beginCoarse(), the
current parameters are used (DIterations, scale, alpha, beta, min,
max). You can apply the fast marching algorithm multiple times to
the same image, each time starting with beginCoarse();
- Overrides:
beginCoarse in class LseSegmenter- Parameters:
aiSeeds - The initial region to grow.
-
beginDistanceTransform
public boolean beginDistanceTransform(float fMaxDistance)
The signed-distance-transform fast march. An annulus is computed
about the boundary of the coarse-level segmentation. The maximum
distance from annulus points to the boundary is the input to this
function (in pixel units).
- Overrides:
beginDistanceTransform in class LseSegmenter- Parameters:
fMaxDistance - The maximum distance to allow when computing the
signed distance transform.- Returns:
- 'true' iff more iterations are allowed
-
beginEvolution
public void beginEvolution(float fAdvectionWeight,
float fPropagationWeight,
float fCurvatureWeight,
float fLaplacianWeight,
float fTimeStep)
The level-set evolution.
- Overrides:
beginEvolution in class LseSegmenter- Parameters:
fAdvectionWeight - The advection coefficient 'a' in the PDE that
controls the evolution.fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.fLaplacianWeight - The Laplacian coefficient 'd' in the PDE that
controls the evolution.fTimeStep - The time step for the PDE solver.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseShapeDetection2.html�������������������������������������0000775�4231163�4231163�00000057537�14537076060�025376� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseShapeDetection2 (MIPAV API Documentation)
-
public class LseShapeDetection2
extends LseEvolve2
A level-set evolver for 2D images. The PDE to be solved numerically for
I(x,t) is:
dI/dt = -b*F(x)*|grad(I)| + c*F(x)*K(x,t)*|grad(I)|, t > 0
I(x,0) = I0(x)
where the feature image is typically
F(x) = 1/(1+|grad(convolve(G,I0))|) or
F(x) = exp(-|grad(convolve(G,I0))|)
where G(x,t) is the Gaussian kernel and where K(x,t) is the curvature of
I(x,t). The constant b is the propagation weight and the constant c is the
curvature weight.
- Version:
- 0.1 November 7, 2006
- Author:
- David Eberly
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float[][] |
m_aafFeature |
The feature image to control the segmentation.
|
protected float |
m_fZeroTolerance |
The threshold below which the feature image values are clamped to this
tolerance.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
m_aabMask, m_aafDst, m_aafSrc, m_fFourthInvDxDy, m_fHalfInvDx, m_fHalfInvDy, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fUmm, m_fUmp, m_fUmz, m_fUpm, m_fUpp, m_fUpz, m_fUzm, m_fUzp, m_fUzz, m_fXSpacing, m_fYSpacing, m_iXBound, m_iYBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseShapeDetection2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float fPropagationWeight,
float fCurvatureWeight) |
Create a new level-set evolver for 2D images.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUy, getUyy, getXBound, getXSpacing, getYBound, getYSpacing, lookUp5, lookUp9, onPostUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseShapeDetection2
public LseShapeDetection2(int iXBound,
int iYBound,
float fXSpacing,
float fYSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float fPropagationWeight,
float fCurvatureWeight)
Create a new level-set evolver for 2D images.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.afFeature - The feature image to control the evolution.fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.
-
Method Detail
-
computePropagationSpeed
protected float computePropagationSpeed(int iX,
int iY)
Compute the propagation speed at pixel (x,y). In this evolver, the
propagation speed is obtained simply by a lookup into the feature
image.
- Overrides:
computePropagationSpeed in class LseEvolve2- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The propagation speed at the pixel.
-
computeCurvatureSpeed
protected float computeCurvatureSpeed(int iX,
int iY)
Compute the curvature speed at pixel (x,y). In this evolver, the
curvature speed is obtained simply by a lookup into the feature
image.
- Overrides:
computeCurvatureSpeed in class LseEvolve2- Parameters:
iX - The x-coordinate of the pixel.iY - The y-coordinate of the pixel.- Returns:
- The curvature speed at the pixel.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/levelset/LseThreshold3.html������������������������������������������0000775�4231163�4231163�00000066410�14537076060�024422� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LseThreshold3 (MIPAV API Documentation)
-
public class LseThreshold3
extends LseEvolve3
A level-set evolver for 3D images. The PDE to be solved numerically for
I(x,t) is:
dI/dt = -b*P(x)*|grad(I)| + c*F(x)*K(x,t)*|grad(I)|, t > 0
I(x,0) = I0(x)
where the feature image is typically
F(x) = 1/(1+|grad(convolve(G,I0))|) or
F(x) = exp(-|grad(convolve(G,I0))|)
where G(x,t) is the Gaussian kernel and where K(x,t) is the curvature of
I(x,t). The propagation image, P(x), is computed from the feature image,
F(x), as follows. A lower threshold L and an upper threshold U are
selected by the user; then
P(x) = F(x) - L, if F(x) < (U+L)/2
P(x) = U - F(x), if F(x) >= (U+L)/2
The constant b is the propagation weight and the constant c is the
curvature weight.
- Version:
- 0.1 November 7, 2006
- Author:
- David Eberly
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float[][][] |
m_aaafFeature |
The feature image to control the segmentation.
|
protected float[][][] |
m_aaafPropagation |
The propagation image to control the segmentation.
|
protected float |
m_fZeroTolerance |
The threshold below which the feature image values are clamped to this
tolerance.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
m_aaabMask, m_aaafDst, m_aaafSrc, m_fFourthInvDxDy, m_fFourthInvDxDz, m_fFourthInvDyDz, m_fHalfInvDx, m_fHalfInvDy, m_fHalfInvDz, m_fInvDx, m_fInvDxDx, m_fInvDy, m_fInvDyDy, m_fInvDz, m_fInvDzDz, m_fUmmm, m_fUmmp, m_fUmmz, m_fUmpm, m_fUmpp, m_fUmpz, m_fUmzm, m_fUmzp, m_fUmzz, m_fUpmm, m_fUpmp, m_fUpmz, m_fUppm, m_fUppp, m_fUppz, m_fUpzm, m_fUpzp, m_fUpzz, m_fUzmm, m_fUzmp, m_fUzmz, m_fUzpm, m_fUzpp, m_fUzpz, m_fUzzm, m_fUzzp, m_fUzzz, m_fXSpacing, m_fYSpacing, m_fZSpacing, m_iXBound, m_iYBound, m_iZBound
-
Fields inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
m_eScaleType, m_fBorderValue, m_fMin, m_fOffset, m_fScale, m_fTimeStep, m_iQuantity, NONE, PRESERVE_ZERO, SYMMETRIC, UNIT
-
Constructor Summary
Constructors
| Constructor |
Description |
LseThreshold3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float fLowerThreshold,
float fUpperThreshold,
float fPropagationWeight,
float fCurvatureWeight) |
Create a new level-set evolver for 2D images.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
assignDirichletImageBorder, assignDirichletMaskBorder, assignNeumannImageBorder, assignNeumannMaskBorder, getMask, getU, getUx, getUxx, getUxy, getUxz, getUy, getUyy, getUyz, getUz, getUzz, getXBound, getXSpacing, getYBound, getYSpacing, getZBound, getZSpacing, lookUp27, lookUp7, onPostUpdate, onUpdate
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LseThreshold3
public LseThreshold3(int iXBound,
int iYBound,
int iZBound,
float fXSpacing,
float fYSpacing,
float fZSpacing,
float[] afData,
boolean[] abMask,
float fBorderValue,
int eScaleType,
float[] afFeature,
float fLowerThreshold,
float fUpperThreshold,
float fPropagationWeight,
float fCurvatureWeight)
Create a new level-set evolver for 2D images.
- Parameters:
iXBound - The x-bound of the image.iYBound - The y-bound of the image.iZBound - The z-bound of the image.fXSpacing - The x-spacing of the image.fYSpacing - The y-spacing of the image.fZSpacing - The z-spacing of the image.afData - The image elements, stored in lexicographical order.abMask - The image mask, stored in lexicographical order. A
pixel value is processed by the PDE solver only when the mask value
is false.fBorderValue - Specifies how to handle the image value. When set
to Float.MAX_VALUE, Neumann conditions are in use, in which case
zero-valued derivatives are assumed on the image border. Otherwise,
Dirichlet conditions are used, in which case the image is assumed
to be constant on the border with value specified by fBorderValue.eScaleType - The type of scaling to apply to the input image.
The choices are NONE, UNIT, SYMMETRIC, or PRESERVE_ZERO.afFeature - The feature image to control the evolution.fLowerThreshold - The lower threshold L used in computing P(x).fUpperThreshold - The lower threshold U used in computing P(x).fPropagationWeight - The propagation coefficient 'b' in the PDE
that controls the evolution.fCurvatureWeight - The curvature coefficient 'c' in the PDE that
controls the evolution.
-
Method Detail
-
computePropagationSpeed
protected float computePropagationSpeed(int iX,
int iY,
int iZ)
Compute the propagation speed at voxel (x,y,z). In this evolver, the
propagation speed is obtained simply by a lookup into the feature
image.
- Overrides:
computePropagationSpeed in class LseEvolve3- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The propagation speed at the voxel.
-
computeCurvatureSpeed
protected float computeCurvatureSpeed(int iX,
int iY,
int iZ)
Compute the curvature speed at voxel (x,y,z). In this evolver, the
curvature speed is obtained simply by a lookup into the feature
image.
- Overrides:
computeCurvatureSpeed in class LseEvolve3- Parameters:
iX - The x-coordinate of the voxel.iY - The y-coordinate of the voxel.iZ - The z-coordinate of the voxel.- Returns:
- The curvature speed at the voxel.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmVOIShapeInterpolation.html����������������������������������0000775�4231163�4231163�00000114475�14537076051�026156� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmVOIShapeInterpolation (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
sliceIndex1
private int sliceIndex1
slice index for voi1
-
sliceIndex2
private int sliceIndex2
slice index for voi2
-
Constructor Detail
-
AlgorithmVOIShapeInterpolation
public AlgorithmVOIShapeInterpolation(ModelImage srcImage,
int sliceIndex1,
VOIContour VOI1,
int sliceIndex2,
VOIContour VOI2,
VOI VOIHandle)
constructor
- Parameters:
srcImage - sliceIndex1 - VOI1 - sliceIndex2 - VOI2 -
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmWatershed.Seed.html�����������������������������������������0000775�4231163�4231163�00000024230�14537076051�024562� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmWatershed.Seed (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmWatershed.Seed
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
WildMagic.LibFoundation.Mathematics.Vector3f |
point |
DOCUMENT ME!
|
short |
seedValue |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Seed(WildMagic.LibFoundation.Mathematics.Vector3f pt,
short value) |
Creates a new Seed object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
seedValue
public short seedValue
DOCUMENT ME!
-
Constructor Detail
-
Seed
public Seed(WildMagic.LibFoundation.Mathematics.Vector3f pt,
short value)
Creates a new Seed object.
- Parameters:
pt - DOCUMENT ME!value - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.interp_type.html����������������������������������������������0000775�4231163�4231163�00000033662�14537076056�023421� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.interp_type (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
interp_type() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
interp_type
private interp_type()
-
Method Detail
-
valueOf
public static SIFT3D.interp_type valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHepticLagrangian.html���������������������������������������0000775�4231163�4231163�00000121126�14537076046�025163� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHepticLagrangian (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHepticLagrangian
extends AlgorithmBase
This is a polynomial p of degree 7 which interpolates a given function f at the points x(-3), x(-2), x(-1), x(0),
x(1), x(2), x(3), and x(4) and is given by p(x) = sum from i = -3 to i = 4 of li(x)*f(xi), where li, i =
-3,-2,-1,0,1,2,3,4 which are called the fundamental polynomials, are given by li(x) = product from k = -3 to k = 4
for k != i of (x - xk)/(xi - xk). li(-3) = (x - -2)/(-3 - -2) * (x - -1)/(-3 - -1) * (x - 0)/(-3 - 0) * (x-1)/(-3 -
1) * (x - 2)/(-3 - 2) * (x - 3)/(-3 - 3) * (x - 4)/(-3 - 4) = (x * (x*x - 1) * (x*x - 4) * (x - 3) * (4 - x))/5040
li(-2) = (x - -3)/(-2 - -3) * (x - -1)/(-2 - -1) * (x - 0)/(-2 - 0) * (x-1)/(-2 - 1) * (x-2)/(-2 - 2) * (x-3)/(-2 -
3) * (x - 4)/(-2 - 4) = (x * (x*x - 1) * (x - 2) * (x*x - 9) * (x - 4))/720 li(-1) = (x - -3)/(-1 - -3) * (x -
-2)/(-1 - -2) * (x - 0)/(-1 - 0)* (x-1)/(-1 - 1) * (x - 2)/(-1 - 2) * (x - 3)/(-1 - 3) * (x - 4)/(-1 - 4) = (x * (x -
1) * (x*x- 4) * (x*x - 9) * (4 - x)))/240 li(0) = (x - -3)/(0 - -3) * (x - -2)/(0 - -2) * (x - -1)/(0 - -1) * (x -
1)/(0 - 1) * (x - 2)/(0 - 2) * (x - 3)/(0 - 3) * (x - 4)/(0 - 4) = ((x*x - 1) * (x*x - 4) * (x*x - 9) * (x - 4))/144
li(1) = (x - -3)/(1 - -3) * (x - -2)/(1 - -2) * (x - -1)/(1 - -1) * (x - 0)/(1 - 0) * (x - 2)/(1 - 2) * (x - 3)/(1 -
3) * (x - 4)/(1 - 4) = (x * (x+1) * (x*x - 4) * (x*x - 9) * (4 - x))/144 li(2) = (x - -3)/(2 - -3) * (x - -2)/(2 -
-2) * (x - -1)/(2 - -1) * (x - 0)/(2 - 0) * (x - 1)/(2 - 1) * (x - 3)/(2 - 3) * (x - 4)/(2 - 4) = (x * (x*x - 1) *
(x+2) * (x*x - 9) * (x - 4))/240 li(3) = (x - -3)/(3 - -3) *(x - -2)/(3 - -2) * (x - -1)/(3 - -1) * (x - 0)/(3 - 0) *
(x - 1)/(3 - 1) * (x - 2)/(3 - 2) * (x - 4)/(3 - 4) = (x * (x*x - 1) * (x*x - 4) * (x + 3) * (4 - x))/720 li(4) = (x
- -3)/(4 - -3) * (x - -2)/(4 - -2) * (x - -1)/(4 - -1) * (x - 0)/(4 - 0) * (x - 1)/(4 - 1) * (x - 2)/(4 - 2) * (x -
3)/(4 - 3) = (x * (x*x - 1) * (x*x - 4) * (x*x - 9))/5040
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
alphaMax |
DOCUMENT ME!
|
private double |
alphaMin |
DOCUMENT ME!
|
private double |
blueMax |
DOCUMENT ME!
|
private double |
blueMin |
DOCUMENT ME!
|
private boolean |
clip |
DOCUMENT ME!
|
private double |
greenMax |
DOCUMENT ME!
|
private double |
greenMin |
DOCUMENT ME!
|
private double |
inputMax |
DOCUMENT ME!
|
private double |
inputMin |
DOCUMENT ME!
|
private double |
redMax |
DOCUMENT ME!
|
private double |
redMin |
DOCUMENT ME!
|
private int |
sliceSize |
DOCUMENT ME!
|
private double[] |
volume |
DOCUMENT ME!
|
private double[][] |
wt |
DOCUMENT ME!
|
private int |
xD |
DOCUMENT ME!
|
private int |
xdim |
DOCUMENT ME!
|
private int |
yD |
DOCUMENT ME!
|
private int |
ydim |
DOCUMENT ME!
|
private int |
zD |
DOCUMENT ME!
|
private int |
zdim |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
finalize -
|
double |
hepticLagrangian2D(double x,
double y) |
2D heptic Lagrangian function.
|
double[] |
hepticLagrangian2DC(double x,
double y) |
2D heptic Lagrangian function for color.
|
double |
hepticLagrangian3D(double x,
double y,
double z) |
3D heptic Lagrangian function.
|
double[] |
hepticLagrangian3DC(double x,
double y,
double z) |
3D heptic Lagrangian function for color (3 channel images).
|
void |
runAlgorithm() |
run - default method that is not really appropiate for this class but must be defined because this class extends
AlgorithmBase.
|
void |
setup2DHepticLagrangian(double[] vol,
int[] extents,
boolean clip) |
Setup 2D hepticLagrangian.
|
void |
setup2DHepticLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip) |
Setup 2D hepticLagrangian for color.
|
void |
setup3DHepticLagrangian(double[] vol,
int[] extents,
boolean clip) |
Setup 3D heptic Lagrangian.
|
void |
setup3DHepticLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip) |
Setup 3D heptic Lagrangian for color.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
alphaMax
private double alphaMax
DOCUMENT ME!
-
alphaMin
private double alphaMin
DOCUMENT ME!
-
blueMax
private double blueMax
DOCUMENT ME!
-
blueMin
private double blueMin
DOCUMENT ME!
-
clip
private boolean clip
DOCUMENT ME!
-
greenMax
private double greenMax
DOCUMENT ME!
-
greenMin
private double greenMin
DOCUMENT ME!
-
inputMax
private double inputMax
DOCUMENT ME!
-
inputMin
private double inputMin
DOCUMENT ME!
-
redMax
private double redMax
DOCUMENT ME!
-
redMin
private double redMin
DOCUMENT ME!
-
sliceSize
private int sliceSize
DOCUMENT ME!
-
volume
private double[] volume
DOCUMENT ME!
-
wt
private double[][] wt
DOCUMENT ME!
-
xD
private int xD
DOCUMENT ME!
-
yD
private int yD
DOCUMENT ME!
-
zD
private int zD
DOCUMENT ME!
-
xdim
private int xdim
DOCUMENT ME!
-
ydim
private int ydim
DOCUMENT ME!
-
zdim
private int zdim
DOCUMENT ME!
-
Method Detail
-
hepticLagrangian3D
public final double hepticLagrangian3D(double x,
double y,
double z)
3D heptic Lagrangian function.
- Parameters:
x - double point indexy - double point indexz - double point index- Returns:
- the hepticLagrangian3D interpolated data point
-
hepticLagrangian3DC
public double[] hepticLagrangian3DC(double x,
double y,
double z)
3D heptic Lagrangian function for color (3 channel images).
- Parameters:
x - double point indexy - double point indexz - double point index- Returns:
- the hepticLagrangian3D interpolated data point
-
setup2DHepticLagrangian
public void setup2DHepticLagrangian(double[] vol,
int[] extents,
boolean clip)
Setup 2D hepticLagrangian.
- Parameters:
vol - volume comprising control points for the heptic Lagrangianextents - vol extents (xdim, ydim)clip - if true clip output to range of input image
-
setup2DHepticLagrangianC
public void setup2DHepticLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip)
Setup 2D hepticLagrangian for color.
- Parameters:
vol - volume comprising control points for the heptic Lagrangianextents - vol extents (xdim, ydim)argbMax - maximum possible color valueclip - if true clip output to range of input image
-
setup3DHepticLagrangian
public void setup3DHepticLagrangian(double[] vol,
int[] extents,
boolean clip)
Setup 3D heptic Lagrangian.
- Parameters:
vol - volume comprising control points for the heptic Lagrangianextents - vol extents (xdim, ydim, zdim)clip - if true clip output to range of input image
-
setup3DHepticLagrangianC
public void setup3DHepticLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip)
Setup 3D heptic Lagrangian for color.
- Parameters:
vol - volume comprising control points for the heptic Lagrangianextents - vol extents (xdim, ydim, zdim)argbMax - maximum possible color valueclip - if true clip output to range of input image
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftClustering.fams_hash_entry2.html�������������������0000775�4231163�4231163�00000023023�14537076047�031132� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftClustering.fams_hash_entry2 (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry2
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int[][] |
dp |
|
(package private) int |
whichCut |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTwoMRIImagesSNR.html����������������������������������������0000775�4231163�4231163�00000072321�14537076050�024612� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTwoMRIImagesSNR (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmTwoMRIImagesSNR(ModelImage image,
ModelImage image2,
int signalIndex,
int signalImage,
int signal2Index,
boolean register,
int cost,
boolean createRegImage) |
Creates a new AlgorithmTwoMRIImagesSNR object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
cost
private int cost
DOCUMENT ME!
-
register
private boolean register
DOCUMENT ME!
-
signal2Index
private int signal2Index
DOCUMENT ME!
-
signalImage
private int signalImage
DOCUMENT ME!
-
signalIndex
private int signalIndex
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmTwoMRIImagesSNR
public AlgorithmTwoMRIImagesSNR(ModelImage image,
ModelImage image2,
int signalIndex,
int signalImage,
int signal2Index,
boolean register,
int cost,
boolean createRegImage)
Creates a new AlgorithmTwoMRIImagesSNR object.
- Parameters:
image - First MRI imageimage2 - Second MRI imagesignalIndex - the index of the signal VOIsignalImage - image the signal VOI belongs to; 1 if image, 2 if image 2signal2Index - the index of the second signal VOI if >= 0register - If true register the image2 to the image before SNRcost - Cost function used in registrationcreateRegImage - If register = true and createRegImage = true, then create a frame with the registered image
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens8.html���������������������������������0000775�4231163�4231163�00000030414�14537076055�026173� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens8 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens8(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens8
public FitPiessens8(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSequentialScanningWatershed.indexValueComparator.html�������0000775�4231163�4231163�00000030251�14537076050�033551� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSequentialScanningWatershed.indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHistogram2Dim.html������������������������������������������0000775�4231163�4231163�00000101445�14537076046�024436� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHistogram2Dim (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHistogram2Dim
extends AlgorithmBase
This algorithm creates a two dimensional histogram of the data in 2 black and white images or 1 color image. if
doLinearRescale is true, the range of data in the second image is rescaled to be the same as the range of data in the
first image. That is the second image minimum is rescaled to the first image minimum and the second image maximum
is rescaled to the first image maximum. Also, if linear rescaling is used the number of bins in the second image
is set equal to the number of bins in the first image.
The default number of bins equals the min(256,maximum value - minimum value + 1) if the data is not float or double.
If the data is float or double, the default number of bins is 256.
ch1 = 0 to ch1 = bin1 - 2 all have a width of (bin1 - 1)/range1,
but ch1 = bin1 - 1 has no width, it is a single value at max1.
bin ch1 = 0 covers min1 <= ch1 < min1 + (max1 - min1)/(bin1 - 1)
bin ch1 = 1 covers min1 + (max1 - min1)/(bin1 - 1) <= ch1 < min1 + 2*(max1 - min1)/(bin1 - 1)
bin ch1 = bin1 - 2 covers min1 + (bin1 - 2)*(max - min1)/(bin1 - 1) <= ch1 < max1
bin ch1 = bin1 - 1 covers only max1
The processing for maximum values is specially handled to prevent loss of top bin counts from rounding errors.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private ModelImage |
baseImage |
Image for Y-axis of Histogram
|
private int |
bin1 |
Number of bins for Image1
|
private int |
bin2 |
Number of bins for Image2
|
private boolean |
doLinearRescale |
Boolean value.
|
private boolean |
doLogResult |
Boolean value.
|
private boolean |
useBlue |
For color images only.
|
private boolean |
useGreen |
For color images only.
|
private boolean |
useRed |
For color images only.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmHistogram2Dim(ModelImage destImg,
ModelImage srcImg,
boolean doLinearRescale,
boolean doLogResult,
int bin1,
int bin2,
boolean useRed,
boolean useGreen,
boolean useBlue) |
Constructor for images in which 2D histogram is placed in a predetermined destination image.
|
AlgorithmHistogram2Dim(ModelImage destImg,
ModelImage srcImg,
ModelImage baseImage,
boolean doLinearRescale,
boolean doLogResult,
int bin1,
int bin2) |
Constructor for images in which 2D histogram is placed in a predetermined destination image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcStoreInDest() |
This function produces a 2D histogram image with srcImage values represented across the x axis and baseImage
values represented across the y axis.
|
private void |
calcStoreInDestColor() |
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis.
|
void |
finalize() |
Prepares this class for destruction.
|
void |
runAlgorithm() |
starts the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
doLogResult
private boolean doLogResult
Boolean value. If true, the log of the result image is displayed for better visualization
-
Constructor Detail
-
AlgorithmHistogram2Dim
public AlgorithmHistogram2Dim(ModelImage destImg,
ModelImage srcImg,
ModelImage baseImage,
boolean doLinearRescale,
boolean doLogResult,
int bin1,
int bin2)
Constructor for images in which 2D histogram is placed in a predetermined destination image. Used for 2 black and
white images
- Parameters:
destImg - image model where result image is to storedsrcImg - image for x axis of histogrambaseImage - image for y axis of histogramdoLinearRescale - If true rescales the Image2 data to the range of Image1 datadoLogResult - If true, displays the log of the result image for better visualizationbin1 - Number of bins on x-axis (Image1)bin2 - Number of bins in y-axis (Image2)
-
AlgorithmHistogram2Dim
public AlgorithmHistogram2Dim(ModelImage destImg,
ModelImage srcImg,
boolean doLinearRescale,
boolean doLogResult,
int bin1,
int bin2,
boolean useRed,
boolean useGreen,
boolean useBlue)
Constructor for images in which 2D histogram is placed in a predetermined destination image. Used for 1 color
image.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modeldoLinearRescale - If true rescales the Image2 data to the range of Image1 datadoLogResult - If true, displays the log of the result image for better visualizationbin1 - Number of bins on x-axis (Image1)bin2 - Number of bins in y-axis (Image2)useRed - For color images only. If true red image is used as one of the images to create a 2D HistogramuseGreen - For color images only. If true green image is used as one of the images to create a 2D HistogramuseBlue - For color images only. If true blue image is used as one of the images to create a 2D Histogram
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.ODEExtModel.html���������������������������0000775�4231163�4231163�00000034774�14537076056�027327� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.ODEExtModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) double[] |
c |
|
(package private) double[][] |
scale |
|
(package private) double[][] |
z |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ODEExtModel(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag,
double[][] scale,
double[][] z,
double[] beta,
double[] c) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ODEExtModel
public ODEExtModel(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag,
double[][] scale,
double[][] z,
double[] beta,
double[] c)
-
Method Detail
-
driver
public void driver()
DOCUMENT ME!
- Overrides:
driver in class ODE
����gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens6.html���������������������������������0000775�4231163�4231163�00000030414�14537076055�026171� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens6 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens6(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens6
public FitPiessens6(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SVM.VlSvmStatistics.html���������������������������������������������0000775�4231163�4231163�00000033640�14537076057�023707� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SVM.VlSvmStatistics (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
dualityGap |
< Dual loss value.
|
(package private) double |
dualLoss |
< Dual objective value.
|
(package private) double |
dualObjective |
< Loss value.
|
(package private) double |
elapsedTime |
< Variance of the score updates.
|
(package private) int |
epoch |
< Solver iteration.
|
(package private) int |
iteration |
< Solver status.
|
(package private) double |
loss |
< Regularizer value.
|
(package private) double |
objective |
< Solver epoch (iteration / num samples).
|
(package private) double |
regularizer |
< Objective function value.
|
(package private) double |
scoresVariation |
< Duality gap = objective - dualObjective.
|
(package private) SVM.VlSvmSolverStatus |
status |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
iteration
int iteration
< Solver status.
-
epoch
int epoch
< Solver iteration.
-
loss
double loss
< Regularizer value.
-
dualObjective
double dualObjective
< Loss value.
-
dualLoss
double dualLoss
< Dual objective value.
-
dualityGap
double dualityGap
< Dual loss value.
-
Constructor Detail
-
VlSvmStatistics
public VlSvmStatistics()
������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmVOIProps.html�����������������������������������������������0000775�4231163�4231163�00000340143�14537076051�023442� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmVOIProps (MIPAV API Documentation)
-
- All Implemented Interfaces:
VOIStatisticList, java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmVOIProps
extends AlgorithmBase
implements VOIStatisticList
This class calculates a properties of an image defined by a VOI. Attributes include: volume, area, number of pixels,
center of mass, average pixel intensity, standard deviation of intensity, eccentricity, principalAxis,
coefficient of skewness, and coefficient of kurtosis.
- Version:
- 0.1 Feb 11, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
Calculates and prepares for display image statistics generated on closed VOI Contours.
The contours can exist on any of the three orthogonal image slices.
The user can select to display the contour statistics sorted by contour, contour and slice,
slice (contours are summed over a slice), or by a total sum.
Depending on the type of output selected by the user the contours are displayed with the following information tags:
By contour : Name, ID
By contour & slice: Name, orientation, slice, ID
By slice only: Name, orientation; slice
By total VOI: Name
Most of the statistics are generated by iterating through the set of voxels that are contained within
the closed contour. These statistic calculations take advantage of the information that is generated
with the VOIBase.getMask() function and stored inside the VOIBase class. Because the information is
generated once at the start of the calculation and stored, the performance for all statistic calculations is improved.
When the VOIBase.getMask() function is called the following information is stored in the VOIBase class:
BitSet mask of voxels inside the closed contour
Vector list of voxel positions inside the closed contour
Geometric Center of the contour.
The following statistics can be derived directly from the stored information:
-- number of voxels
-- area
-- volume
-- min, max, sum, average intensity
-- median, mode, mode count
-- standard deviation, coefficient of skewness, coefficient of kurtosis, center of mass
-- geometric center
When the AlgorithmVOIProps is instantiated from a dialog, the user is able to select the
statistics to calculate. The list of selected statistics is passed to the AlgorithmVOIProps
and only the statistics requested by the user are calculated. When AlgorithmVOIProps is
accessed through another algorithm, all statistics are automatically calculated.
Median statistics (median, mode, mode count) are calculated in a function that takes the
list of voxels as input, can be used on a single contour or on a group of contours.
Standard deviation statistics are calculated in a function that takes the list of voxel positions,
can be used on a single contour or on a group of contours.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Fields inherited from interface gov.nih.mipav.model.structures.VOIStatisticList
areaDescription, asymmetryIndexDescription, avgIntensity, axisDescription, circularityDescription, deviationDescription, eccentricityDescription, fractalDimensionBoxCountDescription, fractalDimensionEuclideanDistanceDescription, geometricCenterDescription, invariantMoment1Description, invariantMoment2Description, invariantMoment3Description, invariantMoment4Description, invariantMoment5Description, invariantMoment6Description, invariantMoment7Description, kurtosisDescription, largestDistanceDescription, largestSliceDistanceDescription, majorAxisDescription, massCenterDescription, maxIntensity, maxWidthDescription, meanCurvatureDescription, meanNegativeCurvatureDescription, median, minIntensity, minorAxisDescription, mode, modeCount, numberOfIndentationsCurvatureDescription, numberOfIndentationsHullDescription, numberOfStatistics, perimeterDescription, quantityDescription, skewnessDescription, solidityDescription, statisticDescription, stdDevCurvatureDescription, sumIntensities, surfaceAreaDescription, volumeDescription
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected java.lang.String |
addScannerLabels(java.lang.String baseString,
WildMagic.LibFoundation.Mathematics.Vector3f currentPt) |
DOCUMENT ME!
|
void |
finalize() |
Prepares this class for destruction.
|
float |
getArea() |
Gets the area of the VOI; return area defined by the VOI.
|
java.lang.String |
getAsymmetryIndex() |
|
float |
getAvgInten() |
Gets the average intensity of the VOI return average intensity of image defined by the VOI.
|
float |
getAvgIntenB() |
Gets the average intensity of the Blue channel of VOI return average intensity of the Blue channel of image
defined by the VOI.
|
float |
getAvgIntenG() |
Gets the average intensity of the Green channel of VOI return average intensity of the Green channel of image
defined by the VOI.
|
float |
getAvgIntenR() |
Gets the average intensity of the Red channel of VOI return average intensity of the Red channel of image defined
by the VOI.
|
java.lang.String |
getCenterOfMass() |
Gets the the center of mass of the VOI ; return center of mass defined by the VOI.
|
java.lang.String |
getCenterOfMassB() |
Gets the the blue center of mass of the VOI ; return blue center of mass defined by the VOI.
|
java.lang.String |
getCenterOfMassG() |
Gets the the green center of mass of the VOI ; return green center of mass defined by the VOI.
|
java.lang.String |
getCenterOfMassR() |
Gets the the red center of mass of the VOI ; return red center of mass defined by the VOI.
|
java.lang.String |
getCircularity() |
Gets the circularity of the VOI.
|
float |
getEccentricity() |
Gets the eccentricity of the VOI: 1 = line, 0 = circle; return eccentricity of the VOI.
|
double |
getFractalDimensionBoxCount() |
|
double |
getFractalDimensionEuclideanDistance() |
|
java.lang.String |
getGeometricCenter() |
Gets the the geometric center of the VOI ; return geometric center defined by the VOI.
|
float |
getKurtosis() |
Gets the coefficient of kurtosis of the pixel values in the VOI
|
float |
getKurtosisB() |
Gets the coefficient of kurtosis of the blue pixel values in the VOI
|
float |
getKurtosisG() |
Gets the coefficient of kurtosis of the green pixel values in the VOI
|
float |
getKurtosisR() |
Gets the coefficient of kurtosis of the red pixel values in the VOI
|
java.lang.String |
getLargestDistance() |
Gets the largest line segment totally contained within a 3D VOI (in terms of res).
|
java.lang.String |
getLargestSliceDistance() |
Gets the largest line segment totally contained within a VOI slice (in terms of res).
|
float |
getMajorAxis() |
Gets the major axis of VOI (only valid for 2D object); return major axis length of the VOI.
|
float |
getMaxIntensity() |
Gets the maximum intensity of the VOI return average intensity of image defined by the VOI.
|
float |
getMaxIntensityBlue() |
Gets the maximum intensity of the Blue channel for the VOI return average intensity of image defined by the VOI.
|
float |
getMaxIntensityGreen() |
Gets the maximum intensity of the Green channel for the VOI return average intensity of image defined by the VOI.
|
float |
getMaxIntensityRed() |
Gets the maximum intensity of the Red channel for the VOI return average intensity of image defined by the VOI.
|
java.lang.String |
getMeanCurvature() |
|
java.lang.String |
getMeanNegativeCurvature() |
|
float |
getMedian() |
Gets the median
|
float |
getMedianB() |
Gets the median of the Blue channel of image
defined by the VOI.
|
float |
getMedianG() |
Gets the median of the Green channel of image
defined by the VOI.
|
float |
getMedianR() |
Gets the median of the Red channel of image defined
by the VOI.
|
float |
getMinIntensity() |
Gets the minimum intensity of the VOI return average intensity of image defined by the VOI.
|
float |
getMinIntensityBlue() |
Gets the minimum intensity of the Blue channel for the VOI return average intensity of image defined by the VOI.
|
float |
getMinIntensityGreen() |
Gets the minimum intensity of the Green channel for the VOI return average intensity of image defined by the VOI.
|
float |
getMinIntensityRed() |
Gets the minimum intensity of the Red channel for the VOI return average intensity of image defined by the VOI.
|
float |
getMinorAxis() |
Gets the minor axis of VOI (only valid for 2D object); return minor axis length of the VOI.
|
float |
getMode() |
Gets the mode
|
float |
getModeB() |
Gets the mode of the Blue channel of image
defined by the VOI.
|
int |
getModeCount() |
Gets the mode
|
int |
getModeCountB() |
Gets the mode of the Blue channel of image
defined by the VOI.
|
int |
getModeCountG() |
Gets the mode of the Green channel of image
defined by the VOI.
|
int |
getModeCountR() |
Gets the mode of the Red channel of image defined
by the VOI.
|
float |
getModeG() |
Gets the mode of the Green channel of image
defined by the VOI.
|
float |
getModeR() |
Gets the mode of the Red channel of image defined
by the VOI.
|
java.lang.String |
getNumberOfIndentationsCurvture() |
|
java.lang.String |
getNumberOfIndentationsHull() |
|
int |
getNVoxels() |
Gets the the number of pixels return number of pixels defined by the VOI.
|
java.lang.String |
getPerimeter() |
Gets the perimeter of the VOI (in terms of res).
|
float |
getPrincipalAxis() |
Gets the principle axis of VOI (only valid for 2D object); return pricipal axis angle of the VOI.
|
int |
getProcessType() |
Reports if algorithm is performing calcs per slice, per contour, or for entire VOI.
|
java.lang.String[] |
getScannerPositionLabels(WildMagic.LibFoundation.Mathematics.Vector3f position) |
Gets position data to display in message bar - for DICOM and MINC images, gives patient position as well.
|
float |
getSkewness() |
Gets the coefficient of skewness of the pixel values in the VOI
|
float |
getSkewnessB() |
Gets the coefficient of skewness of the blue pixel values in the VOI
|
float |
getSkewnessG() |
Gets the coefficient of skewness of the green pixel values in the VOI
|
float |
getSkewnessR() |
Gets the coefficient of skewness of the red pixel values in the VOI
|
java.lang.String |
getSolidity() |
Gets the solidity of the VOI.
|
float |
getStdDev() |
Gets the standard deviation of image intensities return standard deviation of image intensities defined by the
VOI.
|
float |
getStdDevB() |
Gets the get standard deviation of image intensities (blue channel) return standard deviation of image
intensities defined by the VOI.
|
java.lang.String |
getStdDevCurvature() |
|
float |
getStdDevG() |
Gets the standard deviation of image intensities (green channel) return standard deviation of image intensities
defined by the VOI.
|
float |
getStdDevR() |
Gets the standard deviation of image intensities (red channel) return standard deviation of image intensities
defined by the VOI.
|
float |
getSumIntensities() |
Gets the sum of image intensities defined by the VOI
|
float |
getSumIntensitiesB() |
Gets the sum of blue channel mage intensities defined by the VOI
|
float |
getSumIntensitiesG() |
Gets the sum of green channel image intensities defined by the VOI
|
float |
getSumIntensitiesR() |
Gets the sum of red channel image intensities defined by the VOI
|
float |
getSurfaceArea() |
Gets the surfaceArea of the VOI; return surfaceArea defined by the VOI.
|
ViewVOIVector |
getVOIList() |
gets the selected VOIset
|
VOIStatisticalProperties |
getVOIProperties(VOI aVOI) |
DOCUMENT ME!
|
float |
getVolume() |
Gets the volume of the VOI; return volume defined by the VOI.
|
protected int |
indexOf(java.lang.String statistic) |
|
private void |
initialiseDataHolders(int numberOfVOIs) |
DOCUMENT ME!
|
boolean |
isColor() |
Accessor that indicates if the source image is a color image.
|
java.lang.String[] |
makeStatisticListDescriptions() |
Creates the list of labels to use in the checkboxes.
|
void |
runAlgorithm() |
Begins execution of the software.
|
void |
setConsecutiveNegativeNeeded(int consecutiveNegativeNeeded) |
|
void |
setDistanceFlag(boolean distanceFlag) |
Sets whether the largest distance is calculated.
|
void |
setDoOnlyActiveContours(boolean doActive) |
Sets the flag for calculating totals ONLY for active contours
|
void |
setNegativeCurvatureNeeded(double negativeCurvatureNeeded) |
|
void |
setNegativeHysteresisFraction(double negativeHysteresisFraction) |
|
void |
setPositiveHysteresisFraction(double positiveHysteresisFraction) |
|
void |
setPrecisionDisplay(int numDecimal,
boolean doForce) |
Sets the String float formatter to trim to numDecimal number of decimals.
|
void |
setSelectedStatistics(boolean[] checkList) |
Sets the list of selected statistics to calculate.
|
void |
setSelectedVOI(VOI aVOI) |
DOCUMENT ME!
|
void |
setShowTotals(boolean totals) |
tells the algorithm to total the property calculations.
|
void |
setSliceDistanceFlag(boolean sliceDistanceFlag) |
Sets whether the largest slice distance is calculated.
|
void |
setSmoothCurvature(boolean smoothCurvature) |
|
void |
setVOIList(ViewVOIVector vvv) |
sets the selected VOIset and the data set data storage sizes based on the number of curves in the Vector.
|
void |
setVOIList(javax.swing.ListModel list) |
DOCUMENT ME!
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
processType
protected int processType
How the VOI calculations should be performed (entire, contour, slice).
-
sliceDistanceFlag
protected boolean sliceDistanceFlag
Whether or not to calculate largest slice distance, true by default
-
distanceFlag
protected boolean distanceFlag
Whether or not to calculate largest distance (only 3D), true by default
-
Constructor Detail
-
AlgorithmVOIProps
public AlgorithmVOIProps(ModelImage srcImg,
int pType,
JPanelPixelExclusionSelector.RangeType rangeFlag,
ViewVOIVector voiSet)
constructor. note that if there are no VOIs to act on, this constructor returns quietly.
- Parameters:
srcImg - image model that contain the VOIpType - list of items to perform the statistics operations onrangeFlag - Whether the range of values specified by the statistics generator should be ignoredvoiSet - The VOIs that will be calculated
-
AlgorithmVOIProps
public AlgorithmVOIProps(ModelImage srcImg,
ViewVOIVector voiSet)
constructor. sets the source image of the algorithm, and presets the algorithm to calculate properties of 3D
images as a volume of interest, rather than by slice.
- Parameters:
srcImg - image model that contain the VOIvoiSet - The VOIs that will be calculated
-
Method Detail
-
getEccentricity
public float getEccentricity()
Gets the eccentricity of the VOI: 1 = line, 0 = circle; return eccentricity of the VOI.
- Returns:
- DOCUMENT ME!
-
getLargestDistance
public java.lang.String getLargestDistance()
Gets the largest line segment totally contained within a 3D VOI (in terms of res).
If this unexpectedly returns zero, make sure you have not inadvertently set distanceFlag to false.
- Returns:
- String largest distance string
-
getLargestSliceDistance
public java.lang.String getLargestSliceDistance()
Gets the largest line segment totally contained within a VOI slice (in terms of res).
If this unexpectedly returns zero, make sure you have not inadvertently set sliceDistanceFlag to false.
- Returns:
- String largest slice distance string
-
getMedian
public float getMedian()
Gets the median
- Returns:
- DOCUMENT ME!
-
getMode
public float getMode()
Gets the mode
- Returns:
- DOCUMENT ME!
-
getProcessType
public int getProcessType()
Reports if algorithm is performing calcs per slice, per contour, or for entire VOI.
- Returns:
- processType (int for process type)
-
getScannerPositionLabels
public java.lang.String[] getScannerPositionLabels(WildMagic.LibFoundation.Mathematics.Vector3f position)
Gets position data to display in message bar - for DICOM and MINC images, gives patient position as well. The
image's associated transformation must be FileInfoBase.TRANSFORM_SCANNER_ANATOMICAL, or the orientations must be
set up correctly, or else the function returns null.
- Parameters:
image - The image the point lies within.position - (x,y,z(slice)) position in FileCoordinates- Returns:
- An array of strings that represent patient position.
-
setDistanceFlag
public void setDistanceFlag(boolean distanceFlag)
Sets whether the largest distance is calculated. Defaults to true,
set to false if VOI will not complete.
- Parameters:
distanceFlag -
-
setPrecisionDisplay
public void setPrecisionDisplay(int numDecimal,
boolean doForce)
Sets the String float formatter to trim to numDecimal number of decimals.
- Parameters:
numDecimal - int number of decimalsdoForce - boolean force numDecimal or allow zero
-
setSliceDistanceFlag
public void setSliceDistanceFlag(boolean sliceDistanceFlag)
Sets whether the largest slice distance is calculated. Defaults
to true, set to false if VOI will not complete.
- Parameters:
sliceDistanceFlag -
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.MemoryMode.html������������������������������������0000775�4231163�4231163�00000035265�14537076057�025654� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.MemoryMode (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
MemoryMode() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
MemoryMode
private MemoryMode()
-
Method Detail
-
valueOf
public static StochasticForests.MemoryMode valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.BlockSparseMatrix.html�����������������������������������0000775�4231163�4231163�00000067020�14537076051�025742� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.BlockSparseMatrix (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_rows_
private int num_rows_
-
num_cols_
private int num_cols_
-
values_
private double[] values_
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTimeFitting.FitLorentz.html���������������������������������0000775�4231163�4231163�00000040455�14537076050�026305� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTimeFitting.FitLorentz (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
ydata |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitLorentz(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying Lorentz fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
Fit to function - a0/((t-a1)*(t-a1) + a2*a2)
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ydata
final double[] ydata
-
Constructor Detail
-
FitLorentz
public FitLorentz(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a0/((t-a1)*(t-a1) + a2*a2)
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DummyCostFunction3.html������������������������������0000775�4231163�4231163�00000042450�14537076053�026724� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DummyCostFunction3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
kNumResiduals |
|
private int |
N1 |
|
private int |
N2 |
|
private int |
N3 |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMidsagittal.html��������������������������������������������0000775�4231163�4231163�00000075444�14537076047�024241� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMidsagittal (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
baseNumIter |
Limits the number of iterations of Powell's algorithm when registering the original image against the flipped
image.
|
private int |
coarseAngle |
The coarse angle step to use in each dimension when registering the original image against the flipped image.
|
private int |
costFunc |
The cost function to use when registering the original image against the flipped image.
|
private int |
dof |
The number of degrees of freedom to use when registering the original image against the flipped image.
|
private boolean |
doMultiThread |
|
private boolean |
doSubsample |
Whether to use subsampling when registering the original image against the flipped image.
|
private boolean |
fastMode |
Whether to skip searching of the parameter space when registering the original image against the flipped image.
|
private int |
fineAngle |
The fine angle step to use in each dimension when registering the original image against the flipped image.
|
private int |
interp |
The interpolation method to use when registering the original image against the flipped image.
|
private boolean |
maxOfMin |
Whether to use the maximum of the minimum resolutions of the 2 images when respampling during registration
against the flipped image.
|
private int |
numMinima |
Number of minima from level 8 to test at level 4 when registering the original image against the flipped image.
|
private int |
searchAngle |
The search angles to use in each dimension (from -searchAngle to searchAngle) when
registering the original image against the flipped image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
calc35D
private void calc35D()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTimeFitting.FitGaussian.html��������������������������������0000775�4231163�4231163�00000040506�14537076050�026417� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTimeFitting.FitGaussian (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
ydata |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitGaussian(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying Gaussian fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
Fit to function - a0*exp(-(t-a1)^2/(2*(a2)^2))
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ydata
final double[] ydata
-
Constructor Detail
-
FitGaussian
public FitGaussian(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a0*exp(-(t-a1)^2/(2*(a2)^2))
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmWSinc.html��������������������������������������������������0000775�4231163�4231163�00000130616�14537076051�023006� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmWSinc (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
alphaMax |
DOCUMENT ME!
|
private double |
alphaMin |
DOCUMENT ME!
|
private double |
blueMax |
DOCUMENT ME!
|
private double |
blueMin |
DOCUMENT ME!
|
private boolean |
clip |
DOCUMENT ME!
|
private double |
greenMax |
DOCUMENT ME!
|
private double |
greenMin |
DOCUMENT ME!
|
private double |
inputMax |
DOCUMENT ME!
|
private double |
inputMin |
DOCUMENT ME!
|
private double |
redMax |
DOCUMENT ME!
|
private double |
redMin |
DOCUMENT ME!
|
private int |
rX |
DOCUMENT ME!
|
private int |
rY |
DOCUMENT ME!
|
private int |
rZ |
DOCUMENT ME!
|
private double |
scaleX |
DOCUMENT ME!
|
private double |
scaleY |
DOCUMENT ME!
|
private double |
scaleZ |
DOCUMENT ME!
|
private int |
sliceSize |
DOCUMENT ME!
|
private double[] |
volume |
Global variables.
|
private double[] |
wSincXT |
DOCUMENT ME!
|
private double[] |
wSincYT |
DOCUMENT ME!
|
private double[] |
wSincZT |
DOCUMENT ME!
|
private int |
xD |
DOCUMENT ME!
|
private int |
xdim |
DOCUMENT ME!
|
private int |
yD |
DOCUMENT ME!
|
private int |
ydim |
DOCUMENT ME!
|
private int |
zD |
DOCUMENT ME!
|
private int |
zdim |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmWSinc() |
AlgorithmWSinc - default constructor.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
finalize -
|
void |
runAlgorithm() |
Default method that is not really appropiate for this class but must be defined because this class extends
AlgorithmBase.
|
void |
setup2DWSinc(double[] vol,
int[] extents,
boolean clip) |
Setup 2D wSinc.
|
void |
setup2DWSinc(double[] vol,
int[] extents,
int[] range,
boolean clip) |
Setup 2D wSinc.
|
void |
setup2DWSincC(double[] vol,
int[] extents,
float argbMax,
boolean clip) |
Setup 2D wSinc for coor image.
|
void |
setup3DWSinc(double[] vol,
int[] extents,
boolean clip) |
Setup 3D wSinc.
|
void |
setup3DWSinc(double[] vol,
int[] extents,
int[] range,
boolean clip) |
Setup 3D wSinc.
|
void |
setup3DWSincC(double[] vol,
int[] extents,
float argbMax,
boolean clip) |
Setup 3D wSinc for color.
|
double |
wSinc2D(double x,
double y) |
2D windowed sinc function.
|
double[] |
wSinc2DC(double x,
double y) |
2D windowed sinc function for color.
|
double |
wSinc3D(double x,
double y,
double z) |
3D windowed sinc function.
|
double[] |
wSinc3DC(double x,
double y,
double z) |
3D windowed sinc function for color (3 channel images).
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
alphaMax
private double alphaMax
DOCUMENT ME!
-
alphaMin
private double alphaMin
DOCUMENT ME!
-
blueMax
private double blueMax
DOCUMENT ME!
-
blueMin
private double blueMin
DOCUMENT ME!
-
clip
private boolean clip
DOCUMENT ME!
-
greenMax
private double greenMax
DOCUMENT ME!
-
greenMin
private double greenMin
DOCUMENT ME!
-
inputMax
private double inputMax
DOCUMENT ME!
-
inputMin
private double inputMin
DOCUMENT ME!
-
redMax
private double redMax
DOCUMENT ME!
-
redMin
private double redMin
DOCUMENT ME!
-
rX
private int rX
DOCUMENT ME!
-
rY
private int rY
DOCUMENT ME!
-
rZ
private int rZ
DOCUMENT ME!
-
scaleX
private double scaleX
DOCUMENT ME!
-
scaleY
private double scaleY
DOCUMENT ME!
-
scaleZ
private double scaleZ
DOCUMENT ME!
-
sliceSize
private int sliceSize
DOCUMENT ME!
-
volume
private double[] volume
Global variables.
-
wSincXT
private double[] wSincXT
DOCUMENT ME!
-
wSincYT
private double[] wSincYT
DOCUMENT ME!
-
wSincZT
private double[] wSincZT
DOCUMENT ME!
-
xD
private int xD
DOCUMENT ME!
-
yD
private int yD
DOCUMENT ME!
-
zD
private int zD
DOCUMENT ME!
-
xdim
private int xdim
DOCUMENT ME!
-
ydim
private int ydim
DOCUMENT ME!
-
zdim
private int zdim
DOCUMENT ME!
-
Method Detail
-
setup2DWSincC
public void setup2DWSincC(double[] vol,
int[] extents,
float argbMax,
boolean clip)
Setup 2D wSinc for coor image.
- Parameters:
vol - volume comprising control points for the wSincextents - vol extents (xdim, ydim)argbMax - maximum possible color valueclip - if true clip output to range of input image
-
setup3DWSincC
public void setup3DWSincC(double[] vol,
int[] extents,
float argbMax,
boolean clip)
Setup 3D wSinc for color.
- Parameters:
vol - volume comprising control points for the wSincextents - vol extents (xdim, ydim, zdim)argbMax - maximum possible color valueclip - if true clip output to range of input image
-
wSinc3D
public final double wSinc3D(double x,
double y,
double z)
3D windowed sinc function.
- Parameters:
x - double point indexy - double point indexz - double point index- Returns:
- the wSinc3D interpolated data point
-
wSinc3DC
public double[] wSinc3DC(double x,
double y,
double z)
3D windowed sinc function for color (3 channel images).
- Parameters:
x - double point indexy - double point indexz - double point index- Returns:
- the wSinc3D interpolated data point
������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Face.html�������������������������������������������������������0000775�4231163�4231163�00000042360�14537076056�021512� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Face (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Face
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Face() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitWholeNLConModel.html��������������������������������0000775�4231163�4231163�00000041605�14537076046�026111� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitWholeNLConModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitWholeNLConModel(int nPoints,
double[] xData,
float[] yData,
double[] initial) |
Creates a new FitWholeNLConModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitWholeNLConModel
public FitWholeNLConModel(int nPoints,
double[] xData,
float[] yData,
double[] initial)
Creates a new FitWholeNLConModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.NumericDiffMethodType.html�������������������������������0000775�4231163�4231163�00000035460�14537076052�026547� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.NumericDiffMethodType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.NumericDiffMethodType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.EdgeKey.html����������������������������������������������������0000775�4231163�4231163�00000023261�14537076056�022170� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.EdgeKey (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.EdgeKey
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.scmap.html���������������������������������0000775�4231163�4231163�00000037635�14537076056�026360� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.scmap (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
-
Constructor Summary
Constructors
| Constructor |
Description |
scmap() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
prevertex
double[][] prevertex
-
constant
double[] constant
-
rectqdata
double[][] rectqdata
-
center_fix_quadnum
int center_fix_quadnum
-
center_fix_mt
double[][] center_fix_mt
-
crossratio
double[] crossratio
-
affine
double[][][] affine
-
rectaffine
double[][][] rectaffine
-
original
boolean[] original
���������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.JennrichAndSampsonFunction.html����������������������0000775�4231163�4231163�00000034067�14537076053�030446� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.JennrichAndSampsonFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Homology.html���������������������������������������������������0000775�4231163�4231163�00000030615�14537076056�022451� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Homology (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Homology
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
clear
public void clear()
�������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES_ASA.html������������������������������������������������������0000775�4231163�4231163�00000256631�14537076054�021574� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES_ASA (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class gov.nih.mipav.model.algorithms.CVODES
CVODES.CkpntMemRec, CVODES.CVadjMemRec, CVODES.CVDlsMemRec, CVODES.CVDlsMemRecB, CVODES.CVodeBMemRec, CVODES.CVodeMemRec, CVODES.DtpntMemRec, CVODES.HermiteDataMemRec, CVODES.NVector, CVODES.PolynomialDataMemRec, CVODES.SUNLinearSolver, CVODES.SUNLinearSolver_Type, CVODES.UserData
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.CVODES
ADAMS_Q_MAX, ADDON, BAND_DQ, BAND_USER, BDF_Q_MAX, BIAS1, BIAS2, BIAS3, CENTERED1, CENTERED2, CLOSERT, CONV_FAIL, CORTES, CRDOWN, CV_ADAMS, CV_ALLSENS, CV_BAD_DKY, CV_BAD_IS, CV_BAD_K, CV_BAD_T, CV_BAD_TB0, CV_BDF, CV_CENTERED, CV_CONV_FAILURE, CV_EE, CV_ERR_FAILURE, CV_FAIL_BAD_J, CV_FAIL_OTHER, CV_FIRST_QRHSFUNC_ERR, CV_FIRST_QSRHSFUNC_ERR, CV_FIRST_RHSFUNC_ERR, CV_FIRST_SRHSFUNC_ERR, CV_FORWARD, CV_FUNCTIONAL, CV_FWD_FAIL, CV_GETY_BADT, CV_HERMITE, CV_ILL_INPUT, CV_LINIT_FAIL, CV_LSETUP_FAIL, CV_LSOLVE_FAIL, CV_MEM_FAIL, CV_MEM_NULL, CV_NEWTON, CV_NN, CV_NO_ADJ, CV_NO_BCK, CV_NO_FAILURES, CV_NO_FWD, CV_NO_MALLOC, CV_NO_QUAD, CV_NO_QUADSENS, CV_NO_SENS, CV_NORMAL, CV_ONE_STEP, CV_ONESENS, CV_POLYNOMIAL, CV_QRHSFUNC_FAIL, CV_QSRHSFUNC_FAIL, CV_REIFWD_FAIL, CV_REPTD_QRHSFUNC_ERR, CV_REPTD_QSRHSFUNC_ERR, CV_REPTD_RHSFUNC_ERR, CV_REPTD_SRHSFUNC_ERR, CV_RHSFUNC_FAIL, CV_ROOT_RETURN, CV_RTFUNC_FAIL, CV_SIMULTANEOUS, CV_SRHSFUNC_FAIL, CV_SS, CV_STAGGERED, CV_STAGGERED1, CV_SUCCESS, CV_SV, CV_TOO_CLOSE, CV_TOO_MUCH_ACC, CV_TOO_MUCH_WORK, CV_TSTOP_RETURN, CV_UNREC_QRHSFUNC_ERR, CV_UNREC_QSRHSFUNC_ERR, CV_UNREC_RHSFUNC_ERR, CV_UNREC_SRHSFUNC_ERR, CV_WARNING, CV_WF, CVAhermiteFree_select, CVAhermiteGetY_select, CVAhermiteMalloc_select, CVAhermiteStorePnt_select, CVApolynomialFree_select, CVApolynomialGetY_select, CVApolynomialMalloc_select, CVApolynomialStorePnt_select, CVArhs_select, CVArhsQ_select, CVD_DGMAX, CVD_MSBJ, CVDLS_ILL_INPUT, CVDLS_JACFUNC_RECVR, CVDLS_JACFUNC_UNRECVR, CVDLS_LMEM_NULL, CVDLS_LMEMB_NULL, CVDLS_MEM_FAIL, CVDLS_MEM_NULL, CVDLS_NO_ADJ, CVDLS_SUCCESS, CVDLS_SUNMAT_FAIL, cvDlsDQJac, cvDlsFree_select, cvDlsFreeB_select, cvDlsInitialize_select, cvDlsJacBWrapper_select, cvDlsLapackSetup_select, cvDlsLapackSolve_select, cvDlsSetup_select, cvDlsSolve_select, cvEwtSet_select, cvEwtUser_select1, cvsAdvDiff_FSA_non, cvsDirectDemo_ls_Problem_1, cvSensRhs1InternalDQ_select, cvSensRhsInternalDQ_select, cvsRoberts_ASAi_dns, cvsRoberts_dns, cvsRoberts_dns_uw, cvsRoberts_dnsL, cvsRoberts_FSA_dns, DBL_EPSILON, DENSE_DQ, DENSE_USER, DGMAX, DIAG, DO_ERROR_TEST, err_con, ETACF, ETAMIN, ETAMX1, ETAMX2, ETAMX3, ETAMXF, FIRST_CALL, FIVE, FORWARD1, FORWARD2, FOUR, FOURTH, FUNC, FUZZ_FACTOR, H_BIAS, HALF, HLB_FACTOR, HMAX_INV_DEFAULT, HMIN_DEFAULT, HUB_FACTOR, HUNDRED, L_MAX, LONG_WAIT, MAX_ITERS, MIN_INC_MULT, MSBP, MSG_TIME, MSG_TIME_H, MSG_TIME_INT, MSG_TIME_TOUT, MSG_TIME_TSTOP, MSGCV_BACK_ERROR, MSGCV_BAD_ABSTOL, MSGCV_BAD_ABSTOLQ, MSGCV_BAD_ABSTOLQS, MSGCV_BAD_ABSTOLS, MSGCV_BAD_DQRHO, MSGCV_BAD_DQTYPE, MSGCV_BAD_EWT, MSGCV_BAD_EWTQ, MSGCV_BAD_EWTQS, MSGCV_BAD_EWTS, MSGCV_BAD_H0, MSGCV_BAD_HMIN_HMAX, MSGCV_BAD_IFS, MSGCV_BAD_INTERP, MSGCV_BAD_IS, MSGCV_BAD_ISM, MSGCV_BAD_ISM_IFS, MSGCV_BAD_ITASK, MSGCV_BAD_ITASKB, MSGCV_BAD_ITER, MSGCV_BAD_ITOLQ, MSGCV_BAD_ITOLQS, MSGCV_BAD_ITOLS, MSGCV_BAD_K, MSGCV_BAD_LMM, MSGCV_BAD_MAXORD, MSGCV_BAD_NS, MSGCV_BAD_NVECTOR, MSGCV_BAD_PBAR, MSGCV_BAD_PLIST, MSGCV_BAD_RELTOL, MSGCV_BAD_RELTOLQ, MSGCV_BAD_RELTOLQS, MSGCV_BAD_RELTOLS, MSGCV_BAD_SENSI, MSGCV_BAD_STEPS, MSGCV_BAD_T, MSGCV_BAD_TB0, MSGCV_BAD_TBOUT, MSGCV_BAD_TINTERP, MSGCV_BAD_TOUT, MSGCV_BAD_TSTOP, MSGCV_BAD_WHICH, MSGCV_CLOSE_ROOTS, MSGCV_CONV_FAILS, MSGCV_CVMEM_FAIL, MSGCV_ERR_FAILS, MSGCV_EWT_FAIL, MSGCV_EWT_NOW_BAD, MSGCV_EWT_NOW_FAIL, MSGCV_EWTQ_NOW_BAD, MSGCV_EWTQS_NOW_BAD, MSGCV_EWTS_NOW_BAD, MSGCV_HNIL, MSGCV_HNIL_DONE, MSGCV_INACTIVE_ROOTS, MSGCV_LINIT_FAIL, MSGCV_LSOLVE_NULL, MSGCV_MAX_STEPS, MSGCV_MEM_FAIL, MSGCV_NEG_HMAX, MSGCV_NEG_HMIN, MSGCV_NEG_MAXORD, MSGCV_NO_ADJ, MSGCV_NO_BCK, MSGCV_NO_FWD, MSGCV_NO_MALLOC, MSGCV_NO_MEM, MSGCV_NO_QUAD, MSGCV_NO_QUADSENSI, MSGCV_NO_ROOT, MSGCV_NO_SENSI, MSGCV_NO_TOL, MSGCV_NO_TOLQ, MSGCV_NO_TOLQS, MSGCV_NO_TOLS, MSGCV_NULL_ABSTOL, MSGCV_NULL_ABSTOLQ, MSGCV_NULL_ABSTOLQS, MSGCV_NULL_ABSTOLS, MSGCV_NULL_DKY, MSGCV_NULL_DKYA, MSGCV_NULL_F, MSGCV_NULL_FQ, MSGCV_NULL_G, MSGCV_NULL_P, MSGCV_NULL_Y0, MSGCV_NULL_YQS0, MSGCV_NULL_YS0, MSGCV_QRHSFUNC_FAILED, MSGCV_QRHSFUNC_FIRST, MSGCV_QRHSFUNC_REPTD, MSGCV_QRHSFUNC_UNREC, MSGCV_QSRHSFUNC_FAILED, MSGCV_QSRHSFUNC_FIRST, MSGCV_QSRHSFUNC_REPTD, MSGCV_QSRHSFUNC_UNREC, MSGCV_RHSFUNC_FAILED, MSGCV_RHSFUNC_FIRST, MSGCV_RHSFUNC_REPTD, MSGCV_RHSFUNC_UNREC, MSGCV_RTFUNC_FAILED, MSGCV_SENSINIT_2, MSGCV_SET_SLDET, MSGCV_SETUP_FAILED, MSGCV_SOLVE_FAILED, MSGCV_SRHSFUNC_FAILED, MSGCV_SRHSFUNC_FIRST, MSGCV_SRHSFUNC_REPTD, MSGCV_SRHSFUNC_UNREC, MSGCV_TOO_CLOSE, MSGCV_TOO_MUCH_ACC, MSGCV_TRET_NULL, MSGCV_WRONG_INTERP, MSGCV_YOUT_NULL, MSGD_BAD_NVECTOR, MSGD_BAD_SIZES, MSGD_BAD_TINTERP, MSGD_BAD_WHICH, MSGD_CVMEM_NULL, MSGD_JACFUNC_FAILED, MSGD_LMEM_NULL, MSGD_LMEMB_NULL, MSGD_MATCOPY_FAILED, MSGD_MATSCALEADDI_FAILED, MSGD_MATZERO_FAILED, MSGD_MEM_FAIL, MSGD_NO_ADJ, MXHNIL_DEFAULT, MXNCF, MXNEF, MXNEF1, MXSTEP_DEFAULT, NLS_MAXCOR, NUM_TESTS, ONE, ONEPSM, P1_DTOUT, P1_ETA, P1_NEQ, P1_NOUT, P1_T0, P1_T1, P1_TOL_FACTOR, POINT2, PREDICT_AGAIN, PREV_CONV_FAIL, PREV_ERR_FAIL, problem, PT1, Q_MAX, QRHSFUNC_RECVR, QSRHSFUNC_RECVR, RDIV, RHSFUNC_RECVR, RTFOUND, sensi, sensi_meth, SMALL_NEF, SMALL_NST, SRHSFUNC_RECVR, SUNLS_ATIMES_FAIL_REC, SUNLS_ATIMES_FAIL_UNREC, SUNLS_CONV_FAIL, SUNLS_GS_FAIL, SUNLS_ILL_INPUT, SUNLS_LUFACT_FAIL, SUNLS_MEM_FAIL, SUNLS_MEM_NULL, SUNLS_PACKAGE_FAIL_REC, SUNLS_PACKAGE_FAIL_UNREC, SUNLS_PSET_FAIL_REC, SUNLS_PSET_FAIL_UNREC, SUNLS_PSOLVE_FAIL_REC, SUNLS_PSOLVE_FAIL_UNREC, SUNLS_QRFACT_FAIL, SUNLS_QRSOL_FAIL, SUNLS_RES_REDUCED, SUNLS_SUCCESS, testMode, THIRTY, THREE, THRESH, TINY, TRY_AGAIN, TWELVE, TWO, UNIT_ROUNDOFF, ZERO
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private int |
CVAckpntGet(CVODES.CVodeMemRec cv_mem,
CVODES.CkpntMemRec ck_mem) |
|
private CVODES.CkpntMemRec |
CVAckpntInit(CVODES.CVodeMemRec cv_mem) |
|
private CVODES.CkpntMemRec |
CVAckpntNew(CVODES.CVodeMemRec cv_mem) |
|
private int |
CVAdataStore(CVODES.CVodeMemRec cv_mem,
CVODES.CkpntMemRec ck_mem) |
|
private boolean |
CVAhermiteMalloc(CVODES.CVodeMemRec cv_mem) |
|
private int |
CVAhermiteStorePnt(CVODES.CVodeMemRec cv_mem,
CVODES.DtpntMemRec d) |
|
private boolean |
CVApolynomialMalloc(CVODES.CVodeMemRec cv_mem) |
|
private int |
CVApolynomialStorePnt(CVODES.CVodeMemRec cv_mem,
CVODES.DtpntMemRec d) |
|
private int |
CVDlsSetJacFnB(CVODES.CVodeMemRec cv_mem,
int which,
int jacB) |
|
private int |
CVDlsSetLinearSolverB(CVODES.CVodeMemRec cv_mem,
int which,
CVODES.SUNLinearSolver LS,
double[][] A) |
|
private int |
CVodeAdjInit(CVODES.CVodeMemRec cv_mem,
int steps,
int interp) |
|
private int |
CVodeB(CVODES.CVodeMemRec cv_mem,
double tBout,
int itaskB) |
|
private int |
CVodeCreateB(CVODES.CVodeMemRec cv_mem,
int lmmB,
int iterB,
int[] which) |
|
private int |
CVodeF(CVODES.CVodeMemRec cv_mem,
double tout,
CVODES.NVector yout,
double[] tret,
int itask,
int[] ncheckPtr) |
|
private int |
CVodeGetAdjCheckPointsInfo(CVODES.CVodeMemRec cv_mem,
CVODES_ASA.CVadjCheckPointRec[] ckpnt) |
|
private CVODES.CVodeMemRec |
CVodeGetAdjCVodeBmem(CVODES.CVodeMemRec cv_mem,
int which) |
|
private int |
CVodeGetAdjY(CVODES.CVodeMemRec cv_mem,
double t,
CVODES.NVector y) |
|
private int |
CVodeGetB(CVODES.CVodeMemRec cv_mem,
int which,
double[] tret,
CVODES.NVector yB) |
|
private int |
CVodeGetNumSteps(CVODES.CVodeMemRec cv_mem,
long[] nsteps) |
|
private int |
CVodeGetQuad(CVODES.CVodeMemRec cv_mem,
double[] tret,
CVODES.NVector yQout) |
|
private int |
CVodeGetQuadB(CVODES.CVodeMemRec cv_mem,
int which,
double[] tret,
CVODES.NVector qB) |
|
private int |
CVodeGetQuadDky(CVODES.CVodeMemRec cv_mem,
double t,
int k,
CVODES.NVector dkyQ) |
|
private int |
CVodeInitB(CVODES.CVodeMemRec cv_mem,
int which,
int fB,
double tB0,
CVODES.NVector yB0) |
|
private int |
CVodeQuadInit(CVODES.CVodeMemRec cv_mem,
int fQ,
CVODES.NVector yQ0) |
|
private int |
CVodeQuadInitB(CVODES.CVodeMemRec cv_mem,
int which,
int fQB,
CVODES.NVector yQB0) |
|
private int |
CVodeQuadReInit(CVODES.CVodeMemRec cv_mem,
CVODES.NVector yQ0) |
|
private int |
CVodeQuadReInitB(CVODES.CVodeMemRec cv_mem,
int which,
CVODES.NVector yQB0) |
|
private int |
CVodeQuadSensReInit(CVODES.CVodeMemRec cv_mem,
CVODES.NVector[] yQS0) |
|
private int |
CVodeQuadSStolerances(CVODES.CVodeMemRec cv_mem,
double reltolQ,
double abstolQ) |
|
private int |
CVodeQuadSStolerancesB(CVODES.CVodeMemRec cv_mem,
int which,
double reltolQB,
double abstolQB) |
|
private int |
CVodeReInit(CVODES.CVodeMemRec cv_mem,
double t0,
CVODES.NVector y0) |
|
private int |
CVodeReInitB(CVODES.CVodeMemRec cv_mem,
int which,
double tB0,
CVODES.NVector yB0) |
|
private int |
CVodeSensReInit(CVODES.CVodeMemRec cv_mem,
int ism,
CVODES.NVector[] yS0) |
|
private int |
CVodeSetQuadErrConB(CVODES.CVodeMemRec cv_mem,
int which,
boolean errconQB) |
|
private int |
CVodeSetSensDQMethod(CVODES.CVodeMemRec cv_mem,
int DQtype,
double DQrhomax) |
|
private int |
CVodeSetStopTime(CVODES.CVodeMemRec cv_mem,
double tstop) |
|
private int |
CVodeSetUserDataB(CVODES.CVodeMemRec cv_mem,
int which,
CVODES.UserData user_dataB) |
|
private int |
CVodeSStolerancesB(CVODES.CVodeMemRec cv_mem,
int which,
double reltolB,
double abstolB) |
|
private boolean |
cvQuadAllocVectors(CVODES.CVodeMemRec cv_mem,
CVODES.NVector tmpl) |
|
private void |
PrintFinalStats(CVODES.CVodeMemRec cv_mem,
boolean sensi) |
|
private void |
runcvsAdvDiff_FSA_non() |
|
private void |
runcvsRoberts_ASAi_dns() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.CVODES
cv_lsetup, CVAhermiteGetY, CVApolynomialGetY, cvDlsInitializeCounters, CVDlsSetJacFn, CVDlsSetLinearSolver, cvDlsSetup, cvEwtSet, CVode, CVodeCreate, CVodeFree, CVodeGetDky, CVodeGetSens, CVodeInit, CVodeRootInit, CVodeSensEEtolerances, CVodeSensInit1, CVodeSetMaxErrTestFails, CVodeSetMaxNumSteps, CVodeSetSensParams, CVodeSStolerances, CVodeSVtolerances, CVodeWFtolerances, cvProcessError, cvSensRhsWrapper, ewt, ewtTestMode, f, fB, fBTestMode, fQ, fQB, fQBTestMode, fS1, fS1TestMode, fTestMode, g, Jac, JacB, JacBTestMode, N_VClone, N_VClone_Serial, N_VCloneVectorArray_Serial, N_VConst_Serial, N_VDestroy, N_VDestroyVectorArray_Serial, N_VLinearSum_Serial, N_VMaxNorm_Serial, N_VNew_Serial, N_VScale_Serial, N_VSpace_Serial, SUNDenseLinearSolver, SUNLinSolFree_Dense
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
CVODES_ASA
public CVODES_ASA()
-
Method Detail
-
CVodeSStolerancesB
private int CVodeSStolerancesB(CVODES.CVodeMemRec cv_mem,
int which,
double reltolB,
double abstolB)
-
CVodeQuadSStolerancesB
private int CVodeQuadSStolerancesB(CVODES.CVodeMemRec cv_mem,
int which,
double reltolQB,
double abstolQB)
�������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CallStatistics.html��������������������������������������0000775�4231163�4231163�00000022536�14537076051�025276� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CallStatistics (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CallStatistics
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
calls |
|
double |
time |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
CallStatistics
public CallStatistics()
������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmUnionFindComponentLabelling.html����������������������������0000775�4231163�4231163�00000063235�14537076050�027352� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmUnionFindComponentLabelling (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numNeighbor
private int numNeighbor
-
limitBins
boolean limitBins
-
parentBuffer
int[] parentBuffer
-
Constructor Detail
-
AlgorithmUnionFindComponentLabelling
public AlgorithmUnionFindComponentLabelling(ModelImage destImage,
ModelImage srcImage,
int numNeighbor,
boolean limitBins,
int binNumber)
-
Method Detail
-
run2D
public void run2D()
-
run3D
public void run3D()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������././@LongLink���������������������������������������������������������������������������������������0000644�0000000�0000000�00000000165�00000000000�011605� L����������������������������������������������������������������������������������������������������ustar �root����������������������������root�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepGlobalOptimumAlongGradient.html������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepGlobalOptimumAl0000775�4231163�4231163�00000026702�14537076053�035045� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepGlobalOptimumAlongGradient (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
kToleranceLoose |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd1.html���������������������������������������0000775�4231163�4231163�00000030465�14537076055�025005� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd1 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd1(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd1
public Fitqd1(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmThinning2D.html���������������������������������������������0000775�4231163�4231163�00000052222�14537076050�023722� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmThinning2D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DenseNormalCholeskySolver.html���������������������������0000775�4231163�4231163�00000050646�14537076051�027457� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DenseNormalCholeskySolver (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
CeresSolver.LinearSolverSummary |
Solve(CeresSolver.LinearOperator A,
double[] b,
CeresSolver.LinearSolverPerSolveOptions per_solve_options,
double[] x) |
|
CeresSolver.LinearSolverSummary |
SolveImpl(CeresSolver.DenseSparseMatrix A,
double[] b,
CeresSolver.LinearSolverPerSolveOptions per_solve_options,
double[] x) |
|
private CeresSolver.LinearSolverSummary |
SolveUsingEigen(CeresSolver.DenseSparseMatrix A,
double[] b,
CeresSolver.LinearSolverPerSolveOptions per_solve_options,
double[] x) |
|
private CeresSolver.LinearSolverSummary |
SolveUsingLAPACK(CeresSolver.DenseSparseMatrix A,
double[] b,
CeresSolver.LinearSolverPerSolveOptions per_solve_options,
double[] x) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.QuaternionParameterization.html��������������������������0000775�4231163�4231163�00000036236�14537076052�027737� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.QuaternionParameterization (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
ComputeJacobian(double[] x,
int x_start,
double[][] jacobian) |
|
int |
GlobalSize() |
|
int |
LocalSize() |
|
boolean |
Plus(double[] x,
double[] delta,
double[] x_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Plus
public boolean Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index)
- Specified by:
Plus in class CeresSolver.LocalParameterization
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmVOISimplexOpt.html������������������������������������������0000775�4231163�4231163�00000117252�14537076051�024446� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmVOISimplexOpt (MIPAV API Documentation)
-
- All Implemented Interfaces:
de.jtem.numericalMethods.calculus.function.RealFunctionOfSeveralVariables, java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmVOISimplexOpt
extends AlgorithmBase
implements de.jtem.numericalMethods.calculus.function.RealFunctionOfSeveralVariables
Perform Simplex Optimization on a VOI that has been propagated to a slice to find a transformation which will make an
affine "fit" a structure which the VOI fit on the previous slice (used in RFASegTool when propagating liver
segmentation VOIs). Minimize cost = -sum of Gradient magnitude under propagated ROI in match image
- Version:
- 1.0 July, 2003
- Author:
- Evan McCreedy
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float |
baseVOIGradMagSum |
The sum of the gradient magnitude along the polygon.
|
protected int |
costFunc |
Which cost function to use (MINDIFF or MAXSUM).
|
private int |
currentSlice |
The slice number the VOI is in.
|
private AlgorithmVOISimplexOpt.CostFunction |
func |
|
protected float[] |
gradMagBuf |
The gradient magnitude of the slice.
|
private ModelImage |
image |
The source image.
|
protected VOIContour |
inputGon |
The polygon of the VOI we are fitting.
|
static int |
MAXSUM |
Indicates that the maximum summation cost function should be used (this is the perferred cost function).
|
static int |
MINDIFF |
Indicates that the minimum difference cost function should be used (MAXSUM is perferred).
|
private float[] |
sigmas |
the kernel size to use in calculating the gradient magnitude image.
|
private int |
simplexDim |
Size of the simplex vertex array (5 == tx, ty, rot, zoomx, zoomy).
|
private float[] |
sliceBuf |
The image slice that holds the VOI we are working on.
|
protected int |
xDim |
The slice size in the x dimension.
|
protected int |
yDim |
The slice size in the y dimension.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
simplexDim
private int simplexDim
Size of the simplex vertex array (5 == tx, ty, rot, zoomx, zoomy).
-
Constructor Detail
-
AlgorithmVOISimplexOpt
public AlgorithmVOISimplexOpt(ModelImage image,
float[] sigmas,
int costFunc)
Set up the algorithm to perform optimizations on an image. The individual Polygons to optimize will be provided
later (use goOptimize())
- Parameters:
image - the image containing the VOI(s) to run the SimplexOpt algorithm onsigmas - the kernel size to use in calculating the gradient magnitude imagecostFunc - which cost function to use (MINDIFF or MAXSUM)
-
AlgorithmVOISimplexOpt
public AlgorithmVOISimplexOpt(ModelImage image,
VOIContour inputGon,
float[] sigmas,
int costFunc)
Set up the algorithm to perform optimizations on an image. To be used in conjunction with the run
method.
- Parameters:
image - the image containing the VOI(s) to run the SimplexOpt algorithm oninputGon - the Polygon to optimize the fit ofsigmas - the kernel size to use in calculating the gradient magnitude imagecostFunc - which cost function to use (MINDIFF or MAXSUM)
-
Method Detail
-
goOptimize
public VOIContour goOptimize(float[] sliceBuf,
VOIContour inputGon)
Run the simplex opt algorithm on a polygon (VOI) in a slice of an image.
- Parameters:
sliceBuf - the slice the polygon resides ininputGon - the polygon to optimize the fit of- Returns:
- the optimized polygon
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftClustering.fams_hash_entry.html��������������������0000775�4231163�4231163�00000035030�14537076047�031051� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftClustering.fams_hash_entry (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
whichCut
private short whichCut
-
which2
private int which2
-
Constructor Detail
-
fams_hash_entry
public fams_hash_entry()
-
Method Detail
-
getWhich2
public int getWhich2()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftSegmentation.kernelType.html�����������������������0000775�4231163�4231163�00000036065�14537076047�030350� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftSegmentation.kernelType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
kernelType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
kernelType
private kernelType()
-
Method Detail
-
valueOf
public static AlgorithmMeanShiftSegmentation.kernelType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHoughCircle.html��������������������������������������������0000775�4231163�4231163�00000066206�14537076046�024166� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHoughCircle (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHoughCircle
extends AlgorithmBase
This Hough transform uses (xi, yi) points in the original image space to generate x0, y0, rad points in the Hough
transform. This Hough transform module only works with binary images. Before it is used the user must
compute the gradient of an image and threshold it to obtain a binary image. Noise removal and thinning should also
be performed, if necessary, before this program is run.
The user is asked for the number of x0 bins, y0 bins, rad bins, and number of circles. The default size for x0 is
min(512, image.getExtents()[0]). The default size for y0 is min(512, image.getExtents()[1]).
The default size for rad is min(512, max(image.getExtents()[0], image.getExtents()[1]).
The default number of circles is 1. The program generates a Hough transform of the source image using the basic
equation (x - x0)**2 + (y - y0)**2 = rad**2. The program finds the circles containing the largest number of points.
The program produces a dialog which allows the user to select which circles should be drawn.
The Hough transform for the entire image is generated a separate time to find each circle.
For each (xi, yi) point in the original image not having a value of zero, calculate the first dimension value d1 =
j * (xDim - 1)/(x0 - 1), with j = 0 to x0 - 1. Calculate the second dimension value d2 = k * (yDim - 1)/(y0 - 1),
with k = 0 to y0 - 1. Calculate d3 = sqrt((x - d1)**2 + (y - d2)**2).
d3 goes from 0 to maxRad = max(xDim-1, yDim-1)/2.0. s3 is the dimension 3 scaling factor.
s3 * (rad - 1) = maxRad.
s3 = maxRad/(rad - 1)
m = d3*(rad - 1)/maxRad.
Only calculate the Hough transform for d3 <= maxRad.
Find the peak point in the x0, y0, rad Hough transform space.
Put the values for this peak point in x0Array[c], y0Array[c], radArray[c], and
countArray[c].
If more circles are to be found, then zero the houghBuffer and run through the
same Hough transform a second time, but on this second run instead of incrementing
the Hough buffer, zero the values in the source buffer that contributed to the peak
point in the Hough buffer. So on the next run of the Hough transform the source points that
contributed to the Hough peak value just detected will not be present.
Create a dialog with numCirclesFound x0Array[i], y0Array[i], radArray[i], and
countArray[i] values, where the user will select a check box to have that circle drawn.
References: 1.) Digital Image Processing, Second Edition by Richard C. Gonzalez and Richard E. Woods, Section 10.2.2
Global Processing via the Hough Transform, Prentice-Hall, Inc., 2002, pp. 587-591.
2.) Shape Detection in Computer Vision Using the Hough Transform by V. F. Leavers, Springer-Verlag, 1992.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numCircles
private int numCircles
-
Constructor Detail
-
AlgorithmHoughCircle
public AlgorithmHoughCircle(ModelImage destImg,
ModelImage srcImg,
int x0,
int y0,
int rad,
int numCircles)
AlgorithmHoughCircle.
- Parameters:
destImg - Image with lines filled insrcImg - Binary source image that has lines with gapsx0 - number of dimension 1 bins in Hough transform spacey0 - number of dimension 2 bins in Hough transform spacerad - number of dimension 3 bins in Hough transform spacenumCircles - number of circles to be found
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.RandomizedFunctor.html�����������������������������������0000775�4231163�4231163�00000031756�14537076052�026012� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.RandomizedFunctor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.RandomizedFunctor
-
-
Constructor Summary
Constructors
| Constructor |
Description |
RandomizedFunctor(double noise_factor,
long random_seed) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������gov/nih/mipav/model/algorithms/GaussianOneDimKernel.html��������������������������������������������0000775�4231163�4231163�00000026347�14537076055�024134� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
GaussianOneDimKernel (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.GaussianOneDimKernel
-
-
Constructor Summary
Constructors
| Constructor |
Description |
GaussianOneDimKernel() |
Creates a new GaussianOneDimKernel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlFrameOrientedDisc.html��������������������������������������0000775�4231163�4231163�00000024437�14537076054�025176� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlFrameOrientedDisc (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedDisc
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float |
angle |
< radius or scale
|
(package private) float |
sigma |
< center y-coordinate
|
(package private) float |
x |
|
(package private) float |
y |
< center x-coordinate
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
y
float y
< center x-coordinate
-
sigma
float sigma
< center y-coordinate
-
angle
float angle
< radius or scale
-
Constructor Detail
-
VlFrameOrientedDisc
VlFrameOrientedDisc()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBarrelDistortion.html���������������������������������������0000775�4231163�4231163�00000064242�14537076044�025254� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBarrelDistortion (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmBarrelDistortion
extends AlgorithmBase
Corrects barrel and/or pin cushion distortion for 2D images.
rsrc = a * rdest**4 + b * rdest**3 + c * rdest**2 + d * rdest
rsrc and rdest are specified in units of the min((xDim-1)/2, (yDim-1)/2)
Reference 1.) Correcting Barrel Distortion by Helmut Dersch at
http://www.all-in-one.ee/~dersch/barrel/barrel.html
Quoting from this reference:
How to determine suitable Parameters:
The correcting function is a third order polynomial. It relates the distance of a pixel from the center of the source image
(rsrc) to the corresponding distance in the corrected image (rdest) :
rsrc = ( a * rdest3 + b * rdest2 + c * rdest + d ) * rdest
The parameter d describes the linear scaling of the image. Using d=1, and a=b=c=0 leaves the image as it is.
Choosing other d-values scales the image by that amount. a,b and c distort the image. Using negative values shifts distant
points away from the center. This counteracts barrel distortion, and is the basis for the above corrections. Using positive
values shifts distant points towards the center. This counteracts pincussion distortions. Correcting using 'a' affects only
the outermost pixels of the image, while 'b' correction is more uniform. Finally, you may correct pincussion and barrel
distortions in the same image: If the outer regions exhibit barrel distortions, and the inner parts pincussion, you should
use negative 'a' and positive 'b' values. If you do not want to scale the image, you should set d so that a +b + c + d = 1.
In most cases, you will get quite satisfactory results by using just one parameter, like the 'b'-parameter in the above examples.
These examples may also serve as a guide to how large these values should be, ie around 0.1 if the distortion is quite visible,
or around 0.01 if it is very small. Simply optimize this starting value until you like your image.
Reference 2.) Lens correction model by From PanoTools.org Wiki at
http://wiki.panotools.org/Lens_correction_model
Quoting from this reference:
Usual values for a, b, and c are below 1.0, in most cases below 0.01.
The a and c parameters control more complex forms of distortion. In most cases it will be enough to optimize for the b
parameter only, which is good at correcting normal barrel distortion and pincushion distortion.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
a |
DOCUMENT ME!
|
private float |
b |
DOCUMENT ME!
|
private float |
c |
|
private float |
d |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
a
private float a
DOCUMENT ME!
-
b
private float b
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmBarrelDistortion
public AlgorithmBarrelDistortion(ModelImage destImg,
ModelImage srcImg,
float a,
float b,
float c,
float d)
AlgorithmBarrelDistortion.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!a - b - c - d -
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog11.html����������������������������������0000775�4231163�4231163�00000026636�14537076055�025674� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog11 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog11(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog11
public FitdeHoog11(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
��������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DoglegType.html������������������������������������������0000775�4231163�4231163�00000034200�14537076051�024402� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DoglegType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
DoglegType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
DoglegType
private DoglegType()
-
Method Detail
-
valueOf
public static CeresSolver.DoglegType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlFrameDisc.html����������������������������������������������0000775�4231163�4231163�00000023431�14537076054�023475� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlFrameDisc (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlFrameDisc
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float |
sigma |
< center y-coordinate
|
(package private) float |
x |
|
(package private) float |
y |
< center x-coordinate
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
y
float y
< center x-coordinate
-
sigma
float sigma
< center y-coordinate
-
Constructor Detail
-
VlFrameDisc
VlFrameDisc()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.html�����������������������������������������������������������0000775�4231163�4231163�00000531137�14537076055�021221� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class libdt
extends AlgorithmBase
libdt - OpenCV library for Dynamic Textures - version 1.0
Copyright (c) 2011-2014 Antoni B. Chan, Adeel Mumtaz, City University of Hong
Kong All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
1. Redistributions of source code must retain the above copyright notice,
this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above copyright notice,
this list of conditions and the following disclaimer in the documentation
and/or other materials provided with the distribution.
3. Neither name of copyright holders nor the names of its contributors may be
used to endorse or promote products derived from this software without
specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS ``AS IS''
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE REGENTS OR CONTRIBUTORS BE LIABLE FOR
ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Modeling, clustering, and segmenting video with mixtures of dynamic textures.
Antoni B. Chan and Nuno Vasconcelos, IEEE Trans. on Pattern Analysis and
Machine Intelligence (TPAMI), 30(5):909-926, May 2008.
Clustering Dynamic Textures with the Hierarchical EM Algorithm for Modeling
Video. Adeel Mumtaz, Emanuele Coviello, Gert R.G. Lanckriet, and Antoni B.
Chan, IEEE Trans. on Pattern Analysis and Machine Intelligence (TPAMI),
35(7):1606-1621, Jul 2013. [appendix]
A Scalable and Accurate Descriptor for Dynamic Textures using Bag of System
Trees. Adeel Mumtaz, Emanuele Coviello, Gert R.G. Lanckriet, and Antoni B.
Chan, IEEE Trans. on Pattern Analysis and Machine Intelligence (TPAMI),
37(4):697-712, Apr 2015. [appendix]
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
libdt() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
(package private) boolean |
addFrames(libdt.PatchExtractor pe,
libdt.Mat[] invid) |
|
(package private) void |
annotateVideos() |
|
(package private) void |
calculate(libdt.CovMatrix cov,
libdt.Mat data,
boolean use_unbiased) |
|
(package private) int |
checkOptionInStr(java.lang.String str,
java.lang.String opt) |
|
libdt.Mat |
clone(libdt.Mat A) |
|
libdt.Mat |
col(libdt.Mat A,
int colNum) |
|
(package private) void |
colorMask(libdt.Mat[] img,
libdt.Mat[] mask,
libdt.Mat oimg,
int border) |
|
private void |
computeAggregateStats(libdt.Estats Estat,
libdt.Mat W) |
|
private void |
computeEll(libdt.Estats Estat) |
|
(package private) void |
computePrecisionRecall() |
|
(package private) double |
computeVariance3dDouble(libdt.Mat[] input) |
|
(package private) libdt.Mat |
convertmovie(libdt.Mat[] Y,
int[] sx,
int[] sy,
int[] sc,
int[] cnorm) |
|
private void |
copyFromSrcColRange(libdt.Mat A,
libdt.Mat B,
int inclusiveStart,
int exclusiveEnd) |
|
private void |
copyTo(libdt.Mat[] A,
libdt.Mat[] B) |
|
private void |
copyTo(libdt.Mat A,
libdt.Mat B) |
|
private void |
copyToDstColRange(libdt.Mat A,
libdt.Mat B,
int inclusiveStart,
int exclusiveEnd) |
|
int |
countNonZero(libdt.Mat A) |
|
private libdt.Mat[] |
create(int frames,
int rows,
int cols,
int type) |
|
libdt.Mat |
divide(libdt.Mat A,
double q) |
|
libdt.Mat |
divide(libdt.Mat A,
libdt.Mat B) |
|
(package private) void |
dumpMatSize(libdt.Mat[] m) |
|
void |
dytex_kalman(libdt.Mat[] Y2,
libdt.Dytex dt,
java.lang.String opt,
java.util.Vector<libdt.Mat> xt,
libdt.Mat[] Vt,
libdt.Mat[] Vt1,
libdt.Mat L) |
|
private void |
dytex_mix_split(libdt.DytexMix dtm,
libdt.DytexSplitParams splitopt,
int[] ctg,
int[] csp) |
|
private void |
dytex_perturb(libdt.Dytex dtp,
double pert,
libdt.Split_mode mode,
libdt.Split_vars vars) |
|
libdt.Mat |
elementTimes(libdt.Mat A,
libdt.Mat B) |
|
(package private) java.util.Vector<libdt.Mat> |
extractY(libdt.Mat[] Yin,
java.util.Vector<java.lang.Integer> inds) |
|
private libdt.Mat |
frame(libdt.Mat vid,
int f) |
|
void |
getClasses(libdt.DytexMix dtm,
java.util.Vector<libdt.Mat> Y,
libdt.Mat LLm) |
|
void |
getClasses(libdt.DytexMix dtm,
java.util.Vector<libdt.Mat> Y,
java.util.Vector<java.lang.Integer> classes) |
|
libdt.cov_reg_type |
getCov_reg_type(int cov_reg_code) |
|
libdt.cov_type |
getCov_type(int cov_code) |
|
double |
getDouble(boolean bigEndian) |
Reads eight unsigned bytes from file.
|
int |
getInt(boolean bigEndian) |
Reads four signed bytes from file.
|
libdt.norm_type |
getNorm_type(int norm_code) |
|
(package private) java.util.Vector<libdt.Mat[]> |
getPatches(libdt.PatchExtractor pe) |
|
(package private) java.util.Vector<java.lang.Integer> |
getTagVids(java.util.Vector<java.lang.Integer> trainVidIds,
java.lang.String tag,
java.util.Vector<java.util.Vector<java.lang.String>> annlist) |
|
private java.lang.String |
getTime() |
|
libdt.Ymean_type |
getYmean_type(int Ymean_code) |
|
private libdt.Dytex |
init_multiple_dt(libdt.DytexMix dtm) |
|
(package private) libdt.Dytex |
initcluster_doretto(java.util.Vector<libdt.Mat> Y,
libdt.DytexOptions param) |
|
private boolean |
inp_minbnd(double[][] arr,
double min_bnd) |
|
private boolean |
inp_minbnd(double[] arr,
double min_bnd) |
|
(package private) libdt.CovMatrix |
inv(libdt.CovMatrix cov) |
|
(package private) void |
learnBaseDTM() |
|
(package private) void |
learnBaseDTMBoS() |
|
(package private) void |
learnDTM(libdt.VidSegm tvs,
java.lang.String vpath,
boolean dosegm) |
|
(package private) void |
learnLeastSquares(libdt.Dytex mydt,
java.util.Vector<libdt.Mat> videos) |
|
(package private) void |
learnTagDTM() |
|
(package private) void |
learnWithSplitting(libdt.DytexMix dtm,
java.util.Vector<libdt.Mat[]> Yin,
libdt.EMOptions emopt) |
|
(package private) libdt.Mat[] |
loaddat(java.lang.String filename,
java.lang.String opt) |
|
(package private) libdt.DatDescriptor |
loaddatinfo(java.lang.String filename,
int verbose) |
|
(package private) double |
logdetiid(libdt.Mat Q,
double r,
int C) |
|
(package private) libdt.Mat |
logtrick(libdt.Mat lA) |
|
(package private) libdt.Mat |
mask2Border(libdt.Mat mask,
int border,
byte[] mask_flag) |
|
(package private) libdt.Mat[] |
maxvotefilt(libdt.Mat[] I,
int sx,
int sy,
int sz,
int numclass) |
|
(package private) double |
meanOfStdVector(java.util.Vector<java.lang.Double> v) |
|
(package private) double |
minOfStdVector(java.util.Vector<java.lang.Double> v) |
|
libdt.Mat |
minus(libdt.Mat A,
double b) |
|
libdt.Mat |
minus(libdt.Mat A,
libdt.Mat B) |
|
(package private) void |
mulTransposed(libdt.Mat src,
libdt.Mat dst,
boolean transposeFirst) |
|
(package private) double |
norm2(libdt.Mat[] vid) |
|
libdt.Mat |
plus(libdt.Mat A,
double b) |
|
libdt.Mat |
plus(libdt.Mat A,
libdt.Mat B) |
|
(package private) java.util.Vector<java.lang.Double> |
plus(java.util.Vector<java.lang.Double> a,
java.util.Vector<java.lang.Double> b) |
|
(package private) void |
postmultiply(libdt.CovMatrix cov,
libdt.Mat src,
libdt.Mat dst) |
|
private void |
ppertC(libdt.Mat C,
libdt.Mat S0,
double pert) |
|
(package private) void |
printResults() |
|
(package private) void |
processNextPatch(libdt.PatchExtractor pe) |
|
(package private) void |
processVideoTesting(libdt.Dytex dt,
libdt.Mat vin,
libdt.Mat Yout) |
|
(package private) void |
processVideoTraining(libdt.Dytex mydt,
libdt.Mat vin,
libdt.Mat Yout,
libdt.Mat Yout_mean) |
|
void |
read(libdt.CovMatrix cm) |
|
void |
read(libdt.Dytex dt) |
|
void |
read(libdt.DytexMix dtm) |
|
void |
read(libdt.DytexOptions opt) |
|
void |
read(java.lang.String name,
boolean[] val) |
|
void |
read(java.lang.String name,
byte[] val) |
|
void |
read(java.lang.String name,
double[] val) |
|
void |
read(java.lang.String name,
int[] val) |
|
void |
read(java.lang.String name,
libdt.Mat mtx) |
|
void |
read(java.lang.String name,
java.util.Vector<java.lang.Integer> vec) |
|
void |
read(javax.vecmath.Point3i p) |
|
(package private) void |
readGtruthFile(java.lang.String fpath,
java.util.Vector<java.lang.String> vlist,
java.util.Vector<java.util.Vector<java.lang.String>> annlist,
java.util.Vector<java.lang.String> taglist) |
|
void |
readHeader(java.lang.String str) |
|
(package private) void |
readTrialInfo(java.lang.String fpath,
java.util.Vector<java.util.Vector<java.lang.Integer>> trainVidIds,
java.util.Vector<java.util.Vector<java.lang.Integer>> testVidIds) |
|
(package private) void |
readVecDouble(java.lang.String name,
java.util.Vector<java.lang.Double> vec) |
|
void |
readVectorString(java.lang.String name,
java.util.Vector<java.lang.String> vec) |
|
(package private) void |
readVecVecDouble(java.lang.String name,
java.util.Vector<java.util.Vector<java.lang.Double>> vec) |
|
private void |
reduce(libdt.Mat[] vid,
libdt.Mat out,
int reduceOp) |
|
private void |
reduce(libdt.Mat src,
libdt.Mat dst,
int dim,
int rtype) |
|
private libdt.DytexMix |
reduceWithSplitting(libdt.DytexMix dtm,
libdt.HEMOptions hopt) |
|
private void |
regularize(libdt.CovMatrix cov) |
|
private void |
regularize(libdt.Dytex dy,
boolean regA) |
|
libdt.Mat[] |
repeat(libdt.Mat img,
int nf) |
|
void |
repeat(libdt.Mat src,
int ny,
int nx,
libdt.Mat dst) |
|
private void |
resize(java.util.Vector<libdt.Mat> matVec,
int n) |
|
private void |
resizeDouble(java.util.Vector<java.lang.Double> doubleVec,
int n) |
|
void |
runAlgorithm() |
#include #include #include #include
#include #include #include
#include "opencv/cv.h" #include "opencv/cxcore.h" #include "opencv/highgui.h"
#include "options.h" #include "utils/libutils.h" #include "stats/libstats.h"
#include "video/libvideo.h" #include "dytex/libdytex.h" #include
"platInd/platInd.hpp" #include "bufferer/Bufferer.hpp"
using namespace cv; using namespace std;
|
(package private) void |
runEM(libdt.DytexMix dtm,
java.util.Vector<libdt.Mat[]> Yin,
libdt.EMOptions emopt) |
|
private void |
runHEM(libdt.DytexMix dtm,
libdt.DytexMix hembest,
libdt.HEMOptions hopt,
java.util.Vector<java.lang.Integer> classes) |
|
(package private) void |
scaleRows(libdt.Mat m,
libdt.Mat w) |
|
(package private) libdt.Mat[] |
segm_mask(libdt.PatchBatchExtractor pbe,
java.util.Vector<java.lang.Integer> oldclasses) |
|
(package private) libdt.Mat[] |
segm_mask(libdt.VidSegm vs) |
|
(package private) libdt.Mat[] |
segmentVideo(libdt.VidSegm vs,
libdt.Mat[] vid,
int stepxy,
int stepz,
int filtxy,
int filtz,
libdt.Mat[] osmaskout) |
|
void |
segmentVideoSequence(libdt.VidSegm vs,
java.util.Vector<java.lang.String> paths,
int stepxy,
int stepz,
int filtxy,
int filtz,
java.lang.String vidPath2) |
|
private void |
setRegularizer(libdt.CovMatrix cov,
libdt.cov_reg_type regopt,
double regval) |
|
private void |
setRegularizer(libdt.Dytex dy,
libdt.DytexRegOptions dtreg) |
|
(package private) void |
setupKFB(libdt.DytexMix dtm,
int tau) |
|
(package private) java.lang.String[] |
strtok2(java.lang.String str,
java.lang.String del) |
|
(package private) libdt.Mat[] |
subvid(libdt.Mat[] vid,
int frange_start_inclusive,
int frange_end_exclusive) |
|
(package private) libdt.Mat[] |
subvid(libdt.Mat[] vid,
int zstart,
int zend,
int ystart,
int yend,
int xstart,
int xend) |
|
(package private) libdt.Mat[] |
subvid(libdt.Mat[] vid,
libdt.Range box_z,
libdt.Range box_y,
libdt.Range box_x) |
|
double |
sum(libdt.Mat A) |
|
void |
test_BoSClassification() |
|
void |
test_HEM() |
|
void |
test_HEMDTM() |
|
int |
test_videoSegm(java.lang.String paramFile) |
|
libdt.Mat[] |
times(libdt.Mat[] A,
double q) |
|
libdt.Mat |
times(libdt.Mat A,
double q) |
|
libdt.Mat |
times(libdt.Mat A,
libdt.Mat B) |
|
(package private) libdt.Mat |
toFullMatrix(libdt.CovMatrix cov) |
|
(package private) long |
total(libdt.Mat vid) |
|
(package private) long |
total(libdt.Mat[] vid) |
|
double |
trace(libdt.Mat A) |
|
libdt.Mat |
transpose(libdt.Mat A) |
|
(package private) libdt.Mat |
vectorize(libdt.Mat vid,
boolean flag_col) |
|
void |
write(libdt.CovMatrix cm) |
|
void |
write(libdt.Dytex dt) |
|
void |
write(libdt.DytexMix dtm) |
|
void |
write(libdt.DytexOptions opt) |
|
void |
write(java.lang.String name,
boolean val) |
|
void |
write(java.lang.String name,
byte val) |
|
void |
write(java.lang.String name,
double val) |
|
void |
write(java.lang.String name,
int val) |
|
void |
write(java.lang.String name,
libdt.Mat mtx) |
|
void |
write(java.lang.String name,
java.util.Vector<java.lang.Integer> vec) |
|
void |
write(javax.vecmath.Point3i p) |
|
void |
writeDouble(double data,
boolean bigEndian) |
Writes a double as eight bytes to a file.
|
long |
writeHeader(java.lang.String str) |
|
void |
writeInt(int data,
boolean bigEndian) |
Writes an int as four bytes to a file.
|
void |
writeLong(long data,
boolean bigEndian) |
Writes a long as eight bytes to a file.
|
void |
writeSize(long spos) |
|
void |
writeVecDouble(java.lang.String name,
java.util.Vector<java.lang.Double> vec) |
|
void |
writeVecVecDouble(java.lang.String name,
java.util.Vector<java.util.Vector<java.lang.Double>> vec) |
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex
variable zr + j*zi.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
endian
private boolean endian
-
debug
private boolean debug
-
Method Detail
-
runAlgorithm
public void runAlgorithm()
#include #include #include #include
#include #include #include
#include "opencv/cv.h" #include "opencv/cxcore.h" #include "opencv/highgui.h"
#include "options.h" #include "utils/libutils.h" #include "stats/libstats.h"
#include "video/libvideo.h" #include "dytex/libdytex.h" #include
"platInd/platInd.hpp" #include "bufferer/Bufferer.hpp"
using namespace cv; using namespace std;
- Specified by:
runAlgorithm in class AlgorithmBase
-
test_HEM
public void test_HEM()
-
subvid
libdt.Mat[] subvid(libdt.Mat[] vid,
int zstart,
int zend,
int ystart,
int yend,
int xstart,
int xend)
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex
variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
writeDouble
public final void writeDouble(double data,
boolean bigEndian)
throws java.io.IOException
Writes a double as eight bytes to a file.
- Parameters:
data - Data to be written to file.bigEndian - true indicates big endian byte order,
false indicates little endian.- Throws:
java.io.IOException - if there is an error writing the file
-
writeLong
public final void writeLong(long data,
boolean bigEndian)
throws java.io.IOException
Writes a long as eight bytes to a file.
- Parameters:
data - Data to be written to file.bigEndian - true indicates big endian byte order,
false indicates little endian.- Throws:
java.io.IOException - if there is an error writing the file
-
writeInt
public final void writeInt(int data,
boolean bigEndian)
throws java.io.IOException
Writes an int as four bytes to a file.
- Parameters:
data - Data to be written to file.bigEndian - true indicates big endian byte order,
false indicates little endian.- Throws:
java.io.IOException - if there is an error writing the file
-
convertmovie
libdt.Mat convertmovie(libdt.Mat[] Y,
int[] sx,
int[] sy,
int[] sc,
int[] cnorm)
-
segmentVideoSequence
public void segmentVideoSequence(libdt.VidSegm vs,
java.util.Vector<java.lang.String> paths,
int stepxy,
int stepz,
int filtxy,
int filtz,
java.lang.String vidPath2)
-
learnBaseDTM
void learnBaseDTM()
-
learnTagDTM
void learnTagDTM()
-
readGtruthFile
void readGtruthFile(java.lang.String fpath,
java.util.Vector<java.lang.String> vlist,
java.util.Vector<java.util.Vector<java.lang.String>> annlist,
java.util.Vector<java.lang.String> taglist)
-
annotateVideos
void annotateVideos()
-
printResults
void printResults()
-
learnBaseDTMBoS
void learnBaseDTMBoS()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmIAGCWD.html�������������������������������������������������0000775�4231163�4231163�00000057006�14537076046�022726� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmIAGCWD (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
alphaBright |
|
private double |
alphaDim |
|
private double |
Tau |
|
private double |
Taut |
|
private double |
Tt |
Reference: Gang Cao, Lihui Huang, Huawei Tian, Xianglin Huang, Yongbin Wang, Ruicong Zhi.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
Tt
private double Tt
Reference: Gang Cao, Lihui Huang, Huawei Tian, Xianglin Huang, Yongbin Wang, Ruicong Zhi.
Contrast enhancement of brightness-distorted images by improved adaptive gamma correction,
Computers and Electrical Engineering, vol. 66: 569-582, 2018
-
alphaDim
private double alphaDim
-
Constructor Detail
-
AlgorithmIAGCWD
public AlgorithmIAGCWD()
-
AlgorithmIAGCWD
public AlgorithmIAGCWD(ModelImage destImg,
ModelImage srcImg,
double Tt,
double Taut,
double Tau,
double alphaBright,
double alphaDim)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd11.html��������������������������������������0000775�4231163�4231163�00000030506�14537076055�025062� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd11 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd11(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd11
public Fitqd11(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog5.html�����������������������������������0000775�4231163�4231163�00000026621�14537076055�025611� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog5 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog5(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog5
public FitdeHoog5(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMorphology3D.html�������������������������������������������0000775�4231163�4231163�00000264135�14537076047�024322� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMorphology3D (MIPAV API Documentation)
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
private class |
AlgorithmMorphology3D.intObject |
Simple class to temporarily store the object's size, ID and seed index value.
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMorphology3D(ModelImage srcImg,
int kernelType,
float sphereDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage) |
Creates a new AlgorithmMorphology3D object.
|
AlgorithmMorphology3D(ModelImage srcImg,
ModelImage destImg,
int kernelType,
float sphereDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage) |
Creates a new AlgorithmMorphology3D object.
|
AlgorithmMorphology3D(ModelImage srcImg,
ModelImage destImg,
ModelImage maskImage,
int kernelType,
float sphereDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage) |
Creates a new AlgorithmMorphology3D object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
backgroundDistanceMap(boolean returnFlag) |
Generates a Euclidian distance map of the background.
|
private void |
borderClearing(boolean returnFlag) |
Removes objects that touch (i.e., are connected to) the border
|
private void |
deleteObjects(int min,
int max,
boolean returnFlag) |
Deletes objects larger than maximum size indicated and objects smaller than the indicated minimum size.
|
private void |
dilate(boolean returnFlag,
int iters) |
Dilates a boolean, unsigned byte, or unsigned short image using the indicated kernel and the indicated number of
iterations.
|
private void |
distanceMap(boolean returnFlag) |
Generates a Euclidian distance map.
|
private void |
distanceMapForShapeInterpolation(boolean returnFlag) |
|
private void |
erode(boolean returnFlag,
int iters) |
Erodes a boolean, unsigned byte, or unsigned short image using the indicated kernel and the indicated number of
iterations.
|
private void |
fillHoles(boolean returnFlag) |
Fill the holes inside the cell region blocks.
|
private void |
fillHolesRegion(int stIndex,
short floodValue,
short objValue) |
3D flood fill that fill the holes insize the cell region block.
|
void |
finalize() |
Prepares this class for destruction.
|
void |
findEdges(int edgeType,
boolean returnFlag) |
Finds the edges of objects.
|
private int |
floodFill(short[] idBuffer,
int stIndex,
short floodValue,
short objValue) |
3D flood fill that forms a short mask.
|
private void |
geodesicDilation(boolean returnFlag,
int geodesicSize) |
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
geodesicErosion(boolean returnFlag,
int geodesicSize) |
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
void |
identifyObjects(boolean returnFlag) |
Labels each object in an image with a different integer value.
|
private boolean |
isEndpoint(int pix,
short[] tmpBuffer) |
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
|
private void |
makeKernel(int kernelType) |
Generates a kernel of the indicated type.
|
private void |
makeSphericalKernel() |
Generates a spherical kernel of a specific diameter.
|
private boolean |
onePixel(short[] buffer,
int index,
int sliceSize,
int xDim) |
Used by ultimate erode to simplify code a little.
|
private void |
particleAnalysis() |
Take a mask like image and performs an analysis.
|
void |
prune(int iter,
boolean returnFlag) |
This method is to be applied on skeletonized images: it removes all branches which are iter or less pixels in
length.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setAlgorithm(int method) |
Sets the algorithm type (i.e. erode, dilate)
|
void |
setImage(ModelImage img) |
Sets new source image.
|
void |
setKernel(java.util.BitSet kernel,
int dimXY,
int dimZ) |
Sets user defined square kernels.
|
void |
setMinMax(int _min,
int _max) |
Sets the bounds of object size used to delete objects.
|
void |
setPixDistance(float dist) |
Used in the ultimate erode function to remove all eroded points less than the distance specified in pixel units.
|
void |
showKernel() |
Display kernel as 1 or 0 in the debug window.
|
void |
skeletonize(int pruningPixels,
boolean returnFlag) |
Skeletonizes the image by using a lookup table to repeatedly remove pixels from the edges of objects in a binary
image, reducing them to single pixel wide skeletons.
|
private int |
thin(int pass,
int slice,
int[] table) |
This a thinning algorithm used to do half of one layer of thinning (which layer is dictated by whether pass is
even or odd).
|
private void |
ultimateErode(boolean returnFlag) |
Erodes to a single point.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
edgingType
private int edgingType
Edge type.
-
entireImage
private boolean entireImage
if true, indicates that the VOIs should NOT be used and that entire image should be processed.
-
kDimXY
private int kDimXY
Kernel dimension.
-
kDimZ
private int kDimZ
DOCUMENT ME!
-
pixDist
private float pixDist
DOCUMENT ME!
-
maskImage
private ModelImage maskImage
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
-
Constructor Detail
-
AlgorithmMorphology3D
public AlgorithmMorphology3D(ModelImage srcImg,
int kernelType,
float sphereDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage)
Creates a new AlgorithmMorphology3D object.
- Parameters:
srcImg - source image modelkernelType - kernel size (i.e. connectedness)sphereDiameter - only valid if kernelType == SIZED_SPHERE and represents the width of a circle in the
resolution of the imagemethod - setup the algorithm method (i.e. erode)iterD - number of times to dilateiterE - number of times to erodepruningPix - the number of pixels to pruneedType - the type of edging to perform (inner or outer)entireImage - flag that indicates if the VOIs should NOT be used and entire image should be processed
-
AlgorithmMorphology3D
public AlgorithmMorphology3D(ModelImage srcImg,
ModelImage destImg,
int kernelType,
float sphereDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage)
Creates a new AlgorithmMorphology3D object.
- Parameters:
srcImg - source image modeldestImg - destination image modelkernelType - kernel size (i.e. connectedness)sphereDiameter - only valid if kernelType == SIZED_SPHERE and represents the width of a circle in the
resolution of the imagemethod - setup the algorithm method (i.e. erode)iterD - number of times to dilateiterE - number of times to erodepruningPix - the number of pixels to pruneedType - the type of edging to perform (inner or outer)entireImage - flag that indicates if the VOIs should NOT be used and entire image should be processed
-
AlgorithmMorphology3D
public AlgorithmMorphology3D(ModelImage srcImg,
ModelImage destImg,
ModelImage maskImage,
int kernelType,
float sphereDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage)
Creates a new AlgorithmMorphology3D object.
- Parameters:
srcImg - source image modelkernelType - dilation kernel size (i.e. connectedness)circleDiameter - dilation only valid if kernelType == SIZED_CIRCLE and represents the width of a
circle in the resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)geodesicSize - iterD - number of times to dilateiterE - number of times to erodeentireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed
-
Method Detail
-
prune
public void prune(int iter,
boolean returnFlag)
This method is to be applied on skeletonized images: it removes all branches which are iter or less pixels in
length.
- Parameters:
iter - the threshold number of pixels for the maximum length of a removed branch to bereturnFlag - if true then this operation is a step in the morph process (i.e. close)
-
setKernel
public void setKernel(java.util.BitSet kernel,
int dimXY,
int dimZ)
Sets user defined square kernels.
- Parameters:
kernel - user defined kerneldimXY - length of x and y dimensionsdimZ - length of z dimension
-
skeletonize
public void skeletonize(int pruningPixels,
boolean returnFlag)
Skeletonizes the image by using a lookup table to repeatedly remove pixels from the edges of objects in a binary
image, reducing them to single pixel wide skeletons. Based on a thinning algorithm by Zhang and Suen. There is an
entry in the table for each of the 256 possible 3x3 neighborhood configurations. An entry of '1' signifies to
delete the indicated pixel on the first pass, '2' means to delete the indicated pixel on the second pass, and '3'
indicates to delete the pixel on either pass.
- Parameters:
pruningPixels - the number of pixels to prune after skeletonizing. (should be 0 if no pruning is to be done)returnFlag - if true then this operation is a step in the morph process (i.e. close)
-
deleteObjects
private void deleteObjects(int min,
int max,
boolean returnFlag)
Deletes objects larger than maximum size indicated and objects smaller than the indicated minimum size.
- Parameters:
min - delete all objects smaller than the minimum value (pixels)max - delete all objects greater than the maximum value (pixels)returnFlag - if true then this operation is a step in the morph process (i.e. close)
-
borderClearing
private void borderClearing(boolean returnFlag)
Removes objects that touch (i.e., are connected to) the border
- Parameters:
returnFlag -
-
dilate
private void dilate(boolean returnFlag,
int iters)
Dilates a boolean, unsigned byte, or unsigned short image using the indicated kernel and the indicated number of
iterations.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)iters - number of dilation iterations
-
geodesicDilation
private void geodesicDilation(boolean returnFlag,
int geodesicSize)
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
geodesicErosion
private void geodesicErosion(boolean returnFlag,
int geodesicSize)
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
erode
private void erode(boolean returnFlag,
int iters)
Erodes a boolean, unsigned byte, or unsigned short image using the indicated kernel and the indicated number of
iterations.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. open)iters - number of erosion iterations
-
fillHolesRegion
private void fillHolesRegion(int stIndex,
short floodValue,
short objValue)
3D flood fill that fill the holes insize the cell region block.
- Parameters:
stIndex - the starting index of the seed pointfloodValue - the value to flood the region withobjValue - object ID value that idenditifies the flood region.
-
floodFill
private int floodFill(short[] idBuffer,
int stIndex,
short floodValue,
short objValue)
3D flood fill that forms a short mask.
- Parameters:
idBuffer - buffer to store flooding resultsstIndex - starting index indicating the starting location of the flood fillfloodValue - the value to flood the area withobjValue - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
isEndpoint
private boolean isEndpoint(int pix,
short[] tmpBuffer)
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
- Parameters:
pix - the index of a non-zero pixel in tmpBuffertmpBuffer - the image- Returns:
- DOCUMENT ME!
-
makeSphericalKernel
private void makeSphericalKernel()
Generates a spherical kernel of a specific diameter. Most importantly it normalizes the kernel based on the
resolution in the z-dimension. This in effect accounts for the anisotrophy in the z-dimension of typical 3D
medical images. The resultant data is stored in the kernel class variable.
-
onePixel
private boolean onePixel(short[] buffer,
int index,
int sliceSize,
int xDim)
Used by ultimate erode to simplify code a little. Checks to find a single pixels in the 27 neighborhood.
- Parameters:
buffer - input data bufferindex - index of interestsliceSize - number of voxels in the image planexDim - dimension of the image in the x direction- Returns:
- true if single pixel, false if not single pixel.
-
thin
private int thin(int pass,
int slice,
int[] table)
This a thinning algorithm used to do half of one layer of thinning (which layer is dictated by whether pass is
even or odd).
- Parameters:
pass - the number pass this execution is on the imageslice - the slice number being worked on (starting with 0);table - the table to lookup whether to delete the pixel or let it stay.- Returns:
- DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LinearOperator.html��������������������������������������0000775�4231163�4231163�00000027461�14537076051�025300� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LinearOperator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LinearOperator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LinearOperator
public LinearOperator()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEllipseToCircle.html����������������������������������������0000775�4231163�4231163�00000070734�14537076045�025014� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEllipseToCircle (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double |
cosh(double x) |
|
void |
finalize() |
finalize -
|
void |
runAlgorithm() |
Starts the program.
|
private void |
selfTest() |
|
private double |
sinh(double x) |
|
private void |
sqrtc(double zinr,
double zini,
double[] zsqr,
double[] zsqi) |
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
private void |
zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr) |
complex logarithm b = clog(a).
|
private void |
zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex multiply c = a * b.
|
private void |
zsin(double inr,
double ini,
double[] outr,
double[] outi) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
zmlt
private void zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex multiply c = a * b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zlog
private void zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr)
complex logarithm b = clog(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]ierr - int[] ierr = 0, normal return ierr = 1, z = cmplx(0.0, 0.0)
-
selfTest
private void selfTest()
������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DenseJacobianWriter.html���������������������������������0000775�4231163�4231163�00000033144�14537076051�026227� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DenseJacobianWriter (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.DenseJacobianWriter
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmPowerWatershed.Lifo.html������������������������������������0000775�4231163�4231163�00000033455�14537076050�025620� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPowerWatershed.Lifo (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
Max |
|
(package private) int[] |
Pts |
|
(package private) int |
Sp |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Lifo() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getMax
public int getMax()
-
deletePts
public void deletePts()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmPowellOpt2D.html��������������������������������������������0000775�4231163�4231163�00000114535�14537076050�024077� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPowellOpt2D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
rigid |
Flag indicating this is a rigid transformation.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
costFunction, dof, fromOrigin, maxIterations, parallelPowell, parent, pathRecorded, paths, points, savedStartPoint, tolerance, toOrigin, useJTEM
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmPowellOpt2D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector2f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] tols,
int maxIter,
boolean _rigid) |
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
adjustTranslation(TransMatrixd mat,
double sample) |
Adjust the translation of the transformation matrix by the sample pararmeter.
|
double[] |
constructPoint(double[] defaultPoint,
double[] point) |
Construct a full 7-dimension transformation vector from the partial transformation vector.
|
TransMatrixd |
convertToMatrix(TransMatrixd toOrigin,
TransMatrixd fromOrigin,
double[] vector) |
Convert a 7-dimension transformation vector to a 3x3 transformation matrix.
|
double[] |
extractPoint(double[] startPoint) |
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
|
TransMatrixd |
getMatrix(int index,
double sample) |
Obtain the transformation vector and convert to the matrix representation,
then scale the translation by sample.
|
void |
updatePoint(double[] point,
double cost,
Vectornd v) |
Store the optimal point and cost to v
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
convertToMatrix, convertToMatrix, copyPoint, createTerrain, disposeLocal, eval, getCost, getFromOrigin, getMatrix, getMaxIterations, getNumberOfVariables, getPoint, getPoint, getPoints, getToOrigin, isParallelPowell, isPathRecorded, lineMinimization, measureCost, measureCost, optimize, optimizeBlock, print, runAlgorithm, scalePoint, scalePoint, setMaxIterations, setParallelPowell, setPathRecorded, setPoints, setUseJTEM
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmPowellOpt2D
public AlgorithmPowellOpt2D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector2f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] tols,
int maxIter,
boolean _rigid)
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- Parameters:
parent - Algorithm that called this optimization.com - Center of Mass of the input image.degreeOfFreedom - Degree of freedom for transformation (must be 2, 3, 4, 5, 7).costFunc - Cost function to use.tols - Tolerance for each dimension (tols.length == degreeOfFreedom).maxIter - Maximum number of iterations._rigid - true means this was a rigid transformation
-
Method Detail
-
constructPoint
public double[] constructPoint(double[] defaultPoint,
double[] point)
Construct a full 7-dimension transformation vector from the partial transformation vector.
For missing values in point, the values in defaultPoint will be used.
Different degree of freedom has different meanings:
2: only 2 translations
3: rigid: 1 rotation and 2 translations
non-rigid: global scaling and 2 translations
4: 1 rotation, 2 translations and global scaling
5: 1 rotation, 2 translations and scalings
7: 1 rotation, 2 translations, scalings and skews
- Specified by:
constructPoint in class AlgorithmPowellOptBase- Parameters:
defaultPoint - a default full 7-dimension transformation vector.point - a partial or full transformation vector.- Returns:
- a full transformation vector.
-
convertToMatrix
public TransMatrixd convertToMatrix(TransMatrixd toOrigin,
TransMatrixd fromOrigin,
double[] vector)
Convert a 7-dimension transformation vector to a 3x3 transformation matrix.
- Specified by:
convertToMatrix in class AlgorithmPowellOptBase- Parameters:
vector - a 7-dimension transformation vector including 1 rotation, 2 translations, 2 scalings and 2 skews.toOrigin - the matrix translating the origin to some specified pointfromOrigin - the matrix translating the origin back.- Returns:
- a 3x3 transformation matrix
-
extractPoint
public double[] extractPoint(double[] startPoint)
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
- Specified by:
extractPoint in class AlgorithmPowellOptBase- Parameters:
startPoint - the start full 7-dimension transformation vector.- Returns:
- the partial or full transformation vector which will be optimized.
-
updatePoint
public void updatePoint(double[] point,
double cost,
Vectornd v)
Store the optimal point and cost to v
- Specified by:
updatePoint in class AlgorithmPowellOptBase- Parameters:
point - the optimal point.cost - the optimal cost.v - the Vectornd variable used by upper level algorithm.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmShortestPathWatershed.html����������������������������������0000775�4231163�4231163�00000071057�14537076050�026264� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmShortestPathWatershed (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numNeighbor
private int numNeighbor
-
binNumber
private int binNumber
-
imgBuffer
private int[] imgBuffer
-
merge
private boolean merge
-
Constructor Detail
-
AlgorithmShortestPathWatershed
public AlgorithmShortestPathWatershed(ModelImage destImage,
ModelImage srcImage,
int numNeighbor,
boolean limitBins,
int binNumber,
boolean merge,
double mergeThreshold)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DumpFormatType.html��������������������������������������0000775�4231163�4231163�00000034232�14537076051�025264� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DumpFormatType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
DumpFormatType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
DumpFormatType
private DumpFormatType()
-
Method Detail
-
valueOf
public static CeresSolver.DumpFormatType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBrainExtractor.UnorderedSetInt.html�������������������������0000775�4231163�4231163�00000077443�14537076044�030001� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBrainExtractor.UnorderedSetInt (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
DEFAULT_GROW |
The default growth value for reallocations of the array representing the set.
|
protected int[] |
m_aiElement |
The array storage for the set.
|
protected int |
m_iGrow |
On a reallocation, the old maximum quantity is incremented by this value.
|
protected int |
m_iMaxQuantity |
The maximum number of elements in the array.
|
protected int |
m_iNewIndex |
Support for remove and removeAt.
|
protected int |
m_iOldIndex |
Support for remove and removeAt.
|
protected int |
m_iQuantity |
The number of valid elements in the array.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
int |
append(int iElement) |
Append an element to the end of the storage array.
|
void |
compactify() |
Use exactly the amount of array storage for the current elements in the set.
|
void |
copy(AlgorithmBrainExtractor.UnorderedSetInt kSet) |
Make a deep copy of the input set.
|
boolean |
exists(int iElement) |
Search the set to see if the input element currently exists.
|
int |
get(int i) |
Retrieve the element in the array location i.
|
int |
getGrow() |
The growth value for reallocations.
|
int |
getMaxQuantity() |
The maximum quantity of elements in the set.
|
int |
getNewIndex() |
On a call to remove or removeAt, the last element in the array is potentially moved to the array location
vacated by the removed element.
|
int |
getOldIndex() |
On a call to remove or removeAt, the last element in the array is moved to the array location vacated by the
removed element.
|
int |
getQuantity() |
The current number of valid elements in the array.
|
boolean |
insert(int iElement) |
Insert an element into the set.
|
boolean |
remove(int iElement) |
Remove the specified element from the set.
|
boolean |
removeAt(int i) |
Remove the element from the set in the specified location.
|
void |
reset() |
Reset the unordered set to its initial state.
|
void |
reset(int iMaxQuantity,
int iGrow) |
Reset the unordered set to the specified state.
|
void |
set(int i,
int iElement) |
Assign the specified element to array location i.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
UnorderedSetInt
public UnorderedSetInt(int iMaxQuantity,
int iGrow)
Construct an empty unordered set with the specified maximum quantity and growth values.
- Parameters:
iMaxQuantity - The initial number of elements in the array. If the value is nonpositive, the initial
number is DEFAULT_GROW.iGrow - The growth amount for a reallocation. If a reallocation occurs, the new number of elements is
the current maximum quantity plus the growth value. If the input value is nonpositive, the growth
is set to DEFAULT_GROW.
-
Method Detail
-
getGrow
public final int getGrow()
The growth value for reallocations. If a reallocation must occur, the new maximum quantity is the current
maximum quantity plus the growth amount.
- Returns:
- The growth value.
-
getNewIndex
public final int getNewIndex()
On a call to remove or removeAt, the last element in the array is potentially moved to the array location
vacated by the removed element. The new location of the last element is retrived by this function. However,
if the last element is the one that was removed, this function returns -1. If you need the value, you must
call this function before the next call to remove or removeAt.
- Returns:
- The new location of the last element that was moved.
-
getOldIndex
public final int getOldIndex()
On a call to remove or removeAt, the last element in the array is moved to the array location vacated by the
removed element. The old location of the last element is retrived by this function. If you need the value,
you must call this function before the next call to remove or removeAt.
- Returns:
- The old location of the last element that was moved.
-
getQuantity
public final int getQuantity()
The current number of valid elements in the array. This number is less than or equal to the maximum quantity.
The elements with indices 0 through getQuantity()-1 are the valid ones.
- Returns:
- The current number of valid elements.
-
reset
public void reset(int iMaxQuantity,
int iGrow)
Reset the unordered set to the specified state. The old array is deleted. The new array has a maximum
quantity and growth value as specified by the inputs.
- Parameters:
iMaxQuantity - The new maximum quantity for the array.iGrow - The new growth value.
-
set
public final void set(int i,
int iElement)
Assign the specified element to array location i. It is necessary that 0 <= i < getMaxQuantity().
- Parameters:
i - The array location to assign to.iElement - The element to assign to array location i.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlFrameType.html����������������������������������������������0000775�4231163�4231163�00000037557�14537076054�023552� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlFrameType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
VlFrameType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
VlFrameType
private VlFrameType()
-
Method Detail
-
valueOf
public static Covdet.VlFrameType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmASM.P.html��������������������������������������������������0000775�4231163�4231163�00000024642�14537076043�022603� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmASM.P (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmASM.P
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
ModelImage |
I |
|
short |
n |
|
short[] |
t |
|
double[] |
x |
|
double[] |
y |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
P() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NelderMead.simplex_t.html��������������������������������������������0000775�4231163�4231163�00000023103�14537076056�024114� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NelderMead.simplex_t (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.NelderMead.simplex_t
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
n |
|
(package private) NelderMead.point_t[] |
p |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
simplex_t() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
simplex_t
private simplex_t()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Rat42CostFunction.html���������������������������0000775�4231163�4231163�00000034012�14537076052�027132� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Rat42CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmDEMRI3.Fit24DModel.html�������������������������������������0000775�4231163�4231163�00000041466�14537076045�024671� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDEMRI3.Fit24DModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
Fit24DModel(int nPoints,
double[] xData,
float[] yData,
double[] initial) |
Creates a new Fit24DModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
Fit24DModel
public Fit24DModel(int nPoints,
double[] xData,
float[] yData,
double[] initial)
Creates a new Fit24DModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a0 - a1*(a2**x).
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The x value of the data point.residuals - The best guess parameter values.covarMat - The derivative values of y with respect to fitting parameters.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/GenerateDGaussian.html�����������������������������������������������0000775�4231163�4231163�00000052635�14537076055�023455� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
GenerateDGaussian (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.GenerateDGaussian
-
public class GenerateDGaussian
extends java.lang.Object
Calculates an n-dimensional gaussian volume at a given scale, kernel size, and normalized derivative (through the
fourth order) in any of the dimensions. Explanation of normalized derivative: The derivative of n =
(1/sqrt(2*PI*sigma*sigma))*exp(-x*x/(2*sigma*sigma)) with respect to x = -(x/(sigma*sigma))*n. 1/2 the integral of
the derivative from -infinity to infinity with respect to x or the integral of the derivative from 0 to infinity with
respect to x = 1/(sigma * sqrt(2*PI)). Hence, the derivative is normalized by multiplying by the normalizing constant
sigma. GenerateGaussian returns the Gaussian, sigma times the first derivative of the Gaussian, sigma squared times
the second derivative of the Gaussian, sigma cubed times the third derivative of the Gaussian.
- Version:
- 0.8 Aug 4, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
denom |
denominator of gaussian coeff.
|
private int[] |
derivOrder |
derivative order in each dimension.
|
private int[] |
dimLengths |
length of function in pixel in each dim.
|
private double[] |
gaussianData |
data storage buffer.
|
private boolean |
invert |
DOCUMENT ME!
|
private int |
nDims |
number of dimensions.
|
private int[] |
pt |
temp point storage.
|
private double[] |
sigmas |
standard dev. in each direction
|
-
Constructor Summary
Constructors
| Constructor |
Description |
GenerateDGaussian(double[] data,
int[] dimLengths,
double[] sigmas,
int[] derivOrder) |
Initializes class that calculates an n-dim Gaussian.
|
GenerateDGaussian(double[] data,
int[] dimLengths,
double[] sigmas,
int[] derivOrder,
double denom) |
Initializes class that calculates an n-dim Gaussian.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calc(boolean invert) |
Starts the Gaussian calculation.
|
void |
finalize() |
Prepares this class for destruction.
|
private double |
gaussPt(int[] pt) |
Calculates the Gaussian function at a point.
|
private double |
hermite(int order,
double num) |
Factor to include when calculating derivatives.
|
ModelImage |
makeImage() |
Converts gaussian double buffer to image model object.
|
private void |
recursiveCalc(int offset,
int dim) |
Starts the Gaussian calculation.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
invert
private boolean invert
DOCUMENT ME!
-
nDims
private int nDims
number of dimensions.
-
pt
private int[] pt
temp point storage.
-
Constructor Detail
-
GenerateDGaussian
public GenerateDGaussian(double[] data,
int[] dimLengths,
double[] sigmas,
int[] derivOrder)
Initializes class that calculates an n-dim Gaussian.
- Parameters:
data - storage area of Gaussian functiondimLengths - length of function in pixels in each dimensionsigmas - standard dev. in each directionderivOrder - derivative order in each dimension
-
GenerateDGaussian
public GenerateDGaussian(double[] data,
int[] dimLengths,
double[] sigmas,
int[] derivOrder,
double denom)
Initializes class that calculates an n-dim Gaussian.
- Parameters:
data - storage area of Gaussian functiondimLengths - length of function in pixels in each dimensionsigmas - standard dev. in each directionderivOrder - derivative order in each dimensiondenom - denominator of the gaussian scale coeffient
���������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmScaleSaliency.html������������������������������������������0000775�4231163�4231163�00000112217�14537076050�024476� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmScaleSaliency (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmScaleSaliency
extends AlgorithmBase
Original source code in C and MATLAB is Copyright 1998-2004 by Timor Kadir Version 1.5
Kadir/Brady Feature detector (Scale Saliency) Code
For non-commercial use only
Ported by to Java by William Gandler
References:
1.) Saliency, Scale, and Image Description Timor Kadir and Michael Brady.
International Journal of Computer Vision. 45 (2):83-105, November 2001.
2.) Scale, Saliency, and Scene Description Timor Kadir Department of Engineering Science
Robotics Research Group, University of Oxford, Trinity Term, 2002.
3.) An affine invariant salient region detector Timor Kadir, Andrew Zisserman, and
Michael Brady, European Conference on Computer Vision 2004. Pages 228 - 241.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
startScale
private int startScale
-
stopScale
private int stopScale
-
sigma
private double sigma
-
fastplog
private boolean fastplog
-
sliceSize
private int sliceSize
-
Constructor Detail
-
AlgorithmScaleSaliency
public AlgorithmScaleSaliency(ModelImage srcImg,
int startScale,
int stopScale,
int mode,
int nbins,
double sigma,
double wt,
double yt)
- Parameters:
srcImg - Source imagestartScale - stopScale - mode - nbins - Number of bins (has 256 for Parzen window PDF estimation)sigma - for Parzen windowwt - Threshold on inter-scale saliency valuesyt - Fraction of saliency maximum value used as threshold
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmShortestPathWatershed.indexValueComparator.html�������������0000775�4231163�4231163�00000030015�14537076050�032404� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmShortestPathWatershed.indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping2.stpfun3.html������������������������������0000775�4231163�4231163�00000047053�14537076056�026734� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping2.stpfun3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) boolean[] |
cmplx |
|
(package private) int[] |
left |
|
(package private) int |
n |
|
(package private) int |
nb |
|
(package private) double[][] |
nmlen |
|
(package private) double[][] |
qdat |
|
(package private) int[] |
right |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NESolve
analyticJacobian, btrack, chiSquared, details, fparam, fvc, initialJacobianIdentity, itncount, LINE_SEARCH, NO_SCALING, nofun, path, scale, SCALING_WITH_SCALE, SCALING_WITHOUT_SCALE, termcode, TRUST_REGION, x0, xf
-
Constructor Summary
Constructors
| Constructor |
Description |
stpfun3(boolean initialJacobianIdentity,
double[] x0,
double[] fparam,
boolean analyticJacobian,
double[][] scale,
java.util.Vector<java.lang.Double> path,
double[] btrack,
int trace,
int method,
int maxIterations,
double fvectol,
double steptol,
double maxStepSize,
double details11,
int scaling,
int n,
int nb,
double[] beta,
double[][] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
stpfun3
public stpfun3(boolean initialJacobianIdentity,
double[] x0,
double[] fparam,
boolean analyticJacobian,
double[][] scale,
java.util.Vector<java.lang.Double> path,
double[] btrack,
int trace,
int method,
int maxIterations,
double fvectol,
double steptol,
double maxStepSize,
double details11,
int scaling,
int n,
int nb,
double[] beta,
double[][] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat)
-
Method Detail
-
driver
public void driver()
Starts the analysis.
- Overrides:
driver in class NESolve
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmColocalizationEM.html���������������������������������������0000775�4231163�4231163�00000175435�14537076044�025171� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmColocalizationEM (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float[] |
b1 |
DOCUMENT ME!
|
(package private) float[] |
b2 |
DOCUMENT ME!
|
private ModelImage |
baseImage |
DOCUMENT ME!
|
private int |
bin1 |
DOCUMENT ME!
|
private int |
bin2 |
DOCUMENT ME!
|
private int |
bottomPad |
DOCUMENT ME!
|
(package private) float[] |
buffer |
DOCUMENT ME!
|
private int |
cost |
DOCUMENT ME!
|
private int |
count |
DOCUMENT ME!
|
private double[] |
dMax |
DOCUMENT ME!
|
private double[] |
dMin |
DOCUMENT ME!
|
private boolean |
doOr |
If true, or thresholds.
|
private boolean |
entireImage |
DOCUMENT ME!
|
private int |
gaussians |
DOCUMENT ME!
|
private double[] |
halfMajor |
DOCUMENT ME!
|
private double[] |
halfMinor |
DOCUMENT ME!
|
(package private) java.util.BitSet |
inputMask |
DOCUMENT ME!
|
private int |
iterations |
DOCUMENT ME!
|
private int |
leftPad |
Space padding around the histogram data area.
|
private double[][] |
mean |
DOCUMENT ME!
|
private double[][] |
meanOld |
DOCUMENT ME!
|
private byte[] |
mostProbableClass |
DOCUMENT ME!
|
private double[] |
prob |
DOCUMENT ME!
|
private double[] |
probOld |
DOCUMENT ME!
|
private double[] |
probX |
DOCUMENT ME!
|
private double[] |
probXOld |
DOCUMENT ME!
|
private boolean |
register |
DOCUMENT ME!
|
private double[] |
rho |
DOCUMENT ME!
|
private double[] |
rhoOld |
DOCUMENT ME!
|
private int |
rightPad |
DOCUMENT ME!
|
(package private) float[] |
secondBuffer |
DOCUMENT ME!
|
private byte[] |
segBuffer |
DOCUMENT ME!
|
private ModelImage |
segImage |
Displays classes to which pixels belong.
|
private double[][] |
std |
DOCUMENT ME!
|
private double[][] |
stdOld |
DOCUMENT ME!
|
private double[] |
theta |
DOCUMENT ME!
|
private float |
threshold1 |
The minimum values that are considered as data values.
|
private float |
threshold2 |
DOCUMENT ME!
|
private int |
topPad |
DOCUMENT ME!
|
private boolean |
useBlue |
DOCUMENT ME!
|
private boolean |
useGreen |
DOCUMENT ME!
|
private boolean |
useRed |
DOCUMENT ME!
|
(package private) int |
xDim |
DOCUMENT ME!
|
(package private) int |
yDim |
DOCUMENT ME!
|
(package private) int |
zDim |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmColocalizationEM(ModelImage destImg,
ModelImage segImage,
ModelImage srcImg,
int bin1,
int bin2,
float threshold1,
float threshold2,
boolean doOr,
int leftPad,
int rightPad,
int bottomPad,
int topPad,
boolean useRed,
boolean useGreen,
boolean useBlue,
boolean entireImage,
boolean register,
int cost,
int gaussians,
int iterations) |
Constructor for images in which 2D histogram is placed in a predetermined destination image.
|
AlgorithmColocalizationEM(ModelImage destImg,
ModelImage segImage,
ModelImage srcImg,
ModelImage baseImage,
int bin1,
int bin2,
float threshold1,
float threshold2,
boolean doOr,
int leftPad,
int rightPad,
int bottomPad,
int topPad,
boolean entireImage,
boolean register,
int cost,
int gaussians,
int iterations) |
Constructor for images in which 2D histogram is placed in a predetermined destination image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calc2D() |
This function produces a 2D histogram image with srcImage values represented across the x axis and baseImage
values represented across the y axis.
|
private void |
calc3D() |
This function produces a 2D histogram image with srcImage values represented across the x axis and baseImage
values represented across the y axis.
|
private void |
calcColor2D() |
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis.
|
private void |
calcColor3D() |
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis.
|
private void |
emfunction() |
DOCUMENT ME!
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
getProbX() |
DOCUMENT ME!
|
private void |
getProbXOld() |
DOCUMENT ME!
|
private void |
newToOld() |
DOCUMENT ME!
|
private double |
probjxOld(int i,
int j) |
DOCUMENT ME!
|
private double |
probXj(int i,
int j) |
DOCUMENT ME!
|
private double |
probXjOld(int i,
int j) |
DOCUMENT ME!
|
void |
runAlgorithm() |
starts the algorithm.
|
void |
updateFileInfo(ModelImage image,
ModelImage resultImage) |
Copy important file information to resultant image structure.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
b1
float[] b1
DOCUMENT ME!
-
b2
float[] b2
DOCUMENT ME!
-
buffer
float[] buffer
DOCUMENT ME!
-
secondBuffer
float[] secondBuffer
DOCUMENT ME!
-
xDim
int xDim
DOCUMENT ME!
-
yDim
int yDim
DOCUMENT ME!
-
zDim
int zDim
DOCUMENT ME!
-
bin1
private int bin1
DOCUMENT ME!
-
bin2
private int bin2
DOCUMENT ME!
-
bottomPad
private int bottomPad
DOCUMENT ME!
-
cost
private int cost
DOCUMENT ME!
-
count
private int count
DOCUMENT ME!
-
dMax
private double[] dMax
DOCUMENT ME!
-
dMin
private double[] dMin
DOCUMENT ME!
-
gaussians
private int gaussians
DOCUMENT ME!
-
iterations
private int iterations
DOCUMENT ME!
-
mean
private double[][] mean
DOCUMENT ME!
-
prob
private double[] prob
DOCUMENT ME!
-
probOld
private double[] probOld
DOCUMENT ME!
-
probX
private double[] probX
DOCUMENT ME!
-
register
private boolean register
DOCUMENT ME!
-
rho
private double[] rho
DOCUMENT ME!
-
rhoOld
private double[] rhoOld
DOCUMENT ME!
-
rightPad
private int rightPad
DOCUMENT ME!
-
segBuffer
private byte[] segBuffer
DOCUMENT ME!
-
std
private double[][] std
DOCUMENT ME!
-
theta
private double[] theta
DOCUMENT ME!
-
threshold2
private float threshold2
DOCUMENT ME!
-
topPad
private int topPad
DOCUMENT ME!
-
useBlue
private boolean useBlue
DOCUMENT ME!
-
useGreen
private boolean useGreen
DOCUMENT ME!
-
useRed
private boolean useRed
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmColocalizationEM
public AlgorithmColocalizationEM(ModelImage destImg,
ModelImage segImage,
ModelImage srcImg,
ModelImage baseImage,
int bin1,
int bin2,
float threshold1,
float threshold2,
boolean doOr,
int leftPad,
int rightPad,
int bottomPad,
int topPad,
boolean entireImage,
boolean register,
int cost,
int gaussians,
int iterations)
Constructor for images in which 2D histogram is placed in a predetermined destination image. Used for 2 black and
white images
- Parameters:
destImg - image model where result image is to storedsegImage - image to display classes to which pixels belongsrcImg - image for x axis of histogrambaseImage - image for y axis of histogrambin1 - histogram x axis bin numberbin2 - histogram y axis bin numberthreshold1 - minimum value for data in sourceImagethreshold2 - minimum value for data in baseImagedoOr - If true, or thresholds. If false, and thresholds.leftPad - space to the left of the histogram bin arearightPad - space to the right of the histogram bin areabottomPad - space to the bottom of the histogram bin areatopPad - space to the top of the histogram bin areaentireImage - If false, only use data from VOI regionregister - If true register 2 black and white images before colocalizationcost - Cost function used in registrationgaussians - Number of gaussiansiterations - Number of iterations
-
AlgorithmColocalizationEM
public AlgorithmColocalizationEM(ModelImage destImg,
ModelImage segImage,
ModelImage srcImg,
int bin1,
int bin2,
float threshold1,
float threshold2,
boolean doOr,
int leftPad,
int rightPad,
int bottomPad,
int topPad,
boolean useRed,
boolean useGreen,
boolean useBlue,
boolean entireImage,
boolean register,
int cost,
int gaussians,
int iterations)
Constructor for images in which 2D histogram is placed in a predetermined destination image. Used for 1 color
image.
- Parameters:
destImg - image model where result image is to storedsegImage - image to display classes to which pixels belongsrcImg - source image modelbin1 - histogram x axis bin numberbin2 - histogram y axis bin numberthreshold1 - minimum data value for first colorthreshold2 - minimum data value for second colordoOr - If true, or thresholds. If false, and thresholds.leftPad - space to the left of the histogram bin arearightPad - space to the right of the histogram bin areabottomPad - space to the bottom of the histogram bin areatopPad - space to the top of the histogram bin areauseRed - DOCUMENT ME!useGreen - DOCUMENT ME!useBlue - DOCUMENT ME!entireImage - If false, use only data from VOI regionregister - If true, register 2 colors before colocalizationcost - Cost function used in registrationgaussians - Number of gaussiansiterations - Number of iterations
-
Method Detail
-
updateFileInfo
public void updateFileInfo(ModelImage image,
ModelImage resultImage)
Copy important file information to resultant image structure.
- Parameters:
image - Source image.resultImage - Resultant image.
-
getProbX
private void getProbX()
DOCUMENT ME!
-
newToOld
private void newToOld()
DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SolverSummary.html���������������������������������������0000775�4231163�4231163�00000125516�14537076052�025203� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SolverSummary (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
final_cost
public double final_cost
-
fixed_cost
public double fixed_cost
-
num_residuals
public int num_residuals
-
Constructor Detail
-
SolverSummary
public SolverSummary()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList.html�������������0000775�4231163�4231163�00000033577�14537076045�032041� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
BgEdgeList() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
BgEdgeList
private BgEdgeList()
���������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.dpfun.html���������������������������������0000775�4231163�4231163�00000045527�14537076056�026370� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.dpfun (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) boolean[] |
cmplx |
|
(package private) int[] |
left |
|
(package private) int |
n |
|
(package private) double[] |
nmlen |
|
(package private) double[][] |
qdat |
|
(package private) int[] |
right |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
dpfun(double[] y0,
int n,
double[] beta,
double[] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
dpfun
public dpfun(double[] y0,
int n,
double[] beta,
double[] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!covarMat - DOCUMENT ME!
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.PowellEvaluator2.html��������������������������������0000775�4231163�4231163�00000056046�14537076053�026424� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.PowellEvaluator2 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
PowellEvaluator2(boolean col1,
boolean col2,
boolean col3,
boolean col4) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
CeresSolver.SparseMatrix |
CreateJacobian() |
|
boolean |
Evaluate(CeresSolver.EvaluateOptions evaluate_options,
double[] state,
double[] cost,
double[] residuals,
double[] gradient,
CeresSolver.SparseMatrix jacobian) |
|
boolean |
Evaluate(CeresSolver.EvaluateOptions evaluate_options,
java.util.Vector<java.lang.Double> state,
double[] cost,
java.util.Vector<java.lang.Double> residuals,
java.util.Vector<java.lang.Double> gradient,
CeresSolver.SparseMatrix jacobian) |
|
int |
NumEffectiveParameters() |
|
int |
NumParameters() |
|
int |
NumResiduals() |
|
boolean |
Plus(double[] state,
double[] delta,
double[] state_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> state,
java.util.Vector<java.lang.Double> delta,
java.util.Vector<java.lang.Double> state_plus_delta) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
col1
private boolean col1
-
col2
private boolean col2
-
col3
private boolean col3
-
col4
private boolean col4
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Preconditioner.Options.html������������������������������0000775�4231163�4231163�00000017711�14537076052�026766� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Preconditioner.Options (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Preconditioner.Options
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Options() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Preconditioner.html��������������������������������������0000775�4231163�4231163�00000040152�14537076052�025327� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Preconditioner (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Preconditioner
public Preconditioner()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.ImageSaver.ImageSaverException.html����������������������0000775�4231163�4231163�00000030220�14537076053�030317� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.ImageSaver.ImageSaverException (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Throwable
-
- java.lang.Exception
-
- java.lang.RuntimeException
-
- gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver.ImageSaverException
-
-
Method Summary
-
Methods inherited from class java.lang.Throwable
addSuppressed, fillInStackTrace, getCause, getLocalizedMessage, getMessage, getStackTrace, getSuppressed, initCause, printStackTrace, printStackTrace, printStackTrace, setStackTrace, toString
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LossFunctionWrapper.html���������������������������������0000775�4231163�4231163�00000035270�14537076052�026337� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LossFunctionWrapper (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/KDTree.kdhyperrect.html����������������������������������������������0000775�4231163�4231163�00000023205�14537076055�023554� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
KDTree.kdhyperrect (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.KDTree.kdhyperrect
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
dim |
|
(package private) double[] |
max |
|
(package private) double[] |
min |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
kdhyperrect
public kdhyperrect()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Gauss3CostFunction.html��������������������������0000775�4231163�4231163�00000034023�14537076052�027405� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Gauss3CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������././@LongLink���������������������������������������������������������������������������������������0000644�0000000�0000000�00000000164�00000000000�011604� L����������������������������������������������������������������������������������������������������ustar �root����������������������������root�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepLocalOptimumAlongGradient.html�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepLocalOptimumAlo0000775�4231163�4231163�00000026670�14537076053�035062� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepLocalOptimumAlongGradient (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
kToleranceLoose |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Iterators.ImgIterator.html�������������������������������0000775�4231163�4231163�00000037650�14537076054�026613� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Iterators.ImgIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgIterator<P>
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private int |
numValues |
|
private P |
px |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ImgIterator(P px) |
Creates a new ImgIterator over the image of the specified pixel.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Iterator
remove
-
-
Method Detail
-
hasNext
public boolean hasNext()
- Specified by:
hasNext in interface java.util.Iterator<P extends ContourPlot.PixelBase>
����������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmPointArea.html����������������������������������������������0000775�4231163�4231163�00000072176�14537076047�023660� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPointArea (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
averageIntensities |
DOCUMENT ME!
|
private boolean |
doColor |
DOCUMENT ME!
|
private ModelImage |
image |
source image.
|
private boolean |
leftSpace |
if x is an even number, use the extra space on left half (otherwise right).
|
private float[][] |
rgbAverageIntensities |
DOCUMENT ME!
|
private float |
threshold |
DOCUMENT ME!
|
private boolean |
topSpace |
if y is an even number, use the extra space on the top half (otherwise bottom).
|
private boolean |
useThreshold |
DOCUMENT ME!
|
private int |
xLocation |
x value of the origin.
|
private int |
xSpace |
number of pixels in x direction.
|
private int |
yLocation |
y value of the origin.
|
private int |
ySpace |
number of pixels in y direction.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmPointArea(ModelImage srcImage,
int xLoc,
int yLoc,
int xSpace,
int ySpace,
boolean leftSpace,
boolean topSpace,
boolean useThreshold,
float threshold) |
Creates a new AlgorithmPointArea object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
doColor
private boolean doColor
DOCUMENT ME!
-
leftSpace
private boolean leftSpace
if x is an even number, use the extra space on left half (otherwise right).
-
threshold
private float threshold
DOCUMENT ME!
-
xLocation
private int xLocation
x value of the origin.
-
yLocation
private int yLocation
y value of the origin.
-
Constructor Detail
-
AlgorithmPointArea
public AlgorithmPointArea(ModelImage srcImage,
int xLoc,
int yLoc,
int xSpace,
int ySpace,
boolean leftSpace,
boolean topSpace,
boolean useThreshold,
float threshold)
Creates a new AlgorithmPointArea object.
- Parameters:
srcImage - DOCUMENT ME!xLoc - DOCUMENT ME!yLoc - DOCUMENT ME!xSpace - DOCUMENT ME!ySpace - DOCUMENT ME!leftSpace - DOCUMENT ME!topSpace - DOCUMENT ME!useThreshold - DOCUMENT ME!threshold - DOCUMENT ME!
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens13.html��������������������������������0000775�4231163�4231163�00000030443�14537076055�026251� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens13 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens13(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens13
public FitPiessens13(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiscreteSineTransform.cftrec1_th.html��������������������������������0000775�4231163�4231163�00000026633�14537076054�026420� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DiscreteSineTransform.cftrec1_th (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.DiscreteSineTransform.cftrec1_th
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
�����������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.GradientProblem.html�������������������������������������0000775�4231163�4231163�00000041305�14537076051�025421� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.GradientProblem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
finalize
public void finalize()
- Overrides:
finalize in class java.lang.Object
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmPbBoundaryDetection.html������������������������������������0000775�4231163�4231163�00000233522�14537076047�025674� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPbBoundaryDetection (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmPbBoundaryDetection
extends AlgorithmBase
Compute probability of boundary using brightness gradient and texture gradient
Original MATLAB code written by David R. Martin in April 2003
Reference: "Learning to Detect Natural Image Boundaries Using Local Brightness, Color,
and Texture Cues" by David R. Martin, Charles C. Fowlkes, and Jitendra
Malik, IEEE Transactions on Pattern Analysis and Machine Intelligence,
Vol. 26, No. 5, May, 2004, pp. 530-549.
- Author:
- ilb
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmPbBoundaryDetection() |
AlgorithmPbBoundaryDetection - default constructor.
|
AlgorithmPbBoundaryDetection(ModelImage destImg,
ModelImage srcImg,
int gradientType,
int presentation,
double lowRadius,
double highRadius,
int numOrientations,
java.lang.String smooth,
double sigma,
int nthresh,
double hmult) |
AlgorithmPbBoundaryDetection.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
assignTextons(int[][] map,
double[][][][] fim,
double[][] textons) |
|
private void |
cgmo(double[][][][] cg,
double[] theta,
ModelImage image,
double[] radius,
int numOrientations,
int nbins,
double sigmaSim,
double gamma,
java.lang.String smooth,
double[] sigmaSmooth) |
cgmo for color
Compute the color gradient at a single scale and multiple orientations
|
private void |
cgmo(double[][][][] cg,
double[] theta,
ModelImage image,
double[] radius,
int numOrientations,
java.lang.String smooth,
double[] sigmaSmooth) |
|
private void |
cgmo(double[][][] cg,
double[] theta,
ModelImage image,
double radius,
int numOrientations,
int nbins,
double sigmaSim,
java.lang.String smooth,
double sigmaSmooth) |
cgmo for black and white
Compute the color gradient at a single scale and multiple orientations
|
private void |
cgmo(double[][][] cg,
double[] theta,
ModelImage image,
double radius,
int numOrientations,
java.lang.String smooth,
double sigmaSmooth) |
|
private void |
conv2(double[][] A,
double[][] B,
double[][] Cout) |
|
private void |
det2MM(double[][] e0,
double[][] e1,
double[][] theta,
double sigmaI,
double sigmaO) |
|
private void |
detBG(double[][][] bg,
double[] theta) |
|
private void |
detBGTG(double[][][] bg,
double[][][] tg,
double[] theta) |
|
private void |
detCG(double[][][][] cg,
double[] theta) |
|
private void |
detCGTG(double[][][][] cg,
double[][][] tg,
double[] theta) |
|
private void |
detGM(double[][] m,
double[][] theta,
double sigma) |
|
private void |
detTG(double[][][] tg,
double[] theta) |
|
private void |
distsqr(double[][] z,
double[][] x,
double[][] y) |
|
private void |
fbRun(double[][][][] fim,
double[][][][] fb,
double[][] im) |
|
private void |
fbRun(double[][] fim,
double[][] fb,
double[][] im) |
|
private void |
fftconv2(double[][] fim,
double[][] im,
double[][] f) |
|
private void |
fitparab(double[][] a,
double[][] b,
double[][] c,
double[][] z,
double ra,
double rb,
double theta) |
|
int |
getInt(boolean bigEndian) |
Reads four signed bytes from file.
|
long |
getLong(boolean bigEndian) |
Reads eight unsigned bytes from file.
|
java.lang.String |
getString(int length) |
Reads a string from a file of given length.
|
int |
getUnsignedShort(boolean bigEndian) |
Reads two unsigned bytes from file.
|
private void |
nonmax(double[][] imout,
double[][] im,
double theta) |
|
private void |
nonmax(double[][] imout,
double[][] im,
double[][] theta) |
|
private void |
oeFilter(double[][] f,
double sigmaX,
double sigmaY,
int support) |
|
private void |
oeFilter(double[][] f,
double sigmaX,
double sigmaY,
int support,
double theta) |
|
private void |
oeFilter(double[][] f,
double sigmaX,
double sigmaY,
int support,
double theta,
int deriv) |
|
private void |
oeFilter(double[][] f,
double sigmaX,
double sigmaY,
int support,
double theta,
int deriv,
boolean dohil,
boolean dovis) |
Compute unit L1- norm 2D filter.
|
private void |
padReflect(double[][] impad,
double[][] im,
int r) |
|
private void |
pb2MM(double[][] pb,
double[][] theta) |
|
private void |
pb2MM2(double[][] pb,
double[][] theta) |
|
private void |
pbBG(double[][] pb,
double[][] theta) |
|
private void |
pbBGTG(double[][] pb,
double[][] theta) |
|
private void |
pbCanny(double[][] pb) |
|
private void |
pbCG(double[][] pb,
double[][] theta) |
|
private void |
pbCGTG(double[][] pb,
double[][] theta) |
|
private void |
pbGM(double[][] pb,
double[][] theta) |
|
private void |
pbGM2(double[][] pb,
double[][] theta) |
|
private void |
pbTG(double[][] pb,
double[][] theta) |
|
private java.lang.String |
readCString() |
|
private void |
readFile(double[][][][] fb,
double[][] tex,
double[][] tsim) |
|
private void |
RGB2Lab(double[][][] L,
double[] red,
double[] green,
double[] blue) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
savgol(double[][] c,
double[][] z,
int d,
int k,
double ra,
double rb,
double theta) |
|
private void |
tgmo(double[][][] tg,
double[] theta,
int[][] tmap,
int ntex,
double radius,
int numOrientations,
double[][] tsim,
java.lang.String smooth,
double sigma) |
Compute the texture gradient at a single scale and multiple orientations
|
private void |
tgso(double[][] tg,
int[][] tmap,
int ntex,
double radius,
double theta,
java.lang.String smooth,
double sigma,
double[][] tsim) |
Compute the texture graident at a single orientation and scale
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
gradientType
private int gradientType
-
presentation
private int presentation
-
lowRadius
private double lowRadius
-
sigma
private double sigma
-
nthresh
private int nthresh
-
hmult
private double hmult
-
Constructor Detail
-
AlgorithmPbBoundaryDetection
public AlgorithmPbBoundaryDetection(ModelImage destImg,
ModelImage srcImg,
int gradientType,
int presentation,
double lowRadius,
double highRadius,
int numOrientations,
java.lang.String smooth,
double sigma,
int nthresh,
double hmult)
AlgorithmPbBoundaryDetection.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!gradientType - presentation - lowRadius - highRadius - numOrientations - smooth - sigma -
-
Method Detail
-
det2MM
private void det2MM(double[][] e0,
double[][] e1,
double[][] theta,
double sigmaI,
double sigmaO)
- Parameters:
e0 - output smaller eigenvlauese1 - output larger eigenvaluestheta - output Orientation of first eigenvector + PI/2
(i.e. orientation of possible edge)sigmaI - input Inner scale (sigma for image derivatives)sigmaO - input Outer scale (sigma for spatial averaging)
-
cgmo
private void cgmo(double[][][][] cg,
double[] theta,
ModelImage image,
double[] radius,
int numOrientations,
java.lang.String smooth,
double[] sigmaSmooth)
-
cgmo
private void cgmo(double[][][][] cg,
double[] theta,
ModelImage image,
double[] radius,
int numOrientations,
int nbins,
double sigmaSim,
double gamma,
java.lang.String smooth,
double[] sigmaSmooth)
cgmo for color
Compute the color gradient at a single scale and multiple orientations
- Parameters:
cg - output output [yDim][xDim][3][numOrientations] array for coloroutput - [numOrientations] thetaimage - RGB image, values in [0, 1].radius - Radius of disc for cg arraynumOrientations - Number of orientations for cg arraynbins - Number of bins; should be > 1/sigmaSim.sigmaSim - For color similarity functiongamma - Gamma correction for LAB [2.5].smooth - Smoothing method, one of {"gaussian", "savgol", "none"}, default nonesigmaSmooth - Sigma for smoothing, default to radius
-
cgmo
private void cgmo(double[][][] cg,
double[] theta,
ModelImage image,
double radius,
int numOrientations,
java.lang.String smooth,
double sigmaSmooth)
-
cgmo
private void cgmo(double[][][] cg,
double[] theta,
ModelImage image,
double radius,
int numOrientations,
int nbins,
double sigmaSim,
java.lang.String smooth,
double sigmaSmooth)
cgmo for black and white
Compute the color gradient at a single scale and multiple orientations
- Parameters:
cg - output [yDim][xDim][numOrientations] array for black and whiteoutput - [numOrientations] thetaimage - Grayscale image, values in [0, 1].radius - Radius of disc for cg arraynumOrientations - Number of orientations for cg arraynbins - Number of bins; should be > 1/sigmaSim.sigmaSim - For color similarity functionsmooth - Smoothing method, one of {"gaussian", "savgol", "none"}, default nonesigmaSmooth - Sigma for smoothing, default to radius
-
tgmo
private void tgmo(double[][][] tg,
double[] theta,
int[][] tmap,
int ntex,
double radius,
int numOrientations,
double[][] tsim,
java.lang.String smooth,
double sigma)
Compute the texture gradient at a single scale and multiple orientations
- Parameters:
output - tg [yDim][xDim][numOrientations] arrayoutput - [numOrientations] theta Disc orientations (which are orthogonal to the texture gradient).tmap - [yDim][xDim] Texton map, values in [1, ntex]ntex - Number of textonsradius - Radius of disc for texture gradientnumOrientations - Number of orientations at which to compute the texture graidenttsim - Texton similarity matrix. If not provided, then use chi-squared.smooth - Smoothing method. One of "gaussian", "savgol", "none". Default "none".sigma - Sigma for smoothing. Default to radius.
-
tgso
private void tgso(double[][] tg,
int[][] tmap,
int ntex,
double radius,
double theta,
java.lang.String smooth,
double sigma,
double[][] tsim)
Compute the texture graident at a single orientation and scale
- Parameters:
output - tg [yDim][xDim] arraytmap - [yDim][xDim] Texton map, values in [1, ntex].ntex - Number of textonsradius - Radius of disc for tgtheta - Orientation orthogonal to tg.smooth - Smoothing method, one of {"gaussian", "savgol", "none"}, default = "none".sigma - Sigma for smoothing. Default to radius.tsim - [ntex][ntex] Texton similarity matrix. If not provided, then use chi-squared.
-
fitparab
private void fitparab(double[][] a,
double[][] b,
double[][] c,
double[][] z,
double ra,
double rb,
double theta)
-
savgol
private void savgol(double[][] c,
double[][] z,
int d,
int k,
double ra,
double rb,
double theta)
-
oeFilter
private void oeFilter(double[][] f,
double sigmaX,
double sigmaY,
int support,
double theta)
-
oeFilter
private void oeFilter(double[][] f,
double sigmaX,
double sigmaY,
int support,
double theta,
int deriv)
-
oeFilter
private void oeFilter(double[][] f,
double sigmaX,
double sigmaY,
int support,
double theta,
int deriv,
boolean dohil,
boolean dovis)
Compute unit L1- norm 2D filter.
The filter is a Gaussian in the x direction
The filter is a Gaussian derivative with optional Hilbert transform in the y direction.
The filter is zero-meaned if deriv > 0.
- Parameters:
f - output [sz][sz] square filtersigmaX - sigmaY - support - Make filter +/- this many sigmatheta - Orientation of x axis, in radiansderiv - Degree of y derivative, one of {0, 1, 2}.dohil - Do Hilbert transform in y direction?dovis - Visualization for debugging?
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSphereGeneration.IntModelMean2.html�������������������������0000775�4231163�4231163�00000034472�14537076050�027624� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSphereGeneration.IntModelMean2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
density |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
IntModelMean2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit,
double density) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
IntModelMean2
public IntModelMean2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit,
double density)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Iterators.ColSpliterator.html����������������������������0000775�4231163�4231163�00000053435�14537076054�027332� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Iterators.ColSpliterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator<P>
-
- All Implemented Interfaces:
java.util.Spliterator<P>
- Enclosing class:
- ContourPlot.Iterators
public static final class ContourPlot.Iterators.ColSpliterator<P extends ContourPlot.PixelBase>
extends java.lang.Object
implements java.util.Spliterator<P>
Special Spliterator which guarantees that each split will cover at least
an entire column of the image.
- Author:
- hageldave
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from interface java.util.Spliterator
java.util.Spliterator.OfDouble, java.util.Spliterator.OfInt, java.util.Spliterator.OfLong, java.util.Spliterator.OfPrimitive<T extends java.lang.Object,T_CONS extends java.lang.Object,T_SPLITR extends java.util.Spliterator.OfPrimitive<T,T_CONS,T_SPLITR>>
-
Field Summary
-
Fields inherited from interface java.util.Spliterator
CONCURRENT, DISTINCT, IMMUTABLE, NONNULL, ORDERED, SIZED, SORTED, SUBSIZED
-
Constructor Summary
Constructors
| Constructor |
Description |
ColSpliterator(int startX,
int endXincl,
int startY,
int height,
java.util.function.Supplier<P> pixelSupplier) |
Creates a new RowSpliterator for iterating the pixels in the specified area.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Spliterator
getComparator, getExactSizeIfKnown, hasCharacteristics
-
-
Field Detail
-
startY
private final int startY
-
Constructor Detail
-
ColSpliterator
public ColSpliterator(int startX,
int endXincl,
int startY,
int height,
java.util.function.Supplier<P> pixelSupplier)
Creates a new RowSpliterator for iterating the pixels in the specified area.
Each split is guaranteed to cover at least 1 entire row of the area.
- Parameters:
startX - left boundary of the area (inclusive)endXincl - right boundary of the area (inclusive)startY - top boundary of the area (inclusive)height - of the areapixelSupplier - a function that allocates a new pixel
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.GulfResearchAndDevelopmentFunction.html��������������0000775�4231163�4231163�00000034177�14537076053�032124� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.GulfResearchAndDevelopmentFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftSegmentation.userWeightFunct.html������������������0000775�4231163�4231163�00000026052�14537076047�031347� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftSegmentation.userWeightFunct (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.userWeightFunct
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
halfWindow
double halfWindow
-
sampleNumber
int sampleNumber
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.IntModel2.html�����������������������������������������0000775�4231163�4231163�00000034342�14537076046�024312� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.IntModel2 (MIPAV API Documentation)
-
- Enclosing class:
- AlgorithmFRAP
class AlgorithmFRAP.IntModel2
extends Integration2
class IntModel2 extends Integration2 { public IntModel2(double lower,
double upper, int routine, double breakPoints[], double epsabs, double
epsrel, int limit) { super(lower, upper, routine, breakPoints, epsabs,
epsrel, limit); } public double intFunc(double x) { double function =
0.0; if ((x != 1.0/7.0) && (x != 2.0/3.0)) { function =
Math.pow(Math.abs(x - 1.0/7.0), -0.25) * Math.pow(Math.abs(x - 2.0/3.0),
-0.55); } return function; } public void driver() { super.driver(); } }.
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
IntModel2(double lower,
double upper,
int routine,
int key,
double epsabs,
double epsrel,
int limit) |
Creates a new IntModel2 object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
IntModel2
public IntModel2(double lower,
double upper,
int routine,
int key,
double epsabs,
double epsrel,
int limit)
Creates a new IntModel2 object.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!key - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMultiExponentialFitting.html��������������������������������0000775�4231163�4231163�00000214345�14537076047�026620� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMultiExponentialFitting (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMultiExponentialFitting() |
|
AlgorithmMultiExponentialFitting(int nlammx,
int iwt,
int mtry,
boolean regint,
boolean nobase,
boolean nonneg,
boolean showDebug,
boolean pry,
boolean prprel,
boolean prfinl,
boolean plotrs,
boolean repeat,
int n,
double[] t,
int nint,
double[] tstart,
double[] tend,
int[] nt,
double[] y,
double[] sqrtw) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
anlerr(int jlam,
int nlin,
int itype,
boolean inter,
boolean prlsq) |
|
private void |
etheor(double plambd,
boolean invert,
boolean wted,
double[] se,
double[] dse,
double[] ddse,
double[] sye,
boolean doe,
boolean doye) |
|
private void |
evar(double[] q,
int jlam,
double[] var,
boolean invert,
boolean[] allpiv,
double[] ylydum,
int nlin,
double varg,
int ntry,
boolean inter,
int[] ierror) |
|
private double |
expsma(double s) |
|
private void |
fanlyz() |
|
void |
finalize() |
Prepares this class for destruction.
|
private double |
fisher(double fs,
int nu1,
int nu2) |
|
double |
getChiSquared() |
|
double[] |
getParameters() |
|
int |
getStatus() |
|
private void |
lstsqr(double[] lamst,
int jlam,
boolean rawdat,
int n,
int nlin,
int routineCalled,
int itype,
boolean split,
boolean inter,
boolean prlsq) |
|
private void |
pivot(double[][] adub,
int mdima,
int np,
boolean onlyin,
boolean invert,
boolean constr,
double pmin,
double pmax,
double[] p,
double[] dtoler,
double[] deltap,
boolean[] allpiv,
double[] qg,
boolean[] piv,
int jlam,
double[] qmax,
int[] ierror) |
|
private void |
pivot1(double[][] adub,
int mdima,
int npp,
int lpiv) |
|
private void |
residu(int jlam,
boolean plot,
double[] puncor,
double[][][] asave) |
|
void |
runAlgorithm() |
starts the algorithm.
|
void |
selfTest() |
|
private void |
varf(double[] q,
int jlam,
double[] var,
boolean invert,
boolean[] allpiv,
double[] ylyfit,
int nlin,
double varg,
int ntry,
boolean intdum,
int[] ierror) |
|
private void |
weight(boolean finalVar) |
|
private void |
yanlyz() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
nintmx
private int nintmx
This is a port of the Fortran program discrete.for version 2B (December, 1990) written by Stephen Provencher, PhD.
The README.txt file has:
DISCLAIMER: This software and its documentation are free and come "as is" with absolutely no guarantee and no support.
Applications:
Analysis of multi-exponential decay data.
Running in hundreds of laboratories on a wide variety of computers.
Methods:
Fully automatic: no starting estimates needed for the number of exponentials or for their parameters;
Modified Gauss-Newton least squares, with intensive searches from many starting points to find the global optimum;
Methods in the references below are used to get starting estimates and to speed up the analysis:
References:
I) S.W. Provencher: A Fourier Method for the Analysis of Exponential Decay Curves, Biophysical Journal, Vol. 16,
pp. 27-41 (1976).
II)S.W. Provencher: An eigenfunction expansion method for the analysis of exponential decay curves. J. Chem. Phys. 64,
pp. 2772-2777. (1976).
III)S.W. Provencher & R.H. Vogel: Information loss with transform methods in system identification:
A new set of transforms with high information content. Math. Biosci. 50, pp. 251-262 (1980).
IV)S.W. Provencher & R.H. Vogel: Regularization techniques for inverse problems in molecular biology in:
Numerical Treatment of Inverse Problems in Differential and Integral Equations,
eds. P. Deuflhard & E. Hairer (Birkhauser, Boston, 1983), pp. 304-319.
This program is used for the automatic analysis of multicomponent exponential decay for up to 9 components.
Download the Users Manual and other essential documentation from http://S-provencher.com.
The data is represented by y[k] = sum from j = 0 to nlambda of alpha[j]*exp(-lambda[j] * t[k]), k = 1, 2, ..., n,
with nlambda varied from 1 to nlammx with nlammx <= mlammx = 9.
Provision can be make for an unknown baseline component alpha[0] with lambda[0] = 0.
It is completely automatic in that only the raw data y[k] and t[k] are input; no potentially biased initial guesses
at alpha[j], lambda[j], or even the number of terms nlambda are needed or even allowed.
There is no need to normalize any of the input data like tstart, tend, t, y, or sqrtw. However, the number 1.0E20
has been used throughout the program to represent an infinitely large number and hence nothing should get larger than
1.0E20. Since some of the values are squared and summed over n, it is best to choose units so that all input values
are between 1.0E-9 and 1.0E6 in absolute value.
runAlgorithm calls routines weight, fanlyz, yanlyz which in turn call lstSqr,
evar, varf, etheor, pivot, pivot1, anlerr, fisher, residu.
-
mlammx
private int mlammx
-
convrg
private double convrg
-
ngrid2
private int[] ngrid2
-
minter
private int minter
-
sigmap
private double[] sigmap
-
precis
private double precis
-
nlammx
private int nlammx
-
regint
private boolean regint
-
nobase
private boolean nobase
-
nonneg
private boolean nonneg
-
prprel
private boolean prprel
-
prfinl
private boolean prfinl
-
plotrs
private boolean plotrs
-
repeat
private boolean repeat
-
tstart
private double[] tstart
-
tend
private double[] tend
-
sqrtw
private double[] sqrtw
-
ylyfit
private double[] ylyfit
-
gse
private double[][] gse
-
deltat
private double[] deltat
-
evarCalled
private int evarCalled
-
varfCalled
private int varfCalled
-
trbase
private double[] trbase
-
dgfl
private double[][] dgfl
-
dgridf
private double dgridf
-
gfstl
private double gfstl
-
fhat
private double[] fhat
-
varmin
private double varmin
-
sumwty
private double sumwty
-
sumwt
private double sumwt
-
zero
private double[] zero
-
dgride
private double dgride
-
gestl
private double gestl
-
palpha
private double[] palpha
-
plam
private double[] plam
-
plmtry
private double[] plmtry
-
deltap
private double[] deltap
-
sfde
private double[] sfde
-
adub
private double[][] adub
-
ddse
private double[][] ddse
-
dtoler
private double[] dtoler
-
delta
private double delta
-
fhatmx
private double fhatmx
-
lamst
private double[] lamst
-
sigyy
private double sigyy
-
enphi
private double enphi
-
pcerr
private double[] pcerr
-
vgrid2
private double[] vgrid2
-
jgeadd
private int jgeadd
-
nbinom
private int[][] nbinom
-
nvgrid
private int[] nvgrid
-
nperg2
private int[] nperg2
-
iwtsgn
private int iwtsgn
-
jlamp1
private int jlamp1
-
nftry
private int[] nftry
-
failed
private boolean failed
-
wted
private boolean wted
-
pivalp
private boolean[] pivalp
-
params
private double[] params
-
status
private int status
-
Constructor Detail
-
AlgorithmMultiExponentialFitting
public AlgorithmMultiExponentialFitting(int nlammx,
int iwt,
int mtry,
boolean regint,
boolean nobase,
boolean nonneg,
boolean showDebug,
boolean pry,
boolean prprel,
boolean prfinl,
boolean plotrs,
boolean repeat,
int n,
double[] t,
int nint,
double[] tstart,
double[] tend,
int[] nt,
double[] y,
double[] sqrtw)
-
Method Detail
-
selfTest
public void selfTest()
-
getStatus
public int getStatus()
-
lstsqr
private void lstsqr(double[] lamst,
int jlam,
boolean rawdat,
int n,
int nlin,
int routineCalled,
int itype,
boolean split,
boolean inter,
boolean prlsq)
-
pivot
private void pivot(double[][] adub,
int mdima,
int np,
boolean onlyin,
boolean invert,
boolean constr,
double pmin,
double pmax,
double[] p,
double[] dtoler,
double[] deltap,
boolean[] allpiv,
double[] qg,
boolean[] piv,
int jlam,
double[] qmax,
int[] ierror)
-
evar
private void evar(double[] q,
int jlam,
double[] var,
boolean invert,
boolean[] allpiv,
double[] ylydum,
int nlin,
double varg,
int ntry,
boolean inter,
int[] ierror)
-
varf
private void varf(double[] q,
int jlam,
double[] var,
boolean invert,
boolean[] allpiv,
double[] ylyfit,
int nlin,
double varg,
int ntry,
boolean intdum,
int[] ierror)
-
anlerr
private void anlerr(int jlam,
int nlin,
int itype,
boolean inter,
boolean prlsq)
-
etheor
private void etheor(double plambd,
boolean invert,
boolean wted,
double[] se,
double[] dse,
double[] ddse,
double[] sye,
boolean doe,
boolean doye)
-
fanlyz
private void fanlyz()
-
yanlyz
private void yanlyz()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LightboxGenerator.html�����������������������������������������������0000775�4231163�4231163�00000072007�14537076056�023547� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LightboxGenerator (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
LightboxGenerator(ModelImage image,
int startSlice,
int endSlice,
double percentSize,
int rows,
int columns,
int borderR,
int borderG,
int borderB,
boolean display,
int borderThickness) |
Constructor for Lightbox Image Files that will be used to create a lightBox image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
rows
private final int rows
-
Constructor Detail
-
LightboxGenerator
public LightboxGenerator(ModelImage image,
int startSlice,
int endSlice,
double percentSize,
int rows,
int columns,
int borderR,
int borderG,
int borderB,
boolean display,
int borderThickness)
Constructor for Lightbox Image Files that will be used to create a lightBox image.
- Parameters:
image - 3D image to be created in lightbox formatstartSlice - first slice to be usedendSlice - last slice to be usedpercentSize - shrink images by percentrows - number of rows in lightboxcolumns - number of columns in lightboxborderR - R value for borderborderG - G value for borderborderB - B value for borderdisplay - should lightbox image be shown in frame once created?borderThickness - border thickness in pixels
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BadJacobianCostFunction.html�������������������������0000775�4231163�4231163�00000034040�14537076052�027656� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BadJacobianCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens14.html��������������������������������0000775�4231163�4231163�00000030443�14537076055�026252� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens14 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens14(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens14
public FitPiessens14(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSM2.FitSM2ConstrainedModel.html�����������������������������0000775�4231163�4231163�00000041553�14537076050�026602� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSM2.FitSM2ConstrainedModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitSM2ConstrainedModel(int nPoints,
double[] yData,
double[] initial) |
Creates a new FitDEMRI3ConstrainedModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying SM2 fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitSM2ConstrainedModel
public FitSM2ConstrainedModel(int nPoints,
double[] yData,
double[] initial)
Creates a new FitDEMRI3ConstrainedModel object.
- Parameters:
nPoints - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
�����������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.indexValueItem.html������������������������0000775�4231163�4231163�00000026772�14537076056�030200� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.indexValueItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValueItem(int index,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
private double value
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public double getValue()
������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.MisralaCostFunction.html�������������������������0000775�4231163�4231163�00000034034�14537076052�027632� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.MisralaCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMSER.VlMserStats.html���������������������������������������0000775�4231163�4231163�00000026133�14537076047�024762� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMSER.VlMserStats (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserStats
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
VlMserStats() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_extremal
int num_extremal
-
num_unstable
int num_unstable
-
num_abs_unstable
int num_abs_unstable
-
num_too_big
int num_too_big
-
num_too_small
int num_too_small
-
num_duplicates
int num_duplicates
-
Constructor Detail
-
VlMserStats
private VlMserStats()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Kirby2CostFunction.html��������������������������0000775�4231163�4231163�00000034023�14537076052�027402� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Kirby2CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCircleGeneration.erfcModel2.html����������������������������0000775�4231163�4231163�00000034235�14537076044�027163� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCircleGeneration.erfcModel2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
scale |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
erfcModel2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
erfcModel2
public erfcModel2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Slab.html�����������������������������������������������������0000775�4231163�4231163�00000023415�14537076056�021733� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Slab (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Slab
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Slab() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.HalfEdge.html���������������������������������������������������0000775�4231163�4231163�00000063216�14537076056�022316� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.HalfEdge (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
-
Constructor Summary
Constructors
| Constructor |
Description |
HalfEdge() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
HalfEdge
public HalfEdge()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AgglomerativeInformationBottleneck.VlAIB.html������������������������0000775�4231163�4231163�00000036021�14537076043�030013� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AgglomerativeInformationBottleneck.VlAIB (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
< Total number of entries (= # active nodes)
|
(package private) int[] |
bidx |
< Minimum distance to an entry
|
(package private) double[] |
costs |
< Array of parents
|
(package private) int |
nentries |
< Entires to nodes
|
(package private) int |
nlabels |
< Number of feature values
|
(package private) int[] |
nodes |
|
(package private) int |
nvalues |
< Marginal.
|
(package private) int |
nwhich |
< List of entries to update
|
(package private) int[] |
parents |
< Number of labels
|
(package private) double[] |
Pc |
< Marginal.
|
(package private) double[][] |
Pcx |
< Number of entries to update
|
(package private) double[] |
Px |
< Joint probability table
|
(package private) int |
verbosity |
< Cost of each merge
|
(package private) int[] |
which |
< Closest entry
|
-
Constructor Summary
Constructors
| Constructor |
Description |
VlAIB() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
nentries
int nentries
< Entires to nodes
-
which
int[] which
< Closest entry
-
Pc
double[] Pc
< Marginal.
-
nvalues
int nvalues
< Marginal.
-
parents
int[] parents
< Number of labels
-
costs
double[] costs
< Array of parents
-
verbosity
int verbosity
< Cost of each merge
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.PreprocessedProblem.html���������������������������������0000775�4231163�4231163�00000044154�14537076052�026330� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.PreprocessedProblem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
error
java.lang.String[] error
-
fixed_cost
double[] fixed_cost
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.PixelGrid.html���������������������������������0000775�4231163�4231163�00000056761�14537076047�026301� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.PixelGrid (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
-
Constructor Summary
Constructors
| Constructor |
Description |
PixelGrid(int width,
int height) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
addPixelLine(int x1,
int y1,
int x2,
int y2) |
|
java.util.ArrayList<java.awt.Point>[] |
findBranches(int x,
int y,
int recordRate,
boolean[][] visitedPixels) |
|
private void |
findEdgeJunctions() |
|
private void |
findJunctions() |
|
java.util.ArrayList<AlgorithmNetworkSnake.PixelGrid.PixelGridNode> |
getEdgeJunctions() |
|
int |
getGridHeight() |
|
int |
getGridWidth() |
|
java.util.ArrayList<AlgorithmNetworkSnake.PixelGrid.PixelGridNode> |
getJunctions() |
|
AlgorithmNetworkSnake.PixelGrid.PixelGridNode[][] |
getPixels() |
|
void |
loadPixels(java.util.ArrayList<AlgorithmNetworkSnake.Pixel> pixelList) |
|
private void |
setPixel(int x,
int y) |
|
void |
setPixels(AlgorithmNetworkSnake.PixelGrid.PixelGridNode[][] pixels) |
|
private java.util.ArrayList<java.awt.Point> |
traverseWall(AlgorithmNetworkSnake.PixelGrid.PixelGridNode sourceNode,
AlgorithmNetworkSnake.PixelGrid.PixelGridNode nextNode,
int recordRate,
boolean[][] visitedPixels) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
gridWidth
private int gridWidth
-
gridHeight
private int gridHeight
-
Method Detail
-
findBranches
public java.util.ArrayList<java.awt.Point>[] findBranches(int x,
int y,
int recordRate,
boolean[][] visitedPixels)
���������������gov/nih/mipav/model/algorithms/CeresSolverTest.FreudensteinAndRothJacobianFunction.html�������������0000775�4231163�4231163�00000034210�14537076053�032252� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.FreudensteinAndRothJacobianFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BinaryCostFunction2.html�����������������������������0000775�4231163�4231163�00000030230�14537076053�027045� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BinaryCostFunction2 (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.PatchBatchExtractor.html���������������������������������������0000775�4231163�4231163�00000045363�14537076055�025116� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.PatchBatchExtractor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
- Enclosing class:
- libdt
class libdt.PatchBatchExtractor
extends java.lang.Object
Class for extracting spatio-temporal patches (cubes) from a video (batch
mode). This extractor works in "batch" mode, where all patches extracted from
a video and stored. It is basically a wrapper around PatchExtractor, which
stores all the obtained patches. \sa PatchExtractor, PatchOptions
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
java.util.Vector<java.lang.Integer> |
allx |
< offset to center of patch.
|
java.util.Vector<java.lang.Integer> |
ally |
< all x-locations on step grid.
|
java.util.Vector<java.lang.Integer> |
allz |
< all y-locations on step grid.
|
libdt.Range |
box_x |
< vector of all patches, corresponding to loc.
|
libdt.Range |
box_y |
< bounding box (x) for patch locations (top-left corner).
|
libdt.Range |
box_z |
< bounding box (y) for patch locations.
|
javax.vecmath.Point3i |
coff |
< coordinates of top-left of each patch.
|
java.util.Vector<javax.vecmath.Point3i> |
loc |
< patch options.
|
java.util.Vector<javax.vecmath.Point3i> |
locall |
< size of the video.
|
java.util.Vector<java.lang.Boolean> |
locall_mask |
< coordinates of top-left of all patches.
|
java.util.Vector<libdt.Mat[]> |
patches |
< all z-locations on step grid.
|
java.util.Vector<libdt.Mat[]> |
patchesall |
< vector of all patches, corresponding to loc.
|
libdt.PatchOptions |
patopt |
|
javax.vecmath.Point3i |
vidsize |
< bounding box (z) for patch locations.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AgglomerativeInformationBottleneck.html������������������������������0000775�4231163�4231163�00000167750�14537076043�027135� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AgglomerativeInformationBottleneck (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AgglomerativeInformationBottleneck
extends AlgorithmBase
Copyright (C) 2007-11, Andrea Vedaldi and Brian Fulkerson
Copyright (C) 2012-13, The VLFeat Team
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
1. Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the
distribution.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
cluster_null_nodes(int[] parents,
int nvalues,
double[] cost,
int verbosity) |
------------------------------------------------------------------
Null nodes are nodes with null probability and are not merged by AIB.
|
double |
mi(double[][] P) |
|
double |
PLOGP(double x) |
|
void |
plottree(int D,
int K,
int[] parents,
int numClusters) |
|
int[] |
quantize(double[][] X,
int D,
int K) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
setdiff(java.util.Vector<java.lang.Integer> C,
java.util.Vector<java.lang.Integer> ia,
java.util.Vector<java.lang.Integer> A,
java.util.Vector<java.lang.Integer> B) |
|
void |
test_basic() |
|
void |
test_cluster_null() |
|
void |
testSample() |
|
void |
vl_aib(int[] parents,
double[] cost,
double[][] Pcxsource) |
|
void |
vl_aib_calculate_information(AgglomerativeInformationBottleneck.VlAIB aib,
double[] I,
double[] H) |
------------------------------------------------------------------
|
void |
vl_aib_delete(AgglomerativeInformationBottleneck.VlAIB aib) |
------------------------------------------------------------------
|
double[] |
vl_aib_get_costs(AgglomerativeInformationBottleneck.VlAIB aib) |
------------------------------------------------------------------
|
int[] |
vl_aib_get_parents(AgglomerativeInformationBottleneck.VlAIB aib) |
------------------------------------------------------------------
|
int |
vl_aib_get_verbosity(AgglomerativeInformationBottleneck.VlAIB self) |
|
void |
vl_aib_merge_nodes(AgglomerativeInformationBottleneck.VlAIB aib,
int i,
int j,
int new_index) |
------------------------------------------------------------------
|
void |
vl_aib_min_beta(AgglomerativeInformationBottleneck.VlAIB aib,
int[] besti,
int[] bestj,
double[] minbeta) |
------------------------------------------------------------------
|
AgglomerativeInformationBottleneck.VlAIB |
vl_aib_new(double[][] Pcx,
int nvalues,
int nlabels) |
------------------------------------------------------------------
|
int[] |
vl_aib_new_nodelist(int nentries) |
------------------------------------------------------------------
|
double[] |
vl_aib_new_Pc(double[][] Pcx,
int nvalues,
int nlabels) |
------------------------------------------------------------------
|
double[] |
vl_aib_new_Px(double[][] Pcx,
int nvalues,
int nlabels) |
------------------------------------------------------------------
|
void |
vl_aib_normalize_P(double[][] P) |
------------------------------------------------------------------
|
void |
vl_aib_process(AgglomerativeInformationBottleneck.VlAIB aib) |
------------------------------------------------------------------
|
void |
vl_aib_set_verbosity(AgglomerativeInformationBottleneck.VlAIB self,
int verbosity) |
|
void |
vl_aib_update_beta(AgglomerativeInformationBottleneck.VlAIB aib) |
------------------------------------------------------------------
|
void |
vl_aibcut(int[] cut,
int[] map,
java.util.Vector<java.lang.Integer> shortc,
int[] parents,
int n) |
|
int[] |
vl_aibcuthist(int[] map,
int[] x,
java.lang.String mode) |
|
int[] |
vl_aibcutpush(int[] map,
int[] x) |
function y = vl_aibcutpush(map, x)
% VL_AIBCUTPUSH Quantize based on VL_AIB cut
% Y = VL_AIBCUTPUSH(MAP, X) maps the data X to elements of the AIB
% cut specified by MAP
|
int[] |
vl_aibhist(int[] parents,
double[][] data,
boolean histmode) |
% VL_AIBHIST Compute histogram over VL_AIB tree
% H = VL_AIBHIST(PARENTS, DATA) computes the histogram of the data
% points DATA on the VL_AIB tree defined by PARENTS.
|
void |
vl_demo_aib() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
BETA_MAX
private double BETA_MAX
-
Pic
private double[][] Pic
-
verbose
private int verbose
-
Constructor Detail
-
AgglomerativeInformationBottleneck
public AgglomerativeInformationBottleneck(ModelImage image,
int nrows,
int ncols,
double[][] Pic,
int verbose,
boolean cluster_null)
-
Method Detail
-
testSample
public void testSample()
-
test_basic
public void test_basic()
-
vl_aib_new_Px
public double[] vl_aib_new_Px(double[][] Pcx,
int nvalues,
int nlabels)
------------------------------------------------------------------
- Parameters:
Pcx - A two-dimensional array of probabilitiesnvalues - The number of rows in Pcxnlabels - The number of columns in Pcx- Returns:
- an array of size @a nvalues which contains the marginal
distribution over the rows.
-
vl_aib_new_Pc
public double[] vl_aib_new_Pc(double[][] Pcx,
int nvalues,
int nlabels)
------------------------------------------------------------------
- Parameters:
Pcx - A two-dimensional array of probabilitiesnvalues - The number of rows in Pcxnlabels - The number of columns in Pcx- Returns:
- an array of size @a nlabels which contains the marginal distribution
over the columns
-
vl_aib_min_beta
public void vl_aib_min_beta(AgglomerativeInformationBottleneck.VlAIB aib,
int[] besti,
int[] bestj,
double[] minbeta)
------------------------------------------------------------------
- Parameters:
aib - A pointer to the internal data structurebesti - The index of one member of the pair which has mininum betabestj - The index of the other member of the pair which
minimizes betaminbeta - The minimum beta value corresponding to (@a i, @a j)
Searches @a aib->beta to find the minimum value and fills @a minbeta and
-
vl_aib_merge_nodes
public void vl_aib_merge_nodes(AgglomerativeInformationBottleneck.VlAIB aib,
int i,
int j,
int new_index)
------------------------------------------------------------------
- Parameters:
aib - A pointer to the internal data structurei - The index of one member of the pair to mergej - The index of the other member of the pair to mergenew - The index of the new node which corresponds to the union of
(@a i, @a j).
Nodes are merged by replacing the entry @a i with the union of @c
ij, moving the node stored in last position (called @c lastnode)
back to jth position and the entry at the end.
After the nodes have been merged, it updates which nodes should be
considered on the next iteration based on which beta values could
potentially change. The merged node will always be part of this
list.
-
vl_aib_calculate_information
public void vl_aib_calculate_information(AgglomerativeInformationBottleneck.VlAIB aib,
double[] I,
double[] H)
------------------------------------------------------------------
- Parameters:
aib - A pointer to the internal data structureI - The current mutual information (out).H - The current entropy (out).
Calculates the current mutual information and entropy of Pcx and sets
-
vl_aib_new
public AgglomerativeInformationBottleneck.VlAIB vl_aib_new(double[][] Pcx,
int nvalues,
int nlabels)
------------------------------------------------------------------
- Parameters:
Pcx - A pointer to a 2D array of probabilitiesnvalues - The number of rows in the arraynlabels - The number of columns in the array
Creates a new @a VlAIB struct containing pointers to all the data that
will be used during the AIB process.
Allocates memory for the following:
- Px (nvalues*sizeof(double))
- Pc (nlabels*sizeof(double))
- nodelist (nvalues*sizeof(vl_uint))
- which (nvalues*sizeof(vl_uint))
- beta (nvalues*sizeof(double))
- bidx (nvalues*sizeof(vl_uint))
- parents ((2*nvalues-1)*sizeof(vl_uint))
- costs (nvalues*sizeof(double))
Since it simply copies to pointer to Pcx, the total additional memory
requirement is:
(3*nvalues+nlabels)*sizeof(double) + 4*nvalues*sizeof(vl_uint)
-
cluster_null_nodes
public void cluster_null_nodes(int[] parents,
int nvalues,
double[] cost,
int verbosity)
------------------------------------------------------------------
Null nodes are nodes with null probability and are not merged by AIB.
It is convenient, however, to treat them as follows:
- we pretend that AIB merged those nodes at the very beginning into a
single cluster (as they, after all, yield zero information drop).
- we attach this cluster to the root as the very last step (as we
do not want to change other nodes.
-
vl_aibcut
public void vl_aibcut(int[] cut,
int[] map,
java.util.Vector<java.lang.Integer> shortc,
int[] parents,
int n)
- Parameters:
cut - map - shortc - parents - n -
-
setdiff
public void setdiff(java.util.Vector<java.lang.Integer> C,
java.util.Vector<java.lang.Integer> ia,
java.util.Vector<java.lang.Integer> A,
java.util.Vector<java.lang.Integer> B)
-
vl_aibhist
public int[] vl_aibhist(int[] parents,
double[][] data,
boolean histmode)
% VL_AIBHIST Compute histogram over VL_AIB tree
% H = VL_AIBHIST(PARENTS, DATA) computes the histogram of the data
% points DATA on the VL_AIB tree defined by PARENTS. Each element of
% DATA indexes one of the leaves of the VL_AIB tree.
%
% H = VL_AIBHIST(PARENTS, DATA, 'HIST') treats DATA as an histograms.
% In this case each compoment of DATA is the number of occurences of
% the VL_AIB leaves corresponding to that component.
%
% H has the same dimension of parents and counts how many data points
% are descendent of the corresponding node of the VL_AIB tree.
-
vl_aibcutpush
public int[] vl_aibcutpush(int[] map,
int[] x)
function y = vl_aibcutpush(map, x)
% VL_AIBCUTPUSH Quantize based on VL_AIB cut
% Y = VL_AIBCUTPUSH(MAP, X) maps the data X to elements of the AIB
% cut specified by MAP.
%
% The function is equivalent to Y = MAP(X).
������������������������gov/nih/mipav/model/algorithms/LSCM.Point2.html�����������������������������������������������������0000775�4231163�4231163�00000027410�14537076056�022026� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Point2 (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Point2
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
m_v |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitIntensityProfile.html�������������������������������0000775�4231163�4231163�00000041632�14537076045�026466� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitIntensityProfile (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private double[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitIntensityProfile(int nPoints,
double[] xData,
double[] yData,
double[] initial) |
Creates a new FitWholeNLConModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private double[] yData
-
Constructor Detail
-
FitIntensityProfile
public FitIntensityProfile(int nPoints,
double[] xData,
double[] yData,
double[] initial)
Creates a new FitWholeNLConModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ExecutionSummary.html������������������������������������0000775�4231163�4231163�00000030343�14537076051�025664� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ExecutionSummary (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.ExecutionSummary
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.TreeProbability.html�������������������������������0000775�4231163�4231163�00000116353�14537076057�026675� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.TreeProbability (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Tree
alpha, case_weights, child_nodeIDs, data, dependent_varID, deterministic_varIDs, holdout, importance_mode, inbag_counts, keep_inbag, memory_saving_splitting, min_node_size, minprop, mtry, num_random_splits, num_samples, num_samples_oob, oob_sampleIDs, prediction_terminal_nodeIDs, random, sample_fraction, sample_with_replacement, sampleIDs, split_select_varIDs, split_select_weights, split_values, split_varIDs, splitrule, variable_importance
-
Constructor Summary
Constructors
| Constructor |
Description |
TreeProbability(java.util.Vector<java.lang.Double> class_values,
java.util.Vector<java.lang.Integer> response_classIDs,
java.util.Vector<java.util.Vector<java.lang.Integer>> sampleIDs_per_class,
java.util.Vector<java.lang.Double> class_weights) |
|
TreeProbability(java.util.Vector<java.util.Vector<java.lang.Integer>> child_nodeIDs,
java.util.Vector<java.lang.Integer> split_varIDs,
java.util.Vector<java.lang.Double> split_values,
java.util.Vector<java.lang.Double> class_values,
java.util.Vector<java.lang.Integer> response_classIDs,
java.util.Vector<java.util.Vector<java.lang.Double>> terminal_class_counts) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
addImpurityImportance(int nodeID,
int varID,
double decrease) |
|
void |
addToTerminalNodes(int nodeID) |
|
void |
allocateMemory() |
|
void |
appendToFileInternal(java.io.BufferedWriter bw) |
|
void |
bootstrapClassWise() |
|
void |
bootstrapWithoutReplacementClassWise() |
|
void |
cleanUpInternal() |
|
double |
computePredictionAccuracyInternal() |
|
void |
createEmptyNodeInternal() |
|
boolean |
findBestSplit(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
boolean |
findBestSplitExtraTrees(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
void |
findBestSplitValueExtraTrees(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueExtraTreesUnordered(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueLargeQ(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueSmallQ(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueUnordered(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
java.util.Vector<java.lang.Double> |
getPrediction(int sampleID) |
|
int |
getPredictionTerminalNodeID(int sampleID) |
|
java.util.Vector<java.util.Vector<java.lang.Double>> |
getTerminalClassCounts() |
|
boolean |
splitNodeInternal(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Tree
appendToFile, bootstrap, bootstrapWeighted, bootstrapWithoutReplacement, bootstrapWithoutReplacementWeighted, computePermutationImportance, createEmptyNode, createPossibleSplitVarSubset, dispose, dropDownSamplePermuted, getChildNodeIDs, getInbagCounts, getNumSamplesOob, getOobSampleIDs, getSplitValues, getSplitVarIDs, grow, init, permuteAndPredictOobSamples, predict, splitNode
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
counter_per_class
int[] counter_per_class
-
Constructor Detail
-
TreeProbability
public TreeProbability(java.util.Vector<java.lang.Double> class_values,
java.util.Vector<java.lang.Integer> response_classIDs,
java.util.Vector<java.util.Vector<java.lang.Integer>> sampleIDs_per_class,
java.util.Vector<java.lang.Double> class_weights)
-
TreeProbability
public TreeProbability(java.util.Vector<java.util.Vector<java.lang.Integer>> child_nodeIDs,
java.util.Vector<java.lang.Integer> split_varIDs,
java.util.Vector<java.lang.Double> split_values,
java.util.Vector<java.lang.Double> class_values,
java.util.Vector<java.lang.Integer> response_classIDs,
java.util.Vector<java.util.Vector<java.lang.Double>> terminal_class_counts)
-
Method Detail
-
findBestSplitValueSmallQ
public void findBestSplitValueSmallQ(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueLargeQ
public void findBestSplitValueLargeQ(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueUnordered
public void findBestSplitValueUnordered(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueExtraTrees
public void findBestSplitValueExtraTrees(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueExtraTreesUnordered
public void findBestSplitValueExtraTreesUnordered(int nodeID,
int varID,
int num_classes,
int[] class_counts,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SchurComplementSolver.html�������������������������������0000775�4231163�4231163�00000055666�14537076052�026666� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SchurComplementSolver (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
rhs_
private double[] rhs_
-
Method Detail
-
rhs
protected double[] rhs()
��������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd7.html���������������������������������������0000775�4231163�4231163�00000030465�14537076055�025013� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd7 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd7(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd7
public Fitqd7(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmPhaseCongruency.html����������������������������������������0000775�4231163�4231163�00000110066�14537076047�025062� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPhaseCongruency (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmPhaseCongruency
extends AlgorithmBase
Ported from Peter Kovesi's MATLAB code for Phase Congruency
Available from: http://www.csse.uwa.edu.au/~pk/research/matlabfns/PhaseCongruency/phasecong3.m
and: http://www.csse.uwa.edu.au/~pk/research/matlabfns/FrequencyFilt/lowpassfilter.m
in reference to the method lowpassFilter();
% References:
%
% Peter Kovesi, "Image Features From Phase Congruency". Videre: A
% Journal of Computer Vision Research. MIT Press. Volume 1, Number 3,
% Summer 1999 http://mitpress.mit.edu/e-journals/Videre/001/v13.html
%
% Peter Kovesi, "Phase Congruency Detects Corners and
% Edges". Proceedings DICTA 2003, Sydney Dec 10-12
% Copyright (c) 1996-2010 Peter Kovesi
% Centre for Exploration Targeting
% The University of Western Australia
% peter.kovesi at uwa edu au
%
% Permission is hereby granted, free of charge, to any person obtaining a copy
% of this software and associated documentation files (the "Software"), to deal
% in the Software without restriction, subject to the following conditions:
%
% The above copyright notice and this permission notice shall be included in
% all copies or substantial portions of the Software.
%
% The Software is provided "as is", without warranty of any kind.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
nscale
private int nscale
-
norient
private int norient
-
sigmaOnf
private double sigmaOnf
-
cutOff
private double cutOff
-
noiseMethod
private int noiseMethod
-
epsilon
private double epsilon
-
height
private int height
-
length
private int length
-
Method Detail
-
setArguments
public void setArguments(int _nscale,
int _norient,
int _minWaveLength,
double _mult,
double _sigmaOnf,
double _k,
double _cutOff,
int _g,
int _noiseMethod)
% Arguments:
% Default values Description
%
% nscale 4 - Number of wavelet scales, try values 3-6
% norient 6 - Number of filter orientations.
% minWaveLength 3 - Wavelength of smallest scale filter.
% mult 2.1 - Scaling factor between successive filters.
% sigmaOnf 0.55 - Ratio of the standard deviation of the Gaussian
% describing the log Gabor filter's transfer function
% in the frequency domain to the filter center frequency.
% k 2.0 - No of standard deviations of the noise energy beyond
% the mean at which we set the noise threshold point.
% You may want to vary this up to a value of 10 or
% 20 for noisy images
% cutOff 0.5 - The fractional measure of frequency spread
% below which phase congruency values get penalized.
% g 10 - Controls the sharpness of the transition in
% the sigmoid function used to weight phase
% congruency for frequency spread.
% noiseMethod -1 - Parameter specifies method used to determine
% noise statistics.
% -1 use median of smallest scale filter responses
% -2 use mode of smallest scale filter responses
% 0+ use noiseMethod value as the fixed noise threshold
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.CubicInterpolator.html����������������������������������0000775�4231163�4231163�00000030335�14537076052�026057� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.CubicInterpolator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.CubicInterpolator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Pixel.html�����������������������������������������������0000775�4231163�4231163�00000303063�14537076054�023465� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Pixel (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private ContourPlot.Img |
img |
Img this pixel belongs to
|
private int |
index |
index of the value this pixel references
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Pixel(ContourPlot.Img img,
int index) |
Creates a new Pixel object referencing the value
of specified Img at specified index.
|
Pixel(ContourPlot.Img img,
int x,
int y) |
Creates a new Pixel object referencing the value
of specified Img at specified position.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
int |
a() |
|
int |
a(int color) |
|
double |
a_asDouble() |
Returns the alpha value of this pixel at its current position.
|
double |
a_normalized(int color) |
|
int |
argb(int a,
int r,
int g,
int b) |
Packs 8bit ARGB color components into a single 32bit integer value.
|
int |
argb_bounded(int a,
int r,
int g,
int b) |
Packs 8bit ARGB color components into a single 32bit integer value.
|
int |
argb_fast(int a,
int r,
int g,
int b) |
Packs 8bit ARGB color components into a single 32bit integer value.
|
int |
argb_fromNormalized(double a,
double r,
double g,
double b) |
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value.
|
int |
b() |
|
int |
b(int color) |
|
double |
b_asDouble() |
Returns the blue value of this pixel at its current position.
|
double |
b_normalized(int color) |
|
int |
g() |
|
int |
g(int color) |
|
double |
g_asDouble() |
Returns the green value of this pixel at its current position.
|
double |
g_normalized(int color) |
|
int |
getGrey(int redWeight,
int greenWeight,
int blueWeight) |
Calculates the grey value of this pixel using specified weights.
|
int |
getGrey(int color,
int redWeight,
int greenWeight,
int blueWeight) |
Calculates a grey value from an RGB or ARGB value using specified
weights for each R,G and B channel.
|
int |
getIndex() |
Returns this pixel's index.
|
int |
getLuminance() |
|
int |
getLuminance(int color) |
|
ContourPlot.Img |
getSource() |
Returns the underlying image of this pixel (the image referenced by this pixel)
|
int |
getValue() |
Gets the value of the Img at the position currently referenced by
this Pixel.
|
int |
getX() |
|
int |
getY() |
|
int |
r() |
|
int |
r(int color) |
|
double |
r_asDouble() |
Returns the red value of this pixel at its current position.
|
double |
r_normalized(int color) |
|
int |
rgb(int r,
int g,
int b) |
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
|
int |
rgb_bounded(int r,
int g,
int b) |
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
|
int |
rgb_fast(int r,
int g,
int b) |
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
|
int |
rgb_fromNormalized(double r,
double g,
double b) |
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value with alpha=255 (opaque).
|
ContourPlot.Pixel |
setA(int a) |
Sets alpha channel value of this Pixel.
|
ContourPlot.PixelBase |
setA_fromDouble(double a) |
Sets the alpha value of this pixel at its current position with 0.0 as fully transparent and 1.0 as fully opaque.
|
void |
setARGB(int a,
int r,
int g,
int b) |
Sets an ARGB value at the position currently referenced by this Pixel.
|
ContourPlot.Pixel |
setARGB_fromDouble(double a,
double r,
double g,
double b) |
Sets an ARGB value at the position currently referenced by this Pixel.
|
ContourPlot.Pixel |
setB(int b) |
Sets blue channel value of this Pixel.
|
ContourPlot.PixelBase |
setB_fromDouble(double b) |
Sets the blue value of this pixel at its current position with 0.0 as no blue contribution and 1.0 as full blue contribution.
|
ContourPlot.Pixel |
setG(int g) |
Sets green channel value of this Pixel.
|
ContourPlot.PixelBase |
setG_fromDouble(double g) |
Sets the green value of this pixel at its current position with 0.0 as no green contribution and 1.0 as full green contribution.
|
ContourPlot.Pixel |
setIndex(int index) |
Sets the index of the Img value this Pixel references.
|
ContourPlot.Pixel |
setPosition(int x,
int y) |
Sets the position of the Img value this Pixel references.
|
ContourPlot.Pixel |
setR(int r) |
Sets red channel value of this Pixel.
|
ContourPlot.PixelBase |
setR_fromDouble(double r) |
Sets the red value of this pixel at its current position with 0.0 as no red contribution and 1.0 as full red contribution.
|
void |
setRGB(int r,
int g,
int b) |
Sets an opaque RGB value at the position currently referenced by this Pixel.
|
ContourPlot.Pixel |
setRGB_fromDouble(double r,
double g,
double b) |
Sets an opaque RGB value at the position currently referenced by this Pixel.
|
ContourPlot.Pixel |
setRGB_fromDouble_preserveAlpha(double r,
double g,
double b) |
Sets an RGB value at the position currently referenced by this Pixel.
|
void |
setRGB_preserveAlpha(int r,
int g,
int b) |
Sets an RGB value at the position currently referenced by this Pixel.
|
ContourPlot.Pixel |
setValue(int pixelValue) |
Sets the value of the Img at the position currently referenced by
this Pixel.
|
java.lang.String |
toString() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
getValue
public int getValue()
Gets the value of the Img at the position currently referenced by
this Pixel.
If the position of this pixel is not in bounds of the Img the value for
a different position may be returned or an ArrayIndexOutOfBoundsException
may be thrown.
- Returns:
- the value of the Img currently referenced by this Pixel.
- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.0
- See Also:
a(),
r(),
g(),
b(),
setValue(int),
ContourPlot.Img.getValue(int, int)
-
a
public int a()
- Returns:
- the alpha component of the value currently referenced by this
Pixel. It is assumed that the value is an ARGB value with 8bits per
color channel, so this will return a value in [0..255].
- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.0
- See Also:
r(),
g(),
b(),
setRGB(int, int, int),
setARGB(int, int, int, int),
getValue()
-
r
public int r()
- Returns:
- the red component of the value currently referenced by this
Pixel. It is assumed that the value is an ARGB value with 8bits per
color channel, so this will return a value in [0..255].
- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.0
- See Also:
a(),
g(),
b(),
setRGB(int, int, int),
setARGB(int, int, int, int),
getValue()
-
g
public int g()
- Returns:
- the green component of the value currently referenced by this
Pixel. It is assumed that the value is an ARGB value with 8bits per
color channel, so this will return a value in [0..255].
- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.0
- See Also:
a(),
r(),
b(),
setRGB(int, int, int),
setARGB(int, int, int, int),
getValue()
-
b
public int b()
- Returns:
- the blue component of the value currently referenced by this
Pixel. It is assumed that the value is an ARGB value with 8bits per
color channel, so this will return a value in [0..255].
- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.0
- See Also:
a(),
r(),
g(),
setRGB(int, int, int),
setARGB(int, int, int, int),
getValue()
-
a_asDouble
public double a_asDouble()
Returns the alpha value of this pixel at its current position.
If the underlying image does not support alpha, 1.0 is returned.
- Specified by:
a_asDouble in interface ContourPlot.PixelBase- Returns:
- the normalized alpha component of the value currently referenced by this
Pixel. This will return a value in [0.0 .. 1.0].
- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.2
- See Also:
a(),
r_asDouble(),
g_asDouble(),
b_asDouble()
-
setARGB
public void setARGB(int a,
int r,
int g,
int b)
Sets an ARGB value at the position currently referenced by this Pixel.
Each channel value is assumed to be 8bit and otherwise truncated.
- Parameters:
a - alphar - redg - greenb - blue- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.0
- See Also:
setRGB(int, int, int),
setRGB_preserveAlpha(int, int, int),
argb(int, int, int, int),
argb_bounded(int, int, int, int),
argb_fast(int, int, int, int),
setValue(int)
-
setRGB
public void setRGB(int r,
int g,
int b)
Sets an opaque RGB value at the position currently referenced by this Pixel.
Each channel value is assumed to be 8bit and otherwise truncated.
- Parameters:
r - redg - greenb - blue- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.0
- See Also:
setARGB(int, int, int, int),
setRGB_preserveAlpha(int, int, int),
argb(int, int, int, int),
argb_bounded(int, int, int, int),
argb_fast(int, int, int, int),
setValue(int)
-
setRGB_preserveAlpha
public void setRGB_preserveAlpha(int r,
int g,
int b)
Sets an RGB value at the position currently referenced by this Pixel.
The present alpha value will not be altered by this operation.
Each channel value is assumed to be 8bit and otherwise truncated.
- Parameters:
r - redg - greenb - blue- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.2
- See Also:
setRGB_fromDouble_preserveAlpha(double, double, double)
-
setARGB_fromDouble
public ContourPlot.Pixel setARGB_fromDouble(double a,
double r,
double g,
double b)
Sets an ARGB value at the position currently referenced by this Pixel.
Each channel value is assumed to be within [0.0 .. 1.0]. Channel values
outside these bounds will be clamped to them.
- Specified by:
setARGB_fromDouble in interface ContourPlot.PixelBase- Parameters:
a - normalized alphar - normalized redg - normalized greenb - normalized blue- Returns:
- this pixel for chaining.
- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.2
- See Also:
setRGB_fromDouble(double, double, double),
setRGB_fromDouble_preserveAlpha(double, double, double),
setARGB(int, int, int, int),
a_asDouble(),
r_asDouble(),
g_asDouble(),
b_asDouble()
-
setRGB_fromDouble
public ContourPlot.Pixel setRGB_fromDouble(double r,
double g,
double b)
Sets an opaque RGB value at the position currently referenced by this Pixel.
Each channel value is assumed to be within [0.0 .. 1.0]. Channel values
outside these bounds will be clamped to them.
- Specified by:
setRGB_fromDouble in interface ContourPlot.PixelBase- Parameters:
r - normalized redg - normalized greenb - normalized blue- Returns:
- this pixel for chaining.
- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.2
- See Also:
setARGB_fromDouble(double, double, double, double),
setRGB_fromDouble_preserveAlpha(double, double, double),
setRGB(int, int, int),
a_asDouble(),
r_asDouble(),
g_asDouble(),
b_asDouble()
-
setRGB_fromDouble_preserveAlpha
public ContourPlot.Pixel setRGB_fromDouble_preserveAlpha(double r,
double g,
double b)
Sets an RGB value at the position currently referenced by this Pixel.
The present alpha value will not be altered by this operation.
Each channel value is assumed to be within [0.0 .. 1.0]. Channel values
outside these bounds will be clamped to them.
- Specified by:
setRGB_fromDouble_preserveAlpha in interface ContourPlot.PixelBase- Parameters:
r - normalized redg - normalized greenb - normalized blue- Returns:
- this pixel for chaining.
- Throws:
java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.2
- See Also:
setRGB_preserveAlpha(int, int, int)
-
getGrey
public int getGrey(int redWeight,
int greenWeight,
int blueWeight)
Calculates the grey value of this pixel using specified weights.
- Parameters:
redWeight - weight for red channelgreenWeight - weight for green channelblueWeight - weight for blue channel- Returns:
- grey value of pixel for specified weights
- Throws:
java.lang.ArithmeticException - divide by zero if the weights sum up to 0.java.lang.ArrayIndexOutOfBoundsException - if this Pixel's index is not in
range of the Img's data array.- Since:
- 1.2
- See Also:
getLuminance(),
getGrey(int, int, int, int)
-
rgb_bounded
public final int rgb_bounded(int r,
int g,
int b)
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
Components are clamped to [0,255].
- Parameters:
r - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.0
- See Also:
argb(int, int, int, int),
argb_bounded(int, int, int, int),
argb_fast(int, int, int, int),
rgb(int, int, int),
rgb_fast(int, int, int),
a(int),
r(int),
g(int),
b(int)
-
rgb
public final int rgb(int r,
int g,
int b)
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
Components larger than 8bit get truncated to 8bit.
- Parameters:
r - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.0
- See Also:
argb(int, int, int, int),
argb_bounded(int, int, int, int),
argb_fast(int, int, int, int),
rgb_bounded(int, int, int),
rgb_fast(int, int, int),
a(int),
r(int),
g(int),
b(int)
-
rgb_fast
public final int rgb_fast(int r,
int g,
int b)
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
Components larger than 8bit are NOT truncated and will result in a
broken, malformed value.
- Parameters:
r - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.0
- See Also:
argb(int, int, int, int),
argb_bounded(int, int, int, int),
argb_fast(int, int, int, int),
rgb_bounded(int, int, int),
rgb(int, int, int),
a(int),
r(int),
g(int),
b(int)
-
rgb_fromNormalized
public final int rgb_fromNormalized(double r,
double g,
double b)
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value with alpha=255 (opaque).
Component values less than 0 or greater than 1 clamped to fit the range.
- Parameters:
r - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.2
- See Also:
argb_fromNormalized(double, double, double, double),
rgb(int, int, int),
a_normalized(int),
r_normalized(int),
g_normalized(int),
b_normalized(int)
-
argb_bounded
public final int argb_bounded(int a,
int r,
int g,
int b)
Packs 8bit ARGB color components into a single 32bit integer value.
Components are clamped to [0,255].
- Parameters:
a - alphar - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.0
- See Also:
argb(int, int, int, int),
argb_fast(int, int, int, int),
rgb_bounded(int, int, int),
rgb(int, int, int),
rgb_fast(int, int, int),
a(int),
r(int),
g(int),
b(int)
-
argb
public final int argb(int a,
int r,
int g,
int b)
Packs 8bit ARGB color components into a single 32bit integer value.
Components larger than 8bit get truncated to 8bit.
- Parameters:
a - alphar - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.0
- See Also:
argb_bounded(int, int, int, int),
argb_fast(int, int, int, int),
rgb_bounded(int, int, int),
rgb(int, int, int),
rgb_fast(int, int, int),
a(int),
r(int),
g(int),
b(int)
-
argb_fast
public final int argb_fast(int a,
int r,
int g,
int b)
Packs 8bit ARGB color components into a single 32bit integer value.
Components larger than 8bit are NOT truncated and will result in a
broken, malformed value.
- Parameters:
a - alphar - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.0
- See Also:
argb(int, int, int, int),
argb_bounded(int, int, int, int),
rgb_bounded(int, int, int),
rgb(int, int, int),
rgb_fast(int, int, int),
a(int),
r(int),
g(int),
b(int)
-
argb_fromNormalized
public final int argb_fromNormalized(double a,
double r,
double g,
double b)
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value.
Component values less than 0 or greater than 1 are clamped to fit the range.
- Parameters:
a - alphar - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.2
- See Also:
rgb_fromNormalized(double, double, double),
argb(int, int, int, int),
a_normalized(int),
r_normalized(int),
g_normalized(int),
b_normalized(int)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmASM.AppData.html��������������������������������������������0000775�4231163�4231163�00000023363�14537076043�023715� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmASM.AppData (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmASM.AppData
-
-
Constructor Summary
Constructors
| Constructor |
Description |
AppData() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.NonlinearConjugateGradient.html��������������������������0000775�4231163�4231163�00000034473�14537076052�027617� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.NonlinearConjugateGradient (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BadResidualCostFunction.html�������������������������0000775�4231163�4231163�00000034040�14537076052�027720� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BadResidualCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Cvec.html�����������������������������������������������������0000775�4231163�4231163�00000023046�14537076056�021732� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Cvec (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Cvec
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
x |
|
(package private) double |
y |
|
(package private) double |
z |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Cvec() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Hypergeometric.html��������������������������������������������������0000775�4231163�4231163�00000076634�14537076055�023117� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Hypergeometric (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Hypergeometric
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
a |
Input parameter
|
private double |
b |
Input parameter
|
private double |
c |
Input argument
|
static int |
COMPLEX_VERSION |
|
private double[] |
imagResult |
|
private double |
imagZ |
|
static int |
REAL_VERSION |
|
private double[] |
realResult |
outputted result
|
private double |
realZ |
Input argument
|
private double[] |
result |
Outputted result
|
private int |
version |
Tells whether real number or complex number version
|
private double |
x |
Input argument
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Hypergeometric() |
|
Hypergeometric(double a,
double b,
double c,
double x,
double[] result) |
|
Hypergeometric(double a,
double b,
double c,
double realZ,
double imagZ,
double[] realResult,
double[] imagResult) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
complexArgument() |
This is a port of subroutine HYGFZ from Computation of Special Functions by Shanjie Zhang and Jianming Jin, pp.
380-385.
|
void |
finalize() |
Cleanup memory.
|
private void |
realArgument() |
This is a port of subroutine HYGFX from Computation of Special Functions by Shanjie Zhang and Jianming Jin, pp.
376-379.
|
void |
run() |
|
void |
testcomplexArgument() |
|
void |
testrealArgument() |
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
private void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
private void |
zexp(double ar,
double ai,
double[] br,
double[] bi) |
complex exponential function b = exp(a).
|
private void |
zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr) |
complex logarithm b = clog(a).
|
private void |
zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex multiply c = a * b.
|
private void |
zpow(double zr,
double zi,
double a,
double[] br,
double[] bi,
int[] ierr) |
b = z**a = exp(a*log(z))
|
private void |
zshch(double zr,
double zi,
double[] cshr,
double[] cshi,
double[] cchr,
double[] cchi) |
zshch computes the complex hyperbolic functions csh = sinh(x+i*y) and cch = cosh(x+i*y).
|
private void |
zsqrt(double ar,
double ai,
double[] br,
double[] bi) |
complex square root b = csqrt(a).
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
a
private double a
Input parameter
-
b
private double b
Input parameter
-
c
private double c
Input argument
-
result
private double[] result
Outputted result
-
x
private double x
Input argument
-
realZ
private double realZ
Input argument
-
imagZ
private double imagZ
-
Constructor Detail
-
Hypergeometric
public Hypergeometric()
-
Hypergeometric
public Hypergeometric(double a,
double b,
double c,
double x,
double[] result)
- Parameters:
a - input parameterb - input parameterc - input parameter c must not equal 0, -1, -2, ...x - input argumentresult - outputted result
-
Hypergeometric
public Hypergeometric(double a,
double b,
double c,
double realZ,
double imagZ,
double[] realResult,
double[] imagResult)
- Parameters:
a - input real parameterb - input real parameterc - input real parameter c must not equal 0, -1, -2, ...realZ - input real part of argumentimagZ - input imaginary part of argumentrealResult - real part of outputted resultimagResult - imaginary part of outputted result
-
Method Detail
-
realArgument
private void realArgument()
This is a port of subroutine HYGFX from Computation of Special Functions by Shanjie Zhang and Jianming Jin, pp.
376-379.
c != 0, -1, -2
x <= 1
-
complexArgument
private void complexArgument()
This is a port of subroutine HYGFZ from Computation of Special Functions by Shanjie Zhang and Jianming Jin, pp.
380-385.
-
zpow
private void zpow(double zr,
double zi,
double a,
double[] br,
double[] bi,
int[] ierr)
b = z**a = exp(a*log(z))
- Parameters:
zr - zi - a - br - bi - ierr -
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zdiv
private void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zexp
private void zexp(double ar,
double ai,
double[] br,
double[] bi)
complex exponential function b = exp(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]
-
zlog
private void zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr)
complex logarithm b = clog(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]ierr - int[] ierr = 0, normal return ierr = 1, z = cmplx(0.0, 0.0)
-
zmlt
private void zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex multiply c = a * b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zshch
private void zshch(double zr,
double zi,
double[] cshr,
double[] cshi,
double[] cchr,
double[] cchi)
zshch computes the complex hyperbolic functions csh = sinh(x+i*y) and cch = cosh(x+i*y).
- Parameters:
zr - doublezi - doublecshr - double[]cshi - double[]cchr - double[]cchi - double[]
-
zsqrt
private void zsqrt(double ar,
double ai,
double[] br,
double[] bi)
complex square root b = csqrt(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]
����������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.VidSeqSegmParams.html������������������������������������������0000775�4231163�4231163�00000044313�14537076055�024366� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.VidSeqSegmParams (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
inputType
public int inputType
-
trainvidnum
public int trainvidnum
-
totalvids
public int totalvids
-
bkvar
public double bkvar
-
stepxy2
public int stepxy2
-
fsave
public boolean fsave
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ExponentialFunctor.html����������������������������������0000775�4231163�4231163�00000025632�14537076051�026177� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ExponentialFunctor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.ExponentialFunctor
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmContrastEnhancementUsingExposureFusion.html�����������������0000775�4231163�4231163�00000107766�14537076044�031667� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmContrastEnhancementUsingExposureFusion (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[][] |
applyK(double[][] I,
double k,
double a,
double b) |
|
private double[][][] |
applyKColor(double[][][] I,
double k,
double a,
double b) |
|
private void |
computeTextureWeights(double[][] W_h,
double[][] W_v,
double[][] fin,
int sigma,
double sharpness) |
|
double[][] |
copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue) |
|
private double[][] |
filter2Same(double[][] img,
double[][] win) |
|
private double |
log2(double input) |
|
private double[][] |
maxEntropyEnhance(ModelImage IImage,
boolean[][] isBad) |
|
private double[][][] |
maxEntropyEnhanceColor(ModelImage IImage,
boolean[][] isBad) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private double[][] |
solveLinearEquation(double[][] IN,
double[][] wx,
double[][] wy,
double lambda) |
|
private double[][] |
tsmooth(double[][] I,
double lambda,
int sigma,
double sharpness) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmContrastEnhancementUsingExposureFusion
public AlgorithmContrastEnhancementUsingExposureFusion(ModelImage destImg,
ModelImage srcImg,
double mu,
double k,
double a,
double b)
-
Method Detail
-
computeTextureWeights
private void computeTextureWeights(double[][] W_h,
double[][] W_v,
double[][] fin,
int sigma,
double sharpness)
-
copyMakeBorder
public double[][] copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue)
����������gov/nih/mipav/model/algorithms/CeresSolverTest.DenseSparseMatrixTest.html���������������������������0000775�4231163�4231163�00000041327�14537076053�027452� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DenseSparseMatrixTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
passed
private boolean passed
-
num_rows
private int num_rows
-
num_cols
private int num_cols
-
Method Detail
-
SetUp
public void SetUp()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens10.html��������������������������������0000775�4231163�4231163�00000030443�14537076055�026246� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens10 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens10(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens10
public FitPiessens10(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.Forest.predictTreesInThread.html�������������������0000775�4231163�4231163�00000031015�14537076057�031101� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.Forest.predictTreesInThread (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictTreesInThread
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
thread_idx
private int thread_idx
-
Method Detail
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.decision_function.html����������������������������������������0000775�4231163�4231163�00000022526�14537076055�024615� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.decision_function (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LIBSVM.decision_function
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
alpha |
|
(package private) double |
rho |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
decision_function
decision_function()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens3.html���������������������������������0000775�4231163�4231163�00000030414�14537076055�026166� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens3 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens3(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens3
public FitPiessens3(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/RandomNumberGen.html�������������������������������������������������0000775�4231163�4231163�00000053741�14537076056�023147� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
RandomNumberGen (MIPAV API Documentation)
- java.lang.Object
-
- java.util.Random
-
- gov.nih.mipav.model.algorithms.RandomNumberGen
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private static long |
serialVersionUID |
Use serialVersionUID for interoperability.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
RandomNumberGen() |
RandomNumberGen - constructor.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static long |
factorial(int number) |
Returns the factorial of a nonnegative integer.
|
double |
genGaussianRandomNum(double stRange,
double endRange) |
Generates a Gaussian random number greater or equal to the stRange and less than or equal to the endRange.
|
float |
genGaussianRandomNum(float stRange,
float endRange) |
Generates a Gaussian random number greater or equal to the stRange and less than or equal to the endRange.
|
int |
genGaussianRandomNum(int stRange,
int endRange) |
Generates a Gaussian random number greater or equal to the stRange and less than or equal to the endRange.
|
double |
genStandardGaussian() |
|
double |
genUniformRandomNum(double stRange,
double endRange) |
Generates a uniform random number greater or equal to the stRange and less than or equal to the endRange.
|
float |
genUniformRandomNum(float stRange,
float endRange) |
Generates a uniform random number greater or equal to the stRange and less than or equal to the endRange.
|
int |
genUniformRandomNum(int stRange,
int endRange) |
Generates a uniform random number greater or equal to the stRange and less than or equal to the endRange.
|
double[] |
poissDecay(int nEvents,
double mu,
double gain,
double offset) |
This code is derived from PoissDecay.cpp, PoissonDeviate, PoissonRecur, and RandomDeviate,
code accompanying Data Reduction and Error Analysis for the
Physical Sciences, Third Edition, by Philip R.
|
-
Methods inherited from class java.util.Random
doubles, doubles, doubles, doubles, ints, ints, ints, ints, longs, longs, longs, longs, next, nextBoolean, nextBytes, nextDouble, nextFloat, nextGaussian, nextInt, nextInt, nextLong, setSeed
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
genGaussianRandomNum
public final int genGaussianRandomNum(int stRange,
int endRange)
Generates a Gaussian random number greater or equal to the stRange and less than or equal to the endRange.
- Parameters:
stRange - the random number will be greater than or equal to this numberendRange - the random number will be less than or equal to this number- Returns:
- integer number in the range
-
genGaussianRandomNum
public final float genGaussianRandomNum(float stRange,
float endRange)
Generates a Gaussian random number greater or equal to the stRange and less than or equal to the endRange.
- Parameters:
stRange - the random number will be greater than or equal to this numberendRange - the random number will be less than or equal to this number- Returns:
- float number in the range
-
genGaussianRandomNum
public final double genGaussianRandomNum(double stRange,
double endRange)
Generates a Gaussian random number greater or equal to the stRange and less than or equal to the endRange.
- Parameters:
stRange - the random number will be greater than or equal to this numberendRange - the random number will be less than or equal to this number- Returns:
- float number in the range
-
genUniformRandomNum
public final int genUniformRandomNum(int stRange,
int endRange)
Generates a uniform random number greater or equal to the stRange and less than or equal to the endRange.
- Parameters:
stRange - the random number will be greater than or equal to this numberendRange - the random number will be less than or equal to this number- Returns:
- integer number in the range
-
genUniformRandomNum
public final float genUniformRandomNum(float stRange,
float endRange)
Generates a uniform random number greater or equal to the stRange and less than or equal to the endRange.
- Parameters:
stRange - the random number will be greater than or equal to this numberendRange - the random number will be less than or equal to this number- Returns:
- float number in the range
-
genUniformRandomNum
public final double genUniformRandomNum(double stRange,
double endRange)
Generates a uniform random number greater or equal to the stRange and less than or equal to the endRange.
- Parameters:
stRange - the random number will be greater than or equal to this numberendRange - the random number will be less than or equal to this number- Returns:
- float number in the range
-
poissDecay
public final double[] poissDecay(int nEvents,
double mu,
double gain,
double offset)
This code is derived from PoissDecay.cpp, PoissonDeviate, PoissonRecur, and RandomDeviate,
code accompanying Data Reduction and Error Analysis for the
Physical Sciences, Third Edition, by Philip R. Bevington and D. Keith Robinson
p(x, u)is the probability of observing x events where u is the average number of events observed.
x must be zero or a positive integer.
p(x, u) = (u**x)* exp(-u)/x!
The sum of x from 0 to infinity of p(x, u) = 1.
mean value of x = u
variance of x = u
Return gain * p(x, u) + offset
- Parameters:
nEvents - mu - mean of Poisson distribtuiongain - offset - - Returns:
�������������������������������gov/nih/mipav/model/algorithms/AlgorithmFaceAnonymizerBET.BitSetUtility.html������������������������0000775�4231163�4231163�00000055736�14537076045�030021� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFaceAnonymizerBET.BitSetUtility (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) static int |
DOWN_EXP |
|
(package private) static int |
IN_EXP |
|
(package private) static int |
LEFT_EXP |
|
(package private) static int |
OUT_EXP |
|
(package private) static int |
RIGHT_EXP |
|
(package private) static int |
UP_EXP |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
BitSetUtility() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
(package private) java.util.BitSet |
connectNearNeighbors(int loc,
java.util.BitSet connectingRegion,
int maxNeighborDistance) |
Set elements of the returned BitSet meet at least one of the following criteria:
Element is set in connectingRegion.
Walking up, down, right, and/or left from loc to this element requires less than or equal to maxNeighborDistance steps.
|
(package private) java.util.BitSet |
connectNearNeighbors(int loc,
java.util.BitSet connectingRegion,
java.util.BitSet connectingRegionCopy,
int maxNeighborDistance) |
A helper method for connectNearNeighbors(int, BitSet, int) that allows faster copies
|
private boolean |
connectNearNeighborsUtil(int loc,
java.util.BitSet connectingRegion,
java.util.BitSet connectingRegionCopy,
int level,
int dir,
int levelCut) |
|
private java.util.Vector<Point3D> |
convertSetToPoints(java.util.BitSet set) |
|
(package private) int |
getBoundaryCode(java.util.BitSet set,
int value) |
|
(package private) java.util.BitSet |
getEdgePoints(java.util.BitSet set) |
Finds the points of the given BitSet which has at least one neighbor (not including diagonals) not in the BitSet.
|
(package private) float |
getMinDistance(int value,
java.util.BitSet set) |
Calculates the distance between the closest point in this BitSet and the given value.
|
(package private) float |
getMinDistance(int value,
java.util.Vector<Point3D> setPoints) |
Calculates the distance between the closest point in this Vector and the given value.
|
(package private) boolean |
isBoundaryPoint(java.util.BitSet set,
int value) |
|
(package private) boolean |
isInScan(int value) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
BitSetUtility
private BitSetUtility()
-
Method Detail
-
getMinDistance
float getMinDistance(int value,
java.util.BitSet set)
Calculates the distance between the closest point in this BitSet and the given value.
-
getMinDistance
float getMinDistance(int value,
java.util.Vector<Point3D> setPoints)
Calculates the distance between the closest point in this Vector and the given value.
-
connectNearNeighbors
java.util.BitSet connectNearNeighbors(int loc,
java.util.BitSet connectingRegion,
java.util.BitSet connectingRegionCopy,
int maxNeighborDistance)
A helper method for connectNearNeighbors(int, BitSet, int) that allows faster copies
-
connectNearNeighborsUtil
private boolean connectNearNeighborsUtil(int loc,
java.util.BitSet connectingRegion,
java.util.BitSet connectingRegionCopy,
int level,
int dir,
int levelCut)
����������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SchurEliminator.html�������������������������������������0000775�4231163�4231163�00000102327�14537076052�025456� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SchurEliminator (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
BackSubstitute(CeresSolver.BlockSparseMatrix A,
double[] b,
double[] D,
double[] z,
double[] y) |
|
private void |
ChunkDiagonalBlockAndGradient(CeresSolver.Chunk chunk,
CeresSolver.BlockSparseMatrix A,
double[] b,
int row_block_counter,
double[][] etearr,
double[] g,
double[] buffer,
CeresSolver.BlockRandomAccessMatrix lhs) |
|
private void |
ChunkOuterProduct(int thread_id,
CeresSolver.CompressedRowBlockStructure bs,
double[][] inverse_ete,
double[] buffer,
java.util.HashMap<java.lang.Integer,java.lang.Integer> buffer_layout,
CeresSolver.BlockRandomAccessMatrix lhs) |
|
private void |
EBlockRowOuterProduct(CeresSolver.BlockSparseMatrix A,
int row_block_index,
CeresSolver.BlockRandomAccessMatrix lhs) |
|
void |
Eliminate(CeresSolver.BlockSparseMatrix A,
double[] b,
double[] D,
CeresSolver.BlockRandomAccessMatrix lhs,
double[] rhs) |
|
void |
finalize() |
|
void |
Init(int num_eliminate_blocks,
boolean assume_full_rank_ete,
CeresSolver.CompressedRowBlockStructure bs) |
|
private void |
NoEBlockRowOuterProduct(CeresSolver.BlockSparseMatrix A,
int row_block_index,
CeresSolver.BlockRandomAccessMatrix lhs) |
|
private void |
NoEBlockRowsUpdate(CeresSolver.BlockSparseMatrix A,
double[] b,
int row_block_counter,
CeresSolver.BlockRandomAccessMatrix lhs,
double[] rhs) |
|
private void |
UpdateRhs(CeresSolver.Chunk chunk,
CeresSolver.BlockSparseMatrix A,
double[] b,
int row_block_counter,
double[] inverse_ete_g,
double[] rhs) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
kEBlockSize
private int kEBlockSize
-
kFBlockSize
private int kFBlockSize
-
num_threads_
private int num_threads_
-
buffer_
private double[] buffer_
-
buffer_size_
int buffer_size_
-
Method Detail
-
finalize
public void finalize()
- Overrides:
finalize in class java.lang.Object
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.indexIntegerdoubleArrayComparator.html������������������0000775�4231163�4231163�00000027016�14537076052�031300� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.indexIntegerdoubleArrayComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCostFunctions.html������������������������������������������0000775�4231163�4231163�00000337644�14537076044�024600� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCostFunctions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcEntropy(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private void |
calcEntropy(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private void |
calcEntropySmoothed(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private void |
calcEntropySmoothed(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private void |
calcEntropySmoothedWgt(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private void |
calcEntropySmoothedWgt(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private double |
correlationRatio(TransMatrix tMatrix) |
Correlation ratio cost function.
|
private double |
correlationRatio(TransMatrixd tMatrix) |
Correlation ratio cost function.
|
private double |
correlationRatioSmoothed(TransMatrix tMatrix) |
Correlation ratio cost function.
|
private double |
correlationRatioSmoothed(TransMatrixd tMatrix) |
Correlation ratio cost function.
|
private double |
correlationRatioSmoothedWgt(TransMatrix tMatrix) |
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
|
private double |
correlationRatioSmoothedWgt(TransMatrixd tMatrix) |
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
|
double |
cost(double[] data) |
Not implemented in this class.
|
double |
cost(TransMatrix affMatrix) |
Calculates the cost (dependent on the selected cost function) based on the reference image and the input image.
|
double |
cost(TransMatrixd affMatrix) |
Calculates the cost (dependent on the selected cost function) based on the reference image and the input image.
|
void |
disposeLocal() |
Sets class global array variables to null and calls the garbage collector.
|
void |
finalize() |
Calls disposeLocal of this class to ensure this class nulls the references to global class variables so that
memory will be recovered.
|
private void |
findRangeX(java.awt.Point minMaxPt,
double newPtX,
double newPtY,
double newPtZ,
double aT00,
double aT10,
double aT20,
double iT00,
double iT10,
double iT20) |
DOCUMENT ME!
|
int |
getCostCalled() |
Accessor that returns how many times the cost function has been called.
|
int |
getCostFunction() |
|
private double |
getSinc(float[] data,
double x,
double y,
double z) |
DOCUMENT ME!
|
private static double |
hanning(double x,
int w) |
DOCUMENT ME!
|
boolean |
isGPULineMin() |
|
private double |
kernelVal(double x,
int w) |
DOCUMENT ME!
|
private double |
leastSquares(TransMatrix tMatrix) |
Least squares cost function.
|
private double |
leastSquares(TransMatrixd tMatrix) |
Least squares cost function.
|
private double |
leastSquaresColor(TransMatrix tMatrix) |
Least squares cost function.
|
private double |
leastSquaresColor(TransMatrixd tMatrix) |
Least squares cost function.
|
private double |
leastSquaresSmoothed(TransMatrix tMatrix) |
Least squares cost function.
|
private double |
leastSquaresSmoothed(TransMatrixd tMatrix) |
Least squares cost function.
|
private double |
leastSquaresSmoothedColor(TransMatrix tMatrix) |
Least squares cost function.
|
private double |
leastSquaresSmoothedColor(TransMatrixd tMatrix) |
Least squares cost function.
|
private double |
leastSquaresSmoothedWgt(TransMatrix tMatrix) |
Least squares cost function with weighting.
|
private double |
leastSquaresSmoothedWgt(TransMatrixd tMatrix) |
Least squares cost function with weighting.
|
private double |
leastSquaresSmoothedWgtColor(TransMatrix tMatrix) |
Least squares cost function with weighting.
|
private double |
leastSquaresSmoothedWgtColor(TransMatrixd tMatrix) |
Least squares cost function with weighting.
|
float[] |
lineMin(WildMagic.LibFoundation.Mathematics.Matrix4f kToOrigin,
WildMagic.LibFoundation.Mathematics.Matrix4f kFromOrigin,
float rigid,
float dim,
double[] startPoint,
double[] pt,
int ptLength,
double[] unitDirections,
double unit_tolerance,
double fMinDist,
double bracketA,
double functionA,
double bracketB,
double functionB,
double bracketC,
double functionC) |
|
private double |
mutualInformation(TransMatrix tMatrix) |
DOCUMENT ME!
|
private double |
mutualInformation(TransMatrixd tMatrix) |
DOCUMENT ME!
|
private double |
mutualInformationSmoothed(TransMatrix tMatrix) |
DOCUMENT ME!
|
private double |
mutualInformationSmoothed(TransMatrixd tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformation(TransMatrix tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformation(TransMatrixd tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformationSmoothed(TransMatrix tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformationSmoothed(TransMatrixd tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformationSmoothedWgt(TransMatrix tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformationSmoothedWgt(TransMatrixd tMatrix) |
DOCUMENT ME!
|
private double |
normalizedXCorrelation(TransMatrix tMatrix) |
Normalized cross-correlation cost function.
|
private double |
normalizedXCorrelation(TransMatrixd tMatrix) |
Normalized cross-correlation cost function.
|
private double |
normalizedXCorrelationSinc(TransMatrix tMatrix) |
Normalized cross-correlation cost function.
|
private double |
normalizedXCorrelationSinc(TransMatrixd tMatrix) |
Normalized cross-correlation cost function.
|
private double |
normalizedXCorrelationSmoothed(TransMatrix tMatrix) |
Normalized cross-correlation cost function.
|
private double |
normalizedXCorrelationSmoothed(TransMatrixd tMatrix) |
Normalized cross-correlation cost function.
|
private double |
normalizedXCorrelationSmoothedWgt(TransMatrix tMatrix) |
Normalized cross-correlation cost function with weighting.
|
private double |
normalizedXCorrelationSmoothedWgt(TransMatrixd tMatrix) |
Normalized cross-correlation cost function with weighting.
|
void |
setGPUCost(ImageRegistrationGPU kGPUCost) |
|
void |
setInputWgtImage(ModelSimpleImage inputWgtImg) |
Sets the input weight image.
|
private void |
setPLogP(int nBins) |
Precalculates information and allocates buffers used in the calculation of mutual information statistics.
|
void |
setRefWgtImage(ModelSimpleImage refWgtImg) |
Sets the reference weight image.
|
private void |
setupKernel() |
DOCUMENT ME!
|
private static double |
sinc(double x) |
DOCUMENT ME!
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
costCalled
private int costCalled
DOCUMENT ME!
-
costFunctID
private int costFunctID
DOCUMENT ME!
-
nBins
private final int nBins
DOCUMENT ME!
-
nVoxels
private int nVoxels
DOCUMENT ME!
-
pLogP
private double[] pLogP
DOCUMENT ME!
-
xDim
private final int xDim
DOCUMENT ME!
-
xEnd
private int xEnd
DOCUMENT ME!
-
xStart
private int xStart
-
yDim
private final int yDim
DOCUMENT ME!
-
yEnd
private int yEnd
DOCUMENT ME!
-
yStart
private int yStart
-
zDim
private final int zDim
DOCUMENT ME!
-
zEnd
private int zEnd
DOCUMENT ME!
-
zStart
private int zStart
-
Constructor Detail
-
AlgorithmCostFunctions
public AlgorithmCostFunctions(ModelSimpleImage rImage,
ModelSimpleImage iImage,
int functionID,
int nBins,
float smoothSize)
Creates a new AlgorithmCostFunctions object.
- Parameters:
rImage - DOCUMENT ME!iImage - DOCUMENT ME!functionID - DOCUMENT ME!nBins - DOCUMENT ME!smoothSize - DOCUMENT ME!
-
Method Detail
-
lineMin
public float[] lineMin(WildMagic.LibFoundation.Mathematics.Matrix4f kToOrigin,
WildMagic.LibFoundation.Mathematics.Matrix4f kFromOrigin,
float rigid,
float dim,
double[] startPoint,
double[] pt,
int ptLength,
double[] unitDirections,
double unit_tolerance,
double fMinDist,
double bracketA,
double functionA,
double bracketB,
double functionB,
double bracketC,
double functionC)
-
calcEntropy
private void calcEntropy(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
calcEntropy
private void calcEntropy(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
calcEntropySmoothed
private void calcEntropySmoothed(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
calcEntropySmoothed
private void calcEntropySmoothed(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
calcEntropySmoothedWgt
private void calcEntropySmoothedWgt(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
calcEntropySmoothedWgt
private void calcEntropySmoothedWgt(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
correlationRatioSmoothedWgt
private double correlationRatioSmoothedWgt(TransMatrix tMatrix)
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
- Parameters:
tMatrix - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
correlationRatioSmoothedWgt
private double correlationRatioSmoothedWgt(TransMatrixd tMatrix)
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
- Parameters:
tMatrix - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
findRangeX
private void findRangeX(java.awt.Point minMaxPt,
double newPtX,
double newPtY,
double newPtZ,
double aT00,
double aT10,
double aT20,
double iT00,
double iT10,
double iT20)
DOCUMENT ME!
- Parameters:
minMaxPt - DOCUMENT ME!
��������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmLuminanceAdaptation.html������������������������������������0000775�4231163�4231163�00000056767�14537076047�025726� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLuminanceAdaptation (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
alpha |
|
private double |
sigma1 |
Reference: Retinex-Based Perceptual Contrast Enhancement in Images
Using Luminance Adaptation by Qingtao Fu, Cheolkon Jung, and
Kaiqiang Xu, IEEE Access, current version November 9, 2018,
Digital Object Identifier 10.1109/ACCESS.2018.2870638.
|
private double |
sigma2 |
|
private double |
sigma3 |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
sigma1
private double sigma1
Reference: Retinex-Based Perceptual Contrast Enhancement in Images
Using Luminance Adaptation by Qingtao Fu, Cheolkon Jung, and
Kaiqiang Xu, IEEE Access, current version November 9, 2018,
Digital Object Identifier 10.1109/ACCESS.2018.2870638.
-
sigma2
private double sigma2
-
sigma3
private double sigma3
-
alpha
private double alpha
-
Constructor Detail
-
AlgorithmLuminanceAdaptation
public AlgorithmLuminanceAdaptation(ModelImage destImg,
ModelImage srcImg,
double sigma1,
double sigma2,
double sigma3,
double alpha)
���������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd12.html��������������������������������������0000775�4231163�4231163�00000030506�14537076055�025063� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd12 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd12(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd12
public Fitqd12(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LineSearch.html������������������������������������������0000775�4231163�4231163�00000041625�14537076051�024365� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearch (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearch
-
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
abstract void |
DoSearch(double step_size_estimate,
double initial_cost,
double initial_gradient,
CeresSolver.LineSearchSummary summary) |
|
protected double |
InterpolatingPolynomialMinimizingStepSize(CeresSolver.LineSearchInterpolationType interpolation_type,
CeresSolver.FunctionSample lowerbound,
CeresSolver.FunctionSample previous,
CeresSolver.FunctionSample current,
double min_step_size,
double max_step_size) |
|
CeresSolver.LineSearchOptions |
options() |
|
void |
Search(double step_size_estimate,
double initial_cost,
double initial_gradient,
CeresSolver.LineSearchSummary summary) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
DoSearch
public abstract void DoSearch(double step_size_estimate,
double initial_cost,
double initial_gradient,
CeresSolver.LineSearchSummary summary)
�����������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.EvaluatorTest.html�����������������������������������0000775�4231163�4231163�00000051656�14537076053�026021� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.EvaluatorTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
EvaluateAndCompare
public void EvaluateAndCompare(CeresSolver.ProblemImpl problem,
int expected_num_rows,
int expected_num_cols,
double expected_cost,
double[] expected_residuals,
double[] expected_gradient,
double[] expected_jacobian,
boolean[] passed)
����������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlScaleSpaceOctaveGeometry.html�������������������������������0000775�4231163�4231163�00000023730�14537076054�026523� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlScaleSpaceOctaveGeometry (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceOctaveGeometry
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
height |
< Width (number of pixels)
|
(package private) double |
step |
< Height (number of pixels)
|
(package private) int |
width |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHillClimbingWatershed.indexValueItem.html�������������������0000775�4231163�4231163�00000027042�14537076046�031113� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHillClimbingWatershed.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed.indexValueItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValueItem(int index,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
private double value
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public double getValue()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.GSS_filters.html����������������������������������������������0000775�4231163�4231163�00000025025�14537076056�023235� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.GSS_filters (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.GSS_filters
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_filters
int num_filters
-
first_level
int first_level
-
Constructor Detail
-
GSS_filters
public GSS_filters()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.VertexTotalOrderingInteger.html�������������������������0000775�4231163�4231163�00000026506�14537076052�027725� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.VertexTotalOrderingInteger (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.VertexTotalOrderingInteger
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSFTA.html���������������������������������������������������0000775�4231163�4231163�00000075160�14537076050�022521� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSFTA (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int[] |
counts |
|
private double[] |
D |
|
private int |
nt |
Copyright (c) 2013, Alceu Costa
Copyright (c) 2013, GBDI-ICMC-USP
All rights reserved.
|
private int |
numBins |
|
private short[] |
T |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private byte[] |
findBorders(byte[] I,
int xDim,
int yDim) |
FINDBORDERS Returns an binary image with the regions' boundaries of the input
image I.
|
double[] |
getD() |
|
private double |
hausDim(byte[] I,
int xDim,
int yDim) |
HAUSDIM Returns the Haussdorf fractal dimension of an object represented by
a binary image.
|
private int |
otsu(int[] counts) |
|
private void |
otsurec(short[] I,
int ttotal) |
OTSUREC Returns a set of thresholds for the input image using the multi-level
otsu algorith.
|
private void |
otsurec_helper(int lowerBin,
int upperBin,
int tLower,
int tUpper) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
nt
private int nt
Copyright (c) 2013, Alceu Costa
Copyright (c) 2013, GBDI-ICMC-USP
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in
the documentation and/or other materials provided with the distribution
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
POSSIBILITY OF SUCH DAMAGE.
Ported from MATLAB to Java by William Gandler
SFTA extracts texture features from the grayscale image I using the SFTA
algorithm (Segmentation-based Fractal Texture Analysis).
Returns a 1 by 6*nt vector D extracted from the input grayscale image I
using the SFTA (Segmentation-based Fractal Texture Analysis) algorithm. The
feature vector corresponds to texture information extracted from the input
image I.
If necessary, the input image is converted to a grayscale image with
bit-depth of 8.
Reference:
Costa, A. F., G. E. Humpire-Mamani, A. J. M. Traina. 2012. "An Efficient
Algorithm for Fractal Analysis of Textures." In SIBGRAPI 2012 (XXV
Conference on Graphics, Patterns and Images), 39-46, Ouro Preto, Brazil.
Author
------
Alceu Ferraz Costa
email: alceufc [at] icmc [dot] usp [dot] br
-
numBins
private int numBins
-
counts
private int[] counts
-
Method Detail
-
getD
public double[] getD()
- Returns:
-
hausDim
private double hausDim(byte[] I,
int xDim,
int yDim)
HAUSDIM Returns the Haussdorf fractal dimension of an object represented by
a binary image.
Returns the Haussdorf fractal dimension D of an object represented by the
binary image I. Nonzero pixels belong to an object and 0 pixels
constitute the background.
Algorithm
---------
1 - Pad the image with background pixels so that its dimensions are a
power of 2.
2 - Set the box size 'e' to the size of the image.
3 - Compute N(e), which corresponds to the number of boxes of size 'e'
which contains at least one object pixel.
4 - If e > 1 then e = e / 2 and repeat step 3.
5 - Compute the points log(N(e)) x log(1/e) and use the least squares
method to fit a line to the points.
6 - The returned Haussdorf fractal dimension D is the slope of the line.
Author
------
Alceu Ferraz Costa
email: alceufc [at] icmc [dot] usp [dot] br
- Parameters:
I - - Returns:
-
findBorders
private byte[] findBorders(byte[] I,
int xDim,
int yDim)
FINDBORDERS Returns an binary image with the regions' boundaries of the input
image I.
FINDBORDERS returns a binary image with the regions' boundaries of the
input image I. The input image I must be a binary image. The returned image
Im takes the value 1 if the corresponding pixel in I has the value 1 and
at least one neighboring pixel with value 0. Otherwise Im takes the value
0.
Author
------
Alceu Ferraz Costa
email: alceufc [at] icmc [dot] usp [dot] br
- Parameters:
I - - Returns:
-
otsurec
private void otsurec(short[] I,
int ttotal)
OTSUREC Returns a set of thresholds for the input image using the multi-level
otsu algorith.
OTSUREC computes a set T of thresholds from the input image I employing the
multi-level Otsu algorithm. The multi-level Otsu algorithm consists in
finding the threshold that minimizes the input image intra-class variance.
Then, recursively, the Otsu algorithm is applied to each image region until
ttotal threholds are found.
- Parameters:
I - ttotal -
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmColorSaturation.html����������������������������������������0000775�4231163�4231163�00000060131�14537076044�025107� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmColorSaturation (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmColorSaturation
extends AlgorithmBase
This algorithm changes the saturation of a color image while keeping the hue and intensity constant.
Intensity = (R + G + B)/3
Hue = theta if B <= G
= 360 - theta if B > G
with
theta = arccos{0.5[(R - G) + (R - B)]/sqrt[(R - G)**2 + (R - B)*(G - B)]}
Saturation = 1 - 3 * min(R, G, B)/(R + G + B)
Derived from quaternion formula:
Radial dilation = ((a + 2)/2)*(r*i + g*j + b*k) + (a/2)*u*(ri + g*j + b*k)*u
where u is a pure unit quaternion.
For radial dilation around the gray line where r = g = b, set u = (i + j + k)/sqrt(3)
Radial dilation around gray line = ((a + 2)/2)*(r*i + g*j + b*k)
+ (a/2)*((i + j + k)/sqrt(3))*(r*i + g*j + b*k)*((i + j + k)/sqrt(3))
which expands space outward for a > 0 or moves it out from the r = g = b line
and compresses space for a < 0 or moves it in towards the r = g = b line.
Using a = -1 sets r = g = b at every pixel.
Using a = -2 complements the image in an opposing color sense.
If need be, decrease the magnitude of a applied to a particular pixel so that the 3 equations
can be satisfied for legal values of r, g, and b.
References:
1.) Multivariate Image Processing, Christopher Collet, Jocelyn Chanussot, and Kacem Chehdi, editors,
Chapter 13, Hypercomplex Models and Processing of Vector Images by S. J. Sangwine, T. A. Ell, and
N. Le Bihan, Year 2010, Publisher Wiley, pp. 407-436.
2.) "Hypercomplex color affine filters" by T. A. Ell, IEEE International Conference on Image Processing
(ICIP 2000), vol. II, Vancouver, Canada, Institute of Electrical and Electronics Engineers,
pp. 792-795, September 16-19, 2007.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
a |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmColorSaturation
public AlgorithmColorSaturation(ModelImage destImg,
ModelImage srcImg,
float a)
AlgorithmColorSaturation.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!a - Scale factor which increases saturation for a > 0 and decreases saturation for a < 0
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.gaussStandardDeviationFittingCostFunction.html�������0000775�4231163�4231163�00000034302�14537076054�033331� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.gaussStandardDeviationFittingCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SymmsIntegralMapping.html��������������������������������������������0000775�4231163�4231163�00000654407�14537076057�024245� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SymmsIntegralMapping (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
SymmsIntegralMapping() |
|
SymmsIntegralMapping(ModelImage destImg,
ModelImage srcImg,
java.lang.String FORTFL,
boolean SYMTY,
boolean REFLN,
double[] CENSY,
int NARCS,
boolean[] NUMDER,
int[] ARCTY,
double[][] STAPT,
int[] PGM,
double[] RGM,
int[] PTX,
int[] NTX,
java.lang.String[] DEFN) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
ANGLE7(double[] BE,
int NA,
boolean IN) |
|
private double |
ARGIN1(double RT1,
double RT2,
int PT,
double[] DIFF1,
double[] DIFF2,
double[] ZZ,
double LIMIT) |
|
private void |
ASONJ7(double ALFA,
double BETA,
double[] A,
double[] B,
double[] H,
int N) |
|
private void |
ASQUC7(double[] AQCOF,
double[] BQCOF,
double[] CQCOF,
double[] JACIN,
int NJIND,
int NQPTS) |
|
private void |
AXION1(int[] AXION,
int[] NEWDG,
double[] SOLUN,
int MDGPO,
int TNSUA,
int[] DGPOL,
int[] LOSUB,
int[] HISUB,
double[] RIGLL,
double LGTOL,
boolean[] ACCPT,
double[] JACIN,
int[] JATYP,
int NJIND,
double[] NEWHL,
double[] ESTOL,
int[] IER) |
|
private void |
BCFSNG(int TNSUC,
int[] DGPOC,
int[] JTYPC,
int[] LSUBC,
double[] H0VLC,
double[] JAINC,
double[][] BFSNC,
double[][] SOLNC) |
|
private void |
BCFVTF(double[] BCFSN,
double[] VTARG,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int[] PARNT,
int RFARC,
int TNSUA,
double[] H0VAL,
double[] JACIN,
double RFARG,
double[] SOLUN) |
|
private void |
BISNEW(int[] IER,
double LL,
double TT,
double UU,
double[] A1COF,
double[] ACOEF,
double[] B1COF,
double[] BCFSN,
double[] BCOEF,
double BETA,
int DEG,
double H0VAL,
double H1VAL,
double[] JACOF,
double NEWTL,
double SJT,
double RRHS,
double TOLIW) |
|
private void |
BMCANP(double THETA,
double[] PHYPT,
double[] DERIV,
boolean WANTD,
boolean WANTM,
int[] IER) |
|
private void |
BMCAP1(double[] PHYPT,
double[] DERIV,
double THETA,
int NQPTS,
int TNSUC,
int[] DGPOC,
int[] JTYPC,
int[] LSUBC,
int[] PARNT,
int[] PRNSA,
double[] A1COC,
double[] ACOFC,
double[] B1COC,
double[] BCOFC,
double[] H0VLC,
double[] H1VLC,
double[] HALEN,
double[] JAINC,
double[] MIDPT,
double[] PHPAS,
double THET0,
double[] VARGC,
double[][] BFSNC,
double[] CENTR,
double[][] SOLNC,
boolean INTER,
boolean WANTD,
int[] IER) |
|
private void |
BMPHC1(int IARC,
double[] PHYPT,
double[] CANPT,
double[] DERIV,
int NQPTS,
int TNSUA,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int[] LPQSB,
int[] NPPQF,
int[] PARNT,
double[] A1COF,
double[] ACOEF,
double[] B1COF,
double[] BCFSN,
double[] BCOEF,
double[] H0VAL,
double[] H1VAL,
double[] HALEN,
double[] JACIN,
double[] MIDPT,
double[] SOLUN,
double[] TPPQF,
double[] TRRAD,
double[] VTARG,
double[][] ZPPQF,
boolean INTER,
boolean WANTD,
int[] IER) |
|
private void |
BMPHYC(int IARC,
double[] PHYPT,
double[] CANPT,
double[] DERIV,
boolean WANTD,
boolean WANTM,
int[] IER) |
|
private void |
CATPH4(int NPTS,
double[][] PHYPT,
double[][] CANPT,
int NARCS,
int NQPTS,
int TNSUC,
int[] DGPOC,
int[] JTYPC,
int[] LSUBC,
int[] LQSBG,
int[] NPPQG,
int[] PARNT,
int[] PRNSA,
double[] A1COC,
double[] ACOFC,
double[] B1COC,
double[] BCOFC,
double[] H0VLC,
double[] H1VLC,
double[] HALEN,
double[] JAINC,
double LGTOL,
double[] MIDPT,
double[] PHPAS,
double[] QUPTC,
double[] QUWTC,
double THET0,
double[] VARGC,
double[][] BFSNC,
double[] CENTR,
double[] FACTR,
double[][] SOLNC,
double[][] WPPQG,
double[][] ZPPQG,
boolean INTER,
int[] IER) |
|
private double[] |
CCJACS(double[] X,
int N,
double[] A,
double[] B,
double H,
double[][] CO) |
|
private double[] |
CINRAD(int NARCS,
int NQPTS,
int TNSUA,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int[] LPQSB,
int[] NPPQF,
int[] PARNT,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] HALEN,
double[] JACIN,
double LGTOL,
double[] MIDPT,
double[] QUPTS,
double[] QUWTS,
double[] SOLUN,
double[] TPPQF,
double[] TRRAD,
double[] WPPQF,
double[] CENTR,
double[] FACTR,
double[][] ZPPQF,
int[] IER) |
|
private double[] |
CJACSU(double[] X,
int N,
double[] A,
double[] B,
double H,
double[] CO) |
|
private void |
CNDPLT(boolean[] MAP11,
double[] RESMN,
double[] UPHYC,
double[] UCANP,
double CRRES,
java.lang.String[] DASH,
java.lang.String[] NEWD,
int[] IER) |
|
private double[] |
cos(double[] t) |
|
private void |
CPJAC3(int NARCS,
int NQPTS,
int INDEG,
int[] DGPOL,
double[] JACIN,
double[] ACOEF,
double[] BCOEF,
double[] DIAG,
double[] SDIAG,
int[] TNSUA,
int[] LOSUB,
int[] HISUB,
int[] JATYP,
int[] PARNT,
double[] MIDPT,
double[] HALEN,
double[] COLPR,
double[][] ZCOLL,
boolean[] LNSEG,
int[] LOOLD,
int[] HIOLD,
double EPS,
int[] IER,
boolean INIBT) |
|
private int |
CRITCO(int N,
double[] POSCO) |
|
private void |
CSCAL3(double[] COLSC,
int NQPTS,
int NJIND,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] QUPTS,
double[] QUWTS,
double[] JACIN,
double[] MU,
double[] TT,
double[] QQ) |
|
private void |
DEJAC7(double[][] ZZ,
int NZZ,
double BETA,
double[] TAU,
int MAXDG,
int NQUAD,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] REMND,
double[] CSCAL,
double[] TOL,
double[] MAXRM,
int[] IER) |
|
private void |
DELEG7(double[][] ZZ,
int NZZ,
double BETA,
double[] TAU1,
double[] TAU2,
boolean T1FXD,
int MAXDG,
int NQUAD,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] REMND,
double[] CSCAL,
double[] TOL,
double[] MAXRM,
int[] IER) |
|
private void |
DEPPJ8(double BETA,
double[] TAU,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double[] TOL,
double[] MAXRM,
int NINTS,
double DELTA,
int[] IER) |
|
private void |
DEPPJ9(double[][] ZZ,
int NZZ,
double BETA,
double[] TAU,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double[] TOL,
double[] MAXRM,
int[] IER) |
|
private void |
DEPPL8(double BETA,
double[] TAU1,
double[] TAU2,
boolean T1FXD,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double[] TOL,
double[] MAXRM,
int NINTS,
double DELTA,
int[] IER) |
|
private void |
DEPPL9(double[][] ZZ,
int NZZ,
double BETA,
double[] TAU1,
double[] TAU2,
boolean T1FXD,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double[] TOL,
double[] MAXRM,
boolean FIRST,
int[] IER) |
|
private void |
DIAGN4(double[] CCAPH,
double[] COCAP,
double[] COPHC,
double[] CPHCA,
double[] EXCAP,
double[] EXPHC,
int[] ICRVS,
int[] IER,
int[] IPRVS,
int[] NASYM,
int[] NCRVS,
int[] NINFD,
int[] NPRVS,
int[] NZERD,
double[] ARCLN,
double[] ASYMP,
double[] BCDMN,
double[] CORXX,
double[] TOTLN,
double[] VTARG,
boolean[] MAP11,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int NARCS,
int NQPTS,
int NXINT,
int[] PARNT,
int TNSUA,
double[] A1COF,
double[] ACOEF,
double[] B1COF,
double[] BCFSN,
double[] BCOEF,
double[] H0VAL,
double[] H1VAL,
double[] HALEN,
double[] JACIN,
double[] MIDPT,
double[] SOLUN,
double[] QUPTS,
double[] QUWTS) |
|
private double |
DIAPHY(int NARCS) |
|
private void |
DMCANP(int NPTS,
double[][] PHYPT,
double[][] CANPT,
boolean WANTM,
int[] IER) |
|
private void |
DMPHYC(int NPTS,
double[][] PHYPT,
double[][] CANPT,
boolean WANTM,
int[] IER) |
|
private double[] |
DPARFN(int IA,
double[] TT) |
|
void |
DRIVE0() |
|
void |
DRIVE1() |
|
private double |
DSDT(double X) |
|
private void |
EIGSYS(int N,
double EPS,
double[] D,
double[] E,
double[] Z,
int[] IER) |
|
private double |
FNVAL(double X) |
|
private double |
GAMMA(double U) |
|
private void |
GQCANP(double[] RWORK,
int[] IER) |
|
private void |
GQPHYC(int MQIN1,
double[] RWORK,
int[] IER) |
|
private void |
HEADER(java.lang.String TXT,
java.lang.String REDD,
java.io.RandomAccessFile raFile) |
|
private void |
ICOQR1(int NARCS,
int NJIND,
int NQPTS,
int MDGPO,
int MQIN1,
double AQTOL,
double[] QUPTS,
double[] QUWTS,
double[] JACIN,
double[] MIDPT,
double[] HALEN,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] COLSC,
int[] NQUAD,
int[] LOQSB,
double[] QCOMX,
double[] QCOMW,
int MNQUA,
double[] TOLOU,
double[] MCQER,
double[] XENPT,
double[][] XIVAL,
double[] XIDST,
int[] IER) |
|
private java.lang.String |
IERTXT(int IER) |
|
private void |
IGNLVL(double[] RIGLL,
double[] COLSC,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] JACIN,
int NJIND,
int NQPTS,
int[] IER) |
|
private void |
IMTQLH(int N,
double[] D,
double[] E,
int[] IERR) |
|
private void |
INVJCO(double[][] SOLNC,
double[] A1COF,
double AA,
double[] ACOEF,
double[] ACOFC,
double[] B1COF,
double BB,
double[] BCFSN,
double[] BCOEF,
double[] BCOFC,
double BETA,
double BETAC,
double[] CENTR,
double CONST,
int DGPOC,
int DGPOL,
double H0VAL,
double H0VLC,
double H1VAL,
double HAANG,
double HALEN,
int[] IER,
boolean INTER,
double[] JACOF,
int JTYPC,
double MIDPT,
double NEWTL,
int NQUAD,
int PARNT,
double[] QUPTC,
double[] QUWTC,
double[][] RHOVL,
double SJT,
double SJTC,
double[] SVAL,
double TOLIW,
double[] TVAL,
double[] WORK) |
|
private void |
JACANP(double[] RWORK,
int[] IER) |
|
private double[] |
JACSUC(double X,
int N,
double[] A,
double[] B,
double H,
double[][] CO) |
|
private double |
JACSUM(double X,
int N,
double[] A,
double[] B,
double H,
double[] CO) |
|
private void |
JAPAR7(double[] PP,
double X,
double[] AA,
double[] BB,
int N) |
|
private void |
JAPHYC() |
|
private void |
JCFIM5(int[] DGPOC,
int[] IER,
int[] JTYPC,
int[] LSUBC,
double[] PHPAS,
int[] PRNSA,
double[][] SOLNC,
int TNSUC,
double[] VARGC,
double[] AICOF,
double[] ACOEF,
double[] ACOFC,
double[] BICOF,
double[] BCFSN,
double[] BCOEF,
double[] BCOFC,
double[] CENTR,
int[] DGPOL,
double[] ERARC,
double[] H0VAL,
double[] H0VLC,
double[] HIVAL,
double[] HALEN,
boolean INTER,
double[] JACIN,
double[] JAINC,
int[] JATYP,
double LGTOL,
int[] LOSUB,
double[] MIDPT,
int MNCOF,
int MNSUC,
int NJIND,
int NQPTS,
int[] PARNT,
double[] QUPTC,
double[] QUWTC,
double[] RIGLL,
double[] SOLUN,
double NEWTL,
double[] VTARG) |
|
private void |
LEVCUR(int NCONT,
double[] RADII,
int NARGS,
double[] THETA,
double[] RAD1,
double[] RAD2,
double[] PSD,
double[] MINPD,
double[] MAXPD,
java.lang.String[] NEWD,
int[] IER) |
|
private double |
LGGAM(double X) |
|
private void |
LINSEG(boolean[] LNSEG,
int NARCS) |
|
private void |
LNSY11(double[][][] MATRX,
double[] RGTSD,
int MNEQN,
int NCOLL,
int ORDSG,
boolean REFLN,
int NQPTS,
int TNSUA,
int[] JATYP,
int[] PARNT,
int[] DGPOL,
int[] LOSUB,
int[] HISUB,
int[] NQUAD,
int[] LOQSB,
double TOLNR,
double[] MIDPT,
double[] HALEN,
double[] H0VAL,
double[] COLSC,
double[] ACOEF,
double[] BCOEF,
double[] COLPR,
double[] QCOMX,
double[] QCOMW,
double[] CENTR,
double[][] ZCOLL,
boolean INTER,
boolean[] LNSEG,
double[] WORK,
int[] QIERR,
double[] MQERR,
double[] JACIN,
double[] A1COF,
double[] B1COF,
double AQTOL,
double RQTOL,
double[] AQCOF,
double[] BQCOF,
double[] CQCOF,
int[] LOOLD,
int[] HIOLD) |
|
private double |
MDNBT(double ALFA,
double BETA) |
|
private void |
OPQUD1(int NJIND,
int NQPTS,
double[] JACIN,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] AICOF,
double[] BICOF,
double[] HIVAL,
double[] QUPTS,
double[] QUWTS,
double[] WORK,
int[] IER) |
|
private void |
OUPTCL(int[] DGPOC,
int[] JTYPC,
double LGTOL,
int[] LSUBC,
int NQPTS,
int[] PARNT,
int[] PRNSA,
double[] RIGLL,
double[][] SOLNC,
int TNSUC,
boolean INTER,
double INNRAD,
int IER) |
|
private double[] |
PARFUN(int IA,
double[] TT) |
|
void |
PARGEN() |
|
private void |
PHTCA1(int NPTS,
double[][] PHYPT,
double[][] CANPT,
int NARCS,
int NQPTS,
int TNSUA,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int[] LPQSB,
int[] NPPQF,
int[] PARNT,
double[] A1COF,
double[] ACOEF,
double[] B1COF,
double[] BCFSN,
double[] BCOEF,
double[] H0VAL,
double[] H1VAL,
double[] HALEN,
double[] JACIN,
double LGTOL,
double[] MIDPT,
double[] QUPTS,
double[] QUWTS,
double[] SOLUN,
double[] TPPQF,
double[] TRRAD,
double[] VTARG,
double[] WPPQF,
double[] CENTR,
double[] FACTR,
double[][] ZPPQF,
boolean INTER,
int[] IER) |
|
private void |
POPQF1(int[] NPPQF,
int[] LPQSB,
int[] TNPQP,
double[] TOLOU,
double[] TPPQF,
double[] TRRAD,
double[] WPPQF,
double[][] ZPPQF,
int MNQUA,
int MQIN1,
int NARCS,
int NINTS,
int NQPTS,
int TNSUA,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int[] PARNT,
double DELTA,
double LGTOL,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] HALEN,
double[] JACIN,
double[] MIDPT,
double[] QUPTS,
double[] QUWTS,
double[] SOLUN,
double[] XENPT,
int[] IER) |
|
private void |
POPQG1(int[] NPPQG,
int[] LPQSB,
int[] TNPQP,
double[] TOLOU,
double[][] WPPQG,
double[][] ZPPQG,
int MNQUA,
int MQIN1,
int NARCS,
int NINTS,
int NQPTS,
int TNSUC,
int[] DGPOC,
int[] JTYPC,
int[] LSUBC,
double DELTA,
double LGTOL,
double[] ACOFC,
double[] BCOFC,
double[] H0VLC,
double[] JAINC,
double[] QUPTC,
double[] QUWTC,
double[][] SOLNC,
double[] VARGC,
double[] XENPT,
int[] IER) |
|
private void |
PPSBI1(double[] ZZ,
double BETA,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double TOLIN,
double[] TOLOU,
double[] XENPT,
int[] QINTS,
int MQIN1,
int[] IER) |
|
private void |
PPSBI7(double DELTA,
int NINTS,
double BETA,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double TOLIN,
double[] TOLOU,
double[] XENPT,
int[] QINTS,
int MQIN1,
int[] IER) |
|
private void |
PTFUN1(int TYPE,
double[][] STAPT,
double[] RGM,
int NTX,
java.lang.String[] TXT,
int CHNL,
java.lang.String CHTT,
java.lang.String VAR,
java.lang.String REDD,
java.io.RandomAccessFile raFile) |
|
private void |
PTFUN2(int TYPE,
double[][] STAPT,
double[] RGM,
int NTX1,
java.lang.String[] TXT1,
int NTX2,
java.lang.String[] TXT2,
int CHNL,
java.lang.String CHTT,
java.lang.String VAR,
java.lang.String CHIA,
boolean NUMDER,
java.lang.String REDD,
java.io.RandomAccessFile raFile) |
|
private double |
PYTHAG(double A,
double B) |
|
private void |
RECON(int ORDSG,
boolean REFLN,
int NCOLL,
int TNSUA,
int[] LOSUB,
int[] HISUB,
double[] SOLUN) |
|
private void |
RESCAL(int NQPTS,
int TNSUA,
int[] LOSUB,
int[] HISUB,
int[] JATYP,
double[] SOLUN,
double[] COLSC) |
|
private void |
RHOFN(int[] IER,
double[][] RHOVL,
double[] ACOEF,
double[] BCOEF,
double BETA,
double BETAC,
double[] CENTR,
int DGPOL,
double H0VAL,
double HAANG,
double HALEN,
boolean INTER,
double MIDPT,
int NVALS,
int PARNT,
double SJT,
double[] JACOF,
double[] SVAL,
double[] TVAL) |
|
private void |
RSLT71(int[] QIERC,
double RCOND,
double[] SOLUN,
int NEQNS,
int[] LOSUB,
int[] HISUB,
double[] COLSC,
int NQPTS,
int[] JATYP,
int[] PARNT,
int TNSUA,
boolean INTER,
double MQERR,
double MCQER,
double[] CINFN,
int[] ACTIN,
int[] NEWDG,
int NJIND,
double[] JACIN,
int[] NQUAD,
double[] TOLOU,
double LGTOL,
int SOLCO) |
|
private void |
RSLT72(int[] QIERC,
double RCOND,
double GAMMA,
int NEQNS,
int[] DGPOL,
int[] JATYP,
int[] PARNT,
int TNSUA,
boolean INTER,
double MQERR,
double MCQER,
int[] ACTIN,
int[] NEWDG,
int NJIND,
int[] NQUAD,
double[] TOLOU,
double LGTOL,
int SOLCO) |
|
private void |
RSLT80(double SUPER,
double MAXER,
double AQTOL,
boolean INTER,
int NARCS,
int ORDSG,
int NQPTS,
boolean INCST,
int INDEG,
int RFARC,
double RFARG,
double[] CENTR,
double[] BETA,
boolean[] LINEAR,
int TSTNG,
int OULVL,
int[] IBNDS,
int MNEQN) |
|
private void |
RSLT83(double[] ERARC,
int TNSUA,
double MXERM,
double[] ZMXER,
int IMXER,
int[] QIERC,
int[] PARNT,
int ORDSG) |
|
private void |
RSLT84(double[] ERMOD,
int TNSUA,
double MXERM,
double[] ZMXER,
int IMXER,
int[] LOTES,
int[] HITES,
int[] QIERC,
int[] PARNT,
int ORDSG) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
SETIGL(double[] AIGLL,
int[] HISUB,
int[] JATYP,
int[] LOSUB,
int NQPTS,
double[] RIGLL,
int TNSUA) |
|
private double[] |
sin(double[] t) |
|
private double |
SMNAB(int N,
double AL,
double BE,
double X) |
|
private void |
STATS1(double[] SN,
int M,
double[] A,
double[] B,
double[] EA,
double[][] COV,
double[] CONF,
int[] IER) |
|
private void |
SUBIN7(double[][] ZZ,
int NZZ,
double BETA,
int MAXDG,
int NQUAD,
double[] AJAC,
double[] BJAC,
double H0JAC,
double[] CSCAL,
double TOLIN,
double[] TOLOU,
double[] XENPT,
int[] QINTS,
int MQIN1,
int[] IER) |
|
private void |
SYINF1(int[] ORDRG,
int[] ORDSG,
double[] RTUNI,
double[] U2,
boolean REFLN,
double[] Z0,
double[] Z1,
double[] Z2,
int[] IER) |
|
private void |
TESMD9(double[] ERMOD,
double[][] MATRX,
double[] SOLUN,
int MNEQN,
int NCOLL,
int NTEST,
int NQPTS,
int TNSUA,
int[] JATYP,
int[] PARNT,
int[] DGPOL,
int[] LOSUB,
int[] HISUB,
int[] LOTES,
int[] HITES,
int[] NQUAD,
int[] LOQSB,
double TOLNR,
double[] MIDPT,
double[] HALEN,
double[] H0VAL,
double[] COLSC,
double[] ACOEF,
double[] BCOEF,
double[] TESPR,
double[] QCOMX,
double[] QCOMW,
double[] CENTR,
double[][] ZTEST,
boolean INTER,
boolean[] LNSEG,
double[] WORK,
int[] QIERR,
double[] MQERR,
double[] JACIN,
double[] A1COF,
double[] B1COF,
double AQTOL,
double RQTOL,
double[] AQCOF,
double[] BQCOF,
double[] CQCOF,
double[] MXERM,
int[] IMXER,
double[] ZMXER,
double[] ERARC,
int ORDSG,
boolean REFLN) |
|
private void |
TSJAC3(int[] LOTES,
int[] HITES,
double[] TESPR,
double[][] ZTEST,
int NQPTS,
int[] NTEST,
int ORDSG,
int TNSUA,
int TSTNG,
int[] DGPOL,
int[] JATYP,
int[] PARNT,
double[] AICOF,
double[] BICOF,
double[] DIAG,
double[] HALEN,
double[] JACIN,
double[] MIDPT,
double[] SDIAG,
int[] IER) |
|
private void |
TSTPLT(double[] MXMIS,
double[] MXDIF,
double[] PSD,
double[] MINPD,
double[] MAXPD,
int[] IER) |
|
private void |
TSTPLT(double[] MXMIS,
double[] MXDIF,
double[] PSD,
double MINPD,
double MAXPD) |
|
private void |
UPCOQ1(int NARCS,
int NJIND,
int NQPTS,
int MDGPO,
int MQIN1,
double AQTOL,
double[] QUPTS,
double[] QUWTS,
double[] JACIN,
double[] MIDPT,
double[] HALEN,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] COLSC,
int[] NQUAD,
int[] LOQSB,
double[] QCOMX,
double[] QCOMW,
int MNQUA,
double[] TOLOU,
double[] MCQER,
double[] XENPT,
double[][] XIVAL,
double[] XIDST,
int TNSUA,
boolean[] PNEWQ,
boolean[] NEWQU,
int[] JATYP,
int[] PARNT,
boolean[] NUQTL,
int[] IER) |
|
private void |
UPJAC1(int NQPTS,
int NJIND,
int INDEG,
int[] AXION,
int[] DGPOL,
int[] NEWDG,
double[] ACOEF,
double[] BCOEF,
double[] DIAG,
double[] SDIAG,
int TNSUA,
int MNSUA,
int[] LOSUB,
int[] HISUB,
int[] JATYP,
int[] PARNT,
double[] MIDPT,
double[] HALEN,
double[] COLPR,
double[][] ZCOLL,
boolean[] LNSEG,
boolean[] PNEWQ,
double EPS,
int[] IER,
double[] WORK,
double[] NEWHL,
double[] RCOPY,
int[] ICOPY,
boolean[] LCOPY,
int[] LOOLD,
int[] HIOLD) |
|
private void |
WRFUN1(int NARCS,
double[][] STAPT,
int[] ARCTY,
int[] PGM,
double[] RGM,
int[] PTX,
int[] NTX,
java.lang.String[] DEFN,
int CHNL,
java.lang.String CHIA,
java.lang.String CHTT,
java.lang.String VAR,
java.lang.String REDD,
java.io.RandomAccessFile raFile,
boolean writeReturn) |
|
private void |
WRFUN2(int NARCS,
int MNARC,
double[][] STAPT,
int[] ARCTY,
int[] PGM,
double[] RGM,
int[] PTX,
int[] NTX,
java.lang.String[] DEFN,
int CHNL,
java.lang.String CHIA,
java.lang.String CHTT,
java.lang.String VAR,
boolean[] NUMDER,
java.lang.String REDD,
java.io.RandomAccessFile raFile,
boolean writeReturn) |
|
private void |
WRHEAD(int I,
int CHNL,
java.io.RandomAccessFile raFile) |
|
private void |
WRSYM1(int NARCS,
int ORDRG,
int ORDSG,
double[] RTUNI,
double[] U2,
double[] CENSY,
boolean REFLN,
boolean PARFUN,
java.lang.String REDD,
int CHNL,
java.io.RandomAccessFile raFile) |
|
private void |
WRSYM2(int NARCS,
int ORDRG,
double[] CENSY,
boolean REFLN,
int CHNL,
java.io.RandomAccessFile raFile) |
|
private void |
WRSYM3(int NARCS,
int ORDRG,
boolean REFLN,
int CHN,
java.io.RandomAccessFile raFile) |
|
private void |
WRTAIL(int I,
int CHNL,
int IER,
java.io.RandomAccessFile raFile) |
|
double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision
complex variable zr + j*zi.
|
void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
private double[] |
ZDPARF(int I,
double[] T) |
|
void |
zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex multiply c = a * b.
|
private double[] |
ZTOB1(double[] Z,
double B1,
int JT,
boolean IN) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
SymmsIntegralMapping
public SymmsIntegralMapping(ModelImage destImg,
ModelImage srcImg,
java.lang.String FORTFL,
boolean SYMTY,
boolean REFLN,
double[] CENSY,
int NARCS,
boolean[] NUMDER,
int[] ARCTY,
double[][] STAPT,
int[] PGM,
double[] RGM,
int[] PTX,
int[] NTX,
java.lang.String[] DEFN)
-
Method Detail
-
PARGEN
public void PARGEN()
-
DRIVE0
public void DRIVE0()
-
DRIVE1
public void DRIVE1()
-
SYINF1
private void SYINF1(int[] ORDRG,
int[] ORDSG,
double[] RTUNI,
double[] U2,
boolean REFLN,
double[] Z0,
double[] Z1,
double[] Z2,
int[] IER)
-
WRSYM1
private void WRSYM1(int NARCS,
int ORDRG,
int ORDSG,
double[] RTUNI,
double[] U2,
double[] CENSY,
boolean REFLN,
boolean PARFUN,
java.lang.String REDD,
int CHNL,
java.io.RandomAccessFile raFile)
-
WRFUN1
private void WRFUN1(int NARCS,
double[][] STAPT,
int[] ARCTY,
int[] PGM,
double[] RGM,
int[] PTX,
int[] NTX,
java.lang.String[] DEFN,
int CHNL,
java.lang.String CHIA,
java.lang.String CHTT,
java.lang.String VAR,
java.lang.String REDD,
java.io.RandomAccessFile raFile,
boolean writeReturn)
-
PTFUN1
private void PTFUN1(int TYPE,
double[][] STAPT,
double[] RGM,
int NTX,
java.lang.String[] TXT,
int CHNL,
java.lang.String CHTT,
java.lang.String VAR,
java.lang.String REDD,
java.io.RandomAccessFile raFile)
-
WRSYM2
private void WRSYM2(int NARCS,
int ORDRG,
double[] CENSY,
boolean REFLN,
int CHNL,
java.io.RandomAccessFile raFile)
-
WRFUN2
private void WRFUN2(int NARCS,
int MNARC,
double[][] STAPT,
int[] ARCTY,
int[] PGM,
double[] RGM,
int[] PTX,
int[] NTX,
java.lang.String[] DEFN,
int CHNL,
java.lang.String CHIA,
java.lang.String CHTT,
java.lang.String VAR,
boolean[] NUMDER,
java.lang.String REDD,
java.io.RandomAccessFile raFile,
boolean writeReturn)
-
PTFUN2
private void PTFUN2(int TYPE,
double[][] STAPT,
double[] RGM,
int NTX1,
java.lang.String[] TXT1,
int NTX2,
java.lang.String[] TXT2,
int CHNL,
java.lang.String CHTT,
java.lang.String VAR,
java.lang.String CHIA,
boolean NUMDER,
java.lang.String REDD,
java.io.RandomAccessFile raFile)
-
WRSYM3
private void WRSYM3(int NARCS,
int ORDRG,
boolean REFLN,
int CHN,
java.io.RandomAccessFile raFile)
-
TSTPLT
private void TSTPLT(double[] MXMIS,
double[] MXDIF,
double[] PSD,
double MINPD,
double MAXPD)
-
JAPHYC
private void JAPHYC()
-
RSLT80
private void RSLT80(double SUPER,
double MAXER,
double AQTOL,
boolean INTER,
int NARCS,
int ORDSG,
int NQPTS,
boolean INCST,
int INDEG,
int RFARC,
double RFARG,
double[] CENTR,
double[] BETA,
boolean[] LINEAR,
int TSTNG,
int OULVL,
int[] IBNDS,
int MNEQN)
-
OPQUD1
private void OPQUD1(int NJIND,
int NQPTS,
double[] JACIN,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] AICOF,
double[] BICOF,
double[] HIVAL,
double[] QUPTS,
double[] QUWTS,
double[] WORK,
int[] IER)
-
EIGSYS
private void EIGSYS(int N,
double EPS,
double[] D,
double[] E,
double[] Z,
int[] IER)
-
ASONJ7
private void ASONJ7(double ALFA,
double BETA,
double[] A,
double[] B,
double[] H,
int N)
-
ASQUC7
private void ASQUC7(double[] AQCOF,
double[] BQCOF,
double[] CQCOF,
double[] JACIN,
int NJIND,
int NQPTS)
-
CSCAL3
private void CSCAL3(double[] COLSC,
int NQPTS,
int NJIND,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] QUPTS,
double[] QUWTS,
double[] JACIN,
double[] MU,
double[] TT,
double[] QQ)
-
JAPAR7
private void JAPAR7(double[] PP,
double X,
double[] AA,
double[] BB,
int N)
-
IGNLVL
private void IGNLVL(double[] RIGLL,
double[] COLSC,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] JACIN,
int NJIND,
int NQPTS,
int[] IER)
-
CPJAC3
private void CPJAC3(int NARCS,
int NQPTS,
int INDEG,
int[] DGPOL,
double[] JACIN,
double[] ACOEF,
double[] BCOEF,
double[] DIAG,
double[] SDIAG,
int[] TNSUA,
int[] LOSUB,
int[] HISUB,
int[] JATYP,
int[] PARNT,
double[] MIDPT,
double[] HALEN,
double[] COLPR,
double[][] ZCOLL,
boolean[] LNSEG,
int[] LOOLD,
int[] HIOLD,
double EPS,
int[] IER,
boolean INIBT)
-
ICOQR1
private void ICOQR1(int NARCS,
int NJIND,
int NQPTS,
int MDGPO,
int MQIN1,
double AQTOL,
double[] QUPTS,
double[] QUWTS,
double[] JACIN,
double[] MIDPT,
double[] HALEN,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] COLSC,
int[] NQUAD,
int[] LOQSB,
double[] QCOMX,
double[] QCOMW,
int MNQUA,
double[] TOLOU,
double[] MCQER,
double[] XENPT,
double[][] XIVAL,
double[] XIDST,
int[] IER)
-
SUBIN7
private void SUBIN7(double[][] ZZ,
int NZZ,
double BETA,
int MAXDG,
int NQUAD,
double[] AJAC,
double[] BJAC,
double H0JAC,
double[] CSCAL,
double TOLIN,
double[] TOLOU,
double[] XENPT,
int[] QINTS,
int MQIN1,
int[] IER)
-
DEJAC7
private void DEJAC7(double[][] ZZ,
int NZZ,
double BETA,
double[] TAU,
int MAXDG,
int NQUAD,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] REMND,
double[] CSCAL,
double[] TOL,
double[] MAXRM,
int[] IER)
-
DELEG7
private void DELEG7(double[][] ZZ,
int NZZ,
double BETA,
double[] TAU1,
double[] TAU2,
boolean T1FXD,
int MAXDG,
int NQUAD,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] REMND,
double[] CSCAL,
double[] TOL,
double[] MAXRM,
int[] IER)
-
RSLT71
private void RSLT71(int[] QIERC,
double RCOND,
double[] SOLUN,
int NEQNS,
int[] LOSUB,
int[] HISUB,
double[] COLSC,
int NQPTS,
int[] JATYP,
int[] PARNT,
int TNSUA,
boolean INTER,
double MQERR,
double MCQER,
double[] CINFN,
int[] ACTIN,
int[] NEWDG,
int NJIND,
double[] JACIN,
int[] NQUAD,
double[] TOLOU,
double LGTOL,
int SOLCO)
-
RSLT72
private void RSLT72(int[] QIERC,
double RCOND,
double GAMMA,
int NEQNS,
int[] DGPOL,
int[] JATYP,
int[] PARNT,
int TNSUA,
boolean INTER,
double MQERR,
double MCQER,
int[] ACTIN,
int[] NEWDG,
int NJIND,
int[] NQUAD,
double[] TOLOU,
double LGTOL,
int SOLCO)
-
LNSY11
private void LNSY11(double[][][] MATRX,
double[] RGTSD,
int MNEQN,
int NCOLL,
int ORDSG,
boolean REFLN,
int NQPTS,
int TNSUA,
int[] JATYP,
int[] PARNT,
int[] DGPOL,
int[] LOSUB,
int[] HISUB,
int[] NQUAD,
int[] LOQSB,
double TOLNR,
double[] MIDPT,
double[] HALEN,
double[] H0VAL,
double[] COLSC,
double[] ACOEF,
double[] BCOEF,
double[] COLPR,
double[] QCOMX,
double[] QCOMW,
double[] CENTR,
double[][] ZCOLL,
boolean INTER,
boolean[] LNSEG,
double[] WORK,
int[] QIERR,
double[] MQERR,
double[] JACIN,
double[] A1COF,
double[] B1COF,
double AQTOL,
double RQTOL,
double[] AQCOF,
double[] BQCOF,
double[] CQCOF,
int[] LOOLD,
int[] HIOLD)
-
BCFVTF
private void BCFVTF(double[] BCFSN,
double[] VTARG,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int[] PARNT,
int RFARC,
int TNSUA,
double[] H0VAL,
double[] JACIN,
double RFARG,
double[] SOLUN)
-
RECON
private void RECON(int ORDSG,
boolean REFLN,
int NCOLL,
int TNSUA,
int[] LOSUB,
int[] HISUB,
double[] SOLUN)
-
SETIGL
private void SETIGL(double[] AIGLL,
int[] HISUB,
int[] JATYP,
int[] LOSUB,
int NQPTS,
double[] RIGLL,
int TNSUA)
-
AXION1
private void AXION1(int[] AXION,
int[] NEWDG,
double[] SOLUN,
int MDGPO,
int TNSUA,
int[] DGPOL,
int[] LOSUB,
int[] HISUB,
double[] RIGLL,
double LGTOL,
boolean[] ACCPT,
double[] JACIN,
int[] JATYP,
int NJIND,
double[] NEWHL,
double[] ESTOL,
int[] IER)
-
STATS1
private void STATS1(double[] SN,
int M,
double[] A,
double[] B,
double[] EA,
double[][] COV,
double[] CONF,
int[] IER)
-
UPJAC1
private void UPJAC1(int NQPTS,
int NJIND,
int INDEG,
int[] AXION,
int[] DGPOL,
int[] NEWDG,
double[] ACOEF,
double[] BCOEF,
double[] DIAG,
double[] SDIAG,
int TNSUA,
int MNSUA,
int[] LOSUB,
int[] HISUB,
int[] JATYP,
int[] PARNT,
double[] MIDPT,
double[] HALEN,
double[] COLPR,
double[][] ZCOLL,
boolean[] LNSEG,
boolean[] PNEWQ,
double EPS,
int[] IER,
double[] WORK,
double[] NEWHL,
double[] RCOPY,
int[] ICOPY,
boolean[] LCOPY,
int[] LOOLD,
int[] HIOLD)
-
UPCOQ1
private void UPCOQ1(int NARCS,
int NJIND,
int NQPTS,
int MDGPO,
int MQIN1,
double AQTOL,
double[] QUPTS,
double[] QUWTS,
double[] JACIN,
double[] MIDPT,
double[] HALEN,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] COLSC,
int[] NQUAD,
int[] LOQSB,
double[] QCOMX,
double[] QCOMW,
int MNQUA,
double[] TOLOU,
double[] MCQER,
double[] XENPT,
double[][] XIVAL,
double[] XIDST,
int TNSUA,
boolean[] PNEWQ,
boolean[] NEWQU,
int[] JATYP,
int[] PARNT,
boolean[] NUQTL,
int[] IER)
-
TSJAC3
private void TSJAC3(int[] LOTES,
int[] HITES,
double[] TESPR,
double[][] ZTEST,
int NQPTS,
int[] NTEST,
int ORDSG,
int TNSUA,
int TSTNG,
int[] DGPOL,
int[] JATYP,
int[] PARNT,
double[] AICOF,
double[] BICOF,
double[] DIAG,
double[] HALEN,
double[] JACIN,
double[] MIDPT,
double[] SDIAG,
int[] IER)
-
TESMD9
private void TESMD9(double[] ERMOD,
double[][] MATRX,
double[] SOLUN,
int MNEQN,
int NCOLL,
int NTEST,
int NQPTS,
int TNSUA,
int[] JATYP,
int[] PARNT,
int[] DGPOL,
int[] LOSUB,
int[] HISUB,
int[] LOTES,
int[] HITES,
int[] NQUAD,
int[] LOQSB,
double TOLNR,
double[] MIDPT,
double[] HALEN,
double[] H0VAL,
double[] COLSC,
double[] ACOEF,
double[] BCOEF,
double[] TESPR,
double[] QCOMX,
double[] QCOMW,
double[] CENTR,
double[][] ZTEST,
boolean INTER,
boolean[] LNSEG,
double[] WORK,
int[] QIERR,
double[] MQERR,
double[] JACIN,
double[] A1COF,
double[] B1COF,
double AQTOL,
double RQTOL,
double[] AQCOF,
double[] BQCOF,
double[] CQCOF,
double[] MXERM,
int[] IMXER,
double[] ZMXER,
double[] ERARC,
int ORDSG,
boolean REFLN)
-
RSLT83
private void RSLT83(double[] ERARC,
int TNSUA,
double MXERM,
double[] ZMXER,
int IMXER,
int[] QIERC,
int[] PARNT,
int ORDSG)
-
RSLT84
private void RSLT84(double[] ERMOD,
int TNSUA,
double MXERM,
double[] ZMXER,
int IMXER,
int[] LOTES,
int[] HITES,
int[] QIERC,
int[] PARNT,
int ORDSG)
-
RESCAL
private void RESCAL(int NQPTS,
int TNSUA,
int[] LOSUB,
int[] HISUB,
int[] JATYP,
double[] SOLUN,
double[] COLSC)
-
POPQF1
private void POPQF1(int[] NPPQF,
int[] LPQSB,
int[] TNPQP,
double[] TOLOU,
double[] TPPQF,
double[] TRRAD,
double[] WPPQF,
double[][] ZPPQF,
int MNQUA,
int MQIN1,
int NARCS,
int NINTS,
int NQPTS,
int TNSUA,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int[] PARNT,
double DELTA,
double LGTOL,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] HALEN,
double[] JACIN,
double[] MIDPT,
double[] QUPTS,
double[] QUWTS,
double[] SOLUN,
double[] XENPT,
int[] IER)
-
PPSBI7
private void PPSBI7(double DELTA,
int NINTS,
double BETA,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double TOLIN,
double[] TOLOU,
double[] XENPT,
int[] QINTS,
int MQIN1,
int[] IER)
-
DEPPJ8
private void DEPPJ8(double BETA,
double[] TAU,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double[] TOL,
double[] MAXRM,
int NINTS,
double DELTA,
int[] IER)
-
DEPPJ9
private void DEPPJ9(double[][] ZZ,
int NZZ,
double BETA,
double[] TAU,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double[] TOL,
double[] MAXRM,
int[] IER)
-
CCJACS
private double[] CCJACS(double[] X,
int N,
double[] A,
double[] B,
double H,
double[][] CO)
-
DEPPL8
private void DEPPL8(double BETA,
double[] TAU1,
double[] TAU2,
boolean T1FXD,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double[] TOL,
double[] MAXRM,
int NINTS,
double DELTA,
int[] IER)
-
DEPPL9
private void DEPPL9(double[][] ZZ,
int NZZ,
double BETA,
double[] TAU1,
double[] TAU2,
boolean T1FXD,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double[] TOL,
double[] MAXRM,
boolean FIRST,
int[] IER)
-
JACSUM
private double JACSUM(double X,
int N,
double[] A,
double[] B,
double H,
double[] CO)
-
DMPHYC
private void DMPHYC(int NPTS,
double[][] PHYPT,
double[][] CANPT,
boolean WANTM,
int[] IER)
-
PHTCA1
private void PHTCA1(int NPTS,
double[][] PHYPT,
double[][] CANPT,
int NARCS,
int NQPTS,
int TNSUA,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int[] LPQSB,
int[] NPPQF,
int[] PARNT,
double[] A1COF,
double[] ACOEF,
double[] B1COF,
double[] BCFSN,
double[] BCOEF,
double[] H0VAL,
double[] H1VAL,
double[] HALEN,
double[] JACIN,
double LGTOL,
double[] MIDPT,
double[] QUPTS,
double[] QUWTS,
double[] SOLUN,
double[] TPPQF,
double[] TRRAD,
double[] VTARG,
double[] WPPQF,
double[] CENTR,
double[] FACTR,
double[][] ZPPQF,
boolean INTER,
int[] IER)
-
ARGIN1
private double ARGIN1(double RT1,
double RT2,
int PT,
double[] DIFF1,
double[] DIFF2,
double[] ZZ,
double LIMIT)
-
CJACSU
private double[] CJACSU(double[] X,
int N,
double[] A,
double[] B,
double H,
double[] CO)
-
PPSBI1
private void PPSBI1(double[] ZZ,
double BETA,
int NQUAD,
int DGPOL,
double[] ACOEF,
double[] BCOEF,
double H0VAL,
double[][] SOLUN,
double TOLIN,
double[] TOLOU,
double[] XENPT,
int[] QINTS,
int MQIN1,
int[] IER)
-
JCFIM5
private void JCFIM5(int[] DGPOC,
int[] IER,
int[] JTYPC,
int[] LSUBC,
double[] PHPAS,
int[] PRNSA,
double[][] SOLNC,
int TNSUC,
double[] VARGC,
double[] AICOF,
double[] ACOEF,
double[] ACOFC,
double[] BICOF,
double[] BCFSN,
double[] BCOEF,
double[] BCOFC,
double[] CENTR,
int[] DGPOL,
double[] ERARC,
double[] H0VAL,
double[] H0VLC,
double[] HIVAL,
double[] HALEN,
boolean INTER,
double[] JACIN,
double[] JAINC,
int[] JATYP,
double LGTOL,
int[] LOSUB,
double[] MIDPT,
int MNCOF,
int MNSUC,
int NJIND,
int NQPTS,
int[] PARNT,
double[] QUPTC,
double[] QUWTC,
double[] RIGLL,
double[] SOLUN,
double NEWTL,
double[] VTARG)
-
INVJCO
private void INVJCO(double[][] SOLNC,
double[] A1COF,
double AA,
double[] ACOEF,
double[] ACOFC,
double[] B1COF,
double BB,
double[] BCFSN,
double[] BCOEF,
double[] BCOFC,
double BETA,
double BETAC,
double[] CENTR,
double CONST,
int DGPOC,
int DGPOL,
double H0VAL,
double H0VLC,
double H1VAL,
double HAANG,
double HALEN,
int[] IER,
boolean INTER,
double[] JACOF,
int JTYPC,
double MIDPT,
double NEWTL,
int NQUAD,
int PARNT,
double[] QUPTC,
double[] QUWTC,
double[][] RHOVL,
double SJT,
double SJTC,
double[] SVAL,
double TOLIW,
double[] TVAL,
double[] WORK)
-
BISNEW
private void BISNEW(int[] IER,
double LL,
double TT,
double UU,
double[] A1COF,
double[] ACOEF,
double[] B1COF,
double[] BCFSN,
double[] BCOEF,
double BETA,
int DEG,
double H0VAL,
double H1VAL,
double[] JACOF,
double NEWTL,
double SJT,
double RRHS,
double TOLIW)
-
RHOFN
private void RHOFN(int[] IER,
double[][] RHOVL,
double[] ACOEF,
double[] BCOEF,
double BETA,
double BETAC,
double[] CENTR,
int DGPOL,
double H0VAL,
double HAANG,
double HALEN,
boolean INTER,
double MIDPT,
int NVALS,
int PARNT,
double SJT,
double[] JACOF,
double[] SVAL,
double[] TVAL)
-
CINRAD
private double[] CINRAD(int NARCS,
int NQPTS,
int TNSUA,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int[] LPQSB,
int[] NPPQF,
int[] PARNT,
double[] ACOEF,
double[] BCOEF,
double[] H0VAL,
double[] HALEN,
double[] JACIN,
double LGTOL,
double[] MIDPT,
double[] QUPTS,
double[] QUWTS,
double[] SOLUN,
double[] TPPQF,
double[] TRRAD,
double[] WPPQF,
double[] CENTR,
double[] FACTR,
double[][] ZPPQF,
int[] IER)
-
BCFSNG
private void BCFSNG(int TNSUC,
int[] DGPOC,
int[] JTYPC,
int[] LSUBC,
double[] H0VLC,
double[] JAINC,
double[][] BFSNC,
double[][] SOLNC)
-
OUPTCL
private void OUPTCL(int[] DGPOC,
int[] JTYPC,
double LGTOL,
int[] LSUBC,
int NQPTS,
int[] PARNT,
int[] PRNSA,
double[] RIGLL,
double[][] SOLNC,
int TNSUC,
boolean INTER,
double INNRAD,
int IER)
-
POPQG1
private void POPQG1(int[] NPPQG,
int[] LPQSB,
int[] TNPQP,
double[] TOLOU,
double[][] WPPQG,
double[][] ZPPQG,
int MNQUA,
int MQIN1,
int NARCS,
int NINTS,
int NQPTS,
int TNSUC,
int[] DGPOC,
int[] JTYPC,
int[] LSUBC,
double DELTA,
double LGTOL,
double[] ACOFC,
double[] BCOFC,
double[] H0VLC,
double[] JAINC,
double[] QUPTC,
double[] QUWTC,
double[][] SOLNC,
double[] VARGC,
double[] XENPT,
int[] IER)
-
JACSUC
private double[] JACSUC(double X,
int N,
double[] A,
double[] B,
double H,
double[][] CO)
-
CNDPLT
private void CNDPLT(boolean[] MAP11,
double[] RESMN,
double[] UPHYC,
double[] UCANP,
double CRRES,
java.lang.String[] DASH,
java.lang.String[] NEWD,
int[] IER)
-
DIAGN4
private void DIAGN4(double[] CCAPH,
double[] COCAP,
double[] COPHC,
double[] CPHCA,
double[] EXCAP,
double[] EXPHC,
int[] ICRVS,
int[] IER,
int[] IPRVS,
int[] NASYM,
int[] NCRVS,
int[] NINFD,
int[] NPRVS,
int[] NZERD,
double[] ARCLN,
double[] ASYMP,
double[] BCDMN,
double[] CORXX,
double[] TOTLN,
double[] VTARG,
boolean[] MAP11,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int NARCS,
int NQPTS,
int NXINT,
int[] PARNT,
int TNSUA,
double[] A1COF,
double[] ACOEF,
double[] B1COF,
double[] BCFSN,
double[] BCOEF,
double[] H0VAL,
double[] H1VAL,
double[] HALEN,
double[] JACIN,
double[] MIDPT,
double[] SOLUN,
double[] QUPTS,
double[] QUWTS)
-
DMCANP
private void DMCANP(int NPTS,
double[][] PHYPT,
double[][] CANPT,
boolean WANTM,
int[] IER)
-
CATPH4
private void CATPH4(int NPTS,
double[][] PHYPT,
double[][] CANPT,
int NARCS,
int NQPTS,
int TNSUC,
int[] DGPOC,
int[] JTYPC,
int[] LSUBC,
int[] LQSBG,
int[] NPPQG,
int[] PARNT,
int[] PRNSA,
double[] A1COC,
double[] ACOFC,
double[] B1COC,
double[] BCOFC,
double[] H0VLC,
double[] H1VLC,
double[] HALEN,
double[] JAINC,
double LGTOL,
double[] MIDPT,
double[] PHPAS,
double[] QUPTC,
double[] QUWTC,
double THET0,
double[] VARGC,
double[][] BFSNC,
double[] CENTR,
double[] FACTR,
double[][] SOLNC,
double[][] WPPQG,
double[][] ZPPQG,
boolean INTER,
int[] IER)
-
BMPHYC
private void BMPHYC(int IARC,
double[] PHYPT,
double[] CANPT,
double[] DERIV,
boolean WANTD,
boolean WANTM,
int[] IER)
-
BMPHC1
private void BMPHC1(int IARC,
double[] PHYPT,
double[] CANPT,
double[] DERIV,
int NQPTS,
int TNSUA,
int[] DGPOL,
int[] JATYP,
int[] LOSUB,
int[] LPQSB,
int[] NPPQF,
int[] PARNT,
double[] A1COF,
double[] ACOEF,
double[] B1COF,
double[] BCFSN,
double[] BCOEF,
double[] H0VAL,
double[] H1VAL,
double[] HALEN,
double[] JACIN,
double[] MIDPT,
double[] SOLUN,
double[] TPPQF,
double[] TRRAD,
double[] VTARG,
double[][] ZPPQF,
boolean INTER,
boolean WANTD,
int[] IER)
-
BMCANP
private void BMCANP(double THETA,
double[] PHYPT,
double[] DERIV,
boolean WANTD,
boolean WANTM,
int[] IER)
-
BMCAP1
private void BMCAP1(double[] PHYPT,
double[] DERIV,
double THETA,
int NQPTS,
int TNSUC,
int[] DGPOC,
int[] JTYPC,
int[] LSUBC,
int[] PARNT,
int[] PRNSA,
double[] A1COC,
double[] ACOFC,
double[] B1COC,
double[] BCOFC,
double[] H0VLC,
double[] H1VLC,
double[] HALEN,
double[] JAINC,
double[] MIDPT,
double[] PHPAS,
double THET0,
double[] VARGC,
double[][] BFSNC,
double[] CENTR,
double[][] SOLNC,
boolean INTER,
boolean WANTD,
int[] IER)
-
LEVCUR
private void LEVCUR(int NCONT,
double[] RADII,
int NARGS,
double[] THETA,
double[] RAD1,
double[] RAD2,
double[] PSD,
double[] MINPD,
double[] MAXPD,
java.lang.String[] NEWD,
int[] IER)
-
TSTPLT
private void TSTPLT(double[] MXMIS,
double[] MXDIF,
double[] PSD,
double[] MINPD,
double[] MAXPD,
int[] IER)
-
zabs
public double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision
complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zmlt
public void zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex multiply c = a * b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zdiv
public void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBrainExtractor.html�����������������������������������������0000775�4231163�4231163�00000321256�14537076044�024716� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBrainExtractor (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
abort |
If true stop processing.
|
private float |
aboveMedian |
factor above median at which edge values are taken to zero.
|
private float[] |
box |
DOCUMENT ME!
|
private int[] |
direction |
DOCUMENT ME!
|
private boolean |
extractPaint |
If true, do not phyically segment the image but generate a paint mask.
|
private float |
fUpdate1 |
Factor used in controlling the input of the tangetial component of the surface evolution.
|
protected float |
imageFactor |
Controls how much the image influences the surface evolution.
|
private WildMagic.LibGraphics.SceneGraph.TriMesh |
initialMesh |
|
protected float[] |
m_afCurvature |
Stores curvature information of the surface.
|
protected float[] |
m_afLength |
Triangle edge length.
|
protected int[] |
m_aiConnect |
Surface triangle connection.
|
protected int[] |
m_aiImage |
The 3D MRI image stored as a 1D array.
|
protected byte[] |
m_aiMask |
Brain segmenation mask.
|
protected AlgorithmBrainExtractor.UnorderedSetInt[] |
m_akAdjacent |
Surface adjacentcy list.
|
protected WildMagic.LibFoundation.Mathematics.Vector3f[] |
m_akSNormal |
Surface normals.
|
protected WildMagic.LibFoundation.Mathematics.Vector3f[] |
m_akSTangent |
Surface tangents.
|
protected WildMagic.LibFoundation.Mathematics.Vector3f[] |
m_akVertex |
Surface vertex list.
|
protected WildMagic.LibFoundation.Mathematics.Vector3f[] |
m_akVMean |
Average vector.
|
protected WildMagic.LibFoundation.Mathematics.Vector3f[] |
m_akVNormal |
Vertex normal.
|
private float |
m_fBrainSelection |
Factored used to adjust image influence - this is a fixed value.
|
protected float |
m_fEParam |
DOCUMENT ME!
|
protected float |
m_fFParam |
DOCUMENT ME!
|
protected float |
m_fMeanEdgeLength |
Mean length of the vector.
|
protected float |
m_fRayDelta |
DOCUMENT ME!
|
protected float |
m_fReductionX |
Reduce the size of the 1st axis of the ellipsoid so that it fits entirely into brain.
|
protected float |
m_fReductionY |
Reduce the size of the 2st axis of the ellipsoid so that it fits entirely into brain.
|
protected float |
m_fReductionZ |
Reduce the size of the 3st axis of the ellipsoid so that it fits entirely into brain.
|
protected float |
m_fStiffness |
Stiffness of the surface.
|
protected float |
m_fXDelta |
The size of a voxel, in voxel units.
|
protected float |
m_fYDelta |
The size of a voxel, in voxel units.
|
protected float |
m_fZDelta |
The size of a voxel, in voxel units.
|
protected int |
m_iBackThreshold |
Backgroung threshold.
|
protected int |
m_iBrightThreshold |
High threshold.
|
protected int |
m_iDMax |
Dilation size used in generating boundary from the surface.
|
protected int |
m_iMaxDepth |
The length of the vector _normal_ to the surface to sample along.
|
protected int |
m_iMaxThreshold |
Histogram maximum intensity parameter.
|
protected int |
m_iMedianIntensity |
Histogram median intensity parameter.
|
protected int |
m_iMinThreshold |
Histogram minimum intensity parameter.
|
protected int |
m_iQuantity |
The MRI image bounds and quantity of voxels.
|
protected int |
m_iTQuantity |
The number of triangle in the ellipsoid.
|
protected int |
m_iVQuantity |
The number of vertices in the ellipsoid.
|
protected int |
m_iXBound |
The MRI image bounds and quantity of voxels.
|
protected int |
m_iYBound |
The MRI image bounds and quantity of voxels.
|
protected int |
m_iZBound |
The MRI image bounds and quantity of voxels.
|
protected WildMagic.LibFoundation.Mathematics.Vector3f |
m_kCenter |
initial ellipsoid parameters.
|
protected java.util.HashMap<AlgorithmBrainExtractor.Edge,java.lang.Integer> |
m_kEMap |
Edge map.
|
protected WildMagic.LibFoundation.Mathematics.Matrix3f |
m_kRotate |
Used to rotate the initial mesh into the same orientation as the data.
|
private int |
nBrainVoxels |
The number of voxels that define the brain.
|
protected int |
nIterations |
Number of surface evolutions.
|
protected int |
orientationFlag |
Indicated the orientation of the dataset.
|
private boolean |
runOneIter |
If true run one iteration so that one can observe initial surface location.
|
static int |
SAT_COR |
Indicates that the image is in Sagittal or Coronal orientation.
|
private boolean |
saveBrainMesh |
If true, the surface representing the brain (mesh) is saved.
|
private boolean |
secondStageErosion |
Tells whether second stage which erodes edge values exceeding median by a factor >= aboveMedian occurs.
|
private float[] |
startLocation |
Origin of the image.
|
private boolean |
useSphere |
If true initialize surface as a sphere.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmBrainExtractor(ModelImage srcImg,
int orientation,
boolean runOneIteration,
boolean estimateSphere,
WildMagic.LibFoundation.Mathematics.Vector3f centerPoint) |
Create an extractor for segmenting the brain from a 3D magnetic resonance image.
|
AlgorithmBrainExtractor(ModelImage srcImg,
int orientation,
WildMagic.LibGraphics.SceneGraph.TriMesh initialMesh,
int medianIntensity,
WildMagic.LibFoundation.Mathematics.Vector3f centerPoint) |
Create an extractor for segmenting the brain from a 3D magnetic resonance image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
computeMeanEdgeLength() |
Compute the average length of all the edges in the triangle mesh.
|
protected void |
computeMedianIntensity() |
Compute the median intensity of those voxels inside the initial ellipsoid.
|
protected void |
computeMedianIntensityInitial() |
Compute the median intensity of those voxels inside the initial ellipsoid.
|
protected WildMagic.LibFoundation.Mathematics.Vector3f |
computeNewCenter() |
|
protected void |
computeVertexInformation() |
Let V[i] be a vertex in the triangle mesh.
|
protected void |
computeVertexNormals() |
Compute the vertex normals of the triangle mesh.
|
protected boolean |
estimateEllipsoid() |
Approximate the brain surface by an ellipsoid.
|
protected void |
estimateSphere() |
Approximate the intial brain surface by an sphere.
|
void |
extractBrain() |
The segmentation function.
|
void |
finalize() |
Prepares this class for destruction.
|
protected void |
floodFill(int iX,
int iY,
int iZ) |
Identify voxels enclosed by the brain surface by using a flood fill.
|
protected void |
generateEllipsoidMesh(int iSubdivisions) |
Tessellate a unit sphere centered at the origin.
|
byte[] |
getBrainMask() |
Get the 3D image that represents the extracted brain.
|
float |
getBrainSelection() |
Get the current brain selection term, as described in BrainExtraction.pdf, that is part of the image term in the
surface evolution.
|
float |
getBrainVolume() |
Get the 3D image that represents the extracted brain.
|
int |
getDilationSize() |
Get the dilation size for dilating the voxelized brain surface obtained by rasterizing the triangle mesh.
|
protected int |
getIndex(int iX,
int iY,
int iZ) |
A convenience function for mapping the 3D voxel position (iX,iY,iZ) to a 1D array index.
|
protected void |
getInsideVoxels(boolean doErode) |
Identify all voxels that are inside or on the mesh that represents the brain surface.
|
protected int |
getIntersectX(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iY,
int iZ) |
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and the triangle defined by the three input
points.
|
protected int |
getIntersectY(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iX,
int iZ) |
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and the triangle defined by the three input
points.
|
protected int |
getIntersectZ(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iX,
int iY) |
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and the triangle defined by the three input
points.
|
int |
getMaxDepth() |
Get the maximum depth, as described in BrainExtraction.pdf, that is part of the image term in the surface
evolution.
|
float |
getRayDelta() |
Get the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution.
|
float |
getReductionX() |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
float |
getReductionY() |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
float |
getReductionZ() |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
float |
getStiffness() |
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution.
|
void |
histogramAnalysis() |
Analyze the histogram of the 10-bit binned 3D MRI.
|
void |
reIntialize() |
Reinitialize when secondStageErosion has been performed so that the mask will match the eroded image.
|
void |
runAlgorithm() |
Starts the program.
|
protected void |
saveMesh(boolean flip) |
Internal support to write vertices, normals, and connectivity indices to the file.
|
void |
setAboveMedian(float aboveMedian) |
sets the aboveMedian ratio for second stage erosion Edge values >= median * aboveMedian are taken to zero.
|
void |
setBrainSelection(float fBrainSelection) |
Set the brain selection term, as described in BrainExtraction.pdf, that is part of the image term in the surface
evolution.
|
void |
setDilationSize(int iDMax) |
Set the dilation size for dilating the voxelized brain surface obtained by rasterizing the triangle mesh.
|
void |
setExtractPaint(boolean extractPaint) |
Sets whether to extract the brain to a paint mask instead of removing non-brain image data.
|
void |
setImageRatio(float ratio) |
Sets the number of iterations.
|
void |
setIterations(int nIter) |
Sets the number of iterations.
|
void |
setJustIntialEllipsoid(boolean flag) |
Indicates if surface evolution should be skipped.
|
void |
setMaxDepth(int iMaxDepth) |
Set the maximum depth, as described in BrainExtraction.pdf, that is part of the image term in the surface
evolution.
|
void |
setOrientation(int orientation) |
Indicates the orientation of the image for use in the ellipsoid estimation.
|
void |
setRayDelta(float fRayDelta) |
Set the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution.
|
void |
setReductionX(float fReduction) |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
void |
setReductionY(float fReduction) |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
void |
setReductionZ(float fReduction) |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
void |
setSaveBrainMesh(boolean saveMesh) |
Sets whether to save a surface mesh of the extracted brain.
|
void |
setSecondStageErosion(boolean secondStageErosion) |
Sets whether or not second stage erosion occurs taking edge values exceeding median by a factor >= aboveMedian to
zero.
|
void |
setStiffness(float fStiffness) |
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution.
|
void |
setUseSphere(boolean flag) |
Don't try estimating ellipse as initial surface use sphere estimate.
|
protected float |
update2(int i) |
Compute the coefficient of the surface normal for the update of the mesh vertex V[i] in the SNormal[i] direction.
|
protected float |
update3(int i) |
Compute the coefficient of the vertex normal for the update of the mesh vertex V[i] in the VNormal[i] direction.
|
protected boolean |
updateCenter(WildMagic.LibFoundation.Mathematics.Vector3f Center) |
|
void |
updateMesh() |
The heart of the segmentation.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
m_aiImage
protected int[] m_aiImage
The 3D MRI image stored as a 1D array. The mapping from (x,y,z) to 1D is: index = x + xbound*(y + ybound*z).
-
box
private float[] box
DOCUMENT ME!
-
direction
private int[] direction
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmBrainExtractor
public AlgorithmBrainExtractor(ModelImage srcImg,
int orientation,
boolean runOneIteration,
boolean estimateSphere,
WildMagic.LibFoundation.Mathematics.Vector3f centerPoint)
Create an extractor for segmenting the brain from a 3D magnetic resonance image.
- Parameters:
srcImg - The source image. Should be MR image of the brainorientation - Image orienationrunOneIteration - Run one iteration so that one can observe initial surface location.estimateSphere - Use sphere as the initial surface to be evolved.centerPoint - The center of the initial ellipsoid or sphere.
-
AlgorithmBrainExtractor
public AlgorithmBrainExtractor(ModelImage srcImg,
int orientation,
WildMagic.LibGraphics.SceneGraph.TriMesh initialMesh,
int medianIntensity,
WildMagic.LibFoundation.Mathematics.Vector3f centerPoint)
Create an extractor for segmenting the brain from a 3D magnetic resonance image.
- Parameters:
srcImg - The source image. Should be MR image of the brainorientation - Image orienationrunOneIteration - Run one iteration so that one can observe initial surface location.estimateSphere - Use sphere as the initial surface to be evolved.centerPoint - The center of the initial ellipsoid or sphere.
-
Method Detail
-
extractBrain
public void extractBrain()
The segmentation function. Ideally, the only work an application needs to do is create an MjBrainExtractor object
and call the method extractBrain(). Various parameters managed by MjBrainExtractor may be modified, if necessary,
before the call.
-
getBrainMask
public final byte[] getBrainMask()
Get the 3D image that represents the extracted brain. The image is ternary and has the same dimensions as the
input MRI. A voxel value of 0 indicates background. A voxel value of 1 indicates brain surface. A voxel value of
2 indicates a voxel inside the brain surface.
- Returns:
- the image that represents the extracted brain
-
getBrainSelection
public final float getBrainSelection()
Get the current brain selection term, as described in BrainExtraction.pdf, that is part of the image term in the
surface evolution. The default value is 0.5.
- Returns:
- the current brain selection term
-
getBrainVolume
public final float getBrainVolume()
Get the 3D image that represents the extracted brain. The image is ternary and has the same dimensions as the
input MRI. A voxel value of 0 indicates background. A voxel value of 1 indicates brain surface. A voxel value of
2 indicates a voxel inside the brain surface.
- Returns:
- the image that represents the extracted brain
-
getDilationSize
public final int getDilationSize()
Get the dilation size for dilating the voxelized brain surface obtained by rasterizing the triangle mesh. The
rasterization is designed so that the voxel surface has no holes, thereby allowing it to be flood-filled. But
just in case numerical round-off errors cause a few holes, this parameter is exposed for public use. The default
value is 0 (no dilation). If the value is D > 0, the dilation mask is a cube of size (2*D+1)x(2*D+1)x(2*D+1).
- Returns:
- the current dilation size
-
getMaxDepth
public final int getMaxDepth()
Get the maximum depth, as described in BrainExtraction.pdf, that is part of the image term in the surface
evolution. The default value is 7.
- Returns:
- the current maximum depth
-
getRayDelta
public final float getRayDelta()
Get the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution. The default value is 1.0.
- Returns:
- the current spacing
-
getReductionX
public final float getReductionX()
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.6.
- Returns:
- the current reduction factor
-
getReductionY
public final float getReductionY()
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.4.
- Returns:
- the current reduction factor
-
getReductionZ
public final float getReductionZ()
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.6.
- Returns:
- the current reduction factor
-
getStiffness
public final float getStiffness()
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution. The default value is 0.1.
- Returns:
- the current stiffness
-
histogramAnalysis
public void histogramAnalysis()
Analyze the histogram of the 10-bit binned 3D MRI. The function computes a minimum threshold, a maximum
threshold, and a background threshold that are used in the image term of the surface evolution. A brightness
threshold is also computed that is used for determining the initial ellipsoid that approximates the brain
surface.
-
setBrainSelection
public final void setBrainSelection(float fBrainSelection)
Set the brain selection term, as described in BrainExtraction.pdf, that is part of the image term in the surface
evolution. The default value is 0.5.
- Parameters:
fBrainSelection - the new brain selection term
-
setDilationSize
public final void setDilationSize(int iDMax)
Set the dilation size for dilating the voxelized brain surface obtained by rasterizing the triangle mesh. The
rasterization is designed so that the voxel surface has no holes, thereby allowing it to be flood-filled. But
just in case numerical round-off errors cause a few holes, this parameter is exposed for public use. The default
value is 0 (no dilation). If the value is D > 0, the dilation mask is a cube of size (2*D+1)x(2*D+1)x(2*D+1).
- Parameters:
iDMax - the new dilation size
-
setMaxDepth
public final void setMaxDepth(int iMaxDepth)
Set the maximum depth, as described in BrainExtraction.pdf, that is part of the image term in the surface
evolution. The default value is 7.
- Parameters:
iMaxDepth - the new maximum depth
-
setRayDelta
public final void setRayDelta(float fRayDelta)
Set the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution. The default value is 1.0.
- Parameters:
fRayDelta - the new normal ray spacing
-
setReductionX
public final void setReductionX(float fReduction)
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.6.
- Parameters:
fReduction - the amount to reduce the axis of the ellipsoid.
-
setReductionY
public final void setReductionY(float fReduction)
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.5.
- Parameters:
fReduction - the amount to reduce the axis of the ellipsoid.
-
setReductionZ
public final void setReductionZ(float fReduction)
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.6.
- Parameters:
fReduction - the amount to reduce the axis of the ellipsoid.
-
setStiffness
public final void setStiffness(float fStiffness)
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution. The default value is 0.1.
- Parameters:
fStiffness - the new stiffness
-
updateMesh
public void updateMesh()
The heart of the segmentation. This function is responsible for the evolution of the triangle mesh that
approximates the brain surface. The update has a tangential component, a surface normal component, and a vertex
normal component for each vertex in the mesh. The first two components control the geometry of the mesh. The last
component is based on the MRI data itself. See BrainExtraction.pdf for a detailed description of the update
terms.
-
computeVertexInformation
protected void computeVertexInformation()
Let V[i] be a vertex in the triangle mesh. This function computes VMean[i], the average of the immediate
neighbors of V[i]. Define S[i] = VMean[i] - V[i]. The function also computes a surface normal SNormal[i], the
component of S[i] in the vertex normal direction. STangent[i] = S[i] - SNormal[i] is computed as an approximation
to a tangent to the surface. Finally, Curvature[i] is an approximation of the surface curvature at V[i].
-
computeVertexNormals
protected void computeVertexNormals()
Compute the vertex normals of the triangle mesh. Each vertex normal is the unitized average of the non-unit
triangle normals for those triangles sharing the vertex.
-
floodFill
protected void floodFill(int iX,
int iY,
int iZ)
Identify voxels enclosed by the brain surface by using a flood fill. The flood fill is nonrecursive to avoid
overflowing the program stack.
- Parameters:
iX - the x-value of the seed point for the filliY - the y-value of the seed point for the filliZ - the z-value of the seed point for the fill
-
generateEllipsoidMesh
protected void generateEllipsoidMesh(int iSubdivisions)
Tessellate a unit sphere centered at the origin. Start with an octahedron and subdivide. The final mesh is then
affinely mapped to the initial ellipsoid produced by estimateEllipsoid(). The subdivision scheme is described in
BrainExtraction.pdf.
- Parameters:
iSubdivisions - the number of levels to subdivide the ellipsoid
-
getIndex
protected final int getIndex(int iX,
int iY,
int iZ)
A convenience function for mapping the 3D voxel position (iX,iY,iZ) to a 1D array index. The images are stored as
1D arrays, so this function is used frequently.
- Parameters:
iX - the x-value of the voxel positioniY - the y-value of the voxel positioniZ - the z-value of the voxel position- Returns:
- the 1D array index corresponding to (iX,iY,iZ)
-
getInsideVoxels
protected void getInsideVoxels(boolean doErode)
Identify all voxels that are inside or on the mesh that represents the brain surface. The surface voxels are
constructed by rasterizing the triangles of the mesh in 3D. The centroid of these voxels is used as a seed point
for a flood fill of the region enclosed by the surface.
- Parameters:
doErode - DOCUMENT ME!
-
getIntersectX
protected int getIntersectX(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iY,
int iZ)
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and the triangle defined by the three input
points. All calculations are in voxel coordinates and the x-value of the intersection point is truncated to an
integer.
- Parameters:
kV0 - a 3D vertex of the trianglekV1 - a 3D vertex of the trianglekV2 - a 3D vertex of the triangleiY - the y-value of the origin of the lineiZ - the z-value of the origin of the line- Returns:
- the x-value of the intersection
-
getIntersectY
protected int getIntersectY(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iX,
int iZ)
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and the triangle defined by the three input
points. All calculations are in voxel coordinates and the y-value of the intersection point is truncated to an
integer.
- Parameters:
kV0 - a 3D vertex of the trianglekV1 - a 3D vertex of the trianglekV2 - a 3D vertex of the triangleiX - the x-value of the origin of the lineiZ - the z-value of the origin of the line- Returns:
- the y-value of the intersection
-
getIntersectZ
protected int getIntersectZ(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iX,
int iY)
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and the triangle defined by the three input
points. All calculations are in voxel coordinates and the z-value of the intersection point is truncated to an
integer.
- Parameters:
kV0 - a 3D vertex of the trianglekV1 - a 3D vertex of the trianglekV2 - a 3D vertex of the triangleiX - the x-value of the origin of the lineiY - the y-value of the origin of the line- Returns:
- the z-value of the intersection
-
saveMesh
protected void saveMesh(boolean flip)
throws java.io.IOException
Internal support to write vertices, normals, and connectivity indices to the file.
- Parameters:
flip - if the y axis should be flipped - true for extract, false for from another surface- Throws:
java.io.IOException - if there is an error writing to the file
-
update2
protected float update2(int i)
Compute the coefficient of the surface normal for the update of the mesh vertex V[i] in the SNormal[i] direction.
See BrainExtraction.pdf for a description of the update.
- Parameters:
i - the index of the vertex to update- Returns:
- the coefficient of SNormal[i] for the update
-
update3
protected float update3(int i)
Compute the coefficient of the vertex normal for the update of the mesh vertex V[i] in the VNormal[i] direction.
See BrainExtraction.pdf for a description of the update.
- Parameters:
i - the index of the vertex to update- Returns:
- the coefficient of VNormal[i] for the update
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBrainSurfaceExtractor.html����������������������������������0000775�4231163�4231163�00000152734�14537076044�026232� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBrainSurfaceExtractor (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
brainRegionSize |
The size of the region we have identified as the brain.
|
private static float |
brainRegionThresholdRatio |
The proportion of the total number of pixels in the volume that a region should be before we decide that it's
probably the brain.
|
private int |
closeIterations |
The number of closings to perform.
|
private int |
closeKernel |
Use the sized circle kernel for the closing.
|
private float |
closeKernelSize |
The size of the kernel to use in closings.
|
private boolean |
doSeparable |
Whether to use the edge detection algorithm with a separable convolver.
|
private float |
edgeKernel |
The size of the edge detection kernel.
|
private boolean |
erosion25D |
Whether to erode / dilate image slices independently.
|
private int |
erosionIterations |
The number of erosions/dilations to perform.
|
private boolean |
extractPaint |
This flag is set when the algorithm is being used only to extract paint from the brain.
|
private boolean |
fillHolesFlag |
Whether to make an effort to fill in any interior holes in the final brain mask.
|
private int |
filterIterations |
The number of filter passes to make.
|
private float |
filterKernel |
The size of the filter kernel to use.
|
private ModelImage |
image |
The source image.
|
private int |
imgSize |
The size, in voxels, of the volume.
|
private java.util.BitSet |
paintMask |
The actual paint bitmap.
|
private IntVector |
regionPointStack |
The stack of voxels in the image that we should try to grow to.
|
private static float |
regionPointStackRatio |
Used to initialize the stack size when finding the largest segmented region (i.e. the brain).
|
private ModelImage |
resultImage |
The result image.
|
private boolean |
showIntermediateImages |
Whether to show the intermediate images generated during the BSE algorithm.
|
private int |
sliceSize |
The size, in voxels, of a slice of the volume.
|
private int |
xDim |
The image size in the x dimension.
|
private float |
xRes |
The image resolution in the x dimension.
|
private int |
yDim |
The image size in the y dimension.
|
private float |
yRes |
The image resolution in the y dimension.
|
private int |
zDim |
The image size in the z dimension.
|
private float |
zRes |
The image resolution in the z dimension.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmBrainSurfaceExtractor(ModelImage srcImg,
int fIter,
float fKernel,
float eKernel,
boolean ero25D,
int eroIter,
float cKernel,
int cIter,
boolean showIntermediate,
boolean noHoles,
boolean doSep,
boolean extractPaint) |
Create an extractor for segmenting the brain from a 3D magnetic resonance image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmBrainSurfaceExtractor
public AlgorithmBrainSurfaceExtractor(ModelImage srcImg,
int fIter,
float fKernel,
float eKernel,
boolean ero25D,
int eroIter,
float cKernel,
int cIter,
boolean showIntermediate,
boolean noHoles,
boolean doSep,
boolean extractPaint)
Create an extractor for segmenting the brain from a 3D magnetic resonance image.
- Parameters:
srcImg - the source image. Should be MR image of the brainfIter - number of passes to make with the filterfKernel - gaussian kernel size to use when running the filtereKernel - kernel size to use with edge detection algoero25D - whether to use 2.5D processing in erosion / dilationeroIter - number of erosions / dialations to performcKernel - kernel size in mm to be used in closingcIter - number of closings to performshowIntermediate - whether to save intermediate images for displaynoHoles - whether to fill in all interior holes of the extracted braindoSep - whether to use separable convolver for edge detectionextractPaint - whether to extract paint from the brain
-
Method Detail
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
This method is required if the AlgorithmPerformed interface is implemented. It is called by the algorithms when
it has completed or failed to to complete, so that the dialog can be display the result image and/or clean up.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - Algorithm that caused the event.
-
markRegion
public int markRegion(int[] imgData,
int initIndex,
int regionId)
Start at a point in an image and grow to all connected points, marking them and counting as we go.
- Parameters:
imgData - the exported 3d image maskinitIndex - the point to start growing the region fromregionId - what to mark where the region is located- Returns:
- the number of voxels in the grown region
-
calculateProgressRatios
private float[] calculateProgressRatios(int filterIterations,
boolean doSeparable,
boolean fillHolesFlag)
Calculates the progress ratios for different algorithms.
- Parameters:
filterIterations - the iteration number for filter.doSeparable - flag to indicate whether use separable algorithm or not.fillHolesFlag - DOCUMENT ME!- Returns:
- the progress ratios for different algorithms
-
calculateProgressValueBoundary
private int[] calculateProgressValueBoundary(int index,
float[] ratios,
int min,
int max)
Calculates the boundary of progress value which is assigned to the indexth algorithm.
- Parameters:
index - the algorithm indexratios - the ratio array assigned to the algorithms.min - the minimum progress value available to be distributedmax - the maximum progress value available to be distributed- Returns:
- the minimum and maximum progress value assigned to the
indexth algorithm.
������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TrustRegionStrategySummary.html��������������������������0000775�4231163�4231163�00000024332�14537076052�027733� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TrustRegionStrategySummary (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategySummary
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/splev.html�����������������������������������������������������������0000775�4231163�4231163�00000040005�14537076056�021242� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
splev (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.splev
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
c |
|
private int |
e |
|
private int[] |
ier |
|
private int |
k |
|
private int |
m |
|
private int |
n |
|
private double[] |
t |
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
|
private double[] |
x |
|
private double[] |
y |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
splev(double[] t,
int n,
double[] c,
int k,
double[] x,
double[] y,
int m,
int e,
int[] ier) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
t
private double[] t
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions
are met:
1. Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above
copyright notice, this list of conditions and the following
disclaimer in the documentation and/or other materials provided
with the distribution.
3. Neither the name of the copyright holder nor the names of its
contributors may be used to endorse or promote products derived
from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
Constructor Detail
-
splev
public splev(double[] t,
int n,
double[] c,
int k,
double[] x,
double[] y,
int m,
int e,
int[] ier)
-
Method Detail
-
fpbspl
public void fpbspl(double[] t,
int n,
int k,
double x,
int l,
double[] h)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmExtractSurfaceCubes.html������������������������������������0000775�4231163�4231163�00000103010�14537076045�025657� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmExtractSurfaceCubes (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
ADJ_MODE |
Use adjacency model to perform triangle consistency.
|
private boolean |
blurFlag |
If true then the input image is blurred slightly.
|
private float |
blurSigma |
The amount to blur to smooth surface.
|
private boolean |
decimateFlag |
If true then the extracted surface is decimated into a continuous level of detail surface (clod).
|
private int |
level |
Indicates level surface to be extracted.
|
static int |
LEVEL_MODE |
Extract surface based on intensity level.
|
static int |
MASK_MODE |
Extract surface from mask image.
|
private ModelImage |
maskImage |
Mask image to extract surface from.
|
private int |
mode |
Indicates mode - VOI, LEVELSET, or MASK.
|
static int |
NONE_MODE |
Do not perform triangle consistency checking - all counter clockwise or all clockwise.
|
static int |
SMOOTH_MODE |
Use smoothing model to perform triangle consistency.
|
private java.lang.String |
surfaceFileName |
Path and name of extracted surface file. ".sur" will be appended if necessary.
|
static int |
VOI_MODE |
Extract surface from VOI.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmExtractSurfaceCubes(ModelImage image,
int level,
int mode,
boolean decFlag,
boolean blurFlag,
float sigma,
java.lang.String fileName) |
Creates a new AlgorithmExtractSurfaceCubes object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmExtractSurfaceCubes
public AlgorithmExtractSurfaceCubes(ModelImage image,
int level,
int mode,
boolean decFlag,
boolean blurFlag,
float sigma,
java.lang.String fileName)
Creates a new AlgorithmExtractSurfaceCubes object.
- Parameters:
image - mask image or gray-scale where a level surface is to be extractedlevel - indicates level surface to be extractedmode - Indicates mode - VOI, LEVELSET, or MASK.decFlag - indicates whether or not the decimation into a CLOD should take place.blurFlag - if true then the input image is blurred slightlysigma - the amount to blur the imagefileName - path and name of extracted surface file. ".sur" will be appended if necessary.smoothFlag - whether the generated mesh should have smoothing applied to it
-
Method Detail
-
extractSurface
private void extractSurface()
Extracts a surface, in the form of triangles, from an image.
-
init
private void init()
DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������././@LongLink���������������������������������������������������������������������������������������0000644�0000000�0000000�00000000155�00000000000�011604� L����������������������������������������������������������������������������������������������������ustar �root����������������������������root�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureEllipseTrustRegionObeyedTraditional.html��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureEllipseTrustRegionObeyedTraditio0000775�4231163�4231163�00000024303�14537076053�035110� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DoglegStrategyFixtureEllipseTrustRegionObeyedTraditional (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmKMeans.positionWeightComparator.html������������������������0000775�4231163�4231163�00000027363�14537076046�030214� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmKMeans.positionWeightComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmKMeans.positionWeightComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.RowColLessThanComparator.html���������������������������0000775�4231163�4231163�00000026364�14537076052�027335� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.RowColLessThanComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.RowColLessThanComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/WeibullDistribution.ll_weib_beta_cen_r.html��������������������������0000775�4231163�4231163�00000036611�14537076057�027702� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WeibullDistribution.ll_weib_beta_cen_r (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
df |
|
(package private) double[] |
ds |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Edge.html�������������������������������������������������������0000775�4231163�4231163�00000041202�14537076056�021512� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Edge (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Edge
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Edge() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.VertexVertexIterator.html���������������������������������������0000775�4231163�4231163�00000032752�14537076056�025045� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.VertexVertexIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.VertexVertexIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
reset
public void reset()
����������������������gov/nih/mipav/model/algorithms/AlgorithmTimeFitting.fittingTask.html��������������������������������0000775�4231163�4231163�00000034143�14537076050�026471� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTimeFitting.fittingTask (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask
-
-
Constructor Summary
Constructors
| Constructor |
Description |
fittingTask(int start,
int end,
int tDim,
double[] initial,
double[] timeVals,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
start
private final int start
-
end
private final int end
-
tDim
private final int tDim
-
Constructor Detail
-
fittingTask
public fittingTask(int start,
int end,
int tDim,
double[] initial,
double[] timeVals,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds)
-
Method Detail
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LinearSolver.html����������������������������������������0000775�4231163�4231163�00000035164�14537076051�024756� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LinearSolver (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LinearSolver
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LinearSolver
public LinearSolver()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd2.html���������������������������������������0000775�4231163�4231163�00000030465�14537076055�025006� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd2 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd2(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd2
public Fitqd2(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.CovarianceOptions.html����������������������������������0000775�4231163�4231163�00000027444�14537076052�026064� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.CovarianceOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_threads
public int num_threads
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSM2.FitSM2ConstrainedModelC.html����������������������������0000775�4231163�4231163�00000050545�14537076050�026706� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSM2.FitSM2ConstrainedModelC (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitSM2ConstrainedModelC(int nPoints,
double[] yData,
double[] initial,
double[][] exparray,
double[] trapezoidConstant,
double[] trapezoidSlope,
double[] timeVals,
double[] r1ptj,
double[] ymodel) |
Creates a new FitDEMRI3ConstrainedModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying SM2 fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
tDim
private final int tDim
-
Constructor Detail
-
FitSM2ConstrainedModelC
public FitSM2ConstrainedModelC(int nPoints,
double[] yData,
double[] initial,
double[][] exparray,
double[] trapezoidConstant,
double[] trapezoidSlope,
double[] timeVals,
double[] r1ptj,
double[] ymodel)
Creates a new FitDEMRI3ConstrainedModel object.
- Parameters:
nPoints - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
�����������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LoggingCallback.html�������������������������������������0000775�4231163�4231163�00000031742�14537076052�025353� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LoggingCallback (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������gov/nih/mipav/model/algorithms/LIBSVM.html����������������������������������������������������������0000775�4231163�4231163�00000270213�14537076055�021112� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class LIBSVM
extends AlgorithmBase
Copyright (c) 2000-2023 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions
are met:
1. Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the distribution.
3. Neither name of copyright holders nor the names of its contributors
may be used to endorse or promote products derived from this software
without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
``AS IS'' AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE REGENTS OR
CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR
PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF
LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING
NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS
SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Libsvm is a simple, easy-to-use, and efficient software for SVM
classification and regression. It solves C-SVM classification, nu-SVM
classification, one-class-SVM, epsilon-SVM regression, and nu-SVM
regression. It also provides an automatic model selection tool for
C-SVM classification. This document explains the use of libsvm.
Chih-Chung Chang and Chih-Jen Lin, LIBSVM : a library for support
vector machines. ACM Transactions on Intelligent Systems and
Technology, 2:27:1--27:27, 2011. Software available at
http://www.csie.ntu.edu.tw/~cjlin/libsvm
LIBSVM implementation document is available at
http://www.csie.ntu.edu.tw/~cjlin/papers/libsvm.pdf
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
LIBSVM() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double |
atof(java.lang.String s) |
|
private int |
atoi(java.lang.String s) |
|
private void |
do_cross_validation() |
|
(package private) double |
dot(LIBSVM.svm_node[] x,
LIBSVM.svm_node[] y) |
|
(package private) void |
info(java.lang.String s) |
|
(package private) double |
k_function(LIBSVM.svm_node[] x,
LIBSVM.svm_node[] y,
LIBSVM.svm_parameter param) |
|
private void |
multiclass_probability(int k,
double[][] r,
double[] p) |
|
private void |
output(int index,
double value) |
|
private void |
output_target(double value) |
|
private void |
parse_command_line(java.lang.String[] argv,
boolean haveFile) |
|
private double |
powi(double base,
int times) |
|
private void |
predict(java.io.BufferedReader input,
java.io.DataOutputStream output,
LIBSVM.svm_model model,
int predict_probability) |
|
private void |
predict_exit_with_help() |
|
private double |
predict_one_class_probability(LIBSVM.svm_model model,
double dec_value) |
|
private boolean |
read_model_header(java.io.BufferedReader fp,
LIBSVM.svm_model model) |
|
private void |
read_problem() |
|
private void |
read_XY(double[][] Xin,
double[] y) |
|
private java.lang.String |
readline(java.io.BufferedReader fp) |
|
private java.io.BufferedReader |
rewind(java.io.BufferedReader fp,
java.lang.String filename) |
|
void |
run_svm_predict(java.lang.String[] argv) |
|
void |
run_svm_scale(java.lang.String[] argv) |
|
void |
run_svm_toy(java.lang.String[] args) |
|
LIBSVM.svm_model |
run_svm_train(double[][] Xin,
double[] y,
java.lang.String[] argv) |
|
void |
run_svm_train(java.lang.String[] argv) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
scale_exit_with_help() |
|
private double |
sigmoid_predict(double decision_value,
double A,
double B) |
|
private void |
sigmoid_train(int l,
double[] dec_values,
double[] labels,
double[] probAB) |
|
private void |
solve_c_svc(LIBSVM.svm_problem prob,
LIBSVM.svm_parameter param,
double[] alpha,
LIBSVM.Solver.SolutionInfo si,
double Cp,
double Cn) |
|
private void |
solve_epsilon_svr(LIBSVM.svm_problem prob,
LIBSVM.svm_parameter param,
double[] alpha,
LIBSVM.Solver.SolutionInfo si) |
|
private void |
solve_nu_svc(LIBSVM.svm_problem prob,
LIBSVM.svm_parameter param,
double[] alpha,
LIBSVM.Solver.SolutionInfo si) |
|
private void |
solve_nu_svr(LIBSVM.svm_problem prob,
LIBSVM.svm_parameter param,
double[] alpha,
LIBSVM.Solver.SolutionInfo si) |
|
private void |
solve_one_class(LIBSVM.svm_problem prob,
LIBSVM.svm_parameter param,
double[] alpha,
LIBSVM.Solver.SolutionInfo si) |
|
private void |
svm_binary_svc_probability(LIBSVM.svm_problem prob,
LIBSVM.svm_parameter param,
double Cp,
double Cn,
double[] probAB) |
|
java.lang.String |
svm_check_parameter(LIBSVM.svm_problem prob,
LIBSVM.svm_parameter param) |
|
int |
svm_check_probability_model(LIBSVM.svm_model model) |
|
void |
svm_cross_validation(LIBSVM.svm_problem prob,
LIBSVM.svm_parameter param,
int nr_fold,
double[] target) |
|
void |
svm_get_labels(LIBSVM.svm_model model,
int[] label) |
|
int |
svm_get_nr_class(LIBSVM.svm_model model) |
|
int |
svm_get_nr_sv(LIBSVM.svm_model model) |
|
void |
svm_get_sv_indices(LIBSVM.svm_model model,
int[] indices) |
|
int |
svm_get_svm_type(LIBSVM.svm_model model) |
|
double |
svm_get_svr_probability(LIBSVM.svm_model model) |
|
private void |
svm_group_classes(LIBSVM.svm_problem prob,
int[] nr_class_ret,
int[][] label_ret,
int[][] start_ret,
int[][] count_ret,
int[] perm) |
|
LIBSVM.svm_model |
svm_load_model(java.io.BufferedReader fp) |
|
LIBSVM.svm_model |
svm_load_model(java.lang.String model_file_name) |
|
private int |
svm_one_class_probability(LIBSVM.svm_problem prob,
LIBSVM.svm_model model,
double[] prob_density_marks) |
|
double |
svm_predict(LIBSVM.svm_model model,
LIBSVM.svm_node[] x) |
|
double |
svm_predict_probability(LIBSVM.svm_model model,
LIBSVM.svm_node[] x,
double[] prob_estimates) |
|
double |
svm_predict_values(LIBSVM.svm_model model,
LIBSVM.svm_node[] x,
double[] dec_values) |
|
void |
svm_save_model(java.lang.String model_file_name,
LIBSVM.svm_model model) |
|
void |
svm_set_print_string_function(LIBSVM.svm_print_interface print_func) |
|
private double |
svm_svr_probability(LIBSVM.svm_problem prob,
LIBSVM.svm_parameter param) |
|
LIBSVM.svm_model |
svm_train(LIBSVM.svm_problem prob,
LIBSVM.svm_parameter param) |
|
(package private) LIBSVM.decision_function |
svm_train_one(LIBSVM.svm_problem prob,
LIBSVM.svm_parameter param,
double Cp,
double Cn) |
|
private void |
train_exit_with_help() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
nr_fold
private int nr_fold
-
lower
private double lower
-
upper
private double upper
-
y_lower
private double y_lower
-
y_upper
private double y_upper
-
y_max
private double y_max
-
y_min
private double y_min
-
max_index
private int max_index
-
Method Detail
-
svm_group_classes
private void svm_group_classes(LIBSVM.svm_problem prob,
int[] nr_class_ret,
int[][] label_ret,
int[][] start_ret,
int[][] count_ret,
int[] perm)
-
predict
private void predict(java.io.BufferedReader input,
java.io.DataOutputStream output,
LIBSVM.svm_model model,
int predict_probability)
throws java.io.IOException
- Throws:
java.io.IOException
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Mat_rm.html���������������������������������������������������0000775�4231163�4231163�00000027314�14537076056�022273� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Mat_rm (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Mat_rm() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
data_double
double[][] data_double
-
data_float
float[][] data_float
-
data_int
int[][] data_int
-
static_mem
int static_mem
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Mesh.html�������������������������������������������������������0000775�4231163�4231163�00000142144�14537076056�021551� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Mesh (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Mesh
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Mesh() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
numVertices
public int numVertices()
-
numEdges
public int numEdges()
-
numFaces
public int numFaces()
-
clear
public void clear()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmContrastEnhancementUsingExposureFusion.kFitting.html��������0000775�4231163�4231163�00000042733�14537076044�033435� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmContrastEnhancementUsingExposureFusion.kFitting (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
ac |
|
(package private) double |
bc |
|
(package private) double[] |
J |
|
(package private) int |
numValues |
|
(package private) double[] |
validValues |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
kFitting(double[] x0,
double[] validValues) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
validValues
double[] validValues
�������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.ContractingSnakeNode.html����������������������0000775�4231163�4231163�00000047462�14537076047�030453� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.ContractingSnakeNode (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private int |
clamp(int val,
int lowerBound,
int upperBound) |
|
int |
compareTo(java.lang.Object obj) |
|
protected byte[][] |
findThresholdedRegion(int x,
int y,
byte[] imageBuffer,
int bufferWidth,
int bufferHeight,
int radius,
boolean thresholding,
int[] offsetX,
int[] offsetY) |
|
java.util.ArrayList<java.lang.Boolean> |
getNeighbourLink() |
|
java.util.ArrayList<AlgorithmNetworkSnake.ContractingSnakeNode> |
getNeighbours() |
|
int |
getX() |
|
int |
getY() |
|
boolean |
iterate(float alpha,
float beta,
float gamma,
float d,
byte[] imageBuffer,
int bufferWidth,
int bufferHeight,
int m,
boolean imaging) |
|
void |
setNeighbourLink(java.util.ArrayList<java.lang.Boolean> neighbourLink) |
|
void |
setNeighbours(java.util.ArrayList neighbours) |
|
void |
setX(int x) |
|
void |
setY(int y) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
setX
public void setX(int x)
-
setY
public void setY(int y)
-
iterate
public boolean iterate(float alpha,
float beta,
float gamma,
float d,
byte[] imageBuffer,
int bufferWidth,
int bufferHeight,
int m,
boolean imaging)
-
findThresholdedRegion
protected byte[][] findThresholdedRegion(int x,
int y,
byte[] imageBuffer,
int bufferWidth,
int bufferHeight,
int radius,
boolean thresholding,
int[] offsetX,
int[] offsetY)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ProductParameterization.html�����������������������������0000775�4231163�4231163�00000060454�14537076052�027231� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ProductParameterization (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
ComputeJacobian(double[] x,
double[] jacobian_ptr) |
|
boolean |
ComputeJacobian(double[] x,
int x_start,
double[][] jacobian_ptr) |
|
void |
finalize() |
|
int |
GlobalSize() |
|
private void |
Init() |
|
int |
LocalSize() |
|
boolean |
Plus(double[] x,
double[] delta,
double[] x_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
local_size_
private int local_size_
-
global_size_
private int global_size_
-
buffer_size_
private int buffer_size_
-
Method Detail
-
finalize
public void finalize()
- Overrides:
finalize in class java.lang.Object
-
Plus
public boolean Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index)
- Specified by:
Plus in class CeresSolver.LocalParameterization
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.CurveCostFunction.html�������������������������������0000775�4231163�4231163�00000035557�14537076053�026644� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.CurveCostFunction (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
CurveCostFunction(int num_vertices,
double target_length) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.IterationSummary.html������������������������������������0000775�4231163�4231163�00000041647�14537076051�025670� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.IterationSummary (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
iteration
public int iteration
-
step_norm
public double step_norm
-
step_size
public double step_size
�����������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.GaussianFunction.html��������������������������������0000775�4231163�4231163�00000033735�14537076053�026475� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.GaussianFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog14.html����������������������������������0000775�4231163�4231163�00000026636�14537076055�025677� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog14 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog14(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog14
public FitdeHoog14(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
��������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NLConstrainedEngineEP.html�������������������������������������������0000775�4231163�4231163�00000470110�14537076056�024173� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NLConstrainedEngineEP (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
analuc(int[] prank) |
DOCUMENT ME!
|
private void |
btrunc(int[] prank,
boolean internalScaling,
DoubleDouble[] work) |
DOCUMENT ME!
|
private void |
chder(DoubleDouble dphize,
int[] k,
DoubleDouble[] alfk,
DoubleDouble[] phik) |
DOCUMENT ME!
|
private void |
choose(DoubleDouble xmin,
DoubleDouble[] v2,
DoubleDouble[] root1,
DoubleDouble[] root2,
DoubleDouble[] proot2) |
DOCUMENT ME!
|
private void |
covar() |
DOCUMENT ME!
|
private void |
dimsub(int[] prank,
int[] rank) |
DOCUMENT ME!
|
private DoubleDouble |
dnrm2(int n,
DoubleDouble[] x,
int incx) |
DOCUMENT ME!
|
void |
driver() |
driver.
|
private void |
driverCalls() |
|
private void |
dumpTestResults() |
|
private void |
evreuc(int[] prank) |
DOCUMENT ME!
|
private void |
fitTestModel() |
Creates a new Fit24DModel object.
|
abstract void |
fitToFunction(DoubleDouble[] a,
DoubleDouble[] residuals,
DoubleDouble[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
void |
fitToTestFunction(DoubleDouble[] a,
DoubleDouble[] residuals,
DoubleDouble[][] covarMat) |
|
private void |
fsumsq(DoubleDouble alfk,
DoubleDouble[] xnew,
DoubleDouble[] fnew,
DoubleDouble[] fn_val,
int[] ctrl) |
DOCUMENT ME!
|
private void |
gauc(int[] k,
DoubleDouble alfmin,
DoubleDouble[] gmod,
DoubleDouble dphize,
DoubleDouble[] u,
DoubleDouble[] phiu,
DoubleDouble tau,
DoubleDouble pmax) |
DOCUMENT ME!
|
double |
getChiSquared() |
getChiSquared - accessor to chi-squared value (goodness-of-fit measure).
|
int |
getExitStatus() |
|
double[] |
getParameters() |
getParameters accessor to function parameters.
|
double[] |
getResiduals() |
DOCUMENT ME!
|
private void |
gnavuc() |
DOCUMENT ME!
|
private DoubleDouble |
gndunc(boolean internalScaling,
int[] prank,
DoubleDouble[] work) |
DOCUMENT ME!
|
private void |
hess() |
DOCUMENT ME!
|
private void |
jacdif(int[] ctrl) |
DOCUMENT ME!
|
private void |
jtrj(int nn) |
DOCUMENT ME!
|
private void |
lineuc(DoubleDouble[] gmod,
DoubleDouble dphize,
DoubleDouble alplow) |
DOCUMENT ME!
|
private void |
linuc2(DoubleDouble[] fnew,
DoubleDouble alfk,
DoubleDouble[] v2) |
DOCUMENT ME!
|
private void |
lsunc() |
DOCUMENT ME!
|
private void |
minrm(DoubleDouble[] v2,
DoubleDouble alfmin,
DoubleDouble alfmax,
DoubleDouble xmin,
DoubleDouble[] x,
DoubleDouble[] px,
DoubleDouble[] y,
DoubleDouble[] py) |
DOCUMENT ME!
|
private void |
minrm1(DoubleDouble[] v2) |
DOCUMENT ME!
|
private void |
minrm2() |
DOCUMENT ME!
|
private void |
minrn(DoubleDouble x,
DoubleDouble fx,
DoubleDouble w,
DoubleDouble fw,
DoubleDouble v,
DoubleDouble fv,
DoubleDouble alfmin,
DoubleDouble alfmax,
DoubleDouble pmax,
DoubleDouble[] u,
DoubleDouble[] pu) |
DOCUMENT ME!
|
private void |
newunc() |
DOCUMENT ME!
|
private void |
oner(DoubleDouble[] x) |
DOCUMENT ME!
|
private void |
outuc() |
DOCUMENT ME!
|
private void |
pivec(DoubleDouble[] work) |
DOCUMENT ME!
|
private DoubleDouble |
pol3(DoubleDouble x) |
DOCUMENT ME!
|
private DoubleDouble |
pol4(DoubleDouble[] v2,
DoubleDouble x) |
DOCUMENT ME!
|
private void |
pregn(DoubleDouble[] work,
int mindim,
int[] prank,
int[] dim) |
DOCUMENT ME!
|
private void |
presub(DoubleDouble[] work,
int[] prank,
int[] rank) |
DOCUMENT ME!
|
private void |
quamin(DoubleDouble x,
DoubleDouble fx,
DoubleDouble w,
DoubleDouble fw,
DoubleDouble v,
DoubleDouble fv,
DoubleDouble[] u) |
DOCUMENT ME!
|
private void |
reavuc() |
DOCUMENT ME!
|
private void |
reduc(DoubleDouble[] alf,
DoubleDouble[] phialf,
DoubleDouble alfk,
DoubleDouble pk,
DoubleDouble diff,
DoubleDouble eta,
DoubleDouble[] gmod,
DoubleDouble[] fnew,
int[] k,
DoubleDouble[] phik,
boolean[] reduce) |
DOCUMENT ME!
|
private void |
releps() |
DOCUMENT ME!
|
private void |
rtrw1(int nn) |
DOCUMENT ME!
|
private void |
scalv(DoubleDouble[] v,
DoubleDouble factor,
int n) |
DOCUMENT ME!
|
private void |
scaunc() |
DOCUMENT ME!
|
private void |
schdc(int nn,
int[] jpvt,
int job) |
DOCUMENT ME!
|
private void |
secuc() |
DOCUMENT ME!
|
private void |
soliuc(DoubleDouble tau,
int[] prank) |
DOCUMENT ME!
|
private void |
sposl(int nn) |
DOCUMENT ME!
|
private void |
sqrdc(DoubleDouble[][] x,
int n,
int p,
DoubleDouble[] qraux,
int[] jpvt,
int job) |
DOCUMENT ME!
|
private void |
sqrsl(DoubleDouble[][] x,
int n,
int k,
DoubleDouble[] qraux,
DoubleDouble[] y,
DoubleDouble[] qy,
DoubleDouble[] qty,
DoubleDouble[] b,
DoubleDouble[] rsd,
DoubleDouble[] xb,
int job) |
DOCUMENT ME!
|
private void |
stepuc(int[] prank) |
DOCUMENT ME!
|
private void |
strsl(int[] prank,
DoubleDouble[] b) |
DOCUMENT ME!
|
private void |
subuc(int[] prank,
int[] rank) |
DOCUMENT ME!
|
private void |
termuc(int[] prank,
DoubleDouble aNorm) |
DOCUMENT ME!
|
private void |
triunc(DoubleDouble tol,
int constraintAct,
int[] prank) |
DOCUMENT ME!
|
private void |
twor() |
DOCUMENT ME!
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
bounds
protected int bounds
integer scalar code for assessing the bounds bounds = 0 means an unconstrained problem bounds = 1 means the same
lower bounds for all unknowns and the same upper bounds for all unknowns. The lower and upper bound must be
stored in bl[0] and bu[0] respectively. bounds = 2 means that the bounds must be supplied by the user in bl[i]
and bu[i] for i = 0,1, param - 1.
-
covarMat
protected DoubleDouble[][] covarMat
2D array of doubles of dimension nPts by max(4,param) containing the main part of the covariance matrix
(Jtranspose * J)inverse, where J is the Jacobian matrix computed at a.
-
internalScaling
protected boolean internalScaling
If true, the columns of the Jacobian are scaled to have unit length. If false, internal scaling is not used to
compute the Gauss-Newton search direction.
-
secondAllowed
protected boolean secondAllowed
The method of Newton is allowed at the end of the iteration in some situations (large residuals). If true, the
use of second derivatives is permitted
-
ctrl
private int ctrl
ctrl can have 3 different values on entry. If ctrl = 1 or ctrl = -1, compute the residuals for all nPts at a
certain point a and return the residuals = yfit - yseries in the array residuals if the functions are computable.
If not successful and ctrl was set to 1, set ctrl = -1. If not successful and ctrl was set to -1, set ctrl < -10.
If ctrl = 2 and the Jacobian is supplied analytically, calculate the Jacobian = Jij = dymodi/daj. The Jacobian is
placed in matrix covarMat. If the Jacobian cannot be calculated, set ctrl < -10. If you wish to compute the
Jacobian numerically on return, set ctrl = 0.
-
diag
private DoubleDouble[] diag
1D double array of length param conatiaing the diagonal elements of the diagonal matrix D if internalScaling is
true. Otherwise, undefined.
-
errorStatus
private int errorStatus
DOCUMENT ME!
-
eval
private int eval
DOCUMENT ME!
-
exitStatus
private int exitStatus
integer scalar that indicates why the return was taken. If exitStatus != -1 and exitStatus >= -10, then a[]
contains the latest (best) estimate of the solution point. = 1000X convergence because relative predicted
reduction in the objective function = (0.5 * chisquare) is less than (relativeConvergence)**2 = 200X convergence
because sum of squares is less than (absoluteConvergence)**2 = 30X convergence because the relative change in a
is less than parameterConvergence = 4X convergence because we are computing at noise level X, the last digit in
the convergence code, indicates how the last steps were computed X = 0 no trouble (Gauss-Newton the last 3 steps)
= 1 pseudoRank <> param at termination point = 2 The method of Newton was used (at least) in the last step = 3
The (last - 2) step was subspace minimization, but the last 2 steps were Gauss-Newton steps = 4 The steplength
was not unit in both the last 2 steps < 0 indicates that no convergence criterion is fulfilled, but some abnormal
termination criterion is satisfied = -1 Invalid starting condition: nPts < param or param <= 0 or nPts <= 0 or
maxIterations <= 0 or relativeConvergence < 0 or relativeConvergence < 0 or absoluteConvergence < 0 or tolerance
<= 0 or parameterConvergence < 0 or invalid starting point on entry = -2 Number of iterations has exceeded
maximum allowed iterations = -3 The Hessian emanating from the second order method is not positive definite = -4
The algorithm would like to use second derivatives but is not allowed to do that = -5 An undamped step with
Newton's method is a failure = -6 The latest search direction computed using subspace minimization was not a
descent direction (probably caused by wrongly computed Jacobian) = -7 There is only one feasible point, name a[i]
= bl[i] = bu[i]; i = 0,1,...,param-1 < -10 Termination due to user stop indicator
-
gmat
private DoubleDouble[][] gmat
param by param array If secondAllowed if false, gmat can be used as a singly subscripted array of dimension param
by setting all second indices to 0.
-
gndok
private boolean gndok
DOCUMENT ME!
-
iev
private int iev
DOCUMENT ME!
-
ifree
private int ifree
DOCUMENT ME!
-
indic
private int indic
DOCUMENT ME!
-
kod
private int kod
DOCUMENT ME!
-
restart
private boolean restart
DOCUMENT ME!
-
secind
private int secind
DOCUMENT ME!
-
testMode
private boolean testMode
-
testCase
private int testCase
-
Constructor Detail
-
NLConstrainedEngineEP
public NLConstrainedEngineEP(int nPts,
int param)
NLConstrainedEngine - non-linear fit to a function.
- Parameters:
nPts - number of points to fit to the function toparam - number of parameters of function
-
Method Detail
-
fitToFunction
public abstract void fitToFunction(DoubleDouble[] a,
DoubleDouble[] residuals,
DoubleDouble[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!covarMat - DOCUMENT ME!
-
driver
public void driver()
driver.
-
covar
private void covar()
DOCUMENT ME!
-
gnavuc
private void gnavuc()
DOCUMENT ME!
-
hess
private void hess()
DOCUMENT ME!
-
lsunc
private void lsunc()
DOCUMENT ME!
-
minrm2
private void minrm2()
DOCUMENT ME!
-
minrn
private void minrn(DoubleDouble x,
DoubleDouble fx,
DoubleDouble w,
DoubleDouble fw,
DoubleDouble v,
DoubleDouble fv,
DoubleDouble alfmin,
DoubleDouble alfmax,
DoubleDouble pmax,
DoubleDouble[] u,
DoubleDouble[] pu)
DOCUMENT ME!
- Parameters:
phikm2 - DOCUMENT ME!pmax - DOCUMENT ME!
-
newunc
private void newunc()
DOCUMENT ME!
-
outuc
private void outuc()
DOCUMENT ME!
-
reavuc
private void reavuc()
DOCUMENT ME!
-
reduc
private void reduc(DoubleDouble[] alf,
DoubleDouble[] phialf,
DoubleDouble alfk,
DoubleDouble pk,
DoubleDouble diff,
DoubleDouble eta,
DoubleDouble[] gmod,
DoubleDouble[] fnew,
int[] k,
DoubleDouble[] phik,
boolean[] reduce)
DOCUMENT ME!
- Parameters:
pk - DOCUMENT ME!eta - DOCUMENT ME!gmod - DOCUMENT ME!fnew - DOCUMENT ME!
-
releps
private void releps()
DOCUMENT ME!
-
scaunc
private void scaunc()
DOCUMENT ME!
-
secuc
private void secuc()
DOCUMENT ME!
-
sqrdc
private void sqrdc(DoubleDouble[][] x,
int n,
int p,
DoubleDouble[] qraux,
int[] jpvt,
int job)
DOCUMENT ME!
- Parameters:
x - DOCUMENT ME!n - DOCUMENT ME!p - DOCUMENT ME!qraux - DOCUMENT ME!jpvt - DOCUMENT ME!job - DOCUMENT ME!
-
sqrsl
private void sqrsl(DoubleDouble[][] x,
int n,
int k,
DoubleDouble[] qraux,
DoubleDouble[] y,
DoubleDouble[] qy,
DoubleDouble[] qty,
DoubleDouble[] b,
DoubleDouble[] rsd,
DoubleDouble[] xb,
int job)
DOCUMENT ME!
- Parameters:
x - DOCUMENT ME!n - DOCUMENT ME!k - DOCUMENT ME!qraux - DOCUMENT ME!y - DOCUMENT ME!qy - DOCUMENT ME!qty - DOCUMENT ME!b - DOCUMENT ME!rsd - DOCUMENT ME!xb - DOCUMENT ME!job - DOCUMENT ME!
-
twor
private void twor()
DOCUMENT ME!
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEfficientWatershed.html�������������������������������������0000775�4231163�4231163�00000072456�14537076045�025540� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEfficientWatershed (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numNeighbor
private int numNeighbor
-
binNumber
private int binNumber
-
merge
private boolean merge
-
Constructor Detail
-
AlgorithmEfficientWatershed
public AlgorithmEfficientWatershed(ModelImage destImage,
ModelImage srcImage,
int numNeighbor,
boolean limitBins,
int binNumber,
boolean merge,
double mergeThreshold)
-
Method Detail
-
run2D
public void run2D()
-
run3D
public void run3D()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Poly.html������������������������������������������������������������0000775�4231163�4231163�00000051054�14537076056�021042� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Poly (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Poly
-
public class Poly
extends java.lang.Object
Solution of cubic, quartic, and quintic equations
Ported from code written by (c) Khashin S.I. http://math.ivanovo.ac.ru/dalgebra/Khashin/index.html
// khash2 (at) gmail.com
// Thanks to Alexandr Rakhmanin
// public domain
- Author:
- ilb
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
eps |
|
private double |
TwoPi |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Poly() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double |
_root3(double x) |
|
private void |
CSqrt(double x,
double y,
double[] a,
double[] b) |
|
private void |
dblSort3(double[] a,
double[] b,
double[] c) |
|
double |
F5(double t,
double a,
double b,
double c,
double d,
double e) |
|
private double |
N4Step(double x,
double a,
double b,
double c,
double d) |
|
private double |
root3(double x) |
|
void |
selfTest() |
|
int |
SolveP2(double[] x,
double a,
double b) |
|
int |
SolveP3(double[] x,
double a,
double b,
double c) |
|
int |
SolveP4(double[] x,
double a,
double b,
double c,
double d) |
|
private int |
SolveP4Bi(double[] x,
double b,
double d) |
|
private int |
SolveP4De(double[] x,
double b,
double c,
double d) |
|
int |
SolveP5(double[] x,
double a,
double b,
double c,
double d,
double e) |
|
private double |
SolveP5_1(double a,
double b,
double c,
double d,
double e) |
|
private void |
SWAP(double[] a,
double[] b) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
selfTest
public void selfTest()
-
N4Step
private double N4Step(double x,
double a,
double b,
double c,
double d)
-
SolveP4
public int SolveP4(double[] x,
double a,
double b,
double c,
double d)
-
F5
public double F5(double t,
double a,
double b,
double c,
double d,
double e)
-
SolveP5_1
private double SolveP5_1(double a,
double b,
double c,
double d,
double e)
-
SolveP5
public int SolveP5(double[] x,
double a,
double b,
double c,
double d,
double e)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ODEEP.html�����������������������������������������������������������0000775�4231163�4231163�00000202655�14537076056�020760� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ODEEP (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ODEEP
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
iflag
private int[] iflag
-
iwork1
private int iwork1
-
isnold
private int isnold
-
start
private boolean start
-
phase1
private boolean phase1
-
nornd
private boolean nornd
-
maxnum
private int maxnum
-
testMode
private boolean testMode
-
testCase
private int testCase
-
Method Detail
-
getIflag
public int getIflag()
-
driver
public void driver()
-
intrp
private void intrp()
�����������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmObjectExtractor.UnorderedSetInt.html������������������������0000775�4231163�4231163�00000077160�14537076047�030153� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmObjectExtractor.UnorderedSetInt (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
DEFAULT_GROW |
The default growth value for reallocations of the array representing the set.
|
protected int[] |
m_aiElement |
The array storage for the set.
|
protected int |
m_iGrow |
On a reallocation, the old maximum quantity is incremented by this value.
|
protected int |
m_iMaxQuantity |
The maximum number of elements in the array.
|
protected int |
m_iNewIndex |
Support for remove and removeAt.
|
protected int |
m_iOldIndex |
Support for remove and removeAt.
|
protected int |
m_iQuantity |
The number of valid elements in the array.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
int |
append(int iElement) |
Append an element to the end of the storage array.
|
void |
compactify() |
Use exactly the amount of array storage for the current elements in the set.
|
void |
copy(AlgorithmObjectExtractor.UnorderedSetInt kSet) |
Make a deep copy of the input set.
|
boolean |
exists(int iElement) |
Search the set to see if the input element currently exists.
|
int |
get(int i) |
Retrieve the element in the array location i.
|
int |
getGrow() |
The growth value for reallocations.
|
int |
getMaxQuantity() |
The maximum quantity of elements in the set.
|
int |
getNewIndex() |
On a call to remove or removeAt, the last element in the array is potentially moved to the array location
vacated by the removed element.
|
int |
getOldIndex() |
On a call to remove or removeAt, the last element in the array is moved to the array location vacated by the
removed element.
|
int |
getQuantity() |
The current number of valid elements in the array.
|
boolean |
insert(int iElement) |
Insert an element into the set.
|
boolean |
remove(int iElement) |
Remove the specified element from the set.
|
boolean |
removeAt(int i) |
Remove the element from the set in the specified location.
|
void |
reset() |
Reset the unordered set to its initial state.
|
void |
reset(int iMaxQuantity,
int iGrow) |
Reset the unordered set to the specified state.
|
void |
set(int i,
int iElement) |
Assign the specified element to array location i.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
UnorderedSetInt
public UnorderedSetInt(int iMaxQuantity,
int iGrow)
Construct an empty unordered set with the specified maximum quantity and growth values.
- Parameters:
iMaxQuantity - The initial number of elements in the array. If the value is nonpositive, the initial
number is DEFAULT_GROW.iGrow - The growth amount for a reallocation. If a reallocation occurs, the new number of
elements is the current maximum quantity plus the growth value. If the input value is
nonpositive, the growth is set to DEFAULT_GROW.
-
Method Detail
-
getGrow
public final int getGrow()
The growth value for reallocations. If a reallocation must occur, the new maximum quantity is the current
maximum quantity plus the growth amount.
- Returns:
- The growth value.
-
getNewIndex
public final int getNewIndex()
On a call to remove or removeAt, the last element in the array is potentially moved to the array location
vacated by the removed element. The new location of the last element is retrived by this function. However,
if the last element is the one that was removed, this function returns -1. If you need the value, you must
call this function before the next call to remove or removeAt.
- Returns:
- The new location of the last element that was moved.
-
getOldIndex
public final int getOldIndex()
On a call to remove or removeAt, the last element in the array is moved to the array location vacated by the
removed element. The old location of the last element is retrived by this function. If you need the value,
you must call this function before the next call to remove or removeAt.
- Returns:
- The old location of the last element that was moved.
-
getQuantity
public final int getQuantity()
The current number of valid elements in the array. This number is less than or equal to the maximum quantity.
The elements with indices 0 through getQuantity()-1 are the valid ones.
- Returns:
- The current number of valid elements.
-
reset
public void reset(int iMaxQuantity,
int iGrow)
Reset the unordered set to the specified state. The old array is deleted. The new array has a maximum
quantity and growth value as specified by the inputs.
- Parameters:
iMaxQuantity - The new maximum quantity for the array.iGrow - The new growth value.
-
set
public final void set(int i,
int iElement)
Assign the specified element to array location i. It is necessary that 0 <= i < getMaxQuantity().
- Parameters:
i - The array location to assign to.iElement - The element to assign to array location i.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHMRF_EM.html������������������������������������������������0000775�4231163�4231163�00000070645�14537076046�023111� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHMRF_EM (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHMRF_EM
extends AlgorithmBase
This is a port of the MATLAB files HMRF_EM.m and MRF_MAP.m written by Quan Wang to Java.
% Copyright by Quan Wang, 2012/04/25
% Please cite: Quan Wang. HMRF-EM-image: Implementation of the
% Hidden Markov Random Field Model and its Expectation-Maximization
% Algorithm. arXiv:1207.3510 [cs.CV], 2012.
Copyright (c) 2012, Quan Wang
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in
the documentation and/or other materials provided with the distribution
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
POSSIBILITY OF SUCH DAMAGE.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmHMRF_EM() |
AlgorithmHMRF_EM - default constructor.
|
AlgorithmHMRF_EM(ModelImage destImg,
ModelImage srcImg,
int colorWeighting,
int numberClusters,
float gaussianSigma,
int maxEMIterations,
int maxMAPIterations,
boolean showMAPplot,
java.lang.String resultsFileName) |
AlgorithmHMRF_EM.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmHMRF_EM
public AlgorithmHMRF_EM(ModelImage destImg,
ModelImage srcImg,
int colorWeighting,
int numberClusters,
float gaussianSigma,
int maxEMIterations,
int maxMAPIterations,
boolean showMAPplot,
java.lang.String resultsFileName)
AlgorithmHMRF_EM.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!colorWeighting - numberClusters - gaussianSigma - maxEMIterations - maxMAPIterations - showMAPplot - resultsFileName -
�������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Triplet.html����������������������������������������������������0000775�4231163�4231163�00000024177�14537076056�022305� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Triplet (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Triplet
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected int |
m_col |
|
protected int |
m_row |
|
protected double |
m_value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Triplet() |
|
Triplet(int r,
int c,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_row
protected int m_row
-
m_col
protected int m_col
-
m_value
protected double m_value
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitSingleExponentialModel.html�������������������������0000775�4231163�4231163�00000042201�14537076046�027562� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitSingleExponentialModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitSingleExponentialModel(int nPoints,
double[] xData,
float[] yData,
double[] initial) |
Creates a new FitSingleExponentialModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
Fit to function - bottom + span*[1 - exp(-ln(2)*t/thalf)] a1 + a2*(1
- exp(-ln(2)*t/a0)).
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitSingleExponentialModel
public FitSingleExponentialModel(int nPoints,
double[] xData,
float[] yData,
double[] initial)
Creates a new FitSingleExponentialModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - bottom + span*[1 - exp(-ln(2)*t/thalf)] a1 + a2*(1
- exp(-ln(2)*t/a0)).
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting
parameters.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Renderer.html��������������������������������������������0000775�4231163�4231163�00000031051�14537076054�024145� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Renderer (MIPAV API Documentation)
-
-
Method Detail
-
isEnabled
boolean isEnabled()
Whether this renderer is enabled or not. By default a renderer is enabled and will
render upon #render(int, int, int, int) or #renderSVG(org.w3c.dom.Document, org.w3c.dom.Element, int, int).
When disabled those methods return right away and will not render anything.
- Returns:
- true when active
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.BlockRandomAccessMatrix.html�����������������������������0000775�4231163�4231163�00000030115�14537076051�027042� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.BlockRandomAccessMatrix (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessMatrix
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
GetCell
public abstract CeresSolver.CellInfo GetCell(int row_block_id,
int col_block_id,
int[] row,
int[] col,
int[] row_stride,
int[] col_stride)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMSER.VlMserExtrReg.html�������������������������������������0000775�4231163�4231163�00000030177�14537076047�025247� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMSER.VlMserExtrReg (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserExtrReg
-
- Enclosing class:
- AlgorithmMSER
private class AlgorithmMSER.VlMserExtrReg
extends java.lang.Object
Extremal regions (ER) are extracted from the region forest. Each region is represented by an instance of
this structure. The structures are stored into an array, in arbitrary order.
ER are arranged into a tree. parent points to the parent ER, or to itself if the ER is the root.
An instance of the structure represents the extremal region of the level set of intensity VlMserExtrReg::value
and containing the pixel VlMserExtReg::index.
VlMserExtrReg::area is the area of the extremal region and VlMserExtrReg::area_top is the area of the extremal
region containing this region in the level set of intensity VlMserExtrReg::area + delta
VlMserExtrReg::variation is the relative area variation (area_top-area)/area.
VlMserExtrReg::max_stable is a flag signaling whether this region is also maximally stable.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
area |
|
(package private) int |
index |
|
(package private) int |
max_stable |
|
(package private) int |
parent |
|
(package private) int |
shortcut |
|
(package private) short |
value |
|
(package private) double |
variation |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
VlMserExtrReg() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
variation
double variation
-
max_stable
int max_stable
-
Constructor Detail
-
VlMserExtrReg
private VlMserExtrReg()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SolverOptions.html���������������������������������������0000775�4231163�4231163�00000127114�14537076052�025175� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SolverOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_threads
public int num_threads
-
Constructor Detail
-
SolverOptions
public SolverOptions()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmUnionFindWatershed.indexValueItem.html����������������������0000775�4231163�4231163�00000027012�14537076050�030437� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmUnionFindWatershed.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed.indexValueItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValueItem(int index,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
private double value
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public double getValue()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHistogram.html����������������������������������������������0000775�4231163�4231163�00000156771�14537076046�023736� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHistogram (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHistogram
extends AlgorithmBase
Calculates the histogram for an image. The number of bins is determined by the extents of the histogram model. The
calling algorithm can specify if the histogram is to be calculated for whole image or only over VOI regions. The Otsu
and Maximum Entrophy thresholds are also automatically calculated and stored in the ModelHistogram structure. The
Otsu and Max entropy can take time (minutes) to calculate for histgrams with bins larger than (10,000).
- Version:
- 0.1 September 18, 1997
- See Also:
ModelHistogram
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
private class |
AlgorithmHistogram.GrayLevelClass |
Used specifally by the Otsu threshold algorithm to define a gray level object for calculating probabilities.
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
dataOutput |
Flag indicating whether or not histogram data is output to the data window.
|
private boolean |
displayGraph |
|
private boolean |
entireImage |
If true the histogram should be calculated for the entire image.
|
private double[] |
highValue |
DOCUMENT ME!
|
private int[] |
histoBuffer |
DOCUMENT ME!
|
private ModelHistogram |
histogram |
Reference to the histogram storage object.
|
private ModelImage |
image |
Reference to the image.
|
private double[] |
lowValue |
DOCUMENT ME!
|
private int |
processMode |
|
private int |
RGBOffset |
Indicates which channel of the RGB image the histogram should be calculated. 1 = Red channel 2 = Green channel 3
= Blue channel
|
private static int |
SEPARATE_VOIS |
|
private int |
summaryBins |
Used to indicate the number of histogram bins when using the constructors that do NOT pass in the histogram
object.
|
private static int |
TOTAL_VOIS |
|
private boolean |
userLimits |
|
private double |
userMax |
|
private double |
userMin |
|
private static int |
WHOLE_IMAGE |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmHistogram(ModelHistogram histogram,
int RGBOffset,
ModelImage image,
boolean maskFlag) |
Constructs the histogram calculation object for an RGB image.
|
AlgorithmHistogram(ModelHistogram histogram,
ModelImage image,
boolean maskFlag) |
Constructs the histogram calculation object.
|
AlgorithmHistogram(ModelImage image,
int summaryBins) |
Constructs the histogram calculation object for an image.
|
AlgorithmHistogram(ModelImage image,
int summaryBins,
boolean maskFlag) |
Constructs the histogram calculation object for an image.
|
AlgorithmHistogram(ModelImage image,
int summaryBins,
boolean maskFlag,
boolean displayGraph,
boolean userLimits,
double userMin,
double userMax) |
Constructs the histogram calculation object for an image.
|
AlgorithmHistogram(ModelImage image,
int summaryBins,
int RGBOffset) |
Constructs the histogram calculation object for an RGB image.
|
AlgorithmHistogram(ModelImage image,
int summaryBins,
int RGBOffset,
boolean maskFlag) |
Constructs the histogram calculation object for an RGB image.
|
AlgorithmHistogram(ModelImage image,
int summaryBins,
int RGBOffset,
boolean maskFlag,
boolean displayGraph,
boolean userLimits,
double userMin,
double userMax) |
Constructs the histogram calculation object for an RGB image.
|
AlgorithmHistogram(ModelImage image,
int summaryBins,
int processMode,
boolean displayGraph,
boolean userLimits,
float userMin,
float userMax) |
Constructs the histogram calculation object for an image.
|
AlgorithmHistogram(ModelImage image,
int summaryBins,
int RGBOffset,
int processMode,
boolean displayGraph,
boolean userLimits,
float userMin,
float userMax) |
Constructs the histogram calculation object for an RGB image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
disposeLocal() |
Dispose of local variables.
|
void |
entireImage(boolean flag) |
Sets a flag to indicate if the histogram is to be calculated for the entire image or just the VOI.
|
private int |
entropySplit(int[] hist) |
Calculate maximum entropy split of a histogram.
|
void |
finalize() |
Prepares this class for destruction.
|
double[] |
getHighValue() |
DOCUMENT ME!
|
int[] |
getHistoBuffer() |
The buffer of all histogram values.
|
double[] |
getLowValue() |
DOCUMENT ME!
|
ModelHistogram |
getModelHistogram() |
Accessor to the histogram.
|
private int |
otsuThreshold(ModelImage image,
int[] histoBuffer) |
This algorithm is an implementation of Otsu thresholding technique based on the minimization of inter-class
variance [otsu79].
|
void |
runAlgorithm() |
Calculates the histogram.
|
void |
runData(int bins,
int VOINum) |
Calculates the histogram and outputs the number of counts per bin and area/volume information.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
image
private ModelImage image
Reference to the image.
-
userMin
private double userMin
-
userMax
private double userMax
-
processMode
private int processMode
-
Constructor Detail
-
AlgorithmHistogram
public AlgorithmHistogram(ModelImage image,
int summaryBins)
Constructs the histogram calculation object for an image.
- Parameters:
image - ModelImage the imagesummaryBins - number of bins in the histogram
-
AlgorithmHistogram
public AlgorithmHistogram(ModelHistogram histogram,
ModelImage image,
boolean maskFlag)
Constructs the histogram calculation object.
- Parameters:
histogram - model of a histogramimage - model of the source imagemaskFlag - Flag that indicates that the histogram will be calculated for the whole image if equal to true
-
AlgorithmHistogram
public AlgorithmHistogram(ModelImage image,
int summaryBins,
boolean maskFlag)
Constructs the histogram calculation object for an image.
- Parameters:
image - ModelImage the imagesummaryBins - number of bins in the histogrammaskFlag - Flag that indicates that the histogram will be calculated for the whole image if equal to
true
-
AlgorithmHistogram
public AlgorithmHistogram(ModelImage image,
int summaryBins,
int processMode,
boolean displayGraph,
boolean userLimits,
float userMin,
float userMax)
Constructs the histogram calculation object for an image.
- Parameters:
image - ModelImage the imagesummaryBins - number of bins in the histogramprocessMode - WHOLE_IMAGE, TOTAL_VOIS, or SEPARATE_VOISdisplayGraph - If true, produces a graph for displayuserLimits - If true, histogram goes from userMin to userMax instead of image.getMin() to image.getMax()userMin - usermax -
-
AlgorithmHistogram
public AlgorithmHistogram(ModelImage image,
int summaryBins,
boolean maskFlag,
boolean displayGraph,
boolean userLimits,
double userMin,
double userMax)
Constructs the histogram calculation object for an image.
- Parameters:
image - ModelImage the imagesummaryBins - number of bins in the histogrammaskFlag - Flag that indicates that the histogram will be calculated for the whole image if equal to
truedisplayGraph - If true, produces a graph for displayuserLimits - If true, histogram goes from userMin to userMax instead of image.getMin() to image.getMax()userMin - usermax -
-
AlgorithmHistogram
public AlgorithmHistogram(ModelImage image,
int summaryBins,
int RGBOffset)
Constructs the histogram calculation object for an RGB image.
- Parameters:
image - ModelImage the imagesummaryBins - number of bins in the histogramRGBOffset - correct offset for RED = 1 , GREEN = 2, or BLUE = 3 component to be exported
-
AlgorithmHistogram
public AlgorithmHistogram(ModelHistogram histogram,
int RGBOffset,
ModelImage image,
boolean maskFlag)
Constructs the histogram calculation object for an RGB image.
- Parameters:
histogram - model of a histogram for a RGB componentRGBOffset - correct offset for RED = 1 , GREEN = 2, or BLUE = 3 component to be exportedimage - model of the source imagemaskFlag - Flag that indicates that the histogram will be calculated for the whole image if equal to true
-
AlgorithmHistogram
public AlgorithmHistogram(ModelImage image,
int summaryBins,
int RGBOffset,
boolean maskFlag)
Constructs the histogram calculation object for an RGB image.
- Parameters:
image - ModelImage the imagesummaryBins - number of bins in the histogramRGBOffset - correct offset for RED = 1 , GREEN = 2, or BLUE = 3 component to be exportedmaskFlag - Flag that indicates that the histogram will be calculated for the whole image if equal to
true
-
AlgorithmHistogram
public AlgorithmHistogram(ModelImage image,
int summaryBins,
int RGBOffset,
int processMode,
boolean displayGraph,
boolean userLimits,
float userMin,
float userMax)
Constructs the histogram calculation object for an RGB image.
- Parameters:
image - ModelImage the imagesummaryBins - number of bins in the histogramRGBOffset - correct offset for RED = 1 , GREEN = 2, or BLUE = 3 component to be exportedprocessMode - WHOLE_IMAGE, TOTAL_VOIS, or SEPARATE_VOISdisplayGraph - If true, produces a graph for display
* @param userLimits If true, histogram goes from userMin to userMax instead of image.getMin() to image.getMax()userMin - usermax -
-
AlgorithmHistogram
public AlgorithmHistogram(ModelImage image,
int summaryBins,
int RGBOffset,
boolean maskFlag,
boolean displayGraph,
boolean userLimits,
double userMin,
double userMax)
Constructs the histogram calculation object for an RGB image.
- Parameters:
image - ModelImage the imagesummaryBins - number of bins in the histogramRGBOffset - correct offset for RED = 1 , GREEN = 2, or BLUE = 3 component to be exportedmaskFlag - Flag that indicates that the histogram will be calculated for the whole image if equal to
truedisplayGraph - If true, produces a graph for display
* @param userLimits If true, histogram goes from userMin to userMax instead of image.getMin() to image.getMax()userMin - usermax -
-
Method Detail
-
runData
public void runData(int bins,
int VOINum)
Calculates the histogram and outputs the number of counts per bin and area/volume information.
- Parameters:
bins - number of bins in the histogram
-
entropySplit
private int entropySplit(int[] hist)
Calculate maximum entropy split of a histogram. This method is very similar to Otsu's method. Rather than
maximising the inter-class variance, it maximizes the inter-class entropy. Entropy is a measure of the
uncertainity of an event taking place. You can calculate it as: S = -(sum)p*log2(p) so it is very straightforward
to do using the histogram data. (p is the probability of a pixel greyscale value in the image, and (sum) is the
greek capital sigma. It is customary to use log in base 2. P.K. Sahoo, S. Soltani, K.C. Wong and, Y.C. Chen "A
Survey of Thresholding Techniques", Computer Vision, Graphics, and Image Processing, Vol. 41, pp.233-260, 1988.
- Parameters:
hist - histogram to be thresholded.- Returns:
- index of the maximum entropy split.`
- Throws:
java.lang.IllegalArgumentException - DOCUMENT ME!
-
otsuThreshold
private int otsuThreshold(ModelImage image,
int[] histoBuffer)
This algorithm is an implementation of Otsu thresholding technique based on the minimization of inter-class
variance [otsu79].
- Parameters:
image - DOCUMENT ME!histoBuffer - DOCUMENT ME!- Returns:
- DOCUMENT ME!
�������gov/nih/mipav/model/algorithms/AlgorithmPrincipalComponents.html������������������������������������0000775�4231163�4231163�00000125766�14537076050�025763� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPrincipalComponents (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.FocusListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmPrincipalComponents
extends AlgorithmBase
implements java.awt.event.ActionListener, java.awt.event.FocusListener
This algorithm operates on 3D black and white images and on 2D and 3D color images. The user can select 1 or both of
2 output images: The first image is a filtered 3D image containing only the first n principal components, where n is
selected by the user after viewing images of the first 10 (or the number that exist if less than 10) principal
components. The second image is a 2D image created by averaging together the images in the 3D image. Note that red,
green, and blue are treated as separate 2D planes. This implementation assumes that the noise variance is equal in
every slice and that the noise is uncorrelated between slices. Principal components maximizes data variance in
components; it concentrates the information content of the data in as small a number of components as possible. This
algorithm is based on: 1.) Digital Image Processing, Third Edition by Rafael C. Gonzalez and Richard E. Woods,
Section 11.4 Use of Principal Components for Description, pp. 842 - 852, 2008 by Pearson Education, Inc.
Information about using a matchImage:
Eigenfaces for Recognition by Matthew Turk and Alex Pentland Vision and Modeling Group The Media Laboratory
Massachusetts Institute of Technology
2.) Gabor Feature Based Classification Using the Enhanced Linear Discriminant Model for Face Recognition by
Chengjun Liu and Harry Wechsler states "For the Eigenfaces method, the Mahalanobis distance measure
performs better than the L1 distance measure, followed in order by the L2 distance measure and the cosine
similarity measure as shown in Fig. 6. The Mahalanobis distance measure performs better than the other
similarity measures because the Mahalanobis distance measure counteracts the fact that the L1 and L2 distance
measures in PCA space weight preferentially for low frequencies, and this is consistent with results reported
by Moghaddam and Pentland and Sung and Poggio. As the L2 measure weights more the low frequencies than L1 does,
the L1 distance measure should perform better than the L2 distance measure, a conjecture validated by our
experiments as shown in Figure 6. The cosine similarity measure does not compensate the low frequency
preference, and it performs worst among all the measures."
3.) "The statistical properties of three noise removal procedures for multichannel remotely sensed data" by
M. Berman, CSIRO Division of Mathemetics and Statistics P.O. Box 218, Lindfield, N.S.W., 2070 Consulting Report
NSW/85/31/MB9 Note that this algorithm has 4 different names: Hotelling, eigenvector, principal component, and
Karhunen-Loeve transform. Also note that when the noise variance is the same in all bands and the noise is uncorrelated
between bands the principal component transformation is equivalent to the maximum noise fraction transformation.
In the more general case, the MNF transform is equivalent to a transformation of the data to a coordinate system in
which the noise covariance matrix is the identity matrix, followed by a principal components transformation. The
transform in this form is the noise-adjusted principal components transform. In forward order MNF maximizes the noise
content in successive components that are uncorrelated over the dataset or equivalently in reverse order MNF maximizes
the signal to noise ratio of each component. Information about the signal to noise ratio improvement is found in
"Information Extraction, SNR Improvement, and Data Compression in MultiSpectral Imagery", Patrick J. Ready and
Paul A. Wintz, IEEE Transactions on Communications, Vol. COM-21, No. 10, October, 1973, pp. 1123-1130.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private ModelImage[] |
destImage |
DOCUMENT ME!
|
private boolean |
displayAndAsk |
DOCUMENT ME!
|
private boolean |
doAveraging |
if true create an image averaging together the slices in the filtered version.
|
private boolean |
doFilter |
if true create a filtered version of the original image.
|
private boolean |
doMahalanobisDistance |
|
private boolean |
haveColor |
DOCUMENT ME!
|
private ModelImage |
matchImage |
If this 2D black and white image is present, it is matched to the closest slice and/or color in the
source image model by looking for the closest match of the weights of the principal components.
|
private int |
nPlanes |
number of image planes present.
|
private int |
nPresent |
number of principal components displayed 10 or less than 10 if fewer exist.
|
private javax.swing.JButton |
OKButton |
DOCUMENT ME!
|
private int |
pNumber |
number of principal components to be retained.
|
private javax.swing.JDialog |
pNumberDialog |
DOCUMENT ME!
|
private boolean |
pressedOK |
DOCUMENT ME!
|
private ModelImage |
srcImage |
DOCUMENT ME!
|
private javax.swing.JTextField |
textNumber |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmPrincipalComponents(ModelImage[] destImg,
ModelImage srcImg,
boolean doFilter,
boolean doAveraging,
boolean displayAndAsk,
int pNumber) |
Creates a new AlgorithmPrincipalComponents object.
|
AlgorithmPrincipalComponents(ModelImage[] destImg,
ModelImage srcImg,
ModelImage matchImage,
boolean doFilter,
boolean doAveraging,
boolean displayAndAsk,
int pNumber,
boolean doMahalanobisDistance) |
Creates a new AlgorithmPrincipalComponents object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
matchImage
private ModelImage matchImage
If this 2D black and white image is present, it is matched to the closest slice and/or color in the
source image model by looking for the closest match of the weights of the principal components.
-
Constructor Detail
-
AlgorithmPrincipalComponents
public AlgorithmPrincipalComponents(ModelImage[] destImg,
ModelImage srcImg,
ModelImage matchImage,
boolean doFilter,
boolean doAveraging,
boolean displayAndAsk,
int pNumber,
boolean doMahalanobisDistance)
Creates a new AlgorithmPrincipalComponents object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelmatchImage - match image match this image to the closest slice and/or color in the source imagedoFilter - if true create a filtered version of the original imagedoAveraging - if true create an image averaging together the slices in the filtered versiondisplayAndAsk - if true display principal component images and ask how many to retainpNumber - if displayAndAsk if false pNumber is the number of principal component images to retaindoMahalanobisDistance - Select Euclidean or Mahalanobis distance for matching
-
AlgorithmPrincipalComponents
public AlgorithmPrincipalComponents(ModelImage[] destImg,
ModelImage srcImg,
boolean doFilter,
boolean doAveraging,
boolean displayAndAsk,
int pNumber)
Creates a new AlgorithmPrincipalComponents object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modeldoFilter - if true create a filtered version of the original imagedoAveraging - if true create an image averaging together the slices in the filtered versiondisplayAndAsk - if true display principal component images and ask how many to retainpNumber - if displayAndAsk if false pNumber is the number of principal component images to retain
-
Method Detail
-
updateFileInfo
public void updateFileInfo(ModelImage image,
ModelImage resultImage)
Copy important file information to resultant image structure.
- Parameters:
image - Source image.resultImage - Resultant image.
����������gov/nih/mipav/model/algorithms/AlgorithmNonparametricSegmentation.html������������������������������0000775�4231163�4231163�00000064725�14537076047�027157� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNonparametricSegmentation (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
useGreen
private boolean useGreen
DOCUMENT ME!
-
useRed
private boolean useRed
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmNonparametricSegmentation
public AlgorithmNonparametricSegmentation(ModelImage resultImage,
ModelImage srcImage)
Creates a new AlgorithmNonparametricSegmentation object.
- Parameters:
resultImage - segmented imagesrcImage - original image
-
Method Detail
-
segmentBW
private void segmentBW()
DOCUMENT ME!
�������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.QMatrix.html��������������������������������������������������0000775�4231163�4231163�00000025060�14537076055�022474� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.QMatrix (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LIBSVM.QMatrix
-
-
Constructor Summary
Constructors
| Constructor |
Description |
QMatrix() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMatchForReference.html��������������������������������������0000775�4231163�4231163�00000073374�14537076047�025321� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMatchForReference (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmMatchForReference
extends AlgorithmBase
Will take Two 2D images (one Reference, one Adjusted) and use the Reference image's Resolutions to transform the
adjusted Image into a new size and resolution that the Reference Image can then be matched to, while preserving all
Field of Views (there is no loss of FOV).
- Version:
- 1.0
- Author:
- Ben Link
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmMatchForReference
public AlgorithmMatchForReference(ModelImage rImage,
ModelImage aImage)
Constructor.. takes in a reference and adjusted modelImage
- Parameters:
rImage - reference imageaImage - adjusted image
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TrustRegionStrategyOptions.html��������������������������0000775�4231163�4231163�00000030357�14537076052�027735� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TrustRegionStrategyOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
max_radius
public double max_radius
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog4.html�����������������������������������0000775�4231163�4231163�00000026621�14537076055�025610� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog4 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog4(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog4
public FitdeHoog4(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCubicLagrangian.html����������������������������������������0000775�4231163�4231163�00000116571�14537076045�025003� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCubicLagrangian (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmCubicLagrangian
extends AlgorithmBase
This is a polynomial p of degree 3 which interpolates a given function f at the points x(-1), x(0), x(1), and x(2),
and is given by p(x) = sum from i = -1 to i = 2 of li(x)*f(xi), where li, i = -1,0,1,2, which are called the
fundamental polynomials, are given by li(x) = product from k = -1 to k = 2 for k != i of (x - xk)/(xi - xk). li(-1) =
(x - 0)/(-1 - 0) * (x - 1)/(-1 - 1) * (x - 2)/(-1 - 2) = (x * (1-x) * (x-2))/6 li(0) = (x - -1)/(0 - -1) * (x - 1)/(0
- 1) * (x - 2)/(0 - 2) = ((x+1) * (x-1) * (x-2))*0.5 li(1) = (x - -1)/(1 - -1) * (x - 0)/(1 - 0) * (x - 2)/(1 - 2) =
(x * (x+1) * (2-x))*0.5 li(2) = (x - -1)/(2 - -1) * (x - 0)/(2 - 0) * (x - 1)/(2 - 1) = (x * (x+1) * (x-1))/6
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
alphaMax |
DOCUMENT ME!
|
private double |
alphaMin |
DOCUMENT ME!
|
private double |
blueMax |
DOCUMENT ME!
|
private double |
blueMin |
DOCUMENT ME!
|
private boolean |
clip |
DOCUMENT ME!
|
private double |
greenMax |
DOCUMENT ME!
|
private double |
greenMin |
DOCUMENT ME!
|
private double |
inputMax |
DOCUMENT ME!
|
private double |
inputMin |
DOCUMENT ME!
|
private double |
redMax |
DOCUMENT ME!
|
private double |
redMin |
DOCUMENT ME!
|
private int |
sliceSize |
DOCUMENT ME!
|
private double[] |
volume |
DOCUMENT ME!
|
private double[][] |
wt |
DOCUMENT ME!
|
private int |
xD |
DOCUMENT ME!
|
private int |
xdim |
DOCUMENT ME!
|
private int |
yD |
DOCUMENT ME!
|
private int |
ydim |
DOCUMENT ME!
|
private int |
zD |
DOCUMENT ME!
|
private int |
zdim |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double |
cubicLagrangian2D(double x,
double y) |
2D cubic Lagrangian function.
|
double[] |
cubicLagrangian2DC(double x,
double y) |
2D cubic Lagrangian function for color.
|
double |
cubicLagrangian3D(double x,
double y,
double z) |
3D cubic Lagrangian function.
|
double[] |
cubicLagrangian3DC(double x,
double y,
double z) |
3D cubic Lagrangian function for color (3 channel images).
|
void |
finalize() |
Calls garbage collector to release system resources.
|
void |
runAlgorithm() |
default method that is not really appropiate for this class but must be defined because this class extends
AlgorithmBase.
|
void |
setup2DCubicLagrangian(double[] vol,
int[] extents,
boolean clip) |
Setup 2D cubicLagrangian.
|
void |
setup2DCubicLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip) |
Setup 2D cubicLagrangian for color.
|
void |
setup3DCubicLagrangian(double[] vol,
int[] extents,
boolean clip) |
Setup 3D cubic Lagrangian.
|
void |
setup3DCubicLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip) |
Setup 3D cubic Lagrangian for color.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
alphaMax
private double alphaMax
DOCUMENT ME!
-
alphaMin
private double alphaMin
DOCUMENT ME!
-
blueMax
private double blueMax
DOCUMENT ME!
-
blueMin
private double blueMin
DOCUMENT ME!
-
clip
private boolean clip
DOCUMENT ME!
-
greenMax
private double greenMax
DOCUMENT ME!
-
greenMin
private double greenMin
DOCUMENT ME!
-
inputMax
private double inputMax
DOCUMENT ME!
-
inputMin
private double inputMin
DOCUMENT ME!
-
redMax
private double redMax
DOCUMENT ME!
-
redMin
private double redMin
DOCUMENT ME!
-
sliceSize
private int sliceSize
DOCUMENT ME!
-
volume
private double[] volume
DOCUMENT ME!
-
wt
private double[][] wt
DOCUMENT ME!
-
xD
private int xD
DOCUMENT ME!
-
yD
private int yD
DOCUMENT ME!
-
zD
private int zD
DOCUMENT ME!
-
xdim
private int xdim
DOCUMENT ME!
-
ydim
private int ydim
DOCUMENT ME!
-
zdim
private int zdim
DOCUMENT ME!
-
Method Detail
-
cubicLagrangian3D
public final double cubicLagrangian3D(double x,
double y,
double z)
3D cubic Lagrangian function.
- Parameters:
x - double point indexy - double point indexz - double point index- Returns:
- the cubicLagrangian3D interpolated data point
-
cubicLagrangian3DC
public double[] cubicLagrangian3DC(double x,
double y,
double z)
3D cubic Lagrangian function for color (3 channel images).
- Parameters:
x - double point indexy - double point indexz - double point index- Returns:
- the cubicLagrangian3D interpolated data point
-
setup2DCubicLagrangian
public void setup2DCubicLagrangian(double[] vol,
int[] extents,
boolean clip)
Setup 2D cubicLagrangian.
- Parameters:
vol - volume comprising control points for the cubic Lagrangianextents - vol extents (xdim, ydim)clip - if true clip output to range of input image
-
setup2DCubicLagrangianC
public void setup2DCubicLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip)
Setup 2D cubicLagrangian for color.
- Parameters:
vol - volume comprising control points for the cubic Lagrangianextents - vol extents (xdim, ydim)argbMax - maximum possible value of a colorclip - if true clip output to range of input image
-
setup3DCubicLagrangian
public void setup3DCubicLagrangian(double[] vol,
int[] extents,
boolean clip)
Setup 3D cubic Lagrangian.
- Parameters:
vol - volume comprising control points for the cubic Lagrangianextents - vol extents (xdim, ydim, zdim)clip - if true clip output to range of input image
-
setup3DCubicLagrangianC
public void setup3DCubicLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip)
Setup 3D cubic Lagrangian for color.
- Parameters:
vol - volume comprising control points for the cubic Lagrangianextents - vol extents (xdim, ydim, zdim)argbMax - maximum possible value for a colorclip - if true clip output to range of input image
���������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BardFunction.html������������������������������������0000775�4231163�4231163�00000033671�14537076052�025571� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BardFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
BardFunction
public BardFunction()
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.FaceEdgeIterator.html�������������������������������������������0000775�4231163�4231163�00000031776�14537076056�024022� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.FaceEdgeIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.FaceEdgeIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��gov/nih/mipav/model/algorithms/CeresSolver.LineSearchDirectionOptions.html��������������������������0000775�4231163�4231163�00000027543�14537076051�027605� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearchDirectionOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.EasyCostFunction.html������������������������������������0000775�4231163�4231163�00000033657�14537076051�025616� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.EasyCostFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlScaleSpace.html���������������������������������������������0000775�4231163�4231163�00000023213�14537076054�023641� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlScaleSpace (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlScaleSpace
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
VlScaleSpace
VlScaleSpace()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.DatDescriptor.html���������������������������������������������0000775�4231163�4231163�00000026635�14537076055�023771� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.DatDescriptor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.DatDescriptor
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
data_sets
public double data_sets
-
channels
public double channels
-
Constructor Detail
-
DatDescriptor
public DatDescriptor()
���������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CompressedRowBlockStructure.html�������������������������0000775�4231163�4231163�00000023730�14537076051�030035� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CompressedRowBlockStructure (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowBlockStructure
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBSmooth.html������������������������������������������������0000775�4231163�4231163�00000104260�14537076044�023334� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBSmooth (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmBSmooth
extends AlgorithmBase
Smoothing of VOI using 1 iteration of bSplines. All selected curves in all slices of the voi will be smoothed. The
number of interpolated points is user selectable. The user chooses whether or not to trim out nearly collinear
points. The user chooses whether or not to remove the original selected curve. If the original curve is not removed,
the new curve will have a different color. If the original curve is removed, the new curve will have the same color.
- See Also:
AlgorithmBSpline
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calc2D() |
Prepares the data and runs the algorithm for a 2D image.
|
private void |
calc3D() |
Prepares the data and runs the algorithm for a 3D image.
|
void |
finalize() |
Prepares this class for destruction.
|
AlgorithmBSpline |
getbSplineAlgo() |
|
VOI |
getResultVOI() |
Accessor that returns a voi that is a smoothed version of the original.
|
void |
runAlgorithm() |
Starts the smooth algorithm.
|
void |
runSmooth(float[] xPoints,
float[] yPoints,
float[] zPoints,
VOIBase resultContour) |
Actual function that smooths the voi with bsplines.
|
private void |
runSmooth2(float[] xPoints,
float[] yPoints,
float[] zPoints) |
Actual function that smooths the voi with bsplines.
|
void |
setNPts(int nPts) |
|
void |
setPoints(float[] xPoints,
float[] yPoints,
float[] zPoints,
VOIBase contour) |
Takes the polygon and forms two special arrays for use in the Bspline.
|
private void |
setPoints2(float[] xPoints,
float[] yPoints,
float[] zPoints) |
Takes the polygon and forms two special arrays for use in the Bspline.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmBSmooth
public AlgorithmBSmooth(ModelImage srcImg,
VOI activeVOI,
int nPts,
boolean trim)
Creates a new AlgorithmBSmooth object.
- Parameters:
srcImg - 2D or 3D source imageactiveVOI - the selected voinPts - number of interpolation pointstrim - trim out nearly collinear points
-
Method Detail
-
runSmooth2
private void runSmooth2(float[] xPoints,
float[] yPoints,
float[] zPoints)
Actual function that smooths the voi with bsplines.
- Parameters:
xPoints - x coordinates that describe the contouryPoints - y coordinates that describe the contourresultGon - resultant polygon
-
runSmooth
public void runSmooth(float[] xPoints,
float[] yPoints,
float[] zPoints,
VOIBase resultContour)
Actual function that smooths the voi with bsplines.
- Parameters:
xPoints - x coordinates that describe the contouryPoints - y coordinates that describe the contourresultGon - resultant polygon
-
setPoints
public void setPoints(float[] xPoints,
float[] yPoints,
float[] zPoints,
VOIBase contour)
Takes the polygon and forms two special arrays for use in the Bspline.
- Parameters:
xPoints - storage location of array of x coord. pointsyPoints - storage location array of y coord. pointsgon - initial polygon
-
setPoints2
private void setPoints2(float[] xPoints,
float[] yPoints,
float[] zPoints)
Takes the polygon and forms two special arrays for use in the Bspline.
- Parameters:
xPoints - storage location of array of x coord. pointsyPoints - storage location array of y coord. pointsgon - initial polygon
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Sep_FIR_filter.html�������������������������������������������0000775�4231163�4231163�00000024054�14537076056�023646� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Sep_FIR_filter (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Sep_FIR_filter
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
dim |
|
(package private) double[] |
kernel |
|
(package private) int |
symmetric |
|
(package private) int |
width |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Sep_FIR_filter
public Sep_FIR_filter()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.UserData.html�������������������������������������������������0000775�4231163�4231163�00000023513�14537076054�022606� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.UserData (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.UserData
-
-
Constructor Summary
Constructors
| Constructor |
Description |
UserData() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
UserData
public UserData()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/WishartVariateGenerator.html�����������������������������������������0000775�4231163�4231163�00000033706�14537076057�024730� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WishartVariateGenerator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.WishartVariateGenerator
-
public class WishartVariateGenerator
extends java.lang.Object
Ported from original FORTRAN code Algorithm AS 53: Wishart Variate Generator
Authors: W. B. Smith and R. R. Hocking
Source: Journal of the Royal Statistical Society Series C (applied Statistics),
1972, Vol. 21, No. 3, pp. 341-345
Published by: Wiley for the Royal Statistical Society
Stable URL: https://www.jstor.org/stable/2346290
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
N |
|
(package private) RandomNumberGen |
random |
|
private double[][] |
SA |
|
private double[][] |
SB |
|
private double[][] |
sigma |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
WishartVariateGenerator(double[][] sigma,
int N,
double[][] SA,
double[][] SB) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
sigma
private double[][] sigma
����������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCircleToRectangle.html��������������������������������������0000775�4231163�4231163�00000070776�14537076044�025330� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCircleToRectangle (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
x |
DOCUMENT ME!
|
private double[] |
y |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
finalize -
|
void |
runAlgorithm() |
Starts the program.
|
void |
runAlgorithmPrevious() |
Starts the program.
|
void |
runTraditionalAlgorithm() |
Starts the program.
|
private void |
selfTest() |
|
private void |
sqrtc(double zinr,
double zini,
double[] zsqr,
double[] zsqi) |
Performs square root of complex argument.
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
private void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
x
private double[] x
DOCUMENT ME!
-
y
private double[] y
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmCircleToRectangle
public AlgorithmCircleToRectangle(ModelImage destImg,
ModelImage srcImg,
double[] x,
double[] y)
AlgorithmCircleToRectangle.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!x - array with x coordinates of circle center and point on radiusy - array with y coordinates of circle center and point on radius
-
Method Detail
-
zdiv
private void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
sqrtc
private void sqrtc(double zinr,
double zini,
double[] zsqr,
double[] zsqi)
Performs square root of complex argument.
- Parameters:
zinr - DOCUMENT ME!zini - DOCUMENT ME!zsqr - DOCUMENT ME!zsqi - DOCUMENT ME!
-
selfTest
private void selfTest()
��gov/nih/mipav/model/algorithms/AlgorithmSplitAndMergeWatershed.indexValueItem.html������������������0000775�4231163�4231163�00000027052�14537076050�031250� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSplitAndMergeWatershed.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed.indexValueItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValueItem(int index,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
private double value
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public double getValue()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.Osborne2Function.html��������������������������������0000775�4231163�4231163�00000032575�14537076053�026415� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.Osborne2Function (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Chiwrut1CostFunction.html������������������������0000775�4231163�4231163�00000034045�14537076052�027752� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Chiwrut1CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.ProductParameterizationTest.html���������������������0000775�4231163�4231163�00000040001�14537076053�030714� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.ProductParameterizationTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
SetUp
public void SetUp()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitDoubleExponentialModel.html�������������������������0000775�4231163�4231163�00000045037�14537076045�027564� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitDoubleExponentialModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitDoubleExponentialModel(int nPoints,
double[] xData,
float[] yData,
double[] initial) |
Creates a new FitDoubleExponentialModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
double[] |
fitToFunction(double[] x1,
double[] atry) |
Fit to function - a3 + a4*[1 - ao*exp(a1*x) - (1 - a0)*exp(a2*x)].
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitDoubleExponentialModel
public FitDoubleExponentialModel(int nPoints,
double[] xData,
float[] yData,
double[] initial)
Creates a new FitDoubleExponentialModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting
parameters.
-
fitToFunction
public double[] fitToFunction(double[] x1,
double[] atry)
Fit to function - a3 + a4*[1 - ao*exp(a1*x) - (1 - a0)*exp(a2*x)].
- Parameters:
x1 - The x value of the data point.atry - The best guess parameter values.- Returns:
- The calculated y value.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.Fixture.html�����������������������������������������0000775�4231163�4231163�00000026015�14537076053�024634� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.Fixture (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.Fixture
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fixture() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ConjugateGradientTest.html�������������������������������������������0000775�4231163�4231163�00000032471�14537076053�024353� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ConjugateGradientTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ConjugateGradientTest
-
public class ConjugateGradientTest
extends java.lang.Object
MIT License
Copyright (c) 2018 Komahan Boopathy
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
Ported to Java from routine check_conjuage in test.f90 in linear-nonlinear-algebra
package by William Gandler
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
assemble_system_dirichlet(double a,
double b,
int npts,
double[][] V,
double[] rhs,
double[] u,
double[][] P) |
|
private void |
assemble_system_mixed(double a,
double b,
int npts,
double[][] V,
double[] rhs,
double[] u,
double[][] P) |
|
void |
dirichletTest() |
|
void |
mixedTest() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
mixedTest
public void mixedTest()
-
assemble_system_dirichlet
private void assemble_system_dirichlet(double a,
double b,
int npts,
double[][] V,
double[] rhs,
double[] u,
double[][] P)
-
assemble_system_mixed
private void assemble_system_mixed(double a,
double b,
int npts,
double[][] V,
double[] rhs,
double[] u,
double[][] P)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmInterface.html����������������������������������������������0000775�4231163�4231163�00000246007�14537076046�023671� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmInterface (MIPAV API Documentation)
-
- All Known Implementing Classes:
AlgorithmAGVF, AlgorithmAnisotropicDiffusion, AlgorithmBilateralFilter, AlgorithmBrainSurfaceExtractor, AlgorithmCellTrackingAGVF, AlgorithmDTICreateListFile, AlgorithmDWI2DTI, AlgorithmEdgeLaplacian, AlgorithmEdgeNMSuppression, AlgorithmFastMarching, AlgorithmGaussianBlur, AlgorithmGaussianBlurSep, AlgorithmGradientMagnitude, AlgorithmGVF, AlgorithmHarrisCornerDetector, AlgorithmHarrisLaplace, AlgorithmIsophoteCurvature, AlgorithmLaplacian, AlgorithmLearnFromFailure64, AlgorithmLearnFromFailure64Knees, AlgorithmLevelSet, AlgorithmLevelSetDiffusion, AlgorithmNMSuppression, AlgorithmObjectExtractor, AlgorithmProstateBoundaryExt, AlgorithmProstateBoundaryFeature2D, AlgorithmProstateFeatures, AlgorithmProstateFeatures2D, AlgorithmProstateFeaturesSaveAutoTrain, AlgorithmRegELSUNCOAR3D, AlgorithmRegOAR3D, AlgorithmTextureSegmentation, AlgorithmUnsharpMask, AlgorithmVOIShapeInterpolation, DialogDTIColorDisplay, DTIColorDisplay, ImageReorientation, JDialog3DMosaicTo4DSlices, JDialog4DImageCalculator, JDialogAAMClassification, JDialogAAMClassificationExt, JDialogAAMplusSVM, JDialogActiveContoursWithoutEdges, JDialogAdaptiveKuwaharaFilter, JDialogAddMargins, JDialogAGCIE, JDialogAGVF, JDialogAHE, JDialogAHElocal, JDialogAINDANE, JDialogAnisotropicDiffusion, JDialogAntigradient2, JDialogAnyTwoImagesSNR, JDialogAutoCorrelation, JDialogAutoCovariance, JDialogAutoSeedWatershed, JDialogBarrelDistortion, JDialogBGAndFGDistanceMap, JDialogBGDistanceMap, JDialogBilateralFilter, JDialogBiorthogonalWavelets, JDialogBM3D, JDialogBorderClearing, JDialogBottomHat, JDialogBoundaryAttenuation, JDialogBoxCount, JDialogBrainSurfaceExtractor, JDialogBRISK, JDialogBSmooth, JDialogBSnake, JDialogBulkImageCalculator, JDialogCannyEdgeDetection, JDialogCenterOfMass, JDialogCenterOfMassRGB, JDialogCircleGeneration, JDialogCircleToRectangle, JDialogCircularSectorToRectangle, JDialogClose, JDialogCoherenceEnhancingDiffusion, JDialogColocalizationEM, JDialogColocalizationRegression, JDialogColorEdge, JDialogColorSaturation, JDialogConcat, JDialogConcatMult2Dto3D, JDialogConcatMult3Dto3D, JDialogConcatMult3Dto4D, JDialogConstrainedOAR3D, JDialogContrastEnhancementUsingExposureFusion, JDialogConvergenceField, JDialogConvert3Dto4D, JDialogConvert4Dto3D, JDialogConvert4DtoMultiple3D, JDialogConvert4DtoRGB, JDialogConvertType, JDialogConvexHull2D, JDialogCopyFiles, JDialogCorrectSpacing, JDialogCreateHEDpngFiles, JDialogCreateHEDpngFilesTest, JDialogCreateProbMap, JDialogCreateProbMap64, JDialogCreateProbMapConvert, JDialogCrop, JDialogCropBoundaryParam, JDialogCropPointParam, JDialogCropTiltedCuboid, JDialogCropTiltedRectangle, JDialogCumulativeHistogram, JDialogCyclicPermutation, JDialogDBSCANClusteringSegment, JDialogDeconvolution, JDialogDeleteObjects, JDialogDemonsLite, JDialogDEMRI3, JDialogDICOMtoAVI, JDialogDilate, JDialogDirectResample, JDialogDiscreteCosineTransform, JDialogDiscreteSineTransform, JDialogDistanceMap, JDialogDoublyConnectedSC, JDialogDTICreateListFile, JDialogDTIEstimateTensor, JDialogDTIInput, JDialogDualContourSearch, JDialogEdgeDetection3D, JDialogEdgeLaplacian, JDialogEdgeNMSuppression, JDialogEdgePreservingSmoothing, JDialogEfficientWatershed, JDialogEllipseGeneration, JDialogEllipseToCircle, JDialogEllipseToRectangle, JDialogEmbeddedConfidenceEdgeDetection, JDialogEntropicEdgeDetection, JDialogEntropyMinimization, JDialogErode, JDialogEvaluateMaskSegmentation, JDialogEvaluateSegmentation, JDialogExtractBrain, JDialogExtractObject, JDialogExtractSlices, JDialogExtractSlicesVolumes, JDialogExtractSurfaceCubes, JDialogFaceAnonymize, JDialogFaceAnonymizerBET, JDialogFacetModel, JDialogFastMarching, JDialogFemurTraceSectionsNetherland, JDialogFemurTraceSectionsNIH, JDialogFemurTraceSectionsSeparateNetherland, JDialogFFT, JDialogFillObjects, JDialogFindEdges, JDialogFIREEdgeExtraction, JDialogFlip, JDialogFRAP, JDialogFrequencyFilter, JDialogFRET, JDialogFRETBleedThrough, JDialogFRETEfficiency, JDialogFuzzMinDeAndChatterji, JDialogFuzzyCMeans, JDialogFuzzyConnectednessSegmentation, JDialogFuzzyMinimization, JDialogGaborFilter, JDialogGaussianBlur, JDialogGenerateEndingSlices, JDialogGenerateIsolines, JDialogGradientInverseWeightedSmoothing, JDialogGradientMagnitude, JDialogGraphBasedSegmentation, JDialogGuidedFilter, JDialogGVF, JDialogHaarTransform, JDialogHaralickTexture, JDialogHarrisCornerDetector, JDialogHarrisLaplace, JDialogHartleyTransform, JDialogHessian, JDialogHillClimbingWatershed, JDialogHistogram2Dim, JDialogHistogramLUT, JDialogHistogramMatch, JDialogHistogramSliceMatch, JDialogHistogramSummary, JDialogHMRF_EM, JDialogHomomorphicFilter, JDialogHoughCardioid, JDialogHoughCircle, JDialogHoughEllipse, JDialogHoughHyperbola, JDialogHoughLine, JDialogHoughParabola, JDialogHurstIndex, JDialogIAGCWD, JDialogIDObjects, JDialogIHN3Correction, JDialogImageCalculator, JDialogImageInfo, JDialogImageMath, JDialogImRegPOC, JDialogIndependentComponents, JDialogInsertMissingSlices, JDialogInsertSlice, JDialogInsertVolume, JDialogInvert, JDialogIsophoteCurvature, JDialogKernelRegression, JDialogKMeans, JDialogKnees_3DReconstrucion, JDialogKnees_90_data_train_extraction, JDialogKnees2DSlicesAtlasPngConverter, JDialogKneesLearnFromFailure64TestCase, JDialogKneesMapFromMRIandCED, JDialogLaplacian, JDialogLawsTexture, JDialogLearnFromFailure64Knees, JDialogLevelSet, JDialogLevelSetDiffusion, JDialogLightboxGen, JDialogLLE, JDialogLoadImage, JDialogLoadProstateMask, JDialogLocalNormalization, JDialogLocalVariance, JDialogLogSlopeMapping, JDialogLowerCompletion, JDialogLuminanceAdaptation, JDialogMarkovSegment, JDialogMarkovSmooth, JDialogMask, JDialogMatchImages, JDialogMaximumIntensityProjection, JDialogMaximumLikelihoodIteratedBlindDeconvolution, JDialogMean, JDialogMeanShiftClustering, JDialogMeanShiftSegmentation, JDialogMedian, JDialogMidsagittal, JDialogMode, JDialogMorphologicalFilter, JDialogMorphologicalGradient, JDialogMorphologicalLaplacian, JDialogMorphologicalReconstruction, JDialogMosaicToSlices, JDialogMRIShadingCorrection, JDialogMSER, JDialogMSFuzzyCMeans, JDialogMultiResolutionBilateralFilter, JDialogMultiResolutionGuidedFilter, JDialogN4MRIBiasFieldCorrection, JDialogNearlyCircleToCircle, JDialogNLMeans_filt2D, JDialogNLNoiseReduction, JDialogNMSuppression, JDialogNoise, JDialogNoiseLevel, JDialogNonlocalMeansFilter, JDialogOpen, JDialogPadImages, JDialogParticleAnalysisNew, JDialogPatellaTraceSectionsNetherland, JDialogPatellaTraceSectionsNIH, JDialogPbBoundaryDetection, JDialogPhaseCongruency, JDialogPhasePreservingDenoising, JDialogPointArea, JDialogPolygonToCircle, JDialogPolygonToRectangle, JDialogPowerWatershed, JDialogPrincipalComponents, JDialogPromise12_2DVolumetrieHED, JDialogPromise12_2DVolumetrieHED_map, JDialogPromise12_mhg_to_nii, JDialogPromise12ConvertMask, JDialogPromise12ConvertRestoOnePointFiveTest, JDialogPromise12ConvertRestoOnePointFiveTrain, JDialogPromise12CropAndNormalizeTest, JDialogPromise12CropAndNormalizeTrain, JDialogPromise12NIHDataToNii, JDialogPromise12Train3DCnns, JDialogPromise12Train3DCnnsSmall, JDialogProstate2DHEDmap, JDialogProstate2DHEDmapCg, JDialogProstate2DHEDmapMICCAI, JDialogProstate2DHEDmapMICCAI_ced_scale, JDialogProstate2DHEDmapMICCAI_conversion, JDialogProstate2DHEDmapSPIE_2017, JDialogProstate2DSlicesAtlasConverter, JDialogProstate2DSlicesAtlasCopyGTstl, JDialogProstate2DSlicesAtlasPngConverter, JDialogProstate2DSlicesAtlasPngConverter_JMI, JDialogProstate2DSlicesAtlasPngConverter3DSurface, JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap, JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT, JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap, JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest, JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest, JDialogProstate2DSlicesAtlasPngConverterCentralGland, JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale, JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test, JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train, JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test, JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train, JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai, JDialogProstate2DSlicesAtlasPngConverterMICCAI, JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale, JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test, JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale, JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test, JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train, JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion, JDialogProstate2DSlicesAtlasPngConverterTest, JDialogProstate2DSlicesAtlasPngConverterTest_JMI, JDialogProstate2DSlicesAtlasPngConverterTrain, JDialogProstate2DSlicesAtlasPngConverterTrain_JMI, JDialogProstate2DSlicesPngTextFileConverter, JDialogProstate2DSlicesPngTextFileConverterCentralGland, JDialogProstate2DSlicesPngTextFileConverterMICCAI, JDialogProstate2DSlicesPngTextFileConverterTest, JDialogProstate2DSlicesPngTextFileConverterTestCentralGland, JDialogProstate2DSlicesReconstrucion, JDialogProstate2DVolumetricHEDMiccaiProstate12, JDialogProstate3DReconstruction, JDialogProstateCheckPngFile, JDialogProstateEvaluationSegmentation, JDialogProstateEvaluationSegmentation_jmi, JDialogProstateExtractCEFeature, JDialogProstateImageCategorize, JDialogProstateISBIfinalSurfaceCompare, JDialogProstateISBIfinalSurfaceConvertNII, JDialogProstateISBIfinalSurfaceEvalSeg, JDialogProstateJMI_2017_HEDmap, JDialogProstateJMI_2017_VOI_converter, JDialogProstateLearnFromFailure64TestCase, JDialogProstateLearnFromFailure64TrainingCase, JDialogProstateSaveBoundaryFeature2D, JDialogProstateSaveFeatures, JDialogProstateSaveFeatures2D, JDialogProstateSegmentationRegBSpline3D, JDialogProstateSegmentationRegBSpline3DFast, JDialogProstateSPIEcancerChallenge, JDialogProstateSPIEcancerChallenge_HEDmap_image_alone, JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced, JDialogProstateSPIEcancerChallenge_noCED, JDialogProstateSPIEcancerChallengeNIH_boundary_train, JDialogProstateSPIEcancerChallengeNIH_train, JDialogProstateSPIEcancerChallengeNIH_train_ced, JDialogProstateSPIEcancerChallengeNIH_train_ced_ext, JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp, JDialogProstateXReRunWholeProstate, JDialogProstateXReRunWholeProstateTestPatches, JDialogProstateXReRunWholeProstateTrainPatches, JDialogPyWavelets, JDialogQuantify, JDialogQuantifyMask, JDialogRandomizeSliceOrder, JDialogRegionMergingViaBoundaryMelting, JDialogRegionsFromPartialBorders, JDialogRegistrationBSpline, JDialogRegistrationChamfer, JDialogRegistrationLeastSquares, JDialogRegistrationOAR25D, JDialogRegistrationOAR2D, JDialogRegistrationOAR35D, JDialogRegistrationOAR3D, JDialogRegistrationSIFT3D, JDialogRegistrationTPSpline, JDialogRegistrationValidation, JDialogRegPatientPos, JDialogRegularizedIsotropicDiffusion, JDialogRegVOILandmark, JDialogRemoveSlices, JDialogRemoveTSlices, JDialogRenameDirs, JDialogReorient, JDialogReplaceBlankSlicesWithAverages, JDialogReplaceSlice, JDialogReplaceValue, JDialogReslice, JDialogRGBConcat, JDialogRGBtoGray, JDialogRGBtoGrays, JDialogRGBtoHSB, JDialogRotate, JDialogRuleBasedContrastEnhancement, JDialogScaleSaliency, JDialogSCDSegmentation, JDialogScriptableTransform, JDialogSequentialScanningWatershed, JDialogShortestPathWatershed, JDialogShuffleList, JDialogSIFT, JDialogSIFTImageSimilarity, JDialogSimulatedExposureFusion, JDialogSingleMRIImageSNR, JDialogSK10_MRI_CED_map_pre, JDialogSK10_MRI_map_nopre, JDialogSkeletonize, JDialogSKI_10_2D_axial_no_pre, JDialogSKI_10_3D_orthogonal_pre, JDialogSKI10_femur_eval_no_pre, JDialogSKI10_femur_eval_pre, JDialogSlantTransform, JDialogSliceAveraging, JDialogSM2, JDialogSnake, JDialogSobel, JDialogSpectralClustering, JDialogSphereGeneration, JDialogSplitAndMergeWatershed, JDialogStandardDeviationThreshold, JDialogSubsample, JDialogSubset, JDialogSubtractVOI, JDialogSwap34, JDialogSwapDims, JDialogSwapSlicesVolumes, JDialogSWI, JDialogSymmetricNearestNeighbor, JDialogTalairachTransform, JDialogTamuraTexture, JDialogTextureAnalysis, JDialogTextureSegmentation, JDialogThinning2D, JDialogThreshold, JDialogThresholdRGB, JDialogTiltCorrection, JDialogTimeFitting, JDialogTopHat, JDialogTrainingListGenerator, JDialogTransformBSpline, JDialogTreT1, JDialogTreT2, JDialogTrilateralFilter, JDialogTwoMRIImagesSNR, JDialogUltErode, JDialogUnionFindComponentLabelling, JDialogUnionFindWatershed, JDialogUnsharpMask, JDialogVABRA, JDialogVesselEnhancement, JDialogVOIBoolean, JDialogVOIExtraction, JDialogVOIHausdorffDistance, JDialogVOILogicalOperations, JDialogVOIShapeInterpolation, JDialogVOIStatistics, JDialogVOIStats, JDialogWalshHadamardTransform, JDialogWatershed, JDialogWaveletFuse, JDialogWaveletMultiscaleProducts, JDialogWaveletThreshold, JFrameRegistrationMosaic, JPanelDTIEstimateTensor, JPanelDTIImportData, JPanelDTIPreprocessing, Knees_90_data_train_extraction
public interface AlgorithmInterface
The interface used by all classes which want to respond to the conclusion of an algorithm. The algorithm may not have
completed sucessfully, so checking the value of isCompleted() may be necessary.
- Version:
- 0.1 November 24, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
- See Also:
AlgorithmBase.isCompleted()
-
-
Method Detail
-
algorithmPerformed
void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Parameters:
algorithm - the algorithm which has just completed
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.Solver_NU.html������������������������������������������������0000775�4231163�4231163�00000044367�14537076055�022776� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.Solver_NU (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.LIBSVM.Solver
active_set, active_size, alpha, alpha_status, Cn, Cp, eps, FREE, G, G_bar, INF, l, LOWER_BOUND, p, Q, QD, unshrink, UPPER_BOUND, y
-
Constructor Summary
Constructors
| Constructor |
Description |
Solver_NU() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private boolean |
be_shrunk(int i,
double Gmax1,
double Gmax2,
double Gmax3,
double Gmax4) |
|
(package private) double |
calculate_rho() |
|
(package private) void |
do_shrinking() |
|
(package private) int |
select_working_set(int[] working_set) |
|
(package private) void |
Solve(int l,
LIBSVM.QMatrix Q,
double[] p,
byte[] y,
double[] alpha,
double Cp,
double Cn,
double eps,
LIBSVM.Solver.SolutionInfo si,
int shrinking) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
be_shrunk
private boolean be_shrunk(int i,
double Gmax1,
double Gmax2,
double Gmax3,
double Gmax4)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/QuarticEquation.html�������������������������������������������������0000775�4231163�4231163�00000160755�14537076056�023246� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
QuarticEquation (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.QuarticEquation
-
public class QuarticEquation
extends java.lang.Object
Copyright Yair Chuchem 2011.
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above
copyright notice, this list of conditions and the following
disclaimer in the documentation and/or other materials provided
with the distribution.
Neither the name of Yair Chuchem nor the names of other
contributors may be used to endorse or promote products derived
from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
The equation is a*x**4 + b*x**3 + c*x**2 + d*x + e = 0
/* Solve Polynomials of up to the fourth degree. (over complex numbers)
Algorithms by Ferrari, Tartaglia, Cardano, et al. (16th century Italy)
- Author:
- ilb
-
-
Constructor Summary
Constructors
| Constructor |
Description |
QuarticEquation() |
|
QuarticEquation(int degree,
double areal,
double aimag,
double breal,
double bimag,
double creal,
double cimag,
double dreal,
double dimag,
double ereal,
double eimag,
int[] num_sols,
double[] solsreal,
double[] solsimag) |
|
QuarticEquation(int degree,
double areal,
double breal,
double creal,
double dreal,
double ereal,
int[] num_sols,
double[] sols) |
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calc_binomials(int num_binoms,
int stride,
double[][] dst) |
|
private void |
calc_powers(double x,
int max_power,
double[] dst) |
|
private void |
calc_powers(QuarticEquation.complex_t x,
int max_power,
QuarticEquation.complex_t[] dst) |
|
private void |
calc_shifted_coefs(double shift,
int degree,
double[] src,
double[] dst) |
|
private void |
calc_shifted_coefs(QuarticEquation.complex_t shift,
int degree,
QuarticEquation.complex_t[] src,
QuarticEquation.complex_t[] dst) |
|
private QuarticEquation.complex_t |
complex_add(QuarticEquation.complex_t a,
QuarticEquation.complex_t b) |
|
private QuarticEquation.complex_t |
complex_div(QuarticEquation.complex_t a,
QuarticEquation.complex_t b) |
|
private static boolean |
complex_eq(QuarticEquation.complex_t a,
QuarticEquation.complex_t b) |
|
private QuarticEquation.complex_t |
complex_from_real(double x) |
|
private QuarticEquation.complex_t |
complex_inverse(QuarticEquation.complex_t x) |
|
private QuarticEquation.complex_t |
complex_mult(QuarticEquation.complex_t a,
QuarticEquation.complex_t b) |
|
private QuarticEquation.complex_t |
complex_mult_real(double c,
QuarticEquation.complex_t x) |
|
private QuarticEquation.complex_t |
complex_negate(QuarticEquation.complex_t x) |
|
private QuarticEquation.complex_t |
complex_pow_real(QuarticEquation.complex_t x,
double power) |
|
private static double |
complex_sqr_norm(QuarticEquation.complex_t x) |
|
private QuarticEquation.complex_t |
complex_sqrt(QuarticEquation.complex_t x) |
|
private double |
cubic_root(double x) |
|
void |
run() |
|
void |
runComplex() |
|
void |
runReal() |
|
void |
selfTest() |
|
private int |
solve_depressed_cubic(double[] poly,
double[] results) |
|
private int |
solve_depressed_cubic(QuarticEquation.complex_t[] poly,
QuarticEquation.complex_t[] results) |
|
private int |
solve_depressed_poly(int degree,
double[] poly,
double[] results) |
|
private int |
solve_depressed_poly(int degree,
QuarticEquation.complex_t[] poly,
QuarticEquation.complex_t[] results) |
|
private int |
solve_depressed_quadratic(double[] poly,
double[] results) |
|
private int |
solve_depressed_quadratic(QuarticEquation.complex_t[] poly,
QuarticEquation.complex_t[] results) |
|
private int |
solve_depressed_quartic(double[] poly,
double[] results) |
|
private int |
solve_depressed_quartic(QuarticEquation.complex_t[] poly,
QuarticEquation.complex_t[] results) |
|
private int |
solve_normalized_poly(int degree,
double[] poly,
double[] results) |
|
private int |
solve_normalized_poly(int degree,
QuarticEquation.complex_t[] poly,
QuarticEquation.complex_t[] results) |
|
private int |
solve_poly(int degree,
QuarticEquation.complex_t[] poly,
QuarticEquation.complex_t[] results) |
|
(package private) int |
solve_real_poly(int degree,
double[] poly,
double[] results) |
|
private double |
stableness_score(double a,
double b) |
|
private static double |
stableness_score(QuarticEquation.complex_t a,
QuarticEquation.complex_t b) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
degree
private int degree
-
areal
private double areal
-
aimag
private double aimag
-
breal
private double breal
-
bimag
private double bimag
-
creal
private double creal
-
cimag
private double cimag
-
dreal
private double dreal
-
dimag
private double dimag
-
ereal
private double ereal
-
eimag
private double eimag
-
num_sols
private int[] num_sols
-
Constructor Detail
-
QuarticEquation
public QuarticEquation()
-
QuarticEquation
public QuarticEquation(int degree,
double areal,
double aimag,
double breal,
double bimag,
double creal,
double cimag,
double dreal,
double dimag,
double ereal,
double eimag,
int[] num_sols,
double[] solsreal,
double[] solsimag)
-
QuarticEquation
public QuarticEquation(int degree,
double areal,
double breal,
double creal,
double dreal,
double ereal,
int[] num_sols,
double[] sols)
-
Method Detail
-
selfTest
public void selfTest()
-
runReal
public void runReal()
-
runComplex
public void runComplex()
�������������������gov/nih/mipav/model/algorithms/libdt.DytexOptions.html����������������������������������������������0000775�4231163�4231163�00000031551�14537076055�023664� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.DytexOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.DytexOptions
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
m |
< dimension of the state space, x_t.
|
int |
n |
|
libdt.cov_type |
Ropt |
< dimension of the observation space, y_t.
|
libdt.cov_type |
Sopt |
< covariance type for R (usually COV_IID).
|
(package private) libdt.Ymean_type |
Yopt |
< covariance type for S (usually COV_DIAG).
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.html������������������������������������������������������������0000775�4231163�4231163�00000156133�14537076056�020661� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class LSCM
extends AlgorithmBase
Port of LSCM, Least squares conformal mapping
This package includes the prototype code for implementing least squares conformal maps.
LSCM requires at least two fixed vertices. Search in human.obj for "fix" and you will
find two such fixed vertices having an additional trait "fix u v" after the xyz coordinates.
In human.obj, these two vertices are somewhere at the two eyes. These two vertices will be
mapped to (u,v). You can specify your own fixed vertices in the same way.
## References
Gu, Xianfeng David. Computational conformal geometry. Edited by Shing-Tung Yau. Somerville, Mass, USA:
International Press, 2008.
Lévy, Bruno, Sylvain Petitjean, Nicolas Ray, and Jérome Maillot. "Least squares conformal maps for
automatic texture atlas generation." In ACM transactions on graphics (TOG), vol. 21, no. 3, pp. 362-371. ACM, 2002.
// Author : Mi, Liang
// Email : icemiliang@gmail.com
// Date : July 31st 2020
// License : MIT
Copyright (C) 2018 Liang Mi
Permission is hereby granted, free of charge, to any person obtaining
a copy of this software and associated documentation files (the "Software"),
to deal in the Software without restriction, including without limitation
the rights to use, copy, modify, merge, publish, distribute, sublicense,
and/or sell copies of the Software, and to permit persons to whom the
Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included
in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF
MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT.
IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM,
DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT
OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE
OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
LSCM(java.lang.String inputFileName,
java.lang.String outputFileName) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double |
c_a(LSCM.HalfEdge c) |
|
LSCM.HalfEdge |
c_next(LSCM.HalfEdge c) |
|
LSCM.HalfEdge |
c_prev(LSCM.HalfEdge c) |
|
LSCM.Point |
c_s(LSCM.HalfEdge c) |
|
double |
e_l(LSCM.Edge e) |
|
int |
e_mark(LSCM.Edge e) |
|
boolean |
e_sharp(LSCM.Edge e) |
|
java.lang.String |
e_string(LSCM.Edge e) |
|
double |
e_w(LSCM.Edge e) |
|
boolean |
f_touched(LSCM.Face f) |
|
void |
project() |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
set_coefficients() |
|
void |
setc_s(LSCM.HalfEdge c,
LSCM.Point p) |
|
void |
sete_l(LSCM.Edge e,
double value) |
|
void |
sete_mark(LSCM.Edge e,
int i) |
|
void |
sete_sharp(LSCM.Edge e,
boolean b) |
|
void |
setf_touched(LSCM.Face f,
boolean b) |
|
void |
setv_father(LSCM.Vertex v,
LSCM.Vertex father) |
|
void |
setv_idx(LSCM.Vertex v,
int i) |
|
void |
setv_touched(LSCM.Vertex v,
boolean touched) |
|
void |
setv_uv(LSCM.Vertex v,
LSCM.Point2 p2) |
|
void |
setv_valence(LSCM.Vertex v,
int i) |
|
LSCM.Vertex |
v_father(LSCM.Vertex v) |
|
int |
v_idx(LSCM.Vertex v) |
|
boolean |
v_touched(LSCM.Vertex v) |
|
LSCM.Point2 |
v_uv(LSCM.Vertex v) |
|
int |
v_valence(LSCM.Vertex v) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
project
public void project()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.im_format.html������������������������������������������������0000775�4231163�4231163�00000037075�14537076056�023036� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.im_format (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Enum<SIFT3D.im_format>
-
- gov.nih.mipav.model.algorithms.SIFT3D.im_format
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
im_format() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
im_format
private im_format()
-
Method Detail
-
valueOf
public static SIFT3D.im_format valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmUnionFindWatershed.indexValueComparator.html����������������0000775�4231163�4231163�00000027677�14537076050�031671� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmUnionFindWatershed.indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
�����������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.NonlinearConjugateGradientType.html����������������������0000775�4231163�4231163�00000036272�14537076052�030460� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.NonlinearConjugateGradientType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.NonlinearConjugateGradientType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT.ikeysComparator.html��������������������������������������������0000775�4231163�4231163�00000024756�14537076056�024050� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT.ikeysComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT.ikeysComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens2.html���������������������������������0000775�4231163�4231163�00000030414�14537076055�026165� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens2 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens2(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens2
public FitPiessens2(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitDoubleExponentialNoWholeModel.html������������������0000775�4231163�4231163�00000042405�14537076045�031054� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitDoubleExponentialNoWholeModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitDoubleExponentialNoWholeModel(int nPoints,
double[] xData,
float[] yData,
double[] initial) |
Creates a new FitDoubleExponentialNoWholeModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
Fit to function - Fit to function - a3 + (1-a3)*[1 - ao*exp(a1*x) -
(1 - a0)*exp(a2*x)].
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitDoubleExponentialNoWholeModel
public FitDoubleExponentialNoWholeModel(int nPoints,
double[] xData,
float[] yData,
double[] initial)
Creates a new FitDoubleExponentialNoWholeModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - Fit to function - a3 + (1-a3)*[1 - ao*exp(a1*x) -
(1 - a0)*exp(a2*x)].
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The x value of the data point.residuals - The best guess parameter values.covarMat - The derivative values of y with respect to fitting
parameters.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DoublyConnectedSC.html�����������������������������������������������0000775�4231163�4231163�00000227446�14537076054�023436� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DoublyConnectedSC (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
DoublyConnectedSC() |
|
DoublyConnectedSC(int IPOLY,
int NPTQ,
int ISOLV,
int ISPRT) |
|
DoublyConnectedSC(ModelImage destImg,
ModelImage srcImg,
double[][] Z0,
double[][] Z1,
int NPTQ,
int ISPRT,
int IGUESS,
int LINEARC,
double TOL) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
ANGLES(int MN,
double[][] Z01,
double[] ALFA01,
int I01) |
|
private double |
ARGUM(double U1,
double[] W01K) |
|
private void |
CHECK(double[] ALFA0,
double[] ALFA1,
int M,
int N,
int ISHAPE) |
|
private void |
CLASS(int N,
double ALPHA,
double BETA,
double[] B,
double[] A,
double[] MUZERO) |
|
private double |
DGAMMA(double X) |
|
private double |
DIST(int M,
int N,
double[][] W0,
double[][] W1,
double[] W,
int KWA,
int IC) |
|
private void |
DOGLEG(int N,
double[] R,
int LR,
double[] DIAG,
double[] QTB,
double DELTA,
double[] X,
double[] WA1,
double[] WA2) |
|
private void |
DSCDATA(int IPOLY,
int[] M,
int[] N,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1) |
|
private void |
DSCFUN(int NDIM,
double[] X,
double[] FVAL,
int[] IFLAG) |
|
private void |
DSCPRINT(int M,
int N,
double[] C,
double U,
double[][] W0,
double[][] W1,
double[] PHI0,
double[] PHI1,
double TOL,
int NPTQ) |
|
private void |
DSCSOLV(double TOL,
int IGUESS,
int M,
int N,
double[] U,
double[] C,
double[][] W0,
double[][] W1,
double[] PHI0,
double[] PHI1,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK,
int ISHAPE,
int LINEARC) |
|
private void |
DSCTEST(int M,
int N,
double U,
double[] C,
double[][] W0,
double[][] W1,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK) |
|
private double |
ENORM(int N,
double[] X) |
|
private void |
FDJAC1(int FCN,
int N,
double[] X,
double[] FVEC,
double[][] FJAC,
int LDFJAC,
int[] IFLAG,
int ML,
int MU,
double EPSFCN,
double[] WA1,
double[] WA2) |
|
private double |
FMAX(int MN,
double[] FVAL) |
|
private void |
GAUSSJ(int N,
double ALPHA,
double BETA,
double[] B,
double[] T,
double[] W) |
|
private void |
HYBRD(int FCN,
int N,
double[] X,
double[] FVEC,
double XTOL,
int MAXFEV,
int ML,
int MU,
double EPSFCN,
double[] DIAG,
int MODE,
double FACTOR,
int NPRINT,
int[] INFO,
int[] NFEV,
double[][] FJAC,
int LDFJAC,
double[] R,
int LR,
double[] QTF,
double[] WA1,
double[] WA2,
double[] WA3,
double[] WA4) |
|
private void |
IMTQL2(int N,
double[] D,
double[] E,
double[] Z,
int[] IERR) |
|
private void |
NEARW(int M,
int N,
double[][] W0,
double[][] W1,
double[] ALFA0,
double[] W,
int[] KNEAR,
int[] INEAR) |
|
private void |
NEARZ(int M,
int N,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] Z,
int[] KNZ,
int[] INZ) |
|
private void |
plot(double U,
double[] R,
double[] theta,
int num1draw,
int num2draw,
int yInvert,
double[][] W0,
double[][] W1,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1,
double[] QWORK,
double[] C) |
|
private void |
QFORM(int M,
int N,
double[][] Q,
int LDQ,
double[] WA) |
|
private void |
QINIT(int M,
int N,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK) |
|
private void |
QRFAC(int M,
int N,
double[][] A,
int LDA,
boolean PIVOT,
int[] IPVT,
int LIPVT,
double[] RDIAG,
double[] ACNORM,
double[] WA) |
|
private void |
R1MPYQ(int M,
int N,
double[][] A,
int LDA,
double[] V,
double[] W) |
|
private void |
R1UPDT(int M,
int N,
double[] S,
int LS,
double[] U,
double[] V,
double[] W,
boolean[] SING) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
THDATA(double[] U) |
|
private double[] |
WDSC(double[] ZZ,
int M,
int N,
double U,
double[] C,
double[][] W0,
double[][] W1,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1,
double[] PHI0,
double[] PHI1,
int NPTQ,
double[] QWORK,
double EPS,
int IOPT) |
|
private double[] |
WPROD(double[] W,
int M,
int N,
double U,
double[][] W0,
double[][] W1,
double[] ALFA0,
double[] ALFA1) |
|
private double[] |
WQSUM(double[] WA,
double PHIA,
int KWA,
int IC,
double[] WB,
double PHIB,
double RADIUS,
int M,
int N,
double U,
double[][] W0,
double[][] W1,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK,
int LINEARC) |
|
private double[] |
WQUAD(double[] WA,
double PHIA,
int KWA,
int ICA,
double[] WB,
double PHIB,
int KWB,
int ICB,
double RADIUS,
int M,
int N,
double U,
double[][] W0,
double[][] W1,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK,
int LINEARC,
int IEVL) |
|
private double[] |
WQUAD1(double[] WA,
double PHIA,
int KWA,
int IC,
double[] WB,
double PHIB,
double RADIUS,
int M,
int N,
double U,
double[][] W0,
double[][] W1,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK,
int LINEARC) |
|
private double[] |
WTHETA(double U,
double[] W) |
|
private void |
XWTRAN(int M,
int N,
double[] X,
double[] U,
double[] C,
double[][] W0,
double[][] W1,
double[] PHI0,
double[] PHI1) |
|
private double[] |
ZDSC(double[] WW,
int KWW,
int IC,
int M,
int N,
double U,
double[] C,
double[][] W0,
double[][] W1,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1,
double[] PHI0,
double[] PHI1,
int NPTQ,
double[] QWORK,
int IOPT) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
W02
private double[][] W02
-
W12
private double[][] W12
-
Z02
private double[][] Z02
-
Z12
private double[][] Z12
-
PHI02
private double[] PHI02
-
PHI12
private double[] PHI12
-
ALFA02
private double[] ALFA02
-
ALFA12
private double[] ALFA12
-
QWORK2
private double[] QWORK2
-
ISHAPE2
private int ISHAPE2
-
LINEARC2
private int LINEARC2
-
NSHAPE
private int NSHAPE
-
UARY
private double[] UARY
-
VARY
private double[] VARY
-
ICOUNT
private int ICOUNT
-
IGUESS
private int IGUESS
-
LINEARC
private int LINEARC
-
MACHEP
private double MACHEP
-
ISHAPE
private int ISHAPE
-
Constructor Detail
-
DoublyConnectedSC
public DoublyConnectedSC(ModelImage destImg,
ModelImage srcImg,
double[][] Z0,
double[][] Z1,
int NPTQ,
int ISPRT,
int IGUESS,
int LINEARC,
double TOL)
-
Method Detail
-
plot
private void plot(double U,
double[] R,
double[] theta,
int num1draw,
int num2draw,
int yInvert,
double[][] W0,
double[][] W1,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1,
double[] QWORK,
double[] C)
-
DSCDATA
private void DSCDATA(int IPOLY,
int[] M,
int[] N,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1)
-
WPROD
private double[] WPROD(double[] W,
int M,
int N,
double U,
double[][] W0,
double[][] W1,
double[] ALFA0,
double[] ALFA1)
-
WQSUM
private double[] WQSUM(double[] WA,
double PHIA,
int KWA,
int IC,
double[] WB,
double PHIB,
double RADIUS,
int M,
int N,
double U,
double[][] W0,
double[][] W1,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK,
int LINEARC)
-
WQUAD1
private double[] WQUAD1(double[] WA,
double PHIA,
int KWA,
int IC,
double[] WB,
double PHIB,
double RADIUS,
int M,
int N,
double U,
double[][] W0,
double[][] W1,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK,
int LINEARC)
-
WQUAD
private double[] WQUAD(double[] WA,
double PHIA,
int KWA,
int ICA,
double[] WB,
double PHIB,
int KWB,
int ICB,
double RADIUS,
int M,
int N,
double U,
double[][] W0,
double[][] W1,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK,
int LINEARC,
int IEVL)
-
XWTRAN
private void XWTRAN(int M,
int N,
double[] X,
double[] U,
double[] C,
double[][] W0,
double[][] W1,
double[] PHI0,
double[] PHI1)
-
DSCSOLV
private void DSCSOLV(double TOL,
int IGUESS,
int M,
int N,
double[] U,
double[] C,
double[][] W0,
double[][] W1,
double[] PHI0,
double[] PHI1,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK,
int ISHAPE,
int LINEARC)
-
ZDSC
private double[] ZDSC(double[] WW,
int KWW,
int IC,
int M,
int N,
double U,
double[] C,
double[][] W0,
double[][] W1,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1,
double[] PHI0,
double[] PHI1,
int NPTQ,
double[] QWORK,
int IOPT)
-
WDSC
private double[] WDSC(double[] ZZ,
int M,
int N,
double U,
double[] C,
double[][] W0,
double[][] W1,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1,
double[] PHI0,
double[] PHI1,
int NPTQ,
double[] QWORK,
double EPS,
int IOPT)
-
NEARW
private void NEARW(int M,
int N,
double[][] W0,
double[][] W1,
double[] ALFA0,
double[] W,
int[] KNEAR,
int[] INEAR)
-
NEARZ
private void NEARZ(int M,
int N,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] Z,
int[] KNZ,
int[] INZ)
-
DIST
private double DIST(int M,
int N,
double[][] W0,
double[][] W1,
double[] W,
int KWA,
int IC)
-
CHECK
private void CHECK(double[] ALFA0,
double[] ALFA1,
int M,
int N,
int ISHAPE)
-
DSCPRINT
private void DSCPRINT(int M,
int N,
double[] C,
double U,
double[][] W0,
double[][] W1,
double[] PHI0,
double[] PHI1,
double TOL,
int NPTQ)
-
DSCTEST
private void DSCTEST(int M,
int N,
double U,
double[] C,
double[][] W0,
double[][] W1,
double[][] Z0,
double[][] Z1,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK)
-
HYBRD
private void HYBRD(int FCN,
int N,
double[] X,
double[] FVEC,
double XTOL,
int MAXFEV,
int ML,
int MU,
double EPSFCN,
double[] DIAG,
int MODE,
double FACTOR,
int NPRINT,
int[] INFO,
int[] NFEV,
double[][] FJAC,
int LDFJAC,
double[] R,
int LR,
double[] QTF,
double[] WA1,
double[] WA2,
double[] WA3,
double[] WA4)
-
DOGLEG
private void DOGLEG(int N,
double[] R,
int LR,
double[] DIAG,
double[] QTB,
double DELTA,
double[] X,
double[] WA1,
double[] WA2)
-
QINIT
private void QINIT(int M,
int N,
double[] ALFA0,
double[] ALFA1,
int NPTQ,
double[] QWORK)
-
R1MPYQ
private void R1MPYQ(int M,
int N,
double[][] A,
int LDA,
double[] V,
double[] W)
-
R1UPDT
private void R1UPDT(int M,
int N,
double[] S,
int LS,
double[] U,
double[] V,
double[] W,
boolean[] SING)
-
GAUSSJ
private void GAUSSJ(int N,
double ALPHA,
double BETA,
double[] B,
double[] T,
double[] W)
-
CLASS
private void CLASS(int N,
double ALPHA,
double BETA,
double[] B,
double[] A,
double[] MUZERO)
-
IMTQL2
private void IMTQL2(int N,
double[] D,
double[] E,
double[] Z,
int[] IERR)
-
FDJAC1
private void FDJAC1(int FCN,
int N,
double[] X,
double[] FVEC,
double[][] FJAC,
int LDFJAC,
int[] IFLAG,
int ML,
int MU,
double EPSFCN,
double[] WA1,
double[] WA2)
-
QFORM
private void QFORM(int M,
int N,
double[][] Q,
int LDQ,
double[] WA)
-
QRFAC
private void QRFAC(int M,
int N,
double[][] A,
int LDA,
boolean PIVOT,
int[] IPVT,
int LIPVT,
double[] RDIAG,
double[] ACNORM,
double[] WA)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SlantTransform.html��������������������������������������������������0000775�4231163�4231163�00000111160�14537076056�023067� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SlantTransform (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class SlantTransform
extends AlgorithmBase
One dimensional forward and inverse slant transforms are ported from FORATRAN programs in Appendix A
of AD-767 758 Technical Report Slant Transform Image Coding by Wen-Hsiung Cheng of the University of
Southern California, prepared for the Advanced Research Projects Agency, Air Force Eastern Test Range, May 1973.
- Author:
- ilb
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
filter(double[] data,
int filterType,
double filterVal1,
double filterVal2) |
|
void |
forward1D(int N,
double[][] C) |
|
double[] |
greater(double[] data,
double value,
double substitute) |
|
double[][] |
hard(double[][] data,
double value,
double substitute) |
|
double[] |
hard(double[] data,
double value,
double substitute) |
|
void |
inverse1D(int N,
double[][] C) |
|
double[] |
less(double[] data,
double value,
double substitute) |
|
double[] |
nn_garrote(double[] data,
double value,
double substitute) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
double[] |
soft(double[] data,
double value,
double substitute) |
|
double[] |
threshold_firm(double[] data,
double value_low,
double value_high) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
filterType
private int filterType
-
transform
private int transform
-
Constructor Detail
-
SlantTransform
public SlantTransform()
-
SlantTransform
public SlantTransform(ModelImage transformImage,
ModelImage inverseImage,
ModelImage srcImg,
int transform,
int filterType,
double filterVal1,
double filterVal2)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Chunk.html�����������������������������������������������0000775�4231163�4231163�00000023422�14537076051�023413� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Chunk (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Chunk
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
java.util.HashMap<java.lang.Integer,java.lang.Integer> |
buffer_layout |
|
int |
size |
|
int |
start |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Chunk() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFuzzyCMeans.html��������������������������������������������0000775�4231163�4231163�00000210320�14537076046�024174� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFuzzyCMeans (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFuzzyCMeans(ModelImage[] destImg,
ModelImage srcImg,
int _nClass,
int _pyramidLevels,
int _jacobiIters1,
int _jacobiIters2,
float _q,
float _smooth1,
float _smooth2,
boolean _outputGainField,
int _segmentation,
boolean _cropBackground,
float _threshold,
int _max_iter,
float _tolerance,
boolean _wholeImage) |
Creates a new AlgorithmFuzzyCMeans object.
|
AlgorithmFuzzyCMeans(ModelImage srcImg,
int _nClass,
int _pyramidLevels,
int _jacobiIters1,
int _jacobiIters2,
float _q,
float _smooth1,
float _smooth2,
boolean _outputGainField,
int _segmentation,
boolean _cropBackground,
float _threshold,
int _max_iter,
float _tolerance,
boolean _wholeImage) |
Creates a new AlgorithmFuzzyCMeans object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
cleanUp() |
Cleans up the memory usage.
|
private void |
cMeans2() |
DOCUMENT ME!
|
private void |
cMeans3() |
cMeans3.
|
private void |
computeCentroids2D(float[] buffer,
float[] centroids,
float[] mems) |
Determines the centroids of each cluster given fuzzy membership values.
|
private void |
computeCentroids3D(float[] buffer) |
Determines the centroids of each cluster given fuzzy membership values.
|
private void |
computeMemberships2D(float[] buffer,
float[] centroids,
float[] mems,
double exponent) |
Determines the membership of each feature vector in each cluster.
|
private void |
computeMemberships3D(float[] buffer) |
Determines the membership of each feature vector in each cluster.
|
void |
finalize() |
Prepares this class for destruction.
|
void |
runAlgorithm() |
Starts the algorithm.
|
void |
setCentroids(float[] cent) |
Accessor to set the centroids.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
buffer2
private float[] buffer2
DOCUMENT ME!
-
destNum
private int destNum
DOCUMENT ME!
-
exponent
private double exponent
1/(qValue - 1).
-
iterations
private int iterations
DOCUMENT ME!
-
jacobiIters2
private int jacobiIters2
-
maxChange
private float maxChange
DOCUMENT ME!
-
maxIter
private int maxIter
DOCUMENT ME!
-
mems
private float[] mems
DOCUMENT ME!
-
memSize
private int memSize
DOCUMENT ME!
-
nClass
private int nClass
DOCUMENT ME!
-
newSliceSize
private int newSliceSize
DOCUMENT ME!
-
newXDim
private int newXDim
DOCUMENT ME!
-
newYDim
private int newYDim
DOCUMENT ME!
-
newZDim
private int newZDim
DOCUMENT ME!
-
oldX
private int oldX
DOCUMENT ME!
-
oldY
private int oldY
DOCUMENT ME!
-
oldZ
private int oldZ
DOCUMENT ME!
-
orgSlice
private int orgSlice
DOCUMENT ME!
-
orgVol
private int orgVol
DOCUMENT ME!
-
orgXDim
private int orgXDim
DOCUMENT ME!
-
qValue
private double qValue
DOCUMENT ME!
-
segBuffer
private byte[] segBuffer
DOCUMENT ME!
-
segmentation
private int segmentation
DOCUMENT ME!
-
sliceSize
private int sliceSize
DOCUMENT ME!
-
smooth2
private float smooth2
-
threshold
private float threshold
DOCUMENT ME!
-
tolerance
private float tolerance
DOCUMENT ME!
-
volSize
private int volSize
DOCUMENT ME!
-
xDim
private int xDim
DOCUMENT ME!
-
yDim
private int yDim
DOCUMENT ME!
-
zDim
private int zDim
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmFuzzyCMeans
public AlgorithmFuzzyCMeans(ModelImage srcImg,
int _nClass,
int _pyramidLevels,
int _jacobiIters1,
int _jacobiIters2,
float _q,
float _smooth1,
float _smooth2,
boolean _outputGainField,
int _segmentation,
boolean _cropBackground,
float _threshold,
int _max_iter,
float _tolerance,
boolean _wholeImage)
Creates a new AlgorithmFuzzyCMeans object.
- Parameters:
srcImg - source image model_nClass - number of classes into which the image will be segmented_pyramidLevels - Not used in the present version of the code_jacobiIters1 - Not used in the present version of the code_jacobiIters2 - Not used in the present version of the code_q - a weighing exponent on each membership value and determines the amount of
"fuzziness" of the resulting segmentation. q is required to be greater
than 1 and is typically set to 2._smooth1 - Not used in the present version of the code_smooth2 - Not used in the present version of the code_outputGainField - Not used in the present version of the code_segmentation - possible values are hard only, fuzzy only, or both hard and fuzzy_cropBackground - unchecked by default. This function finds the smallest bounding box outside of
which all image pixel values are below the image threshold. Values inside the
bounding box are copied to a smaller array to save space and calculations are
performed with this reduced array. However, these pixels outside the box are
restored for the production of the hard and fuzzy segmented images. In the hard
and fuzzy segmentation cases values outside the box all have a value of 0._threshold - The default value is the image minimum value. In the centroid calculation
only those pixels whose values equal or exceed threshold are used in the centroid
calculaton. In the hard segmentation pixels whose values are less than threshold
or not in a selected VOI if the whole image is not used are set to a segmentation
value of 0, meaning that these pixels are outside of the specified classes._max_iter - Maximum allowed iterations of main program loop_tolerance - The iteration continues until either the user specified maximum number of
iterations has occcured or until convergence has been detected. Convergence occurs
when all membership functions over all pixel locations j change byless than the
tolerance value between 2 iterations._wholeImage - If true apply algorithm to the whole image - constrained to be true
if background cropping is selected. If false, only apply to
VOI regions.
-
AlgorithmFuzzyCMeans
public AlgorithmFuzzyCMeans(ModelImage[] destImg,
ModelImage srcImg,
int _nClass,
int _pyramidLevels,
int _jacobiIters1,
int _jacobiIters2,
float _q,
float _smooth1,
float _smooth2,
boolean _outputGainField,
int _segmentation,
boolean _cropBackground,
float _threshold,
int _max_iter,
float _tolerance,
boolean _wholeImage)
Creates a new AlgorithmFuzzyCMeans object.
- Parameters:
destImg - list of image models where result image is to storedsrcImg - source image model_nClass - number of classes into which the image will be segmented_pyramidLevels - Not used in the present version of the code_jacobiIters1 - Not used in the present version of the code_jacobiIters2 - Not used in the present version of the code_q - a weighing exponent on each membership value and determines the amount of
"fuzziness" of the resulting segmentation. q is required to be greater
than 1 and is typically set to 2._smooth1 - Not used in the present version of the code_smooth2 - Not used in the present version of the code_outputGainField - Not used in the present version of the code_segmentation - possible values are hard only, fuzzy only, or both hard and fuzzy_cropBackground - unchecked by default. This function finds the smallest bounding box outside of
which all image pixel values are below the image threshold. Values inside the
bounding box are copied to a smaller array to save space and calculations are
performed with this reduced array. However, these pixels outside the box are
restored for the production of the hard and fuzzy segmented images. In the hard
and fuzzy segmentation cases values outside the box all have a value of 0._threshold - The default value is the image minimum value. In the centroid calculation
only those pixels whose values equal or exceed threshold are used in the centroid
calculaton. In the hard segmentation pixels whose values are less than threshold
or not in a selected VOI if the whole image is not used are set to a segmentation
value of 0, meaning that these pixels are outside of the specified classes._max_iter - Maximum allowed iterations of main program loop_tolerance - The iteration continues until either the user specified maximum number of
iterations has occcured or until convergence has been detected. Convergence occurs
when all membership functions over all pixel locations j change byless than the
tolerance value between 2 iterations._wholeImage - If true apply algorithm to the whole image - constrained to be true
if background cropping is selected. If false, only apply to
VOI regions.
-
Method Detail
-
cMeans2
private void cMeans2()
DOCUMENT ME!
-
cMeans3
private void cMeans3()
cMeans3.
-
computeCentroids2D
private void computeCentroids2D(float[] buffer,
float[] centroids,
float[] mems)
Determines the centroids of each cluster given fuzzy membership values.
- Parameters:
buffer - DOCUMENT ME!centroids - DOCUMENT ME!mems - DOCUMENT ME!
-
computeMemberships2D
private void computeMemberships2D(float[] buffer,
float[] centroids,
float[] mems,
double exponent)
Determines the membership of each feature vector in each cluster.
- Parameters:
buffer - DOCUMENT ME!centroids - DOCUMENT ME!mems - DOCUMENT ME!exponent - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTreT1.CalculteT1UsingTreT1HIFIInner.html��������������������0000775�4231163�4231163�00000033403�14537076050�030177� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTreT1.CalculteT1UsingTreT1HIFIInner (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
irspgrSlices |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
irspgrSlices
private int irspgrSlices
-
Constructor Detail
-
CalculteT1UsingTreT1HIFIInner
public CalculteT1UsingTreT1HIFIInner(ModelImage image,
int width,
int height,
int irspgrSlices,
int t)
-
Method Detail
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CompressedRowSparseMatrix.html���������������������������0000775�4231163�4231163�00000111257�14537076051�027506� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CompressedRowSparseMatrix (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_rows_
private int num_rows_
-
num_cols_
private int num_cols_
-
rows_
private int[] rows_
-
cols_
private int[] cols_
-
values_
private double[] values_
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.GVFittingCostFunction.html���������������������������0000775�4231163�4231163�00000034016�14537076054�027201� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.GVFittingCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/WalshHadamardTransform2.html�����������������������������������������0000775�4231163�4231163�00000063344�14537076057�024603� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WalshHadamardTransform2 (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.WoodFunction.html������������������������������������0000775�4231163�4231163�00000033671�14537076053�025632� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.WoodFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
WoodFunction
public WoodFunction()
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGraphBasedSegmentation.universe.html������������������������0000775�4231163�4231163�00000032454�14537076046�030205� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGraphBasedSegmentation.universe (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.universe
-
-
Constructor Summary
Constructors
| Constructor |
Description |
universe(int elements) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getnum
public int getnum()
-
find
public int find(int x)
-
delete
public void delete()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CompressedList.html��������������������������������������0000775�4231163�4231163�00000024305�14537076051�025304� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CompressedList (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CompressedList
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
CompressedList
public CompressedList()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.Split_mode.html������������������������������������������������0000775�4231163�4231163�00000032710�14537076055�023310� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.Split_mode (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Enum<libdt.Split_mode>
-
- gov.nih.mipav.model.algorithms.libdt.Split_mode
-
-
Enum Constant Summary
Enum Constants
| Enum Constant |
Description |
MODEP |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
Split_mode() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
Split_mode
private Split_mode()
-
Method Detail
-
valueOf
public static libdt.Split_mode valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
��������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.html���������������������������������������0000775�4231163�4231163�00000520224�14537076056�025245� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
SchwarzChristoffelMapping() |
|
SchwarzChristoffelMapping(ModelImage destImg,
ModelImage srcImg,
double[][] w) |
|
SchwarzChristoffelMapping(ModelImage destImg,
ModelImage srcImg,
double[] xSource,
double[] ySource,
int[] corners,
int algorithm) |
|
SchwarzChristoffelMapping(ModelImage destImg,
ModelImage srcImg,
double[] xSource,
double[] ySource,
int algorithm,
boolean setCenter,
double xCenter,
double yCenter) |
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
angle(double[] alpha,
boolean[] isccw,
int[] index,
double[][] w,
double[] angle) |
|
private SchwarzChristoffelMapping.scmap |
center(SchwarzChristoffelMapping.scmap map,
double[] wc,
double[][] z0) |
|
private int[] |
corners(SchwarzChristoffelMapping.scmap M) |
|
void |
craffine(double[][] w,
double[] beta,
double[] cr,
SchwarzChristoffelMapping.qlgraph Q,
double tol) |
|
private void |
crcdt(double[][] w) |
|
private double |
crdiskAccuracy(SchwarzChristoffelMapping.scmap M) |
|
private SchwarzChristoffelMapping.scmap |
crdiskCenter(SchwarzChristoffelMapping.scmap M,
double[] wc) |
|
private double[][] |
crdiskevalinv(SchwarzChristoffelMapping.scmap M,
double[][] wp,
double tol) |
|
SchwarzChristoffelMapping.scmap |
crdiskmap(SchwarzChristoffelMapping.polygon poly,
double tolerance,
double[][] cr,
SchwarzChristoffelMapping.qlgraph Q) |
|
void |
crdiskplot(SchwarzChristoffelMapping.scmap M,
double[] R,
double[] theta,
int num1draw,
int num2draw,
boolean drawThetaToRadiusOne,
double[] error,
int yInvert) |
|
private double[][] |
crembed(double[] cr,
SchwarzChristoffelMapping.qlgraph Q,
int qnum) |
|
private void |
crfixwc(double[][] w,
double[] beta,
double[] cr,
double[][][] aff,
SchwarzChristoffelMapping.qlgraph Q,
double[] wc) |
|
private void |
crgather(double[][] u,
int[] uquad,
int quadnum,
double[] cr,
SchwarzChristoffelMapping.qlgraph Q,
double[][][] zr) |
|
private double[][] |
crimap0(double[][] wp,
double[][] z,
double[] beta,
double[][] aff,
double[][] qdat,
boolean ode,
boolean newton,
double tol,
int maxiter) |
|
private double[][] |
crinvmap(double[][] wp,
double[][] w,
double[] beta,
double[] cr,
double[][][] aff,
int quadnum,
double[][] mt,
SchwarzChristoffelMapping.qlgraph Q,
double[][] qdat,
boolean ode,
boolean newton,
double tol,
int maxiter) |
|
private double[][] |
crmap(double[][] zp,
double[][] w,
double[] beta,
double[] cr,
double[][][] aff,
int quadnum,
double[][] mt,
SchwarzChristoffelMapping.qlgraph Q,
double[][] qdat) |
|
private double[][] |
crmap0(double[][] zp,
double[][] z,
double[] beta,
double[][] aff,
double[][] qdat) |
|
private double[][] |
crossrat(double[][] w,
SchwarzChristoffelMapping.qlgraph Q) |
|
void |
crparam(double[][] w,
double[] beta,
double[][] cr0,
double tol) |
|
private void |
crplot(double[][] w,
double[] beta,
double[] cr,
double[][][] aff,
int quadnum,
double[][] mt,
SchwarzChristoffelMapping.qlgraph Q,
double[] R,
double[] theta,
int nqpts,
int num1draw,
int num2draw,
boolean drawThetaToRadiusOne,
int yInvert) |
|
private double[] |
crpsdist(double[][] segment,
double[][] pts) |
|
private void |
crpsgd(double[] d1,
double[] d2,
double[][] segment,
double[][] pts1,
double[][] pts2) |
|
private void |
crqgraph(double[][] w) |
|
private double[][] |
crquad(double[][] z1,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat) |
|
void |
crrect(double[][] wr,
double[][][] affr,
double[][] w,
double[] beta,
double[] cr,
double[][][] aff,
SchwarzChristoffelMapping.qlgraph Q,
double[] betar,
double tol) |
|
SchwarzChristoffelMapping.scmap |
crrectmap(double[][] w,
int[] corner,
double tolerance) |
|
void |
crrectplot(SchwarzChristoffelMapping.scmap M,
double[] nre,
double[] nim,
int yInvert) |
|
void |
crrmap(double[][][] wp,
int[][] qnum,
double[][] zp,
double[][] w,
double[] beta,
double[][] wr,
double[] betar,
double[] cr,
double[][][] aff,
double[][][] affr,
SchwarzChristoffelMapping.qlgraph Q,
double[][] qdat,
double[][] qdatr) |
|
void |
crrplot(double[][] w,
double[] beta,
double[][] wr,
double[] betar,
double[] cr,
double[][][] aff,
double[][][] affr,
SchwarzChristoffelMapping.qlgraph Q,
double[] re,
double[] im,
int yInvert) |
|
private void |
crrplot0(java.lang.String direcn,
double[] val,
double minlen,
double maxlen,
int maxrefn,
double tol,
double[][] w,
double[] beta,
double[][] wr,
double[] betar,
double[] cr,
double[][][] aff,
double[][][] affr,
SchwarzChristoffelMapping.qlgraph Q,
double[][] qdat,
double[][] qdatr,
double[] axlim,
double siz,
java.util.Vector<java.lang.Double>[][] linhx,
java.util.Vector<java.lang.Double>[][] linhy) |
|
private void |
crrsort(java.util.Vector<java.lang.Double>[] wpReal,
java.util.Vector<java.lang.Double>[] wpImag,
int[][] qnum,
SchwarzChristoffelMapping.qlgraph Q) |
|
private void |
crsplit(double[][] w) |
|
private void |
crspread(double[][][] ul,
double[][][] dl,
double[][] u,
int quadnum,
double[] cr,
SchwarzChristoffelMapping.qlgraph Q) |
|
private void |
crtriang(double[][] w) |
|
private double[][] |
dabsquad(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat) |
|
private double[][] |
dderiv(double[][] zp,
double[][] z,
double[] beta,
double[] c) |
|
private double[][] |
dederiv(double[][] zp,
double[][] z,
double[] beta,
double[] c) |
|
private double[][] |
deinvmap(double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat,
double[][] z0,
boolean ode,
boolean newton,
double tol,
int maxiter) |
|
private double[][] |
demap(double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat) |
|
private void |
deparam(double[][] z,
double[] c,
double[][] qdat,
double[][] w,
double[] beta,
double[][] z0,
double tol) |
|
private void |
deplot(double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] R,
double[] theta,
int nqpts,
int num1draw,
int num2draw,
int yInvert,
double[] axis) |
|
private double[][] |
dequad(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat) |
|
private int[] |
dinvmap(double[][] zp,
double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat,
double[][] z0,
boolean ode,
boolean newton,
double tol,
int maxiter) |
|
private double |
diskAccuracy(SchwarzChristoffelMapping.scmap M) |
|
private double[][] |
diskeval(SchwarzChristoffelMapping.scmap M,
double[][] zp,
double tol) |
|
private double[][] |
diskevaldiff(SchwarzChristoffelMapping.scmap M,
double[][] zp) |
|
private int[] |
diskevalinv(double[][] zp,
SchwarzChristoffelMapping.scmap M,
double[][] wp,
double[][] tol,
double[][] z0,
int maxiter) |
|
SchwarzChristoffelMapping.scmap |
diskmap(double[][] w,
double[] alpha,
double tolerance,
double[][] z,
double[] c) |
|
void |
diskplot(SchwarzChristoffelMapping.scmap M,
double[] R,
double[] theta,
int num1draw,
int num2draw,
double[] error,
int yInvert) |
|
private double[][] |
dmap(double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat) |
|
private void |
dparam(double[][] z,
double[] c,
double[][] qdat,
double[][] w,
double[] beta,
double[][] z0,
double tol) |
|
private void |
dplot(double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] R,
double[] theta,
int nqpts,
int num1draw,
int num2draw,
int yInvert) |
|
private double[][] |
dquad(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat) |
|
private void |
ellipjc(double[][] sn,
double[][] cn,
double[][] dn,
double[][] u,
double L,
boolean flag) |
|
private void |
ellipkkp(double[] K,
double[] Kp,
double L) |
|
private double |
exterAccuracy(SchwarzChristoffelMapping.scmap M) |
|
private double[][] |
exteriorevalinv(SchwarzChristoffelMapping.scmap M,
double[][] wp,
double[][] tol,
double[][] z0,
int maxiter) |
|
SchwarzChristoffelMapping.scmap |
extermap(double[][] w,
double[] alpha,
double tolerance,
double[][] z,
double[] c) |
|
void |
exterplot(SchwarzChristoffelMapping.scmap M,
double[] R,
double[] theta,
int num1draw,
int num2draw,
double[] error,
int yInvert,
double[] axis) |
|
private void |
gaussj(double[] z,
double[] w,
int n,
double alf,
double bet) |
|
void |
hpmap(double[][] wp,
double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat) |
|
double[][] |
hpquad(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat) |
|
private static boolean |
isFinite(double d) |
|
private void |
isinpoly(boolean[] indexout,
boolean[][] onvtx,
double[][] z,
double[][] w,
double[] beta,
double tol) |
|
private void |
isinpoly2(int[] indexout,
boolean[][] onvtx,
double[][] z,
double[][] w,
double[] beta,
double tol) |
|
private double[][] |
moebius(double[][] z,
double[][] w) |
|
void |
mouseClicked(java.awt.event.MouseEvent mouseEvent) |
|
void |
mouseEntered(java.awt.event.MouseEvent event) |
|
void |
mouseExited(java.awt.event.MouseEvent event) |
|
void |
mousePressed(java.awt.event.MouseEvent event) |
|
void |
mouseReleased(java.awt.event.MouseEvent event) |
|
ViewJFrameGraph |
plotpoly(float[] xPointArray,
float[] yPointArray,
double[][] w,
double[] beta,
boolean addMarkerLabel,
double[] axlim,
int yInvert,
boolean closed,
double[] axis) |
|
void |
printExitStatus(int exitStatus) |
|
private void |
r2strip(double[][] yp,
double[][] yprime,
double[][] zp,
double[][] z,
double L) |
|
private void |
rcorners(double[][] w,
double[] beta,
double[][] z,
int[] corners,
int[] renum) |
|
private double[][] |
rderiv(double[][] zp,
double[][] z,
double[] beta,
double[] c,
double[] L,
double[][] zs) |
|
private double |
rectAccuracy(SchwarzChristoffelMapping.scmap M) |
|
private double[][] |
rectangle(SchwarzChristoffelMapping.scmap M) |
|
private double[][] |
rectevalinv(SchwarzChristoffelMapping.scmap M,
double[][] wp,
double[][] tol,
double[][] z0,
int maxiter) |
|
SchwarzChristoffelMapping.scmap |
rectmap(double[][] w,
int[] corner,
double tolerance,
double[][] z,
double[] c,
double[] L) |
|
void |
rectplot(SchwarzChristoffelMapping.scmap M,
int nre,
int nim,
int yInvert) |
|
private double[][] |
rectproject(double[][] zp,
double[] rect) |
|
private double[][] |
rinvmap(double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] L,
double[][] qdat,
double[][] z0,
boolean ode,
boolean newton,
double tol,
int maxiter) |
|
private void |
rmap(double[][] wp,
double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] L,
double[][] qdat) |
|
private void |
rparam(double[][] z,
double[] c,
double[] L,
double[][] qdat,
double[][] w,
double[] beta,
int[] cnr,
double[][] z0,
double tol) |
|
private void |
rplot(double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] L,
int re,
int im,
int yInvert) |
|
private void |
rptrnsfm(double[][] z,
double[] y,
int[] cnr) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
runCrossRatioPolygonToCircle() |
|
void |
runCrossRatioPolygonToRectangle() |
|
void |
runPolygonExteriorToCircle() |
|
void |
runPolygonToCircle() |
|
void |
runPolygonToRectangle() |
|
private void |
scaddvtx(double[][] wn,
double[] betan,
double[][] w,
double[] beta,
int pos,
double[] window) |
|
private double[] |
scangle(double[][] w) |
|
int |
sccheck(java.lang.String type,
double[][] w,
double[] beta,
int[] aux) |
|
void |
scfix(double[][] wn,
double[] betan,
int[] verticesAdded,
int[] auxn,
java.lang.String type,
double[][] w,
double[] beta,
int[] aux) |
|
void |
scimapz0(double[][] z0,
double[][] w0,
java.lang.String prefix,
double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat,
double[][] aux) |
|
void |
scpadapt(java.util.Vector<java.lang.Double> zpReal,
java.util.Vector<java.lang.Double> zpImag,
java.util.Vector<java.lang.Double> wpReal,
java.util.Vector<java.lang.Double> wpImag,
java.util.Vector<java.lang.Boolean> newlog,
double minlen,
double maxlen,
double[] clip) |
|
private double[][][] |
scpadapt2(java.util.Vector<java.lang.Double> zpReal,
java.util.Vector<java.lang.Double> zpImag,
java.util.Vector<java.lang.Double>[] wpReal,
java.util.Vector<java.lang.Double>[] wpImag,
java.util.Vector<java.lang.Boolean> newlog,
double minlen,
double maxlen,
double[] clip) |
|
void |
scqdata(double[][] qdat,
double[] beta,
int nqpts) |
|
int[] |
scselect(double[][] w,
double[] beta,
int m,
java.lang.String titl,
java.lang.String[] msg) |
|
void |
setEps(double eps) |
|
double |
sign(double d) |
|
private double[] |
sign(double dReal,
double dImag) |
|
double[][] |
stderiv(double[][] zp,
double[][] z,
double[] beta,
double[] c,
int j) |
|
private void |
stmap(double[][] wp,
double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat) |
|
double[][] |
stmap(double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat) |
|
double[][] |
stquad(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat) |
|
double[][] |
stquadh(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat) |
|
void |
testCRDiskmap1() |
|
void |
testCRDiskmap2() |
|
void |
testCRDiskmap3() |
|
void |
testCRDiskmap5() |
|
void |
testCRDiskmap7() |
|
void |
testCRRectmap1() |
|
void |
testCRRectmap2() |
|
void |
testCRRectmap3() |
|
void |
testDiskmap1() |
|
void |
testDiskmap2() |
|
void |
testDiskmap3() |
|
void |
testDiskmap4() |
|
void |
testDiskmap5() |
|
void |
testDiskmap6() |
|
void |
testDiskmap7() |
|
private void |
testExtermap1() |
|
private void |
testExtermap2() |
|
void |
testRectmap1() |
|
void |
testRectmap2() |
|
void |
testRectmap3() |
|
double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
void |
zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex multiply c = a * b.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
tolerance
private double tolerance
-
xClick
private int xClick
-
yClick
private int yClick
-
xSource
private double[] xSource
-
ySource
private double[] ySource
-
corners
private int[] corners
-
algorithm
private int algorithm
-
xCenter
private double xCenter
-
yCenter
private double yCenter
-
crfixwc
private double[] crfixwc
-
Constructor Detail
-
SchwarzChristoffelMapping
public SchwarzChristoffelMapping(ModelImage destImg,
ModelImage srcImg,
double[] xSource,
double[] ySource,
int algorithm,
boolean setCenter,
double xCenter,
double yCenter)
-
SchwarzChristoffelMapping
public SchwarzChristoffelMapping(ModelImage destImg,
ModelImage srcImg,
double[] xSource,
double[] ySource,
int[] corners,
int algorithm)
-
Method Detail
-
crpsgd
private void crpsgd(double[] d1,
double[] d2,
double[][] segment,
double[][] pts1,
double[][] pts2)
-
crimap0
private double[][] crimap0(double[][] wp,
double[][] z,
double[] beta,
double[][] aff,
double[][] qdat,
boolean ode,
boolean newton,
double tol,
int maxiter)
-
crmap0
private double[][] crmap0(double[][] zp,
double[][] z,
double[] beta,
double[][] aff,
double[][] qdat)
-
crinvmap
private double[][] crinvmap(double[][] wp,
double[][] w,
double[] beta,
double[] cr,
double[][][] aff,
int quadnum,
double[][] mt,
SchwarzChristoffelMapping.qlgraph Q,
double[][] qdat,
boolean ode,
boolean newton,
double tol,
int maxiter)
-
rinvmap
private double[][] rinvmap(double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] L,
double[][] qdat,
double[][] z0,
boolean ode,
boolean newton,
double tol,
int maxiter)
-
rderiv
private double[][] rderiv(double[][] zp,
double[][] z,
double[] beta,
double[] c,
double[] L,
double[][] zs)
-
deinvmap
private double[][] deinvmap(double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat,
double[][] z0,
boolean ode,
boolean newton,
double tol,
int maxiter)
-
dinvmap
private int[] dinvmap(double[][] zp,
double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat,
double[][] z0,
boolean ode,
boolean newton,
double tol,
int maxiter)
-
scimapz0
public void scimapz0(double[][] z0,
double[][] w0,
java.lang.String prefix,
double[][] wp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat,
double[][] aux)
-
hpmap
public void hpmap(double[][] wp,
double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat)
-
hpquad
public double[][] hpquad(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat)
-
stmap
public double[][] stmap(double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat)
-
demap
private double[][] demap(double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat)
-
dmap
private double[][] dmap(double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat)
-
crrect
public void crrect(double[][] wr,
double[][][] affr,
double[][] w,
double[] beta,
double[] cr,
double[][][] aff,
SchwarzChristoffelMapping.qlgraph Q,
double[] betar,
double tol)
-
crdiskplot
public void crdiskplot(SchwarzChristoffelMapping.scmap M,
double[] R,
double[] theta,
int num1draw,
int num2draw,
boolean drawThetaToRadiusOne,
double[] error,
int yInvert)
-
exterplot
public void exterplot(SchwarzChristoffelMapping.scmap M,
double[] R,
double[] theta,
int num1draw,
int num2draw,
double[] error,
int yInvert,
double[] axis)
-
crplot
private void crplot(double[][] w,
double[] beta,
double[] cr,
double[][][] aff,
int quadnum,
double[][] mt,
SchwarzChristoffelMapping.qlgraph Q,
double[] R,
double[] theta,
int nqpts,
int num1draw,
int num2draw,
boolean drawThetaToRadiusOne,
int yInvert)
-
crmap
private double[][] crmap(double[][] zp,
double[][] w,
double[] beta,
double[] cr,
double[][][] aff,
int quadnum,
double[][] mt,
SchwarzChristoffelMapping.qlgraph Q,
double[][] qdat)
-
deplot
private void deplot(double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] R,
double[] theta,
int nqpts,
int num1draw,
int num2draw,
int yInvert,
double[] axis)
-
dplot
private void dplot(double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] R,
double[] theta,
int nqpts,
int num1draw,
int num2draw,
int yInvert)
-
crrplot
public void crrplot(double[][] w,
double[] beta,
double[][] wr,
double[] betar,
double[] cr,
double[][][] aff,
double[][][] affr,
SchwarzChristoffelMapping.qlgraph Q,
double[] re,
double[] im,
int yInvert)
-
crrplot0
private void crrplot0(java.lang.String direcn,
double[] val,
double minlen,
double maxlen,
int maxrefn,
double tol,
double[][] w,
double[] beta,
double[][] wr,
double[] betar,
double[] cr,
double[][][] aff,
double[][][] affr,
SchwarzChristoffelMapping.qlgraph Q,
double[][] qdat,
double[][] qdatr,
double[] axlim,
double siz,
java.util.Vector<java.lang.Double>[][] linhx,
java.util.Vector<java.lang.Double>[][] linhy)
-
crrsort
private void crrsort(java.util.Vector<java.lang.Double>[] wpReal,
java.util.Vector<java.lang.Double>[] wpImag,
int[][] qnum,
SchwarzChristoffelMapping.qlgraph Q)
-
crrmap
public void crrmap(double[][][] wp,
int[][] qnum,
double[][] zp,
double[][] w,
double[] beta,
double[][] wr,
double[] betar,
double[] cr,
double[][][] aff,
double[][][] affr,
SchwarzChristoffelMapping.qlgraph Q,
double[][] qdat,
double[][] qdatr)
-
rplot
private void rplot(double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] L,
int re,
int im,
int yInvert)
-
scpadapt
public void scpadapt(java.util.Vector<java.lang.Double> zpReal,
java.util.Vector<java.lang.Double> zpImag,
java.util.Vector<java.lang.Double> wpReal,
java.util.Vector<java.lang.Double> wpImag,
java.util.Vector<java.lang.Boolean> newlog,
double minlen,
double maxlen,
double[] clip)
-
scpadapt2
private double[][][] scpadapt2(java.util.Vector<java.lang.Double> zpReal,
java.util.Vector<java.lang.Double> zpImag,
java.util.Vector<java.lang.Double>[] wpReal,
java.util.Vector<java.lang.Double>[] wpImag,
java.util.Vector<java.lang.Boolean> newlog,
double minlen,
double maxlen,
double[] clip)
-
rmap
private void rmap(double[][] wp,
double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[] L,
double[][] qdat)
-
stmap
private void stmap(double[][] wp,
double[][] zp,
double[][] w,
double[] beta,
double[][] z,
double[] c,
double[][] qdat)
-
plotpoly
public ViewJFrameGraph plotpoly(float[] xPointArray,
float[] yPointArray,
double[][] w,
double[] beta,
boolean addMarkerLabel,
double[] axlim,
int yInvert,
boolean closed,
double[] axis)
-
rcorners
private void rcorners(double[][] w,
double[] beta,
double[][] z,
int[] corners,
int[] renum)
-
angle
public void angle(double[] alpha,
boolean[] isccw,
int[] index,
double[][] w,
double[] angle)
-
isinpoly
private void isinpoly(boolean[] indexout,
boolean[][] onvtx,
double[][] z,
double[][] w,
double[] beta,
double tol)
-
isinpoly2
private void isinpoly2(int[] indexout,
boolean[][] onvtx,
double[][] z,
double[][] w,
double[] beta,
double tol)
-
deparam
private void deparam(double[][] z,
double[] c,
double[][] qdat,
double[][] w,
double[] beta,
double[][] z0,
double tol)
-
dparam
private void dparam(double[][] z,
double[] c,
double[][] qdat,
double[][] w,
double[] beta,
double[][] z0,
double tol)
-
rparam
private void rparam(double[][] z,
double[] c,
double[] L,
double[][] qdat,
double[][] w,
double[] beta,
int[] cnr,
double[][] z0,
double tol)
-
scselect
public int[] scselect(double[][] w,
double[] beta,
int m,
java.lang.String titl,
java.lang.String[] msg)
-
r2strip
private void r2strip(double[][] yp,
double[][] yprime,
double[][] zp,
double[][] z,
double L)
-
ellipjc
private void ellipjc(double[][] sn,
double[][] cn,
double[][] dn,
double[][] u,
double L,
boolean flag)
-
dequad
private double[][] dequad(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat)
-
dquad
private double[][] dquad(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat)
-
dabsquad
private double[][] dabsquad(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat)
-
crquad
private double[][] crquad(double[][] z1,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat)
-
zdiv
public void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zabs
public double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zmlt
public void zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex multiply c = a * b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
stquadh
public double[][] stquadh(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat)
-
stquad
public double[][] stquad(double[][] z1,
double[][] z2,
int[] sing1,
double[][] z,
double[] beta,
double[][] qdat)
-
stderiv
public double[][] stderiv(double[][] zp,
double[][] z,
double[] beta,
double[] c,
int j)
-
gaussj
private void gaussj(double[] z,
double[] w,
int n,
double alf,
double bet)
-
scfix
public void scfix(double[][] wn,
double[] betan,
int[] verticesAdded,
int[] auxn,
java.lang.String type,
double[][] w,
double[] beta,
int[] aux)
-
scaddvtx
private void scaddvtx(double[][] wn,
double[] betan,
double[][] w,
double[] beta,
int pos,
double[] window)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmPowellOpt3D.html��������������������������������������������0000775�4231163�4231163�00000131125�14537076050�024072� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPowellOpt3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
costFunction, dof, fromOrigin, maxIterations, parallelPowell, parent, pathRecorded, paths, points, savedStartPoint, tolerance, toOrigin, useJTEM
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmPowellOpt3D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector3f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] tols,
int maxIter) |
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
adjustTranslation(TransMatrixd mat,
double sample) |
Adjust the translation of the transformation matrix by the sample pararmeter.
|
double[] |
constructPoint(double[] defaultPoint,
double[] point) |
Construct a full 12-dimension transformation vector from the partial transformation vector.
|
TransMatrixd |
convertToMatrix(TransMatrixd toOrigin,
TransMatrixd fromOrigin,
double[] vector) |
Convert a 12-dimension transformation vector to a 4x4 transformation matrix.
|
double[] |
convertToMidsagittal(double[] point) |
Converts a full transformation vector into a midsagittal transformation vector.
|
double[] |
extractPoint(double[] startPoint) |
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
|
TransMatrixd |
getMatrix(double[] point,
double sample) |
|
TransMatrixd |
getMatrix(int index,
double sample) |
Obtain the transformation vector and convert to the matrix representation,
then scale the translation by sample.
|
TransMatrixd |
getMatrixHalf(int index) |
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix.
|
TransMatrixd |
getMatrixHalf(int index,
double sample) |
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix and scale the translations by sample parameter.
|
TransMatrixd |
getMatrixMidsagittal(int index) |
Accessor that returns the matrix representing the best tranformation.
|
TransMatrixd |
getMatrixMidsagittal(int index,
double sample) |
Accessor that returns the matrix representing the best tranformation.
|
void |
updatePoint(double[] point,
double cost,
Vectornd v) |
Store the optimal point and cost to v
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
convertToMatrix, convertToMatrix, copyPoint, createTerrain, disposeLocal, eval, getCost, getFromOrigin, getMatrix, getMaxIterations, getNumberOfVariables, getPoint, getPoint, getPoints, getToOrigin, isParallelPowell, isPathRecorded, lineMinimization, measureCost, measureCost, optimize, optimizeBlock, print, runAlgorithm, scalePoint, scalePoint, setMaxIterations, setParallelPowell, setPathRecorded, setPoints, setUseJTEM
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmPowellOpt3D
public AlgorithmPowellOpt3D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector3f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] tols,
int maxIter)
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- Parameters:
parent - Algorithm that called this optimization.com - Center of Mass of the input image.degreeOfFreedom - Degree of freedom for transformation (must be 3, 4, 6, 7, 9, or 12).costFunc - Cost function to use.tols - Tolerance for each dimension (tols.length == degreeOfFreedom).maxIter - Maximum number of iterations.
-
Method Detail
-
constructPoint
public double[] constructPoint(double[] defaultPoint,
double[] point)
Construct a full 12-dimension transformation vector from the partial transformation vector.
For missing values in point, the values in defaultPoint will be used.
Different degree of freedom has different meanings:
3: only 3 translations
4: 3 translation and global scaling
6: 3 rotations and translations
7: 3 rotations and translations, and global scaling
9: 3 rotations, translations and scalings
12: 3 rotations, translations, scalings and skewings.
- Specified by:
constructPoint in class AlgorithmPowellOptBase- Parameters:
defaultPoint - a default full 12-dimension transformation vector.point - a partial or full transformation vector.- Returns:
- a full transformation vector.
-
convertToMatrix
public TransMatrixd convertToMatrix(TransMatrixd toOrigin,
TransMatrixd fromOrigin,
double[] vector)
Convert a 12-dimension transformation vector to a 4x4 transformation matrix.
- Specified by:
convertToMatrix in class AlgorithmPowellOptBase- Parameters:
vector - a 12-dimension transformation vector including 3
rotations, translations, scalings and skews.toOrigin - the matrix translating the origin to some specified pointfromOrigin - the matrix translating the origin back.- Returns:
- a 4x4 transformation matrix
-
extractPoint
public double[] extractPoint(double[] startPoint)
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
- Specified by:
extractPoint in class AlgorithmPowellOptBase- Parameters:
startPoint - the start full 12-dimension transformation vector.- Returns:
- the partial or full transformation vector which will be optimized.
-
adjustTranslation
public void adjustTranslation(TransMatrixd mat,
double sample)
Adjust the translation of the transformation matrix by the sample pararmeter.
- Specified by:
adjustTranslation in class AlgorithmPowellOptBase- Parameters:
mat - the transformation matrixsample - the resolution adjusting parameter.- See Also:
AlgorithmPowellOptBase#adjustTranslation(TransMatrix, double)
-
getMatrixHalf
public TransMatrixd getMatrixHalf(int index)
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix.
- Parameters:
index - the index of transformation vector.- Returns:
- the scaled transformation matrix.
-
getMatrixHalf
public TransMatrixd getMatrixHalf(int index,
double sample)
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix and scale the translations by sample parameter.
- Parameters:
index - the index of transformation vector.sample - the translation scaling parameter.- Returns:
- the scaled transformation matrix.
-
getMatrixMidsagittal
public TransMatrixd getMatrixMidsagittal(int index)
Accessor that returns the matrix representing the best tranformation. This transformation contains only the z
rotation and the x and y translation, to be used in the midsagittal alignment algorithm.
- Returns:
- matrix representing the best transformation's z rot and x and y trans.
-
getMatrixMidsagittal
public TransMatrixd getMatrixMidsagittal(int index,
double sample)
Accessor that returns the matrix representing the best tranformation. The passed in parameter represents the
resolution (same in all directions and for both input and reference images, since resampled isotropically). Since
the optimization was done in pixel space, not millimeter space, the translation parameters need to be scaled by
the sample value. This transformation contains only the z rotation and the x and y translation, to be used in the
midsagittal alignment algorithm.
- Parameters:
sample - the voxel resolution- Returns:
- matrix representing the best transformation's z rot and x and y trans.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.ColorScheme.html�����������������������������������������0000775�4231163�4231163�00000045456�14537076053�024617� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.ColorScheme (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
-
Constructor Summary
Constructors
| Constructor |
Description |
ColorScheme(int primaryColor,
int secondaryColor,
int tertiaryColor,
int quaternaryColor,
int textColor,
int backgroundColor) |
Constructor for defining a new color scheme.
|
ColorScheme(java.awt.Color primaryColor,
java.awt.Color secondaryColor,
java.awt.Color tertiaryColor,
java.awt.Color quaternaryColor,
java.awt.Color textColor,
java.awt.Color backgroundColor) |
Constructor for defining a new color scheme.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ColorScheme
public ColorScheme(java.awt.Color primaryColor,
java.awt.Color secondaryColor,
java.awt.Color tertiaryColor,
java.awt.Color quaternaryColor,
java.awt.Color textColor,
java.awt.Color backgroundColor)
Constructor for defining a new color scheme.
- Parameters:
primaryColor - primary color of the color schemesecondaryColor - secondary color of the color schemetertiaryColor - tertiary color of the color schemequaternaryColor - quarternary color of the color schemetextColor - text color of the color schemebackgroundColor - the background color
-
ColorScheme
public ColorScheme(int primaryColor,
int secondaryColor,
int tertiaryColor,
int quaternaryColor,
int textColor,
int backgroundColor)
Constructor for defining a new color scheme.
- Parameters:
primaryColor - primary color of the color scheme (integer packed ARGB)secondaryColor - secondary color of the color scheme (integer packed ARGB)tertiaryColor - tertiary color of the color scheme (integer packed ARGB)quaternaryColor - quarternary color of the color scheme (integer packed ARGB)textColor - text color of the color scheme (integer packed ARGB)backgroundColor - the background color (integer packed ARGB)
-
Method Detail
-
getColor1
public int getColor1()
- Returns:
- primary color of the color scheme (integer packed ARGB)
-
getColor2
public int getColor2()
- Returns:
- secondary color of the color scheme (integer packed ARGB)
-
getColor3
public int getColor3()
- Returns:
- tertiary color of the color scheme (integer packed ARGB)
-
getColor4
public int getColor4()
- Returns:
- fourth color of the color scheme (integer packed ARGB)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/����������������������������������������������0002775�4231163�4231163�00000000000�14537076122�023632� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/AlgorithmDTIColorDisplay.html�����������������0000775�4231163�4231163�00000074576�14537076057�031367� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDTIColorDisplay (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
channelImages
private ModelImage[] channelImages
extraced 3D Model Images from image...red Image is [0], green image is [1], blue image is [2] *
����������������������������������������������������������������������������������������������������������������������������������././@LongLink���������������������������������������������������������������������������������������0000644�0000000�0000000�00000000162�00000000000�011602� L����������������������������������������������������������������������������������������������������ustar �root����������������������������root�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/AlgorithmDTICreateListFile.InstanceNumberVolComparator.html���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/AlgorithmDTICreateListFile.InstanceNumberVolCo0000775�4231163�4231163�00000025770�14537076057�034526� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDTICreateListFile.InstanceNumberVolComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile.InstanceNumberVolComparator
-
- All Implemented Interfaces:
java.util.Comparator<java.lang.Object>
- Enclosing class:
- AlgorithmDTICreateListFile
private class AlgorithmDTICreateListFile.InstanceNumberVolComparator
extends java.lang.Object
implements java.util.Comparator<java.lang.Object>
This inner class is used to sort the list by instance number and vol. the vol is determined by the filename
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
��������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/AlgorithmDTI2EGFA.html������������������������0000775�4231163�4231163�00000106570�14537076057�027535� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDTI2EGFA (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmDTI2EGFA
extends AlgorithmBase
Algorithm requires input of a Diffusion Tensor Image to calculate an Apparent Diffusion Coefficient Image,
Functional Anisotropy Image, Color Image, Eigen Value Image, Eigen Vector Image, Relative Anisotropy Image,
Trace Image, and Volume Ratio Image
This algorithm works in conjunction with AlgorithmDTITract to create the
MIPAV DTI Fiber Tracking/ Statistics Dialog
See: Introduction to Diffusion Tensor Imaging, by Susumu Mori
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/AlgorithmDTICreateListFile.html���������������0000775�4231163�4231163�00000326747�14537076057�031622� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDTICreateListFile (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
avgVolIndex |
Philips puts in one volume as the average of all the DWIs.
|
private java.lang.String |
bmatrixFileName |
B Matrix file name
|
private java.lang.String |
bmtxtFilePath |
This is the full path to the b matrix file
|
private java.util.ArrayList<java.lang.Float> |
bValuesArrayList |
this is an array of b-values that for each volume
|
private float |
coarseRate |
registration option parameters
|
private float |
coarseRateX |
registration option parameters
|
private float |
coarseRateY |
registration option parameters
|
private float |
coarseRateZ |
registration option parameters
|
private int |
cost |
registration option parameters
|
private java.lang.String |
dicomB0VolumePath |
path to dicom B0 for registration purposes
|
private java.lang.String[] |
dicomInfo |
Array that holds the dicom tag info*
|
private float[][] |
direction |
this is the gradient matrix that is populated when reading the gradient file
|
private int |
DOF |
registration option parameters
|
private boolean |
doGraph |
registration option parameters
|
private boolean |
doMultiThread |
registration option parameters
|
private boolean |
doSubsample |
registration option parameters
|
private javax.swing.JTextField |
dwiPathTextField |
handle to dwi data textfield of main dialog
|
private boolean |
fastMode |
registration option parameters
|
private FileInfoPARREC |
fileInfoPR |
file info Par/Rec
|
private FileIO |
fileIO |
file IO
|
private FilePARREC |
fileParRec |
FileParRec handle
|
private float |
fineRate |
registration option parameters
|
private float |
fineRateX |
registration option parameters
|
private float |
fineRateY |
registration option parameters
|
private float |
fineRateZ |
registration option parameters
|
private FileInfoDicom |
firstFileInfoDicom |
first fileinfo dicom...used for list file info
|
private int |
geSoftwareVersion |
int telling software version if datset is GE
|
private java.lang.String |
gradientFilePath |
This is the full path to the gradient file
|
private java.lang.String |
horizontalFOVString |
horizontal FOV
|
private ModelImage |
image4D |
ModelImage of 4D par/rec dataset
|
private ViewImageFileFilter |
imageFilter |
This is the image filter needed to select the correct dicom images
|
private java.lang.String |
imageOrientationString |
image orientation
|
private java.lang.String |
imageSlicesDirPath |
path for imageSlicesDir
|
private int |
interp |
registration option parameters
|
private int |
interp2 |
registration option parameters
|
private boolean |
isDICOM |
boolean indicating if we are dealing with dicom or par/rec
|
private boolean |
isEDTI |
boolean telling if dataset is eDTI
|
private boolean |
isGE |
boolean telling if datset is GE
|
private boolean |
isInterleaved |
boolean if dataset is interelaved
|
private boolean |
isOldVersion |
boolean identifying if par/rec datset is older than version 4.1
|
private boolean |
isProcDirCreated |
boolean if proc dir was created
|
private boolean |
isSiemens |
boolean telling if datset is SIEMENS
|
private java.lang.String |
listFileName |
List file name
|
private ModelImage |
matchImage |
model images
|
private int |
maxIterations |
registration option parameters
|
private boolean |
maxOfMinResol |
registration option parameters
|
private int |
nim |
this is the number of gradient quantities that is obtained by reading first line of gradient file
|
private int |
nimCounter |
this counter is used for version 4 of Par/Rec...nim is calculated from gradient file
|
private java.lang.String |
nimString |
t dim
|
private int |
numMinima |
registration option parameters
|
private int |
numSlicesPerVolume |
this is the number of image slices per volume
|
private java.lang.String |
numSlicesString |
z dim
|
private java.util.ArrayList<java.lang.String[]> |
oldVersionGradientsAL |
arraylist of gradients for version 4 of Par/Rec
|
private java.lang.String |
originalColumnsString |
x dim
|
private java.lang.String |
originalRowsString |
y dim
|
private javax.swing.JTextArea |
outputTextArea |
TextArea of main dialog for text output
|
private java.lang.String |
pathFileName |
Path File name
|
private boolean |
performRegistration |
boolean for performing registration
|
private java.lang.String |
phaseEncodingString |
phase encoding...hard coded to vertical
|
private java.lang.String |
prFileDir |
par rec file dir
|
private java.lang.String |
prFileName |
par rec file name
|
private java.lang.String |
rawImageFormatString |
raw image format...hardcoded to float since we will be outputting par/rec slices in float format
|
private ModelImage |
refImage |
model images
|
private AlgorithmRegOAR3D |
reg3 |
handle to AlgorithmRegOAR3D
|
private AlgorithmRegOAR35D |
reg35 |
handle to AlgorithmRegOAR35D
|
private java.lang.String |
registeredDicomB0VolumePathParentFolder |
registered B0 parent folder
|
private java.lang.String |
registeredStudyName |
study name for registered data set
|
private int |
registerTo |
registration option parameters
|
private java.lang.String |
relativeImageSlicesDirPath |
relative path for slices dir for outputting to path file
|
private ModelImage |
resultImage |
model images
|
private float |
rotateBegin |
registration option parameters
|
private float |
rotateBeginX |
registration option parameters
|
private float |
rotateBeginY |
registration option parameters
|
private float |
rotateBeginZ |
registration option parameters
|
private float |
rotateEnd |
registration option parameters
|
private float |
rotateEndX |
registration option parameters
|
private float |
rotateEndY |
registration option parameters
|
private float |
rotateEndZ |
registration option parameters
|
private java.util.TreeMap<java.lang.Integer,java.util.TreeSet<java.lang.String[]>> |
seriesFileInfoTreeMap |
This is an ordered map of series number and seriesFileInfoTreeSet
|
private java.util.TreeSet<java.lang.String[]> |
seriesFileInfoTreeSet |
This is an ordered list of files per series number
|
private java.lang.String |
sliceGapString |
slice gap String
|
private java.lang.String |
sliceThicknessString |
sliec thickness
|
private java.lang.String |
studyName |
This is the dir name of the study
|
private java.lang.String |
studyPath |
This is the full path of the study
|
private boolean |
success |
flag indicating if method was successful
|
private int |
tDim |
tDim of 4d image
|
private int |
totalImageSlices |
total image slices
|
private int |
totalNumVolumes |
total num of volumes in study
|
private AlgorithmTransform |
transform |
handle to AlgorithmTransform
|
private java.util.ArrayList<java.lang.String> |
unsortedPathsArrayList |
arraylist of unsorted path strings to image slices
|
private java.lang.String |
verticalFOVString |
vertical FOV
|
private java.util.HashMap<java.lang.String,java.lang.String> |
volParameters |
vol parameters
|
private int |
xDim |
xDIm of 4d image
|
private int |
xdimA |
parameter for AlgorithmTransform
|
private float |
xresA |
parameter for AlgorithmTransform
|
private int |
yDim |
yDim of 4d image
|
private int |
ydimA |
parameter for AlgorithmTransform
|
private float |
yresA |
parameter for AlgorithmTransform
|
private int |
zDim |
zDim of 4d image
|
private int |
zdimA |
parameter for AlgorithmTransform
|
private float |
zresA |
parameter for AlgorithmTransform
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmDTICreateListFile(java.lang.String studyPath,
java.lang.String studyName,
java.lang.String dicomB0VolumePath,
java.lang.String gradientFilePath,
java.lang.String bmtxtFilePath,
javax.swing.JTextArea outputTextArea,
boolean isInterleaved,
boolean performRegsitration,
int cost,
int DOF,
int interp,
int interp2,
float rotateBeginX,
float rotateEndX,
float coarseRateX,
float fineRateX,
float rotateBeginY,
float rotateEndY,
float coarseRateY,
float fineRateY,
float rotateBeginZ,
float rotateEndZ,
float coarseRateZ,
float fineRateZ,
boolean maxOfMinResol,
boolean doSubsample,
boolean doMultiThread,
boolean fastMode,
int bracketBound,
int maxIterations,
int numMinima,
javax.swing.JTextField dwiPathTextField) |
constructor for dicom if registration is to be done first
|
AlgorithmDTICreateListFile(java.lang.String fileName,
java.lang.String fileDir,
java.lang.String gradientFilePath,
java.lang.String bmtxtFilePath,
javax.swing.JTextArea outputTextArea,
boolean performRegsitration) |
constructor for par/rec
|
AlgorithmDTICreateListFile(java.lang.String studyPath,
java.lang.String studyName,
java.lang.String gradientFilePath,
java.lang.String bmtxtFilePath,
javax.swing.JTextArea outputTextArea,
boolean isInterleaved,
boolean performRegsitration) |
constructor for dicom
|
AlgorithmDTICreateListFile(java.lang.String fileName,
java.lang.String fileDir,
java.lang.String gradientFilePath,
java.lang.String bmtxtFilePath,
javax.swing.JTextArea outputTextArea,
boolean performRegsitration,
int cost,
int DOF,
int interp,
int interp2,
int registerTo,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
boolean doSubsample,
boolean doMultiThread,
boolean fastMode,
int bracketBound,
int maxIterations,
int numMinima,
javax.swing.JTextField dwiPathTextField) |
constructor for par/rec if registration is to be done first
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
boolean |
copyBMatrixFile() |
This method copies the optional b matrix file that user provided, and copies it to proc dir and renames it to the
correct naming syntax.
|
boolean |
createBMatrixFileDICOM() |
This method creates the b-matrix file.
|
boolean |
createBMatrixFileParRec() |
This method creates the B-Matrix file
|
boolean |
createListFileDICOM() |
This method creates the list file.
|
boolean |
createListFileParRec() |
This method creates the list file.
|
boolean |
createPathFileDICOM() |
This method creates the path file.
|
boolean |
createPathFileForInterleavedDICOM() |
This method creates the path file for interleaverd datasets
|
boolean |
createPathFileParRec() |
This method creates the path file
|
boolean |
createProcDirAndImageSlicesDirParRec() |
this method creates the proc dir in which the list file, path file, and b-matrix file go.
|
boolean |
createProcDirDICOM() |
this method creates the proc dir in which the list file, path file, and b-matrix file go.
|
boolean |
createSubDirsInRegisteredDir(java.io.File dir) |
|
boolean |
deleteAllFiles(java.io.File dir) |
|
void |
finalize() |
this method cleans up the proc dir if success is false and it sets the lists to null.
|
boolean |
obtainBValuesDICOM() |
This method obtains the b-values for each volume from either the public tag or the private tag.
|
boolean |
obtainListFileDataParRec() |
This method obtains list file data mostly from the 1st slice
|
boolean |
parse(java.io.File file) |
this method parses the study dir sort into lists using series number that is available in dicom tag. then based
on the filename, get vol number (for example mipav_dicom_dti_series11_volume10005.dcm), and sort within lists
using vol number and instance number that comes from dicom tag.
|
boolean |
performRegistrationDICOM() |
regsitration of DICOM DWI dataset
|
boolean |
performRegistrationPARREC() |
regsitration of PAR REC DWI dataset
|
boolean |
readGradientFileDICOM() |
This method reads in the gradient file gradient file can be in 2 differetn ways....for eDTI, there will be a
number on first line followed by correct number of gradients if it is DTI, there will be no number and just 7
linies of gradients....this needs to be duplicated as many times as there are series.
|
boolean |
readGradientFileParRec() |
this method reads the gradient file
|
boolean |
registerAndSaveVolumes(java.io.File dir) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
runAlgorithmDICOM() |
run algorithm for dicom
|
void |
runAlgorithmPARREC() |
run algorithm for par/rec
|
boolean |
setInitialInfo() |
this method sets initial info about the study.
|
boolean |
writeImageSlicesParRec() |
This method writes out the image slices as raw float
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
seriesFileInfoTreeMap
private java.util.TreeMap<java.lang.Integer,java.util.TreeSet<java.lang.String[]>> seriesFileInfoTreeMap
This is an ordered map of series number and seriesFileInfoTreeSet.*
-
xDim
private int xDim
xDIm of 4d image
-
yDim
private int yDim
yDim of 4d image
-
zDim
private int zDim
zDim of 4d image
-
tDim
private int tDim
tDim of 4d image
-
fileIO
private FileIO fileIO
file IO
-
Constructor Detail
-
AlgorithmDTICreateListFile
public AlgorithmDTICreateListFile(java.lang.String studyPath,
java.lang.String studyName,
java.lang.String gradientFilePath,
java.lang.String bmtxtFilePath,
javax.swing.JTextArea outputTextArea,
boolean isInterleaved,
boolean performRegsitration)
constructor for dicom
- Parameters:
studyPath - studyName - gradientFilePath - bmtxtFilePath - outputTextArea -
-
AlgorithmDTICreateListFile
public AlgorithmDTICreateListFile(java.lang.String studyPath,
java.lang.String studyName,
java.lang.String dicomB0VolumePath,
java.lang.String gradientFilePath,
java.lang.String bmtxtFilePath,
javax.swing.JTextArea outputTextArea,
boolean isInterleaved,
boolean performRegsitration,
int cost,
int DOF,
int interp,
int interp2,
float rotateBeginX,
float rotateEndX,
float coarseRateX,
float fineRateX,
float rotateBeginY,
float rotateEndY,
float coarseRateY,
float fineRateY,
float rotateBeginZ,
float rotateEndZ,
float coarseRateZ,
float fineRateZ,
boolean maxOfMinResol,
boolean doSubsample,
boolean doMultiThread,
boolean fastMode,
int bracketBound,
int maxIterations,
int numMinima,
javax.swing.JTextField dwiPathTextField)
constructor for dicom if registration is to be done first
- Parameters:
studyPath - studyName - gradientFilePath - bmtxtFilePath - outputTextArea -
-
AlgorithmDTICreateListFile
public AlgorithmDTICreateListFile(java.lang.String fileName,
java.lang.String fileDir,
java.lang.String gradientFilePath,
java.lang.String bmtxtFilePath,
javax.swing.JTextArea outputTextArea,
boolean performRegsitration)
constructor for par/rec
-
AlgorithmDTICreateListFile
public AlgorithmDTICreateListFile(java.lang.String fileName,
java.lang.String fileDir,
java.lang.String gradientFilePath,
java.lang.String bmtxtFilePath,
javax.swing.JTextArea outputTextArea,
boolean performRegsitration,
int cost,
int DOF,
int interp,
int interp2,
int registerTo,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
boolean doSubsample,
boolean doMultiThread,
boolean fastMode,
int bracketBound,
int maxIterations,
int numMinima,
javax.swing.JTextField dwiPathTextField)
constructor for par/rec if registration is to be done first
-
Method Detail
-
parse
public boolean parse(java.io.File file)
throws java.io.IOException,
java.lang.OutOfMemoryError
this method parses the study dir sort into lists using series number that is available in dicom tag. then based
on the filename, get vol number (for example mipav_dicom_dti_series11_volume10005.dcm), and sort within lists
using vol number and instance number that comes from dicom tag.
- Parameters:
file - - Returns:
- boolean success
- Throws:
java.io.IOExceptionjava.lang.OutOfMemoryError
-
createProcDirDICOM
public boolean createProcDirDICOM()
this method creates the proc dir in which the list file, path file, and b-matrix file go.
- Returns:
- boolean success
-
readGradientFileDICOM
public boolean readGradientFileDICOM()
This method reads in the gradient file gradient file can be in 2 differetn ways....for eDTI, there will be a
number on first line followed by correct number of gradients if it is DTI, there will be no number and just 7
linies of gradients....this needs to be duplicated as many times as there are series.
- Returns:
- boolean success
-
createProcDirAndImageSlicesDirParRec
public boolean createProcDirAndImageSlicesDirParRec()
this method creates the proc dir in which the list file, path file, and b-matrix file go.
- Returns:
- boolean success
-
copyBMatrixFile
public boolean copyBMatrixFile()
This method copies the optional b matrix file that user provided, and copies it to proc dir and renames it to the
correct naming syntax.
- Returns:
- boolean
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
�������������������������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/AlgorithmDTITract.html������������������������0000775�4231163�4231163�00000113772�14537076057�030030� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDTITract (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmDTITract
extends AlgorithmBase
Algorithm requires input of previous calculated FA, EigenVector and EigenValue images from
AlgorithmDTI2EGFA to calculate fiber bundle tracts
This algorithm works in conjunction with AlgorithmDTI2EGFA to create the
MIPAV DTI Fiber Tracking/ Statistics Dialog
See:Introduction to Diffusion Tensor Imaging, by Susumu Mori
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmDTITract(ModelImage kDTI,
ModelImage kFAImage,
ModelImage kEigenVectorImage,
ModelImage kEigenValueImage,
java.lang.String kFile,
boolean bNegX,
boolean bNegY,
boolean bNegZ,
float fFAMin,
float fFAMax,
float fMaxAngle,
int iMinLength) |
Initialize the Algorithm with the input DTI Image:
|
AlgorithmDTITract(ModelImage kDTI,
ModelImage kEigenVectorImage,
ModelImage kEigenValueImage,
java.lang.String kFile,
boolean bNegX,
boolean bNegY,
boolean bNegZ) |
Initialize the Algorithm with the input DTI Image:
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
disposeLocal() |
Clean up memory.
|
private void |
outputTract(java.util.Vector<java.lang.Integer> kTract,
int iDimX,
int iDimY,
int iDimZ,
java.io.FileOutputStream kFileWriter) |
Writes the fiber bundle tract to disk.
|
private void |
reconstructTracts() |
Constructs the Fiber Bundle Tracts from the DTI and the
EigenVectorImage parameters.
|
void |
runAlgorithm() |
Run the DTI -> EigenVector Functional Anisotropy algorithm.
|
private void |
traceTract2(java.util.Vector<java.lang.Integer> kTract,
WildMagic.LibFoundation.Mathematics.Vector3f kStart,
WildMagic.LibFoundation.Mathematics.Vector3f kDir,
ModelImage EigenVectorImage,
ModelImage eigenValueImage,
ModelImage kFAImage,
boolean bDir) |
Traces a single fiber bundle tract starting at the input
position and following the input direction.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
m_bNegX
private boolean m_bNegX
-
m_bNegY
private boolean m_bNegY
-
m_bNegZ
private boolean m_bNegZ
-
m_fFAMin
private float m_fFAMin
-
m_fFAMax
private float m_fFAMax
-
m_iMinLength
private int m_iMinLength
-
Constructor Detail
-
AlgorithmDTITract
public AlgorithmDTITract(ModelImage kDTI,
ModelImage kEigenVectorImage,
ModelImage kEigenValueImage,
java.lang.String kFile,
boolean bNegX,
boolean bNegY,
boolean bNegZ)
Initialize the Algorithm with the input DTI Image:
- Parameters:
kDTI - input DTI Image.
-
AlgorithmDTITract
public AlgorithmDTITract(ModelImage kDTI,
ModelImage kFAImage,
ModelImage kEigenVectorImage,
ModelImage kEigenValueImage,
java.lang.String kFile,
boolean bNegX,
boolean bNegY,
boolean bNegZ,
float fFAMin,
float fFAMax,
float fMaxAngle,
int iMinLength)
Initialize the Algorithm with the input DTI Image:
- Parameters:
kDTI - input DTI Image.
-
Method Detail
-
traceTract2
private void traceTract2(java.util.Vector<java.lang.Integer> kTract,
WildMagic.LibFoundation.Mathematics.Vector3f kStart,
WildMagic.LibFoundation.Mathematics.Vector3f kDir,
ModelImage EigenVectorImage,
ModelImage eigenValueImage,
ModelImage kFAImage,
boolean bDir)
Traces a single fiber bundle tract starting at the input
position and following the input direction.
- Parameters:
kTract - fiber bundle tract, new positions are stored in this tract as the fiber is traced.kStart - starting position of the tract.kDir - direction from the position.DTI - Diffusion Tensor image used to calculate next direction of tract.bDir - boolean when true the positions are added to the
end of the tract (positive direction). When false the positions
are added to the beginning of the tract (negative direction).
-
outputTract
private void outputTract(java.util.Vector<java.lang.Integer> kTract,
int iDimX,
int iDimY,
int iDimZ,
java.io.FileOutputStream kFileWriter)
Writes the fiber bundle tract to disk.
- Parameters:
kTract - the fiber bundle tract.iDimX - x-dimension of the diffusion tensor image.iDimY - y-dimension of the diffusion tensor image.iDimZ - z-dimension of the diffusion tensor image.kFileWrite - FileOutputStream.
������././@LongLink���������������������������������������������������������������������������������������0000644�0000000�0000000�00000000157�00000000000�011606� L����������������������������������������������������������������������������������������������������ustar �root����������������������������root�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/AlgorithmDTICreateListFile.InstanceNumberComparator.html������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/AlgorithmDTICreateListFile.InstanceNumberCompa0000775�4231163�4231163�00000025402�14537076057�034533� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDTICreateListFile.InstanceNumberComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile.InstanceNumberComparator
-
- All Implemented Interfaces:
java.util.Comparator<java.lang.Object>
- Enclosing class:
- AlgorithmDTICreateListFile
private class AlgorithmDTICreateListFile.InstanceNumberComparator
extends java.lang.Object
implements java.util.Comparator<java.lang.Object>
This inner class is used to sort
the list by instance number
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/package-tree.html�����������������������������0000775�4231163�4231163�00000017325�14537076122�027061� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.DiffusionTensorImaging Class Hierarchy (MIPAV API Documentation)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/package-summary.html��������������������������0000775�4231163�4231163�00000016244�14537076122�027616� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.DiffusionTensorImaging (MIPAV API Documentation)
-
Class Summary
| Class |
Description |
| AlgorithmDTI2EGFA |
Algorithm requires input of a Diffusion Tensor Image to calculate an Apparent Diffusion Coefficient Image,
Functional Anisotropy Image, Color Image, Eigen Value Image, Eigen Vector Image, Relative Anisotropy Image,
Trace Image, and Volume Ratio Image
This algorithm works in conjunction with AlgorithmDTITract to create the
MIPAV DTI Fiber Tracking/ Statistics Dialog
See: Introduction to Diffusion Tensor Imaging, by Susumu Mori
|
| AlgorithmDTIColorDisplay |
|
| AlgorithmDTICreateListFile |
|
| AlgorithmDTITract |
Algorithm requires input of previous calculated FA, EigenVector and EigenValue images from
AlgorithmDTI2EGFA to calculate fiber bundle tracts
This algorithm works in conjunction with AlgorithmDTI2EGFA to create the
MIPAV DTI Fiber Tracking/ Statistics Dialog
See:Introduction to Diffusion Tensor Imaging, by Susumu Mori
|
| AlgorithmDWI2DTI |
Algorithm calculates a Diffusion Tensor Image from a series of Diffusion Weighted Images.
|
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiffusionTensorImaging/AlgorithmDWI2DTI.html�������������������������0000775�4231163�4231163�00000155630�14537076057�027457� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDWI2DTI (MIPAV API Documentation)
-
- All Implemented Interfaces:
AlgorithmInterface, java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmDWI2DTI
extends AlgorithmBase
implements AlgorithmInterface
Algorithm calculates a Diffusion Tensor Image from a series of Diffusion Weighted Images.
See: Introduction to Diffusion Tensor Imaging, by Susumu Mori
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private AlgorithmBrainSurfaceExtractor |
alg |
handle to BSE Algorithm *
|
private java.util.HashMap<java.lang.String,float[]> |
m_3dbufferMap_float |
|
private java.util.HashMap<java.lang.String,int[]> |
m_3dbufferMap_int |
|
private java.util.HashMap<java.lang.String,float[]> |
m_4dbufferMap_float |
|
private java.util.HashMap<java.lang.String,int[]> |
m_4dbufferMap_int |
|
private java.lang.String[][] |
m_aakDWIList |
List of file names for the Diffusion Weighted Images, from the .path file.
|
private int[] |
m_aiMatrixEntries |
keeps track of unique entries in the BMatrix
|
private boolean |
m_bDisplayB0 |
Whether to just display the B0 weighted image and return, or to do a full calculation:
|
private boolean |
m_bUseDTIParameters |
When true, use the ModelImage DTI parameters.
|
private float |
m_fMeanNoise |
The mean noise value:
|
private int |
m_iBOrig |
Number of different entries in the BMatrix:
|
private int |
m_iDimX |
X Dimension of the input images:
|
private int |
m_iDimY |
Y Dimension of the input images:
|
private int |
m_iSlices |
Number of slices in the input images:
|
private int |
m_iWeights |
Number of images in the weighted series:
|
private ViewJFrameImage |
m_kB0Frame |
ViewJFrameImage for displaying the B0 weighted image:
|
private ModelImage |
m_kB0Image |
B0 weighted image:
|
private WildMagic.LibFoundation.Mathematics.GMatrixd |
m_kBMatrix |
General matrix storing BMatrix values.
|
private ModelImage |
m_kDTI |
Output DTI Image:
|
private ModelImage |
m_kDWIImage |
DWI Image 4D series of weighted diffusion images
|
private ModelImage |
m_kMaskImage |
Mask Image for masking brain regions during tensor calculation:
|
private java.lang.String |
m_kRawImageFormat |
Format of the raw data: (float, int, dicom, etc.)
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmDWI2DTI(ModelImage kMaskImage,
boolean bDisplayB0,
int iSlices,
int iDimX,
int iDimY,
int iBOrig,
int iWeights,
float fMeanNoise,
java.lang.String[][] aakDWIList,
int[] aiMatrixEntries,
WildMagic.LibFoundation.Mathematics.GMatrixd kBMatrix,
java.lang.String kRawFormat) |
Create a new AlgorithmDWI2DTI
|
AlgorithmDWI2DTI(ModelImage kDWIImage,
ModelImage maskImage) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
void |
calculateDTI(int start,
int end,
float[] dtiData,
float[][][] weightData,
Jama.Matrix B,
Jama.Matrix H) |
|
void |
calculateDTIVoxel(float[] dtiData,
float[][] dwiData,
float[][][] weightData,
int x,
int y,
int z,
Jama.Matrix B) |
|
void |
calculateDTIVoxel2(float[] dtiData,
float[][] dwiData,
float[][][] weightData,
int x,
int y,
int z,
Jama.Matrix H,
int volumeSize) |
|
Jama.Matrix |
calculateMatrix(Jama.Matrix m) |
|
private void |
createDWI() |
|
float[] |
createDWIImage() |
Second step in processing the diffusion weighted images.
|
private void |
createMaskImage() |
Create the mask image.
|
private float[][][] |
createTensorWeights() |
Creates the weighted data for the tensor calculation from the diffusion weighted images.
|
void |
deleteImages() |
|
void |
disposeLocal() |
|
ModelImage |
getDTI() |
Return the DTI Image.
|
ModelImage |
getDWI() |
|
private float[] |
readDicomWeight(int iSlice,
int iWeight) |
Get the slice data for the image with the given slice and weight.
|
private float |
readFloat(byte[] abData,
int iIndex) |
Translates the byte[] into float values at the given indes iIndex.
|
private float[] |
readFloatWeight(int iSlice,
int iWeight) |
Get the slice data for the image with the given slice and weight.
|
private int |
readInteger(byte[] abData,
int iIndex) |
Translates the byte[] into integer values at the given indes iIndex.
|
private float[] |
readIntegerWeight(int iSlice,
int iWeight) |
Get the slice data for the image with the given slice and weight.
|
private float[] |
readSliceWeight(int iSlice,
int iWeight) |
Get the slice data for the image with the given slice and weight.
|
void |
runAlgorithm() |
Calculate the DTI image.
|
float[] |
solve(Jama.Matrix y,
Jama.Matrix m) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
m_bDisplayB0
private boolean m_bDisplayB0
Whether to just display the B0 weighted image and return, or to do a full calculation:
-
m_aakDWIList
private java.lang.String[][] m_aakDWIList
List of file names for the Diffusion Weighted Images, from the .path file.
-
m_kRawImageFormat
private java.lang.String m_kRawImageFormat
Format of the raw data: (float, int, dicom, etc.)
-
Constructor Detail
-
AlgorithmDWI2DTI
public AlgorithmDWI2DTI(ModelImage kMaskImage,
boolean bDisplayB0,
int iSlices,
int iDimX,
int iDimY,
int iBOrig,
int iWeights,
float fMeanNoise,
java.lang.String[][] aakDWIList,
int[] aiMatrixEntries,
WildMagic.LibFoundation.Mathematics.GMatrixd kBMatrix,
java.lang.String kRawFormat)
Create a new AlgorithmDWI2DTI
- Parameters:
kMaskImage - mask image masking non-brain regions, if null it is calculated.bDisplayB0 - when true open and display the B0 weighted image and return.iSlices - number of slices in the raw data.iDimX - x-dimensions of the raw data.iDimY - y-dimensions of the raw data.iBOrig - number of different entries in the BMatrix.iWeights - number of weighted series.fMeanNoise - mean noise value.aakDWIList - list of file names in the weighted series.repidx - kBMatrix - BMatrix values.kRawFormat - format string for the raw data.
-
Method Detail
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
-
calculateDTI
public void calculateDTI(int start,
int end,
float[] dtiData,
float[][][] weightData,
Jama.Matrix B,
Jama.Matrix H)
-
calculateDTIVoxel
public void calculateDTIVoxel(float[] dtiData,
float[][] dwiData,
float[][][] weightData,
int x,
int y,
int z,
Jama.Matrix B)
-
calculateDTIVoxel2
public void calculateDTIVoxel2(float[] dtiData,
float[][] dwiData,
float[][][] weightData,
int x,
int y,
int z,
Jama.Matrix H,
int volumeSize)
-
createDWIImage
public float[] createDWIImage()
Second step in processing the diffusion weighted images. This function is called once the brain extractor is
complete. The brain image is transformed into a mask image, which is passed to this function. The mask image
limits where the tensor calculations are performed. The tensor is calculated, then the eigen vectors and
functional anisotropy images. The DialogDTIColorDisplay is then launched.
- Parameters:
kMaskImage - mask image representing the brain.
-
runAlgorithm
public void runAlgorithm()
Calculate the DTI image. If the mask image is null, calculate the mask image first.
- Specified by:
runAlgorithm in class AlgorithmBase
-
createDWI
private void createDWI()
-
createMaskImage
private void createMaskImage()
Create the mask image. Create an image with the B0 weighted data, if one has not already been created. Next use
the JDialogBrainSurfaceExtractor to extract only the brain regions.
-
readDicomWeight
private float[] readDicomWeight(int iSlice,
int iWeight)
Get the slice data for the image with the given slice and weight.
- Parameters:
iSlice - slice to read.iWeight - weight to read.- Returns:
- float[] containing the data.
-
readFloat
private float readFloat(byte[] abData,
int iIndex)
Translates the byte[] into float values at the given indes iIndex.
- Parameters:
abData - byte[] containing float values.iIndex - index into the array to get the float from.- Returns:
- float value representing 4 bytes starting at abData[iIndex*4].
-
readFloatWeight
private float[] readFloatWeight(int iSlice,
int iWeight)
Get the slice data for the image with the given slice and weight. For 3d and 4d non-multifile images, the whole
buffer is read in and stored...then slice data is extracted from that buffer
- Parameters:
iSlice - slice to read.iWeight - weight to read.- Returns:
- float[] containing the data.
-
readInteger
private int readInteger(byte[] abData,
int iIndex)
Translates the byte[] into integer values at the given indes iIndex.
- Parameters:
abData - byte[] containing integer values.iIndex - index into the array to get the float from.- Returns:
- integer value representing 4 bytes starting at abData[iIndex*4].
-
readIntegerWeight
private float[] readIntegerWeight(int iSlice,
int iWeight)
Get the slice data for the image with the given slice and weight. For 3d and 4d non-multifile images, the whole
buffer is read in and stored...then slice data is extracted from that buffer
- Parameters:
iSlice - slice to read.iWeight - weight to read.- Returns:
- float[] containing the data.
-
readSliceWeight
private float[] readSliceWeight(int iSlice,
int iWeight)
Get the slice data for the image with the given slice and weight.
- Parameters:
iSlice - slice to read.iWeight - weight to read.- Returns:
- float[] containing the data.
��������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.IdentityParameterization.html����������������������������0000775�4231163�4231163�00000044065�14537076051�027401� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.IdentityParameterization (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
size_ |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
ComputeJacobian(double[] x,
double[] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
int x_start,
double[][] jacobian) |
|
int |
GlobalSize() |
|
int |
LocalSize() |
|
boolean |
MultiplyByJacobian(double[] x,
int num_cols,
double[] global_matrix,
double[] local_matrix) |
|
boolean |
Plus(double[] x,
double[] delta,
double[] x_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Plus
public boolean Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index)
- Specified by:
Plus in class CeresSolver.LocalParameterization
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.CanonicalViewsClustering.html���������������������������0000775�4231163�4231163�00000042116�14537076052�027374� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.CanonicalViewsClustering (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.IntModelI0NuclearArea.html�����������������������������0000775�4231163�4231163�00000033733�14537076046�026527� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.IntModelI0NuclearArea (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
IntModelI0NuclearArea(double lower,
double upper,
int routine,
int key,
double epsabs,
double epsrel,
int limit) |
Creates a new IntModel2 object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
IntModelI0NuclearArea
public IntModelI0NuclearArea(double lower,
double upper,
int routine,
int key,
double epsabs,
double epsrel,
int limit)
Creates a new IntModel2 object.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!key - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
�������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBSpline.ColorInterpolation.html�����������������������������0000775�4231163�4231163�00000030721�14537076044�027142� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBSpline.ColorInterpolation (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmBSpline.ColorInterpolation
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[][][][] |
colorData |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
ColorInterpolation(double[][][][] data) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
setup
private void setup()
-
setup2D
private void setup2D()
�����������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMixGaussEM.html���������������������������������������������0000775�4231163�4231163�00000115660�14537076047�023754� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMixGaussEM (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double[] |
dirichletRnd(double ain,
double[] m) |
|
int[] |
discreteRnd(double[] pin,
int n) |
|
private double[][] |
expectation(double[][] X,
AlgorithmMixGaussEM.model mod) |
|
double |
gamrnd(double a,
double b) |
|
private double[] |
gaussRnd(double[] mu,
double[][] Sigma) |
|
private double[][] |
gaussRnd(double[] mu,
double[][] Sigma,
int n) |
|
private double[][] |
initialization(double[][] X,
int init) |
|
private double[][] |
initialization(double[][] X,
int[] init) |
|
private double[][] |
initialization(double[][] X,
AlgorithmMixGaussEM.model init) |
|
private double[] |
loggausspdf(double[][] Xin,
double[] mu,
double[][] Sigma) |
|
double[] |
logsumexp(double[][] ain,
int dim) |
|
private AlgorithmMixGaussEM.model |
maximization(double[][] X,
double[][] R) |
|
private void |
mixGaussEm(double[][] X,
int init) |
|
void |
mixGaussEm_demo() |
|
private void |
mixGaussPred(double[][] R,
double[][] X,
AlgorithmMixGaussEM.model mod) |
|
void |
mixGaussRnd(int d,
int k,
int n) |
|
private void |
plot(double[] llh) |
|
private void |
plotClass(double[][] X,
int[] label,
java.lang.String title) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
test_dirichletRnd() |
|
void |
test_discreteRnd() |
|
void |
test_gamrnd() |
|
void |
test_gaussRnd() |
|
void |
test_gaussRnd2() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
label
private int[] label
��������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.CVDlsMemRec.html����������������������������������������������0000775�4231163�4231163�00000032032�14537076054�023136� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.CVDlsMemRec (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
CVDlsMemRec
CVDlsMemRec()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCircularSectorToRectangle.html������������������������������0000775�4231163�4231163�00000077017�14537076044�027046� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCircularSectorToRectangle (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
x
private double[] x
DOCUMENT ME!
-
y
private double[] y
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmCircularSectorToRectangle
public AlgorithmCircularSectorToRectangle(ModelImage destImg,
ModelImage srcImg,
double[] x,
double[] y)
AlgorithmCircularSectorToRectangle.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!x - array with x coordinates of 4 sector boundary pointsy - array with y coordinates of 4 sector boundary points
-
Method Detail
-
selfTest
private void selfTest()
-
selfTest2
private void selfTest2()
-
selfTest3
private void selfTest3()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LevenbergMarquardtStrategy.html��������������������������0000775�4231163�4231163�00000051303�14537076051�027657� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LevenbergMarquardtStrategy (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
radius_
private double radius_
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitFullIntModel2i.html���������������������������������0000775�4231163�4231163�00000050701�14537076045�025745� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitFullIntModel2i (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
arg |
DOCUMENT ME!
|
(package private) double[] |
cyi |
DOCUMENT ME!
|
(package private) double[] |
cyr |
DOCUMENT ME!
|
(package private) int[] |
errorFlag |
DOCUMENT ME!
|
(package private) double |
feq |
DOCUMENT ME!
|
(package private) double |
initialOrder |
DOCUMENT ME!
|
(package private) double |
koff |
DOCUMENT ME!
|
(package private) double |
kon |
DOCUMENT ME!
|
(package private) double |
mk |
DOCUMENT ME!
|
(package private) Bessel |
modelBessel |
DOCUMENT ME!
|
(package private) int[] |
nz |
DOCUMENT ME!
|
(package private) int |
sequenceNumber |
DOCUMENT ME!
|
(package private) double |
time |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
FitFullIntModel2i(double time,
double kon,
double koff,
double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit) |
Creates a new FitFullIntModel2i object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
arg
double arg
DOCUMENT ME!
-
cyi
double[] cyi
DOCUMENT ME!
-
cyr
double[] cyr
DOCUMENT ME!
-
errorFlag
int[] errorFlag
DOCUMENT ME!
-
feq
double feq
DOCUMENT ME!
-
initialOrder
double initialOrder
DOCUMENT ME!
-
koff
double koff
DOCUMENT ME!
-
kon
double kon
DOCUMENT ME!
-
mk
double mk
DOCUMENT ME!
-
modelBessel
Bessel modelBessel
DOCUMENT ME!
-
sequenceNumber
int sequenceNumber
DOCUMENT ME!
-
time
double time
DOCUMENT ME!
-
Constructor Detail
-
FitFullIntModel2i
public FitFullIntModel2i(double time,
double kon,
double koff,
double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit)
Creates a new FitFullIntModel2i object.
- Parameters:
time - DOCUMENT ME!kon - DOCUMENT ME!koff - DOCUMENT ME!bound - DOCUMENT ME!routine - DOCUMENT ME!inf - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
���������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.MisralcCostFunction.html�������������������������0000775�4231163�4231163�00000034034�14537076052�027634� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.MisralcCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.gauss2Fitting.html�����������������������������������0000775�4231163�4231163�00000035763�14537076054�025544� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.gauss2Fitting (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
gauss2Fitting(double[] x0,
boolean doAnalytical) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureEllipse.html��������������������0000775�4231163�4231163�00000027045�14537076053�031023� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DoglegStrategyFixtureEllipse (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
SetUp
protected void SetUp()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNonMaxSuppts.html�������������������������������������������0000775�4231163�4231163�00000071315�14537076047�024407� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNonMaxSuppts (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
radius |
|
private boolean |
subpixel |
|
private double |
threshold |
|
private VOIVector |
VOIs |
Non-maximal suppression for features/corners
Non maxima suppression and thresholding for points generated by a feature
or corner detector.
|
private double[] |
xsubp |
|
private double[] |
ysubp |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmNonMaxSuppts(ModelImage destImg,
ModelImage srcImg,
VOIVector VOIs,
int radius,
double threshold) |
|
AlgorithmNonMaxSuppts(ModelImage destImg,
ModelImage srcImg,
VOIVector VOIs,
int radius,
double threshold,
double[] xsubp,
double[] ysubp) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
VOIs
private VOIVector VOIs
Non-maximal suppression for features/corners
Non maxima suppression and thresholding for points generated by a feature
or corner detector.
Note: An issue with integer valued images is that if there are multiple pixels
all with the same value within distance 2*radius of each other then they will
all be marked as local maxima.
Copyright (c) 2003-2013 Peter Kovesi
Centre for Exploration Targeting
The University of Western Australia
peter.kovesi at uwa edu au
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
The Software is provided "as is", without warranty of any kind.
September 2003 Original version
August 2005 Subpixel localization and Octave compatibility
January 2010 Fix for completely horizontal and vertical lines (by Thomas Stehle,
RWTH Aachen University)
January 2011 Warning given if no maxima found
-
radius
private int radius
-
threshold
private double threshold
-
xsubp
private double[] xsubp
-
ysubp
private double[] ysubp
-
subpixel
private boolean subpixel
-
Constructor Detail
-
AlgorithmNonMaxSuppts
public AlgorithmNonMaxSuppts(ModelImage destImg,
ModelImage srcImg,
VOIVector VOIs,
int radius,
double threshold)
- Parameters:
destImg - Optional image. If this is supplied, the thresholded corners are overlayed on
this image. This can be useful for parameter tuningsrcImg - Corner strength imageVOIs - radius - Radius of the region considered in non-maximal suppression.
Typical values to use might be 1-3 pixels.threshold - hcd - byte buffer containing corner points
-
AlgorithmNonMaxSuppts
public AlgorithmNonMaxSuppts(ModelImage destImg,
ModelImage srcImg,
VOIVector VOIs,
int radius,
double threshold,
double[] xsubp,
double[] ysubp)
- Parameters:
destImg - Optional image. If this is supplied, the thresholded corners are overlayed on
this image. This can be useful for parameter tuningsrcImg - Corner strength imageVOIs - radius - Radius of the region considered in non-maximal suppression.
Typical values to use might be 1-3 pixels.threshold - xsubp - Sub-pixel localization of feature points is attempted and returned as as
additional set of floating point coordinates. Note that you may still want
to use the integer valued coordinates to specify centers of correlation
windows for feature matching.ysubp -
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Hist.html�����������������������������������������������������0000775�4231163�4231163�00000021603�14537076056�021756� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Hist (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Hist
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
bins |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Hist() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFloodFill.html����������������������������������������������0000775�4231163�4231163�00000112342�14537076045�023634� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFloodFill (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmFloodFill
extends AlgorithmBase
Stack based flood-fill for 2D and 3D images. The input is a binary (BitSet) object and produces a BitSet or short
mask. A short mask allows for different label values for disconnected objects in a BitSet image. For example, in a
binarized image of cells, each cell could be labeled(filled) with a separate value. However, a short mask uses 16X
more memory than does the BitSet mask.
- Version:
- 0.1 Jan 5, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static short |
BITSET |
DOCUMENT ME!
|
private int[] |
dims |
Dimensionality of the data.
|
private short |
floodValue |
Flood value.
|
private java.util.BitSet |
mask |
DOCUMENT ME!
|
private int |
mode |
Indicates the type of result mask: BITSET or SHORT.
|
private int |
nDims |
The number of dimensions.
|
private java.util.BitSet |
newMask |
DOCUMENT ME!
|
private short[] |
newShortMask |
Reference to short mask.
|
private java.awt.Point |
seed2DPt |
Seed point for 2D datasets.
|
private Point3D |
seed3DPt |
Seed point for 3D datasets.
|
static short |
SHORT |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFloodFill(java.util.BitSet mask,
int[] dims,
int mode,
Point3D pt) |
Stack based flood-fill for 2D and 3D images.
|
AlgorithmFloodFill(java.util.BitSet mask,
int[] dims,
int mode,
java.awt.Point pt) |
Stack based flood-fill for 2D and 3D images.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
Prepares this class for destruction.
|
java.util.BitSet |
floodFill2DBitSet() |
2D flood fill that forms a binary(BitSet) mask.
|
short[] |
floodFill2DShort() |
2D flood fill that forms a short mask.
|
java.util.BitSet |
floodFill3DBitSet() |
3D flood fill that forms a binary(BitSet) mask.
|
short[] |
floodFill3DShort() |
3D flood fill that forms a short mask.
|
java.util.BitSet |
getBitSetMask() |
Gets the Mask image returned as a Java Bitset object.
|
short[] |
getShortMask() |
Gets the mask image (array of short values).
|
void |
runAlgorithm() |
Starts the program.
|
void |
setBitSetMask(java.util.BitSet mask) |
Sets this classes BitSet mask to new mask.
|
void |
setFloodValue(short floodValue) |
Sets the value to be placed in the flood region.
|
void |
setSeed2DPt(java.awt.Point seedPt) |
Sets the seed point for the flood fill for a 2D image region grow.
|
void |
setSeed3DPt(Point3D seedPt) |
Sets the point at which a the flood filling begins.
|
void |
setShortMask(short[] mask) |
Sets this classes short mask to the new mask.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmFloodFill
public AlgorithmFloodFill(java.util.BitSet mask,
int[] dims,
int mode,
java.awt.Point pt)
Stack based flood-fill for 2D and 3D images.
- Parameters:
mask - BitSet object that has the binary object(s) that needs to be filleddims - dimensionality of maskmode - BITSET or SHORT mode for result maskpt - seed point for the flood fill to begin for 2D image
-
AlgorithmFloodFill
public AlgorithmFloodFill(java.util.BitSet mask,
int[] dims,
int mode,
Point3D pt)
Stack based flood-fill for 2D and 3D images.
- Parameters:
mask - BitSet object that has the binary object(s) that needs to be filleddims - dimensionality of maskmode - BITSET or SHORT mode for result maskpt - seed point for the flood fill to begin for 3D image
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmImageHessian.html�������������������������������������������0000775�4231163�4231163�00000071652�14537076046�024330� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmImageHessian (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
algorID
private int algorID
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmImageHessian
public AlgorithmImageHessian(ModelImage destImg,
ModelImage srcImg,
int id)
Creates a new AlgorithmImageHessian object.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!id - DOCUMENT ME!
-
AlgorithmImageHessian
public AlgorithmImageHessian(ModelImage destImg,
ModelImage srcImg,
int id,
float[] sigmas)
Creates a new AlgorithmImageHessian object.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!id - DOCUMENT ME!sigmas - DOCUMENT ME!
-
Method Detail
-
run2D
private void run2D()
DOCUMENT ME!
-
run3D
private void run3D()
DOCUMENT ME!
-
runBatch2D
private void runBatch2D()
Algorithm is given a scale range and scale increment and computed the 1) hessian, 2) eigenvalues, 3) eigenvectors
of the hessian. These values are saved in individual files for each scale
��������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBRISK.html��������������������������������������������������0000775�4231163�4231163�00000163045�14537076044�022641� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBRISK (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmBRISK
extends AlgorithmBase
BRISK - Binary Robust Invariant Scalable Keypoints
Reference implementation of
[1] Stefan Leutenegger,Margarita Chli and Roland Siegwart, BRISK:
Binary Robust Invariant Scalable Keypoints, in Proceedings of
the IEEE International Conference on Computer Vision (ICCV2011).
Copyright (C) 2011 The Autonomous Systems Lab (ASL), ETH Zurich,
Stefan Leutenegger, Simon Lynen and Margarita Chli.
This file is part of BRISK.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the distribution.
Neither the name of the ASL nor the names of its contributors may be
used to endorse or promote products derived from this software without
specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND
ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDERS BE LIABLE FOR ANY
DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES
(INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND
ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS
SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Reference for counting number of bits set in a byte:
Anatomy of High-Performance 2D Similarity Calculations by
Imran S. Haque, Vijay S. Pande, and W. Patrick Walters
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmBRISK() |
AlgorithmBRISK - default constructor.
|
AlgorithmBRISK(ModelImage srcImg) |
|
AlgorithmBRISK(ModelImage destImage,
ModelImage srcImg,
boolean wholeImageFlag,
int threshold,
int HammingDistanceThreshold,
int octaves,
boolean rotationInvariant,
boolean scaleInvariant,
double patternScale,
java.util.Vector<java.lang.Double> radiusList,
java.util.Vector<java.lang.Integer> numberList,
double dMax,
double dMin,
java.util.Vector<java.lang.Integer> indexChange) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
BriskDescriptorExtractor() |
|
private void |
briskScaleSpace() |
|
private byte[][] |
computeImpl(ModelImage image,
java.util.Vector<AlgorithmBRISK.KeyPoint> keypoints) |
|
private void |
constructPyramid(ModelImage image) |
|
void |
detectImpl(ModelImage image,
java.util.Vector<AlgorithmBRISK.KeyPoint> keypoints,
java.util.BitSet mask) |
|
void |
finalize() |
finalize -
|
private void |
generateKernel() |
|
private void |
getKeypoints(java.util.Vector<AlgorithmBRISK.KeyPoint> keypoints) |
|
private double |
getScoreMaxAbove(int layer,
int x_layer,
int y_layer,
int threshold,
boolean[] ismax,
double[] dx,
double[] dy) |
|
private double |
getScoreMaxBelow(int layer,
int x_layer,
int y_layer,
int threshold,
boolean[] ismax,
double[] dx,
double[] dy) |
|
private double |
refine1D(double s_05,
double s0,
double s05,
double[] max) |
|
private double |
refine1D_1(double s_05,
double s0,
double s05,
double[] max) |
|
private double |
refine1D_2(double s_05,
double s0,
double s05,
double[] max) |
|
private double |
refine3D(int layer,
int x_layer,
int y_layer,
double[] x,
double[] y,
double[] scale,
boolean[] ismax) |
|
private boolean |
RoiPredicate(double minX,
double minY,
double maxX,
double maxY,
AlgorithmBRISK.KeyPoint keyPt) |
|
void |
runAlgorithm() |
Starts the program.
|
private int |
smoothedIntensity(ModelImage image,
ModelImage integral,
double key_x,
double key_y,
int scale,
int rot,
int point) |
|
private double |
subpixel2D(int s_0_0,
int s_0_1,
int s_0_2,
int s_1_0,
int s_1_1,
int s_1_2,
int s_2_0,
int s_2_1,
int s_2_2,
double[] delta_x,
double[] delta_y) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
threshold
private int threshold
-
octaves
private int octaves
-
points
private int points
-
sizeList
private int[] sizeList
-
numLongPairs
private int numLongPairs
-
strings
private int strings
-
layers
private int layers
-
Constructor Detail
-
AlgorithmBRISK
public AlgorithmBRISK(ModelImage destImage,
ModelImage srcImg,
boolean wholeImageFlag,
int threshold,
int HammingDistanceThreshold,
int octaves,
boolean rotationInvariant,
boolean scaleInvariant,
double patternScale,
java.util.Vector<java.lang.Double> radiusList,
java.util.Vector<java.lang.Integer> numberList,
double dMax,
double dMin,
java.util.Vector<java.lang.Integer> indexChange)
- Parameters:
destImage - srcImg - Source imagewholeImageFlag - threshold - FAST/AGAST detection thresholdHammingDistanceThreshold - octaves - Number of octaves for the detectionrotationInvariant - scaleInvariant - patternScale - Scale factor for the BRISK pattern.radiusList - numberList - dMax - Short pair maximum distancedMin - Long pair maximum distanceindexChange -
-
Method Detail
-
smoothedIntensity
private int smoothedIntensity(ModelImage image,
ModelImage integral,
double key_x,
double key_y,
int scale,
int rot,
int point)
-
RoiPredicate
private boolean RoiPredicate(double minX,
double minY,
double maxX,
double maxY,
AlgorithmBRISK.KeyPoint keyPt)
-
refine3D
private double refine3D(int layer,
int x_layer,
int y_layer,
double[] x,
double[] y,
double[] scale,
boolean[] ismax)
-
getScoreMaxBelow
private double getScoreMaxBelow(int layer,
int x_layer,
int y_layer,
int threshold,
boolean[] ismax,
double[] dx,
double[] dy)
-
getScoreMaxAbove
private double getScoreMaxAbove(int layer,
int x_layer,
int y_layer,
int threshold,
boolean[] ismax,
double[] dx,
double[] dy)
-
subpixel2D
private double subpixel2D(int s_0_0,
int s_0_1,
int s_0_2,
int s_1_0,
int s_1_1,
int s_1_2,
int s_2_0,
int s_2_1,
int s_2_2,
double[] delta_x,
double[] delta_y)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Trait.html������������������������������������������������������0000775�4231163�4231163�00000020420�14537076056�021730� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Trait (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Trait
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Trait() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.Estats.html����������������������������������������������������0000775�4231163�4231163�00000071127�14537076055�022461� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.Estats (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.Estats
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Estats(java.util.Vector<libdt.Dytex> dti,
java.util.Vector<libdt.Dytex> dtj,
int tau,
boolean useYmean) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
useYmean
public boolean useYmean
-
Constructor Detail
-
Estats
public Estats(java.util.Vector<libdt.Dytex> dti,
java.util.Vector<libdt.Dytex> dtj,
int tau,
boolean useYmean)
-
Method Detail
-
saveCache
public void saveCache()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmArcLength.html����������������������������������������������0000775�4231163�4231163�00000100560�14537076043�023626� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmArcLength (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmArcLength
extends AlgorithmBase
This algorithm calculates the arc-length of a Bspline fit to user defined control points. This algorithm calculates
the entire curve length and also is able to calculate the arc-length between two points.
- Version:
- 0.1 April 27, 1998
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmArcLength(float[] xPts,
float[] yPts) |
Algorithm constructor.
|
AlgorithmArcLength(float[] xPts,
float[] yPts,
float[] zPts) |
Algorithm constructor.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
float |
getTotalArcLength() |
Returns total arc-length of the segment.
|
float |
invlen(float pct) |
Finds the point at some percentage along the curve using simple midpoint root finding algorithm.
|
float |
invlenNewton(float pct) |
Finds the point at some percentage along the curve using Newtons method of root finding.
|
float |
length(float a,
float b) |
The length is calculated between to points a,b using Romberg integration.
|
void |
runAlgorithm() |
DOCUMENT ME!
|
void |
setPoints(float[] xPts,
float[] yPts) |
Sets the controls points of the Bspline and calculates the total arc-length.
|
void |
setPoints(float[] xPts,
float[] yPts,
float[] zPts) |
Sets the controls points of the Bspline and calculates the total arc-length.
|
private float |
speed(float q) |
Calculates the speed at some point q.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
rom
private float[][] rom
DOCUMENT ME!
-
totalLen
private float totalLen
DOCUMENT ME!
-
xPoints
private float[] xPoints
DOCUMENT ME!
-
yPoints
private float[] yPoints
DOCUMENT ME!
-
zPoints
private float[] zPoints
DOCUMENT ME!
-
Method Detail
-
setPoints
public void setPoints(float[] xPts,
float[] yPts)
Sets the controls points of the Bspline and calculates the total arc-length.
- Parameters:
xPts - x coordinate control pointsyPts - y coordinate control points
-
setPoints
public void setPoints(float[] xPts,
float[] yPts,
float[] zPts)
Sets the controls points of the Bspline and calculates the total arc-length.
- Parameters:
xPts - x coordinate control pointsyPts - y coordinate control points
-
length
public float length(float a,
float b)
The length is calculated between to points a,b using Romberg integration.
- Parameters:
a - starting positionb - ending position b > a and b range- Returns:
- length returns arc-length of the segment
������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmAGCIE.html��������������������������������������������������0000775�4231163�4231163�00000052347�14537076043�022600� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAGCIE (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmAGCIE
public AlgorithmAGCIE()
Reference: An Adaptive Gamma Correction for Image Enhancement by
Shanto Rahman, Md Mostafijur Rahman, M. Abdullah-Al-Wadud, Golam Dastegir Al-Quaderi,
and Mohammad Shoyaib, EURASIP Journal on Image and Video Processing,
(2016) 2016:35 DOI 10.1186/s13640-016-0138-1.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.indexRowColItem.html������������������������������������0000775�4231163�4231163�00000030266�14537076052�025506� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.indexRowColItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.indexRowColItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
col |
|
private int |
index |
|
private int |
row |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexRowColItem(int index,
int row,
int col) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getIndex
public int getIndex()
-
getRow
public int getRow()
-
getCol
public int getCol()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LineSearchFunction.html����������������������������������0000775�4231163�4231163�00000044200�14537076051�026063� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearchFunction (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSphereGeneration.html���������������������������������������0000775�4231163�4231163�00000124002�14537076050�025214� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSphereGeneration (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmSphereGeneration() |
AlgorithmSphereGeneration - default constructor.
|
AlgorithmSphereGeneration(ModelImage srcImage,
int minRadius,
int maxRadius,
int numSpheres,
int pattern,
int radiusDistribution,
int initialRandomSpheres,
double minimumNearestNeighborDistance,
double maximumNearestNeighborDistance,
double lowestForbiddenNNDistance,
double highestForbiddenNNDistance,
double highestRegenerationNNDistance) |
AlgorithmRandomSphereGeneration.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numSpheres
private int numSpheres
-
pattern
private int pattern
-
minRadius
private int minRadius
-
maxRadius
private int maxRadius
-
Constructor Detail
-
AlgorithmSphereGeneration
public AlgorithmSphereGeneration(ModelImage srcImage,
int minRadius,
int maxRadius,
int numSpheres,
int pattern,
int radiusDistribution,
int initialRandomSpheres,
double minimumNearestNeighborDistance,
double maximumNearestNeighborDistance,
double lowestForbiddenNNDistance,
double highestForbiddenNNDistance,
double highestRegenerationNNDistance)
AlgorithmRandomSphereGeneration.
- Parameters:
srcImg - Blank source image in which spheres will be drawnradius - Sphere radiusnumSpheres - Number of spheres to be drawnpattern - RANDOM, AGGREGATED, or REGULARinitialRandomSpheres - Used in AGGREGATED. initialRandomSpheres are drawn randomly. The rest
are drawn with nearestNeighborDistance less than or equal ot maximumNearestNeighborDistance.minimumNearestNeighborDistance - Used in REGULARmaximumNearestNeighborDistance - Used in AGGREGATED and REGULARlowestForbiddenNNDistance - Used in CONSTRAINEDhighestForbiddenNNDistance - Used in CONSTRAINEDhighestRegeneerationNNDistance - Used in CONSTRAINED
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmELSUNCOpt2D.FitOAR2DLMModel.html����������������������������0000775�4231163�4231163�00000035515�14537076045�026315� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmELSUNCOpt2D.FitOAR2DLMModel (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.Lmmin
debugMatrix, debugMessages, diag, epsfcn, factor, fnorm, ftol, gtol, info, maxcall, mode, nfev, printflags, x, xtol
-
Constructor Summary
Constructors
| Constructor |
Description |
FitOAR2DLMModel(double[] x,
int currentDim,
double[] point,
int maxIterations) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
currentDim
private int currentDim
-
point
private double[] point
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.html�������������������������������������������������0000775�4231163�4231163�00001533043�14537076052�023213� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class gov.nih.mipav.model.algorithms.CeresSolver
CeresSolver.ArctanLoss, CeresSolver.ArmijoLineSearch, CeresSolver.AutoDiffCostFunction<CostFunctor>, CeresSolver.BadTestTerm, CeresSolver.BFGS, CeresSolver.Block, CeresSolver.BlockEvaluatePreparer, CeresSolver.BlockJacobianWriter, CeresSolver.BlockJacobiPreconditioner, CeresSolver.BlockRandomAccessDenseMatrix, CeresSolver.BlockRandomAccessDiagonalMatrix, CeresSolver.BlockRandomAccessMatrix, CeresSolver.BlockSparseMatrix, CeresSolver.BlockSparseMatrixRandomMatrixOptions, CeresSolver.CallbackReturnType, CeresSolver.CallStatistics, CeresSolver.CauchyLoss, CeresSolver.Cell, CeresSolver.CellInfo, CeresSolver.CellLessThan, CeresSolver.CgnrLinearOperator, CeresSolver.CgnrSolver, CeresSolver.Chunk, CeresSolver.ComposedLoss, CeresSolver.CompressedList, CeresSolver.CompressedRowBlockStructure, CeresSolver.CompressedRowJacobianWriter, CeresSolver.CompressedRowSparseMatrix, CeresSolver.ConjugateGradientsSolver, CeresSolver.Context, CeresSolver.CoordinateDescentMinimizer, CeresSolver.Corrector, CeresSolver.CostFunction, CeresSolver.CostFunctorExample, CeresSolver.CovarianceAlgorithmType, CeresSolver.CRSMatrix, CeresSolver.CurveFittingFunctorExample, CeresSolver.DenseJacobianWriter, CeresSolver.DenseLinearAlgebraLibraryType, CeresSolver.DenseNormalCholeskySolver, CeresSolver.DenseQRSolver, CeresSolver.DenseSchurComplementSolver, CeresSolver.DenseSparseMatrix, CeresSolver.DoglegStrategy, CeresSolver.DoglegType, CeresSolver.DumpFormatType, CeresSolver.DynamicCompressedRowJacobianFinalizer, CeresSolver.DynamicCompressedRowJacobianWriter, CeresSolver.DynamicCostFunction, CeresSolver.DynamicNumericDiffCostFunction<T>, CeresSolver.EasyCostFunction, CeresSolver.EasyFunctor, CeresSolver.EigenQuaternionParameterization, CeresSolver.EvaluateOptions, CeresSolver.EvaluateScratch, CeresSolver.EvaluationCallback, CeresSolver.Evaluator, CeresSolver.EvaluatorOptions, CeresSolver.EventLogger, CeresSolver.ExecutionSummary, CeresSolver.ExponentialCostFunction, CeresSolver.ExponentialFunctor, CeresSolver.FirstOrderFunction, CeresSolver.FunctionSample, CeresSolver.GoodTestTerm, CeresSolver.GradientChecker, CeresSolver.GradientCheckingCostFunction, CeresSolver.GradientCheckingIterationCallback, CeresSolver.GradientProblem, CeresSolver.GradientProblemEvaluator, CeresSolver.GradientProblemSolver, CeresSolver.GradientProblemSolverOptions, CeresSolver.GradientProblemSolverStateUpdatingCallback, CeresSolver.GradientProblemSolverSummary, CeresSolver.Graph<Vertex>, CeresSolver.HomogeneousVectorParameterization, CeresSolver.HuberLoss, CeresSolver.IdentityParameterization, CeresSolver.ImplicitSchurComplement, CeresSolver.indexValueItem<Vertex>, CeresSolver.IterationCallback, CeresSolver.IterationSummary, CeresSolver.IterativeSchurComplementSolver, CeresSolver.LBFGS, CeresSolver.LevenbergMarquardtStrategy, CeresSolver.LinearCostFunction, CeresSolver.LinearLeastSquaresProblem, CeresSolver.LinearOperator, CeresSolver.LinearSolver, CeresSolver.LinearSolverOptions, CeresSolver.LinearSolverPerSolveOptions, CeresSolver.LinearSolverSummary, CeresSolver.LinearSolverTerminationType, CeresSolver.LinearSolverType, CeresSolver.LineSearch, CeresSolver.LineSearchDirection, CeresSolver.LineSearchDirectionOptions, CeresSolver.LineSearchDirectionType, CeresSolver.LineSearchFunction, CeresSolver.LineSearchInterpolationType, CeresSolver.LineSearchMinimizer, CeresSolver.LineSearchOptions, CeresSolver.LineSearchPreprocessor, CeresSolver.LineSearchSummary, CeresSolver.LineSearchType, CeresSolver.LocalParameterization, CeresSolver.LoggingCallback, CeresSolver.LoggingType, CeresSolver.LossFunction, CeresSolver.LossFunctionWrapper, CeresSolver.LowRankInverseHessian, CeresSolver.Minimizer, CeresSolver.MinimizerOptions, CeresSolver.MinimizerType, CeresSolver.MyCostFunctor, CeresSolver.MyThreeParameterCostFunctor, CeresSolver.NonlinearConjugateGradient, CeresSolver.NonlinearConjugateGradientType, CeresSolver.NormalPrior, CeresSolver.NullJacobianFinalizer, CeresSolver.NumericDiffCostFunction<CostFunctor>, CeresSolver.NumericDiffMethodType, CeresSolver.NumericDiffOptions, CeresSolver.OnlyFillsOneOutputFunctor, CeresSolver.OrderedGroups<T>, CeresSolver.Ownership, CeresSolver.Pair<T,U>, CeresSolver.ParameterBlock, CeresSolver.PartitionedMatrixView, CeresSolver.Preconditioner, CeresSolver.PreconditionerOptions, CeresSolver.PreconditionerType, CeresSolver.PreprocessedProblem, CeresSolver.Preprocessor, CeresSolver.ProbeResults, CeresSolver.ProblemImpl, CeresSolver.ProblemOptions, CeresSolver.ProductParameterization, CeresSolver.Program, CeresSolver.ProgramEvaluator<EvaluatePreparer,JacobianWriter,JacobianFinalizer>, CeresSolver.QuaternionParameterization, CeresSolver.RandomizedCostFunction, CeresSolver.RandomizedFunctor, CeresSolver.ResidualBlock, CeresSolver.ScaledLoss, CeresSolver.SchurComplementSolver, CeresSolver.SchurEliminator, CeresSolver.SchurEliminatorBase, CeresSolver.SchurJacobiPreconditioner, CeresSolver.ScopedExecutionTimer, CeresSolver.ScratchEvaluatePreparer, CeresSolver.SizedCostFunction, CeresSolver.SizeTestingCostFunction, CeresSolver.SoftLOneLoss, CeresSolver.Solver, CeresSolver.SolverOptions, CeresSolver.SolverSummary, CeresSolver.SparseLinearAlgebraLibraryType, CeresSolver.SparseMatrix, CeresSolver.SparseMatrixPreconditionerWrapper, CeresSolver.StateUpdatingCallback, CeresSolver.SteepestDescent, CeresSolver.SubsetParameterization, CeresSolver.TerminationType, CeresSolver.TestTerm, CeresSolver.TolerantLoss, CeresSolver.TranscendentalCostFunction, CeresSolver.TranscendentalFunctor, CeresSolver.TripletSparseMatrix, CeresSolver.TripletSparseMatrixRandomMatrixOptions, CeresSolver.TrivialLoss, CeresSolver.TrustRegionMinimizer, CeresSolver.TrustRegionPreprocessor, CeresSolver.TrustRegionStepEvaluator, CeresSolver.TrustRegionStrategy, CeresSolver.TrustRegionStrategyOptions, CeresSolver.TrustRegionStrategyPerSolveOptions, CeresSolver.TrustRegionStrategySummary, CeresSolver.TrustRegionStrategyType, CeresSolver.TukeyLoss, CeresSolver.TypedLinearSolver<MatrixType>, CeresSolver.TypedPreconditioner<MatrixType>, CeresSolver.VertexDegreeLessThan<Vertex>, CeresSolver.VertexTotalOrdering<Vertex>, CeresSolver.VisibilityClusteringType, CeresSolver.WeightedGraph<Vertex>, CeresSolver.WolfeLineSearch
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.CeresSolver
BAD_TEST_TERM_EXAMPLE, COST_FUNCTOR_EXAMPLE, CURVE_FITTING_EXAMPLE, curveFittingData, curveFittingObservations, default_relstep, DYNAMIC, EASY_COST_FUNCTION, EASY_FUNCTOR_EXAMPLE, epsilon, ERROR, EXPONENTIAL_COST_FUNCTION, EXPONENTIAL_FUNCTOR, FATAL, GOOD_TEST_TERM_EXAMPLE, INFO, LINEAR_COST_FUNCTION_EXAMPLE, m, MAX_LOG_LEVEL, MY_COST_FUNCTOR, MY_THREE_PARAMETER_COST_FUNCTOR, N0, ONLY_FILLS_ONE_OUTPUT_FUNCTOR, optionsValid, RANDOMIZED_COST_FUNCTION, RANDOMIZED_FUNCTOR, SIZE_TESTING_COST_FUNCTION, svd, TEST_TERM_EXAMPLE, testCase, testMode, TRANSCENDENTAL_COST_FUNCTION, TRANSCENDENTAL_FUNCTOR, WARNING
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
java.util.Vector<java.lang.Double> |
AddComplexRootPair(java.util.Vector<java.lang.Double> poly,
double real,
double imag) |
|
java.util.Vector<java.lang.Double> |
AddRealRoot(java.util.Vector<java.lang.Double> poly,
double root) |
|
void |
AngleAxisNearZeroRotatePointGivesSameAnswerAsRotationMatrix() |
|
void |
AngleAxisRotatePointGivesSameAnswerAsRotationMatrix() |
|
void |
ArrayUtilsFindInvalidIndex() |
|
void |
ArrayUtilsIsArrayValid() |
|
void |
AssertLossFunctionIsValid(CeresSolver.LossFunction loss,
double s,
java.lang.String testName) |
|
void |
BiCubicInterpolatorTestDegree00Function() |
|
void |
BiCubicInterpolatorTestDegree01Function() |
|
void |
BiCubicInterpolatorTestDegree10Function() |
|
void |
BiCubicInterpolatorTestDegree11Function() |
|
void |
BiCubicInterpolatorTestDegree12Function() |
|
void |
BiCubicInterpolatorTestDegree21Function() |
|
void |
BiCubicInterpolatorTestDegree22Function() |
|
void |
BiCubicInterpolatorTestZeroFunction() |
|
void |
BlockJacobiPreconditionerTestLargeProblem() |
|
void |
BlockJacobiPreconditionerTestSmallProblem() |
|
void |
BlockPermutationToScalarPermutation() |
|
void |
BlockRandomAccessDiagonalMatrixTest() |
|
void |
BlockRandomAccessSparseMatrixGetCell() |
|
void |
BlockRandomAccessSparseMatrixTestIntPairToLongOverflow() |
|
void |
BlockRandomAccessSparseMatrixTestLongToIntPair() |
|
void |
BlockSparseMatrixCreateDiagonalMatrix() |
|
void |
BlockSparseMatrixTestAppendAndDeleteBlockDiagonalMatrix() |
|
void |
BlockSparseMatrixTestAppendRows() |
|
void |
BlockSparseMatrixTestLeftMultiplyTest() |
|
void |
BlockSparseMatrixTestRightMultiplyTest() |
|
void |
BlockSparseMatrixTestSetZeroTest() |
|
void |
BlockSparseMatrixTestSquaredColumnNormTest() |
|
void |
BlockSparseMatrixTestToDenseMatrixTest() |
|
void |
CanonicalViewsTestComputeCanonicalViewsTest() |
|
void |
CanonicalViewsTestSimilarityPenaltyTest() |
|
void |
CanonicalViewsTestSizePenaltyTest() |
|
void |
CanonicalViewsTestViewScoreTest() |
|
void |
CheckDimensions(CeresSolver.ProbeResults results,
java.util.Vector<java.lang.Integer> parameter_sizes,
java.util.Vector<java.lang.Integer> local_parameter_sizes,
int residual_size,
java.lang.String testName,
boolean[] passed) |
|
void |
CheckEvaluation(CeresSolver.CostFunction cost_function,
boolean is_good,
java.lang.String cost_functionName,
boolean[] passed) |
|
void |
CheckIntPairToLong(int a,
int b,
java.lang.String testName,
boolean[] passed) |
|
void |
CheckLongToIntPair(java.lang.String testName,
boolean[] passed) |
|
void |
CheckRotationMatrixToAngleAxisRoundTrip(double theta,
double phi,
double angle,
java.lang.String testName,
boolean[] passed) |
|
void |
CompareEulerToAngleAxis(double[] aa,
double[] ea,
java.lang.String testName,
boolean[] passed) |
|
void |
CompareEvaluations(int expected_num_rows,
int expected_num_cols,
double expected_cost,
double[] expected_residuals,
double[] expected_gradient,
double[][] expected_jacobian,
double actual_cost,
double[] actual_residuals,
double[] actual_gradient,
double[][] actual_jacobian,
java.lang.String testName,
boolean[] passed) |
|
void |
CompareEvaluations(int expected_num_rows,
int expected_num_cols,
double expected_cost,
double[] expected_residuals,
double[] expected_gradient,
double[] expected_jacobian,
double actual_cost,
double[] actual_residuals,
double[] actual_gradient,
double[] actual_jacobian,
java.lang.String testName,
boolean[] passed) |
|
void |
CompareMatrices(CeresSolver.SparseMatrix a,
CeresSolver.SparseMatrix b,
java.lang.String testName,
boolean[] passed) |
|
void |
CompressedRowSparseMatrixCreateBlockDiagonalMatrix() |
|
void |
CompressedRowSparseMatrixFromTripletSparseMatrix() |
|
void |
CompressedRowSparseMatrixFromTripletSparseMatrixTransposed() |
|
void |
CompressedRowSparseMatrixSetUp(int[] num_rows,
int[] num_cols) |
|
void |
CompressedRowSparseMatrixTestAppendAndDeleteBlockDiagonalMatrix() |
|
void |
CompressedRowSparseMatrixTestAppendRows() |
|
void |
CompressedRowSparseMatrixTestColumnNorm() |
|
void |
CompressedRowSparseMatrixTestDeleteRows() |
|
void |
CompressedRowSparseMatrixTestLeftMultiply() |
|
void |
CompressedRowSparseMatrixTestRightMultiply() |
|
void |
CompressedRowSparseMatrixTestScale() |
|
void |
CompressedRowSparseMatrixTestToCRSMatrix() |
|
void |
CompressedRowSparseMatrixTestToDenseMatrix() |
|
void |
CompressedRowSparseMatrixTranspose() |
|
void |
ComputeAndCompareCovarianceBlocks(CeresSolver2.CovarianceOptions options,
double[] expected_covariance,
boolean[] passed) |
|
void |
ComputeAndCompareCovarianceBlocksInTangentOrAmbientSpace(CeresSolver2.CovarianceOptions options,
boolean lift_covariance_to_ambient_space,
double[] expected_covariance,
boolean[] passed) |
|
void |
ComputeAndCompareCovarianceBlocksInTangentSpace(CeresSolver2.CovarianceOptions options,
double[] expected_covariance,
boolean[] passed) |
|
void |
ComputeClustering() |
|
void |
ConjugateGradientTest() |
|
java.util.Vector<java.lang.Double> |
ConstantPolynomial(double value) |
|
void |
CorrectorMultidimensionalGaussNewtonApproximation() |
|
void |
CorrectorMultidimensionalGaussNewtonApproximationZeroResidual() |
|
void |
CorrectorNegativeGradientDeathTest() |
|
void |
CorrectorScalarCorrection() |
|
void |
CorrectorScalarCorrectionAlphaClamped() |
|
void |
CorrectorScalarCorrectionZeroResidual() |
|
void |
CorrectorZeroGradientDeathTest() |
|
void |
CostFunctionTestConditionedCostFunction() |
|
void |
CovarianceImplTestComputeCovarianceSparsity() |
|
void |
CovarianceImplTestComputeCovarianceSparsityWithConstantParameterBlock() |
|
void |
CovarianceImplTestComputeCovarianceSparsityWithFreeParameterBlock() |
|
void |
CovarianceSetUp() |
|
void |
CovarianceTestComputeCovarianceFailure() |
|
void |
CovarianceTestConstantParameterBlock() |
|
void |
CovarianceTestDenseCovarianceMatrixFromSetOfParameters() |
|
void |
CovarianceTestDenseCovarianceMatrixFromSetOfParametersInTangentSpace() |
|
void |
CovarianceTestLocalParameterization() |
|
void |
CovarianceTestLocalParameterizationInTangentSpace() |
|
void |
CovarianceTestLocalParameterizationInTangentSpaceWithConstantBlocks() |
|
void |
CovarianceTestNormalBehavior() |
|
void |
CovarianceTestTruncatedRank() |
|
java.lang.String[] |
createEvaluateStringName() |
|
CeresSolverTest.EvaluatorTestOptions[] |
createEvaluatorTestOptions() |
|
void |
CubicInterpolatorTestConstantFunction() |
|
void |
CubicInterpolatorTestLinearFunction() |
|
void |
CubicInterpolatorTestQuadraticFunction() |
|
void |
Degree2MaximumSpanningForestPreserveWeights() |
|
void |
Degree2MaximumSpanningForestStarGraph() |
|
void |
DenseLinearSolverTest1() |
|
void |
DenseLinearSolverTest2() |
|
void |
DenseSparseMatrixTestColumnNorm() |
|
void |
DenseSparseMatrixTestLeftMultiply() |
|
void |
DenseSparseMatrixTestRightMultiply() |
|
void |
DenseSparseMatrixTestScale() |
|
void |
DenseSparseMatrixTestToDenseMatrix() |
|
void |
DoglegStrategyFixtureEllipseCorrectGaussNewtonStep() |
|
void |
DoglegStrategyFixtureEllipseTrustRegionObeyedSubspace() |
|
void |
DoglegStrategyFixtureEllipseTrustRegionObeyedTraditional() |
|
void |
DoglegStrategyFixtureEllipseValidSubspaceBasis() |
|
void |
DoglegStrategyFixtureValleyCorrectStepGlobalOptimumAlongGradient() |
|
void |
DoglegStrategyFixtureValleyCorrectStepLocalOptimumAlongGradient() |
|
void |
DynamicCompressedRowSparseMatrixTestClearRows() |
|
void |
DynamicCompressedRowSparseMatrixTestInitialization() |
|
void |
DynamicCompressedRowSparseMatrixTestInsertEntryAndFinalize() |
|
void |
DynamicNumericdiffCostFunctionTestJacobianWithFirstParameterBlockConstant() |
|
void |
DynamicNumericdiffCostFunctionTestJacobianWithSecondParameterBlockConstant() |
|
void |
DynamicNumericdiffCostFunctionTestTestJacobian() |
|
void |
DynamicNumericdiffCostFunctionTestTestResiduals() |
|
void |
DynamicompressedRowSparseMatrixSetUp() |
|
void |
DynamicProblemRemoveInvalidResidualBlockDies() |
|
void |
DynamicProblemRemoveParameterBlockWithNoResiduals() |
|
void |
DynamicProblemRemoveParameterBlockWithResiduals() |
|
void |
DynamicProblemRemoveResidualBlock() |
|
void |
EigenQuaternionParameterizationAwayFromZeroTest() |
|
void |
EigenQuaternionParameterizationNearZeroTest() |
|
void |
EigenQuaternionParameterizationTestHelper(double[] x,
double[] delta,
double[] x_plus_delta_ref,
java.lang.String testName) |
|
void |
EigenQuaternionParameterizationZeroTest() |
|
void |
EulerAnglesToRotationMatrixIsOrthonormal() |
|
void |
EulerAnglesToRotationMatrixOnAxis() |
|
double |
EvaluatedFdc(Jama.Matrix coeff_,
double r,
double c) |
|
double |
EvaluatedFdr(Jama.Matrix coeff_,
double r,
double c) |
|
double |
EvaluateF(Jama.Matrix coeff_,
double r,
double c) |
|
void |
EvaluationCallbackWithLineSearchMinimizerArmijoBisection() |
|
void |
EvaluationCallbackWithLineSearchMinimizerArmijoCubic() |
|
void |
EvaluationCallbackWithLineSearchMinimizerArmijoQuadratic() |
|
void |
EvaluationCallbackWithLineSearchMinimizerWolfeBfgsCubic() |
|
void |
EvaluationCallbackWithLineSearchMinimizerWolfeBfgsQuadratic() |
|
void |
EvaluationCallbackWithLineSearchMinimizerWolfeLbfgsCubic() |
|
void |
EvaluationCallbackWithLineSearchMinimizerWolfeLbfgsQuadratic() |
|
void |
EvaluationCallbackWithTrustRegionMinimizer() |
|
void |
EvaluatorRespectsParameterChanges() |
|
void |
EvaluatorTestEvaluatorAbortsForResidualsThatFailToEvaluate() |
|
void |
EvaluatorTestMultipleResidualProblem() |
|
void |
EvaluatorTestMultipleResidualProblemWithSomeConstantParameters() |
|
void |
EvaluatorTestMultipleResidualsWithLocalParameterizations() |
|
void |
EvaluatorTestSingleResidualProblem() |
|
void |
EvaluatorTestSingleResidualProblemWithNuisanceParameters() |
|
void |
EvaluatorTestSingleResidualProblemWithPermutedParameters() |
|
void |
ExpectEmpty() |
|
void |
ExpectEqualToCompressedRowSparseMatrixReference() |
|
void |
ExpectEqualToDenseReference() |
|
void |
ExpectMatricesClose(double[] p,
double[] q,
double tolerance,
java.lang.String testName,
boolean[] passed) |
|
void |
ExpectMatricesClose(Jama.Matrix p,
Jama.Matrix q,
double tolerance,
java.lang.String testName,
boolean[] passed) |
|
void |
FillBlock(java.util.Vector<java.lang.Integer> row_blocks,
java.util.Vector<java.lang.Integer> col_blocks,
int row_block_id,
int col_block_id,
java.util.Vector<CeresSolver2.Triplet<java.lang.Integer,java.lang.Integer,java.lang.Double>> triplets) |
|
void |
Finalize() |
|
boolean |
fitToExternalFunction(double[] x,
double[] residuals,
double[][] jacobian) |
|
(package private) void |
GetCovarianceBlockAndCompare(double[] block1,
double[] block2,
boolean lift_covariance_to_ambient_space,
CeresSolver2.CovarianceImpl covariance,
double[] expected_covariance,
boolean[] passed) |
|
void |
GradientCheckerSmokeTest() |
|
void |
GradientCheckerTestCorrectnessWithLocalParameterizations() |
|
void |
GradientCheckingCostFunctionResidualsAndJacobiansArePreservedTest() |
|
void |
GradientCheckingCostFunctionSmokeTest() |
|
void |
GradientCheckingProblemImplProblemDimensionsMatch() |
|
void |
GradientProblemEvaluationWithoutParameterizationAndWithGradient() |
|
void |
GradientProblemEvaluationWithoutParameterizationOrGradient() |
|
void |
GradientProblemEvaluationWithParameterizationAndWithGradient() |
|
void |
GradientProblemEvalutaionWithParameterizationAndNoGradient() |
|
void |
GradientProblemSolverSolvesRosenbrockWithDefaultOptions() |
|
void |
GradientProblemTakesOwnershipOfFirstOrderFunction() |
|
void |
GraphAddVertexAndEdge() |
|
void |
GraphAddVertexIdempotence() |
|
void |
GraphDieOnNonExistentVertex() |
|
void |
GraphEmptyGraph() |
|
void |
Grid1DOneDataDimension() |
|
void |
Grid1DOneDataDimensionOutOfBounds() |
|
void |
Grid1DTwoDataDimensionIntegerDataInterleaved() |
|
void |
Grid1DTwoDataDimensionIntegerDataStacked() |
|
void |
Grid2DOneDataDimensionRowMajor() |
|
void |
Grid2DOneDataDimensionRowMajorOutOfBounds() |
|
void |
Grid2DTwoDataDimensionColMajorInterleaved() |
|
void |
Grid2DTwoDataDimensionColMajorStacked() |
|
void |
Grid2DTwoDataDimensionRowMajorInterleaved() |
|
void |
Grid2DTwoDataDimensionRowMajorStacked() |
|
long |
hash(byte[] data) |
|
void |
HomogeneousVectorParameterizationAwayFromZeroTest1() |
|
void |
HomogeneousVectorParameterizationAwayFromZeroTest2() |
|
void |
HomogeneousVectorParameterizationAwayFromZeroTest3() |
|
void |
HomogeneousVectorParameterizationAwayFromZeroTest4() |
|
void |
HomogeneousVectorParameterizationAwayFromZeroTest5() |
|
void |
HomogeneousVectorParameterizationHelper(double[] x,
double[] delta,
java.lang.String testName) |
|
void |
HomogeneousVectorParameterizationNearZeroTest1() |
|
void |
HomogeneousVectorParameterizationNearZeroTest2() |
|
void |
HomogeneousVectorParameterizationZeroTest() |
|
void |
HouseholderTestHelper(double[] x,
java.lang.String testName) |
|
void |
HouseholderVectorLastElementZero() |
|
void |
HouseholderVectorNearZeroNegative() |
|
void |
HouseholderVectorNearZeroPositive() |
|
void |
HouseholderVectorNonZeroNegative() |
|
void |
HouseholderVectorNonZeroPositive() |
|
void |
HouseholderVectorNonZeroPositive_Size4() |
|
void |
HouseholderVectorZeroNegative() |
|
void |
HouseholderVectorZeroPositive() |
|
void |
ImplicitSchurComplementTestSchurMatrixValuesTest() |
|
void |
IndependentSetOrderingChain() |
|
void |
IndependentSetOrderingStar() |
|
void |
InitialiseDenseReference() |
|
void |
InitialiseSparseMatrixReferences() |
|
void |
InsertNonZeroEntriesFromDenseReference() |
|
double[] |
IntToPtr(int i) |
|
boolean |
IsNear3x3Matrix(double[] arg,
double[] expected) |
|
boolean |
IsNearAngleAxis(double[] arg,
double[] expected) |
|
boolean |
IsNearQuaternion(double[] arg,
double[] expected) |
|
boolean |
IsNormalizedQuaternion(double[] arg) |
|
boolean |
IsOrthonormal(double[] arg) |
|
void |
IsTrustRegionSolveSuccessful(boolean col1,
boolean col2,
boolean col3,
boolean col4,
CeresSolver.TrustRegionStrategyType strategy_type,
int[] failed) |
|
void |
IterativeSchurComplementSolverTestNormalProblem() |
|
void |
IterativeSchurComplementSolverTestProblemWithNoFBlocks() |
|
void |
LinearSolverAndEvaluatorCreationTestCGNR() |
|
void |
LinearSolverAndEvaluatorCreationTestDenseNormalCholesky() |
|
void |
LinearSolverAndEvaluatorCreationTestDenseQR() |
|
void |
LinearSolverAndEvaluatorCreationTestDenseSchur() |
|
void |
LinearSolverAndEvaluatorCreationTestInnerIterationsWithTwoParameterBlocks() |
|
void |
LinearSolverAndEvaluatorCreationTestInvalidInnerIterationsOrdering() |
|
void |
LinearSolverAndEvaluatorCreationTestIterativeSchur() |
|
void |
LinearSolverAndEvaluatorCreationTestMinimizerIsAwareOfBounds() |
|
void |
LinearSolverAndEvaluatorCreationTestSchurTypeSolverWithBadOrdering() |
|
void |
LinearSolverAndEvaluatorCreationTestSchurTypeSolverWithEmptyFirstEliminationGroup() |
|
void |
LinearSolverAndEvaluatorCreationTestSchurTypeSolverWithEmptySecondEliminationGroup() |
|
void |
LinearSolverAndEvaluatorCreationTestSchurTypeSolverWithGoodOrdering() |
|
void |
LinearSolverAndEvaluatorCreationTestValidInnerIterationsOrdering() |
|
void |
LineSearchMinimizerTestFinalCostIsZero() |
|
void |
LineSearchPreprocessorNormalOperation() |
|
void |
LineSearchPreprocessorParameterBlockHasBounds() |
|
void |
LineSearchPreprocessorProblemWithInvalidParameterBlock() |
|
void |
LineSearchPreprocessorRemoveParameterBlocksFailed() |
|
void |
LineSearchPreprocessorRemoveParameterBlocksSucceeds() |
|
void |
LineSearchPreprocessorZeroProblem() |
|
void |
LossFunctionArctanLoss() |
|
void |
LossFunctionCauchyLoss() |
|
void |
LossFunctionComposedLoss() |
|
void |
LossFunctionHuberLoss() |
|
void |
LossFunctionLossFunctionWrapper() |
|
void |
LossFunctionScaledLoss() |
|
void |
LossFunctionSoftLOneLoss() |
|
void |
LossFunctionTolerantLoss() |
|
void |
LossFunctionTrivialLoss() |
|
void |
LossFunctionTukeyLoss() |
|
void |
MapValuesToContiguousRangeContiguousEntries() |
|
void |
MapValuesToContiguousRangeNonContiguousEntries() |
|
void |
MapValuesToContiguousRangeNonContiguousRepeatingEntries() |
|
void |
MinimizerInitializationCopiesCallbacks() |
|
void |
MinimizerUserAbortUpdatesSummaryMessage() |
|
void |
MinimizerUserSuccessUpdatesSummaryMessage() |
|
void |
NormalPriorTestResidualAtRandomPosition() |
|
void |
NormalPriorTestResidualAtRandomPositionNullJacobians() |
|
void |
NumericDiffCostFunctionEasyCaseCostFunctionCentralDifferences() |
|
void |
NumericDiffCostFunctionEasyCaseCostFunctionForwardDifferences() |
|
void |
NumericDiffCostFunctionEasyCaseCostFunctionRidders() |
|
void |
NumericDiffCostFunctionEasyCaseFunctorCentralDifferences() |
|
void |
NumericDiffCostFunctionEasyCaseFunctorCentralDifferencesAndDynamicNumResiduals() |
|
void |
NumericDiffCostFunctionEasyCaseFunctorForwardDifferences() |
|
void |
NumericDiffCostFunctionEasyCaseFunctorRidders() |
|
void |
NumericDiffCostFunctionEigenRowMajorColMajorTest() |
|
void |
NumericDiffCostFunctionExponentialCostFunctionRidders() |
|
void |
NumericDiffCostFunctionExponentialFunctorRidders() |
|
void |
NumericDiffCostFunctionPartiallyFilledResidualShouldFailEvaluation() |
|
void |
NumericDiffCostFunctionRandomizedCostFunctionRidders() |
|
void |
NumericDiffCostFunctionRandomizedFunctorRidders() |
|
void |
NumericDiffCostFunctionTranscendentalCaseCostFunctionCentralDifferences() |
|
void |
NumericDiffCostFunctionTranscendentalCaseCostFunctionForwardDifferences() |
|
void |
NumericDiffCostFunctionTranscendentalCaseCostFunctionRidders() |
|
void |
NumericDiffCostFunctionTranscendentalCaseFunctorCentralDifferences() |
|
void |
NumericDiffCostFunctionTranscendentalCaseFunctorForwardDifferences() |
|
void |
NumericDiffCostFunctionTranscendentalCaseFunctorRidders() |
|
void |
OrderedGroupsEmptyOrderedGroupBehavesCorrectly() |
|
void |
ParameterBlockDefaultBounds() |
|
void |
ParameterBlockDetectBadLocalParameterization() |
|
void |
ParameterBlockPlusWithBoundsConstraints() |
|
void |
ParameterBlockPlusWithNoLocalParameterization() |
|
void |
ParameterBlocksAreEquivalent(CeresSolver.ParameterBlock left,
CeresSolver.ParameterBlock right,
java.lang.String testName,
boolean[] passed) |
|
void |
ParameterBlockSetBounds() |
|
void |
ParameterBlockSetLocalParameterizationAndNormalOperation() |
|
void |
ParameterBlockSetLocalParameterizationDiesOnNullParameterization() |
|
void |
ParameterBlockSetLocalParameterizationDiesOnSizeMismatch() |
|
void |
ParameterBlockSetLocalParameterizationDiesWhenResettingToDifferentParameterization() |
|
void |
ParameterBlockSetLocalParameterizationDiesWhenResettingToNull() |
|
void |
ParameterBlockSetLocalParameterizationWithSameExistingParameterization() |
|
void |
ParameterBlockSetParameterizationDiesOnZeroLocalSize() |
|
void |
ParameterBlockSetStateUpdatesLocalParameterizationJacobian() |
|
void |
PartitionedMatrixViewTestBlockDiagonalEtE() |
|
void |
PartitionedMatrixViewTestBlockDiagonalFtF() |
|
void |
PartitionedMatrixViewTestDimensionsTest() |
|
void |
PartitionedMatrixViewTestLeftMultiply() |
|
void |
PartitionedMatrixViewTestRightMultiplyE() |
|
void |
PartitionedMatrixViewTestRightMultiplyF() |
|
void |
PolymomialConstantInterpolatingPolynomial() |
|
void |
PolynomialBothOutputArgumentsNullWorks() |
|
void |
PolynomialConstantPolynomialReturnsNoRoots() |
|
void |
PolynomialCubicInterpolatingPolynomialFromValues() |
|
void |
PolynomialCubicInterpolatingPolynomialFromValuesAndGradients() |
|
void |
PolynomialCubicInterpolatingPolynomialFromValuesAndOneGradient() |
|
void |
PolynomialDeficientCubicInterpolatingPolynomial() |
|
void |
PolynomialDifferentiateConstantPolynomial() |
|
void |
PolynomialDifferentiateQuadraticPolynomial() |
|
void |
PolynomialInvalidPolynomialOfZeroLengthIsRejected() |
|
void |
PolynomialLinearInterpolatingPolynomial() |
|
void |
PolynomialLinearPolynomialWithNegativeRootWorks() |
|
void |
PolynomialLinearPolynomialWithPositiveRootWorks() |
|
void |
PolynomialMinimizeConstantPolynomial() |
|
void |
PolynomialMinimizeLinearPolynomial() |
|
void |
PolynomialMinimizeQuadraticPolynomial() |
|
void |
PolynomialNullPointerAsImaginaryPartWorks() |
|
void |
PolynomialNullPointerAsRealPartWorks() |
|
void |
PolynomialQuadraticInterpolatingPolynomial() |
|
void |
PolynomialQuadraticPolynomialWithCloseRootsWorks() |
|
void |
PolynomialQuadraticPolynomialWithComplexRootsWorks() |
|
void |
PolynomialQuadraticPolynomialWithOneNegativeRootWorks() |
|
void |
PolynomialQuadraticPolynomialWithPositiveRootsWorks() |
|
void |
PolynomialQuadraticPolynomialWithTwoNegativeRootsWorks() |
|
void |
PolynomialQuarticMonomialWorks() |
|
void |
PolynomialQuarticPolynomialWithTwoClustersOfCloseRootsWorks() |
|
void |
PolynomialQuarticPolynomialWithTwoZeroRootsWorks() |
|
void |
PolynomialQuarticPolynomialWorks() |
|
void |
PreprocessForGivenLinearSolverAndVerify(CeresSolver.LinearSolverType linear_solver_type,
CeresSolver.ProblemImpl problem_,
java.lang.String testName) |
|
void |
ProblemAddingParametersAndResidualsResultsInExpectedProblem() |
|
void |
ProblemAddParameterIgnoresDuplicateCalls() |
|
void |
ProblemAddParameterWithDifferentSizesOnTheSameVariableDies() |
|
void |
ProblemAddResidualAddsDuplicatedParametersOnlyOnce() |
|
void |
ProblemAddResidualWithDifferentSizesOnTheSameVariableDies() |
|
void |
ProblemAddResidualWithDuplicateParametersDies() |
|
void |
ProblemAddResidualWithIncorrectNumberOfParameterBlocksDies() |
|
void |
ProblemAddResidualWithIncorrectSizesOfParameterBlockDies() |
|
void |
ProblemAddResidualWithNullCostFunctionDies() |
|
void |
ProblemCostFunctionsAreDeletedEvenWithRemovals() |
|
void |
ProblemGetCostFunctionForResidualBlock() |
|
void |
ProblemGetLossFunctionForResidualBlock() |
|
void |
ProblemGetParameterization() |
|
void |
ProblemIsParameterBlockConstant() |
|
void |
ProblemIsParameterBlockConstantWithUnknownPtrDies() |
|
void |
ProblemParameterBlockQueryTest() |
|
void |
ProblemRemoveParameterBlockWithUnknownPtrDies() |
|
void |
ProblemReusedCostFunctionsAreOnlyDeletedOnce() |
|
void |
ProblemSetLocalParameterizationWithUnknownPtrDies() |
|
void |
ProblemSetParameterBlockConstantWithUnknownPtrDies() |
|
void |
ProblemSetParameterBlockVariableWithUnknownPtrDies() |
|
void |
ProductParameterizationTestComputeJacobian() |
|
void |
ProductParameterizationTestLocalAndGlobalSize2() |
|
void |
ProductParameterizationTestLocalAndGlobalSize3() |
|
void |
ProductParameterizationTestLocalAndGlobalSize4() |
|
void |
ProductParameterizationTestPlus() |
|
void |
ProgramCreateJacobianBlockSparsityTranspose() |
|
void |
ProgramInfeasibleConstantParameterBlock() |
|
void |
ProgramInfeasibleParameterBlock() |
|
void |
ProgramProblemHasNanParameterBlocks() |
|
void |
ProgramReallocationInCreateJacobianBlockSparsityTranspose() |
|
void |
ProgramRemoveFixedBlocksAllParameterBlocksConstant() |
|
void |
ProgramRemoveFixedBlocksFixedCost() |
|
void |
ProgramRemoveFixedBlocksNoResidualBlocks() |
|
void |
ProgramRemoveFixedBlocksNothingConstant() |
|
void |
ProgramRemoveFixedBlocksNumEliminateBlocks() |
|
void |
ProgramRemoveFixedBlocksOneParameterBlockConstant() |
|
void |
QuaternionMultiplicationIsAssociative() |
|
void |
QuaternionParameterizationAwayFromZeroTest() |
|
void |
QuaternionParameterizationNearZeroTest() |
|
void |
QuaternionParameterizationTestHelper(double[] x,
double[] delta,
double[] x_plus_delta_ref,
java.lang.String testName) |
|
void |
QuaternionParameterizationZeroTest() |
|
void |
QuaternionRotatePointGivesSameAnswerAsRotationByMatrix() |
|
void |
QuaternionRotatePointGivesSameAnswerAsRotationByMatrixCanned() |
|
void |
RandomMatrix(Jama.Matrix m) |
|
void |
RandomVector(java.util.Vector<java.lang.Double> v) |
|
Jama.Matrix |
RandOrthMat(int n,
double tol) |
|
void |
RankDeficientCovarianceTestAutomaticTruncation() |
|
void |
ResidualBlockUtilsCheckAllCombinationsOfBadness() |
|
void |
RotationAngleAxisToQuaterionAndBack() |
|
void |
RotationAngleAxisToRotationMatrixAndBack() |
|
void |
RotationAngleAxisToRotationMatrixAndBackNearZero() |
|
void |
RotationAtPiAngleAxisRoundTrip() |
|
void |
RotationMatrixToAngleAxisExhaustiveRoundTrip() |
|
void |
RotationMatrixToAngleAxisNearPiExampleOneFromTobiasStrauss() |
|
void |
RotationNearPiAngleAxisRoundTrip() |
|
void |
RotationNearZeroAngleAxisToRotationMatrix() |
|
void |
RotationQuaterionToAngleAxisAndBack() |
|
void |
RotationQuaternionToAngleAxisAngleIsLessThanPi() |
|
void |
RotationSmallAngleAxisToQuaternion() |
|
void |
RotationSmallQuaternionToAngleAxis() |
|
void |
RotationTinyAngleAxisToQuaternion() |
|
void |
RotationTinyQuaternionToAngleAxis() |
|
void |
RotationUnitQuaternionToAngleAxis() |
|
void |
RotationXRotationToQuaternion() |
|
void |
RotationXRotationToRotationMatrix() |
|
void |
RotationYRotationQuaternionToAngleAxis() |
|
void |
RotationYRotationToRotationMatrix() |
|
void |
RotationZeroAngleAxisToQuaternion() |
|
void |
RotationZeroAngleAxisToRotationMatrix() |
|
void |
RotationZRotationQuaternionToAngleAxis() |
|
void |
RotationZRotationToRotationMatrix() |
|
void |
runAutoDiffCostFunctionExample() |
|
void |
runBardFunction() |
|
void |
runBealeFunction() |
|
void |
runBIGGS_EXP6Function() |
|
void |
runBox3DFunction() |
|
void |
runBrownAndDennisFunction() |
|
void |
runBrownBadlyScaledFunction() |
|
void |
runCurveFittingNumericDiffCostFunctionExample() |
|
void |
runCurveFittingSizedCostFunctionExample() |
|
void |
runFreudensteinAndRothFunction() |
|
void |
runFreudensteinAndRothJacobianFunction() |
|
void |
runGaussianFunction() |
|
void |
runGulfResearchAndDevelopmentFunction() |
|
void |
runHelicalValleyFunction() |
|
void |
runJennrichAndSampsonFunction() |
|
void |
runKowalikAndOsborneFunction() |
|
void |
runMeyerFunction() |
|
void |
runNumericDiffCostFunctionExample() |
|
void |
runOsborne1Function() |
|
void |
runOsborne2Function() |
|
void |
RunPolynomialInterpolationTest(int kDataDimension,
double a,
double b,
double c,
double d,
java.lang.String testName,
boolean[] passed) |
|
void |
RunPolynomialInterpolationTest(int kDataDimension,
Jama.Matrix coeff,
java.lang.String testName,
boolean[] passed) |
|
(package private) void |
RunPolynomialTestRealRoots(double[] real_roots,
boolean use_real,
boolean use_imaginary,
double epsilon,
java.lang.String testName) |
|
void |
runPowellBadlyScaledFunction() |
|
void |
runPowellSingularFunction() |
|
void |
runPowellSingularJacobianFunction() |
|
void |
runRosenbrockExample() |
|
void |
runSizedCostFunctionExample() |
|
void |
runWoodFunction() |
|
void |
ScalarMatrixToBlockMatrix() |
|
void |
SchurEliminatorTestScalarProblemNoRegularization() |
|
void |
SchurEliminatorTestScalarProblemWithRegularization() |
|
void |
SchurEliminatorTestVaryingFBlockSizeWithoutStaticStructure() |
|
void |
SchurEliminatorTestVaryingFBlockSizeWithStaticStructure() |
|
void |
SchurOrderingTestAllFixed() |
|
void |
SchurOrderingTestNoFixed() |
|
void |
SchurOrderingTestOneFixed() |
|
void |
SetSparseMatrixConstant(CeresSolver.SparseMatrix sparse_matrix,
double value) |
|
void |
SingleLinkageClusteringComponentWithWeakLink() |
|
void |
SingleLinkageClusteringComponentWithWeakLinkAndStrongLink() |
|
void |
SingleLinkageClusteringGraphHasTwoComponents() |
|
void |
SolverCantMixEvaluationCallbackWithInnerIterations() |
|
void |
SolverFixedCostForConstantProblem() |
|
void |
SolverIterativeLinearSolverForDogleg() |
|
void |
SolverLinearSolverTypeNormalOperation() |
|
void |
SolverLineSearchProblemHasNoParameterBlocks() |
|
void |
SolverLineSearchProblemHasZeroResiduals() |
|
void |
SolverLineSearchProblemIsConstant() |
|
void |
SolverOptionsDefaultLineSearchOptionsAreValid() |
|
void |
SolverOptionsDefaultTrustRegionOptionsAreValid() |
|
void |
SolverTrustRegionProblemHasNoParameterBlocks() |
|
void |
SolverTrustRegionProblemHasZeroResiduals() |
|
void |
SolverTrustRegionProblemIsConstant() |
|
void |
SolverUpdateStateEveryIterationOption() |
|
void |
SolveUpperTriangularTestRTRSolveWithSparseRHS() |
|
void |
SolveUpperTriangularTestSolveInPlace() |
|
void |
SolveUpperTriangularTestTransposeSolveInPlace() |
|
java.util.Vector<java.lang.Double> |
SortVector(java.util.Vector<java.lang.Double> in) |
|
void |
StableIndependentSetBreakTies() |
|
void |
TESTApplyOrderingNormal() |
|
void |
TESTApplyOrderingOrderingTooSmall() |
|
void |
TESTBlockRandomAccessDenseMatrixGetCell() |
|
void |
TESTBlockRandomAccessDenseMatrixWriteCell() |
|
void |
TestDetectStructure() |
|
void |
TESTIdentityParameterizationEverythingTest() |
|
void |
TESTInvertPSDMatrixFullRank5x5() |
|
void |
TESTInvertPSDMatrixIdentity3x3() |
|
void |
TESTInvertPSDMatrixRankDeficient5x5() |
|
void |
TESTLevenbergMarquardtStrategyAcceptRejectStepRadiusScaling() |
|
void |
TESTLevenbergMarquardtStrategyCorrectDiagonalToLinearSolver() |
|
void |
TESTMatrixMatrixMultiply() |
|
void |
TESTMatrixTransposeMatrixMultiply() |
|
void |
TESTMatrixTransposeVectorMultiply() |
|
void |
TESTMatrixVectorMultiply() |
|
void |
TESTOrderedGroupsAddAndRemoveEveryThingFromOneGroup() |
|
void |
TESTOrderedGroupsBulkRemove() |
|
void |
TESTOrderedGroupsBulkRemoveWithNoElements() |
|
void |
TESTOrderedGroupsEverythingInOneGroup() |
|
void |
TESTOrderedGroupsMinNonZeroGroup() |
|
void |
TESTOrderedGroupsReverseOrdering() |
|
void |
TESTOrderedGroupsReverseOrderingWithEmptyOrderedGroups() |
|
void |
TESTOrderedGroupsStartInOneGroupAndThenSplit() |
|
void |
TESTReorderResidualBlockNormalFunction() |
|
void |
TESTResidualBlockEvaluteWithLocalParameterizations() |
|
void |
TESTResidualBlockEvaluteWithNoLossFunctionOrLocalParameterizations() |
|
void |
TESTSubsetParameterizationDuplicateParametersDeathTest() |
|
void |
TESTSubsetParameterizationGreaterThanSizeParameterIndexDeathTest() |
|
void |
TESTSubsetParameterizationNegativeParameterIndexDeathTest() |
|
void |
TESTSubsetParameterizationNormalFunctionTest() |
|
void |
TESTSubsetParameterizationProductParameterizationWithZeroLocalSizeSubsetParameterization1() |
|
void |
TESTSubsetParameterizationProductParameterizationWithZeroLocalSizeSubsetParameterization2() |
|
void |
TESTTripletSparseMatrixAppendCols() |
|
void |
TESTTripletSparseMatrixAppendRows() |
|
void |
TESTTripletSparseMatrixAssignmentOperator() |
|
void |
TESTTripletSparseMatrixCopyConstructor() |
|
void |
TESTTripletSparseMatrixCreateDiagonalMatrix() |
|
void |
TESTTripletSparseMatrixDefaultConstructorReturnsEmptyObject() |
|
void |
TESTTripletSparseMatrixResize() |
|
void |
TESTTripletSparseMatrixSimpleConstructorAndBasicOperations() |
|
void |
ThreeParameterCostFunctorTestTestThreeParameterJacobian() |
|
void |
ThreeParameterCostFunctorTestTestThreeParameterResiduals() |
|
void |
ThreeParameterCostFunctorTestThreeParameterJacobianWithFirstAndLastParameterBlockConstant() |
|
void |
ThreeParameterCostFunctorTestThreeParameterJacobianWithSecondParameterBlockConstant() |
|
void |
TrustRegionMinimizerGradientToleranceConvergenceUpdatesStep() |
|
void |
TrustRegionMinimizerJacobiScalingTest() |
|
void |
TrustRegionMinimizerPowellsSingularFunctionUsingDogleg() |
|
void |
TrustRegionMinimizerPowellsSingularFunctionUsingLevenbergMarquardt() |
|
void |
TrustRegionPreprocessorParameterBlockBoundsAreInvalid() |
|
void |
TrustRegionPreprocessorParamterBlockIsInfeasible() |
|
void |
TrustRegionPreprocessorProblemWithInvalidParameterBlock() |
|
void |
TrustRegionPreprocessorRemoveParameterBlocksFailed() |
|
void |
TrustRegionPreprocessorRemoveParameterBlocksSucceeds() |
|
void |
TrustRegionPreprocessorTestInnerIterationsWithOneParameterBlock() |
|
void |
TrustRegionPreprocessorZeroProblem() |
|
void |
UpperTriangularSetUp(java.util.Vector<java.lang.Integer> rows,
java.util.Vector<java.lang.Integer> cols,
java.util.Vector<java.lang.Double> values) |
|
void |
VertexTotalOrderingTotalOrdering() |
|
void |
VisibilityTestNoEBlocks() |
|
void |
VisibilityTestSimpleMatrix() |
|
void |
WeightedGraphAddVertexAndEdge() |
|
void |
WeightedGraphAddVertexIdempotence() |
|
void |
WeightedGraphDieOnNonExistentVertex() |
|
void |
WeightedGraphEmptyGraph() |
|
void |
WeightedGraphNonExistentEdge() |
|
void |
WithLineSearchMinimizerImpl(CeresSolver.LineSearchType line_search,
CeresSolver.LineSearchDirectionType line_search_direction,
CeresSolver.LineSearchInterpolationType line_search_interpolation,
java.lang.String testName,
boolean[] passed) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.CeresSolver
AppendArrayToString, ApplyOrdering, BuildResidualLayout, ComputeHouseholderVector, ComputeRecursiveIndependentSetOrdering, ComputeSchurOrdering, ComputeStableSchurOrdering, copyFunctionSample, Create, Create, Create, Create, Create, Create, Create, CreateDiagonalMatrix, CreateEvaluatorScratch, CreateGradientCheckingCostFunction, CreateGradientCheckingProblemImpl, CreateHessianGraph, CreateLinearLeastSquaresProblemFromId, CreateOrdering, createPartitionedMatrixView, CreatePreprocessor, CreateRandomMatrix, CreateRandomMatrix, createSchurEliminatorBase, CreateSparseDiagonalMatrix, DetectStructure, DifferentiatePolynomial, DumpLinearLeastSquaresProblem, DumpLinearLeastSquaresProblemToConsole, DumpLinearLeastSquaresProblemToTextFile, EigenQuaternionProduct, EvaluateCostFunction, EvaluateJacobianColumn, EvaluateJacobianForParameterBlock, EvaluateJacobianForParameterBlock, EvaluatePolynomial, EvaluateRiddersJacobianColumn, ExpectClose, FindInterpolatingPolynomial, FindInvalidValue, FindLinearPolynomialRoots, FindPolynomialRoots, FindQuadraticPolynomialRoots, FindWithDefault, FindWithDefault, GetBestSchurTemplateSpecialization, GradientProblemSolverOptionsToSolverOptions, IndependentSetOrdering, InvalidateArray, InvalidateArray, InvalidateArray, InvalidateArray, InvertPSDMatrix, IsArrayValid, IsArrayValid, IsArrayValid, IsArrayValid, IsClose, IsOrderingValid, IsSchurType, IsSolutionUsable, IsSolutionUsable, LexicographicallyOrderResidualBlocks, LinearLeastSquaresProblem0, LinearLeastSquaresProblem1, LinearLeastSquaresProblem2, LinearLeastSquaresProblem3, LinearLeastSquaresProblem4, LinearSolverForZeroEBlocks, LinearSolverTypeToString, LineSearchDirectionTypeToString, LineSearchInterpolationTypeToString, LineSearchTypeToString, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixTransposeMatrixMultiply, MatrixTransposeVectorMultiply, MatrixVectorMultiply, MaybeReorderSchurComplementColumnsUsingEigen, MaybeReorderSchurComplementColumnsUsingSuiteSparse, Minimize, MinimizeInterpolatingPolynomial, MinimizePolynomial, MinParameterBlock, NonlinearConjugateGradientTypeToString, operator, PostSolveSummarize, PreconditionerForZeroEBlocks, PreconditionerTypeToString, QuaternionProduct, RandDouble, RandDouble, RandNormal, RemoveLeadingZeros, ReorderProgramForSchurTypeLinearSolver, RunCallbacks, SchurStructureToString, SetSummaryFinalCost, SetSummaryFinalCost, SetupCommonMinimizerOptions, Solve, Solve, StableIndependentSetOrdering, SummarizeReducedProgram, swap, TerminationTypeToString, TransposeForCompressedRowSparseStructure, Uniform, WriteArrayToFileOrDie, WriteStringToFileOrDie
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
kVertexIds
final int[] kVertexIds
-
dcrmPassed
boolean dcrmPassed
-
parameters_
double[] parameters_
-
Constructor Detail
-
CeresSolverTest
public CeresSolverTest()
-
Method Detail
-
IsTrustRegionSolveSuccessful
public void IsTrustRegionSolveSuccessful(boolean col1,
boolean col2,
boolean col3,
boolean col4,
CeresSolver.TrustRegionStrategyType strategy_type,
int[] failed)
-
QuaternionParameterizationTestHelper
public void QuaternionParameterizationTestHelper(double[] x,
double[] delta,
double[] x_plus_delta_ref,
java.lang.String testName)
-
EigenQuaternionParameterizationTestHelper
public void EigenQuaternionParameterizationTestHelper(double[] x,
double[] delta,
double[] x_plus_delta_ref,
java.lang.String testName)
-
CompareEvaluations
public void CompareEvaluations(int expected_num_rows,
int expected_num_cols,
double expected_cost,
double[] expected_residuals,
double[] expected_gradient,
double[] expected_jacobian,
double actual_cost,
double[] actual_residuals,
double[] actual_gradient,
double[] actual_jacobian,
java.lang.String testName,
boolean[] passed)
-
CompareEvaluations
public void CompareEvaluations(int expected_num_rows,
int expected_num_cols,
double expected_cost,
double[] expected_residuals,
double[] expected_gradient,
double[][] expected_jacobian,
double actual_cost,
double[] actual_residuals,
double[] actual_gradient,
double[][] actual_jacobian,
java.lang.String testName,
boolean[] passed)
-
RunPolynomialTestRealRoots
void RunPolynomialTestRealRoots(double[] real_roots,
boolean use_real,
boolean use_imaginary,
double epsilon,
java.lang.String testName)
-
CompareEulerToAngleAxis
public void CompareEulerToAngleAxis(double[] aa,
double[] ea,
java.lang.String testName,
boolean[] passed)
-
CheckRotationMatrixToAngleAxisRoundTrip
public void CheckRotationMatrixToAngleAxisRoundTrip(double theta,
double phi,
double angle,
java.lang.String testName,
boolean[] passed)
-
CheckDimensions
public void CheckDimensions(CeresSolver.ProbeResults results,
java.util.Vector<java.lang.Integer> parameter_sizes,
java.util.Vector<java.lang.Integer> local_parameter_sizes,
int residual_size,
java.lang.String testName,
boolean[] passed)
-
ExpectMatricesClose
public void ExpectMatricesClose(Jama.Matrix p,
Jama.Matrix q,
double tolerance,
java.lang.String testName,
boolean[] passed)
-
ExpectMatricesClose
public void ExpectMatricesClose(double[] p,
double[] q,
double tolerance,
java.lang.String testName,
boolean[] passed)
-
RunPolynomialInterpolationTest
public void RunPolynomialInterpolationTest(int kDataDimension,
double a,
double b,
double c,
double d,
java.lang.String testName,
boolean[] passed)
-
RunPolynomialInterpolationTest
public void RunPolynomialInterpolationTest(int kDataDimension,
Jama.Matrix coeff,
java.lang.String testName,
boolean[] passed)
-
FillBlock
public void FillBlock(java.util.Vector<java.lang.Integer> row_blocks,
java.util.Vector<java.lang.Integer> col_blocks,
int row_block_id,
int col_block_id,
java.util.Vector<CeresSolver2.Triplet<java.lang.Integer,java.lang.Integer,java.lang.Double>> triplets)
-
Finalize
public void Finalize()
-
ComputeAndCompareCovarianceBlocksInTangentOrAmbientSpace
public void ComputeAndCompareCovarianceBlocksInTangentOrAmbientSpace(CeresSolver2.CovarianceOptions options,
boolean lift_covariance_to_ambient_space,
double[] expected_covariance,
boolean[] passed)
-
GetCovarianceBlockAndCompare
void GetCovarianceBlockAndCompare(double[] block1,
double[] block2,
boolean lift_covariance_to_ambient_space,
CeresSolver2.CovarianceImpl covariance,
double[] expected_covariance,
boolean[] passed)
-
CheckEvaluation
public void CheckEvaluation(CeresSolver.CostFunction cost_function,
boolean is_good,
java.lang.String cost_functionName,
boolean[] passed)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmLapMedianess.html�������������������������������������������0000775�4231163�4231163�00000124773�14537076046�024343� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLapMedianess (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
amplificationFactor |
An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
|
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private float[] |
GxxData |
Storage location of the second derivative of the Gaussian in the X direction.
|
private float[] |
GyyData |
Storage location of the second derivative of the Gaussian in the Y direction.
|
private float[] |
GzzData |
Storage location of the second derivative of the Gaussian in the Z direction.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
private byte[] |
sBuffer |
Buffer that stores the s value in calcInPlace2DBuffer that contributed to resultBuffer.
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmLapMedianess(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor) |
Constructs a Laplacian algorithm object.
|
AlgorithmLapMedianess(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor,
boolean activeImage) |
Constructs a Laplacian algorithm object.
|
AlgorithmLapMedianess(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor) |
Constructs a Laplacian algorithm object.
|
AlgorithmLapMedianess(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor,
boolean activeImage) |
Constructs a Laplacian algorithm object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
float[] |
calcInBuffer2D(float[] buffer,
int[] extents) |
Calculates the laplacian medianess of a 2D image and returns it as a float buffer.
|
private void |
calcInPlace2D(int nImages) |
Calculates the gradient image and replaces the source image with the new image.
|
private float[] |
calcInPlace2DBuffer(int nImages,
float[] buffer,
int[] extents) |
Calculates the Laplacian image and replaces the source image with the new image.
|
private void |
calcInPlace3D() |
Calculates the Laplacian and replaces the source image with the new image.
|
private float[] |
calcInPlace3DBuffer(float[] buffer,
int[] extents) |
Calculates the Laplacian image and replaces the source image with the new image.
|
private void |
calcStoreInDest2D(int nImages) |
This function produces the Laplacian of input image.
|
private void |
calcStoreInDest3D() |
This function produces the Laplacian of input image.
|
void |
finalize() |
Prepares this class for destruction.
|
byte[] |
getSBuffer() |
DOCUMENT ME!
|
private void |
makeKernels2D(float[] sigmas) |
Creates Gaussian derivative kernels.
|
private void |
makeKernels3D(float[] sigmas) |
Creates Gaussian derivative kernels.
|
void |
runAlgorithm() |
Starts the program.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false on process the image over the mask
areas.
-
Constructor Detail
-
AlgorithmLapMedianess
public AlgorithmLapMedianess(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor)
Constructs a Laplacian algorithm object.
- Parameters:
srcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the Laplacian will be calculated for the whole image if equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently.
2D images disregard this flag.ampFactor - An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
-
AlgorithmLapMedianess
public AlgorithmLapMedianess(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor,
boolean activeImage)
Constructs a Laplacian algorithm object.
- Parameters:
srcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the Laplacian will be calculated for the whole image if equal to
trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently.
2D images disregard this flag.ampFactor - An amplification factor greater than 1.0 causes this filter to act like a highpass filter.runningInSeparateThread - whether the algorithm is running in a separate thread
-
AlgorithmLapMedianess
public AlgorithmLapMedianess(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor)
Constructs a Laplacian algorithm object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the Laplacian will be calculated for the whole image if equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently.
2D images disregard this flag.ampFactor - An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
-
AlgorithmLapMedianess
public AlgorithmLapMedianess(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor,
boolean activeImage)
Constructs a Laplacian algorithm object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the Laplacian will be calculated for the whole image if equal to
trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently.
2D images disregard this flag.ampFactor - An amplification factor greater than 1.0 causes this filter to act like a highpass filter.runningInSeparateThread - whether the algorithm is running in a separate thread
-
Method Detail
-
calcInBuffer2D
public float[] calcInBuffer2D(float[] buffer,
int[] extents)
Calculates the laplacian medianess of a 2D image and returns it as a float buffer.
- Parameters:
buffer - DOCUMENT ME!extents - DOCUMENT ME!- Returns:
- Buffer with the laplacian medianess of the image.
-
calcInPlace2DBuffer
private float[] calcInPlace2DBuffer(int nImages,
float[] buffer,
int[] extents)
Calculates the Laplacian image and replaces the source image with the new image.
- Parameters:
nImages - number of images to be blurred. If 2D image then nImage = 1, if 3D image where each image is to
processed independently then nImages equals the number of images in the volume.buffer - DOCUMENT ME!extents - DOCUMENT ME!- Returns:
- resultBuffer
-
calcInPlace3DBuffer
private float[] calcInPlace3DBuffer(float[] buffer,
int[] extents)
Calculates the Laplacian image and replaces the source image with the new image.
- Parameters:
buffer - DOCUMENT ME!extents - DOCUMENT ME!- Returns:
- resultBuffer
�����gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureValley.html���������������������0000775�4231163�4231163�00000026232�14537076053�030657� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DoglegStrategyFixtureValley (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
SetUp
protected void SetUp()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHoughEllipse.html�������������������������������������������0000775�4231163�4231163�00000113036�14537076046�024354� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHoughEllipse (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHoughEllipse
extends AlgorithmBase
This Hough transform uses (xi, yi) points in the original image space to generate p, q, r1, r2, and theta points in the Hough
transform. This Hough transform module only works with binary images. Before it is used the user must
compute the gradient of an image and threshold it to obtain a binary image. Noise removal and thinning should also
be performed, if necessary, before this program is run.
The code for finding the best tangent for a point on a curve uses a port of findOptimalTangent.m from the Randomized Hough
transform used for ellipse detection MATLAB code by Andrew Schuler. The rest of the code is not ported, but is derived
from the writeups by Andrew Schuler and Robert A. Mclaughlin. Robert A. Mclaughlin uses a linked list to save memory at
the cost of slower speed. Andrew Schuler uses an array to achieve higher speed at the cost of more memory usage. In
this application I use the array for higher speed and incur a higher memory cost. If need be, memory can be saved by
rewriting this application to used a linked list.
Pixel neighbors:
0 1 2
3 4
5 6 7
The algorithm works as follows:
1.) Skeletonization is performed. Branches with 2 or less pixels are pruned off.
2.) When a pixel has a diagonal neighbor adjacent to a horizontal or vertical neighbor,
the horizontal or vertical neighbor is deleted.
3.) Remove points with 2 or more neighbors.
4.) Find the 1 or 2 neighbors of every point
Find the number of end points, that is, points with only 1 neighbor
Delete isolated points with no neighbors
5.) Find the starting positions and lengths of the open curves
Delete all open curves with only 2 points
6.) For the open curves find the slope and y axis intercept of the tangent line to the curve at a point
With a user specified sidePointsForTangent on each side of a point find the tangent line that
minimizes the sum of the squared distances from these side points to the tangent line
7.) Find a position and length of closed curve
8.) For the closed curve find the slope and y axis intercept of the tangent line to the curve at a point
With a user specified sidePointsForTangent on each side of a point find the tangent line that
minimizes the sum of the squared distances from these side points to the tangent line
9.) Calculate the desired number of bins that would be used for each parameter if memory were not a
limitation. This desired bin number = (maximum parameter value - minimum parameter value)/maximum bin width
10.) Shrink the number of each bins used for each parameter by the fifth root of desiredBytes/actualBytesAvailable
to keep the buffer size down to user specified actualBytesAvailable.
11.) User a random number generator to select 3 of the points. If 2 of the 3 points are closer than
the user specified minimum distance or farther than the user specified maximum distance, then
run the random number generator again to find another point within the permissible distance
range. If 2 of the points have tangents with the same slope, then run the random number
generator again.
12.) Find the intersection of the tangent line for point 1 and the tangent line for point2, t12.
Find the point midway between point 1 and point 2, point m12.
Find the intersection of the tangent line for point 2 and the tangent line for point3, t23.
Find the point midway between point 2 and point 3, point m23.
The center is found at the intersection of t12m12 and t23m23. If the center is not inside
the bounds of the image, go back and run the random number generator for 3 new points.
13.) Translate the center of the ellipse to the origin by subtracting xCenter, yCenter from
point 1, point 2, and point 3.
14.) Solve for the other 3 ellipse parameters a, b, and c in a*x**2 + 2*b*x*y + c*y**2 = 1 by solving:
[x1**2 2*x1*y1 y1**2] [a] [1]
[x2**2 2*x2*y2 y2**2] [b] = [1]
[x3**2 2*x3*y3 y3**2] [c] [1]
15.) The inequality a*c - b**2 > 0 is true if the parameters represent a valid ellipse.
If this inequality is false, it implies that either the 3 pixels do not lie on the same ellipse,
or that the estimates of the tangents were inaccurate. In either case, we discard the
parameters and run the random number generator to find a new pixel triplet.
16.) Convert a, b, and c to semi major axis r1, semi minor axis r2, and orientation angle theta.
Find the combined index value for these 5 parameters from the 5 individual index values and the bin
numbers for the 5 parameters. Add the respective parameters to xCenterArray[index],
yCenterArray[index], r1Array[index], r2Array[index], and thetaArray[index].
Increment countArray[index].
17.) Keep collecting point triplets until the user specified pointSetsRequired have been collected.
18.) Find the maxIndex yielding the largest value of countArray[index]. If countArray[index] > countThreshold,
then proceed with step 19. Otherwise zero the Hough buffer and start to collect a new set of
pointSetsRequired point triplets.
19.) Divide xCenterArray[maxIndex], yCenterArray[maxIndex], r1Array[maxIndex], r2Array[maxIndex],
and thetaArray[maxIndex] by countArray[maxIndex]. For xCenter, yCenter, r1, r2, and theta,
find the number of pixels near the perimiter of the ellipse. For xCenter, yCenter, r1, r2,
and theta - 90 degrees, find the number of pixels near the perimiter of the ellipse. The
correct one of these 2 cases has the largest number of pixels near the perimiter of the
ellipse. If the correct case finds more pixels than minCoverage percent of the perimiter
length, then the ellipse is considered as valid. If the correct case has fewer than minCoverage
percent of the ellipse perimiter, then this set of parameters is discarded and we return to step 18.
20.) If an ellipse has been found, but the algorithm still has not found the user specified numEllipses
number of ellipses, then delete the points found along its perimiter from indexArray, slopeArray,
and interceptArray before running the Hough transform again. xCenterArray, yCenterArray,
r1Array, r2Array, thetaArray, and countArray are zeroed before the next Hough transform
is acquired.
21.) Perform no more than maxEllipseFindCycles of pointSetsRequired triplet set acquisitions. When
this number of triplet set acquisitions has occurred, stop trying to find new ellipses.
22.) Create a dialog with numEllipsesFound xCenterArray[i], yCenterArray[i], r1Array[i], r2Array[i],
thetaArray[i], and countArray[i] values, where the user will select a check box to have that
ellipse drawn.
References: 1.) The Randomized Hough Transform used for ellipse detection by Andrew Schuler
2.) Technical Report - Randomized Hough Transform: Improved Ellipse Detection with Comparison by
Robert A. Mclaughlin
3.) Digital Image Processing, Second Edition by Richard C. Gonzalez and Richard E. Woods, Section 10.2.2
Global Processing via the Hough Transform, Prentice-Hall, Inc., 2002, pp. 587-591.
4.) Shape Detection in Computer Vision Using the Hough Transform by V. F. Leavers, Springer-Verlag, 1992.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmHoughEllipse() |
AlgorithmHoughEllipse - default constructor.
|
AlgorithmHoughEllipse(ModelImage destImg,
ModelImage srcImg,
double minCoverage,
int sidePointsForTangent,
double maxPixelBinWidth,
double maxDegreesBinWidth,
double minPointDistance,
double maxPointDistance,
int pointSetsRequired,
int countThreshold,
double ellipseRangeTolerance,
int numEllipses,
int maxEllipseFindCycles,
int maxBufferSize) |
AlgorithmHoughEllipse.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numEllipses
private int numEllipses
-
Constructor Detail
-
AlgorithmHoughEllipse
public AlgorithmHoughEllipse(ModelImage destImg,
ModelImage srcImg,
double minCoverage,
int sidePointsForTangent,
double maxPixelBinWidth,
double maxDegreesBinWidth,
double minPointDistance,
double maxPointDistance,
int pointSetsRequired,
int countThreshold,
double ellipseRangeTolerance,
int numEllipses,
int maxEllipseFindCycles,
int maxBufferSize)
AlgorithmHoughEllipse.
- Parameters:
destImg - Image with ellipses filled insrcImg - Binary source image that has ellipses and near ellipse shapes with gapsminCoverage - Minimum percentage of the perimiter of a found ellipse that must be covered by points
for it to be valid.sidePointsForTangent - Maximum number of points to take from each side of a point on a curve
in determining the tangentmaxPixelBinWidth - Maximum pixel difference allowed for xCenter, yCenter, r1, and r2 for 5 values
to be placed into an existing binmaxDegreesBinWidth - Maximum degrees difference allowed for theta for 5 values to be placed into
an existing binminPointDistance - Smallest allowable distance between 2 of 3 picked pointsmaxPointDistance - Largest allowable distance between 2 of 3 picked pointspointSetsRequired - Number of point triplets acquired before each ellipse find is performedcountThreshold - Number of counts required to find an ellipseellipseRangeTolerance - Maximum percent by which perimiter pixels can deviate from the
ellipse equationnumEllipses - number of ellipses to be foundmaxEllipseFindCycles - Maximum number of pointSetsRequired triplet point acqusitions that
is allowed to occurmaxBufferSize - maximum Hough transform size in megabytes
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMorphology25D.html������������������������������������������0000775�4231163�4231163�00000221065�14537076047�024401� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMorphology25D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMorphology25D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage) |
Creates a new AlgorithmMorphology25D object.
|
AlgorithmMorphology25D(ModelImage srcImg,
ModelImage maskImage,
int kernelType,
float circleDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage) |
Creates a new AlgorithmMorphology25D object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
borderClearing(boolean returnFlag) |
Removes objects that touch (i.e., are connected to) the border
|
private void |
dilate(boolean returnFlag,
int iters) |
Dilates a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
dilate2D(int indexZ,
int iters) |
Dilates a boolean, unsigned byte or unsigned short image slice using the indicated kernel and the indicated number of
executions.
|
private void |
erode(boolean returnFlag,
int iters) |
Erodes a boolean or unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
erode2D(int indexZ,
int iters) |
Erodes a boolean or unsigned byte or unsigned short image slice using the indicated kernel and the indicated number of
executions.
|
private void |
fillHoles(boolean returnFlag) |
Fill the holes inside the cell region blocks.
|
private void |
fillHolesRegion(int stIndex,
short floodValue,
short objValue) |
2D flood fill that fill the holes insize the cell region block.
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
geodesicDilation(boolean returnFlag,
int geodesicSize) |
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
geodesicErosion(boolean returnFlag,
int geodesicSize) |
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private boolean |
isEndpoint(int pix,
short[] tmpBuffer) |
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
|
private void |
makeCircularKernel(float circDiameter) |
Generates a cicular kernel of a specific diameter.
|
private void |
makeKernel(int kernelType) |
Generates a kernel of the indicated type.
|
void |
prune(int iter,
boolean returnFlag) |
This method is to be applied on skeletonized images: it removes all branches which are iter or less pixels in
length.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setAlgorithm(int method) |
Sets the algorithm type (i.e. erode, dilate)
|
void |
setImage(ModelImage img) |
Sets the algorithm to new image of boolean type.
|
void |
setIterations(int itersD,
int itersE) |
Sets number of iterations for closing or opening.
|
void |
setKernel(java.util.BitSet kernel,
int dim) |
Sets user defined square kernels.
|
void |
showKernel() |
display kernel as 1 or 0 in the debug window.
|
void |
skeletonize(int pruningPixels,
boolean returnFlag) |
Skeletonizes the image by using a lookup table to repeatedly remove pixels from the edges of objects in a binary
image, reducing them to single pixel wide skeletons.
|
private int |
thin(int pass,
int slice,
int[] table) |
This a thinning algorithm used to do half of one layer of thinning (which layer is dictated by whether pass is
even or odd).
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
algorithm
private int algorithm
DOCUMENT ME!
-
imgLength
private int imgLength
DOCUMENT ME!
-
iterationsD
private int iterationsD
DOCUMENT ME!
-
iterationsE
private int iterationsE
DOCUMENT ME!
-
kDim
private int kDim
DOCUMENT ME!
-
kernelType
private int kernelType
-
sliceLength
private int sliceLength
DOCUMENT ME!
-
maskImage
private ModelImage maskImage
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
-
Constructor Detail
-
AlgorithmMorphology25D
public AlgorithmMorphology25D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage)
Creates a new AlgorithmMorphology25D object.
- Parameters:
srcImg - source image modelkernelType - kernel size (i.e. connectedness)circleDiameter - only valid if kernelType == SIZED_CIRCLE and represents the width of a circle in the
resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)iterD - number of times to dilateiterE - number of times to erodepruningPix - the number of pixels to pruneedType - the type of edging to perform (inner or outer)entireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed
-
AlgorithmMorphology25D
public AlgorithmMorphology25D(ModelImage srcImg,
ModelImage maskImage,
int kernelType,
float circleDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage)
Creates a new AlgorithmMorphology25D object.
- Parameters:
srcImg - source image modelkernelType - dilation kernel size (i.e. connectedness)circleDiameter - dilation only valid if kernelType == SIZED_CIRCLE and represents the width of a
circle in the resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)geodesicSize - iterD - number of times to dilateiterE - number of times to erodeentireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed
-
Method Detail
-
prune
public void prune(int iter,
boolean returnFlag)
This method is to be applied on skeletonized images: it removes all branches which are iter or less pixels in
length.
- Parameters:
iter - the threshold number of pixels for the maximum length of a removed branch to bereturnFlag - if true then this operation is a step in the morph process (i.e. close)
-
skeletonize
public void skeletonize(int pruningPixels,
boolean returnFlag)
Skeletonizes the image by using a lookup table to repeatedly remove pixels from the edges of objects in a binary
image, reducing them to single pixel wide skeletons. Based on a thinning algorithm by Zhang and Suen. There is an
entry in the table for each of the 256 possible 3x3 neighborhood configurations. An entry of '1' signifies to
delete the indicated pixel on the first pass, '2' means to delete the indicated pixel on the second pass, and '3'
indicates to delete the pixel on either pass.
- Parameters:
pruningPixels - the number of pixels to prune after skeletonizing. (should be 0 if no pruning is to be
done)returnFlag - if true then this operation is a step in the morph process (i.e. close)
-
dilate
private void dilate(boolean returnFlag,
int iters)
Dilates a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)iters - number of dilations
-
geodesicDilation
private void geodesicDilation(boolean returnFlag,
int geodesicSize)
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
dilate2D
private void dilate2D(int indexZ,
int iters)
Dilates a boolean, unsigned byte or unsigned short image slice using the indicated kernel and the indicated number of
executions.
- Parameters:
indexZ - iters - number of dilations
-
geodesicErosion
private void geodesicErosion(boolean returnFlag,
int geodesicSize)
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
erode2D
private void erode2D(int indexZ,
int iters)
Erodes a boolean or unsigned byte or unsigned short image slice using the indicated kernel and the indicated number of
executions.
- Parameters:
indexZ - iters - number of erosion iterations.
-
erode
private void erode(boolean returnFlag,
int iters)
Erodes a boolean or unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. open)iters - number of erosion iterations.
-
fillHolesRegion
private void fillHolesRegion(int stIndex,
short floodValue,
short objValue)
2D flood fill that fill the holes insize the cell region block.
- Parameters:
stIndex - the starting index of the seed pointfloodValue - the value to flood the region withobjValue - object ID value that idenditifies the flood region.
-
borderClearing
private void borderClearing(boolean returnFlag)
Removes objects that touch (i.e., are connected to) the border
- Parameters:
returnFlag -
-
isEndpoint
private boolean isEndpoint(int pix,
short[] tmpBuffer)
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
- Parameters:
pix - the index of a non-zero pixel in tmpBuffertmpBuffer - the image- Returns:
- DOCUMENT ME!
-
thin
private int thin(int pass,
int slice,
int[] table)
This a thinning algorithm used to do half of one layer of thinning (which layer is dictated by whether pass is
even or odd).
- Parameters:
pass - the number pass this execution is on the imageslice - the slice number being worked on (starting with 0);table - the table to lookup whether to delete the pixel or let it stay.- Returns:
- DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmAutoSeedWatershed.html��������������������������������������0000775�4231163�4231163�00000071147�14537076044�025350� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAutoSeedWatershed (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmAutoSeedWatershed
extends AlgorithmBase
This is a port of the file AutoSeedWatershed.cpp which calls openCV written by Ravimal Bandara. His web site is
titled Image Segmentation using Unsupervised Watershed Algorithm with an Over-segmentation Reduction Technique.
This code is written for 2D color images. In response to the question:
Would it be possible to modify your code for use on black and white images? What changes would be necessary?
Ravimal Bandara responded:
Yes you can by creating a gray histogram instead of Hues Saturation histogram. But I am not sure about the accuracy
due to the grayscale histograms are less discriminative compared to the colour histogram.
His code is licensed under the Code Project Open License (CPOL).
The formula for the Bhattacharyya distance for multivariate gaussian distributions is taken from "The Divergence
and Bhattacharyya Distance Measures in Signal Selection" by Thomas Kailath, IEEE Transactions on Communication
Technology" Vol. COM-15, No. 1, February, 1967, pp. 52-60.
- Author:
- ilb
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
scaleX
private float scaleX
-
scaleY
private float scaleY
-
error
private boolean error
-
Constructor Detail
-
AlgorithmAutoSeedWatershed
public AlgorithmAutoSeedWatershed(ModelImage destImg,
ModelImage srcImg,
float scaleX,
float scaleY,
boolean mergeSimilar,
double maxDistance)
Constructs new watershed algorithm.
- Parameters:
destImg - Image model where result image is to storedsrcImg - Source image modelscaleX - scaleY - mergeSimilar - maxDistance -
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitFullModelqd.html������������������������������������0000775�4231163�4231163�00000036673�14537076045�025400� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitFullModelqd (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
koff |
DOCUMENT ME!
|
(package private) double |
kon |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
FitFullModelqd(double[] time,
double kon,
double koff) |
Creates a new FitFullModelqd object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double[][] |
fitToLaplace(double realS,
double[] imagS) |
DOCUMENT ME!
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision
complex variable zr + j*zi.
|
private void |
zsqrt(double ar,
double ai,
double[] br,
double[] bi) |
complex square root b = csqrt(a).
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
koff
double koff
DOCUMENT ME!
-
kon
double kon
DOCUMENT ME!
-
Constructor Detail
-
FitFullModelqd
public FitFullModelqd(double[] time,
double kon,
double koff)
Creates a new FitFullModelqd object.
- Parameters:
time - DOCUMENT ME!kon - DOCUMENT ME!koff - DOCUMENT ME!
-
Method Detail
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision
complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zsqrt
private void zsqrt(double ar,
double ai,
double[] br,
double[] bi)
complex square root b = csqrt(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]
���������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.html�������������������������������������������������0000775�4231163�4231163�00000437207�14537076054�023013� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class gov.nih.mipav.model.algorithms.CeresSolver
CeresSolver.ArctanLoss, CeresSolver.ArmijoLineSearch, CeresSolver.AutoDiffCostFunction<CostFunctor>, CeresSolver.BadTestTerm, CeresSolver.BFGS, CeresSolver.Block, CeresSolver.BlockEvaluatePreparer, CeresSolver.BlockJacobianWriter, CeresSolver.BlockJacobiPreconditioner, CeresSolver.BlockRandomAccessDenseMatrix, CeresSolver.BlockRandomAccessDiagonalMatrix, CeresSolver.BlockRandomAccessMatrix, CeresSolver.BlockSparseMatrix, CeresSolver.BlockSparseMatrixRandomMatrixOptions, CeresSolver.CallbackReturnType, CeresSolver.CallStatistics, CeresSolver.CauchyLoss, CeresSolver.Cell, CeresSolver.CellInfo, CeresSolver.CellLessThan, CeresSolver.CgnrLinearOperator, CeresSolver.CgnrSolver, CeresSolver.Chunk, CeresSolver.ComposedLoss, CeresSolver.CompressedList, CeresSolver.CompressedRowBlockStructure, CeresSolver.CompressedRowJacobianWriter, CeresSolver.CompressedRowSparseMatrix, CeresSolver.ConjugateGradientsSolver, CeresSolver.Context, CeresSolver.CoordinateDescentMinimizer, CeresSolver.Corrector, CeresSolver.CostFunction, CeresSolver.CostFunctorExample, CeresSolver.CovarianceAlgorithmType, CeresSolver.CRSMatrix, CeresSolver.CurveFittingFunctorExample, CeresSolver.DenseJacobianWriter, CeresSolver.DenseLinearAlgebraLibraryType, CeresSolver.DenseNormalCholeskySolver, CeresSolver.DenseQRSolver, CeresSolver.DenseSchurComplementSolver, CeresSolver.DenseSparseMatrix, CeresSolver.DoglegStrategy, CeresSolver.DoglegType, CeresSolver.DumpFormatType, CeresSolver.DynamicCompressedRowJacobianFinalizer, CeresSolver.DynamicCompressedRowJacobianWriter, CeresSolver.DynamicCostFunction, CeresSolver.DynamicNumericDiffCostFunction<T>, CeresSolver.EasyCostFunction, CeresSolver.EasyFunctor, CeresSolver.EigenQuaternionParameterization, CeresSolver.EvaluateOptions, CeresSolver.EvaluateScratch, CeresSolver.EvaluationCallback, CeresSolver.Evaluator, CeresSolver.EvaluatorOptions, CeresSolver.EventLogger, CeresSolver.ExecutionSummary, CeresSolver.ExponentialCostFunction, CeresSolver.ExponentialFunctor, CeresSolver.FirstOrderFunction, CeresSolver.FunctionSample, CeresSolver.GoodTestTerm, CeresSolver.GradientChecker, CeresSolver.GradientCheckingCostFunction, CeresSolver.GradientCheckingIterationCallback, CeresSolver.GradientProblem, CeresSolver.GradientProblemEvaluator, CeresSolver.GradientProblemSolver, CeresSolver.GradientProblemSolverOptions, CeresSolver.GradientProblemSolverStateUpdatingCallback, CeresSolver.GradientProblemSolverSummary, CeresSolver.Graph<Vertex>, CeresSolver.HomogeneousVectorParameterization, CeresSolver.HuberLoss, CeresSolver.IdentityParameterization, CeresSolver.ImplicitSchurComplement, CeresSolver.indexValueItem<Vertex>, CeresSolver.IterationCallback, CeresSolver.IterationSummary, CeresSolver.IterativeSchurComplementSolver, CeresSolver.LBFGS, CeresSolver.LevenbergMarquardtStrategy, CeresSolver.LinearCostFunction, CeresSolver.LinearLeastSquaresProblem, CeresSolver.LinearOperator, CeresSolver.LinearSolver, CeresSolver.LinearSolverOptions, CeresSolver.LinearSolverPerSolveOptions, CeresSolver.LinearSolverSummary, CeresSolver.LinearSolverTerminationType, CeresSolver.LinearSolverType, CeresSolver.LineSearch, CeresSolver.LineSearchDirection, CeresSolver.LineSearchDirectionOptions, CeresSolver.LineSearchDirectionType, CeresSolver.LineSearchFunction, CeresSolver.LineSearchInterpolationType, CeresSolver.LineSearchMinimizer, CeresSolver.LineSearchOptions, CeresSolver.LineSearchPreprocessor, CeresSolver.LineSearchSummary, CeresSolver.LineSearchType, CeresSolver.LocalParameterization, CeresSolver.LoggingCallback, CeresSolver.LoggingType, CeresSolver.LossFunction, CeresSolver.LossFunctionWrapper, CeresSolver.LowRankInverseHessian, CeresSolver.Minimizer, CeresSolver.MinimizerOptions, CeresSolver.MinimizerType, CeresSolver.MyCostFunctor, CeresSolver.MyThreeParameterCostFunctor, CeresSolver.NonlinearConjugateGradient, CeresSolver.NonlinearConjugateGradientType, CeresSolver.NormalPrior, CeresSolver.NullJacobianFinalizer, CeresSolver.NumericDiffCostFunction<CostFunctor>, CeresSolver.NumericDiffMethodType, CeresSolver.NumericDiffOptions, CeresSolver.OnlyFillsOneOutputFunctor, CeresSolver.OrderedGroups<T>, CeresSolver.Ownership, CeresSolver.Pair<T,U>, CeresSolver.ParameterBlock, CeresSolver.PartitionedMatrixView, CeresSolver.Preconditioner, CeresSolver.PreconditionerOptions, CeresSolver.PreconditionerType, CeresSolver.PreprocessedProblem, CeresSolver.Preprocessor, CeresSolver.ProbeResults, CeresSolver.ProblemImpl, CeresSolver.ProblemOptions, CeresSolver.ProductParameterization, CeresSolver.Program, CeresSolver.ProgramEvaluator<EvaluatePreparer,JacobianWriter,JacobianFinalizer>, CeresSolver.QuaternionParameterization, CeresSolver.RandomizedCostFunction, CeresSolver.RandomizedFunctor, CeresSolver.ResidualBlock, CeresSolver.ScaledLoss, CeresSolver.SchurComplementSolver, CeresSolver.SchurEliminator, CeresSolver.SchurEliminatorBase, CeresSolver.SchurJacobiPreconditioner, CeresSolver.ScopedExecutionTimer, CeresSolver.ScratchEvaluatePreparer, CeresSolver.SizedCostFunction, CeresSolver.SizeTestingCostFunction, CeresSolver.SoftLOneLoss, CeresSolver.Solver, CeresSolver.SolverOptions, CeresSolver.SolverSummary, CeresSolver.SparseLinearAlgebraLibraryType, CeresSolver.SparseMatrix, CeresSolver.SparseMatrixPreconditionerWrapper, CeresSolver.StateUpdatingCallback, CeresSolver.SteepestDescent, CeresSolver.SubsetParameterization, CeresSolver.TerminationType, CeresSolver.TestTerm, CeresSolver.TolerantLoss, CeresSolver.TranscendentalCostFunction, CeresSolver.TranscendentalFunctor, CeresSolver.TripletSparseMatrix, CeresSolver.TripletSparseMatrixRandomMatrixOptions, CeresSolver.TrivialLoss, CeresSolver.TrustRegionMinimizer, CeresSolver.TrustRegionPreprocessor, CeresSolver.TrustRegionStepEvaluator, CeresSolver.TrustRegionStrategy, CeresSolver.TrustRegionStrategyOptions, CeresSolver.TrustRegionStrategyPerSolveOptions, CeresSolver.TrustRegionStrategySummary, CeresSolver.TrustRegionStrategyType, CeresSolver.TukeyLoss, CeresSolver.TypedLinearSolver<MatrixType>, CeresSolver.TypedPreconditioner<MatrixType>, CeresSolver.VertexDegreeLessThan<Vertex>, CeresSolver.VertexTotalOrdering<Vertex>, CeresSolver.VisibilityClusteringType, CeresSolver.WeightedGraph<Vertex>, CeresSolver.WolfeLineSearch
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.CeresSolver
BAD_TEST_TERM_EXAMPLE, COST_FUNCTOR_EXAMPLE, CURVE_FITTING_EXAMPLE, curveFittingData, curveFittingObservations, default_relstep, DYNAMIC, EASY_COST_FUNCTION, EASY_FUNCTOR_EXAMPLE, epsilon, ERROR, EXPONENTIAL_COST_FUNCTION, EXPONENTIAL_FUNCTOR, FATAL, GOOD_TEST_TERM_EXAMPLE, INFO, LINEAR_COST_FUNCTION_EXAMPLE, m, MAX_LOG_LEVEL, MY_COST_FUNCTOR, MY_THREE_PARAMETER_COST_FUNCTOR, N0, ONLY_FILLS_ONE_OUTPUT_FUNCTOR, optionsValid, RANDOMIZED_COST_FUNCTION, RANDOMIZED_FUNCTOR, SIZE_TESTING_COST_FUNCTION, svd, TEST_TERM_EXAMPLE, testCase, testMode, TRANSCENDENTAL_COST_FUNCTION, TRANSCENDENTAL_FUNCTOR, WARNING
-
Constructor Summary
Constructors
| Constructor |
Description |
DSC_MRI_toolbox() |
|
DSC_MRI_toolbox(double[][][][] volumes,
double te,
double tr,
int aif_nSlice,
java.lang.String outputFilePath) |
|
DSC_MRI_toolbox(ModelImage srcImage,
java.lang.String outputFilePath,
double te,
double tr,
int aif_nSlice,
java.lang.String[] deconv_method) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
backupSecondGaussianRoutine() |
|
private double[][] |
calculateREG(byte[][] mask) |
|
byte[] |
calcZeroX(double[] buffer) |
|
private void |
clusterHierarchical(double[][] dati,
int nCluster,
double[][] centroidi) |
|
private void |
convolve(double[] imageBuffer,
double[] kernelBuffer,
double[] resultBuffer) |
Perform one-dimension convolution.
|
private double[] |
cumtrapz(double[] f) |
|
void |
curveIntersect(double[] x,
double[] param) |
|
void |
curveintersect_local(double[] x1,
double[] y1,
double[] x2,
double[] y2) |
|
void |
DSC_mri_aif() |
|
void |
DSC_mri_cbf() |
|
void |
DSC_mri_cbv() |
|
void |
DSC_mri_cbv_lc() |
|
void |
DSC_mri_conc() |
|
void |
DSC_mri_core() |
|
void |
DSC_mri_cSVD() |
|
void |
DSC_mri_fwhm() |
|
void |
DSC_mri_mask() |
|
void |
DSC_mri_mtt() |
|
void |
DSC_mri_oSVD() |
|
void |
DSC_mri_S0() |
|
int |
DSC_mri_slice_selection_figure() |
|
void |
DSC_mri_SVD() |
|
void |
DSC_mri_ttp() |
|
byte[] |
edgeDetect(double[] secondDerivBuffer) |
|
void |
extractAIF() |
|
private void |
fitGV_peak1(double[] dati,
double[] orgWeights) |
|
private void |
fitGV_peak2(double[] dati,
double[] weights) |
|
boolean |
fitToExternalFunction(double[] x,
double[] residuals,
double[][] jacobian) |
|
(package private) double |
fwhm(double[] x,
double[] yorg) |
|
int[][] |
getAIF_voxels() |
|
private double[] |
GVfunction(double[] p) |
|
private double[] |
GVfunction_peak1(double[] p) |
|
private double[] |
GVfunction_recirculation(double[] p) |
|
double[] |
interp1(double[] x,
double[] y,
double[] x_loc) |
|
private void |
makeGxKernels1D() |
|
private void |
makeGxxKernels1D() |
Creates Gaussian derivative kernels.
|
void |
mminvinterp(double[] x,
double[] y,
double yo) |
|
void |
runAlgorithm() |
|
private java.io.File |
saveImageFile(ModelImage img,
java.lang.String dir,
java.lang.String fileBasename,
int fileType) |
|
private java.io.File |
saveImageFile(ModelImage img,
java.lang.String dir,
java.lang.String fileBasename,
int fileType,
boolean alwaysSave) |
|
private double |
trapz(double[] f) |
|
private double[][] |
trapz(double[][][] f) |
|
private double[][] |
vol2mat(double[][][][] data,
byte[][][] selected) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.CeresSolver
AppendArrayToString, ApplyOrdering, BuildResidualLayout, ComputeHouseholderVector, ComputeRecursiveIndependentSetOrdering, ComputeSchurOrdering, ComputeStableSchurOrdering, copyFunctionSample, Create, Create, Create, Create, Create, Create, Create, CreateDiagonalMatrix, CreateEvaluatorScratch, CreateGradientCheckingCostFunction, CreateGradientCheckingProblemImpl, CreateHessianGraph, CreateLinearLeastSquaresProblemFromId, CreateOrdering, createPartitionedMatrixView, CreatePreprocessor, CreateRandomMatrix, CreateRandomMatrix, createSchurEliminatorBase, CreateSparseDiagonalMatrix, DetectStructure, DifferentiatePolynomial, DumpLinearLeastSquaresProblem, DumpLinearLeastSquaresProblemToConsole, DumpLinearLeastSquaresProblemToTextFile, EigenQuaternionProduct, EvaluateCostFunction, EvaluateJacobianColumn, EvaluateJacobianForParameterBlock, EvaluateJacobianForParameterBlock, EvaluatePolynomial, EvaluateRiddersJacobianColumn, ExpectClose, FindInterpolatingPolynomial, FindInvalidValue, FindLinearPolynomialRoots, FindPolynomialRoots, FindQuadraticPolynomialRoots, FindWithDefault, FindWithDefault, GetBestSchurTemplateSpecialization, GradientProblemSolverOptionsToSolverOptions, IndependentSetOrdering, InvalidateArray, InvalidateArray, InvalidateArray, InvalidateArray, InvertPSDMatrix, IsArrayValid, IsArrayValid, IsArrayValid, IsArrayValid, IsClose, IsOrderingValid, IsSchurType, IsSolutionUsable, IsSolutionUsable, LexicographicallyOrderResidualBlocks, LinearLeastSquaresProblem0, LinearLeastSquaresProblem1, LinearLeastSquaresProblem2, LinearLeastSquaresProblem3, LinearLeastSquaresProblem4, LinearSolverForZeroEBlocks, LinearSolverTypeToString, LineSearchDirectionTypeToString, LineSearchInterpolationTypeToString, LineSearchTypeToString, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixTransposeMatrixMultiply, MatrixTransposeVectorMultiply, MatrixVectorMultiply, MaybeReorderSchurComplementColumnsUsingEigen, MaybeReorderSchurComplementColumnsUsingSuiteSparse, Minimize, MinimizeInterpolatingPolynomial, MinimizePolynomial, MinParameterBlock, NonlinearConjugateGradientTypeToString, operator, PostSolveSummarize, PreconditionerForZeroEBlocks, PreconditionerTypeToString, QuaternionProduct, RandDouble, RandDouble, RandNormal, RemoveLeadingZeros, ReorderProgramForSchurTypeLinearSolver, RunCallbacks, SchurStructureToString, SetSummaryFinalCost, SetSummaryFinalCost, SetupCommonMinimizerOptions, Solve, Solve, StableIndependentSetOrdering, SummarizeReducedProgram, swap, TerminationTypeToString, TransposeForCompressedRowSparseStructure, Uniform, WriteArrayToFileOrDie, WriteStringToFileOrDie
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
extents2D
private int[] extents2D
-
extents3D
private int[] extents3D
-
extents4D
private int[] extents4D
-
resolutions3D
float[] resolutions3D
-
resolutions4D
float[] resolutions4D
-
length
private int length
-
volume
private int volume
-
time
private double[] time
-
display
private int display
-
waitbar
private int waitbar
-
mask_npixel
private int mask_npixel
-
options_conc
private int options_conc
-
S0_thresh
private double S0_thresh
-
aif_enable
private int aif_enable
-
aif_nSlice
private int aif_nSlice
-
aif_pArea
private double aif_pArea
-
aif_pTTP
private double aif_pTTP
-
aif_pReg
private double aif_pReg
-
qr_enable
private int qr_enable
-
par_kh
private double par_kh
-
par_rho
private double par_rho
-
par_kvoi
private double par_kvoi
-
doCurveIntersect
boolean doCurveIntersect
-
readTestImage
boolean readTestImage
-
GxData
private double[] GxData
-
GxxData
private double[] GxxData
-
sigmas
private double[] sigmas
-
firstGaussianMean
double firstGaussianMean
-
firstGaussianMeanBin
int firstGaussianMeanBin
-
equalTimeSpacing
boolean equalTimeSpacing
-
AIF_ROI_x
double[] AIF_ROI_x
-
AIF_ROI_y
double[] AIF_ROI_y
-
AIF_conc
double[] AIF_conc
-
AIF_voxels
int[][] AIF_voxels
-
data_peak1
double[] data_peak1
-
weights_peak1
double[] weights_peak1
-
dati_peak2
double[] dati_peak2
-
weights_peak2
double[] weights_peak2
-
AIF_fit_weights
double[] AIF_fit_weights
-
AIF_fit_gv
double[] AIF_fit_gv
-
alpha_init
double alpha_init
-
beta_init
double beta_init
-
GVFittingCheck
boolean GVFittingCheck
-
doAIFTransfer
boolean doAIFTransfer
-
intensity
double[] intensity
-
probDouble
double[] probDouble
-
cbv_lc
double[][][] cbv_lc
-
cbf_svd
double[][][] cbf_svd
-
cbf_csvd
double[][][] cbf_csvd
-
cbf_osvd
double[][][] cbf_osvd
-
cbf_osvd_OI
double[][][] cbf_osvd_OI
-
mtt_svd
double[][][] mtt_svd
-
mtt_csvd
double[][][] mtt_csvd
-
mtt_osvd
double[][][] mtt_osvd
-
Constructor Detail
-
DSC_MRI_toolbox
public DSC_MRI_toolbox()
-
DSC_MRI_toolbox
public DSC_MRI_toolbox(ModelImage srcImage,
java.lang.String outputFilePath,
double te,
double tr,
int aif_nSlice,
java.lang.String[] deconv_method)
-
DSC_MRI_toolbox
public DSC_MRI_toolbox(double[][][][] volumes,
double te,
double tr,
int aif_nSlice,
java.lang.String outputFilePath)
-
Method Detail
-
DSC_mri_S0
public void DSC_mri_S0()
-
extractAIF
public void extractAIF()
-
saveImageFile
private java.io.File saveImageFile(ModelImage img,
java.lang.String dir,
java.lang.String fileBasename,
int fileType)
-
saveImageFile
private java.io.File saveImageFile(ModelImage img,
java.lang.String dir,
java.lang.String fileBasename,
int fileType,
boolean alwaysSave)
-
convolve
private void convolve(double[] imageBuffer,
double[] kernelBuffer,
double[] resultBuffer)
Perform one-dimension convolution.
- Parameters:
imageBuffer - kernelBuffer - resultBuffer - Problem is huge border effects. Convolution uses kernels
of length going from 9 to 801 on buffer of length 100.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Block.html�����������������������������������������������0000775�4231163�4231163�00000023331�14537076051�023374� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Block (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Block
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
position |
|
int |
size |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Block() |
|
Block(int size_,
int position_) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
position
public int position
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmUnionFindWatershed.html�������������������������������������0000775�4231163�4231163�00000071771�14537076050�025530� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmUnionFindWatershed (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numNeighbor
private int numNeighbor
-
binNumber
private int binNumber
-
imgBuffer
private int[] imgBuffer
-
merge
private boolean merge
-
Constructor Detail
-
AlgorithmUnionFindWatershed
public AlgorithmUnionFindWatershed(ModelImage destImage,
ModelImage srcImage,
int numNeighbor,
boolean limitBins,
int binNumber,
boolean merge,
double mergeThreshold)
�������gov/nih/mipav/model/algorithms/LSCM.FaceHalfedgeIterator.html���������������������������������������0000775�4231163�4231163�00000032102�14537076056�024635� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.FaceHalfedgeIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.FaceHalfedgeIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ConjugateGradientsSolver.html����������������������������0000775�4231163�4231163�00000040210�14537076051�027310� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ConjugateGradientsSolver (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd9.html���������������������������������������0000775�4231163�4231163�00000030465�14537076055�025015� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd9 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd9(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd9
public Fitqd9(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.indexValueItem.html��������������������������������0000775�4231163�4231163�00000030177�14537076057�026517� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.indexValueItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
DOCUMENT ME!
|
private double |
value |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValueItem(int index,
double value) |
Creates a new indexValueItem object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
index
private final int index
DOCUMENT ME!
-
Method Detail
-
getIndex
public int getIndex()
DOCUMENT ME!
- Returns:
- DOCUMENT ME!
-
getValue
public double getValue()
DOCUMENT ME!
- Returns:
- DOCUMENT ME!
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBSnake.html�������������������������������������������������0000775�4231163�4231163�00000132322�14537076044�023124� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBSnake (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmBSnake
extends AlgorithmBase
Snake-like algorithm derivative using BSplines. The algorithm is supplied a polygon (VOI - contour) and that polygon
is allowed to evolve to edge of the object generated by calculating the gradient magnitude (i.e. the energy function)
at scale define by the user. The user/programmer supplies the sigmas (scales) at which to calculate the gradient
magnitude. A large scale slows the snake and causes the snake to conform to large scale structure. A small sigma
value causes the snake to conform to the small scale structure is therefore more sensitive to noise. The
three-dimensional version is really a two-and-half dimensional algorithm where resultant contour in a slice is
projected into the adjacent slice and is used as an initialization to the evolution in the new slice.
- Version:
- 0.1 Feb 11, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
- See Also:
AlgorithmBSpline,
GenerateGaussian,
AlgorithmVOISimplexOpt,
AlgorithmSnake
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
boundaryIterations |
Maximum number of snake iterations.
|
private float[] |
GxData |
Storage location of the first derivative of the Gaussian in the X direction.
|
private float[] |
GyData |
Storage location of the first derivative of the Gaussian in the Y direction.
|
private float[] |
GzData |
Storage location of the first derivative of the Gaussian in the Z direction.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
static int |
PROP_ALL |
Propagate the source VOI to slices above and below its current slice.
|
static int |
PROP_NEXT |
Propagate the source VOI to slices above its current slice in the volume.
|
static int |
PROP_PREV |
Propagate the source VOI to slices below its current slice in the volume.
|
static int |
PROP_SINGLE |
Do not propagate the source VOI to any slices (2D).
|
private static float |
PROP_THRESHOLD |
The maximum ratio of change in the energy under the VOI after propagation.
|
private int |
propagationType |
The VOI propagation mode to use.
|
private VOI |
resultVOI |
The resultant polygon and the evolution has completed.
|
private float[] |
sigmas |
Standard deviations of the Gaussian used to calculate the kernels.
|
private ModelImage |
srcImage |
Source image.
|
private VOI |
srcVOI |
The initial VOI to initialize the evolution process.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmBSnake(ModelImage srcImg,
float[] sigmas,
int boundaryIterations,
VOI srcVOI) |
Set up the snake algorithm so that it can be run.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calc2D() |
Prepares the data and runs the algorithm for a 2D image.
|
private void |
calc3D() |
Prepares the data and runs the algorithm for a 3D image.
|
void |
finalize() |
Prepares this class for destruction.
|
VOI |
getResultVOI() |
Accessor that returns the resultant VOI.
|
private void |
makeKernels2D() |
Makes 2D derivative kernels to be used in the calculation of the gradient magnitude.
|
private void |
makeKernels3D() |
Makes 3D derivative kernels to be used in the calculation of the gradient magnitude.
|
private void |
propDown(VOIContour resultContour,
VOI resultVOI,
float baseEnergy,
int baseNPts) |
|
private void |
propUp(VOIContour resultContour,
VOI resultVOI,
float baseEnergy,
int baseNPts) |
|
void |
runAlgorithm() |
Starts the snake algorithm.
|
private float |
runSnake(float[] xPoints,
float[] yPoints,
float[] zPoints,
float[] image,
VOIBase result) |
Actual function that evolves the boundary.
|
private float |
runSnake(float[] xPoints,
float[] yPoints,
float[] image,
java.awt.Polygon resultGon) |
Actual function that evolves the boundary.
|
private void |
setPoints(float[] xPoints,
float[] yPoints,
float[] zPoints,
VOIBase contour) |
Takes the polygon and forms two special arrays for use in the Bspline.
|
private void |
setPoints(float[] xPoints,
float[] yPoints,
java.awt.Polygon gon) |
Takes the polygon and forms two special arrays for use in the Bspline.
|
void |
setPropagation(int type) |
Sets the propagation type.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmBSnake
public AlgorithmBSnake(ModelImage srcImg,
float[] sigmas,
int boundaryIterations,
VOI srcVOI)
Set up the snake algorithm so that it can be run.
- Parameters:
srcImg - 2D or 3D source imagesigmas - describe the scale of the Gaussian in each dimensionboundaryIterations - maximum number of snake iterationssrcVOI - VOI that is to be evolved
-
Method Detail
-
runSnake
private float runSnake(float[] xPoints,
float[] yPoints,
float[] image,
java.awt.Polygon resultGon)
Actual function that evolves the boundary.
- Parameters:
xPoints - x coordinates that describe the contouryPoints - y coordinates that describe the contourimage - image dataresultGon - resultant polygon- Returns:
- the sum of the energy along the boundary of the
resultGon
-
runSnake
private float runSnake(float[] xPoints,
float[] yPoints,
float[] zPoints,
float[] image,
VOIBase result)
Actual function that evolves the boundary.
- Parameters:
xPoints - x coordinates that describe the contouryPoints - y coordinates that describe the contourimage - image dataresultGon - resultant polygon- Returns:
- the sum of the energy along the boundary of the
resultGon
-
setPoints
private void setPoints(float[] xPoints,
float[] yPoints,
java.awt.Polygon gon)
Takes the polygon and forms two special arrays for use in the Bspline.
- Parameters:
xPoints - storage location of array of x coord. pointsyPoints - storage location array of y coord. pointsgon - initial polygon
-
setPoints
private void setPoints(float[] xPoints,
float[] yPoints,
float[] zPoints,
VOIBase contour)
Takes the polygon and forms two special arrays for use in the Bspline.
- Parameters:
xPoints - storage location of array of x coord. pointsyPoints - storage location array of y coord. pointsgon - initial polygon
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHoughParabola.html������������������������������������������0000775�4231163�4231163�00000103114�14537076046�024474� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHoughParabola (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHoughParabola
extends AlgorithmBase
[(y - vy)*cos(phi) - (x - vx)*sin(phi)]**2 =
4*p*[(y - vy)*sin(phi) + (x - vx)*cos(phi)]
where vx, vy are the coordinates of the parabola vertex
p is the distance between the vertex and focus of the parabola
This Hough transform uses (xi, yi) points in the original image space to generate vx, vy, phi, p points in the Hough
transform. This Hough transform module only works with binary images. Before it is used the user must
compute the gradient of an image and threshold it to obtain a binary image. Noise removal and thinning should also
be performed, if necessary, before this program is run.
The user is asked for the number of vx bins, vy bins, phi bins, the phi constant value for when phi bins == 1,
p bins, pMin value, pMax value, maxBufferSize, and number of parabolas. The desired size for vxBins is
min(512, image.getExtents()[0]). The desired size for vyBins is min(512, image.getExtents()[1]).
The desired size for phi is 360. The default value for phiConstant is 90 degrees. The default value for pBins
is Math.min(512, Math.max(image.getExtents()[0], image.getExtents()[1])). The default value for pMin is 0.1.
The default value for pMax is Math.max(image.getExtents()[0], image.getExtents()[1]). The default value for
maxBufferSize is 256 megabytes. The default number of parabolas is 1. The program generates a Hough transform
of the source image using the basic equation [(y - vy)*cos(phi) - (x - vx)*sin(phi)]**2 =
4*p*[(y - vy)*sin(phi) + (x - vx)*cos(phi)]
The program finds the parabolas containing the largest number of points.
The program produces a dialog which allows the user to select which parabolas should be drawn.
The Hough transform for the entire image is generated a separate time to find each parabola.
For each (xi, yi) point in the original image not having a value of zero, calculate the first dimension value vxArray[j] =
j * (xDim - 1)/(vxBins - 1), with j = 0 to vxBins - 1. Calculate the second dimension value vyArray[k] = k * (yDim - 1)/(vyBins - 1),
with k = 0 to vyBins - 1. calculate the third dimension phiArray[m] = m * 2.0 * PI/phiBins, with m going from 0 to phiBins - 1
Calculate p = [(y - vy)*cos(phi) - (x - vx)*sin(phi)]**2/[4*[(y - vy)*sin(phi) + (x - vx)*cos(phi)]]
p goes from pMin to pMax
pMin + s4 * (pBins - 1) = pMax.
s4 = (pMax - pMin)/(pBins - 1)
n = (p - pMin)*(pBins - 1)/(pMax - pMin).
Only calculate the Hough transform for pMax >= p >= pMin.
Find the peak point in the vx, vy, phi, p Hough transform space.
Put the values for this peak point in vxArray[c], vyArray[c], phiArray[c], pArray[c], and
countArray[c].
yf = y - vy
xf = x - vx
[yf*cos(phi)]^2 - 2*yf*sin[phi]*[xf*cos(phi)+ 2*p] + [xf*sin(phi)]^2 -4*p*xf*cos(phi) = 0
ys = (y - vy)*cos(phi) - (x - vx)*sin(phi)
xs = (y - vy)*sin(phi) + (x - vx)*cos(phi)
ys^2 = 4*p*xs
2*ys*(dys/dxs) = 4p
(dys/dxs) = (2p)/ys = (2p)/sqrt(4pxs) = sqrt(p/xs)
2*ys*[(dy/dx)*cos(phi) - sin(phi)] = 4*p*[(dy/dx)*sin(phi) + cos(phi)]
(dy/dx) = (ys*sin(phi) + 2*p*cos(phi))/(ys*cos(phi) - 2*p*sin(phi))
Using p = (ys^2)/(4*xs)
(dy/dx) = (2*xs*sin(phi) + ys*cos(phi))/(2*xs*cos(phi) - ys*sin(phi))
(dy/dx) = ((x-vx)*cos(phi)*sin(phi) + (y - vy) + (y - vy)*((sin(phi))^2)/((y - vy)*cos(phi)*sin(phi) + (x - vx) + (x - vx)*((cos(phi))^2)
Using sin(2*phi) = 2*sin(phi)*cos(phi), ((cos(phi))^2) = (1/2)*(1 + cos(2*phi)), ((sin(phi)^2) = (1/2)*(1 - cos(2*phi))
(dy/dx) = ((x - vx)*sin(2*phi) + 3*(y - vy)- (y - vy)*cos(2*phi))/((y - vy)*sin(2*phi) + 3*(x - vx)+ (x - vx)*cos(2*phi))
Note that 4 possible values of phi, 2 sets of values 180 degrees apart can be found.
Without slope you can only calculate p. With slope you can calculate both phi and p.
d*cos(2*phi) + e*sin(2*phi) + f = 0
-d*cos(2*phi) = e*sin(2*phi) + f
d^2*cos(2*phi)^2 = e^2*sin(2*phi)^2 + 2*e*f*sin(2*phi) + f^2 = 0
d^2 - d^2*sin(2*phi)^2 = e^2*sin(2*phi)^2 + 2*e*f*sin(2*phi) + f^2 = 0
(d^2 + e^2)*sin(2*phi)^2 + 2*e*f*sin(2*phi) + (f^2 - d^2) = 0
sin(2*phi) = (-2*e*f +- sqrt(4*e^2*f^2 - 4*(d^2 + e^2)*(f^2 - d^2)))/(2*(d^2 + e^2))
sin(2*phi) = (-e*f +- d*sqrt(d^2 + e^2 - f^2))/(d^2 + e^2)
cos(2*phi) = -(e*sin(2*phi) + f)/d = (-d*f -+ e*sqrt(d^2 + e^2 - f^2))/(d^2 + e^2)
Note that + for the sin(2*phi) root corresponds to - for the cos(2*phi) root
Real solutions require d^2 + e^2 - f^2 >= 0.
Each solution of 2*phi generates 2 solutions of phi, 180 degrees apart.
Only use the phi within 90 degrees of arctan(y - vy, x - vx).
So only 2 phi are generated.
If more parabolas are to be found, then zero the houghBuffer and run through the
same Hough transform a second time, but on this second run instead of incrementing
the Hough buffer, zero the values in the source buffer that contributed to the peak
point in the Hough buffer. So on the next run of the Hough transform the source points that
contributed to the Hough peak value just detected will not be present.
Create a dialog with numParabolasFound vxArray[i], vyArray[i], phiArray[i], pArray[i], and
countArray[i] values, where the user will select a check box to have that parabola drawn.
References: 1.) Digital Image Processing, Second Edition by Richard C. Gonzalez and Richard E. Woods, Section 10.2.2
Global Processing via the Hough Transform, Prentice-Hall, Inc., 2002, pp. 587-591.
2.) Form of parabola equation using phi taken from MATLAB routine houghparabola by Clara Isabel Sanchez.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmHoughParabola() |
AlgorithmHoughParabola - default constructor.
|
AlgorithmHoughParabola(ModelImage destImg,
ModelImage srcImg,
int vxBins,
int vyBins,
int phiBins,
double phiConstant,
int pBins,
float pMin,
float pMax,
int sidePointsForTangent,
int maxBufferSize,
int numParabolas) |
AlgorithmHoughParabola.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
vxBins
private int vxBins
-
vyBins
private int vyBins
-
phiBins
private int phiBins
-
numParabolas
private int numParabolas
-
Constructor Detail
-
AlgorithmHoughParabola
public AlgorithmHoughParabola(ModelImage destImg,
ModelImage srcImg,
int vxBins,
int vyBins,
int phiBins,
double phiConstant,
int pBins,
float pMin,
float pMax,
int sidePointsForTangent,
int maxBufferSize,
int numParabolas)
AlgorithmHoughParabola.
- Parameters:
destImg - Image with lines filled insrcImg - Binary source image that has lines with gapsvxBins - number of dimension vx bins in Hough transform spacevyBins - number of dimension vy bins in Hough transform spacephiBins - number of dimension phi bins in Hough transform spacephiConstant - phi value in radians if phiBins == 1pBins - number of dimension p bins in Hough transform spacepMin - minimum p valuepMax - maximum p valuesidePointsForTangent - Maximum number of points to take from each side
of a point on a curve in determining a tangentmaxBufferSize - maximum Hough transform size in megabytesnumParabolas - number of parabolas to be found
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Backpropagation.Connection.html��������������������������������������0000775�4231163�4231163�00000040034�14537076051�025310� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Backpropagation.Connection (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
weight
private double weight
-
Method Detail
-
getWeight
double getWeight()
-
setWeightAsBest
void setWeightAsBest()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.Box3DFunction.html�����������������������������������0000775�4231163�4231163�00000033702�14537076053�025634� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.Box3DFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Box3DFunction
public Box3DFunction()
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
��������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSphereGeneration.IntTorquatoModelMean2.html�����������������0000775�4231163�4231163�00000035023�14537076050�031354� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSphereGeneration.IntTorquatoModelMean2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
volumeFraction |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
IntTorquatoModelMean2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit,
double volumeFraction) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
volumeFraction
double volumeFraction
-
Constructor Detail
-
IntTorquatoModelMean2
public IntTorquatoModelMean2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit,
double volumeFraction)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCumulativeHistogram.html������������������������������������0000775�4231163�4231163�00000063667�14537076045�025775� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCumulativeHistogram (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int[] |
histoBuffer |
int array of histogram values
|
private ModelHistogram |
histogram |
Reference to the histogram storage object.
|
private ModelImage |
image |
Reference to the image.
|
private int |
RGBOffset |
Indicates which channel of the RGB image the histogram should be calculated. 1=Red 2=Green 3=Blue
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
image
private ModelImage image
Reference to the image.
-
Constructor Detail
-
AlgorithmCumulativeHistogram
public AlgorithmCumulativeHistogram(ModelHistogram histogram,
ModelImage image)
Constructor for grey scale image
- Parameters:
histogram - model of a histogram for a RGB componentimage - model of the source imag
-
AlgorithmCumulativeHistogram
public AlgorithmCumulativeHistogram(ModelHistogram histogram,
int RGBOffset,
ModelImage image)
Constructor for RGB image.
- Parameters:
histogram - model of a histogram for a RGB componentRGBOffset - correct offset for RED = 1 , GREEN = 2, or BLUE = 3 component to be exportedimage - model of the source image
�������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmConstELSUNCOpt3D.FitOAR3DConstrainedModel.html��������������0000775�4231163�4231163�00000041350�14537076044�031260� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConstELSUNCOpt3D.FitOAR3DConstrainedModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
currentDim |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitOAR3DConstrainedModel(int currentDim) |
Creates a new FitOAR3DConstrainedModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying OAR3DConstrained fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
currentDim
private int currentDim
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMSER.VlMserReg.html�����������������������������������������0000775�4231163�4231163�00000025740�14537076047�024404� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMSER.VlMserReg (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserReg
-
- Enclosing class:
- AlgorithmMSER
private class AlgorithmMSER.VlMserReg
extends java.lang.Object
Extremal regions and maximally stable extremal regions are instances of image regions.
There is an image region for each pixel of the image. Each regions is represented by an instance of
this structure. Regions are stored into an array in pixel order.
Regions are arranged into a forest. VlMserReg::parent points to the parent node, or the the node itself
if the node is a root. VlMserReg::parent is the index of the node in the node array (which therefore is
also the index of the corresponding pixel). VlMserReg::height is the distance of the farthest leaf. If
the node itself is a leaf, then VlMserReg::height is zero.
VlMserReg::area is the area of the image region corresponding to this node.
VlMserReg::region is the extremal region identifier. Not all regions are extremal regions.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
area |
|
(package private) int |
height |
|
(package private) int |
parent |
|
(package private) int |
shortcut |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
VlMserReg() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
VlMserReg
private VlMserReg()
��������������������������������gov/nih/mipav/model/algorithms/CVODES.CVadjMemRec.html����������������������������������������������0000775�4231163�4231163�00000052563�14537076054�023165� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.CVadjMemRec (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ca_tinitial
double ca_tinitial
-
ca_tfinal
double ca_tfinal
-
ca_tstopCVodeF
double ca_tstopCVodeF
-
ca_nbckpbs
int ca_nbckpbs
-
ca_nckpnts
int ca_nckpnts
-
ca_IMmalloc
int ca_IMmalloc
-
ca_IMstore
int ca_IMstore
-
ca_IMmallocDone
boolean ca_IMmallocDone
-
ca_IMnewData
boolean ca_IMnewData
-
ca_IMstoreSensi
boolean ca_IMstoreSensi
-
ca_IMinterpSensi
boolean ca_IMinterpSensi
-
Constructor Detail
-
CVadjMemRec
CVadjMemRec()
���������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Gamma.html�����������������������������������������������������������0000775�4231163�4231163�00000102533�14537076055�021137� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Gamma (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Gamma
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
a |
|
private double |
b |
|
static int |
CDF |
|
static int |
CGAMMA |
Compute gamma function or log of gamma function for complex arguments
|
private int |
functionCode |
In lgamma and cgamma calculate gamma(x) for functionCode = 1 and calulate the ln(gamma(x)) for functionCode = 0
|
static int |
GAMMA |
Compute gamma function for real x, x is not equal to 0 or a negative integer
|
private double[] |
imagResult |
Imaginary part of outputted result
|
private double |
imagX |
Imaginary part of input argument
|
static int |
INCOG |
Compute incompete gamma functions and regularized gamma P function
|
static int |
INVERSE_CDF |
|
static int |
LGAMMA |
Compute gamma function or log of gamma function for real x > 0
|
private double[] |
lowerIncompleteGamma |
|
private double[] |
realResult |
Real part of outputted result
|
private double |
realX |
Real part of input argument
|
private double[] |
regularizedGammaP |
|
private double[] |
result |
output result
|
private double[] |
upperIncompleteGamma |
|
private int |
version |
GAMMA, LGAMMA, CGAMMA, or INCOG
|
private double |
x |
input argument Note that the gamma function is not defined for x equal to zero or a negative integer
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Gamma() |
|
Gamma(double x,
double[] result) |
|
Gamma(double a,
double x,
double[] lowerIncompleteGamma,
double[] upperIncompleteGamma,
double[] regularizedGammaP) |
|
Gamma(double a,
double b,
double x,
boolean inverse,
double[] result) |
|
Gamma(double realX,
double imagX,
int functionCode,
double[] realResult,
double[] imagResult) |
|
Gamma(double x,
int functionCode,
double[] result) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
cdf() |
|
private void |
cgamma() |
This code is a port of the FORTRAN routine CGAMA from the book Computation of
Special Functions by Shanjie Zhang and Jianming Jin, John Wiley & Sons, Inc.,
1996, pp. 51-52.
|
void |
finalize() |
Cleanup memory.
|
private void |
gamma() |
This code is a port of the FORTRAN routine GAMMA from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 49-50.
|
private void |
incog() |
This code is a port of the FORTRAN routine INCOG from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 63-64.
|
private void |
inverseCumulativeDistributionFunction() |
|
private void |
lgamma() |
This code is a port of the FORTRAN routine LGAMA from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 50-51.
|
void |
run() |
|
void |
testCDF() |
|
void |
testcgamma() |
|
void |
testgamma() |
|
void |
testincog() |
|
void |
testInverseCDF() |
|
void |
testlgamma() |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
GAMMA
public static final int GAMMA
Compute gamma function for real x, x is not equal to 0 or a negative integer
- See Also:
- Constant Field Values
-
result
private double[] result
output result
-
Constructor Detail
-
Gamma
public Gamma(double realX,
double imagX,
int functionCode,
double[] realResult,
double[] imagResult)
- Parameters:
realX - real part of input argumentimagX - imaginary part of input argumentfunctionCode - 1 for gamma(x),0 for ln(gamma(x))realResult - real part of outputted gamma(x) or ln(gamma(x))imagResult - imaginary part of outputted gamma(x) or ln(gamma(x))
-
Gamma
public Gamma(double a,
double x,
double[] lowerIncompleteGamma,
double[] upperIncompleteGamma,
double[] regularizedGammaP)
- Parameters:
a - x - lowerIncompleteGamma - upperIncompleteGamma - regularizedGammaP -
-
Gamma
public Gamma(double a,
double b,
double x,
boolean inverse,
double[] result)
-
Method Detail
-
testCDF
public void testCDF()
-
testgamma
public void testgamma()
-
testlgamma
public void testlgamma()
-
testcgamma
public void testcgamma()
-
testincog
public void testincog()
-
gamma
private void gamma()
This code is a port of the FORTRAN routine GAMMA from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 49-50.
x is not 0 or a negative integer
-
lgamma
private void lgamma()
This code is a port of the FORTRAN routine LGAMA from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 50-51. This routine calculates the gamma(x) for functionCode =
1 or the ln(gamma(x)) for the function code = 0. x must be greater than zero.
-
cgamma
private void cgamma()
This code is a port of the FORTRAN routine CGAMA from the book Computation of
Special Functions by Shanjie Zhang and Jianming Jin, John Wiley & Sons, Inc.,
1996, pp. 51-52. This routine calculates the gamma(x) for functionCode = 1 or
the ln(gamma(x)) for the function code = 0. x is complex and the output is
complex.
-
incog
private void incog()
This code is a port of the FORTRAN routine INCOG from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 63-64. It calculates the incomplete gamma functions and the
regularized gamma function P.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.Range.html�����������������������������������������������������0000775�4231163�4231163�00000023752�14537076055�022253� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.Range (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.Range
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
boolean |
all |
|
int |
end |
|
int |
start |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Range() |
|
Range(int start,
int end) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������gov/nih/mipav/model/algorithms/AlgorithmAGVF.html���������������������������������������������������0000775�4231163�4231163�00000170066�14537076043�022512� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAGVF (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected int |
boundaryIterations |
Maximum iterations to generate new boundary.
|
private boolean |
do25D |
Only applies to 3D, if true do slice by slice.
|
private float[] |
expGvfBuffer |
DOCUMENT ME!
|
protected int[] |
extents |
DOCUMENT ME!
|
private float[] |
fx |
DOCUMENT ME!
|
private float[] |
fy |
DOCUMENT ME!
|
private float[] |
fz |
DOCUMENT ME!
|
private float[] |
gVal |
DOCUMENT ME!
|
private float[] |
gvfBuffer |
DOCUMENT ME!
|
private int |
gvfIterations |
Maximum iterations to generate generalized gradient vector field.
|
private float[] |
GxData |
Storage location of the first derivative of the Gaussian in the X direction.
|
private float[] |
GyData |
Storage location of the first derivative of the Gaussian in the Y direction.
|
private float[] |
GzData |
Storage location of the first derivative of the Gaussian in the Z direction.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
private float |
kValue |
In the paper "Generalized gradient vector flow external forces for active contours" by Chenyang Xu and Jerry
Prince values of 0.05, 0.15, and 0.2 were used for k.
|
private int |
length |
DOCUMENT ME!
|
private float[] |
outputBuffer |
|
private boolean |
propagationFlag |
If true propagate the contour to an adjacent slice.
|
private VOI |
resultVOI |
The resultant polygon and the evolution has completed.
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
private float |
smoothness |
DOCUMENT ME!
|
private VOI |
srcVOI |
The initial VOI to initialize the evolution process.
|
private int |
stSlice |
DOCUMENT ME!
|
private float[] |
uVal |
DOCUMENT ME!
|
private float[] |
vVal |
DOCUMENT ME!
|
private float[] |
wVal |
DOCUMENT ME!
|
protected int |
xDim |
DOCUMENT ME!
|
protected int |
yDim |
DOCUMENT ME!
|
protected int |
zDim |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmAGVF(ModelImage resultImage,
ModelImage srcImg,
float[] sigmas,
int gvfIterations,
int boundaryIterations,
float k,
float smoothness,
VOI srcVOI,
boolean do25D) |
Creates a new AlgorithmAGVF object.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calc25D() |
Prepares the data and runs the algorithm for a 3D image.
|
private void |
calc2D() |
Prepares the data and runs the algorithm for a 2D image.
|
private void |
calc3D() |
Prepares the data and runs the algorithm for a 3D image.
|
private void |
calcGVF(int sliceNum,
float[] imgBuffer) |
Calculate GVF from image buffer.
|
private void |
calcGVF3D(float[] imgBuffer) |
Calculate GVF from 3D image buffer.
|
protected java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector2f> |
cleanLine(float[] xPts,
float[] yPts) |
Removes points (vectors) that form sharp angles (i.e. smoothes boudnary) Also adds points separated by some
distance and removes adjacent points
|
private java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> |
cleanLine(float[] xPts,
float[] yPts,
float[] zPts) |
|
protected void |
cleanup() |
Sets structures to null.
|
private double |
distance(float x1,
float x2,
float y1,
float y2) |
Calculates the euclidian distance between two points.
|
void |
finalize() |
Prepares this class for destruction.
|
protected static float |
getBilinear(int i,
float dx,
float dy,
int[] iExtents,
float[] image) |
Performs bilinear interpolation of image data.
|
VOI |
getResultVOI() |
Returns the resultant VOI.
|
private void |
makeKernels2D() |
Makes derivative kernels to be used in the calculation of the gradient magnitude.
|
private void |
makeKernels3D() |
Makes 3D derivative kernels to be used in the calculation of the gradient magnitude.
|
void |
runAlgorithm() |
starts the snake algorithm.
|
protected void |
runSnake(float[] xPoints,
float[] yPoints,
float[] zPoints,
float[] u,
float[] v,
VOIBase resultContour) |
Actual function that evolves the boundary.
|
protected void |
runSnake(float[] xPoints,
float[] yPoints,
float[] u,
float[] v,
java.awt.Polygon resultGon) |
Actual function that evolves the boundary.
|
private void |
setPoints(float[] xPoints,
float[] yPoints,
float[] zPoints,
VOIBase contour) |
Takes the polygon and forms two special arrarys for use in runSnake.
|
private void |
setPoints(float[] xPoints,
float[] yPoints,
java.awt.Polygon gon) |
Takes the polygon and forms two special arrarys for use in runSnake.
|
void |
setPropagation(boolean flag) |
Sets the propagation flag.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
extents
protected int[] extents
DOCUMENT ME!
-
xDim
protected int xDim
DOCUMENT ME!
-
yDim
protected int yDim
DOCUMENT ME!
-
zDim
protected int zDim
DOCUMENT ME!
-
fx
private float[] fx
DOCUMENT ME!
-
fy
private float[] fy
DOCUMENT ME!
-
fz
private float[] fz
DOCUMENT ME!
-
gVal
private float[] gVal
DOCUMENT ME!
-
length
private int length
DOCUMENT ME!
-
smoothness
private float smoothness
DOCUMENT ME!
-
stSlice
private int stSlice
DOCUMENT ME!
-
uVal
private float[] uVal
DOCUMENT ME!
-
vVal
private float[] vVal
DOCUMENT ME!
-
wVal
private float[] wVal
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmAGVF
public AlgorithmAGVF(ModelImage resultImage,
ModelImage srcImg,
float[] sigmas,
int gvfIterations,
int boundaryIterations,
float k,
float smoothness,
VOI srcVOI,
boolean do25D)
Creates a new AlgorithmAGVF object.
- Parameters:
resultImage - image of GVF field magnitudesrcImg - 2D or 3D source imagesigmas - describe the scale of the gaussian in each dimensiongvfIterations - iterations in calculating GVF fieldboundaryIterations - iterations in calculating boundaryk - GVF constantsmoothness - DOCUMENT ME!srcVOI - VOI that is to be evolveddo25D - only applies to 3D, if true do slice by slice
-
Method Detail
-
getBilinear
protected static float getBilinear(int i,
float dx,
float dy,
int[] iExtents,
float[] image)
Performs bilinear interpolation of image data.
- Parameters:
i - index into imagedx - change in x from integerdy - change in y from integeriExtents - dimensions of imageimage - image data- Returns:
- DOCUMENT ME!
-
cleanLine
protected java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector2f> cleanLine(float[] xPts,
float[] yPts)
Removes points (vectors) that form sharp angles (i.e. smoothes boudnary) Also adds points separated by some
distance and removes adjacent points
- Parameters:
xPts - x coords of points that define a contouryPts - y coords of points that define a contour- Returns:
- DOCUMENT ME!
-
cleanup
protected void cleanup()
Sets structures to null.
-
runSnake
protected void runSnake(float[] xPoints,
float[] yPoints,
float[] u,
float[] v,
java.awt.Polygon resultGon)
Actual function that evolves the boundary.
- Parameters:
xPoints - x coordinates that describe the contouryPoints - y coordinates that describe the contouru - x component of the GVFv - y component of the GVFresultGon - resultant polygon
-
runSnake
protected void runSnake(float[] xPoints,
float[] yPoints,
float[] zPoints,
float[] u,
float[] v,
VOIBase resultContour)
Actual function that evolves the boundary.
- Parameters:
xPoints - x coordinates that describe the contouryPoints - y coordinates that describe the contouru - x component of the GVFv - y component of the GVFresultGon - resultant polygon
-
distance
private double distance(float x1,
float x2,
float y1,
float y2)
Calculates the euclidian distance between two points.
- Parameters:
x1 - first x coord.x2 - seconde x coord.y1 - first y1 coord.y2 - seconde y2 coord.- Returns:
- DOCUMENT ME!
-
setPoints
private void setPoints(float[] xPoints,
float[] yPoints,
java.awt.Polygon gon)
Takes the polygon and forms two special arrarys for use in runSnake.
- Parameters:
xPoints - storage location of array of x coord. pointsyPoints - storage location array of y coord. pointsgon - initial polygon
-
setPoints
private void setPoints(float[] xPoints,
float[] yPoints,
float[] zPoints,
VOIBase contour)
Takes the polygon and forms two special arrarys for use in runSnake.
- Parameters:
xPoints - storage location of array of x coord. pointsyPoints - storage location array of y coord. pointsgon - initial polygon
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DynamicCompressedRowJacobianFinalizer.html���������������0000775�4231163�4231163�00000020137�14537076051�031737� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DynamicCompressedRowJacobianFinalizer (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.DynamicCompressedRowJacobianFinalizer
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmAHE.html����������������������������������������������������0000775�4231163�4231163�00000146374�14537076043�022371� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAHE (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
bChannel |
If true filter the blue channel.
|
private float |
bufMax |
DOCUMENT ME!
|
private float |
bufMin |
DOCUMENT ME!
|
private boolean |
clamped |
Perform a "contrast limited" AHE.
|
private float |
clipLevel |
DOCUMENT ME!
|
private boolean |
gChannel |
If true filter the green channel.
|
private int |
hDivisions |
number of divisions to make in the height.
|
private double |
imageMax |
|
private float |
imageOffset |
DOCUMENT ME!
|
private boolean |
isColorImage |
Indicates the image being messed with is a color image.
|
private boolean |
rChannel |
If true filter the red channel.
|
private double |
scaleMax |
|
private float[] |
sortBuffer |
DOCUMENT ME!
|
private boolean |
useCIELab |
|
private int |
valuesPerPixel |
Number of elements in a pixel.
|
private int |
wDivisions |
number of divisions to make in the width.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmAHE(ModelImage srcImg,
int hd,
int wd,
boolean useCIELab) |
Constructor for images in which changes are returned to the source image.
|
AlgorithmAHE(ModelImage destImg,
ModelImage srcImg,
int hd,
int wd,
boolean useCIELab) |
Constructor for images in which changes are placed in a predetermined destination image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace2D() |
Histogram equalization on the source image.
|
private void |
calcInPlace3D() |
Histogram Equalization on the source image and replaces the source image with the processed image.
|
private void |
calcStoreInDest2D() |
This function produces a new image that has had itself histogram equalized. places filtered image in the
destination image.
|
private void |
calcStoreInDest3D() |
This function produces a new volume image that has been histogram equalized.
|
private void |
clip(int binNumber,
int[] histogram,
int clipLimit) |
after generating a histogram, clip will reduce the number of pixels attributed to that brightness
level.
|
private void |
convertCIELabtoRGB(float[] L,
float[] a,
float[] b,
float[] buffer) |
|
private void |
convertRGBtoCIELab(float[] buffer,
float[] L,
float[] a,
float[] b) |
|
private void |
copyBuffers(float[] dest,
float[] src) |
Copies all values from the srcbuffer to the destination buffer. the format is intended to envision the
organisation of dest[i] := src[i] float dest destination array float src source array
|
void |
finalize() |
Prepares this class for destruction.
|
protected void |
findImageOffset(int type) |
gets the bottom end of the image. for any image but color images, the bottom end is defined as the buffer minimum
for all images except color images; there the offset is defined to be zero
|
protected int |
findTotalBins(int type,
int ideal) |
finds the total number of bins based on the type of image.
|
private void |
monoSliceFilter(float[] srcBuffer,
float[] destBuffer) |
Allows a single monochrome image slice to be filtered.
|
private void |
printhisto(int[] histo) |
a debug tool.
|
void |
runAlgorithm() |
starts the algorithm.
|
void |
setClipLevel(int sectorPercentage) |
the Clip Level is a percentage of the maximum number of pixels in any particular brightness level.
|
void |
setContrastLimited(boolean beClamped) |
Redistribute from brightnesses with at a least a specified percentage of the brightness with the maximum number
of pixels.
|
void |
setRGBChannelFilter(boolean r,
boolean g,
boolean b) |
RGB images are histogram equalized by 'channel.'
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
bufMax
private float bufMax
DOCUMENT ME!
-
bufMin
private float bufMin
DOCUMENT ME!
-
clipLevel
private float clipLevel
DOCUMENT ME!
-
valuesPerPixel
private int valuesPerPixel
Number of elements in a pixel. Monochrome = 1, Color = 4. (a, R, G, B)
-
imageMax
private double imageMax
-
scaleMax
private double scaleMax
-
Constructor Detail
-
AlgorithmAHE
public AlgorithmAHE(ModelImage srcImg,
int hd,
int wd,
boolean useCIELab)
Constructor for images in which changes are returned to the source image.
- Parameters:
srcImg - source image modelhd - number of divisions to make of the image heightwd - number of divisions to make of the image widthuseCIELab - If color, only equalize on L in CIELab space
-
AlgorithmAHE
public AlgorithmAHE(ModelImage destImg,
ModelImage srcImg,
int hd,
int wd,
boolean useCIELab)
Constructor for images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelhd - number of divisions to make of the image heightwd - number of divisions to make of the image widthuseCIELab - If color, only equalize on L in CIELab space
-
Method Detail
-
setClipLevel
public void setClipLevel(int sectorPercentage)
the Clip Level is a percentage of the maximum number of pixels in any particular brightness level. This method
allows one to set that percentage. As the regional histograms are tabulated, the brightness with the maximum
number of pixels attributed to it is remembered. The algorithm will then evenly redistibute the total number of
pixels from any brightness which has a greater number than the max times this fraction to all other (less
populous) brightnesses.
- Parameters:
sectorPercentage - DOCUMENT ME!
-
setRGBChannelFilter
public void setRGBChannelFilter(boolean r,
boolean g,
boolean b)
RGB images are histogram equalized by 'channel.' That is, each color, red, blue and green, is run independantly
of the other two colors. This permits selectively filtering any combination of the three channels instead of
simply trying to handle all three at once. True filters that channel.
- Parameters:
r - DOCUMENT ME!g - DOCUMENT ME!b - DOCUMENT ME!
-
findImageOffset
protected final void findImageOffset(int type)
gets the bottom end of the image. for any image but color images, the bottom end is defined as the buffer minimum
for all images except color images; there the offset is defined to be zero
- Parameters:
type - DOCUMENT ME!
-
findTotalBins
protected final int findTotalBins(int type,
int ideal)
finds the total number of bins based on the type of image.
- Parameters:
type - DOCUMENT ME!ideal - DOCUMENT ME!- Returns:
- the total number of bins.
-
copyBuffers
private void copyBuffers(float[] dest,
float[] src)
Copies all values from the srcbuffer to the destination buffer. the format is intended to envision the
organisation of dest[i] := src[i] float dest destination array float src source array
- Parameters:
dest - DOCUMENT ME!src - DOCUMENT ME!
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Tform.html����������������������������������������������������0000775�4231163�4231163�00000022106�14537076056�022135� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Tform (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Tform
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Tform() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.MeshHalfEdgeIterator.html���������������������������������������0000775�4231163�4231163�00000032706�14537076056�024645� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.MeshHalfEdgeIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.MeshHalfEdgeIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Ownership.html�������������������������������������������0000775�4231163�4231163�00000034155�14537076052�024327� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Ownership (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
Ownership() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
Ownership
private Ownership()
-
Method Detail
-
valueOf
public static CeresSolver.Ownership valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BinaryCostFunction3.html�����������������������������0000775�4231163�4231163�00000037255�14537076053�027064� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BinaryCostFunction3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
i |
|
private java.util.Vector<java.lang.Double> |
jacobian1_ |
|
private java.util.Vector<java.lang.Double> |
jacobian2_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
BinaryCostFunction3(int num_residuals,
int parameter_block1_size,
int parameter_block2_size,
double[] jacobian1,
double[] jacobian2) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
BinaryCostFunction3
public BinaryCostFunction3(int num_residuals,
int parameter_block1_size,
int parameter_block2_size,
double[] jacobian1,
double[] jacobian2)
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEdgeDetection3D.html����������������������������������������0000775�4231163�4231163�00000101314�14537076045�024651� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEdgeDetection3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmEdgeDetection3D() |
AlgorithmEdgeDetection3D - default constructor.
|
AlgorithmEdgeDetection3D(ModelImage destImg,
ModelImage srcImg,
double dx,
double dy,
double dz,
int nx,
int ny,
int nz,
double L,
double threshold,
boolean componentsRequired,
boolean anglesRequired,
boolean magnitudeRequired) |
AlgorithmEdgeDetection3D.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
threshold
double threshold
-
FX
private double[][][] FX
-
FY
private double[][][] FY
-
FZ
private double[][][] FZ
-
Constructor Detail
-
AlgorithmEdgeDetection3D
public AlgorithmEdgeDetection3D(ModelImage destImg,
ModelImage srcImg,
double dx,
double dy,
double dz,
int nx,
int ny,
int nz,
double L,
double threshold,
boolean componentsRequired,
boolean anglesRequired,
boolean magnitudeRequired)
AlgorithmEdgeDetection3D.
- Parameters:
destImg - destination imagesrcImg - source imagedx - x length of the prism over which the data is integrateddy - y length of the prism over which the data is integrateddz - z length of the prism over which the data is integratednx - mask x dimensionny - mask y dimensionnz - mask z dimensionL - Neighborhood size for the directional gradient averagingthreshold - (FMAX/largestFMAX) must be >= threshold to be made an edgecomponentsRequired - If true, keep FX, FY, and FZ arrays.anglesRequired - If true, keep thetaMAX and phiMAX arrays.magnitudeRequired - If true, keep FMAX array.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SchurJacobiPreconditioner.html���������������������������0000775�4231163�4231163�00000047477�14537076052�027465� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SchurJacobiPreconditioner (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.indexArrayComparator.html�������������������������������0000775�4231163�4231163�00000026444�14537076052�026573� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.indexArrayComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGrayScaleMorphology2D.html����������������������������������0000775�4231163�4231163�00000261352�14537076046�026111� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGrayScaleMorphology2D (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmGrayScaleMorphology2D
extends AlgorithmBase
Two-Dimensional mathematical morphology class applied to Gray scale images. Kernels of 3x3 (4 or 8 connected) and 5x5 (12 connected) are available
or user defined kernels can be supplied.
- Version:
- 1.0 March 15, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmGrayScaleMorphology2D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int kernelTypeErode,
float circleDiameterErode,
int method,
int iterOpen,
int iterE,
int pruningPix,
int edType,
boolean entireImage,
boolean _showFrame) |
Creates a new AlgorithmGrayScaleMorphology2D object.
|
AlgorithmGrayScaleMorphology2D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage) |
Creates a new AlgorithmMorphology2D object.
|
AlgorithmGrayScaleMorphology2D(ModelImage srcImg,
ModelImage maskImage,
int kernelType,
float circleDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage,
boolean _showFrame) |
Creates a new AlgorithmGrayScaleMorphology2D object.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
dilate(boolean returnFlag,
int iters) |
Dilates an image using the indicated kernel and the indicated number of
executions.
|
private void |
erode(boolean returnFlag,
int iters) |
Erodes an image using the indicated kernel and the indicated number of
executions.
|
void |
finalize() |
Prepares this class for destruction.
|
private int |
floodFill(short[] idBuffer,
int stIndex,
short floodValue,
short objValue) |
2D flood fill that forms a short mask.
|
static java.awt.Polygon |
genContour(int xDimE,
int yDimE,
java.awt.Point startPt,
java.util.BitSet maskA) |
Static method that generates a boundary of a general object.
|
static java.awt.Polygon |
genContour(short[] image,
int xDim,
int yDim,
java.awt.Point startPt,
short objectValue) |
Static method that generates a boundary of a general object.
|
static java.awt.Polygon |
genContour(ModelImage image,
int xDim,
int yDim,
java.awt.Point startPt) |
Static method that generates a boundary of a binary object.
|
static java.awt.Polygon |
genContour(java.util.BitSet image,
int xDim,
int yDim,
java.awt.Point startPt) |
Static method that generates a boundary of a binary object.
|
private void |
geodesicDilation(boolean returnFlag,
int geodesicSize) |
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
geodesicErosion(boolean returnFlag,
int geodesicSize) |
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private boolean |
isEndpoint(int pix,
short[] tmpBuffer) |
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
|
private boolean |
isNeighbor(int index,
int pixNeighbor) |
Check the neighbor pix.
|
private boolean |
isSinglePoint(int index,
short[] tmpBuffer) |
Check if the given pix is a single point or not.
|
private void |
makeCircularKernel(float circDiameter) |
Generates a cicular kernel of a specific diameter.
|
private void |
makeKernel(int kernelType) |
Generates a kernel of the indicated type.
|
private boolean |
onePixel(short[] buffer,
int index,
int xDim) |
Used by ultimate erode to simplify code a little.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setAlgorithm(int method) |
Sets the algorithm type (i.e. erode, dilate)
|
void |
setImage(ModelImage img) |
Sets the algorithm to new image of boolean type.
|
void |
setIterations(int itersD,
int itersE) |
Sets number of iterations for closing or opening.
|
void |
setKernel(java.util.BitSet kernel,
int dim) |
Sets user defined square kernels.
|
void |
setMinMax(int _min,
int _max) |
Sets bounds of object size used to delete objects.
|
void |
setPixDistance(float dist) |
Used in the ultimate erode function to remove all eroded points less than the distance specified in pixel units.
|
void |
setShowFrame(boolean showFrame) |
DOCUMENT ME!
|
void |
showKernel() |
display kernel as 1 or 0 in the debug window.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
edgingType
private int edgingType
Edge type.
-
entireImage
private boolean entireImage
if true, indicates that the VOIs should NOT be used and that entire image should be processed.
-
iterationsE
private int iterationsE
Erosion iteration times.
-
kDim
private int kDim
Kernel dimension.
-
pixDist
private float pixDist
-
maskImage
private ModelImage maskImage
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
-
Constructor Detail
-
AlgorithmGrayScaleMorphology2D
public AlgorithmGrayScaleMorphology2D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage)
Creates a new AlgorithmMorphology2D object.
- Parameters:
srcImg - source image modelkernelType - kernel size (i.e. connectedness)circleDiameter - only valid if kernelType == SIZED_CIRCLE and represents the width of a circle in the
resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)iterD - number of times to dilateiterE - number of times to erodepruningPix - the number of pixels to pruneedType - the type of edging to perform (inner or outer)entireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed
-
AlgorithmGrayScaleMorphology2D
public AlgorithmGrayScaleMorphology2D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int kernelTypeErode,
float circleDiameterErode,
int method,
int iterOpen,
int iterE,
int pruningPix,
int edType,
boolean entireImage,
boolean _showFrame)
Creates a new AlgorithmGrayScaleMorphology2D object.
- Parameters:
srcImg - source image modelkernelType - dilation kernel size (i.e. connectedness)circleDiameter - dilation only valid if kernelType == SIZED_CIRCLE and represents the width of a
circle in the resolution of the imagekernelTypeErode - kernel size (i.e. connectedness) of erosioncircleDiameterErode - Erosion only valid if kernelType == SIZED_CIRCLE and represents the width of a
circle in the resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)iterOpen - number of times to dilateiterE - number of times to erodepruningPix - the number of pixels to pruneedType - the type of edging to perform (inner or outer)entireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed_showFrame - if true, indicates that show image frame after each algorithm be processed
-
AlgorithmGrayScaleMorphology2D
public AlgorithmGrayScaleMorphology2D(ModelImage srcImg,
ModelImage maskImage,
int kernelType,
float circleDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage,
boolean _showFrame)
Creates a new AlgorithmGrayScaleMorphology2D object.
- Parameters:
srcImg - source image modelkernelType - dilation kernel size (i.e. connectedness)circleDiameter - dilation only valid if kernelType == SIZED_CIRCLE and represents the width of a
circle in the resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)geodesicSize - iterD - number of times to dilateiterE - number of times to erodeentireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed_showFrame - if true, indicates that show image frame after each algorithm be processed
-
Method Detail
-
genContour
public static final java.awt.Polygon genContour(java.util.BitSet image,
int xDim,
int yDim,
java.awt.Point startPt)
Static method that generates a boundary of a binary object. (aka. turtle algorithm: if 1 turn left, step if 0
turn right, step)
- Parameters:
image - input image where binary object is located.xDim - the x dimension of the imageyDim - the y dimension of the imagestartPt - starting point- Returns:
- returns boundary of the object as Polygon
-
genContour
public static final java.awt.Polygon genContour(ModelImage image,
int xDim,
int yDim,
java.awt.Point startPt)
Static method that generates a boundary of a binary object. (aka. turtle algorithm: if 1 turn left, step if 0
turn right, step)
- Parameters:
image - input image (Boolean) where binary object is located.xDim - the x dimension of the imageyDim - the y dimension of the imagestartPt - starting point- Returns:
- returns boundary of the object as Polygon
-
genContour
public static final java.awt.Polygon genContour(int xDimE,
int yDimE,
java.awt.Point startPt,
java.util.BitSet maskA)
Static method that generates a boundary of a general object. (aka. turtle algorithm: if 1 turn left, step if 0
turn right, step)
- Parameters:
xDimE - the x dimension of the imageyDimE - the y dimension of the imagestartPt - starting pointmaskA - mask of the object- Returns:
- returns boundary of the object as Polygon
-
genContour
public static final java.awt.Polygon genContour(short[] image,
int xDim,
int yDim,
java.awt.Point startPt,
short objectValue)
Static method that generates a boundary of a general object. (aka. turtle algorithm: if 1 turn left, step if 0
turn right, step)
- Parameters:
image - input image where <> object is located.xDim - the x dimension of the imageyDim - the y dimension of the imagestartPt - starting pointobjectValue - value of the object- Returns:
- returns boundary of the object as Polygon
-
dilate
private void dilate(boolean returnFlag,
int iters)
Dilates an image using the indicated kernel and the indicated number of
executions. The grayscale dilation is the maximum value over the reflected kernel region.
For symmetric kernels the reflected kernel is the same as the kernel.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)iters - number of dilations
-
geodesicDilation
private void geodesicDilation(boolean returnFlag,
int geodesicSize)
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
geodesicErosion
private void geodesicErosion(boolean returnFlag,
int geodesicSize)
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
erode
private void erode(boolean returnFlag,
int iters)
Erodes an image using the indicated kernel and the indicated number of
executions. The grayscale erosion is the minimum value over the kernel region.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. open)iters - number of erosion iterations.
-
floodFill
private int floodFill(short[] idBuffer,
int stIndex,
short floodValue,
short objValue)
2D flood fill that forms a short mask.
- Parameters:
idBuffer - buffer used to hold flood valuestIndex - the starting index of the seed pointfloodValue - the value to flood the region withobjValue - object ID value that idenditifies the flood region.- Returns:
- DOCUMENT ME!
-
isEndpoint
private boolean isEndpoint(int pix,
short[] tmpBuffer)
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
- Parameters:
pix - the index of a non-zero pixel in tmpBuffertmpBuffer - the image- Returns:
- DOCUMENT ME!
-
isSinglePoint
private boolean isSinglePoint(int index,
short[] tmpBuffer)
Check if the given pix is a single point or not.
- Parameters:
index - indextmpBuffer - short[]- Returns:
- boolean
-
onePixel
private boolean onePixel(short[] buffer,
int index,
int xDim)
Used by ultimate erode to simplify code a little.
- Parameters:
buffer - reference to the mask dataindex - pointer into the arrayxDim - the width of image- Returns:
- DOCUMENT ME!
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.GradientProblemSolver.html�������������������������������0000775�4231163�4231163�00000024000�14537076051�026605� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.GradientProblemSolver (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolver
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping2.stpfun.html�������������������������������0000775�4231163�4231163�00000046426�14537076056�026654� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping2.stpfun (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) boolean[] |
cmplx |
|
(package private) int[] |
left |
|
(package private) int |
n |
|
(package private) int |
nb |
|
(package private) double[][] |
nmlen |
|
(package private) double[][] |
qdat |
|
(package private) int[] |
right |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
stpfun(double[] y0,
int n,
int nb,
double[] beta,
double[][] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
stpfun
public stpfun(double[] y0,
int n,
int nb,
double[] beta,
double[][] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!covarMat - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSphereGeneration.IntModelMean.html��������������������������0000775�4231163�4231163�00000027635�14537076050�027545� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSphereGeneration.IntModelMean (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMean
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
density |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
IntModelMean(double density) |
Creates a new IntModelMean object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Legend.html����������������������������������������������0000775�4231163�4231163�00000110451�14537076054�023577� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Legend (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Legend() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
ContourPlot.Legend |
addLineLabel(double thickness,
int color,
int strokePattern,
java.lang.String labeltxt,
int pickColor) |
Adds a label for a line to this legend.
|
ContourPlot.Legend |
addLineLabel(double thickness,
int color,
java.lang.String labeltxt) |
Adds a label for a line to this legend.
|
ContourPlot.Legend |
addLineLabel(double thickness,
int color,
java.lang.String labeltxt,
int pickColor) |
Adds a label for a line to this legend.
|
boolean |
intersects(java.awt.geom.Rectangle2D rect) |
Always return false.
|
boolean |
isDirty() |
if true, indicates that a call to #updateGL(boolean) is necessary to sync
this objects GL resources to its current state.
|
boolean |
isEnabled() |
Whether this renderer is enabled or not.
|
void |
renderFallback(java.awt.Graphics2D g,
java.awt.Graphics2D p,
int w,
int h) |
|
void |
renderPDF(org.apache.pdfbox.pdmodel.PDDocument doc,
org.apache.pdfbox.pdmodel.PDPage page,
int x,
int y,
int w,
int h) |
Renders this PDFRenderers contents, that is creating
pdf elements and appending them to the specified page
within the corresponding document.
|
void |
setColorScheme(ContourPlot.ColorScheme colorScheme) |
|
ContourPlot.Legend |
setDirty() |
Sets the isDirty() state of this legend to true. |
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
renderPDF
public void renderPDF(org.apache.pdfbox.pdmodel.PDDocument doc,
org.apache.pdfbox.pdmodel.PDPage page,
int x,
int y,
int w,
int h)
Renders this PDFRenderers contents, that is creating
pdf elements and appending them to the specified page
within the corresponding document.
- Specified by:
renderPDF in interface ContourPlot.PDFRenderer- Parameters:
doc - the PDF document holding the pagepage - page in pdf doc to which elements are to be appendedx - x coordinate of the current viewporty - y coordinate of the current viewportw - width of the current viewporth - height of the current viewport
-
isEnabled
public boolean isEnabled()
Whether this renderer is enabled or not. By default a renderer is enabled and will
render upon #render(int, int, int, int) or #renderSVG(org.w3c.dom.Document, org.w3c.dom.Element, int, int).
When disabled those methods return right away and will not render anything.
- Specified by:
isEnabled in interface ContourPlot.Renderer- Returns:
- true when active
-
addLineLabel
public ContourPlot.Legend addLineLabel(double thickness,
int color,
int strokePattern,
java.lang.String labeltxt,
int pickColor)
Adds a label for a line to this legend.
- Parameters:
thickness - of the line to appear in front of the label textcolor - integer packed ARGB color value of the glyphstrokePattern - lines stroke pattern (see Lines#setStrokePattern(int))labeltxt - text of the labelpickColor - picking color (see FBOCanvas)- Returns:
- this for chaining
-
addLineLabel
public ContourPlot.Legend addLineLabel(double thickness,
int color,
java.lang.String labeltxt,
int pickColor)
Adds a label for a line to this legend.
- Parameters:
thickness - of the line to appear in front of the label textcolor - integer packed ARGB color value of the glyphlabeltxt - text of the labelpickColor - picking color (see FBOCanvas)- Returns:
- this for chaining
-
addLineLabel
public ContourPlot.Legend addLineLabel(double thickness,
int color,
java.lang.String labeltxt)
Adds a label for a line to this legend.
- Parameters:
thickness - of the line to appear in front of the label textcolor - integer packed ARGB color value of the glyphlabeltxt - text of the label- Returns:
- this for chaining
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHillClimbingWatershed.indexValueComparator.html�������������0000775�4231163�4231163�00000030015�14537076046�032316� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHillClimbingWatershed.indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTransformBSpline.html���������������������������������������0000775�4231163�4231163�00000105517�14537076050�025214� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTransformBSpline (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmTransformBSpline
extends AlgorithmBase
TransformBSpline algorithm This algorithm takes a source image and uses information read in from a .nlt file to
perform a nonlinear B-Spline transformation on the image. The dimensions of the transformed image, the degree of the
B-Spline(ranging from 1 to 4), the number of control points, and the values of the control points are obtained from
the .nlt file. For the .nlt file to be usable, the dimensions of the source image used in the .nlt file must be the
same as the dimensions of the source image used in the algorithm.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmTransformBSpline(ModelImage kImageSource,
float[] afResolutions,
int[] destExtents,
int iBSplineDegree,
int iBSplineNumControlPoints,
float[][] controlMat) |
AlgorithmTransformBSpline - Constructor.
|
AlgorithmTransformBSpline(ModelImage kImageSource,
float[] afResolutions,
int iBSplineDegree,
int iBSplineNumControlPoints,
float[][][] controlMat25D) |
AlgorithmTransformBSpline - Constructor.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
have25D
private boolean have25D
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmTransformBSpline
public AlgorithmTransformBSpline(ModelImage kImageSource,
float[] afResolutions,
int iBSplineDegree,
int iBSplineNumControlPoints,
float[][][] controlMat25D)
AlgorithmTransformBSpline - Constructor.
- Parameters:
kImageSource - image that the B-Spline transformation is applied toafResolutions - sample resolutions for output imageiBSplineDegree - degree of the B-Spline (same in all dimensions)iBSplineNumControlPoints - number of control points (same in all dimensions)controlMat25D - matrix containing the control point values The first index is the slice number
The second index is used to select the point with controlY varying the fastest
and controlX varying the slowest The second index is used to select the x or y
value
-
AlgorithmTransformBSpline
public AlgorithmTransformBSpline(ModelImage kImageSource,
float[] afResolutions,
int[] destExtents,
int iBSplineDegree,
int iBSplineNumControlPoints,
float[][] controlMat)
AlgorithmTransformBSpline - Constructor.
- Parameters:
kImageSource - image that the B-Spline transformation is applied toafResolutions - sample resolutions for output imagedestExtents - dimensions of the transformed imageiBSplineDegree - degree of the B-Spline (same in all dimensions)iBSplineNumControlPoints - number of control points (same in all dimensions)controlMat - matrix containing the control point values The first index is used to select
the point with controlZ varying the fastest and controlX varying the slowest
The second index is used to select the x, y, or z value
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitFullModel2.html�������������������������������������0000775�4231163�4231163�00000040110�14537076045�025112� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitFullModel2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
koff |
DOCUMENT ME!
|
(package private) double |
kon |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
FitFullModel2(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus,
double kon,
double koff) |
Creates a new FitFullModel2 object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
fitToLaplace(double realIn,
double imagIn,
double[] realOut,
double[] imagOut) |
DOCUMENT ME!
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision
complex variable zr + j*zi.
|
private void |
zsqrt(double ar,
double ai,
double[] br,
double[] bi) |
complex square root b = csqrt(a).
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
koff
double koff
DOCUMENT ME!
-
kon
double kon
DOCUMENT ME!
-
Constructor Detail
-
FitFullModel2
public FitFullModel2(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus,
double kon,
double koff)
Creates a new FitFullModel2 object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!kon - DOCUMENT ME!koff - DOCUMENT ME!
-
Method Detail
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision
complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zsqrt
private void zsqrt(double ar,
double ai,
double[] br,
double[] bi)
complex square root b = csqrt(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.EvaluatorTestOptions.html����������������������������0000775�4231163�4231163�00000025361�14537076053�027367� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.EvaluatorTestOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTestOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBRISK.BriskShortPair.html�����������������������������������0000775�4231163�4231163�00000030070�14537076044�025535� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBRISK.BriskShortPair (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskShortPair
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
i |
|
private int |
j |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
BriskShortPair
public BriskShortPair()
-
Method Detail
-
setI
public void setI(int i)
-
setJ
public void setJ(int j)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LineSearchSummary.html�����������������������������������0000775�4231163�4231163�00000032361�14537076052�025741� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearchSummary (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
success
public boolean success
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMRIShadingCorrection.html�����������������������������������0000775�4231163�4231163�00000067320�14537076047�025746� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMRIShadingCorrection (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
iters |
Number of iterations.
|
private float |
norm |
Normalization constant used to normalize the point force.
|
private float |
scaleX |
x and y standard deviations of Gaussians used to convolve normalized forces.
|
private float |
scaleY |
DOCUMENT ME!
|
private float |
thresholdLevel |
DOCUMENT ME!
|
private boolean |
thresholdSelected |
If true, don't use periphery pixels below threshold or pixels below threshold connected to periphery pixels below
threshold thru a 4 neighbor chain of below threshold pixels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMRIShadingCorrection(ModelImage srcImage,
float norm,
float scaleX,
float scaleY,
int iters,
boolean thresholdSelected,
float thresholdLevel) |
Creates a new AlgorithmMRIShadingCorrection object.
|
AlgorithmMRIShadingCorrection(ModelImage resultImage,
ModelImage srcImage,
float norm,
float scaleX,
float scaleY,
int iters,
boolean thresholdSelected,
float thresholdLevel) |
Creates a new AlgorithmMRIShadingCorrection object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
iters
private int iters
Number of iterations.
-
scaleY
private float scaleY
DOCUMENT ME!
-
thresholdSelected
private boolean thresholdSelected
If true, don't use periphery pixels below threshold or pixels below threshold connected to periphery pixels below
threshold thru a 4 neighbor chain of below threshold pixels.
-
Constructor Detail
-
AlgorithmMRIShadingCorrection
public AlgorithmMRIShadingCorrection(ModelImage srcImage,
float norm,
float scaleX,
float scaleY,
int iters,
boolean thresholdSelected,
float thresholdLevel)
Creates a new AlgorithmMRIShadingCorrection object.
- Parameters:
srcImage - original imagenorm - DOCUMENT ME!scaleX - DOCUMENT ME!scaleY - DOCUMENT ME!iters - DOCUMENT ME!thresholdSelected - DOCUMENT ME!thresholdLevel - DOCUMENT ME!
-
AlgorithmMRIShadingCorrection
public AlgorithmMRIShadingCorrection(ModelImage resultImage,
ModelImage srcImage,
float norm,
float scaleX,
float scaleY,
int iters,
boolean thresholdSelected,
float thresholdLevel)
Creates a new AlgorithmMRIShadingCorrection object.
- Parameters:
resultImage - shading corrected imagesrcImage - original imagenorm - DOCUMENT ME!scaleX - DOCUMENT ME!scaleY - DOCUMENT ME!iters - DOCUMENT ME!thresholdSelected - DOCUMENT ME!thresholdLevel - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.html�����������������������������������������������������0000775�4231163�4231163�00000262540�14537076053�022410� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot (MIPAV API Documentation)
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
static interface |
ContourPlot.AdaptableView |
|
class |
ContourPlot.BarycentricGradientPaint |
The BarycentricGradientPaint class provides a way to fill a Shape
with a triangular color gradient.
|
class |
ContourPlot.BarycentricGradientPaintContext |
|
class |
ContourPlot.BlankCanvasFallback |
Fallback implementation for BlankCanvas for systems that do not support OpenGL 3
through org.lwjgl.opengl.awt.AWTGLCanvas (e.g. macOS).
|
static class |
ContourPlot.BufferedImageFactory |
Class providing convenience methods for converting Images to BufferedImages.
|
static class |
ContourPlot.CharacterAtlas |
The CharacterAtlas class is a texture atlas for looking up character textures.
|
static interface |
ContourPlot.ColorMap |
|
static class |
ContourPlot.ColorOperations |
The ColorOperations class contains methods for manipulating
32bit ARGB color values.
|
class |
ContourPlot.ColorScheme |
The ColorScheme is responsible for storing and providing color information,
which other components can use.
|
class |
ContourPlot.CompleteRenderer |
|
static interface |
ContourPlot.CoordinateViewListener |
|
class |
ContourPlot.CoordSysPanning |
The CoordSysPanning class implements a MouseListener
and MouseMotionListener that realize panning functionality
for the coordinate view of the ContourPlot.CoordSysRenderer. |
class |
ContourPlot.CoordSysRenderer |
|
class |
ContourPlot.CoordSysScrollZoom |
The CoordSysScrollZoom class implements a MouseWheelListener
that realize zooming functionality for the coordinate view of the ContourPlot.CoordSysRenderer. |
static class |
ContourPlot.DefaultColorMap |
|
static class |
ContourPlot.DefaultColorScheme |
|
static class |
ContourPlot.ExtendedWilkinson |
Implementation of the extended Wilkinson algorithm for tick label positioning.
|
static class |
ContourPlot.FontProvider |
|
class |
ContourPlot.GenericKey |
The GenericKey class can be used as key in HashMaps when
multiple objects should be combined to a single key.
|
class |
ContourPlot.GenericRenderer<T extends ContourPlot.Renderable> |
|
static interface |
ContourPlot.Glyph |
The Glyph interface has to be implemented by a class that realizes
a graphical representation of a 2D point (e.g. a cross or a circle).
|
static class |
ContourPlot.ImageSaver |
Class providing convenience methods for saving Images to file.
|
class |
ContourPlot.Img |
Image class with data stored in an int array.
|
static interface |
ContourPlot.ImgBase<P extends ContourPlot.PixelBase> |
Base interface for imagingkit's Img classes.
|
static interface |
ContourPlot.InteractionConstants |
|
static class |
ContourPlot.Iterators |
Class holding all of the Iterator and Spliterator classes
used in the ContourPlot.ImgBase interface. |
static interface |
ContourPlot.JPlotterCanvas |
|
static class |
ContourPlot.Legend |
|
class |
ContourPlot.Lines |
The Lines class is a collection of linear line segments.
|
class |
ContourPlot.LinesRenderer |
|
static class |
ContourPlot.Pair<T1,T2> |
Pair class.
|
class |
ContourPlot.ParallelForEachExecutor<T> |
CountedCompleter class for multithreaded execution of a Consumer on a
Spliterator.
|
static interface |
ContourPlot.PDFRenderer |
|
class |
ContourPlot.Pixel |
|
static interface |
ContourPlot.PixelBase |
|
static class |
ContourPlot.PixelConvertingSpliterator<P extends ContourPlot.PixelBase,T> |
|
static interface |
ContourPlot.PixelManipulator<P extends ContourPlot.PixelBase,T> |
The PixelManipulator interface defines an action to be performed on a pixel.
|
static class |
ContourPlot.PointDetails |
Class for storing all the details of a single point to be rendered.
|
class |
ContourPlot.PointeredPoint2D |
The PointeredPoint2D class is an implementation of the Point2D
class that uses two double arrays of size 1 to store its x and y coordinate.
|
class |
ContourPlot.Points |
The Points class is a collection of 2D points that are to be represented
using the same ContourPlot.Glyph (the graphical representation of a point). |
static interface |
ContourPlot.Renderable |
|
static interface |
ContourPlot.Renderer |
The Renderer interface defines methods to
initialize the renderer,
execute a rendering pass,
close the renderer.
|
class |
ContourPlot.SegmentDetails |
Specification of a line segment which comprises vertex locations, colors, picking color, and thicknesses.
|
static class |
ContourPlot.SignedDistanceCharacters |
The SignedDistanceCharacters class comprises signed distance fields
of a set of characters.
|
class |
ContourPlot.SimpleColorMap |
|
class |
ContourPlot.Text |
|
class |
ContourPlot.TextRenderer |
|
static interface |
ContourPlot.TickMarkGenerator |
|
class |
ContourPlot.TranslatedPoint2D |
The TranslatedPoint2D is an implementation of Point2D
that references another Point2D and has a certain fixed
translation from that point.
|
class |
ContourPlot.TriangleDetails |
Specification of a triangle which comprises vertex locations, colors and picking color.
|
class |
ContourPlot.Triangles |
The Triangles class is a collection of 2D triangles.
|
class |
ContourPlot.TrianglesRenderer |
|
static class |
ContourPlot.Utils |
Class containing utility methods
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private static ContourPlot |
cp |
Example from source ContourPlot.java draws contour plot of function surface correctly.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static int |
a(int color) |
|
static double |
a_normalized(int color) |
|
static int |
argb_bounded(int a,
int r,
int g,
int b) |
Packs 8bit ARGB color components into a single 32bit integer value.
|
static int |
argb_fast(int a,
int r,
int g,
int b) |
Packs 8bit ARGB color components into a single 32bit integer value.
|
static int |
argb_fromNormalized(double a,
double r,
double g,
double b) |
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value.
|
static int |
b(int color) |
|
static double |
b_normalized(int color) |
|
(package private) static int |
celltype(boolean v1,
boolean v2,
boolean v3) |
|
(package private) static int |
celltype(boolean v11,
boolean v21,
boolean v31,
boolean v12,
boolean v22,
boolean v32) |
|
static double |
clamp_0_1(double val) |
Clamps a value to the range [0.0, 1.0].
|
int |
clamp_0_255(int val) |
Clamps a value to the range [0,255].
|
static java.util.List<ContourPlot.TriangleDetails> |
computeContourBands(double[][] X,
double[][] Y,
double[][] Z,
double isoValue1,
double isoValue2,
int c1,
int c2) |
Computes the contour bands from the grid samples of a bivariate function z(x,y).
|
static java.util.List<ContourPlot.TriangleDetails> |
computeContourBands(double[][] uniformGridSamples,
double isoValue1,
double isoValue2,
int c1,
int c2) |
Computes the contour bands from the grid samples of a bivariate function z(x,y)
with implicit integer valued (x,y) = (i,j).
The resulting triangles are solutions to the equation { (x,y) | iso1 < z(x,y) < iso2 }
within the grid.
|
static java.util.List<ContourPlot.SegmentDetails> |
computeContourLines(double[][] X,
double[][] Y,
double[][] Z,
double isoValue,
int color) |
Computes the contour lines from the grid samples of a bivariate function z(x,y).
|
static java.util.List<ContourPlot.SegmentDetails> |
computeContourLines(double[][] uniformGridSamples,
double isoValue,
int color) |
Computes the contour lines from the grid samples of a bivariate function z(x,y)
with implicit integer valued (x,y) = (i,j).
The resulting line segments are solutions to the equation { (x,y) | z(x,y)=iso }
within the grid.
|
static int |
g(int color) |
|
static double |
g_normalized(int color) |
|
static int |
interpolateColor(int c1,
int c2,
double m) |
Linearly interpolates between the two specified colors.
c = c1*(1-m) + c2*m
|
(package private) static double |
interpolateToValue(double lower,
double upper,
double iso) |
Returns m of the equation: iso = lower*(1-m) + upper*m
which is: m = (iso-lower)/(upper-lower)
|
static int |
r(int color) |
|
static double |
r_normalized(int color) |
|
static void |
requireAreaInImageBounds(int xStart,
int yStart,
int width,
int height,
ContourPlot.ImgBase<?> img) |
Throws an IllegalArgumentException when the specified area
is not within the bounds of the specified image, or if the area
is not positive.
|
static int |
rgb_bounded(int r,
int g,
int b) |
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
|
static int |
rgb_fast(int r,
int g,
int b) |
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
|
static int |
rgb_fromNormalized(double r,
double g,
double b) |
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value with alpha=255 (opaque).
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
testContourPlot() |
|
void |
testIsolinesViz() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
ContourPlot
public ContourPlot()
-
Method Detail
-
argb_fast
public static final int argb_fast(int a,
int r,
int g,
int b)
Packs 8bit ARGB color components into a single 32bit integer value.
Components larger than 8bit are NOT truncated and will result in a
broken, malformed value.
- Parameters:
a - alphar - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.0
- See Also:
#argb(int, int, int, int),
argb_bounded(int, int, int, int),
rgb_bounded(int, int, int),
#rgb(int, int, int),
rgb_fast(int, int, int),
a(int),
r(int),
g(int),
b(int)
-
argb_bounded
public static final int argb_bounded(int a,
int r,
int g,
int b)
Packs 8bit ARGB color components into a single 32bit integer value.
Components are clamped to [0,255].
- Parameters:
a - alphar - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.0
- See Also:
#argb(int, int, int, int),
argb_fast(int, int, int, int),
rgb_bounded(int, int, int),
#rgb(int, int, int),
rgb_fast(int, int, int),
a(int),
r(int),
g(int),
b(int)
-
argb_fromNormalized
public static final int argb_fromNormalized(double a,
double r,
double g,
double b)
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value.
Component values less than 0 or greater than 1 are clamped to fit the range.
- Parameters:
a - alphar - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.2
- See Also:
rgb_fromNormalized(double, double, double),
#argb(int, int, int, int),
a_normalized(int),
r_normalized(int),
g_normalized(int),
b_normalized(int)
-
rgb_fast
public static final int rgb_fast(int r,
int g,
int b)
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
Components larger than 8bit are NOT truncated and will result in a
broken, malformed value.
- Parameters:
r - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.0
- See Also:
#argb(int, int, int, int),
argb_bounded(int, int, int, int),
argb_fast(int, int, int, int),
rgb_bounded(int, int, int),
#rgb(int, int, int),
a(int),
r(int),
g(int),
b(int)
-
rgb_bounded
public static final int rgb_bounded(int r,
int g,
int b)
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
Components are clamped to [0,255].
- Parameters:
r - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.0
- See Also:
#argb(int, int, int, int),
argb_bounded(int, int, int, int),
argb_fast(int, int, int, int),
#rgb(int, int, int),
rgb_fast(int, int, int),
a(int),
r(int),
g(int),
b(int)
-
rgb_fromNormalized
public static final int rgb_fromNormalized(double r,
double g,
double b)
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value with alpha=255 (opaque).
Component values less than 0 or greater than 1 clamped to fit the range.
- Parameters:
r - redg - greenb - blue- Returns:
- packed ARGB value
- Since:
- 1.2
- See Also:
argb_fromNormalized(double, double, double, double),
#rgb(int, int, int),
a_normalized(int),
r_normalized(int),
g_normalized(int),
b_normalized(int)
-
interpolateColor
public static int interpolateColor(int c1,
int c2,
double m)
Linearly interpolates between the two specified colors.
c = c1*(1-m) + c2*m
- Parameters:
c1 - integer packed ARGB color valuec2 - integer packed ARGB color value, e.g. 0xff00ff00 for opaque greenm - in [0,1]- Returns:
- interpolated color
-
computeContourLines
public static java.util.List<ContourPlot.SegmentDetails> computeContourLines(double[][] X,
double[][] Y,
double[][] Z,
double isoValue,
int color)
Computes the contour lines from the grid samples of a bivariate function z(x,y).
The resulting line segments are solutions to the equation { (x,y) | z(x,y)=iso }
within the grid.
About indices
For cartesian or rectilinear grids, x varies with the inner index of the 2D array, y with the outer index:
Xij=X[i][j]=X[?][j].
Yij=Y[i][j]=Y[i][?]
- Parameters:
X - x-coordinates of the grid points ( (x,y,z)ij = (Xij,Yij,Zij) )Y - y-coordinates of the grid points ( (x,y,z)ij = (Xij,Yij,Zij) )Z - z-coordinates of the grid points ( (x,y,z)ij = (Xij,Yij,Zij) )isoValue - the iso value for which the contour (iso) lines should be computedcolor - integer packed ARGB color value the returned line segments should have, e.g. 0xff00ff00 for opaque green.- Returns:
- list of line segments that form the contour lines. There is no particular order so subsequent segments are not
necessarily adjacent.
-
computeContourBands
public static java.util.List<ContourPlot.TriangleDetails> computeContourBands(double[][] X,
double[][] Y,
double[][] Z,
double isoValue1,
double isoValue2,
int c1,
int c2)
Computes the contour bands from the grid samples of a bivariate function z(x,y).
The resulting triangles are solutions to the equation { (x,y) | iso1 < z(x,y) < iso2 }
within the grid.
About indices
For cartesian or rectilinear grids, x varies with the inner index of the 2D array, y with the outer index:
Xij=X[i][j]=X[?][j].
Yij=Y[i][j]=Y[i][?]
- Parameters:
X - x-coordinates of the grid points ( (x,y,z)ij = (Xij,Yij,Zij) )Y - y-coordinates of the grid points ( (x,y,z)ij = (Xij,Yij,Zij) )Z - z-coordinates of the grid points ( (x,y,z)ij = (Xij,Yij,Zij) )isoValue1 - the lower bound for values of the iso bandsisoValue2 - the upper bound for values of the iso bandsc1 - color for the isoValue1c2 - color for the isoValue2, values in between iso1 and iso2 will have their color linearly interpolated- Returns:
- list of triangles that form the iso bands. The order of triangles does NOT imply any adjacency between them.
-
computeContourBands
public static java.util.List<ContourPlot.TriangleDetails> computeContourBands(double[][] uniformGridSamples,
double isoValue1,
double isoValue2,
int c1,
int c2)
Computes the contour bands from the grid samples of a bivariate function z(x,y)
with implicit integer valued (x,y) = (i,j).
The resulting triangles are solutions to the equation { (x,y) | iso1 < z(x,y) < iso2 }
within the grid.
The triangles are computed using the Meandering Triangles algorithm which divides each
square cell of the grid into 2 triangle cells first before computing isovalue intersections
on the triangle sides.
The more well known Marching Squares algorithm has significantly more cell cases to check,
which is why Meandering Triangles was preferred here.
- Parameters:
uniformGridSamples - z-coordinates of the grid points ( (x,y,z)ij = (i,j,Zij) )isoValue1 - the lower bound for values of the iso bandsisoValue2 - the upper bound for values of the iso bandsc1 - color for the isoValue1c2 - color for the isoValue2, values in between iso1 and iso2 will have their color linearly interpolated- Returns:
- list of triangles that form the iso bands. The order of triangles does NOT imply any adjacency between them.
-
celltype
static int celltype(boolean v11,
boolean v21,
boolean v31,
boolean v12,
boolean v22,
boolean v32)
-
interpolateToValue
static double interpolateToValue(double lower,
double upper,
double iso)
Returns m of the equation: iso = lower*(1-m) + upper*m
which is: m = (iso-lower)/(upper-lower)
- Parameters:
lower - valueupper - valueiso - value in between lower and upper- Returns:
- m
-
clamp_0_255
public final int clamp_0_255(int val)
Clamps a value to the range [0,255].
Returns 0 for values less than 0, 255 for values greater than 255,
and the value it self when in range.
- Parameters:
val - value to be clamped- Returns:
- value clamped to [0,255]
-
clamp_0_1
public static double clamp_0_1(double val)
Clamps a value to the range [0.0, 1.0].
Returns 0.0 for values less than 0, 1.0 for values greater than 1.0,
and the value it self when in range.
- Parameters:
val - value to be clamped- Returns:
- value clamped to [0.0, 1.0]
-
requireAreaInImageBounds
public static void requireAreaInImageBounds(int xStart,
int yStart,
int width,
int height,
ContourPlot.ImgBase<?> img)
Throws an IllegalArgumentException when the specified area
is not within the bounds of the specified image, or if the area
is not positive.
This is used for parameter evaluation.
- Parameters:
xStart - left boundary of the areayStart - top boundary of the areawidth - of the areaheight - of the areaimg - the area has to fit in.- Throws:
java.lang.IllegalArgumentException - when area not in image bounds or not area not positive
����������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHistogram.GrayLevelClass.html�������������������������������0000775�4231163�4231163�00000037131�14537076046�026601� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHistogram.GrayLevelClass (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
DOCUMENT ME!
|
private float |
mu |
DOCUMENT ME!
|
private float |
omega |
DOCUMENT ME!
|
private float[] |
probabilityHistogram |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
GrayLevelClass(boolean first,
float[] probHistogram) |
Creates a new GrayLevelClass object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
index
private int index
DOCUMENT ME!
-
mu
private float mu
DOCUMENT ME!
-
omega
private float omega
DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.SnakeInitialiser.Node.html���������������������0000775�4231163�4231163�00000051541�14537076047�030523� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.SnakeInitialiser.Node (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Node() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
setX
public void setX(int x)
-
setY
public void setY(int y)
���������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.TreeType.html��������������������������������������0000775�4231163�4231163�00000036312�14537076057�025332� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.TreeType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
TreeType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
TreeType
private TreeType()
-
Method Detail
-
valueOf
public static StochasticForests.TreeType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Preprocessor.html����������������������������������������0000775�4231163�4231163�00000025727�14537076052�025044� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Preprocessor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Preprocessor
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Preprocessor
public Preprocessor()
�����������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.AutoDiffCostFunction.html��������������������������������0000775�4231163�4231163�00000043613�14537076051�026407� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.AutoDiffCostFunction (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
AutoDiffCostFunction(CostFunctor functor,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9) |
|
AutoDiffCostFunction(CostFunctor functor,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
AutoDiffCostFunction
public AutoDiffCostFunction(CostFunctor functor,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9)
-
AutoDiffCostFunction
public AutoDiffCostFunction(CostFunctor functor,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals)
���������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TrivialLoss.html�����������������������������������������0000775�4231163�4231163�00000025005�14537076052�024616� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TrivialLoss (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
TrivialLoss
public TrivialLoss()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.BadTestTerm.html�����������������������������������������0000775�4231163�4231163�00000034377�14537076051�024534� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.BadTestTerm (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.util.Vector<java.util.Vector<java.lang.Double>> |
a_ |
|
private int |
arity_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
BadTestTerm(int arity,
int[] dim) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(double[][] parameters,
double[] residuals) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
arity_
private int arity_
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.CkpntMemRec.html����������������������������������������������0000775�4231163�4231163�00000047437�14537076054�023261� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.CkpntMemRec (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ck_quadr
boolean ck_quadr
-
ck_sensi
boolean ck_sensi
-
ck_quadr_sensi
boolean ck_quadr_sensi
-
ck_tretlast
double ck_tretlast
-
ck_gammap
double ck_gammap
-
ck_hprime
double ck_hprime
-
ck_hscale
double ck_hscale
-
ck_etamax
double ck_etamax
-
ck_saved_tq5
double ck_saved_tq5
-
Constructor Detail
-
CkpntMemRec
CkpntMemRec()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.NumericDiffCostFunction.html�����������������������������0000775�4231163�4231163�00000066664�14537076052�027115� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.NumericDiffCostFunction (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
NumericDiffCostFunction(CostFunctor functor,
CeresSolver.NumericDiffMethodType method,
CeresSolver.Ownership ownership,
CeresSolver.NumericDiffOptions options,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9) |
|
NumericDiffCostFunction(CostFunctor functor,
CeresSolver.NumericDiffMethodType method,
CeresSolver.Ownership ownership,
CeresSolver.NumericDiffOptions options,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
NumericDiffCostFunction
public NumericDiffCostFunction(CostFunctor functor,
CeresSolver.NumericDiffMethodType method,
CeresSolver.Ownership ownership,
CeresSolver.NumericDiffOptions options,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9)
-
NumericDiffCostFunction
public NumericDiffCostFunction(CostFunctor functor,
CeresSolver.NumericDiffMethodType method,
CeresSolver.Ownership ownership,
CeresSolver.NumericDiffOptions options,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals)
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.CoordSysRenderer.html������������������������������������0000775�4231163�4231163�00000203671�14537076053�025643� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.CoordSysRenderer (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
-
Constructor Summary
Constructors
| Constructor |
Description |
CoordSysRenderer() |
Sets up a CoordSysRenderer with the default color scheme
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
ContourPlot.CoordSysRenderer |
addCoordinateViewListener(ContourPlot.CoordinateViewListener l) |
|
ContourPlot.ColorScheme |
getColorScheme() |
|
java.awt.geom.Rectangle2D |
getCoordinateView() |
Returns the coordinate view, which is the range of x and y coordinates visible in the
coordinate system.
|
java.awt.geom.Rectangle2D |
getCoordSysArea() |
|
java.lang.String |
getxAxisLabel() |
|
java.lang.String |
getyAxisLabel() |
|
boolean |
isEnabled() |
Whether this renderer is enabled or not.
|
ContourPlot.CoordSysRenderer |
removeActionListener(ContourPlot.CoordinateViewListener l) |
|
void |
renderFallback(java.awt.Graphics2D g,
java.awt.Graphics2D p,
int w,
int h) |
|
void |
renderPDF(org.apache.pdfbox.pdmodel.PDDocument doc,
org.apache.pdfbox.pdmodel.PDPage page,
int x,
int y,
int w,
int h) |
Renders this PDFRenderers contents, that is creating
pdf elements and appending them to the specified page
within the corresponding document.
|
ContourPlot.Renderer |
setContent(ContourPlot.Renderer content) |
Sets the content renderer that will draw into the area of the coordinate system.
|
ContourPlot.CoordSysRenderer |
setCoordinateView(double minX,
double minY,
double maxX,
double maxY) |
Sets the coordinate view.
|
ContourPlot.CoordSysRenderer |
setCoordinateView(java.awt.geom.Rectangle2D viewRect) |
Sets the coordinate view.
|
protected ContourPlot.CoordSysRenderer |
setCoordinateViewRect(double x,
double y,
double w,
double h) |
|
void |
setDirty() |
Sets the isDirty state of this CoordSysRenderer to true. |
ContourPlot.Renderer |
setLegendRight(ContourPlot.Renderer legend) |
Sets the renderer that will draw the legend to the right of the coordinate system.
|
ContourPlot.CoordSysRenderer |
setLegendRightWidth(int legendRightWidth) |
Sets the width of the legend area right to the coordinate system.
|
protected void |
setupAndLayout() |
Sets up pretty much everything.
|
protected void |
setupCoordSysRenderer() |
Helper method to setup the CoordSysRenderer
|
java.awt.geom.Point2D |
transformAWT2CoordSys(java.awt.geom.Point2D awtPoint,
int canvasheight) |
Transforms a location in AWT coordinates (y axis extends to bottom)
on this renderer to the corresponding coordinates in the coordinate
system view (in GL coords).
|
java.awt.geom.Point2D |
transformGL2CoordSys(java.awt.geom.Point2D point) |
Transforms a location in GL coordinates on this renderer to the
corresponding coordinates in the coordinate system view.
|
protected ContourPlot.CoordSysRenderer |
updateColors() |
Helper method to update the colors if the color scheme is changed.
|
protected void |
updateLegendColorScheme(ContourPlot.Renderer legend) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
paddingTop
protected int paddingTop
-
paddingBot
protected int paddingBot
-
Method Detail
-
setDirty
public void setDirty()
Sets the
isDirty state of this CoordSysRenderer to true.
This indicates that axis locations, tick marks, labels and guides
have to be recomputed.
The recomputing will be done during
#render(int, int, int, int) which
will set the isDirty state back to false.
-
renderPDF
public void renderPDF(org.apache.pdfbox.pdmodel.PDDocument doc,
org.apache.pdfbox.pdmodel.PDPage page,
int x,
int y,
int w,
int h)
Renders this PDFRenderers contents, that is creating
pdf elements and appending them to the specified page
within the corresponding document.
- Specified by:
renderPDF in interface ContourPlot.PDFRenderer- Parameters:
doc - the PDF document holding the pagepage - page in pdf doc to which elements are to be appendedx - x coordinate of the current viewporty - y coordinate of the current viewportw - width of the current viewporth - height of the current viewport
-
isEnabled
public boolean isEnabled()
Whether this renderer is enabled or not. By default a renderer is enabled and will
render upon #render(int, int, int, int) or #renderSVG(org.w3c.dom.Document, org.w3c.dom.Element, int, int).
When disabled those methods return right away and will not render anything.
- Specified by:
isEnabled in interface ContourPlot.Renderer- Returns:
- true when active
-
setCoordinateView
public ContourPlot.CoordSysRenderer setCoordinateView(double minX,
double minY,
double maxX,
double maxY)
Sets the coordinate view. This is the range of x and y coordinates that is displayed by this
ContourPlot.CoordSysRenderer. It is not the rectangular area in which the content appears on screen
but what coordinates that area corresponds to as a coordinate system.
This determines what range of coordinates is visible when rendering the content.
By default the coordinate view covers the range [-1,1] for both x and y coordinates.
When the resulting value ranges maxX-minX or maxY-minY fall below 1e-9, the method
refuses to set the view accordingly to prevent unrecoverable zooming and inaccurate
or broken renderings due to floating point precision.
This method also sets the isDirty state of this ContourPlot.CoordSysRenderer to true.
When ContourPlot.CoordinateViewListener are registered to this renderer, they will be notified
before this method returns.
- Parameters:
minX - minimum x coordinate visible in the coordinate systemminY - minimum y coordinate visible in the coordinate systemmaxX - maximum x coordinate visible in the coordinate systemmaxY - maximum y coordinate visible in the coordinate system- Returns:
- this for chaining
-
setLegendRight
public ContourPlot.Renderer setLegendRight(ContourPlot.Renderer legend)
Sets the renderer that will draw the legend to the right of the coordinate system.
The view port area for this renderer will start at the top edge of the coordinate system,
be #getLegendRightWidth() wide and extend to the bottom (-padding).
- Parameters:
legend - renderer for right side of coordinate system- Returns:
- the previous legend renderer (which may need to be closed to free GL resources),
null if none was set
-
setLegendRightWidth
public ContourPlot.CoordSysRenderer setLegendRightWidth(int legendRightWidth)
Sets the width of the legend area right to the coordinate system.
(height is determined by the space available until the bottom of the renderer's viewport)
- Parameters:
legendRightWidth - width of the right legend area.
(default is 70 px)- Returns:
- this for chaining
-
transformAWT2CoordSys
public java.awt.geom.Point2D transformAWT2CoordSys(java.awt.geom.Point2D awtPoint,
int canvasheight)
Transforms a location in AWT coordinates (y axis extends to bottom)
on this renderer to the corresponding coordinates in the coordinate
system view (in GL coords).
- Parameters:
awtPoint - to be transformedcanvasheight - height of the canvas this ContourPlot.CoordSysRenderer is drawn to- Returns:
- transformed location
�����������������������������������������������������������������������gov/nih/mipav/model/algorithms/BesselEP.html��������������������������������������������������������0000775�4231163�4231163�00000504640�14537076051�021560� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BesselEP (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.BesselEP
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
AIRY_AI |
Airy function Ai.
|
static int |
AIRY_BI |
Airy function Bi.
|
private DoubleDouble |
alim |
DOCUMENT ME!
|
static int |
BESSEL_H |
Bessel functions of the third kind, Hankel functions.
|
static int |
BESSEL_I |
modified Bessel function of the first kind.
|
static int |
BESSEL_J |
Bessel function of the first kind.
|
static int |
BESSEL_K |
modified Bessel function of the second kind.
|
static int |
BESSEL_Y |
Bessel function of the second kind.
|
private int |
BesselType |
DOCUMENT ME!
|
private DoubleDouble[] |
cyi |
DOCUMENT ME!
|
private DoubleDouble[] |
cyr |
DOCUMENT ME!
|
private int |
derivativeOrder |
order of derivative, 0 or 1.
|
private boolean |
doTest |
DOCUMENT ME!
|
private int |
DoubleDoubleDigits |
I1MACH(14) = 106.
|
private DoubleDouble |
elim |
DOCUMENT ME!
|
private int |
emax |
I1MACH(16) = 1024 The largest exponent for DoubleDouble precision.
|
private int |
emin |
I1MACH(15) = -1021; The smallest exponent for DoubleDouble precision.
|
private DoubleDouble |
epsilon |
The smallest representable relative difference between two {link @ DoubleDouble} values
|
private int[] |
errorFlag |
errorFlag = 0, normal return - computation completed errorFlag = 1, input error - no computation errorFlag = 2,
overflow - no computation, Real(z) large on UNSCALED_FUNCTION errorFlag = 3, ABS(Z) or initialOrder +
sequenceNumber - 1 large, computation but losses of significance by arguemnt reduction produce less than half of
machine accuracy errorFlag = 4, ABS(Z) or initialOrder + sequenceNumber - 1 too large, No computation because of
complete losses of significance by argument reduction errorFlag = 5, Error, no computation, argument termination
condition not met Length of array passed in must be 1.
|
private DoubleDouble |
fnul |
DOCUMENT ME!
|
private int |
HankelKind |
real and imaginary outputs Length of arrays passed in must be sequenceNumber Kind of Kankel function = 1 or 2.
|
private double |
initialOrder |
order of initial function.
|
private int[] |
nz |
Number of components set to zero due to underflow nz[0] = 0, normal return nz[0] > 0, Last nz components of cy
set to zero due to underflow, cy[j] = 0.0 + i*0.0 for j = sequenceNumber - nz, ..., sequenceNumber-1 Length of
array passed in must be 1.
|
private boolean |
overflowTest |
DOCUMENT ME!
|
private DoubleDouble |
r1m5 |
D1MACH(5) = log10(2). = log10(e) * loge(2.0)
|
private DoubleDouble |
rl |
DOCUMENT ME!
|
static int |
SCALED_FUNCTION |
multiplied by exp(-abs(Real(z))).
|
private int |
scalingOption |
UNSCALED_FUNCTION returns cy[j-1] = besselFunction(initialOrder+j-1,z), j = 1,...
|
private int |
sequenceNumber |
number of members of the sequence.
|
private DoubleDouble |
tiny |
2**-1022 = D1MACH(1).
|
private DoubleDouble |
tol |
DOCUMENT ME!
|
static int |
UNSCALED_FUNCTION |
DOCUMENT ME!
|
private double |
zi |
DOCUMENT ME!
|
private double |
zr |
zr and zi are the real and imaginary parts of the complex argument.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
BesselEP(int BesselType,
boolean overflowTest) |
Creates a new BesselEP object.
|
BesselEP(int BesselType,
double zr,
double zi,
double initialOrder,
int scalingOption,
int HankelKind,
int sequenceNumber,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] errorFlag) |
This constructor used for H functions of kind 1 and 2.
|
BesselEP(int BesselType,
double zr,
double zi,
double initialOrder,
int scalingOption,
int sequenceNumber,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] errorFlag) |
This constructor used for I, J, K, and Y Bessel functions.
|
BesselEP(int BesselType,
double zr,
double zi,
int derivativeOrder,
int scalingOption,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] errorFlag) |
This constructor is used for Ai and Bi Airy functions.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private DoubleDouble |
dgamln(DoubleDouble z,
int[] ierr) |
DGAMLN COMPUTES THE NATURAL LOG OF THE GAMMA FUNCTION FOR Z.GT.0.
|
void |
finalize() |
Cleanup memory.
|
void |
run() |
DOCUMENT ME!
|
private void |
runTest() |
DOCUMENT ME!
|
private DoubleDouble |
zabs(DoubleDouble zr,
DoubleDouble zi) |
zabs computes the absolute value or magnitude of a DoubleDouble precision complex variable zr + j*zi.
|
private void |
zacai(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int mr,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz) |
ZACAI APPLIES THE ANALYTIC CONTINUATION FORMULA.
|
private void |
zacon(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int mr,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz) |
ZACON APPLIES THE ANALYTIC CONTINUATION FORMULA.
|
private void |
zairy(DoubleDouble zr,
DoubleDouble zi,
int id,
int kode,
DoubleDouble[] air,
DoubleDouble[] aii,
int[] nz,
int[] ierr) |
ON KODE=1, ZAIRY COMPUTES THE COMPLEX AIRY FUNCTION AI(Z) OR ITS DERIVATIVE DAI(Z)/DZ ON ID=0 OR ID=1
RESPECTIVELY.
|
private void |
zasyi(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz) |
ZASYI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE ASYMPTOTIC EXPANSION FOR LARGE CABS(Z) IN
THE REGION CABS(Z).GT.MAX(RL,fnu*fnu/2).
|
private void |
zbesh(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int m,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbesi(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbesj(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbesk(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbesy(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
DoubleDouble[] cwrkr,
DoubleDouble[] cwrki,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbesyh(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
DoubleDouble[] cwrkr,
DoubleDouble[] cwrki,
int[] ierr) |
An older version of zbesy used by the ZQCBY quick check routine.
|
private void |
zbinu(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz) |
zbinu calculates the I function in the right half z plane.
|
private void |
zbiry(DoubleDouble zr,
DoubleDouble zi,
int id,
int kode,
DoubleDouble[] bir,
DoubleDouble[] bii,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbknu(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz) |
zbknu computes the k Bessel function in the right half z plane.
|
private void |
zbuni(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz,
int nui,
int[] nlast,
DoubleDouble fnul) |
ZBUNI COMPUTES THE I BESSEL FUNCTION FOR LARGE CABS(Z).GT.
|
private void |
zbunk(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int mr,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz) |
ZBUNK COMPUTES THE K BESSEL FUNCTION FOR FNU.GT.FNUL.
|
private void |
zdiv(DoubleDouble ar,
DoubleDouble ai,
DoubleDouble br,
DoubleDouble bi,
DoubleDouble[] cr,
DoubleDouble[] ci) |
complex divide c = a/b.
|
private void |
zexp(DoubleDouble ar,
DoubleDouble ai,
DoubleDouble[] br,
DoubleDouble[] bi) |
complex exponential function b = exp(a).
|
private void |
zkscl(DoubleDouble zrr,
DoubleDouble zri,
DoubleDouble fnu,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz,
DoubleDouble rzr,
DoubleDouble rzi,
DoubleDouble ascle) |
Set K functions to zero on underflow, continue recurrence on scaled functions until two members come on scale,
then return with min(zn[0]+2,n) values scaled by 1/tol.
|
private void |
zlog(DoubleDouble ar,
DoubleDouble ai,
DoubleDouble[] br,
DoubleDouble[] bi,
int[] ierr) |
complex logarithm b = clog(a).
|
private void |
zmlri(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz) |
zmlri computes the I Bessel function for the Real(z) >= 0.0 by the Miller Algorithm normalized by a Neumann
series.
|
private void |
zmlt(DoubleDouble ar,
DoubleDouble ai,
DoubleDouble br,
DoubleDouble bi,
DoubleDouble[] cr,
DoubleDouble[] ci) |
complex multiply c = a * b.
|
private void |
zqcai(int mqc) |
DOCUMENT ME!
|
private void |
zqcbh(int mqc) |
DOCUMENT ME!
|
private void |
zqcbi(int mqc) |
DOCUMENT ME!
|
private void |
zqcbj(int mqc) |
DOCUMENT ME!
|
private void |
zqcbk(int mqc) |
DOCUMENT ME!
|
private void |
zqcby(int mqc) |
DOCUMENT ME!
|
private void |
zrati(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi) |
ZRATI COMPUTES RATIOS OF I BESSEL FUNCTIONS BY BACKWARD RECURRENCE.
|
private void |
zs1s2(DoubleDouble zrr,
DoubleDouble zri,
DoubleDouble[] s1r,
DoubleDouble[] s1i,
DoubleDouble[] s2r,
DoubleDouble[] s2i,
int[] nz,
DoubleDouble ascle,
int[] iuf) |
ZS1S2 TESTS FOR A POSSIBLE UNDERFLOW RESULTING FROM THE ADDITION OF THE I AND K FUNCTIONS IN THE ANALYTIC CON-
TINUATION FORMULA WHERE S1=K FUNCTION AND S2=I FUNCTION.
|
private void |
zseri(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz) |
ZSERI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE POWER SERIES FOR LARGE CABS(Z) IN THE
REGION CABS(Z).LE.2*SQRT(fnu+1).
|
private void |
zshch(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble[] cshr,
DoubleDouble[] cshi,
DoubleDouble[] cchr,
DoubleDouble[] cchi) |
zshch computes the complex hyperbolic functions csh = sinh(x+i*y) and cch = cosh(x+i*y).
|
private void |
zsqrt(DoubleDouble ar,
DoubleDouble ai,
DoubleDouble[] br,
DoubleDouble[] bi) |
complex square root b = csqrt(a).
|
private void |
zuchk(DoubleDouble yr,
DoubleDouble yi,
int[] nz,
DoubleDouble ascle) |
Y ENTERS AS A SCALED QUANTITY WHOSE MAGNITUDE IS GREATER THAN EXP(-ALIM)=ASCLE=1.0E+3*D1MACH(1)/TOL.
|
private void |
zunhj(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int ipmtr,
DoubleDouble[] phir,
DoubleDouble[] phii,
DoubleDouble[] argr,
DoubleDouble[] argi,
DoubleDouble[] zeta1r,
DoubleDouble[] zeta1i,
DoubleDouble[] zeta2r,
DoubleDouble[] zeta2i,
DoubleDouble[] asumr,
DoubleDouble[] asumi,
DoubleDouble[] bsumr,
DoubleDouble[] bsumi) |
REFERENCES HANDBOOK OF MATHEMATICAL FUNCTIONS BY M.
|
private void |
zuni1(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz,
int[] nlast,
DoubleDouble fnul) |
ZUNI1 COMPUTES I(FNU,Z) BY MEANS OF THE UNIFORM ASYMPTOTIC EXPANSION FOR I(FNU,Z) IN -PI/3.LE.ARG Z.LE.PI/3.
|
private void |
zuni2(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz,
int[] nlast,
DoubleDouble fnul) |
ZUNI2 COMPUTES I(FNU,Z) IN THE RIGHT HALF PLANE BY MEANS OF UNIFORM ASYMPTOTIC EXPANSION FOR J(FNU,ZN) WHERE ZN
IS Z*I OR -Z*I AND ZN IS IN THE RIGHT HALF PLANE ALSO.
|
private void |
zunik(DoubleDouble zrr,
DoubleDouble zri,
DoubleDouble fnu,
int ikflg,
int ipmtr,
int[] init,
DoubleDouble[] phir,
DoubleDouble[] phii,
DoubleDouble[] zeta1r,
DoubleDouble[] zeta1i,
DoubleDouble[] zeta2r,
DoubleDouble[] zeta2i,
DoubleDouble[] sumr,
DoubleDouble[] sumi,
DoubleDouble[] cwrkr,
DoubleDouble[] cwrki) |
ZUNIK COMPUTES PARAMETERS FOR THE UNIFORM ASYMPTOTIC EXPANSIONS OF THE I AND K FUNCTIONS ON IKFLG= 1 OR 2
RESPECTIVELY BY.
|
private void |
zunk1(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int mr,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz) |
ZUNK1 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSION.
|
private void |
zunk2(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int mr,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz) |
ZUNK2 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR H(KIND,FNU,ZN) AND J(FNU,ZN) WHERE ZN IS IN THE RIGHT HALF PLANE,
KIND=(3-MR)/2, MR=+1 OR -1.
|
private void |
zuoik(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int ikflg,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nuf) |
ZUOIK COMPUTES THE LEADING TERMS OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR THE I AND K FUNCTIONS AND COMPARES THEM
(IN LOGARITHMIC FORM) TO ALIM AND ELIM FOR OVER AND UNDERFLOW WHERE ALIM.LT.ELIM.
|
private void |
zwrsk(DoubleDouble zrr,
DoubleDouble zri,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz,
DoubleDouble[] cwr,
DoubleDouble[] cwi) |
zwrsk computes the I Bessel function for Real(z) >- 0.0 by normalizing the I function ratios from zrati by the
Wronskian.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
doTest
private boolean doTest
DOCUMENT ME!
-
errorFlag
private int[] errorFlag
errorFlag = 0, normal return - computation completed errorFlag = 1, input error - no computation errorFlag = 2,
overflow - no computation, Real(z) large on UNSCALED_FUNCTION errorFlag = 3, ABS(Z) or initialOrder +
sequenceNumber - 1 large, computation but losses of significance by arguemnt reduction produce less than half of
machine accuracy errorFlag = 4, ABS(Z) or initialOrder + sequenceNumber - 1 too large, No computation because of
complete losses of significance by argument reduction errorFlag = 5, Error, no computation, argument termination
condition not met Length of array passed in must be 1.
-
nz
private int[] nz
Number of components set to zero due to underflow nz[0] = 0, normal return nz[0] > 0, Last nz components of cy
set to zero due to underflow, cy[j] = 0.0 + i*0.0 for j = sequenceNumber - nz, ..., sequenceNumber-1 Length of
array passed in must be 1.
-
scalingOption
private int scalingOption
UNSCALED_FUNCTION returns cy[j-1] = besselFunction(initialOrder+j-1,z), j = 1,...,sequenceNumber SCALED_FUNCTION
returns cy[j-1] = besselFunction(initialOrder+j-1,z)*exp(-abs(Real(z))), j = 1,...,sequenceNumber.
-
zi
private double zi
DOCUMENT ME!
-
Constructor Detail
-
BesselEP
public BesselEP(int BesselType,
double zr,
double zi,
int derivativeOrder,
int scalingOption,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] errorFlag)
This constructor is used for Ai and Bi Airy functions.
- Parameters:
BesselType - intzr - doublezi - doublederivativeOrder - intscalingOption - intcyr - DoubleDouble[]cyi - DoubleDouble[]nz - int[]errorFlag - int[]
-
BesselEP
public BesselEP(int BesselType,
double zr,
double zi,
double initialOrder,
int scalingOption,
int sequenceNumber,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] errorFlag)
This constructor used for I, J, K, and Y Bessel functions.
- Parameters:
BesselType - intzr - doublezi - doubleinitialOrder - doublescalingOption - intsequenceNumber - intcyr - DoubleDouble[]cyi - DoubleDouble[]nz - int[]errorFlag - int[]
-
BesselEP
public BesselEP(int BesselType,
double zr,
double zi,
double initialOrder,
int scalingOption,
int HankelKind,
int sequenceNumber,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] errorFlag)
This constructor used for H functions of kind 1 and 2.
- Parameters:
BesselType - intzr - doublezi - doubleinitialOrder - doublescalingOption - intHankelKind - intsequenceNumber - intcyr - DoubleDouble[]cyi - DoubleDouble[]nz - int[]errorFlag - int[]
-
Method Detail
-
run
public void run()
DOCUMENT ME!
-
runTest
private void runTest()
DOCUMENT ME!
-
zabs
private DoubleDouble zabs(DoubleDouble zr,
DoubleDouble zi)
zabs computes the absolute value or magnitude of a DoubleDouble precision complex variable zr + j*zi.
- Parameters:
zr - DoubleDoublezi - DoubleDouble- Returns:
- DoubleDouble
-
zacai
private void zacai(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int mr,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz)
ZACAI APPLIES THE ANALYTIC CONTINUATION FORMULA.
K(FNU,ZN*EXP(MP))=K(FNU,ZN)*EXP(-MP*FNU) - MP*I(FNU,ZN) MP=PI*MR*CMPLX(0.0,1.0)
TO CONTINUE THE K FUNCTION FROM THE RIGHT HALF TO THE LEFT HALF Z PLANE FOR USE WITH ZAIRY WHERE FNU=1/3 OR 2/3
AND N=1. ZACAI IS THE SAME AS ZACON WITH THE PARTS FOR LARGER ORDERS AND RECURRENCE REMOVED. A RECURSIVE CALL TO
ZACON CAN RESULT IF ZACON IS CALLED FROM ZAIRY.
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intmr - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]
-
zacon
private void zacon(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int mr,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz)
ZACON APPLIES THE ANALYTIC CONTINUATION FORMULA.
K(FNU,ZN*EXP(MP))=K(FNU,ZN)*EXP(-MP*FNU) - MP*I(FNU,ZN) MP=PI*MR*CMPLX(0.0,1.0)
TO CONTINUE THE K FUNCTION FROM THE RIGHT HALF TO THE LEFT HALF Z PLANE
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intmr - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]
-
zairy
private void zairy(DoubleDouble zr,
DoubleDouble zi,
int id,
int kode,
DoubleDouble[] air,
DoubleDouble[] aii,
int[] nz,
int[] ierr)
ON KODE=1, ZAIRY COMPUTES THE COMPLEX AIRY FUNCTION AI(Z) OR ITS DERIVATIVE DAI(Z)/DZ ON ID=0 OR ID=1
RESPECTIVELY. ON KODE=2, A SCALING OPTION CEXP(ZTA)*AI(Z) OR CEXP(ZTA)* DAI(Z)/DZ IS PROVIDED TO REMOVE THE
EXPONENTIAL DECAY IN -PI/3.LT.ARG(Z).LT.PI/3 AND THE EXPONENTIAL GROWTH IN PI/3.LT.ABS(ARG(Z)).LT.PI WHERE
ZTA=(2/3)*Z*CSQRT(Z).
WHILE THE AIRY FUNCTIONS AI(Z) AND DAI(Z)/DZ ARE ANALYTIC IN THE WHOLE Z PLANE, THE CORRESPONDING SCALED
FUNCTIONS DEFINED FOR KODE=2 HAVE A CUT ALONG THE NEGATIVE REAL AXIS. DEFINTIONS AND NOTATION ARE FOUND IN THE
NBS HANDBOOK OF C MATHEMATICAL FUNCTIONS (REF. 1). C C INPUT ZR,ZI ARE DOUBLE PRECISION C ZR,ZI - Z=CMPLX(ZR,ZI)
C ID - ORDER OF DERIVATIVE, ID=0 OR ID=1 C KODE - A PARAMETER TO INDICATE THE SCALING OPTION C KODE= 1 RETURNS C
AI=AI(Z) ON ID=0 OR C AI=DAI(Z)/DZ ON ID=1 C = 2 RETURNS C AI=CEXP(ZTA)*AI(Z) ON ID=0 OR C AI=CEXP(ZTA)*DAI(Z)/DZ
ON ID=1 WHERE C ZTA=(2/3)*Z*CSQRT(Z) C C OUTPUT AIR,AII ARE DOUBLE PRECISION C AIR,AII- COMPLEX ANSWER DEPENDING
ON THE CHOICES FOR ID AND C KODE C NZ - UNDERFLOW INDICATOR C NZ= 0 , NORMAL RETURN C NZ= 1 ,
AI=CMPLX(0.0D0,0.0D0) DUE TO UNDERFLOW IN C -PI/3.LT.ARG(Z).LT.PI/3 ON KODE=1 C IERR - ERROR FLAG C IERR=0,
NORMAL RETURN - COMPUTATION COMPLETED C IERR=1, INPUT ERROR - NO COMPUTATION C IERR=2, OVERFLOW - NO COMPUTATION,
REAL(ZTA) C TOO LARGE ON KODE=1 C IERR=3, CABS(Z) LARGE - COMPUTATION COMPLETED C LOSSES OF SIGNIFCANCE BY
ARGUMENT REDUCTION C PRODUCE LESS THAN HALF OF MACHINE ACCURACY C IERR=4, CABS(Z) TOO LARGE - NO COMPUTATION C
COMPLETE LOSS OF ACCURACY BY ARGUMENT C REDUCTION C IERR=5, ERROR - NO COMPUTATION, C ALGORITHM TERMINATION
CONDITION NOT MET C C***LONG DESCRIPTION C C AI AND DAI ARE COMPUTED FOR CABS(Z).GT.1.0 FROM THE K BESSEL C
FUNCTIONS BY C C AI(Z)=C*SQRT(Z)*K(1/3,ZTA) , DAI(Z)=-C*Z*K(2/3,ZTA) C C=1.0/(PI*SQRT(3.0)) C ZTA=(2/3)*Z**(3/2)
C C WITH THE POWER SERIES FOR CABS(Z).LE.1.0. C C IN MOST COMPLEX VARIABLE COMPUTATION, ONE MUST EVALUATE ELE- C
MENTARY FUNCTIONS. WHEN THE MAGNITUDE OF Z IS LARGE, LOSSES C OF SIGNIFICANCE BY ARGUMENT REDUCTION OCCUR.
CONSEQUENTLY, IF C THE MAGNITUDE OF ZETA=(2/3)*Z**1.5 EXCEEDS U1=SQRT(0.5/UR), C THEN LOSSES EXCEEDING HALF
PRECISION ARE LIKELY AND AN ERROR C FLAG IERR=3 IS TRIGGERED WHERE UR=DMAX1(D1MACH(4),1.0D-18) IS C DOUBLE
PRECISION UNIT ROUNDOFF LIMITED TO 18 DIGITS PRECISION. C ALSO, IF THE MAGNITUDE OF ZETA IS LARGER THAN
U2=0.5/UR, THEN C ALL SIGNIFICANCE IS LOST AND IERR=4. IN ORDER TO USE THE INT C FUNCTION, ZETA MUST BE FURTHER
RESTRICTED NOT TO EXCEED THE C LARGEST INTEGER, U3=I1MACH(9). THUS, THE MAGNITUDE OF ZETA C MUST BE RESTRICTED BY
MIN(U2,U3). ON 32 BIT MACHINES, U1,U2, C AND U3 ARE APPROXIMATELY 2.0E+3, 4.2E+6, 2.1E+9 IN SINGLE C PRECISION
ARITHMETIC AND 1.3E+8, 1.8E+16, 2.1E+9 IN DOUBLE C PRECISION ARITHMETIC RESPECTIVELY. THIS MAKES U2 AND U3 LIMIT-
C ING IN THEIR RESPECTIVE ARITHMETICS. THIS MEANS THAT THE MAG- C NITUDE OF Z CANNOT EXCEED 3.1E+4 IN SINGLE AND
2.1E+6 IN C DOUBLE PRECISION ARITHMETIC. THIS ALSO MEANS THAT ONE CAN C EXPECT TO RETAIN, IN THE WORST CASES ON
32 BIT MACHINES, C NO DIGITS IN SINGLE PRECISION AND ONLY 7 DIGITS IN DOUBLE C PRECISION ARITHMETIC. SIMILAR
CONSIDERATIONS HOLD FOR OTHER C MACHINES. C C THE APPROXIMATE RELATIVE ERROR IN THE MAGNITUDE OF A COMPLEX C
BESSEL FUNCTION CAN BE EXPRESSED BY P*10**S WHERE P=MAX(UNIT C ROUNDOFF,1.0E-18) IS THE NOMINAL PRECISION AND
10**S REPRE- C SENTS THE INCREASE IN ERROR DUE TO ARGUMENT REDUCTION IN THE C ELEMENTARY FUNCTIONS. HERE,
S=MAX(1,ABS(LOG10(CABS(Z))), C ABS(LOG10(FNU))) APPROXIMATELY (I.E. S=MAX(1,ABS(EXPONENT OF C
CABS(Z),ABS(EXPONENT OF FNU)) ). HOWEVER, THE PHASE ANGLE MAY C HAVE ONLY ABSOLUTE ACCURACY. THIS IS MOST LIKELY
TO OCCUR WHEN C ONE COMPONENT (IN ABSOLUTE VALUE) IS LARGER THAN THE OTHER BY C SEVERAL ORDERS OF MAGNITUDE. IF
ONE COMPONENT IS 10**K LARGER C THAN THE OTHER, THEN ONE CAN EXPECT ONLY MAX(ABS(LOG10(P))-K, C 0) SIGNIFICANT
DIGITS; OR, STATED ANOTHER WAY, WHEN K EXCEEDS C THE EXPONENT OF P, NO SIGNIFICANT DIGITS REMAIN IN THE SMALLER C
COMPONENT. HOWEVER, THE PHASE ANGLE RETAINS ABSOLUTE ACCURACY C BECAUSE, IN COMPLEX ARITHMETIC WITH PRECISION P,
THE SMALLER C COMPONENT WILL NOT (AS A RULE) DECREASE BELOW P TIMES THE C MAGNITUDE OF THE LARGER COMPONENT. IN
THESE EXTREME CASES, C THE PRINCIPAL PHASE ANGLE IS ON THE ORDER OF +P, -P, PI/2-P, C OR -PI/2+P. C
C***REFERENCES HANDBOOK OF MATHEMATICAL FUNCTIONS BY M. ABRAMOWITZ C AND I. A. STEGUN, NBS AMS SERIES 55, U.S.
DEPT. OF C COMMERCE, 1955. C C COMPUTATION OF BESSEL FUNCTIONS OF COMPLEX ARGUMENT C AND LARGE ORDER BY D. E.
AMOS, SAND83-0643, MAY, 1983 C C A SUBROUTINE PACKAGE FOR BESSEL FUNCTIONS OF A COMPLEX C ARGUMENT AND
NONNEGATIVE ORDER BY D. E. AMOS, SAND85- C 1018, MAY, 1985 C C A PORTABLE PACKAGE FOR BESSEL FUNCTIONS OF A
COMPLEX C ARGUMENT AND NONNEGATIVE ORDER BY D. E. AMOS, ACM C TRANS. MATH. SOFTWARE, VOL. 12, NO. 3, SEPTEMBER
1986, C PP 265-273.
- Parameters:
zr - DoubleDoublezi - DoubleDoubleid - intkode - intair - DoubleDouble[]aii - DoubleDouble[]nz - int[]ierr - int[]
-
zasyi
private void zasyi(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz)
ZASYI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE ASYMPTOTIC EXPANSION FOR LARGE CABS(Z) IN
THE REGION CABS(Z).GT.MAX(RL,fnu*fnu/2). NZ=0 IS A NORMAL RETURN. NZ.LT.0 INDICATES AN OVERFLOW ON
kode=UNSCALED_FUNCTION.
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]
-
zbesh
private void zbesh(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int m,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intm - intn - intcyr - DoubleDouble[]cyi - DoubleDouble[]nz - int[]ierr - int[]
-
zbesi
private void zbesi(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intcyr - DoubleDouble[]cyi - DoubleDouble[]nz - int[]ierr - int[]
-
zbesj
private void zbesj(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intcyr - DoubleDouble[]cyi - DoubleDouble[]nz - int[]ierr - int[]
-
zbesk
private void zbesk(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intcyr - DoubleDouble[]cyi - DoubleDouble[]nz - int[]ierr - int[]
-
zbesy
private void zbesy(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
DoubleDouble[] cwrkr,
DoubleDouble[] cwrki,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intcyr - DoubleDouble[]cyi - DoubleDouble[]nz - int[]cwrkr - DoubleDouble[]cwrki - DoubleDouble[]ierr - int[]
-
zbesyh
private void zbesyh(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz,
DoubleDouble[] cwrkr,
DoubleDouble[] cwrki,
int[] ierr)
An older version of zbesy used by the ZQCBY quick check routine.
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intcyr - DoubleDouble[]cyi - DoubleDouble[]nz - int[]cwrkr - DoubleDouble[]cwrki - DoubleDouble[]ierr - int[]
-
zbinu
private void zbinu(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi,
int[] nz)
zbinu calculates the I function in the right half z plane.
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intcyr - DoubleDouble[]cyi - DoubleDouble[]nz - int[]
-
zbiry
private void zbiry(DoubleDouble zr,
DoubleDouble zi,
int id,
int kode,
DoubleDouble[] bir,
DoubleDouble[] bii,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - DoubleDoublezi - DoubleDoubleid - intkode - intbir - DoubleDouble[]bii - DoubleDouble[]ierr - int[]
-
zbknu
private void zbknu(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz)
zbknu computes the k Bessel function in the right half z plane.
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]
-
zbuni
private void zbuni(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz,
int nui,
int[] nlast,
DoubleDouble fnul)
ZBUNI COMPUTES THE I BESSEL FUNCTION FOR LARGE CABS(Z).GT. FNUL AND fnu+N-1.LT.FNUL. THE ORDER IS INCREASED FROM
fnu+N-1 GREATER THAN FNUL BY ADDING NUI AND COMPUTING ACCORDING TO THE UNIFORM ASYMPTOTIC EXPANSION FOR I(fnu,Z)
ON IFORM=1 AND THE EXPANSION FOR J(fnu,Z) ON IFORM=2
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]nui - intnlast - int[]fnul - DoubleDouble
-
zbunk
private void zbunk(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int mr,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz)
ZBUNK COMPUTES THE K BESSEL FUNCTION FOR FNU.GT.FNUL. ACCORDING TO THE UNIFORM ASYMPTOTIC EXPANSION FOR K(FNU,Z)
IN ZUNK1 AND THE EXPANSION FOR H(2,FNU,Z) IN ZUNK2
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intmr - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]
-
zkscl
private void zkscl(DoubleDouble zrr,
DoubleDouble zri,
DoubleDouble fnu,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz,
DoubleDouble rzr,
DoubleDouble rzi,
DoubleDouble ascle)
Set K functions to zero on underflow, continue recurrence on scaled functions until two members come on scale,
then return with min(zn[0]+2,n) values scaled by 1/tol.
- Parameters:
zrr - DoubleDoublezri - DoubleDoublefnu - DoubleDoublen - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]rzr - DoubleDoublerzi - DoubleDoubleascle - DoubleDouble
-
zlog
private void zlog(DoubleDouble ar,
DoubleDouble ai,
DoubleDouble[] br,
DoubleDouble[] bi,
int[] ierr)
complex logarithm b = clog(a).
- Parameters:
ar - DoubleDoubleai - DoubleDoublebr - DoubleDouble[]bi - DoubleDouble[]ierr - int[] ierr = 0, normal return ierr = 1, z = cmplx(0.0, 0.0)
-
zmlri
private void zmlri(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz)
zmlri computes the I Bessel function for the Real(z) >= 0.0 by the Miller Algorithm normalized by a Neumann
series.
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]
-
zrati
private void zrati(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int n,
DoubleDouble[] cyr,
DoubleDouble[] cyi)
ZRATI COMPUTES RATIOS OF I BESSEL FUNCTIONS BY BACKWARD RECURRENCE. THE STARTING INDEX IS DETERMINED BY FORWARD
RECURRENCE AS DESCRIBED IN J. RES. OF NAT. BUR. OF STANDARDS-B, MATHEMATICAL SCIENCES, VOL 77B, P111-114,
SEPTEMBER, 1973, BESSEL FUNCTIONS I AND J OF COMPLEX ARGUMENT AND INTEGER ORDER, BY D. J. SOOKNE.
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublen - intcyr - DoubleDouble[]cyi - DoubleDouble[]
-
zs1s2
private void zs1s2(DoubleDouble zrr,
DoubleDouble zri,
DoubleDouble[] s1r,
DoubleDouble[] s1i,
DoubleDouble[] s2r,
DoubleDouble[] s2i,
int[] nz,
DoubleDouble ascle,
int[] iuf)
ZS1S2 TESTS FOR A POSSIBLE UNDERFLOW RESULTING FROM THE ADDITION OF THE I AND K FUNCTIONS IN THE ANALYTIC CON-
TINUATION FORMULA WHERE S1=K FUNCTION AND S2=I FUNCTION. ON KODE=1 THE I AND K FUNCTIONS ARE DIFFERENT ORDERS OF
MAGNITUDE, BUT FOR KODE=2 THEY CAN BE OF THE SAME ORDER OF MAGNITUDE AND THE MAXIMUM MUST BE AT LEAST ONE
PRECISION ABOVE THE UNDERFLOW LIMIT.
- Parameters:
zrr - DoubleDoublezri - DoubleDoubles1r - DoubleDouble[]s1i - DoubleDouble[]s2r - DoubleDouble[]s2i - DoubleDouble[]nz - int[]ascle - DoubleDoubleiuf - int[]
-
zseri
private void zseri(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz)
ZSERI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE POWER SERIES FOR LARGE CABS(Z) IN THE
REGION CABS(Z).LE.2*SQRT(fnu+1). NZ=0 IS A NORMAL RETURN. NZ.GT.0 MEANS THAT THE LAST NZ COMPONENTS WERE SET TO
ZERO DUE TO UNDERFLOW. NZ.LT.0 MEANS UNDERFLOW OCCURRED, BUT THE CONDITION CABS(Z).LE.2*SQRT(fnu+1) WAS VIOLATED
AND THE COMPUTATION MUST BE COMPLETED IN ANOTHER ROUTINE WITH N=N-ABS(NZ).
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]
-
zshch
private void zshch(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble[] cshr,
DoubleDouble[] cshi,
DoubleDouble[] cchr,
DoubleDouble[] cchi)
zshch computes the complex hyperbolic functions csh = sinh(x+i*y) and cch = cosh(x+i*y).
- Parameters:
zr - DoubleDoublezi - DoubleDoublecshr - DoubleDouble[]cshi - DoubleDouble[]cchr - DoubleDouble[]cchi - DoubleDouble[]
-
zuchk
private void zuchk(DoubleDouble yr,
DoubleDouble yi,
int[] nz,
DoubleDouble ascle)
Y ENTERS AS A SCALED QUANTITY WHOSE MAGNITUDE IS GREATER THAN EXP(-ALIM)=ASCLE=1.0E+3*D1MACH(1)/TOL. THE TEST IS
MADE TO SEE IF THE MAGNITUDE OF THE REAL OR IMAGINARY PART WOULD UNDERFLOW WHEN Y IS SCALED (BY TOL) TO ITS
PROPER VALUE. Y IS ACCEPTED IF THE UNDERFLOW IS AT LEAST ONE PRECISION BELOW THE MAGNITUDE OF THE LARGEST
COMPONENT; OTHERWISE THE PHASE ANGLE DOES NOT HAVE ABSOLUTE ACCURACY AND AN UNDERFLOW IS ASSUMED.
- Parameters:
yr - DoubleDoubleyi - DoubleDoublenz - int[]ascle - DoubleDouble
-
zunhj
private void zunhj(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int ipmtr,
DoubleDouble[] phir,
DoubleDouble[] phii,
DoubleDouble[] argr,
DoubleDouble[] argi,
DoubleDouble[] zeta1r,
DoubleDouble[] zeta1i,
DoubleDouble[] zeta2r,
DoubleDouble[] zeta2i,
DoubleDouble[] asumr,
DoubleDouble[] asumi,
DoubleDouble[] bsumr,
DoubleDouble[] bsumi)
REFERENCES HANDBOOK OF MATHEMATICAL FUNCTIONS BY M. ABRAMOWITZ AND I.A. STEGUN, AMS55, NATIONAL BUREAU OF
STANDARDS, 1965, CHAPTER 9.
ASYMPTOTICS AND SPECIAL FUNCTIONS BY F.W.J. OLVER, ACADEMIC PRESS, N.Y., 1974, PAGE 420
ABSTRACT ZUNHJ COMPUTES PARAMETERS FOR BESSEL FUNCTIONS C(FNU,Z) = J(FNU,Z), Y(FNU,Z) OR H(I,FNU,Z) I=1,2 FOR
LARGE ORDERS FNU BY MEANS OF THE UNIFORM ASYMPTOTIC EXPANSION
C(FNU,Z)=C1*PHI*( ASUM*AIRY(ARG) + C2*BSUM*DAIRY(ARG) )
FOR PROPER CHOICES OF C1, C2, AIRY AND DAIRY WHERE AIRY IS AN AIRY FUNCTION AND DAIRY IS ITS DERIVATIVE.
(2/3)*FNU*ZETA**1.5 = ZETA1-ZETA2,
ZETA1=0.5*FNU*CLOG((1+W)/(1-W)), ZETA2=FNU*W FOR SCALING PURPOSES IN AIRY FUNCTIONS FROM CAIRY OR CBIRY.
MCONJ=SIGN OF AIMAG(Z), BUT IS AMBIGUOUS WHEN Z IS REAL AND MUST BE SPECIFIED. IPMTR=0 RETURNS ALL PARAMETERS.
IPMTR=1 COMPUTES ALL EXCEPT ASUM AND BSUM.
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoubleipmtr - intphir - DoubleDouble[]phii - DoubleDouble[]argr - DoubleDouble[]argi - DoubleDouble[]zeta1r - DoubleDouble[]zeta1i - DoubleDouble[]zeta2r - DoubleDouble[]zeta2i - DoubleDouble[]asumr - DoubleDouble[]asumi - DoubleDouble[]bsumr - DoubleDouble[]bsumi - DoubleDouble[]
-
zuni1
private void zuni1(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz,
int[] nlast,
DoubleDouble fnul)
ZUNI1 COMPUTES I(FNU,Z) BY MEANS OF THE UNIFORM ASYMPTOTIC EXPANSION FOR I(FNU,Z) IN -PI/3.LE.ARG Z.LE.PI/3.
NUL IS THE SMALLEST ORDER PERMITTED FOR THE ASYMPTOTIC EXPANSION. NLAST=0 MEANS ALL OF THE Y VALUES WERE SET.
NLAST.NE.0 IS THE NUMBER LEFT TO BE COMPUTED BY ANOTHER FORMULA FOR ORDERS FNU TO FNU+NLAST-1 BECAUSE
FNU+NLAST-1.LT.FNUL. Y(I)=CZERO FOR I=NLAST+1,N
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]nlast - int[]fnul - DoubleDouble
-
zuni2
private void zuni2(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz,
int[] nlast,
DoubleDouble fnul)
ZUNI2 COMPUTES I(FNU,Z) IN THE RIGHT HALF PLANE BY MEANS OF UNIFORM ASYMPTOTIC EXPANSION FOR J(FNU,ZN) WHERE ZN
IS Z*I OR -Z*I AND ZN IS IN THE RIGHT HALF PLANE ALSO.
FNUL IS THE SMALLEST ORDER PERMITTED FOR THE ASYMPTOTIC EXPANSION. NLAST=0 MEANS ALL OF THE Y VALUES WERE SET.
NLAST.NE.0 IS THE NUMBER LEFT TO BE COMPUTED BY ANOTHER FORMULA FOR ORDERS FNU TO FNU+NLAST-1 BECAUSE
FNU+NLAST-1.LT.FNUL. Y(I)=CZERO FOR I=NLAST+1,N
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]nlast - int[]fnul - DoubleDouble
-
zunik
private void zunik(DoubleDouble zrr,
DoubleDouble zri,
DoubleDouble fnu,
int ikflg,
int ipmtr,
int[] init,
DoubleDouble[] phir,
DoubleDouble[] phii,
DoubleDouble[] zeta1r,
DoubleDouble[] zeta1i,
DoubleDouble[] zeta2r,
DoubleDouble[] zeta2i,
DoubleDouble[] sumr,
DoubleDouble[] sumi,
DoubleDouble[] cwrkr,
DoubleDouble[] cwrki)
ZUNIK COMPUTES PARAMETERS FOR THE UNIFORM ASYMPTOTIC EXPANSIONS OF THE I AND K FUNCTIONS ON IKFLG= 1 OR 2
RESPECTIVELY BY.
W(fnu,ZR) = PHI*EXP(ZETA)*SUM
WHERE ZETA=-ZETA1 + ZETA2 OR ZETA1 - ZETA2
THE FIRST CALL MUST HAVE INIT=0. SUBSEQUENT CALLS WITH THE SAME ZR AND FNU WILL RETURN THE I OR K FUNCTION ON
IKFLG= 1 OR 2 WITH NO CHANGE IN INIT. CWRK IS A COMPLEX WORK ARRAY. IPMTR=0 COMPUTES ALL PARAMETERS. IPMTR=1
COMPUTES PHI, ZETA1,ZETA2.
- Parameters:
zrr - DoubleDoublezri - DoubleDoublefnu - DoubleDoubleikflg - intipmtr - intinit - intphir - DoubleDouble[]phii - DoubleDouble[]zeta1r - DoubleDouble[]zeta1i - DoubleDouble[]zeta2r - DoubleDouble[]zeta2i - DoubleDouble[]sumr - DoubleDouble[]sumi - DoubleDouble[]cwrkr - DoubleDouble[]cwrki - DoubleDouble[]
-
zunk1
private void zunk1(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int mr,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz)
ZUNK1 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSION. MR INDICATES THE DIRECTION OF ROTATION FOR ANALYTIC CONTINUATION. NZ=-1
MEANS AN OVERFLOW WILL OCCUR
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intmr - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]
-
zunk2
private void zunk2(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int mr,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz)
ZUNK2 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR H(KIND,FNU,ZN) AND J(FNU,ZN) WHERE ZN IS IN THE RIGHT HALF PLANE,
KIND=(3-MR)/2, MR=+1 OR -1. HERE ZN=ZR*I OR -ZR*I WHERE ZR=Z IF Z IS IN THE RIGHT HALF PLANE OR ZR=-Z IF Z IS IN
THE LEFT HALF PLANE. MR INDIC- ATES THE DIRECTION OF ROTATION FOR ANALYTIC CONTINUATION. NZ=-1 MEANS AN OVERFLOW
WILL OCCUR
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intmr - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]
-
zuoik
private void zuoik(DoubleDouble zr,
DoubleDouble zi,
DoubleDouble fnu,
int kode,
int ikflg,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nuf)
ZUOIK COMPUTES THE LEADING TERMS OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR THE I AND K FUNCTIONS AND COMPARES THEM
(IN LOGARITHMIC FORM) TO ALIM AND ELIM FOR OVER AND UNDERFLOW WHERE ALIM.LT.ELIM. IF THE MAGNITUDE, BASED ON THE
LEADING EXPONENTIAL, IS LESS THAN ALIM OR GREATER THAN -ALIM, THEN THE RESULT IS ON SCALE. IF NOT, THEN A REFINED
TEST USING OTHER MULTIPLIERS (IN LOGARITHMIC FORM) IS MADE BASED ON ELIM. HERE EXP(-ELIM)=SMALLEST MACHINE
NUMBER*1.0E+3 AND EXP(-ALIM)= EXP(-ELIM)/TOL
IKFLG=1 MEANS THE I SEQUENCE IS TESTED =2 MEANS THE K SEQUENCE IS TESTED NUF = 0 MEANS THE LAST MEMBER OF THE
SEQUENCE IS ON SCALE =-1 MEANS AN OVERFLOW WOULD OCCUR IKFLG=1 AND NUF.GT.0 MEANS THE LAST NUF Y VALUES WERE SET
TO ZERO THE FIRST N-NUF VALUES MUST BE SET BY ANOTHER ROUTINE IKFLG=2 AND NUF.EQ.N MEANS ALL Y VALUES WERE SET TO
ZERO IKFLG=2 AND 0.LT.NUF.LT.N NOT CONSIDERED. Y MUST BE SET BY ANOTHER ROUTINE
- Parameters:
zr - DoubleDoublezi - DoubleDoublefnu - DoubleDoublekode - intikflg - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nuf - int[]
-
zwrsk
private void zwrsk(DoubleDouble zrr,
DoubleDouble zri,
DoubleDouble fnu,
int kode,
int n,
DoubleDouble[] yr,
DoubleDouble[] yi,
int[] nz,
DoubleDouble[] cwr,
DoubleDouble[] cwi)
zwrsk computes the I Bessel function for Real(z) >- 0.0 by normalizing the I function ratios from zrati by the
Wronskian.
- Parameters:
zrr - DoubleDoublezri - DoubleDoublefnu - DoubleDoublekode - intn - intyr - DoubleDouble[]yi - DoubleDouble[]nz - int[]cwr - DoubleDouble[]cwi - DoubleDouble[]
������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.IntModel.html������������������������������������������0000775�4231163�4231163�00000026012�14537076046�024223� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.IntModel (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModel
-
- All Implemented Interfaces:
de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable
- Enclosing class:
- AlgorithmFRAP
class AlgorithmFRAP.IntModel
extends java.lang.Object
implements de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable
class IntModel extends Integration { public IntModel(double lower, double
upper, int routine, double eps) { super(lower, upper, routine, eps); }
public double intFunc(double x) { double function = 0.0; if ((x !=
1.0/7.0) && (x != 2.0/3.0)) { function = Math.pow(Math.abs(x - 1.0/7.0),
-0.25) * Math.pow(Math.abs(x - 2.0/3.0), -0.55); } return function; }
public void driver() { super.driver(); } }.
-
-
Constructor Summary
Constructors
| Constructor |
Description |
IntModel() |
Creates a new IntModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ParameterBlock.html��������������������������������������0000775�4231163�4231163�00000114662�14537076052�025246� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ParameterBlock (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
(package private) void |
AddResidualBlock(CeresSolver.ResidualBlock residual_block) |
|
int |
delta_offset() |
|
(package private) void |
EnableResidualBlockDependencies() |
|
boolean |
equalsParameterBlock(CeresSolver.ParameterBlock pb) |
|
void |
GetState(double[] x,
int x_start) |
|
int |
index() |
|
(package private) void |
Init(double[] user_state,
int size,
int index,
CeresSolver.LocalParameterization local_parameterization) |
|
boolean |
IsConstant() |
|
CeresSolver.LocalParameterization |
local_parameterization() |
|
double[][] |
LocalParameterizationJacobian() |
|
int |
LocalSize() |
|
double |
LowerBoundForParameter(int index) |
|
CeresSolver.LocalParameterization |
mutable_local_parameterization() |
|
java.util.HashSet<CeresSolver.ResidualBlock> |
mutable_residual_blocks() |
|
double[] |
mutable_user_state() |
|
boolean |
Plus(double[] x,
double[] delta,
double[] x_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index) |
|
void |
RemoveResidualBlock(CeresSolver.ResidualBlock residual_block) |
|
void |
set_delta_offset(int delta_offset) |
|
void |
set_index(int index) |
|
void |
set_state_offset(int state_offset) |
|
void |
SetConstant() |
|
(package private) void |
SetLowerBound(int index,
double lower_bound) |
|
void |
SetParameterization(CeresSolver.LocalParameterization new_parameterization) |
|
boolean |
SetState(double[] x,
int state_start) |
|
void |
SetUpperBound(int index,
double upper_bound) |
|
void |
SetVarying() |
|
int |
Size() |
|
double[] |
state() |
|
int |
state_offset() |
|
int |
state_start() |
|
java.lang.String |
StringOutput() |
|
(package private) void |
ToString() |
|
(package private) boolean |
UpdateLocalParameterizationJacobian() |
|
double |
UpperBoundForParameter(int index) |
|
double[] |
user_state() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
is_constant_
boolean is_constant_
-
state_start
int state_start
-
state_offset_
int state_offset_
-
delta_offset_
int delta_offset_
-
upper_bounds_
double[] upper_bounds_
-
lower_bounds_
double[] lower_bounds_
-
Method Detail
-
LocalSize
public int LocalSize()
-
SetVarying
public void SetVarying()
-
state
public double[] state()
-
state_start
public int state_start()
-
Plus
public boolean Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index)
������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmDEMRI3.Fit25HModel.html�������������������������������������0000775�4231163�4231163�00000041602�14537076045�024666� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDEMRI3.Fit25HModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private double[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
Fit25HModel(int nPoints,
double[] xData,
double[] yData,
double[] initial) |
Creates a new Fit25HModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
Fit to function - Math.pow((a[0] * Math.log(xSeries[i])),a[1]) + a[2]
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private double[] yData
-
Constructor Detail
-
Fit25HModel
public Fit25HModel(int nPoints,
double[] xData,
double[] yData,
double[] initial)
Creates a new Fit25HModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - Math.pow((a[0] * Math.log(xSeries[i])),a[1]) + a[2]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The x value of the data point.residuals - The best guess parameter values.covarMat - The derivative values of y with respect to fitting parameters.
������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlScaleSpaceGeometry.html�������������������������������������0000775�4231163�4231163�00000031767�14537076054�025372� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlScaleSpaceGeometry (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
baseScale |
< Index of the last octave subdivision
|
(package private) int |
firstOctave |
< Image height
|
(package private) int |
height |
< Image width
|
(package private) int |
lastOctave |
< Index of the fisrt octave
|
(package private) double |
nominalScale |
< Base smoothing (smoothing of octave 0, level 0)
|
(package private) int |
octaveFirstSubdivision |
< Number of octave subdivisions
|
(package private) int |
octaveLastSubdivision |
< Index of the first octave subdivision
|
(package private) int |
octaveResolution |
< Index of the last octave
|
(package private) int |
width |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
height
int height
< Image width
-
firstOctave
int firstOctave
< Image height
-
Constructor Detail
-
VlScaleSpaceGeometry
VlScaleSpaceGeometry()
���������gov/nih/mipav/model/algorithms/LSCM.FaceVertexIterator.html�����������������������������������������0000775�4231163�4231163�00000032040�14537076056�024414� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.FaceVertexIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.FaceVertexIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SVM.VlSvmLossType.html�����������������������������������������������0000775�4231163�4231163�00000037207�14537076057�023342� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SVM.VlSvmLossType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
VlSvmLossType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
VlSvmLossType
private VlSvmLossType()
-
Method Detail
-
valueOf
public static SVM.VlSvmLossType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNearlyCircleToCircle.html�����������������������������������0000775�4231163�4231163�00000062354�14537076047�025774� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNearlyCircleToCircle (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmNearlyCircleToCircle
public AlgorithmNearlyCircleToCircle(ModelImage destImg,
ModelImage srcImg)
AlgorithmNearlyCircleToCircle.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!
-
Method Detail
-
zmlt
private void zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex multiply c = a * b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
selfTest
private void selfTest()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.LinearCostFunction2.html�����������������������������0000775�4231163�4231163�00000033200�14537076053�027033� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.LinearCostFunction2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
a_ |
|
private double |
b_ |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CurveFittingFunctorExample.html��������������������������0000775�4231163�4231163�00000023216�14537076051�027632� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CurveFittingFunctorExample (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CurveFittingFunctorExample
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.EMOptions.html�������������������������������������������������0000775�4231163�4231163�00000032202�14537076055�023062� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.EMOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.EMOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
termvalue
public double termvalue
-
maxiter
public int maxiter
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.Grid1D.html���������������������������������������������0000775�4231163�4231163�00000033616�14537076052�023506� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.Grid1D (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Grid1D(double[] x,
int kDataDimension,
boolean interleaved,
int begin,
int end) |
|
Grid1D(int[] x,
int kDataDimension,
boolean interleaved,
int begin,
int end) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
begin_
private int begin_
-
num_values_
private int num_values_
-
Constructor Detail
-
Grid1D
public Grid1D(int[] x,
int kDataDimension,
boolean interleaved,
int begin,
int end)
-
Grid1D
public Grid1D(double[] x,
int kDataDimension,
boolean interleaved,
int begin,
int end)
������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmPowerWatershed.html�����������������������������������������0000775�4231163�4231163�00000310507�14537076050�024724� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPowerWatershed (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmPowerWatershed
extends AlgorithmBase
This is a port of C code written by Camille Couprie in 2009.
Camille Couprie has kindly granted the NIH MIPAV project permission to port her Power watershed code from C to Java
under a BSD license.
Porting performed by William Gandler.
This "powerwatershed" package provides implementation of several segmentation algorithms on 2D or 3D images.
The 3 algorithms are:
1.) Maximum Spanning Forest computed by Kruskal algorithm.
2.) Powerwatersheds (p=infinite, q= 2) : Maximum Spanning Forest computed by Kruskal algorithm and
Random walker on plateaus.
3.) Maximum Spanning Forest computed by Prim algorithm using red and black trees.
Reference: "Power watersheds: A new image segmentation framework extending graph cuts, random walker
and optimal spanning forest" by Camille Couprie, Leo Grady, Laurent Najman, and Hugues Talbot,
ICCV'09, 2009,
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmPowerWatershed(ModelImage destImg,
ModelImage srcImg,
int algo,
java.util.Vector<java.lang.Integer> index_seeds,
java.util.Vector<java.lang.Short> index_labels,
boolean geod) |
Constructs Power watershed algorithm.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
BucketSort(int[] A,
int[] I,
int r,
int N) |
|
private void |
BucketSortCroiss(int[] A,
int[] I,
int r,
int N) |
|
private int |
color_standard_weights(ModelImage image,
int[] weights,
int[][] edges,
java.util.Vector<java.lang.Integer> seeds,
int size_seeds,
boolean geod,
boolean quicksort) |
|
private int[] |
color_standard_weights_PW(ModelImage image,
int[] weights,
int[][] edges,
java.util.Vector<java.lang.Integer> seeds,
int size_seeds,
int[] maxi,
boolean quicksort) |
|
private void |
compute_edges(int[][] edges,
int rs,
int cs,
int ds) |
|
private AlgorithmPowerWatershed.Lifo |
CreeLifoVide(int taillemax) |
|
private AlgorithmPowerWatershed.Rbt |
CreeRbtVide(int taillemax) |
|
(package private) int |
element_find(int x,
int[] Fth) |
|
private int |
element_link(int x,
int y,
int[] Rnk,
int[] Fth) |
|
private void |
element_link_geod_dilate(int n,
int p,
int[] Fth,
int[] G,
int[] O) |
|
private boolean |
fill_A(double[] A_a,
int[] A_indc,
int[] A_indr,
int[] A_nelem,
int[] A_m,
int[] A_n,
int N,
int M,
int numb_boundary,
int[][] index_edges,
boolean[] seeded_vertex,
int[] indic_sparse,
int[] nb_same_edges) |
|
private void |
fill_B(double[] B_a,
int[] B_indc,
int[] B_indr,
int[] B_nelem,
int[] B_m,
int[] B_n,
int N,
int M,
int numb_boundary,
int[][] index_edges,
boolean[] seeded_vertex,
int[] indic_sparse,
int[] nb_same_edges) |
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
gageodilate_union_find(int[] F,
int[] G,
int[] O,
int[][] edges,
int rs,
int cs,
int ds,
int max_weight,
boolean quicksort) |
|
private void |
grey_weights(ModelImage image,
int[] weights,
int[][] edges,
java.util.Vector<java.lang.Integer> seeds,
int size_seeds,
boolean geod,
boolean quicksort) |
|
private int[] |
grey_weights_PW(ModelImage image,
int[][] edges,
java.util.Vector<java.lang.Integer> seeds,
int size_seeds,
int[] weights,
boolean quicksort) |
|
private void |
IndicsInit(int Size) |
|
private void |
indicTest() |
|
private boolean |
IsSet(int x,
int INDIC) |
|
(package private) static void |
LeftRotate(AlgorithmPowerWatershed.Rbt T,
AlgorithmPowerWatershed.RbtElt x) |
|
private void |
LifoFlush(AlgorithmPowerWatershed.Lifo L) |
|
private int |
LifoPop(AlgorithmPowerWatershed.Lifo L) |
|
private void |
LifoPrint(AlgorithmPowerWatershed.Lifo L) |
|
private void |
LifoPush(AlgorithmPowerWatershed.Lifo L,
int V) |
|
private void |
LifoTermine(AlgorithmPowerWatershed.Lifo L) |
|
private void |
lifoTest() |
|
private boolean |
LifoVide(AlgorithmPowerWatershed.Lifo L) |
|
private void |
merge_node(int e1,
int e2,
int[] Rnk,
int[] Fth,
float[][] proba,
int nb_labels) |
|
private void |
MSF_Kruskal(int[][] edges,
int[] weights,
int max_weight,
java.util.Vector<java.lang.Integer> seeds,
java.util.Vector<java.lang.Short> labels,
int size_seeds,
int rs,
int cs,
int ds,
int nblabels) |
|
private void |
MSF_Prim(int[][] edges,
int[] weights,
java.util.Vector<java.lang.Integer> seeds,
java.util.Vector<java.lang.Short> labels,
int size_seeds,
int rs,
int cs,
int ds,
int nblabels) |
|
private int |
neighbor(int i,
int k,
int rs,
int cs,
int ds) |
|
private int |
neighbor_edge(int i,
int k,
int rs,
int cs,
int ds) |
|
private int |
neighbor_edge_3D(int node1,
int node2,
int i,
int k,
int rs,
int cs,
int ds) |
|
private int |
neighbor_node_edge(int i,
int k,
int rs,
int cs,
int ds) |
|
private int |
Partitionner(int[] A,
int[] I,
int p,
int r) |
|
private int |
Partitionner_dec(int[] A,
int[] I,
int p,
int r) |
|
(package private) int |
Partitionner_inc(int[] A,
int[] I,
int p,
int r) |
|
private int |
PartitionStochastique(int[] A,
int[] I,
int p,
int r) |
|
private int |
PartitionStochastique_dec(int[] A,
int[] I,
int p,
int r) |
|
private int |
PartitionStochastique_inc(int[] A,
int[] I,
int p,
int r) |
|
private void |
PowerWatershed_q2(int[][] edges,
int[] weights,
int[] normal_weights,
int max_weight,
java.util.Vector<java.lang.Integer> seeds,
java.util.Vector<java.lang.Short> labels,
int size_seeds,
int rs,
int cs,
int ds,
int nb_labels,
boolean quicksort,
ModelImage img_proba) |
|
private boolean |
RandomWalker(int[][] index_edges,
int M,
int[] index,
int[] indic_vertex,
int N,
int[] index_seeds,
float[][] boundary_values,
int numb_boundary,
int nb_labels,
float[][] proba) |
|
private void |
RbtCopy(AlgorithmPowerWatershed.Rbt dest,
AlgorithmPowerWatershed.Rbt src) |
|
private void |
RbtDelete(AlgorithmPowerWatershed.Rbt T,
AlgorithmPowerWatershed.RbtElt z) |
|
private AlgorithmPowerWatershed.RbtElt |
RbtDeleteAux(AlgorithmPowerWatershed.Rbt T,
AlgorithmPowerWatershed.RbtElt z) |
|
private void |
RbtDeleteFixup(AlgorithmPowerWatershed.Rbt T,
AlgorithmPowerWatershed.RbtElt x) |
|
private AlgorithmPowerWatershed.RbtElt |
RbtInsert(AlgorithmPowerWatershed.Rbt T,
double k,
int d) |
|
private AlgorithmPowerWatershed.RbtElt |
RbtInsertAux(AlgorithmPowerWatershed.Rbt T,
double k,
int d) |
|
(package private) void |
RbtInsertSimple(AlgorithmPowerWatershed.Rbt T,
AlgorithmPowerWatershed.RbtElt z) |
|
private void |
rbtInteractiveTest() |
|
private AlgorithmPowerWatershed.RbtElt |
RbtMaximum(AlgorithmPowerWatershed.Rbt T,
AlgorithmPowerWatershed.RbtElt x) |
|
private AlgorithmPowerWatershed.RbtElt |
RbtMinimum(AlgorithmPowerWatershed.Rbt T,
AlgorithmPowerWatershed.RbtElt x) |
|
private int |
RbtPopMin(AlgorithmPowerWatershed.Rbt T) |
|
private void |
RbtPrint(AlgorithmPowerWatershed.Rbt T) |
|
private void |
RbtPrintRec(AlgorithmPowerWatershed.Rbt T,
AlgorithmPowerWatershed.RbtElt x,
int niv) |
|
private void |
rbtRandomTest() |
|
private void |
RbtReAlloc(AlgorithmPowerWatershed.Rbt A) |
|
private AlgorithmPowerWatershed.RbtElt |
RbtSearch(AlgorithmPowerWatershed.Rbt T,
double k) |
|
private AlgorithmPowerWatershed.RbtElt |
RbtSuccessor(AlgorithmPowerWatershed.Rbt T,
AlgorithmPowerWatershed.RbtElt x) |
|
void |
RbtTermine(AlgorithmPowerWatershed.Rbt T) |
|
private void |
RbtTransRec(AlgorithmPowerWatershed.Rbt T,
AlgorithmPowerWatershed.Rbt A,
AlgorithmPowerWatershed.RbtElt x) |
|
private boolean |
RbtVide(AlgorithmPowerWatershed.Rbt T) |
|
(package private) static void |
RightRotate(AlgorithmPowerWatershed.Rbt T,
AlgorithmPowerWatershed.RbtElt x) |
|
void |
runAlgorithm() |
Starts the program.
|
private void |
Set(int x,
int INDIC) |
|
private void |
TriEdges(int[][] index_edges,
int M,
int[] nb_same_edges) |
|
private void |
TriRapideStochastique(int[] A,
int[] I,
int p,
int r) |
|
private void |
TriRapideStochastique_dec(int[] A,
int[] I,
int p,
int r) |
|
private void |
TriRapideStochastique_inc(int[] A,
int[] I,
int p,
int r) |
|
private void |
UnSet(int x,
int INDIC) |
|
private void |
UnSetAll(int x) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
Prim
private static int Prim
-
epsilon
private double epsilon
-
testLifo
private boolean testLifo
-
geod
private boolean geod
-
error
private boolean error
-
Indics
private short[] Indics
-
Constructor Detail
-
AlgorithmPowerWatershed
public AlgorithmPowerWatershed(ModelImage destImg,
ModelImage srcImg,
int algo,
java.util.Vector<java.lang.Integer> index_seeds,
java.util.Vector<java.lang.Short> index_labels,
boolean geod)
Constructs Power watershed algorithm.
- Parameters:
destImg - Image model where result image is to storedsrcImg - Source image modelalgo - Kruskal, or Primindex_seeds - The index in the image array of the seedindex_labels - For 2-labels 1 for white foreground and 2 for black background
For multi-labels values from 1 to n with n <= 255 for segmentation in n labelsgeod - Geodesic reconstruction
-
Method Detail
-
indicTest
private void indicTest()
-
lifoTest
private void lifoTest()
-
PowerWatershed_q2
private void PowerWatershed_q2(int[][] edges,
int[] weights,
int[] normal_weights,
int max_weight,
java.util.Vector<java.lang.Integer> seeds,
java.util.Vector<java.lang.Short> labels,
int size_seeds,
int rs,
int cs,
int ds,
int nb_labels,
boolean quicksort,
ModelImage img_proba)
-
RandomWalker
private boolean RandomWalker(int[][] index_edges,
int M,
int[] index,
int[] indic_vertex,
int N,
int[] index_seeds,
float[][] boundary_values,
int numb_boundary,
int nb_labels,
float[][] proba)
-
fill_A
private boolean fill_A(double[] A_a,
int[] A_indc,
int[] A_indr,
int[] A_nelem,
int[] A_m,
int[] A_n,
int N,
int M,
int numb_boundary,
int[][] index_edges,
boolean[] seeded_vertex,
int[] indic_sparse,
int[] nb_same_edges)
-
fill_B
private void fill_B(double[] B_a,
int[] B_indc,
int[] B_indr,
int[] B_nelem,
int[] B_m,
int[] B_n,
int N,
int M,
int numb_boundary,
int[][] index_edges,
boolean[] seeded_vertex,
int[] indic_sparse,
int[] nb_same_edges)
-
merge_node
private void merge_node(int e1,
int e2,
int[] Rnk,
int[] Fth,
float[][] proba,
int nb_labels)
-
grey_weights_PW
private int[] grey_weights_PW(ModelImage image,
int[][] edges,
java.util.Vector<java.lang.Integer> seeds,
int size_seeds,
int[] weights,
boolean quicksort)
-
color_standard_weights_PW
private int[] color_standard_weights_PW(ModelImage image,
int[] weights,
int[][] edges,
java.util.Vector<java.lang.Integer> seeds,
int size_seeds,
int[] maxi,
boolean quicksort)
-
MSF_Prim
private void MSF_Prim(int[][] edges,
int[] weights,
java.util.Vector<java.lang.Integer> seeds,
java.util.Vector<java.lang.Short> labels,
int size_seeds,
int rs,
int cs,
int ds,
int nblabels)
-
MSF_Kruskal
private void MSF_Kruskal(int[][] edges,
int[] weights,
int max_weight,
java.util.Vector<java.lang.Integer> seeds,
java.util.Vector<java.lang.Short> labels,
int size_seeds,
int rs,
int cs,
int ds,
int nblabels)
-
neighbor
private int neighbor(int i,
int k,
int rs,
int cs,
int ds)
-
grey_weights
private void grey_weights(ModelImage image,
int[] weights,
int[][] edges,
java.util.Vector<java.lang.Integer> seeds,
int size_seeds,
boolean geod,
boolean quicksort)
-
color_standard_weights
private int color_standard_weights(ModelImage image,
int[] weights,
int[][] edges,
java.util.Vector<java.lang.Integer> seeds,
int size_seeds,
boolean geod,
boolean quicksort)
-
neighbor_node_edge
private int neighbor_node_edge(int i,
int k,
int rs,
int cs,
int ds)
-
gageodilate_union_find
private void gageodilate_union_find(int[] F,
int[] G,
int[] O,
int[][] edges,
int rs,
int cs,
int ds,
int max_weight,
boolean quicksort)
-
element_link_geod_dilate
private void element_link_geod_dilate(int n,
int p,
int[] Fth,
int[] G,
int[] O)
-
neighbor_edge_3D
private int neighbor_edge_3D(int node1,
int node2,
int i,
int k,
int rs,
int cs,
int ds)
-
neighbor_edge
private int neighbor_edge(int i,
int k,
int rs,
int cs,
int ds)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceqd.html������������������������������������������������0000775�4231163�4231163�00000051313�14537076055�023336� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceqd (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
- Direct Known Subclasses:
AlgorithmFRAP.FitExpModelqd, AlgorithmFRAP.FitFullModelqd, InverseLaplaceTest.Fitqd1, InverseLaplaceTest.Fitqd10, InverseLaplaceTest.Fitqd11, InverseLaplaceTest.Fitqd12, InverseLaplaceTest.Fitqd13, InverseLaplaceTest.Fitqd14, InverseLaplaceTest.Fitqd15, InverseLaplaceTest.Fitqd16, InverseLaplaceTest.Fitqd2, InverseLaplaceTest.Fitqd3, InverseLaplaceTest.Fitqd4, InverseLaplaceTest.Fitqd5, InverseLaplaceTest.Fitqd6, InverseLaplaceTest.Fitqd7, InverseLaplaceTest.Fitqd8, InverseLaplaceTest.Fitqd9
public abstract class InverseLaplaceqd
extends java.lang.Object
This is a port of niltqd.m, a fast numerical inverse Laplace transform based on FFT and quotient-difference algorithm
by Lubomir Brancik, 2001, Brno University of Technology.
In doing fits be sure to exclude the t = 0.0 point values as the error associated with this point is far greater than
the error associated with the other points. Increasing p above 3 did not have any appreciable effect on the rms
error. For the exp(t) example the effect of tol was: tol = 1.0E-8 rms error = 6.29E-5 tol = 1.0E-9 rms error =
7.26E-6 tol = 1.0E-10 rms error = 4.40E-6 tol = 1.0E-11 rms error = 1.13E-5 tol = 1.0E-12 rms error = 3.27E-5
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
endTime |
DOCUMENT ME!
|
private double |
largestPole |
largest pole of Laplace space function (default zero) Note that InverseLaplace may give incorrect results if the
default value of largestPole is used.
|
private int |
p |
DOCUMENT ME!
|
private double[] |
time |
resulting vector of times.
|
private double[] |
timeFunction |
resulting vector of real-space values.
|
private double |
tol |
numerical tolerance of approaching pole (default 1.0e-9).
|
private int |
tPts |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
InverseLaplaceqd(int timePoints,
double endTime) |
Constructor for InverseLaplaceqd.
|
InverseLaplaceqd(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Constructor for InverseLaplaceqd.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
endTime
double endTime
DOCUMENT ME!
-
largestPole
private double largestPole
largest pole of Laplace space function (default zero) Note that InverseLaplace may give incorrect results if the
default value of largestPole is used. For example, the function exp(t) with the Laplace transform 1/(s-1) will
give correct results if largestPole is set to 1.0, but will return incorrect negative values for time >= 1.0 if
the largestPole default of 0.0 is used.
-
p
private int p
DOCUMENT ME!
-
tPts
private final int tPts
DOCUMENT ME!
-
Constructor Detail
-
InverseLaplaceqd
public InverseLaplaceqd(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Constructor for InverseLaplaceqd.
- Parameters:
timePoints - intendTime - doublelargestPole - doubletol - doublematrixSizeParameter - int
-
Method Detail
-
fitToLaplace
public abstract double[][] fitToLaplace(double realS,
double[] imagS)
The second index is 0 for the real part and 1 for the imaginary part.
- Parameters:
realS - DOCUMENT ME!imagS - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
driver
public void driver()
driver.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog9.html�����������������������������������0000775�4231163�4231163�00000026621�14537076055�025615� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog9 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog9(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog9
public FitdeHoog9(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.CurveFittingCostFunction.html������������������������0000775�4231163�4231163�00000034051�14537076053�030155� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.CurveFittingCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEllipsoidFit.html�������������������������������������������0000775�4231163�4231163�00000027567�14537076045�024367� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEllipsoidFit (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmEllipsoidFit
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
axis |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmEllipsoidFit(java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> kPoints) |
Creates a new AlgorithmEllipsoidFit object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
axis
double[] axis
DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BlockJacobiPreconditionerTest.html�������������������0000775�4231163�4231163�00000031134�14537076053�031113� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BlockJacobiPreconditionerTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.BlockJacobiPreconditionerTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
passed
private boolean passed
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.TreeRegression.html��������������������������������0000775�4231163�4231163�00000105215�14537076057�026530� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.TreeRegression (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int[] |
counter |
|
private double[] |
sums |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Tree
alpha, case_weights, child_nodeIDs, data, dependent_varID, deterministic_varIDs, holdout, importance_mode, inbag_counts, keep_inbag, memory_saving_splitting, min_node_size, minprop, mtry, num_random_splits, num_samples, num_samples_oob, oob_sampleIDs, prediction_terminal_nodeIDs, random, sample_fraction, sample_with_replacement, sampleIDs, split_select_varIDs, split_select_weights, split_values, split_varIDs, splitrule, variable_importance
-
Constructor Summary
Constructors
| Constructor |
Description |
TreeRegression() |
|
TreeRegression(java.util.Vector<java.util.Vector<java.lang.Integer>> child_nodeIDs,
java.util.Vector<java.lang.Integer> split_varIDs,
java.util.Vector<java.lang.Double> split_values) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
addImpurityImportance(int nodeID,
int varID,
double decrease) |
|
void |
allocateMemory() |
|
void |
appendToFileInternal(java.io.BufferedWriter bw) |
|
void |
bootstrapClassWise() |
|
void |
bootstrapWithoutReplacementClassWise() |
|
void |
cleanUpInternal() |
|
double |
computePredictionAccuracyInternal() |
|
void |
createEmptyNodeInternal() |
|
double |
estimate(int nodeID) |
|
boolean |
findBestSplit(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
boolean |
findBestSplitExtraTrees(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
boolean |
findBestSplitMaxstat(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
void |
findBestSplitValueExtraTrees(int nodeID,
int varID,
double sum_node,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueExtraTreesUnordered(int nodeID,
int varID,
double sum_node,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueLargeQ(int nodeID,
int varID,
double sum_node,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueSmallQ(int nodeID,
int varID,
double sum_node,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
void |
findBestSplitValueUnordered(int nodeID,
int varID,
double sum_node,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease) |
|
double |
getPrediction(int sampleID) |
|
int |
getPredictionTerminalNodeID(int sampleID) |
|
boolean |
splitNodeInternal(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Tree
appendToFile, bootstrap, bootstrapWeighted, bootstrapWithoutReplacement, bootstrapWithoutReplacementWeighted, computePermutationImportance, createEmptyNode, createPossibleSplitVarSubset, dispose, dropDownSamplePermuted, getChildNodeIDs, getInbagCounts, getNumSamplesOob, getOobSampleIDs, getSplitValues, getSplitVarIDs, grow, init, permuteAndPredictOobSamples, predict, splitNode
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
counter
private int[] counter
-
sums
private double[] sums
-
Constructor Detail
-
TreeRegression
public TreeRegression()
-
Method Detail
-
findBestSplitValueSmallQ
public void findBestSplitValueSmallQ(int nodeID,
int varID,
double sum_node,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueLargeQ
public void findBestSplitValueLargeQ(int nodeID,
int varID,
double sum_node,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueUnordered
public void findBestSplitValueUnordered(int nodeID,
int varID,
double sum_node,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueExtraTrees
public void findBestSplitValueExtraTrees(int nodeID,
int varID,
double sum_node,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
-
findBestSplitValueExtraTreesUnordered
public void findBestSplitValueExtraTreesUnordered(int nodeID,
int varID,
double sum_node,
int num_samples_node,
double[] best_value,
int[] best_varID,
double[] best_decrease)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.TickMarkGenerator.html�����������������������������������0000775�4231163�4231163�00000027147�14537076054�025766� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.TickMarkGenerator (MIPAV API Documentation)
-
-
Method Detail
-
genTicksAndLabels
ContourPlot.Pair<double[],java.lang.String[]> genTicksAndLabels(double min,
double max,
int desiredNumTicks,
boolean verticalAxis)
Generates a number of tick marks and corresponding labels.
The first entry of the returned pair are the tick mark values,
the second part are the corresponding labels.
- Parameters:
min - minimum of value range for which ticks marks are to be generatedmax - maximum of value range for which ticks marks are to be generateddesiredNumTicks - the desired number of generated tick marks, not obligatory,
can also create less or more tick marks if that leads to better tick values.verticalAxis - true if marks are for vertical axis, false when for horizontal axis- Returns:
- pair of a tick mark value array and corresponding label array for these values
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSM2.Integration2All.html������������������������������������0000775�4231163�4231163�00000030455�14537076050�025360� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSM2.Integration2All (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Integration2All
public Integration2All()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmConstELSUNCOpt3D.html���������������������������������������0000775�4231163�4231163�00000163340�14537076044�024637� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConstELSUNCOpt3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmConstELSUNCOpt3D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector3f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] initial,
double[] tols,
int maxIter,
int bracketBound) |
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
TransMatrixd |
convertToMatrix(double[] vector) |
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
|
TransMatrixd |
convertToMatrixHalf(double[] vector) |
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
|
TransMatrixd |
convertToMatrixMidsagittal(double[] vector) |
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
|
boolean |
didSucceed() |
Returns whether or not a minimum was found.
|
void |
disposeLocal() |
Sets everything to null and prepares this class for destruction.
|
double |
getCost() |
Returns the cost of the best transformation.
|
double[] |
getFinal() |
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
|
double[] |
getFinal(double[] point) |
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
|
double[] |
getFinal(float sample) |
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
|
TransMatrixd |
getMatrix() |
Accessor that returns the matrix representing the best transformation.
|
TransMatrixd |
getMatrix(float sample) |
Accessor that returns the matrix representing the best transformation.
|
TransMatrixd |
getMatrixHalf() |
Accessor that returns the matrix representing the best tranformation.
|
TransMatrixd |
getMatrixHalf(float sample) |
Accessor that returns the matrix representing the best tranformation.
|
TransMatrixd |
getMatrixMidsagittal() |
Accessor that returns the matrix representing the best tranformation.
|
TransMatrixd |
getMatrixMidsagittal(float sample) |
Accessor that returns the matrix representing the best tranformation.
|
double[] |
getPoint() |
Returns the optimized point, with length == degrees of freedom.
|
void |
measureCost() |
Calls cost function with point and saves result in functionAtBest.
|
void |
runAlgorithm() |
Runs ELSUNC along one dimension at a time as long as the costFunction improves during one cycle of runs along
every dimension.
|
void |
setInitialPoint(double[] initial) |
Sets the initial point to the value passed in.
|
void |
setLimits(float[][] limits) |
Sets the limits on rotation and translation.
|
void |
setMaxIterations(int max) |
Sets the maximum number of iterations.
|
void |
setProgressBar(ViewJProgressBar progress,
int begin,
int max) |
Accessor that sets the progress bar so it can be updated from here.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
nDims
private int nDims
Degress of freedom.
-
status
private int status
-
Constructor Detail
-
AlgorithmConstELSUNCOpt3D
public AlgorithmConstELSUNCOpt3D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector3f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] initial,
double[] tols,
int maxIter,
int bracketBound)
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- Parameters:
parent - Algorithm that called this optimization.com - Center of Mass of the input image.degreeOfFreedom - Degree of freedom for transformation (must be 3, 4, 6, 7, 9, or 12).costFunc - Cost function to use.initial - Initial point to start from, length of 12.tols - Tolerance for each dimension (tols.length == degreeOfFreedom).maxIter - Maximum number of iterations.bracketBound - DOCUMENT ME!
-
Method Detail
-
convertToMatrix
public TransMatrixd convertToMatrix(double[] vector)
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix. The length of the vector should be equal to the global variable nDims, which in turn was initialized by
the degrees of freedom originally sent to this algorithm. Therefore, if there are 3 degrees of freedom, we set
only the translations; 4 means translation and global scaling; 6 means rotation and translation; 7 means
rotation, translation, and global scaling; 9 means rotation, translation, and scaling; and 12 means rotation,
translation, scaling, and skewing.
- Parameters:
vector - Vector that represented a "point" in the algorithm which needs to be converted to a matrix.- Returns:
- The transformation matrix created from the vector.
-
convertToMatrixHalf
public TransMatrixd convertToMatrixHalf(double[] vector)
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix. The length of the vector should be equal to the global variable nDims, which in turn was initialized by
the degrees of freedom originally sent to this algorithm. Therefore, if there are 3 degrees of freedom, we set
only the translations; 4 means translation and global scaling; 6 means rotation and translation; 7 means
rotation, translation, and global scaling; 9 means rotation, translation, and scaling; and 12 means rotation,
translation, scaling, and skewing.
- Parameters:
vector - Vector that represented a "point" in the algorithm which needs to be converted to a matrix.- Returns:
- The transformation matrix created from the vector.
-
convertToMatrixMidsagittal
public TransMatrixd convertToMatrixMidsagittal(double[] vector)
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix. The length of the vector should be equal to the global variable nDims, which in turn was initialized by
the degrees of freedom originally sent to this algorithm. Therefore, if there are 3 degrees of freedom, we set
only the translations; 4 means translation and global scaling; 6 means rotation and translation; 7 means
rotation, translation, and global scaling; 9 means rotation, translation, and scaling; and 12 means rotation,
translation, scaling, and skewing.
- Parameters:
vector - Vector that represented a "point" in the algorithm which needs to be converted to a matrix.- Returns:
- The transformation matrix created from the vector.
-
getFinal
public double[] getFinal()
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- Returns:
- vector representing the best transformation in terms of translations, rotations, scales, and skews.
-
getFinal
public double[] getFinal(double[] point)
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- Returns:
- vector representing the best transformation in terms of translations, rotations, scales, and skews.
-
getFinal
public double[] getFinal(float sample)
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- Parameters:
sample - the voxel resolution- Returns:
- vector representing the best transformation in terms of translations, rotations, scales, and skews.
-
getMatrix
public TransMatrixd getMatrix(float sample)
Accessor that returns the matrix representing the best transformation. The passed in parameter represents the
resolution (same in all directions and for both input and reference images, since resampled isotropically). Since
the optimization was done in pixel space, not millimeter space, the translation parameters need to be scaled by
the sample value.
- Parameters:
sample - the voxel resolution- Returns:
- matrix representing the best transformation.
-
getMatrixHalf
public TransMatrixd getMatrixHalf(float sample)
Accessor that returns the matrix representing the best tranformation. The passed in parameter represents the
resolution (same in all directions and for both input and reference images, since resampled isotropically). Since
the optimization was done in pixel space, not millimeter space, the translation parameters need to be scaled by
the sample value. All of the components of the transformation are halved from the 'best transformation' matrix.
- Parameters:
sample - the voxel resolution- Returns:
- matrix representing the best transformation with its components halved.
-
getMatrixMidsagittal
public TransMatrixd getMatrixMidsagittal()
Accessor that returns the matrix representing the best tranformation. This transformation contains only the z
rotation and the x and y translation, to be used in the midsagittal alignment algorithm.
- Returns:
- matrix representing the best transformation's z rot and x and y trans.
-
getMatrixMidsagittal
public TransMatrixd getMatrixMidsagittal(float sample)
Accessor that returns the matrix representing the best tranformation. The passed in parameter represents the
resolution (same in all directions and for both input and reference images, since resampled isotropically). Since
the optimization was done in pixel space, not millimeter space, the translation parameters need to be scaled by
the sample value. This transformation contains only the z rotation and the x and y translation, to be used in the
midsagittal alignment algorithm.
- Parameters:
sample - the voxel resolution- Returns:
- matrix representing the best transformation's z rot and x and y trans.
-
setProgressBar
public void setProgressBar(ViewJProgressBar progress,
int begin,
int max)
Accessor that sets the progress bar so it can be updated from here.
- Parameters:
progress - DOCUMENT ME!begin - Value of progress bar when sent here.max - Maximum value allowed.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens7.html���������������������������������0000775�4231163�4231163�00000030414�14537076055�026172� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens7 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens7(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens7
public FitPiessens7(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.DynamicCompressedRowSparseMatrix.html�������������������0000775�4231163�4231163�00000043210�14537076052�031067� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.DynamicCompressedRowSparseMatrix (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.util.Vector<java.util.Vector<java.lang.Integer>> |
dynamic_cols_ |
|
private java.util.Vector<java.util.Vector<java.lang.Double>> |
dynamic_values_ |
|
-
Method Summary
-
AppendRows, col_blocks, cols, DeleteRows, LeftMultiply, mutable_col_blocks, mutable_cols, mutable_row_blocks, mutable_rows, mutable_values, num_cols, num_nonzeros, num_rows, RightMultiply, row_blocks, rows, ScaleColumns, set_col_blocks, set_num_cols, set_num_rows, set_row_blocks, set_storage_type, SetMaxNumNonZeros, SetZero, SquaredColumnNorm, storage_type, ToCRSMatrix, ToCRSMatrix, ToDenseMatrix, ToTextFile, Transpose, values
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.CVodeMemRec.html����������������������������������������������0000775�4231163�4231163�00000257535�14537076054�023204� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.CVodeMemRec (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
cv_uround
double cv_uround
-
cv_reltol
double cv_reltol
-
cv_Sabstol
double cv_Sabstol
-
cv_user_efun
boolean cv_user_efun
-
cv_efun_select
int cv_efun_select
-
cv_quadr
boolean cv_quadr
-
cv_errconQ
boolean cv_errconQ
-
cv_reltolQ
double cv_reltolQ
-
cv_SabstolQ
double cv_SabstolQ
-
cv_sensi
boolean cv_sensi
-
cv_DQrhomax
double cv_DQrhomax
-
cv_errconS
boolean cv_errconS
-
cv_reltolS
double cv_reltolS
-
cv_SabstolS
double[] cv_SabstolS
-
cv_quadr_sensi
boolean cv_quadr_sensi
-
cv_fQSDQ
boolean cv_fQSDQ
-
cv_errconQS
boolean cv_errconQS
-
cv_reltolQS
double cv_reltolQS
-
cv_SabstolQS
double[] cv_SabstolQS
-
cv_stgr1alloc
boolean cv_stgr1alloc
-
cv_tstopset
boolean cv_tstopset
-
cv_hprime
double cv_hprime
-
cv_next_h
double cv_next_h
-
cv_hscale
double cv_hscale
-
cv_tretlast
double cv_tretlast
-
cv_gammap
double cv_gammap
-
cv_gamrat
double cv_gamrat
-
cv_crateS
double cv_crateS
-
cv_acnrmQ
double cv_acnrmQ
-
cv_acnrmS
double cv_acnrmS
-
cv_acnrmQS
double cv_acnrmQS
-
cv_nlscoef
double cv_nlscoef
-
cv_ncfS1
int[][] cv_ncfS1
-
cv_maxcorS
int cv_maxcorS
-
cv_hmax_inv
double cv_hmax_inv
-
cv_etamax
double cv_etamax
-
cv_ncfnS1
long[][] cv_ncfnS1
-
cv_netfQS
long[] cv_netfQS
-
cv_nsetups
long cv_nsetups
-
cv_nsetupsS
long cv_nsetupsS
-
cv_etaqm1
double cv_etaqm1
-
cv_etaqp1
double cv_etaqp1
-
cv_linit_select
int cv_linit_select
-
cv_lsetup_select
int cv_lsetup_select
-
cv_lsolve_select
int cv_lsolve_select
-
cv_lfree_select
int cv_lfree_select
-
cv_forceSetup
boolean cv_forceSetup
-
cv_saved_tq5
double cv_saved_tq5
-
cv_jcur
boolean[] cv_jcur
-
cv_convfail
int cv_convfail
-
cv_qmax_alloc
int cv_qmax_alloc
-
cv_qmax_allocQ
int cv_qmax_allocQ
-
cv_qmax_allocS
int cv_qmax_allocS
-
cv_qmax_allocQS
int cv_qmax_allocQS
-
cv_indx_acor
int cv_indx_acor
-
cv_MallocDone
boolean cv_MallocDone
-
cv_sldeton
boolean cv_sldeton
-
cv_ssdat
double[][] cv_ssdat
-
cv_iroots
int[] cv_iroots
-
cv_rootdir
int[] cv_rootdir
-
cv_grout
double[] cv_grout
-
cv_gactive
boolean[] cv_gactive
-
cv_mxgnull
int cv_mxgnull
-
cv_adjMallocDone
boolean cv_adjMallocDone
-
Constructor Detail
-
CVodeMemRec
public CVodeMemRec()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TypedPreconditioner.html���������������������������������0000775�4231163�4231163�00000035023�14537076052�026336� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TypedPreconditioner (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.CompleteRenderer.html������������������������������������0000775�4231163�4231163�00000065232�14537076053�025645� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.CompleteRenderer (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
ContourPlot.CompleteRenderer |
addItemToRender(ContourPlot.Renderable item) |
Adds the specified item to the corresponding renderer.
|
boolean |
isEnabled() |
Whether this renderer is enabled or not.
|
void |
renderFallback(java.awt.Graphics2D g,
java.awt.Graphics2D p,
int w,
int h) |
|
void |
renderPDF(org.apache.pdfbox.pdmodel.PDDocument doc,
org.apache.pdfbox.pdmodel.PDPage page,
int x,
int y,
int w,
int h) |
Renders this PDFRenderers contents, that is creating
pdf elements and appending them to the specified page
within the corresponding document.
|
void |
setView(java.awt.geom.Rectangle2D rect) |
Sets the view matrix for each of the renderers
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
isEnabled
boolean isEnabled
-
Method Detail
-
isEnabled
public boolean isEnabled()
Whether this renderer is enabled or not. By default a renderer is enabled and will
render upon #render(int, int, int, int) or #renderSVG(org.w3c.dom.Document, org.w3c.dom.Element, int, int).
When disabled those methods return right away and will not render anything.
- Specified by:
isEnabled in interface ContourPlot.Renderer- Returns:
- true when active
-
renderPDF
public void renderPDF(org.apache.pdfbox.pdmodel.PDDocument doc,
org.apache.pdfbox.pdmodel.PDPage page,
int x,
int y,
int w,
int h)
Renders this PDFRenderers contents, that is creating
pdf elements and appending them to the specified page
within the corresponding document.
- Specified by:
renderPDF in interface ContourPlot.PDFRenderer- Parameters:
doc - the PDF document holding the pagepage - page in pdf doc to which elements are to be appendedx - x coordinate of the current viewporty - y coordinate of the current viewportw - width of the current viewporth - height of the current viewport
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.EventLogger.html�����������������������������������������0000775�4231163�4231163�00000026772�14537076051�024577� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.EventLogger (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.EventLogger
-
-
Constructor Summary
Constructors
| Constructor |
Description |
EventLogger(java.lang.String logger_name) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
events_
java.lang.String events_
������gov/nih/mipav/model/algorithms/SIFT3D.SIFT3D_Descriptor_store.html����������������������������������0000775�4231163�4231163�00000025162�14537076056�025421� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.SIFT3D_Descriptor_store (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor_store
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) SIFT3D.SIFT3D_Descriptor[] |
buf |
|
(package private) int |
num |
|
(package private) int |
nx |
|
(package private) int |
ny |
|
(package private) int |
nz |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHistogramMatch.html�����������������������������������������0000775�4231163�4231163�00000102256�14537076046�024700� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHistogramMatch (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace() |
Histogram matching of the source image to the base image.
|
private void |
calcStoreInDest() |
This function produces a new image that has had itself histogram matched to the base image. places filtered image
in the destination image.
|
private void |
filter(float[] srcBuffer,
float[] baseBuffer) |
just break up each RGB image into these separate monochrome images sliceFilter and then reassemble int aRGB.
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
findBufferMinMax(float[] buf,
int bufStart,
int bufEnd) |
Finds the local maximum and minimum values in the given range in order, as given by the starting and stoping
values.
|
private float |
getIdealWidth(float[] srcBuffer) |
Calculate idealWidth for bins.
|
void |
runAlgorithm() |
starts the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
bChannel
private boolean bChannel
DOCUMENT ME!
-
bufMax
private float bufMax
DOCUMENT ME!
-
bufMin
private float bufMin
DOCUMENT ME!
-
gChannel
private boolean gChannel
DOCUMENT ME!
-
rChannel
private boolean rChannel
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmHistogramMatch
public AlgorithmHistogramMatch(ModelImage srcImg,
ModelImage baseImage)
Constructor for 3D images in which changes are returned to the source image.
- Parameters:
srcImg - source image modelbaseImage - image whose histogram serves as a model
-
AlgorithmHistogramMatch
public AlgorithmHistogramMatch(ModelImage destImg,
ModelImage srcImg,
ModelImage baseImage)
Constructor for 3D images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelbaseImage - image whose histogram serves as a model
-
Method Detail
-
filter
private void filter(float[] srcBuffer,
float[] baseBuffer)
just break up each RGB image into these separate monochrome images sliceFilter and then reassemble int aRGB.
- Parameters:
srcBuffer - source bufferbaseBuffer - base Buffer
-
findBufferMinMax
private void findBufferMinMax(float[] buf,
int bufStart,
int bufEnd)
Finds the local maximum and minimum values in the given range in order, as given by the starting and stoping
values.
- Parameters:
buf - float array of valuesbufStart - where to begin lookingbufEnd - where to stop
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCannyEdgeDetection.html�������������������������������������0000775�4231163�4231163�00000057022�14537076044�025460� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCannyEdgeDetection (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
sigma
private float sigma
-
Constructor Detail
-
AlgorithmCannyEdgeDetection
public AlgorithmCannyEdgeDetection(ModelImage destImg,
ModelImage srcImg,
double highThreshold,
double lowThreshold,
float sigma)
AlgorithmCannyEdgeDetection.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!highThreshold - lowThreshold - sigma -
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Vertex.html�����������������������������������������������������0000775�4231163�4231163�00000060532�14537076056�022132� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Vertex (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Vertex
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Vertex() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCircleGeneration.html���������������������������������������0000775�4231163�4231163�00000127564�14537076044�025212� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCircleGeneration (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmCircleGeneration
extends AlgorithmBase
This module draws uniformly randomly positioned circles with a specified radius.
See http://www.indiana.edu/~statmath for skewness, kurtosis, and Jarque-Bera Test that uses skewness
and kurtosis to test for normality. Tests for a Gaussian fit reveal nothing since RANDOM, AGGREGATED,
UNIFORM, and CONSTRAINED patterns all fail Gaussian fit tests.
From Computational Methods in Biophysics, Biomaterials, BioTechnology, and Medical Systems
Algorithm Development, Mathematical Analysis, and Diagnostics Volume 2 Computational Methods edited by Cornelius
T. Leondes, Chapter 2 Computer techniques for spatial analysis of objects in biomedical images by
G. Cevenini, M. R. Massia, and P. Barbini, Kluwer Academic Publishers, 2003, pp. 39-90, information about
randomly distributed circles.
"Analysis of the distribution W**2 of squared NN distances between n randomly distributed circles shows that
2*lambda*PI*(W**2 - n*diameter**2)
has a chi-squared distribution with 2*n degrees of freedom. diameter is the average diameter of the circular objects,
lambda is the mean number per unit area.
X is a point to NN object distance.
W is an inter-object NN distance. Consider W as going from the center of one object to the center of
the nearest object.
The point-object squared NN distance distribution, X**2, is not affected by the reperesentation of objects
as circles, thus 2*lambda*X**2 also has a chi-squared distribution with 2m degrees of freedom, where m is the
number of selected points. It means that, under the assumption of circular objecs of equal size, all tests
based on squared NN distances, like those of Hopkins, Brown, or others, can still be used. If m = n, and these
results are combined, an estimate of the mean radius of the objects as circles can be obtained as
rest = sqrt((W**2 - X**2)/n)
Again, a Monte Carlo approach is sugested. If rest is significantly different from the value measured directly
on the image by automatic procedures of digital image processing or a value nevertheless compatible with the
average physical size of the objects, we can sustain that the statistical pattern is not random. If rest is high,
it indicates regularity; if low, aggregation. Moreover, since the formula for rest is formally a function of NN
distances, we can again inspect classes of distances to obtain scale-related indications about the statistical
pattern.
Best reference for nearest neighbor distribution for equally sized circles is: "Nearest Neighbor Assessments of
Spatial Configurations of Circles rather Than Points" by Daniel Simberloff, Ecology, Vol. 60, No. 4, Aug. 1979,
pp. 679-685.
d = diameter
lambda = mean number per unit area
Dr. Daniel Simberloff writes:
"In any event, you are probably correct that it would be more logical to caclulate rho for the points only in
the interior, not the border region, remembering to leave out the border region when calculating area."
mean nearest neighbor value = d + (exp(lambda * PI * d**2)/sqrt(lambda)*integral from t = d*sqrt(2*lambda*PI) to
t = infinity of (1/sqrt(2*PI))*exp(-t**2/2)dt. The integral is simply the 1 - Gaussian probability integral.
E(nearest neighbor distance squared) = d**2 + 1/(lambda * PI)
variance = E(r**2) - [E(r)]**2 = d**2 + 1/(lambda * PI) - [E(r)]**2
standard error = sqrt(variance)/sqrt(N)
Get percentile from Gaussian probability integral.
If the measured mean is significantly greater than the analytical mean, the distribution is uniform or regular.
If the measured mean is signficantly less than than the analytical mean, the distribution is clumped or
aggregated.
For larger circles these equations become increasingly inaccurate because an assumption of the Poisson
distribution of rare events is violated: the mean number of circles per sampling unit is not small relative
to the maximum possible number of circles per sampling unit. In fact for a given lambda there is a maximum
E[r]= sqrt(2)/((3**0.25)*sqrt(lambda)), which obtains when all the points are perfectly arranged as vertices
of a hexagonal lattice. Put another way, the maximum size circles that can be arranged with density lambda
have diameter d = sqrt(2)/((3**0.25)*sqrt(lambda)), and are located at the centers of hexagons completely
filling space. At d = sqrt(2)/((3**0.25)*sqrt(lambda)), the standard error of average r will be zero, since
there is only one possible arrangement. The Poisson derived expresion for standard error does not vanish until
d is somewhat greater than this maximum d.
According to Simberloff for d = 0 and lambda = 0.005, E[r] = 7.0711. When I ran a random distribution
for 10,000 by 1,000 with 50,000 circles requested and circle diameter = 0, I had observed mean = 7.09
and analytical mean = 7.0717.
The analytic equation for E[r(d,lambda)] is quite accurate for d as large as E[r(0, lambda)]; it exceeds the
simulated value by only 6.6%. The analytic equation for the standard error begins to go badly awry at
approximately d = 0.75E[r(0,lambda)]. For example, for d = E[r(0,lambda)], whereas the equation for E[r]
exceeds its true value by only 6.6%, the calculated standard error exceeds the correct value by 29.1%.
For small circles either the analytic expressions or simulations for the expected mean nearest neighbor
and its standard error can be used, but for larger circles simulations should be used.
Let x2 = chi squared and v = degrees of freedom
The probability density function p(x2,v) = (1/((2**(v/2))* gamma(v/2)))*(x2**((v-2)/2))*exp(-x2/2)
The probability of observing a value of chi square that is larger than a particular value for a random
sample of N observations with v degrees of freedom is the integral of this probability from chi square = x2
to chi square = infinity.
I have used the formula from "Nearest-neighbor distribution functions in many-body systems" by S. Torquato,
B. Lu. and J. Rubinstein, The American Physical Society Physical Review A, Volume 41, Number 4,
February 15, 1990, pp. 2059-2075.
Let the area fraction of the circles = af
a2 = 4*af/((1 - af)**2)
b2 = 4*af*(2 + af)/((1 - af)**2)
mean nearest neighbor distance = diameter * (1 + 0.5*sqrt(PI/a2)*exp(b2*b2/(4*a2))*erfc[b2/(2*sqrt(a2))])
Torquato developed more accurate equations in 1995 superseding the 1990 equations. In "Nearest-neighbor
statistics for packings of hard spheres and disks" by S. Torquato, Physical Review E, Volume 51, Number 4,
April, 1995, pp. 3170 - 3182:
af = area fraction of circles
mean nearest neighbor distance = diameter * (1 + integral)
integral = integral from x = 1 to x = infinity of
exp{-af[4*a0*(x*x - 1) + 8*a1*(x - 1)]}
For af <= 0.69, the freezing packing fraction:
a0 = (1 + 0.128*af)/((1 - af)**2)
a1 = -0.564*af/((1 - af)**2)
For 0.69 < af < 0.82, random close packing
gf(1) = (1 - 0.436*0.69)/((1 - 0.69)**2)
Professor Torquato confirmed that the phi in the disk gf(1) equation numerator is incorrectly missing a f subscript.
a0 = 2*gf(1)*(0.82 - 0.69)/(0.82 - af) - 1/(1 - af)
a1 = -gf(1)*(0.82 - 0.69)/(0.82 - af) + 1/(1 - af)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmCircleGeneration() |
AlgorithmCircleGeneration - default constructor.
|
AlgorithmCircleGeneration(ModelImage srcImage,
int radius,
int numCircles,
int pattern,
int initialRandomCircles,
double minimumNearestNeighborDistance,
double maximumNearestNeighborDistance,
double lowestForbiddenNNDistance,
double highestForbiddenNNDistance,
double highestRegenerationNNDistance,
double semiMajorAxis,
double semiMinorAxis,
double phi,
double smallestToLargestMajorAxisRatio) |
AlgorithmRandomCircleGeneration.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
radius
private int radius
-
numCircles
private int numCircles
-
pattern
private int pattern
-
Constructor Detail
-
AlgorithmCircleGeneration
public AlgorithmCircleGeneration(ModelImage srcImage,
int radius,
int numCircles,
int pattern,
int initialRandomCircles,
double minimumNearestNeighborDistance,
double maximumNearestNeighborDistance,
double lowestForbiddenNNDistance,
double highestForbiddenNNDistance,
double highestRegenerationNNDistance,
double semiMajorAxis,
double semiMinorAxis,
double phi,
double smallestToLargestMajorAxisRatio)
AlgorithmRandomCircleGeneration.
- Parameters:
srcImg - Blank source image in which circles will be drawnradius - Circle radiusnumCircles - Number of circles to be drawnpattern - RANDOM, AGGREGATED, or REGULARinitialRandomCircles - Used in AGGREGATED. initialRandomCircles are drawn randomly. The rest
are drawn with nearestNeighborDistance less than or equal ot maximumNearestNeighborDistance.minimumNearestNeighborDistance - Used in REGULARmaximumNearestNeighborDistance - Used in AGGREGATED and REGULARlowestForbiddenNNDistance - Used in CONSTRAINEDhighestForbiddenNNDistance - Used in CONSTRAINEDhighestRegeneerationNNDistance - Used in CONSTRAINEDsemiMajorAxis - used in AGGREGATED_ELIPSEsemiMinorAxis - used in AGGREGATED_ELLIPSEphi - used in AGGREGATED_ELLIPSEsmallestToLargestMajorAxisRatio - used in AGGREGATED_CIRCLES_DIFFERENT_SIZES
��������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CDFLIB.html����������������������������������������������������������0000775�4231163�4231163�00000154414�14537076051�021041� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CDFLIB (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CDFLIB
-
public class CDFLIB
extends java.lang.Object
Legalities
==========
We place our efforts in writing this package in the public domain.
However, code from ACM publications is subject to the ACM policy
(below).
References
==========
Incomplete Beta
---------------
DiDinato, A. R. and Morris, A. H. (1993) ``Algorithm 708:
Significant Digit Computation of the Incomplete Beta Function
Ratios.'' ACM Trans. Math. Softw. 18, 360-373.
Incomplete Gamma
----------------
DiDinato, A. R. and Morris, A. H. (1986) ``Computation of the
incomplete gamma function ratios and their inverse.'' ACM Trans. Math.
Softw. 12, 377-393.
Cumulative Normal
-----------------
Cody, W.D. (1993). ``ALGORITHM 715: SPECFUN - A Portable FORTRAN
Package of Special Function Routines and Test Drivers'' ACM
Trans. Math. Softw. 19, 22-32.
Inverse Normal
--------------
``Algorithm AS241'' (1988) Appl. Statist. 37, NO. 3, 477-484.
Finding a Zero of a Monotone Function
-------------------------------------
Alefeld, G. E., Potra, F. A., Shi, Y. (1995) ``Algorithm 748:
Enclosing Zeros of Continuous Functions.'', by G. E. Alefeld, F. A.
Potra, YiXun Shi, ACM Trans. Math. Softw., 21, No. 3, 327-344
ACM Policy on Use of Code
=========================
Here is the software Policy of the ACM.
Submittal of an algorithm for publication in one of the
ACM Transactions implies that unrestricted use of the
algorithm within a computer is permissible. General
permission to copy and distribute the algorithm without
fee is granted provided that the copies are not made or
distributed for direct commercial advantage. The ACM
copyright notice and the title of the publication and
its date appear, and notice is given that copying is by
permission of the Association for Computing
Machinery. To copy otherwise, or to republish, requires
a fee and/or specific permission. Krogh, F. (1997)
``Algorithms Policy.'' ACM Tran. Math. Softw. 13,
183-186.
We do not know the policy of the Royal Statistical Society; they have
discontinued publishing algorithms. However, they made a number of
these programs available on Statlib on condition that there be no
charge for their distribution.
Here is our standard disclaimer.
NO WARRANTY
WE PROVIDE ABSOLUTELY NO WARRANTY OF ANY KIND EITHER EXPRESSED OR
IMPLIED, INCLUDING BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF
MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. THE ENTIRE RISK
AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM IS WITH YOU. SHOULD
THIS PROGRAM PROVE DEFECTIVE, YOU ASSUME THE COST OF ALL NECESSARY
SERVICING, REPAIR OR CORRECTION.IN NO EVENT SHALL THE UNIVERSITY OF
TEXAS OR ANY OF ITS COMPONENT INSTITUTIONS INCLUDING M. D. ANDERSON
HOSPITAL BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY LOST PROFITS,
LOST MONIES, OR OTHER SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES
ARISING OUT OF THE USE OR INABILITY TO USE (INCLUDING BUT NOT LIMITED
TO LOSS OF DATA OR DATA OR ITS ANALYSIS BEING RENDERED INACCURATE OR
LOSSES SUSTAINED BY THIRD PARTIES) THE PROGRAM.
-
-
Constructor Summary
Constructors
| Constructor |
Description |
CDFLIB() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double |
algdiv(double a,
double b) |
|
private double |
alnrel(double a) |
|
private double |
apser(double a,
double b,
double x,
double eps) |
|
private double |
basym(double a,
double b,
double lambda,
double eps) |
|
private double |
bcorr(double a0,
double b0) |
|
private double |
betaln(double a0,
double b0) |
|
private double |
bfrac(double a,
double b,
double x,
double y,
double lambda,
double eps) |
|
private void |
bgrat(double a,
double b,
double x,
double y,
double[] w,
double eps,
int[] ierr) |
|
private double |
bpser(double a,
double b,
double x,
double eps) |
|
private void |
bratio(double a,
double b,
double x,
double y,
double[] w,
double[] w1,
int[] ierr) |
|
private double |
brcmp1(int mu,
double a,
double b,
double x,
double y) |
|
private double |
brcomp(double a,
double b,
double x,
double y) |
|
private double |
bup(double a,
double b,
double x,
double y,
int n,
double eps) |
|
private void |
cdff(int which,
double[] p,
double[] q,
double[] f,
double[] dfn,
double[] dfd,
int[] status,
double[] bound) |
|
private void |
cumf(double f,
double dfn,
double dfd,
double[] cum,
double[] ccum) |
|
private void |
dinvr(int[] status,
double[] x,
double[] fx,
boolean[] qleft,
boolean[] qhi) |
|
private void |
dstinv(double zsmall,
double zbig,
double zabsst,
double zrelst,
double zstpmu,
double zabsto,
double zrelto) |
|
private void |
dstzr(double zxlo,
double zxhi,
double zabstl,
double zreltl) |
|
private void |
dzror(int[] status,
double[] x,
double[] fx,
double[] xlo,
double[] xhi,
boolean[] qleft,
boolean[] qhi) |
|
private double |
EPSILON() |
|
private double |
erf(double x) |
|
private double |
erfc1(int ind,
double x) |
|
private double |
esum(int mu,
double x) |
|
private double |
evaluate_polynomial(double[] a,
double x) |
|
private double |
exparg(int l) |
|
private double |
fpser(double a,
double b,
double x,
double eps) |
|
private double |
ftol(double zx) |
|
private double |
gam1(double a) |
|
private double |
gamln(double a) |
|
private double |
gamln1(double a) |
|
private void |
grat1(double a,
double x,
double r,
double[] p,
double[] q,
double eps) |
|
private double |
gsumln(double a,
double b) |
|
private int |
ipmpar(int i) |
|
private double |
psi(double xx) |
|
private boolean |
qxmon(double zx,
double zy,
double zz) |
|
private double |
rexp(double x) |
|
private double |
rlog1(double x) |
|
void |
selfTest() |
|
private double |
spmpar(int i) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
small
private double small
-
absstp
private double absstp
-
relstp
private double relstp
-
stpmul
private double stpmul
-
abstol
private double abstol
-
reltol
private double reltol
-
i99999_dinvr
private int i99999_dinvr
-
yy_dinvr
private double yy_dinvr
-
xub_dinvr
private double xub_dinvr
-
xlb_dinvr
private double xlb_dinvr
-
i99999_dzror
private int i99999_dzror
-
fda_dzror
private double fda_dzror
-
fdb_dzror
private double fdb_dzror
-
m_dzror
private double m_dzror
-
fb_dzror
private double fb_dzror
-
a_dzror
private double a_dzror
-
fa_dzror
private double fa_dzror
-
b_dzror
private double b_dzror
-
c_dzror
private double c_dzror
-
fc_dzror
private double fc_dzror
-
mb_dzror
private double mb_dzror
-
tol_dzror
private double tol_dzror
-
d_dzror
private double d_dzror
-
fd_dzror
private double fd_dzror
-
p_dzror
private double p_dzror
-
q_dzror
private double q_dzror
-
w_dzror
private double w_dzror
-
ext_dzror
private int ext_dzror
-
Method Detail
-
selfTest
public void selfTest()
-
cdff
private void cdff(int which,
double[] p,
double[] q,
double[] f,
double[] dfn,
double[] dfd,
int[] status,
double[] bound)
-
dstinv
private void dstinv(double zsmall,
double zbig,
double zabsst,
double zrelst,
double zstpmu,
double zabsto,
double zrelto)
-
dinvr
private void dinvr(int[] status,
double[] x,
double[] fx,
boolean[] qleft,
boolean[] qhi)
-
dzror
private void dzror(int[] status,
double[] x,
double[] fx,
double[] xlo,
double[] xhi,
boolean[] qleft,
boolean[] qhi)
-
cumf
private void cumf(double f,
double dfn,
double dfd,
double[] cum,
double[] ccum)
-
EPSILON
private double EPSILON()
-
bratio
private void bratio(double a,
double b,
double x,
double y,
double[] w,
double[] w1,
int[] ierr)
-
bgrat
private void bgrat(double a,
double b,
double x,
double y,
double[] w,
double eps,
int[] ierr)
-
grat1
private void grat1(double a,
double x,
double r,
double[] p,
double[] q,
double eps)
-
bup
private double bup(double a,
double b,
double x,
double y,
int n,
double eps)
-
brcmp1
private double brcmp1(int mu,
double a,
double b,
double x,
double y)
-
bfrac
private double bfrac(double a,
double b,
double x,
double y,
double lambda,
double eps)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/QuarticEquationEP.complex_t.html�������������������������������������0000775�4231163�4231163�00000023266�14537076056�025457� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
QuarticEquationEP.complex_t (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.QuarticEquationEP.complex_t
-
-
Constructor Summary
Constructors
| Constructor |
Description |
complex_t() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEfficientWatershed.indexValueComparator.html����������������0000775�4231163�4231163�00000027677�14537076045�031700� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEfficientWatershed.indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
�����������������������������������������������������������������gov/nih/mipav/model/algorithms/SVM.VlHomogeneousKernelMapWindowType.html����������������������������0000775�4231163�4231163�00000035472�14537076057�027215� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SVM.VlHomogeneousKernelMapWindowType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static SVM.VlHomogeneousKernelMapWindowType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHoughCardioid.html������������������������������������������0000775�4231163�4231163�00000074415�14537076046�024504� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHoughCardioid (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHoughCardioid
extends AlgorithmBase
This Hough transform uses (xi, yi) points in the original image space to generate theta0, a0 points in the Hough
transform. xc and yc of the cusp are obtained from finding the point of maximum curvature.
Hough space is used to check the (xcdim * ycdim) possibilities of xc-xchalf to xc + xchalf, yc - ychalf to yc + ychalf,
where xchalf = (xcdim - 1)/2 and ychalf = (ycdim - 1)/2.
This Hough transform module only works with binary images. Before it is used the user must
compute the gradient of an image and threshold it to obtain a binary image. Noise removal and thinning should also
be performed, if necessary, before this program is run.
The user is asked for the number of theta0 bins, a0 bins, side points for curvature, and number of cardioids.
The default size for theta0Num is 720 and the default size for a0Num is min(512, 2*max(image.getExtents()[0], image.getExtents()[1]).
The default number of cardioids is 1. The program generates a Hough transform of the source image using the basic
equations:
theta = atan2(y - yc, x - xc) where xc and yc are the cusp points.
Calculate d2 = sqrt((x - d1)**2 + (y - d2)**2)/(1 - cos(theta + theta0)) if theta != -theta0
In general:
sqrt((x - xc)**2 + (y - yc)**2) = a*(1 - cos(theta + theta0))
((x-xc)**2 + (y-yc)**2 - a*((x-xc)*cos*(theta0) - (y-yc)*sin(theta0)) = a*sqrt((x-xc)**2 + (y-yc)**2)
dy/dx = (-2*(x-xc) + a*cos(theta0) + a*(x-xc)/sqrt((x-xc)**2 + (y-yc)**2))/
(2*(y-yc) - a*sin(theta0) - a*(y-yc)/sqrt((x-xc)**2 + (y-yc)**2))
x = xc + a*cos(theta)*(1 - cos(theta + theta0))
= xc + a*(-0.5*cos(theta0) + cos(theta) - 0.5*cos(2*theta + theta0))
y = yc + a*sin(theta)*(1 - cos(theta + theta0))
= yc + a*(0.5*sin(theta0) + sin(theta) -0.5*sin(2*theta + theta0))
dy/dx = dy/dtheta/dx/dtheta = (-cos(2*theta + theta0) + cos(theta))/(sin(2*theta + theta0) - sin(theta))
= tan((1/2)*(3*theta + theta0))
Every slope value occurs 3 times so we must use the second derivative to find which of the 3 theta values
is correct.
dy'/dtheta = -a*sin(theta) + 2a*sin(2*theta + theta0)
d2y/dx2 = dy'/dtheta/dx/dtheta =
(-sin(theta) + 2*sin(2*theta + theta0))/(-sin(theta) + sin(2*theta + theta0))
curvature(theta) = ((dx/dtheta)*(d2y/dtheta2) - (dy/dtheta)*(d2x/dtheta2))/((dx/dtheta)**2 + (dy/dtheta)**2)**1.5
d2x/dtheta2 = -a*cos(theta) + 2*a*cos(2*theta + theta0)
d2y/dtheta2 = -a*sin(theta) + 2*a*sin(2*theta + theta0)
curvature(theta) = 3/(2*sqrt(2)*a*sqrt(1 - cos(theta+theta0))
so the curvature is infinite at theta = -theta0.
All cusp chords are of length 2 * a.
The tangents to the endpoints of a cusp chord are perpindicular.
If 3 points have parallel tangents, the lines from the cusp to these 3 points make equal angles
of 2*PI/3 at the cusp.
For cusp on the left:
sqrt((x - xc)**2 + (y - yc)**2) = a*(1 + cos(theta)).
x = xc + (a/2)*(1 + 2*cos(theta) + cos(2*theta))) = xc + a*cos(theta)*(1 + cos(theta))
y = yc + (a/2)*(2*sin(theta) + sin(2*theta)) = yc + a*sin(theta)*(1 + cos(theta))
For cusp on the right:
sqrt((x - xc)**2 + (y - yc)**2) = a*(1 - cos(theta)).
x = xc + (a/2)*(-1 + 2*cos(theta) - cos(2*theta))) = xc + a*cos(theta)*(1 - cos(theta))
y = yc + (a/2)*(2*sin(theta) - sin(2*theta)) = yc + a*sin(theta)*(1 - cos(theta))
For cusp on top:
sqrt((x - xc)**2 + (y - yc)**2) = a*(1 + sin(theta)).
x = xc + (a/2)*(2*cos(theta) + sin(2*theta))) = xc + a*cos(theta)*(1 + sin(theta))
y = yc + (a/2)*(1 + 2*sin(theta) - cos(2*theta)) = yc + a*sin(theta)*(1 + sin(theta))
For cusp on bottom:
sqrt((x - xc)**2 + (y - yc)**2) = a*(1 - sin(theta)).
x = xc + (a/2)*(2*cos(theta) - sin(2*theta))) = xc + a*cos(theta)*(1 - sin(theta))
y = yc + (a/2)*(-1 + 2*sin(theta) + cos(2*theta)) = yc + a*sin(theta)*(1 - sin(theta))
The program finds the cardioids containing the largest number of points.
The program produces a dialog which allows the user to select which cardioids should be drawn.
The Hough transform for the entire image is generated a separate time to find each cardioid.
Calculate theta = atan2(y - yc, x - xc).
Calculate d3 = sqrt((x - xc)**2 + (y - yc)**2)/(1 - cos(theta + theta0)) if theta != -theta0
Don't calculate d2 if theta = -theta0.
d2 goes from 0 to maxA = sqrt((xDim-1)**2 + (yDim-1)**2)/2.0. s2 is the dimension 2 scaling factor.
s2 * (a0 - 1) = maxA.
s2 = maxA/(a0 - 1)
m = d2*(a0 - 1)/maxA.
Only calculate the Hough transform for d2 <= maxA.
Find the peak point in the theta0, a0 Hough transform space.
Put the values for this peak point in xcArray[c], ycArray[c], a0Array[c], and
countArray[c].
If more cardioids are to be found, then zero the houghBuffer and run through the
same Hough transform a second time, but on this second run instead of incrementing
the Hough buffer, zero the values in the source buffer that contributed to the peak
point in the Hough buffer. So on the next run of the Hough transform the source points that
contributed to the Hough peak value just detected will not be present.
Create a dialog with numCardioidsFound xcArray[i], ycArray[i], a0Array[i], and
countArray[i] values, where the user will select a check box to have that cardioid drawn.
References: 1.) Digital Image Processing, Second Edition by Richard C. Gonzalez and Richard E. Woods, Section 10.2.2
Global Processing via the Hough Transform, Prentice-Hall, Inc., 2002, pp. 587-591.
2.) Shape Detection in Computer Vision Using the Hough Transform by V. F. Leavers, Springer-Verlag, 1992.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
theta0Num
private int theta0Num
-
numCardioids
private int numCardioids
-
Constructor Detail
-
AlgorithmHoughCardioid
public AlgorithmHoughCardioid(ModelImage destImg,
ModelImage srcImg,
int theta0Num,
int a0Num,
int numCardioids,
int sidePointsForCurvature)
AlgorithmHoughCardioid.
- Parameters:
destImg - Image with lines filled insrcImg - Binary source image that has lines with gapstheta0Num - number of dimension 1 bins in Hough transform spacea0Num - number of dimension 2 bins in Hough transform spacenumCardioids - number of cardioids to be foundsidePointsForCurvature - Maximum number of points to take from each side of a point on a curve
in determining the tangent
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmASM.LandData.html�������������������������������������������0000775�4231163�4231163�00000023260�14537076043�024047� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmASM.LandData (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmASM.LandData
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
double[] |
dg_mean |
|
double[][] |
S |
|
double[][] |
Sinv |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
LandData() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
Sinv
public double[][] Sinv
-
dg_mean
public double[] dg_mean
-
Constructor Detail
-
LandData
public LandData()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEvaluateMaskSegmentation.html�������������������������������0000775�4231163�4231163�00000075121�14537076045�026725� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEvaluateMaskSegmentation (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmEvaluateMaskSegmentation
extends AlgorithmBase
Compares segmentation results of a test image to segmentation results of an ideal gold standard true image.
Comparisons are made for identical nonzero levels in the 2 images. For each nonzero level, the false negative volume
fraction, the false positive volume fraction, and the positive volume fraction are output to the global data text.
The images must be boolean, UBYTE, or USHORT.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
length
private int length
DOCUMENT ME!
-
levelsMatch
private int levelsMatch
DOCUMENT ME!
-
present
private boolean present
DOCUMENT ME!
-
testLength
private int testLength
DOCUMENT ME!
-
testLevels
private int testLevels
DOCUMENT ME!
-
trueFound
private int trueFound
in the true image.
-
trueLevels
private int trueLevels
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmEvaluateMaskSegmentation
public AlgorithmEvaluateMaskSegmentation(ModelImage trueImage,
ModelImage testImage)
Creates a new AlgorithmEvaluateMaskSegmentation object.
- Parameters:
trueImage - image model used as a ideal gold standardtestImage - image model tested against the trueImage
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT.html������������������������������������������������������������0000775�4231163�4231163�00000325531�14537076056�020670� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class SIFT
extends AlgorithmBase
Copyright (C) 2007-11, Andrea Vedaldi and Brian Fulkerson
Copyright (C) 2012-13, The VLFeat Team
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
1. Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the
distribution.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
SIFT() |
SIFT - default constructor.
|
SIFT(java.lang.String[] fileDir,
java.lang.String[] fileName,
boolean mosaic,
boolean verbose,
java.lang.String outarg,
java.lang.String framesarg,
java.lang.String descriptorarg,
java.lang.String metaarg,
java.lang.String read_framesarg,
java.lang.String gssarg,
int O,
int S,
int omin,
double edge_thresh,
double peak_thresh,
double norm_thresh,
double magnif,
double window_size,
boolean force_orientations,
boolean writeFrames,
boolean readFrames,
boolean writeDescriptor,
boolean writeMeta,
boolean writeGss) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
_vl_sift_smooth(SIFT.VlSiftFilt self,
float[] outputImage,
int output_index,
float[] tempImage,
float[] inputImage,
int input_index,
int width,
int height,
double sigma) |
------------------------------------------------------------------
|
private void |
copy_and_downsample(float[] dst,
int dstIndex,
float[] src,
int srcIndex,
int width,
int height,
int d) |
------------------------------------------------------------------
|
private void |
copy_and_upsample_rows(float[] dst,
int dstIndex,
float[] src,
int srcIndex,
int width,
int height) |
------------------------------------------------------------------
|
private void |
fast_expn_init() |
|
private int |
findNeighbor(double x,
int[] X,
int K) |
|
private double |
log2(double x) |
|
private float |
normalize_histogram(float[] buf,
int begin,
int end) |
------------------------------------------------------------------
|
private void |
PRNFO(java.lang.String name,
SIFT.VlFileMeta fm) |
|
private void |
randomize(int[] arr) |
|
private double |
readAsciiDouble(java.io.RandomAccessFile f,
int[] err) |
|
private int |
readAsciiInt(java.io.RandomAccessFile f) |
|
private int |
remove_blanks(java.io.RandomAccessFile f,
int[] err) |
------------------------------------------------------------------
|
private int |
remove_line(java.io.RandomAccessFile f) |
------------------------------------------------------------------
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private int |
save_gss(SIFT.VlSiftFilt filt,
SIFT.VlFileMeta fm,
java.lang.String basename,
boolean verbose) |
|
private void |
update_gradient(SIFT.VlSiftFilt f) |
------------------------------------------------------------------
|
private void |
vl_file_meta_close(SIFT.VlFileMeta self) |
|
private int |
vl_file_meta_get_double(int protocol,
java.io.RandomAccessFile file,
double[] x) |
|
private java.io.RandomAccessFile |
vl_file_meta_open(SIFT.VlFileMeta self,
java.lang.String basename,
java.lang.String mode,
int[] error) |
|
private int |
vl_file_meta_parse(SIFT.VlFileMeta self,
java.lang.String optarg) |
|
private int |
vl_file_meta_put_double(int protocol,
java.io.RandomAccessFile file,
double x) |
|
private int |
vl_file_meta_put_uint8(int protocol,
java.io.RandomAccessFile file,
byte x) |
|
private void |
vl_imconvcol_vf(float[] dst,
int dst_index,
int dst_stride,
float[] src,
int src_index,
int src_width,
int src_height,
int src_stride,
float[] filt,
int filt_begin,
int filt_end,
int step,
int flags) |
|
private double[] |
vl_imwbackwardmx(int[] X_pt,
int[] Y_pt,
double[] I_pt,
double[][] iwXp_pt,
double[][] iwYp_pt,
int M,
int N) |
|
private float[] |
vl_imwbackwardmx(int[] X_pt,
int[] Y_pt,
float[] I_pt,
double[][] iwXp_pt,
double[][] iwYp_pt,
int M,
int N) |
|
private float |
vl_mod_2pi_f(float x) |
|
(package private) int |
vl_pgm_extract_data(java.io.RandomAccessFile f,
SIFT.VlPgmImage im,
int[] data) |
|
private int |
vl_pgm_extract_head(java.io.RandomAccessFile f,
SIFT.VlPgmImage im) |
------------------------------------------------------------------
|
private int |
vl_pgm_get_bpp(SIFT.VlPgmImage im) |
|
private int |
vl_pgm_get_npixels(SIFT.VlPgmImage im) |
|
private int |
vl_pgm_insert(java.io.RandomAccessFile f,
SIFT.VlPgmImage im,
byte[] data) |
|
private int |
VL_SHIFT_LEFT(int x,
int n) |
|
private void |
vl_sift_calc_keypoint_descriptor(SIFT.VlSiftFilt f,
float[] descr,
SIFT.VlSiftKeypoint k,
double angle0) |
------------------------------------------------------------------
|
private int |
vl_sift_calc_keypoint_orientations(SIFT.VlSiftFilt f,
double[] angles,
SIFT.VlSiftKeypoint k) |
------------------------------------------------------------------
|
private void |
vl_sift_delete(SIFT.VlSiftFilt f) |
------------------------------------------------------------------
|
private void |
vl_sift_detect(SIFT.VlSiftFilt f) |
------------------------------------------------------------------
|
private float[] |
vl_sift_get_octave(SIFT.VlSiftFilt f,
int s,
int[] octave_index) |
------------------------------------------------------------------
|
private void |
vl_sift_keypoint_init(SIFT.VlSiftFilt f,
SIFT.VlSiftKeypoint k,
double x,
double y,
double sigma) |
------------------------------------------------------------------
|
(package private) SIFT.VlSiftFilt |
vl_sift_new(int width,
int height,
int noctaves,
int nlevels,
int o_min) |
|
private int |
vl_sift_process_first_octave(SIFT.VlSiftFilt f,
float[] im) |
|
private int |
vl_sift_process_next_octave(SIFT.VlSiftFilt f) |
------------------------------------------------------------------
|
private java.lang.String |
vl_string_basename(java.lang.String destination,
int destinationSize,
java.lang.String source,
int maxNumStrippedExtensions,
int[] num) |
------------------------------------------------------------------
|
private java.lang.String |
vl_string_copy_sub(java.lang.String destination,
int destinationSize,
java.lang.String source,
int beginning,
int end,
int[] num) |
------------------------------------------------------------------
|
private java.lang.String |
vl_string_parse_protocol(java.lang.String string,
int[] protocol) |
------------------------------------------------------------------
|
private java.lang.String |
vl_string_protocol_name(int protocol) |
------------------------------------------------------------------
|
private java.lang.String |
vl_string_replace_wildcard(java.lang.String destination,
int destinationSize,
java.lang.String source,
java.lang.String wildcardChar,
java.lang.String escapeChar,
java.lang.String replacement,
int[] num) |
------------------------------------------------------------------
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
fileNum
private int fileNum
-
mosaic
private boolean mosaic
-
verbose
private boolean verbose
-
magnif
private double magnif
-
writeGss
private boolean writeGss
-
EXPN_SZ
private int EXPN_SZ
-
Constructor Detail
-
SIFT
public SIFT(java.lang.String[] fileDir,
java.lang.String[] fileName,
boolean mosaic,
boolean verbose,
java.lang.String outarg,
java.lang.String framesarg,
java.lang.String descriptorarg,
java.lang.String metaarg,
java.lang.String read_framesarg,
java.lang.String gssarg,
int O,
int S,
int omin,
double edge_thresh,
double peak_thresh,
double norm_thresh,
double magnif,
double window_size,
boolean force_orientations,
boolean writeFrames,
boolean readFrames,
boolean writeDescriptor,
boolean writeMeta,
boolean writeGss)
-
Method Detail
-
vl_imwbackwardmx
private float[] vl_imwbackwardmx(int[] X_pt,
int[] Y_pt,
float[] I_pt,
double[][] iwXp_pt,
double[][] iwYp_pt,
int M,
int N)
-
vl_imwbackwardmx
private double[] vl_imwbackwardmx(int[] X_pt,
int[] Y_pt,
double[] I_pt,
double[][] iwXp_pt,
double[][] iwYp_pt,
int M,
int N)
-
vl_file_meta_open
private java.io.RandomAccessFile vl_file_meta_open(SIFT.VlFileMeta self,
java.lang.String basename,
java.lang.String mode,
int[] error)
- Parameters:
self - File meta information.basename - Basename.mode - Opening mode (as in @c fopen).- Returns:
- error code. The error may be either either
::VL_ERR_OVERFLOW if the file name is too long or to ::VL_ERR_IO
if the file cannot be opened.
-
vl_string_parse_protocol
private java.lang.String vl_string_parse_protocol(java.lang.String string,
int[] protocol)
------------------------------------------------------------------
- Parameters:
string - string.protocol - protocol code (output).- Returns:
- pointer to the first character after the protocol prefix.
The function extracts the prefix of the string @a string
terminated by the first occurrence of the @c :// substring (if
any). It then matches the suffix terminated by @c :// to the
supported @ref vl-stringop-file-protocols protocols. If @c protocol is not
-
vl_string_basename
private java.lang.String vl_string_basename(java.lang.String destination,
int destinationSize,
java.lang.String source,
int maxNumStrippedExtensions,
int[] num)
------------------------------------------------------------------
- Parameters:
destination - destination buffer.destinationSize - size of destination buffer.source - input string.maxNumStrippedExtensions - maximum number of extensions to strip.- Returns:
- length of the destination string.
The function removes the leading path and up to @c
maxNumStrippedExtensions trailing extensions from the string @a
source and writes the result to the buffer @a destination.
The leading path is the longest suffix that ends with either the
-
vl_string_copy_sub
private java.lang.String vl_string_copy_sub(java.lang.String destination,
int destinationSize,
java.lang.String source,
int beginning,
int end,
int[] num)
------------------------------------------------------------------
- Parameters:
destination - output buffer.destinationSize - size of output buffer.beginning - start of the substring.end - end of the substring.- Returns:
- length of the destination string.
The function copies the substring from at @a beginning to @a end
(not included) to the buffer @a destination of size @a
destinationSize. If, however, the null character is found before
-
vl_pgm_extract_head
private int vl_pgm_extract_head(java.io.RandomAccessFile f,
SIFT.VlPgmImage im)
------------------------------------------------------------------
- Parameters:
f - input file.im - image structure to fill.- Returns:
- error code.
The function extracts from the file @a f the meta-data section of
an image encoded in PGM format. The function fills the structure
::VlPgmImage accordingly.
The error may be either ::VL_ERR_PGM_INV_HEAD or ::VL_ERR_PGM_INV_META
depending whether the error occurred in decoding the header or
meta section of the PGM file.
-
remove_blanks
private int remove_blanks(java.io.RandomAccessFile f,
int[] err)
------------------------------------------------------------------
- Parameters:
f - file to strip.- Returns:
- number of characters removed.
-
vl_string_replace_wildcard
private java.lang.String vl_string_replace_wildcard(java.lang.String destination,
int destinationSize,
java.lang.String source,
java.lang.String wildcardChar,
java.lang.String escapeChar,
java.lang.String replacement,
int[] num)
------------------------------------------------------------------
- Parameters:
destination - output buffer.destinationSize - size of the output buffer.source - input string.wildcardChar - wildcard character.escapeChar - escape character.replacement - replacement string.
The function replaces the occurrence of the specified wildcard
character @a wildcardChar by the string @a replacement. The result
is written to the buffer @a destination of size @a
destinationSize.
Wildcard characters may be escaped by preceding them by the @a esc
character. More in general, anything following an occurrence of @a
esc character is copied verbatim. To disable the escape characters
simply set @a esc to 0.- Returns:
- length of the result.
-
vl_sift_new
SIFT.VlSiftFilt vl_sift_new(int width,
int height,
int noctaves,
int nlevels,
int o_min)
-
copy_and_upsample_rows
private void copy_and_upsample_rows(float[] dst,
int dstIndex,
float[] src,
int srcIndex,
int width,
int height)
------------------------------------------------------------------
- Parameters:
f - SIFT filter.im - image data.
The function starts processing a new image by computing its
Gaussian scale space at the lower octave. It also empties the
internal keypoint buffer.
-
copy_and_downsample
private void copy_and_downsample(float[] dst,
int dstIndex,
float[] src,
int srcIndex,
int width,
int height,
int d)
------------------------------------------------------------------
- Parameters:
dst - output imgae buffer.src - input image buffer.width - input image width.height - input image height.d - octaves (non negative).
The function downsamples the image @a d times, reducing it to @c
1/2^d of its original size. The parameters @a width and @a height
are the size of the input image. The destination image @a dst is
assumed to be floor(width/2^d) pixels wide and
floor(height/2^d) pixels high.
-
vl_imconvcol_vf
private void vl_imconvcol_vf(float[] dst,
int dst_index,
int dst_stride,
float[] src,
int src_index,
int src_width,
int src_height,
int src_stride,
float[] filt,
int filt_begin,
int filt_end,
int step,
int flags)
-
_vl_sift_smooth
private void _vl_sift_smooth(SIFT.VlSiftFilt self,
float[] outputImage,
int output_index,
float[] tempImage,
float[] inputImage,
int input_index,
int width,
int height,
double sigma)
------------------------------------------------------------------
- Parameters:
self - SIFT filter.outputImage - output imgae buffer.tempImage - temporary image buffer.inputImage - input image buffer.width - input image width.height - input image height.sigma - smoothing.
-
vl_sift_get_octave
private float[] vl_sift_get_octave(SIFT.VlSiftFilt f,
int s,
int[] octave_index)
------------------------------------------------------------------
- Parameters:
f - SIFT filter.s - level index.
The level index @a s ranges in the interval s_min = -1
and s_max = S + 2, where @c S is the number of levels
per octave.- Returns:
- pointer to the octave data for level @a s.
-
vl_sift_keypoint_init
private void vl_sift_keypoint_init(SIFT.VlSiftFilt f,
SIFT.VlSiftKeypoint k,
double x,
double y,
double sigma)
------------------------------------------------------------------
- Parameters:
f - SIFT filter.k - SIFT keypoint (output).x - x coordinate of the keypoint center.y - y coordinate of the keypoint center.sigma - keypoint scale.
The function initializes a keypoint structure @a k from
the location @a x
and @a y and the scale @a sigma of the keypoint. The keypoint structure
maps the keypoint to an octave and scale level of the discretized
Gaussian scale space, which is required for instance to compute the
keypoint SIFT descriptor.
-
vl_sift_calc_keypoint_orientations
private int vl_sift_calc_keypoint_orientations(SIFT.VlSiftFilt f,
double[] angles,
SIFT.VlSiftKeypoint k)
------------------------------------------------------------------
- Parameters:
f - SIFT filter.angles - orientations (output).k - keypoint.
The function computes the orientation(s) of the keypoint @a k.
The function returns the number of orientations found (up to
four). The orientations themselves are written to the vector @a
angles.- Returns:
- number of orientations found.
-
vl_sift_calc_keypoint_descriptor
private void vl_sift_calc_keypoint_descriptor(SIFT.VlSiftFilt f,
float[] descr,
SIFT.VlSiftKeypoint k,
double angle0)
------------------------------------------------------------------
- Parameters:
f - SIFT filter.descr - SIFT descriptor (output)k - keypoint.angle0 - keypoint direction.
The function computes the SIFT descriptor of the keypoint @a k of
orientation @a angle0. The function fills the buffer @a descr
which must be large enough to hold the descriptor.
The function assumes that the keypoint is on the current octave.
If not, it does not do anything.
-
normalize_histogram
private float normalize_histogram(float[] buf,
int begin,
int end)
------------------------------------------------------------------
- Parameters:
begin - begin of histogram.end - end of histogram.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitWholeNLConModelqd.html������������������������������0000775�4231163�4231163�00000041647�14537076046�026444� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitWholeNLConModelqd (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitWholeNLConModelqd(int nPoints,
double[] xData,
float[] yData,
double[] initial) |
Creates a new FitWholeNLConModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitWholeNLConModelqd
public FitWholeNLConModelqd(int nPoints,
double[] xData,
float[] yData,
double[] initial)
Creates a new FitWholeNLConModelqd object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
�����������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Context.html���������������������������������������������0000775�4231163�4231163�00000017535�14537076051�023777� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Context (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Context
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Context() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/FitExponential.html��������������������������������������������������0000775�4231163�4231163�00000055655�14537076054�023061� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
FitExponential (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitExponential() |
FitExponential - test constructor, builds and test function.
|
FitExponential(int nPoints,
double[] xData,
double[] yData) |
FitExponential.
|
FitExponential(int nPoints,
float[] xData,
float[] yData) |
Constructs new fit exponential.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
calculateChiSq() |
Calculates chi squared
|
protected void |
calculateFittedY() |
Calculates yDataFitted
|
void |
displayResults() |
Display results of displaying exponential fitting parameters.
|
void |
driver() |
Starts the analysis.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
Fit to function - a0 + a1*exp(a2*x).
|
protected Jama.Matrix |
generateResiduals() |
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
|
private void |
testData() |
Test data to test fitting of exponential.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitExponential
public FitExponential(int nPoints,
float[] xData,
float[] yData)
Constructs new fit exponential.
- Parameters:
nPoints - Number of points in the functionxData - DOCUMENT ME!yData - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a0 + a1*exp(a2*x).
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
-
generateResiduals
protected Jama.Matrix generateResiduals()
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
- Specified by:
generateResiduals in class NLFittedFunction- Returns:
�����������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.IterationCallback.html�����������������������������������0000775�4231163�4231163�00000026572�14537076051�025727� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.IterationCallback (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.IterationCallback
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMarkovSegment.html������������������������������������������0000775�4231163�4231163�00000054634�14537076047�024557� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMarkovSegment (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
class_number
private int class_number
-
potential
private double potential
-
iterations
private int iterations
-
Constructor Detail
-
AlgorithmMarkovSegment
public AlgorithmMarkovSegment(ModelImage destImg,
ModelImage srcImg,
int class_number,
double potential,
int iterations)
����������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NLFittedFunction.html������������������������������������������������0000775�4231163�4231163�00000053505�14537076056�023301� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NLFittedFunction (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected double |
chisq |
Total error as X^2
|
static double |
EPSILON |
Minimum allowable distance between iterations of a coefficient before considered converged.
|
static int |
MAX_ITR |
Max number of iterations to perform.
|
static int |
MIN_ITR |
Min number of iterations to perform.
|
protected double[] |
xSeries |
Original xData
|
protected double[] |
yDataFitted |
Fitted y-data, based on original x points.
|
protected double[] |
ySeries |
Original y data
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
chisq
protected double chisq
Total error as X^2
-
Method Detail
-
getChisq
public double getChisq()
-
generateResiduals
protected abstract Jama.Matrix generateResiduals()
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
- Returns:
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.svm_print_interface.html��������������������������������������0000775�4231163�4231163�00000017572�14537076056�025162� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.svm_print_interface (MIPAV API Documentation)
��������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Solver.html����������������������������������������������0000775�4231163�4231163�00000023365�14537076052�023624� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Solver (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Solver
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Solver() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.svm_toy_frame.html��������������������������������������������0000775�4231163�4231163�00000074361�14537076056�023772� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.svm_toy_frame (MIPAV API Documentation)
- java.lang.Object
-
- java.awt.Component
-
- java.awt.Container
-
- java.awt.Window
-
- java.awt.Frame
-
- gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.awt.Frame
java.awt.Frame.AccessibleAWTFrame
-
Nested classes/interfaces inherited from class java.awt.Window
java.awt.Window.AccessibleAWTWindow, java.awt.Window.Type
-
Nested classes/interfaces inherited from class java.awt.Container
java.awt.Container.AccessibleAWTContainer
-
Nested classes/interfaces inherited from class java.awt.Component
java.awt.Component.AccessibleAWTComponent, java.awt.Component.BaselineResizeBehavior, java.awt.Component.BltBufferStrategy, java.awt.Component.FlipBufferStrategy
-
Field Summary
-
Fields inherited from class java.awt.Frame
CROSSHAIR_CURSOR, DEFAULT_CURSOR, E_RESIZE_CURSOR, HAND_CURSOR, ICONIFIED, MAXIMIZED_BOTH, MAXIMIZED_HORIZ, MAXIMIZED_VERT, MOVE_CURSOR, N_RESIZE_CURSOR, NE_RESIZE_CURSOR, NORMAL, NW_RESIZE_CURSOR, S_RESIZE_CURSOR, SE_RESIZE_CURSOR, SW_RESIZE_CURSOR, TEXT_CURSOR, W_RESIZE_CURSOR, WAIT_CURSOR
-
Fields inherited from class java.awt.Component
accessibleContext, BOTTOM_ALIGNMENT, CENTER_ALIGNMENT, LEFT_ALIGNMENT, RIGHT_ALIGNMENT, TOP_ALIGNMENT
-
Fields inherited from interface java.awt.image.ImageObserver
ABORT, ALLBITS, ERROR, FRAMEBITS, HEIGHT, PROPERTIES, SOMEBITS, WIDTH
-
Constructor Summary
Constructors
| Constructor |
Description |
svm_toy_frame(java.lang.String title,
int width,
int height) |
|
-
Method Summary
-
Methods inherited from class java.awt.Frame
addNotify, getAccessibleContext, getCursorType, getExtendedState, getFrames, getIconImage, getMaximizedBounds, getMenuBar, getState, getTitle, isResizable, isUndecorated, paramString, remove, removeNotify, setBackground, setCursor, setExtendedState, setIconImage, setMaximizedBounds, setMenuBar, setOpacity, setResizable, setShape, setState, setTitle, setUndecorated
-
Methods inherited from class java.awt.Window
addPropertyChangeListener, addPropertyChangeListener, addWindowFocusListener, addWindowListener, addWindowStateListener, applyResourceBundle, applyResourceBundle, createBufferStrategy, createBufferStrategy, dispose, getBackground, getBufferStrategy, getFocusableWindowState, getFocusCycleRootAncestor, getFocusOwner, getFocusTraversalKeys, getIconImages, getInputContext, getListeners, getLocale, getModalExclusionType, getMostRecentFocusOwner, getOpacity, getOwnedWindows, getOwner, getOwnerlessWindows, getShape, getToolkit, getType, getWarningString, getWindowFocusListeners, getWindowListeners, getWindows, getWindowStateListeners, hide, isActive, isAlwaysOnTop, isAlwaysOnTopSupported, isAutoRequestFocus, isFocusableWindow, isFocusCycleRoot, isFocused, isLocationByPlatform, isOpaque, isShowing, isValidateRoot, pack, postEvent, processEvent, processWindowEvent, processWindowFocusEvent, processWindowStateEvent, removeWindowFocusListener, removeWindowListener, removeWindowStateListener, reshape, setAlwaysOnTop, setAutoRequestFocus, setBounds, setBounds, setCursor, setFocusableWindowState, setFocusCycleRoot, setIconImages, setLocation, setLocation, setLocationByPlatform, setLocationRelativeTo, setMinimumSize, setModalExclusionType, setSize, setSize, setType, setVisible, show, toBack, toFront
-
Methods inherited from class java.awt.Container
add, add, add, add, add, addContainerListener, addImpl, applyComponentOrientation, areFocusTraversalKeysSet, countComponents, deliverEvent, doLayout, findComponentAt, findComponentAt, getAlignmentX, getAlignmentY, getComponent, getComponentAt, getComponentAt, getComponentCount, getComponents, getComponentZOrder, getContainerListeners, getFocusTraversalPolicy, getInsets, getLayout, getMaximumSize, getMinimumSize, getMousePosition, getPreferredSize, insets, invalidate, isAncestorOf, isFocusCycleRoot, isFocusTraversalPolicyProvider, isFocusTraversalPolicySet, layout, list, list, locate, minimumSize, paintComponents, preferredSize, print, printComponents, processContainerEvent, remove, remove, removeAll, removeContainerListener, setComponentZOrder, setFocusTraversalKeys, setFocusTraversalPolicy, setFocusTraversalPolicyProvider, setFont, setLayout, transferFocusDownCycle, update, validate, validateTree
-
Methods inherited from class java.awt.Component
action, add, addComponentListener, addFocusListener, addHierarchyBoundsListener, addHierarchyListener, addInputMethodListener, addKeyListener, addMouseListener, addMouseMotionListener, addMouseWheelListener, bounds, checkImage, checkImage, coalesceEvents, contains, contains, createImage, createImage, createVolatileImage, createVolatileImage, disable, disableEvents, dispatchEvent, enable, enable, enableEvents, enableInputMethods, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, getBaseline, getBaselineResizeBehavior, getBounds, getBounds, getColorModel, getComponentListeners, getComponentOrientation, getCursor, getDropTarget, getFocusListeners, getFocusTraversalKeysEnabled, getFont, getFontMetrics, getForeground, getGraphics, getGraphicsConfiguration, getHeight, getHierarchyBoundsListeners, getHierarchyListeners, getIgnoreRepaint, getInputMethodListeners, getInputMethodRequests, getKeyListeners, getLocation, getLocation, getLocationOnScreen, getMouseListeners, getMouseMotionListeners, getMousePosition, getMouseWheelListeners, getName, getParent, getPropertyChangeListeners, getPropertyChangeListeners, getSize, getSize, getTreeLock, getWidth, getX, getY, gotFocus, handleEvent, hasFocus, imageUpdate, inside, isBackgroundSet, isCursorSet, isDisplayable, isDoubleBuffered, isEnabled, isFocusable, isFocusOwner, isFocusTraversable, isFontSet, isForegroundSet, isLightweight, isMaximumSizeSet, isMinimumSizeSet, isPreferredSizeSet, isValid, isVisible, keyDown, keyUp, list, list, list, location, lostFocus, mouseDown, mouseDrag, mouseEnter, mouseExit, mouseMove, mouseUp, move, nextFocus, paintAll, prepareImage, prepareImage, printAll, processComponentEvent, processFocusEvent, processHierarchyBoundsEvent, processHierarchyEvent, processInputMethodEvent, processKeyEvent, processMouseMotionEvent, processMouseWheelEvent, removeComponentListener, removeFocusListener, removeHierarchyBoundsListener, removeHierarchyListener, removeInputMethodListener, removeKeyListener, removeMouseListener, removeMouseMotionListener, removeMouseWheelListener, removePropertyChangeListener, removePropertyChangeListener, repaint, repaint, repaint, repaint, requestFocus, requestFocus, requestFocus, requestFocus, requestFocusInWindow, requestFocusInWindow, requestFocusInWindow, resize, resize, revalidate, setComponentOrientation, setDropTarget, setEnabled, setFocusable, setFocusTraversalKeysEnabled, setForeground, setIgnoreRepaint, setLocale, setMaximumSize, setMixingCutoutShape, setName, setPreferredSize, show, size, toString, transferFocus, transferFocusBackward, transferFocusUpCycle
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
Methods inherited from interface java.awt.MenuContainer
getFont, postEvent
-
-
Field Detail
-
buffer
java.awt.Image buffer
-
current_value
byte current_value
-
Method Detail
-
clear_all
void clear_all()
-
draw_all_points
void draw_all_points()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.IterativeSchurComplementSolverTest.html��������������0000775�4231163�4231163�00000036325�14537076053�032233� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.IterativeSchurComplementSolverTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_rows_
private int num_rows_
-
num_cols_
private int num_cols_
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/��������������������������������������������������������0002775�4231163�4231163�00000000000�14537076122�021727� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/RegistrationMeasureCorrelationRatio.html����������������0000775�4231163�4231163�00000064420�14537076061�032023� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
RegistrationMeasureCorrelationRatio (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected double[] |
m_adBinSum1 |
Sum of the intensities in bin.
|
protected double[] |
m_adBinSum2 |
Sum of the squared intensities in bin.
|
protected int[] |
m_aiBinSum0 |
Bins used to hold cummulative summations for computing the variances.
|
protected int[] |
m_aiImageBin |
Image corresponding to the samples in the target image which identifies to which bin the sample belongs.
|
protected double |
m_dSum1 |
DOCUMENT ME!
|
protected double |
m_dSum2 |
DOCUMENT ME!
|
protected int |
m_iNumBins |
Number of bins to use for computation.
|
protected int |
m_iSum0 |
Cummulative summations for computing the total variance.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
RegistrationMeasure |
createNew() |
Create a new instance of this measure.
|
double |
getError() |
Return the current error measure between the target image and the registered source image.
|
java.lang.String |
getName() |
Return the name of the particular registration measure.
|
static java.lang.String |
getStaticName() |
Return the name of the particular registration measure without having an instance.
|
protected static double |
getVariance(int N,
double dSum1,
double dSum2) |
Compute the variance given the total number of samples along with the sum of values and sum of squared values.
|
void |
setImages(ModelSimpleImage kImageSrc,
ModelSimpleImage kImageTrg) |
Setup the measure to use information from the target image and the original source image.
|
void |
updateRegistration(int iIndex,
float fNewValue) |
Update the specified value in the registered source image.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_dSum1
protected double m_dSum1
DOCUMENT ME!
-
m_dSum2
protected double m_dSum2
DOCUMENT ME!
-
Method Detail
-
createNew
public RegistrationMeasure createNew()
Create a new instance of this measure. That is, the same type and having the same properties. But initially, the
target is not defined.
- Specified by:
createNew in class RegistrationMeasure- Returns:
- RegistrationMeasure Newly created instance.
-
setImages
public void setImages(ModelSimpleImage kImageSrc,
ModelSimpleImage kImageTrg)
Setup the measure to use information from the target image and the original source image. Each derived class
override of this method must call this method.
- Overrides:
setImages in class RegistrationMeasure- Parameters:
kImageSrc - ModelSimpleImage Contains information and data about the original source image. This array may
be empty but not null.kImageTrg - ModelSimpleImage Contains information and data about yhe target image. This array may be empty
but not null.
-
updateRegistration
public void updateRegistration(int iIndex,
float fNewValue)
Update the specified value in the registered source image. Causes a change in the computed error measure.
- Specified by:
updateRegistration in class RegistrationMeasure- Parameters:
iIndex - int Linear array index for the value to be updated.fNewValue - float New registered source image value to store at the specified index.
-
getVariance
protected static final double getVariance(int N,
double dSum1,
double dSum2)
Compute the variance given the total number of samples along with the sum of values and sum of squared values.
- Parameters:
N - int Number of samples.dSum1 - double Sum of sample values.dSum2 - double Sum of sample squared values.- Returns:
- double Computed variance. Zero is returned if there are not at least two samples.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegVOILandmark.CostFunction.html���������������0000775�4231163�4231163�00000040224�14537076061�031653� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegVOILandmark.CostFunction (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark.CostFunction
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
slice |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
CostFunction() |
CostFunction constructor.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
slice
int slice
DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/MatrixListItem.html�������������������������������������0000775�4231163�4231163�00000054131�14537076061�025543� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
MatrixListItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
- All Implemented Interfaces:
java.lang.Comparable<MatrixListItem>
public class MatrixListItem
extends java.lang.Object
implements java.lang.Comparable<MatrixListItem>
Helper class to make it easy to store the necessary information about a minimum. Stores the "point", or vector at
which the minimum was reached; the "cost", or value of the cost function at that minimum; and the matrix, which
was the true input into the cost function and represents the transformation that gives the minimum cost of
differences between the images. Implements Comparable, so that a list of MatrixListItems can be sorted using
Java's sort.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected double |
cost |
Cost of function at this minimum.
|
protected TransMatrix |
halfMatrix |
Matrix with the best transformation divided by half.
|
protected TransMatrixd |
halfMatrixd |
Matrix with the best transformation divided by half.
|
protected double[] |
initial |
Rotations, translations, scales, and skews that make up transformation.
|
protected TransMatrix |
matrix |
Matrix that gives best transformation.
|
protected TransMatrixd |
matrixd |
Matrix that gives best transformation.
|
protected TransMatrix |
midsagMatrix |
Matrix with the best transformation's z rot and xy translations.
|
protected TransMatrixd |
midsagMatrixd |
Matrix with the best transformation's z rot and xy translations.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
MatrixListItem(double _cost,
TransMatrixd _matrix,
double[] _initial) |
Creates new minimum object, setting the data and copying the point array
explicitly.
|
MatrixListItem(double _cost,
TransMatrix _matrix,
double[] _initial) |
Creates new minimum object, setting the data and copying the point array
explicitly.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
initial
protected double[] initial
Rotations, translations, scales, and skews that make up transformation.
-
Constructor Detail
-
MatrixListItem
public MatrixListItem(double _cost,
TransMatrix _matrix,
double[] _initial)
Creates new minimum object, setting the data and copying the point array
explicitly.
- Parameters:
_cost - Cost of this minimum._matrix - Matrix that gives best transformation._initial - Rotations, translations, scales, and skews that make up
transformation.
-
MatrixListItem
public MatrixListItem(double _cost,
TransMatrixd _matrix,
double[] _initial)
Creates new minimum object, setting the data and copying the point array
explicitly.
- Parameters:
_cost - Cost of this minimum._matrix - Matrix that gives best transformation._initial - Rotations, translations, scales, and skews that make up
transformation.
-
Method Detail
-
compareTo
public int compareTo(MatrixListItem o)
Necessary to implement so that list may be sorted. Returns -1 if this
cost is less than the parameter's cost; 1 if this cost is greater than
the parameter's cost; and 0 if they are equal.
- Specified by:
compareTo in interface java.lang.Comparable<MatrixListItem>- Parameters:
o - MatrixListItem to compare to.- Returns:
- -1 if this is less than, 1 if greater than, 0 if equal.
-
toString
public java.lang.String toString()
Creates readable string of this object, including cost, matrix, and point
with its meanings.
- Overrides:
toString in class java.lang.Object- Returns:
- Readable string representation of this object.
-
getCost
public double getCost()
Returns the cost.
- Returns:
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegELSUNCOAR2D.html����������������������������0000775�4231163�4231163�00000450571�14537076060�026661� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegELSUNCOAR2D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
allowLevel16 |
DOCUMENT ME!
|
private boolean |
allowLevel2 |
DOCUMENT ME!
|
private boolean |
allowLevel4 |
DOCUMENT ME!
|
private boolean |
allowLevel8 |
DOCUMENT ME!
|
private MatrixListItem |
answer |
Final answer after registration.
|
private int |
baseNumIter |
these numbers hard coded for constructors that don't include them.
|
private ModelImage |
blurredInput |
Blurred input image.
|
private ModelImage |
blurredRef |
Blurred reference image.
|
private int |
coarseNum |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private float |
coarseRate |
Coarse and fine sampling parameters.
|
private AlgorithmCostFunctions2D |
cost |
|
private int |
costChoice |
Choice of which cost function to use.
|
private boolean |
doColor |
DOCUMENT ME!
|
private int |
DOF |
Maximum degrees of freedom when running the optimization.
|
private boolean |
doJTEM |
|
private boolean |
doMultiThread |
|
private boolean |
doSubsample |
If true subsample.
|
private int |
fineNum |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private float |
fineRate |
Coarse and fine sampling parameters.
|
private ModelImage |
imageInputIso |
Isotropic input image.
|
private ModelImage |
imageRefIso |
Isotropic reference image.
|
private ModelImage |
imageWeightInputIso |
Isotropic weighted input image.
|
private ModelImage |
imageWeightRefIso |
Isotropic weighted reference image.
|
private ModelImage |
inputImage |
This image is to registered to the reference image.
|
private ModelImage |
inputWeight |
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
|
private int |
interp |
Interpolation method.
|
private float |
level1Factor |
Multiplication factor for level 1 - will be set based on subsampling.
|
private float |
level2Factor |
Multiplication factor for level 2 - will be set based on subsampling.
|
private float |
level4Factor |
Multiplication factor for level 4 - will be set based on subsampling.
|
private boolean |
m_bBruteForce |
If true, calculate the brute-force solution:.
|
private float |
m_fRotationRange |
The range of rotations to try in brute-force mode:.
|
private float |
m_fXScaleRange |
The range of scales in x to try in brute-force mode:.
|
private float |
m_fYScaleRange |
The range of scales in y to try in brute-force mode:.
|
private int |
m_iScaleSteps |
The number of steps to divide scale ranges:.
|
private int |
m_iTranslationRange |
The range of x,y translations to try in brute-force mode:.
|
private ImageRegistrationGPU |
m_kGPUCost |
|
private int |
maxDim |
DOCUMENT ME!
|
private int |
maxIter |
Limits number of iterations in ELSUNC optimization. maxIter in the call to ELSUNC will be an integer multiple
of baseNumIter
|
private int |
numMinima |
Number of minima from level 8 to test at level 4.
|
private java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> |
optimalPath |
The optimal path.
|
private static WildMagic.LibFoundation.Mathematics.Vector3f[] |
originalPath |
|
private java.util.Vector<java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f>>[] |
paths |
Used to store all paths for levelEigth, levelFour, levelTwo and levelOne.
|
private ModelImage |
refImage |
The inputImage will be registered to this reference image.
|
private ModelImage |
refWeight |
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
|
private boolean |
resampleInput |
DOCUMENT ME!
|
private boolean |
resampleRef |
DOCUMENT ME!
|
private float[] |
resInput |
The voxel resolutions of the image to be registered to the reference image.
|
private float[] |
resRef |
The voxel resolutions of the reference image.
|
private boolean |
rigidFlag |
Flag used to indicate if the registration is rigid (rotation and translation only; DOF = 3.
|
private float |
rotateBegin |
Coarse and fine sampling parameters.
|
private float |
rotateEnd |
Coarse and fine sampling parameters.
|
private int |
searchAlgorithm |
|
private ModelSimpleImage |
simpleInput |
Simple version of input image.
|
private ModelSimpleImage |
simpleInputSub2 |
Simple version of input image, subsampled by 2.
|
private ModelSimpleImage |
simpleInputSub4 |
Simple version of input image, subsampled by 4.
|
private ModelSimpleImage |
simpleInputSub8 |
Simple version of input image, subsampled by 8.
|
private ModelSimpleImage |
simpleRef |
Simple version of reference image.
|
private ModelSimpleImage |
simpleRefSub2 |
Simple version of reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleRefSub4 |
Simple version of reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleRefSub8 |
Simple version of reference image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightInput |
Simple version of weighted input image.
|
private ModelSimpleImage |
simpleWeightInputSub2 |
Simple version of weighted input image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightInputSub4 |
Simple version of weighted input image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightInputSub8 |
Simple version of weighted input image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightRef |
Simple version of weighted reference image.
|
private ModelSimpleImage |
simpleWeightRefSub2 |
Simple version of weighted reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightRefSub4 |
Simple version of weighted reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightRefSub8 |
Simple version of weighted reference image, subsampled by 8.
|
private AlgorithmTransform |
transform |
Transformation algorithm for creating an isotropic reference image.
|
private AlgorithmTransform |
transform2 |
Transformation algorithm for creating an isotropic input image.
|
private boolean |
weighted |
Flag to determine if there are weighted images or not.
|
private int |
weightedInputPixels |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub8 |
DOCUMENT ME!
|
private int |
weightedRefPixels |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub8 |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
algorithmBruteForce() |
Compute the brute-force solution.
|
WildMagic.LibFoundation.Mathematics.Vector2f |
calculateCenterOfMass2D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor) |
Calculates the center of mass (gravity) of a 2D image.
|
private void |
createTerrain() |
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
void |
drawLine(int xdim,
int ydim,
int zdim,
float[] image,
float value,
java.util.Vector<Point3D> path) |
|
void |
finalize() |
Prepares this class for destruction.
|
java.util.Vector<Point3D> |
findPointsOfLine(java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> realPath) |
|
private java.lang.String |
getConstructionInfo() |
Creates a string with the parameters that the image was constructed with.
|
double |
getCost() |
|
float |
getLevel1Factor() |
|
float |
getLevel2Factor() |
|
float |
getLevel4Factor() |
|
int |
getMaxDim() |
|
double |
getRotation() |
|
private double[] |
getTolerance(int DOF) |
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of
freedom).
|
TransMatrix |
getTransform() |
Accessor that returns the matrix calculated in this algorithm.
|
private int |
indexOf(java.util.Vector<java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f>> aPaths,
WildMagic.LibFoundation.Mathematics.Vector3f tp3d) |
|
private void |
interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale) |
Performs a bilinear interpolation on points.
|
java.util.Vector<MatrixListItem>[] |
levelEight(ModelSimpleImage ref,
ModelSimpleImage input) |
Takes two images that have been subsampled by a factor of eight.
|
java.util.Vector<MatrixListItem> |
levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima) |
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
|
MatrixListItem |
levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item) |
Takes the two images, no subsampling, and the best minimum so far.
|
private MatrixListItem |
levelOne2D(ModelSimpleImage ref,
ModelSimpleImage input) |
Only used for translations only = 2 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling.
|
private MatrixListItem |
levelOne2DRotation(ModelSimpleImage ref,
ModelSimpleImage input) |
Only used for rotations only = 1 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling.
|
MatrixListItem |
levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima) |
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
|
float |
line(float a,
float b,
int x,
float y) |
|
void |
midpointLine(WildMagic.LibFoundation.Mathematics.Vector3f p0,
WildMagic.LibFoundation.Mathematics.Vector3f p1,
java.util.Vector<Point3D> imagePath) |
|
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> |
param2Coordinates(double startX,
double endX,
double stepX,
double startY,
double endY,
double stepY,
double startZ,
double endZ,
double stepZ,
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> path) |
|
void |
print(MatrixListItem item,
java.lang.String message) |
|
void |
print(java.util.Vector data,
java.lang.String message) |
|
void |
runAlgorithm() |
Runs the image registration.
|
private void |
searchOptimalPath() |
|
void |
setBruteForce(boolean bOn,
float fRotationRange,
float fXScaleRange,
float fYScaleRange,
int iScaleSteps,
int iTranslationRange) |
setBruteForce.
|
void |
setJTEM(boolean bOn) |
|
void |
setLevel1Factor(float level1Factor) |
|
void |
setLevel2Factor(float level2Factor) |
|
void |
setLevel4Factor(float level4Factor) |
|
void |
setMaxDim(int maxDim) |
|
private static ModelSimpleImage |
subsampleBy2(ModelSimpleImage srcImage,
boolean isColor) |
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
doColor
private boolean doColor
DOCUMENT ME!
-
doJTEM
private boolean doJTEM
-
interp
private final int interp
Interpolation method.
-
maxDim
private int maxDim
DOCUMENT ME!
-
simpleWeightInputSub2
private ModelSimpleImage simpleWeightInputSub2
Simple version of weighted input image, subsampled by 2.
-
simpleWeightInputSub4
private ModelSimpleImage simpleWeightInputSub4
Simple version of weighted input image, subsampled by 4.
-
simpleWeightInputSub8
private ModelSimpleImage simpleWeightInputSub8
Simple version of weighted input image, subsampled by 8.
-
simpleWeightRefSub2
private ModelSimpleImage simpleWeightRefSub2
Simple version of weighted reference image, subsampled by 2.
-
simpleWeightRefSub4
private ModelSimpleImage simpleWeightRefSub4
Simple version of weighted reference image, subsampled by 4.
-
simpleWeightRefSub8
private ModelSimpleImage simpleWeightRefSub8
Simple version of weighted reference image, subsampled by 8.
-
paths
private final java.util.Vector<java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f>>[] paths
Used to store all paths for levelEigth, levelFour, levelTwo and levelOne.
-
Constructor Detail
-
AlgorithmRegELSUNCOAR2D
public AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread - searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
Constructor without weighting and without advanced settings (num iter).
-
AlgorithmRegELSUNCOAR2D
public AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsamplesearchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
Constructor without weighting and without advanced settings (num iter).
-
AlgorithmRegELSUNCOAR2D
public AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread - searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
Constructor with weighting and without advanced settings (num iter).
-
AlgorithmRegELSUNCOAR2D
public AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsamplesearchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
Constructor with weighting and without advanced settings (num iter).
-
AlgorithmRegELSUNCOAR2D
public AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread - _baseNumIter - Limits the number of iterations of ELSUNC algorithm. maxIter in the call to ELSUNC will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
Constructor without weighting and with advanced settings (num iter) set.
-
AlgorithmRegELSUNCOAR2D
public AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread - _baseNumIter - Limits the number of iterations of ELSUNC algorithm. maxIter in the call to ELSUNC will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
Constructor without weighting and with advanced settings (num iter) set.
-
AlgorithmRegELSUNCOAR2D
public AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread - _baseNumIter - Limits the number of iterations of ELSUNC algorithm. maxIter in the call to ELSUNC will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
Constructor with weighting and with advanced settings (num iter) set.
-
AlgorithmRegELSUNCOAR2D
public AlgorithmRegELSUNCOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread - _baseNumIter - Limits the number of iterations of ELSUNC algorithm. maxIter in the call to ELSUNC will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
Constructor with weighting and with advanced settings (num iter) set.
-
Method Detail
-
calculateCenterOfMass2D
public WildMagic.LibFoundation.Mathematics.Vector2f calculateCenterOfMass2D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor)
Calculates the center of mass (gravity) of a 2D image. In image space where the upper left hand corner of the
image is 0,0. The x axis goes left to right, y axis goes top to bottom. (i.e. the right hand rule). One could
simply multiply by voxel resolutions.
- Parameters:
image - DOCUMENT ME!wgtImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- the center of mass as a 2D point
-
drawLine
public void drawLine(int xdim,
int ydim,
int zdim,
float[] image,
float value,
java.util.Vector<Point3D> path)
-
param2Coordinates
public java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> param2Coordinates(double startX,
double endX,
double stepX,
double startY,
double endY,
double stepY,
double startZ,
double endZ,
double stepZ,
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> path)
-
runAlgorithm
public void runAlgorithm()
Runs the image registration. Blurs the images based on what their minimum resolutions are. The reference image is
blurred if one of the input image resolutions is 50% or more bigger than the corresponding resolution in the
reference image; likewise, the input image is blurred if one of the reference image resolutions is 50% or more
bigger than the corresponding resolution in the input image. Thus, it is unlikely, though not impossible, that
both images will be blurred. The images are then transformed into isotropic voxels. The resolutions of the two
images after the isotropic transformation will be the same in all dimensions. That resolution will equal the
minimum of the minimums of each image's resolutions: Min( Min (resolutions of ref image, resolutions of input
image) ). If the images are weighted, the weight images are blurred and transformed into isotropic voxels in the
same manner as the originals. Then the images are subsampled by 2, 4, and 8. If the images are too small they
will not be subsampled down to the smallest level; if they are too big, they will be subsampled to 16. The same
is done with the weight images if necessary. The function levelEight is called with the images subsampled by 8;
it returns two vectors with minima. Then the function levelFour is called with images subsampled by 4 and the two
vectors; it returns one vector of minima. The function levelTwo is called with images subsampled by 2 and the
vector; it returns an "answer" in the form of a MatrixListItem, which is a convenient way of storing the point,
the matrix, and the cost of the minimum. Then the function levelOne is called with the minimum; it returns a
final "answer", or minimum, which will then be accessed by the dialog that called this algorithm.
- Specified by:
runAlgorithm in class AlgorithmBase
-
getCost
public double getCost()
-
setBruteForce
public void setBruteForce(boolean bOn,
float fRotationRange,
float fXScaleRange,
float fYScaleRange,
int iScaleSteps,
int iTranslationRange)
setBruteForce. Tells the algorithm to do a brute-force optimization, where it will iterate of the the input
rotation, xscale, yscale, and translation ranges calculating the cost function at each point and returing the
minimum. No optimization with the brute-force approach.
- Parameters:
bOn - DOCUMENT ME!fRotationRange - DOCUMENT ME!fXScaleRange - DOCUMENT ME!fYScaleRange - DOCUMENT ME!iScaleSteps - DOCUMENT ME!iTranslationRange - DOCUMENT ME!
-
subsampleBy2
private static ModelSimpleImage subsampleBy2(ModelSimpleImage srcImage,
boolean isColor)
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- Parameters:
srcImage - Image to subsample.isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
algorithmBruteForce
private void algorithmBruteForce()
Compute the brute-force solution. Iterates over a range of angles, scales and translations, calculating the cost
function for each new position, returning the one with minimum cost:
-
interpolate
private void interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale)
Performs a bilinear interpolation on points. Takes an initial point, a vector of values to set, and an array in
which to look at neighbors of that point. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - Initial index into array.initial - Vector to set; if scale is true, set two translations and a scale. Otherwise just
set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
levelEight
public java.util.Vector<MatrixListItem>[] levelEight(ModelSimpleImage ref,
ModelSimpleImage input)
Takes two images that have been subsampled by a factor of eight. Sets up the cost function with the images and
the weighted images, if necessary. Uses the coarse sampling rate and optimizes translations and global scale at
the given rotation. So for example, if the coarse sampling range were -30 to 30 at every 15 degrees, we would
optimize at rotations of -30, -15, 0, 15, 30. Measures the cost at the fine sampling rate. Interpolates the
translations and global scale to come up with a good guess as to what the optimized translation would be at that
point. Takes the top 20% of the points and optimizes them. Now have a large multi-array of costs. 20% of those
have been optimized and placed back into their original position in the multi-array. Looks at the 2 neighbors of
a point: + and - one fine sample. If the point has a cost greater than any of these, it is not a minima.
Otherwise it is. Saves it in a vector of minima. Optimizes the minima over rotation as well as translations and
global scale. (Previously had not optimized over rotation.) Returns two vectors, one containing the minima before
optimization, one containing the minima after optimization.
- Parameters:
ref - Subsampled by 8 reference image.input - Subsampled by 8 input image.- Returns:
- List of preoptimized and optimized points.
-
levelFour
public java.util.Vector<MatrixListItem> levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima)
Takes two images that have been subsampled by a factor of four, and two vectors of minima. Sets up the cost
function with the images and the weighted images, if necessary. Adds the level4Factor determined during
subsampling. Measures the costs of the minima on the images and sort them. Takes the top three in each vector
(pre-optimization and post-optimization) and optimizes them. Puts them all into one vector. Perturbs the rotation
by zero and plus-minus fineDelta. If it's not a rigid transformation, perturbs the global scaling by factors of
0.8, 0.9, 1.0, 1.1, and 1.2. Optimize the perturbations. Returns a vector of the perturbed, optimized minima.
- Parameters:
ref - Reference image, subsampled by 4.input - Input image, subsampled by 4.minima - Preoptimized minima.optMinima - Optimized minima.- Returns:
- A vector of perturbed, optimized minima.
-
levelOne
public MatrixListItem levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item)
Takes the two images, no subsampling, and the best minimum so far. Sets up the cost function with the images and
the weighted images, if necessary. Adds the level1Factor determined during subsampling. Performs one optimization
run, with the maximum allowable degrees of freedom as specified by the user (the max is 7). Returns the best
minimum.
- Parameters:
ref - Reference image.input - Input image.item - Best minimum so far.- Returns:
- Best minimum after optimization.
-
levelOne2D
private MatrixListItem levelOne2D(ModelSimpleImage ref,
ModelSimpleImage input)
Only used for translations only = 2 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling. Sets up the cost function with the images and the weighted images, Performs one
optimization run, with 2 degrees of freedom Returns the best minimum.
- Parameters:
ref - Reference image.input - Input image.- Returns:
- Best minimum after optimization.
-
levelOne2DRotation
private MatrixListItem levelOne2DRotation(ModelSimpleImage ref,
ModelSimpleImage input)
Only used for rotations only = 1 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling. Sets up the cost function with the images and the weighted images, Performs one
optimization run, with 2 degrees of freedom Returns the best minimum.
- Parameters:
ref - Reference image.input - Input image.- Returns:
- Best minimum after optimization.
-
levelTwo
public MatrixListItem levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima)
Takes two images that have been subsampled by a factor of 2 and a vector of minima. Sets up the cost function
with the images and the weighted images, if necessary. Adds the level2Factor determined during subsampling.
Measures the costs of the minima at the images. Optimizes the best minimum with 4 degrees of freedom, then 5,
then 7. If the user has limited the degrees of freedom to 3, there will only be one optimization run, with 3
degrees of freedom. Returns the best minimum after optimization.
- Parameters:
ref - Reference image, subsampled by 2.input - Input image, subsampled by 2.minima - Minima.- Returns:
- The optimized minimum.
-
getMaxDim
public int getMaxDim()
���������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegOAR25D2.html��������������������������������0000775�4231163�4231163�00000433105�14537076061�026111� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegOAR25D2 (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
allowLevel16 |
DOCUMENT ME!
|
private boolean |
allowLevel2 |
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
|
private boolean |
allowLevel4 |
DOCUMENT ME!
|
private boolean |
allowLevel8 |
DOCUMENT ME!
|
private MatrixListItem |
answer |
Final answer after registration.
|
private int |
baseNumIter |
Limits number of iterations in Powell optimization. maxIter in the call to Powell's will be an integer multiple
of baseNumIter
|
private float[] |
buffer |
DOCUMENT ME!
|
private float[] |
bufferA |
DOCUMENT ME!
|
private float[] |
bufferIW |
DOCUMENT ME!
|
private float[] |
bufferW |
DOCUMENT ME!
|
private int |
coarseNum |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private float |
coarseRate |
Coarse and fine sampling parameters.
|
private int |
colorFactor |
1 for black and white, 4 for color.
|
private int |
costChoice |
Choice of which cost function to use.
|
private boolean |
doColor |
DOCUMENT ME!
|
private int |
DOF |
Maximum degrees of freedom when running the optimization.
|
private boolean |
doGraph |
Produce 2 output graphs - 1 for rotation and 1 for 2 translations.
|
private boolean |
doSubsample |
if true subsample.
|
private int |
fineNum |
|
private float |
fineRate |
Coarse and fine sampling parameters.
|
private boolean |
ignoreCOG |
whether or not to use center of gravity for first translation.
|
private ModelImage |
imageWeightIso |
DOCUMENT ME!
|
private ModelImage |
input1 |
Image used to import a slice from inputImage.
|
private ModelImage |
input2 |
Image used to import a slice from inputImage2.
|
private ModelImage |
input3 |
Image used to import a slice from inputImage3.
|
private ModelImage |
inputImage |
This is the image in which internal registration will be performed.
|
private ModelImage |
inputImage2 |
Other images which will not determine the registration, but which will undergo the same transformations as input
image.
|
private ModelImage |
inputImage3 |
DOCUMENT ME!
|
private ModelImage |
inputw_1 |
Image used to import a slice from inputWeight.
|
private ModelImage |
inputWeight |
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
|
private int |
interp |
Interpolation method used in transformations.
|
private int |
interp2 |
Interpolation method used in output.
|
private float[] |
iResols |
The voxel resolutions of the input image.
|
private ModelImage |
isoImage |
new to this version: must keep isoImage around if image needed to be transformed.
|
private float |
level1Factor |
Multiplication factor for level 1 - will be set based on subsampling.
|
private float |
level2Factor |
Multiplication factor for level 2 - will be set based on subsampling.
|
private float |
level4Factor |
Multiplication factor for level 4 - will be set based on subsampling.
|
private float |
maxDim |
DOCUMENT ME!
|
private int |
numMinima |
Number of minima from level 8 to test at level 4.
|
private ModelImage |
output_1 |
DOCUMENT ME!
|
private ModelImage |
output_2 |
DOCUMENT ME!
|
private ModelImage |
output_3 |
DOCUMENT ME!
|
private ModelImage |
outsidePreReferenceSlice |
DOCUMENT ME!
|
private ModelImage |
outsideReferenceSlice |
DOCUMENT ME!
|
private int |
refImageNo |
Indicates the first slice used as a reference slice, if regToAdjImage is true.
|
private boolean |
regToAdjImage |
If true use adjacent image for registration.
|
private boolean |
resample |
true if resolutions unequal, false if resolutions equal.
|
private boolean |
resampleW |
true if weight image must be resampled.
|
private boolean |
rigidFlag |
Flag used to indicate if the registration is ridgid (rotation and translation - DOF = 3.
|
private float[] |
rot |
Arrays used for producing graphs for DOF == 3 and register to reference image.
|
private float |
rotateBegin |
Coarse and fine sampling parameters.
|
private float |
rotateEnd |
Coarse and fine sampling parameters.
|
private ModelSimpleImage |
simpleInput_1 |
Simple version of an image slice of the input image.
|
private ModelSimpleImage |
simpleInputSub16_1 |
Simple version of an image slice of the input image, subsampled by 16.
|
private ModelSimpleImage |
simpleInputSub2_1 |
Simple version of an image slice of the input image, subsampled by 2.
|
private ModelSimpleImage |
simpleInputSub4_1 |
Simple version of an image slice of the input image, subsampled by 4.
|
private ModelSimpleImage |
simpleInputSub8_1 |
Simple version of an image slice of the input image, subsampled by 8.
|
private ModelSimpleImage |
simpleRef_1 |
Simple version of input image.
|
private ModelSimpleImage |
simpleRefSub16_1 |
Simple version of input image, subsampled by 16.
|
private ModelSimpleImage |
simpleRefSub2_1 |
Simple version of input image, subsampled by 2.
|
private ModelSimpleImage |
simpleRefSub4_1 |
Simple version of input image, subsampled by 4.
|
private ModelSimpleImage |
simpleRefSub8_1 |
Simple version of input image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightI_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub16_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub2_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub4_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub8_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightR_1 |
Simple version of weighted input image.
|
private ModelSimpleImage |
simpleWeightRSub16_1 |
Simple version of weighted input image, subsampled by 16.
|
private ModelSimpleImage |
simpleWeightRSub2_1 |
Simple version of weighted input image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightRSub4_1 |
Simple version of weighted input image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightRSub8_1 |
Simple version of weighted input image, subsampled by 8.
|
private double[] |
sliceCosts |
DOCUMENT ME!
|
private float[][] |
trans |
DOCUMENT ME!
|
private boolean |
transformVOIs |
if true transform VOIs.
|
private boolean |
useOutsideReferenceSlice |
DOCUMENT ME!
|
private boolean |
weighted |
Flag to determine if there are weighted images or not.
|
private ModelImage |
weightSliceImage |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRegOAR25D2(ModelImage _image,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
boolean mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean transformVOIs,
int _baseNumIter,
int _numMinima) |
Creates new automatic internal registration algorithm and sets necessary variables.
|
AlgorithmRegOAR25D2(ModelImage _image,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
boolean mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean transformVOIs,
int _baseNumIter,
int _numMinima) |
Creates new automatic internal registration algorithm and sets necessary variables.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static WildMagic.LibFoundation.Mathematics.Vector2f |
calculateCenterOfMass2D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor) |
Calculates the center of mass (gravity) of a 2D image.
|
private static void |
copyFloatData(ModelSimpleImage srcImage,
ModelSimpleImage resultImage) |
DOCUMENT ME!
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
void |
finalize() |
Prepares this class for destruction.
|
private java.lang.String |
getConstructionInfo() |
Creates a string with the parameters that the image was constructed with.
|
double[] |
getCosts() |
accessor for costs.
|
float[] |
getRot() |
accessor for rot.
|
private double[] |
getTolerance(int DOF) |
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and.
|
private static double[] |
getTolerance(int DOF,
boolean rigidFlag,
float maxDim) |
|
float[][] |
getTrans() |
accessor for trans.
|
ModelImage |
getTransformedImage() |
accessor to get the internally registered image.
|
private void |
interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale) |
Performs a bilinear interpolation on points.
|
private static void |
interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale,
int coarseNum) |
|
private java.util.Vector<MatrixListItem>[] |
levelEight(ModelSimpleImage ref,
ModelSimpleImage input) |
Takes two slices that have been subsampled by a factor of 8 or 16.
|
private static java.util.Vector<MatrixListItem>[] |
levelEightMultiThread(ModelSimpleImage ref,
ModelSimpleImage input,
int DOF,
boolean rigidFlag,
float maxDim,
int baseNumIter,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
int coarseNum,
int fineNum,
int costChoice,
boolean doColor,
boolean ignoreCOG,
boolean weighted,
boolean allowLevel16,
ModelSimpleImage simpleWeightRSub16_1,
ModelSimpleImage simpleWeightRSub8_1,
ModelSimpleImage simpleWeightISub16_1,
ModelSimpleImage simpleWeightISub8_1) |
|
private java.util.Vector<MatrixListItem> |
levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima) |
Takes two slices that have been subsampled by a factor of four, and two vectors of minima.
|
private static java.util.Vector<MatrixListItem> |
levelFourMultiThread(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima,
int numMinima,
int DOF,
boolean rigidFlag,
float maxDim,
int baseNumIter,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
int coarseNum,
int fineNum,
int costChoice,
boolean doColor,
boolean ignoreCOG,
boolean weighted,
float level4Factor,
ModelSimpleImage simpleWeightRSub4_1,
ModelSimpleImage simpleWeightISub4_1) |
|
private MatrixListItem |
levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item,
int frame) |
Takes the two slices, no subsampling, and the best minimum so far.
|
private MatrixListItem |
levelOne2D(ModelSimpleImage ref,
ModelSimpleImage input) |
This routine is used only with DOF = 2, translations only.
|
private static MatrixListItem |
levelOne2DMultiThread(ModelSimpleImage ref,
ModelSimpleImage input,
int frame,
int DOF,
boolean rigidFlag,
float maxDim,
int baseNumIter,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
int coarseNum,
int fineNum,
int costChoice,
boolean doColor,
boolean ignoreCOG,
boolean weighted,
float level1Factor,
ModelSimpleImage simpleWeightR_1,
ModelSimpleImage simpleWeightI_1,
double[] sliceCosts) |
|
private static MatrixListItem |
levelOneMultiThread(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item,
int frame,
int DOF,
boolean rigidFlag,
float maxDim,
int baseNumIter,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
int coarseNum,
int fineNum,
int costChoice,
boolean doColor,
boolean ignoreCOG,
boolean weighted,
float level1Factor,
ModelSimpleImage simpleWeightR_1,
ModelSimpleImage simpleWeightI_1,
double[] sliceCosts) |
|
private MatrixListItem |
levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima) |
Takes two slices that have been subsampled by a factor of 2 and a vector of minima.
|
private static MatrixListItem |
levelTwoMultiThread(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
int numMinima,
int DOF,
boolean rigidFlag,
float maxDim,
int baseNumIter,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
int coarseNum,
int fineNum,
int costChoice,
boolean doColor,
boolean ignoreCOG,
boolean weighted,
float level2Factor,
ModelSimpleImage simpleWeightRSub2_1,
ModelSimpleImage simpleWeightISub2_1) |
|
private void |
registerSlice(int rNumber,
int startIndex,
int endIndex,
int sliceSize,
int[] iExtents) |
|
void |
runAlgorithm() |
Runs the image registration.
|
void |
runAlgorithmTest() |
|
void |
setInputImage2(ModelImage inputImage2) |
inputImage2 is not used to determine the registration, but each slice of inputImage2 undergoes the same
transformation as inputImage.
|
void |
setInputImage3(ModelImage inputImage3) |
inputImage3 is not used to determine the registration, but each slice of inputImage3 undergoes the same
transformation as inputImage.
|
boolean |
setReferenceSlice(ModelImage refSlice) |
allows the user to pass in an OUTSIDE reference slice.
|
private static ModelSimpleImage |
subSample2DimBy2(ModelSimpleImage srcImage,
ModelSimpleImage resultImage,
boolean isColor) |
DOCUMENT ME!
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
allowLevel2
private boolean allowLevel2
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
-
buffer
private float[] buffer
DOCUMENT ME!
-
bufferA
private float[] bufferA
DOCUMENT ME!
-
bufferIW
private float[] bufferIW
DOCUMENT ME!
-
bufferW
private float[] bufferW
DOCUMENT ME!
-
inputImage2
private ModelImage inputImage2
Other images which will not determine the registration, but which will undergo the same transformations as input
image. Useful if registering a color image based on only 1 of the colors
-
simpleInputSub16_1
private ModelSimpleImage simpleInputSub16_1
Simple version of an image slice of the input image, subsampled by 16.
-
simpleInputSub2_1
private ModelSimpleImage simpleInputSub2_1
Simple version of an image slice of the input image, subsampled by 2.
-
simpleInputSub4_1
private ModelSimpleImage simpleInputSub4_1
Simple version of an image slice of the input image, subsampled by 4.
-
simpleInputSub8_1
private ModelSimpleImage simpleInputSub8_1
Simple version of an image slice of the input image, subsampled by 8.
-
simpleWeightRSub16_1
private ModelSimpleImage simpleWeightRSub16_1
Simple version of weighted input image, subsampled by 16.
-
simpleWeightRSub2_1
private ModelSimpleImage simpleWeightRSub2_1
Simple version of weighted input image, subsampled by 2.
-
simpleWeightRSub4_1
private ModelSimpleImage simpleWeightRSub4_1
Simple version of weighted input image, subsampled by 4.
-
simpleWeightRSub8_1
private ModelSimpleImage simpleWeightRSub8_1
Simple version of weighted input image, subsampled by 8.
-
trans
private float[][] trans
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmRegOAR25D2
public AlgorithmRegOAR25D2(ModelImage _image,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
boolean mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean transformVOIs,
int _baseNumIter,
int _numMinima)
Creates new automatic internal registration algorithm and sets necessary variables.
- Parameters:
_image - Input image_costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._interp2 - Interpolation method used in outputmode - If true, register to adjacent. If false, register to reference.refImageNum - If register to reference, the slice all other slices are registered to. If register to
adjacent, the first slice used as a reference._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doGraph - If true produce 2 output graphs - one for rotation and one for 2 translationsdoSubsample - If true subsampletransformVOIs - If true, transform VOIs_baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
AlgorithmRegOAR25D2
public AlgorithmRegOAR25D2(ModelImage _image,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
boolean mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean transformVOIs,
int _baseNumIter,
int _numMinima)
Creates new automatic internal registration algorithm and sets necessary variables.
- Parameters:
_image - Input image_inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - DOCUMENT ME!_interp - Interpolation method used in transformations._interp2 - Interpolation method used in outputmode - If true, register to adjacent. If false, register to reference.refImageNum - If register to reference, the slice all other slices are registered to. If register to
adjacent, the first slice used as a reference._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doGraph - If true produce 2 output graphs - 1 for rotation and one for 2 translationsdoSubsample - If true subsampletransformVOIs - If true, transform VOIs_baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
Method Detail
-
calculateCenterOfMass2D
public static WildMagic.LibFoundation.Mathematics.Vector2f calculateCenterOfMass2D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor)
Calculates the center of mass (gravity) of a 2D image. In image space where the upper left hand corner of the
image is 0,0. The x axis goes left to right, y axis goes top to bottom. (i.e. the right hand rule). One could
simply multiply by voxel resolutions.
- Parameters:
image - DOCUMENT ME!wgtImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- the center of mass as a 2D point
-
getRot
public float[] getRot()
accessor for rot.
- Returns:
- rot
-
runAlgorithm
public void runAlgorithm()
Runs the image registration. If the resolutions are unequal, the image is transformed into isotropic pixels. The
resolutions of the two images after the xy isotropic transformation will be the same in the x and y dimensions.
That resolution will equal the minimum resolution. If the image is weighted, the weight image is transformed into
isotropic pixels in the same manner as the original. Then the image is subsampled by 2, 4, and 8 or 16. If the
image is too small it will not be subsampled down to the smallest level; if it is too big, it will be subsampled
to 16. The same is done with the weight image if necessary. The program loops thru levelEight, levelFour,
levelTwo, and levelOne with one slice as the reference slice and one slice as the input slice. The function
levelEight is called with the slices subsampled by 8 or 16; it returns two vectors with minima. Then the function
levelFour is called with slices subsampled by 4 and the two vectors; it returns one vector of minima. The
function levelTwo is called with slices subsampled by 2 and the vector; it returns an "answer" in the form of a
MatrixListItem, which is a convenient way of storing the point, the matrix, and the cost of the minimum. Then the
function levelOne is called with the minimum; it returns a final "answer", or minimum, which is used to register
the input slice to the reference slice. The registered input slice data is imported into inputImage.
- Specified by:
runAlgorithm in class AlgorithmBase
-
registerSlice
private void registerSlice(int rNumber,
int startIndex,
int endIndex,
int sliceSize,
int[] iExtents)
-
setInputImage2
public void setInputImage2(ModelImage inputImage2)
inputImage2 is not used to determine the registration, but each slice of inputImage2 undergoes the same
transformation as inputImage. This is useful for color images where you wish the registration to be determined by
only 1 of the colors
- Parameters:
inputImage2 - DOCUMENT ME!
-
setInputImage3
public void setInputImage3(ModelImage inputImage3)
inputImage3 is not used to determine the registration, but each slice of inputImage3 undergoes the same
transformation as inputImage. This is useful for color images where you wish the registration to be determined by
only 1 of the colors
- Parameters:
inputImage3 - DOCUMENT ME!
-
interpolate
private void interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale)
Performs a bilinear interpolation on points. Takes an initial point, a vector of values to set, and an array in
which to look at neighbors of that point. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - Initial index into array.initial - Vector to set; if scale is true, set two translations and a scale. Otherwise just
set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
interpolate
private static void interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale,
int coarseNum)
-
levelEight
private java.util.Vector<MatrixListItem>[] levelEight(ModelSimpleImage ref,
ModelSimpleImage input)
Takes two slices that have been subsampled by a factor of 8 or 16. Sets up the cost function with the slices and
the weighted slices, if necessary. Uses the coarse sampling rate and optimize translations and global scale at
the given rotation. So for example, if the coarse sampling range were -30 to 30 at every 15 degrees, we would
optimize at rotations of -30, -15, 0, 15, 30. Measures the cost at the fine sampling rate. Interpolates the
translations and global scale to come up with a good guess as to what the optimized translation would be at that
point. Takes the top 20% of the points and optimizes them. Now have a large multi-array of costs. 20% of those
have been optimized and placed back into their original position in the multi-array. Looks at the 3 neighbors of
a point: +, =, or - one fine sample. If the point has a cost greater than any of these, it is not a minima.
Otherwise it is. Saves it in a vector of minima. Optimizes the minima over rotation as well as translations and
global scale. (Previously had not optimized over rotation.) Returns two vectors, one containing the minima before
optimization, one containing the minima after optimization.
- Parameters:
ref - Subsampled by 8 or 16 reference slice.input - Subsampled by 8 or 16 input slice.- Returns:
- List of preoptimized and optimized points.
-
levelFour
private java.util.Vector<MatrixListItem> levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima)
Takes two slices that have been subsampled by a factor of four, and two vectors of minima. Sets up the cost
function with the slices and the weighted slices, if necessary. Adds the level4Factor determined during
subsampling. Measures the costs of the minima on the images and sort them. Takes the top three in each vector
(pre-optimization and post-optimization) and optimizes them. Puts them all into one vector. Perturbs the rotation
by zero and by plus-minus fineDelta. If it's not a rigid transformation, perturbs the scales by 0, plus-minus .1,
then plus-minus .2. Optimize the perturbations. Returns a vector of the perturbed, optimized minima.
- Parameters:
ref - Reference slice, subsampled by 4.input - Input slice, subsampled by 4.minima - Preoptimized minima.optMinima - DOCUMENT ME!- Returns:
- A vector of perturbed, optimized minima.
-
levelOne
private MatrixListItem levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item,
int frame)
Takes the two slices, no subsampling, and the best minimum so far. Sets up the cost function with the slices and
the weighted slices, if necessary. Adds the level1Factor determined during subsampling. Performs one optimization
run, with the maximum allowable degrees of freedom as specified by the user (the max is 7). Returns the best
minimum.
- Parameters:
ref - Reference slice.input - Input slice.item - Best minimum so far.frame - DOCUMENT ME!- Returns:
- Best minimum after optimization.
-
levelOne2D
private MatrixListItem levelOne2D(ModelSimpleImage ref,
ModelSimpleImage input)
This routine is used only with DOF = 2, translations only. LevelEight, levelFour, and levelTwo are skipped Takes
the two slices, no subsampling. Sets up the cost function with the slices and the weighted slices. Adds the
level1Factor determined during subsampling. Performs one optimization run, with 2 degrees of freedom
- Parameters:
ref - Reference slice.input - Input slice.- Returns:
- Best minimum after optimization.
-
levelTwo
private MatrixListItem levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima)
Takes two slices that have been subsampled by a factor of 2 and a vector of minima. Sets up the cost function
with the images and the weighted images, if necessary. Adds the level2Factor determined during subsampling.
Measures the costs of the minima at the images. Optimizes the best minimum with 4 degrees of freedom, then 5,
then 7. If the user has limited the degrees of freedom to 3, there will only be one optimization run, with 3
degrees of freedom. Returns the best minimum after optimization.
- Parameters:
ref - Reference slice, subsampled by 2.input - Input slice, subsampled by 2.minima - Minima.- Returns:
- The optimized minimum.
-
levelEightMultiThread
private static java.util.Vector<MatrixListItem>[] levelEightMultiThread(ModelSimpleImage ref,
ModelSimpleImage input,
int DOF,
boolean rigidFlag,
float maxDim,
int baseNumIter,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
int coarseNum,
int fineNum,
int costChoice,
boolean doColor,
boolean ignoreCOG,
boolean weighted,
boolean allowLevel16,
ModelSimpleImage simpleWeightRSub16_1,
ModelSimpleImage simpleWeightRSub8_1,
ModelSimpleImage simpleWeightISub16_1,
ModelSimpleImage simpleWeightISub8_1)
-
levelFourMultiThread
private static java.util.Vector<MatrixListItem> levelFourMultiThread(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima,
int numMinima,
int DOF,
boolean rigidFlag,
float maxDim,
int baseNumIter,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
int coarseNum,
int fineNum,
int costChoice,
boolean doColor,
boolean ignoreCOG,
boolean weighted,
float level4Factor,
ModelSimpleImage simpleWeightRSub4_1,
ModelSimpleImage simpleWeightISub4_1)
-
levelTwoMultiThread
private static MatrixListItem levelTwoMultiThread(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
int numMinima,
int DOF,
boolean rigidFlag,
float maxDim,
int baseNumIter,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
int coarseNum,
int fineNum,
int costChoice,
boolean doColor,
boolean ignoreCOG,
boolean weighted,
float level2Factor,
ModelSimpleImage simpleWeightRSub2_1,
ModelSimpleImage simpleWeightISub2_1)
-
levelOneMultiThread
private static MatrixListItem levelOneMultiThread(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item,
int frame,
int DOF,
boolean rigidFlag,
float maxDim,
int baseNumIter,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
int coarseNum,
int fineNum,
int costChoice,
boolean doColor,
boolean ignoreCOG,
boolean weighted,
float level1Factor,
ModelSimpleImage simpleWeightR_1,
ModelSimpleImage simpleWeightI_1,
double[] sliceCosts)
-
levelOne2DMultiThread
private static MatrixListItem levelOne2DMultiThread(ModelSimpleImage ref,
ModelSimpleImage input,
int frame,
int DOF,
boolean rigidFlag,
float maxDim,
int baseNumIter,
float rotateBegin,
float rotateEnd,
float coarseRate,
float fineRate,
int coarseNum,
int fineNum,
int costChoice,
boolean doColor,
boolean ignoreCOG,
boolean weighted,
float level1Factor,
ModelSimpleImage simpleWeightR_1,
ModelSimpleImage simpleWeightI_1,
double[] sliceCosts)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegELSUNCOAR25D.html���������������������������0000775�4231163�4231163�00000346244�14537076060�026747� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegELSUNCOAR25D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
allowLevel16 |
DOCUMENT ME!
|
private boolean |
allowLevel2 |
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
|
private boolean |
allowLevel4 |
DOCUMENT ME!
|
private boolean |
allowLevel8 |
DOCUMENT ME!
|
private MatrixListItem |
answer |
Final answer after registration.
|
private int |
baseNumIter |
Limits number of iterations in ELSUNC, LEVENBERG_MARQUARDT, or NL2SOL optimization.
|
private float[] |
buffer |
DOCUMENT ME!
|
private float[] |
bufferA |
DOCUMENT ME!
|
private float[] |
bufferIW |
DOCUMENT ME!
|
private float[] |
bufferW |
DOCUMENT ME!
|
private int |
coarseNum |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private float |
coarseRate |
Coarse and fine sampling parameters.
|
private int |
colorFactor |
1 for black and white, 4 for color.
|
private int |
costChoice |
Choice of which cost function to use.
|
private boolean |
doColor |
DOCUMENT ME!
|
private int |
DOF |
Maximum degrees of freedom when running the optimization.
|
private boolean |
doGraph |
Produce 2 output graphs - 1 for rotation and 1 for 2 translations.
|
private boolean |
doSubsample |
if true subsample.
|
private int |
fineNum |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private float |
fineRate |
Coarse and fine sampling parameters.
|
private boolean |
ignoreCOG |
whether or not to use center of gravity for first translation.
|
private ModelImage |
imageWeightIso |
DOCUMENT ME!
|
private ModelImage |
input1 |
Image used to import a slice from inputImage.
|
private ModelImage |
input2 |
Image used to import a slice from inputImage2.
|
private ModelImage |
input3 |
Image used to import a slice from inputImage3.
|
private ModelImage |
inputImage |
This is the image in which internal registration will be performed.
|
private ModelImage |
inputImage2 |
Other images which will not determine the registration, but which will undergo the same transformations as input
image.
|
private ModelImage |
inputImage3 |
DOCUMENT ME!
|
private ModelImage |
inputw_1 |
Image used to import a slice from inputWeight.
|
private ModelImage |
inputWeight |
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
|
private int |
interp |
Interpolation method used in transformations.
|
private int |
interp2 |
Interpolation method used in output.
|
private float[] |
iResols |
The voxel resolutions of the input image.
|
private ModelImage |
isoImage |
new to this version: must keep isoImage around if image needed to be transformed.
|
private float |
level1Factor |
Multiplication factor for level 1 - will be set based on subsampling.
|
private float |
level2Factor |
Multiplication factor for level 2 - will be set based on subsampling.
|
private float |
level4Factor |
Multiplication factor for level 4 - will be set based on subsampling.
|
private float |
maxDim |
DOCUMENT ME!
|
private int |
maxIter |
Limits number of iterations in ELSUNC, LEVENBERG_MARQUARDT, or NL2SOL optimization.
|
private int |
numMinima |
Number of minima from level 8 to test at level 4.
|
private ModelImage |
output_1 |
DOCUMENT ME!
|
private ModelImage |
output_2 |
DOCUMENT ME!
|
private ModelImage |
output_3 |
DOCUMENT ME!
|
private ModelImage |
outsidePreReferenceSlice |
DOCUMENT ME!
|
private ModelImage |
outsideReferenceSlice |
DOCUMENT ME!
|
private int |
refImageNo |
Indicates the first slice used as a reference slice, if regToAdjImage is true.
|
private boolean |
regToAdjImage |
If true use adjacent image for registration.
|
private boolean |
resample |
true if resolutions unequal, false if resolutions equal.
|
private boolean |
resampleW |
true if weight image must be resampled.
|
private boolean |
rigidFlag |
Flag used to indicate if the registration is ridgid (rotation and translation - DOF = 3.
|
private float[] |
rot |
Arrays used for producing graphs for DOF == 3 and register to reference image.
|
private float |
rotateBegin |
Coarse and fine sampling parameters.
|
private float |
rotateEnd |
Coarse and fine sampling parameters.
|
private int |
searchAlgorithm |
|
private ModelSimpleImage |
simpleInput_1 |
Simple version of an image slice of the input image.
|
private ModelSimpleImage |
simpleInputSub16_1 |
Simple version of an image slice of the input image, subsampled by 16.
|
private ModelSimpleImage |
simpleInputSub2_1 |
Simple version of an image slice of the input image, subsampled by 2.
|
private ModelSimpleImage |
simpleInputSub4_1 |
Simple version of an image slice of the input image, subsampled by 4.
|
private ModelSimpleImage |
simpleInputSub8_1 |
Simple version of an image slice of the input image, subsampled by 8.
|
private ModelSimpleImage |
simpleRef_1 |
Simple version of input image.
|
private ModelSimpleImage |
simpleRefSub16_1 |
Simple version of input image, subsampled by 16.
|
private ModelSimpleImage |
simpleRefSub2_1 |
Simple version of input image, subsampled by 2.
|
private ModelSimpleImage |
simpleRefSub4_1 |
Simple version of input image, subsampled by 4.
|
private ModelSimpleImage |
simpleRefSub8_1 |
Simple version of input image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightI_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub16_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub2_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub4_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub8_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightR_1 |
Simple version of weighted input image.
|
private ModelSimpleImage |
simpleWeightRSub16_1 |
Simple version of weighted input image, subsampled by 16.
|
private ModelSimpleImage |
simpleWeightRSub2_1 |
Simple version of weighted input image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightRSub4_1 |
Simple version of weighted input image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightRSub8_1 |
Simple version of weighted input image, subsampled by 8.
|
private double[] |
sliceCosts |
DOCUMENT ME!
|
private float[][] |
trans |
DOCUMENT ME!
|
private boolean |
transformVOIs |
if true transform VOIs.
|
private boolean |
useOutsideReferenceSlice |
DOCUMENT ME!
|
private boolean |
weighted |
Flag to determine if there are weighted images or not.
|
private ModelImage |
weightSliceImage |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRegELSUNCOAR25D(ModelImage _image,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
boolean mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean transformVOIs,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic internal registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR25D(ModelImage _image,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
boolean mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean transformVOIs,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic internal registration algorithm and sets necessary variables.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
WildMagic.LibFoundation.Mathematics.Vector2f |
calculateCenterOfMass2D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor) |
Calculates the center of mass (gravity) of a 2D image.
|
private void |
copyFloatData(ModelSimpleImage srcImage,
ModelSimpleImage resultImage) |
DOCUMENT ME!
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
void |
finalize() |
Prepares this class for destruction.
|
private java.lang.String |
getConstructionInfo() |
Creates a string with the parameters that the image was constructed with.
|
double[] |
getCosts() |
accessor for costs.
|
float[] |
getRot() |
accessor for rot.
|
private double[] |
getTolerance(int DOF) |
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and.
|
float[][] |
getTrans() |
accessor for trans.
|
ModelImage |
getTransformedImage() |
accessor to get the internally registered image.
|
private void |
interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale) |
Performs a bilinear interpolation on points.
|
private java.util.Vector<MatrixListItem>[] |
levelEight(ModelSimpleImage ref,
ModelSimpleImage input) |
Takes two slices that have been subsampled by a factor of 8 or 16.
|
private java.util.Vector<MatrixListItem> |
levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima) |
Takes two slices that have been subsampled by a factor of four, and two vectors of minima.
|
private MatrixListItem |
levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item,
int frame) |
Takes the two slices, no subsampling, and the best minimum so far.
|
private MatrixListItem |
levelOne2D(ModelSimpleImage ref,
ModelSimpleImage input) |
This routine is used only with DOF = 2, translations only.
|
private MatrixListItem |
levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima) |
Takes two slices that have been subsampled by a factor of 2 and a vector of minima.
|
void |
runAlgorithm() |
Runs the image registration.
|
void |
setInputImage2(ModelImage inputImage2) |
inputImage2 is not used to determine the registration, but each slice of inputImage2 undergoes the same
transformation as inputImage.
|
void |
setInputImage3(ModelImage inputImage3) |
inputImage3 is not used to determine the registration, but each slice of inputImage3 undergoes the same
transformation as inputImage.
|
boolean |
setReferenceSlice(ModelImage refSlice) |
allows the user to pass in an OUTSIDE reference slice.
|
private static ModelSimpleImage |
subSample2DimBy2(ModelSimpleImage srcImage,
ModelSimpleImage resultImage,
boolean isColor) |
DOCUMENT ME!
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
allowLevel2
private boolean allowLevel2
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
-
buffer
private float[] buffer
DOCUMENT ME!
-
bufferA
private float[] bufferA
DOCUMENT ME!
-
bufferIW
private float[] bufferIW
DOCUMENT ME!
-
bufferW
private float[] bufferW
DOCUMENT ME!
-
doColor
private boolean doColor
DOCUMENT ME!
-
inputImage2
private ModelImage inputImage2
Other images which will not determine the registration, but which will undergo the same transformations as input
image. Useful if registering a color image based on only 1 of the colors
-
maxDim
private float maxDim
DOCUMENT ME!
-
simpleInputSub16_1
private ModelSimpleImage simpleInputSub16_1
Simple version of an image slice of the input image, subsampled by 16.
-
simpleInputSub2_1
private ModelSimpleImage simpleInputSub2_1
Simple version of an image slice of the input image, subsampled by 2.
-
simpleInputSub4_1
private ModelSimpleImage simpleInputSub4_1
Simple version of an image slice of the input image, subsampled by 4.
-
simpleInputSub8_1
private ModelSimpleImage simpleInputSub8_1
Simple version of an image slice of the input image, subsampled by 8.
-
simpleWeightRSub16_1
private ModelSimpleImage simpleWeightRSub16_1
Simple version of weighted input image, subsampled by 16.
-
simpleWeightRSub2_1
private ModelSimpleImage simpleWeightRSub2_1
Simple version of weighted input image, subsampled by 2.
-
simpleWeightRSub4_1
private ModelSimpleImage simpleWeightRSub4_1
Simple version of weighted input image, subsampled by 4.
-
simpleWeightRSub8_1
private ModelSimpleImage simpleWeightRSub8_1
Simple version of weighted input image, subsampled by 8.
-
trans
private float[][] trans
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmRegELSUNCOAR25D
public AlgorithmRegELSUNCOAR25D(ModelImage _image,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
boolean mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean transformVOIs,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic internal registration algorithm and sets necessary variables.
- Parameters:
_image - Input image_costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._interp2 - Interpolation method used in outputmode - If true, register to adjacent. If false, register to reference.refImageNum - If register to reference, the slice all other slices are registered to. If register to
adjacent, the first slice used as a reference._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doGraph - If true produce 2 output graphs - one for rotation and one for 2 translationsdoSubsample - If true subsampletransformVOIs - If true, transform VOIs_baseNumIter - Limits the number of iterations of elsunc algorithm. maxIter in the call to elsunc
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
-
AlgorithmRegELSUNCOAR25D
public AlgorithmRegELSUNCOAR25D(ModelImage _image,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
boolean mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean transformVOIs,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic internal registration algorithm and sets necessary variables.
- Parameters:
_image - Input image_inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - DOCUMENT ME!_interp - Interpolation method used in transformations._interp2 - Interpolation method used in outputmode - If true, register to adjacent. If false, register to reference.refImageNum - If register to reference, the slice all other slices are registered to. If register to
adjacent, the first slice used as a reference._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doGraph - If true produce 2 output graphs - 1 for rotation and one for 2 translationsdoSubsample - If true subsampletransformVOIs - If true, transform VOIs_baseNumIter - Limits the number of iterations of elsunc algorithm. maxIter in the call to elsunc
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
-
Method Detail
-
calculateCenterOfMass2D
public WildMagic.LibFoundation.Mathematics.Vector2f calculateCenterOfMass2D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor)
Calculates the center of mass (gravity) of a 2D image. In image space where the upper left hand corner of the
image is 0,0. The x axis goes left to right, y axis goes top to bottom. (i.e. the right hand rule). One could
simply multiply by voxel resolutions.
- Parameters:
image - DOCUMENT ME!wgtImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- the center of mass as a 2D point
-
getRot
public float[] getRot()
accessor for rot.
- Returns:
- rot
-
runAlgorithm
public void runAlgorithm()
Runs the image registration. If the resolutions are unequal, the image is transformed into isotropic pixels. The
resolutions of the two images after the xy isotropic transformation will be the same in the x and y dimensions.
That resolution will equal the minimum resolution. If the image is weighted, the weight image is transformed into
isotropic pixels in the same manner as the original. Then the image is subsampled by 2, 4, and 8 or 16. If the
image is too small it will not be subsampled down to the smallest level; if it is too big, it will be subsampled
to 16. The same is done with the weight image if necessary. The program loops thru levelEight, levelFour,
levelTwo, and levelOne with one slice as the reference slice and one slice as the input slice. The function
levelEight is called with the slices subsampled by 8 or 16; it returns two vectors with minima. Then the function
levelFour is called with slices subsampled by 4 and the two vectors; it returns one vector of minima. The
function levelTwo is called with slices subsampled by 2 and the vector; it returns an "answer" in the form of a
MatrixListItem, which is a convenient way of storing the point, the matrix, and the cost of the minimum. Then the
function levelOne is called with the minimum; it returns a final "answer", or minimum, which is used to register
the input slice to the reference slice. The registered input slice data is imported into inputImage.
- Specified by:
runAlgorithm in class AlgorithmBase
-
setInputImage2
public void setInputImage2(ModelImage inputImage2)
inputImage2 is not used to determine the registration, but each slice of inputImage2 undergoes the same
transformation as inputImage. This is useful for color images where you wish the registration to be determined by
only 1 of the colors
- Parameters:
inputImage2 - DOCUMENT ME!
-
setInputImage3
public void setInputImage3(ModelImage inputImage3)
inputImage3 is not used to determine the registration, but each slice of inputImage3 undergoes the same
transformation as inputImage. This is useful for color images where you wish the registration to be determined by
only 1 of the colors
- Parameters:
inputImage3 - DOCUMENT ME!
-
interpolate
private void interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale)
Performs a bilinear interpolation on points. Takes an initial point, a vector of values to set, and an array in
which to look at neighbors of that point. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - Initial index into array.initial - Vector to set; if scale is true, set two translations and a scale. Otherwise just
set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
levelEight
private java.util.Vector<MatrixListItem>[] levelEight(ModelSimpleImage ref,
ModelSimpleImage input)
Takes two slices that have been subsampled by a factor of 8 or 16. Sets up the cost function with the slices and
the weighted slices, if necessary. Uses the coarse sampling rate and optimize translations and global scale at
the given rotation. So for example, if the coarse sampling range were -30 to 30 at every 15 degrees, we would
optimize at rotations of -30, -15, 0, 15, 30. Measures the cost at the fine sampling rate. Interpolates the
translations and global scale to come up with a good guess as to what the optimized translation would be at that
point. Takes the top 20% of the points and optimizes them. Now have a large multi-array of costs. 20% of those
have been optimized and placed back into their original position in the multi-array. Looks at the 3 neighbors of
a point: +, =, or - one fine sample. If the point has a cost greater than any of these, it is not a minima.
Otherwise it is. Saves it in a vector of minima. Optimizes the minima over rotation as well as translations and
global scale. (Previously had not optimized over rotation.) Returns two vectors, one containing the minima before
optimization, one containing the minima after optimization.
- Parameters:
ref - Subsampled by 8 or 16 reference slice.input - Subsampled by 8 or 16 input slice.- Returns:
- List of preoptimized and optimized points.
-
levelFour
private java.util.Vector<MatrixListItem> levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima)
Takes two slices that have been subsampled by a factor of four, and two vectors of minima. Sets up the cost
function with the slices and the weighted slices, if necessary. Adds the level4Factor determined during
subsampling. Measures the costs of the minima on the images and sort them. Takes the top three in each vector
(pre-optimization and post-optimization) and optimizes them. Puts them all into one vector. Perturbs the rotation
by zero and by plus-minus fineDelta. If it's not a rigid transformation, perturbs the scales by 0, plus-minus .1,
then plus-minus .2. Optimize the perturbations. Returns a vector of the perturbed, optimized minima.
- Parameters:
ref - Reference slice, subsampled by 4.input - Input slice, subsampled by 4.minima - Preoptimized minima.optMinima - DOCUMENT ME!- Returns:
- A vector of perturbed, optimized minima.
-
levelOne
private MatrixListItem levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item,
int frame)
Takes the two slices, no subsampling, and the best minimum so far. Sets up the cost function with the slices and
the weighted slices, if necessary. Adds the level1Factor determined during subsampling. Performs one optimization
run, with the maximum allowable degrees of freedom as specified by the user (the max is 7). Returns the best
minimum.
- Parameters:
ref - Reference slice.input - Input slice.item - Best minimum so far.frame - DOCUMENT ME!- Returns:
- Best minimum after optimization.
-
levelOne2D
private MatrixListItem levelOne2D(ModelSimpleImage ref,
ModelSimpleImage input)
This routine is used only with DOF = 2, translations only. LevelEight, levelFour, and levelTwo are skipped Takes
the two slices, no subsampling. Sets up the cost function with the slices and the weighted slices. Adds the
level1Factor determined during subsampling. Performs one optimization run, with 2 degrees of freedom
- Parameters:
ref - Reference slice.input - Input slice.- Returns:
- Best minimum after optimization.
-
levelTwo
private MatrixListItem levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima)
Takes two slices that have been subsampled by a factor of 2 and a vector of minima. Sets up the cost function
with the images and the weighted images, if necessary. Adds the level2Factor determined during subsampling.
Measures the costs of the minima at the images. Optimizes the best minimum with 4 degrees of freedom, then 5,
then 7. If the user has limited the degrees of freedom to 3, there will only be one optimization run, with 3
degrees of freedom. Returns the best minimum after optimization.
- Parameters:
ref - Reference slice, subsampled by 2.input - Input slice, subsampled by 2.minima - Minima.- Returns:
- The optimized minimum.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegChamfer.html��������������������������������0000775�4231163�4231163�00000151217�14537076060�026500� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegChamfer (MIPAV API Documentation)
-
- All Implemented Interfaces:
de.jtem.numericalMethods.calculus.function.RealFunctionOfSeveralVariables, java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmRegChamfer
extends AlgorithmBase
implements de.jtem.numericalMethods.calculus.function.RealFunctionOfSeveralVariables
AlgorithmRegChamfer First slice is template (base image) to which match image is registered. Minimize cost, measures
distance between surfaces in base image and match image.
- Version:
- 1.0 April, 2000
- Author:
- Delia McGarry
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
private class |
AlgorithmRegChamfer.CostFunction |
Class for specifying optimization function for AlgorithmSimplexOpt.
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
DIM
private int DIM
DOCUMENT ME!
-
image25D
private boolean image25D
DOCUMENT ME!
-
N
private int N
DOCUMENT ME!
-
simplexDim
private int simplexDim
DOCUMENT ME!
-
volLength
private int volLength
DOCUMENT ME!
-
sliceSize
private int sliceSize
DOCUMENT ME!
-
xdimB
private int xdimB
DOCUMENT ME!
-
ydimB
private int ydimB
DOCUMENT ME!
-
zdimB
private int zdimB
DOCUMENT ME!
-
xdimM
private int xdimM
DOCUMENT ME!
-
ydimM
private int ydimM
DOCUMENT ME!
-
zdimM
private int zdimM
DOCUMENT ME!
-
xresB
private float xresB
DOCUMENT ME!
-
yresB
private float yresB
DOCUMENT ME!
-
zresB
private float zresB
DOCUMENT ME!
-
xresM
private float xresM
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmRegChamfer
public AlgorithmRegChamfer(ModelImage base,
ModelImage matchImage,
boolean maskFlag)
Constructs a new registration algorithm.
- Parameters:
base - binary, edge-extracted base imagematchImage - binary edge-extracted image to be transformedmaskFlag - flag indicating if the whole image should be processed
-
AlgorithmRegChamfer
public AlgorithmRegChamfer(ModelImage volume25D,
ModelImage edgeImg,
boolean maskFlag,
boolean image25D)
Constructs new registration algorithm.
- Parameters:
volume25D - volume to be registerededgeImg - binary, edge-extracted version of volume25DmaskFlag - flag indicating whether to mask to image or notimage25D - volume processed as 2.5D, slices registered to adjacent slice
-
Method Detail
-
concatenateMatrix
private void concatenateMatrix(TransMatrix[] tMatrixMatchtoBase,
int matchSlice)
Concatenates the matrices.
- Parameters:
tMatrixMatchtoBase - Array of matrices to concatenatematchSlice - Last slice to concatenate
-
transform25DMatchSlice
private void transform25DMatchSlice(int matchSlice,
TransMatrix xfrm,
float[] imgBuf,
float[] tImgBuf)
Transforms 2.5 D match slice.
- Parameters:
matchSlice - Slice to matchxfrm - Transformation matriximgBuf - Image buffertImgBuf - Transformed image buffer
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegOAR35D.MatrixListItem.html������������������0000775�4231163�4231163�00000041715�14537076061�030750� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegOAR35D.MatrixListItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D.MatrixListItem
-
- All Implemented Interfaces:
java.lang.Comparable<AlgorithmRegOAR35D.MatrixListItem>
- Enclosing class:
- AlgorithmRegOAR35D
class AlgorithmRegOAR35D.MatrixListItem
extends java.lang.Object
implements java.lang.Comparable<AlgorithmRegOAR35D.MatrixListItem>
Helper class to make it easy to store the necessary information about a minimum. Stores the "point", or vector at
which the minimum was reached; the "cost", or value of the cost function at that minimum; and the matrix, which
was the true input into the cost function and represents the transformation that gives the minimum cost of
differences between the images. Implements Comparable, so that a list of MatrixListItems can be sorted using
Java's sort.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected double |
cost |
Cost of function at this minimum.
|
protected double[] |
initial |
Rotations, translations, scales, and skews that make up transformation.
|
protected TransMatrixd |
matrix |
Matrix that gives best transformation.
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
MatrixListItem(double _cost,
TransMatrixd _matrix,
double[] _initial) |
Creates new minimum object, setting the data and copying the point array explicitly.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
initial
protected double[] initial
Rotations, translations, scales, and skews that make up transformation.
-
Constructor Detail
-
MatrixListItem
protected MatrixListItem(double _cost,
TransMatrixd _matrix,
double[] _initial)
Creates new minimum object, setting the data and copying the point array explicitly.
- Parameters:
_cost - Cost of this minimum._matrix - Matrix that gives best transformation._initial - Rotations, translations, scales, and skews that make up transformation.
-
Method Detail
-
compareTo
public int compareTo(AlgorithmRegOAR35D.MatrixListItem o)
Necessary to implement so that list may be sorted. Returns -1 if this cost is less than the parameter's cost;
1 if this cost is greater than the parameter's cost; and 0 if they are equal.
- Specified by:
compareTo in interface java.lang.Comparable<AlgorithmRegOAR35D.MatrixListItem>- Parameters:
o - MatrixListItem to compare to.- Returns:
- -1 if this is less than, 1 if greater than, 0 if equal.
-
toString
public java.lang.String toString()
Creates readable string of this object, including cost, matrix, and point with its meanings.
- Overrides:
toString in class java.lang.Object- Returns:
- Readable string representation of this object.
���������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegPatientPos.html�����������������������������0000775�4231163�4231163�00000131064�14537076061�027220� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegPatientPos (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
name
java.lang.String name
DOCUMENT ME!
-
axisDirA
private int[] axisDirA
DOCUMENT ME!
-
axisDirB
private int[] axisDirB
DOCUMENT ME!
-
coordA
private double[] coordA
DOCUMENT ME!
-
coordB
private double[] coordB
DOCUMENT ME!
-
doMatch
private boolean doMatch
DOCUMENT ME!
-
index2ImgA
private int[] index2ImgA
DOCUMENT ME!
-
sign2Axial
private int[] sign2Axial
DOCUMENT ME!
-
sign2ImgA
private int[] sign2ImgA
DOCUMENT ME!
-
Method Detail
-
getPatientOrientation
public void getPatientOrientation(double[] xOrient,
double[] yOrient,
ModelImage image)
Extract orientation info from file header.
- Parameters:
xOrient - 3D array of directional cosines in xyOrient - 3D array of directional cosines in yimage - image
-
getPatientPosition
public void getPatientPosition(double[] coord,
ModelImage image)
Extracts the origin from image file info.
- Parameters:
coord - 3D array of patient position x,y,z *image - image
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/vabra/��������������������������������������������������0002775�4231163�4231163�00000000000�14537076122�023022� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/vabra/VabraConfiguration.html���������������������������0000775�4231163�4231163�00000045566�14537076061�027516� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
VabraConfiguration (MIPAV API Documentation)
- java.lang.Object
-
- org.xml.sax.helpers.DefaultHandler
-
- gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) java.util.ArrayList<java.lang.Integer> |
downSampleResolutions |
|
(package private) java.util.ArrayList<java.lang.Integer> |
levels |
|
(package private) java.util.ArrayList<java.lang.Integer> |
resolutionSwitches |
|
-
Method Summary
-
Methods inherited from class org.xml.sax.helpers.DefaultHandler
characters, endDocument, endPrefixMapping, error, fatalError, ignorableWhitespace, notationDecl, processingInstruction, resolveEntity, setDocumentLocator, skippedEntity, startDocument, startPrefixMapping, unparsedEntityDecl, warning
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
startElement
public void startElement(java.lang.String uri,
java.lang.String name,
java.lang.String qName,
org.xml.sax.Attributes atts)
- Specified by:
startElement in interface org.xml.sax.ContentHandler- Overrides:
startElement in class org.xml.sax.helpers.DefaultHandler
������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/vabra/VabraVolumeCollection.html������������������������0000775�4231163�4231163�00000054616�14537076061�030166� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
VabraVolumeCollection (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
-
Method Summary
-
Methods inherited from class java.lang.Object
equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
numOfBins
public int numOfBins
-
chInterpType
private int chInterpType
-
Constructor Detail
-
VabraVolumeCollection
public VabraVolumeCollection(int XN,
int YN,
int ZN,
int interpType,
int numOfBins)
-
Method Detail
-
getMax
public double getMax()
-
getMin
public double getMin()
������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/vabra/RegistrationUtilities.InterpolationType.html������0000775�4231163�4231163�00000024365�14537076061�033763� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
RegistrationUtilities.InterpolationType (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities.InterpolationType
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/vabra/VabraSubjectTargetPairs.html����������������������0000775�4231163�4231163�00000160021�14537076061�030434� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
VabraSubjectTargetPairs (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
-
Constructor Summary
Constructors
| Constructor |
Description |
VabraSubjectTargetPairs(ModelImage subjectVols,
ModelImage targetVols,
float robustMaxT,
float robustMinT,
int numBins,
int interpType,
boolean useMNMI,
double[] directionsOptmizationWeight,
int defFieldUpdateMode) |
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
adjustBins(int[] subjectHist,
int[] jointHist,
int subBin,
int tarBin,
int newBin) |
|
private void |
adjustGradientBins(VabraVolumeCollection subject,
double x,
double y,
double z,
int[] subjectHist,
int[] jointHist,
int targetBins,
int subjectBins) |
|
private void |
adjustOrigBins(int subBin,
int tarBin,
int newBin) |
|
(package private) void |
calculateBoundingBox() |
|
private double |
coarseCostFunction(double coeff) |
|
private double |
coarseCostFunctionCommit(double coeff,
boolean commitUpdate) |
|
void |
coarseGradient(int[] regionCenter,
double[] results) |
|
int |
coarseGradientParameters() |
|
double |
coarseOptimize(int[] regionCenter,
double[] gradient) |
|
private int[] |
copyHist(int[] in) |
|
private int[][] |
copyHist(int[][] in) |
|
private int[][][] |
copyHist(int[][][] vol) |
|
void |
dispose() |
|
double |
eval(double arg0) |
|
private double |
getCurrentNMI() |
|
(package private) ModelImage |
getDeformationField() |
|
(package private) ModelImage |
getDeformedSubject() |
|
double |
getDomainMax() |
|
double |
getDomainMin() |
|
double |
getDomainTolerance() |
|
private void |
getNMIGradients(double[] results,
double[] deltaC) |
|
VabraRBF |
getRBF() |
|
double |
getValue(double c) |
|
int[] |
prepareForNextLevel() |
|
private void |
resetCurrentHistograms() |
|
private static float |
robustMaximum(float[] image,
float ratio,
int scales,
int nx,
int ny,
int nz) |
Robust maximum estimation
|
private static float |
robustMinimum(float[] image,
float ratio,
int scales,
int nx,
int ny,
int nz) |
Robust maximum estimation
|
void |
setResolution(float downSampleFactor) |
|
private void |
threshAtRobustMaxAndMin(VabraVolumeCollection imgVec) |
|
private void |
updateDefField(int[] regionToUpdate) |
|
(package private) void |
updateFromCoarseOptimization(double coeff) |
|
private void |
updateHistograms(VabraVolumeCollection normedTarget,
VabraVolumeCollection normedDeformedSubject,
int[] boundingBox) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
chInterpType
private int chInterpType
-
numOfBins
private int numOfBins
-
levelCount
private int levelCount
-
resCount
private int resCount
-
localROI
private int[] localROI
-
domainMax
private double domainMax
-
domainMin
private double domainMin
-
tolerance
private double tolerance
-
commitCount
private int commitCount
-
defSTxPlus
private int[] defSTxPlus
-
defSTyPlus
private int[] defSTyPlus
-
defSTzPlus
private int[] defSTzPlus
-
defSxPlus
private int[] defSxPlus
-
defSxMinus
private int[] defSxMinus
-
defSyPlus
private int[] defSyPlus
-
defSyMinus
private int[] defSyMinus
-
defSzPlus
private int[] defSzPlus
-
defSzMinus
private int[] defSzMinus
-
origTarget
private int[] origTarget
-
Constructor Detail
-
VabraSubjectTargetPairs
public VabraSubjectTargetPairs(ModelImage subjectVols,
ModelImage targetVols,
float robustMaxT,
float robustMinT,
int numBins,
int interpType,
boolean useMNMI,
double[] directionsOptmizationWeight,
int defFieldUpdateMode)
-
Method Detail
-
robustMaximum
private static final float robustMaximum(float[] image,
float ratio,
int scales,
int nx,
int ny,
int nz)
Robust maximum estimation
- Parameters:
ratio - float fraction in [0,1]: the minimum number of points above or equal to the maximum over the total volumescales - int: the number of times the scale is refined for finding the robust maximumnx - ,ny,nz image dimensions- Returns:
- the robust maximum value
-
robustMinimum
private static final float robustMinimum(float[] image,
float ratio,
int scales,
int nx,
int ny,
int nz)
Robust maximum estimation
- Parameters:
ratio - float fraction in [0,1]: the minimum number of points below or equal to the minimum over the total volumescales - int: the number of times the scale is refined for finding the robust minimum- Returns:
- the robust minimum value
-
dispose
public void dispose()
-
adjustGradientBins
private void adjustGradientBins(VabraVolumeCollection subject,
double x,
double y,
double z,
int[] subjectHist,
int[] jointHist,
int targetBins,
int subjectBins)
-
adjustBins
private void adjustBins(int[] subjectHist,
int[] jointHist,
int subBin,
int tarBin,
int newBin)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/vabra/VabraRBF.html�������������������������������������0000775�4231163�4231163�00000031772�14537076061�025312� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
VabraRBF (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.vabra.VabraRBF
-
-
Constructor Summary
Constructors
| Constructor |
Description |
VabraRBF() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
offset
private int offset
-
Constructor Detail
-
VabraRBF
public VabraRBF()
-
Method Detail
-
getScale
public int getScale()
-
getOffset
public int getOffset()
������gov/nih/mipav/model/algorithms/registration/vabra/VabraAlgorithm.html�������������������������������0000775�4231163�4231163�00000033536�14537076061�026627� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
VabraAlgorithm (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.vabra.VabraAlgorithm
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
VabraAlgorithm
public VabraAlgorithm()
������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/vabra/RegistrationUtilities.html������������������������0000775�4231163�4231163�00000132616�14537076061�030272� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
RegistrationUtilities (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static int |
calculateBin(double interval,
double minVal,
double val) |
|
static int[] |
calculateBoundingBox(ModelImage sub,
ModelImage tar) |
|
static void |
DeformationFieldResample3DM(float[] oldDF,
float[] newDF,
int oldSizeX,
int oldSizeY,
int oldSizeZ,
int newSizeX,
int newSizeY,
int newSizeZ) |
|
static void |
DeformImage3D(float[] im,
float[] deformedIm,
float[] DF,
int sizeX,
int sizeY,
int sizeZ,
int type) |
|
static void |
DeformImage3D(ModelImage im,
ModelImage deformedIm,
float[] DF,
int sizeX,
int sizeY,
int sizeZ,
int type) |
|
static void |
DeformImage3D(ModelImage im,
ModelImage deformedIm,
ModelImage DF,
int sizeX,
int sizeY,
int sizeZ,
int type) |
|
static double |
DoubleDistance(double z0,
double y0,
double x0,
double z1,
double y1,
double x1) |
|
static void |
Histogram3D(float[] im,
int numBin,
int[] roi,
int[] hist,
int XN,
int YN,
int ZN) |
|
static void |
Histogram3D(float[] im,
int channel,
int numBin,
int[] roi,
int[][] hist,
int XN,
int YN,
int ZN) |
|
static double |
Interpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int type) |
|
static double |
Interpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int c,
int type) |
|
static double |
Interpolation(ModelImage oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int type) |
|
static void |
JointHistogram3D(float[] imA,
float[] imB,
int numBin,
int[] roi,
int[][] jointHist,
int XN,
int YN,
int ZN) |
|
static void |
JointHistogram3D(float[] imA,
float[] imB,
int numBin,
int[] roi,
int[] jointHist,
int XN,
int YN,
int ZN) |
|
static void |
JointHistogram3D(float[] imA,
float[] imB,
int channel,
int numBin,
int[] roi,
int[][][] jointHist,
int XN,
int YN,
int ZN) |
|
static double |
MI(int[] histA,
int[] histB,
int[][] histAB,
int numBin) |
|
static double |
NMI(int[][] histA,
int[][] histB,
int[][][] histAB,
int channel,
int numBin) |
|
static double |
NMI(int[] histA,
int[] histB,
int[][] histAB,
int numBin) |
|
static double |
NMI(int[] histA,
int[] histB,
int[] histAB,
int numBin) |
|
static double |
NNInterpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z) |
|
static double |
NNInterpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int c) |
|
static double |
NNInterpolation(ModelImage oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z) |
|
static boolean |
NNInterpolationBool(boolean[][][] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z) |
|
static int[] |
NNInterpolationLoc(ModelImage oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z) |
|
static int[] |
QKSort2(float[] arr) |
|
static float |
RBF(float r) |
|
static float |
RBF3D(int cx,
int cy,
int cz,
int x,
int y,
int z,
float scale) |
|
static double |
TrilinearInterpolateDefField(ModelImage defField,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int c) |
|
static double |
TrilinearInterpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z) |
|
static double |
TrilinearInterpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int c) |
|
static double |
TrilinearInterpolation(ModelImage oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z) |
|
static double |
VectorNormalization(double[] v,
int n) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
JointHistogram3D
public static void JointHistogram3D(float[] imA,
float[] imB,
int numBin,
int[] roi,
int[][] jointHist,
int XN,
int YN,
int ZN)
-
JointHistogram3D
public static void JointHistogram3D(float[] imA,
float[] imB,
int numBin,
int[] roi,
int[] jointHist,
int XN,
int YN,
int ZN)
-
JointHistogram3D
public static void JointHistogram3D(float[] imA,
float[] imB,
int channel,
int numBin,
int[] roi,
int[][][] jointHist,
int XN,
int YN,
int ZN)
-
Histogram3D
public static void Histogram3D(float[] im,
int numBin,
int[] roi,
int[] hist,
int XN,
int YN,
int ZN)
-
Histogram3D
public static void Histogram3D(float[] im,
int channel,
int numBin,
int[] roi,
int[][] hist,
int XN,
int YN,
int ZN)
-
DeformImage3D
public static void DeformImage3D(float[] im,
float[] deformedIm,
float[] DF,
int sizeX,
int sizeY,
int sizeZ,
int type)
-
DeformImage3D
public static void DeformImage3D(ModelImage im,
ModelImage deformedIm,
float[] DF,
int sizeX,
int sizeY,
int sizeZ,
int type)
-
DeformationFieldResample3DM
public static void DeformationFieldResample3DM(float[] oldDF,
float[] newDF,
int oldSizeX,
int oldSizeY,
int oldSizeZ,
int newSizeX,
int newSizeY,
int newSizeZ)
-
DoubleDistance
public static double DoubleDistance(double z0,
double y0,
double x0,
double z1,
double y1,
double x1)
-
RBF3D
public static float RBF3D(int cx,
int cy,
int cz,
int x,
int y,
int z,
float scale)
-
Interpolation
public static double Interpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int c,
int type)
-
Interpolation
public static double Interpolation(ModelImage oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int type)
-
Interpolation
public static double Interpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int type)
-
NNInterpolation
public static double NNInterpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z)
-
NNInterpolation
public static double NNInterpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int c)
-
NNInterpolationBool
public static boolean NNInterpolationBool(boolean[][][] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z)
-
NNInterpolationLoc
public static int[] NNInterpolationLoc(ModelImage oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z)
-
TrilinearInterpolation
public static double TrilinearInterpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z)
-
TrilinearInterpolation
public static double TrilinearInterpolation(float[] oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int c)
-
TrilinearInterpolation
public static double TrilinearInterpolation(ModelImage oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z)
-
NNInterpolation
public static double NNInterpolation(ModelImage oldV,
int XN,
int YN,
int ZN,
double x,
double y,
double z)
-
TrilinearInterpolateDefField
public static double TrilinearInterpolateDefField(ModelImage defField,
int XN,
int YN,
int ZN,
double x,
double y,
double z,
int c)
-
NMI
public static double NMI(int[][] histA,
int[][] histB,
int[][][] histAB,
int channel,
int numBin)
������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/vabra/package-tree.html���������������������������������0000775�4231163�4231163�00000017237�14537076122�026253� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.registration.vabra Class Hierarchy (MIPAV API Documentation)
Class Hierarchy
- java.lang.Object
- org.xml.sax.helpers.DefaultHandler (implements org.xml.sax.ContentHandler, org.xml.sax.DTDHandler, org.xml.sax.EntityResolver, org.xml.sax.ErrorHandler)
- gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
- gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities.IndexedFloat (implements java.lang.Comparable<T>)
- gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities.InterpolationType
- gov.nih.mipav.model.algorithms.registration.vabra.VabraAlgorithm
- gov.nih.mipav.model.algorithms.registration.vabra.VabraRBF
- gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
- gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs (implements de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable)
- gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection (implements java.lang.Cloneable)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/vabra/package-summary.html������������������������������0000775�4231163�4231163�00000016303�14537076122�027002� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.registration.vabra (MIPAV API Documentation)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/vabra/VabraSolver.html����������������������������������0000775�4231163�4231163�00000066013�14537076061�026147� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
VabraSolver (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
interval_x
float interval_x
-
interval_y
float interval_y
-
interval_z
float interval_z
-
gridPoints
int gridPoints
-
reverseIdxGrid
int[][] reverseIdxGrid
-
gridVisited
byte[][][] gridVisited
-
outputDir
java.io.File outputDir
-
gradients
double[][] gradients
-
Constructor Detail
-
VabraSolver
public VabraSolver(VabraSubjectTargetPairs imgSubTarPairs,
java.io.File configFile,
java.io.File outputDir,
boolean saveIntermResults)
-
Method Detail
-
dispose
public void dispose()
-
identifyRegions
void identifyRegions()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/vabra/RegistrationUtilities.IndexedFloat.html�����������0000775�4231163�4231163�00000030660�14537076061�032633� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
RegistrationUtilities.IndexedFloat (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities.IndexedFloat
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
index |
|
float |
val |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
IndexedFloat(float val,
int index) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmConstrainedELSUNCOAR3D.MatrixListItem.html�����0000775�4231163�4231163�00000047007�14537076060�033330� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConstrainedELSUNCOAR3D.MatrixListItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
-
- All Implemented Interfaces:
java.lang.Comparable<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem>
- Enclosing class:
- AlgorithmConstrainedELSUNCOAR3D
class AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
extends java.lang.Object
implements java.lang.Comparable<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem>
Helper class to make it easy to store the necessary information about a minimum. Stores the "point", or vector at
which the minimum was reached; the "cost", or value of the cost function at that minimum; and the matrix, which
was the true input into the cost function and represents the transformation that gives the minimum cost of
differences between the images. Implements Comparable, so that a list of MatrixListItems can be sorted using
Java's sort.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected double |
cost |
Cost of function at this minimum.
|
protected TransMatrixd |
halfMatrix |
Matrix with the best transformation divided by half.
|
protected double[] |
initial |
Rotations, translations, scales, and skews that make up transformation.
|
protected TransMatrixd |
matrix |
Matrix that gives best transformation.
|
protected TransMatrixd |
midsagMatrix |
Matrix with the best transformation's z rot and xy translations.
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
MatrixListItem(double _cost) |
Creates new minimum object, with identity transMatrix and a given cost.
|
protected |
MatrixListItem(double _cost,
TransMatrixd _matrix,
double[] _initial) |
Creates new minimum object, setting the data and copying the point array explicitly.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
initial
protected double[] initial
Rotations, translations, scales, and skews that make up transformation.
-
Constructor Detail
-
MatrixListItem
protected MatrixListItem(double _cost)
Creates new minimum object, with identity transMatrix and a given cost.
- Parameters:
_cost - Cost of this minimum.
-
MatrixListItem
protected MatrixListItem(double _cost,
TransMatrixd _matrix,
double[] _initial)
Creates new minimum object, setting the data and copying the point array explicitly.
- Parameters:
_cost - Cost of this minimum._matrix - Matrix that gives best transformation._initial - Rotations, translations, scales, and skews that make up transformation.
-
Method Detail
-
compareTo
public int compareTo(AlgorithmConstrainedELSUNCOAR3D.MatrixListItem o)
Necessary to implement so that list may be sorted. Returns -1 if this cost is less than the parameter's cost;
1 if this cost is greater than the parameter's cost; and 0 if they are equal.
- Specified by:
compareTo in interface java.lang.Comparable<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem>- Parameters:
o - MatrixListItem to compare to.- Returns:
- -1 if this is less than, 1 if greater than, 0 if equal.
-
toString
public java.lang.String toString()
Creates readable string of this object, including cost, matrix, and point with its meanings.
- Overrides:
toString in class java.lang.Object- Returns:
- Readable string representation of this object.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegBSpline2D.html������������������������������0000775�4231163�4231163�00000106655�14537076060�026663� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegBSpline2D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmRegBSpline2D
public AlgorithmRegBSpline2D(ModelImage kImageResult,
ModelImage kImageSource,
ModelImage kImageTarget,
ModelImage kImageDeformation,
RegistrationMeasure kRegMeasure,
AlgorithmRegBSpline.Options kOptionsPass1,
AlgorithmRegBSpline.Options kOptionsPass2)
Constructor.
- Parameters:
kImageResult - ModelImage Reference to an image to store the registered source image. This image must
have the same dimensions as the registration target image.kImageSource - ModelImage Reference to the original input image to use as the registration source.
This image does not have to have the same dimensions as the image to be used as the
registration target.kImageTarget - ModelImage Reference to the original input image to use as the registration target.kImageDeformation - ModelImage Reference to an image to store the computed deformation. This may be a null
reference to indicate that the deformation is not to be computed. If this reference is
not null, then the image must have the same dimensions as the target image.kRegMeasure - RegistrationMeasure Reference to the particular cost measure to use for this
registration. The cost measure is the same for all passes.kOptionsPass1 - Options Options to use for a first pass of registration. This may *not* be a null
reference.kOptionsPass2 - Options Options to use for a second pass of registration. This may be null to indicate
that only a single pass of registration is to be performed.
-
Method Detail
-
transform2DVOI
private void transform2DVOI(ModelImage image,
ModelImage destImage,
float[] imgBuffer,
float[] kImageMapX,
float[] kImageMapY)
Transforms and resamples a 2D VOI using nearest neighbor interpolation.
For each VOI in VOIVector:
- Export VOIs as a mask image
- Transform mask
- Extract VOI contours from mask image and put in new image.
- Parameters:
image - Image where VOIs are storedimgBuffer - Image arrayxfrm - Transformation matrix to be applied
-
runPass
protected BSplineRegistration2Df runPass(ModelSimpleImage kSource,
ModelSimpleImage kTarget,
AlgorithmRegBSpline.Options kOptions,
BSplineRegistration2Df kRegPrev,
java.lang.String kProgressPrefixString)
Perform a "pass" of BSpline based registration. A "pass" is defined to be one or more iterations using the
BSpline basis parameters, gradient descent parameters, and convergence parameters.
- Parameters:
kSource - ModelSimpleImage Reference to the original input image to use as the registration
source. This image does not have to have the same dimensions as the image to be
used as the registration target.kTarget - ModelSimpleImage Reference to the original input image to use as the registration
target.kOptions - Options Options to use for a this registration pass. This may *not* be a null
reference.kRegPrev - BSplineRegistration2Df Reference to a previous registration which can be used to
initialize this registration. This may be a null reference meaning that the this
registration uses the default "identity" initialization. If this it not a null
reference, then this registration is initialized to provide the a close
approximation to the same BSpline mapping as determined by the input
registration. The main property of a registration is the position of its control
points.kProgressPrefixString - String Text to add to the beginning of the progress bar message.- Returns:
- BSplineRegistration2Df Registration instance resulting from this pass. This may be needed to provide for
the initialization of subsequent passes or to compute the deformation image.
-
writeResults
private void writeResults(BSplineRegistration2Df kReg)
Save the registration information to a file. This information includes the BSpline parameters; in particular, the
coordinates for the lattice of control points.
- Parameters:
kReg - BSplineRegistration2Df Contains the parameters which define the BSpline for registering the source
image to the targe image.
�����������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmDemonsLite.html��������������������������������0000775�4231163�4231163�00000104313�14537076060�026533� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDemonsLite (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmDemonsLite
extends AlgorithmBase
Algorithm for non-linear registration with the DEMONS algorithm.
* (Demons variant from Tom Vercauteren's 2009 paper,
"Diffeomorphic demons: Efficient non-parametric image registration by
Tom Vercauteren, Xavier Pennec, Aymeric Perchant, and Nicholas Ayache,
NeuroImage, 45, 2009, S61-S72.)
- Version:
- Feb 2005
- Author:
- Pierre-Louis Bazin
- See Also:
JDialogDemons
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmDemonsLite(ModelImage srcImg,
ModelImage targetImg,
int levels_,
int Ni_,
float smooth_,
float scale_,
java.lang.String reg_,
java.lang.String out_) |
Constructor for 3D images in which changes are placed in a predetermined destination image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
smoothing
private float smoothing
-
scale
private float scale
-
levels
private int levels
-
regType
private int regType
-
Constructor Detail
-
AlgorithmDemonsLite
public AlgorithmDemonsLite(ModelImage srcImg,
ModelImage targetImg,
int levels_,
int Ni_,
float smooth_,
float scale_,
java.lang.String reg_,
java.lang.String out_)
Constructor for 3D images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is to stored.srcImg - Source image model.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegBSpline25D.html�����������������������������0000775�4231163�4231163�00000107033�14537076060�026737� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegBSpline25D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected int |
m_iSliceTarget |
Index of the slice in the input source image to use as the target.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
m_iSliceTarget
protected final int m_iSliceTarget
Index of the slice in the input source image to use as the target. If the value is -1, then each slice is
registered to its adjacent one.
-
Constructor Detail
-
AlgorithmRegBSpline25D
public AlgorithmRegBSpline25D(ModelImage kImageResult,
ModelImage kImageSource,
int iSliceTarget,
ModelImage kImageDeformation,
RegistrationMeasure kRegMeasure,
AlgorithmRegBSpline.Options kOptionsPass1,
AlgorithmRegBSpline.Options kOptionsPass2)
Constructor.
- Parameters:
kImageResult - ModelImage Reference to an image to store the registered source image. This image must
have the same dimensions as the input source image.kImageSource - ModelImage Reference to the original input image to use as the registration source.iSliceTarget - int Index of the slice in the input source image that is to be used as the reference.
If this index is -1, then each slice is registered to the one before itkImageDeformation - ModelImage Reference to an image to store the computed deformation. This may be a null
reference to indicate that the deformation is not to be computed. If this reference is
not null, then the image must have the same dimensions as the input source image.kRegMeasure - RegistrationMeasure Reference to the particular cost measure to use for this
registration. The cost measure is the same for all passes.kOptionsPass1 - Options Options to use for a first pass of registration. This may *not* be a null
reference.kOptionsPass2 - Options Options to use for a second pass of registration. This may be null to indicate
that only a single pass of registration is to be performed.
-
Method Detail
-
transform2DVOI
private void transform2DVOI(ModelImage image,
ModelImage destImage,
float[] imgBuffer,
float[] kImageMapX,
float[] kImageMapY,
int iSlice,
int iNumSlices)
-
runPass
protected BSplineRegistration2Df runPass(ModelSimpleImage kSource,
ModelSimpleImage kTarget,
AlgorithmRegBSpline.Options kOptions,
BSplineRegistration2Df kRegPrev)
Perform a "pass" of BSpline based registration. A "pass" is defined to be one or more iterations using the
BSpline basis parameters, gradient descent parameters, and convergence parameters.
- Parameters:
kSource - ModelSimpleImage Reference to the original input image to use as the registration source. This
image does not have to have the same dimensions as the image to be used as the registration
target.kTarget - ModelSimpleImage Reference to the original input image to use as the registration target.kOptions - Options Options to use for a this registration pass. This may *not* be a null reference.kRegPrev - BSplineRegistration2Df Reference to a previous registration which can be used to initialize
this registration. This may be a null reference meaning that the this registration uses the
default "identity" initialization. If this it not a null reference, then this registration is
initialized to provide the a close approximation to the same BSpline mapping as determined by
the input registration. The main property of a registration is the position of its control
points.- Returns:
- BSplineRegistration2Df Registration instance resulting from this pass. This may be needed to provide for
the initialization of subsequent passes or to compute the deformation image.
-
writeResults
private void writeResults(BSplineRegistration2Df[] akReg)
Save the registration information to a file. This information includes the BSpline parameters; in particular, the
coordinates for the lattice of control points.
- Parameters:
akReg - BSplineRegistration2Df[] Contains the parameters which define the BSpline for registering each
slice of the source image to the particular reference slice.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmConstrainedELSUNCOAR3D.html��������������������0000775�4231163�4231163�00000400336�14537076060�030410� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConstrainedELSUNCOAR3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
allowLevel16XY |
DOCUMENT ME!
|
private boolean |
allowLevel16Z |
DOCUMENT ME!
|
private boolean |
allowLevel2XY |
DOCUMENT ME!
|
private boolean |
allowLevel2Z |
DOCUMENT ME!
|
private boolean |
allowLevel4XY |
DOCUMENT ME!
|
private boolean |
allowLevel4Z |
DOCUMENT ME!
|
private boolean |
allowLevel8XY |
DOCUMENT ME!
|
private boolean |
allowLevel8Z |
DOCUMENT ME!
|
private AlgorithmConstrainedELSUNCOAR3D.MatrixListItem |
answer |
Final answer after registration.
|
private int |
baseNumIter |
Advanced optimization settings maxIter in the call to ELSUNC will be an integer multiple of baseNumIter.
|
private AlgorithmConstrainedELSUNCOAR3D.MatrixListItem |
bestGuessLevel2 |
DOCUMENT ME!
|
private ModelImage |
blurredInput |
Blurred input image.
|
private ModelImage |
blurredRef |
Blurred reference image.
|
private int |
bracketBound |
Sets minimum and maximum limits as initial guess -+ unit_tolerance[i]*bracketBound.
|
private boolean |
calcCOG |
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
|
private int |
coarseNumX |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private int |
coarseNumY |
DOCUMENT ME!
|
private int |
coarseNumZ |
DOCUMENT ME!
|
private float |
coarseRateX |
Coarse and fine sampling parameters.
|
private float |
coarseRateY |
DOCUMENT ME!
|
private float |
coarseRateZ |
DOCUMENT ME!
|
private int |
costChoice |
Choice of which cost function to use.
|
private boolean |
doColor |
DOCUMENT ME!
|
private int |
DOF |
Maximum degrees of freedom when running the optimization.
|
private boolean |
doSubsample |
If true subsample for levelEight, levelFour and levelTwo analyses.
|
private double[] |
dummy |
Dummy initial values used to create a ELSUNC algorithm instance before setting initial.
|
private boolean |
fastMode |
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
|
private int |
fineNumX |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private int |
fineNumY |
DOCUMENT ME!
|
private int |
fineNumZ |
DOCUMENT ME!
|
private float |
fineRateX |
Coarse and fine sampling parameters.
|
private float |
fineRateY |
DOCUMENT ME!
|
private float |
fineRateZ |
DOCUMENT ME!
|
private boolean |
fullAnalysisMode |
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
|
private ModelImage |
imageInputIso |
Isotropic input image.
|
private ModelImage |
imageRefIso |
Isotropic reference image.
|
private ModelImage |
imageWeightInputIso |
Isotropic weighted input image.
|
private ModelImage |
imageWeightRefIso |
Isotropic weighted reference image.
|
(package private) double |
initialCost |
DOCUMENT ME!
|
private java.lang.String |
initialMessage |
DOCUMENT ME!
|
private ModelImage |
inputImage |
This image is to registered to the reference image.
|
private ModelImage |
inputWeight |
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
|
private int |
interp |
Interpolation method.
|
private float |
level1FactorXY |
Multiplication factor for level 1 - will be set based on subsampling.
|
private float |
level1FactorZ |
DOCUMENT ME!
|
private float |
level2FactorXY |
Multiplication factor for level 2 - will be set based on subsampling.
|
private float |
level2FactorZ |
DOCUMENT ME!
|
private float |
level4FactorXY |
Multiplication factor for level 4 - will be set based on subsampling.
|
private float |
level4FactorZ |
DOCUMENT ME!
|
private float[][] |
limits |
Translation limits.
|
private float[][] |
limits_mm |
DOCUMENT ME!
|
private int |
maxDim |
DOCUMENT ME!
|
private int |
maxIter |
Advanced optimization settings maxIter in the call to ELSUNC will be an integer multiple of baseNumIter.
|
(package private) double |
maxPossibleCost |
DOCUMENT ME!
|
private boolean |
maxResol |
Flag to determine if the maximum of the minimum resolutions of the two datasets should be used.
|
private static int |
minimumZForSub |
DOCUMENT ME!
|
private int |
numMinima |
Number of minima from level 8 to test at level 4.
|
private ModelImage |
refImage |
The inputImage will be registered to this reference image.
|
private ModelImage |
refWeight |
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
|
private boolean |
resampleInput |
DOCUMENT ME!
|
private boolean |
resampleRef |
DOCUMENT ME!
|
private float[] |
resInput |
The voxel resolutions of the image to be registered to the reference image.
|
private float[] |
resRef |
The voxel resolutions of the reference image.
|
private float |
rotateBeginX |
Coarse and fine sampling parameters.
|
private float |
rotateBeginY |
DOCUMENT ME!
|
private float |
rotateBeginZ |
DOCUMENT ME!
|
private float |
rotateRangeX |
Coarse and fine sampling parameters.
|
private float |
rotateRangeY |
DOCUMENT ME!
|
private float |
rotateRangeZ |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleInput |
Simple version of input image.
|
private ModelSimpleImage |
simpleInputSub2 |
Simple version of input image, subsampled by 2.
|
private ModelSimpleImage |
simpleInputSub4 |
Simple version of input image, subsampled by 4.
|
private ModelSimpleImage |
simpleInputSub8 |
Simple version of input image, subsampled by 8.
|
private ModelSimpleImage |
simpleRef |
Simple version of reference image.
|
private ModelSimpleImage |
simpleRefSub2 |
Simple version of reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleRefSub4 |
Simple version of reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleRefSub8 |
Simple version of reference image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightInput |
Simple version of weighted input image.
|
private ModelSimpleImage |
simpleWeightInputSub2 |
Simple version of weighted input image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightInputSub4 |
Simple version of weighted input image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightInputSub8 |
Simple version of weighted input image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightRef |
Simple version of weighted reference image.
|
private ModelSimpleImage |
simpleWeightRefSub2 |
Simple version of weighted reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightRefSub4 |
Simple version of weighted reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightRefSub8 |
Simple version of weighted reference image, subsampled by 8.
|
(package private) long |
timeElapsed |
DOCUMENT ME!
|
(package private) long |
timeLater |
DOCUMENT ME!
|
(package private) long |
timeNow |
DOCUMENT ME!
|
(package private) TransMatrix |
tMatrix |
DOCUMENT ME!
|
private AlgorithmTransform |
transform |
Transformation algorithm for creating an isotropic reference image.
|
private AlgorithmTransform |
transform2 |
Transformation algorithm for creating an isotropic input image.
|
private boolean |
weighted |
Flag to determine if there are weighted images or not.
|
private int |
weightedInputPixels |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub8 |
DOCUMENT ME!
|
private int |
weightedRefPixels |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub8 |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmConstrainedELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateRangeX,
float _rotateBeginY,
float _rotateRangeY,
float _rotateBeginZ,
float _rotateRangeZ,
int _nCoarseX,
int _nCoarseY,
int _nCoarseZ,
float[][] _transLimits,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
boolean _calcCOG,
int _bracketBound,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmConstrainedELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateRangeX,
float _rotateBeginY,
float _rotateRangeY,
float _rotateBeginZ,
float _rotateRangeZ,
int _nCoarseX,
int _nCoarseY,
int _nCoarseZ,
float[][] _transLimits,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
boolean _calcCOG,
int _bracketBound,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static WildMagic.LibFoundation.Mathematics.Vector3f |
calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor) |
Calculates the center of mass (gravity) of a 3D image.
|
private boolean |
checkMinimum(AlgorithmConstrainedELSUNCOAR3D.MatrixListItem item) |
Check if the given minimum is within the translation and rotation bounds.
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
void |
finalize() |
Prepares this class for destruction.
|
double |
getAnswer() |
Accessor that returns the final cost function.
|
private java.lang.String |
getConstructionInfo() |
Creates a string with the parameters that the image was constructed with.
|
private double[] |
getTolerance(int DOF) |
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
|
double[] |
getTransArray() |
Access that returns an array containing the transformation parameters.
|
TransMatrix |
getTransform() |
Accessor that returns the matrix calculated in this algorithm.
|
TransMatrix |
getTransformHalf() |
Accessor that returns the matrix calculated in this algorithm divided by 2.
|
TransMatrix |
getTransformMigsagittal() |
Accessor that returns the z rot and x and y trans from the matrix calculated in this algorithm.
|
private void |
interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale) |
Performs a trilinear interpolation on points.
|
private java.util.Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem>[] |
levelEight(ModelSimpleImage ref,
ModelSimpleImage input) |
Takes two images that have been subsampled by a factor of eight.
|
private java.util.Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem> |
levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem> minima,
java.util.Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem> optMinima) |
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
|
private AlgorithmConstrainedELSUNCOAR3D.MatrixListItem |
levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
AlgorithmConstrainedELSUNCOAR3D.MatrixListItem item,
int maxIter) |
Takes the two images, no subsampling, and the best minimum so far.
|
private AlgorithmConstrainedELSUNCOAR3D.MatrixListItem |
levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem> minima) |
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
|
void |
runAlgorithm() |
Runs the image registration.
|
private static ModelSimpleImage |
subsampleBy2(ModelSimpleImage srcImage,
boolean isColor) |
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
|
private static ModelSimpleImage |
subsampleBy2XY(ModelSimpleImage srcImage,
boolean isColor) |
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
|
protected boolean |
testBounds3D(double[] point,
java.lang.String message) |
DOCUMENT ME!
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
initialCost
double initialCost
DOCUMENT ME!
-
maxPossibleCost
double maxPossibleCost
DOCUMENT ME!
-
timeElapsed
long timeElapsed
DOCUMENT ME!
-
timeLater
long timeLater
DOCUMENT ME!
-
timeNow
long timeNow
DOCUMENT ME!
-
coarseNumY
private int coarseNumY
DOCUMENT ME!
-
fineNumY
private int fineNumY
DOCUMENT ME!
-
coarseNumZ
private int coarseNumZ
DOCUMENT ME!
-
fineNumZ
private int fineNumZ
DOCUMENT ME!
-
doColor
private boolean doColor
DOCUMENT ME!
-
fullAnalysisMode
private boolean fullAnalysisMode
If true this algorithm skips all subsample and goes directly to the level 1 optimization. This assumes that
images are fairly well aligned to begin with and therefore no sophisticated search is needed.
-
interp
private int interp
Interpolation method.
-
limits
private float[][] limits
Translation limits.
-
maxDim
private int maxDim
DOCUMENT ME!
-
fineRateY
private float fineRateY
DOCUMENT ME!
-
fineRateZ
private float fineRateZ
DOCUMENT ME!
-
simpleWeightInputSub2
private ModelSimpleImage simpleWeightInputSub2
Simple version of weighted input image, subsampled by 2.
-
simpleWeightInputSub4
private ModelSimpleImage simpleWeightInputSub4
Simple version of weighted input image, subsampled by 4.
-
simpleWeightInputSub8
private ModelSimpleImage simpleWeightInputSub8
Simple version of weighted input image, subsampled by 8.
-
simpleWeightRefSub2
private ModelSimpleImage simpleWeightRefSub2
Simple version of weighted reference image, subsampled by 2.
-
simpleWeightRefSub4
private ModelSimpleImage simpleWeightRefSub4
Simple version of weighted reference image, subsampled by 4.
-
simpleWeightRefSub8
private ModelSimpleImage simpleWeightRefSub8
Simple version of weighted reference image, subsampled by 8.
-
Constructor Detail
-
AlgorithmConstrainedELSUNCOAR3D
public AlgorithmConstrainedELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateRangeX,
float _rotateBeginY,
float _rotateRangeY,
float _rotateBeginZ,
float _rotateRangeZ,
int _nCoarseX,
int _nCoarseY,
int _nCoarseZ,
float[][] _transLimits,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
boolean _calcCOG,
int _bracketBound,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeX - DOCUMENT ME!_rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeY - DOCUMENT ME!_rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeZ - DOCUMENT ME!_nCoarseX - DOCUMENT ME!_nCoarseY - DOCUMENT ME!_nCoarseZ - DOCUMENT ME!_transLimits - Limitations on translations._maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to
level one immediately_calcCOG - If true calculate the center of gravity (mass) to initialize registration._bracketBound - Sets minimum and maximum limits as initial guess -+ unit_tolerance[i]*bracketBound._baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
AlgorithmConstrainedELSUNCOAR3D
public AlgorithmConstrainedELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateRangeX,
float _rotateBeginY,
float _rotateRangeY,
float _rotateBeginZ,
float _rotateRangeZ,
int _nCoarseX,
int _nCoarseY,
int _nCoarseZ,
float[][] _transLimits,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
boolean _calcCOG,
int _bracketBound,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeX - DOCUMENT ME!_rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeY - DOCUMENT ME!_rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeZ - DOCUMENT ME!_nCoarseX - DOCUMENT ME!_nCoarseY - DOCUMENT ME!_nCoarseZ - DOCUMENT ME!_transLimits - DOCUMENT ME!_maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to
level one immediately_calcCOG - If true calculate the center of gravity (mass) to initialize registration._bracketBound - Sets minimum and maximum limits as initial guess -+ unit_tolerance[i]*bracketBound._baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
Method Detail
-
calculateCenterOfMass3D
public static WildMagic.LibFoundation.Mathematics.Vector3f calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor)
Calculates the center of mass (gravity) of a 3D image. In image space where the upper left hand corner of the
image is 0,0. The x axis goes left to right, y axis goes top to bottom and z axis goes into the screen. (i.e. the
right hand rule). One could simply multiply by voxel resolutions.
- Parameters:
image - the center of mass will be calculated from this image datawgtImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- the center of mass as a 3D point
-
runAlgorithm
public void runAlgorithm()
Runs the image registration. Blurs the images based on what their minimum resolutions are. The reference image is
blurred if one of the input image resolutions is 50% or more bigger than the corresponding resolution in the
reference image; likewise, the input image is blurred if one of the reference resolutions is 50% or more bigger
than the corresponding resolution in the input image. Thus, it is unlikely, though not impossible, that both
images will be blurred. The images are then transformed into isotropic voxels. The resolutions of the two images
after the isotropic transformation will be the same in all dimensions. If maxResol is true, that resolution will
equal the maximum of the minimums of each image's resolutions: Max( Min (resolutions of ref image, resolutions of
input image) ). If the images are weighted, the weight images are blurred and transformed into isotropic voxels
in the same manner as the originals. Then the images are subsampled by 2, 4, and 8. If the images are too small
they will not be subsampled down to the smallest level; if they are too big, they will be subsampled to 16. The
same is done with the weight images if necessary. The function levelEight is called with the images subsampled by
8; it returns two vectors with minima. Then the function levelFour is called with images subsampled by 4 and the
two vectors; it returns one vector of minima. The function levelTwo is called with images subsampled by 2 and the
vector; it returns an "answer" in the form of a MatrixListItem, which is a convenient way of storing the point,
the matrix, and the cost of the minimum. Then the function levelOne is called with the minimum; it returns a
final "answer", or minimum, which will then be accessed by the dialog that called this algorithm.
- Specified by:
runAlgorithm in class AlgorithmBase
-
subsampleBy2
private static ModelSimpleImage subsampleBy2(ModelSimpleImage srcImage,
boolean isColor)
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- Parameters:
srcImage - Image to subsample.isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
subsampleBy2XY
private static ModelSimpleImage subsampleBy2XY(ModelSimpleImage srcImage,
boolean isColor)
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- Parameters:
srcImage - Image to subsample.isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
getTolerance
private double[] getTolerance(int DOF)
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- Parameters:
DOF - Degrees of freedom, will be length of vector.- Returns:
- New tolerance vector to send to optimization.
Based on FLIRT paper: let n=pixel dimension (in one dimension) R=brain radius, here assumed to be
half of field-of-view Translation tolerance = n/2 Rotation tolerance = (180/PI)*n/(2R) (converted to
degrees because AlgorithmConstELSUNC works in degrees) Scaling tolerance = n/(2R) Skewing tolerance =
n/(2R)
-
interpolate
private void interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale)
Performs a trilinear interpolation on points. Takes 3 initial points, a vector of values to set, and an array in
which to look at neighbors of those points. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - X rotation initial index into array.y - Y rotation initial index into array.z - Z rotation initial index into array.initial - Vector to set; if scale is true, set three translations and a scale. Otherwise
just set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
levelEight
private java.util.Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem>[] levelEight(ModelSimpleImage ref,
ModelSimpleImage input)
Takes two images that have been subsampled by a factor of eight. Sets up the cost function with the images and
the weighted images, if necessary. Uses the coarse sampling rate and optimizes translations and global scale at
the given rotation. So for example, if the coarse sampling range were -30 to 30 at every 15 degrees, we would
optimize at rotations of (-30, -30, -30), (-30, -30, -15), (-30, -30, 0), etc. In this case there would be a
total of 125 calls to the optimization method. Measures the cost at the fine sampling rate. Interpolates the
translations and global scale to come up with a good guess as to what the optimized translation would be at that
point. Takes the top 20% of the points and optimizes them. Now have a large multi-array of costs. 20% of those
have been optimized and placed back into their original position in the multi-array. Removes those items that are
outisde the rotation begin and end limits. Looks at the 8 neighbors of a point: +, =, or - one fine sample in
each of the three directions. If the point has a cost greater than any of these, it is not a minima. Otherwise it
is. Saves it in a vector of minima. Optimizes the minima over rotations as well as translations and global scale.
(Previously had not optimized over rotations.) Returns two vectors, one containing the minima before
optimization, one containing the minima after optimization.
- Parameters:
ref - Subsampled by 8 reference image.input - Subsampled by 8 input image.- Returns:
- List of preoptimized and optimized points.
-
levelFour
private java.util.Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem> levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem> minima,
java.util.Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem> optMinima)
Takes two images that have been subsampled by a factor of four, and two vectors of minima. Sets up the cost
function with the images and the weighted images, if necessary. Adds the level4Factor determined during
subsampling. Measures the costs of the minima on the images and sort them. Takes the top three in each vector
(pre-optimization and post-optimization) and optimizes them. Puts them all into one vector. Perturbs the
rotations in each dimension by zero and plus-minus fineDelta. If it's not a rigid transformation, perturbs the
scales by factors of 0.8, 0.9, 1.0, 1.1, and 1.2. Optimize the perturbations. Returns a vector of the perturbed,
optimized minima.
- Parameters:
ref - Reference image, subsampled by 4.input - Input image, subsampled by 4.minima - Preoptimized minima.optMinima - Optimized minima.- Returns:
- A vector of perturbed, optimized minima.
-
levelOne
private AlgorithmConstrainedELSUNCOAR3D.MatrixListItem levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
AlgorithmConstrainedELSUNCOAR3D.MatrixListItem item,
int maxIter)
Takes the two images, no subsampling, and the best minimum so far. Sets up the cost function with the images and
the weighted images, if necessary. Adds the level1Factor determined during subsampling. Performs one optimization
run, with the maximum allowable degrees of freedom as specified by the user (the max is 12). Returns the best
minimum.
- Parameters:
ref - Reference image.input - Input image.item - Best minimum so far.maxIter - DOCUMENT ME!- Returns:
- Best minimum after optimization.
-
levelTwo
private AlgorithmConstrainedELSUNCOAR3D.MatrixListItem levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem> minima)
Takes two images that have been subsampled by a factor of 2 and a vector of minima. Sets up the cost function
with the images and the weighted images, if necessary. Adds the level2Factor determined during subsampling.
Measures the costs of the minima at the images. Optimizes the best minimum with 7 degrees of freedom, then 9,
then 12. If the user has limited the degrees of freedom to 6, there will only be one optimization run, with 6
degrees of freedom. Returns the best minimum after optimization.
- Parameters:
ref - Reference image, subsampled by 2.input - Input image, subsampled by 2.minima - Minima.- Returns:
- The optimized minimum.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/DemonsRegistrationLite.html�����������������������������0000775�4231163�4231163�00000153530�14537076061�027265� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DemonsRegistrationLite (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
public class DemonsRegistrationLite
extends java.lang.Object
This algorithm handles registration algorithms
of images with the Demons algorithm
and a simple multiscale technique
(Demons variant from Tom Vercauteren's 2009 paper,
"Diffeomorphic demons: Efficient non-parametric image registration by
Tom Vercauteren, Xavier Pennec, Aymeric Perchant, and Nicholas Ayache,
NeuroImage, 45, 2009, S61-S72.)
- Version:
- November 2009
- Author:
- Pierre-Louis Bazin
-
-
Constructor Summary
Constructors
| Constructor |
Description |
DemonsRegistrationLite(float[] image_,
float[] target_,
int nix_,
int niy_,
int niz_,
float rix_,
float riy_,
float riz_,
int ntx_,
int nty_,
int ntz_,
float rtx_,
float rty_,
float rtz_,
float smoothing_,
float scale_,
int lev_,
int Ni_,
int reg_,
float[][] trans_) |
constructor
note: the membership function mems_ must have sum = 0 on the masked areas
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
float[] |
exportTransformedImage() |
returns the transformed image
|
float[] |
exportTransformField() |
returns the transform field v defined as X' = X+v (=s)
|
void |
finalize() |
|
float[][] |
getCurrentTransform() |
|
float[][] |
getCurrentUpdate() |
|
private void |
initializeImages(int lvl) |
create an image pyramid from the original data, initialize Jacobians, etc
|
private void |
initializeImages2D(int lvl) |
create an image pyramid from the original data, initialize Jacobians, etc
|
private void |
initializeTransform(int lvl) |
initialize the transform from previous estimate, if exists
|
private void |
initializeTransform2D(int lvl) |
initialize the transform from previous estimate, if exists
|
boolean |
isCompleted() |
|
boolean |
isWorking() |
|
private float |
linearInterpolation(float[] image,
float value,
float x,
float y,
float z,
int nx,
int ny,
int nz) |
linear interpolation, with value outside the image
|
private float |
linearInterpolation(float[] image,
float value,
float x,
float y,
int nx,
int ny) |
linear interpolation, with value outside the image
|
private void |
preprocessInputImages(float[] img,
float[] trg) |
|
private void |
preprocessInputImages2D(float[] img,
float[] trg) |
|
void |
registerImageToTarget(int lvl,
int iterations) |
compute the image position given the target
for a given level l
performs only one iteration
|
void |
registerImageToTarget2D(int lvl,
int iterations) |
compute the image position given the target
for a given level l
performs only one iteration
|
void |
runGaussianPyramid() |
runs the gaussian pyramid algorithm
|
private float[] |
separableConvolution(float[] image,
int nx,
int ny,
float[][] kernel,
int kx,
int ky) |
convolution with a separable kernel (the kernel is 3x{kx,ky,kz})
|
private float[] |
separableConvolution(float[] image,
int nx,
int ny,
int nz,
float[][] kernel,
int kx,
int ky,
int kz) |
convolution with a separable kernel (the kernel is 3x{kx,ky,kz})
|
private float[][] |
separableGaussianKernel(float sx,
float sy) |
|
private float[][] |
separableGaussianKernel(float sx,
float sy,
float sz) |
|
private float[] |
subsample(float[] image,
int nx,
int ny,
int factor) |
scale down by a factor
|
private float[] |
subsample(float[] image,
int nx,
int ny,
int nz,
int factor) |
scale down by a factor
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
image
private float[] image
-
target
private float[] target
-
fixed
private float[] fixed
-
moving
private float[] moving
-
levels
private int levels
-
regType
private int regType
-
sigma2
private float sigma2
-
do2D
private boolean do2D
-
Constructor Detail
-
DemonsRegistrationLite
public DemonsRegistrationLite(float[] image_,
float[] target_,
int nix_,
int niy_,
int niz_,
float rix_,
float riy_,
float riz_,
int ntx_,
int nty_,
int ntz_,
float rtx_,
float rty_,
float rtz_,
float smoothing_,
float scale_,
int lev_,
int Ni_,
int reg_,
float[][] trans_)
constructor
note: the membership function mems_ must have sum = 0 on the masked areas
-
Method Detail
-
initializeImages2D
private final void initializeImages2D(int lvl)
create an image pyramid from the original data, initialize Jacobians, etc
-
initializeImages
private final void initializeImages(int lvl)
create an image pyramid from the original data, initialize Jacobians, etc
-
initializeTransform2D
private final void initializeTransform2D(int lvl)
initialize the transform from previous estimate, if exists
-
initializeTransform
private final void initializeTransform(int lvl)
initialize the transform from previous estimate, if exists
-
registerImageToTarget2D
public final void registerImageToTarget2D(int lvl,
int iterations)
compute the image position given the target
for a given level l
performs only one iteration
-
registerImageToTarget
public final void registerImageToTarget(int lvl,
int iterations)
compute the image position given the target
for a given level l
performs only one iteration
-
subsample
private float[] subsample(float[] image,
int nx,
int ny,
int nz,
int factor)
scale down by a factor
-
linearInterpolation
private float linearInterpolation(float[] image,
float value,
float x,
float y,
int nx,
int ny)
linear interpolation, with value outside the image
-
linearInterpolation
private float linearInterpolation(float[] image,
float value,
float x,
float y,
float z,
int nx,
int ny,
int nz)
linear interpolation, with value outside the image
-
separableConvolution
private float[] separableConvolution(float[] image,
int nx,
int ny,
float[][] kernel,
int kx,
int ky)
convolution with a separable kernel (the kernel is 3x{kx,ky,kz})
-
separableConvolution
private float[] separableConvolution(float[] image,
int nx,
int ny,
int nz,
float[][] kernel,
int kx,
int ky,
int kz)
convolution with a separable kernel (the kernel is 3x{kx,ky,kz})
������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/ImRegPOC.html�������������������������������������������0000775�4231163�4231163�00000116063�14537076061�024174� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ImRegPOC (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[] |
CenterOfGravity(double[][] mat) |
|
private double[] |
createHanningWindow() |
|
private double[][] |
fftshift(double[] in,
int yDim,
int xDim) |
|
private double[][] |
ImageRotateScale(double[][] Image,
double theta,
double scale,
int width,
int height) |
|
private double[] |
imtranslate(double[][] Image,
double translateX,
double translateY,
double outOfBoundsValue) |
|
private double |
log2(double input) |
|
private double[][] |
PhaseCorrelation(double[] a,
double[] b,
double[] Diff,
double[] peak) |
|
private Jama.Matrix |
poc2warp(double cx,
double cy,
double dx,
double dy,
double theta,
double scale) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
runMATLABVersion() |
|
void |
runPythonVersion() |
|
private double[] |
Warp_4dof(double[] Img,
double dx,
double dy,
double theta,
double scale,
double outOfBoundsValue) |
|
private double[] |
WeightedCOG(double[][] mat) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
height
private int height
-
length
private int length
-
alpha
private double alpha
-
hanw
private double[] hanw
-
Method Detail
-
Warp_4dof
private double[] Warp_4dof(double[] Img,
double dx,
double dy,
double theta,
double scale,
double outOfBoundsValue)
-
poc2warp
private Jama.Matrix poc2warp(double cx,
double cy,
double dx,
double dy,
double theta,
double scale)
-
imtranslate
private double[] imtranslate(double[][] Image,
double translateX,
double translateY,
double outOfBoundsValue)
-
ImageRotateScale
private double[][] ImageRotateScale(double[][] Image,
double theta,
double scale,
int width,
int height)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmConstrainedOAR3D.MatrixListItem.html�����������0000775�4231163�4231163�00000046617�14537076060�032424� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConstrainedOAR3D.MatrixListItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D.MatrixListItem
-
- All Implemented Interfaces:
java.lang.Comparable<AlgorithmConstrainedOAR3D.MatrixListItem>
- Enclosing class:
- AlgorithmConstrainedOAR3D
class AlgorithmConstrainedOAR3D.MatrixListItem
extends java.lang.Object
implements java.lang.Comparable<AlgorithmConstrainedOAR3D.MatrixListItem>
Helper class to make it easy to store the necessary information about a minimum. Stores the "point", or vector at
which the minimum was reached; the "cost", or value of the cost function at that minimum; and the matrix, which
was the true input into the cost function and represents the transformation that gives the minimum cost of
differences between the images. Implements Comparable, so that a list of MatrixListItems can be sorted using
Java's sort.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected double |
cost |
Cost of function at this minimum.
|
protected TransMatrixd |
halfMatrix |
Matrix with the best transformation divided by half.
|
protected double[] |
initial |
Rotations, translations, scales, and skews that make up transformation.
|
protected TransMatrixd |
matrix |
Matrix that gives best transformation.
|
protected TransMatrixd |
midsagMatrix |
Matrix with the best transformation's z rot and xy translations.
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
MatrixListItem(double _cost) |
Creates new minimum object, with identity transMatrix and a given cost.
|
protected |
MatrixListItem(double _cost,
TransMatrixd _matrix,
double[] _initial) |
Creates new minimum object, setting the data and copying the point array explicitly.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
initial
protected double[] initial
Rotations, translations, scales, and skews that make up transformation.
-
Constructor Detail
-
MatrixListItem
protected MatrixListItem(double _cost)
Creates new minimum object, with identity transMatrix and a given cost.
- Parameters:
_cost - Cost of this minimum.
-
MatrixListItem
protected MatrixListItem(double _cost,
TransMatrixd _matrix,
double[] _initial)
Creates new minimum object, setting the data and copying the point array explicitly.
- Parameters:
_cost - Cost of this minimum._matrix - Matrix that gives best transformation._initial - Rotations, translations, scales, and skews that make up transformation.
-
Method Detail
-
compareTo
public int compareTo(AlgorithmConstrainedOAR3D.MatrixListItem o)
Necessary to implement so that list may be sorted. Returns -1 if this cost is less than the parameter's cost;
1 if this cost is greater than the parameter's cost; and 0 if they are equal.
- Specified by:
compareTo in interface java.lang.Comparable<AlgorithmConstrainedOAR3D.MatrixListItem>- Parameters:
o - MatrixListItem to compare to.- Returns:
- -1 if this is less than, 1 if greater than, 0 if equal.
-
toString
public java.lang.String toString()
Creates readable string of this object, including cost, matrix, and point with its meanings.
- Overrides:
toString in class java.lang.Object- Returns:
- Readable string representation of this object.
�����������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegVOILandmark.html����������������������������0000775�4231163�4231163�00000133044�14537076061�027241� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegVOILandmark (MIPAV API Documentation)
-
- All Implemented Interfaces:
de.jtem.numericalMethods.calculus.function.RealFunctionOfSeveralVariables, java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmRegVOILandmark
extends AlgorithmBase
implements de.jtem.numericalMethods.calculus.function.RealFunctionOfSeveralVariables
AlgorithmRegVOILandmark First slice is template (base image) to which subsequent slices are registered. Trace kidney
in 1st slice using polygon VOI. Minimize cost = -sum of Gradient magnitude under propagated ROI in match image
- Version:
- 1.0 June, 2000
- Author:
- Delia McGarry
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
private class |
AlgorithmRegVOILandmark.CostFunction |
CostFunction - class for specifying optimization function for AlgorithmSimplexOpt slice - current fluoroscopy
slice being operated on.
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRegVOILandmark(ModelImage volume,
ModelImage gradMagVol,
float[] sigmas,
boolean maskFlag,
VOIBase position,
double minTx,
double maxTx,
double minTy,
double maxTy,
double minRz,
double maxRz,
double step,
int opt,
int costFunc) |
Constructor.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
minTx
private double minTx
DOCUMENT ME!
-
maxTx
private double maxTx
DOCUMENT ME!
-
minTy
private double minTy
DOCUMENT ME!
-
maxTy
private double maxTy
DOCUMENT ME!
-
minRz
private double minRz
DOCUMENT ME!
-
maxRz
private double maxRz
DOCUMENT ME!
-
step
private double step
DOCUMENT ME!
-
opt
protected int opt
DOCUMENT ME!
-
costFunc
protected int costFunc
DOCUMENT ME!
-
simplexDim
private int simplexDim
DOCUMENT ME!
-
VOIlength
protected int VOIlength
DOCUMENT ME!
-
volLength
protected int volLength
DOCUMENT ME!
-
sliceSize
protected int sliceSize
DOCUMENT ME!
-
xdim
protected int xdim
DOCUMENT ME!
-
ydim
protected int ydim
DOCUMENT ME!
-
tdim
protected int tdim
DOCUMENT ME!
-
sigmas
private float[] sigmas
-
maskFlag
private boolean maskFlag
-
Constructor Detail
-
AlgorithmRegVOILandmark
public AlgorithmRegVOILandmark(ModelImage volume,
ModelImage gradMagVol,
float[] sigmas,
boolean maskFlag,
VOIBase position,
double minTx,
double maxTx,
double minTy,
double maxTy,
double minRz,
double maxRz,
double step,
int opt,
int costFunc)
Constructor.
- Parameters:
volume - DOCUMENT ME!gradMagVol - DOCUMENT ME!sigmas - DOCUMENT ME!maskFlag - DOCUMENT ME!position - DOCUMENT ME!minTx - DOCUMENT ME!maxTx - DOCUMENT ME!minTy - DOCUMENT ME!maxTy - DOCUMENT ME!minRz - DOCUMENT ME!maxRz - DOCUMENT ME!step - DOCUMENT ME!opt - DOCUMENT ME!costFunc - DOCUMENT ME!
-
Method Detail
-
exhaustiveSearch
private void exhaustiveSearch(double[] p,
AlgorithmRegVOILandmark.CostFunction func)
Exhaustive search for global minimum.
- Parameters:
p - DOCUMENT ME!func - DOCUMENT ME!
-
search
private void search()
Search.
-
transformSlice
private void transformSlice(int slice,
TransMatrix xfrm,
float[] imgBuf,
float[] tImgBuf,
WildMagic.LibFoundation.Mathematics.Vector3f center)
Transforms a slice.
- Parameters:
slice - DOCUMENT ME!xfrm - DOCUMENT ME!imgBuf - DOCUMENT ME!tImgBuf - DOCUMENT ME!
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegOAR35D.html���������������������������������0000775�4231163�4231163�00000364354�14537076061�026041� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegOAR35D (MIPAV API Documentation)
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
(package private) class |
AlgorithmRegOAR35D.MatrixListItem |
Helper class to make it easy to store the necessary information about a minimum.
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private static int |
ADJACENT |
DOCUMENT ME!
|
private boolean |
allowLevel16XY |
DOCUMENT ME!
|
private boolean |
allowLevel16Z |
DOCUMENT ME!
|
private boolean |
allowLevel2XY |
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
|
private boolean |
allowLevel2Z |
DOCUMENT ME!
|
private boolean |
allowLevel4XY |
DOCUMENT ME!
|
private boolean |
allowLevel4Z |
DOCUMENT ME!
|
private boolean |
allowLevel8XY |
DOCUMENT ME!
|
private boolean |
allowLevel8Z |
DOCUMENT ME!
|
private AlgorithmRegOAR35D.MatrixListItem |
answer |
Final answer after registration.
|
private static int |
AVERAGE |
DOCUMENT ME!
|
private int |
baseNumIter |
Limits number of iterations in Powell optimization. maxIter in the call to Powell's will be an integer multiple
of baseNumIter
|
private float[] |
buffer |
DOCUMENT ME!
|
private float[] |
bufferA |
DOCUMENT ME!
|
private float[] |
bufferIW |
DOCUMENT ME!
|
private float[] |
bufferW |
DOCUMENT ME!
|
private boolean |
calcCOG |
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
|
private int |
coarseNum |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private float |
coarseRate |
Coarse and fine sampling parameters.
|
private int |
colorFactor |
1 for black and white, 4 for color.
|
private int |
costChoice |
Choice of which cost function to use.
|
private boolean |
doColor |
DOCUMENT ME!
|
private int |
DOF |
Maximum degrees of freedom when running the optimization.
|
private boolean |
doGraph |
Produce 2 output graphs - 1 for 3 rotations and 1 for 3 translations.
|
private boolean |
doJTEM |
Turns the full version of Powell's algorithm on/off.
|
private boolean |
doMultiThread |
|
private boolean |
doSubsample |
if true subsample.
|
private boolean |
fastMode |
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
|
private int |
fineNum |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private float |
fineRate |
Coarse and fine sampling parameters.
|
private ModelImage |
imageWeightIso |
DOCUMENT ME!
|
private ModelImage |
input1 |
Image used to import a volume from inputImage.
|
private ModelImage |
inputImage |
This is the image in which internal registration will be performed.
|
private ModelImage |
inputw_1 |
Image used to import a volume from inputWeight.
|
private ModelImage |
inputWeight |
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
|
private int |
interp |
Interpolation method used in transformations.
|
private int |
interp2 |
Interpolation method used in output.
|
private float[] |
iResols |
The voxel resolutions of the input image.
|
private ModelImage |
isoImage |
new to this version: must keep isoImage around if image needed to be transformed.
|
private float |
level1FactorXY |
Multiplication factor for level 1 - will be set based on subsampling.
|
private float |
level1FactorZ |
DOCUMENT ME!
|
private float |
level2FactorXY |
Multiplication factor for level 2 - will be set based on subsampling.
|
private float |
level2FactorZ |
DOCUMENT ME!
|
private float |
level4FactorXY |
Multiplication factor for level 4 - will be set based on subsampling.
|
private float |
level4FactorZ |
DOCUMENT ME!
|
private int |
maxDim |
DOCUMENT ME!
|
private int |
maxIter |
Limits number of iterations in Powell optimization. maxIter in the call to Powell's will be an integer multiple
of baseNumIter
|
private static int |
minimumZForSub |
DOCUMENT ME!
|
private int |
mode |
DOCUMENT ME!
|
private int |
numMinima |
Number of minima from level 8 to test at level 4.
|
private ModelImage |
output_1 |
DOCUMENT ME!
|
private ModelImage |
outsidePreReferenceVolume |
DOCUMENT ME!
|
private ModelImage |
outsideReferenceVolume |
DOCUMENT ME!
|
private int |
refImageNo |
Indicates the first volume used as a reference volume, if mode == ADJACENT.
|
private boolean |
regToAdjImage |
If true use adjacent image for registration.
|
private boolean |
resample |
true if resolutions unequal, false if resolutions equal.
|
private boolean |
resampleW |
true if weight image is resampled.
|
private float[][] |
rot |
Arrays used for producing graphs for DOF == 6 and register to average or reference image.
|
private float |
rotateBegin |
Coarse and fine sampling parameters.
|
private float |
rotateEnd |
Coarse and fine sampling parameters.
|
private ModelSimpleImage |
simpleInput_1 |
Simple version of an image volume of the input image.
|
private ModelSimpleImage |
simpleInputSub16_1 |
Simple version of an image volume of the input image, subsampled by 16.
|
private ModelSimpleImage |
simpleInputSub2_1 |
Simple version of an image volume of the input image, subsampled by 2.
|
private ModelSimpleImage |
simpleInputSub4_1 |
Simple version of an image volume of the input image, subsampled by 4.
|
private ModelSimpleImage |
simpleInputSub8_1 |
Simple version of an image volume of the input image, subsampled by 8.
|
private ModelSimpleImage |
simpleRef_1 |
Simple version of input image.
|
private ModelSimpleImage |
simpleRefSub16_1 |
Simple version of input image, subsampled by 16.
|
private ModelSimpleImage |
simpleRefSub2_1 |
Simple version of input image, subsampled by 2.
|
private ModelSimpleImage |
simpleRefSub4_1 |
Simple version of input image, subsampled by 4.
|
private ModelSimpleImage |
simpleRefSub8_1 |
Simple version of input image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightI_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub16_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub2_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub4_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub8_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightR_1 |
Simple version of weighted input image.
|
private ModelSimpleImage |
simpleWeightRSub16_1 |
Simple version of weighted input image, subsampled by 16.
|
private ModelSimpleImage |
simpleWeightRSub2_1 |
Simple version of weighted input image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightRSub4_1 |
Simple version of weighted input image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightRSub8_1 |
Simple version of weighted input image, subsampled by 8.
|
private float[][] |
trans |
DOCUMENT ME!
|
private int[] |
TransMatsInumber |
|
private boolean |
useOutsideReferenceVolume |
DOCUMENT ME!
|
private TransMatrix[] |
VolumesToReferenceTransformations |
|
private boolean |
weighted |
Flag to determine if there are weighted images or not.
|
private ModelImage |
weightVolumeImage |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRegOAR35D(ModelImage _image,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
int mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean fastMode,
int _baseNumIter,
int _numMinima) |
Creates new automatic internal registration algorithm and sets necessary variables.
|
AlgorithmRegOAR35D(ModelImage _image,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
int mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean fastMode,
int _baseNumIter,
int _numMinima) |
Creates new automatic internal registration algorithm and sets necessary variables.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static WildMagic.LibFoundation.Mathematics.Vector3f |
calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor) |
Calculates the center of mass (gravity) of a 3D image.
|
private void |
copyFloatData(ModelSimpleImage srcImage,
ModelSimpleImage resultImage) |
DOCUMENT ME!
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
void |
finalize() |
Prepares this class for destruction.
|
void |
generateTestImages() |
A test of the diffeomorphic demons is to transform a circle image to a letter C image.
|
double |
getAnswer() |
|
TransMatrix[] |
getArrayTransMatrix() |
Sorts the array of transformation matricies and returns the sorted array.
|
TransMatrix[] |
getArrayTransMatrix2() |
Sorts the array of transformation matricies and returns the sorted array.
|
private java.lang.String |
getConstructionInfo() |
Creates a string with the parameters that the image was constructed with.
|
float[][] |
getRot() |
accessor for rot.
|
private double[] |
getTolerance(int DOF) |
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
|
float[][] |
getTrans() |
accessor for trans.
|
TransMatrix |
getTransform() |
|
ModelImage |
getTransformedImage() |
accessor to get the internally registered image.
|
private void |
interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale) |
Performs a bilinear interpolation on points.
|
private void |
interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale) |
Performs a trilinear interpolation on points.
|
private java.util.Vector<AlgorithmRegOAR35D.MatrixListItem>[] |
levelEight(ModelSimpleImage ref,
ModelSimpleImage input) |
Takes two images that have been subsampled by a factor of eight.
|
private java.util.Vector<AlgorithmRegOAR35D.MatrixListItem> |
levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmRegOAR35D.MatrixListItem> minima,
java.util.Vector<AlgorithmRegOAR35D.MatrixListItem> optMinima) |
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
|
private AlgorithmRegOAR35D.MatrixListItem |
levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
AlgorithmRegOAR35D.MatrixListItem item,
int maxIter) |
Takes the two images, no subsampling, and the best minimum so far.
|
private AlgorithmRegOAR35D.MatrixListItem |
levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmRegOAR35D.MatrixListItem> minima) |
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
|
void |
runAlgorithm() |
Runs the image registration.
|
void |
setJTEM(boolean bOn) |
Turns the full version of Powell's algorithm on/off.
|
boolean |
setReferenceVolume(ModelImage refVolume) |
allows the user to pass in an OUTSIDE reference volume.
|
private void |
subSampleBy2(ModelSimpleImage srcImage,
ModelSimpleImage resultImage,
boolean isColor) |
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
|
private static ModelSimpleImage |
subSampleBy2XY(ModelSimpleImage srcImage,
ModelSimpleImage resultImage,
boolean isColor) |
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
allowLevel2XY
private boolean allowLevel2XY
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
-
buffer
private float[] buffer
DOCUMENT ME!
-
bufferA
private float[] bufferA
DOCUMENT ME!
-
bufferIW
private float[] bufferIW
DOCUMENT ME!
-
bufferW
private float[] bufferW
DOCUMENT ME!
-
doColor
private boolean doColor
DOCUMENT ME!
-
maxDim
private int maxDim
DOCUMENT ME!
-
mode
private int mode
DOCUMENT ME!
-
regToAdjImage
private boolean regToAdjImage
If true use adjacent image for registration. If false use the average volume or use the image volume reference
number to indicate the image volume to register all images to.
-
simpleInputSub16_1
private ModelSimpleImage simpleInputSub16_1
Simple version of an image volume of the input image, subsampled by 16.
-
simpleInputSub2_1
private ModelSimpleImage simpleInputSub2_1
Simple version of an image volume of the input image, subsampled by 2.
-
simpleInputSub4_1
private ModelSimpleImage simpleInputSub4_1
Simple version of an image volume of the input image, subsampled by 4.
-
simpleInputSub8_1
private ModelSimpleImage simpleInputSub8_1
Simple version of an image volume of the input image, subsampled by 8.
-
simpleWeightRSub16_1
private ModelSimpleImage simpleWeightRSub16_1
Simple version of weighted input image, subsampled by 16.
-
simpleWeightRSub2_1
private ModelSimpleImage simpleWeightRSub2_1
Simple version of weighted input image, subsampled by 2.
-
simpleWeightRSub4_1
private ModelSimpleImage simpleWeightRSub4_1
Simple version of weighted input image, subsampled by 4.
-
simpleWeightRSub8_1
private ModelSimpleImage simpleWeightRSub8_1
Simple version of weighted input image, subsampled by 8.
-
trans
private float[][] trans
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmRegOAR35D
public AlgorithmRegOAR35D(ModelImage _image,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
int mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean fastMode,
int _baseNumIter,
int _numMinima)
Creates new automatic internal registration algorithm and sets necessary variables.
- Parameters:
_image - Input image_costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._interp2 - Interpolation method used in outputmode - 1 = adjacent, 2 = average, 3 = referencerefImageNum - If mode == REFERENCE, the volume all other volumes are registered to. If mode == ADJACENT,
the first volume used as a reference._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doGraph - If true produce 2 output graphs - one for 3 rotations and one for 3 translationsdoSubsample - If true subsamplefastMode - If true skip subsample and go directly to level 1 optimization_baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
AlgorithmRegOAR35D
public AlgorithmRegOAR35D(ModelImage _image,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
int mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean fastMode,
int _baseNumIter,
int _numMinima)
Creates new automatic internal registration algorithm and sets necessary variables.
- Parameters:
_image - Input image_inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - DOCUMENT ME!_interp - Interpolation method used in transformations._interp2 - Interpolation method used in outputmode - 1 = adjacent, 2 = average, 3 = averagerefImageNum - If mode == REFERENCE, the volume all other volumes are registered to. If mode == ADJACENT,
the first volume used as a reference._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doGraph - If true produce 2 output graphs - 1 for 3 rotations and one for 3 translationsdoSubsample - If true subsamplefastMode - If true skip subsample and go directly to level 1 optimization_baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
Method Detail
-
calculateCenterOfMass3D
public static WildMagic.LibFoundation.Mathematics.Vector3f calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor)
Calculates the center of mass (gravity) of a 3D image. In image space where the upper left hand corner of the
image is 0,0. The x axis goes left to right, y axis goes top to bottom and z axis goes into the screen. (i.e. the
right hand rule). One could simply multiply by voxel resolutions.
- Parameters:
image - the center of mass will be calculated from this image datawgtImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- the center of mass as a 3D point
-
getArrayTransMatrix2
public TransMatrix[] getArrayTransMatrix2()
Sorts the array of transformation matricies and returns the sorted array.
If the sub-volumes are sorted to a sub-volume within the 4D image, then the matrix
for the reference volume is the identity matrix.
- Returns:
- Array of TransMatrix, one for each sub-volume in the 4D image.
-
getArrayTransMatrix
public TransMatrix[] getArrayTransMatrix()
Sorts the array of transformation matricies and returns the sorted array.
If the sub-volumes are sorted to a sub-volume within the 4D image, then the matrix
for the reference volume is the identity matrix.
- Returns:
- Array of TransMatrix, one for each sub-volume in the 4D image.
-
runAlgorithm
public void runAlgorithm()
Runs the image registration. If the resolutions are unequal, the image is transformed into isotropic pixels. The
resolutions of the two images after the xyz isotropic transformation will be the same in the x, y, and z
dimensions. That resolution will equal the minimum resolution. If the image is weighted, the weight image is
transformed into isotropic pixels in the same manner as the original. Then the image is subsampled by 2, 4, and 8
or 16. If the image is too small it will not be subsampled down to the smallest level; if it is too big, it will
be subsampled to 8 or 16. The same is done with the weight image if necessary. The program loops thru levelEight,
levelFour, levelTwo, and levelOne with one volume as the reference volume and one volume as the input volume. The
function levelEight is called with the volumes subsampled by 8 or 16; it returns two vectors with minima. Then
the function levelFour is called with volumes subsampled by 4 and the two vectors; it returns one vector of
minima. The function levelTwo is called with volumes subsampled by 2 and the vector; it returns an "answer" in
the form of a MatrixListItem, which is a convenient way of storing the point, the matrix, and the cost of the
minimum. Then the function levelOne is called with the minimum; it returns a final "answer", or minimum, which is
used to register the input volume to the reference volume. The registered input volume data is imported into
inputImage.
- Specified by:
runAlgorithm in class AlgorithmBase
-
subSampleBy2XY
private static ModelSimpleImage subSampleBy2XY(ModelSimpleImage srcImage,
ModelSimpleImage resultImage,
boolean isColor)
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- Parameters:
srcImage - Image to subsample.resultImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
getTolerance
private double[] getTolerance(int DOF)
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- Parameters:
DOF - Degrees of freedom, will be length of vector.- Returns:
- New tolerance vector to send to optimization.
Based on FLIRT paper: let n=pixel dimension (in one dimension) R=brain radius, here assumed to be
half of field-of-view Translation tolerance = n/2 Rotation tolerance = (180/PI)*n/(2R) (converted to
degrees because AlgorithmPowell works in degrees) Scaling tolerance = n/(2R) Skewing tolerance = n/(2R)
-
interpolate
private void interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale)
Performs a bilinear interpolation on points. Takes an initial point, a vector of values to set, and an array in
which to look at neighbors of that point. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - Initial index into array.initial - Vector to set; if scale is true, set two translations and a scale. Otherwise just
set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
interpolate
private void interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale)
Performs a trilinear interpolation on points. Takes 3 initial points, a vector of values to set, and an array in
which to look at neighbors of those points. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - X rotation initial index into array.y - Y rotation initial index into array.z - Z rotation initial index into array.initial - Vector to set; if scale is true, set three translations and a scale. Otherwise
just set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
levelEight
private java.util.Vector<AlgorithmRegOAR35D.MatrixListItem>[] levelEight(ModelSimpleImage ref,
ModelSimpleImage input)
Takes two images that have been subsampled by a factor of eight. Sets up the cost function with the images and
the weighted images, if necessary. Uses the coarse sampling rate and optimizes translations and global scale at
the given rotation. So for example, if the coarse sampling range were -30 to 30 at every 15 degrees, we would
optimize at rotations of (-30, -30, -30), (-30, -30, -15), (-30, -30, 0), etc. In this case there would be a
total of 125 calls to the optimization method. Measures the cost at the fine sampling rate. Interpolates the
translations and global scale to come up with a good guess as to what the optimized translation would be at that
point. Takes the top 20% of the points and optimizes them. Now have a large multi-array of costs. 20% of those
have been optimized and placed back into their original position in the multi-array. Looks at the 8 neighbors of
a point: +, =, or - one fine sample in each of the three directions. If the point has a cost greater than any of
these, it is not a minima. Otherwise it is. Saves it in a vector of minima. Optimizes the minima over rotations
as well as translations and global scale. (Previously had not optimized over rotations.) Returns two vectors, one
containing the minima before optimization, one containing the minima after optimization.
- Parameters:
ref - Subsampled by 8 reference image.input - Subsampled by 8 input image.- Returns:
- List of preoptimized and optimized points.
-
levelFour
private java.util.Vector<AlgorithmRegOAR35D.MatrixListItem> levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmRegOAR35D.MatrixListItem> minima,
java.util.Vector<AlgorithmRegOAR35D.MatrixListItem> optMinima)
Takes two images that have been subsampled by a factor of four, and two vectors of minima. Sets up the cost
function with the images and the weighted images, if necessary. Adds the level4Factor determined during
subsampling. Measures the costs of the minima on the images and sort them. Takes the top three in each vector
(pre-optimization and post-optimization) and optimizes them. Puts them all into one vector. Perturbs the
rotations in each dimension by zero and plus-minus fineDelta. If it's not a rigid transformation, perturbs the
scales by factors of 0.8, 0.9, 1.0, 1.1, and 1.2. Optimize the perturbations. Returns a vector of the perturbed,
optimized minima.
- Parameters:
ref - Reference image, subsampled by 4.input - Input image, subsampled by 4.minima - Preoptimized minima.optMinima - Optimized minima.- Returns:
- A vector of perturbed, optimized minima.
-
levelOne
private AlgorithmRegOAR35D.MatrixListItem levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
AlgorithmRegOAR35D.MatrixListItem item,
int maxIter)
Takes the two images, no subsampling, and the best minimum so far. Sets up the cost function with the images and
the weighted images, if necessary. Adds the level1Factor determined during subsampling. Performs one optimization
run, with the maximum allowable degrees of freedom as specified by the user (the max is 12). Returns the best
minimum.
- Parameters:
ref - Reference image.input - Input image.item - Best minimum so far.maxIter - DOCUMENT ME!- Returns:
- Best minimum after optimization.
-
levelTwo
private AlgorithmRegOAR35D.MatrixListItem levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmRegOAR35D.MatrixListItem> minima)
Takes two images that have been subsampled by a factor of 2 and a vector of minima. Sets up the cost function
with the images and the weighted images, if necessary. Adds the level2Factor determined during subsampling.
Measures the costs of the minima at the images. Optimizes the best minimum with 7 degrees of freedom, then 9,
then 12. If the user has limited the degrees of freedom to 6, there will only be one optimization run, with 6
degrees of freedom. Returns the best minimum after optimization.
- Parameters:
ref - Reference image, subsampled by 2.input - Input image, subsampled by 2.minima - Minima.- Returns:
- The optimized minimum.
-
subSampleBy2
private void subSampleBy2(ModelSimpleImage srcImage,
ModelSimpleImage resultImage,
boolean isColor)
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- Parameters:
srcImage - Image to subsample.resultImage - DOCUMENT ME!isColor - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegLeastSquares.html���������������������������0000775�4231163�4231163�00000111172�14537076061�027544� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegLeastSquares (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
dim |
The number of dimensions (2D or 3D).
|
private int |
numCoords |
DOCUMENT ME!
|
private double[][] |
pointSetA |
Input point set A (2D or 3D)
|
private double[][] |
pointSetB |
Input point set B (2D or 3D)
|
private TransMatrix |
xfrmBA |
The transformation matrix that describes the transform from point set B to point set A.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRegLeastSquares(double[][] coordsA,
double[][] coordsB,
int dim2or3) |
AlgorithmRegLeastSquares - Constructor.
|
AlgorithmRegLeastSquares(WildMagic.LibFoundation.Mathematics.Vector3f[] coordsA3D,
WildMagic.LibFoundation.Mathematics.Vector3f[] coordsB3D,
int dim2or3) |
AlgorithmRegLeastSquares - Constructor.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private TransMatrix |
buildXfrm(double[] p1,
double[] p2,
Jama.Matrix R) |
Builds 4x4 transformation matrix from R and T where T=p2-R*p1.
|
void |
calculateResiduals() |
CalculateResiduals.
|
double |
EuclideanDistance(double[] ptA,
double[] ptB) |
EuclideanDistance.
|
void |
finalize() |
Prepares this class for destruction.
|
TransMatrix |
getTransformBtoA() |
Accesses xfrm from point set B to point set A.
|
void |
matchBtoA() |
matchBtoA pA and pB are 2 3D point sets (pointSetA and B).
|
void |
runAlgorithm() |
Starts the program.
|
void |
setTransformBtoA(TransMatrix xfrm) |
Set transform from point set A to point set B.
|
int |
setup(double[][] coordsA,
double[][] coordsB) |
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
|
int |
setup(WildMagic.LibFoundation.Mathematics.Vector2f[] coordsA,
WildMagic.LibFoundation.Mathematics.Vector2f[] coordsB) |
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
|
int |
setup(WildMagic.LibFoundation.Mathematics.Vector3f[] coordsA,
WildMagic.LibFoundation.Mathematics.Vector3f[] coordsB) |
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
|
static double |
SQR(double x) |
SQR = x^2.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numCoords
private int numCoords
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmRegLeastSquares
public AlgorithmRegLeastSquares(double[][] coordsA,
double[][] coordsB,
int dim2or3)
AlgorithmRegLeastSquares - Constructor.
- Parameters:
coordsA - - double[dim][n] 3D or 2D point setcoordsB - - double[dim][n] 3D or 2D point setdim2or3 - - indicates whether data set is 2D or 3D
-
AlgorithmRegLeastSquares
public AlgorithmRegLeastSquares(WildMagic.LibFoundation.Mathematics.Vector3f[] coordsA3D,
WildMagic.LibFoundation.Mathematics.Vector3f[] coordsB3D,
int dim2or3)
AlgorithmRegLeastSquares - Constructor.
- Parameters:
coordsA3D - Vector3f[n] 3D point setcoordsB3D - Vector3f[n] 3D point setdim2or3 - indicates whether data set is 2D or 3D
-
Method Detail
-
buildXfrm
private TransMatrix buildXfrm(double[] p1,
double[] p2,
Jama.Matrix R)
Builds 4x4 transformation matrix from R and T where T=p2-R*p1.
- Parameters:
p1 - from Matchp2 - from MatchR - =rotation matrix from Match- Returns:
- DOCUMENT ME!
-
matchBtoA
public void matchBtoA()
matchBtoA pA and pB are 2 3D point sets (pointSetA and B).
p1[i]=(1/numCoords)*(sum from j = 0 to j = numCoords - 1 of pB[i][j]) p2[i]=(1/numCoords)*(sum from j = 0 to j
= numCoords - 1 of pA[i][j])
q1[i][j] =pB[i][j]-p1[i] q2[i][j]=pA[i][j]-p2[i]
-
setup
public int setup(double[][] coordsA,
double[][] coordsB)
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- Parameters:
coordsA - first 3D point setcoordsB - second 3D point set- Returns:
- distinguishing reason for error
-
setup
public int setup(WildMagic.LibFoundation.Mathematics.Vector3f[] coordsA,
WildMagic.LibFoundation.Mathematics.Vector3f[] coordsB)
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- Parameters:
coordsA - first 3D point setcoordsB - second 3D point Set- Returns:
- int distinguishing reason for error
-
setup
public int setup(WildMagic.LibFoundation.Mathematics.Vector2f[] coordsA,
WildMagic.LibFoundation.Mathematics.Vector2f[] coordsB)
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- Parameters:
coordsA - first 2D point setcoordsB - second 2D point Set- Returns:
- int distinguishing reason for error
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmConstrainedOAR3D.html��������������������������0000775�4231163�4231163�00000376720�14537076060�027507� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConstrainedOAR3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
allowLevel16XY |
DOCUMENT ME!
|
private boolean |
allowLevel16Z |
DOCUMENT ME!
|
private boolean |
allowLevel2XY |
DOCUMENT ME!
|
private boolean |
allowLevel2Z |
DOCUMENT ME!
|
private boolean |
allowLevel4XY |
DOCUMENT ME!
|
private boolean |
allowLevel4Z |
DOCUMENT ME!
|
private boolean |
allowLevel8XY |
DOCUMENT ME!
|
private boolean |
allowLevel8Z |
DOCUMENT ME!
|
private AlgorithmConstrainedOAR3D.MatrixListItem |
answer |
Final answer after registration.
|
private int |
baseNumIter |
Advanced optimization settings maxIter in the call to Powell's will be an integer multiple of baseNumIter.
|
private AlgorithmConstrainedOAR3D.MatrixListItem |
bestGuessLevel2 |
DOCUMENT ME!
|
private ModelImage |
blurredInput |
Blurred input image.
|
private ModelImage |
blurredRef |
Blurred reference image.
|
private int |
bracketBound |
The bracket size around the minimum in multiples of unit_tolerance in the first iteration of Powell's algorithm.
|
private boolean |
calcCOG |
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
|
private int |
coarseNumX |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private int |
coarseNumY |
DOCUMENT ME!
|
private int |
coarseNumZ |
DOCUMENT ME!
|
private float |
coarseRateX |
Coarse and fine sampling parameters.
|
private float |
coarseRateY |
DOCUMENT ME!
|
private float |
coarseRateZ |
DOCUMENT ME!
|
private int |
costChoice |
Choice of which cost function to use.
|
private boolean |
doColor |
DOCUMENT ME!
|
private int |
DOF |
Maximum degrees of freedom when running the optimization.
|
private boolean |
doSubsample |
If true subsample for levelEight, levelFour and levelTwo analyses.
|
private double[] |
dummy |
Dummy initial values used to create a Powell's algorithm instance before setting initial.
|
private boolean |
fastMode |
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
|
private int |
fineNumX |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private int |
fineNumY |
DOCUMENT ME!
|
private int |
fineNumZ |
DOCUMENT ME!
|
private float |
fineRateX |
Coarse and fine sampling parameters.
|
private float |
fineRateY |
DOCUMENT ME!
|
private float |
fineRateZ |
DOCUMENT ME!
|
private boolean |
fullAnalysisMode |
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
|
private ModelImage |
imageInputIso |
Isotropic input image.
|
private ModelImage |
imageRefIso |
Isotropic reference image.
|
private ModelImage |
imageWeightInputIso |
Isotropic weighted input image.
|
private ModelImage |
imageWeightRefIso |
Isotropic weighted reference image.
|
(package private) double |
initialCost |
DOCUMENT ME!
|
private java.lang.String |
initialMessage |
DOCUMENT ME!
|
private ModelImage |
inputImage |
This image is to registered to the reference image.
|
private ModelImage |
inputWeight |
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
|
private int |
interp |
Interpolation method.
|
private float |
level1FactorXY |
Multiplication factor for level 1 - will be set based on subsampling.
|
private float |
level1FactorZ |
DOCUMENT ME!
|
private float |
level2FactorXY |
Multiplication factor for level 2 - will be set based on subsampling.
|
private float |
level2FactorZ |
DOCUMENT ME!
|
private float |
level4FactorXY |
Multiplication factor for level 4 - will be set based on subsampling.
|
private float |
level4FactorZ |
DOCUMENT ME!
|
private float[][] |
limits |
Translation limits.
|
private float[][] |
limits_mm |
DOCUMENT ME!
|
private int |
maxDim |
DOCUMENT ME!
|
private int |
maxIter |
Advanced optimization settings maxIter in the call to Powell's will be an integer multiple of baseNumIter.
|
(package private) double |
maxPossibleCost |
DOCUMENT ME!
|
private boolean |
maxResol |
Flag to determine if the maximum of the minimum resolutions of the two datasets should be used.
|
private static int |
minimumZForSub |
DOCUMENT ME!
|
private int |
numMinima |
Number of minima from level 8 to test at level 4.
|
private ModelImage |
refImage |
The inputImage will be registered to this reference image.
|
private ModelImage |
refWeight |
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
|
private boolean |
resampleInput |
DOCUMENT ME!
|
private boolean |
resampleRef |
DOCUMENT ME!
|
private float[] |
resInput |
The voxel resolutions of the image to be registered to the reference image.
|
private float[] |
resRef |
The voxel resolutions of the reference image.
|
private float |
rotateBeginX |
Coarse and fine sampling parameters.
|
private float |
rotateBeginY |
DOCUMENT ME!
|
private float |
rotateBeginZ |
DOCUMENT ME!
|
private float |
rotateRangeX |
Coarse and fine sampling parameters.
|
private float |
rotateRangeY |
DOCUMENT ME!
|
private float |
rotateRangeZ |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleInput |
Simple version of input image.
|
private ModelSimpleImage |
simpleInputSub2 |
Simple version of input image, subsampled by 2.
|
private ModelSimpleImage |
simpleInputSub4 |
Simple version of input image, subsampled by 4.
|
private ModelSimpleImage |
simpleInputSub8 |
Simple version of input image, subsampled by 8.
|
private ModelSimpleImage |
simpleRef |
Simple version of reference image.
|
private ModelSimpleImage |
simpleRefSub2 |
Simple version of reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleRefSub4 |
Simple version of reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleRefSub8 |
Simple version of reference image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightInput |
Simple version of weighted input image.
|
private ModelSimpleImage |
simpleWeightInputSub2 |
Simple version of weighted input image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightInputSub4 |
Simple version of weighted input image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightInputSub8 |
Simple version of weighted input image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightRef |
Simple version of weighted reference image.
|
private ModelSimpleImage |
simpleWeightRefSub2 |
Simple version of weighted reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightRefSub4 |
Simple version of weighted reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightRefSub8 |
Simple version of weighted reference image, subsampled by 8.
|
(package private) long |
timeElapsed |
DOCUMENT ME!
|
(package private) long |
timeLater |
DOCUMENT ME!
|
(package private) long |
timeNow |
DOCUMENT ME!
|
(package private) TransMatrix |
tMatrix |
DOCUMENT ME!
|
private AlgorithmTransform |
transform |
Transformation algorithm for creating an isotropic reference image.
|
private AlgorithmTransform |
transform2 |
Transformation algorithm for creating an isotropic input image.
|
private boolean |
weighted |
Flag to determine if there are weighted images or not.
|
private int |
weightedInputPixels |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub8 |
DOCUMENT ME!
|
private int |
weightedRefPixels |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub8 |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmConstrainedOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateRangeX,
float _rotateBeginY,
float _rotateRangeY,
float _rotateBeginZ,
float _rotateRangeZ,
int _nCoarseX,
int _nCoarseY,
int _nCoarseZ,
float[][] _transLimits,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
boolean _calcCOG,
int _bracketBound,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmConstrainedOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateRangeX,
float _rotateBeginY,
float _rotateRangeY,
float _rotateBeginZ,
float _rotateRangeZ,
int _nCoarseX,
int _nCoarseY,
int _nCoarseZ,
float[][] _transLimits,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
boolean _calcCOG,
int _bracketBound,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static WildMagic.LibFoundation.Mathematics.Vector3f |
calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor) |
Calculates the center of mass (gravity) of a 3D image.
|
private boolean |
checkMinimum(AlgorithmConstrainedOAR3D.MatrixListItem item) |
Check if the given minimum is within the translation and rotation bounds.
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
void |
finalize() |
Prepares this class for destruction.
|
double |
getAnswer() |
Accessor that returns the final cost function.
|
private java.lang.String |
getConstructionInfo() |
Creates a string with the parameters that the image was constructed with.
|
private double[] |
getTolerance(int DOF) |
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
|
double[] |
getTransArray() |
Access that returns an array containing the transformation parameters.
|
TransMatrix |
getTransform() |
Accessor that returns the matrix calculated in this algorithm.
|
TransMatrix |
getTransformHalf() |
Accessor that returns the matrix calculated in this algorithm divided by 2.
|
TransMatrix |
getTransformMigsagittal() |
Accessor that returns the z rot and x and y trans from the matrix calculated in this algorithm.
|
private void |
interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale) |
Performs a trilinear interpolation on points.
|
private java.util.Vector<AlgorithmConstrainedOAR3D.MatrixListItem>[] |
levelEight(ModelSimpleImage ref,
ModelSimpleImage input) |
Takes two images that have been subsampled by a factor of eight.
|
private java.util.Vector<AlgorithmConstrainedOAR3D.MatrixListItem> |
levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmConstrainedOAR3D.MatrixListItem> minima,
java.util.Vector<AlgorithmConstrainedOAR3D.MatrixListItem> optMinima) |
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
|
private AlgorithmConstrainedOAR3D.MatrixListItem |
levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
AlgorithmConstrainedOAR3D.MatrixListItem item,
int maxIter) |
Takes the two images, no subsampling, and the best minimum so far.
|
private AlgorithmConstrainedOAR3D.MatrixListItem |
levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmConstrainedOAR3D.MatrixListItem> minima) |
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
|
void |
runAlgorithm() |
Runs the image registration.
|
private static ModelSimpleImage |
subsampleBy2(ModelSimpleImage srcImage,
boolean isColor) |
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
|
private static ModelSimpleImage |
subsampleBy2XY(ModelSimpleImage srcImage,
boolean isColor) |
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
|
protected boolean |
testBounds3D(double[] point,
java.lang.String message) |
DOCUMENT ME!
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
initialCost
double initialCost
DOCUMENT ME!
-
maxPossibleCost
double maxPossibleCost
DOCUMENT ME!
-
timeElapsed
long timeElapsed
DOCUMENT ME!
-
timeLater
long timeLater
DOCUMENT ME!
-
timeNow
long timeNow
DOCUMENT ME!
-
coarseNumY
private int coarseNumY
DOCUMENT ME!
-
fineNumY
private int fineNumY
DOCUMENT ME!
-
coarseNumZ
private int coarseNumZ
DOCUMENT ME!
-
fineNumZ
private int fineNumZ
DOCUMENT ME!
-
doColor
private boolean doColor
DOCUMENT ME!
-
fullAnalysisMode
private boolean fullAnalysisMode
If true this algorithm skips all subsample and goes directly to the level 1 optimization. This assumes that
images are fairly well aligned to begin with and therefore no sophisticated search is needed.
-
interp
private int interp
Interpolation method.
-
limits
private float[][] limits
Translation limits.
-
maxDim
private int maxDim
DOCUMENT ME!
-
fineRateY
private float fineRateY
DOCUMENT ME!
-
fineRateZ
private float fineRateZ
DOCUMENT ME!
-
simpleWeightInputSub2
private ModelSimpleImage simpleWeightInputSub2
Simple version of weighted input image, subsampled by 2.
-
simpleWeightInputSub4
private ModelSimpleImage simpleWeightInputSub4
Simple version of weighted input image, subsampled by 4.
-
simpleWeightInputSub8
private ModelSimpleImage simpleWeightInputSub8
Simple version of weighted input image, subsampled by 8.
-
simpleWeightRefSub2
private ModelSimpleImage simpleWeightRefSub2
Simple version of weighted reference image, subsampled by 2.
-
simpleWeightRefSub4
private ModelSimpleImage simpleWeightRefSub4
Simple version of weighted reference image, subsampled by 4.
-
simpleWeightRefSub8
private ModelSimpleImage simpleWeightRefSub8
Simple version of weighted reference image, subsampled by 8.
-
Constructor Detail
-
AlgorithmConstrainedOAR3D
public AlgorithmConstrainedOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateRangeX,
float _rotateBeginY,
float _rotateRangeY,
float _rotateBeginZ,
float _rotateRangeZ,
int _nCoarseX,
int _nCoarseY,
int _nCoarseZ,
float[][] _transLimits,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
boolean _calcCOG,
int _bracketBound,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeX - DOCUMENT ME!_rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeY - DOCUMENT ME!_rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeZ - DOCUMENT ME!_nCoarseX - DOCUMENT ME!_nCoarseY - DOCUMENT ME!_nCoarseZ - DOCUMENT ME!_transLimits - Limitations on translations._maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to
level one immediately_calcCOG - If true calculate the center of gravity (mass) to initialize registration._bracketBound - The bracket size around the minimum in multiples of unit_tolerance for the first iteration
of Powell's algorithm._baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
AlgorithmConstrainedOAR3D
public AlgorithmConstrainedOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateRangeX,
float _rotateBeginY,
float _rotateRangeY,
float _rotateBeginZ,
float _rotateRangeZ,
int _nCoarseX,
int _nCoarseY,
int _nCoarseZ,
float[][] _transLimits,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
boolean _calcCOG,
int _bracketBound,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeX - DOCUMENT ME!_rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeY - DOCUMENT ME!_rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateRangeZ - DOCUMENT ME!_nCoarseX - DOCUMENT ME!_nCoarseY - DOCUMENT ME!_nCoarseZ - DOCUMENT ME!_transLimits - DOCUMENT ME!_maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to
level one immediately_calcCOG - If true calculate the center of gravity (mass) to initialize registration._bracketBound - The bracket size around the minimum in multiples of unit_tolerance for the first iteration
of Powell's algorithm._baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
Method Detail
-
calculateCenterOfMass3D
public static WildMagic.LibFoundation.Mathematics.Vector3f calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor)
Calculates the center of mass (gravity) of a 3D image. In image space where the upper left hand corner of the
image is 0,0. The x axis goes left to right, y axis goes top to bottom and z axis goes into the screen. (i.e. the
right hand rule). One could simply multiply by voxel resolutions.
- Parameters:
image - the center of mass will be calculated from this image datawgtImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- the center of mass as a 3D point
-
runAlgorithm
public void runAlgorithm()
Runs the image registration. Blurs the images based on what their minimum resolutions are. The reference image is
blurred if one of the input image resolutions is 50% or more bigger than the corresponding resolution in the
reference image; likewise, the input image is blurred if one of the reference resolutions is 50% or more bigger
than the corresponding resolution in the input image. Thus, it is unlikely, though not impossible, that both
images will be blurred. The images are then transformed into isotropic voxels. The resolutions of the two images
after the isotropic transformation will be the same in all dimensions. If maxResol is true, that resolution will
equal the maximum of the minimums of each image's resolutions: Max( Min (resolutions of ref image, resolutions of
input image) ). If the images are weighted, the weight images are blurred and transformed into isotropic voxels
in the same manner as the originals. Then the images are subsampled by 2, 4, and 8. If the images are too small
they will not be subsampled down to the smallest level; if they are too big, they will be subsampled to 16. The
same is done with the weight images if necessary. The function levelEight is called with the images subsampled by
8; it returns two vectors with minima. Then the function levelFour is called with images subsampled by 4 and the
two vectors; it returns one vector of minima. The function levelTwo is called with images subsampled by 2 and the
vector; it returns an "answer" in the form of a MatrixListItem, which is a convenient way of storing the point,
the matrix, and the cost of the minimum. Then the function levelOne is called with the minimum; it returns a
final "answer", or minimum, which will then be accessed by the dialog that called this algorithm.
- Specified by:
runAlgorithm in class AlgorithmBase
-
subsampleBy2
private static ModelSimpleImage subsampleBy2(ModelSimpleImage srcImage,
boolean isColor)
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- Parameters:
srcImage - Image to subsample.isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
subsampleBy2XY
private static ModelSimpleImage subsampleBy2XY(ModelSimpleImage srcImage,
boolean isColor)
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- Parameters:
srcImage - Image to subsample.isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
getTolerance
private double[] getTolerance(int DOF)
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- Parameters:
DOF - Degrees of freedom, will be length of vector.- Returns:
- New tolerance vector to send to optimization.
Based on FLIRT paper: let n=pixel dimension (in one dimension) R=brain radius, here assumed to be
half of field-of-view Translation tolerance = n/2 Rotation tolerance = (180/PI)*n/(2R) (converted to
degrees because AlgorithmConstPowell works in degrees) Scaling tolerance = n/(2R) Skewing tolerance =
n/(2R)
-
interpolate
private void interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale)
Performs a trilinear interpolation on points. Takes 3 initial points, a vector of values to set, and an array in
which to look at neighbors of those points. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - X rotation initial index into array.y - Y rotation initial index into array.z - Z rotation initial index into array.initial - Vector to set; if scale is true, set three translations and a scale. Otherwise
just set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
levelEight
private java.util.Vector<AlgorithmConstrainedOAR3D.MatrixListItem>[] levelEight(ModelSimpleImage ref,
ModelSimpleImage input)
Takes two images that have been subsampled by a factor of eight. Sets up the cost function with the images and
the weighted images, if necessary. Uses the coarse sampling rate and optimizes translations and global scale at
the given rotation. So for example, if the coarse sampling range were -30 to 30 at every 15 degrees, we would
optimize at rotations of (-30, -30, -30), (-30, -30, -15), (-30, -30, 0), etc. In this case there would be a
total of 125 calls to the optimization method. Measures the cost at the fine sampling rate. Interpolates the
translations and global scale to come up with a good guess as to what the optimized translation would be at that
point. Takes the top 20% of the points and optimizes them. Now have a large multi-array of costs. 20% of those
have been optimized and placed back into their original position in the multi-array. Removes those items that are
outisde the rotation begin and end limits. Looks at the 8 neighbors of a point: +, =, or - one fine sample in
each of the three directions. If the point has a cost greater than any of these, it is not a minima. Otherwise it
is. Saves it in a vector of minima. Optimizes the minima over rotations as well as translations and global scale.
(Previously had not optimized over rotations.) Returns two vectors, one containing the minima before
optimization, one containing the minima after optimization.
- Parameters:
ref - Subsampled by 8 reference image.input - Subsampled by 8 input image.- Returns:
- List of preoptimized and optimized points.
-
levelFour
private java.util.Vector<AlgorithmConstrainedOAR3D.MatrixListItem> levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmConstrainedOAR3D.MatrixListItem> minima,
java.util.Vector<AlgorithmConstrainedOAR3D.MatrixListItem> optMinima)
Takes two images that have been subsampled by a factor of four, and two vectors of minima. Sets up the cost
function with the images and the weighted images, if necessary. Adds the level4Factor determined during
subsampling. Measures the costs of the minima on the images and sort them. Takes the top three in each vector
(pre-optimization and post-optimization) and optimizes them. Puts them all into one vector. Perturbs the
rotations in each dimension by zero and plus-minus fineDelta. If it's not a rigid transformation, perturbs the
scales by factors of 0.8, 0.9, 1.0, 1.1, and 1.2. Optimize the perturbations. Returns a vector of the perturbed,
optimized minima.
- Parameters:
ref - Reference image, subsampled by 4.input - Input image, subsampled by 4.minima - Preoptimized minima.optMinima - Optimized minima.- Returns:
- A vector of perturbed, optimized minima.
-
levelOne
private AlgorithmConstrainedOAR3D.MatrixListItem levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
AlgorithmConstrainedOAR3D.MatrixListItem item,
int maxIter)
Takes the two images, no subsampling, and the best minimum so far. Sets up the cost function with the images and
the weighted images, if necessary. Adds the level1Factor determined during subsampling. Performs one optimization
run, with the maximum allowable degrees of freedom as specified by the user (the max is 12). Returns the best
minimum.
- Parameters:
ref - Reference image.input - Input image.item - Best minimum so far.maxIter - DOCUMENT ME!- Returns:
- Best minimum after optimization.
-
levelTwo
private AlgorithmConstrainedOAR3D.MatrixListItem levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmConstrainedOAR3D.MatrixListItem> minima)
Takes two images that have been subsampled by a factor of 2 and a vector of minima. Sets up the cost function
with the images and the weighted images, if necessary. Adds the level2Factor determined during subsampling.
Measures the costs of the minima at the images. Optimizes the best minimum with 7 degrees of freedom, then 9,
then 12. If the user has limited the degrees of freedom to 6, there will only be one optimization run, with 6
degrees of freedom. Returns the best minimum after optimization.
- Parameters:
ref - Reference image, subsampled by 2.input - Input image, subsampled by 2.minima - Minima.- Returns:
- The optimized minimum.
������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegBSpline.Options.html������������������������0000775�4231163�4231163�00000042067�14537076060�030123� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegBSpline.Options (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline.Options
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
boolean |
bSubsample |
Boolean flag set to true to indicate whether the registration is performed to a subsampled target image.
|
float |
fConvergenceLimit |
One iteration is defined such that all control points are moved once by gradient descent.
|
float |
fGradientDescentMinimizeStepSize |
Size of step in sample units when locating the minimum of the gradient descent.
|
int |
iBSplineDegree |
Degree of the BSpline basis functions.
|
int |
iBSplineNumControlPoints |
Number of control points to use for the open/uniform BSpline basis functions.
|
int |
iGradientDescentMinimizeMaxSteps |
Maximum number of steps to test when locating the minimum of the gradient descent.
|
int |
iMaxIterations |
Maximum number of iterations to perform if convergence limit condition is still not satisfied.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Options() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
setFromString(java.lang.String kOptions,
java.lang.String kDelim) |
DOCUMENT ME!
|
java.lang.String |
toString(java.lang.String kDelim) |
Convert the options to a delimeted text string.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
bSubsample
public boolean bSubsample
Boolean flag set to true to indicate whether the registration is performed to a subsampled target image. This
may be used to speed up processing at some tradeoff for registration quality.
-
fConvergenceLimit
public float fConvergenceLimit
One iteration is defined such that all control points are moved once by gradient descent. The registration
error before and after one iteration are compared and if the relative change is less than this limit, then
the registration terminates.
-
iGradientDescentMinimizeMaxSteps
public int iGradientDescentMinimizeMaxSteps
Maximum number of steps to test when locating the minimum of the gradient descent. Combined with the
fGradientDescentMinimizeStepSize parameter, this determines the maximum distance from the current state to
search for the minimum of the gradient descent.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/RegistrationMeasureNormalizedMutualInformation.html�����0000775�4231163�4231163�00000067623�14537076061�034255� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
RegistrationMeasureNormalizedMutualInformation (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected int[] |
m_aiBinReg |
Bins used to hold the histograms.
|
protected int[] |
m_aiBinRegTrg |
DOCUMENT ME!
|
protected int[] |
m_aiImageBinReg |
Image corresponding to the samples in the registered source image which identifies to which bin the sample
belongs.
|
protected int[] |
m_aiImageBinTrg |
Image corresponding to the samples in the target image which identifies to which bin the sample belongs.
|
protected double |
m_dEntropyImageTrg |
Precomputed entropy for the target image.
|
protected float |
m_fSrcMin |
Given a value in the registered source image, these values are used in this equation to determine the actual
histogram bin: int iBinReg = (int)((value - m_fSrcMin) * m_fSrcScale);.
|
protected float |
m_fSrcScale |
DOCUMENT ME!
|
protected int |
m_iNumBins |
Number of bins to use for computation.
|
protected static double[] |
s_adIntLog |
Table with precalculated logarithms.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_aiImageBinReg
protected int[] m_aiImageBinReg
Image corresponding to the samples in the registered source image which identifies to which bin the sample
belongs. This is a linear storage for a 2D array where iBinReg and iBinTrg map to the 1D index by computing
iBinReg*m_iNumBins+iBinTrg.
-
m_fSrcMin
protected float m_fSrcMin
Given a value in the registered source image, these values are used in this equation to determine the actual
histogram bin: int iBinReg = (int)((value - m_fSrcMin) * m_fSrcScale);.
-
Method Detail
-
createNew
public RegistrationMeasure createNew()
Create a new instance of this measure. That is, the same type and having the same properties. But initially, the
target is not defined.
- Specified by:
createNew in class RegistrationMeasure- Returns:
- RegistrationMeasure Newly created instance.
-
setImages
public void setImages(ModelSimpleImage kImageSrc,
ModelSimpleImage kImageTrg)
Setup the measure to use information from the target image and the original source image. Each derived class
override of this method must call this method.
- Overrides:
setImages in class RegistrationMeasure- Parameters:
kImageSrc - ModelSimpleImage Contains information and data about the original source image. This array may
be empty but not null.kImageTrg - ModelSimpleImage Contains information and data about yhe target image. This array may be empty
but not null.
-
updateRegistration
public void updateRegistration(int iIndex,
float fNewValue)
Update the specified value in the registered source image. Causes a change in the computed error measure.
- Specified by:
updateRegistration in class RegistrationMeasure- Parameters:
iIndex - int Linear array index for the value to be updated.fNewValue - float New registered source image value to store at the specified index.
-
getEntropy
protected static double getEntropy(int[] aiHistBin,
double dNumSamples)
Standard entropy calculation.
- Parameters:
aiHistBin - int[] Array of histogram bins. The sum of the the values in each of the array positions
should equal the values passed in iNumSamples.dNumSamples - double Total number of samples in the distribution. Must be a double-precision floating
point number because the number can be quite large in the case of the joint entropy.- Returns:
- double Computed entropy value.
�������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/BSplineRegistration2Df.html�����������������������������0000775�4231163�4231163�00000124033�14537076061�027106� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BSplineRegistration2Df (MIPAV API Documentation)
-
public class BSplineRegistration2Df
extends BSplineRegistrationBasef
This class is used to register a 2D source image to a 2D target image. The images do not have to have the same
dimensions, but they must both contain single-channel data. The resulting registered source image has the same
dimensions as the input target image. A 2D B-Spline is used to map the coordinates of the registered image to
coordinates of the input source image. A separate B-Spline basis is setup for each axis given the number of control
points and the degree of the basis functions to use. Each B-Spline is uniform open with control points spaced equally
for each dimension. Bilinear interpolation is used to determine which input source image value(s) to assign to the
resulting registered source image. The "error" measure between the input target image and the current registered
source image is the sum of squared differences, where the root mean squared error is also computed. Control points
are moved one at a time by means of gradient descent minimization in order to minimize the error. The gradient is
approximated at each control point by means of finite differences. Control points are restricted from moving outside
the polygon formed by its 8 neighboring control points.
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
ModelSimpleImage |
createImageDeformation() |
Generate an image which contains the deformation value at each sample in the target image as it relates to how
the source image is transformed as a result of the registration.
|
ModelSimpleImage |
createImageDisplacement() |
Generate an image which contains the magnitude of the displacement vector at each sample in the target image as
it relates to how the source image is transformed as a result of the registration.
|
ModelSimpleImage[] |
createImageSourceMap() |
Generate an image the size of the target image in which each sample contains the 2D interpolated point
coordinates in the source image which "maps" or is registered with the corresponding point in the target image.
|
BSplineRegistration2Df |
createSameMapping(ModelSimpleImage kImageTrg) |
Create a new registration with the same mapping as this one and which uses the same source image and the same
BSpline basis degree and number of control points.
|
BSplineRegistration2Df |
createSameMapping(ModelSimpleImage kImageTrg,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisX,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisY) |
Create a new registration with the same mapping as this one and which uses the same source image and a possibly
resampled target image, however, this time the BSpline basis degree and/or the number of control points may be
different.
|
void |
finalize() |
Cleanup memory.
|
protected float |
getControlPointMaxMoveDist(int iControlX,
int iControlY,
WildMagic.LibFoundation.Mathematics.Vector2f kRayDirection,
float fMaxDesiredDist) |
Compute the maximum distance the control point can be moved in the specified direction while keeping the control
point relative to its 8 neighboring control points such that "folding" does not occur.
|
protected void |
getErrorDeriv(int iControlX,
int iControlY,
WildMagic.LibFoundation.Mathematics.Vector2f kDeriv) |
Computes the derivative of the error function at a control point by approximating with finite differences where
the control point is moved small amounts in each orthgonal direction.
|
BSplineLattice2Df |
getLattice() |
Return access to the 2D discretized B-Spline internally created given the size of tbe input target image, and the
specified number of control points and degree of basis function for each B-Spline basis axis.
|
void |
minimizeControlPoint(int iControlX,
int iControlY,
int iMaxSteps,
float fStepSize) |
Move the specified control point using a gradient descent approach to minimize the error.
|
float |
moveControlPoint(int iControlX,
int iControlY,
WildMagic.LibFoundation.Mathematics.Vector2f kPoint) |
Move the control point from its current location to the requested location.
|
protected void |
updateControlPointSamples(int iControlX,
int iControlY) |
Update the registered source image and the computed error as a result of making changes to a single control
point.
|
protected void |
updateSamples(int iMinX,
int iMaxX,
int iMinY,
int iMaxY) |
Update the registered source image and the computed error but only for the specified range of samples.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
BSplineRegistration2Df
public BSplineRegistration2Df(ModelSimpleImage kImageSrc,
ModelSimpleImage kImageTrg,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisX,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisY,
RegistrationMeasure kRegMeasure)
Create instance to be used for registration. Upon construction, the initial state of the registered source image
is computed along with the error in comparing it to the reference target image.
- Parameters:
kImageSrc - ModelSimpleImage Input source image which contains properties and data values. Must have
either 2 or 3 dimensions where the number of dimensions matches that of the target image.kImageTrg - ModelSimpleImage Input target image which contains properties and data values. Must have
either 2 or 3 dimensions where the number of dimensions matches that of the source image.kBasisX - BSplineBasisf B-spline basis for X axis which contains the B-spline degree and number of
control points.kBasisY - BSplineBasisf B-spline basis for Y axis which contains the B-spline degree and number of
control points.kRegMeasure - RegistrationMeasure Defines the cost measure for comparing the target image with the
registered source image.
-
Method Detail
-
createImageDeformation
public ModelSimpleImage createImageDeformation()
Generate an image which contains the deformation value at each sample in the target image as it relates to how
the source image is transformed as a result of the registration. The image of interpolated source image
coordinates for each target image sample is generated and from that the Jacobian is generated at each sample
using finite differences. The deformation value is then the determinant of the Jacobian.
- Returns:
- ModelSimpleImage New instance which contains the properties and data for the deformation image. This
image has the same dimensions as and corresponds to the sample in the target image.
-
createImageDisplacement
public ModelSimpleImage createImageDisplacement()
Generate an image which contains the magnitude of the displacement vector at each sample in the target image as
it relates to how the source image is transformed as a result of the registration. The image of interpolated
source image coordinates for each target image sample is generated and the displacement is computed from the
source image coordinates for the identity registration transformation.
- Returns:
- ModelSimpleImage New instance which contains the properties and data for the deformation image. This
image has the same dimensions as and corresponds to the sample in the target image.
-
createImageSourceMap
public ModelSimpleImage[] createImageSourceMap()
Generate an image the size of the target image in which each sample contains the 2D interpolated point
coordinates in the source image which "maps" or is registered with the corresponding point in the target image.
- Returns:
- ModelSimpleImage[] Array of two ModelSimpleImage instances. The first one contains the x coordinate and
the second contains the y coordinate for the map. Each image has the same dimensions which are that of
the target image.
-
createSameMapping
public BSplineRegistration2Df createSameMapping(ModelSimpleImage kImageTrg)
Create a new registration with the same mapping as this one and which uses the same source image and the same
BSpline basis degree and number of control points. The only thing that changes is that the discrete [0,1]
interval is resampled.
- Parameters:
kImageTrg - ModelSimpleImage Resampled target image.- Returns:
- BSplineRegistration2Df New registration of the same source image referenced to the resampled target
image.
-
createSameMapping
public BSplineRegistration2Df createSameMapping(ModelSimpleImage kImageTrg,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisX,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisY)
Create a new registration with the same mapping as this one and which uses the same source image and a possibly
resampled target image, however, this time the BSpline basis degree and/or the number of control points may be
different.
- Parameters:
kImageTrg - ModelSimpleImage Possibly resampled target image.kBasisX - BSplineBasisf B-spline basis for X axis which contains the B-spline degree and number of
control points.kBasisY - BSplineBasisf B-spline basis for Y axis which contains the B-spline degree and number of
control points.- Returns:
- BSplineRegistration2Df New registration of the same source image referenced to the resampled target
image.
-
getLattice
public BSplineLattice2Df getLattice()
Return access to the 2D discretized B-Spline internally created given the size of tbe input target image, and the
specified number of control points and degree of basis function for each B-Spline basis axis.
- Returns:
- BSplineLattice2Df Access to 2D discretized B-Spline.
-
minimizeControlPoint
public void minimizeControlPoint(int iControlX,
int iControlY,
int iMaxSteps,
float fStepSize)
Move the specified control point using a gradient descent approach to minimize the error. The gradient descent
minimization is performed by sampling the error function at specified intervals. A maximum number of samples is
specified, but sampling always terminates when the bounding polygon formed by the 8 neighboring control points is
reached.
- Parameters:
iControlX - int Identifies the control point in the 2D lattice.iControlY - int Identifies the control point in the 2D lattice.iMaxSteps - int Maximum number of samples of the error function by moving the control point in the
direction of the negative gradient.fStepSize - float Spacing between the samples of the error function by moving the control point in the
direction of the negative gradient.
-
moveControlPoint
public float moveControlPoint(int iControlX,
int iControlY,
WildMagic.LibFoundation.Mathematics.Vector2f kPoint)
Move the control point from its current location to the requested location. The requested location must be inside
the polygon formed by its 8 neighboring control points. If not, then a line segment is created between the
current and requested locations and the point where this line segment intersects the bounding polygon is found.
This point is offset a little along the line segment so that it is just inside the bounding polygon, and this
point is taken as the new location for the specified control point.
- Parameters:
iControlX - int Identifies the control point in the 2D lattice.iControlY - int Identifies the control point in the 2D lattice.kPoint - Point2f Requested new coordinates for the specified control point.- Returns:
- float The distance between the updated control point position and its position before being modified.
-
getControlPointMaxMoveDist
protected float getControlPointMaxMoveDist(int iControlX,
int iControlY,
WildMagic.LibFoundation.Mathematics.Vector2f kRayDirection,
float fMaxDesiredDist)
Compute the maximum distance the control point can be moved in the specified direction while keeping the control
point relative to its 8 neighboring control points such that "folding" does not occur.
- Parameters:
iControlX - int Identifies the control point in the 2D lattice.iControlY - int Identifies the control point in the 2D lattice.kRayDirection - Vector2f Direction from the current control point location for finding the distance to
the bounding polygon.fMaxDesiredDist - float Maximum distance along the ray direction that should be considered. At most, the
code would consider moving the control point.- Returns:
- float Computed distance.
-
getErrorDeriv
protected void getErrorDeriv(int iControlX,
int iControlY,
WildMagic.LibFoundation.Mathematics.Vector2f kDeriv)
Computes the derivative of the error function at a control point by approximating with finite differences where
the control point is moved small amounts in each orthgonal direction.
- Parameters:
iControlX - int Identifies the control point in the 2D lattice.iControlY - int Identifies the control point in the 2D lattice.kDeriv - Vector2f Vector to be filled with the derivative computed along each axis.
-
updateControlPointSamples
protected void updateControlPointSamples(int iControlX,
int iControlY)
Update the registered source image and the computed error as a result of making changes to a single control
point. This is the local control aspect of the B-Spline which means only those image samples which are affected
by the control point need to be updated.
- Parameters:
iControlX - int Identifies the control point in the 2D lattice.iControlY - int Identifies the control point in the 2D lattice.
-
updateSamples
protected void updateSamples(int iMinX,
int iMaxX,
int iMinY,
int iMaxY)
Update the registered source image and the computed error but only for the specified range of samples.
- Parameters:
iMinX - int Minimum X axis sample index.iMaxX - int Maximum X axis sample index.iMinY - int Minimum Y axis sample index.iMaxY - int Maximum Y axis sample index.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/RegistrationMeasureLeastSquares.html��������������������0000775�4231163�4231163�00000051466�14537076061�031165� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
RegistrationMeasureLeastSquares (MIPAV API Documentation)
-
public class RegistrationMeasureLeastSquares
extends RegistrationMeasure
Concrete implementation of the RegistrationMeasure class based on sum of the squared differences between the target
image and the registered source image. The error value is normalized by computing the root mean squared error. The
differences between corresponding target image and registered source image are maintained in a separate image and a
cummulative sum of squared differences is maintained.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float[] |
m_afImageErr |
Current error at each sample (registered-target).
|
protected double |
m_dSumSquaredError |
Current sum of squared error measure.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
createNew
public RegistrationMeasure createNew()
Create a new instance of this measure. That is, the same type and having the same properties. But initially, the
target is not defined.
- Specified by:
createNew in class RegistrationMeasure- Returns:
- RegistrationMeasure Newly created instance.
-
setImages
public void setImages(ModelSimpleImage kImageSrc,
ModelSimpleImage kImageTrg)
Setup the measure to use information from the target image and the original source image. Each derived class
override of this method must call this method.
- Overrides:
setImages in class RegistrationMeasure- Parameters:
kImageSrc - ModelSimpleImage Contains information and data about the original source image. This array may
be empty but not null.kImageTrg - ModelSimpleImage Contains information and data about yhe target image. This array may be empty
but not null.
-
updateRegistration
public void updateRegistration(int iIndex,
float fNewValue)
Update the specified value in the registered source image. Causes a change in the computed error measure.
- Specified by:
updateRegistration in class RegistrationMeasure- Parameters:
iIndex - int Linear array index for the value to be updated.fNewValue - float New registered source image value to store at the specified index.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/package-tree.html���������������������������������������0000775�4231163�4231163�00000036032�14537076122�025152� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.registration Class Hierarchy (MIPAV API Documentation)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegChamfer.CostFunction.html�������������������0000775�4231163�4231163�00000034537�14537076060�031122� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegChamfer.CostFunction (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer.CostFunction
-
-
Constructor Summary
Constructors
| Constructor |
Description |
CostFunction() |
CostFunction constructor.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegELSUNCOAR35D.MatrixListItem.html������������0000775�4231163�4231163�00000042105�14537076061�031654� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegELSUNCOAR35D.MatrixListItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D.MatrixListItem
-
- All Implemented Interfaces:
java.lang.Comparable<AlgorithmRegELSUNCOAR35D.MatrixListItem>
- Enclosing class:
- AlgorithmRegELSUNCOAR35D
class AlgorithmRegELSUNCOAR35D.MatrixListItem
extends java.lang.Object
implements java.lang.Comparable<AlgorithmRegELSUNCOAR35D.MatrixListItem>
Helper class to make it easy to store the necessary information about a minimum. Stores the "point", or vector at
which the minimum was reached; the "cost", or value of the cost function at that minimum; and the matrix, which
was the true input into the cost function and represents the transformation that gives the minimum cost of
differences between the images. Implements Comparable, so that a list of MatrixListItems can be sorted using
Java's sort.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected double |
cost |
Cost of function at this minimum.
|
protected double[] |
initial |
Rotations, translations, scales, and skews that make up transformation.
|
protected TransMatrixd |
matrix |
Matrix that gives best transformation.
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
MatrixListItem(double _cost,
TransMatrixd _matrix,
double[] _initial) |
Creates new minimum object, setting the data and copying the point array explicitly.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
initial
protected double[] initial
Rotations, translations, scales, and skews that make up transformation.
-
Constructor Detail
-
MatrixListItem
protected MatrixListItem(double _cost,
TransMatrixd _matrix,
double[] _initial)
Creates new minimum object, setting the data and copying the point array explicitly.
- Parameters:
_cost - Cost of this minimum._matrix - Matrix that gives best transformation._initial - Rotations, translations, scales, and skews that make up transformation.
-
Method Detail
-
compareTo
public int compareTo(AlgorithmRegELSUNCOAR35D.MatrixListItem o)
Necessary to implement so that list may be sorted. Returns -1 if this cost is less than the parameter's cost;
1 if this cost is greater than the parameter's cost; and 0 if they are equal.
- Specified by:
compareTo in interface java.lang.Comparable<AlgorithmRegELSUNCOAR35D.MatrixListItem>- Parameters:
o - MatrixListItem to compare to.- Returns:
- -1 if this is less than, 1 if greater than, 0 if equal.
-
toString
public java.lang.String toString()
Creates readable string of this object, including cost, matrix, and point with its meanings.
- Overrides:
toString in class java.lang.Object- Returns:
- Readable string representation of this object.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/package-summary.html������������������������������������0000775�4231163�4231163�00000036114�14537076122�025711� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.registration (MIPAV API Documentation)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/BSplineRegistration3Df.html�����������������������������0000775�4231163�4231163�00000145031�14537076061�027110� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BSplineRegistration3Df (MIPAV API Documentation)
-
public class BSplineRegistration3Df
extends BSplineRegistrationBasef
This class is used to register a 3D source image to a 3D target image. The images do not have to have the same
dimensions, but they must both contain single-channel data. The resulting registered source image has the same
dimensions as the input target image. A 3D B-Spline is used to map the coordinates of the registered image to
coordinates of the input source image. A separate B-Spline basis is setup for each axis given the number of control
points and the degree of the basis functions to use. Each B-Spline is uniform open with control points spaced equally
for each dimension. Trilinear interpolation is used to determine which input source image value(s) to assign to the
resulting registered source image. The "error" measure between the input target image and the current registered
source image is the sum of squared differences, where the root mean squared error is also computed. Control points
are moved one at a time by means of gradient descent minimization in order to minimize the error. The gradient is
approximated at each control point by means of finite differences. Control points are restricted from moving outside
the polyhedron formed by its 26 neighboring control points.
-
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
ModelSimpleImage |
createImageDeformation() |
Generate an image which contains the deformation value at each sample in the target image as it relates to how
the source image is transformed as a result of the registration.
|
ModelSimpleImage |
createImageDisplacement() |
Generate an image which contains the magnitude of the displacement vector at each sample in the target image as
it relates to how the source image is transformed as a result of the registration.
|
ModelSimpleImage[] |
createImageSourceMap() |
Generate an image the size of the target image in which each sample contains the 3D interpolated point
coordinates in the source image which "maps" or is registered with the corresponding point in the target image.
|
BSplineRegistration3Df |
createSameMapping(ModelSimpleImage kImageTrg) |
Create a new registration with the same mapping as this one and which uses the same source image and the same
BSpline basis degree and number of control points.
|
BSplineRegistration3Df |
createSameMapping(ModelSimpleImage kImageTrg,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisX,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisY,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisZ) |
Create a new registration with the same mapping as this one and which uses the same source image and a possibly
resampled target image, however, this time the BSpline basis degree and/or the number of control points may be
different.
|
void |
finalize() |
Cleanup memory.
|
protected float |
getControlPointMaxMoveDist(int iControlX,
int iControlY,
int iControlZ,
WildMagic.LibFoundation.Mathematics.Vector3f kRayDirection,
float fMaxDesiredDist) |
Compute the maximum distance the control point can be moved in the specified direction while keeping the control
point relative to its 26 neighboring control points such that "folding" does not occur.
|
protected void |
getErrorDeriv(int iControlX,
int iControlY,
int iControlZ,
WildMagic.LibFoundation.Mathematics.Vector3f kDeriv) |
Computes the derivative of the error function at a control point by approximating with finite differences where
the control point is moved small amounts in each orthgonal direction.
|
BSplineLattice3Df |
getLattice() |
Return access to the 3D discretized B-Spline internally created given the size of tbe input target image, and the
specified number of control points and degree of basis function for each B-Spline basis axis.
|
private static void |
initPolyhedronTrimeshConnectivity(int iTriangleOffset,
int iAxisA,
int iAxisB,
int iAxisC,
int iOffsetAxisC) |
Called by the constructor to add the relative control point offset indices for triangle mesh representation of
the bounding polyhedron formed by the neighboring 26 control points.
|
void |
minimizeControlPoint(int iControlX,
int iControlY,
int iControlZ,
int iMaxSteps,
float fStepSize) |
Move the specified control point using a gradient descent approach to minimize the error.
|
float |
moveControlPoint(int iControlX,
int iControlY,
int iControlZ,
WildMagic.LibFoundation.Mathematics.Vector3f kPoint) |
Move the control point from its current location to the requested location.
|
protected void |
update(int iMinX,
int iMaxX,
int iMinY,
int iMaxY,
int iMinZ,
int iMaxZ) |
|
protected void |
updateControlPointSamples(int iControlX,
int iControlY,
int iControlZ) |
Update the registered source image and the computed error as a result of making changes to a single control
point.
|
protected void |
updateSamplesMT(int iMinX,
int iMaxX,
int iMinY,
int iMaxY,
int iMinZ,
int iMaxZ) |
|
protected void |
updateSamplesST(int iMinX,
int iMaxX,
int iMinY,
int iMaxY,
int iMinZ,
int iMaxZ) |
Update the registered source image and the computed error but only for the specified range of samples.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ms_aaaiPolyhedronTriangleControlPointOffset
protected static int[][][] ms_aaaiPolyhedronTriangleControlPointOffset
Defines the relative offset in control point indices for the triangle mesh associated with the bounding
polyhedron formed by the 26 neighboring control points. Triangle vertices are consistently counterclockwise
ordered. First index: 0 for X axis, 1 for Y axis, 2 for Z axis; Second index: index of vertex within triangle;
Third index: index for triangle (there are 48 -- 8 per face; see initPolyhedronTrimeshConnectivity method for
description)
-
Constructor Detail
-
BSplineRegistration3Df
public BSplineRegistration3Df(ModelSimpleImage kImageSrc,
ModelSimpleImage kImageTrg,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisX,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisY,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisZ,
RegistrationMeasure kRegMeasure)
Create instance to be used for registration. Upon construction, the initial state of the registered source image
is computed along with the error in comparing it to the reference target image.
- Parameters:
kImageSrc - ModelSimpleImage Input source image which contains properties and data values. Must have
either 2 or 3 dimensions where the number of dimensions matches that of the target image.kImageTrg - ModelSimpleImage Input target image which contains properties and data values. Must have
either 2 or 3 dimensions where the number of dimensions matches that of the source image.kBasisX - BSplineBasisf B-spline basis for X axis which contains the B-spline degree and number of
control points.kBasisY - BSplineBasisf B-spline basis for Y axis which contains the B-spline degree and number of
control points.kBasisZ - BSplineBasisf B-spline basis for Z axis which contains the B-spline degree and number of
control points.kRegMeasure - RegistrationMeasure Defines the cost measure for comparing the target image with the
registered source image.
-
Method Detail
-
createImageDeformation
public ModelSimpleImage createImageDeformation()
Generate an image which contains the deformation value at each sample in the target image as it relates to how
the source image is transformed as a result of the registration. The image of interpolated source image
coordinates for each target image sample is generated and from that the Jacobian is generated at each sample
using finite differences. The deformation value is then the determinant of the Jacobian.
- Returns:
- ModelSimpleImage New instance which contains the properties and data for the deformation image. This
image has the same dimensions as and corresponds to the sample in the target image.
-
createImageDisplacement
public ModelSimpleImage createImageDisplacement()
Generate an image which contains the magnitude of the displacement vector at each sample in the target image as
it relates to how the source image is transformed as a result of the registration. The image of interpolated
source image coordinates for each target image sample is generated and the displacement is computed from the
source image coordinates for the identity registration transformation.
- Returns:
- ModelSimpleImage New instance which contains the properties and data for the deformation image. This
image has the same dimensions as and corresponds to the sample in the target image.
-
createImageSourceMap
public ModelSimpleImage[] createImageSourceMap()
Generate an image the size of the target image in which each sample contains the 3D interpolated point
coordinates in the source image which "maps" or is registered with the corresponding point in the target image.
- Returns:
- ModelSimpleImage[] Array of three ModelSimpleImage instances. The first one contains the x coordinate,
the second contains the y coordinate for the map, and the third contains the z coordinate for the map.
Each image has the same dimensions which are that of the target image.
-
createSameMapping
public BSplineRegistration3Df createSameMapping(ModelSimpleImage kImageTrg)
Create a new registration with the same mapping as this one and which uses the same source image and the same
BSpline basis degree and number of control points. The only thing that changes is that the discrete [0,1]
interval is resampled.
- Parameters:
kImageTrg - ModelSimpleImage Resampled target image.- Returns:
- BSplineRegistration2Df New registration of the same source image referenced to the resampled target
image.
-
createSameMapping
public BSplineRegistration3Df createSameMapping(ModelSimpleImage kImageTrg,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisX,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisY,
WildMagic.LibFoundation.Curves.BSplineBasisf kBasisZ)
Create a new registration with the same mapping as this one and which uses the same source image and a possibly
resampled target image, however, this time the BSpline basis degree and/or the number of control points may be
different.
- Parameters:
kImageTrg - ModelSimpleImage Possibly resampled target image.kBasisX - BSplineBasisf B-spline basis for X axis which contains the B-spline degree and number of
control points.kBasisY - BSplineBasisf B-spline basis for Y axis which contains the B-spline degree and number of
control points.kBasisZ - BSplineBasisf B-spline basis for Z axis which contains the B-spline degree and number of
control points.- Returns:
- BSplineRegistration2Df New registration of the same source image referenced to the resampled target
image.
-
getLattice
public BSplineLattice3Df getLattice()
Return access to the 3D discretized B-Spline internally created given the size of tbe input target image, and the
specified number of control points and degree of basis function for each B-Spline basis axis.
- Returns:
- BSplineLattice3Df Access to 3D discretized B-Spline.
-
minimizeControlPoint
public void minimizeControlPoint(int iControlX,
int iControlY,
int iControlZ,
int iMaxSteps,
float fStepSize)
Move the specified control point using a gradient descent approach to minimize the error. The gradient descent
minimization is performed by sampling the error function at specified intervals. A maximum number of samples is
specified, but sampling always terminates when the bounding polyhedron formed by the 26 neighboring control
points is reached.
- Parameters:
iControlX - int Identifies the control point in the 3D lattice.iControlY - int Identifies the control point in the 3D lattice.iControlZ - int Identifies the control point in the 3D lattice.iMaxSteps - int Maximum number of samples of the error function by moving the control point in the
direction of the negative gradient.fStepSize - float Spacing between the samples of the error function by moving the control point in the
direction of the negative gradient.
-
moveControlPoint
public float moveControlPoint(int iControlX,
int iControlY,
int iControlZ,
WildMagic.LibFoundation.Mathematics.Vector3f kPoint)
Move the control point from its current location to the requested location. The requested location must be inside
the polyhedron formed by its 26 neighboring control points. If not, then a line segment is created between the
current and requested locations and the point where this line segment intersects the bounding polyhedron is
found. This point is offset a little along the line segment so that it is just inside the bounding polyhedron,
and this point is taken as the new location for the specified control point.
- Parameters:
iControlX - int Identifies the control point in the 3D lattice.iControlY - int Identifies the control point in the 3D lattice.iControlZ - int Identifies the control point in the 3D lattice.kPoint - Point3f Requested new coordinates for the specified control point.- Returns:
- float The distance between the updated control point position and its position before being modified.
-
getControlPointMaxMoveDist
protected float getControlPointMaxMoveDist(int iControlX,
int iControlY,
int iControlZ,
WildMagic.LibFoundation.Mathematics.Vector3f kRayDirection,
float fMaxDesiredDist)
Compute the maximum distance the control point can be moved in the specified direction while keeping the control
point relative to its 26 neighboring control points such that "folding" does not occur.
- Parameters:
iControlX - int Identifies the control point in the 3D lattice.iControlY - int Identifies the control point in the 3D lattice.iControlZ - int Identifies the control point in the 3D lattice.kRayDirection - Vector3f Direction from the current control point location for finding the distance to
the bounding polyhedron.fMaxDesiredDist - float Maximum distance along the ray direction that should be considered. At most, the
code would consider moving the control point.- Returns:
- float Computed distance.
-
getErrorDeriv
protected void getErrorDeriv(int iControlX,
int iControlY,
int iControlZ,
WildMagic.LibFoundation.Mathematics.Vector3f kDeriv)
Computes the derivative of the error function at a control point by approximating with finite differences where
the control point is moved small amounts in each orthgonal direction.
- Parameters:
iControlX - int Identifies the control point in the 3D lattice.iControlY - int Identifies the control point in the 3D lattice.iControlZ - int Identifies the control point in the 3D lattice.kDeriv - Vector3f Vector to be filled with the derivative computed along each axis.
-
updateControlPointSamples
protected void updateControlPointSamples(int iControlX,
int iControlY,
int iControlZ)
Update the registered source image and the computed error as a result of making changes to a single control
point. This is the local control aspect of the B-Spline which means only those image samples which are affected
by the control point need to be updated.
- Parameters:
iControlX - int Identifies the control point in the 3D lattice.iControlY - int Identifies the control point in the 3D lattice.iControlZ - int Identifies the control point in the 3D lattice.
-
updateSamplesST
protected void updateSamplesST(int iMinX,
int iMaxX,
int iMinY,
int iMaxY,
int iMinZ,
int iMaxZ)
Update the registered source image and the computed error but only for the specified range of samples.
- Parameters:
iMinX - int Minimum X axis sample index.iMaxX - int Maximum X axis sample index.iMinY - int Minimum Y axis sample index.iMaxY - int Maximum Y axis sample index.iMinZ - int Minimum Z axis sample index.iMaxZ - int Maximum Z axis sample index.
-
updateSamplesMT
protected void updateSamplesMT(int iMinX,
int iMaxX,
int iMinY,
int iMaxY,
int iMinZ,
int iMaxZ)
-
update
protected void update(int iMinX,
int iMaxX,
int iMinY,
int iMaxY,
int iMinZ,
int iMaxZ)
-
initPolyhedronTrimeshConnectivity
private static void initPolyhedronTrimeshConnectivity(int iTriangleOffset,
int iAxisA,
int iAxisB,
int iAxisC,
int iOffsetAxisC)
Called by the constructor to add the relative control point offset indices for triangle mesh representation of
the bounding polyhedron formed by the neighboring 26 control points. This method is only called for the 8
triangles on a "face" which result from holding one of the axes at a fixed offset of -1 or +1. Hence this method
would need to be called once for each of the six "faces". All of the triangles go into a single table where order
does not matter.
- Parameters:
iTriangleOffset - int Offset into triangle array for current "face". Should be one the following values:
{0,8,16,24,32,40}.iAxisA - int Index {0,1,2} for {X,Y,Z} axis to be assigned to "face" relative A (X) axis.iAxisB - int Index {0,1,2} for {X,Y,Z} axis to be assigned to "face" relative B (Y) axis.iAxisC - int Index {0,1,2} for {X,Y,Z} axis to be assigned to "face" relative C (Z) axis.iOffsetAxisC - int Fixed control point index relative offset value -1 or +1 to be assigned to "face"
relative C (Z) axis.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/RegistrationMeasure.html��������������������������������0000775�4231163�4231163�00000051244�14537076061�026622� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
RegistrationMeasure (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
createNew
public abstract RegistrationMeasure createNew()
Create a new instance of this measure. That is, the same type and having the same properties. But initially, the
target is not defined.
- Returns:
- RegistrationMeasure Newly created instance.
-
updateRegistration
public abstract void updateRegistration(int iIndex,
float fNewValue)
Update the specified value in the registered source image. Causes a change in the computed error measure.
- Parameters:
iIndex - int Linear array index for the value to be updated.fNewValue - float New registered source image value to store at the specified index.
-
setImages
public void setImages(ModelSimpleImage kImageSrc,
ModelSimpleImage kImageTrg)
Setup the measure to use information from the target image and the original source image. Each derived class
override of this method must call this method.
- Parameters:
kImageSrc - ModelSimpleImage Contains information and data about the original source image. This array may
be empty but not null.kImageTrg - ModelSimpleImage Contains information and data about yhe target image. This array may be empty
but not null.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegELSUNCOAR3D.html����������������������������0000775�4231163�4231163�00000441124�14537076061�026655� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegELSUNCOAR3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
allowLevel16XY |
DOCUMENT ME!
|
private boolean |
allowLevel16Z |
DOCUMENT ME!
|
private boolean |
allowLevel2XY |
DOCUMENT ME!
|
private boolean |
allowLevel2Z |
DOCUMENT ME!
|
private boolean |
allowLevel4XY |
DOCUMENT ME!
|
private boolean |
allowLevel4Z |
DOCUMENT ME!
|
private boolean |
allowLevel8XY |
DOCUMENT ME!
|
private boolean |
allowLevel8Z |
DOCUMENT ME!
|
private MatrixListItem |
answer |
Final answer after registration.
|
(package private) int |
baseNumIter |
|
private MatrixListItem |
bestGuessLevel2 |
DOCUMENT ME!
|
private ModelImage |
blurredInput |
Blurred input image.
|
private ModelImage |
blurredRef |
Blurred reference image.
|
private boolean |
calcCOG |
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
|
private int |
coarseNumX |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private int |
coarseNumY |
DOCUMENT ME!
|
private int |
coarseNumZ |
DOCUMENT ME!
|
private float |
coarseRateX |
Coarse and fine sampling parameters.
|
private float |
coarseRateY |
DOCUMENT ME!
|
private float |
coarseRateZ |
DOCUMENT ME!
|
private int |
costChoice |
Choice of which cost function to use.
|
private boolean |
doColor |
DOCUMENT ME!
|
private int |
DOF |
Maximum degrees of freedom when running the optimization.
|
private boolean |
doMultiThread |
|
private java.util.concurrent.CountDownLatch |
doneSignal |
|
private boolean |
doSubsample |
If true subsample for levelEight, levelFour and levelTwo analyses.
|
private boolean |
fastMode |
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
|
private int |
fineNumX |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private int |
fineNumY |
DOCUMENT ME!
|
private int |
fineNumZ |
DOCUMENT ME!
|
private float |
fineRateX |
Coarse and fine sampling parameters.
|
private float |
fineRateY |
DOCUMENT ME!
|
private float |
fineRateZ |
DOCUMENT ME!
|
private boolean |
fullAnalysisMode |
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
|
private ModelImage |
imageInputIso |
Isotropic input image.
|
private ModelImage |
imageRefIso |
Isotropic reference image.
|
private ModelImage |
imageWeightInputIso |
Isotropic weighted input image.
|
private ModelImage |
imageWeightRefIso |
Isotropic weighted reference image.
|
(package private) double |
initialCost |
DOCUMENT ME!
|
private ModelImage |
inputImage |
This image is to registered to the reference image.
|
private ModelImage |
inputWeight |
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
|
private int |
interp |
Interpolation method.
|
private float |
level1FactorXY |
Multiplication factor for level 1 - will be set based on subsampling.
|
private float |
level1FactorZ |
DOCUMENT ME!
|
private float |
level2FactorXY |
Multiplication factor for level 2 - will be set based on subsampling.
|
private float |
level2FactorZ |
DOCUMENT ME!
|
private float |
level4FactorXY |
Multiplication factor for level 4 - will be set based on subsampling.
|
private float |
level4FactorZ |
DOCUMENT ME!
|
private ImageRegistrationGPU |
m_kGPUCost |
|
private int |
maxDim |
DOCUMENT ME!
|
private int |
maxIter |
Advanced optimization settings maxIter in the call to ELSUNC will be an integer multiple of baseNumIter.
|
private boolean |
maxResol |
Flag to determine if the maximum of the minimum resolutions of the two datasets should be used.
|
private static int |
minimumZForSub |
DOCUMENT ME!
|
private int |
numMinima |
Number of minima from level 8 to test at level 4.
|
private ModelImage |
refImage |
The inputImage will be registered to this reference image.
|
private ModelImage |
refWeight |
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
|
private boolean |
resampleInput |
DOCUMENT ME!
|
private boolean |
resampleRef |
DOCUMENT ME!
|
private float[] |
resInput |
The voxel resolutions of the image to be registered to the reference image.
|
private float[] |
resRef |
The voxel resolutions of the reference image.
|
private float |
rotateBeginX |
Coarse and fine sampling parameters.
|
private float |
rotateBeginY |
DOCUMENT ME!
|
private float |
rotateBeginZ |
DOCUMENT ME!
|
private float |
rotateEndX |
Coarse and fine sampling parameters.
|
private float |
rotateEndY |
DOCUMENT ME!
|
private float |
rotateEndZ |
DOCUMENT ME!
|
private int |
searchAlgorithm |
|
private ModelSimpleImage |
simpleInput |
Simple version of input image.
|
private ModelSimpleImage |
simpleInputSub2 |
Simple version of input image, subsampled by 2.
|
private ModelSimpleImage |
simpleInputSub4 |
Simple version of input image, subsampled by 4.
|
private ModelSimpleImage |
simpleInputSub8 |
Simple version of input image, subsampled by 8.
|
private ModelSimpleImage |
simpleRef |
Simple version of reference image.
|
private ModelSimpleImage |
simpleRefSub2 |
Simple version of reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleRefSub4 |
Simple version of reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleRefSub8 |
Simple version of reference image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightInput |
Simple version of weighted input image.
|
private ModelSimpleImage |
simpleWeightInputSub2 |
Simple version of weighted input image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightInputSub4 |
Simple version of weighted input image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightInputSub8 |
Simple version of weighted input image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightRef |
Simple version of weighted reference image.
|
private ModelSimpleImage |
simpleWeightRefSub2 |
Simple version of weighted reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightRefSub4 |
Simple version of weighted reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightRefSub8 |
Simple version of weighted reference image, subsampled by 8.
|
(package private) long |
timeElapsed |
DOCUMENT ME!
|
(package private) long |
timeLater |
DOCUMENT ME!
|
(package private) long |
timeNow |
DOCUMENT ME!
|
(package private) TransMatrix |
tMatrix |
DOCUMENT ME!
|
private AlgorithmTransform |
transform |
Transformation algorithm for creating an isotropic reference image.
|
private AlgorithmTransform |
transform2 |
Transformation algorithm for creating an isotropic input image.
|
private boolean |
weighted |
Flag to determine if there are weighted images or not.
|
private int |
weightedInputPixels |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub8 |
DOCUMENT ME!
|
private int |
weightedRefPixels |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub8 |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRegELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _doMultiThread,
boolean _fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _doMultiThread,
boolean _fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
static WildMagic.LibFoundation.Mathematics.Vector3f |
calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor) |
Calculates the center of mass (gravity) of a 3D image.
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
void |
finalize() |
Prepares this class for destruction.
|
double |
getAnswer() |
Accessor that returns the final cost function.
|
private java.lang.String |
getConstructionInfo() |
Creates a string with the parameters that the image was constructed with.
|
float |
getLevel1FactorXY() |
|
float |
getLevel1FactorZ() |
|
float |
getLevel2FactorXY() |
|
float |
getLevel2FactorZ() |
|
float |
getLevel4FactorXY() |
|
float |
getLevel4FactorZ() |
|
private double[] |
getTolerance(int DOF) |
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
|
double[] |
getTransArray() |
Access that returns an array containing the transformation parameters.
|
TransMatrix |
getTransform() |
Accessor that returns the matrix calculated in this algorithm.
|
TransMatrix |
getTransformHalf() |
Accessor that returns the matrix calculated in this algorithm divided by 2.
|
TransMatrix |
getTransformMigsagittal() |
Accessor that returns the z rot and x and y trans from the matrix calculated in this algorithm.
|
private void |
interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale) |
Performs a trilinear interpolation on points.
|
java.util.Vector<MatrixListItem>[] |
levelEight(ModelSimpleImage ref,
ModelSimpleImage input,
float progressFrom,
float progressTo) |
Takes two images that have been subsampled by a factor of eight.
|
java.util.Vector<MatrixListItem> |
levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima,
float progressFrom,
float progressTo) |
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
|
MatrixListItem |
levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item,
int maxIter,
float progressFrom,
float progressTo) |
Takes the two images, no subsampling, and the best minimum so far.
|
MatrixListItem |
levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
float progressFrom,
float progressTo) |
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
|
void |
runAlgorithm() |
Runs the image registration.
|
void |
setLevel1FactorXY(float level1FactorXY) |
|
void |
setLevel1FactorZ(float level1FactorZ) |
|
void |
setLevel2FactorXY(float level2FactorXY) |
|
void |
setLevel2FactorZ(float level2FactorZ) |
|
void |
setLevel4FactorXY(float level4FactorXY) |
|
void |
setLevel4FactorZ(float level4FactorZ) |
|
static ModelSimpleImage |
subsampleBy2(ModelSimpleImage srcImage,
boolean isColor) |
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
|
static ModelSimpleImage |
subsampleBy2XY(ModelSimpleImage srcImage,
boolean isColor) |
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
initialCost
double initialCost
DOCUMENT ME!
-
timeElapsed
long timeElapsed
DOCUMENT ME!
-
timeLater
long timeLater
DOCUMENT ME!
-
timeNow
long timeNow
DOCUMENT ME!
-
calcCOG
private final boolean calcCOG
If true calculate the center of gravity (mass) and use the difference to intialize the translation. If false,
images are pretty much aligned then don't calculated COG.
- See Also:
- Constant Field Values
-
doColor
private boolean doColor
DOCUMENT ME!
-
fullAnalysisMode
private boolean fullAnalysisMode
If true this algorithm skips all subsample and goes directly to the level 1 optimization. This assumes that
images are fairly well aligned to begin with and therefore no sophisticated search is needed.
-
interp
private final int interp
Interpolation method.
-
maxDim
private int maxDim
DOCUMENT ME!
-
baseNumIter
final int baseNumIter
-
maxResol
private final boolean maxResol
Flag to determine if the maximum of the minimum resolutions of the two datasets should be used. If true use the
maximum resolution of the two dataset. Throws away information some image information but is faster. If false the
algorithms uses the minimum of the resolutions when resampling the images. Can be slower but does not "lose"
informaton.
-
simpleWeightInputSub2
private ModelSimpleImage simpleWeightInputSub2
Simple version of weighted input image, subsampled by 2.
-
simpleWeightInputSub4
private ModelSimpleImage simpleWeightInputSub4
Simple version of weighted input image, subsampled by 4.
-
simpleWeightInputSub8
private ModelSimpleImage simpleWeightInputSub8
Simple version of weighted input image, subsampled by 8.
-
simpleWeightRefSub2
private ModelSimpleImage simpleWeightRefSub2
Simple version of weighted reference image, subsampled by 2.
-
simpleWeightRefSub4
private ModelSimpleImage simpleWeightRefSub4
Simple version of weighted reference image, subsampled by 4.
-
simpleWeightRefSub8
private ModelSimpleImage simpleWeightRefSub8
Simple version of weighted reference image, subsampled by 8.
-
Constructor Detail
-
AlgorithmRegELSUNCOAR3D
public AlgorithmRegELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndX - End of coarse sampling range (i.e., 60 degrees)._coarseRateX - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateX - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndY - End of coarse sampling range (i.e., 60 degrees)._coarseRateY - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateY - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndZ - End of coarse sampling range (i.e., 60 degrees)._coarseRateZ - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateZ - Point at which fine samples should be taken (i.e., every 15 degrees)._maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to level
one immediately_baseNumIter - Limits the number of iterations of ELSUNC algorithm. maxIter in the call to ELSUNC will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
-
AlgorithmRegELSUNCOAR3D
public AlgorithmRegELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _doMultiThread,
boolean _fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndX - End of coarse sampling range (i.e., 60 degrees)._coarseRateX - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateX - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndY - End of coarse sampling range (i.e., 60 degrees)._coarseRateY - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateY - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndZ - End of coarse sampling range (i.e., 60 degrees)._coarseRateZ - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateZ - Point at which fine samples should be taken (i.e., every 15 degrees)._maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_doMultiThread - _fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to level
one immediately_baseNumIter - Limits the number of iterations of ELSUNC algorithm. maxIter in the call to ELSUNC will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
-
AlgorithmRegELSUNCOAR3D
public AlgorithmRegELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndX - End of coarse sampling range (i.e., 60 degrees)._coarseRateX - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateX - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndY - End of coarse sampling range (i.e., 60 degrees)._coarseRateY - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateY - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndZ - End of coarse sampling range (i.e., 60 degrees)._coarseRateZ - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateZ - Point at which fine samples should be taken (i.e., every 15 degrees)._maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to level
one immediately_baseNumIter - Limits the number of iterations of ELSUNC algorithm. maxIter in the call to ELSUNC will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
-
AlgorithmRegELSUNCOAR3D
public AlgorithmRegELSUNCOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _doMultiThread,
boolean _fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndX - End of coarse sampling range (i.e., 60 degrees)._coarseRateX - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateX - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndY - End of coarse sampling range (i.e., 60 degrees)._coarseRateY - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateY - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndZ - End of coarse sampling range (i.e., 60 degrees)._coarseRateZ - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateZ - Point at which fine samples should be taken (i.e., every 15 degrees)._maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_doMultiThread - _fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to level
one immediately_baseNumIter - Limits the number of iterations of ELSUNC algorithm. maxIter in the call to ELSUNC will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ESLUNC, LEVENBERG_MARQUARDT, or NL2SOL.
-
Method Detail
-
calculateCenterOfMass3D
public static WildMagic.LibFoundation.Mathematics.Vector3f calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor)
Calculates the center of mass (gravity) of a 3D image. In image space where the upper left hand corner of the
image is 0,0. The x axis goes left to right, y axis goes top to bottom and z axis goes into the screen. (i.e. the
right hand rule). One could simply multiply by voxel resolutions.
- Parameters:
image - the center of mass will be calculated from this image datawgtImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- the center of mass as a 3D point
-
runAlgorithm
public void runAlgorithm()
Runs the image registration. Blurs the images based on what their minimum resolutions are. The reference image is
blurred if one of the input image resolutions is 50% or more bigger than the corresponding resolution in the
reference image; likewise, the input image is blurred if one of the reference resolutions is 50% or more bigger
than the corresponding resolution in the input image. Thus, it is unlikely, though not impossible, that both
images will be blurred. The images are then transformed into isotropic voxels. The resolutions of the two images
after the isotropic transformation will be the same in all dimensions. If maxResol is true, that resolution will
equal the maximum of the minimums of each image's resolutions: Max( Min (resolutions of ref image, resolutions of
input image) ). If the images are weighted, the weight images are blurred and transformed into isotropic voxels
in the same manner as the originals. Then the images are subsampled by 2, 4, and 8. If the images are too small
they will not be subsampled down to the smallest level; if they are too big, they will be subsampled to 16. The
same is done with the weight images if necessary. The function levelEight is called with the images subsampled by
8; it returns two vectors with minima. Then the function levelFour is called with images subsampled by 4 and the
two vectors; it returns one vector of minima. The function levelTwo is called with images subsampled by 2 and the
vector; it returns an "answer" in the form of a MatrixListItem, which is a convenient way of storing the point,
the matrix, and the cost of the minimum. Then the function levelOne is called with the minimum; it returns a
final "answer", or minimum, which will then be accessed by the dialog that called this algorithm.
- Specified by:
runAlgorithm in class AlgorithmBase
-
subsampleBy2
public static ModelSimpleImage subsampleBy2(ModelSimpleImage srcImage,
boolean isColor)
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- Parameters:
srcImage - Image to subsample.isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
subsampleBy2XY
public static ModelSimpleImage subsampleBy2XY(ModelSimpleImage srcImage,
boolean isColor)
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- Parameters:
srcImage - Image to subsample.isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
getTolerance
private double[] getTolerance(int DOF)
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- Parameters:
DOF - Degrees of freedom, will be length of vector.- Returns:
- New tolerance vector to send to optimization.
Based on FLIRT paper: let n=pixel dimension (in one dimension) R=brain radius, here assumed to be half of
field-of-view Translation tolerance = n/2 Rotation tolerance = (180/PI)*n/(2R) (converted to degrees because
AlgorithmELSUNC works in degrees) Scaling tolerance = n/(2R) Skewing tolerance = n/(2R)
-
interpolate
private void interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale)
Performs a trilinear interpolation on points. Takes 3 initial points, a vector of values to set, and an array in
which to look at neighbors of those points. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - X rotation initial index into array.y - Y rotation initial index into array.z - Z rotation initial index into array.initial - Vector to set; if scale is true, set three translations and a scale. Otherwise
just set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
levelEight
public java.util.Vector<MatrixListItem>[] levelEight(ModelSimpleImage ref,
ModelSimpleImage input,
float progressFrom,
float progressTo)
Takes two images that have been subsampled by a factor of eight. Sets up the cost function with the images and
the weighted images, if necessary. Uses the coarse sampling rate and optimizes translations and global scale at
the given rotation. So for example, if the coarse sampling range were -30 to 30 at every 15 degrees, we would
optimize at rotations of (-30, -30, -30), (-30, -30, -15), (-30, -30, 0), etc. In this case there would be a
total of 125 calls to the optimization method. Measures the cost at the fine sampling rate. Interpolates the
translations and global scale to come up with a good guess as to what the optimized translation would be at that
point. Takes the top 20% of the points and optimizes them. Now have a large multi-array of costs. 20% of those
have been optimized and placed back into their original position in the multi-array. Removes those items that are
outside the rotation begin and end limits. Looks at the 8 neighbors of a point: +, =, or - one fine sample in
each of the three directions. If the point has a cost greater than any of these, it is not a minima. Otherwise it
is. Saves it in a vector of minima. Optimizes the minima over rotations as well as translations and global scale.
(Previously had not optimized over rotations.) Returns two vectors, one containing the minima before
optimization, one containing the minima after optimization.
- Parameters:
ref - Subsampled by 8 reference image.input - Subsampled by 8 input image.- Returns:
- List of preoptimized and optimized points.
-
levelFour
public java.util.Vector<MatrixListItem> levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima,
float progressFrom,
float progressTo)
Takes two images that have been subsampled by a factor of four, and two vectors of minima. Sets up the cost
function with the images and the weighted images, if necessary. Adds the level4Factor determined during
subsampling. Measures the costs of the minima on the images and sort them. Takes the top three in each vector
(pre-optimization and post-optimization) and optimizes them. Puts them all into one vector. Perturbs the
rotations in each dimension by zero and plus-minus fineDelta. If it's not a rigid transformation, perturbs the
scales by factors of 0.8, 0.9, 1.0, 1.1, and 1.2. Optimize the perturbations. Returns a vector of the perturbed,
optimized minima.
- Parameters:
ref - Reference image, subsampled by 4.input - Input image, subsampled by 4.minima - Preoptimized minima.optMinima - Optimized minima.- Returns:
- A vector of perturbed, optimized minima.
-
levelOne
public MatrixListItem levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item,
int maxIter,
float progressFrom,
float progressTo)
Takes the two images, no subsampling, and the best minimum so far. Sets up the cost function with the images and
the weighted images, if necessary. Adds the level1Factor determined during subsampling. Performs one optimization
run, with the maximum allowable degrees of freedom as specified by the user (the max is 12). Returns the best
minimum.
- Parameters:
ref - Reference image.input - Input image.item - Best minimum so far.maxIter - DOCUMENT ME!- Returns:
- Best minimum after optimization.
-
levelTwo
public MatrixListItem levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
float progressFrom,
float progressTo)
Takes two images that have been subsampled by a factor of 2 and a vector of minima. Sets up the cost function
with the images and the weighted images, if necessary. Adds the level2Factor determined during subsampling.
Measures the costs of the minima at the images. Optimizes the best minimum with 7 degrees of freedom, then 9,
then 12. If the user has limited the degrees of freedom to 6, there will only be one optimization run, with 6
degrees of freedom. Returns the best minimum after optimization.
- Parameters:
ref - Reference image, subsampled by 2.input - Input image, subsampled by 2.minima - Minima.- Returns:
- The optimized minimum.
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegELSUNCOAR35D.html���������������������������0000775�4231163�4231163�00000361621�14537076060�026744� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegELSUNCOAR35D (MIPAV API Documentation)
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
(package private) class |
AlgorithmRegELSUNCOAR35D.MatrixListItem |
Helper class to make it easy to store the necessary information about a minimum.
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private static int |
ADJACENT |
DOCUMENT ME!
|
private boolean |
allowLevel16XY |
DOCUMENT ME!
|
private boolean |
allowLevel16Z |
DOCUMENT ME!
|
private boolean |
allowLevel2XY |
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
|
private boolean |
allowLevel2Z |
DOCUMENT ME!
|
private boolean |
allowLevel4XY |
DOCUMENT ME!
|
private boolean |
allowLevel4Z |
DOCUMENT ME!
|
private boolean |
allowLevel8XY |
DOCUMENT ME!
|
private boolean |
allowLevel8Z |
DOCUMENT ME!
|
private AlgorithmRegELSUNCOAR35D.MatrixListItem |
answer |
Final answer after registration.
|
private static int |
AVERAGE |
DOCUMENT ME!
|
private int |
baseNumIter |
Limits number of iterations in elsunc optimization. maxIter in the call to elsunc will be an integer multiple
of baseNumIter
|
private float[] |
buffer |
DOCUMENT ME!
|
private float[] |
bufferA |
DOCUMENT ME!
|
private float[] |
bufferIW |
DOCUMENT ME!
|
private float[] |
bufferW |
DOCUMENT ME!
|
private boolean |
calcCOG |
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
|
private int |
coarseNum |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private float |
coarseRate |
Coarse and fine sampling parameters.
|
private int |
colorFactor |
1 for black and white, 4 for color.
|
private int |
costChoice |
Choice of which cost function to use.
|
private boolean |
doColor |
DOCUMENT ME!
|
private int |
DOF |
Maximum degrees of freedom when running the optimization.
|
private boolean |
doGraph |
Produce 2 output graphs - 1 for 3 rotations and 1 for 3 translations.
|
private boolean |
doMultiThread |
|
private boolean |
doSubsample |
if true subsample.
|
private boolean |
fastMode |
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
|
private int |
fineNum |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private float |
fineRate |
Coarse and fine sampling parameters.
|
private ModelImage |
imageWeightIso |
DOCUMENT ME!
|
private ModelImage |
input1 |
Image used to import a volume from inputImage.
|
private ModelImage |
inputImage |
This is the image in which internal registration will be performed.
|
private ModelImage |
inputw_1 |
Image used to import a volume from inputWeight.
|
private ModelImage |
inputWeight |
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
|
private int |
interp |
Interpolation method used in transformations.
|
private int |
interp2 |
Interpolation method used in output.
|
private float[] |
iResols |
The voxel resolutions of the input image.
|
private ModelImage |
isoImage |
new to this version: must keep isoImage around if image needed to be transformed.
|
private float |
level1FactorXY |
Multiplication factor for level 1 - will be set based on subsampling.
|
private float |
level1FactorZ |
DOCUMENT ME!
|
private float |
level2FactorXY |
Multiplication factor for level 2 - will be set based on subsampling.
|
private float |
level2FactorZ |
DOCUMENT ME!
|
private float |
level4FactorXY |
Multiplication factor for level 4 - will be set based on subsampling.
|
private float |
level4FactorZ |
DOCUMENT ME!
|
private int |
maxDim |
DOCUMENT ME!
|
private int |
maxIter |
Limits number of iterations in elsunc optimization. maxIter in the call to elsunc will be an integer multiple
of baseNumIter
|
private static int |
minimumZForSub |
DOCUMENT ME!
|
private int |
mode |
DOCUMENT ME!
|
private int |
numMinima |
Number of minima from level 8 to test at level 4.
|
private ModelImage |
output_1 |
DOCUMENT ME!
|
private ModelImage |
outsidePreReferenceVolume |
DOCUMENT ME!
|
private ModelImage |
outsideReferenceVolume |
DOCUMENT ME!
|
private int |
refImageNo |
Indicates the first volume used as a reference volume, if mode == ADJACENT.
|
private boolean |
regToAdjImage |
If true use adjacent image for registration.
|
private boolean |
resample |
true if resolutions unequal, false if resolutions equal.
|
private boolean |
resampleW |
true if weight image is resampled.
|
private float[][] |
rot |
Arrays used for producing graphs for DOF == 6 and register to average or reference image.
|
private float |
rotateBegin |
Coarse and fine sampling parameters.
|
private float |
rotateEnd |
Coarse and fine sampling parameters.
|
private int |
searchAlgorithm |
|
private ModelSimpleImage |
simpleInput_1 |
Simple version of an image volume of the input image.
|
private ModelSimpleImage |
simpleInputSub16_1 |
Simple version of an image volume of the input image, subsampled by 16.
|
private ModelSimpleImage |
simpleInputSub2_1 |
Simple version of an image volume of the input image, subsampled by 2.
|
private ModelSimpleImage |
simpleInputSub4_1 |
Simple version of an image volume of the input image, subsampled by 4.
|
private ModelSimpleImage |
simpleInputSub8_1 |
Simple version of an image volume of the input image, subsampled by 8.
|
private ModelSimpleImage |
simpleRef_1 |
Simple version of input image.
|
private ModelSimpleImage |
simpleRefSub16_1 |
Simple version of input image, subsampled by 16.
|
private ModelSimpleImage |
simpleRefSub2_1 |
Simple version of input image, subsampled by 2.
|
private ModelSimpleImage |
simpleRefSub4_1 |
Simple version of input image, subsampled by 4.
|
private ModelSimpleImage |
simpleRefSub8_1 |
Simple version of input image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightI_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub16_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub2_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub4_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightISub8_1 |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleWeightR_1 |
Simple version of weighted input image.
|
private ModelSimpleImage |
simpleWeightRSub16_1 |
Simple version of weighted input image, subsampled by 16.
|
private ModelSimpleImage |
simpleWeightRSub2_1 |
Simple version of weighted input image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightRSub4_1 |
Simple version of weighted input image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightRSub8_1 |
Simple version of weighted input image, subsampled by 8.
|
private float[][] |
trans |
DOCUMENT ME!
|
private int[] |
TransMatsInumber |
|
private boolean |
useOutsideReferenceVolume |
DOCUMENT ME!
|
private TransMatrix[] |
VolumesToReferenceTransformations |
|
private boolean |
weighted |
Flag to determine if there are weighted images or not.
|
private ModelImage |
weightVolumeImage |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRegELSUNCOAR35D(ModelImage _image,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
int mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic internal registration algorithm and sets necessary variables.
|
AlgorithmRegELSUNCOAR35D(ModelImage _image,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
int mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm) |
Creates new automatic internal registration algorithm and sets necessary variables.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static WildMagic.LibFoundation.Mathematics.Vector3f |
calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor) |
Calculates the center of mass (gravity) of a 3D image.
|
private void |
copyFloatData(ModelSimpleImage srcImage,
ModelSimpleImage resultImage) |
DOCUMENT ME!
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
void |
finalize() |
Prepares this class for destruction.
|
void |
generateTestImages() |
A test of the diffeomorphic demons is to transform a circle image to a letter C image.
|
double |
getAnswer() |
|
TransMatrix[] |
getArrayTransMatrix() |
|
private java.lang.String |
getConstructionInfo() |
Creates a string with the parameters that the image was constructed with.
|
float[][] |
getRot() |
accessor for rot.
|
private double[] |
getTolerance(int DOF) |
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
|
float[][] |
getTrans() |
accessor for trans.
|
TransMatrix |
getTransform() |
|
ModelImage |
getTransformedImage() |
accessor to get the internally registered image.
|
private void |
interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale) |
Performs a bilinear interpolation on points.
|
private void |
interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale) |
Performs a trilinear interpolation on points.
|
private java.util.Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem>[] |
levelEight(ModelSimpleImage ref,
ModelSimpleImage input) |
Takes two images that have been subsampled by a factor of eight.
|
private java.util.Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem> |
levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem> minima,
java.util.Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem> optMinima) |
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
|
private AlgorithmRegELSUNCOAR35D.MatrixListItem |
levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
AlgorithmRegELSUNCOAR35D.MatrixListItem item,
int maxIter) |
Takes the two images, no subsampling, and the best minimum so far.
|
private AlgorithmRegELSUNCOAR35D.MatrixListItem |
levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem> minima) |
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
|
void |
runAlgorithm() |
Runs the image registration.
|
boolean |
setReferenceVolume(ModelImage refVolume) |
allows the user to pass in an OUTSIDE reference volume.
|
private void |
subSampleBy2(ModelSimpleImage srcImage,
ModelSimpleImage resultImage,
boolean isColor) |
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
|
private static ModelSimpleImage |
subSampleBy2XY(ModelSimpleImage srcImage,
ModelSimpleImage resultImage,
boolean isColor) |
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
allowLevel2XY
private boolean allowLevel2XY
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
-
buffer
private float[] buffer
DOCUMENT ME!
-
bufferA
private float[] bufferA
DOCUMENT ME!
-
bufferIW
private float[] bufferIW
DOCUMENT ME!
-
bufferW
private float[] bufferW
DOCUMENT ME!
-
doColor
private boolean doColor
DOCUMENT ME!
-
maxDim
private int maxDim
DOCUMENT ME!
-
mode
private int mode
DOCUMENT ME!
-
regToAdjImage
private boolean regToAdjImage
If true use adjacent image for registration. If false use the average volume or use the image volume reference
number to indicate the image volume to register all images to.
-
simpleInputSub16_1
private ModelSimpleImage simpleInputSub16_1
Simple version of an image volume of the input image, subsampled by 16.
-
simpleInputSub2_1
private ModelSimpleImage simpleInputSub2_1
Simple version of an image volume of the input image, subsampled by 2.
-
simpleInputSub4_1
private ModelSimpleImage simpleInputSub4_1
Simple version of an image volume of the input image, subsampled by 4.
-
simpleInputSub8_1
private ModelSimpleImage simpleInputSub8_1
Simple version of an image volume of the input image, subsampled by 8.
-
simpleWeightRSub16_1
private ModelSimpleImage simpleWeightRSub16_1
Simple version of weighted input image, subsampled by 16.
-
simpleWeightRSub2_1
private ModelSimpleImage simpleWeightRSub2_1
Simple version of weighted input image, subsampled by 2.
-
simpleWeightRSub4_1
private ModelSimpleImage simpleWeightRSub4_1
Simple version of weighted input image, subsampled by 4.
-
simpleWeightRSub8_1
private ModelSimpleImage simpleWeightRSub8_1
Simple version of weighted input image, subsampled by 8.
-
trans
private float[][] trans
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmRegELSUNCOAR35D
public AlgorithmRegELSUNCOAR35D(ModelImage _image,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
int mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic internal registration algorithm and sets necessary variables.
- Parameters:
_image - Input image_costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._interp2 - Interpolation method used in outputmode - 1 = adjacent, 2 = average, 3 = referencerefImageNum - If mode == REFERENCE, the volume all other volumes are registered to. If mode == ADJACENT,
the first volume used as a reference._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doGraph - If true produce 2 output graphs - one for 3 rotations and one for 3 translationsdoSubsample - If true subsamplefastMode - If true skip subsample and go directly to level 1 optimization_baseNumIter - Limits the number of iterations of elsunc algorithm. maxIter in the call to elsunc
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ELSUNC, NL2SOL, or LEVENBERG_MARQUARDT
-
AlgorithmRegELSUNCOAR35D
public AlgorithmRegELSUNCOAR35D(ModelImage _image,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
int _interp2,
int mode,
int refImageNum,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doGraph,
boolean doSubsample,
boolean fastMode,
int _baseNumIter,
int _numMinima,
int searchAlgorithm)
Creates new automatic internal registration algorithm and sets necessary variables.
- Parameters:
_image - Input image_inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - DOCUMENT ME!_interp - Interpolation method used in transformations._interp2 - Interpolation method used in outputmode - 1 = adjacent, 2 = average, 3 = averagerefImageNum - If mode == REFERENCE, the volume all other volumes are registered to. If mode == ADJACENT,
the first volume used as a reference._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doGraph - If true produce 2 output graphs - 1 for 3 rotations and one for 3 translationsdoSubsample - If true subsamplefastMode - If true skip subsample and go directly to level 1 optimization_baseNumIter - Limits the number of iterations of elsunc algorithm. maxIter in the call to elsunc
will be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4searchAlgorithm - ELSUNC, NL2SOL, or LEVENBERG_MARQUARDT
-
Method Detail
-
calculateCenterOfMass3D
public static WildMagic.LibFoundation.Mathematics.Vector3f calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor)
Calculates the center of mass (gravity) of a 3D image. In image space where the upper left hand corner of the
image is 0,0. The x axis goes left to right, y axis goes top to bottom and z axis goes into the screen. (i.e. the
right hand rule). One could simply multiply by voxel resolutions.
- Parameters:
image - the center of mass will be calculated from this image datawgtImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- the center of mass as a 3D point
-
runAlgorithm
public void runAlgorithm()
Runs the image registration. If the resolutions are unequal, the image is transformed into isotropic pixels. The
resolutions of the two images after the xyz isotropic transformation will be the same in the x, y, and z
dimensions. That resolution will equal the minimum resolution. If the image is weighted, the weight image is
transformed into isotropic pixels in the same manner as the original. Then the image is subsampled by 2, 4, and 8
or 16. If the image is too small it will not be subsampled down to the smallest level; if it is too big, it will
be subsampled to 8 or 16. The same is done with the weight image if necessary. The program loops thru levelEight,
levelFour, levelTwo, and levelOne with one volume as the reference volume and one volume as the input volume. The
function levelEight is called with the volumes subsampled by 8 or 16; it returns two vectors with minima. Then
the function levelFour is called with volumes subsampled by 4 and the two vectors; it returns one vector of
minima. The function levelTwo is called with volumes subsampled by 2 and the vector; it returns an "answer" in
the form of a MatrixListItem, which is a convenient way of storing the point, the matrix, and the cost of the
minimum. Then the function levelOne is called with the minimum; it returns a final "answer", or minimum, which is
used to register the input volume to the reference volume. The registered input volume data is imported into
inputImage.
- Specified by:
runAlgorithm in class AlgorithmBase
-
subSampleBy2XY
private static ModelSimpleImage subSampleBy2XY(ModelSimpleImage srcImage,
ModelSimpleImage resultImage,
boolean isColor)
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- Parameters:
srcImage - Image to subsample.resultImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
getTolerance
private double[] getTolerance(int DOF)
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- Parameters:
DOF - Degrees of freedom, will be length of vector.- Returns:
- New tolerance vector to send to optimization.
Based on FLIRT paper: let n=pixel dimension (in one dimension) R=brain radius, here assumed to be
half of field-of-view Translation tolerance = n/2 Rotation tolerance = (180/PI)*n/(2R) (converted to
degrees because AlgorithmELSUNC works in degrees) Scaling tolerance = n/(2R) Skewing tolerance = n/(2R)
-
interpolate
private void interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale)
Performs a bilinear interpolation on points. Takes an initial point, a vector of values to set, and an array in
which to look at neighbors of that point. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - Initial index into array.initial - Vector to set; if scale is true, set two translations and a scale. Otherwise just
set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
interpolate
private void interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale)
Performs a trilinear interpolation on points. Takes 3 initial points, a vector of values to set, and an array in
which to look at neighbors of those points. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - X rotation initial index into array.y - Y rotation initial index into array.z - Z rotation initial index into array.initial - Vector to set; if scale is true, set three translations and a scale. Otherwise
just set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
levelEight
private java.util.Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem>[] levelEight(ModelSimpleImage ref,
ModelSimpleImage input)
Takes two images that have been subsampled by a factor of eight. Sets up the cost function with the images and
the weighted images, if necessary. Uses the coarse sampling rate and optimizes translations and global scale at
the given rotation. So for example, if the coarse sampling range were -30 to 30 at every 15 degrees, we would
optimize at rotations of (-30, -30, -30), (-30, -30, -15), (-30, -30, 0), etc. In this case there would be a
total of 125 calls to the optimization method. Measures the cost at the fine sampling rate. Interpolates the
translations and global scale to come up with a good guess as to what the optimized translation would be at that
point. Takes the top 20% of the points and optimizes them. Now have a large multi-array of costs. 20% of those
have been optimized and placed back into their original position in the multi-array. Looks at the 8 neighbors of
a point: +, =, or - one fine sample in each of the three directions. If the point has a cost greater than any of
these, it is not a minima. Otherwise it is. Saves it in a vector of minima. Optimizes the minima over rotations
as well as translations and global scale. (Previously had not optimized over rotations.) Returns two vectors, one
containing the minima before optimization, one containing the minima after optimization.
- Parameters:
ref - Subsampled by 8 reference image.input - Subsampled by 8 input image.- Returns:
- List of preoptimized and optimized points.
-
levelFour
private java.util.Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem> levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem> minima,
java.util.Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem> optMinima)
Takes two images that have been subsampled by a factor of four, and two vectors of minima. Sets up the cost
function with the images and the weighted images, if necessary. Adds the level4Factor determined during
subsampling. Measures the costs of the minima on the images and sort them. Takes the top three in each vector
(pre-optimization and post-optimization) and optimizes them. Puts them all into one vector. Perturbs the
rotations in each dimension by zero and plus-minus fineDelta. If it's not a rigid transformation, perturbs the
scales by factors of 0.8, 0.9, 1.0, 1.1, and 1.2. Optimize the perturbations. Returns a vector of the perturbed,
optimized minima.
- Parameters:
ref - Reference image, subsampled by 4.input - Input image, subsampled by 4.minima - Preoptimized minima.optMinima - Optimized minima.- Returns:
- A vector of perturbed, optimized minima.
-
levelOne
private AlgorithmRegELSUNCOAR35D.MatrixListItem levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
AlgorithmRegELSUNCOAR35D.MatrixListItem item,
int maxIter)
Takes the two images, no subsampling, and the best minimum so far. Sets up the cost function with the images and
the weighted images, if necessary. Adds the level1Factor determined during subsampling. Performs one optimization
run, with the maximum allowable degrees of freedom as specified by the user (the max is 12). Returns the best
minimum.
- Parameters:
ref - Reference image.input - Input image.item - Best minimum so far.maxIter - DOCUMENT ME!- Returns:
- Best minimum after optimization.
-
levelTwo
private AlgorithmRegELSUNCOAR35D.MatrixListItem levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem> minima)
Takes two images that have been subsampled by a factor of 2 and a vector of minima. Sets up the cost function
with the images and the weighted images, if necessary. Adds the level2Factor determined during subsampling.
Measures the costs of the minima at the images. Optimizes the best minimum with 7 degrees of freedom, then 9,
then 12. If the user has limited the degrees of freedom to 6, there will only be one optimization run, with 6
degrees of freedom. Returns the best minimum after optimization.
- Parameters:
ref - Reference image, subsampled by 2.input - Input image, subsampled by 2.minima - Minima.- Returns:
- The optimized minimum.
-
subSampleBy2
private void subSampleBy2(ModelSimpleImage srcImage,
ModelSimpleImage resultImage,
boolean isColor)
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- Parameters:
srcImage - Image to subsample.resultImage - DOCUMENT ME!isColor - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegBSpline3D.html������������������������������0000775�4231163�4231163�00000105702�14537076060�026654� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegBSpline3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmRegBSpline3D
public AlgorithmRegBSpline3D(ModelImage kImageResult,
ModelImage kImageSource,
ModelImage kImageTarget,
ModelImage kImageDeformation,
RegistrationMeasure kRegMeasure,
AlgorithmRegBSpline.Options kOptionsPass1,
AlgorithmRegBSpline.Options kOptionsPass2)
Constructor.
- Parameters:
kImageResult - ModelImage Reference to an image to store the registered source image. This image must
have the same dimensions as the registration target image.kImageSource - ModelImage Reference to the original input image to use as the registration source.
This image does not have to have the same dimensions as the image to be used as the
registration target.kImageTarget - ModelImage Reference to the original input image to use as the registration target.kImageDeformation - ModelImage Reference to an image to store the computed deformation. This may be a null
reference to indicate that the deformation is not to be computed. If this reference is
not null, then the image must have the same dimensions as the target image.kRegMeasure - RegistrationMeasure Reference to the particular cost measure to use for this
registration. The cost measure is the same for all passes.kOptionsPass1 - Options Options to use for a first pass of registration. This may *not* be a null
reference.kOptionsPass2 - Options Options to use for a second pass of registration. This may be null to indicate
that only a single pass of registration is to be performed.
-
Method Detail
-
transform3DVOI
private void transform3DVOI(ModelImage image,
ModelImage destImage,
float[] imgBuffer,
float[] kImageMapX,
float[] kImageMapY,
float[] kImageMapZ)
-
runPass
protected BSplineRegistration3Df runPass(ModelSimpleImage kSource,
ModelSimpleImage kTarget,
AlgorithmRegBSpline.Options kOptions,
BSplineRegistration3Df kRegPrev,
java.lang.String kProgressPrefixString)
Perform a "pass" of BSpline based registration. A "pass" is defined to be one or more iterations using the
BSpline basis parameters, gradient descent parameters, and convergence parameters.
- Parameters:
kSource - ModelSimpleImage Reference to the original input image to use as the registration
source. This image does not have to have the same dimensions as the image to be
used as the registration target.kTarget - ModelSimpleImage Reference to the original input image to use as the registration
target.kOptions - Options Options to use for a this registration pass. This may *not* be a null
reference.kRegPrev - BSplineRegistration2Df Reference to a previous registration which can be used to
initialize this registration. This may be a null reference meaning that the this
registration uses the default "identity" initialization. If this it not a null
reference, then this registration is initialized to provide the a close
approximation to the same BSpline mapping as determined by the input
registration. The main property of a registration is the position of its control
points.kProgressPrefixString - String Text to add to the beginning of the progress bar message.- Returns:
- BSplineRegistration2Df Registration instance resulting from this pass. This may be needed to provide for
the initialization of subsequent passes or to compute the deformation image.
-
writeResults
private void writeResults(BSplineRegistration3Df kReg)
Save the registration information to a file. This information includes the BSpline parameters; in particular, the
coordinates for the lattice of control points.
- Parameters:
kReg - BSplineRegistration3Df Contains the parameters which define the BSpline for registering the source
image to the targe image.
��������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegBSpline.html��������������������������������0000775�4231163�4231163�00000101064�14537076060�026462� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegBSpline (MIPAV API Documentation)
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
static class |
AlgorithmRegBSpline.Options |
Data structure which contains the parameters or options used to perform a BSpline based registration of two
images.
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, runAlgorithm, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
m_kImageDeformation
protected ModelImage m_kImageDeformation
Reference to an image to store the computed deformation. This may be a null reference to indicate that the
deformation is not to be computed. If this reference is not null, then the image must have the same dimensions as
the target image.
-
m_kImageSource
protected ModelImage m_kImageSource
Reference to the original input image to use as the registration source. This image does not have to have the
same dimensions as the image to be used as the registration target.
-
Constructor Detail
-
AlgorithmRegBSpline
protected AlgorithmRegBSpline(ModelImage kImageResult,
ModelImage kImageSource,
ModelImage kImageTarget,
ModelImage kImageDeformation,
RegistrationMeasure kRegMeasure,
AlgorithmRegBSpline.Options kOptionsPass1,
AlgorithmRegBSpline.Options kOptionsPass2)
Constructor.
- Parameters:
kImageResult - ModelImage Reference to an image to store the registered source image. This image must
have the same dimensions as the registration target image.kImageSource - ModelImage Reference to the original input image to use as the registration source.
This image does not have to have the same dimensions as the image to be used as the
registration target.kImageTarget - ModelImage Reference to the original input image to use as the registration target.kImageDeformation - ModelImage Reference to an image to store the computed deformation. This may be a null
reference to indicate that the deformation is not to be computed. If this reference is
not null, then the image must have the same dimensions as the target image.kRegMeasure - RegistrationMeasure Reference to the particular cost measure to use for this
registration. The cost measure is the same for all passes.kOptionsPass1 - Options Options to use for a first pass of registration. This may *not* be a null
reference.kOptionsPass2 - Options Options to use for a second pass of registration. This may be null to indicate
that only a single pass of registration is to be performed.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/BSplineRegistrationBasef.html���������������������������0000775�4231163�4231163�00000051702�14537076061�027515� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BSplineRegistrationBasef (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected float[] |
createIdentityMapControlPoints(WildMagic.LibFoundation.Curves.BSplineBasisDiscretef kBasis) |
Create optimal placement of control points for each dimension which yields the identity mapping of the source
image, i.e., identity in that the output value to the Bspline function is the same as the input value.
|
void |
finalize() |
Cleanup memory.
|
double |
getError() |
Return the current error measure computeas the root mean squared error.
|
ModelSimpleImage |
getImageSource() |
Return access to input source image data values which is the same as was passed to the constructor.
|
ModelSimpleImage |
getImageTarget() |
Return access to input target image data values which is the same as was passed to the constructor.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_iNumSamplesTrg
protected int m_iNumSamplesTrg
Total number of samples in target, registered source, and error images.
-
nthreads
protected int nthreads
The number of threads.
-
Constructor Detail
-
BSplineRegistrationBasef
protected BSplineRegistrationBasef(ModelSimpleImage kImageSrc,
ModelSimpleImage kImageTrg,
RegistrationMeasure kRegMeasure)
Create instance to be used for registration. Creates the memory for the registered source image and the error
image given the total number of samples in the image.
- Parameters:
kImageSrc - ModelSimpleImage Input source image which contains properties and data values. Must have
either 2 or 3 dimensions where the number of dimensions matches that of the target image.kImageTrg - ModelSimpleImage Input target image which contains properties and data values. Must have
either 2 or 3 dimensions where the number of dimensions matches that of the source image.kRegMeasure - RegistrationMeasure Defines the cost measure for comparing the target image with the
registered source image.
-
Method Detail
-
createIdentityMapControlPoints
protected float[] createIdentityMapControlPoints(WildMagic.LibFoundation.Curves.BSplineBasisDiscretef kBasis)
Create optimal placement of control points for each dimension which yields the identity mapping of the source
image, i.e., identity in that the output value to the Bspline function is the same as the input value.
- Parameters:
kBasis - BSplineBasisDiscretef Input BSpline-basis for a single dimension.- Returns:
- float[] Array of control point positions for this single dimension input B-spline basis These positions
are in the [0,1] range and are monotonically increasing. The size of this array is determined by the
number of control points specified for the input BSpline basis.
��������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegOAR3D.html����������������������������������0000775�4231163�4231163�00000434212�14537076061�025743� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegOAR3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
allowLevel16XY |
DOCUMENT ME!
|
private boolean |
allowLevel16Z |
DOCUMENT ME!
|
private boolean |
allowLevel2XY |
DOCUMENT ME!
|
private boolean |
allowLevel2Z |
DOCUMENT ME!
|
private boolean |
allowLevel4XY |
DOCUMENT ME!
|
private boolean |
allowLevel4Z |
DOCUMENT ME!
|
private boolean |
allowLevel8XY |
DOCUMENT ME!
|
private boolean |
allowLevel8Z |
DOCUMENT ME!
|
private MatrixListItem |
answer |
Final answer after registration.
|
(package private) int |
baseNumIter |
|
private MatrixListItem |
bestGuessLevel2 |
DOCUMENT ME!
|
private ModelImage |
blurredInput |
Blurred input image.
|
private ModelImage |
blurredRef |
Blurred reference image.
|
private boolean |
calcCOG |
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
|
private int |
coarseNumX |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private int |
coarseNumY |
DOCUMENT ME!
|
private int |
coarseNumZ |
DOCUMENT ME!
|
private float |
coarseRateX |
Coarse and fine sampling parameters.
|
private float |
coarseRateY |
DOCUMENT ME!
|
private float |
coarseRateZ |
DOCUMENT ME!
|
private int |
costChoice |
Choice of which cost function to use.
|
private boolean |
doColor |
DOCUMENT ME!
|
private int |
DOF |
Maximum degrees of freedom when running the optimization.
|
private boolean |
doJTEM |
Turns the full version of Powell's algorithm on/off.
|
private boolean |
doMultiThread |
|
private java.util.concurrent.CountDownLatch |
doneSignal |
|
private boolean |
doSubsample |
If true subsample for levelEight, levelFour and levelTwo analyses.
|
private boolean |
fastMode |
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
|
private int |
fineNumX |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private int |
fineNumY |
DOCUMENT ME!
|
private int |
fineNumZ |
DOCUMENT ME!
|
private float |
fineRateX |
Coarse and fine sampling parameters.
|
private float |
fineRateY |
DOCUMENT ME!
|
private float |
fineRateZ |
DOCUMENT ME!
|
private boolean |
fullAnalysisMode |
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
|
private ModelImage |
imageInputIso |
Isotropic input image.
|
private ModelImage |
imageRefIso |
Isotropic reference image.
|
private ModelImage |
imageWeightInputIso |
Isotropic weighted input image.
|
private ModelImage |
imageWeightRefIso |
Isotropic weighted reference image.
|
(package private) double |
initialCost |
DOCUMENT ME!
|
private ModelImage |
inputImage |
This image is to registered to the reference image.
|
private ModelImage |
inputWeight |
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
|
private int |
interp |
Interpolation method.
|
private float |
level1FactorXY |
Multiplication factor for level 1 - will be set based on subsampling.
|
private float |
level1FactorZ |
DOCUMENT ME!
|
private float |
level2FactorXY |
Multiplication factor for level 2 - will be set based on subsampling.
|
private float |
level2FactorZ |
DOCUMENT ME!
|
private float |
level4FactorXY |
Multiplication factor for level 4 - will be set based on subsampling.
|
private float |
level4FactorZ |
DOCUMENT ME!
|
private ImageRegistrationGPU |
m_kGPUCost |
|
private int |
maxDim |
DOCUMENT ME!
|
private int |
maxIter |
Advanced optimization settings maxIter in the call to Powell's will be an integer multiple of baseNumIter.
|
private boolean |
maxResol |
Flag to determine if the maximum of the minimum resolutions of the two datasets should be used.
|
private static int |
minimumZForSub |
DOCUMENT ME!
|
private int |
numMinima |
Number of minima from level 8 to test at level 4.
|
private ModelImage |
refImage |
The inputImage will be registered to this reference image.
|
private ModelImage |
refWeight |
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
|
private boolean |
resampleInput |
DOCUMENT ME!
|
private boolean |
resampleRef |
DOCUMENT ME!
|
private float[] |
resInput |
The voxel resolutions of the image to be registered to the reference image.
|
private float[] |
resRef |
The voxel resolutions of the reference image.
|
private float |
rotateBeginX |
Coarse and fine sampling parameters.
|
private float |
rotateBeginY |
DOCUMENT ME!
|
private float |
rotateBeginZ |
DOCUMENT ME!
|
private float |
rotateEndX |
Coarse and fine sampling parameters.
|
private float |
rotateEndY |
DOCUMENT ME!
|
private float |
rotateEndZ |
DOCUMENT ME!
|
private ModelSimpleImage |
simpleInput |
Simple version of input image.
|
private ModelSimpleImage |
simpleInputSub2 |
Simple version of input image, subsampled by 2.
|
private ModelSimpleImage |
simpleInputSub4 |
Simple version of input image, subsampled by 4.
|
private ModelSimpleImage |
simpleInputSub8 |
Simple version of input image, subsampled by 8.
|
private ModelSimpleImage |
simpleRef |
Simple version of reference image.
|
private ModelSimpleImage |
simpleRefSub2 |
Simple version of reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleRefSub4 |
Simple version of reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleRefSub8 |
Simple version of reference image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightInput |
Simple version of weighted input image.
|
private ModelSimpleImage |
simpleWeightInputSub2 |
Simple version of weighted input image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightInputSub4 |
Simple version of weighted input image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightInputSub8 |
Simple version of weighted input image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightRef |
Simple version of weighted reference image.
|
private ModelSimpleImage |
simpleWeightRefSub2 |
Simple version of weighted reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightRefSub4 |
Simple version of weighted reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightRefSub8 |
Simple version of weighted reference image, subsampled by 8.
|
(package private) long |
timeElapsed |
DOCUMENT ME!
|
(package private) long |
timeLater |
DOCUMENT ME!
|
(package private) long |
timeNow |
DOCUMENT ME!
|
private AlgorithmTransform |
transform |
Transformation algorithm for creating an isotropic reference image.
|
private AlgorithmTransform |
transform2 |
Transformation algorithm for creating an isotropic input image.
|
private boolean |
weighted |
Flag to determine if there are weighted images or not.
|
private int |
weightedInputPixels |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub8 |
DOCUMENT ME!
|
private int |
weightedRefPixels |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub8 |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRegOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _doMultiThread,
boolean _fastMode,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _doMultiThread,
boolean _fastMode,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
static WildMagic.LibFoundation.Mathematics.Vector3f |
calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor) |
Calculates the center of mass (gravity) of a 3D image.
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
void |
finalize() |
Prepares this class for destruction.
|
double |
getAnswer() |
Accessor that returns the final cost function.
|
private java.lang.String |
getConstructionInfo() |
Creates a string with the parameters that the image was constructed with.
|
float |
getLevel1FactorXY() |
|
float |
getLevel1FactorZ() |
|
float |
getLevel2FactorXY() |
|
float |
getLevel2FactorZ() |
|
float |
getLevel4FactorXY() |
|
float |
getLevel4FactorZ() |
|
private double[] |
getTolerance(int DOF) |
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
|
TransMatrix |
getTransform() |
Accessor that returns the matrix calculated in this algorithm.
|
TransMatrix |
getTransformHalf() |
Accessor that returns the matrix calculated in this algorithm divided by 2.
|
TransMatrix |
getTransformMigsagittal() |
Accessor that returns the z rot and x and y trans from the matrix calculated in this algorithm.
|
private void |
interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale) |
Performs a trilinear interpolation on points.
|
java.util.Vector<MatrixListItem>[] |
levelEight(ModelSimpleImage ref,
ModelSimpleImage input,
float progressFrom,
float progressTo) |
Takes two images that have been subsampled by a factor of eight.
|
java.util.Vector<MatrixListItem> |
levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima,
float progressFrom,
float progressTo) |
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
|
MatrixListItem |
levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item,
int maxIter,
float progressFrom,
float progressTo) |
Takes the two images, no subsampling, and the best minimum so far.
|
MatrixListItem |
levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
float progressFrom,
float progressTo) |
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
|
void |
runAlgorithm() |
Runs the image registration.
|
void |
setJTEM(boolean bOn) |
Turns the full version of Powell's algorithm on/off.
|
void |
setLevel1FactorXY(float level1FactorXY) |
|
void |
setLevel1FactorZ(float level1FactorZ) |
|
void |
setLevel2FactorXY(float level2FactorXY) |
|
void |
setLevel2FactorZ(float level2FactorZ) |
|
void |
setLevel4FactorXY(float level4FactorXY) |
|
void |
setLevel4FactorZ(float level4FactorZ) |
|
static ModelSimpleImage |
subsampleBy2(ModelSimpleImage srcImage,
boolean isColor) |
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
|
static ModelSimpleImage |
subsampleBy2XY(ModelSimpleImage srcImage,
boolean isColor) |
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
initialCost
double initialCost
DOCUMENT ME!
-
timeElapsed
long timeElapsed
DOCUMENT ME!
-
timeLater
long timeLater
DOCUMENT ME!
-
timeNow
long timeNow
DOCUMENT ME!
-
calcCOG
private final boolean calcCOG
If true calculate the center of gravity (mass) and use the difference to intialize the translation. If false,
images are pretty much aligned then don't calculated COG.
- See Also:
- Constant Field Values
-
doColor
private boolean doColor
DOCUMENT ME!
-
fullAnalysisMode
private boolean fullAnalysisMode
If true this algorithm skips all subsample and goes directly to the level 1 optimization. This assumes that
images are fairly well aligned to begin with and therefore no sophisticated search is needed.
-
interp
private final int interp
Interpolation method.
-
maxDim
private int maxDim
DOCUMENT ME!
-
baseNumIter
final int baseNumIter
-
maxResol
private final boolean maxResol
Flag to determine if the maximum of the minimum resolutions of the two datasets should be used. If true use the
maximum resolution of the two dataset. Throws away information some image information but is faster. If false the
algorithms uses the minimum of the resolutions when resampling the images. Can be slower but does not "lose"
informaton.
-
simpleWeightInputSub2
private ModelSimpleImage simpleWeightInputSub2
Simple version of weighted input image, subsampled by 2.
-
simpleWeightInputSub4
private ModelSimpleImage simpleWeightInputSub4
Simple version of weighted input image, subsampled by 4.
-
simpleWeightInputSub8
private ModelSimpleImage simpleWeightInputSub8
Simple version of weighted input image, subsampled by 8.
-
simpleWeightRefSub2
private ModelSimpleImage simpleWeightRefSub2
Simple version of weighted reference image, subsampled by 2.
-
simpleWeightRefSub4
private ModelSimpleImage simpleWeightRefSub4
Simple version of weighted reference image, subsampled by 4.
-
simpleWeightRefSub8
private ModelSimpleImage simpleWeightRefSub8
Simple version of weighted reference image, subsampled by 8.
-
Constructor Detail
-
AlgorithmRegOAR3D
public AlgorithmRegOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndX - End of coarse sampling range (i.e., 60 degrees)._coarseRateX - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateX - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndY - End of coarse sampling range (i.e., 60 degrees)._coarseRateY - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateY - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndZ - End of coarse sampling range (i.e., 60 degrees)._coarseRateZ - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateZ - Point at which fine samples should be taken (i.e., every 15 degrees)._maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to level
one immediately_baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
AlgorithmRegOAR3D
public AlgorithmRegOAR3D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _doMultiThread,
boolean _fastMode,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndX - End of coarse sampling range (i.e., 60 degrees)._coarseRateX - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateX - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndY - End of coarse sampling range (i.e., 60 degrees)._coarseRateY - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateY - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndZ - End of coarse sampling range (i.e., 60 degrees)._coarseRateZ - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateZ - Point at which fine samples should be taken (i.e., every 15 degrees)._maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_doMultiThread - _fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to level
one immediately_baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
AlgorithmRegOAR3D
public AlgorithmRegOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _fastMode,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndX - End of coarse sampling range (i.e., 60 degrees)._coarseRateX - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateX - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndY - End of coarse sampling range (i.e., 60 degrees)._coarseRateY - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateY - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndZ - End of coarse sampling range (i.e., 60 degrees)._coarseRateZ - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateZ - Point at which fine samples should be taken (i.e., every 15 degrees)._maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to level
one immediately_baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
AlgorithmRegOAR3D
public AlgorithmRegOAR3D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBeginX,
float _rotateEndX,
float _coarseRateX,
float _fineRateX,
float _rotateBeginY,
float _rotateEndY,
float _coarseRateY,
float _fineRateY,
float _rotateBeginZ,
float _rotateEndZ,
float _coarseRateZ,
float _fineRateZ,
boolean _maxResol,
boolean _doSubsample,
boolean _doMultiThread,
boolean _fastMode,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBeginX - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndX - End of coarse sampling range (i.e., 60 degrees)._coarseRateX - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateX - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginY - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndY - End of coarse sampling range (i.e., 60 degrees)._coarseRateY - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateY - Point at which fine samples should be taken (i.e., every 15 degrees)._rotateBeginZ - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEndZ - End of coarse sampling range (i.e., 60 degrees)._coarseRateZ - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRateZ - Point at which fine samples should be taken (i.e., every 15 degrees)._maxResol - If true is the maximum of the minimum resolution of the two datasets when resampling._doSubsample - If true then subsample_doMultiThread - _fastMode - If true then searching the parameter space is not conducted and the algorithm proceeds to level
one immediately_baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
-
Method Detail
-
calculateCenterOfMass3D
public static WildMagic.LibFoundation.Mathematics.Vector3f calculateCenterOfMass3D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor)
Calculates the center of mass (gravity) of a 3D image. In image space where the upper left hand corner of the
image is 0,0. The x axis goes left to right, y axis goes top to bottom and z axis goes into the screen. (i.e. the
right hand rule). One could simply multiply by voxel resolutions.
- Parameters:
image - the center of mass will be calculated from this image datawgtImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- the center of mass as a 3D point
-
runAlgorithm
public void runAlgorithm()
Runs the image registration. Blurs the images based on what their minimum resolutions are. The reference image is
blurred if one of the input image resolutions is 50% or more bigger than the corresponding resolution in the
reference image; likewise, the input image is blurred if one of the reference resolutions is 50% or more bigger
than the corresponding resolution in the input image. Thus, it is unlikely, though not impossible, that both
images will be blurred. The images are then transformed into isotropic voxels. The resolutions of the two images
after the isotropic transformation will be the same in all dimensions. If maxResol is true, that resolution will
equal the maximum of the minimums of each image's resolutions: Max( Min (resolutions of ref image, resolutions of
input image) ). If the images are weighted, the weight images are blurred and transformed into isotropic voxels
in the same manner as the originals. Then the images are subsampled by 2, 4, and 8. If the images are too small
they will not be subsampled down to the smallest level; if they are too big, they will be subsampled to 16. The
same is done with the weight images if necessary. The function levelEight is called with the images subsampled by
8; it returns two vectors with minima. Then the function levelFour is called with images subsampled by 4 and the
two vectors; it returns one vector of minima. The function levelTwo is called with images subsampled by 2 and the
vector; it returns an "answer" in the form of a MatrixListItem, which is a convenient way of storing the point,
the matrix, and the cost of the minimum. Then the function levelOne is called with the minimum; it returns a
final "answer", or minimum, which will then be accessed by the dialog that called this algorithm.
- Specified by:
runAlgorithm in class AlgorithmBase
-
subsampleBy2
public static ModelSimpleImage subsampleBy2(ModelSimpleImage srcImage,
boolean isColor)
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- Parameters:
srcImage - Image to subsample.isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
subsampleBy2XY
public static ModelSimpleImage subsampleBy2XY(ModelSimpleImage srcImage,
boolean isColor)
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- Parameters:
srcImage - Image to subsample.isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
getTolerance
private double[] getTolerance(int DOF)
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- Parameters:
DOF - Degrees of freedom, will be length of vector.- Returns:
- New tolerance vector to send to optimization.
Based on FLIRT paper: let n=pixel dimension (in one dimension) R=brain radius, here assumed to be half of
field-of-view Translation tolerance = n/2 Rotation tolerance = (180/PI)*n/(2R) (converted to degrees because
AlgorithmPowell works in degrees) Scaling tolerance = n/(2R) Skewing tolerance = n/(2R)
-
interpolate
private void interpolate(double x,
double y,
double z,
double[] initial,
double[][][][] tranforms,
boolean scale)
Performs a trilinear interpolation on points. Takes 3 initial points, a vector of values to set, and an array in
which to look at neighbors of those points. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - X rotation initial index into array.y - Y rotation initial index into array.z - Z rotation initial index into array.initial - Vector to set; if scale is true, set three translations and a scale. Otherwise
just set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
levelEight
public java.util.Vector<MatrixListItem>[] levelEight(ModelSimpleImage ref,
ModelSimpleImage input,
float progressFrom,
float progressTo)
Takes two images that have been subsampled by a factor of eight. Sets up the cost function with the images and
the weighted images, if necessary. Uses the coarse sampling rate and optimizes translations and global scale at
the given rotation. So for example, if the coarse sampling range were -30 to 30 at every 15 degrees, we would
optimize at rotations of (-30, -30, -30), (-30, -30, -15), (-30, -30, 0), etc. In this case there would be a
total of 125 calls to the optimization method. Measures the cost at the fine sampling rate. Interpolates the
translations and global scale to come up with a good guess as to what the optimized translation would be at that
point. Takes the top 20% of the points and optimizes them. Now have a large multi-array of costs. 20% of those
have been optimized and placed back into their original position in the multi-array. Removes those items that are
outside the rotation begin and end limits. Looks at the 8 neighbors of a point: +, =, or - one fine sample in
each of the three directions. If the point has a cost greater than any of these, it is not a minima. Otherwise it
is. Saves it in a vector of minima. Optimizes the minima over rotations as well as translations and global scale.
(Previously had not optimized over rotations.) Returns two vectors, one containing the minima before
optimization, one containing the minima after optimization.
- Parameters:
ref - Subsampled by 8 reference image.input - Subsampled by 8 input image.- Returns:
- List of preoptimized and optimized points.
-
levelFour
public java.util.Vector<MatrixListItem> levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima,
float progressFrom,
float progressTo)
Takes two images that have been subsampled by a factor of four, and two vectors of minima. Sets up the cost
function with the images and the weighted images, if necessary. Adds the level4Factor determined during
subsampling. Measures the costs of the minima on the images and sort them. Takes the top three in each vector
(pre-optimization and post-optimization) and optimizes them. Puts them all into one vector. Perturbs the
rotations in each dimension by zero and plus-minus fineDelta. If it's not a rigid transformation, perturbs the
scales by factors of 0.8, 0.9, 1.0, 1.1, and 1.2. Optimize the perturbations. Returns a vector of the perturbed,
optimized minima.
- Parameters:
ref - Reference image, subsampled by 4.input - Input image, subsampled by 4.minima - Preoptimized minima.optMinima - Optimized minima.- Returns:
- A vector of perturbed, optimized minima.
-
levelOne
public MatrixListItem levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item,
int maxIter,
float progressFrom,
float progressTo)
Takes the two images, no subsampling, and the best minimum so far. Sets up the cost function with the images and
the weighted images, if necessary. Adds the level1Factor determined during subsampling. Performs one optimization
run, with the maximum allowable degrees of freedom as specified by the user (the max is 12). Returns the best
minimum.
- Parameters:
ref - Reference image.input - Input image.item - Best minimum so far.maxIter - DOCUMENT ME!- Returns:
- Best minimum after optimization.
-
levelTwo
public MatrixListItem levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
float progressFrom,
float progressTo)
Takes two images that have been subsampled by a factor of 2 and a vector of minima. Sets up the cost function
with the images and the weighted images, if necessary. Adds the level2Factor determined during subsampling.
Measures the costs of the minima at the images. Optimizes the best minimum with 7 degrees of freedom, then 9,
then 12. If the user has limited the degrees of freedom to 6, there will only be one optimization run, with 6
degrees of freedom. Returns the best minimum after optimization.
- Parameters:
ref - Reference image, subsampled by 2.input - Input image, subsampled by 2.minima - Minima.- Returns:
- The optimized minimum.
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegValidation.html�����������������������������0000775�4231163�4231163�00000107306�14537076061�027226� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegValidation (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
dim |
The number of dimensions (2D or 3D).
|
private int |
numCoords |
DOCUMENT ME!
|
private double[][] |
pointSetA |
Input point set A (2D or 3D)
|
private double[][] |
pointSetB |
Input point set B (2D or 3D)
|
private TransMatrix |
xfrmBA |
The transformation matrix that describes the transform from point set B to point set A.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRegValidation(double[][] coordsA,
double[][] coordsB,
int dim2or3) |
AlgorithmRegValidation - Constructor.
|
AlgorithmRegValidation(WildMagic.LibFoundation.Mathematics.Vector3f[] coordsA3D,
WildMagic.LibFoundation.Mathematics.Vector3f[] coordsB3D,
int dim2or3) |
AlgorithmRegValidation - Constructor.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private TransMatrix |
buildXfrm(double[] p1,
double[] p2,
Jama.Matrix R) |
Builds 4x4 transformation matrix from R and T where T=p2-R*p1.
|
void |
calculateResiduals() |
CalculateResiduals.
|
double |
EuclideanDistance(double[] ptA,
double[] ptB) |
EuclideanDistance.
|
void |
finalize() |
Prepares this class for destruction.
|
TransMatrix |
getTransformBtoA() |
Accesses xfrm from point set B to point set A.
|
void |
matchBtoA() |
matchBtoA pA and pB are 2 3D point sets (pointSetA and B).
|
void |
runAlgorithm() |
Starts the program.
|
void |
setTransformBtoA(TransMatrix xfrm) |
Set transform from point set A to point set B.
|
int |
setup(double[][] coordsA,
double[][] coordsB) |
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
|
int |
setup(WildMagic.LibFoundation.Mathematics.Vector2f[] coordsA,
WildMagic.LibFoundation.Mathematics.Vector2f[] coordsB) |
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
|
int |
setup(WildMagic.LibFoundation.Mathematics.Vector3f[] coordsA,
WildMagic.LibFoundation.Mathematics.Vector3f[] coordsB) |
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
|
static double |
SQR(double x) |
SQR = x^2.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numCoords
private int numCoords
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmRegValidation
public AlgorithmRegValidation(double[][] coordsA,
double[][] coordsB,
int dim2or3)
AlgorithmRegValidation - Constructor.
- Parameters:
coordsA - - double[dim][n] 3D or 2D point setcoordsB - - double[dim][n] 3D or 2D point setdim2or3 - - indicates whether data set is 2D or 3D
-
AlgorithmRegValidation
public AlgorithmRegValidation(WildMagic.LibFoundation.Mathematics.Vector3f[] coordsA3D,
WildMagic.LibFoundation.Mathematics.Vector3f[] coordsB3D,
int dim2or3)
AlgorithmRegValidation - Constructor.
- Parameters:
coordsA3D - Vector3f[n] 3D point setcoordsB3D - Vector3f[n] 3D point setdim2or3 - indicates whether data set is 2D or 3D
-
Method Detail
-
buildXfrm
private TransMatrix buildXfrm(double[] p1,
double[] p2,
Jama.Matrix R)
Builds 4x4 transformation matrix from R and T where T=p2-R*p1.
- Parameters:
p1 - from Matchp2 - from MatchR - =rotation matrix from Match- Returns:
- DOCUMENT ME!
-
matchBtoA
public void matchBtoA()
matchBtoA pA and pB are 2 3D point sets (pointSetA and B).
p1[i]=(1/numCoords)*(sum from j = 0 to j = numCoords - 1 of pB[i][j]) p2[i]=(1/numCoords)*(sum from j = 0 to j
= numCoords - 1 of pA[i][j])
q1[i][j] =pB[i][j]-p1[i] q2[i][j]=pA[i][j]-p2[i]
-
setup
public int setup(double[][] coordsA,
double[][] coordsB)
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- Parameters:
coordsA - first 3D point setcoordsB - second 3D point set- Returns:
- distinguishing reason for error
-
setup
public int setup(WildMagic.LibFoundation.Mathematics.Vector3f[] coordsA,
WildMagic.LibFoundation.Mathematics.Vector3f[] coordsB)
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- Parameters:
coordsA - first 3D point setcoordsB - second 3D point Set- Returns:
- int distinguishing reason for error
-
setup
public int setup(WildMagic.LibFoundation.Mathematics.Vector2f[] coordsA,
WildMagic.LibFoundation.Mathematics.Vector2f[] coordsB)
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- Parameters:
coordsA - first 2D point setcoordsB - second 2D point Set- Returns:
- int distinguishing reason for error
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/registration/AlgorithmRegOAR2D.html����������������������������������0000775�4231163�4231163�00000442327�14537076061�025750� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegOAR2D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
allowLevel16 |
DOCUMENT ME!
|
private boolean |
allowLevel2 |
DOCUMENT ME!
|
private boolean |
allowLevel4 |
DOCUMENT ME!
|
private boolean |
allowLevel8 |
DOCUMENT ME!
|
private MatrixListItem |
answer |
Final answer after registration.
|
private int |
baseNumIter |
these numbers hard coded for constructors that don't include them.
|
private ModelImage |
blurredInput |
Blurred input image.
|
private ModelImage |
blurredRef |
Blurred reference image.
|
private int |
coarseNum |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private float |
coarseRate |
Coarse and fine sampling parameters.
|
private AlgorithmCostFunctions2D |
cost |
|
private int |
costChoice |
Choice of which cost function to use.
|
private boolean |
doColor |
DOCUMENT ME!
|
private int |
DOF |
Maximum degrees of freedom when running the optimization.
|
private boolean |
doJTEM |
|
private boolean |
doMultiThread |
|
private boolean |
doSubsample |
If true subsample.
|
private int |
fineNum |
Number of passes that will be made in the coarse sampling and fine sampling.
|
private float |
fineRate |
Coarse and fine sampling parameters.
|
private ModelImage |
imageInputIso |
Isotropic input image.
|
private ModelImage |
imageRefIso |
Isotropic reference image.
|
private ModelImage |
imageWeightInputIso |
Isotropic weighted input image.
|
private ModelImage |
imageWeightRefIso |
Isotropic weighted reference image.
|
private ModelImage |
inputImage |
This image is to registered to the reference image.
|
private ModelImage |
inputWeight |
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
|
private int |
interp |
Interpolation method.
|
private float |
level1Factor |
Multiplication factor for level 1 - will be set based on subsampling.
|
private float |
level2Factor |
Multiplication factor for level 2 - will be set based on subsampling.
|
private float |
level4Factor |
Multiplication factor for level 4 - will be set based on subsampling.
|
private boolean |
m_bBruteForce |
If true, calculate the brute-force solution:.
|
private float |
m_fRotationRange |
The range of rotations to try in brute-force mode:.
|
private float |
m_fXScaleRange |
The range of scales in x to try in brute-force mode:.
|
private float |
m_fYScaleRange |
The range of scales in y to try in brute-force mode:.
|
private int |
m_iScaleSteps |
The number of steps to divide scale ranges:.
|
private int |
m_iTranslationRange |
The range of x,y translations to try in brute-force mode:.
|
private ImageRegistrationGPU |
m_kGPUCost |
|
private int |
maxDim |
DOCUMENT ME!
|
private int |
maxIter |
Limits number of iterations in Powell optimization. maxIter in the call to Powell's will be an integer multiple
of baseNumIter
|
private int |
numMinima |
Number of minima from level 8 to test at level 4.
|
private java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> |
optimalPath |
The optimal path.
|
private static WildMagic.LibFoundation.Mathematics.Vector3f[] |
originalPath |
|
private java.util.Vector<java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f>>[] |
paths |
Used to store all paths for levelEigth, levelFour, levelTwo and levelOne.
|
private ModelImage |
refImage |
The inputImage will be registered to this reference image.
|
private ModelImage |
refWeight |
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
|
private boolean |
resampleInput |
DOCUMENT ME!
|
private boolean |
resampleRef |
DOCUMENT ME!
|
private float[] |
resInput |
The voxel resolutions of the image to be registered to the reference image.
|
private float[] |
resRef |
The voxel resolutions of the reference image.
|
private boolean |
rigidFlag |
Flag used to indicate if the registration is rigid (rotation and translation only; DOF = 3.
|
private float |
rotateBegin |
Coarse and fine sampling parameters.
|
private float |
rotateEnd |
Coarse and fine sampling parameters.
|
private ModelSimpleImage |
simpleInput |
Simple version of input image.
|
private ModelSimpleImage |
simpleInputSub2 |
Simple version of input image, subsampled by 2.
|
private ModelSimpleImage |
simpleInputSub4 |
Simple version of input image, subsampled by 4.
|
private ModelSimpleImage |
simpleInputSub8 |
Simple version of input image, subsampled by 8.
|
private ModelSimpleImage |
simpleRef |
Simple version of reference image.
|
private ModelSimpleImage |
simpleRefSub2 |
Simple version of reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleRefSub4 |
Simple version of reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleRefSub8 |
Simple version of reference image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightInput |
Simple version of weighted input image.
|
private ModelSimpleImage |
simpleWeightInputSub2 |
Simple version of weighted input image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightInputSub4 |
Simple version of weighted input image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightInputSub8 |
Simple version of weighted input image, subsampled by 8.
|
private ModelSimpleImage |
simpleWeightRef |
Simple version of weighted reference image.
|
private ModelSimpleImage |
simpleWeightRefSub2 |
Simple version of weighted reference image, subsampled by 2.
|
private ModelSimpleImage |
simpleWeightRefSub4 |
Simple version of weighted reference image, subsampled by 4.
|
private ModelSimpleImage |
simpleWeightRefSub8 |
Simple version of weighted reference image, subsampled by 8.
|
private AlgorithmTransform |
transform |
Transformation algorithm for creating an isotropic reference image.
|
private AlgorithmTransform |
transform2 |
Transformation algorithm for creating an isotropic input image.
|
private boolean |
weighted |
Flag to determine if there are weighted images or not.
|
private int |
weightedInputPixels |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedInputPixelsSub8 |
DOCUMENT ME!
|
private int |
weightedRefPixels |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub2 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub4 |
DOCUMENT ME!
|
private int |
weightedRefPixelsSub8 |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int _baseNumIter,
int _numMinima) |
Creates new automatic linear registration algorithm and sets necessary variables.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
algorithmBruteForce() |
Compute the brute-force solution.
|
WildMagic.LibFoundation.Mathematics.Vector2f |
calculateCenterOfMass2D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor) |
Calculates the center of mass (gravity) of a 2D image.
|
private void |
createTerrain() |
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
void |
drawLine(int xdim,
int ydim,
int zdim,
double[] image,
float value,
java.util.Vector<Point3D> path) |
|
void |
finalize() |
Prepares this class for destruction.
|
java.util.Vector<Point3D> |
findPointsOfLine(java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> realPath) |
|
private java.lang.String |
getConstructionInfo() |
Creates a string with the parameters that the image was constructed with.
|
double |
getCost() |
|
float |
getLevel1Factor() |
|
float |
getLevel2Factor() |
|
float |
getLevel4Factor() |
|
int |
getMaxDim() |
|
double |
getRotation() |
|
private double[] |
getTolerance(int DOF) |
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of
freedom).
|
TransMatrix |
getTransform() |
Accessor that returns the matrix calculated in this algorithm.
|
private int |
indexOf(java.util.Vector<java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f>> aPaths,
WildMagic.LibFoundation.Mathematics.Vector3f tp3d) |
|
private void |
interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale) |
Performs a bilinear interpolation on points.
|
java.util.Vector<MatrixListItem>[] |
levelEight(ModelSimpleImage ref,
ModelSimpleImage input) |
Takes two images that have been subsampled by a factor of eight.
|
java.util.Vector<MatrixListItem> |
levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima) |
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
|
MatrixListItem |
levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item) |
Takes the two images, no subsampling, and the best minimum so far.
|
private MatrixListItem |
levelOne2D(ModelSimpleImage ref,
ModelSimpleImage input) |
Only used for translations only = 2 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling.
|
private MatrixListItem |
levelOne2DRotation(ModelSimpleImage ref,
ModelSimpleImage input) |
Only used for rotations only = 1 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling.
|
MatrixListItem |
levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima) |
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
|
float |
line(float a,
float b,
int x,
float y) |
|
void |
midpointLine(WildMagic.LibFoundation.Mathematics.Vector3f p0,
WildMagic.LibFoundation.Mathematics.Vector3f p1,
java.util.Vector<Point3D> imagePath) |
|
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> |
param2Coordinates(double startX,
double endX,
double stepX,
double startY,
double endY,
double stepY,
double startZ,
double endZ,
double stepZ,
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> path) |
|
void |
print(MatrixListItem item,
java.lang.String message) |
|
void |
print(java.util.Vector data,
java.lang.String message) |
|
void |
runAlgorithm() |
Runs the image registration.
|
private void |
searchOptimalPath() |
|
void |
setBruteForce(boolean bOn,
float fRotationRange,
float fXScaleRange,
float fYScaleRange,
int iScaleSteps,
int iTranslationRange) |
setBruteForce.
|
void |
setJTEM(boolean bOn) |
|
void |
setLevel1Factor(float level1Factor) |
|
void |
setLevel2Factor(float level2Factor) |
|
void |
setLevel4Factor(float level4Factor) |
|
void |
setMaxDim(int maxDim) |
|
private static ModelSimpleImage |
subsampleBy2(ModelSimpleImage srcImage,
boolean isColor) |
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
doColor
private boolean doColor
DOCUMENT ME!
-
doJTEM
private boolean doJTEM
-
interp
private final int interp
Interpolation method.
-
maxDim
private int maxDim
DOCUMENT ME!
-
simpleWeightInputSub2
private ModelSimpleImage simpleWeightInputSub2
Simple version of weighted input image, subsampled by 2.
-
simpleWeightInputSub4
private ModelSimpleImage simpleWeightInputSub4
Simple version of weighted input image, subsampled by 4.
-
simpleWeightInputSub8
private ModelSimpleImage simpleWeightInputSub8
Simple version of weighted input image, subsampled by 8.
-
simpleWeightRefSub2
private ModelSimpleImage simpleWeightRefSub2
Simple version of weighted reference image, subsampled by 2.
-
simpleWeightRefSub4
private ModelSimpleImage simpleWeightRefSub4
Simple version of weighted reference image, subsampled by 4.
-
simpleWeightRefSub8
private ModelSimpleImage simpleWeightRefSub8
Simple version of weighted reference image, subsampled by 8.
-
paths
private final java.util.Vector<java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f>>[] paths
Used to store all paths for levelEigth, levelFour, levelTwo and levelOne.
-
Constructor Detail
-
AlgorithmRegOAR2D
public AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread -
Constructor without weighting and without advanced settings (num iter).
-
AlgorithmRegOAR2D
public AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsample
Constructor without weighting and without advanced settings (num iter).
-
AlgorithmRegOAR2D
public AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread -
Constructor with weighting and without advanced settings (num iter).
-
AlgorithmRegOAR2D
public AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsample
Constructor with weighting and without advanced settings (num iter).
-
AlgorithmRegOAR2D
public AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread - _baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
Constructor without weighting and with advanced settings (num iter) set.
-
AlgorithmRegOAR2D
public AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread - _baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
Constructor without weighting and with advanced settings (num iter) set.
-
AlgorithmRegOAR2D
public AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
boolean doMultiThread,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread - _baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
Constructor with weighting and with advanced settings (num iter) set.
-
AlgorithmRegOAR2D
public AlgorithmRegOAR2D(ModelImage _imageA,
ModelImage _imageB,
ModelImage _refWeight,
ModelImage _inputWeight,
int _costChoice,
int _DOF,
int _interp,
float _rotateBegin,
float _rotateEnd,
float _coarseRate,
float _fineRate,
boolean doSubsample,
int _baseNumIter,
int _numMinima)
Creates new automatic linear registration algorithm and sets necessary variables.
- Parameters:
_imageA - Reference image (register input image to reference image)._imageB - Input image (register input image to reference image)._refWeight - Reference weighted image, used to give certain areas of the image greater impact on the
registration._inputWeight - Input weighted image, used to give certain areas of the image greater impact on the
registration._costChoice - Choice of cost functions, like correlation ratio or mutual information._DOF - Degrees of freedom for registration_interp - Interpolation method used in transformations._rotateBegin - Beginning of coarse sampling range (i.e., -60 degrees)._rotateEnd - End of coarse sampling range (i.e., 60 degrees)._coarseRate - Point at which coarse samples should be taken (i.e., every 45 degrees)._fineRate - Point at which fine samples should be taken (i.e., every 15 degrees).doSubsample - If true subsampledoMultiThread - _baseNumIter - Limits the number of iterations of Powell's algorithm. maxIter in the call to Powell's will
be an integer multiple of baseNumIter_numMinima - Number of minima from level 8 to test at level 4
Constructor with weighting and with advanced settings (num iter) set.
-
Method Detail
-
calculateCenterOfMass2D
public WildMagic.LibFoundation.Mathematics.Vector2f calculateCenterOfMass2D(ModelSimpleImage image,
ModelSimpleImage wgtImage,
boolean isColor)
Calculates the center of mass (gravity) of a 2D image. In image space where the upper left hand corner of the
image is 0,0. The x axis goes left to right, y axis goes top to bottom. (i.e. the right hand rule). One could
simply multiply by voxel resolutions.
- Parameters:
image - DOCUMENT ME!wgtImage - DOCUMENT ME!isColor - DOCUMENT ME!- Returns:
- the center of mass as a 2D point
-
drawLine
public void drawLine(int xdim,
int ydim,
int zdim,
double[] image,
float value,
java.util.Vector<Point3D> path)
-
param2Coordinates
public java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> param2Coordinates(double startX,
double endX,
double stepX,
double startY,
double endY,
double stepY,
double startZ,
double endZ,
double stepZ,
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> path)
-
runAlgorithm
public void runAlgorithm()
Runs the image registration. Blurs the images based on what their minimum resolutions are. The reference image is
blurred if one of the input image resolutions is 50% or more bigger than the corresponding resolution in the
reference image; likewise, the input image is blurred if one of the reference image resolutions is 50% or more
bigger than the corresponding resolution in the input image. Thus, it is unlikely, though not impossible, that
both images will be blurred. The images are then transformed into isotropic voxels. The resolutions of the two
images after the isotropic transformation will be the same in all dimensions. That resolution will equal the
minimum of the minimums of each image's resolutions: Min( Min (resolutions of ref image, resolutions of input
image) ). If the images are weighted, the weight images are blurred and transformed into isotropic voxels in the
same manner as the originals. Then the images are subsampled by 2, 4, and 8. If the images are too small they
will not be subsampled down to the smallest level; if they are too big, they will be subsampled to 16. The same
is done with the weight images if necessary. The function levelEight is called with the images subsampled by 8;
it returns two vectors with minima. Then the function levelFour is called with images subsampled by 4 and the two
vectors; it returns one vector of minima. The function levelTwo is called with images subsampled by 2 and the
vector; it returns an "answer" in the form of a MatrixListItem, which is a convenient way of storing the point,
the matrix, and the cost of the minimum. Then the function levelOne is called with the minimum; it returns a
final "answer", or minimum, which will then be accessed by the dialog that called this algorithm.
- Specified by:
runAlgorithm in class AlgorithmBase
-
getCost
public double getCost()
-
setBruteForce
public void setBruteForce(boolean bOn,
float fRotationRange,
float fXScaleRange,
float fYScaleRange,
int iScaleSteps,
int iTranslationRange)
setBruteForce. Tells the algorithm to do a brute-force optimization, where it will iterate of the the input
rotation, xscale, yscale, and translation ranges calculating the cost function at each point and returing the
minimum. No optimization with the brute-force approach.
- Parameters:
bOn - DOCUMENT ME!fRotationRange - DOCUMENT ME!fXScaleRange - DOCUMENT ME!fYScaleRange - DOCUMENT ME!iScaleSteps - DOCUMENT ME!iTranslationRange - DOCUMENT ME!
-
subsampleBy2
private static ModelSimpleImage subsampleBy2(ModelSimpleImage srcImage,
boolean isColor)
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- Parameters:
srcImage - Image to subsample.isColor - DOCUMENT ME!- Returns:
- Subsampled image.
-
algorithmBruteForce
private void algorithmBruteForce()
Compute the brute-force solution. Iterates over a range of angles, scales and translations, calculating the cost
function for each new position, returning the one with minimum cost:
-
interpolate
private void interpolate(double x,
double[] initial,
double[][] tranforms,
boolean scale)
Performs a bilinear interpolation on points. Takes an initial point, a vector of values to set, and an array in
which to look at neighbors of that point. Sets the appropriate values in the vector. Does not set scale if the
scale parameter is false.
- Parameters:
x - Initial index into array.initial - Vector to set; if scale is true, set two translations and a scale. Otherwise just
set translations.tranforms - DOCUMENT ME!scale - true means set the scale in the vector.
-
levelEight
public java.util.Vector<MatrixListItem>[] levelEight(ModelSimpleImage ref,
ModelSimpleImage input)
Takes two images that have been subsampled by a factor of eight. Sets up the cost function with the images and
the weighted images, if necessary. Uses the coarse sampling rate and optimizes translations and global scale at
the given rotation. So for example, if the coarse sampling range were -30 to 30 at every 15 degrees, we would
optimize at rotations of -30, -15, 0, 15, 30. Measures the cost at the fine sampling rate. Interpolates the
translations and global scale to come up with a good guess as to what the optimized translation would be at that
point. Takes the top 20% of the points and optimizes them. Now have a large multi-array of costs. 20% of those
have been optimized and placed back into their original position in the multi-array. Looks at the 2 neighbors of
a point: + and - one fine sample. If the point has a cost greater than any of these, it is not a minima.
Otherwise it is. Saves it in a vector of minima. Optimizes the minima over rotation as well as translations and
global scale. (Previously had not optimized over rotation.) Returns two vectors, one containing the minima before
optimization, one containing the minima after optimization.
- Parameters:
ref - Subsampled by 8 reference image.input - Subsampled by 8 input image.- Returns:
- List of preoptimized and optimized points.
-
levelFour
public java.util.Vector<MatrixListItem> levelFour(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima,
java.util.Vector<MatrixListItem> optMinima)
Takes two images that have been subsampled by a factor of four, and two vectors of minima. Sets up the cost
function with the images and the weighted images, if necessary. Adds the level4Factor determined during
subsampling. Measures the costs of the minima on the images and sort them. Takes the top three in each vector
(pre-optimization and post-optimization) and optimizes them. Puts them all into one vector. Perturbs the rotation
by zero and plus-minus fineDelta. If it's not a rigid transformation, perturbs the global scaling by factors of
0.8, 0.9, 1.0, 1.1, and 1.2. Optimize the perturbations. Returns a vector of the perturbed, optimized minima.
- Parameters:
ref - Reference image, subsampled by 4.input - Input image, subsampled by 4.minima - Preoptimized minima.optMinima - Optimized minima.- Returns:
- A vector of perturbed, optimized minima.
-
levelOne
public MatrixListItem levelOne(ModelSimpleImage ref,
ModelSimpleImage input,
MatrixListItem item)
Takes the two images, no subsampling, and the best minimum so far. Sets up the cost function with the images and
the weighted images, if necessary. Adds the level1Factor determined during subsampling. Performs one optimization
run, with the maximum allowable degrees of freedom as specified by the user (the max is 7). Returns the best
minimum.
- Parameters:
ref - Reference image.input - Input image.item - Best minimum so far.- Returns:
- Best minimum after optimization.
-
levelOne2D
private MatrixListItem levelOne2D(ModelSimpleImage ref,
ModelSimpleImage input)
Only used for translations only = 2 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling. Sets up the cost function with the images and the weighted images, Performs one
optimization run, with 2 degrees of freedom Returns the best minimum.
- Parameters:
ref - Reference image.input - Input image.- Returns:
- Best minimum after optimization.
-
levelOne2DRotation
private MatrixListItem levelOne2DRotation(ModelSimpleImage ref,
ModelSimpleImage input)
Only used for rotations only = 1 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling. Sets up the cost function with the images and the weighted images, Performs one
optimization run, with 2 degrees of freedom Returns the best minimum.
- Parameters:
ref - Reference image.input - Input image.- Returns:
- Best minimum after optimization.
-
levelTwo
public MatrixListItem levelTwo(ModelSimpleImage ref,
ModelSimpleImage input,
java.util.Vector<MatrixListItem> minima)
Takes two images that have been subsampled by a factor of 2 and a vector of minima. Sets up the cost function
with the images and the weighted images, if necessary. Adds the level2Factor determined during subsampling.
Measures the costs of the minima at the images. Optimizes the best minimum with 4 degrees of freedom, then 5,
then 7. If the user has limited the degrees of freedom to 3, there will only be one optimization run, with 3
degrees of freedom. Returns the best minimum after optimization.
- Parameters:
ref - Reference image, subsampled by 2.input - Input image, subsampled by 2.minima - Minima.- Returns:
- The optimized minimum.
-
getMaxDim
public int getMaxDim()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions.html�������0000775�4231163�4231163�00000027365�14537076052�033501� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/HartleyTransform.html������������������������������������������������0000775�4231163�4231163�00000120141�14537076055�023414� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
HartleyTransform (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class HartleyTransform
extends AlgorithmBase
The MIT License (MIT)
Copyright (c) 2015 Eugeniy Sokol
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"),
to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute,
sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
addsub(double[] u,
double[] v) |
|
private void |
addsub(double[] u,
double[] v,
double scale) |
|
void |
back_transform(double[] fht_data) |
|
void |
finalize() |
Calls garbage collector to release system resources.
|
double[] |
get_frequency(double[] fht_data,
int number) |
|
void |
hartley_multiply(double[] fht_data,
double[] fht_fir,
boolean scaled) |
|
private void |
revbin_permute(double[] data) |
|
private void |
rotate(double[] u,
double[] v,
double c,
double s) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
show(double[] data,
int size) |
|
private void |
step_addsub(double[] data,
int ldn) |
|
private void |
step_addsub4(double[] data) |
|
private void |
step_addsub8(double[] data) |
|
private void |
step_rotate(double[] data,
int ldn) |
|
private void |
step_rotate8(double[] data) |
|
void |
testHartley() |
|
void |
transform(double[] data,
boolean scaled) |
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.OnlyFillsOneOutputFunctor.html���������������������������0000775�4231163�4231163�00000023201�14537076052�027476� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.OnlyFillsOneOutputFunctor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.OnlyFillsOneOutputFunctor
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitPure1DModel.html������������������������������������0000775�4231163�4231163�00000041566�14537076045�025246� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitPure1DModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPure1DModel(int nPoints,
double[] xData,
float[] yData,
double[] initial) |
Creates a new FitPure1DModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying pure 1D fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
Fit to function - a1 + a2*[1 - 1/sqrt(1 + 4*PI*a0*x)].
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitPure1DModel
public FitPure1DModel(int nPoints,
double[] xData,
float[] yData,
double[] initial)
Creates a new FitPure1DModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a1 + a2*[1 - 1/sqrt(1 + 4*PI*a0*x)].
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting
parameters.
������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmAHElocal.html�����������������������������������������������0000775�4231163�4231163�00000247526�14537076043�023405� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAHElocal (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float |
absMinThreshold |
pixel does not get remapped when pixel is below threshold.
|
static int |
AXIAL_KERNEL |
along the major axis (+).
|
protected boolean |
bChannel |
the blue channel.
|
protected int |
brightnessLevel |
a pixel (no matter whether represented as a float or int), has a brightnessLevel, which is in the histogram as a
value between 0 and totalBins.
|
protected float |
bufMax |
maximum of the image buffer.
|
protected float |
bufMin |
minimum of the image buffer.
|
protected boolean |
clampingIsNecessary |
perform a "contrast limited" AHE.
|
protected float |
clipLevel |
DOCUMENT ME!
|
(package private) int |
colorUsed |
|
static int |
CROSS_KERNEL |
cross (+).
|
protected int |
currentSlice |
DOCUMENT ME!
|
protected boolean |
entireImage |
true means apply to entire image, false only region.
|
protected boolean |
gChannel |
the green channel.
|
protected int |
halfK |
DOCUMENT ME!
|
protected int[] |
histogram |
(cumulative) histogram.
|
protected float[] |
histomap |
the scaled histogram.
|
private double |
imageMax |
|
protected float |
imageOffset |
image minimum; used as offset for images to build histogram.
|
protected boolean |
isColorImage |
indicates the image is a color image.
|
protected float[] |
kernel |
DOCUMENT ME!
|
protected int |
kernelCenter |
DOCUMENT ME!
|
protected byte[] |
kernelMask |
mask to determine the region of pixels used in a median filter.
|
protected int |
kernelShape |
user-selectable shape of the region for neighbor-selection.
|
protected int |
kernelSize |
dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).
|
(package private) float[] |
Lmax |
|
(package private) float[] |
Lmin |
|
protected java.util.BitSet |
mask |
DOCUMENT ME!
|
protected int |
maskCenter |
DOCUMENT ME!
|
protected float |
maxScale |
range of max - min over local kernel, slice, or entire image.
|
protected int |
maxScaleRule |
flag how/when to set the maximum scale. default per slice
|
protected float |
minThreshold |
DOCUMENT ME!
|
protected float |
minValue |
min over local kernel, slice, or entire image.
|
protected int |
numberOfSlices |
DOCUMENT ME!
|
(package private) int |
numColors |
|
protected boolean |
rChannel |
if T, filter the red channel.
|
private double |
scaleMaxCIELab |
|
static int |
scaleOnImage |
DOCUMENT ME!
|
static int |
scaleOnLocal |
DOCUMENT ME!
|
static int |
scaleOnSlice |
DOCUMENT ME!
|
protected float[] |
sortBuffer |
here for memory/speed concerns.
|
static int |
SQUARE_KERNEL |
square kernel.
|
protected boolean |
thresholdingIsNecessary |
threshold the image while processing.
|
protected int |
totalBins |
number of histogram and histomap values actually used.
|
protected float |
unitSize |
one unit is one totalBin-th of the distance between max & min brightness.
|
private boolean |
useCIELab |
|
protected int |
valuesPerPixel |
number of elements in a pixel.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmAHElocal(ModelImage srcImg,
int kSize,
int kShape,
boolean wholeImage,
boolean useCIELab,
float[] Lmin,
float[] Lmax) |
Constructor for images in which changes are returned to the source image.
|
AlgorithmAHElocal(ModelImage destImg,
ModelImage srcImg,
int kSize,
int kShape,
boolean wholeImage,
boolean useCIELab,
float[] Lmin,
float[] Lmax) |
Constructor for images in which changes are placed in a predetermined destination image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected int |
buildHistogram() |
make histogram uses the class-global vars kernel and histogram.
|
protected void |
calcInPlace2D() |
Histogram equalization on the source image.
|
protected void |
calcInPlace3D() |
Histogram Equalization on the source image and replaces the source image with the processed image.
|
protected void |
calcStoreInDest2D() |
This function produces a new image that has had itself histogram equalized. places filtered image in the
destination image.
|
protected void |
calcStoreInDest3D() |
This function produces a new volume image that has been histogram equalized.
|
protected void |
clip(int[] histogram,
int clipLimit) |
after generating a histogram, clip will reduce the number of pixels attributed to that brightness
level.
|
private void |
convertCIELabtoRGB(float[] L,
float[] a,
float[] b,
float[] buffer) |
|
private void |
convertRGBtoCIELab(float[] buffer,
float[] L,
float[] a,
float[] b) |
|
protected void |
copyBuffers(float[] dest,
float[] src) |
Copies all values from the srcbuffer to the destination buffer. the format is intended to envision the
Organization of dest[i] := src[i] float dest destination array float src source array
|
void |
finalize() |
Prepares this class for destruction.
|
protected void |
findBufferMinMax(float[] buf,
int bufStart,
int bufEnd) |
Finds the local maximum and minimum values in the given range in order, as given by the starting and stoping
values.
|
protected void |
findImageOffset(int type) |
gets the bottom end of the image. for any image but color images, the bottom end is defined as the buffer minimum
for all images except color images; there the offset is defined to be zero
|
protected int |
findTotalBins(int type,
int ideal) |
finds the total number of bins based on the type of image.
|
protected float |
getMax(int color) |
gets the image max based on 1st) whether or not the image is color. 2) the color.
|
protected float |
getMin(int color) |
gets the image max based on 1st) whether or not the image is color. 2) the color.
|
protected void |
getNeighborList(int i,
float[] data) |
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
|
protected boolean |
getThresholdNeighborList(int i,
float[] data) |
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
|
protected void |
makeKernel() |
Makes the kernel.
|
protected void |
makeKernelMask() |
Forms kernel.
|
protected void |
monoSliceEqualizer(float[] srcBuffer,
float[] destBuffer) |
Allows a single monochrome image slice to be filtered.
|
protected void |
printhisto(int[] histo) |
a debug tool.
|
protected float |
procPixel(int pix,
float[] srcBuffer) |
process pixel at pixel pix using data from the srcBuffer. builds a list of monochromatic image
values of the neighboring pixels image values (using a map generated by the kernelMask), builds the histogram of
those values, clamps when necessary, then scales the cumulative histogram, getting the brightness back out.
|
void |
runAlgorithm() |
starts the algorithm.
|
void |
setClipLevel(int sectorPercentage) |
The Clip Level is a percentage of the maximum number of pixels in any particular brightness level.
|
void |
setContrastLimited(boolean beClamped) |
Redistribute from brightnesses with at a least a specified percentage of the brightness with the maximum number
of pixels.
|
private void |
setCopyColorText(java.lang.String colorText) |
If the progress bar is visible, sets the text to:
Copying all color values ...
|
void |
setHistogramScaleRule(int scaleRule) |
permit the user to select the scale on which the algorithm forms the brightness pattern of the histogram.
|
protected void |
setKernelMask() |
Fill in the mask for which pixels are used in filtering.
|
void |
setMinimumThreshold(float minThresh) |
sets minimum threshold values.
|
void |
setRGBChannelFilter(boolean r,
boolean g,
boolean b) |
RGB images are histogram equalized by 'channel.'
|
void |
setThresholdImage(boolean useThreshold) |
If useThreshold true only copy when both the source pixel and its local neighborhoold are are less than
minThreshold.
|
protected float |
thresholdProcPixel(int pix,
float[] srcBuffer) |
process pixel at pixel pix using data from the srcBuffer. builds a list of monochromatic image
values of the neighboring pixels image values (using a map generated by the kernelMask), builds the histogram of
those values, clamps when necessary, then scales the cumulative histogram, getting the brightness back out.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
brightnessLevel
protected int brightnessLevel
a pixel (no matter whether represented as a float or int), has a brightnessLevel, which is in the histogram as a
value between 0 and totalBins.
-
halfK
protected int halfK
DOCUMENT ME!
-
kernel
protected float[] kernel
DOCUMENT ME!
-
kernelSize
protected int kernelSize
dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).
-
maskCenter
protected int maskCenter
DOCUMENT ME!
-
valuesPerPixel
protected int valuesPerPixel
number of elements in a pixel. Monochrome = 1, Color = 4. (a, R, G, B)
-
imageMax
private double imageMax
-
Constructor Detail
-
AlgorithmAHElocal
public AlgorithmAHElocal(ModelImage srcImg,
int kSize,
int kShape,
boolean wholeImage,
boolean useCIELab,
float[] Lmin,
float[] Lmax)
Constructor for images in which changes are returned to the source image.
- Parameters:
srcImg - source image modelkSize - size of kernelkShape - shape of kernelwholeImage - If true whole image useduseCIELab - If color, use intensity L in CIELab spaceLmin - [0] is lowest color image L value in CIELab spaceLmax - [0] is highest color image L value in CIELab space
-
AlgorithmAHElocal
public AlgorithmAHElocal(ModelImage destImg,
ModelImage srcImg,
int kSize,
int kShape,
boolean wholeImage,
boolean useCIELab,
float[] Lmin,
float[] Lmax)
Constructor for images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelkSize - size of kernelkShape - shape of kernelwholeImage - If true whole image useduseCIELab - If color, use intensity L in CIELab spaceLmin - [0] is lowest color image L value in CIELab spaceLmax - [0] is highest color image L value in CIELab space
-
Method Detail
-
setClipLevel
public void setClipLevel(int sectorPercentage)
The Clip Level is a percentage of the maximum number of pixels in any particular brightness level. This method
allows one to set that percentage. As the regional histograms are tabulated, the brightness with the maximum
number of pixels attributed to it is remembered. The algorithm will then evenly redistibute the total number of
pixels from any brightness which has a greater number than the max times this fraction to all other (less
populous) brightnesses.
- Parameters:
sectorPercentage - DOCUMENT ME!
-
setMinimumThreshold
public void setMinimumThreshold(float minThresh)
sets minimum threshold values. Pixels are copied over when both the source pixel and the local neighborhood
surrounding the pixel are all less than the given minimum pixel value.
- Parameters:
minThresh - DOCUMENT ME!
-
setRGBChannelFilter
public void setRGBChannelFilter(boolean r,
boolean g,
boolean b)
RGB images are histogram equalized by 'channel.' That is, each color, red, blue and green, is run independently
of the other two colors. This permits selectively filtering any combination of the three channels instead of
simply trying to handle all three at once. True filters that channel.
- Parameters:
r - DOCUMENT ME!g - DOCUMENT ME!b - DOCUMENT ME!
-
copyBuffers
protected final void copyBuffers(float[] dest,
float[] src)
Copies all values from the srcbuffer to the destination buffer. the format is intended to envision the
Organization of dest[i] := src[i] float dest destination array float src source array
- Parameters:
dest - DOCUMENT ME!src - DOCUMENT ME!
-
findBufferMinMax
protected final void findBufferMinMax(float[] buf,
int bufStart,
int bufEnd)
Finds the local maximum and minimum values in the given range in order, as given by the starting and stoping
values.
- Parameters:
buf - float array of valuesbufStart - where to begin lookingbufEnd - where to stop
-
findImageOffset
protected final void findImageOffset(int type)
gets the bottom end of the image. for any image but color images, the bottom end is defined as the buffer minimum
for all images except color images; there the offset is defined to be zero
- Parameters:
type - DOCUMENT ME!
-
findTotalBins
protected final int findTotalBins(int type,
int ideal)
finds the total number of bins based on the type of image.
- Parameters:
type - DOCUMENT ME!ideal - DOCUMENT ME!- Returns:
- the total number of bins.
-
setCopyColorText
private void setCopyColorText(java.lang.String colorText)
If the progress bar is visible, sets the text to:
Copying all color values ...
- Parameters:
colorText - the color to use. Eg., "red" or "blue"
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.RegularizationCheckingLinearSolver.html��������������0000775�4231163�4231163�00000042617�14537076053�032175� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.RegularizationCheckingLinearSolver (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
passedReg
boolean[] passedReg
-
Constructor Detail
-
RegularizationCheckingLinearSolver
public RegularizationCheckingLinearSolver(int num_cols,
double[] diagonal,
java.lang.String testName,
boolean[] passedReg)
�����������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.html����������������������������������������������������������0000775�4231163�4231163�00000657411�14537076056�021064� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
SIFT3D() |
SIFT3D - default constructor.
|
SIFT3D(ModelImage imageA,
ModelImage imageB,
double SIFT3D_nn_thresh_default,
double SIFT3D_err_thresh_default,
int SIFT3D_num_iter_default,
boolean useOCL,
double SIFT3D_GAUSS_WIDTH_FCTR,
double SIFT3D_MATCH_MAX_DIST,
boolean ICOS_HIST,
boolean SIFT3D_RANSAC_REFINE,
boolean CUBOID_EXTREMA,
boolean SIFT3D_ORI_SOLID_ANGLE_WEIGHT) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private int |
_SIFT3D_extract_descriptors(SIFT3D.SIFT3DC sift3d,
SIFT3D.Pyramid gpyr,
SIFT3D.Keypoint_store kp,
SIFT3D.SIFT3D_Descriptor_store desc) |
|
private int |
Affine_set_mat(SIFT3D.Mat_rm mat,
SIFT3D.Affine affine) |
|
private void |
apply_Affine_xyz(SIFT3D.Affine affine,
double x_in,
double y_in,
double z_in,
double[] x_out,
double[] y_out,
double[] z_out) |
|
private int |
apply_Sep_FIR_filter(SIFT3D.Image src,
SIFT3D.Image dst,
SIFT3D.Sep_FIR_filter f,
double unit) |
|
private int |
assign_eig_ori(SIFT3D.Image im,
SIFT3D.Cvec vcenter,
double sigma,
SIFT3D.Mat_rm R,
double[] conf) |
|
private int |
assign_orientation_thresh(SIFT3D.Image im,
SIFT3D.Cvec vcenter,
double sigma,
double thresh,
SIFT3D.Mat_rm R) |
|
private int |
assign_orientations(SIFT3D.SIFT3DC sift3d,
SIFT3D.Keypoint_store kp) |
|
private int |
build_dog(SIFT3D.SIFT3DC sift3d) |
|
private int |
build_gpyr(SIFT3D.SIFT3DC sift3d) |
|
private int |
cart2bary(SIFT3D.Cvec cart,
SIFT3D.Tri tri,
SIFT3D.Cvec bary,
double[] k) |
|
private void |
cleanup_Affine(SIFT3D.Affine aff) |
|
private void |
cleanup_Gauss_filter(SIFT3D.Gauss_filter gauss) |
|
private void |
cleanup_GSS_filters(SIFT3D.GSS_filters gss) |
|
private void |
cleanup_Keypoint_store(SIFT3D.Keypoint_store kp) |
|
private void |
cleanup_Mat_rm(SIFT3D.Mat_rm mat) |
|
private void |
cleanup_Mesh(SIFT3D.Mesh mesh) |
|
private void |
cleanup_Pyramid(SIFT3D.Pyramid pyr) |
|
private void |
cleanup_Reg_SIFT3D(SIFT3D.Reg_SIFT3D reg) |
|
private void |
cleanup_Sep_FIR_filter(SIFT3D.Sep_FIR_filter f) |
|
private void |
cleanup_SIFT3D(SIFT3D.SIFT3DC sift3d) |
|
private void |
cleanup_SIFT3D_Descriptor_store(SIFT3D.SIFT3D_Descriptor_store desc) |
|
private void |
cleanup_Slab(SIFT3D.Slab slab) |
|
private boolean |
CMP_CUBE_GT(SIFT3D.Image im,
int x,
int y,
int z,
int IGNORESELF,
double val) |
|
private boolean |
CMP_CUBE_LT(SIFT3D.Image im,
int x,
int y,
int z,
int IGNORESELF,
double val) |
|
private boolean |
CMP_CUR_GT(SIFT3D.Image im,
int x,
int y,
int z,
double val) |
|
private boolean |
CMP_CUR_LT(SIFT3D.Image im,
int x,
int y,
int z,
double val) |
|
private boolean |
CMP_NEXT_GT(SIFT3D.Image im,
int x,
int y,
int z,
double val) |
|
private boolean |
CMP_NEXT_LT(SIFT3D.Image im,
int x,
int y,
int z,
double val) |
|
private boolean |
CMP_PREV_GT(SIFT3D.Image im,
int x,
int y,
int z,
double val) |
|
private boolean |
CMP_PREV_LT(SIFT3D.Image im,
int x,
int y,
int z,
double val) |
|
private int |
convert_Mat_rm(SIFT3D.Mat_rm in,
SIFT3D.Mat_rm out,
SIFT3D.Mat_rm_type type) |
|
private int |
convolve_sep(SIFT3D.Image src,
SIFT3D.Image dst,
SIFT3D.Sep_FIR_filter f,
int dim,
double unit) |
|
private int |
convolve_sep_gen(SIFT3D.Image src,
SIFT3D.Image dst,
SIFT3D.Sep_FIR_filter f,
int dim,
double unit) |
|
private int |
convolve_sep_sym(SIFT3D.Image src,
SIFT3D.Image dst,
SIFT3D.Sep_FIR_filter f,
int dim,
double unit) |
|
private int |
copy_Affine(SIFT3D.Affine src,
SIFT3D.Affine dst) |
|
(package private) int |
copy_Keypoint(SIFT3D.Keypoint src,
SIFT3D.Keypoint dst) |
|
private int |
copy_Mat_rm(SIFT3D.Mat_rm src,
SIFT3D.Mat_rm dst) |
|
private int |
Cvec_to_sbins(SIFT3D.Cvec vd,
SIFT3D.Svec bins) |
|
private int |
detect_extrema(SIFT3D.SIFT3DC sift3d,
SIFT3D.Keypoint_store kp) |
|
private int |
eigen_Mat_rm(SIFT3D.Mat_rm A,
SIFT3D.Mat_rm Q,
SIFT3D.Mat_rm L) |
|
private int |
extract_descrip(SIFT3D.SIFT3DC sift3d,
SIFT3D.Image im,
SIFT3D.Keypoint key,
SIFT3D.SIFT3D_Descriptor desc) |
|
private int |
find_tform_ransac(SIFT3D.Ransac ran,
SIFT3D.Mat_rm src,
SIFT3D.Mat_rm ref,
SIFT3D.Affine tform) |
|
private double |
fmodf(double in1,
double in2) |
|
ModelImage |
getResultImage() |
|
private void |
hist_zero(SIFT3D.Hist hist) |
|
private int |
icos_hist_bin(SIFT3D.SIFT3DC sift3d,
SIFT3D.Cvec x,
SIFT3D.Cvec bary,
int[] bin) |
|
private int |
im_copy_data(SIFT3D.Image src,
SIFT3D.Image dst) |
|
private int |
im_copy_dims(SIFT3D.Image src,
SIFT3D.Image dst) |
|
private void |
im_default_stride(SIFT3D.Image im) |
|
private int |
im_downsample_2x(SIFT3D.Image src,
SIFT3D.Image dst) |
|
private void |
im_free(SIFT3D.Image im) |
|
private void |
IM_GET_GRAD_ISO(SIFT3D.Image im,
int x,
int y,
int z,
int c,
SIFT3D.Cvec vd) |
|
private int |
im_inv_transform(SIFT3D.Affine tform,
SIFT3D.Image src,
SIFT3D.interp_type interp,
int resize,
SIFT3D.Image dst) |
|
private double |
im_max_abs(SIFT3D.Image im) |
|
private int |
im_permute(SIFT3D.Image src,
int dim1,
int dim2,
SIFT3D.Image dst) |
|
private int |
im_resize(SIFT3D.Image im) |
|
private void |
im_scale(SIFT3D.Image im) |
|
private int |
im_subtract(SIFT3D.Image src1,
SIFT3D.Image src2,
SIFT3D.Image dst) |
|
private void |
im_zero(SIFT3D.Image im) |
|
private int |
im2mm(SIFT3D.Mat_rm im,
double[] units,
SIFT3D.Mat_rm mm) |
|
private int |
init_Affine(SIFT3D.Affine affine,
int dim) |
|
private int |
init_cl_SIFT3D(SIFT3D.SIFT3DC sift3d) |
|
private int |
init_Gauss_filter(SIFT3D.Gauss_filter gauss,
double sigma,
int dim) |
|
(package private) int |
init_Gauss_incremental_filter(SIFT3D.Gauss_filter gauss,
double s_cur,
double s_next,
int dim) |
|
private int |
init_geometry(SIFT3D.SIFT3DC sift3d) |
|
private void |
init_GSS_filters(SIFT3D.GSS_filters gss) |
|
private void |
init_im(SIFT3D.Image im) |
|
private int |
init_Keypoint(SIFT3D.Keypoint key) |
|
private void |
init_Keypoint_store(SIFT3D.Keypoint_store kp) |
|
private int |
init_Mat_rm(SIFT3D.Mat_rm mat,
int num_rows,
int num_cols,
SIFT3D.Mat_rm_type type,
int set_zero) |
|
private int |
init_Mat_rm_p(SIFT3D.Mat_rm mat,
double[][] p,
int num_rows,
int num_cols,
SIFT3D.Mat_rm_type type,
int set_zero) |
|
private void |
init_Mesh(SIFT3D.Mesh mesh) |
|
private void |
init_Pyramid(SIFT3D.Pyramid pyr) |
|
private void |
init_Ransac(SIFT3D.Ransac ran) |
|
private int |
init_Reg_SIFT3D(SIFT3D.Reg_SIFT3D reg) |
|
private int |
init_Sep_FIR_filter(SIFT3D.Sep_FIR_filter f,
int dim,
int width,
double[] kernel,
int symmetric) |
|
private int |
init_SIFT3D(SIFT3D.SIFT3DC sift3d) |
|
private void |
init_SIFT3D_Descriptor_store(SIFT3D.SIFT3D_Descriptor_store desc) |
|
private void |
init_Slab(SIFT3D.Slab slab) |
|
private double |
lanczos(double x,
double a) |
|
private double |
log2(double x) |
|
private int |
make_affine_matrix(SIFT3D.Mat_rm pts_in,
int dim,
SIFT3D.Mat_rm mat_out) |
|
(package private) int |
make_gss(SIFT3D.GSS_filters gss,
SIFT3D.Pyramid pyr) |
|
private int |
match_desc(SIFT3D.SIFT3D_Descriptor desc,
SIFT3D.SIFT3D_Descriptor_store store,
double nn_thresh) |
|
private int |
mm2im(double[] src_units,
double[] ref_units,
SIFT3D.Affine aff) |
|
private int[] |
n_choose_k(int n,
int k,
int[] status_out) |
|
private void |
normalize_desc(SIFT3D.SIFT3D_Descriptor desc) |
|
private int[] |
ransac(SIFT3D.Mat_rm src,
SIFT3D.Mat_rm ref,
SIFT3D.Ransac ran,
SIFT3D.Affine tform,
int[] cset,
int[] len,
int[] status_out) |
|
private void |
refine_Hist(SIFT3D.Hist hist) |
|
private int |
register_SIFT3D(SIFT3D.Reg_SIFT3D reg,
SIFT3D.Affine tform) |
|
private double |
resample_lanczos2(SIFT3D.Image im,
double x,
double y,
double z,
int c) |
|
private double |
resample_linear(SIFT3D.Image in,
double x,
double y,
double z,
int c) |
|
private int |
resize_Keypoint_store(SIFT3D.Keypoint_store kp,
int num) |
|
private int |
resize_Mat_rm(SIFT3D.Mat_rm mat) |
|
(package private) int |
resize_Pyramid(SIFT3D.Image im,
int first_level,
int num_kp_levels,
int num_levels,
int first_octave,
int num_octaves,
SIFT3D.Pyramid pyr) |
|
private int |
resize_SIFT3D(SIFT3D.SIFT3DC sift3d,
int num_kp_levels) |
|
private int |
resize_SIFT3D_Descriptor_store(SIFT3D.SIFT3D_Descriptor_store desc,
int num) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
SAMP_AND_ACC(SIFT3D.Image src,
SIFT3D.Image dst,
double tap,
double[] coords,
int x,
int y,
int z,
int c,
int dim) |
|
private int |
set_corner_thresh_SIFT3D(SIFT3D.SIFT3DC sift3d,
double corner_thresh) |
|
private int |
set_im_Reg_SIFT3D(SIFT3D.Reg_SIFT3D reg,
SIFT3D.Image im,
double[] units,
SIFT3D.SIFT3D_Descriptor_store desc) |
|
private int |
set_im_SIFT3D(SIFT3D.SIFT3DC sift3d,
SIFT3D.Image im) |
|
private int |
set_num_kp_levels_SIFT3D(SIFT3D.SIFT3DC sift3d,
int num_kp_levels) |
|
private int |
set_peak_thresh_SIFT3D(SIFT3D.SIFT3DC sift3d,
double peak_thresh) |
|
private int |
set_ref_Reg_SIFT3D(SIFT3D.Reg_SIFT3D reg,
SIFT3D.Image ref) |
|
private int |
set_scales_Pyramid(double sigma0,
double sigma_n,
SIFT3D.Pyramid pyr) |
|
private int |
set_scales_SIFT3D(SIFT3D.SIFT3DC sift3d,
double sigma0,
double sigma_n) |
|
private int |
set_sigma_n_SIFT3D(SIFT3D.SIFT3DC sift3d,
double sigma_n) |
|
private int |
set_sigma0_SIFT3D(SIFT3D.SIFT3DC sift3d,
double sigma0) |
|
private int |
set_src_Reg_SIFT3D(SIFT3D.Reg_SIFT3D reg,
SIFT3D.Image src) |
|
private void |
SIFT3D_CVEC_CROSS(SIFT3D.Cvec in1,
SIFT3D.Cvec in2,
SIFT3D.Cvec out) |
|
private double |
SIFT3D_CVEC_DOT(SIFT3D.Cvec in1,
SIFT3D.Cvec in2) |
|
private double |
SIFT3D_CVEC_L2_NORM(SIFT3D.Cvec cvec) |
|
private double |
SIFT3D_CVEC_L2_NORM_SQ(SIFT3D.Cvec cvec) |
|
private void |
SIFT3D_CVEC_MINUS(SIFT3D.Cvec ca,
SIFT3D.Cvec cb,
SIFT3D.Cvec cc) |
|
private void |
SIFT3D_CVEC_PLUS(SIFT3D.Cvec ca,
SIFT3D.Cvec cb,
SIFT3D.Cvec cc) |
|
private void |
SIFT3D_CVEC_SCALE(SIFT3D.Cvec cvec,
double a) |
|
private void |
SIFT3D_CVEC_TO_SVEC(SIFT3D.Cvec cvec,
SIFT3D.Svec svec) |
|
private void |
SIFT3D_desc_acc_interp(SIFT3D.SIFT3DC sift3d,
SIFT3D.Cvec vbins,
SIFT3D.Cvec grad,
SIFT3D.SIFT3D_Descriptor desc) |
|
private int |
SIFT3D_detect_keypoints(SIFT3D.SIFT3DC sift3d,
SIFT3D.Image im,
SIFT3D.Keypoint_store kp) |
|
private int |
SIFT3D_extract_descriptors(SIFT3D.SIFT3DC sift3d,
SIFT3D.Keypoint_store kp,
SIFT3D.SIFT3D_Descriptor_store desc) |
|
private SIFT3D.Gauss_filter |
SIFT3D_GAUSS_GET(SIFT3D.GSS_filters gss,
int s) |
|
private int |
SIFT3D_have_gpyr(SIFT3D.SIFT3DC sift3d) |
|
private boolean |
SIFT3D_IM_CONTAINS_CVEC(SIFT3D.Image im,
SIFT3D.Cvec cvec) |
|
private void |
SIFT3D_IM_GET_GRAD(SIFT3D.Image im,
int x,
int y,
int z,
int c,
SIFT3D.Cvec vd) |
|
private int |
SIFT3D_matches_to_Mat_rm(SIFT3D.SIFT3D_Descriptor_store d1,
SIFT3D.SIFT3D_Descriptor_store d2,
int[] matches,
SIFT3D.Mat_rm match1,
SIFT3D.Mat_rm match2) |
|
private void |
SIFT3D_MUL_MAT_RM_CVEC(SIFT3D.Mat_rm mat,
SIFT3D.Cvec v_in,
SIFT3D.Cvec v_out) |
|
private int[] |
SIFT3D_nn_match(SIFT3D.SIFT3D_Descriptor_store d1,
SIFT3D.SIFT3D_Descriptor_store d2,
double nn_thresh,
int[] status_out) |
|
private SIFT3D.Image |
SIFT3D_PYR_IM_GET(SIFT3D.Pyramid pyr,
int o,
int s) |
|
private int |
SIFT3D_PYR_LAST_LEVEL(SIFT3D.Pyramid pyr) |
|
private int |
SIFT3D_PYR_LAST_OCTAVE(SIFT3D.Pyramid pyr) |
|
private void |
SIFT3D_RESIZE_SLAB(SIFT3D.Slab slab,
int num_new) |
|
(package private) int |
solve_Mat_rm(SIFT3D.Mat_rm A,
SIFT3D.Mat_rm B,
double limit,
SIFT3D.Mat_rm X) |
|
(package private) int |
solve_Mat_rm_ls(SIFT3D.Mat_rm A,
SIFT3D.Mat_rm B,
SIFT3D.Mat_rm X) |
|
private int |
solve_system(SIFT3D.Mat_rm src,
SIFT3D.Mat_rm ref,
SIFT3D.Affine tform) |
|
private double |
tform_err_sq(SIFT3D.Affine tform,
SIFT3D.Mat_rm src,
SIFT3D.Mat_rm ref,
int i) |
|
private int |
transpose_Mat_rm(SIFT3D.Mat_rm src,
SIFT3D.Mat_rm dst) |
|
private int |
verify_keys(SIFT3D.Keypoint_store kp,
SIFT3D.Image im) |
|
private int |
write_Affine(java.lang.String path,
SIFT3D.Affine affine) |
|
private int |
write_Mat_rm(java.lang.String path,
SIFT3D.Mat_rm mat) |
|
private int |
zero_Mat_rm(SIFT3D.Mat_rm mat) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
useOCL
private boolean useOCL
-
NBINS_AZ
private int NBINS_AZ
-
NBINS_PO
private int NBINS_PO
-
IM_NDIMS
private int IM_NDIMS
-
ICOS_NFACES
private int ICOS_NFACES
-
ICOS_NVERT
private int ICOS_NVERT
-
HIST_NUMEL
private int HIST_NUMEL
-
DESC_NUMEL
private int DESC_NUMEL
-
gr
private final double gr
-
Constructor Detail
-
SIFT3D
public SIFT3D(ModelImage imageA,
ModelImage imageB,
double SIFT3D_nn_thresh_default,
double SIFT3D_err_thresh_default,
int SIFT3D_num_iter_default,
boolean useOCL,
double SIFT3D_GAUSS_WIDTH_FCTR,
double SIFT3D_MATCH_MAX_DIST,
boolean ICOS_HIST,
boolean SIFT3D_RANSAC_REFINE,
boolean CUBOID_EXTREMA,
boolean SIFT3D_ORI_SOLID_ANGLE_WEIGHT)
- Parameters:
imageA - Reference image (register input image to reference image).imageB - Input image (register input image to reference image).SIFT3D_nn_thresh_default - SIFT3D_err_thresh_default - SIFT3D_num_iter_default - useOCL - SIFT3D_GAUSS_WIDTH_FCTR -
-
Method Detail
-
init_Sep_FIR_filter
private int init_Sep_FIR_filter(SIFT3D.Sep_FIR_filter f,
int dim,
int width,
double[] kernel,
int symmetric)
-
resize_Pyramid
int resize_Pyramid(SIFT3D.Image im,
int first_level,
int num_kp_levels,
int num_levels,
int first_octave,
int num_octaves,
SIFT3D.Pyramid pyr)
-
apply_Affine_xyz
private void apply_Affine_xyz(SIFT3D.Affine affine,
double x_in,
double y_in,
double z_in,
double[] x_out,
double[] y_out,
double[] z_out)
-
resample_linear
private double resample_linear(SIFT3D.Image in,
double x,
double y,
double z,
int c)
-
resample_lanczos2
private double resample_lanczos2(SIFT3D.Image im,
double x,
double y,
double z,
int c)
-
SAMP_AND_ACC
private void SAMP_AND_ACC(SIFT3D.Image src,
SIFT3D.Image dst,
double tap,
double[] coords,
int x,
int y,
int z,
int c,
int dim)
-
CMP_PREV_GT
private boolean CMP_PREV_GT(SIFT3D.Image im,
int x,
int y,
int z,
double val)
-
CMP_PREV_LT
private boolean CMP_PREV_LT(SIFT3D.Image im,
int x,
int y,
int z,
double val)
-
CMP_CUR_GT
private boolean CMP_CUR_GT(SIFT3D.Image im,
int x,
int y,
int z,
double val)
-
CMP_CUR_LT
private boolean CMP_CUR_LT(SIFT3D.Image im,
int x,
int y,
int z,
double val)
-
CMP_NEXT_GT
private boolean CMP_NEXT_GT(SIFT3D.Image im,
int x,
int y,
int z,
double val)
-
CMP_NEXT_LT
private boolean CMP_NEXT_LT(SIFT3D.Image im,
int x,
int y,
int z,
double val)
-
CMP_CUBE_GT
private boolean CMP_CUBE_GT(SIFT3D.Image im,
int x,
int y,
int z,
int IGNORESELF,
double val)
-
CMP_CUBE_LT
private boolean CMP_CUBE_LT(SIFT3D.Image im,
int x,
int y,
int z,
int IGNORESELF,
double val)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.UnaryIdentityCostFunction.html�����������������������0000775�4231163�4231163�00000031674�14537076053�030364� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.UnaryIdentityCostFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHistogramSliceMatch.html������������������������������������0000775�4231163�4231163�00000075161�14537076046�025664� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHistogramSliceMatch (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace() |
Histogram equalizing of slices to reference slice.
|
private void |
calcStoreInDest() |
This function produces a new image that has had all slices histogram equalized to reference slice. places filtered image
in the destination image.
|
private void |
filter(float[] srcBuffer,
float[] baseBuffer) |
just break up each RGB image into these separate monochrome images sliceFilter and then reassemble int aRGB.
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
findBufferMinMax(float[] buf,
int bufStart,
int bufEnd) |
Finds the local maximum and minimum values in the given range in order, as given by the starting and stoping
values.
|
private float |
getIdealWidth(float[] srcBuffer) |
find the ideal bin width
|
void |
runAlgorithm() |
starts the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
bufMax
private float bufMax
DOCUMENT ME!
-
bufMin
private float bufMin
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmHistogramSliceMatch
public AlgorithmHistogramSliceMatch(ModelImage srcImg,
int referenceSlice)
Constructor for 3D images in which changes are returned to the source image.
- Parameters:
srcImg - source image modelreferenceSlice -
-
AlgorithmHistogramSliceMatch
public AlgorithmHistogramSliceMatch(ModelImage destImg,
ModelImage srcImg,
int referenceSlice)
Constructor for 3D images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelreferenceSlice -
-
Method Detail
-
filter
private void filter(float[] srcBuffer,
float[] baseBuffer)
just break up each RGB image into these separate monochrome images sliceFilter and then reassemble int aRGB.
- Parameters:
srcBuffer - source bufferbaseBuffer - base Buffer
-
findBufferMinMax
private void findBufferMinMax(float[] buf,
int bufStart,
int bufEnd)
Finds the local maximum and minimum values in the given range in order, as given by the starting and stoping
values.
- Parameters:
buf - float array of valuesbufStart - where to begin lookingbufEnd - where to stop
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.PartitionedMatrixViewTest.html�����������������������0000775�4231163�4231163�00000042162�14537076053�030351� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.PartitionedMatrixViewTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_rows_
private int num_rows_
-
num_cols_
private int num_cols_
-
Method Detail
-
SetUp
public void SetUp()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/WeibullDistribution.threeParameterFittingCostFunction.html�����������0000775�4231163�4231163�00000034232�14537076057�032755� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WeibullDistribution.threeParameterFittingCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.BlockEvaluatePreparer.html�������������������������������0000775�4231163�4231163�00000032727�14537076051�026575� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.BlockEvaluatePreparer (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.BlockEvaluatePreparer
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.EasyFunctor.html�����������������������������������������0000775�4231163�4231163�00000026700�14537076051�024607� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.EasyFunctor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.EasyFunctor
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
EasyFunctor
public EasyFunctor()
����������������������������������������������������������������gov/nih/mipav/model/algorithms/Backpropagation.MainFrame.html���������������������������������������0000775�4231163�4231163�00000132550�14537076051�025055� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Backpropagation.MainFrame (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
-
Constructor Summary
Constructors
| Constructor |
Description |
MainFrame() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
maxTimes
private int maxTimes
-
momentum
private double momentum
-
threshold
private double threshold
-
minRange
private double minRange
-
maxRange
private double maxRange
-
minError
private double minError
-
drawMode
private boolean drawMode
-
Constructor Detail
-
MainFrame
public MainFrame()
-
Method Detail
-
resetData
private void resetData()
��������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.ForestSurvival.html��������������������������������0000775�4231163�4231163�00000077542�14537076057�026601� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.ForestSurvival (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Forest
alpha, case_weights, data, dependent_varID, deterministic_varIDs, holdout, importance_mode, keep_inbag, memory_mode, memory_saving_splitting, min_node_size, minprop, mtry, mutex, num_independent_variables, num_random_splits, num_samples, num_threads, num_trees, num_variables, output_prefix, overall_prediction_error, predict_all, prediction_mode, prediction_type, predictions, progress, random, sample_fraction, sample_with_replacement, seed, split_select_varIDs, split_select_weights, splitrule, thread_ranges, trees, variable_importance, verbose_out
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Forest
computePermutationImportance, computePredictionError, dispose, getChildNodeIDs, getDependentVarId, getInbagCounts, getIsOrderedVariable, getMinNodeSize, getMtry, getNumIndependentVariables, getNumTrees, getOverallPredictionError, getPredictions, getSplitValues, getSplitVarIDs, getVariableImportance, grow, init, initCpp, initR, loadFromFile, predict, run, saveToFile, setAlwaysSplitVariables, setSplitWeightVector, writeImportanceFile, writeOutput
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
status_varID
private int status_varID
-
Constructor Detail
-
ForestSurvival
public ForestSurvival()
-
Method Detail
-
loadForest
public void loadForest(int dependent_varID,
int num_trees,
java.util.Vector<java.util.Vector<java.util.Vector<java.lang.Integer>>> forest_child_nodeIDs,
java.util.Vector<java.util.Vector<java.lang.Integer>> forest_split_varIDs,
java.util.Vector<java.util.Vector<java.lang.Double>> forest_split_values,
int status_varID,
java.util.Vector<java.util.Vector<java.util.Vector<java.lang.Double>>> forest_chf,
java.util.Vector<java.lang.Double> unique_timepoints,
java.util.Vector<java.lang.Boolean> is_ordered_variable)
��������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.PDFRenderer.html�����������������������������������������0000775�4231163�4231163�00000025353�14537076054�024507� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.PDFRenderer (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Default Methods
| Modifier and Type |
Method |
Description |
default void |
renderPDF(org.apache.pdfbox.pdmodel.PDDocument doc,
org.apache.pdfbox.pdmodel.PDPage page,
int x,
int y,
int w,
int h) |
Renders this PDFRenderers contents, that is creating
pdf elements and appending them to the specified page
within the corresponding document.
|
-
-
Method Detail
-
renderPDF
default void renderPDF(org.apache.pdfbox.pdmodel.PDDocument doc,
org.apache.pdfbox.pdmodel.PDPage page,
int x,
int y,
int w,
int h)
Renders this PDFRenderers contents, that is creating
pdf elements and appending them to the specified page
within the corresponding document.
- Parameters:
doc - the PDF document holding the pagepage - page in pdf doc to which elements are to be appendedx - x coordinate of the current viewporty - y coordinate of the current viewportw - width of the current viewporth - height of the current viewport
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGenerateIsolines.html���������������������������������������0000775�4231163�4231163�00000136352�14537076046�025232� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGenerateIsolines (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
intensityR
private float intensityR
-
intensityG
private float intensityG
-
intensityB
private float intensityB
-
out
private float[][] out
-
minx
private double[] minx
-
miny
private double[] miny
-
maxx
private double[] maxx
-
maxy
private double[] maxy
-
tips
private double[] tips
-
sliceSize
private int sliceSize
-
STEP_SIZE
private double STEP_SIZE
-
numContours
private int numContours
-
Constructor Detail
-
AlgorithmGenerateIsolines
public AlgorithmGenerateIsolines(ModelImage destImg,
ModelImage srcImg,
double threshold,
float intensityR,
float intensityG,
float intensityB)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.indexValueDescendingComparator.html����������������0000775�4231163�4231163�00000027000�14537076057�031703� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.indexValueDescendingComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.indexValueDescendingComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
gov/nih/mipav/model/algorithms/AlgorithmGrayScaleMorphology25D.html���������������������������������0000775�4231163�4231163�00000205414�14537076046�026173� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGrayScaleMorphology25D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmGrayScaleMorphology25D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage) |
Creates a new AlgorithmMorphology25D object.
|
AlgorithmGrayScaleMorphology25D(ModelImage srcImg,
ModelImage maskImage,
int kernelType,
float circleDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage) |
Creates a new AlgorithmGrayScaleMorphology25D object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
dilate(boolean returnFlag,
int iters) |
Dilates an image using the indicated kernel and the indicated number of
executions.
|
private void |
dilate2D(int indexZ,
int iters) |
Dilates an image slice using the indicated kernel and the indicated number of
executions.
|
private void |
erode(boolean returnFlag,
int iters) |
Erodes an image using the indicated kernel and the indicated number of
executions.
|
private void |
erode2D(int indexZ,
int iters) |
Erodes an image slice using the indicated kernel and the indicated number of
executions.
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
geodesicDilation(boolean returnFlag,
int geodesicSize) |
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
geodesicErosion(boolean returnFlag,
int geodesicSize) |
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
makeCircularKernel(float circDiameter) |
Generates a circular kernel of a specific diameter.
|
private void |
makeKernel(int kernelType) |
Generates a kernel of the indicated type.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setAlgorithm(int method) |
Sets the algorithm type (i.e. erode, dilate)
|
void |
setImage(ModelImage img) |
Sets the algorithm to new image of boolean type.
|
void |
setIterations(int itersD,
int itersE) |
Sets number of iterations for closing or opening.
|
void |
setKernel(java.util.BitSet kernel,
int dim) |
Sets user defined square kernels.
|
void |
showKernel() |
display kernel as 1 or 0 in the debug window.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
algorithm
private int algorithm
DOCUMENT ME!
-
imgLength
private int imgLength
DOCUMENT ME!
-
iterationsD
private int iterationsD
DOCUMENT ME!
-
iterationsE
private int iterationsE
DOCUMENT ME!
-
kDim
private int kDim
DOCUMENT ME!
-
kernelType
private int kernelType
-
sliceLength
private int sliceLength
DOCUMENT ME!
-
maskImage
private ModelImage maskImage
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
-
Constructor Detail
-
AlgorithmGrayScaleMorphology25D
public AlgorithmGrayScaleMorphology25D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage)
Creates a new AlgorithmMorphology25D object.
- Parameters:
srcImg - source image modelkernelType - kernel size (i.e. connectedness)circleDiameter - only valid if kernelType == SIZED_CIRCLE and represents the width of a circle in the
resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)iterD - number of times to dilateiterE - number of times to erodepruningPix - the number of pixels to pruneedType - the type of edging to perform (inner or outer)entireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed
-
AlgorithmGrayScaleMorphology25D
public AlgorithmGrayScaleMorphology25D(ModelImage srcImg,
ModelImage maskImage,
int kernelType,
float circleDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage)
Creates a new AlgorithmGrayScaleMorphology25D object.
- Parameters:
srcImg - source image modelkernelType - dilation kernel size (i.e. connectedness)circleDiameter - dilation only valid if kernelType == SIZED_CIRCLE and represents the width of a
circle in the resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)geodesicSize - iterD - number of times to dilateiterE - number of times to erodeentireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed
-
Method Detail
-
dilate
private void dilate(boolean returnFlag,
int iters)
Dilates an image using the indicated kernel and the indicated number of
executions. The grayscale dilation is the maximum value over the reflected kernel region.
For symmetric kernels the reflected kernel is the same as the kernel.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)iters - number of dilations
-
geodesicDilation
private void geodesicDilation(boolean returnFlag,
int geodesicSize)
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
dilate2D
private void dilate2D(int indexZ,
int iters)
Dilates an image slice using the indicated kernel and the indicated number of
executions. The grayscale dilation is the maximum value over the reflected kernel region.
For symmetric kernels the reflected kernel is the same as the kernel.
- Parameters:
indexZ - iters - number of dilations
-
geodesicErosion
private void geodesicErosion(boolean returnFlag,
int geodesicSize)
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
erode2D
private void erode2D(int indexZ,
int iters)
Erodes an image slice using the indicated kernel and the indicated number of
executions. The grayscale erosion is the minimum value over the kernel region.
- Parameters:
indexZ - iters - number of erosion iterations.
-
erode
private void erode(boolean returnFlag,
int iters)
Erodes an image using the indicated kernel and the indicated number of
executions. The grayscale erosion is the minimum value over the kernel region.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. open)iters - number of erosion iterations.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Iterators.html�������������������������������������������0000775�4231163�4231163�00000033331�14537076054�024356� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Iterators (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
Iterators() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Iterators
private Iterators()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SteepestDescent.html�������������������������������������0000775�4231163�4231163�00000030032�14537076052�025441� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SteepestDescent (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
SteepestDescent
public SteepestDescent()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Triangles.html�������������������������������������������0000775�4231163�4231163�00000071623�14537076054�024340� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Triangles (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Triangles() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
hidden
protected boolean hidden
-
Constructor Detail
-
Triangles
public Triangles()
�������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SVM.VlSvm.html�������������������������������������������������������0000775�4231163�4231163�00000051536�14537076057�021640� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SVM.VlSvm (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SVM.VlSvm
-
-
Constructor Summary
Constructors
| Constructor |
Description |
VlSvm() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
dimension
int dimension
< SVM solver type.
-
model
double[] model
< Model dimension.
-
bias
double bias
< Model ($\bw$ vector).
-
biasMultiplier
double biasMultiplier
< Bias.
-
weights
double[] weights
< Data labels.
-
diagnosticFrequency
int diagnosticFrequency
-
conjugateLossFn
int conjugateLossFn
-
lossDerivativeFn
int lossDerivativeFn
-
dcaUpdateFn
int dcaUpdateFn
-
innerProductFn
int innerProductFn
-
accumulateFn
int accumulateFn
-
scores
double[] scores
< Statistcs.
-
biasLearningRate
double biasLearningRate
-
alpha
double[] alpha
< Bias learning rate.
������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmELSUNCOpt3D.html��������������������������������������������0000775�4231163�4231163�00000205242�14537076045�023627� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmELSUNCOpt3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmELSUNCOpt3D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector3f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] tols,
int maxIter,
int searchAlgorithm) |
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
adjustTranslation(TransMatrixd mat,
float sample) |
|
double[] |
constructPoint(double[] defaultPoint,
double[] point) |
Construct a full 12-dimension transformation vector from the partial transformation vector.
|
TransMatrixd |
convertToMatrix(double[] vector) |
Convert a transformation vector to a transformation matrix.
|
TransMatrixd |
convertToMatrix(TransMatrixd toOrigin,
TransMatrixd fromOrigin,
double[] vector) |
Convert a 12-dimension transformation vector to a 4x4 transformation matrix.
|
double[] |
convertToMidsagittal(double[] point) |
Converts a full transformation vector into a midsagittal transformation vector.
|
static double[] |
copyPoint(double[] point) |
Make a copy of the transformation vector
|
private void |
dfault(int[] iv,
double[] v) |
|
void |
disposeLocal() |
Sets everything to null and prepares this class for destruction.
|
double[] |
extractPoint(double[] startPoint) |
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
|
double |
getCost(int index) |
Returns the cost for the transformation vector.
|
double[] |
getFinal(double[] point) |
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
|
TransMatrixd |
getMatrix(double[] point,
float sample) |
|
TransMatrixd |
getMatrix(int index) |
Obtain the transformation vector and convert to the matrix representation.
|
TransMatrixd |
getMatrix(int index,
float sample) |
|
TransMatrixd |
getMatrixHalf(int index) |
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix.
|
TransMatrixd |
getMatrixHalf(int index,
float sample) |
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix and scale the translations by sample parameter.
|
TransMatrixd |
getMatrixMidsagittal(int index) |
Accessor that returns the matrix representing the best tranformation.
|
TransMatrixd |
getMatrixMidsagittal(int index,
float sample) |
Accessor that returns the matrix representing the best tranformation.
|
int |
getMaxIterations() |
|
double[] |
getPoint(int index) |
Return the full transformation vector.
|
double[] |
getPoint(int index,
float sample) |
Obtain the transformation vector and adjust its translation by sample parameters.
|
Vectornd[] |
getPoints() |
Return an array of transformation vector.
|
double |
measureCost(double[] point) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
runELSUNC() |
Runs ELSUNC along one dimension at a time as long as the costFunction improves during one cycle
of runs along every dimension.
|
private void |
runLM() |
Runs Levneberg-Marqaurdt along one dimension at a time as long as the costFunction improves during one cycle
of runs along every dimension.
|
private void |
runNL2sol() |
|
static double[] |
scalePoint(double[] point,
double scale) |
Scale the point by scale parameter and store it into another vector.
|
double[] |
scalePoint(int index,
double scale) |
Obtain the transformation vector and make a copy, then scale it by scale parameter.
|
void |
setMaxIterations(int max) |
Accessor that sets the maximum number of iterations.
|
void |
setPoints(Vectornd[] points) |
Sets the transformation vectors.
|
void |
updatePoint(double[] point,
double cost,
Vectornd v) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
nDims
private int nDims
Degress of freedom.
-
status
private int status
-
epsilon
private double epsilon
-
Constructor Detail
-
AlgorithmELSUNCOpt3D
public AlgorithmELSUNCOpt3D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector3f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] tols,
int maxIter,
int searchAlgorithm)
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- Parameters:
parent - Algorithm that called this optimization.com - Center of Mass of the input image.degreeOfFreedom - Degree of freedom for transformation (must be 3, 4, 6, 7, 9, or 12).costFunc - Cost function to use.tols - Tolerance for each dimension (tols.length == degreeOfFreedom).maxIter - Maximum number of iterations.searchAlgorithm - ELSUNC, LEVENBERG_MARQUARDT, or NL2SOL;
-
Method Detail
-
getPoints
public Vectornd[] getPoints()
Return an array of transformation vector. The meanings of those
transformation vector are as following:
the initial transformation vector: before algorithm is performed
the final transformation vector: after algorithm was performed.
- Returns:
-
runNL2sol
private void runNL2sol()
-
constructPoint
public double[] constructPoint(double[] defaultPoint,
double[] point)
Construct a full 12-dimension transformation vector from the partial transformation vector.
For missing values in point, the values in defaultPoint will be used.
Different degree of freedom has different meanings:
3: only 3 translations
4: 3 translation and global scaling
6: 3 rotations and translations
7: 3 rotations and translations, and global scaling
9: 3 rotations, translations and scalings
12: 3 rotations, translations, scalings and skewings.
- Parameters:
defaultPoint - a default full 12-dimension transformation vector.point - a partial or full transformation vector.- Returns:
- a full transformation vector.
-
getFinal
public double[] getFinal(double[] point)
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- Returns:
- vector representing the best transformation in terms of translations, rotations, scales, and skews.
-
convertToMatrix
public TransMatrixd convertToMatrix(TransMatrixd toOrigin,
TransMatrixd fromOrigin,
double[] vector)
Convert a 12-dimension transformation vector to a 4x4 transformation matrix.
- Parameters:
vector - a 12-dimension transformation vector including 3
rotations, translations, scalings and skews.- Returns:
- a 4x4 transformation matrix
-
extractPoint
public double[] extractPoint(double[] startPoint)
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
- Parameters:
startPoint - the start full 12-dimension transformation vector.- Returns:
- the partial or full transformation vector which will be optimized.
-
getPoint
public double[] getPoint(int index,
float sample)
Obtain the transformation vector and adjust its translation by sample parameters.
- Parameters:
index - the index of transformation vector.sample - the translation scaling parameter.- Returns:
- the translation scaled transformation vector.
-
getMatrixHalf
public TransMatrixd getMatrixHalf(int index)
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix.
- Parameters:
index - the index of transformation vector.- Returns:
- the scaled transformation matrix.
-
scalePoint
public static final double[] scalePoint(double[] point,
double scale)
Scale the point by scale parameter and store it into another vector.
- Parameters:
point - the transformation vector.scale - the scale parameter.- Returns:
- the scaled transformation vector
-
scalePoint
public final double[] scalePoint(int index,
double scale)
Obtain the transformation vector and make a copy, then scale it by scale parameter.
- Parameters:
index - the index of transformation vectorscale - the scale parameter- Returns:
- the new scaled transformation vector.
-
getMatrixHalf
public TransMatrixd getMatrixHalf(int index,
float sample)
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix and scale the translations by sample parameter.
- Parameters:
index - the index of transformation vector.sample - the translation scaling parameter.- Returns:
- the scaled transformation matrix.
-
getMatrixMidsagittal
public TransMatrixd getMatrixMidsagittal(int index)
Accessor that returns the matrix representing the best tranformation. This transformation contains only the z
rotation and the x and y translation, to be used in the midsagittal alignment algorithm.
- Returns:
- matrix representing the best transformation's z rot and x and y trans.
-
getMatrixMidsagittal
public TransMatrixd getMatrixMidsagittal(int index,
float sample)
Accessor that returns the matrix representing the best tranformation. The passed in parameter represents the
resolution (same in all directions and for both input and reference images, since resampled isotropically). Since
the optimization was done in pixel space, not millimeter space, the translation parameters need to be scaled by
the sample value. This transformation contains only the z rotation and the x and y translation, to be used in the
midsagittal alignment algorithm.
- Parameters:
sample - the voxel resolution- Returns:
- matrix representing the best transformation's z rot and x and y trans.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.GradientCheckingIterationCallback.html�������������������0000775�4231163�4231163�00000034627�14537076051�031041� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.GradientCheckingIterationCallback (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmPowellOptBase.html������������������������������������������0000775�4231163�4231163�00000210664�14537076050�024504� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPowellOptBase (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected AlgorithmOptimizeFunctionBase |
costFunction |
Cost function called to measure cost - 1D.
|
protected int |
dof |
Degrees of freedom.
|
protected TransMatrixd |
fromOrigin |
The transformation matrix from the origin of the input image.
|
protected int |
maxIterations |
The maximum number of iterations the optimization allows.
|
protected boolean |
parallelPowell |
The flag for parallel powell's method
|
protected AlgorithmBase |
parent |
Parent algorithm that called this optimization.
|
protected boolean |
pathRecorded |
The flag to indicate whether the searching path need to be recorded.
|
protected java.util.Hashtable<java.lang.Long,java.util.Vector<java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3d>>> |
paths |
Store the paths for every thread.
|
protected Vectornd[] |
points |
Array used to hold the initial points, final points and costs
|
(package private) double[] |
savedStartPoint |
The different searches change the number of variables in the transformation matrix that change.
|
private static double |
TINY |
Used to prevent division by zero.
|
protected double[] |
tolerance |
Array of tolerances for each dimension.
|
protected TransMatrixd |
toOrigin |
The transformation matrix to the origin of the input image.
|
protected boolean |
useJTEM |
When true, JTEM Powell.search is used, otherwise, JTEM BrentOnline.search is used.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmPowellOptBase(AlgorithmBase parentAlgo,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] tols,
int maxIter) |
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, and some
tolerance within that point to look for the minimum.
|
-
Method Summary
All Methods Static Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
abstract void |
adjustTranslation(TransMatrixd mat,
double sample) |
Adjust the translation of the transformation matrix by the sample pararmeter.
|
abstract double[] |
constructPoint(double[] defaultPoint,
double[] point) |
Construct a full transformation vector from the partial transformation vector.
|
TransMatrixd |
convertToMatrix(double[] vector) |
Convert a transformation vector to a transformation matrix.
|
TransMatrixd |
convertToMatrix(double[] defaultPoint,
double[] point) |
Convert a transformation vector to a transformation matrix.
|
abstract TransMatrixd |
convertToMatrix(TransMatrixd toOrigin,
TransMatrixd fromOrigin,
double[] vector) |
Convert a transformation vector to a transformation matrix about the origin.
|
static double[] |
copyPoint(double[] point) |
Make a copy of the transformation vector
|
private void |
createTerrain(double[] terrain,
double transXFrom,
double transXTo,
double transXStep,
int xstart,
int xdim,
double transYFrom,
double transYTo,
double transYStep,
int ystart,
int ydim,
double rotFrom,
double rotTo,
double rotStep,
int zstart,
int zdim) |
|
double[] |
createTerrain(double transXFrom,
double transXTo,
double transXStep,
double transYFrom,
double transYTo,
double transYStep,
double rotFrom,
double rotTo,
double rotStep) |
|
void |
disposeLocal() |
Sets everything to null and prepares this class for destruction.
|
double |
eval(double[] x) |
|
abstract double[] |
extractPoint(double[] startPoint) |
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
|
double |
getCost(int index) |
Returns the cost for the transformation vector.
|
TransMatrixd |
getFromOrigin() |
|
TransMatrixd |
getMatrix(int index) |
Obtain the transformation vector and convert to the matrix representation.
|
abstract TransMatrixd |
getMatrix(int index,
double sample) |
Obtain the transformation vector and convert to the matrix representation,
then scale the translation by sample.
|
int |
getMaxIterations() |
|
int |
getNumberOfVariables() |
|
double[] |
getPoint(int index) |
Return the full transformation vector.
|
double[] |
getPoint(int index,
double sample) |
Obtain the transformation vector and adjust its translation by sample parameters.
|
Vectornd[] |
getPoints() |
Return an array of transformation vector.
|
TransMatrixd |
getToOrigin() |
|
boolean |
isParallelPowell() |
|
boolean |
isPathRecorded() |
|
void |
lineMinimization(double[] pt,
double[] directions,
double[] bestCost) |
Minimizes the point along the given vector direction.
|
double |
measureCost(double[] point) |
Measure the cost value for the given transformation vector.
|
double |
measureCost(TransMatrixd m) |
Measure the cost value for the given transformation matrix.
|
void |
optimize(Vectornd v) |
Finds optimal point for the given initial point
|
void |
optimizeBlock(int start,
int end) |
Optimize several initial points.
|
void |
print(double[] pt,
java.lang.String message) |
The utility function used to print information.
|
void |
runAlgorithm() |
Runs Powell's method.
|
static double[] |
scalePoint(double[] point,
double scale) |
Scale the point by scale parameter and store it into another vector.
|
double[] |
scalePoint(int index,
double scale) |
Obtain the transformation vector and make a copy, then scale it by scale parameter.
|
void |
setMaxIterations(int max) |
Accessor that sets the maximum number of iterations.
|
void |
setParallelPowell(boolean parallelPowell) |
|
void |
setPathRecorded(boolean pathRecorded) |
|
void |
setPoints(Vectornd[] points) |
Sets the transformation vectors.
|
void |
setUseJTEM(boolean bOn) |
|
abstract void |
updatePoint(double[] point,
double cost,
Vectornd v) |
Store the optimal point and cost to v
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
dof
protected int dof
Degrees of freedom.
-
useJTEM
protected boolean useJTEM
When true, JTEM Powell.search is used, otherwise, JTEM BrentOnline.search is used.
-
paths
protected java.util.Hashtable<java.lang.Long,java.util.Vector<java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3d>>> paths
Store the paths for every thread.
-
Constructor Detail
-
AlgorithmPowellOptBase
public AlgorithmPowellOptBase(AlgorithmBase parentAlgo,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] tols,
int maxIter)
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, and some
tolerance within that point to look for the minimum. The initial point contains rotations, translations, scales,
and skews.
- Parameters:
parentAlgo - DOCUMENT ME!degreeOfFreedom - Degree of freedom for transformation (must be 3, 4, 6, 7, 9, or 12).costFunc - Cost function to use.tols - Tolerance for each dimension (tols.length == degreeOfFreedom).maxIter - The maximum iterations.
-
Method Detail
-
convertToMatrix
public abstract TransMatrixd convertToMatrix(TransMatrixd toOrigin,
TransMatrixd fromOrigin,
double[] vector)
Convert a transformation vector to a transformation matrix about the origin.
- Parameters:
toOrigin - the matrix translating the origin to some specified pointfromOrigin - the matrix translating the origin back.vector - a transformation vector.- Returns:
- a transformation matrix.
-
constructPoint
public abstract double[] constructPoint(double[] defaultPoint,
double[] point)
Construct a full transformation vector from the partial transformation vector.
For missing values in point, the values in defaultPoint will be used.
- Parameters:
defaultPoint - a default full transformation vector.point - a partial or full transformation vector.- Returns:
- a full transformation vector.
-
convertToMatrix
public final TransMatrixd convertToMatrix(double[] defaultPoint,
double[] point)
Convert a transformation vector to a transformation matrix. For missing values,
use the values from defaultPoint.
- Parameters:
defaultPoint - a start transformation vector.point - a transformation vector.- Returns:
- a transformation matrix.
-
extractPoint
public abstract double[] extractPoint(double[] startPoint)
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
- Parameters:
startPoint - the start full transformation vector.- Returns:
- the partial or full transformation vector which will be optimized.
-
getPoint
public double[] getPoint(int index,
double sample)
Obtain the transformation vector and adjust its translation by sample parameters.
- Parameters:
index - the index of transformation vector.sample - the translation scaling parameter.- Returns:
- the translation scaled transformation vector.
-
getMatrix
public abstract TransMatrixd getMatrix(int index,
double sample)
Obtain the transformation vector and convert to the matrix representation,
then scale the translation by sample.
- Parameters:
index - the index of transformation vector.sample - the translation scaling parameter.- Returns:
- the scaled transformation matrix.
-
adjustTranslation
public abstract void adjustTranslation(TransMatrixd mat,
double sample)
Adjust the translation of the transformation matrix by the sample pararmeter.
- Parameters:
mat - the transformation matrixsample - the resolution adjusting parameter.
-
scalePoint
public static final double[] scalePoint(double[] point,
double scale)
Scale the point by scale parameter and store it into another vector.
- Parameters:
point - the transformation vector.scale - the scale parameter.- Returns:
- the scaled transformation vector
-
scalePoint
public final double[] scalePoint(int index,
double scale)
Obtain the transformation vector and make a copy, then scale it by scale parameter.
- Parameters:
index - the index of transformation vectorscale - the scale parameter- Returns:
- the new scaled transformation vector.
-
lineMinimization
public void lineMinimization(double[] pt,
double[] directions,
double[] bestCost)
Minimizes the point along the given vector direction. Given an initial point and a guess as to how far from that
point we should go to look for a minimum.
- Parameters:
pt - directions - bestCost -
-
getPoints
public Vectornd[] getPoints()
Return an array of transformation vector. The meanings of those
transformation vector are as following:
the initial transformation vector: before algorithm is performed
the final transformation vector: after algorithm was performed.
- Returns:
-
print
public void print(double[] pt,
java.lang.String message)
The utility function used to print information.
- Parameters:
pt - a double array.message - the message
-
runAlgorithm
public void runAlgorithm()
Runs Powell's method. Powell's method is a way to find minimums without finding derivatives. Basically, it starts
at some point P in N-dimensional space, proceeds in a direction, and minimizes along that line using golden
search. It then resets the point and minimizes again, until the point moves by less than the tolerance. This
method starts with the initial point defined in the constructor and initial directions of (1 0 ... 0) (0 1 0 ...
) ..., the basis vectors. At the end, "point" is the best point found and functionAtBest is the value at "point".
- Specified by:
runAlgorithm in class AlgorithmBase
-
updatePoint
public abstract void updatePoint(double[] point,
double cost,
Vectornd v)
Store the optimal point and cost to v
- Parameters:
point - the optimal point.cost - the optimal cost.v - the Vectornd variable used by upper level algorithm.
-
createTerrain
public double[] createTerrain(double transXFrom,
double transXTo,
double transXStep,
double transYFrom,
double transYTo,
double transYStep,
double rotFrom,
double rotTo,
double rotStep)
-
createTerrain
private void createTerrain(double[] terrain,
double transXFrom,
double transXTo,
double transXStep,
int xstart,
int xdim,
double transYFrom,
double transYTo,
double transYStep,
int ystart,
int ydim,
double rotFrom,
double rotTo,
double rotStep,
int zstart,
int zdim)
����������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmStandardDeviationThreshold.html�����������������������������0000775�4231163�4231163�00000161217�14537076050�027243� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmStandardDeviationThreshold (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmStandardDeviationThreshold
extends AlgorithmBase
The Standard Deviation Threshold works by first having an active VOI in which the standard deviation and other
statistics are calculated. The dialog allows the user to enter the number of standard deviations and the values
outside the range for the thersholding process. The theresholding can be done on the whole image or alternatively,
on other VOIS that are not active that might be on the image. The destination can either be a new image or paint in
existing image except if the src image is a color image.
- Author:
- pandyan
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.util.BitSet |
bitset |
bitset for src image
|
private boolean |
inverseThreshold |
flags for destination, threshold, inverse, and color image
|
private boolean |
isColorImage |
flags for destination, threshold, inverse, and color image
|
private int |
length |
dimensions and length
|
private java.util.BitSet |
mask |
bitset of vois mask
|
private float |
maxIntensity |
max intensities for threshold
|
private float |
maxIntensityB |
max intensities for threshold
|
private float |
maxIntensityG |
max intensities for threshold
|
private float |
maxIntensityR |
max intensities for threshold
|
private float |
minIntensity |
min intensities for threshold
|
private float |
minIntensityB |
min intensities for threshold
|
private float |
minIntensityG |
min intensities for threshold
|
private float |
minIntensityR |
min intensities for threshold
|
private boolean |
newImageDestination |
flags for destination, threshold, inverse, and color image
|
private int |
numPixels |
num pixels in threshold
|
private int |
numPixelsB |
num pixels in threshold
|
private int |
numPixelsG |
num pixels in threshold
|
private int |
numPixelsR |
num pixels in threshold
|
private ModelImage |
resultImage |
src image, result image
|
private ModelImage |
srcImage |
src image, result image
|
private float |
sumIntensities |
total volume in threshold
|
private float |
sumIntensitiesB |
total volume in threshold
|
private float |
sumIntensitiesG |
total volume in threshold
|
private float |
sumIntensitiesR |
total volume in threshold
|
private float |
totalArea |
total volume in threshold
|
private float |
totalAreaB |
total volume in threshold
|
private float |
totalAreaG |
total volume in threshold
|
private float |
totalAreaR |
total volume in threshold
|
private float |
totalVolume |
total volume in threshold
|
private float |
totalVolumeB |
total volume in threshold
|
private float |
totalVolumeG |
total volume in threshold
|
private float |
totalVolumeR |
total volume in threshold
|
private float |
valuesOutside |
values outside intensities for threshold
|
private float |
valuesOutsideB |
values outside intensities for threshold
|
private float |
valuesOutsideG |
values outside intensities for threshold
|
private float |
valuesOutsideR |
values outside intensities for threshold
|
private boolean |
wholeImageThreshold |
flags for destination, threshold, inverse, and color image
|
private int |
xDim |
dimensions and length
|
private float |
xRes |
resolutions
|
private int |
yDim |
dimensions and length
|
private float |
yRes |
resolutions
|
private int |
zDim |
dimensions and length
|
private float |
zRes |
resolutions
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmStandardDeviationThreshold(ModelImage srcImage,
float minIntensity,
float maxIntensity,
float valuesOutside,
boolean newImageDestination,
boolean wholeImageThreshold,
boolean inverseThreshold) |
constructor for grey scale image
|
AlgorithmStandardDeviationThreshold(ModelImage srcImage,
float minIntensityR,
float minIntensityG,
float minIntensityB,
float maxIntensityR,
float maxIntensityG,
float maxIntensityB,
float valuesOutsideR,
float valuesOutsideG,
float valuesOutsideB,
boolean newImageDestination,
boolean wholeImageThreshold,
boolean inverseThreshold) |
constructor for color image
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
xDim
private int xDim
dimensions and length
-
yDim
private int yDim
dimensions and length
-
zDim
private int zDim
dimensions and length
-
length
private int length
dimensions and length
-
numPixels
private int numPixels
num pixels in threshold
-
numPixelsR
private int numPixelsR
num pixels in threshold
-
numPixelsG
private int numPixelsG
num pixels in threshold
-
numPixelsB
private int numPixelsB
num pixels in threshold
-
xRes
private float xRes
resolutions
-
yRes
private float yRes
resolutions
-
zRes
private float zRes
resolutions
-
newImageDestination
private boolean newImageDestination
flags for destination, threshold, inverse, and color image
-
wholeImageThreshold
private boolean wholeImageThreshold
flags for destination, threshold, inverse, and color image
-
inverseThreshold
private boolean inverseThreshold
flags for destination, threshold, inverse, and color image
-
isColorImage
private boolean isColorImage
flags for destination, threshold, inverse, and color image
-
Constructor Detail
-
AlgorithmStandardDeviationThreshold
public AlgorithmStandardDeviationThreshold(ModelImage srcImage,
float minIntensity,
float maxIntensity,
float valuesOutside,
boolean newImageDestination,
boolean wholeImageThreshold,
boolean inverseThreshold)
constructor for grey scale image
- Parameters:
srcImage - minIntensity - maxIntensity - valuesOutside - newImageDestination - wholeImageThreshold - inverseThreshold -
-
AlgorithmStandardDeviationThreshold
public AlgorithmStandardDeviationThreshold(ModelImage srcImage,
float minIntensityR,
float minIntensityG,
float minIntensityB,
float maxIntensityR,
float maxIntensityG,
float maxIntensityB,
float valuesOutsideR,
float valuesOutsideG,
float valuesOutsideB,
boolean newImageDestination,
boolean wholeImageThreshold,
boolean inverseThreshold)
constructor for color image
- Parameters:
srcImage - minIntensityR - minIntensityG - minIntensityB - maxIntensityR - maxIntensityG - maxIntensityB - valuesOutsideR - valuesOutsideG - valuesOutsideB - newImageDestination - wholeImageThreshold - inverseThreshold -
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������././@LongLink���������������������������������������������������������������������������������������0000644�0000000�0000000�00000000147�00000000000�011605� L����������������������������������������������������������������������������������������������������ustar �root����������������������������root�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureEllipseCorrectGaussNewtonStep.html��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureEllipseCorrectGaussNewtonStep.ht0000775�4231163�4231163�00000026476�14537076053�035055� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DoglegStrategyFixtureEllipseCorrectGaussNewtonStep (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
kToleranceLoose |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmWatershed.html����������������������������������������������0000775�4231163�4231163�00000105032�14537076051�023703� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmWatershed (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmWatershed
extends AlgorithmBase
This program applies the watershed algorithm to the image. It assumes that the user has identified the starting
watershed regions via VOIs. Future work might be to develop a algorithm that automatically identifies initial seed
points and regions or possibly an automatic method that forms watersheds - see method at end of file (does not work
yet);
- Version:
- 1.1 March 11, 1998
- Author:
- Matthew J. McAuliffe, Ph.D. and Ray Lert, MD
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
private class |
AlgorithmWatershed.Seed |
Simple class to hold seed point and basin (object label) value.
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calc2D() |
Calculates the watershed intialized by the VOI regions.
|
private void |
calc3D() |
Calculates the watershed intialized by the VOI regions.
|
void |
finalize() |
Prepares this class for destruction.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setEnergyImage(ModelImage _energyImage) |
This image is typically the gradient magnitude.
|
void |
setSeedVector(WildMagic.LibFoundation.Mathematics.Vector3f[] seedPoints) |
Sets the seed vector.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
sigmas
private float[] sigmas
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmWatershed
public AlgorithmWatershed(ModelImage destImg,
ModelImage srcImg,
ModelImage gmImg,
float[] sigmas,
java.util.Vector<AlgorithmWatershed.Seed> seeds)
Constructs new watershed algorithm.
- Parameters:
destImg - Image model where result image is to storedsrcImg - Source image modelgmImg - Gradient magnitude image (can be null)sigmas - Gaussian's standard deviations in the each dimensionseeds - Seed points for starting watershed
-
AlgorithmWatershed
public AlgorithmWatershed(ModelImage destImg,
ModelImage srcImg,
ModelImage gmImg,
float[] sigmas,
java.util.Vector<AlgorithmWatershed.Seed> seeds,
boolean entireImage)
Constructs new watershed algorithm.
- Parameters:
destImg - Image model where result image is to storedsrcImg - Source image modelgmImg - Gradient magnitude image (can be null)sigmas - Gaussian's standard deviations in the each dimensionseeds - Seed points for starting watershedentireImage - If true, ignore VOIs and process entire image
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DenseSparseMatrix.html�����������������������������������0000775�4231163�4231163�00000065155�14537076051�025755� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DenseSparseMatrix (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_
private Jama.Matrix m_
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ExponentialCostFunction.html�����������������������������0000775�4231163�4231163�00000034003�14537076051�027165� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ExponentialCostFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LBFGS.html�����������������������������������������������0000775�4231163�4231163�00000033574�14537076051�023211� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LBFGS (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
LBFGS(int num_parameters,
int max_lbfgs_rank,
boolean use_approximate_eigenvalue_bfgs_scaling) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.TriangleDetails.html�������������������������������������0000775�4231163�4231163�00000072771�14537076054�025470� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.TriangleDetails (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
- All Implemented Interfaces:
java.lang.Cloneable
- Enclosing class:
- ContourPlot
public class ContourPlot.TriangleDetails
extends java.lang.Object
implements java.lang.Cloneable
Specification of a triangle which comprises vertex locations, colors and picking color.
- Author:
- hageldave
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
java.util.function.IntSupplier |
c0 |
|
java.util.function.IntSupplier |
c1 |
|
java.util.function.IntSupplier |
c2 |
|
java.awt.geom.Point2D |
p0 |
|
java.awt.geom.Point2D |
p1 |
|
java.awt.geom.Point2D |
p2 |
|
int |
pickColor |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
TriangleDetails(double x0,
double y0,
double x1,
double y1,
double x2,
double y2) |
|
TriangleDetails(java.awt.geom.Point2D p0,
java.awt.geom.Point2D p1,
java.awt.geom.Point2D p2) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
pickColor
public int pickColor
-
Constructor Detail
-
TriangleDetails
public TriangleDetails(double x0,
double y0,
double x1,
double y1,
double x2,
double y2)
�������gov/nih/mipav/model/algorithms/AlgorithmAntigradient2.html������������������������������������������0000775�4231163�4231163�00000152755�14537076043�024467� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAntigradient2 (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmAntigradient2
extends AlgorithmBase
This is a port of the files anitgradient2.m and antigradient2.c created by Gunnar Farneback in the
Spatial domain toolbox at http://www.imt.liu.se/mi/Tools. Email permission to do so was granted by
Gunnar Farneback:
On 03/15/2013 08:24 PM, Gandler, William (NIH/CIT) [E] wrote:
> Dear Gunnar Farneback:
>
> I am a Java programmer for the MIPAV software project at the National
> Institutes of Health. I would like to port your inverse gradient C and
> MATLAB routines in the Spatial Domain Toolbox to Java for inclusion in
> the MIPAV imaging analysis package. However, while MIPAV is open
> source, it does not distribute its code under the GNU General public
> license and has no plans to do so. Our open source license is:
>
> http://mipav.cit.nih.gov/license/license.html
>
> Would it be possible to obtain permission to distribute a port of your
> inverse gradient code in MIPAV without the GNU General public license
> as long as we give full credit to you?
Yes, go ahead.
/Gunnar
On 04/29/2013 11:32 PM, Gandler, William (NIH/CIT) [E] wrote:
> Gunnar,
>
> I have ported Antigradient2.c to MIPAV and found its performance to be very impressive.
Would there be any reason to port Antigradient.c as well? Does Antigradient.c have any capability
not possessed by Antigradient2.c?
>
>
> Sincerely,
>
>
> William Gandler
The difference between antigradient.c and antigradient2.c is that the former doesn't allow
a mask and therefore only can handle rectangular domains. Not having a mask is a big limitation
but it does simplify the algorithm drastically, making the code simpler and faster. On the other hand,
for rectangular domains it's entirely possible that there are even faster transform-based methods.
I mostly implemented antigradient.c to learn the multigrid approach.
Computing inverse gradients on irregular domains was central to my research at the time.
I'm happy to hear that it performs well.
/Gunnar
function f = antigradient2(g, mask, mu, n)
% ANTIGRADIENT2 Reconstruction from gradients in 2D and 3D.
%
% This differs from antigradient in that it can handle arbitrarily
% shaped domains.
%
% f = antigradient2(g) computes the function f which has a gradient
% as close as possible to g. The vector field g must either be an
% MxNx2 array or an MxNxPx3 array.
%
% f = antigradient2(g, mask) does the same thing but restricted to
% points where mask is nonzero. For meaningful results the domain must
% be simply connected (otherwise run it multiple times for each
% connected component). Certain shapes may give poor convergence; in
% general almost convex shapes can be expected to have the best
% properties. The mask should have size MxN or MxNxP. It can also be
% set to an empty matrix or omitted, in which case all points are
% included in the domain.
%
% f = antigradient2(g, mask, mu) sets the unrecoverable
% mean of f to mu. When omitted, the mean of f is set to zero.
%
% f = antigradient2(g, mask, mu, n) uses n multigrid iterations. The
% default value of 2 iterations is fast but only moderately accurate.
% The algorithm converges quickly, however, so usually 10-15
% iterations are sufficient to reach full convergence. This may depend
% on the shape of the domain, however.
%
% This function is based on transforming the inverse gradient problem to a
% PDE - a Poisson equation with Neumann boundary conditions. This equation
% is solved by an implementation of the full multigrid algorithm.
%
% The implementation is most efficient when all sides are of approximately
% the same size. The worst case is when two sides are large and the
% third side much smaller. The reason is that only uniform
% downsampling is implemented and when the smallest side becomes
% smaller than 4, a direct solution is applied. It makes no big
% difference whether the sides are odd or even, although sides which
% are of the form 2^k+1 give somewhat faster convergence.
%
% Author: Gunnar Farneback
% Medical Informatics
% Linkoping University, Sweden
% gunnar@imt.liu.se
On 04/23/2013 12:08 AM, Gandler, William (NIH/CIT) [E] wrote:
> Dear Gunnar:
>
> In Antigradient2.c I note the 2 differences in poisson_multigrid2D and poisson_multigrid3D:
>
> 1.) poisson_multigrid2D has:
> // Initialize solution.
> memcpy(f_out, f, M * N * sizeof(*f_out)); but no corresponding line
> is found in poisson_multigrid3D.
Looks like an artefact from some earlier development phase of the code or a not completely removed experiment.
In all cases when poisson_multigrid2D is called, f_out and f point to the same memory, so the memcpy call doesn't do anything.
> 2.) poisson_multigrid2D has if (1) at the end but poisson_multigrid3D has if (0) at the end.
That's definitely leftovers from frustrated attempts to work around a bug that long plagued the code.
I never checked if it still had any effect after finally tracking the bug down. It's not supposed to make a difference.
/Gunnar
Reference:
"Efficient Computation of the Inverse Gradient on Irregular Domains" by Gunnar Farneback,
Joakim Rydell, Tino Ebbers, Mats Andersson, and Hans Knutsson.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
antigradient2D() |
|
private void |
antigradient3D() |
|
private void |
compute_residual2D(double[] r,
double[] A,
double[] d,
double[] f,
int M,
int N) |
|
private void |
compute_residual3D(double[] r,
double[] A,
double[] d,
double[] f,
int M,
int N,
int P) |
|
private void |
downsample2D(double[] rhs,
int M,
int N,
double[] rhs_coarse,
int Mhalf,
int Nhalf,
double[] weight,
double[] coarse_weight) |
|
private void |
downsample3D(double[] rhs,
int M,
int N,
int P,
double[] rhs_coarse,
int Mhalf,
int Nhalf,
int Phalf,
double[] weight,
double[] coarse_weight) |
|
private void |
galerkin2D(int level,
int M,
int N,
int Mhalf,
int Nhalf,
double[] weight,
double[] coarse_weight) |
|
private void |
galerkin3D(int level,
int M,
int N,
int P,
int Mhalf,
int Nhalf,
int Phalf,
double[] weight,
double[] coarse_weight) |
|
private void |
gauss_seidel2D(double[] f,
double[] A,
double[] d,
int M,
int N) |
|
private void |
gauss_seidel3D(double[] f,
double[] A,
double[] d,
int M,
int N,
int P) |
|
private void |
poisson_full_multigrid2D(int level,
double[] rhs,
double[] weight,
int number_of_iterations,
int M,
int N,
double[] f_out) |
|
private void |
poisson_full_multigrid3D(int level,
double[] rhs,
double[] weight,
int number_of_iterations,
int M,
int N,
int P,
double[] f_out) |
|
private void |
poisson_multigrid2D(double[] f,
int level,
double[] rhs,
double[] weight,
int n1,
int n2,
int nm,
double[] f_out,
int M,
int N,
int[] directly_solved) |
|
private void |
poisson_multigrid3D(int level,
double[] rhs,
double[] weight,
int n1,
int n2,
int nm,
double[] f_out,
int M,
int N,
int P,
int[] directly_solved) |
|
void |
run2DSelfTest() |
|
void |
run3DSelfTest() |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
solve_directly2D(double[] lhs,
double[] rhs,
double[] f_out,
int M,
int N) |
|
private void |
solve_directly3D(double[] lhs,
double[] rhs,
double[] f_out,
int M,
int N,
int P) |
|
private void |
upsample2D(int M,
int N,
double[] v,
int Mhalf,
int Nhalf,
double[] f_out,
double[] weight,
double[] coarse_weight) |
|
private void |
upsample3D(int M,
int N,
int P,
double[] v,
int Mhalf,
int Nhalf,
int Phalf,
double[] f_out,
double[] weight,
double[] coarse_weight) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
fMean
private double fMean
-
testMode
boolean testMode
-
Constructor Detail
-
AlgorithmAntigradient2
public AlgorithmAntigradient2(ModelImage destImage,
ModelImage srcImg,
boolean entireImage,
double fMean,
int number_of_iterations)
-
AlgorithmAntigradient2
public AlgorithmAntigradient2(ModelImage destImage,
ModelImage srcImg,
boolean entireImage,
double fMean,
int number_of_iterations,
boolean testMode)
-
Method Detail
-
poisson_full_multigrid2D
private void poisson_full_multigrid2D(int level,
double[] rhs,
double[] weight,
int number_of_iterations,
int M,
int N,
double[] f_out)
-
poisson_multigrid2D
private void poisson_multigrid2D(double[] f,
int level,
double[] rhs,
double[] weight,
int n1,
int n2,
int nm,
double[] f_out,
int M,
int N,
int[] directly_solved)
-
solve_directly2D
private void solve_directly2D(double[] lhs,
double[] rhs,
double[] f_out,
int M,
int N)
-
gauss_seidel2D
private void gauss_seidel2D(double[] f,
double[] A,
double[] d,
int M,
int N)
-
compute_residual2D
private void compute_residual2D(double[] r,
double[] A,
double[] d,
double[] f,
int M,
int N)
-
downsample2D
private void downsample2D(double[] rhs,
int M,
int N,
double[] rhs_coarse,
int Mhalf,
int Nhalf,
double[] weight,
double[] coarse_weight)
-
galerkin2D
private void galerkin2D(int level,
int M,
int N,
int Mhalf,
int Nhalf,
double[] weight,
double[] coarse_weight)
-
upsample2D
private void upsample2D(int M,
int N,
double[] v,
int Mhalf,
int Nhalf,
double[] f_out,
double[] weight,
double[] coarse_weight)
-
poisson_full_multigrid3D
private void poisson_full_multigrid3D(int level,
double[] rhs,
double[] weight,
int number_of_iterations,
int M,
int N,
int P,
double[] f_out)
-
poisson_multigrid3D
private void poisson_multigrid3D(int level,
double[] rhs,
double[] weight,
int n1,
int n2,
int nm,
double[] f_out,
int M,
int N,
int P,
int[] directly_solved)
-
gauss_seidel3D
private void gauss_seidel3D(double[] f,
double[] A,
double[] d,
int M,
int N,
int P)
-
compute_residual3D
private void compute_residual3D(double[] r,
double[] A,
double[] d,
double[] f,
int M,
int N,
int P)
-
solve_directly3D
private void solve_directly3D(double[] lhs,
double[] rhs,
double[] f_out,
int M,
int N,
int P)
-
downsample3D
private void downsample3D(double[] rhs,
int M,
int N,
int P,
double[] rhs_coarse,
int Mhalf,
int Nhalf,
int Phalf,
double[] weight,
double[] coarse_weight)
-
galerkin3D
private void galerkin3D(int level,
int M,
int N,
int P,
int Mhalf,
int Nhalf,
int Phalf,
double[] weight,
double[] coarse_weight)
-
upsample3D
private void upsample3D(int M,
int N,
int P,
double[] v,
int Mhalf,
int Nhalf,
int Phalf,
double[] f_out,
double[] weight,
double[] coarse_weight)
�������������������gov/nih/mipav/model/algorithms/CeresSolver2.SingleLinkageClusteringOptions.html���������������������0000775�4231163�4231163�00000022305�14537076052�030555� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.SingleLinkageClusteringOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.SingleLinkageClusteringOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.SegmentDetails.html��������������������������������������0000775�4231163�4231163�00000074644�14537076054�025326� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.SegmentDetails (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- All Implemented Interfaces:
java.lang.Cloneable
- Enclosing class:
- ContourPlot
public class ContourPlot.SegmentDetails
extends java.lang.Object
implements java.lang.Cloneable
Specification of a line segment which comprises vertex locations, colors, picking color, and thicknesses.
- Author:
- hageldave
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
java.util.function.IntSupplier |
color0 |
|
java.util.function.IntSupplier |
color1 |
|
java.awt.geom.Point2D |
p0 |
|
java.awt.geom.Point2D |
p1 |
|
int |
pickColor |
|
protected java.util.function.DoubleSupplier[] |
PREDEFINED_THICKNESSES |
|
java.util.function.DoubleSupplier |
thickness0 |
|
java.util.function.DoubleSupplier |
thickness1 |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
SegmentDetails(java.awt.geom.Point2D p0,
java.awt.geom.Point2D p1) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
pickColor
public int pickColor
��������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NoiseLevel.rowComparator.html����������������������������������������0000775�4231163�4231163�00000025014�14537076056�025017� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NoiseLevel.rowComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.NoiseLevel.rowComparator
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
rowComparator() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
-
-
Constructor Detail
-
rowComparator
private rowComparator()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.SIFT3D_Descriptor.html����������������������������������������0000775�4231163�4231163�00000025045�14537076056�024205� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.SIFT3D_Descriptor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) SIFT3D.Hist[] |
hists |
|
(package private) double |
sd |
|
(package private) double |
xd |
|
(package private) double |
yd |
|
(package private) double |
zd |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.Dytex.html�����������������������������������������������������0000775�4231163�4231163�00000041340�14537076055�022305� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.Dytex (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.Dytex
-
- Enclosing class:
- libdt
public class libdt.Dytex
extends java.lang.Object
Dynamic Texture class. This is the class for a standard dynamic texture. It
serves as the base class for the online version of the DT. It includes
functions for: 1) estimating parameters; 2) regularizing; 3) synthesizing
video; 4) pre-processing video for usage with DT (for other classes).
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
Ymean
public libdt.Mat Ymean
< options for the Dytex
-
mu0
public libdt.Mat mu0
< observation matrix
-
Cvs
public libdt.Mat Cvs
< indicates am empty Dt
-
isCvs
public boolean isCvs
< Cvs precomputed value
-
Constructor Detail
-
Dytex
public Dytex()
< Cvs computed
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiscreteSineTransform.cftrec2_th.html��������������������������������0000775�4231163�4231163�00000026633�14537076054�026421� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DiscreteSineTransform.cftrec2_th (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.DiscreteSineTransform.cftrec2_th
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
�����������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEllipseToRectangle.html�������������������������������������0000775�4231163�4231163�00000061600�14537076045�025507� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEllipseToRectangle (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
xDimDest
private int xDimDest
-
Method Detail
-
selfTest
private void selfTest()
��������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.tform_type.html�����������������������������������������������0000775�4231163�4231163�00000033574�14537076056�023251� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.tform_type (MIPAV API Documentation)
-
-
Enum Constant Summary
Enum Constants
| Enum Constant |
Description |
AFFINE |
|
TPS |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
tform_type() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
tform_type
private tform_type()
-
Method Detail
-
valueOf
public static SIFT3D.tform_type valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Lines.html�����������������������������������������������0000775�4231163�4231163�00000110551�14537076054�023454� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Lines (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Lines() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
hidden
protected boolean hidden
-
Method Detail
-
numSegments
public int numSegments()
- Returns:
- the number of line segments in this
ContourPlot.Lines object
�������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.Forest.showProgress.html���������������������������0000775�4231163�4231163�00000026656�14537076057�027551� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.Forest.showProgress (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.Forest.showProgress
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
max_progress |
|
(package private) java.lang.String |
operation |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
showProgress(java.lang.String operation,
int max_progress) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
max_progress
int max_progress
-
Method Detail
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
����������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEdgeNMSuppression.html��������������������������������������0000775�4231163�4231163�00000140751�14537076045�025341� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEdgeNMSuppression (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calcStoreInDest2D(int nImages,
int detectionType) |
This function produces the EdgeNMSup of input image.
|
private void |
calcStoreInDest3D(int detectionType) |
This function produces the Non-maximum suppression of input image.
|
void |
finalize() |
Prepares this class for destruction.
|
static java.util.BitSet |
genLevelMask(int xDim,
int yDim,
float[] buffer,
float level,
int detectionType) |
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
|
void |
genZeroXMask(int slice,
float[] buffer,
float[] buffer2,
int detectionType) |
Generates a zero crossing mask for a 2D function sets a ModelImage to 255 if a zero crossing is detected.
|
ModelImage |
getZeroXMask() |
Accessor to return mask indicating zero crossings.
|
private void |
makeKernels2D() |
Creates Gaussian derivative kernels.
|
private void |
makeKernels3D() |
Creates Gaussian derivative kernels.
|
void |
runAlgorithm() |
Starts the program.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
GxData
private float[] GxData
DOCUMENT ME!
-
GxxData
private float[] GxxData
DOCUMENT ME!
-
GxxxData
private float[] GxxxData
DOCUMENT ME!
-
GxxyData
private float[] GxxyData
DOCUMENT ME!
-
GxxzData
private float[] GxxzData
DOCUMENT ME!
-
GxyData
private float[] GxyData
DOCUMENT ME!
-
GxyyData
private float[] GxyyData
DOCUMENT ME!
-
GxyzData
private float[] GxyzData
DOCUMENT ME!
-
GxzData
private float[] GxzData
DOCUMENT ME!
-
GxzzData
private float[] GxzzData
DOCUMENT ME!
-
GyData
private float[] GyData
DOCUMENT ME!
-
GyyData
private float[] GyyData
DOCUMENT ME!
-
GyyyData
private float[] GyyyData
DOCUMENT ME!
-
GyyzData
private float[] GyyzData
DOCUMENT ME!
-
GyzData
private float[] GyzData
DOCUMENT ME!
-
GyzzData
private float[] GyzzData
DOCUMENT ME!
-
GzData
private float[] GzData
DOCUMENT ME!
-
GzzData
private float[] GzzData
DOCUMENT ME!
-
GzzzData
private float[] GzzzData
DOCUMENT ME!
-
kExtents
private int[] kExtents
DOCUMENT ME!
-
sigmas
private float[] sigmas
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmEdgeNMSuppression
public AlgorithmEdgeNMSuppression(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D)
Creates a new AlgorithmEdgeNMSuppression object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the EdgeNMSup will be calculated for the whole image if equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
Method Detail
-
genLevelMask
public static java.util.BitSet genLevelMask(int xDim,
int yDim,
float[] buffer,
float level,
int detectionType)
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
- Parameters:
xDim - the buffer's x dimensionyDim - the buffer's y dimensionbuffer - array in which to find zero crossinglevel - the level to find the crossing of (usually will be 0)detectionType - the type of zero crossing method to use- Returns:
- DOCUMENT ME!
-
genZeroXMask
public void genZeroXMask(int slice,
float[] buffer,
float[] buffer2,
int detectionType)
Generates a zero crossing mask for a 2D function sets a ModelImage to 255 if a zero crossing is detected.
- Parameters:
slice - DOCUMENT ME!buffer - array in which to find zero crossingbuffer2 - array which ensures that zero crossing is only counted if buffer2 value at that position
is less than zerodetectionType - the type of zero crossing detection to perform
-
calcStoreInDest2D
private void calcStoreInDest2D(int nImages,
int detectionType)
This function produces the EdgeNMSup of input image.
- Parameters:
nImages - number of images to be blurred. If 2D image then nImage = 1, if 3D image where each image
is to processed independently then nImages equals the number of images in the volume.detectionType - the type of zero crossing detection to perform
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
�����������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Lanczos2CostFunction.html������������������������0000775�4231163�4231163�00000034045�14537076052�027737� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Lanczos2CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmObjectExtractor.Edge.html�����������������������������������0000775�4231163�4231163�00000032333�14537076047�025732� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmObjectExtractor.Edge (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.Edge
-
- Enclosing class:
- AlgorithmObjectExtractor
protected class AlgorithmObjectExtractor.Edge
extends java.lang.Object
A representation of an edge for the vertex-edge-triangle table. This class stores the pair of vertex indices for
the end points of the edge. The edges and are considered to be identical. To simplify
comparisons, the class stores the ordered indices. The class extends Object to obtain support for hashing into a
map of edges.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
m_i0 |
DOCUMENT ME!
|
int |
m_i1 |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Edge(int i0,
int i1) |
Constructs an edge in the table.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, finalize, getClass, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_i0
public int m_i0
DOCUMENT ME!
-
m_i1
public int m_i1
DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ScaledLoss.html������������������������������������������0000775�4231163�4231163�00000033547�14537076052�024411� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ScaledLoss (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.FailingCostFunction.html�����������������������������0000775�4231163�4231163�00000033774�14537076053�027130� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.FailingCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����gov/nih/mipav/model/algorithms/AlgorithmFRETBleedThrough.html���������������������������������������0000775�4231163�4231163�00000075236�14537076046�025032� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRETBleedThrough (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
acceptorRun
private boolean acceptorRun
If acceptorRun is true, run on 3 images with acceptor dye only. If acceptorRun is false, run on 3 images with
donor dye only.
-
useBlue
private boolean useBlue
DOCUMENT ME!
-
useGreen
private boolean useGreen
DOCUMENT ME!
-
useRed
private boolean useRed
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmFRETBleedThrough
public AlgorithmFRETBleedThrough(ModelImage FP1Image,
ModelImage FRETImage,
ModelImage FP2Image,
boolean useRed,
boolean useGreen,
boolean useBlue,
boolean acceptorRun)
Creates a new AlgorithmFRETBleedThrough object.
- Parameters:
FP1Image - FP1 taken with FP1 filterFRETImage - FP1 taken with FRET filterFP2Image - FP1 taken with FP2 filteruseRed - If true, use the red color values for the FRETuseGreen - If true, use the green color values for the FRETuseBlue - If true, use the blue color values for the FRETacceptorRun - If true, run on 3 images with only acceptor dye If false, run on 3 images with only donor
dye
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.MatrixParameterization.html��������������������������0000775�4231163�4231163�00000044560�14537076053�027716� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.MatrixParameterization (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
ComputeJacobian(double[] x,
double[] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
double[][] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
int x_offset,
double[][] jacobian) |
|
boolean |
ComputeJacobian(double[] x,
Jama.Matrix jacobian) |
|
int |
GlobalSize() |
|
int |
LocalSize() |
|
boolean |
Plus(double[] x,
double[] delta,
double[] x_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_offset,
java.util.Vector<java.lang.Double> delta,
int delta_offset,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Plus
public boolean Plus(java.util.Vector<java.lang.Double> x,
int x_offset,
java.util.Vector<java.lang.Double> delta,
int delta_offset,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_offset)
- Specified by:
Plus in class CeresSolver.LocalParameterization
������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DenseLinearAlgebraLibraryType.html�����������������������0000775�4231163�4231163�00000035071�14537076051�030204� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DenseLinearAlgebraLibraryType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.DenseLinearAlgebraLibraryType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.HomogeneousVectorParameterization.html�������������������0000775�4231163�4231163�00000040632�14537076051�031257� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.HomogeneousVectorParameterization (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
size_ |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
ComputeJacobian(double[] x_ptr,
int x_start,
double[][] jacobian_ptr) |
|
int |
GlobalSize() |
|
int |
LocalSize() |
|
boolean |
Plus(double[] x_ptr,
double[] delta_ptr,
double[] x_plus_delta_ptr) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Plus
public boolean Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index)
- Specified by:
Plus in class CeresSolver.LocalParameterization
������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmVOILogicalOperations.html�����������������������������������0000775�4231163�4231163�00000073367�14537076051�025770� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmVOILogicalOperations (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
operation
protected int operation
operation type
-
kernel
private int kernel
-
Constructor Detail
-
AlgorithmVOILogicalOperations
public AlgorithmVOILogicalOperations(ModelImage clonedImage,
ViewVOIVector selectedVOIset,
int operation,
boolean doVoiImage)
constructor
- Parameters:
img - clonedImage - selectedVOIset - operation - doVoiImage -
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TrustRegionStrategyPerSolveOptions.html������������������0000775�4231163�4231163�00000024352�14537076052�031413� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TrustRegionStrategyPerSolveOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyPerSolveOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.Tree.html������������������������������������������0000775�4231163�4231163�00000130331�14537076057�024464� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.Tree (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Tree() |
|
Tree(java.util.Vector<java.util.Vector<java.lang.Integer>> child_nodeIDs,
java.util.Vector<java.lang.Integer> split_varIDs,
java.util.Vector<java.lang.Double> split_values) |
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
abstract void |
allocateMemory() |
|
void |
appendToFile(java.io.BufferedWriter bw) |
|
abstract void |
appendToFileInternal(java.io.BufferedWriter bw) |
|
void |
bootstrap() |
|
protected abstract void |
bootstrapClassWise() |
|
void |
bootstrapWeighted() |
|
void |
bootstrapWithoutReplacement() |
|
protected abstract void |
bootstrapWithoutReplacementClassWise() |
|
void |
bootstrapWithoutReplacementWeighted() |
|
protected abstract void |
cleanUpInternal() |
|
void |
computePermutationImportance(java.util.Vector<java.lang.Double> forest_importance,
java.util.Vector<java.lang.Double> forest_variance) |
|
protected abstract double |
computePredictionAccuracyInternal() |
|
void |
createEmptyNode() |
|
protected abstract void |
createEmptyNodeInternal() |
|
void |
createPossibleSplitVarSubset(java.util.Vector<java.lang.Integer> result) |
|
void |
dispose() |
|
int |
dropDownSamplePermuted(int permuted_varID,
int sampleID,
int permuted_sampleID) |
|
java.util.Vector<java.util.Vector<java.lang.Integer>> |
getChildNodeIDs() |
|
java.util.Vector<java.lang.Integer> |
getInbagCounts() |
|
int |
getNumSamplesOob() |
|
java.util.Vector<java.lang.Integer> |
getOobSampleIDs() |
|
java.util.Vector<java.lang.Double> |
getSplitValues() |
|
java.util.Vector<java.lang.Integer> |
getSplitVarIDs() |
|
void |
grow(java.util.Vector<java.lang.Double> variable_importance) |
|
void |
init(StochasticForests.Data data,
int mtry,
int dependent_varID,
int num_samples,
long seed,
java.util.Vector<java.lang.Integer> deterministic_varIDs,
java.util.Vector<java.lang.Integer> split_select_varIDs,
java.util.Vector<java.lang.Double> split_select_weights,
StochasticForests.ImportanceMode importance_mode,
int min_node_size,
boolean sample_with_replacement,
boolean memory_saving_splitting,
StochasticForests.SplitRule splitrule,
java.util.Vector<java.lang.Double> case_weights,
boolean keep_inbag,
java.util.Vector<java.lang.Double> sample_fraction,
double alpha,
double minprop,
boolean holdout,
int num_random_splits) |
|
void |
permuteAndPredictOobSamples(int permuted_varID,
java.util.Vector<java.lang.Integer> permutations) |
|
void |
predict(StochasticForests.Data prediction_data,
boolean oob_prediction) |
|
boolean |
splitNode(int nodeID) |
|
protected abstract boolean |
splitNodeInternal(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
alpha
protected double alpha
-
minprop
protected double minprop
-
Method Detail
-
dispose
public void dispose()
-
init
public void init(StochasticForests.Data data,
int mtry,
int dependent_varID,
int num_samples,
long seed,
java.util.Vector<java.lang.Integer> deterministic_varIDs,
java.util.Vector<java.lang.Integer> split_select_varIDs,
java.util.Vector<java.lang.Double> split_select_weights,
StochasticForests.ImportanceMode importance_mode,
int min_node_size,
boolean sample_with_replacement,
boolean memory_saving_splitting,
StochasticForests.SplitRule splitrule,
java.util.Vector<java.lang.Double> case_weights,
boolean keep_inbag,
java.util.Vector<java.lang.Double> sample_fraction,
double alpha,
double minprop,
boolean holdout,
int num_random_splits)
-
bootstrap
public void bootstrap()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBRISK.BriskLayer.html���������������������������������������0000775�4231163�4231163�00000052307�14537076044�024705� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBRISK.BriskLayer (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
getAgastPoints(int threshold,
java.util.Vector<javax.vecmath.Point2i> keypoints) |
|
int |
getAgastScore(double xf,
double yf,
int threshold) |
|
int |
getAgastScore(double xf,
double yf,
int threshold,
double scale) |
|
int |
getAgastScore(int x,
int y,
int threshold) |
|
int |
getAgastScore_5_8(int x,
int y,
int threshold) |
|
ModelImage |
getImage() |
|
double |
getOffset() |
|
double |
getScale() |
|
int |
getXDim() |
|
int |
getYDim() |
|
boolean |
isMax2D(int x_layer,
int y_layer) |
|
private int |
value(int[][] scores,
double xf,
double yf,
double scale) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
scale
private double scale
-
offset
private double offset
-
scores
private int[][] scores
-
Method Detail
-
getScale
public double getScale()
-
getXDim
public int getXDim()
-
getYDim
public int getYDim()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.NoOpEvaluationCallback.html��������������������������0000775�4231163�4231163�00000024662�14537076053�027534� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.NoOpEvaluationCallback (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.ThurberCostFunction.html�������������������������0000775�4231163�4231163�00000034034�14537076052�027655� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.ThurberCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.NormalPrior.html�����������������������������������������0000775�4231163�4231163�00000033302�14537076052�024606� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.NormalPrior (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private Jama.Matrix |
A_ |
|
private java.util.Vector<java.lang.Double> |
b_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
NormalPrior(Jama.Matrix A,
java.util.Vector<java.lang.Double> b) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
A_
private Jama.Matrix A_
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBRISK.BriskPatternPoint.html��������������������������������0000775�4231163�4231163�00000032607�14537076044�026261� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBRISK.BriskPatternPoint (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
sigma |
|
private double |
x |
|
private double |
y |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
sigma
private double sigma
-
Method Detail
-
getX
public double getX()
-
getY
public double getY()
-
getSigma
public double getSigma()
�������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.IterativeSchurComplementSolver.html����������������������0000775�4231163�4231163�00000044547�14537076051�030536� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.IterativeSchurComplementSolver (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Bennett5CostFunction.html������������������������0000775�4231163�4231163�00000034045�14537076052�027730� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Bennett5CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/fMRIBlindDeconvolution.ConvAndLinear.html����������������������������0000775�4231163�4231163�00000032100�14537076055�027106� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
fMRIBlindDeconvolution.ConvAndLinear (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.ConvAndLinear
-
-
Constructor Summary
Constructors
| Constructor |
Description |
ConvAndLinear(double[] kernel,
int dim_in,
int dim_out,
boolean spectral_conv) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
spectral_conv
boolean spectral_conv
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmVOIHausdorffDistance.html�����������������������������������0000775�4231163�4231163�00000054227�14537076051�025740� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmVOIHausdorffDistance (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TrustRegionMinimizer.html��������������������������������0000775�4231163�4231163�00000114702�14537076052�026517� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TrustRegionMinimizer (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
x_norm_
private double x_norm_
-
x_cost_
private double[] x_cost_
-
Method Detail
-
DoLineSearch
private void DoLineSearch(java.util.Vector<java.lang.Double> x,
java.util.Vector<java.lang.Double> gradient,
double cost,
java.util.Vector<java.lang.Double> delta)
��������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftSegmentation.html����������������������������������0000775�4231163�4231163�00000223473�14537076047�026230� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftSegmentation (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmMeanShiftSegmentation
extends AlgorithmBase
The java code is ported from C++ code downloaded from http://coewww.rutgers.edu/riul/research/code.html.
The relevant web page section says:
Edge Detection and Image SegmentatiON (EDISON) System
C++ code, can be used through a graphical interface or command line.
The system is described in Synergism in low level vision.
For comments, please contact Bogdan Georgescu or Chris M. Christoudias.
The EDISON system contains the image segmentation/edge preserving filtering algorithm described in the
paper Mean shift: A robust approach toward feature space analysis and the edge detection algorithm
described in the paper Edge detection with embedded confidence.
Relevant points from reference 1:
This code works on 2 dimensional gray level and color images. RGB is converted to LUV for processing.
Location and range vectors are concatenated
in a joint spatial-range domain of dimension d = p + 2, where p = 1 in the gray level case, 3 for color
images, and p > 3 in the multispectral case. There is a spatial kernel bandwidth hs and a range kernel
bandwidth hr. For the 256 by 256 gray level cameraman image mean shift filtering a uniform kernel
having hs = 8, hr = 4, M = 10 was used. For the 512 by 512 color image baboon normal filters with hs going from
8 to 32 and hr going from 4 to 16 were used. Only features with large spatial support are represented in
the filtered image when hs increases. On the other hand, only features with high color contrast survive
when hr is large. Mean shift filtering is run on the image before mean shift segmentation is performed.
In mean shift segmentation clusters are formed by grouping together pixels which are
closer than hs in the spatial domain and hr in the range domain. Assign a label Li to each of the pixels ]
depending on which cluster it belongs to. Optionally eliminate spatial regions containing less than M pixels.
The following were segmented with uniform kernels:
256 by 256 gray level MIT building with hs = 8, hr = 7, M = 20 into 225 homogeneous regions.
256 by 256 color room image with hs = 8, hr = 5, M = 20.
512 by 512 color lake image with hs = 16, hr = 7, M = 40.
512 by 512 color image hand with hs = 16, hr = 19, M = 40.
All 256 by 256 images used the same hs = 8 corresponding to a 17 by 17 spatial window,
while all 512 by 512 images used hs = 16 corresponding to a 31 by 31 window.
The range parameter hr and the smallest significant feature size M control the number
of regions in the segmented image. The more an image deviates from the assumed piecewise
constant model, larger values have to be used for hr and M to discard the effect of small
local variations in feature space.
4 color landscape images were segmented with hs = 8, hr = 7, M = 100.
4 other color examples used hs = 8, hr = 7, M = 20.
This code was ported by William Gandler.
References
-------------------------------------------------------------------------------------------------
[1] D. Comanicu, P. Meer: "Mean shift: A robust approach toward feature space analysis".
IEEE Trans. Pattern Anal. Machine Intell., May 2002.
[2] P. Meer, B. Georgescu: "Edge detection with embedded confidence". IEEE Trans. Pattern Anal.
Machine Intell., 28, 2001.
[3] C. Christoudias, B. Georgescu, P. Meer: "Synergism in low level vision". 16th International
Conference of Pattern Recognition, Track 1 - Computer Vision and Robotics, Quebec City,
Canada, August 2001.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMeanShiftSegmentation(ModelImage destImage,
ModelImage srcImage,
AlgorithmMeanShiftSegmentation.kernelType spatialKernelType,
AlgorithmMeanShiftSegmentation.kernelType rangeKernelType,
float spatialBandwidth,
float rangeBandwidth,
int minRegion,
AlgorithmMeanShiftSegmentation.SpeedUpLevel speedUpLevel,
boolean measureTime,
double speedThreshold,
double[] weightMap,
boolean weightMapDefined,
ModelImage filteredImage,
ModelImage boundariesImage) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
buildRAM() |
|
private void |
classConsistencyCheck(int iN,
boolean usingLattice) |
|
private void |
computeEdgeStrengths() |
|
private void |
connect() |
|
private void |
defineBoundaries() |
|
private void |
defineLInput() |
|
private void |
destroyOutput() |
|
private void |
destroyRAM() |
|
private void |
fill(int regionLoc,
int label) |
|
private void |
filter() |
|
private void |
generateLookupTable() |
|
private void |
initializeOutput() |
|
private int |
insert(AlgorithmMeanShiftSegmentation.RAList source,
AlgorithmMeanShiftSegmentation.RAList[] entry) |
|
private boolean |
inWindow(int mode1,
int mode2) |
|
private void |
LUVtoRGB(float[] luvVal,
int luvOffset,
byte[] rgbVal,
int rgbOffset) |
|
private void |
meanShift() |
|
private int |
my_round(double in_x) |
|
private void |
newNonOptimizedFilter(float sigmaS,
float sigmaR) |
|
private void |
newOptimizedFilter1(float sigmaS,
float sigmaR) |
|
private void |
newOptimizedFilter2(float sigmaS,
float sigmaR) |
|
private void |
prune(int minRegion) |
|
private void |
RGBtoLUV(float[] rgb,
int rgbOffset,
double[] luv,
int luvOffset) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
segment() |
|
private float |
sqDistance(int mode1,
int mode2) |
|
private void |
transitiveClosure() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
data
private double[] data
-
height
private int height
-
offset
private float[] offset
-
labels
private int[] labels
-
modes
private float[] modes
-
indexTable
private int[] indexTable
-
LUV_data
private float[] LUV_data
-
regionCount
private int regionCount
-
modeTable
private byte[] modeTable
-
pointList
private int[] pointList
-
pointCount
private int pointCount
-
neigh
private int[] neigh
-
epsilon
private double epsilon
-
minRegion
private int minRegion
-
Constructor Detail
-
AlgorithmMeanShiftSegmentation
public AlgorithmMeanShiftSegmentation(ModelImage destImage,
ModelImage srcImage,
AlgorithmMeanShiftSegmentation.kernelType spatialKernelType,
AlgorithmMeanShiftSegmentation.kernelType rangeKernelType,
float spatialBandwidth,
float rangeBandwidth,
int minRegion,
AlgorithmMeanShiftSegmentation.SpeedUpLevel speedUpLevel,
boolean measureTime,
double speedThreshold,
double[] weightMap,
boolean weightMapDefined,
ModelImage filteredImage,
ModelImage boundariesImage)
-
Method Detail
-
meanShift
private void meanShift()
-
segment
private void segment()
-
buildRAM
private void buildRAM()
-
filter
private void filter()
-
connect
private void connect()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSimulatedExposureFusion.html��������������������������������0000775�4231163�4231163�00000130567�14537076050�026635� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSimulatedExposureFusion (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
a |
|
private double |
alpha |
Original code from dispersionMap.m, multiscaleBlending.m, remapFun.m, robustNormalization.m,
runsef.m, and sef.m located at https://github.com/chlsl/simulated-exposure-fusion-ipol was
written by Charles Hessel and is being ported to Java with his permission.
|
private double |
b |
|
private double |
beta |
|
int |
BORDER_CONSTANT |
|
int |
BORDER_DEFAULT |
|
int |
BORDER_REFLECT |
|
int |
BORDER_REFLECT_101 |
|
int |
BORDER_REPLICATE |
|
int |
BORDER_WRAP |
|
private double |
epsilon |
|
private double |
lambda |
|
private int |
M |
|
private double |
med |
|
private int |
Mp |
|
private int |
N |
|
private int |
Ns |
|
private int |
nScales |
|
private int |
Nx |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double[][] |
copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue) |
|
private double[] |
dg(double[] t,
int k) |
|
private double[] |
dh(double[] t,
int k) |
|
private double[] |
dhs(double[] t,
int k) |
|
private double[][] |
downsample(double[][] I,
double[][] filter) |
|
private double[] |
f(double[] t,
int k) |
|
private double[][] |
filter2Same(double[][] img,
double[][] win) |
|
private double[] |
fs(double[] t,
int k) |
|
private double[] |
g(double[] t,
int k) |
|
(package private) java.util.Vector<double[][]> |
gaussian_pyramid(double[][] I,
int nlev) |
|
private double[] |
h(double[] t,
int k) |
|
private double[] |
hs(double[] t,
int k) |
|
(package private) java.util.Vector<double[][]> |
laplacian_pyramid(double[][] I,
int nlev) |
|
private double[][] |
multiscaleBlending(double[][][] seq,
double[][][] W,
int nScales) |
|
private double[][] |
pyramid_filter() |
|
private double |
r(int k) |
|
private double[][] |
reconstruct_laplacian_pyramid(java.util.Vector<double[][]> pyr) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private double[][] |
upsample(double[][] I,
int[] odd,
double[][] filter) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
alpha
private double alpha
Original code from dispersionMap.m, multiscaleBlending.m, remapFun.m, robustNormalization.m,
runsef.m, and sef.m located at https://github.com/chlsl/simulated-exposure-fusion-ipol was
written by Charles Hessel and is being ported to Java with his permission.
This method was first described in the following paper:
HESSEL, Charles, MOREL, Jean-Michel, An Extended Exposure Fusion and its Application to
Single Image Contrast Enhancement. In: 2020 IEEE Winter Conference on Applications of
Computer Vision (WACV). IEEE, 2020.
For robustNormalization.m refer to:
Charles Hessel, An Implementation of the Exposure Fusion Algorithm, Image Processing On Line, 8 (2018),
pp. 369–387. https://doi.org/10.5201/ipol.2018.230
The code provided by Charles Hessel makes use of downsample.m, gaussian_pyramid.m,
laplacian_pyramid.m, pyramid_filter.m, reconstruct_laplacian_pyramid.m, and upsample.m,
which is from code located at https://github.com/Mericam/exposure-fusion that is covered under the
BSD-2-Clause license:
Copyright (c) 2015, Tom Mertens, tom.mertens@gmail.com
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
Redistributions of source code must retain the above copyright notice, this
list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright notice,
this list of conditions and the following disclaimer in the documentation
and/or other materials provided with the distribution.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Implementation of Exposure Fusion in Matlab, as described in:
"Exposure Fusion", Tom Mertens, Jan Kautz and Frank Van Reeth In proceedings of Pacific Graphics 2007
"Exposure Fusion: A Simple and Practical Alternative to High Dynamic Range Photography. " Tom Mertens, Jan Kautz and Frank Van Reeth In Computer Graphics Forum, 28 (1) 161 - 171, 2009
This code was originally written by Tom Mertens at Hasselt University, August 2007. Uploaded to GitHub in February 2015
Author and main contact: Tom Mertens, tom.mertens@gmail.com
-
nScales
private int nScales
-
lambda
private double lambda
-
epsilon
private double epsilon
-
Constructor Detail
-
AlgorithmSimulatedExposureFusion
public AlgorithmSimulatedExposureFusion(ModelImage destImg,
ModelImage srcImg,
double alpha,
double beta,
int nScales,
int M,
double med,
double lambda)
-
Method Detail
-
copyMakeBorder
public double[][] copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue)
-
r
private double r(int k)
�����������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LowRankInverseHessian.html�������������������������������0000775�4231163�4231163�00000045634�14537076052�026601� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LowRankInverseHessian (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
LowRankInverseHessian(int num_parameters,
int max_num_corrections,
boolean use_approximate_eigenvalue_scaling) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.DataChar.html��������������������������������������0000775�4231163�4231163�00000044075�14537076057�025245� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.DataChar (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private char[] |
data |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Data
externalData, i, index_data, is_ordered_variable, max_num_unique_values, no_split_variables, num_cols, num_cols_no_snp, num_rows, num_rows_rounded, permuted_sampleIDs, snp_data, unique_data_values, variable_names
-
Constructor Summary
Constructors
| Constructor |
Description |
DataChar() |
|
DataChar(double[] data_double,
java.util.Vector<java.lang.String> variable_names,
int num_rows,
int num_cols,
boolean[] error) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Data
addNoSplitVariable, addSnpData, getAllValues, getIndex, getIsOrderedVariable, getMaxNumUniqueValues, getMinMaxValues, getNoSplitVariables, getNumCols, getNumRows, getNumUniqueDataValues, getPermutedSampleID, getUniqueDataValue, getUnpermutedVarID, getVariableID, getVariableNames, isOrderedVariable, loadFromFile, loadFromFileOther, permuteSampleIDs, setIsOrderedVariable, setIsOrderedVariableString, sort
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DataChar
public DataChar()
-
DataChar
public DataChar(double[] data_double,
java.util.Vector<java.lang.String> variable_names,
int num_rows,
int num_cols,
boolean[] error)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlCovDetMethod.html�������������������������������������������0000775�4231163�4231163�00000040607�14537076054�024171� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlCovDetMethod (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
VlCovDetMethod() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
VlCovDetMethod
private VlCovDetMethod()
-
Method Detail
-
valueOf
public static Covdet.VlCovDetMethod valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Image.html����������������������������������������������������0000775�4231163�4231163�00000033321�14537076056�022071� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Image (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Image
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
cl_image |
|
(package private) int |
cl_valid |
|
(package private) double[] |
data |
|
(package private) int |
nc |
|
(package private) int |
nx |
|
(package private) int |
ny |
|
(package private) int |
nz |
|
(package private) double |
s |
|
(package private) int |
size |
|
(package private) double |
ux |
|
(package private) double |
uy |
|
(package private) double |
uz |
|
(package private) int |
xs |
|
(package private) int |
ys |
|
(package private) int |
zs |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Image() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.NetworkSnake.html������������������������������0000775�4231163�4231163�00000057052�14537076047�027017� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.NetworkSnake (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
alpha
private float alpha
-
gamma
private float gamma
-
spacing
private int spacing
-
Constructor Detail
-
NetworkSnake
public NetworkSnake()
-
Method Detail
-
getAlpha
public float getAlpha()
-
getBeta
public float getBeta()
-
getGamma
private float getGamma()
-
iterate
public void iterate(byte[] imageBuffer,
int bufferWidth,
int bufferHeight,
int m,
int timeout)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.DataFloat.html�������������������������������������0000775�4231163�4231163�00000043765�14537076057�025442� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.DataFloat (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
data |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Data
externalData, i, index_data, is_ordered_variable, max_num_unique_values, no_split_variables, num_cols, num_cols_no_snp, num_rows, num_rows_rounded, permuted_sampleIDs, snp_data, unique_data_values, variable_names
-
Constructor Summary
Constructors
| Constructor |
Description |
DataFloat() |
|
DataFloat(double[] data_double,
java.util.Vector<java.lang.String> variable_names,
int num_rows,
int num_cols) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Data
addNoSplitVariable, addSnpData, getAllValues, getIndex, getIsOrderedVariable, getMaxNumUniqueValues, getMinMaxValues, getNoSplitVariables, getNumCols, getNumRows, getNumUniqueDataValues, getPermutedSampleID, getUniqueDataValue, getUnpermutedVarID, getVariableID, getVariableNames, isOrderedVariable, loadFromFile, loadFromFileOther, permuteSampleIDs, setIsOrderedVariable, setIsOrderedVariableString, sort
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
data
private float[] data
-
Constructor Detail
-
DataFloat
public DataFloat()
-
DataFloat
public DataFloat(double[] data_double,
java.util.Vector<java.lang.String> variable_names,
int num_rows,
int num_cols)
�����������gov/nih/mipav/model/algorithms/AlgorithmCellTrackingAGVF.html���������������������������������������0000775�4231163�4231163�00000115511�14537076044�024770� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCellTrackingAGVF (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
m_afX |
Previous snake results (X-position):.
|
private float[] |
m_afY |
Previous snake results (Y-position):.
|
private boolean |
m_bDilate |
whether or not to dilate the cell contour before solving for the cell on the next frame (dilation helps capture
cells that are moving fast).
|
private boolean |
m_bUseVelocity |
boolean when true, use the velocity vector:.
|
private float |
m_fDilationFactor |
Amount to dilate the cell (multiple of the cell radius).
|
private float |
m_fK |
expected cell radius:.
|
private float |
m_fLambda1 |
Constraint factor for the cell shape:.
|
private float |
m_fLambda2 |
Constraint factor for the cell size:.
|
private float |
m_fLambda3 |
Constraint factor for sampling:.
|
private float |
m_fTolerance |
tolerance factor for snake evolution:.
|
private Jama.Matrix |
m_kC |
Cos matrix: = cos( 2*pi*i/n).
|
private Jama.Matrix |
m_kG |
G Matrix, equation 19:.
|
private Jama.Matrix |
m_kH |
H Matrix, equation 19:.
|
private java.awt.Polygon |
m_kPreviousSnake |
Previous snake polygon:.
|
private Jama.Matrix |
m_kQ |
Q Matrix, equation 24 (inverse calculated once per image sequence on the inital frame):.
|
private Jama.Matrix |
m_kS |
Sin matrix: = sin( 2*pi*i/n).
|
private WildMagic.LibFoundation.Mathematics.Vector2f |
m_kVelocity |
Velocity vector (either the initial user-defined guess, or the calculated velocity (new snake center - previous
snake center):.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmCellTrackingAGVF(ModelImage resultImage,
ModelImage srcImg,
float[] sigmas,
int gvfIterations,
int boundaryIterations,
float k,
float smoothness,
VOI srcVOI,
boolean do25D,
float radiusConstraint,
float shapeConstraint,
float sizeConstraint,
float resamplingConstraint,
boolean bDilate,
float fDilation,
float fDx,
float fDy) |
Creates a new AlgorithmCellTrackingAGVF object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
Prepares this class for destruction.
|
private void |
initSnakeConstants(int iNPoints) |
Initializes the H, G, and Q matrices once per image sequence on the first frame.
|
protected void |
runSnake(float[] xPoints,
float[] yPoints,
float[] u,
float[] v,
java.awt.Polygon resultGon) |
Actual function that evolves the boundary.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
m_fK
private float m_fK
expected cell radius:.
-
m_kG
private Jama.Matrix m_kG
G Matrix, equation 19:.
-
m_kH
private Jama.Matrix m_kH
H Matrix, equation 19:.
-
m_kVelocity
private WildMagic.LibFoundation.Mathematics.Vector2f m_kVelocity
Velocity vector (either the initial user-defined guess, or the calculated velocity (new snake center - previous
snake center):.
-
Constructor Detail
-
AlgorithmCellTrackingAGVF
public AlgorithmCellTrackingAGVF(ModelImage resultImage,
ModelImage srcImg,
float[] sigmas,
int gvfIterations,
int boundaryIterations,
float k,
float smoothness,
VOI srcVOI,
boolean do25D,
float radiusConstraint,
float shapeConstraint,
float sizeConstraint,
float resamplingConstraint,
boolean bDilate,
float fDilation,
float fDx,
float fDy)
Creates a new AlgorithmCellTrackingAGVF object.
- Parameters:
resultImage - image of GVF field magnitudesrcImg - 2D or 3D source imagesigmas - describe the scale of the gaussian in each dimensiongvfIterations - iterations in calculating GVF fieldboundaryIterations - iterations in calculating boundaryk - GVF constantsmoothness - factor for smoothing points on contour (see AlgorithmAGVF)srcVOI - VOI that is to be evolveddo25D - only applies to 3D, if true do slice by sliceradiusConstraint - The user-defined cell radiusshapeConstraint - The contribution of the shape constraint in the minimizationsizeConstraint - The contribution of the size constraint in the minimizationresamplingConstraint - The contribution of the resampling constraint in the minimizationbDilate - Whether to dilate the cell radius before optimizingfDilation - dilation factor (multiple of the cell radius)fDx - The initial cell velocity (x-component)fDy - The initial cell velocity (y-component)
-
Method Detail
-
runSnake
protected void runSnake(float[] xPoints,
float[] yPoints,
float[] u,
float[] v,
java.awt.Polygon resultGon)
Actual function that evolves the boundary.
- Overrides:
runSnake in class AlgorithmAGVF- Parameters:
xPoints - x coordinates that describe the contouryPoints - y coordinates that describe the contouru - x component of the GVFv - y component of the GVFresultGon - resultant polygon
-
initSnakeConstants
private void initSnakeConstants(int iNPoints)
Initializes the H, G, and Q matrices once per image sequence on the first frame. The matrix inverse only has to
be computed once.
- Parameters:
iNPoints - the number of points in the initial VOI (snake)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping2.hppfun.html�������������������������������0000775�4231163�4231163�00000045566�14537076056�026641� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping2.hppfun (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) boolean[] |
cmplx |
|
(package private) int[] |
left |
|
(package private) int |
n |
|
(package private) double[] |
nmlen |
|
(package private) double[][] |
qdat |
|
(package private) int[] |
right |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
hppfun(double[] y0,
int n,
double[] beta,
double[] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
hppfun
public hppfun(double[] y0,
int n,
double[] beta,
double[] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!covarMat - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ODE.html�������������������������������������������������������������0000775�4231163�4231163�00000163467�14537076056�020542� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ODE (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ODE
-
-
Constructor Summary
Constructors
| Constructor |
Description |
ODE() |
Creates a new ODE object.
|
ODE(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
relerr
private double[] relerr
-
abserr
private double[] abserr
-
iflag
private int[] iflag
-
alpha
private double[] alpha
-
beta
private double[] beta
-
phase
private double phase
-
istart
private double istart
-
delsn
private double delsn
-
ypout
private double[] ypout
-
phi
private double[][] phi
-
iwork1
private int iwork1
-
isnold
private int isnold
-
start
private boolean start
-
phase1
private boolean phase1
-
nornd
private boolean nornd
-
fouru
private double fouru
-
maxnum
private int maxnum
-
testMode
private boolean testMode
-
testCase
private int testCase
-
Constructor Detail
-
ODE
public ODE(int neqn,
double[] y,
double[] t,
double tout,
double[] relerr,
double[] abserr,
int[] iflag)
-
Method Detail
-
getY
public double[] getY()
-
getT
public double getT()
-
getIflag
public int getIflag()
-
driver
public void driver()
-
intrp
private void intrp()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.AdaptableView.html���������������������������������������0000775�4231163�4231163�00000024100�14537076053�025103� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.AdaptableView (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Abstract Methods
| Modifier and Type |
Method |
Description |
void |
setView(java.awt.geom.Rectangle2D view) |
Sets the view rectangle that is the range of coordinates to be
projected onto the view port.
|
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.HEMOptions.html������������������������������������������������0000775�4231163�4231163�00000035327�14537076055�023205� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.HEMOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
termvalue
double termvalue
-
termvalBest
double termvalBest
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.Metadata.html����������������������������������0000775�4231163�4231163�00000035562�14537076047�026126� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.Metadata (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.util.ArrayList<java.util.HashMap<java.lang.String,java.lang.String>> |
data |
|
private java.lang.String |
instanceTitle |
|
private java.lang.String |
title |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Metadata(java.lang.String title,
java.lang.String instanceTitle) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
clear
public void clear()
����������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.BufferedImageFactory.html��������������������������������0000775�4231163�4231163�00000034123�14537076053�026416� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.BufferedImageFactory (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.BufferedImageFactory
-
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static java.awt.image.BufferedImage |
get(java.awt.Image img,
int imgType) |
Creates a new BufferedImage of the specified imgType and same size as
the provided image and draws the provided Image onto the new BufferedImage.
|
static java.awt.image.BufferedImage |
getINT_ARGB(int width,
int height) |
Instancing method for BufferedImage of type BufferedImage.TYPE_INT_ARGB
|
static java.awt.image.BufferedImage |
getINT_ARGB(java.awt.Dimension d) |
Instancing method for BufferedImage of type BufferedImage.TYPE_INT_ARGB
|
static java.awt.image.BufferedImage |
getINT_ARGB(java.awt.Image img) |
shortcut for get(img, BufferedImage.TYPE_INT_ARGB).
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getINT_ARGB
public static java.awt.image.BufferedImage getINT_ARGB(java.awt.Image img)
shortcut for get(img, BufferedImage.TYPE_INT_ARGB).
- Parameters:
img - to be copied to BufferedImage of type INT_ARGB- Returns:
- a BufferedImage copy of the provided Image
- Since:
- 1.0
-
get
public static java.awt.image.BufferedImage get(java.awt.Image img,
int imgType)
Creates a new BufferedImage of the specified imgType and same size as
the provided image and draws the provided Image onto the new BufferedImage.
- Parameters:
img - to be copied to BufferedImageimgType - of the BufferedImage. See
BufferedImage(int, int, int) for details on the
available imgTypes.- Returns:
- a BufferedImage copy of the provided Image
- Since:
- 1.0
-
getINT_ARGB
public static java.awt.image.BufferedImage getINT_ARGB(int width,
int height)
Instancing method for BufferedImage of type BufferedImage.TYPE_INT_ARGB
- Parameters:
width - of the created BufferedImageheight - of the created BufferedImage- Returns:
- a new BufferedImage of specified dimension and type TYPE_INT_ARGB
- Since:
- 1.0
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmThresholdDualRGB.html���������������������������������������0000775�4231163�4231163�00000104004�14537076050�025047� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmThresholdDualRGB (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmThresholdDualRGB
extends AlgorithmBase
Runs threshold (lower and upper) on color images and replaces values either outside (inverse) or inside (normal) with
the fill values specified.
- Version:
- 1.0
- Author:
- Ben Link
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private float[] |
fillValues |
Arrays containing fill values for each channel (red=0,green=1,blue=2).
|
private boolean |
isInverse |
fill values are for values outside (inverse) or inside (normal/false).
|
private int |
pixelsInRangeB |
Variable that will store the total number of blue pixel values in thresholding range
|
private int |
pixelsInRangeG |
Variable that will store the total number of green pixel values in thresholding range
|
private int |
pixelsInRangeR |
Variable that will store the total number of red pixel values in thresholding range
|
private float[] |
thresholdB |
DOCUMENT ME!
|
private float[] |
thresholdG |
DOCUMENT ME!
|
private float[] |
thresholdR |
Three arrays (R,G,B) containing minimum and maximum threshold for each channel.
|
private boolean[] |
useChannels |
Which channels to use (0 = red, 1 = green, 2 = blue).
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmThresholdDualRGB(ModelImage srcImage,
float[] thresholdR,
float[] thresholdG,
float[] thresholdB,
float[] fillValues,
boolean[] useChannels,
boolean maskFlag,
boolean isInverse) |
Default constructor for running algorithm on and modifying source image.
|
AlgorithmThresholdDualRGB(ModelImage destImg,
ModelImage srcImg,
float[] thresholdR,
float[] thresholdG,
float[] thresholdB,
float[] fillValues,
boolean[] useChannels,
boolean maskFlag,
boolean isInverse) |
Default constructor for running algorithm into a destination image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false on process the image over the mask
areas.
-
fillValues
private float[] fillValues
Arrays containing fill values for each channel (red=0,green=1,blue=2).
-
thresholdR
private float[] thresholdR
Three arrays (R,G,B) containing minimum and maximum threshold for each channel.
-
useChannels
private boolean[] useChannels
Which channels to use (0 = red, 1 = green, 2 = blue).
-
Constructor Detail
-
AlgorithmThresholdDualRGB
public AlgorithmThresholdDualRGB(ModelImage srcImage,
float[] thresholdR,
float[] thresholdG,
float[] thresholdB,
float[] fillValues,
boolean[] useChannels,
boolean maskFlag,
boolean isInverse)
Default constructor for running algorithm on and modifying source image.
- Parameters:
srcImage - ModelImage sourcethresholdR - float[] red threshthresholdG - float[] green threshthresholdB - float[] blue threshfillValues - float[] fill values [3] (r,g,b)useChannels - boolean[] use channels [3] (r,g,b)maskFlag - boolean whole image or voiisInverse - boolean replace values outside (true) or inside (false)
-
AlgorithmThresholdDualRGB
public AlgorithmThresholdDualRGB(ModelImage destImg,
ModelImage srcImg,
float[] thresholdR,
float[] thresholdG,
float[] thresholdB,
float[] fillValues,
boolean[] useChannels,
boolean maskFlag,
boolean isInverse)
Default constructor for running algorithm into a destination image.
- Parameters:
destImg - ModelImage destinationsrcImg - ModelImage sourcethresholdR - float[] red threshthresholdG - float[] green threshthresholdB - float[] blue threshfillValues - float[] fill values [3] (r,g,b)useChannels - boolean[] use channels [3] (r,g,b)maskFlag - boolean whole image or voiisInverse - boolean replace values outside (true) or inside (false)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.HermiteDataMemRec.html����������������������������������������0000775�4231163�4231163�00000025326�14537076054�024362� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.HermiteDataMemRec (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.HermiteDataMemRec
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
HermiteDataMemRec
HermiteDataMemRec()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DBSCANClusteringSegment.html�����������������������������������������0000775�4231163�4231163�00000106505�14537076054�024434� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DBSCANClusteringSegment (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class DBSCANClusteringSegment
extends AlgorithmBase
% Copyright (c) 2013 Peter Kovesi
% www.peterkovesi.com/matlabfns/
%
% Permission is hereby granted, free of charge, to any person obtaining a copy
% of this software and associated documentation files (the "Software"), to deal
% in the Software without restriction, subject to the following conditions:
%
% The above copyright notice and this permission notice shall be included in
% all copies or substantial portions of the Software.
%
% The Software is provided "as is", without warranty of any kind.
The image must be a color image
First the slic.m software performs a SLIC Simple Linear Iterative Clustering SuperPixels.
SLIC is followed by SPDBSCAN.m to perform a DBSCAN clustering of superpixels. This results in
a simple and fast segmentation of an image.
Ported MATLAB files:
slic.m Implementation of Achanta, Shaji, Smith, Lucchi, Fua and Susstrunk's SLIC Superpixels.
spdbscan.m Implements DBSCAN clustering of superpixels.
mcleanupregions.m Morphological version of cleanupregions.m The output is not quite as nice but the execution is much faster.
finddisconnected.m Finds groupings of disconnected labeled regions. Used by mcleanupregions.m to reduce execution time.
makeregionsdistinct.m Ensures labeled regions are distinct.
renumberregions.m Ensures all regions in labeled image have a unique label and that the label numbering forms a contiguous sequence.
regionadjacency.m Computes adjacency matrix for an image of labeled segmented regions.
References:
R. Achanta, A. Shaji, K. Smith, A. Lucchi, P. Fua and S. Susstrunk. "SLIC Superpixels Compared
to State-of-the-Art Superpixel Methods" PAMI. Vol 34 No 11. November 2012. pp 2274-2281.
Martin Ester, Hans-Peter Kriegel, Jorg Sander, Xiaowei Xu (1996). "A density-based algorithm
for discovering clusters in large spatial databases with noise". Proceedings of the Second International
Conference on Knowledge Discovery and Data Mining (KDD-96). AAAI Press. pp. 226-231.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private int |
bwlabel4(int[][] bl) |
|
private double[][] |
dist(double[] C,
double[][][] im,
int r1,
int c1,
double S,
double m) |
|
private java.util.Vector<java.util.Vector<java.lang.Integer>> |
finddisconnected(int[][] l) |
|
private int |
makeregionsdistinct(int[][] seg,
int connectivity) |
|
private DBSCANClusteringSegment.AmAl |
mcleanupregions(int[][] seg,
double seRadius) |
|
private DBSCANClusteringSegment.AmAl |
regionadjacency(int[][] L,
int connectivity) |
|
private java.util.Vector<java.lang.Integer> |
regionQueryM(DBSCANClusteringSegment.SP Sp,
DBSCANClusteringSegment.AmAl amal,
int n,
double Ec) |
|
private DBSCANClusteringSegment.Renum |
renumberregions(int[][] L) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
seRadius
private double seRadius
-
center
private int center
-
Constructor Detail
-
DBSCANClusteringSegment
public DBSCANClusteringSegment(ModelImage destImg,
ModelImage srcImg,
int k,
double m,
double seRadius,
int center,
int mw1,
int mw2,
int nItr,
double Ec)
-
Method Detail
-
dist
private double[][] dist(double[] C,
double[][][] im,
int r1,
int c1,
double S,
double m)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/fMRIBlindDeconvolution.Tracker.html����������������������������������0000775�4231163�4231163�00000032247�14537076055�026032� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
fMRIBlindDeconvolution.Tracker (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.Tracker
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
dur |
|
(package private) int |
idx |
|
java.util.Vector<java.lang.Double> |
J |
|
(package private) double |
t_r |
|
(package private) int |
verbose |
|
(package private) double[] |
y |
|
(package private) double[] |
z |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Tracker(java.util.Vector<java.lang.Double> J,
double[] z,
double[] y,
double t_r,
double dur,
int verbose) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Tracker
public Tracker(java.util.Vector<java.lang.Double> J,
double[] z,
double[] y,
double t_r,
double dur,
int verbose)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSM2.html����������������������������������������������������0000775�4231163�4231163�00000144366�14537076050�022372� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSM2 (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmSM2
extends AlgorithmBase
Based on the document provided by Daniel Reich: Notes on DCE with SM2 (standard model, aka Tofts model,
2-compartment) 3 model parameters are fit for each voxel in 3D: 1) K_trans in [1.0E-5, 5.0] in /min On input ktrans
is converted from /min to /sec and on output ktrans is converted from /sec to /min. 2) ve in [1.0E-5, 0.99] 3) f_vp
in [0, 0.99]
srcImage is a dynamic "4D volume" of MRI signal (3D over time). The equation used here is virtually identical to
equation 10.3 in T1-w DCE-MRI. Ct(t) = vpCp(t) + ktrans*integral from 0 to t of Cp(t') * exp[-ktrans*(t - t')/ve]dt'
(10.3) Cp is the concentration of agent in the vascular plasma space, vp. ve is the volume of the extravascular
extracellular space per unit volume of tissue. ktrans is the volume transfer constant between vp and ve. Ct is the
tracer concentration in the tissue as a whole. Our equation is: R1(t) - R10 = (vp * [R1,p(t) - R10,p] +
ktrans*integral from 0 to t of [R1,p(tau) - R10,p]*exp[-ktrans*(t - tau)/ve]d(tau))/(1 - h) where R10 is the tissue
R1 map in the absence of contrast material, a 3D volume R1(tj) is the tissue R1 map during contrast infusion, a 4D
data set. h = hematocrit with a default value of 0.4. With the sagittal sinus VOI: Average over this VOI to extract
the constant R10,p from the R10 map. Average over this VOI to extract the time series R1,p(tj) from the R1(tj) 4D
data set. tj is a vector of the center times for each volume, where j = 1,...,n and n is the number of post-contrast
volumes.
Solve the equation numerically assuming piecewise linearity and using the trapezoid rule.
The pre-injection volumes are actually averaged together to generate the R10 map. So you're right, they wouldn't
provide any additional information, and we don't need to fit them. After injection (t=t1), the first volume usually
has no contrast in it. That's because the contrast has to circulate to the brain. So R1,p(t1) should be the same as
R10,p, but in our scheme R1,p(t1) wasn't used to generate the R10 map. Any differences should be due to noise. Does
that help explain things?
For monomeric gadolinium chelates, Ktrans for the normal blood brain barrier is approximately 10^-4 min^-1 (from the
legend to Fig 5 of Li, Rooney, and Springer (MRM, 2005)). So a lower bound of 10^-5 should be ok. If R1,p(t1) = R10,p
except for noise, then R1,p(t1) - R10,p is purely noise and contains no useful information
References: 1.) "A Unified Magnetic Resonance Imaging Pharmacokinetic Theory: Intravascular and Extracellular
Contrast Reagents" by Xin Li, William D. Rooney, and Charles S. Springer, Jr., Magnetic Resonance in Medicine, Vol.
54, 2005, pp. 1351-1359. 2.) Erratum: Magnetic Resonance in Medicine, Vol. 55, 2006, p.1217. 3.) Quantitative MRI of
the Brain, Edited by Paul Tofts, 2003, John Wiley & Sons, Ltd., ISBN: 0-47084721-2, Chapter 10, T1-w DCE-MRI:
T1-weighted Dynamic Contrast-enhanced MRI by Geoff J. M. Parker and Anwar R. Padhani, pp. 341-364. 4.) Larsson HBW,
Courivaud F, Rostrup E, Hansen AE. Measurement of brain perfusion, blood volume, and blood-brain barrier
permeability, using dynamic contrast-enhanced T1-weighted MRI at 3 tesla. Magnetic Resonance in Medicine 2009;
62(5):1270-1281. 5.) Li X, Rooney WD, Springer CS. A unified magnetic resonance imaging pharmacokinetic theory:
intravascular and extracellular contrast reagents. Magnetic Resonance in Medicine 2005 Dec; 54(6): 1351-1359. 6.)
Tofts PS, Modeling tracer kinetics in dynamic Gd-DPTA MR imaging. Journal of Magnetic Resonance Imaging, 1997, 7(1),
pp. 91-101. 7.) Tofts PS, Brix G, Buckley DL, Evelhoch JL, Henderson E, Knopp MV, Larsson HB, Mayr NA, Parker GJ,
Port RE, Taylor J, Weisskoff RM. Estimating kinetic parameters from dynamic contrast-enhanced T(1)-weighted MRI of a
diffusable tracer: standardized quantitites and symbols. J. Magn. Reson Imaging 1999 Sep; 10(3), pp. 223-232.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmSM2(ModelImage[] destImage,
ModelImage srcImage,
double[] min_constr,
double[] max_constr,
double[] initial,
ModelImage tissueImage,
double[] timeVals,
double h,
int sagittalSinusIndex,
int processRegionIndex) |
Creates a new AlgorithmDEMRI3 object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
r1t0
private double[] r1t0
-
r1tj
private double[] r1tj
-
r1pt0
private double r1pt0
-
r1ptj
private double[] r1ptj
-
ymodel
private double[] ymodel
-
volSize
private int volSize
-
initial
private double[] initial
-
exitStatus
private int[] exitStatus
-
processors
private int processors
-
barMarker
private int barMarker
-
oldBarMarker
private int oldBarMarker
-
validVoxels
private int validVoxels
-
veTotal
private double veTotal
-
vpTotal
private double vpTotal
-
Constructor Detail
-
AlgorithmSM2
public AlgorithmSM2(ModelImage[] destImage,
ModelImage srcImage,
double[] min_constr,
double[] max_constr,
double[] initial,
ModelImage tissueImage,
double[] timeVals,
double h,
int sagittalSinusIndex,
int processRegionIndex)
Creates a new AlgorithmDEMRI3 object.
-
Method Detail
-
output
public void output(double[] params,
double paramSecs0,
int i,
int exitBits,
float chi_squared)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CompressedRowJacobianWriter.html�������������������������0000775�4231163�4231163�00000043661�14537076051�027772� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CompressedRowJacobianWriter (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
GetOrderedParameterBlocks
public void GetOrderedParameterBlocks(CeresSolver.Program program,
int residual_id,
java.util.Vector<CeresSolver.Pair<java.lang.Integer,java.lang.Integer>> evaluated_jacobian_blocks)
-
Write
public void Write(int residual_id,
int residual_offset,
double[][] jacobians,
CeresSolver.SparseMatrix base_jacobian)
�������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/WeibullDistribution.twoParameterFittingCostFunction.html�������������0000775�4231163�4231163�00000034210�14537076057�032453� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WeibullDistribution.twoParameterFittingCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.MinimizerOptions.html������������������������������������0000775�4231163�4231163�00000076335�14537076052�025676� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.MinimizerOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_threads
public int num_threads
-
is_silent
public boolean is_silent
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.DoglegStrategy.html��������������������������������������0000775�4231163�4231163�00000114273�14537076051�025274� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DoglegStrategy (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
radius_
private double radius_
-
min_mu_
private double min_mu_
-
max_mu_
private double max_mu_
-
alpha_
private double alpha_
-
reuse_
private boolean reuse_
-
kMaxMu
private double kMaxMu
-
kMinMu
private double kMinMu
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.FaceTrait.html��������������������������������������������������0000775�4231163�4231163�00000022244�14537076056�022515� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.FaceTrait (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
boolean |
m_touched |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
FaceTrait() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_touched
public boolean m_touched
-
Constructor Detail
-
FaceTrait
public FaceTrait()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CompressedRowJacobianWriter.indexintintComparator.html���0000775�4231163�4231163�00000027610�14537076051�034352� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CompressedRowJacobianWriter.indexintintComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
-
-
Constructor Detail
-
indexintintComparator
indexintintComparator()
������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Boundary.html���������������������������������������������������0000775�4231163�4231163�00000027111�14537076056�022434� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Boundary (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Boundary
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmDConvolver.html���������������������������������������������0000775�4231163�4231163�00000355630�14537076045�024054� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDConvolver (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY,
double[] kernelXZ,
double[] kernelYZ,
double[] kernelZZ,
boolean entireImage,
int[] kExtents) |
|
AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY,
double[] kernelXZ,
double[] kernelYZ,
double[] kernelZZ,
double[] kernelXXX,
double[] kernelXXY,
double[] kernelXYY,
double[] kernelYYY,
double[] kernelXXZ,
double[] kernelXZZ,
double[] kernelXYZ,
double[] kernelYYZ,
double[] kernelYZZ,
double[] kernelZZZ,
int[] kExtents,
boolean entireImage) |
|
AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY,
double[] kernelXXX,
double[] kernelXXY,
double[] kernelXYY,
double[] kernelYYY,
int[] kExtents,
boolean entireImage) |
|
AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY,
int[] kExtents,
boolean entireImage) |
|
AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
double[] kernelX2,
double[] kernelY2,
int[] kExtents,
boolean entireImage,
boolean combined2D3D) |
|
AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
int[] kExtents,
boolean entireImage) |
|
AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
int[] kExtents,
boolean entireImage,
boolean sqrtXY) |
|
AlgorithmDConvolver(ModelImage srcImage,
double[] kernel,
int[] kExtents,
boolean entireImage,
boolean image25D) |
Sets the source and kernel images and calls the appropriate method based on image dimensionality.
|
AlgorithmDConvolver(ModelImage srcImage,
double[] kernel,
int[] kExtents,
boolean entireImage,
boolean image25D,
double intensityGaussianDenom) |
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
convolve2D(int startSlice,
int endSlice) |
|
private void |
convolve2D3D(int start,
int end,
double[] iImage,
int index,
int min3DLength,
int max3DLength) |
|
private void |
convolve2DBilateral(int startSlice,
int endSlice) |
|
private void |
convolve2DNMS(int startSlice,
int endSlice) |
|
private void |
convolve2DNMSE(int startSlice,
int endSlice) |
|
static double |
convolve2DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve2DPt(WildMagic.LibFoundation.Mathematics.Vector2f pt,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve2DPtMed(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve2DPtNMS(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve2DPtNMSE(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelXXX,
double[] kernelXXY,
double[] kernelXYY,
double[] kernelYYY) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve2DPtSqrtXY(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve2DRGBPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an RGB image at a position.
|
static double |
convolve2DRGBPtSqrtXY(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY) |
A static function that convolves a kernel with an RGB image at a position.
|
private void |
convolve2DSqrtXY(int startSlice,
int endSlice) |
|
private void |
convolve2DXY(int startSlice,
int endSlice) |
|
private void |
convolve3D(int start,
int end,
double[] iImage,
int index) |
|
private void |
convolve3DBilateral(int start,
int end,
double[] iImage,
int index) |
|
private void |
convolve3DNMS(int start,
int end,
double[] iImage,
int index) |
|
private void |
convolve3DNMSE(int start,
int end,
double[] iImage,
int index) |
|
static double |
convolve3DPt(double[] pt,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve3DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve3DPt(WildMagic.LibFoundation.Mathematics.Vector3f kPt,
ModelImage kImage,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve3DPtMed(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve3DPtNMS(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY,
double[] kernelXZ,
double[] kernelYZ,
double[] kernelZZ) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve3DPtNMSE(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
double[] kernelXXX,
double[] kernelXXY,
double[] kernelXYY,
double[] kernelYYY,
double[] kernelXXZ,
double[] kernelXZZ,
double[] kernelXYZ,
double[] kernelYYZ,
double[] kernelYZZ,
double[] kernelZZZ) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve3DPtXYZ(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelZ) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolve3DRGBPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an RGB image at a position.
|
static double |
convolve3DRGBPtXYZ(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelZ) |
A static function that convolves a kernel with an RGB image at a position.
|
private void |
convolve3DXYZ(int start,
int end,
double[] iImage,
int index) |
|
static double[] |
convolveBilateral2DCIELabPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel,
double intensityGaussianDenom) |
A static function that convolves a kernel with an CIELab image at a position.
|
static double |
convolveBilateral2DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel,
double intensityGaussianDenom) |
A static function that convolves a kernel with an image at a position.
|
static double[] |
convolveBilateral3DCIELabPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel,
double intensityGaussianDenom) |
A static function that convolves a kernel with a CIELab image at a position.
|
static double |
convolveBilateral3DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel,
double intensityGaussianDenom) |
A static function that convolves a kernel with an image at a position.
|
static void |
convolveBlock3D(int start,
int end,
int lpv,
double[] iImage,
int[] iExtents,
int[] kExtents,
double[] kernel,
ModelImage oImage) |
|
static double |
convolveWhole2DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an image at a position.
|
static double |
convolveWhole3DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel) |
A static function that convolves a kernel with an image at a position The convolution is performed only if the
whole kernel fits inside the image.
|
void |
finalize() |
Prepares this class for destruction.
|
private static double |
getBilinear(int i,
double dx,
double dy,
int[] iExtents,
double[] image) |
Performs bilinear interpolation of image data.
|
double[] |
getOutputBuffer() |
Returns the output buffer
|
private static double |
getTrilinear(int i1,
double dx,
double dy,
double dz,
int[] iExtents,
double[] image) |
Performs trilinear interpolation of image data.
|
static byte[] |
getTrilinearC(int i1,
double dx,
double dy,
double dz,
int[] iExtents,
byte[] image) |
Performs trilinear interpolation of image data.
|
boolean |
isBlue() |
|
boolean |
isGreen() |
|
boolean |
isRed() |
|
void |
run2D() |
Begins the execution of the 2D convolver.
|
void |
run3D() |
Begins the execution of the 3D convolver.
|
void |
run4D() |
|
void |
runAlgorithm() |
Begins execution of the convolver.
|
void |
setBlue(boolean blue) |
|
void |
setColorChannels(boolean red,
boolean green,
boolean blue) |
|
void |
setGreen(boolean green) |
|
void |
setRed(boolean red) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
blue
private boolean blue
-
green
private boolean green
-
doXY
private boolean doXY
-
sqrtXY
private boolean sqrtXY
-
sqrtXYZ
private boolean sqrtXYZ
-
nms2
private boolean nms2
-
nms2e
private boolean nms2e
-
nms3
private boolean nms3
-
nms3e
private boolean nms3e
-
Constructor Detail
-
AlgorithmDConvolver
public AlgorithmDConvolver(ModelImage srcImage,
double[] kernel,
int[] kExtents,
boolean entireImage,
boolean image25D)
Sets the source and kernel images and calls the appropriate method based on image dimensionality.
- Parameters:
srcImage - kernel - kExtents - entireImage - image25D -
-
AlgorithmDConvolver
public AlgorithmDConvolver(ModelImage srcImage,
double[] kernel,
int[] kExtents,
boolean entireImage,
boolean image25D,
double intensityGaussianDenom)
-
AlgorithmDConvolver
public AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
int[] kExtents,
boolean entireImage,
boolean sqrtXY)
-
AlgorithmDConvolver
public AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
int[] kExtents,
boolean entireImage)
-
AlgorithmDConvolver
public AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY,
int[] kExtents,
boolean entireImage)
-
AlgorithmDConvolver
public AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY,
double[] kernelXXX,
double[] kernelXXY,
double[] kernelXYY,
double[] kernelYYY,
int[] kExtents,
boolean entireImage)
-
AlgorithmDConvolver
public AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY,
double[] kernelXZ,
double[] kernelYZ,
double[] kernelZZ,
boolean entireImage,
int[] kExtents)
-
AlgorithmDConvolver
public AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY,
double[] kernelXZ,
double[] kernelYZ,
double[] kernelZZ,
double[] kernelXXX,
double[] kernelXXY,
double[] kernelXYY,
double[] kernelYYY,
double[] kernelXXZ,
double[] kernelXZZ,
double[] kernelXYZ,
double[] kernelYYZ,
double[] kernelYZZ,
double[] kernelZZZ,
int[] kExtents,
boolean entireImage)
-
AlgorithmDConvolver
public AlgorithmDConvolver(ModelImage srcImage,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
double[] kernelX2,
double[] kernelY2,
int[] kExtents,
boolean entireImage,
boolean combined2D3D)
-
Method Detail
-
isRed
public boolean isRed()
-
isBlue
public boolean isBlue()
-
isGreen
public boolean isGreen()
-
convolve2DPt
public static final double convolve2DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveBilateral2DPt
public static final double convolveBilateral2DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel,
double intensityGaussianDenom)
A static function that convolves a kernel with an image at a position. The intensity difference between the
center pixel and the indexed pixel is used in a Gaussian in the weighing.
The intensity Gaussian is (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma))* exp(-intensityDifference**2/intenDenom)
Since the same (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma) term would appear in every weight term, it would cancel
out by appearing in both the numerator and denominator in (sum / norm) and so can be omitted.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel dataintensityGaussianDenom - - Returns:
- the value of the pixel after convolution with the kernel
-
convolve2DPtSqrtXY
public static final double convolve2DPtSqrtXY(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve2DPtNMS
public static final double convolve2DPtNMS(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelXX - kernel datakernelXY - kernel datakernelYY - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve2DPtNMSE
public static final double convolve2DPtNMSE(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelXXX,
double[] kernelXXY,
double[] kernelXYY,
double[] kernelYYY)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelXXX - kernel datakernelXXY - kernel datakernelXYY - kernel datakernelYYY - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve2DPt
public static final double convolve2DPt(WildMagic.LibFoundation.Mathematics.Vector2f pt,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an image at a position.
- Parameters:
pt - doubleing point indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve2DPtMed
public static final double convolve2DPtMed(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an image at a position. This version seems to just be used by
AlgorithmDConvolverLapMedianess.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
- See Also:
gov.nih.mipav.model.AlgorithmDConvolvers.AlgorithmDConvolverLapMedianess
-
convolve2DRGBPt
public static final double convolve2DRGBPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an RGB image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveBilateral2DCIELabPt
public static final double[] convolveBilateral2DCIELabPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel,
double intensityGaussianDenom)
A static function that convolves a kernel with an CIELab image at a position. The CIE76 intensity difference between the
center pixel and the indexed pixel is used in a Gaussian in the weighing.
The intensity Gaussian is (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma))* exp(-intensityDifference**2/intenDenom)
Since the same (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma) term would appear in every weight term, it would cancel
out by appearing in both the numerator and denominator in (sum / norm) and so can be omitted.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel dataintensityGaussianDenom - - Returns:
- the L*,a*,b* of the pixel after convolution with the kernel
-
convolve2DRGBPtSqrtXY
public static final double convolve2DRGBPtSqrtXY(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY)
A static function that convolves a kernel with an RGB image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve3DPt
public static final double convolve3DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveBilateral3DPt
public static final double convolveBilateral3DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel,
double intensityGaussianDenom)
A static function that convolves a kernel with an image at a position. The intensity difference between the
center pixel and the indexed pixel is used in a Gaussian in the weighing.
The intensity Gaussian is (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma))* exp(-intensityDifference**2/intenDenom)
Since the same (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma) term would appear in every weight term, it would cancel
out by appearing in both the numerator and denominator in (sum / norm) and so can be omitted.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel dataintensityGaussianDenom - - Returns:
- the value of the pixel after convolution with the kernel
-
convolve3DPtXYZ
public static final double convolve3DPtXYZ(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelZ)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelZ - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve3DPtNMS
public static final double convolve3DPtNMS(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
double[] kernelXX,
double[] kernelXY,
double[] kernelYY,
double[] kernelXZ,
double[] kernelYZ,
double[] kernelZZ)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelZ - kernel datakernelXX - kernel datakernelXY - kernel datakernelYY - kernel datakernelXZ - kernel datakernelYZ - kernel datakernelZZ - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve3DPtNMSE
public static final double convolve3DPtNMSE(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelZ,
double[] kernelXXX,
double[] kernelXXY,
double[] kernelXYY,
double[] kernelYYY,
double[] kernelXXZ,
double[] kernelXZZ,
double[] kernelXYZ,
double[] kernelYYZ,
double[] kernelYZZ,
double[] kernelZZZ)
A static function that convolves a kernel with an image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelZ - kernel datakernelXXX - kernel datakernelXXY - kernel datakernelXYY - kernel datakernelYYY - kernel datakernelXXZ - kernel datakernelXZZ - kernel datakernelXYZ - kernel datakernelYZZ - kernel datakernelZZZ - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveBlock3D
public static final void convolveBlock3D(int start,
int end,
int lpv,
double[] iImage,
int[] iExtents,
int[] kExtents,
double[] kernel,
ModelImage oImage)
- Parameters:
start - end - lpp - length per voxel, for example 4 for RGB image.iImage - iExtents - kExtents - kernel - oImage -
-
convolve3DPt
public static final double convolve3DPt(double[] pt,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an image at a position.
- Parameters:
pt - doubleing point indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve3DPtMed
public static final double convolve3DPtMed(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an image at a position. This version seems to just be used by
AlgorithmDConvolverLapMedianess.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
- See Also:
gov.nih.mipav.model.AlgorithmDConvolvers.AlgorithmDConvolverLapMedianess
-
convolve3DRGBPt
public static final double convolve3DRGBPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an RGB image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveBilateral3DCIELabPt
public static final double[] convolveBilateral3DCIELabPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel,
double intensityGaussianDenom)
A static function that convolves a kernel with a CIELab image at a position. The CIE76 intensity difference between the
center pixel and the indexed pixel is used in a Gaussian in the weighing.
The intensity Gaussian is (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma))* exp(-intensityDifference**2/intenDenom)
Since the same (1.0/(Math.sqrt(2.0 * Math.PI) * intensitySigma) term would appear in every weight term, it would cancel
out by appearing in both the numerator and denominator in (sum / norm) and so can be omitted.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel dataintensityGaussianDenom - - Returns:
- the L*,a*,b* of the pixel after convolution with the kernel
-
convolve3DRGBPtXYZ
public static final double convolve3DRGBPtXYZ(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernelX,
double[] kernelY,
double[] kernelZ)
A static function that convolves a kernel with an RGB image at a position.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernelX - kernel datakernelY - kernel datakernelZ - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolveWhole2DPt
public static final double convolveWhole2DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an image at a position. The convolution is performed only if the
whole kernel fits inside the image.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel or 0 if the kernel does not fit wholly within
the image
-
convolveWhole3DPt
public static final double convolveWhole3DPt(int pix,
int[] iExtents,
double[] image,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an image at a position The convolution is performed only if the
whole kernel fits inside the image.
- Parameters:
pix - index indicating location of convolutioniExtents - image dimensionsimage - image datakExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel or 0 if the kernel does not fit wholly within
the image
-
convolve3DPt
public static final double convolve3DPt(WildMagic.LibFoundation.Mathematics.Vector3f kPt,
ModelImage kImage,
int[] kExtents,
double[] kernel)
A static function that convolves a kernel with an image at a position.
- Parameters:
kExtents - kernel dimensionskernel - kernel data- Returns:
- the value of the pixel after convolution with the kernel
-
convolve2D3D
private final void convolve2D3D(int start,
int end,
double[] iImage,
int index,
int min3DLength,
int max3DLength)
-
run4D
public void run4D()
-
getBilinear
private static double getBilinear(int i,
double dx,
double dy,
int[] iExtents,
double[] image)
Performs bilinear interpolation of image data.
- Parameters:
i - index into imagedx - change in x from integerdy - change in y from integeriExtents - dimensions of imageimage - image data- Returns:
- the bilinearly interpolated value
-
getTrilinear
private static double getTrilinear(int i1,
double dx,
double dy,
double dz,
int[] iExtents,
double[] image)
Performs trilinear interpolation of image data.
- Parameters:
i1 - index into imagedx - change in x from integerdy - change in y from integerdz - change in z from integeriExtents - dimensions of imageimage - image data- Returns:
- the trilinearly interpolated data value
-
getTrilinearC
public static byte[] getTrilinearC(int i1,
double dx,
double dy,
double dz,
int[] iExtents,
byte[] image)
Performs trilinear interpolation of image data.
- Parameters:
i1 - index into imagedx - change in x from integerdy - change in y from integerdz - change in z from integeriExtents - dimensions of imageimage - image data- Returns:
- the trilinearly interpolated data value
��������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.GradientProblemSolverStateUpdatingCallback.html����������0000775�4231163�4231163�00000032557�14537076051�032737� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.GradientProblemSolverStateUpdatingCallback (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.MisraldCostFunction.html�������������������������0000775�4231163�4231163�00000034034�14537076052�027635� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.MisraldCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitSineModel.html��������������������������������������0000775�4231163�4231163�00000030412�14537076045�025030� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitSineModel (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitSineModel(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitSineModel
public FitSineModel(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.LocallyParameterizedCostFunction.html����������������0000775�4231163�4231163�00000042375�14537076053�031670� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.LocallyParameterizedCostFunction (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
LocallyParameterizedCostFunction() |
|
LocallyParameterizedCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9) |
|
LocallyParameterizedCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LocallyParameterizedCostFunction
public LocallyParameterizedCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals)
-
LocallyParameterizedCostFunction
public LocallyParameterizedCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9)
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LinearCostFunction.html����������������������������������0000775�4231163�4231163�00000045555�14537076051�026127� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LinearCostFunction (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
LinearCostFunction(java.util.Vector<java.lang.Double> residuals_offset) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
AddParameter(Jama.Matrix residual_J_param,
java.lang.String testName,
boolean[] passed) |
|
boolean |
Evaluate(double[][] parameter_ptrs,
double[] residuals_ptr) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameter_ptrs,
double[] residuals_ptr,
double[][] residual_J_params) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameter_ptrs,
double[] residuals_ptr,
double[][] residual_J_params,
int[] jacobian_offsets) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameter_ptrs,
double[] residuals_ptr,
java.util.Vector<Jama.Matrix> residual_J_params) |
|
void |
SetJacobianOffset(int index,
Jama.Matrix offset,
java.lang.String testName,
boolean[] passed) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameter_ptrs,
double[] residuals_ptr,
double[][] residual_J_params,
int[] jacobian_offsets)
- Overrides:
Evaluate in class CeresSolver.CostFunction
-
SetJacobianOffset
public void SetJacobianOffset(int index,
Jama.Matrix offset,
java.lang.String testName,
boolean[] passed)
���������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCenterOfMassRGB.html����������������������������������������0000775�4231163�4231163�00000065463�14537076044�024660� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCenterOfMassRGB (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmCenterOfMassRGB
extends AlgorithmBase
* This algorithm calculates the red, green, and blue center of mass for 2D and 3D color images.
- Version:
- 1.0 February 26, 2008
- Author:
- William Gandler
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private float[] |
thresholdB |
DOCUMENT ME!
|
private float[] |
thresholdG |
DOCUMENT ME!
|
private float[] |
thresholdR |
Three arrays (R,G,B) containing minimum and maximum threshold for each channel.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmCenterOfMassRGB(ModelImage srcImage,
float[] thresholdR,
float[] thresholdG,
float[] thresholdB,
boolean maskFlag) |
Default constructor for running algorithm to calculate red, green, and blue centers of mass.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false on process the image over the mask
areas.
-
thresholdR
private float[] thresholdR
Three arrays (R,G,B) containing minimum and maximum threshold for each channel.
-
Constructor Detail
-
AlgorithmCenterOfMassRGB
public AlgorithmCenterOfMassRGB(ModelImage srcImage,
float[] thresholdR,
float[] thresholdG,
float[] thresholdB,
boolean maskFlag)
Default constructor for running algorithm to calculate red, green, and blue centers of mass.
- Parameters:
srcImage - ModelImage sourcethresholdR - float[] red threshthresholdG - float[] green threshthresholdB - float[] blue threshmaskFlag - boolean whole image or voi
-
Method Detail
-
calcInPlace2D
private void calcInPlace2D()
Calculate red, green, and blue centers of mass for 2D color image.
-
calcInPlace3D
private void calcInPlace3D()
Calculates red, green, and blue centers of mass in 3D color image.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEntropicEdgeDetection.html����������������������������������0000775�4231163�4231163�00000053727�14537076045�026204� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEntropicEdgeDetection (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmEntropicEdgeDetection
public AlgorithmEntropicEdgeDetection(ModelImage destImg,
ModelImage srcImg)
AlgorithmEntropicEdgeDetection.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!
�����������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTreT1.CalculateT1UsingConventionalTreT1Inner.html�����������0000775�4231163�4231163�00000031575�14537076050�032270� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTreT1.CalculateT1UsingConventionalTreT1Inner (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
�����������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCostFunctions2D.html����������������������������������������0000775�4231163�4231163�00000310652�14537076045�024755� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCostFunctions2D (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcEntropy(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private void |
calcEntropy(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private void |
calcEntropySmoothed(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private void |
calcEntropySmoothed(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private void |
calcEntropySmoothedWgt(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private void |
calcEntropySmoothedWgt(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI) |
DOCUMENT ME!
|
private double |
correlationRatio(TransMatrix tMatrix) |
Correlation ratio cost function.
|
private double |
correlationRatio(TransMatrixd tMatrix) |
Correlation ratio cost function.
|
private double |
correlationRatioSmoothed(TransMatrix tMatrix) |
Correlation ratio cost function.
|
private double |
correlationRatioSmoothed(TransMatrixd tMatrix) |
Correlation ratio cost function.
|
private double |
correlationRatioSmoothedWgt(TransMatrix tMatrix) |
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
|
private double |
correlationRatioSmoothedWgt(TransMatrixd tMatrix) |
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
|
double |
cost(double[] data) |
Not implemented in this class.
|
double |
cost(TransMatrix affMatrix) |
Calculates the cost (dependent on the selected cost function) based on the reference image and the input image.
|
double |
cost(TransMatrixd affMatrix) |
Calculates the cost (dependent on the selected cost function) based on the reference image and the input image.
|
void |
disposeLocal() |
Sets class global array variables to null and calls the garbage collector.
|
void |
finalize() |
Calls disposeLocal of this class to ensure this class nulls the references to global class variables so that
memory will be recovered.
|
private void |
findRangeX(java.awt.Point minMaxPt,
double newPtX,
double newPtY,
double aT00,
double aT10,
double iT00,
double iT10) |
DOCUMENT ME!
|
int |
getCostCalled() |
Accessor that returns how many times the cost function has been called.
|
int |
getCostFunction() |
|
boolean |
isGPULineMin() |
|
private double |
leastSquares(TransMatrix tMatrix) |
Least squares cost function.
|
private double |
leastSquares(TransMatrixd tMatrix) |
Least squares cost function.
|
private double |
leastSquaresColor(TransMatrix tMatrix) |
Least squares cost function.
|
private double |
leastSquaresColor(TransMatrixd tMatrix) |
Least squares cost function.
|
private double |
leastSquaresSmoothed(TransMatrix tMatrix) |
Least squares cost function.
|
private double |
leastSquaresSmoothed(TransMatrixd tMatrix) |
Least squares cost function.
|
private double |
leastSquaresSmoothedColor(TransMatrix tMatrix) |
Least squares cost function.
|
private double |
leastSquaresSmoothedColor(TransMatrixd tMatrix) |
Least squares cost function.
|
private double |
leastSquaresSmoothedWgt(TransMatrix tMatrix) |
Least squares cost function with weighting.
|
private double |
leastSquaresSmoothedWgt(TransMatrixd tMatrix) |
Least squares cost function with weighting.
|
private double |
leastSquaresSmoothedWgtColor(TransMatrix tMatrix) |
Least squares cost function with weighting.
|
private double |
leastSquaresSmoothedWgtColor(TransMatrixd tMatrix) |
Least squares cost function with weighting.
|
float[] |
lineMin(WildMagic.LibFoundation.Mathematics.Matrix4f kToOrigin,
WildMagic.LibFoundation.Mathematics.Matrix4f kFromOrigin,
float rigid,
float dim,
double[] startPoint,
double[] pt,
int ptLength,
double[] unitDirections,
double unit_tolerance,
double fMinDist,
double bracketA,
double functionA,
double bracketB,
double functionB,
double bracketC,
double functionC) |
|
private double |
mutualInformation(TransMatrix tMatrix) |
DOCUMENT ME!
|
private double |
mutualInformation(TransMatrixd tMatrix) |
DOCUMENT ME!
|
private double |
mutualInformationSmoothed(TransMatrix tMatrix) |
DOCUMENT ME!
|
private double |
mutualInformationSmoothed(TransMatrixd tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformation(TransMatrix tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformation(TransMatrixd tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformationSmoothed(TransMatrix tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformationSmoothed(TransMatrixd tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformationSmoothedWgt(TransMatrix tMatrix) |
DOCUMENT ME!
|
private double |
normalizedMutualInformationSmoothedWgt(TransMatrixd tMatrix) |
DOCUMENT ME!
|
private double |
normalizedXCorrelation(TransMatrix tMatrix) |
Normalized cross-correlation cost function.
|
private double |
normalizedXCorrelation(TransMatrixd tMatrix) |
Normalized cross-correlation cost function.
|
private double |
normalizedXCorrelationSmoothed(TransMatrix tMatrix) |
Normalized cross-correlation cost function.
|
private double |
normalizedXCorrelationSmoothed(TransMatrixd tMatrix) |
Normalized cross-correlation cost function.
|
private double |
normalizedXCorrelationSmoothedWgt(TransMatrix tMatrix) |
Normalized cross-correlation cost function with weighting.
|
private double |
normalizedXCorrelationSmoothedWgt(TransMatrixd tMatrix) |
Normalized cross-correlation cost function with weighting.
|
void |
setGPUCost(ImageRegistrationGPU kGPUCost) |
|
void |
setInputWgtImage(ModelSimpleImage inputWgtImg) |
Sets the input weight image.
|
private void |
setPLogP(int nBins) |
Precalculates information and allocates buffers used in the calculation of mutual information statistics.
|
void |
setRefWgtImage(ModelSimpleImage refWgtImg) |
Sets the reference weight image.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
costCalled
private int costCalled
DOCUMENT ME!
-
costFunctID
private int costFunctID
DOCUMENT ME!
-
nBins
private int nBins
DOCUMENT ME!
-
pLogP
private double[] pLogP
DOCUMENT ME!
-
smoothSize
private float smoothSize
DOCUMENT ME!
-
xDim
private int xDim
DOCUMENT ME!
-
xStart
private int xStart
-
xEnd
private int xEnd
DOCUMENT ME!
-
xEnd2
private double xEnd2
DOCUMENT ME!
-
yDim
private int yDim
DOCUMENT ME!
-
yStart
private int yStart
-
yEnd
private int yEnd
DOCUMENT ME!
-
yEnd2
private double yEnd2
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmCostFunctions2D
public AlgorithmCostFunctions2D(ModelSimpleImage rImage,
ModelSimpleImage iImage,
int functionID,
int nBins,
float smoothSize,
boolean calcMinMax)
Creates a new AlgorithmCostFunctions2D object.
- Parameters:
rImage - DOCUMENT ME!iImage - DOCUMENT ME!functionID - DOCUMENT ME!nBins - DOCUMENT ME!smoothSize - DOCUMENT ME!
-
Method Detail
-
lineMin
public float[] lineMin(WildMagic.LibFoundation.Mathematics.Matrix4f kToOrigin,
WildMagic.LibFoundation.Mathematics.Matrix4f kFromOrigin,
float rigid,
float dim,
double[] startPoint,
double[] pt,
int ptLength,
double[] unitDirections,
double unit_tolerance,
double fMinDist,
double bracketA,
double functionA,
double bracketB,
double functionB,
double bracketC,
double functionC)
-
calcEntropy
private void calcEntropy(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
calcEntropy
private void calcEntropy(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
calcEntropySmoothed
private void calcEntropySmoothed(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
calcEntropySmoothed
private void calcEntropySmoothed(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
calcEntropySmoothedWgt
private void calcEntropySmoothedWgt(TransMatrix tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
calcEntropySmoothedWgt
private void calcEntropySmoothedWgt(TransMatrixd tMatrix,
double[] jointEntropy,
double[] margEntropyR,
double[] margEntropyI)
DOCUMENT ME!
- Parameters:
tMatrix - DOCUMENT ME!jointEntropy - DOCUMENT ME!margEntropyR - DOCUMENT ME!margEntropyI - DOCUMENT ME!
-
correlationRatioSmoothedWgt
private double correlationRatioSmoothedWgt(TransMatrix tMatrix)
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
- Parameters:
tMatrix - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
correlationRatioSmoothedWgt
private double correlationRatioSmoothedWgt(TransMatrixd tMatrix)
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
- Parameters:
tMatrix - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
findRangeX
private void findRangeX(java.awt.Point minMaxPt,
double newPtX,
double newPtY,
double aT00,
double aT10,
double iT00,
double iT10)
DOCUMENT ME!
- Parameters:
minMaxPt - DOCUMENT ME!
��������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.NelsonCostFunction.html��������������������������0000775�4231163�4231163�00000034023�14537076052�027476� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.NelsonCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.html�����������������������������������������������������0000775�4231163�4231163�00001007404�14537076051�022347� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver
-
- Direct Known Subclasses:
CeresSolver2, CeresSolverNISTTest, CeresSolverTest, DSC_MRI_toolbox, WeibullDistribution
public abstract class CeresSolver
extends java.lang.Object
This is a port of the C++ files in ceres-solver-1.14.0 under the BSD license:
Ceres Solver - A fast non-linear least squares minimizer Copyright 2015
Google Inc. All rights reserved. http://ceres-solver.org/
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
Redistributions of source code must retain the above copyright notice, this
list of conditions and the following disclaimer. Redistributions in binary
form must reproduce the above copyright notice, this list of conditions and
the following disclaimer in the documentation and/or other materials provided
with the distribution. Neither the name of Google Inc. nor the names of its
contributors may be used to endorse or promote products derived from this
software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
POSSIBILITY OF SUCH DAMAGE.
Ceres Solver is an open source C++ library for modeling and solving large,
complicated optimization problems. It is a feature rich, mature and
performant library which has been used in production at Google since 2010.
Ceres Solver can solve two kinds of problems.
1. Non-linear Least Squares problems with bounds constraints. 2. General
unconstrained optimization problems.
Please see [ceres-solver.org](http://ceres-solver.org/) for more information.
- Author:
- aailb
-
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
AppendArrayToString(int size,
double[] x,
java.lang.String[] result) |
|
boolean |
ApplyOrdering(java.util.HashMap<double[],CeresSolver.ParameterBlock> parameter_map,
CeresSolver.OrderedGroups<double[]> ordering,
CeresSolver.Program program,
java.lang.String[] error) |
|
void |
BuildResidualLayout(CeresSolver.Program program,
java.util.Vector<java.lang.Integer> residual_layout) |
|
void |
ComputeHouseholderVector(double[] x,
double[] v,
double[] beta) |
|
void |
ComputeRecursiveIndependentSetOrdering(CeresSolver.Program program,
CeresSolver.OrderedGroups<double[]> ordering) |
|
int |
ComputeSchurOrdering(CeresSolver.Program program,
java.util.Vector<CeresSolver.ParameterBlock> ordering) |
|
int |
ComputeStableSchurOrdering(CeresSolver.Program program,
java.util.Vector<CeresSolver.ParameterBlock> ordering) |
|
void |
copyFunctionSample(CeresSolver.FunctionSample dst,
CeresSolver.FunctionSample src) |
|
CeresSolver.Evaluator |
Create(CeresSolver.EvaluatorOptions options,
CeresSolver.Program program,
java.lang.String[] error) |
|
CeresSolver.LinearSolver |
Create(CeresSolver.LinearSolverOptions options) |
|
CeresSolver.LineSearchDirection |
Create(CeresSolver.LineSearchDirectionOptions options) |
|
CeresSolver.LineSearch |
Create(CeresSolver.LineSearchType line_search_type,
CeresSolver.LineSearchOptions options,
java.lang.String[] error) |
|
CeresSolver.Minimizer |
Create(CeresSolver.MinimizerType minimizer_type) |
|
CeresSolver.ScratchEvaluatePreparer[] |
Create(CeresSolver.Program program,
int num_threads) |
|
CeresSolver.TrustRegionStrategy |
Create(CeresSolver.TrustRegionStrategyOptions options) |
|
CeresSolver.BlockSparseMatrix |
CreateDiagonalMatrix(double[] diagonal,
java.util.Vector<CeresSolver.Block> column_blocks) |
|
CeresSolver.EvaluateScratch[] |
CreateEvaluatorScratch(CeresSolver.Program program,
int num_threads) |
|
CeresSolver.CostFunction |
CreateGradientCheckingCostFunction(CeresSolver.CostFunction cost_function,
java.util.Vector<CeresSolver.LocalParameterization> local_parameterizations,
double relative_step_size,
double relative_precision,
java.lang.String extra_info,
CeresSolver.GradientCheckingIterationCallback callback) |
|
CeresSolver.ProblemImpl |
CreateGradientCheckingProblemImpl(CeresSolver.ProblemImpl problem_impl,
double relative_step_size,
double relative_precision,
CeresSolver.GradientCheckingIterationCallback callback) |
|
CeresSolver.Graph<CeresSolver.ParameterBlock> |
CreateHessianGraph(CeresSolver.Program program) |
|
CeresSolver.LinearLeastSquaresProblem |
CreateLinearLeastSquaresProblemFromId(int id) |
|
CeresSolver.OrderedGroups<double[]> |
CreateOrdering(CeresSolver.Program program) |
|
CeresSolver.PartitionedMatrixView |
createPartitionedMatrixView(CeresSolver.LinearSolverOptions options,
CeresSolver.BlockSparseMatrix matrix) |
|
(package private) CeresSolver.Preprocessor |
CreatePreprocessor(CeresSolver.MinimizerType minimizer_type) |
|
CeresSolver.BlockSparseMatrix |
CreateRandomMatrix(CeresSolver.BlockSparseMatrixRandomMatrixOptions options) |
|
CeresSolver.TripletSparseMatrix |
CreateRandomMatrix(CeresSolver.TripletSparseMatrixRandomMatrixOptions options) |
|
CeresSolver.SchurEliminatorBase |
createSchurEliminatorBase(CeresSolver.LinearSolverOptions options) |
|
CeresSolver.TripletSparseMatrix |
CreateSparseDiagonalMatrix(double[] values,
int num_rows) |
|
void |
DetectStructure(CeresSolver.CompressedRowBlockStructure bs,
int num_eliminate_blocks,
int[] row_block_size,
int[] e_block_size,
int[] f_block_size) |
|
(package private) java.util.Vector<java.lang.Double> |
DifferentiatePolynomial(java.util.Vector<java.lang.Double> polynomial) |
|
boolean |
DumpLinearLeastSquaresProblem(java.lang.String filename_base,
CeresSolver.DumpFormatType dump_format_type,
CeresSolver.SparseMatrix A,
double[] D,
double[] b,
double[] x,
int num_eliminate_blocks) |
|
boolean |
DumpLinearLeastSquaresProblemToConsole(CeresSolver.SparseMatrix A,
double[] D,
double[] b,
double[] x,
int num_eliminate_blocks) |
|
boolean |
DumpLinearLeastSquaresProblemToTextFile(java.lang.String filename_base,
CeresSolver.SparseMatrix A,
double[] D,
double[] b,
double[] x,
int num_eliminate_blocks) |
|
void |
EigenQuaternionProduct(double[] a,
double[] b,
double[] ab) |
Constructs and initializes the quaternion \f$ w+xi+yj+zk \f$ from
its four coefficients \a w, \a x, \a y and \a z.
|
private int |
EstimateWorkSizeForQR(int num_rows,
int num_cols) |
|
boolean |
EvaluateCostFunction(CeresSolver.CostFunction function,
java.util.Vector<double[]> parameters,
java.util.Vector<CeresSolver.LocalParameterization> local_parameterizations,
java.util.Vector<java.lang.Double> residuals,
java.util.Vector<Jama.Matrix> jacobians,
java.util.Vector<Jama.Matrix> local_jacobians) |
|
<CostFunctor>
boolean |
EvaluateJacobianColumn(CeresSolver.NumericDiffMethodType kMethod,
int kNumResiduals,
int kParameterBlockSize,
CostFunctor functor,
int parameter_index,
double delta,
int num_residuals,
int parameter_block_index,
int parameter_block_size,
double[] x_ptr,
double[] residuals_at_eval_point,
double[][] parameters,
double[] x_plus_delta_ptr,
double[] temp_residuals_ptr,
double[] residuals_ptr) |
|
<CostFunctor>
boolean |
EvaluateJacobianForParameterBlock(CeresSolver.NumericDiffMethodType kMethod,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int kParameterBlock,
int kParameterBlockSize,
CostFunctor functor,
double[] residuals_at_eval_point,
CeresSolver.NumericDiffOptions options,
int num_residuals,
int parameter_block_index,
int parameter_block_size,
double[][] parameters,
double[] jacobian) |
|
<CostFunctor>
boolean |
EvaluateJacobianForParameterBlock(CeresSolver.NumericDiffMethodType kMethod,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int kParameterBlock,
int kParameterBlockSize,
CostFunctor functor,
double[] residuals_at_eval_point,
CeresSolver.NumericDiffOptions options,
int num_residuals,
int parameter_block_index,
int parameter_block_size,
double[][] parameters,
double[] jacobian,
int jacobian_offset) |
|
(package private) double |
EvaluatePolynomial(java.util.Vector<java.lang.Double> polynomial,
double x) |
|
<CostFunctor>
boolean |
EvaluateRiddersJacobianColumn(CeresSolver.NumericDiffMethodType kMethod,
int kNumResiduals,
int kParameterBlockSize,
CostFunctor functor,
int parameter_index,
double delta,
CeresSolver.NumericDiffOptions options,
int num_residuals,
int parameter_block_index,
int parameter_block_size,
double[] x_ptr,
double[] residuals_at_eval_point,
double[][] parameters,
double[] x_plus_delta_ptr,
double[] temp_residuals_ptr,
double[] residuals_ptr) |
|
boolean |
ExpectClose(double x,
double y,
double max_abs_relative_difference) |
|
(package private) java.util.Vector<java.lang.Double> |
FindInterpolatingPolynomial(java.util.Vector<CeresSolver.FunctionSample> samples) |
|
(package private) int |
FindInvalidValue(int size,
double[] x) |
|
void |
FindLinearPolynomialRoots(java.util.Vector<java.lang.Double> polynomial,
java.util.Vector<java.lang.Double> real,
java.util.Vector<java.lang.Double> imaginary) |
|
boolean |
FindPolynomialRoots(java.util.Vector<java.lang.Double> polynomial,
java.util.Vector<java.lang.Double> roots_real,
java.util.Vector<java.lang.Double> roots_imag) |
|
void |
FindQuadraticPolynomialRoots(java.util.Vector<java.lang.Double> polynomial,
java.util.Vector<java.lang.Double> real,
java.util.Vector<java.lang.Double> imaginary) |
|
(package private) CeresSolver.ParameterBlock |
FindWithDefault(java.util.HashMap<double[],CeresSolver.ParameterBlock> collection,
double[] key,
CeresSolver.ParameterBlock value) |
|
(package private) CeresSolver.CallStatistics |
FindWithDefault(java.util.HashMap<java.lang.String,CeresSolver.CallStatistics> collection,
java.lang.String key,
CeresSolver.CallStatistics value) |
|
abstract boolean |
fitToExternalFunction(double[] a,
double[] residuals,
double[][] jacobian) |
|
void |
GetBestSchurTemplateSpecialization(int[] row_block_size,
int[] e_block_size,
int[] f_block_size) |
|
CeresSolver.SolverOptions |
GradientProblemSolverOptionsToSolverOptions(CeresSolver.GradientProblemSolverOptions options) |
|
<Vertex> int |
IndependentSetOrdering(CeresSolver.Graph<Vertex> graph,
java.util.Vector<Vertex> ordering) |
|
void |
InvalidateArray(int size,
double[] x) |
|
void |
InvalidateArray(int size,
double[] x,
int x_offset) |
|
void |
InvalidateArray(int row,
int col,
double[][] x) |
|
void |
InvalidateArray(int size,
java.util.Vector<java.lang.Double> x) |
|
double[][] |
InvertPSDMatrix(boolean assume_full_rank,
double[][] arr) |
|
boolean |
IsArrayValid(int size,
double[] x) |
|
boolean |
IsArrayValid(int size,
double[] x,
int x_offset) |
|
boolean |
IsArrayValid(int row,
int col,
double[][] x) |
|
boolean |
IsArrayValid(int size,
java.util.Vector<java.lang.Double> x) |
|
boolean |
IsClose(double x,
double y,
double relative_precision,
double[] relative_error,
double[] absolute_error) |
|
boolean |
IsOrderingValid(CeresSolver.Program program,
CeresSolver.OrderedGroups<double[]> ordering,
java.lang.String[] message) |
|
boolean |
IsSchurType(CeresSolver.LinearSolverType type) |
|
boolean |
IsSolutionUsable(CeresSolver.GradientProblemSolverSummary sum) |
|
boolean |
IsSolutionUsable(CeresSolver.SolverSummary sum) |
|
boolean |
LexicographicallyOrderResidualBlocks(int size_of_first_elimination_group,
CeresSolver.Program program,
java.lang.String[] error) |
|
CeresSolver.LinearLeastSquaresProblem |
LinearLeastSquaresProblem0() |
|
CeresSolver.LinearLeastSquaresProblem |
LinearLeastSquaresProblem1() |
|
CeresSolver.LinearLeastSquaresProblem |
LinearLeastSquaresProblem2() |
|
CeresSolver.LinearLeastSquaresProblem |
LinearLeastSquaresProblem3() |
|
CeresSolver.LinearLeastSquaresProblem |
LinearLeastSquaresProblem4() |
|
CeresSolver.LinearSolverType |
LinearSolverForZeroEBlocks(CeresSolver.LinearSolverType linear_solver_type) |
|
java.lang.String |
LinearSolverTypeToString(CeresSolver.LinearSolverType type) |
|
java.lang.String |
LineSearchDirectionTypeToString(CeresSolver.LineSearchDirectionType type) |
|
(package private) java.lang.String |
LineSearchInterpolationTypeToString(CeresSolver.LineSearchInterpolationType type) |
|
(package private) java.lang.String |
LineSearchTypeToString(CeresSolver.LineSearchType type) |
|
void |
MatrixMatrixMultiply(int kOperation,
double[] A,
int NUM_ROW_A,
int NUM_COL_A,
double[][] B,
int NUM_ROW_B,
int NUM_COL_B,
double[] C,
int start_row_c,
int start_col_c,
int row_stride_c,
int col_stride_c) |
|
void |
MatrixMatrixMultiply(int kOperation,
double[] A,
int NUM_ROW_A,
int NUM_COL_A,
double[] B,
int NUM_ROW_B,
int NUM_COL_B,
double[] C,
int start_row_c,
int start_col_c,
int row_stride_c,
int col_stride_c) |
|
void |
MatrixMatrixMultiply(int kOperation,
double[] A,
int A_start,
int NUM_ROW_A,
int NUM_COL_A,
double[][] B,
int NUM_ROW_B,
int NUM_COL_B,
double[] C,
int C_start,
int start_row_c,
int start_col_c,
int row_stride_c,
int col_stride_c) |
|
void |
MatrixMatrixMultiply(int kRowA,
int kColA,
int kRowB,
int kColB,
int kOperation,
double[] A,
int A_start,
int num_row_a,
int num_col_a,
double[] B,
int B_start,
int num_row_b,
int num_col_b,
double[] C,
int C_start,
int start_row_c,
int start_col_c,
int row_stride_c,
int col_stride_c) |
|
void |
MatrixTransposeMatrixMultiply(int kRowA,
int kColA,
int kRowB,
int kColB,
int kOperation,
double[] A,
int A_start,
int num_row_a,
int num_col_a,
double[] B,
int B_start,
int num_row_b,
int num_col_b,
double[] C,
int C_start,
int start_row_c,
int start_col_c,
int row_stride_c,
int col_stride_c) |
|
void |
MatrixTransposeVectorMultiply(int kRowA,
int kColA,
int kOperation,
double[] A,
int Astart,
int num_row_a,
int num_col_a,
double[] b,
int bstart,
double[] c,
int cstart) |
|
void |
MatrixVectorMultiply(int kRowA,
int kColA,
int kOperation,
double[] A,
int Astart,
int num_row_a,
int num_col_a,
double[] b,
int bstart,
double[] c,
int cstart) |
|
void |
MaybeReorderSchurComplementColumnsUsingEigen(int size_of_first_elimination_group,
java.util.HashMap<double[],CeresSolver.ParameterBlock> parameter_map,
CeresSolver.Program program) |
|
void |
MaybeReorderSchurComplementColumnsUsingSuiteSparse(CeresSolver.OrderedGroups<double[]> parameter_block_ordering,
CeresSolver.Program program) |
|
void |
Minimize(CeresSolver.PreprocessedProblem pp,
CeresSolver.SolverSummary summary) |
|
void |
MinimizeInterpolatingPolynomial(java.util.Vector<CeresSolver.FunctionSample> samples,
double x_min,
double x_max,
double[] optimal_x,
double[] optimal_value) |
|
void |
MinimizePolynomial(java.util.Vector<java.lang.Double> polynomial,
double x_min,
double x_max,
double[] optimal_x,
double[] optimal_value) |
|
int |
MinParameterBlock(CeresSolver.ResidualBlock residual_block,
int size_of_first_elimination_group) |
|
java.lang.String |
NonlinearConjugateGradientTypeToString(CeresSolver.NonlinearConjugateGradientType type) |
|
CeresSolver.TripletSparseMatrix |
operator(CeresSolver.TripletSparseMatrix lhs,
CeresSolver.TripletSparseMatrix rhs) |
|
private void |
OrderingToGroupSizes(CeresSolver.OrderedGroups<double[]> ordering,
java.util.Vector<java.lang.Integer> group_sizes) |
|
void |
PostSolveSummarize(CeresSolver.PreprocessedProblem pp,
CeresSolver.SolverSummary summary) |
|
CeresSolver.PreconditionerType |
PreconditionerForZeroEBlocks(CeresSolver.PreconditionerType preconditioner_type) |
|
java.lang.String |
PreconditionerTypeToString(CeresSolver.PreconditionerType type) |
|
private void |
PreSolveSummarize(CeresSolver.SolverOptions options,
CeresSolver.ProblemImpl problem,
CeresSolver.SolverSummary summary) |
|
void |
QuaternionProduct(double[] z,
double[] w,
double[] zw) |
|
double |
RandDouble() |
|
double |
RandDouble(long longSeed) |
|
double |
RandNormal() |
|
java.util.Vector<java.lang.Double> |
RemoveLeadingZeros(java.util.Vector<java.lang.Double> polynomial_in) |
|
boolean |
ReorderProgramForSchurTypeLinearSolver(CeresSolver.LinearSolverType linear_solver_type,
CeresSolver.SparseLinearAlgebraLibraryType sparse_linear_algebra_library_type,
java.util.HashMap<double[],CeresSolver.ParameterBlock> parameter_map,
CeresSolver.OrderedGroups<double[]> parameter_block_ordering,
CeresSolver.Program program,
java.lang.String[] error) |
|
boolean |
RunCallbacks(CeresSolver.MinimizerOptions options,
CeresSolver.IterationSummary iteration_summary,
CeresSolver.SolverSummary summary) |
|
java.lang.String |
SchurStructureToString(int row_block_size,
int e_block_size,
int f_block_size) |
|
void |
SetSummaryFinalCost(CeresSolver.GradientProblemSolverSummary summary) |
|
void |
SetSummaryFinalCost(CeresSolver.SolverSummary summary) |
|
void |
SetupCommonMinimizerOptions(CeresSolver.PreprocessedProblem pp) |
|
void |
Solve(CeresSolver.GradientProblemSolverOptions options,
CeresSolver.GradientProblem problem,
double[] parameters_ptr,
CeresSolver.GradientProblemSolverSummary summary) |
|
void |
Solve(CeresSolver.SolverOptions options,
CeresSolver.ProblemImpl problem,
CeresSolver.SolverSummary summary) |
|
private CeresSolver.LinearSolverTerminationType |
SolveInPlaceUsingCholesky(int num_rows,
double[][] in_lhs,
double[] rhs_and_solution,
java.lang.String[] message) |
|
private CeresSolver.LinearSolverTerminationType |
SolveInPlaceUsingQR(int num_rows,
int num_cols,
double[][] in_lhs,
int work_size,
double[] work,
double[] rhs_and_solution,
java.lang.String[] message) |
|
<Vertex> int |
StableIndependentSetOrdering(CeresSolver.Graph<Vertex> graph,
java.util.Vector<Vertex> ordering) |
|
private void |
SummarizeGivenProgram(CeresSolver.Program program,
CeresSolver.SolverSummary summary) |
|
void |
SummarizeReducedProgram(CeresSolver.Program program,
CeresSolver.SolverSummary summary) |
|
<T> void |
swap(T el1,
T el2) |
|
private void |
SymmetricRankUpdate(int num_rows,
int num_cols,
double[] a,
boolean transpose,
double alpha,
double beta,
double[][] c) |
|
java.lang.String |
TerminationTypeToString(CeresSolver.TerminationType type) |
|
void |
TransposeForCompressedRowSparseStructure(int num_rows,
int num_cols,
int num_nonzeros,
int[] rows,
int[] cols,
double[] values,
int[] transpose_rows,
int[] transpose_cols,
double[] transpose_values) |
|
int |
Uniform(int n) |
|
(package private) void |
WriteArrayToFileOrDie(java.lang.String filename,
double[] x,
int size) |
|
void |
WriteStringToFileOrDie(java.lang.String data,
java.lang.String filename) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
MAX_LOG_LEVEL
public int MAX_LOG_LEVEL
-
WARNING
public int WARNING
-
testMode
public boolean testMode
-
default_relstep
double default_relstep
-
DYNAMIC
protected int DYNAMIC
-
testCase
public int testCase
-
Constructor Detail
-
CeresSolver
public CeresSolver()
-
Method Detail
-
MaybeReorderSchurComplementColumnsUsingEigen
public void MaybeReorderSchurComplementColumnsUsingEigen(int size_of_first_elimination_group,
java.util.HashMap<double[],CeresSolver.ParameterBlock> parameter_map,
CeresSolver.Program program)
-
TransposeForCompressedRowSparseStructure
public void TransposeForCompressedRowSparseStructure(int num_rows,
int num_cols,
int num_nonzeros,
int[] rows,
int[] cols,
double[] values,
int[] transpose_rows,
int[] transpose_cols,
double[] transpose_values)
-
SymmetricRankUpdate
private void SymmetricRankUpdate(int num_rows,
int num_cols,
double[] a,
boolean transpose,
double alpha,
double beta,
double[][] c)
-
SolveInPlaceUsingQR
private CeresSolver.LinearSolverTerminationType SolveInPlaceUsingQR(int num_rows,
int num_cols,
double[][] in_lhs,
int work_size,
double[] work,
double[] rhs_and_solution,
java.lang.String[] message)
-
DumpLinearLeastSquaresProblemToConsole
public boolean DumpLinearLeastSquaresProblemToConsole(CeresSolver.SparseMatrix A,
double[] D,
double[] b,
double[] x,
int num_eliminate_blocks)
-
DumpLinearLeastSquaresProblemToTextFile
public boolean DumpLinearLeastSquaresProblemToTextFile(java.lang.String filename_base,
CeresSolver.SparseMatrix A,
double[] D,
double[] b,
double[] x,
int num_eliminate_blocks)
-
EvaluateJacobianForParameterBlock
public <CostFunctor> boolean EvaluateJacobianForParameterBlock(CeresSolver.NumericDiffMethodType kMethod,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int kParameterBlock,
int kParameterBlockSize,
CostFunctor functor,
double[] residuals_at_eval_point,
CeresSolver.NumericDiffOptions options,
int num_residuals,
int parameter_block_index,
int parameter_block_size,
double[][] parameters,
double[] jacobian)
-
EvaluateJacobianForParameterBlock
public <CostFunctor> boolean EvaluateJacobianForParameterBlock(CeresSolver.NumericDiffMethodType kMethod,
int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int kParameterBlock,
int kParameterBlockSize,
CostFunctor functor,
double[] residuals_at_eval_point,
CeresSolver.NumericDiffOptions options,
int num_residuals,
int parameter_block_index,
int parameter_block_size,
double[][] parameters,
double[] jacobian,
int jacobian_offset)
-
EvaluateJacobianColumn
public <CostFunctor> boolean EvaluateJacobianColumn(CeresSolver.NumericDiffMethodType kMethod,
int kNumResiduals,
int kParameterBlockSize,
CostFunctor functor,
int parameter_index,
double delta,
int num_residuals,
int parameter_block_index,
int parameter_block_size,
double[] x_ptr,
double[] residuals_at_eval_point,
double[][] parameters,
double[] x_plus_delta_ptr,
double[] temp_residuals_ptr,
double[] residuals_ptr)
-
EvaluateRiddersJacobianColumn
public <CostFunctor> boolean EvaluateRiddersJacobianColumn(CeresSolver.NumericDiffMethodType kMethod,
int kNumResiduals,
int kParameterBlockSize,
CostFunctor functor,
int parameter_index,
double delta,
CeresSolver.NumericDiffOptions options,
int num_residuals,
int parameter_block_index,
int parameter_block_size,
double[] x_ptr,
double[] residuals_at_eval_point,
double[][] parameters,
double[] x_plus_delta_ptr,
double[] temp_residuals_ptr,
double[] residuals_ptr)
-
EigenQuaternionProduct
public void EigenQuaternionProduct(double[] a,
double[] b,
double[] ab)
Constructs and initializes the quaternion \f$ w+xi+yj+zk \f$ from
its four coefficients \a w, \a x, \a y and \a z.
\warning Note the order of the arguments: the real \a w coefficient first,
while internally the coefficients are stored in the following order:
[\c x, \c y, \c z, \c w]
-
EvaluateCostFunction
public boolean EvaluateCostFunction(CeresSolver.CostFunction function,
java.util.Vector<double[]> parameters,
java.util.Vector<CeresSolver.LocalParameterization> local_parameterizations,
java.util.Vector<java.lang.Double> residuals,
java.util.Vector<Jama.Matrix> jacobians,
java.util.Vector<Jama.Matrix> local_jacobians)
-
IsClose
public boolean IsClose(double x,
double y,
double relative_precision,
double[] relative_error,
double[] absolute_error)
-
MatrixTransposeVectorMultiply
public void MatrixTransposeVectorMultiply(int kRowA,
int kColA,
int kOperation,
double[] A,
int Astart,
int num_row_a,
int num_col_a,
double[] b,
int bstart,
double[] c,
int cstart)
-
MatrixVectorMultiply
public void MatrixVectorMultiply(int kRowA,
int kColA,
int kOperation,
double[] A,
int Astart,
int num_row_a,
int num_col_a,
double[] b,
int bstart,
double[] c,
int cstart)
-
MatrixTransposeMatrixMultiply
public void MatrixTransposeMatrixMultiply(int kRowA,
int kColA,
int kRowB,
int kColB,
int kOperation,
double[] A,
int A_start,
int num_row_a,
int num_col_a,
double[] B,
int B_start,
int num_row_b,
int num_col_b,
double[] C,
int C_start,
int start_row_c,
int start_col_c,
int row_stride_c,
int col_stride_c)
-
MatrixMatrixMultiply
public void MatrixMatrixMultiply(int kRowA,
int kColA,
int kRowB,
int kColB,
int kOperation,
double[] A,
int A_start,
int num_row_a,
int num_col_a,
double[] B,
int B_start,
int num_row_b,
int num_col_b,
double[] C,
int C_start,
int start_row_c,
int start_col_c,
int row_stride_c,
int col_stride_c)
-
MatrixMatrixMultiply
public void MatrixMatrixMultiply(int kOperation,
double[] A,
int NUM_ROW_A,
int NUM_COL_A,
double[] B,
int NUM_ROW_B,
int NUM_COL_B,
double[] C,
int start_row_c,
int start_col_c,
int row_stride_c,
int col_stride_c)
-
MatrixMatrixMultiply
public void MatrixMatrixMultiply(int kOperation,
double[] A,
int NUM_ROW_A,
int NUM_COL_A,
double[][] B,
int NUM_ROW_B,
int NUM_COL_B,
double[] C,
int start_row_c,
int start_col_c,
int row_stride_c,
int col_stride_c)
-
MatrixMatrixMultiply
public void MatrixMatrixMultiply(int kOperation,
double[] A,
int A_start,
int NUM_ROW_A,
int NUM_COL_A,
double[][] B,
int NUM_ROW_B,
int NUM_COL_B,
double[] C,
int C_start,
int start_row_c,
int start_col_c,
int row_stride_c,
int col_stride_c)
-
MinimizeInterpolatingPolynomial
public void MinimizeInterpolatingPolynomial(java.util.Vector<CeresSolver.FunctionSample> samples,
double x_min,
double x_max,
double[] optimal_x,
double[] optimal_value)
-
MinimizePolynomial
public void MinimizePolynomial(java.util.Vector<java.lang.Double> polynomial,
double x_min,
double x_max,
double[] optimal_x,
double[] optimal_value)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/WeibullDistribution.WeibullCostFunction2param.html�������������������0000775�4231163�4231163�00000036243�14537076057�031172� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WeibullDistribution.WeibullCostFunction2param (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmVOIExtraction.html������������������������������������������0000775�4231163�4231163�00000121311�14537076050�024450� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmVOIExtraction (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace() |
Calculates the VOI extraction.
|
private void |
calcInPlace2() |
From text description in 4th edition Image Processing, Analysis, and Machine Vision International Edition
by Milan Sonka, Vaclav Hlavac, and Roger Boyle, Algorithm 6.6 Inner Boundary Tracing, pp. 191-192.
|
void |
disposeLocal() |
DOCUMENT ME!
|
private void |
extendedBoundaryTracing() |
From text description in 4th edition Image Processing, Analysis, and Machine Vision International Edition
by Milan Sonka, Vaclav Hlavac, and Roger Boyle, Algorithm 6.8 Extended Boundary Tracing, pp. 195-196.
|
void |
finalize() |
Prepares this class for destruction.
|
VOI |
getAddedVOI() |
Retrieve the VOI generated by the mask to voi extraction.
|
int |
getNumVOIAdded() |
|
private void |
outerBoundaryTracing() |
From text description in 4th edition Image Processing, Analysis, and Machine Vision International Edition
by Milan Sonka, Vaclav Hlavac, and Roger Boyle, Algorithm 6.7 Outer Boundary Tracing, p. 193.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setColorTable(java.awt.Color[] colorTable) |
DOCUMENT ME!
|
void |
setNameTable(java.lang.String[] nameTable) |
DOCUMENT ME!
|
private void |
setRegionMaskAll() |
Sets the mask of all points in the 4 connected region with a gray scale value.
|
private void |
setRegionMaskI(int xStart,
int yStart,
short objectValue) |
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue Uses iteration.
|
private void |
setRegionOutMaskI(int xStart,
int yStart,
short objectValue) |
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue Uses iteration.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
addedVOI
private VOI addedVOI
DOCUMENT ME!
-
xDim
private int xDim
DOCUMENT ME!
-
xDimE
private int xDimE
DOCUMENT ME!
-
yDim
private int yDim
DOCUMENT ME!
-
yDimE
private int yDimE
DOCUMENT ME!
-
connected
private int connected
-
numVOIAdded
private int numVOIAdded
-
Method Detail
-
extendedBoundaryTracing
private void extendedBoundaryTracing()
From text description in 4th edition Image Processing, Analysis, and Machine Vision International Edition
by Milan Sonka, Vaclav Hlavac, and Roger Boyle, Algorithm 6.8 Extended Boundary Tracing, pp. 195-196.
-
outerBoundaryTracing
private void outerBoundaryTracing()
From text description in 4th edition Image Processing, Analysis, and Machine Vision International Edition
by Milan Sonka, Vaclav Hlavac, and Roger Boyle, Algorithm 6.7 Outer Boundary Tracing, p. 193.
-
calcInPlace2
private void calcInPlace2()
From text description in 4th edition Image Processing, Analysis, and Machine Vision International Edition
by Milan Sonka, Vaclav Hlavac, and Roger Boyle, Algorithm 6.6 Inner Boundary Tracing, pp. 191-192.
"Algorithm 6.6 works for all regions larger than one pixel. It is able to find region borders but does
not find borders of region holes, which may be located by identifying border elements unallocated thus
far to borders. The search for border elements always starts after a traced border is closed, and the
search for "unused" border elements can continue in the same way as the search for the first border element.
Note that if objects are of unit width, more conditions must be added."
Can be used with either connected = 4 or connected = 8. Much less memory than calcInPlace.
-
setRegionMaskI
private void setRegionMaskI(int xStart,
int yStart,
short objectValue)
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue Uses iteration.
- Parameters:
xStart - the x coordinate of the starting pointyStart - the y coordinate of the starting pointobjectValue - the gray scale value of the object
-
setRegionOutMaskI
private void setRegionOutMaskI(int xStart,
int yStart,
short objectValue)
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue Uses iteration.
- Parameters:
xStart - the x coordinate of the starting pointyStart - the y coordinate of the starting pointobjectValue - the gray scale value of the object
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitWholeNLConModel2.html�������������������������������0000775�4231163�4231163�00000052017�14537076046�026172� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitWholeNLConModel2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
abscissa |
DOCUMENT ME!
|
(package private) double |
absEps |
DOCUMENT ME!
|
(package private) int[] |
errStatus |
DOCUMENT ME!
|
(package private) double[] |
estErr |
DOCUMENT ME!
|
(package private) int[] |
evaluations |
DOCUMENT ME!
|
(package private) double |
relEps |
DOCUMENT ME!
|
(package private) double[] |
result |
DOCUMENT ME!
|
private double[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitWholeNLConModel2(int nPoints,
double[] xData,
float[] yData,
double[] initial,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitWholeNLConModel2 object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
abscissa
double abscissa
DOCUMENT ME!
-
absEps
double absEps
DOCUMENT ME!
-
errStatus
int[] errStatus
DOCUMENT ME!
-
estErr
double[] estErr
DOCUMENT ME!
-
evaluations
int[] evaluations
DOCUMENT ME!
-
relEps
double relEps
DOCUMENT ME!
-
result
double[] result
DOCUMENT ME!
-
Constructor Detail
-
FitWholeNLConModel2
public FitWholeNLConModel2(int nPoints,
double[] xData,
float[] yData,
double[] initial,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitWholeNLConModel2 object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.HalfEdgeTrait.html����������������������������������������������0000775�4231163�4231163�00000025373�14537076056�023324� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.HalfEdgeTrait (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_angle
public double m_angle
-
Constructor Detail
-
HalfEdgeTrait
public HalfEdgeTrait()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.MeshEdgeIterator.html�������������������������������������������0000775�4231163�4231163�00000033024�14537076056�024044� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.MeshEdgeIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.MeshEdgeIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.indexArrayItem.html�������������������������������������0000775�4231163�4231163�00000026646�14537076052�025366� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.indexArrayItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
array |
|
private int |
index |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexArrayItem(int index,
double[] array) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
array
private double[] array
-
Method Detail
-
getIndex
public int getIndex()
������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmLogSlopeMapping.html����������������������������������������0000775�4231163�4231163�00000055420�14537076047�025027� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLogSlopeMapping (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTimeFitting.FitLine.html������������������������������������0000775�4231163�4231163�00000040300�14537076050�025524� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTimeFitting.FitLine (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
ydata |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitLine(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ydata
final double[] ydata
-
Constructor Detail
-
FitLine
public FitLine(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBRISK.KeyPoint.html�����������������������������������������0000775�4231163�4231163�00000034027�14537076044�024377� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBRISK.KeyPoint (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
angle |
|
private int |
class_id |
|
private int |
octave |
|
private javax.vecmath.Point2d |
pt |
|
private double |
response |
|
private double |
size |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
KeyPoint(double x,
double y,
double size,
double angle,
double response,
int octave) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
angle
private double angle
-
response
private double response
-
octave
private int octave
-
class_id
private int class_id
-
Constructor Detail
-
KeyPoint
public KeyPoint(double x,
double y,
double size,
double angle,
double response,
int octave)
-
Method Detail
-
getSize
public double getSize()
-
getAngle
public double getAngle()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Integration2.html����������������������������������������������������0000775�4231163�4231163�00000461452�14537076055�022472� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Integration2 (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Integration2
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
abserr |
Estimate of the absolute value of the error, which should equal or exceed abs(actual integral - result).
|
private double |
actualAnswer |
|
private double |
alfa |
parameter in the weight function, alfa.gt.(-1) if alfa.le.(-1), the routine will end with ier[0] = 6.
|
private double[] |
alist |
The left end points of the subintervals in the partition of the given integration range (lower, upper).
|
private double |
beta |
parameter in the weight function, beta.gt.(-1) if beta.le.(-1), the routine will end with ier[0] = 6.
|
private double[] |
blist |
The right end points of the subintervals in the partition of the given integration range (lower, upper).
|
private double |
bound |
finite bound of integration range used in dqagie (has no meaning if interval is doubly-infinite).
|
private double[] |
breakPoints |
Used in dqagpe This array must always be >= 2 in length.
|
private double |
c |
Parameter in the weight function, c !
|
private double[][] |
chebmo |
array of dimension (maxp1,25) containing the chebyshev moments
|
protected static int |
DQAGE |
Integral without singularities, discontinuities, or infinite bounds.
|
protected static int |
DQAGIE |
Integral over (bound, +infinity), (-infinity, bound), or (-infinity, +infinity).
|
protected static int |
DQAGPE |
Integral over (lower, upper) with user specified break points.
|
protected static int |
DQAGSE |
Integral over (lower, upper) which can handle end point singularities.
|
protected static int |
DQAWCE |
Cauchy principal value
|
protected static int |
DQAWFE |
Automatic integrator, special-purpose, fourier integrals
|
protected static int |
DQAWOE |
Automatic integrator, integrand with oscillatory cosine or sine factor
|
protected static int |
DQAWSE |
Adaptive integrator for integrands with algebraic or logarithmic singularities at endpoints.
|
protected static int |
DQK15 |
Gauss-Kronod quadrature rule
|
protected static int |
DQK21 |
Gauss-Kronod quadrature rule
|
protected static int |
DQK31 |
Gauss-Kronod quadrature rule
|
protected static int |
DQK41 |
Gauss-Kronod quadrature rule
|
protected static int |
DQK51 |
Gauss-Kronod quadrature rule
|
protected static int |
DQK61 |
Gauss-Kronod quadrature rule
|
protected static int |
DQNG |
Non-adaptive integration.
|
private double[] |
elist |
Estimates of the absolute errors on the subintervals.
|
private double |
epmach |
epmach = D1MACH(4) Machine epmach is the smallest positive epmach such that (1.0 + epmach) !
|
private double |
epsabs |
If epsabs <= 0.0 and epsrel < Math.max(50*relative machine accuracy, 5.0E-29), the routine will exit with an
error message.
|
private double |
epsrel |
DOCUMENT ME!
|
private double[] |
erlst |
In dqawfe vector of dimension at least limlst erlst[k] contains the error estimate corresponding wiht rstlst[k].
|
private double |
gamma |
|
private int |
icall |
if dqawoe is to be used only once, icall must be set to 1. assume that during this call, the c chebyshev moments
(for clenshaw-curtis integration c of degree 24) have been computed for intervals of c lenghts
(abs(b-a))*2**(-l), l=0,1,2,...momcom-1. c if icall.gt.1 this means that dqawoe has been c called twice or more
on intervals of the same c length abs(b-a). the chebyshev moments already c computed are then re-used in
subsequent calls. c if icall.lt.1, the routine will end with ier[0] = 6.
|
private int[] |
ier |
ier[0] = 0 for normal and reliable termination of the routine.
|
private int[] |
ierlst |
In dqawfe vector of dimension at least limlst ierlst[k] contains the error flag corresponding with rstlst[k].
|
private int |
inf |
In dqagie indicates the kind of integration range involved inf = 1 corresponds to (bound, +infinity) inf = -1
corresponds to (-infinity, bound) inf = 2 corresponds to (-infinity, +infinity).
|
private int |
integr |
With dqawoe: indicates which of the weight functions is to be used integr = 1 w(x) = cos(omega*x) integr = 2 w(x) =
sin(omega*x) if integr.ne.1 and integr.ne.2, the routine will end with ier[0] = 6.
|
private int[] |
iord |
The first k elements of iord are pointers to the error estimates over the subintervals, such that elist[iord[0]],
..., elist[iord[k-1]] form a decreasing sequence, with k = last if last <= (limit/2 + 2) , and k = limit + 1 -
last otheriwse.
|
private int |
key |
In dqage key selects the local integration rule A gauss-kronrod pair is used with 7 - 15 points if key < 2 10 -
21 points if key = 2 15 - 31 points if key = 3 20 - 41 points if key = 4 25 - 51 points if key = 5 30 - 61 points
if key > 5.
|
private int |
last |
The number of subintervals actually called in the subdivision process.
|
private int[] |
level |
level contains the subdivision levels of the subinterval, i.e., if (aa, bb) is a subinterval of (p1, p2) where p1
as well as p2 is a user-provided break point or integration limit, then (aa, bb) has level 1 if abs(bb - aa) =
abs(p2 - p1) * 2**(-1).
|
private int |
limit |
Gives an upper bound on the number of subintervals in the partition of lower, upper.
|
private int |
limlst |
In dqawfe limlst gives an upper bound on the number of cycles, limlst >= 1.
|
private double |
lower |
DOCUMENT ME!
|
private int |
lst |
In dqawfe number of subintervals needed for the integration.
|
private int |
maxp1 |
gives an upper bound on the number of chebyshev c moments which can be stored, i.e. for the c intervals of
lenghts abs(b-a)*2**(-l), c l=0,1, ..., maxp1-2, maxp1.ge.1. c if maxp1.lt.1, the routine will end with ier[0] =
6.
|
private int |
momcom |
indicating that the chebyshev moments c have been computed for intervals of lengths c (abs(b-a))*2**(-l),
l=0,1,2, ..., momcom-1, c momcom.lt.maxp1
|
private int[] |
ndin |
After the first integration over the intervals (pts[i], pts[i+1]), i = 0, 1, ..., npts2 - 2, the error estimates
over some of the intervals may have been increased artificially, in order to put their subdivision forward.
|
private int[] |
neval |
Number of integrand evaluations.
|
private int[] |
nnlog |
vector of dimension at least limit, containing the c subdivision levels of the subintervals, i.e. c iwork(i) = l
means that the subinterval c numbered i is of length abs(b-a)*2**(1-l)
|
private int |
npts |
npts = npts2 - 2.
|
private int |
npts2 |
npts2 = breakPoints.length.
|
private double |
oflow |
D1MACH(2) = 2**(emax)*(1 - 2**(-doubleDigits)) = 2**1024*(1 - 2**-53) D1MACH(2) = Double.MAX_VALUE.
|
private double |
omega |
parameter in the integrand weight function
|
private double[] |
pts |
Integration limits and the break points of the interval in ascending sequence.
|
private double[] |
resabs |
|
private double[] |
resasc |
|
private double[] |
result |
Approximation to the integral.
|
private double[] |
rlist |
The integral approximations of the subintervals.
|
private int |
routine |
DOCUMENT ME!
|
private double[] |
rslst |
In dqawfe vector of dimension at least limlst. rslst[k-1] contains the integral contribution over the interval
(a+(k-1)c, a+kc), where c = (2*int(abs(omega))+1)*pi/abs(omega), k = 1, 2, ..., lst.
|
private boolean |
selfTest |
|
private int |
testCase |
|
private double |
uflow |
DOCUMENT ME!
|
private double |
upper |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Integration2() |
Constructor for running self tests.
|
Integration2(double lower,
double upper,
double c,
int routine,
double epsabs,
double epsrel,
int limit) |
Constructor for Integration2 Used with routine = DQAWCE.
|
Integration2(double lower,
double upper,
int routine,
double[] breakPoints,
double epsabs,
double epsrel,
int limit) |
Constructor for Integration Used with routine = DQAGPE.
|
Integration2(double lower,
double upper,
int routine,
double epsabs,
double epsrel) |
Constructor for Integration Used with routine = DQNG.
|
Integration2(double lower,
double upper,
int routine,
double epsabs,
double epsrel,
int limit) |
Constructor for Integration Used with routine = DQAGSE.
|
Integration2(double lower,
double upper,
int routine,
double alfa,
double beta,
int integr,
double epsabs,
double epsrel,
int limit) |
This constructor must be used with routine DQAWSE.
|
Integration2(double lower,
double upper,
int routine,
double omega,
int integr,
double epsabs,
double epsrel,
int limit,
int icall,
int maxp1) |
Constructor must be used with routine dqawoe
|
Integration2(double lower,
double upper,
int routine,
int key,
double epsabs,
double epsrel,
int limit) |
Constructor for Integration Used with routine = DQAGE.
|
Integration2(double lower,
int routine,
double omega,
int integr,
double epsabs,
int limlst,
int limit,
int maxp1) |
Constructor must be used with routine dqawfe
|
Integration2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit) |
Constructor used with routine = DQAGIE.
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
dgtsl(int n,
double[] c,
double[] d,
double[] e,
double[] b,
int[] info) |
This is a port of the FORTRAN routine whose header is given below: c c dgtsl given a general tridiagonal matrix
and a right hand c side will find the solution. c c on entry c c n integer c is the order of the tridiagonal
matrix. c c c double precision(n) c is the subdiagonal of the tridiagonal matrix. c c(2) through c(n) should
contain the subdiagonal. c on output c is destroyed. c c d double precision(n) c is the diagonal of the
tridiagonal matrix. c on output d is destroyed. c c e double precision(n) c is the superdiagonal of the
tridiagonal matrix. c e(1) through e(n-1) should contain the superdiagonal. c on output e is destroyed. c c b
double precision(n) c is the right hand side vector. c c on return c c b is the solution vector. c c info integer
c = 0 normal value. c = k if the k-th element of the diagonal becomes c exactly zero. the subroutine returns when
c this is detected. c c linpack. this version dated 08/14/78 . c jack dongarra, argonne national laboratory.
|
private void |
dqage() |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqage c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c integrand examinator, globally adaptive, c gauss-kronrod c***author
piessens,robert,appl. math.
|
void |
dqagie(double bound,
int inf,
double epsrel) |
This is a port of the orginal FORTRAN code whose header is given below: c***begin prologue dqagie c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1,h2a4a1 c***keywords automatic
integrator, infinite intervals, c general-purpose, transformation, extrapolation, c globally adaptive c***author
piessens,robert,appl. math & progr. div - k.u.leuven c de doncker,elise,appl. math & progr. div - k.u.leuven
c***purpose the routine calculates an approximation result to a given c integral i = integral of f over
(bound,+infinity) c or i = integral of f over (-infinity,bound) c or i = integral of f over
(-infinity,+infinity), c hopefully satisfying following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)) c***description c c integration over infinite intervals c standard
fortran subroutine
|
void |
dqagpe() |
dqagpe.
|
private void |
dqagse() |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqagse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c (end point) singularities, extrapolation, c globally adaptive c***author
piessens,robert,appl. math.
|
private void |
dqawce() |
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawce c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,j4 c***keywords automatic
integrator, special-purpose, c cauchy principal value, clenshaw-curtis method c***author piessens,robert,appl.
|
private void |
dqawfe() |
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawfe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1 c***keywords automatic
integrator, special-purpose, c fourier integrals, c integration between zeros with dqawoe, c convergence
acceleration with dqelg c***author piessens,robert,appl. math.
|
private void |
dqawoe(double a,
double b,
double epsabs,
double epsrel,
int icall,
double[] result,
double[] abserr,
int[] neval,
int[] ier) |
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawoe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c integrand with oscillatory cos or sin factor, c clenshaw-curtis method, (end
point) singularities, c extrapolation, globally adaptive c***author piessens,robert,appl. math.
|
private void |
dqawse() |
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c algebraico-logarithmic end point singularities, c clenshaw-curtis method
c***author piessens,robert,appl. math.
|
private void |
dqc25c(double a,
double b,
double c,
double[] result,
double[] abserr,
int[] krul,
int[] neval) |
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqc25c c***date
written 810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2,j4 c***keywords 25-point
clenshaw-curtis integration c***author piessens,robert,appl. math.
|
private void |
dqc25f(double a,
double b,
double omega,
int nrmom,
int ksave,
double[] result,
double[] abserr,
int[] neval,
double[] resabs,
double[] resasc) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25f c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords integration rules for
functions with cos or sin c factor, clenshaw-curtis, gauss-kronrod c***author piessens,robert,appl. math.
|
private void |
dqc25s(double bl,
double br,
double[] ri,
double[] rj,
double[] rg,
double[] rh,
double[] result,
double[] abserr,
double[] resasc,
int[] nev) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25s c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords 25-point clenshaw-curtis
integration c***author piessens,robert,appl. math.
|
private void |
dqcheb(double[] x,
double[] fval,
double[] cheb12,
double[] cheb24) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqcheb c***refer to
dqc25c,dqc25f,dqc25s c***routines called (none) c***revision date 830518 (yymmdd) c***keywords chebyshev series
expansion, fast fourier transform c***author piessens,robert,appl. math.
|
private void |
dqelg(int[] n,
double[] epstab,
double[] result,
double[] abserr,
double[] res31a,
int[] nres) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqelg c***refer to
dqagie,dqagoe,dqagpe,dqagse c***routines called d1mach c***revision date 830518 (yymmdd) c***keywords epsilon
algorithm, convergence acceleration, c extrapolation c***author piessens,robert,appl. math.
|
private void |
dqk15(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc) |
The is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math.
|
private void |
dqk15i(double boun,
int inf,
double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15i c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a2,h2a4a2 c***keywords 15-point
transformed gauss-kronrod rules c***author piessens,robert,appl. math.
|
private void |
dqk15w(double p1,
double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc) |
This a a port of the original FORTRAN whose header is given below: c***begin prologue dqk15w c***date written
810101 (yymmdd) c***revision date 830518 (mmddyy) c***category no. h2a2a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math.
|
private void |
dqk21(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk21 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 21-point gauss-kronrod
rules c***author piessens,robert,appl. math.
|
private void |
dqk31(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk31 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 31-point gauss-kronrod
rules c***author piessens,robert,appl. math.
|
private void |
dqk41(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc) |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk41 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 41-point
gauss-kronrod rules c***author piessens,robert,appl. math.
|
private void |
dqk51(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc) |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk51 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 51-point
gauss-kronrod rules c***author piessens,robert,appl. math.
|
private void |
dqk61(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc) |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk61 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 61-point
gauss-kronrod rules c***author piessens,robert,appl. math.
|
private void |
dqmomo(double[] ri,
double[] rj,
double[] rg,
double[] rh) |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqmomo c***date
written 820101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,c3a2 c***keywords modified
chebyshev moments c***author piessens,robert,appl. math.
|
private void |
dqng() |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqng c***date
written 800101 (yymmdd) c***revision date 810101 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, smooth integrand, c non-adaptive, gauss-kronrod(patterson) c***author piessens,robert,appl. math.
|
private void |
dqpsrt(int limit,
int last,
int[] maxErr,
double[] ermax,
double[] elist,
int[] iord,
int[] nrmax) |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqpsrt c***refer
to dqage,dqagie,dqagpe,dqawse c***routines called (none) c***revision date 810101 (yymmdd) c***keywords
sequential sorting c***author piessens,robert,appl. math.
|
void |
driver() |
DOCUMENT ME!
|
double |
getAbserr() |
DOCUMENT ME!
|
int |
getErrorStatus() |
DOCUMENT ME!
|
double |
getIntegral() |
DOCUMENT ME!
|
int |
getNeval() |
DOCUMENT ME!
|
abstract double |
intFunc(double x) |
DOCUMENT ME!
|
private double |
intFuncTest(double x) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
DQAGIE
protected static final int DQAGIE
Integral over (bound, +infinity), (-infinity, bound), or (-infinity, +infinity).
- See Also:
- Constant Field Values
-
DQAGSE
protected static final int DQAGSE
Integral over (lower, upper) which can handle end point singularities.
- See Also:
- Constant Field Values
-
DQAGE
protected static final int DQAGE
Integral without singularities, discontinuities, or infinite bounds.
- See Also:
- Constant Field Values
-
DQAWOE
protected static final int DQAWOE
Automatic integrator, integrand with oscillatory cosine or sine factor
- See Also:
- Constant Field Values
-
DQAWFE
protected static final int DQAWFE
Automatic integrator, special-purpose, fourier integrals
- See Also:
- Constant Field Values
-
abserr
private final double[] abserr
Estimate of the absolute value of the error, which should equal or exceed abs(actual integral - result).
-
breakPoints
private double[] breakPoints
Used in dqagpe This array must always be >= 2 in length. The first breakPoints.length - 2 points are user
provided break points. If these points are not in an ascending sequence, they will automatically be sorted.
-
c
private double c
Parameter in the weight function, c != lower, c != upper. If c == a or c == b, the routine will end with
errorStatus = 6
-
epsrel
private double epsrel
DOCUMENT ME!
-
gamma
private double gamma
-
icall
private int icall
if dqawoe is to be used only once, icall must be set to 1. assume that during this call, the c chebyshev moments
(for clenshaw-curtis integration c of degree 24) have been computed for intervals of c lenghts
(abs(b-a))*2**(-l), l=0,1,2,...momcom-1. c if icall.gt.1 this means that dqawoe has been c called twice or more
on intervals of the same c length abs(b-a). the chebyshev moments already c computed are then re-used in
subsequent calls. c if icall.lt.1, the routine will end with ier[0] = 6.
-
ier
private final int[] ier
ier[0] = 0 for normal and reliable termination of the routine. It is assumed that the requested accuracy has been
achieved. ier[0] > 0 for abnormal termination of the routine. The estimates for the integral and error are less
reliable. It is assumed that the requested accuracy has not been achieved.
ier[0] = 1 maximum number of subdivisions allowed has been achieved. One can allow more subdivisions by
increasing the value of limit (and taking the according dimension adjustments into account). However, if this
yields no improvement, it is advised to analyze the integrand in order to determine the integration difficulties.
If the position of a local difficulty can be determined( i.e. singularity, discontinuity within the interval), it
should be supplied to the routine as an element of the breakPoints array. If necessary, an appropriate special
purpose integrator must be used, which is designed for handling the type of difficulty involved.
ier[0] = 2 The occurrence of roundoff error is detected, which prevents the requested tolerance from being
achieved. The error may be under-estimated.
ier[0] = 3 Extremely bad integrand behavior occurs at some points of the integration interval.
ier[0] = 4 The algorithm does not converge. Roundoff error is detected in the extrapolation table. It is presumed
that the requested tolerance cannot be achieved, and that the returned result is the best that can be obtained.
ier[0] = 5 The integral is probably divergent, or slowly convergent. It must be noted that divergence can occur
with any other value of ier[0] > 0.
ier[0] = 6 The input is invalid because (epsabs <= 0 and epsrel < max(50.0 * relative machine accuracy, 5.0E-29)
or in the case of dqagpe can also happen because npts2 < 2, the breakPoints are specified outside the integration
range, or , or limit <= npts.
-
inf
private int inf
In dqagie indicates the kind of integration range involved inf = 1 corresponds to (bound, +infinity) inf = -1
corresponds to (-infinity, bound) inf = 2 corresponds to (-infinity, +infinity).
-
integr
private int integr
With dqawoe: indicates which of the weight functions is to be used integr = 1 w(x) = cos(omega*x) integr = 2 w(x) =
sin(omega*x) if integr.ne.1 and integr.ne.2, the routine will end with ier[0] = 6. With dqawse: indicates which
weight function is to be used = 1 (x-lower)**alfa*(upper-x)**beta = 2
(x-lower)**alfa*(upper-x)**beta*log(x-lower) = 3 (x-lower)**alfa*(upper-x)**beta*log(upper-x) = 4
(x-lower)**alfa*(upper-x)**beta*log(x-lower)*log(upper-x) if integr.lt.1 or integr.gt.4, the routine will end
with ier[0] = 6.
-
iord
private int[] iord
The first k elements of iord are pointers to the error estimates over the subintervals, such that elist[iord[0]],
..., elist[iord[k-1]] form a decreasing sequence, with k = last if last <= (limit/2 + 2) , and k = limit + 1 -
last otheriwse.
-
level
private int[] level
level contains the subdivision levels of the subinterval, i.e., if (aa, bb) is a subinterval of (p1, p2) where p1
as well as p2 is a user-provided break point or integration limit, then (aa, bb) has level 1 if abs(bb - aa) =
abs(p2 - p1) * 2**(-1).
-
limit
private int limit
Gives an upper bound on the number of subintervals in the partition of lower, upper. In dqagpe limit must be >=
npts2. If limit < npts2 in dqagpe, the routine exits with an error message. In dqawse limit must be >= 2. If
limit < 2 in dqawse, the routine exits with ier[0] = 6.
-
lower
private double lower
DOCUMENT ME!
-
maxp1
private int maxp1
gives an upper bound on the number of chebyshev c moments which can be stored, i.e. for the c intervals of
lenghts abs(b-a)*2**(-l), c l=0,1, ..., maxp1-2, maxp1.ge.1. c if maxp1.lt.1, the routine will end with ier[0] =
6.
-
momcom
private int momcom
indicating that the chebyshev moments c have been computed for intervals of lengths c (abs(b-a))*2**(-l),
l=0,1,2, ..., momcom-1, c momcom.lt.maxp1
-
ndin
private int[] ndin
After the first integration over the intervals (pts[i], pts[i+1]), i = 0, 1, ..., npts2 - 2, the error estimates
over some of the intervals may have been increased artificially, in order to put their subdivision forward. If
this happens for the subinterval numbered k, ndin[k] is put to 1, otherwise ndin[k] = 0.
-
npts
private int npts
npts = npts2 - 2.
-
routine
private int routine
DOCUMENT ME!
-
rslst
private double[] rslst
In dqawfe vector of dimension at least limlst. rslst[k-1] contains the integral contribution over the interval
(a+(k-1)c, a+kc), where c = (2*int(abs(omega))+1)*pi/abs(omega), k = 1, 2, ..., lst. Note that if omega = 0,
rslst[0] contains the value of the integral over (a, infinity).
-
upper
private double upper
DOCUMENT ME!
-
selfTest
private boolean selfTest
-
testCase
private int testCase
-
Constructor Detail
-
Integration2
public Integration2(double lower,
double upper,
int routine,
double epsabs,
double epsrel)
Constructor for Integration Used with routine = DQNG.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!
-
Integration2
public Integration2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit)
Constructor used with routine = DQAGIE.
- Parameters:
bound - doubleroutine - intinf - intepsabs - doubleepsrel - doublelimit - int
-
Integration2
public Integration2(double lower,
double upper,
int routine,
double epsabs,
double epsrel,
int limit)
Constructor for Integration Used with routine = DQAGSE.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
-
Integration2
public Integration2(double lower,
double upper,
double c,
int routine,
double epsabs,
double epsrel,
int limit)
Constructor for Integration2 Used with routine = DQAWCE.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!c - routine - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
-
Integration2
public Integration2(double lower,
int routine,
double omega,
int integr,
double epsabs,
int limlst,
int limit,
int maxp1)
Constructor must be used with routine dqawfe
- Parameters:
lower - routine - omega - integr - epsabs - limlst - limit - maxp1 -
-
Integration2
public Integration2(double lower,
double upper,
int routine,
double omega,
int integr,
double epsabs,
double epsrel,
int limit,
int icall,
int maxp1)
Constructor must be used with routine dqawoe
- Parameters:
lower - upper - routine - omega - integr - epsabs - epsrel - limit - icall - maxp1 -
-
Integration2
public Integration2(double lower,
double upper,
int routine,
double alfa,
double beta,
int integr,
double epsabs,
double epsrel,
int limit)
This constructor must be used with routine DQAWSE.
- Parameters:
lower - upper - routine - alfa - beta - integr - epsabs - epsrel - limit -
-
Integration2
public Integration2(double lower,
double upper,
int routine,
double[] breakPoints,
double epsabs,
double epsrel,
int limit)
Constructor for Integration Used with routine = DQAGPE.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!breakPoints - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
-
Integration2
public Integration2(double lower,
double upper,
int routine,
int key,
double epsabs,
double epsrel,
int limit)
Constructor for Integration Used with routine = DQAGE.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!key - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
-
Method Detail
-
dgtsl
private void dgtsl(int n,
double[] c,
double[] d,
double[] e,
double[] b,
int[] info)
This is a port of the FORTRAN routine whose header is given below: c c dgtsl given a general tridiagonal matrix
and a right hand c side will find the solution. c c on entry c c n integer c is the order of the tridiagonal
matrix. c c c double precision(n) c is the subdiagonal of the tridiagonal matrix. c c(2) through c(n) should
contain the subdiagonal. c on output c is destroyed. c c d double precision(n) c is the diagonal of the
tridiagonal matrix. c on output d is destroyed. c c e double precision(n) c is the superdiagonal of the
tridiagonal matrix. c e(1) through e(n-1) should contain the superdiagonal. c on output e is destroyed. c c b
double precision(n) c is the right hand side vector. c c on return c c b is the solution vector. c c info integer
c = 0 normal value. c = k if the k-th element of the diagonal becomes c exactly zero. the subroutine returns when
c this is detected. c c linpack. this version dated 08/14/78 . c jack dongarra, argonne national laboratory.
- Parameters:
n - c - d - e - b -
-
dqagie
public void dqagie(double bound,
int inf,
double epsrel)
This is a port of the orginal FORTRAN code whose header is given below: c***begin prologue dqagie c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1,h2a4a1 c***keywords automatic
integrator, infinite intervals, c general-purpose, transformation, extrapolation, c globally adaptive c***author
piessens,robert,appl. math & progr. div - k.u.leuven c de doncker,elise,appl. math & progr. div - k.u.leuven
c***purpose the routine calculates an approximation result to a given c integral i = integral of f over
(bound,+infinity) c or i = integral of f over (-infinity,bound) c or i = integral of f over
(-infinity,+infinity), c hopefully satisfying following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)) c***description c c integration over infinite intervals c standard
fortran subroutine
-
dqagpe
public void dqagpe()
dqagpe. This is a port of the original FORTRAN code whose header is given below: c***begin prologue dqagie
c***date written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1,h2a4a1 c***keywords
automatic integrator, infinite intervals, c general-purpose, transformation, extrapolation, c globally adaptive
c***author piessens,robert,appl. math & progr. div - k.u.leuven c de doncker,elise,appl. math & progr. div -
k.u.leuven c***purpose the routine calculates an approximation result to a given c integral i = integral of f
over (bound,+infinity) c or i = integral of f over (-infinity,bound) c or i = integral of f over
(-infinity,+infinity), c hopefully satisfying following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)) c***description c c integration over infinite intervals c standard
fortran subroutine
-
driver
public void driver()
DOCUMENT ME!
-
getNeval
public int getNeval()
DOCUMENT ME!
- Returns:
- neval
-
dqage
private void dqage()
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqage c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c integrand examinator, globally adaptive, c gauss-kronrod c***author
piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr. div. - k.u.leuven
c***purpose the routine calculates an approximation result to a given c definite integral i = integral of f over
(a,b), c hopefully satisfying following claim for accuracy c abs(i-reslt).le.max(epsabs,epsrel*abs(i)).
c***description c c computation of a definite integral c standard fortran subroutine c double precision version
Calculates an integral over (lower, upper), hopefully satisfying the abs(actual integral - result) <= max(epsabs,
epsresl * abs(actual integral)).
-
dqagse
private void dqagse()
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqagse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c (end point) singularities, extrapolation, c globally adaptive c***author
piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr. div. - k.u.leuven
c***purpose the routine calculates an approximation result to a given c definite integral i = integral of f over
(a,b), c hopefully satisfying following claim for accuracy c abs(i-result).le.max(epsabs,epsrel*abs(i)).
c***description c c computation of a definite integral c standard fortran subroutine c double precision version
This routine calculates the integral of intFunc over (lower, upper) and can handle end-point singularities at
lower and upper. It tries to satisfy the claim for accuracy abs(actual integral - result) <= max(epsabs, esprel *
abs(actual integral))
-
dqawce
private void dqawce()
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawce c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,j4 c***keywords automatic
integrator, special-purpose, c cauchy principal value, clenshaw-curtis method c***author piessens,robert,appl.
math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr. div. - k.u.leuven c*** purpose the
routine calculates an approximation result to a c cauchy principal value i = integral of f*w over (a,b) c (w(x) =
1/(x-c), (c.ne.a, c.ne.b), hopefully satisfying c following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)) c***description c c computation of a cauchy principal value c standard
fortran subroutine c double precision version
-
dqawfe
private void dqawfe()
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawfe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1 c***keywords automatic
integrator, special-purpose, c fourier integrals, c integration between zeros with dqawoe, c convergence
acceleration with dqelg c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c dedoncker,elise,appl.
math. & progr. div. - k.u.leuven c***purpose the routine calculates an approximation result to a c given fourier
integal c i = integral of f(x)*w(x) over (a,infinity) c where w(x)=cos(omega*x) or w(x)=sin(omega*x), c hopefully
satisfying following claim for accuracy c abs(i-result).le.epsabs. c***description c c computation of fourier
integrals c standard fortran subroutine c double precision version c c parameters c on entry c f - double
precision c function subprogram defining the integrand c function f(x). the actual name for f needs to c be
declared e x t e r n a l in the driver program. c c a - double precision c lower limit of integration c c omega -
double precision c parameter in the weight function c c integr - integer c indicates which weight function is
used c integr = 1 w(x) = cos(omega*x) c integr = 2 w(x) = sin(omega*x) c if integr.ne.1.and.integr.ne.2, the
routine will c end with ier = 6. c c epsabs - double precision c absolute accuracy requested, epsabs.gt.0 c if
epsabs.le.0, the routine will end with ier = 6. c c limlst - integer c limlst gives an upper bound on the number
of c cycles, limlst.ge.1. c if limlst.lt.3, the routine will end with ier = 6. c c limit - integer c gives an
upper bound on the number of subintervals c allowed in the partition of each cycle, limit.ge.1 c each cycle,
limit.ge.1. c c maxp1 - integer c gives an upper bound on the number of c chebyshev moments which can be stored,
i.e. c for the intervals of lengths abs(b-a)*2**(-l), c l=0,1, ..., maxp1-2, maxp1.ge.1 c c on return c result -
double precision c approximation to the integral x c c abserr - double precision c estimate of the modulus of the
absolute error, c which should equal or exceed abs(i-result) c c neval - integer c number of integrand
evaluations c c ier - ier = 0 normal and reliable termination of c the routine. it is assumed that the c
requested accuracy has been achieved. c ier.gt.0 abnormal termination of the routine. the c estimates for
integral and error are less c reliable. it is assumed that the requested c accuracy has not been achieved. c
error messages c if omega.ne.0 c ier = 1 maximum number of cycles allowed c has been achieved., i.e. of
subintervals c (a+(k-1)c,a+kc) where c c = (2*int(abs(omega))+1)*pi/abs(omega), c for k = 1, 2, ..., lst. c one
can allow more cycles by increasing c the value of limlst (and taking the c according dimension adjustments into
c account). c examine the array iwork which contains c the error flags on the cycles, in order to c look for
eventual local integration c difficulties. if the position of a local c difficulty can be determined (e.g. c
singularity, discontinuity within the c interval) one will probably gain from c splitting up the interval at this
point c and calling appropriate integrators on c the subranges. c = 4 the extrapolation table constructed for c
convergence acceleration of the series c formed by the integral contributions over c the cycles, does not
converge to within c the requested accuracy. as in the case of c ier = 1, it is advised to examine the c array
iwork which contains the error c flags on the cycles. c = 6 the input is invalid because c (integr.ne.1 and
integr.ne.2) or c epsabs.le.0 or limlst.lt.3. c result, abserr, neval, lst are set c to zero. c = 7 bad integrand
behaviour occurs within one c or more of the cycles. location and type c of the difficulty involved can be c
determined from the vector ierlst. here c lst is the number of cycles actually c needed (see below). c ierlst(k) =
1 the maximum number of c subdivisions (= limit) has c been achieved on the k th c cycle. c = 2 occurrence of
roundoff error c is detected and prevents the c tolerance imposed on the c k th cycle, from being c achieved. c =
3 extremely bad integrand c behaviour occurs at some c points of the k th cycle. c = 4 the integration procedure
c over the k th cycle does c not converge (to within the c required accuracy) due to c roundoff in the c
extrapolation procedure c invoked on this cycle. it c is assumed that the result c on this interval is the c best
which can be obtained. c = 5 the integral over the k th c cycle is probably divergent c or slowly convergent. it
c must be noted that c divergence can occur with c any other value of c ierlst(k). c if omega = 0 and integr = 1,
c the integral is calculated by means of dqagie c and ier = ierlst(1) (with meaning as described c for ierlst(k),
k = 1). c c rslst - double precision c vector of dimension at least limlst c rslst(k) contains the integral
contribution c over the interval (a+(k-1)c,a+kc) where c c = (2*int(abs(omega))+1)*pi/abs(omega), c k = 1, 2,
..., lst. c note that, if omega = 0, rslst(1) contains c the value of the integral over (a,infinity). c c erlst -
double precision c vector of dimension at least limlst c erlst(k) contains the error estimate corresponding c
with rslst(k). c c ierlst - integer c vector of dimension at least limlst c ierlst(k) contains the error flag
corresponding c with rslst(k). for the meaning of the local error c flags see description of output parameter
ier. c c lst - integer c number of subintervals needed for the integration c if omega = 0 then lst is set to 1. c
c alist, blist, rlist, elist - double precision c vector of dimension at least limit, c c iord, nnlog - integer c
vector of dimension at least limit, providing c space for the quantities needed in the subdivision c process of
each cycle c c chebmo - double precision c array of dimension at least (maxp1,25), providing c space for the
chebyshev moments needed within the c cycles c c***references (none) c***routines called
d1mach,dqagie,dqawoe,dqelg c***end prologue dqawfe c
-
dqawoe
private void dqawoe(double a,
double b,
double epsabs,
double epsrel,
int icall,
double[] result,
double[] abserr,
int[] neval,
int[] ier)
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawoe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c integrand with oscillatory cos or sin factor, c clenshaw-curtis method, (end
point) singularities, c extrapolation, globally adaptive c***author piessens,robert,appl. math. & progr. div. -
k.u.leuven c de doncker,elise,appl. math. & progr. div. - k.u.leuven c***purpose the routine calculates an
approximation result to a given c definite integral c i = integral of f(x)*w(x) over (a,b) c where w(x) =
cos(omega*x) or w(x)=sin(omega*x), c hopefully satisfying following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)). c***description c c computation of oscillatory integrals c standard
fortran subroutine c double precision version c c parameters c on entry c f - double precision c function
subprogram defining the integrand c function f(x). the actual name for f needs to be c declared e x t e r n a l
in the driver program. c c a - double precision c lower limit of integration c c b - double precision c upper
limit of integration c c omega - double precision c parameter in the integrand weight function c c integr -
integer c indicates which of the weight functions is to be c used c integr = 1 w(x) = cos(omega*x) c integr = 2
w(x) = sin(omega*x) c if integr.ne.1 and integr.ne.2, the routine c will end with ier = 6. c c epsabs - double
precision c absolute accuracy requested c epsrel - double precision c relative accuracy requested c if
epsabs.le.0 c and epsrel.lt.max(50*rel.mach.acc.,0.5d-28), c the routine will end with ier = 6. c c limit -
integer c gives an upper bound on the number of subdivisions c in the partition of (a,b), limit.ge.1. c c icall -
integer c if dqawoe is to be used only once, icall must c be set to 1. assume that during this call, the c
chebyshev moments (for clenshaw-curtis integration c of degree 24) have been computed for intervals of c lenghts
(abs(b-a))*2**(-l), l=0,1,2,...momcom-1. c if icall.gt.1 this means that dqawoe has been c called twice or more
on intervals of the same c length abs(b-a). the chebyshev moments already c computed are then re-used in
subsequent calls. c if icall.lt.1, the routine will end with ier = 6. c c maxp1 - integer c gives an upper bound
on the number of chebyshev c moments which can be stored, i.e. for the c intervals of lenghts abs(b-a)*2**(-l), c
l=0,1, ..., maxp1-2, maxp1.ge.1. c if maxp1.lt.1, the routine will end with ier = 6. c c on return c result -
double precision c approximation to the integral c c abserr - double precision c estimate of the modulus of the
absolute error, c which should equal or exceed abs(i-result) c c neval - integer c number of integrand
evaluations c c ier - integer c ier = 0 normal and reliable termination of the c routine. it is assumed that the
c requested accuracy has been achieved. c - ier.gt.0 abnormal termination of the routine. c the estimates for
integral and error are c less reliable. it is assumed that the c requested accuracy has not been achieved. c
error messages c ier = 1 maximum number of subdivisions allowed c has been achieved. one can allow more c
subdivisions by increasing the value of c limit (and taking according dimension c adjustments into account).
however, if c this yields no improvement it is advised c to analyze the integrand, in order to c determine the
integration difficulties. c if the position of a local difficulty can c be determined (e.g. singularity, c
discontinuity within the interval) one c will probably gain from splitting up the c interval at this point and
calling the c integrator on the subranges. if possible, c an appropriate special-purpose integrator c should be
used which is designed for c handling the type of difficulty involved. c = 2 the occurrence of roundoff error is
c detected, which prevents the requested c tolerance from being achieved. c the error may be under-estimated. c =
3 extremely bad integrand behaviour occurs c at some points of the integration c interval. c = 4 the algorithm
does not converge. c roundoff error is detected in the c extrapolation table. c it is presumed that the requested
c tolerance cannot be achieved due to c roundoff in the extrapolation table, c and that the returned result is
the c best which can be obtained. c = 5 the integral is probably divergent, or c slowly convergent. it must be
noted that c divergence can occur with any other value c of ier.gt.0. c = 6 the input is invalid, because c
(epsabs.le.0 and c epsrel.lt.max(50*rel.mach.acc.,0.5d-28)) c or (integr.ne.1 and integr.ne.2) or c icall.lt.1 or
maxp1.lt.1. c result, abserr, neval, last, rlist(1), c elist(1), iord(1) and nnlog(1) are set c to zero. alist(1)
and blist(1) are set c to a and b respectively. c c last - integer c on return, last equals the number of c
subintervals produces in the subdivision c process, which determines the number of c significant elements
actually in the c work arrays. c alist - double precision c vector of dimension at least limit, the first c last
elements of which are the left c end points of the subintervals in the partition c of the given integration range
(a,b) c c blist - double precision c vector of dimension at least limit, the first c last elements of which are
the right c end points of the subintervals in the partition c of the given integration range (a,b) c c rlist -
double precision c vector of dimension at least limit, the first c last elements of which are the integral c
approximations on the subintervals c c elist - double precision c vector of dimension at least limit, the first c
last elements of which are the moduli of the c absolute error estimates on the subintervals c c iord - integer c
vector of dimension at least limit, the first k c elements of which are pointers to the error c estimates over
the subintervals, c such that elist(iord(1)), ..., c elist(iord(k)) form a decreasing sequence, with c k = last
if last.le.(limit/2+2), and c k = limit+1-last otherwise. c c nnlog - integer c vector of dimension at least
limit, containing the c subdivision levels of the subintervals, i.e. c iwork(i) = l means that the subinterval c
numbered i is of length abs(b-a)*2**(1-l) c c on entry and return c momcom - integer c indicating that the
chebyshev moments c have been computed for intervals of lengths c (abs(b-a))*2**(-l), l=0,1,2, ..., momcom-1, c
momcom.lt.maxp1 c c chebmo - double precision c array of dimension (maxp1,25) containing the c chebyshev moments
c c***references (none) c***routines called d1mach,dqc25f,dqelg,dqpsrt c***end prologue dqawoe c
-
dqawse
private void dqawse()
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c algebraico-logarithmic end point singularities, c clenshaw-curtis method
c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr. div. -
k.u.leuven c***purpose the routine calculates an approximation result to a given c definite integral i = integral
of f*w over (a,b), c (where w shows a singular behaviour at the end points, c see parameter integr). c hopefully
satisfying following claim for accuracy c abs(i-result).le.max(epsabs,epsrel*abs(i)). c***description c c
integration of functions having algebraico-logarithmic c end point singularities c standard fortran subroutine c
double precision version c c parameters c on entry c f - double precision c function subprogram defining the
integrand c function f(x). the actual name for f needs to be c declared e x t e r n a l in the driver program. c
c a - double precision c lower limit of integration c c b - double precision c upper limit of integration, b.gt.a
c if b.le.a, the routine will end with ier = 6. c c alfa - double precision c parameter in the weight function,
alfa.gt.(-1) c if alfa.le.(-1), the routine will end with c ier = 6. c c beta - double precision c parameter in
the weight function, beta.gt.(-1) c if beta.le.(-1), the routine will end with c ier = 6. c c integr - integer c
indicates which weight function is to be used c = 1 (x-a)**alfa*(b-x)**beta c = 2
(x-a)**alfa*(b-x)**beta*log(x-a) c = 3 (x-a)**alfa*(b-x)**beta*log(b-x) c = 4
(x-a)**alfa*(b-x)**beta*log(x-a)*log(b-x) c if integr.lt.1 or integr.gt.4, the routine c will end with ier = 6. c
c epsabs - double precision c absolute accuracy requested c epsrel - double precision c relative accuracy
requested c if epsabs.le.0 c and epsrel.lt.max(50*rel.mach.acc.,0.5d-28), c the routine will end with ier = 6. c
c limit - integer c gives an upper bound on the number of subintervals c in the partition of (a,b), limit.ge.2 c
if limit.lt.2, the routine will end with ier = 6. c c on return c result - double precision c approximation to
the integral c c abserr - double precision c estimate of the modulus of the absolute error, c which should equal
or exceed abs(i-result) c c neval - integer c number of integrand evaluations c c ier - integer c ier = 0 normal
and reliable termination of the c routine. it is assumed that the requested c accuracy has been achieved. c
ier.gt.0 abnormal termination of the routine c the estimates for the integral and error c are less reliable. it
is assumed that the c requested accuracy has not been achieved. c error messages c = 1 maximum number of
subdivisions allowed c has been achieved. one can allow more c subdivisions by increasing the value of c limit.
however, if this yields no c improvement, it is advised to analyze the c integrand in order to determine the c
integration difficulties which prevent the c requested tolerance from being achieved. c in case of a jump
discontinuity or a local c singularity of algebraico-logarithmic type c at one or more interior points of the c
integration range, one should proceed by c splitting up the interval at these c points and calling the integrator
on the c subranges. c = 2 the occurrence of roundoff error is c detected, which prevents the requested c
tolerance from being achieved. c = 3 extremely bad integrand behaviour occurs c at some points of the integration
c interval. c = 6 the input is invalid, because c b.le.a or alfa.le.(-1) or beta.le.(-1), or c integr.lt.1 or
integr.gt.4, or c (epsabs.le.0 and c epsrel.lt.max(50*rel.mach.acc.,0.5d-28), c or limit.lt.2. c result, abserr,
neval, rlist(1), elist(1), c iord(1) and last are set to zero. alist(1) c and blist(1) are set to a and b c
respectively. c c alist - double precision c vector of dimension at least limit, the first c last elements of
which are the left c end points of the subintervals in the partition c of the given integration range (a,b) c c
blist - double precision c vector of dimension at least limit, the first c last elements of which are the right c
end points of the subintervals in the partition c of the given integration range (a,b) c c rlist - double
precision c vector of dimension at least limit,the first c last elements of which are the integral c
approximations on the subintervals c c elist - double precision c vector of dimension at least limit, the first c
last elements of which are the moduli of the c absolute error estimates on the subintervals c c iord - integer c
vector of dimension at least limit, the first k c of which are pointers to the error c estimates over the
subintervals, so that c elist(iord(1)), ..., elist(iord(k)) with k = last c if last.le.(limit/2+2), and k =
limit+1-last c otherwise form a decreasing sequence c c last - integer c number of subintervals actually produced
in c the subdivision process c c***references (none) c***routines called d1mach,dqc25s,dqmomo,dqpsrt c***end
prologue dqawse c
-
dqc25c
private void dqc25c(double a,
double b,
double c,
double[] result,
double[] abserr,
int[] krul,
int[] neval)
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqc25c c***date
written 810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2,j4 c***keywords 25-point
clenshaw-curtis integration c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de
doncker,elise,appl. math. & progr. div. - k.u.leuven c***purpose to compute i = integral of f*w over (a,b) with c
error estimate, where w(x) = 1/(x-c) c***description c c integration rules for the computation of cauchy c
principal value integrals c standard fortran subroutine c double precision version c c c a - double precision c
left end point of the integration interval c c b - double precision c right end point of the integration
interval, b.gt.a c c c - double precision c parameter in the weight function c c result - double precision c
approximation to the integral c result is computed by using a generalized c clenshaw-curtis method if c lies
within ten percent c of the integration interval. in the other case the c 15-point kronrod rule obtained by
optimal addition c of abscissae to the 7-point gauss rule, is applied. c c abserr - double precision c estimate
of the modulus of the absolute error, c which should equal or exceed abs(i-result) c c krul - integer c key which
is decreased by 1 if the 15-point c gauss-kronrod scheme has been used c c neval - integer c number of integrand
evaluations c c....................................................................... c***references (none)
c***routines called dqcheb,dqk15w,dqwgtc c***end prologue dqc25c c
- Parameters:
a - b - c - result - abserr - krul - neval -
-
dqc25f
private void dqc25f(double a,
double b,
double omega,
int nrmom,
int ksave,
double[] result,
double[] abserr,
int[] neval,
double[] resabs,
double[] resasc)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25f c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords integration rules for
functions with cos or sin c factor, clenshaw-curtis, gauss-kronrod c***author piessens,robert,appl. math. &
progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr. div. - k.u.leuven c***purpose to compute the
integral i=integral of f(x) over (a,b) c where w(x) = cos(omega*x) or w(x)=sin(omega*x) and to c compute j =
integral of abs(f) over (a,b). for small value c of omega or small intervals (a,b) the 15-point gauss-kronro c
rule is used. otherwise a generalized clenshaw-curtis c method is used. c***description c c integration rules for
functions with cos or sin factor c standard fortran subroutine c double precision version c c parameters c on
entry c f - double precision c function subprogram defining the integrand c function f(x). the actual name for f
needs to c be declared e x t e r n a l in the calling program. c c a - double precision c lower limit of
integration c c b - double precision c upper limit of integration c c omega - double precision c parameter in the
weight function c c integr - integer c indicates which weight function is to be used c integr = 1 w(x) =
cos(omega*x) c integr = 2 w(x) = sin(omega*x) c c nrmom - integer c the length of interval (a,b) is equal to the
length c of the original integration interval divided by c 2**nrmom (we suppose that the routine is used in an c
adaptive integration process, otherwise set c nrmom = 0). nrmom must be zero at the first call. c c maxp1 -
integer c gives an upper bound on the number of chebyshev c moments which can be stored, i.e. for the c intervals
of lengths abs(bb-aa)*2**(-l), c l = 0,1,2, ..., maxp1-2. c c ksave - integer c key which is one when the moments
for the c current interval have been computed c c on return c result - double precision c approximation to the
integral i c c abserr - double precision c estimate of the modulus of the absolute c error, which should equal or
exceed abs(i-result) c c neval - integer c number of integrand evaluations c c resabs - double precision c
approximation to the integral j c c resasc - double precision c approximation to the integral of abs(f-i/(b-a)) c
c on entry and return c momcom - integer c for each interval length we need to compute the c chebyshev moments.
momcom counts the number of c intervals for which these moments have already been c computed. if nrmom.lt.momcom
or ksave = 1, the c chebyshev moments for the interval (a,b) have c already been computed and stored, otherwise
we c compute them and we increase momcom. c c chebmo - double precision c array of dimension at least (maxp1,25)
containing c the modified chebyshev moments for the first momcom c momcom interval lengths c c
...................................................................... c***references (none) c***routines called
d1mach,dgtsl,dqcheb,dqk15w,dqwgtf c***end prologue dqc25f c
- Parameters:
a - b - omega - nrmom - ksave - result - abserr - neval - resabs - resasc -
-
dqc25s
private void dqc25s(double bl,
double br,
double[] ri,
double[] rj,
double[] rg,
double[] rh,
double[] result,
double[] abserr,
double[] resasc,
int[] nev)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25s c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords 25-point clenshaw-curtis
integration c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. &
progr. div. - k.u.leuven c***purpose to compute i = integral of f*w over (bl,br), with error c estimate, where
the weight function w has a singular c behaviour of algebraico-logarithmic type at the points c a and/or b.
(bl,br) is a part of (a,b). c***description c c integration rules for integrands having algebraico-logarithmic c
end point singularities c standard fortran subroutine c double precision version c c parameters c f - double
precision c function subprogram defining the integrand c f(x). the actual name for f needs to be declared c e x t
e r n a l in the driver program. c c a - double precision c left end point of the original interval c c b -
double precision c right end point of the original interval, b.gt.a c c bl - double precision c lower limit of
integration, bl.ge.a c c br - double precision c upper limit of integration, br.le.b c c alfa - double precision
c parameter in the weight function c c beta - double precision c parameter in the weight function c c ri,rj,rg,rh -
double precision c modified chebyshev moments for the application c of the generalized clenshaw-curtis c method
(computed in subroutine dqmomo) c c result - double precision c approximation to the integral c result is
computed by using a generalized c clenshaw-curtis method if b1 = a or br = b. c in all other cases the 15-point
kronrod c rule is applied, obtained by optimal addition of c abscissae to the 7-point gauss rule. c c abserr -
double precision c estimate of the modulus of the absolute error, c which should equal or exceed abs(i-result) c
c resasc - double precision c approximation to the integral of abs(f*w-i/(b-a)) c c integr - integer c which
determines the weight function c = 1 w(x) = (x-a)**alfa*(b-x)**beta c = 2 w(x) = (x-a)**alfa*(b-x)**beta*log(x-a)
c = 3 w(x) = (x-a)**alfa*(b-x)**beta*log(b-x) c = 4 w(x) = (x-a)**alfa*(b-x)**beta*log(x-a)* c log(b-x) c c nev -
integer c number of integrand evaluations c***references (none) c***routines called dqcheb,dqk15w c***end
prologue dqc25s c
- Parameters:
bl - br - ri - rj - rg - rh - result - abserr - resasc - nev -
-
dqcheb
private void dqcheb(double[] x,
double[] fval,
double[] cheb12,
double[] cheb24)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqcheb c***refer to
dqc25c,dqc25f,dqc25s c***routines called (none) c***revision date 830518 (yymmdd) c***keywords chebyshev series
expansion, fast fourier transform c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de
doncker,elise,appl. math. & progr. div. - k.u.leuven c***purpose this routine computes the chebyshev series
expansion c of degrees 12 and 24 of a function using a c fast fourier transform method c f(x) = sum(k=1,..,13)
(cheb12(k)*t(k-1,x)), c f(x) = sum(k=1,..,25) (cheb24(k)*t(k-1,x)), c where t(k,x) is the chebyshev polynomial of
degree k. c***description c c chebyshev series expansion c standard fortran subroutine c double precision version
c c parameters c on entry c x - double precision c vector of dimension 11 containing the c values cos(k*pi/24), k =
1, ..., 11 c c fval - double precision c vector of dimension 25 containing the c function values at the points c
(b+a+(b-a)*cos(k*pi/24))/2, k = 0, ...,24, c where (a,b) is the approximation interval. c fval(1) and fval(25)
are divided by two c (these values are destroyed at output). c c on return c cheb12 - double precision c vector
of dimension 13 containing the c chebyshev coefficients for degree 12 c c cheb24 - double precision c vector of
dimension 25 containing the c chebyshev coefficients for degree 24 c c***end prologue dqcheb c
- Parameters:
x - fval - cheb12 - cheb24 -
-
dqelg
private void dqelg(int[] n,
double[] epstab,
double[] result,
double[] abserr,
double[] res31a,
int[] nres)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqelg c***refer to
dqagie,dqagoe,dqagpe,dqagse c***routines called d1mach c***revision date 830518 (yymmdd) c***keywords epsilon
algorithm, convergence acceleration, c extrapolation c***author piessens,robert,appl. math. & progr. div. -
k.u.leuven c de doncker,elise,appl. math & progr. div. - k.u.leuven c***purpose the routine determines the limit
of a given sequence of c approximations, by means of the epsilon algorithm of c p.wynn. an estimate of the
absolute error is also given. c the condensed epsilon table is computed. only those c elements needed for the
computation of the next diagonal c are preserved. c***description c c epsilon algorithm c standard fortran
subroutine c double precision version
This routine determines the limit of a given sequence of approximations, by means of the epsilon algorithm of P.
Wynn. An estimate of the absolute error is also given. The condensed epsilon table is computed. Only those
elements needed for the computation of the next diagonal are preserved.
- Parameters:
n - epstab[n[0]-1] contains the new element in the first column of the epsilon tableepstab - 52 element array containing the elements of the two lower diagonals of the triangular epsilon
table. The elements are numbered starting at the right-hand corner of the triangleresult - resulting approximation to the integral The element in the new diagonal with the least value of
error.abserr - estimate of the absolute error computed from result and the 3 previous resultsres31a - array containing the last 3 resultsnres - number of calls to the routine (should be zero at first call)
-
dqk15
private void dqk15(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc)
The is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr.
div - k.u.leuven c***purpose to compute i = integral of f over (a,b), with error c estimate c j = integral of
abs(f) over (a,b) c***description c c integration rules c standard fortran subroutine c double precision version
This routine computes theintegral of the intFunc over (a, b) and the integral of the abs(intFunc) over (a, b).
- Parameters:
a - lower limit for integrationb - upper limit for integrationresult - Approximation to the integral. The result is computed by applying the 15-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 7-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of intFunc
over (a,b) - result)resabs - Approximation to integral of abs(intFunc)resasc - Approximation to the integral of abs(intFunc - integral of intFunc/(b - a)) over (a, b)
-
dqk15i
private void dqk15i(double boun,
int inf,
double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15i c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a2,h2a4a2 c***keywords 15-point
transformed gauss-kronrod rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de
doncker,elise,appl. math. & progr. div. - k.u.leuven c***purpose the original (infinite integration range is
mapped c onto the interval (0,1) and (a,b) is a part of (0,1). c it is the purpose to compute c i = integral of
transformed integrand over (a,b), c j = integral of abs(transformed integrand) over (a,b). c***description c c
integration rule c standard fortran subroutine c double precision version
The original infinite integration range is mapped onto the interval (0, 1) and (a, b) is a part of (0, 1). This
routine computes the integral of the transformed integrand over (a, b) and the integral of the abs(transformed
integrand) over (a, b).
- Parameters:
boun - finite bound of original integration range (set to zero if inf = +2)inf - If inf = -1, the original interval is (-infinity, bound) If inf = +1, the original interval is (bound,
+infinity) If inf = +2, the original interval is (-infinity, +infinity) and the integral is computed
as the sum of two integrals, one over (-infinity, 0) and one over (0, +infinity)a - lower limit for integration over subrange of (0, 1)b - upper limit for integration over subrange of (0, 1)result - Approximation to the integral. The result is computed by applying the 15-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 7-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of
transformed integrand - result)resabs - Approximation to integral of abs(transformed integrand)resasc - Approximation to the integral of abs(transformed integrand - integral of transformed integrand/(b -
a)) over (a, b)
-
dqk15w
private void dqk15w(double p1,
double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc)
This a a port of the original FORTRAN whose header is given below: c***begin prologue dqk15w c***date written
810101 (yymmdd) c***revision date 830518 (mmddyy) c***category no. h2a2a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr.
div. - k.u.leuven c***purpose to compute i = integral of f*w over (a,b), with error c estimate c j = integral of
abs(f*w) over (a,b) c***description c c integration rules c standard fortran subroutine c double precision
version c c parameters c on entry c c p1, p2, p3, p4 - double precision c parameters in the weight function c c
kp - integer c key for indicating the type of weight function c c a - double precision c lower limit of
integration c c b - double precision c upper limit of integration c c on return c result - double precision c
approximation to the integral i c result is computed by applying the 15-point c kronrod rule (resk) obtained by
optimal addition c of abscissae to the 7-point gauss rule (resg). c c abserr - double precision c estimate of the
modulus of the absolute error, c which should equal or exceed abs(i-result) c c resabs - double precision c
approximation to the integral of abs(f) c c resasc - double precision c approximation to the integral of
abs(f-i/(b-a)) c
- Parameters:
p1 - kp - a - b - result - abserr - resabs - resasc -
-
dqk21
private void dqk21(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk21 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 21-point gauss-kronrod
rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr.
div. - k.u.leuven c***purpose to compute i = integral of f over (a,b), with error c estimate c j = integral of
abs(f) over (a,b) c***description c c integration rules c standard fortran subroutine c double precision version
Computes integral of function over (a,b), with error estimate and computes integral of abs(function) over (a,b).
- Parameters:
a - lower limit of integrationb - upper limit of integrationresult - Approximation to the integral. Result is computed by applying the 21-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 10-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should not exceed abs(actual integral -
result)resabs - Approximation to the integral of abs(function) over (a,b).resasc - Approximation to the integral of abs(function - actual integral/(b-a)) over (a,b)
-
dqk31
private void dqk31(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk31 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 31-point gauss-kronrod
rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr.
div. - k.u.leuven c***purpose to compute i = integral of f over (a,b) with error c estimate c j = integral of
abs(f) over (a,b) c***description c c integration rules c standard fortran subroutine c double precision version
This routine computes theintegral of the intFunc over (a, b) and the integral of the abs(intFunc) over (a, b).
- Parameters:
a - lower limit for integrationb - upper limit for integrationresult - Approximation to the integral. The result is computed by applying the 31-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 15-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of intFunc
over (a,b) - result)resabs - Approximation to integral of abs(intFunc)resasc - Approximation to the integral of abs(intFunc - integral of intFunc/(b - a)) over (a, b)
-
dqk41
private void dqk41(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc)
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk41 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 41-point
gauss-kronrod rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl.
math. & progr. div. - k.u.leuven c***purpose to compute i = integral of f over (a,b), with error c estimate c j =
integral of abs(f) over (a,b) c***description c c integration rules c standard fortran subroutine c double
precision version
This routine computes theintegral of the intFunc over (a, b) and the integral of the abs(intFunc) over (a, b).
- Parameters:
a - lower limit for integrationb - upper limit for integrationresult - Approximation to the integral. The result is computed by applying the 41-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 20-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of intFunc
over (a,b) - result)resabs - Approximation to integral of abs(intFunc)resasc - Approximation to the integral of abs(intFunc - integral of intFunc/(b - a)) over (a, b)
-
dqk51
private void dqk51(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc)
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk51 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 51-point
gauss-kronrod rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl.
math & progr. div. - k.u.leuven c***purpose to compute i = integral of f over (a,b) with error c estimate c j =
integral of abs(f) over (a,b) c***description c c integration rules c standard fortran subroutine c double
precision version
This routine computes theintegral of the intFunc over (a, b) and the integral of the abs(intFunc) over (a, b).
- Parameters:
a - lower limit for integrationb - upper limit for integrationresult - Approximation to the integral. The result is computed by applying the 51-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 25-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of intFunc
over (a,b) - result)resabs - Approximation to integral of abs(intFunc)resasc - Approximation to the integral of abs(intFunc - integral of intFunc/(b - a)) over (a, b)
-
dqk61
private void dqk61(double a,
double b,
double[] result,
double[] abserr,
double[] resabs,
double[] resasc)
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk61 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 61-point
gauss-kronrod rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl.
math. & progr. div. - k.u.leuven c***purpose to compute i = integral of f over (a,b) with error c estimate c j =
integral of dabs(f) over (a,b) c***description c c integration rule c standard fortran subroutine c double
precision version
This routine computes the integral of the intFunc over (a, b) and the integral of the abs(intFunc) over (a, b).
- Parameters:
a - lower limit for integrationb - upper limit for integrationresult - Approximation to the integral. The result is computed by applying the 61-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 30-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of intFunc
over (a,b) - result)resabs - Approximation to integral of abs(intFunc)resasc - Approximation to the integral of abs(intFunc - integral of intFunc/(b - a)) over (a, b)
-
dqmomo
private void dqmomo(double[] ri,
double[] rj,
double[] rg,
double[] rh)
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqmomo c***date
written 820101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,c3a2 c***keywords modified
chebyshev moments c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl.
math. & progr. div. - k.u.leuven c***purpose this routine computes modified chebsyshev moments. the k-th c
modified chebyshev moment is defined as the integral over c (-1,1) of w(x)*t(k,x), where t(k,x) is the chebyshev
c polynomial of degree k. c***description c c modified chebyshev moments c standard fortran subroutine c double
precision version c c parameters c alfa - double precision c parameter in the weight function w(x), alfa.gt.(-1)
c c beta - double precision c parameter in the weight function w(x), beta.gt.(-1) c c ri - double precision c
vector of dimension 25 c ri(k) is the integral over (-1,1) of c (1+x)**alfa*t(k-1,x), k = 1, ..., 25. c c rj -
double precision c vector of dimension 25 c rj(k) is the integral over (-1,1) of c (1-x)**beta*t(k-1,x), k = 1,
..., 25. c c rg - double precision c vector of dimension 25 c rg(k) is the integral over (-1,1) of c
(1+x)**alfa*log((1+x)/2)*t(k-1,x), k = 1, ..., 25. c c rh - double precision c vector of dimension 25 c rh(k) is
the integral over (-1,1) of c (1-x)**beta*log((1-x)/2)*t(k-1,x), k = 1, ..., 25. c c integr - integer c input
parameter indicating the modified c moments to be computed c integr = 1 compute ri, rj c = 2 compute ri, rj, rg c =
3 compute ri, rj, rh c = 4 compute ri, rj, rg, rh c c***references (none) c***routines called (none) c***end
prologue dqmomo c
- Parameters:
ri - rj - rg - rh -
-
dqng
private void dqng()
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqng c***date
written 800101 (yymmdd) c***revision date 810101 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, smooth integrand, c non-adaptive, gauss-kronrod(patterson) c***author piessens,robert,appl. math. &
progr. div. - k.u.leuven c de doncker,elise,appl math & progr. div. - k.u.leuven c kahaner,david,nbs - modified
(2/82) c***purpose the routine calculates an approximation result to a c given definite integral i = integral of
f over (a,b), c hopefully satisfying following claim for accuracy c abs(i-result).le.max(epsabs,epsrel*abs(i)).
c***description c c non-adaptive integration c standard fortran subroutine c double precision version
Calculates an integral over (lower, upper), hopefully satisfying the abs(actual integral - result) <= max(epsabs,
epsresl * abs(actual integral)) Result is obtained by applying the 21-point gauss-kronrod rule (res21) obtained
by optimal addition of abscissae to the 10-point gauss rule (res10), or by applying the 43-point rule (res43)
obtained by optimal addition of abscissae to the 21-point gauss-kronrod rule, or by applying the 87-point rule
(res87) obtained by optimal addition of abscissae to the 43-point rule.
-
dqpsrt
private void dqpsrt(int limit,
int last,
int[] maxErr,
double[] ermax,
double[] elist,
int[] iord,
int[] nrmax)
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqpsrt c***refer
to dqage,dqagie,dqagpe,dqawse c***routines called (none) c***revision date 810101 (yymmdd) c***keywords
sequential sorting c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl.
math. & progr. div. - k.u.leuven c***purpose this routine maintains the descending ordering in the c list of the
local error estimated resulting from the c interval subdivision process. at each call two error c estimates are
inserted using the sequential search c method, top-down for the largest error estimate and c bottom-up for the
smallest error estimate. c***description c c ordering routine c standard fortran subroutine c double precision
version
This routine maintains the descending ordering in the list of the local error estimated resulting from the
interval subdivision process. At each call two error estimates are inserted using the sequential search method,
top-down for the largest error estimate and bottom-up for the smallest error estimate.
- Parameters:
limit - maximum number of error estimates the list can containlast - number of error estimates currently in the listmaxErr - maxErr points to the nrmax-th largest estimate currently in the listermax - nrmax-th largest error estimate ermax[0] = elist[maxErr[0]]elist - the error estimatesiord - Array of size last , the first k elements of which contain pointers to the error estimates, such that
elist[iord[0]],...,elist[iord[k-1]] form a decreasing sequence, with k = last if last <= (limit/2 +
2), and k = limit + 1 - last otherwisenrmax - maxErr[0] = iord[nrmax[0] - 1]
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Integration2EP.html��������������������������������������������������0000775�4231163�4231163�00000565127�14537076055�022723� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Integration2EP (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Integration2EP
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private DoubleDouble[] |
abserr |
Estimate of the absolute value of the error, which should equal or exceed abs(actual integral - result).
|
private DoubleDouble |
actualAnswer |
|
private DoubleDouble |
alfa |
parameter in the weight function, alfa.gt.(-1) if alfa.le.(-1), the routine will end with errorStatus = 6.
|
private DoubleDouble[] |
alist |
The left end points of the subintervals in the partition of the given integration range (lower, upper).
|
private DoubleDouble |
beta |
parameter in the weight function, beta.gt.(-1) if beta.le.(-1), the routine will end with ier[0] = 6.
|
private DoubleDouble[] |
blist |
The right end points of the subintervals in the partition of the given integration range (lower, upper).
|
private DoubleDouble |
bound |
finite bound of integration range used in dqagie (has no meaning if interval is doubly-infinite).
|
private DoubleDouble[] |
breakPoints |
Used in dqagpe This array must always be >= 2 in length.
|
private DoubleDouble |
c |
Parameter in the weight function, c !
|
private DoubleDouble[][] |
chebmo |
array of dimension (maxp1,25) containing the chebyshev moments
|
protected static int |
DQAGE |
Integral without singularities, discontinuities, or infinite bounds.
|
protected static int |
DQAGIE |
Integral over (bound, +infinity), (-infinity, bound), or (-infinity, +infinity).
|
protected static int |
DQAGPE |
Integral over (lower, upper) with user specified break points.
|
protected static int |
DQAGSE |
Integral over (lower, upper) which can handle end point singularities.
|
protected static int |
DQAWCE |
Cauchy principal value
|
protected static int |
DQAWFE |
Automatic integrator, special-purpose, fourier integrals
|
protected static int |
DQAWOE |
Automatic integrator, integrand with oscillatory cosine or sine factor
|
protected static int |
DQAWSE |
Adaptive integrator for integrands with algebraic or logarithmic singularities at endpoints.
|
protected static int |
DQK15 |
Gauss-Kronod quadrature rule
|
protected static int |
DQK21 |
Gauss-Kronod quadrature rule
|
protected static int |
DQK31 |
Gauss-Kronod quadrature rule
|
protected static int |
DQK41 |
Gauss-Kronod quadrature rule
|
protected static int |
DQK51 |
Gauss-Kronod quadrature rule
|
protected static int |
DQK61 |
Gauss-Kronod quadrature rule
|
protected static int |
DQNG |
Non-adaptive integration.
|
private DoubleDouble[] |
elist |
Estimates of the absolute errors on the subintervals.
|
private DoubleDouble |
epmach |
epmach = D1MACH(4) Machine epmach is the smallest positive epmach such that (1.0 + epmach) !
|
private DoubleDouble |
epsabs |
If epsabs <= 0.0 and epsrel < Math.max(50*relative machine accuracy, 5.0E-29), the routine will exit with an
error message.
|
private DoubleDouble |
epsrel |
DOCUMENT ME!
|
private DoubleDouble[] |
erlst |
In dqawfe vector of dimension at least limlst erlst[k] contains the error estimate corresponding wiht rstlst[k].
|
private DoubleDouble |
gamma |
|
private int |
icall |
if dqawoe is to be used only once, icall must be set to 1. assume that during this call, the c chebyshev moments
(for clenshaw-curtis integration c of degree 24) have been computed for intervals of c lenghts
(abs(b-a))*2**(-l), l=0,1,2,...momcom-1. c if icall.gt.1 this means that dqawoe has been c called twice or more
on intervals of the same c length abs(b-a). the chebyshev moments already c computed are then re-used in
subsequent calls. c if icall.lt.1, the routine will end with ier[0] = 6.
|
private int[] |
ier |
ier[0] = 0 for normal and reliable termination of the routine.
|
private int[] |
ierlst |
In dqawfe vector of dimension at least limlst ierlst[k] contains the error flag corresponding with rstlst[k].
|
private int |
inf |
In dqagie indicates the kind of integration range involved inf = 1 corresponds to (bound, +infinity) inf = -1
corresponds to (-infinity, bound) inf = 2 corresponds to (-infinity, +infinity).
|
private int |
integr |
With dqawoe: indicates which of the weight functions is to be used integr = 1 w(x) = cos(omega*x) integr = 2 w(x) =
sin(omega*x) if integr.ne.1 and integr.ne.2, the routine will end with ier[0] = 6.
|
private int[] |
iord |
The first k elements of iord are pointers to the error estimates over the subintervals, such that elist[iord[0]],
..., elist[iord[k-1]] form a decreasing sequence, with k = last if last <= (limit/2 + 2) , and k = limit + 1 -
last otheriwse.
|
private int |
key |
In dqage key selects the local integration rule A gauss-kronrod pair is used with 7 - 15 points if key < 2 10 -
21 points if key = 2 15 - 31 points if key = 3 20 - 41 points if key = 4 25 - 51 points if key = 5 30 - 61 points
if key > 5.
|
private int |
last |
The number of subintervals actually called in the subdivision process.
|
private int[] |
level |
level contains the subdivision levels of the subinterval, i.e., if (aa, bb) is a subinterval of (p1, p2) where p1
as well as p2 is a user-provided break point or integration limit, then (aa, bb) has level 1 if abs(bb - aa) =
abs(p2 - p1) * 2**(-1).
|
private int |
limit |
Gives an upper bound on the number of subintervals in the partition of lower, upper.
|
private int |
limlst |
In dqawfe limlst gives an upper bound on the number of cycles, limlst >= 1.
|
private DoubleDouble |
lower |
DOCUMENT ME!
|
private int |
lst |
In dqawfe number of subintervals needed for the integration.
|
private int |
maxp1 |
gives an upper bound on the number of chebyshev c moments which can be stored, i.e. for the c intervals of
lenghts abs(b-a)*2**(-l), c l=0,1, ..., maxp1-2, maxp1.ge.1. c if maxp1.lt.1, the routine will end with ier[0] =
6.
|
private int |
momcom |
indicating that the chebyshev moments c have been computed for intervals of lengths c (abs(b-a))*2**(-l),
l=0,1,2, ..., momcom-1, c momcom.lt.maxp1
|
private int[] |
ndin |
After the first integration over the intervals (pts[i], pts[i+1]), i = 0, 1, ..., npts2 - 2, the error estimates
over some of the intervals may have been increased artificially, in order to put their subdivision forward.
|
private int[] |
neval |
Number of integrand evaluations.
|
private int[] |
nnlog |
vector of dimension at least limit, containing the c subdivision levels of the subintervals, i.e. c iwork(i) = l
means that the subinterval c numbered i is of length abs(b-a)*2**(1-l)
|
private int |
npts |
npts = npts2 - 2.
|
private int |
npts2 |
npts2 = breakPoints.length.
|
private DoubleDouble |
oflow |
D1MACH(2) = 2**(emax)*(1 - 2**(-doubleDigits)) = 2**1024*(1 - 2**-53) D1MACH(2) = Double.MAX_VALUE.
|
private DoubleDouble |
omega |
parameter in the integrand weight function
|
private DoubleDouble[] |
pts |
Integration limits and the break points of the interval in ascending sequence.
|
private DoubleDouble[] |
resabs |
|
private DoubleDouble[] |
resasc |
|
private DoubleDouble[] |
result |
Approximation to the integral.
|
private DoubleDouble[] |
rlist |
The integral approximations of the subintervals.
|
private int |
routine |
DOCUMENT ME!
|
private DoubleDouble[] |
rslst |
In dqawfe vector of dimension at least limlst. rslst[k-1] contains the integral contribution over the interval
(a+(k-1)c, a+kc), where c = (2*int(abs(omega))+1)*pi/abs(omega), k = 1, 2, ..., lst.
|
private boolean |
selfTest |
|
private int |
testCase |
|
private DoubleDouble |
uflow |
For doubles uflow = 2**-1022, but a double has 53 bits of precision while a DoubleDouble has 106 bits of
precision, so uflow = 2**-(1022 - 53) = 2**-969
|
private DoubleDouble |
upper |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Integration2EP() |
Constructor for running self tests.
|
Integration2EP(DoubleDouble bound,
int routine,
int inf,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit) |
Constructor used with routine = DQAGIE.
|
Integration2EP(DoubleDouble lower,
int routine,
DoubleDouble omega,
int integr,
DoubleDouble epsabs,
int limlst,
int limit,
int maxp1) |
Constructor must be used with routine dqawfe
|
Integration2EP(DoubleDouble lower,
DoubleDouble upper,
int routine,
int key,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit) |
Constructor for Integration Used with routine = DQAGE.
|
Integration2EP(DoubleDouble lower,
DoubleDouble upper,
int routine,
DoubleDouble[] breakPoints,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit) |
Constructor for Integration Used with routine = DQAGPE.
|
Integration2EP(DoubleDouble lower,
DoubleDouble upper,
int routine,
DoubleDouble omega,
int integr,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit,
int icall,
int maxp1) |
Constructor must be used with routine dqawoe
|
Integration2EP(DoubleDouble lower,
DoubleDouble upper,
int routine,
DoubleDouble epsabs,
DoubleDouble epsrel) |
Constructor for Integration Used with routine = DQNG.
|
Integration2EP(DoubleDouble lower,
DoubleDouble upper,
int routine,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit) |
Constructor for Integration Used with routine = DQAGSE.
|
Integration2EP(DoubleDouble lower,
DoubleDouble upper,
int routine,
DoubleDouble alfa,
DoubleDouble beta,
int integr,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit) |
This constructor must be used with routine DQAWSE.
|
Integration2EP(DoubleDouble lower,
DoubleDouble upper,
DoubleDouble c,
int routine,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit) |
Constructor for Integration2 Used with routine = DQAWCE.
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
dgtsl(int n,
DoubleDouble[] c,
DoubleDouble[] d,
DoubleDouble[] e,
DoubleDouble[] b,
int[] info) |
This is a port of the FORTRAN routine whose header is given below: c c dgtsl given a general tridiagonal matrix
and a right hand c side will find the solution. c c on entry c c n integer c is the order of the tridiagonal
matrix. c c c double precision(n) c is the subdiagonal of the tridiagonal matrix. c c(2) through c(n) should
contain the subdiagonal. c on output c is destroyed. c c d double precision(n) c is the diagonal of the
tridiagonal matrix. c on output d is destroyed. c c e double precision(n) c is the superdiagonal of the
tridiagonal matrix. c e(1) through e(n-1) should contain the superdiagonal. c on output e is destroyed. c c b
double precision(n) c is the right hand side vector. c c on return c c b is the solution vector. c c info integer
c = 0 normal value. c = k if the k-th element of the diagonal becomes c exactly zero. the subroutine returns when
c this is detected. c c linpack. this version dated 08/14/78 . c jack dongarra, argonne national laboratory.
|
private void |
dqage() |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqage c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c integrand examinator, globally adaptive, c gauss-kronrod c***author
piessens,robert,appl. math.
|
void |
dqagie(DoubleDouble bound,
int inf,
DoubleDouble epsrel) |
This is a port of the orginal FORTRAN code whose header is given below: c***begin prologue dqagie c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1,h2a4a1 c***keywords automatic
integrator, infinite intervals, c general-purpose, transformation, extrapolation, c globally adaptive c***author
piessens,robert,appl. math & progr. div - k.u.leuven c de doncker,elise,appl. math & progr. div - k.u.leuven
c***purpose the routine calculates an approximation result to a given c integral i = integral of f over
(bound,+infinity) c or i = integral of f over (-infinity,bound) c or i = integral of f over
(-infinity,+infinity), c hopefully satisfying following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)) c***description c c integration over infinite intervals c standard
fortran subroutine
|
void |
dqagpe() |
dqagpe.
|
private void |
dqagse() |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqagse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c (end point) singularities, extrapolation, c globally adaptive c***author
piessens,robert,appl. math.
|
private void |
dqawce() |
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawce c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,j4 c***keywords automatic
integrator, special-purpose, c cauchy principal value, clenshaw-curtis method c***author piessens,robert,appl.
|
private void |
dqawfe() |
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawfe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1 c***keywords automatic
integrator, special-purpose, c fourier integrals, c integration between zeros with dqawoe, c convergence
acceleration with dqelg c***author piessens,robert,appl. math.
|
private void |
dqawoe(DoubleDouble a,
DoubleDouble b,
DoubleDouble epsabs,
DoubleDouble epsrel,
int icall,
DoubleDouble[] result,
DoubleDouble[] abserr,
int[] neval,
int[] ier) |
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawoe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c integrand with oscillatory cos or sin factor, c clenshaw-curtis method, (end
point) singularities, c extrapolation, globally adaptive c***author piessens,robert,appl. math.
|
private void |
dqawse() |
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c algebraico-logarithmic end point singularities, c clenshaw-curtis method
c***author piessens,robert,appl. math.
|
private void |
dqc25c(DoubleDouble a,
DoubleDouble b,
DoubleDouble c,
DoubleDouble[] result,
DoubleDouble[] abserr,
int[] krul,
int[] neval) |
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqc25c c***date
written 810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2,j4 c***keywords 25-point
clenshaw-curtis integration c***author piessens,robert,appl. math.
|
private void |
dqc25f(DoubleDouble a,
DoubleDouble b,
DoubleDouble omega,
int nrmom,
int ksave,
DoubleDouble[] result,
DoubleDouble[] abserr,
int[] neval,
DoubleDouble[] resabs,
DoubleDouble[] resasc) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25f c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords integration rules for
functions with cos or sin c factor, clenshaw-curtis, gauss-kronrod c***author piessens,robert,appl. math.
|
private void |
dqc25s(DoubleDouble bl,
DoubleDouble br,
DoubleDouble[] ri,
DoubleDouble[] rj,
DoubleDouble[] rg,
DoubleDouble[] rh,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resasc,
int[] nev) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25s c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords 25-point clenshaw-curtis
integration c***author piessens,robert,appl. math.
|
private void |
dqcheb(DoubleDouble[] x,
DoubleDouble[] fval,
DoubleDouble[] cheb12,
DoubleDouble[] cheb24) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqcheb c***refer to
dqc25c,dqc25f,dqc25s c***routines called (none) c***revision date 830518 (yymmdd) c***keywords chebyshev series
expansion, fast fourier transform c***author piessens,robert,appl. math.
|
private void |
dqelg(int[] n,
DoubleDouble[] epstab,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] res31a,
int[] nres) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqelg c***refer to
dqagie,dqagoe,dqagpe,dqagse c***routines called d1mach c***revision date 830518 (yymmdd) c***keywords epsilon
algorithm, convergence acceleration, c extrapolation c***author piessens,robert,appl. math.
|
private void |
dqk15(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc) |
The is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math.
|
private void |
dqk15i(DoubleDouble boun,
int inf,
DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15i c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a2,h2a4a2 c***keywords 15-point
transformed gauss-kronrod rules c***author piessens,robert,appl. math.
|
private void |
dqk15w(DoubleDouble p1,
DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc) |
This a a port of the original FORTRAN whose header is given below: c***begin prologue dqk15w c***date written
810101 (yymmdd) c***revision date 830518 (mmddyy) c***category no. h2a2a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math.
|
private void |
dqk21(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk21 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 21-point gauss-kronrod
rules c***author piessens,robert,appl. math.
|
private void |
dqk31(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc) |
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk31 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 31-point gauss-kronrod
rules c***author piessens,robert,appl. math.
|
private void |
dqk41(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc) |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk41 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 41-point
gauss-kronrod rules c***author piessens,robert,appl. math.
|
private void |
dqk51(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc) |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk51 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 51-point
gauss-kronrod rules c***author piessens,robert,appl. math.
|
private void |
dqk61(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc) |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk61 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 61-point
gauss-kronrod rules c***author piessens,robert,appl. math.
|
private void |
dqmomo(DoubleDouble[] ri,
DoubleDouble[] rj,
DoubleDouble[] rg,
DoubleDouble[] rh) |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqmomo c***date
written 820101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,c3a2 c***keywords modified
chebyshev moments c***author piessens,robert,appl. math.
|
private void |
dqng() |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqng c***date
written 800101 (yymmdd) c***revision date 810101 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, smooth integrand, c non-adaptive, gauss-kronrod(patterson) c***author piessens,robert,appl. math.
|
private void |
dqpsrt(int limit,
int last,
int[] maxErr,
DoubleDouble[] ermax,
DoubleDouble[] elist,
int[] iord,
int[] nrmax) |
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqpsrt c***refer
to dqage,dqagie,dqagpe,dqawse c***routines called (none) c***revision date 810101 (yymmdd) c***keywords
sequential sorting c***author piessens,robert,appl. math.
|
void |
driver() |
DOCUMENT ME!
|
DoubleDouble |
getAbserr() |
DOCUMENT ME!
|
int |
getErrorStatus() |
DOCUMENT ME!
|
DoubleDouble |
getIntegral() |
DOCUMENT ME!
|
int |
getNeval() |
DOCUMENT ME!
|
abstract DoubleDouble |
intFunc(DoubleDouble x) |
DOCUMENT ME!
|
private DoubleDouble |
intFuncTest(DoubleDouble x) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
DQAGIE
protected static final int DQAGIE
Integral over (bound, +infinity), (-infinity, bound), or (-infinity, +infinity).
- See Also:
- Constant Field Values
-
DQAGSE
protected static final int DQAGSE
Integral over (lower, upper) which can handle end point singularities.
- See Also:
- Constant Field Values
-
DQAGE
protected static final int DQAGE
Integral without singularities, discontinuities, or infinite bounds.
- See Also:
- Constant Field Values
-
DQAWOE
protected static final int DQAWOE
Automatic integrator, integrand with oscillatory cosine or sine factor
- See Also:
- Constant Field Values
-
DQAWFE
protected static final int DQAWFE
Automatic integrator, special-purpose, fourier integrals
- See Also:
- Constant Field Values
-
abserr
private final DoubleDouble[] abserr
Estimate of the absolute value of the error, which should equal or exceed abs(actual integral - result).
-
alfa
private DoubleDouble alfa
parameter in the weight function, alfa.gt.(-1) if alfa.le.(-1), the routine will end with errorStatus = 6.
-
alist
private DoubleDouble[] alist
The left end points of the subintervals in the partition of the given integration range (lower, upper).
-
beta
private DoubleDouble beta
parameter in the weight function, beta.gt.(-1) if beta.le.(-1), the routine will end with ier[0] = 6.
-
blist
private DoubleDouble[] blist
The right end points of the subintervals in the partition of the given integration range (lower, upper).
-
breakPoints
private DoubleDouble[] breakPoints
Used in dqagpe This array must always be >= 2 in length. The first breakPoints.length - 2 points are user
provided break points. If these points are not in an ascending sequence, they will automatically be sorted.
-
c
private DoubleDouble c
Parameter in the weight function, c != lower, c != upper. If c == a or c == b, the routine will end with ier[0] =
6
-
epmach
private DoubleDouble epmach
epmach = D1MACH(4) Machine epmach is the smallest positive epmach such that (1.0 + epmach) != 1.0. epmach = 2**(1 -
doubleDigits) = 2**(1 - 53) = 2**(-52) epmach = 2.224460e-16 epmach is called the largest relative spacing for
doubles For DoubleDouble useEPS = 1.23259516440783e-32= 2^-106
-
epsabs
private DoubleDouble epsabs
If epsabs <= 0.0 and epsrel < Math.max(50*relative machine accuracy, 5.0E-29), the routine will exit with an
error message.
-
icall
private int icall
if dqawoe is to be used only once, icall must be set to 1. assume that during this call, the c chebyshev moments
(for clenshaw-curtis integration c of degree 24) have been computed for intervals of c lenghts
(abs(b-a))*2**(-l), l=0,1,2,...momcom-1. c if icall.gt.1 this means that dqawoe has been c called twice or more
on intervals of the same c length abs(b-a). the chebyshev moments already c computed are then re-used in
subsequent calls. c if icall.lt.1, the routine will end with ier[0] = 6.
-
ier
private final int[] ier
ier[0] = 0 for normal and reliable termination of the routine. It is assumed that the requested accuracy has been
achieved. errorStatus > 0 for abnormal termination of the routine. The estimates for the integral and error are
less reliable. It is assumed that the requested accuracy has not been achieved.
ier[0] = 1 maximum number of subdivisions allowed has been achieved. One can allow more subdivisions by
increasing the value of limit (and taking the according dimension adjustments into account). However, if this
yields no improvement, it is advised to analyze the integrand in order to determine the integration difficulties.
If the position of a local difficulty can be determined( i.e. singularity, discontinuity within the interval), it
should be supplied to the routine as an element of the breakPoints array. If necessary, an appropriate special
purpose integrator must be used, which is designed for handling the type of difficulty involved.
ier[0] = 2 The occurrence of roundoff error is detected, which prevents the requested tolerance from being
achieved. The error may be under-estimated.
ier[0] = 3 Extremely bad integrand behavior occurs at some points of the integration interval.
ier[0 = 4 The algorithm does not converge. Roundoff error is detected in the extrapolation table. It is presumed
that the requested tolerance cannot be achieved, and that the returned result is the best that can be obtained.
ier[0] = 5 The integral is probably divergent, or slowly convergent. It must be noted that divergence can occur
with any other value of errorStatus > 0.
ier[0] = 6 The input is invalid because (epsabs <= 0 and epsrel < max(50.0 * relative machine accuracy, 5.0E-29)
or in the case of dqagpe can also happen because npts2 < 2, the breakPoints are specified outside the integration
range, or , or limit <= npts.
-
inf
private int inf
In dqagie indicates the kind of integration range involved inf = 1 corresponds to (bound, +infinity) inf = -1
corresponds to (-infinity, bound) inf = 2 corresponds to (-infinity, +infinity).
-
integr
private int integr
With dqawoe: indicates which of the weight functions is to be used integr = 1 w(x) = cos(omega*x) integr = 2 w(x) =
sin(omega*x) if integr.ne.1 and integr.ne.2, the routine will end with ier[0] = 6. With dqawse: indicates which
weight function is to be used = 1 (x-lower)**alfa*(upper-x)**beta = 2
(x-lower)**alfa*(upper-x)**beta*log(x-lower) = 3 (x-lower)**alfa*(upper-x)**beta*log(upper-x) = 4
(x-lower)**alfa*(upper-x)**beta*log(x-lower)*log(upper-x) if integr.lt.1 or integr.gt.4, the routine will end
with ier[0] = 6.
-
iord
private int[] iord
The first k elements of iord are pointers to the error estimates over the subintervals, such that elist[iord[0]],
..., elist[iord[k-1]] form a decreasing sequence, with k = last if last <= (limit/2 + 2) , and k = limit + 1 -
last otheriwse.
-
level
private int[] level
level contains the subdivision levels of the subinterval, i.e., if (aa, bb) is a subinterval of (p1, p2) where p1
as well as p2 is a user-provided break point or integration limit, then (aa, bb) has level 1 if abs(bb - aa) =
abs(p2 - p1) * 2**(-1).
-
limit
private int limit
Gives an upper bound on the number of subintervals in the partition of lower, upper. In dqagpe limit must be >=
npts2. If limit < npts2 in dqagpe, the routine exits with an error message. In dqawse limit must be >= 2. If
limit < 2 in dqawse, the routine exits with ier[0] = 6.
-
maxp1
private int maxp1
gives an upper bound on the number of chebyshev c moments which can be stored, i.e. for the c intervals of
lenghts abs(b-a)*2**(-l), c l=0,1, ..., maxp1-2, maxp1.ge.1. c if maxp1.lt.1, the routine will end with ier[0] =
6.
-
momcom
private int momcom
indicating that the chebyshev moments c have been computed for intervals of lengths c (abs(b-a))*2**(-l),
l=0,1,2, ..., momcom-1, c momcom.lt.maxp1
-
ndin
private int[] ndin
After the first integration over the intervals (pts[i], pts[i+1]), i = 0, 1, ..., npts2 - 2, the error estimates
over some of the intervals may have been increased artificially, in order to put their subdivision forward. If
this happens for the subinterval numbered k, ndin[k] is put to 1, otherwise ndin[k] = 0.
-
npts
private int npts
npts = npts2 - 2.
-
routine
private int routine
DOCUMENT ME!
-
rslst
private DoubleDouble[] rslst
In dqawfe vector of dimension at least limlst. rslst[k-1] contains the integral contribution over the interval
(a+(k-1)c, a+kc), where c = (2*int(abs(omega))+1)*pi/abs(omega), k = 1, 2, ..., lst. Note that if omega = 0,
rslst[0] contains the value of the integral over (a, infinity).
-
uflow
private final DoubleDouble uflow
For doubles uflow = 2**-1022, but a double has 53 bits of precision while a DoubleDouble has 106 bits of
precision, so uflow = 2**-(1022 - 53) = 2**-969
-
selfTest
private boolean selfTest
-
testCase
private int testCase
-
Constructor Detail
-
Integration2EP
public Integration2EP(DoubleDouble lower,
DoubleDouble upper,
int routine,
DoubleDouble epsabs,
DoubleDouble epsrel)
Constructor for Integration Used with routine = DQNG.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!
-
Integration2EP
public Integration2EP(DoubleDouble bound,
int routine,
int inf,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit)
Constructor used with routine = DQAGIE.
- Parameters:
bound - doubleroutine - intinf - intepsabs - doubleepsrel - doublelimit - int
-
Integration2EP
public Integration2EP(DoubleDouble lower,
DoubleDouble upper,
int routine,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit)
Constructor for Integration Used with routine = DQAGSE.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
-
Integration2EP
public Integration2EP(DoubleDouble lower,
DoubleDouble upper,
DoubleDouble c,
int routine,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit)
Constructor for Integration2 Used with routine = DQAWCE.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!c - routine - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
-
Integration2EP
public Integration2EP(DoubleDouble lower,
int routine,
DoubleDouble omega,
int integr,
DoubleDouble epsabs,
int limlst,
int limit,
int maxp1)
Constructor must be used with routine dqawfe
- Parameters:
lower - routine - omega - integr - epsabs - limlst - limit - maxp1 -
-
Integration2EP
public Integration2EP(DoubleDouble lower,
DoubleDouble upper,
int routine,
DoubleDouble omega,
int integr,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit,
int icall,
int maxp1)
Constructor must be used with routine dqawoe
- Parameters:
lower - upper - routine - omega - integr - epsabs - epsrel - limit - icall - maxp1 -
-
Integration2EP
public Integration2EP(DoubleDouble lower,
DoubleDouble upper,
int routine,
DoubleDouble[] breakPoints,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit)
Constructor for Integration Used with routine = DQAGPE.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!breakPoints - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
-
Integration2EP
public Integration2EP(DoubleDouble lower,
DoubleDouble upper,
int routine,
int key,
DoubleDouble epsabs,
DoubleDouble epsrel,
int limit)
Constructor for Integration Used with routine = DQAGE.
- Parameters:
lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!key - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
-
Method Detail
-
dgtsl
private void dgtsl(int n,
DoubleDouble[] c,
DoubleDouble[] d,
DoubleDouble[] e,
DoubleDouble[] b,
int[] info)
This is a port of the FORTRAN routine whose header is given below: c c dgtsl given a general tridiagonal matrix
and a right hand c side will find the solution. c c on entry c c n integer c is the order of the tridiagonal
matrix. c c c double precision(n) c is the subdiagonal of the tridiagonal matrix. c c(2) through c(n) should
contain the subdiagonal. c on output c is destroyed. c c d double precision(n) c is the diagonal of the
tridiagonal matrix. c on output d is destroyed. c c e double precision(n) c is the superdiagonal of the
tridiagonal matrix. c e(1) through e(n-1) should contain the superdiagonal. c on output e is destroyed. c c b
double precision(n) c is the right hand side vector. c c on return c c b is the solution vector. c c info integer
c = 0 normal value. c = k if the k-th element of the diagonal becomes c exactly zero. the subroutine returns when
c this is detected. c c linpack. this version dated 08/14/78 . c jack dongarra, argonne national laboratory.
- Parameters:
n - c - d - e - b -
-
dqagie
public void dqagie(DoubleDouble bound,
int inf,
DoubleDouble epsrel)
This is a port of the orginal FORTRAN code whose header is given below: c***begin prologue dqagie c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1,h2a4a1 c***keywords automatic
integrator, infinite intervals, c general-purpose, transformation, extrapolation, c globally adaptive c***author
piessens,robert,appl. math & progr. div - k.u.leuven c de doncker,elise,appl. math & progr. div - k.u.leuven
c***purpose the routine calculates an approximation result to a given c integral i = integral of f over
(bound,+infinity) c or i = integral of f over (-infinity,bound) c or i = integral of f over
(-infinity,+infinity), c hopefully satisfying following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)) c***description c c integration over infinite intervals c standard
fortran subroutine
-
dqagpe
public void dqagpe()
dqagpe. This is a port of the original FORTRAN code whose header is given below: c***begin prologue dqagie
c***date written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1,h2a4a1 c***keywords
automatic integrator, infinite intervals, c general-purpose, transformation, extrapolation, c globally adaptive
c***author piessens,robert,appl. math & progr. div - k.u.leuven c de doncker,elise,appl. math & progr. div -
k.u.leuven c***purpose the routine calculates an approximation result to a given c integral i = integral of f
over (bound,+infinity) c or i = integral of f over (-infinity,bound) c or i = integral of f over
(-infinity,+infinity), c hopefully satisfying following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)) c***description c c integration over infinite intervals c standard
fortran subroutine
-
driver
public void driver()
DOCUMENT ME!
-
getNeval
public int getNeval()
DOCUMENT ME!
- Returns:
- neval[0
-
dqage
private void dqage()
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqage c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c integrand examinator, globally adaptive, c gauss-kronrod c***author
piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr. div. - k.u.leuven
c***purpose the routine calculates an approximation result to a given c definite integral i = integral of f over
(a,b), c hopefully satisfying following claim for accuracy c abs(i-reslt).le.max(epsabs,epsrel*abs(i)).
c***description c c computation of a definite integral c standard fortran subroutine c DoubleDouble precision
version
Calculates an integral over (lower, upper), hopefully satisfying the abs(actual integral - result) <= max(epsabs,
epsresl * abs(actual integral)).
-
dqagse
private void dqagse()
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqagse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c (end point) singularities, extrapolation, c globally adaptive c***author
piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr. div. - k.u.leuven
c***purpose the routine calculates an approximation result to a given c definite integral i = integral of f over
(a,b), c hopefully satisfying following claim for accuracy c abs(i-result).le.max(epsabs,epsrel*abs(i)).
c***description c c computation of a definite integral c standard fortran subroutine c DoubleDouble precision
version
This routine calculates the integral of intFunc over (lower, upper) and can handle end-point singularities at
lower and upper. It tries to satisfy the claim for accuracy abs(actual integral - result) <= max(epsabs, esprel *
abs(actual integral))
-
dqawce
private void dqawce()
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawce c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,j4 c***keywords automatic
integrator, special-purpose, c cauchy principal value, clenshaw-curtis method c***author piessens,robert,appl.
math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr. div. - k.u.leuven c*** purpose the
routine calculates an approximation result to a c cauchy principal value i = integral of f*w over (a,b) c (w(x) =
1/(x-c), (c.ne.a, c.ne.b), hopefully satisfying c following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)) c***description c c computation of a cauchy principal value c standard
fortran subroutine c double precision version
-
dqawfe
private void dqawfe()
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawfe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1 c***keywords automatic
integrator, special-purpose, c fourier integrals, c integration between zeros with dqawoe, c convergence
acceleration with dqelg c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c dedoncker,elise,appl.
math. & progr. div. - k.u.leuven c***purpose the routine calculates an approximation result to a c given fourier
integal c i = integral of f(x)*w(x) over (a,infinity) c where w(x)=cos(omega*x) or w(x)=sin(omega*x), c hopefully
satisfying following claim for accuracy c abs(i-result).le.epsabs. c***description c c computation of fourier
integrals c standard fortran subroutine c DoubleDouble precision version c c parameters c on entry c f -
DoubleDouble precision c function subprogram defining the integrand c function f(x). the actual name for f needs
to c be declared e x t e r n a l in the driver program. c c a - DoubleDouble precision c lower limit of
integration c c omega - DoubleDouble precision c parameter in the weight function c c integr - integer c
indicates which weight function is used c integr = 1 w(x) = cos(omega*x) c integr = 2 w(x) = sin(omega*x) c if
integr.ne.1.and.integr.ne.2, the routine will c end with ier = 6. c c epsabs - DoubleDouble precision c absolute
accuracy requested, epsabs.gt.0 c if epsabs.le.0, the routine will end with ier = 6. c c limlst - integer c
limlst gives an upper bound on the number of c cycles, limlst.ge.1. c if limlst.lt.3, the routine will end with
ier = 6. c c limit - integer c gives an upper bound on the number of subintervals c allowed in the partition of
each cycle, limit.ge.1 c each cycle, limit.ge.1. c c maxp1 - integer c gives an upper bound on the number of c
chebyshev moments which can be stored, i.e. c for the intervals of lengths abs(b-a)*2**(-l), c l=0,1, ...,
maxp1-2, maxp1.ge.1 c c on return c result - DoubleDouble precision c approximation to the integral x c c abserr -
DoubleDouble precision c estimate of the modulus of the absolute error, c which should equal or exceed
abs(i-result) c c neval - integer c number of integrand evaluations c c ier - ier = 0 normal and reliable
termination of c the routine. it is assumed that the c requested accuracy has been achieved. c ier.gt.0 abnormal
termination of the routine. the c estimates for integral and error are less c reliable. it is assumed that the
requested c accuracy has not been achieved. c error messages c if omega.ne.0 c ier = 1 maximum number of cycles
allowed c has been achieved., i.e. of subintervals c (a+(k-1)c,a+kc) where c c =
(2*int(abs(omega))+1)*pi/abs(omega), c for k = 1, 2, ..., lst. c one can allow more cycles by increasing c the
value of limlst (and taking the c according dimension adjustments into c account). c examine the array iwork
which contains c the error flags on the cycles, in order to c look for eventual local integration c difficulties.
if the position of a local c difficulty can be determined (e.g. c singularity, discontinuity within the c
interval) one will probably gain from c splitting up the interval at this point c and calling appropriate
integrators on c the subranges. c = 4 the extrapolation table constructed for c convergence acceleration of the
series c formed by the integral contributions over c the cycles, does not converge to within c the requested
accuracy. as in the case of c ier = 1, it is advised to examine the c array iwork which contains the error c
flags on the cycles. c = 6 the input is invalid because c (integr.ne.1 and integr.ne.2) or c epsabs.le.0 or
limlst.lt.3. c result, abserr, neval, lst are set c to zero. c = 7 bad integrand behaviour occurs within one c or
more of the cycles. location and type c of the difficulty involved can be c determined from the vector ierlst.
here c lst is the number of cycles actually c needed (see below). c ierlst(k) = 1 the maximum number of c
subdivisions (= limit) has c been achieved on the k th c cycle. c = 2 occurrence of roundoff error c is detected
and prevents the c tolerance imposed on the c k th cycle, from being c achieved. c = 3 extremely bad integrand c
behaviour occurs at some c points of the k th cycle. c = 4 the integration procedure c over the k th cycle does c
not converge (to within the c required accuracy) due to c roundoff in the c extrapolation procedure c invoked on
this cycle. it c is assumed that the result c on this interval is the c best which can be obtained. c = 5 the
integral over the k th c cycle is probably divergent c or slowly convergent. it c must be noted that c divergence
can occur with c any other value of c ierlst(k). c if omega = 0 and integr = 1, c the integral is calculated by
means of dqagie c and ier = ierlst(1) (with meaning as described c for ierlst(k), k = 1). c c rslst -
DoubleDouble precision c vector of dimension at least limlst c rslst(k) contains the integral contribution c over
the interval (a+(k-1)c,a+kc) where c c = (2*int(abs(omega))+1)*pi/abs(omega), c k = 1, 2, ..., lst. c note that,
if omega = 0, rslst(1) contains c the value of the integral over (a,infinity). c c erlst - DoubleDouble precision
c vector of dimension at least limlst c erlst(k) contains the error estimate corresponding c with rslst(k). c c
ierlst - integer c vector of dimension at least limlst c ierlst(k) contains the error flag corresponding c with
rslst(k). for the meaning of the local error c flags see description of output parameter ier. c c lst - integer c
number of subintervals needed for the integration c if omega = 0 then lst is set to 1. c c alist, blist, rlist,
elist - DoubleDouble precision c vector of dimension at least limit, c c iord, nnlog - integer c vector of
dimension at least limit, providing c space for the quantities needed in the subdivision c process of each cycle
c c chebmo - DoubleDouble precision c array of dimension at least (maxp1,25), providing c space for the chebyshev
moments needed within the c cycles c c***references (none) c***routines called d1mach,dqagie,dqawoe,dqelg c***end
prologue dqawfe c
-
dqawoe
private void dqawoe(DoubleDouble a,
DoubleDouble b,
DoubleDouble epsabs,
DoubleDouble epsrel,
int icall,
DoubleDouble[] result,
DoubleDouble[] abserr,
int[] neval,
int[] ier)
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawoe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c integrand with oscillatory cos or sin factor, c clenshaw-curtis method, (end
point) singularities, c extrapolation, globally adaptive c***author piessens,robert,appl. math. & progr. div. -
k.u.leuven c de doncker,elise,appl. math. & progr. div. - k.u.leuven c***purpose the routine calculates an
approximation result to a given c definite integral c i = integral of f(x)*w(x) over (a,b) c where w(x) =
cos(omega*x) or w(x)=sin(omega*x), c hopefully satisfying following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)). c***description c c computation of oscillatory integrals c standard
fortran subroutine c double precision version c c parameters c on entry c f - DoubleDouble precision c function
subprogram defining the integrand c function f(x). the actual name for f needs to be c declared e x t e r n a l
in the driver program. c c a - DoubleDouble precision c lower limit of integration c c b - DoubleDouble precision
c upper limit of integration c c omega - DoubleDouble precision c parameter in the integrand weight function c c
integr - integer c indicates which of the weight functions is to be c used c integr = 1 w(x) = cos(omega*x) c
integr = 2 w(x) = sin(omega*x) c if integr.ne.1 and integr.ne.2, the routine c will end with ier = 6. c c epsabs -
DoubleDouble precision c absolute accuracy requested c epsrel - DoubleDouble precision c relative accuracy
requested c if epsabs.le.0 c and epsrel.lt.max(50*rel.mach.acc.,0.5d-28), c the routine will end with ier = 6. c
c limit - integer c gives an upper bound on the number of subdivisions c in the partition of (a,b), limit.ge.1. c
c icall - integer c if dqawoe is to be used only once, icall must c be set to 1. assume that during this call,
the c chebyshev moments (for clenshaw-curtis integration c of degree 24) have been computed for intervals of c
lenghts (abs(b-a))*2**(-l), l=0,1,2,...momcom-1. c if icall.gt.1 this means that dqawoe has been c called twice
or more on intervals of the same c length abs(b-a). the chebyshev moments already c computed are then re-used in
subsequent calls. c if icall.lt.1, the routine will end with ier = 6. c c maxp1 - integer c gives an upper bound
on the number of chebyshev c moments which can be stored, i.e. for the c intervals of lenghts abs(b-a)*2**(-l), c
l=0,1, ..., maxp1-2, maxp1.ge.1. c if maxp1.lt.1, the routine will end with ier = 6. c c on return c result -
DoubleDouble precision c approximation to the integral c c abserr - DoubleDouble precision c estimate of the
modulus of the absolute error, c which should equal or exceed abs(i-result) c c neval - integer c number of
integrand evaluations c c ier - integer c ier = 0 normal and reliable termination of the c routine. it is assumed
that the c requested accuracy has been achieved. c - ier.gt.0 abnormal termination of the routine. c the
estimates for integral and error are c less reliable. it is assumed that the c requested accuracy has not been
achieved. c error messages c ier = 1 maximum number of subdivisions allowed c has been achieved. one can allow
more c subdivisions by increasing the value of c limit (and taking according dimension c adjustments into
account). however, if c this yields no improvement it is advised c to analyze the integrand, in order to c
determine the integration difficulties. c if the position of a local difficulty can c be determined (e.g.
singularity, c discontinuity within the interval) one c will probably gain from splitting up the c interval at
this point and calling the c integrator on the subranges. if possible, c an appropriate special-purpose
integrator c should be used which is designed for c handling the type of difficulty involved. c = 2 the
occurrence of roundoff error is c detected, which prevents the requested c tolerance from being achieved. c the
error may be under-estimated. c = 3 extremely bad integrand behaviour occurs c at some points of the integration
c interval. c = 4 the algorithm does not converge. c roundoff error is detected in the c extrapolation table. c
it is presumed that the requested c tolerance cannot be achieved due to c roundoff in the extrapolation table, c
and that the returned result is the c best which can be obtained. c = 5 the integral is probably divergent, or c
slowly convergent. it must be noted that c divergence can occur with any other value c of ier.gt.0. c = 6 the
input is invalid, because c (epsabs.le.0 and c epsrel.lt.max(50*rel.mach.acc.,0.5d-28)) c or (integr.ne.1 and
integr.ne.2) or c icall.lt.1 or maxp1.lt.1. c result, abserr, neval, last, rlist(1), c elist(1), iord(1) and
nnlog(1) are set c to zero. alist(1) and blist(1) are set c to a and b respectively. c c last - integer c on
return, last equals the number of c subintervals produces in the subdivision c process, which determines the
number of c significant elements actually in the c work arrays. c alist - DoubleDouble precision c vector of
dimension at least limit, the first c last elements of which are the left c end points of the subintervals in the
partition c of the given integration range (a,b) c c blist - DoubleDouble precision c vector of dimension at
least limit, the first c last elements of which are the right c end points of the subintervals in the partition c
of the given integration range (a,b) c c rlist - DoubleDouble precision c vector of dimension at least limit, the
first c last elements of which are the integral c approximations on the subintervals c c elist - DoubleDouble
precision c vector of dimension at least limit, the first c last elements of which are the moduli of the c
absolute error estimates on the subintervals c c iord - integer c vector of dimension at least limit, the first k
c elements of which are pointers to the error c estimates over the subintervals, c such that elist(iord(1)), ...,
c elist(iord(k)) form a decreasing sequence, with c k = last if last.le.(limit/2+2), and c k = limit+1-last
otherwise. c c nnlog - integer c vector of dimension at least limit, containing the c subdivision levels of the
subintervals, i.e. c iwork(i) = l means that the subinterval c numbered i is of length abs(b-a)*2**(1-l) c c on
entry and return c momcom - integer c indicating that the chebyshev moments c have been computed for intervals of
lengths c (abs(b-a))*2**(-l), l=0,1,2, ..., momcom-1, c momcom.lt.maxp1 c c chebmo - DoubleDouble precision c
array of dimension (maxp1,25) containing the c chebyshev moments c c***references (none) c***routines called
d1mach,dqc25f,dqelg,dqpsrt c***end prologue dqawoe c
-
dqawse
private void dqawse()
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c algebraico-logarithmic end point singularities, c clenshaw-curtis method
c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr. div. -
k.u.leuven c***purpose the routine calculates an approximation result to a given c definite integral i = integral
of f*w over (a,b), c (where w shows a singular behaviour at the end points, c see parameter integr). c hopefully
satisfying following claim for accuracy c abs(i-result).le.max(epsabs,epsrel*abs(i)). c***description c c
integration of functions having algebraico-logarithmic c end point singularities c standard fortran subroutine c
DoubleDouble precision version c c parameters c on entry c f - DoubleDouble precision c function subprogram
defining the integrand c function f(x). the actual name for f needs to be c declared e x t e r n a l in the
driver program. c c a - DoubleDouble precision c lower limit of integration c c b - DoubleDouble precision c
upper limit of integration, b.gt.a c if b.le.a, the routine will end with ier = 6. c c alfa - DoubleDouble
precision c parameter in the weight function, alfa.gt.(-1) c if alfa.le.(-1), the routine will end with c ier =
6. c c beta - DoubleDouble precision c parameter in the weight function, beta.gt.(-1) c if beta.le.(-1), the
routine will end with c ier = 6. c c integr - integer c indicates which weight function is to be used c = 1
(x-a)**alfa*(b-x)**beta c = 2 (x-a)**alfa*(b-x)**beta*log(x-a) c = 3 (x-a)**alfa*(b-x)**beta*log(b-x) c = 4
(x-a)**alfa*(b-x)**beta*log(x-a)*log(b-x) c if integr.lt.1 or integr.gt.4, the routine c will end with ier = 6. c
c epsabs - DoubleDouble precision c absolute accuracy requested c epsrel - DoubleDouble precision c relative
accuracy requested c if epsabs.le.0 c and epsrel.lt.max(50*rel.mach.acc.,0.5d-28), c the routine will end with
ier = 6. c c limit - integer c gives an upper bound on the number of subintervals c in the partition of (a,b),
limit.ge.2 c if limit.lt.2, the routine will end with ier = 6. c c on return c result - DoubleDouble precision c
approximation to the integral c c abserr - DoubleDouble precision c estimate of the modulus of the absolute
error, c which should equal or exceed abs(i-result) c c neval - integer c number of integrand evaluations c c ier -
integer c ier = 0 normal and reliable termination of the c routine. it is assumed that the requested c accuracy
has been achieved. c ier.gt.0 abnormal termination of the routine c the estimates for the integral and error c
are less reliable. it is assumed that the c requested accuracy has not been achieved. c error messages c = 1
maximum number of subdivisions allowed c has been achieved. one can allow more c subdivisions by increasing the
value of c limit. however, if this yields no c improvement, it is advised to analyze the c integrand in order to
determine the c integration difficulties which prevent the c requested tolerance from being achieved. c in case
of a jump discontinuity or a local c singularity of algebraico-logarithmic type c at one or more interior points
of the c integration range, one should proceed by c splitting up the interval at these c points and calling the
integrator on the c subranges. c = 2 the occurrence of roundoff error is c detected, which prevents the requested
c tolerance from being achieved. c = 3 extremely bad integrand behaviour occurs c at some points of the
integration c interval. c = 6 the input is invalid, because c b.le.a or alfa.le.(-1) or beta.le.(-1), or c
integr.lt.1 or integr.gt.4, or c (epsabs.le.0 and c epsrel.lt.max(50*rel.mach.acc.,0.5d-28), c or limit.lt.2. c
result, abserr, neval, rlist(1), elist(1), c iord(1) and last are set to zero. alist(1) c and blist(1) are set to
a and b c respectively. c c alist - DoubleDouble precision c vector of dimension at least limit, the first c last
elements of which are the left c end points of the subintervals in the partition c of the given integration range
(a,b) c c blist - DoubleDouble precision c vector of dimension at least limit, the first c last elements of which
are the right c end points of the subintervals in the partition c of the given integration range (a,b) c c rlist -
DoubleDouble precision c vector of dimension at least limit,the first c last elements of which are the integral c
approximations on the subintervals c c elist - DoubleDouble precision c vector of dimension at least limit, the
first c last elements of which are the moduli of the c absolute error estimates on the subintervals c c iord -
integer c vector of dimension at least limit, the first k c of which are pointers to the error c estimates over
the subintervals, so that c elist(iord(1)), ..., elist(iord(k)) with k = last c if last.le.(limit/2+2), and k =
limit+1-last c otherwise form a decreasing sequence c c last - integer c number of subintervals actually produced
in c the subdivision process c c***references (none) c***routines called d1mach,dqc25s,dqmomo,dqpsrt c***end
prologue dqawse c
-
dqc25c
private void dqc25c(DoubleDouble a,
DoubleDouble b,
DoubleDouble c,
DoubleDouble[] result,
DoubleDouble[] abserr,
int[] krul,
int[] neval)
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqc25c c***date
written 810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2,j4 c***keywords 25-point
clenshaw-curtis integration c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de
doncker,elise,appl. math. & progr. div. - k.u.leuven c***purpose to compute i = integral of f*w over (a,b) with c
error estimate, where w(x) = 1/(x-c) c***description c c integration rules for the computation of cauchy c
principal value integrals c standard fortran subroutine c DoubleDouble precision version c c c a - DoubleDouble
precision c left end point of the integration interval c c b - DoubleDouble precision c right end point of the
integration interval, b.gt.a c c c - DoubleDouble precision c parameter in the weight function c c result -
DoubleDouble precision c approximation to the integral c result is computed by using a generalized c
clenshaw-curtis method if c lies within ten percent c of the integration interval. in the other case the c
15-point kronrod rule obtained by optimal addition c of abscissae to the 7-point gauss rule, is applied. c c
abserr - DoubleDouble precision c estimate of the modulus of the absolute error, c which should equal or exceed
abs(i-result) c c krul - integer c key which is decreased by 1 if the 15-point c gauss-kronrod scheme has been
used c c neval - integer c number of integrand evaluations c
c....................................................................... c***references (none) c***routines
called dqcheb,dqk15w,dqwgtc c***end prologue dqc25c c
- Parameters:
a - b - c - result - abserr - krul - neval -
-
dqc25f
private void dqc25f(DoubleDouble a,
DoubleDouble b,
DoubleDouble omega,
int nrmom,
int ksave,
DoubleDouble[] result,
DoubleDouble[] abserr,
int[] neval,
DoubleDouble[] resabs,
DoubleDouble[] resasc)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25f c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords integration rules for
functions with cos or sin c factor, clenshaw-curtis, gauss-kronrod c***author piessens,robert,appl. math. &
progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr. div. - k.u.leuven c***purpose to compute the
integral i=integral of f(x) over (a,b) c where w(x) = cos(omega*x) or w(x)=sin(omega*x) and to c compute j =
integral of abs(f) over (a,b). for small value c of omega or small intervals (a,b) the 15-point gauss-kronro c
rule is used. otherwise a generalized clenshaw-curtis c method is used. c***description c c integration rules for
functions with cos or sin factor c standard fortran subroutine c double precision version c c parameters c on
entry c f - double precision c function subprogram defining the integrand c function f(x). the actual name for f
needs to c be declared e x t e r n a l in the calling program. c c a - double precision c lower limit of
integration c c b - double precision c upper limit of integration c c omega - double precision c parameter in the
weight function c c integr - integer c indicates which weight function is to be used c integr = 1 w(x) =
cos(omega*x) c integr = 2 w(x) = sin(omega*x) c c nrmom - integer c the length of interval (a,b) is equal to the
length c of the original integration interval divided by c 2**nrmom (we suppose that the routine is used in an c
adaptive integration process, otherwise set c nrmom = 0). nrmom must be zero at the first call. c c maxp1 -
integer c gives an upper bound on the number of chebyshev c moments which can be stored, i.e. for the c intervals
of lengths abs(bb-aa)*2**(-l), c l = 0,1,2, ..., maxp1-2. c c ksave - integer c key which is one when the moments
for the c current interval have been computed c c on return c result - double precision c approximation to the
integral i c c abserr - double precision c estimate of the modulus of the absolute c error, which should equal or
exceed abs(i-result) c c neval - integer c number of integrand evaluations c c resabs - double precision c
approximation to the integral j c c resasc - double precision c approximation to the integral of abs(f-i/(b-a)) c
c on entry and return c momcom - integer c for each interval length we need to compute the c chebyshev moments.
momcom counts the number of c intervals for which these moments have already been c computed. if nrmom.lt.momcom
or ksave = 1, the c chebyshev moments for the interval (a,b) have c already been computed and stored, otherwise
we c compute them and we increase momcom. c c chebmo - double precision c array of dimension at least (maxp1,25)
containing c the modified chebyshev moments for the first momcom c momcom interval lengths c c
...................................................................... c***references (none) c***routines called
d1mach,dgtsl,dqcheb,dqk15w,dqwgtf c***end prologue dqc25f c
- Parameters:
a - b - omega - nrmom - ksave - result - abserr - neval - resabs - resasc -
-
dqc25s
private void dqc25s(DoubleDouble bl,
DoubleDouble br,
DoubleDouble[] ri,
DoubleDouble[] rj,
DoubleDouble[] rg,
DoubleDouble[] rh,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resasc,
int[] nev)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25s c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords 25-point clenshaw-curtis
integration c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. &
progr. div. - k.u.leuven c***purpose to compute i = integral of f*w over (bl,br), with error c estimate, where
the weight function w has a singular c behaviour of algebraico-logarithmic type at the points c a and/or b.
(bl,br) is a part of (a,b). c***description c c integration rules for integrands having algebraico-logarithmic c
end point singularities c standard fortran subroutine c DoubleDouble precision version c c parameters c f -
DoubleDouble precision c function subprogram defining the integrand c f(x). the actual name for f needs to be
declared c e x t e r n a l in the driver program. c c a - DoubleDouble precision c left end point of the original
interval c c b - DoubleDouble precision c right end point of the original interval, b.gt.a c c bl - DoubleDouble
precision c lower limit of integration, bl.ge.a c c br - DoubleDouble precision c upper limit of integration,
br.le.b c c alfa - DoubleDouble precision c parameter in the weight function c c beta - DoubleDouble precision c
parameter in the weight function c c ri,rj,rg,rh - DoubleDouble precision c modified chebyshev moments for the
application c of the generalized clenshaw-curtis c method (computed in subroutine dqmomo) c c result -
DoubleDouble precision c approximation to the integral c result is computed by using a generalized c
clenshaw-curtis method if b1 = a or br = b. c in all other cases the 15-point kronrod c rule is applied, obtained
by optimal addition of c abscissae to the 7-point gauss rule. c c abserr - DoubleDouble precision c estimate of
the modulus of the absolute error, c which should equal or exceed abs(i-result) c c resasc - DoubleDouble
precision c approximation to the integral of abs(f*w-i/(b-a)) c c integr - integer c which determines the weight
function c = 1 w(x) = (x-a)**alfa*(b-x)**beta c = 2 w(x) = (x-a)**alfa*(b-x)**beta*log(x-a) c = 3 w(x) =
(x-a)**alfa*(b-x)**beta*log(b-x) c = 4 w(x) = (x-a)**alfa*(b-x)**beta*log(x-a)* c log(b-x) c c nev - integer c
number of integrand evaluations c***references (none) c***routines called dqcheb,dqk15w c***end prologue dqc25s c
- Parameters:
bl - br - ri - rj - rg - rh - result - abserr - resasc - nev -
-
dqcheb
private void dqcheb(DoubleDouble[] x,
DoubleDouble[] fval,
DoubleDouble[] cheb12,
DoubleDouble[] cheb24)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqcheb c***refer to
dqc25c,dqc25f,dqc25s c***routines called (none) c***revision date 830518 (yymmdd) c***keywords chebyshev series
expansion, fast fourier transform c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de
doncker,elise,appl. math. & progr. div. - k.u.leuven c***purpose this routine computes the chebyshev series
expansion c of degrees 12 and 24 of a function using a c fast fourier transform method c f(x) = sum(k=1,..,13)
(cheb12(k)*t(k-1,x)), c f(x) = sum(k=1,..,25) (cheb24(k)*t(k-1,x)), c where t(k,x) is the chebyshev polynomial of
degree k. c***description c c chebyshev series expansion c standard fortran subroutine c DoubleDouble precision
version c c parameters c on entry c x - DoubleDouble precision c vector of dimension 11 containing the c values
cos(k*pi/24), k = 1, ..., 11 c c fval - DoubleDouble precision c vector of dimension 25 containing the c function
values at the points c (b+a+(b-a)*cos(k*pi/24))/2, k = 0, ...,24, c where (a,b) is the approximation interval. c
fval(1) and fval(25) are divided by two c (these values are destroyed at output). c c on return c cheb12 -
DoubleDouble precision c vector of dimension 13 containing the c chebyshev coefficients for degree 12 c c cheb24 -
DoubleDouble precision c vector of dimension 25 containing the c chebyshev coefficients for degree 24 c c***end
prologue dqcheb c
- Parameters:
x - fval - cheb12 - cheb24 -
-
dqelg
private void dqelg(int[] n,
DoubleDouble[] epstab,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] res31a,
int[] nres)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqelg c***refer to
dqagie,dqagoe,dqagpe,dqagse c***routines called d1mach c***revision date 830518 (yymmdd) c***keywords epsilon
algorithm, convergence acceleration, c extrapolation c***author piessens,robert,appl. math. & progr. div. -
k.u.leuven c de doncker,elise,appl. math & progr. div. - k.u.leuven c***purpose the routine determines the limit
of a given sequence of c approximations, by means of the epsilon algorithm of c p.wynn. an estimate of the
absolute error is also given. c the condensed epsilon table is computed. only those c elements needed for the
computation of the next diagonal c are preserved. c***description c c epsilon algorithm c standard fortran
subroutine c DoubleDouble precision version
This routine determines the limit of a given sequence of approximations, by means of the epsilon algorithm of P.
Wynn. An estimate of the absolute error is also given. The condensed epsilon table is computed. Only those
elements needed for the computation of the next diagonal are preserved.
- Parameters:
n - epstab[n[0]-1] contains the new element in the first column of the epsilon tableepstab - 52 element array containing the elements of the two lower diagonals of the triangular epsilon
table. The elements are numbered starting at the right-hand corner of the triangleresult - resulting approximation to the integral The element in the new diagonal with the least value of
error.abserr - estimate of the absolute error computed from result and the 3 previous resultsres31a - array containing the last 3 resultsnres - number of calls to the routine (should be zero at first call)
-
dqk15
private void dqk15(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc)
The is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr.
div - k.u.leuven c***purpose to compute i = integral of f over (a,b), with error c estimate c j = integral of
abs(f) over (a,b) c***description c c integration rules c standard fortran subroutine c DoubleDouble precision
version
This routine computes theintegral of the intFunc over (a, b) and the integral of the abs(intFunc) over (a, b).
- Parameters:
a - lower limit for integrationb - upper limit for integrationresult - Approximation to the integral. The result is computed by applying the 15-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 7-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of intFunc
over (a,b) - result)resabs - Approximation to integral of abs(intFunc)resasc - Approximation to the integral of abs(intFunc - integral of intFunc/(b - a)) over (a, b)
-
dqk15i
private void dqk15i(DoubleDouble boun,
int inf,
DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15i c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a2,h2a4a2 c***keywords 15-point
transformed gauss-kronrod rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de
doncker,elise,appl. math. & progr. div. - k.u.leuven c***purpose the original (infinite integration range is
mapped c onto the interval (0,1) and (a,b) is a part of (0,1). c it is the purpose to compute c i = integral of
transformed integrand over (a,b), c j = integral of abs(transformed integrand) over (a,b). c***description c c
integration rule c standard fortran subroutine c DoubleDouble precision version
The original infinite integration range is mapped onto the interval (0, 1) and (a, b) is a part of (0, 1). This
routine computes the integral of the transformed integrand over (a, b) and the integral of the abs(transformed
integrand) over (a, b).
- Parameters:
boun - finite bound of original integration range (set to zero if inf = +2)inf - If inf = -1, the original interval is (-infinity, bound) If inf = +1, the original interval is (bound,
+infinity) If inf = +2, the original interval is (-infinity, +infinity) and the integral is computed
as the sum of two integrals, one over (-infinity, 0) and one over (0, +infinity)a - lower limit for integration over subrange of (0, 1)b - upper limit for integration over subrange of (0, 1)result - Approximation to the integral. The result is computed by applying the 15-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 7-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of
transformed integrand - result)resabs - Approximation to integral of abs(transformed integrand)resasc - Approximation to the integral of abs(transformed integrand - integral of transformed integrand/(b -
a)) over (a, b)
-
dqk15w
private void dqk15w(DoubleDouble p1,
DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc)
This a a port of the original FORTRAN whose header is given below: c***begin prologue dqk15w c***date written
810101 (yymmdd) c***revision date 830518 (mmddyy) c***category no. h2a2a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr.
div. - k.u.leuven c***purpose to compute i = integral of f*w over (a,b), with error c estimate c j = integral of
abs(f*w) over (a,b) c***description c c integration rules c standard fortran subroutine c double precision
version c c parameters c on entry c c p1, p2, p3, p4 - double precision c parameters in the weight function c c
kp - integer c key for indicating the type of weight function c c a - double precision c lower limit of
integration c c b - double precision c upper limit of integration c c on return c result - double precision c
approximation to the integral i c result is computed by applying the 15-point c kronrod rule (resk) obtained by
optimal addition c of abscissae to the 7-point gauss rule (resg). c c abserr - double precision c estimate of the
modulus of the absolute error, c which should equal or exceed abs(i-result) c c resabs - double precision c
approximation to the integral of abs(f) c c resasc - double precision c approximation to the integral of
abs(f-i/(b-a)) c
- Parameters:
p1 - kp - a - b - result - abserr - resabs - resasc -
-
dqk21
private void dqk21(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk21 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 21-point gauss-kronrod
rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr.
div. - k.u.leuven c***purpose to compute i = integral of f over (a,b), with error c estimate c j = integral of
abs(f) over (a,b) c***description c c integration rules c standard fortran subroutine c DoubleDouble precision
version
Computes integral of function over (a,b), with error estimate and computes integral of abs(function) over (a,b).
- Parameters:
a - lower limit of integrationb - upper limit of integrationresult - Approximation to the integral. Result is computed by applying the 21-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 10-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should not exceed abs(actual integral -
result)resabs - Approximation to the integral of abs(function) over (a,b).resasc - Approximation to the integral of abs(function - actual integral/(b-a)) over (a,b)
-
dqk31
private void dqk31(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc)
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk31 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 31-point gauss-kronrod
rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl. math. & progr.
div. - k.u.leuven c***purpose to compute i = integral of f over (a,b) with error c estimate c j = integral of
abs(f) over (a,b) c***description c c integration rules c standard fortran subroutine c DoubleDouble precision
version
This routine computes theintegral of the intFunc over (a, b) and the integral of the abs(intFunc) over (a, b).
- Parameters:
a - lower limit for integrationb - upper limit for integrationresult - Approximation to the integral. The result is computed by applying the 31-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 15-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of intFunc
over (a,b) - result)resabs - Approximation to integral of abs(intFunc)resasc - Approximation to the integral of abs(intFunc - integral of intFunc/(b - a)) over (a, b)
-
dqk41
private void dqk41(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc)
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk41 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 41-point
gauss-kronrod rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl.
math. & progr. div. - k.u.leuven c***purpose to compute i = integral of f over (a,b), with error c estimate c j =
integral of abs(f) over (a,b) c***description c c integration rules c standard fortran subroutine c DoubleDouble
precision version
This routine computes theintegral of the intFunc over (a, b) and the integral of the abs(intFunc) over (a, b).
- Parameters:
a - lower limit for integrationb - upper limit for integrationresult - Approximation to the integral. The result is computed by applying the 41-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 20-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of intFunc
over (a,b) - result)resabs - Approximation to integral of abs(intFunc)resasc - Approximation to the integral of abs(intFunc - integral of intFunc/(b - a)) over (a, b)
-
dqk51
private void dqk51(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc)
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk51 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 51-point
gauss-kronrod rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl.
math & progr. div. - k.u.leuven c***purpose to compute i = integral of f over (a,b) with error c estimate c j =
integral of abs(f) over (a,b) c***description c c integration rules c standard fortran subroutine c DoubleDouble
precision version
This routine computes theintegral of the intFunc over (a, b) and the integral of the abs(intFunc) over (a, b).
- Parameters:
a - lower limit for integrationb - upper limit for integrationresult - Approximation to the integral. The result is computed by applying the 51-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 25-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of intFunc
over (a,b) - result)resabs - Approximation to integral of abs(intFunc)resasc - Approximation to the integral of abs(intFunc - integral of intFunc/(b - a)) over (a, b)
-
dqk61
private void dqk61(DoubleDouble a,
DoubleDouble b,
DoubleDouble[] result,
DoubleDouble[] abserr,
DoubleDouble[] resabs,
DoubleDouble[] resasc)
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk61 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 61-point
gauss-kronrod rules c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl.
math. & progr. div. - k.u.leuven c***purpose to compute i = integral of f over (a,b) with error c estimate c j =
integral of dabs(f) over (a,b) c***description c c integration rule c standard fortran subroutine c DoubleDouble
precision version
This routine computes the integral of the intFunc over (a, b) and the integral of the abs(intFunc) over (a, b).
- Parameters:
a - lower limit for integrationb - upper limit for integrationresult - Approximation to the integral. The result is computed by applying the 61-point kronrod rule (resk)
obtained by optimal addition of abscissae to the 30-point gauss rule (resg).abserr - Estimate of the modulus of the absolute error, which should equal or exceed abs(integral of intFunc
over (a,b) - result)resabs - Approximation to integral of abs(intFunc)resasc - Approximation to the integral of abs(intFunc - integral of intFunc/(b - a)) over (a, b)
-
dqmomo
private void dqmomo(DoubleDouble[] ri,
DoubleDouble[] rj,
DoubleDouble[] rg,
DoubleDouble[] rh)
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqmomo c***date
written 820101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,c3a2 c***keywords modified
chebyshev moments c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl.
math. & progr. div. - k.u.leuven c***purpose this routine computes modified chebsyshev moments. the k-th c
modified chebyshev moment is defined as the integral over c (-1,1) of w(x)*t(k,x), where t(k,x) is the chebyshev
c polynomial of degree k. c***description c c modified chebyshev moments c standard fortran subroutine c
DoubleDouble precision version c c parameters c alfa - DoubleDouble precision c parameter in the weight function
w(x), alfa.gt.(-1) c c beta - DoubleDouble precision c parameter in the weight function w(x), beta.gt.(-1) c c ri -
DoubleDouble precision c vector of dimension 25 c ri(k) is the integral over (-1,1) of c (1+x)**alfa*t(k-1,x), k =
1, ..., 25. c c rj - DoubleDouble precision c vector of dimension 25 c rj(k) is the integral over (-1,1) of c
(1-x)**beta*t(k-1,x), k = 1, ..., 25. c c rg - DoubleDouble precision c vector of dimension 25 c rg(k) is the
integral over (-1,1) of c (1+x)**alfa*log((1+x)/2)*t(k-1,x), k = 1, ..., 25. c c rh - DoubleDouble precision c
vector of dimension 25 c rh(k) is the integral over (-1,1) of c (1-x)**beta*log((1-x)/2)*t(k-1,x), k = 1, ...,
25. c c integr - integer c input parameter indicating the modified c moments to be computed c integr = 1 compute
ri, rj c = 2 compute ri, rj, rg c = 3 compute ri, rj, rh c = 4 compute ri, rj, rg, rh c c***references (none)
c***routines called (none) c***end prologue dqmomo c
- Parameters:
ri - rj - rg - rh -
-
dqng
private void dqng()
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqng c***date
written 800101 (yymmdd) c***revision date 810101 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, smooth integrand, c non-adaptive, gauss-kronrod(patterson) c***author piessens,robert,appl. math. &
progr. div. - k.u.leuven c de doncker,elise,appl math & progr. div. - k.u.leuven c kahaner,david,nbs - modified
(2/82) c***purpose the routine calculates an approximation result to a c given definite integral i = integral of
f over (a,b), c hopefully satisfying following claim for accuracy c abs(i-result).le.max(epsabs,epsrel*abs(i)).
c***description c c non-adaptive integration c standard fortran subroutine c DoubleDouble precision version
Calculates an integral over (lower, upper), hopefully satisfying the abs(actual integral - result) <= max(epsabs,
epsresl * abs(actual integral)) Result is obtained by applying the 21-point gauss-kronrod rule (res21) obtained
by optimal addition of abscissae to the 10-point gauss rule (res10), or by applying the 43-point rule (res43)
obtained by optimal addition of abscissae to the 21-point gauss-kronrod rule, or by applying the 87-point rule
(res87) obtained by optimal addition of abscissae to the 43-point rule.
-
dqpsrt
private void dqpsrt(int limit,
int last,
int[] maxErr,
DoubleDouble[] ermax,
DoubleDouble[] elist,
int[] iord,
int[] nrmax)
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqpsrt c***refer
to dqage,dqagie,dqagpe,dqawse c***routines called (none) c***revision date 810101 (yymmdd) c***keywords
sequential sorting c***author piessens,robert,appl. math. & progr. div. - k.u.leuven c de doncker,elise,appl.
math. & progr. div. - k.u.leuven c***purpose this routine maintains the descending ordering in the c list of the
local error estimated resulting from the c interval subdivision process. at each call two error c estimates are
inserted using the sequential search c method, top-down for the largest error estimate and c bottom-up for the
smallest error estimate. c***description c c ordering routine c standard fortran subroutine c DoubleDouble
precision version
This routine maintains the descending ordering in the list of the local error estimated resulting from the
interval subdivision process. At each call two error estimates are inserted using the sequential search method,
top-down for the largest error estimate and bottom-up for the smallest error estimate.
- Parameters:
limit - maximum number of error estimates the list can containlast - number of error estimates currently in the listmaxErr - maxErr points to the nrmax-th largest estimate currently in the listermax - nrmax-th largest error estimate ermax[0] = elist[maxErr[0]]elist - the error estimatesiord - Array of size last , the first k elements of which contain pointers to the error estimates, such that
elist[iord[0]],...,elist[iord[k-1]] form a decreasing sequence, with k = last if last <= (limit/2 +
2), and k = limit + 1 - last otherwisenrmax - maxErr[0] = iord[nrmax[0] - 1]
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitWholeNL2solInt2.html��������������������������������0000775�4231163�4231163�00000046542�14537076046�026032� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitWholeNL2solInt2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
epsabs |
DOCUMENT ME!
|
(package private) double |
epsrel |
DOCUMENT ME!
|
(package private) int |
inf |
DOCUMENT ME!
|
(package private) int[] |
iv |
|
(package private) int |
limit |
DOCUMENT ME!
|
(package private) double |
lower |
DOCUMENT ME!
|
(package private) double[] |
v |
|
(package private) double[] |
x |
|
(package private) double[] |
xData |
|
(package private) float[] |
yData |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
FitWholeNL2solInt2(int nPoints,
double[] xData,
float[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian) |
Creates a new FitWholeNL2solInt2 object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
void |
calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm) |
|
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
epsabs
double epsabs
DOCUMENT ME!
-
epsrel
double epsrel
DOCUMENT ME!
-
limit
int limit
DOCUMENT ME!
-
lower
double lower
DOCUMENT ME!
-
Constructor Detail
-
FitWholeNL2solInt2
public FitWholeNL2solInt2(int nPoints,
double[] xData,
float[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian)
Creates a new FitWholeNL2solInt2 object.
- Parameters:
nPoints - DOCUMENT ME!yData - DOCUMENT ME!x - DOCUMENT ME!iv - v - useAnalyticJacobian -
-
Method Detail
-
driver
public void driver()
Starts the analysis.
- Overrides:
driver in class NL2sol
-
calcj
public void calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm)
- Specified by:
calcj in class NL2sol
-
calcr
public void calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm)
- Specified by:
calcr in class NL2sol
��������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.Forest.growTreesInThread.html����������������������0000775�4231163�4231163�00000027203�14537076057�030431� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.Forest.growTreesInThread (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.Forest.growTreesInThread
-
-
Constructor Summary
Constructors
| Constructor |
Description |
growTreesInThread(int thread_idx,
java.util.Vector<java.lang.Double> variable_importance) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
thread_idx
private int thread_idx
-
Method Detail
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.weighted_edgesComparator.html���������������������������0000775�4231163�4231163�00000026433�14537076052�027432� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.weighted_edgesComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NESolve.html���������������������������������������������������������0000775�4231163�4231163�00000151567�14537076056�021444� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NESolve (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.NESolve
-
- Direct Known Subclasses:
SchwarzChristoffelMapping2.stpfun3
public abstract class NESolve
extends java.lang.Object
This is a port of nesolve.m and supporting files coded in MATLAB by Richard T. Behrens in 1988
with portions replaced to be closer to original pseudocode in appendix A of
Numerical Methods for Unconstrained Optimization and Nonlinear Equations.
NESolve produces the solution to a system of nonlinear equations
For example, find the x, y, and z that solve the simultaneous equations:
sin(x) + y^2 + log(z) - 7 = 0
3*x + 2^y - z^3 + 1 = 0;
x + y + z - 5 = 0
nesolve.m coded in MATLAB by Ricaard T. Behrens, April 1988.
Revised 11/278/88 JNL
Hookstep option added 8/21/90 RTB.
Hello William,
Thank you for contacting MathWorks Technical Support. My name is Stephen and I am writing in reference to your
Technical Support Case #02445410 regarding 'Permission to port nesolve.m'.
Thank you for contacting us about this. It appears that "nesolve" is a File Exchange function that is not part
of the MATLAB code base. The author included parts of a MATLAB function help header, but none of its source code.
Therefore, we neither grant nor deny permission to copy the contents of that file as it does not pertain to
the MATLAB code base.
If you have any more related questions, let me know and I would be happy to help.
Sincerely,
Stephen Jue
MathWorks Technical Support Department
In a document with the title
NONLINPK
NESOLVE and UMSOLVE
Release 1.1, August 31, 1990
by Richard T. Behrens
He states:
The UMSOLVE files are distributed as Shareware (but NESOLVE is
public domain).
nesolve.m is based on Algorithm D6.1.3: Part of the modular software system from the
appendix of the book "Numerical Methods for Unconstrained Optimization and Nonlinear Equations"
by Dennis & Schnabel, 1983. Refer to that book for more detailed information about the
algorithms.
-
-
Constructor Summary
Constructors
| Constructor |
Description |
NESolve() |
|
NESolve(boolean initialJacobianIdentity,
double[] x0,
double[] fparam,
boolean analyticJacobian,
double[][] scale,
java.util.Vector<java.lang.Double> path,
double[] btrack,
int trace,
int method,
int maxIterations,
double fvectol,
double steptol,
double maxStepSize,
double details11,
int scaling) |
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
|
private void |
driverCalls() |
|
void |
dumpTestResults() |
|
private void |
fitTestModel() |
|
abstract void |
fitToFunction(double[] fvplus,
double[] xplus,
double[] fparam) |
|
abstract void |
fitToJacobian(double[][] jc,
int[] addfun,
double[] x0,
double[] fparam) |
|
void |
fitToTestFunction(double[] fvplus,
double[] xplus,
double[] fparam) |
|
void |
fitToTestJacobian(double[][] jc,
int[] addfun,
double[] x0,
double[] fparam) |
|
int |
getExitStatus() |
|
double[] |
getParameters() |
|
private void |
nebroyuf(double[][] A,
double[] xc,
double[] xp,
double[] fc,
double[] fp,
double[] sx,
double eta) |
|
private void |
nechdcmp(double[][] L,
double[] maxadd,
double[][] H,
double maxoffl) |
|
private double |
neconest(double[][] M,
double[] M2) |
|
private void |
nefdjac(double[][] J,
int[] nofun,
double[] fc,
double[] xc,
double[] sx,
double[] details,
double[] fparam) |
|
private void |
nefn(double[] fplus,
double[] fvplus,
int[] nofun,
double[] xplus,
double[] sf,
double[] fparam) |
|
private void |
nehook(int[] retcode,
double[] xp,
double[] fp,
double[] Fp,
boolean[] maxtaken,
double[] details,
double[] trustvars,
int[] nofun,
double[] xc,
double[] fc,
double[] g,
double[][] L,
double[][] H,
double[] sn,
double[] sx,
double[] sf,
int itn,
double[] fparam) |
|
private void |
neinck(double[] dout,
double[] sx,
double[] sf,
int[] termcode,
double[] x0,
double[] f0,
double[] din,
double[][] scale) |
|
private void |
nelnsrch(int[] retcode,
double[] xp,
double[] fp,
double[] Fp,
boolean[] maxtaken,
int[] nofun,
double[] btrack,
double[] xc,
double fc,
double[] g,
double[] p,
double[] sx,
double[] sf,
double[] details,
double[] fparam) |
|
private void |
nemodel(double[][] m,
double[][] h,
double[] sn,
double[] fc,
double[][] J,
double[] g,
double[] sf,
double[] sx,
double globmeth) |
|
private void |
neqrdcmp(double[][] M,
double[] M1,
double[] M2,
int[] sing) |
|
private void |
neqrsolv(double[] b,
double[][] M,
double[] M1,
double[] M2) |
|
private void |
nersolv(double[] b,
double[][] M,
double[] M2) |
|
private void |
nestop(int[] consecmax,
int[] termcode,
double[] xc,
double[] xp,
double[] F,
double[] Fnorm,
double[] g,
double[] sx,
double[] sf,
int retcode,
double[] details,
int itncount,
boolean maxtaken) |
|
private void |
netrust(double[] xp,
double[] fp,
double[] Fp,
boolean[] maxtaken,
int[] retcode,
double[] xpprev,
double[] fpprev,
double[] Fpprev,
double[] details,
int[] nofun,
double[] xc,
double[] fc,
double[] g,
double[][] L,
double[] s,
double[] sx,
double[] sf,
boolean newttaken,
int steptype,
double[][] H,
boolean umflag,
double[] fparam) |
|
void |
printExitStatus(int exitStatus) |
|
private double |
shiftedChebyshev(double x,
int n) |
|
private double |
shiftedChebyshevDerivative(double x,
int n) |
|
private double |
sign(double x) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
NO_SCALING
public int NO_SCALING
-
LINE_SEARCH
public int LINE_SEARCH
-
TRUST_REGION
public int TRUST_REGION
-
fvc
protected double[] fvc
-
termcode
protected int[] termcode
-
nofun
protected int[] nofun
-
itncount
protected int itncount
-
testMode
private boolean testMode
-
testCase
private int testCase
-
Constructor Detail
-
NESolve
public NESolve(boolean initialJacobianIdentity,
double[] x0,
double[] fparam,
boolean analyticJacobian,
double[][] scale,
java.util.Vector<java.lang.Double> path,
double[] btrack,
int trace,
int method,
int maxIterations,
double fvectol,
double steptol,
double maxStepSize,
double details11,
int scaling)
-
Method Detail
-
driver
public void driver()
-
nefn
private void nefn(double[] fplus,
double[] fvplus,
int[] nofun,
double[] xplus,
double[] sf,
double[] fparam)
-
neinck
private void neinck(double[] dout,
double[] sx,
double[] sf,
int[] termcode,
double[] x0,
double[] f0,
double[] din,
double[][] scale)
-
nefdjac
private void nefdjac(double[][] J,
int[] nofun,
double[] fc,
double[] xc,
double[] sx,
double[] details,
double[] fparam)
-
nemodel
private void nemodel(double[][] m,
double[][] h,
double[] sn,
double[] fc,
double[][] J,
double[] g,
double[] sf,
double[] sx,
double globmeth)
-
nelnsrch
private void nelnsrch(int[] retcode,
double[] xp,
double[] fp,
double[] Fp,
boolean[] maxtaken,
int[] nofun,
double[] btrack,
double[] xc,
double fc,
double[] g,
double[] p,
double[] sx,
double[] sf,
double[] details,
double[] fparam)
-
nehook
private void nehook(int[] retcode,
double[] xp,
double[] fp,
double[] Fp,
boolean[] maxtaken,
double[] details,
double[] trustvars,
int[] nofun,
double[] xc,
double[] fc,
double[] g,
double[][] L,
double[][] H,
double[] sn,
double[] sx,
double[] sf,
int itn,
double[] fparam)
-
netrust
private void netrust(double[] xp,
double[] fp,
double[] Fp,
boolean[] maxtaken,
int[] retcode,
double[] xpprev,
double[] fpprev,
double[] Fpprev,
double[] details,
int[] nofun,
double[] xc,
double[] fc,
double[] g,
double[][] L,
double[] s,
double[] sx,
double[] sf,
boolean newttaken,
int steptype,
double[][] H,
boolean umflag,
double[] fparam)
-
nebroyuf
private void nebroyuf(double[][] A,
double[] xc,
double[] xp,
double[] fc,
double[] fp,
double[] sx,
double eta)
-
nestop
private void nestop(int[] consecmax,
int[] termcode,
double[] xc,
double[] xp,
double[] F,
double[] Fnorm,
double[] g,
double[] sx,
double[] sf,
int retcode,
double[] details,
int itncount,
boolean maxtaken)
�����������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmObjectExtractor.html����������������������������������������0000775�4231163�4231163�00000254157�14537076047�025101� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmObjectExtractor (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmObjectExtractor(ModelImage srcImg,
VOI voi,
boolean justInit,
boolean saveGVF,
WildMagic.LibGraphics.SceneGraph.TriMesh triMesh,
float[] uVal,
float[] vVal,
float[] wVal) |
Create an extractor for segmenting an object from an image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calcGradMag() |
DOCUMENT ME!
|
private void |
calcGVF3D() |
Calculate GVF from 3D image buffer.
|
protected void |
computeMeanEdgeLength() |
Compute the average length of all the edges in the triangle mesh.
|
protected void |
computeVertexInformation() |
Let V[i] be a vertex in the triangle mesh.
|
protected void |
computeVertexNormals() |
Compute the vertex normals of the triangle mesh.
|
protected void |
estimateEllipsoid() |
Approximate the brain surface by an ellipsoid.
|
void |
extractObject() |
The segmentation function.
|
void |
finalize() |
Prepares this class for destruction.
|
protected void |
floodFill(int iX,
int iY,
int iZ) |
Identify voxels enclosed by the brain surface by using a flood fill.
|
protected void |
generateEllipsoidMesh() |
Tessellate a unit sphere centered at the origin.
|
int |
getDilationSize() |
Get the dilation size for dilating the voxelized object surface obtained by rasterizing the triangle mesh.
|
protected int |
getIndex(int iX,
int iY,
int iZ) |
A convenience function for mapping the 3D voxel position (iX,iY,iZ) to a 1D array index.
|
protected void |
getInsideVoxels() |
Identify all voxels that are inside or on the mesh that represents the brain surface.
|
protected int |
getIntersectX(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iY,
int iZ) |
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and the triangle defined by the three input
points.
|
protected int |
getIntersectY(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iX,
int iZ) |
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and the triangle defined by the three input
points.
|
protected int |
getIntersectZ(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iX,
int iY) |
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and the triangle defined by the three input
points.
|
byte[] |
getObjectMask() |
Get the 3D image that represents the extracted object.
|
float |
getRayDelta() |
Get the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution.
|
float |
getReductionX() |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
float |
getReductionY() |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
float |
getReductionZ() |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
float |
getStiffness() |
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution.
|
float |
getTriLinear(float x,
float y,
float z,
float[] buffer) |
DOCUMENT ME!
|
void |
runAlgorithm() |
Starts the program.
|
protected void |
saveMesh(boolean flip) |
Internal support to write vertices, normals, and connectivity indices to the file.
|
void |
setDilationSize(int iDMax) |
Set the dilation size for dilating the voxelized object surface obtained by rasterizing the triangle mesh.
|
void |
setJustIntial(boolean flag) |
Indicates if surface evolution should be skipped.
|
void |
setRayDelta(float fRayDelta) |
Set the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution.
|
void |
setReductionX(float fReduction) |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
void |
setReductionY(float fReduction) |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
void |
setReductionZ(float fReduction) |
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
|
void |
setStiffness(float fStiffness) |
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution.
|
protected float |
update2(int i) |
Compute the coefficient of the surface normal for the update of the mesh vertex V[i] in the SNormal[i] direction.
|
protected void |
update3(int i) |
Compute the coefficient of the vertex normal for the update of the mesh vertex V[i] in the VNormal[i] direction.
|
void |
updateMesh() |
The heart of the segmentation.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
c1Factor
protected float c1Factor
DOCUMENT ME!
-
c3Factor
protected float c3Factor
DOCUMENT ME!
-
m_afImage
protected float[] m_afImage
The 3D MRI image stored as a 1D array. The mapping from (x,y,z) to 1D is: index = x + xbound*(y + ybound*z).
-
m_iDMax
protected int m_iDMax
DOCUMENT ME!
-
box
private float[] box
DOCUMENT ME!
-
direction
private int[] direction
DOCUMENT ME!
-
oldUVal
private float oldUVal
DOCUMENT ME!
-
oldVVal
private float oldVVal
DOCUMENT ME!
-
oldWVal
private float oldWVal
DOCUMENT ME!
-
onlyInit
private boolean onlyInit
DOCUMENT ME!
-
saveGVF
private boolean saveGVF
DOCUMENT ME!
-
uVal
private float[] uVal
DOCUMENT ME!
-
voi
private VOI voi
DOCUMENT ME!
-
vVal
private float[] vVal
DOCUMENT ME!
-
wVal
private float[] wVal
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmObjectExtractor
public AlgorithmObjectExtractor(ModelImage srcImg,
VOI voi,
boolean justInit,
boolean saveGVF,
WildMagic.LibGraphics.SceneGraph.TriMesh triMesh,
float[] uVal,
float[] vVal,
float[] wVal)
Create an extractor for segmenting an object from an image.
- Parameters:
srcImg - the source image.voi - initial voi used to estimate the inital ellipsoidjustInit - if true just perform one iterationsaveGVF - if true save uvf, vvf, and wvf filestriMesh - if not null use mesh instead of voiuVal - x component of GVF fieldvVal - y component of GVF fieldwVal - z component of GVF field
-
Method Detail
-
extractObject
public void extractObject()
The segmentation function. Various parameters may be modified, if necessary, before the call.
-
getDilationSize
public final int getDilationSize()
Get the dilation size for dilating the voxelized object surface obtained by rasterizing the triangle mesh. The
rasterization is designed so that the voxel surface has no holes, thereby allowing it to be flood-filled. But
just in case numerical round-off errors cause a few holes, this parameter is exposed for public use. The default
value is 0 (no dilation). If the value is D > 0, the dilation mask is a cube of size (2*D+1)x(2*D+1)x(2*D+1).
- Returns:
- the current dilation size
-
getObjectMask
public final byte[] getObjectMask()
Get the 3D image that represents the extracted object. The image is ternary and has the same dimensions as the
input MRI. A voxel value of 0 indicates background. A voxel value of 1 indicates object surface. A voxel value of
2 indicates a voxel inside the object surface.
- Returns:
- the image that represents the extracted object
-
getRayDelta
public final float getRayDelta()
Get the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution. The default value is 1.0.
- Returns:
- the current spacing
-
getReductionX
public final float getReductionX()
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.75.
- Returns:
- the current reduction factor
-
getReductionY
public final float getReductionY()
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.75.
- Returns:
- the current reduction factor
-
getReductionZ
public final float getReductionZ()
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.75.
- Returns:
- the current reduction factor
-
getStiffness
public final float getStiffness()
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution. The default value is 0.1.
- Returns:
- the current stiffness
-
setDilationSize
public final void setDilationSize(int iDMax)
Set the dilation size for dilating the voxelized object surface obtained by rasterizing the triangle mesh. The
rasterization is designed so that the voxel surface has no holes, thereby allowing it to be flood-filled. But
just in case numerical round-off errors cause a few holes, this parameter is exposed for public use. The default
value is 0 (no dilation). If the value is D > 0, the dilation mask is a cube of size (2*D+1)x(2*D+1)x(2*D+1).
- Parameters:
iDMax - the new dilation size
-
setRayDelta
public final void setRayDelta(float fRayDelta)
Set the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution. The default value is 1.0.
- Parameters:
fRayDelta - the new spacing along the vertex normal rays
-
setReductionX
public final void setReductionX(float fReduction)
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.6.
- Parameters:
fReduction - the amount to reduce the axis of the ellipsoid.
-
setReductionY
public final void setReductionY(float fReduction)
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.5.
- Parameters:
fReduction - the amount to reduce the axis of the ellipsoid.
-
setReductionZ
public final void setReductionZ(float fReduction)
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf. The default
value is 0.6.
- Parameters:
fReduction - the amount to reduce the axis of the ellipsoid.
-
setStiffness
public final void setStiffness(float fStiffness)
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution. The default value is 0.1.
- Parameters:
fStiffness - the new stiffness
-
updateMesh
public void updateMesh()
The heart of the segmentation. This function is responsible for the evolution of the triangle mesh that
approximates the object surface. The update has a tangential component, a surface normal component, and a vertex
normal component for each vertex in the mesh. The first two components control the geometry of the mesh. The last
component is based on the MRI data itself. See BrainExtraction.pdf for a detailed description of the update
terms.
-
computeVertexInformation
protected void computeVertexInformation()
Let V[i] be a vertex in the triangle mesh. This function computes VMean[i], the average of the immediate
neighbors of V[i]. Define S[i] = VMean[i] - V[i]. The function also computes a surface normal SNormal[i], the
component of S[i] in the vertex normal direction. STangent[i] = S[i] - SNormal[i] is computed as an approximation
to a tangent to the surface. Finally, Curvature[i] is an approximation of the surface curvature at V[i].
-
computeVertexNormals
protected void computeVertexNormals()
Compute the vertex normals of the triangle mesh. Each vertex normal is the unitized average of the non-unit
triangle normals for those triangles sharing the vertex.
-
floodFill
protected void floodFill(int iX,
int iY,
int iZ)
Identify voxels enclosed by the brain surface by using a flood fill. The flood fill is nonrecursive to avoid
overflowing the program stack.
- Parameters:
iX - the x-value of the seed point for the filliY - the y-value of the seed point for the filliZ - the z-value of the seed point for the fill
-
generateEllipsoidMesh
protected void generateEllipsoidMesh()
Tessellate a unit sphere centered at the origin. Start with an octahedron and subdivide. The final mesh is then
affinely mapped to the initial ellipsoid produced by estimateEllipsoid(). The subdivision scheme is described in
BrainExtraction.pdf.
-
getIndex
protected final int getIndex(int iX,
int iY,
int iZ)
A convenience function for mapping the 3D voxel position (iX,iY,iZ) to a 1D array index. The images are stored as
1D arrays, so this function is used frequently.
- Parameters:
iX - the x-value of the voxel positioniY - the y-value of the voxel positioniZ - the z-value of the voxel position- Returns:
- the 1D array index corresponding to (iX,iY,iZ)
-
getInsideVoxels
protected void getInsideVoxels()
Identify all voxels that are inside or on the mesh that represents the brain surface. The surface voxels are
constructed by rasterizing the triangles of the mesh in 3D. The centroid of these voxels is used as a seed point
for a flood fill of the region enclosed by the surface.
-
getIntersectX
protected int getIntersectX(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iY,
int iZ)
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and the triangle defined by the three input
points. All calculations are in voxel coordinates and the x-value of the intersection point is truncated to an
integer.
- Parameters:
kV0 - a 3D vertex of the trianglekV1 - a 3D vertex of the trianglekV2 - a 3D vertex of the triangleiY - the y-value of the origin of the lineiZ - the z-value of the origin of the line- Returns:
- the x-value of the intersection
-
getIntersectY
protected int getIntersectY(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iX,
int iZ)
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and the triangle defined by the three input
points. All calculations are in voxel coordinates and the y-value of the intersection point is truncated to an
integer.
- Parameters:
kV0 - a 3D vertex of the trianglekV1 - a 3D vertex of the trianglekV2 - a 3D vertex of the triangleiX - the x-value of the origin of the lineiZ - the z-value of the origin of the line- Returns:
- the y-value of the intersection
-
getIntersectZ
protected int getIntersectZ(WildMagic.LibFoundation.Mathematics.Vector3f kV0,
WildMagic.LibFoundation.Mathematics.Vector3f kV1,
WildMagic.LibFoundation.Mathematics.Vector3f kV2,
int iX,
int iY)
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and the triangle defined by the three input
points. All calculations are in voxel coordinates and the z-value of the intersection point is truncated to an
integer.
- Parameters:
kV0 - a 3D vertex of the trianglekV1 - a 3D vertex of the trianglekV2 - a 3D vertex of the triangleiX - the x-value of the origin of the lineiY - the y-value of the origin of the line- Returns:
- the z-value of the intersection
-
saveMesh
protected void saveMesh(boolean flip)
throws java.io.IOException
Internal support to write vertices, normals, and connectivity indices to the file.
- Parameters:
flip - if the y axis should be inverted - true for extract, false for from another surface- Throws:
java.io.IOException - if there is an error writing to the file
-
update2
protected float update2(int i)
Compute the coefficient of the surface normal for the update of the mesh vertex V[i] in the SNormal[i] direction.
See BrainExtraction.pdf for a description of the update.
- Parameters:
i - the index of the vertex to update- Returns:
- the coefficient of SNormal[i] for the update
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmOptimizeFunctionBase.html�����������������������������������0000775�4231163�4231163�00000025654�14537076047�026076� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmOptimizeFunctionBase (MIPAV API Documentation)
-
-
Method Detail
-
cost
double cost(double[] x)
DOCUMENT ME!
- Parameters:
x - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
getCostFunction
int getCostFunction()
������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.PreconditionerType.html����������������������������������0000775�4231163�4231163�00000037337�14537076052�026204� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.PreconditionerType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.PreconditionerType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmScaleSaliency.sixItemsComparator.html�����������������������0000775�4231163�4231163�00000027277�14537076050�030345� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmScaleSaliency.sixItemsComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItemsComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Svec.html�����������������������������������������������������0000775�4231163�4231163�00000023072�14537076056�021751� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Svec (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Svec
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
az |
|
(package private) double |
mag |
|
(package private) double |
po |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Svec() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/package-tree.html����������������������������������������������������0000775�4231163�4231163�00001030001�14537076122�022427� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms Class Hierarchy (MIPAV API Documentation)
Class Hierarchy
- java.lang.Object
- gov.nih.mipav.model.algorithms.AgastDetector5_8
- gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
- gov.nih.mipav.model.algorithms.AlgorithmASM.AppData
- gov.nih.mipav.model.algorithms.AlgorithmASM.ASMData
- gov.nih.mipav.model.algorithms.AlgorithmASM.LandData
- gov.nih.mipav.model.algorithms.AlgorithmASM.Options
- gov.nih.mipav.model.algorithms.AlgorithmASM.P
- gov.nih.mipav.model.algorithms.AlgorithmASM.PData
- gov.nih.mipav.model.algorithms.AlgorithmASM.SData
- gov.nih.mipav.model.algorithms.AlgorithmASM.TData
- gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.Edge
- gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
- gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
- gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
- gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
- gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskShortPair
- gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
- gov.nih.mipav.model.algorithms.AlgorithmBSpline.ColorInterpolation
- gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.erfcModel (implements de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable)
- gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.IntTorquato95ModelMean (implements de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable)
- gov.nih.mipav.model.algorithms.AlgorithmCostFunctions (implements gov.nih.mipav.model.algorithms.AlgorithmOptimizeFunctionBase)
- gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D (implements gov.nih.mipav.model.algorithms.AlgorithmOptimizeFunctionBase)
- gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed.indexValueComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed.indexValueItem
- gov.nih.mipav.model.algorithms.AlgorithmEllipsoidFit
- gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdge
- gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
- gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList
- gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgImage
- gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
- gov.nih.mipav.model.algorithms.AlgorithmFRAP.distanceIntensityComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.AlgorithmFRAP.distanceIntensityItem
- gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel (implements de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable)
- gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModel (implements de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable)
- gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassData
- gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassSig
- gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SigSet
- gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SubSig
- gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
- gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edgeComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.uni_elt
- gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.universe
- gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D.intObject
- gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed.indexValueComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed.indexValueItem
- gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
- gov.nih.mipav.model.algorithms.AlgorithmKMeans.positionWeightComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.AlgorithmKMeans.positionWeightItem
- gov.nih.mipav.model.algorithms.AlgorithmLLE.distanceIndexComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.AlgorithmLLE.distanceIndexItem
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_cut
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry2
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_res_cont
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.ClassStateStruct
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RAList
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.REGION
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RegionList
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.userWeightFunct
- gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM.model
- gov.nih.mipav.model.algorithms.AlgorithmMorphology2D.intObject
- gov.nih.mipav.model.algorithms.AlgorithmMorphology3D.intObject
- gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserExtrReg
- gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
- gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserReg
- gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserStats
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode (implements java.lang.Comparable<T>)
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ExtentionMath
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake (implements gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.IMetadataProvider)
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Pixel
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser (implements java.io.Serializable)
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.KeyValuePair
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node (implements java.io.Serializable)
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode (implements java.lang.Comparable<T>)
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.tuple2i
- gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.Edge
- gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
- gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
- gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
- gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
- gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
- gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting.mergeItem
- gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
- gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItemsComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed.indexValueComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed.indexValueItem
- gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed.indexValueComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed.indexValueItem
- gov.nih.mipav.model.algorithms.AlgorithmSM2.IntModel (implements de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable)
- gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMean (implements de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable)
- gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMeanSquared (implements de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable)
- gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquato95ModelMean (implements de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable)
- gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquatoModelMean (implements de.jtem.numericalMethods.calculus.function.RealFunctionOfOneVariable)
- gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed.indexValueComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed.indexValueItem
- gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.AlgorithmTProcess.CalculateT
- gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed.indexValueComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed.indexValueItem
- gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
- gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt.CostFunction (implements gov.nih.mipav.model.algorithms.AlgorithmOptimizeFunctionBase)
- gov.nih.mipav.model.algorithms.AlgorithmWatershed.Seed
- gov.nih.mipav.model.algorithms.Backpropagation.Connection
- gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
- gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
- gov.nih.mipav.model.algorithms.Backpropagation.Neuron
- gov.nih.mipav.model.algorithms.Bessel
- gov.nih.mipav.model.algorithms.BesselEP
- gov.nih.mipav.model.algorithms.BlindDeblur.Pair<T,U>
- gov.nih.mipav.model.algorithms.CDFLIB
- gov.nih.mipav.model.algorithms.Cephes
- gov.nih.mipav.model.algorithms.CeresSolver
- gov.nih.mipav.model.algorithms.CeresSolver.Block
- gov.nih.mipav.model.algorithms.CeresSolver.BlockEvaluatePreparer
- gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobianWriter
- gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessMatrix
- gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrixRandomMatrixOptions
- gov.nih.mipav.model.algorithms.CeresSolver.CallStatistics
- gov.nih.mipav.model.algorithms.CeresSolver.Cell
- gov.nih.mipav.model.algorithms.CeresSolver.CellInfo
- gov.nih.mipav.model.algorithms.CeresSolver.CellLessThan (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.CeresSolver.Chunk
- gov.nih.mipav.model.algorithms.CeresSolver.CompressedList
- gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowBlockStructure
- gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter
- gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintItem
- gov.nih.mipav.model.algorithms.CeresSolver.Context
- gov.nih.mipav.model.algorithms.CeresSolver.Corrector
- gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
- gov.nih.mipav.model.algorithms.CeresSolver.CostFunctorExample
- gov.nih.mipav.model.algorithms.CeresSolver.CRSMatrix
- gov.nih.mipav.model.algorithms.CeresSolver.CurveFittingFunctorExample
- gov.nih.mipav.model.algorithms.CeresSolver.DenseJacobianWriter
- gov.nih.mipav.model.algorithms.CeresSolver.DynamicCompressedRowJacobianFinalizer
- gov.nih.mipav.model.algorithms.CeresSolver.DynamicCompressedRowJacobianWriter
- gov.nih.mipav.model.algorithms.CeresSolver.EasyFunctor
- gov.nih.mipav.model.algorithms.CeresSolver.EvaluateOptions
- gov.nih.mipav.model.algorithms.CeresSolver.EvaluateScratch
- gov.nih.mipav.model.algorithms.CeresSolver.EvaluationCallback
- gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
- gov.nih.mipav.model.algorithms.CeresSolver.EvaluatorOptions
- gov.nih.mipav.model.algorithms.CeresSolver.EventLogger
- gov.nih.mipav.model.algorithms.CeresSolver.ExecutionSummary
- gov.nih.mipav.model.algorithms.CeresSolver.ExponentialFunctor
- gov.nih.mipav.model.algorithms.CeresSolver.FirstOrderFunction
- gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
- gov.nih.mipav.model.algorithms.CeresSolver.GradientChecker
- gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
- gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolver
- gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
- gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
- gov.nih.mipav.model.algorithms.CeresSolver.Graph<Vertex>
- gov.nih.mipav.model.algorithms.CeresSolver.indexValueItem<Vertex>
- gov.nih.mipav.model.algorithms.CeresSolver.IterationCallback
- gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
- gov.nih.mipav.model.algorithms.CeresSolver.LinearLeastSquaresProblem
- gov.nih.mipav.model.algorithms.CeresSolver.LinearOperator
- gov.nih.mipav.model.algorithms.CeresSolver.LinearSolver
- gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
- gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverPerSolveOptions
- gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverSummary
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearch
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirection
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionOptions
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer.State
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
- gov.nih.mipav.model.algorithms.CeresSolver.LocalParameterization
- gov.nih.mipav.model.algorithms.CeresSolver.LossFunction
- gov.nih.mipav.model.algorithms.CeresSolver.Minimizer
- gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
- gov.nih.mipav.model.algorithms.CeresSolver.MyCostFunctor
- gov.nih.mipav.model.algorithms.CeresSolver.MyThreeParameterCostFunctor
- gov.nih.mipav.model.algorithms.CeresSolver.NullJacobianFinalizer
- gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffOptions
- gov.nih.mipav.model.algorithms.CeresSolver.OnlyFillsOneOutputFunctor
- gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups<T>
- gov.nih.mipav.model.algorithms.CeresSolver.Pair<T,U>
- gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
- gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
- gov.nih.mipav.model.algorithms.CeresSolver.Preconditioner.Options
- gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
- gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
- gov.nih.mipav.model.algorithms.CeresSolver.Preprocessor
- gov.nih.mipav.model.algorithms.CeresSolver.ProbeResults
- gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
- gov.nih.mipav.model.algorithms.CeresSolver.ProblemOptions
- gov.nih.mipav.model.algorithms.CeresSolver.Program
- gov.nih.mipav.model.algorithms.CeresSolver.RandomizedFunctor
- gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
- gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminatorBase
- gov.nih.mipav.model.algorithms.CeresSolver.ScopedExecutionTimer
- gov.nih.mipav.model.algorithms.CeresSolver.ScratchEvaluatePreparer
- gov.nih.mipav.model.algorithms.CeresSolver.Solver
- gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
- gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
- gov.nih.mipav.model.algorithms.CeresSolver.TranscendentalFunctor
- gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrixRandomMatrixOptions
- gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
- gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategy
- gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyOptions
- gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyPerSolveOptions
- gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategySummary
- gov.nih.mipav.model.algorithms.CeresSolver.VertexDegreeLessThan<Vertex> (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.CeresSolver.VertexTotalOrdering<Vertex> (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph<Vertex>
- gov.nih.mipav.model.algorithms.CeresSolver2.BiCubicInterpolator
- gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
- gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClusteringOptions
- gov.nih.mipav.model.algorithms.CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions
- gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
- gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceOptions
- gov.nih.mipav.model.algorithms.CeresSolver2.CubicInterpolator
- gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
- gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
- gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayItem
- gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayItem
- gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayItem
- gov.nih.mipav.model.algorithms.CeresSolver2.indexRowColItem
- gov.nih.mipav.model.algorithms.CeresSolver2.RowColLessThanComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.CeresSolver2.SingleLinkageClusteringOptions
- gov.nih.mipav.model.algorithms.CeresSolver2.Triplet<T,U,V>
- gov.nih.mipav.model.algorithms.CeresSolver2.VertexTotalOrderingInteger
- gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesItem
- gov.nih.mipav.model.algorithms.CeresSolverTest.BlockJacobiPreconditionerTest
- gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
- gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
- gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
- gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
- gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTestOptions
- gov.nih.mipav.model.algorithms.CeresSolverTest.ExpectedEvaluation
- gov.nih.mipav.model.algorithms.CeresSolverTest.Fixture
- gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
- gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
- gov.nih.mipav.model.algorithms.CeresSolverTest.LinearSolverAndEvaluatorCreationTest
- gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
- gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
- gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
- gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
- gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
- java.awt.Component (implements java.awt.image.ImageObserver, java.awt.MenuContainer, java.io.Serializable)
- java.awt.Container
- javax.swing.JComponent (implements java.io.Serializable)
- java.awt.Window (implements javax.accessibility.Accessible)
- java.awt.Frame (implements java.awt.MenuContainer)
- gov.nih.mipav.model.algorithms.ConfluentHypergeometric
- gov.nih.mipav.model.algorithms.ConjugateGradient
- gov.nih.mipav.model.algorithms.ConjugateGradientTest
- gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint (implements java.awt.Paint)
- gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext (implements java.awt.PaintContext)
- gov.nih.mipav.model.algorithms.ContourPlot.BufferedImageFactory
- gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
- gov.nih.mipav.model.algorithms.ContourPlot.ColorOperations
- gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
- gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer (implements gov.nih.mipav.model.algorithms.ContourPlot.AdaptableView, gov.nih.mipav.model.algorithms.ContourPlot.Renderer)
- gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer (implements gov.nih.mipav.model.algorithms.ContourPlot.Renderer)
- gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom (implements gov.nih.mipav.model.algorithms.ContourPlot.InteractionConstants, java.awt.event.MouseWheelListener)
- gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson (implements gov.nih.mipav.model.algorithms.ContourPlot.TickMarkGenerator)
- gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
- gov.nih.mipav.model.algorithms.ContourPlot.GenericKey
- gov.nih.mipav.model.algorithms.ContourPlot.GenericRenderer<T> (implements gov.nih.mipav.model.algorithms.ContourPlot.AdaptableView, gov.nih.mipav.model.algorithms.ContourPlot.Renderer)
- gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
- gov.nih.mipav.model.algorithms.ContourPlot.Img (implements gov.nih.mipav.model.algorithms.ContourPlot.ImgBase<P>)
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator<P> (implements java.util.Spliterator<T>)
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator<P> (implements java.util.Iterator<E>)
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator<P> (implements java.util.Spliterator<T>)
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgIterator<P> (implements java.util.Iterator<E>)
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator<P> (implements java.util.Spliterator<T>)
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator<P> (implements java.util.Spliterator<T>)
- gov.nih.mipav.model.algorithms.ContourPlot.Legend (implements gov.nih.mipav.model.algorithms.ContourPlot.Renderable, gov.nih.mipav.model.algorithms.ContourPlot.Renderer)
- gov.nih.mipav.model.algorithms.ContourPlot.Legend.ColormapLabel
- gov.nih.mipav.model.algorithms.ContourPlot.Legend.GlyphLabel
- gov.nih.mipav.model.algorithms.ContourPlot.Legend.LineLabel
- gov.nih.mipav.model.algorithms.ContourPlot.Lines (implements gov.nih.mipav.model.algorithms.ContourPlot.Renderable)
- gov.nih.mipav.model.algorithms.ContourPlot.Pair<T1,T2>
- gov.nih.mipav.model.algorithms.ContourPlot.Pixel (implements gov.nih.mipav.model.algorithms.ContourPlot.PixelBase)
- gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator<P,T> (implements java.util.Spliterator<T>)
- gov.nih.mipav.model.algorithms.ContourPlot.PointDetails (implements java.lang.Cloneable)
- gov.nih.mipav.model.algorithms.ContourPlot.Points (implements gov.nih.mipav.model.algorithms.ContourPlot.Renderable)
- gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails (implements java.lang.Cloneable)
- gov.nih.mipav.model.algorithms.ContourPlot.SignedDistanceCharacters
- gov.nih.mipav.model.algorithms.ContourPlot.SimpleColorMap (implements gov.nih.mipav.model.algorithms.ContourPlot.ColorMap)
- gov.nih.mipav.model.algorithms.ContourPlot.Text (implements gov.nih.mipav.model.algorithms.ContourPlot.Renderable)
- gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails (implements java.lang.Cloneable)
- gov.nih.mipav.model.algorithms.ContourPlot.Triangles (implements gov.nih.mipav.model.algorithms.ContourPlot.Renderable)
- gov.nih.mipav.model.algorithms.ContourPlot.Utils
- gov.nih.mipav.model.algorithms.Covdet.VlCovDet
- gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum2
- gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum3
- gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeature
- gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeatureLaplacianScale
- gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeatureOrientation
- gov.nih.mipav.model.algorithms.Covdet.VlFrameDisc
- gov.nih.mipav.model.algorithms.Covdet.VlFrameEllipse
- gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedDisc
- gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedEllipse
- gov.nih.mipav.model.algorithms.Covdet.VlScaleSpace
- gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
- gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceOctaveGeometry
- gov.nih.mipav.model.algorithms.CubicEquation
- gov.nih.mipav.model.algorithms.curev
- gov.nih.mipav.model.algorithms.curfit
- gov.nih.mipav.model.algorithms.CVODES
- gov.nih.mipav.model.algorithms.CVODES_ASA.CVadjCheckPointRec
- gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
- gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
- gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
- gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRecB
- gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
- gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
- gov.nih.mipav.model.algorithms.CVODES.DtpntMemRec
- gov.nih.mipav.model.algorithms.CVODES.HermiteDataMemRec
- gov.nih.mipav.model.algorithms.CVODES.NVector
- gov.nih.mipav.model.algorithms.CVODES.PolynomialDataMemRec
- gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver
- gov.nih.mipav.model.algorithms.CVODES.UserData
- gov.nih.mipav.model.algorithms.DAgostinosKsquaredTest
- gov.nih.mipav.model.algorithms.dataStruct
- gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.AmAl
- gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.Renum
- gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
- gov.nih.mipav.model.algorithms.DiscreteSineTransform.cdft_arg_t
- gov.nih.mipav.model.algorithms.DiscreteSineTransform.cftrec1_th (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.DiscreteSineTransform.cftrec2_th (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.EllipticIntegral
- gov.nih.mipav.model.algorithms.Erfinv
- gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
- gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
- gov.nih.mipav.model.algorithms.Fastfit
- gov.nih.mipav.model.file.FileBase
- gov.nih.mipav.model.algorithms.FloodFill
- gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.ConvAndLinear
- gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.DiscretInteg
- gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.Tracker
- java.util.concurrent.ForkJoinTask<V> (implements java.util.concurrent.Future<V>, java.io.Serializable)
- java.util.concurrent.CountedCompleter<T>
- gov.nih.mipav.model.algorithms.Gamma
- gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.Background
- gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
- gov.nih.mipav.model.algorithms.GaussianOneDimKernel
- gov.nih.mipav.model.algorithms.GenerateDGaussian
- gov.nih.mipav.model.algorithms.GenerateGaussian
- gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.tImage
- gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
- gov.nih.mipav.model.algorithms.Hypergeometric
- gov.nih.mipav.model.algorithms.indexValue
- gov.nih.mipav.model.algorithms.indexValueComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.Integration2
- gov.nih.mipav.model.algorithms.Integration2EP
- gov.nih.mipav.model.algorithms.InverseLaplace
- gov.nih.mipav.model.algorithms.InverseLaplace2
- gov.nih.mipav.model.algorithms.InverseLaplaceqd
- gov.nih.mipav.model.algorithms.JacobianElliptic
- gov.nih.mipav.model.algorithms.KDTree
- gov.nih.mipav.model.algorithms.KDTree.kdhyperrect
- gov.nih.mipav.model.algorithms.KDTree.kdnode
- gov.nih.mipav.model.algorithms.KDTree.kdres
- gov.nih.mipav.model.algorithms.KDTree.kdtree
- gov.nih.mipav.model.algorithms.KDTree.res_node
- gov.nih.mipav.model.algorithms.L_BFGS_B
- gov.nih.mipav.model.algorithms.libdt.ConfigFile
- gov.nih.mipav.model.algorithms.libdt.CovMatrix
- gov.nih.mipav.model.algorithms.libdt.DatDescriptor
- gov.nih.mipav.model.algorithms.libdt.Dytex
- gov.nih.mipav.model.algorithms.libdt.DytexKalmanFilter
- gov.nih.mipav.model.algorithms.libdt.DytexMix
- gov.nih.mipav.model.algorithms.libdt.DytexOptions
- gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
- gov.nih.mipav.model.algorithms.libdt.DytexSplitParams
- gov.nih.mipav.model.algorithms.libdt.EMOptions
- gov.nih.mipav.model.algorithms.libdt.Estats
- gov.nih.mipav.model.algorithms.libdt.HEMOptions
- gov.nih.mipav.model.algorithms.libdt.indexValueComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.libdt.indexValueItem
- gov.nih.mipav.model.algorithms.libdt.Mat
- gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
- gov.nih.mipav.model.algorithms.libdt.PatchExtractor
- gov.nih.mipav.model.algorithms.libdt.PatchOptions
- gov.nih.mipav.model.algorithms.libdt.Range
- gov.nih.mipav.model.algorithms.libdt.VidSegm
- gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
- gov.nih.mipav.model.algorithms.LIBSVM.Cache
- gov.nih.mipav.model.algorithms.LIBSVM.Cache.head_t
- gov.nih.mipav.model.algorithms.LIBSVM.decision_function
- gov.nih.mipav.model.algorithms.LIBSVM.QMatrix
- gov.nih.mipav.model.algorithms.LIBSVM.Solver
- gov.nih.mipav.model.algorithms.LIBSVM.Solver.SolutionInfo
- gov.nih.mipav.model.algorithms.LIBSVM.svm_model (implements java.io.Serializable)
- gov.nih.mipav.model.algorithms.LIBSVM.svm_node (implements java.io.Serializable)
- gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter (implements java.lang.Cloneable, java.io.Serializable)
- gov.nih.mipav.model.algorithms.LIBSVM.svm_problem (implements java.io.Serializable)
- gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame.point
- gov.nih.mipav.model.algorithms.Lmmin
- gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.tliop
- gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
- gov.nih.mipav.model.algorithms.LSCM.Boundary
- gov.nih.mipav.model.algorithms.LSCM.Edge
- gov.nih.mipav.model.algorithms.LSCM.EdgeKey
- gov.nih.mipav.model.algorithms.LSCM.Face
- gov.nih.mipav.model.algorithms.LSCM.FaceEdgeIterator
- gov.nih.mipav.model.algorithms.LSCM.FaceHalfedgeIterator
- gov.nih.mipav.model.algorithms.LSCM.FaceVertexIterator
- gov.nih.mipav.model.algorithms.LSCM.FormTrait
- gov.nih.mipav.model.algorithms.LSCM.Graph
- gov.nih.mipav.model.algorithms.LSCM.HalfEdge
- gov.nih.mipav.model.algorithms.LSCM.Homology
- gov.nih.mipav.model.algorithms.LSCM.Loop
- gov.nih.mipav.model.algorithms.LSCM.Mesh
- gov.nih.mipav.model.algorithms.LSCM.MeshEdgeIterator
- gov.nih.mipav.model.algorithms.LSCM.MeshFaceIterator
- gov.nih.mipav.model.algorithms.LSCM.MeshHalfEdgeIterator
- gov.nih.mipav.model.algorithms.LSCM.MeshVertexIterator
- gov.nih.mipav.model.algorithms.LSCM.Parser
- gov.nih.mipav.model.algorithms.LSCM.Point
- gov.nih.mipav.model.algorithms.LSCM.Point2
- gov.nih.mipav.model.algorithms.LSCM.Token
- gov.nih.mipav.model.algorithms.LSCM.Trait
- gov.nih.mipav.model.algorithms.LSCM.Triplet
- gov.nih.mipav.model.algorithms.LSCM.Vertex
- gov.nih.mipav.model.algorithms.LSCM.VertexEdgeIterator
- gov.nih.mipav.model.algorithms.LSCM.VertexFaceIterator
- gov.nih.mipav.model.algorithms.LSCM.VertexInHalfedgeIterator
- gov.nih.mipav.model.algorithms.LSCM.VertexOutHalfedgeIterator
- gov.nih.mipav.model.algorithms.LSCM.VertexVertexIterator
- gov.nih.mipav.model.algorithms.LsqFit
- gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
- java.awt.event.MouseAdapter (implements java.awt.event.MouseListener, java.awt.event.MouseMotionListener, java.awt.event.MouseWheelListener)
- gov.nih.mipav.model.algorithms.NelderMead
- gov.nih.mipav.model.algorithms.NelderMead.param_t
- gov.nih.mipav.model.algorithms.NelderMead.point_t
- gov.nih.mipav.model.algorithms.NelderMead.pointComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.NelderMead.simplex_t
- gov.nih.mipav.model.algorithms.NESolve
- gov.nih.mipav.model.algorithms.NL2sol
- gov.nih.mipav.model.algorithms.NLConstrainedEngine
- gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
- gov.nih.mipav.model.algorithms.NMSimplex
- gov.nih.mipav.model.algorithms.NoiseLevel.rowComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.OastDetector9_16
- gov.nih.mipav.model.algorithms.ODE
- gov.nih.mipav.model.algorithms.ODEEP
- gov.nih.mipav.model.algorithms.OpenCLInfo
- java.awt.geom.Point2D (implements java.lang.Cloneable)
- gov.nih.mipav.model.algorithms.Poly
- gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
- gov.nih.mipav.model.algorithms.Psi
- gov.nih.mipav.model.algorithms.QuarticEquation
- gov.nih.mipav.model.algorithms.QuarticEquation.complex_t
- gov.nih.mipav.model.algorithms.QuarticEquationEP
- gov.nih.mipav.model.algorithms.QuarticEquationEP.complex_t
- java.util.Random (implements java.io.Serializable)
- gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.indexValueComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.indexValueItem
- gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.polygon
- gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.qlgraph
- gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
- gov.nih.mipav.model.algorithms.SIFT.ikeysComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.SIFT.VlFileMeta
- gov.nih.mipav.model.algorithms.SIFT.VlPgmImage
- gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
- gov.nih.mipav.model.algorithms.SIFT.VlSiftKeypoint
- gov.nih.mipav.model.algorithms.SIFT3D.Affine
- gov.nih.mipav.model.algorithms.SIFT3D.CL_data
- gov.nih.mipav.model.algorithms.SIFT3D.Cvec
- gov.nih.mipav.model.algorithms.SIFT3D.Gauss_filter
- gov.nih.mipav.model.algorithms.SIFT3D.GSS_filters
- gov.nih.mipav.model.algorithms.SIFT3D.Hist
- gov.nih.mipav.model.algorithms.SIFT3D.Image
- gov.nih.mipav.model.algorithms.SIFT3D.Kernels
- gov.nih.mipav.model.algorithms.SIFT3D.Keypoint
- gov.nih.mipav.model.algorithms.SIFT3D.Keypoint_store
- gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm
- gov.nih.mipav.model.algorithms.SIFT3D.Mesh
- gov.nih.mipav.model.algorithms.SIFT3D.Pyramid
- gov.nih.mipav.model.algorithms.SIFT3D.Ransac
- gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
- gov.nih.mipav.model.algorithms.SIFT3D.Sep_FIR_filter
- gov.nih.mipav.model.algorithms.SIFT3D.SIFT_cl_kernels
- gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor
- gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor_store
- gov.nih.mipav.model.algorithms.SIFT3D.SIFT3DC
- gov.nih.mipav.model.algorithms.SIFT3D.Slab
- gov.nih.mipav.model.algorithms.SIFT3D.Svec
- gov.nih.mipav.model.algorithms.SIFT3D.Tform
- gov.nih.mipav.model.algorithms.SIFT3D.Tps
- gov.nih.mipav.model.algorithms.SIFT3D.Tri
- gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatch
- gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatchComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeyPoint
- gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeypointComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.splev
- gov.nih.mipav.model.algorithms.sproot
- gov.nih.mipav.model.algorithms.Statistics
- gov.nih.mipav.model.algorithms.StatisticsTable
- gov.nih.mipav.model.algorithms.StochasticForests.Data
- gov.nih.mipav.model.algorithms.StochasticForests.Forest
- gov.nih.mipav.model.algorithms.StochasticForests.Forest.computeTreePermutationImportanceInThread (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.StochasticForests.Forest.growTreesInThread (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictInternalInThread (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictTreesInThread (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.StochasticForests.Forest.showProgress (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.StochasticForests.indexValueComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.StochasticForests.indexValueDescendingComparator (implements java.util.Comparator<T>)
- gov.nih.mipav.model.algorithms.StochasticForests.indexValueItem
- gov.nih.mipav.model.algorithms.StochasticForests.SparseMatrix
- gov.nih.mipav.model.algorithms.StochasticForests.Tree
- gov.nih.mipav.model.algorithms.StochasticForests.ValuePair<K,V>
- gov.nih.mipav.model.algorithms.SVM.svmtest
- gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
- gov.nih.mipav.model.algorithms.SVM.VlSvm
- gov.nih.mipav.model.algorithms.SVM.VlSvmDataset
- gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
- java.lang.Thread (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.AlgorithmBase (implements java.awt.event.ActionListener, java.awt.event.WindowListener)
- java.lang.Throwable (implements java.io.Serializable)
- java.lang.Exception
- java.lang.RuntimeException
- gov.nih.mipav.model.algorithms.Vectornd
- gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
- gov.nih.mipav.model.algorithms.WeibullDistribution.Pair<T,U>
- gov.nih.mipav.model.algorithms.WishartVariateGenerator
Enum Hierarchy
- java.lang.Object
- java.lang.Enum<E> (implements java.lang.Comparable<T>, java.io.Serializable)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.TernaryCostFunction3.html����������������������������0000775�4231163�4231163�00000030241�14537076053�027250� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.TernaryCostFunction3 (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitWholeNL2solModel.html�������������������������������0000775�4231163�4231163�00000042434�14537076046�026252� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitWholeNL2solModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int[] |
iv |
|
(package private) double[] |
v |
|
(package private) double[] |
x |
|
private double[] |
xData |
|
private float[] |
yData |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
FitWholeNL2solModel(int nPoints,
double[] xData,
float[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian) |
Creates a new FitWholeNL2solModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
void |
calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm) |
|
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitWholeNL2solModel
public FitWholeNL2solModel(int nPoints,
double[] xData,
float[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian)
Creates a new FitWholeNL2solModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - yData - DOCUMENT ME!x - DOCUMENT ME!iv - v - useAnalyticJacobian -
-
Method Detail
-
driver
public void driver()
Starts the analysis.
- Overrides:
driver in class NL2sol
-
calcr
public void calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm)
- Specified by:
calcr in class NL2sol
-
calcj
public void calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm)
- Specified by:
calcj in class NL2sol
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.ColorOperations.html�������������������������������������0000775�4231163�4231163�00000031035�14537076053�025522� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.ColorOperations (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.ColorOperations
-
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static int |
changeSaturation(int argb,
double s) |
Changes the saturation of a color.
|
static int |
interpolateColor(int c1,
int c2,
double m) |
Linearly interpolates between the two specified colors.
c = c1*(1-m) + c2*m
|
static int |
scaleColorAlpha(int color,
double m) |
Scales the alpha value of a specified integer packed ARGB color by a
specified scaling factor m.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ColorOperations
public ColorOperations()
-
Method Detail
-
interpolateColor
public static int interpolateColor(int c1,
int c2,
double m)
Linearly interpolates between the two specified colors.
c = c1*(1-m) + c2*m
- Parameters:
c1 - integer packed ARGB color valuec2 - integer packed ARGB color value, e.g. 0xff00ff00 for opaque greenm - in [0,1]- Returns:
- interpolated color
-
scaleColorAlpha
public static int scaleColorAlpha(int color,
double m)
Scales the alpha value of a specified integer packed ARGB color by a
specified scaling factor m.
New color will be (a*m, r, g, b).
- Parameters:
color - of which alpha will be scaledm - scaling factor- Returns:
- integer packed ARGB color with scaled alpha
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.DytexSplitParams.html������������������������������������������0000775�4231163�4231163�00000027417�14537076055�024476� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.DytexSplitParams (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.DytexSplitParams
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.BlankCanvasFallback.html���������������������������������0000775�4231163�4231163�00000131317�14537076053�026207� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.BlankCanvasFallback (MIPAV API Documentation)
- java.lang.Object
-
- java.awt.Component
-
- java.awt.Container
-
- javax.swing.JComponent
-
- gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class javax.swing.JComponent
javax.swing.JComponent.AccessibleJComponent
-
Nested classes/interfaces inherited from class java.awt.Container
java.awt.Container.AccessibleAWTContainer
-
Nested classes/interfaces inherited from class java.awt.Component
java.awt.Component.AccessibleAWTComponent, java.awt.Component.BaselineResizeBehavior, java.awt.Component.BltBufferStrategy, java.awt.Component.FlipBufferStrategy
-
Field Summary
-
Fields inherited from class javax.swing.JComponent
listenerList, TOOL_TIP_TEXT_KEY, ui, UNDEFINED_CONDITION, WHEN_ANCESTOR_OF_FOCUSED_COMPONENT, WHEN_FOCUSED, WHEN_IN_FOCUSED_WINDOW
-
Fields inherited from class java.awt.Component
accessibleContext, BOTTOM_ALIGNMENT, CENTER_ALIGNMENT, LEFT_ALIGNMENT, RIGHT_ALIGNMENT, TOP_ALIGNMENT
-
Fields inherited from interface java.awt.image.ImageObserver
ABORT, ALLBITS, ERROR, FRAMEBITS, HEIGHT, PROPERTIES, SOMEBITS, WIDTH
-
Method Summary
-
Methods inherited from class javax.swing.JComponent
addAncestorListener, addNotify, addVetoableChangeListener, computeVisibleRect, contains, createToolTip, disable, enable, firePropertyChange, firePropertyChange, firePropertyChange, fireVetoableChange, getActionForKeyStroke, getActionMap, getAlignmentX, getAlignmentY, getAncestorListeners, getAutoscrolls, getBaseline, getBaselineResizeBehavior, getBorder, getBounds, getClientProperty, getComponentGraphics, getComponentPopupMenu, getConditionForKeyStroke, getDebugGraphicsOptions, getDefaultLocale, getFontMetrics, getGraphics, getHeight, getInheritsPopupMenu, getInputMap, getInputMap, getInputVerifier, getInsets, getInsets, getListeners, getLocation, getMaximumSize, getMinimumSize, getNextFocusableComponent, getPopupLocation, getPreferredSize, getRegisteredKeyStrokes, getRootPane, getSize, getToolTipLocation, getToolTipText, getToolTipText, getTopLevelAncestor, getTransferHandler, getUI, getUIClassID, getVerifyInputWhenFocusTarget, getVetoableChangeListeners, getVisibleRect, getWidth, getX, getY, grabFocus, hide, isDoubleBuffered, isLightweightComponent, isManagingFocus, isOpaque, isOptimizedDrawingEnabled, isPaintingForPrint, isPaintingOrigin, isPaintingTile, isRequestFocusEnabled, isValidateRoot, paintBorder, paintChildren, paintComponent, paintImmediately, paintImmediately, paramString, print, printAll, printBorder, printChildren, printComponent, processComponentKeyEvent, processKeyBinding, processKeyEvent, processMouseEvent, processMouseMotionEvent, putClientProperty, registerKeyboardAction, registerKeyboardAction, removeAncestorListener, removeNotify, removeVetoableChangeListener, repaint, repaint, requestDefaultFocus, requestFocus, requestFocus, requestFocusInWindow, requestFocusInWindow, resetKeyboardActions, reshape, revalidate, scrollRectToVisible, setActionMap, setAlignmentX, setAlignmentY, setAutoscrolls, setBackground, setBorder, setComponentPopupMenu, setDebugGraphicsOptions, setDefaultLocale, setDoubleBuffered, setEnabled, setFocusTraversalKeys, setFont, setForeground, setInheritsPopupMenu, setInputMap, setInputVerifier, setMaximumSize, setMinimumSize, setNextFocusableComponent, setOpaque, setPreferredSize, setRequestFocusEnabled, setToolTipText, setTransferHandler, setUI, setVerifyInputWhenFocusTarget, setVisible, unregisterKeyboardAction, update, updateUI
-
Methods inherited from class java.awt.Container
add, add, add, add, add, addContainerListener, addImpl, addPropertyChangeListener, addPropertyChangeListener, applyComponentOrientation, areFocusTraversalKeysSet, countComponents, deliverEvent, doLayout, findComponentAt, findComponentAt, getComponent, getComponentAt, getComponentAt, getComponentCount, getComponents, getComponentZOrder, getContainerListeners, getFocusTraversalKeys, getFocusTraversalPolicy, getLayout, getMousePosition, insets, invalidate, isAncestorOf, isFocusCycleRoot, isFocusCycleRoot, isFocusTraversalPolicyProvider, isFocusTraversalPolicySet, layout, list, list, locate, minimumSize, paintComponents, preferredSize, printComponents, processContainerEvent, processEvent, remove, remove, removeAll, removeContainerListener, setComponentZOrder, setFocusCycleRoot, setFocusTraversalPolicy, setFocusTraversalPolicyProvider, setLayout, transferFocusDownCycle, validate, validateTree
-
Methods inherited from class java.awt.Component
action, add, addComponentListener, addFocusListener, addHierarchyBoundsListener, addHierarchyListener, addInputMethodListener, addKeyListener, addMouseListener, addMouseMotionListener, addMouseWheelListener, bounds, checkImage, checkImage, coalesceEvents, contains, createImage, createImage, createVolatileImage, createVolatileImage, disableEvents, dispatchEvent, enable, enableEvents, enableInputMethods, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, getAccessibleContext, getBackground, getBounds, getColorModel, getComponentListeners, getComponentOrientation, getCursor, getDropTarget, getFocusCycleRootAncestor, getFocusListeners, getFocusTraversalKeysEnabled, getFont, getForeground, getGraphicsConfiguration, getHierarchyBoundsListeners, getHierarchyListeners, getIgnoreRepaint, getInputContext, getInputMethodListeners, getInputMethodRequests, getKeyListeners, getLocale, getLocation, getLocationOnScreen, getMouseListeners, getMouseMotionListeners, getMousePosition, getMouseWheelListeners, getName, getParent, getPropertyChangeListeners, getPropertyChangeListeners, getSize, getToolkit, getTreeLock, gotFocus, handleEvent, hasFocus, imageUpdate, inside, isBackgroundSet, isCursorSet, isDisplayable, isEnabled, isFocusable, isFocusOwner, isFocusTraversable, isFontSet, isForegroundSet, isLightweight, isMaximumSizeSet, isMinimumSizeSet, isPreferredSizeSet, isShowing, isValid, isVisible, keyDown, keyUp, list, list, list, location, lostFocus, mouseDown, mouseDrag, mouseEnter, mouseExit, mouseMove, mouseUp, move, nextFocus, paintAll, postEvent, prepareImage, prepareImage, processComponentEvent, processFocusEvent, processHierarchyBoundsEvent, processHierarchyEvent, processInputMethodEvent, processMouseWheelEvent, remove, removeComponentListener, removeFocusListener, removeHierarchyBoundsListener, removeHierarchyListener, removeInputMethodListener, removeKeyListener, removeMouseListener, removeMouseMotionListener, removeMouseWheelListener, removePropertyChangeListener, removePropertyChangeListener, repaint, repaint, requestFocus, requestFocus, requestFocusInWindow, resize, resize, setBounds, setBounds, setComponentOrientation, setCursor, setDropTarget, setFocusable, setFocusTraversalKeysEnabled, setIgnoreRepaint, setLocale, setLocation, setLocation, setMixingCutoutShape, setName, setSize, setSize, show, show, size, toString, transferFocus, transferFocusBackward, transferFocusUpCycle
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
scheduleRepaint
public void scheduleRepaint()
Schedules a repaint call on the AWT event dispatch thread.
If a repaint is already pending, this method will not schedule an
additional call until the render method within repaint is about to be executed.
- Specified by:
scheduleRepaint in interface ContourPlot.JPlotterCanvas
-
repaint
public void repaint()
On AWT event dispatch thread:
Uses the set
ContourPlot.Renderer render to render display contents, then calls super.repaint() to display rendered content.
Schedules a repaint call call on the AWT event dispatch thread if not on it.
This method is only deprecated for calling directly, call ContourPlot.JPlotterCanvas.scheduleRepaint() instead.
Of course super.repaint() is implemented by the implementing Component already.
- Specified by:
repaint in interface ContourPlot.JPlotterCanvas- Overrides:
repaint in class java.awt.Component
-
render
protected void render()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGraphBasedSegmentation.html���������������������������������0000775�4231163�4231163�00000071360�14537076046�026345� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGraphBasedSegmentation (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
k |
|
private int |
minSize |
|
private float |
sigma |
The C++ source code for the port was downloaded from Pedro F.
|
(package private) ViewUserInterface |
UI |
|
private int |
xDim |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
sigma
private float sigma
The C++ source code for the port was downloaded from Pedro F. Felzenswalb's web page
Graph Based Image Segmentation at http://cs.brown.edu/~pff/segment/
This code is ported with the permission of Pedro F. Felzenszwalb
Reference: Pedro F. Felzenszwalb and Daniel P. Huttenlocher,
International Journal of Computer Vision, 59(2), September, 2004.
Port performed by William Gandler.
This program takes a color image and produces a segmentation
with a random color assigned to each region
Typical parameters are: sigma = 0.5, k = 500, minSize = 20.
Larger values for k result in larger components in the result.
-
minSize
private int minSize
-
Constructor Detail
-
AlgorithmGraphBasedSegmentation
public AlgorithmGraphBasedSegmentation(ModelImage destImg,
ModelImage srcImg,
float sigma,
float k,
int minSize)
Constructs graph based segmentation algorithm.
- Parameters:
destImg - Image model where result image is to storedsrcImg - Source image modelsigma - Used to smooth the input image before segmenting itk - Value for the threshold functionminSize - Minimum component size enforced by post-processing
-
Method Detail
-
diff
private float diff(float[] r,
float[] g,
float[] b,
int x1,
int y1,
int x2,
int y2)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmScaleSaliency.sixItems.html���������������������������������0000775�4231163�4231163�00000036140�14537076050�026302� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmScaleSaliency.sixItems (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
-
Constructor Summary
Constructors
| Constructor |
Description |
sixItems(int pointx,
int pointy,
int circleRadius,
double entropy,
double interScaleSaliency,
double saliency) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
pointx
private int pointx
-
pointy
private int pointy
-
circleRadius
private int circleRadius
-
entropy
private double entropy
-
saliency
private double saliency
-
Constructor Detail
-
sixItems
public sixItems(int pointx,
int pointy,
int circleRadius,
double entropy,
double interScaleSaliency,
double saliency)
-
Method Detail
-
getPointx
public int getPointx()
-
getPointy
public int getPointy()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Lmmin.html�����������������������������������������������������������0000775�4231163�4231163�00000176037�14537076056�021204� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Lmmin (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Lmmin
-
- Direct Known Subclasses:
AlgorithmELSUNCOpt2D.FitOAR2DLMModel, AlgorithmELSUNCOpt3D.FitOAR3DLMModel
public abstract class Lmmin
extends java.lang.Object
To run self tests in another module put:
if (testMode) {
new FitAll();
setCompleted(false);
return;
}
class FitAll extends Lmmin {
public FitAll() {
super();
}
public void fitToFunction(double x[], double fvec[], int info[]) {
return;
}
}
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
BARD |
|
private int |
BOX_3D |
|
private int |
BROWN_ALMOST_LINEAR |
|
private int |
BROWN_AND_DENNIS |
|
private int |
CHEBYQUAD |
|
private double |
DBL_EPSILON |
|
private double |
DBL_MAX |
|
private double |
DBL_MIN |
2**-1022 = D1MACH(1).
|
protected boolean |
debugMatrix |
|
protected boolean |
debugMessages |
|
protected double[] |
diag |
diag is an array of length n.
|
private int |
DRAPER24D |
|
protected double |
epsfcn |
step used to calculate the jacobian
epsfcn is an input variable used in choosing a step length for
the forward-difference approximation.
|
private int |
EQUILIBRIUM_COMBUSTION |
|
protected double |
factor |
initial bound to steps in the outer loop
factor is a positive input variable used in determining the
initial step bound.
|
private double[] |
fjac |
fjac is an OUTPUT m by n array.
|
protected double |
fnorm |
norm of the residue vector fvec
|
private int |
FREUDENSTEIN_AND_ROTH |
|
protected double |
ftol |
ftol is a nonnegative input variable.
|
private double[] |
fvec |
fvec is an output array of length m which contains the functions evaluated at
the output x.
|
protected double |
gtol |
gtol is a nonnegative input variable.
|
private int |
HATFLDB |
|
private int |
HATFLDC |
|
private int |
HELICAL_VALLEY |
|
private int |
HOCK1 |
|
private int |
HOCK21_MODIFIED |
|
private int |
HOCK25 |
|
protected int[] |
info |
status of minimization
info is an integer OUTPUT variable that indicates the termination
status of lm_lmdif as follows:
info < 0 termination requested by user-supplied routine *evaluate;
info = 0 fnorm almost vanishing;
info = 1 both actual and predicted relative reductions
in the sum of squares are at most ftol;
info = 2 relative error between two consecutive iterates
is at most xtol;
info = 3 conditions for info = 1 and info = 2 both hold;
info = 4 the cosine of the angle between fvec and any
column of the jacobian is at most gtol in
absolute value;
info = 5 number of calls to lm_fcn has reached or
exceeded maxfev;
info = 6 ftol is too small: no further reduction in
the sum of squares is possible;
info = 7 xtol is too small: no further improvement in
the approximate solution x is possible;
info = 8 gtol is too small: fvec is orthogonal to the
columns of the jacobian to machine precision;
info =10 improper input parameters;
|
private int[] |
ipvt |
ipvt is an integer OUTPUT array of length n.
|
private int |
JENNRICH_AND_SAMPSON |
|
private int |
KOWALIK_AND_OSBORNE |
|
private int |
LEVMAR_ROSENBROCK |
|
private int |
LINEAR_FULL_RANK |
|
private int |
LINEAR_RANK1 |
|
private int |
LINEAR_RANK1_WITH_ZERO_COLUMNS_AND_ROWS |
|
private double |
LM_DWARF |
|
private java.lang.String[] |
lm_infmsg |
Set message texts (indexed by info)
|
private double |
LM_MACHEP |
resolution of arithmetic
|
private java.lang.String[] |
lm_shortmsg |
|
private double |
LM_SQRT_DWARF |
Square should not underflow
|
private double |
LM_SQRT_GIANT |
Square should not overflow
|
private double |
LM_USERTOL |
|
private int |
m |
m is a positive integer input variable set to the number of functions.
|
protected int |
maxcall |
maximum number of iterations
|
private int |
maxfev |
maxfev is a positive integer input variable.
|
private int |
MEYER |
|
protected int |
mode |
mode is an integer input variable.
|
private int |
MODIFIED_ROSENBROCK |
|
private int |
n |
n is a positive integer variable set to the number of variables; n must not exceed m.
|
protected int |
nfev |
actual number of iterations
|
private int |
OSBORNE1 |
|
private int |
OSBORNE2 |
|
private double[] |
par |
|
private int |
POWELL_2_PARAMETER |
|
private int |
POWELL_SINGULAR |
|
protected int |
printflags |
Bits ored to show where to output diagnostics
|
private double[] |
qtf |
qtf is an OUTPUT array of length n which contains
the first n elements of the vector (q transpose)*fvec.
|
private int |
ROSENBROCK |
|
private int |
testCase |
|
private boolean |
testMode |
|
private double[] |
wa1 |
wa1, wa2, and wa3 are work arrays of length n.
|
private double[] |
wa2 |
|
private double[] |
wa3 |
|
private double[] |
wa4 |
wa4 is a work array of length m, used among others to hold
residuals from evaluate.
|
private int |
WATSON |
|
private int |
WOOD |
|
protected double[] |
x |
x is an array of length n.
|
private double[] |
xSeries |
|
protected double |
xtol |
xtol is a nonnegative input variable.
|
private double[] |
ySeries |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Lmmin() |
|
Lmmin(int m,
int n) |
|
Lmmin(int m,
int n,
double[] x) |
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
driver.
|
void |
dumpResults() |
|
private void |
fitTestModel() |
|
abstract void |
fitToFunction(double[] x,
double[] fvec,
int[] info) |
|
private void |
fitToTestFunction(double[] par,
double[] fvec) |
lm_enorm.
|
double[] |
getParameters() |
|
int |
getStatus() |
|
(package private) double |
lm_enorm(int n,
double[] x,
int offset) |
|
private void |
lm_lmdif() |
|
private void |
lm_lmpar(int n,
double[] r,
int ldr,
int[] ipvt,
double[] diag,
double[] qtb,
double delta,
double[] par,
double[] x,
double[] sdiag,
double[] aux,
double[] xdi) |
|
private void |
lm_printout_std(double[] par,
double[] fvec,
int printflags,
int iflag,
int iter,
int nfev) |
|
private void |
lm_qrfac(int m,
int n,
double[] a,
int pivot,
int[] ipvt,
double[] rdiag,
double[] acnorm,
double[] wa) |
|
private void |
lm_qrsolv(int n,
double[] r,
int ldr,
int[] ipvt,
double[] diag,
double[] qtb,
double[] x,
double[] sdiag,
double[] wa) |
|
private double |
shiftedChebyshev(double x,
int n) |
|
void |
statusMessage(int status) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
testMode
private boolean testMode
-
factor
protected double factor
initial bound to steps in the outer loop
factor is a positive input variable used in determining the
initial step bound. This bound is set to the product of
factor and the euclidean norm of diag*x if nonzero, or else
to factor itself. In most cases factor should lie in the
interval (0.1,100.0). Generally, the value 100.0 is recommended.
-
fjac
private double[] fjac
fjac is an OUTPUT m by n array. The upper n by n submatrix
of fjac contains an upper triangular matrix r with
diagonal elements of nonincreasing magnitude such that
pT*(jacT*jac)*p = rT*r
(NOTE: T stands for matrix transposition),
where p is a permutation matrix and jac is the final
calculated jacobian. Column j of p is column ipvt(j)
(see below) of the identity matrix. The lower trapezoidal
part of fjac contains information generated during
the computation of r.
-
ipvt
private int[] ipvt
ipvt is an integer OUTPUT array of length n. It defines a
permutation matrix p such that jac*p = q*r, where jac is
the final calculated jacobian, q is orthogonal (not stored),
and r is upper triangular with diagonal elements of
nonincreasing magnitude. Column j of p is column ipvt(j)
of the identity matrix.
-
testCase
private int testCase
-
xSeries
private double[] xSeries
-
ySeries
private double[] ySeries
-
Method Detail
-
getStatus
public int getStatus()
-
driver
public void driver()
driver.
-
lm_lmdif
private void lm_lmdif()
-
lm_qrfac
private void lm_qrfac(int m,
int n,
double[] a,
int pivot,
int[] ipvt,
double[] rdiag,
double[] acnorm,
double[] wa)
-
lm_printout_std
private void lm_printout_std(double[] par,
double[] fvec,
int printflags,
int iflag,
int iter,
int nfev)
-
lm_lmpar
private void lm_lmpar(int n,
double[] r,
int ldr,
int[] ipvt,
double[] diag,
double[] qtb,
double delta,
double[] par,
double[] x,
double[] sdiag,
double[] aux,
double[] xdi)
-
lm_qrsolv
private void lm_qrsolv(int n,
double[] r,
int ldr,
int[] ipvt,
double[] diag,
double[] qtb,
double[] x,
double[] sdiag,
double[] wa)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplace2.html�������������������������������������������������0000775�4231163�4231163�00000072263�14537076055�023102� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplace2 (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.InverseLaplace2
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
abscissa |
abscissa of convergence of the Laplace transform.
|
private double |
absEps |
absolute accuracy requested.
|
private double |
epsilon |
D1MACH(4).
|
private int[] |
errStatus |
Parameter giving information on the termination of the algorithm errStatus[0] = 0 normal and reliable termination
of the routine errStatus[0] = 1 The computations are terminated because the bound on the number of evaluations of
the user supplied Laplace function has been achieved.
|
private double[] |
estErr |
Estimate of the absolute error abs(f(t) - result[0]).
|
private int[] |
evaluations |
Number of evaluations of user supplied Laplace function.
|
private int |
it |
index of the time variable being used.
|
private int |
maxBound |
maxBound is a bound on the number of terms used in the Durbin formula.
|
private int |
nex |
DOCUMENT ME!
|
private int |
nres |
DOCUMENT ME!
|
private double |
oflow |
emax = 1024, the largest exponent E for double precision, is I1MACH(16) D1MACH(2) = 2**(emax)*(1 -
2**(-doubleDigits)) = 2**1024*(1 - 2**-53) D1MACH(2) = Double.MAX_VALUE.
|
private double |
relEps |
relative accuracy requested.
|
private double[] |
res3la |
DOCUMENT ME!
|
private double[] |
result |
The routine tries to satisfy the least stringent of both accuracy requirements.
|
private double[] |
rex |
DOCUMENT ME!
|
private double[] |
time |
Independent variable for which the inverse Laplace transform has to be computed. time value should be greater
than zero.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
InverseLaplace2(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new InverseLaplace2 object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
epsilon
private double epsilon
D1MACH(4).
-
errStatus
private final int[] errStatus
Parameter giving information on the termination of the algorithm errStatus[0] = 0 normal and reliable termination
of the routine errStatus[0] = 1 The computations are terminated because the bound on the number of evaluations of
the user supplied Laplace function has been achieved. This bound is equal to 8*maxBound+ 5. One can allow more
Laplace function evalutions by increasing the value of maxBound. errStatus[0] = 2 An input time value is less
than or equal to zero
-
nex
private int nex
DOCUMENT ME!
-
nres
private int nres
DOCUMENT ME!
-
oflow
private final double oflow
emax = 1024, the largest exponent E for double precision, is I1MACH(16) D1MACH(2) = 2**(emax)*(1 -
2**(-doubleDigits)) = 2**1024*(1 - 2**-53) D1MACH(2) = Double.MAX_VALUE.
- See Also:
- Constant Field Values
-
result
private final double[] result
The routine tries to satisfy the least stringent of both accuracy requirements. That is, the routine tries to
satisfy: ABS(f(t) - result[0]) <= max(absEps, relEps*ABS(f(t))) where f(t) is the actual time function Inverse
Laplace transform
-
Constructor Detail
-
InverseLaplace2
public InverseLaplace2(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new InverseLaplace2 object.
- Parameters:
time - double[]abscissa - doublerelEps - doubleabsEps - doubleresult - double[]estErr - double[]evaluations - int[]errStatus - int[]
-
Method Detail
-
fitToLaplace
public abstract void fitToLaplace(double realIn,
double imagIn,
double[] realOut,
double[] imagOut)
DOCUMENT ME!
- Parameters:
realIn - double real part of independent variable of Laplace transformimagIn - double imag part of independent varialbe of Laplace transformrealOut - double[] real part of Laplace transform outputimagOut - double[] imag part of Laplace transform output
-
driver
public void driver()
driver.
-
dqext
private void dqext()
DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmQuadraticFit.html�������������������������������������������0000775�4231163�4231163�00000045404�14537076050�024342� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmQuadraticFit (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected float[] |
m_afCoeff |
the coeffficients of the approximating quadratic equation.
|
protected float[] |
m_afDiagonal |
DOCUMENT ME!
|
protected float |
m_fConstant |
DOCUMENT ME!
|
protected WildMagic.LibFoundation.Mathematics.Vector3f |
m_kCenter |
The center G, orientation R, diagonal matrix D, and constant L in the factorization (P-G)^T R^T D R (P-G) = L.
|
protected WildMagic.LibFoundation.Mathematics.Matrix3f |
m_kOrient |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmQuadraticFit(java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> kPoints) |
Fit a set of 3D points with a quadric surface.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
WildMagic.LibFoundation.Mathematics.Vector3f |
getCenter() |
Get the center of the quadric surface.
|
float |
getCoefficient(int i) |
Get the coefficients of the quadratic equation that represents the approximating quadric surface.
|
float |
getConstant() |
Get the constant term for the factored quadratic equation.
|
float |
getDiagonal(int i) |
Get a diagonal entry for the quadric surface.
|
WildMagic.LibFoundation.Mathematics.Matrix3f |
getOrient() |
Get the orientation of the quadric surface.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_kCenter
protected WildMagic.LibFoundation.Mathematics.Vector3f m_kCenter
The center G, orientation R, diagonal matrix D, and constant L in the factorization (P-G)^T R^T D R (P-G) = L.
-
Constructor Detail
-
AlgorithmQuadraticFit
public AlgorithmQuadraticFit(java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> kPoints)
Fit a set of 3D points with a quadric surface. The various representations of the surface can be accessed by
member functions.
- Parameters:
kPoints - a vector of points, each vector element is of type Point3f
-
Method Detail
-
getDiagonal
public final float getDiagonal(int i)
Get a diagonal entry for the quadric surface. This is a diagonal term for the matrix D in the factorization A =
R^T D R where A is the coefficient matrix for the quadratic term in the equation.
- Parameters:
i - the index of the diagonal (0 <= i < 3)- Returns:
- the diagonal entry
-
getOrient
public final WildMagic.LibFoundation.Mathematics.Matrix3f getOrient()
Get the orientation of the quadric surface. This is the matrix R in the factorization A = R^T D R where A is the
coefficient matrix for the quadratic term in the equation.
- Returns:
- the orientation matrix
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftSegmentation.RegionList.html�����������������������0000775�4231163�4231163�00000033142�14537076047�030276� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftSegmentation.RegionList (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RegionList
-
-
Constructor Summary
Constructors
| Constructor |
Description |
RegionList(int maxRegions_,
int L_,
int N_) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
maxRegions
int maxRegions
-
numRegions
int numRegions
-
freeRegion
int freeRegion
-
indexTable
int[] indexTable
-
freeBlockLoc
int freeBlockLoc
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT.VlSiftKeypoint.html���������������������������������������������0000775�4231163�4231163�00000030022�14537076056�023605� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT.VlSiftKeypoint (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT.VlSiftKeypoint
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
is |
< Integer unnormalized y coordinate.
|
(package private) int |
ix |
< o coordinate (octave).
|
(package private) int |
iy |
< Integer unnormalized x coordinate.
|
(package private) int |
o |
|
(package private) double |
s |
< y coordinate.
|
(package private) double |
sigma |
< s coordinate.
|
(package private) double |
x |
< Integer s coordinate.
|
(package private) double |
y |
< x coordinate.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ix
int ix
< o coordinate (octave).
-
x
double x
< Integer s coordinate.
-
y
double y
< x coordinate.
-
s
double s
< y coordinate.
-
sigma
double sigma
< s coordinate.
-
Constructor Detail
-
VlSiftKeypoint
public VlSiftKeypoint()
< scale.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Keypoint.html�������������������������������������������������0000775�4231163�4231163�00000026752�14537076056�022663� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Keypoint (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Keypoint
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
o |
|
(package private) SIFT3D.Mat_rm |
R |
|
(package private) double[][] |
r_data |
|
(package private) int |
s |
|
(package private) double |
sd |
|
(package private) double |
xd |
|
(package private) double |
yd |
|
(package private) double |
zd |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Keypoint() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Keypoint
public Keypoint()
����������������������gov/nih/mipav/model/algorithms/CVODES.NVector.html��������������������������������������������������0000775�4231163�4231163�00000026370�14537076054�022462� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.NVector (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.NVector
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
data |
|
(package private) boolean |
own_data |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
NVector() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
own_data
boolean own_data
-
Method Detail
-
getData
double[] getData()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TripletSparseMatrix.html���������������������������������0000775�4231163�4231163�00000103402�14537076052�026327� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TripletSparseMatrix (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_rows_
private int num_rows_
-
num_cols_
private int num_cols_
-
rows_
private int[] rows_
-
cols_
private int[] cols_
-
values_
private double[] values_
-
Constructor Detail
-
TripletSparseMatrix
public TripletSparseMatrix(int num_rows,
int num_cols,
java.util.Vector<java.lang.Integer> rows,
java.util.Vector<java.lang.Integer> cols,
java.util.Vector<java.lang.Double> values)
-
Method Detail
-
IsValid
public boolean IsValid()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.CovMatrix.html�������������������������������������������������0000775�4231163�4231163�00000030461�14537076055�023126� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.CovMatrix (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.CovMatrix
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
libdt.cov_type |
covopt |
< storage for the covariance matrix. full matrix is [n x n]; diagonal matrix
is [n x 1]; iid matrix is [1 x 1].
|
libdt.Mat |
mtx |
< dimension of the (square) covariance matrix.
|
int |
n |
|
libdt.cov_reg_type |
regopt |
< type of covariance matrix
|
double |
regval |
< type of regularization to be used
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/KDTree.kdnode.html���������������������������������������������������0000775�4231163�4231163�00000025226�14537076055�022501� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
KDTree.kdnode (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.KDTree.kdnode
-
-
Constructor Summary
Constructors
| Constructor |
Description |
kdnode() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmQuantify.html�����������������������������������������������0000775�4231163�4231163�00000061407�14537076050�023563� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmQuantify (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmQuantify
extends AlgorithmBase
Quantify image data based on a mask image. At present calculates the number of voxels, volume, total
intensity , mean intensity, and standard deviation for an object defined in a mask image.
- Version:
- 0.1 Feb 11, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
Prepares this class for destruction.
|
void |
runAlgorithm() |
Starts the program
|
void |
showRegionInfo(int[] count) |
Display statistics about the grown region.
|
void |
showRegionInfo(int[] count,
double[][] total,
double[][] mean,
double[][] stdDev,
double[][] median) |
Display statistics about the grown region.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
maskImage
private ModelImage maskImage
The mask image. The range of the image [0, positive integer value] where zero is the background and a positive
number indicates that is part of an object that has the same positive integer number.
-
Constructor Detail
-
AlgorithmQuantify
public AlgorithmQuantify(ModelImage srcImg,
ModelImage maskImg)
Creates a new AlgorithmQuantify object.
- Parameters:
srcImg - image model where result image is to storedmaskImg - source image model
-
Method Detail
-
showRegionInfo
public void showRegionInfo(int[] count,
double[][] total,
double[][] mean,
double[][] stdDev,
double[][] median)
Display statistics about the grown region.
- Parameters:
count - Number of pixels (voxels)total - Sum of pixel intensitiesmean - Average pixel intensitystdDev - Standard deviation of pixel intensitiesmedian - Median of pixel intensities
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.html����������������������������������������������������������0000775�4231163�4231163�00001661635�14537076054�021115� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES
-
-
Constructor Summary
Constructors
| Constructor |
Description |
CVODES() |
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private int |
check_ans(CVODES.NVector y,
double rtol,
CVODES.NVector atol) |
|
private int |
cv_efun(CVODES.NVector ycur,
CVODES.NVector weight,
CVODES.UserData user_data,
int cv_efun_select) |
|
private void |
cv_lfree(CVODES.CVodeMemRec cv_mem,
int cv_lfree_select) |
|
private int |
cv_linit(CVODES.CVodeMemRec cv_mem,
int cv_linit_select) |
|
(package private) int |
cv_lsetup(CVODES.CVodeMemRec cv_mem,
int convfail,
CVODES.NVector y,
CVODES.NVector fy,
boolean[] jcurPtr,
CVODES.NVector tmp1,
CVODES.NVector tmp2,
CVODES.NVector tmp3,
int select) |
|
private int |
cv_lsolve(CVODES.CVodeMemRec cv_mem,
CVODES.NVector b,
CVODES.NVector weight,
CVODES.NVector ycur,
CVODES.NVector fcur,
int select) |
|
private void |
CVAbckpbDelete(CVODES.CVodeBMemRec cvB_memPtr) |
|
private void |
CVAckpntDelete(CVODES.CkpntMemRec ck_memPtr) |
|
private void |
cvAdamsFinish(CVODES.CVodeMemRec cv_mem,
double[] m,
double[] M,
double hsum) |
|
private double |
cvAdamsStart(CVODES.CVodeMemRec cv_mem,
double[] m) |
|
private void |
cvAdjustAdams(CVODES.CVodeMemRec cv_mem,
int deltaq) |
|
private void |
cvAdjustBDF(CVODES.CVodeMemRec cv_mem,
int deltaq) |
|
private void |
cvAdjustOrder(CVODES.CVodeMemRec cv_mem,
int deltaq) |
|
private void |
cvAdjustParams(CVODES.CVodeMemRec cv_mem) |
|
private int |
CVAfindIndex(CVODES.CVodeMemRec cv_mem,
double t,
long[] indx,
boolean[] newpoint) |
|
private void |
CVAhermiteFree(CVODES.CVodeMemRec cv_mem) |
|
protected int |
CVAhermiteGetY(CVODES.CVodeMemRec cv_mem,
double t,
CVODES.NVector y,
CVODES.NVector[] yS) |
|
private boolean |
cvAllocVectors(CVODES.CVodeMemRec cv_mem,
CVODES.NVector tmpl) |
|
private double |
cvAltSum(int iend,
double[] a,
int k) |
|
private void |
CVApolynomialFree(CVODES.CVodeMemRec cv_mem) |
|
protected int |
CVApolynomialGetY(CVODES.CVodeMemRec cv_mem,
double t,
CVODES.NVector y,
CVODES.NVector[] yS) |
|
private int |
CVArhs(double t,
CVODES.NVector yB,
CVODES.NVector yBdot,
CVODES.CVodeMemRec cv_mem) |
|
private int |
CVArhsQ(double t,
CVODES.NVector yB,
CVODES.NVector qBdot,
CVODES.CVodeMemRec cv_mem) |
|
private void |
cvBDFStab(CVODES.CVodeMemRec cv_mem) |
|
private void |
cvChooseEta(CVODES.CVodeMemRec cv_mem) |
|
private void |
cvCompleteStep(CVODES.CVodeMemRec cv_mem) |
|
private double |
cvComputeEtaqm1(CVODES.CVodeMemRec cv_mem) |
|
private double |
cvComputeEtaqp1(CVODES.CVodeMemRec cv_mem) |
|
private void |
cvDecreaseBDF(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvDlsDenseDQJac(double t,
CVODES.NVector y,
CVODES.NVector fy,
double[][] Jac,
CVODES.CVodeMemRec cv_mem,
CVODES.NVector tmp1) |
|
private int |
cvDlsFree(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvDlsFreeB(CVODES.CVodeBMemRec cvB_mem) |
|
private int |
CVDlsGetWorkSpace(CVODES.CVodeMemRec cv_mem,
long[] lenrwLS,
long[] leniwLS) |
|
private int |
cvDlsInitialize(CVODES.CVodeMemRec cv_mem) |
|
(package private) int |
cvDlsInitializeCounters(CVODES.CVDlsMemRec cvdls_mem) |
|
private int |
cvDlsJacBWrapper(double t,
CVODES.NVector yB,
CVODES.NVector fyB,
double[][] JB,
CVODES.CVodeMemRec cv_mem,
CVODES.NVector tmp1B,
CVODES.NVector tmp2B,
CVODES.NVector tmp3B) |
|
(package private) int |
CVDlsSetJacFn(CVODES.CVodeMemRec cv_mem,
int jac) |
|
(package private) int |
CVDlsSetLinearSolver(CVODES.CVodeMemRec cv_mem,
CVODES.SUNLinearSolver LS,
double[][] A) |
|
(package private) int |
cvDlsSetup(CVODES.CVodeMemRec cv_mem,
int convfail,
CVODES.NVector y,
CVODES.NVector fy,
boolean[] jcurPtr,
CVODES.NVector tmp1,
CVODES.NVector tmp2,
CVODES.NVector tmp3,
int select) |
|
private int |
cvDlsSolve(CVODES.CVodeMemRec cv_mem,
CVODES.NVector b,
CVODES.NVector weight,
CVODES.NVector ycur,
CVODES.NVector fcur,
int select) |
|
private int |
cvDoErrorTest(CVODES.CVodeMemRec cv_mem,
int[] nflagPtr,
double saved_t,
double acor_nrm,
int[] nefPtr,
long[] netfPtr,
double[] dsmPtr) |
|
(package private) int |
cvEwtSet(CVODES.NVector ycur,
CVODES.NVector weight,
CVODES.CVodeMemRec cv_mem) |
|
private int |
cvEwtSetSS(CVODES.CVodeMemRec cv_mem,
CVODES.NVector ycur,
CVODES.NVector weight) |
|
private int |
cvEwtSetSV(CVODES.CVodeMemRec cv_mem,
CVODES.NVector ycur,
CVODES.NVector weight) |
|
private void |
cvFreeVectors(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvHandleFailure(CVODES.CVodeMemRec cv_mem,
int flag) |
|
private int |
cvHandleNFlag(CVODES.CVodeMemRec cv_mem,
int[] nflagPtr,
double saved_t,
int[] ncfPtr,
long[] ncfnPtr) |
|
private int |
cvHin(CVODES.CVodeMemRec cv_mem,
double tout) |
|
private void |
cvIncreaseBDF(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvInitialSetup(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvNewtonIteration(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvNls(CVODES.CVodeMemRec cv_mem,
int nflag) |
|
private int |
cvNlsFunctional(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvNlsNewton(CVODES.CVodeMemRec cv_mem,
int nflag) |
|
(package private) int |
CVode(CVODES.CVodeMemRec cv_mem,
double tout,
CVODES.NVector yout,
double[] tret,
int itask) |
|
private void |
CVodeAdjFree(CVODES.CVodeMemRec cv_mem) |
|
protected CVODES.CVodeMemRec |
CVodeCreate(int lmm,
int iter) |
|
protected void |
CVodeFree(CVODES.CVodeMemRec cv_mem) |
|
protected int |
CVodeGetDky(CVODES.CVodeMemRec cv_mem,
double t,
int k,
CVODES.NVector dky) |
|
private int |
CVodeGetRootInfo(CVODES.CVodeMemRec cv_mem,
int[] rootsfound) |
|
protected int |
CVodeGetSens(CVODES.CVodeMemRec cv_mem,
double[] tret,
CVODES.NVector[] ySout) |
|
private int |
CVodeGetSensDky(CVODES.CVodeMemRec cv_mem,
double t,
int k,
CVODES.NVector[] dkyS) |
|
private int |
CVodeGetSensDky1(CVODES.CVodeMemRec cv_mem,
double t,
int k,
int is,
CVODES.NVector dkyS) |
|
(package private) int |
CVodeInit(CVODES.CVodeMemRec cv_mem,
int f,
double t0,
CVODES.NVector y0) |
|
private void |
CVodeQuadFree(CVODES.CVodeMemRec cv_mem) |
|
private void |
CVodeQuadSensFree(CVODES.CVodeMemRec cv_mem) |
|
private int |
CVodeReInit(CVODES.CVodeMemRec cv_mem,
double t0,
CVODES.NVector y0) |
|
(package private) int |
CVodeRootInit(CVODES.CVodeMemRec cv_mem,
int nrtfn,
int g) |
|
protected int |
CVodeSensEEtolerances(CVODES.CVodeMemRec cv_mem) |
|
private void |
CVodeSensFree(CVODES.CVodeMemRec cv_mem) |
|
protected int |
CVodeSensInit1(CVODES.CVodeMemRec cv_mem,
int Ns,
int ism,
int fS1_select,
CVODES.NVector[] yS0) |
|
private int |
CVodeSetIterType(CVODES.CVodeMemRec cv_mem,
int iter) |
|
protected int |
CVodeSetMaxErrTestFails(CVODES.CVodeMemRec cv_mem,
int maxnef) |
|
protected int |
CVodeSetMaxNumSteps(CVODES.CVodeMemRec cv_mem,
long mxsteps) |
|
protected int |
CVodeSetSensParams(CVODES.CVodeMemRec cv_mem,
double[] p,
double[] pbar,
int[] plist) |
|
protected int |
CVodeSStolerances(CVODES.CVodeMemRec cv_mem,
double reltol,
double abstol) |
|
(package private) int |
CVodeSVtolerances(CVODES.CVodeMemRec cv_mem,
double reltol,
CVODES.NVector abstol) |
|
protected int |
CVodeWFtolerances(CVODES.CVodeMemRec cv_mem,
int efun_select) |
|
private void |
cvPredict(CVODES.CVodeMemRec cv_mem) |
|
private void |
cvPrepareNextStep(CVODES.CVodeMemRec cv_mem,
double dsm) |
|
(package private) void |
cvProcessError(CVODES.CVodeMemRec cv_mem,
int error_code,
java.lang.String module,
java.lang.String fname,
java.lang.String msgfmt,
double... numbers) |
|
private int |
cvQuadEwtSet(CVODES.CVodeMemRec cv_mem,
CVODES.NVector qcur,
CVODES.NVector weightQ) |
|
private int |
cvQuadEwtSetSS(CVODES.CVodeMemRec cv_mem,
CVODES.NVector qcur,
CVODES.NVector weightQ) |
|
private int |
cvQuadEwtSetSV(CVODES.CVodeMemRec cv_mem,
CVODES.NVector qcur,
CVODES.NVector weightQ) |
|
private void |
cvQuadFreeVectors(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvQuadNls(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvQuadSensEwtSet(CVODES.CVodeMemRec cv_mem,
CVODES.NVector[] yQScur,
CVODES.NVector[] weightQS) |
|
private int |
cvQuadSensEwtSetEE(CVODES.CVodeMemRec cv_mem,
CVODES.NVector[] yQScur,
CVODES.NVector[] weightQS) |
|
private int |
cvQuadSensEwtSetSS(CVODES.CVodeMemRec cv_mem,
CVODES.NVector[] yQScur,
CVODES.NVector[] weightQS) |
|
private int |
cvQuadSensEwtSetSV(CVODES.CVodeMemRec cv_mem,
CVODES.NVector[] yQScur,
CVODES.NVector[] weightQS) |
|
private void |
cvQuadSensFreeVectors(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvQuadSensNls(CVODES.CVodeMemRec cv_mem) |
|
private double |
cvQuadSensNorm(CVODES.CVodeMemRec cv_mem,
CVODES.NVector[] xQS,
CVODES.NVector[] wQS) |
|
private int |
cvQuadSensRhs1InternalDQ(CVODES.CVodeMemRec cv_mem,
int is,
double t,
CVODES.NVector y,
CVODES.NVector yS,
CVODES.NVector yQdot,
CVODES.NVector yQSdot,
CVODES.NVector tmp,
CVODES.NVector tmpQ) |
|
private int |
cvQuadSensRhsInternalDQ(int Ns,
double t,
CVODES.NVector y,
CVODES.NVector[] yS,
CVODES.NVector yQdot,
CVODES.NVector[] yQSdot,
CVODES.CVodeMemRec cv_mem,
CVODES.NVector tmp,
CVODES.NVector tmpQ) |
|
private double |
cvQuadSensUpdateNorm(CVODES.CVodeMemRec cv_mem,
double old_nrm,
CVODES.NVector[] xQS,
CVODES.NVector[] wQS) |
|
private double |
cvQuadUpdateNorm(CVODES.CVodeMemRec cv_mem,
double old_nrm,
CVODES.NVector xQ,
CVODES.NVector wQ) |
|
private int |
cvRcheck1(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvRcheck2(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvRcheck3(CVODES.CVodeMemRec cv_mem) |
|
private void |
cvRescale(CVODES.CVodeMemRec cv_mem) |
|
private void |
cvRestore(CVODES.CVodeMemRec cv_mem,
double saved_t) |
|
private int |
cvRootfind(CVODES.CVodeMemRec cv_mem) |
|
private boolean |
cvSensAllocVectors(CVODES.CVodeMemRec cv_mem,
CVODES.NVector tmpl) |
|
private int |
cvSensEwtSet(CVODES.CVodeMemRec cv_mem,
CVODES.NVector[] yScur,
CVODES.NVector[] weightS) |
|
private int |
cvSensEwtSetEE(CVODES.CVodeMemRec cv_mem,
CVODES.NVector[] yScur,
CVODES.NVector[] weightS) |
|
private int |
cvSensEwtSetSS(CVODES.CVodeMemRec cv_mem,
CVODES.NVector[] yScur,
CVODES.NVector[] weightS) |
|
private int |
cvSensEwtSetSV(CVODES.CVodeMemRec cv_mem,
CVODES.NVector[] yScur,
CVODES.NVector[] weightS) |
|
private void |
cvSensFreeVectors(CVODES.CVodeMemRec cv_mem) |
|
private double |
cvSensNorm(CVODES.CVodeMemRec cv_mem,
CVODES.NVector[] xS,
CVODES.NVector[] wS) |
|
private int |
cvSensRhs1InternalDQ(int Ns,
double t,
CVODES.NVector y,
CVODES.NVector ydot,
int is,
CVODES.NVector yS,
CVODES.NVector ySdot,
CVODES.CVodeMemRec cv_mem,
CVODES.NVector ytemp,
CVODES.NVector ftemp) |
|
private int |
cvSensRhs1Wrapper(CVODES.CVodeMemRec cv_mem,
double time,
CVODES.NVector ycur,
CVODES.NVector fcur,
int is,
CVODES.NVector yScur,
CVODES.NVector fScur,
CVODES.NVector temp1,
CVODES.NVector temp2) |
|
private int |
cvSensRhsInternalDQ(int Ns,
double t,
CVODES.NVector y,
CVODES.NVector ydot,
CVODES.NVector[] yS,
CVODES.NVector[] ySdot,
CVODES.CVodeMemRec cv_mem,
CVODES.NVector ytemp,
CVODES.NVector ftemp) |
|
(package private) int |
cvSensRhsWrapper(CVODES.CVodeMemRec cv_mem,
double time,
CVODES.NVector ycur,
CVODES.NVector fcur,
CVODES.NVector[] yScur,
CVODES.NVector[] fScur,
CVODES.NVector temp1,
CVODES.NVector temp2) |
|
private double |
cvSensUpdateNorm(CVODES.CVodeMemRec cv_mem,
double old_nrm,
CVODES.NVector[] xS,
CVODES.NVector[] wS) |
|
private void |
cvSet(CVODES.CVodeMemRec cv_mem) |
|
private void |
cvSetAdams(CVODES.CVodeMemRec cv_mem) |
|
private void |
cvSetBDF(CVODES.CVodeMemRec cv_mem) |
|
private void |
cvSetEta(CVODES.CVodeMemRec cv_mem) |
|
private void |
cvSetTqBDF(CVODES.CVodeMemRec cv_mem,
double hsum,
double alpha0,
double alpha0_hat,
double xi_inv,
double xistar_inv) |
|
private int |
cvSLdet(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvStep(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvStgr1NewtonIteration(CVODES.CVodeMemRec cv_mem,
int is) |
|
private int |
cvStgr1Nls(CVODES.CVodeMemRec cv_mem,
int is) |
|
private int |
cvStgr1NlsFunctional(CVODES.CVodeMemRec cv_mem,
int is) |
|
private int |
cvStgr1NlsNewton(CVODES.CVodeMemRec cv_mem,
int is) |
|
private int |
cvStgrNewtonIteration(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvStgrNls(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvStgrNlsFunctional(CVODES.CVodeMemRec cv_mem) |
|
private int |
cvStgrNlsNewton(CVODES.CVodeMemRec cv_mem) |
|
private double |
cvUpperBoundH0(CVODES.CVodeMemRec cv_mem,
double tdist) |
|
private int |
cvYddNorm(CVODES.CVodeMemRec cv_mem,
double hg,
double[] yddnrm) |
|
private int |
denseGETRF(double[][] a,
int m,
int n,
int[] p) |
|
private void |
denseGETRS(double[][] a,
int n,
int[] p,
double[] b) |
|
abstract int |
ewt(CVODES.NVector y,
CVODES.NVector w,
CVODES.UserData user_data) |
|
int |
ewtTestMode(CVODES.NVector y,
CVODES.NVector w,
CVODES.UserData user_data) |
|
abstract int |
f(double t,
CVODES.NVector yv,
CVODES.NVector ydotv,
CVODES.UserData user_data) |
|
abstract int |
fB(double t,
CVODES.NVector y,
CVODES.NVector yB,
CVODES.NVector yBdot,
CVODES.UserData user_dataB) |
|
int |
fBTestMode(double t,
CVODES.NVector y,
CVODES.NVector yB,
CVODES.NVector yBdot,
CVODES.UserData user_dataB) |
|
abstract int |
fQ(double t,
CVODES.NVector x,
CVODES.NVector y,
CVODES.UserData user_data) |
|
abstract int |
fQB(double t,
CVODES.NVector y,
CVODES.NVector yB,
CVODES.NVector qBdot,
CVODES.UserData user_dataB) |
|
int |
fQBTestMode(double t,
CVODES.NVector y,
CVODES.NVector yB,
CVODES.NVector qBdot,
CVODES.UserData user_dataB) |
|
private int |
fQTestMode(double t,
CVODES.NVector x,
CVODES.NVector y,
CVODES.UserData user_data) |
|
abstract int |
fS1(int Ns,
double t,
CVODES.NVector yv,
CVODES.NVector ydot,
int is,
CVODES.NVector yS,
CVODES.NVector ySdot,
CVODES.UserData user_data,
CVODES.NVector tmp1,
CVODES.NVector tmp2) |
|
protected int |
fS1TestMode(int Ns,
double t,
CVODES.NVector yv,
CVODES.NVector ydot,
int is,
CVODES.NVector yS,
CVODES.NVector ySdot,
CVODES.UserData user_data,
CVODES.NVector tmp1,
CVODES.NVector tmp2) |
|
protected int |
fTestMode(double t,
CVODES.NVector yv,
CVODES.NVector ydotv,
CVODES.UserData user_data) |
f routine.
|
abstract int |
g(double t,
CVODES.NVector yv,
double[] gout,
CVODES.UserData user_data) |
|
private int |
gTestMode(double t,
CVODES.NVector yv,
double[] gout,
CVODES.UserData user_data) |
g routine.
|
abstract int |
Jac(double t,
CVODES.NVector yv,
CVODES.NVector fy,
double[][] J,
CVODES.UserData data,
CVODES.NVector tmp1,
CVODES.NVector tmp2,
CVODES.NVector tmp3) |
|
abstract int |
JacB(double t,
CVODES.NVector y,
CVODES.NVector yB,
CVODES.NVector fyB,
double[][] JB,
CVODES.UserData user_dataB,
CVODES.NVector tmp1B,
CVODES.NVector tmp2B,
CVODES.NVector tmp3B) |
|
int |
JacBTestMode(double t,
CVODES.NVector y,
CVODES.NVector yB,
CVODES.NVector fyB,
double[][] JB,
CVODES.UserData user_dataB,
CVODES.NVector tmp1B,
CVODES.NVector tmp2B,
CVODES.NVector tmp3B) |
|
private int |
JacTestMode(double t,
CVODES.NVector yv,
CVODES.NVector fy,
double[][] J,
CVODES.UserData data,
CVODES.NVector tmp1,
CVODES.NVector tmp2,
CVODES.NVector tmp3) |
Jacobian routine.
|
private void |
N_VAbs_Serial(CVODES.NVector x,
CVODES.NVector z) |
|
private void |
N_VAddConst_Serial(CVODES.NVector x,
double b,
CVODES.NVector z) |
|
protected CVODES.NVector |
N_VClone(CVODES.NVector y) |
|
protected CVODES.NVector |
N_VClone_Serial(CVODES.NVector w) |
|
private CVODES.NVector |
N_VCloneEmpty_Serial(CVODES.NVector w) |
|
protected CVODES.NVector[] |
N_VCloneVectorArray_Serial(int count,
CVODES.NVector w) |
|
protected void |
N_VConst_Serial(double c,
CVODES.NVector z) |
|
protected void |
N_VDestroy(CVODES.NVector x) |
|
private void |
N_VDestroyVectorArray(CVODES.NVector[] vs,
int count) |
|
protected void |
N_VDestroyVectorArray_Serial(CVODES.NVector[] vs,
int count) |
|
private void |
N_VDiv_Serial(CVODES.NVector x,
CVODES.NVector y,
CVODES.NVector z) |
|
private void |
N_VInv_Serial(CVODES.NVector x,
CVODES.NVector z) |
|
protected void |
N_VLinearSum_Serial(double a,
CVODES.NVector x,
double b,
CVODES.NVector y,
CVODES.NVector z) |
|
protected double |
N_VMaxNorm_Serial(CVODES.NVector x) |
|
private double |
N_VMin_Serial(CVODES.NVector x) |
|
protected void |
N_VNew_Serial(CVODES.NVector y,
int length) |
|
protected void |
N_VScale_Serial(double c,
CVODES.NVector x,
CVODES.NVector z) |
|
private void |
N_VSpace_Serial(CVODES.NVector v,
int[] lrw,
int[] liw) |
|
(package private) void |
N_VSpace_Serial(CVODES.NVector v,
long[] lrw,
long[] liw) |
|
private double |
N_VWrmsNorm_Serial(CVODES.NVector x,
CVODES.NVector w) |
|
private int |
PrepareNextRun(CVODES.CVodeMemRec cvode_mem,
int lmm,
int miter,
CVODES.NVector y,
double[][] A,
int mu,
int ml,
CVODES.SUNLinearSolver LS) |
|
private void |
PrintFinalStats(CVODES.CVodeMemRec cv_mem) |
|
private void |
PrintFinalStats(CVODES.CVodeMemRec cv_mem,
boolean sensi) |
|
private void |
PrintFinalStats(CVODES.CVodeMemRec cvode_mem,
int miter,
double ero) |
|
private void |
runcvsDirectDemo_Problem_1() |
|
private void |
runcvsRoberts_dns() |
|
private void |
runcvsRoberts_dns_uw() |
|
private void |
runcvsRoberts_dnsL() |
|
private void |
runcvsRoberts_FSA_dns() |
|
private CVODES.SUNLinearSolver |
SUNDenseLinearLapackSolver(CVODES.NVector y,
double[][] A) |
|
protected CVODES.SUNLinearSolver |
SUNDenseLinearSolver(CVODES.NVector y,
double[][] A) |
|
protected int |
SUNLinSolFree_Dense(CVODES.SUNLinearSolver S) |
|
private int |
SUNLinSolInitialize_Dense(CVODES.SUNLinearSolver S) |
|
private int |
SUNLinSolSetup_Dense(CVODES.SUNLinearSolver S,
double[][] A) |
|
private int |
SUNLinSolSetup_LapackDense(CVODES.SUNLinearSolver S,
double[][] A) |
|
private int |
SUNLinSolSolve_Dense(CVODES.SUNLinearSolver S,
double[][] A,
CVODES.NVector x,
CVODES.NVector b,
double tol) |
|
private int |
SUNLinSolSolve_LapackDense(CVODES.SUNLinearSolver S,
double[][] A,
CVODES.NVector x,
CVODES.NVector b,
double tol) |
|
private int |
SUNMatCopy(double[][] A,
double[][] B) |
|
private int |
SUNMatScaleAddI(double c,
double[][] A) |
|
private int |
SUNMatZero(double[][] A) |
|
private void |
Vaxpy_Serial(double a,
CVODES.NVector x,
CVODES.NVector y) |
|
private void |
VCopy_Serial(CVODES.NVector x,
CVODES.NVector z) |
|
private void |
VDiff_Serial(CVODES.NVector x,
CVODES.NVector y,
CVODES.NVector z) |
|
private void |
VLin1_Serial(double a,
CVODES.NVector x,
CVODES.NVector y,
CVODES.NVector z) |
|
private void |
VLin2_Serial(double a,
CVODES.NVector x,
CVODES.NVector y,
CVODES.NVector z) |
|
private void |
VNeg_Serial(CVODES.NVector x,
CVODES.NVector z) |
|
private void |
VScaleBy_Serial(double a,
CVODES.NVector x) |
|
private void |
VScaleDiff_Serial(double c,
CVODES.NVector x,
CVODES.NVector y,
CVODES.NVector z) |
|
private void |
VScaleSum_Serial(double c,
CVODES.NVector x,
CVODES.NVector y,
CVODES.NVector z) |
|
private void |
VSum_Serial(CVODES.NVector x,
CVODES.NVector y,
CVODES.NVector z) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
DBL_EPSILON
double DBL_EPSILON
-
UNIT_ROUNDOFF
double UNIT_ROUNDOFF
-
sensi_meth
int sensi_meth
-
testMode
boolean testMode
-
Method Detail
-
gTestMode
private int gTestMode(double t,
CVODES.NVector yv,
double[] gout,
CVODES.UserData user_data)
g routine. Compute functions g_i(t,y) for i = 0,1.
- Parameters:
t - yv - gout - user_data - - Returns:
-
cvProcessError
void cvProcessError(CVODES.CVodeMemRec cv_mem,
int error_code,
java.lang.String module,
java.lang.String fname,
java.lang.String msgfmt,
double... numbers)
-
cvSetTqBDF
private void cvSetTqBDF(CVODES.CVodeMemRec cv_mem,
double hsum,
double alpha0,
double alpha0_hat,
double xi_inv,
double xistar_inv)
-
cvHandleNFlag
private int cvHandleNFlag(CVODES.CVodeMemRec cv_mem,
int[] nflagPtr,
double saved_t,
int[] ncfPtr,
long[] ncfnPtr)
-
cvDoErrorTest
private int cvDoErrorTest(CVODES.CVodeMemRec cv_mem,
int[] nflagPtr,
double saved_t,
double acor_nrm,
int[] nefPtr,
long[] netfPtr,
double[] dsmPtr)
-
CVodeSetSensParams
protected int CVodeSetSensParams(CVODES.CVodeMemRec cv_mem,
double[] p,
double[] pbar,
int[] plist)
���������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmRegionsFromPartialBorders.html������������������������������0000775�4231163�4231163�00000056304�14537076050�027053� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegionsFromPartialBorders (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
threshold
private double threshold
-
Constructor Detail
-
AlgorithmRegionsFromPartialBorders
public AlgorithmRegionsFromPartialBorders(ModelImage destImg,
ModelImage srcImg,
double threshold,
boolean darkObjectOnWhiteBackground,
double maximumDistance)
Creates a new AlgorithmRegionsFromPartialBorders object.
- Parameters:
srcImg - source image model
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BIGGS_EXP6Function.html������������������������������0000775�4231163�4231163�00000033757�14537076052�026363� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BIGGS_EXP6Function (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�����������������gov/nih/mipav/model/algorithms/CeresSolver.BlockJacobianWriter.html���������������������������������0000775�4231163�4231163�00000037645�14537076051�026235� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.BlockJacobianWriter (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobianWriter
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
BuildJacobianLayout
public void BuildJacobianLayout(CeresSolver.Program program,
int num_eliminate_blocks,
java.util.Vector<int[]> jacobian_layout,
java.util.Vector<java.lang.Integer> jacobian_layout_storage)
�������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CubicEquation.html���������������������������������������������������0000775�4231163�4231163�00000040230�14537076054�022642� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CubicEquation (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CubicEquation
-
public class CubicEquation
extends java.lang.Object
This is a port of code written by Gerolamo Cardano under the Code Project Open Licence.
A copy of the license if found at https://www.codeproject.com/info/cpol10.aspx.
The equation is a1*x**3 + b*x**2 + c*x + d = 0
If result = 0, a1 = 0
If result = 1, x1 is real and x2 and x3 are complex with x3 = complex conjugate of x2
If result = 2, there are 3 real roots of which at least 2 are equal
If result = 3, 3 real and unequal roots are found
- Author:
- ilb
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
a1 |
|
private double |
b |
|
private double |
c |
|
private double |
d |
|
private int[] |
result |
|
private double[] |
x1real |
|
private double[] |
x2imag |
|
private double[] |
x2real |
|
private double[] |
x3imag |
|
private double[] |
x3real |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
CubicEquation() |
|
CubicEquation(double a1,
double b,
double c,
double d,
double[] x1real,
double[] x2real,
double[] x2imag,
double[] x3real,
double[] x3imag,
int[] result) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
x1real
private double[] x1real
-
x2real
private double[] x2real
-
x2imag
private double[] x2imag
-
x3real
private double[] x3real
-
x3imag
private double[] x3imag
-
result
private int[] result
-
Constructor Detail
-
CubicEquation
public CubicEquation()
-
CubicEquation
public CubicEquation(double a1,
double b,
double c,
double d,
double[] x1real,
double[] x2real,
double[] x2imag,
double[] x3real,
double[] x3imag,
int[] result)
-
Method Detail
-
selfTest
public void selfTest()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.WeightedGraph.html���������������������������������������0000775�4231163�4231163�00000052335�14537076052�025073� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.WeightedGraph (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph<Vertex>
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
WeightedGraph
public WeightedGraph()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.ImageSaver.html������������������������������������������0000775�4231163�4231163�00000054411�14537076053�024426� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.ImageSaver (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
ImageSaver() |
|
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static java.lang.String[] |
getSaveableImageFileFormats() |
|
private static boolean |
isBufferedImageOfType(java.awt.Image image,
int type) |
|
static boolean |
isFormatBWOnly(java.lang.String imgFormat) |
|
static boolean |
isFormatRGBOnly(java.lang.String imgFormat) |
returns if specified image format supports rgb values only.
|
static void |
saveImage(java.awt.Image image,
java.io.File file) |
|
static void |
saveImage(java.awt.Image image,
java.io.File file,
java.lang.String imgFileFormat) |
|
static void |
saveImage(java.awt.Image image,
java.io.OutputStream os,
java.lang.String imgFileFormat) |
Saves specified Image to file of specified img file format.
|
static void |
saveImage(java.awt.Image image,
java.lang.String filename) |
|
static void |
saveImage(java.awt.Image image,
java.lang.String filename,
java.lang.String imgFileFormat) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ImageSaver
private ImageSaver()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.SIFT_cl_kernels.html������������������������������������������0000775�4231163�4231163�00000021770�14537076056�024022� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.SIFT_cl_kernels (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.SIFT_cl_kernels
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
downsample_2 |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
downsample_2
int downsample_2
-
Constructor Detail
-
SIFT_cl_kernels
SIFT_cl_kernels()
��������gov/nih/mipav/model/algorithms/AlgorithmHoughLine.html����������������������������������������������0000775�4231163�4231163�00000065312�14537076046�023651� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHoughLine (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHoughLine
extends AlgorithmBase
This Hough transform uses (xi, yi) points in the original image space to generate rho, theta points in the Hough
transform. This Hough transform module only works with binary images. Before it is used the user must
compute the gradient of an image and threshold it to obtain a binary image. Noise removal and thinning should also
be performed, if necessary, before this program is run.
The user is asked for the number of rho and theta bins. The program generates a Hough transform of the source image
using the basic equation rho = x*cos(theta) + y*sin(theta). The program selects the lines containing the largest
number of points. The program can select up to maxLineNumber, which currently has a value of 10, lines. The program
produces a dialog which allows the user to select which lines should be filled in and for selected lines the maximum
length of the gaps to be filled. By setting the maximum distance equal to 0.0, the user can have this module function
solely for line detection and not perform any line filling.
rho goes from -sqrt((xDim-1)*(xDim-1) + (yDim-1)*(yDim-1)) to +sqrt((xDim-1)*(xDim-1) + (yDim-1)*(yDim-1)).
theta goes from -PI/2 to +PI/2. rho has n1 cells and theta has n2 cells. d = sqrt((xDim-1)*(xDim-1) + (yDim-1)*(yDim-1)).
For each (xi, yi) point in the original image not having a value of zero, calculate n2 values of theta.
Take k from 0 to (n2 - 1) to generate theta(k) = -PI/2 + k*PI/n2.
rho = x*cos(theta) + y*sin(theta). Then find which of n1 bins rho belongs to by calculating
j = (rho + d)*n1/(2*d), with j going from 0 to n1-1. If j = n1, set j equal to n1 - 1.
For each of the points in the Hough transform make a list of the x values and y values
that went to generate it.
Generate the Hough transform image.
Find which rho, theta points are peak points in the rho, theta plane.
Find up to maxLineNumber lines with the highest number of points by finding the peaks in the
Hough transform with the highest number of counts. Note that only peaks in the rho, theta plane are
considered so that we do not make selections from the spread around the peak. Form rho, theta, and count arrays for these
lines.
Create a dialog with numLinesFound rhoArray[i], thetaArray[i], and
countArray[i] values, where the user will select a check box to have that line selected for
gap filling and fill in a text field with the maximum gap length to be filled on that line.
Fill in the gaps on the selected lines by examining distances between adjacent points.
References: 1.) Digital Image Processing, Second Edition by Richard C. Gonzalez and Richard E. Woods, Section 10.2.2
Global Processing via the Hough Transform, Prentice-Hall, Inc., 2002, pp. 587-591.
2.) Shape Detection in Computer Vision Using the Hough Transform by V. F. Leavers, Springer-Verlag, 1992.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.TernaryCostFunction4.html����������������������������0000775�4231163�4231163�00000031327�14537076053�027257� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.TernaryCostFunction4 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
TernaryCostFunction4(int num_residuals,
int parameter_block1_size,
int parameter_block2_size,
int parameter_block3_size) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
TernaryCostFunction4
public TernaryCostFunction4(int num_residuals,
int parameter_block1_size,
int parameter_block2_size,
int parameter_block3_size)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.EvaluatorOptions.html������������������������������������0000775�4231163�4231163�00000027354�14537076051�025671� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.EvaluatorOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.EvaluatorOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_threads
public int num_threads
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSphereGeneration.IntModelMeanSquared.html�������������������0000775�4231163�4231163�00000027752�14537076050�031072� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSphereGeneration.IntModelMeanSquared (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMeanSquared
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
density |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
IntModelMeanSquared(double density) |
Creates a new IntModelMeanSquared object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������gov/nih/mipav/model/algorithms/CeresSolver.TukeyLoss.html�������������������������������������������0000775�4231163�4231163�00000027255�14537076052�024316� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TukeyLoss (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
a_squared_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
TukeyLoss(double a) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTProcess.CalculateT.html������������������������������������0000775�4231163�4231163�00000033432�14537076050�025542� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTProcess.CalculateT (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmTProcess.CalculateT
-
-
Constructor Summary
Constructors
| Constructor |
Description |
CalculateT(int t) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
width
protected int width
-
height
protected int height
-
Method Detail
-
calculateThreshold
protected float calculateThreshold(ModelImage image,
int k)
Performs smart thresholding for the given image at at certain slice k
- Parameters:
image - k - - Returns:
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LocalIntensityOrderPattern.VlLiopDesc.html���������������������������0000775�4231163�4231163�00000035435�14537076056�027422� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LocalIntensityOrderPattern.VlLiopDesc (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
numNeighbours
int numNeighbours
-
numSpatialBins
int numSpatialBins
< Number of neighbours.
-
intensityThreshold
float intensityThreshold
< Number of bins.
-
dimension
int dimension
< Weight threshold.
-
patchSideLength
int patchSideLength
< LIOP descriptor size.
-
patchPixels
int[] patchPixels
-
patchIntensities
float[] patchIntensities
-
patchPermutation
int[] patchPermutation
-
neighRadius
float neighRadius
-
neighPermutation
int[] neighPermutation
-
neighSamplesX
double[] neighSamplesX
-
neighSamplesY
double[] neighSamplesY
-
Constructor Detail
-
VlLiopDesc
public VlLiopDesc()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTimeFitting.FitRayleigh.html��������������������������������0000775�4231163�4231163�00000040576�14537076050�026420� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTimeFitting.FitRayleigh (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
ydata |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitRayleigh(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying Rayleigh fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
Fit to function - a0 * (t-a1)*exp(-(t-a1)*(t-a1)/a2)*u(t - a1) with a2 > 0
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ydata
final double[] ydata
-
Constructor Detail
-
FitRayleigh
public FitRayleigh(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a0 * (t-a1)*exp(-(t-a1)*(t-a1)/a2)*u(t - a1) with a2 > 0
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
����������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SVM.VlHomogeneousKernelType.html�������������������������������������0000775�4231163�4231163�00000036056�14537076057�025366� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SVM.VlHomogeneousKernelType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static SVM.VlHomogeneousKernelType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Fastfit.html���������������������������������������������������������0000775�4231163�4231163�00000214407�14537076054�021520� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Fastfit (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Fastfit
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
CACHE_SIZE |
|
double |
epsilon |
Original C and MATLAB code from fastfit and lightspeed packages by Tom Minka.
|
(package private) static long |
ix |
|
(package private) static long |
iy |
|
(package private) static long |
iz |
|
(package private) static double |
RandN_previous |
|
(package private) static int |
RandN_usePrevious |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Fastfit() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double |
BetaRand(double a,
double b) |
|
long |
BinoRand(double p,
long n) |
|
double[][] |
cholproj(double[][] A,
boolean[] isPosDef) |
|
double[] |
col_sum(double[][] x) |
|
double |
di_pochhammer(double x,
double n) |
|
double |
di_pochhammer(double x,
int n) |
|
double |
digamma(double x) |
|
double[] |
dirichlet_fit(double[] e,
double[][] data,
double[] ain,
double[] bar_p) |
|
double[] |
dirichlet_fit_m(double[][] data,
double[] ain,
double[] bar_p,
int niter) |
|
double[] |
dirichlet_fit_newton(double[] e,
double[][] data,
double[] ain,
double[] bar_p) |
|
double[] |
dirichlet_fit_s(double[][] data,
double[] ain,
double[] bar_p,
int niter) |
|
double[] |
dirichlet_fit_simple(double[] e,
double[][] data,
double[] ain) |
|
double[] |
dirichlet_logProb(double[] a,
double[][] data) |
|
double |
dirichlet_logProb_fast(double[] a,
double[] meanlog) |
|
double[] |
dirichlet_moment_match(double[][] p) |
|
double[][] |
dirichlet_sample(double[][] a,
int n) |
|
double[][] |
dirichlet_sample_col(double[] acol,
int n) |
|
void |
gamma_fit(double[] a,
double[] b,
double[] x,
double s) |
|
(package private) double |
gammaln(double x) |
|
(package private) double |
gammaln2(double x,
double d) |
|
double |
GammaRand(double a) |
|
void |
GetSeed(long[] ix_out,
long[] iy_out,
long[] iz_out) |
|
double[] |
gradient2(double[] a,
double[][] data,
double[] sdata) |
|
double[] |
hessian_times_gradient(double[] a,
double[] g,
double lambda) |
|
double[] |
hessian_times_gradient2(double[] a,
double[][] data,
double[] sdata,
double[] g,
double lambda) |
|
double |
inv_digamma(double y,
int niter) |
|
double[][] |
inv_posdef(double[][] A) |
|
double[][] |
inv_triu(double[][] U) |
|
double |
invnormcdf(double p) |
|
double |
logdet(double[][] A) |
|
double[][] |
logmulexp(double[][] a,
double[][] b) |
|
double[] |
logsumexp(double[][] ain,
int dim) |
|
double[] |
mvnormpdf(double[][] x,
double[][] m,
double[][] S,
double[][] iS,
double[][] V,
double[][] iV) |
|
double[] |
mvnormpdfln(double[][] x,
double[][] m,
double[][] S,
double[][] iS,
double[][] V,
double[][] iV) |
|
double |
normcdf(double x,
double m,
double s) |
|
double |
normcdfln(double x) |
|
double |
normcdflogit(double x) |
|
double |
pochhammer(double x,
double n) |
|
double |
pochhammer(double x,
int n) |
|
double[] |
polya_fit(double[][] data,
double[] ain) |
|
double[] |
polya_fit_m(double[][] data,
double[] ain,
double[] weight) |
|
double[] |
polya_fit_ms(double[][] data,
double[] ain,
double[] weight) |
|
double[] |
polya_fit_s(double[][] data,
double[] ain,
double[] weight) |
|
double[] |
polya_fit_simple(double[][] data,
double[] ain) |
|
double[] |
polya_logProb(double[] a,
double[][] data) |
|
double[] |
polya_moment_match(double[][] data) |
|
double[][] |
polya_sample(double[][] a,
int[] n) |
|
void |
quad_roots(double[] r1,
double[] r2,
double a2,
double a1,
double a0) |
|
double |
Rand() |
|
double |
RandN() |
|
double[][] |
randwishart(double a,
int d) |
|
void |
ResetSeed() |
|
double[] |
row_sum(double[][] x) |
|
void |
s_derivatives(double[] g,
double[] h,
double[] c1,
double[] c3,
double[] a,
double[][] data,
double[] sdata,
double[] weight) |
|
void |
s_derivatives_c(double[] g,
double[] h,
double[] c1,
double[] c3,
double[] a,
double[][] data,
double[] len,
double[] weight) |
|
double[][] |
sample_hist(double[][] p,
int[] n) |
|
void |
SetSeed(long new_ix,
long new_iy,
long new_iz) |
|
double |
slow_di_pochhammer(double x,
int n) |
|
double |
slow_pochhammer(double x,
int n) |
|
double |
slow_tri_pochhammer(double x,
int n) |
|
double[][] |
solve_tril(double[][] T,
double[][] b) |
|
double[][] |
solve_tril2(double[][] T,
double[][] b) |
|
double[][] |
solve_triu(double[][] T,
double[][] b) |
|
double[][] |
solve_triu2(double[][] T,
double[][] b) |
|
double |
special_case(double s,
double g,
double h,
double c1,
double c3) |
|
double[][] |
sqdist(double[][] p,
double[][] q,
double[][] A) |
|
void |
test_cholproj() |
|
void |
test_digamma() |
|
void |
test_dirichlet_fit() |
|
void |
test_dirichlet_sample() |
|
void |
test_gamma_fit() |
|
void |
test_gammaln() |
|
void |
test_inv_posdef() |
|
void |
test_logmulexp() |
|
void |
test_logsumexp() |
|
void |
test_normcdf() |
|
void |
test_pochhammer() |
|
void |
test_polya_fit() |
|
void |
test_randgamma() |
|
void |
test_randwishart() |
|
void |
test_solve_tri() |
|
void |
test_trigamma() |
|
void |
test_wishpdf() |
|
double |
tetragamma(double x) |
|
double |
tri_pochhammer(double x,
double n) |
|
double |
tri_pochhammer(double x,
int n) |
|
double |
trigamma(double x) |
|
double |
wishpdf(double[][] X,
double a,
double[][] B,
boolean inverse) |
|
double |
wishpdf(double X,
double a,
double B,
boolean inverse) |
|
double |
wishpdfln(double[][] Xin,
double a,
double[][] B,
boolean inverse) |
|
double |
wishpdfln(double X,
double a,
double B,
boolean inverse) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
epsilon
public double epsilon
Original C and MATLAB code from fastfit and lightspeed packages by Tom Minka.
Ported to Java by William Gandler
Fastfit
=======
This toolbox implements efficient maximum-likelihood estimation of various
distributions. It utilizes the technique of generalized Newton iteration,
described in the following papers:
[Beyond Newton's method](http://tminka.github.io/papers/newton.html)
[Estimating a Dirichlet distribution](http://tminka.github.io/papers/dirichlet/)
[Estimating a Gamma distribution](http://tminka.github.io/papers/minka-gamma.pdf)
This toolbox requires the [Lightspeed toolbox](https://github.com/tminka/lightspeed/), so you will need to install both.
See Contents.m for more details.
A python port is available at https://github.com/ericsuh/dirichlet
Tom Minka
Lightspeed matlab toolbox
=========================
This library provides:
highly optimized versions of mathematical functions such as `normcdf`, set intersection, and `gammaln`
efficient random number generators
evaluation of common probability densities
routines for counting floating-point
operations (FLOPS), useful for benchmarking algorithms.
utilities such as filename globbing and parsing of variable-length argument lists.
graphics functions such as `axis_pct` and `mobile_text` (in the graphics subdirectory).
See Contents.m for a table of contents.
Tom Minka
MIT License
Copyright (c) 2017 Tom Minka
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
-
CACHE_SIZE
int CACHE_SIZE
-
Method Detail
-
Rand
public double Rand()
-
ResetSeed
public void ResetSeed()
-
RandN
public double RandN()
-
mvnormpdf
public double[] mvnormpdf(double[][] x,
double[][] m,
double[][] S,
double[][] iS,
double[][] V,
double[][] iV)
-
mvnormpdfln
public double[] mvnormpdfln(double[][] x,
double[][] m,
double[][] S,
double[][] iS,
double[][] V,
double[][] iV)
-
hessian_times_gradient2
public double[] hessian_times_gradient2(double[] a,
double[][] data,
double[] sdata,
double[] g,
double lambda)
-
quad_roots
public void quad_roots(double[] r1,
double[] r2,
double a2,
double a1,
double a0)
-
special_case
public double special_case(double s,
double g,
double h,
double c1,
double c3)
-
s_derivatives_c
public void s_derivatives_c(double[] g,
double[] h,
double[] c1,
double[] c3,
double[] a,
double[][] data,
double[] len,
double[] weight)
-
s_derivatives
public void s_derivatives(double[] g,
double[] h,
double[] c1,
double[] c3,
double[] a,
double[][] data,
double[] sdata,
double[] weight)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DummyCostFunction4.html������������������������������0000775�4231163�4231163�00000033645�14537076053�026733� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DummyCostFunction4 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
kNumResiduals |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.html���������������������������������������������0000775�4231163�4231163�00000316773�14537076052�023721� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class gov.nih.mipav.model.algorithms.CeresSolver
CeresSolver.ArctanLoss, CeresSolver.ArmijoLineSearch, CeresSolver.AutoDiffCostFunction<CostFunctor>, CeresSolver.BadTestTerm, CeresSolver.BFGS, CeresSolver.Block, CeresSolver.BlockEvaluatePreparer, CeresSolver.BlockJacobianWriter, CeresSolver.BlockJacobiPreconditioner, CeresSolver.BlockRandomAccessDenseMatrix, CeresSolver.BlockRandomAccessDiagonalMatrix, CeresSolver.BlockRandomAccessMatrix, CeresSolver.BlockSparseMatrix, CeresSolver.BlockSparseMatrixRandomMatrixOptions, CeresSolver.CallbackReturnType, CeresSolver.CallStatistics, CeresSolver.CauchyLoss, CeresSolver.Cell, CeresSolver.CellInfo, CeresSolver.CellLessThan, CeresSolver.CgnrLinearOperator, CeresSolver.CgnrSolver, CeresSolver.Chunk, CeresSolver.ComposedLoss, CeresSolver.CompressedList, CeresSolver.CompressedRowBlockStructure, CeresSolver.CompressedRowJacobianWriter, CeresSolver.CompressedRowSparseMatrix, CeresSolver.ConjugateGradientsSolver, CeresSolver.Context, CeresSolver.CoordinateDescentMinimizer, CeresSolver.Corrector, CeresSolver.CostFunction, CeresSolver.CostFunctorExample, CeresSolver.CovarianceAlgorithmType, CeresSolver.CRSMatrix, CeresSolver.CurveFittingFunctorExample, CeresSolver.DenseJacobianWriter, CeresSolver.DenseLinearAlgebraLibraryType, CeresSolver.DenseNormalCholeskySolver, CeresSolver.DenseQRSolver, CeresSolver.DenseSchurComplementSolver, CeresSolver.DenseSparseMatrix, CeresSolver.DoglegStrategy, CeresSolver.DoglegType, CeresSolver.DumpFormatType, CeresSolver.DynamicCompressedRowJacobianFinalizer, CeresSolver.DynamicCompressedRowJacobianWriter, CeresSolver.DynamicCostFunction, CeresSolver.DynamicNumericDiffCostFunction<T>, CeresSolver.EasyCostFunction, CeresSolver.EasyFunctor, CeresSolver.EigenQuaternionParameterization, CeresSolver.EvaluateOptions, CeresSolver.EvaluateScratch, CeresSolver.EvaluationCallback, CeresSolver.Evaluator, CeresSolver.EvaluatorOptions, CeresSolver.EventLogger, CeresSolver.ExecutionSummary, CeresSolver.ExponentialCostFunction, CeresSolver.ExponentialFunctor, CeresSolver.FirstOrderFunction, CeresSolver.FunctionSample, CeresSolver.GoodTestTerm, CeresSolver.GradientChecker, CeresSolver.GradientCheckingCostFunction, CeresSolver.GradientCheckingIterationCallback, CeresSolver.GradientProblem, CeresSolver.GradientProblemEvaluator, CeresSolver.GradientProblemSolver, CeresSolver.GradientProblemSolverOptions, CeresSolver.GradientProblemSolverStateUpdatingCallback, CeresSolver.GradientProblemSolverSummary, CeresSolver.Graph<Vertex>, CeresSolver.HomogeneousVectorParameterization, CeresSolver.HuberLoss, CeresSolver.IdentityParameterization, CeresSolver.ImplicitSchurComplement, CeresSolver.indexValueItem<Vertex>, CeresSolver.IterationCallback, CeresSolver.IterationSummary, CeresSolver.IterativeSchurComplementSolver, CeresSolver.LBFGS, CeresSolver.LevenbergMarquardtStrategy, CeresSolver.LinearCostFunction, CeresSolver.LinearLeastSquaresProblem, CeresSolver.LinearOperator, CeresSolver.LinearSolver, CeresSolver.LinearSolverOptions, CeresSolver.LinearSolverPerSolveOptions, CeresSolver.LinearSolverSummary, CeresSolver.LinearSolverTerminationType, CeresSolver.LinearSolverType, CeresSolver.LineSearch, CeresSolver.LineSearchDirection, CeresSolver.LineSearchDirectionOptions, CeresSolver.LineSearchDirectionType, CeresSolver.LineSearchFunction, CeresSolver.LineSearchInterpolationType, CeresSolver.LineSearchMinimizer, CeresSolver.LineSearchOptions, CeresSolver.LineSearchPreprocessor, CeresSolver.LineSearchSummary, CeresSolver.LineSearchType, CeresSolver.LocalParameterization, CeresSolver.LoggingCallback, CeresSolver.LoggingType, CeresSolver.LossFunction, CeresSolver.LossFunctionWrapper, CeresSolver.LowRankInverseHessian, CeresSolver.Minimizer, CeresSolver.MinimizerOptions, CeresSolver.MinimizerType, CeresSolver.MyCostFunctor, CeresSolver.MyThreeParameterCostFunctor, CeresSolver.NonlinearConjugateGradient, CeresSolver.NonlinearConjugateGradientType, CeresSolver.NormalPrior, CeresSolver.NullJacobianFinalizer, CeresSolver.NumericDiffCostFunction<CostFunctor>, CeresSolver.NumericDiffMethodType, CeresSolver.NumericDiffOptions, CeresSolver.OnlyFillsOneOutputFunctor, CeresSolver.OrderedGroups<T>, CeresSolver.Ownership, CeresSolver.Pair<T,U>, CeresSolver.ParameterBlock, CeresSolver.PartitionedMatrixView, CeresSolver.Preconditioner, CeresSolver.PreconditionerOptions, CeresSolver.PreconditionerType, CeresSolver.PreprocessedProblem, CeresSolver.Preprocessor, CeresSolver.ProbeResults, CeresSolver.ProblemImpl, CeresSolver.ProblemOptions, CeresSolver.ProductParameterization, CeresSolver.Program, CeresSolver.ProgramEvaluator<EvaluatePreparer,JacobianWriter,JacobianFinalizer>, CeresSolver.QuaternionParameterization, CeresSolver.RandomizedCostFunction, CeresSolver.RandomizedFunctor, CeresSolver.ResidualBlock, CeresSolver.ScaledLoss, CeresSolver.SchurComplementSolver, CeresSolver.SchurEliminator, CeresSolver.SchurEliminatorBase, CeresSolver.SchurJacobiPreconditioner, CeresSolver.ScopedExecutionTimer, CeresSolver.ScratchEvaluatePreparer, CeresSolver.SizedCostFunction, CeresSolver.SizeTestingCostFunction, CeresSolver.SoftLOneLoss, CeresSolver.Solver, CeresSolver.SolverOptions, CeresSolver.SolverSummary, CeresSolver.SparseLinearAlgebraLibraryType, CeresSolver.SparseMatrix, CeresSolver.SparseMatrixPreconditionerWrapper, CeresSolver.StateUpdatingCallback, CeresSolver.SteepestDescent, CeresSolver.SubsetParameterization, CeresSolver.TerminationType, CeresSolver.TestTerm, CeresSolver.TolerantLoss, CeresSolver.TranscendentalCostFunction, CeresSolver.TranscendentalFunctor, CeresSolver.TripletSparseMatrix, CeresSolver.TripletSparseMatrixRandomMatrixOptions, CeresSolver.TrivialLoss, CeresSolver.TrustRegionMinimizer, CeresSolver.TrustRegionPreprocessor, CeresSolver.TrustRegionStepEvaluator, CeresSolver.TrustRegionStrategy, CeresSolver.TrustRegionStrategyOptions, CeresSolver.TrustRegionStrategyPerSolveOptions, CeresSolver.TrustRegionStrategySummary, CeresSolver.TrustRegionStrategyType, CeresSolver.TukeyLoss, CeresSolver.TypedLinearSolver<MatrixType>, CeresSolver.TypedPreconditioner<MatrixType>, CeresSolver.VertexDegreeLessThan<Vertex>, CeresSolver.VertexTotalOrdering<Vertex>, CeresSolver.VisibilityClusteringType, CeresSolver.WeightedGraph<Vertex>, CeresSolver.WolfeLineSearch
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.CeresSolver
BAD_TEST_TERM_EXAMPLE, COST_FUNCTOR_EXAMPLE, CURVE_FITTING_EXAMPLE, curveFittingData, curveFittingObservations, default_relstep, DYNAMIC, EASY_COST_FUNCTION, EASY_FUNCTOR_EXAMPLE, epsilon, ERROR, EXPONENTIAL_COST_FUNCTION, EXPONENTIAL_FUNCTOR, FATAL, GOOD_TEST_TERM_EXAMPLE, INFO, LINEAR_COST_FUNCTION_EXAMPLE, m, MAX_LOG_LEVEL, MY_COST_FUNCTOR, MY_THREE_PARAMETER_COST_FUNCTOR, N0, ONLY_FILLS_ONE_OUTPUT_FUNCTOR, optionsValid, RANDOMIZED_COST_FUNCTION, RANDOMIZED_FUNCTOR, SIZE_TESTING_COST_FUNCTION, svd, TEST_TERM_EXAMPLE, testCase, testMode, TRANSCENDENTAL_COST_FUNCTION, TRANSCENDENTAL_FUNCTOR, WARNING
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.CeresSolver
AppendArrayToString, ApplyOrdering, BuildResidualLayout, ComputeHouseholderVector, ComputeRecursiveIndependentSetOrdering, ComputeSchurOrdering, ComputeStableSchurOrdering, copyFunctionSample, Create, Create, Create, Create, Create, Create, Create, CreateDiagonalMatrix, CreateEvaluatorScratch, CreateGradientCheckingCostFunction, CreateGradientCheckingProblemImpl, CreateHessianGraph, CreateLinearLeastSquaresProblemFromId, CreateOrdering, createPartitionedMatrixView, CreatePreprocessor, CreateRandomMatrix, CreateRandomMatrix, createSchurEliminatorBase, CreateSparseDiagonalMatrix, DetectStructure, DifferentiatePolynomial, DumpLinearLeastSquaresProblem, DumpLinearLeastSquaresProblemToConsole, DumpLinearLeastSquaresProblemToTextFile, EigenQuaternionProduct, EvaluateCostFunction, EvaluateJacobianColumn, EvaluateJacobianForParameterBlock, EvaluateJacobianForParameterBlock, EvaluatePolynomial, EvaluateRiddersJacobianColumn, ExpectClose, FindInterpolatingPolynomial, FindInvalidValue, FindLinearPolynomialRoots, FindPolynomialRoots, FindQuadraticPolynomialRoots, FindWithDefault, FindWithDefault, GetBestSchurTemplateSpecialization, GradientProblemSolverOptionsToSolverOptions, IndependentSetOrdering, InvalidateArray, InvalidateArray, InvalidateArray, InvalidateArray, InvertPSDMatrix, IsArrayValid, IsArrayValid, IsArrayValid, IsArrayValid, IsClose, IsOrderingValid, IsSchurType, IsSolutionUsable, IsSolutionUsable, LexicographicallyOrderResidualBlocks, LinearLeastSquaresProblem0, LinearLeastSquaresProblem1, LinearLeastSquaresProblem2, LinearLeastSquaresProblem3, LinearLeastSquaresProblem4, LinearSolverForZeroEBlocks, LinearSolverTypeToString, LineSearchDirectionTypeToString, LineSearchInterpolationTypeToString, LineSearchTypeToString, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixTransposeMatrixMultiply, MatrixTransposeVectorMultiply, MatrixVectorMultiply, MaybeReorderSchurComplementColumnsUsingEigen, MaybeReorderSchurComplementColumnsUsingSuiteSparse, Minimize, MinimizeInterpolatingPolynomial, MinimizePolynomial, MinParameterBlock, NonlinearConjugateGradientTypeToString, operator, PostSolveSummarize, PreconditionerForZeroEBlocks, PreconditionerTypeToString, QuaternionProduct, RandDouble, RandDouble, RandNormal, RemoveLeadingZeros, ReorderProgramForSchurTypeLinearSolver, RunCallbacks, SchurStructureToString, SetSummaryFinalCost, SetSummaryFinalCost, SetupCommonMinimizerOptions, Solve, Solve, StableIndependentSetOrdering, SummarizeReducedProgram, swap, TerminationTypeToString, TransposeForCompressedRowSparseStructure, Uniform, WriteArrayToFileOrDie, WriteStringToFileOrDie
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
Roszman1Data
double[] Roszman1Data
-
ENSOData
double[] ENSOData
-
ThurberData
double[] ThurberData
-
BoxBODData
double[] BoxBODData
-
Rat42Data
double[] Rat42Data
-
Rat43Data
double[] Rat43Data
-
Eckerle4Data
double[] Eckerle4Data
-
Bennett5Data
double[] Bennett5Data
�����gov/nih/mipav/model/algorithms/CeresSolverTest.HelicalValleyFunction.html���������������������������0000775�4231163�4231163�00000034012�14537076053�027426� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.HelicalValleyFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.CanonicalViewsClusteringOptions.html��������������������0000775�4231163�4231163�00000024727�14537076052�030760� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.CanonicalViewsClusteringOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClusteringOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
min_views
public int min_views
�����������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMinimumPerimeterPolygon.html��������������������������������0000775�4231163�4231163�00000066067�14537076047�026640� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMinimumPerimeterPolygon (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmMinimumPerimeterPolygon
extends AlgorithmBase
Smoothing VOI with minimum perimeter polygon.
References:
1.) Digital ImageProcessing Fourth Edition, Rafael C. Gonzalez and Richard E. Woods,
Boundary Approximations Using Minimum-Perimeter Polygons, pp. 963-968.
- Author:
- ilb
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calc() |
Prepares the data and runs the algorithm for a 2D or 3D image.
|
private double |
det(double x1,
double x2,
double x3,
double y1,
double y2,
double y3) |
|
void |
finalize() |
Prepares this class for destruction.
|
VOI |
getResultVOI() |
Accessor that returns a voi that is a smoothed version of the original.
|
void |
runAlgorithm() |
Starts the smooth algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmMinimumPerimeterPolygon
public AlgorithmMinimumPerimeterPolygon(ModelImage srcImg,
VOI activeVOI,
int squareCellLength)
Creates a new AlgorithmMinimumPerimeterPolygon object.
- Parameters:
srcImg - 2D or 3D source imageactiveVOI - the selected voisquareCellLength - square cell length
-
Method Detail
-
det
private double det(double x1,
double x2,
double x3,
double y1,
double y2,
double y3)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LinearSolverSummary.html���������������������������������0000775�4231163�4231163�00000025076�14537076051�026335� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LinearSolverSummary (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverSummary
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
residual_norm
double residual_norm
-
num_iterations
int num_iterations
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmASM.FileMATLAB.html�����������������������������������������0000775�4231163�4231163�00000151726�14537076043�024150� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmASM.FileMATLAB (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.io.File |
file |
DOCUMENT ME!
|
private java.lang.String |
fileDir |
DOCUMENT ME!
|
private FileInfoMATLAB |
fileInfo |
DOCUMENT ME!
|
private FileInfoMATLAB |
fileInfo2 |
|
private java.lang.String |
fileName |
DOCUMENT ME!
|
private ModelImage |
image |
DOCUMENT ME!
|
private ModelImage |
image2 |
|
private int[] |
imageExtents |
DOCUMENT ME!
|
private float[] |
imgBuffer |
DOCUMENT ME!
|
private float[] |
imgResols |
DOCUMENT ME!
|
private ModelLUT |
LUT |
DOCUMENT ME!
|
private FileInfoMATLAB |
maskFileInfo |
|
private FileInfoMATLAB |
maskFileInfo2 |
|
private ModelImage |
maskImage |
|
private ModelImage |
maskImage2 |
|
private static int |
miCOMPRESSED |
Compressed Data
|
private static int |
miDOUBLE |
IEEE 754 double format
|
private static int |
miINT16 |
16-bit, signed
|
private static int |
miINT32 |
32-bit signed
|
private static int |
miINT64 |
64-bit, signed
|
private static int |
miINT8 |
8 bit, signed
|
private static int |
miMATRIX |
MATLAB ARRAY
|
private static int |
miSINGLE |
IEEE 754 single format
|
private static int |
miUINT16 |
16-bit, unsigned
|
private static int |
miUINT32 |
32-bit, unsigned
|
private static int |
miUINT64 |
64-bit, unsigned
|
private static int |
miUINT8 |
8 bit, unsigned
|
private static int |
miUTF16 |
Unicode UTF-16 Encoded Character Data
|
private static int |
miUTF32 |
Unicode UTF-32 Encoded Character Data
|
private static int |
miUTF8 |
Unicode UTF-8 Encoded Character Data
|
private static byte |
mxCELL_CLASS |
Cell array
|
private static byte |
mxCHAR_CLASS |
Character array
|
private static byte |
mxDOUBLE_CLASS |
Double precision array
|
private static byte |
mxINT16_CLASS |
16-bit, signed integer
|
private static byte |
mxINT32_CLASS |
32-bit, signed integer
|
private static byte |
mxINT64_CLASS |
64-bit, signed integer
|
private static byte |
mxINT8_CLASS |
8-bit, signed integer
|
private static byte |
mxOBJECT_CLASS |
Object
|
private static byte |
mxSINGLE_CLASS |
Single precision array
|
private static byte |
mxSPARSE_CLASS |
Sparse array
|
private static byte |
mxSTRUCT_CLASS |
Structure
|
private static byte |
mxUINT16_CLASS |
16-bit, unsigned integer
|
private static byte |
mxUINT32_CLASS |
32-bit, unsigned integer
|
private static byte |
mxUINT64_CLASS |
64-bit, unsigned integer
|
private static byte |
mxUINT8_CLASS |
8-bit, unsigned integer
|
private ViewJFrameImage |
vFrame2 |
|
private ViewJFrameImage |
vmFrame |
|
private ViewJFrameImage |
vmFrame2 |
|
private java.util.zip.Inflater |
zlibDecompresser |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
FileMATLAB(java.lang.String fileName,
java.lang.String fileDir) |
LIFF reader/writer constructor.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.file.FileBase
addProgressChangeListener, bytesToDouble, bytesToFloat, bytesToInt, bytesToShort, doubleToBytes, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, floatToBytes, getBufferDouble, getBufferFloat, getBufferInt, getBufferLong, getBufferShort, getBufferUShort, getDataType, getDouble, getFloat, getInt, getLong, getProgressChangeListeners, getRaFile, getSignedShort, getString, getUInt, getUnsignedByte, getUnsignedShort, intToBytes, isBigEndian, isProgressBarVisible, linkProgress, longToBytes, readDouble, readFloat, readInt, readLong, readShort, readString, readUnsignedShort, removeProgressChangeListener, setBigEndian, setBufferFloat, setBufferInt, setBufferLong, setBufferShort, setBufferString, setDataType, setEndianess, shortToBytes, writeBytes, writeDouble, writeFloat, writeInt, writeLong, writeShort
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FileMATLAB
public FileMATLAB(java.lang.String fileName,
java.lang.String fileDir)
throws java.io.IOException
LIFF reader/writer constructor.
- Parameters:
fileName - file namefileDir - file directory- Throws:
java.io.IOException - if there is an error making the file
������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGrayScaleMorphology2D.intObject.html������������������������0000775�4231163�4231163�00000025124�14537076046�030024� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGrayScaleMorphology2D.intObject (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D.intObject
-
- Enclosing class:
- AlgorithmGrayScaleMorphology2D
private class AlgorithmGrayScaleMorphology2D.intObject
extends java.lang.Object
Simple class to temporarily store the object's size, ID and seed index value. This class is used by the
identifyObjects and deleteObjects methods of AlgorithmMorphology2D class.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
short |
id |
|
int |
index |
|
int |
size |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
intObject(int idx,
short objectID,
int objectSize) |
Initializes object with supplied parameters.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
intObject
public intObject(int idx,
short objectID,
int objectSize)
Initializes object with supplied parameters.
- Parameters:
idx - seed index. Index is the location in the imageobjectID - the flood seed having a value >= 0.objectSize - the number of voxels in the object
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DummyCostFunction.html�������������������������������0000775�4231163�4231163�00000037512�14537076053�026644� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DummyCostFunction (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
DummyCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9) |
|
DummyCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[][] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DummyCostFunction
public DummyCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals)
-
DummyCostFunction
public DummyCostFunction(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9)
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[][] jacobians_offset)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.PixelConvertingSpliterator.html��������������������������0000775�4231163�4231163�00000103015�14537076054�027750� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.PixelConvertingSpliterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator<P,T>
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from interface java.util.Spliterator
java.util.Spliterator.OfDouble, java.util.Spliterator.OfInt, java.util.Spliterator.OfLong, java.util.Spliterator.OfPrimitive<T extends java.lang.Object,T_CONS extends java.lang.Object,T_SPLITR extends java.util.Spliterator.OfPrimitive<T,T_CONS,T_SPLITR>>
-
Field Summary
-
Fields inherited from interface java.util.Spliterator
CONCURRENT, DISTINCT, IMMUTABLE, NONNULL, ORDERED, SIZED, SORTED, SUBSIZED
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Spliterator
getComparator, getExactSizeIfKnown, hasCharacteristics
-
-
Constructor Detail
-
PixelConvertingSpliterator
public PixelConvertingSpliterator(java.util.Spliterator<? extends P> delegate,
java.util.function.Supplier<T> elementAllocator,
java.util.function.BiConsumer<P,T> fromPixelConverter,
java.util.function.BiConsumer<T,P> toPixelConverter)
Constructs a new PixelConvertingSpliterator.
- Parameters:
delegate - the Spliterator<Pixel> this spliterator delegates to.elementAllocator - method for allocating an object of this spliterator's
element type.fromPixelConverter - method for setting up an element of this spliterator
according to its underlying pixel.toPixelConverter - method for adopting an underlying pixel value
according to an element of this spliterator.- Since:
- 1.4
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.LinesRenderer.html���������������������������������������0000775�4231163�4231163�00000052753�14537076054�025154� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.LinesRenderer (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected static char |
NL |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected double[] |
findStrokeInterval(double current,
double strokeLen,
short pattern) |
|
void |
renderFallback(java.awt.Graphics2D g,
java.awt.Graphics2D p,
int w,
int h) |
|
private void |
renderFallbackLinesCT(java.awt.Graphics2D g,
java.awt.Graphics2D p,
ContourPlot.Lines lines,
double translateX,
double translateY,
double scaleX,
double scaleY,
java.awt.geom.Rectangle2D viewportRect,
float thickness) |
|
private void |
renderFallbackLinesVT(java.awt.Graphics2D g,
java.awt.Graphics2D p,
ContourPlot.Lines lines,
double translateX,
double translateY,
double scaleX,
double scaleY,
java.awt.geom.Rectangle2D viewportRect,
float[][] polygonCoords) |
|
protected float[] |
strokePattern2dashPattern(short pattern,
float strokeLen) |
|
protected int[] |
transferBits(short bits,
int[] target) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LinesRenderer
public LinesRenderer()
-
Method Detail
-
renderFallbackLinesCT
private void renderFallbackLinesCT(java.awt.Graphics2D g,
java.awt.Graphics2D p,
ContourPlot.Lines lines,
double translateX,
double translateY,
double scaleX,
double scaleY,
java.awt.geom.Rectangle2D viewportRect,
float thickness)
-
renderFallbackLinesVT
private void renderFallbackLinesVT(java.awt.Graphics2D g,
java.awt.Graphics2D p,
ContourPlot.Lines lines,
double translateX,
double translateY,
double scaleX,
double scaleY,
java.awt.geom.Rectangle2D viewportRect,
float[][] polygonCoords)
���������������������gov/nih/mipav/model/algorithms/AlgorithmFuzzyConnectednessSegmentation.html�������������������������0000775�4231163�4231163�00000100256�14537076046�030205� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFuzzyConnectednessSegmentation (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[] |
afc(java.util.Vector<java.lang.Integer> index_seeds_original,
java.util.Vector<java.lang.Integer> index1,
java.util.Vector<java.lang.Integer> index2,
java.util.Vector<java.lang.Double> affinity) |
|
void |
finalize() |
Prepares this class for destruction.
|
private short[] |
irfc(java.util.Vector<java.lang.Integer> index_seeds,
java.util.Vector<java.lang.Short> index_labels,
java.util.Vector<java.lang.Integer> index1,
java.util.Vector<java.lang.Integer> index2,
java.util.Vector<java.lang.Double> affinity) |
|
void |
runAlgorithm() |
Starts the program.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
BOTH_FUZZY_HARD
public static final int BOTH_FUZZY_HARD
This code is ported from MATLAB routines adjacency, affinity, afc, and irfc written by Joakim Lindblad
References:
1.) "Fuzzy Connectedness and Object Definition: Theory, Algorithms, and Applications in Image Segmentation"
by Jayaram K. Udupa and Supun Samarasekera, Graphical Models and Image Processing, Vol. 58, No. 3,
May, 1996, pp. 246-261.
2.) "Fuzzy Connected Object Delineation: Axiomatic Path Strength Definition and the Case of Multiple Seeds"
by Punam K. Saha and Jayaram K. Udupa, Computer Vision and Image Understanding, 83, 2001, pp. 275-295.
3.) "Iterative relative fuzzy connectedness for multiple objects with multiple seeds" by
Krzysztof Chris Ciesielski, Jayaram K. Udupa, Punam K. Saha, and Ying Zhuge, Computer Vision and Image
Understanding, 107, 2007, pp. 160-182.
- See Also:
- Constant Field Values
-
destNum
private int destNum
DOCUMENT ME!
-
L1Distance
private int L1Distance
-
algorithm
private int algorithm
-
sliceSize
private int sliceSize
-
Constructor Detail
-
AlgorithmFuzzyConnectednessSegmentation
public AlgorithmFuzzyConnectednessSegmentation(ModelImage[] destImg,
ModelImage srcImg,
int algorithm,
int L1Distance,
double distanceDecline,
double gradientWeight,
java.util.Vector<java.lang.Integer> index_seeds,
java.util.Vector<java.lang.Short> index_labels)
-
Method Detail
-
afc
private double[] afc(java.util.Vector<java.lang.Integer> index_seeds_original,
java.util.Vector<java.lang.Integer> index1,
java.util.Vector<java.lang.Integer> index2,
java.util.Vector<java.lang.Double> affinity)
-
irfc
private short[] irfc(java.util.Vector<java.lang.Integer> index_seeds,
java.util.Vector<java.lang.Short> index_labels,
java.util.Vector<java.lang.Integer> index1,
java.util.Vector<java.lang.Integer> index2,
java.util.Vector<java.lang.Double> affinity)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmASM.ASMData.html��������������������������������������������0000775�4231163�4231163�00000027756�14537076043�023627� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmASM.ASMData (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmASM.ASMData
-
-
Constructor Summary
Constructors
| Constructor |
Description |
ASMData() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
Lines
public int[][] Lines
������������������gov/nih/mipav/model/algorithms/AlgorithmCircleGeneration.erfcModel.html�����������������������������0000775�4231163�4231163�00000027757�14537076044�027114� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCircleGeneration.erfcModel (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.erfcModel
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
scale |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
erfcModel() |
Creates a new IntModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������gov/nih/mipav/model/algorithms/SIFT3D.Tri.html������������������������������������������������������0000775�4231163�4231163�00000022566�14537076056�021616� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Tri (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Tri
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int[] |
idx |
|
(package private) SIFT3D.Cvec[] |
v |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Tri() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NelderMead.point_t.html����������������������������������������������0000775�4231163�4231163�00000022412�14537076056�023566� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NelderMead.point_t (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.NelderMead.point_t
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
double |
fx |
|
double[] |
x |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
point_t() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel.html������������������������0000775�4231163�4231163�00000044460�14537076045�027117� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitOAR3DNL2solModel(double[] x,
int[] iv,
double[] v,
int currentDim,
double[] point) |
Creates a new FitSM2nl2solModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
void |
calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm) |
|
void |
dumpResults() |
Display results of displaying OAR3D fitting parameter.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
currentDim
private int currentDim
-
point
private double[] point
-
Constructor Detail
-
FitOAR3DNL2solModel
public FitOAR3DNL2solModel(double[] x,
int[] iv,
double[] v,
int currentDim,
double[] point)
Creates a new FitSM2nl2solModel object.
- Parameters:
nPoints - DOCUMENT ME!yData - DOCUMENT ME!x - DOCUMENT ME!iv - v - useAnalyticJacobian -
-
Method Detail
-
calcr
public void calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm)
- Specified by:
calcr in class NL2sol
-
calcj
public void calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm)
- Specified by:
calcj in class NL2sol
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.LinearSolverAndEvaluatorCreationTest.html������������0000775�4231163�4231163�00000031353�14537076053�032447� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.LinearSolverAndEvaluatorCreationTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.LinearSolverAndEvaluatorCreationTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LinearSolverAndEvaluatorCreationTest
public LinearSolverAndEvaluatorCreationTest(CeresSolver.ProblemImpl problem_,
double[] x_,
double[] y_,
double[] z_)
-
Method Detail
-
SetUp
public void SetUp()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFacetModel.html���������������������������������������������0000775�4231163�4231163�00000131334�14537076045�023767� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFacetModel (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
bivariateCubicCoefficients(int x,
int y,
double[] k1,
double[] k2,
double[] k3,
double[] k4,
double[] k5,
double[] k6,
double[] k7,
double[] k8,
double[] k9,
double[] k10,
double[] sinAngle,
double[] cosAngle,
double[] gradientAngle) |
|
private void |
bivariateCubicCoefficients5By5(int x,
int y,
double[] k1,
double[] k2,
double[] k3,
double[] k4,
double[] k5,
double[] k6,
double[] k7,
double[] k8,
double[] k9,
double[] k10,
double[] sinAngle,
double[] cosAngle,
double[] gradientAngle) |
|
private double |
columnDerivativeMask5By5(int x,
int y) |
|
private double |
columnDerivativeMask7By7(int x,
int y) |
|
private void |
cornerDetector() |
|
private void |
directionalDerivatives(double k1,
double k2,
double k3,
double k4,
double k5,
double k6,
double k7,
double k8,
double k9,
double k10,
double sinAngle,
double cosAngle,
double rho,
double[] firstDirectionalDerivative,
double[] secondDirectionalDerivative,
double[] thirdDirectionalDerivative) |
|
private void |
facetBasedPeakNoiseRemoval() |
|
private void |
gradientBasedFacetEdgeDetection() |
|
private void |
integratedDirectionalDerivative() |
|
private boolean |
isEdgePixel(double k1,
double k2,
double k3,
double k4,
double k5,
double k6,
double k7,
double k8,
double k9,
double k10,
double sinAngle,
double cosAngle,
double[] rho) |
|
private void |
iteratedFacetModel() |
|
private double |
rowDerivativeMask5By5(int x,
int y) |
|
private double |
rowDerivativeMask7By7(int x,
int y) |
|
void |
runAlgorithm() |
Starts the program.
|
private void |
testBivariateCubicCoefficients5By5() |
|
private void |
zeroCrossingEdgeDetector() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
blockSide
private int blockSide
-
alpha
private double alpha
-
routine
private int routine
-
buffer
private double[] buffer
-
result
private double[] result
-
blockHalf
private int blockHalf
-
Constructor Detail
-
AlgorithmFacetModel
public AlgorithmFacetModel(ModelImage srcImg,
int routine,
int blockSide,
double alpha,
double gradientDirectionThreshold)
-
AlgorithmFacetModel
public AlgorithmFacetModel(ModelImage destImg,
ModelImage srcImg,
int routine,
int blockSide,
double alpha,
double gradientDirectionThreshold)
-
Method Detail
-
isEdgePixel
private boolean isEdgePixel(double k1,
double k2,
double k3,
double k4,
double k5,
double k6,
double k7,
double k8,
double k9,
double k10,
double sinAngle,
double cosAngle,
double[] rho)
-
directionalDerivatives
private void directionalDerivatives(double k1,
double k2,
double k3,
double k4,
double k5,
double k6,
double k7,
double k8,
double k9,
double k10,
double sinAngle,
double cosAngle,
double rho,
double[] firstDirectionalDerivative,
double[] secondDirectionalDerivative,
double[] thirdDirectionalDerivative)
-
bivariateCubicCoefficients
private void bivariateCubicCoefficients(int x,
int y,
double[] k1,
double[] k2,
double[] k3,
double[] k4,
double[] k5,
double[] k6,
double[] k7,
double[] k8,
double[] k9,
double[] k10,
double[] sinAngle,
double[] cosAngle,
double[] gradientAngle)
-
bivariateCubicCoefficients5By5
private void bivariateCubicCoefficients5By5(int x,
int y,
double[] k1,
double[] k2,
double[] k3,
double[] k4,
double[] k5,
double[] k6,
double[] k7,
double[] k8,
double[] k9,
double[] k10,
double[] sinAngle,
double[] cosAngle,
double[] gradientAngle)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog7.html�����������������������������������0000775�4231163�4231163�00000026621�14537076055�025613� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog7 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog7(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog7
public FitdeHoog7(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.PreconditionerOptions.html�������������������������������0000775�4231163�4231163�00000034421�14537076052�026705� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.PreconditionerOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_threads
public int num_threads
-
e_block_size
public int e_block_size
-
f_block_size
public int f_block_size
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGVF.html����������������������������������������������������0000775�4231163�4231163�00000163202�14537076046�022406� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGVF (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
boundaryIterations |
Maximum iterations to generate new boundary.
|
private boolean |
do25D |
Only applies to 3D, if true do slice by slice.
|
private float[] |
expGvfBuffer |
DOCUMENT ME!
|
private int[] |
extents |
DOCUMENT ME!
|
private float[] |
fx |
DOCUMENT ME!
|
private float[] |
fy |
DOCUMENT ME!
|
private float[] |
fz |
DOCUMENT ME!
|
private float[] |
gVal |
DOCUMENT ME!
|
private float[] |
gvfBuffer |
DOCUMENT ME!
|
private int |
gvfIterations |
Maximum iterations to generate generalized gradient vector field.
|
private float[] |
GxData |
Storage location of the first derivative of the Gaussian in the X direction.
|
private float[] |
GyData |
Storage location of the first derivative of the Gaussian in the Y direction.
|
private float[] |
GzData |
Storage location of the first derivative of the Gaussian in the Z direction.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
private float |
kValue |
In the paper "Generalized gradient vector flow external forces for active contours" by Chenyang Xu and Jerry
Prince values of 0.05, 0.15, and 0.2 were used for k.
|
private int |
length |
DOCUMENT ME!
|
private float[] |
outputBuffer |
|
private boolean |
propagationFlag |
If true propagate the contour to an adjacent slice.
|
private VOI |
resultVOI |
The resultant polygon and the evolution has completed.
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
private VOI |
srcVOI |
The initial VOI to initialize the evolution process.
|
private int |
stSlice |
Starting slice to evolve contour.
|
private float[] |
uVal |
DOCUMENT ME!
|
private float[] |
vVal |
DOCUMENT ME!
|
private float[] |
wVal |
DOCUMENT ME!
|
private int |
xDim |
DOCUMENT ME!
|
private int |
yDim |
DOCUMENT ME!
|
private int |
zDim |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmGVF(ModelImage destImage,
ModelImage srcImg,
float[] sigmas,
int gvfIterations,
int boundaryIterations,
float k,
VOI srcVOI,
boolean do25D) |
Creates a new AlgorithmGVF object.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calc25D() |
Prepares the data and runs the algorithm for a 3D image on a slice by slice basis.
|
private void |
calc2D() |
Prepares the data and runs the algorithm for a 2D image.
|
private void |
calc3D() |
Prepares the data and runs the algorithm for a 3D image.
|
private void |
calcGVF(int sliceNum,
float[] imgBuffer) |
Calculate GVF from image buffer.
|
private void |
calcGVF3D(float[] imgBuffer) |
Calculate GVF from 3D image buffer.
|
private void |
cleanup() |
Sets the structures to null.
|
private double |
distance(int x1,
int x2,
int y1,
int y2) |
Calculates the distance between two points.
|
void |
finalize() |
Prepares this class for destruction.
|
private static float |
getBilinear(int i,
float dx,
float dy,
int[] iExtents,
float[] image) |
Performs bilinear interpolation of image data.
|
VOI |
getResultVOI() |
Accessor that returns the resultant VOI.
|
private void |
makeKernels2D() |
Makes 2D derivative kernels to be used in the calculation of the gradient magnitude.
|
private void |
makeKernels3D() |
Makes 3D derivative kernels to be used in the calculation of the gradient magnitude.
|
void |
runAlgorithm() |
Starts the snake algorithm.
|
private void |
runSnake(float[] xPoints,
float[] yPoints,
float[] zPoints,
float[] u,
float[] v,
VOIBase resultContour) |
Actual function that evolves the boundary.
|
private void |
runSnake(float[] xPoints,
float[] yPoints,
float[] u,
float[] v,
java.awt.Polygon resultGon) |
Actual function that evolves the boundary.
|
private void |
setPoints(float[] xPoints,
float[] yPoints,
float[] zPoints,
VOIBase contour) |
Takes the polygon and forms two special arrays for use in the Bspline.
|
private void |
setPoints(float[] xPoints,
float[] yPoints,
java.awt.Polygon gon) |
Takes the polygon and forms two special arrarys for use in the Bspline.
|
void |
setPropagation(boolean flag) |
Sets the propagation flag.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
extents
private int[] extents
DOCUMENT ME!
-
fx
private float[] fx
DOCUMENT ME!
-
fy
private float[] fy
DOCUMENT ME!
-
fz
private float[] fz
DOCUMENT ME!
-
gVal
private float[] gVal
DOCUMENT ME!
-
length
private int length
DOCUMENT ME!
-
uVal
private float[] uVal
DOCUMENT ME!
-
vVal
private float[] vVal
DOCUMENT ME!
-
wVal
private float[] wVal
DOCUMENT ME!
-
xDim
private int xDim
DOCUMENT ME!
-
yDim
private int yDim
DOCUMENT ME!
-
zDim
private int zDim
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmGVF
public AlgorithmGVF(ModelImage destImage,
ModelImage srcImg,
float[] sigmas,
int gvfIterations,
int boundaryIterations,
float k,
VOI srcVOI,
boolean do25D)
Creates a new AlgorithmGVF object.
- Parameters:
destImage - image of GVF field magnitudesrcImg - 2D or 3D source imagesigmas - describe the scale of the gaussian in each dimensiongvfIterations - iterations in calculating GVF fieldboundaryIterations - iterations in calculating boundaryk - GVF constantsrcVOI - VOI that is to be evolveddo25D - only applies to 3D, if true do slice by slice
-
Method Detail
-
getBilinear
private static float getBilinear(int i,
float dx,
float dy,
int[] iExtents,
float[] image)
Performs bilinear interpolation of image data.
- Parameters:
i - index into imagedx - change in x from integerdy - change in y from integeriExtents - dimensions of imageimage - image data- Returns:
- DOCUMENT ME!
-
distance
private double distance(int x1,
int x2,
int y1,
int y2)
Calculates the distance between two points.
- Parameters:
x1 - first x coord.x2 - second x coord.y1 - first y1 coord.y2 - second y2 coord.- Returns:
- DOCUMENT ME!
-
runSnake
private void runSnake(float[] xPoints,
float[] yPoints,
float[] u,
float[] v,
java.awt.Polygon resultGon)
Actual function that evolves the boundary.
- Parameters:
xPoints - x coordinates that describe the contouryPoints - y coordinates that describe the contouru - gradient vector field x componentv - gradient vector field y componentresultGon - resultant polygon energy is too much extra computation to be worth computing energy is given
by the sum over 0.5*alpha*|first order derivative|**2 + Eext, where v = -grad(Eext). The first
derivative of the curve and Eext would also have to be calculated to obtain the energy.
-
runSnake
private void runSnake(float[] xPoints,
float[] yPoints,
float[] zPoints,
float[] u,
float[] v,
VOIBase resultContour)
Actual function that evolves the boundary.
- Parameters:
xPoints - x coordinates that describe the contouryPoints - y coordinates that describe the contouru - gradient vector field x componentv - gradient vector field y componentresultGon - resultant polygon energy is too much extra computation to be worth computing energy is given
by the sum over 0.5*alpha*|first order derivative|**2 + Eext, where v = -grad(Eext). The first
derivative of the curve and Eext would also have to be calculated to obtain the energy.
-
setPoints
private void setPoints(float[] xPoints,
float[] yPoints,
java.awt.Polygon gon)
Takes the polygon and forms two special arrarys for use in the Bspline.
- Parameters:
xPoints - storage location of array of x coord. pointsyPoints - storage location array of y coord. pointsgon - initial polygon
-
setPoints
private void setPoints(float[] xPoints,
float[] yPoints,
float[] zPoints,
VOIBase contour)
Takes the polygon and forms two special arrays for use in the Bspline.
- Parameters:
xPoints - storage location of array of x coord. pointsyPoints - storage location array of y coord. pointsgon - initial polygon
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Gauss2CostFunction.html��������������������������0000775�4231163�4231163�00000034023�14537076052�027404� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Gauss2CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.CVDlsMemRecB.html���������������������������������������������0000775�4231163�4231163�00000022436�14537076054�023247� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.CVDlsMemRecB (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRecB
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
jacB |
|
(package private) int |
jacBS |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
CVDlsMemRecB
CVDlsMemRecB()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEllipticFourierDescriptors.html�����������������������������0000775�4231163�4231163�00000071100�14537076045�027301� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEllipticFourierDescriptors (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmEllipticFourierDescriptors
extends AlgorithmBase
Smoothing VOI with Elliptic Fourier Descriptors. The number of coefficients can range from 1 to the number of
points in the curve divided by 2.
References:
1.) Feature Extraction & Image Processing for Computer Vision, Third Edition, Mark S. Nixon and
Alberto S. Aguado, 2012, pp. 369-378.
2.) Boundary Finding with Parametrically Deformable Models by Lawrence H. Staib and James S. Duncan.
- Author:
- ilb
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
coefficients
private int coefficients
Number of coefficients.
-
Constructor Detail
-
AlgorithmEllipticFourierDescriptors
public AlgorithmEllipticFourierDescriptors(ModelImage srcImg,
VOI activeVOI,
int coefficients)
Creates a new AlgorithmEllipticFourierDescriptors object.
- Parameters:
srcImg - 2D or 3D source imageactiveVOI - the selected voicoefficients - number of coefficients
-
Method Detail
-
runEllipticFourierDescriptors
private void runEllipticFourierDescriptors(float[] xPoints,
float[] yPoints,
float[] xSmooth,
float[] ySmooth)
-
runEllipticFourierDescriptorsOpenCurve
private void runEllipticFourierDescriptorsOpenCurve(float[] xPoints,
float[] yPoints,
float[] xSmooth,
float[] ySmooth)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEmbeddedConfidenceEdgeDetection.html������������������������0000775�4231163�4231163�00000134232�14537076045�030057� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEmbeddedConfidenceEdgeDetection (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmEmbeddedConfidenceEdgeDetection
extends AlgorithmBase
The java code is ported from C++ code downloaded from http://coewww.rutgers.edu/riul/research/code.html.
The relevant web page section says:
Edge Detection and Image SegmentatiON (EDISON) System
C++ code, can be used through a graphical interface or command line.
The system is described in Synergism in low level vision.
For comments, please contact Bogdan Georgescu or Chris M. Christoudias.
The EDISON system contains the image segmentation/edge preserving filtering algorithm described in the
paper Mean shift: A robust approach toward feature space analysis and the edge detection algorithm
described in the paper Edge detection with embedded confidence.
This code was ported by William Gandler.
References
-------------------------------------------------------------------------------------------------
[1] D. Comanicu, P. Meer: "Mean shift: A robust approach toward feature space analysis".
IEEE Trans. Pattern Anal. Machine Intell., May 2002.
[2] P. Meer, B. Georgescu: "Edge detection with embedded confidence". IEEE Trans. Pattern Anal.
Machine Intell., 28, 2001.
[3] C. Christoudias, B. Georgescu, P. Meer: "Synergism in low level vision". 16th International
Conference of Pattern Recognition, Track 1 - Computer Vision and Robotics, Quebec City,
Canada, August 2001.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmEmbeddedConfidenceEdgeDetection(ModelImage destImage,
ModelImage srcImage,
int kernelSize,
double nmxr,
double nmxc,
double rh,
double ch,
double rl,
double cl,
int nMin,
int nmxType,
int hystTypeHigh,
int hystTypeLow) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
kernelSize
private int kernelSize
-
nmxType
private int nmxType
-
hystTypeHigh
private int hystTypeHigh
-
hystTypeLow
private int hystTypeLow
-
Constructor Detail
-
AlgorithmEmbeddedConfidenceEdgeDetection
public AlgorithmEmbeddedConfidenceEdgeDetection(ModelImage destImage,
ModelImage srcImage,
int kernelSize,
double nmxr,
double nmxc,
double rh,
double ch,
double rl,
double cl,
int nMin,
int nmxType,
int hystTypeHigh,
int hystTypeLow)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LineSearchInterpolationType.html�������������������������0000775�4231163�4231163�00000035764�14537076051�030006� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearchInterpolationType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.LineSearchInterpolationType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd5.html���������������������������������������0000775�4231163�4231163�00000030465�14537076055�025011� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd5 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd5(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd5
public Fitqd5(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SparseMatrixPreconditionerWrapper.html�������������������0000775�4231163�4231163�00000042071�14537076052�031235� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SparseMatrixPreconditionerWrapper (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/WalshHadamardTransform3.html�����������������������������������������0000775�4231163�4231163�00000123414�14537076057�024577� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WalshHadamardTransform3 (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[] |
bitrevorder(double[] X) |
|
double[] |
fhtdya(double[] data,
boolean forwardTransform) |
|
void |
fhtdya2D(int yDim,
int xDim,
double[][] src,
double[][] dst,
boolean forwardTransform) |
|
double[] |
fhtnat(double[] data,
boolean forwardTransform) |
|
void |
fhtnat2D(int yDim,
int xDim,
double[][] src,
double[][] dst,
boolean forwardTransform) |
|
double[] |
fhtseq(double[] data,
boolean forwardTransform) |
|
void |
fhtseq2D(int yDim,
int xDim,
double[][] src,
double[][] dst,
boolean forwardTransform) |
|
private void |
filter(double[] data,
int filterType,
double filterVal1,
double filterVal2) |
|
double |
fwht_sum_absolute_difference(int n,
double[] a,
double[] b) |
|
double[] |
greater(double[] data,
double value,
double substitute) |
|
double[][] |
hard(double[][] data,
double value,
double substitute) |
|
double[] |
hard(double[] data,
double value,
double substitute) |
|
double[] |
less(double[] data,
double value,
double substitute) |
|
double[] |
nn_garrote(double[] data,
double value,
double substitute) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
double[] |
soft(double[] data,
double value,
double substitute) |
|
void |
test() |
|
double[] |
threshold_firm(double[] data,
double value_low,
double value_high) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
filterType
private int filterType
-
Constructor Detail
-
WalshHadamardTransform3
public WalshHadamardTransform3(ModelImage transformImage,
ModelImage inverseImage,
ModelImage srcImg,
int type,
int filterType,
double filterVal1,
double filterVal2)
-
Method Detail
-
fhtseq2D
public void fhtseq2D(int yDim,
int xDim,
double[][] src,
double[][] dst,
boolean forwardTransform)
-
fhtdya2D
public void fhtdya2D(int yDim,
int xDim,
double[][] src,
double[][] dst,
boolean forwardTransform)
-
fhtnat2D
public void fhtnat2D(int yDim,
int xDim,
double[][] src,
double[][] dst,
boolean forwardTransform)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.PatchOptions.html����������������������������������������������0000775�4231163�4231163�00000034102�14537076055�023621� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.PatchOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.PatchOptions
-
- Enclosing class:
- libdt
class libdt.PatchOptions
extends java.lang.Object
Class for specifying spatio-temporal patches (cubes). \sa PatchExtractor,
PatchBatchExtractor
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
double |
minvar |
< normalization method.
|
int |
minvarf |
< minimum variance.
|
libdt.norm_type |
normopt |
< step size between patches (x, y, z).
|
javax.vecmath.Point3i |
step |
< patch size (x, y, z).
|
javax.vecmath.Point3i |
win |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
normopt
public libdt.norm_type normopt
< step size between patches (x, y, z).
-
minvar
public double minvar
< normalization method.
-
minvarf
public int minvarf
< minimum variance.
-
Constructor Detail
-
PatchOptions
PatchOptions(int winxy,
int winz,
int stepxy,
int stepz,
libdt.norm_type normopt,
double minvar,
int minvarf)
< frames to skip in checking variance.
-
Method Detail
-
checkValues
void checkValues()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.QuadraticFunction.html�������������������������������0000775�4231163�4231163�00000027122�14537076053�026631� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.QuadraticFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CostFunctorExample.html����������������������������������0000775�4231163�4231163�00000023106�14537076051�026127� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CostFunctorExample (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CostFunctorExample
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlCovDet.html�������������������������������������������������0000775�4231163�4231163�00000055277�14537076054�023041� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlCovDet (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
-
Constructor Summary
Constructors
| Constructor |
Description |
VlCovDet() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
edgeThreshold
double edgeThreshold
< peak threshold.
-
lapPeakThreshold
double lapPeakThreshold
< edge threshold.
-
firstOctave
int firstOctave
< number of octaves
-
numFeatures
int numFeatures
-
numFeatureBufferSize
int numFeatureBufferSize
-
patchBufferSize
int patchBufferSize
-
transposed
boolean transposed
-
aaPatchX
float[] aaPatchX
-
aaPatchY
float[] aaPatchY
-
lapPatch
float[] lapPatch
-
laplacians
float[] laplacians
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.gauss2FittingCostFunction.html�����������������������0000775�4231163�4231163�00000034062�14537076054�030072� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.gauss2FittingCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/package-summary.html�������������������������������������������������0000775�4231163�4231163�00000373314�14537076122�023205� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms (MIPAV API Documentation)
-
-
Class Summary
| Class |
Description |
| AgastDetector5_8 |
agast5 - AGAST, an adaptive and generic corner detector based on the
accelerated segment test for a 8 pixel mask
Copyright (c) 2010, Elmar Mair
All rights reserved.
|
| AgglomerativeInformationBottleneck |
Copyright (C) 2007-11, Andrea Vedaldi and Brian Fulkerson
Copyright (C) 2012-13, The VLFeat Team
All rights reserved.
|
| AlgorithmActiveContoursWithoutEdges |
|
| AlgorithmAGCIE |
|
| AlgorithmAGVF |
Snake-like algorithm deriviative.
|
| AlgorithmAHE |
algorithm to apply an adaptive histogram to an image, placing it in a new ModelImage, or returning the changed
picture to the same image.
|
| AlgorithmAHElocal |
algorithm to apply an adaptive histogram to an image, placing it in a new ModelImage, or returning the changed
picture to the same image.
|
| AlgorithmAINDANE |
|
| AlgorithmAntigradient2 |
This is a port of the files anitgradient2.m and antigradient2.c created by Gunnar Farneback in the
Spatial domain toolbox at http://www.imt.liu.se/mi/Tools.
|
| AlgorithmAnyTwoImagesSNR |
| AlgorithmArcLength |
This algorithm calculates the arc-length of a Bspline fit to user defined control points.
|
| AlgorithmASM |
|
| AlgorithmAutoCorrelation |
Reference: Digital Image Processing, Second Edition by Rafael C.
|
| AlgorithmAutoCovariance |
let deli(x,y) = (i(x,y) - )/ where the angle brackets are used to denote a spatial average.
|
| AlgorithmAutoSeedWatershed |
This is a port of the file AutoSeedWatershed.cpp which calls openCV written by Ravimal Bandara.
|
| AlgorithmBarrelDistortion |
Corrects barrel and/or pin cushion distortion for 2D images.
|
| AlgorithmBase |
Base abstract class for algorithms.
|
| AlgorithmBoxCount |
|
| AlgorithmBrainExtractor |
A class for segmenting the brain from a 3D MRI.
|
| AlgorithmBrainSurfaceExtractor |
This class provides an implementation of a second method for segmentation of the brain from a 3D MRI, as opposed to
the BET algorithm implemented in AlgorithmBrainExtractor.
|
| AlgorithmBRISK |
BRISK - Binary Robust Invariant Scalable Keypoints
Reference implementation of
[1] Stefan Leutenegger,Margarita Chli and Roland Siegwart, BRISK:
Binary Robust Invariant Scalable Keypoints, in Proceedings of
the IEEE International Conference on Computer Vision (ICCV2011).
|
| AlgorithmBSmooth |
Smoothing of VOI using 1 iteration of bSplines.
|
| AlgorithmBSnake |
Snake-like algorithm derivative using BSplines.
|
| AlgorithmBSpline |
Modified code from Aaron Carass's Java implementation of
Philippe Thevenaz's Cubic B-spline Interpolation.
|
| AlgorithmCannyEdgeDetection |
|
| AlgorithmCellTrackingAGVF |
Active Contour class optimized for Cell Tacking, based on the following paper:
|
| AlgorithmCenterOfMass |
This algorithm calculates the center of mass for 2D and 3D black and white images.
|
| AlgorithmCenterOfMassRGB |
* This algorithm calculates the red, green, and blue center of mass for 2D and 3D color images.
|
| AlgorithmCircleGeneration |
This module draws uniformly randomly positioned circles with a specified radius.
|
| AlgorithmCircleToRectangle |
References: 1.)
|
| AlgorithmCircularSectorToRectangle |
This software uses 2D conformal mapping in converting a circular sector defined by 4 user points at the sector corners
to a rectangle of user specified size.
|
| AlgorithmColocalizationEM |
An optional registration may be performed before colocalization.
|
| AlgorithmColocalizationRegression |
This algorithm creates a 2D histogram from 2 colors of a single image or from 2 black and white images and uses an
orthogonal line fit of the histogram data to generate a correlation line thru the histogram.
|
| AlgorithmColorSaturation |
This algorithm changes the saturation of a color image while keeping the hue and intensity constant.
|
| AlgorithmConstELSUNCOpt3D |
Runs ELSUNC for a 3D image.
|
| AlgorithmConstPowellOpt3D |
Runs Powell's method for a 3D image.
|
| AlgorithmConstPowellOptBase |
Powell's Method
|
| AlgorithmContrastEnhancementUsingExposureFusion |
|
| AlgorithmConvergenceField |
|
| AlgorithmConvolver |
Convolves kernel with a 2D or 3D image - only pixels where the kernel is completely contained in the image are
convolved, otherwise they are set to zero.
|
| AlgorithmCostFunctions |
CostFunction - class for specifying optimization function.
|
| AlgorithmCostFunctions2D |
CostFunction - class for specifying optimization function.
|
| AlgorithmCubicLagrangian |
This is a polynomial p of degree 3 which interpolates a given function f at the points x(-1), x(0), x(1), and x(2),
and is given by p(x) = sum from i = -1 to i = 2 of li(x)*f(xi), where li, i = -1,0,1,2, which are called the
fundamental polynomials, are given by li(x) = product from k = -1 to k = 2 for k !
|
| AlgorithmCumulativeHistogram |
|
| AlgorithmDConvolver |
Convolves kernel with a 2D or 3D image - only pixels where the kernel is completely contained in the image are
convolved, otherwise they are set to zero.
|
| AlgorithmDEMRI3 |
3 model parameters are fit for each voxel in 3D:
1) K_trans in [0, 0.99]
2) User choice of k_ep in [0, 0.99] or ve
3) f_vp in [0, 0.99]
K_trans and k_ep default to rates per second, but the user changed select rates per minute.
|
| AlgorithmDualContourSearch |
|
| AlgorithmEdgeDetection3D |
|
| AlgorithmEdgeLaplacian |
Calculates the EdgeLap of an image at a scale defined by the user.
|
| AlgorithmEdgeLaplacianSep |
Calculates the EdgeLap of an image at a scale defined by the user.
|
| AlgorithmEdgeNMSuppression |
Calculates the non-maximum suppression of an image at a scale defined by the user.
|
| AlgorithmEfficientWatershed |
|
| AlgorithmEllipseGeneration |
This module draws uniformly randomly positioned ellipses with a specified semi-major axis, semi-minor axis,
and angle phi between the x-axis and the major axis of the ellipse.
|
| AlgorithmEllipseToCircle |
This program performs the conformal mapping of an ellipse to a circle.
|
| AlgorithmEllipseToRectangle |
This program performs the conformal mapping of an ellipse to a rectangle.
|
| AlgorithmEllipsoidFit |
This code fits data points to a 3D ellipsoid.
|
| AlgorithmEllipticFourierDescriptors |
Smoothing VOI with Elliptic Fourier Descriptors.
|
| AlgorithmELSUNCOpt2D |
Runs ELSUNC, LEVENBERG_MARQUARDT, or NL2SOL for a 2D image.
|
| AlgorithmELSUNCOpt3D |
Runs ELSUNC, LEVENBERG_MARQUARDT, or NL2SOL for a 3D image.
|
| AlgorithmEmbeddedConfidenceEdgeDetection |
The java code is ported from C++ code downloaded from http://coewww.rutgers.edu/riul/research/code.html.
|
| AlgorithmEntropicEdgeDetection |
|
| AlgorithmEntropyMinimization |
DOCUMENT ME!
|
| AlgorithmEvaluateMaskSegmentation |
Compares segmentation results of a test image to segmentation results of an ideal gold standard true image.
|
| AlgorithmEvaluateSegmentation |
Compares segmentation results of a test image to segmentation results of an ideal gold standard true image.
|
| AlgorithmExtractSurface |
Extracts a surface using Tetrahedron Extraction.
|
| AlgorithmExtractSurfaceCubes |
Extracts a surface using Marching Cube Extraction.
|
| AlgorithmFaceAnonymizer |
FaceAnonymizer algorithm computes the "face" from a ModelImage based on input parameters that specify the min/max
voxel values for the face voxels, and the maximum skin thinkness.
|
| AlgorithmFaceAnonymizerBET |
Anonymize an image of a patient's head by removing the face.
|
| AlgorithmFacetModel |
|
| AlgorithmFastMarching |
DOCUMENT ME!
|
| AlgorithmFloodFill |
Stack based flood-fill for 2D and 3D images.
|
| AlgorithmFRAP |
Fluorescence Recovery after PhotoBleaching Only 1 color will be used from a
color image.
|
| AlgorithmFRETAcceptorPhotobleach |
Fluorescence Resonance Energy Transfer FRET refers to the nonradiative transfer of energy from an excited state donor
fluorescent molecule to a nearby acceptor fluorescent molecule.
|
| AlgorithmFRETBleedThrough |
Fluorescence Resonance Energy Transfer FRET refers to the nonradiative transfer of energy from an excited state donor
fluorescent molecule to a nearby acceptor fluorescent molecule.
|
| AlgorithmFRETEfficiency |
Fluorescence Resonance Energy Transfer FRET refers to the nonradiative transfer of energy from an excited state donor
fluorescent molecule to a nearby acceptor fluorescent molecule.
|
| AlgorithmFuzzyCMeans |
Fuzzy C-Means Segmentation algorithm
|
| AlgorithmFuzzyConnectednessSegmentation |
|
| AlgorithmGaussianMixtureModelEM |
Copyright (c) 1995 The Board of Trustees of Purdue University.
|
| AlgorithmGenerateIsolines |
|
| AlgorithmGraphBasedSegmentation |
|
| AlgorithmGrayScaleMorphology25D |
2.5D mathematical morphology class applied to Gray scale images. (2D morphology on 3D volumes).
|
| AlgorithmGrayScaleMorphology2D |
Two-Dimensional mathematical morphology class applied to Gray scale images.
|
| AlgorithmGrayScaleMorphology3D |
Three-Dimensional mathematical morphology class applied to Gray scale images.
|
| AlgorithmGVF |
Snake-like algorithm derivative using BSplines.
|
| AlgorithmHarrisCornerDetector |
|
| AlgorithmHarrisLaplace |
|
| AlgorithmHeightFunction |
The class generates a triangle or quad mesh of a 2D dataset (image) to be displayed in the surface viewer.
|
| AlgorithmHepticLagrangian |
This is a polynomial p of degree 7 which interpolates a given function f at the points x(-3), x(-2), x(-1), x(0),
x(1), x(2), x(3), and x(4) and is given by p(x) = sum from i = -3 to i = 4 of li(x)*f(xi), where li, i =
-3,-2,-1,0,1,2,3,4 which are called the fundamental polynomials, are given by li(x) = product from k = -3 to k = 4
for k !
|
| AlgorithmHessian |
Provides functions to convolve an image with the second derivitive of the Gaussian function to obtain the Hessian
matrix for a particular point on the image.
|
| AlgorithmHillClimbingWatershed |
|
| AlgorithmHistogram |
Calculates the histogram for an image.
|
| AlgorithmHistogram2Dim |
This algorithm creates a two dimensional histogram of the data in 2 black and white images or 1 color image. if
doLinearRescale is true, the range of data in the second image is rescaled to be the same as the range of data in the
first image.
|
| AlgorithmHistogramMatch |
Algorithm that matches the transforms a match or source image so as to make its histogram equal to the histogram of a
base image.
|
| AlgorithmHistogramSliceMatch |
Algorithm that matches or transforms a match or source slice so as to make its histogram equal to the histogram of a
base slice.
|
| AlgorithmHMRF_EM |
This is a port of the MATLAB files HMRF_EM.m and MRF_MAP.m written by Quan Wang to Java
|
| AlgorithmHoughCardioid |
This Hough transform uses (xi, yi) points in the original image space to generate theta0, a0 points in the Hough
transform.
|
| AlgorithmHoughCircle |
This Hough transform uses (xi, yi) points in the original image space to generate x0, y0, rad points in the Hough
transform.
|
| AlgorithmHoughEllipse |
This Hough transform uses (xi, yi) points in the original image space to generate p, q, r1, r2, and theta points in the Hough
transform.
|
| AlgorithmHoughHyperbola |
This work is made possible by the following mathematical theorem proved by Professor Alan Horwitz
of Penn State University:
Finding the Center of a Hyperbola, H, given three nonparallel tangent lines to H and
the corresponding points of tangency.
|
| AlgorithmHoughLine |
This Hough transform uses (xi, yi) points in the original image space to generate rho, theta points in the Hough
transform.
|
| AlgorithmHoughParabola |
[(y - vy)*cos(phi) - (x - vx)*sin(phi)]**2 =
4*p*[(y - vy)*sin(phi) + (x - vx)*cos(phi)]
where vx, vy are the coordinates of the parabola vertex
p is the distance between the vertex and focus of the parabola
This Hough transform uses (xi, yi) points in the original image space to generate vx, vy, phi, p points in the Hough
transform.
|
| AlgorithmIAGCWD |
|
| AlgorithmIHN3Correction |
N3 Inhomogeneity correction This is based on code by John G.
|
| AlgorithmImageHessian |
DOCUMENT ME!
|
| AlgorithmIndependentComponents |
This algorithm operates on 2D and 3D black and white and color images.
|
| AlgorithmIteratedBlindDeconvolution |
DOCUMENT ME!
|
| AlgorithmKMeans |
This program can be run on data of any dimensionality.
|
| AlgorithmLapMedianess |
Calculates the Laplacian of the gaussian of an image at a scale defined by the user.
|
| AlgorithmLevelSet |
This algorithm iteratively expands or contracts one or more contours to a boundary.
|
| AlgorithmLevelSetDiffusion |
DOCUMENT ME!
|
| AlgorithmLLE |
|
| AlgorithmLogSlopeMapping |
|
| AlgorithmLowerCompletion |
|
| AlgorithmLuminanceAdaptation |
|
| AlgorithmMarkovSegment |
|
| AlgorithmMatchForReference |
Will take Two 2D images (one Reference, one Adjusted) and use the Reference image's Resolutions to transform the
adjusted Image into a new size and resolution that the Reference Image can then be matched to, while preserving all
Field of Views (there is no loss of FOV).
|
| AlgorithmMaximumLikelihoodIteratedBlindDeconvolution |
An implementation of Maximum Likelihood Iterated Blind Deconvolution based on the following papers:
|
| AlgorithmMeanShiftClustering |
The java code is ported from C++ code downloaded from http://coewww.rutgers.edu/riul/research/code.html.
|
| AlgorithmMeanShiftSegmentation |
The java code is ported from C++ code downloaded from http://coewww.rutgers.edu/riul/research/code.html.
|
| AlgorithmMidsagittal |
Finds the midsagittal line of a brain MRI by:
Flipping the image horizontally.
Registering the flipped image against the original.
Getting the angle that the registration rotated the image.
Transforming the original image by half the registration rotation.
|
| AlgorithmMinimumPerimeterPolygon |
Smoothing VOI with minimum perimeter polygon.
|
| AlgorithmMixGaussEM |
|
| AlgorithmMorphology25D |
2.5D mathmatical morphology class (2D morphology on 3D volumes).
|
| AlgorithmMorphology2D |
Two-Dimensional mathmatical morphology class.
|
| AlgorithmMorphology3D |
Three-Dimensional mathmatical morphology class.
|
| AlgorithmMRIShadingCorrection |
DOCUMENT ME!
|
| AlgorithmMSER |
| AlgorithmMSpectralFuzzyCMeans |
Fuzzy C-Means Segmentation algorithm
|
| AlgorithmMultiExponentialFitting |
|
| AlgorithmNearlyCircleToCircle |
This program performs the conformal mapping of a nearly circular region to a circle.
|
| AlgorithmNetworkSnake |
Copyright (c) 2011, The University of Nottingham
All rights reserved.
|
| AlgorithmNetworkSnake.ExtentionMath |
|
| AlgorithmNonMaxSuppts |
|
| AlgorithmNonparametricSegmentation |
DOCUMENT ME!
|
| AlgorithmObjectExtractor |
A class for segmenting objects.
|
| AlgorithmPbBoundaryDetection |
Compute probability of boundary using brightness gradient and texture gradient
Original MATLAB code written by David R.
|
| AlgorithmPhaseCongruency |
Ported from Peter Kovesi's MATLAB code for Phase Congruency
Available from: http://www.csse.uwa.edu.au/~pk/research/matlabfns/PhaseCongruency/phasecong3.m
and: http://www.csse.uwa.edu.au/~pk/research/matlabfns/FrequencyFilt/lowpassfilter.m
in reference to the method lowpassFilter();
% References:
%
% Peter Kovesi, "Image Features From Phase Congruency".
|
| AlgorithmPointArea |
DOCUMENT ME!
|
| AlgorithmPowellOpt2D |
Runs Powell's method for a 2D image.
|
| AlgorithmPowellOpt3D |
Runs Powell's method for a 3D image.
|
| AlgorithmPowellOptBase |
Powell's Method
|
| AlgorithmPowerWatershed |
This is a port of C code written by Camille Couprie in 2009.
|
| AlgorithmPrincipalComponents |
This algorithm operates on 3D black and white images and on 2D and 3D color images.
|
| AlgorithmQuadraticFit |
Approximate a set of points by a quadric surface.
|
| AlgorithmQuantify |
Quantify image data based on a mask image.
|
| AlgorithmQuinticLagrangian |
This is a polynomial p of degree 5 which interpolates a given function f at the points x(-2), x(-1), x(0), x(1),
x(2), and x(3) and is given by p(x) = sum from i = -2 to i = 3 of li(x)*f(xi), where li, i = -2,-1,0,1,2,3 which are
called the fundamental polynomials, are given by li(x) = product from k = -2 to k = 3 for k !
|
| AlgorithmRegionGrow |
Fills a region based on average intensity +or- standard deviation.
|
| AlgorithmRegionMergingViaBoundaryMelting |
|
| AlgorithmRegionsFromPartialBorders |
|
| AlgorithmScaleSaliency |
Original source code in C and MATLAB is Copyright 1998-2004 by Timor Kadir Version 1.5
Kadir/Brady Feature detector (Scale Saliency) Code
For non-commercial use only
Ported by to Java by William Gandler
References:
1.)
|
| AlgorithmSCDSegmentation |
|
| AlgorithmSeparableConvolver |
Convolves an image with a separable (symmetric) kernel and returns the result.
|
| AlgorithmSequentialScanningWatershed |
|
| AlgorithmSFTA |
|
| AlgorithmShortestPathWatershed |
|
| AlgorithmSimulatedExposureFusion |
|
| AlgorithmSingleMRIImageSNR |
This program uses a mandatory signal 1 VOI, an optional signal 2 VOI, a mandatory noise background VOI, and the
number of NMR receivers to calculate the signal to noise ratio for the signal VOI(s).
|
| AlgorithmSkullRemoval |
Algorithm Implementation
1.
|
| AlgorithmSM2 |
Based on the document provided by Daniel Reich: Notes on DCE with SM2 (standard model, aka Tofts model,
2-compartment) 3 model parameters are fit for each voxel in 3D: 1) K_trans in [1.0E-5, 5.0] in /min On input ktrans
is converted from /min to /sec and on output ktrans is converted from /sec to /min. 2) ve in [1.0E-5, 0.99] 3) f_vp
in [0, 0.99]
srcImage is a dynamic "4D volume" of MRI signal (3D over time).
|
| AlgorithmSnake |
Snake-like algorithm deriviative.
|
| AlgorithmSpectralClustering |
|
| AlgorithmSphereGeneration |
This module draws uniformly randomly positioned spheres with a specified radius.
|
| AlgorithmSplitAndMergeWatershed |
|
| AlgorithmStandardDeviationThreshold |
The Standard Deviation Threshold works by first having an active VOI in which the standard deviation and other
statistics are calculated.
|
| AlgorithmSubtractVOI |
Algorithm that subtracts the mean or median value of a VOI from the image.
|
| AlgorithmTalairachTransform |
Performs original to ACPC, original to Talairach, ACPC to original, ACPC to Talairach, Talairach to original, or
Talairach to ACPC transformation.
|
| AlgorithmTextureAnalysis |
Overview
This code contains the texture analysis functions for the paper `Texture
Analysis and Segmentation Using Modulation Features, Generative Models, and
Weighted Curve Evolution', by I.
|
| AlgorithmTextureSegmentation |
This software implements the factorization-based segmentation algorithm.
|
| AlgorithmThinning2D |
|
| AlgorithmThresholdDual |
This algorithm has two modes of operation:
|
| AlgorithmThresholdDualRGB |
Runs threshold (lower and upper) on color images and replaces values either outside (inverse) or inside (normal) with
the fill values specified.
|
| AlgorithmTimeFitting |
|
| AlgorithmTProcess |
This abstract class defines terms common to both T1 and T2 processing, such as thresholding and
multithreading management methods.
|
| AlgorithmTPSpline |
Thin plate spline Warning: If the supplied (x,y) data set in setupTPSpline2D is nearly collinear, singular matrices
will result and a matrix inversion will fail.
|
| AlgorithmTranscode |
Title:
|
| AlgorithmTransform |
Transforms Volume by resampling using transformation matrix and the choice of nearest-neighbor, trilinear
interpolation, 3rd order Bspline, 4th order Bspline, cubic Lagrangian, quintic Lagrangian, heptic Lagrangian, or
windowed sinc.
|
| AlgorithmTransformBSpline |
TransformBSpline algorithm This algorithm takes a source image and uses information read in from a .nlt file to
perform a nonlinear B-Spline transformation on the image.
|
| AlgorithmTransformVOI |
|
| AlgorithmTreT1 |
This class is adapted from the ImageJ version originally written by Sean Deoni while working at the
National Institutes of Health.
|
| AlgorithmTreT2 |
This class is adapted from the ImageJ version originally written by Sean Deoni while working at the National
Institutes of Health.
|
| AlgorithmTwoMRIImagesSNR |
This module implements the National Electrical Manufacturers Association (NEMA) standard for SNR estimation in
diagnostic MRI.
|
| AlgorithmUnionFindComponentLabelling |
|
| AlgorithmUnionFindWatershed |
|
| AlgorithmVesselEnhancement |
|
| AlgorithmVOIExtraction |
DOCUMENT ME!
|
| AlgorithmVOIExtractionPaint |
DOCUMENT ME!
|
| AlgorithmVOIHausdorffDistance |
Algorithm class for finding Hausdorff distance on 2 VOIs
|
| AlgorithmVOILogicalOperations |
Algorithm class for performing logical operations on VOIs
|
| AlgorithmVOIProps |
This class calculates a properties of an image defined by a VOI.
|
| AlgorithmVOIShapeInterpolation |
|
| AlgorithmVOISimplexOpt |
Perform Simplex Optimization on a VOI that has been propagated to a slice to find a transformation which will make an
affine "fit" a structure which the VOI fit on the previous slice (used in RFASegTool when propagating liver
segmentation VOIs).
|
| AlgorithmWatershed |
This program applies the watershed algorithm to the image.
|
| AlgorithmWSinc |
Sinc function windowed with Hanning window function used for interpolation This function will create images with
greater maximums and lower minimums than the original image, so if the input image type is BYTE or UBYTE, the output
image type should be a SHORT.
|
| Backpropagation |
MIT License
Copyright (c) 2016 Jason Wu
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
|
| Bessel |
This module computes Bessel functions of complex arguments and a nonnegative order.
|
| BesselEP |
This module computes Bessel functions of complex arguments and a nonnegative order.
|
| BlindDeblur |
|
| CDFLIB |
Legalities
==========
We place our efforts in writing this package in the public domain.
|
| Cephes |
Correct values for ndtri are taken from scipy-main/scipy/special/tests/test_ndtr.py under the BSD-3 license:
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
|
| CeresSolver |
This is a port of the C++ files in ceres-solver-1.14.0 under the BSD license:
Ceres Solver - A fast non-linear least squares minimizer Copyright 2015
Google Inc.
|
| CeresSolver2 |
This is a port of the C++ files in ceres-solver-1.14.0 under the BSD license:
Ceres Solver - A fast non-linear least squares minimizer Copyright 2015
Google Inc.
|
| CeresSolverNISTTest |
|
| CeresSolverTest |
|
| ConfluentHypergeometric |
This code calculates the confluent hypergeometric function of the first and second kinds For the confluent
hypergeometric function of the first kind a typical usage for the routine requiring real parameters and a real
argument would be:
|
| ConjugateGradient |
MIT License
Copyright (c) 2018 Komahan Boopathy
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
|
| ConjugateGradientTest |
MIT License
Copyright (c) 2018 Komahan Boopathy
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
|
| ContourPlot |
The Contours class provides methods to compute contour lines and contour bands
from a 2D regular grid of scalar values.
|
| ContourPlot.BufferedImageFactory |
Class providing convenience methods for converting Images to BufferedImages.
|
| ContourPlot.CharacterAtlas |
The CharacterAtlas class is a texture atlas for looking up character textures.
|
| ContourPlot.ColorOperations |
The ColorOperations class contains methods for manipulating
32bit ARGB color values.
|
| ContourPlot.ExtendedWilkinson |
Implementation of the extended Wilkinson algorithm for tick label positioning.
|
| ContourPlot.FontProvider |
|
| ContourPlot.ImageSaver |
Class providing convenience methods for saving Images to file.
|
| ContourPlot.Iterators |
Class holding all of the Iterator and Spliterator classes
used in the ContourPlot.ImgBase interface. |
| ContourPlot.Iterators.ColSpliterator<P extends ContourPlot.PixelBase> |
Special Spliterator which guarantees that each split will cover at least
an entire column of the image.
|
| ContourPlot.Iterators.ImgAreaIterator<P extends ContourPlot.PixelBase> |
The standard iterator class for iterating over an area of an image.
|
| ContourPlot.Iterators.ImgAreaSpliterator<P extends ContourPlot.PixelBase> |
Spliterator class for images bound to a specific area
|
| ContourPlot.Iterators.ImgIterator<P extends ContourPlot.PixelBase> |
The standard Iterator class for images.
|
| ContourPlot.Iterators.ImgSpliterator<P extends ContourPlot.PixelBase> |
The standard Spliterator class for images.
|
| ContourPlot.Iterators.RowSpliterator<P extends ContourPlot.PixelBase> |
Special Spliterator for images which guarantees that each split will cover at least
an entire row of the image.
|
| ContourPlot.Legend |
|
| ContourPlot.Legend.ColormapLabel |
|
| ContourPlot.Legend.GlyphLabel |
|
| ContourPlot.Legend.LineLabel |
|
| ContourPlot.Pair<T1,T2> |
Pair class.
|
| ContourPlot.PixelConvertingSpliterator<P extends ContourPlot.PixelBase,T> |
|
| ContourPlot.PointDetails |
Class for storing all the details of a single point to be rendered.
|
| ContourPlot.SignedDistanceCharacters |
The SignedDistanceCharacters class comprises signed distance fields
of a set of characters.
|
| ContourPlot.Utils |
Class containing utility methods
|
| Covdet |
Copyright (C) 2013-14 Andrea Vedaldi.
|
| CubicEquation |
This is a port of code written by Gerolamo Cardano under the Code Project Open Licence.
|
| curev |
|
| curfit |
|
| CVODES |
|
| CVODES_ASA |
|
| DAgostinosKsquaredTest |
This code calculates the Ksquared statistic of an input array x[].
|
| dataStruct |
|
| DBSCANClusteringSegment |
% Copyright (c) 2013 Peter Kovesi
% www.peterkovesi.com/matlabfns/
%
% Permission is hereby granted, free of charge, to any person obtaining a copy
% of this software and associated documentation files (the "Software"), to deal
% in the Software without restriction, subject to the following conditions:
%
% The above copyright notice and this permission notice shall be included in
% all copies or substantial portions of the Software.
%
% The Software is provided "as is", without warranty of any kind.
|
| DiscreteCosineTransform |
This routines except the SLOW routines are ported from FORTRAN to Java from:
ALGORITHM 749, COLLECTED ALGORITHMS FROM ACM.
|
| DiscreteSineTransform |
|
| DoublyConnectedSC |
|
| DSC_MRI_toolbox |
|
| EllipticIntegral |
DOCUMENT ME!
|
| Erfinv |
|
| Fastfit |
|
| FitExponential |
FitExponential -fits an array of points to an exponential of the type y = a0 + a1*exp(a2*x).
|
| FitGaussian |
FitGaussian -fits an array of points to a normal curve, general from f = a*exp(-(x-b)^2/2sigma^2)
Will also perform thresholding techniques to determine useful data points for fitting
|
| FitLaplace |
FitLaplace -fits an array of points to a normal curve, general from f = a*exp(Math.abs(x-mu)/beta)
Will also perform thresholding techniques to determine useful data points for fitting
|
| FitLine |
y = mx + b;.
|
| FitLorentz |
FitLorentz -fits an array of points to a lorentz distribution, thresholding techniques come from ViewJFrameGraph,
no need to implement here
|
| FitMultiExponential |
FitMultiExponential -fits an array of points to an multiexponential of the type
y = a0 + a1*exp(a2*x) + a3*exp(a4*x) + ...
|
| FitRayleigh |
For -infinity < a < +infinity and b > 0
y = scale factor * (2/b)*(x - a)*exp(-((x-a)**2)/b)*u(x - a)
where u(x-a) = 0 for x < a and = 1 for x >= a.
|
| FloodFill |
DOCUMENT ME!
|
| fMRIBlindDeconvolution |
|
| Gamma |
This code calculates the gamma function of an input argument x.
|
| GaussianMixtureModelsIncompleteSamples |
dirichletRnd ported from mixGaussRnd.m by Mo Chen
Copyright (c) 2016, Mo Chen
All rights reserved.
|
| GaussianOneDimKernel |
DOCUMENT ME!
|
| GenerateDGaussian |
Calculates an n-dimensional gaussian volume at a given scale, kernel size, and normalized derivative (through the
fourth order) in any of the dimensions.
|
| GenerateGaussian |
Calculates an n-dimensional gaussian volume at a given scale, kernel size, and normalized derivative (through the
fourth order) in any of the dimensions.
|
| HaarTransform |
|
| HartleyTransform |
The MIT License (MIT)
Copyright (c) 2015 Eugeniy Sokol
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"),
to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute,
sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
|
| HartleyTransform2 |
Smithsonian Astrophysical Observatory
Submillimeter Receiver Laboratory
am
transform.c S.
|
| HistogramOfOrientedGradients |
Copyright (C) 2007-11, Andrea Vedaldi and Brian Fulkerson
Copyright (C) 2012-13, The VLFeat Team
All rights reserved.
|
| Hypergeometric |
The function 2F1(a,b,c,x) is the hypergeometric function or Gauss's hypergeometric function.
|
| ImageQuality |
|
| indexValue |
|
| indexValueComparator |
|
| Integration2 |
This is a port of FORTRAN numerical integration routines in QUADPACK found at http://www.netlib.org/quadpack
Reference: R.
|
| Integration2EP |
This is a port of FORTRAN numerical integration routines in QUADPACK found at http://www.netlib.org/quadpack
Reference: R.
|
| InverseLaplace |
This is a port of the MATLAB INVLAP.M, a numerical inverse Laplace transform using the de Hoog algorithm, copyright
by Karl Hollenbeck on November 22, 1996, Department of Hydrodynamics and Water Resources, Technical University of
Denmark, DK-2800 Lyngby email:karl@isv16.isva.dtu.dk Downloaded from MATLAB central in ECP1 Software.zip.
|
| InverseLaplace2 |
This is a port of the numerical inverse Laplace transform found as the FORTRAN implementation of Algorithm 619 from
the collected algorithms from the ACM found at http://www.netlib.org/toms/619.
|
| InverseLaplaceqd |
This is a port of niltqd.m, a fast numerical inverse Laplace transform based on FFT and quotient-difference algorithm
by Lubomir Brancik, 2001, Brno University of Technology.
|
| InverseLaplaceTest |
|
| JacobianElliptic |
Calculate Jacobian Elliptic functions.
|
| KDTree |
Original code Copyright (C) 2007-2011 John Tsiombikas
Ported to Java by William Gandler
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
1.
|
| L_BFGS_B |
This is a port of the FORTRAN 77 L-BFGS-B code to Java
L-BFGS-B is released under the “New BSD License” (aka “Modified BSD License”
or “3-clause license”)
=========== L-BFGS-B (version 3.0.
|
| libdt |
libdt - OpenCV library for Dynamic Textures - version 1.0
Copyright (c) 2011-2014 Antoni B.
|
| LIBSVM |
Copyright (c) 2000-2023 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
|
| LightboxGenerator |
The class creates a RGB image of a 3d image in a Lightbox type format.
|
| Lmmin |
To run self tests in another module put:
if (testMode) {
new FitAll();
setCompleted(false);
return;
}
class FitAll extends Lmmin {
public FitAll() {
super();
}
public void fitToFunction(double x[], double fvec[], int info[]) {
return;
}
}
|
| LocalIntensityOrderPattern |
| LSCM |
Port of LSCM, Least squares conformal mapping
This package includes the prototype code for implementing least squares conformal maps.
|
| LsqFit |
LsqFit.jl is licensed under the MIT License:
Returns the argmin over x of `sum(f(x).^2)` using the Levenberg-Marquardt
algorithm, and an estimate of the Jacobian of `f` at x.
|
| ModifiedCholeskyFactorization |
Copyright (c) 2015, Sheung Hun Cheng and Nicholas J.
|
| NelderMead |
Nelder-Mead original code copyright 2017 by Matteo Maggioni under the MIT Licence.
|
| NESolve |
This is a port of nesolve.m and supporting files coded in MATLAB by Richard T.
|
| NL2sol |
This is a port of the source code nl2sol.f90 and the nl2sol_prb2.f90 extensive set of tests from FORTRAN into Java.
|
| NLConstrainedEngine |
Display results of displaying exponential fitting parameters.
|
| NLConstrainedEngineEP |
Display results of displaying exponential fitting parameters.
|
| NLFittedFunction |
|
| NLMeans_filt2D |
|
| NMSimplex |
Example
public class Objfunc implements Objfun
{
public double evalObjfun(double x[]){
return (100*(x[1]-x[0]*x[0])*(x[1]-x[0]*x[0])+(1.0-x[0])*(1.0-x[0]));
}
}
public class Constraint implements Constraints
{
double round2(double num, int precision)
{
double rnum;
int tnum;
rnum = num*Math.pow(10,precision);
tnum = (int)(rnum < 0 ?
|
| NoiseLevel |
|
| OastDetector9_16 |
oast9 - OAST, an optimal corner detector based on the
accelerated segment test for a 16 pixel mask
Copyright (c) 2010, Elmar Mair
All rights reserved.
|
| ODE |
|
| ODEEP |
|
| OpenCLAlgorithmBase |
Abstract base class for implementing Algorithms in OpenCL.
|
| OpenCLInfo |
Queries the OpenCL Platforms and launches an information dialog with the OpenCL Platform and Device information:
|
| Poly |
Solution of cubic, quartic, and quintic equations
Ported from code written by (c) Khashin S.I. http://math.ivanovo.ac.ru/dalgebra/Khashin/index.html
// khash2 (at) gmail.com
// Thanks to Alexandr Rakhmanin
// public domain
|
| PreconditionedConjugateGradient |
MIT License
Copyright (c) 2018 Komahan Boopathy
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
|
| Psi |
This code calculates the psi function of an input argument x.
|
| PyramidToolbox |
|
| QuarticEquation |
Copyright Yair Chuchem 2011.
|
| QuarticEquationEP |
Copyright Yair Chuchem 2011.
|
| Quaternions |
Copyright (c) 2000-2009, Jay St.
|
| RandomNumberGen |
Algorithm that produces a random number (Gaussian or uniform) in a specific user/programmer defined range.
|
| SchwarzChristoffelMapping |
|
| SchwarzChristoffelMapping2 |
|
| SIFT |
Copyright (C) 2007-11, Andrea Vedaldi and Brian Fulkerson
Copyright (C) 2012-13, The VLFeat Team
All rights reserved.
|
| SIFT3D |
|
| SIFTImageSimilarity |
|
| SlantTransform |
One dimensional forward and inverse slant transforms are ported from FORATRAN programs in Appendix A
of AD-767 758 Technical Report Slant Transform Image Coding by Wen-Hsiung Cheng of the University of
Southern California, prepared for the Advanced Research Projects Agency, Air Force Eastern Test Range, May 1973.
|
| splev |
|
| sproot |
|
| Statistics |
|
| StatisticsTable |
|
| StochasticForests |
|
| SVM |
| SymmsIntegralMapping |
|
| Vectornd |
N dimension vector class with the cost value.
|
| WalshHadamardTransform |
Copyright (c) 2016, suresh
All rights reserved.
|
| WalshHadamardTransform2 |
|
| WalshHadamardTransform3 |
|
| WeibullDistribution |
|
| WishartVariateGenerator |
Ported from original FORTRAN code Algorithm AS 53: Wishart Variate Generator
Authors: W.
|
-
-
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CauchyLoss.html������������������������������������������0000775�4231163�4231163�00000027761�14537076051�024432� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CauchyLoss (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
b_ |
|
private double |
c_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
CauchyLoss(double a) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������gov/nih/mipav/model/algorithms/SIFTImageSimilarity.html���������������������������������������������0000775�4231163�4231163�00000154334�14537076056�023703� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFTImageSimilarity (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
batchDistance(java.util.Vector<java.util.Vector<java.lang.Double>> src1,
java.util.Vector<java.util.Vector<java.lang.Double>> src2,
double[][] dist,
int[][] nidx,
int normType,
int K,
java.util.Vector<java.lang.Double> mask,
int update,
boolean crosscheck) |
|
private void |
BatchDistInvoker(java.util.Vector<java.util.Vector<java.lang.Double>> src1,
java.util.Vector<java.util.Vector<java.lang.Double>> src2,
double[][] dist,
int[][] nidx,
int K,
java.util.Vector<java.lang.Double> mask,
int update) |
|
private double[] |
computeGradientAtCenterPixel(double[][][] pixel_array) |
|
private double[][] |
computeHessianAtCenterPixel(double[][][] pixel_array) |
|
void |
computeKeypointsAndDescriptors(ModelImage image,
boolean doimage1) |
|
private java.util.Vector<SIFTImageSimilarity.KeyPoint> |
computeKeypointsWithOrientations(SIFTImageSimilarity.KeyPoint keypoint,
int octave_index,
ModelImage gaussian_image,
double radius_factor,
int num_bins,
double peak_ratio,
double scale_factor) |
|
private int |
computeNumberOfOctaves(int[] image_shape) |
|
private java.util.Vector<SIFTImageSimilarity.KeyPoint> |
convertKeypointsToInputImageSize(java.util.Vector<SIFTImageSimilarity.KeyPoint> keypoints) |
|
private java.util.Vector<SIFTImageSimilarity.KeyPoint> |
findScaleSpaceExtrema(ModelImage[][] gaussian_images,
ModelImage[][] dog_images,
int num_intervals,
double sigma,
int image_border_width,
double contrast_threshold) |
|
private ModelImage |
generateBaseImage(ModelImage image,
double sigma,
double assumed_blur) |
|
private java.util.Vector<java.util.Vector<java.lang.Double>> |
generateDescriptors(java.util.Vector<SIFTImageSimilarity.KeyPoint> keypoints,
ModelImage[][] gaussian_images,
int window_width,
int num_bins,
double scale_multiplier,
double descriptor_max_value) |
|
private ModelImage[][] |
generateDoGImages(ModelImage[][] gaussian_images) |
|
private ModelImage[][] |
generateGaussianImages(ModelImage image,
int num_octaves,
double[] gaussian_kernels) |
|
private double[] |
generateGaussianKernels(double sigma,
int num_intervals) |
|
private boolean |
isPixelAnExtremum(double[][][] subimages,
double threshold) |
|
private SIFTImageSimilarity.KeyPoint |
localizeExtremumViaQuadraticFit(int[] localized_image_index,
int i,
int j,
int image_index,
int octave_index,
int num_intervals,
ModelImage[] dog_images_in_octave,
double sigma,
double contrast_threshold,
int image_border_width,
double eigenvalue_ratio,
int num_attempts_until_convergence) |
|
private java.util.Vector<SIFTImageSimilarity.KeyPoint> |
removeDuplicateKeypoints(java.util.Vector<SIFTImageSimilarity.KeyPoint> keypoints) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
unpackOctave(int[] octave,
int[] layer,
double[] scale,
SIFTImageSimilarity.KeyPoint keypoint) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
sigma
private double sigma
-
tolerance
private double tolerance
-
Constructor Detail
-
SIFTImageSimilarity
public SIFTImageSimilarity(ModelImage image1,
ModelImage image2,
double sigma,
int num_intervals,
double assumed_blur,
int image_border_width,
java.lang.String logFile)
-
Method Detail
-
batchDistance
private void batchDistance(java.util.Vector<java.util.Vector<java.lang.Double>> src1,
java.util.Vector<java.util.Vector<java.lang.Double>> src2,
double[][] dist,
int[][] nidx,
int normType,
int K,
java.util.Vector<java.lang.Double> mask,
int update,
boolean crosscheck)
-
BatchDistInvoker
private void BatchDistInvoker(java.util.Vector<java.util.Vector<java.lang.Double>> src1,
java.util.Vector<java.util.Vector<java.lang.Double>> src2,
double[][] dist,
int[][] nidx,
int K,
java.util.Vector<java.lang.Double> mask,
int update)
-
findScaleSpaceExtrema
private java.util.Vector<SIFTImageSimilarity.KeyPoint> findScaleSpaceExtrema(ModelImage[][] gaussian_images,
ModelImage[][] dog_images,
int num_intervals,
double sigma,
int image_border_width,
double contrast_threshold)
-
localizeExtremumViaQuadraticFit
private SIFTImageSimilarity.KeyPoint localizeExtremumViaQuadraticFit(int[] localized_image_index,
int i,
int j,
int image_index,
int octave_index,
int num_intervals,
ModelImage[] dog_images_in_octave,
double sigma,
double contrast_threshold,
int image_border_width,
double eigenvalue_ratio,
int num_attempts_until_convergence)
-
generateDescriptors
private java.util.Vector<java.util.Vector<java.lang.Double>> generateDescriptors(java.util.Vector<SIFTImageSimilarity.KeyPoint> keypoints,
ModelImage[][] gaussian_images,
int window_width,
int num_bins,
double scale_multiplier,
double descriptor_max_value)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTProcess.html�����������������������������������������������0000775�4231163�4231163�00000075524�14537076050�023532� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTProcess (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
- Direct Known Subclasses:
AlgorithmTreT1, AlgorithmTreT2
public abstract class AlgorithmTProcess
extends AlgorithmBase
This abstract class defines terms common to both T1 and T2 processing, such as thresholding and
multithreading management methods. Some methods were adapted from the ImageJ code by Sean Deoni.
- Author:
- senseneyj
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, runAlgorithm, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
cloneFileInfo
public void cloneFileInfo(ModelImage orig,
ModelImage clo)
This method gives clo the file info of orig.
- Parameters:
orig - Original imageclo - Near clone image
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFaceAnonymizer.html�����������������������������������������0000775�4231163�4231163�00000150772�14537076045�024705� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFaceAnonymizer (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmFaceAnonymizer
extends AlgorithmBase
FaceAnonymizer algorithm computes the "face" from a ModelImage based on input parameters that specify the min/max
voxel values for the face voxels, and the maximum skin thinkness. The algorithm also blurs the face voxels based on
input parameter for blur factor. The face and blured face are stored in the ModelImage so the user can see the
results. On getting an OK message, the blurred face is recombined with the rest of the head volume. On getting a
Cancel message the original volume is restored.
- Author:
- Alexandra Bokinsky, Magic Software. Under contract from NIH.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
BLUR |
DOCUMENT ME!
|
static int |
CANCEL |
DOCUMENT ME!
|
static int |
DELETE |
DOCUMENT ME!
|
static int |
FIND |
DOCUMENT ME!
|
private float[] |
kernXBuffer |
DOCUMENT ME!
|
private float[] |
kernYBuffer |
DOCUMENT ME!
|
private float[] |
kernZBuffer |
DOCUMENT ME!
|
private boolean[] |
m_abMask |
face mask to keep track of which voxels are in the face:.
|
private int[] |
m_aiAxis |
parameters for finding and bluring the face:.
|
private int[] |
m_asOriginal |
the original unblurred data:.
|
private boolean |
m_bFinish |
m_bFinish is set to true on an OK or Cancel message:.
|
private double |
m_dMinValue |
m_iMinValue is used to set the minimum value in the face and blurred face images so that the image is displayed
"nicely" in the image window.
|
private int |
m_iBlur |
DOCUMENT ME!
|
private int |
m_iFaceDeleted |
DOCUMENT ME!
|
private int |
m_iFaceFound |
DOCUMENT ME!
|
private int |
m_iMax |
DOCUMENT ME!
|
private int |
m_iMin |
DOCUMENT ME!
|
private int |
m_iQuantity |
DOCUMENT ME!
|
private int |
m_iRange |
DOCUMENT ME!
|
private int |
m_iState |
state variables to keep track of which step the algorithm is on:.
|
private int |
m_iXBound |
image parameters:.
|
private int |
m_iYBound |
DOCUMENT ME!
|
private int |
m_iZBound |
DOCUMENT ME!
|
private ModelImage |
m_kHeadOriginal |
DOCUMENT ME!
|
static int |
OK |
DOCUMENT ME!
|
private int |
sliceSize |
DOCUMENT ME!
|
private int |
xMaskMax |
DOCUMENT ME!
|
private int |
xMaskMin |
DOCUMENT ME!
|
private int |
yMaskMax |
DOCUMENT ME!
|
private int |
yMaskMin |
DOCUMENT ME!
|
private int |
zMaskMax |
DOCUMENT ME!
|
private int |
zMaskMin |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
anonymizeFace() |
Find face, blur face, commit, or cancel based on which buttons in the dialog are pressed.
|
void |
blurFace() |
Blurs the face mask voxels The blurred face volume is copied into the ModelImage and displayed to the user.
|
void |
deleteFace() |
Cancel Button has been pressed: Copy the unaltered original data into the ModelImage.
|
void |
finalize() |
Prepares this class for destruction.
|
void |
findFace() |
Computes which voxels in the ModelImage are face voxels.
|
void |
findFaceX() |
The head points along the X axis: rays are traced in the +/- x direction:
|
void |
findFaceY() |
The head points along the Y axis: rays are traced in the +/- y direction:
|
void |
findFaceZ() |
The head points along the Z axis: rays are traced in the +/- z direction:
|
boolean |
isFinished() |
Called by the dialog.
|
void |
okFace() |
OK Button has been pressed: Copy the blurred face volume and the original data into the ModelImage.
|
void |
preBlur() |
Extends the m_abMask so all the voxels in the neighborhood are blurred.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setAxis(int[] aiAxis) |
Set the axis toward which the face points.
|
void |
setBlur() |
Called when the Blur Face button is pressed. the algorithm computes the blurred face and sets the displayed image
to be the blurred region.
|
void |
setBlur(int iBlur) |
Sets the blur factor in number of voxels.
|
void |
setCancel() |
Called when the dialog Cancel button is pressed. this sets up the Algorithm state to revert to the original copy
of the image and to tell the dialog to cleanup and delete this algorithm.
|
void |
setDelete() |
DOCUMENT ME!
|
void |
setFind() |
Called when the Find Face button is pressed. the algorithm computes the face region of the volume and sets the
displayed image to be that region.
|
void |
setMax(int iMax) |
Sets the maximum voxel value for the skin.
|
void |
setMin(int iMin) |
Sets the minimum voxel value for the skin.
|
void |
setOK() |
Called when the dialog OK button is pressed. this sets up the Algorithm state to commit the changes in the image
and to tell the dialog to cleanup and delete this algorithm.
|
void |
setRange(int iRange) |
Sets the thickness in number of voxels value for the skin.
|
void |
undoFace() |
Cancel Button has been pressed: Copy the unaltered original data into the ModelImage.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
m_iBlur
private int m_iBlur
DOCUMENT ME!
-
m_iFaceFound
private int m_iFaceFound
DOCUMENT ME!
-
m_iMax
private int m_iMax
DOCUMENT ME!
-
m_iMin
private int m_iMin
DOCUMENT ME!
-
m_iQuantity
private int m_iQuantity
DOCUMENT ME!
-
m_iRange
private int m_iRange
DOCUMENT ME!
-
m_iXBound
private int m_iXBound
image parameters:.
-
m_iYBound
private int m_iYBound
DOCUMENT ME!
-
m_iZBound
private int m_iZBound
DOCUMENT ME!
-
sliceSize
private int sliceSize
DOCUMENT ME!
-
xMaskMax
private int xMaskMax
DOCUMENT ME!
-
xMaskMin
private int xMaskMin
DOCUMENT ME!
-
yMaskMax
private int yMaskMax
DOCUMENT ME!
-
yMaskMin
private int yMaskMin
DOCUMENT ME!
-
zMaskMax
private int zMaskMax
DOCUMENT ME!
-
zMaskMin
private int zMaskMin
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmFaceAnonymizer
public AlgorithmFaceAnonymizer(ModelImage srcImg,
int[] aiAxis,
int iMin,
int iMax,
int iRange)
Create a face Anonymizer.
- Parameters:
srcImg - the source imageaiAxis - the axis that the face points towardsiMin - the minimum intensity value for the faceiMax - the maximum intensity value for the faceiRange - thickness in number of voxels value for the skin
-
Method Detail
-
anonymizeFace
public void anonymizeFace()
Find face, blur face, commit, or cancel based on which buttons in the dialog are pressed.
-
findFace
public void findFace()
Computes which voxels in the ModelImage are face voxels. This is done based on the min/max voxel values for the
face, and the maximum face thickness value, which are set by the FaceAnonymizer dialog. The face volume is copied
into the ModelImage and displayed to the user.
-
setDelete
public void setDelete()
DOCUMENT ME!
������gov/nih/mipav/model/algorithms/CeresSolver.TranscendentalFunctor.html�������������������������������0000775�4231163�4231163�00000027032�14537076052�026653� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TranscendentalFunctor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.TranscendentalFunctor
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NoiseLevel.html������������������������������������������������������0000775�4231163�4231163�00000071320�14537076056�022162� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NoiseLevel (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
patchSize
private int patchSize
-
Constructor Detail
-
NoiseLevel
public NoiseLevel(ModelImage destImg,
ModelImage srcImg,
int patchSize,
int decim,
double conf,
int itr)
-
Method Detail
-
copyMakeBorder
public double[][] copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Pyramid.html��������������������������������������������������0000775�4231163�4231163�00000027356�14537076056�022467� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Pyramid (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Pyramid
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Pyramid() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_kp_levels
int num_kp_levels
-
first_octave
int first_octave
-
num_octaves
int num_octaves
-
first_level
int first_level
-
num_levels
int num_levels
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.crpfun.html��������������������������������0000775�4231163�4231163�00000045160�14537076056�026542� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.crpfun (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
crtarget
double[][] crtarget
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!covarMat - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.VidSegm.html���������������������������������������������������0000775�4231163�4231163�00000037343�14537076055�022556� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.VidSegm (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.VidSegm
-
-
Constructor Summary
Constructors
| Constructor |
Description |
VidSegm(int winxy,
int winz,
int stepxy,
int stepz,
libdt.norm_type nt,
double bkv,
int K,
int n,
double reg,
int nf,
int bkvf) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
VidSegm
public VidSegm(int winxy,
int winz,
int stepxy,
int stepz,
libdt.norm_type nt,
double bkv,
int K,
int n,
double reg,
int nf,
int bkvf)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.SVC_Q.html����������������������������������������������������0000775�4231163�4231163�00000035773�14537076055�022036� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.SVC_Q (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private LIBSVM.Cache |
cache |
|
private double[] |
QD |
|
private byte[] |
y |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog10.html����������������������������������0000775�4231163�4231163�00000026636�14537076055�025673� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog10 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog10(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog10
public FitdeHoog10(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
��������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Reg_SIFT3D.html�����������������������������������������������0000775�4231163�4231163�00000032712�14537076056�022603� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Reg_SIFT3D (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
src_units
double[] src_units
-
ref_units
double[] ref_units
-
nn_thresh
double nn_thresh
������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.TrianglesRenderer.html�����������������������������������0000775�4231163�4231163�00000035025�14537076054�026023� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.TrianglesRenderer (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TripletSparseMatrixRandomMatrixOptions.html��������������0000775�4231163�4231163�00000023706�14537076052�032241� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TripletSparseMatrixRandomMatrixOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrixRandomMatrixOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_rows
public int num_rows
-
num_cols
public int num_cols
-
density
public double density
����������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.UnaryCostFunction2.html������������������������������0000775�4231163�4231163�00000030217�14537076053�026724� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.UnaryCostFunction2 (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NLConstrainedEngine.html���������������������������������������������0000775�4231163�4231163�00000474326�14537076056�023763� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NLConstrainedEngine (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected double[] |
a |
On completion if exitStatus >= 0 a[] contains the latest (best) estimate of the solution point.
|
private double |
a1div3 |
DOCUMENT ME!
|
protected double |
absoluteConvergence |
absolute convergence constant Used to test for convergence by the sum of squares being less than the
absoluteConvergence squared.
|
private double |
aDiff |
DOCUMENT ME!
|
private double |
alfkm1 |
DOCUMENT ME!
|
private double |
alfkm2 |
DOCUMENT ME!
|
private double |
alfnoi |
DOCUMENT ME!
|
private double |
alpha |
DOCUMENT ME!
|
private double |
alphup |
DOCUMENT ME!
|
protected boolean |
analyticalJacobian |
|
private int[] |
aset |
1D integer array of length param containing a code which indicates whether an unknown is active or not aset[i] =
0 when a[i] is free = +1 when a[i] == bl[i] = -1 when a[i] == bu[i].
|
private double |
aupkm1 |
DOCUMENT ME!
|
private int |
BARD |
|
private int |
BEALE |
|
private double |
bestpg |
DOCUMENT ME!
|
private double |
beta |
scalar containing the norm of the orthogonal projection of residuals onto the space spanned by the columns of the
Jacobian.
|
private double |
betkm1 |
DOCUMENT ME!
|
private double |
betkm2 |
DOCUMENT ME!
|
private static double |
big |
DOCUMENT ME!
|
private int |
BIGGS_EXP6 |
|
protected double[] |
bl |
DOCUMENT ME!
|
private double |
bl0 |
DOCUMENT ME!
|
private double |
bn |
DOCUMENT ME!
|
protected int |
bounds |
integer scalar code for assessing the bounds bounds = 0 means an unconstrained problem bounds = 1 means the same
lower bounds for all unknowns and the same upper bounds for all unknowns.
|
private int |
BOX_3D |
|
private int |
BROWN_ALMOST_LINEAR |
|
private int |
BROWN_AND_DENNIS |
|
private int |
BROWN_BADLY_SCALED |
|
private int |
BROYDEN_BANDED |
|
private int |
BROYDEN_TRIDIAGONAL |
|
protected double[] |
bu |
DOCUMENT ME!
|
private double |
bu0 |
DOCUMENT ME!
|
private int |
CERES_CURVE_FITTING |
|
private int |
CHEBYQUAD |
|
private double |
cnorm |
DOCUMENT ME!
|
private int |
constraintAct |
Number of active constraints.
|
private int |
ctrl |
ctrl can have 3 different values on entry.
|
protected int[] |
ctrlMat |
Wrapper for ctrl or lctrl communication with driver.
|
private double |
d1km1 |
DOCUMENT ME!
|
private double |
d1sqs |
scalar containing the predicted reduction in the objective function if gn-direction is used.
|
private double |
deltaMinrm |
DOCUMENT ME!
|
private double[] |
diag |
1D double array of length param conatiaing the diagonal elements of the diagonal matrix D if internalScaling is
true.
|
private int |
DISCRETE_BOUNDARY_VALUE |
|
private int |
DISCRETE_INTEGRAL |
|
private int |
DRAPER24D |
|
private double[] |
dx |
double working areas 1D array of length param containing the solution of J * dx = -residuals.
|
private double |
dxnkm1 |
DOCUMENT ME!
|
private double |
dxnorm |
DOCUMENT ME!
|
protected double[] |
dyda |
DOCUMENT ME!
|
private double |
eps |
DOCUMENT ME!
|
private double |
epsl |
DOCUMENT ME!
|
private int |
EQUILIBRIUM_COMBUSTION |
|
private int |
errorStatus |
DOCUMENT ME!
|
private int |
eval |
DOCUMENT ME!
|
private int |
exitStatus |
integer scalar that indicates why the return was taken.
|
private double |
exp0p1 |
|
private double[] |
expap1 |
|
private int |
EXTENDED_POWELL_SINGULAR |
|
private int |
EXTENDED_ROSENBROCK |
|
private int |
FREUDENSTEIN_AND_ROTH |
|
private double |
fsqkm1 |
DOCUMENT ME!
|
private double |
fsum |
DOCUMENT ME!
|
private int |
funcEval |
integer scalar containing the total number of function evaluations done inside this routine.
|
private double[] |
g |
1D array of length param containing the gradient of the objective at the current point.
|
private int |
GAUSSIAN |
|
private double[][] |
gmat |
param by param array If secondAllowed if false, gmat can be used as a singly subscripted array of dimension param
by setting all second indices to 0.
|
private boolean |
gndok |
DOCUMENT ME!
|
private double |
gnorm |
scalar containing norm of the gradient divided by norm of Jacobian.
|
protected double[] |
gues |
DOCUMENT ME!
|
private int |
GULF_RESEARCH_AND_DEVELOPMENT |
|
private int |
HATFLDB |
|
private int |
HATFLDC |
|
private int |
HELICAL_VALLEY |
|
private int |
HOCK1 |
|
private int |
HOCK21_MODIFIED |
|
private int |
HOCK25 |
|
private int |
HOCK3 |
|
private int |
HOCK4 |
|
private int |
icount |
Variables used for restart information.
|
private int |
iev |
DOCUMENT ME!
|
private int |
ifree |
DOCUMENT ME!
|
private int |
imax |
Variables used for restart information.
|
private int |
indic |
DOCUMENT ME!
|
private int |
info |
Consistently use 1 base indexing rather than 0 based indexing
|
protected boolean |
internalScaling |
If true, the columns of the Jacobian are scaled to have unit length.
|
private int |
irank |
Variables used for restart information.
|
protected int |
iters |
integer scalar containing the number of iterations until termination.
|
private int |
itotal |
Variables used for restart information.
|
private int |
ival |
Variables used for restart information.
|
protected double[][] |
jacobian |
2D array of doubles of dimension nPts by max(4,param) containing the main part of the covariance matrix
(Jtranspose * J)inverse, where J is the Jacobian matrix computed at a.
|
private int |
jacobianEval |
integer scalar containing the number of function evaluations caused by computing Jacobians with difference
methods.
|
private int |
JENNRICH_AND_SAMPSON |
|
private int |
kod |
DOCUMENT ME!
|
private int |
kodkm1 |
The suffices km2 and km1 in the names of the variables represent time step k-2 and k-1 respectively.
|
private int |
kodkm2 |
The suffices km2 and km1 in the names of the variables represent time step k-2 and k-1 respectively.
|
private int |
KOWALIK_AND_OSBORNE |
|
private int |
lattry |
Variables used for restart information.
|
private int |
LEVMAR_ROSENBROCK |
|
private int |
LINEAR_FULL_RANK |
|
private int |
LINEAR_RANK1 |
|
private int |
LINEAR_RANK1_WITH_ZERO_COLUMNS_AND_ROWS |
|
private int |
lineEval |
integer scalar containing the number of function evaluations caused by the linesearch algorithm.
|
private int |
MADSEN |
|
protected int |
maxIterations |
DOCUMENT ME!
|
private int |
mdg |
Leading dimension of array gmat mdg must be >= param if secondAllowed is true.
|
private int |
MEYER |
|
private int |
MODIFIED_ROSENBROCK |
|
private double |
noise |
DOCUMENT ME!
|
protected int |
nPts |
integer scalar containing the number of data points.
|
private int |
OSBORNE1 |
|
private int |
OSBORNE2 |
|
protected boolean |
outputMes |
|
private double |
p1sqrtem5 |
|
protected int |
param |
variables integer scalar containing the number of unknowns.
|
protected double |
parameterConvergence |
parameter convergence constant Used to test for convergence by the relative change in a[] being less than the
parameterConvergence.
|
private int |
PENALTY_FUNCTION_I |
|
private int |
PENALTY_FUNCTION_II |
|
private double |
pgb1 |
DOCUMENT ME!
|
private double |
pgb2 |
DOCUMENT ME!
|
private double |
phi |
double scalar containging the value of the objective function = (0.5 * chisquare) at the termination point a.
|
private double |
phikp1 |
DOCUMENT ME!
|
private double |
philat |
DOCUMENT ME!
|
private int[] |
pivit |
array of integers of dimension param containing the permutation matrix E in the decomposition QTranspose * J * D
E = (R) (0) pivit[i] contains the index of the column that was moved into column i.
|
private double |
pMinrm |
DOCUMENT ME!
|
private int |
POWELL_2_PARAMETER |
|
private int |
POWELL_BADLY_SCALED |
|
private int |
POWELL_SINGULAR |
|
private double |
predb |
DOCUMENT ME!
|
private double |
prekm1 |
scalar containing the predicted reduction in the objective if pseudoRank from previous step is used.
|
private double |
qMinrm |
DOCUMENT ME!
|
private double |
rabs |
DOCUMENT ME!
|
protected double |
relativeConvergence |
relative convergence constant Used to test for convergence by reduction in objective function being less than
relativeConvergence squared.
|
protected double[] |
residuals |
1D array of doubles of dimension nPts containing the value of the residuals at the termination point a;.
|
private boolean |
restart |
DOCUMENT ME!
|
private double |
rlenb |
DOCUMENT ME!
|
private double |
rmin |
DOCUMENT ME!
|
private int |
rngkm1 |
The suffices km2 and km1 in the names of the variables represent time step k-2 and k-1 respectively.
|
private double |
rootsp |
DOCUMENT ME!
|
private int |
ROSENBROCK |
|
private double |
scv0v1 |
DOCUMENT ME!
|
private double |
scv0v2 |
DOCUMENT ME!
|
private double |
scv1v2 |
DOCUMENT ME!
|
private int |
secind |
DOCUMENT ME!
|
protected boolean |
secondAllowed |
The method of Newton is allowed at the end of the iteration in some situations (large residuals).
|
private int |
secondEval |
integer scalar containing the number of function evaluations caused by using second derivatives in the method of
Newton.
|
private double |
smax |
DOCUMENT ME!
|
private double |
sn |
DOCUMENT ME!
|
private double |
speed |
double scalar containing an estimate of the linear convergence factor.
|
private double |
sqrt10 |
|
private double |
sqrt5 |
|
private double |
sqrtem5 |
|
private double |
srelpr |
single relative precision.
|
protected double |
stdv |
DOCUMENT ME!
|
private double |
stepb |
DOCUMENT ME!
|
private int |
testCase |
|
private boolean |
testMode |
|
protected double |
tolerance |
pseudo rank tolerance constant used to determine the pseudo rank of the Jacobian J.
|
private int |
TRIGONOMETRIC |
|
private double[] |
v |
1D array of length nPts containing the orthogonal projection of residuals onto space spanned by the first
pseudoRank linear independent columns of the Jacobian.
|
private double |
v0norm |
DOCUMENT ME!
|
private double |
v1norm |
DOCUMENT ME!
|
private double |
v2norm |
DOCUMENT ME!
|
private int |
VARIABLY_DIMENSIONED_FUNCTION |
|
private double[] |
w0 |
DOCUMENT ME!
|
private double[] |
w1 |
DOCUMENT ME!
|
private double[] |
w2 |
DOCUMENT ME!
|
private double[] |
w3 |
DOCUMENT ME!
|
private int |
WATSON |
|
private int |
WOOD |
|
private double |
x1Minrm |
DOCUMENT ME!
|
private double |
x2Minrm |
DOCUMENT ME!
|
private double |
x3Minrm |
DOCUMENT ME!
|
private double[] |
xSeries |
DOCUMENT ME!
|
private double[] |
ySeries |
DOCUMENT ME!
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
analuc(int[] prank) |
DOCUMENT ME!
|
private void |
btrunc(int[] prank,
boolean internalScaling,
double[] work) |
DOCUMENT ME!
|
private void |
chder(double dphize,
int[] k,
double[] alfk,
double[] phik) |
DOCUMENT ME!
|
private void |
choose(double xmin,
double[] v2,
double[] root1,
double[] root2,
double[] proot2) |
DOCUMENT ME!
|
private void |
covar() |
DOCUMENT ME!
|
private void |
dimsub(int[] prank,
int[] rank) |
DOCUMENT ME!
|
private double |
dnrm2(int n,
double[] x,
int incx) |
DOCUMENT ME!
|
void |
driver() |
driver.
|
private void |
driverCalls() |
|
void |
dumpTestResults() |
|
private void |
evreuc(int[] prank) |
DOCUMENT ME!
|
private void |
fitTestModel() |
Creates a new Fit24DModel object.
|
abstract void |
fitToFunction(double[] a,
double[] residuals,
double[][] jacobian) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
void |
fitToTestFunction(double[] a,
double[] residuals,
double[][] jacobian) |
|
private void |
fsumsq(double alfk,
double[] xnew,
double[] fnew,
double[] fn_val,
int[] ctrl) |
DOCUMENT ME!
|
private void |
gauc(int[] k,
double alfmin,
double[] gmod,
double dphize,
double[] u,
double[] phiu,
double tau,
double pmax) |
DOCUMENT ME!
|
double |
getChiSquared() |
getChiSquared - accessor to chi-squared value (goodness-of-fit measure).
|
int |
getExitStatus() |
|
int |
getIterations() |
|
double[] |
getParameters() |
getParameters accessor to function parameters.
|
double[] |
getResiduals() |
DOCUMENT ME!
|
private void |
gnavuc() |
DOCUMENT ME!
|
private double |
gndunc(boolean internalScaling,
int[] prank,
double[] work) |
DOCUMENT ME!
|
private void |
hess() |
DOCUMENT ME!
|
private void |
jacdif(int[] ctrl) |
DOCUMENT ME!
|
private void |
jtrj(int nn) |
DOCUMENT ME!
|
private void |
lineuc(double[] gmod,
double dphize,
double alplow) |
DOCUMENT ME!
|
private void |
linuc2(double[] fnew,
double alfk,
double[] v2) |
DOCUMENT ME!
|
private void |
lsunc() |
DOCUMENT ME!
|
private void |
minrm(double[] v2,
double alfmin,
double alfmax,
double xmin,
double[] x,
double[] px,
double[] y,
double[] py) |
DOCUMENT ME!
|
private void |
minrm1(double[] v2) |
DOCUMENT ME!
|
private void |
minrm2() |
DOCUMENT ME!
|
private void |
minrn(double x,
double fx,
double w,
double fw,
double v,
double fv,
double alfmin,
double alfmax,
double pmax,
double[] u,
double[] pu) |
DOCUMENT ME!
|
private void |
newunc() |
DOCUMENT ME!
|
private void |
oner(double[] x) |
DOCUMENT ME!
|
private void |
outuc() |
DOCUMENT ME!
|
private void |
pivec(double[] work) |
DOCUMENT ME!
|
private double |
pol3(double x) |
DOCUMENT ME!
|
private double |
pol4(double[] v2,
double x) |
DOCUMENT ME!
|
private void |
pregn(double[] work,
int mindim,
int[] prank,
int[] dim) |
DOCUMENT ME!
|
private void |
presub(double[] work,
int[] prank,
int[] rank) |
DOCUMENT ME!
|
private void |
quamin(double x,
double fx,
double w,
double fw,
double v,
double fv,
double[] u) |
DOCUMENT ME!
|
private void |
reavuc() |
DOCUMENT ME!
|
private void |
reduc(double[] alf,
double[] phialf,
double alfk,
double pk,
double diff,
double eta,
double[] gmod,
double[] fnew,
int[] k,
double[] phik,
boolean[] reduce) |
DOCUMENT ME!
|
private void |
releps() |
DOCUMENT ME!
|
private void |
rtrw1(int nn) |
DOCUMENT ME!
|
private void |
scalv(double[] v,
double factor,
int n) |
DOCUMENT ME!
|
private void |
scaunc() |
DOCUMENT ME!
|
private void |
schdc(int nn,
int[] jpvt,
int job) |
DOCUMENT ME!
|
private void |
secuc() |
DOCUMENT ME!
|
private double |
shiftedChebyshev(double x,
int n) |
|
private double |
shiftedChebyshevDerivative(double x,
int n) |
|
private void |
soliuc(double tau,
int[] prank) |
DOCUMENT ME!
|
private void |
sposl(int nn) |
DOCUMENT ME!
|
private void |
sqrdc(double[][] x,
int n,
int p,
double[] qraux,
int[] jpvt,
int job) |
DOCUMENT ME!
|
private void |
sqrsl(double[][] x,
int n,
int k,
double[] qraux,
double[] y,
double[] qy,
double[] qty,
double[] b,
double[] rsd,
double[] xb,
int job) |
DOCUMENT ME!
|
void |
statusMessage(int status) |
|
private void |
stepuc(int[] prank) |
DOCUMENT ME!
|
private void |
strsl(int[] prank,
double[] b) |
DOCUMENT ME!
|
private void |
subuc(int[] prank,
int[] rank) |
DOCUMENT ME!
|
private void |
termuc(int[] prank,
double aNorm) |
DOCUMENT ME!
|
private void |
triunc(double tol,
int constraintAct,
int[] prank) |
DOCUMENT ME!
|
private void |
twor() |
DOCUMENT ME!
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
bl
protected double[] bl
DOCUMENT ME!
-
bounds
protected int bounds
integer scalar code for assessing the bounds bounds = 0 means an unconstrained problem bounds = 1 means the same
lower bounds for all unknowns and the same upper bounds for all unknowns. The lower and upper bound must be
stored in bl[0] and bu[0] respectively. bounds = 2 means that the bounds must be supplied by the user in bl[i]
and bu[i] for i = 0,1, param - 1.
-
bu
protected double[] bu
DOCUMENT ME!
-
jacobian
protected double[][] jacobian
2D array of doubles of dimension nPts by max(4,param) containing the main part of the covariance matrix
(Jtranspose * J)inverse, where J is the Jacobian matrix computed at a.
-
dyda
protected double[] dyda
DOCUMENT ME!
-
stdv
protected double stdv
DOCUMENT ME!
-
gues
protected double[] gues
DOCUMENT ME!
-
internalScaling
protected boolean internalScaling
If true, the columns of the Jacobian are scaled to have unit length. If false, internal scaling is not used to
compute the Gauss-Newton search direction.
-
secondAllowed
protected boolean secondAllowed
The method of Newton is allowed at the end of the iteration in some situations (large residuals). If true, the
use of second derivatives is permitted
-
xSeries
private double[] xSeries
DOCUMENT ME!
-
ySeries
private double[] ySeries
DOCUMENT ME!
-
aDiff
private double aDiff
DOCUMENT ME!
-
alfnoi
private double alfnoi
DOCUMENT ME!
-
alpha
private double alpha
DOCUMENT ME!
-
alphup
private double alphup
DOCUMENT ME!
-
betkm2
private double betkm2
DOCUMENT ME!
-
alfkm2
private double alfkm2
DOCUMENT ME!
-
betkm1
private double betkm1
DOCUMENT ME!
-
d1km1
private double d1km1
DOCUMENT ME!
-
fsqkm1
private double fsqkm1
DOCUMENT ME!
-
dxnkm1
private double dxnkm1
DOCUMENT ME!
-
alfkm1
private double alfkm1
DOCUMENT ME!
-
aupkm1
private double aupkm1
DOCUMENT ME!
-
bn
private double bn
DOCUMENT ME!
-
cnorm
private double cnorm
DOCUMENT ME!
-
ctrl
private int ctrl
ctrl can have 3 different values on entry. If ctrl = 1 or ctrl = -1, compute the residuals for all nPts at a
certain point a and return the residuals = yfit - yseries in the array residuals if the functions are computable.
If not successful and ctrl was set to 1, set ctrl = -1. If not successful and ctrl was set to -1, set ctrl < -10.
If ctrl = 2 and the Jacobian is supplied analytically, calculate the Jacobian = Jij = dymodi/daj. The Jacobian is
placed in matrix jacobian. If the Jacobian cannot be calculated, set ctrl < -10. If you wish to compute the
Jacobian numerically on return, set ctrl = 0.
-
dxnorm
private double dxnorm
DOCUMENT ME!
-
eps
private double eps
DOCUMENT ME!
-
epsl
private double epsl
DOCUMENT ME!
-
errorStatus
private int errorStatus
DOCUMENT ME!
-
eval
private int eval
DOCUMENT ME!
-
exitStatus
private int exitStatus
integer scalar that indicates why the return was taken. If exitStatus != -1 and exitStatus >= -10, then a[]
contains the latest (best) estimate of the solution point. = 1000X convergence because relative predicted
reduction in the objective function = (0.5 * chisquare) is less than (relativeConvergence)**2 = 200X convergence
because sum of squares is less than (absoluteConvergence)**2 = 30X convergence because the relative change in a
is less than parameterConvergence = 4X convergence because we are computing at noise level X, the last digit in
the convergence code, indicates how the last steps were computed X = 0 no trouble (Gauss-Newton the last 3 steps)
= 1 pseudoRank <> param at termination point = 2 The method of Newton was used (at least) in the last step = 3
The (last - 2) step was subspace minimization, but the last 2 steps were Gauss-Newton steps = 4 The steplength
was not unit in both the last 2 steps < 0 indicates that no convergence criterion is fulfilled, but some abnormal
termination criterion is satisfied = -1 Invalid starting condition: nPts < param or param <= 0 or nPts <= 0 or
maxIterations <= 0 or relativeConvergence < 0 or relativeConvergence < 0 or absoluteConvergence < 0 or tolerance
<= 0 or parameterConvergence < 0 or invalid starting point on entry = -2 Number of iterations has exceeded
maximum allowed iterations = -3 The Hessian emanating from the second order method is not positive definite = -4
The algorithm would like to use second derivatives but is not allowed to do that = -5 An undamped step with
Newton's method is a failure = -6 The latest search direction computed using subspace minimization was not a
descent direction (probably caused by wrongly computed Jacobian) = -7 There is only one feasible point, name a[i]
= bl[i] = bu[i]; i = 0,1,...,param-1 < -10 Termination due to user stop indicator
-
fsum
private double fsum
DOCUMENT ME!
-
gndok
private boolean gndok
DOCUMENT ME!
-
iev
private int iev
DOCUMENT ME!
-
ifree
private int ifree
DOCUMENT ME!
-
indic
private int indic
DOCUMENT ME!
-
kod
private int kod
DOCUMENT ME!
-
noise
private double noise
DOCUMENT ME!
-
pgb1
private double pgb1
DOCUMENT ME!
-
pgb2
private double pgb2
DOCUMENT ME!
-
phikp1
private double phikp1
DOCUMENT ME!
-
philat
private double philat
DOCUMENT ME!
-
bestpg
private double bestpg
DOCUMENT ME!
-
pMinrm
private double pMinrm
DOCUMENT ME!
-
qMinrm
private double qMinrm
DOCUMENT ME!
-
a1div3
private double a1div3
DOCUMENT ME!
-
predb
private double predb
DOCUMENT ME!
-
rabs
private double rabs
DOCUMENT ME!
-
restart
private boolean restart
DOCUMENT ME!
-
rlenb
private double rlenb
DOCUMENT ME!
-
rmin
private double rmin
DOCUMENT ME!
-
rootsp
private double rootsp
DOCUMENT ME!
-
bl0
private double bl0
DOCUMENT ME!
-
bu0
private double bu0
DOCUMENT ME!
-
secind
private int secind
DOCUMENT ME!
-
smax
private double smax
DOCUMENT ME!
-
sn
private double sn
DOCUMENT ME!
-
stepb
private double stepb
DOCUMENT ME!
-
v0norm
private double v0norm
DOCUMENT ME!
-
v1norm
private double v1norm
DOCUMENT ME!
-
v2norm
private double v2norm
DOCUMENT ME!
-
scv0v1
private double scv0v1
DOCUMENT ME!
-
scv0v2
private double scv0v2
DOCUMENT ME!
-
scv1v2
private double scv1v2
DOCUMENT ME!
-
w0
private double[] w0
DOCUMENT ME!
-
w1
private double[] w1
DOCUMENT ME!
-
w2
private double[] w2
DOCUMENT ME!
-
w3
private double[] w3
DOCUMENT ME!
-
x1Minrm
private double x1Minrm
DOCUMENT ME!
-
x2Minrm
private double x2Minrm
DOCUMENT ME!
-
x3Minrm
private double x3Minrm
DOCUMENT ME!
-
sqrtem5
private double sqrtem5
-
p1sqrtem5
private double p1sqrtem5
-
exp0p1
private double exp0p1
-
sqrt5
private double sqrt5
-
sqrt10
private double sqrt10
-
expap1
private double[] expap1
-
testMode
private boolean testMode
-
testCase
private int testCase
-
Method Detail
-
fitToFunction
public abstract void fitToFunction(double[] a,
double[] residuals,
double[][] jacobian)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!jacobian - DOCUMENT ME!
-
driver
public void driver()
driver.
-
choose
private void choose(double xmin,
double[] v2,
double[] root1,
double[] root2,
double[] proot2)
DOCUMENT ME!
- Parameters:
xmin - DOCUMENT ME!v2 - DOCUMENT ME!
-
covar
private void covar()
DOCUMENT ME!
-
fsumsq
private void fsumsq(double alfk,
double[] xnew,
double[] fnew,
double[] fn_val,
int[] ctrl)
DOCUMENT ME!
- Parameters:
alfk - DOCUMENT ME!xnew - DOCUMENT ME!fnew - DOCUMENT ME!phiMat - DOCUMENT ME!
-
gauc
private void gauc(int[] k,
double alfmin,
double[] gmod,
double dphize,
double[] u,
double[] phiu,
double tau,
double pmax)
DOCUMENT ME!
- Parameters:
gmod - DOCUMENT ME!dphize - DOCUMENT ME!tau - DOCUMENT ME!pmax - DOCUMENT ME!
-
gnavuc
private void gnavuc()
DOCUMENT ME!
-
hess
private void hess()
DOCUMENT ME!
-
lsunc
private void lsunc()
DOCUMENT ME!
-
minrm
private void minrm(double[] v2,
double alfmin,
double alfmax,
double xmin,
double[] x,
double[] px,
double[] y,
double[] py)
DOCUMENT ME!
- Parameters:
v2 - DOCUMENT ME!xmin - DOCUMENT ME!
-
minrm2
private void minrm2()
DOCUMENT ME!
-
minrn
private void minrn(double x,
double fx,
double w,
double fw,
double v,
double fv,
double alfmin,
double alfmax,
double pmax,
double[] u,
double[] pu)
DOCUMENT ME!
- Parameters:
phikm2 - DOCUMENT ME!pmax - DOCUMENT ME!
-
newunc
private void newunc()
DOCUMENT ME!
-
outuc
private void outuc()
DOCUMENT ME!
-
quamin
private void quamin(double x,
double fx,
double w,
double fw,
double v,
double fv,
double[] u)
DOCUMENT ME!
- Parameters:
phikm2 - DOCUMENT ME!
-
reavuc
private void reavuc()
DOCUMENT ME!
-
reduc
private void reduc(double[] alf,
double[] phialf,
double alfk,
double pk,
double diff,
double eta,
double[] gmod,
double[] fnew,
int[] k,
double[] phik,
boolean[] reduce)
DOCUMENT ME!
- Parameters:
pk - DOCUMENT ME!eta - DOCUMENT ME!gmod - DOCUMENT ME!fnew - DOCUMENT ME!
-
releps
private void releps()
DOCUMENT ME!
-
scaunc
private void scaunc()
DOCUMENT ME!
-
secuc
private void secuc()
DOCUMENT ME!
-
sqrdc
private void sqrdc(double[][] x,
int n,
int p,
double[] qraux,
int[] jpvt,
int job)
DOCUMENT ME!
- Parameters:
x - DOCUMENT ME!n - DOCUMENT ME!p - DOCUMENT ME!qraux - DOCUMENT ME!jpvt - DOCUMENT ME!job - DOCUMENT ME!
-
sqrsl
private void sqrsl(double[][] x,
int n,
int k,
double[] qraux,
double[] y,
double[] qy,
double[] qty,
double[] b,
double[] rsd,
double[] xb,
int job)
DOCUMENT ME!
- Parameters:
x - DOCUMENT ME!n - DOCUMENT ME!k - DOCUMENT ME!qraux - DOCUMENT ME!y - DOCUMENT ME!qy - DOCUMENT ME!qty - DOCUMENT ME!b - DOCUMENT ME!rsd - DOCUMENT ME!xb - DOCUMENT ME!job - DOCUMENT ME!
-
twor
private void twor()
DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.MyCostFunctor.html���������������������������������������0000775�4231163�4231163�00000023160�14537076052�025122� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.MyCostFunctor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.MyCostFunctor
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
MyCostFunctor
public MyCostFunctor()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog6.html�����������������������������������0000775�4231163�4231163�00000026621�14537076055�025612� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog6 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog6(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog6
public FitdeHoog6(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmELSUNCOpt3D.FitOAR3DELSUNCModel.html������������������������0000775�4231163�4231163�00000040602�14537076045�026771� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmELSUNCOpt3D.FitOAR3DELSUNCModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
currentDim |
|
private double[] |
point |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitOAR3DELSUNCModel(int currentDim,
double[] point) |
Creates a new FitOAR3DConstrainedModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
dumpResults() |
Display results of displaying OAR3D fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
currentDim
private int currentDim
-
point
private double[] point
-
Constructor Detail
-
FitOAR3DELSUNCModel
public FitOAR3DELSUNCModel(int currentDim,
double[] point)
Creates a new FitOAR3DConstrainedModel object.
- Parameters:
currentDim - Only optimize along 1 dimension at a time
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BealeFunction.html�����������������������������������0000775�4231163�4231163�00000033702�14537076052�025724� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BealeFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
BealeFunction
public BealeFunction()
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
��������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHessian.html������������������������������������������������0000775�4231163�4231163�00000100213�14537076046�023347� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHessian (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHessian
extends AlgorithmBase
Provides functions to convolve an image with the second derivitive of the Gaussian function to obtain the Hessian
matrix for a particular point on the image.
- Author:
- Evan McCreedy
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
GxxData |
Storage location of the second derivative of the Gaussian in the XX direction.
|
private float[] |
GxyData |
Storage location of the second derivative of the Gaussian in the XY direction.
|
private float[] |
GxzData |
Storage location of the second derivative of the Gaussian in the XZ direction.
|
private float[] |
GyyData |
Storage location of the second derivative of the Gaussian in the YY direction.
|
private float[] |
GyzData |
Storage location of the second derivative of the Gaussian in the YZ direction.
|
private float[] |
GzzData |
Storage location of the second derivative of the Gaussian in the ZZ direction.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
private ModelImage |
srcImage |
Image to convolve with hessian.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double[][] |
hessian2D(float[] imgBuf,
int[] extents,
float x,
float y) |
Convolves the source image at the point (x,y,z) with the hessian of the gaussian function.
|
double[][] |
hessian2D(float x,
float y) |
Convolves the source image at the point (x,y) with the hessian of the gaussian function.
|
double[][] |
hessian3D(float[] imgBuf,
int[] extents,
float x,
float y,
float z) |
Convolves the source image at the point (x,y,z) with the hessian of the gaussian function.
|
double[][] |
hessian3D(float x,
float y,
float z) |
Convolves the source image at the point (x,y,z) with the hessian of the gaussian function.
|
private void |
makeKernels2D() |
Makes 2D derivative kernels to be used in the calculation of the hessian.
|
private void |
makeKernels3D() |
Makes 3D derivative kernels to be used in the calculation of the hessian.
|
void |
runAlgorithm() |
Should not be used for this algorithm -- just a placeholder.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
hessian2D
public double[][] hessian2D(float x,
float y)
Convolves the source image at the point (x,y) with the hessian of the gaussian function.
- Parameters:
x - float point index indicating point of interesty - float point index indicating point of interest- Returns:
- hessian matrix for the point (x,y)
-
hessian2D
public double[][] hessian2D(float[] imgBuf,
int[] extents,
float x,
float y)
Convolves the source image at the point (x,y,z) with the hessian of the gaussian function.
- Parameters:
imgBuf - the imageextents - the extents of the imagex - float point index indicating point of interesty - float point index indicating point of interest- Returns:
- hessian matrix for the point (x,y,z)
-
hessian3D
public double[][] hessian3D(float x,
float y,
float z)
Convolves the source image at the point (x,y,z) with the hessian of the gaussian function.
- Parameters:
x - float point index indicating point of interesty - float point index indicating point of interestz - float point index indicating point of interest- Returns:
- hessian matrix for the point (x,y,z)
-
hessian3D
public double[][] hessian3D(float[] imgBuf,
int[] extents,
float x,
float y,
float z)
Convolves the source image at the point (x,y,z) with the hessian of the gaussian function.
- Parameters:
imgBuf - DOCUMENT ME!extents - DOCUMENT ME!x - float point index indicating point of interesty - float point index indicating point of interestz - float point index indicating point of interest- Returns:
- hessian matrix for the point (x,y,z)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRETEfficiency.html�����������������������������������������0000775�4231163�4231163�00000106602�14537076046�024512� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRETEfficiency (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFRETEfficiency(ModelImage donorImage,
ModelImage FRETImage,
ModelImage acceptorImage,
boolean useRed,
boolean useGreen,
boolean useBlue,
float DFPintoFRET,
float AFPintoFRET,
float DFPintoAFP,
float AFPintoDFP,
ModelImage fDivDImage,
ModelImage fDivAImage,
ModelImage efficiencyImage) |
Creates a new AlgorithmFRETEfficiency object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
AFPintoDFP
private float AFPintoDFP
DOCUMENT ME!
-
DFPintoAFP
private float DFPintoAFP
DOCUMENT ME!
-
useBlue
private boolean useBlue
DOCUMENT ME!
-
useGreen
private boolean useGreen
DOCUMENT ME!
-
useRed
private boolean useRed
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmFRETEfficiency
public AlgorithmFRETEfficiency(ModelImage donorImage,
ModelImage FRETImage,
ModelImage acceptorImage,
boolean useRed,
boolean useGreen,
boolean useBlue,
float DFPintoFRET,
float AFPintoFRET,
float DFPintoAFP,
float AFPintoDFP,
ModelImage fDivDImage,
ModelImage fDivAImage,
ModelImage efficiencyImage)
Creates a new AlgorithmFRETEfficiency object.
- Parameters:
donorImage - image taken with donor filterFRETImage - image taken with FRET filteracceptorImage - image taken with acceptor filteruseRed - If true, use the red color values for the FRETuseGreen - If true, use the green color values for the FRETuseBlue - If true, use the blue color values for the FRETDFPintoFRET - DOCUMENT ME!AFPintoFRET - DOCUMENT ME!DFPintoAFP - DOCUMENT ME!AFPintoDFP - DOCUMENT ME!fDivDImage - If not null, create adjusted FRET/adjusted donor image.fDivAImage - If not null, create adjusted FRET/adjusted acceptor image.efficiencyImage - If not null, create efficiency image.
������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.ONE_CLASS_Q.html����������������������������������������������0000775�4231163�4231163�00000035234�14537076055�022741� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.ONE_CLASS_Q (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGaussianMixtureModelEM.SigSet.html��������������������������0000775�4231163�4231163�00000025016�14537076046�027514� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGaussianMixtureModelEM.SigSet (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SigSet
-
-
Constructor Summary
Constructors
| Constructor |
Description |
SigSet() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
title
java.lang.String title
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiscreteSineTransform.html�������������������������������������������0000775�4231163�4231163�00000207022�14537076054�024370� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DiscreteSineTransform (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
BANDPASS |
|
static int |
BANDSTOP |
|
static int |
BUTTERWORTH |
|
private static int |
CDFT_4THREADS_BEGIN_N |
|
private static int |
CDFT_THREADS_BEGIN_N |
-------- DST (Discrete Sine Transform) / Inverse of DST --------
[definition]
IDST (excluding scale)
S[k] = sum_j=1^n A[j]*sin(pi*j*(k+1/2)/n), 0<=k DST
S[k] = sum_j=0^n-1 a[j]*sin(pi*(j+1/2)*k/n), 0
ip[0] = 0; // first time only
ddst(n, 1, a, ip, w);
ip[0] = 0; // first time only
ddst(n, -1, a, ip, w);
[parameters]
n :data length (int)
n >= 2, n = power of 2
a[0...n-1] :input/output data (double *)
input data
a[j] = A[j], 0
output data
a[k] = S[k], 0= 2+sqrt(n/2)
strictly,
length of ip >=
2+(1<<(int)(log(n/2+0.5)/log(2))/2).
|
static int |
CHEBYSHEV_TYPE_I |
|
static int |
CHEBYSHEV_TYPE_II |
|
static int |
CONSTRUCTION_NONE |
|
private int |
constructionMethod |
|
static int |
ELLIPTIC |
|
private double |
epsilon |
|
private double |
f1 |
|
private double |
f2 |
|
private int |
filterOrder |
|
private int |
filterType |
|
static int |
GAUSSIAN |
|
static int |
HIGHPASS |
|
private ModelImage |
inverseImage |
|
static int |
LOWPASS |
|
private boolean |
multiProcessor |
|
private static int |
NMAX |
|
private static int |
NMAXSQRT |
|
private double |
rs |
|
private int |
seed |
|
private ModelImage |
transformImage |
|
private int |
xDim |
|
private int |
yDim |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
DiscreteSineTransform() |
|
DiscreteSineTransform(boolean multiProcessor) |
|
DiscreteSineTransform(ModelImage transformImage,
ModelImage inverseImage,
ModelImage srcImg,
boolean multiProcessor,
int constructionMethod,
int filterType,
double f1,
double f2,
int filterOrder,
double epsilon,
double rs) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
bitrv2(int n,
int[] ip,
double[] a) |
|
private void |
bitrv208(double[] a) |
|
private void |
bitrv208neg(double[] a) |
|
private void |
bitrv216(double[] a) |
|
private void |
bitrv216neg(double[] a) |
|
private void |
bitrv2conj(int n,
int[] ip,
double[] a) |
|
private void |
cftb040(double[] a) |
|
private void |
cftb1st(int n,
double[] a,
double[] w) |
|
private void |
cftbsub(int n,
double[] a,
int[] ip,
int nw,
double[] w) |
|
private void |
cftf040(double[] a) |
|
private void |
cftf081(double[] a,
double[] w) |
|
private void |
cftf082(double[] a,
double[] w) |
|
private void |
cftf161(double[] a,
double[] w) |
|
private void |
cftf162(double[] a,
double[] w) |
|
private void |
cftf1st(int n,
double[] a,
double[] w) |
|
private void |
cftfsub(int n,
double[] a,
int[] ip,
int nw,
double[] w) |
|
private void |
cftfx41(int n,
double[] a,
int nw,
double[] w) |
|
private void |
cftleaf(int n,
int isplt,
double[] a,
int nw,
double[] w) |
|
private void |
cftmdl1(int n,
double[] a,
double[] w) |
|
private void |
cftmdl2(int n,
double[] a,
double[] w) |
|
private void |
cftrec4(int n,
double[] a,
int nw,
double[] w) |
|
private void |
cftrec4_th(int n,
double[] a,
int nw,
double[] w) |
|
private int |
cfttree(int n,
int j,
int k,
double[] a,
int nw,
double[] w) |
|
private void |
cftx020(double[] a) |
|
private double |
Chebyshev(int order,
double w) |
|
void |
ddst(int n,
int isgn,
double[] a,
int[] ip,
double[] w) |
|
void |
ddst2D(int yDim,
int xDim,
double[][] src,
double[][] dst,
int isgn) |
|
private void |
dstsub(int n,
double[] a,
int nc,
double[] c) |
|
private double |
errorcheck(int nini,
int nend,
double scale,
double[] a) |
|
private void |
makeButterworthFilter(double[] buffer,
double fr1,
double fr2) |
DOCUMENT ME!
|
private void |
makeChebyshevTypeIFilter(double[] buffer,
double fr1,
double fr2) |
|
private void |
makeChebyshevTypeIIFilter(double[] buffer,
double fr1,
double fr2) |
|
private void |
makect(int nc,
int[] ip,
double[] c) |
|
private void |
makeEllipticFilter(double[] buffer,
double fr1,
double fr2) |
|
private void |
makeGaussianFilter(double[] buffer,
double rmsFreq) |
|
private void |
makeipt(int nw,
int[] ip) |
|
private void |
makewt(int nw,
int[] ip,
double[] w) |
|
private void |
putdata(int nini,
int nend,
double[] a) |
|
private void |
rftbsub(int n,
double[] a,
int nc,
double[] c) |
|
private void |
rftfsub(int n,
double[] a,
int nc,
double[] c) |
|
private double |
RND() |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
testddst(int n) |
|
void |
testRND(int n) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
CDFT_THREADS_BEGIN_N
private static final int CDFT_THREADS_BEGIN_N
-------- DST (Discrete Sine Transform) / Inverse of DST --------
[definition]
IDST (excluding scale)
S[k] = sum_j=1^n A[j]*sin(pi*j*(k+1/2)/n), 0<=k DST
S[k] = sum_j=0^n-1 a[j]*sin(pi*(j+1/2)*k/n), 0
ip[0] = 0; // first time only
ddst(n, 1, a, ip, w);
ip[0] = 0; // first time only
ddst(n, -1, a, ip, w);
[parameters]
n :data length (int)
n >= 2, n = power of 2
a[0...n-1] :input/output data (double *)
input data
a[j] = A[j], 0
output data
a[k] = S[k], 0= 2+sqrt(n/2)
strictly,
length of ip >=
2+(1<<(int)(log(n/2+0.5)/log(2))/2).
ip[0],ip[1] are pointers of the cos/sin table.
w[0...n*5/4-1] :cos/sin table (double *)
w[],ip[] are initialized if ip[0] == 0.
[remark]
Inverse of
ddst(n, -1, a, ip, w);
is
a[0] *= 0.5;
ddst(n, 1, a, ip, w);
for (j = 0; j <= n - 1; j++) {
a[j] *= 2.0 / n;
}
- See Also:
- Constant Field Values
-
filterType
private int filterType
-
filterOrder
private int filterOrder
-
epsilon
private double epsilon
-
Constructor Detail
-
DiscreteSineTransform
public DiscreteSineTransform(ModelImage transformImage,
ModelImage inverseImage,
ModelImage srcImg,
boolean multiProcessor,
int constructionMethod,
int filterType,
double f1,
double f2,
int filterOrder,
double epsilon,
double rs)
-
Method Detail
-
ddst2D
public void ddst2D(int yDim,
int xDim,
double[][] src,
double[][] dst,
int isgn)
-
ddst
public void ddst(int n,
int isgn,
double[] a,
int[] ip,
double[] w)
-
cftfsub
private void cftfsub(int n,
double[] a,
int[] ip,
int nw,
double[] w)
-
cftbsub
private void cftbsub(int n,
double[] a,
int[] ip,
int nw,
double[] w)
-
cfttree
private int cfttree(int n,
int j,
int k,
double[] a,
int nw,
double[] w)
-
cftleaf
private void cftleaf(int n,
int isplt,
double[] a,
int nw,
double[] w)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ScopedExecutionTimer.html��������������������������������0000775�4231163�4231163�00000030331�14537076052�026443� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ScopedExecutionTimer (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.ScopedExecutionTimer
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
finalize
public void finalize()
- Overrides:
finalize in class java.lang.Object
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmLevelSetDiffusion.html��������������������������������������0000775�4231163�4231163�00000114753�14537076047�025366� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLevelSetDiffusion (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
GxData |
Storage location of the first derivative of the Gaussian in the X direction.
|
private float[] |
GyData |
Storage location of the first derivative of the Gaussian in the Y direction.
|
private float[] |
GzData |
Storage location of the first derivative of the Gaussian in the Z direction.
|
private boolean |
image25D |
If true in 3D images, process each slice separately
|
private int |
iterations |
Number of iterations of the diffusion.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
private float |
kValue |
Controls the diffusion rate.
|
private float[] |
levelImage |
DOCUMENT ME!
|
private float[] |
outputBuffer |
Stores output of AlgorithmConvolver
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calc25D() |
calc25D - calculates the diffused image and creates the new VOI for the original image.
|
private void |
calc2D() |
calc2D - calculates the diffused image and creates the new VOI for the original image.
|
private void |
calc3D() |
calc3D - calculates the diffused image and creates the new VOI for the original image.
|
void |
cleanUp() |
DOCUMENT ME!
|
void |
finalize() |
finalize - sets class storages arrays to null so that System.gc() can free the memory.
|
private float |
getBiLinear(float[] imageBuffer,
int xDim,
float x,
float y) |
getBiLinear - version of get that performs bi-linear interpoloation.
|
private float |
getTriLinear(float[] imageBuffer,
int xDim,
int imageSliceSize,
float x,
float y,
float z) |
getTriLinear - version of get that performs trilinear interpoloation.
|
private void |
makeKernels2D() |
makeKernals2D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
|
private void |
makeKernels3D() |
makeKernals3D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
|
void |
runAlgorithm() |
starts the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmLevelSetDiffusion
public AlgorithmLevelSetDiffusion(ModelImage srcImg,
float[] sigmas,
int iter,
float kValue,
boolean image25D)
AnisotropicDiffusion.
- Parameters:
srcImg - reference to the source imagesigmas - sigmas used to describe the gaussian that is used in the calculation of the gradient magnitudeiter - number of iterations (t) of the diffusion equationkValue - K is a factor that controls the diffusion rate. A large value causes this algorithms to act like
gaussian smoothing and therefore diffuses across edges. K = small reduces blur across edges.
Typical K = 10;image25D - If true in 3D images, process each slice separately
-
Method Detail
-
cleanUp
public void cleanUp()
DOCUMENT ME!
-
getBiLinear
private float getBiLinear(float[] imageBuffer,
int xDim,
float x,
float y)
getBiLinear - version of get that performs bi-linear interpoloation. Note - does NOT perform bounds checking
- Parameters:
imageBuffer - buffer containing pixel dataxDim - x dimension offsetx - x coordinatey - y coordinate- Returns:
- DOCUMENT ME!
-
getTriLinear
private float getTriLinear(float[] imageBuffer,
int xDim,
int imageSliceSize,
float x,
float y,
float z)
getTriLinear - version of get that performs trilinear interpoloation.
- Parameters:
imageBuffer - buffer containing pixel dataxDim - x dimension offsetimageSliceSize - DOCUMENT ME!x - x coordinatey - y coordinatez - z coordinate- Returns:
- DOCUMENT ME!
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
���������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.Fit24DModel.html���������������������������������������0000775�4231163�4231163�00000041462�14537076045�024472� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.Fit24DModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
Fit24DModel(int nPoints,
double[] xData,
float[] yData,
double[] initial) |
Creates a new Fit24DModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
Fit24DModel
public Fit24DModel(int nPoints,
double[] xData,
float[] yData,
double[] initial)
Creates a new Fit24DModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a0 - a1*(a2**x).
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The x value of the data point.residuals - The best guess parameter values.covarMat - The derivative values of y with respect to fitting
parameters.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Mesh.html�����������������������������������������������������0000775�4231163�4231163�00000022601�14537076056�021742� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Mesh (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Mesh
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
num |
|
(package private) SIFT3D.Tri[] |
tri |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Mesh() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.NullJacobianFinalizer.html�������������������������������0000775�4231163�4231163�00000017733�14537076052�026561� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.NullJacobianFinalizer (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.NullJacobianFinalizer
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������gov/nih/mipav/model/algorithms/GaussianMixtureModelsIncompleteSamples.GMM.html����������������������0000775�4231163�4231163�00000034402�14537076055�030374� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
GaussianMixtureModelsIncompleteSamples.GMM (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
amp |
|
(package private) double[][][] |
covar |
|
(package private) int |
D |
|
(package private) int |
K |
|
(package private) double[][] |
mean |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
GMM(int K,
int D) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double[] |
_call_(double[][] coords,
double[][][] cov,
boolean as_log) |
|
double[][] |
draw(int size,
java.util.Random rng) |
|
double[] |
logL(double[][] coords,
double[][][] cov) |
|
double[] |
logL_k(int k,
double[][] coords,
double[][][] cov,
boolean chi2_only) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/FitLine.html���������������������������������������������������������0000775�4231163�4231163�00000051027�14537076054�021447� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
FitLine (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitLine() |
Creates a new FitLine object.
|
FitLine(int nPoints,
float[] xData,
float[] yData) |
FitLine.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
calculateChiSq() |
Calculates chi squared
|
protected void |
calculateFittedY() |
Calculates yDataFitted
|
void |
displayResults() |
Display results of displaying linear fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] jacobian) |
Fit line to function.
|
protected Jama.Matrix |
generateResiduals() |
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
|
private void |
setupData() |
Sets up data to test fitting of exponential.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
generateResiduals
protected Jama.Matrix generateResiduals()
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
- Specified by:
generateResiduals in class NLFittedFunction- Returns:
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/GaussianMixtureModelsIncompleteSamples.Background.html���������������0000775�4231163�4231163�00000031534�14537076055�032036� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
GaussianMixtureModelsIncompleteSamples.Background (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.Background
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) boolean |
adjust_amp |
|
(package private) double |
amp |
|
(package private) double |
amp_max |
|
(package private) double |
amp_min |
|
(package private) double[][] |
footprint |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Background(double[][] footprint,
double amp) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
footprint
double[][] footprint
-
adjust_amp
boolean adjust_amp
��������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.fill_type.html�������������������������������������������������0000775�4231163�4231163�00000035004�14537076055�023177� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.fill_type (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Enum<libdt.fill_type>
-
- gov.nih.mipav.model.algorithms.libdt.fill_type
-
-
Enum Constant Summary
Enum Constants
| Enum Constant |
Description |
FILL_NN |
|
FILL_NNFILL |
< use nearest-neighbor.
|
FILL_VOTE |
< use nearest-neighbor (fill in patches).
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
fill_type() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
fill_type
private fill_type()
-
Method Detail
-
valueOf
public static libdt.fill_type valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.qlgraph.html�������������������������������0000775�4231163�4231163�00000024243�14537076056�026702� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.qlgraph (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.qlgraph
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) boolean[][] |
adjacent |
|
(package private) int[][] |
edge |
|
(package private) int[][] |
qledge |
|
(package private) int[][] |
qlvert |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
qlgraph() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
adjacent
boolean[][] adjacent
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Loop.html�������������������������������������������������������0000775�4231163�4231163�00000031600�14537076056�021560� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Loop (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Loop
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
clear
public void clear()
��������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.VertexEdgeIterator.html�����������������������������������������0000775�4231163�4231163�00000032710�14537076056�024426� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.VertexEdgeIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.VertexEdgeIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
reset
public void reset()
��������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.cov_reg_type.html����������������������������������������������0000775�4231163�4231163�00000040715�14537076055�023702� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.cov_reg_type (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
cov_reg_type(int cov_reg_code) |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static libdt.cov_reg_type valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
���������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.RandomizedCostFunction.html������������������������������0000775�4231163�4231163�00000034254�14537076052�027004� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.RandomizedCostFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.BlockRandomAccessDenseMatrix.html������������������������0000775�4231163�4231163�00000041403�14537076051�030023� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.BlockRandomAccessDenseMatrix (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_rows_
private int num_rows_
-
values_
private double[] values_
-
Method Detail
-
values
public double[] values()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.SparseMatrix.html����������������������������������0000775�4231163�4231163�00000031466�14537076057�026220� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.SparseMatrix (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.SparseMatrix
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_nonzero_values
int num_nonzero_values
-
Constructor Detail
-
SparseMatrix
public SparseMatrix()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/FitMultiExponential.html���������������������������������������������0000775�4231163�4231163�00000057054�14537076055�024070� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
FitMultiExponential (MIPAV API Documentation)
-
public class FitMultiExponential
extends NLFittedFunction
FitMultiExponential -fits an array of points to an multiexponential of the type
y = a0 + a1*exp(a2*x) + a3*exp(a4*x) + ...
where all the exponentials are negative decaying exponentials.
- Version:
- 0.9
- Author:
- William Gandler
- See Also:
NLConstrainedEngine
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitMultiExponential() |
FitMultiExponential - test constructor, builds and test function.
|
FitMultiExponential(int nPoints,
int nCoefficients,
double[] xData,
double[] yData) |
FitMultiExponential assuming all exponentials are negative
|
FitMultiExponential(int nPoints,
int nCoefficients,
float[] xData,
float[] yData) |
Constructs new fit multiexponential assuming all exponentials are negative.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
calculateChiSq() |
Calculates chi squared
|
protected void |
calculateFittedY() |
Calculates yDataFitted
|
void |
displayResults() |
Display results of displaying exponential fitting parameters.
|
void |
driver() |
Starts the analysis.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
Fit to function - a0 + a1*exp(a2*x) + a3*exp(a4*x) + ...
|
protected Jama.Matrix |
generateResiduals() |
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
|
private void |
testData() |
Test data to test fitting of exponential.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitMultiExponential
public FitMultiExponential(int nPoints,
int nCoefficients,
double[] xData,
double[] yData)
FitMultiExponential assuming all exponentials are negative
- Parameters:
nPoints - number of points in the functionnCoefficients - number of variables in the functionxData - DOCUMENT ME!yData - DOCUMENT ME!
-
FitMultiExponential
public FitMultiExponential(int nPoints,
int nCoefficients,
float[] xData,
float[] yData)
Constructs new fit multiexponential assuming all exponentials are negative.
- Parameters:
nPoints - Number of points in the functionnCoefficients - Number of variables in the functionxData - DOCUMENT ME!yData - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a0 + a1*exp(a2*x) + a3*exp(a4*x) + ...
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
-
generateResiduals
protected Jama.Matrix generateResiduals()
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
- Specified by:
generateResiduals in class NLFittedFunction- Returns:
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmKMeans.html�������������������������������������������������0000775�4231163�4231163�00000167622�14537076046�023154� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmKMeans (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmKMeans
extends AlgorithmBase
This program can be run on data of any dimensionality. However, VOIs will only be placed in images
for 2D and 3D data.
This program can be used for one dimensional segmenting of black and white images or two dimensional
segmenting of color images.
The data file format is as follows:
# is used to start any comment line
number of dimensions nDims
extents[0] ... extents[nDims-1], length of each dimension
scale[0] ... scale[nDims-1], scale factor of each dimension
nPoints, number of points
For each point a line of the form
weight pos[0] ... pos[nDims-1]
This program can be run to find the mean of centroids using Euclidean squared distances, the program
can be run to find the median of centroids using city-block or Manhattan distances, or the program
can be run to find the mean of centroids using Mahalanobis squared distances. Using medians with
city-block distances is probably best in cases of noise and outlier data points since a few outliers can
greatly affect the mean value. Median components are found separately for each dimension. The
determinant(withinGroupSumOfSquaresMatrix) = det(W) is minimized by minimizing the Mahalanobis squared distance,
which equals the (distance vector)' * (withinGroupSumOfSquaresMatrix).inverse() * (distance vector).
The distance is between a centroid and a point. However, we don't initially know the
withinGroupSumOfSquaresMatrix so we can't initially use the Mahalanobis squared distance. We must
initialize with the Euclidean squared distance in order to obtain a withinGroupSumOfSquaresDistance.
Minimizing the det(W)has the advantage of being scale independent.
The Euclidean squared metric is scale-dependent. Different solutions may be obtained from the raw data
and from the data scaled in some way. The Euclidean squared method does not work well in finding clusters
with nonconvex shapes or very different sizes. The Euclidean squared metric may impose a spherical structure
on the observed clusters even when the observed clusters are of other shapes. For example, the Euclidean
squared measure may fail on 2 well separated elliptical clusters. The Euclidean metric tends to find
groups with similar numbers of points. The Mahalanobis metric minimizing det(W) can find ellipsoidal
distributions with the same size and orientation.
With the Euclidean distance incremental changing 1 point at a time follows batch processing
which changes all points at once. The batch algorithm is faster but the incremental algorithm is more
accurate. With air pollution for 4 clusters scaled variance the incremental improved hierarchical and fast global
and left max-min and global unchanged. With city block the incremental decreased the Calinski and Harabasz figure
of merit for the air pollution study. With Mahalanobis the incremental was too slow for a large number of points
and decreased the Calinski and Harabasz figure of merit for the air pollution study.
The S metric minimizes S = Sum over all clusters of Sk. Let Wk be the within cluster sum of squares of
cluster k. w1k, w2k, ..., wnDimsk are the eigenvalues in descending order from the eigenvalue
decomposition of Wk. The clusters must be ellipsoidal shapes of the same size and different orientations.
Specify a known ellipsoidal shape that applies to all the clusters in the distribution.
Put the axes ratio of all ellipsoidal axes to the largest ellipsoidal axis in descending order, where the
first ratio of the largest axis to itself is 1.0. Sk = w1k/(ellipsoidal axis ratio 1)**2 +
w2k/(ellipsoidal axis ratio 2)**2 + ... + wnDimsk/(ellipsoidal axis ratio nDims)**2. Minimize S by
going thru all the points 1 at a time and for each point checking to see which cluster yields the
lowest value of S. For each point we test its possible removal from its present cluster and its
possible addition to every other cluster. After doing all the points, we keep doing more iterations
of all the points until no cluster changes occur. Since we don't initially know the withinGroupSumOfSquares
for each cluster, initialization is performed with the Euclidean metric.
Minimizing the sum over all clusters k of nk*log(tr(Wk/nk)) finds spherical distributions of different
sizes.
Minimizing S* = sum over all k of nk * log(Sk/nk) finds ellipsoidal shapes of different sizes and
orientations. As with the S metric the axes ratios of the ellipsoidal axes must be known and
specified. Cannot get S* to work.
The dialog checkbox Scale variables to unit variance allow combining variables using different scales
such as temperature in degrees Fahrenheit and wind speed in miles per hour.
With a small number of records, it is feasible to use RANDOM_INIT to perform multiple restarts efficiently.
With a small sample size, the subsampling for initialization is not effective in the Bradley-Fayyad
initialization. The Bradley-Fayyad method is best suited for large-scale data. By initializing a general
clustering algorithm near the nodes, not only are the true clusters found more often, but it follows that
the clustering algorithm will iterate fewer times prior to convergence.
The k-means algorithm will run differently with each run when random initialization and Bradley
Fayyad initialization are used since random number generation is used in selection. The k-means
algorithm will run the same with each run when Hierarchical grouping initialization and maxmin
initialization are used. Global k-means and fast global k-means will run the same with each run.
Initialization methods are only chosen with k-means; initialization methods are not chosen with
global K-means and with fast global k-means.
In the maxmin initialization first select the 2 points that are farthest apart as seeds. For each
additional seed find the minimum distance from each nonseed point to any of the seed points. The new
seed point will be the point that yields the maximum of these minimum distances.
In hierarchical grouping all n points are initially considered as n groups of 1 member. The number of groups is
decreased by 1 with each iteration from n to n-1 to n-2 until the desired number of groups has been obtained.
At each step the sum over all groups of the error sum of squares of each group is minimized. The error sum of
squares of a group of n members is
(sum from i = 1 to n of (xi - xaverage)**2 + (yi - yaverage)**2 + (zi - zaverage)**2)
where xaverage, yaverage, and zaverage are for all members of 1 group.
With n groups n*(n-1)/2 possible groupings to go from n to n-1 groups are tried to find the n-1 grouping with the lowest
sum over all groups of the error sum of squares.
In Bradley-Fayyad we perform k-means on 10 subsamples, each with 1/10 of all the points, chosen at random. The initial
centroids are chosen at random and then 1/10 of the data points are selected at random. When a
subsample k-means finishes, if a centroid does not have any members, then the initial centroid is reassigned
to the point which is farthest from its assigned cluster centroid, and k-means is run again from these new initial
centroids. The final centroids cmi from each of the 10 subsample runs are grouped into a common set cm. 10 k-means runs are
performed on this common cm centroid set, each starting with a cmi from a subsample run. Let the final resulting centroids
from each of these 10 runs be fmi. Then the fmi which has the lowest sum over all groups of the error sum of squares of
each group will be chosen as the initial starting centroids for the full sample run.
The global k-means problem solves a problem with m clusters by sequentially solving all intermediate
problems with 1,2, ..., m-1 clusters. At the start of a run with m clusters the first m-1 clusters
are put at positions corresponding to their final locations in the m-1 cluster problem. For global
k-means at every intermediate stage the one unassigned cluster is started at locations corresponding
to every data point in the image and the clustering error is calculated for a full k-means run.
The run with the lowest clustering error is taken as the solution. For fast global k-means at each
intermediate step only 1 full k-means run is performed instead of having the number of k-means runs
equal the number of data points in the image. The point which provides the largest guaranteed
reduction in the error measure is used as the new cluster starting location.
In fast global k-means we wish to find the point xn that maximizes bn, the guaranteed reduction in clustering
error obtained by inserting a new cluster center at position xn. Let there be N points. Then
bn = sum from j = 1 to N of the max(d(j,k-1)**2 - ||xn -xj||**2,0)
where d(j,k-1) is the distance between xj and the closest center among the k-1 cluster centers obtained so far.
Fast global k-means is not used for the city-block measure.
From the Celebi reference:
Consider a point xi, two cluster centers ca and cb and a distance metric d. Using the triangle
inequality, we have d(ca,cb) <= d(xi,ca) + d(xi,cb). Therefore, if we know that 2d(xi,ca) <= d(ca,cb),
we can conclude that d(xi,ca) <= d(xi,cb) without having to calculate d(xi,cb).
By doing runs with different number of clusters and seeing which run gives the highest Calinski and
Harabasz figure of merit, the ideal number of clusters can be determined. Let B = the between groups
sum of squares and W = the within group sum of squares. Then the Calinski and Harabasz figure of merit
equals = (B/(number of clusters -1))/(W/(totalWeight - number of clusters), where the weight of each point
equals 1 in an unweighted data set or the totalWeight = the number of points in an unweighted data set.
The sum of squared deviations from cluster centroids from 2 different runs can be used in an 'F test'
proposed by Beale. Let SD denote the sum of the squared deviations from cluster centroids in the sample.
Then a divison of n objects into g2 clusters is significantly better than a division into g1 clusters (g2 > g1)
if the test statistic F(g1,g2) = ((SD1 - SD2)/SD2)/([(n-g1)/(n-g2)]*((g2/g1)**(2/nDims)) - 1) exceeds the
critical value from an F distribution with nDims*(g2 - g1) and nDims*(n - g2) degrees of freedom. Experience
with Beale's rule suggest that it will only be successful when the clusters are fairly well separated and
approximately spherical in shape.
Marriott proposed finding the ideal number of groups g by finding the minimum of
g*g*determinant(withinGroupSumOfSquaresMatrix), where the matrix is nDims by nDims. For unimodal distributions
the minimum value is likely to be g = 1. For strongly grouped distributions the minimum will indicate the
appropriate value of g. For a uniform distribution the value will be constant over different group numbers.
If g*g*determinant(withinGroupSumOfSquaresMatrix)/determinant(totalSumOfSquaresMatrix) > 1 for all numbers of
clusters, then the distribution should be regarded as a single group.
References:
1.) "A systematic evaluation of different methods for initializing the K-means clustering algorithm"
by Anna D. Peterson, Arka. P. Ghosh, and Ranjan Maitra, IEEE Transactions on Knowledge and
Data Engineering
2.) "Refining Initial Points for K-Means Clustering" by P.S. Bradley and Usama M. Fayyad.
3.) "Hierarchical Grouping to Optimize an Objective Function" by Joe H. Ward, Jr.,
Journal of the American Statistical Association, Volume 58, Issue 301, March, 1963, pp. 236-244.
4.) "Improving the Performance of K-Means for Color Quantization" by M. Emre Celebi,
Image and Vision Computing, Volume 29, No. 4, 2011, pp. 260-271.
5.) "The global k-means clustering algorithm" by Aristidis Likas, Nikos Vlassis, and
Jakob J. Verbeek, Pattern Recognition, Volume 36, 2003, pp. 451-461.
6.) Data Mining Concepts and Techniques by Jiawei Han and Micheline Kamber, Section 8.4
Partitioning Methods, Morgan Kaufmann Publishers, 2001, pp. 348-353.
7.) Cluster Analysis Fourth Edition by Brian S. Everitt, Sabine Landau, and Morven
Leese, Arnold Publishers, 2001, Chapter 5, Optimization Clustering Techniques,
pp. 90-117.
8.) "Practical Problems in Cluster Analysis" by F.H.C. Marriott, Biometrics, Vol. 27,
September, 1971, pp. 501-514.
9.) Multivariate Observations by G. A. F. Seber, John Wiley & Sons, INc., 1984, Section
7.5 Partitioning Methods, pp.379-387.
10.) "Model-Based Gaussian and Non-Gaussian Clustering" by Jeffrey D. Banfield and
Adrian E. Raftery, Biometrics, Vol. 49, No. 3., September, 1993, pp. 803-821.
11.) "Introduction to Clustering Large and High-Dimensional Data" by Jacob Kogan,
Cambridge University Press, 2007, Chapter 2 Quadratic k-means algorithm,
pp. 9-39.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmKMeans(ModelImage image,
int algoSelection,
int distanceMeasure,
double[][] pos,
double[] scale,
int[] groupNum,
double[] weight,
double[][] centroidPos,
java.lang.String resultsFileName,
int initSelection,
float[] redBuffer,
float[] greenBuffer,
float[] blueBuffer,
double scaleMax,
boolean useColorHistogram,
boolean scaleVariablesToUnitVariance,
double[] axesRatio,
boolean bwSegmentedImage,
double[] doubleBuffer,
boolean showSegmentedImage,
boolean followBatchWithIncremental,
boolean colorSegmentInRGB) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
scale
private double[] scale
-
pos
private double[][] pos
-
groupNum
private int[] groupNum
-
weight
private double[] weight
-
scaleMax
private double scaleMax
-
scale2
private double[] scale2
-
nPoints
private int nPoints
-
Constructor Detail
-
AlgorithmKMeans
public AlgorithmKMeans(ModelImage image,
int algoSelection,
int distanceMeasure,
double[][] pos,
double[] scale,
int[] groupNum,
double[] weight,
double[][] centroidPos,
java.lang.String resultsFileName,
int initSelection,
float[] redBuffer,
float[] greenBuffer,
float[] blueBuffer,
double scaleMax,
boolean useColorHistogram,
boolean scaleVariablesToUnitVariance,
double[] axesRatio,
boolean bwSegmentedImage,
double[] doubleBuffer,
boolean showSegmentedImage,
boolean followBatchWithIncremental,
boolean colorSegmentInRGB)
-
Method Detail
-
cityBlock
private void cityBlock()
��������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/KDTree.html����������������������������������������������������������0000775�4231163�4231163�00000166370�14537076055�021244� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
KDTree (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.KDTree
-
public class KDTree
extends java.lang.Object
Original code Copyright (C) 2007-2011 John Tsiombikas
Ported to Java by William Gandler
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
1. Redistributions of source code must retain the above copyright notice, this
list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above copyright notice,
this list of conditions and the following disclaimer in the documentation
and/or other materials provided with the distribution.
3. The name of the author may not be used to endorse or promote products
derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE AUTHOR ``AS IS'' AND ANY EXPRESS OR IMPLIED
WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF
MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO
EVENT SHALL THE AUTHOR BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT
OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING
IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY
OF SUCH DAMAGE.
kdtree
======
.. image:: http://nuclear.mutantstargoat.com/sw/kdtree/img/kdtree_logo.png
Overview
--------
kdtree is a simple, easy to use C library for working with kd-trees.
Kd-trees are an extension of binary search trees to k-dimensional data. They
facilitate very fast searching, and nearest-neighbor queries.
This particular implementation is designed to be efficient and very easy to
use. It is completely written in ANSI/ISO C, and thus completely
cross-platform.
See under the doc/ and examples/ directories to find out how to use the
kdtree library.
License
-------
Author: John Tsiombikas
kdtree is free software. You may use, modify, and redistribute it under the
terms of the 3-clause BSD license.
Download
--------
Latest release (0.5.7): http://nuclear.mutantstargoat.com/sw/kdtree/files/kdtree-0.5.7.tar.gz
You can find previous releases here:
http://nuclear.mutantstargoat.com/sw/kdtree/files/
You can also grab a copy of the source from github: https://github.com/jtsiomb/kdtree
Programming guide
Using the kdtree library in your programs is very easy.
Creating a tree
Call the kd_create function to create a tree. It takes a single argument specifying the dimensionality of the data,
and returns a pointer to the tree. You need to pass that pointer as an argument to any functions that manipulate the kd-tree.
For example you may create a 3-dimensional kd-tree with:
void *kd = kd_create(3);
Destroying a tree
Call kd_free with a pointer returned from kd_create in order to free the memory occupied by the tree.
Note that any data pointers passed by the user with the kd_insert functions will not be freed, unless a "data destructor" function is provided (see below).
Managing user pointers
When inserting data to the tree, you may pass a pointer to be stored in the node. If you wish,
you may provide a custom "destructor" function to be called for each of these pointers when their node is removed from the tree.
You can do that by supplying a pointer to that destructor function with a call to kd_data_destructor.
The first argument is again a valid pointer to a kd-tree, while the second argument is a function pointer with the signature: void (*)(void*).
Populating the tree
To insert data to the kd-tree you may use one of the kd_insert functions.
All of the insertion functions take a valid tree pointer as their first argument,
and an optional pointer to user data to be stored along with the node as their last argument (it can be null if no user data are needed).
kd_insert, and kd_insertf expect a pointer to an array of k doubles or floats respectively as a second argument,
which contain the position of the inserted point. So for example, for a 3D tree you need to pass an array of 3 values.
The convenience kd_insert3, and kd_insert3f are meant to be called for 3-dimensional kd-trees
(which is considered the most common case), and expect 3 values (doubles or floats) signifying the position of the 3-dimensional point to be stored.
Performing nearest-neighbor queries
After you have your data in the kd-tree, you can perform queries for discoverying nearest neighbors in a given range around an arbitrary point.
The query returns a pointer to the "result set", which can from then on be accessed with the kd_res_* functions.
The nearest-neighbor queries are performed with the kd_nearest_range functions. Like the kd_insert functions described above,
they also provide generic array argument versions for k-dimensional trees, and 3-dimensional convenience functions, all in double and float varieties.
For example in order to query for the nearest neighbors around the 2D point (10, 15), inside a radius of 3 units, you could do:
void *result_set; double pt[] = {10.0, 15.0}; result_set = kd_nearest_range(kd, pt, 3.0);
where "kd" is a pointer to a 2-dimensional kd-tree returned by kd_create(2).
A result set aquired with one of the kd_nearest_range functions, must be freed by calling kd_res_free and supplying the result set pointer as its only argument.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) java.util.concurrent.locks.Lock |
alloc |
|
(package private) static KDTree.res_node |
free_nodes |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
KDTree() |
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
KDTree.res_node |
alloc_resnode() |
|
static void |
clear_rec(KDTree.kdnode node) |
|
void |
clear_results(KDTree.kdres rset) |
|
double |
dist_sq(double[] a1,
double[] a2,
int dims) |
|
int |
find_nearest(KDTree.kdnode node,
double[] pos,
double range,
KDTree.res_node list,
int ordered,
int dim) |
|
int |
find_nearest_chebyshev(KDTree.kdnode node,
double[] pos,
double range,
KDTree.res_node list,
int ordered,
int dim) |
|
void |
free_resnode(KDTree.res_node node) |
|
KDTree.kdhyperrect |
hyperrect_create(int dim,
double[] min,
double[] max) |
|
double |
hyperrect_dist_sq(KDTree.kdhyperrect rect,
double[] pos) |
|
KDTree.kdhyperrect |
hyperrect_duplicate(KDTree.kdhyperrect rect) |
|
static void |
hyperrect_extend(KDTree.kdhyperrect rect,
double[] pos) |
|
static void |
hyperrect_free(KDTree.kdhyperrect rect) |
|
int |
insert_rec(KDTree.kdnode nptr,
boolean nptrwasnull,
double[] pos,
double[] data,
int dir,
int dim) |
|
void |
kd_clear(KDTree.kdtree tree) |
|
KDTree.kdtree |
kd_create(int k) |
|
void |
kd_free(KDTree.kdtree tree) |
|
int |
kd_insert(KDTree.kdtree tree,
double[] pos,
double[] data) |
|
int |
kd_insert3(KDTree.kdtree tree,
double x,
double y,
double z,
double[] data) |
|
int |
kd_insert3f(KDTree.kdtree tree,
float x,
float y,
float z,
double[] data) |
|
int |
kd_insertf(KDTree.kdtree tree,
double[] pos,
double[] data) |
|
KDTree.kdres |
kd_nearest(KDTree.kdtree kd,
double[] pos) |
|
void |
kd_nearest_i(KDTree.kdnode node,
double[] pos,
KDTree.kdnode result,
double[] result_dist_sq,
KDTree.kdhyperrect rect) |
|
KDTree.kdres |
kd_nearest_range(KDTree.kdtree kd,
double[] pos,
double range) |
|
KDTree.kdres |
kd_nearest_range_chebyshev(KDTree.kdtree kd,
double[] pos,
double range) |
|
KDTree.kdres |
kd_nearest_range3(KDTree.kdtree tree,
double x,
double y,
double z,
double range) |
|
KDTree.kdres |
kd_nearest_range3f(KDTree.kdtree tree,
float x,
float y,
float z,
float range) |
|
KDTree.kdres |
kd_nearest_rangef(KDTree.kdtree kd,
float[] pos,
float range) |
|
KDTree.kdres |
kd_nearest3(KDTree.kdtree tree,
double x,
double y,
double z) |
|
KDTree.kdres |
kd_nearest3f(KDTree.kdtree tree,
float x,
float y,
float z) |
|
KDTree.kdres |
kd_nearestf(KDTree.kdtree tree,
float[] pos) |
|
int |
kd_res_end(KDTree.kdres rset) |
|
void |
kd_res_free(KDTree.kdres rset) |
|
double[] |
kd_res_item(KDTree.kdres rset,
double[] pos) |
|
double[] |
kd_res_item_data(KDTree.kdres set) |
|
double[] |
kd_res_item3(KDTree.kdres rset,
double[] x,
double[] y,
double[] z) |
|
double[] |
kd_res_item3f(KDTree.kdres rset,
float[] x,
float[] y,
float[] z) |
|
double[] |
kd_res_itemf(KDTree.kdres rset,
float[] pos) |
|
int |
kd_res_next(KDTree.kdres rset) |
|
void |
kd_res_rewind(KDTree.kdres rset) |
|
int |
kd_res_size(KDTree.kdres set) |
|
double |
rd(java.util.Random rnd) |
|
int |
rlist_insert(KDTree.res_node list,
KDTree.kdnode item,
double dist_sq) |
|
double |
SQ(double x) |
|
void |
test() |
|
void |
test2() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
test2
public void test2()
-
insert_rec
public int insert_rec(KDTree.kdnode nptr,
boolean nptrwasnull,
double[] pos,
double[] data,
int dir,
int dim)
-
kd_insert3
public int kd_insert3(KDTree.kdtree tree,
double x,
double y,
double z,
double[] data)
-
kd_insert3f
public int kd_insert3f(KDTree.kdtree tree,
float x,
float y,
float z,
double[] data)
-
find_nearest_chebyshev
public int find_nearest_chebyshev(KDTree.kdnode node,
double[] pos,
double range,
KDTree.res_node list,
int ordered,
int dim)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.ContractingSnake.html��������������������������0000775�4231163�4231163�00000043733�14537076047�027642� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.ContractingSnake (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
alpha
private float alpha
-
gamma
private float gamma
-
Method Detail
-
getAlpha
public float getAlpha()
-
getBeta
public float getBeta()
-
getGamma
public float getGamma()
�������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCircleGeneration.IntTorquato95ModelMean2.html���������������0000775�4231163�4231163�00000035057�14537076044�031517� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCircleGeneration.IntTorquato95ModelMean2 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
areaFraction |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
IntTorquato95ModelMean2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit,
double areaFraction) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
areaFraction
double areaFraction
-
Constructor Detail
-
IntTorquato95ModelMean2
public IntTorquato95ModelMean2(double bound,
int routine,
int inf,
double epsabs,
double epsrel,
int limit,
double areaFraction)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHoughHyperbola.html�����������������������������������������0000775�4231163�4231163�00000114466�14537076046�024714� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHoughHyperbola (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHoughHyperbola
extends AlgorithmBase
This work is made possible by the following mathematical theorem proved by Professor Alan Horwitz
of Penn State University:
Finding the Center of a Hyperbola, H, given three nonparallel tangent lines to H and
the corresponding points of tangency.
Theorem: Let P1,P2,P3 be any three distinct points on the hyperbola, H; Let L1,L2,L3 be the
tangent lines to H at P1,P2,P3, and assume that no two of the Lj are parallel. Let t12 = Intersection
Point of L1 & L2, t23 = Intersection Point of L2 & L3,
m12 = midpoint of P1P2, m23 = midpoint of P2P3, J1 = line thru t12 & m12, J2 = line thru t23 & m23
Then the Intersection Point of J1 & J2 is the center of H
This Hough transform uses (xi, yi) points in the original image space to generate p, q, r1, r2, and theta points in the Hough
transform. This Hough transform module only works with binary images. Before it is used the user must
compute the gradient of an image and threshold it to obtain a binary image. Noise removal and thinning should also
be performed, if necessary, before this program is run.
The code for finding the best tangent for a point on a curve uses a port of findOptimalTangent.m from the Randomized Hough
transform used for ellipse detection MATLAB code by Andrew Schuler. The rest of the code is not ported, but is derived
from the Hough ellipse writeups by Andrew Schuler and Robert A. Mclaughlin. Robert A. Mclaughlin uses a linked list to save memory at
the cost of slower speed. Andrew Schuler uses an array to achieve higher speed at the cost of more memory usage. In
this application I use the array for higher speed and incur a higher memory cost. If need be, memory can be saved by
rewriting this application to used a linked list.
Pixel neighbors:
0 1 2
3 4
5 6 7
The algorithm works as follows:
1.) Skeletonization is performed. Branches with 2 or less pixels are pruned off.
2.) When a pixel has a diagonal neighbor adjacent to a horizontal or vertical neighbor,
the horizontal or vertical neighbor is deleted.
3.) Remove points with 2 or more neighbors.
4.) Find the 1 or 2 neighbors of every point
Find the number of end points, that is, points with only 1 neighbor
Delete isolated points with no neighbors
5.) Find the starting positions and lengths of the open curves
Delete all open curves with only 2 points
6.) For the open curves find the slope and y axis intercept of the tangent line to the curve at a point
With a user specified sidePointsForTangent on each side of a point find the tangent line that
minimizes the sum of the squared distances from these side points to the tangent line
7.) Find a position and length of closed curve
8.) For the closed curve find the slope and y axis intercept of the tangent line to the curve at a point
With a user specified sidePointsForTangent on each side of a point find the tangent line that
minimizes the sum of the squared distances from these side points to the tangent line
9.) Calculate the desired number of bins that would be used for each parameter if memory were not a
limitation. This desired bin number = (maximum parameter value - minimum parameter value)/maximum bin width
10.) Shrink the number of each bins used for each parameter by the fifth root of desiredBytes/actualBytesAvailable
to keep the buffer size down to user specified actualBytesAvailable.
11.) User a random number generator to select 3 of the points. If 2 of the 3 points are closer than
the user specified minimum distance or farther than the user specified maximum distance, then
run the random number generator again to find another point within the permissible distance
range. If 2 of the points have tangents with the same slope, then run the random number
generator again.
12.) Find the intersection of the tangent line for point 1 and the tangent line for point2, t12.
Find the point midway between point 1 and point 2, point m12.
Find the intersection of the tangent line for point 2 and the tangent line for point3, t23.
Find the point midway between point 2 and point 3, point m23.
The center is found at the intersection of t12m12 and t23m23. If the center is not inside
the bounds of the image, go back and run the random number generator for 3 new points.
13.) Translate the center of the hyperbola to the origin by subtracting xCenter, yCenter from
point 1, point 2, and point 3.
14.) Solve for the other 3 hyberbola parameters a, b, and c in a*x**2 + 2*b*x*y + c*y**2 = 1 by solving:
[x1**2 2*x1*y1 y1**2] [a] [1]
[x2**2 2*x2*y2 y2**2] [b] = [1]
[x3**2 2*x3*y3 y3**2] [c] [1]
15.) The inequality a*c - b**2 < 0 is true if the parameters represent a valid hyperbola.
If this inequality is false, it implies that either the 3 pixels do not lie on the same hyperbola,
or that the estimates of the tangents were inaccurate. In either case, we discard the
parameters and run the random number generator to find a new pixel triplet.
16.) Convert a, b, and c to semi major axis r1, semi minor axis r2, and orientation angle theta.
Find the combined index value for these 5 parameters from the 5 individual index values and the bin
numbers for the 5 parameters. Add the respective parameters to xCenterArray[index],
yCenterArray[index], r1Array[index], r2Array[index], and thetaArray[index].
Increment countArray[index].
17.) Keep collecting point triplets until the user specified pointSetsRequired have been collected.
18.) Find the maxIndex yielding the largest value of countArray[index]. If countArray[index] > countThreshold,
then proceed with step 19. Otherwise zero the Hough buffer and start to collect a new set of
pointSetsRequired point triplets.
19.) Divide xCenterArray[maxIndex], yCenterArray[maxIndex], r1Array[maxIndex], r2Array[maxIndex],
and thetaArray[maxIndex] by countArray[maxIndex]. For xCenter, yCenter, r1, r2, and theta,
find the number of pixels near the perimiter of the hyperbola. For xCenter, yCenter, r1, r2,
and theta - 90 degrees, find the number of pixels near the perimiter of the hyperbola. The
correct one of these 2 cases has the largest number of pixels near the perimiter of the
hyperbola. If the correct case finds more pixels than minPixels, then the hyberbola is considered as valid.
If the correct case has fewer than minPixels, then this set of parameters is discarded and we return to step 18.
20.) If an hyperbola has been found, but the algorithm still has not found the user specified numHyperbolas
number of hyperbolas, then delete the points found along its perimiter from indexArray, slopeArray,
and interceptArray before running the Hough transform again. xCenterArray, yCenterArray,
r1Array, r2Array, thetaArray, and countArray are zeroed before the next Hough transform
is acquired.
21.) Perform no more than maxHyperbolaFindCycles of pointSetsRequired triplet set acquisitions. When
this number of triplet set acquisitions has occurred, stop trying to find new hyperbolas.
22.) Create a dialog with numHyperbolasFound xCenterArray[i], yCenterArray[i], r1Array[i], r2Array[i],
thetaArray[i], and countArray[i] values, where the user will select a check box to have that
hyperbola drawn.
References:
1.) Private communication from Professor Alan Horwitz of Penn State University
2.) The Randomized Hough Transform used for ellipse detection by Andrew Schuler
3.) Technical Report - Randomized Hough Transform: Improved Ellipse Detection with Comparison by
Robert A. Mclaughlin
4.) Digital Image Processing, Second Edition by Richard C. Gonzalez and Richard E. Woods, Section 10.2.2
Global Processing via the Hough Transform, Prentice-Hall, Inc., 2002, pp. 587-591.
5.) Shape Detection in Computer Vision Using the Hough Transform by V. F. Leavers, Springer-Verlag, 1992.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmHoughHyperbola() |
AlgorithmHoughHyperbola - default constructor.
|
AlgorithmHoughHyperbola(ModelImage destImg,
ModelImage srcImg,
int minPixels,
int sidePointsForTangent,
double maxPixelBinWidth,
double maxDegreesBinWidth,
double minPointDistance,
double maxPointDistance,
int pointSetsRequired,
int countThreshold,
double hyperbolaRangeTolerance,
int numHyperbolas,
int maxHyperbolaFindCycles,
int maxBufferSize) |
AlgorithmHoughHyperbola.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
minPixels
private int minPixels
-
Constructor Detail
-
AlgorithmHoughHyperbola
public AlgorithmHoughHyperbola(ModelImage destImg,
ModelImage srcImg,
int minPixels,
int sidePointsForTangent,
double maxPixelBinWidth,
double maxDegreesBinWidth,
double minPointDistance,
double maxPointDistance,
int pointSetsRequired,
int countThreshold,
double hyperbolaRangeTolerance,
int numHyperbolas,
int maxHyperbolaFindCycles,
int maxBufferSize)
AlgorithmHoughHyperbola.
- Parameters:
destImg - Image with hyperbolas filled insrcImg - Binary source image that has hyperbolas and near hyperbola shapes with gapsminPixels - Minimum number of points on a found hyperbola for it to be valid.sidePointsForTangent - Maximum number of points to take from each side of a point on a curve
in determining the tangentmaxPixelBinWidth - Maximum pixel difference allowed for xCenter, yCenter, r1, and r2 for 5 values
to be placed into an existing binmaxDegreesBinWidth - Maximum degrees difference allowed for theta for 5 values to be placed into
an existing binminPointDistance - Smallest allowable distance between 2 of 3 picked pointsmaxPointDistance - Largest allowable distance between 2 of 3 picked pointspointSetsRequired - Number of point triplets acquired before each hyperbola find is performedcountThreshold - Number of counts required to find a hyperbolahyperbolaRangeTolerance - Maximum percent by which perimiter pixels can deviate from the
hyperbola equationnumHyperbolas - number of hyperbolas to be foundmaxHyperbolaFindCycles - Maximum number of pointSetsRequired triplet point acquisitions that
is allowed to occurmaxBufferSize - maximum Hough transform size in megabytes
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Statistics.html������������������������������������������������������0000775�4231163�4231163�00000062124�14537076056�022251� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Statistics (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Statistics
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Statistics() |
|
Statistics(int statisticType,
double x,
double degreesOfFreedom,
double[] ansR) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ansR
private double[] ansR
-
Constructor Detail
-
Statistics
public Statistics()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NL2sol.html����������������������������������������������������������0000775�4231163�4231163�00000171756�14537076056�021244� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NL2sol (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.NL2sol
-
-
Constructor Summary
Constructors
| Constructor |
Description |
NL2sol() |
|
NL2sol(int n,
int p,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian,
int[] uiparm,
double[] urparm) |
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
assess(double[] d,
int[] iv,
int p,
double[] step,
double[] stlstg,
double[] v,
double[] x,
double[] x0) |
|
abstract void |
calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
private void |
calcjTest(int n,
int p,
double[] x,
int nfcall,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
abstract void |
calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm) |
|
private void |
calcrTest(int n,
int p,
double[] x,
int[] nfcall,
double[] r,
int[] uiparm,
double[] urparm) |
|
private void |
covclc(int[] covirc,
double[] d,
int[] iv,
double[][] j,
int n,
int nn,
int p,
double[] r,
double[] v,
double[] x) |
|
private void |
dfault(int[] iv,
double[] v) |
|
private double |
dotprd(int p,
double[] x,
double[] y) |
|
void |
driver() |
|
private void |
dupdat(double[] d,
int[] iv,
double[][] j,
int n,
int nn,
int p,
double[] v) |
|
double |
getChiSquared() |
getChiSquared - accessor to chi-squared value (goodness-of-fit measure).
|
int |
getIterations() |
|
private void |
gqtstp(double[] d,
double[] dig,
double[] dihdi,
int[] ka,
double[] l,
int p,
double[] step,
double[] v,
double[] w) |
|
private void |
itsmry(double[] d,
int[] iv,
int p,
double[] v,
double[] x) |
|
private void |
linvrt(int n,
double[] lin,
double[] l) |
|
private void |
litvmu(int n,
double[] x,
double[] l,
double[] y) |
|
private void |
livmul(int n,
double[] x,
double[] l,
double[] y) |
|
private void |
lmstep(double[] d,
double[] g,
int[] ierr,
int[] ipivot,
int[] ka,
int p,
double[] qtr,
double[] r,
double[] step,
double[] v,
double[] w) |
|
private void |
lsqrt(int n1,
int n,
double[] l,
double[] a,
int[] irc) |
|
private double |
lsvmin(int p,
double[] l,
double[] x,
double[] y) |
|
private void |
ltsqar(int n,
double[] a,
double[] l) |
|
private void |
main() |
|
private void |
nl2itr(double[] d,
int[] iv,
double[][] j,
int n,
int nn,
int p,
double[] r,
double[] v,
double[] x) |
|
void |
nl2sno() |
|
void |
nl2sol() |
|
private void |
nltest(java.lang.String title,
boolean rstart,
int xscal1,
int xscal2) |
|
private void |
parchk(int[] iv,
int n,
int nn,
int p,
double[] v) |
|
private void |
qapply(int nn,
int n,
int p,
double[][] j,
double[] r,
int ierr) |
|
private void |
qrfact(int nm,
int m,
int n,
double[][] qr,
double[] alpha,
int[] ipivot,
int[] ierr,
int nopivk,
double[] sum) |
|
(package private) double |
reldst(int p,
double[] d,
double[] x,
double[] x0) |
|
private void |
rptmul(int func,
int[] ipivot,
double[][] j,
int nn,
int p,
double[] rd,
double[] x,
double[] y,
double[] z) |
|
private void |
slupdt(double[] a,
double cosmin,
int p,
double size,
double[] step,
double[] u,
double[] w,
double[] wchmtd,
double[] wscale,
double[] y) |
|
private void |
slvmul(int p,
double[] y,
double[] s,
double[] x) |
|
void |
statusMessageNL2sol(int status,
int numParam) |
|
private boolean |
stopx(int[] idummy) |
|
private void |
timestamp() |
|
private double |
v2norm(int p,
double[] x) |
|
private void |
xinit(int p,
double[] x,
int nex) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
testMode
private boolean testMode
-
tiny
private double tiny
2**-1022 = D1MACH(1).
-
epsilon
private double epsilon
-
ix_lsvmin
private double ix_lsvmin
-
uiparm
private int[] uiparm
-
urparm
private double[] urparm
-
Constructor Detail
-
NL2sol
public NL2sol(int n,
int p,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian,
int[] uiparm,
double[] urparm)
-
Method Detail
-
driver
public void driver()
-
nl2sol
public void nl2sol()
-
nl2sno
public void nl2sno()
-
assess
private void assess(double[] d,
int[] iv,
int p,
double[] step,
double[] stlstg,
double[] v,
double[] x,
double[] x0)
-
calcj
public abstract void calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm)
-
calcjTest
private void calcjTest(int n,
int p,
double[] x,
int nfcall,
double[][] jac,
int[] uiparm,
double[] urparm)
-
calcr
public abstract void calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm)
-
calcrTest
private void calcrTest(int n,
int p,
double[] x,
int[] nfcall,
double[] r,
int[] uiparm,
double[] urparm)
-
covclc
private void covclc(int[] covirc,
double[] d,
int[] iv,
double[][] j,
int n,
int nn,
int p,
double[] r,
double[] v,
double[] x)
-
dupdat
private void dupdat(double[] d,
int[] iv,
double[][] j,
int n,
int nn,
int p,
double[] v)
-
gqtstp
private void gqtstp(double[] d,
double[] dig,
double[] dihdi,
int[] ka,
double[] l,
int p,
double[] step,
double[] v,
double[] w)
-
itsmry
private void itsmry(double[] d,
int[] iv,
int p,
double[] v,
double[] x)
-
lmstep
private void lmstep(double[] d,
double[] g,
int[] ierr,
int[] ipivot,
int[] ka,
int p,
double[] qtr,
double[] r,
double[] step,
double[] v,
double[] w)
-
lsqrt
private void lsqrt(int n1,
int n,
double[] l,
double[] a,
int[] irc)
-
nl2itr
private void nl2itr(double[] d,
int[] iv,
double[][] j,
int n,
int nn,
int p,
double[] r,
double[] v,
double[] x)
-
parchk
private void parchk(int[] iv,
int n,
int nn,
int p,
double[] v)
-
qapply
private void qapply(int nn,
int n,
int p,
double[][] j,
double[] r,
int ierr)
-
qrfact
private void qrfact(int nm,
int m,
int n,
double[][] qr,
double[] alpha,
int[] ipivot,
int[] ierr,
int nopivk,
double[] sum)
-
rptmul
private void rptmul(int func,
int[] ipivot,
double[][] j,
int nn,
int p,
double[] rd,
double[] x,
double[] y,
double[] z)
-
slupdt
private void slupdt(double[] a,
double cosmin,
int p,
double size,
double[] step,
double[] u,
double[] w,
double[] wchmtd,
double[] wscale,
double[] y)
-
timestamp
private void timestamp()
������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitFullIntModel2s.html���������������������������������0000775�4231163�4231163�00000050723�14537076045�025763� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitFullIntModel2s (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
arg |
DOCUMENT ME!
|
(package private) double[] |
cyi |
DOCUMENT ME!
|
(package private) double[] |
cyr |
DOCUMENT ME!
|
(package private) int[] |
errorFlag |
DOCUMENT ME!
|
(package private) double |
feq |
DOCUMENT ME!
|
(package private) double |
initialOrder |
DOCUMENT ME!
|
(package private) double |
koff |
DOCUMENT ME!
|
(package private) double |
kon |
DOCUMENT ME!
|
(package private) double |
mk |
DOCUMENT ME!
|
(package private) Bessel |
modelBessel |
DOCUMENT ME!
|
(package private) int[] |
nz |
DOCUMENT ME!
|
(package private) int |
sequenceNumber |
DOCUMENT ME!
|
(package private) double |
time |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.Integration2
DQAGE, DQAGIE, DQAGPE, DQAGSE, DQAWCE, DQAWFE, DQAWOE, DQAWSE, DQK15, DQK21, DQK31, DQK41, DQK51, DQK61, DQNG
-
Constructor Summary
Constructors
| Constructor |
Description |
FitFullIntModel2s(double time,
double kon,
double koff,
double lower,
double upper,
int routine,
double epsabs,
double epsrel,
int limit) |
Creates a new FitFullIntModel2s object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
arg
double arg
DOCUMENT ME!
-
cyi
double[] cyi
DOCUMENT ME!
-
cyr
double[] cyr
DOCUMENT ME!
-
errorFlag
int[] errorFlag
DOCUMENT ME!
-
feq
double feq
DOCUMENT ME!
-
initialOrder
double initialOrder
DOCUMENT ME!
-
koff
double koff
DOCUMENT ME!
-
kon
double kon
DOCUMENT ME!
-
mk
double mk
DOCUMENT ME!
-
modelBessel
Bessel modelBessel
DOCUMENT ME!
-
sequenceNumber
int sequenceNumber
DOCUMENT ME!
-
time
double time
DOCUMENT ME!
-
Constructor Detail
-
FitFullIntModel2s
public FitFullIntModel2s(double time,
double kon,
double koff,
double lower,
double upper,
int routine,
double epsabs,
double epsrel,
int limit)
Creates a new FitFullIntModel2s object.
- Parameters:
time - DOCUMENT ME!kon - DOCUMENT ME!koff - DOCUMENT ME!lower - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!epsabs - DOCUMENT ME!epsrel - DOCUMENT ME!limit - DOCUMENT ME!
���������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.html�������������������������������������������0000775�4231163�4231163�00000063067�14537076047�024410� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmNetworkSnake
extends AlgorithmBase
Copyright (c) 2011, The University of Nottingham
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the distribution.
Neither the name of the University of Nottingham nor the
names of its contributors may be used to endorse or promote products
derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND
ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL THE UNIVERSITY OF NOTTINGHAM BE LIABLE FOR ANY
DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES
(INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND
ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS
SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
This is a port of the original CellSet C# code into Java.
Porting done by William Gandler
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.CoordSysPanning.html�������������������������������������0000775�4231163�4231163�00000057551�14537076053�025473� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.CoordSysPanning (MIPAV API Documentation)
- java.lang.Object
-
- java.awt.event.MouseAdapter
-
- gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
-
Method Summary
-
Methods inherited from class java.awt.event.MouseAdapter
mouseClicked, mouseEntered, mouseExited, mouseMoved, mouseWheelMoved
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/indexValueComparator.html��������������������������������������������0000775�4231163�4231163�00000025671�14537076055�024260� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
-
-
Constructor Detail
-
indexValueComparator
indexValueComparator()
�����������������������������������������������������������������������gov/nih/mipav/model/algorithms/WeibullDistribution.Pair.html����������������������������������������0000775�4231163�4231163�00000034667�14537076057�025030� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WeibullDistribution.Pair (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.WeibullDistribution.Pair<T,U>
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Pair(T t,
U u) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, finalize, getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
Pair
public Pair(T t,
U u)
-
Method Detail
-
getFirst
public T getFirst()
-
getSecond
public U getSecond()
�������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.FontProvider.html����������������������������������������0000775�4231163�4231163�00000041374�14537076053�025030� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.FontProvider (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static java.awt.Font |
getUbuntuMono(float size,
int style) |
Returns the Ubuntu Mono font for the specified font size and style
|
static java.awt.Font |
registerTrueTypeFont(java.net.URL resource) |
Loads a true type font (ttf) from the specified source
and registers it with the local GraphicsEnvironment.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FontProvider
public FontProvider()
-
Method Detail
-
getUbuntuMono
public static java.awt.Font getUbuntuMono(float size,
int style)
Returns the Ubuntu Mono font for the specified font size and style
- Parameters:
size - font sizestyle - font style, Font.PLAIN, Font.BOLD, Font.ITALIC
or BOLD|ITALIC- Returns:
- font of specified size and style
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.PatchExtractor.html��������������������������������������������0000775�4231163�4231163�00000053266�14537076055�024155� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.PatchExtractor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
- Enclosing class:
- libdt
class libdt.PatchExtractor
extends java.lang.Object
Class for extracting spatio-temporal patches (cubes) from a video (online
mode). The extractor works in an "online" mode, where frames are added
sequentially. When enough frames are added a true flag is returned, which
indicates that new patches have been formed. Normalization of patches is
handled efficiently, and access is given to the current video buffer. Also
included is a function for converting a set of labels corresponding to each
patche to an image.
The actual patches will be in different places, depending on the
normalization used: 1) norm_none --> patches are sub-videos of the buffer
(vbuf); 2) norm_zm --> patches are sub-videos of the buffer (vbuf_zm); 3)
norm_zmuv --> patches are local copies. Note that in some cases, the patches
are just references to a sub-videos of the video buffer. Hence, it is not
allowed to modify the patches.
\sa PatchOptions, PatchBatchExtractor
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
java.util.Vector<java.lang.Integer> |
allx |
< offset to center of patch.
|
java.util.Vector<java.lang.Integer> |
ally |
< all x-locations on step grid.
|
javax.vecmath.Point3i |
coff |
< value of curz that will form a new patch.
|
int |
curz |
< current z location of the patches (z of the first frame of the patch).
|
boolean |
flag_zm |
< the set of patches.
|
libdt.Mat |
frame_center |
< flag if vbuf_zm is used.
|
libdt.Mat[] |
frame_patches |
< center frame of the video buffer (reference to vbuf).
|
java.util.Vector<javax.vecmath.Point2i> |
locyx |
< number of columns in the video frame.
|
java.util.Vector<java.lang.Boolean> |
locyx_mask |
< (y,x) coordinates of top-left of each patch.
|
int |
locz |
< patch mask depending on pixel variance.
|
int |
nextz |
< z location for next frame added.
|
java.util.Vector<libdt.Mat[]> |
patches |
< video buffer w/o mean [vrows,vcols,patopt.win.z] type=OPT_MAT_TYPE.
|
libdt.PatchOptions |
patopt |
fill type for generating images from patch labels.
|
libdt.Mat[] |
vbuf |
< all y-locations on step grid.
|
libdt.Mat[] |
vbuf_zm |
< video buffer to store current frames [vrows,vcols,patopt.win.z]
type=OPT_MAT_TYPE.
|
int |
vcols |
< options for extracting patches.
|
int |
vrows |
< options for extracting patches.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
vbuf_zm
public libdt.Mat[] vbuf_zm
< video buffer to store current frames [vrows,vcols,patopt.win.z]
type=OPT_MAT_TYPE.
-
patches
public java.util.Vector<libdt.Mat[]> patches
< video buffer w/o mean [vrows,vcols,patopt.win.z] type=OPT_MAT_TYPE.
-
flag_zm
public boolean flag_zm
< the set of patches.
-
Constructor Detail
-
PatchExtractor
public PatchExtractor(libdt.PatchOptions patopt,
int vrows,
int vcols)
< center frames of the video buffer (reference to vbuf).
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMaximumLikelihoodIteratedBlindDeconvolution.html������������0000775�4231163�4231163�00000202526�14537076047�032615� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMaximumLikelihoodIteratedBlindDeconvolution (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMaximumLikelihoodIteratedBlindDeconvolution(ModelImage kSrcImg,
int iIterations,
int iProgress,
float fObjectiveNumericalAperature,
float fWavelength,
float fRefractiveIndex,
boolean bUseConstraints,
int[] newExtents,
boolean doResample) |
Creates a new AlgorithmMaximumLikelihoodIteratedBlindDeconvolution object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private ModelImage |
calc(ModelImage kReturn,
ModelImage kImage1,
ModelImage kImage2,
int iType) |
Performs a AlgorithmImageCalculator calculation on the two input images.
|
private void |
cleanUp() |
Dispose of temporary images after the deconvolution process is completed:
|
private ModelImage |
constraints(ModelImage kImagePSF) |
Applies constraints to the input image kImage and writes the constrained values into the m_kPSFImage.
|
private ModelImage |
convertFromGray(ModelImage kRed,
ModelImage kGreen,
ModelImage kBlue) |
Called after the deconvolution algorithm is run.
|
private ModelImage |
convertToGray(ModelImage kImage) |
Convert the input image, kImage, to a grayscale image using the AlgorithmRGBtoGray.
|
private ModelImage |
convolve(ModelImage kImage1,
ModelImage kImage2,
float fNoise) |
Convolves two image by computing the fast fourier transforms of each image, multiplying the ffts and then
computing the inverse fft of the result:
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
private ModelImage |
fft(ModelImage kImageFFT,
ModelImage kImage,
int iDir) |
Computes the fft of the input image, returns the fft.
|
void |
finalize() |
Prepares this class for destruction.
|
ModelImage |
getPSFImage() |
Returns the point spread function image.
|
ModelImage |
getReconstructedImage() |
Returns the reconstructed image:
|
private void |
initConstraints() |
Initializes the constraint variables for the PSF deconvolution, based on the microscope parameters (numerical
aperature, wavelength, and refractive index).
|
private void |
initPSF(int iNumberDimensions,
int[] aiExtents) |
Initialize the first PSF guess as a 3x3 Gaussian.
|
private ModelImage |
mirror(ModelImage kImage) |
Does a mirror operation on an image, so that x, y, and z values are mirrored Calls JDialogFlip.
|
private ModelImage |
resample(ModelImage kImage,
int[] newExtents) |
|
void |
runAlgorithm() |
Starts the program.
|
private ModelImage |
runDeconvolution(ModelImage kSource,
ModelImage kEstimate,
ModelImage kPSF,
boolean bCopy) |
Runs the deconvolution algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
m_aiUnits
private int[] m_aiUnits
DOCUMENT ME!
-
m_fRadius
private float m_fRadius
DOCUMENT ME!
-
m_iDimX
private int m_iDimX
Constraint parameters:.
-
m_iDimY
private int m_iDimY
DOCUMENT ME!
-
m_iDimZ
private int m_iDimZ
DOCUMENT ME!
-
m_kSourceRed
private ModelImage m_kSourceRed
For color images: the source is converted to gray for the deconvolution. Once the estimate and psf are found,
each component is reconstructed.
-
Constructor Detail
-
AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
public AlgorithmMaximumLikelihoodIteratedBlindDeconvolution(ModelImage kSrcImg,
int iIterations,
int iProgress,
float fObjectiveNumericalAperature,
float fWavelength,
float fRefractiveIndex,
boolean bUseConstraints,
int[] newExtents,
boolean doResample)
Creates a new AlgorithmMaximumLikelihoodIteratedBlindDeconvolution object.
- Parameters:
kSrcImg - the input image to be reconstructediIterations - the number of times to iterate in the deconvolutioniProgress - Display deconvolved image every iProgress imagesfObjectiveNumericalAperature - the numerical aperature of the imaging lensefWavelength - the reflected or fluorescing lightfRefractiveIndex - the index of refraction for the samplebUseConstraints - When true, the lens NA, wavelength, and refractive index are used in the
deconvolution process
-
Method Detail
-
calc
private ModelImage calc(ModelImage kReturn,
ModelImage kImage1,
ModelImage kImage2,
int iType)
Performs a AlgorithmImageCalculator calculation on the two input images. Used here to either multiply or divide
two images.
- Parameters:
kReturn - DOCUMENT ME!kImage1 - the first input imagekImage2 - the second input imageiType - the type of calculation (multiply or divide)- Returns:
- kReturn, the result of the image calculation
-
constraints
private ModelImage constraints(ModelImage kImagePSF)
Applies constraints to the input image kImage and writes the constrained values into the m_kPSFImage. Constraints
are the following: 2). Hourglass constraint 3). Bandlimit and missing cone constraint 4). Nonnegativity
constraint 1). Unit summation constraint
- Parameters:
kImagePSF - the unconstrained PSFImage- Returns:
- DOCUMENT ME!
-
convertFromGray
private ModelImage convertFromGray(ModelImage kRed,
ModelImage kGreen,
ModelImage kBlue)
Called after the deconvolution algorithm is run. The deconvolution processes the grayscale image. Once the
estimated and psf images are calculated, they are used to reconstruct the red, green, and blue channels
separately, which are then recombined into a color image.
- Parameters:
kRed - the reconstructed red imagekGreen - the reconstructed green imagekBlue - the reconstructed blue image- Returns:
- the RGB image
-
convertToGray
private ModelImage convertToGray(ModelImage kImage)
Convert the input image, kImage, to a grayscale image using the AlgorithmRGBtoGray. The deconvolution is done on
the grayscale image, however after deconvolution, the original color values are reconstructed from the psf and
grayscale estimate.
- Parameters:
kImage - the color image to conver to grayscale:- Returns:
- the converted grayscale image
-
convolve
private ModelImage convolve(ModelImage kImage1,
ModelImage kImage2,
float fNoise)
Convolves two image by computing the fast fourier transforms of each image, multiplying the ffts and then
computing the inverse fft of the result:
- Parameters:
kImage1 - the first input imagekImage2 - the second input imagefNoise - amount of Noise to add when the result of the convolution is going to be the denominator in the
next equation to avoid divide by zero errors.- Returns:
- kResult, the result of convolving the two images
-
fft
private ModelImage fft(ModelImage kImageFFT,
ModelImage kImage,
int iDir)
Computes the fft of the input image, returns the fft. Calls AlgorithmFFT.
- Parameters:
kImageFFT - DOCUMENT ME!kImage - the input imageiDir - forward fft when iDir = 1, inverse fft when iDir = -1- Returns:
- kResult, the fft of kImage
-
initConstraints
private void initConstraints()
Initializes the constraint variables for the PSF deconvolution, based on the microscope parameters (numerical
aperature, wavelength, and refractive index). The pixel resolutions are also converted to nanometers -- the units
for wavelength.
-
initPSF
private void initPSF(int iNumberDimensions,
int[] aiExtents)
Initialize the first PSF guess as a 3x3 Gaussian.
- Parameters:
iNumberDimensions - iNumberDimensions, the dimensions of the dataaiExtents - aiExtents, the ranges in each dimension
-
mirror
private ModelImage mirror(ModelImage kImage)
Does a mirror operation on an image, so that x, y, and z values are mirrored Calls JDialogFlip.
- Parameters:
kImage - the input image- Returns:
- DOCUMENT ME!
-
runDeconvolution
private ModelImage runDeconvolution(ModelImage kSource,
ModelImage kEstimate,
ModelImage kPSF,
boolean bCopy)
Runs the deconvolution algorithm.
- Parameters:
kSource - the original image datakEstimate - the initial estimated guess at the reconstructed imagekPSF - the initial point spread function guessbCopy - when true the new estimates after interating are copied back into the data members.- Returns:
- , the resulting estimated image
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.Data.html������������������������������������������0000775�4231163�4231163�00000100576�14537076056�024445� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.Data (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.Data
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Data() |
|
Data(java.util.Vector<java.lang.String> variable_names,
int num_rows,
int num_cols) |
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
addNoSplitVariable(int varID) |
|
void |
addSnpData(char[] snp_data,
int num_cols_snp) |
|
void |
dispose() |
|
abstract double |
get(int row,
int column) |
|
void |
getAllValues(java.util.Vector<java.lang.Double> all_values,
java.util.Vector<java.lang.Integer> sampleIDs,
int varID) |
|
int |
getIndex(int row,
int col) |
|
java.util.Vector<java.lang.Boolean> |
getIsOrderedVariable() |
|
int |
getMaxNumUniqueValues() |
|
void |
getMinMaxValues(double[] min,
double[] max,
java.util.Vector<java.lang.Integer> sampleIDs,
int varID) |
|
java.util.Vector<java.lang.Integer> |
getNoSplitVariables() |
|
int |
getNumCols() |
|
int |
getNumRows() |
|
int |
getNumUniqueDataValues(int varID) |
|
int |
getPermutedSampleID(int sampleID) |
|
double |
getUniqueDataValue(int varID,
int index) |
|
int |
getUnpermutedVarID(int varID) |
|
int |
getVariableID(java.lang.String variable_name) |
|
java.util.Vector<java.lang.String> |
getVariableNames() |
|
boolean |
isOrderedVariable(int varID) |
|
boolean |
loadFromFile(java.lang.String filename) |
|
boolean |
loadFromFileOther(java.io.BufferedReader input_file,
java.lang.String header_line,
java.lang.String separator) |
|
void |
permuteSampleIDs(java.util.Random random) |
|
abstract void |
reserveMemory() |
|
abstract void |
set(int col,
int row,
double value,
boolean[] error) |
|
void |
setIsOrderedVariable(java.util.Vector<java.lang.Boolean> is_ordered_variable) |
|
void |
setIsOrderedVariableString(java.util.Vector<java.lang.String> unordered_variable_names) |
|
void |
sort() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_rows
protected int num_rows
-
num_cols
protected int num_cols
-
Method Detail
-
dispose
public void dispose()
-
getMinMaxValues
public void getMinMaxValues(double[] min,
double[] max,
java.util.Vector<java.lang.Integer> sampleIDs,
int varID)
-
getNumCols
public int getNumCols()
-
getNumRows
public int getNumRows()
����������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BinaryCostFunction4.html�����������������������������0000775�4231163�4231163�00000031122�14537076053�027050� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BinaryCostFunction4 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
BinaryCostFunction4(int num_residuals,
int parameter_block1_size,
int parameter_block2_size) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.CL_data.html��������������������������������������������������0000775�4231163�4231163�00000026775�14537076056�022355� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.CL_data (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.CL_data
-
-
Constructor Summary
Constructors
| Constructor |
Description |
CL_data() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_devices
int num_devices
-
image_format
int image_format
���gov/nih/mipav/model/algorithms/CeresSolver2.indexArrayArrayItem.html��������������������������������0000775�4231163�4231163�00000030612�14537076052�026351� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.indexArrayArrayItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
array1 |
|
private double[] |
array2 |
|
private int |
index |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexArrayArrayItem(int index,
double[] array1,
double[] array2) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
array1
private double[] array1
-
array2
private double[] array2
-
Method Detail
-
getIndex
public int getIndex()
����������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlCovDetExtremum3.html����������������������������������������0000775�4231163�4231163�00000026631�14537076054�024643� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlCovDetExtremum3 (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum3
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float |
edgeScore |
|
(package private) float |
peakScore |
|
(package private) float |
x |
|
(package private) int |
xi |
|
(package private) float |
y |
|
(package private) int |
yi |
|
(package private) float |
z |
|
(package private) int |
zi |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
peakScore
float peakScore
-
edgeScore
float edgeScore
-
Constructor Detail
-
VlCovDetExtremum3
VlCovDetExtremum3()
�������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.MyThreeParameterCostFunctor.html�������������������������0000775�4231163�4231163�00000023356�14537076052�027762� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.MyThreeParameterCostFunctor (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.MyThreeParameterCostFunctor
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmRegionMergingViaBoundaryMelting.html������������������������0000775�4231163�4231163�00000057006�14537076050�030203� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegionMergingViaBoundaryMelting (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
t1 |
|
private double |
t2 |
|
private double |
t3 |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmRegionMergingViaBoundaryMelting
public AlgorithmRegionMergingViaBoundaryMelting(ModelImage destImg,
ModelImage srcImg,
double t1,
double t2,
double t3)
Creates a new AlgorithmRegionMergingViaBoundaryMelting object.
- Parameters:
destImg - srcImg - source image modelt1 - t2 - t3 -
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTalairachTransform.html�������������������������������������0000775�4231163�4231163�00000160211�14537076050�025540� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTalairachTransform (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmTalairachTransform
extends AlgorithmBase
Performs original to ACPC, original to Talairach, ACPC to original, ACPC to Talairach, Talairach to original, or
Talairach to ACPC transformation.
- Version:
- May 26, 2005
- Author:
- Pilou Bazin
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
computeBSplineImage(float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr) |
DOCUMENT ME!
|
private void |
computeCubicLagrangian(float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr) |
DOCUMENT ME!
|
private void |
computeHepticLagrangian(float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr) |
DOCUMENT ME!
|
private void |
computeNearestImage(double[] img,
float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr) |
Transforms and resamples volume using nearest neighbor interpolation.
|
private void |
computeQuinticLagrangian(float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr) |
DOCUMENT ME!
|
private void |
computeTrilinearImage(double[] img,
float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr) |
Transforms and resamples volume using trilinear interpolation.
|
private void |
computeWSincImage(float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr) |
DOCUMENT ME!
|
void |
disposeLocal() |
Dispose of local variables that may be taking up lots of room.
|
private VOI |
generateVOI(VOI obj,
java.util.BitSet mask) |
extract a VOI from a binary mask image.
|
void |
runAlgorithm() |
DOCUMENT ME!
|
private void |
transformTalairachVolume(double[] img,
float[] result) |
computes the selected Talairach transform.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
doClip
boolean doClip
DOCUMENT ME!
-
doVOI
boolean doVOI
DOCUMENT ME!
-
interpolation
int interpolation
DOCUMENT ME!
-
suffix
java.lang.String suffix
DOCUMENT ME!
-
transformType
int transformType
DOCUMENT ME!
-
nix
private int nix
DOCUMENT ME!
-
niy
private int niy
DOCUMENT ME!
-
niz
private int niz
DOCUMENT ME!
-
nrx
private int nrx
DOCUMENT ME!
-
nry
private int nry
DOCUMENT ME!
-
nrz
private int nrz
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmTalairachTransform
public AlgorithmTalairachTransform(ModelImage destImage,
ModelImage srcImage,
TalairachTransformInfo tInfo,
int transformType,
int interpolation,
boolean doClip,
boolean doVOI)
Creates a new AlgorithmTalairachTransform object.
- Parameters:
destImage - DOCUMENT ME!srcImage - DOCUMENT ME!tInfo - DOCUMENT ME!transformType - DOCUMENT ME!interpolation - DOCUMENT ME!doClip - DOCUMENT ME!doVOI - DOCUMENT ME!
-
Method Detail
-
computeBSplineImage
private void computeBSplineImage(float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr)
DOCUMENT ME!
- Parameters:
xi - DOCUMENT ME!yi - DOCUMENT ME!zi - DOCUMENT ME!result - DOCUMENT ME!xr - DOCUMENT ME!yr - DOCUMENT ME!zr - DOCUMENT ME!
-
computeCubicLagrangian
private void computeCubicLagrangian(float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr)
DOCUMENT ME!
- Parameters:
xi - DOCUMENT ME!yi - DOCUMENT ME!zi - DOCUMENT ME!result - DOCUMENT ME!xr - DOCUMENT ME!yr - DOCUMENT ME!zr - DOCUMENT ME!
-
computeHepticLagrangian
private void computeHepticLagrangian(float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr)
DOCUMENT ME!
- Parameters:
xi - DOCUMENT ME!yi - DOCUMENT ME!zi - DOCUMENT ME!result - DOCUMENT ME!xr - DOCUMENT ME!yr - DOCUMENT ME!zr - DOCUMENT ME!
-
computeNearestImage
private void computeNearestImage(double[] img,
float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
img - DOCUMENT ME!xi - DOCUMENT ME!yi - DOCUMENT ME!zi - DOCUMENT ME!result - DOCUMENT ME!xr - DOCUMENT ME!yr - DOCUMENT ME!zr - DOCUMENT ME!
-
computeQuinticLagrangian
private void computeQuinticLagrangian(float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr)
DOCUMENT ME!
- Parameters:
xi - DOCUMENT ME!yi - DOCUMENT ME!zi - DOCUMENT ME!result - DOCUMENT ME!xr - DOCUMENT ME!yr - DOCUMENT ME!zr - DOCUMENT ME!
-
computeTrilinearImage
private void computeTrilinearImage(double[] img,
float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr)
Transforms and resamples volume using trilinear interpolation.
- Parameters:
img - DOCUMENT ME!xi - DOCUMENT ME!yi - DOCUMENT ME!zi - DOCUMENT ME!result - DOCUMENT ME!xr - DOCUMENT ME!yr - DOCUMENT ME!zr - DOCUMENT ME!
-
computeWSincImage
private void computeWSincImage(float xi,
float yi,
float zi,
float[] result,
int xr,
int yr,
int zr)
DOCUMENT ME!
- Parameters:
xi - DOCUMENT ME!yi - DOCUMENT ME!zi - DOCUMENT ME!result - DOCUMENT ME!xr - DOCUMENT ME!yr - DOCUMENT ME!zr - DOCUMENT ME!
-
transformTalairachVolume
private void transformTalairachVolume(double[] img,
float[] result)
computes the selected Talairach transform.
- Parameters:
img - the original imageresult - the transformed image
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd6.html���������������������������������������0000775�4231163�4231163�00000030465�14537076055�025012� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd6 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd6(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd6
public Fitqd6(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Pair.html������������������������������������������������0000775�4231163�4231163�00000035744�14537076054�023307� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Pair (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Pair<T1,T2>
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Pair(T1 first,
T2 second) |
Creates a pair
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, finalize, getClass, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
first
public final T1 first
-
second
public final T2 second
-
Method Detail
-
hashCode
public int hashCode()
- Overrides:
hashCode in class java.lang.Object
����������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.distanceIntensityComparator.html�����������������������0000775�4231163�4231163�00000027420�14537076045�030244� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.distanceIntensityComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmFRAP.distanceIntensityComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.Ymean_type.html������������������������������������������������0000775�4231163�4231163�00000037610�14537076055�023327� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.Ymean_type (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Enum<libdt.Ymean_type>
-
- gov.nih.mipav.model.algorithms.libdt.Ymean_type
-
- All Implemented Interfaces:
java.io.Serializable, java.lang.Comparable<libdt.Ymean_type>
- Enclosing class:
- libdt
public static enum libdt.Ymean_type
extends java.lang.Enum<libdt.Ymean_type>
Options for modeling the observation mean, Ymean.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
Ymean_code |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
Ymean_type(int Ymean_code) |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Enum Constant Detail
-
NONZERO_YMEAN
public static final libdt.Ymean_type NONZERO_YMEAN
< assume observations are already zero-mean, i.e. Ymean=0.
-
Method Detail
-
valueOf
public static libdt.Ymean_type valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGraphBasedSegmentation.uni_elt.html�������������������������0000775�4231163�4231163�00000026345�14537076046�030006� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGraphBasedSegmentation.uni_elt (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.uni_elt
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
p |
|
private int |
rank |
|
private int |
size |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
uni_elt() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getsize
public int getsize()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.SplitRule.html�������������������������������������0000775�4231163�4231163�00000037043�14537076057�025516� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.SplitRule (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
SplitRule() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
SplitRule
private SplitRule()
-
Method Detail
-
valueOf
public static StochasticForests.SplitRule valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.gauss1FittingCostFunction.html�����������������������0000775�4231163�4231163�00000034062�14537076054�030071� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.gauss1FittingCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������././@LongLink���������������������������������������������������������������������������������������0000644�0000000�0000000�00000000153�00000000000�011602� L����������������������������������������������������������������������������������������������������ustar �root����������������������������root�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback.InnerClass.html����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback.InnerClas0000775�4231163�4231163�00000025246�14537076053�034642� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback.InnerClass (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
InnerClass
public InnerClass()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Erfinv.ppnd16_impl.html����������������������������������������������0000775�4231163�4231163�00000064755�14537076054�023512� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Erfinv.ppnd16_impl (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
a0 |
|
(package private) double |
a1 |
|
(package private) double |
a2 |
|
(package private) double |
a3 |
|
(package private) double |
a4 |
|
(package private) double |
a5 |
|
(package private) double |
a6 |
|
(package private) double |
a7 |
|
(package private) double |
b1 |
|
(package private) double |
b2 |
|
(package private) double |
b3 |
|
(package private) double |
b4 |
|
(package private) double |
b5 |
|
(package private) double |
b6 |
|
(package private) double |
b7 |
|
(package private) double |
c0 |
|
(package private) double |
c1 |
|
(package private) double |
c2 |
|
(package private) double |
c3 |
|
(package private) double |
c4 |
|
(package private) double |
c5 |
|
(package private) double |
c6 |
|
(package private) double |
c7 |
|
(package private) double |
d1 |
|
(package private) double |
d2 |
|
(package private) double |
d3 |
|
(package private) double |
d4 |
|
(package private) double |
d5 |
|
(package private) double |
d6 |
|
(package private) double |
d7 |
|
(package private) double |
e0 |
|
(package private) double |
e1 |
|
(package private) double |
e2 |
|
(package private) double |
e3 |
|
(package private) double |
e4 |
|
(package private) double |
e5 |
|
(package private) double |
e6 |
|
(package private) double |
e7 |
|
(package private) double |
f1 |
|
(package private) double |
f2 |
|
(package private) double |
f3 |
|
(package private) double |
f4 |
|
(package private) double |
f5 |
|
(package private) double |
f6 |
|
(package private) double |
f7 |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ppnd16_impl
ppnd16_impl()
�������������������gov/nih/mipav/model/algorithms/AlgorithmTreT2.html��������������������������������������������������0000775�4231163�4231163�00000202613�14537076050�022717� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTreT2 (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmTreT2
extends AlgorithmTProcess
This class is adapted from the ImageJ version originally written by Sean Deoni while working at the National
Institutes of Health. This class performs T2 calculations given any number of SPGR images.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmTProcess
computeDataThreads, do4D, Gaussian, hardNoiseThreshold, loadDataThreads, lowerLeftCorner, lowerRightCorner, MAX_PROCESS, noiseScale, nSlices, processDataThreads, upperLeftCorner, upperRightCorner, useHardThresholding, useSmartThresholding
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmTreT2(ModelImage destImage,
ModelImage srcImage,
JDialogTreT2 dialog,
double[] treFAPhase0,
double[] treFAPhase180,
java.lang.String[] ssfpImageNamesPhase0,
java.lang.String[] ssfpImageNamesPhase180,
java.lang.String t1ImageName,
java.lang.String b1ImageName,
double[] simplexLineValues,
double[] simplexResiduals,
double[] simplexCentre,
double[] reflection,
double[] expansion,
double[] contraction,
double[] shrink,
double[][] simplex,
double[] twoPSimplexLineValues,
double[] twoPSimplexResiduals,
double[] twoPSimplexCentre,
double[] twoPReflection,
double[] twoPExpansion,
double[] twoPContraction,
double[] twoPShrink,
double[][] twoPSimplex,
int[] bestToWorst,
java.lang.String[] wList) |
|
AlgorithmTreT2(JDialogTreT2 dialog,
double[] treFAPhase0,
double[] treFAPhase180,
java.lang.String[] ssfpImageNamesPhase0,
java.lang.String[] ssfpImageNamesPhase180,
java.lang.String t1ImageName,
java.lang.String b1ImageName,
double[] simplexLineValues,
double[] simplexResiduals,
double[] simplexCentre,
double[] reflection,
double[] expansion,
double[] contraction,
double[] shrink,
double[][] simplex,
double[] twoPSimplexLineValues,
double[] twoPSimplexResiduals,
double[] twoPSimplexCentre,
double[] twoPReflection,
double[] twoPExpansion,
double[] twoPContraction,
double[] twoPShrink,
double[][] twoPSimplex,
int[] bestToWorst,
java.lang.String[] wList) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double |
calculate2PResiduals(double[] simplexLineValues,
double b0,
double t1,
double tr,
double[] Signal,
double[] sina,
double[] cosa,
double[] phaseIncrements,
int N) |
|
void |
calculateBestToWorst(double[] simplexResiduals,
int[] bestToWorst,
int numVertices) |
|
double |
calculateResiduals(double[] simplexLineValues,
double t1,
double tr,
double[] Signal,
double[] sina,
double[] cosa,
double[] phaseIncrements,
int N) |
|
void |
calculateT2with0Phase() |
|
void |
calculateT2with180Phase() |
|
void |
calculateT2withApproximateModeling() |
|
void |
calculateT2withFullModeling() |
|
double |
calculateTwoPResiduals(double[] simplexLineValues,
double b0,
double t1,
double tr,
double[] Signal,
double[] sina,
double[] cosa,
double[] phaseIncrements,
int N) |
|
protected void |
computeProcessors() |
|
protected void |
displayImages() |
|
void |
finalize() |
Prepares this class for destruction.
|
ModelImage |
getB0ResultStack() |
|
ModelImage |
getM0ResultStack() |
|
ModelImage |
getR2ResultStack() |
|
ModelImage |
getT2ResultStack() |
|
void |
reduceB0Field(double[][] b0Field,
double resonancePeriod,
int width,
int height) |
|
void |
resetSliceToZero(double[][] field,
int width,
int height) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
smoothField(double[][] field,
float[][] fieldValues,
int width,
int height,
int k) |
|
void |
smoothFieldB(double[][] field,
int width,
int height) |
|
void |
swapMatrixForVector(double[][] fieldField,
float[][] fieldValues,
int k,
int width,
int height) |
|
void |
swapMatrixForVectorB(double[][] fieldField,
float[][] fieldValues,
int k,
int width,
int height) |
|
void |
threePDownHillSimplex(double[] optimization,
double[] initialGuess,
double t1,
double tr,
double[] ssfpSampleData,
double[] sina,
double[] cosa,
double[] phaseIncrements,
int N) |
|
void |
twoPDownHillSimplex(double[] optimization,
double[] initialGuess,
double b0,
double t1,
double tr,
double[] ssfpSampleData,
double[] sina,
double[] cosa,
double[] phaseIncrements,
int N) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
shrink
private double[] shrink
-
dialog
private final JDialogTreT2 dialog
The dialog for accessing GUI specific information, also set during scripting.
-
Constructor Detail
-
AlgorithmTreT2
public AlgorithmTreT2(JDialogTreT2 dialog,
double[] treFAPhase0,
double[] treFAPhase180,
java.lang.String[] ssfpImageNamesPhase0,
java.lang.String[] ssfpImageNamesPhase180,
java.lang.String t1ImageName,
java.lang.String b1ImageName,
double[] simplexLineValues,
double[] simplexResiduals,
double[] simplexCentre,
double[] reflection,
double[] expansion,
double[] contraction,
double[] shrink,
double[][] simplex,
double[] twoPSimplexLineValues,
double[] twoPSimplexResiduals,
double[] twoPSimplexCentre,
double[] twoPReflection,
double[] twoPExpansion,
double[] twoPContraction,
double[] twoPShrink,
double[][] twoPSimplex,
int[] bestToWorst,
java.lang.String[] wList)
-
AlgorithmTreT2
public AlgorithmTreT2(ModelImage destImage,
ModelImage srcImage,
JDialogTreT2 dialog,
double[] treFAPhase0,
double[] treFAPhase180,
java.lang.String[] ssfpImageNamesPhase0,
java.lang.String[] ssfpImageNamesPhase180,
java.lang.String t1ImageName,
java.lang.String b1ImageName,
double[] simplexLineValues,
double[] simplexResiduals,
double[] simplexCentre,
double[] reflection,
double[] expansion,
double[] contraction,
double[] shrink,
double[][] simplex,
double[] twoPSimplexLineValues,
double[] twoPSimplexResiduals,
double[] twoPSimplexCentre,
double[] twoPReflection,
double[] twoPExpansion,
double[] twoPContraction,
double[] twoPShrink,
double[][] twoPSimplex,
int[] bestToWorst,
java.lang.String[] wList)
-
Method Detail
-
twoPDownHillSimplex
public void twoPDownHillSimplex(double[] optimization,
double[] initialGuess,
double b0,
double t1,
double tr,
double[] ssfpSampleData,
double[] sina,
double[] cosa,
double[] phaseIncrements,
int N)
-
threePDownHillSimplex
public void threePDownHillSimplex(double[] optimization,
double[] initialGuess,
double t1,
double tr,
double[] ssfpSampleData,
double[] sina,
double[] cosa,
double[] phaseIncrements,
int N)
-
calculateTwoPResiduals
public double calculateTwoPResiduals(double[] simplexLineValues,
double b0,
double t1,
double tr,
double[] Signal,
double[] sina,
double[] cosa,
double[] phaseIncrements,
int N)
-
calculateResiduals
public double calculateResiduals(double[] simplexLineValues,
double t1,
double tr,
double[] Signal,
double[] sina,
double[] cosa,
double[] phaseIncrements,
int N)
-
calculate2PResiduals
public double calculate2PResiduals(double[] simplexLineValues,
double b0,
double t1,
double tr,
double[] Signal,
double[] sina,
double[] cosa,
double[] phaseIncrements,
int N)
-
smoothField
public void smoothField(double[][] field,
float[][] fieldValues,
int width,
int height,
int k)
-
swapMatrixForVector
public void swapMatrixForVector(double[][] fieldField,
float[][] fieldValues,
int k,
int width,
int height)
-
swapMatrixForVectorB
public void swapMatrixForVectorB(double[][] fieldField,
float[][] fieldValues,
int k,
int width,
int height)
���������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LocalParameterization.html�������������������������������0000775�4231163�4231163�00000040076�14537076052�026641� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LocalParameterization (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LocalParameterization
-
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
abstract boolean |
ComputeJacobian(double[] x,
int x_start,
double[][] jacobian) |
|
abstract int |
GlobalSize() |
|
abstract int |
LocalSize() |
|
boolean |
MultiplyByJacobian(double[] x,
int num_rows,
double[][] global_matrix,
double[][] local_matrix) |
|
boolean |
MultiplyByJacobian(double[] x,
int num_rows,
double[] global_matrix,
double[] local_matrix) |
|
abstract boolean |
Plus(double[] x,
double[] delta,
double[] x_plus_delta) |
|
abstract boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LocalParameterization
LocalParameterization()
-
Method Detail
-
MultiplyByJacobian
public boolean MultiplyByJacobian(double[] x,
int num_rows,
double[][] global_matrix,
double[][] local_matrix)
-
MultiplyByJacobian
public boolean MultiplyByJacobian(double[] x,
int num_rows,
double[] global_matrix,
double[] local_matrix)
-
Plus
public abstract boolean Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Rat43CostFunction.html���������������������������0000775�4231163�4231163�00000034012�14537076052�027133� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Rat43CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/indexValue.html������������������������������������������������������0000775�4231163�4231163�00000026205�14537076055�022222� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
indexValue (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.indexValue
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValue(int index,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
private double value
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public double getValue()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CellLessThan.html����������������������������������������0000775�4231163�4231163�00000025635�14537076051�024674� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CellLessThan (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CellLessThan
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
-
-
Constructor Detail
-
CellLessThan
CellLessThan()
���������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens16.html��������������������������������0000775�4231163�4231163�00000030445�14537076055�026256� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens16 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens16(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitPiessens16 object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens16
public FitPiessens16(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitPiessens16 object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.ExtentionMath.html�����������������������������0000775�4231163�4231163�00000023215�14537076047�027165� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.ExtentionMath (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ExtentionMath
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ExtentionMath
public ExtentionMath()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmConstPowellOpt3D.html���������������������������������������0000775�4231163�4231163�00000136441�14537076044�025112� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConstPowellOpt3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
bracketBound, costFunction, finalPoint, fromOrigin, functionAtBest, maxIterations, myProgressBar, nDims, parent, point, progressBegin, progressMax, start, success, tolerance, toOrigin, trLimits
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmConstPowellOpt3D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector3f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] initial,
double[] tols,
int maxIter,
int bracketBound) |
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
TransMatrixd |
convertToMatrix(double[] vector) |
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
|
TransMatrixd |
convertToMatrixHalf(double[] vector) |
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
|
TransMatrixd |
convertToMatrixMidsagittal(double[] vector) |
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
|
double[] |
getFinal() |
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
|
double[] |
getFinal(double[] point) |
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
|
double[] |
getFinal(float sample) |
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
|
TransMatrixd |
getMatrix() |
Accessor that returns the matrix representing the best transformation.
|
TransMatrixd |
getMatrix(double sample) |
Accessor that returns the matrix representing the best transformation.
|
TransMatrixd |
getMatrixHalf() |
Accessor that returns the matrix representing the best tranformation.
|
TransMatrixd |
getMatrixHalf(double sample) |
Accessor that returns the matrix representing the best tranformation.
|
TransMatrixd |
getMatrixMidsagittal() |
Accessor that returns the matrix representing the best tranformation.
|
TransMatrixd |
getMatrixMidsagittal(double sample) |
Accessor that returns the matrix representing the best tranformation.
|
void |
measureCost() |
Calls cost function with point and saves result in functionAtBest.
|
void |
runAlgorithm() |
Runs Powell's method.
|
void |
setInitialPoint(double[] initial) |
Sets the initial point to the value passed in.
|
void |
setLimits(float[][] limits) |
Sets the limits on rotation and translation.
|
void |
setProgressBar(ViewJProgressBar progress,
int begin,
int max) |
Accessor that sets the progress bar so it can be updated from here.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmConstPowellOpt3D
public AlgorithmConstPowellOpt3D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector3f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] initial,
double[] tols,
int maxIter,
int bracketBound)
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- Parameters:
parent - Algorithm that called this optimization.com - Center of Mass of the input image.degreeOfFreedom - Degree of freedom for transformation (must be 3, 4, 6, 7, 9, or 12).costFunc - Cost function to use.initial - Initial point to start from, length of 12.tols - Tolerance for each dimension (tols.length == degreeOfFreedom).maxIter - Maximum number of iterations.bracketBound - DOCUMENT ME!
-
Method Detail
-
convertToMatrix
public TransMatrixd convertToMatrix(double[] vector)
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix. The length of the vector should be equal to the global variable nDims, which in turn was initialized by
the degrees of freedom originally sent to this algorithm. Therefore, if there are 3 degrees of freedom, we set
only the translations; 4 means translation and global scaling; 6 means rotation and translation; 7 means
rotation, translation, and global scaling; 9 means rotation, translation, and scaling; and 12 means rotation,
translation, scaling, and skewing.
- Specified by:
convertToMatrix in class AlgorithmConstPowellOptBase- Parameters:
vector - Vector that represented a "point" in the algorithm which needs to be converted to a matrix.- Returns:
- The transformation matrix created from the vector.
-
convertToMatrixHalf
public TransMatrixd convertToMatrixHalf(double[] vector)
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix. The length of the vector should be equal to the global variable nDims, which in turn was initialized by
the degrees of freedom originally sent to this algorithm. Therefore, if there are 3 degrees of freedom, we set
only the translations; 4 means translation and global scaling; 6 means rotation and translation; 7 means
rotation, translation, and global scaling; 9 means rotation, translation, and scaling; and 12 means rotation,
translation, scaling, and skewing.
- Parameters:
vector - Vector that represented a "point" in the algorithm which needs to be converted to a matrix.- Returns:
- The transformation matrix created from the vector.
-
convertToMatrixMidsagittal
public TransMatrixd convertToMatrixMidsagittal(double[] vector)
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix. The length of the vector should be equal to the global variable nDims, which in turn was initialized by
the degrees of freedom originally sent to this algorithm. Therefore, if there are 3 degrees of freedom, we set
only the translations; 4 means translation and global scaling; 6 means rotation and translation; 7 means
rotation, translation, and global scaling; 9 means rotation, translation, and scaling; and 12 means rotation,
translation, scaling, and skewing.
- Parameters:
vector - Vector that represented a "point" in the algorithm which needs to be converted to a matrix.- Returns:
- The transformation matrix created from the vector.
-
getFinal
public double[] getFinal()
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- Specified by:
getFinal in class AlgorithmConstPowellOptBase- Returns:
- vector representing the best transformation in terms of translations, rotations, scales, and skews.
-
getFinal
public double[] getFinal(double[] point)
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- Specified by:
getFinal in class AlgorithmConstPowellOptBase- Returns:
- vector representing the best transformation in terms of translations, rotations, scales, and skews.
-
getFinal
public double[] getFinal(float sample)
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- Parameters:
sample - the voxel resolution- Returns:
- vector representing the best transformation in terms of translations, rotations, scales, and skews.
-
getMatrix
public TransMatrixd getMatrix(double sample)
Accessor that returns the matrix representing the best transformation. The passed in parameter represents the
resolution (same in all directions and for both input and reference images, since resampled isotropically). Since
the optimization was done in pixel space, not millimeter space, the translation parameters need to be scaled by
the sample value.
- Specified by:
getMatrix in class AlgorithmConstPowellOptBase- Parameters:
sample - the voxel resolution- Returns:
- matrix representing the best transformation.
-
getMatrixHalf
public TransMatrixd getMatrixHalf(double sample)
Accessor that returns the matrix representing the best tranformation. The passed in parameter represents the
resolution (same in all directions and for both input and reference images, since resampled isotropically). Since
the optimization was done in pixel space, not millimeter space, the translation parameters need to be scaled by
the sample value. All of the components of the transformation are halved from the 'best transformation' matrix.
- Parameters:
sample - the voxel resolution- Returns:
- matrix representing the best transformation with its components halved.
-
getMatrixMidsagittal
public TransMatrixd getMatrixMidsagittal()
Accessor that returns the matrix representing the best tranformation. This transformation contains only the z
rotation and the x and y translation, to be used in the midsagittal alignment algorithm.
- Returns:
- matrix representing the best transformation's z rot and x and y trans.
-
getMatrixMidsagittal
public TransMatrixd getMatrixMidsagittal(double sample)
Accessor that returns the matrix representing the best tranformation. The passed in parameter represents the
resolution (same in all directions and for both input and reference images, since resampled isotropically). Since
the optimization was done in pixel space, not millimeter space, the translation parameters need to be scaled by
the sample value. This transformation contains only the z rotation and the x and y translation, to be used in the
midsagittal alignment algorithm.
- Parameters:
sample - the voxel resolution- Returns:
- matrix representing the best transformation's z rot and x and y trans.
-
runAlgorithm
public void runAlgorithm()
Runs Powell's method. Powell's method is a way to find minimums without finding derivatives. Basically, it starts
at some point P in N-dimensional space, proceeds in a direction, and minimizes along that line using golden
search. It then resets the point and minimizes again, until the point moves by less than the tolerance. This
method starts with the initial point defined in the constructor and initial directions of (1 0 ... 0) (0 1 0 ...
) ..., the basis vectors. At the end, "point" is the best point found and functionAtBest is the value at "point".
- Specified by:
runAlgorithm in class AlgorithmBase
-
setProgressBar
public void setProgressBar(ViewJProgressBar progress,
int begin,
int max)
Accessor that sets the progress bar so it can be updated from here.
- Parameters:
progress - DOCUMENT ME!begin - Value of progress bar when sent here.max - Maximum value allowed.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/NLMeans_filt2D.html��������������������������������������������������0000775�4231163�4231163�00000061670�14537076056�022625� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
NLMeans_filt2D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
ksize |
|
(package private) int |
Nlevels |
|
private double |
noise_std |
|
(package private) int |
NoOfBands |
|
private double |
sigmaX |
|
private double |
sigmaY |
|
(package private) java.lang.String |
sorh |
|
private int |
ssize |
|
(package private) java.lang.String |
wname |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
sigmaX
private double sigmaX
-
sigmaY
private double sigmaY
-
noise_std
private double noise_std
-
wname
java.lang.String wname
-
sorh
java.lang.String sorh
-
Constructor Detail
-
NLMeans_filt2D
public NLMeans_filt2D(ModelImage destImage,
ModelImage srcImg,
double sigmaX,
double sigmaY,
int ksize,
int ssize,
double noise_std)
������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitDoubleExponentialNoWholeConstrainedModel.html�������0000775�4231163�4231163�00000042634�14537076045�033252� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitDoubleExponentialNoWholeConstrainedModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
Fit to function - a3 + (1-a3)*[1 - ao*exp(a1*x) - (1 -
a0)*exp(a2*x)].
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
Constructor Detail
-
FitDoubleExponentialNoWholeConstrainedModel
public FitDoubleExponentialNoWholeConstrainedModel(int nPoints,
double[] xData,
float[] yData,
double[] initial)
Creates a new FitDoubleExponentialNoWholeConstrainedModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a3 + (1-a3)*[1 - ao*exp(a1*x) - (1 -
a0)*exp(a2*x)].
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The x value of the data point.residuals - The best guess parameter values.covarMat - The derivative values of y with respect to fitting
parameters.
����������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmVOIProps.Calc34D.html���������������������������������������0000775�4231163�4231163�00000210773�14537076051�024563� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmVOIProps.Calc34D (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private VOI |
calcSelectedVOI |
The VOI being used just for this calculation (may be a single curve of a single slice or entire VOI
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Calc34D(VOI selectedVOI) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private AlgorithmVOIProps.Calc34D.ContourStats |
calcStatsPerContour(FileInfoBase fileInfo,
VOIBase contour,
int orientation,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMin,
float ignoreMax,
VOIStatisticalProperties statProperty,
int iSlice,
int iID) |
Calculates statistics for a single contour.
|
private AlgorithmVOIProps.Calc34D.ContourStats |
calcStatsPerContourRGB(FileInfoBase fileInfo,
VOIBase contour,
int orientation,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMinR,
float ignoreMaxR,
float ignoreMinG,
float ignoreMaxG,
float ignoreMinB,
float ignoreMaxB,
VOIStatisticalProperties statProperty,
int iSlice,
int iID) |
Calculates statistics for a single contour.
|
private void |
calcStatsTotal(VOI kVOI,
VOIStatisticalProperties statProperty,
FileInfoBase fileInfo,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMin,
float ignoreMax) |
Calculates the statistics for the VOI as a whole (across all contours within the VOI).
|
private void |
calcStatsTotalRGB(VOI kVOI,
VOIStatisticalProperties statProperty,
FileInfoBase fileInfo,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMinR,
float ignoreMaxR,
float ignoreMinG,
float ignoreMaxG,
float ignoreMinB,
float ignoreMaxB) |
|
void |
getMedianStatistics(AlgorithmVOIProps.Calc34D.ContourStats stats) |
Calculates the median statistics for a grayscale image.
|
void |
getMedianStatisticsRGB(AlgorithmVOIProps.Calc34D.ContourStats stats) |
Calculates the median statistics for a color image.
|
void |
getStdSkewStatistics(AlgorithmVOIProps.Calc34D.ContourStats stats,
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> kPositions,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMin,
float ignoreMax) |
Calculates the standard deviation, coefficient of skewness, coefficient of kurtosis and center of mass
for a grayscale image.
|
void |
getStdSkewStatisticsRGB(AlgorithmVOIProps.Calc34D.ContourStats stats,
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> kPositions,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMinR,
float ignoreMaxR,
float ignoreMinG,
float ignoreMaxG,
float ignoreMinB,
float ignoreMaxB) |
Calculates the standard deviation, coefficient of skewness, coefficient of kurtosis and center of mass
for a color image.
|
private void |
printTotals(AlgorithmVOIProps.Calc34D.ContourStats[] stats,
VOIStatisticalProperties statProperty,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
java.lang.String end,
float ignoreMin,
float ignoreMax,
double largestDistance) |
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
|
private void |
printTotals(java.util.Vector<AlgorithmVOIProps.Calc34D.ContourStats> allStats,
VOIStatisticalProperties statProperty,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
java.lang.String end,
float ignoreMin,
float ignoreMax,
double largestDistance) |
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
|
private void |
printTotalsRGB(AlgorithmVOIProps.Calc34D.ContourStats[] stats,
VOIStatisticalProperties statProperty,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
java.lang.String end,
float ignoreMinR,
float ignoreMaxR,
float ignoreMinG,
float ignoreMaxG,
float ignoreMinB,
float ignoreMaxB,
double largestDistance) |
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
|
private void |
printTotalsRGB(java.util.Vector<AlgorithmVOIProps.Calc34D.ContourStats> allStats,
VOIStatisticalProperties statProperty,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
java.lang.String end,
float ignoreMinR,
float ignoreMaxR,
float ignoreMinG,
float ignoreMaxG,
float ignoreMinB,
float ignoreMaxB,
double largestDistance) |
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
|
void |
run() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getMedianStatistics
public void getMedianStatistics(AlgorithmVOIProps.Calc34D.ContourStats stats)
Calculates the median statistics for a grayscale image. The image data is stored in the input stats.values. This
function can be used for a single contour or a group of contours.
- Parameters:
stats - contains the Vector of voxels inside the contour(s) used to calculate the median, mode and mode count.
-
getMedianStatisticsRGB
public void getMedianStatisticsRGB(AlgorithmVOIProps.Calc34D.ContourStats stats)
Calculates the median statistics for a color image. The image data is stored in the input stats.valuesRGB. This
function can be used for a single contour or a group of contours.
- Parameters:
stats - contains the Vector of voxels inside the contour(s) used to calculate the median, mode and mode count.
-
getStdSkewStatistics
public void getStdSkewStatistics(AlgorithmVOIProps.Calc34D.ContourStats stats,
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> kPositions,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMin,
float ignoreMax)
Calculates the standard deviation, coefficient of skewness, coefficient of kurtosis and center of mass
for a grayscale image.
- Parameters:
stats - output values are written into stats.kPositions - list of positions of voxels inside the contour (or multiple contours).unit2DStr - , 2D label stringunit3DStr - , 3D label stringignoreMin - , threshold minimumignoreMax - , threshold maximum
-
getStdSkewStatisticsRGB
public void getStdSkewStatisticsRGB(AlgorithmVOIProps.Calc34D.ContourStats stats,
java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> kPositions,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMinR,
float ignoreMaxR,
float ignoreMinG,
float ignoreMaxG,
float ignoreMinB,
float ignoreMaxB)
Calculates the standard deviation, coefficient of skewness, coefficient of kurtosis and center of mass
for a color image.
- Parameters:
stats - output values are written into stats.kPositions - list of positions of voxels inside the contour (or multiple contours).unit2DStr - , 2D label stringunit3DStr - , 3D label stringignoreMinR - , threshold minimum redignoreMaxR - , threshold maximum redignoreMinG - , threshold minimum greenignoreMaxG - , threshold maximum greenignoreMinB - , threshold minimum blueignoreMaxB - , threshold maximum blue
-
run
public void run()
- Specified by:
run in interface java.lang.Runnable
-
calcStatsPerContour
private AlgorithmVOIProps.Calc34D.ContourStats calcStatsPerContour(FileInfoBase fileInfo,
VOIBase contour,
int orientation,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMin,
float ignoreMax,
VOIStatisticalProperties statProperty,
int iSlice,
int iID)
Calculates statistics for a single contour. Calculations are done on an as-needed basis for faster performance.
- Parameters:
fileInfo - information on image resolutions and dimensionscontour - input contourorientation - the image plane the contour is onunit2DStr - 2D label stringunit3DStr - 3D label stringignoreMin - threshold minimumignoreMax - threshold maximumstatProperty - output labels are written to statPropertyiSlice - contour sliceiID - contour iD- Returns:
- ContourStats data structure contains the statistic values.
-
calcStatsPerContourRGB
private AlgorithmVOIProps.Calc34D.ContourStats calcStatsPerContourRGB(FileInfoBase fileInfo,
VOIBase contour,
int orientation,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMinR,
float ignoreMaxR,
float ignoreMinG,
float ignoreMaxG,
float ignoreMinB,
float ignoreMaxB,
VOIStatisticalProperties statProperty,
int iSlice,
int iID)
Calculates statistics for a single contour. Calculations are done on an as-needed basis for faster performance.
- Parameters:
fileInfo - information on image resolutions and dimensionscontour - input contourorientation - the image plane the contour is onunit2DStr - 2D label stringunit3DStr - 3D label stringignoreMinR - threshold minimum redignoreMaxR - threshold maximum redignoreMinG - threshold minimum greenignoreMaxG - threshold maximum greenignoreMinB - threshold minimum blueignoreMaxB - threshold maximum bluestatProperty - output labels are written to statPropertyiSlice - contour sliceiID - contour iD- Returns:
- ContourStats data structure contains the statistic values.
-
calcStatsTotal
private void calcStatsTotal(VOI kVOI,
VOIStatisticalProperties statProperty,
FileInfoBase fileInfo,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMin,
float ignoreMax)
Calculates the statistics for the VOI as a whole (across all contours within the VOI).
Calculations are done on an as-needed basis for faster performance.
- Parameters:
contours - list of contours in the VOIstatProperty - stores the calculated outputfileInfo - information for image resolutionsunit2DStr - 2D label stringunit3DStr - 3D label stringignoreMin - threshold minimumignoreMax - threshold maximumlargestDistance - largest Distance in the VOI.
private void calcStatsTotal( Vector contours, VOIStatisticalProperties statProperty,
FileInfoBase fileInfo,
String unit2DStr, String unit3DStr, float ignoreMin, float ignoreMax, double largestDistance )
{
ContourStats stats = new ContourStats();
// The following depend on each other: quantityDescription, volumeDescription, areaDescription,
// circularityDescription, solidityDescription
// If one is selected, all are calculated.
if ( statsList[ indexOf( quantityDescription ) ] ||
statsList[ indexOf( volumeDescription ) ] ||
statsList[ indexOf( areaDescription ) ] ||
statsList[ indexOf( circularityDescription)] ||
statsList[ indexOf( solidityDescription)])
{
stats.nVox = 0;
stats.area = 0;
stats.volume = 0;
for ( int i = 0; i < contours.size(); i++ )
{
int nVox = contours.elementAt(i).getNumVoxels();
stats.nVox += nVox;
stats.area += nVox * (fileInfo.getResolutions()[0] * fileInfo.getResolutions()[1]);
stats.volume += nVox * (fileInfo.getResolutions()[0] * fileInfo.getResolutions()[1] * fileInfo.getResolutions()[2]);
}
statProperty.setProperty(VOIStatisticList.areaDescription, nf.format(stats.area));
statProperty.setProperty(VOIStatisticList.volumeDescription, nf.format(stats.volume));
statProperty.setProperty(VOIStatisticList.quantityDescription, nf.format(stats.nVox));
}
// If user selects perimeterDescription or circularityDescription:
if ( statsList[ indexOf( perimeterDescription ) ] || statsList [ indexOf (circularityDescription) ])
{
stats.perimeter = 0;
for ( int i = 0; i < contours.size(); i++ )
{
stats.perimeter += contours.elementAt(i).getLengthPtToPt(srcImage.getFileInfo(0).getResolutions());
}
statProperty.setProperty(VOIStatisticList.perimeterDescription, nf.format(stats.perimeter));
}
if ( statsList[indexOf(circularityDescription)]) {
stats.circularity = (4.0 * Math.PI * stats.area)/(stats.perimeter * stats.perimeter);
statProperty.setProperty(VOIStatisticList.circularityDescription + end, nf.format(stats.circularity));
}
if ( statsList[indexOf(solidityDescription)]) {
VOI convexKVOI = (VOI)kVOI.clone();
for ( int i = 0; i < convexKVOI.getCurves().size(); i++) {
((VOIContour)convexKVOI.getCurves().elementAt(i)).convexHull();
}
ContourStats convexStats = new ContourStats();
BitSet convexMask = new BitSet( xDim * yDim * zDim );
convexKVOI.createBinaryMask3D(convexMask, xDim, yDim, false, false);
if(rangeFlag != RangeType.NO_RANGE && rangeFlag != null) { //some intensity values need to be ignored in relevant calculations
float fVal = 0.0f;
for (int i = convexMask.nextSetBit(0); i >= 0; i = convexMask.nextSetBit(i+1)) {
fVal = srcImage.getFloat(i);
if (MipavUtil.inRange(ignoreMin, ignoreMax, fVal, rangeFlag)) {
convexMask.set(i, false);
}
}
}
convexStats.nVox = convexMask.cardinality();
convexStats.area = convexStats.nVox * (fileInfo.getResolutions()[0] * fileInfo.getResolutions()[1]);
stats.solidity = stats.area/convexStats.area;
statProperty.setProperty(VOIStatisticList.solidityDescription, nf.format(stats.solidity));
}
if (statsList[indexOf(numberOfIndentationsDescription)]) {
stats.numberOfIndentations = contour.findVOIIndentations2D(srcImage, iSlice, null, false);
statProperty.setProperty(VOIStatisticList.numberOfIndentationsDescription + end, nf.format(stats.numberOfIndentations));
}
if (statsList[indexOf(meanCurvatureDescription)] ||
statsList[indexOf(stdDevCurvatureDescription)] ||
statsList[indexOf(meanNegativeCurvatureDescription)]) {
Vector positions = new Vector();
Vector curvature = new Vector();
double meanCurvature[] = new double[1];
double stdDevCurvature[] = new double[1];
double meanNegativeCurvature[] = new double[1];
boolean smooth = true;
VOIBase convexContour = new VOIContour((VOIContour)contour);
convexContour.findPositionAndCurvature( srcImage, positions, curvature, smooth, meanCurvature, stdDevCurvature,
meanNegativeCurvature);
if (statsList[indexOf(meanCurvatureDescription)]) {
stats.meanCurvature = meanCurvature[0];
statProperty.setProperty(VOIStatisticList.meanCurvatureDescription + end, nf.format(stats.meanCurvature));
}
if (statsList[indexOf(stdDevCurvatureDescription)]) {
stats.stdDevCurvature = stdDevCurvature[0];
statProperty.setProperty(VOIStatisticList.stdDevCurvatureDescription + end, nf.format(stats.stdDevCurvature));
}
if (statsList[indexOf(meanNegativeCurvatureDescription)]) {
stats.meanNegativeCurvature = meanNegativeCurvature[0];
statProperty.setProperty(VOIStatisticList.meanNegativeCurvatureDescription + end,
nf.format(stats.meanNegativeCurvature));
}
}
// The following statistics are derived from the minIntensity, maxIntensity, avgIntensity, and sumIntensity:
// median, mode, modeCount
// deviationDescription, skewnessDescription, kurtosisDescription, massCenterDescription
if ( statsList[ indexOf( minIntensity ) ] ||
statsList[ indexOf( maxIntensity ) ] ||
statsList[ indexOf( avgIntensity ) ] ||
statsList[ indexOf( sumIntensities ) ] ||
statsList[ indexOf( median ) ] ||
statsList[ indexOf( mode ) ] ||
statsList[ indexOf( modeCount ) ] ||
statsList[ indexOf( deviationDescription ) ] ||
statsList[ indexOf( skewnessDescription ) ] ||
statsList[ indexOf( kurtosisDescription ) ] ||
statsList[ indexOf( massCenterDescription ) ] )
{
stats.nVox = 0;
stats.values = new Vector();
stats.valuesRGB = new Vector();
for ( int i = 0; i < contours.size(); i++ )
{
int nVox = contours.elementAt(i).getNumVoxels();
stats.nVox += nVox;
if (srcImage.isColorImage()) {
ColorRGB kMin = new ColorRGB();
ColorRGB kMax = new ColorRGB();
ColorRGB kSum = new ColorRGB();
stats.valuesRGB.addAll( contours.elementAt(i).calcRGBIntensity( srcImage, kMin, kMax, kSum,
ignoreMin, ignoreMax, rangeFlag ) );
if ( i == 0 )
{
stats.minIntenRed = kMin.R;
stats.minIntenGreen = kMin.G;
stats.minIntenBlue = kMin.B;
stats.maxIntenRed = kMax.R;
stats.maxIntenGreen = kMax.G;
stats.maxIntenBlue = kMax.B;
}
stats.minIntenRed = Math.min( stats.minIntenRed, kMin.R );
stats.minIntenGreen = Math.min( stats.minIntenGreen, kMin.G );
stats.minIntenBlue = Math.min( stats.minIntenBlue, kMin.B );
stats.maxIntenRed = Math.max( stats.minIntenRed, kMax.R );
stats.maxIntenGreen = Math.max( stats.minIntenGreen, kMax.G );
stats.maxIntenBlue = Math.max( stats.minIntenBlue, kMax.B );
stats.sumR += kSum.R;
stats.sumG += kSum.G;
stats.sumB += kSum.B;
}
else
{
Vector3f kMinMax = new Vector3f();
stats.values.addAll( contours.elementAt(i).calcIntensity( srcImage, kMinMax, ignoreMin, ignoreMax, rangeFlag ) );
if ( i == 0 )
{
stats.minIntensity = kMinMax.X;
stats.maxIntensity = kMinMax.Y;
}
stats.minIntensity = Math.min( stats.minIntensity, kMinMax.X );
stats.maxIntensity = Math.max( stats.maxIntensity, kMinMax.Y );
stats.sum += kMinMax.Z;
}
}
statProperty.setProperty(VOIStatisticList.quantityDescription, nf.format(stats.nVox));
if (srcImage.isColorImage()) {
stats.avgIntenR = stats.sumR/stats.nVox;
stats.avgIntenG = stats.sumG/stats.nVox;
stats.avgIntenB = stats.sumB/stats.nVox;
statProperty.setProperty(VOIStatisticList.minIntensity + "Red", nf.format(stats.minIntenRed));
statProperty.setProperty(VOIStatisticList.maxIntensity + "Red", nf.format(stats.maxIntenRed));
statProperty.setProperty(VOIStatisticList.minIntensity + "Green", nf.format(stats.minIntenGreen));
statProperty.setProperty(VOIStatisticList.maxIntensity + "Green", nf.format(stats.maxIntenGreen));
statProperty.setProperty(VOIStatisticList.minIntensity + "Blue", nf.format(stats.minIntenBlue));
statProperty.setProperty(VOIStatisticList.maxIntensity + "Blue", nf.format(stats.maxIntenBlue));
statProperty.setProperty(VOIStatisticList.avgIntensity + "Red", nf.format(stats.avgIntenR));
statProperty.setProperty(VOIStatisticList.avgIntensity + "Green", nf.format(stats.avgIntenG));
statProperty.setProperty(VOIStatisticList.avgIntensity + "Blue", nf.format(stats.avgIntenB));
statProperty.setProperty(VOIStatisticList.sumIntensities + "Red", nf.format(stats.sumR));
statProperty.setProperty(VOIStatisticList.sumIntensities + "Green", nf.format(stats.sumG));
statProperty.setProperty(VOIStatisticList.sumIntensities + "Blue", nf.format(stats.sumB));
}
else
{
stats.avgInten = stats.sum/stats.nVox;
statProperty.setProperty(VOIStatisticList.minIntensity, nf.format(stats.minIntensity));
statProperty.setProperty(VOIStatisticList.maxIntensity, nf.format(stats.maxIntensity));
statProperty.setProperty(VOIStatisticList.avgIntensity, nf.format(stats.avgInten));
statProperty.setProperty(VOIStatisticList.sumIntensities, nf.format(stats.sum));
}
// median, mode, modeCount
if ( statsList[ indexOf( median ) ] || statsList[ indexOf( mode ) ] || statsList[ indexOf( modeCount ) ] )
{
if (srcImage.isColorImage()) {
getMedianStatisticsRGB( stats );
statProperty.setProperty(VOIStatisticList.mode + "Red", nf.format(stats.modeR));
statProperty.setProperty(VOIStatisticList.mode + "Green", nf.format(stats.modeG));
statProperty.setProperty(VOIStatisticList.mode + "Blue", nf.format(stats.modeB));
statProperty.setProperty(VOIStatisticList.modeCount + "Red", nf.format(stats.maxCountR));
statProperty.setProperty(VOIStatisticList.modeCount + "Green", nf.format(stats.maxCountG));
statProperty.setProperty(VOIStatisticList.modeCount + "Blue", nf.format(stats.maxCountB));
statProperty.setProperty(VOIStatisticList.median + "Red", nf.format(stats.medianR));
statProperty.setProperty(VOIStatisticList.median + "Green", nf.format(stats.medianG));
statProperty.setProperty(VOIStatisticList.median + "Blue", nf.format(stats.medianB));
}
else
{
getMedianStatistics( stats );
statProperty.setProperty(VOIStatisticList.mode, nf.format(stats.mode));
statProperty.setProperty(VOIStatisticList.modeCount, nf.format(stats.maxCount));
statProperty.setProperty(VOIStatisticList.median, nf.format(stats.median));
}
}
// deviationDescription, skewnessDescription, kurtosisDescription, massCenterDescription
if ( statsList[ indexOf( deviationDescription ) ] ||
statsList[ indexOf( skewnessDescription ) ] ||
statsList[ indexOf( kurtosisDescription ) ] ||
statsList[ indexOf( massCenterDescription ) ] )
{
Vector kPositions = new Vector();
for ( int i = 0; i < contours.size(); i++ )
{
kPositions.addAll( contours.elementAt(i).getMaskPositions() );
}
if (srcImage.isColorImage())
{
getStdSkewStatisticsRGB(stats, kPositions,
unit2DStr, unit3DStr, ignoreMin, ignoreMax);
statProperty.setProperty(VOIStatisticList.deviationDescription + "Red", nf.format(stats.stdDevR));
statProperty.setProperty(VOIStatisticList.deviationDescription + "Green", nf.format(stats.stdDevG));
statProperty.setProperty(VOIStatisticList.deviationDescription + "Blue", nf.format(stats.stdDevB));
statProperty.setProperty(VOIStatisticList.skewnessDescription + "Red", nf.format(stats.skewnessR));
statProperty.setProperty(VOIStatisticList.skewnessDescription + "Green", nf.format(stats.skewnessG));
statProperty.setProperty(VOIStatisticList.skewnessDescription + "Blue", nf.format(stats.skewnessB));
statProperty.setProperty(VOIStatisticList.kurtosisDescription + "Red", nf.format(stats.kurtosisR));
statProperty.setProperty(VOIStatisticList.kurtosisDescription + "Green", nf.format(stats.kurtosisG));
statProperty.setProperty(VOIStatisticList.kurtosisDescription + "Blue", nf.format(stats.kurtosisB));
statProperty.setProperty(VOIStatisticList.massCenterDescription + "Red", stats.massCenterDescriptionR);
statProperty.setProperty(VOIStatisticList.massCenterDescription + "Green", stats.massCenterDescriptionG);
statProperty.setProperty(VOIStatisticList.massCenterDescription + "Blue", stats.massCenterDescriptionB);
}
else
{
getStdSkewStatistics(stats, kPositions,
unit2DStr, unit3DStr, ignoreMin, ignoreMax);
statProperty.setProperty(VOIStatisticList.deviationDescription, nf.format(stats.stdDev));
statProperty.setProperty(VOIStatisticList.skewnessDescription, nf.format(stats.skewness));
statProperty.setProperty(VOIStatisticList.kurtosisDescription , nf.format(stats.kurtosis));
statProperty.setProperty(VOIStatisticList.massCenterDescription, stats.massCenterDescription);
}
}
}
// If user selects geometricCenterDescription
if ( statsList[ indexOf( geometricCenterDescription ) ] )
{
Vector3f selectedCOM = calcSelectedVOI.getGeometricCenter();
selectedCOM.X *= srcImage.getFileInfo(0).getResolutions()[0];
selectedCOM.Y *= srcImage.getFileInfo(0).getResolutions()[1];
String unitStr = unit2DStr + "\tZ";
if (srcImage.getNDims() > 2) {
selectedCOM.Z *= srcImage.getFileInfo(0).getResolutions()[2];
unitStr = unit3DStr;
}
String comStr = unitStr + "\n\t\t" + nf.format(selectedCOM.X) + "\t" + nf.format(selectedCOM.Y) + "\t" +
nf.format(selectedCOM.Z);
comStr = addScannerLabels(comStr, selectedCOM);
stats.gCenterString = new String(comStr);
statProperty.setProperty(VOIStatisticList.geometricCenterDescription, stats.gCenterString);
}
// If user selects largestSliceDistanceDescription:
if ( statsList[ indexOf( largestSliceDistanceDescription ) ] )
{
for ( int i = 0; i < contours.size(); i++ )
{
Vector3f kPos1 = new Vector3f();
Vector3f kPos2 = new Vector3f();
if ( i == 0 )
{
stats.largestContourDistance = ((VOIContour) (contours.elementAt(i))).calcLargestSliceDistance(
fileInfo.getResolutions()[0], fileInfo.getResolutions()[1], kPos1, kPos2);
// Uncomment the following to at the VOILine to the image:
//VOILine kLine = new VOILine();
//kLine.add(kPos1);
//kLine.add(kPos2);
//VOI kVOI = new VOI( (short)srcImage.getVOIs().size(), "LargestDist", VOI.LINE, 0 );
//kVOI.importCurve(kLine);
//srcImage.registerVOI(kVOI);
}
else
{
stats.largestContourDistance = Math.max( stats.largestContourDistance,
((VOIContour) (contours.elementAt(i))).calcLargestSliceDistance(
fileInfo.getResolutions()[0], fileInfo.getResolutions()[1], kPos1, kPos2));
// Uncomment the following to at the VOILine to the image:
//VOILine kLine = new VOILine();
//kLine.add(kPos1);
//kLine.add(kPos2);
//VOI kVOI = new VOI( (short)srcImage.getVOIs().size(), "LargestDist", VOI.LINE, 0 );
//kVOI.importCurve(kLine);
//srcImage.registerVOI(kVOI);
}
}
statProperty.setProperty(VOIStatisticList.largestSliceDistanceDescription, nf.format(stats.largestContourDistance));
}
if ( statsList[ indexOf( largestDistanceDescription ) ] )
{
stats.largestContourDistance = largestDistance;
statProperty.setProperty(VOIStatisticList.largestDistanceDescription, nf.format(stats.largestContourDistance));
}
// Ellipsoid fit parameters are calculated as a group, if one is selected, calculate all.
// For the VOI, only calculate these parameters for one contour:
if ( statsList[ indexOf( axisDescription ) ] ||
statsList[ indexOf( eccentricityDescription ) ] ||
statsList[ indexOf( majorAxisDescription ) ] ||
statsList[ indexOf( minorAxisDescription ) ] )
{
float[] tmpPAxis = new float[1];
float[] tmpEcc = new float[1];
float[] tmpMajorAxis = new float[1];
float[] tmpMinorAxis = new float[1];
((VOIContour)contours.firstElement()).secondOrderAttributes(srcImage,
tmpPAxis, tmpEcc, tmpMajorAxis,
tmpMinorAxis);
stats.PAxis = tmpPAxis[0];
stats.Ecc = tmpEcc[0];
stats.MajorAxis = tmpMajorAxis[0];
stats.MinorAxis = tmpMinorAxis[0];
System.out.println("HERE2");
statProperty.setProperty(VOIStatisticList.axisDescription, nf.format(stats.PAxis));
statProperty.setProperty(VOIStatisticList.eccentricityDescription, nf.format(stats.Ecc));
statProperty.setProperty(VOIStatisticList.majorAxisDescription, nf.format(stats.MajorAxis));
statProperty.setProperty(VOIStatisticList.minorAxisDescription, nf.format(stats.MinorAxis));
}
}
-
calcStatsTotalRGB
private void calcStatsTotalRGB(VOI kVOI,
VOIStatisticalProperties statProperty,
FileInfoBase fileInfo,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
float ignoreMinR,
float ignoreMaxR,
float ignoreMinG,
float ignoreMaxG,
float ignoreMinB,
float ignoreMaxB)
-
printTotals
private void printTotals(AlgorithmVOIProps.Calc34D.ContourStats[] stats,
VOIStatisticalProperties statProperty,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
java.lang.String end,
float ignoreMin,
float ignoreMax,
double largestDistance)
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
- Parameters:
stats - array of per-contour statisticsstatProperty - output is written to the statPropertyunit2DStr - 2D label stringunit3DStr - 3D label stringend - tag for statProperty labelsignoreMin - threshold minimumignoreMax - threshold maximumlargestDistance - VOI largest distance.
-
printTotalsRGB
private void printTotalsRGB(AlgorithmVOIProps.Calc34D.ContourStats[] stats,
VOIStatisticalProperties statProperty,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
java.lang.String end,
float ignoreMinR,
float ignoreMaxR,
float ignoreMinG,
float ignoreMaxG,
float ignoreMinB,
float ignoreMaxB,
double largestDistance)
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
- Parameters:
stats - array of per-contour statisticsstatProperty - output is written to the statPropertyunit2DStr - 2D label stringunit3DStr - 3D label stringend - tag for statProperty labelsignoreMinR - threshold minimum redignoreMaxR - threshold maximum redignoreMinG - threshold minimum greenignoreMaxG - threshold maximum greenignoreMinB - threshold minimum blueignoreMaxB - threshold maximum bluelargestDistance - VOI largest distance.
-
printTotals
private void printTotals(java.util.Vector<AlgorithmVOIProps.Calc34D.ContourStats> allStats,
VOIStatisticalProperties statProperty,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
java.lang.String end,
float ignoreMin,
float ignoreMax,
double largestDistance)
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
- Parameters:
allStats - list of per-contour statisticsstatProperty - output is written to the statPropertyunit2DStr - 2D label stringunit3DStr - 3D label stringend - tag for statProperty labelsignoreMin - threshold minimumignoreMax - threshold maximumlargestDistance - VOI largest distance.
-
printTotalsRGB
private void printTotalsRGB(java.util.Vector<AlgorithmVOIProps.Calc34D.ContourStats> allStats,
VOIStatisticalProperties statProperty,
java.lang.String unit2DStr,
java.lang.String unit3DStr,
java.lang.String end,
float ignoreMinR,
float ignoreMaxR,
float ignoreMinG,
float ignoreMaxG,
float ignoreMinB,
float ignoreMaxB,
double largestDistance)
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
- Parameters:
allStats - list of per-contour statisticsstatProperty - output is written to the statPropertyunit2DStr - 2D label stringunit3DStr - 3D label stringend - tag for statProperty labelsignoreMinR - threshold minimum redignoreMaxR - threshold maximum redignoreMinG - threshold minimum greenignoreMaxG - threshold maximum greenignoreMinB - threshold minimum blueignoreMaxB - threshold maximum bluelargestDistance - VOI largest distance.
�����gov/nih/mipav/model/algorithms/CeresSolver.LoggingType.html�����������������������������������������0000775�4231163�4231163�00000034211�14537076052�024572� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LoggingType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
LoggingType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
LoggingType
private LoggingType()
-
Method Detail
-
valueOf
public static CeresSolver.LoggingType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.QuadraticFirstOrderFunction.html���������������������0000775�4231163�4231163�00000027254�14537076053�030643� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.QuadraticFirstOrderFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBoxCount.html�����������������������������������������������0000775�4231163�4231163�00000063625�14537076044�023533� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBoxCount (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
�����������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmLowerCompletion.html����������������������������������������0000775�4231163�4231163�00000060623�14537076047�025112� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLowerCompletion (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numNeighbor
private int numNeighbor
-
binNumber
private int binNumber
-
Constructor Detail
-
AlgorithmLowerCompletion
public AlgorithmLowerCompletion(ModelImage destImage,
ModelImage srcImage,
int numNeighbor,
boolean limitBins,
int binNumber)
-
Method Detail
-
run2D
public void run2D()
-
run3D
public void run3D()
�������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.SimpleColorMap.html��������������������������������������0000775�4231163�4231163�00000047251�14537076054�025276� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.SimpleColorMap (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.SimpleColorMap
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected int[] |
colors |
|
protected double[] |
locations |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
colors
protected int[] colors
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.FormTrait.html��������������������������������������������������0000775�4231163�4231163�00000042024�14537076056�022560� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.FormTrait (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
clear
public void clear()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.SnakeInitialiser.html��������������������������0000775�4231163�4231163�00000157043�14537076047�027643� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.SnakeInitialiser (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
addLineSegment(AlgorithmNetworkSnake.SnakeInitialiser.Node StartNodeA,
AlgorithmNetworkSnake.SnakeInitialiser.Node StartNodeB,
AlgorithmNetworkSnake.SnakeInitialiser.Node EndNodeA,
AlgorithmNetworkSnake.SnakeInitialiser.Node EndNodeB,
java.util.ArrayList<java.awt.Point> LineSegments) |
|
void |
addNode(int x,
int y,
AlgorithmNetworkSnake.AnchorPosition anchor) |
|
AlgorithmNetworkSnake.SnakeInitialiser |
clone() |
|
java.util.ArrayList<java.awt.Point> |
createAndRedistributePoints(java.util.ArrayList<java.awt.Point> originalPoints) |
|
boolean |
exists(int x,
int y) |
|
private AlgorithmNetworkSnake.SnakeInitialiser.Node |
findNextJunction(AlgorithmNetworkSnake.SnakeInitialiser.Node currentNode,
AlgorithmNetworkSnake.SnakeInitialiser.Node sourceNode) |
|
java.util.ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node> |
findNextJunctions(AlgorithmNetworkSnake.SnakeInitialiser.Node currentNode) |
|
private void |
fixConsistency() |
|
private java.util.ArrayList<java.util.ArrayList<java.awt.Point>> |
getAllWalls(java.util.ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node> internalNodes,
java.util.ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node> externalNodes) |
|
java.util.ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node> |
getExternalNodes() |
|
java.util.ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node> |
getInternalNodes() |
|
private void |
getJunctionWalls(AlgorithmNetworkSnake.SnakeInitialiser.Node junction,
java.util.ArrayList<java.util.ArrayList<java.awt.Point>> walls) |
|
java.util.ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node> |
getLinkingNodes() |
|
double |
getMergeThreshold() |
|
java.util.TreeMap<AlgorithmNetworkSnake.tuple2i,AlgorithmNetworkSnake.SnakeInitialiser.Node> |
getNodeList() |
|
int |
getRecordRate() |
|
private java.util.ArrayList<java.awt.Point> |
getWall(AlgorithmNetworkSnake.SnakeInitialiser.Node sourceNode,
int index) |
|
java.util.ArrayList<java.util.ArrayList<java.awt.Point>> |
getWallPositions() |
|
AlgorithmNetworkSnake.SnakeInitialiser.Node |
insertNode(int x,
int y,
AlgorithmNetworkSnake.AnchorPosition anchor,
int ax,
int ay) |
|
AlgorithmNetworkSnake.SnakeInitialiser.Node |
insertNode(int x,
int y,
AlgorithmNetworkSnake.AnchorPosition anchor,
int ax,
int ay,
int bx,
int by) |
|
void |
linkJunctionNodes(AlgorithmNetworkSnake.SnakeInitialiser.Node node1,
AlgorithmNetworkSnake.SnakeInitialiser.Node node2) |
|
void |
linkNodes(AlgorithmNetworkSnake.SnakeInitialiser.Node node1,
AlgorithmNetworkSnake.SnakeInitialiser.Node node2) |
|
void |
loadPixelGrid(AlgorithmNetworkSnake.PixelGrid pixelGrid) |
|
private AlgorithmNetworkSnake.SnakeInitialiser.Node |
mergeNearbyJunctionNodes(AlgorithmNetworkSnake.SnakeInitialiser.Node currentNode,
double minimumJunctionDistance) |
|
void |
mergeNodes() |
|
private double |
pointDistance(java.awt.Point P1,
java.awt.Point P2) |
|
private void |
reCalculateJunctionNeighbours() |
|
java.util.ArrayList<java.awt.Point> |
redistributePoints(java.util.ArrayList<java.awt.Point> originalPoints) |
|
void |
refresh() |
|
void |
removeNode(int x,
int y,
boolean Unlink) |
|
private void |
removeWall(AlgorithmNetworkSnake.SnakeInitialiser.Node currentNode,
AlgorithmNetworkSnake.SnakeInitialiser.Node sourceNode) |
|
void |
RemoveWalls(AlgorithmNetworkSnake.SnakeInitialiser.Node currentNode) |
|
private void |
rePopulateLists() |
|
void |
setExternalNodes(java.util.ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node> externalNodes) |
|
void |
setInternalNodes(java.util.ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node> internalNodes) |
|
void |
setLinkingNodes(java.util.ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node> linkingNodes) |
|
void |
setMergeThreshold(double mergeThreshold) |
|
void |
setNodeList(java.util.TreeMap<AlgorithmNetworkSnake.tuple2i,AlgorithmNetworkSnake.SnakeInitialiser.Node> nodeList) |
|
void |
setRecordRate(int recordRate) |
|
void |
setWallPositions(java.util.ArrayList<java.util.ArrayList<java.awt.Point>> wallPositions) |
|
void |
unLinkNodes(AlgorithmNetworkSnake.SnakeInitialiser.Node node1,
AlgorithmNetworkSnake.SnakeInitialiser.Node node2) |
|
-
Methods inherited from class java.lang.Object
equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
recordRate
private int recordRate
-
Method Detail
-
mergeNodes
public void mergeNodes()
-
refresh
public void refresh()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.indexValueComparator.html��������������������������������������0000775�4231163�4231163�00000026635�14537076055�025356� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
���������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.BlockRandomAccessSparseMatrix.html����������������������0000775�4231163�4231163�00000054216�14537076052�030313� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.BlockRandomAccessSparseMatrix (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
finalize
public void finalize()
- Overrides:
finalize in class java.lang.Object
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEvaluateSegmentation.html�����������������������������������0000775�4231163�4231163�00000073667�14537076045�026126� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEvaluateSegmentation (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmEvaluateSegmentation
extends AlgorithmBase
Compares segmentation results of a test image to segmentation results of an ideal gold standard true image.
Comparisons are made for contour or polyline vois having the same ids in the 2 images. For each id number, the false
negative volume fraction, the false positive volume fraction, and the positive volume fraction are output to the
global data text.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
absoluteTrue |
total number of id voxels in true image.
|
private double |
falseNegative |
where trueImage has id but test image does not.
|
private double |
falsePositive |
where trueImage does not have id but test image does.
|
private double |
fnvf |
false negative volume fraction.
|
private double |
fpvf |
false positive volume fraction.
|
private int |
length |
DOCUMENT ME!
|
private int |
nTestVOIs |
DOCUMENT ME!
|
private int |
nTrueVOIs |
DOCUMENT ME!
|
private int |
testID |
DOCUMENT ME!
|
private ModelImage |
testImage |
DOCUMENT ME!
|
private int |
testLength |
DOCUMENT ME!
|
private ViewVOIVector |
testVOIs |
DOCUMENT ME!
|
private double |
tpvf |
positive volume fraction.
|
private double |
trueFound |
number of the absoluteTrue found in the test image.
|
private int |
trueID |
DOCUMENT ME!
|
private ViewVOIVector |
trueVOIs |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
length
private int length
DOCUMENT ME!
-
nTestVOIs
private int nTestVOIs
DOCUMENT ME!
-
nTrueVOIs
private int nTrueVOIs
DOCUMENT ME!
-
testID
private int testID
DOCUMENT ME!
-
testLength
private int testLength
DOCUMENT ME!
-
trueID
private int trueID
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmEvaluateSegmentation
public AlgorithmEvaluateSegmentation(ModelImage trueImage,
ModelImage testImage)
Creates a new AlgorithmEvaluateSegmentation object.
- Parameters:
trueImage - image model used as a ideal gold standardtestImage - image model tested against the trueImage
�������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.ImgBase.html���������������������������������������������0000775�4231163�4231163�00000304460�14537076054�023715� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.ImgBase (MIPAV API Documentation)
-
-
Method Summary
All Methods Static Methods Instance Methods Abstract Methods Default Methods
| Modifier and Type |
Method |
Description |
default java.util.Spliterator<P> |
colSpliterator() |
Creates a Spliterator that guarantees that each split will
at least cover an entire column of the Img.
|
ContourPlot.ImgBase<P> |
copy() |
Returns a deep copy of this image.
|
default java.awt.Graphics2D |
createGraphics() |
Creates a Graphics2D, which can be used to draw into this image.
|
default <T> void |
forEach(boolean parallel,
int xStart,
int yStart,
int width,
int height,
ContourPlot.PixelManipulator<? super P,T> manipulator) |
Applies the specified manipulator to every pixel in the specified area of this image.
|
default void |
forEach(boolean parallel,
int xStart,
int yStart,
int width,
int height,
java.util.function.Consumer<? super P> action) |
Applies the specified action to every pixel in the specified area of this image.
|
default <T> void |
forEach(boolean parallel,
ContourPlot.PixelManipulator<? super P,T> manipulator) |
Applies the specified manipulator to every pixel of this image.
|
default void |
forEach(boolean parallel,
java.util.function.Consumer<? super P> action) |
Performs the specified action on each of the pixels of this image.
|
default <T> void |
forEach(int xStart,
int yStart,
int width,
int height,
ContourPlot.PixelManipulator<? super P,T> manipulator) |
Applies the specified manipulator to every pixel in the specified area of this image.
|
default void |
forEach(int xStart,
int yStart,
int width,
int height,
java.util.function.Consumer<? super P> action) |
Applies the specified action to every pixel in the specified area of this image.
|
default <T> void |
forEach(ContourPlot.PixelConvertingSpliterator.PixelConverter<? super P,T> converter,
boolean parallel,
int xStart,
int yStart,
int width,
int height,
java.util.function.Consumer<? super T> action) |
Applies the specified action to every pixel in the specified area of this image.
|
default <T> void |
forEach(ContourPlot.PixelConvertingSpliterator.PixelConverter<? super P,T> converter,
boolean parallel,
java.util.function.Consumer<? super T> action) |
Applies the specified action to every pixel of this image.
|
default <T> void |
forEach(ContourPlot.PixelManipulator<? super P,T> manipulator) |
Applies the specified manipulator to every pixel of this image.
|
default void |
forEach(java.util.function.Consumer<? super P> action) |
Performs the specified action on each of the pixels of this image.
|
default void |
forEach_defaultimpl(java.util.function.Consumer<? super P> action) |
Default implementation of Iterable.forEach(Consumer)
only for performance test purposes as it is slower than the
forEach(Consumer) implementation. |
default java.awt.Dimension |
getDimension() |
|
int |
getHeight() |
|
P |
getPixel() |
Creates a new pixel object (instance of ContourPlot.PixelBase) for this Img
with initial position (0,0) i.e. top left corner. |
P |
getPixel(int x,
int y) |
Creates a new Pixel object for this Img at specified position
|
default java.awt.image.BufferedImage |
getRemoteBufferedImage() |
Creates a BufferedImage that shares the data of this image.
|
default int |
getSpliteratorMinimumSplitSize() |
Returns the minimum number of elements in a split of a Spliterator
of this Img.
|
int |
getWidth() |
|
default java.util.Iterator<P> |
iterator() |
Returns an iterator over the pixels of this image.
|
default java.util.Iterator<P> |
iterator(int xStart,
int yStart,
int width,
int height) |
Returns an Iterator for the specified area of the image.
|
default int |
numValues() |
|
default void |
paint(java.util.function.Consumer<java.awt.Graphics2D> paintInstructions) |
Uses the specified paintInstructions to draw into this image.
|
default java.util.Spliterator<P> |
rowSpliterator() |
Creates a Spliterator that guarantees that each split will
at least cover an entire row of the Img.
|
default java.util.Spliterator<P> |
spliterator() |
Returns a Spliterator over the pixels of this image.
|
default java.util.Spliterator<P> |
spliterator(int xStart,
int yStart,
int width,
int height) |
Creates a Spliterator over the pixels within the specified area.
|
default java.util.stream.Stream<P> |
stream() |
Returns a sequential Stream of pixels of this image.
|
default java.util.stream.Stream<P> |
stream(boolean parallel) |
Returns a Stream of pixels of this image.
|
default java.util.stream.Stream<P> |
stream(boolean parallel,
int xStart,
int yStart,
int width,
int height) |
|
default java.util.stream.Stream<P> |
stream(int xStart,
int yStart,
int width,
int height) |
|
default <T> java.util.stream.Stream<T> |
stream(ContourPlot.PixelConvertingSpliterator.PixelConverter<? super P,T> converter,
boolean parallel) |
|
default <T> java.util.stream.Stream<T> |
stream(ContourPlot.PixelConvertingSpliterator.PixelConverter<? super P,T> converter,
boolean parallel,
int xStart,
int yStart,
int width,
int height) |
|
static <Px extends ContourPlot.PixelBase>
java.util.stream.Stream<Px> |
stream(java.util.Spliterator<Px> spliterator,
boolean parallel) |
Returns a Stream<Pixel> for the specified Spliterator<Pixel>.
|
default boolean |
supportsRemoteBufferedImage() |
|
default java.awt.image.BufferedImage |
toBufferedImage() |
|
java.awt.image.BufferedImage |
toBufferedImage(java.awt.image.BufferedImage bimg) |
Copies this image's data to the specified BufferedImage.
|
-
-
Method Detail
-
toBufferedImage
java.awt.image.BufferedImage toBufferedImage(java.awt.image.BufferedImage bimg)
Copies this image's data to the specified BufferedImage.
This method will preserve the Raster of the specified
BufferedImage and will only modify the contents of it.
- Parameters:
bimg - the BufferedImage- Returns:
- the specified BufferedImage
- Throws:
java.lang.IllegalArgumentException - if the provided BufferedImage
has a different dimension as this image.- See Also:
toBufferedImage(),
getRemoteBufferedImage()
-
getSpliteratorMinimumSplitSize
default int getSpliteratorMinimumSplitSize()
Returns the minimum number of elements in a split of a Spliterator
of this Img. Spliterators will only split if they contain more elements than
specified by this value. Default is 1024.
- Returns:
- minimum number of elements of a Spliterator to allow for splitting.
-
iterator
default java.util.Iterator<P> iterator(int xStart,
int yStart,
int width,
int height)
Returns an Iterator for the specified area of the image. The Iterator will
always return the same pixel object on next() but with different index
(thus referencing different values in the image).
- Parameters:
xStart - left boundary of the area (inclusive)yStart - upper boundary of the area (inclusive)width - of the areaheight - of the area- Returns:
- iterator for iterating over the pixels in the specified area.
- Throws:
java.lang.IllegalArgumentException - if provided area is not within this
image's bounds, or if the area is not positive (width or height ≤ 0).- See Also:
iterator(),
spliterator(),
spliterator(int, int, int, int)
-
spliterator
default java.util.Spliterator<P> spliterator()
Returns a Spliterator over the pixels of this image. Within each
split of the Spliterator a unique pixel object will be used on tryAdvance()
but with changing index (thus referencing different values in the image).
- Specified by:
spliterator in interface java.lang.Iterable<P extends ContourPlot.PixelBase>- Returns:
- a Spliterator over the pixels of this image
- See Also:
spliterator(int, int, int, int),
rowSpliterator(),
colSpliterator(),
iterator(),
iterator(int, int, int, int)
-
rowSpliterator
default java.util.Spliterator<P> rowSpliterator()
Creates a Spliterator that guarantees that each split will
at least cover an entire row of the Img. It also guarantes that each
row will be iterated starting at the least index of that row
(e.g.starts at index 0 then continues with index 1, then 2, until
the end of the row, then continuing with the next row).
This Spliterator iterates in row-major order.
- Returns:
- Spliterator that splits at beginning of rows.
- See Also:
colSpliterator(),
spliterator(),
stream(Spliterator, boolean),
stream(PixelConverter, boolean)
-
colSpliterator
default java.util.Spliterator<P> colSpliterator()
Creates a Spliterator that guarantees that each split will
at least cover an entire column of the Img. It also guarantes that each
column will be iterated starting at the least index of that column
(e.g.starts at index 0 then continues with index 1, then 2, until
the end of the column, then continuing with the next column).
This Spliterator iterates in column-major order.
- Returns:
- Spliterator that splits at beginning of columns.
- See Also:
rowSpliterator(),
spliterator(),
stream(Spliterator, boolean),
stream(PixelConverter, boolean)
-
spliterator
default java.util.Spliterator<P> spliterator(int xStart,
int yStart,
int width,
int height)
Creates a Spliterator over the pixels within the specified area.
- Parameters:
xStart - left boundary of the area (inclusive)yStart - upper boundary of the area (inclusive)width - of the areaheight - of the area- Returns:
- spliterator for the specified area.
- Throws:
java.lang.IllegalArgumentException - if provided area is not within this
image's bounds, or if the area is not positive (width or height ≤ 0).- See Also:
spliterator(),
colSpliterator(),
rowSpliterator(),
stream(Spliterator, boolean),
stream(PixelConverter, boolean)
-
forEach
default void forEach(boolean parallel,
java.util.function.Consumer<? super P> action)
Performs the specified action on each of the pixels of this image.
- Parameters:
parallel - whether to be performed in parallelaction - to be performed- See Also:
forEach(Consumer),
forEach(PixelManipulator),
forEach(boolean, Consumer),
forEach(boolean, PixelManipulator),
forEach(PixelConverter, boolean, Consumer),
forEach(int, int, int, int, Consumer),
forEach(int, int, int, int, PixelManipulator),
forEach(boolean, int, int, int, int, Consumer),
forEach(boolean, int, int, int, int, PixelManipulator),
forEach(PixelConverter, boolean, int, int, int, int, Consumer),
stream()
-
forEach
default void forEach(int xStart,
int yStart,
int width,
int height,
java.util.function.Consumer<? super P> action)
Applies the specified action to every pixel in the specified area of this image.
- Parameters:
xStart - left boundary of the area (inclusive)yStart - upper boundary of the area (inclusive)width - of the areaheight - of the areaaction - to be performed on each pixel- Throws:
java.lang.IllegalArgumentException - if provided area is not within this
images's bounds.- See Also:
forEach(Consumer),
forEach(PixelManipulator),
forEach(boolean, Consumer),
forEach(boolean, PixelManipulator),
forEach(PixelConverter, boolean, Consumer),
forEach(int, int, int, int, Consumer),
forEach(int, int, int, int, PixelManipulator),
forEach(boolean, int, int, int, int, Consumer),
forEach(boolean, int, int, int, int, PixelManipulator),
forEach(PixelConverter, boolean, int, int, int, int, Consumer),
stream()
-
forEach
default void forEach(boolean parallel,
int xStart,
int yStart,
int width,
int height,
java.util.function.Consumer<? super P> action)
Applies the specified action to every pixel in the specified area of this image.
- Parameters:
parallel - whether to be performed in parallelxStart - left boundary of the area (inclusive)yStart - upper boundary of the area (inclusive)width - of the areaheight - of the areaaction - to be performed on each pixel- Throws:
java.lang.IllegalArgumentException - if provided area is not within this
images's bounds, or if the area is not positive (width or height ≤ 0).- See Also:
forEach(Consumer),
forEach(PixelManipulator),
forEach(boolean, Consumer),
forEach(boolean, PixelManipulator),
forEach(PixelConverter, boolean, Consumer),
forEach(int, int, int, int, Consumer),
forEach(int, int, int, int, PixelManipulator),
forEach(boolean, int, int, int, int, Consumer),
forEach(boolean, int, int, int, int, PixelManipulator),
forEach(PixelConverter, boolean, int, int, int, int, Consumer),
stream()
-
forEach
default <T> void forEach(ContourPlot.PixelConvertingSpliterator.PixelConverter<? super P,T> converter,
boolean parallel,
java.util.function.Consumer<? super T> action)
Applies the specified action to every pixel of this image.
Prior to applying the action, each time the pixel is converted using the specified
converter. The action is then performed on an instance of the element type of the converter
(which is also the type accepted by the action).
Finally the modified instance is then converted back to the pixel.
- Type Parameters:
T - converter's element type- Parameters:
converter - that converts the pixel to the type accepted by the actionparallel - whether to be performed in parallelaction - to be performed on each pixel- See Also:
forEach(Consumer),
forEach(PixelManipulator),
forEach(boolean, Consumer),
forEach(boolean, PixelManipulator),
forEach(PixelConverter, boolean, Consumer),
forEach(int, int, int, int, Consumer),
forEach(int, int, int, int, PixelManipulator),
forEach(boolean, int, int, int, int, Consumer),
forEach(boolean, int, int, int, int, PixelManipulator),
forEach(PixelConverter, boolean, int, int, int, int, Consumer),
stream()
-
forEach
default <T> void forEach(ContourPlot.PixelConvertingSpliterator.PixelConverter<? super P,T> converter,
boolean parallel,
int xStart,
int yStart,
int width,
int height,
java.util.function.Consumer<? super T> action)
Applies the specified action to every pixel in the specified area of this image.
Prior to applying the action, each time the pixel is converted using the specified
converter. The action is then performed on an instance of the element type of the converter
(which is also the type accepted by the action).
Finally the modified instance is then converted back to the pixel.
- Type Parameters:
T - converter's element type- Parameters:
converter - that converts the pixel to the type accepted by the actionparallel - whether to be performed in parallelxStart - left boundary of the area (inclusive)yStart - upper boundary of the area (inclusive)width - of the areaheight - of the areaaction - to be performed on each pixel- Throws:
java.lang.IllegalArgumentException - if provided area is not within this
images's bounds, or if the area is not positive (width or height ≤ 0).- See Also:
forEach(Consumer),
forEach(PixelManipulator),
forEach(boolean, Consumer),
forEach(boolean, PixelManipulator),
forEach(PixelConverter, boolean, Consumer),
forEach(int, int, int, int, Consumer),
forEach(int, int, int, int, PixelManipulator),
forEach(boolean, int, int, int, int, Consumer),
forEach(boolean, int, int, int, int, PixelManipulator),
forEach(PixelConverter, boolean, int, int, int, int, Consumer),
stream()
-
forEach
default <T> void forEach(ContourPlot.PixelManipulator<? super P,T> manipulator)
Applies the specified manipulator to every pixel of this image.
- Type Parameters:
T - manipulator's element type- Parameters:
manipulator - that will be applied- See Also:
forEach(Consumer),
forEach(PixelManipulator),
forEach(boolean, Consumer),
forEach(boolean, PixelManipulator),
forEach(PixelConverter, boolean, Consumer),
forEach(int, int, int, int, Consumer),
forEach(int, int, int, int, PixelManipulator),
forEach(boolean, int, int, int, int, Consumer),
forEach(boolean, int, int, int, int, PixelManipulator),
forEach(PixelConverter, boolean, int, int, int, int, Consumer),
stream()
-
forEach
default <T> void forEach(boolean parallel,
ContourPlot.PixelManipulator<? super P,T> manipulator)
Applies the specified manipulator to every pixel of this image.
- Type Parameters:
T - manipulator's element type- Parameters:
parallel - whether to be performed in parallelmanipulator - that will be applied- See Also:
forEach(Consumer),
forEach(PixelManipulator),
forEach(boolean, Consumer),
forEach(boolean, PixelManipulator),
forEach(PixelConverter, boolean, Consumer),
forEach(int, int, int, int, Consumer),
forEach(int, int, int, int, PixelManipulator),
forEach(boolean, int, int, int, int, Consumer),
forEach(boolean, int, int, int, int, PixelManipulator),
forEach(PixelConverter, boolean, int, int, int, int, Consumer),
stream()
-
forEach
default <T> void forEach(int xStart,
int yStart,
int width,
int height,
ContourPlot.PixelManipulator<? super P,T> manipulator)
Applies the specified manipulator to every pixel in the specified area of this image.
- Type Parameters:
T - manipulator's element type- Parameters:
xStart - left boundary of the area (inclusive)yStart - upper boundary of the area (inclusive)width - of the areaheight - of the areamanipulator - that will be applied- Throws:
java.lang.IllegalArgumentException - if provided area is not within this
images's bounds.- See Also:
forEach(Consumer),
forEach(PixelManipulator),
forEach(boolean, Consumer),
forEach(boolean, PixelManipulator),
forEach(PixelConverter, boolean, Consumer),
forEach(int, int, int, int, Consumer),
forEach(int, int, int, int, PixelManipulator),
forEach(boolean, int, int, int, int, Consumer),
forEach(boolean, int, int, int, int, PixelManipulator),
forEach(PixelConverter, boolean, int, int, int, int, Consumer),
stream()
-
forEach
default <T> void forEach(boolean parallel,
int xStart,
int yStart,
int width,
int height,
ContourPlot.PixelManipulator<? super P,T> manipulator)
Applies the specified manipulator to every pixel in the specified area of this image.
- Type Parameters:
T - manipulator's element type- Parameters:
parallel - whether to be performed in parallelxStart - left boundary of the area (inclusive)yStart - upper boundary of the area (inclusive)width - of the areaheight - of the areamanipulator - that will be applied- Throws:
java.lang.IllegalArgumentException - if provided area is not within this
images's bounds.- See Also:
forEach(Consumer),
forEach(PixelManipulator),
forEach(boolean, Consumer),
forEach(boolean, PixelManipulator),
forEach(PixelConverter, boolean, Consumer),
forEach(int, int, int, int, Consumer),
forEach(int, int, int, int, PixelManipulator),
forEach(boolean, int, int, int, int, Consumer),
forEach(boolean, int, int, int, int, PixelManipulator),
forEach(PixelConverter, boolean, int, int, int, int, Consumer),
stream()
-
stream
default java.util.stream.Stream<P> stream(boolean parallel,
int xStart,
int yStart,
int width,
int height)
- Parameters:
parallel - whether the stream is parallel (true) or sequential (false)xStart - left boundary of the area (inclusive)yStart - upper boundary of the area (inclusive)width - of the areaheight - of the area- Returns:
- Pixel Stream for specified area.
- Throws:
java.lang.IllegalArgumentException - if provided area is not within this
image's bounds.- See Also:
stream(),
stream(boolean parallel),
stream(int x, int y, int w, int h),
stream(boolean parallel, int x, int y, int w, int h),
stream(PixelConverter c, boolean parallel),
stream(PixelConverter c, boolean parallel, int x, int y, int w, int h),
stream(Spliterator spliterator, boolean parallel),
forEach(Consumer action)
-
stream
default <T> java.util.stream.Stream<T> stream(ContourPlot.PixelConvertingSpliterator.PixelConverter<? super P,T> converter,
boolean parallel,
int xStart,
int yStart,
int width,
int height)
Returns a
Stream of the specified
ContourPlot.PixelConvertingSpliterator.PixelConverter's element type
over the pixels of this image within the specified area. Each pixel will be converted to the element type
before being processed, and the element will be back converted to the pixel after
processing. The conversion and back conversion is handled by the specified converter.
- Type Parameters:
T - converter's element type- Parameters:
converter - that determines the element type of the stream and handles conversion/back conversionparallel - whether the stream is parallel (true) or sequential (false)xStart - left boundary of the area (inclusive)yStart - upper boundary of the area (inclusive)width - of the areaheight - of the area- Returns:
- a Stream over the pixels in the specified area of this image
in the representation given by the specified converter.
- Throws:
java.lang.IllegalArgumentException - if provided area is not within this image's bounds.- See Also:
stream(),
stream(boolean parallel),
stream(int x, int y, int w, int h),
stream(boolean parallel, int x, int y, int w, int h),
stream(PixelConverter c, boolean parallel),
stream(PixelConverter c, boolean parallel, int x, int y, int w, int h),
stream(Spliterator spliterator, boolean parallel),
forEach(boolean parallel, int x, int y, int w, int h, PixelManipulator m),
forEach(PixelConverter c, boolean parallel, int x, int y, int w, int h, Consumer action)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Ransac.html���������������������������������������������������0000775�4231163�4231163�00000022447�14537076056�022265� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Ransac (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Ransac
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
err_thresh |
|
(package private) int |
num_iter |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Ransac() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
err_thresh
double err_thresh
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.SnakeInitialiser.KeyValuePair.html�������������0000775�4231163�4231163�00000025734�14537076047�032204� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.SnakeInitialiser.KeyValuePair (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.KeyValuePair
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ScratchEvaluatePreparer.html�����������������������������0000775�4231163�4231163�00000030143�14537076052�027121� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ScratchEvaluatePreparer (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.ScratchEvaluatePreparer
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.OrderedGroups.html���������������������������������������0000775�4231163�4231163�00000044242�14537076052�025133� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.OrderedGroups (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups<T>
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.util.HashMap<T,java.lang.Integer> |
element_to_group_ |
|
private java.util.HashMap<java.lang.Integer,java.util.Set<T>> |
group_to_elements_ |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
OrderedGroups
public OrderedGroups()
-
Method Detail
-
NumGroups
public int NumGroups()
-
NumElements
public int NumElements()
-
Clear
public void Clear()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmColocalizationRegression.html�������������������������������0000775�4231163�4231163�00000300236�14537076044�026775� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmColocalizationRegression (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmColocalizationRegression(ModelImage destImg,
ModelImage srcImg,
ModelImage baseImage,
java.util.BitSet mask,
int bin1,
int bin2,
float background1,
float background2,
int leftPad,
int rightPad,
int bottomPad,
int topPad,
boolean doColocWithThresholds,
boolean entireImage,
boolean register,
int cost,
boolean doSecondIteration,
boolean doVOISubtraction,
boolean pointCalculation,
float point1,
float point2) |
Constructor for images in which 2D histogram is placed in a predetermined destination image.
|
AlgorithmColocalizationRegression(ModelImage destImg,
ModelImage srcImg,
java.util.BitSet mask,
int bin1,
int bin2,
float background1,
float background2,
int leftPad,
int rightPad,
int bottomPad,
int topPad,
boolean useRed,
boolean useGreen,
boolean useBlue,
boolean doColocWithThresholds,
boolean entireImage,
boolean register,
int cost,
boolean doSecondIteration,
boolean doVOISubtraction,
boolean pointCalculation,
float point1,
float point2) |
Constructor for images in which 2D histogram is placed in a predetermined destination image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calc2D() |
This function produces a 2D histogram image with srcImage values represented across the x axis and baseImage
values represented across the y axis.
|
void |
calc2DBWStats() |
DOCUMENT ME!
|
void |
calc2DColorStats() |
DOCUMENT ME!
|
private void |
calc3D() |
This function produces a 2D histogram image with srcImage values represented across the x axis and baseImage
values represented across the y axis.
|
private void |
calcColor2D() |
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis.
|
private void |
calcColor3D() |
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis.
|
void |
calculateFreeRangeThreshold(int ch1,
int ch2) |
DOCUMENT ME!
|
void |
calculateThreshold(int thresholdIndex) |
DOCUMENT ME!
|
void |
createFreeRangeArrays() |
DOCUMENT ME!
|
void |
finalize() |
Prepares this class for destruction.
|
void |
removeVOIUpdateListener() |
DOCUMENT ME!
|
void |
runAlgorithm() |
starts the algorithm.
|
void |
selectionChanged(UpdateVOIEvent newVOIselection) |
responds to the volume of interest (VOI) change events.
|
void |
updateFileInfo(ModelImage image,
ModelImage resultImage) |
Copy important file information to resultant image structure.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
bin1
private int bin1
DOCUMENT ME!
-
bin2
private int bin2
DOCUMENT ME!
-
bottomPad
private int bottomPad
DOCUMENT ME!
-
buffer
private float[] buffer
DOCUMENT ME!
-
color
private int color
DOCUMENT ME!
-
cost
private int cost
DOCUMENT ME!
-
doP
private boolean doP
DOCUMENT ME!
-
doSecondIteration
private boolean doSecondIteration
If true, do second iteration excluded subtrhesholded region from first iteration.
-
hsb
private float[] hsb
DOCUMENT ME!
-
hue
private float hue
DOCUMENT ME!
-
lineMin1
private double lineMin1
DOCUMENT ME!
-
lineMin2
private double lineMin2
DOCUMENT ME!
-
min1
private double min1
DOCUMENT ME!
-
min2
private double min2
DOCUMENT ME!
-
scale1
private double scale1
DOCUMENT ME!
-
scale2
private double scale2
DOCUMENT ME!
-
nVOIs
private int nVOIs
DOCUMENT ME!
-
point1
private float point1
DOCUMENT ME!
-
point2
private float point2
DOCUMENT ME!
-
pointCalculation
private boolean pointCalculation
If pointCalculation is true, go to free range mode and set location at point1, point2.
-
PValue
private float PValue
DOCUMENT ME!
-
r
private float r
DOCUMENT ME!
-
redo
private boolean redo
DOCUMENT ME!
-
regionIndex
private int regionIndex
DOCUMENT ME!
-
register
private boolean register
DOCUMENT ME!
-
rightPad
private int rightPad
DOCUMENT ME!
-
secondColor
private int secondColor
DOCUMENT ME!
-
thirdColor
private int thirdColor
DOCUMENT ME!
-
thrLength
private int thrLength
DOCUMENT ME!
-
topPad
private int topPad
DOCUMENT ME!
-
useBlue
private boolean useBlue
DOCUMENT ME!
-
useGreen
private boolean useGreen
DOCUMENT ME!
-
useRed
private boolean useRed
DOCUMENT ME!
-
voiSize
private int voiSize
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmColocalizationRegression
public AlgorithmColocalizationRegression(ModelImage destImg,
ModelImage srcImg,
ModelImage baseImage,
java.util.BitSet mask,
int bin1,
int bin2,
float background1,
float background2,
int leftPad,
int rightPad,
int bottomPad,
int topPad,
boolean doColocWithThresholds,
boolean entireImage,
boolean register,
int cost,
boolean doSecondIteration,
boolean doVOISubtraction,
boolean pointCalculation,
float point1,
float point2)
Constructor for images in which 2D histogram is placed in a predetermined destination image. Used for 2 black and
white images
- Parameters:
destImg - image model where result image is to storedsrcImg - image for x axis of histogrambaseImage - image for y axis of histogrammask - mask for image - use is optionalbin1 - histogram x axis bin numberbin2 - histogram y axis bin numberbackground1 - minimum value for data in sourceImagebackground2 - minimum value for data in baseImageleftPad - space to the left of the histogram bin arearightPad - space to the right of the histogram bin areabottomPad - space to the bottom of the histogram bin areatopPad - space to the top of the histogram bin areadoColocWithThresholds - If true, calculate colocalization only using pixels >= thresholdentireImage - If false, only use data from VOI regionregister - If true register 2 black and white images before colocalizationcost - Cost function used in registrationdoSecondIteration - If true, do second iteration excluding subthresholded region from first iterationdoVOISubtraction - If true, create a new image with the average VOI background level subtracted outpointCalculation - If true, go to free range mode and set position at point1, point2point1 - DOCUMENT ME!point2 - DOCUMENT ME!
-
AlgorithmColocalizationRegression
public AlgorithmColocalizationRegression(ModelImage destImg,
ModelImage srcImg,
java.util.BitSet mask,
int bin1,
int bin2,
float background1,
float background2,
int leftPad,
int rightPad,
int bottomPad,
int topPad,
boolean useRed,
boolean useGreen,
boolean useBlue,
boolean doColocWithThresholds,
boolean entireImage,
boolean register,
int cost,
boolean doSecondIteration,
boolean doVOISubtraction,
boolean pointCalculation,
float point1,
float point2)
Constructor for images in which 2D histogram is placed in a predetermined destination image. Used for 1 color
image.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelmask - mask for image - use optionalbin1 - histogram x axis bin numberbin2 - histogram y axis bin numberbackground1 - minimum data value for first colorbackground2 - minimum data value for second colorleftPad - space to the left of the histogram bin arearightPad - space to the right of the histogram bin areabottomPad - space to the bottom of the histogram bin areatopPad - space to the top of the histogram bin areauseRed - DOCUMENT ME!useGreen - DOCUMENT ME!useBlue - DOCUMENT ME!doColocWithThresholds - If true, calculate colocalization only using pixels >= thresholdentireImage - If false, use only data from VOI regionregister - If true, register 2 colors before colocalizationcost - Cost function used in registrationdoSecondIteration - If true, do second iteration excluding subthresholded region from first iterationdoVOISubtraction - If true, create a new image with the average VOI background level subtracted outpointCalculation - If true, go to free range mode and set position at point1, point2point1 - DOCUMENT ME!point2 - DOCUMENT ME!
-
Method Detail
-
updateFileInfo
public void updateFileInfo(ModelImage image,
ModelImage resultImage)
Copy important file information to resultant image structure.
- Parameters:
image - Source image.resultImage - Resultant image.
-
calcColor2D
private void calcColor2D()
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis. The total least squares line and a matrix of correlation coefficients
for L shaped subthreshold regions are also generated.
-
calcColor3D
private void calcColor3D()
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis. The total least squares line and a matrix of correlation coefficients
for L shaped subthreshold regions are also generated.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LineSearchOptions.html�����������������������������������0000775�4231163�4231163�00000032472�14537076052�025742� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LineSearchOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
is_silent
public boolean is_silent
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.WolfeLineSearch.html�������������������������������������0000775�4231163�4231163�00000041754�14537076052�025366� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.WolfeLineSearch (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
BracketingPhase(CeresSolver.FunctionSample initial_position,
double step_size_estimate,
CeresSolver.FunctionSample bracket_low,
CeresSolver.FunctionSample bracket_high,
boolean[] do_zoom_search,
CeresSolver.LineSearchSummary summary) |
|
void |
DoSearch(double step_size_estimate,
double initial_cost,
double initial_gradient,
CeresSolver.LineSearchSummary summary) |
|
boolean |
ZoomPhase(CeresSolver.FunctionSample initial_position,
CeresSolver.FunctionSample bracket_low,
CeresSolver.FunctionSample bracket_high,
CeresSolver.FunctionSample solution,
CeresSolver.LineSearchSummary summary) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������gov/nih/mipav/model/algorithms/PyramidToolbox.html��������������������������������������������������0000775�4231163�4231163�00000077337�14537076056�023107� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PyramidToolbox (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
buildSpyr(java.util.Vector<double[][]> pyr,
java.util.Vector<int[]> pind,
java.util.Vector<int[]> harmonics,
java.util.Vector<double[][]> steermtx,
double[][] im,
int ht,
java.lang.String filtfile,
int borderType) |
|
private void |
buildSpyrLevs(java.util.Vector<double[][]> pyr,
java.util.Vector<int[]> pind,
double[][] lo0,
int ht,
double[][] lofilt,
double[][] bfilts,
int borderType) |
|
double[][] |
copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue) |
|
private double[][] |
filter2SameWithDownSample(double[][] img,
double[][] win,
int borderType,
int downSampleY,
int downSampleX) |
|
private int |
maxPyrHt(int imszy,
int imszx,
int filtsz) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
BORDER_CONSTANT
public final int BORDER_CONSTANT
This code is a port of the MATLAB Pyramid Toolbox
=========================== matlabPyrTools ============================
This package contains some MatLab tools for multi-scale image
processing. Briefly, the tools include:
- Recursive multi-scale image decompositions (pyramids), including
Laplacian pyramids, QMFs, Wavelets, and steerable pyramids. These
operate on 1D or 2D signals of arbitrary dimension. Data
structures are compatible with the MatLab wavelet toolbox.
- Fast 2D convolution routines, with subsampling and boundary-handling.
- Fast point-operations, histograms, histogram-matching.
- Fast synthetic image generation: sine gratings, zone plates, fractals, etc.
- Display routines for images and pyramids. These include several
auto-scaling options, rounding to integer zoom factors to avoid
resampling artifacts, and useful labeling (dimensions and gray-range).
The package is available as a gnu-zipped UNIX "tar" file, accessible
from the web page: http://www.cns.nyu.edu/~lcv/software.html
The MIT License (MIT)
Copyright (c) 2015 LabForComputationalVision
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
- See Also:
- Constant Field Values
-
Constructor Detail
-
PyramidToolbox
public PyramidToolbox()
-
Method Detail
-
buildSpyr
public void buildSpyr(java.util.Vector<double[][]> pyr,
java.util.Vector<int[]> pind,
java.util.Vector<int[]> harmonics,
java.util.Vector<double[][]> steermtx,
double[][] im,
int ht,
java.lang.String filtfile,
int borderType)
-
copyMakeBorder
public double[][] copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue)
-
filter2SameWithDownSample
private double[][] filter2SameWithDownSample(double[][] img,
double[][] win,
int borderType,
int downSampleY,
int downSampleX)
-
buildSpyrLevs
private void buildSpyrLevs(java.util.Vector<double[][]> pyr,
java.util.Vector<int[]> pind,
double[][] lo0,
int ht,
double[][] lofilt,
double[][] bfilts,
int borderType)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmKMeans.positionWeightItem.html������������������������������0000775�4231163�4231163�00000030357�14537076046�027000� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmKMeans.positionWeightItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmKMeans.positionWeightItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
position |
DOCUMENT ME!
|
private double |
weight |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
positionWeightItem(double position,
double weight) |
Creates a new positionWieghtItem object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/�����������������������������������������������������������0002775�4231163�4231163�00000000000�14537076122�021230� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/Algorithm4DImageCalculator.html����������������������������0000775�4231163�4231163�00000265013�14537076061�027223� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Algorithm4DImageCalculator (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private byte[] |
doByteAddClip(byte[] xytBuff) |
Calculates addition between 2 images
|
private short[] |
doByteAddPromote(byte[] xytBuff) |
Calculates addition between 2 images
|
private byte[] |
doByteAverage(byte[] xytBuff) |
Calculates the average between 2 images
|
private byte[] |
doByteMax(byte[] xytBuff) |
Calculates the max between 2 4d-byte-images by doing math on an xyt buffer that is built from both images
|
private byte[] |
doByteMin(byte[] xytBuff) |
Calculates the minimum between 2 images
|
private byte[] |
doByteNormClip(byte[] xytBuff) |
Calculates the norm between 2 images
|
private short[] |
doByteNormPromote(byte[] xytBuff) |
Calculates the norm between 2 images
|
private byte[] |
doByteStdDev(byte[] xytBuff) |
Calculates the standard deviation between 2 images
|
private double[] |
doDoubleAddClip(double[] xytBuff) |
Calculates addition between 2 images
|
private double[] |
doDoubleAddClipComplex(double[] xytBuff) |
Calculates addition between 2 images
|
private double[] |
doDoubleAverage(double[] xytBuff) |
Calculates the average between 2 images
|
private double[] |
doDoubleAverageComplex(double[] xytBuff) |
Calculates the average between 2 images
|
private double[] |
doDoubleMax(double[] xytBuff) |
Calculates the max between 2 images
|
private double[] |
doDoubleMaxComplex(double[] xytBuff) |
Calculates the max between 2 images
|
private double[] |
doDoubleMin(double[] xytBuff) |
Calculates the minimum between 2 images
|
private double[] |
doDoubleMinComplex(double[] xytBuff) |
Calculates the minimum between 2 images
|
private double[] |
doDoubleNormClip(double[] xytBuff) |
Calculates the norm between 2 images
|
private double[] |
doDoubleStdDev(double[] xytBuff) |
Calculates the standard deviation between 2 images
|
private float[] |
doFloatAddClip(float[] xytBuff) |
Calculates addition between 2 images
|
private float[] |
doFloatAddClipARGB(float[] xytBuff) |
Calculates addition between 2 images
|
private float[] |
doFloatAddClipComplex(float[] xytBuff) |
Calculates addition between 2 images
|
private double[] |
doFloatAddPromote(float[] xytBuff) |
Calculates addition between 2 images
|
private double[] |
doFloatAddPromoteComplex(float[] xytBuff) |
Calculates addition between 2 images
|
private float[] |
doFloatAverage(float[] xytBuff) |
Calculates the average between 2 images
|
private float[] |
doFloatAverageARGB(float[] xytBuff) |
Calculates the average between 2 images
|
private float[] |
doFloatAverageComplex(float[] xytBuff) |
Calculates the average between 2 images
|
private float[] |
doFloatMax(float[] xytBuff) |
Calculates the max between 2 images
|
private float[] |
doFloatMaxARGB(float[] xytBuff) |
Calculates the max between 2 images
|
private float[] |
doFloatMaxComplex(float[] xytBuff) |
Calculates the max between 2 images
|
private float[] |
doFloatMin(float[] xytBuff) |
Calculates the minimum between 2 images
|
private float[] |
doFloatMinARGB(float[] xytBuff) |
Calculates the minimum between 2 images
|
private float[] |
doFloatMinComplex(float[] xytBuff) |
Calculates the minimum between 2 images
|
private float[] |
doFloatNormClip(float[] xytBuff) |
Calculates the norm between 2 images
|
private float[] |
doFloatNormClipARGB(float[] xytBuff) |
Calculates the norm between 2 images
|
private double[] |
doFloatNormPromote(float[] xytBuff) |
Calculates the norm between 2 images
|
private float[] |
doFloatStdDev(float[] xytBuff) |
Calculates the standard deviation between 2 images
|
private float[] |
doFloatStdDevARGB(float[] xytBuff) |
Calculates the standard deviation between 2 images
|
private int[] |
doIntAddClip(int[] xytBuff) |
Calculates addition between 2 images
|
private int[] |
doIntAddClipARGB(int[] xytBuff) |
Calculates addition between 2 images
|
private long[] |
doIntAddPromote(int[] xytBuff) |
Calculates addition between 2 images
|
private float[] |
doIntAddPromoteARGB(int[] xytBuff) |
Calculates addition between 2 images
|
private int[] |
doIntAverage(int[] xytBuff) |
Calculates the average between 2 images
|
private int[] |
doIntAverageARGB(int[] xytBuff) |
Calculates the average between 2 images
|
private int[] |
doIntMax(int[] xytBuff) |
Calculates the max between 2 images
|
private int[] |
doIntMaxARGB(int[] xytBuff) |
Calculates the max between 2 images
|
private int[] |
doIntMin(int[] xytBuff) |
Calculates the minimum between 2 images
|
private int[] |
doIntMinARGB(int[] xytBuff) |
Calculates the minimum between 2 images
|
private int[] |
doIntNormClip(int[] xytBuff) |
Calculates the norm between 2 images
|
private int[] |
doIntNormClipARGB(int[] xytBuff) |
Calculates the norm between 2 images
|
private long[] |
doIntNormPromote(int[] xytBuff) |
Calculates the norm between 2 images
|
private float[] |
doIntNormPromoteARGB(int[] xytBuff) |
Calculates the norm between 2 short images
|
private int[] |
doIntStdDev(int[] xytBuff) |
Calculates the standard deviation between 2 images
|
private int[] |
doIntStdDevARGB(int[] xytBuff) |
Calculates the standard deviation between 2 images
|
private long[] |
doLongAddClip(long[] xytBuff) |
Calculates addition between 2 images
|
private double[] |
doLongAddPromote(long[] xytBuff) |
Calculates addition between 2 images
|
private long[] |
doLongAverage(long[] xytBuff) |
Calculates the average between 2 images
|
private long[] |
doLongMax(long[] xytBuff) |
Calculates the max between 2 images
|
private long[] |
doLongMin(long[] xytBuff) |
Calculates the minimum between 2 images
|
private long[] |
doLongNormClip(long[] xytBuff) |
Calculates the norm between 2 images
|
private double[] |
doLongNormPromote(long[] xytBuff) |
Calculates the norm between 2 images
|
private long[] |
doLongStdDev(long[] xytBuff) |
Calculates the standard deviation between 2 images
|
private short[] |
doShortAddClip(short[] xytBuff) |
Calculates addition between 2 images
|
private short[] |
doShortAddClipARGB(short[] xytBuff) |
Calculates addition between 2 images
|
private int[] |
doShortAddPromote(short[] xytBuff) |
Calculates addition between 2 images
|
private int[] |
doShortAddPromoteARGB(short[] xytBuff) |
Calculates addition between 2 images
|
private short[] |
doShortAverage(short[] xytBuff) |
Calculates the average between 2 images
|
private short[] |
doShortAverageARGB(short[] xytBuff) |
Calculates the average between 2 images
|
private short[] |
doShortMax(short[] xytBuff) |
Calculates the max between 2 images
|
private short[] |
doShortMaxARGB(short[] xytBuff) |
Calculates the max between 2 images
|
private short[] |
doShortMin(short[] xytBuff) |
Calculates the minimum between 2 images
|
private short[] |
doShortMinARGB(short[] xytBuff) |
Calculates the minimum between 2 images
|
private short[] |
doShortNormClip(short[] xytBuff) |
Calculates the norm between 2 images
|
private short[] |
doShortNormClipARGB(short[] xytBuff) |
Calculates the norm between 2 images
|
private int[] |
doShortNormPromote(short[] xytBuff) |
Calculates the norm between 2 short images
|
private int[] |
doShortNormPromoteARGB(short[] xytBuff) |
Calculates the norm between 2 short images
|
private short[] |
doShortStdDev(short[] xytBuff) |
Calculates the standard deviation between 2 images
|
private short[] |
doShortStdDevARGB(short[] xytBuff) |
Calculates the standard deviation between 2 images
|
void |
runAlgorithm() |
Run algorithm
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
dataType
private int dataType
data type
-
colorFactor
private int colorFactor
-
Constructor Detail
-
Algorithm4DImageCalculator
public Algorithm4DImageCalculator(ModelImage image,
ModelImage resultImage,
int operationType,
boolean doClip)
constructor
- Parameters:
image - resultImage - operationType - doClip -
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmComplexConcat.html��������������������������������0000775�4231163�4231163�00000105553�14537076061�026540� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmComplexConcat (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
boolean |
commonMapping |
If true, map all colors based on image min and max.
|
private int |
dataType |
ARGB, ARGB_USHORT, or ARGB_FLOAT
|
private ModelImage |
destImage |
Destination image where results are to be stored.
|
private boolean |
performBoundsChecking |
flag for performing bounds checking...normally should be set to true unless negative numbers are desired
|
private boolean |
reMap |
Flag indicating whether of not to remap the data.
|
private float |
remapHighestValue |
|
private ModelImage |
srcImageB |
Source gray scale image to be stored in the BLUE channel.
|
private ModelImage |
srcImageG |
Source gray scale image to be stored in the GREEN channel.
|
private ModelImage |
srcImageR |
Source gray scale image to be stored in the RED channel.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmComplexConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
int dataType,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking) |
Creates a new AlgorithmRGBConcat object.
|
AlgorithmComplexConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
ModelImage destImg,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking) |
Creates a new AlgorithmRGBConcat object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
commonMapping
public boolean commonMapping
If true, map all colors based on image min and max. If false, map each color separately based on its own min
and max.
-
Constructor Detail
-
AlgorithmComplexConcat
public AlgorithmComplexConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
int dataType,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking)
Creates a new AlgorithmRGBConcat object.
- Parameters:
srcImgR - image model where result image of the Red channel is to be storedsrcImgG - image model where result image of the Green channel is to be storedsrcImgB - image model where result image of the Blue channel is to be storeddataType - Tells if srcImage will become ARGB, ARGB_USHORT, or ARGB_FLOATremap - if true and srcImage data max is < remapHighestValue data will be remapped [0-remapHighestValue]
else if image max > remapHighestValue data will automatically be remapped [0-remapHighestValue].commonMapping - remapHighestValue - The highest value that will occur if remapping occursperformBoundsChecking - flag for performing bounds checking...normally should be set to true unless negative numbers are desired
-
AlgorithmComplexConcat
public AlgorithmComplexConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
ModelImage destImg,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking)
Creates a new AlgorithmRGBConcat object.
- Parameters:
srcImgR - image model where result image of the Red channel is to be storedsrcImgG - image model where result image of the Green channel is to be storedsrcImgB - image model where result image of the Blue channel is to be storeddestImg - destination image image modelremap - if true and srcImage data max is < remapHighestValue data will be remapped [0-remapHighestValue]
else if image max > remapHighestValue data will automatically be remapped [0-remapHighestValue].commonMapping - remapHighestValue - The highest value that will occur if remapping occurs
* @param performBoundsChecking flag for performing bounds checking...normally should be set to true unless negative numbers are desired
�����������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmAddMargins.html�����������������������������������0000775�4231163�4231163�00000103514�14537076061�026005� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAddMargins (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmAddMargins
extends AlgorithmBase
Algorithm to add or remove margins around the image. Margins are defined in the screen-space coordinates.
marginX is screen-space left,right.
marginY is screen-space top,bottom.
marginZ is screen-space front,back.
Margins may be positive to add to the image, or negative to crop the image.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
marginColor |
|
private int[] |
marginT |
marginT indicating the number of slices to be padded in time at the start and end of T dimension
|
private int[] |
marginX |
marginX indicating the number of pixels to be padded on left and the right of X dimension
|
private int[] |
marginY |
marginY indicating the number of pixels to be padded on top and the bottom of Y dimension
|
private int[] |
marginZ |
marginZ indicating the number of slices to be padded in front and the back of Z dimension
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcStoreInDest() |
Adds image margins and stores result in destImage.
|
private void |
calcStoreInPlace() |
Adds image margins and stores result in srcImage Must use getSrcImage after running this routine.
|
private float[] |
calculateNewOrigin(ModelImage srcImg,
int[] margin) |
Calculates the origin values for the modified image, based on the current origin values and the added margins.
|
void |
finalize() |
Prepares this class for destruction.
|
ModelImage |
getSrcImage() |
Returns the source image.
|
void |
runAlgorithm() |
Runs the add image margins algorithm.
|
void |
setPadValue(float[] value) |
Sets the value for the added margins, for either grayscale or color images.
|
void |
setTMargins(int[] tMargin) |
Adds or removes margins in the 4th dimensions.
|
private void |
updateFileInfo(ModelImage kRead,
ModelImage kWrite) |
Updates the fileInfo values for the kWrite image, uses the fileInfo values from kRead.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmAddMargins
public AlgorithmAddMargins(ModelImage srcImage,
ModelImage destImage,
int[] x,
int[] y,
int[] z)
Add or remove margins from the srcImage and store the results in the destImage.
- Parameters:
srcImage - original imagedestImage - output modified imagex - margin in the screen-space x-direction to add or remove [left,right]y - margin in the screen-space y-direction to add or remove [top,bottom]z - margin in the screen-space z-direction to add or remove [front,back]
-
AlgorithmAddMargins
public AlgorithmAddMargins(ModelImage srcImage,
int[] x,
int[] y,
int[] z)
Add or remove margins from the srcImage.
- Parameters:
srcImage - original image modified by this algorithm.x - margin in the screen-space x-direction to add or remove [left,right]y - margin in the screen-space y-direction to add or remove [top,bottom]z - margin in the screen-space z-direction to add or remove [front,back]
-
Method Detail
-
setPadValue
public void setPadValue(float[] value)
Sets the value for the added margins, for either grayscale or color images.
- Parameters:
value - the image values to fill in the added margins.
-
updateFileInfo
private void updateFileInfo(ModelImage kRead,
ModelImage kWrite)
Updates the fileInfo values for the kWrite image, uses the fileInfo values from kRead.
- Parameters:
kRead - image to read fileInfo values fromkWrite - image to write fileInfo values to.
-
calculateNewOrigin
private float[] calculateNewOrigin(ModelImage srcImg,
int[] margin)
Calculates the origin values for the modified image, based on the current origin values and the added margins.
- Parameters:
srcImg - original imagemargin - margins added or removed from the image- Returns:
- new origins.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmSubset.html���������������������������������������0000775�4231163�4231163�00000063541�14537076061�025246� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSubset (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmSubset
extends AlgorithmBase
Algorithm to create a 3D subset image from a 4D image. The user specifies the dimension to remove - x, y, z, or t and
the value of the removed dimension.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
REMOVE_T |
Remove t dimension.
|
static int |
REMOVE_X |
Remove x dimension.
|
static int |
REMOVE_Y |
Remove y dimension.
|
static int |
REMOVE_Z |
Remove z dimension.
|
private int |
removeDim |
Dimension to be removed.
|
private int |
sliceNum |
Slice value for removed dimension.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmSubset(ModelImage srcImage,
ModelImage destImage,
int removeDim,
int sliceNum) |
import source and destination images into the class.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmSubset
public AlgorithmSubset(ModelImage srcImage,
ModelImage destImage,
int removeDim,
int sliceNum)
import source and destination images into the class.
- Parameters:
srcImage - source image (image to clip from)destImage - destination image (image to paste to)removeDim - the dimension to be removedsliceNum - slice value for removed dimension
���������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmSwap34.html���������������������������������������0000775�4231163�4231163�00000054641�14537076061�025063� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSwap34 (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
�����������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmMatchImages.html����������������������������������0000775�4231163�4231163�00000121342�14537076061�026155� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMatchImages (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmMatchImages
extends AlgorithmBase
Matches two ModelImages.
The output of this Algorithm is two ModelImages that have the same units of measure,
the same resolutions, and the same extents. If the user chooses, the image orientations
(left-to-right, anterior-to-posterior, inferior-to-superior, etc) will be matched. If the
user chooses, the image origins will be matched.
Either imageA, imageB or sometimes neither will be different after the algorithm completes.
The result images are returned with the getImageA() and getImageB() functions.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
doOrients |
flag for turning on/off using the image orientations to match the images
|
private boolean |
doOrigins |
flag for turning on/off using the image origins to match the images
|
private float[] |
padValue |
image values to use for padding the images, if necessary
|
private ModelImage |
srcImageB |
srcImageB: image to match to srcImage
|
private boolean |
useReferenceResolutions |
When true resolution matching defaults to the reference image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private ModelImage |
changeResolutions(ModelImage kImage,
float[] afNewRes) |
Changes the resolutions of the input image.
|
void |
disposeLocal() |
remove local memory
|
void |
finalize() |
Prepares this class for destruction.
|
ModelImage |
getImageA() |
Returns imageA, which may have changed during the match.
|
ModelImage |
getImageB() |
Returns imageB, which may have changed during the match.
|
private boolean |
matchOriginsExtents(ModelImage imageA,
ModelImage imageB,
int[] padAFront,
int[] padABack,
int[] padBFront,
int[] padBBack) |
Matches the origins and extents of the two input images.
|
private float[] |
matchResolutions(ModelImage imageA,
ModelImage imageB) |
Match the resolutions of the two images.
|
private void |
matchUnits(ModelImage imageA,
ModelImage imageB) |
Matches the units of measure for the two input images.
|
private ModelImage |
padImage(ModelImage kImage,
int[] padFront,
int[] padBack) |
Adds or removes margins to the input image.
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
setPadValue(float value) |
Sets the pad value for single-channel images.
|
void |
setPadValue(float red,
float green,
float blue) |
Sets the pad value for color images
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmMatchImages
public AlgorithmMatchImages(ModelImage kImageA,
ModelImage kImageB,
boolean doOrigins,
boolean doOrients)
Create an AlgorithmMatchImages to match the two input images.
- Parameters:
kImageA - target image to match tokImageB - image that is changing to match to imageAdoOrigins - flag for turning on/off using the image origins to match the imagesdoOrients - flag for turning on/off using the image orientations to match the images
-
AlgorithmMatchImages
public AlgorithmMatchImages(ModelImage kImageA,
ModelImage kImageB,
boolean doOrigins,
boolean doOrients,
boolean useReferenceResolutions)
Create an AlgorithmMatchImages to match the two input images.
- Parameters:
kImageA - target image to match tokImageB - image that is changing to match to imageAdoOrigins - flag for turning on/off using the image origins to match the imagesdoOrients - flag for turning on/off using the image orientations to match the images
-
Method Detail
-
setPadValue
public void setPadValue(float red,
float green,
float blue)
Sets the pad value for color images
- Parameters:
red - red pad valuegreen - green pad valueblue - blue pad value
-
matchUnits
private void matchUnits(ModelImage imageA,
ModelImage imageB)
Matches the units of measure for the two input images.
- Parameters:
imageA - target image to match to.imageB - image that is being changed.
-
matchResolutions
private float[] matchResolutions(ModelImage imageA,
ModelImage imageB)
Match the resolutions of the two images. Determines the lowest resolution
of either image along each dimension.
If useReferenceResolutions is true, the reference image (imageA) resolutions are used.
- Parameters:
imageA - imageB - - Returns:
- new resolutions that will be applied to both images.
-
changeResolutions
private ModelImage changeResolutions(ModelImage kImage,
float[] afNewRes)
Changes the resolutions of the input image.
- Parameters:
kImage - input image.afNewRes - new resolutions.- Returns:
- new ModelImage, or the input image if unchanged.
-
matchOriginsExtents
private boolean matchOriginsExtents(ModelImage imageA,
ModelImage imageB,
int[] padAFront,
int[] padABack,
int[] padBFront,
int[] padBBack)
Matches the origins and extents of the two input images. Matching origins is an option the user sets.
- Parameters:
imageA - input image A.imageB - input image B.padAFront - output values for adding or removing voxels to the front of imageA [left,top,front,time]padABack - output values for adding or removing voxels to the back of imageA [right,bottom,back,time]padBFront - output values for adding or removing voxels to the front of imageB [left,top,front,time]padBBack - output values for adding or removing voxels to the back of imageB [right,bottom,back,time]- Returns:
- true if either image requires changing to match the two images, false if neither image requires changing.
-
padImage
private ModelImage padImage(ModelImage kImage,
int[] padFront,
int[] padBack)
Adds or removes margins to the input image.
- Parameters:
kImage - input images.padFront - margins to add or remove to the front of the image [left,top,front,time]padBack - margins to add or remove to the end of the image [right,bottom,back,time]- Returns:
- new image or the original input image if no change.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmMask.html�����������������������������������������0000775�4231163�4231163�00000155412�14537076061�024673� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMask (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
imageFill |
Set the mask areas to this value.
|
private float |
imageFillB |
DOCUMENT ME!
|
private float |
imageFillG |
DOCUMENT ME!
|
private float |
imageFillI |
|
private float |
imageFillR |
DOCUMENT ME!
|
private boolean |
polarity |
if true then fill inside the VOI.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMask(ModelImage srcImg,
float fill,
boolean polarity,
boolean useVOI) |
Creates a new AlgorithmMask object.
|
AlgorithmMask(ModelImage srcImg,
float fill,
float fillI,
boolean polarity,
boolean useVOI) |
Creates a new AlgorithmMask object.
|
AlgorithmMask(ModelImage srcImg,
float fillR,
float fillG,
float fillB,
boolean polarity,
boolean useVOI) |
Creates a new AlgorithmMask object.
|
AlgorithmMask(ModelImage destImg,
ModelImage srcImg,
float fill,
boolean polarity,
boolean useVOI) |
Creates a new AlgorithmMask object.
|
AlgorithmMask(ModelImage destImg,
ModelImage srcImg,
float fill,
float fillI,
boolean polarity,
boolean useVOI) |
Creates a new AlgorithmMask object.
|
AlgorithmMask(ModelImage destImg,
ModelImage srcImg,
float fillR,
float fillG,
float fillB,
boolean polarity,
boolean useVOI) |
Creates a new AlgorithmMask object.
|
AlgorithmMask(ModelImage srcImg,
java.awt.Color _fillColor,
boolean polarity,
boolean useVOI) |
Creates a new AlgorithmMask object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcInPlace25D(java.util.BitSet mask,
float fillValue,
int tSlice) |
Fills VOI of the source image with fill value.
|
void |
calcInPlace25D(java.util.BitSet mask,
float fillValue,
int tSlice,
java.util.Vector<java.lang.Integer> intensityLockVector,
boolean showProgressBar) |
Fills VOI of the source image with fill value.
|
void |
calcInPlace25DC(java.util.BitSet mask,
java.awt.Color fillColor,
int tSlice,
java.lang.String rgbString,
java.util.Vector<java.lang.Integer> intensityLockVector,
boolean showProgressBar) |
Fills VOI of the color source image with fill color.
|
void |
calcInPlace25DCMask(java.util.BitSet mask,
java.awt.Color fillColor,
int tSlice) |
Fills VOI of the color source image with fill color.
|
void |
calcInPlace25DMask(java.util.BitSet mask,
float fillValue,
int tSlice) |
Fills VOI of the source image with fill value.
|
void |
calcInPlace25DMask(java.util.BitSet mask,
float fillValue,
int tSlice,
java.util.Vector<java.lang.Integer> intensityLockVector) |
Fills VOI of the source image with fill value.
|
private void |
calcInPlace2D() |
Fills VOI of source image with fill value.
|
private void |
calcInPlace2DComplex() |
Fills VOI of source image with fill value.
|
private void |
calcInPlace2DRGB() |
Fills VOI of source image with fill value.
|
private void |
calcInPlace3D() |
Fills VOI of the source image with fill value.
|
private void |
calcInPlace3DComplex() |
Fills VOI of the source image with fill value.
|
private void |
calcInPlace3DRGB() |
Fills VOI of the source image with fill value.
|
private void |
calcInPlace4D() |
Fills VOI of the source image with fill value.
|
private void |
calcInPlace4DComplex() |
Fills VOI of the source image with fill value.
|
private void |
calcInPlace4DRGB() |
Fills VOI of the source image with fill value.
|
private void |
calcStoreInDest2D() |
Fills new image/VOI with new fill value;
|
private void |
calcStoreInDest2DComplex() |
Fills new image/VOI with new fill value;
|
private void |
calcStoreInDest2DRGB() |
Fills new image/VOI with new fill value;
|
private void |
calcStoreInDest3D() |
Fills new image/VOI with new fill value;
|
private void |
calcStoreInDest3DComplex() |
Fills new image/VOI with new fill value;
|
private void |
calcStoreInDest3DRGB() |
Fills new image/VOI with new fill value;
|
private void |
calcStoreInDest4D() |
Fills new image/VOI with new fill value;
|
private void |
calcStoreInDest4DComplex() |
Fills new image/VOI with new fill value;
|
private void |
calcStoreInDest4DRGB() |
Fills new image/VOI with new fill value;
|
void |
finalize() |
Prepares this class for destruction.
|
void |
runAlgorithm() |
Starts the program.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
imageFillB
private float imageFillB
DOCUMENT ME!
-
imageFillG
private float imageFillG
DOCUMENT ME!
-
imageFillR
private float imageFillR
DOCUMENT ME!
-
imageFillI
private float imageFillI
-
Constructor Detail
-
AlgorithmMask
public AlgorithmMask(ModelImage srcImg,
float fill,
boolean polarity,
boolean useVOI)
Creates a new AlgorithmMask object.
- Parameters:
srcImg - source image modelfill - value used to fill a regionpolarity - flag indicating fill location, true = fill inside; false fill outsideuseVOI - use the VOI to define the mask area else it will use the painted area to define the mask.
-
AlgorithmMask
public AlgorithmMask(ModelImage srcImg,
java.awt.Color _fillColor,
boolean polarity,
boolean useVOI)
Creates a new AlgorithmMask object.
- Parameters:
srcImg - source image model_fillColor - color used to fill a regionpolarity - flag indicating fill location, true = fill inside; false fill outsideuseVOI - use the VOI to define the mask area else it will use the painted area to define the mask.
-
AlgorithmMask
public AlgorithmMask(ModelImage destImg,
ModelImage srcImg,
float fill,
boolean polarity,
boolean useVOI)
Creates a new AlgorithmMask object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelfill - value used to fill a regionpolarity - flag indicating fill location, true = fill inside; false fill outsideuseVOI - use the VOI to define the mask area else it will use the painted area to define the mask.
-
AlgorithmMask
public AlgorithmMask(ModelImage srcImg,
float fillR,
float fillG,
float fillB,
boolean polarity,
boolean useVOI)
Creates a new AlgorithmMask object.
- Parameters:
srcImg - source image modelfillR - red value used to fill a regionfillG - green value used to fill a regionfillB - blue value used to fill a regionpolarity - flag indicating fill location, true = fill inside; false fill outsideuseVOI - use the VOI to define the mask area else it will use the painted area to define the mask.
-
AlgorithmMask
public AlgorithmMask(ModelImage destImg,
ModelImage srcImg,
float fillR,
float fillG,
float fillB,
boolean polarity,
boolean useVOI)
Creates a new AlgorithmMask object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelfillR - red value used to fill a regionfillG - green value used to fill a regionfillB - blue value used to fill a regionpolarity - flag indicating fill location, true = fill inside; false fill outsideuseVOI - use the VOI to define the mask area else it will use the painted area to define the mask.
-
AlgorithmMask
public AlgorithmMask(ModelImage srcImg,
float fill,
float fillI,
boolean polarity,
boolean useVOI)
Creates a new AlgorithmMask object.
- Parameters:
srcImg - source image modelfill - real value used to fill a regionfillI - imaginary value used to fill a regionpolarity - flag indicating fill location, true = fill inside; false fill outsideuseVOI - use the VOI to define the mask area else it will use the painted area to define the mask.
-
AlgorithmMask
public AlgorithmMask(ModelImage destImg,
ModelImage srcImg,
float fill,
float fillI,
boolean polarity,
boolean useVOI)
Creates a new AlgorithmMask object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelfill - real value used to fill a regionfillI - imaginary value used to fill a regionpolarity - flag indicating fill location, true = fill inside; false fill outsideuseVOI - use the VOI to define the mask area else it will use the painted area to define the mask.
-
Method Detail
-
calcInPlace25D
public void calcInPlace25D(java.util.BitSet mask,
float fillValue,
int tSlice)
Fills VOI of the source image with fill value.
- Parameters:
mask - DOCUMENT ME!fillValue - value to be placed in the image where the mask is truetSlice - indicates which volume should be painted (tSlice = 4th dimension)
-
calcInPlace25D
public void calcInPlace25D(java.util.BitSet mask,
float fillValue,
int tSlice,
java.util.Vector<java.lang.Integer> intensityLockVector,
boolean showProgressBar)
Fills VOI of the source image with fill value.
- Parameters:
mask - DOCUMENT ME!fillValue - value to be placed in the image where the mask is truetSlice - indicates which volume should be painted (tSlice = 4th dimension)intensityLockVector - Vector containing Integer objects that represent the intensity values that are not
mutable
-
calcInPlace25DC
public void calcInPlace25DC(java.util.BitSet mask,
java.awt.Color fillColor,
int tSlice,
java.lang.String rgbString,
java.util.Vector<java.lang.Integer> intensityLockVector,
boolean showProgressBar)
Fills VOI of the color source image with fill color.
- Parameters:
mask - DOCUMENT ME!fillColor - color to be placed in the image where the mask is truetSlice - indicates which volume should be painted (tSlice = 4th dimension)
-
calcInPlace25DCMask
public void calcInPlace25DCMask(java.util.BitSet mask,
java.awt.Color fillColor,
int tSlice)
Fills VOI of the color source image with fill color.
- Parameters:
mask - DOCUMENT ME!fillColor - color to be placed in the image where the mask is truetSlice - indicates which volume should be painted (tSlice = 4th dimension)
-
calcInPlace25DMask
public void calcInPlace25DMask(java.util.BitSet mask,
float fillValue,
int tSlice)
Fills VOI of the source image with fill value.
- Parameters:
mask - DOCUMENT ME!fillValue - value to be placed in the image where the mask is truetSlice - indicates which volume should be painted (tSlice = 4th dimension)
-
calcInPlace25DMask
public void calcInPlace25DMask(java.util.BitSet mask,
float fillValue,
int tSlice,
java.util.Vector<java.lang.Integer> intensityLockVector)
Fills VOI of the source image with fill value.
- Parameters:
mask - DOCUMENT ME!fillValue - value to be placed in the image where the mask is truetSlice - indicates which volume should be painted (tSlice = 4th dimension)intensityLockVector - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmRemoveSlices.html���������������������������������0000775�4231163�4231163�00000107313�14537076061�026375� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRemoveSlices (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
oldZdim |
Original Z dimension of the image.
|
private boolean[] |
remove |
List of slices to remove from source image.
|
private int |
sliceArea |
Area of a slice (Xdim * Ydim).
|
private int |
Xdim |
X dimension of the image.
|
private int |
Ydim |
Y dimension of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcInPlace() |
Calculates the final output and stores it in the source image.
|
void |
calcStoreInDest() |
Calculates the final output and puts it in a destination image.
|
private int[] |
computeNewExtents() |
Calculates and returns the new extents based on the source image and the list of slices to be removed.
|
void |
finalize() |
Prepares this class for destruction.
|
protected int |
getAxisOfChange() |
Calculates and returns the axis of change based on the srcImage.
|
protected int |
getColorFactor() |
Calculates and returns the color factor based on the srcImage.
|
private int |
getNumRemoved() |
computes and returns the number of slices to remove.
|
private int |
getOffset(int ndims,
int[] extents,
int colorFactor,
int t) |
Calculate and return the offset for the given image and time slice.
|
private int |
getOffset(ModelImage img,
int colorFactor,
int t) |
Calculate and return the offset for the given image and time slice.
|
private FileInfoBase |
getSliceFileInfo(int srcSlice,
int destSlice,
int t,
int[] newExtents) |
Build and return the fileInfo for the current slice based on the source slice, the destination slice and time
slice.
|
void |
runAlgorithm() |
Calculates the final output.
|
static void |
updateFileInfo(ModelImage image,
ModelImage resultImage) |
Copy important file information to resultant image structure.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmRemoveSlices
public AlgorithmRemoveSlices(ModelImage srcImage,
ModelImage destImage,
boolean[] removeSlices)
Import source and destination images into the class.
- Parameters:
srcImage - source image (image to clip from)destImage - destination image (image to paste to)removeSlices - list of boolean indicating which slices in source should *not* be in the destination
-
Method Detail
-
updateFileInfo
public static void updateFileInfo(ModelImage image,
ModelImage resultImage)
Copy important file information to resultant image structure.
- Parameters:
image - Source image.resultImage - Resultant image.
-
getOffset
private int getOffset(ModelImage img,
int colorFactor,
int t)
Calculate and return the offset for the given image and time slice.
- Parameters:
img - -- ModelImage whose offset is being computedcolorFactor - -- the image's colorFactort - -- current time slice- Returns:
- -- the computed offset into the data buffer
-
getOffset
private int getOffset(int ndims,
int[] extents,
int colorFactor,
int t)
Calculate and return the offset for the given image and time slice.
- Parameters:
ndims - -- number of dimensionsextents - -- the extents for the image offsetcolorFactor - -- the image's colorFactort - -- current time slice- Returns:
- -- the computed offset into the data buffer
-
getSliceFileInfo
private FileInfoBase getSliceFileInfo(int srcSlice,
int destSlice,
int t,
int[] newExtents)
Build and return the fileInfo for the current slice based on the source slice, the destination slice and time
slice.
- Parameters:
srcSlice - the current slice index for the src imagedestSlice - the current slice index for the result (dest) imaget - current time slicenewExtents - the extents for the result (dest) image- Returns:
- the fileInfo for destSlice
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmComplexToReal.html��������������������������������0000775�4231163�4231163�00000103737�14537076061�026521� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmComplexToReal (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
blueValue |
Weighting values for the red, green, and blue channels.
|
private float |
greenValue |
Weighting values for the red, green, and blue channels.
|
private boolean |
intensityAverage |
If true indicates that the result image is an average of the three channels.
|
private float |
redValue |
Weighting values for the red, green, and blue channels.
|
private float |
thirdValue |
This value equal one third (0.3333333).
|
private float |
threshold |
Only average values above threshold.
|
private boolean |
thresholdAverage |
If true only average values above threshold.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmComplexToReal(ModelImage srcImg) |
Creates a new AlgorithmComplexToReal object.
|
AlgorithmComplexToReal(ModelImage srcImg,
float redValue,
float greenValue,
float blueValue,
boolean thresholdAverage,
float threshold,
boolean intensityAverage) |
Creates a new AlgorithmComplexToReal object.
|
AlgorithmComplexToReal(ModelImage destImg,
ModelImage srcImg) |
Creates a new AlgorithmComplexToReal object.
|
AlgorithmComplexToReal(ModelImage destImg,
ModelImage srcImg,
float redValue,
float greenValue,
float blueValue,
boolean thresholdAverage,
float threshold,
boolean intensityAverage) |
Creates a new AlgorithmComplexToReal object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmComplexToReal
public AlgorithmComplexToReal(ModelImage destImg,
ModelImage srcImg)
Creates a new AlgorithmComplexToReal object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image model
-
AlgorithmComplexToReal
public AlgorithmComplexToReal(ModelImage srcImg,
float redValue,
float greenValue,
float blueValue,
boolean thresholdAverage,
float threshold,
boolean intensityAverage)
Creates a new AlgorithmComplexToReal object.
- Parameters:
srcImg - source image modelredValue - weighting of the red channelgreenValue - weighting of the green channelblueValue - weighting of the blue channelthresholdAverage - if true only average values above thresholdthreshold - DOCUMENT ME!intensityAverage - DOCUMENT ME!
-
AlgorithmComplexToReal
public AlgorithmComplexToReal(ModelImage destImg,
ModelImage srcImg,
float redValue,
float greenValue,
float blueValue,
boolean thresholdAverage,
float threshold,
boolean intensityAverage)
Creates a new AlgorithmComplexToReal object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelredValue - weighting of the red channelgreenValue - weighting of the green channelblueValue - weighting of the blue channelthresholdAverage - if true only average values above thresholdthreshold - DOCUMENT ME!intensityAverage - DOCUMENT ME!
���������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmConcat.html���������������������������������������0000775�4231163�4231163�00000070514�14537076061�025206� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConcat (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmConcat
public AlgorithmConcat(ModelImage srcIm1,
ModelImage srcIm2,
ModelImage dest)
Creates a new AlgorithmConcat object.
- Parameters:
srcIm1 - source image model 1srcIm2 - source image model 2dest - destination image
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmImageCalculator.html������������������������������0000775�4231163�4231163�00000270014�14537076061�027030� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmImageCalculator (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.FocusListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmImageCalculator
extends AlgorithmBase
implements java.awt.event.ActionListener, java.awt.event.FocusListener
Algorithm that adds, subtracts, multiplies, or divides an image by by another image. In addition, two images can be
ANDed, ORed or XORed together. Also, more advanced operator expressions can be entered in a dialog text field.
- Version:
- 1.0 Oct 1, 2000
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private javax.swing.JButton |
absButton |
DOCUMENT ME!
|
private javax.swing.JButton |
aButton |
DOCUMENT ME!
|
static int |
ADD |
DOCUMENT ME!
|
private javax.swing.JButton |
addButton |
DOCUMENT ME!
|
private javax.swing.JDialog |
adOpDialog |
DOCUMENT ME!
|
private java.lang.String |
adOpString |
DOCUMENT ME!
|
static int |
ADVANCED |
DOCUMENT ME!
|
static int |
AND |
DOCUMENT ME!
|
private double |
aVal |
DOCUMENT ME!
|
static int |
AVERAGE |
DOCUMENT ME!
|
static int |
AVGERAGE_WITH_STDEV |
|
private javax.swing.JButton |
backSpaceButton |
DOCUMENT ME!
|
private javax.swing.JButton |
bButton |
DOCUMENT ME!
|
private double |
bestMax |
/**.
|
private double |
bestMin |
/**.
|
private double |
bVal |
DOCUMENT ME!
|
private boolean |
cancel |
DOCUMENT ME!
|
private javax.swing.JButton |
cancelButton |
DOCUMENT ME!
|
private javax.swing.JButton |
ceButton |
DOCUMENT ME!
|
static int |
CLIP |
DOCUMENT ME!
|
private double |
clipMax |
Minimum and maximum clipping modes.
|
private double |
clipMin |
Minimum and maximum clipping modes.
|
private int |
clipMode |
Clipping mode.
|
private int |
colorFactor |
DOCUMENT ME!
|
private javax.swing.JButton |
commaButton |
DOCUMENT ME!
|
private javax.swing.JButton |
cosButton |
DOCUMENT ME!
|
private javax.swing.JButton |
decimalButton |
DOCUMENT ME!
|
static int |
DIFFERENCE |
DOCUMENT ME!
|
private javax.swing.JButton |
divButton |
DOCUMENT ME!
|
static int |
DIVIDE |
DOCUMENT ME!
|
private javax.swing.JButton |
eightButton |
DOCUMENT ME!
|
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private javax.swing.JButton |
expButton |
DOCUMENT ME!
|
private javax.swing.JButton |
fiveButton |
DOCUMENT ME!
|
private javax.swing.JButton |
fourButton |
DOCUMENT ME!
|
private javax.swing.JButton |
leftParButton |
DOCUMENT ME!
|
private javax.swing.JButton |
lnButton |
DOCUMENT ME!
|
private javax.swing.JButton |
logButton |
DOCUMENT ME!
|
private double |
maxA |
/**.
|
private double |
maxAB |
DOCUMENT ME!
|
private double |
maxAG |
DOCUMENT ME!
|
private double |
maxAR |
DOCUMENT ME!
|
private double |
maxB |
/**.
|
private double |
maxBB |
DOCUMENT ME!
|
private double |
maxBG |
DOCUMENT ME!
|
private double |
maxBR |
DOCUMENT ME!
|
static int |
MAXIMUM |
DOCUMENT ME!
|
static int |
MEAN_SQUARED_ERROR |
|
private double |
minA |
/**.
|
private double |
minAB |
DOCUMENT ME!
|
private double |
minAG |
DOCUMENT ME!
|
private double |
minAR |
DOCUMENT ME!
|
private double |
minB |
/**.
|
private double |
minBB |
DOCUMENT ME!
|
private double |
minBG |
DOCUMENT ME!
|
private double |
minBR |
DOCUMENT ME!
|
static int |
MINIMUM |
DOCUMENT ME!
|
private javax.swing.JButton |
modButton |
DOCUMENT ME!
|
private javax.swing.JButton |
multButton |
DOCUMENT ME!
|
static int |
MULTIPLY |
DOCUMENT ME!
|
private javax.swing.JButton |
nineButton |
DOCUMENT ME!
|
private boolean |
OK |
DOCUMENT ME!
|
private javax.swing.JButton |
OKButton |
DOCUMENT ME!
|
private javax.swing.JButton |
oneButton |
DOCUMENT ME!
|
private int |
opType |
Operation to be performed on the images (i.e.
|
static int |
OR |
DOCUMENT ME!
|
private javax.swing.JButton |
piButton |
DOCUMENT ME!
|
private javax.swing.JButton |
powButton |
DOCUMENT ME!
|
private boolean |
pressedOK |
DOCUMENT ME!
|
static int |
PROMOTE |
DOCUMENT ME!
|
private javax.swing.JButton |
rightParButton |
DOCUMENT ME!
|
private java.lang.String |
rpn |
|
private javax.swing.JButton |
sevenButton |
DOCUMENT ME!
|
private javax.swing.JButton |
sinButton |
DOCUMENT ME!
|
private javax.swing.JButton |
sixButton |
DOCUMENT ME!
|
private ModelImage |
srcImageA |
Source image A.
|
private ModelImage |
srcImageB |
Source image B.
|
private ModelImage[] |
srcImages |
when performing bulk operations via Image Calculator (Bulk Images) dialog, this array is populated
|
private javax.swing.JButton |
subButton |
DOCUMENT ME!
|
static int |
SUBTRACT |
DOCUMENT ME!
|
private javax.swing.JButton |
tanButton |
DOCUMENT ME!
|
private javax.swing.JTextField |
textOperator |
DOCUMENT ME!
|
private javax.swing.JButton |
threeButton |
DOCUMENT ME!
|
private javax.swing.JButton |
twoButton |
DOCUMENT ME!
|
static int |
XOR |
DOCUMENT ME!
|
private javax.swing.JButton |
zeroButton |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmImageCalculator(ModelImage destImage,
ModelImage[] srcImages,
int opType,
int clipMode) |
constructor used for bulk images
|
AlgorithmImageCalculator(ModelImage srcImgA,
ModelImage srcImgB,
int type,
int _clipMode,
boolean maskFlag,
java.lang.String adOpString) |
Creates a new AlgorithmImageCalculator object using srcImgA srcImgB.
|
AlgorithmImageCalculator(ModelImage destImg,
ModelImage srcImgA,
ModelImage srcImgB,
int type,
int _clipMode,
boolean maskFlag,
java.lang.String adOpString) |
Creates a new AlgorithmImageCalculator object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
actionPerformed(java.awt.event.ActionEvent event) |
Calls various methods depending on the action used by the advanced calculator.
|
private void |
calcInPlace() |
Runs the calculation and stores the result into the same source buffer.
|
private void |
calcMSE() |
|
private void |
calcStoreInDest() |
Runs the calculation and stores it in a new ModelImage.
|
java.lang.String |
convertToRPN(java.util.Vector<java.lang.String> tokens) |
method that converts the tokens to RPN
|
private void |
createAdOpDialog(java.awt.event.ActionListener al) |
Builds the advanced function dialog - looks like a calculator.
|
double |
evaluateRPNExpression(double a,
double b,
java.lang.String rpn) |
Method that evaluates the RPN expression and returns the value
|
java.lang.String |
evaluateToRPN(java.lang.String expression) |
method that determines the RPN
|
void |
finalize() |
Prepares this class for destruction.
|
private int |
findType(int stType) |
Find the type able to contain the full range of the data.
|
void |
focusGained(java.awt.event.FocusEvent event) |
Unchanged.
|
void |
focusLost(java.awt.event.FocusEvent event) |
Unchanged.
|
java.lang.String |
getAdvFunction() |
Accessor to return the advanced function string.
|
boolean |
initialValidate(java.lang.String expression) |
method that does some initial validation of the expression
|
boolean |
isDigit(char c) |
determines if char is a digit
|
boolean |
isFunction(java.lang.String token) |
method determining if token is function
|
boolean |
isOperator(java.lang.String token) |
method determining if token is an operator
|
boolean |
isValidNumber(java.lang.String s) |
|
private void |
performBulkAdding() |
perform bulk adidng
|
private void |
performBulkAveraging(boolean findSD) |
perform bulk averaging
|
private void |
performBulkMax() |
perform bulk adidng
|
private void |
performBulkMin() |
perform bulk adidng
|
int |
precedence(java.lang.String op) |
method that determines precedence
|
private int |
promoteType(int presentType) |
DOCUMENT ME!
|
char |
readChar(java.lang.String exp,
int pos) |
reads char
|
void |
runAlgorithm() |
Starts the program.
|
private void |
setClipValues() |
Sets the minimum and maximum clipping values.
|
private boolean |
testType(int type,
double minVal,
double maxVal) |
Determine if the min and max values are in the image types range.
|
boolean |
tokenize(java.lang.String expression,
java.util.Vector<java.lang.String> tokens) |
method that tokenizes the expression
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
aVal
private double aVal
DOCUMENT ME!
-
bestMin
private double bestMin
/**.
-
bestMax
private double bestMax
/**.
-
bVal
private double bVal
DOCUMENT ME!
-
cancel
private boolean cancel
DOCUMENT ME!
-
clipMode
private int clipMode
Clipping mode.
CLIP = 0; clamp result data to the bounds of the input image type
PROMOTE = 1; promote image type so that the range of the result fits into
the new image type. ( ie. byte to short).
-
colorFactor
private int colorFactor
DOCUMENT ME!
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false, process the image over the mask
areas.
-
minA
private double minA
/**.
-
maxA
private double maxA
/**.
-
minB
private double minB
/**.
-
maxB
private double maxB
/**.
-
minAB
private double minAB
DOCUMENT ME!
-
maxAB
private double maxAB
DOCUMENT ME!
-
minBB
private double minBB
DOCUMENT ME!
-
maxBB
private double maxBB
DOCUMENT ME!
-
minAG
private double minAG
DOCUMENT ME!
-
maxAG
private double maxAG
DOCUMENT ME!
-
minBG
private double minBG
DOCUMENT ME!
-
maxBG
private double maxBG
DOCUMENT ME!
-
minAR
private double minAR
DOCUMENT ME!
-
maxAR
private double maxAR
DOCUMENT ME!
-
minBR
private double minBR
DOCUMENT ME!
-
maxBR
private double maxBR
DOCUMENT ME!
-
OK
private boolean OK
DOCUMENT ME!
-
srcImages
private ModelImage[] srcImages
when performing bulk operations via Image Calculator (Bulk Images) dialog, this array is populated
-
Constructor Detail
-
AlgorithmImageCalculator
public AlgorithmImageCalculator(ModelImage srcImgA,
ModelImage srcImgB,
int type,
int _clipMode,
boolean maskFlag,
java.lang.String adOpString)
Creates a new AlgorithmImageCalculator object using srcImgA srcImgB.
- Parameters:
srcImgA - source image A modelsrcImgB - source image B modeltype - operation type_clipMode - CLIP or PROMOTE input image datamaskFlag - Flag that indicates that the operator will be calculated for the whole image if equal to trueadOpString - text for advanced operations
-
AlgorithmImageCalculator
public AlgorithmImageCalculator(ModelImage destImg,
ModelImage srcImgA,
ModelImage srcImgB,
int type,
int _clipMode,
boolean maskFlag,
java.lang.String adOpString)
Creates a new AlgorithmImageCalculator object.
- Parameters:
destImg - image model where result image is to storedsrcImgA - source image A modelsrcImgB - source image B modeltype - operation type_clipMode - CLIP or PROMOTE input image datamaskFlag - Flag that indicates that the operator will be calculated for the whole image if equal to trueadOpString - text for advanced operations
-
AlgorithmImageCalculator
public AlgorithmImageCalculator(ModelImage destImage,
ModelImage[] srcImages,
int opType,
int clipMode)
constructor used for bulk images
- Parameters:
destImage - srcImages - opType - clipMode -
-
Method Detail
-
calcMSE
private void calcMSE()
-
evaluateRPNExpression
public double evaluateRPNExpression(double a,
double b,
java.lang.String rpn)
Method that evaluates the RPN expression and returns the value
-
tokenize
public boolean tokenize(java.lang.String expression,
java.util.Vector<java.lang.String> tokens)
method that tokenizes the expression
- Parameters:
expression - tokens - - Returns:
-
testType
private boolean testType(int type,
double minVal,
double maxVal)
Determine if the min and max values are in the image types range.
- Parameters:
type - image typeminVal - min value of the imagemaxVal - max value of the image- Returns:
- true if min and max are within the image type specified
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmConcatMult3Dto3D.html�����������������������������0000775�4231163�4231163�00000056670�14537076061�027000� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConcatMult3Dto3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmExtractSlices.html��������������������������������0000775�4231163�4231163�00000066174�14537076061�026563� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmExtractSlices (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
convert4Dto3D |
If true convert the selected images to 3D datasets.
|
private java.util.Vector<java.lang.String> |
extractList |
List of slices to extract from source image.
|
private int |
oldZdim |
Original Z dimension of the image.
|
private int |
sliceArea |
Area of a slice (Xdim * Ydim).
|
private int |
Xdim |
X dimension of the image.
|
private int |
Ydim |
Y dimension of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmExtractSlices
public AlgorithmExtractSlices(ModelImage srcImage,
ModelImage destImage,
java.lang.String[] extractSlices)
Import source and destination images into the class.
- Parameters:
srcImage - source image (image to clip from)destImage - destination image (image to paste to)extractSlices - list of slice numbers indicating which slices in source should be extracted to
destination.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmRGBtoGray.html������������������������������������0000775�4231163�4231163�00000111224�14537076061�025571� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRGBtoGray (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
blueValue |
Weighting values for the red, green, and blue channels.
|
private boolean |
equalRange |
|
private float |
greenValue |
Weighting values for the red, green, and blue channels.
|
private boolean |
intensityAverage |
If true indicates that the result image is an average of the three channels.
|
private float |
maxB |
|
private float |
maxG |
|
private float |
maxR |
|
private float |
minB |
|
private float |
minG |
|
private float |
minR |
|
private float |
redValue |
Weighting values for the red, green, and blue channels.
|
private float |
thirdValue |
This value equal one third (0.3333333).
|
private float |
threshold |
Only average values above threshold.
|
private boolean |
thresholdAverage |
If true only average values above threshold.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRGBtoGray(ModelImage srcImg) |
Creates a new AlgorithmRGBtoGray object.
|
AlgorithmRGBtoGray(ModelImage srcImg,
float redValue,
float greenValue,
float blueValue,
boolean thresholdAverage,
float threshold,
boolean intensityAverage,
boolean equalRange,
float minR,
float maxR,
float minG,
float maxG,
float minB,
float maxB) |
Creates a new AlgorithmRGBtoGray object.
|
AlgorithmRGBtoGray(ModelImage destImg,
ModelImage srcImg) |
Creates a new AlgorithmRGBtoGray object.
|
AlgorithmRGBtoGray(ModelImage destImg,
ModelImage srcImg,
float redValue,
float greenValue,
float blueValue,
boolean thresholdAverage,
float threshold,
boolean intensityAverage,
boolean equalRange,
float minR,
float maxR,
float minG,
float maxG,
float minB,
float maxB) |
Creates a new AlgorithmRGBtoGray object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmRGBtoGray
public AlgorithmRGBtoGray(ModelImage destImg,
ModelImage srcImg)
Creates a new AlgorithmRGBtoGray object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image model
-
AlgorithmRGBtoGray
public AlgorithmRGBtoGray(ModelImage srcImg,
float redValue,
float greenValue,
float blueValue,
boolean thresholdAverage,
float threshold,
boolean intensityAverage,
boolean equalRange,
float minR,
float maxR,
float minG,
float maxG,
float minB,
float maxB)
Creates a new AlgorithmRGBtoGray object.
- Parameters:
srcImg - source image modelredValue - weighting of the red channelgreenValue - weighting of the green channelblueValue - weighting of the blue channelthresholdAverage - if true only average values above thresholdthreshold - DOCUMENT ME!intensityAverage - DOCUMENT ME!
-
AlgorithmRGBtoGray
public AlgorithmRGBtoGray(ModelImage destImg,
ModelImage srcImg,
float redValue,
float greenValue,
float blueValue,
boolean thresholdAverage,
float threshold,
boolean intensityAverage,
boolean equalRange,
float minR,
float maxR,
float minG,
float maxG,
float minB,
float maxB)
Creates a new AlgorithmRGBtoGray object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelredValue - weighting of the red channelgreenValue - weighting of the green channelblueValue - weighting of the blue channelthresholdAverage - if true only average values above thresholdthreshold - DOCUMENT ME!intensityAverage - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmReplaceRemovedSlices.html�������������������������0000775�4231163�4231163�00000073513�14537076061�030041� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmReplaceRemovedSlices (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmReplaceRemovedSlices
extends AlgorithmBase
This algorithm is used to insert averaged slices where slices have been removed -If slices were removed at the
beginning of the original movie, these slices will not be replaced. - Slices are only inserted between the first and
last kept slices
- Author:
- Ben Link
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
destFlag |
DOCUMENT ME!
|
private float |
imageMin |
DOCUMENT ME!
|
private boolean |
insertBlank |
If true, insert a blank rather than a weighted average.
|
private boolean |
isDicom |
DOCUMENT ME!
|
private boolean |
isSplit |
DOCUMENT ME!
|
private boolean[] |
removedSlices |
every false value in the array corresponds to a slice within the movie passed in. true values represent removed
slices
|
private ModelImage |
resultImage |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmReplaceRemovedSlices(ModelImage srcImage,
boolean[] removedSlices,
boolean isSplit,
boolean destFlag,
boolean insertBlank) |
Constructor for algorithm.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
destFlag
private boolean destFlag
DOCUMENT ME!
-
imageMin
private float imageMin
DOCUMENT ME!
-
isDicom
private boolean isDicom
DOCUMENT ME!
-
isSplit
private boolean isSplit
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmReplaceRemovedSlices
public AlgorithmReplaceRemovedSlices(ModelImage srcImage,
boolean[] removedSlices,
boolean isSplit,
boolean destFlag,
boolean insertBlank)
Constructor for algorithm.
- Parameters:
srcImage - the source imageremovedSlices - an array showing which slices were removedisSplit - DOCUMENT ME!destFlag - DOCUMENT ME!insertBlank - If true, insert a blank rather than a weighted average
-
Method Detail
-
insertAveragedSlices
private void insertAveragedSlices(float[] buffer1,
float[] buffer2,
int start,
int end)
Insert weighted averaged slices between the two indices.
- Parameters:
buffer1 - empty buffer to hold the first slicebuffer2 - empty buffer to hold the last slicestart - start indexend - end index
-
insertBlankSlices
private void insertBlankSlices(float[] buffer1,
int start,
int end)
Insert blank slices between the two indices.
- Parameters:
buffer1 - empty buffer to hold the minimum valuestart - start indexend - end index
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmTiltCorrection.html�������������������������������0000775�4231163�4231163�00000062146�14537076061�026745� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTiltCorrection (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
tiltAngle
private double tiltAngle
-
Constructor Detail
-
AlgorithmTiltCorrection
public AlgorithmTiltCorrection(ModelImage destImg,
ModelImage srcImg,
boolean nonHelical,
double tiltAngle)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmFlip.html�����������������������������������������0000775�4231163�4231163�00000072752�14537076061�024677� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFlip (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmFlip
extends AlgorithmBase
Flips 2D, 3D or 4D grays scale or color dataset about X, Y, or Z axis (when applicable) when AlgorithmFlip.IMAGE is
passed to the constructor. An option is given to flip all VOIs at this time. When AlgorithmFlip.VOI is passed, only
the selected VOI is flipped about the specified axis.
- Version:
- 1.0 July 14, 2000
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
changeOrientationOrigin |
Whether orientation and origin should change with flipping.
|
private int |
flipAxis |
Axis to flip along.
|
private int |
flipObject |
Type of object to flip.
|
static int |
IMAGE |
Denotes image should be flipped without VOI.
|
static int |
IMAGE_AND_VOI |
Image and all VOIs should be flipped.
|
static int |
VOI_TYPE |
Denotes selected VOI should be flipped.
|
static int |
X_AXIS |
Flip along X axis.
|
static int |
Y_AXIS |
Flip along Y axis.
|
static int |
Z_AXIS |
Flip along Z axis.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFlip(ModelImage srcImg,
int flipMode,
int flipObject,
boolean changeOrientationOrigin) |
Flips 2D, 3D or 4D grays scale or color dataset about X or Y axis.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
flipAxis
private int flipAxis
Axis to flip along.
-
flipObject
private int flipObject
Type of object to flip.
-
Constructor Detail
-
AlgorithmFlip
public AlgorithmFlip(ModelImage srcImg,
int flipMode,
int flipObject,
boolean changeOrientationOrigin)
Flips 2D, 3D or 4D grays scale or color dataset about X or Y axis.
- Parameters:
srcImg - source image modelflipMode - flip about which axisflipObject - DOCUMENT ME!changeOrientationOrigin -
����������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmMaximumIntensityProjection.html�������������������0000775�4231163�4231163�00000146251�14537076061�031362� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMaximumIntensityProjection (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmMaximumIntensityProjection
extends AlgorithmBase
Computes the maximum or the minimum intensity along each projection of a 3D image.
The user can specify theshold values in image intensity for the calculation, as well as
which projection to compute along (X,Y, or Z), the start and end slice used in the calculation,
the size of a sliding 'window' in number of slices to use in the calculation, and whether to calculate the minimum,
maximum or both projections.
When the sliding window size is not equal to the number of slices used in the calculation the output is a 3D image,
where each slice of the output image is computed using the number of slices in the sliding window. When the
sliding window size is equal to the number of slices used in the calculation the output image is a 2D image.
- Author:
- joshim2
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
colorFactor |
When the image is a color image, the colorFactor is set to 4, otherwise it defaults to 1.
|
private boolean |
computeMaximum |
When true, computes the maximum intensity projection.
|
private boolean |
computeMinimum |
When true, computes the minimum intensity projection.
|
(package private) float[] |
imResolutions |
Source Image Resolutions
|
(package private) int[] |
imUnitsOfMeasure |
Source Image Units of Measure
|
private double[] |
maxIntensity |
Maximum intensity threshold value.
|
private double[] |
minIntensity |
Minimum intensity threshold value.
|
private int |
projectionDirection |
Default Projection is along the z-Axis.
|
private boolean |
quiet |
|
private java.util.Vector<ModelImage> |
resultImages |
Array of Result Images
|
private int |
startSlice |
The first slice in the intensity projection calculation:
|
private int |
stopSlice |
The last slice in the intensity projection calculation:
|
private int |
window |
The number of slices used in the intensity projection, represents a sliding window.
|
static int |
X_PROJECTION |
Project along the X-Axis.
|
static int |
Y_PROJECTION |
Project along the Y-Axis.
|
static int |
Z_PROJECTION |
Project along the Z-Axis.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMaximumIntensityProjection(ModelImage srcImg,
int _startSlice,
int _stopSlice,
int _window,
double _minIntensity,
double _maxIntensity,
boolean _computeMaximum,
boolean _computeMinimum,
int _projectionDirection) |
Estimates the maximum intensity projection in each direction of a 3D black and white image
|
AlgorithmMaximumIntensityProjection(ModelImage srcImg,
int _startSlice,
int _stopSlice,
int _window,
double _minR,
double _maxR,
double _minG,
double _maxG,
double _minB,
double _maxB,
boolean _computeMaximum,
boolean _computeMinimum,
int _projectionDirection) |
Estimates the maximum intensity projection of a 3D color image
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
imResolutions
float[] imResolutions
Source Image Resolutions
-
window
private int window
The number of slices used in the intensity projection, represents a sliding window.
When this number is not the difference between the stop and start slices, the output image is a 3D
that is a collection of projections. Otherwise the output image is a single 2D projection.
-
quiet
private boolean quiet
-
Constructor Detail
-
AlgorithmMaximumIntensityProjection
public AlgorithmMaximumIntensityProjection(ModelImage srcImg,
int _startSlice,
int _stopSlice,
int _window,
double _minIntensity,
double _maxIntensity,
boolean _computeMaximum,
boolean _computeMinimum,
int _projectionDirection)
Estimates the maximum intensity projection in each direction of a 3D black and white image
- Parameters:
srcImg - source image_startSlice - the first slice used in the projection calculation._stopSlice - the last slice used in the projection calculation._window - the number of slices to use in the projection._minIntensity - minimum intensity threshold._maxIntensity - maximum intensity threshold._computeMaximum - when true compute the maximum intensity projection._computeMinimum - when true compute the minimum intensity projection._projectionDirection - image axis to project along (X, Y, or Z).
-
AlgorithmMaximumIntensityProjection
public AlgorithmMaximumIntensityProjection(ModelImage srcImg,
int _startSlice,
int _stopSlice,
int _window,
double _minR,
double _maxR,
double _minG,
double _maxG,
double _minB,
double _maxB,
boolean _computeMaximum,
boolean _computeMinimum,
int _projectionDirection)
Estimates the maximum intensity projection of a 3D color image
- Parameters:
srcImg - source image_startSlice - the first slice used in the projection calculation._stopSlice - the last slice used in the projection calculation._window - the number of slices to use in the projection._minR - minimum Red intensity threshold._maxR - maximum Red intensity threshold._minG - minimum Green intensity threshold._maxG - maximum Green intensity threshold._minB - minimum Blue intensity threshold._maxB - maximum Blue intensity threshold._computeMaximum - when true compute the maximum intensity projection._computeMinimum - when true compute the minimum intensity projection._projectionDirection - image axis to project along (X, Y, or Z).
-
Method Detail
-
getWindow
public int getWindow()
- Returns:
- the window
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmConvert3Dto4D.html��������������������������������0000775�4231163�4231163�00000064671�14537076061�026350� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConvert3Dto4D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
resol3 |
resolution of the 3rd dimension.
|
private float |
resol4 |
resolution of the 4rd dimension.
|
private int |
resolUnit3 |
units of measure for the 3rd dimension.
|
private int |
resolUnit4 |
units of measure for the 4th dimension.
|
private int |
volumeLength |
number of slices in the 3rd dimension. 4th dim length = sourceImage.3rd_dim / volumeLength
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmConvert3Dto4D(ModelImage srcImg,
int volumeLength,
float res3,
float res4,
int unit3,
int unit4) |
Constructs new algorithm and sets source.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmConvert3Dto4D
public AlgorithmConvert3Dto4D(ModelImage srcImg,
int volumeLength,
float res3,
float res4,
int unit3,
int unit4)
Constructs new algorithm and sets source.
- Parameters:
srcImg - source image modelvolumeLength - the 3D image will be chopped upto to volumes of this length volumeLength should divide evenly
(without remainder) into the 3rd dimension length of the original image.res3 - resolution of the 3rd dimensionres4 - resolution of the 4rd dimensionunit3 - units of measure for the 3rd dimensionunit4 - units of measure for the 4rd dimensioncopyAllInfo - whether all file information is copied
�����������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmCyclicPermutation.html����������������������������0000775�4231163�4231163�00000057125�14537076061�027440� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCyclicPermutation (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
shiftT |
|
(package private) int |
shiftX |
|
(package private) int |
shiftY |
|
(package private) int |
shiftZ |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmCyclicPermutation
public AlgorithmCyclicPermutation(ModelImage destImg,
ModelImage srcImg,
int shiftX,
int shiftY,
int shiftZ,
int shiftT)
- Parameters:
destImg - srcImg - shiftX - shiftY - shiftZ - shiftT -
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmReplaceValue.html���������������������������������0000775�4231163�4231163�00000064215�14537076061�026350� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmReplaceValue (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
colorFactor
private int colorFactor
DOCUMENT ME!
-
outputVal
private double outputVal
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmReplaceValue
public AlgorithmReplaceValue(ModelImage destImage,
ModelImage srcImage,
java.util.Vector<JDialogReplaceValue.Values> input,
double output,
boolean entireImage)
Default contructor.
- Parameters:
destImage - ModelImage destination imagesrcImage - ModelImage source imageinput - double input value to replaceoutput - double value to replace with
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmNoise.html����������������������������������������0000775�4231163�4231163�00000130263�14537076061�025052� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNoise (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmNoise
extends AlgorithmBase
Algorithm used to add Gaussian, Poisson, Uniform, Rayleigh, or Rician noise to an image.
The additive noise is clamped to the lowest or highest value is the source image type.
For example a byte image where the source pixel = 120 + noise = 15 would be clamped
to 127 the maximum pixel value for a byte image.
For Rayleigh noise the formula is simply sigma * sqrt(-2.0 * ln(U)), where U is a uniform 0 to 1 distribution
not including 0. The Rayleigh cumulative distribution function F(x) = 1 - exp(-(x**2)/(2*sigma**2)) is simply
set equal to U and then the inverse function is obtained by solving for x in terms of U,
giving x = sigma * sqrt(-2.0 * ln(1 - U)) and finally noting that 1 - U has the same distribution as U.
-----Original Message-----
From: hakim.achterberg@gmail.com [mailto:hakim.achterberg@gmail.com] On Behalf Of Hakim Achterberg
Sent: Wednesday, April 18, 2012 9:30 AM
To: Gandler, William (NIH/CIT) [E]
Cc: McAuliffe, Matthew (NIH/CIT) [E]; Senseney, Justin (NIH/CIT) [E]
Subject: Re: Which Rician noise generator is the best?
Dear William,
All methods come down to the same equations, however there are some differences in the assumption of the signal.
Adding Rician noise to the magnitude of a complex signal, is equivalent to adding Gaussian noise to both the real
and imaginary part of the signal and then taking the magnitude. However, in our case the phase of this signal was
unknown, so some assumption had to be made about the phase in the simulation.
The assumption I can deduct from the methods mentioned:
In equation (14) in "A Nonlocal Maximum Likelihood Estimation Method for Rician Noise Reduction in MR Images" the
phase of the signal is assumed to be zero (or 0.5 pi, pi, 1.5 pi) so that the magnitude is completely in one of
the two components.
In equation (4) in "Rician noise removal by non-Local Means filtering for low signal-to-noise ratio MRI:
applications to DT-MRI" the phase of the signal is assumed to be 0.25 pi (or an equivalent rotation) so that
the magnitude is split into two equal parts (a + bi, where a=b=M/sqrt(2)).
In equation (6) in "Development of computer-generated phantoms for FMRI software evaluation", I have the feeling
they make an assumption which is incorrect and that is that adding the squared noises separately to the magnitude
it is similar as to adding the noise to the real and imaginary parts of the signal in computation of the
gradient magnitude. My feeling says this one is not correct, but I haven't extensively checked this.
In our work ( Algorithm 2.1 in "Optimal acquisition schemes in high angular resolution diffusion weighted
imaging" ), we assume the phase of the signal to be random. So we create a random phase, change the signal from
a magnitude and phase into real and imaginary parts, add noise to these parts and calculate the gradient magnitude.
To be honest, from discussion with our MR physicist we thought our assumption to be (more or less) valid, but I do not
recall that this assumption has been carefully checked. To really establish which algorithm is the best,
the assumptions made in each model should be checked against the data you are trying to simulate.
I hope that this helps and does not only add confusion.
Kind regards,
Hakim
Email from MRI manufacturer neusoft supports using random phase for Rician noise generation:
FW: NIH questions FW: MRI phase characterization
Dear Keith
There are several key points about the questions as below:
1) About Quadrature coils, the two coils are orthogonally orientated having 90 degree phase difference to maximizing the SNR.
We do not adjust the phase difference between the 2 coils to 45 degrees just before combining them into a magnitude signal.
2) About a complex signal, the phases of a set of actual data of MRI not simulation is usually not the only 45 degree.
3) About noise, it be added to the real and imaginary parts of the signal respectively is benefit to getting Rician noise.
FYI.
Best Regards,
Polly Yang
Software Team Leader, MR R&D Department
Philips and Neusoft Medical Systems Co.,Ltd.
No.16 Century Road, Hun Nan New District Shenyang 110179, PRC
Tel: (86 24)8366 0778
Fax: (86 24)8366 1915
Mobile: (86)13940069636
Email: yangp@neusoft.com
Dear William,
Thanks for your interest in my paper. If X and Y are independent Gaussian random variables, then R=sqrt(X^2+Y^2) is Rician distributed.
In particular, if X had mean mu*cos(theta) and variance sigma^2 and Y has mean mu*sin(theta) and variance sigma^2, then R is Rician distributed with parameters mu and sigma. If mu is much larger than sigma, then R is approximately Gaussian distributed with mean mu and variance sigma^2.
The motivation for using this form in MRI is the fact that the raw
(received) signals have real and imaginary component (the component in-phase with the RF excitation and the component out-of-phase with the excitation). The value of theta, above, reflects how much is in and out of phase. However, the raw signals are measured with noise (due to many
factors) and the noise in each component is independent. This gives rise to the Rician model that is generally accepted in MRI.
This paper by Prof. Makovski is gives an excellent explanation of the physics that lead to this model:
www.ncbi.nlm.nih.gov/pubmed/8875425
I hope this is helpful.
Best wishes,
Rob
Gandler, William (NIH/CIT) [E] wrote:
>
> Dear Robert Nowak:
>
>
>
> In Noise Removal Methods for High Resolution MRI you present a model
> for Rician noise generation in equation (1). Is there a reference or
> motivation for using this particular form? Some researchers use an
> equation for Rician noise generation where the phase is zero and all
> of the signal is in the real part. Other researchers split the signal
> into equal real and imaginary parts.
>
>
>
>
>
> Sincerely,
>
>
>
>
> William Gandler
>
>
>
--
Robert Nowak
University of Wisconsin-Madison
www.ece.wisc.edu/~nowak
Dear William,
To generate Rician noise, it doesn't really matter if the signal is in real part only or if it is split into real and imaginary parts. The important thing is to add Gaussian noise to both channels and then make the magnitude image. You will always get exactly the same noise distribution independently of the phase angle. Equation 2 represents the signal in a real MR image, and there is phase angle neither zero or 45 degrees.
Best regards
Adnan Bibic, MSc
Research Engineer
Preclinical MRI systems, LBIC
Faculty of Medicine, Lund University
Klinikgatan 32, building D11
SE-221 84 Sweden
Phone: +46 46 222 42 15
homepage (LBIC): www.med.lu.se/bioimaging_center
________________________________________
From: Gandler, William (NIH/CIT) [E] [ilb@mail.nih.gov]
Sent: 29 May 2012 20:51
To: Adnan Bibic
Cc: Senseney, Justin (NIH/CIT) [E]; McAuliffe, Matthew (NIH/CIT) [E]
Subject: Rician noise generation equation
Dear Adnan Bibic:
In your master of science thesis you present a model for Rician noise generation in equation (2). Is there a reference or motivation for using this particular form? Some researchers use an equation for Rician noise generation where the phase is zero and all of the signal is in the real part. Other researchers split the signal into equal real and imaginary parts.
Sincerely,
William Gandler
Rician noise is not additive, but is instead data dependent. Let a be the original noiseless data value,
and x and y be gaussian random variables with zero mean and identical standard deviations sigma. Then with a
uniformly distributed theta the resulting value m = sqrt((a*cos(theta) + x)**2 + (a*sin(theta) + y)**2)
is Rician distributed. MR images have Rician noise.
References for Rician noise generation: Optimal acquisition schemes in high angular resolution diffusion
weighted imaging" MSC Thesis by Hakim Achterberg.
Denoising of Complex MRI Data by Wiener-like Filtering in the Wavelet Domain: Application to High b-value
Diffusion Weighted Imaging by Adnan Bibic.
Noise Removal Methods for High Resolution MRI by R. L. Gregg and R. D. Nowak
Wavelet-Based Rician Noise Removal for Magnetic Resonance Imaging by Robert D. Nowak
MRI denoising via phase error estimation by Dylan Tisdall and M. Stella Atkins
Confirmation that the zero angle phase noise generator leads to a Rician noise distribution is found in
"Analytically exact correct scheme for signal extraction from noisy magnitude MR signals" by Cheng Guan Koay
and Peter J. Basser, Journal of Magnetic Resonance, 179, 2006, pp. 317-322, Equations 2 - 4.
- Version:
- 2.0 July 25, 2008
- Author:
- Matthew J. McAuliffe, Ph.D.
William Gandler
- See Also:
RandomNumberGen
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
gain |
|
static int |
GAUSSIAN |
Used to indicate Gaussian distribution of noise.
|
private double |
level |
Noise level to be added to the image.
|
private double |
max |
Storage or min and max values.
|
private double |
mean |
For Poisson out = gain * Poisson(mean) + offset
|
private double |
min |
Storage or min and max values.
|
private int |
noiseType |
Noise type.
|
private double |
offset |
|
static int |
POISSON |
Used to indicate added Poisson noise
|
private RandomNumberGen |
randomGen |
Reference to the random number generator.
|
static int |
RAYLEIGH |
|
static int |
RICIAN |
|
private double |
sigma |
|
static int |
UNIFORM |
Used to indicate Uniform distribution of noise.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmNoise(ModelImage srcImg,
int _noiseType,
double _level,
double mean,
double gain,
double offset,
double sigma) |
Creates a new AlgorithmNoise object.
|
AlgorithmNoise(ModelImage destImg,
ModelImage srcImg,
int _noiseType,
double _level,
double mean,
double gain,
double offset,
double sigma) |
Creates a new AlgorithmNoise object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace2D() |
This function replaces the 2D source image with an image that has noise added to it.
|
private void |
calcInPlace34D() |
This function replaces the 3D or 4D source image with an image that has noise added to it.
|
private void |
calcStoreInDest2D() |
This function produces a new 2D image that is the sum of the source image and noise.
|
private void |
calcStoreInDest34D() |
This function produces a new 3D or 4D image that is the sum of the source image and noise.
|
void |
finalize() |
Prepares this class for destruction.
|
void |
runAlgorithm() |
Starts algorithm.
|
private void |
setRange() |
Sets the range of the destination image.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
offset
private double offset
-
sigma
private double sigma
-
Constructor Detail
-
AlgorithmNoise
public AlgorithmNoise(ModelImage srcImg,
int _noiseType,
double _level,
double mean,
double gain,
double offset,
double sigma)
Creates a new AlgorithmNoise object.
- Parameters:
srcImg - source image model_noiseType - gaussian noise or uniform noise_level - level of noisemean - For poisson: out = gain * Poisson(mean) + offsetgain - offset - sigma - for Rayleigh
-
AlgorithmNoise
public AlgorithmNoise(ModelImage destImg,
ModelImage srcImg,
int _noiseType,
double _level,
double mean,
double gain,
double offset,
double sigma)
Creates a new AlgorithmNoise object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image model_noiseType - gaussian noise or uniform noise_level - level of noisemean - For poisson: out = gain * Poisson(mean) + offsetgain - offset - sigma - for Rayleigh
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmChangeType.html�����������������������������������0000775�4231163�4231163�00000100605�14537076061�026021� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmChangeType (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmChangeType
extends AlgorithmBase
This is a convenience function to convert from one image type to another and remap the data into a new range. It
assumes that that calling function has checked that the range values are in the range of the image type. For example,
an Unsigned Byte image type can represent data from 0 - 255 and therefore if converting from a Short type (-32768 to
32767) the range parameters should fall between 0 and 255. This class can also be used to remap data to a different
range without changing the data type!
In going between COMPLEX and DCOMPLEX the real and imaginary signs should not be changed and the imaginary/real ratios
should not be changed so just multiply both the real and imaginary parts by endRange2/endRange1.
- Version:
- 0.1 June 15, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
- See Also:
ModelImage
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
colorFactor |
1 for black and white, 4 for color.
|
private int |
complexFactor |
1 for real images, 2 for complex.
|
private double |
endRange1 |
The ending range value of the input image.
|
private double |
endRange2 |
The ending range value of the output image.
|
private ModelStorageBase.DataType |
newType |
Indicates the new data type which the image should be converted to.
|
private double |
stRange1 |
The starting range value of the input image.
|
private double |
stRange2 |
The starting range value of the output image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmChangeType(ModelImage srcImg,
int newType,
double stRge1,
double endRge1,
double stRge2,
double endRge2,
boolean img25D) |
Creates a new AlgorithmChangeType object.
|
AlgorithmChangeType(ModelImage destImg,
ModelImage srcImg,
double stRge1,
double endRge1,
double stRge2,
double endRge2,
boolean img25D) |
Creates a new AlgorithmChangeType object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace2D() |
This function replaces the source image with the new type image and new data range.
|
private void |
calcInPlace34D() |
This function replaces the source image with the new type image and new data range.
|
private void |
calcStoreInDest2D() |
This function produces a new image with the new data type and new data range.
|
private void |
calcStoreInDest34D() |
This function produces a new image with the new data type and new data range.
|
void |
finalize() |
Prepares this class for destruction.
|
void |
runAlgorithm() |
Start algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmChangeType
public AlgorithmChangeType(ModelImage destImg,
ModelImage srcImg,
double stRge1,
double endRge1,
double stRge2,
double endRge2,
boolean img25D)
Creates a new AlgorithmChangeType object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelstRge1 - starting value of intensities of the source imageendRge1 - ending value of intensities of the source imagestRge2 - starting value of intensities of the destination imageendRge2 - ending value of intensities of the destination imageimg25D - DOCUMENT ME!
-
AlgorithmChangeType
public AlgorithmChangeType(ModelImage srcImg,
int newType,
double stRge1,
double endRge1,
double stRge2,
double endRge2,
boolean img25D)
Creates a new AlgorithmChangeType object.
- Parameters:
srcImg - source image modelnewType - new type that the source image is to become.stRge1 - starting value of intensities of the source imageendRge1 - ending value of intensities of the source imagestRge2 - starting value of intensities of the destination imageendRge2 - ending value of intensities of the destination imageimg25D - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmSwapDims.html�������������������������������������0000775�4231163�4231163�00000062270�14537076061�025526� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSwapDims (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
Prepares this class for destruction.
|
ModelImage |
getResultImage() |
Returns result image.
|
void |
runAlgorithm() |
Starts the program.
|
private void |
swap14() |
Swaps the image first and fourth dimensions and replaces the source image with the swapped dimension image.
|
private void |
swap34() |
Swaps the image third and fourth dimensions and replaces the source image with the swapped dimension image.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
swapType
private int swapType
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmReplaceBlankSlicesWithAverages.html���������������0000775�4231163�4231163�00000052171�14537076061�031776� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmReplaceBlankSlicesWithAverages (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmFlip.ShapeHolder.html�����������������������������0000775�4231163�4231163�00000040213�14537076061�027057� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFlip.ShapeHolder (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
isConstructed |
DOCUMENT ME!
|
private java.util.ArrayList<java.lang.Object> |
shapeList |
DOCUMENT ME!
|
private java.util.ArrayList<java.lang.Integer> |
sliceList |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
ShapeHolder() |
Creates a new ShapeHolder object.
|
private |
ShapeHolder(java.lang.Object[] shapeArr,
int[] sliceLocArr) |
Creates a new ShapeHolder object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ShapeHolder
private ShapeHolder(java.lang.Object[] shapeArr,
int[] sliceLocArr)
Creates a new ShapeHolder object.
- Parameters:
shapeArr - DOCUMENT ME!sliceLocArr - DOCUMENT ME!
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmConcatMult3Dto4D.html�����������������������������0000775�4231163�4231163�00000057121�14537076061�026771� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConcatMult3Dto4D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmExtractSlicesVolumes.html�������������������������0000775�4231163�4231163�00000075573�14537076061�030141� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmExtractSlicesVolumes (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean[] |
extract |
List of slices to remove from source image.
|
private java.util.Vector<ModelImage> |
extractedImages |
DOCUMENT ME!
|
(package private) FileInfoDicom[] |
fileInfoDicom |
|
private int |
oldZdim |
Original Z dimension of the image.
|
private int |
sliceArea |
Area of a slice (Xdim * Ydim).
|
private int |
Xdim |
X dimension of the image.
|
private int |
Ydim |
Y dimension of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmExtractSlicesVolumes
public AlgorithmExtractSlicesVolumes(ModelImage srcImage,
boolean[] removeSlices)
Import source and destination images into the class.
- Parameters:
srcImage - source image (image to extract from)removeSlices - list of booleans for slices that should be extracted
-
Method Detail
-
updateFileInfo
public void updateFileInfo(ModelImage image,
ModelImage resultImage,
int slice)
Copy important file information to resultant image structure.
- Parameters:
image - Source image.resultImage - Resultant image.slice - DOCUMENT ME!
-
getOffset
private int getOffset(ModelImage img,
int colorFactor,
int t)
Calculate and return the offset for the given image and time slice.
- Parameters:
img - -- ModelImage whose offset is being computedcolorFactor - -- the image's colorFactort - -- current time slice- Returns:
- -- the computed offset into the data buffer
�������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmImageMath.Operator.html���������������������������0000775�4231163�4231163�00000057140�14537076061�027425� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmImageMath.Operator (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
legacyNum |
|
private java.lang.String |
name |
|
private java.lang.String |
shortOp |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
Operator(int legacyNum,
java.lang.String name,
java.lang.String shortOp) |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
legacyNum
private int legacyNum
-
Method Detail
-
valueOf
public static AlgorithmImageMath.Operator valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmSwapSlicesVolume.html�����������������������������0000775�4231163�4231163�00000111026�14537076061�027236� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSwapSlicesVolume (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
extentDest |
Internal sorting variables for sorting slices on images of greater than 3 dimensions
|
private int |
extentSrc |
Internal sorting variables for sorting slices on images of greater than 3 dimensions
|
private JDialogSwapSlicesVolumes.SwapMode |
mode |
Swap mode, either 3D or 4D.
|
private int |
nSlices |
Number of slices in mode.
|
private int[][] |
sliceRenum |
Reordering of slices/volumes.
|
private int |
sliceSize |
Number of pixels used by a slice/volume, includes colorFactor.
|
private boolean[] |
sliceTouched |
Slices that have been examined in recursive structure for swapping slices.
|
private int[] |
srcExtents |
Original extents array
|
private FileInfoBase[] |
srcFileInfos |
Original FileInfoBase array.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
srcExtents
private int[] srcExtents
Original extents array
-
Constructor Detail
-
AlgorithmSwapSlicesVolume
public AlgorithmSwapSlicesVolume(ModelImage destImage,
JDialogSwapSlicesVolumes.SwapMode mode,
int[][] sliceRenum,
ModelImage srcImage)
Import source and destination images into the class.
- Parameters:
destImage - destination imagesrcImage - source image (image to extract from)sliceRenum - list of locations for slices that should be extracted/movedmode - type of swapping operation
-
Method Detail
-
collectFileInfos
private FileInfoBase[] collectFileInfos(int in,
int tDim)
Gets the fileInfos from the specified position.
-
importFileInfos
private void importFileInfos(ModelImage destImage,
FileInfoBase[] fileIn,
int in,
int tDim)
Inserts the fileInfos into the specified position.
-
transferIn
private boolean transferIn(FileInfoBase[] fileIn,
java.lang.Number[] bufferIn,
int in,
int tDim)
Transfers the given buffer into the given location. Also recursively transfers all
the old data to the location(s) where the old data is used.
- Parameters:
bufferIn - relieves the symptoms of arthritisin - location to import data- Returns:
- whether import was successful
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/package-tree.html������������������������������������������0000775�4231163�4231163�00000042001�14537076122�024444� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.utilities Class Hierarchy (MIPAV API Documentation)
Class Hierarchy
- java.lang.Object
- gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
- java.lang.Thread (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.AlgorithmBase (implements java.awt.event.ActionListener, java.awt.event.WindowListener)
Enum Hierarchy
- java.lang.Object
- java.lang.Enum<E> (implements java.lang.Comparable<T>, java.io.Serializable)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmRemoveTSlices.html��������������������������������0000775�4231163�4231163�00000062447�14537076061�026531� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRemoveTSlices (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmRemoveTSlices
extends AlgorithmBase
Algorithm to run the remove T slices. Algorithm verifies the t-th slice should be in included in the destination
image, as defined in the list, remove. It copies the slice from the src img to a buffer, and then from the buffer
into the destination img. Copies the src file info to a buffer and makes it conform to the new img, then copies it
into the dest file.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
oldTdim |
Original T dimension of the image.
|
private boolean[] |
remove |
List of slices to remove from source image.
|
private int |
volume |
Area of a slice (Xdim * Ydim * Zdim).
|
private int |
Xdim |
X dimension of the image.
|
private int |
Ydim |
Y dimension of the image.
|
private int |
Zdim |
Z dimension of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmRemoveTSlices
public AlgorithmRemoveTSlices(ModelImage srcImage,
ModelImage destImage,
boolean[] removeSlices)
import source and destination images into the class.
- Parameters:
srcImage - source image (image to clip from)destImage - destination image (image to paste to)removeSlices - list of boolean indicating which slices in source should *not* be in the destination
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmRandSliceOrder.html�������������������������������0000775�4231163�4231163�00000061054�14537076061�026636� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRandSliceOrder (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int[] |
randomOrder |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmRandSliceOrder
public AlgorithmRandSliceOrder(ModelImage srcImg,
int progress)
Constructs an algorithm object that randomizes the order of 3D image dataset.
- Parameters:
srcImg - source image modelprogress - Progress mode - see AlgorithmBase.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmCropTilted.html�����������������������������������0000775�4231163�4231163�00000116325�14537076061�026051� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCropTilted (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
DEGREES |
used for setting rotation
|
(package private) int |
MASK_METHOD |
|
(package private) int |
method |
|
static int |
RADIANS |
used for setting rotation
|
private ModelImage |
resultImage |
|
private boolean |
run2D |
|
(package private) int |
VERTICES_METHOD |
|
(package private) int |
VOI_METHOD |
|
private double |
x1 |
|
private double |
x2 |
|
private double |
x3 |
|
private double |
x4 |
|
private double |
x5 |
|
private double |
x6 |
|
private double |
x7 |
|
private double |
x8 |
|
private double |
y1 |
|
private double |
y2 |
|
private double |
y3 |
|
private double |
y4 |
|
private double |
y5 |
|
private double |
y6 |
|
private double |
y7 |
|
private double |
y8 |
|
private double |
z1 |
|
private double |
z2 |
|
private double |
z3 |
|
private double |
z4 |
|
private double |
z5 |
|
private double |
z6 |
|
private double |
z7 |
|
private double |
z8 |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmCropTilted(ModelImage srcImage,
double x1,
double y1,
double z1,
double x2,
double y2,
double z2,
double x3,
double y3,
double z3,
double x4,
double y4,
double z4,
double x5,
double y5,
double z5,
double x6,
double y6,
double z6,
double x7,
double y7,
double z7,
double x8,
double y8,
double z8,
int method) |
Rotate tilted cuboid to remove tilt and crop cuboid.
|
AlgorithmCropTilted(ModelImage srcImage,
double x1,
double y1,
double x2,
double y2,
double x3,
double y3,
double x4,
double y4,
int method) |
Rotate tilted rectangle to remove tilt and crop rectangle.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
run2D
private boolean run2D
-
Constructor Detail
-
AlgorithmCropTilted
public AlgorithmCropTilted(ModelImage srcImage,
double x1,
double y1,
double x2,
double y2,
double x3,
double y3,
double x4,
double y4,
int method)
Rotate tilted rectangle to remove tilt and crop rectangle.
- Parameters:
srcImage - original imagex1 - y1 - x2 - y2 - x3 - y3 - x4 - y4 -
-
AlgorithmCropTilted
public AlgorithmCropTilted(ModelImage srcImage,
double x1,
double y1,
double z1,
double x2,
double y2,
double z2,
double x3,
double y3,
double z3,
double x4,
double y4,
double z4,
double x5,
double y5,
double z5,
double x6,
double y6,
double z6,
double x7,
double y7,
double z7,
double x8,
double y8,
double z8,
int method)
Rotate tilted cuboid to remove tilt and crop cuboid.
- Parameters:
srcImage - original imagex1 - y1 - z1 - x2 - y2 - z2 - x3 - y3 - z3 - x4 - y4 - z4 - x5 - y5 - z5 - x6 - y6 - z6 - x7 - y7 - z7 - x8 - y8 - z8 -
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmMosaicToSlices.html�������������������������������0000775�4231163�4231163�00000062577�14537076061�026672� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMosaicToSlices (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmMosaicToSlices
extends AlgorithmBase
Algorithm requires input of 2D or 3D mosaics. Based on the dimension of the mosaic image, the
algorithm converts 2D mosaics to 3D slices and 3D mosaics to 4D slices (note: slice numbers
are specified by the user).
- Version:
- 0.2 July 25, 2011, 0.1 September 2, 2010
- Author:
- Beth Tyrie, William Gandler
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmMosaicToSlices
public AlgorithmMosaicToSlices(ModelImage srcIm,
ModelImage dest)
Creates a new AlgorithmMosaicToSlices object.
- Parameters:
srcIm - source image modeldest - destination image
���������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmRGBConcat.html������������������������������������0000775�4231163�4231163�00000123127�14537076061�025540� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRGBConcat (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRGBConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
int dataType,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking) |
Creates a new AlgorithmRGBConcat object.
|
AlgorithmRGBConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
int dataType,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking,
boolean copyAllInfo) |
Creates a new AlgorithmRGBConcat object.
|
AlgorithmRGBConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
ModelImage destImg,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking) |
Creates a new AlgorithmRGBConcat object.
|
AlgorithmRGBConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
ModelImage destImg,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking,
boolean copyAllInfo) |
Creates a new AlgorithmRGBConcat object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
commonMapping
public boolean commonMapping
If true, map all colors based on image min and max. If false, map each color separately based on its own min
and max.
-
Constructor Detail
-
AlgorithmRGBConcat
public AlgorithmRGBConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
int dataType,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking,
boolean copyAllInfo)
Creates a new AlgorithmRGBConcat object.
- Parameters:
srcImgR - image model where result image of the Red channel is to be storedsrcImgG - image model where result image of the Green channel is to be storedsrcImgB - image model where result image of the Blue channel is to be storeddataType - Tells if srcImage will become ARGB, ARGB_USHORT, or ARGB_FLOATremap - if true and srcImage data max is < remapHighestValue data will be remapped [0-remapHighestValue]
else if image max > remapHighestValue data will automatically be remapped [0-remapHighestValue].commonMapping - remapHighestValue - The highest value that will occur if remapping occursperformBoundsChecking - flag for performing bounds checking...normally should be set to true unless negative numbers are desired
-
AlgorithmRGBConcat
public AlgorithmRGBConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
ModelImage destImg,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking,
boolean copyAllInfo)
Creates a new AlgorithmRGBConcat object.
- Parameters:
srcImgR - image model where result image of the Red channel is to be storedsrcImgG - image model where result image of the Green channel is to be storedsrcImgB - image model where result image of the Blue channel is to be storeddestImg - destination image image modelremap - if true and srcImage data max is < remapHighestValue data will be remapped [0-remapHighestValue]
else if image max > remapHighestValue data will automatically be remapped [0-remapHighestValue].commonMapping - remapHighestValue - The highest value that will occur if remapping occurs
* @param performBoundsChecking flag for performing bounds checking...normally should be set to true unless negative numbers are desiredcopyAllInfo -
-
AlgorithmRGBConcat
public AlgorithmRGBConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
ModelImage destImg,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking)
Creates a new AlgorithmRGBConcat object.
- Parameters:
srcImgR - image model where result image of the Red channel is to be storedsrcImgG - image model where result image of the Green channel is to be storedsrcImgB - image model where result image of the Blue channel is to be storeddestImg - destination image image modelremap - if true and srcImage data max is < remapHighestValue data will be remapped [0-remapHighestValue]
else if image max > remapHighestValue data will automatically be remapped [0-remapHighestValue].commonMapping - remapHighestValue - The highest value that will occur if remapping occurs
* @param performBoundsChecking flag for performing bounds checking...normally should be set to true unless negative numbers are desired
-
AlgorithmRGBConcat
public AlgorithmRGBConcat(ModelImage srcImgR,
ModelImage srcImgG,
ModelImage srcImgB,
int dataType,
boolean remap,
boolean commonMapping,
float remapHighestValue,
boolean performBoundsChecking)
Creates a new AlgorithmRGBConcat object.
- Parameters:
srcImgR - image model where result image of the Red channel is to be storedsrcImgG - image model where result image of the Green channel is to be storedsrcImgB - image model where result image of the Blue channel is to be storeddataType - Tells if srcImage will become ARGB, ARGB_USHORT, or ARGB_FLOATremap - if true and srcImage data max is < remapHighestValue data will be remapped [0-remapHighestValue]
else if image max > remapHighestValue data will automatically be remapped [0-remapHighestValue].commonMapping - remapHighestValue - The highest value that will occur if remapping occursperformBoundsChecking - flag for performing bounds checking...normally should be set to true unless negative numbers are desired
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/package-summary.html���������������������������������������0000775�4231163�4231163�00000050020�14537076122�025202� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.utilities (MIPAV API Documentation)
-
Class Summary
| Class |
Description |
| Algorithm4DImageCalculator |
|
| AlgorithmAddMargins |
Algorithm to add or remove margins around the image.
|
| AlgorithmChangeType |
This is a convenience function to convert from one image type to another and remap the data into a new range.
|
| AlgorithmComplexConcat |
Simple algorithm that generates a complex image from real data and imaginary data.
|
| AlgorithmComplexToReal |
Simple algorithm that converts an RGB image to a single greyscale image.
|
| AlgorithmConcat |
Assumes the pixel resolutions are equal.
|
| AlgorithmConcatMult |
|
| AlgorithmConcatMult2Dto3D |
|
| AlgorithmConcatMult3Dto3D |
|
| AlgorithmConcatMult3Dto4D |
|
| AlgorithmConvert3Dto4D |
Converts a 3D dataset that is really a 4D dataset into a 4D dataset.
|
| AlgorithmConvert4Dto3D |
The image is converted from a 4D to a 3D image.
|
| AlgorithmCorrectSpacing |
Algorithm to adjust image volume for cases when the slice spacing is not equal to the slice thickness.
|
| AlgorithmCrop |
Crops 2D and 3D images using a supplied VOI.
|
| AlgorithmCropTilted |
Algorithm to crop a tilted rectangle
|
| AlgorithmCyclicPermutation |
|
| AlgorithmDicomOrder |
Put 3D dataset into dicom order.
|
| AlgorithmDICOMtoAVI |
Recursively traverses a directory and its subfolders, converting all 3D DICOM files to AVI with MP42 Compression.
|
| AlgorithmExtractSlices |
Algorithm that extracts the slices indicated in the list from the srcImage and puts them into the destImage.
|
| AlgorithmExtractSlicesVolumes |
Title: AlgorithmExtractIndividualSlices
|
| AlgorithmFlip |
Flips 2D, 3D or 4D grays scale or color dataset about X, Y, or Z axis (when applicable) when AlgorithmFlip.IMAGE is
passed to the constructor.
|
| AlgorithmImageCalculator |
Algorithm that adds, subtracts, multiplies, or divides an image by by another image.
|
| AlgorithmImageMath |
Algorithm that adds, subtracts, multiplies, or divides an image by some user specified value.
|
| AlgorithmInsertSlice |
Algorithm to insert a slice.
|
| AlgorithmInsertVolume |
|
| AlgorithmMask |
Allow the user to fill a VOI or fill everything outside the VOI with a specific fill value.
|
| AlgorithmMatchImages |
Matches two ModelImages.
|
| AlgorithmMaximumIntensityProjection |
Computes the maximum or the minimum intensity along each projection of a 3D image.
|
| AlgorithmMosaicToSlices |
Algorithm requires input of 2D or 3D mosaics.
|
| AlgorithmNoise |
Algorithm used to add Gaussian, Poisson, Uniform, Rayleigh, or Rician noise to an image.
|
| AlgorithmQuantifyMask |
Algorithm that does basic calculations on Mask images (boolean/ubyte/short)
calculates Center of Mass, area (in resolutions), and number of pixels per mask
|
| AlgorithmRandSliceOrder |
Algorithm that randomizes the order of 3D dataset.
|
| AlgorithmRemoveSlices |
Algorithm verifies the z-th slice should be in included in the destination image, as defined in the list, remove.
|
| AlgorithmRemoveTSlices |
Algorithm to run the remove T slices.
|
| AlgorithmReplaceBlankSlicesWithAverages |
|
| AlgorithmReplaceRemovedSlices |
This algorithm is used to insert averaged slices where slices have been removed -If slices were removed at the
beginning of the original movie, these slices will not be replaced. - Slices are only inserted between the first and
last kept slices
|
| AlgorithmReplaceSlice |
DOCUMENT ME!
|
| AlgorithmReplaceValue |
Title: AlgorithmReplaceValue
|
| AlgorithmReslice |
Reslices 3D image into (isotropic)cubic voxels.
|
| AlgorithmRGBConcat |
Simple algorithm that generates an RGB image from three gray images.
|
| AlgorithmRGBtoGray |
Simple algorithm that converts an RGB image to a single greyscale image.
|
| AlgorithmRGBtoGrays |
Simple algorithm that converts an RGB image to a red, green, and blue greyscale images.
|
| AlgorithmRGBtoHSB |
Simple algorithm that converts an RGB image to a hue, saturation and brightness greyscale images.
|
| AlgorithmRotate |
An Algorithm to rotate 3D or 4D dataset 90 or 180 degrees about X, Y, or Z axis. 2D Images can also be rotated.
|
| AlgorithmSubsample |
Takes in an image and subsamples it to a new set of dimensions.
|
| AlgorithmSubset |
Algorithm to create a 3D subset image from a 4D image.
|
| AlgorithmSwap34 |
Swaps third and fourth dimensions in 4D dataset.
|
| AlgorithmSwapDims |
Swaps dimensions in 4D dataset.
|
| AlgorithmSwapSlicesVolume |
Title: AlgorithmSwapSlicesVolume
|
| AlgorithmTiltCorrection |
|
-
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmConcatMult.html�����������������������������������0000775�4231163�4231163�00000063370�14537076061�026052� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConcatMult (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected boolean |
copyAllInfo |
Whether to copy all file information
|
protected ModelImage |
destImage |
final image
|
protected ModelImage[] |
images |
array of images
|
protected int |
xDim |
x and y dimensions of image
|
protected int |
yDim |
x and y dimensions of image
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
copyBaseInfo(FileInfoBase[] fileInfo,
FileInfoBase srcFileInfo,
float[] resols,
float[] origins,
int[] units,
int i) |
|
protected void |
copyDicomInfo(FileInfoBase[] destFileInfo,
FileInfoBase baseDicomInfo,
float[] resols,
int z,
int t,
int sliceCounter) |
Most efficient way of creating DICOM tags for 4-D.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, runAlgorithm, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
copyBaseInfo
protected void copyBaseInfo(FileInfoBase[] fileInfo,
FileInfoBase srcFileInfo,
float[] resols,
float[] origins,
int[] units,
int i)
-
copyDicomInfo
protected void copyDicomInfo(FileInfoBase[] destFileInfo,
FileInfoBase baseDicomInfo,
float[] resols,
int z,
int t,
int sliceCounter)
Most efficient way of creating DICOM tags for 4-D. Uses pointers based on srcimage dicom tags
- Parameters:
destFileInfo - resols - j - z - t - sliceCounter -
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmCorrectSpacing.html�������������������������������0000775�4231163�4231163�00000074304�14537076061�026706� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCorrectSpacing (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmCorrectSpacing
extends AlgorithmBase
Algorithm to adjust image volume for cases when the slice spacing is not equal to the slice thickness. When spacing >
thickness: repeat images from original image set insert blank images (so that in the final image volume, all images
will have the same slice thickness and the image volume will be to proper scale. When spacing < thickness: set
thickness = spacing.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
colorFactor |
|
private int |
DIM |
The number of dimensions in the image.
|
private int |
newTimeStepVolume |
Volume for each time step.
|
private int |
newZdim |
New Z dimension.
|
private int |
numBlanks |
Number of blank images, to make up gap.
|
private int |
numRepIm |
Number of repeated images, to compensate for gap.
|
private int |
oldTimeStepVolume |
Volume for each time step.
|
private int |
oldZdim |
Original Z dimension of the image.
|
private ModelImage |
resultImage |
Result Image.
|
private int |
sliceArea |
Area of a slice (Xdim * Ydim).
|
private int |
Tdim |
Time dimension of the image.
|
private int |
Xdim |
X dimension of the image.
|
private int |
Ydim |
Y dimension of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
newZdim
private int newZdim
New Z dimension.
-
colorFactor
private int colorFactor
-
Constructor Detail
-
AlgorithmCorrectSpacing
public AlgorithmCorrectSpacing(ModelImage srcImage,
ModelImage resultImage,
int numRepIm,
int numBlanks)
Import source image into the class.
- Parameters:
srcImage - source image (image to clip from)resultImage - corrected imagenumRepIm - number of times to repeat each of original imagesnumBlanks - number of blank images to insert
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmRGBtoGrays.html�����������������������������������0000775�4231163�4231163�00000064735�14537076061�025772� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRGBtoGrays (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmRGBtoGrays
extends AlgorithmBase
Simple algorithm that converts an RGB image to a red, green, and blue greyscale images.
- Version:
- 1.0 Dec 30, 1999
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private ModelImage |
destImageB |
Destination image (gray type) to store the Blue channel of the source image.
|
private ModelImage |
destImageG |
Destination image (gray type) to store the Green channel of the source image.
|
private ModelImage |
destImageR |
Destination image (gray type) to store the Red channel of the source image.
|
private ModelImage |
srcImage |
Source image RGB type image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmRGBtoGrays
public AlgorithmRGBtoGrays(ModelImage destImgR,
ModelImage destImgG,
ModelImage destImgB,
ModelImage srcImg)
Creates a new AlgorithmRGBtoGrays object.
- Parameters:
destImgR - image model where result image of the Red channel is to be storeddestImgG - image model where result image of the Green channel is to be storeddestImgB - image model where result image of the Blue channel is to be storedsrcImg - source image model
�����������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmReslice.html��������������������������������������0000775�4231163�4231163�00000072134�14537076061�025365� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmReslice (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmReslice
extends AlgorithmBase
Reslices 3D image into (isotropic)cubic voxels. This class assumes that the the X and Y dimensions are equal and that
the Z dimension is of lower resolution than of X and Y. However, it does not assume equal spacing in the input image
between all slices (sometimes common in CT and MR images). Note that since this class only adds images between slices
it reduces to a 1D problem. For example, we only need the pixel above and below for linear interp since there isn't
any change in X or change in Y.
- Version:
- 0.1 Sept 14, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
CUBIC |
Cubic interpolation mode.
|
static int |
CUBIC_BSPLINE |
Cubic b-spline interpolation mode.
|
private int |
interpMode |
Interpolation mode (Linear, Cubic Bspline, Cubic Convolution).
|
static int |
LINEAR |
Linear interpolation mode.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmReslice(ModelImage srcImg,
int _interpMode) |
Creates new algorithm for reslicing to isotropic voxels.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private float |
calcRBSpline(float u) |
Reslice data is Cubic Bspline where.
|
private float |
calcRCUBIC(float u) |
Reslice using cubic convolution reslice where.
|
private void |
cubicReslice() |
Reslices the data into isotropic voxels using one of two interpolation methods (cubic Bspline or cubic
convolution).
|
void |
finalize() |
Prepares this class for destruction.
|
ModelImage |
getResultImage() |
Accessor to get interpolated image.
|
private void |
linearReslice() |
Reslices the data into isotropic voxels using linear interpolation.
|
void |
runAlgorithm() |
Starts the program.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmReslice
public AlgorithmReslice(ModelImage srcImg,
int _interpMode)
Creates new algorithm for reslicing to isotropic voxels.
- Parameters:
srcImg - source image model_interpMode - interpolation mode supported by the class.
-
Method Detail
-
cubicReslice
private void cubicReslice()
Reslices the data into isotropic voxels using one of two interpolation methods (cubic Bspline or cubic
convolution). Positions between the first and second image, and the last two images are interpolated using
terminal slices in 2 of the buffers instead of only in 1 buffer because traditional usage of the interpolation
function in these positions would exceed the bounds of the input data.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmInsertSlice.html����������������������������������0000775�4231163�4231163�00000100332�14537076061�026213� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmInsertSlice (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmInsertSlice
extends AlgorithmBase
Algorithm to insert a slice. Operates with sliceType either AVERAGE or BLANK or ORGIINAL. If AVERAGE, the inserted
slice is set equal to the mean of the 2 surrounding slices unless it is an new start or end. A new start or end
simply preserves the usual slice spacing. In BLANK mode a slice with all pixels zero is inserted. In original a 2D
image of the same dimensions is inserted. Must insert black and white with black and white and color with color.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
ADJACENT_DOWN |
Copy adjacent slice.
|
static int |
ADJACENT_UP |
Copy adjacent slice.
|
static int |
AVERAGE |
Average slice type - the inserted slice is set equal to the mean of the 2 surrounding slices.
|
static int |
BLANK |
Blank slice type - the inserted slice is blank.
|
private ModelImage |
insertedImage |
Image inserted for slice type == ORIGINAL.
|
private int |
insertSlice |
Number of slice before which another slice is inserted.
|
private int |
oldZdim |
Original Z dimension of the image.
|
static int |
ORIGINAL |
Original slice type - a 2D image is inserted.
|
private int |
sliceArea |
Area of a slice (Xdim * Ydim).
|
private int |
sliceType |
Insert an AVERAGE or BLANK image slice.
|
static int |
WEIGHTED_AVERAGE |
Weighted average slice type.
|
private float |
weightPrevious |
For weighted averaging.
|
private int |
Xdim |
X dimension of the image.
|
private int |
Ydim |
Y dimension of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmInsertSlice
public AlgorithmInsertSlice(ModelImage srcImage,
ModelImage destImage,
int insertSlice,
int sliceType,
ModelImage insertedImage)
Import source and destination images into the class.
- Parameters:
srcImage - source image (image to clip from)destImage - destination image (image to paste to)insertSlice - number of slice before which another slice is insertedsliceType - AVERAGE or BLANK or ORIGINALinsertedImage - image inserted for sliceType == ORIGINAL
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmInsertVolume.html���������������������������������0000775�4231163�4231163�00000100442�14537076061�026425� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmInsertVolume (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
ADJACENT_BACK |
Copy adjacent slice.
|
static int |
ADJACENT_NEXT |
Copy adjacent slice.
|
static int |
AVERAGE |
Average slice type - the inserted slice is set equal to the mean of the 2 surrounding slices.
|
static int |
BLANK |
Blank slice type - the inserted slice is blank.
|
private float[] |
imageBuffer2 |
|
static int |
INSERTED_IMAGE |
Original slice type - a 2D image is inserted.
|
private ModelImage |
insertedImage |
Image inserted for slice type == ORIGINAL.
|
private int |
insertSlice |
Number of slice before which another slice is inserted.
|
private int |
insertVolumePos |
|
private int |
sliceArea |
Area of a slice (Xdim * Ydim).
|
private int |
Tdim |
Original T dimension of the image.
|
private int |
volumeType |
|
static int |
WEIGHTED_AVERAGE |
Weighted average slice type.
|
private float |
weightPrevious |
For weighted averaging.
|
private int |
Xdim |
X dimension of the image.
|
private int |
Ydim |
Y dimension of the image.
|
private int |
Zdim |
Z dimension of the image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
volumeType
private int volumeType
-
Constructor Detail
-
AlgorithmInsertVolume
public AlgorithmInsertVolume(ModelImage srcImage,
ModelImage destImage,
int volumeType,
int insertVolumePos,
ModelImage insertedImage)
Import source and destination images into the class.
- Parameters:
srcImage - source image (image to clip from)destImage - destination image (image to paste to)volumeType - WEIGHTED_AVERAGE or AVERAGE or BLANK or ADJACENT_BACK or ADJACENT_NEXTinsertVolumePos - position of volume to be insertedinsertedImage - (image designated by user to be inserted)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmQuantifyMask.html���������������������������������0000775�4231163�4231163�00000052456�14537076061�026420� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmQuantifyMask (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmQuantifyMask
extends AlgorithmBase
Algorithm that does basic calculations on Mask images (boolean/ubyte/short)
calculates Center of Mass, area (in resolutions), and number of pixels per mask
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
calc2D
private void calc2D()
-
calc34D
private void calc34D()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmReplaceSlice.html���������������������������������0000775�4231163�4231163�00000054667�14537076061�026345� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmReplaceSlice (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
sliceNum
private int sliceNum
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmReplaceSlice
public AlgorithmReplaceSlice(ModelImage srcImage,
ModelImage sliceImage,
int sliceNum)
Creates a new AlgorithmReplaceSlice object.
- Parameters:
srcImage - DOCUMENT ME!sliceImage - DOCUMENT ME!sliceNum - DOCUMENT ME!
�������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmDicomOrder.html�����������������������������������0000775�4231163�4231163�00000056737�14537076061�026041� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDicomOrder (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int[] |
orient |
Axis orientations of image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
���������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmImageMath.html������������������������������������0000775�4231163�4231163�00000147632�14537076061�025641� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmImageMath (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmImageMath
extends AlgorithmBase
Algorithm that adds, subtracts, multiplies, or divides an image by some user specified value. In addition, the square
root or log of an image can be calculated. If the new image exceeds the range that can be stored in an image of that
type the data is either clipped and stored in the original image. Or a new image of a type (int, float...) that can
store the range of new data is generated.
- Version:
- 1.0 Dec 30, 1999
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
ABSOLUTE_VALUE |
DOCUMENT ME!
|
static int |
ADD |
DOCUMENT ME!
|
static int |
AVERAGE |
DOCUMENT ME!
|
static int |
CLIP |
DOCUMENT ME!
|
private double |
clipMax |
Maximum clipping modes if data result value exceeds the capacity of image's data type.
|
private double |
clipMin |
Minimum clipping modes if data result value exceeds the capacity of image's data type.
|
private int |
clipMode |
Clipping mode.
|
static int |
CONSTANT |
DOCUMENT ME!
|
static int |
CONVERT_FLOAT |
DOCUMENT ME!
|
static int |
DIVIDE |
DOCUMENT ME!
|
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
static int |
INVERSE |
DOCUMENT ME!
|
static int |
LOG |
DOCUMENT ME!
|
private double |
max |
Used to store the image maximum.
|
private double |
maxB |
|
private double |
maxG |
|
private double |
maxR |
|
private double |
min |
Used to store the image minimum.
|
private double |
minB |
|
private double |
minG |
|
private double |
minR |
|
static int |
MULTIPLY |
DOCUMENT ME!
|
private AlgorithmImageMath.Operator |
opType |
Operation to be performed on the images (i.e.
|
static int |
PROMOTE |
DOCUMENT ME!
|
static int |
SQUARE |
DOCUMENT ME!
|
static int |
SQUARE_ROOT |
DOCUMENT ME!
|
static int |
SUBTRACT |
DOCUMENT ME!
|
static int |
SUM |
DOCUMENT ME!
|
private boolean |
useComplex |
DOCUMENT ME!
|
private double |
value |
the value to modify the image with.
|
private double |
valueB |
|
private double |
valueI |
imaginary part of value to modify complex or dcomplex image with or green color of color image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmImageMath(ModelImage srcImg,
int type,
double val,
double valI,
double valB,
int _clipMode,
boolean maskFlag) |
Creates a new AlgorithmImageMath object.
|
AlgorithmImageMath(ModelImage destImg,
ModelImage srcImg,
int type,
double val,
double valI,
double valB,
int _clipMode,
boolean maskFlag) |
Creates a new AlgorithmImageMath object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
clipMode
private int clipMode
Clipping mode.
CLIP = 0; clamp result data to the bounds of the input image type
PROMOTE = 1; promote image type so that the range of the result fits into
the new image type. ( ie. byte to short).
FLOAT = 2; Convert image to float
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false, process the image over the mask
areas.
-
valueB
private double valueB
-
Constructor Detail
-
AlgorithmImageMath
public AlgorithmImageMath(ModelImage srcImg,
int type,
double val,
double valI,
double valB,
int _clipMode,
boolean maskFlag)
Creates a new AlgorithmImageMath object.
- Parameters:
srcImg - source image modeltype - operation type to be performed on the imageval - value applied to the imagevalI - imaginary part of value applied if image is of complex type or
green part of color if color imagevalB - blue part of color image_clipMode - clamp data to image type range or promote image type to hold new data range.maskFlag - Flag that indicates that the operator will be calculated for the whole image if equal to true
-
AlgorithmImageMath
public AlgorithmImageMath(ModelImage destImg,
ModelImage srcImg,
int type,
double val,
double valI,
double valB,
int _clipMode,
boolean maskFlag)
Creates a new AlgorithmImageMath object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modeltype - operation type to be performed on the imageval - value applied to the imagevalI - imaginary part of value applied if image is of complex type or
green part of color if color imagevalB - blue part of color image_clipMode - clamp data to image type range or promote image type to hold new data range.maskFlag - Flag that indicates that the operator will be calculated for the whole image if equal to true
-
Method Detail
-
testType
private boolean testType(int type,
double minVal,
double maxVal)
Determine if the min and max values are in the image types range.
- Parameters:
type - image typeminVal - min value of the imagemaxVal - max value of the image- Returns:
- true if min and max are within the image type specified
������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmDICOMtoAVI.html�����������������������������������0000775�4231163�4231163�00000064717�14537076061�025545� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDICOMtoAVI (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmDICOMtoAVI
extends AlgorithmBase
Recursively traverses a directory and its subfolders, converting all 3D DICOM files to AVI with MP42 Compression.
- Version:
- 1.0
- Author:
- Ben Link
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
compression |
DOCUMENT ME!
|
private java.lang.String |
dirPath |
Directory to recursively operate in.
|
private FileIO |
fileIO |
DOCUMENT ME!
|
private java.lang.String |
outputPath |
Output path to build new tree.
|
private float |
quality |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmDICOMtoAVI(java.lang.String dir,
java.lang.String outputDir,
int compression) |
Default Constructor.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
addFilesToVector(java.lang.String name,
java.util.Vector<java.lang.String> vec) |
Recursively adds DICOM filenames and directory paths to a Vector.
|
void |
runAlgorithm() |
DOCUMENT ME!
|
private void |
runConversion(java.lang.String fileName) |
Opens a dicom image, checks to see if it is 3d, adds margins if the image dimensions are not multiples of 4, and
saves the image as an AVI with MP42 compression**note - the directory structure is intact with the only
difference being that the name of the top level directory now has "_AVI" appended.
|
void |
setQuality(float q) |
DOCUMENT ME!
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
compression
private int compression
DOCUMENT ME!
-
fileIO
private FileIO fileIO
DOCUMENT ME!
-
quality
private float quality
DOCUMENT ME!
-
Method Detail
-
addFilesToVector
private void addFilesToVector(java.lang.String name,
java.util.Vector<java.lang.String> vec)
Recursively adds DICOM filenames and directory paths to a Vector.
- Parameters:
name - The name of either file or directoryvec - Vector that holds all files to be processed
-
runConversion
private void runConversion(java.lang.String fileName)
Opens a dicom image, checks to see if it is 3d, adds margins if the image dimensions are not multiples of 4, and
saves the image as an AVI with MP42 compression**note - the directory structure is intact with the only
difference being that the name of the top level directory now has "_AVI" appended.
- Parameters:
fileName - name of file to convert
�������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmSubsample.html������������������������������������0000775�4231163�4231163�00000154421�14537076061�025732� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSubsample (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmSubsample
extends AlgorithmBase
Takes in an image and subsamples it to a new set of dimensions. The subsample image is a Gaussian weighted average of
neighboring pixels (voxels) of the original image. For 4D images only the first 3 dimensions are subsampled
- Author:
- Evan McCreedy
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmSubsample(ModelImage src,
ModelImage result,
int[] newExtents,
int[] padExtents,
float[] _sigmas,
boolean indep,
boolean transformVOI,
TransMatrix transMatrix,
boolean doPad) |
Setup for a later subsampling of an image.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double |
computeGaussian2D(double locX,
double locY,
double sigmaX,
double sigmaY) |
Compute the value of the 2D gaussian at a point.
|
private double |
computeGaussian3D(double locX,
double locY,
double locZ,
double sigmaX,
double sigmaY,
double sigmaZ) |
Computes the gaussian weights for a particular point.
|
private void |
computeRatios() |
Computes the image scaling ratios.
|
void |
finalize() |
Prepares this class for destruction.
|
private float[] |
getNearestNeighborPos2D(float x,
float y) |
Translates a point from the result image to the source image.
|
private float[] |
getNearestNeighborPos3D(float x,
float y,
float z) |
Translates a point from the result image to the source image.
|
ModelImage |
getResultImage() |
Return the result image (or null if not created yet).
|
private float |
getTriLinearVal3D(float x,
float y,
float z,
int t,
int channelIndex,
ModelSimpleImage src) |
Version of get that performs tri-linear interpoloation.
|
private float |
getTriLinearVal3D(float x,
float y,
float z,
int channelIndex,
ModelSimpleImage src) |
Version of get that performs tri-linear interpoloation.
|
private float |
getValue2D(float x,
float y,
float z,
int channelIndex,
ModelSimpleImage src) |
Get the value of a 2D point.
|
private float |
getValue3D(float x,
float y,
float z,
int t,
int channelIndex,
ModelSimpleImage src) |
Get the value of a 4D point.
|
private float |
getValue3D(float x,
float y,
float z,
int channelIndex,
ModelSimpleImage src) |
Get the value of a 3D point.
|
private static java.lang.String |
makeImageName(java.lang.String image_name,
java.lang.String ext) |
Helper method for making the result image's name.
|
private ModelImage |
padImage(ModelImage kImage,
int[] padExtents) |
|
void |
runAlgorithm() |
Subsample the image.
|
private ModelSimpleImage |
subsample2D(int nImages) |
Subsample a 2D image.
|
private ModelSimpleImage |
subsample3D() |
Perform the subsampling.
|
private ModelSimpleImage |
subsample4D() |
Perform the subsampling.
|
private void |
transform25DVOI(ModelImage image,
float[] imgBuffer,
TransMatrix xfrm) |
Transforms and resamples a 2D or 25D VOI using nearest neighbor interpolation.
|
private void |
transform3DVOI(ModelImage image,
float[] imgBuffer,
TransMatrix xfrm) |
Transforms and resamples a 3D VOI using nearest neighbor interpolation.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmSubsample
public AlgorithmSubsample(ModelImage src,
ModelImage result,
int[] newExtents,
int[] padExtents,
float[] _sigmas,
boolean indep,
boolean transformVOI,
TransMatrix transMatrix,
boolean doPad)
Setup for a later subsampling of an image.
- Parameters:
src - image to be subsampledresult - image created by subsamplingnewExtents - dimensions of the result image to be sampled into_sigmas - x, y, and z scales for the gaussian functionindep - process slices independently (cannot change the z dimension)transformVOI - if true transform the VOIstransMatrix - transformation matrix
-
Method Detail
-
computeGaussian2D
private double computeGaussian2D(double locX,
double locY,
double sigmaX,
double sigmaY)
Compute the value of the 2D gaussian at a point.
- Parameters:
locX - x location of the value to computelocY - y location of the value to computesigmaX - standard deviation of the guassian in the x dimensionsigmaY - standard deviation of the guassian in the y dimension- Returns:
- the value of the 2D gaussian at the given point
-
computeGaussian3D
private double computeGaussian3D(double locX,
double locY,
double locZ,
double sigmaX,
double sigmaY,
double sigmaZ)
Computes the gaussian weights for a particular point. Written by Paul Hemler in AlgorithmVesselSegmenation.
- Parameters:
locX - distance to go in the x dir from the pointlocY - distance to go in the y dir from the pointlocZ - distance to go in the z dir from the pointsigmaX - stddev of the gaussian function in the x dirsigmaY - stddev of the gaussian function in the y dirsigmaZ - stddev of the gaussian function in the z dir- Returns:
- the gaussian weight coeff.
-
getNearestNeighborPos2D
private float[] getNearestNeighborPos2D(float x,
float y)
Translates a point from the result image to the source image.
- Parameters:
x - x coordinate of point to be translatedy - y coordinate of point to be translated- Returns:
- the translated point on the source image
-
getNearestNeighborPos3D
private float[] getNearestNeighborPos3D(float x,
float y,
float z)
Translates a point from the result image to the source image.
- Parameters:
x - x coordinate of point to be translatedy - y coordinate of point to be translatedz - z coordinate of point to be translated- Returns:
- the translated point on the source image
-
getTriLinearVal3D
private float getTriLinearVal3D(float x,
float y,
float z,
int channelIndex,
ModelSimpleImage src)
Version of get that performs tri-linear interpoloation. Note: does NOT perform bounds checking.
- Parameters:
x - x coordinatey - y coordinatez - z coordinatechannelIndex - color channelsrc - image to get intensity value from- Returns:
- the tri-linear interpolated value
-
getTriLinearVal3D
private float getTriLinearVal3D(float x,
float y,
float z,
int t,
int channelIndex,
ModelSimpleImage src)
Version of get that performs tri-linear interpoloation. Note: does NOT perform bounds checking.
- Parameters:
x - x coordinatey - y coordinatez - z coordinatet - t coordinatechannelIndex - color channelsrc - image to get intensity value from- Returns:
- the tri-linear interpolated value
-
getValue2D
private float getValue2D(float x,
float y,
float z,
int channelIndex,
ModelSimpleImage src)
Get the value of a 2D point.
- Parameters:
x - x coordinatey - y coordinatez - z coordinate (0 if really 2D)channelIndex - color channelsrc - image to sample from- Returns:
- the point's value
-
getValue3D
private float getValue3D(float x,
float y,
float z,
int channelIndex,
ModelSimpleImage src)
Get the value of a 3D point.
- Parameters:
x - x coordinatey - y coordinatez - z coordinatechannelIndex - color channelsrc - image to sample from- Returns:
- the point's value
-
getValue3D
private float getValue3D(float x,
float y,
float z,
int t,
int channelIndex,
ModelSimpleImage src)
Get the value of a 4D point.
- Parameters:
x - x coordinatey - y coordinatez - z coordinatet - DOCUMENT ME!channelIndex - color channelsrc - image to sample from- Returns:
- the point's value
-
subsample3D
private ModelSimpleImage subsample3D()
Perform the subsampling. Create a result image with the extents given into the constuctor. Then, for each point
in the result image, find point which corresponds to it in the source image. Add up weighted intensities of the
neighbors of this point in the source image and the intensity of the point itself. Store this value in the point
of the result image. Once all points in the result image have been visted, return the result image.
- Returns:
- resampled image
-
subsample4D
private ModelSimpleImage subsample4D()
Perform the subsampling. Create a result image with the extents given into the constuctor. Then, for each point
in the result image, find point which corresponds to it in the source image. Add up weighted intensities of the
neighbors of this point in the source image and the intensity of the point itself. Store this value in the point
of the result image. Once all points in the result image have been visted, return the result image. Does not
subsample in fourth time dimension - 3.5D operation
- Returns:
- resampled image
-
makeImageName
private static java.lang.String makeImageName(java.lang.String image_name,
java.lang.String ext)
Helper method for making the result image's name. Strips the current extension from the original name, adds the
given extension, and returns the new name.
- Parameters:
image_name - the original image's nameext - Extension to add which gives information about what algorithm was performed on the image.- Returns:
- The new image name.
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmCrop.html�����������������������������������������0000775�4231163�4231163�00000103030�14537076061�024670� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCrop (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
cushion |
Extra space around VOI in x and y dimensions.
|
private boolean |
RGBImage |
Flag for color or noncolor image.
|
private int[] |
x |
Storage for VOI.
|
private int[] |
y |
Storage for VOI.
|
private int[] |
z |
Storage for VOI.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmCrop(ModelImage destImg,
ModelImage srcImg,
int _cushion,
int[] _x,
int[] _y,
int[] _z) |
Creates new algorithms to crop image by specified bounds.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
x
private int[] x
Storage for VOI.
-
y
private int[] y
Storage for VOI.
-
z
private int[] z
Storage for VOI.
-
Constructor Detail
-
AlgorithmCrop
public AlgorithmCrop(ModelImage destImg,
ModelImage srcImg,
int _cushion,
int[] _x,
int[] _y,
int[] _z)
Creates new algorithms to crop image by specified bounds. Stores in destImg.
- Parameters:
destImg - image model where result image is to stored, use null to do in-place calculationsrcImg - source image model_cushion - extra space around VOI in x and y dimensions._x - VOI xBounds: x[0] = min. bound and x[1] = max. bound_y - VOI yBounds: y[0] = min. bound and y[1] = max. bound_z - VOI zBounds: z[0] = min. bound and z[1] = max. bound
-
Method Detail
-
originImg2LPS
private float[] originImg2LPS(float[] origImg,
ModelImage img)
Switch origin order from image order to LPS order.
- Parameters:
origImg - DOCUMENT ME!img - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
originLPS2Img
private float[] originLPS2Img(float[] origLPS,
ModelImage img)
Switch origin order from LPS order to Img order.
- Parameters:
origLPS - DOCUMENT ME!img - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
updateFileInfoData
private void updateFileInfoData()
Updates important image attributes (start locations, orientation ) for the new cropped file by modifing the
fileinfo fo the new ( destination ) image.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmConcatMult2Dto3D.html�����������������������������0000775�4231163�4231163�00000057506�14537076061�026776� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConcatMult2Dto3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmConvert4Dto3D.html��������������������������������0000775�4231163�4231163�00000057004�14537076061�026340� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConvert4Dto3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
copyAlInfo |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmConvert4Dto3D
public AlgorithmConvert4Dto3D(ModelImage srcImg,
boolean copyAllInfo)
Constructs new algorithm and sets source.
- Parameters:
srcImg - source image modelcopyAllInfo - has no effect right now since this is an in-place algorithm
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmRotate.html���������������������������������������0000775�4231163�4231163�00000106365�14537076061�025241� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRotate (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmRotate
extends AlgorithmBase
An Algorithm to rotate 3D or 4D dataset 90 or 180 degrees about X, Y, or Z axis. 2D Images can also be rotated. A new
rotated image with modified dimensions and resolutions created and can be accessed through returnImage().
- Version:
- 1.0 July 25, 2000
- Author:
- Harman J. Singh, Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean[] |
axisFlip |
|
private int[] |
axisOrder |
|
(package private) ViewJProgressBar |
progressBar |
|
private boolean |
quiet |
|
static int |
X_AXIS_180 |
Rotate about the x axis 180 degrees.
|
static int |
X_AXIS_MINUS |
Rotate about the x axis -90 degrees (or 270 degrees).
|
static int |
X_AXIS_PLUS |
Rotate about the x axis 90 degrees.
|
static int |
Y_AXIS_180 |
Rotate about the y axis 180 degrees.
|
static int |
Y_AXIS_MINUS |
Rotate about the y axis -90 degrees (or 270 degrees).
|
static int |
Y_AXIS_PLUS |
Rotate about the y axis 90 degrees.
|
static int |
Z_AXIS_180 |
Rotate about the z axis 180 degrees.
|
static int |
Z_AXIS_MINUS |
Rotate about the z axis -90 degrees (or 270 degrees).
|
static int |
Z_AXIS_PLUS |
Rotate about the z axis 90 degrees.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
axisOrder
private int[] axisOrder
-
quiet
private boolean quiet
-
Constructor Detail
-
AlgorithmRotate
public AlgorithmRotate(ModelImage srcImg,
int[] order,
boolean[] flip)
Creates new algorithm for rotating. Sets the source image and axis parameter.
- Parameters:
srcImg - Source image model.rotateMode - Rotate about which axis.
-
AlgorithmRotate
public AlgorithmRotate(ModelImage srcImg,
int rotateMode)
Creates new algorithm for rotating. Sets the source image and axis parameter.
- Parameters:
srcImg - Source image model.rotateMode - Rotate about which axis.
-
AlgorithmRotate
public AlgorithmRotate(ModelImage srcImg,
int rotateMode,
int progress)
Creates new algorithm for rotating. Sets the source image and axis parameter.
- Parameters:
srcImg - Source image model.rotateMode - Rotate about which axis.progress - Progress mode (see AlgorithmBase).
-
Method Detail
-
runAlgorithm
public void runAlgorithm()
Runs the rotation algorithm. The algorithm is run in place so automatically replaces the source model image.
Resets image orientation, axis orientations, and start locations.
- Specified by:
runAlgorithm in class AlgorithmBase
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/utilities/AlgorithmRGBtoHSB.html�������������������������������������0000775�4231163�4231163�00000064733�14537076061�025317� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRGBtoHSB (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmRGBtoHSB
extends AlgorithmBase
Simple algorithm that converts an RGB image to a hue, saturation and brightness greyscale images.
- Version:
- 1.0 Dec 30, 1999
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private ModelImage |
destImageB |
Destination image (gray type) to store the Brightness channel of the source image.
|
private ModelImage |
destImageH |
Destination image (gray type) to store the Hue channel of the source image.
|
private ModelImage |
destImageS |
Destination image (gray type) to store the Saturation channel of the source image.
|
private ModelImage |
srcImage |
Source image RGB type image.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmRGBtoHSB
public AlgorithmRGBtoHSB(ModelImage destImgH,
ModelImage destImgS,
ModelImage destImgB,
ModelImage srcImg)
Creates a new AlgorithmRGBtoHSB object.
- Parameters:
destImgH - image model where result image of the Red channel is to be storeddestImgS - image model where result image of the Green channel is to be storeddestImgB - image model where result image of the Blue channel is to be storedsrcImg - source image model
�������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHeightFunction.html�����������������������������������������0000775�4231163�4231163�00000065107�14537076046�024707� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHeightFunction (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmHeightFunction
extends AlgorithmBase
The class generates a triangle or quad mesh of a 2D dataset (image) to be displayed in the surface viewer. If the
image is 3D, takes the 2D current slice. The triangle mesh is like a relief map of the image; the higher intensities
are peaks and the lower intensities are valleys.
- Version:
- 0.1 Aug 1, 2001
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
mesh |
DOCUMENT ME!
|
private static int |
QUAD |
DOCUMENT ME!
|
private int |
sampleSize |
DOCUMENT ME!
|
private int |
slice |
DOCUMENT ME!
|
private java.lang.String |
surfaceFileName |
DOCUMENT ME!
|
private static int |
TRIANGLE |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmHeightFunction(ModelImage srcImg,
int sampleSize,
java.lang.String fileName,
int slice,
int mesh) |
Sets up variables needed by algorithm to run.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
mesh
private final int mesh
DOCUMENT ME!
-
sampleSize
private int sampleSize
DOCUMENT ME!
-
slice
private final int slice
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmHeightFunction
public AlgorithmHeightFunction(ModelImage srcImg,
int sampleSize,
java.lang.String fileName,
int slice,
int mesh)
Sets up variables needed by algorithm to run.
- Parameters:
srcImg - Source image model.sampleSize - Sample size to use when plotting surface.fileName - File name to save surface to.slice - Slice of 3D image to plot; 0 if 2D image.mesh - Type of mesh; 0 = Quad mesh, 1 = Triangle mesh
-
Method Detail
-
runAlgorithm
public void runAlgorithm()
Runs the algorithm; calls either calcQuadSurface or calcTriangleSurface, depending on the mesh parameter set in
the constructor.
- Specified by:
runAlgorithm in class AlgorithmBase
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/WeibullDistribution.WeibullCostFunction3param.html�������������������0000775�4231163�4231163�00000036243�14537076057�031173� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WeibullDistribution.WeibullCostFunction3param (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmConstPowellOptBase.html�������������������������������������0000775�4231163�4231163�00000135074�14537076044�025517� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmConstPowellOptBase (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected int |
bracketBound |
The initial bracket size for first iteration of Powell.
|
protected AlgorithmOptimizeFunctionBase |
costFunction |
Cost function called to measure cost - 1D.
|
protected double[] |
finalPoint |
Final point when optimization is complete.
|
protected TransMatrixd |
fromOrigin |
The transformation matrix from the origin of the input image.
|
protected double |
functionAtBest |
The cost of the function at the best minimum.
|
protected int |
maxIterations |
The maximum number of iterations the optimization allows.
|
protected ViewJProgressBar |
myProgressBar |
Progress bar that may be set for long optimization runs.
|
protected int |
nDims |
Degress of freedom.
|
protected AlgorithmBase |
parent |
Parent algorithm that called this optimization.
|
protected double[] |
point |
Point that is currently being optimized.
|
protected int |
progressBegin |
Where progress is when sent in.
|
protected int |
progressMax |
The max the progress can go to.
|
protected double[] |
start |
Point that was initially passed into function.
|
protected boolean |
success |
Indicates whether the Powell algorithm succeeded in finding a minimum.
|
protected double[] |
tolerance |
Array of tolerances for each dimension.
|
protected TransMatrixd |
toOrigin |
The transformation matrix to the origin of the input image.
|
protected float[][] |
trLimits |
Array of translation and rotation limits for each dimension.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmConstPowellOptBase(AlgorithmBase parentAlgo,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] initial,
double[] tols,
int maxIter,
int coords,
int bracket) |
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, and some
tolerance within that point to look for the minimum.
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
abstract TransMatrixd |
convertToMatrix(double[] vector) |
Helper method that converts a vector with certain values set to a matrix.
|
protected void |
debugPoint(double[] point,
java.lang.String message) |
Method to display current point values.
|
boolean |
didSucceed() |
Returns whether or not a minimum was found.
|
void |
disposeLocal() |
Sets everything to null and prepares this class for destruction.
|
double |
eval(double[] x) |
|
double |
getCost() |
Returns the cost of the best transformation.
|
abstract double[] |
getFinal() |
Returns the final point with translations, rotations, scales, and skews representing the best
Transformation.
|
abstract double[] |
getFinal(double[] point) |
Returns the final point with translations, rotations, scales, and skews representing the best
Transformation.
|
abstract TransMatrixd |
getMatrix() |
Returns the matrix representing the best transformation.
|
abstract TransMatrixd |
getMatrix(double sample) |
Returns the matrix representing the best transformation.
|
int |
getNumberOfVariables() |
|
double[] |
getPoint() |
Returns the optimized point, with length == degrees of freedom.
|
abstract void |
measureCost() |
Calls cost function with inputed point and saves result in functionAtBest.
|
abstract void |
setInitialPoint(double[] initial) |
Sets the initial point to the value passed in.
|
abstract void |
setLimits(float[][] limits) |
Sets the limits on rotation and translation.
|
void |
setMaxIterations(int max) |
Sets the maximum number of iterations.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, runAlgorithm, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
nDims
protected int nDims
Degress of freedom.
-
Constructor Detail
-
AlgorithmConstPowellOptBase
public AlgorithmConstPowellOptBase(AlgorithmBase parentAlgo,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] initial,
double[] tols,
int maxIter,
int coords,
int bracket)
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, and some
tolerance within that point to look for the minimum. The initial point contains rotations, translations, scales,
and skews.
- Parameters:
parentAlgo - DOCUMENT ME!degreeOfFreedom - Degree of freedom for transformation (must be 3, 4, 6, 7, 9, or 12).costFunc - Cost function to use.initial - Initial point to start from, length of 12.tols - Tolerance for each dimension (tols.length == degreeOfFreedom).maxIter - The maximum iterations.coords - 2 or 3 for 2D or 3Dbracket - the bracket bound for the first iteration of powell
-
Method Detail
-
convertToMatrix
public abstract TransMatrixd convertToMatrix(double[] vector)
Helper method that converts a vector with certain values set to a matrix. For values not set, uses those in start
variable.
- Parameters:
vector - Point with possible rotations, translations, etc. set.- Returns:
- Matrix representation of that point.
-
getFinal
public abstract double[] getFinal()
Returns the final point with translations, rotations, scales, and skews representing the best
Transformation.
- Returns:
- A vector representing the best transformation in terms of translations, rotations, scales, and skews.
-
getFinal
public abstract double[] getFinal(double[] point)
Returns the final point with translations, rotations, scales, and skews representing the best
Transformation.
- Returns:
- A vector representing the best transformation in terms of translations, rotations, scales, and skews.
-
getMatrix
public abstract TransMatrixd getMatrix(double sample)
Returns the matrix representing the best transformation. The passed in parameter represents the
resolution (same in all directions and for both input and reference images, since resampled isotropically). Since
the optimization was done in pixel space, not millimeter space, the translation parameters need to be scaled by
the sample value.
- Parameters:
sample - Sample size.- Returns:
- A matrix representing the best transformation.
-
debugPoint
protected void debugPoint(double[] point,
java.lang.String message)
Method to display current point values.
- Parameters:
point - DOCUMENT ME!message - DOCUMENT ME!
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.CovarianceImpl.html�������������������������������������0000775�4231163�4231163�00000070021�14537076052�025317� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.CovarianceImpl (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
CheckForDuplicates(java.util.Vector<double[]> blocks) |
|
boolean |
CheckForPairDuplicates(java.util.Vector<CeresSolver.Pair<double[],double[]>> blocks) |
|
boolean |
Compute(java.util.Vector<double[]> parameter_blocks,
CeresSolver.ProblemImpl problem) |
|
boolean |
ComputeCovarianceSparsity(java.util.Vector<CeresSolver.Pair<double[],double[]>> original_covariance_blocks,
CeresSolver.ProblemImpl problem) |
|
(package private) boolean |
ComputeCovarianceValues() |
|
(package private) boolean |
ComputeCovarianceValuesUsingDenseSVD() |
|
CeresSolver.CompressedRowSparseMatrix |
covariance_matrix() |
|
boolean |
GetCovarianceBlock(double[] parameter_block1,
double[] parameter_block2,
double[] covariance_block) |
|
boolean |
GetCovarianceBlockInTangentOrAmbientSpace(double[] original_parameter_block1,
double[] original_parameter_block2,
boolean lift_covariance_to_ambient_space,
double[] covariance_block) |
|
boolean |
GetCovarianceBlockInTangentSpace(double[] parameter_block1,
double[] parameter_block2,
double[] covariance_block) |
|
boolean |
GetCovarianceMatrix(java.util.Vector<double[]> parameter_blocks,
double[] covariance_matrix) |
|
boolean |
GetCovarianceMatrixInTangentOrAmbientSpace(java.util.Vector<double[]> parameters,
boolean lift_covariance_to_ambient_space,
double[] covariance_matrix) |
|
boolean |
GetCovarianceMatrixInTangentSpace(java.util.Vector<double[]> parameter_blocks,
double[] covariance_matrix) |
|
(package private) void |
LinearIndexToUpperTriangularIndex(int k,
int n,
int[] i,
int[] j) |
|
boolean |
pairCompute(java.util.Vector<CeresSolver.Pair<double[],double[]>> covariance_blocks,
CeresSolver.ProblemImpl problem) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
GetCovarianceBlockInTangentOrAmbientSpace
public boolean GetCovarianceBlockInTangentOrAmbientSpace(double[] original_parameter_block1,
double[] original_parameter_block2,
boolean lift_covariance_to_ambient_space,
double[] covariance_block)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SparseLinearAlgebraLibraryType.html����������������������0000775�4231163�4231163�00000037157�14537076052�030413� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SparseLinearAlgebraLibraryType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.SparseLinearAlgebraLibraryType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGraphBasedSegmentation.edgeComparator.html������������������0000775�4231163�4231163�00000027475�14537076046�031310� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGraphBasedSegmentation.edgeComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edgeComparator
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
edgeComparator() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
-
-
Constructor Detail
-
edgeComparator
private edgeComparator()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.Fitqd16.html��������������������������������������0000775�4231163�4231163�00000030506�14537076055�025067� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.Fitqd16 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Fitqd16(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Fitqd16
public Fitqd16(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LocalIntensityOrderPattern.tliop.html��������������������������������0000775�4231163�4231163�00000022627�14537076056�026544� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LocalIntensityOrderPattern.tliop (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.tliop
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float[][] |
blob |
|
(package private) float[][] |
patch |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
tliop() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ImplicitSchurComplement.html�����������������������������0000775�4231163�4231163�00000060616�14537076051�027154� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ImplicitSchurComplement (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
UpdateRhs
private void UpdateRhs()
������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmIteratedBlindDeconvolution.html�����������������������������0000775�4231163�4231163�00000110467�14537076046�027254� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmIteratedBlindDeconvolution (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
arrayLength
int arrayLength
DOCUMENT ME!
-
blurredReals
float[] blurredReals
DOCUMENT ME!
-
estimatedReals
float[] estimatedReals
DOCUMENT ME!
-
psfReals
float[] psfReals
DOCUMENT ME!
-
psfSpectrumImags
float[] psfSpectrumImags
DOCUMENT ME!
-
psfSpectrumReals
float[] psfSpectrumReals
DOCUMENT ME!
-
tmpArray
float[] tmpArray
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmIteratedBlindDeconvolution
public AlgorithmIteratedBlindDeconvolution(ModelImage destImg,
ModelImage srcImg,
ModelImage psfImg)
Creates a new AlgorithmIteratedBlindDeconvolution object.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!psfImg - DOCUMENT ME!
-
Method Detail
-
initAlgorithm
private void initAlgorithm()
All of this stuff was being done in the constructor...why?
Shoved it in here to have progress bar continuity
(also we shouldn't be running other algorithms within a constructor)
-
run2D
private void run2D()
DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LossFunction.html����������������������������������������0000775�4231163�4231163�00000027102�14537076052�024771� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LossFunction (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LossFunction
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
LossFunction
public LossFunction()
-
Method Detail
-
finalize
public void finalize()
- Overrides:
finalize in class java.lang.Object
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitPiessens1.html���������������������������������0000775�4231163�4231163�00000030414�14537076055�026164� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitPiessens1 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitPiessens1(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus) |
Creates a new FitSineModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitPiessens1
public FitPiessens1(double[] time,
double abscissa,
double relEps,
double absEps,
double[] result,
double[] estErr,
int[] evaluations,
int[] errStatus)
Creates a new FitSineModel object.
- Parameters:
time - DOCUMENT ME!abscissa - DOCUMENT ME!relEps - DOCUMENT ME!absEps - DOCUMENT ME!result - DOCUMENT ME!estErr - DOCUMENT ME!evaluations - DOCUMENT ME!errStatus - DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.ResidualBlock.html���������������������������������������0000775�4231163�4231163�00000062072�14537076052�025073� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ResidualBlock (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
CeresSolver.CostFunction |
cost_function() |
|
boolean |
Evaluate(boolean apply_loss_function,
double[] cost,
double[] residuals,
double[][] jacobians,
double[] scratch) |
|
boolean |
Evaluate(boolean apply_loss_function,
double[] cost,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset,
double[] scratch) |
|
java.lang.String |
EvaluationToString(java.util.Vector<double[]> parameters,
double[] cost,
double[] residuals,
double[][] jacobians) |
|
java.lang.String |
EvaluationToString(java.util.Vector<double[]> parameters,
double[] cost,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
void |
InvalidateEvaluation(double[] cost,
double[] residuals,
double[][] jacobians) |
|
void |
InvalidateEvaluation(double[] cost,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
boolean |
IsEvaluationValid(java.util.Vector<double[]> parameters,
double[] cost,
double[] residuals,
double[][] jacobians) |
|
boolean |
IsEvaluationValid(java.util.Vector<double[]> parameters,
double[] cost,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
CeresSolver.LossFunction |
loss_function() |
|
int |
NumParameterBlocks() |
|
int |
NumResiduals() |
|
int |
NumScratchDoublesForEvaluate() |
|
CeresSolver.ParameterBlock[] |
parameter_blocks() |
|
java.lang.String |
toString() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
index_
private int index_
-
Method Detail
-
Evaluate
public boolean Evaluate(boolean apply_loss_function,
double[] cost,
double[] residuals,
double[][] jacobians,
double[] scratch)
-
Evaluate
public boolean Evaluate(boolean apply_loss_function,
double[] cost,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset,
double[] scratch)
-
InvalidateEvaluation
public void InvalidateEvaluation(double[] cost,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
-
IsEvaluationValid
public boolean IsEvaluationValid(java.util.Vector<double[]> parameters,
double[] cost,
double[] residuals,
double[][] jacobians)
-
IsEvaluationValid
public boolean IsEvaluationValid(java.util.Vector<double[]> parameters,
double[] cost,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
-
EvaluationToString
public java.lang.String EvaluationToString(java.util.Vector<double[]> parameters,
double[] cost,
double[] residuals,
double[][] jacobians)
-
EvaluationToString
public java.lang.String EvaluationToString(java.util.Vector<double[]> parameters,
double[] cost,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlFrameOrientedEllipse.html�����������������������������������0000775�4231163�4231163�00000025714�14537076054�025710� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlFrameOrientedEllipse (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedEllipse
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float |
a11 |
< center y-coordinate
|
(package private) float |
a12 |
<
|
(package private) float |
a21 |
|
(package private) float |
a22 |
|
(package private) float |
x |
|
(package private) float |
y |
< center x-coordinate
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
y
float y
< center x-coordinate
-
a11
float a11
< center y-coordinate
-
Constructor Detail
-
VlFrameOrientedEllipse
VlFrameOrientedEllipse()
����������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.Pixel.html�������������������������������������0000775�4231163�4231163�00000030340�14537076047�025454� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.Pixel (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Pixel
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
x |
|
int |
y |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Pixel(int x,
int y) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, finalize, getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
hashCode
public int hashCode()
- Overrides:
hashCode in class java.lang.Object
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.TreeSurvival.html����������������������������������0000775�4231163�4231163�00000121546�14537076057�026230� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.TreeSurvival (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Tree
alpha, case_weights, child_nodeIDs, data, dependent_varID, deterministic_varIDs, holdout, importance_mode, inbag_counts, keep_inbag, memory_saving_splitting, min_node_size, minprop, mtry, num_random_splits, num_samples, num_samples_oob, oob_sampleIDs, prediction_terminal_nodeIDs, random, sample_fraction, sample_with_replacement, sampleIDs, split_select_varIDs, split_select_weights, split_values, split_varIDs, splitrule, variable_importance
-
Constructor Summary
Constructors
| Constructor |
Description |
TreeSurvival(java.util.Vector<java.lang.Double> unique_timepoints,
int status_varID,
java.util.Vector<java.lang.Integer> response_timepoints) |
|
TreeSurvival(java.util.Vector<java.util.Vector<java.lang.Integer>> child_nodeIDs,
java.util.Vector<java.lang.Integer> split_varIDs,
java.util.Vector<java.lang.Double> split_values,
java.util.Vector<java.util.Vector<java.lang.Double>> chf,
java.util.Vector<java.lang.Double> unique_timepoints,
java.util.Vector<java.lang.Integer> response_timepointIDs) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
addImpurityImportance(int nodeID,
int varID,
double decrease) |
|
void |
allocateMemory() |
|
void |
appendToFileInternal(java.io.BufferedWriter bw) |
|
void |
bootstrapClassWise() |
|
void |
bootstrapWithoutReplacementClassWise() |
|
void |
cleanUpInternal() |
|
void |
computeAucSplit(double time_k,
double time_l,
double status_k,
double status_l,
double value_k,
double value_l,
int num_splits,
java.util.Vector<java.lang.Double> possible_split_values,
double[] num_count,
double[] num_total) |
|
void |
computeChildDeathCounts(int nodeID,
int varID,
java.util.Vector<java.lang.Double> possible_split_values,
int[] num_samples_right_child,
int[] delta_samples_at_risk_right_child,
int[] num_deaths_right_child,
int num_splits) |
|
void |
computeDeathCounts(int nodeID) |
|
double |
computePredictionAccuracyInternal() |
|
void |
computeSurvival(int nodeID) |
|
void |
createEmptyNodeInternal() |
|
boolean |
findBestSplit(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
boolean |
findBestSplitExtraTrees(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
boolean |
findBestSplitMaxstat(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
void |
findBestSplitValueAUC(int nodeID,
int varID,
double[] best_value,
int[] best_varID,
double[] best_auc) |
|
void |
findBestSplitValueExtraTrees(int nodeID,
int varID,
double[] best_value,
int[] best_varID,
double[] best_logrank) |
|
void |
findBestSplitValueExtraTreesUnordered(int nodeID,
int varID,
double[] best_value,
int[] best_varID,
double[] best_logrank) |
|
void |
findBestSplitValueLogRank(int nodeID,
int varID,
double[] best_value,
int[] best_varID,
double[] best_logrank) |
|
void |
findBestSplitValueLogRankUnordered(int nodeID,
int varID,
double[] best_value,
int[] best_varID,
double[] best_logrank) |
|
java.util.Vector<java.util.Vector<java.lang.Double>> |
getChf() |
|
java.util.Vector<java.lang.Double> |
getPrediction(int sampleID) |
|
int |
getPredictionTerminalNodeID(int sampleID) |
|
boolean |
splitNodeInternal(int nodeID,
java.util.Vector<java.lang.Integer> possible_split_varIDs) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Tree
appendToFile, bootstrap, bootstrapWeighted, bootstrapWithoutReplacement, bootstrapWithoutReplacementWeighted, computePermutationImportance, createEmptyNode, createPossibleSplitVarSubset, dispose, dropDownSamplePermuted, getChildNodeIDs, getInbagCounts, getNumSamplesOob, getOobSampleIDs, getSplitValues, getSplitVarIDs, grow, init, permuteAndPredictOobSamples, predict, splitNode
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
status_varID
private int status_varID
-
num_deaths
private int[] num_deaths
-
Constructor Detail
-
TreeSurvival
public TreeSurvival(java.util.Vector<java.util.Vector<java.lang.Integer>> child_nodeIDs,
java.util.Vector<java.lang.Integer> split_varIDs,
java.util.Vector<java.lang.Double> split_values,
java.util.Vector<java.util.Vector<java.lang.Double>> chf,
java.util.Vector<java.lang.Double> unique_timepoints,
java.util.Vector<java.lang.Integer> response_timepointIDs)
-
Method Detail
-
computeChildDeathCounts
public void computeChildDeathCounts(int nodeID,
int varID,
java.util.Vector<java.lang.Double> possible_split_values,
int[] num_samples_right_child,
int[] delta_samples_at_risk_right_child,
int[] num_deaths_right_child,
int num_splits)
-
findBestSplitValueLogRank
public void findBestSplitValueLogRank(int nodeID,
int varID,
double[] best_value,
int[] best_varID,
double[] best_logrank)
-
findBestSplitValueLogRankUnordered
public void findBestSplitValueLogRankUnordered(int nodeID,
int varID,
double[] best_value,
int[] best_varID,
double[] best_logrank)
-
findBestSplitValueAUC
public void findBestSplitValueAUC(int nodeID,
int varID,
double[] best_value,
int[] best_varID,
double[] best_auc)
-
computeAucSplit
public void computeAucSplit(double time_k,
double time_l,
double status_k,
double status_l,
double value_k,
double value_l,
int num_splits,
java.util.Vector<java.lang.Double> possible_split_values,
double[] num_count,
double[] num_total)
-
findBestSplitValueExtraTrees
public void findBestSplitValueExtraTrees(int nodeID,
int varID,
double[] best_value,
int[] best_varID,
double[] best_logrank)
-
findBestSplitValueExtraTreesUnordered
public void findBestSplitValueExtraTreesUnordered(int nodeID,
int varID,
double[] best_value,
int[] best_varID,
double[] best_logrank)
����������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.PowellSingularFunction.html��������������������������0000775�4231163�4231163�00000027177�14537076053�027675� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.PowellSingularFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/FitLorentz.html������������������������������������������������������0000775�4231163�4231163�00000074221�14537076054�022216� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
FitLorentz (MIPAV API Documentation)
-
public class FitLorentz
extends NLFittedFunction
FitLorentz -fits an array of points to a lorentz distribution, thresholding techniques come from ViewJFrameGraph,
no need to implement here
- Version:
- 1.0
- Author:
- senseneyj
- See Also:
NLConstrainedEngine
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
amp |
Amplitude parameter
|
private int |
dataEnd |
Location in xSeries where Gaussian data ends
|
private int |
dataStart |
Location in xSeries where Gaussian data starts
|
private double |
gamma |
half width at half maximum
|
private int |
iters |
Iterations performed
|
private double |
xMedian |
Statistical median
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitLorentz() |
FitLorentz - test constructor, builds and test function.
|
FitLorentz(int nPoints,
double[] xData,
double[] yData) |
FitLorentz.
|
FitLorentz(int nPoints,
float[] xData,
float[] yData) |
Constructs new fit lorentz distribution.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[] |
applyKernel() |
Apply small Gaussian kernel to smooth out data.
|
protected void |
calculateChiSq() |
Calculates chi squared
|
protected void |
calculateFittedY() |
Calculates yDataFitted
|
void |
displayResults() |
Display results of displaying lorentz fitting parameters.
|
private double |
dLdA(double x) |
Partial derivative of Lorentz distribution with respect to A.
|
private double |
dLdgamma(double x) |
Partial derivative of Lorentz distribution with respect to gamma.
|
private double |
dLdxMedian(double x) |
Partial derivative of Lorentz distribution with respect to xMedian.
|
void |
driver() |
Starts the analysis.
|
private void |
estimateInitial() |
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
protected Jama.Matrix |
generateJacobian() |
Jacobian used for non-linear least squares fitting.
|
protected Jama.Matrix |
generateResiduals() |
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
|
private double |
lorentz(double x) |
Lorentz distribution evaluated at a point with given parameters
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
amp
private double amp
Amplitude parameter
-
xMedian
private double xMedian
Statistical median
-
iters
private int iters
Iterations performed
-
Constructor Detail
-
FitLorentz
public FitLorentz(int nPoints,
float[] xData,
float[] yData)
Constructs new fit lorentz distribution.
- Parameters:
nPoints - Number of points in the functionxData - values along x-axisyData - values along y-axis
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!covarMat - DOCUMENT ME!
-
generateResiduals
protected Jama.Matrix generateResiduals()
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
- Specified by:
generateResiduals in class NLFittedFunction- Returns:
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmELSUNCOpt2D.html��������������������������������������������0000775�4231163�4231163�00000174063�14537076045�023634� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmELSUNCOpt2D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmELSUNCOpt2D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector2f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] tols,
int maxIter,
boolean _rigid,
int searchAlgorithm) |
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
adjustTranslation(TransMatrixd mat,
float sample) |
|
double[] |
constructPoint(double[] defaultPoint,
double[] point) |
Construct a full 7-dimension transformation vector from the partial transformation vector.
|
TransMatrixd |
convertToMatrix(double[] vector) |
Convert a transformation vector to a transformation matrix.
|
TransMatrixd |
convertToMatrix(TransMatrixd toOrigin,
TransMatrixd fromOrigin,
double[] vector) |
Convert a 7-dimension transformation vector to a 3x3 transformation matrix.
|
private void |
createTerrain(float[] terrain,
float transXFrom,
float transXTo,
float transXStep,
int xstart,
int xdim,
float transYFrom,
float transYTo,
float transYStep,
int ystart,
int ydim,
float rotFrom,
float rotTo,
float rotStep,
int zstart,
int zdim) |
|
float[] |
createTerrain(float transXFrom,
float transXTo,
float transXStep,
float transYFrom,
float transYTo,
float transYStep,
float rotFrom,
float rotTo,
float rotStep) |
|
private void |
dfault(int[] iv,
double[] v) |
|
void |
disposeLocal() |
Sets everything to null and prepares this class for destruction.
|
double[] |
extractPoint(double[] startPoint) |
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
|
double |
getCost(int index) |
Returns the cost for the transformation vector.
|
double[] |
getFinal(double[] point) |
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
|
TransMatrixd |
getMatrix(int index) |
Obtain the transformation vector and convert to the matrix representation.
|
TransMatrixd |
getMatrix(int index,
float sample) |
|
double[] |
getPoint(int index) |
Return the full transformation vector.
|
Vectornd[] |
getPoints() |
Return an array of transformation vector.
|
boolean |
isPathRecorded() |
|
double |
measureCost(double[] point) |
Measure the cost value for the given transformation vector.
|
double |
measureCost(TransMatrixd m) |
Measure the cost value for the given transformation matrix.
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
runELSUNC() |
Runs ELSUNC along one dimension at a time as long as the costFunction improves during one cycle
of runs along every dimension.
|
private void |
runLM() |
Runs Levneberg-Marqaurdt along one dimension at a time as long as the costFunction improves during one cycle
of runs along every dimension.
|
private void |
runNL2sol() |
|
void |
setMaxIterations(int max) |
Accessor that sets the maximum number of iterations.
|
void |
setPathRecorded(boolean pathRecorded) |
|
void |
setPoints(Vectornd[] points) |
Sets the transformation vectors.
|
void |
updatePoint(double[] point,
double cost,
Vectornd v) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
nDims
private int nDims
Degress of freedom.
-
status
private int status
-
paths
protected java.util.Hashtable<java.lang.Long,java.util.Vector<java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f>>> paths
Store the paths for every thread.
-
epsilon
private double epsilon
-
Constructor Detail
-
AlgorithmELSUNCOpt2D
public AlgorithmELSUNCOpt2D(AlgorithmBase parent,
WildMagic.LibFoundation.Mathematics.Vector2f com,
int degreeOfFreedom,
AlgorithmOptimizeFunctionBase costFunc,
double[] tols,
int maxIter,
boolean _rigid,
int searchAlgorithm)
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- Parameters:
parent - Algorithm that called this optimization.com - Center of Mass of the input image.degreeOfFreedom - Degree of freedom for transformation (must be 2, 3, 4, 5, 7).costFunc - Cost function to use.tols - Tolerance for each dimension (tols.length == degreeOfFreedom).maxIter - Maximum number of iterations._rigid - true means this was a rigid transformationsearchAlgorithm - ELSUNC, LEVENBERG_MARQUARDT, or NL2SOL;
-
Method Detail
-
getPoints
public Vectornd[] getPoints()
Return an array of transformation vector. The meanings of those
transformation vector are as following:
the initial transformation vector: before algorithm is performed
the final transformation vector: after algorithm was performed.
- Returns:
-
runNL2sol
private void runNL2sol()
-
getFinal
public double[] getFinal(double[] point)
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- Returns:
- vector representing the best transformation in terms of translations, rotations, scales, and skews.
-
constructPoint
public double[] constructPoint(double[] defaultPoint,
double[] point)
Construct a full 7-dimension transformation vector from the partial transformation vector.
For missing values in point, the values in defaultPoint will be used.
Different degree of freedom has different meanings:
2: only 2 translations
3: rigid: 1 rotation and 2 translations
non-rigid: global scaling and 2 translations
4: 1 rotation, 2 translations and global scaling
5: 1 rotation, 2 translations and scalings
7: 1 rotation, 2 translations, scalings and skews
- Parameters:
defaultPoint - a default full 7-dimension transformation vector.point - a partial or full transformation vector.- Returns:
- a full transformation vector.
-
convertToMatrix
public TransMatrixd convertToMatrix(TransMatrixd toOrigin,
TransMatrixd fromOrigin,
double[] vector)
Convert a 7-dimension transformation vector to a 3x3 transformation matrix.
- Parameters:
vector - a 7-dimension transformation vector including 1 rotation, 2 translations, 2 scalings and 2 skews.- Returns:
- a 3x3 transformation matrix
-
extractPoint
public double[] extractPoint(double[] startPoint)
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
- Parameters:
startPoint - the start full 7-dimension transformation vector.- Returns:
- the partial or full transformation vector which will be optimized.
-
createTerrain
public float[] createTerrain(float transXFrom,
float transXTo,
float transXStep,
float transYFrom,
float transYTo,
float transYStep,
float rotFrom,
float rotTo,
float rotStep)
-
createTerrain
private void createTerrain(float[] terrain,
float transXFrom,
float transXTo,
float transXStep,
int xstart,
int xdim,
float transYFrom,
float transYTo,
float transYStep,
int ystart,
int ydim,
float rotFrom,
float rotTo,
float rotStep,
int zstart,
int zdim)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.ValuePair.html�������������������������������������0000775�4231163�4231163�00000024536�14537076057�025466� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.ValuePair (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.StochasticForests.ValuePair<K,V>
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private K |
key |
|
private V |
val |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ValuePair(K key,
V val) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.InteractionConstants.html��������������������������������0000775�4231163�4231163�00000020560�14537076054�026556� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.InteractionConstants (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
X_AXIS |
|
static int |
Y_AXIS |
|
������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmVOIProps.Calc34D.ContourStats.html��������������������������0000775�4231163�4231163�00000117471�14537076051�027233� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmVOIProps.Calc34D.ContourStats (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- Enclosing class:
- AlgorithmVOIProps.Calc34D
private class AlgorithmVOIProps.Calc34D.ContourStats
extends java.lang.Object
Stores the statistics for a single contour, color or grayscale.
Can also be used to store the summed statistics for a group of contours.
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
hullArea
public double hullArea
-
volume
public double volume
-
perimeter
public double perimeter
-
solidity
public double solidity
-
xMass
public double[] xMass
-
yMass
public double[] yMass
-
zMass
public double[] zMass
-
massI
public double[] massI
-
PAxis
public double PAxis
-
MajorAxis
public double MajorAxis
-
MinorAxis
public double MinorAxis
-
avgIntenR
public double avgIntenR
-
avgIntenG
public double avgIntenG
-
avgIntenB
public double avgIntenB
-
medianR
public double medianR
-
medianG
public double medianG
-
medianB
public double medianB
-
modeR
public double modeR
-
modeG
public double modeG
-
modeB
public double modeB
-
maxCountR
public double maxCountR
-
maxCountG
public double maxCountG
-
maxCountB
public double maxCountB
-
avgInten
public double avgInten
-
median
public double median
-
maxCount
public double maxCount
-
stdDevR
public double stdDevR
-
stdDevG
public double stdDevG
-
stdDevB
public double stdDevB
-
skewnessR
public double skewnessR
-
skewnessG
public double skewnessG
-
skewnessB
public double skewnessB
-
kurtosisR
public double kurtosisR
-
kurtosisG
public double kurtosisG
-
kurtosisB
public double kurtosisB
-
stdDev
public double stdDev
-
skewness
public double skewness
-
kurtosis
public double kurtosis
-
Constructor Detail
-
ContourStats
public ContourStats()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.ExpectedEvaluation.html������������������������������0000775�4231163�4231163�00000025634�14537076053�027005� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.ExpectedEvaluation (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.ExpectedEvaluation
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_rows
public int num_rows
-
num_cols
public int num_cols
-
gradient
public double[] gradient
-
jacobian
public double[] jacobian
����������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.ForestClassification.html��������������������������0000775�4231163�4231163�00000101023�14537076057�027677� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.ForestClassification (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Forest
alpha, case_weights, data, dependent_varID, deterministic_varIDs, holdout, importance_mode, keep_inbag, memory_mode, memory_saving_splitting, min_node_size, minprop, mtry, mutex, num_independent_variables, num_random_splits, num_samples, num_threads, num_trees, num_variables, output_prefix, overall_prediction_error, predict_all, prediction_mode, prediction_type, predictions, progress, random, sample_fraction, sample_with_replacement, seed, split_select_varIDs, split_select_weights, splitrule, thread_ranges, trees, variable_importance, verbose_out
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Forest
computePermutationImportance, computePredictionError, dispose, getChildNodeIDs, getDependentVarId, getInbagCounts, getIsOrderedVariable, getMinNodeSize, getMtry, getNumIndependentVariables, getNumTrees, getOverallPredictionError, getPredictions, getSplitValues, getSplitVarIDs, getVariableImportance, grow, init, initCpp, initR, loadFromFile, predict, run, saveToFile, setAlwaysSplitVariables, setSplitWeightVector, writeImportanceFile, writeOutput
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
loadForest
public void loadForest(int dependent_varID,
int num_trees,
java.util.Vector<java.util.Vector<java.util.Vector<java.lang.Integer>>> forest_child_nodeIDs,
java.util.Vector<java.util.Vector<java.lang.Integer>> forest_split_varIDs,
java.util.Vector<java.util.Vector<java.lang.Double>> forest_split_values,
java.util.Vector<java.lang.Double> class_values,
java.util.Vector<java.lang.Boolean> is_ordered_variable)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.rpfun.html���������������������������������0000775�4231163�4231163�00000046177�14537076056�026410� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.rpfun (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
beta |
|
(package private) boolean[] |
cmplx |
|
(package private) int[] |
corners |
|
(package private) int[] |
left |
|
(package private) int |
n |
|
(package private) double[][] |
nmlen |
|
(package private) double[][] |
qdat |
|
(package private) int[] |
right |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
rpfun(double[] y0,
int n,
double[] beta,
double[][] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat,
int[] corners) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
rpfun
public rpfun(double[] y0,
int n,
double[] beta,
double[][] nmlen,
int[] left,
int[] right,
boolean[] cmplx,
double[][] qdat,
int[] corners)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!covarMat - DOCUMENT ME!
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmAnyTwoImagesSNR.html����������������������������������������0000775�4231163�4231163�00000062351�14537076043�024716� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAnyTwoImagesSNR (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
cost
private int cost
DOCUMENT ME!
-
register
private boolean register
DOCUMENT ME!
-
scale
private boolean scale
-
Constructor Detail
-
AlgorithmAnyTwoImagesSNR
public AlgorithmAnyTwoImagesSNR(ModelImage image,
ModelImage image2,
boolean scale,
boolean register,
int cost,
boolean createRegImage)
Creates a new AlgorithmAnyTwoImagesSNR object.
- Parameters:
image - First MRI imageimage2 - Second MRI imagescale - if true scale image 2 so its min and max match min and max of image 1register - If true register the image2 to the image before SNRcost - Cost function used in registrationcreateRegImage - If register = true and createRegImage = true, then create a frame with the registered image
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/OastDetector9_16.html������������������������������������������������0000775�4231163�4231163�00000051116�14537076056�023115� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OastDetector9_16 (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.OastDetector9_16
-
public class OastDetector9_16
extends java.lang.Object
oast9 - OAST, an optimal corner detector based on the
accelerated segment test for a 16 pixel mask
Copyright (c) 2010, Elmar Mair
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the distribution.
Neither the name of the owner nor the names of its contributors may be
used to endorse or promote products derived from this software without
specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND
ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED
WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDERS BE LIABLE FOR ANY
DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES
(INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND
ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS
SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
-
Constructor Summary
Constructors
| Constructor |
Description |
OastDetector9_16(int xsize,
int ysize,
int threshold) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
threshold
private int threshold
-
s_offset0
private int s_offset0
-
s_offset1
private int s_offset1
-
s_offset2
private int s_offset2
-
s_offset3
private int s_offset3
-
s_offset4
private int s_offset4
-
s_offset5
private int s_offset5
-
s_offset6
private int s_offset6
-
s_offset7
private int s_offset7
-
s_offset8
private int s_offset8
-
s_offset9
private int s_offset9
-
s_offset10
private int s_offset10
-
s_offset11
private int s_offset11
-
s_offset12
private int s_offset12
-
s_offset13
private int s_offset13
-
s_offset14
private int s_offset14
-
s_offset15
private int s_offset15
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHarrisCornerDetector.html�����������������������������������0000775�4231163�4231163�00000075763�14537076046�026075� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHarrisCornerDetector (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
epsilon
private double epsilon
-
sigma
private float sigma
-
radius
private int radius
-
Constructor Detail
-
AlgorithmHarrisCornerDetector
public AlgorithmHarrisCornerDetector(ModelImage destImg,
ModelImage srcImg,
float sigma,
int radius,
double pointThreshold)
AlgorithmHarrisCornerDetector.
- Parameters:
destImg - DOCUMENT ME!srcImg - DOCUMENT ME!sigma - radius - pointThreshold -
-
Method Detail
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
�������������gov/nih/mipav/model/algorithms/CeresSolver.ProgramEvaluator.html������������������������������������0000775�4231163�4231163�00000065105�14537076052�025642� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.ProgramEvaluator (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
CeresSolver.SparseMatrix |
CreateJacobian() |
|
boolean |
Evaluate(CeresSolver.EvaluateOptions evaluate_options,
double[] state_array,
double[] cost,
double[] residuals_array,
double[] gradient_array,
CeresSolver.SparseMatrix jacobian) |
|
boolean |
Evaluate(CeresSolver.EvaluateOptions evaluate_options,
java.util.Vector<java.lang.Double> state,
double[] cost,
java.util.Vector<java.lang.Double> residuals,
java.util.Vector<java.lang.Double> gradient,
CeresSolver.SparseMatrix jacobian) |
|
int |
NumEffectiveParameters() |
|
int |
NumParameters() |
|
int |
NumResiduals() |
|
boolean |
Plus(double[] state,
double[] delta,
double[] state_plus_delta) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> state,
java.util.Vector<java.lang.Double> delta,
java.util.Vector<java.lang.Double> state_plus_delta) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmIHN3Correction.html�����������������������������������������0000775�4231163�4231163�00000357451�14537076046�024530� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmIHN3Correction (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[][] |
AtA |
DOCUMENT ME!
|
private int |
AtAP |
DOCUMENT ME!
|
private double[][] |
AtF |
DOCUMENT ME!
|
private int |
AtFP |
DOCUMENT ME!
|
private boolean |
autoThreshold |
If true determines the threshold by histogram analysis.
|
private float[][][][] |
bendingMatrix |
DOCUMENT ME!
|
private int |
binNumber |
DOCUMENT ME!
|
private float |
binWidth |
Histogram bin width.
|
private int |
blockInt |
DOCUMENT ME!
|
private float[] |
blurI |
DOCUMENT ME!
|
private float[] |
blurR |
DOCUMENT ME!
|
private float[] |
buffer |
Buffer for original source image.
|
private float[][] |
bW |
DOCUMENT ME!
|
private float[] |
CArray |
DOCUMENT ME!
|
private float |
class_max |
DOCUMENT ME!
|
private float |
class_min |
DOCUMENT ME!
|
private double[][] |
coef |
DOCUMENT ME!
|
private float[] |
correctedBuffer |
DOCUMENT ME!
|
private int |
currentOffset |
DOCUMENT ME!
|
private float[][] |
d1Spline |
DOCUMENT ME!
|
private float[][] |
DArray |
DOCUMENT ME!
|
private float |
denom |
DOCUMENT ME!
|
private int[] |
derivative |
DOCUMENT ME!
|
private int[] |
dloc_i |
DOCUMENT ME!
|
private int[] |
dloc_j |
DOCUMENT ME!
|
private float[][] |
domain |
DOCUMENT ME!
|
private int |
DP |
DOCUMENT ME!
|
private float |
endTol |
The measure used to terminate the iterations is the coefficient of variation of change in field estimates between
successive iterations.
|
private boolean |
entireImage |
Ideally the Weiner filter noise equals the white noise of the image.
|
private float[] |
estimateBuffer |
DOCUMENT ME!
|
private float |
estimateOffset |
DOCUMENT ME!
|
private float |
estimateScale |
DOCUMENT ME!
|
private float |
estimateSlope |
DOCUMENT ME!
|
private float[] |
fHist |
DOCUMENT ME!
|
private float[] |
fHistPaddedI |
DOCUMENT ME!
|
private float[] |
fHistPaddedR |
DOCUMENT ME!
|
private float |
field_floor |
Lowest allowable field value.
|
private float[] |
fieldBuffer |
DOCUMENT ME!
|
private float |
fieldDistance |
Characteristic distance over which the field varies.
|
private ModelImage |
fieldImage |
DOCUMENT ME!
|
private float[] |
filterI |
DOCUMENT ME!
|
private float[] |
filterR |
DOCUMENT ME!
|
private float |
fIndex |
DOCUMENT ME!
|
private int |
first |
DOCUMENT ME!
|
private double |
firstMoment0 |
DOCUMENT ME!
|
private double |
firstMoment1 |
DOCUMENT ME!
|
private float |
fOffset |
DOCUMENT ME!
|
static int |
FORWARD |
forward FFT
|
private int |
four |
DOCUMENT ME!
|
private int |
FP |
DOCUMENT ME!
|
private float |
frac |
DOCUMENT ME!
|
private double |
fwhm |
DOCUMENT ME!
|
private double |
fwhmFactor |
DOCUMENT ME!
|
private double |
fwhmScale |
DOCUMENT ME!
|
private double |
halfBin |
DOCUMENT ME!
|
private int[] |
hist |
DOCUMENT ME!
|
private float |
histFactor |
DOCUMENT ME!
|
private double |
histMean |
DOCUMENT ME!
|
private float |
histOffset |
DOCUMENT ME!
|
private double |
histSum |
Sum of contents of hisotogram bins.
|
private int |
iLoc |
DOCUMENT ME!
|
private float |
incr |
DOCUMENT ME!
|
private int |
index |
DOCUMENT ME!
|
private int |
index1 |
DOCUMENT ME!
|
private float[][] |
integral |
DOCUMENT ME!
|
private int |
interval |
DOCUMENT ME!
|
static int |
INVERSE |
inverse FFT
|
private int |
iters |
DOCUMENT ME!
|
private double[][] |
JArray |
DOCUMENT ME!
|
private float |
kernelfwhm |
Width of deconvolution kernel used to sharpen the histogram.
|
private float[][] |
knots |
DOCUMENT ME!
|
private float |
lambda |
DOCUMENT ME!
|
private int |
last |
DOCUMENT ME!
|
private int |
length |
DOCUMENT ME!
|
private float |
loc |
DOCUMENT ME!
|
private int[] |
locations |
DOCUMENT ME!
|
private float[] |
logBuffer |
Log transformed data.
|
private float |
logOffset |
If minimum value of shrunken buffer < 1.0f, amount that must be added to make it 1.0f.
|
private int[] |
lower |
DOCUMENT ME!
|
private java.util.BitSet |
mask |
DOCUMENT ME!
|
private int |
maxIters |
Maximum number of iterations.
|
private float |
mean |
DOCUMENT ME!
|
private int |
mid |
DOCUMENT ME!
|
private float[] |
momentI |
DOCUMENT ME!
|
private float[] |
momentR |
DOCUMENT ME!
|
private int[] |
nArray |
Number of basis functions in each dimension.
|
private int |
nBins |
Number of histogram bins for shrunken buffer.
|
private int |
nDimensions |
DOCUMENT ME!
|
private int[] |
newDim |
DOCUMENT ME!
|
private float |
newRes |
DOCUMENT ME!
|
private float[] |
newResol |
DOCUMENT ME!
|
private int |
newSliceSize |
DOCUMENT ME!
|
private int |
newVolSize |
DOCUMENT ME!
|
private int |
nMax |
DOCUMENT ME!
|
private float |
noise |
Noise used in Weiner filter.
|
private int |
nProduct |
DOCUMENT ME!
|
private float |
numVoxels |
DOCUMENT ME!
|
private int |
offset |
DOCUMENT ME!
|
private int |
offset1 |
DOCUMENT ME!
|
private int |
offset2 |
DOCUMENT ME!
|
private int[][] |
offsetSp |
DOCUMENT ME!
|
private int |
offsetStep |
DOCUMENT ME!
|
private int |
order |
DOCUMENT ME!
|
private int[] |
orgDim |
DOCUMENT ME!
|
private float[] |
orgResol |
Distance per pixel in millimeters.
|
private int |
padded_size |
DOCUMENT ME!
|
private int |
pDloc_i |
DOCUMENT ME!
|
private int |
pDloc_j |
DOCUMENT ME!
|
private int |
pLocation |
DOCUMENT ME!
|
private int |
pLocation2 |
DOCUMENT ME!
|
private int |
pOffset |
DOCUMENT ME!
|
private float |
product |
DOCUMENT ME!
|
private int |
pSpline |
DOCUMENT ME!
|
private int |
pValue |
DOCUMENT ME!
|
private int |
region |
DOCUMENT ME!
|
private float[] |
residueBuffer |
DOCUMENT ME!
|
private float |
rfrac |
DOCUMENT ME!
|
private float[] |
sBuffer |
Buffer for sampled image.
|
private float |
scale |
DOCUMENT ME!
|
private float |
shrink |
The factor by which the data is subsampled to a lower resolution in estimating the slowly varying non-uniformity
field.
|
private int |
sizeC |
DOCUMENT ME!
|
private int |
sliceSize |
DOCUMENT ME!
|
private double |
slope |
DOCUMENT ME!
|
private int[] |
smallN |
DOCUMENT ME!
|
private java.util.BitSet |
sMask |
Mask for shrunken buffer.
|
private float |
sMax |
Maximum value of shrunken buffer.
|
private float |
sMin |
Minimum value of shrunken buffer.
|
private float |
sourceMax |
DOCUMENT ME!
|
private float |
sourceMin |
DOCUMENT ME!
|
static int |
spline |
DOCUMENT ME!
|
private float |
spline_lambda |
DOCUMENT ME!
|
private float |
spline_subsample |
DOCUMENT ME!
|
private double |
sqrtNum |
DOCUMENT ME!
|
private int |
start |
DOCUMENT ME!
|
private float |
startK |
DOCUMENT ME!
|
private float |
stddev |
DOCUMENT ME!
|
private int[] |
step |
DOCUMENT ME!
|
private float |
sum2Value |
DOCUMENT ME!
|
private float |
sumValue |
DOCUMENT ME!
|
private double |
Sx |
DOCUMENT ME!
|
private double |
Sy |
DOCUMENT ME!
|
private double |
Sz |
DOCUMENT ME!
|
private float |
temp |
DOCUMENT ME!
|
private float |
temp2 |
DOCUMENT ME!
|
private float |
threshold |
Values at less than threshold are treated as part of the background.
|
private int |
tiflat |
DOCUMENT ME!
|
private int[] |
tiindex |
DOCUMENT ME!
|
private int[] |
tistep |
DOCUMENT ME!
|
private int |
tjflat |
DOCUMENT ME!
|
private int[] |
tjindex |
DOCUMENT ME!
|
private int[] |
tjstep |
DOCUMENT ME!
|
private java.util.BitSet |
tMask |
Mask that meets threshold and sMask requirements for shrunken volume.
|
private int |
transformDir |
FORWARD or INVERSE for FFT.
|
private int |
UP |
DOCUMENT ME!
|
private int[] |
upper |
DOCUMENT ME!
|
private boolean |
useScript |
If true, the program is run from a script.
|
private float |
value |
DOCUMENT ME!
|
private float |
value_k |
DOCUMENT ME!
|
private float |
value1 |
DOCUMENT ME!
|
private float |
value2 |
DOCUMENT ME!
|
private float[] |
values |
DOCUMENT ME!
|
private double |
vari |
DOCUMENT ME!
|
private double |
varMax |
DOCUMENT ME!
|
private int |
volSize |
DOCUMENT ME!
|
private float |
volumeFactor |
Factor by which to shrink volume.
|
private float[] |
workingBuffer |
DOCUMENT ME!
|
private float |
xf |
DOCUMENT ME!
|
private int |
xo |
DOCUMENT ME!
|
private float |
xv |
DOCUMENT ME!
|
private int |
xyo |
DOCUMENT ME!
|
private float |
xyv |
DOCUMENT ME!
|
private float[] |
yMat |
DOCUMENT ME!
|
private float[] |
ys |
DOCUMENT ME!
|
private float[] |
zero |
DOCUMENT ME!
|
private double |
zeroMoment0 |
DOCUMENT ME!
|
private double |
zeroMoment1 |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmIHN3Correction(ModelImage destImg,
ModelImage fieldImg,
ModelImage srcImg,
float _threshold,
int _maxIters,
float _endTol,
float _fieldDistance,
float _shrink,
float _kernelfwhm,
float _noise,
boolean _entireImage,
boolean _autoThreshold,
boolean useScript) |
Creates a new AlgorithmIHN3Correction object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
AtA
private float[][] AtA
DOCUMENT ME!
-
AtAP
private int AtAP
DOCUMENT ME!
-
AtFP
private int AtFP
DOCUMENT ME!
-
UP
private int UP
DOCUMENT ME!
-
DP
private int DP
DOCUMENT ME!
-
FP
private int FP
DOCUMENT ME!
-
AtF
private double[][] AtF
DOCUMENT ME!
-
binWidth
private float binWidth
Histogram bin width.
-
blockInt
private int blockInt
DOCUMENT ME!
-
blurI
private float[] blurI
DOCUMENT ME!
-
blurR
private float[] blurR
DOCUMENT ME!
-
CArray
private float[] CArray
DOCUMENT ME!
-
class_max
private float class_max
DOCUMENT ME!
-
class_min
private float class_min
DOCUMENT ME!
-
coef
private double[][] coef
DOCUMENT ME!
-
DArray
private float[][] DArray
DOCUMENT ME!
-
denom
private float denom
DOCUMENT ME!
-
derivative
private int[] derivative
DOCUMENT ME!
-
dloc_i
private int[] dloc_i
DOCUMENT ME!
-
dloc_j
private int[] dloc_j
DOCUMENT ME!
-
domain
private float[][] domain
DOCUMENT ME!
-
entireImage
private boolean entireImage
Ideally the Weiner filter noise equals the white noise of the image. The performance of the N3 method is enhanced
by supplying a mask for the region of interest. If true, the N3 method is applied to the entire image.
-
fHist
private float[] fHist
DOCUMENT ME!
-
fieldDistance
private float fieldDistance
Characteristic distance over which the field varies. The distance between adjacent knots in bspline fitting with
at least 4 knots going in every dimension. The default in the dialog is one third the distance (resolution *
extents) of the smallest dimension.
-
filterI
private float[] filterI
DOCUMENT ME!
-
filterR
private float[] filterR
DOCUMENT ME!
-
fIndex
private float fIndex
DOCUMENT ME!
-
fOffset
private float fOffset
DOCUMENT ME!
-
fwhm
private double fwhm
DOCUMENT ME!
-
fwhmScale
private double fwhmScale
DOCUMENT ME!
-
halfBin
private double halfBin
DOCUMENT ME!
-
hist
private int[] hist
DOCUMENT ME!
-
histFactor
private float histFactor
DOCUMENT ME!
-
histMean
private double histMean
DOCUMENT ME!
-
histOffset
private float histOffset
DOCUMENT ME!
-
iLoc
private int iLoc
DOCUMENT ME!
-
incr
private float incr
DOCUMENT ME!
-
value_k
private float value_k
DOCUMENT ME!
-
index
private int index
DOCUMENT ME!
-
index1
private int index1
DOCUMENT ME!
-
interval
private int interval
DOCUMENT ME!
-
iters
private int iters
DOCUMENT ME!
-
knots
private float[][] knots
DOCUMENT ME!
-
lambda
private float lambda
DOCUMENT ME!
-
loc
private float loc
DOCUMENT ME!
-
locations
private int[] locations
DOCUMENT ME!
-
lower
private int[] lower
DOCUMENT ME!
-
momentI
private float[] momentI
DOCUMENT ME!
-
momentR
private float[] momentR
DOCUMENT ME!
-
nDimensions
private int nDimensions
DOCUMENT ME!
-
newDim
private int[] newDim
DOCUMENT ME!
-
newRes
private float newRes
DOCUMENT ME!
-
newResol
private float[] newResol
DOCUMENT ME!
-
newSliceSize
private int newSliceSize
DOCUMENT ME!
-
newVolSize
private int newVolSize
DOCUMENT ME!
-
nMax
private int nMax
DOCUMENT ME!
-
nProduct
private int nProduct
DOCUMENT ME!
-
four
private int four
DOCUMENT ME!
-
offset
private int offset
DOCUMENT ME!
-
offset1
private int offset1
DOCUMENT ME!
-
offset2
private int offset2
DOCUMENT ME!
-
offsetSp
private int[][] offsetSp
DOCUMENT ME!
-
offsetStep
private int offsetStep
DOCUMENT ME!
-
first
private int first
DOCUMENT ME!
-
last
private int last
DOCUMENT ME!
-
order
private int order
DOCUMENT ME!
-
orgDim
private int[] orgDim
DOCUMENT ME!
-
padded_size
private int padded_size
DOCUMENT ME!
-
pLocation
private int pLocation
DOCUMENT ME!
-
pLocation2
private int pLocation2
DOCUMENT ME!
-
pValue
private int pValue
DOCUMENT ME!
-
pDloc_i
private int pDloc_i
DOCUMENT ME!
-
pDloc_j
private int pDloc_j
DOCUMENT ME!
-
product
private float product
DOCUMENT ME!
-
pSpline
private int pSpline
DOCUMENT ME!
-
pOffset
private int pOffset
DOCUMENT ME!
-
region
private int region
DOCUMENT ME!
-
scale
private float scale
DOCUMENT ME!
-
sizeC
private int sizeC
DOCUMENT ME!
-
sliceSize
private int sliceSize
DOCUMENT ME!
-
slope
private double slope
DOCUMENT ME!
-
smallN
private int[] smallN
DOCUMENT ME!
-
sourceMin
private float sourceMin
DOCUMENT ME!
-
sourceMax
private float sourceMax
DOCUMENT ME!
-
sqrtNum
private double sqrtNum
DOCUMENT ME!
-
start
private int start
DOCUMENT ME!
-
length
private int length
DOCUMENT ME!
-
mid
private int mid
DOCUMENT ME!
-
startK
private float startK
DOCUMENT ME!
-
stddev
private float stddev
DOCUMENT ME!
-
mean
private float mean
DOCUMENT ME!
-
numVoxels
private float numVoxels
DOCUMENT ME!
-
sumValue
private float sumValue
DOCUMENT ME!
-
sum2Value
private float sum2Value
DOCUMENT ME!
-
step
private int[] step
DOCUMENT ME!
-
Sx
private double Sx
DOCUMENT ME!
-
Sy
private double Sy
DOCUMENT ME!
-
Sz
private double Sz
DOCUMENT ME!
-
temp
private float temp
DOCUMENT ME!
-
temp2
private float temp2
DOCUMENT ME!
-
tiflat
private int tiflat
DOCUMENT ME!
-
tiindex
private int[] tiindex
DOCUMENT ME!
-
tistep
private int[] tistep
DOCUMENT ME!
-
tjflat
private int tjflat
DOCUMENT ME!
-
tjindex
private int[] tjindex
DOCUMENT ME!
-
tjstep
private int[] tjstep
DOCUMENT ME!
-
upper
private int[] upper
DOCUMENT ME!
-
value
private float value
DOCUMENT ME!
-
value1
private float value1
DOCUMENT ME!
-
value2
private float value2
DOCUMENT ME!
-
frac
private float frac
DOCUMENT ME!
-
rfrac
private float rfrac
DOCUMENT ME!
-
values
private float[] values
DOCUMENT ME!
-
vari
private double vari
DOCUMENT ME!
-
varMax
private double varMax
DOCUMENT ME!
-
volSize
private int volSize
DOCUMENT ME!
-
xf
private float xf
DOCUMENT ME!
-
xo
private int xo
DOCUMENT ME!
-
xyo
private int xyo
DOCUMENT ME!
-
xv
private float xv
DOCUMENT ME!
-
xyv
private float xyv
DOCUMENT ME!
-
yMat
private float[] yMat
DOCUMENT ME!
-
ys
private float[] ys
DOCUMENT ME!
-
zero
private float[] zero
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmIHN3Correction
public AlgorithmIHN3Correction(ModelImage destImg,
ModelImage fieldImg,
ModelImage srcImg,
float _threshold,
int _maxIters,
float _endTol,
float _fieldDistance,
float _shrink,
float _kernelfwhm,
float _noise,
boolean _entireImage,
boolean _autoThreshold,
boolean useScript)
Creates a new AlgorithmIHN3Correction object.
- Parameters:
destImg - image model where result image is to storedfieldImg - image model where used field is storedsrcImg - source image model_threshold - Values at less than _threshold are treated as part of the background_maxIters - Maximum number of iterations_endTol - The measure used to terminate the iterations is the coefficient of variation of change in field
estimates between successive iterations._fieldDistance - Characteristic distance over which the field varies. The distance between adjacent knots in
bspline fitting with at least 4 knots going in every dimension. The default in the dialog is one third
the distance (resolution * extents) of the smallest dimension._shrink - The factor by which the data is subsampled to a lower resolution in estimating the slowly varying
non-uniformity field. Reduce sampling in the finest sampling direction by the shrink factor._kernelfwhm - Width of deconvolution kernel used to sharpen the histogram. Larger values give faster
convergence while smaller values give greater accuracy._noise - Noise used in Weiner filter_entireImage - If true, the N3 method is applied to the entire image. If false, the N3 method is applied
only to the region of interest._autoThreshold - If true determines the threshold by histogram analysis. If true a VOI cannot be used and
the input threshold is ignored.useScript - If true, the program is run from a script
-
Method Detail
-
transformBilinear
private void transformBilinear(float[] imgBuf,
TransMatrix xfrm)
Transforms and resamples volume using bilinear interpolation.
- Parameters:
imgBuf - - image arrayxfrm - - TransMatrix to be applied
-
transformNearestNeighbor2D
private void transformNearestNeighbor2D(float[] imgBuf,
TransMatrix xfrm)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
imgBuf - image arrayxfrm - transformation matrix to be applied
-
transformNearestNeighbor3D
private void transformNearestNeighbor3D(float[] imgBuf,
TransMatrix xfrm)
Transforms and resamples volume using nearest neighbor interpolation.
- Parameters:
imgBuf - image arrayxfrm - transformation matrix to be applied
-
transformTrilinear
private void transformTrilinear(float[] imgBuffer,
TransMatrix matrix)
Transforms and resamples volume using trilinear interpolation.
- Parameters:
imgBuffer - image arrayxfrm - transformation matrix to be applied
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Bessel.html����������������������������������������������������������0000775�4231163�4231163�00000342252�14537076051�021332� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Bessel (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Bessel
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
AIRY_AI |
Airy function Ai.
|
static int |
AIRY_BI |
Airy function Bi.
|
private double |
alim |
DOCUMENT ME!
|
static int |
BESSEL_H |
Bessel functions of the third kind, Hankel functions.
|
static int |
BESSEL_I |
modified Bessel function of the first kind.
|
static int |
BESSEL_J |
Bessel function of the first kind.
|
static int |
BESSEL_K |
modified Bessel function of the second kind.
|
static int |
BESSEL_Y |
Bessel function of the second kind.
|
private int |
BesselType |
DOCUMENT ME!
|
private double[] |
cyi |
DOCUMENT ME!
|
private double[] |
cyr |
DOCUMENT ME!
|
private int |
derivativeOrder |
order of derivative, 0 or 1.
|
private boolean |
doTest |
DOCUMENT ME!
|
private int |
doubleDigits |
I1MACH(14) = 53.
|
private double |
elim |
DOCUMENT ME!
|
private int |
emax |
I1MACH(16) = 1024 The largest exponent for double precision.
|
private int |
emin |
I1MACH(15) = -1021; The smallest exponent for double precision.
|
private double |
epsilon |
D1MACH(4).
|
private int[] |
errorFlag |
errorFlag = 0, normal return - computation completed errorFlag = 1, input error - no computation errorFlag = 2,
overflow - no computation, Real(z) large on UNSCALED_FUNCTION errorFlag = 3, ABS(Z) or initialOrder +
sequenceNumber - 1 large, computation but losses of significance by arguemnt reduction produce less than half of
machine accuracy errorFlag = 4, ABS(Z) or initialOrder + sequenceNumber - 1 too large, No computation because of
complete losses of significance by argument reduction errorFlag = 5, Error, no computation, argument termination
condition not met Length of array passed in must be 1.
|
private double |
fnul |
DOCUMENT ME!
|
private int |
HankelKind |
real and imaginary outputs Length of arrays passed in must be sequenceNumber Kind of Kankel function = 1 or 2.
|
private double |
initialOrder |
order of initial function.
|
private int[] |
nz |
Number of components set to zero due to underflow nz[0] = 0, normal return nz[0] > 0, Last nz components of cy
set to zero due to underflow, cy[j] = 0.0 + i*0.0 for j = sequenceNumber - nz, ..., sequenceNumber-1 Length of
array passed in must be 1.
|
private boolean |
overflowTest |
DOCUMENT ME!
|
private double |
r1m5 |
D1MACH(5) = log10(2).
|
private double |
rl |
DOCUMENT ME!
|
static int |
SCALED_FUNCTION |
multiplied by exp(-abs(Real(z))).
|
private int |
scalingOption |
UNSCALED_FUNCTION returns cy[j-1] = besselFunction(initialOrder+j-1,z), j = 1,...
|
private int |
sequenceNumber |
number of members of the sequence.
|
private double |
tiny |
2**-1022 = D1MACH(1).
|
private double |
tol |
DOCUMENT ME!
|
static int |
UNSCALED_FUNCTION |
DOCUMENT ME!
|
private double |
zi |
DOCUMENT ME!
|
private double |
zr |
zr and zi are the real and imaginary parts of the complex argument.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Bessel(int BesselType,
boolean overflowTest) |
Creates a new Bessel object.
|
Bessel(int BesselType,
double zr,
double zi,
double initialOrder,
int scalingOption,
int sequenceNumber,
double[] cyr,
double[] cyi,
int[] nz,
int[] errorFlag) |
This construtor used for I, J, K, and Y Bessel functions.
|
Bessel(int BesselType,
double zr,
double zi,
double initialOrder,
int scalingOption,
int HankelKind,
int sequenceNumber,
double[] cyr,
double[] cyi,
int[] nz,
int[] errorFlag) |
This constructor used for H functions of kind 1 and 2.
|
Bessel(int BesselType,
double zr,
double zi,
int derivativeOrder,
int scalingOption,
double[] cyr,
double[] cyi,
int[] nz,
int[] errorFlag) |
This constructor is used for Ai and Bi Airy functions.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double |
dgamln(double z,
int[] ierr) |
DGAMLN COMPUTES THE NATURAL LOG OF THE GAMMA FUNCTION FOR Z.GT.0.
|
void |
finalize() |
Cleanup memory.
|
void |
run() |
DOCUMENT ME!
|
private void |
runTest() |
DOCUMENT ME!
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
private void |
zacai(double zr,
double zi,
double fnu,
int kode,
int mr,
int n,
double[] yr,
double[] yi,
int[] nz) |
ZACAI APPLIES THE ANALYTIC CONTINUATION FORMULA.
|
private void |
zacon(double zr,
double zi,
double fnu,
int kode,
int mr,
int n,
double[] yr,
double[] yi,
int[] nz) |
ZACON APPLIES THE ANALYTIC CONTINUATION FORMULA.
|
private void |
zairy(double zr,
double zi,
int id,
int kode,
double[] air,
double[] aii,
int[] nz,
int[] ierr) |
ON KODE=1, ZAIRY COMPUTES THE COMPLEX AIRY FUNCTION AI(Z) OR ITS DERIVATIVE DAI(Z)/DZ ON ID=0 OR ID=1
RESPECTIVELY.
|
private void |
zasyi(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz) |
ZASYI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE ASYMPTOTIC EXPANSION FOR LARGE CABS(Z) IN
THE REGION CABS(Z).GT.MAX(RL,fnu*fnu/2).
|
private void |
zbesh(double zr,
double zi,
double fnu,
int kode,
int m,
int n,
double[] cyr,
double[] cyi,
int[] nz,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbesi(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbesj(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbesk(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbesy(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz,
double[] cwrkr,
double[] cwrki,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbesyh(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz,
double[] cwrkr,
double[] cwrki,
int[] ierr) |
An older version of zbesy used by the ZQCBY quick check routine.
|
private void |
zbinu(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz) |
zbinu calculates the I function in the right half z plane.
|
private void |
zbiry(double zr,
double zi,
int id,
int kode,
double[] bir,
double[] bii,
int[] ierr) |
DOCUMENT ME!
|
private void |
zbknu(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz) |
zbknu computes the k Bessel function in the right half z plane.
|
private void |
zbuni(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz,
int nui,
int[] nlast,
double fnul) |
ZBUNI COMPUTES THE I BESSEL FUNCTION FOR LARGE CABS(Z).GT.
|
private void |
zbunk(double zr,
double zi,
double fnu,
int kode,
int mr,
int n,
double[] yr,
double[] yi,
int[] nz) |
ZBUNK COMPUTES THE K BESSEL FUNCTION FOR FNU.GT.FNUL.
|
private void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
private void |
zexp(double ar,
double ai,
double[] br,
double[] bi) |
complex exponential function b = exp(a).
|
private void |
zkscl(double zrr,
double zri,
double fnu,
int n,
double[] yr,
double[] yi,
int[] nz,
double rzr,
double rzi,
double ascle) |
Set K functions to zero on underflow, continue recurrence on scaled functions until two members come on scale,
then return with min(zn[0]+2,n) values scaled by 1/tol.
|
private void |
zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr) |
complex logarithm b = clog(a).
|
private void |
zmlri(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz) |
zmlri computes the I Bessel function for the Real(z) >= 0.0 by the Miller Algorithm normalized by a Neumann
series.
|
private void |
zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex multiply c = a * b.
|
private void |
zqcai(int mqc) |
DOCUMENT ME!
|
private void |
zqcbh(int mqc) |
DOCUMENT ME!
|
private void |
zqcbi(int mqc) |
DOCUMENT ME!
|
private void |
zqcbj(int mqc) |
DOCUMENT ME!
|
private void |
zqcbk(int mqc) |
DOCUMENT ME!
|
private void |
zqcby(int mqc) |
DOCUMENT ME!
|
private void |
zrati(double zr,
double zi,
double fnu,
int n,
double[] cyr,
double[] cyi) |
ZRATI COMPUTES RATIOS OF I BESSEL FUNCTIONS BY BACKWARD RECURRENCE.
|
private void |
zs1s2(double zrr,
double zri,
double[] s1r,
double[] s1i,
double[] s2r,
double[] s2i,
int[] nz,
double ascle,
int[] iuf) |
ZS1S2 TESTS FOR A POSSIBLE UNDERFLOW RESULTING FROM THE ADDITION OF THE I AND K FUNCTIONS IN THE ANALYTIC CON-
TINUATION FORMULA WHERE S1=K FUNCTION AND S2=I FUNCTION.
|
private void |
zseri(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz) |
ZSERI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE POWER SERIES FOR LARGE CABS(Z) IN THE
REGION CABS(Z).LE.2*SQRT(fnu+1).
|
private void |
zshch(double zr,
double zi,
double[] cshr,
double[] cshi,
double[] cchr,
double[] cchi) |
zshch computes the complex hyperbolic functions csh = sinh(x+i*y) and cch = cosh(x+i*y).
|
private void |
zsqrt(double ar,
double ai,
double[] br,
double[] bi) |
complex square root b = csqrt(a).
|
private void |
zuchk(double yr,
double yi,
int[] nz,
double ascle) |
Y ENTERS AS A SCALED QUANTITY WHOSE MAGNITUDE IS GREATER THAN EXP(-ALIM)=ASCLE=1.0E+3*D1MACH(1)/TOL.
|
private void |
zunhj(double zr,
double zi,
double fnu,
int ipmtr,
double[] phir,
double[] phii,
double[] argr,
double[] argi,
double[] zeta1r,
double[] zeta1i,
double[] zeta2r,
double[] zeta2i,
double[] asumr,
double[] asumi,
double[] bsumr,
double[] bsumi) |
REFERENCES HANDBOOK OF MATHEMATICAL FUNCTIONS BY M.
|
private void |
zuni1(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz,
int[] nlast,
double fnul) |
ZUNI1 COMPUTES I(FNU,Z) BY MEANS OF THE UNIFORM ASYMPTOTIC EXPANSION FOR I(FNU,Z) IN -PI/3.LE.ARG Z.LE.PI/3.
|
private void |
zuni2(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz,
int[] nlast,
double fnul) |
ZUNI2 COMPUTES I(FNU,Z) IN THE RIGHT HALF PLANE BY MEANS OF UNIFORM ASYMPTOTIC EXPANSION FOR J(FNU,ZN) WHERE ZN
IS Z*I OR -Z*I AND ZN IS IN THE RIGHT HALF PLANE ALSO.
|
private void |
zunik(double zrr,
double zri,
double fnu,
int ikflg,
int ipmtr,
int[] init,
double[] phir,
double[] phii,
double[] zeta1r,
double[] zeta1i,
double[] zeta2r,
double[] zeta2i,
double[] sumr,
double[] sumi,
double[] cwrkr,
double[] cwrki) |
ZUNIK COMPUTES PARAMETERS FOR THE UNIFORM ASYMPTOTIC EXPANSIONS OF THE I AND K FUNCTIONS ON IKFLG= 1 OR 2
RESPECTIVELY BY.
|
private void |
zunk1(double zr,
double zi,
double fnu,
int kode,
int mr,
int n,
double[] yr,
double[] yi,
int[] nz) |
ZUNK1 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSION.
|
private void |
zunk2(double zr,
double zi,
double fnu,
int kode,
int mr,
int n,
double[] yr,
double[] yi,
int[] nz) |
ZUNK2 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR H(KIND,FNU,ZN) AND J(FNU,ZN) WHERE ZN IS IN THE RIGHT HALF PLANE,
KIND=(3-MR)/2, MR=+1 OR -1.
|
private void |
zuoik(double zr,
double zi,
double fnu,
int kode,
int ikflg,
int n,
double[] yr,
double[] yi,
int[] nuf) |
ZUOIK COMPUTES THE LEADING TERMS OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR THE I AND K FUNCTIONS AND COMPARES THEM
(IN LOGARITHMIC FORM) TO ALIM AND ELIM FOR OVER AND UNDERFLOW WHERE ALIM.LT.ELIM.
|
private void |
zwrsk(double zrr,
double zri,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz,
double[] cwr,
double[] cwi) |
zwrsk computes the I Bessel function for Real(z) >- 0.0 by normalizing the I function ratios from zrati by the
Wronskian.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
alim
private double alim
DOCUMENT ME!
-
cyi
private double[] cyi
DOCUMENT ME!
-
cyr
private double[] cyr
DOCUMENT ME!
-
doTest
private boolean doTest
DOCUMENT ME!
-
doubleDigits
private int doubleDigits
I1MACH(14) = 53.
-
elim
private double elim
DOCUMENT ME!
-
epsilon
private double epsilon
D1MACH(4).
-
errorFlag
private int[] errorFlag
errorFlag = 0, normal return - computation completed errorFlag = 1, input error - no computation errorFlag = 2,
overflow - no computation, Real(z) large on UNSCALED_FUNCTION errorFlag = 3, ABS(Z) or initialOrder +
sequenceNumber - 1 large, computation but losses of significance by arguemnt reduction produce less than half of
machine accuracy errorFlag = 4, ABS(Z) or initialOrder + sequenceNumber - 1 too large, No computation because of
complete losses of significance by argument reduction errorFlag = 5, Error, no computation, argument termination
condition not met Length of array passed in must be 1.
-
fnul
private double fnul
DOCUMENT ME!
-
nz
private int[] nz
Number of components set to zero due to underflow nz[0] = 0, normal return nz[0] > 0, Last nz components of cy
set to zero due to underflow, cy[j] = 0.0 + i*0.0 for j = sequenceNumber - nz, ..., sequenceNumber-1 Length of
array passed in must be 1.
-
r1m5
private double r1m5
D1MACH(5) = log10(2).
-
rl
private double rl
DOCUMENT ME!
-
scalingOption
private int scalingOption
UNSCALED_FUNCTION returns cy[j-1] = besselFunction(initialOrder+j-1,z), j = 1,...,sequenceNumber SCALED_FUNCTION
returns cy[j-1] = besselFunction(initialOrder+j-1,z)*exp(-abs(Real(z))), j = 1,...,sequenceNumber.
-
tiny
private double tiny
2**-1022 = D1MACH(1).
-
tol
private double tol
DOCUMENT ME!
-
zi
private double zi
DOCUMENT ME!
-
Constructor Detail
-
Bessel
public Bessel(int BesselType,
double zr,
double zi,
int derivativeOrder,
int scalingOption,
double[] cyr,
double[] cyi,
int[] nz,
int[] errorFlag)
This constructor is used for Ai and Bi Airy functions.
- Parameters:
BesselType - intzr - doublezi - doublederivativeOrder - intscalingOption - intcyr - double[]cyi - double[]nz - int[]errorFlag - int[]
-
Bessel
public Bessel(int BesselType,
double zr,
double zi,
double initialOrder,
int scalingOption,
int sequenceNumber,
double[] cyr,
double[] cyi,
int[] nz,
int[] errorFlag)
This construtor used for I, J, K, and Y Bessel functions.
- Parameters:
BesselType - intzr - doublezi - doubleinitialOrder - doublescalingOption - intsequenceNumber - intcyr - double[]cyi - double[]nz - int[]errorFlag - int[]
-
Bessel
public Bessel(int BesselType,
double zr,
double zi,
double initialOrder,
int scalingOption,
int HankelKind,
int sequenceNumber,
double[] cyr,
double[] cyi,
int[] nz,
int[] errorFlag)
This constructor used for H functions of kind 1 and 2.
- Parameters:
BesselType - intzr - doublezi - doubleinitialOrder - doublescalingOption - intHankelKind - intsequenceNumber - intcyr - double[]cyi - double[]nz - int[]errorFlag - int[]
-
Method Detail
-
run
public void run()
DOCUMENT ME!
-
runTest
private void runTest()
DOCUMENT ME!
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zacai
private void zacai(double zr,
double zi,
double fnu,
int kode,
int mr,
int n,
double[] yr,
double[] yi,
int[] nz)
ZACAI APPLIES THE ANALYTIC CONTINUATION FORMULA.
K(FNU,ZN*EXP(MP))=K(FNU,ZN)*EXP(-MP*FNU) - MP*I(FNU,ZN) MP=PI*MR*CMPLX(0.0,1.0)
TO CONTINUE THE K FUNCTION FROM THE RIGHT HALF TO THE LEFT HALF Z PLANE FOR USE WITH ZAIRY WHERE FNU=1/3 OR 2/3
AND N=1. ZACAI IS THE SAME AS ZACON WITH THE PARTS FOR LARGER ORDERS AND RECURRENCE REMOVED. A RECURSIVE CALL TO
ZACON CAN RESULT IF ZACON IS CALLED FROM ZAIRY.
- Parameters:
zr - doublezi - doublefnu - doublekode - intmr - intn - intyr - double[]yi - double[]nz - int[]
-
zacon
private void zacon(double zr,
double zi,
double fnu,
int kode,
int mr,
int n,
double[] yr,
double[] yi,
int[] nz)
ZACON APPLIES THE ANALYTIC CONTINUATION FORMULA.
K(FNU,ZN*EXP(MP))=K(FNU,ZN)*EXP(-MP*FNU) - MP*I(FNU,ZN) MP=PI*MR*CMPLX(0.0,1.0)
TO CONTINUE THE K FUNCTION FROM THE RIGHT HALF TO THE LEFT HALF Z PLANE
- Parameters:
zr - doublezi - doublefnu - doublekode - intmr - intn - intyr - double[]yi - double[]nz - int[]
-
zairy
private void zairy(double zr,
double zi,
int id,
int kode,
double[] air,
double[] aii,
int[] nz,
int[] ierr)
ON KODE=1, ZAIRY COMPUTES THE COMPLEX AIRY FUNCTION AI(Z) OR ITS DERIVATIVE DAI(Z)/DZ ON ID=0 OR ID=1
RESPECTIVELY. ON KODE=2, A SCALING OPTION CEXP(ZTA)*AI(Z) OR CEXP(ZTA)* DAI(Z)/DZ IS PROVIDED TO REMOVE THE
EXPONENTIAL DECAY IN -PI/3.LT.ARG(Z).LT.PI/3 AND THE EXPONENTIAL GROWTH IN PI/3.LT.ABS(ARG(Z)).LT.PI WHERE
ZTA=(2/3)*Z*CSQRT(Z).
WHILE THE AIRY FUNCTIONS AI(Z) AND DAI(Z)/DZ ARE ANALYTIC IN THE WHOLE Z PLANE, THE CORRESPONDING SCALED
FUNCTIONS DEFINED FOR KODE=2 HAVE A CUT ALONG THE NEGATIVE REAL AXIS. DEFINTIONS AND NOTATION ARE FOUND IN THE
NBS HANDBOOK OF C MATHEMATICAL FUNCTIONS (REF. 1). C C INPUT ZR,ZI ARE DOUBLE PRECISION C ZR,ZI - Z=CMPLX(ZR,ZI)
C ID - ORDER OF DERIVATIVE, ID=0 OR ID=1 C KODE - A PARAMETER TO INDICATE THE SCALING OPTION C KODE= 1 RETURNS C
AI=AI(Z) ON ID=0 OR C AI=DAI(Z)/DZ ON ID=1 C = 2 RETURNS C AI=CEXP(ZTA)*AI(Z) ON ID=0 OR C AI=CEXP(ZTA)*DAI(Z)/DZ
ON ID=1 WHERE C ZTA=(2/3)*Z*CSQRT(Z) C C OUTPUT AIR,AII ARE DOUBLE PRECISION C AIR,AII- COMPLEX ANSWER DEPENDING
ON THE CHOICES FOR ID AND C KODE C NZ - UNDERFLOW INDICATOR C NZ= 0 , NORMAL RETURN C NZ= 1 ,
AI=CMPLX(0.0D0,0.0D0) DUE TO UNDERFLOW IN C -PI/3.LT.ARG(Z).LT.PI/3 ON KODE=1 C IERR - ERROR FLAG C IERR=0,
NORMAL RETURN - COMPUTATION COMPLETED C IERR=1, INPUT ERROR - NO COMPUTATION C IERR=2, OVERFLOW - NO COMPUTATION,
REAL(ZTA) C TOO LARGE ON KODE=1 C IERR=3, CABS(Z) LARGE - COMPUTATION COMPLETED C LOSSES OF SIGNIFCANCE BY
ARGUMENT REDUCTION C PRODUCE LESS THAN HALF OF MACHINE ACCURACY C IERR=4, CABS(Z) TOO LARGE - NO COMPUTATION C
COMPLETE LOSS OF ACCURACY BY ARGUMENT C REDUCTION C IERR=5, ERROR - NO COMPUTATION, C ALGORITHM TERMINATION
CONDITION NOT MET C C***LONG DESCRIPTION C C AI AND DAI ARE COMPUTED FOR CABS(Z).GT.1.0 FROM THE K BESSEL C
FUNCTIONS BY C C AI(Z)=C*SQRT(Z)*K(1/3,ZTA) , DAI(Z)=-C*Z*K(2/3,ZTA) C C=1.0/(PI*SQRT(3.0)) C ZTA=(2/3)*Z**(3/2)
C C WITH THE POWER SERIES FOR CABS(Z).LE.1.0. C C IN MOST COMPLEX VARIABLE COMPUTATION, ONE MUST EVALUATE ELE- C
MENTARY FUNCTIONS. WHEN THE MAGNITUDE OF Z IS LARGE, LOSSES C OF SIGNIFICANCE BY ARGUMENT REDUCTION OCCUR.
CONSEQUENTLY, IF C THE MAGNITUDE OF ZETA=(2/3)*Z**1.5 EXCEEDS U1=SQRT(0.5/UR), C THEN LOSSES EXCEEDING HALF
PRECISION ARE LIKELY AND AN ERROR C FLAG IERR=3 IS TRIGGERED WHERE UR=DMAX1(D1MACH(4),1.0D-18) IS C DOUBLE
PRECISION UNIT ROUNDOFF LIMITED TO 18 DIGITS PRECISION. C ALSO, IF THE MAGNITUDE OF ZETA IS LARGER THAN
U2=0.5/UR, THEN C ALL SIGNIFICANCE IS LOST AND IERR=4. IN ORDER TO USE THE INT C FUNCTION, ZETA MUST BE FURTHER
RESTRICTED NOT TO EXCEED THE C LARGEST INTEGER, U3=I1MACH(9). THUS, THE MAGNITUDE OF ZETA C MUST BE RESTRICTED BY
MIN(U2,U3). ON 32 BIT MACHINES, U1,U2, C AND U3 ARE APPROXIMATELY 2.0E+3, 4.2E+6, 2.1E+9 IN SINGLE C PRECISION
ARITHMETIC AND 1.3E+8, 1.8E+16, 2.1E+9 IN DOUBLE C PRECISION ARITHMETIC RESPECTIVELY. THIS MAKES U2 AND U3 LIMIT-
C ING IN THEIR RESPECTIVE ARITHMETICS. THIS MEANS THAT THE MAG- C NITUDE OF Z CANNOT EXCEED 3.1E+4 IN SINGLE AND
2.1E+6 IN C DOUBLE PRECISION ARITHMETIC. THIS ALSO MEANS THAT ONE CAN C EXPECT TO RETAIN, IN THE WORST CASES ON
32 BIT MACHINES, C NO DIGITS IN SINGLE PRECISION AND ONLY 7 DIGITS IN DOUBLE C PRECISION ARITHMETIC. SIMILAR
CONSIDERATIONS HOLD FOR OTHER C MACHINES. C C THE APPROXIMATE RELATIVE ERROR IN THE MAGNITUDE OF A COMPLEX C
BESSEL FUNCTION CAN BE EXPRESSED BY P*10**S WHERE P=MAX(UNIT C ROUNDOFF,1.0E-18) IS THE NOMINAL PRECISION AND
10**S REPRE- C SENTS THE INCREASE IN ERROR DUE TO ARGUMENT REDUCTION IN THE C ELEMENTARY FUNCTIONS. HERE,
S=MAX(1,ABS(LOG10(CABS(Z))), C ABS(LOG10(FNU))) APPROXIMATELY (I.E. S=MAX(1,ABS(EXPONENT OF C
CABS(Z),ABS(EXPONENT OF FNU)) ). HOWEVER, THE PHASE ANGLE MAY C HAVE ONLY ABSOLUTE ACCURACY. THIS IS MOST LIKELY
TO OCCUR WHEN C ONE COMPONENT (IN ABSOLUTE VALUE) IS LARGER THAN THE OTHER BY C SEVERAL ORDERS OF MAGNITUDE. IF
ONE COMPONENT IS 10**K LARGER C THAN THE OTHER, THEN ONE CAN EXPECT ONLY MAX(ABS(LOG10(P))-K, C 0) SIGNIFICANT
DIGITS; OR, STATED ANOTHER WAY, WHEN K EXCEEDS C THE EXPONENT OF P, NO SIGNIFICANT DIGITS REMAIN IN THE SMALLER C
COMPONENT. HOWEVER, THE PHASE ANGLE RETAINS ABSOLUTE ACCURACY C BECAUSE, IN COMPLEX ARITHMETIC WITH PRECISION P,
THE SMALLER C COMPONENT WILL NOT (AS A RULE) DECREASE BELOW P TIMES THE C MAGNITUDE OF THE LARGER COMPONENT. IN
THESE EXTREME CASES, C THE PRINCIPAL PHASE ANGLE IS ON THE ORDER OF +P, -P, PI/2-P, C OR -PI/2+P. C
C***REFERENCES HANDBOOK OF MATHEMATICAL FUNCTIONS BY M. ABRAMOWITZ C AND I. A. STEGUN, NBS AMS SERIES 55, U.S.
DEPT. OF C COMMERCE, 1955. C C COMPUTATION OF BESSEL FUNCTIONS OF COMPLEX ARGUMENT C AND LARGE ORDER BY D. E.
AMOS, SAND83-0643, MAY, 1983 C C A SUBROUTINE PACKAGE FOR BESSEL FUNCTIONS OF A COMPLEX C ARGUMENT AND
NONNEGATIVE ORDER BY D. E. AMOS, SAND85- C 1018, MAY, 1985 C C A PORTABLE PACKAGE FOR BESSEL FUNCTIONS OF A
COMPLEX C ARGUMENT AND NONNEGATIVE ORDER BY D. E. AMOS, ACM C TRANS. MATH. SOFTWARE, VOL. 12, NO. 3, SEPTEMBER
1986, C PP 265-273.
- Parameters:
zr - doublezi - doubleid - intkode - intair - double[]aii - double[]nz - int[]ierr - int[]
-
zasyi
private void zasyi(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz)
ZASYI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE ASYMPTOTIC EXPANSION FOR LARGE CABS(Z) IN
THE REGION CABS(Z).GT.MAX(RL,fnu*fnu/2). NZ=0 IS A NORMAL RETURN. NZ.LT.0 INDICATES AN OVERFLOW ON
kode=UNSCALED_FUNCTION.
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intyr - double[]yi - double[]nz - int[]
-
zbesh
private void zbesh(double zr,
double zi,
double fnu,
int kode,
int m,
int n,
double[] cyr,
double[] cyi,
int[] nz,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - doublezi - doublefnu - doublekode - intm - intn - intcyr - double[]cyi - double[]nz - int[]ierr - int[]
-
zbesi
private void zbesi(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intcyr - double[]cyi - double[]nz - int[]ierr - int[]
-
zbesj
private void zbesj(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intcyr - double[]cyi - double[]nz - int[]ierr - int[]
-
zbesk
private void zbesk(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intcyr - double[]cyi - double[]nz - int[]ierr - int[]
-
zbesy
private void zbesy(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz,
double[] cwrkr,
double[] cwrki,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intcyr - double[]cyi - double[]nz - int[]cwrkr - double[]cwrki - double[]ierr - int[]
-
zbesyh
private void zbesyh(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz,
double[] cwrkr,
double[] cwrki,
int[] ierr)
An older version of zbesy used by the ZQCBY quick check routine.
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intcyr - double[]cyi - double[]nz - int[]cwrkr - double[]cwrki - double[]ierr - int[]
-
zbinu
private void zbinu(double zr,
double zi,
double fnu,
int kode,
int n,
double[] cyr,
double[] cyi,
int[] nz)
zbinu calculates the I function in the right half z plane.
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intcyr - double[]cyi - double[]nz - int[]
-
zbiry
private void zbiry(double zr,
double zi,
int id,
int kode,
double[] bir,
double[] bii,
int[] ierr)
DOCUMENT ME!
- Parameters:
zr - doublezi - doubleid - intkode - intbir - double[]bii - double[]ierr - int[]
-
zbknu
private void zbknu(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz)
zbknu computes the k Bessel function in the right half z plane.
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intyr - double[]yi - double[]nz - int[]
-
zbuni
private void zbuni(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz,
int nui,
int[] nlast,
double fnul)
ZBUNI COMPUTES THE I BESSEL FUNCTION FOR LARGE CABS(Z).GT. FNUL AND fnu+N-1.LT.FNUL. THE ORDER IS INCREASED FROM
fnu+N-1 GREATER THAN FNUL BY ADDING NUI AND COMPUTING ACCORDING TO THE UNIFORM ASYMPTOTIC EXPANSION FOR I(fnu,Z)
ON IFORM=1 AND THE EXPANSION FOR J(fnu,Z) ON IFORM=2
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intyr - double[]yi - double[]nz - int[]nui - intnlast - int[]fnul - double
-
zbunk
private void zbunk(double zr,
double zi,
double fnu,
int kode,
int mr,
int n,
double[] yr,
double[] yi,
int[] nz)
ZBUNK COMPUTES THE K BESSEL FUNCTION FOR FNU.GT.FNUL. ACCORDING TO THE UNIFORM ASYMPTOTIC EXPANSION FOR K(FNU,Z)
IN ZUNK1 AND THE EXPANSION FOR H(2,FNU,Z) IN ZUNK2
- Parameters:
zr - doublezi - doublefnu - doublekode - intmr - intn - intyr - double[]yi - double[]nz - int[]
-
zdiv
private void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zexp
private void zexp(double ar,
double ai,
double[] br,
double[] bi)
complex exponential function b = exp(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]
-
zkscl
private void zkscl(double zrr,
double zri,
double fnu,
int n,
double[] yr,
double[] yi,
int[] nz,
double rzr,
double rzi,
double ascle)
Set K functions to zero on underflow, continue recurrence on scaled functions until two members come on scale,
then return with min(zn[0]+2,n) values scaled by 1/tol.
- Parameters:
zrr - doublezri - doublefnu - doublen - intyr - double[]yi - double[]nz - int[]rzr - doublerzi - doubleascle - double
-
zlog
private void zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr)
complex logarithm b = clog(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]ierr - int[] ierr = 0, normal return ierr = 1, z = cmplx(0.0, 0.0)
-
zmlri
private void zmlri(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz)
zmlri computes the I Bessel function for the Real(z) >= 0.0 by the Miller Algorithm normalized by a Neumann
series.
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intyr - double[]yi - double[]nz - int[]
-
zmlt
private void zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex multiply c = a * b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zrati
private void zrati(double zr,
double zi,
double fnu,
int n,
double[] cyr,
double[] cyi)
ZRATI COMPUTES RATIOS OF I BESSEL FUNCTIONS BY BACKWARD RECURRENCE. THE STARTING INDEX IS DETERMINED BY FORWARD
RECURRENCE AS DESCRIBED IN J. RES. OF NAT. BUR. OF STANDARDS-B, MATHEMATICAL SCIENCES, VOL 77B, P111-114,
SEPTEMBER, 1973, BESSEL FUNCTIONS I AND J OF COMPLEX ARGUMENT AND INTEGER ORDER, BY D. J. SOOKNE.
- Parameters:
zr - doublezi - doublefnu - doublen - intcyr - double[]cyi - double[]
-
zs1s2
private void zs1s2(double zrr,
double zri,
double[] s1r,
double[] s1i,
double[] s2r,
double[] s2i,
int[] nz,
double ascle,
int[] iuf)
ZS1S2 TESTS FOR A POSSIBLE UNDERFLOW RESULTING FROM THE ADDITION OF THE I AND K FUNCTIONS IN THE ANALYTIC CON-
TINUATION FORMULA WHERE S1=K FUNCTION AND S2=I FUNCTION. ON KODE=1 THE I AND K FUNCTIONS ARE DIFFERENT ORDERS OF
MAGNITUDE, BUT FOR KODE=2 THEY CAN BE OF THE SAME ORDER OF MAGNITUDE AND THE MAXIMUM MUST BE AT LEAST ONE
PRECISION ABOVE THE UNDERFLOW LIMIT.
- Parameters:
zrr - doublezri - doubles1r - double[]s1i - double[]s2r - double[]s2i - double[]nz - int[]ascle - doubleiuf - int[]
-
zseri
private void zseri(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz)
ZSERI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE POWER SERIES FOR LARGE CABS(Z) IN THE
REGION CABS(Z).LE.2*SQRT(fnu+1). NZ=0 IS A NORMAL RETURN. NZ.GT.0 MEANS THAT THE LAST NZ COMPONENTS WERE SET TO
ZERO DUE TO UNDERFLOW. NZ.LT.0 MEANS UNDERFLOW OCCURRED, BUT THE CONDITION CABS(Z).LE.2*SQRT(fnu+1) WAS VIOLATED
AND THE COMPUTATION MUST BE COMPLETED IN ANOTHER ROUTINE WITH N=N-ABS(NZ).
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intyr - double[]yi - double[]nz - int[]
-
zshch
private void zshch(double zr,
double zi,
double[] cshr,
double[] cshi,
double[] cchr,
double[] cchi)
zshch computes the complex hyperbolic functions csh = sinh(x+i*y) and cch = cosh(x+i*y).
- Parameters:
zr - doublezi - doublecshr - double[]cshi - double[]cchr - double[]cchi - double[]
-
zsqrt
private void zsqrt(double ar,
double ai,
double[] br,
double[] bi)
complex square root b = csqrt(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]
-
zuchk
private void zuchk(double yr,
double yi,
int[] nz,
double ascle)
Y ENTERS AS A SCALED QUANTITY WHOSE MAGNITUDE IS GREATER THAN EXP(-ALIM)=ASCLE=1.0E+3*D1MACH(1)/TOL. THE TEST IS
MADE TO SEE IF THE MAGNITUDE OF THE REAL OR IMAGINARY PART WOULD UNDERFLOW WHEN Y IS SCALED (BY TOL) TO ITS
PROPER VALUE. Y IS ACCEPTED IF THE UNDERFLOW IS AT LEAST ONE PRECISION BELOW THE MAGNITUDE OF THE LARGEST
COMPONENT; OTHERWISE THE PHASE ANGLE DOES NOT HAVE ABSOLUTE ACCURACY AND AN UNDERFLOW IS ASSUMED.
- Parameters:
yr - doubleyi - doublenz - int[]ascle - double
-
zunhj
private void zunhj(double zr,
double zi,
double fnu,
int ipmtr,
double[] phir,
double[] phii,
double[] argr,
double[] argi,
double[] zeta1r,
double[] zeta1i,
double[] zeta2r,
double[] zeta2i,
double[] asumr,
double[] asumi,
double[] bsumr,
double[] bsumi)
REFERENCES HANDBOOK OF MATHEMATICAL FUNCTIONS BY M. ABRAMOWITZ AND I.A. STEGUN, AMS55, NATIONAL BUREAU OF
STANDARDS, 1965, CHAPTER 9.
ASYMPTOTICS AND SPECIAL FUNCTIONS BY F.W.J. OLVER, ACADEMIC PRESS, N.Y., 1974, PAGE 420
ABSTRACT ZUNHJ COMPUTES PARAMETERS FOR BESSEL FUNCTIONS C(FNU,Z) = J(FNU,Z), Y(FNU,Z) OR H(I,FNU,Z) I=1,2 FOR
LARGE ORDERS FNU BY MEANS OF THE UNIFORM ASYMPTOTIC EXPANSION
C(FNU,Z)=C1*PHI*( ASUM*AIRY(ARG) + C2*BSUM*DAIRY(ARG) )
FOR PROPER CHOICES OF C1, C2, AIRY AND DAIRY WHERE AIRY IS AN AIRY FUNCTION AND DAIRY IS ITS DERIVATIVE.
(2/3)*FNU*ZETA**1.5 = ZETA1-ZETA2,
ZETA1=0.5*FNU*CLOG((1+W)/(1-W)), ZETA2=FNU*W FOR SCALING PURPOSES IN AIRY FUNCTIONS FROM CAIRY OR CBIRY.
MCONJ=SIGN OF AIMAG(Z), BUT IS AMBIGUOUS WHEN Z IS REAL AND MUST BE SPECIFIED. IPMTR=0 RETURNS ALL PARAMETERS.
IPMTR=1 COMPUTES ALL EXCEPT ASUM AND BSUM.
- Parameters:
zr - doublezi - doublefnu - doubleipmtr - intphir - double[]phii - double[]argr - double[]argi - double[]zeta1r - double[]zeta1i - double[]zeta2r - double[]zeta2i - double[]asumr - double[]asumi - double[]bsumr - double[]bsumi - double[]
-
zuni1
private void zuni1(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz,
int[] nlast,
double fnul)
ZUNI1 COMPUTES I(FNU,Z) BY MEANS OF THE UNIFORM ASYMPTOTIC EXPANSION FOR I(FNU,Z) IN -PI/3.LE.ARG Z.LE.PI/3.
NUL IS THE SMALLEST ORDER PERMITTED FOR THE ASYMPTOTIC EXPANSION. NLAST=0 MEANS ALL OF THE Y VALUES WERE SET.
NLAST.NE.0 IS THE NUMBER LEFT TO BE COMPUTED BY ANOTHER FORMULA FOR ORDERS FNU TO FNU+NLAST-1 BECAUSE
FNU+NLAST-1.LT.FNUL. Y(I)=CZERO FOR I=NLAST+1,N
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intyr - double[]yi - double[]nz - int[]nlast - int[]fnul - double
-
zuni2
private void zuni2(double zr,
double zi,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz,
int[] nlast,
double fnul)
ZUNI2 COMPUTES I(FNU,Z) IN THE RIGHT HALF PLANE BY MEANS OF UNIFORM ASYMPTOTIC EXPANSION FOR J(FNU,ZN) WHERE ZN
IS Z*I OR -Z*I AND ZN IS IN THE RIGHT HALF PLANE ALSO.
FNUL IS THE SMALLEST ORDER PERMITTED FOR THE ASYMPTOTIC EXPANSION. NLAST=0 MEANS ALL OF THE Y VALUES WERE SET.
NLAST.NE.0 IS THE NUMBER LEFT TO BE COMPUTED BY ANOTHER FORMULA FOR ORDERS FNU TO FNU+NLAST-1 BECAUSE
FNU+NLAST-1.LT.FNUL. Y(I)=CZERO FOR I=NLAST+1,N
- Parameters:
zr - doublezi - doublefnu - doublekode - intn - intyr - double[]yi - double[]nz - int[]nlast - int[]fnul - double
-
zunik
private void zunik(double zrr,
double zri,
double fnu,
int ikflg,
int ipmtr,
int[] init,
double[] phir,
double[] phii,
double[] zeta1r,
double[] zeta1i,
double[] zeta2r,
double[] zeta2i,
double[] sumr,
double[] sumi,
double[] cwrkr,
double[] cwrki)
ZUNIK COMPUTES PARAMETERS FOR THE UNIFORM ASYMPTOTIC EXPANSIONS OF THE I AND K FUNCTIONS ON IKFLG= 1 OR 2
RESPECTIVELY BY.
W(fnu,ZR) = PHI*EXP(ZETA)*SUM
WHERE ZETA=-ZETA1 + ZETA2 OR ZETA1 - ZETA2
THE FIRST CALL MUST HAVE INIT=0. SUBSEQUENT CALLS WITH THE SAME ZR AND FNU WILL RETURN THE I OR K FUNCTION ON
IKFLG= 1 OR 2 WITH NO CHANGE IN INIT. CWRK IS A COMPLEX WORK ARRAY. IPMTR=0 COMPUTES ALL PARAMETERS. IPMTR=1
COMPUTES PHI, ZETA1,ZETA2.
- Parameters:
zrr - doublezri - doublefnu - doubleikflg - intipmtr - intinit - intphir - double[]phii - double[]zeta1r - double[]zeta1i - double[]zeta2r - double[]zeta2i - double[]sumr - double[]sumi - double[]cwrkr - double[]cwrki - double[]
-
zunk1
private void zunk1(double zr,
double zi,
double fnu,
int kode,
int mr,
int n,
double[] yr,
double[] yi,
int[] nz)
ZUNK1 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSION. MR INDICATES THE DIRECTION OF ROTATION FOR ANALYTIC CONTINUATION. NZ=-1
MEANS AN OVERFLOW WILL OCCUR
- Parameters:
zr - doublezi - doublefnu - doublekode - intmr - intn - intyr - double[]yi - double[]nz - int[]
-
zunk2
private void zunk2(double zr,
double zi,
double fnu,
int kode,
int mr,
int n,
double[] yr,
double[] yi,
int[] nz)
ZUNK2 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR H(KIND,FNU,ZN) AND J(FNU,ZN) WHERE ZN IS IN THE RIGHT HALF PLANE,
KIND=(3-MR)/2, MR=+1 OR -1. HERE ZN=ZR*I OR -ZR*I WHERE ZR=Z IF Z IS IN THE RIGHT HALF PLANE OR ZR=-Z IF Z IS IN
THE LEFT HALF PLANE. MR INDIC- ATES THE DIRECTION OF ROTATION FOR ANALYTIC CONTINUATION. NZ=-1 MEANS AN OVERFLOW
WILL OCCUR
- Parameters:
zr - doublezi - doublefnu - doublekode - intmr - intn - intyr - double[]yi - double[]nz - int[]
-
zuoik
private void zuoik(double zr,
double zi,
double fnu,
int kode,
int ikflg,
int n,
double[] yr,
double[] yi,
int[] nuf)
ZUOIK COMPUTES THE LEADING TERMS OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR THE I AND K FUNCTIONS AND COMPARES THEM
(IN LOGARITHMIC FORM) TO ALIM AND ELIM FOR OVER AND UNDERFLOW WHERE ALIM.LT.ELIM. IF THE MAGNITUDE, BASED ON THE
LEADING EXPONENTIAL, IS LESS THAN ALIM OR GREATER THAN -ALIM, THEN THE RESULT IS ON SCALE. IF NOT, THEN A REFINED
TEST USING OTHER MULTIPLIERS (IN LOGARITHMIC FORM) IS MADE BASED ON ELIM. HERE EXP(-ELIM)=SMALLEST MACHINE
NUMBER*1.0E+3 AND EXP(-ALIM)= EXP(-ELIM)/TOL
IKFLG=1 MEANS THE I SEQUENCE IS TESTED =2 MEANS THE K SEQUENCE IS TESTED NUF = 0 MEANS THE LAST MEMBER OF THE
SEQUENCE IS ON SCALE =-1 MEANS AN OVERFLOW WOULD OCCUR IKFLG=1 AND NUF.GT.0 MEANS THE LAST NUF Y VALUES WERE SET
TO ZERO THE FIRST N-NUF VALUES MUST BE SET BY ANOTHER ROUTINE IKFLG=2 AND NUF.EQ.N MEANS ALL Y VALUES WERE SET TO
ZERO IKFLG=2 AND 0.LT.NUF.LT.N NOT CONSIDERED. Y MUST BE SET BY ANOTHER ROUTINE
- Parameters:
zr - doublezi - doublefnu - doublekode - intikflg - intn - intyr - double[]yi - double[]nuf - int[]
-
zwrsk
private void zwrsk(double zrr,
double zri,
double fnu,
int kode,
int n,
double[] yr,
double[] yi,
int[] nz,
double[] cwr,
double[] cwi)
zwrsk computes the I Bessel function for Real(z) >- 0.0 by normalizing the I function ratios from zrati by the
Wronskian.
- Parameters:
zrr - doublezri - doublefnu - doublekode - intn - intyr - double[]yi - double[]nz - int[]cwr - double[]cwi - double[]
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.ParameterIgnoringCostFunction.html�������������������0000775�4231163�4231163�00000041132�14537076053�031157� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.ParameterIgnoringCostFunction (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
c |
|
(package private) int |
kFactor |
|
(package private) boolean |
kSucceeds |
|
(package private) int |
r |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
kSucceeds
boolean kSucceeds
-
Constructor Detail
-
ParameterIgnoringCostFunction
public ParameterIgnoringCostFunction(int kFactor,
int kNumResiduals,
int N0,
int N1,
int N2,
boolean kSucceeds)
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CompressedRowJacobianWriter.indexintintItem.html���������0000775�4231163�4231163�00000030556�14537076051�033144� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CompressedRowJacobianWriter.indexintintItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private int |
p1 |
|
private int |
p2 |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexintintItem(int index,
int p1,
int p2) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getIndex
public int getIndex()
��������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.html�����������������������������������������������0000775�4231163�4231163�00000322111�14537076056�023564� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
StochasticForests() |
|
StochasticForests(StochasticForests.TreeType treetype,
boolean probability,
boolean verbose_out,
java.lang.String dependent_variable_name,
StochasticForests.MemoryMode memory_mode,
java.lang.String input_file,
int mtry,
java.lang.String output_prefix,
int num_trees,
long seed,
int num_threads,
java.lang.String load_forest_filename,
StochasticForests.ImportanceMode importance_mode,
int min_node_size,
java.lang.String split_select_weights_file,
java.util.Vector<java.lang.String> always_split_variable_names,
java.lang.String status_variable_name,
boolean sample_with_replacement,
java.util.Vector<java.lang.String> unordered_variable_names,
boolean memory_saving_splitting,
StochasticForests.SplitRule splitrule,
java.lang.String case_weights_file,
boolean predict_all,
double sample_fraction,
double alpha,
double minprop,
boolean holdout,
StochasticForests.PredictionType prediction_type,
int num_random_splits,
boolean write) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private java.util.Vector<java.lang.Double> |
adjustPvalues(java.util.Vector<java.lang.Double> unadjusted_pvalues) |
|
private java.lang.String |
beautifyTime(int seconds) |
|
private boolean |
checkPositiveIntegers(java.util.Vector<java.lang.Double> all_values) |
|
private java.lang.String |
checkUnorderedVariables(StochasticForests.Data data,
java.util.Vector<java.lang.String> unordered_variable_names) |
|
private double |
computeConcordanceIndex(StochasticForests.Data data,
java.util.Vector<java.lang.Double> sum_chf,
int dependent_varID,
int status_varID,
java.util.Vector<java.lang.Integer> sample_IDs) |
|
private void |
drawWithoutReplacementFisherYates(java.util.Vector<java.lang.Integer> result,
java.util.Random random,
int max,
java.util.Vector<java.lang.Integer> skip,
int num_samples) |
|
private void |
drawWithoutReplacementSimple(java.util.Vector<java.lang.Integer> result,
java.util.Random random,
int max,
java.util.Vector<java.lang.Integer> skip,
int num_samples) |
|
private void |
drawWithoutReplacementSkip(java.util.Vector<java.lang.Integer> result,
java.util.Random random,
int max,
java.util.Vector<java.lang.Integer> skip,
int num_samples) |
|
private void |
drawWithoutReplacementWeighted(java.util.Vector<java.lang.Integer> result,
java.util.Random random,
int max_index,
int num_samples,
java.util.Vector<java.lang.Double> weights) |
|
private void |
drawWithoutReplacementWeighted(java.util.Vector<java.lang.Integer> result,
java.util.Random random,
java.util.Vector<java.lang.Integer> indices,
int num_samples,
java.util.Vector<java.lang.Double> weights) |
|
private double |
dstdnorm(double x) |
|
private void |
equalSplit(java.util.Vector<java.lang.Integer> result,
int start,
int end,
int num_parts) |
|
private boolean |
equalVectorDouble(java.util.Vector<java.lang.Double> v1,
java.util.Vector<java.lang.Double> v2,
java.lang.String str) |
|
private boolean |
equalVectorInteger(java.util.Vector<java.lang.Integer> v1,
java.util.Vector<java.lang.Integer> v2,
java.lang.String str) |
|
private boolean |
equalVectorVectorDouble(java.util.Vector<java.util.Vector<java.lang.Double>> v1,
java.util.Vector<java.util.Vector<java.lang.Double>> v2,
java.lang.String str) |
|
private boolean |
equalVectorVectorInteger(java.util.Vector<java.util.Vector<java.lang.Integer>> v1,
java.util.Vector<java.util.Vector<java.lang.Integer>> v2,
java.lang.String str) |
|
private double |
erf(double x) |
|
private boolean |
expectNear(double val1,
double val2,
double error,
java.lang.String str) |
|
(package private) void |
loadDoubleVectorFromFile(java.util.Vector<java.lang.Double> result,
java.lang.String filename) |
|
private java.util.Vector<java.lang.Double> |
logrankScores(java.util.Vector<java.lang.Double> time,
java.util.Vector<java.lang.Double> status) |
|
private void |
maxstat(java.util.Vector<java.lang.Double> scores,
java.util.Vector<java.lang.Double> x,
java.util.Vector<java.lang.Integer> indices,
double[] best_maxstat,
double[] best_split_value,
double minprop,
double maxprop) |
|
private double |
maxstatPValueLau92(double b,
double minprop,
double maxprop) |
|
private double |
maxstatPValueLau94(double b,
double minprop,
double maxprop,
int N,
java.util.Vector<java.lang.Integer> m) |
|
private double |
maxstatPValueUnadjusted(double b) |
|
private int |
mostFrequentClass(java.util.Vector<java.lang.Integer> class_count,
java.util.Random random) |
Returns the most frequent class index of a vector with counts for the classes.
|
private int |
mostFrequentDClass(java.util.Vector<java.lang.Double> class_count,
java.util.Random random) |
Returns the most frequent class index of a vector with counts for the classes.
|
private double |
mostFrequentValue(java.util.HashMap<java.lang.Double,java.lang.Integer> class_count,
java.util.Random random) |
|
private java.util.Vector<java.lang.Integer> |
numSamplesLeftOfCutpoint(java.util.Vector<java.lang.Double> x,
java.util.Vector<java.lang.Integer> indices) |
|
private java.util.Vector<java.lang.Integer> |
order(java.util.Vector<java.lang.Double> x,
boolean decreasing) |
|
private double |
pstdnorm(double x) |
|
(package private) java.util.Vector<java.lang.Double> |
rank(java.util.Vector<java.lang.Double> values) |
Sample ranks starting from 1.
|
private void |
readBVector1D(java.util.Vector<java.lang.Boolean> result,
java.io.BufferedReader br) |
Read a 1d vector written by saveVector1D() from filestream.
|
private void |
readDVector1D(java.util.Vector<java.lang.Double> result,
java.io.BufferedReader br) |
Read a 1d vector written by saveVector1D() from filestream.
|
private void |
readDVector2D(java.util.Vector<java.util.Vector<java.lang.Double>> result,
java.io.BufferedReader br) |
Read a 2d vector written by saveVector2D() from filestream.
|
private void |
readVector1D(java.util.Vector<java.lang.Integer> result,
java.io.BufferedReader br) |
Read a 1d vector written by saveVector1D() from filestream.
|
private void |
readVector2D(java.util.Vector<java.util.Vector<java.lang.Integer>> result,
java.io.BufferedReader br) |
Read a 2d vector written by saveVector2D() from filestream.
|
private int |
roundToNextMultiple(int value,
int multiple) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
saveBVector1D(java.util.Vector<java.lang.Boolean> vector,
java.io.BufferedWriter bw) |
Write a 1d vector to filestream.
|
private void |
saveDVector1D(java.util.Vector<java.lang.Double> vector,
java.io.BufferedWriter bw) |
Write a 1d vector to filestream.
|
private void |
saveDVector2D(java.util.Vector<java.util.Vector<java.lang.Double>> vector,
java.io.BufferedWriter bw) |
Write a 2d vector to filestream.
|
private void |
saveVector1D(java.util.Vector<java.lang.Integer> vector,
java.io.BufferedWriter bw) |
Write a 1d vector to filestream.
|
private void |
saveVector2D(java.util.Vector<java.util.Vector<java.lang.Integer>> vector,
java.io.BufferedWriter bw) |
Write a 2d vector to filestream.
|
private void |
shuffle(java.util.Vector<java.lang.Integer> v,
java.util.Random random) |
|
private void |
shuffleAndSplit(java.util.Vector<java.lang.Integer> first_part,
java.util.Vector<java.lang.Integer> second_part,
int n_all,
int n_first,
java.util.Random random) |
|
private void |
shuffleAndSplitAppend(java.util.Vector<java.lang.Integer> first_part,
java.util.Vector<java.lang.Integer> second_part,
int n_all,
int n_first,
java.util.Vector<java.lang.Integer> mapping,
java.util.Random random) |
|
private void |
splitString(java.util.Vector<java.lang.String> result,
java.lang.String input,
java.lang.String split_string) |
|
private java.lang.String |
uintToString(int number) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
mask
static final int[] mask
-
testMain
private boolean testMain
-
num_trees
private int num_trees
-
num_threads
private int num_threads
-
alpha
private double alpha
-
minprop
private double minprop
-
holdout
private boolean holdout
-
write
private boolean write
-
Constructor Detail
-
StochasticForests
public StochasticForests(StochasticForests.TreeType treetype,
boolean probability,
boolean verbose_out,
java.lang.String dependent_variable_name,
StochasticForests.MemoryMode memory_mode,
java.lang.String input_file,
int mtry,
java.lang.String output_prefix,
int num_trees,
long seed,
int num_threads,
java.lang.String load_forest_filename,
StochasticForests.ImportanceMode importance_mode,
int min_node_size,
java.lang.String split_select_weights_file,
java.util.Vector<java.lang.String> always_split_variable_names,
java.lang.String status_variable_name,
boolean sample_with_replacement,
java.util.Vector<java.lang.String> unordered_variable_names,
boolean memory_saving_splitting,
StochasticForests.SplitRule splitrule,
java.lang.String case_weights_file,
boolean predict_all,
double sample_fraction,
double alpha,
double minprop,
boolean holdout,
StochasticForests.PredictionType prediction_type,
int num_random_splits,
boolean write)
-
Method Detail
-
equalSplit
private void equalSplit(java.util.Vector<java.lang.Integer> result,
int start,
int end,
int num_parts)
-
drawWithoutReplacementSkip
private void drawWithoutReplacementSkip(java.util.Vector<java.lang.Integer> result,
java.util.Random random,
int max,
java.util.Vector<java.lang.Integer> skip,
int num_samples)
-
drawWithoutReplacementSimple
private void drawWithoutReplacementSimple(java.util.Vector<java.lang.Integer> result,
java.util.Random random,
int max,
java.util.Vector<java.lang.Integer> skip,
int num_samples)
-
drawWithoutReplacementFisherYates
private void drawWithoutReplacementFisherYates(java.util.Vector<java.lang.Integer> result,
java.util.Random random,
int max,
java.util.Vector<java.lang.Integer> skip,
int num_samples)
-
drawWithoutReplacementWeighted
private void drawWithoutReplacementWeighted(java.util.Vector<java.lang.Integer> result,
java.util.Random random,
java.util.Vector<java.lang.Integer> indices,
int num_samples,
java.util.Vector<java.lang.Double> weights)
-
drawWithoutReplacementWeighted
private void drawWithoutReplacementWeighted(java.util.Vector<java.lang.Integer> result,
java.util.Random random,
int max_index,
int num_samples,
java.util.Vector<java.lang.Double> weights)
-
mostFrequentClass
private int mostFrequentClass(java.util.Vector<java.lang.Integer> class_count,
java.util.Random random)
Returns the most frequent class index of a vector with counts for the classes. Returns a random class if counts are equal.
- Parameters:
class_count - Vector with class countsrandom_number_generator - Random number generator- Returns:
- Most frequent class index. Out of range index if all 0.
-
mostFrequentDClass
private int mostFrequentDClass(java.util.Vector<java.lang.Double> class_count,
java.util.Random random)
Returns the most frequent class index of a vector with counts for the classes. Returns a random class if counts are equal.
- Parameters:
class_count - Vector with class countsrandom_number_generator - Random number generator- Returns:
- Most frequent class index. Out of range index if all 0.
-
computeConcordanceIndex
private double computeConcordanceIndex(StochasticForests.Data data,
java.util.Vector<java.lang.Double> sum_chf,
int dependent_varID,
int status_varID,
java.util.Vector<java.lang.Integer> sample_IDs)
-
shuffleAndSplit
private void shuffleAndSplit(java.util.Vector<java.lang.Integer> first_part,
java.util.Vector<java.lang.Integer> second_part,
int n_all,
int n_first,
java.util.Random random)
-
shuffleAndSplitAppend
private void shuffleAndSplitAppend(java.util.Vector<java.lang.Integer> first_part,
java.util.Vector<java.lang.Integer> second_part,
int n_all,
int n_first,
java.util.Vector<java.lang.Integer> mapping,
java.util.Random random)
-
maxstatPValueLau94
private double maxstatPValueLau94(double b,
double minprop,
double maxprop,
int N,
java.util.Vector<java.lang.Integer> m)
-
maxstat
private void maxstat(java.util.Vector<java.lang.Double> scores,
java.util.Vector<java.lang.Double> x,
java.util.Vector<java.lang.Integer> indices,
double[] best_maxstat,
double[] best_split_value,
double minprop,
double maxprop)
-
saveVector1D
private void saveVector1D(java.util.Vector<java.lang.Integer> vector,
java.io.BufferedWriter bw)
Write a 1d vector to filestream. First the size is written, then all vector elements.
- Parameters:
vector - Vector of type T to savefile - ofstream object to write to.
-
saveBVector1D
private void saveBVector1D(java.util.Vector<java.lang.Boolean> vector,
java.io.BufferedWriter bw)
Write a 1d vector to filestream. First the size is written, then all vector elements.
- Parameters:
vector - Vector of type T to savefile - ofstream object to write to.
-
readVector1D
private void readVector1D(java.util.Vector<java.lang.Integer> result,
java.io.BufferedReader br)
Read a 1d vector written by saveVector1D() from filestream.
- Parameters:
result - Result vector with elements of type T.file - ifstream object to read from.
-
readBVector1D
private void readBVector1D(java.util.Vector<java.lang.Boolean> result,
java.io.BufferedReader br)
Read a 1d vector written by saveVector1D() from filestream.
- Parameters:
result - Result vector with elements of type T.file - ifstream object to read from.
-
saveDVector1D
private void saveDVector1D(java.util.Vector<java.lang.Double> vector,
java.io.BufferedWriter bw)
Write a 1d vector to filestream. First the size is written, then all vector elements.
- Parameters:
vector - Vector of type T to savefile - ofstream object to write to.
-
readDVector1D
private void readDVector1D(java.util.Vector<java.lang.Double> result,
java.io.BufferedReader br)
Read a 1d vector written by saveVector1D() from filestream.
- Parameters:
result - Result vector with elements of type T.file - ifstream object to read from.
-
saveVector2D
private void saveVector2D(java.util.Vector<java.util.Vector<java.lang.Integer>> vector,
java.io.BufferedWriter bw)
Write a 2d vector to filestream. First the size of the first dim is written as size_t, then for all inner vectors the size and elements.
- Parameters:
vector - Vector of vectors of type T to write to file.file - ofstream object to write to.
-
readVector2D
private void readVector2D(java.util.Vector<java.util.Vector<java.lang.Integer>> result,
java.io.BufferedReader br)
Read a 2d vector written by saveVector2D() from filestream.
- Parameters:
result - Result vector of vectors with elements of type T.file - ifstream object to read from.
-
saveDVector2D
private void saveDVector2D(java.util.Vector<java.util.Vector<java.lang.Double>> vector,
java.io.BufferedWriter bw)
Write a 2d vector to filestream. First the size of the first dim is written as size_t, then for all inner vectors the size and elements.
- Parameters:
vector - Vector of vectors of type T to write to file.file - ofstream object to write to.
-
readDVector2D
private void readDVector2D(java.util.Vector<java.util.Vector<java.lang.Double>> result,
java.io.BufferedReader br)
Read a 2d vector written by saveVector2D() from filestream.
- Parameters:
result - Result vector of vectors with elements of type T.file - ifstream object to read from.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.gauss1Fitting.html�����������������������������������0000775�4231163�4231163�00000035763�14537076054�025543� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.gauss1Fitting (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
gauss1Fitting(double[] x0,
boolean doAnalytical) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������gov/nih/mipav/model/algorithms/CeresSolverTest.PowellBadlyScaledFunction.html�����������������������0000775�4231163�4231163�00000034056�14537076053�030252� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.PowellBadlyScaledFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Cephes.html����������������������������������������������������������0000775�4231163�4231163�00000431573�14537076051�021331� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Cephes (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Cephes
-
public class Cephes
extends java.lang.Object
Correct values for ndtri are taken from scipy-main/scipy/special/tests/test_ndtr.py under the BSD-3 license:
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions
are met:
1. Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above
copyright notice, this list of conditions and the following
disclaimer in the documentation and/or other materials provided
with the distribution.
3. Neither the name of the copyright holder nor the names of its
contributors may be used to endorse or promote products derived
from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private static double[] |
AD |
|
private static double[] |
ALGAM |
|
private static double[] |
AN |
|
private static double[] |
APSI |
|
private static double[] |
ASPENCE |
|
private static double[] |
AZETA |
|
private static double[] |
azetac |
|
private static double[] |
AZETAC |
|
private static double[] |
BD |
|
static int |
BDTR |
|
static int |
BDTRC |
|
static int |
BDTRI |
|
static int |
BETA |
|
private static double |
big |
|
private static double |
BIG |
|
private static double |
biginv |
|
private static double[] |
BLGAM |
|
private static double[] |
BN |
|
private static double[] |
BSPENCE |
|
static int |
BTDTR |
|
private static double[] |
BZETAC |
|
private static double |
C1 |
|
private static double[] |
C1CHI |
|
private static double[] |
C2CHI |
|
private double[] |
cca |
|
private static double[] |
cd |
|
private static double[] |
CD |
|
private static double[] |
CDCI |
|
static int |
CHBEVL |
|
static int |
CHDTR |
|
static int |
CHDTRC |
|
static int |
CHDTRI |
|
private double[] |
chi |
|
private double[] |
ci |
|
private static double[] |
CLGAM |
|
private static double[] |
cn |
|
private static double[] |
CN |
|
private static double[] |
CNCI |
|
private static double[] |
coscof |
|
static int |
COSM1 |
|
static int |
DAWSN |
|
private boolean |
DEBUG |
|
static int |
ELLIE |
|
static int |
ELLIK |
|
static int |
ELLPE |
|
static int |
ELLPK |
|
private static double[] |
EP |
|
private static double |
EPS |
|
private static double |
EPS2 |
|
private static double[] |
EQ |
|
static int |
ERF |
|
static int |
ERFC |
|
private static double |
ETHRESH |
|
private static double |
EUL |
|
static int |
EXPM1 |
|
static int |
EXPN |
|
static int |
EXPX2 |
|
static int |
FAC |
|
private static double[] |
factbl |
|
private static double[] |
fd |
|
private static double[] |
FD4 |
|
private static double[] |
FD8 |
|
static int |
FDTR |
|
static int |
FDTRC |
|
static int |
FDTRI |
|
private static double[] |
fn |
|
private static double[] |
FN4 |
|
private static double[] |
FN8 |
|
static int |
FRESNL |
|
private static double[] |
gd |
|
private static double[] |
GD4 |
|
private static double[] |
GD8 |
|
static int |
GDTR |
|
static int |
GDTRC |
|
private static double[] |
gn |
|
private static double[] |
GN4 |
|
private static double[] |
GN8 |
|
static int |
HYP2F1 |
|
static int |
HYPERG |
|
static int |
IGAM |
|
static int |
IGAMC |
|
static int |
IGAMI |
|
static int |
INCBET |
|
static int |
INCBI |
|
static int |
KOLMOGI |
|
static int |
KOLMOGOROV |
|
static int |
LBETA |
|
static int |
LGAM |
|
static int |
LOG1P |
|
private static double |
LOGPI |
|
private static double[] |
LP |
|
private static double[] |
LQ |
|
private static double |
LS2PI |
|
private static double |
MACHEP |
|
private static int |
MAX_ITERATIONS |
|
private static int |
MAXFAC |
|
private static double |
MAXGAM |
|
private static int |
MAXL2 |
|
private static double |
MAXLGM |
|
private static double |
MAXLOG |
|
private static double |
MAXNUM |
|
private static double |
MAXSTIR |
|
private static double |
MINLOG |
|
static int |
NBDTR |
|
static int |
NBDTRC |
|
static int |
NBDTRI |
|
static int |
NDTR |
|
static int |
NDTRI |
|
private static double[] |
P |
|
private static double[] |
P0 |
|
private static double[] |
P1 |
|
static int |
P1EVL |
|
private static double[] |
P2 |
|
private double |
par1 |
|
private double |
par2 |
|
private double[] |
par3 |
|
private int |
par4 |
|
private double |
par5 |
|
private int |
par6 |
|
private double |
par7 |
|
static int |
PDTR |
|
static int |
PDTRC |
|
static int |
PDTRI |
|
private static double[] |
PELLPE |
|
private static double[] |
PELLPK |
|
private static double[] |
PGAMMA |
|
private static double |
PIO2 |
|
private static double |
PIO4 |
|
static int |
POLEVL |
|
static int |
PSI |
|
private static double[] |
PZETAC |
|
private static double[] |
Q |
|
private static double[] |
Q0 |
|
private static double[] |
Q1 |
|
private static double[] |
Q2 |
|
private static double[] |
QELLPE |
|
private static double[] |
QELLPK |
|
private static double[] |
QGAMMA |
|
private static double[] |
QZETAC |
|
private static double[] |
R |
|
private double[] |
result |
|
private static double[] |
RGAM |
|
static int |
RGAMMA |
|
private static double[] |
RZETAC |
|
private static double[] |
S |
|
private static double[] |
S1SHI |
|
private static double |
s2pi |
|
private static double[] |
S2SHI |
|
private static double[] |
sd |
|
private static double[] |
SDSI |
|
private int |
sgngam |
|
private double[] |
shi |
|
static int |
SHICHI |
|
private double[] |
si |
|
static int |
SICI |
|
static int |
SMIRNOV |
|
static int |
SMIRNOVI |
|
private static double[] |
sn |
|
private static double[] |
SNSI |
|
static int |
SPENCE |
|
private static double |
SQRT2 |
|
private static double |
SQRTH |
|
private static double |
SQTPI |
|
private double[] |
ssa |
|
static int |
STDTR |
|
static int |
STDTRI |
|
private static double[] |
STIR |
|
static int |
STIRF |
|
private static double |
stop |
|
static int |
STRUVE |
|
private static double[] |
SZETAC |
|
private static double[] |
T |
|
static int |
TRUE_GAMMA |
|
private static double[] |
U |
|
private int |
version |
|
static int |
ZETA |
|
static int |
ZETAC |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Cephes() |
|
Cephes(double par1,
double[] par3,
int par4,
int version,
double[] result) |
|
Cephes(double par1,
double par2,
double par5,
int version,
double[] result) |
|
Cephes(double par1,
double par2,
int version,
double[] result) |
|
Cephes(double par1,
int version,
double[] result) |
|
Cephes(double par1,
int version,
double[] ssa,
double[] cca) |
|
Cephes(int par4,
double par1,
int version,
double[] result) |
|
Cephes(int par4,
int version,
double[] result) |
|
Cephes(int par4,
int par6,
double par1,
int version,
double[] result) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double |
bdtr(int k,
int n,
double p) |
|
double |
bdtrc(int k,
int n,
double p) |
|
double |
bdtri(int k,
int n,
double y) |
|
double |
beta(double a,
double b) |
|
double |
btdtr(double a,
double b,
double x) |
|
double |
chbevl(double x,
double[] array,
int n) |
|
double |
chdtr(double df,
double x) |
|
double |
chdtrc(double df,
double x) |
|
double |
chdtri(double df,
double y) |
|
double |
cosm1(double x) |
|
double |
dawsn(double xx) |
|
double |
ellie(double phi,
double m) |
|
double |
ellik(double phi,
double m) |
|
double |
ellpe(double x) |
|
double |
ellpk(double x) |
|
double |
erf(double x) |
|
double |
erfc(double a) |
|
double |
expm1(double x) |
|
double |
expn(int n,
double x) |
|
double |
expx2(double x,
int sign) |
|
double |
fac(int i) |
|
double |
fdtr(int ia,
int ib,
double x) |
|
double |
fdtrc(int ia,
int ib,
double x) |
|
double |
fdtri(int ia,
int ib,
double y) |
|
int |
fresnl(double xxa,
double[] ssa,
double[] cca) |
|
double |
gdtr(double a,
double b,
double x) |
|
double |
gdtrc(double a,
double b,
double x) |
|
double |
hcephes_hyp2f1_neg_c_equal_bc(double a,
double b,
double x) |
|
double |
hcephes_hyp2f1ra(double a,
double b,
double c,
double x,
double[] loss) |
|
double |
hy1f1a(double a,
double b,
double x,
double[] err) |
|
double |
hy1f1p(double a,
double b,
double x,
double[] err) |
|
(package private) double |
hyp2f0(double a,
double b,
double x,
int type,
double[] err) |
|
double |
hyp2f1(double a,
double b,
double c,
double x) |
|
double |
hyperg(double a,
double b,
double x) |
|
double |
hys2f1(double a,
double b,
double c,
double x,
double[] loss) |
|
double |
hyt2f1(double a,
double b,
double c,
double x,
double[] loss) |
|
double |
igam(double a,
double x) |
|
double |
igamc(double a,
double x) |
|
double |
igami(double a,
double y0) |
|
double |
incbcf(double a,
double b,
double x) |
|
double |
incbd(double a,
double b,
double x) |
|
double |
incbet(double aa,
double bb,
double xx) |
|
(package private) double |
incbi(double aa,
double bb,
double yy0) |
|
double |
kolmogi(double p) |
|
double |
kolmogorov(double y) |
|
double |
lbeta(double a,
double b) |
|
double |
lgam(double x) |
|
double |
log1p(double x) |
|
double |
nbdtr(int k,
int n,
double p) |
|
double |
nbdtrc(int k,
int n,
double p) |
|
double |
nbdtri(int k,
int n,
double p) |
|
double |
ndtr(double a) |
|
double |
ndtri(double y0) |
|
double |
onef2(double a,
double b,
double c,
double x,
double[] err) |
|
double |
p1evl(double x,
double[] coef,
int N) |
|
double |
pdtr(int k,
double m) |
|
double |
pdtrc(int k,
double m) |
|
double |
pdtri(int k,
double y) |
|
double |
polevl(double x,
double[] coef,
int N) |
|
double |
pseries(double a,
double b,
double x) |
|
double |
psi(double x) |
|
double |
rgamma(double x) |
|
void |
run() |
|
void |
shichi(double x,
double[] shi,
double[] chi) |
|
void |
sici(double x,
double[] si,
double[] ci) |
|
double |
smirnov(int n,
double e) |
|
double |
smirnovi(int n,
double p) |
|
double |
spence(double x) |
|
(package private) double |
stdtr(int k,
double t) |
|
double |
stdtri(int k,
double p) |
|
double |
stirf(double x) |
|
double |
struve(double v,
double x) |
|
void |
testCephes() |
|
double |
threef0(double a,
double b,
double c,
double x,
double[] err) |
|
double |
true_gamma(double x) |
|
double |
zeta(double x,
double q) |
|
double |
zetac(double x) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
sgngam
private int sgngam
-
result
private double[] result
-
version
private int version
-
par3
private double[] par3
-
Constructor Detail
-
Cephes
public Cephes(double par1,
double par2,
double par5,
int version,
double[] result)
-
Cephes
public Cephes(int par4,
int par6,
double par1,
int version,
double[] result)
-
Cephes
public Cephes(double par1,
double[] par3,
int par4,
int version,
double[] result)
-
Method Detail
-
testCephes
public void testCephes()
-
onef2
public double onef2(double a,
double b,
double c,
double x,
double[] err)
-
threef0
public double threef0(double a,
double b,
double c,
double x,
double[] err)
-
hyt2f1
public double hyt2f1(double a,
double b,
double c,
double x,
double[] loss)
-
hys2f1
public double hys2f1(double a,
double b,
double c,
double x,
double[] loss)
-
hcephes_hyp2f1ra
public double hcephes_hyp2f1ra(double a,
double b,
double c,
double x,
double[] loss)
-
hyp2f0
double hyp2f0(double a,
double b,
double x,
int type,
double[] err)
�������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel.html������������0000775�4231163�4231163�00000043313�14537076045�032105� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int[] |
iv |
|
(package private) double[] |
v |
|
(package private) double[] |
x |
|
(package private) double[] |
xData |
|
(package private) float[] |
yData |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
FitDoubleExponentialNoWholeNL2solModel(int nPoints,
double[] xData,
float[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian) |
Creates a new FitDoubleExponentialNoWholeNL2solModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm) |
|
void |
calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm) |
|
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying exponential fitting parameters.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitDoubleExponentialNoWholeNL2solModel
public FitDoubleExponentialNoWholeNL2solModel(int nPoints,
double[] xData,
float[] yData,
double[] x,
int[] iv,
double[] v,
boolean useAnalyticJacobian)
Creates a new FitDoubleExponentialNoWholeNL2solModel object.
- Parameters:
nPoints - DOCUMENT ME!xData - yData - DOCUMENT ME!x - DOCUMENT ME!iv - v - useAnalyticJacobian -
-
Method Detail
-
driver
public void driver()
Starts the analysis.
- Overrides:
driver in class NL2sol
-
calcr
public void calcr(int meqn,
int nvar,
double[] x,
int[] nf,
double[] r,
int[] uiparm,
double[] urparm)
- Specified by:
calcr in class NL2sol
-
calcj
public void calcj(int meqn,
int nvar,
double[] x,
int nf,
double[][] jac,
int[] uiparm,
double[] urparm)
- Specified by:
calcj in class NL2sol
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmQuinticLagrangian.html��������������������������������������0000775�4231163�4231163�00000120110�14537076050�025346� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmQuinticLagrangian (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmQuinticLagrangian
extends AlgorithmBase
This is a polynomial p of degree 5 which interpolates a given function f at the points x(-2), x(-1), x(0), x(1),
x(2), and x(3) and is given by p(x) = sum from i = -2 to i = 3 of li(x)*f(xi), where li, i = -2,-1,0,1,2,3 which are
called the fundamental polynomials, are given by li(x) = product from k = -2 to k = 3 for k != i of (x - xk)/(xi -
xk). li(-2) = (x - -1)/(-2 - -1) * (x - 0)/(-2 - 0) * (x-1)/(-2 - 1) * (x-2)/(-2 - 2) * (x-3)/(-2 - 3) = (x * (x*x -
1) * (2 - x) * (x - 3))/120 li(-1) = (x - -2)/(-1 - -2) * (x - 0)/(-1 - 0)* (x-1)/(-1 - 1) * (x - 2)/(-1 - 2) * (x -
3)/(-1 - 3) = (x * (x*x - 4) * (x - 1) * (x - 3))/24 li(0) = (x - -2)/(0 - -2) * (x - -1)/(0 - -1) * (x - 1)/(0 - 1)
(x - 2)/(0 - 2) * (x - 3)/(0 - 3) = ((x*x - 4) * (x*x - 1) * (3 - x))/12 li(1) = (x - -2)/(1 - -2) * (x - -1)/(1 -
-1) * (x - 0)/(1 - 0) * (x - 2)/(1 - 2) * (x - 3)/(1 - 3) = (x * (x*x - 4) * (x+1) * (x-3))/12 li(2) = (x - -2)/(2 -
-2) * (x - -1)/(2 - -1) * (x - 0)/(2 - 0) * (x - 1)/(2 - 1) * (x - 3)/(2 - 3) = (x * (x*x - 1) * (x+2) * (3 - x))/24
li(3) = (x - -2)/(3 - -2) * (x - -1)/(3 - -1) * (x - 0)/(3 - 0) * (x - 1)/(3 - 1) * (x - 2)/(3 - 2) = (x * (x*x - 1)
(x*x - 4))/120
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
alphaMax |
DOCUMENT ME!
|
private double |
alphaMin |
DOCUMENT ME!
|
private double |
blueMax |
DOCUMENT ME!
|
private double |
blueMin |
DOCUMENT ME!
|
private boolean |
clip |
DOCUMENT ME!
|
private double |
greenMax |
DOCUMENT ME!
|
private double |
greenMin |
DOCUMENT ME!
|
private double |
inputMax |
DOCUMENT ME!
|
private double |
inputMin |
DOCUMENT ME!
|
private double |
redMax |
DOCUMENT ME!
|
private double |
redMin |
DOCUMENT ME!
|
private int |
sliceSize |
DOCUMENT ME!
|
private double[] |
volume |
DOCUMENT ME!
|
private double[][] |
wt |
DOCUMENT ME!
|
private int |
xD |
DOCUMENT ME!
|
private int |
xdim |
DOCUMENT ME!
|
private int |
yD |
DOCUMENT ME!
|
private int |
ydim |
DOCUMENT ME!
|
private int |
zD |
DOCUMENT ME!
|
private int |
zdim |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
Calls garbage collector to release system resources.
|
double |
quinticLagrangian2D(double x,
double y) |
2D quintic Lagrangian function.
|
double[] |
quinticLagrangian2DC(double x,
double y) |
2D quintic Lagrangian function for color.
|
double |
quinticLagrangian3D(double x,
double y,
double z) |
3D quintic Lagrangian function.
|
double[] |
quinticLagrangian3DC(double x,
double y,
double z) |
3D quintic Lagrangian function for color (3 channel images).
|
void |
runAlgorithm() |
run - default method that is not really appropiate for this class but must be defined because this class extends
AlgorithmBase.
|
void |
setup2DQuinticLagrangian(double[] vol,
int[] extents,
boolean clip) |
Setup 2D quinticLagrangian.
|
void |
setup2DQuinticLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip) |
Setup 2D quinticLagrangian for color.
|
void |
setup3DQuinticLagrangian(double[] vol,
int[] extents,
boolean clip) |
Setup 3D quintic Lagrangian.
|
void |
setup3DQuinticLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip) |
Setup 3D quintic Lagrangian for color.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
alphaMax
private double alphaMax
DOCUMENT ME!
-
alphaMin
private double alphaMin
DOCUMENT ME!
-
blueMax
private double blueMax
DOCUMENT ME!
-
blueMin
private double blueMin
DOCUMENT ME!
-
clip
private boolean clip
DOCUMENT ME!
-
greenMax
private double greenMax
DOCUMENT ME!
-
greenMin
private double greenMin
DOCUMENT ME!
-
inputMax
private double inputMax
DOCUMENT ME!
-
inputMin
private double inputMin
DOCUMENT ME!
-
redMax
private double redMax
DOCUMENT ME!
-
redMin
private double redMin
DOCUMENT ME!
-
sliceSize
private int sliceSize
DOCUMENT ME!
-
volume
private double[] volume
DOCUMENT ME!
-
wt
private double[][] wt
DOCUMENT ME!
-
xD
private int xD
DOCUMENT ME!
-
yD
private int yD
DOCUMENT ME!
-
zD
private int zD
DOCUMENT ME!
-
xdim
private int xdim
DOCUMENT ME!
-
ydim
private int ydim
DOCUMENT ME!
-
zdim
private int zdim
DOCUMENT ME!
-
Method Detail
-
quinticLagrangian3D
public final double quinticLagrangian3D(double x,
double y,
double z)
3D quintic Lagrangian function.
- Parameters:
x - double point indexy - double point indexz - double point index- Returns:
- the quinticLagrangian3D interpolated data point
-
quinticLagrangian3DC
public double[] quinticLagrangian3DC(double x,
double y,
double z)
3D quintic Lagrangian function for color (3 channel images).
- Parameters:
x - double point indexy - double point indexz - double point index- Returns:
- the quinticLagrangian3D interpolated data point
-
setup2DQuinticLagrangian
public void setup2DQuinticLagrangian(double[] vol,
int[] extents,
boolean clip)
Setup 2D quinticLagrangian.
- Parameters:
vol - volume comprising control points for the quintic Lagrangianextents - vol extents (xdim, ydim)clip - if true clip output to range of input image
-
setup2DQuinticLagrangianC
public void setup2DQuinticLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip)
Setup 2D quinticLagrangian for color.
- Parameters:
vol - volume comprising control points for the quintic Lagrangianextents - vol extents (xdim, ydim)argbMax - maximum possible value of a colorclip - if true clip output to range of input image
-
setup3DQuinticLagrangian
public void setup3DQuinticLagrangian(double[] vol,
int[] extents,
boolean clip)
Setup 3D quintic Lagrangian.
- Parameters:
vol - volume comprising control points for the quintic Lagrangianextents - vol extents (xdim, ydim, zdim)clip - if true clip output to range of input image
-
setup3DQuinticLagrangianC
public void setup3DQuinticLagrangianC(double[] vol,
int[] extents,
float argbMax,
boolean clip)
Setup 3D quintic Lagrangian for color.
- Parameters:
vol - volume comprising control points for the quintic Lagrangianextents - vol extents (xdim, ydim, zdim)argbMax - maximum possible value of a colorclip - if true clip output to range of input image
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT3D.Affine.html���������������������������������������������������0000775�4231163�4231163�00000023115�14537076056�022237� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT3D.Affine (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT3D.Affine
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Affine() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.CoordSysScrollZoom.html����������������������������������0000775�4231163�4231163�00000052572�14537076053�026202� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.CoordSysScrollZoom (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftClustering.html������������������������������������0000775�4231163�4231163�00000313212�14537076047�025701� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftClustering (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmMeanShiftClustering
extends AlgorithmBase
The java code is ported from C++ code downloaded from http://coewww.rutgers.edu/riul/research/code.html.
The relevant web page section says:
Adaptive mean shift based clustering
C++ code implementing an (approximate) mean shift procedure with variable bandwith (in high dimensions).
The algorithm is described in Mean shift based clustering in high dimensions: A texture classification example.
For comments, please contact Bogdan Georgescu or Ilan Shimshoni.
The original paper was written by Bogdan Georgescu, Ilan Shimshoni, and P. Meer in the proceedings of ICCV 2003.
The original files were fams.cpp and fams.h.
This code was ported by William Gandler.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMeanShiftClustering(ModelImage image,
int K,
int L,
int k_neigh,
java.lang.String data_file_name,
java.lang.String input_directory,
int choosePoints,
int jump,
double percent,
boolean fixedWidth,
float width,
boolean findOptimalKL,
float epsilon,
int Kmin,
int Kjump,
boolean FAMS_DO_SPEEDUP,
int nPoints,
int nDims,
float[] pttemp,
ModelImage modesImage,
ModelImage prunedModesImage) |
File formats:
Files are all ASCII files.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
addDataToHash(AlgorithmMeanShiftClustering.fams_hash_entry[][] HT,
int[] hs,
AlgorithmMeanShiftClustering.famsPoint pt,
int where,
int Bs,
int M,
int which,
int which2,
int hjump) |
|
private void |
addDataToRes(AlgorithmMeanShiftClustering.fams_hash_entry[][] HT,
int[] hs,
AlgorithmMeanShiftClustering.fams_res_cont res,
int where,
int Bs,
int M,
int which,
int nnres,
int which2,
int hjump) |
|
(package private) void |
bgISort(int[] ra,
int nVec,
int[] ira) |
|
private void |
bgSort(long[] ra,
int nVec) |
|
private void |
cleanPrunedModes() |
|
private void |
cleanSelected() |
|
private boolean |
compareCutRes(int[][] in_cr1,
int[][] in_cr2) |
|
private void |
computePilot(AlgorithmMeanShiftClustering.fams_hash_entry[][] HT,
int[] hs,
AlgorithmMeanShiftClustering.fams_cut[][] cuts,
java.lang.String pilot_file_name) |
|
private void |
computeRealBandwidths(int h) |
|
private void |
computeScores(AlgorithmMeanShiftClustering.fams_hash_entry[][] HT,
int[] hs,
AlgorithmMeanShiftClustering.fams_cut[][] cuts,
float[] scores) |
|
private int |
distL1(AlgorithmMeanShiftClustering.famsPoint inPt1,
AlgorithmMeanShiftClustering.famsPoint inPt2) |
|
private boolean |
distL1Data(int[] in_d1,
AlgorithmMeanShiftClustering.famsPoint in_pt2,
double in_dist,
double[] in_res) |
|
private void |
doFAMS(AlgorithmMeanShiftClustering.fams_hash_entry[][] HT,
int[] hs,
AlgorithmMeanShiftClustering.fams_cut[][] cuts,
AlgorithmMeanShiftClustering.fams_hash_entry2[][] HT2,
int[] hs2) |
|
private long |
doFindKLIteration(int K,
int L,
float[] scores) |
|
private int |
doMeanShiftAdaptiveIteration(AlgorithmMeanShiftClustering.fams_res_cont res,
int[] old,
int[] ret) |
|
private void |
evalCutRes(int[] in_dat,
AlgorithmMeanShiftClustering.fams_cut[] in_part,
int[] in_cut_res) |
|
private void |
evalCutRes(AlgorithmMeanShiftClustering.famsPoint in_pt,
AlgorithmMeanShiftClustering.fams_cut[] in_part,
int[] in_cut_res) |
|
private int[] |
findInHash(AlgorithmMeanShiftClustering.fams_hash_entry2[][] HT2,
int[] hs2,
int where,
int which,
int M2,
int hjump) |
|
float |
getFloat(boolean bigEndian) |
Reads four unsigned bytes from file.
|
int |
getInt(boolean bigEndian) |
Reads four signed bytes from file.
|
private void |
getNearestNeighbours(AlgorithmMeanShiftClustering.famsPoint who,
AlgorithmMeanShiftClustering.fams_hash_entry[][] HT,
int[] hs,
AlgorithmMeanShiftClustering.fams_cut[][] cuts,
AlgorithmMeanShiftClustering.fams_res_cont res,
int print,
int[] num_l) |
|
private int[] |
getNearestNeighbours2H(int[] who,
AlgorithmMeanShiftClustering.fams_hash_entry[][] HT,
int[] hs,
AlgorithmMeanShiftClustering.fams_cut[][] cuts,
AlgorithmMeanShiftClustering.fams_res_cont res,
int[][] solution,
AlgorithmMeanShiftClustering.fams_hash_entry2[][] HT2,
int[] hs2) |
|
private int |
getPrime(int minp) |
|
private int |
hashFunction(int[] cutVals,
int offset,
int whichPartition,
int kk,
int M,
int[] hjump,
int hOffset) |
|
private void |
initHash(int nk) |
|
private void |
insertIntoHash(AlgorithmMeanShiftClustering.fams_hash_entry2[][] HT2,
int[] hs2,
int where,
int which,
int[][] solution,
int M,
int hjump) |
|
private boolean |
loadBandwidths(java.lang.String fn) |
|
private void |
makeCutL(AlgorithmMeanShiftClustering.fams_cut[] cut) |
|
private void |
makeCuts(AlgorithmMeanShiftClustering.fams_cut[][] cuts) |
|
private boolean |
notEq(int[] in_d1,
int[] in_d2) |
|
private int |
pruneModes(int hprune,
int npmin) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private void |
saveBandwidths(java.lang.String fn) |
|
private void |
saveModes(java.lang.String fn) |
|
private void |
savePrunedModes(java.lang.String fn) |
|
private void |
selectMSPoints(double percent,
int jump) |
|
private double |
SQ(double x) |
|
void |
writeFloat(float data,
boolean bigEndian) |
Writes a float as four bytes to a file.
|
void |
writeInt(int data,
boolean bigEndian) |
Writes an int as four bytes to a file.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
k_neigh
private int k_neigh
-
choosePoints
private int choosePoints
-
percent
private double percent
-
width
private float width
-
epsilon
private float epsilon
-
nPoints
private int nPoints
-
pttemp
private float[] pttemp
-
noLSH
private boolean noLSH
-
array1
private int[] array1
-
minVal
private float minVal
-
maxVal
private float maxVal
-
data
private int[][] data
-
dataSize
private int dataSize
-
modes
private int[][] modes
-
hmodes
private int[][] hmodes
-
hashCoeffs
private int[] hashCoeffs
-
t_old_m
private int[] t_old_m
-
t_hjump
private int[] t_hjump
-
nnres1
private int nnres1
-
nnres2
private int nnres2
-
Constructor Detail
-
AlgorithmMeanShiftClustering
public AlgorithmMeanShiftClustering(ModelImage image,
int K,
int L,
int k_neigh,
java.lang.String data_file_name,
java.lang.String input_directory,
int choosePoints,
int jump,
double percent,
boolean fixedWidth,
float width,
boolean findOptimalKL,
float epsilon,
int Kmin,
int Kjump,
boolean FAMS_DO_SPEEDUP,
int nPoints,
int nDims,
float[] pttemp,
ModelImage modesImage,
ModelImage prunedModesImage)
File formats:
Files are all ASCII files.
The input file has a one line header with two
number_of_points dimension
Then the input points are given as lines including d numbers.
The pilot process produces the neighborhood size for each point
If the input file is for example d040_1S.txt and the number of neighbors is k
the pilot file will be pilot_d040_1S_k.txt
If the file exists the program will assume that it was created by a
previous run and use the information
in it and will not rerun the pilot creation procedure.
This enables the users to provide their own neighborhood sizes.
The output files are for example:
The result of MS on the selected points is in out_data_file_name.txt
The result of joined modes is in modes_data_file_name.txt
Example:
We are given a file d040_1S.txt
fams 30 46 200 d040_1S ./ -f 0.05 10 2
Finds K,L and optionally runs mean shift on all points.
To run mean shift on same data with K=24 and L=35
fams 24 35 200 d040_1S ./
NOTES:
- Internally the program scales the data between 0 and 2^16-1, therefore
the precision is limited by range_of_data/2^16
- Running mean shift on all the points is not necessary when only the modes
are needed
- In the file fams.h there are several constants that influence the speed and
accuracy of the program. For example you can set the bandwidth on which two
modes are joined or the number of trials on which the test is run when
finding K and L.
Permission to port granted by Ilan Shimshoni:
No problem.
Good luck with that. I'll be happy to put your code also on my website if you like.
Ilan
Sent from my Cyanogen phone
On Nov 23, 2016 9:02 PM, "Gandler, William (NIH/CIT) [E]" wrote:
Dear Ilan Shimshoni,
I am a Java programmer for the MIPAV imaging package at NIH working on mean shift. Could I have permission to port your Adaptive mean shift based clustering C++ code to Java for use in MIPAV? You will receive full acknowledgement for all code ported.
Sincerely,
William Gandler
-
Method Detail
-
writeInt
public final void writeInt(int data,
boolean bigEndian)
throws java.io.IOException
Writes an int as four bytes to a file.
- Parameters:
data - Data to be written to file.bigEndian - true indicates big endian byte order, false indicates little
endian.- Throws:
java.io.IOException - if there is an error writing the file
-
writeFloat
public final void writeFloat(float data,
boolean bigEndian)
throws java.io.IOException
Writes a float as four bytes to a file.
- Parameters:
data - Data to be written to file.bigEndian - true indicates big endian byte order, false indicates little
endian.- Throws:
java.io.IOException - if there is an error writing the file
-
hashFunction
private int hashFunction(int[] cutVals,
int offset,
int whichPartition,
int kk,
int M,
int[] hjump,
int hOffset)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/HistogramOfOrientedGradients.html������������������������������������0000775�4231163�4231163�00000146747�14537076055�025711� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
HistogramOfOrientedGradients (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class HistogramOfOrientedGradients
extends AlgorithmBase
Copyright (C) 2007-11, Andrea Vedaldi and Brian Fulkerson
Copyright (C) 2012-13, The VLFeat Team
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
1. Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the
distribution.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
runAlgorithm() |
Actually runs the algorithm.
|
HistogramOfOrientedGradients.tImage |
setup() |
|
void |
test_basic_call() |
|
void |
test_bilinear_operations() |
|
void |
test_polar() |
|
void |
test_variants_and_flipping() |
|
void |
vl_demo_hog() |
|
float[][][] |
vl_hog(float[][][] image,
int cellSize,
boolean bilinearOrientations,
HistogramOfOrientedGradients.VlHogVariant variant,
int numOrientations,
boolean directedPolarField,
boolean undirectedPolarField) |
|
float[][][] |
vl_hog(float[][] image,
int cellSize,
boolean bilinearOrientations,
HistogramOfOrientedGradients.VlHogVariant variant,
int numOrientations) |
|
void |
vl_hog_delete(HistogramOfOrientedGradients.VlHog self) |
|
void |
vl_hog_extract(HistogramOfOrientedGradients.VlHog self,
float[] features) |
|
int |
vl_hog_get_dimension(HistogramOfOrientedGradients.VlHog self) |
|
int |
vl_hog_get_glyph_size(HistogramOfOrientedGradients.VlHog self) |
|
int |
vl_hog_get_height(HistogramOfOrientedGradients.VlHog self) |
|
int[] |
vl_hog_get_permutation(HistogramOfOrientedGradients.VlHog self) |
|
boolean |
vl_hog_get_use_bilinear_orientation_assignments(HistogramOfOrientedGradients.VlHog self) |
|
int |
vl_hog_get_width(HistogramOfOrientedGradients.VlHog self) |
|
HistogramOfOrientedGradients.VlHog |
vl_hog_new(HistogramOfOrientedGradients.VlHogVariant variant,
int numOrientations,
boolean transposed) |
|
int[] |
vl_hog_permutation(HistogramOfOrientedGradients.VlHogVariant variant,
int numOrientations) |
|
void |
vl_hog_prepare_buffers(HistogramOfOrientedGradients.VlHog self,
int width,
int height,
int cellSize) |
|
void |
vl_hog_put_image(HistogramOfOrientedGradients.VlHog self,
float[] image,
int height,
int width,
int numChannels,
int cellSize) |
|
void |
vl_hog_put_polar_field(HistogramOfOrientedGradients.VlHog self,
float[] modulus,
float[] angle,
boolean directed,
int height,
int width,
int cellSize) |
|
float[][] |
vl_hog_render(float[][][] descriptor,
HistogramOfOrientedGradients.VlHogVariant variant,
int numOrientations) |
|
void |
vl_hog_render(HistogramOfOrientedGradients.VlHog self,
float[] image,
float[] descriptor,
int height,
int width) |
|
void |
vl_hog_set_use_bilinear_orientation_assignments(HistogramOfOrientedGradients.VlHog self,
boolean x) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
vl_hog_render
public void vl_hog_render(HistogramOfOrientedGradients.VlHog self,
float[] image,
float[] descriptor,
int height,
int width)
- Parameters:
self - HOG object.image - glyph image (output).descriptor - HOG descriptor.width - HOG descriptor width.height - HOG descriptor height.
The function renders the HOG descriptor or filter
-
vl_hog_prepare_buffers
public void vl_hog_prepare_buffers(HistogramOfOrientedGradients.VlHog self,
int width,
int height,
int cellSize)
- Parameters:
self - HOG object.width - image width.height - image height.cellSize - size of a HOG cell.
-
vl_hog_put_image
public void vl_hog_put_image(HistogramOfOrientedGradients.VlHog self,
float[] image,
int height,
int width,
int numChannels,
int cellSize)
- Parameters:
self - HOG object.image - image to process.width - image width.height - image height.numChannels - number of image channles.cellSize - size of a HOG cell.
The buffer @c hog must be a three-dimensional array.
The first two dimensions are @c (width + cellSize/2)/cellSize and
-
vl_hog_put_polar_field
public void vl_hog_put_polar_field(HistogramOfOrientedGradients.VlHog self,
float[] modulus,
float[] angle,
boolean directed,
int height,
int width,
int cellSize)
- Parameters:
self - HOG object.modulus - image gradient modulus.angle - image gradient angle.directed - wrap the gradient angles at 2pi (directed) or pi (undirected).width - image width.height - image height.cellSize - size of a HOG cell.
The function behaves like ::vl_hog_put_image, but foregoes the internal
computation of the gradient field, allowing the user to specify
their own. Angles are measure clockwise, the y axis pointing downwards,
starting from the x axis (pointing to the right).
-
test_polar
public void test_polar()
-
vl_hog
public float[][][] vl_hog(float[][][] image,
int cellSize,
boolean bilinearOrientations,
HistogramOfOrientedGradients.VlHogVariant variant,
int numOrientations,
boolean directedPolarField,
boolean undirectedPolarField)
�������������������������gov/nih/mipav/model/algorithms/CeresSolver.GradientProblemSolverOptions.html������������������������0000775�4231163�4231163�00000056312�14537076051�030174� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.GradientProblemSolverOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.DoglegStrategyFixtureEllipseValidSubspaceBasis.html��0000775�4231163�4231163�00000026370�14537076053�034453� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.DoglegStrategyFixtureEllipseValidSubspaceBasis (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
kTolerance |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.PolynomialDataMemRec.html�������������������������������������0000775�4231163�4231163�00000024051�14537076054�025102� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.PolynomialDataMemRec (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.PolynomialDataMemRec
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
PolynomialDataMemRec
PolynomialDataMemRec()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/HaarTransform.html���������������������������������������������������0000775�4231163�4231163�00000112521�14537076055�022662� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
HaarTransform (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
filter(double[] data,
int filterType,
double filterVal1,
double filterVal2) |
|
double[] |
forward1D(double[] arr) |
|
void |
forward2D(int yDim,
int xDim,
double[][] src,
double[][] dst) |
|
void |
generateTransformationMatrix(int N) |
|
double[] |
greater(double[] data,
double value,
double substitute) |
|
double[][] |
hard(double[][] data,
double value,
double substitute) |
|
double[] |
hard(double[] data,
double value,
double substitute) |
|
double[] |
inverse1D(double[] arr) |
|
void |
inverse2D(int yDim,
int xDim,
double[][] src,
double[][] dst) |
|
double[] |
less(double[] data,
double value,
double substitute) |
|
double[] |
nn_garrote(double[] data,
double value,
double substitute) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
double[] |
soft(double[] data,
double value,
double substitute) |
|
void |
test1D() |
|
double[] |
threshold_firm(double[] data,
double value_low,
double value_high) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
filterType
private int filterType
-
Constructor Detail
-
HaarTransform
public HaarTransform()
-
HaarTransform
public HaarTransform(ModelImage transformImage,
ModelImage inverseImage,
ModelImage srcImg,
int filterType,
double filterVal1,
double filterVal2)
-
Method Detail
-
test1D
public void test1D()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.svm_model.html������������������������������������������������0000775�4231163�4231163�00000033065�14537076055�023100� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.svm_model (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
-
Constructor Summary
Constructors
| Constructor |
Description |
svm_model() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
nr_class
public int nr_class
-
probA
public double[] probA
-
probB
public double[] probB
-
sv_indices
public int[] sv_indices
-
Constructor Detail
-
svm_model
public svm_model()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/�������������������������������������������������������������0002775�4231163�4231163�00000000000�14537076122�020665� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmLocalNormalization.html�����������������������������0000775�4231163�4231163�00000111327�14537076057�027240� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLocalNormalization (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
bChannel |
when true, indicates whether to process the colour channel.
|
private AlgorithmFrequencyFilter |
FFTer |
the AlgorithmFrequencyFilter, to lo-pass filter the image.
|
private float |
frequency |
FrequencyFilter's low-pass cut-off frequency.
|
private boolean |
gChannel |
when true, indicates whether to process the colour channel.
|
private boolean |
is2d |
Images that are solely 2D images set this to true; images with other dimensionality are false.
|
private boolean |
isColourImage |
Colour images set this to true; monochromatic should be false;.
|
private int |
kernelDiameter |
Required by the low pass filter, but is unused with these options.
|
private float[] |
norm |
temporary image-data buffer to store (hi-pass)/(lo-pass) data.
|
private boolean |
rChannel |
when true, indicates whether to process the colour channel.
|
private float[] |
sigmas |
UnsharpMask sigmas, for blurring.
|
private ModelImage[] |
tempImage |
a temporary image array.
|
private AlgorithmUnsharpMask |
unsharper |
the UnsharpMask algorithm, to hi-pass filter the image.
|
private double |
weightingFactor |
UnsharpMask weighting factor.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmLocalNormalization(ModelImage dest,
ModelImage src,
float[] sigmas,
double weight,
int kernSize,
float freq) |
This constructor initialises a Local normalisation algorithm for a source and destination image, and ensures that
the destination image is ModelStorageBase.FLOAT.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace() |
Filters the source image.
|
private void |
calcStoreInDest() |
This function produces a local-normalized image into a ModelImage that does not replace the original image-data.
|
private float[] |
doImageDivision(float[] top,
float[] bot) |
takes the data of the two images, one unsharp'd and the other gaussian blur'd, and divides the two pixel-by-pixel
to find the locally normalized value for each pixel.
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
normalize() |
works depending on the extent of the image and the colourisation of the source image in question.
|
void |
runAlgorithm() |
Standard algorithm run method.
|
void |
setRGBChannelFilter(boolean r,
boolean g,
boolean b) |
RGB images are local-normalized by 'channel.'
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmLocalNormalization
public AlgorithmLocalNormalization(ModelImage dest,
ModelImage src,
float[] sigmas,
double weight,
int kernSize,
float freq)
This constructor initialises a Local normalisation algorithm for a source and destination image, and ensures that
the destination image is
ModelStorageBase.FLOAT.
Currently (8 May 2003), this algorithm does not support replacing the original data set with that of the
locally-normalized image.
- Parameters:
dest - DOCUMENT ME!src - DOCUMENT ME!sigmas - DOCUMENT ME!weight - DOCUMENT ME!kernSize - DOCUMENT ME!freq - DOCUMENT ME!
-
Method Detail
-
setRGBChannelFilter
public void setRGBChannelFilter(boolean r,
boolean g,
boolean b)
RGB images are local-normalized by 'channel.' That is, each colour, red, blue and green, is filtered
independantly of the other two colours. This filter permits selectively filtering any combination of the three
channels instead of simply filtering all three. True for any of the arguments enforces filtering that channel.
- Parameters:
r - Filter red channel.g - Filter green channel.b - Filter blue channel.
-
doImageDivision
private float[] doImageDivision(float[] top,
float[] bot)
takes the data of the two images, one unsharp'd and the other gaussian blur'd, and divides the two pixel-by-pixel
to find the locally normalized value for each pixel.
- Parameters:
top - DOCUMENT ME!bot - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
normalize
private void normalize()
works depending on the extent of the image and the colourisation of the source image in question.
calls to doImageDivision(...) for as many slices (and selected colour channels) as necessary to finish off the
image.
- See Also:
doImageDivision(float[], float[])
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmFFT2.html�������������������������������������������0000775�4231163�4231163�00000146740�14537076057�024147� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFFT2 (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFFT2(ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse) |
|
AlgorithmFFT2(ModelImage destImg,
ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse) |
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
afterExecute() |
|
void |
beforeExecute() |
Make the dimension be the power of two, and zero pad them.
|
private void |
center(double[] rdata,
double[] idata) |
|
private void |
doFFT(double[] rdata,
double[] idata,
int start,
int end,
int startDist,
int endDist,
int length,
int direction) |
Perform one dimension fast fourier transformation from start slice to end slice on given data, which includes x,
y or orientation.
|
void |
execute() |
|
void |
finalize() |
Prepare this class for destruction.
|
static int[] |
generateFFTIndices(int l) |
In order to use FFT, first thing is to rearrange the order of signals.
|
double[] |
getImaginaryData() |
Returns reference to imaginary data array.
|
double[] |
getRealData() |
Returns reference to real data array.
|
private boolean |
hasSameDimension(int[] oldDims,
int[] newDims) |
|
private void |
perform() |
This is the method that calculates the FFT Perform a data centering operation after the forward FFT Perform a
data centering operation before the inverse FFT Note that a frequency filter operation performs a forward FFT.
|
private void |
performMT() |
The multi-threading version of FFT algorithm.
|
void |
runAlgorithm() |
Starts the program.
|
static void |
swapSlices(double[] rdata,
double[] idata,
int xdim,
int ydim,
int zdim,
int plane) |
Swap slices in order to apply FFT algorithm.
|
void |
useOCL(boolean on) |
Turns on/off using OpenCL to compute the FFT.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
dimLengths
private int[] dimLengths
Dimension sizes.
-
ndim
private int ndim
Number of dimensions.
-
useOCL
private boolean useOCL
-
Constructor Detail
-
AlgorithmFFT2
public AlgorithmFFT2(ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse)
-
AlgorithmFFT2
public AlgorithmFFT2(ModelImage destImg,
ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse)
-
Method Detail
-
doFFT
private void doFFT(double[] rdata,
double[] idata,
int start,
int end,
int startDist,
int endDist,
int length,
int direction)
Perform one dimension fast fourier transformation from start slice to end slice on given data, which includes x,
y or orientation.
For x direction: start = index of the start slice * xdim * ydim end = index of the end slice * xdim * ydim
startDist = 1 endDist = xdim length = end
For y direction: start = index of the start slice end = index of the end slice startDist = xdim endDist = xdim *
ydim length = xdim * ydim * zdim
For z direction: start = index of the start slice * xdim end = index of the end slice * xdim startDist = xdim *
ydim endDist = xdim * ydim * zdim length = xdim * ydim * zdim
- Parameters:
rdata - the real part of the dataidata - the imaginary part of the datastart - the location of the first pixel of the start sliceend - the location of the first pixel of the end slicestartDist - the start distance between two adjacent pixels from the FFT algorithmendDist - the end distance between two adjacent pixels from the FFT algorithmlength - the length for each slice.
-
execute
public void execute()
-
generateFFTIndices
public static final int[] generateFFTIndices(int l)
In order to use FFT, first thing is to rearrange the order of signals.
- Parameters:
l - the length of one dimension FFT- Returns:
- the indices used by FFT
-
swapSlices
public static void swapSlices(double[] rdata,
double[] idata,
int xdim,
int ydim,
int zdim,
int plane)
Swap slices in order to apply FFT algorithm.
- Parameters:
rdata - idata - xdim - ydim - zdim - plane -
��������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmProstateBoundaryExt.Edge.html�����������������������0000775�4231163�4231163�00000041704�14537076060�030263� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmProstateBoundaryExt.Edge (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Edge() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
orientation
float orientation
-
orientationRank
int orientationRank
-
isUshape
boolean isUshape
-
Method Detail
-
clear
public void clear()
������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmGradientMagnitudeSep.html���������������������������0000775�4231163�4231163�00000120311�14537076057�027473� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGradientMagnitudeSep (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
afterExecute() |
|
void |
beforeExecute() |
|
private float[] |
calculateDerivativeImage(float[] imgData,
int[] imgExtents,
boolean color,
float[][] kernelData,
int progressFrom,
int progressTo) |
|
int |
calculateValidEndZIndex() |
|
int |
calculateValidStartZIndex() |
|
void |
execute() |
|
void |
finalize() |
Prepares this class for destruction.
|
int[] |
getKExtents() |
|
float[] |
getResultBuffer() |
|
float[] |
getXDerivativeDirections() |
|
float[] |
getYDerivativeDirections() |
|
private boolean |
is3DKernel() |
|
boolean |
isDirectionNeeded() |
|
boolean |
isNormalized() |
|
private float[] |
magnitude(float[] buffer,
int cFactor,
float[] xDerivatives,
float[] yDerivatives,
float[] zDerivatives,
int progressFrom,
int progressTo) |
|
void |
runAlgorithm() |
Starts the program.
|
void |
setBlue(boolean flag) |
Sets the flag for the blue channel.
|
void |
setDirectionNeeded(boolean directionNeeded) |
|
void |
setGreen(boolean flag) |
Sets the flag for the green channel.
|
void |
setNormalized(boolean normalized) |
|
void |
setRed(boolean flag) |
Sets the flag for the red channel.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
blue
private boolean blue
DOCUMENT ME!
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false only process the image over the mask
areas.
-
green
private boolean green
DOCUMENT ME!
-
kExtents
private int[] kExtents
-
Constructor Detail
-
AlgorithmGradientMagnitudeSep
public AlgorithmGradientMagnitudeSep(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D)
Creates a new AlgorithmGradientMagnitudeSep object.
- Parameters:
srcImg - source image modelsigmas - Gaussian standard deviations in each dimensionmaskFlag - Flag, if true, indicates that the gradient magnitude will be calculated for the whole imageimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
Method Detail
-
execute
public void execute()
-
calculateDerivativeImage
private float[] calculateDerivativeImage(float[] imgData,
int[] imgExtents,
boolean color,
float[][] kernelData,
int progressFrom,
int progressTo)
-
magnitude
private float[] magnitude(float[] buffer,
int cFactor,
float[] xDerivatives,
float[] yDerivatives,
float[] zDerivatives,
int progressFrom,
int progressTo)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmBilateralFilter.html��������������������������������0000775�4231163�4231163�00000135303�14537076057�026504� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBilateralFilter (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmBilateralFilter() |
|
AlgorithmBilateralFilter(ModelImage srcImg,
float[] sigmas,
float intensityFraction,
boolean maskFlag,
boolean img25D,
boolean useProgressBar) |
Creates a new AlgorithmBilateralFilter object.
|
AlgorithmBilateralFilter(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
float intensityFraction,
boolean maskFlag,
boolean img25D,
boolean useProgressBar) |
Constructor which sets the source and destination images, the minimum and maximum progress value.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
double[][] |
bilateralFilter(double[][] src,
int channels,
int d,
double sigmaColor,
double sigmaSpace,
int borderType) |
|
private void |
convertCIELabtoRGB(float[] buffer) |
|
private void |
convertRGBtoCIELab() |
|
double[][] |
copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue) |
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
makeKernels2D() |
Creates 2D Gaussian kernels for the blurring process.
|
private void |
makeKernels3D() |
Creates 3D Gaussian kernels for the blurring process.
|
void |
runAlgorithm() |
Starts the program.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false on process the image over the mask
areas.
-
imageMax
private double imageMax
-
scaleMax
private double scaleMax
-
Constructor Detail
-
AlgorithmBilateralFilter
public AlgorithmBilateralFilter(ModelImage srcImg,
float[] sigmas,
float intensityFraction,
boolean maskFlag,
boolean img25D,
boolean useProgressBar)
Creates a new AlgorithmBilateralFilter object.
- Parameters:
srcImg - DOCUMENT ME!sigmas - DOCUMENT ME!intensityFraction - maskFlag - DOCUMENT ME!img25D - DOCUMENT ME!useProgressBar -
-
AlgorithmBilateralFilter
public AlgorithmBilateralFilter(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
float intensityFraction,
boolean maskFlag,
boolean img25D,
boolean useProgressBar)
Constructor which sets the source and destination images, the minimum and maximum progress value.
- Parameters:
destImg - the destination imagesrcImg - the source imagesigmas - the sigmasintensityFraction - units of intensity range; it is multiplied by the intensity range to create intensitySigmamaskFlag - the mask flagimg25D - the 2.5D indicatoruseProgressBar -
-
Method Detail
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
-
bilateralFilter
public double[][] bilateralFilter(double[][] src,
int channels,
int d,
double sigmaColor,
double sigmaSpace,
int borderType)
-
copyMakeBorder
public double[][] copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmWaveletFuse.html������������������������������������0000775�4231163�4231163�00000077716�14537076060�025700� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmWaveletFuse (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmWaveletFuse
extends AlgorithmBase
MIT License
Copyright (c) 2021 Hans Brouwer, Riyo Wanagiri
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
Reference:
Image Fusion Using Wavelet Transform by Aggariyo Wanagiri and
Hans Brouwer, Delft University of Technology.
This is a port of wavelet_fuse.py and part of util.py.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private boolean[][][] |
decision_map(double[][][] img1,
double[][][] img2,
int ks) |
|
private double[][][] |
fuse(double[][][] img1,
double[][][] img2,
int ks,
boolean slow) |
|
private boolean[][][] |
majority_filter(boolean[][][] map,
int ks) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private boolean[][][] |
slow_decision_map(double[][][] img1,
double[][][] img2,
int ks) |
|
private boolean[][][] |
slow_majority_filter(boolean[][][] map,
int ks) |
|
private double[][] |
truncateArray(double[][] imgBuf,
int newXDim,
int newYDim) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
kernel_size
private int kernel_size
-
orders
private int[] orders
-
max_depth
private int max_depth
-
slow
private boolean slow
-
numXColors
private int numXColors
-
numYColors
private int numYColors
��������������������������������������������������gov/nih/mipav/model/algorithms/filters/PyWavelets.ArrayInfo.html������������������������������������0000775�4231163�4231163�00000023547�14537076060�025564� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PyWavelets.ArrayInfo (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.PyWavelets.ArrayInfo
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
ndim |
|
(package private) int[] |
shape |
|
(package private) int[] |
strides |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
ArrayInfo() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ArrayInfo
private ArrayInfo()
���������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmSliceAveraging.html���������������������������������0000775�4231163�4231163�00000063760�14537076060�026323� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSliceAveraging (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
averagingNumber |
DOCUMENT ME!
|
private boolean |
haveColor |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmSliceAveraging
public AlgorithmSliceAveraging(ModelImage srcImg,
int averagingNumber)
Creates a new AlgorithmSliceAveraging object.
- Parameters:
srcImg - source image modelaveragingNumber - number of slices to average together, if 1 average all slices together
-
AlgorithmSliceAveraging
public AlgorithmSliceAveraging(ModelImage destImg,
ModelImage srcImg,
int averagingNumber)
Creates a new AlgorithmSliceAveraging object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelaveragingNumber - number of slices to average together, if 1 average all slices together
����������������gov/nih/mipav/model/algorithms/filters/OpenCL/������������������������������������������������������0002775�4231163�4231163�00000000000�14537076060�022006� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/����������������������������������������������0002775�4231163�4231163�00000000000�14537076122�023455� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/OpenCLAlgorithmFFT.html�����������������������0000775�4231163�4231163�00000115476�14537076060�027712� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OpenCLAlgorithmFFT (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
complexInverse |
|
static int |
FORWARD |
Forward FFT
|
private float[] |
imagData |
Imaginary data.
|
private boolean |
image25D |
If true process each slice one at a time in 3D image.
|
static int |
INVERSE |
Inverse FFT
|
private boolean |
logMagDisplay |
If true display log10 of 1 + magnitude.
|
private float[] |
realData |
Real data.
|
static int |
SLICE_XY |
Constants for xy plane, yz plane and zx plane.
|
static int |
SLICE_YZ |
|
static int |
SLICE_ZX |
|
(package private) long |
startTime |
|
private int |
transformDir |
Transform direction.
|
private boolean |
unequalDim |
If true allow unequal FFT dimensions.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
cl, color, colorMask, contextLibrary, depth, device, entireImage, height, m_iDeviceType, m_kGL, openCLTypeLibrary, time, width
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
OpenCLAlgorithmFFT(ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse) |
|
OpenCLAlgorithmFFT(ModelImage destImg,
ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
checkError, getInt, getInts, getLong, getLongs, getMaxMemoryUsed, getString, getString, initCL, isOCLAvailable, readKernelFile, roundUp, saveImage, saveImage, setBlue, setGreen, setRed, setTime
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
imagData
private float[] imagData
Imaginary data.
-
realData
private float[] realData
Real data.
-
Constructor Detail
-
OpenCLAlgorithmFFT
public OpenCLAlgorithmFFT(ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse)
-
OpenCLAlgorithmFFT
public OpenCLAlgorithmFFT(ModelImage destImg,
ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/CLFFTPlan.CLFFTDim3.html����������������������0000775�4231163�4231163�00000024515�14537076060�027377� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CLFFTPlan.CLFFTDim3 (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDim3
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
x |
|
int |
y |
|
int |
z |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
CLFFTDim3(int[] size) |
|
CLFFTDim3(int x,
int y,
int z) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
CLFFTDim3
CLFFTDim3(int[] size)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/CLFFTPlan.fftPadding.html���������������������0000775�4231163�4231163�00000024172�14537076060�030071� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CLFFTPlan.fftPadding (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.fftPadding
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
lMemSize |
|
(package private) int |
midPad |
|
(package private) int |
offset |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
fftPadding(int lMemSize,
int offset,
int midPad) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/CLFFTPlan.WorkDimensions.html�����������������0000775�4231163�4231163�00000024371�14537076060�030777� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CLFFTPlan.WorkDimensions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.WorkDimensions
-
-
Constructor Summary
Constructors
| Constructor |
Description |
WorkDimensions(int batchSize,
long gWorkItems,
long lWorkItems) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
gWorkItems
long gWorkItems
-
lWorkItems
long lWorkItems
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/CLFFTPlan.CLFFTDataFormat.html����������������0000775�4231163�4231163�00000035325�14537076060�030626� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CLFFTPlan.CLFFTDataFormat (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CLFFTPlan.CLFFTDataFormat valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/CLFFTPlan.InvalidContextException.html��������0000775�4231163�4231163�00000022065�14537076060�032634� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CLFFTPlan.InvalidContextException (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Throwable
-
- java.lang.Exception
-
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.InvalidContextException
-
-
Method Summary
-
Methods inherited from class java.lang.Throwable
addSuppressed, fillInStackTrace, getCause, getLocalizedMessage, getMessage, getStackTrace, getSuppressed, initCause, printStackTrace, printStackTrace, printStackTrace, setStackTrace, toString
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/OpenCLAlgorithmConvolver.html�����������������0000775�4231163�4231163�00000035514�14537076060�031242� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OpenCLAlgorithmConvolver (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmConvolver
-
public class OpenCLAlgorithmConvolver
extends java.lang.Object
OpenCL Algorithm convolves a kernel with a 2D, 3D or 4D image.
-
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static void |
convolveSep2D(org.jocl.cl_context cl,
org.jocl.cl_device_id device,
org.jocl.cl_mem inputBuffer,
org.jocl.cl_mem outputBuffer,
int width,
int height,
int depth,
int size,
Kernel kKernel,
int color,
int[] colorMask) |
|
static void |
convolveSep3D(org.jocl.cl_context cl,
org.jocl.cl_device_id device,
org.jocl.cl_mem inputBuffer,
org.jocl.cl_mem outputBuffer,
int width,
int height,
int depth,
int size,
Kernel kKernel,
int color,
int[] colorMask,
boolean clipZ) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
convolveSep2D
public static void convolveSep2D(org.jocl.cl_context cl,
org.jocl.cl_device_id device,
org.jocl.cl_mem inputBuffer,
org.jocl.cl_mem outputBuffer,
int width,
int height,
int depth,
int size,
Kernel kKernel,
int color,
int[] colorMask)
- Parameters:
cl - the current cl context.device - the cl device to run the OpenCL code on.inputBuffer - the cl_mem buffer containing the input image data.outputBuffer - the cl_mem buffer for the output data.width - input image width.height - input image height.depth - input image depth (0 for 2D, number of slices for 25D).size - the size of the image.kKernel - the Kernel containing the separable convolution kernels.color - when 1, the input image is a MIPAV color image.colorMask - the color mask, which determines how the RGB channels of the color image are treated in the convolution.
-
convolveSep3D
public static void convolveSep3D(org.jocl.cl_context cl,
org.jocl.cl_device_id device,
org.jocl.cl_mem inputBuffer,
org.jocl.cl_mem outputBuffer,
int width,
int height,
int depth,
int size,
Kernel kKernel,
int color,
int[] colorMask,
boolean clipZ)
- Parameters:
cl - the current cl context.device - the cl device to run the OpenCL code on.inputBuffer - the cl_mem buffer containing the input image data.outputBuffer - the cl_mem buffer for the output data.width - input image width.height - input image height.depth - input image depth.size - the size of the image.kKernel - the Kernel containing the separable convolution kernels.color - when 1, the input image is a MIPAV color image.colorMask - the color mask, which determines how the RGB channels of the color image are treated in the convolution.clipZ - when true the z-component of the convolution kernel is applied only where it overlaps entirely with the input image,
otherwise the z-component of the convolution kernel is truncated and applied to all image slices.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/CLFFTPlan.CLFFTDirection.html�����������������0000775�4231163�4231163�00000036446�14537076060�030531� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CLFFTPlan.CLFFTDirection (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
CLFFTDirection() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
CLFFTDirection
private CLFFTDirection()
-
Method Detail
-
valueOf
public static CLFFTPlan.CLFFTDirection valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
-
value
abstract int value()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/OpenCLAlgorithmMarchingCubes.html�������������0000775�4231163�4231163�00000103210�14537076060�031764� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OpenCLAlgorithmMarchingCubes (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
blurFlag |
If true then the input image is blurred slightly.
|
private float |
blurSigma |
The amount to blur to smooth surface.
|
private boolean |
decimateFlag |
If true then the extracted surface is decimated into a continuous level of detail surface (clod).
|
private int[] |
edgeTable |
|
private float |
isoValue |
|
(package private) int[] |
numVertsTable |
|
private WildMagic.LibGraphics.SceneGraph.TriMesh |
resultMesh |
|
private java.lang.String |
surfaceFileName |
Path and name of extracted surface file. ".sur" will be appended if necessary.
|
private int[] |
triTable |
|
private static int |
X |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
cl, color, colorMask, contextLibrary, depth, device, entireImage, height, m_iDeviceType, m_kGL, openCLTypeLibrary, time, width
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
OpenCLAlgorithmMarchingCubes(ModelImage image,
int level,
boolean entireImage,
boolean decFlag,
boolean blurFlag,
float sigma,
java.lang.String fileName) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
Prepares this class for destruction.
|
WildMagic.LibGraphics.SceneGraph.TriMesh |
getMesh() |
|
private void |
marchingCubes3D(int time) |
|
private float |
reductionKernel(org.jocl.cl_command_queue commandQueue,
long elementCount,
org.jocl.cl_mem inputBuffer) |
|
void |
runAlgorithm() |
Starts the program.
|
private void |
saveMesh(java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> newVertices,
int[] aiConnect,
boolean flip,
java.lang.String kName) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
checkError, getInt, getInts, getLong, getLongs, getMaxMemoryUsed, getString, getString, initCL, isOCLAvailable, readKernelFile, roundUp, saveImage, saveImage, setBlue, setGreen, setRed, setTime
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
isoValue
private float isoValue
-
edgeTable
private int[] edgeTable
-
triTable
private int[] triTable
-
numVertsTable
int[] numVertsTable
-
Constructor Detail
-
OpenCLAlgorithmMarchingCubes
public OpenCLAlgorithmMarchingCubes(ModelImage image,
int level,
boolean entireImage,
boolean decFlag,
boolean blurFlag,
float sigma,
java.lang.String fileName)
-
Method Detail
-
saveMesh
private void saveMesh(java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> newVertices,
int[] aiConnect,
boolean flip,
java.lang.String kName)
throws java.io.IOException
- Throws:
java.io.IOException
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/OpenCLAlgorithmGradientMagnitude.html���������0000775�4231163�4231163�00000116640�14537076060�032660� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OpenCLAlgorithmGradientMagnitude (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class OpenCLAlgorithmGradientMagnitude
extends OpenCLAlgorithmBase
OpenCL Algorithm computes the Gradient Magnitude of a 2D, 3D or 4D image.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
Gx2Data |
Storage location of the first derivative of the Gaussian in the X direction for 2D images;
|
private float[] |
GxData |
Storage location of the first derivative of the Gaussian in the X direction.
|
private float[] |
Gy2Data |
Storage location of the first derivative of the Gaussian in the Y direction for 2D images;
|
private float[] |
GyData |
Storage location of the first derivative of the Gaussian in the Y direction.
|
private float[] |
GzData |
Storage location of the first derivative of the Gaussian in the Z direction.
|
private int[] |
kExtents_2D |
Extents of the 2D kernel.
|
private int[] |
kExtents_3D |
Extents of the 3D kernel.
|
private int[] |
kOrigins_2D |
Origins of the 2D kernel.
|
private int[] |
kOrigins_3D |
Origins of the 3D kernel.
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
cl, color, colorMask, contextLibrary, depth, device, entireImage, height, m_iDeviceType, m_kGL, openCLTypeLibrary, time, width
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
checkError, getInt, getInts, getLong, getLongs, getMaxMemoryUsed, getString, getString, initCL, isOCLAvailable, readKernelFile, roundUp, saveImage, saveImage, setBlue, setGreen, setRed, setTime
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
OpenCLAlgorithmGradientMagnitude
public OpenCLAlgorithmGradientMagnitude(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D)
Creates a new AlgorithmGradientMagnitude object.
- Parameters:
srcImg - source image modelsigmas - Gaussian standard deviations in each dimensionmaskFlag - Flag, if true, indicates that the gradient magnitude will be calculated for the whole imageimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
OpenCLAlgorithmGradientMagnitude
public OpenCLAlgorithmGradientMagnitude(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D)
Creates a new AlgorithmGradientMagnitude object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelsigmas - Gaussian standard deviations in each dimensionmaskFlag - Flag, if true, indicates that the gradient magnitude will be calculated for the whole imageimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
Method Detail
-
gradientMagnitude25D
private void gradientMagnitude25D()
2D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
Run the Kernel and save the results into a new image.
-
gradientMagnitude3D
public void gradientMagnitude3D(int time)
3D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
Run the Kernel and save the results into a new image.
-
gradientMagnitudeSep25D
private void gradientMagnitudeSep25D()
25D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
Run the Kernel and save the results into a new image.
-
gradientMagnitudeSep3D
public void gradientMagnitudeSep3D(int time)
3D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
Run the Kernel and save the results into a new image.
������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/OpenCLAlgorithmGaussianBlur.html��������������0000775�4231163�4231163�00000122267�14537076060�031666� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OpenCLAlgorithmGaussianBlur (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class OpenCLAlgorithmGaussianBlur
extends OpenCLAlgorithmBase
OpenCL Algorithm computes the GaussianBlur of a 2D, 3D or 4D image.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int[] |
colorMask |
Color flags.
|
private float[] |
GaussData_2D |
Storage location of the 2D Gaussian kernel.
|
private float[] |
GaussData_3D |
|
private int[] |
kExtents_2D |
Extents of the 2D kernel.
|
private int[] |
kExtents_3D |
Extents of the 3D kernel.
|
private int[] |
kOrigins_2D |
Origins of the 2D kernel.
|
private int[] |
kOrigins_3D |
Origins of the 3D kernel.
|
private float[] |
sigmas |
Standard deviations of the Gaussian used to calculate the kernels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
cl, color, contextLibrary, depth, device, entireImage, height, m_iDeviceType, m_kGL, openCLTypeLibrary, time, width
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
OpenCLAlgorithmGaussianBlur(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D) |
Creates a new AlgorithmGaussianBlur object.
|
OpenCLAlgorithmGaussianBlur(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D) |
Constructor which sets the source and destination images, the minimum and maximum progress value.
|
OpenCLAlgorithmGaussianBlur(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D,
long deviceType) |
Constructor which sets the source and destination images, the minimum and maximum progress value.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
Prepares this class for destruction.
|
private void |
gaussianBlur25D() |
2D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
|
private void |
gaussianBlur3D(int time) |
3D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
|
private void |
gaussianBlur4D() |
Calls gaussianBlur3D for each volume in the time series image.
|
private void |
gaussianBlurSep25D() |
|
private void |
gaussianBlurSep25DSlices() |
|
private void |
gaussianBlurSep3D(int time) |
|
static org.jocl.cl_mem |
gaussianBlurSep3D(org.jocl.cl_context cl,
org.jocl.cl_device_id device,
org.jocl.cl_mem inputBuffer,
int time,
int elementCount,
float[] sigmas,
int width,
int height,
int depth,
int color,
int[] colorMask) |
|
private void |
makeKernels2D() |
Creates 2D Gaussian kernels for the blurring process.
|
private void |
makeKernels3D() |
Creates 3D Gaussian kernels for the blurring process.
|
void |
runAlgorithm() |
Starts the program.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
checkError, getInt, getInts, getLong, getLongs, getMaxMemoryUsed, getString, getString, initCL, isOCLAvailable, readKernelFile, roundUp, saveImage, saveImage, setBlue, setGreen, setRed, setTime
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
colorMask
private int[] colorMask
Color flags.
-
Constructor Detail
-
OpenCLAlgorithmGaussianBlur
public OpenCLAlgorithmGaussianBlur(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D)
Creates a new AlgorithmGaussianBlur object.
- Parameters:
srcImg - the source imagesigmas - the standard deviations of the GaussianmaskFlag - VOI Maskingimg25D - calculate per slice or for 3D volume
-
OpenCLAlgorithmGaussianBlur
public OpenCLAlgorithmGaussianBlur(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D)
Constructor which sets the source and destination images, the minimum and maximum progress value.
- Parameters:
destImg - the destination imagesrcImg - the source imagesigmas - the sigmasmaskFlag - the mask flagimg25D - the 2.5D indicator
-
OpenCLAlgorithmGaussianBlur
public OpenCLAlgorithmGaussianBlur(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D,
long deviceType)
Constructor which sets the source and destination images, the minimum and maximum progress value.
- Parameters:
destImg - the destination imagesrcImg - the source imagesigmas - the sigmasmaskFlag - the mask flagimg25D - the 2.5D indicator
-
Method Detail
-
gaussianBlur25D
private void gaussianBlur25D()
2D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
Run the Kernel and save the results into a new image.
-
gaussianBlur3D
private void gaussianBlur3D(int time)
3D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
Run the Kernel and save the results into a new image.
-
gaussianBlurSep3D
public static org.jocl.cl_mem gaussianBlurSep3D(org.jocl.cl_context cl,
org.jocl.cl_device_id device,
org.jocl.cl_mem inputBuffer,
int time,
int elementCount,
float[] sigmas,
int width,
int height,
int depth,
int color,
int[] colorMask)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/OpenCLAlgorithmDeconvolution.html�������������0000775�4231163�4231163�00000200135�14537076060�032106� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OpenCLAlgorithmDeconvolution (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
AVERAGE_DECON |
Average deconvolution is based on the arithmetical mean of the two estimates from A and B separately
|
private org.jocl.cl_mem |
brightnessBuffer |
buffer for storing the original maximum of the OpenCL buffer
|
private int[] |
colorMask |
Color flags.
|
private org.jocl.cl_mem[] |
derivativeX |
derivative buffer in OpenCL for convolving along the x-axis
|
private org.jocl.cl_mem[] |
derivativeY |
derivative buffer in OpenCL for convolving along the y-axis
|
private org.jocl.cl_mem[] |
derivativeZ |
derivative buffer in OpenCL for convolving along the z-axis
|
private int |
iterations |
number of iterations in the deconvolution:
|
static int |
JOINT_DECON |
Default case
|
private int[][] |
kExtents |
extents for the gaussian kernels
|
private int[][] |
kOrigins |
center positions for the gaussian kernels
|
private long |
maxWorkSize |
Maximum number of work items in a work group on OpenCL.
|
private int |
method |
|
static int |
MULTIPLICATION_DECON |
Multiplication deconvolution is based on the geometrical mean of the two estimates from A and B separately
|
private org.jocl.cl_kernel |
reductionKernel |
OpenCL reduction kernel, calculates the max of and OpenCL buffer.
|
private org.jocl.cl_kernel |
scaleKernel |
OpenCL scale kernel, multiplies the image by buffer1[0] / buffer2[0],
where all buffers are OpenCL buffers on the GPU / CPU.
|
private float[] |
sigmas |
Standard deviations of the Gaussian used to calculate the kernels.
|
private float[] |
sigmasB |
second sigma values for dual-deconvolution
|
private ModelImage |
srcImageB |
second ModelImage for dual-deconvolution
|
private float[] |
sum |
|
private org.jocl.cl_mem |
sumBuffer |
buffer for storing the current max of an OpenCL buffer
|
private boolean |
useConversion |
when true, the sigma values are multiplied by: 1.0 / (2*Math.sqrt(2*Math.log(2)))
before the gaussian is generated.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
cl, color, contextLibrary, depth, device, entireImage, height, m_iDeviceType, m_kGL, openCLTypeLibrary, time, width
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
OpenCLAlgorithmDeconvolution(ModelImage srcImg,
int method,
float[] sigmas,
boolean maskFlag,
int iterations,
boolean conversion) |
New Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
|
OpenCLAlgorithmDeconvolution(ModelImage destImg,
ModelImage srcImg,
int method,
float[] sigmas,
boolean maskFlag,
int iterations,
boolean conversion) |
New Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
|
OpenCLAlgorithmDeconvolution(ModelImage destImg,
ModelImage srcImg,
int method,
float[] sigmas,
boolean maskFlag,
int iterations,
boolean conversion,
long deviceType) |
New Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
|
OpenCLAlgorithmDeconvolution(ModelImage srcImgA,
ModelImage srcImgB,
int method,
float[] sigmasA,
float[] sigmasB,
boolean maskFlag,
int iterations,
boolean conversion) |
New Dual image Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
|
OpenCLAlgorithmDeconvolution(ModelImage destImg,
ModelImage srcImgA,
ModelImage srcImgB,
int method,
float[] sigmasA,
float[] sigmasB,
boolean maskFlag,
int iterations,
boolean conversion) |
New Dual image Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
|
OpenCLAlgorithmDeconvolution(ModelImage destImg,
ModelImage srcImgA,
ModelImage srcImgB,
int method,
float[] sigmasA,
float[] sigmasB,
boolean maskFlag,
int iterations,
boolean conversion,
long deviceType) |
New Dual image Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
deconvolution4D() |
Calls Deconvolution for each volume in the time series image.
|
private void |
deconvolutionSep3D_2(int time) |
Single - Image deconvolution
|
private void |
deconvolutionSep3D_2A(int time) |
Unused, for testing...
|
private void |
deconvolutionSep3D_Dual(int time) |
Dual image deconvolution.
|
void |
finalize() |
Prepares this class for destruction.
|
private float[] |
getKernel(float sigma) |
Computes a 1D Gaussian kernel for the given sigma value.
|
private long |
getMaxMemoryUsed(float[] sigmas) |
Determines the amount of memory used for the OpenCL buffers
required for the gaussian kernels for the given sigmas.
|
private void |
initConvolutionBuffers(int index,
float[] sigmas) |
Creates the Convolution kernels (data arrays) in OpenCL.
|
private void |
initEstimate(org.jocl.cl_command_queue commandQueue,
long elementCount,
org.jocl.cl_mem inputBufferA,
org.jocl.cl_mem inputBufferB,
org.jocl.cl_mem estimateBuffer) |
Creates the first estimate image for dual-image deconvolution
estimate = 0.5 * (imageBufferA + imageBufferB).
|
private float |
initReductionKernel(org.jocl.cl_command_queue commandQueue,
long elementCount,
org.jocl.cl_mem inputBuffer) |
Inializes the reduction kernel to calculate the maximum of the estimateBuffer
during the dual-image deconvolution.
|
private void |
initScaleKernel(org.jocl.cl_command_queue commandQueue,
long elementCount,
org.jocl.cl_mem inputBuffer) |
Initialize the scale OpenCL kernel which calculates
estimateBuffer *= max(estimateBuffer)
|
private void |
reduce(org.jocl.cl_command_queue commandQueue) |
Calls the reduction kernel to calculate the maximum of the estimateBuffer in OpenCL.
|
void |
runAlgorithm() |
Starts the program.
|
private void |
scale(org.jocl.cl_command_queue commandQueue,
long elementCount) |
Calls the scale kernel which computes estimateBuffer *= max(estimateBuffer) in OpenCL
should be called after a call to reduce( commandQueue )
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
checkError, getInt, getInts, getLong, getLongs, getMaxMemoryUsed, getString, getString, initCL, isOCLAvailable, readKernelFile, roundUp, saveImage, saveImage, setBlue, setGreen, setRed, setTime
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
colorMask
private int[] colorMask
Color flags.
-
useConversion
private boolean useConversion
when true, the sigma values are multiplied by: 1.0 / (2*Math.sqrt(2*Math.log(2)))
before the gaussian is generated.
-
reductionKernel
private org.jocl.cl_kernel reductionKernel
OpenCL reduction kernel, calculates the max of and OpenCL buffer.
-
scaleKernel
private org.jocl.cl_kernel scaleKernel
OpenCL scale kernel, multiplies the image by buffer1[0] / buffer2[0],
where all buffers are OpenCL buffers on the GPU / CPU.
-
method
private int method
-
Constructor Detail
-
OpenCLAlgorithmDeconvolution
public OpenCLAlgorithmDeconvolution(ModelImage srcImg,
int method,
float[] sigmas,
boolean maskFlag,
int iterations,
boolean conversion)
New Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image. Overwrites the input image.
- Parameters:
srcImg - method - sigmas - maskFlag - iterations - conversion -
-
OpenCLAlgorithmDeconvolution
public OpenCLAlgorithmDeconvolution(ModelImage destImg,
ModelImage srcImg,
int method,
float[] sigmas,
boolean maskFlag,
int iterations,
boolean conversion)
New Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image. Stores the output in the destImage.
- Parameters:
destImg - srcImg - method - sigmas - maskFlag - iterations - conversion -
-
OpenCLAlgorithmDeconvolution
public OpenCLAlgorithmDeconvolution(ModelImage destImg,
ModelImage srcImg,
int method,
float[] sigmas,
boolean maskFlag,
int iterations,
boolean conversion,
long deviceType)
New Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image. Stores the output in the destImage.
Enables the user to specify the device type (CL.CL_DEVICE_TYPE_GPU or CL.CL_DEVICE_TYPE_CPU)
- Parameters:
destImg - srcImg - method - sigmas - maskFlag - iterations - conversion - deviceType -
-
OpenCLAlgorithmDeconvolution
public OpenCLAlgorithmDeconvolution(ModelImage srcImgA,
ModelImage srcImgB,
int method,
float[] sigmasA,
float[] sigmasB,
boolean maskFlag,
int iterations,
boolean conversion)
New Dual image Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image. Overwrites the input imageA as output.
- Parameters:
srcImgA - srcImgB - method - sigmasA - sigmasB - maskFlag - iterations - conversion -
-
OpenCLAlgorithmDeconvolution
public OpenCLAlgorithmDeconvolution(ModelImage destImg,
ModelImage srcImgA,
ModelImage srcImgB,
int method,
float[] sigmasA,
float[] sigmasB,
boolean maskFlag,
int iterations,
boolean conversion)
New Dual image Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
- Parameters:
destImg - srcImgA - srcImgB - method - sigmasA - sigmasB - maskFlag - iterations - conversion -
-
OpenCLAlgorithmDeconvolution
public OpenCLAlgorithmDeconvolution(ModelImage destImg,
ModelImage srcImgA,
ModelImage srcImgB,
int method,
float[] sigmasA,
float[] sigmasB,
boolean maskFlag,
int iterations,
boolean conversion,
long deviceType)
New Dual image Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image. Stores the output in the destImage.
Enables the user to specify the device type (CL.CL_DEVICE_TYPE_GPU or CL.CL_DEVICE_TYPE_CPU)
- Parameters:
destImg - srcImgA - srcImgB - method - sigmasA - sigmasB - maskFlag - iterations - conversion - deviceType -
-
Method Detail
-
initConvolutionBuffers
private void initConvolutionBuffers(int index,
float[] sigmas)
Creates the Convolution kernels (data arrays) in OpenCL.
Creates 3 1D arrays in OpenCL for the x-convolution kernel
the y-convolution kernel, and the z-convolution kernel.
- Parameters:
index - (0 for single-image deconvolution, 0,1 for dual-image)sigmas -
-
initEstimate
private void initEstimate(org.jocl.cl_command_queue commandQueue,
long elementCount,
org.jocl.cl_mem inputBufferA,
org.jocl.cl_mem inputBufferB,
org.jocl.cl_mem estimateBuffer)
Creates the first estimate image for dual-image deconvolution
estimate = 0.5 * (imageBufferA + imageBufferB).
This is calculated in OpenCL and the results stored in the OpenCL buffer.
- Parameters:
commandQueue - elementCount - inputBufferA - input A OpenCL bufferinputBufferB - input B OpenCL bufferestimateBuffer - output OpenCL buffer
-
initReductionKernel
private float initReductionKernel(org.jocl.cl_command_queue commandQueue,
long elementCount,
org.jocl.cl_mem inputBuffer)
Inializes the reduction kernel to calculate the maximum of the estimateBuffer
during the dual-image deconvolution. Returns the max of the initial buffer.
- Parameters:
commandQueue - elementCount - inputBuffer - , the estimateBuffer- Returns:
- maximum of the inputBuffer
-
initScaleKernel
private void initScaleKernel(org.jocl.cl_command_queue commandQueue,
long elementCount,
org.jocl.cl_mem inputBuffer)
Initialize the scale OpenCL kernel which calculates
estimateBuffer *= max(estimateBuffer)
- Parameters:
commandQueue - elementCount - inputBuffer -
-
scale
private void scale(org.jocl.cl_command_queue commandQueue,
long elementCount)
Calls the scale kernel which computes estimateBuffer *= max(estimateBuffer) in OpenCL
should be called after a call to reduce( commandQueue )
- Parameters:
commandQueue - elementCount -
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/CLFFTPlan.CLFFTKernelDir.html�����������������0000775�4231163�4231163�00000035640�14537076060�030463� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CLFFTPlan.CLFFTKernelDir (MIPAV API Documentation)
-
-
Enum Constant Summary
Enum Constants
| Enum Constant |
Description |
X |
|
Y |
|
Z |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
CLFFTKernelDir() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
CLFFTKernelDir
private CLFFTKernelDir()
-
Method Detail
-
valueOf
public static CLFFTPlan.CLFFTKernelDir valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/package-tree.html�����������������������������0000775�4231163�4231163�00000025310�14537076122�026675� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.filters.OpenCL.filters Class Hierarchy (MIPAV API Documentation)
Class Hierarchy
- java.lang.Object
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDim3
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelInfo
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.fftPadding
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.WorkDimensions
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmConvolver
- java.lang.Thread (implements java.lang.Runnable)
- gov.nih.mipav.model.algorithms.AlgorithmBase (implements java.awt.event.ActionListener, java.awt.event.WindowListener)
- java.lang.Throwable (implements java.io.Serializable)
Enum Hierarchy
- java.lang.Object
- java.lang.Enum<E> (implements java.lang.Comparable<T>, java.io.Serializable)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/package-summary.html��������������������������0000775�4231163�4231163�00000022475�14537076122�027444� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.filters.OpenCL.filters (MIPAV API Documentation)
-
-
-
Exception Summary
| Exception |
Description |
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/OpenCLAlgorithmLaplacian.html�����������������0000775�4231163�4231163�00000122656�14537076060�031155� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OpenCLAlgorithmLaplacian (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class OpenCLAlgorithmLaplacian
extends OpenCLAlgorithmBase
OpenCL Algorithm computes the Laplacian of a 2D, 3D or 4D image.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
amplificationFactor |
An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
|
private float[] |
GxxData |
Storage location of the second derivative of the Gaussian in the X direction for the 3D kernel.
|
private float[] |
GxxData2D |
Storage location of the second derivative of the Gaussian in the X direction for the 2D kernel.
|
private float[] |
GyyData |
Storage location of the second derivative of the Gaussian in the Y direction for the 3D kernel.
|
private float[] |
GyyData2D |
Storage location of the second derivative of the Gaussian in the Y direction for the 2D kernel.
|
private float[] |
GzzData |
Storage location of the second derivative of the Gaussian in the Z direction for the 3D kernel.
|
private int[] |
kExtents_2D |
Extents of the 2D kernel.
|
private int[] |
kExtents_3D |
Extents of the 3D kernel.
|
private int[] |
kOrigins_2D |
Origins of the 2D kernel.
|
private int[] |
kOrigins_3D |
Origins of the 3D kernel.
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
cl, color, colorMask, contextLibrary, depth, device, entireImage, height, m_iDeviceType, m_kGL, openCLTypeLibrary, time, width
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
OpenCLAlgorithmLaplacian(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D,
float ampFactor) |
Constructs a Laplacian algorithm object.
|
OpenCLAlgorithmLaplacian(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D,
float ampFactor) |
Constructs a Laplacian algorithm object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
checkError, getInt, getInts, getLong, getLongs, getMaxMemoryUsed, getString, getString, initCL, isOCLAvailable, readKernelFile, roundUp, saveImage, saveImage, setBlue, setGreen, setRed, setTime
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
OpenCLAlgorithmLaplacian
public OpenCLAlgorithmLaplacian(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D,
float ampFactor)
Constructs a Laplacian algorithm object.
- Parameters:
srcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the Laplacian will be calculated for the whole image if equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently.
2D images disregard this flag.ampFactor - An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
-
OpenCLAlgorithmLaplacian
public OpenCLAlgorithmLaplacian(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean separable,
boolean img25D,
float ampFactor)
Constructs a Laplacian algorithm object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the Laplacian will be calculated for the whole image if equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently.
2D images disregard this flag.ampFactor - An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
-
Method Detail
-
genLevelMask
public static void genLevelMask(int xDim,
int yDim,
float[] buffer,
java.util.BitSet edgeImage,
float level)
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
- Parameters:
xDim - X dimension lengthyDim - Y dimension lengthbuffer - array of data in which to find level crossingedgeImage - edge map of level crossingslevel - level of crossings to find (e.g. zero crossing of the Laplacian)
-
laplacian25D
private void laplacian25D()
2D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
Run the Kernel and save the results into a new image.
-
laplacian3D
private void laplacian3D(int time)
3D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
Run the Kernel and save the results into a new image.
����������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/CLFFTPlan.CLFFTKernelInfo.html����������������0000775�4231163�4231163�00000030566�14537076060�030642� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CLFFTPlan.CLFFTKernelInfo (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelInfo
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_workgroups
int num_workgroups
-
Constructor Detail
-
CLFFTKernelInfo
CLFFTKernelInfo()
������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/CLFFTPlan.html��������������������������������0000775�4231163�4231163�00000157553�14537076060�026036� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CLFFTPlan (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
-
Constructor Summary
Constructors
| Constructor |
Description |
CLFFTPlan(org.jocl.cl_context context,
int[] sizes,
CLFFTPlan.CLFFTDataFormat dataFormat,
org.jocl.cl_device_id gpu) |
Create a new FFT plan.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
(package private) void |
allocateTemporaryBufferInterleaved(int batchSize) |
|
(package private) void |
allocateTemporaryBufferPlanar(int batchSize) |
|
(package private) void |
createGlobalFFTKernelString(int n,
int BS,
CLFFTPlan.CLFFTKernelDir dir,
int vertBS) |
|
private void |
createKernelList() |
|
(package private) void |
createLocalMemfftKernelString() |
|
void |
dumpPlan(java.io.OutputStream os) |
Dump the planner result to the output stream.
|
void |
executeInterleaved(org.jocl.cl_command_queue queue,
int batchSize,
CLFFTPlan.CLFFTDirection dir,
org.jocl.cl_mem data_in,
org.jocl.cl_mem data_out,
org.jocl.cl_event condition,
org.jocl.cl_event event) |
Calculate FFT on interleaved complex data.
|
void |
executePlanar(org.jocl.cl_command_queue queue,
int batchSize,
CLFFTPlan.CLFFTDirection dir,
org.jocl.cl_mem data_in_real,
org.jocl.cl_mem data_in_imag,
org.jocl.cl_mem data_out_real,
org.jocl.cl_mem data_out_imag,
org.jocl.cl_event contition,
org.jocl.cl_event event) |
Calculate FFT of planar data.
|
(package private) void |
FFT1D(CLFFTPlan.CLFFTKernelDir dir) |
|
(package private) void |
formattedLoad(java.lang.StringBuilder kernelString,
int aIndex,
int gIndex,
CLFFTPlan.CLFFTDataFormat dataFormat) |
|
(package private) void |
formattedStore(java.lang.StringBuilder kernelString,
int aIndex,
int gIndex,
CLFFTPlan.CLFFTDataFormat dataFormat) |
|
private void |
getBlockConfigAndKernelString() |
|
(package private) int |
getGlobalRadixInfo(int n,
int[] radix,
int[] R1,
int[] R2) |
|
(package private) CLFFTPlan.WorkDimensions |
getKernelWorkDimensions(CLFFTPlan.CLFFTKernelInfo kernelInfo,
int batchSize) |
|
(package private) long |
getMaxKernelWorkGroupSize(org.jocl.cl_device_id devices) |
|
(package private) CLFFTPlan.fftPadding |
getPadding(int numWorkItemsPerXForm,
int Nprev,
int numWorkItemsReq,
int numXFormsPerWG,
int Nr,
int numBanks) |
|
private boolean |
getPatchingRequired(org.jocl.cl_device_id devices) |
|
(package private) int |
getRadixArray(int n,
int[] radixArray,
int maxRadix) |
|
(package private) void |
insertfftKernel(java.lang.StringBuilder kernelString,
int Nr,
int numIter) |
|
(package private) int |
insertGlobalLoadsAndTranspose(java.lang.StringBuilder kernelString,
int N,
int numWorkItemsPerXForm,
int numXFormsPerWG,
int R0,
int mem_coalesce_width,
CLFFTPlan.CLFFTDataFormat dataFormat) |
|
(package private) int |
insertGlobalStoresAndTranspose(java.lang.StringBuilder kernelString,
int N,
int maxRadix,
int Nr,
int numWorkItemsPerXForm,
int numXFormsPerWG,
int mem_coalesce_width,
CLFFTPlan.CLFFTDataFormat dataFormat) |
|
(package private) void |
insertHeader(java.lang.StringBuilder kernelString,
java.lang.String kernelName,
CLFFTPlan.CLFFTDataFormat dataFormat) |
|
(package private) void |
insertLocalLoadIndexArithmatic(java.lang.StringBuilder kernelString,
int Nprev,
int Nr,
int numWorkItemsReq,
int numWorkItemsPerXForm,
int numXFormsPerWG,
int offset,
int midPad) |
|
(package private) void |
insertLocalLoads(java.lang.StringBuilder kernelString,
int n,
int Nr,
int Nrn,
int Nprev,
int Ncurr,
int numWorkItemsPerXForm,
int numWorkItemsReq,
int offset,
java.lang.String comp) |
|
(package private) void |
insertLocalStoreIndexArithmatic(java.lang.StringBuilder kernelString,
int numWorkItemsReq,
int numXFormsPerWG,
int Nr,
int offset,
int midPad) |
|
(package private) void |
insertLocalStores(java.lang.StringBuilder kernelString,
int numIter,
int Nr,
int numWorkItemsPerXForm,
int numWorkItemsReq,
int offset,
java.lang.String comp) |
|
(package private) void |
insertTwiddleKernel(java.lang.StringBuilder kernelString,
int Nr,
int numIter,
int Nprev,
int len,
int numWorkItemsPerXForm) |
|
(package private) void |
insertVariables(java.lang.StringBuilder kStream,
int maxRadix) |
|
(package private) int |
log2(int x) |
|
void |
release() |
Release system resources.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
last_batch_size
int last_batch_size
-
num_local_mem_banks
int num_local_mem_banks
-
Constructor Detail
-
CLFFTPlan
public CLFFTPlan(org.jocl.cl_context context,
int[] sizes,
CLFFTPlan.CLFFTDataFormat dataFormat,
org.jocl.cl_device_id gpu)
throws CLFFTPlan.InvalidContextException
Create a new FFT plan.
Use the matching executeInterleaved() or executePlanar() depending on the dataFormat specified.
- Parameters:
context - sizes - Array of sizes for each dimension. The length of array defines how many dimensions there are.dataFormat - Data format, InterleavedComplex (array of complex) or SplitComplex (separate planar arrays).- Throws:
zephyr.cl.CLFFTPlan.InvalidContextExceptionCLFFTPlan.InvalidContextException
-
Method Detail
-
executeInterleaved
public void executeInterleaved(org.jocl.cl_command_queue queue,
int batchSize,
CLFFTPlan.CLFFTDirection dir,
org.jocl.cl_mem data_in,
org.jocl.cl_mem data_out,
org.jocl.cl_event condition,
org.jocl.cl_event event)
Calculate FFT on interleaved complex data.
- Parameters:
queue - batchSize - How many instances to calculate. Use 1 for a single FFT.dir - Direction of calculation, Forward or Inverse.data_in - Input buffer.data_out - Output buffer. May be the same as data_in for in-place transform.condition - Condition to wait for. NOT YET IMPLEMENTED.event - Event to wait for completion. NOT YET IMPLEMENTED.
-
executePlanar
public void executePlanar(org.jocl.cl_command_queue queue,
int batchSize,
CLFFTPlan.CLFFTDirection dir,
org.jocl.cl_mem data_in_real,
org.jocl.cl_mem data_in_imag,
org.jocl.cl_mem data_out_real,
org.jocl.cl_mem data_out_imag,
org.jocl.cl_event contition,
org.jocl.cl_event event)
Calculate FFT of planar data.
- Parameters:
queue - batchSize - dir - data_in_real - data_in_imag - data_out_real - data_out_imag - contition - event -
-
formattedLoad
void formattedLoad(java.lang.StringBuilder kernelString,
int aIndex,
int gIndex,
CLFFTPlan.CLFFTDataFormat dataFormat)
-
formattedStore
void formattedStore(java.lang.StringBuilder kernelString,
int aIndex,
int gIndex,
CLFFTPlan.CLFFTDataFormat dataFormat)
-
insertGlobalLoadsAndTranspose
int insertGlobalLoadsAndTranspose(java.lang.StringBuilder kernelString,
int N,
int numWorkItemsPerXForm,
int numXFormsPerWG,
int R0,
int mem_coalesce_width,
CLFFTPlan.CLFFTDataFormat dataFormat)
-
insertGlobalStoresAndTranspose
int insertGlobalStoresAndTranspose(java.lang.StringBuilder kernelString,
int N,
int maxRadix,
int Nr,
int numWorkItemsPerXForm,
int numXFormsPerWG,
int mem_coalesce_width,
CLFFTPlan.CLFFTDataFormat dataFormat)
-
insertTwiddleKernel
void insertTwiddleKernel(java.lang.StringBuilder kernelString,
int Nr,
int numIter,
int Nprev,
int len,
int numWorkItemsPerXForm)
-
getPadding
CLFFTPlan.fftPadding getPadding(int numWorkItemsPerXForm,
int Nprev,
int numWorkItemsReq,
int numXFormsPerWG,
int Nr,
int numBanks)
-
insertLocalStores
void insertLocalStores(java.lang.StringBuilder kernelString,
int numIter,
int Nr,
int numWorkItemsPerXForm,
int numWorkItemsReq,
int offset,
java.lang.String comp)
-
insertLocalLoads
void insertLocalLoads(java.lang.StringBuilder kernelString,
int n,
int Nr,
int Nrn,
int Nprev,
int Ncurr,
int numWorkItemsPerXForm,
int numWorkItemsReq,
int offset,
java.lang.String comp)
-
insertLocalLoadIndexArithmatic
void insertLocalLoadIndexArithmatic(java.lang.StringBuilder kernelString,
int Nprev,
int Nr,
int numWorkItemsReq,
int numWorkItemsPerXForm,
int numXFormsPerWG,
int offset,
int midPad)
-
insertLocalStoreIndexArithmatic
void insertLocalStoreIndexArithmatic(java.lang.StringBuilder kernelString,
int numWorkItemsReq,
int numXFormsPerWG,
int Nr,
int offset,
int midPad)
�����������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/OpenCLAlgorithmVolumeCrop.html����������������0000775�4231163�4231163�00000075667�14537076060�031375� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OpenCLAlgorithmVolumeCrop (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private WildMagic.LibFoundation.Mathematics.Vector3f |
clip |
|
private WildMagic.LibFoundation.Mathematics.Vector4f |
clipArb |
|
private WildMagic.LibFoundation.Mathematics.Vector4f |
clipEye |
|
private WildMagic.LibFoundation.Mathematics.Vector4f |
clipEyeI |
|
private WildMagic.LibFoundation.Mathematics.Vector3f |
clipI |
|
private int[] |
doClip |
|
private float[][] |
WVPMatrix |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
cl, color, colorMask, contextLibrary, depth, device, entireImage, height, m_iDeviceType, m_kGL, openCLTypeLibrary, time, width
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcCroppedShared() |
|
void |
finalize() |
Prepare this class for destruction.
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
setClip(WildMagic.LibFoundation.Mathematics.Vector3f clip,
WildMagic.LibFoundation.Mathematics.Vector3f clipI,
boolean doClip) |
|
void |
setClipEyeArb(WildMagic.LibFoundation.Mathematics.Vector4f clipE,
WildMagic.LibFoundation.Mathematics.Vector4f clipEI,
WildMagic.LibFoundation.Mathematics.Vector4f clipA,
float[] WVPMatrix) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
checkError, getInt, getInts, getLong, getLongs, getMaxMemoryUsed, getString, getString, initCL, isOCLAvailable, readKernelFile, roundUp, saveImage, saveImage, setBlue, setGreen, setRed, setTime
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
doClip
private int[] doClip
-
Method Detail
-
setClipEyeArb
public void setClipEyeArb(WildMagic.LibFoundation.Mathematics.Vector4f clipE,
WildMagic.LibFoundation.Mathematics.Vector4f clipEI,
WildMagic.LibFoundation.Mathematics.Vector4f clipA,
float[] WVPMatrix)
�������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/OpenCL/filters/OpenCLAlgorithmVolumeNormals.html�������������0000775�4231163�4231163�00000100216�14537076060�032060� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OpenCLAlgorithmVolumeNormals (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class OpenCLAlgorithmVolumeNormals
extends OpenCLAlgorithmBase
OpenCL Algorithm implementation calculate the volume normals of a 3D image.
Two methods for the normal calculation are provided. One reads the ModelImage data and creates OpenCL Buffers for the data.
The other method reads the volume data from a shared OpenGL Texture
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private WildMagic.LibRenderers.OpenGLRenderer.TextureID |
m_kTextureID |
OpenGL Texture ID containing the volume data.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
cl, color, colorMask, contextLibrary, depth, device, entireImage, height, m_iDeviceType, m_kGL, openCLTypeLibrary, time, width
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
checkError, getInt, getInts, getLong, getLongs, getMaxMemoryUsed, getString, getString, initCL, isOCLAvailable, readKernelFile, roundUp, saveImage, saveImage, setBlue, setGreen, setRed, setTime
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
OpenCLAlgorithmVolumeNormals
public OpenCLAlgorithmVolumeNormals(ModelImage srcImg,
long type)
Create an OpenCL Algorithm for calculating the volume normals. Does not use OpenGL Shared texture.
- Parameters:
srcImg - source imagetype - OpenCL Platform type, may be CL.CL_DEVICE_TYPE_GPU to specify the GPU or CL.CL_DEVICE_TYPE_CPU to specify the CPU.
-
OpenCLAlgorithmVolumeNormals
public OpenCLAlgorithmVolumeNormals(ModelImage srcImg,
ModelImage destImg,
long type)
Create an OpenCL Algorithm for calculating the volume normals. Does not use OpenGL Shared texture.
- Parameters:
srcImg - source imagetype - OpenCL Platform type, may be CL.CL_DEVICE_TYPE_GPU to specify the GPU or CL.CL_DEVICE_TYPE_CPU to specify the CPU.
-
OpenCLAlgorithmVolumeNormals
public OpenCLAlgorithmVolumeNormals(ModelImage srcImg,
com.jogamp.opengl.GL3bc gl,
WildMagic.LibRenderers.OpenGLRenderer.TextureID textureID)
Create an OpenCL Algorithm for calculating the volume normals. Uses OpenGL Shared texture.
- Parameters:
srcImg - source imagegl - OpenGL context, must be currenttextureID - OpenCL texture ID
-
Method Detail
-
calcNormals
private void calcNormals()
Calculates the volume normals from the input source ModelImage.
Creates the kernels, command queue, and OpenCL buffers. Execute the kernels on the command queue and
saves the result into a new ModelImage.
-
calcNormalsSlices
private void calcNormalsSlices()
Calculates the volume normals from the input source ModelImage.
Creates the kernels, command queue, and OpenCL buffers. Execute the kernels on the command queue and
saves the result into a new ModelImage.
-
calcNormalsShared
private void calcNormalsShared()
Calculates the volume normals shared OpenGL texture.
Creates the kernels, command queue, and OpenCL buffers. Execute the kernels on the command queue and
saves the result into a new ModelImage.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmBoundaryAttenuation.html����������������������������0000775�4231163�4231163�00000075553�14537076057�027450� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBoundaryAttenuation (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
attenuationBuffer |
The attenuated VOI mask buffer.
|
private int |
kDimXY |
The erosion kernel x and y dims.
|
private int |
kDimZ |
The erosion kernel z dimension.
|
private java.util.BitSet |
kernel |
The erosion kernel.
|
private ModelImage |
maskImage |
The mask image generated from the VOIs within the image.
|
private float |
maxAttenuation |
The maximum amount of attenuation to perform (between 0 and 1).
|
private int |
numErosions |
The number of erosions to perform (and the number of levels of attenuation to do).
|
private int |
xDim |
The image's x dimension.
|
private float |
xRes |
The image's x resolution.
|
private int |
yDim |
The image's y dimension.
|
private int |
zDim |
The image's z dimension.
|
private float |
zRes |
The image's z resolution.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
xDim
private int xDim
The image's x dimension.
-
yDim
private int yDim
The image's y dimension.
-
zDim
private int zDim
The image's z dimension.
-
Constructor Detail
-
AlgorithmBoundaryAttenuation
public AlgorithmBoundaryAttenuation(ModelImage srcImg,
int numErosions,
float maxAttenuation)
Set up the algorithm. Extract a mask to use in the attenuation using VOIs within the image and set up the kernel.
- Parameters:
srcImg - the image to attenuate (must have a VOI in it to define the area to attenuate)numErosions - the number of erosions to domaxAttenuation - the maximum amount to reduce the object intensity by (0,1)
-
Method Detail
-
erode
private void erode(ModelImage img,
int iterations)
Erode an image and mark the pixels we erode for attenuation later.
- Parameters:
img - the image to erodeiterations - the number of erosions to perform
�����������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmGradientMagnitude.html������������������������������0000775�4231163�4231163�00000135716�14537076057�027042� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGradientMagnitude (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
blue |
DOCUMENT ME!
|
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private boolean |
green |
DOCUMENT ME!
|
private float[] |
Gx2Data |
Storage location of the first derivative of the Gaussian in the X direction for 2D images;
|
private float[] |
GxData |
Storage location of the first derivative of the Gaussian in the X direction.
|
private float[] |
Gy2Data |
Storage location of the first derivative of the Gaussian in the Y direction for 2D images;
|
private float[] |
GyData |
Storage location of the first derivative of the Gaussian in the Y direction.
|
private float[] |
GzData |
Storage location of the first derivative of the Gaussian in the Z direction.
|
private int[] |
kExtents |
Extents of the kernel.
|
private float[] |
outputBuffer |
Receives output of AlgorithmConvolver
|
private boolean |
red |
Flags indicate which color channel to process.
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
float[] |
calcInBuffer2D(float[] buffer,
int[] extents,
boolean color,
float[] xDirs,
float[] yDirs) |
Calculates the gradient magnitude of a 2D image and returns it as a float buffer.
|
float[] |
calcInBuffer2DUnnormalized(float[] buffer,
int[] extents,
boolean color,
float[] xDirs,
float[] yDirs) |
Calculates the gradient magnitude of a 2D image and returns it as a float buffer.
|
private void |
calcInPlace2D(int nImages) |
Calculates the gradient image and replaces the source image with the new image.
|
private float[] |
calcInPlace2DBuffer(int nImages,
float[] buffer,
int[] extents,
boolean color,
float[] xDirections,
float[] yDirections) |
Calculates the gradient image and returns a float buffer with the new values.
|
private float[] |
calcInPlace2DBufferUnnormalized(int nImages,
float[] buffer,
int[] extents,
boolean color,
float[] xDirections,
float[] yDirections) |
Calculates the gradient image and returns a float buffer with the new values.
|
private void |
calcInPlace34D() |
Calculates the gradient magnitude image and replaces the source image with the new image.
|
private void |
calcStoreInDest2D(int nImages) |
This function produces the gradient magnitude of input image.
|
private void |
calcStoreInDest34D() |
This function produces the gradient magnitude of input image.
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
makeKernels2D() |
Creates Gaussian derivative kernels.
|
private void |
makeKernels3D() |
Creates Gaussian derivative kernels.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setBlue(boolean flag) |
Sets the flag for the blue channel.
|
void |
setGreen(boolean flag) |
Sets the flag for the green channel.
|
void |
setRed(boolean flag) |
Sets the flag for the red channel.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
blue
private boolean blue
DOCUMENT ME!
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false only process the image over the mask
areas.
-
green
private boolean green
DOCUMENT ME!
-
kExtents
private int[] kExtents
Extents of the kernel.
-
Constructor Detail
-
AlgorithmGradientMagnitude
public AlgorithmGradientMagnitude(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D)
Creates a new AlgorithmGradientMagnitude object.
- Parameters:
srcImg - source image modelsigmas - Gaussian standard deviations in each dimensionmaskFlag - Flag, if true, indicates that the gradient magnitude will be calculated for the whole imageimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
AlgorithmGradientMagnitude
public AlgorithmGradientMagnitude(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D)
Creates a new AlgorithmGradientMagnitude object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelsigmas - Gaussian standard deviations in each dimensionmaskFlag - Flag, if true, indicates that the gradient magnitude will be calculated for the whole imageimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
Method Detail
-
calcInBuffer2D
public float[] calcInBuffer2D(float[] buffer,
int[] extents,
boolean color,
float[] xDirs,
float[] yDirs)
Calculates the gradient magnitude of a 2D image and returns it as a float buffer.
- Parameters:
buffer - DOCUMENT ME!extents - DOCUMENT ME!color - DOCUMENT ME!xDirs - DOCUMENT ME!yDirs - DOCUMENT ME!- Returns:
- Buffer with the gradient magnitude of the image.
-
calcInBuffer2DUnnormalized
public float[] calcInBuffer2DUnnormalized(float[] buffer,
int[] extents,
boolean color,
float[] xDirs,
float[] yDirs)
Calculates the gradient magnitude of a 2D image and returns it as a float buffer.
- Parameters:
buffer - DOCUMENT ME!extents - DOCUMENT ME!color - DOCUMENT ME!xDirs - DOCUMENT ME!yDirs - DOCUMENT ME!- Returns:
- Buffer with the gradient magnitude of the image.
-
calcInPlace2DBuffer
private float[] calcInPlace2DBuffer(int nImages,
float[] buffer,
int[] extents,
boolean color,
float[] xDirections,
float[] yDirections)
Calculates the gradient image and returns a float buffer with the new values.
- Parameters:
nImages - number of images on which to calculate the gradient magnitude. If 2D image then nImage = 1.
If 3D image where each image is to processed independently then nImages equals the number
of images in the volume.buffer - DOCUMENT ME!extents - DOCUMENT ME!color - DOCUMENT ME!xDirections - DOCUMENT ME!yDirections - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
calcInPlace2DBufferUnnormalized
private float[] calcInPlace2DBufferUnnormalized(int nImages,
float[] buffer,
int[] extents,
boolean color,
float[] xDirections,
float[] yDirections)
Calculates the gradient image and returns a float buffer with the new values.
- Parameters:
nImages - number of images on which to calculate the gradient magnitude. If 2D image then nImage = 1.
If 3D image where each image is to processed independently then nImages equals the number
of images in the volume.buffer - DOCUMENT ME!extents - DOCUMENT ME!color - DOCUMENT ME!xDirections - DOCUMENT ME!yDirections - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
��������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmDistanceFilter.html���������������������������������0000775�4231163�4231163�00000061055�14537076057�026341� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmDistanceFilter (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
imagData
private float[] imagData
DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmLearnFromFailure64.ClassType.html�������������������0000775�4231163�4231163�00000036052�14537076057�030715� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLearnFromFailure64.ClassType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
ClassType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
ClassType
private ClassType()
-
Method Detail
-
valueOf
public static AlgorithmLearnFromFailure64.ClassType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/MultiGuidedFilter.html���������������������������������������0000775�4231163�4231163�00000073674�14537076060�025160� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
MultiGuidedFilter (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class MultiGuidedFilter
extends AlgorithmBase
This is a port of multi_guided_est.py by Yiqian Wang.
References:
1.) Feature preserving image denoising with multiresolution filters by
Yiqian Wang and You-Yi Jau.
2.) D. L. Donoho and I. M. Johnstone. "Ideal spatial adaptation
by wavelet shrinkage." Biometrika 81.3 (1994): 425-455.
:DOI:10.1093/biomet/81.3.425
3.) Reference: J. Immerkaer, "Fast Noise Variance Estimation",
Computer Vision and Image Understanding,
Vol. 64, No. 2, pp. 300-302, Sep. 1996 [PDF]
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
filterType
private int filterType
-
epsilon
private double epsilon
-
Constructor Detail
-
MultiGuidedFilter
public MultiGuidedFilter(ModelImage destImg,
ModelImage srcImg,
PyWavelets.WAVELET_NAME wavelet_name,
int wavelet_order,
int wavelet_levels,
boolean estimateNoiseStandardDeviation,
double noiseStandardDeviation,
int filterType,
int d)
��������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmEllipticFilter.html���������������������������������0000775�4231163�4231163�00000114312�14537076057�026347� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEllipticFilter (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmEllipticFilter
extends AlgorithmBase
This module contains a port from FORTRAN to Java of the FORTRAN program for designing elliptic-function
filters and a port from MATLAB to Java of the MATLAB program ellipap1 for designing an elliptic
analog lowpass filter prototype found in "Elliptic Functions for Filter Design" by H. J. Orchard and Alan N. Willson, Jr. in
IEEE Transactions on Circuits and Systems-I: Fundamental Theory and Applications, Vol. 44. No. 4,
April, 1997, pp. 273-287. Permission to port code kindly granted by Alan N. Willson, Jr.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
D0 |
|
private double[] |
D1 |
|
private double[] |
D2 |
|
private boolean |
displayOutput |
|
private double[] |
gain |
|
private double |
k |
|
private int |
n |
|
private double[] |
N0 |
|
private int |
n2 |
|
private double[] |
N2 |
|
private int |
n3 |
|
private int |
no |
|
private double[] |
pimag |
|
private double[] |
preal |
|
private double |
rp |
|
private double |
rs |
|
private boolean |
runFORTRAN |
|
private boolean |
test |
|
private double[] |
zimag |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmEllipticFilter() |
The FORTRAN example in the article of n = 7, apd = 0.1dB, k = 0.8 gives in Table VI:
Make FORTRAN zeros poles and FORTRAN poles zeros
Poles:
-0.0455944342 + j1.026557002
-0.1713670100 + j0.918389608
-0.3689660125 + j0.603979789
-0.4980421689 + j0.0
Zeros:
1.268831784
1.467798747
2.384834232
For the MATLAB example rs = 55.43dB.
|
AlgorithmEllipticFilter(int n,
double rp,
double k,
double[] preal,
double[] pimag,
double[] zimag,
boolean displayOutput) |
|
AlgorithmEllipticFilter(int n,
double rp,
double rs,
double[] zimag,
double[] preal,
double[] pimag,
double[] gain,
boolean displayOutput) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
ellipap1() |
|
void |
finalize() |
Prepares this class for destruction.
|
double |
find3dBfrequency() |
|
double |
findGain(double w) |
|
void |
generatePoly() |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
runFORTRAN() |
Starts the program.
|
void |
runTest() |
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
private void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
private void |
zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex multiply c = a * b.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
zimag
private double[] zimag
-
preal
private double[] preal
-
pimag
private double[] pimag
-
gain
private double[] gain
-
test
private boolean test
-
Constructor Detail
-
AlgorithmEllipticFilter
public AlgorithmEllipticFilter()
The FORTRAN example in the article of n = 7, apd = 0.1dB, k = 0.8 gives in Table VI:
Make FORTRAN zeros poles and FORTRAN poles zeros
Poles:
-0.0455944342 + j1.026557002
-0.1713670100 + j0.918389608
-0.3689660125 + j0.603979789
-0.4980421689 + j0.0
Zeros:
1.268831784
1.467798747
2.384834232
For the MATLAB example rs = 55.43dB.
ellipap1 PORT gives:
Zeros:
j * -2.384764161974976
j * 2.384764161974976
j * -1.4677649005263902
j * 1.4677649005263902
j * -1.268807714942811
j * 1.268807714942811
Poles:
-0.368967058832794 + j * -0.6039890555820511
-0.368967058832794 + j * 0.6039890555820511
-0.17136300802103874 + j * -0.9183938396880713
-0.17136300802103874 + j * 0.9183938396880713
-0.04559255065683074 + j * -1.026556156803157
-0.04559255065683074 + j * 1.026556156803157
-0.498050705720998 + j * 0.0
Gain = 0.011657502783825976
-
AlgorithmEllipticFilter
public AlgorithmEllipticFilter(int n,
double rp,
double k,
double[] preal,
double[] pimag,
double[] zimag,
boolean displayOutput)
- Parameters:
n - apd - k - preal - pimag - zimag - displayOutput -
-
AlgorithmEllipticFilter
public AlgorithmEllipticFilter(int n,
double rp,
double rs,
double[] zimag,
double[] preal,
double[] pimag,
double[] gain,
boolean displayOutput)
-
Method Detail
-
runTest
public void runTest()
-
runFORTRAN
public void runFORTRAN()
Starts the program.
-
ellipap1
public void ellipap1()
-
zmlt
private void zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex multiply c = a * b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zdiv
private void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmGradientInverseWeightedSmoothing.html���������������0000775�4231163�4231163�00000055162�14537076057�032105� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGradientInverseWeightedSmoothing (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
iterations |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
iterations
private int iterations
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmHaralickTexture.html��������������������������������0000775�4231163�4231163�00000153362�14537076057�026543� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHaralickTexture (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
asm |
If true calculate angular second moment Sum over i,j of Probability(i,j) * Probability(i,j).
|
private boolean |
concatenate |
If true, form only 1 result image by concatenating the original source to each of the
calculated features.
|
private boolean |
contrast |
If true calculate contrast, also known as sum of squares variance Sum over i,j of Probability(i,j) * (i-j) *
(i-j).
|
private boolean |
correlation |
If true calculate glcm correlation Sum over i,j of Probability(i,j) * (i - glcm mean) * (j - glcm mean)/ glcm
variance.
|
private ModelImage[] |
destImage |
DOCUMENT ME!
|
private boolean |
dissimilarity |
If true calculate dissimilarity Sum over i,j of Probability(i,j) * Absolute value(i-j).
|
private boolean |
energy |
If true calculate energy Energy = square root(asm).
|
private boolean |
entropy |
If true calcuate entropy Sum over i,j of -Probability(i,j) * ln(Probability(i,j)).
|
private boolean |
ew |
If true east-west direction calculated.
|
private int |
greyLevels |
Number of grey levels used if rescaling performed.
|
private boolean |
homogeneity |
If true calculate homogeneity, also called the Inverse Difference Moment of Order 2 Sum over i,j of
Probability(i,j)/(1 + (i-j)*(i-j)).
|
private boolean |
invariantDir |
If true spatially invariant direction calculated.
|
private boolean |
inverseOrder1 |
If true calculate inverse difference moment of order 1 Sum over i,j of Probability(i,j)/(1 + abs(i-j)).
|
private boolean |
maxProbability |
If true calculate maximum probability maximum probability is the largest probability value within the window.
|
private boolean |
mean |
If true calculate gray level co-occurrence matrix mean Sum over i,j of i * Probability(i,j) = Sum over i,j of j *
Probability(i,j).
|
private boolean |
nesw |
If true northeast-southwest direction calculated.
|
private boolean |
ns |
If true north-south direction calculated.
|
private int |
offsetDistance |
Distance between the 2 pixels in the pair - almost always 1.
|
private boolean |
promenance |
If true calculate the cluster promenance Sum over i,j of ((i + j - x mean - y mean)**4) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j of ((i + j - 2 * glcm mean)**4) * Probability(i,j)
|
private static int |
RED_OFFSET |
Red channel.
|
private int |
RGBOffset |
|
private boolean |
senw |
If true southeast-northwest direction calculated.
|
private boolean |
shade |
If true calculate the cluster shade Sum over i,j of ((i + j - x mean - y mean)**3) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j over ((i + j - 2 * glcm mean)**3) * Probability(i,j)
It is a measure of the degree to which the outliers in the histogram favor one side or another
of the statistical mean.
|
private boolean |
standardDeviation |
If true calculate glcm standard deviation glcm standard deviation = square root(glcm variance).
|
private boolean |
variance |
If true calculate glcm variance Sum over i,j of Probability(i,j) * (i - glcm mean) * (i - glcm mean) = Sum over
i,j of Probability(i,j) * (j - glcm mean) * (j - glcm mean).
|
private int |
windowSize |
Size of square window used in calculating each glcm matrix - must be an odd number.
|
private boolean |
zscore |
If true, produce zscore output.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmHaralickTexture(ModelImage[] destImg,
ModelImage srcImg,
int windowSize,
int offsetDistance,
int greyLevels,
boolean ns,
boolean nesw,
boolean ew,
boolean senw,
boolean invariantDir,
boolean contrast,
boolean dissimilarity,
boolean homogeneity,
boolean inverseOrder1,
boolean asm,
boolean energy,
boolean maxProbability,
boolean entropy,
boolean mean,
boolean variance,
boolean standardDeviation,
boolean correlation,
boolean shade,
boolean promenance,
boolean concatenate,
boolean zscore) |
Creates a new AlgorithmHaralickTexture object for black and white image.
|
AlgorithmHaralickTexture(ModelImage[] destImg,
ModelImage srcImg,
int RGBOffset,
int windowSize,
int offsetDistance,
int greyLevels,
boolean ns,
boolean nesw,
boolean ew,
boolean senw,
boolean invariantDir,
boolean contrast,
boolean dissimilarity,
boolean homogeneity,
boolean inverseOrder1,
boolean asm,
boolean energy,
boolean maxProbability,
boolean entropy,
boolean mean,
boolean variance,
boolean standardDeviation,
boolean correlation,
boolean shade,
boolean promenance,
boolean concatenate,
boolean zscore) |
Creates a new AlgorithmHaralickTexture object for color image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
contrast
private boolean contrast
If true calculate contrast, also known as sum of squares variance Sum over i,j of Probability(i,j) * (i-j) *
(i-j).
-
correlation
private boolean correlation
If true calculate glcm correlation Sum over i,j of Probability(i,j) * (i - glcm mean) * (j - glcm mean)/ glcm
variance.
-
dissimilarity
private boolean dissimilarity
If true calculate dissimilarity Sum over i,j of Probability(i,j) * Absolute value(i-j).
-
homogeneity
private boolean homogeneity
If true calculate homogeneity, also called the Inverse Difference Moment of Order 2 Sum over i,j of
Probability(i,j)/(1 + (i-j)*(i-j)).
-
inverseOrder1
private boolean inverseOrder1
If true calculate inverse difference moment of order 1 Sum over i,j of Probability(i,j)/(1 + abs(i-j)).
-
mean
private boolean mean
If true calculate gray level co-occurrence matrix mean Sum over i,j of i * Probability(i,j) = Sum over i,j of j *
Probability(i,j).
-
variance
private boolean variance
If true calculate glcm variance Sum over i,j of Probability(i,j) * (i - glcm mean) * (i - glcm mean) = Sum over
i,j of Probability(i,j) * (j - glcm mean) * (j - glcm mean).
-
shade
private boolean shade
If true calculate the cluster shade Sum over i,j of ((i + j - x mean - y mean)**3) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j over ((i + j - 2 * glcm mean)**3) * Probability(i,j)
It is a measure of the degree to which the outliers in the histogram favor one side or another
of the statistical mean.
-
promenance
private boolean promenance
If true calculate the cluster promenance Sum over i,j of ((i + j - x mean - y mean)**4) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j of ((i + j - 2 * glcm mean)**4) * Probability(i,j)
-
concatenate
private boolean concatenate
If true, form only 1 result image by concatenating the original source to each of the
calculated features.
-
RGBOffset
private int RGBOffset
-
Constructor Detail
-
AlgorithmHaralickTexture
public AlgorithmHaralickTexture(ModelImage[] destImg,
ModelImage srcImg,
int windowSize,
int offsetDistance,
int greyLevels,
boolean ns,
boolean nesw,
boolean ew,
boolean senw,
boolean invariantDir,
boolean contrast,
boolean dissimilarity,
boolean homogeneity,
boolean inverseOrder1,
boolean asm,
boolean energy,
boolean maxProbability,
boolean entropy,
boolean mean,
boolean variance,
boolean standardDeviation,
boolean correlation,
boolean shade,
boolean promenance,
boolean concatenate,
boolean zscore)
Creates a new AlgorithmHaralickTexture object for black and white image.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelwindowSize - the size of the square windowoffsetDistance - distance between 2 pixels of pairgreyLevels - Number of grey levels used if rescaling performedns - true if north south offset direction calculatednesw - true if northeast-southwest offset direction calculatedew - true if east west offset direction calculatedsenw - true if southeast-northwest offset direction calculatedinvariantDir - true if spatially invariant calculatedcontrast - true if contrast calculateddissimilarity - true if dissimilarity calculatedhomogeneity - true if homogeneity calculatedinverseOrder1 - true if inverse difference moment of order 1 calculatedasm - true if angular second moment calculatedenergy - true if energy calculatedmaxProbability - true if maximum probability calculatedentropy - true if entropy calculatedmean - true if gray level coordinate matrix mean calculatedvariance - true if gray level coordinate matrix variance calculatedstandardDeviation - true if gray level coordinate matrix standard deviation calculatedcorrelation - true if gray level coordinate matrix correlation calculatedshade - true if cluster shade calculatedpromenance - true if cluster promenance calculatedconcatenate - If true, only 1 result image formed by concatenating the original
source to each of the calculated featureszscore - If true, produce z score output
-
AlgorithmHaralickTexture
public AlgorithmHaralickTexture(ModelImage[] destImg,
ModelImage srcImg,
int RGBOffset,
int windowSize,
int offsetDistance,
int greyLevels,
boolean ns,
boolean nesw,
boolean ew,
boolean senw,
boolean invariantDir,
boolean contrast,
boolean dissimilarity,
boolean homogeneity,
boolean inverseOrder1,
boolean asm,
boolean energy,
boolean maxProbability,
boolean entropy,
boolean mean,
boolean variance,
boolean standardDeviation,
boolean correlation,
boolean shade,
boolean promenance,
boolean concatenate,
boolean zscore)
Creates a new AlgorithmHaralickTexture object for color image.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelRGBOffset - selects red, green, or blue channelwindowSize - the size of the square windowoffsetDistance - distance between 2 pixels of pairgreyLevels - Number of grey levels used if rescaling performedns - true if north south offset direction calculatednesw - true if northeast-southwest offset direction calculatedew - true if east west offset direction calculatedsenw - true if southeast-northwest offset direction calculatedinvariantDir - true if spatially invariant calculatedcontrast - true if contrast calculateddissimilarity - true if dissimilarity calculatedhomogeneity - true if homogeneity calculatedinverseOrder1 - true if inverse difference moment of order 1 calculatedasm - true if angular second moment calculatedenergy - true if energy calculatedmaxProbability - true if maximum probability calculatedentropy - true if entropy calculatedmean - true if gray level coordinate matrix mean calculatedvariance - true if gray level coordinate matrix variance calculatedstandardDeviation - true if gray level coordinate matrix standard deviation calculatedcorrelation - true if gray level coordinate matrix correlation calculatedshade - true if cluster shade calculatedpromenance - true if cluster promenance calculatedconcatenate - If true, only 1 result image formed by concatenating the original
source to each of the calculated featureszscore - If true, produce z score output
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmHurstIndex.DistanceIntensityComparator.html���������0000775�4231163�4231163�00000027212�14537076057�033223� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHurstIndex.DistanceIntensityComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex.DistanceIntensityComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmHurstIndex.html�������������������������������������0000775�4231163�4231163�00000112230�14537076057�025526� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHurstIndex (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmHurstIndex(ModelImage srcImg,
double minDist,
double maxDist,
boolean integerDistanceRound,
int grouping) |
Creates a new AlgorithmHurstIndex object for black and white image.
|
AlgorithmHurstIndex(ModelImage srcImg,
int RGBOffset,
double minDist,
double maxDist,
boolean integerDistanceRound,
int grouping) |
Creates a new AlgorithmHurstIndex object for color image.
|
AlgorithmHurstIndex(ModelImage destImg,
ModelImage srcImg,
double minDist,
double maxDist,
boolean integerDistanceRound) |
Creates a new AlgorithmHurstIndex object for black and white image.
|
AlgorithmHurstIndex(ModelImage destImg,
ModelImage srcImg,
int RGBOffset,
double minDist,
double maxDist,
boolean integerDistanceRound) |
Creates a new AlgorithmHurstIndex object for color image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
minDist
private double minDist
-
maxDist
private double maxDist
-
RGBOffset
private int RGBOffset
-
grouping
private int grouping
-
Constructor Detail
-
AlgorithmHurstIndex
public AlgorithmHurstIndex(ModelImage destImg,
ModelImage srcImg,
double minDist,
double maxDist,
boolean integerDistanceRound)
Creates a new AlgorithmHurstIndex object for black and white image.
- Parameters:
destImg - destination image modelsrcImg - source image modelminDist - minimum distance between pixelsmaxDist - maximum distance between pixelsintegerDistanceRound - If true, take the rounding of the Euclidean distance as the distance.
if false, take the Euclidean distance as the distance.
-
AlgorithmHurstIndex
public AlgorithmHurstIndex(ModelImage destImg,
ModelImage srcImg,
int RGBOffset,
double minDist,
double maxDist,
boolean integerDistanceRound)
Creates a new AlgorithmHurstIndex object for color image.
- Parameters:
destImg - destination image modelsrcImg - source image modelRGBOffset - selects red, green, or blue channelminDist - minimum distance between pixelsmaxDist - maximum distance between pixelsintegerDistancePart - If true, take the integer part of the Euclidean distance as the distance.
if false, take the Euclidean distance as the distance.
-
AlgorithmHurstIndex
public AlgorithmHurstIndex(ModelImage srcImg,
double minDist,
double maxDist,
boolean integerDistanceRound,
int grouping)
Creates a new AlgorithmHurstIndex object for black and white image.
- Parameters:
srcImg - source image modelminDist - minimum distance between pixelsmaxDist - maximum distance between pixelsintegerDistanceRound - If true, take the rounding of the Euclidean distance as the distance.
if false, take the Euclidean distance as the distance.grouping - VOI_GROUPING or SLICE_GROUPING
-
AlgorithmHurstIndex
public AlgorithmHurstIndex(ModelImage srcImg,
int RGBOffset,
double minDist,
double maxDist,
boolean integerDistanceRound,
int grouping)
Creates a new AlgorithmHurstIndex object for color image.
- Parameters:
srcImg - source image modelRGBOffset - selects red, green, or blue channelminDist - minimum distance between pixelsmaxDist - maximum distance between pixelsintegerDistancePart - If true, take the integer part of the Euclidean distance as the distance.
if false, take the Euclidean distance as the distance.grouping - VOI_GROUPING or SLICE_GROUPING
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmKernelRegression.html�������������������������������0000775�4231163�4231163�00000165017�14537076057�026725� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmKernelRegression (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmKernelRegression(ModelImage destImage,
ModelImage srcImg,
int method,
boolean hasNaN,
boolean hasInfinity,
boolean hasGreaterEqual,
double greaterEqualValue,
boolean hasEqual,
double equalValue,
boolean hasLesserEqual,
double lesserEqualValue,
float initialGlobalSmoothing,
float iterativeGlobalSmoothing,
float iterativeGlobalSmoothing2,
int upscale,
int initialKernelSize,
int iterativeKernelSize,
int iterations,
int iterations2,
int windowSize,
float lambda,
float alpha,
float classicStepSize,
float steeringStepSize,
boolean do25D) |
Creates a new AlgorithmKernelRegression object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
output
private float[] output
-
extents
private int[] extents
-
input
private float[] input
-
zInit
private float[] zInit
-
scaleMax
private double scaleMax
-
Constructor Detail
-
AlgorithmKernelRegression
public AlgorithmKernelRegression(ModelImage destImage,
ModelImage srcImg,
int method,
boolean hasNaN,
boolean hasInfinity,
boolean hasGreaterEqual,
double greaterEqualValue,
boolean hasEqual,
double equalValue,
boolean hasLesserEqual,
double lesserEqualValue,
float initialGlobalSmoothing,
float iterativeGlobalSmoothing,
float iterativeGlobalSmoothing2,
int upscale,
int initialKernelSize,
int iterativeKernelSize,
int iterations,
int iterations2,
int windowSize,
float lambda,
float alpha,
float classicStepSize,
float steeringStepSize,
boolean do25D)
Creates a new AlgorithmKernelRegression object.
- Parameters:
destImage - denoised imagesrcImg - 2D or 3D source imagemethod - 1 of 4 possible sets of routines to be executedhasNaN - true if irregularly sampled data uses NaN for missing valueshasInfinity - true if irregularly sampled data uses infinity for missing valueshasGreaterEqual - true if irregularly sampled data uses values >= greaterEqualValue for missing valuesgreaterEqualValue - hasEqual - true if irregularly sampled data uses values == equalValue for missing valuesequalValue - hasLesserEqual - true if irregularly sampled data uses values <= lesserEqualValue for missing valueslesserEqualValue - initialGlobalSmoothing - iterativeGlobalSmoothing - iterativeGlobalSmoothing2 - Global smoothing in L1 steering kernel regressionupscale - Upscaling factorinitialKernelSize - iterativeKernelSize - iterations - Total number of iterationsiterations2 - Iterations in L1 steering kernel regressionwindowSize - Size of the local orientation analysis windowlambda - Regularization for the elongation parameteralpha - Structure sensitive parameterclassicStepSize - steeringStepSize - do25D - If true, do slice by slice filtering
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmFrequencyFilter.html��������������������������������0000775�4231163�4231163�00000317053�14537076057�026552� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFrequencyFilter (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFrequencyFilter(ModelImage srcImg,
boolean image25D,
boolean imageCrop) |
Constructor used in Laplacian medialness option of live wire cost function.
|
AlgorithmFrequencyFilter(ModelImage srcImg,
boolean image25D,
boolean imageCrop,
int kernelDiameter,
int filterType,
double freq1,
double freq2,
int constructionMethod,
int filterOrder,
double epsilon,
double rs,
boolean onlyFrequencyFilter) |
Creates a new AlgorithmFrequencyFilter object.
|
AlgorithmFrequencyFilter(ModelImage srcImg,
boolean image25D,
float freq1,
int filterOrder,
float lowGain,
float highGain,
float lowTruncated,
float highTruncated) |
This constructor is only used for HOMOMORPHIC filters.
|
AlgorithmFrequencyFilter(ModelImage srcImg,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor) |
Constructor used for Gabor transform.
|
AlgorithmFrequencyFilter(ModelImage destImg,
ModelImage srcImg,
boolean image25D,
boolean imageCrop,
int kernelDiameter,
int filterType,
double freq1,
double freq2,
int constructionMethod,
int filterOrder,
double epsilon,
double rs,
boolean onlyFrequencyFilter) |
Creates a new AlgorithmFrequencyFilter object.
|
AlgorithmFrequencyFilter(ModelImage destImg,
ModelImage srcImg,
boolean image25D,
float freq1,
int filterOrder,
float lowGain,
float highGain,
float lowTruncated,
float highTruncated) |
This constructor is only used for HOMOMORPHIC filters.
|
AlgorithmFrequencyFilter(ModelImage destImg,
ModelImage srcImg,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor) |
Constructor used for Gabor transform.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace() |
This function replaces the original image with a new image that is either the FFT, the filtered FFT, or the
inverse FFT of the original or filtered image.
|
private void |
calcStoreInDest() |
This function produces a new image that is either the FFT, the filtered FFT, or the inverse FFT of the original
or filtered image.
|
private void |
center(float[] rData,
float[] iData) |
Centers the FFT for display purposes.
|
private double |
Chebyshev(int order,
double w) |
|
private void |
edgeStrip(float[] rData,
int z) |
This function edge strips the realData after the inverse FFT to return to the original dimensions that were
present before the forward FFT was performed.
|
private void |
exec(float[] rData,
float[] iData,
int z) |
This is the method that calculates the FFT Perform a data centering operation after the forward FFT Perform a
data centering operation before the inverse FFT Note that a frequency filter operation performs a forward FFT.
|
void |
finalize() |
Prepares this class for destruction.
|
ModelImage |
getGabor() |
DOCUMENT ME!
|
float[] |
getImaginaryData() |
Returns reference to imaginary data array.
|
float[] |
getMagData() |
Returns reference to magnitude data array.
|
float[] |
getPhaseData() |
Returns reference to phase data array.
|
float[] |
getRealData() |
Returns reference to real data array.
|
byte[] |
getSData() |
DOCUMENT ME!
|
private void |
hammingKernel2D() |
Builds a hamming kernel in 2 dimensions.
|
private void |
hammingKernel3D() |
Builds a hamming kernel in 3 dimensions.
|
private void |
idealBPKernel2D(double FLow,
double FHigh) |
Builds the idealized bandpass kernel in 2 dimensions.
|
private void |
idealBPKernel3D(double FLow,
double FHigh) |
Builds the idealized bandpass kernel in 2 dimensions.
|
private void |
idealBSKernel2D(double FLow,
double FHigh) |
Builds the idealized bandstop kernel in 2 dimensions.
|
private void |
idealBSKernel3D(double FLow,
double FHigh) |
Builds the idealized bandstop kernel in 3 dimensions.
|
private void |
idealHPKernel2D(double cutoffFreq) |
Builds the idealized highpass kernel in 2 dimensions.
|
private void |
idealHPKernel3D(double cutoffFreq) |
Builds the idealized highpass kernel in 3 dimensions.
|
private void |
idealLPKernel2D(double cutoffFreq) |
Builds the idealized lowpass kernel in 2 dimensions.
|
private void |
idealLPKernel3D(double cutoffFreq) |
Builds the idealized lowpass kernel in 3 dimensions.
|
private void |
magnitude() |
Calculates magnitude from real and imaginary parts magnitude = ( (realData)^2 + (imagData)^2 )^(1/2);
|
private void |
makeButterworthFilter(double fr1,
double fr2) |
DOCUMENT ME!
|
private void |
makeChebyshevTypeIFilter(double fr1,
double fr2) |
|
private void |
makeChebyshevTypeIIFilter(double fr1,
double fr2) |
|
private void |
makeComplexData() |
makeComplexData -
|
private void |
makeEllipticFilter(double fr1,
double fr2) |
|
private void |
makeGaborFilter(float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor) |
DOCUMENT ME!
|
private void |
makeGaussianFilter(double rmsFreq) |
DOCUMENT ME!
|
private void |
makeHomomorphicFilter(double fr1) |
DOCUMENT ME!
|
private void |
makeKernelData() |
sets the kernel variables.
|
private void |
phase(float[] phase) |
Calculates phase from real and imaginary parts.
|
private void |
restoreFinalData() |
DOCUMENT ME!
|
void |
runAlgorithm() |
Starts the program.
|
private void |
shiftBack(float[] rData) |
Shifts the FFT data back from the center for processing purposes and inverse FFT.
|
private void |
zeroAround() |
If a cropping operation was performed, shift the data back to the center and put zeros around the edges.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
arrayLength
private int arrayLength
DOCUMENT ME!
-
filterOrder
private int filterOrder
DOCUMENT ME!
-
dimLengths
private int[] dimLengths
DOCUMENT ME!
-
doCrop
private boolean doCrop
DOCUMENT ME!
-
end
private int[] end
DOCUMENT ME!
-
f1
private double f1
DOCUMENT ME!
-
f2
private double f2
DOCUMENT ME!
-
filterType
private int filterType
DOCUMENT ME!
-
freqV
private float freqV
DOCUMENT ME!
-
highGain
private float highGain
DOCUMENT ME!
-
iKernel
private float[] iKernel
DOCUMENT ME!
-
imagData
private float[] imagData
DOCUMENT ME!
-
image25D
private boolean image25D
DOCUMENT ME!
-
kDim
private int kDim
DOCUMENT ME!
-
lowGain
private float lowGain
DOCUMENT ME!
-
magData
private float[] magData
DOCUMENT ME!
-
minimum
private float minimum
DOCUMENT ME!
-
maximum
private float maximum
DOCUMENT ME!
-
ndim
private int ndim
DOCUMENT ME!
-
newSliceSize
private int newSliceSize
DOCUMENT ME!
-
realData
private float[] realData
DOCUMENT ME!
-
sData
private byte[] sData
DOCUMENT ME!
-
sigmaU
private float sigmaU
DOCUMENT ME!
-
sigmaV
private float sigmaV
DOCUMENT ME!
-
start
private int[] start
DOCUMENT ME!
-
theta
private float theta
DOCUMENT ME!
-
transformDir
private int transformDir
DOCUMENT ME!
-
wKernel
private float[] wKernel
DOCUMENT ME!
-
zeroPad
private boolean zeroPad
DOCUMENT ME!
-
epsilon
private double epsilon
-
Constructor Detail
-
AlgorithmFrequencyFilter
public AlgorithmFrequencyFilter(ModelImage srcImg,
boolean image25D,
boolean imageCrop)
Constructor used in Laplacian medialness option of live wire cost function.
- Parameters:
srcImg - source image modelimage25D - if true processes each slice of a 3D image independentlyimageCrop - if true crop image if largest image dimension + kDim - 1 exceeds the smallest power of 2
number >= the largest dimension
-
AlgorithmFrequencyFilter
public AlgorithmFrequencyFilter(ModelImage srcImg,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor)
Constructor used for Gabor transform.
- Parameters:
srcImg - Source image modelfreqU - Frequency along U axis before rotation by theta range -1 to 1freqV - Frequency along V axis before rotation by theta range -1 to 1sigmaU - Standard deviation along prerotated U axissigmaV - Standard deviation along prerotated V axistheta - Rotation in radianscreateGabor - If true, produce an image of the Gabor filter
-
AlgorithmFrequencyFilter
public AlgorithmFrequencyFilter(ModelImage srcImg,
boolean image25D,
float freq1,
int filterOrder,
float lowGain,
float highGain,
float lowTruncated,
float highTruncated)
This constructor is only used for HOMOMORPHIC filters.
- Parameters:
srcImg - source image modelimage25D - If true, processes each slice of a 3D image independentlyfreq1 - cutoff frequency, transition frequency from low to high gainfilterOrder - order of the Butterworth filterlowGain - < 1, gain at low frequencieshighGain - > 1, gain at high frequencieslowTruncated - part of low histogram end truncatedhighTruncated - part of high histogram end truncated
-
AlgorithmFrequencyFilter
public AlgorithmFrequencyFilter(ModelImage destImg,
ModelImage srcImg,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor)
Constructor used for Gabor transform.
- Parameters:
destImg - Destination image modelsrcImg - Source image modelfreqU - Frequency along U axis before rotation by theta range -1 to 1freqV - Frequency along V axis before rotation by theta range -1 to 1sigmaU - Standard deviation along prerotated U axissigmaV - Standard deviation along prerotated V axistheta - Rotation in radianscreateGabor - If true, produce an image of the Gabor filter
-
AlgorithmFrequencyFilter
public AlgorithmFrequencyFilter(ModelImage destImg,
ModelImage srcImg,
boolean image25D,
float freq1,
int filterOrder,
float lowGain,
float highGain,
float lowTruncated,
float highTruncated)
This constructor is only used for HOMOMORPHIC filters.
- Parameters:
destImg - image model where result image is to be storedsrcImg - source image modelimage25D - If true, processes each slice of a 3D image independentlyfreq1 - cutoff frequency, transition frequency from low to high gainfilterOrder - order of the Butterworth filterlowGain - < 1, gain at low frequencieshighGain - > 1, gain at high frequencieslowTruncated - part of low histogram end truncatedhighTruncated - part of high histogram end truncated
-
AlgorithmFrequencyFilter
public AlgorithmFrequencyFilter(ModelImage srcImg,
boolean image25D,
boolean imageCrop,
int kernelDiameter,
int filterType,
double freq1,
double freq2,
int constructionMethod,
int filterOrder,
double epsilon,
double rs,
boolean onlyFrequencyFilter)
Creates a new AlgorithmFrequencyFilter object.
- Parameters:
srcImg - source image modelimage25D - if true processes each slice of a 3D image independentlyimageCrop - if true crop image if largest image dimension + kDim - 1 exceeds the smallest power
of 2 number >= the largest dimensionkernelDiameter - convolution kernel diameter - must be an odd integer >= 3filterType - LOWPASS, HIGHPASS, BANDPASS, or BANDSTOPfreq1 - cutoff frequency in LOWPASS and HIGHPASS lower frequency in BANDPASS and BANDSTOPfreq2 - higher frequency in BANDPASS and BANDSTOP User inputs f1 and f2 going from 0.0 to
1.0. Program multiplies these numbers by PI for FIR filters.constructionMethod - WINDOW for window finite impulse response, GAUSSIAN, or BUTTERWORTHfilterOrder - order of a Butterworth or Chebyshev filterepsilon - Maximum Chebyshev filter ripple or Elliptic passband ripple in decibelsrs - decibels stopband is down in EllipticonlyFrequencyFilter -
-
AlgorithmFrequencyFilter
public AlgorithmFrequencyFilter(ModelImage destImg,
ModelImage srcImg,
boolean image25D,
boolean imageCrop,
int kernelDiameter,
int filterType,
double freq1,
double freq2,
int constructionMethod,
int filterOrder,
double epsilon,
double rs,
boolean onlyFrequencyFilter)
Creates a new AlgorithmFrequencyFilter object.
- Parameters:
destImg - image model where result image is to be storedsrcImg - source image modelimage25D - if true processes each slice of a 3D image independentlyimageCrop - if true crop image if largest image dimension + kDim - 1 exceeds the smallest power
of 2 number >= the largest dimensionkernelDiameter - convolution kernel diameter - must be an odd integer >= 3filterType - LOWPASS, HIGHPASS, BANDPASS, or BANDSTOPfreq1 - cutoff frequency in LOWPASS and HIGHPASS lower frequency in BANDPASS and BANDSTOPfreq2 - higher frequency in BANDPASS and BANDSTOP User inputs f1 and f2 going from 0.0 to
1.0. Program multiplies these numbers by PI for FIR filters.constructionMethod - WINDOW for window finite impulse response, GAUSSIAN, or BUTTERWORTHfilterOrder - order of the Butterworth or Chebyshev filterepsilon - Maximum Chebyshev filter ripple or Elliptic passband ripple in decibelsrs - decibels stopband is down in EllipticonlyFrequencyFilter -
-
Method Detail
-
getSData
public byte[] getSData()
DOCUMENT ME!
- Returns:
- sData
-
calcInPlace
private void calcInPlace()
This function replaces the original image with a new image that is either the FFT, the filtered FFT, or the
inverse FFT of the original or filtered image.
-
calcStoreInDest
private void calcStoreInDest()
This function produces a new image that is either the FFT, the filtered FFT, or the inverse FFT of the original
or filtered image.
-
edgeStrip
private void edgeStrip(float[] rData,
int z)
This function edge strips the realData after the inverse FFT to return to the original dimensions that were
present before the forward FFT was performed.
- Parameters:
rData - DOCUMENT ME!z - DOCUMENT ME!
-
exec
private void exec(float[] rData,
float[] iData,
int z)
This is the method that calculates the FFT Perform a data centering operation after the forward FFT Perform a
data centering operation before the inverse FFT Note that a frequency filter operation performs a forward FFT.
- Parameters:
rData - real data bufferiData - imaginary data bufferz - slice number in image25D processing, 0 otherwise
-
idealBPKernel2D
private void idealBPKernel2D(double FLow,
double FHigh)
Builds the idealized bandpass kernel in 2 dimensions.
- Parameters:
FLow - defines the cutoff frequecy at low freqs.FHigh - defines the cutoff frequecy at high freqs.
-
idealBPKernel3D
private void idealBPKernel3D(double FLow,
double FHigh)
Builds the idealized bandpass kernel in 2 dimensions.
- Parameters:
FLow - defines the cutoff frequecy at low freqs.FHigh - defines the cutoff frequecy at high freqs.
-
idealBSKernel2D
private void idealBSKernel2D(double FLow,
double FHigh)
Builds the idealized bandstop kernel in 2 dimensions.
- Parameters:
FLow - defines the cutoff frequecy at low freqs.FHigh - defines the cutoff frequecy at high freqs.
-
idealBSKernel3D
private void idealBSKernel3D(double FLow,
double FHigh)
Builds the idealized bandstop kernel in 3 dimensions.
- Parameters:
FLow - defines the cutoff frequecy at low freqs.FHigh - defines the cutoff frequecy at high freqs.
-
makeGaborFilter
private void makeGaborFilter(float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor)
DOCUMENT ME!
- Parameters:
freqU - DOCUMENT ME!freqV - DOCUMENT ME!sigmaU - DOCUMENT ME!sigmaV - DOCUMENT ME!theta - DOCUMENT ME!createGabor - DOCUMENT ME!
-
zeroAround
private void zeroAround()
If a cropping operation was performed, shift the data back to the center and put zeros around the edges.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/FFTUtilityEP.html��������������������������������������������0000775�4231163�4231163�00000117314�14537076060�024014� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
FFTUtilityEP (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class FFTUtilityEP
extends AlgorithmBase
This extended precision FFT should only be used when it is necessary to perform a N-dimensional FFT on non-power of
two data without adding padding. Otherwise, developsers should use AlgorithmFFT2 (which has multithreading/jocl
optimizations).
For forward transforms arrays a and b originally hold the real and imaginary components of the data, and return the
real and imaginary components of the resulting fourier coefficients. The roles reverse for the inverse transform.
multivariate data is indexed according to Java indexing conventions in which the last dimension is contiguous in
memory, without limit on the number of implied multiple subscripts. the subroutine is called once for each variate.
the calls for a multivariate transform may be in any order. n is the dimension of the current variable. If n has more
than 15 "factors", FFT terminates with an error message. The smallest number with 16 "factors" is 12,754,584, so this
error condition should not occur very often. nspn is the spacing of consecutive data values while indexing the
current variable. nseg*n*nspn is the total number of complex data values. The sign of isn determines the sign of the
complex exponential, and the magnitude of isn is normally one. isn is -1 for the forward transform and +1 for the
inverse transform. The magnitude of isn determines the indexing increment for a & b. If fft is called twice, with
opposite signs on isn, an identity transformation is done. Calls can be in either order. The results are scaled by
1/n when the sign of isn is positive. a tri-variate transform with a(n1,n2,n3), b(n1,n2,n3) is computed by FFTUtility
fft = new FFTUtility(a,b,n1*n2,n3,1,-1,FFTUtility.FFT); fft.run(); fft = new
FFTUtility(a,b,n1,n2,n3,-1,FFTUtility.FFT); fft.run(); fft = new FFTUtility(a,b,1,n1,n2*n3,-1,FFTUtility.FFT);
fft.run(); for a single-variate transform, FFTUtility fft = new FFTUtility(a,b,1,n,1,-1,FFTUtility.FFT); fft.run();
- See Also:
This class is based on the Fortran/C code for R. C. Singleton's mixed radix FFT algorithm, released under the below
license by Mark Olesen on NETLIB (netlib.org).
References: R. C. Singleton, An algorithm for computing the mixed radix fast Fourier transform, IEEE Transactions on
Audio and Electroacoustics, AU-17, no. 2, June, 1969, pp. 93-103.
multivariate complex fourier transform, computed in place using mixed-radix fast fourier transform algorithm. by r.
c. singleton, stanford research institute, sept. 1968
Copyright(c)1995,97 Mark Olesen olesen@me.QueensU.CA
Queen's Univ at Kingston (Canada)
Permission to use, copy, modify, and distribute this software for
any purpose without fee is hereby granted, provided that this
entire notice is included in all copies of any software which is
or includes a copy or modification of this software and in all
copies of the supporting documentation for such software.
THIS SOFTWARE IS BEING PROVIDED AS IS, WITHOUT ANY EXPRESS OR
IMPLIED WARRANTY. IN PARTICULAR, NEITHER THE AUTHOR NOR QUEEN'S
UNIVERSITY AT KINGSTON MAKES ANY REPRESENTATION OR WARRANTY OF ANY
KIND CONCERNING THE MERCHANTABILITY OF THIS SOFTWARE OR ITS
FITNESS FOR ANY PARTICULAR PURPOSE.
All of which is to say that you can do what you like with this
source code provided you don't try to sell it as your own and you
include an unaltered copy of this message (including the
copyright).
It is also implicitly understood that bug fixes and improvements
should make their way back to the general Internet community so
that everyone benefits.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private DoubleDouble[] |
a |
DOCUMENT ME!
|
private double[] |
adbl |
|
private DoubleDouble[] |
b |
DOCUMENT ME!
|
private double[] |
bdbl |
|
static int |
FFT |
DOCUMENT ME!
|
private int |
functionType |
DOCUMENT ME!
|
private int |
isn |
DOCUMENT ME!
|
private int |
n |
DOCUMENT ME!
|
private int |
nseg |
DOCUMENT ME!
|
private int |
nspn |
DOCUMENT ME!
|
static int |
REALS |
DOCUMENT ME!
|
static int |
REALT |
DOCUMENT ME!
|
static int |
SELF_TEST |
DOCUMENT ME!
|
private boolean |
showProgress |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
FFTUtilityEP(double[] adbl,
double[] bdbl,
int nseg,
int n,
int nspn,
int isn,
int functionType) |
Creates a new FFTUtility object.
|
FFTUtilityEP(int functionType) |
This constructor should only be used for functionType == SELF_TEST.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
adbl
private double[] adbl
-
bdbl
private double[] bdbl
-
functionType
private int functionType
DOCUMENT ME!
-
isn
private int isn
DOCUMENT ME!
-
n
private int n
DOCUMENT ME!
-
nseg
private int nseg
DOCUMENT ME!
-
nspn
private int nspn
DOCUMENT ME!
-
Constructor Detail
-
FFTUtilityEP
public FFTUtilityEP(double[] adbl,
double[] bdbl,
int nseg,
int n,
int nspn,
int isn,
int functionType)
Creates a new FFTUtility object.
- Parameters:
a - DOCUMENT ME!b - DOCUMENT ME!nseg - DOCUMENT ME!n - DOCUMENT ME!nspn - DOCUMENT ME!isn - DOCUMENT ME!functionType - DOCUMENT ME!
-
Method Detail
-
normal
DoubleDouble[] normal()
DOCUMENT ME!
- Returns:
- DOCUMENT ME!
-
fft
private void fft()
DOCUMENT ME!
-
reals
private void reals()
DOCUMENT ME!
-
realt
private void realt()
DOCUMENT ME!
-
selfTest
private void selfTest()
DOCUMENT ME!
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmMode.html�������������������������������������������0000775�4231163�4231163�00000157064�14537076057�024333� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMode (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
AXIAL_KERNEL |
(3D only).
|
(package private) int |
bdrBufferDepth |
Border buffer number of slices.
|
(package private) int |
bdrBufferHeight |
Border buffer number of rows.
|
(package private) int |
bdrBufferWidth |
Border buffer number of columns.
|
static int |
CROSS_KERNEL |
cross (2D only).
|
static int |
CUBE_KERNEL |
(3D only).
|
private int |
currentSlice |
Used for 3D loop control.
|
private boolean |
entireImage |
true means apply to entire image, false only region.
|
private int |
halfK |
The kernel radius.
|
static int |
HORZ_KERNEL |
horizontal (2D only).
|
private byte[] |
kernel |
mask to determine the region of pixels used in the mode filter.
|
private int |
kernelCenter |
The index of the kernel center.
|
private int[] |
kernelMask |
The kernel.
|
private int |
kernelShape |
user-selectable shape of the region for neighbor-selection.
|
private int |
kernelSize |
dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).
|
private int |
numberOfSlices |
Used for 3D loop control.
|
private boolean |
sliceFiltering |
do all filtering slice-by-slice, rather than as a volume.
|
static int |
SQUARE_KERNEL |
square kernel (2D only).
|
(package private) int |
srcBufferDepth |
Source buffer number of slices.
|
(package private) int |
srcBufferHeight |
Source buffer number of rows.
|
(package private) int |
srcBufferWidth |
Source buffer number of columns.
|
static int |
VERT_KERNEL |
vertical (2D only).
|
static int |
X_KERNEL |
X-shaped kernel, from 1 corner to opposite corner.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMode(ModelImage srcImg,
int kSize,
int kShape,
boolean maskFlag) |
Constructor for 2D images in which changes are returned to the source image.
|
AlgorithmMode(ModelImage srcImg,
int kSize,
int kShape,
boolean sliceBySlice,
boolean maskFlag) |
Constructor for 3D images in which changes are returned to the source image.
|
AlgorithmMode(ModelImage destImg,
ModelImage srcImg,
int kSize,
int kShape,
boolean maskFlag) |
Constructor for 2D images in which changes are placed in a predetermined destination image.
|
AlgorithmMode(ModelImage destImg,
ModelImage srcImg,
int kSize,
int kShape,
boolean sliceBySlice,
boolean maskFlag) |
Constructor for 3D images in which changes are placed in a predetermined destination image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlaceBorder2D() |
Mode filters the 2D source image.
|
private void |
calcInPlaceBorder3D() |
Mode filters the 3D source image and replaces it with the mode filtered image.
|
private void |
calcStoreInDestBorder2D() |
This function produces a new image that has been mode filtered and places filtered image in the destination
image.
|
private void |
calcStoreInDestBorder3D() |
Mode filters the 3D source image and makes a new image for the mode filtered image.
|
private void |
copy2DSrcBufferToBdrBuffer(int[] srcBuffer,
int[] bdrBuffer,
int srcBufferOffsetIndex,
int bdrBufferOffsetIndex) |
Method copies the data in srcBuffer centered in the border buffer That is, the src image is completely surrounded
by a border.
|
private void |
copy3DSrcBufferToBdrBuffer(int[] srcBuffer,
int[] bdrBuffer) |
Method copies the data in srcBuffer centered in the border buffer That is, the src image is completely surrounded
by a border.
|
void |
finalize() |
Prepares this class for destruction.
|
private int[] |
getBorderBufferNeighborList(int i,
int[] data,
boolean is2D) |
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
|
private void |
makeKernel() |
Forms kernel.
|
private void |
makeKernelMask() |
Makes the kernel mask.
|
private int |
mode(int[] list,
int val) |
Finds the mode value of the list.
|
void |
runAlgorithm() |
Starts the algorithm.
|
private void |
setKernel() |
Fill in the mask for which pixels are used in filtering.
|
private void |
sliceFilterBorder(int[] srcBdrBuffer,
int[] destBuffer,
int srcBufferStartingPoint,
int destBufferStartingPoint) |
Performs mode filtering on a single slice with a 2D or 3D buffer.
|
private void |
volumeFilterBorder(int[] srcBdrBuffer,
int[] destBuffer) |
Assumes a monochrome image of type BYTE, SHORT, INTEGER, UBYTE, USHORT, UINTEGER.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
halfK
private int halfK
The kernel radius.
-
kernelMask
private int[] kernelMask
The kernel.
-
kernelSize
private int kernelSize
dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).
-
Constructor Detail
-
AlgorithmMode
public AlgorithmMode(ModelImage srcImg,
int kSize,
int kShape,
boolean maskFlag)
Constructor for 2D images in which changes are returned to the source image.
- Parameters:
srcImg - Source image model.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).kShape - Kernel shape: element neighbors to include when finding the mode.maskFlag - Flag that indicates that the mode filtering will be performed for the whole image if equal to
true.
-
AlgorithmMode
public AlgorithmMode(ModelImage destImg,
ModelImage srcImg,
int kSize,
int kShape,
boolean maskFlag)
Constructor for 2D images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).kShape - Kernel shape: element neighbors to include when finding the mode.maskFlag - Flag that indicates that the mode filtering will be performed for the whole image if equal to
true.
-
AlgorithmMode
public AlgorithmMode(ModelImage srcImg,
int kSize,
int kShape,
boolean sliceBySlice,
boolean maskFlag)
Constructor for 3D images in which changes are returned to the source image.
- Parameters:
srcImg - Source image model.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).kShape - Kernel shape: element neighbors to include when finding the mode.sliceBySlice - Each slice in a volume image is to be filtered separately (when true), else the volume will
use a kernel with 3 dimensions.maskFlag - Flag that indicates that the mode filtering will be performed for the whole image if equal
to true.
-
AlgorithmMode
public AlgorithmMode(ModelImage destImg,
ModelImage srcImg,
int kSize,
int kShape,
boolean sliceBySlice,
boolean maskFlag)
Constructor for 3D images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).kShape - Kernel shape: element neighbors to include when finding the mode.sliceBySlice - Each slice in a volume image is filtered separately (when true), else the volume will use a
kernel with 3 dimensions.maskFlag - Flag that indicates that the mode filtering will be performed for the whole image if equal
to true.
-
Method Detail
-
copy2DSrcBufferToBdrBuffer
private void copy2DSrcBufferToBdrBuffer(int[] srcBuffer,
int[] bdrBuffer,
int srcBufferOffsetIndex,
int bdrBufferOffsetIndex)
Method copies the data in srcBuffer centered in the border buffer That is, the src image is completely surrounded
by a border. The values in the border locations are copies of nearby srcBuffer values.
- Parameters:
srcBuffer - int[] the source image bufferbdrBuffer - int[] the border image buffersrcBufferOffsetIndex - offset into srcBufferbdrBufferOffsetIndex - offset into bdrBuffer
-
copy3DSrcBufferToBdrBuffer
private void copy3DSrcBufferToBdrBuffer(int[] srcBuffer,
int[] bdrBuffer)
Method copies the data in srcBuffer centered in the border buffer That is, the src image is completely surrounded
by a border. The values in the border locations are copies of nearby srcBuffer values.
- Parameters:
srcBuffer - int[] the source image bufferbdrBuffer - int[] the border image buffer
-
getBorderBufferNeighborList
private int[] getBorderBufferNeighborList(int i,
int[] data,
boolean is2D)
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
- Parameters:
i - The central pixel to find neighbors for.data - Image datais2D - True indicates that the neighbors are found along a 2D slice (or 2D image) instead of neighbors in
a 3D volume.- Returns:
- The neighboring pixel list corresponds to the kernel chosen.
-
mode
private int mode(int[] list,
int val)
Finds the mode value of the list. If the numbers in the list are unique, return the value of the second
parameter. This method assumes the parameter list is sorted, and counts consecutive array elements containing the
same value.
- Parameters:
list - int[] List of numbersval - Value to return if all list elements are unique- Returns:
- the mode of the values in the list
-
sliceFilterBorder
private void sliceFilterBorder(int[] srcBdrBuffer,
int[] destBuffer,
int srcBufferStartingPoint,
int destBufferStartingPoint)
Performs mode filtering on a single slice with a 2D or 3D buffer.
- Parameters:
srcBdrBuffer - Source buffer.destBuffer - Destination Buffer.srcBufferStartingPoint - Index of the first pixel in the source bufferdestBufferStartingPoint - Index of the first pixel for the slice to be filtered in the destination buffer.
-
volumeFilterBorder
private void volumeFilterBorder(int[] srcBdrBuffer,
int[] destBuffer)
Assumes a monochrome image of type BYTE, SHORT, INTEGER, UBYTE, USHORT, UINTEGER.
- Parameters:
srcBdrBuffer - int[] the border buffer containing the source image datadestBuffer - int[] the destination buffer
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/BM3D.indexValueComparator.html�������������������������������0000775�4231163�4231163�00000027025�14537076060�026403� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BM3D.indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.BM3D.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmMarkovSmooth.html�����������������������������������0000775�4231163�4231163�00000064070�14537076057�026072� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMarkovSmooth (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
covariance |
The known covariance of the Gaussian noise
|
private int |
iterations |
The number of iterations to perform
|
private double |
max_diff |
The maximum contribution to the potential of the difference between two neighboring pixel values.
|
private double |
weight_diff |
The weighting attached to the component of the potential due to the difference between two
neighboring pixel values.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmMarkovSmooth
public AlgorithmMarkovSmooth(ModelImage srcImg,
double covariance,
double max_diff,
double weight_diff,
int iterations)
- Parameters:
srcImg - covariance - max_diff - weight_diff - iterations -
-
AlgorithmMarkovSmooth
public AlgorithmMarkovSmooth(ModelImage destImg,
ModelImage srcImg,
double covariance,
double max_diff,
double weight_diff,
int iterations)
- Parameters:
destImg - srcImg - covariance - max_diff - weight_diff - iterations -
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PhasePreservingDenoising.html��������������������������������0000775�4231163�4231163�00000100206�14537076060�026521� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PhasePreservingDenoising (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
dthetaonsigma |
|
private double |
k |
|
private double |
minwavelength |
|
private double |
mult |
|
private int |
norient |
|
private int |
nscale |
Phase preserving wavelet image denoising
MIT License
Copyright (c) 2018 Peter Kovesi
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
|
private double |
sigmaonf |
|
private double |
softness |
|
private ModelImage |
targetImage |
|
private boolean |
useProgressBar |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
PhasePreservingDenoising() |
|
PhasePreservingDenoising(ModelImage srcImg,
int nscale,
int norient,
double mult,
double minwavelength,
double sigmaonf,
double dthetaonsigma,
double k,
double softness,
boolean useProgressBar) |
|
PhasePreservingDenoising(ModelImage destImg,
ModelImage srcImg,
int nscale,
int norient,
double mult,
double minwavelength,
double sigmaonf,
double dthetaonsigma,
double k,
double softness,
boolean useProgressBar) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
nscale
private int nscale
Phase preserving wavelet image denoising
MIT License
Copyright (c) 2018 Peter Kovesi
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
## Documentation
[The main documentation page](https://peterkovesi.github.io/ImagePhaseCongruency.jl/dev/index.html)
[Examples](https://peterkovesi.github.io/ImagePhaseCongruency.jl/dev/examples/)
[Function reference](https://peterkovesi.github.io/ImagePhaseCongruency.jl/dev/functions/)
"Phase Preserving Denoising of Images" by Peter Kovesi
The Australia Pattern Recognition Society Conference: DICTA'99.
December, 1999. Perth WA, pp.212-217.
http://www.peterkovesi.com/papers/denoise.pdf
-
norient
private int norient
-
sigmaonf
private double sigmaonf
-
softness
private double softness
-
Constructor Detail
-
PhasePreservingDenoising
public PhasePreservingDenoising(ModelImage srcImg,
int nscale,
int norient,
double mult,
double minwavelength,
double sigmaonf,
double dthetaonsigma,
double k,
double softness,
boolean useProgressBar)
-
PhasePreservingDenoising
public PhasePreservingDenoising(ModelImage destImg,
ModelImage srcImg,
int nscale,
int norient,
double mult,
double minwavelength,
double sigmaonf,
double dthetaonsigma,
double k,
double softness,
boolean useProgressBar)
-
Method Detail
-
gaussianangularfilter
private double[][] gaussianangularfilter(double angl,
double thetaSigma,
double[][] sintheta,
double[][] costheta)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmIsophoteCurvature.html������������������������������0000775�4231163�4231163�00000114051�14537076057�027127� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmIsophoteCurvature (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
entireImage |
|
private float[] |
GxData |
Storage location of the first derivative of the Gaussian in the X direction.
|
private float[] |
GxxData |
|
private float[] |
GxyData |
|
private float[] |
GyData |
Storage location of the first derivative of the Gaussian in the Y direction.
|
private float[] |
GyyData |
|
private float[] |
GzData |
Storage location of the first derivative of the Gaussian in the Z direction.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
private int |
operationType |
|
private float[] |
oX |
Stores output of AlgorithmConvolver
|
private float[] |
oXX |
|
private float[] |
oXY |
|
private float[] |
oY |
|
private float[] |
oYY |
|
private float[] |
oZ |
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
private static int |
xOp |
|
private static int |
xxOp |
|
private static int |
xyOp |
|
private static int |
yOp |
|
private static int |
yyOp |
|
private static int |
zOp |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calc25D() |
|
private void |
calc3D() |
|
void |
cleanUp() |
|
void |
finalize() |
finalize - sets class storages arrays to null so that System.gc() can free the memory.
|
private void |
makeKernels2D() |
makeKernals2D - creates the derivative kernels used to calculate the gradient magnitude.
|
private void |
makeKernels3D() |
makeKernals3D - creates the derivative kernels used to calculate the gradient magnitude.
|
void |
runAlgorithm() |
starts the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
GxxData
private float[] GxxData
-
GxyData
private float[] GxyData
-
GyyData
private float[] GyyData
-
Constructor Detail
-
AlgorithmIsophoteCurvature
public AlgorithmIsophoteCurvature(ModelImage srcImg,
float[] sigmas,
boolean entireImage,
boolean image25D)
-
AlgorithmIsophoteCurvature
public AlgorithmIsophoteCurvature(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean entireImage,
boolean image25D)
-
Method Detail
-
cleanUp
public void cleanUp()
-
calc25D
private void calc25D()
-
calc3D
private void calc3D()
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmLearnFromFailure64.html�����������������������������0000775�4231163�4231163�00000121500�14537076057�027000� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLearnFromFailure64 (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmLearnFromFailure64(ModelImage _srcImage,
int _imageNum,
int _sliceNum,
float min,
float max,
boolean train,
java.io.BufferedWriter _outStream,
java.lang.String _savedImageDir) |
|
AlgorithmLearnFromFailure64(ModelImage _srcImage,
int _imageNum,
int _sliceNum,
float min,
float max,
boolean train,
java.lang.String _savedImageDir) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
cropImage(int xMin,
int xMax,
int yMin,
int yMax) |
|
void |
disposeLocal() |
|
private void |
extractImage24bits(int xMin,
int xMax,
int yMin,
int yMax,
boolean isCenter) |
|
private void |
extractImage8bitsTest(int xMin,
int xMax,
int yMin,
int yMax,
AlgorithmLearnFromFailure64.ClassType type,
float centerX,
float centerY) |
|
private void |
extractImage8bitsTrain(int xMin,
int xMax,
int yMin,
int yMax,
AlgorithmLearnFromFailure64.ClassType type) |
|
private void |
generatePatches() |
|
private void |
learnFromFailure() |
|
int |
numDigits(int value) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
smoothVOI128double(ModelImage maskImage,
ModelImage resultImage) |
|
void |
smoothVOI128single(ModelImage maskImage,
ModelImage resultImage) |
|
void |
smoothVOI30(ModelImage maskImage,
ModelImage resultImage) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
imageNum
private int imageNum
-
sliceNum
private int sliceNum
-
patchNum
private int patchNum
-
training
private boolean training
-
Constructor Detail
-
AlgorithmLearnFromFailure64
public AlgorithmLearnFromFailure64(ModelImage _srcImage,
int _imageNum,
int _sliceNum,
float min,
float max,
boolean train,
java.lang.String _savedImageDir)
-
AlgorithmLearnFromFailure64
public AlgorithmLearnFromFailure64(ModelImage _srcImage,
int _imageNum,
int _sliceNum,
float min,
float max,
boolean train,
java.io.BufferedWriter _outStream,
java.lang.String _savedImageDir)
-
Method Detail
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
-
extractImage24bits
private void extractImage24bits(int xMin,
int xMax,
int yMin,
int yMax,
boolean isCenter)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmBSplineControlPointImageFilter.html�����������������0000775�4231163�4231163�00000122234�14537076057�031456� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBSplineControlPointImageFilter (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
origin
private float[] origin
-
extents
private int[] extents
-
epsilon
private double epsilon
-
extentsSlice
private int extentsSlice
-
xyzExtents
private int xyzExtents
-
Method Detail
-
collapsePhiLattice
private void collapsePhiLattice(double[] lattice,
int[] latticeIndex,
double[] collapsedLattice,
int[] collapsedLatticeIndex,
double u,
int dimension)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PyWavelets.Coefficient.html����������������������������������0000775�4231163�4231163�00000036604�14537076060�026106� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PyWavelets.Coefficient (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
type |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
Coefficient(int type) |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
type
private final int type
-
Method Detail
-
valueOf
public static PyWavelets.Coefficient valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
����������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PyWavelets.DiscreteWavelet.html������������������������������0000775�4231163�4231163�00000030563�14537076060�026760� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PyWavelets.DiscreteWavelet (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteWavelet
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
dec_len
public int dec_len
-
Constructor Detail
-
DiscreteWavelet
public DiscreteWavelet()
���������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmProstateBoundaryFeature2D.html����������������������0000775�4231163�4231163�00000163134�14537076060�030443� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmProstateBoundaryFeature2D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmProstateBoundaryFeature2D(ModelImage destImg,
ModelImage classImage,
ModelImage srcImg,
boolean imageIntensityFilter,
boolean coherenceEnhancingDiffusionFilter,
boolean regisotropicDiffusionFilter,
boolean IHN3CorrectionFilter,
boolean modeFilter,
boolean meanFilter,
boolean medianFilter,
boolean invertFilter,
boolean haralickFilter,
boolean gaborFilter,
boolean hurstFilter,
boolean waveletFilter,
boolean gaussianFilter,
boolean gmFilter,
int numberFeatures) |
Creates a new AlgorithmHaralickTexture object for black and white image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
gmFilter
private boolean gmFilter
-
Constructor Detail
-
AlgorithmProstateBoundaryFeature2D
public AlgorithmProstateBoundaryFeature2D(ModelImage destImg,
ModelImage classImage,
ModelImage srcImg,
boolean imageIntensityFilter,
boolean coherenceEnhancingDiffusionFilter,
boolean regisotropicDiffusionFilter,
boolean IHN3CorrectionFilter,
boolean modeFilter,
boolean meanFilter,
boolean medianFilter,
boolean invertFilter,
boolean haralickFilter,
boolean gaborFilter,
boolean hurstFilter,
boolean waveletFilter,
boolean gaussianFilter,
boolean gmFilter,
int numberFeatures)
Creates a new AlgorithmHaralickTexture object for black and white image.
-
Method Detail
-
calculate
private void calculate()
DOCUMENT ME!
-
whichClass
public int whichClass(int pos,
int centerX,
int centerY,
int xDim,
int yDim)
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/BiorthogonalWavelets.realImaginaryComparator.html������������0000775�4231163�4231163�00000030006�14537076060�032531� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BiorthogonalWavelets.realImaginaryComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets.realImaginaryComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PseudoPolarFourierTransform.indexValueComparator.html��������0000775�4231163�4231163�00000030153�14537076060�033377� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PseudoPolarFourierTransform.indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmHilbertTransform.html�������������������������������0000775�4231163�4231163�00000076761�14537076057�026740� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHilbertTransform (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
n |
|
private double[] |
z |
The Hilbert tramsform and the other needed supporting routines are ported from the file transform.c written by
Scott Paine of the Smithsonian Astrophysical Observatory, Submillimeter Receiver Laboratory on February 2, 2010.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
fft_dif(double[] z,
int n) |
void fft_dif(double z[], int n)
Purpose:
Computes the forward discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-frequency FFT.
|
private void |
fft_dif_iter(double[] z,
int n) |
static void fft_dif_iter(double *z, unsigned long n)
Purpose:
Computes the forward discrete Fourier transform of a complex
sequence z, using an iterative radix 2 decimation-in-frequency
FFT.
|
private void |
fft_dif_rec(double[] z,
int n,
int nbranch) |
static void fft_dif_rec(double z[], int n, int nbranch)
Purpose:
Computes the forward discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-frequency FFT.
|
private void |
ifft_dit(double[] z,
int n) |
void ifft_dit(double z[], int n)
Purpose:
Computes the inverse discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-time FFT.
|
private void |
ifft_dit_iter(double[] z,
int n) |
static void ifft_dit_iter(double *z, unsigned long n)
Purpose:
Computes the inverse discrete Fourier transform of a complex
sequence z, using an iterative radix 2 decimation-in-time FFT.
|
private void |
ifft_dit_rec(double[] z,
int n,
int nbranch) |
static void ifft_dit_rec(double z[], int n, int nbranch)
Purpose:
Computes the inverse discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-time FFT.
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
z
private double[] z
The Hilbert tramsform and the other needed supporting routines are ported from the file transform.c written by
Scott Paine of the Smithsonian Astrophysical Observatory, Submillimeter Receiver Laboratory on February 2, 2010.
Scott Paine wrote these routines with the add of Joerg Arndt's excellent text, "Matters Computational," online
at http://www.jjj.de./fxt
All of the functions assume n is a power of 2, without checking
Purpose:
Given a real sequence, initially stored in the complex array z,
this function computes the corresponding analytic sequence. The
imaginary part is the Hilbert transform of the real part.
-
Method Detail
-
fft_dif
private void fft_dif(double[] z,
int n)
void fft_dif(double z[], int n)
Purpose:
Computes the forward discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-frequency FFT.
z[0..2n-1] is an array of n complex numbers, stored in the
usual way with real elements in z[0,2,..2n-2] and imaginary
elements in z[1,3,..2n-1].
Entering this function, z[] should be in normal order. On
return, the FT is stored in bit-reversed order.
n must be a power of 2.
Arguments:
double z[] - array of 2n doubles, representing n complex numbers
int n - dimension of z, must be a power of 2
Return:
none
-
fft_dif_rec
private void fft_dif_rec(double[] z,
int n,
int nbranch)
static void fft_dif_rec(double z[], int n, int nbranch)
Purpose:
Computes the forward discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-frequency FFT.
If the computation is small enough to fit in cache, it is
done iteratively. Otherwise, it is done recursively until
the recursion descends to cache-sized chunks.
z[0..2n-1] is an array of n complex numbers, stored in the
usual way with real elements in z[0,2,..2n-2] and imaginary
elements in z[1,3,..2n-1].
Entering this function, z[] should be in normal order. On
return, the FT is stored in bit-reversed order.
n must be a power of 2.
To support OpenMP parallelism, nbranch keeps track of the
number of active transforms at a given recursion level. On
the first call to this function, nbranch should be 1. It
is then doubled for each recursion.
Arguments:
double z[] - array of 2n doubles, representing n complex numbers
int n - dimension of z, must be a power of 2
int nbranch - number of transforms at this recursion level
Return:
none
-
fft_dif_iter
private void fft_dif_iter(double[] z,
int n)
static void fft_dif_iter(double *z, unsigned long n)
Purpose:
Computes the forward discrete Fourier transform of a complex
sequence z, using an iterative radix 2 decimation-in-frequency
FFT. z[0..2n-1] is an array of n complex numbers, stored in the
usual way with real elements in z[0,2,..2n-2] and imaginary
elements in z[1,3,..2n-1].
Entering this function, z[] should be in normal order. On
return, the FT is stored in bit-reversed order.
n must be a power of 2.
Arguments:
double *z - array of 2n doubles, representing n complex numbers
unsigned long n - dimension of z, must be a power of 2
Return:
none
-
ifft_dit
private void ifft_dit(double[] z,
int n)
void ifft_dit(double z[], int n)
Purpose:
Computes the inverse discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-time FFT.
z[0..2n-1] is an array of n complex numbers, stored in the
usual way with real elements in z[0,2,..2n-2] and imaginary
elements in z[1,3,..2n-1].
Entering this function, z[] should be in bit-reversed order.
The returned inverse FT is restored to normal order.
n must be a power of 2.
Arguments:
double z[] - array of 2n doubles, representing n complex numbers
int n - dimension of z, must be a power of 2
Return:
none
-
ifft_dit_rec
private void ifft_dit_rec(double[] z,
int n,
int nbranch)
static void ifft_dit_rec(double z[], int n, int nbranch)
Purpose:
Computes the inverse discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-time FFT. If the
computation is small enough to fit in cache, it is done
iteratively. Otherwise, it is done recursively until the
recursion descends to cache-sized chunks.
z[0..2n-1] is an array of n complex numbers, stored in the
usual way with real elements in z[0,2,..2n-2] and imaginary
elements in z[1,3,..2n-1].
Entering this function, z[] should be in normal order. On
return, the FT is stored in bit-reversed order.
n must be a power of 2.
To support OpenMP parallelism, nbranch keeps track of the
number of active transforms at a given recursion level. On
the first call to this function, nbranch should be 1. It
is then doubled for each recursion.
Arguments:
double z[] - array of 2n doubles, representing n complex numbers
int n - dimension of z, must be a power of 2
int nbranch - number of transforms at this recursion level
Return:
none
-
ifft_dit_iter
private void ifft_dit_iter(double[] z,
int n)
static void ifft_dit_iter(double *z, unsigned long n)
Purpose:
Computes the inverse discrete Fourier transform of a complex
sequence z, using an iterative radix 2 decimation-in-time FFT.
z[0..2n-1] is an array of n complex numbers, stored in the
usual way with real elements in z[0,2,..2n-2] and imaginary
elements in z[1,3,..2n-1].
Entering this function, z[] should be in bit-reversed order.
The returned inverse FT is restored to normal order.
n must be a power of 2.
Arguments:
double *z - array of 2n doubles, representing n complex numbers
unsigned long n - dimension of z, must be a power of 2
Return:
none
���������������gov/nih/mipav/model/algorithms/filters/AlgorithmLaplacian.html��������������������������������������0000775�4231163�4231163�00000146074�14537076057�025332� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLaplacian (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float |
amplificationFactor |
An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
|
private boolean |
edgeImage |
If true an edge map image should be produced.
|
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private float[] |
GxxData |
Storage location of the second derivative of the Gaussian in the X direction.
|
private float[] |
GyyData |
Storage location of the second derivative of the Gaussian in the Y direction.
|
private float[] |
GzzData |
Storage location of the second derivative of the Gaussian in the Z direction.
|
private float |
hiThres |
Lower and upper threshold values used in the generation of the edge map.
|
private int |
kernelSize |
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
private float |
loThres |
Lower and upper threshold values used in the generation of the edge map.
|
private boolean |
nonLinear |
|
private int |
operationType |
|
private float[] |
outputBufferX |
|
private float[] |
outputBufferY |
|
private float[] |
outputBufferZ |
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
private static int |
xOp |
|
private static int |
yOp |
|
private static int |
zOp |
|
private ModelImage |
zXMask |
Mask(unsigned byte) of the zero-crossings of the Laplacian of the gaussian.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmLaplacian(ModelImage srcImg,
boolean nonLinear,
int kernelSize,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor) |
Constructs a Laplacian algorithm object.
|
AlgorithmLaplacian(ModelImage srcImg,
float[] sigmas,
boolean[] objectBuffer,
boolean img25D,
float ampFactor) |
Constructs a Laplacian algorithm object.
|
AlgorithmLaplacian(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor) |
Constructs a Laplacian algorithm object.
|
AlgorithmLaplacian(ModelImage destImg,
ModelImage srcImg,
boolean nonLinear,
int kernelSize,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor) |
Constructs a Laplacian algorithm object.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calcInPlace2D(int nImages) |
Calculates the Laplacian image and replaces the source image with the new image.
|
private void |
calcInPlace3D() |
Calculates the Laplacian and replaces the source image with the new image.
|
private void |
calcStoreInDest2D(int nImages) |
This function produces the Laplacian of input image.
|
private void |
calcStoreInDest3D() |
This function produces the Laplacian of input image.
|
void |
finalize() |
Prepares this class for destruction.
|
static void |
genLevelMask(int xDim,
int yDim,
float[] buffer,
java.util.BitSet edgeImage,
float level) |
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
|
private void |
genZeroXMask(float[] buffer) |
Generates a zero crossing mask for a 2D function sets a ModelImage to 1 if a zero crossing is detected.
|
ModelImage |
getZeroXMask() |
Accessor to return mask indicating zero crossings.
|
private void |
makeKernels2D() |
Creates Gaussian derivative kernels.
|
private void |
makeKernels3D() |
Creates Gaussian derivative kernels.
|
void |
runAlgorithm() |
Starts the program.
|
private void |
runNonLinear() |
|
void |
setEdgeOptions(float loThres,
float hiThres) |
Call from dialog if you wish to produce edge image.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false on process the image over the mask
areas.
-
kernelSize
private int kernelSize
-
Constructor Detail
-
AlgorithmLaplacian
public AlgorithmLaplacian(ModelImage srcImg,
float[] sigmas,
boolean[] objectBuffer,
boolean img25D,
float ampFactor)
Constructs a Laplacian algorithm object.
- Parameters:
srcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionobjectBuffer - array with true for object, false for backgroundimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed
independently. 2D images disregard this flag.ampFactor - An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
-
AlgorithmLaplacian
public AlgorithmLaplacian(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor)
Constructs a Laplacian algorithm object.
- Parameters:
srcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the Laplacian will be calculated for the whole image if equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently.
2D images disregard this flag.ampFactor - An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
-
AlgorithmLaplacian
public AlgorithmLaplacian(ModelImage srcImg,
boolean nonLinear,
int kernelSize,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor)
Constructs a Laplacian algorithm object.
- Parameters:
srcImg - source image modelnonLinear - If true, use nonlinear LaplaciankernelSize - Used only with nonlinear Laplaciansigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the Laplacian will be calculated for the whole image if equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently.
2D images disregard this flag.ampFactor - An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
-
AlgorithmLaplacian
public AlgorithmLaplacian(ModelImage destImg,
ModelImage srcImg,
boolean nonLinear,
int kernelSize,
float[] sigmas,
boolean maskFlag,
boolean img25D,
float ampFactor)
Constructs a Laplacian algorithm object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelnonLinear - If true, use nonlinear LaplaciankernelSize - Used only with nonlinear Laplaciansigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the Laplacian will be calculated for the whole image if equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently.
2D images disregard this flag.ampFactor - An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
-
Method Detail
-
genLevelMask
public static void genLevelMask(int xDim,
int yDim,
float[] buffer,
java.util.BitSet edgeImage,
float level)
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
- Parameters:
xDim - X dimension lengthyDim - Y dimension lengthbuffer - array of data in which to find level crossingedgeImage - edge map of level crossingslevel - level of crossings to find (e.g. zero crossing of the Laplacian)
-
setEdgeOptions
public void setEdgeOptions(float loThres,
float hiThres)
Call from dialog if you wish to produce edge image.
- Parameters:
loThres - DOCUMENT ME!hiThres - DOCUMENT ME!
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/BM3D.indexValueItem.html�������������������������������������0000775�4231163�4231163�00000026646�14537076060�025202� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BM3D.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.BM3D.indexValueItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValueItem(int index,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
private double value
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public double getValue()
������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmAdaptiveKuwaharaFilter.html�������������������������0000775�4231163�4231163�00000053066�14537076057�030033� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAdaptiveKuwaharaFilter (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmAdaptiveKuwaharaFilter
extends AlgorithmBase
This algorithm is created from the description provided in the article:
"Adaptive Kuwahara Filter" by Krzysztof Bartyzel, Published online
July 6, 2015. This article is published with open access at Springerlink.com.
This article is distributed under the terms of the Creative
Commons Attribution 4.0 International License (http://creativecomm
ons.org/licenses/by/4.0/), which permits unrestricted use, distribution,
and reproduction in any medium, provided you give appropriate credit
to the original author(s) and the source, provide a link to the Creative
Commons license, and indicate if changes were made.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmCoherenceEnhancingDiffusion.html��������������������0000775�4231163�4231163�00000165744�14537076057�031030� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCoherenceEnhancingDiffusion (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float |
derivativeScale |
Gaussian scale for derivative operations.
|
(package private) boolean |
do25D |
flag indicating 2.5D processing.
|
private float[] |
dxKernelX |
Kernels for the X derivative.
|
private float[] |
dxKernelY |
DOCUMENT ME!
|
private float[] |
dxKernelZ |
DOCUMENT ME!
|
private float[] |
dyKernelX |
Kernels for the Y derivative.
|
private float[] |
dyKernelY |
DOCUMENT ME!
|
private float[] |
dyKernelZ |
DOCUMENT ME!
|
private float[] |
dzKernelX |
Kernels for the Z derivative.
|
private float[] |
dzKernelY |
DOCUMENT ME!
|
private float[] |
dzKernelZ |
DOCUMENT ME!
|
private WildMagic.LibFoundation.NumericalAnalysis.Eigenf |
eigenSystemAlgo |
Eigensystem solver.
|
private boolean |
entireImage |
Whether to process the entire image, or just the portion within the currently selected VOI.
|
(package private) float |
gaussianScale |
Gaussian scale for structure tensor smoothing.
|
private float[] |
intermediateBuffer |
Reference to intermediate buffer.
|
(package private) double |
k |
diffusitivity denominator.
|
(package private) double |
k2 |
diffusitivity denominator squared.
|
private int |
kRadius |
Width of the derivative buffer.
|
(package private) int |
numIterations |
The number of iterations.
|
private float[] |
skernelX |
Kernels for the Smoothing kernel.
|
private float[] |
skernelY |
DOCUMENT ME!
|
private float[] |
skernelZ |
DOCUMENT ME!
|
private int |
skRadius |
Width of the smoothing buffer.
|
(package private) float |
timeStep |
The time parameter step size, called tau in the algorithm description In 2D for stability the time step should be
<= 0.25.
|
private int |
xDim |
image dimensions.
|
private int |
yDim |
image dimensions.
|
private int |
zDim |
image dimensions.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmCoherenceEnhancingDiffusion(ModelImage srcImg,
int numI,
float k,
float derivativeScale,
float gaussianScale,
boolean do25D,
boolean entireImage) |
Creates a new AlgorithmCoherenceEnhancingDiffusion object.
|
AlgorithmCoherenceEnhancingDiffusion(ModelImage destImg,
ModelImage srcImg,
int numI,
float k,
float derivativeScale,
float gaussianScale,
boolean do25D,
boolean entireImage) |
Creates a new AlgorithmCoherenceEnhancingDiffusion object.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
computeDx(float[] dx,
float[] src) |
DOCUMENT ME!
|
private void |
computeDx3D(float[] dx,
float[] src) |
DOCUMENT ME!
|
private void |
computeDy(float[] dy,
float[] src) |
DOCUMENT ME!
|
private void |
computeDy3D(float[] dy,
float[] src) |
DOCUMENT ME!
|
private void |
computeDz(float[] dz,
float[] src) |
DOCUMENT ME!
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
gaussianSmooth(float[] gs,
float[] src) |
DOCUMENT ME!
|
private void |
gaussianSmooth3D(float[] gs,
float[] src) |
DOCUMENT ME!
|
private float |
getVal(float[] buffer,
int col,
int row) |
Returns the value in a 2D image buffer of the pixel at location row, col.
|
private float |
getVal(float[] buffer,
int col,
int row,
int slice) |
Returns the value in a 3D image buffer of the pixel at location slice, row, col.
|
private void |
init() |
Initialize buffers and kernels.
|
private static float |
max(float a,
float b) |
Computes the maximum of two floating point numbers passed in.
|
private void |
run2D(int numImages) |
Starts the algorithm for 2D images.
|
private void |
run2DC(int numImages) |
Starts the algorithm for 2D images.
|
private void |
run3D() |
Starts the algorithm for 3D images.
|
private void |
run3DC() |
Starts the algorithm for 3D color images.
|
void |
runAlgorithm() |
Starts the program.
|
private void |
setVal(float val,
float[] buffer,
int col,
int row) |
Sets the value in a 2D image buffer at location row, col.
|
private void |
setVal(float val,
float[] buffer,
int col,
int row,
int slice) |
Sets the value in a 3D image buffer at location row, col.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Whether to process the entire image, or just the portion within the currently selected VOI.
-
skernelY
private float[] skernelY
DOCUMENT ME!
-
skernelZ
private float[] skernelZ
DOCUMENT ME!
-
xDim
private int xDim
image dimensions.
-
yDim
private int yDim
image dimensions.
-
zDim
private int zDim
image dimensions.
-
Constructor Detail
-
AlgorithmCoherenceEnhancingDiffusion
public AlgorithmCoherenceEnhancingDiffusion(ModelImage srcImg,
int numI,
float k,
float derivativeScale,
float gaussianScale,
boolean do25D,
boolean entireImage)
Creates a new AlgorithmCoherenceEnhancingDiffusion object.
- Parameters:
srcImg - Source image modelnumI - Number of iterationsk - Diffusitivity denominatorderivativeScale - Scale of the gaussian when taking derivativesgaussianScale - Scale of the gaussian for smoothing the structure tensordo25D - Flag indicating 2.5D processingentireImage - whether to filter the entire image or just the VOI region
-
AlgorithmCoherenceEnhancingDiffusion
public AlgorithmCoherenceEnhancingDiffusion(ModelImage destImg,
ModelImage srcImg,
int numI,
float k,
float derivativeScale,
float gaussianScale,
boolean do25D,
boolean entireImage)
Creates a new AlgorithmCoherenceEnhancingDiffusion object.
- Parameters:
destImg - Image model where result image is to storedsrcImg - Source image modelnumI - Number of iterationsk - Diffusitivity denominatorderivativeScale - Scale of the gaussian when taking derivativesgaussianScale - Scale of the gaussian for smoothing the structure tensordo25D - Flag indicating 2.5D processingentireImage - whether to filter the entire image or just the VOI region
-
Method Detail
-
max
private static float max(float a,
float b)
Computes the maximum of two floating point numbers passed in.
- Parameters:
a - float The first valueb - float The second value- Returns:
- float The maximum of values a and b
-
getVal
private float getVal(float[] buffer,
int col,
int row)
Returns the value in a 2D image buffer of the pixel at location row, col.
- Parameters:
buffer - float[] The image buffercol - int Column indexrow - int Row index- Returns:
- float The pixel value
-
getVal
private float getVal(float[] buffer,
int col,
int row,
int slice)
Returns the value in a 3D image buffer of the pixel at location slice, row, col.
- Parameters:
buffer - float[] The image buffercol - int Column indexrow - int Row indexslice - int Slice index- Returns:
- float The pixel value
-
setVal
private void setVal(float val,
float[] buffer,
int col,
int row)
Sets the value in a 2D image buffer at location row, col.
- Parameters:
val - float The value to set the pixel tobuffer - float[] 2D image buffercol - int Column indexrow - int Row index
-
setVal
private void setVal(float val,
float[] buffer,
int col,
int row,
int slice)
Sets the value in a 3D image buffer at location row, col.
- Parameters:
val - float The value to set the pixel tobuffer - float[] 3D image buffercol - int Column indexrow - int Row indexslice - int Slice index
����������������������������gov/nih/mipav/model/algorithms/filters/BiorthogonalWavelets.realImaginaryItem.html������������������0000775�4231163�4231163�00000030521�14537076060�031322� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BiorthogonalWavelets.realImaginaryItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets.realImaginaryItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
imaginary |
DOCUMENT ME!
|
private double |
real |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
realImaginaryItem(double real,
double imaginary) |
Creates a new realImaginaryItem object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getReal
public double getReal()
DOCUMENT ME!
- Returns:
- DOCUMENT ME!
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmRegularizedIsotropicDiffusion.html������������������0000775�4231163�4231163�00000131777�14537076060�031464� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegularizedIsotropicDiffusion (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private float |
diffusivity(float d) |
Returns the weighting for values used in computing new (diffused) pixel values.
|
void |
finalize() |
Prepares this class for destruction.
|
private float |
getVal(float[] buffer,
int col,
int row) |
Returns the value in a 2D image buffer of the pixel at location col, row.
|
private float |
getVal(float[] buffer,
int col,
int row,
int slice) |
Returns the value in a 3D image buffer of the pixel at location col, row, slice.
|
private void |
gradientMagnitude(float[] img,
float[] mag) |
Computes the gradient magnitude of the buffer passed in.
|
private void |
gradientMagnitude3D(float[] img,
float[] mag) |
Computes the gradient magnitude of the buffer passed in.
|
private void |
makeKernels1D(boolean do3D) |
DOCUMENT ME!
|
private void |
run2D(int numImages) |
Iterates the Regularized Isotropic Nonlinear Diffusion algorithm for 2D and 2.5D images.
|
private void |
run2DC(int numImages) |
Iterates the Regularized Isotropic Nonlinear Diffusion algorithm for 2D and 2.5D color images.
|
private void |
run3D() |
Iterates the Regularized Isotropic Nonlinear Diffusion algorithm for 3D images.
|
private void |
run3DC() |
Iterates the Regularized Isotropic Nonlinear Diffusion algorithm for 3D color images.
|
void |
runAlgorithm() |
Starts the program.
|
private void |
upDateImage(float[] resltBuffer,
float[] srcBuffer,
float[] gradBuffer) |
DOCUMENT ME!
|
private void |
upDateImage3D(float[] resltBuffer,
float[] srcBuffer,
float[] gradBuffer) |
DOCUMENT ME!
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
xDim
private int xDim
Image dimensions.
-
yDim
private int yDim
Image dimensions.
-
zDim
private int zDim
Image dimensions.
-
Constructor Detail
-
AlgorithmRegularizedIsotropicDiffusion
public AlgorithmRegularizedIsotropicDiffusion(ModelImage destImg,
ModelImage srcImg,
int numI,
float stdDev,
float contrast,
boolean do25D)
Creates a new AlgorithmRegularizedIsotropicDiffusion object.
- Parameters:
destImg - ModelImage image model where result image is to storedsrcImg - ModelImage source image modelnumI - int number of iterationsstdDev - float standard deviation used in the Gaussianscontrast - float diffusion contrast parameterdo25D - boolean If true, process each slice separately
-
Method Detail
-
getVal
private float getVal(float[] buffer,
int col,
int row)
Returns the value in a 2D image buffer of the pixel at location col, row.
- Parameters:
buffer - float[] The image buffercol - int Column indexrow - int Row index- Returns:
- float The pixel value
-
getVal
private float getVal(float[] buffer,
int col,
int row,
int slice)
Returns the value in a 3D image buffer of the pixel at location col, row, slice.
- Parameters:
buffer - float[] The image buffercol - int Column indexrow - int Row indexslice - int Slice index- Returns:
- float The pixel value
-
gradientMagnitude
private void gradientMagnitude(float[] img,
float[] mag)
Computes the gradient magnitude of the buffer passed in. This version computes values for the image borders and
corners
- Parameters:
img - float [] source buffermag - float [] a buffer where the gradient magnitude will be placed
-
gradientMagnitude3D
private void gradientMagnitude3D(float[] img,
float[] mag)
Computes the gradient magnitude of the buffer passed in. This version computes values for the image borders and
corners
- Parameters:
img - float [] source buffermag - float [] a buffer where the gradient magnitude will be placed
�gov/nih/mipav/model/algorithms/filters/AlgorithmLawsTexture.html������������������������������������0000775�4231163�4231163�00000074643�14537076057�025737� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLawsTexture (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private ModelImage[] |
destImage |
|
private static int[] |
E3 |
Edge 3
|
private static int[] |
E5 |
Edge 5
|
private static int[] |
E7 |
Edge 7
|
private static int[] |
L3 |
Level 3
|
private static int[] |
L5 |
Level 5
|
private static int[] |
L7 |
Level 7
|
private static int[] |
O7 |
Oscillation 7
|
private static int[] |
R5 |
Ripple 5
|
private static int[] |
R7 |
Ripple 7
|
private static int |
RED_OFFSET |
Red channel.
|
private int |
RGBOffset |
|
private static int[] |
S3 |
Spot 3
|
private static int[] |
S5 |
Spot 5
|
private static int[] |
S7 |
Spot 7
|
private static int[] |
W5 |
Wave 5
|
private static int[] |
W7 |
Wave 7
|
private int |
windowSize |
Size of square window must be 3, 5, or 7
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
RGBOffset
private int RGBOffset
-
Constructor Detail
-
AlgorithmLawsTexture
public AlgorithmLawsTexture(ModelImage[] destImg,
ModelImage srcImg,
int windowSize,
int RGBOffset)
- Parameters:
destImg - srcImg - windowSize - RGBOffset -
���������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmN4MRIBiasFieldCorrectionFilter.html�����������������0000775�4231163�4231163�00000131020�14537076057�031221� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmN4MRIBiasFieldCorrectionFilter (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmN4MRIBiasFieldCorrectionFilter(ModelImage destImg,
ModelImage fieldImage,
ModelImage srcImg,
int maximumIterations,
double convergenceThreshold,
double biasFieldFullWidthAtHalfMaximum,
double WienerFilterNoise,
int fittingLevels,
int controlPoints,
ModelImage confidenceImage,
boolean maskFlag) |
Constructor which sets the source and destination images
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If
false either: 1.) Process where the mask is set true 2.) Make sure the
mask is set false and process where the confidence image is > 0.0
-
length
private int length
-
origin
private float[] origin
-
sliceSize
private int sliceSize
-
xyzSize
private int xyzSize
-
maskIndex
private int[] maskIndex
-
selfTest
private boolean selfTest
-
Constructor Detail
-
AlgorithmN4MRIBiasFieldCorrectionFilter
public AlgorithmN4MRIBiasFieldCorrectionFilter(ModelImage destImg,
ModelImage fieldImage,
ModelImage srcImg,
int maximumIterations,
double convergenceThreshold,
double biasFieldFullWidthAtHalfMaximum,
double WienerFilterNoise,
int fittingLevels,
int controlPoints,
ModelImage confidenceImage,
boolean maskFlag)
Constructor which sets the source and destination images
- Parameters:
destImg - the destination imagefieldImage - srcImg - the source imageconfidenceImage - maskFlag - the mask flag
-
Method Detail
-
selfTest
private void selfTest()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PseudoPolarFourierTransform.indexValueItem.html��������������0000775�4231163�4231163�00000027136�14537076060�032175� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PseudoPolarFourierTransform.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform.indexValueItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValueItem(int index,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
private double value
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public double getValue()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmLocalVariance.html����������������������������������0000775�4231163�4231163�00000057463�14537076057�026154� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLocalVariance (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
do25D |
|
private boolean |
entireImage |
|
private int |
halfK |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmLocalVariance(ModelImage destImg,
ModelImage srcImg,
int kernelSize,
boolean do25D,
boolean entireImage) |
Constructor for 3D images in which changes are placed in a predetermined destination image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
do25D
private boolean do25D
-
Constructor Detail
-
AlgorithmLocalVariance
public AlgorithmLocalVariance(ModelImage destImg,
ModelImage srcImg,
int kernelSize,
boolean do25D,
boolean entireImage)
Constructor for 3D images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.kernelSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).do25D - Each slice in a volume image is filtered separately (when true), else the volume will use a
kernel with 3 dimensions.maskFlag - Flag that indicates that the mean filtering will be performed for the whole image if equal
to true.
-
Method Detail
-
run2D
private void run2D()
-
run3D
private void run3D()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PyWavelets.WAVELET_NAME.html���������������������������������0000775�4231163�4231163�00000046461�14537076060�025601� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PyWavelets.WAVELET_NAME (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
WAVELET_NAME() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
WAVELET_NAME
private WAVELET_NAME()
-
Method Detail
-
valueOf
public static PyWavelets.WAVELET_NAME valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmProstateBoundaryExt.html����������������������������0000775�4231163�4231163�00000105650�14537076057�027427� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmProstateBoundaryExt (MIPAV API Documentation)
-
- All Implemented Interfaces:
AlgorithmInterface, java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmProstateBoundaryExt
extends AlgorithmBase
implements AlgorithmInterface
This algorithm traces the prostate boundary from the target image, non prostate binary mask image and
prostate boundary binary mask image. After AAM generates the initial contour, the contour is copied
to all the three images. Target image represent the test image original intensity texture. non-prostate
binary image and prostate boundary image are generated from SVM classification.
Current tracing mechanism is polar coordinate based, along the AAM generated initial contour landmark points,
the alpha angel ranges from 0 to 360 degree, the alpha expansion line is used for tracing the ideal prostate
boundary point. A basic voting mechanism is applied to find the ideal point.
Lately, we will use normal line of the contour curve from the landmark point to represent the tracing path.
- Author:
- Ruida Cheng
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
resultVOI
private VOI resultVOI
result VOI
-
Constructor Detail
-
AlgorithmProstateBoundaryExt
public AlgorithmProstateBoundaryExt(ModelImage _srcImage,
ModelImage _nonProstateImage,
ModelImage _boundaryImage,
int _imageSliceNumber)
Constructor
- Parameters:
_srcImage - target image_nonProstateImage - non-prostate binary mask image_boundaryImage - prostate boundary mask image._imageSliceNumber - image slice number, trivial.
-
Method Detail
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
-
smoothVOI30
public void smoothVOI30(ModelImage maskImage,
ModelImage resultImage)
Smooth the AAM initial generated contour with 30 landmark points.
- Parameters:
maskImage - binary mask imageresultImage - result image
����������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmTamuraTexture.html����������������������������������0000775�4231163�4231163�00000077355�14537076060�026257� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTamuraTexture (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmTamuraTexture(ModelImage[] destImage,
ModelImage srcImg,
boolean doCoarseness,
double coarsenessThreshold,
boolean doContrast,
int cSize,
boolean doDirectionality,
int histogramBins,
double histogramThreshold) |
Creates a new AlgorithmTamuraTexture object for black and white image.
|
AlgorithmTamuraTexture(ModelImage[] destImage,
ModelImage srcImg,
int RGBOffset,
boolean doCoarseness,
double coarsenessThreshold,
boolean doContrast,
int cSize,
boolean doDirectionality,
int histogramBins,
double histogramThreshold) |
Creates a new AlgorithmTamuraTexture object for color image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
coarsenessThreshold
private double coarsenessThreshold
coarsenessThreshold must be <= 1.0.
If coarsenessThreshold < 1.0, select the largest k for which Ek >= coarsenessThreshold * Emax.
If coarsenessThreshold = 1.0, select the largest k which gives Emax.
-
RGBOffset
private int RGBOffset
-
Constructor Detail
-
AlgorithmTamuraTexture
public AlgorithmTamuraTexture(ModelImage[] destImage,
ModelImage srcImg,
boolean doCoarseness,
double coarsenessThreshold,
boolean doContrast,
int cSize,
boolean doDirectionality,
int histogramBins,
double histogramThreshold)
Creates a new AlgorithmTamuraTexture object for black and white image.
- Parameters:
destImage - arraysrcImg - source image modeldoCoarseness - coarsenessThreshold - doContrast - cSize - doDirectionality - histogramBins - histogramThreshold -
-
AlgorithmTamuraTexture
public AlgorithmTamuraTexture(ModelImage[] destImage,
ModelImage srcImg,
int RGBOffset,
boolean doCoarseness,
double coarsenessThreshold,
boolean doContrast,
int cSize,
boolean doDirectionality,
int histogramBins,
double histogramThreshold)
Creates a new AlgorithmTamuraTexture object for color image.
- Parameters:
destImage - arraysrcImg - source image modelRGBOffset - selects red, green, or blue channeldoCoarseness - coarsenessThreshold - doContrast - cSize - doDirectionality - histogramBins - histogramThreshold -
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmTrilateralFilter.html�������������������������������0000775�4231163�4231163�00000126752�14537076060�026712� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTrilateralFilter (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmTrilateralFilter
extends AlgorithmBase
This is a port of openCVtrilateralFilter.h and openCVtrilateralFilter.cpp
written by Tobi Vaudrey. These files were released under the 3-clause BSD license
References: 1.) "Fast Trilateral Filtering" by Tobi Vaudrey and Reinhard Klette,
Conference Paper in Lecture Notes in Computer Science, September,
2009, DOI: 10.1007/978-3-642-03767-2_66
2.) "The Trilateral Filter for High Contrast Images and Meshes" by
Prasun Choudhury and Jack Tumblin, Eurographics Symposium on
Rendering 2003, pp. 1-11, Per Christensen and Daniel Cohen-Or (Editors)
By downloading, copying, installing or using the software you agree to this license.
If you do not agree to this license, do not download, install,
copy or use the software.
License Agreement
For Open Source Computer Vision Library
(3-clause BSD License)
Copyright (C) 2000-2020, Intel Corporation, all rights reserved.
Copyright (C) 2009-2011, Willow Garage Inc., all rights reserved.
Copyright (C) 2009-2016, NVIDIA Corporation, all rights reserved.
Copyright (C) 2010-2013, Advanced Micro Devices, Inc., all rights reserved.
Copyright (C) 2015-2016, OpenCV Foundation, all rights reserved.
Copyright (C) 2015-2016, Itseez Inc., all rights reserved.
Copyright (C) 2019-2020, Xperience AI, all rights reserved.
Third party copyrights are property of their respective owners.
Redistribution and use in source and binary forms, with or without modification,
are permitted provided that the following conditions are met:
Redistributions of source code must retain the above copyright notice,
this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright notice,
this list of conditions and the following disclaimer in the documentation
and/or other materials provided with the distribution.
Neither the names of the copyright holders nor the names of the contributors
may be used to endorse or promote products derived from this software
without specific prior written permission.
This software is provided by the copyright holders and contributors "as is" and
any express or implied warranties, including, but not limited to, the implied
warranties of merchantability and fitness for a particular purpose are disclaimed.
In no event shall copyright holders or contributors be liable for any direct,
indirect, incidental, special, exemplary, or consequential damages
(including, but not limited to, procurement of substitute goods or services;
loss of use, data, or profits; or business interruption) however caused
and on any theory of liability, whether in contract, strict liability,
or tort (including negligence or otherwise) arising in any way out of
the use of this software, even if advised of the possibility of such damage.
(c) 2021 GitHub, Inc.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
BilateralGradientFilter(double[][] xGradient,
double[][] yGradient,
double[][] gradientMagnitude,
double sigmaC,
double sigmaR,
double epsilon,
double[][] xGradientSmooth,
double[][] yGradientSmooth) |
|
void |
BilateralGradientFilterLUT(double[][] xGradient,
double[][] yGradient,
double[][] gradientMagnitude,
double sigmaC,
double sigmaR,
double[][] xGradientSmooth,
double[][] yGradientSmooth) |
|
void |
buildMinMaxImageStack(double[][] gradientMagnitude,
double[][][] minStack,
double[][][] maxStack) |
|
void |
computeGradients(double[][] inputImg,
double[][] xGradient,
double[][] yGradient) |
|
void |
computeMagnitude(double[][] xGradient,
double[][] yGradient,
double[][] gradientMagnitude) |
|
double[][] |
copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue) |
|
void |
DetailBilateralFilter(double[][] inputImage,
double[][] adaptiveRegion,
double[][] xGradientSmooth,
double[][] yGradientSmooth,
double sigmaC,
double sigmaR,
int maxDomainSize,
double epsilon,
double[][] outputImg) |
|
void |
DetailBilateralFilterLUT(double[][] inputImage,
double[][] adaptiveRegion,
double[][] xGradientSmooth,
double[][] yGradientSmooth,
double sigmaC,
double sigmaR,
int maxDomainSize,
double[][] outputImg) |
|
private int |
log2(int input,
boolean roundUp) |
|
void |
minMaxLoc(double[][] input,
double[] minGrad,
double[] maxGrad) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
setAdaptiveNeighbourHood(double[][] gradientMagnitude,
double sigmaR,
int maxLevel,
double[][] adaptiveNeighborhood) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
sigmaC
private double sigmaC
-
epsilon
private double epsilon
-
filterType
private int filterType
-
length
private int length
-
Constructor Detail
-
AlgorithmTrilateralFilter
public AlgorithmTrilateralFilter(ModelImage destImg,
ModelImage srcImg,
double sigmaC,
double epsilon,
int filterType)
-
Method Detail
-
setAdaptiveNeighbourHood
public void setAdaptiveNeighbourHood(double[][] gradientMagnitude,
double sigmaR,
int maxLevel,
double[][] adaptiveNeighborhood)
-
BilateralGradientFilterLUT
public void BilateralGradientFilterLUT(double[][] xGradient,
double[][] yGradient,
double[][] gradientMagnitude,
double sigmaC,
double sigmaR,
double[][] xGradientSmooth,
double[][] yGradientSmooth)
-
BilateralGradientFilter
public void BilateralGradientFilter(double[][] xGradient,
double[][] yGradient,
double[][] gradientMagnitude,
double sigmaC,
double sigmaR,
double epsilon,
double[][] xGradientSmooth,
double[][] yGradientSmooth)
-
DetailBilateralFilterLUT
public void DetailBilateralFilterLUT(double[][] inputImage,
double[][] adaptiveRegion,
double[][] xGradientSmooth,
double[][] yGradientSmooth,
double sigmaC,
double sigmaR,
int maxDomainSize,
double[][] outputImg)
-
DetailBilateralFilter
public void DetailBilateralFilter(double[][] inputImage,
double[][] adaptiveRegion,
double[][] xGradientSmooth,
double[][] yGradientSmooth,
double sigmaC,
double sigmaR,
int maxDomainSize,
double epsilon,
double[][] outputImg)
-
copyMakeBorder
public double[][] copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue)
����������������������gov/nih/mipav/model/algorithms/filters/AlgorithmFuzzyMinimization.html������������������������������0000775�4231163�4231163�00000100524�14537076057�027153� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFuzzyMinimization (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmFuzzyMinimization
extends AlgorithmBase
This algorithm performs minimization of fuzziness, a reduction of the amount of fuzziness. This method is probably the first
fuzzy approach to image enhancement and is also known in the literature as contrast intensification operator. The main idea
is to reduce the amount of image fuzziness. The algorithm is as follows:
1.) Gray-level fuzzification (u(g) denotes the degree of brightness)
u(g) = pow(1 + (gmax - g)/Fd, -Fe)
where Fd and Fe are the exponential and denominational fuzzifiers that control the amount of grayness ambiguity in the
membership plane. Suitable values for Fe are 1 and 2. Fd is computed from a user selected crossover gray scale value, gc,
at which u(gc) = 0.5. gmax is the maximum gray level in the new image. gmax >= srcMax.
alpha = pow(1 + (gmax - gmin)/Fd, -Fe)
gmin <= srcMin
2.) Membership modification using successive application of Zadeh's intensification operator
for (iters = 1; iters <= iterations; iters++) {
u(g) = 2*u(g)*u(g) if 0 <= u(g) <= 0.5
u(g) = 1 - 2*[1 - u(g)]*[1 - u(g)] if 0.5 < u(g) <= 1
if (u(g) < alpha) {
// This prevents the gray level from decreasing below gmin
u(g) = alpha
}
} // for (iters = 1; iters <= iterations; iters++)
This operation decreases values of u(g) which are <= 0.5 and increases those values of u(g)which are above 0.5.
As the number of iterations approaches infinity, a 2 level binary image is produced. The amount of contrast
enhancement can be increased either by increasing the number of iterations or by increasing the value of Fe.
Values below the crossover value will be decreased and values above the crossover value will be increased.
3.) New gray-levels by defuzzification
g' = gmax - Fd*(pow(u(g), -1.0/Fe) - 1.0)
References: 1.) Tizhoosh, H. R., "Fuzzy Image Enhancement: An Overview," in Fuzzy Techniques in Image Processing,
E. Kerre and M. Nachtegael, eds., Springer-Verlag, New York, 2000, pp. 140-141.
2.) Sankar K. Pal and Robert A. King, "Image Enhancement Using Smoothing with Fuzzy Sets", IEEE Transactions on
Systems, Man, and Cybernetics, vol. smc-11, no. 7, July, 1981.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
crossVal |
The crossover gray scale value at which u(crossVal) = 0.5
|
private boolean |
entireImage |
true means apply to entire image, false only region.
|
private double |
expFuzzifier |
Exponential fuzzifier between 1.0 and 2.0
|
private double |
gmax |
The new maximum level gmax >= srcMax
|
private double |
gmin |
The new minimum level gmin <= srcMin
|
private int |
iterations |
number of times to filter the image.
|
private java.util.BitSet |
mask |
contains VOI.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFuzzyMinimization(ModelImage srcImg,
int iters,
double crossVal,
double expFuzzifier,
double gmin,
double gmax,
boolean maskFlag) |
Constructor for images in which changes are returned to the source image.
|
AlgorithmFuzzyMinimization(ModelImage destImg,
ModelImage srcImg,
int iters,
double crossVal,
double expFuzzifier,
double gmin,
double gmax,
boolean maskFlag) |
Constructor for images in which changes are placed in a predetermined destination image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmFuzzyMinimization
public AlgorithmFuzzyMinimization(ModelImage srcImg,
int iters,
double crossVal,
double expFuzzifier,
double gmin,
double gmax,
boolean maskFlag)
Constructor for images in which changes are returned to the source image.
- Parameters:
srcImg - Source image model.iters - Number of iterations of the fuzzy minimization filter.crossVal - crossover gray scale value at which u(crossVal) = 0.5expFuzzifier - exponential fuzzifier between 1.0 and 2.0gmin - The new minimum level gmin <= srcMingmax - The new maximum level gmax >= srcMaxmaskFlag - Flag that indicates that the fuzzy minimization filtering will be performed for the whole image if equal to
true.
-
AlgorithmFuzzyMinimization
public AlgorithmFuzzyMinimization(ModelImage destImg,
ModelImage srcImg,
int iters,
double crossVal,
double expFuzzifier,
double gmin,
double gmax,
boolean maskFlag)
Constructor for images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.iters - Number of iterations of the fuzzy minimization filter.crossVal - crossover gray scale value at which u(crossVal) = 0.5expFuzzifier - exponential fuzzifier between 1.0 and 2.0gmin - The new minimum level gmin <= srcMingmax - The new maximum level gmax >= srcMaxmaskFlag - Flag that indicates that the fuzzy minimization filtering will be performed for the whole image if equal to
true.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmEdgePreservingSmoothing.html������������������������0000775�4231163�4231163�00000057477�14537076057�030257� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEdgePreservingSmoothing (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmEdgePreservingSmoothing
extends AlgorithmBase
These are Maximum Homogeneity Neighbor Filters.
The standard from Nagao:
At each point the variance of 9 masks are compared with each other, and the average gray level
of the least variance mask is given to the point. There is one traditional 3 by 3 mask, an up
7 point pentagonal mask, a down 7 point pentagonal mask, a left 7 point pentagonal mask, a
right 7 point pentagonal mask, and 4 diagonal 7 point hexagonal masks.
Extended From Wang:
The 9 masks used all have 9 points. 5 are traditional 3 by 3 masks. 4 are 5,3,1 stacks.
- Author:
- ilb
References: 1.) Edge Preserving Smoothing by Makoto Nagao and Takashi Matsuyama, Proceedings of the
Fourth International Joint Conference on Pattern Recognition, November, 1978, pp. 518-520.
2.) A New Approach to Edge-Preserving Smoothing for Edge Extraction and Image Segmentation by
Carsten Garnica, Frank Boochs, and Marek Twardochlib, International Archives of Photogrammetry
and Remote Sensing, Vol. XXXIII, Part B3., Amsterdam, 2000.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
iterations
private int iterations
-
standard
private boolean standard
-
Constructor Detail
-
AlgorithmEdgePreservingSmoothing
public AlgorithmEdgePreservingSmoothing(ModelImage destImg,
ModelImage srcImg,
boolean standard,
int iters,
boolean entireImage)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/BM3D.html����������������������������������������������������0000775�4231163�4231163�00000131344�14537076060�022250� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BM3D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
BM3D(ModelImage[] destImage,
ModelImage srcImg,
boolean estimateNoiseStandardDeviation,
double sigma,
int n_H,
int N_H,
int p_H,
boolean useSD_H,
java.lang.String tau_2D_H,
double lambda3D_H,
int n_W,
int N_W,
int p_W,
boolean useSD_W,
java.lang.String tau_2D_W) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[][] |
bm3d_1st_step(double sigma,
ModelImage img_noisy,
int nHard,
int kHard,
int NHard,
int pHard,
double lambdaHard3D,
double tauMatch,
boolean useSD,
java.lang.String tau_2D) |
|
private double[][] |
bm3d_2nd_step(double sigma,
ModelImage img_noisy,
ModelImage img_basic,
int nWien,
int kWien,
int NWien,
int pWien,
double tauMatch,
boolean useSD,
java.lang.String tau_2D) |
|
private double[][][] |
build_3D_group(java.util.Vector<java.util.Vector<double[][]>> fre_all_patches,
int[][] N__ni_nj,
int nSx_r) |
|
private int[] |
closest_power_of_2(int[] M,
int max_) |
|
private void |
get_add_patch_matrix(int h,
int w,
int nHW,
int kHW,
double[][] row_add_mat,
double[][] column_add_mat) |
|
private double[][] |
get_kaiserWindow(int kHW) |
|
private double[][][] |
ht_filtering_hadamard(double[][][] group_3D,
double sigma,
double lambdaHard3D,
boolean doWeight,
double[] weight) |
|
private java.util.Vector<java.util.Vector<double[][]>> |
image2patches(ModelImage im,
int patch_h,
int patch_w) |
|
private int[] |
ind_initialize(int max_size,
int N,
int step) |
|
private double[] |
kaiser(int M,
double beta) |
|
private double |
log2(double x) |
|
private int[][][][] |
precompute_BM(ModelImage img,
int kHW,
int NHW,
int nHW,
double tauMatch,
int[][] threshold_count) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private double |
sd_weighting(double[][][] group_3D) |
|
private ModelImage |
symetrize(ModelImage img,
int pad) |
|
private double[][] |
translation_2d_mat(double[][] mat,
int right,
int down) |
|
private double[][][] |
wiener_filtering_hadamard(double[][][] group_3D_img,
double[][][] group_3D_est,
double sigma,
boolean doWeight,
double[] weight) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
sigma
private double sigma
-
useSD_H
private boolean useSD_H
-
useSD_W
private boolean useSD_W
-
Constructor Detail
-
BM3D
public BM3D(ModelImage[] destImage,
ModelImage srcImg,
boolean estimateNoiseStandardDeviation,
double sigma,
int n_H,
int N_H,
int p_H,
boolean useSD_H,
java.lang.String tau_2D_H,
double lambda3D_H,
int n_W,
int N_W,
int p_W,
boolean useSD_W,
java.lang.String tau_2D_W)
-
Method Detail
-
bm3d_2nd_step
private double[][] bm3d_2nd_step(double sigma,
ModelImage img_noisy,
ModelImage img_basic,
int nWien,
int kWien,
int NWien,
int pWien,
double tauMatch,
boolean useSD,
java.lang.String tau_2D)
-
wiener_filtering_hadamard
private double[][][] wiener_filtering_hadamard(double[][][] group_3D_img,
double[][][] group_3D_est,
double sigma,
boolean doWeight,
double[] weight)
-
bm3d_1st_step
private double[][] bm3d_1st_step(double sigma,
ModelImage img_noisy,
int nHard,
int kHard,
int NHard,
int pHard,
double lambdaHard3D,
double tauMatch,
boolean useSD,
java.lang.String tau_2D)
-
ht_filtering_hadamard
private double[][][] ht_filtering_hadamard(double[][][] group_3D,
double sigma,
double lambdaHard3D,
boolean doWeight,
double[] weight)
-
precompute_BM
private int[][][][] precompute_BM(ModelImage img,
int kHW,
int NHW,
int nHW,
double tauMatch,
int[][] threshold_count)
-
get_add_patch_matrix
private void get_add_patch_matrix(int h,
int w,
int nHW,
int kHW,
double[][] row_add_mat,
double[][] column_add_mat)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmMedian.html�����������������������������������������0000775�4231163�4231163�00000315072�14537076057�024637� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMedian (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
ADAPTIVE_SIZE |
|
static int |
ADAPTIVE_TRUNCATED_VECTOR_MEDIAN_FILTER |
|
static int |
AXIAL_KERNEL |
(3D only).
|
private boolean |
bChannel |
the blue channel.
|
(package private) int |
bdrBufferDepth |
Border buffer number of slices.
|
(package private) int |
bdrBufferHeight |
Border buffer number of rows.
|
(package private) int |
bdrBufferWidth |
Border buffer number of columns.
|
private int |
colorFilterType |
Either COMPONENT_FILTER, VECTOR_MAGNITUDE_FILTER, VECTOR_DIRECTION_FILTER, or ADAPTIVE_TRUNCATED_VECTOR_MEDIAN_FILTER
For a vector filter the new red, green, and blue will all come from the same pixel.
|
static int |
COMPONENT_FILTER |
|
static int |
CROSS_KERNEL |
cross (2D only).
|
static int |
CUBE_KERNEL |
(3D only).
|
private int |
currentSlice |
Used for 3D loop control.
|
private float |
delta |
Used in adaptive truncated vector median filter used on color images
If the changes in the RGB components are all less than a threshold
delta then the color image pixels are not changed, otherwise they are
replaced by the ATVMF.
|
private boolean |
entireImage |
true means apply to entire image, false only region.
|
private int |
filterType |
|
private boolean |
gChannel |
the green channel.
|
private int[] |
halfK |
The kernel radius.
|
static int |
HORZ_KERNEL |
horizontal (2D only).
|
private boolean |
isColorImage |
indicates the image is a color image.
|
private int |
iterations |
number of times to filter the image.
|
private byte[][] |
kernel |
mask to determine the region of pixels used in a median filter.
|
private int[] |
kernelCenter |
The index of the kernel center.
|
private float[][] |
kernelMask |
The kernel.
|
private int |
kernelNumber |
Number of kernels used, more than 1 if adaptive filtering is used
|
private int |
kernelShape |
user-selectable shape of the region for neighbor-selection.
|
private int[] |
kernelSize |
dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).
|
private float[][] |
kernelVectorMask |
|
private java.util.BitSet |
mask |
contains VOI.
|
private int[] |
maskCenter |
The kernel.
|
private int |
maximumSize |
When adaptiveSize is true, the maximum size the kernel mask can be increased to.
|
private int |
minimumSize |
Smallest kernel size used in adaptive filtering
|
private int |
numberOfSlices |
Used for 3D loop control.
|
private boolean |
rChannel |
// if T, filter the red channel.
|
private boolean |
sliceFiltering |
do all filtering slice-by-slice, rather than as a volume.
|
static int |
SQUARE_KERNEL |
square kernel (2D only).
|
(package private) int |
srcBufferDepth |
Source buffer number of slices.
|
(package private) int |
srcBufferHeight |
Source buffer number of rows.
|
(package private) int |
srcBufferWidth |
Source buffer number of columns.
|
static int |
STANDARD |
|
private float |
stdDevLimit |
only filter pixels with a value further than stdDevLimit from the mean.
|
static int |
SYMMETRICAL_TRIANGULAR_FUZZY_TRUNCATED_MEDIAN |
|
static int |
TRUNCATED_MEDIAN |
|
private int |
valuesPerPixel |
number of elements in a pixel.
|
static int |
VECTOR_DIRECTION_FILTER |
|
static int |
VECTOR_MAGNITUDE_FILTER |
|
static int |
VERT_KERNEL |
vertical (2D only).
|
static int |
X_KERNEL |
X-shaped kernel, from 1 corner to opposite corner.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMedian(ModelImage srcImg,
int iters,
int kSize,
int kShape,
float stdDev,
int filterType,
int maximumSize,
boolean maskFlag) |
Constructor for 2D images in which changes are returned to the source image.
|
AlgorithmMedian(ModelImage srcImg,
int iters,
int kSize,
int kShape,
float stdDev,
int filterType,
int maximumSize,
boolean sliceBySlice,
boolean maskFlag) |
Constructor for 3D images in which changes are returned to the source image.
|
AlgorithmMedian(ModelImage destImg,
ModelImage srcImg,
int iters,
int kSize,
int kShape,
float stdDev,
int filterType,
int maximumSize,
boolean maskFlag) |
Constructor for 2D images in which changes are placed in a predetermined destination image.
|
AlgorithmMedian(ModelImage destImg,
ModelImage srcImg,
int iters,
int kSize,
int kShape,
float stdDev,
int filterType,
int maximumSize,
boolean sliceBySlice,
boolean maskFlag) |
Constructor for 3D images in which changes are placed in a predetermined destination image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private float[] |
adaptiveTruncatedVectorMedian(float r,
float g,
float b,
float[] list) |
Only used with color images in vector filtering.
|
private void |
calcInPlace2D() |
Median filters the source image.
|
private void |
calcInPlace3D() |
Median filters the source image and replaces the source image with the median filtered image.
|
private void |
calcInPlaceBorder2D() |
Replaces the original image with the Median filtered image.
|
private void |
calcInPlaceBorder3D() |
Mode filters the source image and replaces the source image with the mode filtered image.
|
private void |
calcStoreInDest2D() |
This function produces a new image that has been median filtered and places filtered image in the destination
image.
|
private void |
calcStoreInDest3D() |
This function produces a new volume image that has been median filtered.
|
private void |
calcStoreInDestBorder2D() |
This method produces a new image that has been mode filtered and places filtered image in the destination image.
|
private void |
calcStoreInDestBorder3D() |
Median filters the source image and replaces the source image with the mode filtered image.
|
private void |
copy2DSrcBufferToBdrBuffer(float[] srcBuffer,
float[] bdrBuffer,
int srcBufferOffsetIndex,
int bdrBufferOffsetIndex) |
Method copies the data in srcBuffer centered in the border buffer That is, the src image is completely surrounded
by a border.
|
private void |
copy3DSrcBufferToBdrBuffer(float[] srcBuffer,
float[] bdrBuffer) |
Method copies the data in srcBuffer so it is centered in the border buffer That is, the src image is completely
surrounded by a border.
|
void |
finalize() |
Prepares this class for destruction.
|
private float[] |
getBorderBufferNeighborList(int kn,
int i,
float[] data,
boolean is2D) |
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
|
private float[] |
getNeighborList(int kn,
int i,
float[] data,
boolean is2D) |
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
|
private float[] |
getVectorNeighborList(int kn,
int i,
float[] data,
boolean is2D) |
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
|
private void |
makeKernel() |
Forms kernel.
|
private void |
makeKernelMask() |
Makes the kernel mask.
|
private float |
mean(float[] list) |
Finds the mean value (average) in the list.
|
private float |
median(float[] list) |
Finds the median value of the list.
|
void |
runAlgorithm() |
Starts the algorithm.
|
private void |
setCopyColorText(java.lang.String colorText) |
If the progress bar is visible, sets the text to:
Copying all color values ...
|
private void |
setKernel() |
Fill in the mask for which pixels are used in filtering.
|
void |
setRGBChannelFilter(int colorFilterType,
boolean r,
boolean g,
boolean b,
float delta) |
RGB images are median filtered by 'channel.'
|
private void |
sliceAdaptiveTruncatedVectorMedianFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString) |
Allows a single slice to be filtered.
|
private void |
sliceFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString) |
Allows a single slice to be filtered.
|
private void |
sliceFilterBorder(float[] srcBdrBuffer,
float[] destBuffer,
int srcBufferStartingPoint,
int destBufferStartingPoint,
boolean showProgress) |
Allows a single slice to be filtered.
|
private void |
sliceVectorDirectionFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString) |
Allows a single slice to be filtered.
|
private void |
sliceVectorMagnitudeFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString) |
Allows a single slice to be filtered.
|
private float |
standardDeviation(float[] list,
float average) |
Finds the standard deviation of the values in the input list (defined as: s = [(1/(N-1))*SUM (from 0 to N-1)[ (Xi
- X)^2]]^(1/2)).
|
private int |
vectorDirectionMedian(float[] list) |
Only used with color images in vector filtering.
|
private int |
vectorMagnitudeMedian(float[] list) |
Only used with color images in vector filtering.
|
private void |
volumeAdaptiveTruncatedVectorMedianColorFilter(float[] srcBuffer,
float[] destBuffer) |
Filter a Color 3D image with a 3D kernel with adaptive truncated vector median filtering.
|
private void |
volumeColorFilter(float[] srcBuffer,
float[] destBuffer) |
Filter a Color 3D image with a 3D kernel.
|
private void |
volumeFilter(float[] srcBuffer,
float[] destBuffer) |
Filter a 3D image with a 3D kernel.
|
private void |
volumeFilterBorder(float[] srcBdrBuffer,
float[] destBuffer) |
Method performs median filtering on a volume that has been centerend in a border buffer and places the result in
the destination buffer.
|
private void |
volumeVectorDirectionColorFilter(float[] srcBuffer,
float[] destBuffer) |
Filter a Color 3D image with a 3D kernel with vector direction filtering.
|
private void |
volumeVectorMagnitudeColorFilter(float[] srcBuffer,
float[] destBuffer) |
Filter a Color 3D image with a 3D kernel with vector magnitude filtering.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
bChannel
private boolean bChannel
the blue channel.
-
gChannel
private boolean gChannel
the green channel.
-
halfK
private int[] halfK
The kernel radius.
-
kernelSize
private int[] kernelSize
dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).
-
filterType
private int filterType
-
maskCenter
private int[] maskCenter
The kernel.
-
valuesPerPixel
private int valuesPerPixel
number of elements in a pixel. Monochrome = 1, Color = 4. (a, R, G, B)
-
colorFilterType
private int colorFilterType
Either COMPONENT_FILTER, VECTOR_MAGNITUDE_FILTER, VECTOR_DIRECTION_FILTER, or ADAPTIVE_TRUNCATED_VECTOR_MEDIAN_FILTER
For a vector filter the new red, green, and blue will all come from the same pixel.
-
Constructor Detail
-
AlgorithmMedian
public AlgorithmMedian(ModelImage srcImg,
int iters,
int kSize,
int kShape,
float stdDev,
int filterType,
int maximumSize,
boolean maskFlag)
Constructor for 2D images in which changes are returned to the source image.
- Parameters:
srcImg - Source image model.iters - Number of interations of the median filter.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).kShape - Kernel shape: element neighbors to include when finding the median.stdDev - Inner-bounds by which to process pixels (pixel values outside this bound will be median
filtered).filterType - STANDARD, ADAPTIVE_SIZE, or TRUNCATED_MEDIANmaximumSize - If adaptiveSize is true, the maximum size the kernel mask can be increased to.maskFlag - Flag that indicates that the median filtering will be performed for the whole image if equal to
true.
-
AlgorithmMedian
public AlgorithmMedian(ModelImage destImg,
ModelImage srcImg,
int iters,
int kSize,
int kShape,
float stdDev,
int filterType,
int maximumSize,
boolean maskFlag)
Constructor for 2D images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.iters - Number of interations of the median filter.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).kShape - Kernel shape: element neighbors to include when finding the median.stdDev - Inner-bounds by which to process pixels (pixel values outside this bound will be median
filtered).filterType - STANDARD, ADAPTIVE_SIZE, or TRUNCATED_MEDIAN.maximumSize - If adaptiveSize is true, the maximum size the kernel mask can be increased to.maskFlag - Flag that indicates that the median filtering will be performed for the whole image if equal to
true.
-
AlgorithmMedian
public AlgorithmMedian(ModelImage srcImg,
int iters,
int kSize,
int kShape,
float stdDev,
int filterType,
int maximumSize,
boolean sliceBySlice,
boolean maskFlag)
Constructor for 3D images in which changes are returned to the source image.
- Parameters:
srcImg - Source image model.iters - Number of interations of the median filter.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).kShape - Kernel shape: element neighbors to include when finding the median.stdDev - Inner-bounds by which to process pixels (pixel values outside this bound will be median
filtered).filterType - STANDARD, ADAPTIVE_SIZE, or TRUNCATED_MEDIANmaximumSize - If adaptiveSize is true, the maximum size the kernel mask can be increased to.sliceBySlice - Each slice in a volume image is to be filtered separately (when true), else the volume will
use a kernel with 3 dimensions.maskFlag - Flag that indicates that the median filtering will be performed for the whole image if
equal to true.
-
AlgorithmMedian
public AlgorithmMedian(ModelImage destImg,
ModelImage srcImg,
int iters,
int kSize,
int kShape,
float stdDev,
int filterType,
int maximumSize,
boolean sliceBySlice,
boolean maskFlag)
Constructor for 3D images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.iters - Number of interations of the median filter.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).kShape - Kernel shape: element neighbors to include when finding the median.stdDev - Inner-bounds by which to process pixels (pixel values outside this bound will be median
filtered).filterType - STANDARD, ADAPTIVE_SIZE, or TRUNCATED_MEDIANmaximumSize - If adaptiveSize is true, the maximum size the kernel mask can be increased to.sliceBySlice - Each slice in a volume image is filtered separately (when true), else the volume will use a
kernel with 3 dimensions.maskFlag - Flag that indicates that the median filtering will be performed for the whole image if
equal to true.
-
Method Detail
-
setRGBChannelFilter
public void setRGBChannelFilter(int colorFilterType,
boolean r,
boolean g,
boolean b,
float delta)
RGB images are median filtered by 'channel.' That is, each color, red, blue and green, is filtered independently
of the other two colors. This median filter permits selectively filtering any combination of the three channels
instead of simply filtering all three.
- Parameters:
colorFilterType - Either COMPONENT_FILTER, VECTOR_MAGNITUDE_FILTER, or VECTOR_DIRECTION_FILTERr - Filter red channel.g - Filter green channel.b - Filter blue channel.delta -
-
calcStoreInDest3D
private void calcStoreInDest3D()
This function produces a new volume image that has been median filtered. Image can be filtered by filtering each
slice individually, or by filtering using a kernel-volume.
-
copy2DSrcBufferToBdrBuffer
private void copy2DSrcBufferToBdrBuffer(float[] srcBuffer,
float[] bdrBuffer,
int srcBufferOffsetIndex,
int bdrBufferOffsetIndex)
Method copies the data in srcBuffer centered in the border buffer That is, the src image is completely surrounded
by a border. The values in the border locations are copies of nearby srcBuffer values.
- Parameters:
srcBuffer - float [] the source image bufferbdrBuffer - float [] the border image buffersrcBufferOffsetIndex - offset into srcBufferbdrBufferOffsetIndex - offset into bdrBuffer
-
copy3DSrcBufferToBdrBuffer
private void copy3DSrcBufferToBdrBuffer(float[] srcBuffer,
float[] bdrBuffer)
Method copies the data in srcBuffer so it is centered in the border buffer That is, the src image is completely
surrounded by a border. The values in the border locations are copies of nearby srcBuffer values.
- Parameters:
srcBuffer - float [] the source image bufferbdrBuffer - float [] the border image buffer
-
getBorderBufferNeighborList
private float[] getBorderBufferNeighborList(int kn,
int i,
float[] data,
boolean is2D)
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
- Parameters:
kn - The kernel number; always 0 if adaptiveSize is falsei - The central pixel to find neighbors for.data - float [] Image datais2D - True indicates that the neighbors are found along a 2D slice (or 2D image) instead of neighbors in
a 3D volume.- Returns:
- The neighboring pixel list corresponds to the kernel chosen.
-
adaptiveTruncatedVectorMedian
private float[] adaptiveTruncatedVectorMedian(float r,
float g,
float b,
float[] list)
Only used with color images in vector filtering. Returns red, green, blue in float array
for adaptive truncated vector median filtering
- Parameters:
r - g - b - list - - Returns:
-
setCopyColorText
private void setCopyColorText(java.lang.String colorText)
If the progress bar is visible, sets the text to:
Copying all color values ...
- Parameters:
colorText - The color to use. Eg., "red" or "blue".
-
sliceFilter
private void sliceFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString)
Allows a single slice to be filtered. Note that a progressBar must be created first.
- Parameters:
srcBuffer - float [] Source buffer.destBuffer - float[] Destination Buffer.bufferStartingPoint - Starting point for the buffer.msgString - A text message that can be displayed as a message text in the progressBar.
-
sliceVectorMagnitudeFilter
private void sliceVectorMagnitudeFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString)
Allows a single slice to be filtered. Note that a progressBar must be created first.
Only used on color with vector magnitude filtering.
Red, green, and blue are all filtered together; that is, the
new red, green, and blue will all come from the same pixel.
- Parameters:
srcBuffer - float [] Source buffer.destBuffer - float[] Destination Buffer.bufferStartingPoint - Starting point for the buffer.msgString - A text message that can be displayed as a message text in the progressBar.
-
sliceVectorDirectionFilter
private void sliceVectorDirectionFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString)
Allows a single slice to be filtered. Note that a progressBar must be created first.
Only used on color with vector direction filtering.
Red, green, and blue are all filtered together; that is, the
new red, green, and blue will all come from the same pixel.
- Parameters:
srcBuffer - float [] Source buffer.destBuffer - float[] Destination Buffer.bufferStartingPoint - Starting point for the buffer.msgString - A text message that can be displayed as a message text in the progressBar.
-
sliceAdaptiveTruncatedVectorMedianFilter
private void sliceAdaptiveTruncatedVectorMedianFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString)
Allows a single slice to be filtered. Note that a progressBar must be created first.
Only used on color with adaptive truncated vector median filtering.
Red, green, and blue are all filtered together; that is, the
new red, green, and blue will all come from the same pixel.
- Parameters:
srcBuffer - float [] Source buffer.destBuffer - float[] Destination Buffer.bufferStartingPoint - Starting point for the buffer.msgString - A text message that can be displayed as a message text in the progressBar.
-
sliceFilterBorder
private void sliceFilterBorder(float[] srcBdrBuffer,
float[] destBuffer,
int srcBufferStartingPoint,
int destBufferStartingPoint,
boolean showProgress)
Allows a single slice to be filtered. Note that a progressBar must be created first.
- Parameters:
srcBdrBuffer - float[] Source buffer.destBuffer - float[] Destination Buffer.srcBufferStartingPoint - Starting point for the buffer.destBufferStartingPoint - Starting point for the buffer.
-
standardDeviation
private float standardDeviation(float[] list,
float average)
Finds the standard deviation of the values in the input list (defined as: s = [(1/(N-1))*SUM (from 0 to N-1)[ (Xi
- X)^2]]^(1/2)).
- Parameters:
list - float [] The list of numbers.average - Arithmetic mean of the values in list.- Returns:
- The standard deviation.
-
volumeColorFilter
private void volumeColorFilter(float[] srcBuffer,
float[] destBuffer)
Filter a Color 3D image with a 3D kernel.
Allows median filtering to include the picture elements at greater
depths than only the current slice. This method allows selected band filtering,
and does not filter the alpha band.
- Parameters:
srcBuffer - float [] Source image.destBuffer - float [] Destination image.- See Also:
volumeFilter(float[],float[])
-
volumeVectorMagnitudeColorFilter
private void volumeVectorMagnitudeColorFilter(float[] srcBuffer,
float[] destBuffer)
Filter a Color 3D image with a 3D kernel with vector magnitude filtering.
Allows median filtering to include the picture elements at greater
depths than only the current slice. This method does not filter the alpha band. Red,
green, and blue are all filtered together; that is, the new red, green, and blue will
all come from the same pixel.
- Parameters:
srcBuffer - float [] Source image.destBuffer - float [] Destination image.- See Also:
volumeFilter(float[],float[])
-
volumeVectorDirectionColorFilter
private void volumeVectorDirectionColorFilter(float[] srcBuffer,
float[] destBuffer)
Filter a Color 3D image with a 3D kernel with vector direction filtering.
Allows median filtering to include the picture elements at greater
depths than only the current slice. This method does not filter the alpha band. Red,
green, and blue are all filtered together; that is, the new red, green, and blue will
all come from the same pixel.
- Parameters:
srcBuffer - float [] Source image.destBuffer - float [] Destination image.- See Also:
volumeFilter(float[],float[])
-
volumeAdaptiveTruncatedVectorMedianColorFilter
private void volumeAdaptiveTruncatedVectorMedianColorFilter(float[] srcBuffer,
float[] destBuffer)
Filter a Color 3D image with a 3D kernel with adaptive truncated vector median filtering.
Allows median filtering to include the picture elements at greater
depths than only the current slice. This method does not filter the alpha band. Red,
green, and blue are all filtered together; that is, the new red, green, and blue will
all come from the same pixel.
- Parameters:
srcBuffer - float [] Source image.destBuffer - float [] Destination image.- See Also:
volumeFilter(float[],float[])
-
volumeFilterBorder
private void volumeFilterBorder(float[] srcBdrBuffer,
float[] destBuffer)
Method performs median filtering on a volume that has been centerend in a border buffer and places the result in
the destination buffer.
- Parameters:
srcBdrBuffer - float[]destBuffer - float[]
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PyWavelets.DiscreteTransformType.html������������������������0000775�4231163�4231163�00000037272�14537076060�030172� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PyWavelets.DiscreteTransformType (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
type |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
type
private final int type
-
Method Detail
-
valueOf
public static PyWavelets.DiscreteTransformType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PyWavelets.MODE.html�����������������������������������������0000775�4231163�4231163�00000047632�14537076060�024417� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PyWavelets.MODE (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Enum<PyWavelets.MODE>
-
- gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
type |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
MODE(int type) |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
type
private final int type
-
Constructor Detail
-
MODE
private MODE(int type)
-
Method Detail
-
valueOf
public static PyWavelets.MODE valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmGaussianBlur.html�����������������������������������0000775�4231163�4231163�00000124530�14537076057�026036� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGaussianBlur (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
blue |
Flags indicate which color channel to process.
|
private boolean |
doMultiThread |
|
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private float[] |
GaussData |
Storage location of the Gaussian kernel.
|
private boolean |
green |
Flags indicate which color channel to process.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
private boolean |
red |
Flags indicate which color channel to process.
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmGaussianBlur(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D) |
Creates a new AlgorithmGaussianBlur object.
|
AlgorithmGaussianBlur(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D) |
Constructor which sets the source and destination images, the minimum and maximum progress value.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calcInPlace2D(int nImages) |
Calculates the blurred image and replaces the source image with the blurred image.
|
private void |
calcInPlace3D() |
Calculates the blurred image and replaces the source image with the blurred image.
|
private void |
calcInPlace4D() |
Calculates the blurred image and replaces the source image with the blurred image.
|
private void |
calcStoreInDest2D(int nImages) |
This function produces a new image that has been blurred.
|
private void |
calcStoreInDest3D() |
Produces a new image that has been blurred.
|
private void |
calcStoreInDest4D() |
Produces a new image that has been blurred.
|
private void |
convolve2D(int startSlice,
int endSlice) |
|
private void |
convolve3D(int start,
int end,
float[] iImage,
int index) |
|
private void |
convolve3DRGB(int start,
int end,
float[] iImage,
int index) |
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
makeKernels2D() |
Creates 2D Gaussian kernels for the blurring process.
|
private void |
makeKernels3D() |
Creates 3D Gaussian kernels for the blurring process.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setBlue(boolean flag) |
Sets the flag for the blue channel.
|
void |
setDoMultiThread(boolean doMultiThread) |
|
void |
setGreen(boolean flag) |
Sets the flag for the green channel.
|
void |
setRed(boolean flag) |
Sets the flag for the red channel.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false on process the image over the mask
areas.
-
Constructor Detail
-
AlgorithmGaussianBlur
public AlgorithmGaussianBlur(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D)
Creates a new AlgorithmGaussianBlur object.
- Parameters:
srcImg - DOCUMENT ME!sigmas - DOCUMENT ME!maskFlag - DOCUMENT ME!img25D - DOCUMENT ME!
-
AlgorithmGaussianBlur
public AlgorithmGaussianBlur(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D)
Constructor which sets the source and destination images, the minimum and maximum progress value.
- Parameters:
destImg - the destination imagesrcImg - the source imagesigmas - the sigmasmaskFlag - the mask flagimg25D - the 2.5D indicator
-
Method Detail
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmSymmetricNearestNeighbor.html�����������������������0000775�4231163�4231163�00000057040�14537076060�030406� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSymmetricNearestNeighbor (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
iterations
private int iterations
-
doMedian
private boolean doMedian
-
windowSize
private int windowSize
-
Constructor Detail
-
AlgorithmSymmetricNearestNeighbor
public AlgorithmSymmetricNearestNeighbor(ModelImage destImg,
ModelImage srcImg,
boolean doMedian,
int windowSize,
int iters,
boolean entireImage)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmSWI.html��������������������������������������������0000775�4231163�4231163�00000140332�14537076060�024071� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSWI (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmSWI(boolean inScript,
ModelImage resultImage,
ModelImage magImage,
ModelImage phaseImage,
double maskThreshold,
int roFilterSize,
int peFilterSize,
int multFactor,
boolean showInterImages) |
Constructor.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calc2D() |
|
private void |
calc3D() |
|
private ModelImage |
createBrainMask() |
|
private ModelImage |
createiImage(double[] realData,
double[] imagData) |
|
private ModelImage |
createKCenterImage(ModelImage kImage) |
|
private ModelImage |
createkImage(ModelImage iImage) |
|
void |
finalize() |
Prepares this class for destruction.
|
private ModelImage |
generateIFinal(ModelImage iImage,
ModelImage iCenterImage,
java.util.BitSet brainMaskSet,
double[] ixRealFinal,
double[] ixImagFinal) |
|
private ModelImage |
generateMagEnhanced(double[] phaseMaskData,
ModelImage magnitude) |
|
private ModelImage |
generatePhaseMask(java.util.BitSet brainMaskSet,
double[] ixRealFinal,
double[] ixImagFinal,
double[] phaseMaskData) |
|
ModelImage |
getBrainMask() |
|
ModelImage |
getiCenter() |
|
ModelImage |
getiFinal() |
|
ModelImage |
getiImage() |
|
ModelImage |
getkCenterImage() |
|
ModelImage |
getkImage() |
|
ModelImage |
getPhaseMask() |
|
private void |
rescaleToComplex(ModelImage magImage,
ModelImage phaseImage,
double[] realData,
double[] imagData) |
|
void |
runAlgorithm() |
Starts the algorithm.
|
private ModelImage |
runiFFTonKCenter(ModelImage kCenterImage) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
xFilterSize
private int xFilterSize
-
yFilterSize
private int yFilterSize
-
multFactor
private int multFactor
-
xDim
private int xDim
X dimension length
-
yDim
private int yDim
Y dimension length
-
zDim
private int zDim
Z dimension length
-
Constructor Detail
-
AlgorithmSWI
public AlgorithmSWI(boolean inScript,
ModelImage resultImage,
ModelImage magImage,
ModelImage phaseImage,
double maskThreshold,
int roFilterSize,
int peFilterSize,
int multFactor,
boolean showInterImages)
Constructor.
- Parameters:
resultImage - Result image modelsrcImg - Source image model.
-
Method Detail
-
runAlgorithm
public void runAlgorithm()
Starts the algorithm. At the conclusion of this method, AlgorithmBase reports to any
algorithm listeners that this algorithm has completed. This method is not usually called explicitly by
a controlling dialog. Instead, see AlgorithmBase.run() or start().
- Specified by:
runAlgorithm in class AlgorithmBase
-
calc2D
private void calc2D()
-
calc3D
private void calc3D()
-
generatePhaseMask
private ModelImage generatePhaseMask(java.util.BitSet brainMaskSet,
double[] ixRealFinal,
double[] ixImagFinal,
double[] phaseMaskData)
-
generateIFinal
private ModelImage generateIFinal(ModelImage iImage,
ModelImage iCenterImage,
java.util.BitSet brainMaskSet,
double[] ixRealFinal,
double[] ixImagFinal)
-
rescaleToComplex
private void rescaleToComplex(ModelImage magImage,
ModelImage phaseImage,
double[] realData,
double[] imagData)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmProstateBoundaryExt.PointAttribute.html�������������0000775�4231163�4231163�00000034624�14537076060�032377� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmProstateBoundaryExt.PointAttribute (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
-
Constructor Summary
Constructors
| Constructor |
Description |
PointAttribute(float _r,
float _theta,
double _intensity) |
|
PointAttribute(int _x,
int _y,
double _gradient_mag_src,
double _gradient_dir_src,
double _gradient_mag_non,
double _gradient_dir_non,
double _gradient_mag_b,
double _gradient_dir_b) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
gradient_mag_src
double gradient_mag_src
-
gradient_dir_src
double gradient_dir_src
-
gradient_mag_non
double gradient_mag_non
-
gradient_dir_non
double gradient_dir_non
-
gradient_mag_b
double gradient_mag_b
-
gradient_dir_b
double gradient_dir_b
-
intensity
double intensity
-
Constructor Detail
-
PointAttribute
public PointAttribute(int _x,
int _y,
double _gradient_mag_src,
double _gradient_dir_src,
double _gradient_mag_non,
double _gradient_dir_non,
double _gradient_mag_b,
double _gradient_dir_b)
������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmFuzzMinDeAndChatterji.html��������������������������0000775�4231163�4231163�00000106644�14537076057�027601� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFuzzMinDeAndChatterji (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmFuzzMinDeAndChatterji
extends AlgorithmBase
This algorithm performs minimization of fuzziness, a reduction of the amount of fuzziness. This method is probably the first
fuzzy approach to image enhancement and is also known in the literature as contrast intensification operator. The main idea
is to reduce the amount of image fuzziness. The algorithm is as follows:
1.) Gray-level fuzzification (u(g) denotes the degree of brightness)
u(g) = 0.5*(1 - (srcThreshold - g)/(srcThreshold - srcMin)) for srcMin <= g <= srcThreshold
u(g) = 0.5*(1 + (g - srcThreshold)/(srcMax - srcThreshold)) for srcThreshold <= g <= srcMax
2.) Contrast intensification
u'(g) = 0.5*(1 - {sin(theta1*(1 - 2*u(g)))/sin(theta1)}**p1) for 0 <= u(g) <= 0.5
u'(g) = 0.5*(1 + {sin(theta2*(2*u(g) - 1))}/sin(theta2)}**p2) for 0.5 <= u(g) <= 1.0
Values below the crossover value will be decreased and values above the crossover value will be increased.
3.) New gray-levels by defuzzification
g' = enhancedThreshold - (enhancedThreshold - gmin)*(1 - 2*u'(g)) for 0 <= u'(g) <= 0.5
g' = enhancedThreshold + (gmax - enhancedThreshold)*(2*u'(g) - 1) for 0.5 <= u'(g) <= 1.0
gmax >= srcMax.
gmin <= srcMin
References: 1.) Tizhoosh, H. R., "Fuzzy Image Enhancement: An Overview," in Fuzzy Techniques in Image Processing,
E. Kerre and M. Nachtegael, eds., Springer-Verlag, New York, 2000, pp. 141-142.
2.) De T.K. and Chatterji B.N.,"An approach to a generalized technique for image contrast enhancement using the
concept of fuzzy set", Fuzzy Sets and Systems, Vol. 25, pp.145-158, 1998.
3.) Fang N. and Cheng M.C.,"An automatic crossover point selection technique for image enhancement using fuzzy
sets", Pattern Recognition Letters, Vol. 14, pp. 397-406, 1993.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
autoThreshold |
If true, ignore srcThreshold input and calculate best value
|
private double |
enhancedThreshold |
Enhanced image threshold
|
private boolean |
entireImage |
true means apply to entire image, false only region.
|
private double |
gmax |
The new maximum level gmax >= srcMax
|
private double |
gmin |
The new minimum level gmin <= srcMin
|
private java.util.BitSet |
mask |
contains VOI.
|
private double |
p1 |
Black region exponent, 0 <= p1 <= 1.0
|
private double |
p2 |
White region exponent, 0 <= p2 <= 1.0
|
private double |
srcThreshold |
Original image threshold
|
private double |
theta1 |
Angular equivalence of black band, 0 <= theta1 <= PI/2
|
private double |
theta2 |
Angular equivalence of white band, 0 <= theta2 <= PI/2
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFuzzMinDeAndChatterji(ModelImage srcImg,
double srcThreshold,
boolean autoThreshold,
double enhancedThreshold,
double theta1,
double theta2,
double p1,
double p2,
double gmin,
double gmax,
boolean maskFlag) |
Constructor for images in which changes are returned to the source image.
|
AlgorithmFuzzMinDeAndChatterji(ModelImage destImg,
ModelImage srcImg,
double srcThreshold,
boolean autoThreshold,
double enhancedThreshold,
double theta1,
double theta2,
double p1,
double p2,
double gmin,
double gmax,
boolean maskFlag) |
Constructor for images in which changes are placed in a predetermined destination image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmFuzzMinDeAndChatterji
public AlgorithmFuzzMinDeAndChatterji(ModelImage srcImg,
double srcThreshold,
boolean autoThreshold,
double enhancedThreshold,
double theta1,
double theta2,
double p1,
double p2,
double gmin,
double gmax,
boolean maskFlag)
Constructor for images in which changes are returned to the source image.
- Parameters:
srcImg - Source image model.srcThreshold - original image thresholdautoThreshold - If true, ignore srcThreshold and calculate best valueenhancedThreshold - enhanced image thresholdtheta1 - angular equivalence of black bandtheta2 - angular equivalence of white bandp1 - black region exponentp2 - white region exponentgmin - The new minimum level gmin <= srcMingmax - The new maximum level gmax >= srcMaxmaskFlag - Flag that indicates that the fuzzy minimization filtering will be performed for the whole image if equal to
true.
-
AlgorithmFuzzMinDeAndChatterji
public AlgorithmFuzzMinDeAndChatterji(ModelImage destImg,
ModelImage srcImg,
double srcThreshold,
boolean autoThreshold,
double enhancedThreshold,
double theta1,
double theta2,
double p1,
double p2,
double gmin,
double gmax,
boolean maskFlag)
Constructor for images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.srcThreshold - original image thresholdautoThreshold - If true, ignore srcThreshold and calculate best valueenhancedThreshold - enhanced image thresholdtheta1 - angular equivalence of black bandtheta2 - angular equivalence of white bandp1 - black region exponentp2 - white region exponentgmin - The new minimum level gmin <= srcMingmax - The new maximum level gmax >= srcMaxmaskFlag - Flag that indicates that the fuzzy minimization filtering will be performed for the whole image if equal to
true.
��������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PseudoPolarFourierTransform.html�����������������������������0000775�4231163�4231163�00000356153�14537076060�027257� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PseudoPolarFourierTransform (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[][] |
adjCfrft(double[][] x,
double alpha) |
|
private double[][] |
adjE(double[][] v) |
|
private double[][] |
adjF(double[][] y) |
|
private double[][] |
adjGKN(double[][] w,
int k) |
|
private double[][] |
adjInvF(double[][] v) |
|
private double[][][] |
adjPPFT(double[][][] pp1,
double[][][] pp2) |
|
private double[][] |
adjRadon(double[][] r1,
double[][] r2) |
|
private double[][] |
adjU(double[][] v) |
|
private double[][][][] |
applyppftfilter(double[][][][] X,
double[][][][] filter) |
|
private double[][] |
cdft(double[] x) |
|
private double[][] |
cdft(double[][] x) |
|
private double[][][] |
cdft2(double[][] x) |
|
private double[][][] |
cdft2(double[][][] x) |
|
private double[][][][] |
cdft3(double[][][] x) |
|
private double[][][][] |
cdft3(double[][][][] x) |
|
private double[][] |
cfft(double[][] x) |
|
private double[][][] |
cfft2(double[][][] x) |
|
private double[][][][] |
cfft3(double[][][][] x) |
|
private double[][] |
cfrft(double[][] x,
double alpha) |
|
private double[][] |
cfrftV2(double[][] x,
double alpha) |
|
private double[][][] |
cfrftV3(double[][][] x,
double alpha,
double[][][] PQ,
double[][][] PZ,
int k) |
|
private void |
cfrftV3_precomp(double[][][] PQ,
double[][][] PZ,
int m,
double[] alpha) |
|
private void |
CG(double[][][][] Y,
int[] flag,
double[] relres,
int[] iter,
double[] absres,
boolean ref,
double[][][][] X,
double[][][][] filt,
double ErrTol,
int MaxIts,
double[][][][] guess,
boolean verbose,
double[][][][] RefY) |
|
private void |
CG(double[][][] Y,
int[] flag,
double[] relres,
int[] iter,
double[] absres,
double[][][] X,
double ErrTol,
int MaxIts,
double[][][] guess,
boolean verbose,
double[][][] RefY) |
|
private double[] |
chebzeros(int n) |
|
private int |
checkInput(double[][][] pp1,
double[][][] pp2) |
|
private double[][] |
ChirpZ(double[][] x,
double[] A,
double[] W,
int M) |
|
private void |
compare(double[][] c1,
double[][] c2) |
|
private double[] |
compC(int n,
int j,
int type) |
|
private double[] |
compD(int n,
int j,
int type) |
|
private int[] |
createArray(int lower,
int upper) |
|
private double[] |
dirichlet(double[] t,
int m) |
|
private void |
DoublyEvenMagicSquare(int[][] matrix,
int n) |
|
private void |
equals(double[][][][][] v1,
double[][][][][] v2,
double eps,
boolean[] ok,
double[] error) |
|
private void |
equals(double[][][][] v1,
double[][][][] v2,
double eps,
boolean[] ok,
double[] error) |
|
private double[][] |
fastfmmresample(double[][] f,
double[] yin,
double[] xin,
double[] dj,
double[] cl,
double EPS) |
|
private double[][][] |
fftshift(double[][][] in) |
|
private double[][][][] |
fftshift(double[][][][] in) |
|
private double[][] |
fftshift1d(double[][] x) |
|
private void |
fippft3(double[][][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][][][] pp,
double ErrTol,
int MaxIts,
boolean verbose) |
|
private boolean |
floateq(double[] x,
double[] y) |
|
private boolean |
floateq(double x,
double y) |
|
private double[][][][] |
FPtP(double[][][][] X,
double[][][][] H) |
|
private double[][] |
frft(double[][] x,
double alpha) |
|
private java.lang.String |
getppfiltname(int n) |
|
private double[][] |
GKN(double[][] x,
int k) |
|
private double[][] |
GKN3(double[][] x,
int k) |
|
private int |
hiIdx(int n) |
|
private double |
I1(double[][][] im,
int n,
double x,
int v,
int w) |
|
private double |
I1(double[][] im,
int n,
int u,
double y) |
|
private double |
I2(double[][][] im,
int n,
int u,
double y,
int w) |
|
private double |
I2(double[][] im,
int n,
double x,
int v) |
|
private double |
I3(double[][][] im,
int n,
int u,
int v,
double z) |
|
private double[][] |
icdft(double[][] x) |
|
private double[][] |
icfft(double[][] x) |
|
private double[][][] |
icfft2(double[][][] x) |
|
private double[][][][] |
icfft3(double[][][][] x) |
|
private double[][][] |
ifftshift(double[][][] in) |
|
private double[][][][] |
ifftshift(double[][][][] in) |
|
private double[][] |
ifftshift1d(double[][] x) |
|
private double[][] |
invDecimatedFreqs(double[][][] fim) |
|
private double[] |
ip(double[][][][][] a,
double[][][][][] b) |
|
private double[] |
ip(double[][][][] a,
double[][][][] b) |
|
private double[] |
ip(double[][][] a,
double[][][] b) |
|
private double |
ip(double[][] a,
double[][] b) |
|
private void |
ippft(double[][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][] pp1,
double[][][] pp2,
double ErrTol,
int MaxIts,
boolean verbose) |
|
private void |
ippft3(double[][][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][][][] pp,
double ErrTol,
int MaxIts,
boolean verbose) |
|
private void |
ippft3_ref(double[][][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][][][] pp,
double ErrTol,
int MaxIts,
boolean verbose) |
|
private void |
ippftconsts(double[][][] c,
double[][][] d,
int n) |
|
private double[][] |
ippftd(double[][][] pp1,
double[][][] pp2,
double EPS) |
|
private void |
ippftprecomp(int n) |
|
private void |
iRadon(double[][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][] res1,
double[][][] res2,
double ErrTol,
int MaxIts,
boolean verbose) |
|
private void |
iradon3(double[][][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][][] res,
double ErrTol,
int MaxIts,
boolean verbose) |
|
private void |
loadConsts(double[][][] c,
double[][][] d,
int n) |
|
void |
loadppftfilter(int[] precond,
double[][][][] filter,
java.lang.String fname,
boolean verbose) |
|
private double |
log2(double input) |
|
private int |
lowIdx(int n) |
|
private int[][] |
MagicSquare(int n) |
|
private double[][][][] |
makeppftfilter(int n,
int precond) |
|
private int |
matlab_mod(int j,
int n) |
|
private double |
mult(int k,
double alpha,
int n) |
|
private int |
N(int k,
int s) |
|
private double[][][][] |
nufft_3d(double[][][][] alpha,
double[][] omega,
int M) |
|
private double[][][][] |
nufft3dauxmx(int n,
int M,
int m,
int q,
int[] mu,
double[] Px,
double[] Py,
double[] Pz,
double[][] alpha) |
|
private void |
OddMagicSquare(int[][] matrix,
int n) |
|
private double[][][] |
OptimizedAdjPPFT(double[][][] pp1,
double[][][] pp2) |
|
private void |
OptimizedPPFT(double[][][] res1,
double[][][] res2,
double[][][] im) |
|
private double[][] |
optimizedtansum(double[][] alphain,
double[] xin,
double[] yin,
double eps) |
|
private void |
PPFT(double[][][] res1,
double[][][] res2,
double[][][] im) |
|
private double[][][][][] |
ppft3(double[][][][] im) |
|
private double[][][][][] |
ppft3_ref(double[][][][] im) |
|
private double[][][] |
PrecondAdjPPFT(double[][][] pp1,
double[][][] pp2) |
|
private double[][][][] |
precondadjppft3(double[][][][][] pp) |
|
private double[][][][] |
precondadjppft3_ref(double[][][][][] pp) |
|
private void |
prepConstC(double[][][] c,
int n) |
|
private void |
prepConstD(double[][][] d,
int n) |
|
private double[][][] |
PtP(double[][][] X) |
|
private double[][][][] |
PtP3(double[][][][] X) |
|
private double[][][][] |
PtP3_ref(double[][][][] X) |
|
private void |
Radon(double[][] res1,
double[][] res2,
double[][] im) |
|
private double[][][][] |
Radon3(double[][][][] im) |
|
private double[][] |
recover(double[][] fu,
double[][] u,
int j,
int type,
double[] dj,
double[] cl,
double EPS) |
|
private void |
reportResult(java.lang.String testMsg,
boolean res,
double err) |
|
private void |
reportResult(java.lang.String testMsg,
int n,
boolean res,
double err,
double t1,
double t2) |
|
void |
runAlgorithm() |
Starts the program.
|
private void |
runTest(double[][][][] pp,
double ErrTol,
int MaxIts,
double[][][] ref,
java.lang.String description,
boolean verbose,
boolean trueimage) |
|
private void |
runTest(double[][][] pp1,
double[][][] pp2,
double ErrTol,
int MaxIts,
double[][] ref,
java.lang.String description,
boolean verbose,
boolean trueimage) |
|
private void |
runTest(int n,
double[][][][][] pp,
double ErrTol,
int MaxIts,
double[][][][] ref,
boolean verbose,
boolean doippt3_ref) |
|
private void |
saveppftfilter(int precond,
double[][][][] filter,
java.lang.String fname) |
|
private void |
SinglyEvenMagicSquare(int[][] matrix,
int n) |
|
private double[][] |
slowChirp(double[][] x,
double[] A,
double[] W,
int M) |
|
private void |
slowPPFT(double[][][] res1,
double[][][] res2,
double[][][] im) |
|
private double[][][][][] |
slowppft3(double[][][][] im) |
|
private void |
slowRadon(double[][] res1,
double[][] res2,
double[][] im) |
|
private double[][][][] |
slowradon3(double[][][][] im) |
|
void |
testAdj() |
|
void |
testCfft() |
|
void |
testChirp() |
|
void |
testippft() |
|
void |
testippft3() |
|
void |
testIRadon() |
|
void |
testiRadon3() |
|
void |
testOptimizedAdjPPFT() |
|
void |
testppft3() |
|
void |
testppft3_ref() |
|
void |
testprecondAdjPPFT3(boolean ref) |
|
void |
testRadon() |
|
private void |
topinv(double[][] m1,
double[][] m2,
double[][] m3,
double[][] m4,
double[][] c,
double[][] r) |
|
private double[][] |
topinvmul(double[][] D1,
double[][] D2,
double[][] D3,
double[][] D4,
double[][] v) |
|
private double[][] |
topmul(double[][] D,
double[][] v) |
|
private double[][] |
topprep(double[][] c,
double[][] r) |
|
private void |
topprepinv(double[][] D1,
double[][] D2,
double[][] D3,
double[][] D4,
double[][] m1,
double[][] m2,
double[][] m3,
double[][] m4) |
|
private double[][] |
topsol(double[][] c,
double[][] rin,
double[][] y) |
|
private int[] |
toUnaliasedCoord(int[] aCoord,
int[] N) |
|
private int |
toUnaliasedIdx(int idx,
int n) |
|
private double[] |
trigPoly(double[][][][] im,
double ox,
double oy,
double oz) |
|
private double[] |
trigPoly(double[][][] im,
double xi1,
double xi2) |
|
boolean |
verifyImage(double[][][][] im) |
|
private int |
verifyPP(double[][][][][] pp) |
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
private void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
private void |
zexp(double ar,
double ai,
double[] br,
double[] bi) |
complex exponential function b = exp(a).
|
private void |
zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr) |
complex logarithm b = clog(a).
|
private void |
zpow(double zr,
double zi,
double a,
double[] br,
double[] bi,
int[] ierr) |
b = z**a = exp(a*log(z))
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
testCfft
public void testCfft()
-
testChirp
public void testChirp()
-
testippft
public void testippft()
-
testAdj
public void testAdj()
-
testRadon
public void testRadon()
-
testIRadon
public void testIRadon()
-
runTest
private void runTest(double[][][] pp1,
double[][][] pp2,
double ErrTol,
int MaxIts,
double[][] ref,
java.lang.String description,
boolean verbose,
boolean trueimage)
-
testppft3
public void testppft3()
-
reportResult
private void reportResult(java.lang.String testMsg,
int n,
boolean res,
double err,
double t1,
double t2)
-
testippft3
public void testippft3()
-
runTest
private void runTest(int n,
double[][][][][] pp,
double ErrTol,
int MaxIts,
double[][][][] ref,
boolean verbose,
boolean doippt3_ref)
-
runTest
private void runTest(double[][][][] pp,
double ErrTol,
int MaxIts,
double[][][] ref,
java.lang.String description,
boolean verbose,
boolean trueimage)
-
equals
private void equals(double[][][][][] v1,
double[][][][][] v2,
double eps,
boolean[] ok,
double[] error)
-
equals
private void equals(double[][][][] v1,
double[][][][] v2,
double eps,
boolean[] ok,
double[] error)
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zpow
private void zpow(double zr,
double zi,
double a,
double[] br,
double[] bi,
int[] ierr)
b = z**a = exp(a*log(z))
- Parameters:
zr - zi - a - br - bi - ierr -
-
zlog
private void zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr)
complex logarithm b = clog(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]ierr - int[] ierr = 0, normal return ierr = 1, z = cmplx(0.0, 0.0)
-
zexp
private void zexp(double ar,
double ai,
double[] br,
double[] bi)
complex exponential function b = exp(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]
-
zdiv
private void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
iRadon
private void iRadon(double[][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][] res1,
double[][][] res2,
double ErrTol,
int MaxIts,
boolean verbose)
-
iradon3
private void iradon3(double[][][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][][] res,
double ErrTol,
int MaxIts,
boolean verbose)
-
fippft3
private void fippft3(double[][][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][][][] pp,
double ErrTol,
int MaxIts,
boolean verbose)
-
ippft3_ref
private void ippft3_ref(double[][][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][][][] pp,
double ErrTol,
int MaxIts,
boolean verbose)
-
ippft3
private void ippft3(double[][][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][][][] pp,
double ErrTol,
int MaxIts,
boolean verbose)
-
ippft
private void ippft(double[][][] Y,
int[] flag,
double[] residual,
int[] iter,
double[][][] pp1,
double[][][] pp2,
double ErrTol,
int MaxIts,
boolean verbose)
-
CG
private void CG(double[][][] Y,
int[] flag,
double[] relres,
int[] iter,
double[] absres,
double[][][] X,
double ErrTol,
int MaxIts,
double[][][] guess,
boolean verbose,
double[][][] RefY)
-
CG
private void CG(double[][][][] Y,
int[] flag,
double[] relres,
int[] iter,
double[] absres,
boolean ref,
double[][][][] X,
double[][][][] filt,
double ErrTol,
int MaxIts,
double[][][][] guess,
boolean verbose,
double[][][][] RefY)
-
fastfmmresample
private double[][] fastfmmresample(double[][] f,
double[] yin,
double[] xin,
double[] dj,
double[] cl,
double EPS)
-
topinv
private void topinv(double[][] m1,
double[][] m2,
double[][] m3,
double[][] m4,
double[][] c,
double[][] r)
-
topinvmul
private double[][] topinvmul(double[][] D1,
double[][] D2,
double[][] D3,
double[][] D4,
double[][] v)
-
topprepinv
private void topprepinv(double[][] D1,
double[][] D2,
double[][] D3,
double[][] D4,
double[][] m1,
double[][] m2,
double[][] m3,
double[][] m4)
-
recover
private double[][] recover(double[][] fu,
double[][] u,
int j,
int type,
double[] dj,
double[] cl,
double EPS)
-
I1
private double I1(double[][][] im,
int n,
double x,
int v,
int w)
-
I2
private double I2(double[][][] im,
int n,
int u,
double y,
int w)
-
I3
private double I3(double[][][] im,
int n,
int u,
int v,
double z)
-
cfrftV3
private double[][][] cfrftV3(double[][][] x,
double alpha,
double[][][] PQ,
double[][][] PZ,
int k)
-
loadppftfilter
public void loadppftfilter(int[] precond,
double[][][][] filter,
java.lang.String fname,
boolean verbose)
-
nufft3dauxmx
private double[][][][] nufft3dauxmx(int n,
int M,
int m,
int q,
int[] mu,
double[] Px,
double[] Py,
double[] Pz,
double[][] alpha)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmNonlocalMeansFilter.html����������������������������0000775�4231163�4231163�00000075341�14537076057�027343� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNonlocalMeansFilter (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmNonlocalMeansFilter
extends AlgorithmBase
This is a port of the 09/03/2006 NLmeansfilter.m and UNLmeansfilter2.m on 02/15/2008 by Jose Vicente
Manjon Herrera & Antoni Buades. The code in NLmeansfilter.m is an implementation of the algorithm in the article
"A non-local algorithm for image denoising" by Antoni Buades and Jean-Michel Morel.
The code in UNLmeansfilter2.m is an implementation of the algortihm in the article
"MRI denoising using non-Local Means" by Jose Manjon, Jose Carbonell-Caballero, Juan J. Lull,
Gracian Garcia-Marti, Luis Marti-Bonmati, Montserratt Robles, Medical Image Analysis 12 (2008),
pp. 514-523.
For post processing with Bayes shrink threshold computation:
B. K. Shreyamsha Kumar, "Image Denoising based on Non Local-means Filter and its Method Noise Thresholding", Signal,
Image and Video Processing, Vol. 7, Issue 6, pp. 1211-1227, 2013. (doi: 10.1007/s11760-012-0389-y)
unbiased nonlocal means (value) = sqrt((nonlocal means (value))**2 - 2* sigma**2)
For Rician noise standard deviation = sqrt(background mean/2)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmNonlocalMeansFilter(ModelImage destImage,
ModelImage srcImg,
int searchWindowSide,
int similarityWindowSide,
boolean estimateNoiseStandardDeviation,
float noiseStandardDeviation,
float degreeOfFiltering,
boolean doRician,
boolean do25D,
boolean doBayesShrinkThresholdComputation) |
Creates a new AlgorithmNonlocalMeans object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
similarityWindowSide
private int similarityWindowSide
Comparsion window. This should be smaller than the search window size. In a non-noisy image it
can be set to 3 X 3. The value increases with the amount of noise. In general, for noisy images
7 X 7 or 9 X 9 is a good size.
-
Constructor Detail
-
AlgorithmNonlocalMeansFilter
public AlgorithmNonlocalMeansFilter(ModelImage destImage,
ModelImage srcImg,
int searchWindowSide,
int similarityWindowSide,
boolean estimateNoiseStandardDeviation,
float noiseStandardDeviation,
float degreeOfFiltering,
boolean doRician,
boolean do25D,
boolean doBayesShrinkThresholdComputation)
Creates a new AlgorithmNonlocalMeans object.
- Parameters:
destImage - denoised imagesrcImg - 2D or 3D source imagesearchWindowSide - Side of the learning window of pixels which will be averagedsimilarityWindowSide - Side of the comparsion windowestimateNoiseStandardDeviation - noiseStandardDeviation - Noise standard deviationdegreeOfFiltering - degree of filtering - used only for Rician noise filterdo25D - If true, do slice by slice filteringdoBayesShrinkThresholdComputation -
-
Method Detail
-
run2D
private void run2D()
-
run3D
private void run3D()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/BiorthogonalWavelets.html������������������������������������0000775�4231163�4231163�00000151121�14537076060�025720� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
BiorthogonalWavelets (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class BiorthogonalWavelets
extends AlgorithmBase
Copyright (c) 2012, Brian Moore
Copyright (c) 2004, Ben Barrowes
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in
the documentation and/or other materials provided with the distribution
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
POSSIBILITY OF SUCH DAMAGE.\
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
BiorthogonalWavelets(ModelImage transformImage,
ModelImage compressedTransformImage,
ModelImage reconstructedImage,
ModelImage srcImg,
int iterations,
double compressionFactor,
boolean display,
int method,
int type,
int len,
int lent) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
CDFWavelets() |
|
private double[] |
circshift(double[] vec,
int shift) |
|
private void |
computeEpsilon() |
|
private void |
ComputeFilters() |
|
private void |
ComputeFrequencyResponse() |
|
private void |
computeRoots() |
|
private double[] |
conv(double[] u,
double[] v) |
|
private double[][] |
cplxpair(double[][] p) |
|
private double[] |
diffBinomial(int n) |
|
long |
factorial(int number) |
Returns the factorial of a nonnegative integer.
|
private double[][] |
FastConvWaveletMult(double[][] mat,
double[] h,
double[] g,
int[] inds_h,
int[] inds_g) |
|
private long |
nchoosek(int n,
int k) |
|
private double[][] |
roots(double[] p) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
SplineWavelets() |
|
private double[][] |
WaveletMatrix(int M,
double[] h,
double[] g,
int[] inds_h,
int[] inds_g) |
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
epsilon
private double epsilon
D1MACH(4).
-
inds_h
private int[] inds_h
-
inds_ht
private int[] inds_ht
-
inds_g
private int[] inds_g
-
inds_gt
private int[] inds_gt
-
iterations
private int iterations
-
display
private boolean display
-
method
private int method
-
HwReal
private double[] HwReal
-
HwImag
private double[] HwImag
-
absHw
private float[] absHw
-
HtwReal
private double[] HtwReal
-
HtwImag
private double[] HtwImag
-
absHtw
private float[] absHtw
-
GwReal
private double[] GwReal
-
GwImag
private double[] GwImag
-
absGw
private float[] absGw
-
GtwReal
private double[] GtwReal
-
GtwImag
private double[] GtwImag
-
absGtw
private float[] absGtw
-
Constructor Detail
-
BiorthogonalWavelets
public BiorthogonalWavelets(ModelImage transformImage,
ModelImage compressedTransformImage,
ModelImage reconstructedImage,
ModelImage srcImg,
int iterations,
double compressionFactor,
boolean display,
int method,
int type,
int len,
int lent)
-
Method Detail
-
FastConvWaveletMult
private double[][] FastConvWaveletMult(double[][] mat,
double[] h,
double[] g,
int[] inds_h,
int[] inds_g)
-
WaveletMatrix
private double[][] WaveletMatrix(int M,
double[] h,
double[] g,
int[] inds_h,
int[] inds_g)
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmRiceWaveletTools.EigenvalueComplex.html�������������0000775�4231163�4231163�00000027160�14537076060�032300� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRiceWaveletTools.EigenvalueComplex (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools.EigenvalueComplex
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
ei |
|
private double |
er |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getImaginary
double getImaginary()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmColorEdge.html��������������������������������������0000775�4231163�4231163�00000066142�14537076057�025306� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmColorEdge (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmColorEdge
extends AlgorithmBase
This algorithm uses a hypercomplex filter to find the edges between a region of two
user specified colors. This code is based on material in the article:
Colour-Sensitive Edge Detection using Hypercomplex Filters by Carolyn J. Evans and
Stephen J. Sangwine. This filter operates in 2D. Since the 2 colors are normalized to
unit vectors, the filter only responds to the color or chromaticity information and
ignores the luminance information.
In this case hypercomplex filters is really just a fancy way of saying that dot
products and cross products of colors are used.
FLAG_T24.tif is an excellent test file for this algorithm.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
blue1 |
|
private double |
blue2 |
|
private double |
green1 |
|
private double |
green2 |
|
private double |
red1 |
|
private double |
red2 |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmColorEdge(ModelImage dest,
ModelImage src,
int red1int,
int green1int,
int blue1int,
int red2int,
int green2int,
int blue2int) |
This constructor initialises a Color Edge algorithm for a source and destination image, and ensures that
the destination image is ModelStorageBase.UBYTE.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
green1
private double green1
-
blue1
private double blue1
-
green2
private double green2
-
blue2
private double blue2
-
Constructor Detail
-
AlgorithmColorEdge
public AlgorithmColorEdge(ModelImage dest,
ModelImage src,
int red1int,
int green1int,
int blue1int,
int red2int,
int green2int,
int blue2int)
This constructor initialises a Color Edge algorithm for a source and destination image, and ensures that
the destination image is
ModelStorageBase.UBYTE.
Currently (9 May 2006), this algorithm does not support replacing the original data set with that of the
color edge image.
- Parameters:
dest - DOCUMENT ME!src - DOCUMENT ME!red1 - green1 - blue1 - red2 - green2 - blue2 -
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmUnsharpMask.html������������������������������������0000775�4231163�4231163�00000107460�14537076060�025670� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmUnsharpMask (MIPAV API Documentation)
-
- All Implemented Interfaces:
AlgorithmInterface, java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmUnsharpMask
extends AlgorithmBase
implements AlgorithmInterface
Calculates the Unsharp Mask of an image at a scale defined by the user ( unsharp image = original image - weight *
blurred image); weight < 1;
- Version:
- 1.0 Feb 11, 2000
- Author:
- Matthew J. McAuliffe, Ph.D.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmUnsharpMask(ModelImage srcImg,
float[] sigmas,
double weight,
boolean maskFlag,
boolean img25D,
boolean cubic,
double maximumCorrection) |
Constructor.
|
AlgorithmUnsharpMask(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
double weight,
boolean maskFlag,
boolean img25D,
boolean cubic,
double maximumCorrection) |
Constructor.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calcInPlace2D(int nImages) |
calculates the blurred image and replaces the source image with the blurred image.
|
private void |
calcInPlace3D() |
calculates the UnsharpMask and replaces the source image with the new image.
|
private void |
calcStoreInDest2D(int nImages) |
this function produces a new image that has been blurred.
|
private void |
calcStoreInDest3D() |
this function produces the UnsharpMask of input image.
|
void |
finalize() |
prepares this class for destruction.
|
private void |
makeKernels2D() |
creates Gaussian kernels for the blurring process.
|
private void |
makeKernels3D() |
creates Gaussian kernels for the blurring process.
|
void |
runAlgorithm() |
starts the program.
|
private void |
runCubicAlgorithm() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
kExtents
private int[] kExtents
DOCUMENT ME!
-
sigmas
private float[] sigmas
DOCUMENT ME!
-
weightA
private double weightA
-
cubic
private boolean cubic
-
Constructor Detail
-
AlgorithmUnsharpMask
public AlgorithmUnsharpMask(ModelImage srcImg,
float[] sigmas,
double weight,
boolean maskFlag,
boolean img25D,
boolean cubic,
double maximumCorrection)
Constructor.
- Parameters:
srcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionweight - weighting factor, should be less than 1maskFlag - Flag that indicates that the unsharp mask will be calculated for the whole image if equal to
trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.cubic - If true use nonlinear cubic filtermaximumCorrection - absolute value of maximum correction allowed in cubic algorithm
-
AlgorithmUnsharpMask
public AlgorithmUnsharpMask(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
double weight,
boolean maskFlag,
boolean img25D,
boolean cubic,
double maximumCorrection)
Constructor.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionweight - weighting factor, should be less than 1maskFlag - Flag that indicates that the unsharp mask will be calculated for the whole image if equal to
trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.cubic - If true use nonlinear cubic filtermaximumCorrection - absolute value of maximum correction allowed in cubic algorithm
-
Method Detail
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmNLNoiseReduction.html�������������������������������0000775�4231163�4231163�00000156553�14537076057�026635� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNLNoiseReduction (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
addBorder(float[] in,
float[] tmpEnImage,
int border) |
DOCUMENT ME!
|
private void |
addBorder3D(float[] data,
float[] tmpEnImage,
int border) |
This method adds a border to the input data so that borders can be dealt with easily.
|
private void |
calcMinMaxSlice(float[] data) |
Calculates the min and max values for the image array, so that the image is displayed properly.
|
void |
finalize() |
Prepares this class for destruction.
|
private float |
median2D(float[] data,
int x,
int y) |
Simple 3x3 median filter.
|
private float |
median3D(float[] data,
int x,
int y,
int z) |
Simple 3x3x3 median filter.
|
void |
runAlgorithm() |
Starts the program.
|
private void |
setupBrightness() |
The SUSAN brightness function is implemented as a LUT (Look-Up-Table) for speed.
|
private void |
smoothing2D(int z) |
Performs 2D and 2.5 nonlinear smoothing.
|
private void |
smoothing3D() |
Performs 3D nonlinear smoothing.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
bTableSize
private int bTableSize
DOCUMENT ME!
-
dimension
private int dimension
DOCUMENT ME!
-
gaussMask
private byte[] gaussMask
DOCUMENT ME!
-
maskSize
private int maskSize
DOCUMENT ME!
-
xMaskSize
private int xMaskSize
DOCUMENT ME!
-
yMaskSize
private int yMaskSize
DOCUMENT ME!
-
zMaskSize
private int zMaskSize
DOCUMENT ME!
-
sliceSize
private int sliceSize
DOCUMENT ME!
-
srcMin
private double srcMin
DOCUMENT ME!
-
srcMax
private double srcMax
DOCUMENT ME!
-
tmpImage
private float[] tmpImage
DOCUMENT ME!
-
volSize
private int volSize
DOCUMENT ME!
-
xSize
private int xSize
DOCUMENT ME!
-
ySize
private int ySize
DOCUMENT ME!
-
zSize
private int zSize
DOCUMENT ME!
-
xStdDev
private float xStdDev
DOCUMENT ME!
-
yStdDev
private float yStdDev
DOCUMENT ME!
-
zStdDev
private float zStdDev
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmNLNoiseReduction
public AlgorithmNLNoiseReduction(ModelImage srcImg,
double bt,
float maskSD,
boolean useMedian,
boolean img25D)
AlgorithmNLNoiseReduction - Constructor.
- Parameters:
srcImg - source image modelbt - Brightness threshold: this allows discrimination between noise and the underlying image. Ideally, the
value should be set greater than the noise level and less than the contrast of the underlying image.
Edges of contrast smaller than this threshold will be blurred whereas those of greater contrast will
not be. Reducing bt gives less smoothing. bt has a default value = 0.1 * (srcMax - srcMin).maskSD - This determines the spatial extent of the smoothing. The mask is basically Gaussian with standard
deviation (in image units - e.g. mm.) set by the user. However, for a small, fast, flat response with
a 3x3 or 3x3x3 voxel mask, set maskSD to zero. maskSD has a default value equal to the x resolution.useMedian - If true, the center pixel is not included in the sums. When the local neighborhood of similar
brightness voxels is empty, a local median filter is used. This allows the correction of
impulse("salt-and-pepper")noise. If false, this feature is turned off. In this case, the center pixel
is included in the sums. When no neighborhood is found, the original intensity of the voxel of
interest remains unchanged.img25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
AlgorithmNLNoiseReduction
public AlgorithmNLNoiseReduction(ModelImage destImg,
ModelImage srcImg,
double bt,
float maskSD,
boolean useMedian,
boolean img25D)
AlgorithmNLNoiseReduction - Constructor.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelbt - Brightness threshold: this allows discrimination between noise and the underlying image. Ideally, the
value should be set greater than the noise level and less than the contrast of the underlying image.
Edges of contrast smaller than this threshold will be blurred whereas those of greater contrast will
not be. Reducing bt gives less smoothing. bt has a default value = 0.1 * (srcMax - srcMin).maskSD - This determines the spatial extent of the smoothing. The mask is basically Gaussian with standard
deviation (in image units - e.g. mm.) set by the user. However, for a small, fast, flat response with
a 3x3 or 3x3x3 voxel mask, set maskSD to zero. maskSD has a default value equal to the x resolution.useMedian - If true, the center pixel is not included in the sums. When the local neighborhood of similar
brightness voxels is empty, a local median filter is used. This allows the correction of
impulse("salt-and-pepper")noise. If false, this feature is turned off. In this case, the center pixel
is included in the sums. When no neighborhood is found, the original intensity of the voxel of
interest remains unchanged.img25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
Method Detail
-
addBorder3D
private void addBorder3D(float[] data,
float[] tmpEnImage,
int border)
This method adds a border to the input data so that borders can be dealt with easily.
- Parameters:
data - DOCUMENT ME!tmpEnImage - DOCUMENT ME!border - DOCUMENT ME!
-
calcMinMaxSlice
private void calcMinMaxSlice(float[] data)
Calculates the min and max values for the image array, so that the image is displayed properly.
- Parameters:
data - DOCUMENT ME!
-
median2D
private float median2D(float[] data,
int x,
int y)
Simple 3x3 median filter.
- Parameters:
data - image datax - width index into image datay - height index into image data- Returns:
- median value
-
median3D
private float median3D(float[] data,
int x,
int y,
int z)
Simple 3x3x3 median filter.
- Parameters:
data - image datax - width index into image datay - height index into image dataz - image slice index into image data- Returns:
- median value
-
setupBrightness
private void setupBrightness()
The SUSAN brightness function is implemented as a LUT (Look-Up-Table) for speed. In setupBrightness() the LUT is
setup. This creates a 257 entry brightness table. The SUSAN function e^-(x^2) is calculated and converted to a
byte in the range 0-100, for all possible image brightness differences (including negative ones). Thus
brightnessTable[23] is the output for a brightness difference of 23*(srcMax - srcMin)/256. In the smoothing and
smoothing3D algorithms this LUT is used as follows: ip = ((i-yMaskSize)*xSize) + j - xMaskSize; ip = (i-1)*x_size +
j - 1; ip points to the first image pixel in the circular mask surrounding point (x,y). ip =
(k-zMaskSize)*xSize*ySize + (i-yMaskSize)*xSize + j-xMaskSize; ip = (k-1)*xSize*ySize + (i-1)*xSize + j-1; ip
points to the first image voxel in the spherical mask surrounding point (x,y,z). brightness is the intensity
value at this mask point i*x_size+j points to the center pixel (x,y). k*xSize*ySize+i*xSize+j points to the
center voxel (x,y,z). center is the intensity value of this center point tmp = gaussMask[dpt++] *
brightnessTable[(int)Math.abs(256*(center-brightness)/(srcMax - srcMin))]; brightnessTable gives the SUSAN
brightness function of the absolute value of the difference of the 2 intensity values. dpt gives the current
position inside the mask, so the SUSAN brightness function is multiplied by a Gaussian weighting function. In
area += tmp, tmp is added to the area and in total += tmp * brightness, the total area*brightness is calculated.
After summing over all mask values and performing median replacement if requested, total is divided by area to
obtain the filtered intensity value.
�����������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmRuleBasedContrastEnhancement.html�������������������0000775�4231163�4231163�00000071415�14537076060�031166� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRuleBasedContrastEnhancement (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmRuleBasedContrastEnhancement
extends AlgorithmBase
This algorithm uses an equation with 3 membership functions, udark, ugray, and ubright, to transform a gray level g
to a new gray level g' for histogram enhancement. Data type is promoted if necessary.
g' = (udark(g)*gmin + ugray(g)*gmid + ubright(g)*gmax)/(udark(g) + ugray(g) + ubright(g))
gmin and gmax are the new user selected minimum and maximum gray scale levels, with
gmin <= srcMin and gmax >= srcMax. Must have gmin < srcMin or gmax > srcMax.
If we were to have gmin == srcMin and gmax = srcMax, then the image would be unchanged after processing.
By default gmid = (srcMin + srcMax)/2.0, but the user can select other values between srcMin and srcMax.
Note that in reference 3 the authors used gmin = 0, gmid = 200, gmax = 255.
udark(g) has 2 straight line segments. The first stays at 1 from gmin to srcMin. The second goes from goes from 1 at srcMin to 0 at gmid.
ugray(g) has 2 line segments. The first goes from 0 at srcMin to 1 at gmid. The second goes from 1
at gmid to 0 at srcMax.
udark has 2 straight line segments. The first goes from 0 at gmid to 1 at srcMax. The second stays at 1 from srcMax to gmax.
References:
1.) Digital Image Processing Third Edition by Rafael C. Gonzalez and Richard E. Woods, Section 3.8.4
Using Fuzzy Sets for Intensity Transformations, Pearson Prentice Hall, 2008, pp. 186-189.
2.) Tizhoosh, H. R., "Fuzzy Image Enhancement: An Overview," in Fuzzy Techniques in Image Processing,
E. Kerre and M. Nachtegael, eds., Springer-Verlag, New York, 2000, pp. 147-148.
3.) Tizhoosh HR, Krell G, and Michaelis B., "On Fuzzy Image Enhancement of Megavoltage Images in Radiation Therapy,"
in Proceedings of FUZZ-IEEE'97 (Barcelona), pp. 1399-1404, 1997.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
gmax |
The new image maximum.
|
private double |
gmid |
Gray scale value at which ugray(g) = 1.0.
|
private double |
gmin |
The new image minimum.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmRuleBasedContrastEnhancement
public AlgorithmRuleBasedContrastEnhancement(ModelImage srcImg,
double gmin,
double gmid,
double gmax)
Constructor for images in which changes are returned to the source image.
- Parameters:
srcImg - Source image model.gmin - The new image minimumgmid - Gray scale value at which ugray(g) = 1.0gmax - The new image maximum
-
AlgorithmRuleBasedContrastEnhancement
public AlgorithmRuleBasedContrastEnhancement(ModelImage destImg,
ModelImage srcImg,
double gmin,
double gmid,
double gmax)
Constructor for images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.gmin - The new image minimumgmid - Gray scale value at which ugray(g) = 1.0gmax - The new image maximum
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmProstateFeaturesSaveAutoTrain.html������������������0000775�4231163�4231163�00000171502�14537076060�031400� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmProstateFeaturesSaveAutoTrain (MIPAV API Documentation)
-
- All Implemented Interfaces:
AlgorithmInterface, java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmProstateFeaturesSaveAutoTrain
extends AlgorithmBase
implements AlgorithmInterface
This class save the Coherence Enhanced Diffusion (CED) 2D slice based features, which are Hurst index
and Haralick features. The input is the CED 2D slice, the output is SVM feature array.
- Author:
- Ruida Cheng
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmProstateFeaturesSaveAutoTrain(ModelImage destImg,
ModelImage classImage,
ModelImage srcImg,
boolean imageIntensityFilter,
boolean coherenceEnhancingDiffusionFilter,
boolean regisotropicDiffusionFilter,
boolean IHN3CorrectionFilter,
boolean modeFilter,
boolean meanFilter,
boolean medianFilter,
boolean invertFilter,
boolean haralickFilter,
boolean gaborFilter,
boolean hurstFilter,
boolean waveletFilter,
boolean gaussianFilter,
boolean gmFilter,
int numberFeatures) |
Constructor.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
VOIs
private VOIVector VOIs
source imag VOIs.
-
gmFilter
private boolean gmFilter
-
Constructor Detail
-
AlgorithmProstateFeaturesSaveAutoTrain
public AlgorithmProstateFeaturesSaveAutoTrain(ModelImage destImg,
ModelImage classImage,
ModelImage srcImg,
boolean imageIntensityFilter,
boolean coherenceEnhancingDiffusionFilter,
boolean regisotropicDiffusionFilter,
boolean IHN3CorrectionFilter,
boolean modeFilter,
boolean meanFilter,
boolean medianFilter,
boolean invertFilter,
boolean haralickFilter,
boolean gaborFilter,
boolean hurstFilter,
boolean waveletFilter,
boolean gaussianFilter,
boolean gmFilter,
int numberFeatures)
Constructor.
- Parameters:
destImg - classImage - srcImg - imageIntensityFilter - flag for image intensity filter.coherenceEnhancingDiffusionFilter - flag for CED filter.regisotropicDiffusionFilter - flag for iso-tropic diffusion filter.IHN3CorrectionFilter - flag for N3 correction filter.modeFilter - flag for mode filter.meanFilter - flag for mean filter.medianFilter - flag for median filter.invertFilter - flag for invert filter.haralickFilter - flag for filter.gaborFilter - flag for filter.hurstFilter - flag for index filter.waveletFilter - flag for filter.gaussianFilter - flag for filter.gmFilter - flag for gradient magnitude filter.numberFeatures - number features.
-
Method Detail
-
calculate
private void calculate()
DOCUMENT ME!
-
whichClass
public int whichClass(int pos,
int centerX,
int centerY,
int xDim,
int yDim)
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmFFT.html��������������������������������������������0000775�4231163�4231163�00000146624�14537076057�024066� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFFT (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFFT(ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse) |
|
AlgorithmFFT(ModelImage destImg,
ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse) |
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
afterExecute() |
|
void |
beforeExecute() |
Make the dimension be the power of two, and zero pad them.
|
private void |
center(float[] rdata,
float[] idata) |
|
private void |
doFFT(float[] rdata,
float[] idata,
int start,
int end,
int startDist,
int endDist,
int length,
int direction) |
Perform one dimension fast fourier transformation from start slice to end slice on given data, which includes x,
y or orientation.
|
void |
execute() |
|
void |
finalize() |
Prepare this class for destruction.
|
static int[] |
generateFFTIndices(int l) |
In order to use FFT, first thing is to rearrange the order of signals.
|
float[] |
getImaginaryData() |
Returns reference to imaginary data array.
|
float[] |
getRealData() |
Returns reference to real data array.
|
private boolean |
hasSameDimension(int[] oldDims,
int[] newDims) |
|
private void |
perform() |
This is the method that calculates the FFT Perform a data centering operation after the forward FFT Perform a
data centering operation before the inverse FFT Note that a frequency filter operation performs a forward FFT.
|
private void |
performMT() |
The multi-threading version of FFT algorithm.
|
void |
runAlgorithm() |
Starts the program.
|
static void |
swapSlices(float[] rdata,
float[] idata,
int xdim,
int ydim,
int zdim,
int plane) |
Swap slices in order to apply FFT algorithm.
|
void |
useOCL(boolean on) |
Turns on/off using OpenCL to compute the FFT.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
dimLengths
private int[] dimLengths
Dimension sizes.
-
imagData
private float[] imagData
Imaginary data.
-
ndim
private int ndim
Number of dimensions.
-
realData
private float[] realData
Real data.
-
useOCL
private boolean useOCL
-
Constructor Detail
-
AlgorithmFFT
public AlgorithmFFT(ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse)
-
AlgorithmFFT
public AlgorithmFFT(ModelImage destImg,
ModelImage srcImg,
int transformDir,
boolean logMagDisplay,
boolean unequalDim,
boolean image25D,
boolean complexInverse)
-
Method Detail
-
doFFT
private void doFFT(float[] rdata,
float[] idata,
int start,
int end,
int startDist,
int endDist,
int length,
int direction)
Perform one dimension fast fourier transformation from start slice to end slice on given data, which includes x,
y or orientation.
For x direction: start = index of the start slice * xdim * ydim end = index of the end slice * xdim * ydim
startDist = 1 endDist = xdim length = end
For y direction: start = index of the start slice end = index of the end slice startDist = xdim endDist = xdim *
ydim length = xdim * ydim * zdim
For z direction: start = index of the start slice * xdim end = index of the end slice * xdim startDist = xdim *
ydim endDist = xdim * ydim * zdim length = xdim * ydim * zdim
- Parameters:
rdata - the real part of the dataidata - the imaginary part of the datastart - the location of the first pixel of the start sliceend - the location of the first pixel of the end slicestartDist - the start distance between two adjacent pixels from the FFT algorithmendDist - the end distance between two adjacent pixels from the FFT algorithmlength - the length for each slice.
-
execute
public void execute()
-
generateFFTIndices
public static final int[] generateFFTIndices(int l)
In order to use FFT, first thing is to rearrange the order of signals.
- Parameters:
l - the length of one dimension FFT- Returns:
- the indices used by FFT
-
swapSlices
public static void swapSlices(float[] rdata,
float[] idata,
int xdim,
int ydim,
int zdim,
int plane)
Swap slices in order to apply FFT algorithm.
- Parameters:
rdata - idata - xdim - ydim - zdim - plane -
������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/MultiResolutionBilateralFilter.html��������������������������0000775�4231163�4231163�00000076324�14537076060�027735� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
MultiResolutionBilateralFilter (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class MultiResolutionBilateralFilter
extends AlgorithmBase
This is a port of multi_bilateral.py by Yiqian Wang.
References:
1.) Feature preserving image denoising with multiresolution filters by
Yiqian Wang and You-Yi Jau.
2.) D. L. Donoho and I. M. Johnstone. "Ideal spatial adaptation
by wavelet shrinkage." Biometrika 81.3 (1994): 425-455.
:DOI:10.1093/biomet/81.3.425
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
MultiResolutionBilateralFilter(ModelImage destImg,
ModelImage srcImg,
PyWavelets.WAVELET_NAME wavelet_name,
int wavelet_order,
int wavelet_levels,
boolean estimateNoiseStandardDeviation,
double noiseStandardDeviation,
int filterType,
int d,
double sigmaColor,
double sigmaSpace) |
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
filterType
private int filterType
-
epsilon
private double epsilon
-
Constructor Detail
-
MultiResolutionBilateralFilter
public MultiResolutionBilateralFilter(ModelImage destImg,
ModelImage srcImg,
PyWavelets.WAVELET_NAME wavelet_name,
int wavelet_order,
int wavelet_levels,
boolean estimateNoiseStandardDeviation,
double noiseStandardDeviation,
int filterType,
int d,
double sigmaColor,
double sigmaSpace)
-
Method Detail
-
denoiseBW
public void denoiseBW()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PyWavelets.html����������������������������������������������0000775�4231163�4231163�00001235605�14537076060�023674� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PyWavelets (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class PyWavelets
extends AlgorithmBase
Copyright (c) 2006-2012 Filip Wasilewski
Copyright (c) 2012-2017 The PyWavelets Developers
Permission is hereby granted, free of charge, to any person obtaining a copy of
this software and associated documentation files (the "Software"), to deal in
the Software without restriction, including without limitation the rights to
use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies
of the Software, and to permit persons to whom the Software is furnished to do
so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
PyWavelets() |
|
PyWavelets(ModelImage srcImg,
double[] noiseStandardDeviation) |
|
PyWavelets(ModelImage dstImg,
ModelImage srcImg,
int tType,
PyWavelets.WAVELET_NAME[] names,
int[] orders,
PyWavelets.MODE[] modes,
int[] axes,
int[] filterType,
double[] filterVal1,
double[] filterVal2,
boolean showTransform,
boolean showFilteredTransform,
int levels,
int start_level,
boolean doBayesShrinkThresholdComputation) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[] |
_integrate(double[] arr,
double step) |
|
private double[][][] |
_sign(double[][] xReal,
double[][] xImag) |
|
private double[][][] |
_soft(double[][] xReal,
double[][] xImag,
double thresh) |
|
private double |
BayesShrinkThresholdComputation(double[] data,
double noise_var) |
|
(package private) PyWavelets.ContinuousWavelet |
blank_continuous_wavelet() |
|
private PyWavelets.DiscreteWavelet |
blank_discrete_wavelet(int filters_length) |
|
double[][][] |
BM3Dwavedec2(double[][] patch,
int level) |
|
double[][] |
BM3Dwaverec2(double[][] bior_img,
int level) |
|
private double |
central_frequency(PyWavelets.ContinuousWavelet wavelet,
int precision) |
|
private double |
central_frequency(PyWavelets.DiscreteWavelet wavelet,
int precision) |
|
private void |
cgau(double[] input,
double[] output_r,
double[] output_i,
int N,
int number) |
|
private boolean |
check_coefficients(PyWavelets.DiscreteWavelet w) |
|
private boolean |
check_coefficients_biorthogonal(PyWavelets.DiscreteWavelet w) |
|
(package private) boolean |
check_coefficients_orthogonal(PyWavelets.DiscreteWavelet w) |
|
private int |
check_level(int sizes,
int dec_lens,
int level) |
|
private boolean |
check_reconstruction(PyWavelets.MODE mode,
PyWavelets.DiscreteWavelet wavelet) |
|
private void |
cmor(double[] input,
double[] output_r,
double[] output_i,
int N,
double FB,
double FC) |
|
private boolean |
coeffs_ok13or23(java.util.HashMap<java.lang.String,double[][][]> coeffs) |
|
private boolean |
coeffs_ok2(java.util.HashMap<java.lang.String,double[][]> coeffs) |
|
private boolean |
coeffs_ok3(java.util.HashMap<java.lang.String,double[][][]> coeffs) |
|
(package private) PyWavelets.ContinuousWavelet |
continuous_wavelet(PyWavelets.WAVELET_NAME name,
int order) |
|
private double[] |
convolve(double[] a,
double[] b) |
|
(package private) PyWavelets.DiscreteWavelet |
copy_discrete_wavelet(PyWavelets.DiscreteWavelet base) |
|
private double[][][] |
cwt(double[] data,
double[] scales,
PyWavelets.ContinuousWavelet w,
double sampling_period,
java.lang.String method) |
|
private double[][] |
cwt_psi_single(double[] data_t,
PyWavelets.ContinuousWavelet wavelet,
int output_len) |
|
private int |
dec_a(double[] input,
int input_len,
PyWavelets.DiscreteWavelet wavelet,
double[] output,
int output_len,
PyWavelets.MODE mode) |
|
private int |
dec_d(double[] input,
int input_len,
PyWavelets.DiscreteWavelet wavelet,
double[] output,
int output_len,
PyWavelets.MODE mode) |
|
int |
decompose1DSignal() |
|
PyWavelets.DiscreteWavelet |
discrete_wavelet(PyWavelets.WAVELET_NAME name,
int order) |
|
double[] |
downcoef(boolean do_dec_a,
double[] data,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int level) |
|
double[] |
downcoef(char part,
double[] data,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int level) |
|
private int |
downcoef_axis(double[][][] input,
PyWavelets.ArrayInfo input_info,
double[][][] output,
PyWavelets.ArrayInfo output_info,
PyWavelets.DiscreteWavelet wavelet,
int axis,
PyWavelets.Coefficient coef,
PyWavelets.MODE dwt_mode,
int swt_level,
PyWavelets.DiscreteTransformType transform) |
|
private int |
downcoef_axis(double[][] input,
PyWavelets.ArrayInfo input_info,
double[][] output,
PyWavelets.ArrayInfo output_info,
PyWavelets.DiscreteWavelet wavelet,
int axis,
PyWavelets.Coefficient coef,
PyWavelets.MODE dwt_mode,
int swt_level,
PyWavelets.DiscreteTransformType transform) |
|
private int |
downsampling_convolution(double[] input,
int N,
double[] filter,
int F,
double[] output,
int step,
PyWavelets.MODE mode) |
|
private int |
downsampling_convolution_periodization(double[] input,
int N,
double[] filter,
int F,
double[] output,
int step,
int fstep) |
|
private double[][][][] |
dwt(double[][][] data,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int axis) |
|
private double[][][] |
dwt(double[][] data,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int axis) |
|
private double[][] |
dwt(double[] data,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode) |
|
private double[][][][] |
dwt_axis(double[][][] data,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int axis) |
|
private double[][][] |
dwt_axis(double[][] data,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int axis) |
|
private int |
dwt_buffer_length(int input_len,
int filter_len,
PyWavelets.MODE mode) |
|
private int |
dwt_coeff_len(int data_len,
int filter_len,
PyWavelets.MODE mode) |
|
short |
dwt_max_level(int input_len,
int filter_len) |
|
short |
dwt_max_level(int input_len,
PyWavelets.DiscreteWavelet w) |
|
private double[][] |
dwt_single(double[] data,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode) |
|
double[][][][] |
dwt2(double[][][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
double[][][] |
dwt2(double[][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
private double[][][][] |
dwt3(double[][][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
java.util.HashMap<java.lang.String,double[][]> |
dwtn(double[][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] modein,
int[] axes) |
|
java.util.HashMap<java.lang.String,double[][]> |
dwtn2(double[][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] modein,
int[] axes) |
|
java.util.HashMap<java.lang.String,double[][][]> |
dwtn23(double[][][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] modein,
int[] axes) |
|
java.util.HashMap<java.lang.String,double[][][]> |
dwtn3(double[][][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] modein,
int[] axes) |
|
private void |
fbsp(double[] input,
double[] output_r,
double[] output_i,
int N,
int M,
double FB,
double FC) |
|
private void |
filter(double[] data,
int filterType,
double filterVal1,
double filterVal2) |
|
int |
fix_output_length(int output_length,
int keep_length) |
|
private void |
free_discrete_wavelet(PyWavelets.DiscreteWavelet w) |
|
private void |
gaus(double[] input,
double[] output,
int N,
int number) |
|
int |
get_keep_length(int output_length,
int level,
int filter_length) |
|
int |
get_right_extent_length(int output_length,
int keep_length) |
|
double[][] |
greater(double[][] data,
double value,
double substitute) |
|
double[] |
greater(double[] data,
double value,
double substitute) |
|
double[][][] |
hard(double[][] dataReal,
double[][] dataImag,
double value,
double substituteReal,
double substituteImag) |
|
double[][] |
hard(double[][] data,
double value,
double substitute) |
|
double[][] |
hard(double[] dataReal,
double[] dataImag,
double value,
double substituteReal,
double substituteImag) |
|
double[] |
hard(double[] data,
double value,
double substitute) |
|
private int |
idwt(double[] coeffs_a,
int coeffs_a_len,
double[] coeffs_d,
int coeffs_d_len,
double[] output,
int output_len,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode) |
|
private double[][][] |
idwt_axis(double[][][] coefs_a,
double[][][] coefs_d,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int axis) |
|
private double[][] |
idwt_axis(double[][] coefs_a,
double[][] coefs_d,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int axis) |
|
private int |
idwt_axis(double[] coefs_a,
PyWavelets.ArrayInfo a_info,
double[] coefs_d,
PyWavelets.ArrayInfo d_info,
double[] output,
PyWavelets.ArrayInfo output_info,
PyWavelets.DiscreteWavelet wavelet,
int axis,
PyWavelets.MODE mode) |
|
private int |
idwt_buffer_length(int coeffs_len,
int filter_len,
PyWavelets.MODE mode) |
|
private double[] |
idwt_single(double[] cA,
double[] cD,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode) |
|
private double[][][] |
idwt13(double[][][][] coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
double[][] |
idwt2(double[][][] coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
double[][][] |
idwt23(double[][][][] coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
double[][][] |
idwt3(double[][][][] coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
private double[][][] |
idwtn13(java.util.HashMap<java.lang.String,double[][][]> coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] modein,
int[] axes) |
|
private double[][] |
idwtn2(java.util.HashMap<java.lang.String,double[][]> coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] modein,
int[] axes) |
|
private double[][][] |
idwtn23(java.util.HashMap<java.lang.String,double[][][]> coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] modein,
int[] axes) |
|
private double[][][] |
idwtn3(java.util.HashMap<java.lang.String,double[][][]> coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] modein,
int[] axes) |
|
private double[][] |
integrate_wavelet(PyWavelets.ContinuousWavelet wavelet,
int precision) |
|
private double[][] |
integrate_wavelet(PyWavelets.DiscreteWavelet wavelet,
int precision) |
|
private double[][] |
inverse_filter_bank(PyWavelets.DiscreteWavelet w) |
|
private int |
is_discrete_wavelet(PyWavelets.WAVELET_NAME name) |
|
private double[] |
iswt(double[][] coeffs,
PyWavelets.DiscreteWavelet wavelet) |
|
private double[][] |
iswt2(double[][][] coeffs,
PyWavelets.DiscreteWavelet[] wavelet) |
|
private double[][][] |
iswtn(java.util.HashMap<java.lang.String,double[][][]>[] coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
int[] axes) |
|
private double[][] |
iswtn2(java.util.HashMap<java.lang.String,double[][]>[] coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
int[] axes) |
|
double[] |
keep(double[] arr,
int keep_length) |
|
double[][] |
less(double[][] data,
double value,
double substitute) |
|
double[] |
less(double[] data,
double value,
double substitute) |
|
private double[] |
linspace(double LB,
double UB,
int N) |
|
private void |
mexh(double[] input,
double[] output,
int N) |
|
private void |
morl(double[] input,
double[] output,
int N) |
|
double[][] |
nn_garrote(double[] dataReal,
double[] dataImag,
double value,
double substituteReal,
double substituteImag) |
|
double[] |
nn_garrote(double[] data,
double value,
double substitute) |
|
private int |
rec_a(double[] coeffs_a,
int coeffs_len,
PyWavelets.DiscreteWavelet wavelet,
double[] output,
int output_len) |
|
private int |
rec_d(double[] coeffs_d,
int coeffs_len,
PyWavelets.DiscreteWavelet wavelet,
double[] output,
int output_len) |
|
private int |
reconstruction_buffer_length(int coeffs_len,
int filter_len) |
|
double[][] |
ref_cgau(double LB,
double UB,
int N,
int num) |
|
double[][] |
ref_cmor(double LB,
double UB,
int N,
double Fb,
double Fc) |
|
double[][] |
ref_fbsp(double LB,
double UB,
int N,
double m,
double Fb,
double Fc) |
|
private double[][] |
ref_gaus(double LB,
double UB,
int N,
int num) |
|
double[][] |
ref_mexh(double LB,
double UB,
int N) |
|
double[][] |
ref_morl(double LB,
double UB,
int N) |
|
double[][] |
ref_shan(double LB,
double UB,
int N,
double Fb,
double Fc) |
|
(package private) PyWavelets.DiscreteWavelet |
rescale_wavelet_filterbank(PyWavelets.DiscreteWavelet wavelet,
double sf) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private double[] |
scale2frequency(PyWavelets.ContinuousWavelet wavelet,
double[] scale,
int precision) |
|
private double[] |
scale2frequency(PyWavelets.DiscreteWavelet wavelet,
double[] scale,
int precision) |
|
private void |
shan(double[] input,
double[] output_r,
double[] output_i,
int N,
double FB,
double FC) |
|
double[] |
sinc2(double[] x) |
|
private short |
size_log2(int x) |
|
double[][][] |
soft(double[][] dataReal,
double[][] dataImag,
double value,
double substituteReal,
double substituteImag) |
|
double[][] |
soft(double[][] data,
double value,
double substitute) |
|
double[][] |
soft(double[] dataReal,
double[] dataImag,
double value,
double substituteReal,
double substituteImag) |
|
double[] |
soft(double[] data,
double value,
double substitute) |
|
private void |
SWAP_DOUBLE_ARRAY(double[] x,
double[] y) |
|
private int |
swt(double[] input,
int input_len,
double[] filter,
int filter_len,
double[] output,
int output_len,
int level) |
|
double[][] |
swt(double[] data,
PyWavelets.DiscreteWavelet wavelet,
int level,
int start_level,
boolean trim_approx) |
|
private int |
swt_a(double[] input,
int input_len,
PyWavelets.DiscreteWavelet wavelet,
double[] output,
int output_len,
int level) |
|
private double[][][][] |
swt_axis(double[][][] data,
PyWavelets.DiscreteWavelet wavelet,
int level,
int start_level,
int axis,
boolean trim_approx) |
|
private double[][][] |
swt_axis(double[][] data,
PyWavelets.DiscreteWavelet wavelet,
int level,
int start_level,
int axis,
boolean trim_approx) |
|
private int |
swt_buffer_length(int input_len) |
|
private int |
swt_d(double[] input,
int input_len,
PyWavelets.DiscreteWavelet wavelet,
double[] output,
int output_len,
int level) |
|
private short |
swt_max_level(int input_len) |
|
private double[][][][] |
swt1D(double[][][] data,
PyWavelets.DiscreteWavelet wavelet,
int level,
int start_level,
int axis,
boolean trim_approx,
boolean norm) |
|
private double[][][] |
swt1D(double[][] data,
PyWavelets.DiscreteWavelet wavelet,
int level,
int start_level,
int axis,
boolean trim_approx,
boolean norm) |
|
private double[][] |
swt1D(double[] data,
PyWavelets.DiscreteWavelet wavelet,
int level,
int start_level,
boolean trim_approx,
boolean norm) |
|
private double[][][] |
swt2(double[][] data,
PyWavelets.DiscreteWavelet[] wavelet,
int level,
int start_level,
int[] axes,
boolean trim_approx,
boolean norm) |
|
private java.util.HashMap<java.lang.String,double[][][]>[] |
swtn(double[][][] datain,
PyWavelets.DiscreteWavelet[] wavelet,
int level,
int start_level,
int[] axes,
boolean trim_approx,
boolean norm) |
|
private java.util.HashMap<java.lang.String,double[][]>[] |
swtn(double[][] datain,
PyWavelets.DiscreteWavelet[] wavelet,
int level,
int start_level,
int[] axes,
boolean trim_approx,
boolean norm) |
|
void |
test_3D_reconstruct() |
|
void |
test_centrfreq() |
|
void |
test_cgau() |
|
void |
test_cmor() |
|
void |
test_compare_downcoef_coeffs() |
|
void |
test_cwt_method_fft() |
|
void |
test_cwt_small_scales() |
|
void |
test_downcoef_multilevel() |
|
void |
test_dwdtn_idwtn_allwavelets() |
|
void |
test_dwt_coeff_len() |
|
void |
test_dwt_idwt_allmodes() |
|
void |
test_dwt_idwt_basic() |
|
void |
test_dwt_idwt_basic_complex() |
|
void |
test_dwt_idwt_partial_complex() |
|
void |
test_dwt_max_level() |
|
void |
test_dwt_short_input_allmodes() |
|
void |
test_dwt_wavelet_kwd() |
|
void |
test_dwt2() |
|
void |
test_fbsp() |
|
void |
test_gaus() |
|
void |
test_idwt_none_input() |
|
void |
test_idwt2() |
|
void |
test_intwave_orthogonal() |
|
void |
test_mexh() |
|
void |
test_morl() |
|
void |
test_nonnegative_garotte() |
|
void |
test_per_axis_wavelets() |
|
void |
test_perfect_reconstruction() |
|
void |
test_scal2frq_scale() |
|
void |
test_shan() |
|
void |
test_swt_axis() |
|
void |
test_swt_decomposition() |
|
void |
test_swt_default_level_by_axis() |
|
void |
test_swt_iswt_integration() |
|
void |
test_swt_max_level() |
|
void |
test_swt_variance_and_energy_preservation() |
|
void |
test_swt2_axes() |
|
void |
test_swt2_iswt2_integration() |
|
void |
test_swt2_iswt2_non_square() |
|
void |
test_swt2_variance_and_energy_preservation() |
|
void |
test_swtn_axes() |
|
void |
test_swtn_decomposition() |
|
void |
test_swtn_iswtn_integration() |
|
void |
test_swtn_iswtn2_integration() |
|
void |
test_swtn_variance_and_energy_preservation() |
|
void |
test_threshold() |
|
void |
test_threshold_firm() |
|
void |
test_upcoef_multilevel() |
|
void |
test_upcoef_reconstruct() |
|
void |
test_wavedec() |
|
void |
test_wavedec2_many_levels() |
|
void |
test_wavefun_bior13() |
|
void |
test_wavefun_sym3() |
|
void |
test_wavelet_coefficients() |
|
void |
test_wavelet_properties() |
|
void |
test_waverec_accuracies() |
|
void |
test_waverec_all_wavelets_modes() |
|
void |
test_waverec_axes_subsets() |
|
void |
test_waverec_axis_db2() |
|
void |
test_waverec_odd_length() |
|
void |
test_waverec2_accuracies() |
|
void |
test_waverec2_all_wavelets_modes() |
|
void |
test_waverec2_axes_subsets() |
|
void |
test_waverec2_odd_length() |
|
void |
test_waverec3_accuracies() |
|
void |
test_waverecn2() |
|
void |
test_waverecn3() |
|
double[][] |
threshold_firm(double[] dataReal,
double[] dataImag,
double value_low,
double value_high) |
|
double[] |
threshold_firm(double[] data,
double value_low,
double value_high) |
|
double[] |
upcoef(boolean do_rec_a,
double[] coeffs,
PyWavelets.DiscreteWavelet wavelet,
int level,
int take) |
|
private double[] |
upcoef(char part,
double[] coeffs,
PyWavelets.DiscreteWavelet wavelet,
int level,
int take) |
|
private int |
upsampling_convolution_full(double[] input,
int N,
double[] filter,
int F,
double[] output,
int O) |
|
private int |
upsampling_convolution_valid_sf(double[] input,
int N,
double[] filter,
int F,
double[] output,
int O,
PyWavelets.MODE mode) |
|
private int |
upsampling_convolution_valid_sf_periodization(double[] input,
int N,
double[] filter,
int F,
double[] output,
int O) |
|
double[][][][] |
wavedec(double[][][] data,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int level,
int axis) |
|
double[][][] |
wavedec(double[][] data,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int level,
int axis) |
|
double[][] |
wavedec(double[] data,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int level) |
|
private double[][][][] |
wavedec2(double[][][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int level,
int[] axes) |
|
double[][][] |
wavedec2(double[][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int level,
int[] axes) |
|
private double[][][][] |
wavedec3(double[][][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int level,
int[] axes) |
|
private java.util.Vector<java.util.HashMap<java.lang.String,double[][][]>> |
wavedecn(double[][][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] modein,
int level,
int[] axes) |
|
private java.util.Vector<java.util.HashMap<java.lang.String,double[][]>> |
wavedecn(double[][] data,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] modein,
int level,
int[] axes) |
|
private double[][] |
wavefun(PyWavelets.ContinuousWavelet w,
int level,
int length) |
|
double[][] |
wavefun(PyWavelets.DiscreteWavelet w,
int level) |
|
private PyWavelets.DiscreteWavelet |
Wavelet(double[][] filter_bank) |
|
private double[][][] |
waverec(double[][][][] coeffs,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int axis) |
|
private double[][] |
waverec(double[][][] coeffs,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode,
int axis) |
|
private double[] |
waverec(double[][] coeffs,
PyWavelets.DiscreteWavelet wavelet,
PyWavelets.MODE mode) |
|
private double[][][] |
waverec2(double[][][][] coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
double[][] |
waverec2(double[][][] coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
private double[][][] |
waverec3(double[][][][] coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
private double[][] |
waverecn2(java.util.Vector<java.util.HashMap<java.lang.String,double[][]>> coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
private double[][][] |
waverecn3(java.util.Vector<java.util.HashMap<java.lang.String,double[][][]>> coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
PyWavelets.MODE[] mode,
int[] axes) |
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
filterType
int[] filterType
-
filterVal1
double[] filterVal1
-
filterVal2
double[] filterVal2
-
levels
private int levels
-
start_level
private int start_level
-
SWT
public static int SWT
-
Constructor Detail
-
PyWavelets
public PyWavelets()
-
PyWavelets
public PyWavelets(ModelImage dstImg,
ModelImage srcImg,
int tType,
PyWavelets.WAVELET_NAME[] names,
int[] orders,
PyWavelets.MODE[] modes,
int[] axes,
int[] filterType,
double[] filterVal1,
double[] filterVal2,
boolean showTransform,
boolean showFilteredTransform,
int levels,
int start_level,
boolean doBayesShrinkThresholdComputation)
-
Method Detail
-
downsampling_convolution_periodization
private int downsampling_convolution_periodization(double[] input,
int N,
double[] filter,
int F,
double[] output,
int step,
int fstep)
-
downsampling_convolution
private int downsampling_convolution(double[] input,
int N,
double[] filter,
int F,
double[] output,
int step,
PyWavelets.MODE mode)
-
upsampling_convolution_full
private int upsampling_convolution_full(double[] input,
int N,
double[] filter,
int F,
double[] output,
int O)
-
upsampling_convolution_valid_sf_periodization
private int upsampling_convolution_valid_sf_periodization(double[] input,
int N,
double[] filter,
int F,
double[] output,
int O)
-
upsampling_convolution_valid_sf
private int upsampling_convolution_valid_sf(double[] input,
int N,
double[] filter,
int F,
double[] output,
int O,
PyWavelets.MODE mode)
-
cgau
private void cgau(double[] input,
double[] output_r,
double[] output_i,
int N,
int number)
-
shan
private void shan(double[] input,
double[] output_r,
double[] output_i,
int N,
double FB,
double FC)
-
fbsp
private void fbsp(double[] input,
double[] output_r,
double[] output_i,
int N,
int M,
double FB,
double FC)
-
cmor
private void cmor(double[] input,
double[] output_r,
double[] output_i,
int N,
double FB,
double FC)
-
swt
private int swt(double[] input,
int input_len,
double[] filter,
int filter_len,
double[] output,
int output_len,
int level)
-
swt_a
private int swt_a(double[] input,
int input_len,
PyWavelets.DiscreteWavelet wavelet,
double[] output,
int output_len,
int level)
-
swt_d
private int swt_d(double[] input,
int input_len,
PyWavelets.DiscreteWavelet wavelet,
double[] output,
int output_len,
int level)
-
ref_shan
public double[][] ref_shan(double LB,
double UB,
int N,
double Fb,
double Fc)
-
ref_fbsp
public double[][] ref_fbsp(double LB,
double UB,
int N,
double m,
double Fb,
double Fc)
-
ref_cmor
public double[][] ref_cmor(double LB,
double UB,
int N,
double Fb,
double Fc)
-
test_gaus
public void test_gaus()
-
test_cgau
public void test_cgau()
-
test_shan
public void test_shan()
-
test_cmor
public void test_cmor()
-
test_fbsp
public void test_fbsp()
-
test_morl
public void test_morl()
-
test_mexh
public void test_mexh()
-
test_dwt2
public void test_dwt2()
-
test_idwt2
public void test_idwt2()
-
cwt
private double[][][] cwt(double[] data,
double[] scales,
PyWavelets.ContinuousWavelet w,
double sampling_period,
java.lang.String method)
-
soft
public double[][] soft(double[] dataReal,
double[] dataImag,
double value,
double substituteReal,
double substituteImag)
-
soft
public double[][][] soft(double[][] dataReal,
double[][] dataImag,
double value,
double substituteReal,
double substituteImag)
-
nn_garrote
public double[][] nn_garrote(double[] dataReal,
double[] dataImag,
double value,
double substituteReal,
double substituteImag)
-
hard
public double[][] hard(double[] dataReal,
double[] dataImag,
double value,
double substituteReal,
double substituteImag)
-
hard
public double[][][] hard(double[][] dataReal,
double[][] dataImag,
double value,
double substituteReal,
double substituteImag)
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
threshold_firm
public double[][] threshold_firm(double[] dataReal,
double[] dataImag,
double value_low,
double value_high)
-
swt1D
private double[][] swt1D(double[] data,
PyWavelets.DiscreteWavelet wavelet,
int level,
int start_level,
boolean trim_approx,
boolean norm)
-
swt1D
private double[][][] swt1D(double[][] data,
PyWavelets.DiscreteWavelet wavelet,
int level,
int start_level,
int axis,
boolean trim_approx,
boolean norm)
-
swt1D
private double[][][][] swt1D(double[][][] data,
PyWavelets.DiscreteWavelet wavelet,
int level,
int start_level,
int axis,
boolean trim_approx,
boolean norm)
-
swt_axis
private double[][][] swt_axis(double[][] data,
PyWavelets.DiscreteWavelet wavelet,
int level,
int start_level,
int axis,
boolean trim_approx)
-
swt_axis
private double[][][][] swt_axis(double[][][] data,
PyWavelets.DiscreteWavelet wavelet,
int level,
int start_level,
int axis,
boolean trim_approx)
-
swt2
private double[][][] swt2(double[][] data,
PyWavelets.DiscreteWavelet[] wavelet,
int level,
int start_level,
int[] axes,
boolean trim_approx,
boolean norm)
-
swtn
private java.util.HashMap<java.lang.String,double[][]>[] swtn(double[][] datain,
PyWavelets.DiscreteWavelet[] wavelet,
int level,
int start_level,
int[] axes,
boolean trim_approx,
boolean norm)
-
swtn
private java.util.HashMap<java.lang.String,double[][][]>[] swtn(double[][][] datain,
PyWavelets.DiscreteWavelet[] wavelet,
int level,
int start_level,
int[] axes,
boolean trim_approx,
boolean norm)
-
iswtn2
private double[][] iswtn2(java.util.HashMap<java.lang.String,double[][]>[] coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
int[] axes)
-
iswtn
private double[][][] iswtn(java.util.HashMap<java.lang.String,double[][][]>[] coeffs,
PyWavelets.DiscreteWavelet[] wavelet,
int[] axes)
���������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/package-tree.html��������������������������������������������0000775�4231163�4231163�00000072733�14537076122�024120� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.filters Class Hierarchy (MIPAV API Documentation)
Enum Hierarchy
- java.lang.Object
- java.lang.Enum<E> (implements java.lang.Comparable<T>, java.io.Serializable)
�������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmLearnFromFailure64Knees.ClassType.html��������������0000775�4231163�4231163�00000036300�14537076057�031677� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLearnFromFailure64Knees.ClassType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
ClassType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
ClassType
private ClassType()
-
Method Detail
-
valueOf
public static AlgorithmLearnFromFailure64Knees.ClassType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmMean.html�������������������������������������������0000775�4231163�4231163�00000167024�14537076057�024324� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMean (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMean(ModelImage srcImg,
int kSize,
boolean maskFlag) |
Constructor for 2D images in which changes are returned to the source image.
|
AlgorithmMean(ModelImage srcImg,
int kSize,
boolean sliceBySlice,
boolean maskFlag) |
Constructor for 3D images in which changes are returned to the source image.
|
AlgorithmMean(ModelImage destImg,
ModelImage srcImg,
int kSize,
boolean maskFlag) |
Constructor for 2D images in which changes are placed in a predetermined destination image.
|
AlgorithmMean(ModelImage destImg,
ModelImage srcImg,
int kSize,
boolean sliceBySlice,
boolean maskFlag) |
Constructor for 3D images in which changes are placed in a predetermined destination image.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace2D() |
Mean filters the source image.
|
private void |
calcInPlace3D() |
Mean filters the source image and replaces the source image with the mean filtered image.
|
private void |
calcStoreInDest2D() |
This function produces a new image that has been mean filtered and places filtered image in the destination
image.
|
private void |
calcStoreInDest3D() |
This function produces a new volume image that has been mean filtered.
|
void |
finalize() |
Prepares this class for destruction.
|
private float[] |
getAdaptiveMean(int i,
float[] data,
boolean is2D) |
Used for color images only when filterType == ADAPTIVE_VECTOR.
|
private float |
getMean(int i,
float[] data,
boolean is2D) |
DOCUMENT ME!
|
void |
runAlgorithm() |
Starts the algorithm.
|
void |
setRGBChannelFilter(int filterType,
boolean r,
boolean g,
boolean b,
int redVector,
int greenVector,
int blueVector) |
If filterType == SEPARATE_COMPONENT, RGB images are mean filtered by 'channel.'
|
private void |
sliceAdaptiveVectorFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString) |
Allows a single slice to be filtered.
|
private void |
sliceFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString) |
Allows a single slice to be filtered.
|
private void |
sliceParallelVectorFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString) |
Allows a single slice to be filtered.
|
private void |
volumeAdaptiveVectorFilter(float[] srcBuffer,
float[] destBuffer) |
Filter a Color 3D image with a 3D kernel.
|
private void |
volumeColorFilter(float[] srcBuffer,
float[] destBuffer) |
Filter a Color 3D image with a 3D kernel.
|
private void |
volumeFilter(float[] srcBuffer,
float[] destBuffer) |
Filter a 3D image with a 3D kernel.
|
private void |
volumeParallelVectorFilter(float[] srcBuffer,
float[] destBuffer) |
Filter a Color 3D image with a 3D kernel.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
bChannel
private boolean bChannel
DOCUMENT ME!
-
currentSlice
private int currentSlice
DOCUMENT ME!
-
gChannel
private boolean gChannel
DOCUMENT ME!
-
halfK
private int halfK
DOCUMENT ME!
-
kernelSize
private int kernelSize
DOCUMENT ME!
-
rChannel
private boolean rChannel
DOCUMENT ME!
-
filterType
private int filterType
-
redNorm
private float redNorm
-
greenNorm
private float greenNorm
-
blueNorm
private float blueNorm
-
midGray
private float midGray
-
colorMax
private float colorMax
-
Constructor Detail
-
AlgorithmMean
public AlgorithmMean(ModelImage srcImg,
int kSize,
boolean maskFlag)
Constructor for 2D images in which changes are returned to the source image.
- Parameters:
srcImg - Source image model.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).maskFlag - Flag that indicates that the mean filtering will be performed for the whole image if equal to
true.
-
AlgorithmMean
public AlgorithmMean(ModelImage destImg,
ModelImage srcImg,
int kSize,
boolean maskFlag)
Constructor for 2D images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).maskFlag - Flag that indicates that the mean filtering will be performed for the whole image if equal to
true.
-
AlgorithmMean
public AlgorithmMean(ModelImage srcImg,
int kSize,
boolean sliceBySlice,
boolean maskFlag)
Constructor for 3D images in which changes are returned to the source image.
- Parameters:
srcImg - Source image model.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).sliceBySlice - Each slice in a volume image is to be filtered separately (when true), else the volume will
use a kernel with 3 dimensions.maskFlag - Flag that indicates that the mean filtering will be performed for the whole image if equal
to true.
-
AlgorithmMean
public AlgorithmMean(ModelImage destImg,
ModelImage srcImg,
int kSize,
boolean sliceBySlice,
boolean maskFlag)
Constructor for 3D images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.kSize - Kernel size: dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).sliceBySlice - Each slice in a volume image is filtered separately (when true), else the volume will use a
kernel with 3 dimensions.maskFlag - Flag that indicates that the mean filtering will be performed for the whole image if equal
to true.
-
Method Detail
-
setRGBChannelFilter
public void setRGBChannelFilter(int filterType,
boolean r,
boolean g,
boolean b,
int redVector,
int greenVector,
int blueVector)
If filterType == SEPARATE_COMPONENT, RGB images are mean filtered by 'channel.'
That is, each color, red, blue and green, is filtered independently of
the other two colors. This mean filter permits selectively filtering any combination of the three channels
instead of simply filtering all three.
If filterType == ADAPTIVE_VECTOR, use fuzzy memebership functions based on an angle
criterion to determine the weights of an adaptive weighted mean filter.
If filterType == PARALLEL_VECTOR, decompose image into components parallel
and perpindicular to the direction given by (redVector, greenVector, and blueVector)
and only filter the parallel component before adding the 2 components back together.
- Parameters:
filterType - r - Filter red channel.g - Filter green channel.b - Filter blue channel.redVector - greenVector - blueVector -
-
calcStoreInDest3D
private void calcStoreInDest3D()
This function produces a new volume image that has been mean filtered. Image can be filtered by filtering each
slice individually, or by filtering using a kernel-volume.
-
getAdaptiveMean
private float[] getAdaptiveMean(int i,
float[] data,
boolean is2D)
Used for color images only when filterType == ADAPTIVE_VECTOR.
- Parameters:
i - The central pixel to find neighbors for.data - Image datais2D - True indicates that the neighbors are found along a 2D slice (or 2D image) instead of neighbors in
a 3D volume.- Returns:
- mean value of the kernel neighborhood
-
sliceFilter
private void sliceFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString)
Allows a single slice to be filtered. Note that a progressBar must be created first.
- Parameters:
srcBuffer - Source buffer.destBuffer - Destination Buffer.bufferStartingPoint - Starting point for the buffer.msgString - A text message that can be displayed as a message text in the progressBar.
-
sliceParallelVectorFilter
private void sliceParallelVectorFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString)
Allows a single slice to be filtered.
Used only for color images when filterType == PARALLEL_VECTOR.
- Parameters:
srcBuffer - Source buffer.destBuffer - Destination Buffer.bufferStartingPoint - Starting point for the buffer.msgString - A text message that can be displayed as a message text in the progressBar.
-
sliceAdaptiveVectorFilter
private void sliceAdaptiveVectorFilter(float[] srcBuffer,
float[] destBuffer,
int bufferStartingPoint,
java.lang.String msgString)
Allows a single slice to be filtered.
Used only for color images when filterType == ADAPTIVE_VECTOR.
- Parameters:
srcBuffer - Source buffer.destBuffer - Destination Buffer.bufferStartingPoint - Starting point for the buffer.msgString - A text message that can be displayed as a message text in the progressBar.
-
volumeColorFilter
private void volumeColorFilter(float[] srcBuffer,
float[] destBuffer)
Filter a Color 3D image with a 3D kernel. Allows mean filtering to include the picture elements at greater depths
than only the current slice. This method allows selected band filtering, and does not filter the alpha band.
- Parameters:
srcBuffer - Source image.destBuffer - Destination image.- See Also:
volumeFilter(float[],float[])
-
volumeParallelVectorFilter
private void volumeParallelVectorFilter(float[] srcBuffer,
float[] destBuffer)
Filter a Color 3D image with a 3D kernel. Allows mean filtering to include the picture elements at greater depths
than only the current slice. This method allows selected band filtering, and does not filter the alpha band.
Used on when filterType == PARALLEL_VECTOR.
- Parameters:
srcBuffer - Source image.destBuffer - Destination image.- See Also:
volumeFilter(float[],float[])
-
volumeAdaptiveVectorFilter
private void volumeAdaptiveVectorFilter(float[] srcBuffer,
float[] destBuffer)
Filter a Color 3D image with a 3D kernel. Allows mean filtering to include the picture elements at greater depths
than only the current slice. This method allows selected band filtering, and does not filter the alpha band.
Used only when filterType == ADAPTIVE_VECTOR.
- Parameters:
srcBuffer - Source image.destBuffer - Destination image.- See Also:
volumeFilter(float[],float[])
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmHurstIndex.DistanceIntensity.html�������������������0000775�4231163�4231163�00000027257�14537076057�031204� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHurstIndex.DistanceIntensity (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex.DistanceIntensity
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
distance |
|
private double |
intensity |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
DistanceIntensity(double distance,
double intensity) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
distance
private double distance
-
intensity
private double intensity
-
Method Detail
-
getDistance
double getDistance()
-
getIntensity
double getIntensity()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmProstateFeatures.html�������������������������������0000775�4231163�4231163�00000260625�14537076060�026737� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmProstateFeatures (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static float |
ALPHA |
DOCUMENT ME!
|
private boolean |
asm |
If true calculate angular second moment Sum over i,j of Probability(i,j) * Probability(i,j).
|
static int |
BOTH_FUZZY_HARD |
possible values for segmentation.
|
private float[] |
centroids |
DOCUMENT ME!
|
private ModelImage[] |
classificationImage |
|
private int[] |
classNumber |
|
private boolean |
concatenate |
If true, form only 1 result image by concatenating the original source to each of the
calculated features.
|
private boolean |
contrast |
If true calculate contrast, also known as sum of squares variance Sum over i,j of Probability(i,j) * (i-j) *
(i-j).
|
private boolean |
correlation |
If true calculate glcm correlation Sum over i,j of Probability(i,j) * (i - glcm mean) * (j - glcm mean)/ glcm
variance.
|
private boolean |
cropBackground |
DOCUMENT ME!
|
private ModelImage[] |
destImage |
DOCUMENT ME!
|
private boolean |
dissimilarity |
If true calculate dissimilarity Sum over i,j of Probability(i,j) * Absolute value(i-j).
|
private boolean |
distanceFilter |
|
private AlgorithmDistanceFilter |
distanceFilterAlgo |
|
private ModelImage |
distanceImage |
|
private boolean |
energy |
If true calculate energy Energy = square root(asm).
|
private boolean |
entropy |
If true calcuate entropy Sum over i,j of -Probability(i,j) * ln(Probability(i,j)).
|
private boolean |
ew |
If true east-west direction calculated.
|
private double |
exponent |
1/(qValue - 1).
|
private AlgorithmFuzzyCMeans |
fcmAlgo |
|
private float |
freqU |
DOCUMENT ME!
|
private AlgorithmFrequencyFilter |
FrequencyFilterAlgo |
|
private float |
freqV |
DOCUMENT ME!
|
static int |
FUZZY_ONLY |
DOCUMENT ME!
|
private boolean |
fuzzyCMeanFilter |
|
private ModelImage[] |
fuzzyCMeanImages |
|
private boolean |
gaborFilter |
|
private ModelImage |
gaborImage |
DOCUMENT ME!
|
private ModelImage |
gmImage |
|
private AlgorithmGradientMagnitude |
gradientMagAlgo |
|
private int |
greyLevels |
Number of grey levels used if rescaling performed.
|
private int |
haralickImagesNumber |
|
static int |
HARD_ONLY |
DOCUMENT ME!
|
private boolean |
homogeneity |
If true calculate homogeneity, also called the Inverse Difference Moment of Order 2 Sum over i,j of
Probability(i,j)/(1 + (i-j)*(i-j)).
|
private ModelImage |
image |
|
private boolean |
imageOriginFilter |
|
private boolean |
invariantDir |
If true spatially invariant direction calculated.
|
private boolean |
inverseOrder1 |
If true calculate inverse difference moment of order 1 Sum over i,j of Probability(i,j)/(1 + abs(i-j)).
|
private int |
jacobiIters1 |
jacobiIters1 and jacobiIter2 are only used with gain correction.
|
private int |
jacobiIters2 |
DOCUMENT ME!
|
static float |
MAX_FLOAT |
DOCUMENT ME!
|
private int |
maxIter |
DOCUMENT ME!
|
private boolean |
maxProbability |
If true calculate maximum probability maximum probability is the largest probability value within the window.
|
private boolean |
mean |
If true calculate gray level co-occurrence matrix mean Sum over i,j of i * Probability(i,j) = Sum over i,j of j *
Probability(i,j).
|
private int |
nClass |
DOCUMENT ME!
|
private boolean |
nesw |
If true northeast-southwest direction calculated.
|
private boolean |
ns |
If true north-south direction calculated.
|
private int |
numberFiltersAdditional |
|
private int |
offsetDistance |
Distance between the 2 pixels in the pair - almost always 1.
|
private float[] |
oldMember |
|
private boolean |
outputGainField |
DOCUMENT ME!
|
private boolean |
powEIntFlag |
|
private boolean |
promenance |
If true calculate the cluster promenance Sum over i,j of ((i + j - x mean - y mean)**4) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j of ((i + j - 2 * glcm mean)**4) * Probability(i,j)
|
private int |
pyramidLevels |
pyramidLevels is only used with gain correction.
|
private float |
qValue |
DOCUMENT ME!
|
private static int |
RED_OFFSET |
Red channel.
|
private int |
RGBOffset |
|
private float[] |
sCentroids |
|
private int |
segmentation |
DOCUMENT ME!
|
private boolean |
senw |
If true southeast-northwest direction calculated.
|
private boolean |
shade |
If true calculate the cluster shade Sum over i,j of ((i + j - x mean - y mean)**3) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j over ((i + j - 2 * glcm mean)**3) * Probability(i,j)
It is a measure of the degree to which the outliers in the histogram favor one side or another
of the statistical mean.
|
private float |
sigmaU |
DOCUMENT ME!
|
private float |
sigmaV |
DOCUMENT ME!
|
private float |
smooth1 |
smooth1 and smooth2 are only used with gain field correction.
|
private float |
smooth2 |
DOCUMENT ME!
|
private boolean |
standardDeviation |
If true calculate glcm standard deviation glcm standard deviation = square root(glcm variance).
|
private float |
theta |
DOCUMENT ME!
|
private float |
threshold |
DOCUMENT ME!
|
private float |
tolerance |
DOCUMENT ME!
|
private boolean[] |
unusedCentroids |
|
private boolean |
variance |
If true calculate glcm variance Sum over i,j of Probability(i,j) * (i - glcm mean) * (i - glcm mean) = Sum over
i,j of Probability(i,j) * (j - glcm mean) * (j - glcm mean).
|
private VOIVector |
VOIs |
|
private boolean |
wholeImage |
|
private int |
windowSize |
Size of square window used in calculating each glcm matrix - must be an odd number.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmProstateFeatures(ModelImage[] destImg,
ModelImage[] classImage,
ModelImage srcImg,
int windowSize,
int offsetDistance,
int greyLevels,
boolean ns,
boolean nesw,
boolean ew,
boolean senw,
boolean invariantDir,
boolean contrast,
boolean dissimilarity,
boolean homogeneity,
boolean inverseOrder1,
boolean asm,
boolean energy,
boolean maxProbability,
boolean entropy,
boolean mean,
boolean variance,
boolean standardDeviation,
boolean correlation,
boolean shade,
boolean promenance,
boolean concatenate,
boolean gaborFilter,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean distanceFilter,
int numberFiltersAdditional,
boolean imageOriginFilter,
boolean fuzzyCMeanFilter,
int _nClass,
int _pyramidLevels,
int _jacobiIters1,
int _jacobiIters2,
float _q,
float _smooth1,
float _smooth2,
boolean _outputGainField,
int _segmentation,
boolean _cropBackground,
float _threshold,
int _max_iter,
float _tolerance,
boolean _wholeImage,
float[] centroids) |
Creates a new AlgorithmHaralickTexture object for black and white image.
|
AlgorithmProstateFeatures(ModelImage[] destImg,
ModelImage[] classImage,
ModelImage srcImg,
int RGBOffset,
int windowSize,
int offsetDistance,
int greyLevels,
boolean ns,
boolean nesw,
boolean ew,
boolean senw,
boolean invariantDir,
boolean contrast,
boolean dissimilarity,
boolean homogeneity,
boolean inverseOrder1,
boolean asm,
boolean energy,
boolean maxProbability,
boolean entropy,
boolean mean,
boolean variance,
boolean standardDeviation,
boolean correlation,
boolean shade,
boolean promenance,
boolean concatenate,
boolean gaborFilter,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean distanceFilter,
int numberFiltersAdditional,
boolean imageOriginFilter,
boolean fuzzyCMeanFilter,
int _nClass,
int _pyramidLevels,
int _jacobiIters1,
int _jacobiIters2,
float _q,
float _smooth1,
float _smooth2,
boolean _outputGainField,
int _segmentation,
boolean _cropBackground,
float _threshold,
int _max_iter,
float _tolerance,
boolean _wholeImage,
float[] centroids) |
Creates a new AlgorithmHaralickTexture object for color image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
contrast
private boolean contrast
If true calculate contrast, also known as sum of squares variance Sum over i,j of Probability(i,j) * (i-j) *
(i-j).
-
correlation
private boolean correlation
If true calculate glcm correlation Sum over i,j of Probability(i,j) * (i - glcm mean) * (j - glcm mean)/ glcm
variance.
-
dissimilarity
private boolean dissimilarity
If true calculate dissimilarity Sum over i,j of Probability(i,j) * Absolute value(i-j).
-
homogeneity
private boolean homogeneity
If true calculate homogeneity, also called the Inverse Difference Moment of Order 2 Sum over i,j of
Probability(i,j)/(1 + (i-j)*(i-j)).
-
inverseOrder1
private boolean inverseOrder1
If true calculate inverse difference moment of order 1 Sum over i,j of Probability(i,j)/(1 + abs(i-j)).
-
mean
private boolean mean
If true calculate gray level co-occurrence matrix mean Sum over i,j of i * Probability(i,j) = Sum over i,j of j *
Probability(i,j).
-
variance
private boolean variance
If true calculate glcm variance Sum over i,j of Probability(i,j) * (i - glcm mean) * (i - glcm mean) = Sum over
i,j of Probability(i,j) * (j - glcm mean) * (j - glcm mean).
-
shade
private boolean shade
If true calculate the cluster shade Sum over i,j of ((i + j - x mean - y mean)**3) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j over ((i + j - 2 * glcm mean)**3) * Probability(i,j)
It is a measure of the degree to which the outliers in the histogram favor one side or another
of the statistical mean.
-
promenance
private boolean promenance
If true calculate the cluster promenance Sum over i,j of ((i + j - x mean - y mean)**4) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j of ((i + j - 2 * glcm mean)**4) * Probability(i,j)
-
concatenate
private boolean concatenate
If true, form only 1 result image by concatenating the original source to each of the
calculated features.
-
RGBOffset
private int RGBOffset
-
freqU
private float freqU
DOCUMENT ME!
-
freqV
private float freqV
DOCUMENT ME!
-
sigmaU
private float sigmaU
DOCUMENT ME!
-
sigmaV
private float sigmaV
DOCUMENT ME!
-
theta
private float theta
DOCUMENT ME!
-
exponent
private double exponent
1/(qValue - 1).
-
jacobiIters2
private int jacobiIters2
DOCUMENT ME!
-
maxIter
private int maxIter
DOCUMENT ME!
-
nClass
private int nClass
DOCUMENT ME!
-
qValue
private float qValue
DOCUMENT ME!
-
segmentation
private int segmentation
DOCUMENT ME!
-
smooth2
private float smooth2
DOCUMENT ME!
-
threshold
private float threshold
DOCUMENT ME!
-
tolerance
private float tolerance
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmProstateFeatures
public AlgorithmProstateFeatures(ModelImage[] destImg,
ModelImage[] classImage,
ModelImage srcImg,
int windowSize,
int offsetDistance,
int greyLevels,
boolean ns,
boolean nesw,
boolean ew,
boolean senw,
boolean invariantDir,
boolean contrast,
boolean dissimilarity,
boolean homogeneity,
boolean inverseOrder1,
boolean asm,
boolean energy,
boolean maxProbability,
boolean entropy,
boolean mean,
boolean variance,
boolean standardDeviation,
boolean correlation,
boolean shade,
boolean promenance,
boolean concatenate,
boolean gaborFilter,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean distanceFilter,
int numberFiltersAdditional,
boolean imageOriginFilter,
boolean fuzzyCMeanFilter,
int _nClass,
int _pyramidLevels,
int _jacobiIters1,
int _jacobiIters2,
float _q,
float _smooth1,
float _smooth2,
boolean _outputGainField,
int _segmentation,
boolean _cropBackground,
float _threshold,
int _max_iter,
float _tolerance,
boolean _wholeImage,
float[] centroids)
Creates a new AlgorithmHaralickTexture object for black and white image.
- Parameters:
destImg - image model where result image is to storedclassificationImg - for each pixel, store which class this pixel belongs tosrcImg - source image modelwindowSize - the size of the square windowoffsetDistance - distance between 2 pixels of pairgreyLevels - Number of grey levels used if rescaling performedns - true if north south offset direction calculatednesw - true if northeast-southwest offset direction calculatedew - true if east west offset direction calculatedsenw - true if southeast-northwest offset direction calculatedinvariantDir - true if spatially invariant calculatedcontrast - true if contrast calculateddissimilarity - true if dissimilarity calculatedhomogeneity - true if homogeneity calculatedinverseOrder1 - true if inverse difference moment of order 1 calculatedasm - true if angular second moment calculatedenergy - true if energy calculatedmaxProbability - true if maximum probability calculatedentropy - true if entropy calculatedmean - true if gray level coordinate matrix mean calculatedvariance - true if gray level coordinate matrix variance calculatedstandardDeviation - true if gray level coordinate matrix standard deviation calculatedcorrelation - true if gray level coordinate matrix correlation calculatedshade - true if cluster shade calculatedpromenance - true if cluster promenance calculatedconcatenate - If true, only 1 result image formed by concatenating the original
source to each of the calculated features
-
AlgorithmProstateFeatures
public AlgorithmProstateFeatures(ModelImage[] destImg,
ModelImage[] classImage,
ModelImage srcImg,
int RGBOffset,
int windowSize,
int offsetDistance,
int greyLevels,
boolean ns,
boolean nesw,
boolean ew,
boolean senw,
boolean invariantDir,
boolean contrast,
boolean dissimilarity,
boolean homogeneity,
boolean inverseOrder1,
boolean asm,
boolean energy,
boolean maxProbability,
boolean entropy,
boolean mean,
boolean variance,
boolean standardDeviation,
boolean correlation,
boolean shade,
boolean promenance,
boolean concatenate,
boolean gaborFilter,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean distanceFilter,
int numberFiltersAdditional,
boolean imageOriginFilter,
boolean fuzzyCMeanFilter,
int _nClass,
int _pyramidLevels,
int _jacobiIters1,
int _jacobiIters2,
float _q,
float _smooth1,
float _smooth2,
boolean _outputGainField,
int _segmentation,
boolean _cropBackground,
float _threshold,
int _max_iter,
float _tolerance,
boolean _wholeImage,
float[] centroids)
Creates a new AlgorithmHaralickTexture object for color image.
- Parameters:
destImg - image model where result image is to storedclassificationImg - for each pixel store which class this pixel belongs tosrcImg - source image modelRGBOffset - selects red, green, or blue channelwindowSize - the size of the square windowoffsetDistance - distance between 2 pixels of pairgreyLevels - Number of grey levels used if rescaling performedns - true if north south offset direction calculatednesw - true if northeast-southwest offset direction calculatedew - true if east west offset direction calculatedsenw - true if southeast-northwest offset direction calculatedinvariantDir - true if spatially invariant calculatedcontrast - true if contrast calculateddissimilarity - true if dissimilarity calculatedhomogeneity - true if homogeneity calculatedinverseOrder1 - true if inverse difference moment of order 1 calculatedasm - true if angular second moment calculatedenergy - true if energy calculatedmaxProbability - true if maximum probability calculatedentropy - true if entropy calculatedmean - true if gray level coordinate matrix mean calculatedvariance - true if gray level coordinate matrix variance calculatedstandardDeviation - true if gray level coordinate matrix standard deviation
calculatedcorrelation - true if gray level coordinate matrix correlation calculatedshade - true if cluster shade calculatedpromenance - true if cluster promenance calculatedconcatenate - If true, only 1 result image formed by concatenating the
original source to each of the calculated features
-
Method Detail
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
�����������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PyWavelets.ContinuousWavelet.html����������������������������0000775�4231163�4231163�00000030314�14537076060�027356� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PyWavelets.ContinuousWavelet (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.PyWavelets.ContinuousWavelet
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
lower_bound
double lower_bound
-
upper_bound
double upper_bound
-
complex_cwt
boolean complex_cwt
-
center_frequency
double center_frequency
-
fbsp_order
int fbsp_order
-
family_number
int family_number
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmBSplineScatteredDataPointSetToImageFilter.html������0000775�4231163�4231163�00000137523�14537076057�033534� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBSplineScatteredDataPointSetToImageFilter (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
direction, extents, extentsLength, extentsSlice, insideValue, nDims, numberOfRequiredInputs, origin, outputImage, outsideValue, pointData, pointLocation, resolutions, xyzExtents
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
epsilon
private double epsilon
-
currentLevel
private int currentLevel
-
Method Detail
-
collapsePhiLattice
private void collapsePhiLattice(double[] lattice,
int[] latticeIndex,
double[] collapsedLattice,
int[] collapsedLatticeIndex,
double u,
int dimension)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/package-summary.html�����������������������������������������0000775�4231163�4231163�00000074760�14537076122�024660� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.algorithms.filters (MIPAV API Documentation)
-
Class Summary
| Class |
Description |
| AlgorithmAdaptiveKuwaharaFilter |
This algorithm is created from the description provided in the article:
"Adaptive Kuwahara Filter" by Krzysztof Bartyzel, Published online
July 6, 2015.
|
| AlgorithmAnisotropicDiffusion |
This algorithm anisotropically diffuses an image.
|
| AlgorithmBilateralFilter |
Bilateral filtering smooths an image or VOI region of the image while preserving edges with 2 Gaussian functions.
|
| AlgorithmBoundaryAttenuation |
Attenuate around the boundary of an object defined by a VOI in an image volume.
|
| AlgorithmBSplineControlPointImageFilter |
|
| AlgorithmBSplineScatteredDataPointSetToImageFilter |
|
| AlgorithmCoherenceEnhancingDiffusion |
Algorithm to apply Coherence Enhancing Anisotropic Diffusion
|
| AlgorithmColorEdge |
This algorithm uses a hypercomplex filter to find the edges between a region of two
user specified colors.
|
| AlgorithmDistanceFilter |
|
| AlgorithmEdgePreservingSmoothing |
These are Maximum Homogeneity Neighbor Filters.
|
| AlgorithmEllipticFilter |
This module contains a port from FORTRAN to Java of the FORTRAN program for designing elliptic-function
filters and a port from MATLAB to Java of the MATLAB program ellipap1 for designing an elliptic
analog lowpass filter prototype found in "Elliptic Functions for Filter Design" by H.
|
| AlgorithmFFT |
Processing images by filtering in the frequency domain is a 3 step process: 1.)
|
| AlgorithmFFT2 |
Processing images by filtering in the frequency domain is a 3 step process: 1.)
|
| AlgorithmFIREEdgeExtraction |
References:
1.)
|
| AlgorithmFrequencyFilter |
AlgorithmFrequencyFilter.java.
|
| AlgorithmFrequencyFilterColor |
AlgorithmFrequencyFilterColor.java.
|
| AlgorithmFuzzMinDeAndChatterji |
This algorithm performs minimization of fuzziness, a reduction of the amount of fuzziness.
|
| AlgorithmFuzzyMinimization |
This algorithm performs minimization of fuzziness, a reduction of the amount of fuzziness.
|
| AlgorithmGaussianBlur |
The application of this algorithm blurs an image or VOI region of the image with a Gaussian function at a user
defined scale (sigma - standard deviation).
|
| AlgorithmGaussianBlurSep |
Calculates the gaussian blur of an image at a scale defined by the user (using separable convolutions).
|
| AlgorithmGradientInverseWeightedSmoothing |
|
| AlgorithmGradientMagnitude |
Calculates the gradient magnitude of an image at a scale defined by the user.
|
| AlgorithmGradientMagnitudeSep |
Calculates the gradient magnitude of an image at a scale defined by the user (using separable convolutions).
|
| AlgorithmGuidedFilter |
The MIT License (MIT)
Copyright (c) 2014 Atilim Cetin
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
|
| AlgorithmHaralickTexture |
DOCUMENT ME!
|
| AlgorithmHilbertTransform |
|
| AlgorithmHurstIndex |
DOCUMENT ME!
|
| AlgorithmIsophoteCurvature |
|
| AlgorithmKernelRegression |
This is a port of MATLAB routines contained in kernelRegressionBasedImageProcessingToolBox_ver1-2beta written by
Hiroyuki Takeda, Sina Farsiu, and Peyman Milanfar.
|
| AlgorithmLaplacian |
Calculates the Laplacian of the gaussian of an image at a scale defined by the user.
|
| AlgorithmLawsTexture |
|
| AlgorithmLearnFromFailure64 |
|
| AlgorithmLearnFromFailure64Knees |
|
| AlgorithmLocalNormalization |
Local Normalisation equalises colour levels among pixels by removing variations due to lighting; this brings out
contrasts in detail.
|
| AlgorithmLocalVariance |
|
| AlgorithmMarkovSmooth |
|
| AlgorithmMean |
Algorithm to apply a mean filter to an image, placing it in a new ModelImage if New image is selected or returning
the changed picture to the same image if Replace image is selected.
|
| AlgorithmMedian |
Algorithm to apply a median filter to an image, placing it in a new ModelImage, or returning the changed picture to
the same image.
|
| AlgorithmMode |
AlgorithmMode applies one of the user specified kernels to a 2D or 3D BYTE, SHORT, INTEGER, UBYTE, USHORT, UINTEGER.
|
| AlgorithmMorphologicalFilter |
Performs morphological filtering on black and white images.
|
| AlgorithmN4MRIBiasFieldCorrectionFilter |
|
| AlgorithmNLNoiseReduction |
This is a port of the SUSAN Nonlinear Noise reduction program.
|
| AlgorithmNMSuppression |
Calculates the non-maximum suppression of an image at a scale defined by the user Edges are defined as the union of
points for which the gradient magnitude assumes a maximum in the gradient direction.
|
| AlgorithmNonlocalMeansFilter |
This is a port of the 09/03/2006 NLmeansfilter.m and UNLmeansfilter2.m on 02/15/2008 by Jose Vicente
Manjon Herrera & Antoni Buades.
|
| AlgorithmPointSetToImageFilter |
|
| AlgorithmProstateBoundaryExt |
This algorithm traces the prostate boundary from the target image, non prostate binary mask image and
prostate boundary binary mask image.
|
| AlgorithmProstateBoundaryFeature2D |
DOCUMENT ME!
|
| AlgorithmProstateFeatures |
DOCUMENT ME!
|
| AlgorithmProstateFeatures2D |
DOCUMENT ME!
|
| AlgorithmProstateFeaturesSaveAutoTrain |
This class save the Coherence Enhanced Diffusion (CED) 2D slice based features, which are Hurst index
and Haralick features.
|
| AlgorithmRegularizedIsotropicDiffusion |
Algorithm to apply Regularized Isotropic Nonlinear Diffusion as described by:
|
| AlgorithmRiceWaveletTools |
This "rice-wlet-tools", version 2.4
Released -
CONDITIONS FOR USE:
Copyright (c) 2000 RICE UNIVERSITY.
|
| AlgorithmRuleBasedContrastEnhancement |
This algorithm uses an equation with 3 membership functions, udark, ugray, and ubright, to transform a gray level g
to a new gray level g' for histogram enhancement.
|
| AlgorithmSliceAveraging |
This algorithm averages together slices of a 3D image.
|
| AlgorithmSobel |
|
| AlgorithmSWI |
This class recalculates mo and dceFullTre to provide better estimates using the inverse Ernst equation
|
| AlgorithmSymmetricNearestNeighbor |
|
| AlgorithmTamuraTexture |
DOCUMENT ME!
|
| AlgorithmTrilateralFilter |
This is a port of openCVtrilateralFilter.h and openCVtrilateralFilter.cpp
written by Tobi Vaudrey.
|
| AlgorithmUnsharpMask |
Calculates the Unsharp Mask of an image at a scale defined by the user ( unsharp image = original image - weight *
blurred image); weight < 1;
|
| AlgorithmWaveletFuse |
MIT License
Copyright (c) 2021 Hans Brouwer, Riyo Wanagiri
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
|
| AlgorithmWaveletThreshold |
In hard thresholding a wavelet coefficient whose magnitude is below the product of threshold and the maximum wavelet
magnitude is zeroed, and a wavelet coefficient whose magnitude is greater than or equal to the product is left
unchanged.
|
| BiorthogonalWavelets |
Copyright (c) 2012, Brian Moore
Copyright (c) 2004, Ben Barrowes
All rights reserved.
|
| BM3D |
|
| ChirpZTransform |
|
| FFTUtility |
This FFT should only be used when it is necessary to perform a N-dimensional FFT on non-power of two data without
adding padding.
|
| FFTUtilityEP |
This extended precision FFT should only be used when it is necessary to perform a N-dimensional FFT on non-power of
two data without adding padding.
|
| MultiGuidedFilter |
This is a port of multi_guided_est.py by Yiqian Wang.
|
| MultiResolutionBilateralFilter |
This is a port of multi_bilateral.py by Yiqian Wang.
|
| PhasePreservingDenoising |
|
| PseudoPolarFourierTransform |
|
| PyWavelets |
Copyright (c) 2006-2012 Filip Wasilewski
Copyright (c) 2012-2017 The PyWavelets Developers
Permission is hereby granted, free of charge, to any person obtaining a copy of
this software and associated documentation files (the "Software"), to deal in
the Software without restriction, including without limitation the rights to
use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies
of the Software, and to permit persons to whom the Software is furnished to do
so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
|
-
����������������gov/nih/mipav/model/algorithms/filters/PyWavelets.SYMMETRY.html�������������������������������������0000775�4231163�4231163�00000041230�14537076060�025150� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PyWavelets.SYMMETRY (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
type |
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
SYMMETRY(int type) |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
type
private final int type
-
Method Detail
-
valueOf
public static PyWavelets.SYMMETRY valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmFIREEdgeExtraction.html�����������������������������0000775�4231163�4231163�00000067127�14537076057�027022� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFIREEdgeExtraction (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmFIREEdgeExtraction
extends AlgorithmBase
References:
1.) Digital Image Processing Third Edition by Rafael C. Gonzalez and Richard E. Woods, Section 3.8.5
Using Fuzzy Sets for Spatial Filtering, Pearson Prentice Hall, 2008, pp. 189-191.
2.) Russo F. and Ramponi G., "Edge Extraction by FIRE Operators", FUZZ-IEEE '94, 1994, vol 1, pp. 249-253,
IEEE Press, New York.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
blackEnd |
gray scale value at which the black membership function ends the linear transition from 1 at the
lowest gray scale value to 0
|
private double |
gaussianStdDev |
Standard deviation of the gaussian used in determining the zero membership function from intensity
differences
|
private double |
whiteStart |
Gray scale value at which the white membership function begins the linear transition from 0 to 1
at the highest intensity value
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFIREEdgeExtraction(ModelImage srcImg,
double gaussianStdDev,
double whiteStart,
double blackEnd) |
Constructor for images in which changes are returned to the source image.
|
AlgorithmFIREEdgeExtraction(ModelImage destImg,
ModelImage srcImg,
double gaussianStdDev,
double whiteStart,
double blackEnd) |
Constructor for images in which changes are placed in a predetermined destination image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmFIREEdgeExtraction
public AlgorithmFIREEdgeExtraction(ModelImage srcImg,
double gaussianStdDev,
double whiteStart,
double blackEnd)
Constructor for images in which changes are returned to the source image.
- Parameters:
srcImg - Source image model.gaussianStdDev - whiteStart - blackEnd -
-
AlgorithmFIREEdgeExtraction
public AlgorithmFIREEdgeExtraction(ModelImage destImg,
ModelImage srcImg,
double gaussianStdDev,
double whiteStart,
double blackEnd)
Constructor for images in which changes are placed in a predetermined destination image.
- Parameters:
destImg - Image model where result image is stored.srcImg - Source image model.gaussianStdDev - whiteStart - blackEnd -
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmProstateFeatures2D.html�����������������������������0000775�4231163�4231163�00000162457�14537076060�027131� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmProstateFeatures2D (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmProstateFeatures2D(ModelImage destImg,
ModelImage classImage,
ModelImage srcImg,
boolean imageIntensityFilter,
boolean coherenceEnhancingDiffusionFilter,
boolean regisotropicDiffusionFilter,
boolean IHN3CorrectionFilter,
boolean modeFilter,
boolean meanFilter,
boolean medianFilter,
boolean invertFilter,
boolean haralickFilter,
boolean gaborFilter,
boolean hurstFilter,
boolean waveletFilter,
boolean gaussianFilter,
boolean gmFilter,
int numberFeatures) |
Creates a new AlgorithmHaralickTexture object for black and white image.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
gmFilter
private boolean gmFilter
-
Constructor Detail
-
AlgorithmProstateFeatures2D
public AlgorithmProstateFeatures2D(ModelImage destImg,
ModelImage classImage,
ModelImage srcImg,
boolean imageIntensityFilter,
boolean coherenceEnhancingDiffusionFilter,
boolean regisotropicDiffusionFilter,
boolean IHN3CorrectionFilter,
boolean modeFilter,
boolean meanFilter,
boolean medianFilter,
boolean invertFilter,
boolean haralickFilter,
boolean gaborFilter,
boolean hurstFilter,
boolean waveletFilter,
boolean gaussianFilter,
boolean gmFilter,
int numberFeatures)
Creates a new AlgorithmHaralickTexture object for black and white image.
-
Method Detail
-
calculate
private void calculate()
DOCUMENT ME!
-
whichClass
public int whichClass(int pos,
int centerX,
int centerY,
int xDim,
int yDim)
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmAnisotropicDiffusion.html���������������������������0000775�4231163�4231163�00000122502�14537076057�027575� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmAnisotropicDiffusion (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private float[] |
GxData |
Storage location of the first derivative of the Gaussian in the X direction.
|
private float[] |
GyData |
Storage location of the first derivative of the Gaussian in the Y direction.
|
private float[] |
GzData |
Storage location of the first derivative of the Gaussian in the Z direction.
|
private int |
iterations |
Number of iterations of the diffusion.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
private int[] |
klapExtents |
Dimensionality for the Laplacian kernel.
|
private float |
konsnt |
Controls the diffusion rate.
|
private float[] |
lapData |
Storage location of the Laplacian data.
|
private float[] |
outputBuffer |
Receives output of AlgorithmConvolver
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmAnisotropicDiffusion(ModelImage srcImg,
float[] sigmas,
int iter,
float kValue,
boolean maskFlag,
boolean img25D) |
Creates a new AlgorithmAnisotropicDiffusion object.
|
AlgorithmAnisotropicDiffusion(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
int iter,
float kValue,
boolean maskFlag,
boolean img25D) |
Creates a new AlgorithmAnisotropicDiffusion object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calcInPlace2D(int nImages) |
Calculates the diffused image and replaces the source image with the diffused image.
|
private void |
calcInPlace3D() |
Calculates the diffused image and replaces the source image with the diffused image.
|
private void |
calcStoreInDest2D(int nImages) |
Calculates the diffused image and stores the resultant diffused image in the destination image model.
|
private void |
calcStoreInDest3D() |
Calculates the diffused image and stores the resultant diffused image in the destination image model.
|
void |
finalize() |
Sets class storages arrays to null so that System.gc() can free the memory.
|
private void |
makeKernels2D() |
Creates the derivative kernels used to calculate the gradient magnitude and kernel for the diffusion process.
|
private void |
makeKernels3D() |
Creates the 3D derivative kernels used to calculate the gradient magnitude and kernel for the diffusion process.
|
void |
runAlgorithm() |
Starts the algorithm.
|
void |
setLinkedProgressValues(int n,
AlgorithmBase convolver) |
Sets convolver progress values so that linked algorithm will show at least a 1% change.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false on process the image over the mask
areas.
-
Constructor Detail
-
AlgorithmAnisotropicDiffusion
public AlgorithmAnisotropicDiffusion(ModelImage srcImg,
float[] sigmas,
int iter,
float kValue,
boolean maskFlag,
boolean img25D)
Creates a new AlgorithmAnisotropicDiffusion object.
- Parameters:
srcImg - reference to the source imagesigmas - sigmas used to describe the gaussian that is used in the calculation of the gradient magnitudeiter - number of iterations (t) of the diffusion equationkValue - K is a factor that controls the diffusion rate. A large value causes this algorithms to act
like gaussian smoothing and therefore diffuses across edges. K = small reduces blur across
edges. Typical K = 5;maskFlag - Flag that indicates that the anisotropic diffusion will be performed for the whole image if
equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
AlgorithmAnisotropicDiffusion
public AlgorithmAnisotropicDiffusion(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
int iter,
float kValue,
boolean maskFlag,
boolean img25D)
Creates a new AlgorithmAnisotropicDiffusion object.
- Parameters:
destImg - Reference to destination image.srcImg - Reference to the source image.sigmas - Sigmas used to describe the gaussian that is used in the calculation of the gradient magnitude.iter - Number of iterations (t) of the diffusion equationkValue - K is a factor that controls the diffusion rate. A large value causes this algorithms to act
like gaussian smoothing and therefore diffuses across edges. K = small reduces blur across
edges. Typical K = 5.maskFlag - Flag that indicates that the anisotropic diffusion will be performed for the whole image if
equal to true.img25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
Method Detail
-
setLinkedProgressValues
public void setLinkedProgressValues(int n,
AlgorithmBase convolver)
Sets convolver progress values so that linked algorithm will show at least a 1% change.
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/FFTUtility.html����������������������������������������������0000775�4231163�4231163�00000111540�14537076060�023562� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
FFTUtility (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class FFTUtility
extends AlgorithmBase
This FFT should only be used when it is necessary to perform a N-dimensional FFT on non-power of two data without
adding padding. Otherwise, developers should use AlgorithmFFT (which has multithreading/jocl optimizations).
For forward transforms arrays a and b originally hold the real and imaginary components of the data, and return the
real and imaginary components of the resulting fourier coefficients. The roles reverse for the inverse transform.
multivariate data is indexed according to Java indexing conventions in which the last dimension is contiguous in
memory, without limit on the number of implied multiple subscripts. the subroutine is called once for each variate.
the calls for a multivariate transform may be in any order. n is the dimension of the current variable. If n has more
than 15 "factors", FFT terminates with an error message. The smallest number with 16 "factors" is 12,754,584, so this
error condition should not occur very often. nspn is the spacing of consecutive data values while indexing the
current variable. nseg*n*nspn is the total number of complex data values. The sign of isn determines the sign of the
complex exponential, and the magnitude of isn is normally one. isn is -1 for the forward transform and +1 for the
inverse transform. The magnitude of isn determines the indexing increment for a & b. If fft is called twice, with
opposite signs on isn, an identity transformation is done. Calls can be in either order. The results are scaled by
1/n when the sign of isn is positive. a tri-variate transform with a(n1,n2,n3), b(n1,n2,n3) is computed by FFTUtility
fft = new FFTUtility(a,b,n1*n2,n3,1,-1,FFTUtility.FFT); fft.run(); fft = new
FFTUtility(a,b,n1,n2,n3,-1,FFTUtility.FFT); fft.run(); fft = new FFTUtility(a,b,1,n1,n2*n3,-1,FFTUtility.FFT);
fft.run(); for a single-variate transform, FFTUtility fft = new FFTUtility(a,b,1,n,1,-1,FFTUtility.FFT); fft.run();
- See Also:
This class is based on the Fortran/C code for R. C. Singleton's mixed radix FFT algorithm, released under the below
license by Mark Olesen on NETLIB (netlib.org).
References: R. C. Singleton, An algorithm for computing the mixed radix fast Fourier transform, IEEE Transactions on
Audio and Electroacoustics, AU-17, no. 2, June, 1969, pp. 93-103.
multivariate complex fourier transform, computed in place using mixed-radix fast fourier transform algorithm. by r.
c. singleton, stanford research institute, sept. 1968
Copyright(c)1995,97 Mark Olesen olesen@me.QueensU.CA
Queen's Univ at Kingston (Canada)
Permission to use, copy, modify, and distribute this software for
any purpose without fee is hereby granted, provided that this
entire notice is included in all copies of any software which is
or includes a copy or modification of this software and in all
copies of the supporting documentation for such software.
THIS SOFTWARE IS BEING PROVIDED AS IS, WITHOUT ANY EXPRESS OR
IMPLIED WARRANTY. IN PARTICULAR, NEITHER THE AUTHOR NOR QUEEN'S
UNIVERSITY AT KINGSTON MAKES ANY REPRESENTATION OR WARRANTY OF ANY
KIND CONCERNING THE MERCHANTABILITY OF THIS SOFTWARE OR ITS
FITNESS FOR ANY PARTICULAR PURPOSE.
All of which is to say that you can do what you like with this
source code provided you don't try to sell it as your own and you
include an unaltered copy of this message (including the
copyright).
It is also implicitly understood that bug fixes and improvements
should make their way back to the general Internet community so
that everyone benefits.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
a |
DOCUMENT ME!
|
private double[] |
b |
DOCUMENT ME!
|
static int |
FFT |
DOCUMENT ME!
|
private int |
functionType |
DOCUMENT ME!
|
private int |
isn |
DOCUMENT ME!
|
private int |
n |
DOCUMENT ME!
|
private int |
nseg |
DOCUMENT ME!
|
private int |
nspn |
DOCUMENT ME!
|
static int |
REALS |
DOCUMENT ME!
|
static int |
REALT |
DOCUMENT ME!
|
static int |
SELF_TEST |
DOCUMENT ME!
|
private boolean |
showProgress |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
FFTUtility(double[] a,
double[] b,
int nseg,
int n,
int nspn,
int isn,
int functionType) |
Creates a new FFTUtility object.
|
FFTUtility(int functionType) |
This constructor should only be used for functionType == SELF_TEST.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
fft() |
DOCUMENT ME!
|
void |
finalize() |
DOCUMENT ME!
|
(package private) double[] |
normal() |
DOCUMENT ME!
|
private void |
reals() |
DOCUMENT ME!
|
private void |
realt() |
DOCUMENT ME!
|
(package private) double[] |
rms(double[] a,
double[] b,
double[] c,
double[] d,
int n) |
DOCUMENT ME!
|
void |
runAlgorithm() |
Starts the program.
|
private void |
selfTest() |
DOCUMENT ME!
|
void |
setShowProgress(boolean showProgress) |
|
void |
sortg(double[] a,
int n,
double[] tag) |
DOCUMENT ME!
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
a
private double[] a
DOCUMENT ME!
-
b
private double[] b
DOCUMENT ME!
-
functionType
private int functionType
DOCUMENT ME!
-
isn
private int isn
DOCUMENT ME!
-
n
private int n
DOCUMENT ME!
-
nseg
private int nseg
DOCUMENT ME!
-
nspn
private int nspn
DOCUMENT ME!
-
Constructor Detail
-
FFTUtility
public FFTUtility(double[] a,
double[] b,
int nseg,
int n,
int nspn,
int isn,
int functionType)
Creates a new FFTUtility object.
- Parameters:
a - DOCUMENT ME!b - DOCUMENT ME!nseg - DOCUMENT ME!n - DOCUMENT ME!nspn - DOCUMENT ME!isn - DOCUMENT ME!functionType - DOCUMENT ME!
-
Method Detail
-
normal
double[] normal()
DOCUMENT ME!
- Returns:
- DOCUMENT ME!
-
rms
double[] rms(double[] a,
double[] b,
double[] c,
double[] d,
int n)
DOCUMENT ME!
- Parameters:
a - DOCUMENT ME!b - DOCUMENT ME!c - DOCUMENT ME!d - DOCUMENT ME!n - DOCUMENT ME!- Returns:
- DOCUMENT ME!
-
fft
private void fft()
DOCUMENT ME!
-
reals
private void reals()
DOCUMENT ME!
-
realt
private void realt()
DOCUMENT ME!
-
selfTest
private void selfTest()
DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmRiceWaveletTools.EigenvalueComplexComparator.html���0000775�4231163�4231163�00000027442�14537076060�034333� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRiceWaveletTools.EigenvalueComplexComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools.EigenvalueComplexComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmFrequencyFilterColor.html���������������������������0000775�4231163�4231163�00000334606�14537076057�027554� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFrequencyFilterColor (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmFrequencyFilterColor
extends AlgorithmBase
AlgorithmFrequencyFilterColor.java.
AlgorithmFrequencyFilterColor only works for 2D and 25D for color. Quaternion Fourier transforms are
used.
imagiData[i] = (float)((red + green + blue)/sqrt(3));
imagjData[i] = (float)((green - blue)/sqrt(2));
imagkData[i] = (float)((-2.0*red + green + blue)/sqrt(6));
imagi corresponds corresponds to luminance information and imagj and imagk correspond to
chrominance information.
u1 = (i + j + k)/sqrt(3)
u2 = (j - k)/sqrt(2)
where u1 and u2 are two unit pure quaternions that are orthogonal to each other.
u3 = u1 * u2 = (-2*i + j + k)/sqrt(6)
The zero valued real array and the imagiData are used for one complex FFT. The imagjData and
imagkData are used for a second complex FFT. In the Butterworth and Gaussian filters the same
coefficient is multiplied by realData, imagiData, imagjData, and imagkData. This works
because when h(x,y) = h(-x,-y), the quaternion convolution operation in the space domain
corresponds to the product operation in the frequency domain. This is the same as the
case of the conventional convolution. After inverse filtering red, green, and blue are formed
form the processed luminance and chrominance data:
finalRData[i] = (lum/sqrt(3) - 2.0*chr2/sqrt(6));
finalGData[i] = (lum/sqrt(3) + chr1/sqrt(2) + chr2/sqrt(6));
finalBData[i] = (float)(lum/sqrt(3) - chr1/sqrt(2) + chr2/sqrt(6));
- Author:
- William Gandler and Matthew J. McAuliffe Processing images by filtering in the frequency domain is a 3 step
process: 1.) Performing a forward fast fourier transform to convert a spatial image into its frequency
image. 2.) Enhancing some frequency components of the image and attenuating other frequency components of
the image by mulitplying by a lowpass, highpass, bandpass, or bandstop filter. Frequency filters may be
constructed with 1 of 3 methods - finite impulse response filters constructed with Hamming windows, Gaussian
filters, and Butterworth filters. However, for the Gaussian filters only lowpass and highpass filters are
available. 3.) Performing an inverse fast fourier transform to convert from the frequency domain back into
the spatial domain. This software module performs all 3 steps in one combined process. AlgorithmFFT is used
to perform the steps one at a time and examine the Frequency space images.
The module also creates a Gabor filter, which is essentially a tilted Gaussian with 2 unequal axes at an
offset (freqU, freqV) from the origin. A Gabor filter only responds to a texture having both a particular
frequency and a particular orientation. Note that a filter and its mirror image reflected across the u and v
frequency axes produce identical frequency responses.
This module also performs homomorphic fitering in which if any data is zero or negative a positive
constant is added to all pixels to give a minimum value of 1. Then the log of the data is taken, the fast
fourier transform is performed, the high frequencies are multiplied by a gain greater than 1 while the low
frequencies are multiplied by a gain less than 1, the inverse fast fourier transform is performed, and the
exponential of the the data is taken. Optionally, a specified percentage of the data can be clamped at the
low end and/or at the high end. Finally, the data is rescaled so that the original minimum and maximum
values are achieved. Only Butterworth filters are used with homomorphic filters in this module. References
on homomorphic filters: 1.) Digital Image Processing Second Edition by Rafael C. Gonzalez and Richard E.
Woods, Prentice-Hall, Inc., 2002, Chapter 4.5, pp. 191-194. 2.) "Butterworth equations for homomorphic
filtering of images" by Holger. G. Adelmann, Computers in Medicine and Biology, Vol. 28, 1998, pp. 169-181.
3.) "Efficient Implementation of Quanternion Fourier Transform, Convolution, and Correlation by 2-D
Complex FFT" by Soo-Chang Pei, Jian-Jiun Ding, and Ja-Han Chang, IEEE Transactions on Signal Processing,
Vol. 49, No. 11, November, 2001, pp. 2783-2797.
4.) "Frequency Domain Filtering of Colour Images using Quaternion Fourier Transforms" by
B.D. Venkatramana Redd and Dr. T. Jaychandra Prasad, IJSCT, VOl. 1, Issue 2, December, 2010,
pp. 46-52.
The core algorithm of this module, the fast fourier transform algorithm found in exec(), requires that
all the dimensions of an N-dimensional dataset be powers of 2. To be able to use this algorithm on datasets
with arbitrary dimensions, the data is zero padded to powers of 2 before applying the forward fast fourier
transform and stripped down to the original dimensions after applying the inverse fast fourier transform.
The powers of 2 are not kept identical because symmetrical Fourier pictures are not required.
The typical full sequence is as follows: 1.) Data from a real spatial image is exported into a float
array realData. 2.) An equally sized float array called imagData is created and filled with zeros. 3.)
realData and imagData are enlarged to the powers of two. If finite impulse repsonse filters are constructed
with Hamming windows and no cropping, the new dimension size is equal to the minimum power of two number
that equals or exceeds the original dimension size + kDim - 1, where kDim is the diameter of a circular or
spherical convolution kernel. If finite impulse response filters with Hamming windows and cropping or
infinite impulse response Gaussian or Butterworth filters are used, the new dimension size is equal to the
minimum power of two number that equals or exceeds the original dimension size. The data is padded with
zeros at the end of each dimension. 4.) exec() is invoked to run the fast fourier transform algorithm. 5.)
If Butterworth or Gaussian or Gabor filters are used, the center algorithm is invoked to reorder the data so
that frequencies with the lowest magnitudes are at the center. If finite impulse response filters with
windows are used: 6a.) An ideal filter kernel is constructed in the spatial domain. 7a.) A Hamming window
kernel is constructed in the spatial domain. 8a.) The ideal kernel and the Hamming window kernel are
multiplied together. 9a.) The kernel is zero padded up to the same dimensions that the image data was. 10a.)
exec() is run to obtain the FFT of the kernel. If Gaussian or Butterworth filters are used: For Gaussian and
Butterworth filters the transfer functions affect the real and imaginary parts of the FFT of the image in
exactly the same manner. These filters are zero-phase- shift filters because they do not alter the phase of
the transform. Since these filters are conjugate symmetric, the inverse FFTs of these filters are purely
real. Since this filtering is equivalent to convolving to real 2D data sets, the result must be purely real.
6b.) The real part of the FFT is set equal to the appropriate filter magnitude and the imaginary part is set
equal to zero. This filter has the same dimensions as the padded image data. 11.) The data FFT is set equal
to the product of the data FFT and the filter FFT. 12.) The inverse FFT process is invoked. The complex data
is exported into the 2 float arrays realData and imagData. There should be no need for zero padding at this
point since the dimensions should already be all powers of 2 from before. 13.) If Butterworth or Gaussian
filters are used, the center() routine is invoked to restore the data to its original ordering. 14.) exec()
is invoked to run the inverse fast fourier transform algorithm. 15.) The realData now holds the correct
response if Gaussian or Butterworth filtering was used. If FIR filtering with windows was used then realData
holds a version of the correct response shifted by (kDim - 1)/2 toward the end of each dimension. The
imagData should contain only roundoff error. 16.) For FIR filters shift the data back by (kDim - 1)/2 toward
the start of each dimension. 17.) Stripping is performed to return the image to its original dimensions.
18.) The realData() is imported into the the new spatial image.
Methods included calculate the magnitude and phase as shown below:
magnitude = ( (realData)^2 + (imagData)^2 )^(1/2); phase = arctan(imagData/realData);
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFrequencyFilterColor(ModelImage srcImg,
boolean image25D,
boolean imageCrop) |
Constructor used in Laplacian medialness option of live wire cost function.
|
AlgorithmFrequencyFilterColor(ModelImage srcImg,
boolean image25D,
boolean imageCrop,
int kernelDiameter,
int filterType,
double freq1,
double freq2,
int constructionMethod,
int filterOrder,
double epsilon,
double rs) |
Creates a new AlgorithmFrequencyFilter object.
|
AlgorithmFrequencyFilterColor(ModelImage srcImg,
boolean image25D,
float freq1,
int filterOrder,
float lowGain,
float highGain,
float lowTruncated,
float highTruncated) |
This constructor is only used for HOMOMORPHIC filters.
|
AlgorithmFrequencyFilterColor(ModelImage srcImg,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor) |
Constructor used for Gabor transform.
|
AlgorithmFrequencyFilterColor(ModelImage destImg,
ModelImage srcImg,
boolean image25D,
boolean imageCrop,
int kernelDiameter,
int filterType,
double freq1,
double freq2,
int constructionMethod,
int filterOrder,
double epsilon,
double rs) |
Creates a new AlgorithmFrequencyFilter object.
|
AlgorithmFrequencyFilterColor(ModelImage destImg,
ModelImage srcImg,
boolean image25D,
float freq1,
int filterOrder,
float lowGain,
float highGain,
float lowTruncated,
float highTruncated) |
This constructor is only used for HOMOMORPHIC filters.
|
AlgorithmFrequencyFilterColor(ModelImage destImg,
ModelImage srcImg,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor) |
Constructor used for Gabor transform.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace() |
This function replaces the original image with a new image that is either the FFT, the filtered FFT, or the
inverse FFT of the original or filtered image.
|
private void |
calcStoreInDest() |
This function produces a new image that is either the FFT, the filtered FFT, or the inverse FFT of the original
or filtered image.
|
private void |
center(float[] rData,
float[] iData) |
Centers the FFT for display purposes.
|
private double |
Chebyshev(int order,
double w) |
|
private void |
edgeStrip(float[] rData,
int z,
int colorIndex) |
This function edge strips the realData after the inverse FFT to return to the original dimensions that were
present before the forward FFT was performed.
|
private void |
exec(float[] rData,
float[] iData,
int z,
int complexHalf) |
This is the method that calculates the FFT Perform a data centering operation after the forward FFT Perform a
data centering operation before the inverse FFT Note that a frequency filter operation performs a forward FFT.
|
void |
finalize() |
Prepares this class for destruction.
|
ModelImage |
getGabor() |
DOCUMENT ME!
|
float[] |
getImaginaryiData() |
Returns reference to imaginaryi data array.
|
float[] |
getImaginaryjData() |
Returns reference to imaginaryj data array.
|
float[] |
getImaginarykData() |
Returns reference to imaginaryk data array.
|
float[] |
getMagData() |
Returns reference to magnitude data array.
|
float[] |
getPhaseData() |
Returns reference to phase data array.
|
float[] |
getRealData() |
Returns reference to real data array.
|
byte[] |
getSData() |
DOCUMENT ME!
|
private void |
hammingKernel2D() |
Builds a hamming kernel in 2 dimensions.
|
private void |
hammingKernel3D() |
Builds a hamming kernel in 3 dimensions.
|
private void |
idealBPKernel2D(double FLow,
double FHigh) |
Builds the idealized bandpass kernel in 2 dimensions.
|
private void |
idealBPKernel3D(double FLow,
double FHigh) |
Builds the idealized bandpass kernel in 2 dimensions.
|
private void |
idealBSKernel2D(double FLow,
double FHigh) |
Builds the idealized bandstop kernel in 2 dimensions.
|
private void |
idealBSKernel3D(double FLow,
double FHigh) |
Builds the idealized bandstop kernel in 3 dimensions.
|
private void |
idealHPKernel2D(double cutoffFreq) |
Builds the idealized highpass kernel in 2 dimensions.
|
private void |
idealHPKernel3D(double cutoffFreq) |
Builds the idealized highpass kernel in 3 dimensions.
|
private void |
idealLPKernel2D(double cutoffFreq) |
Builds the idealized lowpass kernel in 2 dimensions.
|
private void |
idealLPKernel3D(double cutoffFreq) |
Builds the idealized lowpass kernel in 3 dimensions.
|
private void |
magnitude() |
Calculates magnitude from real and imaginary parts magnitude = ( (realData)^2 + (imagData)^2 )^(1/2);
|
private void |
makeButterworthFilter(double fr1,
double fr2) |
DOCUMENT ME!
|
private void |
makeChebyshevTypeIFilter(double fr1,
double fr2) |
|
private void |
makeChebyshevTypeIIFilter(double fr1,
double fr2) |
|
private void |
makeEllipticFilter(double fr1,
double fr2) |
|
private void |
makeGaborFilter(float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor) |
DOCUMENT ME!
|
private void |
makeGaussianFilter(double rmsFreq) |
DOCUMENT ME!
|
private void |
makeHomomorphicFilter(double fr1) |
DOCUMENT ME!
|
private void |
makeHyperComplexData() |
makeHyperComplexData -
|
private void |
makeKernelData() |
sets the kernel variables.
|
private void |
phase(float[] phase) |
Calculates phase from real and imaginary parts.
|
private void |
restoreFinalData(float[] finalData) |
DOCUMENT ME!
|
void |
runAlgorithm() |
Starts the program.
|
private void |
shiftBack(float[] rData) |
Shifts the FFT data back from the center for processing purposes and inverse FFT.
|
private void |
zeroAround(float[] finalData) |
If a cropping operation was performed, shift the data back to the center and put zeros around the edges.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
arrayLength
private int arrayLength
DOCUMENT ME!
-
filterOrder
private int filterOrder
DOCUMENT ME!
-
dimLengths
private int[] dimLengths
DOCUMENT ME!
-
doCrop
private boolean doCrop
DOCUMENT ME!
-
end
private int[] end
DOCUMENT ME!
-
f1
private double f1
DOCUMENT ME!
-
f2
private double f2
DOCUMENT ME!
-
filterType
private int filterType
DOCUMENT ME!
-
freqV
private float freqV
DOCUMENT ME!
-
highGain
private float highGain
DOCUMENT ME!
-
iKernel
private float[] iKernel
DOCUMENT ME!
-
image25D
private boolean image25D
DOCUMENT ME!
-
kDim
private int kDim
DOCUMENT ME!
-
lowGain
private float lowGain
DOCUMENT ME!
-
magData
private float[] magData
DOCUMENT ME!
-
minimum
private float minimum
DOCUMENT ME!
-
maximum
private float maximum
DOCUMENT ME!
-
ndim
private int ndim
DOCUMENT ME!
-
newSliceSize
private int newSliceSize
DOCUMENT ME!
-
realData
private float[] realData
DOCUMENT ME!
-
sData
private byte[] sData
DOCUMENT ME!
-
sigmaU
private float sigmaU
DOCUMENT ME!
-
sigmaV
private float sigmaV
DOCUMENT ME!
-
start
private int[] start
DOCUMENT ME!
-
theta
private float theta
DOCUMENT ME!
-
transformDir
private int transformDir
DOCUMENT ME!
-
wKernel
private float[] wKernel
DOCUMENT ME!
-
zeroPad
private boolean zeroPad
DOCUMENT ME!
-
epsilon
private double epsilon
-
sqrt2
private double sqrt2
-
sqrt3
private double sqrt3
-
sqrt6
private double sqrt6
-
Constructor Detail
-
AlgorithmFrequencyFilterColor
public AlgorithmFrequencyFilterColor(ModelImage srcImg,
boolean image25D,
boolean imageCrop)
Constructor used in Laplacian medialness option of live wire cost function.
- Parameters:
srcImg - source image modelimage25D - if true processes each slice of a 3D image independentlyimageCrop - if true crop image if largest image dimension + kDim - 1 exceeds the smallest power of 2
number >= the largest dimension
-
AlgorithmFrequencyFilterColor
public AlgorithmFrequencyFilterColor(ModelImage srcImg,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor)
Constructor used for Gabor transform.
- Parameters:
srcImg - Source image modelfreqU - Frequency along U axis before rotation by theta range -1 to 1freqV - Frequency along V axis before rotation by theta range -1 to 1sigmaU - Standard deviation along prerotated U axissigmaV - Standard deviation along prerotated V axistheta - Rotation in radianscreateGabor - If true, produce an image of the Gabor filter
-
AlgorithmFrequencyFilterColor
public AlgorithmFrequencyFilterColor(ModelImage srcImg,
boolean image25D,
float freq1,
int filterOrder,
float lowGain,
float highGain,
float lowTruncated,
float highTruncated)
This constructor is only used for HOMOMORPHIC filters.
- Parameters:
srcImg - source image modelimage25D - If true, processes each slice of a 3D image independentlyfreq1 - cutoff frequency, transition frequency from low to high gainfilterOrder - order of the Butterworth filterlowGain - < 1, gain at low frequencieshighGain - > 1, gain at high frequencieslowTruncated - part of low histogram end truncatedhighTruncated - part of high histogram end truncated
-
AlgorithmFrequencyFilterColor
public AlgorithmFrequencyFilterColor(ModelImage destImg,
ModelImage srcImg,
float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor)
Constructor used for Gabor transform.
- Parameters:
destImg - Destination image modelsrcImg - Source image modelfreqU - Frequency along U axis before rotation by theta range -1 to 1freqV - Frequency along V axis before rotation by theta range -1 to 1sigmaU - Standard deviation along prerotated U axissigmaV - Standard deviation along prerotated V axistheta - Rotation in radianscreateGabor - If true, produce an image of the Gabor filter
-
AlgorithmFrequencyFilterColor
public AlgorithmFrequencyFilterColor(ModelImage destImg,
ModelImage srcImg,
boolean image25D,
float freq1,
int filterOrder,
float lowGain,
float highGain,
float lowTruncated,
float highTruncated)
This constructor is only used for HOMOMORPHIC filters.
- Parameters:
destImg - image model where result image is to be storedsrcImg - source image modelimage25D - If true, processes each slice of a 3D image independentlyfreq1 - cutoff frequency, transition frequency from low to high gainfilterOrder - order of the Butterworth filterlowGain - < 1, gain at low frequencieshighGain - > 1, gain at high frequencieslowTruncated - part of low histogram end truncatedhighTruncated - part of high histogram end truncated
-
AlgorithmFrequencyFilterColor
public AlgorithmFrequencyFilterColor(ModelImage srcImg,
boolean image25D,
boolean imageCrop,
int kernelDiameter,
int filterType,
double freq1,
double freq2,
int constructionMethod,
int filterOrder,
double epsilon,
double rs)
Creates a new AlgorithmFrequencyFilter object.
- Parameters:
srcImg - source image modelimage25D - if true processes each slice of a 3D image independentlyimageCrop - if true crop image if largest image dimension + kDim - 1 exceeds the smallest power
of 2 number >= the largest dimensionkernelDiameter - convolution kernel diameter - must be an odd integer >= 3filterType - LOWPASS, HIGHPASS, BANDPASS, or BANDSTOPfreq1 - cutoff frequency in LOWPASS and HIGHPASS lower frequency in BANDPASS and BANDSTOPfreq2 - higher frequency in BANDPASS and BANDSTOP User inputs f1 and f2 going from 0.0 to
1.0. Program multiplies these numbers by PI for FIR filters.constructionMethod - WINDOW for window finite impulse response, GAUSSIAN, or BUTTERWORTHfilterOrder - order of a Butterworth or chebyshev filterepsilon - Maximum ripple in a chebyshev filter or passband ripple in decibels in Elliptic filterrs - Decibels stopband is down in Elliptic filter
-
AlgorithmFrequencyFilterColor
public AlgorithmFrequencyFilterColor(ModelImage destImg,
ModelImage srcImg,
boolean image25D,
boolean imageCrop,
int kernelDiameter,
int filterType,
double freq1,
double freq2,
int constructionMethod,
int filterOrder,
double epsilon,
double rs)
Creates a new AlgorithmFrequencyFilter object.
- Parameters:
destImg - image model where result image is to be storedsrcImg - source image modelimage25D - if true processes each slice of a 3D image independentlyimageCrop - if true crop image if largest image dimension + kDim - 1 exceeds the smallest power
of 2 number >= the largest dimensionkernelDiameter - convolution kernel diameter - must be an odd integer >= 3filterType - LOWPASS, HIGHPASS, BANDPASS, or BANDSTOPfreq1 - cutoff frequency in LOWPASS and HIGHPASS lower frequency in BANDPASS and BANDSTOPfreq2 - higher frequency in BANDPASS and BANDSTOP User inputs f1 and f2 going from 0.0 to
1.0. Program multiplies these numbers by PI for FIR filters.constructionMethod - WINDOW for window finite impulse response, GAUSSIAN, or BUTTERWORTHfilterOrder - order of the Butterworth or chebyshev filterepsilon - Maximum ripple in chebyshev filter or passband ripple in decibels in Elliptic filterrs - Decibels stopband is down in Elliptic
-
Method Detail
-
getSData
public byte[] getSData()
DOCUMENT ME!
- Returns:
- sData
-
calcInPlace
private void calcInPlace()
This function replaces the original image with a new image that is either the FFT, the filtered FFT, or the
inverse FFT of the original or filtered image.
-
calcStoreInDest
private void calcStoreInDest()
This function produces a new image that is either the FFT, the filtered FFT, or the inverse FFT of the original
or filtered image.
-
edgeStrip
private void edgeStrip(float[] rData,
int z,
int colorIndex)
This function edge strips the realData after the inverse FFT to return to the original dimensions that were
present before the forward FFT was performed.
- Parameters:
rData - DOCUMENT ME!z - DOCUMENT ME!
-
exec
private void exec(float[] rData,
float[] iData,
int z,
int complexHalf)
This is the method that calculates the FFT Perform a data centering operation after the forward FFT Perform a
data centering operation before the inverse FFT Note that a frequency filter operation performs a forward FFT.
- Parameters:
rData - real data bufferiData - imaginary data bufferz - slice number in image25D processing, 0 otherwisecomplexHalf - = 1 for first half, 2 for second half
-
idealBPKernel2D
private void idealBPKernel2D(double FLow,
double FHigh)
Builds the idealized bandpass kernel in 2 dimensions.
- Parameters:
FLow - defines the cutoff frequency at low freqs.FHigh - defines the cutoff frequency at high freqs.
-
idealBPKernel3D
private void idealBPKernel3D(double FLow,
double FHigh)
Builds the idealized bandpass kernel in 2 dimensions.
- Parameters:
FLow - defines the cutoff frequency at low freqs.FHigh - defines the cutoff frequency at high freqs.
-
idealBSKernel2D
private void idealBSKernel2D(double FLow,
double FHigh)
Builds the idealized bandstop kernel in 2 dimensions.
- Parameters:
FLow - defines the cutoff frequecy at low freqs.FHigh - defines the cutoff frequecy at high freqs.
-
idealBSKernel3D
private void idealBSKernel3D(double FLow,
double FHigh)
Builds the idealized bandstop kernel in 3 dimensions.
- Parameters:
FLow - defines the cutoff frequecy at low freqs.FHigh - defines the cutoff frequecy at high freqs.
-
makeGaborFilter
private void makeGaborFilter(float freqU,
float freqV,
float sigmaU,
float sigmaV,
float theta,
boolean createGabor)
DOCUMENT ME!
- Parameters:
freqU - DOCUMENT ME!freqV - DOCUMENT ME!sigmaU - DOCUMENT ME!sigmaV - DOCUMENT ME!theta - DOCUMENT ME!createGabor - DOCUMENT ME!
-
zeroAround
private void zeroAround(float[] finalData)
If a cropping operation was performed, shift the data back to the center and put zeros around the edges.
��������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmRiceWaveletTools.html�������������������������������0000775�4231163�4231163�00000217006�14537076060�026665� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRiceWaveletTools (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmRiceWaveletTools
extends AlgorithmBase
This "rice-wlet-tools", version 2.4
Released -
CONDITIONS FOR USE:
Copyright (c) 2000 RICE UNIVERSITY. All rights reserved.
This software is distributed and licensed to you on a non-exclusive
basis, free-of-charge. Redistribution and use in source and binary forms,
with or without modification, are permitted provided that the following
conditions are met:
1. Redistribution of source code must retain the above copyright notice,
this list of conditions and the following disclaimer.
2. Redistribution in binary form must reproduce the above copyright notice,
this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the distribution.
3. All advertising materials mentioning features or use of this software
must display the following acknowledgment: This product includes
software developed by Rice University, Houston, Texas and its contributors.
4. Neither the name of the University nor the names of its contributors
may be used to endorse or promote products derived from this software
without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY WILLIAM MARSH RICE UNIVERSITY, HOUSTON, TEXAS,
AND CONTRIBUTORS AS IS AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING,
BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL RICE UNIVERSITY
OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
OR BUSINESS INTERRUPTIONS) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
OTHERWISE), PRODUCT LIABILITY, OR OTHERWISE ARISING IN ANY WAY OUT OF THE
USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
For information on commercial licenses, contact Rice University's Office of
Technology Transfer at techtran@rice.edu or (713) 348-6173
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmRiceWaveletTools() |
|
AlgorithmRiceWaveletTools(ModelImage srcImg,
double[] noiseStandardDeviation) |
|
AlgorithmRiceWaveletTools(ModelImage srcImg,
int filterLength,
boolean redundant,
int numberOfLevels,
boolean doWaveletImages,
int minimumLevel,
int maximumLevel,
int filterType,
boolean doDenoise,
double actualThreshold,
int varianceEstimator,
double thresholdMultiplier,
int thresholdingType,
boolean thresholdLowPass,
boolean doBayesShrinkThresholdComputation) |
|
AlgorithmRiceWaveletTools(ModelImage destImg,
ModelImage srcImg,
int filterLength,
boolean redundant,
int numberOfLevels,
boolean doWaveletImages,
int minimumLevel,
int maximumLevel,
int filterType,
boolean doDenoise,
double actualThreshold,
int varianceEstimator,
double thresholdMultiplier,
int thresholdingType,
boolean thresholdLowPass,
boolean doBayesShrinkThresholdComputation) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double |
BayesShrinkThresholdComputation(double[] data,
double noise_var) |
|
private void |
bpconv(double[] x_out,
int lx,
double[] g0,
double[] g1,
int lh,
double[] x_inl,
double[] x_inh) |
|
private void |
bpsconv(double[] x_out,
int lx,
double[] g0,
double[] g1,
int lhm1,
int lhhm1,
double[] x_inl,
double[] x_inh) |
|
private void |
daubcqf() |
Function computes the Daubechies' scaling and wavelet filters (normalized to sqrt(2)).
|
private void |
fpconv(double[] x_in,
int lx,
double[] h0,
double[] h1,
int lh,
double[] x_outl,
double[] x_outh) |
|
private void |
fpsconv(double[] x_in,
int lx,
double[] h0,
double[] h1,
int lhm1,
double[] x_outl,
double[] x_outh) |
|
ModelImage[] |
getWaveletImages() |
Accessor that returns the image.
|
private void |
makeSig(java.lang.String sigName,
int signalLength) |
|
private void |
mdwt() |
|
void |
midwt() |
|
void |
mirdwt() |
|
private void |
mrdwt() |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
signalTest() |
|
void |
test_denoise_2D() |
|
void |
test_denoise_actual_thresh() |
|
void |
test_denoise_default() |
|
void |
test_denoise_hard() |
|
void |
test_denoise_levels() |
|
void |
test_denoise_std() |
|
void |
test_denoise_thresh_multiplier() |
|
void |
test_denoise_threshold_low() |
|
void |
test_denoise_udwt() |
|
void |
test_denoise_udwt_2d() |
|
void |
test_denoise_udwt_actual_thresh() |
|
void |
test_denoise_udwt_levels() |
|
void |
test_denoise_udwt_soft() |
|
void |
test_denoise_udwt_std() |
|
void |
test_denoise_udwt_thresh_multiplier() |
|
void |
test_denoise_udwt_threshold_low() |
|
void |
test_mdwt_1D() |
|
void |
test_mdwt_2D() |
|
void |
test_midwt_1D() |
|
void |
test_midwt_2D() |
|
void |
test_mirdwt_1() |
|
void |
test_mirdwt_2D() |
|
void |
test_mrdwt_1() |
|
void |
test_mrdwt_2() |
|
void |
test_mrdwt_2L2() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
filterLength
private int filterLength
-
filterType
private int filterType
-
extents
private int[] extents
-
sliceSize
private int sliceSize
-
aArray
private double[] aArray
-
llA
private double[][] llA
-
lhA
private double[][] lhA
-
hlA
private double[][] hlA
-
hhA
private double[][] hhA
-
minimumLevel
private int minimumLevel
-
maximumLevel
private int maximumLevel
-
Constructor Detail
-
AlgorithmRiceWaveletTools
public AlgorithmRiceWaveletTools(ModelImage destImg,
ModelImage srcImg,
int filterLength,
boolean redundant,
int numberOfLevels,
boolean doWaveletImages,
int minimumLevel,
int maximumLevel,
int filterType,
boolean doDenoise,
double actualThreshold,
int varianceEstimator,
double thresholdMultiplier,
int thresholdingType,
boolean thresholdLowPass,
boolean doBayesShrinkThresholdComputation)
-
AlgorithmRiceWaveletTools
public AlgorithmRiceWaveletTools(ModelImage srcImg,
int filterLength,
boolean redundant,
int numberOfLevels,
boolean doWaveletImages,
int minimumLevel,
int maximumLevel,
int filterType,
boolean doDenoise,
double actualThreshold,
int varianceEstimator,
double thresholdMultiplier,
int thresholdingType,
boolean thresholdLowPass,
boolean doBayesShrinkThresholdComputation)
-
Method Detail
-
signalTest
public void signalTest()
-
mrdwt
private void mrdwt()
-
fpconv
private void fpconv(double[] x_in,
int lx,
double[] h0,
double[] h1,
int lh,
double[] x_outl,
double[] x_outh)
-
fpsconv
private void fpsconv(double[] x_in,
int lx,
double[] h0,
double[] h1,
int lhm1,
double[] x_outl,
double[] x_outh)
-
midwt
public void midwt()
-
mirdwt
public void mirdwt()
-
bpsconv
private void bpsconv(double[] x_out,
int lx,
double[] g0,
double[] g1,
int lhm1,
int lhhm1,
double[] x_inl,
double[] x_inh)
-
bpconv
private void bpconv(double[] x_out,
int lx,
double[] g0,
double[] g1,
int lh,
double[] x_inl,
double[] x_inh)
-
daubcqf
private void daubcqf()
Function computes the Daubechies' scaling and wavelet filters (normalized to sqrt(2)).
The user specifies an even number filter length and a minimum phase, mid phase, or
maximum phase solution.
Reference: "Orthonormal Bases of Compactly Supported Wavelets", CPAM, October, 1989.
From the original source file:
%File Name: daubcqf.m
%Last Modification Date: 01/02/96 15:12:57
%Current Version: daubcqf.m 2.4
%File Creation Date: 10/10/88
%Author: Ramesh Gopinath
%
%Copyright (c) 2000 RICE UNIVERSITY. All rights reserved.
%Created by Ramesh Gopinath, Department of ECE, Rice University.
Correctly gives scaling and wavelet filters for filter length = 4 minimum phase:
Calculated scaling filter:
0.48296291314453416
0.8365163037378078
0.2241438680420134
-0.12940952255126037
Calculated Wavelet filter:
0.12940952255126037
0.2241438680420134
-0.8365163037378078
0.48296291314453416
Correct scaling filter = [0.482962913144534 0.836516303737808 0.224143868042013 -0.129409522551260];
Correct wavelet filter = [0.129409522551260 0.224143868042013 -0.836516303737808 0.482962913144534];
Correctly gives scaling and wavelet filters for filter length = 4 mid phase
Calculated scaling filter:
0.48296291314453416
0.8365163037378078
0.2241438680420134
-0.12940952255126037
Calculated wavelet filter:
0.12940952255126037
0.2241438680420134
-0.8365163037378078
0.48296291314453416
Correct scaling filter = [0.482962913144534 0.836516303737808 0.224143868042013 -0.129409522551260];
Corrct wavelet filter = [0.129409522551260 0.224143868042013 -0.836516303737808 0.482962913144534];
Correctly gives scaling and wavelet filters for filter length = 4 maximum phase
Calculated scaling filter:
-0.12940952255126037
0.2241438680420134
0.8365163037378078
0.48296291314453416
Calculated wavelet filter:
-0.48296291314453416
0.8365163037378078
-0.2241438680420134
-0.12940952255126037
Correct scaling filter = [-0.129409522551260 0.224143868042013 0.836516303737808 0.482962913144534];
Correct wavelet filter = [-0.482962913144534 0.836516303737808 -0.224143868042013 -0.129409522551260];
Correctly gives scaling and wavelet filters for filter length = 6 minimum phase
Scaling filter:
0.3326705529500828
0.8068915093110931
0.459877502118492
-0.1350110200102549
-0.08544127388202716
0.03522629188570937
Wavelet filter:
-0.03522629188570937
-0.08544127388202716
0.1350110200102549
0.459877502118492
-0.8068915093110931
0.3326705529500828
Correctly gives scaling and wavelet filters for filter length = 6 mid phase
Scaling filter:
0.3326705529500828
0.8068915093110931
0.459877502118492
-0.1350110200102549
-0.08544127388202716
0.03522629188570937
Wavelet filter:
-0.03522629188570937
-0.08544127388202716
0.1350110200102549
0.459877502118492
-0.8068915093110931
0.3326705529500828
Correct scaling filter = [0.332670552950083 0.806891509311093 0.459877502118491 -0.135011020010255 -0.085441273882027 0.035226291885710];
Correct wavelet filter = [-0.035226291885710 -0.085441273882027 0.135011020010255 0.459877502118491 -0.806891509311093 0.332670552950083];
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmSobel.html������������������������������������������0000775�4231163�4231163�00000056063�14537076060�024502� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSobel (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
kernelSize |
5 x 5 Sobel template found in Feature Extraction & Image Processing for Computer Vision Third Edition
by Mark S.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
kernelSize
private int kernelSize
5 x 5 Sobel template found in Feature Extraction & Image Processing for Computer Vision Third Edition
by Mark S. Nixon and Alberto S. Aguado Section 4.2.1.4. Sobel edge-detection operator pp. 146-153.
Formulas for deriving 7 x 7 Sobel template also found there.
smoothx_win = (winsize - 1)!/((winsize - 1 - x_win)! * x_win!)
Pascal(k, n) = n!/((n-k)! * k!) if ((k >= 0) && (k <= n))
0 otherwise
diffx_win = Pascal(x_win, winsize-2) - Pascal(x_win - 1, winsize-2)
Sobel x template = sum from xwin = 0 to winsize-1 sum from ywin = 0 to winsize-1 of smoothy_win * diffx_win
Sobel y template = sum from xwin = 0 to winsize-1 sum from ywin = 0 to winsize-1 of smoothx_win * diffy_win
-
Method Detail
-
run2D
public void run2D()
-
run3D
public void run3D()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmLearnFromFailure64Knees.html������������������������0000775�4231163�4231163�00000123142�14537076057�027772� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLearnFromFailure64Knees (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmLearnFromFailure64Knees(ModelImage _srcImage,
int _imageNum,
int _sliceNum,
float min,
float max,
boolean train,
java.io.BufferedWriter _outStream,
java.lang.String _savedImageDir) |
|
AlgorithmLearnFromFailure64Knees(ModelImage _srcImage,
int _imageNum,
int _sliceNum,
float min,
float max,
boolean train,
java.lang.String _savedImageDir) |
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
cropImage(int xMin,
int xMax,
int yMin,
int yMax) |
|
void |
disposeLocal() |
|
private void |
extractImage24bits(int xMin,
int xMax,
int yMin,
int yMax,
boolean isCenter) |
|
private void |
extractImage8bitsTest(int xMin,
int xMax,
int yMin,
int yMax,
AlgorithmLearnFromFailure64Knees.ClassType type,
float centerX,
float centerY) |
|
private void |
extractImage8bitsTrain(int xMin,
int xMax,
int yMin,
int yMax,
AlgorithmLearnFromFailure64Knees.ClassType type) |
|
private void |
generatePatches() |
|
private void |
learnFromFailure() |
|
int |
numDigits(int value) |
|
static void |
pause() |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
smoothVOI128(ModelImage maskImage,
ModelImage resultImage) |
|
void |
smoothVOI128single(ModelImage maskImage,
ModelImage resultImage) |
|
void |
smoothVOI30(ModelImage maskImage,
ModelImage resultImage) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
imageNum
private int imageNum
-
sliceNum
private int sliceNum
-
patchNum
private int patchNum
-
training
private boolean training
-
Constructor Detail
-
AlgorithmLearnFromFailure64Knees
public AlgorithmLearnFromFailure64Knees(ModelImage _srcImage,
int _imageNum,
int _sliceNum,
float min,
float max,
boolean train,
java.lang.String _savedImageDir)
-
AlgorithmLearnFromFailure64Knees
public AlgorithmLearnFromFailure64Knees(ModelImage _srcImage,
int _imageNum,
int _sliceNum,
float min,
float max,
boolean train,
java.io.BufferedWriter _outStream,
java.lang.String _savedImageDir)
-
Method Detail
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
-
extractImage24bits
private void extractImage24bits(int xMin,
int xMax,
int yMin,
int yMax,
boolean isCenter)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmPointSetToImageFilter.html��������������������������0000775�4231163�4231163�00000076243�14537076057�027627� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPointSetToImageFilter (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
nDims
protected int nDims
-
extents
protected int[] extents
-
origin
protected float[] origin
-
xyzExtents
protected int xyzExtents
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmNMSuppression.html����������������������������������0000775�4231163�4231163�00000141315�14537076057�026224� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNMSuppression (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
algorithmPerformed(AlgorithmBase algorithm) |
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
|
private void |
calcInPlace2D(int nImages) |
Calculates the non-maximum suppression image and replaces the source image with the new image.
|
private void |
calcInPlace3D() |
Calculates the non-maximum suppression and replaces the source image with the new image.
|
private void |
calcStoreInDest2D(int nImages) |
This function produces the non-maximum suppression of input image.
|
private void |
calcStoreInDest3D() |
This function produces the Non-maximum suppression of input image.
|
void |
finalize() |
Prepares this class for destruction.
|
static void |
genLevelMask(int xDim,
int yDim,
float[] buffer,
java.util.BitSet edgeImage,
float level) |
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
|
void |
genZeroXMask(float[] buffer,
float[] buffer2) |
Generates a zero crossing mask for a 2D function sets a ModelImage to 1 if a zero crossing is detected.
|
ModelImage |
getZeroXMask() |
Accessor to return mask indicating zero crossings.
|
private void |
makeKernels2D() |
Creates 2D Gaussian derivative kernels.
|
private void |
makeKernels3D() |
Creates 3D Gaussian derivative kernels.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setEdgeOptions(float loThres,
float hiThres) |
Call from dialog if you wish to produce edge image.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
GxData
private float[] GxData
DOCUMENT ME!
-
GxxData
private float[] GxxData
DOCUMENT ME!
-
GxxxData
private float[] GxxxData
DOCUMENT ME!
-
GxxyData
private float[] GxxyData
DOCUMENT ME!
-
GxyData
private float[] GxyData
DOCUMENT ME!
-
GxyyData
private float[] GxyyData
DOCUMENT ME!
-
GxzData
private float[] GxzData
DOCUMENT ME!
-
GyData
private float[] GyData
DOCUMENT ME!
-
GyyData
private float[] GyyData
DOCUMENT ME!
-
GyyyData
private float[] GyyyData
DOCUMENT ME!
-
GyzData
private float[] GyzData
DOCUMENT ME!
-
GzData
private float[] GzData
DOCUMENT ME!
-
GzzData
private float[] GzzData
DOCUMENT ME!
-
kExtents
private int[] kExtents
DOCUMENT ME!
-
loThres
private float loThres
DOCUMENT ME!
-
hiThres
private float hiThres
DOCUMENT ME!
-
sigmas
private float[] sigmas
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmNMSuppression
public AlgorithmNMSuppression(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D)
AlgorithmNMSuppression - Constructor.
- Parameters:
srcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the non-maximum suppression will be calculated for the whole image if
equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
AlgorithmNMSuppression
public AlgorithmNMSuppression(ModelImage destImg,
ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D)
AlgorithmNMSuppression - Constructor.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the non-maximum suppression will be calculated for the whole image if
equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
Method Detail
-
genLevelMask
public static void genLevelMask(int xDim,
int yDim,
float[] buffer,
java.util.BitSet edgeImage,
float level)
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
- Parameters:
xDim - X dimension lengthyDim - Y dimension lengthbuffer - array of data in which to find level crossingedgeImage - edge map of level crossingslevel - level of crossings to find (e.g. zero crossing of the non-maximum suppression)
-
genZeroXMask
public void genZeroXMask(float[] buffer,
float[] buffer2)
Generates a zero crossing mask for a 2D function sets a ModelImage to 1 if a zero crossing is detected.
- Parameters:
buffer - array in which to find zero crossingbuffer2 - array which ensures that zero crossing is only counted if buffer2 value at that position is less
than zero
-
setEdgeOptions
public void setEdgeOptions(float loThres,
float hiThres)
Call from dialog if you wish to produce edge image.
- Parameters:
loThres - DOCUMENT ME!hiThres - DOCUMENT ME!
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/PyWavelets.BaseWavelet.html����������������������������������0000775�4231163�4231163�00000030222�14537076060�026060� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
PyWavelets.BaseWavelet (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.filters.PyWavelets.BaseWavelet
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
BaseWavelet() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
support_width
int support_width
-
orthogonal
boolean orthogonal
-
biorthogonal
boolean biorthogonal
-
compact_support
boolean compact_support
-
name
java.lang.String name
-
Constructor Detail
-
BaseWavelet
private BaseWavelet()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/ChirpZTransform.html�����������������������������������������0000775�4231163�4231163�00000130241�14537076060�024651� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ChirpZTransform (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
A |
|
private java.lang.String |
f_method |
|
private boolean |
forward |
|
private int |
M |
|
private int |
MN |
|
private int |
N |
|
private double[][] |
output |
|
private boolean |
simple |
|
private java.lang.String |
t_method |
|
private ViewUserInterface |
UI |
|
private double[] |
W |
|
private double[][] |
x |
|
private double[][] |
X |
|
private double[][] |
xX |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
ChirpZTransform() |
|
ChirpZTransform(double[][] output,
double[][] xX,
int MN,
double[] W,
double[] A,
boolean simple,
java.lang.String t_method,
java.lang.String f_method,
boolean forward) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[][] |
_circulant_multiply(double[][] corg,
double[][] xorg,
java.lang.String f_method) |
|
private void |
_czt(double[][] output,
double[][] x,
int M,
double[] W,
double[] A) |
|
private double[][] |
_fft(double[][] x) |
|
private double[][] |
_ifft(double[][] y) |
|
private double[] |
_signal_model(double[] tt) |
|
private double[][] |
_skew_circulant_multiply(double[][] c,
double[][] x,
java.lang.String f_method) |
|
private double[][] |
_toeplitz_mult_ce(double[][] r,
double[][] c,
double[][] x,
java.lang.String f_method) |
|
private double[][] |
_toeplitz_mult_pd(double[][] r,
double[][] c,
double[][] x,
java.lang.String f_method) |
|
private void |
assert_almost_equal(double[][] actual,
double[][] desired,
int decimal,
java.lang.String actualString,
java.lang.String desiredString) |
|
private double |
log2(double input) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
test_compare_different_czt_methods() |
Starts the program.
|
private double[][][] |
toeplitz(double[][] c,
double[][] r) |
|
private double |
zabs(double zr,
double zi) |
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
|
private void |
zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex divide c = a/b.
|
private void |
zexp(double ar,
double ai,
double[] br,
double[] bi) |
complex exponential function b = exp(a).
|
private void |
zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr) |
complex logarithm b = clog(a).
|
private void |
zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci) |
complex multiply c = a * b.
|
private void |
zpow(double zr,
double zi,
double a,
double[] br,
double[] bi,
int[] ierr) |
b = z**a = exp(a*log(z))
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
simple
private boolean simple
-
forward
private boolean forward
-
Constructor Detail
-
ChirpZTransform
public ChirpZTransform()
-
ChirpZTransform
public ChirpZTransform(double[][] output,
double[][] xX,
int MN,
double[] W,
double[] A,
boolean simple,
java.lang.String t_method,
java.lang.String f_method,
boolean forward)
-
Method Detail
-
assert_almost_equal
private void assert_almost_equal(double[][] actual,
double[][] desired,
int decimal,
java.lang.String actualString,
java.lang.String desiredString)
-
_toeplitz_mult_pd
private double[][] _toeplitz_mult_pd(double[][] r,
double[][] c,
double[][] x,
java.lang.String f_method)
-
_toeplitz_mult_ce
private double[][] _toeplitz_mult_ce(double[][] r,
double[][] c,
double[][] x,
java.lang.String f_method)
-
zabs
private double zabs(double zr,
double zi)
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- Parameters:
zr - doublezi - double- Returns:
- double
-
zpow
private void zpow(double zr,
double zi,
double a,
double[] br,
double[] bi,
int[] ierr)
b = z**a = exp(a*log(z))
- Parameters:
zr - zi - a - br - bi - ierr -
-
zlog
private void zlog(double ar,
double ai,
double[] br,
double[] bi,
int[] ierr)
complex logarithm b = clog(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]ierr - int[] ierr = 0, normal return ierr = 1, z = cmplx(0.0, 0.0)
-
zexp
private void zexp(double ar,
double ai,
double[] br,
double[] bi)
complex exponential function b = exp(a).
- Parameters:
ar - doubleai - doublebr - double[]bi - double[]
-
zdiv
private void zdiv(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex divide c = a/b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
zmlt
private void zmlt(double ar,
double ai,
double br,
double bi,
double[] cr,
double[] ci)
complex multiply c = a * b.
- Parameters:
ar - doubleai - doublebr - doublebi - doublecr - double[]ci - double[]
-
_czt
private void _czt(double[][] output,
double[][] x,
int M,
double[] W,
double[] A)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmWaveletThreshold.html�������������������������������0000775�4231163�4231163�00000165434�14537076060�026725� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmWaveletThreshold (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private float[] |
aArray |
DOCUMENT ME!
|
private float |
aCutoff |
DOCUMENT ME!
|
private float[] |
aExp |
DOCUMENT ME!
|
private float[] |
aLog |
DOCUMENT ME!
|
private float |
aMax |
DOCUMENT ME!
|
private int |
arrayLength |
DOCUMENT ME!
|
private int |
belowThreshold |
DOCUMENT ME!
|
static double |
C0 |
coefficents for DAUB4 wavelet filter.
|
static double |
C1 |
DOCUMENT ME!
|
static double[] |
c12 |
DOCUMENT ME!
|
static double |
C2 |
DOCUMENT ME!
|
static double[] |
c20 |
DOCUMENT ME!
|
static double |
C3 |
DOCUMENT ME!
|
static double[] |
c4 |
coefficients for the PWT filter.
|
private double[] |
cc |
DOCUMENT ME!
|
private int |
cm2 |
DOCUMENT ME!
|
private int |
cNum |
DOCUMENT ME!
|
private double[] |
cr |
DOCUMENT ME!
|
private int |
dataType |
DOCUMENT ME!
|
static int |
DAUB4 |
underlying wavelet filter For 4 coefficients the routine daub4 is considerably faster than pwt.
|
private boolean |
doWaveletImage |
DOCUMENT ME!
|
private int[] |
extents |
DOCUMENT ME!
|
private int |
filterType |
DOCUMENT ME!
|
static int |
FORWARD |
DOCUMENT ME!
|
private boolean |
foundSize |
DOCUMENT ME!
|
static int |
HARD |
thresholding estimator.
|
static int |
INVERSE |
FORWARD and INVERSE are 2 possible transformDir values
|
private int |
ioff |
DOCUMENT ME!
|
private int |
joff |
DOCUMENT ME!
|
private int |
minSize |
DOCUMENT ME!
|
private int |
nDims |
DOCUMENT ME!
|
private int |
newArrayLength |
DOCUMENT ME!
|
private int[] |
newExtents |
DOCUMENT ME!
|
private int |
newXDim |
DOCUMENT ME!
|
private int |
newXY |
DOCUMENT ME!
|
private int |
newYDim |
DOCUMENT ME!
|
private int |
newZDim |
DOCUMENT ME!
|
static int |
NONNEGATIVE_GARROTE |
|
private int |
offsetX |
DOCUMENT ME!
|
private int |
offsetY |
DOCUMENT ME!
|
private int |
offsetZ |
DOCUMENT ME!
|
static int |
PWT |
DOCUMENT ME!
|
static int |
SCAD |
|
static int |
SOFT |
DOCUMENT ME!
|
private float |
threshold |
DOCUMENT ME!
|
private int |
thresholdType |
DOCUMENT ME!
|
private int |
transformDir |
DOCUMENT ME!
|
private ModelImage |
waveletImage |
DOCUMENT ME!
|
private int |
xDim |
DOCUMENT ME!
|
private int |
xy |
DOCUMENT ME!
|
private int |
yDim |
DOCUMENT ME!
|
private int |
zDim |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmWaveletThreshold(ModelImage srcImg,
int filterType,
int cNum,
int thresholdType,
float threshold,
boolean doWaveletImage) |
Creates a new AlgorithmWaveletThreshold object.
|
AlgorithmWaveletThreshold(ModelImage destImg,
ModelImage srcImg,
int filterType,
int cNum,
int thresholdType,
float threshold,
boolean doWaveletImage) |
Creates a new AlgorithmWaveletThreshold object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
DAUB4
public static final int DAUB4
underlying wavelet filter For 4 coefficients the routine daub4 is considerably faster than pwt. DAUB4 implements
a Daubechies 4-coefficient wavelet filter. PWT implements Daubechies filters with 4, 12, and 20 coefficients.
DAUB4 and PWT use different default centerings. In spite of the faster speed of DAUB4, the dialog is designed
only to call PWT so that the user only sees changes due to the number of coefficients and is not confused by
changes in centering. Reference on NONNEGATIVE_GARROTE and SCAD thresholding: "Wavelet Estimators in
Nonparametric Regression: A Comparative Simulation Study" by Anestis Antoniadis, Jeremie Bigot, and Theofanis
Sapatinas, Journal of Statistical Software, Vol. 6, Issue 6, pp. 1-83, 2001.
- See Also:
- Constant Field Values
-
aArray
private float[] aArray
DOCUMENT ME!
-
aCutoff
private float aCutoff
DOCUMENT ME!
-
aExp
private float[] aExp
DOCUMENT ME!
-
aLog
private float[] aLog
DOCUMENT ME!
-
aMax
private float aMax
DOCUMENT ME!
-
arrayLength
private int arrayLength
DOCUMENT ME!
-
cc
private double[] cc
DOCUMENT ME!
-
cm2
private final int cm2
DOCUMENT ME!
-
cNum
private final int cNum
DOCUMENT ME!
-
cr
private double[] cr
DOCUMENT ME!
-
dataType
private int dataType
DOCUMENT ME!
-
extents
private int[] extents
DOCUMENT ME!
-
ioff
private int ioff
DOCUMENT ME!
-
joff
private int joff
DOCUMENT ME!
-
minSize
private int minSize
DOCUMENT ME!
-
nDims
private int nDims
DOCUMENT ME!
-
newExtents
private int[] newExtents
DOCUMENT ME!
-
newXDim
private int newXDim
DOCUMENT ME!
-
newYDim
private int newYDim
DOCUMENT ME!
-
newZDim
private int newZDim
DOCUMENT ME!
-
offsetX
private int offsetX
DOCUMENT ME!
-
offsetY
private int offsetY
DOCUMENT ME!
-
offsetZ
private int offsetZ
DOCUMENT ME!
-
transformDir
private int transformDir
DOCUMENT ME!
-
xDim
private int xDim
DOCUMENT ME!
-
yDim
private int yDim
DOCUMENT ME!
-
zDim
private int zDim
DOCUMENT ME!
-
xy
private int xy
DOCUMENT ME!
-
newXY
private int newXY
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmWaveletThreshold
public AlgorithmWaveletThreshold(ModelImage srcImg,
int filterType,
int cNum,
int thresholdType,
float threshold,
boolean doWaveletImage)
Creates a new AlgorithmWaveletThreshold object.
- Parameters:
srcImg - source image modelfilterType - wavelet filtercNum - number of coefficients in the pwt filterthresholdType - HARD or SOFT thresholdingthreshold - fraction of maximum magnitude below which coefficients are zeroeddoWaveletImage - display wavelet transform image in log magnitude if trueuserInterface - DOCUMENT ME!
-
AlgorithmWaveletThreshold
public AlgorithmWaveletThreshold(ModelImage destImg,
ModelImage srcImg,
int filterType,
int cNum,
int thresholdType,
float threshold,
boolean doWaveletImage)
Creates a new AlgorithmWaveletThreshold object.
- Parameters:
destImg - image model where result image is to be storedsrcImg - source image modelfilterType - wavelet filtercNum - number of coefficients in the pwt filterthresholdType - HARD or SOFT thresholdingthreshold - fraction of maximum magnitude below which coefficients are zeroeddoWaveletImage - display log maagnitude wavelet transform image if trueuserInterface - DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmGuidedFilter.html�����������������������������������0000775�4231163�4231163�00000121272�14537076057�026006� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGuidedFilter (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmGuidedFilter
extends AlgorithmBase
The MIT License (MIT)
Copyright (c) 2014 Atilim Cetin
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
Reference:
K.He, J.Sun, and X.Tang. Guided Image Filtering. TPAMI'12.
Original C++ source code by Atilim Cetin
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[][] |
add(double[][] a,
double b) |
|
private double[][] |
add(double[][] a,
double[][] b) |
|
private double[][] |
boxfilter(double[][] img,
int r) |
|
double[][] |
copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue) |
|
private double[][] |
div(double[][] a,
double[][] b) |
|
private double[][] |
filterSingleChannel(double[][] p) |
|
private double[][] |
filterSingleColorChannel(double[][] p) |
|
void |
GuidedFilterColor() |
|
void |
GuidedFilterMono() |
|
private double[][] |
mul(double[][] a,
double[][] b) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
private double[][] |
sub(double[][] a,
double[][] b) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
length
private int length
-
var_I
private double[][] var_I
-
invrr
private double[][] invrr
-
invrg
private double[][] invrg
-
invrb
private double[][] invrb
-
invgg
private double[][] invgg
-
invgb
private double[][] invgb
-
invbb
private double[][] invbb
-
Method Detail
-
copyMakeBorder
public double[][] copyMakeBorder(double[][] src,
int top,
int bottom,
int left,
int right,
int borderType,
double borderValue)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmMorphologicalFilter.html����������������������������0000775�4231163�4231163�00000105164�14537076057�027406� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMorphologicalFilter (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmMorphologicalFilter
extends AlgorithmBase
Performs morphological filtering on black and white images. This is a shading correction routine, that is, it
corrects for non-uniform illumination and non-uniform camera sensitivity. A morphological filtered pixel = the
original pixel - the morphological smoothed pixel + a constant to restore the original average image brightness. A
morphological smoothed pixel is given by the min(max(max(min(original pixel)))), where the sizes[] array contains the
dimensions of the region examined for the minimum and the maximum. Reference: 1.) "Shading Correction: Compensation
for Illumination and Sensor Inhomogeneities" by Ian T. Young, July 19, 2000.
www.ph.tn.tudelft.nl/People/albert/papers/YoungShading.pdf
- Version:
- 0.1 Feb 17, 2005
- Author:
- William Gandler
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private int[] |
sizes |
Kernel dimensionality.
|
private int |
xDim |
DOCUMENT ME!
|
private int |
yDim |
DOCUMENT ME!
|
private int |
zDim |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace2D(int nImages) |
Calculates the Morphological Filter image and replaces the source image with the new image.
|
private void |
calcInPlace3D() |
Calculates the Morphological Filter and replaces the source image with the new image.
|
private void |
calcStoreInDest2D(int nImages) |
This function produces the Morphological Filter of input image.
|
private void |
calcStoreInDest3D() |
This function produces the Morphological Filter of input image.
|
void |
finalize() |
Prepares this class for destruction.
|
private float |
max2DPt(int pix,
float[] image) |
A function that finds the maximum value in a local image rectangle.
|
private float |
max3DPt(int pix,
float[] image) |
A function that finds the maximum value in a local image volume.
|
private float |
min2DPt(int pix,
float[] image) |
A function that finds the minimum value in a local image rectangle.
|
private float |
min3DPt(int pix,
float[] image) |
A function that finds the minimum value in a local image volume.
|
void |
runAlgorithm() |
Starts the program.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false on process the image over the mask
areas.
-
sizes
private int[] sizes
Kernel dimensionality.
-
xDim
private int xDim
DOCUMENT ME!
-
yDim
private int yDim
DOCUMENT ME!
-
zDim
private int zDim
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmMorphologicalFilter
public AlgorithmMorphologicalFilter(ModelImage srcImg,
int[] sizes,
boolean maskFlag,
boolean img25D)
Constructs a Morphological filter object.
- Parameters:
srcImg - source image modelsizes - Filter size in each dimensionmaskFlag - Flag that indicates that the Morphological filter will be calculated for the whole image if
equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
AlgorithmMorphologicalFilter
public AlgorithmMorphologicalFilter(ModelImage destImg,
ModelImage srcImg,
int[] sizes,
boolean maskFlag,
boolean img25D)
Constructs a Morphological filter object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelsizes - Filter size in each dimensionmaskFlag - Flag that indicates that the Morphological filter will be calculated for the whole image if
equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
Method Detail
-
max2DPt
private float max2DPt(int pix,
float[] image)
A function that finds the maximum value in a local image rectangle.
- Parameters:
pix - index indicating location of convolutionimage - image data- Returns:
- DOCUMENT ME!
-
max3DPt
private float max3DPt(int pix,
float[] image)
A function that finds the maximum value in a local image volume.
- Parameters:
pix - index indicating location of convolutionimage - image data- Returns:
- DOCUMENT ME!
-
min2DPt
private float min2DPt(int pix,
float[] image)
A function that finds the minimum value in a local image rectangle.
- Parameters:
pix - index indicating location of convolutionimage - image data- Returns:
- DOCUMENT ME!
-
min3DPt
private float min3DPt(int pix,
float[] image)
A function that finds the minimum value in a local image volume.
- Parameters:
pix - index indicating location of convolutionimage - image data- Returns:
- DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/filters/AlgorithmGaussianBlurSep.html��������������������������������0000775�4231163�4231163�00000104117�14537076057�026505� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGaussianBlurSep (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
blue |
Flags indicate which color channel to process.
|
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private Kernel |
gaussianKernel |
|
private boolean |
green |
Flags indicate which color channel to process.
|
private float[] |
inputBuffer |
|
private float[] |
outputBuffer |
|
private boolean |
red |
Flags indicate which color channel to process.
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmGaussianBlurSep(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D) |
Creates a new AlgorithmGaussianBlurSep object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false on process the image over the mask
areas.
-
Constructor Detail
-
AlgorithmGaussianBlurSep
public AlgorithmGaussianBlurSep(ModelImage srcImg,
float[] sigmas,
boolean maskFlag,
boolean img25D)
Creates a new AlgorithmGaussianBlurSep object.
- Parameters:
srcImg - source image modelsigmas - Gaussian's standard deviations in the each dimensionmaskFlag - Flag that indicates that the gaussian convolution will be performed over the whole image if
equal to trueimg25D - Flag, if true, indicates that each slice of the 3D volume should be processed independently. 2D
images disregard this flag.
-
Method Detail
-
execute
public void execute()
-
algorithmPerformed
public void algorithmPerformed(AlgorithmBase algorithm)
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not). If the algorithm
is run in a separate thread, this call will be made within that thread. If not, this call will be made from that
same, shared thread.
- Specified by:
algorithmPerformed in interface AlgorithmInterface- Parameters:
algorithm - the algorithm which has just completed
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.NoJacobianUpdateCostFunction.html��������������������0000775�4231163�4231163�00000034115�14537076053�030713� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.NoJacobianUpdateCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.indexArrayArrayComparator.html��������������������������0000775�4231163�4231163�00000026653�14537076052�027574� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.indexArrayArrayComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
�������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMSER.VlMserFilt.html����������������������������������������0000775�4231163�4231163�00000045062�14537076047�024564� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMSER.VlMserFilt (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
max_variation
double max_variation
-
min_diversity
double min_diversity
-
Constructor Detail
-
VlMserFilt
public VlMserFilt()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.PixelGrid.PixelGridNode.html�������������������0000775�4231163�4231163�00000057634�14537076047�030775� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.PixelGrid.PixelGridNode (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
setX
public void setX(int x)
-
setY
public void setY(int y)
����������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/HistogramOfOrientedGradients.tImage.html�����������������������������0000775�4231163�4231163�00000024323�14537076055�027077� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
HistogramOfOrientedGradients.tImage (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.tImage
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float[][][] |
im |
|
(package private) float[][][] |
imSmall |
|
(package private) float[][][] |
imSmallFlipped |
|
(package private) float[][] |
round |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
tImage() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
imSmall
float[][][] imSmall
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT.VlFileMeta.html�������������������������������������������������0000775�4231163�4231163�00000026507�14537076056�022660� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT.VlFileMeta (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT.VlFileMeta
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) boolean |
active |
|
(package private) java.io.File |
file |
< Current file name
|
(package private) java.lang.String |
name |
< File protocol
|
(package private) java.lang.String |
pattern |
< Is the file active?
|
(package private) int[] |
protocol |
< File name pattern
|
-
Constructor Summary
Constructors
| Constructor |
Description |
VlFileMeta(boolean active,
java.lang.String pattern,
int[] protocol,
java.lang.String name,
java.io.File file) |
< Current file stream
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
pattern
java.lang.String pattern
< Is the file active?
-
protocol
int[] protocol
< File name pattern
-
name
java.lang.String name
< File protocol
-
file
java.io.File file
< Current file name
-
Constructor Detail
-
VlFileMeta
public VlFileMeta(boolean active,
java.lang.String pattern,
int[] protocol,
java.lang.String name,
java.io.File file)
< Current file stream
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/KDTree.kdres.html����������������������������������������������������0000775�4231163�4231163�00000024752�14537076055�022350� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
KDTree.kdres (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.KDTree.kdres
-
-
Constructor Summary
Constructors
| Constructor |
Description |
kdres() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������gov/nih/mipav/model/algorithms/CeresSolver.NumericDiffOptions.html����������������������������������0000775�4231163�4231163�00000025654�14537076052�026124� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.NumericDiffOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.VisibilityClusteringType.html����������������������������0000775�4231163�4231163�00000035002�14537076052�027372� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.VisibilityClusteringType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static CeresSolver.VisibilityClusteringType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmRegionGrow.html���������������������������������������������0000775�4231163�4231163�00000134126�14537076050�024044� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmRegionGrow (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
Prepares this class for destruction.
|
int |
regionGrow2D(java.util.BitSet paintMask,
java.awt.Point seedPt,
float th,
boolean useVOI,
boolean dp,
RegionGrowDialog growDialog,
float lowBoundR,
float upperBoundR,
float lowBoundG,
float upperBoundG,
float lowBoundB,
float upperBoundB,
int sizeLimit,
float maxDistance) |
2D flood fill for color images that forms a bitset(boolean) mask.
|
int |
regionGrow2D(java.util.BitSet paintMask,
java.awt.Point seedPt,
float th,
boolean useVOI,
boolean dp,
RegionGrowDialog growDialog,
float lowBound,
float upperBound,
int sizeLimit,
float maxDistance,
boolean variableThresholds) |
2D flood fill that forms a bitset(boolean) mask.
|
int |
regionGrow3D(java.util.BitSet paintMask,
Point3D seedPt,
float th,
boolean useVOI,
boolean dp,
RegionGrowDialog growDialog,
float lowBoundR,
float upperBoundR,
float lowBoundG,
float upperBoundG,
float lowBoundB,
float upperBoundB,
int sizeLimit,
float maxDistance,
int timeSlice,
CubeBounds regionBounds) |
3D flood fill for color images that forms a bitset(boolean) mask.
|
int |
regionGrow3D(java.util.BitSet paintMask,
Point3D seedPt,
float th,
boolean useVOI,
boolean dp,
RegionGrowDialog growDialog,
float lowBound,
float upperBound,
int sizeLimit,
float maxDistance,
boolean variableThresholds,
int timeSlice,
CubeBounds regionBounds) |
3D flood fill that forms a bitset(boolean) mask.
|
void |
runAlgorithm() |
Starts the program.
|
void |
setNewThreshold(float threshold,
PaintGrowListener compImage,
boolean dp) |
DOCUMENT ME!
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
c
private double c
DOCUMENT ME!
-
mMean
private double mMean
DOCUMENT ME!
-
mRMean
private double mRMean
DOCUMENT ME!
-
mGMean
private double mGMean
DOCUMENT ME!
-
mBMean
private double mBMean
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmRegionGrow
public AlgorithmRegionGrow(ModelImage srcImg,
float _multiplier,
float _floodValue)
Creates a new AlgorithmRegionGrow object.
- Parameters:
srcImg - source image model_multiplier - aaaaa_floodValue - aaaaa
-
AlgorithmRegionGrow
public AlgorithmRegionGrow(ModelImage destImg,
ModelImage srcImg,
float _multiplier,
float _floodValue)
Creates a new AlgorithmRegionGrow object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image model_multiplier - placeholder_floodValue - placeholder
-
Method Detail
-
regionGrow2D
public int regionGrow2D(java.util.BitSet paintMask,
java.awt.Point seedPt,
float th,
boolean useVOI,
boolean dp,
RegionGrowDialog growDialog,
float lowBound,
float upperBound,
int sizeLimit,
float maxDistance,
boolean variableThresholds)
2D flood fill that forms a bitset(boolean) mask.
- Parameters:
paintMask - mask used to indicated where region has grownseedPt - seed point for flood fillth - useVOI - use selected VOI for initial variancedp - growDialog - the RegionGrowDialoglowBound - lower bound of values which are included in the regionupperBound - upper bound of values which are included in the regionsizeLimit - stop region grow when objects exceeds size limit in pixelsmaxDistance - max distance from the seed point (in pixels) that the region is allowed to grow.variableThresholds - If true vary thresholds as region grows- Returns:
- returns the area region
-
regionGrow2D
public int regionGrow2D(java.util.BitSet paintMask,
java.awt.Point seedPt,
float th,
boolean useVOI,
boolean dp,
RegionGrowDialog growDialog,
float lowBoundR,
float upperBoundR,
float lowBoundG,
float upperBoundG,
float lowBoundB,
float upperBoundB,
int sizeLimit,
float maxDistance)
2D flood fill for color images that forms a bitset(boolean) mask.
- Parameters:
paintMask - mask used to indicated where region has grownseedPt - seed point for flood fillth - useVOI - use selected VOI for initial variancedp - growDialog - the RegionGrowDialoglowBoundR - lower bound of red values which are included in the regionupperBoundR - upper bound of red values which are included in the regionlowBoundG - lower bound of green values which are included in the regionupperBoundG - upper bound of green values which are included in the regionlowBoundB - lower bound of blue values which are included in the regionupperBoundB - upper bound of blue values which are included in the regionsizeLimit - stop region grow when objects exceeds size limit in pixelsmaxDistance - max distance from the seed point (in pixels) that the region is allowed to grow.- Returns:
- returns the area region
-
regionGrow3D
public int regionGrow3D(java.util.BitSet paintMask,
Point3D seedPt,
float th,
boolean useVOI,
boolean dp,
RegionGrowDialog growDialog,
float lowBound,
float upperBound,
int sizeLimit,
float maxDistance,
boolean variableThresholds,
int timeSlice,
CubeBounds regionBounds)
3D flood fill that forms a bitset(boolean) mask.
- Parameters:
paintMask - mask used to indicated where region has grownseedPt - seed point for flood fillth - useVOI - use selected VOI for initial variancedp - growDialog - the RegionGrowDialoglowBound - lower bound of values which are included in the regionupperBound - upper bound of values which are included in the regionsizeLimit - stop region grow when objects exceeds size limit in pixelsmaxDistance - max distance from the seed point (in pixels) that the region is allowed to grow.variableThresholds - If true vary thresholds as region growstimeSlice - timeSlice that will be used in a 4D imageregionBounds - DOCUMENT ME!- Returns:
- returns the volume region
-
regionGrow3D
public int regionGrow3D(java.util.BitSet paintMask,
Point3D seedPt,
float th,
boolean useVOI,
boolean dp,
RegionGrowDialog growDialog,
float lowBoundR,
float upperBoundR,
float lowBoundG,
float upperBoundG,
float lowBoundB,
float upperBoundB,
int sizeLimit,
float maxDistance,
int timeSlice,
CubeBounds regionBounds)
3D flood fill for color images that forms a bitset(boolean) mask.
- Parameters:
paintMask - mask used to indicated where region has grownseedPt - seed point for flood fillth - useVOI - use selected VOI for initial variancedp - growDialog - the RegionGrowDialoglowBoundR - lower bound of red values which are included in the regionupperBoundR - upper bound of red values which are included in the regionlowBoundG - lower bound of green values which are included in the regionupperBoundG - upper bound of green values which are included in the regionlowBoundB - lower bound of blue values which are included in the regionupperBoundB - upper bound of blue values which are included in the regionsizeLimit - stop region grow when objects exceeds size limit in pixelsmaxDistance - max distance from the seed point (in pixels) that the region is allowed to grow.timeSlice - timeSlice that will be used in a 4D imageregionBounds - DOCUMENT ME!- Returns:
- returns the volume region
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.gaussSecondStandardDeviationFittingCostFunction.html�0000775�4231163�4231163�00000034370�14537076054�034472� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.gaussSecondStandardDeviationFittingCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSubtractVOI.html��������������������������������������������0000775�4231163�4231163�00000121541�14537076050�024124� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSubtractVOI (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmSubtractVOI
extends AlgorithmBase
Algorithm that subtracts the mean or median value of a VOI from the image. If only 1 contour is present, that contour
is used whether or not it is selected. If multiple contours are present, at least 1 contour must be selected, and
only selected contours are used. Note that under MIPAV all selected contours must belong to the same VOI. If the new
image exceeds the range that can be stored in an image of that type the data is either clipped and stored in the
original image. Or a new image of a type (int, float...) that can store the range of new data is generated. For color
the dialog currently disables promotion for color because MIPAV cannot handle negative color values.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
average |
DOCUMENT ME!
|
private float |
averageB |
DOCUMENT ME!
|
private float |
averageG |
DOCUMENT ME!
|
private int |
averageMode |
DOCUMENT ME!
|
private float |
averageR |
DOCUMENT ME!
|
static int |
CLIP |
DOCUMENT ME!
|
private double |
clipMax |
Maximum clipping modes if data result value exceeds the capacity of image's data type.
|
private float |
clipMaxC |
DOCUMENT ME!
|
private double |
clipMin |
Minimum clipping modes if data result value exceeds the capacity of image's data type.
|
private float |
clipMinC |
DOCUMENT ME!
|
private int |
clipMode |
Clipping mode.
|
private double |
max |
Used to store the image maximum.
|
static int |
MEAN |
DOCUMENT ME!
|
static int |
MEDIAN |
DOCUMENT ME!
|
private double |
min |
Used to store the image minimum.
|
private double |
minB |
DOCUMENT ME!
|
private double |
minG |
DOCUMENT ME!
|
private double |
minR |
DOCUMENT ME!
|
static int |
PROMOTE |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calcInPlace() |
Generates the new data and places in the source image.
|
private void |
calcInPlaceColor() |
Generates the new data and places in the source image.
|
private void |
calcStoreInDest() |
Generates the new data and places in a new (destination) image.
|
private void |
calcStoreInDestColor() |
Generates the new data and places in a new (destination) image.
|
void |
finalize() |
Prepares this class for destruction.
|
private int |
findType(int stType) |
Find the type able to contain the full range of the data.
|
private void |
getAverage() |
DOCUMENT ME!
|
private int |
promoteType(int presentType) |
DOCUMENT ME!
|
void |
runAlgorithm() |
Starts the program.
|
private void |
setClipValues() |
Sets clipMin and clipMax.
|
private boolean |
testType(int type,
double minVal,
double maxVal) |
Determine if the min and max values are in the image types range.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
average
private double average
DOCUMENT ME!
-
averageB
private float averageB
DOCUMENT ME!
-
averageG
private float averageG
DOCUMENT ME!
-
averageMode
private int averageMode
DOCUMENT ME!
-
averageR
private float averageR
DOCUMENT ME!
-
clipMaxC
private float clipMaxC
DOCUMENT ME!
-
clipMinC
private float clipMinC
DOCUMENT ME!
-
clipMode
private int clipMode
Clipping mode.
CLIP = 0; clamp result data to the bounds of the input image type
PROMOTE = 1; promote image type so that the range of the result fits into
the new image type. ( ie. byte to short).
-
minR
private double minR
DOCUMENT ME!
-
minG
private double minG
DOCUMENT ME!
-
minB
private double minB
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmSubtractVOI
public AlgorithmSubtractVOI(ModelImage srcImg,
int _averageMode,
int _clipMode)
Creates a new AlgorithmSubtractVOI object.
- Parameters:
srcImg - source image model_averageMode - mean or median of VOI_clipMode - clamp data to image type range or promote image type to hold new data range.
-
AlgorithmSubtractVOI
public AlgorithmSubtractVOI(ModelImage destImg,
ModelImage srcImg,
int _averageMode,
int _clipMode)
Creates a new AlgorithmSubtractVOI object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image model_averageMode - mean or median of VOI_clipMode - clamp data to image type range or promote image type to hold new data range.
-
Method Detail
-
testType
private boolean testType(int type,
double minVal,
double maxVal)
Determine if the min and max values are in the image types range.
- Parameters:
type - image typeminVal - min value of the imagemaxVal - max value of the image- Returns:
- true if min and max are within the image type specified
���������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.CostFunction.html����������������������������������������0000775�4231163�4231163�00000047612�14537076051�024770� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.CostFunction (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
CostFunction
public CostFunction()
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
-
finalize
public void finalize()
- Overrides:
finalize in class java.lang.Object
����������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBSpline.html������������������������������������������������0000775�4231163�4231163�00000166242�14537076044�023325� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBSpline (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmBSpline
extends AlgorithmBase
Modified code from Aaron Carass's Java implementation of
Philippe Thevenaz's Cubic B-spline Interpolation. Code is
simply wrapped to allow for calls consistent with MIPAV
style as well as allow for 2D images.
B-Spline interpolation.
- Author:
- Philippe Thevenaz, Aaron Carass
Jet code is untouched from when the new code was implemented on June 24th, 2014.
Fourth-order Bspline for 1-3D lines and 2D surface. This class is based on code from
Dave Eberly's MAGIC C++ library.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
double |
bSpline2D(int orderDx,
int orderDy,
double x,
double y) |
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation.
|
double[] |
bSpline2DC(int orderDx,
int orderDy,
double x,
double y) |
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation.
|
double |
bSpline3D(int orderDx,
int orderDy,
int orderDz,
double x,
double y,
double z) |
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation.
|
double[] |
bSpline3DC(int orderDx,
int orderDy,
int orderDz,
double x,
double y,
double z) |
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation.
|
float |
bSplineJet1D(byte derivOrder,
float t,
float[] dataX) |
This method can also be used to calculate derivatives of the Bspline.
|
WildMagic.LibFoundation.Mathematics.Vector2f |
bSplineJetXY(int derivOrder,
float t,
float[] dataX,
float[] dataY) |
This method can also be used to calculate derivatives of the Bspline.
|
WildMagic.LibFoundation.Mathematics.Vector3f |
bSplineJetXYZ(int derivOrder,
float t,
float[] dataX,
float[] dataY,
float[] dataZ) |
This method can also be used to calculate derivatives of the Bspline.
|
javax.vecmath.Vector3d |
bSplineJetXYZ_double(int derivOrder,
float t,
float[] dataX,
float[] dataY,
float[] dataZ) |
This method can also be used to calculate derivatives of the Bspline.
|
private void |
ConvertToInterpolationCoefficients(double[] c,
int DataLength,
double[] z,
int NbPoles,
double Tolerance) |
|
void |
finalize() |
Clean up memeory.
|
private double[] |
GetColumn(int x,
int z,
double[][][] Image) |
|
private double[] |
GetRow(int y,
int z,
double[][][] Image,
int width) |
|
private double[] |
GetVertical(int x,
int y,
double[][][] Image) |
|
private double |
InitialAntiCausalCoefficient(double[] c,
int DataLength,
double z) |
|
private double |
InitialCausalCoefficient(double[] c,
int DataLength,
double z,
double Tolerance) |
|
private double |
interpolateBSpline(double[][][] image,
double x,
double y,
double z,
int SplineDegree) |
Do the B-Spline Interpolation
|
private double |
interpolateBSpline2D(double[][][] image,
double x,
double y,
int SplineDegree) |
|
private void |
PutColumn(double[] Line,
int x,
int z,
double[][][] Image) |
|
private void |
PutRow(double[] Line,
int y,
int z,
double[][][] Image) |
|
private void |
PutVertical(double[] Line,
int x,
int y,
double[][][] Image) |
|
void |
resetBspline() |
Resets parameters used by the Bsplines.
|
void |
runAlgorithm() |
Default method that is not really appropriate for this class but must be defined because this class extends
AlgorithmBase.
|
private int |
SamplesToCoefficients(double[][][] Image,
int SplineDegree) |
|
private int |
SamplesToCoefficients2D(double[][][] Image,
int SplineDegree) |
|
void |
setup2DBSpline(double[] vol,
int[] extents,
int _degree) |
Allocates memory and constructs arrays needed for BSpline.
|
void |
setup2DBSplineC(double[] vol,
int[] extents,
int _degree) |
Allocates memory and constructs arrays needed for BSpline.
|
void |
setup3DBSpline(double[] vol,
int[] extents,
int _degree) |
setup3DBSpline - setup 3D Bspline for black and white.
|
void |
setup3DBSplineC(double[] vol,
int[] extents,
int _degree) |
Allocates memory and constructs arrays needed for BSpline.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
degree
private int degree
DOCUMENT ME!
-
dt
private double[] dt
DOCUMENT ME!
-
geoms
private double[] geoms
DOCUMENT ME!
-
geomx
private double[] geomx
DOCUMENT ME!
-
geomy
private double[] geomy
DOCUMENT ME!
-
geomz
private double[] geomz
DOCUMENT ME!
-
width
private int width
DOCUMENT ME!
-
height
private int height
DOCUMENT ME!
-
depth
private int depth
DOCUMENT ME!
-
xold_tbase
private int xold_tbase
DOCUMENT ME!
-
xyold_tbase
private int xyold_tbase
DOCUMENT ME!
-
Method Detail
-
bSpline2D
public double bSpline2D(int orderDx,
int orderDy,
double x,
double y)
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation. For precise interpolation, use the analogous method
in AlgorithmBSpline3D instead, as that provides true B-spline interpolation.
This method can also be used to calculate derivatives of the Bspline.
- Parameters:
orderDx - derivative order in x direction (n <= 4 )orderDy - derivative order in y direction (n <= 4 )x - double point index along the Bspline indicating point of interesty - double point index along the Bspline indicating point of interest- Returns:
- the Bspline interpolated data point
-
bSpline2DC
public double[] bSpline2DC(int orderDx,
int orderDy,
double x,
double y)
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation. For precise interpolation, use the analogous method
in AlgorithmBSpline3D instead, as that provides true B-spline interpolation.
This method can also be used to calculate derivatives of the Bspline.
- Parameters:
orderDx - derivative order in x direction (n <= 4 )orderDy - derivative order in y direction (n <= 4 )x - double point index along the Bspline indicating point of interesty - double point index along the Bspline indicating point of interest- Returns:
- the Bspline interpolated data point
-
bSpline3D
public double bSpline3D(int orderDx,
int orderDy,
int orderDz,
double x,
double y,
double z)
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation. For precise interpolation, use the analogous method
in AlgorithmBSpline3D instead, as that provides true B-spline interpolation.
3D graph Bspline for black and white. This method can also be used to calculate derivatives of the Bspline.
WARNING - programmer must call setup3DBSpline before using this function!!!
- Parameters:
orderDx - derivative order in x direction (n <= 4 )orderDy - derivative order in y direction (n <= 4 )orderDz - derivative order in z direction (n <= 4 )x - double point index along the Bspline indicating point of interesty - double point index along the Bspline indicating point of interestz - double point index along the Bspline indicating pointof interest- Returns:
- the Bspline interpolated data point
-
bSpline3DC
public double[] bSpline3DC(int orderDx,
int orderDy,
int orderDz,
double x,
double y,
double z)
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation. For precise interpolation, use the analogous method
in AlgorithmBSpline3D instead, as that provides true B-spline interpolation.
3D graph Bspline for color. This method can also be used to calculate derivatives of the Bspline. WARNING -
programmer must call setup3DBSpline before using this function!!!
- Parameters:
orderDx - derivative order in x direction (n <= 4 )orderDy - derivative order in y direction (n <= 4 )orderDz - derivative order in z direction (n <= 4 )x - double point index along the Bspline indicating point of interesty - double point index along the Bspline indicating point of interestz - double point index along the Bspline indicating point of interest- Returns:
- the Bspline interpolated data point
-
bSplineJet1D
public float bSplineJet1D(byte derivOrder,
float t,
float[] dataX)
This method can also be used to calculate derivatives of the Bspline.
- Parameters:
derivOrder - derivative order (n <= 4 )t - float point index along the Bspline indicating point of interestdataX - control points for the Bspline- Returns:
- the Bspline interpolated data point
-
bSplineJetXY
public WildMagic.LibFoundation.Mathematics.Vector2f bSplineJetXY(int derivOrder,
float t,
float[] dataX,
float[] dataY)
This method can also be used to calculate derivatives of the Bspline.
Used for smoothing VOI lines
- Parameters:
derivOrder - derivative order (n <= 4 )t - float point index along the Bspline indicating point of interestdataX - control points for the BsplinedataY - control points for the Bspline- Returns:
- the Bspline interpolated data point
-
bSplineJetXYZ
public WildMagic.LibFoundation.Mathematics.Vector3f bSplineJetXYZ(int derivOrder,
float t,
float[] dataX,
float[] dataY,
float[] dataZ)
This method can also be used to calculate derivatives of the Bspline.
Used for smoothing VOI lines
- Parameters:
derivOrder - derivative order (n <= 4 )t - float point index along the Bspline indicating point of interestdataX - control points for the BsplinedataY - control points for the BsplinedataZ - control points for the Bspline- Returns:
- the Bspline interpolated data point
-
bSplineJetXYZ_double
public javax.vecmath.Vector3d bSplineJetXYZ_double(int derivOrder,
float t,
float[] dataX,
float[] dataY,
float[] dataZ)
This method can also be used to calculate derivatives of the Bspline.
- Parameters:
derivOrder - derivative order (n <= 4 )t - float point index along the Bspline indicating point of interestdataX - control points for the BsplinedataY - control points for the BsplinedataZ - control points for the Bspline- Returns:
- the Bspline interpolated data point
-
setup2DBSpline
public void setup2DBSpline(double[] vol,
int[] extents,
int _degree)
Allocates memory and constructs arrays needed for BSpline.
- Parameters:
vol - volume comprising control points for the Bsplineextents - vol extents (xDim,yDim)_degree - degree of spline (3 or 4)
-
setup2DBSplineC
public void setup2DBSplineC(double[] vol,
int[] extents,
int _degree)
Allocates memory and constructs arrays needed for BSpline.
- Parameters:
vol - volume comprising control points for the Bsplineextents - vol extents (xDim,yDim)_degree - degree of spline (3 or 4)
-
setup3DBSpline
public void setup3DBSpline(double[] vol,
int[] extents,
int _degree)
setup3DBSpline - setup 3D Bspline for black and white. Allocates memory and constructs arrays needed for BSpline
- Parameters:
vol - volume comprising control points for the Bsplineextents - vol extents (xDim,yDim, zDim)_degree - degree of spline (3 or 4)
-
setup3DBSplineC
public void setup3DBSplineC(double[] vol,
int[] extents,
int _degree)
Allocates memory and constructs arrays needed for BSpline.
- Parameters:
vol - volume comprising control points for the Bsplineextents - vol extents (xDim,yDim, zDim)_degree - degree of spline (3 or 4)
-
interpolateBSpline
private double interpolateBSpline(double[][][] image,
double x,
double y,
double z,
int SplineDegree)
Do the B-Spline Interpolation
- Parameters:
Bcoeff - B-spline array of coefficientsWidth - Width of the imageHeight - Height of the imageDepth - Depth of the imagex - x coordinate where to interpolatey - y coordinate where to interpolatez - z coordinate where to interpolateSplineDegree - Degree of the B-Spline
-
ConvertToInterpolationCoefficients
private void ConvertToInterpolationCoefficients(double[] c,
int DataLength,
double[] z,
int NbPoles,
double Tolerance)
- Parameters:
c - SamplesDataLength - Number of samples or coefficientsz - PolesNbPoles - Number of polesTolerance - Admissible relative error
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.BlockSparseMatrixRandomMatrixOptions.html����������������0000775�4231163�4231163�00000030420�14537076051�031636� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.BlockSparseMatrixRandomMatrixOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrixRandomMatrixOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog13.html����������������������������������0000775�4231163�4231163�00000026636�14537076055�025676� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog13 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog13(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog13
public FitdeHoog13(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
��������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.CVodeBMemRec.html���������������������������������������������0000775�4231163�4231163�00000034531�14537076054�023273� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.CVodeBMemRec (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
cv_f_withSensi
boolean cv_f_withSensi
-
cv_fQ_withSensi
boolean cv_fQ_withSensi
-
Constructor Detail
-
CVodeBMemRec
CVodeBMemRec()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.TernaryCostFunction.html�����������������������������0000775�4231163�4231163�00000033476�14537076053�027202� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.TernaryCostFunction (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
TernaryCostFunction(int num_residuals,
int parameter_block1_size,
int parameter_block2_size,
int parameter_block3_size) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
TernaryCostFunction
public TernaryCostFunction(int num_residuals,
int parameter_block1_size,
int parameter_block2_size,
int parameter_block3_size)
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFT.VlPgmImage.html�������������������������������������������������0000775�4231163�4231163�00000024527�14537076056�022660� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFT.VlPgmImage (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFT.VlPgmImage
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
height |
< image width.
|
(package private) int |
is_raw |
< pixel maximum value (<= 2^16-1).
|
(package private) int |
max_value |
< image height.
|
(package private) int |
width |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
VlPgmImage() |
< is RAW format?
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
height
int height
< image width.
-
max_value
int max_value
< image height.
-
Constructor Detail
-
VlPgmImage
public VlPgmImage()
< is RAW format?
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSnake.html��������������������������������������������������0000775�4231163�4231163�00000150656�14537076050�023031� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSnake (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmSnake
extends AlgorithmBase
Snake-like algorithm deriviative. The algorithm is supplied a polygon (VOI - contour) and that polygon is allowed to
evolve to the edge of the object generated by calculating the gradient magnitude (i.e. the energy function) at scale
define by the user. The user/programmer supplies the sigmas (scales) at which to calculate the gradient magnitude. A
large scale slows the snake and causes the snake to conform to large scale structure. A small sigma value causes the
snake to conform to the small scale structure is therefore more sensitive to noise. The three-dimensional version is
really a two-and-half dimensional algorithm where the resultant contour in a slice is projected into the adjacent
slice and is used as an initialization to the evolution in the new slice.
- Version:
- 0.1 Feb 11, 1998
- Author:
- Matthew J. McAuliffe, Ph.D.
- See Also:
AlgorithmBSpline,
GenerateGaussian,
AlgorithmVOISimplexOpt,
AlgorithmBSnake
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
ANY_DIR |
Indicates boundary can move in or out.
|
private int |
boundaryIterations |
Maximum number of snake iterations.
|
private int |
evolveDirection |
Indicates boundary how the VOI boundary can move - in and/or out.
|
private float[] |
GxData |
Storage location of the first derivative of the Gaussian in the X direction.
|
private float[] |
GyData |
Storage location of the first derivative of the Gaussian in the Y direction.
|
private float[] |
GzData |
Storage location of the first derivative of the Gaussian in the Z direction.
|
static int |
IN_DIR |
Indicates boundary can move in.
|
private int[] |
kExtents |
Dimensionality of the kernel.
|
static int |
OUT_DIR |
Indicates boundary can move out.
|
static int |
PROP_ALL |
Propagate the source VOI to slices above and below its current slice.
|
static int |
PROP_NEXT |
Propagate the source VOI to slices above its current slice in the volume.
|
static int |
PROP_PREV |
Propagate the source VOI to slices below its current slice in the volume.
|
static int |
PROP_SINGLE |
Do not propagate the VOI to any slices (2D).
|
private static float |
PROP_THRESHOLD |
The maximum ratio of change in the energy under the VOI after propagation.
|
private int |
propagationType |
The VOI propagation mode to use.
|
private VOI |
resultVOI |
The resultant polygon and the evolution has completed.
|
private float[] |
sigmas |
Standard deviations of the gaussian used to calculate the kernels.
|
private float |
smoothness |
The maximum angle we want to have between points in the result VOI.
|
private ModelImage |
srcImage |
Source image.
|
private VOI |
srcVOI |
The initial VOI to initialize the evolution process.
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmSnake(ModelImage _srcImg,
float[] _sigmas,
int _boundaryIterations,
float _smoothness,
VOI srcVOI,
int boundDir) |
Set up the snake algorithm so that it can be run.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
calc2D() |
Prepares the data and runs the algorithm for a 2D image.
|
private void |
calc3D() |
Prepares the data and runs the algorithm for a 3D image.
|
private java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector2f> |
cleanLine(float[] xPts,
float[] yPts) |
Removes points (vectors) that form sharp angles (i.e. smoothes boudnary) Also adds points separated by some
distance and removes adjacent points
|
private java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector3f> |
cleanLine(float[] xPts,
float[] yPts,
float[] zPts) |
|
private double |
distance(float x1,
float x2,
float y1,
float y2) |
Calculates the euclidian distance between two points.
|
private double |
distance(int x1,
int x2,
int y1,
int y2) |
Calculates the euclidian distance between two points.
|
void |
finalize() |
Prepares this class for destruction.
|
VOI |
getResultVOI() |
Returns the resultant VOI.
|
private void |
makeKernels2D() |
Makes derivative kernels to be used in the calculation of the gradient magnitude.
|
private void |
makeKernels3D() |
Makes derivative kernels to be used in the calculation of the gradient magnitude.
|
private void |
propDown(VOIContour resultContour,
VOI resultVOI,
float baseEnergy,
int baseNPts) |
|
private void |
propUp(VOIContour resultContour,
VOI resultVOI,
float baseEnergy,
int baseNPts) |
|
void |
runAlgorithm() |
run - starts the snake algorithm.
|
private float |
runSnake(float[] xPoints,
float[] yPoints,
float[] zPoints,
float[] image,
VOIBase contour) |
|
private float |
runSnake(float[] xPoints,
float[] yPoints,
float[] image,
java.awt.Polygon resultGon) |
Actual function that evolves the boundary by moving normal to the boundary.
|
private void |
setPoints(float[] xPoints,
float[] yPoints,
float[] zPoints,
VOIBase contour) |
|
private void |
setPoints(float[] xPoints,
float[] yPoints,
java.awt.Polygon gon) |
Takes the polygon and forms two special arrays for use in runSnake.
|
void |
setPropagation(int type) |
Sets the propagation type.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
AlgorithmSnake
public AlgorithmSnake(ModelImage _srcImg,
float[] _sigmas,
int _boundaryIterations,
float _smoothness,
VOI srcVOI,
int boundDir)
Set up the snake algorithm so that it can be run.
- Parameters:
_srcImg - 2D or 3D source image_sigmas - describe the scale of the gaussian in each dimension_boundaryIterations - maximum number of snake iterations_smoothness - the boundary smoothness parametersrcVOI - VOI that is to be evolvedboundDir - indicates the boundary direction (in and/or out)
-
Method Detail
-
cleanLine
private java.util.Vector<WildMagic.LibFoundation.Mathematics.Vector2f> cleanLine(float[] xPts,
float[] yPts)
Removes points (vectors) that form sharp angles (i.e. smoothes boudnary) Also adds points separated by some
distance and removes adjacent points
- Parameters:
xPts - x coords of points that define a contouryPts - y coords of points that define a contour- Returns:
- an ordered list of the points along the cleaned-up line
-
distance
private double distance(int x1,
int x2,
int y1,
int y2)
Calculates the euclidian distance between two points.
- Parameters:
x1 - first x coord.x2 - seconde x coord.y1 - first y1 coord.y2 - seconde y2 coord.- Returns:
- the distance between the points
(x1,y1) and (x2,y2)
-
distance
private double distance(float x1,
float x2,
float y1,
float y2)
Calculates the euclidian distance between two points.
- Parameters:
x1 - first x coord.x2 - seconde x coord.y1 - first y1 coord.y2 - seconde y2 coord.- Returns:
- the distance between the points
(x1,y1) and (x2,y2)
-
runSnake
private float runSnake(float[] xPoints,
float[] yPoints,
float[] image,
java.awt.Polygon resultGon)
Actual function that evolves the boundary by moving normal to the boundary.
- Parameters:
xPoints - x coordinates that describe the contouryPoints - y coordinates that describe the contourimage - image dataresultGon - resultant polygon- Returns:
- the sum of the energy along the boundary of the
resultGon
-
runSnake
private float runSnake(float[] xPoints,
float[] yPoints,
float[] zPoints,
float[] image,
VOIBase contour)
-
setPoints
private void setPoints(float[] xPoints,
float[] yPoints,
java.awt.Polygon gon)
Takes the polygon and forms two special arrays for use in runSnake.
- Parameters:
xPoints - storage location of array of x coord. pointsyPoints - storage location array of y coord. pointsgon - initial polygon
����������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Backpropagation.NeuralNetwork.html�����������������������������������0000775�4231163�4231163�00000051451�14537076051�026016� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Backpropagation.NeuralNetwork (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
-
Constructor Summary
Constructors
| Constructor |
Description |
NeuralNetwork(java.util.ArrayList<java.lang.Double[]> inputs,
java.util.ArrayList<java.lang.Double> outputKinds,
java.lang.String hidden,
double momentum,
double learningRate,
double threshold,
double minRange,
double maxRange) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
momentum
private double momentum
-
Constructor Detail
-
NeuralNetwork
public NeuralNetwork(java.util.ArrayList<java.lang.Double[]> inputs,
java.util.ArrayList<java.lang.Double> outputKinds,
java.lang.String hidden,
double momentum,
double learningRate,
double threshold,
double minRange,
double maxRange)
-
Method Detail
-
activate
private void activate()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.GVRecirculation.html���������������������������������0000775�4231163�4231163�00000036033�14537076054�026042� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.GVRecirculation (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
GVRecirculation(double[] x0,
boolean doAnalytical) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.UnaryCostFunction.html�������������������������������0000775�4231163�4231163�00000033072�14537076053�026644� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.UnaryCostFunction (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
UnaryCostFunction(int num_residuals,
int parameter_block_size) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGraphBasedSegmentation.edge.html����������������������������0000775�4231163�4231163�00000032412�14537076046�027243� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGraphBasedSegmentation.edge (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
a |
|
private int |
b |
|
private float |
w |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
edge() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
seta
public void seta(int a)
-
setb
public void setb(int b)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.html���������������������������������������������������0000775�4231163�4231163�00000215660�14537076045�022521� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP (MIPAV API Documentation)
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
private class |
AlgorithmFRAP.distanceIntensityComparator |
|
private class |
AlgorithmFRAP.distanceIntensityItem |
|
(package private) class |
AlgorithmFRAP.Fit24DModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitDoubleExponentialModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitDoubleExponentialNoWholeConstrainedModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitDoubleExponentialNoWholeModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitExpModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitExpModelqd |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitFullIntModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitFullIntModel2i |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitFullIntModel2p |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitFullIntModel2s |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitFullModel2 |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitFullModelqd |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitIntensityProfile |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitPure1DModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitPure1DNoWholeModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitSineModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitSingleExponentialModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitSingleExponentialNoWholeModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitWholeNL2solInt2 |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitWholeNL2solModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitWholeNLConInt2 |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitWholeNLConModel |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitWholeNLConModel2 |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitWholeNLConModel3 |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.FitWholeNLConModelqd |
DOCUMENT ME!
|
(package private) class |
AlgorithmFRAP.IntModel |
class IntModel extends Integration { public IntModel(double lower, double
upper, int routine, double eps) { super(lower, upper, routine, eps); }
public double intFunc(double x) { double function = 0.0; if ((x !
|
(package private) class |
AlgorithmFRAP.IntModel2 |
class IntModel2 extends Integration2 { public IntModel2(double lower,
double upper, int routine, double breakPoints[], double epsabs, double
epsrel, int limit) { super(lower, upper, routine, breakPoints, epsabs,
epsrel, limit); } public double intFunc(double x) { double function =
0.0; if ((x !
|
(package private) class |
AlgorithmFRAP.IntModelBessel |
|
(package private) class |
AlgorithmFRAP.IntModelI0NuclearArea |
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmFRAP(ModelImage srcImg,
boolean useRed,
boolean useGreen,
boolean useBlue,
int firstSliceNum,
int photoBleachedIndex,
int wholeOrganIndex,
int backgroundIndex,
int model,
boolean register,
int cost,
boolean createRegImage,
boolean paramVary,
double diffusion,
boolean findDiffusion) |
Creates a new AlgorithmFRAP object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double |
actInt(double x) |
DOCUMENT ME!
|
private double |
computeJ1(int m) |
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
fitFullModel(double[] timeFunction,
double[] time,
double kon,
double koff,
double diffusion) |
|
private void |
JYNDD(int N,
double X,
double[] BJN,
double[] DJN,
double[] FJN,
double[] BYN,
double[] DYN,
double[] FYN) |
|
private void |
JYZO(int N,
int NT,
double[] RJ0,
double[] RJ1,
double[] RY0,
double[] RY1) |
|
void |
runAlgorithm() |
starts the algorithm.
|
private void |
runFullModelTest() |
DOCUMENT ME!
|
private void |
runIntegrationTest2() |
private void runIntegrationTest2() { IntModel2 imod; double lower = 0.0;
double upper = 1.0; int routine = Integration2.DQAGPE; double
breakPoints[] = new double[4]; breakPoints[0] = 1.0/7.0; breakPoints[1] =
2.0/3.0; double epsabs = 0.0; double epsrel = 1.0E-4; int limit = 100;
double numInt; int errorStatus; double absError; int neval; double eps =
5.0e-7; int steps; imod = new IntModel2(lower, upper, routine,
breakPoints, epsabs, epsrel, limit); imod.driver(); numInt =
imod.getIntegral(); errorStatus = imod.getErrorStatus(); absError =
imod.getAbserr(); neval = imod.getNeval();
Preferences.debug("Numerical Integral = " + numInt + " after " + neval
+" integrand evaluations used\n", Preferences.DEBUG_ALGORITHM);
Preferences.debug("Error status = " + errorStatus
+" with absolute error = " + absError + "\n",
Preferences.DEBUG_ALGORITHM);
|
private void |
runLapTest() |
DOCUMENT ME!
|
private void |
runLapTest2() |
DOCUMENT ME!
|
private void |
runLapTestqd() |
DOCUMENT ME!
|
private void |
runTest() |
DOCUMENT ME!
|
void |
runTest24D() |
DOCUMENT ME!
|
void |
testComputeJ1() |
|
void |
testJYZO() |
|
void |
updateFileInfo(ModelImage image,
ModelImage resultImage) |
Copy important file information to resultant image structure.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
cost
private int cost
DOCUMENT ME!
-
model
private int model
DOCUMENT ME!
-
register
private boolean register
DOCUMENT ME!
-
useBlue
private boolean useBlue
DOCUMENT ME!
-
useGreen
private boolean useGreen
DOCUMENT ME!
-
useRed
private boolean useRed
DOCUMENT ME!
-
theta
private double theta
-
sigma
private double sigma
-
numParam
private int numParam
-
alpha
private double[] alpha
-
avgJ0
private double[] avgJ0
-
RN2J02
private double[] RN2J02
-
bessInt
private double[] bessInt
-
Constructor Detail
-
AlgorithmFRAP
public AlgorithmFRAP(ModelImage srcImg,
boolean useRed,
boolean useGreen,
boolean useBlue,
int firstSliceNum,
int photoBleachedIndex,
int wholeOrganIndex,
int backgroundIndex,
int model,
boolean register,
int cost,
boolean createRegImage,
boolean paramVary,
double diffusion,
boolean findDiffusion)
Creates a new AlgorithmFRAP object.
- Parameters:
srcImg - source imageuseRed - If true, use the red color values for the FRAPuseGreen - If true, use the green color values for the FRAPuseBlue - If true, use the blue color values for the FRAPfirstSliceNum - first slice after bleach operationphotoBleachedIndex - the index of the photoBleached VOIwholeOrganIndex - the index of the wholeOrgan VOI if >= 0backgroundIndex - the index of the background VOI if >= 0model - NARROW_BAND_2D, CIRCLE_2D, or PURE_1Dregister - If true register all slices to the wholeOrgan slice before
FRAPcost - Cost function used in registrationcreateRegImage - If register = true and createRegImage = true, then create a
frame with the registered imageparamVary - Calculate sum of square of errors for different parameter
values and output the minimumdiffusion - diffusion constant in um*um/secfindDiffusion -
-
Method Detail
-
runTest24D
public void runTest24D()
DOCUMENT ME!
-
updateFileInfo
public void updateFileInfo(ModelImage image,
ModelImage resultImage)
Copy important file information to resultant image structure.
- Parameters:
image - Source image.resultImage - Resultant image.
-
runIntegrationTest2
private void runIntegrationTest2()
private void runIntegrationTest2() { IntModel2 imod; double lower = 0.0;
double upper = 1.0; int routine = Integration2.DQAGPE; double
breakPoints[] = new double[4]; breakPoints[0] = 1.0/7.0; breakPoints[1] =
2.0/3.0; double epsabs = 0.0; double epsrel = 1.0E-4; int limit = 100;
double numInt; int errorStatus; double absError; int neval; double eps =
5.0e-7; int steps; imod = new IntModel2(lower, upper, routine,
breakPoints, epsabs, epsrel, limit); imod.driver(); numInt =
imod.getIntegral(); errorStatus = imod.getErrorStatus(); absError =
imod.getAbserr(); neval = imod.getNeval();
Preferences.debug("Numerical Integral = " + numInt + " after " + neval
+" integrand evaluations used\n", Preferences.DEBUG_ALGORITHM);
Preferences.debug("Error status = " + errorStatus
+" with absolute error = " + absError + "\n",
Preferences.DEBUG_ALGORITHM);
-
runTest
private void runTest()
DOCUMENT ME!
-
fitFullModel
private void fitFullModel(double[] timeFunction,
double[] time,
double kon,
double koff,
double diffusion)
-
testJYZO
public void testJYZO()
-
JYZO
private void JYZO(int N,
int NT,
double[] RJ0,
double[] RJ1,
double[] RY0,
double[] RY1)
-
JYNDD
private void JYNDD(int N,
double X,
double[] BJN,
double[] DJN,
double[] FJN,
double[] BYN,
double[] DYN,
double[] FYN)
��������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.TrustRegionStepEvaluator.html����������������������������0000775�4231163�4231163�00000035627�14537076052�027362� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.TrustRegionStepEvaluator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
-
Constructor Summary
Constructors
| Constructor |
Description |
TrustRegionStepEvaluator(double initial_cost,
int max_consecutive_nonmonotonic_steps) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/GaussianMixtureModelsIncompleteSamples.html��������������������������0000775�4231163�4231163�00000250027�14537076055�027760� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
GaussianMixtureModelsIncompleteSamples (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class GaussianMixtureModelsIncompleteSamples
extends AlgorithmBase
dirichletRnd ported from mixGaussRnd.m by Mo Chen
Copyright (c) 2016, Mo Chen
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
Redistributions of source code must retain the above copyright notice, this
list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright notice,
this list of conditions and the following disclaimer in the documentation
and/or other materials provided with the distribution
Neither the name of nor the names of its
contributors may be used to endorse or promote products derived from this
software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE
FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
_drawGMM_BG(java.util.Vector<double[][]> data2Vec,
java.util.Vector<double[][][]> covar2Vec,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double size,
java.lang.String covar_callback,
GaussianMixtureModelsIncompleteSamples.Background background,
java.util.Random rng) |
|
void |
_EM(double[] log_L,
int[] N,
double[] N2,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] log_p,
int[][] U,
double[][][][] T_inv,
double[] log_S,
double[][] data,
double[][][] covar,
double[][][] R,
java.lang.String sel_callback,
int oversampling,
java.lang.String covar_callback,
GaussianMixtureModelsIncompleteSamples.Background background,
double[][] p_bg,
double w,
double cutoff,
int miniter,
int maxiter,
double tol,
java.lang.String prefix,
boolean[] changeable_amp,
boolean[] changeable_mean,
boolean[] changeable_covar,
java.util.Random rng) |
|
void |
_EMstep(double[] log_L,
int[] N,
double[] N2,
double[] N0update,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] log_p,
int[][] U,
double[][][][] T_inv,
double[] log_S,
double N0,
double[][] data,
double[][][] covar,
double[][][] R,
java.lang.String sel_callback,
double[] omega,
int oversampling,
java.lang.String covar_callback,
GaussianMixtureModelsIncompleteSamples.Background background,
double[][] p_bg,
double w,
double cutoff,
double tol,
boolean[] changeable_amp,
boolean[] changeable_mean,
boolean[] changeable_covar,
int it,
java.util.Random rng) |
|
double |
_Estep(GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] log_p,
int[][] U,
double[][][][] T_inv,
double[] log_S,
double[][] data,
double[][][] covar,
double[][][] R,
double[] omega,
GaussianMixtureModelsIncompleteSamples.Background background,
double[][] p_bg,
double cutoff,
int it,
java.util.Random rng) |
|
void |
_Esum(double[][] log_p,
double[][][][] T_inv,
int k,
int[][] U,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] data,
double[][][] covar,
double[][][] R,
double cutoff) |
|
void |
_findSNMComponents(int[] changing,
boolean[] cleanup,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
int[][] U,
double[][] log_p,
double[] log_S,
double N) |
|
double |
_JS(int k,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] log_p,
double[] log_S,
int[][] U,
double[] A) |
|
void |
_Mstep(double[] A,
double[][] M,
double[][][] C,
double[] B,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
int[][] U,
double[][] log_p,
double[][][][] T_inv,
double[] log_S,
double[][] data,
double[][][] covar,
double[][][] R,
double[][] p_bg) |
|
void |
_Msums(double[] A,
double[][] M,
double[][][] C,
int k,
int[][] U,
double[][] log_p,
double[][][][] T_inv,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] data,
double[][][] R,
double[] log_S) |
|
void |
_update(GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[] A,
double[][] M,
double[][][] C,
int[] N,
double[] B,
double[] A2,
double[][] M2,
double[][][] C2,
double[] N2,
double[] B2,
double w,
boolean[] changeable_amp,
boolean[] changeable_mean,
boolean[] changeable_covar,
GaussianMixtureModelsIncompleteSamples.Background background) |
|
void |
_update_snm(GaussianMixtureModelsIncompleteSamples.GMM gmm,
int[] changeable,
int[][] U,
double N,
boolean cleanup) |
|
(package private) double |
asinh(double x) |
|
int[] |
bincount(int[] indices,
int minlength) |
|
int[][][] |
binSample(double[][] coords,
int C) |
|
double |
chi2_cutoff(int D,
double cutoff) |
|
double[][][] |
covar_callback_default(double[][] coords) |
|
double[] |
dirichletRnd(double[] ain,
double[] m) |
|
void |
draw(java.util.Vector<double[][]> dataVec,
java.util.Vector<double[][][]> covarVec,
double[] updated_orig_size,
java.util.Vector<double[]> omegaVec,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
int obs_size,
java.lang.String sel_callback,
boolean invert_sel,
int orig_size,
java.lang.String covar_callback,
GaussianMixtureModelsIncompleteSamples.Background background,
java.util.Random rng) |
|
void |
drawWithNbh(double[][] samples,
int[][] nbh,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
int size,
java.util.Random rng) |
|
private double |
erf(double x) |
|
double |
fit(int[][] U,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] data,
double[][][] covar,
double[][][] R,
java.lang.String init_method,
double w,
double cutoff,
java.lang.String sel_callback,
int oversampling,
java.lang.String covar_callback,
GaussianMixtureModelsIncompleteSamples.Background background,
double tol,
int miniter,
int maxiter,
int[] frozen_amp,
int[] frozen_mean,
int[] frozen_covar,
int split_n_merge,
java.util.Random rng) |
|
double |
gamrnd(double a,
double b) |
|
double[] |
getAll(double[][] coords) |
|
double[] |
getBox(double[][] coords) |
|
double[] |
getBoxWithHole(double[][] coords) |
|
double[] |
getCut(double[][] coords) |
|
double[] |
getHalf(double[][] coords) |
|
double[] |
getHole(double[][] coords) |
|
double[] |
getNoSel(double[][] coords) |
|
double[] |
getSelection(java.lang.String sel_type,
double[][] noisy,
java.util.Random rng) |
|
double[] |
getSlopeSel(double[][] coords,
java.util.Random rng) |
|
boolean[] |
GMMSel(double[][] coords,
double[][][] covar,
GaussianMixtureModelsIncompleteSamples.GMM sel_gmm,
double cutoff_nd,
java.util.Random rng) |
|
void |
initCube(GaussianMixtureModelsIncompleteSamples.GMM gmm,
double w,
java.util.Random rng) |
|
void |
initFromDataAtRandom(GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] data,
double[][][] covar,
double s,
int[] k,
java.util.Random rng) |
|
void |
initFromDataMinMax(GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] data,
double[][][] covar,
double s,
int[] k,
java.util.Random rng) |
|
void |
initFromKMeans(GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] data,
java.util.Random rng) |
|
boolean[] |
insideComponent(int k,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] coords,
double[][][] covar,
double cutoff) |
|
double |
logsum(double[] input) |
|
double[] |
logsum(double[][] input) |
|
void |
match1d(java.util.Vector<java.lang.Integer> sub1Vec,
java.util.Vector<java.lang.Integer> sub2Vec,
int[] arr1Input,
int[] arr2,
boolean presorted) |
|
void |
plotDifferences(double[][] orig,
double[][] data,
GaussianMixtureModelsIncompleteSamples.GMM[] gmms,
GaussianMixtureModelsIncompleteSamples.GMM avg,
double[] l) |
|
void |
plotResults(double[][] orig,
double[][] data,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
java.lang.String description,
double disp) |
|
void |
printResults(GaussianMixtureModelsIncompleteSamples.GMM gmm,
java.lang.String description) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
GaussianMixtureModelsIncompleteSamples.GMM |
stack(GaussianMixtureModelsIncompleteSamples.GMM[] gmms,
double[] weights) |
|
GaussianMixtureModelsIncompleteSamples.GMM |
stack_fit(GaussianMixtureModelsIncompleteSamples.GMM[] gmms,
double[][] data,
double[][][] covar,
java.lang.String init_callback,
double w,
double cutoff,
java.lang.String sel_callback,
java.lang.String covar_callack,
GaussianMixtureModelsIncompleteSamples.Background bg,
int L,
double tol,
java.util.Random rng) |
|
void |
test() |
|
void |
test_3D() |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
test_3D
public void test_3D()
-
stack_fit
public GaussianMixtureModelsIncompleteSamples.GMM stack_fit(GaussianMixtureModelsIncompleteSamples.GMM[] gmms,
double[][] data,
double[][][] covar,
java.lang.String init_callback,
double w,
double cutoff,
java.lang.String sel_callback,
java.lang.String covar_callack,
GaussianMixtureModelsIncompleteSamples.Background bg,
int L,
double tol,
java.util.Random rng)
-
asinh
double asinh(double x)
-
fit
public double fit(int[][] U,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] data,
double[][][] covar,
double[][][] R,
java.lang.String init_method,
double w,
double cutoff,
java.lang.String sel_callback,
int oversampling,
java.lang.String covar_callback,
GaussianMixtureModelsIncompleteSamples.Background background,
double tol,
int miniter,
int maxiter,
int[] frozen_amp,
int[] frozen_mean,
int[] frozen_covar,
int split_n_merge,
java.util.Random rng)
-
match1d
public void match1d(java.util.Vector<java.lang.Integer> sub1Vec,
java.util.Vector<java.lang.Integer> sub2Vec,
int[] arr1Input,
int[] arr2,
boolean presorted)
-
_EM
public void _EM(double[] log_L,
int[] N,
double[] N2,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] log_p,
int[][] U,
double[][][][] T_inv,
double[] log_S,
double[][] data,
double[][][] covar,
double[][][] R,
java.lang.String sel_callback,
int oversampling,
java.lang.String covar_callback,
GaussianMixtureModelsIncompleteSamples.Background background,
double[][] p_bg,
double w,
double cutoff,
int miniter,
int maxiter,
double tol,
java.lang.String prefix,
boolean[] changeable_amp,
boolean[] changeable_mean,
boolean[] changeable_covar,
java.util.Random rng)
-
_EMstep
public void _EMstep(double[] log_L,
int[] N,
double[] N2,
double[] N0update,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] log_p,
int[][] U,
double[][][][] T_inv,
double[] log_S,
double N0,
double[][] data,
double[][][] covar,
double[][][] R,
java.lang.String sel_callback,
double[] omega,
int oversampling,
java.lang.String covar_callback,
GaussianMixtureModelsIncompleteSamples.Background background,
double[][] p_bg,
double w,
double cutoff,
double tol,
boolean[] changeable_amp,
boolean[] changeable_mean,
boolean[] changeable_covar,
int it,
java.util.Random rng)
-
_update
public void _update(GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[] A,
double[][] M,
double[][][] C,
int[] N,
double[] B,
double[] A2,
double[][] M2,
double[][][] C2,
double[] N2,
double[] B2,
double w,
boolean[] changeable_amp,
boolean[] changeable_mean,
boolean[] changeable_covar,
GaussianMixtureModelsIncompleteSamples.Background background)
-
draw
public void draw(java.util.Vector<double[][]> dataVec,
java.util.Vector<double[][][]> covarVec,
double[] updated_orig_size,
java.util.Vector<double[]> omegaVec,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
int obs_size,
java.lang.String sel_callback,
boolean invert_sel,
int orig_size,
java.lang.String covar_callback,
GaussianMixtureModelsIncompleteSamples.Background background,
java.util.Random rng)
-
_Mstep
public void _Mstep(double[] A,
double[][] M,
double[][][] C,
double[] B,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
int[][] U,
double[][] log_p,
double[][][][] T_inv,
double[] log_S,
double[][] data,
double[][][] covar,
double[][][] R,
double[][] p_bg)
-
_Msums
public void _Msums(double[] A,
double[][] M,
double[][][] C,
int k,
int[][] U,
double[][] log_p,
double[][][][] T_inv,
GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] data,
double[][][] R,
double[] log_S)
-
_Estep
public double _Estep(GaussianMixtureModelsIncompleteSamples.GMM gmm,
double[][] log_p,
int[][] U,
double[][][][] T_inv,
double[] log_S,
double[][] data,
double[][][] covar,
double[][][] R,
double[] omega,
GaussianMixtureModelsIncompleteSamples.Background background,
double[][] p_bg,
double cutoff,
int it,
java.util.Random rng)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTransformVOI.html�������������������������������������������0000775�4231163�4231163�00000064441�14537076050�024315� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTransformVOI (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
allVOIs
private boolean allVOIs
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.BarycentricGradientPaint.html����������������������������0000775�4231163�4231163�00000057325�14537076053�027331� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.BarycentricGradientPaint (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected java.awt.Color |
color1 |
|
protected java.awt.Color |
color2 |
|
protected java.awt.Color |
color3 |
|
protected java.awt.geom.Point2D.Float |
p1 |
|
protected java.awt.geom.Point2D.Float |
p2 |
|
protected java.awt.geom.Point2D.Float |
p3 |
|
-
Fields inherited from interface java.awt.Transparency
BITMASK, OPAQUE, TRANSLUCENT
-
Constructor Summary
Constructors
| Constructor |
Description |
BarycentricGradientPaint(double x1,
double y1,
double x2,
double y2,
double x3,
double y3,
java.awt.Color color1,
java.awt.Color color2,
java.awt.Color color3) |
|
BarycentricGradientPaint(float[] x,
float[] y,
java.awt.Color color1,
java.awt.Color color2,
java.awt.Color color3) |
|
BarycentricGradientPaint(float x1,
float y1,
float x2,
float y2,
float x3,
float y3,
java.awt.Color color1,
java.awt.Color color2,
java.awt.Color color3) |
|
BarycentricGradientPaint(java.awt.geom.Point2D p1,
java.awt.geom.Point2D p2,
java.awt.geom.Point2D p3,
java.awt.Color color1,
java.awt.Color color2,
java.awt.Color color3) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
java.awt.PaintContext |
createContext(java.awt.image.ColorModel cm,
java.awt.Rectangle deviceBounds,
java.awt.geom.Rectangle2D userBounds,
java.awt.geom.AffineTransform xform,
java.awt.RenderingHints hints) |
|
int |
getTransparency() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
BarycentricGradientPaint
public BarycentricGradientPaint(java.awt.geom.Point2D p1,
java.awt.geom.Point2D p2,
java.awt.geom.Point2D p3,
java.awt.Color color1,
java.awt.Color color2,
java.awt.Color color3)
- Parameters:
p1 - vertex of trianglep2 - vertex of trianglep3 - vertex of trianglecolor1 - color of vertexcolor2 - color of vertexcolor3 - color of vertex
-
BarycentricGradientPaint
public BarycentricGradientPaint(float[] x,
float[] y,
java.awt.Color color1,
java.awt.Color color2,
java.awt.Color color3)
- Parameters:
x - x-coordinates for the triangle verticesy - y-coordinates for the triangle verticescolor1 - color of vertexcolor2 - color of vertexcolor3 - color of vertex
-
BarycentricGradientPaint
public BarycentricGradientPaint(double x1,
double y1,
double x2,
double y2,
double x3,
double y3,
java.awt.Color color1,
java.awt.Color color2,
java.awt.Color color3)
- Parameters:
x1 - x-coord of triangle vertexy1 - y-coord of triangle vertexx2 - x-coord of triangle vertexy2 - y-coord of triangle vertexx3 - x-coord of triangle vertexy3 - y-coord of triangle vertexcolor1 - color of vertexcolor2 - color of vertexcolor3 - color of vertex
-
BarycentricGradientPaint
public BarycentricGradientPaint(float x1,
float y1,
float x2,
float y2,
float x3,
float y3,
java.awt.Color color1,
java.awt.Color color2,
java.awt.Color color3)
- Parameters:
x1 - x-coord of triangle vertexy1 - y-coord of triangle vertexx2 - x-coord of triangle vertexy2 - y-coord of triangle vertexx3 - x-coord of triangle vertexy3 - y-coord of triangle vertexcolor1 - color of vertexcolor2 - color of vertexcolor3 - color of vertex
-
Method Detail
-
createContext
public java.awt.PaintContext createContext(java.awt.image.ColorModel cm,
java.awt.Rectangle deviceBounds,
java.awt.geom.Rectangle2D userBounds,
java.awt.geom.AffineTransform xform,
java.awt.RenderingHints hints)
- Specified by:
createContext in interface java.awt.Paint
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.html����������������������������������������������������������0000775�4231163�4231163�00000534667�14537076054�021361� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class Covdet
extends AlgorithmBase
Copyright (C) 2013-14 Andrea Vedaldi.
Copyright (C) 2012 Karel Lenc, Andrea Vedaldi and Michal Perdoch.
All rights reserved.
vl_svd2, vl_solve_linear_system_2, vl_solve_linear_system_3, and gaussian_elimination from mathop.c by
Copyright (C) 2014 Andrea Vedaldi.
Copyright (C) 2007-12 Andrea Vedaldi and Brian Fulkerson.
All rights reserved.
vl_imsmooth_f, vl_imgradient_f, vl_imgradient_polar_f, _vl_new_gaussian_fitler_f,
and vl_imconvcol_vf from imopv.c by
Copyright (C) 2007-12 Andrea Vedaldi and Brian Fulkerson.
test_svd2 routines from test_svd2.c
Copyright (C) 2007-12 Andrea Vedaldi and Brian Fulkerson.
Testing vl_imconvcol.vf from code in test_imopv.c
Copyright (C) 2007-12 Andrea Vedaldi and Brian Fulkerson.
Routines form scalespace.c by
Copyright (C) 2007-12 Andrea Vedaldi and Brian Fulkerson.
Routines form qsort-def.h by
Copyright (C) 2007-12 Andrea Vedaldi and Brian Fulkerson.
From vl_covdet.c
Copyright (C) 2007-12 Karel Lencl, Andrea Vedaldi and Michal Perdoch.
This file is part of the VLFeat library and is made available under
the terms of the BSD license (see the COPYING file).
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
1. Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in the
documentation and/or other materials provided with the
distribution.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
- Author:
- Karel Lenc, Andrea Vedaldi, Michal Perdoch
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
Covdet() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
_vl_covdet_check_frame_inside(Covdet.VlCovDet self,
Covdet.VlFrameOrientedEllipse frame,
double margin) |
|
int |
_vl_covdet_compare_orientations_descending(Covdet.VlCovDetFeatureOrientation a,
Covdet.VlCovDetFeatureOrientation b) |
|
void |
_vl_det_hessian_response(float[] hessian,
int hessianOriginalOffset,
float[] image,
int imageOffset,
int width,
int height,
double step,
double sigma) |
|
void |
_vl_dog_response(float[] dog,
int dogOffset,
float[] level1,
int level1Offset,
float[] level2,
int level2Offset,
int width,
int height) |
|
void |
_vl_harris_response(float[] harris,
int harrisOffset,
float[] image,
int imageOffset,
int width,
int height,
double step,
double sigma,
double sigmaI,
double alpha) |
|
float[] |
_vl_new_gaussian_fitler_f(int[] size,
double sigma) |
|
void |
_vl_scalespace_fill_octave(Covdet.VlScaleSpace self,
int o) |
|
void |
_vl_scalespace_start_octave_from_image(Covdet.VlScaleSpace self,
float[] image,
int o) |
------------------------------------------------------------------
|
void |
_vl_scalespace_start_octave_from_previous_octave(Covdet.VlScaleSpace self,
int o) |
|
void |
check_svd(double[] M,
double[] U,
double[] S,
double[] V) |
|
void |
copy_and_downsample(float[] destination,
int destinationOffset,
float[] source,
int sourceOffset,
int width,
int height,
int numOctaves) |
------------------------------------------------------------------
|
void |
copy_and_upsample(float[] destination,
int destinationOffset,
float[] source,
int sourceOffset,
int width,
int height) |
------------------------------------------------------------------
|
float[][] |
covdet_detector(float[][] image,
boolean verbose,
Covdet.VlCovDetMethod method,
boolean doubleImage,
int numOctaves,
int octaveResolution,
double baseScale,
int maxNumOrientations,
double peakThreshold,
double edgeThreshold,
double lapPeakThreshold,
boolean allowPaddedWarping,
double boundaryMargin,
Covdet.vlCovDetDescriptorType descriptorType,
int patchResolution,
double patchRelativeExtent,
double patchRelativeSmoothing,
float[] patch,
float[] patchXY,
double[][] userFrames,
boolean estimateAffineShape,
boolean estimateOrientation,
boolean outputDescriptors,
java.util.Vector<float[][]> descriptors,
int liopNumSpatialBins,
int liopNumNeighbors,
float liopRadius,
float liopIntensityThreshold,
boolean outputInfo,
java.util.Vector<Covdet.VlScaleSpace> gssVec,
java.util.Vector<Covdet.VlScaleSpace> cssVec,
java.util.Vector<java.lang.Float> peak,
java.util.Vector<java.lang.Float> edge,
java.util.Vector<java.lang.Float> orientation,
java.util.Vector<java.lang.Float> laplacian) |
|
void |
demo() |
|
double |
det2(double[] A) |
|
java.lang.String |
getName(Covdet.VlCovDetMethod method) |
|
boolean |
is_valid_geometry(Covdet.VlScaleSpaceGeometry geom) |
|
(package private) int |
isign(int i) |
|
private double |
log2(double input) |
|
boolean |
neighbors2DGreatest(float v,
float[] map,
int mapOffset,
int xo,
int yo,
double threshold) |
|
boolean |
neighbors2DLeast(float v,
float[] map,
int mapOffset,
int xo,
int yo,
double threshold) |
|
boolean |
neighbors3DGreatest(float v,
float[] map,
int mapOffset,
int xo,
int yo,
int zo,
double threshold) |
|
boolean |
neighbors3DLeast(float v,
float[] map,
int mapOffset,
int xo,
int yo,
int zo,
double threshold) |
|
void |
prod2(double[] R,
double[] A,
double[] B) |
|
void |
qsort(Covdet.VlCovDetFeatureOrientation[] array,
int length) |
|
void |
qsort_recursive(Covdet.VlCovDetFeatureOrientation[] array,
int begin,
int end) |
|
void |
qsort_swap(Covdet.VlCovDetFeatureOrientation[] array,
int indexA,
int indexB) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
(package private) double |
sign(double x) |
|
void |
test_conv() |
|
void |
test_gaussian_elimination() |
|
void |
test_qsort() |
|
void |
test_smooth() |
|
void |
test_svd2() |
|
void |
transp2(double[] R,
double[] A) |
|
int |
vl_covdet_append_feature(Covdet.VlCovDet self,
Covdet.VlCovDetFeature feature) |
|
void |
vl_covdet_delete(Covdet.VlCovDet self) |
|
void |
vl_covdet_detect(Covdet.VlCovDet self) |
|
void |
vl_covdet_drop_features_outside(Covdet.VlCovDet self,
double margin) |
|
void |
vl_covdet_extract_affine_shape(Covdet.VlCovDet self) |
|
int |
vl_covdet_extract_affine_shape_for_frame(Covdet.VlCovDet self,
Covdet.VlFrameOrientedEllipse adapted,
Covdet.VlFrameOrientedEllipse frame) |
|
void |
vl_covdet_extract_laplacian_scales(Covdet.VlCovDet self) |
|
Covdet.VlCovDetFeatureLaplacianScale[] |
vl_covdet_extract_laplacian_scales_for_frame(Covdet.VlCovDet self,
int[] numScales,
Covdet.VlFrameOrientedEllipse frame) |
|
void |
vl_covdet_extract_orientations(Covdet.VlCovDet self) |
|
Covdet.VlCovDetFeatureOrientation[] |
vl_covdet_extract_orientations_for_frame(Covdet.VlCovDet self,
int[] numOrientations,
Covdet.VlFrameOrientedEllipse frame) |
|
int |
vl_covdet_extract_patch_for_frame(Covdet.VlCovDet self,
float[] patch,
int resolution,
double extent,
double sigma,
Covdet.VlFrameOrientedEllipse frame) |
|
int |
vl_covdet_extract_patch_helper(Covdet.VlCovDet self,
double[] sigma1,
double[] sigma2,
float[] patch,
int resolution,
double extent,
double sigma,
double[] A_,
double[] T_,
double d1,
double d2) |
|
boolean |
vl_covdet_get_aa_accurate_smoothing(Covdet.VlCovDet self) |
|
boolean |
vl_covdet_get_allow_padded_warping(Covdet.VlCovDet self) |
|
double |
vl_covdet_get_base_scale(Covdet.VlCovDet self) |
|
Covdet.VlScaleSpace |
vl_covdet_get_css(Covdet.VlCovDet self) |
|
double |
vl_covdet_get_edge_threshold(Covdet.VlCovDet self) |
|
Covdet.VlCovDetFeature[] |
vl_covdet_get_features(Covdet.VlCovDet self) |
|
int |
vl_covdet_get_first_octave(Covdet.VlCovDet self) |
|
Covdet.VlScaleSpace |
vl_covdet_get_gss(Covdet.VlCovDet self) |
|
double |
vl_covdet_get_laplacian_peak_threshold(Covdet.VlCovDet self) |
|
int[] |
vl_covdet_get_laplacian_scales_statistics(Covdet.VlCovDet self,
int[] numScales) |
|
int |
vl_covdet_get_max_num_orientations(Covdet.VlCovDet self) |
|
double |
vl_covdet_get_non_extrema_suppression_threshold(Covdet.VlCovDet self) |
|
int |
vl_covdet_get_num_features(Covdet.VlCovDet self) |
|
int |
vl_covdet_get_num_non_extrema_suppressed(Covdet.VlCovDet self) |
|
int |
vl_covdet_get_num_octaves(Covdet.VlCovDet self) |
|
int |
vl_covdet_get_octave_resolution(Covdet.VlCovDet self) |
|
double |
vl_covdet_get_peak_threshold(Covdet.VlCovDet self) |
|
boolean |
vl_covdet_get_transposed(Covdet.VlCovDet self) |
|
(package private) Covdet.VlCovDet |
vl_covdet_new(Covdet.VlCovDetMethod method) |
|
int |
vl_covdet_put_image(Covdet.VlCovDet self,
float[] image,
int width,
int height) |
|
void |
vl_covdet_reset(Covdet.VlCovDet self) |
|
void |
vl_covdet_set_aa_accurate_smoothing(Covdet.VlCovDet self,
boolean x) |
|
void |
vl_covdet_set_allow_padded_warping(Covdet.VlCovDet self,
boolean t) |
|
void |
vl_covdet_set_base_scale(Covdet.VlCovDet self,
double s) |
|
void |
vl_covdet_set_edge_threshold(Covdet.VlCovDet self,
double edgeThreshold) |
|
void |
vl_covdet_set_first_octave(Covdet.VlCovDet self,
int o) |
|
void |
vl_covdet_set_laplacian_peak_threshold(Covdet.VlCovDet self,
double peakThreshold) |
|
void |
vl_covdet_set_max_num_orientations(Covdet.VlCovDet self,
int m) |
|
void |
vl_covdet_set_non_extrema_suppression_threshold(Covdet.VlCovDet self,
double x) |
|
void |
vl_covdet_set_num_octaves(Covdet.VlCovDet self,
int o) |
|
void |
vl_covdet_set_octave_resolution(Covdet.VlCovDet self,
int r) |
|
void |
vl_covdet_set_peak_threshold(Covdet.VlCovDet self,
double peakThreshold) |
|
void |
vl_covdet_set_transposed(Covdet.VlCovDet self,
boolean t) |
|
int[] |
vl_find_local_extrema_2(int[] extrema,
int[] numExtrema,
int[] bufferSize,
float[] map,
int mapOffset,
int width,
int height,
double threshold) |
|
int[] |
vl_find_local_extrema_3(int[] extrema,
int[] numExtrema,
int[] bufferSize,
float[] map,
int mapOffset,
int width,
int height,
int depth,
double threshold) |
|
int |
vl_gaussian_elimination(double[] A,
int numRows,
int numColumns) |
|
int |
vl_get_frame_size(Covdet.VlFrameType frameType) |
|
Covdet.VlFrameType |
vl_get_frame_type(boolean affineAdaptation,
boolean orientation) |
|
void |
vl_imconvcol_vf(float[] dst,
int dstOffset,
int dst_stride,
float[] src,
int srcOffset,
int src_width,
int src_height,
int src_stride,
float[] filt,
int filt_begin,
int filt_end,
int step,
int flags) |
|
void |
vl_imgradient_f(float[] xGradient,
float[] yGradient,
int gradWidthStride,
int gradHeightStride,
float[] image,
int imageOffset,
int imageWidth,
int imageHeight,
int imageStride) |
|
void |
vl_imgradient_polar_f(float[] gradientModulus,
float[] gradientAngle,
int gradientHorizontalStride,
int gradHeightStride,
float[] image,
int imageWidth,
int imageHeight,
int imageStride) |
|
void |
vl_imsmooth_f(float[] smoothed,
int smoothedOffset,
int smoothedStride,
float[] image,
int imageOffset,
int width,
int height,
int stride,
double sigmax,
double sigmay) |
|
void |
vl_lapack_dlasv2(double[] smin,
double[] smax,
double[] sv,
double[] cv,
double[] su,
double[] cu,
double f,
double g,
double h) |
|
double |
vl_mod_2pi(double x) |
|
boolean |
vl_refine_local_extreum_2(Covdet.VlCovDetExtremum2 refined,
float[] map,
int mapOffsetOriginal,
int width,
int height,
int x,
int y) |
|
boolean |
vl_refine_local_extreum_3(Covdet.VlCovDetExtremum3 refined,
float[] map,
int mapOffsetOriginal,
int width,
int height,
int depth,
int x,
int y,
int z) |
|
void |
vl_scalespace_delete(Covdet.VlScaleSpace self) |
|
Covdet.VlScaleSpaceGeometry |
vl_scalespace_get_default_geometry(int width,
int height) |
|
Covdet.VlScaleSpaceGeometry |
vl_scalespace_get_geometry(Covdet.VlScaleSpace self) |
|
float[] |
vl_scalespace_get_level(Covdet.VlScaleSpace self,
int o,
int s,
int[] levelOffset) |
|
double |
vl_scalespace_get_level_sigma(Covdet.VlScaleSpace self,
int o,
int s) |
------------------------------------------------------------------
|
Covdet.VlScaleSpaceOctaveGeometry |
vl_scalespace_get_octave_geometry(Covdet.VlScaleSpace self,
int o) |
|
Covdet.VlScaleSpace |
vl_scalespace_new_with_geometry(Covdet.VlScaleSpaceGeometry geom) |
------------------------------------------------------------------
|
void |
vl_scalespace_put_image(Covdet.VlScaleSpace self,
float[] image) |
|
boolean |
vl_scalespacegeometry_is_equal(Covdet.VlScaleSpaceGeometry a,
Covdet.VlScaleSpaceGeometry b) |
|
int |
VL_SHIFT_LEFT(int x,
int n) |
|
int |
vl_solve_linear_system_2(double[] x,
double[] A,
double[] b) |
|
int |
vl_solve_linear_system_3(double[] x,
double[] A,
double[] b) |
|
void |
vl_svd2(double[] S,
double[] U,
double[] V,
double[] M) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
VL_EPSILON_D
double VL_EPSILON_D
-
VL_ERR_OVERFLOW
int VL_ERR_OVERFLOW
< No error
-
VL_ERR_ALLOC
int VL_ERR_ALLOC
< Buffer overflow error
-
VL_ERR_EOF
int VL_ERR_EOF
< Input/output error
-
VL_PAD_BY_ZERO
int VL_PAD_BY_ZERO
-
Method Detail
-
neighbors3DGreatest
public boolean neighbors3DGreatest(float v,
float[] map,
int mapOffset,
int xo,
int yo,
int zo,
double threshold)
-
neighbors3DLeast
public boolean neighbors3DLeast(float v,
float[] map,
int mapOffset,
int xo,
int yo,
int zo,
double threshold)
-
vl_find_local_extrema_3
public int[] vl_find_local_extrema_3(int[] extrema,
int[] numExtrema,
int[] bufferSize,
float[] map,
int mapOffset,
int width,
int height,
int depth,
double threshold)
- Parameters:
extrema - buffer containing the extrema found (in/out).bufferSize - size of the @a extrema buffer in bytes (in/out).map - a 3D array representing the map.width - of the map.height - of the map.depth - of the map.threshold - minumum extremum value.- Returns:
- number of extrema found.
-
neighbors2DGreatest
public boolean neighbors2DGreatest(float v,
float[] map,
int mapOffset,
int xo,
int yo,
double threshold)
-
neighbors2DLeast
public boolean neighbors2DLeast(float v,
float[] map,
int mapOffset,
int xo,
int yo,
double threshold)
-
vl_find_local_extrema_2
public int[] vl_find_local_extrema_2(int[] extrema,
int[] numExtrema,
int[] bufferSize,
float[] map,
int mapOffset,
int width,
int height,
double threshold)
- Parameters:
extrema - buffer containing the found extrema (in/out).bufferSize - size of the @a extrema buffer in bytes (in/out).map - a 3D array representing the map.width - of the map.height - of the map.threshold - minumum extremum value.- Returns:
- number of extrema found.
An extremum contains 2 ::vl_index values; they are arranged
sequentially.
The function can reuse an already allocated buffer if
-
vl_refine_local_extreum_3
public boolean vl_refine_local_extreum_3(Covdet.VlCovDetExtremum3 refined,
float[] map,
int mapOffsetOriginal,
int width,
int height,
int depth,
int x,
int y,
int z)
- Parameters:
refined - refined extremum (out).map - a 3D array representing the map.width - of the map.height - of the map.depth - of the map.x - initial x position.y - initial y position.z - initial z position.- Returns:
- a flat indicating whether the extrema refinement was stable.
-
vl_refine_local_extreum_2
public boolean vl_refine_local_extreum_2(Covdet.VlCovDetExtremum2 refined,
float[] map,
int mapOffsetOriginal,
int width,
int height,
int x,
int y)
- Parameters:
refined - refined extremum (out).map - a 2D array representing the map.width - of the map.height - of the map.x - initial x position.y - initial y position.- Returns:
- a flat indicating whether the extrema refinement was stable.
-
vl_imsmooth_f
public void vl_imsmooth_f(float[] smoothed,
int smoothedOffset,
int smoothedStride,
float[] image,
int imageOffset,
int width,
int height,
int stride,
double sigmax,
double sigmay)
-
test_conv
public void test_conv()
-
vl_imconvcol_vf
public void vl_imconvcol_vf(float[] dst,
int dstOffset,
int dst_stride,
float[] src,
int srcOffset,
int src_width,
int src_height,
int src_stride,
float[] filt,
int filt_begin,
int filt_end,
int step,
int flags)
-
copy_and_downsample
public void copy_and_downsample(float[] destination,
int destinationOffset,
float[] source,
int sourceOffset,
int width,
int height,
int numOctaves)
------------------------------------------------------------------
- Parameters:
destination - output imgae buffer.source - input image buffer.width - input image width.height - input image height.numOctaves - octaves (non negative).
The function downsamples the image @a d times, reducing it to @c
1/2^d of its original size. The parameters @a width and @a height
are the size of the input image. The destination image @a dst is
assumed to be floor(width/2^d) pixels wide and
floor(height/2^d) pixels high.
-
copy_and_upsample
public void copy_and_upsample(float[] destination,
int destinationOffset,
float[] source,
int sourceOffset,
int width,
int height)
------------------------------------------------------------------
- Parameters:
destination - output image.source - input image.width - input image width.height - input image height.
The output image has dimensions @a height by 2 @a width (so the
destination buffer must be at least as big as two times the
input buffer).
Upsampling is performed by linear interpolation.
-
_vl_scalespace_start_octave_from_image
public void _vl_scalespace_start_octave_from_image(Covdet.VlScaleSpace self,
float[] image,
int o)
------------------------------------------------------------------
- Parameters:
self - ::VlScaleSpace object instance.image - image data.o - octave to start.
The function initializes the first level of octave @a o from
image @a image. The dimensions of the image are the ones set
during the creation of the ::VlScaleSpace object instance.
-
vl_scalespace_get_level_sigma
public double vl_scalespace_get_level_sigma(Covdet.VlScaleSpace self,
int o,
int s)
------------------------------------------------------------------
- Parameters:
self - object.o - octave index.s - sublevel index.
The function returns the scale $\sigma(o,s)$ as a function of the
octave index @a o and sublevel @a s.
-
_vl_det_hessian_response
public void _vl_det_hessian_response(float[] hessian,
int hessianOriginalOffset,
float[] image,
int imageOffset,
int width,
int height,
double step,
double sigma)
- Parameters:
hessian - output image.image - input image.width - image width.height - image height.step - image sampling step (pixel size).sigma - Gaussian smoothing of the input image.
-
_vl_harris_response
public void _vl_harris_response(float[] harris,
int harrisOffset,
float[] image,
int imageOffset,
int width,
int height,
double step,
double sigma,
double sigmaI,
double alpha)
- Parameters:
harris - output image.image - input image.width - image width.height - image height.step - image sampling step (pixel size).sigma - Gaussian smoothing of the input image.sigmaI - integration scale.alpha - factor in the definition of the Harris score.
-
vl_imgradient_f
public void vl_imgradient_f(float[] xGradient,
float[] yGradient,
int gradWidthStride,
int gradHeightStride,
float[] image,
int imageOffset,
int imageWidth,
int imageHeight,
int imageStride)
-
_vl_dog_response
public void _vl_dog_response(float[] dog,
int dogOffset,
float[] level1,
int level1Offset,
float[] level2,
int level2Offset,
int width,
int height)
- Parameters:
dog - output image.level1 - input image at the smaller Gaussian scale.level2 - input image at the larger Gaussian scale.width - image width.height - image height.
-
vl_covdet_extract_patch_helper
public int vl_covdet_extract_patch_helper(Covdet.VlCovDet self,
double[] sigma1,
double[] sigma2,
float[] patch,
int resolution,
double extent,
double sigma,
double[] A_,
double[] T_,
double d1,
double d2)
- Parameters:
self - object.patch - buffer.resolution - patch resolution.extent - patch extent.sigma - desired smoothing in the patch frame.A_ - linear transfomration from patch to image.T_ - translation from patch to image.d1 - first singular value @a A.d2 - second singular value of @a A.
-
vl_covdet_extract_patch_for_frame
public int vl_covdet_extract_patch_for_frame(Covdet.VlCovDet self,
float[] patch,
int resolution,
double extent,
double sigma,
Covdet.VlFrameOrientedEllipse frame)
- Parameters:
self - object.patch - buffer.resolution - patch resolution.extent - patch extent.sigma - desired smoothing in the patch frame.frame - feature frame.
The function considers a patch of extent [-extent,extent]
on each side, with a side counting 2*resolution+1 pixels.
In attempts to extract from the scale space a patch
based on the affine warping specified by @a frame in such a way
that the resulting smoothing of the image is @a sigma (in the
patch frame).
The transformation is specified by the matrices @c A and @c T
embedded in the feature @a frame. Note that this transformation maps
pixels from the patch frame to the image frame.
-
test_svd2
public void test_svd2()
-
isign
int isign(int i)
- Parameters:
smin - smallest (in modulus) singular value (out).smax - largest (in modulus) singuarl value (out).sv - second component of the right singular vector of @c smax (out).cv - first component of the right singular vector of @c smax (out).su - second component of the left singular vector of @c smax (out).cu - first component of the left singular vector of @c smax (out).f - first entry of the upper triangular matrix.g - second entry of the upper triangular matrix.h - third entry of the upper triangular matrix.
-
sign
double sign(double x)
-
vl_lapack_dlasv2
public void vl_lapack_dlasv2(double[] smin,
double[] smax,
double[] sv,
double[] cv,
double[] su,
double[] cu,
double f,
double g,
double h)
-
vl_imgradient_polar_f
public void vl_imgradient_polar_f(float[] gradientModulus,
float[] gradientAngle,
int gradientHorizontalStride,
int gradHeightStride,
float[] image,
int imageWidth,
int imageHeight,
int imageStride)
-
test_qsort
public void test_qsort()
-
covdet_detector
public float[][] covdet_detector(float[][] image,
boolean verbose,
Covdet.VlCovDetMethod method,
boolean doubleImage,
int numOctaves,
int octaveResolution,
double baseScale,
int maxNumOrientations,
double peakThreshold,
double edgeThreshold,
double lapPeakThreshold,
boolean allowPaddedWarping,
double boundaryMargin,
Covdet.vlCovDetDescriptorType descriptorType,
int patchResolution,
double patchRelativeExtent,
double patchRelativeSmoothing,
float[] patch,
float[] patchXY,
double[][] userFrames,
boolean estimateAffineShape,
boolean estimateOrientation,
boolean outputDescriptors,
java.util.Vector<float[][]> descriptors,
int liopNumSpatialBins,
int liopNumNeighbors,
float liopRadius,
float liopIntensityThreshold,
boolean outputInfo,
java.util.Vector<Covdet.VlScaleSpace> gssVec,
java.util.Vector<Covdet.VlScaleSpace> cssVec,
java.util.Vector<java.lang.Float> peak,
java.util.Vector<java.lang.Float> edge,
java.util.Vector<java.lang.Float> orientation,
java.util.Vector<java.lang.Float> laplacian)
�������������������������������������������������������������������������gov/nih/mipav/model/algorithms/curev.html�����������������������������������������������������������0000775�4231163�4231163�00000041474�14537076054�021246� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
curev (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.curev
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double[] |
c |
|
private int |
idim |
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
|
private int[] |
ier |
|
private int |
k |
|
private int |
m |
|
private int |
mx |
|
private int |
n |
|
private int |
nc |
|
private double[] |
t |
|
private double[] |
u |
|
private double[] |
x |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
curev(int idim,
double[] t,
int n,
double[] c,
int nc,
int k,
double[] u,
int m,
double[] x,
int mx,
int[] ier) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
idim
private int idim
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions
are met:
1. Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
2. Redistributions in binary form must reproduce the above
copyright notice, this list of conditions and the following
disclaimer in the documentation and/or other materials provided
with the distribution.
3. Neither the name of the copyright holder nor the names of its
contributors may be used to endorse or promote products derived
from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
"AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
(INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
-
Constructor Detail
-
curev
public curev(int idim,
double[] t,
int n,
double[] c,
int nc,
int k,
double[] u,
int m,
double[] x,
int mx,
int[] ier)
-
Method Detail
-
fpbspl
public void fpbspl(double[] t,
int n,
int k,
double x,
int l,
double[] h)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.FakeIterationCallback.html���������������������������0000775�4231163�4231163�00000025441�14537076053�027352� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.FakeIterationCallback (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSplitAndMergeWatershed.indexValueComparator.html������������0000775�4231163�4231163�00000030047�14537076050�032457� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSplitAndMergeWatershed.indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEmbeddedConfidenceEdgeDetection.BgEdge.html�����������������0000775�4231163�4231163�00000027634�14537076045�031202� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEmbeddedConfidenceEdgeDetection.BgEdge (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdge
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
BgEdge() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/OpenCLAlgorithmBase.html���������������������������������������������0000775�4231163�4231163�00000136020�14537076056�023676� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
OpenCLAlgorithmBase (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
protected void |
checkError(int errcode) |
Checks the OpenCL error status.
|
void |
finalize() |
Prepare this class for destruction.
|
static int |
getInt(org.jocl.cl_device_id device,
int paramName) |
Returns the value of the device info parameter with the given name
|
static int[] |
getInts(org.jocl.cl_device_id device,
int paramName,
int numValues) |
Returns the values of the device info parameter with the given name
|
static long |
getLong(org.jocl.cl_device_id device,
int paramName) |
Returns the value of the device info parameter with the given name
|
static long[] |
getLongs(org.jocl.cl_device_id device,
int paramName,
int numValues) |
Returns the values of the device info parameter with the given name
|
protected long |
getMaxMemoryUsed(int nBuffers,
int elementCount,
float[] sigmas) |
Determines the amount of memory used for the OpenCL buffers
required for the gaussian kernels for the given sigmas.
|
static java.lang.String |
getString(org.jocl.cl_device_id device,
int paramName) |
Returns the value of the device info parameter with the given name
|
static java.lang.String |
getString(org.jocl.cl_platform_id platform,
int paramName) |
Returns the value of the platform info parameter with the given name
|
protected void |
initCL(long iType,
com.jogamp.opengl.GL3 gl) |
|
private static void |
initContextProperties(org.jocl.cl_context_properties contextProperties,
com.jogamp.opengl.GL gl) |
Initializes the given context properties so that they may be
used to create an OpenCL context for the given GL object.
|
static boolean |
isOCLAvailable() |
|
static java.lang.String |
readKernelFile(java.lang.String fileName) |
Helper function which reads the file with the given name and returns
the contents of this file as a String.
|
protected static long |
roundUp(long groupSize,
long globalSize) |
|
void |
saveImage(float[] data,
int time,
boolean calcMinMax) |
|
void |
saveImage(float[] data,
int time,
int zSlice,
boolean calcMinMax) |
|
void |
setBlue(boolean flag) |
Sets the flag for the blue channel.
|
void |
setGreen(boolean flag) |
Sets the flag for the green channel.
|
void |
setRed(boolean flag) |
Sets the flag for the red channel.
|
void |
setTime(int timeSlice) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, runAlgorithm, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
width
protected int width
-
height
protected int height
-
depth
protected int depth
-
color
protected int color
-
entireImage
protected boolean entireImage
Flag, if true, indicates that the whole image should be processed.
If false only process the image over the mask areas.
-
Method Detail
-
initContextProperties
private static void initContextProperties(org.jocl.cl_context_properties contextProperties,
com.jogamp.opengl.GL gl)
Initializes the given context properties so that they may be
used to create an OpenCL context for the given GL object.
- Parameters:
contextProperties - The context propertiesgl - The GL object
-
getInt
public static int getInt(org.jocl.cl_device_id device,
int paramName)
Returns the value of the device info parameter with the given name
- Parameters:
device - The deviceparamName - The parameter name- Returns:
- The value
-
getInts
public static int[] getInts(org.jocl.cl_device_id device,
int paramName,
int numValues)
Returns the values of the device info parameter with the given name
- Parameters:
device - The deviceparamName - The parameter namenumValues - The number of values- Returns:
- The value
-
getLong
public static long getLong(org.jocl.cl_device_id device,
int paramName)
Returns the value of the device info parameter with the given name
- Parameters:
device - The deviceparamName - The parameter name- Returns:
- The value
-
getLongs
public static long[] getLongs(org.jocl.cl_device_id device,
int paramName,
int numValues)
Returns the values of the device info parameter with the given name
- Parameters:
device - The deviceparamName - The parameter namenumValues - The number of values- Returns:
- The value
-
getString
public static java.lang.String getString(org.jocl.cl_device_id device,
int paramName)
Returns the value of the device info parameter with the given name
- Parameters:
device - The deviceparamName - The parameter name- Returns:
- The value
-
getString
public static java.lang.String getString(org.jocl.cl_platform_id platform,
int paramName)
Returns the value of the platform info parameter with the given name
- Parameters:
platform - The platformparamName - The parameter name- Returns:
- The value
-
readKernelFile
public static java.lang.String readKernelFile(java.lang.String fileName)
Helper function which reads the file with the given name and returns
the contents of this file as a String. Will exit the application
if the file can not be read.
- Parameters:
fileName - The name of the file to read.- Returns:
- The contents of the file
-
getMaxMemoryUsed
protected long getMaxMemoryUsed(int nBuffers,
int elementCount,
float[] sigmas)
Determines the amount of memory used for the OpenCL buffers
required for the gaussian kernels for the given sigmas.
Plus the memory used for the nBuffers OpenCL buffers, each
elementCount in size.
- Parameters:
nBuffers - number of bufferselementCount - buffer sizesigmas - - Returns:
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.VertexDegreeLessThan.html��������������������������������0000775�4231163�4231163�00000031711�14537076052�026377� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.VertexDegreeLessThan (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.VertexDegreeLessThan<Vertex>
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
�������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmSphereGeneration.IntTorquato95ModelMean.html����������������0000775�4231163�4231163�00000030074�14537076050�031451� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmSphereGeneration.IntTorquato95ModelMean (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquato95ModelMean
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
volumeFraction |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
IntTorquato95ModelMean(double volumeFraction) |
Creates a new IntTorquato95ModelMean object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
volumeFraction
double volumeFraction
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.indexValueComparator.html������������������0000775�4231163�4231163�00000027613�14537076056�031404� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.indexValueComparator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.indexValueComparator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Comparator
equals, reversed, thenComparing, thenComparing, thenComparing, thenComparingDouble, thenComparingInt, thenComparingLong
���������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.VertexFaceIterator.html�����������������������������������������0000775�4231163�4231163�00000032710�14537076056�024420� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.VertexFaceIterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.VertexFaceIterator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
reset
public void reset()
��������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.HuberLoss.html�������������������������������������������0000775�4231163�4231163�00000027750�14537076051�024261� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.HuberLoss (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
a_ |
|
private double |
b_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
HuberLoss(double a) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.Chiwrut2CostFunction.html������������������������0000775�4231163�4231163�00000034045�14537076052�027753� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.Chiwrut2CostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.vlCovDetDescriptorType.html�����������������������������������0000775�4231163�4231163�00000036566�14537076054�026002� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.vlCovDetDescriptorType (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
valueOf
public static Covdet.vlCovDetDescriptorType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DSC_MRI_toolbox.gaussStandardDeviationFitting.html�������������������0000775�4231163�4231163�00000036263�14537076054�031002� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DSC_MRI_toolbox.gaussStandardDeviationFitting (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmELSUNCOpt2D.FitOAR2DELSUNCModel.html������������������������0000775�4231163�4231163�00000040602�14537076045�026767� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmELSUNCOpt2D.FitOAR2DELSUNCModel (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
currentDim |
|
private double[] |
point |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitOAR2DELSUNCModel(int currentDim,
double[] point) |
Creates a new FitOAR3DConstrainedModel object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
dumpResults() |
Display results of displaying OAR2D fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
currentDim
private int currentDim
-
point
private double[] point
-
Constructor Detail
-
FitOAR2DELSUNCModel
public FitOAR2DELSUNCModel(int currentDim,
double[] point)
Creates a new FitOAR3DConstrainedModel object.
- Parameters:
currentDim - Only optimize along 1 dimension at a time
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.BiCubicInterpolator.html��������������������������������0000775�4231163�4231163�00000030735�14537076052�026336� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.BiCubicInterpolator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.BiCubicInterpolator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public void Evaluate(double r,
double c,
double[] f,
double[] dfdr,
double[] dfdc)
�����������������������������������gov/nih/mipav/model/algorithms/FitGaussian.html�����������������������������������������������������0000775�4231163�4231163�00000076726�14537076054�022347� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
FitGaussian (MIPAV API Documentation)
-
public class FitGaussian
extends NLFittedFunction
FitGaussian -fits an array of points to a normal curve, general from f = a*exp(-(x-b)^2/2sigma^2)
Will also perform thresholding techniques to determine useful data points for fitting
- Version:
- 0.1
- Author:
- senseneyj
- See Also:
NLConstrainedEngine
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
amp |
Amplitude parameter
|
private int |
dataEnd |
Location in xSeries where Gaussian data ends
|
private int |
dataStart |
Location in xSeries where Gaussian data starts
|
private int |
iters |
|
private double |
rSquared |
R squared
|
private double |
sigma |
Sigma parameter
|
private double |
xInit |
Center parameter
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitGaussian() |
FitGaussian - test constructor, builds and test function.
|
FitGaussian(int nPoints,
double[] xData,
double[] yData) |
FitGaussian.
|
FitGaussian(int nPoints,
float[] xData,
float[] yData) |
Constructs new fit gaussian.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private double[] |
applyKernel() |
Apply small kernel to smooth out data.
|
protected void |
calculateChiSq() |
Calculates chi squared
|
protected void |
calculateFittedY() |
Calculates yDataFitted
|
private double |
dgdA(double x) |
Partial derivative of gaussian with respect to A.
|
private double |
dgdsigma(double x) |
Partial derivative of gaussian with respect to sigma.
|
private double |
dgdx(double x) |
Partial derivative of gaussian with respect to x.
|
void |
displayResults() |
Display results of displaying exponential fitting parameters.
|
void |
driver() |
Starts the analysis.
|
private void |
estimateInitial() |
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
|
private double |
gauss(double x) |
Gaussian evaluated at a point with given parameters
|
protected Jama.Matrix |
generateJacobian() |
Jacobian used for non-linear least squares fitting.
|
protected Jama.Matrix |
generateResiduals() |
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
|
double |
getRSquared() |
|
private void |
testData() |
Test data to test fitting of gaussian.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
amp
private double amp
Amplitude parameter
-
xInit
private double xInit
Center parameter
-
sigma
private double sigma
Sigma parameter
-
rSquared
private double rSquared
R squared
-
Constructor Detail
-
FitGaussian
public FitGaussian(int nPoints,
float[] xData,
float[] yData)
Constructs new fit gaussian.
- Parameters:
nPoints - Number of points in the functionxData - DOCUMENT ME!yData - DOCUMENT ME!
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl. Evaluates the residuals or the Jacobian at a certain a[]
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - DOCUMENT ME!residuals - DOCUMENT ME!covarMat - DOCUMENT ME!
-
generateResiduals
protected Jama.Matrix generateResiduals()
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
- Specified by:
generateResiduals in class NLFittedFunction- Returns:
������������������������������������������gov/nih/mipav/model/algorithms/Backpropagation.MainFrame.GPanel.html��������������������������������0000775�4231163�4231163�00000047620�14537076051�026225� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Backpropagation.MainFrame.GPanel (MIPAV API Documentation)
- java.lang.Object
-
- java.awt.Component
-
- java.awt.Container
-
- javax.swing.JComponent
-
- javax.swing.JPanel
-
- gov.nih.mipav.model.algorithms.Backpropagation.MainFrame.GPanel
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class javax.swing.JPanel
javax.swing.JPanel.AccessibleJPanel
-
Nested classes/interfaces inherited from class javax.swing.JComponent
javax.swing.JComponent.AccessibleJComponent
-
Nested classes/interfaces inherited from class java.awt.Container
java.awt.Container.AccessibleAWTContainer
-
Nested classes/interfaces inherited from class java.awt.Component
java.awt.Component.AccessibleAWTComponent, java.awt.Component.BaselineResizeBehavior, java.awt.Component.BltBufferStrategy, java.awt.Component.FlipBufferStrategy
-
Field Summary
-
Fields inherited from class javax.swing.JComponent
listenerList, TOOL_TIP_TEXT_KEY, ui, UNDEFINED_CONDITION, WHEN_ANCESTOR_OF_FOCUSED_COMPONENT, WHEN_FOCUSED, WHEN_IN_FOCUSED_WINDOW
-
Fields inherited from class java.awt.Component
accessibleContext, BOTTOM_ALIGNMENT, CENTER_ALIGNMENT, LEFT_ALIGNMENT, RIGHT_ALIGNMENT, TOP_ALIGNMENT
-
Fields inherited from interface java.awt.image.ImageObserver
ABORT, ALLBITS, ERROR, FRAMEBITS, HEIGHT, PROPERTIES, SOMEBITS, WIDTH
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
GPanel() |
|
-
Method Summary
-
Methods inherited from class javax.swing.JPanel
getAccessibleContext, getUI, getUIClassID, paramString, setUI, updateUI
-
Methods inherited from class javax.swing.JComponent
addAncestorListener, addNotify, addVetoableChangeListener, computeVisibleRect, contains, createToolTip, disable, enable, firePropertyChange, firePropertyChange, firePropertyChange, fireVetoableChange, getActionForKeyStroke, getActionMap, getAlignmentX, getAlignmentY, getAncestorListeners, getAutoscrolls, getBaseline, getBaselineResizeBehavior, getBorder, getBounds, getClientProperty, getComponentGraphics, getComponentPopupMenu, getConditionForKeyStroke, getDebugGraphicsOptions, getDefaultLocale, getFontMetrics, getGraphics, getHeight, getInheritsPopupMenu, getInputMap, getInputMap, getInputVerifier, getInsets, getInsets, getListeners, getLocation, getMaximumSize, getMinimumSize, getNextFocusableComponent, getPopupLocation, getPreferredSize, getRegisteredKeyStrokes, getRootPane, getSize, getToolTipLocation, getToolTipText, getToolTipText, getTopLevelAncestor, getTransferHandler, getVerifyInputWhenFocusTarget, getVetoableChangeListeners, getVisibleRect, getWidth, getX, getY, grabFocus, hide, isDoubleBuffered, isLightweightComponent, isManagingFocus, isOpaque, isOptimizedDrawingEnabled, isPaintingForPrint, isPaintingOrigin, isPaintingTile, isRequestFocusEnabled, isValidateRoot, paint, paintBorder, paintChildren, paintImmediately, paintImmediately, print, printAll, printBorder, printChildren, printComponent, processComponentKeyEvent, processKeyBinding, processKeyEvent, processMouseEvent, processMouseMotionEvent, putClientProperty, registerKeyboardAction, registerKeyboardAction, removeAncestorListener, removeNotify, removeVetoableChangeListener, repaint, repaint, requestDefaultFocus, requestFocus, requestFocus, requestFocusInWindow, requestFocusInWindow, resetKeyboardActions, reshape, revalidate, scrollRectToVisible, setActionMap, setAlignmentX, setAlignmentY, setAutoscrolls, setBackground, setBorder, setComponentPopupMenu, setDebugGraphicsOptions, setDefaultLocale, setDoubleBuffered, setEnabled, setFocusTraversalKeys, setFont, setForeground, setInheritsPopupMenu, setInputMap, setInputVerifier, setMaximumSize, setMinimumSize, setNextFocusableComponent, setOpaque, setPreferredSize, setRequestFocusEnabled, setToolTipText, setTransferHandler, setUI, setVerifyInputWhenFocusTarget, setVisible, unregisterKeyboardAction, update
-
Methods inherited from class java.awt.Container
add, add, add, add, add, addContainerListener, addImpl, addPropertyChangeListener, addPropertyChangeListener, applyComponentOrientation, areFocusTraversalKeysSet, countComponents, deliverEvent, doLayout, findComponentAt, findComponentAt, getComponent, getComponentAt, getComponentAt, getComponentCount, getComponents, getComponentZOrder, getContainerListeners, getFocusTraversalKeys, getFocusTraversalPolicy, getLayout, getMousePosition, insets, invalidate, isAncestorOf, isFocusCycleRoot, isFocusCycleRoot, isFocusTraversalPolicyProvider, isFocusTraversalPolicySet, layout, list, list, locate, minimumSize, paintComponents, preferredSize, printComponents, processContainerEvent, processEvent, remove, remove, removeAll, removeContainerListener, setComponentZOrder, setFocusCycleRoot, setFocusTraversalPolicy, setFocusTraversalPolicyProvider, setLayout, transferFocusDownCycle, validate, validateTree
-
Methods inherited from class java.awt.Component
action, add, addComponentListener, addFocusListener, addHierarchyBoundsListener, addHierarchyListener, addInputMethodListener, addKeyListener, addMouseListener, addMouseMotionListener, addMouseWheelListener, bounds, checkImage, checkImage, coalesceEvents, contains, createImage, createImage, createVolatileImage, createVolatileImage, disableEvents, dispatchEvent, enable, enableEvents, enableInputMethods, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, firePropertyChange, getBackground, getBounds, getColorModel, getComponentListeners, getComponentOrientation, getCursor, getDropTarget, getFocusCycleRootAncestor, getFocusListeners, getFocusTraversalKeysEnabled, getFont, getForeground, getGraphicsConfiguration, getHierarchyBoundsListeners, getHierarchyListeners, getIgnoreRepaint, getInputContext, getInputMethodListeners, getInputMethodRequests, getKeyListeners, getLocale, getLocation, getLocationOnScreen, getMouseListeners, getMouseMotionListeners, getMousePosition, getMouseWheelListeners, getName, getParent, getPropertyChangeListeners, getPropertyChangeListeners, getSize, getToolkit, getTreeLock, gotFocus, handleEvent, hasFocus, imageUpdate, inside, isBackgroundSet, isCursorSet, isDisplayable, isEnabled, isFocusable, isFocusOwner, isFocusTraversable, isFontSet, isForegroundSet, isLightweight, isMaximumSizeSet, isMinimumSizeSet, isPreferredSizeSet, isShowing, isValid, isVisible, keyDown, keyUp, list, list, list, location, lostFocus, mouseDown, mouseDrag, mouseEnter, mouseExit, mouseMove, mouseUp, move, nextFocus, paintAll, postEvent, prepareImage, prepareImage, processComponentEvent, processFocusEvent, processHierarchyBoundsEvent, processHierarchyEvent, processInputMethodEvent, processMouseWheelEvent, remove, removeComponentListener, removeFocusListener, removeHierarchyBoundsListener, removeHierarchyListener, removeInputMethodListener, removeKeyListener, removeMouseListener, removeMouseMotionListener, removeMouseWheelListener, removePropertyChangeListener, removePropertyChangeListener, repaint, repaint, repaint, requestFocus, requestFocus, requestFocusInWindow, resize, resize, setBounds, setBounds, setComponentOrientation, setCursor, setDropTarget, setFocusable, setFocusTraversalKeysEnabled, setIgnoreRepaint, setLocale, setLocation, setLocation, setMixingCutoutShape, setName, setSize, setSize, show, show, size, toString, transferFocus, transferFocusBackward, transferFocusUpCycle
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
����������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.EvaluationCallback.html����������������������������������0000775�4231163�4231163�00000024221�14537076051�026065� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.EvaluationCallback (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.EvaluationCallback
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.LinearSolverPerSolveOptions.html�������������������������0000775�4231163�4231163�00000025031�14537076051�030002� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.LinearSolverPerSolveOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverPerSolveOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.SchurEliminatorTest.html�����������������������������0000775�4231163�4231163�00000045630�14537076053�027162� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.SchurEliminatorTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/StochasticForests.ForestProbability.html�����������������������������0000775�4231163�4231163�00000101202�14537076057�027223� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
StochasticForests.ForestProbability (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected java.util.Vector<java.lang.Double> |
class_values |
|
protected java.util.Vector<java.lang.Double> |
class_weights |
|
protected java.util.Vector<java.lang.Integer> |
response_classIDs |
|
protected java.util.Vector<java.util.Vector<java.lang.Integer>> |
sampleIDs_per_class |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Forest
alpha, case_weights, data, dependent_varID, deterministic_varIDs, holdout, importance_mode, keep_inbag, memory_mode, memory_saving_splitting, min_node_size, minprop, mtry, mutex, num_independent_variables, num_random_splits, num_samples, num_threads, num_trees, num_variables, output_prefix, overall_prediction_error, predict_all, prediction_mode, prediction_type, predictions, progress, random, sample_fraction, sample_with_replacement, seed, split_select_varIDs, split_select_weights, splitrule, thread_ranges, trees, variable_importance, verbose_out
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.StochasticForests.Forest
computePermutationImportance, computePredictionError, dispose, getChildNodeIDs, getDependentVarId, getInbagCounts, getIsOrderedVariable, getMinNodeSize, getMtry, getNumIndependentVariables, getNumTrees, getOverallPredictionError, getPredictions, getSplitValues, getSplitVarIDs, getVariableImportance, grow, init, initCpp, initR, loadFromFile, predict, run, saveToFile, setAlwaysSplitVariables, setSplitWeightVector, writeImportanceFile, writeOutput
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
loadForest
public void loadForest(int dependent_varID,
int num_trees,
java.util.Vector<java.util.Vector<java.util.Vector<java.lang.Integer>>> forest_child_nodeIDs,
java.util.Vector<java.util.Vector<java.lang.Integer>> forest_split_varIDs,
java.util.Vector<java.util.Vector<java.lang.Double>> forest_split_values,
java.util.Vector<java.lang.Double> class_values,
java.util.Vector<java.util.Vector<java.util.Vector<java.lang.Double>>> forest_terminal_class_counts,
java.util.Vector<java.lang.Boolean> is_ordered_variable)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmNetworkSnake.IMetadataProvider.html�������������������������0000775�4231163�4231163�00000023077�14537076047�027750� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmNetworkSnake.IMetadataProvider (MIPAV API Documentation)
-
-
Method Detail
-
InitialiseData
void InitialiseData()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/WalshHadamardTransform.html������������������������������������������0000775�4231163�4231163�00000105012�14537076057�024506� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
WalshHadamardTransform (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class WalshHadamardTransform
extends AlgorithmBase
Copyright (c) 2016, suresh
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in
the documentation and/or other materials provided with the distribution
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
POSSIBILITY OF SUCH DAMAGE.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
filter(double[] data,
int filterType,
double filterVal1,
double filterVal2) |
|
double[] |
greater(double[] data,
double value,
double substitute) |
|
double[][] |
hard(double[][] data,
double value,
double substitute) |
|
double[] |
hard(double[] data,
double value,
double substitute) |
|
double[] |
less(double[] data,
double value,
double substitute) |
|
double[] |
nn_garrote(double[] data,
double value,
double substitute) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
double[] |
soft(double[] data,
double value,
double substitute) |
|
double[] |
threshold_firm(double[] data,
double value_low,
double value_high) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
filterType
private int filterType
-
Constructor Detail
-
WalshHadamardTransform
public WalshHadamardTransform(ModelImage transformImage,
ModelImage inverseImage,
ModelImage srcImg,
int filterType,
double filterVal1,
double filterVal2)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DiscreteCosineTransform.html�����������������������������������������0000775�4231163�4231163�00000157202�14537076054�024716� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DiscreteCosineTransform (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
DiscreteCosineTransform() |
|
DiscreteCosineTransform(boolean fastAlgorithm,
int[] dims,
int testDataType,
boolean printData,
int filterType,
double filterVal1,
double filterVal2) |
|
DiscreteCosineTransform(ModelImage transformImage,
ModelImage inverseImage,
ModelImage srcImg,
int constructionMethod,
int filterType,
double f1,
double f2,
int filterOrder,
double epsilon,
double rs) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
BITREV(double[] F,
int transformLength) |
|
private double |
Chebyshev(int order,
double w) |
|
private void |
FCT(double[] F,
double[] C,
int transformLength,
int[] IFAULT) |
|
private void |
FCT2D(double[] F,
int xDim,
int yDim) |
|
private void |
IFCT(double[] F,
double[] C,
int transformLength,
int[] IFAULT) |
|
private void |
IFCT2D(double[] F,
int xDim,
int yDim) |
|
private void |
INIFCT(double[] C,
int transformLength,
int[] IFAULT) |
|
private void |
makeButterworthFilter(double[] buffer,
double fr1,
double fr2) |
DOCUMENT ME!
|
private void |
makeChebyshevTypeIFilter(double[] buffer,
double fr1,
double fr2) |
|
private void |
makeChebyshevTypeIIFilter(double[] buffer,
double fr1,
double fr2) |
|
private void |
makeEllipticFilter(double[] buffer,
double fr1,
double fr2) |
|
private void |
makeGaussianFilter(double[] buffer,
double rmsFreq) |
|
double |
RANDOM(int[] IX,
int[] IY,
int[] IZ) |
|
void |
runAlgorithm() |
Actually runs the algorithm.
|
void |
runTest() |
|
private void |
SCRAMB(double[] F,
int transformLength) |
|
private void |
SLOW2DFCT(double[] F,
int xDim,
int yDim) |
|
private void |
SLOW2DIFCT(double[] F,
int xDim,
int yDim) |
|
private void |
SLOWFCT(double[] F,
int transformLength) |
|
private void |
SLOWIFCT(double[] F,
int transformLength) |
|
private void |
USCRAM(double[] F,
int transformLength) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
filterType
private int filterType
-
filterOrder
private int filterOrder
-
epsilon
private double epsilon
-
testDataType
private int testDataType
-
LENGTH
private int LENGTH
-
Constructor Detail
-
DiscreteCosineTransform
public DiscreteCosineTransform(ModelImage transformImage,
ModelImage inverseImage,
ModelImage srcImg,
int constructionMethod,
int filterType,
double f1,
double f2,
int filterOrder,
double epsilon,
double rs)
-
DiscreteCosineTransform
public DiscreteCosineTransform(boolean fastAlgorithm,
int[] dims,
int testDataType,
boolean printData,
int filterType,
double filterVal1,
double filterVal2)
-
Method Detail
-
runTest
public void runTest()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/DBSCANClusteringSegment.Renum.html�����������������������������������0000775�4231163�4231163�00000023370�14537076054�025517� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DBSCANClusteringSegment.Renum (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.Renum
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
maxLabel |
|
(package private) int |
minLabel |
|
(package private) int[][] |
nL |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Renum() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.SignedDistanceCharacters.html����������������������������0000775�4231163�4231163�00000032436�14537076054�027273� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.SignedDistanceCharacters (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.SignedDistanceCharacters
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.Grid2D.html���������������������������������������������0000775�4231163�4231163�00000040575�14537076052�023511� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.Grid2D (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Grid2D(double[] data,
int kDataDimension,
boolean rowMajor,
boolean interleaved,
int row_begin,
int row_end,
int col_begin,
int col_end) |
|
Grid2D(int[] data,
int kDataDimension,
boolean rowMajor,
boolean interleaved,
int row_begin,
int row_end,
int col_begin,
int col_end) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Grid2D
public Grid2D(int[] data,
int kDataDimension,
boolean rowMajor,
boolean interleaved,
int row_begin,
int row_end,
int col_begin,
int col_end)
-
Grid2D
public Grid2D(double[] data,
int kDataDimension,
boolean rowMajor,
boolean interleaved,
int row_begin,
int row_end,
int col_begin,
int col_end)
�����������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMixGaussEM.model.html���������������������������������������0000775�4231163�4231163�00000023712�14537076047�025047� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMixGaussEM.model (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM.model
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[][] |
mu |
|
(package private) double[][][] |
Sigma |
|
(package private) double[] |
w |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
model(double[][] mu,
double[][][] Sigma,
double[] w) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.MeyerFunction.html�����������������������������������0000775�4231163�4231163�00000033702�14537076053�025776� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.MeyerFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
MeyerFunction
public MeyerFunction()
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
��������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Iterators.ImgAreaSpliterator.html������������������������0000775�4231163�4231163�00000060506�14537076054�030117� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Iterators.ImgAreaSpliterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator<P>
-
- All Implemented Interfaces:
java.util.Spliterator<P>
- Enclosing class:
- ContourPlot.Iterators
public static final class ContourPlot.Iterators.ImgAreaSpliterator<P extends ContourPlot.PixelBase>
extends java.lang.Object
implements java.util.Spliterator<P>
Spliterator class for images bound to a specific area
- Author:
- hageldave
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from interface java.util.Spliterator
java.util.Spliterator.OfDouble, java.util.Spliterator.OfInt, java.util.Spliterator.OfLong, java.util.Spliterator.OfPrimitive<T extends java.lang.Object,T_CONS extends java.lang.Object,T_SPLITR extends java.util.Spliterator.OfPrimitive<T,T_CONS,T_SPLITR>>
-
Field Summary
-
Fields inherited from interface java.util.Spliterator
CONCURRENT, DISTINCT, IMMUTABLE, NONNULL, ORDERED, SIZED, SORTED, SUBSIZED
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
ImgAreaSpliterator(int xStart,
int endXexcl,
int x,
int y,
int finalXexcl,
int finalYincl,
int minSplitSize,
java.util.function.Supplier<P> pixelSupplier) |
|
|
ImgAreaSpliterator(int xStart,
int yStart,
int width,
int height,
int minSplitSize,
java.util.function.Supplier<P> pixelSupplier) |
Constructs a new ImgAreaSpliterator for the specified area
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Spliterator
getComparator, getExactSizeIfKnown, hasCharacteristics
-
-
Field Detail
-
startX
private final int startX
-
finalXexcl
private int finalXexcl
-
finalYincl
private int finalYincl
-
Constructor Detail
-
ImgAreaSpliterator
public ImgAreaSpliterator(int xStart,
int yStart,
int width,
int height,
int minSplitSize,
java.util.function.Supplier<P> pixelSupplier)
Constructs a new ImgAreaSpliterator for the specified area
- Parameters:
xStart - left boundary of the area (inclusive)yStart - upper boundary of the area (inclusive)width - of the areaheight - of the areaminSplitSize - the minimum number of elements in a splitpixelSupplier - a function that allocates a new pixel- Since:
- 1.1
-
ImgAreaSpliterator
private ImgAreaSpliterator(int xStart,
int endXexcl,
int x,
int y,
int finalXexcl,
int finalYincl,
int minSplitSize,
java.util.function.Supplier<P> pixelSupplier)
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SchwarzChristoffelMapping.polygon.html�������������������������������0000775�4231163�4231163�00000023210�14537076056�026724� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SchwarzChristoffelMapping.polygon (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.polygon
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
angle |
|
(package private) double[][] |
vertex |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
polygon(double[] x,
double[] y,
double[] alpha) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Evaluator.html�������������������������������������������0000775�4231163�4231163�00000050145�14537076051�024307� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Evaluator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Evaluator() |
|
-
Method Summary
All Methods Instance Methods Abstract Methods Concrete Methods
| Modifier and Type |
Method |
Description |
abstract CeresSolver.SparseMatrix |
CreateJacobian() |
|
boolean |
Evaluate(double[] state,
double[] cost,
double[] residuals,
double[] gradient,
CeresSolver.SparseMatrix jacobian) |
|
abstract boolean |
Evaluate(CeresSolver.EvaluateOptions evaluate_options,
double[] state,
double[] cost,
double[] residuals,
double[] gradient,
CeresSolver.SparseMatrix jacobian) |
|
abstract boolean |
Evaluate(CeresSolver.EvaluateOptions evaluate_options,
java.util.Vector<java.lang.Double> state,
double[] cost,
java.util.Vector<java.lang.Double> residuals,
java.util.Vector<java.lang.Double> gradient,
CeresSolver.SparseMatrix jacobian) |
|
abstract int |
NumEffectiveParameters() |
|
abstract int |
NumParameters() |
|
abstract int |
NumResiduals() |
|
abstract boolean |
Plus(double[] state,
double[] delta,
double[] state_plus_delta) |
|
abstract boolean |
Plus(java.util.Vector<java.lang.Double> state,
java.util.Vector<java.lang.Double> delta,
java.util.Vector<java.lang.Double> state_plus_delta) |
|
java.util.HashMap<java.lang.String,CeresSolver.CallStatistics> |
Statistics() |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
Evaluator
public Evaluator()
-
Method Detail
-
Evaluate
public abstract boolean Evaluate(CeresSolver.EvaluateOptions evaluate_options,
java.util.Vector<java.lang.Double> state,
double[] cost,
java.util.Vector<java.lang.Double> residuals,
java.util.Vector<java.lang.Double> gradient,
CeresSolver.SparseMatrix jacobian)
-
Evaluate
public boolean Evaluate(double[] state,
double[] cost,
double[] residuals,
double[] gradient,
CeresSolver.SparseMatrix jacobian)
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog16.html����������������������������������0000775�4231163�4231163�00000026636�14537076055�025701� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog16 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog16(double[] time,
double largestPole,
double tol) |
Creates a new FitdeHoog16 object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog16
public FitdeHoog16(double[] time,
double largestPole,
double tol)
Creates a new FitdeHoog16 object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
��������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.QuadraticTestFunction.html���������������������������0000775�4231163�4231163�00000032362�14537076053�027473� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.QuadraticTestFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.DytexMix.html��������������������������������������������������0000775�4231163�4231163�00000027422�14537076055�022770� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.DytexMix (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.libdt.DytexMix
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DytexMix
public DytexMix()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Parser.html�����������������������������������������������������0000775�4231163�4231163�00000034521�14537076056�022110� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Parser (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Parser
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Parser(java.lang.String str) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
m_line
private char[] m_line
-
m_key
private char[] m_key
-
m_value
private char[] m_value
-
m_pt_index
int m_pt_index
-
Method Detail
-
clear
public void clear()
-
next_char
public char next_char()
-
skip_blank
public void skip_blank()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmEfficientWatershed.indexValueItem.html����������������������0000775�4231163�4231163�00000027012�14537076045�030446� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmEfficientWatershed.indexValueItem (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed.indexValueItem
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
index |
|
private double |
value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
indexValueItem(int index,
double value) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
value
private double value
-
Method Detail
-
getIndex
public int getIndex()
-
getValue
public double getValue()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Quaternions.html�����������������������������������������������������0000775�4231163�4231163�00000102440�14537076056�022423� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Quaternions (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class Quaternions
extends AlgorithmBase
Copyright (c) 2000-2009, Jay St. Pierre
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in
the documentation and/or other materials provided with the distribution
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
POSSIBILITY OF SUCH DAMAGE.
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
epsilon
private double epsilon
-
neweps
private double neweps
-
Constructor Detail
-
Quaternions
public Quaternions()
-
Method Detail
-
test_isq
public void test_isq()
-
test_qnorm
public void test_qnorm()
-
test_qmult
public void test_qmult()
-
test_qconj
public void test_qconj()
-
test_qcvq
public void test_qcvq()
-
test_qvqc
public void test_qvqc()
-
test_dcm2q
public void test_dcm2q()
-
test_q2dcm
public void test_q2dcm()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmCenterOfMass.html�������������������������������������������0000775�4231163�4231163�00000066643�14537076044�024326� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmCenterOfMass (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
allowDataWindow |
If true, allow data window output
|
private boolean |
entireImage |
Flag, if true, indicates that the whole image should be processed.
|
private float[] |
threshold |
Array of two thresholds. threshold[0] = Minimum threshold, threshold[1] = Maximum threshold.
|
double |
xCOM |
x coordinate for center of mass, normalized by image resolution
|
double |
yCOM |
y coordinate for center of mass, normalized by image resolution
|
double |
zCOM |
z coordinate for center of mass, normalized by image resolution, if srcImage is 2D = 0
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmCenterOfMass(ModelImage srcImg,
float[] threshold,
boolean maskFlag) |
Creates a new AlgorithmCenterOfMass object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
entireImage
private boolean entireImage
Flag, if true, indicates that the whole image should be processed. If false on process the image over the mask
areas.
-
threshold
private float[] threshold
Array of two thresholds. threshold[0] = Minimum threshold, threshold[1] = Maximum threshold.
-
Constructor Detail
-
AlgorithmCenterOfMass
public AlgorithmCenterOfMass(ModelImage srcImg,
float[] threshold,
boolean maskFlag)
Creates a new AlgorithmCenterOfMass object.
- Parameters:
srcImg - source image modelthreshold - array of two thresholdsmaskFlag - true indicates that the whole image should be processed
-
Method Detail
-
getCenterOfMass
public double[] getCenterOfMass()
Returns the computed center of mass.
If algorithm is not completed: returns null.
If 2D: returns {xCenter, yCenter, 0}
If 3D: returns {xCenter, yCenter, zCenter}
���������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlCovDetExtremum2.html����������������������������������������0000775�4231163�4231163�00000025346�14537076054�024644� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlCovDetExtremum2 (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum2
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float |
edgeScore |
|
(package private) float |
peakScore |
|
(package private) float |
x |
|
(package private) int |
xi |
|
(package private) float |
y |
|
(package private) int |
yi |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
peakScore
float peakScore
-
edgeScore
float edgeScore
-
Constructor Detail
-
VlCovDetExtremum2
VlCovDetExtremum2()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BlockSparseMatrixTest.html���������������������������0000775�4231163�4231163�00000037605�14537076053�027452� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BlockSparseMatrixTest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
SetUp
public void SetUp()
���������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CVODES.DtpntMemRec.html����������������������������������������������0000775�4231163�4231163�00000025041�14537076054�023256� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CVODES.DtpntMemRec (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CVODES.DtpntMemRec
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DtpntMemRec
DtpntMemRec()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SVM.VlSvmDataset.html������������������������������������������������0000775�4231163�4231163�00000026775�14537076057�023155� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SVM.VlSvmDataset (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SVM.VlSvmDataset
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
data |
|
(package private) int |
dimension |
< Number of wrapped data.
|
(package private) SVM.VlHomogeneousKernelMap |
hom |
< Data point dimension.
|
(package private) double[] |
homBuffer |
< Homogeneous kernel map (optional).
|
(package private) int |
homDimension |
< Homogeneous kernel map buffer.
|
(package private) int |
numData |
< Pointer to data.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
numData
int numData
< Pointer to data.
-
Constructor Detail
-
VlSvmDataset
public VlSvmDataset()
���gov/nih/mipav/model/algorithms/CeresSolver.DynamicCompressedRowJacobianWriter.html������������������0000775�4231163�4231163�00000030077�14537076051�031274� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.DynamicCompressedRowJacobianWriter (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.DynamicCompressedRowJacobianWriter
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmGaussianMixtureModelEM.ClassSig.html������������������������0000775�4231163�4231163�00000027622�14537076046�030033� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmGaussianMixtureModelEM.ClassSig (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassSig
-
-
Constructor Summary
Constructors
| Constructor |
Description |
ClassSig() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
title
java.lang.String title
-
nsubclasses
int nsubclasses
-
Constructor Detail
-
ClassSig
public ClassSig()
��������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmActiveContoursWithoutEdges.html�����������������������������0000775�4231163�4231163�00000104675�14537076043�027276� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmActiveContoursWithoutEdges (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private static int |
chan |
|
private double |
epsilon |
|
private static int |
holes |
|
private static int |
holes_small |
|
private static int |
large |
|
private int |
maskType |
|
private static int |
medium |
|
private int |
method |
|
private double |
mu |
|
private int |
numIter |
|
private static int |
small |
|
private static int |
twophase |
|
private static int |
user |
Copyright (c) 2009, Yue Wu
All rights reserved.
|
private static int |
vector |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
user
private static final int user
Copyright (c) 2009, Yue Wu
All rights reserved.
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are
met:
Redistributions of source code must retain the above copyright
notice, this list of conditions and the following disclaimer.
Redistributions in binary form must reproduce the above copyright
notice, this list of conditions and the following disclaimer in
the documentation and/or other materials provided with the distribution
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
POSSIBILITY OF SUCH DAMAGE.
% Active contour with Chen-Vese Method
% for image segementation
%
% Implemented by Yue Wu (yue.wu@tufts.edu)
% Tufts University
% Feb 2009
% http://sites.google.com/site/rexstribeofimageprocessing/
%
% all rights reserved
% Last update 02/26/2009
% Description: This code implements the paper: "Active Contours Without
% Edges" by Chan and Vese for method 'chen', the paper:"Active Contours Without
% Edges for vector image" by Chan and Vese for method 'vector', and the paper
% "A Multiphase Level Set Framework for Image Segmentation Using the
% Mumford and Shah Model" by Chan and Vese.
This is a port to Java of the MATLAB code in chenvese.m and supporting MATLAB files
written by Yue Wu.
References: 1.) Active Contours Without Edges by Tony F. Chan and
Luminita A. Vese, IEEE Transactions on Image Processing,
Vol. 10, No. 2, February, 2001, pp. 266- 277.
2.) Active Contours Without Edges for Vector-Valued Images by
Tony F. Chan, B. Yezrielev, and Luminita A. Vese, Journal of
Visual Communication and Image Representation, 11, 2000, pp. 130-141.
3.) A Multiphase Level Set Framework for Image Segmentation Using the
Mumford and Shah Model by Tony F. Chan and Luminita A. Vese, International
Journal of Computer Vision, 50(3), 2002, pp. 271-293.
- See Also:
- Constant Field Values
-
maskType
private int maskType
-
numIter
private int numIter
-
method
private int method
-
epsilon
private double epsilon
-
Constructor Detail
-
AlgorithmActiveContoursWithoutEdges
public AlgorithmActiveContoursWithoutEdges(ModelImage destImg,
ModelImage srcImg,
int maskType,
int numIter,
double mu,
int method)
�������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmIndependentComponents.html����������������������������������0000775�4231163�4231163�00000125372�14537076046�026275� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmIndependentComponents (MIPAV API Documentation)
-
- All Implemented Interfaces:
java.awt.event.ActionListener, java.awt.event.WindowListener, java.lang.Runnable, java.util.EventListener
public class AlgorithmIndependentComponents
extends AlgorithmBase
This algorithm operates on 2D and 3D black and white and color images.
Requirements:
1.) The independent components must be statistically independent.
2.) The independent components must have all nongaussian distributions or one gaussian distribution
and all the other distributions nongaussian or the independent components have time dependencies.
3.) For simplicity, assume the unknown mixture matrix is square. In other words, the number of
mixtures equals the number of independent components. If the number of independent components is
smaller than the number of mixtures, use principal component analysis to reduce the number of
mixtures to the number of principal components. Reducing the number of dimensions can reduce noise and
prevent overlearning.
Filtering the data in the Fourier domain is allowed before performing independent component analysis since
applying the Fourier transform to the data does not change the mixing matrix.
References:
1.) Independent Component Analysis by Aapo Hyvarinen, Juha Karhunen, and Erkki Oja, John-Wiley & Sons, Inc.,
2001.
2.) Independent Component Analysis A Tutorial Introduction by James V. Stone, Massachusetts Institute of
Technology, 2004.
3.) Independent Component Analysis Principles and Practice Edited by Stephen Roberts and Richard Everson,
Cambridge University Press, 2001.
From the text: "Another very useful thing to do is to reduce the dimension of the data by principal component
analysis. This reduces noise and prevents overlearning. It may also solve the problems with data that has a
smaller number of independent components than mixtures."
Software was tested with images obtained from the site at http://www.lx.it.pt/~lbalmeida/ica/seethrough/index.html,
"See-through" data sets for nonlinear source separation by Luis B. Almeida. In the paper "Separating a Real-Life
Nonlinear Image Mixture" by Luis B. Almeida, the following average linear and nonlinear separation SNR results are
given in decibels for sets 4 thru 8:
Set number linear source 1 linear source 2 nonlinear source1 nonlinear source2
4 9.0 8.7 13.8 13.1
5 5.2 10.5 9.3 13.9
6 13.4 6.6 14.2 6.4
7 4.5 11.2 6.2 11.2
8 5.8 3.4 6.0 3.7
My results:
set 4:
symmetric orthogonalization tanh a1 = 1.0 source1 3.96 dB source2 8.56 dB
set 5:
symmetric orthogonalization tanh a1 = 1.0 source1 5.93 dB source2 4.05 dB
symmetric orthogonalization exp source1 9.76 dB source2 9.86 dB
symmetric orthogonalization cubic source1 5.84 dB source2 3.99 dB
maximum likelihood estimation exp source1 5.64 dB source2 3.89 dB
source1 5.36 dB source2 3.89 dB
set 6:
symmetric orthogonalization tanh a1 = 1.0 source1 15.5 dB source2 11.8 dB
maximum likelihood estimation tanh a1 = 1.0 source1 15.5 dB source2 11.8 dB
set 7:
symmetric orthogonalization tanh a1 = 1.0 source1 9.93 dB source2 14.8 dB
maximum likelihood estimation tanh a1 = 1.0 source1 10.1 dB source2 14.8 dB
set 8:
symmetric orthogonalization tanh a1 = 1.0 source1 11.5 dB source2 6.91 dB
source1 11.3 dB source2 10.9 dB
maximum likelihood estimation tanh a1 = 1.0 source1 11.4 dB source2 6.79 dB
source1 11.4 dB source2 6.79 dB
source1 11.4 dB source2 6.79 dB
maximum likelihood estimation exp source1 11.4 dB source2 6.79 dB
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmIndependentComponents(ModelImage[] destImg,
ModelImage[] srcImgArray,
int icNumber,
int icAlgorithm,
int nonlinearFunction,
double a1,
double endTolerance,
int maxIterations,
boolean redRequested,
boolean greenRequested,
boolean blueRequested) |
Creates a new AlgorithmIndependentComponents object.
|
AlgorithmIndependentComponents(ModelImage[] destImg,
ModelImage srcImg,
int icNumber,
int icAlgorithm,
int nonlinearFunction,
double a1,
double endTolerance,
int maxIterations,
boolean redRequested,
boolean greenRequested,
boolean blueReuqested) |
Creates a new AlgorithmIndependentComponents object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
icAlgorithm
private int icAlgorithm
-
selfTest
private boolean selfTest
-
Constructor Detail
-
AlgorithmIndependentComponents
public AlgorithmIndependentComponents(ModelImage[] destImg,
ModelImage srcImg,
int icNumber,
int icAlgorithm,
int nonlinearFunction,
double a1,
double endTolerance,
int maxIterations,
boolean redRequested,
boolean greenRequested,
boolean blueReuqested)
Creates a new AlgorithmIndependentComponents object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelicNumber - icNumber is the number of independent component images to retainicAlgorithm - nonlinearFunction - a1 - endTolerance - maxIterations -
-
AlgorithmIndependentComponents
public AlgorithmIndependentComponents(ModelImage[] destImg,
ModelImage[] srcImgArray,
int icNumber,
int icAlgorithm,
int nonlinearFunction,
double a1,
double endTolerance,
int maxIterations,
boolean redRequested,
boolean greenRequested,
boolean blueRequested)
Creates a new AlgorithmIndependentComponents object.
- Parameters:
destImg - image model where result image is to storedsrcImg - source image modelicNumber - icNumber is the number of independent component images to retainicAlgorithm - nonlinearFunction - a1 - endTolerance - maxIterations - redRequested - greenRequested - blueRequested -
-
Method Detail
-
updateFileInfo
public void updateFileInfo(ModelImage image,
ModelImage resultImage)
Copy important file information to resultant image structure.
- Parameters:
image - Source image.resultImage - Resultant image.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTranscode.html����������������������������������������������0000775�4231163�4231163�00000123602�14537076050�023701� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTranscode (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmTranscode(java.net.URL inputURL,
java.lang.String outName,
int compressionType) |
Creates a new AlgorithmTranscode object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
controllerUpdate(javax.media.ControllerEvent evt) |
Controller Listener.
|
(package private) javax.media.DataSink |
createDataSink(javax.media.Processor p,
javax.media.MediaLocator outML) |
Create the DataSink.
|
void |
dataSinkUpdate(javax.media.datasink.DataSinkEvent evt) |
Event handler for the file writer.
|
void |
finalize() |
DOCUMENT ME!
|
void |
runAlgorithm() |
DOCUMENT ME!
|
(package private) void |
setJPEGQuality(javax.media.Player p,
float val) |
Setting the encoding quality to the specified value on the JPEG encoder. 0.5 is a good default.
|
void |
setQuality(float quality) |
DOCUMENT ME!
|
(package private) boolean |
waitForFileDone(int maxTime) |
Block until file writing is done.
|
(package private) boolean |
waitForState(javax.media.Processor p,
int state) |
Block until the processor has transitioned to the given state.
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
fileDone
private boolean fileDone
DOCUMENT ME!
-
quality
private float quality
DOCUMENT ME!
-
Constructor Detail
-
AlgorithmTranscode
public AlgorithmTranscode(java.net.URL inputURL,
java.lang.String outName,
int compressionType)
Creates a new AlgorithmTranscode object.
- Parameters:
inputURL - DOCUMENT ME!outName - DOCUMENT ME!compressionType - DOCUMENT ME!
-
Method Detail
-
setJPEGQuality
void setJPEGQuality(javax.media.Player p,
float val)
Setting the encoding quality to the specified value on the JPEG encoder. 0.5 is a good default.
- Parameters:
p - DOCUMENT ME!val - DOCUMENT ME!
-
waitForState
boolean waitForState(javax.media.Processor p,
int state)
Block until the processor has transitioned to the given state. Return false if the transition failed.
- Parameters:
p - DOCUMENT ME!state - DOCUMENT ME!- Returns:
- DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftClustering.famsPoint.html��������������������������0000775�4231163�4231163�00000033013�14537076047�027636� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftClustering.famsPoint (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int[] |
data |
|
private int |
usedFlag |
|
(package private) float |
weightdp2 |
|
private int |
window |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
famsPoint() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
usedFlag
private int usedFlag
-
window
private int window
-
weightdp2
float weightdp2
-
Constructor Detail
-
famsPoint
public famsPoint()
-
Method Detail
-
getData
public int[] getData()
-
getUsedFlag
public int getUsedFlag()
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LSCM.Token.html������������������������������������������������������0000775�4231163�4231163�00000022406�14537076056�021733� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LSCM.Token (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LSCM.Token
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
java.lang.String |
m_key |
|
java.lang.String |
m_value |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Token() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/libdt.Split_crit.html������������������������������������������������0000775�4231163�4231163�00000033566�14537076055�023337� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
libdt.Split_crit (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Enum<libdt.Split_crit>
-
- gov.nih.mipav.model.algorithms.libdt.Split_crit
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
Split_crit() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
Split_crit
private Split_crit()
-
Method Detail
-
valueOf
public static libdt.Split_crit valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.GenericKey.html������������������������������������������0000775�4231163�4231163�00000035416�14537076053�024434� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.GenericKey (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.GenericKey
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.lang.Object[] |
keycontents |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
GenericKey(java.lang.Object... objects) |
Creates a new key from the specified objects
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, finalize, getClass, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
hashCode
public int hashCode()
- Overrides:
hashCode in class java.lang.Object
-
getComponent
public <T> T getComponent(int i,
java.lang.Class<T> clazz)
Returns the component at specified index
casted to the specified type
- Type Parameters:
T - type of the component- Parameters:
i - indexclazz - type to cast to- Returns:
- key component
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.GenericRenderer.html�������������������������������������0000775�4231163�4231163�00000051743�14537076053�025453� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.GenericRenderer (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.GenericRenderer<T>
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected boolean |
isEnabled |
|
protected java.util.LinkedList<T> |
itemsToRender |
|
protected java.awt.geom.Rectangle2D |
view |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
GenericRenderer
public GenericRenderer()
-
Method Detail
-
isEnabled
public boolean isEnabled()
Whether this renderer is enabled or not. By default a renderer is enabled and will
render upon #render(int, int, int, int) or #renderSVG(org.w3c.dom.Document, org.w3c.dom.Element, int, int).
When disabled those methods return right away and will not render anything.
- Specified by:
isEnabled in interface ContourPlot.Renderer- Returns:
- true when active
�����������������������������gov/nih/mipav/model/algorithms/HistogramOfOrientedGradients.VlHog.html������������������������������0000775�4231163�4231163�00000034553�14537076055�026716� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
HistogramOfOrientedGradients.VlHog (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
-
Constructor Summary
Constructors
| Constructor |
Description |
VlHog() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
numOrientations
int numOrientations
-
transposed
boolean transposed
-
permutation
int[] permutation
-
orientationX
float[] orientationX
-
orientationY
float[] orientationY
�����������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Points.html����������������������������������������������0000775�4231163�4231163�00000052307�14537076054�023662� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Points (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Points
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Points() |
Creates a new ContourPlot.Points object which uses DefaultGlyph#CIRCLE_F for displaying its points. |
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
hidden
protected boolean hidden
-
Constructor Detail
-
Points
public Points()
Creates a new
ContourPlot.Points object which uses
DefaultGlyph#CIRCLE_F for displaying its points.
-
Method Detail
-
numPoints
public int numPoints()
- Returns:
- the number of points in this in this
ContourPlot.Points object.
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftSegmentation.RAList.html���������������������������0000775�4231163�4231163�00000027064�14537076047�027363� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftSegmentation.RAList (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RAList
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
RAList() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
exists
private byte exists
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.AbortingIterationCallback.html�����������������������0000775�4231163�4231163�00000025505�14537076052�030251� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.AbortingIterationCallback (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.EigenQuaternionParameterization.html���������������������0000775�4231163�4231163�00000036333�14537076051�030704� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.EigenQuaternionParameterization (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
ComputeJacobian(double[] x,
int x_start,
double[][] jacobian) |
|
int |
GlobalSize() |
|
int |
LocalSize() |
|
boolean |
Plus(double[] x_ptr,
double[] delta,
double[] x_plus_delta_ptr) |
|
boolean |
Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Plus
public boolean Plus(java.util.Vector<java.lang.Double> x,
int x_index,
java.util.Vector<java.lang.Double> delta,
int delta_index,
java.util.Vector<java.lang.Double> x_plus_delta,
int x_plus_delta_index)
- Specified by:
Plus in class CeresSolver.LocalParameterization
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.MockCostFunctionBase.html����������������������������0000775�4231163�4231163�00000040323�14537076053�027227� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.MockCostFunctionBase (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
MockCostFunctionBase(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9) |
|
MockCostFunctionBase(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
MockCostFunctionBase
public MockCostFunctionBase(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9,
int num_residuals)
-
MockCostFunctionBase
public MockCostFunctionBase(int kNumResiduals,
int N0,
int N1,
int N2,
int N3,
int N4,
int N5,
int N6,
int N7,
int N8,
int N9)
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Legend.ColormapLabel.html��������������������������������0000775�4231163�4231163�00000034242�14537076054�026315� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Legend.ColormapLabel (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Legend.ColormapLabel
-
-
Constructor Summary
Constructors
| Constructor |
Description |
ColormapLabel(java.lang.String labelText,
ContourPlot.ColorMap cmap,
boolean vertical,
int pickColor) |
|
ColormapLabel(java.lang.String labelText,
ContourPlot.ColorMap cmap,
boolean vertical,
int pickColor,
double[] ticks) |
|
ColormapLabel(java.lang.String labelText,
ContourPlot.ColorMap cmap,
boolean vertical,
int pickColor,
double[] ticks,
java.lang.String[] ticklabels) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
vertical
public boolean vertical
-
pickColor
public int pickColor
-
ticks
public double[] ticks
-
Constructor Detail
-
ColormapLabel
public ColormapLabel(java.lang.String labelText,
ContourPlot.ColorMap cmap,
boolean vertical,
int pickColor,
double[] ticks,
java.lang.String[] ticklabels)
-
ColormapLabel
public ColormapLabel(java.lang.String labelText,
ContourPlot.ColorMap cmap,
boolean vertical,
int pickColor,
double[] ticks)
-
ColormapLabel
public ColormapLabel(java.lang.String labelText,
ContourPlot.ColorMap cmap,
boolean vertical,
int pickColor)
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Utils.html�����������������������������������������������0000775�4231163�4231163�00000064013�14537076054�023503� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Utils (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Utils() |
|
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static double |
clamp(double lower,
double v,
double upper) |
Clamps value between specified bounds
|
static float |
clamp(float lower,
float v,
float upper) |
Clamps value between specified bounds
|
static int |
clamp(int lower,
int v,
int upper) |
Clamps value between specified bounds
|
static <T extends java.awt.geom.Point2D>
T |
copy(T p) |
Copies the specified Point2D (calls clone) and
casts the copy to the class of the original.
|
static double |
hypot(double x,
double y) |
Calculates sqrt(x*x + y*y) which is the hypotenuse length given catheti x and y.
|
static java.awt.image.ImageObserver |
imageObserver(int flags) |
Creates an ImageObserver that checks the for the specified infoflags.
|
static <T extends java.lang.Comparable<T>>
boolean |
isSorted(java.util.Iterator<T> iter) |
Checks if specified iterator is sorted according to natural ordering.
|
static double |
max3(double v0,
double v1,
double v2) |
Returns the maximum of 3 values
|
static double |
min3(double v0,
double v1,
double v2) |
Returns the minimum of 3 values
|
static <T> java.util.stream.Stream<T> |
parallelize(java.util.stream.Stream<T> stream,
boolean parallel) |
Syntactic sugar for conditional stream.parallel().
|
private static boolean |
pointInTri(double px,
double py,
double x0,
double y0,
double x1,
double y1,
double x2,
double y2) |
|
static boolean |
rectIntersectsOrIsContainedInTri(java.awt.geom.Rectangle2D rect,
double x0,
double y0,
double x1,
double y1,
double x2,
double y2) |
tests intersection or containment of rectangle and triangle.
|
private static double |
sign(double x1,
double y1,
double x2,
double y2,
double x3,
double y3) |
|
static <P extends java.awt.geom.Point2D>
P |
swapYAxis(P point,
int height) |
Swaps between GL and AWT coordinates, AWT coordinate system
has its origin in the top left corner of a component and downwards pointing
y axis, whereas GL has its origin in the bottom left corner of the viewport
(at least in JPlotter) and upwards pointing y axis.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
parallelize
public static <T> java.util.stream.Stream<T> parallelize(java.util.stream.Stream<T> stream,
boolean parallel)
Syntactic sugar for conditional stream.parallel().
- Type Parameters:
T - element type of stream- Parameters:
stream - to make parallelparallel - whether to make parallel or not- Returns:
- stream.parallel() if true
-
clamp
public static double clamp(double lower,
double v,
double upper)
Clamps value between specified bounds
- Parameters:
lower - minimum valuev - value to clampupper - maximum value- Returns:
- max(lower,min(upper,v))
-
clamp
public static float clamp(float lower,
float v,
float upper)
Clamps value between specified bounds
- Parameters:
lower - minimum valuev - value to clampupper - maximum value- Returns:
- max(lower,min(upper,v))
-
clamp
public static int clamp(int lower,
int v,
int upper)
Clamps value between specified bounds
- Parameters:
lower - minimum valuev - value to clampupper - maximum value- Returns:
- max(lower,min(upper,v))
-
min3
public static double min3(double v0,
double v1,
double v2)
Returns the minimum of 3 values
- Parameters:
v0 - valuev1 - valuev2 - value- Returns:
- minimum
-
max3
public static double max3(double v0,
double v1,
double v2)
Returns the maximum of 3 values
- Parameters:
v0 - valuev1 - valuev2 - value- Returns:
- maximum
-
rectIntersectsOrIsContainedInTri
public static boolean rectIntersectsOrIsContainedInTri(java.awt.geom.Rectangle2D rect,
double x0,
double y0,
double x1,
double y1,
double x2,
double y2)
tests intersection or containment of rectangle and triangle.
- Parameters:
rect - rectangle to testx0 - x coordinate of 0th triangle vertexy0 - y coordinate of 0th triangle vertexx1 - x coordinate of 1st triangle vertexy1 - y coordinate of 1st triangle vertexx2 - x coordinate of 2nd triangle vertexy2 - y coordinate of 2nd triangle vertex- Returns:
- true when intersecting
-
sign
private static double sign(double x1,
double y1,
double x2,
double y2,
double x3,
double y3)
-
pointInTri
private static boolean pointInTri(double px,
double py,
double x0,
double y0,
double x1,
double y1,
double x2,
double y2)
-
imageObserver
public static java.awt.image.ImageObserver imageObserver(int flags)
Creates an ImageObserver that checks the for the specified infoflags.
See ImageObserver.imageUpdate(java.awt.Image, int, int, int, int, int).
- Parameters:
flags - infoflags to check- Returns:
- a new ImageObserver
-
hypot
public static final double hypot(double x,
double y)
Calculates sqrt(x*x + y*y) which is the hypotenuse length given catheti x and y.
- Parameters:
x - a valuey - a value- Returns:
- hypotenuse length
-
swapYAxis
public static <P extends java.awt.geom.Point2D> P swapYAxis(P point,
int height)
Swaps between GL and AWT coordinates, AWT coordinate system
has its origin in the top left corner of a component and downwards pointing
y axis, whereas GL has its origin in the bottom left corner of the viewport
(at least in JPlotter) and upwards pointing y axis.
- Type Parameters:
P - type of Point2D- Parameters:
point - to swap the y axis ofheight - of the component or viewport- Returns:
- point in coordinates of the other reference coordinate system.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitWholeNLConModel3.html�������������������������������0000775�4231163�4231163�00000046250�14537076046�026175� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitWholeNLConModel3 (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double |
eps |
DOCUMENT ME!
|
(package private) double[] |
result |
DOCUMENT ME!
|
(package private) int |
routine |
DOCUMENT ME!
|
(package private) double |
upper |
DOCUMENT ME!
|
private double[] |
xData |
|
private float[] |
yData |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitWholeNLConModel3(int nPoints,
double[] xData,
float[] yData,
double[] initial,
double upper,
int routine,
double eps,
double[] result) |
Creates a new FitWholeNLConModel3 object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
xData
private double[] xData
-
yData
private float[] yData
-
eps
double eps
DOCUMENT ME!
-
result
double[] result
DOCUMENT ME!
-
routine
int routine
DOCUMENT ME!
-
upper
double upper
DOCUMENT ME!
-
Constructor Detail
-
FitWholeNLConModel3
public FitWholeNLConModel3(int nPoints,
double[] xData,
float[] yData,
double[] initial,
double upper,
int routine,
double eps,
double[] result)
Creates a new FitWholeNLConModel3 object.
- Parameters:
nPoints - DOCUMENT ME!xData - DOCUMENT ME!yData - DOCUMENT ME!initial - DOCUMENT ME!upper - DOCUMENT ME!routine - DOCUMENT ME!eps - DOCUMENT ME!result - DOCUMENT ME!
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.KowalikAndOsborneFunction.html�����������������������0000775�4231163�4231163�00000034056�14537076053�030274� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.KowalikAndOsborneFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobian,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.ConditionedCostFunction.html����������������������������0000775�4231163�4231163�00000041113�14537076052�027221� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.ConditionedCostFunction (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/InverseLaplaceTest.FitdeHoog1.html�����������������������������������0000775�4231163�4231163�00000026621�14537076055�025605� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
InverseLaplaceTest.FitdeHoog1 (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitdeHoog1(double[] time,
double largestPole,
double tol) |
Creates a new FitExpModel object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitdeHoog1
public FitdeHoog1(double[] time,
double largestPole,
double tol)
Creates a new FitExpModel object.
- Parameters:
time - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!
���������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.Iterators.RowSpliterator.html����������������������������0000775�4231163�4231163�00000053451�14537076054�027362� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Iterators.RowSpliterator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator<P>
-
- All Implemented Interfaces:
java.util.Spliterator<P>
- Enclosing class:
- ContourPlot.Iterators
public static final class ContourPlot.Iterators.RowSpliterator<P extends ContourPlot.PixelBase>
extends java.lang.Object
implements java.util.Spliterator<P>
Special Spliterator for images which guarantees that each split will cover at least
an entire row of the image.
- Author:
- hageldave
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from interface java.util.Spliterator
java.util.Spliterator.OfDouble, java.util.Spliterator.OfInt, java.util.Spliterator.OfLong, java.util.Spliterator.OfPrimitive<T extends java.lang.Object,T_CONS extends java.lang.Object,T_SPLITR extends java.util.Spliterator.OfPrimitive<T,T_CONS,T_SPLITR>>
-
Field Summary
-
Fields inherited from interface java.util.Spliterator
CONCURRENT, DISTINCT, IMMUTABLE, NONNULL, ORDERED, SIZED, SORTED, SUBSIZED
-
Constructor Summary
Constructors
| Constructor |
Description |
RowSpliterator(int startX,
int width,
int startY,
int endYincl,
java.util.function.Supplier<P> pixelSupplier) |
Creates a new RowSpliterator for iterating the pixels in the specified area.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
Methods inherited from interface java.util.Spliterator
getComparator, getExactSizeIfKnown, hasCharacteristics
-
-
Field Detail
-
startX
private final int startX
-
Constructor Detail
-
RowSpliterator
public RowSpliterator(int startX,
int width,
int startY,
int endYincl,
java.util.function.Supplier<P> pixelSupplier)
Creates a new RowSpliterator for iterating the pixels in the specified area.
Each split is guaranteed to cover at least 1 entire row of the area.
- Parameters:
startX - left boundary of the area (inclusive)width - width of the areastartY - top boundary of the area (inclusive)endYincl - bottom boundary of the area (inclusive)pixelSupplier - a function that allocates a new pixel
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTimeFitting.FitMultiExponential.html������������������������0000775�4231163�4231163�00000041102�14537076050�030137� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTimeFitting.FitMultiExponential (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) double[] |
ydata |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.NLConstrainedEngine
a, absoluteConvergence, analyticalJacobian, bl, bounds, bu, ctrlMat, dyda, gues, internalScaling, iters, jacobian, maxIterations, nPts, outputMes, param, parameterConvergence, relativeConvergence, residuals, secondAllowed, stdv, tolerance
-
Constructor Summary
Constructors
| Constructor |
Description |
FitMultiExponential(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
driver() |
Starts the analysis.
|
void |
dumpResults() |
Display results of displaying multiExponential fitting parameters.
|
void |
fitToFunction(double[] a,
double[] residuals,
double[][] covarMat) |
Fit to function - a0 + a1*exp(a2*t) + a3*exp(a4*t) + ...
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ydata
final double[] ydata
-
Constructor Detail
-
FitMultiExponential
public FitMultiExponential(int tDim,
double[] ydata,
double[] initial,
boolean[] useBounds,
double[] lowBounds,
double[] highBounds)
-
Method Detail
-
fitToFunction
public void fitToFunction(double[] a,
double[] residuals,
double[][] covarMat)
Fit to function - a0 + a1*exp(a2*t) + a3*exp(a4*t) + ...
where all the exponentials are negative decaying exponentials.
- Specified by:
fitToFunction in class NLConstrainedEngine- Parameters:
a - The best guess parameter values.residuals - ymodel - yData.covarMat - The derivative values of y with respect to fitting parameters.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmLLE.html����������������������������������������������������0000775�4231163�4231163�00000060646�14537076047�022411� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmLLE (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
d |
|
private int |
numberOfNeighbors |
This is a port of the file lle.m created by Professor Lawrence K.
|
private double |
tol |
|
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmLLE(ModelImage destImg,
ModelImage srcImg,
int d,
int numberOfNeighbors,
double tol) |
Creates a new AlgorithmLLE object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numberOfNeighbors
private int numberOfNeighbors
This is a port of the file lle.m created by Professor Lawrence K. Saul
References:
1.) Nonlinear Dimensionality Reduction by Locally Linear Embedding by Sam T. Roweis and Lawrence K Saul,
Science, Vol. 290, December 22, 2000, pp. 2323 - 2326.
2.) Think Globally, Fit Locally: Unsupervised Learning of Low Dimensional Manifolds by Lawrence K. Saul
and Sam T. Roweis, Journal of Machine Learning Research, Vol. 4, 2003, pp. 119 - 155.
3.) Unsupervised Learning of Image Manifolds by Semidefinite Programming by Kilian Q. Weinberger and
Lawrence K. Saul.
-
Constructor Detail
-
AlgorithmLLE
public AlgorithmLLE(ModelImage destImg,
ModelImage srcImg,
int d,
int numberOfNeighbors,
double tol)
Creates a new AlgorithmLLE object.
- Parameters:
destImg - list of image models where result image is to storedsrcImg - source image modeld - Number of embedded dimensionsnumberOfNeighbors - Number of neighborstol - regularizer
������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMeanShiftClustering.fams_cut.html���������������������������0000775�4231163�4231163�00000030372�14537076047�027504� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMeanShiftClustering.fams_cut (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_cut
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
where |
|
private int |
which |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
fams_cut() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
fams_cut
public fams_cut()
-
Method Detail
-
getWhich
public int getWhich()
-
getWhere
public int getWhere()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmFRAP.FitExpModelqd.html�������������������������������������0000775�4231163�4231163�00000030652�14537076045�025221� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmFRAP.FitExpModelqd (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
FitExpModelqd(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter) |
Creates a new FitExpModelqd object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
FitExpModelqd
public FitExpModelqd(int timePoints,
double endTime,
double largestPole,
double tol,
int matrixSizeParameter)
Creates a new FitExpModelqd object.
- Parameters:
timePoints - DOCUMENT ME!endTime - DOCUMENT ME!largestPole - DOCUMENT ME!tol - DOCUMENT ME!matrixSizeParameter - DOCUMENT ME!
��������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.html����������������������������������������������������0000775�4231163�4231163�00000311157�14537076052�022434� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2 (MIPAV API Documentation)
-
public class CeresSolver2
extends CeresSolver
This is a port of the C++ files in ceres-solver-1.14.0 under the BSD license:
Ceres Solver - A fast non-linear least squares minimizer Copyright 2015
Google Inc. All rights reserved. http://ceres-solver.org/
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
Redistributions of source code must retain the above copyright notice, this
list of conditions and the following disclaimer. Redistributions in binary
form must reproduce the above copyright notice, this list of conditions and
the following disclaimer in the documentation and/or other materials provided
with the distribution. Neither the name of Google Inc. nor the names of its
contributors may be used to endorse or promote products derived from this
software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
POSSIBILITY OF SUCH DAMAGE.
Ceres Solver is an open source C++ library for modeling and solving large,
complicated optimization problems. It is a feature rich, mature and
performant library which has been used in production at Google since 2010.
Ceres Solver can solve two kinds of problems.
1. Non-linear Least Squares problems with bounds constraints. 2. General
unconstrained optimization problems.
Please see [ceres-solver.org](http://ceres-solver.org/) for more information.
- Author:
- aailb
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class gov.nih.mipav.model.algorithms.CeresSolver
CeresSolver.ArctanLoss, CeresSolver.ArmijoLineSearch, CeresSolver.AutoDiffCostFunction<CostFunctor>, CeresSolver.BadTestTerm, CeresSolver.BFGS, CeresSolver.Block, CeresSolver.BlockEvaluatePreparer, CeresSolver.BlockJacobianWriter, CeresSolver.BlockJacobiPreconditioner, CeresSolver.BlockRandomAccessDenseMatrix, CeresSolver.BlockRandomAccessDiagonalMatrix, CeresSolver.BlockRandomAccessMatrix, CeresSolver.BlockSparseMatrix, CeresSolver.BlockSparseMatrixRandomMatrixOptions, CeresSolver.CallbackReturnType, CeresSolver.CallStatistics, CeresSolver.CauchyLoss, CeresSolver.Cell, CeresSolver.CellInfo, CeresSolver.CellLessThan, CeresSolver.CgnrLinearOperator, CeresSolver.CgnrSolver, CeresSolver.Chunk, CeresSolver.ComposedLoss, CeresSolver.CompressedList, CeresSolver.CompressedRowBlockStructure, CeresSolver.CompressedRowJacobianWriter, CeresSolver.CompressedRowSparseMatrix, CeresSolver.ConjugateGradientsSolver, CeresSolver.Context, CeresSolver.CoordinateDescentMinimizer, CeresSolver.Corrector, CeresSolver.CostFunction, CeresSolver.CostFunctorExample, CeresSolver.CovarianceAlgorithmType, CeresSolver.CRSMatrix, CeresSolver.CurveFittingFunctorExample, CeresSolver.DenseJacobianWriter, CeresSolver.DenseLinearAlgebraLibraryType, CeresSolver.DenseNormalCholeskySolver, CeresSolver.DenseQRSolver, CeresSolver.DenseSchurComplementSolver, CeresSolver.DenseSparseMatrix, CeresSolver.DoglegStrategy, CeresSolver.DoglegType, CeresSolver.DumpFormatType, CeresSolver.DynamicCompressedRowJacobianFinalizer, CeresSolver.DynamicCompressedRowJacobianWriter, CeresSolver.DynamicCostFunction, CeresSolver.DynamicNumericDiffCostFunction<T>, CeresSolver.EasyCostFunction, CeresSolver.EasyFunctor, CeresSolver.EigenQuaternionParameterization, CeresSolver.EvaluateOptions, CeresSolver.EvaluateScratch, CeresSolver.EvaluationCallback, CeresSolver.Evaluator, CeresSolver.EvaluatorOptions, CeresSolver.EventLogger, CeresSolver.ExecutionSummary, CeresSolver.ExponentialCostFunction, CeresSolver.ExponentialFunctor, CeresSolver.FirstOrderFunction, CeresSolver.FunctionSample, CeresSolver.GoodTestTerm, CeresSolver.GradientChecker, CeresSolver.GradientCheckingCostFunction, CeresSolver.GradientCheckingIterationCallback, CeresSolver.GradientProblem, CeresSolver.GradientProblemEvaluator, CeresSolver.GradientProblemSolver, CeresSolver.GradientProblemSolverOptions, CeresSolver.GradientProblemSolverStateUpdatingCallback, CeresSolver.GradientProblemSolverSummary, CeresSolver.Graph<Vertex>, CeresSolver.HomogeneousVectorParameterization, CeresSolver.HuberLoss, CeresSolver.IdentityParameterization, CeresSolver.ImplicitSchurComplement, CeresSolver.indexValueItem<Vertex>, CeresSolver.IterationCallback, CeresSolver.IterationSummary, CeresSolver.IterativeSchurComplementSolver, CeresSolver.LBFGS, CeresSolver.LevenbergMarquardtStrategy, CeresSolver.LinearCostFunction, CeresSolver.LinearLeastSquaresProblem, CeresSolver.LinearOperator, CeresSolver.LinearSolver, CeresSolver.LinearSolverOptions, CeresSolver.LinearSolverPerSolveOptions, CeresSolver.LinearSolverSummary, CeresSolver.LinearSolverTerminationType, CeresSolver.LinearSolverType, CeresSolver.LineSearch, CeresSolver.LineSearchDirection, CeresSolver.LineSearchDirectionOptions, CeresSolver.LineSearchDirectionType, CeresSolver.LineSearchFunction, CeresSolver.LineSearchInterpolationType, CeresSolver.LineSearchMinimizer, CeresSolver.LineSearchOptions, CeresSolver.LineSearchPreprocessor, CeresSolver.LineSearchSummary, CeresSolver.LineSearchType, CeresSolver.LocalParameterization, CeresSolver.LoggingCallback, CeresSolver.LoggingType, CeresSolver.LossFunction, CeresSolver.LossFunctionWrapper, CeresSolver.LowRankInverseHessian, CeresSolver.Minimizer, CeresSolver.MinimizerOptions, CeresSolver.MinimizerType, CeresSolver.MyCostFunctor, CeresSolver.MyThreeParameterCostFunctor, CeresSolver.NonlinearConjugateGradient, CeresSolver.NonlinearConjugateGradientType, CeresSolver.NormalPrior, CeresSolver.NullJacobianFinalizer, CeresSolver.NumericDiffCostFunction<CostFunctor>, CeresSolver.NumericDiffMethodType, CeresSolver.NumericDiffOptions, CeresSolver.OnlyFillsOneOutputFunctor, CeresSolver.OrderedGroups<T>, CeresSolver.Ownership, CeresSolver.Pair<T,U>, CeresSolver.ParameterBlock, CeresSolver.PartitionedMatrixView, CeresSolver.Preconditioner, CeresSolver.PreconditionerOptions, CeresSolver.PreconditionerType, CeresSolver.PreprocessedProblem, CeresSolver.Preprocessor, CeresSolver.ProbeResults, CeresSolver.ProblemImpl, CeresSolver.ProblemOptions, CeresSolver.ProductParameterization, CeresSolver.Program, CeresSolver.ProgramEvaluator<EvaluatePreparer,JacobianWriter,JacobianFinalizer>, CeresSolver.QuaternionParameterization, CeresSolver.RandomizedCostFunction, CeresSolver.RandomizedFunctor, CeresSolver.ResidualBlock, CeresSolver.ScaledLoss, CeresSolver.SchurComplementSolver, CeresSolver.SchurEliminator, CeresSolver.SchurEliminatorBase, CeresSolver.SchurJacobiPreconditioner, CeresSolver.ScopedExecutionTimer, CeresSolver.ScratchEvaluatePreparer, CeresSolver.SizedCostFunction, CeresSolver.SizeTestingCostFunction, CeresSolver.SoftLOneLoss, CeresSolver.Solver, CeresSolver.SolverOptions, CeresSolver.SolverSummary, CeresSolver.SparseLinearAlgebraLibraryType, CeresSolver.SparseMatrix, CeresSolver.SparseMatrixPreconditionerWrapper, CeresSolver.StateUpdatingCallback, CeresSolver.SteepestDescent, CeresSolver.SubsetParameterization, CeresSolver.TerminationType, CeresSolver.TestTerm, CeresSolver.TolerantLoss, CeresSolver.TranscendentalCostFunction, CeresSolver.TranscendentalFunctor, CeresSolver.TripletSparseMatrix, CeresSolver.TripletSparseMatrixRandomMatrixOptions, CeresSolver.TrivialLoss, CeresSolver.TrustRegionMinimizer, CeresSolver.TrustRegionPreprocessor, CeresSolver.TrustRegionStepEvaluator, CeresSolver.TrustRegionStrategy, CeresSolver.TrustRegionStrategyOptions, CeresSolver.TrustRegionStrategyPerSolveOptions, CeresSolver.TrustRegionStrategySummary, CeresSolver.TrustRegionStrategyType, CeresSolver.TukeyLoss, CeresSolver.TypedLinearSolver<MatrixType>, CeresSolver.TypedPreconditioner<MatrixType>, CeresSolver.VertexDegreeLessThan<Vertex>, CeresSolver.VertexTotalOrdering<Vertex>, CeresSolver.VisibilityClusteringType, CeresSolver.WeightedGraph<Vertex>, CeresSolver.WolfeLineSearch
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.CeresSolver
BAD_TEST_TERM_EXAMPLE, COST_FUNCTOR_EXAMPLE, CURVE_FITTING_EXAMPLE, curveFittingData, curveFittingObservations, default_relstep, DYNAMIC, EASY_COST_FUNCTION, EASY_FUNCTOR_EXAMPLE, epsilon, ERROR, EXPONENTIAL_COST_FUNCTION, EXPONENTIAL_FUNCTOR, FATAL, GOOD_TEST_TERM_EXAMPLE, INFO, LINEAR_COST_FUNCTION_EXAMPLE, m, MAX_LOG_LEVEL, MY_COST_FUNCTOR, MY_THREE_PARAMETER_COST_FUNCTOR, N0, ONLY_FILLS_ONE_OUTPUT_FUNCTOR, optionsValid, RANDOMIZED_COST_FUNCTION, RANDOMIZED_FUNCTOR, SIZE_TESTING_COST_FUNCTION, svd, TEST_TERM_EXAMPLE, testCase, testMode, TRANSCENDENTAL_COST_FUNCTION, TRANSCENDENTAL_FUNCTOR, WARNING
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
AddRandomBlock(int num_rows,
int num_cols,
int row_block_begin,
int col_block_begin,
java.util.Vector<java.lang.Integer> rows,
java.util.Vector<java.lang.Integer> cols,
java.util.Vector<java.lang.Double> values) |
|
void |
AngleAxisRotatePoint(double[] angle_axis,
double[] pt,
double[] result) |
|
void |
AngleAxisToQuaternion(double[] angle_axis,
double[] quaternion) |
|
void |
AngleAxisToRotationMatrix(double[] angle_axis,
double[] R) |
|
void |
BlockOrderingToScalarOrdering(java.util.Vector<java.lang.Integer> blocks,
java.util.Vector<java.lang.Integer> block_ordering,
java.util.Vector<java.lang.Integer> scalar_ordering) |
|
void |
CompressedColumnScalarMatrixToBlockMatrix(int[] scalar_rows,
int[] scalar_cols,
java.util.Vector<java.lang.Integer> row_blocks,
java.util.Vector<java.lang.Integer> col_blocks,
java.util.Vector<java.lang.Integer> block_rows,
java.util.Vector<java.lang.Integer> block_cols) |
|
void |
ComputeCanonicalViewsClustering(CeresSolver2.CanonicalViewsClusteringOptions options,
CeresSolver.WeightedGraph<java.lang.Integer> graph,
java.util.Vector<java.lang.Integer> centers,
java.util.HashMap<java.lang.Integer,java.lang.Integer> membership) |
|
int |
ComputeSingleLinkageClustering(CeresSolver2.SingleLinkageClusteringOptions options,
CeresSolver.WeightedGraph<java.lang.Integer> graph,
java.util.HashMap<java.lang.Integer,java.lang.Integer> membership) |
|
void |
ComputeVisibility(CeresSolver.CompressedRowBlockStructure block_structure,
int num_eliminate_blocks,
java.util.Vector<java.util.HashSet<java.lang.Integer>> visibility) |
|
CeresSolver.CompressedRowSparseMatrix |
CreateBlockDiagonalMatrix(double[] diagonal,
java.util.Vector<java.lang.Integer> blocks) |
|
CeresSolver.CompressedRowSparseMatrix |
CreateRandomMatrix(CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions options) |
|
(package private) CeresSolver.WeightedGraph<java.lang.Integer> |
CreateSchurComplementGraph(java.util.Vector<java.util.HashSet<java.lang.Integer>> visibility) |
|
void |
CubicHermiteSpline(int kDataDimension,
double[] p0,
double[] p1,
double[] p2,
double[] p3,
double x,
double[] f,
double[] dfdx) |
|
CeresSolver.WeightedGraph<java.lang.Integer> |
Degree2MaximumSpanningForest(CeresSolver.WeightedGraph<java.lang.Integer> graph) |
|
double |
DotProduct(double[] a,
double[] b) |
|
void |
EulerAnglesToRotationMatrix(double[] euler,
double[] R) |
|
<Vertex> Vertex |
FindConnectedComponent(Vertex vertex,
java.util.HashMap<Vertex,Vertex> union_find) |
|
boolean |
fitToExternalFunction(double[] x,
double[] residuals,
double[][] jacobian) |
|
CeresSolver.CompressedRowSparseMatrix |
FromTripletSparseMatrix(CeresSolver.TripletSparseMatrix input) |
|
CeresSolver.CompressedRowSparseMatrix |
FromTripletSparseMatrix(CeresSolver.TripletSparseMatrix input,
boolean transpose) |
|
CeresSolver.CompressedRowSparseMatrix |
FromTripletSparseMatrixTransposed(CeresSolver.TripletSparseMatrix input) |
|
void |
MapValuesToContiguousRange(int[] array) |
|
double |
norm(double[] arg) |
|
void |
QuaternionToAngleAxis(double[] quaternion,
double[] angle_axis) |
|
void |
QuaternionToRotation(double[] q,
double[] R) |
|
void |
QuaternionToScaledRotation(double[] q,
double[] R) |
|
void |
RotationMatrixToAngleAxis(double[] R,
double[] angle_axis) |
|
void |
RotationMatrixToQuaternion(double[] R,
double[] quaternion) |
|
void |
SolveRTRWithSparseRHS(int num_cols,
int[] rows,
int[] cols,
double[] values,
int rhs_nonzero_index,
double[] solution) |
|
void |
SolveUpperTriangularInPlace(int num_cols,
int[] rows,
int[] cols,
double[] values,
double[] rhs_and_solution) |
|
void |
SolveUpperTriangularTransposeInPlace(int num_cols,
int[] rows,
int[] cols,
double[] values,
double[] rhs_and_solution) |
|
void |
ToDegrees(double[] euler_angles) |
|
void |
Transpose3x3(double[] m) |
|
void |
UnitQuaternionRotatePoint(double[] q,
double[] pt,
double[] result) |
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.CeresSolver
AppendArrayToString, ApplyOrdering, BuildResidualLayout, ComputeHouseholderVector, ComputeRecursiveIndependentSetOrdering, ComputeSchurOrdering, ComputeStableSchurOrdering, copyFunctionSample, Create, Create, Create, Create, Create, Create, Create, CreateDiagonalMatrix, CreateEvaluatorScratch, CreateGradientCheckingCostFunction, CreateGradientCheckingProblemImpl, CreateHessianGraph, CreateLinearLeastSquaresProblemFromId, CreateOrdering, createPartitionedMatrixView, CreatePreprocessor, CreateRandomMatrix, CreateRandomMatrix, createSchurEliminatorBase, CreateSparseDiagonalMatrix, DetectStructure, DifferentiatePolynomial, DumpLinearLeastSquaresProblem, DumpLinearLeastSquaresProblemToConsole, DumpLinearLeastSquaresProblemToTextFile, EigenQuaternionProduct, EvaluateCostFunction, EvaluateJacobianColumn, EvaluateJacobianForParameterBlock, EvaluateJacobianForParameterBlock, EvaluatePolynomial, EvaluateRiddersJacobianColumn, ExpectClose, FindInterpolatingPolynomial, FindInvalidValue, FindLinearPolynomialRoots, FindPolynomialRoots, FindQuadraticPolynomialRoots, FindWithDefault, FindWithDefault, GetBestSchurTemplateSpecialization, GradientProblemSolverOptionsToSolverOptions, IndependentSetOrdering, InvalidateArray, InvalidateArray, InvalidateArray, InvalidateArray, InvertPSDMatrix, IsArrayValid, IsArrayValid, IsArrayValid, IsArrayValid, IsClose, IsOrderingValid, IsSchurType, IsSolutionUsable, IsSolutionUsable, LexicographicallyOrderResidualBlocks, LinearLeastSquaresProblem0, LinearLeastSquaresProblem1, LinearLeastSquaresProblem2, LinearLeastSquaresProblem3, LinearLeastSquaresProblem4, LinearSolverForZeroEBlocks, LinearSolverTypeToString, LineSearchDirectionTypeToString, LineSearchInterpolationTypeToString, LineSearchTypeToString, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixMatrixMultiply, MatrixTransposeMatrixMultiply, MatrixTransposeVectorMultiply, MatrixVectorMultiply, MaybeReorderSchurComplementColumnsUsingEigen, MaybeReorderSchurComplementColumnsUsingSuiteSparse, Minimize, MinimizeInterpolatingPolynomial, MinimizePolynomial, MinParameterBlock, NonlinearConjugateGradientTypeToString, operator, PostSolveSummarize, PreconditionerForZeroEBlocks, PreconditionerTypeToString, QuaternionProduct, RandDouble, RandDouble, RandNormal, RemoveLeadingZeros, ReorderProgramForSchurTypeLinearSolver, RunCallbacks, SchurStructureToString, SetSummaryFinalCost, SetSummaryFinalCost, SetupCommonMinimizerOptions, Solve, Solve, StableIndependentSetOrdering, SummarizeReducedProgram, swap, TerminationTypeToString, TransposeForCompressedRowSparseStructure, Uniform, WriteArrayToFileOrDie, WriteStringToFileOrDie
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
CeresSolver2
public CeresSolver2()
-
Method Detail
-
CubicHermiteSpline
public void CubicHermiteSpline(int kDataDimension,
double[] p0,
double[] p1,
double[] p2,
double[] p3,
double x,
double[] f,
double[] dfdx)
-
CompressedColumnScalarMatrixToBlockMatrix
public void CompressedColumnScalarMatrixToBlockMatrix(int[] scalar_rows,
int[] scalar_cols,
java.util.Vector<java.lang.Integer> row_blocks,
java.util.Vector<java.lang.Integer> col_blocks,
java.util.Vector<java.lang.Integer> block_rows,
java.util.Vector<java.lang.Integer> block_cols)
-
SolveUpperTriangularInPlace
public void SolveUpperTriangularInPlace(int num_cols,
int[] rows,
int[] cols,
double[] values,
double[] rhs_and_solution)
-
SolveUpperTriangularTransposeInPlace
public void SolveUpperTriangularTransposeInPlace(int num_cols,
int[] rows,
int[] cols,
double[] values,
double[] rhs_and_solution)
-
SolveRTRWithSparseRHS
public void SolveRTRWithSparseRHS(int num_cols,
int[] rows,
int[] cols,
double[] values,
int rhs_nonzero_index,
double[] solution)
-
AddRandomBlock
public void AddRandomBlock(int num_rows,
int num_cols,
int row_block_begin,
int col_block_begin,
java.util.Vector<java.lang.Integer> rows,
java.util.Vector<java.lang.Integer> cols,
java.util.Vector<java.lang.Double> values)
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmPowerWatershed.RbtElt.html����������������������������������0000775�4231163�4231163�00000047224�14537076050�026122� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmPowerWatershed.RbtElt (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
-
Constructor Summary
Constructors
| Constructor |
Description |
RbtElt() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getAuxdata
public int getAuxdata()
-
getKey
public double getKey()
-
getColor
public byte getColor()
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/SIFTImageSimilarity.DMatch.html��������������������������������������0000775�4231163�4231163�00000025253�14537076056�025037� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
SIFTImageSimilarity.DMatch (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatch
-
-
Constructor Summary
Constructors
| Constructor |
Description |
DMatch() |
|
DMatch(int queryIdx,
int trainIdx,
int imgIdx,
double distance) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
distance
public double distance
-
trainIdx
public int trainIdx
-
queryIdx
public int queryIdx
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/KDTree.res_node.html�������������������������������������������������0000775�4231163�4231163�00000023756�14537076055�023041� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
KDTree.res_node (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.KDTree.res_node
-
-
Constructor Summary
Constructors
| Constructor |
Description |
res_node() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
res_node
public res_node()
������������������gov/nih/mipav/model/algorithms/ContourPlot.Renderable.html������������������������������������������0000775�4231163�4231163�00000027534�14537076054�024455� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.Renderable (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Abstract Methods Default Methods
| Modifier and Type |
Method |
Description |
boolean |
intersects(java.awt.geom.Rectangle2D rect) |
|
boolean |
isDirty() |
if true, indicates that a call to #updateGL(boolean) is necessary to sync
this objects GL resources to its current state.
|
default boolean |
isHidden() |
Indicates whether this Renderable is hidden i.e. will not be drawn.
|
��������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.EvaluateOptions.html�������������������������������������0000775�4231163�4231163�00000026007�14537076051�025467� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.EvaluateOptions (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.EvaluateOptions
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
num_threads
public int num_threads
-
Constructor Detail
-
EvaluateOptions
public EvaluateOptions()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/ContourPlot.JPlotterCanvas.html��������������������������������������0000775�4231163�4231163�00000064073�14537076054�025310� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ContourPlot.JPlotterCanvas (MIPAV API Documentation)
-
-
Method Detail
-
toImg
ContourPlot.Img toImg()
Fetches the current contents of the framebuffer and returns them as an
ContourPlot.Img.
- Returns:
- image of the current framebuffer.
-
paintToPDF
default void paintToPDF(org.apache.pdfbox.pdmodel.PDDocument document,
org.apache.pdfbox.pdmodel.PDPage page,
int w,
int h)
- Parameters:
document - PDF document holding the pagepage - page in the document to create PDF elements inw - width of the pageh - height of the page
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/LIBSVM.Solver.html���������������������������������������������������0000775�4231163�4231163�00000062737�14537076055�022375� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
LIBSVM.Solver (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int[] |
active_set |
|
(package private) int |
active_size |
|
(package private) double[] |
alpha |
|
(package private) byte[] |
alpha_status |
|
(package private) double |
Cn |
|
(package private) double |
Cp |
|
(package private) double |
eps |
|
(package private) byte |
FREE |
|
(package private) double[] |
G |
|
(package private) double[] |
G_bar |
|
(package private) double |
INF |
|
(package private) int |
l |
|
(package private) byte |
LOWER_BOUND |
|
(package private) double[] |
p |
|
(package private) LIBSVM.QMatrix |
Q |
|
(package private) double[] |
QD |
|
(package private) boolean |
unshrink |
|
(package private) byte |
UPPER_BOUND |
|
(package private) byte[] |
y |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
Solver() |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private boolean |
be_shrunk(int i,
double Gmax1,
double Gmax2) |
|
(package private) double |
calculate_rho() |
|
(package private) void |
do_shrinking() |
|
(package private) double |
get_C(int i) |
|
(package private) boolean |
is_free(int i) |
|
(package private) boolean |
is_lower_bound(int i) |
|
(package private) boolean |
is_upper_bound(int i) |
|
(package private) void |
reconstruct_gradient() |
|
(package private) int |
select_working_set(int[] working_set) |
|
(package private) void |
Solve(int l,
LIBSVM.QMatrix Q,
double[] p_,
byte[] y_,
double[] alpha_,
double Cp,
double Cn,
double eps,
LIBSVM.Solver.SolutionInfo si,
int shrinking) |
|
(package private) void |
swap_index(int i,
int j) |
|
(package private) void |
update_alpha_status(int i) |
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
active_size
int active_size
-
alpha_status
byte[] alpha_status
-
active_set
int[] active_set
-
unshrink
boolean unshrink
-
Method Detail
-
get_C
double get_C(int i)
-
is_free
boolean is_free(int i)
-
do_shrinking
void do_shrinking()
-
calculate_rho
double calculate_rho()
���������������������������������gov/nih/mipav/model/algorithms/CeresSolverTest.BinaryCostFunction.html������������������������������0000775�4231163�4231163�00000033273�14537076053�026775� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverTest.BinaryCostFunction (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
BinaryCostFunction(int num_residuals,
int parameter_block1_size,
int parameter_block2_size) |
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver2.StorageType.html����������������������������������������0000775�4231163�4231163�00000035215�14537076052�024677� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver2.StorageType (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
StorageType() |
|
-
Method Summary
-
Methods inherited from class java.lang.Enum
clone, compareTo, equals, finalize, getDeclaringClass, hashCode, name, ordinal, toString, valueOf
-
Methods inherited from class java.lang.Object
getClass, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
StorageType
private StorageType()
-
Method Detail
-
valueOf
public static CeresSolver2.StorageType valueOf(java.lang.String name)
Returns the enum constant of this type with the specified name.
The string must match exactly an identifier used to declare an
enum constant in this type. (Extraneous whitespace characters are
not permitted.)
- Parameters:
name - the name of the enum constant to be returned.- Returns:
- the enum constant with the specified name
- Throws:
java.lang.IllegalArgumentException - if this enum type has no constant with the specified namejava.lang.NullPointerException - if the argument is null
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/Covdet.VlFrameEllipse.html�������������������������������������������0000775�4231163�4231163�00000025041�14537076054�024207� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Covdet.VlFrameEllipse (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.Covdet.VlFrameEllipse
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) float |
e11 |
< center y-coordinate
|
(package private) float |
e12 |
<
|
(package private) float |
e22 |
|
(package private) float |
x |
|
(package private) float |
y |
< center x-coordinate
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
y
float y
< center x-coordinate
-
e11
float e11
< center y-coordinate
-
Constructor Detail
-
VlFrameEllipse
VlFrameEllipse()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmASM.TData.html����������������������������������������������0000775�4231163�4231163�00000023262�14537076043�023376� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmASM.TData (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmASM.TData
-
-
Constructor Summary
Constructors
| Constructor |
Description |
TData() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
offsetv
public double[] offsetv
-
offsetr
public double offsetr
-
offsets
public double offsets
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmBRISK.BriskLongPair.html������������������������������������0000775�4231163�4231163�00000035323�14537076044�025343� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmBRISK.BriskLongPair (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
weighted_dx
private int weighted_dx
-
weighted_dy
private int weighted_dy
-
Constructor Detail
-
BriskLongPair
public BriskLongPair()
-
Method Detail
-
setI
public void setI(int i)
-
setJ
public void setJ(int j)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmMorphology2D.html�������������������������������������������0000775�4231163�4231163�00000324017�14537076047�024315� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmMorphology2D (MIPAV API Documentation)
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
private class |
AlgorithmMorphology2D.intObject |
Simple class to temporarily store the object's size, ID and seed index value.
|
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
AlgorithmMorphology2D() |
|
AlgorithmMorphology2D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int kernelTypeErode,
float circleDiameterErode,
int method,
int iterErodeDilate,
int iterE,
int pruningPix,
int edType,
boolean entireImage,
boolean _showFrame) |
Creates a new AlgorithmMorphology2D object.
|
AlgorithmMorphology2D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage) |
Creates a new AlgorithmMorphology2D object.
|
AlgorithmMorphology2D(ModelImage srcImg,
ModelImage maskImage,
int kernelType,
float circleDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage,
boolean _showFrame) |
Creates a new AlgorithmMorphology2D object.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
backgroundDistanceMap(boolean returnFlag) |
Euclidian distance map of the background.
|
private void |
borderClearing(boolean returnFlag) |
Removes objects that touch (i.e., are connected to) the border
|
private void |
deleteObjects(int min,
int max,
boolean returnFlag) |
Deletes objects larger than maximum size indicated and objects smaller than the indicated minimum size.
|
private void |
dilate(boolean returnFlag,
int iters) |
Dilates a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
distanceMap(boolean returnFlag) |
Euclidian distance map.
|
private void |
distanceMapForShapeInterpolation(boolean returnFlag) |
|
private void |
erode(boolean returnFlag,
int iters) |
Erodes a boolean or unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
fillHoles(boolean returnFlag) |
Fill the holes inside the cell region blocks.
|
private void |
fillHolesRegion(int stIndex,
short floodValue,
short objValue) |
2D flood fill that fill the holes insize the cell region block.
|
void |
finalize() |
Prepares this class for destruction.
|
private void |
findEdges(int edgingType,
boolean returnFlag) |
Finds the edges of the objects in an image.
|
private int |
floodFill(short[] idBuffer,
int stIndex,
short floodValue,
short objValue) |
2D flood fill that forms a short mask.
|
static java.awt.Polygon |
genContour(int xDimE,
int yDimE,
java.awt.Point startPt,
java.util.BitSet maskA) |
Static method that generates a boundary of a general object.
|
static java.awt.Polygon |
genContour(short[] image,
int xDim,
int yDim,
java.awt.Point startPt,
short objectValue) |
Static method that generates a boundary of a general object.
|
static java.awt.Polygon |
genContour(ModelImage image,
int xDim,
int yDim,
java.awt.Point startPt) |
Static method that generates a boundary of a binary object.
|
static java.awt.Polygon |
genContour(java.util.BitSet image,
int xDim,
int yDim,
java.awt.Point startPt) |
Static method that generates a boundary of a binary object.
|
private void |
geodesicDilation(boolean returnFlag,
int geodesicSize) |
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
private void |
geodesicErosion(boolean returnFlag,
int geodesicSize) |
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
|
void |
identifyObjects(boolean returnFlag) |
Labels each object in an image with a different integer value.
|
private boolean |
isEndpoint(int pix,
short[] tmpBuffer) |
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
|
private boolean |
isNeighbor(int index,
int pixNeighbor) |
Check the neighbor pix.
|
private boolean |
isSinglePoint(int index,
short[] tmpBuffer) |
Check if the given pix is a single point or not.
|
private void |
makeCircularKernel(float circDiameter) |
Generates a cicular kernel of a specific diameter.
|
private void |
makeKernel(int kernelType) |
Generates a kernel of the indicated type.
|
private boolean |
onePixel(short[] buffer,
int index,
int xDim) |
Used by ultimate erode to simplify code a little.
|
private void |
particleAnalysis() |
DOCUMENT ME!
|
private void |
particleAnalysisNew(boolean returnFlag) |
particleAnalysis = Ult erode & (bg dist map AND orig image) => watershed(ultErodePts, ANDED Bg Dist) =>
IDobjects.
|
void |
prune(int iter,
boolean returnFlag) |
This method is to be applied on skeletonized images: it removes all branches which are iter or less pixels in
length.
|
void |
pruneAuto(boolean returnFlag) |
This method is to be applied on skeletonized images: it skeletonized each branches into a point.
|
void |
runAlgorithm() |
Starts the program.
|
void |
runGeodesicDilationTest() |
|
void |
runGeodesicErosionTest() |
|
void |
runMorphologicalReconstructionByDilationTest() |
|
void |
setAlgorithm(int method) |
Sets the algorithm type (i.e. erode, dilate)
|
void |
setImage(ModelImage img) |
Sets the algorithm to new image of boolean type.
|
void |
setIterations(int itersD,
int itersE) |
Sets number of iterations for closing or opening.
|
void |
setKernel(java.util.BitSet kernel,
int dim) |
Sets user defined square kernels.
|
void |
setMinMax(int _min,
int _max) |
Sets bounds of object size used to delete objects.
|
void |
setPixDistance(float dist) |
Used in the ultimate erode function to remove all eroded points less than the distance specified in pixel units.
|
void |
setShowFrame(boolean showFrame) |
DOCUMENT ME!
|
void |
showKernel() |
display kernel as 1 or 0 in the debug window.
|
void |
skeletonize(int pruningPixels,
boolean returnFlag) |
Skeletonizes the image by using a lookup table to repeatedly remove pixels from the edges of objects in a binary
image, reducing them to single pixel wide skeletons.
|
private int |
thin(int pass,
int[] table) |
This a thinning algorithm used to do half of one layer of thinning (which layer is dictated by whether pass is
even or odd).
|
private void |
ultimateErode(boolean returnFlag) |
Ultimate erodes objects down to a single pixel (almost).
|
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
edgingType
private int edgingType
Edge type.
-
entireImage
private boolean entireImage
if true, indicates that the VOIs should NOT be used and that entire image should be processed.
-
iterationsE
private int iterationsE
Erosion iteration times.
-
kDim
private int kDim
Kernel dimension.
-
pixDist
private float pixDist
DOCUMENT ME!
-
maskImage
private ModelImage maskImage
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
-
Constructor Detail
-
AlgorithmMorphology2D
public AlgorithmMorphology2D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int method,
int iterD,
int iterE,
int pruningPix,
int edType,
boolean entireImage)
Creates a new AlgorithmMorphology2D object.
- Parameters:
srcImg - source image modelkernelType - kernel size (i.e. connectedness)circleDiameter - only valid if kernelType == SIZED_CIRCLE and represents the width of a circle in the
resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)iterD - number of times to dilateiterE - number of times to erodepruningPix - the number of pixels to pruneedType - the type of edging to perform (inner or outer)entireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed
-
AlgorithmMorphology2D
public AlgorithmMorphology2D(ModelImage srcImg,
int kernelType,
float circleDiameter,
int kernelTypeErode,
float circleDiameterErode,
int method,
int iterErodeDilate,
int iterE,
int pruningPix,
int edType,
boolean entireImage,
boolean _showFrame)
Creates a new AlgorithmMorphology2D object.
- Parameters:
srcImg - source image modelkernelType - dilation kernel size (i.e. connectedness)circleDiameter - dilation only valid if kernelType == SIZED_CIRCLE and represents the width of a
circle in the resolution of the imagekernelTypeErode - kernel size (i.e. connectedness) of erosioncircleDiameterErode - Erosion only valid if kernelType == SIZED_CIRCLE and represents the width of a
circle in the resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)iterErodeDilate - number of times to erode and dilateiterE - number of times to erodepruningPix - the number of pixels to pruneedType - the type of edging to perform (inner or outer)entireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed_showFrame - if true, indicates that show image frame after each algorithm be processed
-
AlgorithmMorphology2D
public AlgorithmMorphology2D(ModelImage srcImg,
ModelImage maskImage,
int kernelType,
float circleDiameter,
int method,
int geodesicSize,
int iterD,
int iterE,
boolean entireImage,
boolean _showFrame)
Creates a new AlgorithmMorphology2D object.
- Parameters:
srcImg - source image modelkernelType - dilation kernel size (i.e. connectedness)circleDiameter - dilation only valid if kernelType == SIZED_CIRCLE and represents the width of a
circle in the resolution of the imagemethod - setup the algorithm method (i.e. erode, dilate)geodesicSize - iterD - number of times to dilateiterE - number of times to erodeentireImage - if true, indicates that the VOIs should NOT be used and that entire image should be
processed_showFrame - if true, indicates that show image frame after each algorithm be processed
-
Method Detail
-
genContour
public static final java.awt.Polygon genContour(java.util.BitSet image,
int xDim,
int yDim,
java.awt.Point startPt)
Static method that generates a boundary of a binary object. (aka. turtle algorithm: if 1 turn left, step if 0
turn right, step)
- Parameters:
image - input image where binary object is located.xDim - the x dimension of the imageyDim - the y dimension of the imagestartPt - starting point- Returns:
- returns boundary of the object as Polygon
-
genContour
public static final java.awt.Polygon genContour(ModelImage image,
int xDim,
int yDim,
java.awt.Point startPt)
Static method that generates a boundary of a binary object. (aka. turtle algorithm: if 1 turn left, step if 0
turn right, step)
- Parameters:
image - input image (Boolean) where binary object is located.xDim - the x dimension of the imageyDim - the y dimension of the imagestartPt - starting point- Returns:
- returns boundary of the object as Polygon
-
genContour
public static final java.awt.Polygon genContour(int xDimE,
int yDimE,
java.awt.Point startPt,
java.util.BitSet maskA)
Static method that generates a boundary of a general object. (aka. turtle algorithm: if 1 turn left, step if 0
turn right, step)
- Parameters:
xDimE - the x dimension of the imageyDimE - the y dimension of the imagestartPt - starting pointmaskA - mask of the object- Returns:
- returns boundary of the object as Polygon
-
genContour
public static final java.awt.Polygon genContour(short[] image,
int xDim,
int yDim,
java.awt.Point startPt,
short objectValue)
Static method that generates a boundary of a general object. (aka. turtle algorithm: if 1 turn left, step if 0
turn right, step)
- Parameters:
image - input image where <> object is located.xDim - the x dimension of the imageyDim - the y dimension of the imagestartPt - starting pointobjectValue - value of the object- Returns:
- returns boundary of the object as Polygon
-
prune
public void prune(int iter,
boolean returnFlag)
This method is to be applied on skeletonized images: it removes all branches which are iter or less pixels in
length.
- Parameters:
iter - the threshold number of pixels for the maximum length of a removed branch to bereturnFlag - if true then this operation is a step in the morph process (i.e. close)
-
skeletonize
public void skeletonize(int pruningPixels,
boolean returnFlag)
Skeletonizes the image by using a lookup table to repeatedly remove pixels from the edges of objects in a binary
image, reducing them to single pixel wide skeletons. Based on a thinning algorithm by Zhang and Suen. There is an
entry in the table for each of the 256 possible 3x3 neighborhood configurations. An entry of '1' signifies to
delete the indicated pixel on the first pass, '2' means to delete the indicated pixel on the second pass, and '3'
indicates to delete the pixel on either pass.
- Parameters:
pruningPixels - the number of pixels to prune after skeletonizing. (should be 0 if no pruning is to be
done)returnFlag - if true then this operation is a step in the morph process (i.e. close)
-
deleteObjects
private void deleteObjects(int min,
int max,
boolean returnFlag)
Deletes objects larger than maximum size indicated and objects smaller than the indicated minimum size.
- Parameters:
min - delete all objects smaller than the minimum value (pixels)max - delete all objects greater than the maximum value (pixels)returnFlag - if true then this operation is a step in the morph process (i.e. close)
-
borderClearing
private void borderClearing(boolean returnFlag)
Removes objects that touch (i.e., are connected to) the border
- Parameters:
returnFlag -
-
dilate
private void dilate(boolean returnFlag,
int iters)
Dilates a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)iters - number of dilations
-
geodesicDilation
private void geodesicDilation(boolean returnFlag,
int geodesicSize)
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
geodesicErosion
private void geodesicErosion(boolean returnFlag,
int geodesicSize)
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. close)geodesicSize -
-
erode
private void erode(boolean returnFlag,
int iters)
Erodes a boolean or unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- Parameters:
returnFlag - if true then this operation is a step in the morph process (i.e. open)iters - number of erosion iterations.
-
fillHolesRegion
private void fillHolesRegion(int stIndex,
short floodValue,
short objValue)
2D flood fill that fill the holes insize the cell region block.
- Parameters:
stIndex - the starting index of the seed pointfloodValue - the value to flood the region withobjValue - object ID value that idenditifies the flood region.
-
findEdges
private void findEdges(int edgingType,
boolean returnFlag)
Finds the edges of the objects in an image.
- Parameters:
edgingType - DOCUMENT ME!returnFlag - if true then this operation is a step in the morph process (i.e. close)
-
floodFill
private int floodFill(short[] idBuffer,
int stIndex,
short floodValue,
short objValue)
2D flood fill that forms a short mask.
- Parameters:
idBuffer - buffer used to hold flood valuestIndex - the starting index of the seed pointfloodValue - the value to flood the region withobjValue - object ID value that idenditifies the flood region.- Returns:
- DOCUMENT ME!
-
isEndpoint
private boolean isEndpoint(int pix,
short[] tmpBuffer)
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
- Parameters:
pix - the index of a non-zero pixel in tmpBuffertmpBuffer - the image- Returns:
- DOCUMENT ME!
-
isSinglePoint
private boolean isSinglePoint(int index,
short[] tmpBuffer)
Check if the given pix is a single point or not.
- Parameters:
index - indextmpBuffer - short[]- Returns:
- boolean
-
onePixel
private boolean onePixel(short[] buffer,
int index,
int xDim)
Used by ultimate erode to simplify code a little.
- Parameters:
buffer - reference to the mask dataindex - pointer into the arrayxDim - the width of image- Returns:
- DOCUMENT ME!
-
particleAnalysisNew
private void particleAnalysisNew(boolean returnFlag)
particleAnalysis = Ult erode & (bg dist map AND orig image) => watershed(ultErodePts, ANDED Bg Dist) =>
IDobjects.
- Parameters:
returnFlag - DOCUMENT ME!
-
thin
private int thin(int pass,
int[] table)
This a thinning algorithm used to do half of one layer of thinning (which layer is dictated by whether pass is
even or odd).
- Parameters:
pass - the number pass this execution is on the imagetable - the table to lookup whether to delete the pixel or let it stay.- Returns:
- DOCUMENT ME!
-
ultimateErode
private void ultimateErode(boolean returnFlag)
Ultimate erodes objects down to a single pixel (almost). Sometimes depending on the shape of the object (bar
bell) more than a single point. Most likely a good situation.
- Parameters:
returnFlag - if true then this operation is a step in the morph process
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmTreT1.CalculateT1.html��������������������������������������0000775�4231163�4231163�00000031632�14537076050�025020� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmTreT1.CalculateT1 (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.SoftLOneLoss.html����������������������������������������0000775�4231163�4231163�00000030003�14537076052�024667� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.SoftLOneLoss (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private double |
b_ |
|
private double |
c_ |
|
-
Constructor Summary
Constructors
| Constructor |
Description |
SoftLOneLoss(double a) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolverNISTTest.BoxBODCostFunction.html��������������������������0000775�4231163�4231163�00000034023�14537076052�027315� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolverNISTTest.BoxBODCostFunction (MIPAV API Documentation)
-
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians) |
|
boolean |
Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset) |
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
Evaluate
public boolean Evaluate(java.util.Vector<double[]> parameters,
double[] residuals,
double[][] jacobians,
int[] jacobians_offset)
- Overrides:
Evaluate in class CeresSolver.CostFunction
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/CeresSolver.Cell.html������������������������������������������������0000775�4231163�4231163�00000023347�14537076051�023230� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
CeresSolver.Cell (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.algorithms.CeresSolver.Cell
-
-
Constructor Summary
Constructors
| Constructor |
Description |
Cell() |
|
Cell(int block_id_,
int position_) |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
block_id
public int block_id
-
position
public int position
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/algorithms/AlgorithmHillClimbingWatershed.html����������������������������������0000775�4231163�4231163�00000063273�14537076046�026177� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
AlgorithmHillClimbingWatershed (MIPAV API Documentation)
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
destFlag, destImage, image25D, mask, maxProgressValue, minProgressValue, multiThreadingEnabled, nthreads, progress, progressModulus, progressStep, runningInSeparateThread, separable, srcImage, threadStopped
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.algorithms.AlgorithmBase
actionPerformed, addListener, addProgressChangeListener, calculateImageSize, calculatePrincipleAxis, computeElapsedTime, computeElapsedTime, convertIntoFloat, delinkProgressToAlgorithm, delinkProgressToAlgorithmMulti, displayError, errorCleanUp, finalize, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, fireProgressStateChanged, generateProgressValues, getDestImage, getElapsedTime, getMask, getMaxProgressValue, getMinProgressValue, getNumberOfThreads, getProgress, getProgressChangeListener, getProgressChangeListeners, getProgressModulus, getProgressStep, getProgressValues, getSrcImage, isCompleted, isImage25D, isMultiThreadingEnabled, isRunningInSeparateThread, isThreadStopped, linkProgressToAlgorithm, linkProgressToAlgorithm, makeProgress, notifyListeners, removeListener, removeProgressChangeListener, run, setCompleted, setImage25D, setMask, setMaxProgressValue, setMinProgressValue, setMultiThreadingEnabled, setNumberOfThreads, setProgress, setProgressModulus, setProgressStep, setProgressValues, setProgressValues, setRunningInSeparateThread, setSrcImage, setStartTime, setThreadStopped, startMethod, windowActivated, windowClosed, windowClosing, windowDeactivated, windowDeiconified, windowIconified, windowOpened
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
numNeighbor
private int numNeighbor
-
binNumber
private int binNumber
-
merge
private boolean merge
-
Constructor Detail
-
AlgorithmHillClimbingWatershed
public AlgorithmHillClimbingWatershed(ModelImage destImage,
ModelImage srcImage,
int numNeighbor,
boolean limitBins,
int binNumber,
boolean merge,
double mergeThreshold)
-
Method Detail
-
run2D
public void run2D()
-
run3D
public void run3D()
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/provenance/���������������������������������������������������������������������0002775�4231163�4231163�00000000000�14537076122�017204� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/provenance/ProvenanceChangeListener.html����������������������������������������0000775�4231163�4231163�00000021163�14537076070�025014� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ProvenanceChangeListener (MIPAV API Documentation)
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/provenance/ProvenanceEntry.html�������������������������������������������������0000775�4231163�4231163�00000076526�14537076070�023237� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ProvenanceEntry (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.lang.String |
action |
action describing the event
|
private java.lang.String |
architecture |
|
private java.lang.String |
compilerVersion |
java's version
|
private java.lang.String |
hostName |
the machine host name
|
private java.lang.String |
mipavBuild |
probably unused
|
private java.lang.String |
mipavInputs |
mipav cmd line arguments
|
private java.lang.String |
mipavOutputs |
probably unused
|
private java.lang.String |
mipavVersion |
mipav's version
|
private java.lang.String |
platform |
the name of the operating system
|
private java.lang.String |
platformVersion |
the operating system's version
|
private java.lang.String |
programName |
|
private java.lang.String |
timeStamp |
The timestamp
|
private java.lang.String |
user |
the user name
|
-
Method Summary
-
Methods inherited from class java.lang.Object
equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
ProvenanceEntry
public ProvenanceEntry()
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/provenance/ProvenanceHolder.html������������������������������������������������0000775�4231163�4231163�00000042534�14537076070�023343� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ProvenanceHolder (MIPAV API Documentation)
- java.lang.Object
-
- java.util.AbstractCollection<E>
-
- java.util.AbstractList<E>
-
- java.util.Vector<ProvenanceEntry>
-
- gov.nih.mipav.model.provenance.ProvenanceHolder
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private javax.swing.event.EventListenerList |
listenerList |
A list of the ChangeListeners which are interested in the ChangeEvent.
|
-
Fields inherited from class java.util.Vector
capacityIncrement, elementCount, elementData
-
Fields inherited from class java.util.AbstractList
modCount
-
Method Summary
-
Methods inherited from class java.util.Vector
add, add, addAll, addAll, capacity, clear, contains, containsAll, copyInto, elementAt, elements, ensureCapacity, equals, firstElement, forEach, get, hashCode, indexOf, indexOf, insertElementAt, isEmpty, iterator, lastElement, lastIndexOf, lastIndexOf, listIterator, listIterator, remove, remove, removeAll, removeAllElements, removeElement, removeElementAt, removeIf, removeRange, replaceAll, retainAll, set, setElementAt, setSize, size, sort, spliterator, subList, toArray, toArray, toString, trimToSize
-
Methods inherited from class java.lang.Object
finalize, getClass, notify, notifyAll, wait, wait, wait
-
Methods inherited from interface java.util.Collection
parallelStream, stream, toArray
��������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/provenance/ProvenanceChangeEvent.html�������������������������������������������0000775�4231163�4231163�00000031061�14537076070�024306� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ProvenanceChangeEvent (MIPAV API Documentation)
- java.lang.Object
-
- java.util.EventObject
-
- javax.swing.event.ChangeEvent
-
- gov.nih.mipav.model.provenance.ProvenanceChangeEvent
-
-
Field Summary
-
Fields inherited from class java.util.EventObject
source
-
Method Summary
-
Methods inherited from class java.util.EventObject
getSource, toString
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/provenance/package-tree.html����������������������������������������������������0000775�4231163�4231163�00000015723�14537076122�022433� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.provenance Class Hierarchy (MIPAV API Documentation)
Class Hierarchy
- java.lang.Object
- java.util.AbstractCollection<E> (implements java.util.Collection<E>)
- java.util.AbstractList<E> (implements java.util.List<E>)
- java.util.Vector<E> (implements java.lang.Cloneable, java.util.List<E>, java.util.RandomAccess, java.io.Serializable)
- java.util.EventObject (implements java.io.Serializable)
- javax.swing.event.ChangeEvent
- gov.nih.mipav.model.structures.ModelSerialCloneable (implements java.lang.Cloneable, java.io.Serializable)
- gov.nih.mipav.model.provenance.ProvenanceRecorder
���������������������������������������������gov/nih/mipav/model/provenance/package-summary.html�������������������������������������������������0000775�4231163�4231163�00000016157�14537076122�023173� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.provenance (MIPAV API Documentation)
-
Interface Summary
| Interface |
Description |
| ProvenanceChangeListener |
Used by JDialogDataProvenance to display changes in the provenanceholder (when entries are added)
|
-
Class Summary
| Class |
Description |
| ProvenanceChangeEvent |
Provenance Change event for listeners to update (jtable provenance viewing)
|
| ProvenanceEntry |
|
| ProvenanceHolder |
Class that stores matrices (owned by ModelImage) with accessor functions to the matrix map/adding and changing
matrices.
|
| ProvenanceRecorder |
Singleton class modelled after ScriptRecorder that is turned on when Mipav starts if
DATA_PROVENANCE boolean is set to true in preferences (set through Mipav-Options)
Records data provenance line by line (after running algorithms or doing other important actions (Change name) etc
images are placed in registers (similar to the script recorder) but there are also Vectors of input and output images
so that the data provenance is placed into the correct place(s)
|
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/provenance/ProvenanceRecorder.html����������������������������������������������0000775�4231163�4231163�00000072755�14537076070�023703� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ProvenanceRecorder (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.provenance.ProvenanceRecorder
-
public class ProvenanceRecorder
extends java.lang.Object
Singleton class modelled after ScriptRecorder that is turned on when Mipav starts if
DATA_PROVENANCE boolean is set to true in preferences (set through Mipav-Options)
Records data provenance line by line (after running algorithms or doing other important actions (Change name) etc
images are placed in registers (similar to the script recorder) but there are also Vectors of input and output images
so that the data provenance is placed into the correct place(s)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected ImageVariableTable |
imageTable |
The table containing image-placeholder-to-image-name mappings for the script we are currently recording.
|
protected java.util.Vector<java.lang.String> |
inputImages |
Vector of Strings holding the registers of images used as input
|
protected static java.lang.String |
LINE_SEPARATOR |
The line separator to use for scripts.
|
protected java.util.Vector<java.lang.String> |
outputImages |
Vector of Strings holding the registers of images used as output
|
static int |
PAUSED |
Status indicating that the script recorder is currently paused.
|
protected int |
recorderStatus |
The current status of the recorder, either PAUSED, RECORDING, or STOPPED.
|
static int |
RECORDING |
Status indicating that the script recorder is currently recording.
|
protected java.util.Vector |
recordingListeners |
A list of listeners who want to know about lines added to the script.
|
protected static ProvenanceRecorder |
singletonReference |
The reference to the only occurrance of this class.
|
static java.lang.String[] |
statusStrings |
Strings describing the various recorder statuses.
|
static int |
STOPPED |
Status indicating that the script recorder is currently stopped (either never started, or recording is over).
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
protected |
ProvenanceRecorder() |
Creates a new ProvenanceRecorder object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
STOPPED
public static final int STOPPED
Status indicating that the script recorder is currently stopped (either never started, or recording is over).
- See Also:
- Constant Field Values
-
recorderStatus
protected int recorderStatus
The current status of the recorder, either PAUSED, RECORDING, or STOPPED.
-
Method Detail
-
addLine
public void addLine(java.lang.String action,
ParameterTable parameterList)
Appends a line of text to the current script (if one is being recorded) using a script action and list of parameters.
- Parameters:
action - The action to put into the new script line.parameterList - The list of parameters to include in the new script line.
-
startRecording
public boolean startRecording()
Starts the recording of a new script (if one isn't already being recorded). Any script text which was
previously recorded and stored in the recorder is erased (unless we are resuming from a recorder pause).
- Returns:
True if recording was started successfully, false otherwise.
�������������������gov/nih/mipav/model/provenance/actions/�������������������������������������������������������������0002775�4231163�4231163�00000000000�14537076122�020644� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/provenance/actions/ActionStartMipav.html����������������������������������������0000775�4231163�4231163�00000040463�14537076070�024774� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ActionStartMipav (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/provenance/actions/ActionOpenImage.html�����������������������������������������0000775�4231163�4231163�00000042370�14537076070�024545� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ActionOpenImage (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
ActionOpenImage(ModelImage input) |
Constructor used to record the provenance action line
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/provenance/actions/package-tree.html��������������������������������������������0000775�4231163�4231163�00000014605�14537076122�024071� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.provenance.actions Class Hierarchy (MIPAV API Documentation)
���������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/provenance/actions/package-summary.html�����������������������������������������0000775�4231163�4231163�00000013776�14537076122�024637� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.provenance.actions (MIPAV API Documentation)
-
Class Summary
| Class |
Description |
| ActionOpenImage |
An action for the mipav system data provenance that records the opening of an image
|
| ActionStartMipav |
An action for the mipav system data provenance that records the starting of MIPAV
|
| ActionStopMipav |
An action for the mipav system data provenance that records the closing of MIPAV
|
��gov/nih/mipav/model/provenance/actions/ActionStopMipav.html�����������������������������������������0000775�4231163�4231163�00000033721�14537076070�024623� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ActionStopMipav (MIPAV API Documentation)
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
ActionStopMipav
public ActionStopMipav()
�����������������������������������������������gov/nih/mipav/model/package-tree.html���������������������������������������������������������������0000775�4231163�4231163�00000013640�14537076122�020267� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model Class Hierarchy (MIPAV API Documentation)
������������������������������������������������������������������������������������������������gov/nih/mipav/model/package-summary.html������������������������������������������������������������0000775�4231163�4231163�00000013650�14537076122�021026� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model (MIPAV API Documentation)
����������������������������������������������������������������������������������������gov/nih/mipav/model/KernelFactory.html��������������������������������������������������������������0000775�4231163�4231163�00000017553�14537076043�020520� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
KernelFactory (MIPAV API Documentation)
-
-
Method Detail
-
createKernel
Kernel createKernel()
�����������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/����������������������������������������������������������������������0002775�4231163�4231163�00000000000�14537076122�017013� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_ObjectList.html�������������������������������������������������0000775�4231163�4231163�00000036534�14537076061�022674� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_ObjectList (MIPAV API Documentation)
- java.lang.Object
-
- java.util.AbstractCollection<E>
-
- java.util.AbstractList<E>
-
- java.util.Vector
-
- gov.nih.mipav.model.dicomcomm.DICOM_ObjectList
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private static long |
serialVersionUID |
Use serialVersionUID for interoperability.
|
-
Fields inherited from class java.util.Vector
capacityIncrement, elementCount, elementData
-
Fields inherited from class java.util.AbstractList
modCount
-
Method Summary
-
Methods inherited from class java.util.Vector
add, add, addAll, addAll, addElement, capacity, clear, clone, contains, containsAll, copyInto, elementAt, elements, ensureCapacity, equals, firstElement, forEach, get, hashCode, indexOf, indexOf, insertElementAt, isEmpty, iterator, lastElement, lastIndexOf, lastIndexOf, listIterator, listIterator, remove, remove, removeAll, removeAllElements, removeElement, removeElementAt, removeIf, removeRange, replaceAll, retainAll, set, setElementAt, setSize, size, sort, spliterator, subList, toArray, toArray, toString, trimToSize
-
Methods inherited from class java.lang.Object
finalize, getClass, notify, notifyAll, wait, wait, wait
-
Methods inherited from interface java.util.Collection
parallelStream, stream, toArray
��������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_PDUTypeBase.html������������������������������������������������0000775�4231163�4231163�00000122215�14537076061�022707� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_PDUTypeBase (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
itemType
protected byte itemType
DOCUMENT ME!
-
length
protected int length
DOCUMENT ME!
-
reserved1
protected byte reserved1
DOCUMENT ME!
-
reserved2
protected byte reserved2
DOCUMENT ME!
-
reserved3
protected byte reserved3
DOCUMENT ME!
-
reserved4
protected byte reserved4
DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_AAssociateAC.html�����������������������������������������������0000775�4231163�4231163�00000064623�14537076061�023052� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_AAssociateAC (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved4, UID
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_AAssociateAC() |
Creates a new DICOM_AAssociateAC object.
|
-
Method Summary
-
Methods inherited from class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
addPresentationContext, clearPresentationContexts, getApplicationContext, getCalledAppTitle, getCallingAppTitle, getPresentationContextFromID, getPresentationContextID, getPresentationContextID, getPresentationContexts, getUserInformation, setApplicationContext, setApplicationContextUID, setCalledAppTitle, setCallingAppTitle, setUserInformation
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Object.html�����������������������������������������������������0000775�4231163�4231163�00000062152�14537076061�022033� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Object (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_Object
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
private class |
DICOM_Object.GroupElements |
Simple extension of the Hastable for use a GroupElements object.
|
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected java.util.Hashtable |
groups |
A hash table of the DICOM groups
|
private boolean |
popGroupLength |
Flag used to support processing of GroupLength tags (XXXX, 0000)
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
clear() |
Removes all VRs from hash table.
|
DICOM_Object |
copy() |
Makes a deep copy of the DICOM_DataObject.
|
void |
finalize() |
|
int |
getInt16(int ddType) |
Retrieves an integer (16 bit) value from a DICOM object.
|
java.lang.String |
getStr(int ddType) |
Retrieves a string value from a DICOM object.
|
private DICOM_VR |
getVR(int grp,
int elem) |
Gets the value representation.
|
java.lang.String |
getVRString(int group,
int element) |
Returns the string representation of the VR.
|
static int |
makeEven(int length) |
Makes length even.
|
DICOM_VR |
pop() |
Pops a VR of the list.
|
void |
push(DICOM_VR vr) |
Adds DICOM_VR to this list (object).
|
void |
setInt16(int ddType,
int val) |
Sets an integer (16 bit) value in a DICOM object.
|
void |
setStr(int ddType,
java.lang.String s) |
Sets a string value in a DICOM object.
|
java.lang.String |
toString() |
Used for DICOM data objects.
|
java.lang.String |
toString(java.lang.String s) |
Creates a description of the entire DICOM_VR list.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Constructor Detail
-
DICOM_Object
public DICOM_Object()
-
Method Detail
-
finalize
public void finalize()
- Overrides:
finalize in class java.lang.Object
-
getVRString
public final java.lang.String getVRString(int group,
int element)
Returns the string representation of the VR.
- Parameters:
group - Group valueelement - Element value- Returns:
- The string representation VR for the group and element
-
pop
public DICOM_VR pop()
Pops a VR of the list.
- Returns:
- vr The VR pop of the list.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Store.html������������������������������������������������������0000775�4231163�4231163�00000054451�14537076062�021725� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Store (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_Store
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.lang.String |
classUID |
Class UID.
|
private java.lang.String |
fileName |
File name of the image to be stored.
|
private ViewJFrameDICOMQuery |
frame |
Reference to the Query/Retrieve GUI object.
|
private java.lang.String |
instanceUID |
The instance UID.
|
private DICOM_PDUService |
pdu |
Protocol Data Units (PDU) object.
|
private java.lang.String |
remoteAETitle |
The remote Application Entity Title.
|
private java.lang.String |
transferSyntax |
The transfer syntax used when storing images.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_Store(java.lang.String _fileName,
java.lang.String _remoteAETitle,
ViewJFrameDICOMQuery _frame) |
Creates a new DICOM_Store object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
finalize() |
DOCUMENT ME!
|
private void |
getDirUIDs(java.io.File fileDir) |
|
private java.lang.String |
getFirstFile(java.lang.String dir) |
DOCUMENT ME!
|
private void |
getUIDs(java.lang.String file) |
Read in the DICOM file and parses the header to find the UIDs needed to send the image.
|
void |
run() |
Runs this move request in a separate thread.
|
private boolean |
sendImages(java.lang.String dir) |
Recursily desends the directory tree to send the images.
|
boolean |
sendStoreRQ(java.lang.String fileName) |
Reads in the DICOM image file from disk, composes a DICOM C-Store request and sends the request.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DICOM_Store
public DICOM_Store(java.lang.String _fileName,
java.lang.String _remoteAETitle,
ViewJFrameDICOMQuery _frame)
Creates a new DICOM_Store object.
- Parameters:
_fileName - file name of the images_remoteAETitle - remote application entity name_frame - MIPAV's query frame
-
Method Detail
-
finalize
public void finalize()
DOCUMENT ME!
- Overrides:
finalize in class java.lang.Object
-
sendStoreRQ
public boolean sendStoreRQ(java.lang.String fileName)
Reads in the DICOM image file from disk, composes a DICOM C-Store request and sends the request.
- Parameters:
fileName - name of DICOM image file- Returns:
- true if the method succeeded in sending all images else false
-
sendImages
private boolean sendImages(java.lang.String dir)
Recursily desends the directory tree to send the images. This is a patient level is specified as the directly,
all studies, series, and images for that patient are sent
- Parameters:
dir - directory of where images to be sent are located- Returns:
- true is the method succeed in sending all images else false
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_AAssociateRJ.html�����������������������������������������������0000775�4231163�4231163�00000053004�14537076061�023071� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_AAssociateRJ (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
byte |
reason |
DOCUMENT ME!
|
byte |
result |
DOCUMENT ME!
|
byte |
source |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved2, reserved3, reserved4, UID
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_AAssociateRJ() |
Creates a new DICOM_AAssociateRJ object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
reason
public byte reason
DOCUMENT ME!
-
result
public byte result
DOCUMENT ME!
-
source
public byte source
DOCUMENT ME!
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Util.html�������������������������������������������������������0000775�4231163�4231163�00000101535�14537076062�021542� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Util (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_Util
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
uniqueID |
|
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static java.lang.String |
addLeadingZeros(int value,
int length) |
Pads zeros to a number.
|
static java.lang.String |
addLeadingZeros(java.lang.String value,
int length) |
Pads zeros to a string representation of a number.
|
static void |
clearByteArray(byte[] byteArray) |
Simple routine to fill a byte array with ' '
|
static void |
copyByteArray(byte[] dest,
byte[] src) |
Copies the source byte array into the destination byte array.
|
static java.lang.String |
determineSOPClassUID(DICOM_Object dco,
DICOM_Object ddo) |
Determines relevant SOP Class UID for a storage operation.
|
static void |
determineSOPClassUIDAndPush(java.lang.String UID,
DICOM_Object dco,
DICOM_Object ddo,
DICOM_Object dcor) |
Puts the required SOP class UID into the DICOMObject (Command).
|
static void |
fillByteArray(byte[] byteArray,
char charValue) |
Fills a byte array with some "char" value.
|
static int |
getUniqueID() |
Returns a unique number for DICOM communiciton.
|
static int |
getUniqueID16() |
Returns a unique number for DICOM communiciton.
|
static int |
getUniqueID8() |
Returns a unique number for DICOM communiciton.
|
static int |
getUniqueOddID() |
Returns an ODD unique number for DICOM communiciton.
|
static int |
getUniqueOddID16() |
Returns an ODD unique number for DICOM communiciton.
|
static int |
getUniqueOddID8() |
Returns an ODD unique number for DICOM communiciton.
|
static java.lang.String |
padAndOrTruncate(java.lang.String str,
int length) |
Pads with spaces and/or truncates string.
|
static java.lang.String |
timeStamper() |
Creates a string in the form of the time determined when this method is called.
|
static java.lang.String |
toHexString(int data) |
Converts an integer to a hex string of length 4 with leading zeros.
|
static java.lang.String |
toHexString2(int data) |
Converts an integer to a hex string of length 2 with leading zeros.
|
static java.lang.String |
trimIgnorableChar(java.lang.String str) |
Trims the numbers and special character from the file name.
|
static java.lang.String |
truncate(java.lang.String str,
int length) |
Trims string to length.
|
static java.lang.String |
unpadStringVal(byte[] byteArray) |
Unpads a DICOM ASCII string.
|
static void |
zeroByteArray(byte[] byteArray) |
Fills a byte array with some zeros.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DICOM_Util
public DICOM_Util()
-
Method Detail
-
addLeadingZeros
public static final java.lang.String addLeadingZeros(java.lang.String value,
int length)
Pads zeros to a string representation of a number.
- Parameters:
value - string value to be paddedlength - total length of string- Returns:
- a string with zero padding if necessary
-
copyByteArray
public static final void copyByteArray(byte[] dest,
byte[] src)
Copies the source byte array into the destination byte array.
- Parameters:
dest - destintation arraysrc - source array
-
determineSOPClassUID
public static java.lang.String determineSOPClassUID(DICOM_Object dco,
DICOM_Object ddo)
throws DICOM_Exception
Determines relevant SOP Class UID for a storage operation.
- Parameters:
dco - the incoming DICOM command messageddo - the incoming DICOM data object- Returns:
- the UID for the SOP class
- Throws:
DICOM_Exception - DOCUMENT ME!
-
determineSOPClassUIDAndPush
public static void determineSOPClassUIDAndPush(java.lang.String UID,
DICOM_Object dco,
DICOM_Object ddo,
DICOM_Object dcor)
throws DICOM_Exception
Puts the required SOP class UID into the DICOMObject (Command).
- Parameters:
UID - UID (null if unknown)dco - incoming DICOM command message to which we are respondingddo - incoming DICOM data object to which we are sending with dcordcor - outgoing DICOM command message (the one to push the UID onto )- Throws:
DICOM_Exception - DOCUMENT ME!
-
fillByteArray
public static final void fillByteArray(byte[] byteArray,
char charValue)
Fills a byte array with some "char" value.
- Parameters:
byteArray - array to be filledcharValue - value to fill the array (converted to byte)
-
padAndOrTruncate
public static final java.lang.String padAndOrTruncate(java.lang.String str,
int length)
Pads with spaces and/or truncates string.
- Parameters:
str - string to be modifiedlength - length to modify to string to- Returns:
- the modified string
�������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Comms.html������������������������������������������������������0000775�4231163�4231163�00000165537�14537076061�021716� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Comms (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
-
Nested Class Summary
Nested Classes
| Modifier and Type |
Class |
Description |
protected class |
DICOM_Comms.ByteBuffer |
Simple inner class to facilitate the memory allocation of of a byte buffer used in DICOM_Comms to support I/O.
|
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
static int |
BIG_ENDIAN |
Flag used to indicate Big Endianess.
|
protected int |
breakSize |
Defaults to the maximum buffer size in streaming.
|
private byte[] |
byteArray1 |
One byte array allocated once to speed process and reduced the need to reallocate memory.
|
private byte[] |
byteArray2 |
Two byte array allocated once to speed process and reduced the need to reallocate memory.
|
private byte[] |
byteArray4 |
Four byte array allocated once to speed process and reduced the need to reallocate memory.
|
private boolean |
debugFlag |
Debug flag.
|
private boolean |
havePeeked |
Flag indicating whether the first byte has been looked at.
|
protected int |
inBuffersLength |
Length of the total input data (Not buffer size but total length of data ).
|
protected java.util.Vector<DICOM_Comms.ByteBuffer> |
incomingBuffers |
Vector of ByteBuffer's of incoming data.
|
private int |
inEndianess |
Endianess of the input stream.
|
static int |
LITTLE_ENDIAN |
Flag used to indicate Little Endianess.
|
static int |
MAX_READ_LENGTH |
The maximum read buffer size.
|
protected int |
outBuffersLength |
Length of the total output data (Not buffer size but total length of data ).
|
private int |
outEndianess |
Endianess of the output stream.
|
protected java.util.Vector<DICOM_Comms.ByteBuffer> |
outgoingBuffers |
Vector of ByteBuffer's of outgoing data.
|
private byte |
peekedByte |
Storage for the first byte (i.e. the PDU type )
|
private byte[] |
srcByteArray |
Source byte array allocated ONCE used in reading from the stream.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_Comms() |
Constructor for DICOM network I/O class.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static int |
bufferToInt16(byte[] buffer,
int index,
int endianess) |
Copies a 2 byte array into a 16 bit integer of proper endianess.
|
static int |
bufferToInt32(byte[] buffer,
int index,
int endianess) |
Copies a 4 byte array into a 32 bit integer of proper endianess.
|
protected void |
finalize() |
Prepares this class for destruction.
|
void |
flush() |
Sends all byte buffers of the outgoing buffer vector out the port. see DICOM PDUService.sendBinary and
DICOMSocket
|
void |
flush(int nBytes) |
Sends specified number of bytes out the port. see DICOM PDUService.sendBinary and DICOMSocket
|
int |
getIncomingEndian() |
Returns constant indicating endianess of incoming data.
|
int |
getIncomingSize() |
Returns the incoming data size.
|
int |
getOutgoingEndian() |
Returns constant indicating endianess of outgoing data.
|
int |
getOutgoingSize() |
Returns the outgoing data size.
|
static void |
int16ToBuffer(byte[] buffer,
int index,
int value,
int endianess) |
Copies a 16 bit (2 bytes) integer into the specified portion of the byte array of proper endianess.
|
static void |
int32ToBuffer(byte[] buffer,
int index,
int value,
int endianess) |
Copies a 32 bit (4 bytes) integer into the specified portion of the byte array of proper endianess.
|
byte |
peekFirstByte() |
Typically used to determine the PDUTYPE (i.e.
|
int |
peekForEndOfSequence() |
DOCUMENT ME!
|
void |
read(byte[] data) |
Simple method that take a byte array and call read with two parameters: byte array and array length.
|
void |
read(byte[] data,
int nBytes) |
Reads a specified number of bytes into the byte data buffer.
|
int |
readBinary(byte[] data,
int nbytes) |
Dummy method and should be overloaded by DICOMPDUService.
|
private void |
readBlock(int useBreakSize) |
This is the method that actually reads in the data from the socket or IO stream.
|
byte |
readByte() |
Reads a single byte from the data stream.
|
byte[] |
readBytes(int length) |
Allocates and.
|
void |
readFill(int nBytes) |
Reads in a nBytes and puts them in a ByteBuffer and puts the byte buffer in the vector of incomingBuffers.
|
int |
readInt32() |
Reads a 4 byte integer (otherwise known as an int).
|
int |
readShort16() |
Reads a 2 byte integer (otherwise known as a short).
|
void |
seekToEndOfGroupTwoTags() |
Strips preamble and group 2 tags from ioBuffer if present.
|
void |
sendBinary(byte[] data,
int startIndex,
int nbytes) |
Dummy method and should be overloaded by DICOMPDUService.
|
void |
setIncomingEndianess(int endianess) |
Sets the endianess for the incoming data.
|
void |
setOutgoingEndianess(int endianess) |
Sets the endianess for the outgoing data.
|
void |
write(byte[] byteArray) |
Writes a byte arrary to the outgoing buffers.
|
void |
write(byte[] data,
int dataOffset,
int nBytes) |
Writes a specified number of bytes from the byte buffer into outGoing ByteBuffer list of byte buffers.
|
void |
writeByte(byte value) |
Writes a byte to the outgoing buffers.
|
void |
writeByteIn(byte value,
DICOM_FileIO ioBuffer) |
Writes a byte to the incoming buffers.
|
void |
writeIn(byte[] data,
int dataOffset,
int nBytes,
DICOM_FileIO ioBuffer) |
Writes a specified number of bytes from the byte buffer into incomming ByteBuffer list of byte buffers.
|
void |
writeInt32(int value) |
Writes a 32 (4 byte) integer to the outgoing buffers.
|
void |
writeInt32In(int value,
DICOM_FileIO ioBuffer) |
Writes a 32 (4 byte) integer to the incoming buffers.
|
void |
writeShort16(int value) |
Writes a 16 (2 byte) integer to the outgoing buffers.
|
void |
writeShort16In(int value,
DICOM_FileIO ioBuffer) |
Writes a 16 (2 byte) integer to the incomming buffers.
|
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
bufferToInt16
public static final int bufferToInt16(byte[] buffer,
int index,
int endianess)
Copies a 2 byte array into a 16 bit integer of proper endianess.
- Parameters:
buffer - source byte arrayindex - index into bufferendianess - Byte ordering as defined above.- Returns:
- 16 bit integer value
-
bufferToInt32
public static final int bufferToInt32(byte[] buffer,
int index,
int endianess)
Copies a 4 byte array into a 32 bit integer of proper endianess.
- Parameters:
buffer - source byte arrayindex - index into bufferendianess - endianess- Returns:
- 32 bit integer value
-
int16ToBuffer
public static final void int16ToBuffer(byte[] buffer,
int index,
int value,
int endianess)
Copies a 16 bit (2 bytes) integer into the specified portion of the byte array of proper endianess.
- Parameters:
buffer - destination byte arrayindex - index into buffervalue - 16 bit integer valueendianess - endianess
-
int32ToBuffer
public static final void int32ToBuffer(byte[] buffer,
int index,
int value,
int endianess)
Copies a 32 bit (4 bytes) integer into the specified portion of the byte array of proper endianess.
- Parameters:
buffer - destination byte arrayindex - index into buffervalue - 16 bit integer valueendianess - endianess
-
read
public void read(byte[] data,
int nBytes)
throws DICOM_Exception
Reads a specified number of bytes into the byte data buffer.
- Parameters:
data - byte data array ( destination )nBytes - the number of bytes to read into the buffer- Throws:
DICOM_Exception - Throws error if there is an error reading data from the port.
-
readBinary
public int readBinary(byte[] data,
int nbytes)
throws DICOM_Exception
Dummy method and should be overloaded by DICOMPDUService.
- Parameters:
data - Buffer to store the data.nbytes - Number of bytes to be read.- Returns:
- The actual number of bytes read.
- Throws:
DICOM_Exception - Throws error if method is not overwritten!
-
sendBinary
public void sendBinary(byte[] data,
int startIndex,
int nbytes)
throws DICOM_Exception
Dummy method and should be overloaded by DICOMPDUService.
- Parameters:
data - Buffer of data send out the port (connection).startIndex - starting offsetnbytes - Number of bytes to be sent.- Throws:
DICOM_Exception - DOCUMENT ME!
-
write
public void write(byte[] data,
int dataOffset,
int nBytes)
Writes a specified number of bytes from the byte buffer into outGoing ByteBuffer list of byte buffers.
- Parameters:
data - byte bufferdataOffset - DOCUMENT ME!nBytes - number of bytes to write
-
writeIn
public void writeIn(byte[] data,
int dataOffset,
int nBytes,
DICOM_FileIO ioBuffer)
Writes a specified number of bytes from the byte buffer into incomming ByteBuffer list of byte buffers.
- Parameters:
data - byte bufferdataOffset - DOCUMENT ME!nBytes - number of bytes to writeioBuffer -
-
writeByteIn
public final void writeByteIn(byte value,
DICOM_FileIO ioBuffer)
Writes a byte to the incoming buffers.
- Parameters:
value - byte valueioBuffer -
-
writeInt32In
public final void writeInt32In(int value,
DICOM_FileIO ioBuffer)
Writes a 32 (4 byte) integer to the incoming buffers.
- Parameters:
value - the value to be sent. The value is put into a 4 byte "byte" buffer in the order indicated by the
specified endianess of this class.ioBuffer -
-
writeShort16In
public final void writeShort16In(int value,
DICOM_FileIO ioBuffer)
Writes a 16 (2 byte) integer to the incomming buffers.
- Parameters:
value - the value to be sent. The value is put into a 2 byte "byte" buffer in the order indicated by the
specified endianess of this class.ioBuffer -
�����������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_PresentationContext.html����������������������������������������0000775�4231163�4231163�00000057672�14537076061�024660� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_PresentationContext (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved2, reserved3, reserved4, UID
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Verification.html�����������������������������������������������0000775�4231163�4231163�00000053521�14537076062�023250� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Verification (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Object.GroupElements.html���������������������������������������0000775�4231163�4231163�00000025514�14537076061�024624� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Object.GroupElements (MIPAV API Documentation)
- java.lang.Object
-
- java.util.Dictionary<K,V>
-
- java.util.Hashtable
-
- gov.nih.mipav.model.dicomcomm.DICOM_Object.GroupElements
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
grpLength |
Stores length of group.
|
private static long |
serialVersionUID |
Use serialVersionUID for interoperability.
|
-
Constructor Summary
Constructors
| Modifier |
Constructor |
Description |
private |
GroupElements() |
|
-
Method Summary
-
Methods inherited from class java.util.Hashtable
clear, clone, compute, computeIfAbsent, computeIfPresent, contains, containsKey, containsValue, elements, entrySet, equals, forEach, get, getOrDefault, hashCode, isEmpty, keys, keySet, merge, put, putAll, putIfAbsent, rehash, remove, remove, replace, replace, replaceAll, size, toString, values
-
Methods inherited from class java.lang.Object
finalize, getClass, notify, notifyAll, wait, wait, wait
-
-
Field Detail
-
grpLength
public int grpLength
Stores length of group.
-
Constructor Detail
-
GroupElements
private GroupElements()
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/RTCEntry.html���������������������������������������������������������0000775�4231163�4231163�00000026622�14537076062�021367� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
RTCEntry (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.RTCEntry
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
dd_type |
DOCUMENT ME!
|
(package private) java.lang.String |
description |
DOCUMENT ME!
|
(package private) int |
element |
DOCUMENT ME!
|
(package private) int |
group |
DOCUMENT ME!
|
(package private) int |
typeCode |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
RTCEntry(int group,
int element,
int typeCode,
java.lang.String description,
int dd_type) |
Loads the inputted variabels straight into the class.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
dd_type
int dd_type
DOCUMENT ME!
-
element
int element
DOCUMENT ME!
-
group
int group
DOCUMENT ME!
-
typeCode
int typeCode
DOCUMENT ME!
-
Constructor Detail
-
RTCEntry
RTCEntry(int group,
int element,
int typeCode,
java.lang.String description,
int dd_type)
Loads the inputted variabels straight into the class.
- Parameters:
group - DOCUMENT ME!element - DOCUMENT ME!typeCode - DOCUMENT ME!description - DOCUMENT ME!dd_type - DOCUMENT ME!
��������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Query.html������������������������������������������������������0000775�4231163�4231163�00000115450�14537076061�021732� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Query (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_SOP
UID
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
DICOM_PDUService |
connectToServer(java.lang.String AETitle) |
Connects to the server with an Application Entity title provided.
|
int |
getMsgID() |
getMsgID - This returns the msgID for the outgoing C-Move Request.
|
void |
run() |
Runs this query in a separate thread.
|
void |
sendFindCancelRQ(int msgID,
DICOM_PDUService pdu) |
Send a C-CANCEL-FIND-RQ to the Service Class Provider;ie.
|
void |
sendQuery(DICOM_PDUService pdu,
DICOM_Object ddo) |
Sends patient root query to remote DICOM Q/R server.
|
int |
setMsgID() |
This sets the unique msgID for the outgoing C-Move Request.
|
void |
setParameters(DICOM_PDUService pdu,
DICOM_Object ddo) |
Sets up the neccessary parameters for sending a query.
|
void |
setPatientRootQuery() |
setPatientRootQuery - sets query to Patient Root.
|
void |
setPatientStudyOnlyQuery() |
setPatientStudyOnlyQuery - sets query to Patient Study Only.
|
DICOM_Object |
setQueryImagesData(java.lang.String patientID,
java.lang.String studyInstUID,
java.lang.String seriesInstUID) |
Sets up the data object (IOD) for a patient root image level C-Find request on key patient ID.
|
DICOM_Object |
setQueryPatientData(java.lang.String patientName,
java.lang.String patientID) |
Sets up the data object (IOD) for a patient root patient level C-Find request on key patient name.
|
DICOM_Object |
setQuerySeriesData(java.lang.String patientID,
java.lang.String studyInstUID) |
Sets up the data object (IOD) for a patient root series level C-Find request on key patient ID.
|
DICOM_Object |
setQueryStudyData(java.lang.String patientID,
java.lang.String studyID) |
Sets up the data object (IOD) for a patient root study level C-Find request on key patient ID.
|
DICOM_Object |
setQueryStudyData(java.lang.String patientName,
java.lang.String patientID,
java.lang.String studyID,
java.lang.String studyDate,
java.lang.String referringPhys) |
Sets up the data object (IOD) for a patient root study level C-Find request on key patient ID.
|
void |
setStop() |
Tells the thread to stop (does not call thread.stop(): unsafe).
|
void |
setStudyRootQuery() |
Sets query to Study Root.
|
void |
write(DICOM_PDUService pdu,
DICOM_Object ddo) |
Writes a query.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
MSG_ID
protected int MSG_ID
The DICOM message ID.
-
Constructor Detail
-
DICOM_Query
public DICOM_Query()
DICOM_Query constructor.
-
Method Detail
-
sendFindCancelRQ
public void sendFindCancelRQ(int msgID,
DICOM_PDUService pdu)
Send a C-CANCEL-FIND-RQ to the Service Class Provider;ie. Image Archive
- Parameters:
msgID - unique identifier for the current messagepdu - instance of PDU_Service containing remote connect info.
-
sendQuery
public void sendQuery(DICOM_PDUService pdu,
DICOM_Object ddo)
Sends patient root query to remote DICOM Q/R server.
- Parameters:
pdu - instance of PDU_Service containing remote connect info.ddo - patient root query data object
-
setParameters
public void setParameters(DICOM_PDUService pdu,
DICOM_Object ddo)
Sets up the neccessary parameters for sending a query. Must be called before the thread is started.
- Parameters:
pdu - instance of PDU_Service containing remote connect info.ddo - move request identifier
-
setQueryImagesData
public DICOM_Object setQueryImagesData(java.lang.String patientID,
java.lang.String studyInstUID,
java.lang.String seriesInstUID)
Sets up the data object (IOD) for a patient root image level C-Find request on key patient ID.
- Parameters:
patientID - key attribute for image level querystudyInstUID - key attribute for image level queryseriesInstUID - key attribute for image level query- Returns:
- return patient root image level query data object
-
setQueryPatientData
public DICOM_Object setQueryPatientData(java.lang.String patientName,
java.lang.String patientID)
Sets up the data object (IOD) for a patient root patient level C-Find request on key patient name.
- Parameters:
patientName - a key attribute for querypatientID - a key attribute for query - can be empty string- Returns:
- return patient root patient level query data object
-
setQuerySeriesData
public DICOM_Object setQuerySeriesData(java.lang.String patientID,
java.lang.String studyInstUID)
Sets up the data object (IOD) for a patient root series level C-Find request on key patient ID.
- Parameters:
patientID - key attribute for study level querystudyInstUID - key attribute for series level query- Returns:
- return patient root series level query data object
-
setQueryStudyData
public DICOM_Object setQueryStudyData(java.lang.String patientID,
java.lang.String studyID)
Sets up the data object (IOD) for a patient root study level C-Find request on key patient ID.
- Parameters:
patientID - key attribute for study level querystudyID - key attribute for study level query/ can be empty string ""- Returns:
- return patient root study level query data object
-
setQueryStudyData
public DICOM_Object setQueryStudyData(java.lang.String patientName,
java.lang.String patientID,
java.lang.String studyID,
java.lang.String studyDate,
java.lang.String referringPhys)
Sets up the data object (IOD) for a patient root study level C-Find request on key patient ID.
- Parameters:
patientName - DOCUMENT ME!patientID - key attribute for study level querystudyID - key attribute for study level query/ can be empty string ""studyDate - DOCUMENT ME!referringPhys - DOCUMENT ME!- Returns:
- return patient root study level query data object
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_AReleaseRSP.html������������������������������������������������0000775�4231163�4231163�00000050652�14537076061�022675� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_AReleaseRSP (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) byte[] |
reserved2 |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved3, reserved4, UID
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_AReleaseRSP() |
Creates a new DICOM_AReleaseRSP object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
reserved2
byte[] reserved2
DOCUMENT ME!
��������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_CResponse.html��������������������������������������������������0000775�4231163�4231163�00000045017�14537076061�022527� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_CResponse (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_CResponse(int commandType) |
Creates a new DICOM_CResponse object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
read(DICOM_Object dco,
DICOM_PDUService pdu,
DICOM_Object ddo) |
Reads a DIMSE-C message.
|
void |
write(DICOM_PDUService pdu,
DICOM_Object dco,
java.lang.String UID,
int status,
java.lang.String errComment,
DICOM_Object ddo,
int nRemaining,
int nComplete,
int nFailed,
int nWarning) |
Writes a DIMSE-C message.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
write
public void write(DICOM_PDUService pdu,
DICOM_Object dco,
java.lang.String UID,
int status,
java.lang.String errComment,
DICOM_Object ddo,
int nRemaining,
int nComplete,
int nFailed,
int nWarning)
throws DICOM_Exception
Writes a DIMSE-C message.
- Parameters:
pdu - context pdu DICOMClientServerdco - data command objectUID - SOP Class UID null for C-Storesstatus - status value to be senterrComment - string to send errorddo - the outgoing DICOM data object or null if none requirednRemaining - number of C-Stores remaining for a C-Move operationnComplete - number of C-Stores which have been completed successfullynFailed - number of C-Stores which have failednWarning - number of C-Stores which have completed with a warning- Throws:
DICOM_Exception - indicates an error
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_UID.html��������������������������������������������������������0000775�4231163�4231163�00000047604�14537076062�021254� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_UID (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_UID
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private java.lang.String |
seriesInstanceUID |
String representing the Series Instance UID
|
private java.lang.String |
SOPInstanceUID |
String representing the SOP Instance UID
|
private java.lang.String |
studyInstanceUID |
String representing the Study Instance UID
|
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_UID(java.lang.String studyUID) |
Creates a new DICOM_UID object.
|
DICOM_UID(java.lang.String seriesUID,
java.lang.String studyUID) |
Creates a new DICOM_UID object.
|
DICOM_UID(java.lang.String seriesUID,
java.lang.String SOP_UID,
java.lang.String studyUID) |
Creates a new DICOM_UID object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DICOM_UID
public DICOM_UID(java.lang.String seriesUID,
java.lang.String studyUID)
Creates a new DICOM_UID object.
- Parameters:
seriesUID - the series instance UIDstudyUID - the study instance UID
-
DICOM_UID
public DICOM_UID(java.lang.String seriesUID,
java.lang.String SOP_UID,
java.lang.String studyUID)
Creates a new DICOM_UID object.
- Parameters:
seriesUID - the series instance UIDSOP_UID - the SOP instance UIDstudyUID - the study instance UID
����������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_StdStorage.html�������������������������������������������������0000775�4231163�4231163�00000044176�14537076062�022713� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_StdStorage (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_SOP
UID
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_StdStorage() |
Creates a new DICOM_StdStorage object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
write
public void write(DICOM_PDUService pdu,
DICOM_Object ddo,
java.lang.String transferSyntax,
java.lang.String classUID,
java.lang.String instanceUID)
throws DICOM_Exception
Provides Storage SOP write capability.
- Parameters:
pdu - PDU service objectddo - DICOM data objecttransferSyntax - The DICOM transfer syntax.classUID - The class UID.instanceUID - The instance UID.- Throws:
DICOM_Exception - Indicates error when writing data.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_AReleaseRQ.html�������������������������������������������������0000775�4231163�4231163�00000050623�14537076061�022551� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_AReleaseRQ (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) byte[] |
reserved2 |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved3, reserved4, UID
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_AReleaseRQ() |
Creates a new DICOM_AReleaseRQ object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
reserved2
byte[] reserved2
DOCUMENT ME!
�������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Comms.ByteBuffer.html�������������������������������������������0000775�4231163�4231163�00000035664�14537076061�023747� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Comms.ByteBuffer (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_Comms.ByteBuffer
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
int |
bufferSize |
The total capacity of the buffer.
|
byte[] |
data |
The byte type data buffer.
|
(package private) static int |
DEFAULT_SIZE |
Static indicating the default size of the byte buffer.
|
int |
endIndex |
Pointer to the end of data in the buffer.
|
int |
startIndex |
Points the start of data in the buffer.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
ByteBuffer(int size) |
Allocates the byte buffer of the given size.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_SCPSCURoleSelect.html�������������������������������������������0000775�4231163�4231163�00000052044�14537076062�023607� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_SCPSCURoleSelect (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected byte |
SCPRole |
Indicates the Serivce Class Provider (SCP) (i.e.
|
protected byte |
SCURole |
Indicates the Serivce Class User (SCU) (i.e.
|
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved2, reserved3, reserved4, UID
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_VR.html���������������������������������������������������������0000775�4231163�4231163�00000076160�14537076062�021161� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_VR (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_VR
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
byte[] |
data |
Actual data array of the the VR.
|
private int |
ddType |
Inital DICOM type.
|
int |
element |
Represents the DICOM element number.
|
int |
group |
Represents the DICOM group number.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_VR() |
Default constructor.
|
DICOM_VR(int group,
int element,
byte[] data,
int DDType) |
Creates a new DICOM_VR object.
|
DICOM_VR(int group,
int element,
int val,
int size) |
Creates a new DICOM_VR object.
|
DICOM_VR(int group,
int element,
java.lang.String strData,
int DDType) |
Creates a new DICOM_VR object.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
DICOM_VR |
copy() |
Returns a deep copy the VR.
|
private static java.lang.String |
dataToString(DICOM_VR vr,
int typeCode) |
Build a string reprsentation of the Data based on the VR type.
|
int |
getDDType() |
Gets the index for this VR.
|
int |
getTypeCode() |
Gets the type code for this VR.
|
void |
initVR(int group,
int element,
byte[] data,
int DDType) |
Initializes the VR.
|
private static boolean |
isAlpha(byte ch) |
Determines if a byte is an alpha character.
|
private static boolean |
isDataAlpha(byte[] data) |
Determines if data byte array is a string of characters.
|
private void |
makeDataEven(byte[] _data) |
Make the length of the data buffer even by adding a space or null.
|
static DICOM_VR |
readData(int group,
int element,
int length,
DICOM_Comms vrBuffer) |
Reads a VR from a Buffer (network socket).
|
java.lang.String |
toString(java.lang.String str) |
Creates a string representation of this VR.
|
static long |
unsignedInt(int value) |
Converts value to an unsigned integer and returns it as a long.
|
static int |
unsignedShort(int value) |
Converts value to an unsigned short and returns it as an integer.
|
static void |
writeData(DICOM_VR vr,
DICOM_Comms vrBuffer) |
Writes a VR to a DICOM_Comms (network socket).
|
static void |
writeDataIn(DICOM_VR vr,
DICOM_Comms vrBuffer,
DICOM_FileIO ioBuffer) |
Writes a VR to a DICOM_Comms (network socket).
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
ddType
private int ddType
Inital DICOM type.
-
Constructor Detail
-
DICOM_VR
public DICOM_VR()
Default constructor.
-
DICOM_VR
public DICOM_VR(int group,
int element,
byte[] data,
int DDType)
Creates a new DICOM_VR object.
- Parameters:
group - DICOM group number.element - DICOM element number.data - Actual data array of the the VR.DDType - DOCUMENT ME!
-
DICOM_VR
public DICOM_VR(int group,
int element,
java.lang.String strData,
int DDType)
Creates a new DICOM_VR object.
- Parameters:
group - DICOM group number.element - DICOM element number.strData - String representation of the VR.DDType - Type of group, element tag
-
DICOM_VR
public DICOM_VR(int group,
int element,
int val,
int size)
Creates a new DICOM_VR object.
- Parameters:
group - DICOM group number.element - DICOM element number.val - Value of the VR.size - DOCUMENT ME!
-
Method Detail
-
readData
public static DICOM_VR readData(int group,
int element,
int length,
DICOM_Comms vrBuffer)
throws DICOM_Exception
Reads a VR from a Buffer (network socket).
- Parameters:
group - the group numberelement - the element numberlength - the length of the data to readvrBuffer - the DICOM_Comms to read from- Returns:
- a created VR with the data inside
- Throws:
DICOM_Exception - DOCUMENT ME!
-
writeData
public static final void writeData(DICOM_VR vr,
DICOM_Comms vrBuffer)
Writes a VR to a DICOM_Comms (network socket).
- Parameters:
vr - the VR to writevrBuffer - the DICOM_Comms to write to
-
writeDataIn
public static final void writeDataIn(DICOM_VR vr,
DICOM_Comms vrBuffer,
DICOM_FileIO ioBuffer)
Writes a VR to a DICOM_Comms (network socket).
- Parameters:
vr - the VR to writevrBuffer - the DICOM_Comms to write toioBuffer -
-
dataToString
private static java.lang.String dataToString(DICOM_VR vr,
int typeCode)
Build a string reprsentation of the Data based on the VR type. Only used by the "toString" of this class.
- Parameters:
vr - the data to converted into a string in this the value representation objecttypeCode - type of VR- Returns:
- the string representation
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Socket.html�����������������������������������������������������0000775�4231163�4231163�00000055041�14537076062�022055� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Socket (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
boolean |
connected |
Flag indicating whether of not the socket is connected.
|
java.io.InputStream |
inStream |
Input stream object acquired from the socket.
|
java.io.OutputStream |
outStream |
Output stream object acquired from the socket.
|
java.net.Socket |
socket |
Socket object.
|
static int |
timeout |
DOCUMENT ME!
|
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_Socket() |
DICOMSocket constructor.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
attach(java.net.Socket socket) |
Attaches this DICOMSocket to a JAVA socket.
|
void |
close() |
Closes the socket.
|
private static char |
convertToASCII(int num) |
Simple utility to convert a number to ASCII.
|
private static char |
convertToHex(int num) |
Simple utility to convert a number [0:15] to hex.
|
void |
open(java.lang.String ip,
int port) |
Open (and connect) a socket.
|
int |
readBinary(byte[] data,
int count) |
Low level socket read.
|
private static void |
showDataBuffer(byte[] data,
int offset,
int count) |
Utility method to dump hex and ASCII to the MIPAV debug frame.
|
void |
writeBinary(byte[] data,
int offset,
int count) |
Low level socket write.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DICOM_Socket
public DICOM_Socket()
DICOMSocket constructor.
-
Method Detail
-
close
public void close()
Closes the socket.
-
showDataBuffer
private static void showDataBuffer(byte[] data,
int offset,
int count)
Utility method to dump hex and ASCII to the MIPAV debug frame.
- Parameters:
data - data buffer to be displayedoffset - starting offsetcount - number of bytes to be displayed from data buffer
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_StdRetrieve.html������������������������������������������������0000775�4231163�4231163�00000050545�14537076062�023071� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_StdRetrieve (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_SOP
UID
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_StdRetrieve(java.lang.String UID) |
This implements a DICOM Retrieve SOP Class.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
write
public void write(DICOM_PDUService pdu,
DICOM_Object ddo,
byte[] localAppTitle,
DICOM_Move dcmMove)
throws DICOM_Exception
Transfers a C-MOVE request to a SCP.
- Parameters:
pdu - PDU objectddo - DICOM data objectlocalAppTitle - Appliation entity title of the local entitydcmMove - DICOM move object - not used here- Throws:
DICOM_Exception - DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Constants.html��������������������������������������������������0000775�4231163�4231163�00000255654�14537076061�022614� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Constants (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static java.lang.String |
convertCommandToString(int command) |
Converts DICOM command from and int code to a string
|
static java.lang.String |
convertUIDToString(java.lang.String UID) |
Converts a transfer syntax UID (i.e. "1.2.840.10008.5.1.4.1.1.1") to a more understandable string form( i.e.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DICOM_Constants
public DICOM_Constants()
������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_CommsLink.html��������������������������������������������������0000775�4231163�4231163�00000056024�14537076061�022522� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_CommsLink (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) DICOM_Comms |
linkToComms |
Reference to the link communications object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
flush(DICOM_Comms connection,
int length) |
Send the data out the connection (pdu).
|
int |
readBinary(byte[] data,
int length) |
Copies data from the port buffer into the a new buffer used typically in pDataTF.
|
void |
readFill(DICOM_Comms connection,
int length) |
Sets linkToComms to connection and fills(read) the connection buffer via readBinary.
|
void |
sendBinary(byte[] data,
int offset,
int length) |
Actual binary data to be sent.
|
-
Methods inherited from class gov.nih.mipav.model.dicomcomm.DICOM_Comms
bufferToInt16, bufferToInt32, finalize, flush, flush, getIncomingEndian, getIncomingSize, getOutgoingEndian, getOutgoingSize, int16ToBuffer, int32ToBuffer, peekFirstByte, peekForEndOfSequence, read, read, readByte, readBytes, readFill, readInt32, readShort16, seekToEndOfGroupTwoTags, setIncomingEndianess, setOutgoingEndianess, write, write, writeByte, writeByteIn, writeIn, writeInt32, writeInt32In, writeShort16, writeShort16In
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DICOM_CommsLink
public DICOM_CommsLink()
-
Method Detail
-
flush
public void flush(DICOM_Comms connection,
int length)
throws DICOM_Exception
Send the data out the connection (pdu).
- Parameters:
connection - the PDU or connection (DICOM_Comms is the parent class of DICOM_PDUService)length - The length of data to be flushed out the port.- Throws:
DICOM_Exception - Throws an error when attempting to flush more bytes than are present!
-
readBinary
public int readBinary(byte[] data,
int length)
throws DICOM_Exception
Copies data from the port buffer into the a new buffer used typically in pDataTF.
- Overrides:
readBinary in class DICOM_Comms- Parameters:
data - Buffer to store the datalength - Number of bytes to be read- Returns:
- The length of the data read in.
- Throws:
DICOM_Exception - Throws an error if there is a problem reading the port.
-
readFill
public void readFill(DICOM_Comms connection,
int length)
throws DICOM_Exception
Sets linkToComms to connection and fills(read) the connection buffer via readBinary.
- Parameters:
connection - The connection to the socket.length - The number of bytes to read.- Throws:
DICOM_Exception - Throws an error if there is a problem reading the port.
-
sendBinary
public void sendBinary(byte[] data,
int offset,
int length)
throws DICOM_Exception
Actual binary data to be sent.
- Overrides:
sendBinary in class DICOM_Comms- Parameters:
data - Buffer of data send out the port (socket)offset - The offset into the data indicating the starting point of the data to be sent.length - The number of bytes to be sent.- Throws:
DICOM_Exception - Throws an error if there is a problem sendting via port.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_SOP.html��������������������������������������������������������0000775�4231163�4231163�00000033371�14537076062�021270� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_SOP (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_SOP
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected java.lang.String |
UID |
Unique identifier.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_SOP() |
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DICOM_SOP
public DICOM_SOP()
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_AAbortRQ.html���������������������������������������������������0000775�4231163�4231163�00000053135�14537076061�022241� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_AAbortRQ (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
byte |
reason |
DOCUMENT ME!
|
byte |
reserved |
DOCUMENT ME!
|
byte |
result |
DOCUMENT ME!
|
byte |
source |
DOCUMENT ME!
|
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved2, reserved3, reserved4, UID
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_AAbortRQ() |
Creates a new DICOM_AAbortRQ object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
reason
public byte reason
DOCUMENT ME!
-
reserved
public byte reserved
DOCUMENT ME!
-
result
public byte result
DOCUMENT ME!
-
source
public byte source
DOCUMENT ME!
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Exception.html��������������������������������������������������0000775�4231163�4231163�00000031772�14537076061�022567� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Exception (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Throwable
-
- java.lang.Exception
-
- gov.nih.mipav.model.dicomcomm.DICOM_Exception
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private static long |
serialVersionUID |
Use serialVersionUID for interoperability.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_Exception() |
Creates a new DICOM_Exception object.
|
DICOM_Exception(java.lang.String str) |
Creates a new DICOM_Exception object.
|
-
Method Summary
-
Methods inherited from class java.lang.Throwable
addSuppressed, fillInStackTrace, getCause, getLocalizedMessage, getMessage, getStackTrace, getSuppressed, initCause, printStackTrace, printStackTrace, printStackTrace, setStackTrace, toString
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
������gov/nih/mipav/model/dicomcomm/DICOM_RTC.html��������������������������������������������������������0000775�4231163�4231163�00004312524�14537076062�021263� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_RTC (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_RTC() |
|
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private static void |
addDDTypeHash(int g,
int e,
int dd_type) |
DOCUMENT ME!
|
static java.lang.String |
getDescription(int dd_type) |
Gets the description of a given integer hash index.
|
static int |
getElement(int dd_type) |
Gets the element number of a given integer hash index.
|
static int |
getGroup(int dd_type) |
Gets the group number of a given integer hash index.
|
private static int |
getIndex(int dd_type) |
DOCUMENT ME!
|
static int |
getTypeCode(int dd_type) |
Gets the type code of a given integer hash index.
|
static java.lang.String |
getTypeCodeName(int dd_type) |
gets the type code name of a given integer hash index for example: getTypeCodeName( RTC.DD_PatientID ) returns
"LO"
|
static int |
unknownDDType(int g,
int e) |
hash a group, element pair that is not already present in our list.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DICOM_RTC
public DICOM_RTC()
-
Method Detail
-
unknownDDType
public static int unknownDDType(int g,
int e)
hash a group, element pair that is not already present in our list.
- Parameters:
g - DOCUMENT ME!e - DOCUMENT ME!- Returns:
- a dd_type integer hash index for use with the other methods here.
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Move.html�������������������������������������������������������0000775�4231163�4231163�00000070767�14537076061�021546� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Move (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_Move
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private DICOM_Object |
ddo |
DICOM data object.
|
private byte[] |
localAppTitle |
Local application entity of the
|
private int |
MSG_ID |
Unique message identifier for the C-MOVE request.
|
private DICOM_PDUService |
pdu |
PDU service object.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_Move() |
Creates a new DICOM_Move object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
DICOM_PDUService |
connectToServer(java.lang.String AETitle) |
connects to server with the supplied Application entity title.
|
int |
getMsgID() |
Accessor to get the message ID for the current message.
|
void |
run() |
Runs this move request in a separate thread.
|
void |
sendCancelRQ(int msgID,
DICOM_PDUService pdu) |
Sends a C-CANCEL-MOVE-RQ to the Service Class Provider; ie.
|
void |
sendMoveRQ(DICOM_PDUService pdu,
DICOM_Object ddo,
byte[] localAppTitle) |
Sends a move request.
|
DICOM_Object |
setMoveImageData(java.lang.String patientID,
java.lang.String studyInstUID,
java.lang.String seriesInstUID,
java.lang.String sopInstUID) |
Sets up the data object (IOD) for a patient root image level C-Move request given patID, study instance UID,
series instance UID, and SOP Instance UID.
|
void |
setMoveParameters(DICOM_PDUService pdu,
DICOM_Object ddo,
byte[] localAppTitle) |
Sets up the neccessary parameters for sending a move request.
|
DICOM_Object |
setMovePatientData(java.lang.String patientID) |
Sets up the data object (IOD) for a patient root patient level C-Move request given patID.
|
DICOM_Object |
setMoveSeriesData(java.lang.String patientID,
java.lang.String studyInstUID,
java.lang.String seriesInstUID) |
Set up the data object (IOD) for a patient root series level C-Move request given patID, study instance UID, and
series instance UID.
|
DICOM_Object |
setMoveStudyData(java.lang.String patientID,
java.lang.String studyInstUID) |
Sets up the data object (IOD) for a patient root study level C-Move request given patID and study instance UID.
|
int |
setMsgID() |
Sets the msgID for the outgoing C-Move Request.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
sendCancelRQ
public void sendCancelRQ(int msgID,
DICOM_PDUService pdu)
Sends a C-CANCEL-MOVE-RQ to the Service Class Provider; ie. Image Archive
- Parameters:
msgID - Unique identifier for the C-MOVE request to be cancelledpdu - Instance of PDU_Service containing remote connect info.
-
setMoveImageData
public DICOM_Object setMoveImageData(java.lang.String patientID,
java.lang.String studyInstUID,
java.lang.String seriesInstUID,
java.lang.String sopInstUID)
Sets up the data object (IOD) for a patient root image level C-Move request given patID, study instance UID,
series instance UID, and SOP Instance UID.
- Parameters:
patientID - key attribute for image level move requeststudyInstUID - key attribute for image level move requestseriesInstUID - key attribute for image level move requestsopInstUID - key attribute for image level move request- Returns:
- return patient root image level move data object
-
setMoveParameters
public void setMoveParameters(DICOM_PDUService pdu,
DICOM_Object ddo,
byte[] localAppTitle)
Sets up the neccessary parameters for sending a move request. Must be called before the thread is started.
- Parameters:
pdu - Instance of PDU_Service containing remote connect info.ddo - Move request identifierappTitle - Local application entity title
-
setMoveSeriesData
public DICOM_Object setMoveSeriesData(java.lang.String patientID,
java.lang.String studyInstUID,
java.lang.String seriesInstUID)
Set up the data object (IOD) for a patient root series level C-Move request given patID, study instance UID, and
series instance UID.
- Parameters:
patientID - key attribute for series level move requeststudyInstUID - key attribute for series level move requestseriesInstUID - key attribute for series level move request- Returns:
- return patient root series level move data object
-
setMoveStudyData
public DICOM_Object setMoveStudyData(java.lang.String patientID,
java.lang.String studyInstUID)
Sets up the data object (IOD) for a patient root study level C-Move request given patID and study instance UID.
- Parameters:
patientID - key attribute for study level move requeststudyInstUID - key attribute for study level move request- Returns:
- return patient root study level move data object
���������gov/nih/mipav/model/dicomcomm/DICOM_PDUItemType.html������������������������������������������������0000775�4231163�4231163�00000055411�14537076061�022736� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_PDUItemType (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved2, reserved3, reserved4, UID
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_PDUItemType(byte itemType) |
Creates a new DICOM_PDUItemType object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_MaximumSubLength.html�������������������������������������������0000775�4231163�4231163�00000054124�14537076061�024056� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_MaximumSubLength (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private int |
maxLength |
The maximum length - default is zero.
|
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved2, reserved3, reserved4, UID
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_MaximumSubLength() |
Simple class that implements a Maximum SubLength PDU type.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/package-tree.html�����������������������������������������������������0000775�4231163�4231163�00000034773�14537076122�022250� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.dicomcomm Class Hierarchy (MIPAV API Documentation)
Class Hierarchy
- java.lang.Object
- java.util.AbstractCollection<E> (implements java.util.Collection<E>)
- java.util.AbstractList<E> (implements java.util.List<E>)
- java.util.Vector<E> (implements java.lang.Cloneable, java.util.List<E>, java.util.RandomAccess, java.io.Serializable)
- gov.nih.mipav.model.dicomcomm.DICOM_Comms
- gov.nih.mipav.model.dicomcomm.DICOM_Comms.ByteBuffer
- gov.nih.mipav.model.dicomcomm.DICOM_Constants
- gov.nih.mipav.model.dicomcomm.DICOM_CRequest
- gov.nih.mipav.model.dicomcomm.DICOM_Move (implements java.lang.Runnable)
- gov.nih.mipav.model.dicomcomm.DICOM_Object
- gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
- gov.nih.mipav.model.dicomcomm.DICOM_RTC
- gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
- gov.nih.mipav.model.dicomcomm.DICOM_Socket
- gov.nih.mipav.model.dicomcomm.DICOM_SOP
- gov.nih.mipav.model.dicomcomm.DICOM_Store (implements java.lang.Runnable)
- gov.nih.mipav.model.dicomcomm.DICOM_TransferSyntaxUtil
- gov.nih.mipav.model.dicomcomm.DICOM_UID
- gov.nih.mipav.model.dicomcomm.DICOM_Util
- gov.nih.mipav.model.dicomcomm.DICOM_Verification
- gov.nih.mipav.model.dicomcomm.DICOM_VR
- java.util.Dictionary<K,V>
- java.util.Hashtable<K,V> (implements java.lang.Cloneable, java.util.Map<K,V>, java.io.Serializable)
- gov.nih.mipav.model.dicomcomm.RTCEntry
- java.lang.Thread (implements java.lang.Runnable)
- java.lang.Throwable (implements java.io.Serializable)
�����gov/nih/mipav/model/dicomcomm/DICOM_PresentationContextAccept.html����������������������������������0000775�4231163�4231163�00000055552�14537076061�025773� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_PresentationContextAccept (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved2, reserved3, reserved4, UID
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
result
public byte result
Result default to 2.
������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_UserInformation.html��������������������������������������������0000775�4231163�4231163�00000061404�14537076062�023751� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_UserInformation (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved2, reserved3, reserved4, UID
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
userInfoSize
private int userInfoSize
DOCUMENT ME!
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_CRequest.html���������������������������������������������������0000775�4231163�4231163�00000061742�14537076061�022364� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_CRequest (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
COMMAND |
This field distinguishes the DIMSE-C operation conveyed by this message.
|
protected static int |
HIGH |
Flag indicating high priority transfer.
|
protected static int |
LOW |
Flag indicating low priority transfer.
|
protected static int |
MEDIUM |
Flag indicating medium priority transfer.
|
private int |
MSG_ID |
Message ID - Used to distinguish this message from other messages.
|
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_CRequest(int commandType) |
Creates a new DICOM_CRequest object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
write
public void write(DICOM_PDUService pdu,
java.lang.String transferSyntax,
java.lang.String classUID,
java.lang.String instanceUID,
DICOM_Object ddo,
byte[] AETitle)
throws DICOM_Exception
Writes a DIMSE-C message.
- Parameters:
pdu - the context pdu DICOMClientServertransferSyntax - transfer syntax.classUID - the SOP Class UID.instanceUID - DOCUMENT ME!ddo - the outgoing DICOM data object (null if none required)AETitle - byte array to store the destination Application Entity title for C-Moves- Throws:
DICOM_Exception - DOCUMENT ME!
������������������������������gov/nih/mipav/model/dicomcomm/package-summary.html��������������������������������������������������0000775�4231163�4231163�00000042107�14537076122�022774� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
gov.nih.mipav.model.dicomcomm (MIPAV API Documentation)
-
Class Summary
| Class |
Description |
| DICOM_AAbortRQ |
DICOM Association Abort PDU Type.
|
| DICOM_AAssociateAC |
Implements a DICOM Association Acceptance PDU Type.
|
| DICOM_AAssociateRJ |
DICOM Association Rejection.
|
| DICOM_AAssociateRQ |
DICOM Association Request PDU Type class.
|
| DICOM_AReleaseRQ |
DICOM Association Release Request.
|
| DICOM_AReleaseRSP |
DICOM Association Release Response.
|
| DICOM_AsyncOpWindowSubItem |
DICOM AsyncOpWindowSubItem PDU Item Type - Not supported but we read it in.
|
| DICOM_Comms |
This class is used as a base class for all DICOM file and network I/O.
|
| DICOM_CommsLink |
It is a bit odd since it both extends DICOM_Comms and has a DICOM_Comms object.
|
| DICOM_Constants |
Useful DICOM constants.
|
| DICOM_CRequest |
DIMSE-C service implementations.
|
| DICOM_CResponse |
This is the base class for DIMSE-C response messages.
|
| DICOM_FileIO |
DICOM communication package reads the data from the socket and saves the data to a file stream.
|
| DICOM_MaximumSubLength |
Simple class that implements a Maximum SubLength PDU type.
|
| DICOM_Move |
This is the DICOM move class that defines functions to compose and send move requests to the server found in the
.preferences file.
|
| DICOM_Object |
The DICOM data object for storing DICOM tags (i.e. groups, elements).
|
| DICOM_ObjectList |
Vector of DICOM_Objects.
|
| DICOM_PDataTF |
Used to exchange application information (i.e.
|
| DICOM_PDUItemType |
This class implements a 2 byte item length (DICOM_PDUType implements 4 byte item length.
|
| DICOM_PDUService |
The Protocol Data Units (PDU) - PDU_Service class is a wrapper of all the lower level DICOM messaging classes.
|
| DICOM_PDUType |
This an abstract class implements a 4 byte item length (DICOM_PDUItemType implements 2 byte item length.
|
| DICOM_PDUTypeBase |
DICOMPDUTypeBase abstract base class that is extended by DICOMPDUType and DICOMPDUItemType.
|
| DICOM_PresentationContext |
DICOM Presentation Context PDU Item Type.
|
| DICOM_PresentationContextAccept |
DICOM Presentation Context Acceptance PDU Item Type.
|
| DICOM_Query |
This is the DICOM query class that defines functions to compose and send a patient root, patient level DICOM query
request to the image file server located in NIH's Clinical Center.
|
| DICOM_Receiver |
This is the DICOM server class that hangs a listener on a given port for incoming image store requests from a remote
DICOM client.
|
| DICOM_RTC |
RTC - Run Time Class (although it is actually statically defined here) This allows access to information in the DICOM
data dictionary.
|
| DICOM_RTC_Generator |
This class generates the DICOM_RTC class file from the master DICOM tag list file (whose entries are obtained through
calls to DicomDictionary).
|
| DICOM_SCPSCURoleSelect |
DICOM SCP/SCU Role Selection PDU Item Type.
|
| DICOM_Socket |
Simple class to setup and the socket and streams.
|
| DICOM_SOP |
This is a base class for all SOP Class implementations.
|
| DICOM_StdRetrieve |
DICOM Retrieve SOP Class.
|
| DICOM_StdStorage |
A DICOM Storage SOP Class.
|
| DICOM_Store |
This is the DICOM store class that defines functions to compose and send a store request to a DICOM image file
archive such as the image file server located in NIH's Clinical Center.
|
| DICOM_TransferSyntaxUtil |
Simple utilities to convert transfer syntaxes to a different form.
|
| DICOM_UID |
DICOM_UID.
|
| DICOM_UserInformation |
DICOM User Information PDU Item Type (part 8 section 9.3).
|
| DICOM_Util |
Static DICOM and general utilities to support DICOM interfacing.
|
| DICOM_Verification |
This is the DICOM verification class that defines functions to perform Verification to a DICOM image file archive
such as the Kodak PACS image file server located in NIH's Clinical Center.
|
| DICOM_VR |
DICOM Value Representation.
|
| RTCEntry |
DOCUMENT ME!
|
-
Exception Summary
| Exception |
Description |
| DICOM_Exception |
Used to for DICOM communication error handling.
|
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_FileIO.html�����������������������������������������������������0000775�4231163�4231163�00000056351�14537076061�021740� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_FileIO (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
java.io.FileInputStream |
inFileStream |
File input stream object.
|
java.io.FileOutputStream |
outFileStream |
File output stream object.
|
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
close() |
Closes both the input and output streams if not null.
|
void |
finalize() |
Prepares this class for destruction.
|
boolean |
openForRead(java.lang.String fileName) |
Open file input stream for file.
|
boolean |
openForWrite(java.lang.String fileName) |
Open file output stream for the file.
|
int |
readBinary(byte[] data,
int count) |
Read file stream data into buffer.
|
void |
sendBinary(byte[] data,
int count) |
Writes bytes from the data buffer into the file stream.
|
-
Methods inherited from class gov.nih.mipav.model.dicomcomm.DICOM_Comms
bufferToInt16, bufferToInt32, flush, flush, getIncomingEndian, getIncomingSize, getOutgoingEndian, getOutgoingSize, int16ToBuffer, int32ToBuffer, peekFirstByte, peekForEndOfSequence, read, read, readByte, readBytes, readFill, readInt32, readShort16, seekToEndOfGroupTwoTags, sendBinary, setIncomingEndianess, setOutgoingEndianess, write, write, writeByte, writeByteIn, writeIn, writeInt32, writeInt32In, writeShort16, writeShort16In
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DICOM_FileIO
public DICOM_FileIO()
-
Method Detail
-
readBinary
public int readBinary(byte[] data,
int count)
throws DICOM_Exception
Read file stream data into buffer.
- Overrides:
readBinary in class DICOM_Comms- Parameters:
data - buffer in which to store data from file streamcount - number of bytes to read into buffer- Returns:
- The actual number of bytes read.
- Throws:
DICOM_Exception - Throws an exception if there was a problem readiing in the data to the port.
-
sendBinary
public void sendBinary(byte[] data,
int count)
throws DICOM_Exception
Writes bytes from the data buffer into the file stream.
- Parameters:
data - buffer which holds the info to outputcount - number of bytes to output- Throws:
DICOM_Exception - Throws an exception if there was a problem outputting the data to the port.
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_RTC_Generator.html����������������������������������������������0000775�4231163�4231163�00000123556�14537076062�023272� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_RTC_Generator (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
defaultRTCclassName
protected static final java.lang.String defaultRTCclassName
Default classname for the generated file being used in the Run Time Class, which allows access to information in
the DICOM data dictionary. It is created for use with the dicomcomm package, a UC-Berkeley-originated collection
objects.
- See Also:
- Constant Field Values
-
default_RTC_name
public static java.lang.String default_RTC_name
Default output file name for the RTC source output, "DICOM_RTC.java".
��������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_PDUType.html����������������������������������������������������0000775�4231163�4231163�00000046760�14537076061�022126� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_PDUType (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved2, reserved3, reserved4, UID
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Constructor Detail
-
DICOM_PDUType
public DICOM_PDUType()
����������������gov/nih/mipav/model/dicomcomm/DICOM_PDUService.html�������������������������������������������������0000775�4231163�4231163�00000215633�14537076061�022602� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_PDUService (MIPAV API Documentation)
-
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_PDUService() |
PDU_Service constructor.
|
-
Method Summary
All Methods Static Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
private void |
abort() |
Aborts an association and closes the socket.
|
void |
addAbstractSyntax(java.lang.String SOP_UID) |
Adds proposed abstract syntax to hash table.
|
void |
addAllSupportedAbstractSyntaxes() |
Adds all proposed abstract syntaxes to hash table.
|
void |
addFindResultToList(DICOM_Object dco,
DICOM_Object ddo) |
Utility function to collect the results of a DICOM query.
|
void |
addJustVerificationAbstractSyntax() |
Adds just the verification syntax for DICOM verification process.
|
private void |
buildRawBuffer(DICOM_Comms vrBuffer) |
Fills the compData buffer from the vrBuffer.incomming buffers.
|
private boolean |
canWeHandleTransferSyntax(DICOM_PDUItemType trnSyntax) |
Determines wheather or not this transfer syntax is support by MIPAV.
|
void |
close() |
Disconnect socket and free up memory.
|
void |
connectClientToServer(java.lang.String remoteAppTitle,
boolean verification,
java.lang.String transferSyntax,
java.lang.String classUID) |
This is a simple interface to establish an association over a socket from the client (i.e.
|
private DICOM_UserInformation |
constructUserInformation() |
Fills the with MIPAV information.
|
protected void |
finalize() |
Used to make sure socket has properly been closed.
|
DICOM_AAssociateRQ |
getAAssociateRQ() |
Returns the association request.
|
java.lang.String |
getImplementationClassUID() |
Implementation class uid.
|
java.lang.String |
getImplementationVersion() |
Implementation version uid.
|
java.lang.String |
getLocalAppTitle() |
Returns the AETitle we use to identify ourself (our local AppTitle name).
|
protected java.lang.String |
getTransferSyntaxID() |
Gets the transfer syntax ID of the data.
|
void |
handleConnectionFromServer(java.net.Socket sock) |
Establishes an association over a socket from the server (SCP) side.
|
private boolean |
interrogateAAssociateAC() |
Decompose association ack.
|
private boolean |
interrogateAAssociateRQ() |
Decompose association request and send proper response.
|
void |
parseDICOMintoBuffer(DICOM_Object ddo,
DICOM_Comms vrBuffer,
DICOM_FileIO ioBuffer) |
|
void |
parseDICOMIntoRawVR(DICOM_Object dobj,
DICOM_Comms vrBuffer) |
Converts a DICOMObject into an outgoing DICOM data stream.
|
static void |
parseRawVRIntoDICOM(DICOM_Comms vrBuffer,
DICOM_Object dobj) |
Convert an incoming DICOM network data stream into a DICOMObject.
|
static java.lang.String[] |
parseServerInfo(java.lang.String info) |
Parses the server info string and returns a tokenized array of strings that where deliniated by ";" (See MIPAV
preference file).
|
int |
readBinary(byte[] data,
int count) |
Actual binary data from the port.
|
DICOM_Object |
readDICOMDataObjectFromFile(java.lang.String filename) |
Loads a DICOM image from a file.
|
boolean |
readInObject(DICOM_Object DICOMobj) |
The main method for reading incoming DICOM messages. true: complete PData unit received, socket still open false:
release request received, then close the socket
|
void |
saveImageToFile(DICOM_Comms.ByteBuffer dataObj,
java.lang.String fileName) |
Saves the DDO to the file name supplied as a method parameter.
|
void |
sendBinary(byte[] data,
int offset,
int count) |
Actual binary data to be sent.
|
private void |
setApplicationContext(java.lang.String applicationUID) |
Sets the application context UID.
|
void |
setDICOMMessageDisplayer(DICOMDisplayer displayer) |
Sets the display viewer.
|
private void |
setLocalAddress(java.lang.String localAddress) |
Sets the local address of the calling application entity.
|
private boolean |
shouldWeAcceptAbstractSyntax(DICOM_PDUItemType abstractSyntax) |
Should MIPAV accept the abstract syntax.
|
private boolean |
shouldWeAcceptApplicationContext(DICOM_PDUItemType applicationContext) |
As it turn out we accept all application contexts.
|
boolean |
shouldWeAcceptLocalAppTitle(java.lang.String AEtitle) |
Accept all.
|
boolean |
shouldWeAcceptRemoteAppTitle(java.lang.String remoteAETitle) |
Accept only AETitles listed in the server host table (remote) *** We accept all AETitles at this time!
|
void |
showMessage(java.lang.String str) |
Shows a message in the GUI message panel.
|
void |
write(DICOM_Object DICOMObj,
java.lang.String sopClassUID,
byte messageHeader) |
Writes the DICOMObj out through the socket.
|
void |
write(java.lang.String transferSyntax,
DICOM_Object ddo,
java.lang.String sopClassUID,
byte messageHeader) |
Writes the image (loaded into ioBuffer from file) out the port.
|
-
Methods inherited from class gov.nih.mipav.model.dicomcomm.DICOM_Comms
bufferToInt16, bufferToInt32, flush, flush, getIncomingEndian, getIncomingSize, getOutgoingEndian, getOutgoingSize, int16ToBuffer, int32ToBuffer, peekFirstByte, peekForEndOfSequence, read, read, readByte, readBytes, readFill, readInt32, readShort16, seekToEndOfGroupTwoTags, setIncomingEndianess, setOutgoingEndianess, write, write, writeByte, writeByteIn, writeIn, writeInt32, writeInt32In, writeShort16, writeShort16In
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
proposedAbstractSyntaxs
java.util.Hashtable<java.lang.String,DICOM_PDUItemType> proposedAbstractSyntaxs
A hash table of proposed abstract syntaxes where: value = AbstractSyntaxes; key = UID.
-
Method Detail
-
parseRawVRIntoDICOM
public static void parseRawVRIntoDICOM(DICOM_Comms vrBuffer,
DICOM_Object dobj)
Convert an incoming DICOM network data stream into a DICOMObject.
- Parameters:
vrBuffer - the I/O DICOM_CommsLink.java from which to read the data streamdobj - the DICOM_Object.java to fill
-
parseServerInfo
public static java.lang.String[] parseServerInfo(java.lang.String info)
Parses the server info string and returns a tokenized array of strings that where deliniated by ";" (See MIPAV
preference file).
- Parameters:
info - A string deliniated by ";" that contains (AETitle, Alias, IP, PORT).- Returns:
- server info parsed into an array of strings (AETitle, Alias, IP, PORT).
-
addFindResultToList
public void addFindResultToList(DICOM_Object dco,
DICOM_Object ddo)
Utility function to collect the results of a DICOM query. Fills the findResults list.
- Parameters:
dco - the received command objectddo - the received data object
-
connectClientToServer
public void connectClientToServer(java.lang.String remoteAppTitle,
boolean verification,
java.lang.String transferSyntax,
java.lang.String classUID)
throws DICOM_Exception
This is a simple interface to establish an association over a socket from the client (i.e. MIPAV) (SCU) side.
- Parameters:
remoteAppTitle - the application entity title to attempt to connect toverification - if true only add Verification UID syntax.transferSyntax - if this is passed in, only add this transfer syntax to the the available pres contextsclassUID - used in conjunction with transfer syntax to specify ONE type of abstract syntax to use- Throws:
DICOM_Exception - Throws an error if there was a problem connecting to the server.
-
parseDICOMIntoRawVR
public void parseDICOMIntoRawVR(DICOM_Object dobj,
DICOM_Comms vrBuffer)
Converts a DICOMObject into an outgoing DICOM data stream.
- Parameters:
dobj - the DICOMObject to sendvrBuffer - the I/O Buffer to write to
-
readBinary
public int readBinary(byte[] data,
int count)
throws DICOM_Exception
Actual binary data from the port.
- Overrides:
readBinary in class DICOM_Comms- Parameters:
data - buffer to store the datacount - number of bytes to be read- Returns:
- number of bytes actually read
- Throws:
DICOM_Exception - Throws an error if there was a problem reading the socket.
-
readInObject
public boolean readInObject(DICOM_Object DICOMobj)
throws DICOM_Exception
The main method for reading incoming DICOM messages. true: complete PData unit received, socket still open false:
release request received, then close the socket
- Parameters:
DICOMobj - The DICOM object. Null if pDataTF.getVRLinkedBuffer holds data.- Returns:
- true complete PData unit received, socket still open false release request received, then close the
socket
- Throws:
DICOM_Exception - Throws an error if a problem reading in the object or data is encountered.
-
saveImageToFile
public void saveImageToFile(DICOM_Comms.ByteBuffer dataObj,
java.lang.String fileName)
throws DICOM_Exception
Saves the DDO to the file name supplied as a method parameter.
- Parameters:
fileName - name of the file where the ddo is to be stored- Throws:
DICOM_Exception - Throws error if a problem writing the image to file is encountered.
-
sendBinary
public void sendBinary(byte[] data,
int offset,
int count)
throws DICOM_Exception
Actual binary data to be sent.
- Overrides:
sendBinary in class DICOM_Comms- Parameters:
data - buffer of data send out the port (socket)offset - starting offsetcount - number of bytes to be sent- Throws:
Throws - an error when a problem is encoutered writing.DICOM_Exception - DOCUMENT ME!
-
shouldWeAcceptRemoteAppTitle
public boolean shouldWeAcceptRemoteAppTitle(java.lang.String remoteAETitle)
throws DICOM_Exception
Accept only AETitles listed in the server host table (remote) *** We accept all AETitles at this time!
- Parameters:
remoteAETitle - - calling (remote AE Title)- Returns:
- true if the remoteAETitle has been found in the server host table (host table in the user preference file
- Throws:
DICOM_Exception - Not used at this time.
-
write
public void write(java.lang.String transferSyntax,
DICOM_Object ddo,
java.lang.String sopClassUID,
byte messageHeader)
throws DICOM_Exception
Writes the image (loaded into ioBuffer from file) out the port.
- Parameters:
transferSyntax - Transfer syntaxddo - sopClassUID - SOP class UIDmessageHeader - 1 = indicates command, 0 = data.- Throws:
DICOM_Exception - Throws error if an error is encountered writing the image out the port.
-
write
public void write(DICOM_Object DICOMObj,
java.lang.String sopClassUID,
byte messageHeader)
throws DICOM_Exception
Writes the DICOMObj out through the socket.
- Parameters:
DICOMObj - the DICOM object to be sent.sopClassUID - SOP class UIDmessageHeader - Value of 0 indicates data message. Value of 1 indicates command message.- Throws:
DICOM_Exception - Indicates erroring writing DICOM objects.
�����������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_PDataTF.html����������������������������������������������������0000775�4231163�4231163�00000066754�14537076061�022064� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_PDataTF (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
(package private) int |
outBlockSize |
Size of the output data
|
private int |
PDVLength |
Presentation Data Value length.
|
private byte |
PDVMsgHeader |
Presentation Data Value message header. 01H Accociate request. 02H Associate ack. 03H Associate reject. 04H PData
PDU 05H Release request 06H Release response 07H Abort 10H Application context item 20H Presetation context item
21H Pr 30H Abstract Syntax sub-item 40H Trnasfer Syntax sub-item 50H User information item
|
byte |
PDVPresContID |
Presentation Data Value presentation context ID.
|
private boolean |
readMessageStatus |
Flag used to identify read message status.
|
(package private) DICOM_CommsLink |
vrLinkedBuffer |
Reference to the link buffer communication link.
|
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved2, reserved3, reserved4, UID
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_PDataTF() |
Creates a new DICOM_PDataTF object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
outBlockSize
int outBlockSize
Size of the output data
-
PDVMsgHeader
private byte PDVMsgHeader
Presentation Data Value message header. 01H Accociate request. 02H Associate ack. 03H Associate reject. 04H PData
PDU 05H Release request 06H Release response 07H Abort 10H Application context item 20H Presetation context item
21H Pr 30H Abstract Syntax sub-item 40H Trnasfer Syntax sub-item 50H User information item
-
Method Detail
-
finalize
public void finalize()
Cleans up memory.
- Overrides:
finalize in class java.lang.Object
-
write
public void write(DICOM_PDUService PDU,
byte presentationContextID,
byte msgHeader)
throws DICOM_Exception
Writes P-DATA-TF Messages.
- Parameters:
PDU - The PDUpresentationContextID - The presentation context ID.msgHeader - The message header.- Throws:
DICOM_Exception - Indicates error writing PData information.
��������������������gov/nih/mipav/model/dicomcomm/DICOM_AAssociateRQ.html�����������������������������������������������0000775�4231163�4231163�00000116200�14537076061�023076� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_AAssociateRQ (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved4, UID
-
Constructor Summary
Constructors
| Constructor |
Description |
DICOM_AAssociateRQ() |
Creates a new DICOM_AAssociateRQ object.
|
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
getPresentationContextID
public byte getPresentationContextID(java.lang.String transferSyntax,
java.lang.String absUID)
throws DICOM_Exception
Gets a presentation context ID for a given abstrax syntax.
- Parameters:
absUID - the abstract syntax UID- Returns:
- the presentation context ID
- Throws:
DICOM_Exception - unknown presentation context ID
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Receiver.RunnerThread.html��������������������������������������0000775�4231163�4231163�00000032417�14537076061�024772� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Receiver.RunnerThread (MIPAV API Documentation)
- java.lang.Object
-
- java.lang.Thread
-
- gov.nih.mipav.model.dicomcomm.DICOM_Receiver.RunnerThread
-
-
Nested Class Summary
-
Nested classes/interfaces inherited from class java.lang.Thread
java.lang.Thread.State, java.lang.Thread.UncaughtExceptionHandler
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
private boolean |
keepGoing |
DOCUMENT ME!
|
-
Fields inherited from class java.lang.Thread
MAX_PRIORITY, MIN_PRIORITY, NORM_PRIORITY
-
Constructor Summary
Constructors
| Constructor |
Description |
RunnerThread(java.lang.Runnable target) |
Creates a new RunnerThread object.
|
-
Method Summary
-
Methods inherited from class java.lang.Thread
activeCount, checkAccess, clone, countStackFrames, currentThread, dumpStack, enumerate, getAllStackTraces, getContextClassLoader, getDefaultUncaughtExceptionHandler, getId, getName, getPriority, getStackTrace, getState, getThreadGroup, getUncaughtExceptionHandler, holdsLock, interrupt, interrupted, isAlive, isDaemon, isInterrupted, join, join, join, onSpinWait, resume, run, setContextClassLoader, setDaemon, setDefaultUncaughtExceptionHandler, setName, setPriority, setUncaughtExceptionHandler, sleep, sleep, start, stop, suspend, toString, yield
-
Methods inherited from class java.lang.Object
equals, finalize, getClass, hashCode, notify, notifyAll, wait, wait, wait
-
-
Method Detail
-
setStop
public void setStop()
DOCUMENT ME!
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_AsyncOpWindowSubItem.html���������������������������������������0000775�4231163�4231163�00000052406�14537076061�024663� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_AsyncOpWindowSubItem (MIPAV API Documentation)
-
-
Field Summary
Fields
| Modifier and Type |
Field |
Description |
protected short |
maxNumOpsInvoked |
Indicates the maximum number of operations invoked.
|
protected short |
maxNumOpsPerformed |
Indicates the maximum number of operations performed.
|
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
itemType, length, PDUTYPE_AAbortRQ, PDUTYPE_AAssociateAC, PDUTYPE_AAssociateRJ, PDUTYPE_AAssociateRQ, PDUTYPE_AbstractSyntax, PDUTYPE_ApplicationContext, PDUTYPE_AReleaseRQ, PDUTYPE_AReleaseRSP, PDUTYPE_AsyncOpWindowSubItem, PDUTYPE_ImplementationClass, PDUTYPE_ImplementationVersion, PDUTYPE_MaximumSubLength, PDUTYPE_PDataTF, PDUTYPE_PresentationContext, PDUTYPE_PresentationContextAccept, PDUTYPE_SCPSCURoleSelect, PDUTYPE_TransferSyntax, PDUTYPE_UNKNOWN, PDUTYPE_UserInformation, RESERVED, reserved1, reserved2, reserved3, reserved4, UID
-
Method Summary
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������gov/nih/mipav/model/dicomcomm/DICOM_Receiver.html���������������������������������������������������0000775�4231163�4231163�00000144752�14537076061�022400� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_Receiver (MIPAV API Documentation)
-
-
Field Summary
-
Fields inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
abortRQ, associateAC, associateRJ, associateRQ, compData, dicomMessageDisplayer, findResults, ioBuffer, moveResults, pDataTF, PresentationContexts, proposedAbstractSyntaxs, releaseRQ, releaseRSP, socket
-
Method Summary
All Methods Instance Methods Concrete Methods
| Modifier and Type |
Method |
Description |
void |
addObserver(Observer o) |
Adds an observer to the set of observers for this object,
provided that it is not the same as some observer already in the set.
|
private void |
addPreambleAndGroupTwoTags(DICOM_Object dco) |
Builds buffer of DICOM part 10 preamble and require Part 10 group 2 tags.
|
void |
clearChanged() |
Marks this object as no longer having been changed.
|
int |
countObservers() |
Returns the number of the observers of this Observable object.
|
private boolean |
createServerSocket() |
Creates the initial server socket binded to the given port.
|
void |
deleteObserver(Observer o) |
Deletes an observer from the set of observers of this object.
|
void |
deleteObservers() |
Clears the observer list so that this object no longer has
any observer.
|
void |
finalize() |
DOCUMENT ME!
|
java.lang.String |
getDefaultStorageDir() |
Returns the default storage directory for the received dicom files.
|
boolean |
hasChanged() |
Test if this object has changed.
|
boolean |
isAlive() |
Checks to see if the thread controlling the receivers execution is alive.
|
void |
mipavReceiver() |
Starts the DICOM image receiver.
|
void |
notifyObservers(java.lang.Object obj) |
If this object has changed, as indicated by the hasChanged
method, then notify all of its observers and then call the
clearChanged method to indicate that this object has no
longer changed.
|
void |
receiverClient(java.net.Socket socket) |
Routine to Process a DICOM Store Request.
|
void |
resetPort(int port) |
Resets the port and changes where the receiver is listening.
|
void |
run() |
Run method so that this receiver can execute in its own thread.
|
void |
setCancelled(boolean flag) |
Turns the cancelled flag on or off.
|
void |
setChanged() |
Marks this object as having been changed.
|
void |
setStop() |
Stops the receiver thread.
|
void |
start(int priority) |
Checks to see if a thread is already running on this object, and if not starts it.
|
-
Methods inherited from class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
addAbstractSyntax, addAllSupportedAbstractSyntaxes, addFindResultToList, addJustVerificationAbstractSyntax, close, connectClientToServer, getAAssociateRQ, getImplementationClassUID, getImplementationVersion, getLocalAppTitle, getTransferSyntaxID, handleConnectionFromServer, parseDICOMintoBuffer, parseDICOMIntoRawVR, parseRawVRIntoDICOM, parseServerInfo, readBinary, readDICOMDataObjectFromFile, readInObject, saveImageToFile, sendBinary, setDICOMMessageDisplayer, shouldWeAcceptLocalAppTitle, shouldWeAcceptRemoteAppTitle, showMessage, write, write
-
Methods inherited from class gov.nih.mipav.model.dicomcomm.DICOM_Comms
bufferToInt16, bufferToInt32, flush, flush, getIncomingEndian, getIncomingSize, getOutgoingEndian, getOutgoingSize, int16ToBuffer, int32ToBuffer, peekFirstByte, peekForEndOfSequence, read, read, readByte, readBytes, readFill, readInt32, readShort16, seekToEndOfGroupTwoTags, setIncomingEndianess, setOutgoingEndianess, write, write, writeByte, writeByteIn, writeIn, writeInt32, writeInt32In, writeShort16, writeShort16In
-
Methods inherited from class java.lang.Object
clone, equals, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Field Detail
-
changed
private boolean changed
DOCUMENT ME!
-
Method Detail
-
addObserver
public void addObserver(Observer o)
Adds an observer to the set of observers for this object,
provided that it is not the same as some observer already in the set.
- Specified by:
addObserver in interface Observable- Parameters:
o - an observer object.- See Also:
Observable.addObserver(Observer)
-
notifyObservers
public void notifyObservers(java.lang.Object obj)
If this object has changed, as indicated by the hasChanged
method, then notify all of its observers and then call the
clearChanged method to indicate that this object has no
longer changed.
- Specified by:
notifyObservers in interface Observable- Parameters:
obj - the argument object- See Also:
Observable.notifyObservers(Object)
-
start
public void start(int priority)
Checks to see if a thread is already running on this object, and if not starts it.
- Parameters:
priority - thread priority
-
createServerSocket
private boolean createServerSocket()
Creates the initial server socket binded to the given port. If unable to be created, will return without having
started the dicom receiver.
- Parameters:
port -
����������������������gov/nih/mipav/model/dicomcomm/DICOM_TransferSyntaxUtil.html�����������������������������������������0000775�4231163�4231163�00000042032�14537076062�024452� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
DICOM_TransferSyntaxUtil (MIPAV API Documentation)
- java.lang.Object
-
- gov.nih.mipav.model.dicomcomm.DICOM_TransferSyntaxUtil
-
-
Method Summary
All Methods Static Methods Concrete Methods
| Modifier and Type |
Method |
Description |
static int |
convertToAlias(java.lang.String transferSyntaxUID) |
Converts a transfer syntax UID to one of the three transfer syntaxes.
|
static java.lang.String |
convertToReadableString(java.lang.String transferSyntaxUID) |
Converts a transfer syntax UID (i.e. "1.2.840.10008.1.2.4.50") to a more understandable string form ( i.e.
|
-
Methods inherited from class java.lang.Object
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait
-
-
Method Detail
-
convertToReadableString
public static java.lang.String convertToReadableString(java.lang.String transferSyntaxUID)
Converts a transfer syntax UID (i.e. "1.2.840.10008.1.2.4.50") to a more understandable string form ( i.e.
TransferJPEGBASELINEPROCESS1 )
- Parameters:
transferSyntaxUID - UID to be converted- Returns:
- the convert UID string.
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������help-doc.html���������������������������������������������������������������������������������������0000775�4231163�4231163�00000022462�14537076136�013654� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
API Help (MIPAV API Documentation)
-
Overview
The Overview page is the front page of this API document and provides a list of all packages with a summary for each. This page can also contain an overall description of the set of packages.
-
Package
Each package has a page that contains a list of its classes and interfaces, with a summary for each. These pages may contain six categories:
- Interfaces
- Classes
- Enums
- Exceptions
- Errors
- Annotation Types
-
Class or Interface
Each class, interface, nested class and nested interface has its own separate page. Each of these pages has three sections consisting of a class/interface description, summary tables, and detailed member descriptions:
- Class Inheritance Diagram
- Direct Subclasses
- All Known Subinterfaces
- All Known Implementing Classes
- Class or Interface Declaration
- Class or Interface Description
- Nested Class Summary
- Field Summary
- Property Summary
- Constructor Summary
- Method Summary
- Field Detail
- Property Detail
- Constructor Detail
- Method Detail
Each summary entry contains the first sentence from the detailed description for that item. The summary entries are alphabetical, while the detailed descriptions are in the order they appear in the source code. This preserves the logical groupings established by the programmer.
-
Annotation Type
Each annotation type has its own separate page with the following sections:
- Annotation Type Declaration
- Annotation Type Description
- Required Element Summary
- Optional Element Summary
- Element Detail
-
Enum
Each enum has its own separate page with the following sections:
- Enum Declaration
- Enum Description
- Enum Constant Summary
- Enum Constant Detail
-
Tree (Class Hierarchy)
There is a Class Hierarchy page for all packages, plus a hierarchy for each package. Each hierarchy page contains a list of classes and a list of interfaces. Classes are organized by inheritance structure starting with java.lang.Object. Interfaces do not inherit from java.lang.Object.
- When viewing the Overview page, clicking on "Tree" displays the hierarchy for all packages.
- When viewing a particular package, class or interface page, clicking on "Tree" displays the hierarchy for only that package.
-
Deprecated API
The Deprecated API page lists all of the API that have been deprecated. A deprecated API is not recommended for use, generally due to improvements, and a replacement API is usually given. Deprecated APIs may be removed in future implementations.
-
Index
The Index contains an alphabetic index of all classes, interfaces, constructors, methods, and fields, as well as lists of all packages and all classes.
-
All Classes
The All Classes link shows all classes and interfaces except non-static nested types.
-
Serialized Form
Each serializable or externalizable class has a description of its serialization fields and methods. This information is of interest to re-implementors, not to developers using the API. While there is no link in the navigation bar, you can get to this information by going to any serialized class and clicking "Serialized Form" in the "See also" section of the class description.
-
-
Search
You can search for definitions of modules, packages, types, fields, methods and other terms defined in the API, using some or all of the name. "Camel-case" abbreviations are supported: for example, "InpStr" will find "InputStream" and "InputStreamReader".
This help file applies to API documentation generated by the standard doclet.
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������index-all.html��������������������������������������������������������������������������������������0000775�4231163�4231163�00261513010�14537076136�014041� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Index (MIPAV API Documentation)
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z _ All Classes All Packages
A
- a - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBarrelDistortion
-
DOCUMENT ME!
- a - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
generated with randomly scrambled blocks of pixels having a linear correlation coefficient less than that of the
actual image.
- a - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColorSaturation
-
- a - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- a - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
-
- a - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.tuple2i
-
- a - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- a - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Input parameter
- a - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
-
- a - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cdft_arg_t
-
- a - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- a - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- a - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
- a - Variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
Input parameter
- a - Variable in class gov.nih.mipav.model.algorithms.NelderMead.param_t
-
- a - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
On completion if exitStatus >= 0 a[] contains the latest (best) estimate of the solution point.
- a - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
On completion if exitStatus >= 0 a[] contains the latest (best) estimate of the solution point.
- a - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_t
-
- a - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- a - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- a - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
- a - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- a - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Edge
-
- a() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- a(int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- a(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- a(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- A - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- A - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearLeastSquaresProblem
-
- A - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockJacobiPreconditionerTest
-
- A - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- A - Variable in class gov.nih.mipav.model.algorithms.ConjugateGradient
-
- A - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- A - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- A - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< observation mean
- A - Variable in class gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
- A - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Affine
-
- A - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- A - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- A - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.TestRun
-
- A() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- a_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ArctanLoss
-
- a_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BadTestTerm
-
- a_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GoodTestTerm
-
- a_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.HuberLoss
-
- a_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ScaledLoss
-
- a_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TestTerm
-
- a_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TolerantLoss
-
- a_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.LinearCostFunction2
-
- A_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CgnrLinearOperator
-
- A_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- A_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NormalPrior
-
- A_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- A_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- A_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- A_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- A_array - Variable in class gov.nih.mipav.model.algorithms.dataStruct
-
- a_asDouble() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- a_asDouble() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Returns the alpha value of this pixel at its current position.
- A_CLIPSLICE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an x clip slice.
- a_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- A_init - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- a_normalized(int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- a_normalized(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- a_offset - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cdft_arg_t
-
- a_squared_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TukeyLoss
-
- a0 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- a0 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- a0 - Variable in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- a0 - Variable in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- a0Array - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
- a0Num - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughCardioid
-
- a0Num - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
- a1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- a1 - Variable in class gov.nih.mipav.model.algorithms.CubicEquation
-
- a1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- a1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- a1 - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
- A1 - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- a11 - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedEllipse
-
< center y-coordinate
- a11 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- a12 - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedEllipse
-
<
- a12 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- a13 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- A1COF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- a1div3 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- a1div3 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- a2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- a2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- a21 - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedEllipse
-
- a22 - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedEllipse
-
- a22 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- a23 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- a3 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- a3 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- a33 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- a4 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- a5 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- a6 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- a7 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- aaAccurateSmoothing - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- aaButton - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- Aac - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- AAM_MAX2(double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.AAMdef
-
define the max function with two given double values.
- AAM_MAX3(double, double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.AAMdef
-
define the max function for three given double values.
- AAM_MIN2(double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.AAMdef
-
define the min function for two given double values.
- AAM_MIN3(double, double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.AAMdef
-
define the min function for three given double values.
- aam_Table - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- aaMask - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- aamc - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
AAM-API LICENSE - file: license.txt
This software is freely available for non-commercial use such as research and education.
- aamc() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.aamc
-
- aamClassification() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- AAMdef - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- AAMdef() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.AAMdef
-
- aamGroupRename() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- aamGroups() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- AAMinitialization() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Atlas based AAM segmentation.
- AAMLoadAnalyzerSynthesizer(DataInputStream, CAAMReferenceFrame) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
Analyzer/Synthesizer loader.
- AAMLoadTransferFunction(DataInputStream, CAAMModel) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
The function loads a transfer function from a stream, instantiates the
correct concrete class and returns a base class pointer.
- aamMLClassification() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- AAMName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase.ImageAttributes
-
- AAMName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile.ImageAttributes
-
- AAMName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase.ImageAttributes
-
- AAMName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase.ImageAttributes
-
- AAMRound(double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.AAMdef
-
Round up function
- aaPatch - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- aaPatchX - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- aaPatchY - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- aArray - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- aArray - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- abbrev - Variable in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- abdomenLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
Preset labels.
- abdomenLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Preset labels.
- abdomenLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Preset labels.
- abdomenMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
Preset min, max values.
- abdomenMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Preset min, max values.
- abdomenMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Preset min, max values.
- abdomenMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
Preset min, max values.
- abdomenMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Preset min, max values.
- abdomenMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Preset min, max values.
- abort - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
If true stop processing.
- abort() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Aborts an association and closes the socket.
- AbortingIterationCallback() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.AbortingIterationCallback
-
- abortRQ - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Abort connection request.
- about() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Makes an aboutDialog box and displays information of the image plane presently being displayed.
- about() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Creates simple dialog that describes basic info about MIPAV, with MIPAV as the title.
- about(int, int) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Makes an aboutDialog box that displays information about the image slice.
- about(String, String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Creates a fairly simple plain-text viewing box.
- ABOUT_MIPAV - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Access about mipav panel
- aboutDataProvenance() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Displays the system data provenance using a simple dialog with table and jtextarea (for current selection).
- aboutJava() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Creates simple dialog that describes basic info about the version of Java.
- aboutPanel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
- ABOVE - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- aboveMedian - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
factor above median at which edge values are taken to zero.
- aboveMedian - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
The factor above which second stage edge erosion occurs.
- abs() - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns the absolute value of this value.
- Abs() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Takes the absolute valueof each element.
- abs1(double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- Abs2Rel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Converts shape coordinates from absolute to relative.
- Abs2Rel(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Converts shape coordinates from absolute to relative by using the
hostimage.
- absBiggest(double, double, double) - Method in class gov.nih.mipav.model.file.FileIO
-
Helper method for finding biggest (absolute value) of three numbers.
- absButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- abscissa - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
DOCUMENT ME!
- abscissa - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
abscissa of convergence of the Laplace transform.
- absEps - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
DOCUMENT ME!
- absEps - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
absolute accuracy requested.
- abserr - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
Estimate of the absolute value of the error, which should equal or exceed abs(actual integral - result).
- abserr - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Estimate of the absolute value of the error, which should equal or exceed abs(actual integral - result).
- abserr - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- abserr - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- absGtw - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- absGw - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- absHtw - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- absHw - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- absMinThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
pixel does not get remapped when pixel is below threshold.
- ABSOLUTE_VALUE - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- ABSOLUTE_VALUE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- absoluteConvergence - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
absolute convergence constant Used to test for convergence by the sum of squares being less than the
absoluteConvergence squared.
- absoluteConvergence - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
absolute convergence constant Used to test for convergence by the sum of squares being less than the
absoluteConvergence squared.
- absoluteGoTo() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Method that goes to the absolute voxel coordinate that is entered
- absoluteGoToButton - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- absoluteGoToPanel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- absoluteLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Labels for the current absolute position:.
- absoluteLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Labels for the current absolute position:.
- absoluteLabelVals - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Labels for the current absolute position values:.
- absoluteLabelVals - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Labels for the current absolute position values:.
- absolutePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
JPanel containing the absoulte position labels:.
- absolutePanel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
JPanel containing the absoulte position labels:.
- absoluteTrue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
total number of voxels at a particular nonzero level.
- absoluteTrue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
total number of id voxels in true image.
- absoluteValue(int, float[]) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
absolute value
- absoluteValue(ModelImage) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Take the absolute value of image.
- absoluteValue(ModelImage) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Absolute value of image.
- absoluteWindowLevelButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- absoluteXLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
voxel absolute goto components*
- absoluteXTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- absoluteYLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
voxel absolute goto components*
- absoluteYTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- absoluteZLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
voxel absolute goto components*
- absoluteZTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- abssq(double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- absstp - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- absSyntax - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContext
-
Abstract syntax object.
- abstol - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- abstol - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- aButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- ac - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion.kFitting
-
- AC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable.HuffmanTableClass
-
- ac_cur_tbls - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- ac_derived_tbl - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- ac_derived_tbls - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- ac_huff_tbl_ptrs - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- AC_STAT_BINS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- ac_stats - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- ac_tbl_no - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- ac1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ac2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ac3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ac4 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ac5 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ac6 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ac7 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ac8 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ac9 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- acc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- accept(File) - Method in class gov.nih.mipav.view.renderer.flythroughview.FileFilterExt
-
FileFilter override.
- accept(File) - Method in class gov.nih.mipav.view.ViewImageFileFilter
-
One of the overrides to FileFilter.
- accept(String) - Method in class gov.nih.mipav.view.ViewImageFileFilter
-
Checks if extension matches what is accepted for the filter type.
- acceptedChars - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea.JTextFieldFilter
-
DOCUMENT ME!
- acceptedSocket - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Socket used to receive the data.
- acceptorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- acceptorImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- acceptorImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- acceptorRun - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETBleedThrough
-
If acceptorRun is true, run on 3 images with acceptor dye only.
- acceptorRun - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- access_virt_barray(libjpeg.jpeg_decompress_struct, libjpeg.jvirt_barray_control, int, int, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- access_virt_sarray8(libjpeg.jpeg_decompress_struct, libjpeg.jvirt_sarray_control, int, int, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- access_virt_sarray9to12(libjpeg.jpeg_decompress_struct, libjpeg.jvirt_sarray_control, int, int, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- accessionNumber - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- accessLock - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- accessoryPanel - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- accessPrimaryData(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
permits the caller to get a value out of the primary table by using the name given to the fileInfo.
- accessPrimaryData(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
permits the caller to get a value out of the primary table by using the name given to the fileInfo.
- accumulate - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- accumulate_hom - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- accumulated_candidate_model_cost_change_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
- accumulated_reference_model_cost_change_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
- accumulateFn - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- accumulateFunction(int, SVM.VlSvmDataset, int, double[], double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- accuracy - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- aCenter - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- aCenter - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- acins - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- acins - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- ackleyNum - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- AclipPlanePts - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping plane four corners points.
- aClipVisible - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean visibility values for x, y, z, arbitrary clipping slider frames.
- ACOEF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ACOFC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- acos() - Method in class gov.nih.mipav.util.DoubleDouble
-
For all -1 < x < 1, arccos(x) = PI/2 - arcsin(x)
- ACPC_ANTERIOR - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
acpc constants.
- ACPC_INFERIOR - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
acpc constants.
- ACPC_LATERAL - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
acpc constants.
- ACPC_POSTERIOR - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
acpc constants.
- ACPC_SUPERIOR - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
acpc constants.
- ACPC_TO_ORIG - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- ACPC_TO_ORIG - Static variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- ACPC_TO_TLRC - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- ACPC_TO_TLRC - Static variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- acpcAC - Variable in class gov.nih.mipav.model.file.FileAfni
-
Anterior Comissure in acpc space.
- acpcAC - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Anterior Comissure in acpc space.
- acpcACFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- acpcDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- acpcDim - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Image dimensions.
- acpcDimFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- ACPCGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- acpcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- acpcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- ACPCImage - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- acpcMax - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- acpcMax - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
ACPC min and max extents of the brain.
- acpcMaxCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- acpcMaxFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- acpcMaxPt - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- acpcMin - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- acpcMin - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
ACPC min and max extents of the brain.
- acpcMinCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- acpcMinFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
TLRC Specific info.
- acpcMinPt - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- acpcName - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- acpcPC - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- acpcPC - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- acpcPC - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Posterior Comissure in acpc space.
- acpcPC - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- acpcPCCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- acpcPCFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- acpcRes - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- acpcRes - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Voxel resolution (cubic).
- acpcRes - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- acpcResField - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- acpcResLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- acpcResOrg - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- acpcResPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- acpcResText - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- acpcToOrig(int, int, int, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from acpc to orig...matrix is implicitly inverted in code.
- acpcToOrig(Vector3f, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from acpc to orig...matrix is implicitly inverted in code.
- acpcToTlrc(int, int, int, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from acpc to tlrc.
- acpcToTlrc(Vector3f, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from acpc to tlrc.
- acqGradMat - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- acquiredCardiacCycles - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- acquiredCardiacCyclesIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- acquiredStudyDuration - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- acquiredStudyDurationIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- acquisitionBitDepth - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- AcquisitionDateDD - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- AcquisitionDateMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- AcquisitionDateYYYY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- acquisitionDuration - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- acquisitionDuration - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- acquisitionMatrix - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- acquisitionMode - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- AcquisitionNumber - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- acquisitionOrientationField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- acquisitionTime - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- AcquisitionTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- AcquisitionTimeHH - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- AcquisitionTimeMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- AcquisitionTimeSS - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- actInt(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- action - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.ParallelForEachExecutor
-
- action - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
action describing the event
- action - Variable in class gov.nih.mipav.model.scripting.ParsedActionLine
-
The String representing the action which should be taken when this line is executed.
- action - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter.SliceTransferable
-
- action - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAction
-
Current notes for the node.
- ActionAdapter() - Constructor for class gov.nih.mipav.view.MipavUtil.ActionAdapter
-
Creates a new ActionAdapter object.
- ActionBase - Class in gov.nih.mipav.model.scripting.actions
-
A base class for all non-algorithmic (not JDialog*) script actions.
- ActionBase() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionBase
-
- ActionChangeEndianess - Class in gov.nih.mipav.model.scripting.actions
-
A script action which changes the image's endianess
- ActionChangeEndianess() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeEndianess
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionChangeEndianess(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeEndianess
-
Main constructor with parameters for changing the endianess
- ActionChangeModality - Class in gov.nih.mipav.model.scripting.actions
-
A script action which changes the image's modality
- ActionChangeModality() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeModality
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionChangeModality(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeModality
-
Main constructor with parameters for changing the modality
- ActionChangeName - Class in gov.nih.mipav.model.scripting.actions
-
A script action which changes the name of an image.
- ActionChangeName() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionChangeName(ModelImage, String, String) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
Constructor used to record the ChangeName script action line.
- ActionChangeOrientations - Class in gov.nih.mipav.model.scripting.actions
-
A script action which changes the image's orientations
- ActionChangeOrientations() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeOrientations
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionChangeOrientations(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeOrientations
-
Main constructor with parameters for changing the orientations
- ActionChangeOrigin - Class in gov.nih.mipav.model.scripting.actions
-
A script action which changes the image's origin
- ActionChangeOrigin() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeOrigin
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionChangeOrigin(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeOrigin
-
Main constructor with parameters for changing the origin
- ActionChangeResolutions - Class in gov.nih.mipav.model.scripting.actions
-
A script action which changes the image's resolutions.
- ActionChangeResolutions() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeResolutions
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionChangeResolutions(ModelImage, boolean, int, float) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeResolutions
-
Main constructor with parameters for changing the resolution/slice thickness.
- ActionChangeTalairachInfo - Class in gov.nih.mipav.model.scripting.actions
-
A script action which changes the image's talairach information
- ActionChangeTalairachInfo() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeTalairachInfo
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionChangeTalairachInfo(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeTalairachInfo
-
Main constructor with parameters for changing the talairach information
- ActionChangeTransformInfo - Class in gov.nih.mipav.model.scripting.actions
-
A script action which changes the image's resolutions
- ActionChangeTransformInfo() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeTransformInfo
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionChangeTransformInfo(ModelImage, TransMatrix) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeTransformInfo
-
Main constructor with parameters for changing the transform information
- ActionChangeUnits - Class in gov.nih.mipav.model.scripting.actions
-
A script action which changes the image's resolutions
- ActionChangeUnits() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeUnits
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionChangeUnits(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionChangeUnits
-
Main constructor with parameters for changing the units of measure
- ActionClone - Class in gov.nih.mipav.model.scripting.actions
-
A script action which clones an input image and puts it into a new image frame.
- ActionClone() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionClone
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionClone(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionClone
-
Constructor used to record the script action line.
- ActionCloseFrame - Class in gov.nih.mipav.model.scripting.actions
-
An action which closes the frame containing an image.
- ActionCloseFrame() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionCloseFrame
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionCloseFrame(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionCloseFrame
-
Constructor used to record the script action line.
- ActionCollectGarbage - Class in gov.nih.mipav.model.scripting.actions
-
Forces the JVM to perform a garbage collection of un-referenced memory.
- ActionCollectGarbage() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionCollectGarbage
-
- ActionCreateBlankImage - Class in gov.nih.mipav.model.scripting.actions
-
A script action which creates a new blank image with a set of characteristics.
- ActionCreateBlankImage() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
Constructor for the dynamic instantiation and execution of the CreateBlankImage script action.
- ActionCreateBlankImage(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
Constructor used to record the CreateBlankImage script action line.
- actionDialog - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- ActionDiscovery - Interface in gov.nih.mipav.view.dialogs
-
Classes which implement this interface are able to report metainformation about themselves, return their input and
output parameters, run their action using a set of input parameters, retrieve the real name of images they output,
and return whether they have completed successfully.
- ActionExit - Class in gov.nih.mipav.model.scripting.actions
-
A script action which causes MIPAV to exit completely.
- ActionExit() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionExit
-
- ActionExtractImageB - Class in gov.nih.mipav.model.scripting.actions
-
An action which extracts the imageB from a frame and puts it into a new image frame.
- ActionExtractImageB() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionExtractImageB
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionExtractImageB(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionExtractImageB
-
Constructor used to record the script action line.
- actionField - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAction
-
NoteField for providing a note about this marker.
- ActionImageProcessorBase - Class in gov.nih.mipav.model.scripting.actions
-
A base class for script actions which perform their action using an input image.
- ActionImageProcessorBase() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionImageProcessorBase(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
Constructor used to record the Clone script action line.
- ActionImageProcessorBase(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
Constructor used to record the Clone script action line.
- ActionKeyListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.ActionKeyListener
-
- actionListener - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- ActionMaskToPaint - Class in gov.nih.mipav.model.scripting.actions
-
A script action which generates a paint mask based on a mask image.
- ActionMaskToPaint() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionMaskToPaint
-
Constructor for the dynamic instantiation and execution of the MaskToPaint script action.
- ActionMaskToPaint(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionMaskToPaint
-
Constructor used to record the MaskToPaint script action line.
- ActionMaskToVOI - Class in gov.nih.mipav.model.scripting.actions
-
A script action which generates a VOI from a mask image.
- ActionMaskToVOI() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionMaskToVOI
-
Constructor for the dynamic instantiation and execution of the MaskToVOI script action.
- ActionMaskToVOI(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionMaskToVOI
-
Constructor used to record the MaskToVOI script action line.
- ActionMetadata - Interface in gov.nih.mipav.view.dialogs
-
- ActionMetadata.ImageRequirements - Enum in gov.nih.mipav.view.dialogs
-
- ActionOpenAllVOIs - Class in gov.nih.mipav.model.scripting.actions
-
A script action which opens all VOIs from the directory where VOIs are saved by default when a SaveAllVOIs action is executed.
- ActionOpenAllVOIs() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionOpenAllVOIs
-
Constructor for the dynamic instantiation and execution of the OpenAllVOIs script action.
- ActionOpenAllVOIs(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionOpenAllVOIs
-
Constructor used to record the OpenAllVOIs script action line.
- ActionOpenImage - Class in gov.nih.mipav.model.provenance.actions
-
An action for the mipav system data provenance that records the opening of an image
- ActionOpenImage(ModelImage) - Constructor for class gov.nih.mipav.model.provenance.actions.ActionOpenImage
-
Constructor used to record the provenance action line
- ActionOpenVOI - Class in gov.nih.mipav.model.scripting.actions
-
A script action which opens a VOI from disk and adds it to an image.
- ActionOpenVOI() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionOpenVOI
-
Constructor for the dynamic instantiation and execution of the OpenVOI script action.
- ActionOpenVOI(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionOpenVOI
-
Constructor used to record the OpenVOI script action line.
- ActionPaintToMask - Class in gov.nih.mipav.model.scripting.actions
-
A script action which converts all paint within an image to some type of mask image (short, binary, ubyte).
- ActionPaintToMask() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionPaintToMask
-
Constructor for the dynamic instantiation and execution of the PaintToMask script action.
- ActionPaintToMask(ModelImage, ModelImage, String) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionPaintToMask
-
Constructor used to record the PaintToMask script action line.
- ActionPaintToVOI - Class in gov.nih.mipav.model.scripting.actions
-
A script action which generates a VOI based on the paint mask of an image.
- ActionPaintToVOI() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionPaintToVOI
-
Constructor for the dynamic instantiation and execution of the PaintToVOI script action.
- ActionPaintToVOI(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionPaintToVOI
-
Constructor used to record the PaintToVOI script action line.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Routine to catch action events
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.CoordinateViewListener
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Calls various methods depending on the action used by the advanced calculator.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.model.file.FileJP2
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Do super.actionPerformed().
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
If user clicks "Set", sets point here and in component image.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
When the OK button is pressed, sets variables and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
Responds to row button, column button, OK button, cancel button, and borderB button for color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnimate.CancelListener
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnimate.OkBorderListener
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Performs some error checking, then closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
Catches action events: Okay, Cancel, Help and ChooseColor.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnnotation.CancelListener
-
Does nothing.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnnotation.OkColorListener
-
Get color from chooser and set button and VOI color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnnotation.UpdateTextAction
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
when a button is clicked.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
Closes dialog box when the OK button is pressed and does the routine.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizePresets
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Closes dialog box when the OK button is pressed, sets the variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Closes dialog box when the OK button is pressed, sets the variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase.CancelAction
-
Key action event handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase.HelpAction
-
Key action event handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase.OKAction
-
Key action event handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBlankImage
-
Closes dialog box when the OK button is pressed and sets the variables.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Handle action events from the GUI.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
Closes dialog box when the OK button is pressed, sets the variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Handles events generated by the user interface, and takes appropriate action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Performs the following actions based on the command:
OK - uses the "current rectangle" set either by a listener of a glass pane (region mode) or by the window
listener (window mode)
Cancel - cleans up and disposes the dialog
Region - sets all the glass panes visible to enable drawing on top of objects without selecting them
Window - sets the glass panes invisible; then when a window is selected, the listener will save that
rectangle.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreens
-
Handles the action events (called from script).
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass.CheckValueAction
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
Closes dialog box when the OK button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
Sets parameters in ViewJComponentEditImage when Apply is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
a button has been clicked!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Closes dialog box when the OK button is pressed, sets the variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Calls run on the algorithm from the script parser.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
Action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Closes dialog box when the OK button is pressed and sets the variables.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCT
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
Closes dialog box when the "Close" button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Handles the IGNORE button possibility of the ActionEvent, otherwise passes control to the super event handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
closes dialog box when the OK button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Closes dialog box when the "Close" button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
closes dialog box when the OK button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
closes dialog box when the OK button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
Method for catching actions (button/script).
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
On "OK", sets the name variable to the text entered.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Closes dialog box when the OK button is pressed, sets the variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
The actionPerformed method
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEnhancedDicomChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Closes dialog box when the OK button is pressed, set variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Closes dialog box when the OK button is pressed, set variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Presently only the script function calls this method.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
Presently only the script function calls this method.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Presently only the script function calls this method.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Presently only the script function calls this method.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
closes the dialog when the user clicks close.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Closes the dialog when the user clicks close and toggles private tags on and off when the user hits the "Show
Private" button.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoMinc
-
Converts the file infos to FileInfoDicoms.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
Closes the dialog when the user clicks close and toggles private tags on and off when the user hits the "Show
Private" button.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
closes the dialog when the user clicks close.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
Sets the appropriate file filter when the "OK" button is pressed; otherwise disposes of the dialog.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Processes button events.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGridOptions.CancelListener
-
Does nothing.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGridOptions.OkColorListener
-
Get color from chooser and set button and VOI color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGVF
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHessian
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
When Apply button is pressed, applies changes to all three areas: image name, resolutions, and transformation
matrix.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
Closes dialog box when the OK button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
Tests if entered intensity is within bounds and saves it.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogIntensityThreshold
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Closes dialog box when the OK button is pressed and sets the variables.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox.CancelListener
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox.OkBgListener
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox.OkBorderListener
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Invoked when an action occurs.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.JPanelListSelection
-
Performs a directed action of the delete button or listB buttons.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLivewire
-
Sets the selection based on which radio button is selected.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
when a button is clicked.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
when a button is clicked.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
a button has been clicked!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMask3D4D
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Closes Dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
Reads event from one of the buttons to perform that buttons action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMetaImageChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Calls various methods based on the user's actions.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMSER
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Processes the events from this dialog's buttons.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNColors
-
Tests then sets the number of colors when the "OK" button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNIFTIChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
actionPerformed - closes dialog box when the OK button is pressed and sets the variables.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Sets opacity once close button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOrder
-
Disposes of dialog.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOrientMatrix
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
performed an action!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
the usual stuff.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Sets parameters in PaintGrowListener when Apply is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintRGBComponents
-
Sets opacity once close button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Handle events from the dialog's buttons.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea.UpdateYSpaceAction
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Closes dialog box when the OK button is pressed and sets the variables.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Only perform the save LUT action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Closes dialog box when the OK button is pressed, sets up the variables needed for running the algorithm, and
calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Closes dialog box when the OK button is pressed, set variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Closes dialog box when the OK button is pressed, sets the variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Closes dialog box when the OK button is pressed, sets the variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Closes dialog box when the OK button is pressed, sets the variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Closes dialog box when the OK button is pressed, sets the variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Closes dialog box when the OK button is pressed, set variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRemovePlugin
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
Invoked when an action occurs.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Invoked when an action occurs.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptController
-
Main event handler for MIPAV scripting tool.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Closes dialog box when the OK button is pressed and sets the information, doing error checking for every tag.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
handler the button click evens.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Closes dialog box when the OK button is pressed and sets the information.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMincVersionChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Closes dialog box when the OK button is pressed and sets the information; when multi checkbox is selected or
deselected, enables or disables appropriate labels and text fields; and disposes on cancel.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Closes dialog box when the OK button is pressed, sets the variables, and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Reacts to the following actions:
Open - asks the user to choose a script file and dumps the contents to the text area
Save - saves the script to a file
Exit - calls windowClosing
Pause - pauses or resumes the script recording by setting isRecording appropriately
Edit - makes the text area editable or uneditable.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSelectChannelSequence
-
Invoked when an action occurs.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogServer
-
If the user hits the "OK" button, checks to make sure he or she entered valid data.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Sets smoothing varaibles when "OK" is pressed; enables the volumeText
box when the limitCheckBox is pressed, disposes dialog when "Cancel" is
pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSnake
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Method for catching actions (button/script).
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
handler the button click evens.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
If user clicks "Set", sets point here and in component image.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogText
-
Closes dialog box when the "Close" button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTextGE
-
Converts the file infos to FileInfoDicoms.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTextGE4X
-
Converts the file infos to FileInfoDicoms.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold.CheckValueAction
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Closes dialog box when the OK button is pressed, sets variables and calls algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
If user clicks "Set", sets point here and in component image.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Presently only the script function calls this method.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTreMethod.ThresholdChoiceListener
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.ProcessChoiceListener
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.ScannerChoiceListener
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogTwo
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
Calls transform methods to transform image if "Apply" is pressed; if "Cancel" is pressed, disposes.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
Closes dialog box when the OK button is pressed and sets the image type and suffix.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVABRA
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.JPanelAddRemoveVOI
-
Checks if all super's action commands are used, and ensures that the delete button removes items from listB,
and that duplicate items in listB are not repeated.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.JPanelAddRemoveVOI
-
Checks if all super's action commands are used, and ensures that the delete button removes items from listB,
and that duplicate items in listB are not repeated.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
when a button is clicked.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelAddRemoveVOI
-
Checks if all super's action commands are used, and ensures that the delete button removes items from listB,
and that duplicate items in listB are not repeated.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions.StatisticsOptionsActionListener
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Applies changes to VOI when "Apply" is pressed; closes when "Cancel" is pressed; and calculates statistics and
outputs them to the message frame when "Calculate" is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.CancelListener
-
Does nothing.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.OkColorListener
-
Get color from chooser and set button and VOI color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
actionPerformed - Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Closes dialog box when the OK button is pressed and sets zoom.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
actionPerformed - JButton events:
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
When state changes in some elements of the panel, the panel must make display changes; these changes are
registered here.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector.ExcluderOptionsActionListener
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Performs the following actions based on the command:
OK - Initializes pertinent fields, checking that all fields are filled out correctly, before sending the
information to be processed for an email
Cancel - cleans up and disposes the dialog
Other - sends event to secondary method that looks for combobox events
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogAction
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
Catches action events: Okay, Cancel
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.JPanelChecklist
-
Closes dialog box when the OK button is pressed and does the routine.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.JPanelFileSelection
-
Responds to ActionEvents, such as the "Browse" button being clicked.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.JPanelListController
-
responds to the button presses.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.JPanelTreeController
-
responds to the button presses.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Closes dialog box when the OK button is pressed and sets the variables.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.MipavUtil.ActionAdapter
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Invoke the action event accroding to the comamnd passed in.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Closes dialog box when the OK button is pressed and sets the variables.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Changes color of slices box frame and button if color button was pressed; turns bounding box on and off if
checkbox was pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip.CancelListener
-
Does nothing.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip.OkColorListener
-
Get color from chooser and set button and VOI color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Changes color of slices box frame and button if color button was pressed; turns bounding box on and off if
checkbox was pressed; and closes dialog if "Close" button was pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights.CancelListener
-
Unchanged.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights.OkColorListener
-
Sets the button color to the chosen color and changes the color of the surface.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Command processor to handle the geodesic button events.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Closes dialog box when the OK button is pressed and sets the variables.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Action performed method required when extending JPanelRendererBase.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
Closes dialog box when the OK button is pressed, sets up the variables needed for running the algorithm, and
calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
actionPerformed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Closes dialog box when the OK button is pressed, sets up the variables needed for running the algorithm, and
calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSimpleText
-
On "OK", sets the name variable to the text entered.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Takes the following actions:
OK Button - gets the frame rate from the text box and the subsample parameter from the combo boxes
Cancel Button - closes the dialog without doing anything
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Called when a button is pressed:
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Changes color of box frame and button if color button was pressed; turns bounding box on and off if checkbox was
pressed; and closes dialog if "Close" button was pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay.CancelListener
-
Does nothing.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay.OkColorListener
-
Get color from chooser and set button and color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Command processor to handle the geodesic button events.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Performs various actions depending on which event triggered this method.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.ChangeNameDialog
-
Perform action for okButton and cancelButton.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Changes color of slices box frame and button if color button was
pressed; turns bounding box on and off if checkbox was pressed; and
closes dialog if "Close" button was pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices.CancelListener
-
Does nothing.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices.OkColorListener
-
Get color from chooser and set button and VOI color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The override necessary to be an ActionListener.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface.CancelListener
-
Do nothing.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface.OkColorListener
-
Sets the button color to the chosen color and changes the color of the surface.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
actionPerformed, listens for interface events.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Executes the following actions depending on what called this method:
Fly - changes the view platform to fly mode, so that the left mouse button is zoom, the right mouse button
is translate, and the middle mouse button is pitch and roll.
Standard - changes the view platform back to the standard, with the left mouse button grabbing the object
and rotating it and the left mouse button with the alt mask doing a zoom.
Reset - resets the view to what it was when the user called up this dialog.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Called when a button is pressed:
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Performs various actions depending on which event triggered this method.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.ChangeNameDialog
-
Perform action for okButton and cancelButton.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Changes color of box frame and button if color button was pressed; turns bounding box on and off if checkbox was
pressed; and closes dialog if "Close" button was pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox.CancelListener
-
Does nothing.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox.OkColorListener
-
Get color from chooser and set button and VOI color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Calls various methods depending on the action:
Load in menu - calls a file chooser and loads the quad surface
Save in menu - calls a file chooser and saves the quad surface
Exit in menu - exits this frame
View in menu - opens view dialog
Mouse in menu - opens mouse recorder dialog
Line checkbox in menu - toggles polygon mode between fill and line
Visible checkbox on panel - toggles image on and off
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Action perform event function that handle all the commands in the probe panel.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe.CancelListener
-
Unchanged.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe.OkColorListener
-
Sets the button color to the chosen color and changes the color of the surface.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
actionPerformed, listens for interface events.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Handler for action events.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Changes color of box frame and button if color button was pressed; turns bounding box on and off if checkbox was
pressed; and closes dialog if "Close" button was pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast.CancelListener
-
Does nothing.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast.OkColorListener
-
Get color from chooser and set button and VOI color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Changes color of box frame and button if color button was pressed; turns bounding box on and off if checkbox was
pressed; and closes dialog if "Close" button was pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp.CancelListener
-
Does nothing.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp.OkColorListener
-
Get color from chooser and set button and VOI color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Takes the following actions:
OK Button - gets the frame rate from the text box and the subsample parameter from the combo boxes
Cancel Button - closes the dialog without doing anything
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
On "OK", sets the name variable to the text entered.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Checks to see if the OK or Cancel buttons were pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Action performed method.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.SceneState
-
Stub method for classes that extend this Object.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
action performed
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
When Apply button is pressed, applies changes to all three areas: image name, resolutions, and transformation
matrix.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel.CancelListener
-
Do nothing.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel.OkColorListener
-
Sets the button color to the chosen color and changes the color of
the fiber bundle.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Closes dialog box when the OK button is pressed, sets up the variables needed for running the algorithm, and
calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
ActionListener event.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Called when a button is pressed:
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase.CancelListener
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase.OkColorListener
-
Get color from chooser and set button and color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation.OkColorListener
-
Get color from chooser and set button and color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Changes color of slices box frame and button if color button was pressed; turns bounding box on and off if
checkbox was pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Changes color of box frame and button if color button was pressed; turns bounding box on and off if checkbox was
pressed; and closes dialog if "Close" button was pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Command processor to handle the geodesic button events.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Changes color of slices box frame and button if color button was pressed; turns bounding box on and off if
checkbox was pressed; and closes dialog if "Close" button was pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Command processor to handle the geodesic button events.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Changes color of slices box frame and button if color button was
pressed; turns bounding box on and off if checkbox was pressed; and
closes dialog if "Close" button was pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The override necessary to be an ActionListener.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM.OkColorListener
-
Get color from chooser and set button and color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelVolume4D
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
actionPerformed, listens for interface events.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Dialog local handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Action performed handler for this dialog.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
ActionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Dialog local handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
Closes dialog box when the OK button is pressed and calls the algorithm.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Just handle GUI button clicks event.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Just handle GUI button clicks event.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
Dialog local actionPerformed handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
handler the button click evens.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
handler the button click evens.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface.OkColorListener
-
Get color from chooser and set button and color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Stops the thread, and disposes the progress bar.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewControlsImage
-
Action event handler.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewDICOMDoubleListPanel
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Recreates the tree when a new directory is selected; refreshes the tree when refresh is selected.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Method to handle action events generated by the main UI when the current frame is selected.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
Handles action events
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Recreates the tree when a new directory is selected; refreshes the tree when refresh is selected.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Takes the action commands and paints if the apply button is pressed, closes if the close button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph.bColorListener
-
Resets the background color based on the user's choice.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph.CancelListener
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph.ColorListener
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage.DicomQueryListener
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage.OkColorListener
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Handler for action events.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameMemory
-
Calls various methods based on the user's actions.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
If "Save", saves text to file; if "Clear", clears appropriate text area; if "Copy", copies text to clipboard; if
"Cut", removes the text and copies it to the clipboard; and if "Select", selects all text in text area.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
Closes dialog box when the OK button is pressed.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Listen for events from the MIP frame GUI.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Calls various methods based on the user's actions.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration.JDialogIncrement
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool.JDialogIncrement
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage.OkColorListener
-
Pick up the selected color and call method to change the color.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT.CancelColorListener
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT.OkColorListener
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Calls various methods depending on the action.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJPopupPlugin
-
Will execute the uninstall action
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Closes this progress bar when the cancel button is clicked.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
DOCUMENT ME!
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Calls various methods based on the user's actions.
- actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.ViewUserInterface.DicomQueryListener
-
- ActionSaveAllVOIs - Class in gov.nih.mipav.model.scripting.actions
-
A script action which saves all the VOIs in an image to disk.
- ActionSaveAllVOIs() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveAllVOIs
-
Constructor for the dynamic instantiation and execution of the SaveAllVOIs script action.
- ActionSaveAllVOIs(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveAllVOIs
-
Constructor used to record the SaveAllVOIs script action line.
- ActionSaveAllVOIs(ModelImage, String) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveAllVOIs
-
Constructor used to record the SaveAllVOIs script action line.
- ActionSaveBase - Class in gov.nih.mipav.model.scripting.actions
-
A script action which writes out an image to disk.
- ActionSaveBase() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Constructor for the dynamic instantiation and execution of the script action.
- ActionSaveBase(ModelImage, FileWriteOptions) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Constructor used to record the script action line.
- ActionSaveImage - Class in gov.nih.mipav.model.scripting.actions
-
A script action which writes out an image to disk.
- ActionSaveImage() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveImage
-
Constructor for the dynamic instantiation and execution of the SaveImage script action.
- ActionSaveImage(ModelImage, FileWriteOptions) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveImage
-
Constructor used to record the script action line.
- ActionSaveImageAs - Class in gov.nih.mipav.model.scripting.actions
-
A script action which writes out an image to disk.
- ActionSaveImageAs() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveImageAs
-
Constructor for the dynamic instantiation and execution of the SaveImage script action.
- ActionSaveImageAs(ModelImage, FileWriteOptions) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveImageAs
-
Constructor used to record the script action line.
- ActionSaveTab - Class in gov.nih.mipav.model.scripting.actions
-
A script action which records saves the text contained in one of the output frame's tabs.
- ActionSaveTab() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveTab
-
Constructor for the dynamic instantiation and execution of the SaveTab script action.
- ActionSaveTab(String) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveTab
-
Constructor used to record the SaveTab script action line.
- ActionSaveVOIIntensities - Class in gov.nih.mipav.model.scripting.actions
-
A script action which saves all the VOI intensities in an image to disk.
- ActionSaveVOIIntensities() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveVOIIntensities
-
Constructor for the dynamic instantiation and execution of the SaveVOIIntensities script action.
- ActionSaveVOIIntensities(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveVOIIntensities
-
Constructor used to record the SaveVOIIntensities script action line.
- ActionSaveVOIIntensities(ModelImage, String) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSaveVOIIntensities
-
Constructor used to record the SaveVOIIntensities script action line.
- ActionSelectAllVOIs - Class in gov.nih.mipav.model.scripting.actions
-
- ActionSelectAllVOIs() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSelectAllVOIs
-
Constructor for the dynamic instantiation and execution of the SelectAllVOIs script action.
- ActionSelectAllVOIs(ModelImage) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionSelectAllVOIs
-
Constructor used to record the SelectAllVOIs script action line.
- ActionStartMipav - Class in gov.nih.mipav.model.provenance.actions
-
An action for the mipav system data provenance that records the starting of MIPAV
- ActionStartMipav() - Constructor for class gov.nih.mipav.model.provenance.actions.ActionStartMipav
-
- ActionStopMipav - Class in gov.nih.mipav.model.provenance.actions
-
An action for the mipav system data provenance that records the closing of MIPAV
- ActionStopMipav() - Constructor for class gov.nih.mipav.model.provenance.actions.ActionStopMipav
-
- ActionVOIToMask - Class in gov.nih.mipav.model.scripting.actions
-
A script action which converts all VOIs within an image to some type of mask image (short, binary, ubyte).
- ActionVOIToMask() - Constructor for class gov.nih.mipav.model.scripting.actions.ActionVOIToMask
-
Constructor for the dynamic instantiation and execution of the VOIToMask script action.
- ActionVOIToMask(ModelImage, ModelImage, String) - Constructor for class gov.nih.mipav.model.scripting.actions.ActionVOIToMask
-
Constructor used to record the VOIToMask script action line.
- activate() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- activateStore - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Buttons used for the host tab
- active - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlFileMeta
-
- active - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.polygon_node
-
- active - Variable in class gov.nih.mipav.model.structures.VOI
-
- active - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Flag indicating whether or not a VOI is active (selected).
- active - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FrontEdge
-
- active - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- active(int, double[], double[], int[], double[], int[], int, boolean[], boolean[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- ACTIVE_IMAGE_COLOR - Static variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Color used in the rectangle indicating the image is active.
- active_set - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- active_set - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- active_size - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- active_size - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- activeBurn(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Active the current burning point type.
- activeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- activeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- activeColor - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- activeContoursAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- activeDWIButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- activeFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Active frame
- activeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
The image that contains the VOI text.
- activeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTrim
-
The currently selected image
- activeImageColorBorderSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
border size for active image color
- activeIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- activeIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- activeLightBulbIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Record the current active index of light bulb, which is being picked.
- activeProbe(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Active the corresponding probe with the given probe type.
- activeReceivers - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- activeSliceButton - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- activeTree - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Livewire calculations:
- activeTree - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- ActiveTree() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.ActiveTree
-
Sets root node to null.
- ActiveTree() - Constructor for class gov.nih.mipav.view.RubberbandLivewire.ActiveTree
-
Sets root node to null.
- activeVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
The voi selected by the user.
- activeVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
The voi selected by the user.
- activeVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMinimumPerimeterPolygon
-
The voi selected by the user.
- activeVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
The VOI on which to perform the calculations.
- activeVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- activeVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- activeVolumeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
A radio button to select calculation only for the active volume
- activeVolumeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- actOnPath - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
for the files selected ...
- actual_number_of_colors - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- actualAnswer - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
- actualAnswer - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
- actualDateTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
18.
- actualHistory - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- actualPerSecond - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- actualPerSecond - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- actualReceiveFrequency - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- actualReceiveFrequency - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- actualThreshold - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- actualThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- actualThresholdLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- actualThresholdText - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- actualTransmitFrequency - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- actualTransmitFrequency - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- aCutoff - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- AD - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- ad1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ad2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ad3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ad4 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ad5 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ad6 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ad7 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ad8 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ad9 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- ADAMS_Q_MAX - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- ADAPTIVE_SIZE - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
- ADAPTIVE_SIZE - Static variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- ADAPTIVE_TRUNCATED_VECTOR_MEDIAN_FILTER - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
- ADAPTIVE_TRUNCATED_VECTOR_MEDIAN_FILTER - Static variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- ADAPTIVE_VECTOR - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
- ADAPTIVE_VECTOR - Static variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- adaptiveButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- adaptiveTruncatedVectorMedian(float, float, float, float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Only used with color images in vector filtering.
- adaptiveVectorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- adbl - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
- adcImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- ADCImageName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- add(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- add(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- add(double[][], double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- add(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- add(float) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
New edges that occur because of modified triangles being added to the mesh must be added to the heap and the heap
must be updated.
- add(int) - Method in class gov.nih.mipav.model.file.FileInfoDicom.LengthStorageUnit
-
Adds the parameter i to the stored value.
- add(int[], Vector3f[]) - Method in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraphSamples
-
Add the following information for a "branch" path of the graph: an array of key values for each point along the
path, an array of 3D coordinates assoicated with each point, and an array of distances each point is from its
nearest boundary.
- add(int, float) - Method in class gov.nih.mipav.model.structures.HQueue
-
add - adds a value to the queue.
- add(int, float) - Method in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Add a branch to the already existing branch at the specified distance along the branch.
- add(int, VOIBase) - Method in class gov.nih.mipav.model.structures.VOIBaseVector
-
- add(MetadataExtractor.Knot) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Subpath
-
Appends a knot (set of 3 points) into the list
- add(RealPolynomial) - Method in class gov.nih.mipav.model.structures.RealPolynomial
-
- add(VOI) - Method in class gov.nih.mipav.model.structures.VOIVector
-
Override the Vector method to ensure that object is a voi, and that the new voi's name is unique.
- add(VOIBase) - Method in class gov.nih.mipav.model.structures.VOIBaseVector
-
- add(VOIBase, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from ViewJComponentTriImage to add the image-align protractor.
- add(VOIBase, int, Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Add a point to the voi contour
- add(VOIBase, Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Add a new point to the end of the current contour.
- add(VOIPoint) - Method in class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
Add a new VOIPoint to this polyline.
- add(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns a DoubleDouble whose value is (this + y).
- add(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- add(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Plus operator.
- add(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- add(CVisRGBA, CVisRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- add(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- add(Box3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- add(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- add(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- add(NVectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- add(Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- add(PPolynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- add(VectorD) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- add(VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- add(Component) - Method in class gov.nih.mipav.view.JScrollMenu
-
- add(Component, int) - Method in class gov.nih.mipav.view.JScrollMenu
-
- add(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.ViewControlsImage
-
Adds a component to the toolbar panel using the given gridbag constraints.
- add(Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- add(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Adds a new mouse event to the end of the mouseEvents vector.
- add(Object) - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Adds a new mouse event to the end of the mouseEvents vector.
- add(Object, Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Adds a new mouse event to the end of the mouseEvents vector.
- add(Object, Object) - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Adds a new mouse event to the end of the mouseEvents vector.
- add(HashMap<String, String>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
- add(JComponent) - Method in class gov.nih.mipav.view.components.PanelManager
-
Adds a new component to the panel.
- add(JComponent, int) - Method in class gov.nih.mipav.view.components.PanelManager
-
Adds a new component to the panel.
- add(JMenuItem) - Method in class gov.nih.mipav.view.JScrollMenu
-
- add(Vector3f) - Method in class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
- add(Polyline, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- Add(double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- Add(NVectorF, float, NVectorF, float, NVectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- Add(NVectorF, float, NVectorF, NVectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- Add(VectorD, double, VectorD, double, VectorD) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- Add(VectorD, double, VectorD, VectorD) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- Add(VectorF, float, VectorF, float, VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- Add(VectorF, float, VectorF, VectorF) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- ADD - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- ADD - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
operation constants
- ADD - Static variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
add
- ADD - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- ADD - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- add_edge_to_aet(GenericPolygonClipper.edge_node[], GenericPolygonClipper.edge_node, GenericPolygonClipper.edge_node) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- add_event(TURN_REP, TURN_REP, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- add_gaussian_noise(double[], double[], double[], double, boolean, long) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- add_intersection(GenericPolygonClipper.it_node[], GenericPolygonClipper.edge_node, GenericPolygonClipper.edge_node, double, double) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- add_into(byte) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- add_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- add_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- add_into(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- add_into(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- add_into(CVisRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- add_into(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- add_into(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- add_into(NVectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- add_into(Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- add_into(VectorD) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- add_into(VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- add_left(GenericPolygonClipper.polygon_node, double, double) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- add_local_min(GenericPolygonClipper.polygon_node[], GenericPolygonClipper.edge_node, double, double) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- add_right(GenericPolygonClipper.polygon_node, double, double) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- add_st_edge(GenericPolygonClipper.st_node[], GenericPolygonClipper.it_node[], GenericPolygonClipper.edge_node, double) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- add_SubSigs(AlgorithmGaussianMixtureModelEM.SubSig, AlgorithmGaussianMixtureModelEM.SubSig, AlgorithmGaussianMixtureModelEM.SubSig, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- ADD_TAG - Static variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
For adding a top level dicom tag
- ADD_TAG_SEQ - Static variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
For adding a dicom tag contained within a sequence
- add_to_sbtree(int[], GenericPolygonClipper.sb_tree[], double) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- add128 - Variable in class gov.nih.mipav.model.file.FileZVI
-
- add3DMarker(VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- add3DMarker(VOI, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- add3DMarker(VOI, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- add3DMarker(VOI, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- add3DMarker(VOI, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- add3DVOI(String, SurfaceState, VolumeSurface) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- addABCD(LODMesh.Quadric) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Vertices
-
- addAbstractSyntax(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Adds proposed abstract syntax to hash table.
- addActionListener(ActionListener) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
DOCUMENT ME!
- addActiveImageControl() - Method in class gov.nih.mipav.view.ViewControlsImage
-
Displays the panel which controls which image is the "active image" displayed when imageB is available.
- addAllSupportedAbstractSyntaxes() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Adds all proposed abstract syntaxes to hash table.
- addAloneMenu(JMenuBar) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Adds a standalone menu to the user interface.
- addAmbient(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Calculate the color due to ambient lighting.
- addAnimationLattice(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- addAnimationVOIs(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- addAnimationVOIs(VOIVector, JPanelAnnotationAnimation) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- addAnnotateButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
button for adding annotation points for the path planning
- addAnnotation(VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
Add an annotation to the latticeModel.
- addAnnotation(VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
Add an annotation to the latticeModel.
- addAnnotation(VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Add an annotation to the annotation list.
- addAnnotation(VOIWormAnnotation, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- addAnnotationListener(AnnotationListener) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
Adds an annotation listener to the latticeModel.
- addAnnotationListener(AnnotationListener) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Adds an annotation listener.
- addAnnotationPoint(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
When left mouse press with the control key down on the bottom three planar view, add the annotation point
- addAnnotationPoint(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Add the annotation point
- addAnnotations(VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Called when new annotations are loaded from file, replaces current annotations.
- addAnnotations(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- addAnonymizeButton() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoMinc
-
Creates the anonymization button and adds it to the button panel.
- addAnonymizeButton() - Method in class gov.nih.mipav.view.dialogs.JDialogTextGE
-
Creates the anonymization button and adds it to the button panel.
- addAnonymizeButton() - Method in class gov.nih.mipav.view.dialogs.JDialogTextGE4X
-
Creates the anonymization button and adds it to the button panel.
- addAttachedSurfaces() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Add any attached surfaces the current image has in its file info (if the file info is in the xml format).
- addAttachedSurfaces() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Add any attached surfaces the current image has in its file info (if the file info is in the xml format).
- addAttValue(FileMincAttElem, Object, int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Sets the value of the attribute element; used for setting attribute of variables.
- AddBackSlash(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Ensures that a string is terminated with a backslash.
- addBlur(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Combines the randomized-voxel blurred image with the output image.
- addBorder(float[], float[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- addBorder3D(float[], float[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
This method adds a border to the input data so that borders can be dealt with easily.
- addBoxSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Adds the slice frame for slice of the given orientation to the scene graph.
- addBranch(BranchGroup, ModelTriangleMesh, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Adds a BranchGroup to the display.
- addBranch(BranchGroup, ModelTriangleMesh, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Updates the surRender -- adds a BranchGroup to the main Display.
- addBranchGroup(Node, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Creates a BranchGroup containing the input Node and Transform3D, and returns the BranchGroup.
- addBrowseFilesButton() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
adds the "Browse Files ...." button to the right of the panel.
- addBurn(BurnAttributes) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Add a burn to the treatment list.
- addButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- addButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Buttons used by this dialog
- addButton - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
Selection buttons
- addButton(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
***************************************************************************************************** Creating
buttons
- addButtonListener(ActionListener) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
tell the "Apply to all slices" check-box, OK and cancel buttons to tell the calling object that it is doing
something.
- addButtonListener(ActionListener) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
tell the "Apply to all slices" check-box, OK and cancel buttons to tell the calling object that it is doing
something.
- addButtonListener(ActionListener) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
tell the "Apply to all slices" check-box, OK and cancel buttons to tell the calling object that it is doing
something.
- addButtonSeq - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Buttons used by this dialog
- addCellEditorListener(CellEditorListener) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- addChannelCheckboxListener(ItemListener) - Method in class gov.nih.mipav.view.components.JPanelColorChannels
-
Add an ItemListener to all of the color channel checkboxes.
- addChannelComponent(String, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DOCUMENT ME!
- addChannelInfo(String, Integer, String, Integer, String, String, String, Integer, Integer, String, Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- addCleanupOnWindowClosingListener(Window) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
Adds a WindowListener to the specified window that takes care of
cleanup (GL resources) when the window is about to close.
- addClipSlice() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Attach clipping plane branch group.
- addClipSliceA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Attach arbitrary clip slice bounding frame.
- addClipSliceStatic() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Attach static clip slice bounding frame.
- addClipSliceStaticInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Attach static inverse clip slice bounding frame.
- addClipSliceX() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Attach X clip slice bounding frame.
- addClipSliceXInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Attach X Invative clip slice bounding frame.
- addClipSliceY() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Attach Y clip slice bounding frame.
- addClipSliceYInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Attach Y Invative clip slice bounding frame.
- addClipSliceZ() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Attach Z clip slice bounding frame.
- addClipSliceZInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Attach Z Invative clip slice bounding frame.
- addCollectionOfRunnable(Collection<Runnable>, Collection<String>) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
Secondary method for registering algorithms to the multi-bar.
- addCommentLine(String) - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Appends a comment line to the current script (if one is being recorded).
- AddComplexRootPair(Vector<Double>, double, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- addConfiguredListener(RendererListener) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- addConfiguredListener(RendererListener) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- addConnections(Backpropagation.Neuron[]) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- addConnections(ArrayList<Backpropagation.Neuron>) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- addControlPanel(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Helper method that adds components to the control panel for the grid
bag layout.
- addControlPanel(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Helper method that adds components to the control panel for the grid
bag layout.
- addControlPanel(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Method that adds components to the control paenl.
- addControlPanel(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Method that adds components to the control paenl.
- addControlPanel(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Adds a component to the control panel.
- addControlPanel(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Adds a component to the control panel.
- addControlPanel(JPanel, Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Helper method that adds components to the control panel for the grid bag layout.
- addControlPanel(JPanel, Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Helper method that adds components to the control panel for the grid bag layout.
- addControlPanel(JPanel, Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Helper method that adds components to the control panel for the grid bag layout.
- addControlPanel(JPanel, Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Helper method that adds components to the control panel for the grid bag layout.
- addConvert() - Method in class gov.nih.mipav.view.dialogs.JDialogTextGE
-
Creates the convert button and adds it to the button panel.
- addConvert() - Method in class gov.nih.mipav.view.dialogs.JDialogTextGE4X
-
Creates the convert button and adds it to the button panel.
- addCoordinateChangeListener(CoordinateChangeListener) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Add someone who wants to be notified about crosshair coordinate changes.
- addCoordinateViewListener(ContourPlot.CoordinateViewListener) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- addCubicControl() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Attach cubic control branch group.
- addCubicControl() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Attach cubic control branch group.
- addCurveListener(CurveListener) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- addCurveListener(CurveListener) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- addCustomToolBar(Vector<CustomUIBuilder.UIParams>) - Method in class gov.nih.mipav.view.ViewControlsImage
-
- addDataset(String, Integer, Boolean) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- addDatasetRef(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- addDataToHash(AlgorithmMeanShiftClustering.fams_hash_entry[][], int[], AlgorithmMeanShiftClustering.famsPoint, int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- addDataToRes(AlgorithmMeanShiftClustering.fams_hash_entry[][], int[], AlgorithmMeanShiftClustering.fams_res_cont, int, int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- addDDTypeHash(int, int, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- addDetector(String, String, String, Float, Float, Float, Integer, String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- AddDiagonalAndInvert(double[], int, CeresSolver.BlockSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- addDiffuse(SoftwareMaterial, SoftwareVertexProperty, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Calculate the color due to diffuse lighting.
- addDimElem(String, int, int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Puts a new dimension element with the specified parameters into the dimension array at the gievn index.
- addDirectory(T) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
Adds a directory to this metadata collection.
- addDirToLibPath(String) - Static method in class gov.nih.mipav.util.NativeLibraryLoader
-
- addedCurve(VOIEvent) - Method in interface gov.nih.mipav.model.structures.event.VOIListener
-
handles an VOIEvent as a selection change.
- addedCurve(VOIEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.VOIHighlighter
-
We are not interested in adding Curves, so this method is empty.
- addedCurve(VOIEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.VOIHighlighter
-
We are not interested in adding Curves, so this method is empty.
- addedCurve(VOIEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.VOIHighlighter
-
We are not interested in adding Curves, so this method is empty.
- addedCurve(VOIEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- addEdge(float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList
-
- addEdge(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Add the edge to the EdgeList, check to make sure that edge has not already been added.
- addEdge(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Add the edge to the EdgeList, check to make sure that edge has not already been added.
- AddEdge(Vertex, Vertex) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Graph
-
- AddEdge(Vertex, Vertex) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- AddEdge(Vertex, Vertex, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- AddEdgeIndices(double[], double, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingSquares
-
- AddEdges(double[], double, Edge[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingSquares
-
- addedVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- addedVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- addedVOI - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- addedVOI(VOIVectorEvent) - Method in interface gov.nih.mipav.model.structures.event.VOIVectorListener
-
handles an VOIEvent as a selection change.
- addedVOI(VOIVectorEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
resets the volumes list to the current VOIVector. adds the highlighter to the new VOI.
- addedVOI(VOIVectorEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
resets the volumes list to the current VOIVector. adds the highlighter to the new VOI.
- addedVOI(VOIVectorEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
resets the volumes list to the current VOIVector. adds the highlighter to the new VOI.
- addedVOI(VOIVectorEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- addElement(float, float, float) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Adds a point to the curve.
- addElement(int) - Method in class gov.nih.mipav.model.structures.IntVector
-
Pushes a new value onto the array.
- addElement(int, int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Adds a point to the curve.
- addElement(ProvenanceEntry) - Method in class gov.nih.mipav.model.provenance.ProvenanceHolder
-
Catches the Vector's addElement for listener notifaction
- addElement(VOI) - Method in class gov.nih.mipav.model.structures.VOIVector
-
Override the Vector method to ensure that object is a voi, and that the new voi's name is unique.
- addElement(VOI) - Method in class gov.nih.mipav.view.ViewVOIVector
-
Override the Vector method to ensure that object is a voi, and that the new voi's name is unique.
- addElement(VOIBase) - Method in class gov.nih.mipav.model.structures.VOIBaseVector
-
- addElement(VOIBase, boolean) - Method in class gov.nih.mipav.model.structures.VOIBaseVector
-
- AddElementToGroup(T, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- addEntry(Class, Class...) - Method in class gov.nih.mipav.plugins.ManifestFile
-
Adds an entry to the manifest file, does in fact write to the file.
- addError(String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Registers an error message with this directory.
- addError(String, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpReader
-
- AddEvent(String) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.EventLogger
-
- addExifTagNames(HashMap<Integer, String>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- addExperiment(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- addExperimenter(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- addExtension(String) - Method in class gov.nih.mipav.model.file.FileTypeInfo
-
Add an extension to the file type's list of supported suffixes.
- addExtension(String) - Method in class gov.nih.mipav.view.renderer.flythroughview.FileFilterExt
-
Add an extension to the list of possible extensions valid for this filter.
- addExtensionAssociation(String, int) - Static method in class gov.nih.mipav.model.file.FileTypeTable
-
- AddExtents() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the amount shape extents added (warning: shape extents will be
remove in later versions).
- addFace() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- addFace(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- addFiles(File, Vector<String>) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
- addFilesToVector(String, Vector<String>) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDICOMtoAVI
-
Recursively adds DICOM filenames and directory paths to a Vector.
- addFilter(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- addFindResultToList(DICOM_Object, DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Utility function to collect the results of a DICOM query.
- addFlightPath() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Updates the surRender to display the flythru flight path from the flythruRender.
- addFlightPath(Shape3D, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Adds the flythru path shape and current view position to the display.
- addFrames(libdt.PatchExtractor, libdt.Mat[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- addFunctionPoint(float, float) - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Add a new function point to the current LUT transfer function.
- addFunctionPoint(float, float) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
/
- addFunctionPoint(float, float) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Add a new function point to the current LUT transfer function.
- addFunctionToLUT() - Method in class gov.nih.mipav.model.file.FileImageXML
-
Adds the LUT functions collected within the functionVector.
- addFunctionToRGB() - Method in class gov.nih.mipav.model.file.FileImageXML
-
Adds the ModelRGB functions contained within the functionVector.
- addGattElem(String, int, int, int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Puts a new global attribute array element with the specified parameters into the global attribute array at the
given index.
- addGeodesic(TriMesh, Geometry, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Add a new geodesic component to the TriMesh surface display.
- addGeodesic(TriMesh, Geometry, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Add a geodesic element to the surface display.
- addGeodesic(TriMesh, Geometry, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Add a new geodesic component to the surface.
- AddGeodesic(Geometry, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Add a new geodesic component to the surface.
- addGiniImportance(int, int, double) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- addGM() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Add the gradient magnitude histogram to the opacity control panel.
- addGM() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Add the gradient magnitude histogram to the opacity control panel.
- addGM() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
- addGM() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Add the gradient magnitude hitogram to the opacity control panel.
- AddGroundtruth(CAAMShape, ModelSimpleImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
Add ground truth from give image and voi
- AddGroundtruths(CAAMLowerBounds) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
Add ground truth
- addGroup(String, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- addGroupRef(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
DOCUMENT ME!
- addGuideLine() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Draw the red guiding line along the start and end point.
- addImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Add model image into the capture frame.
- addImage(String, String, String, Integer, Integer, Integer, Integer, Integer, Float, Float, Float, Float, Integer, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- addImageBrowseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
browse button
- addImageBrowseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
browse button
- addImageDisplayListener(ViewImageUpdateInterface) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Add a listener to this class so that notifyListener can be used to notify all listeners to update the display of
the image.
- addImageRegistryChangeListener(ChangeListener) - Method in class gov.nih.mipav.view.ImageRegistryMonitor
-
add a memory change listener.
- addImpl(Component, Object, int) - Method in class gov.nih.mipav.view.JScrollPopupMenu
-
- addImpurityImportance(int, int, double) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- addImpurityImportance(int, int, double) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- addImpurityImportance(int, int, double) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- addInclude(Integer, URI, String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
need these functions to create the classes within..
- addInputImage(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Adds an image register as an input-image
- addInsertionPoint(Vector3f, Vector3f, Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Adds a point to the lattice.
- addInstrument(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- addIntensityLock(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Adds an Integer object to the intensityLockVector.
- AddInterior(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Add articifial interior points to the shape by making a Delaunay
triangulation and adding the centroid of each triangle.
- addItem(int, float, boolean, Point3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList
-
Create a new annotation item with the specified information and add the item to the end of the list.
- addItem(int, float, boolean, Vector3f, Vector3f, Vector3f, Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM
-
Create a new annotation item with the specified information and add the item to the end of the list.
- addItem(FileDicomSQItem) - Method in class gov.nih.mipav.model.file.FileDicomSQ
-
Add an item to the sequence vector.
- addItem(FlyPathAnnotateList.Item) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList
-
Add the specified annotation item to the end of the list.
- addItem(FlyPathAnnotateList_WM.Item) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM
-
Add the specified annotation item to the end of the list.
- addItemToRender(ContourPlot.Renderable) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
Adds the specified item to the corresponding renderer.
- addItemToRender(T) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.GenericRenderer
-
- additionalImagesLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
label for browsing for additional images
- additionalImagesLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
label for browsing for additional images
- additionalImagesList - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
list of any additional images browsed to
- additionalImagesToConcat - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
additional images to concat...the ones you add later on
- additionalImagesToConcat - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
additional images to concat...the ones you add later on
- additionalImagesToConcat - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
additional images to concat...the ones you add later on
- additionalPluginDirList - Static variable in class gov.nih.mipav.plugins.PluginUtil
-
- additionalSets - Variable in class gov.nih.mipav.model.file.FileImageXML
-
A listing of all the additional PSets to be written into the saved file.
- additionalTagsList - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
- ADDITIVE - Static variable in class gov.nih.mipav.model.structures.VOI
-
Mask as ones - i.e. put ones to indicate VOI location
- addJarContext(String) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- addJustVerificationAbstractSyntax() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Adds just the verification syntax for DICOM verification process.
- addKey(String, String, String) - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- addKeysToAllowList(ArrayList<FileDicomKey>, ArrayList<String>) - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- addLabel(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
***************************************************************************************************** Creating
labels
- addLatticeListener(LatticeListener) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- addLatticeListener(LatticeListener) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- addLayoutComponent(String, Component) - Method in class gov.nih.mipav.view.JScrollPopupMenu.ScrollPopupMenuLayout
-
- addLeadingZeros(int, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Pads zeros to a number.
- addLeadingZeros(String, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Pads zeros to a string representation of a number.
- addLeftRightMarker(VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- addLeftRightMarker(Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Adds a new left/right marker to the worm image.
- addLightSource(String, String, String, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- addLightSourceRef(Integer, Integer, String, Float, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DOCUMENT ME!
- addLine(ScriptableActionInterface) - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Adds a scriptable action to an image's data provenance
- addLine(ScriptableActionInterface) - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Add a line to the current script by requesting a script action to generate its script line.
- addLine(String, ParameterTable) - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Appends a line of text to the current script (if one is being recorded) using a script action and list of parameters.
- addLine(String, ParameterTable) - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Appends a line of text to the current script (if one is being recorded) using a script action and list of parameters.
- addLineArray(LineArray, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Called from the JDialogDTIInput.
- addLineLabel(double, int, int, String, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
Adds a label for a line to this legend.
- addLineLabel(double, int, String) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
Adds a label for a line to this legend.
- addLineLabel(double, int, String, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
Adds a label for a line to this legend.
- addLineSegment(AlgorithmNetworkSnake.SnakeInitialiser.Node, AlgorithmNetworkSnake.SnakeInitialiser.Node, AlgorithmNetworkSnake.SnakeInitialiser.Node, AlgorithmNetworkSnake.SnakeInitialiser.Node, ArrayList<Point>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- addList() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- addListener - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- addListener(AlgorithmInterface) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Add a listener to this class so that when when the algorithm has completed processing it can use notifyListener
to notify all listeners that the algorithm has completed.
- addListeners() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
Adds all listeners required by this accessory.
- addLUValue(String) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Adds LUValue for either LUT or modelRGB.
- addMatrix(TransMatrix) - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Adds a matrix to the map. matrices will be keyed by their type and sequential numbering
- addMemoryChangeListener(ChangeListener) - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
add a memory change listener.
- addMenuDragListener(Component, MenuDragMouseListener) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Attaches a MenuDragMouseListener to comp and all of its
sub-components (if comp is a JMenu/JMenuItem.
- addMesh(ModelTriangleMesh, ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
ReplaceMesh is used by the Geodesic when a mesh is cut.
- addMesh(ModelTriangleMesh, ModelTriangleMesh, String) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Add new mesh to the volume rendering.
- addMesh(ModelTriangleMesh, ModelTriangleMesh, String) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Called when a mesh is changed by the Geodesic class, when a mesh is cut along the geodesic curve it may be
divided into two or more meshes.
- addNeurite(VOI, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Generates a natural spline curve to fit the input set of annotation points to model a neurite.
- addNeurite(String, String[], ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- addNode - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
When true the dialog creates a new node, otherwise it is used to edit the Notes.
- addNode - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- addNode - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel.PropertiesDialog
-
- addNode(int, int, AlgorithmNetworkSnake.AnchorPosition) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- addNode(String, String) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Add a new node under the picked node.
- addNode(Node) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Add a new display node to the volume/surface display list.
- AddNode(Node) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Add a new scene-graph node to the display list.
- addNodeDialog - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- addNormals(ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- addNoSplitVariable(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- addObjective(String, String, String, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- addObserver(Observer) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
- addObserver(Observer) - Method in interface gov.nih.mipav.model.util.Observable
-
Adds an observer to the set of observers for this object,
provided that it is not the same as some observer already in the set.
- ADDON - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- addon_message_table - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- addOnNextLine(JComponent) - Method in class gov.nih.mipav.view.components.PanelManager
-
Adds a new component to the panel on a new line (vertically).
- addOnNextLine(JComponent, int) - Method in class gov.nih.mipav.view.components.PanelManager
-
Adds a new component to the panel on a new line (vertically).
- addOpacityControlPanel(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Helper method that adds components to the control panel for the grid
bag layout.
- addOpacityControlPanel(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Helper method that adds components to the control panel for the grid
bag layout.
- addOTF(Integer, Integer, Integer, String, Boolean, Integer, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- addOutOfCorePoint(Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredMeshData
-
- addOutOfCorePoint(Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- addOutputImage(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
- addPadding(ModelImage) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Pad an image by copying the first and last slices 2 more times so that the laplacian algorithm behaves well in
edge conditions.
- addParam - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
menu item for adding parameter.
- addParameter(String) - Method in class gov.nih.mipav.model.file.XMLPSet
-
Adds a new parameter to the set.
- AddParameter(Matrix, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearCostFunction
-
- AddParameterBlock(double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- AddParameterBlock(double[], int, CeresSolver.LocalParameterization) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- AddParameterBlock(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- addParameterData(String, String, String, String, String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay
-
Adds a new row of parameter data to the display's table.
- addParentTag(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- addPath(T, byte[]...) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie
-
Store the given value at the specified path.
- AddPath(CAAMShape, CAAMPointInfo) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Adds a path to the shape.
- addPixelLine(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- addPlate(Integer, String, String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- addPluginDirectory(String) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
- addPluginToMenu(Class<?>, String, String, JMenu, ActionListener, String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
- addPoint(float, float) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Adds a point to the function at the end.
- addPoint(float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- addPoint(int, int) - Method in class gov.nih.mipav.model.structures.PointStack
-
Adds a point to the arrays.
- addPoint(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- addPoint(Vector2f) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Adds a point to the function at the end.
- addPointCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
Standard cursor: add a point (hand).
- addPointCursor - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- addPointFlag - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- addPointFlag - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- addPointToFunction(String) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Adds a point to the function associated with the LUT or modelRGB.
- addPointToggleButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Toggle buttons for voi/points
- addPolyline() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Add polyline to the render.
- addPolyline(VOIContour, Polyline, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Add a polyline to the display.
- addPolyline(VOIContour, Polyline, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Add a polyline to the VolumeDTI display.
- addPopup() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- addPopup() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- addPopup(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Link the popup menu to the input voi so the popup menu will operate on the input voi.
- addPreambleAndGroupTwoTags(DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Builds buffer of DICOM part 10 preamble and require Part 10 group 2 tags.
- addPresentationContext(DICOM_PresentationContext) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Adds a presentation object to a vector list of presentation contexts.
- addPresentationContextAccept(DICOM_PresentationContextAccept) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateAC
-
Adds the presentation context to the accepted context list.
- addProcessLoggingNotifier(JTextArea) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
a list of JTextAreas to be notified when a change in the process/output log is made. this permits
almost-real-time updates to output devices this method adds the selected list of JTextAreas to receieve the
output logs.
- addProgressChangeListener(ProgressChangeListener) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Adds the ProgressChangeListener to this FileBase object.
- addProgressChangeListener(ProgressChangeListener) - Method in class gov.nih.mipav.model.file.FileBase
-
Adds the ProgressChangeListener to this FileBase object.
- addProject(String, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- addProjectRef(Integer, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
DOCUMENT ME!
- addProvenanceChangeListener(ProvenanceChangeListener) - Method in class gov.nih.mipav.model.provenance.ProvenanceHolder
-
Adds a listener (JDialogDataProvenance) to receive notifications
- addProvenanceData(ProvenanceEntry) - Method in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
Adds an entry to the Model (shows on table)
- addPset(String, XMLPSet) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
- addQE(LODMesh.Quadric) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- AddRandomBlock(int, int, int, int, Vector<Integer>, Vector<Integer>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- addRawOptionsToParameters(ParameterTable, FileInfoBase) - Static method in class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
Adds parameters to a table, describing a raw image.
- AddRealRoot(Vector<Double>, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- addRegion(int, int, int[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RegionList
-
- addremove - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
Panel to push/pull VOIs from full list to selectable list.
- addremove - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
Panel to push/pull VOIs from full list to selectable list.
- addremove - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Panel to push/pull VOIs from full list to selectable list.
- addReplaceMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Add as New/Replace button (depending on selected matrix type).
- AddResidualBlock(CeresSolver.CostFunction, CeresSolver.LossFunction, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- AddResidualBlock(CeresSolver.CostFunction, CeresSolver.LossFunction, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- AddResidualBlock(CeresSolver.CostFunction, CeresSolver.LossFunction, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- AddResidualBlock(CeresSolver.CostFunction, CeresSolver.LossFunction, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- AddResidualBlock(CeresSolver.CostFunction, CeresSolver.LossFunction, double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- AddResidualBlock(CeresSolver.CostFunction, CeresSolver.LossFunction, double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- AddResidualBlock(CeresSolver.CostFunction, CeresSolver.LossFunction, Vector<double[]>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- AddResidualBlock(CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- address - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- AddResult(CAAMShape, CAAMShape, double, CAAMOptRes) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvaluationResults
-
Adds a new result to the back.
- AddResults(CAAMEvaluationResults) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvaluationResults
-
Adds a new set of results to the back.
- addROI(Integer, Integer, Integer, Integer, Integer, Integer, String, String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- addRow(ViewTableModel, Object[], boolean) - Static method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Determines whether the given row should be shown.
- addRunnable(Runnable, String, int, int) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
Basic method for registering an algorithm to the multi-bar.
- addSaveOptionsToParameters(ParameterTable, FileWriteOptions, int[]) - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Add the save options needed to record the saving of an image to a parameter table.
- addScaled(Polynomial, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- addScaled(PPolynomial, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- AddScaled(NVectorF, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- AddScaled(Polynomial, double, Polynomial, double, Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- AddScaled(Polynomial, double, Polynomial, Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- AddScaled(Polynomial, Polynomial, double, Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- AddScaled(VectorD, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- AddScaled(VectorF, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- addScannerLabels(String, Vector3f) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
DOCUMENT ME!
- addSchwarzChristoffelLines - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- addScreen(Integer, String, String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- addScreenRef(Integer, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Plate
-
DOCUMENT ME!
- addScriptActionLocation(String) - Static method in class gov.nih.mipav.model.scripting.ScriptableActionLoader
-
Adds a new package where we should look for scriptable actions.
- addScriptRecordingListener(ScriptRecordingListener) - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Adds a class to the recorder's list of listeners.
- addScriptVOI(ScriptVOI) - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- addScrollList(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- addSegment(byte, byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Adds segment bytes to the collection.
- addSegment(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
Adds a new line segment to this object.
- addSegment(Point2D, Point2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
Adds a new line segment to this object.
- addSelectionPaths(TreePath[]) - Method in class gov.nih.mipav.view.CheckTreeManager.CheckTreeSelectionModel
-
- addSeparator() - Method in class gov.nih.mipav.view.JScrollMenu
-
- addSeriesData(String) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
AddSeriesData This method populates the series table based upon the studyID.
- addSet - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
button for adding sets.
- addShape(Object, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
-
DOCUMENT ME!
- AddShapeExtends(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Adds an extra outer path on each outer path in the distance of 'nPixels'
along the point normal.
- addShortcut - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
add shortcut button.
- addShortcut(String) - Static method in class gov.nih.mipav.view.Preferences
-
Adds a new shortcut to the hashtable. if there is already a command predefined for the keystroke set from
setShortcut(), it will be removed then replaced with the new command.
- addShortcut(String, KeyStroke) - Static method in class gov.nih.mipav.view.Preferences
-
Adds a new shortcut to the hashtable with a given keystroke. if there is already a command predefined for the
keystroke set from
setShortcut(), it will be removed then replaced with the new command.
- addSlices(VolumeSlices) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Adds the VolumeSlices object to the display list for rendering.
- addSlices(VolumeSlices) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Adds the VolumeSlices object to the display list for rendering.
- addSlices(VolumeSlices) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Pass the VolumeSlices from the Volume Renderer to the PlaneRender objects.
- addSnpData(char[], int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- addSortButtons() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
DOCUMENT ME!
- addSpecular(SoftwareMaterial, SoftwareVertexProperty, Vector3f, float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Calculate the color due to specular lighting.
- addSphere(Vector3f, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- addSphereVOIs(VOI) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- addSphereVOIs(VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- addSphereVOIs(VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- addSphereVOIs(VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- addSphereVOIs(VOI) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- addSphereVOIs(VOI) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- addSphereVOIs(VOI) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- addSphereVOIs(VOI) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- addSplineControlPts(Vector<VOIWormAnnotation>) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- addSplineControlPts(Vector<VOIWormAnnotation>) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Add a curve to the list.
- addStatusPanel(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Method that adds components to the control paenl.
- addStringToTable(byte[]) - Method in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
Add a new string to the string table.
- addStringToTable(byte[], byte) - Method in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
Add a new string to the string table.
- addStudyData(FileInfoDicom) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Adds the study data to the table.
- addsub(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- addsub(double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- addSubscriber(Object, Method) - Method in class gov.nih.mipav.model.structures.ReminderThread
-
DOCUMENT ME!
- addSubscriber(Object, Method) - Method in class gov.nih.mipav.model.structures.TimeoutThread
-
DOCUMENT ME!
- addSubTree(Graph, Node, Node, Component[], int) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Function recursively creates a tree structure based on an array of menu components.
- addSurface - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
button for adding surfaces.
- addSurface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Add surface to the volume image.
- addSurface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Sets up the surface by setting the color of the material to black, setting the polygon to no cull-face and a fill
mode, and allowing intersections in case we want picking ability.
- addSurface() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Add surface to the volume image.
- addSurface(SurfaceState) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- addSurface(SurfaceState) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- addSurface(SurfaceState) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Add surfaces to the display list.
- addSurface(SurfaceState, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Add TriMesh surfaces to the Volume Renderer.
- addSurface(SurfaceState, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Add surfaces to the display list.
- addSurface(SurfaceState, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- addSurface(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Adds a surface path to the image's surface list.
- addSurface(String, float, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay
-
Add a surface to the table.
- addSurface(String, File) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Adding surface to the 3D texuture volume.
- addSurface(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Add a surface to the display list.
- addSurface(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Add new mesh to the volume rendering.
- addSurface(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- addSurface(TriMesh, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Add the fly-through surface.
- addSurfaceMask(int, BitSet, ColorRGBA[], ColorRGBA) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Adds a surface mask to this image.
- addSurfaces(SurfaceAttributes[], boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Adds an array of surfaces described by their SurfaceAttributes to the scene graph.
- addSurfaces(String, File) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Adding the surface with specific directory and file name.
- addSurfaces(TriMesh[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Add surfaces to the Volume Tri-Planar renderer.
- addTab(String) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Adds a tab to the MessageFrame tabbed pane with the given Title.
- addTabbedPane() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Called when the volumePositionFrame closes, the volumePositionPanel is again displayed in the window:.
- addToAvailableImageList(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- addToAvailableImageList(String, String, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- addToEnd() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
DOCUMENT ME!
- addToFile(Class, ArrayList<Class>) - Method in class gov.nih.mipav.plugins.ManifestFile
-
- addToList(Parameter) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Add a parameter to the end of the list.
- addToModelClip(BranchGroup) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Add a new branch group to model clip for clipping.
- addToolbar() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Add surface volume renderer control buttons.
- addToPane() - Method in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
Adds what the container just built (based on the given inputs) to the
component barPanel.
- addTopPanel(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Adds a component to the top panel.
- addTopPanel(Component, GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Adds a component to the top panel.
- addToTempDirList(String) - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- addToTerminalNodes(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- addTract() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Updates the tract list user-interface.
- addTract(VOIContour, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Adds a fiber bundle tract to the GPUVolumeRender and JPanelSurface.
- addTract(VOIContour, Polyline, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Add tract into the DTI display
- addTransferSyntax(DICOM_PDUItemType) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContext
-
Adds a new transfer syntax to the list (ie. vector)
- addTriangle(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- addTriangle(delaunay.Site, delaunay.Site, delaunay.Site) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- addTriangle(TriangleIndex, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredMeshData
-
- addTriangle(TriangleIndex, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- AddTriangleIndices(double[], double, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- AddTriangleIndices(float[], float, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- AddTriangleIndices(int, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- AddTriangles(double[], double, Triangle[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- AddTriangles(float[], float, Triangle[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- AddTriangles(CoredMeshData, Vector<CoredPointIndex>[], Vector<Point3D>, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- AddTriangles(CoredMeshData, Vector<CoredPointIndex>, Vector<Point3D>, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- addValue - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
112 - value to add to pixels.
- addVarElem(String, int, int[], int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Puts a new variable element with the specified paramenters into the array at the given index.
- addVattElem(String, int, int, int) - Method in class gov.nih.mipav.model.file.FileMincVarElem
-
Adds an attribute element to the variable attribute array.
- addVattValue(FileMincAttElem, Object, int) - Method in class gov.nih.mipav.model.file.FileMincVarElem
-
Sets the value of a variable attribute element.
- addVectorListener(VOIVectorListener) - Method in class gov.nih.mipav.model.structures.VOIVector
-
adds the update listener.
- addVertex(Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- AddVertex(Vertex) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Graph
-
- AddVertex(Vertex) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- AddVertex(Vertex, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- addVOI(ModelImage, VOIBase, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- addVOI(VOI) - Method in class gov.nih.mipav.model.structures.VOIVector
-
Adds voi to the voi vector
- addVOI(VOIBase, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- addVOI(VOIBase, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Add a new VOIBase.
- addVOI(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Adds a voi path to the image's VOI list.
- addVOI(String, String, int) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- addVOIListener(VOIListener) - Method in class gov.nih.mipav.model.structures.VOI
-
adds the update listener.
- addVOIManager(ModelImage, ModelImage, Component, ScreenCoordinateListener, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- addVOIPoint(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- addVOIPoint(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Adds a point to the current voi.
- addVOIs(VOIVector) - Method in class gov.nih.mipav.model.structures.ModelImage
-
adds VOI vector for with new VOIs.
- addVOIS(VOIVector, Vector<String>) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- addVOIsToCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- addVOIUpdateListener(UpdateVOISelectionListener) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Adds a UpdateVOISelectionListener.
- addVOIUpdateListener(UpdateVOISelectionListener) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Add a UpdateVOISelectionListener so it will receive VOI selection updates.
- addVolumeVOI(VolumeVOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- addWhiteListedKeys(ArrayList<FileDicomKey>, ArrayList<String>) - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
Deprecated.
- aDiff - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- aDiff - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- adj(double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.ConvAndLinear
-
- adj(double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.DiscretInteg
-
- ADJ_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Use adjacency model to perform triangle consistency.
- adj_ranks - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- adjacencies - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.AdjacencySetFunction
-
- adjacencyCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.AdjacencyCountFunction
-
- adjacencyCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.AdjacencySetFunction
-
- AdjacencyCountFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- AdjacencyCountFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.AdjacencyCountFunction
-
- AdjacencySetFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- AdjacencySetFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.AdjacencySetFunction
-
- adjacent - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.qlgraph
-
- ADJACENT - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- ADJACENT - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- ADJACENT_BACK - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Copy adjacent slice.
- ADJACENT_DOWN - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Copy adjacent slice.
- ADJACENT_DOWN_SLICE - Static variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- ADJACENT_NEXT - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Copy adjacent slice.
- ADJACENT_UP - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Copy adjacent slice.
- ADJACENT_UP_SLICE - Static variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- adjacentDown - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- adjacentImageRButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- adjacentImageRButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- adjacentUp - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- adjCfrft(double[][], double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- adjE(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- adjF(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- adjGKN(double[][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- adjImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
adjusted image.
- adjInvF(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- adjMark - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
number of VOIs for adjustable slice
- adjMark - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- adjMark - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- ADJMARK - Static variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- ADJMARK - Static variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- ADJMARK - Static variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
adjusted marker type.
- adjMarkButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- adjMarkButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- adjMarkMinusButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- adjMarkMinusButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- adjPPFT(double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- adjRadon(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- adjU(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- adjust_amp - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.Background
-
- adjustBins(int[], int[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- adjustExp - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
adjust exp *
- adjustExp - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
adjust exp *
- adjustExp - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
adjust exp *
- adjustExpPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- adjustExpPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- adjustExpSlider - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
various sliders in dialog *
- adjustExpSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
various sliders in dialog *
- adjustExpTextField - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
textfields *
- adjustExpTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
textfields *
- adjustGradientBins(VabraVolumeCollection, double, double, double, int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- adjustGreen(float, float, float) - Method in class gov.nih.mipav.view.ColorWheel
-
adjust green intensity
- adjustGreen(float, float, float) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
adjust green intensity
- adjustmentValueChanged(AdjustmentEvent) - Method in class gov.nih.mipav.view.ScrollCorrector
-
DOCUMENT ME!
- adjustOpacityFor000Color() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
>>>>>>> .r533 The purpose of this method is to examine both LUTs to determine if they are zero-based, that is, if
they map values of zero to the color R=0, G=0, B=0.
- adjustOrigBins(int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- adjustPvalues(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- adjustScrollbars(int, int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- adjustScrollbars(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
This method adjust the scrollbars to area where user clicked when doing individual frame zooming in and out.
- adjustScrollbars(int, int, JScrollPane) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
DOCUMENT ME!
- adjustScrollbars(int, int, JScrollPane) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
DOCUMENT ME!
- adjustScrollbars(int, int, JScrollPane) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- adjustTranslation(TransMatrixd, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt2D
-
- adjustTranslation(TransMatrixd, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
- adjustTranslation(TransMatrixd, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Adjust the translation of the transformation matrix by the sample pararmeter.
- adjustTranslation(TransMatrixd, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- adjustTranslation(TransMatrixd, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- adjustVOIs(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
When user draws the 3 VOIs out of order, adjust the VOIs in ascending order
- adjustVOIs(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
When user draws the 3 VOIs out of order, adjust the VOIs in ascending order
- Adobe_transform - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- AdobeJpegDescriptor(MetadataExtractor.AdobeJpegDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDescriptor
-
- AdobeJpegDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDirectory
-
- AdobeJpegReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegReader
-
- AdobeJpegReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.AdobeJpegReaderTest
-
- adOpDialog - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- adOpString - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- adOpString - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Advanced function string.
- adub - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- adv(int, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
Advance N-dimensional subscript
- ADVANCED - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- advancedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- advancedDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Variables for Advanced Settings dialog.
- advancedDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Variables for Advanced Settings dialog.
- advancedDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Variables for Advanced Settings dialog.
- advancedDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Variables for Advanced Settings dialog.
- advancedDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Variables for Advanced Settings dialog.
- advancedDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Variables for Advanced Settings dialog.
- advanceVOIUID() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Increments the VOI uid for internal tracking, used during both creation and loading of a new VOI
- AdvancingFront - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- AdvancingFront(TriMesh) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- AdvancingFront.AdvancingTest - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- AdvancingTest(TriMesh) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront.AdvancingTest
-
- advDecOptDialog - Variable in class gov.nih.mipav.model.file.FileJP2
-
The height of image
- AE - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- aExp - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- afc(Vector<Integer>, Vector<Integer>, Vector<Integer>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
- afcmAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- affiliation - Variable in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Affiliation of investigator.
- affine - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- Affine() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Affine
-
- AFFINE - gov.nih.mipav.model.algorithms.SIFT3D.tform_type
-
- Affine_set_mat(SIFT3D.Mat_rm, SIFT3D.Affine) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- affineTransform(double[][]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
The input 4x4 homogeneous matrix H is assumed to multiply vectors V as H*V where V = (x,y,z,1).
- affineTransform(float[][], float[], float[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Rotation R is 3x3, translation T is 3x1, and scale S is 3x1.
- AFInfo() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- AFNI - Static variable in class gov.nih.mipav.model.file.FileUtility
-
AFNI file type. extension: .head, .brik
- AFNI_ACPC - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
AFNI view type ACPC.
- AFNI_ORIG - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
AFNI view type Original.
- AFNI_TLRC - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
AFNI view type Talairach.
- afniEnabled - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- afniGroup - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- afniGroupArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- AFNIOrigExtents - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- AFNIOrigResolutions - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- AFNITypeString - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- AFNIViewType - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- AFPintoDFP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- AFPintoDFP - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- AFPintoFRET - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- AFPintoFRET - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- AFTER - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Before/After index values for the two displayed spheres, canvases, and display panels:.
- AFTER - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Before/After index values for the two displayed spheres, canvases, and display panels:.
- afterExecute() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- afterExecute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
- afterExecute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
- afterExecute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
- afterExecute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- afterThreadedGenerateData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- afTimeC - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- agastDetector_5_8 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- AgastDetector5_8 - Class in gov.nih.mipav.model.algorithms
-
agast5 - AGAST, an adaptive and generic corner detector based on the
accelerated segment test for a 8 pixel mask
Copyright (c) 2010, Elmar Mair
All rights reserved.
- AgastDetector5_8(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- agcieAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
DOCUMENT ME!
- Age() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- Age(int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- AgeTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.AgeTest
-
- AgglomerativeInformationBottleneck - Class in gov.nih.mipav.model.algorithms
-
Copyright (C) 2007-11, Andrea Vedaldi and Brian Fulkerson
Copyright (C) 2012-13, The VLFeat Team
All rights reserved.
- AgglomerativeInformationBottleneck() - Constructor for class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- AgglomerativeInformationBottleneck(ModelImage, int, int, double[][], int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- AgglomerativeInformationBottleneck.VlAIB - Class in gov.nih.mipav.model.algorithms
-
------------------------------------------------------------------
- AGGREGATED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- AGGREGATED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- AGGREGATED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- AGGREGATED_CIRCLES_DIFFERENT_SIZES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- AGGREGATED_ELLIPSE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- AGGREGATED_ELLIPSE_RANDOM_ORIENTATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- AGGREGATED_ELLIPSE_RANDOM_ORIENTATION_DIFFERENT_SIZES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- aggregatedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- aggregatedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- aggregatedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- aggregatedCirclesDifferentSizesButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- aggregatedEllipseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- aggregatedEllipseRandomOrientationButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- aggregatedEllipseRandomOrientationDifferentSizes - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- agvfAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- Ah - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- aheAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- aheAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- aicAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- AICOC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- AICOF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- AIF_conc - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aif_diffPeak - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aif_enable - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- AIF_fit_cv_est_parGV - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- AIF_fit_gv - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- AIF_fit_parameters - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- AIF_fit_weights - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aif_nSlice - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aif_nSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- aif_nSliceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- aif_nSliceText - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- aif_nVoxelMax - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aif_nVoxelMin - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aif_pArea - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aif_pReg - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aif_pTTP - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aif_recirculation - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- AIF_ROI - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- AIF_ROI_x - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- AIF_ROI_y - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aif_semiMajorAxis - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aif_semiMinorAxis - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- AIF_voxels - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- AIFslice - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- aimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- aimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- Ain - Variable in class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- aindaneAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
DOCUMENT ME!
- airPressure - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- AIRY_AI - Static variable in class gov.nih.mipav.model.algorithms.Bessel
-
Airy function Ai.
- AIRY_AI - Static variable in class gov.nih.mipav.model.algorithms.BesselEP
-
Airy function Ai.
- AIRY_BI - Static variable in class gov.nih.mipav.model.algorithms.Bessel
-
Airy function Bi.
- AIRY_BI - Static variable in class gov.nih.mipav.model.algorithms.BesselEP
-
Airy function Bi.
- aki - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- akMVertex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Polylines
-
Array of mesh points.
- akNormal - Static variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
normal vector arrayes.
- akPVertex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Polylines
-
Array of plane points.
- akr - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- akSVertex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Polylines
-
Array of sphere points.
- Al - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.AmAl
-
- Al - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- aLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- aLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
- alertBackground(JTextField, boolean) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- alfa - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
parameter in the weight function, alfa.gt.(-1) if alfa.le.(-1), the routine will end with ier[0] = 6.
- alfa - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
parameter in the weight function, alfa.gt.(-1) if alfa.le.(-1), the routine will end with errorStatus = 6.
- ALFA02 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- ALFA12 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- alfkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- alfkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- alfkm2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- alfkm2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- alfnoi - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- alfnoi - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- alg - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
handle to BSE Algorithm *
- alg - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
handle to the algorithm *
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
handle to alg
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
handle to algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
handle to the algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
handle to algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
handle to algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
handle to algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
handle to algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
handle to algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
algorithm
- alg - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIShapeInterpolation
-
algorithm
- alg - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
handle to the algorithm *
- alg - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- alg - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- alg2D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
- alg3D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
- ALGAM - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- algCont - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
List of containers that hold all the information to correctly
draw each progress bar
- algdiv(double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- algList - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
List containing which runnables are registered to this listener
- algo - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- algo - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- algo - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Use serialVersionUID for interoperability.
- algo - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Use serialVersionUID for interoperability.
- algo - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- algoAutoCorrelation - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- algoAutoCovariance - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- algoColorEdge - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- AlgoContainer(String, int, int) - Constructor for class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
- algoCost - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Algorithm that implement cost functions, either a AlgorithmCostFunctions or AlgorithmCostFunctions2D
- algoCost - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Is either a AlgorithmCostFunction or a AlgorithmCostFunctions2D depending on images
- algoCost - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
- algoCost - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- algoGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- algoGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- algoGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- algoLocal - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- algoPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- algoQuantify - Variable in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
DOCUMENT ME!
- algoRegVOILankmark - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- algoReplace - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- algorID - Variable in class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
DOCUMENT ME!
- algorithm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
- algorithm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- algorithm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
algorithm type (i.e. erode, dilate)
- algorithm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
algorithm type (i.e. erode, dilate)
- algorithm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- algorithm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
algorithm type (i.e. erode, dilate)
- algorithm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
algorithm type (i.e. erode, dilate)
- algorithm - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- algorithm - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- algorithm - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- algorithm - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
- algorithm_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceOptions
-
- Algorithm4DImageCalculator - Class in gov.nih.mipav.model.algorithms.utilities
-
- Algorithm4DImageCalculator() - Constructor for class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
constructor
- Algorithm4DImageCalculator(ModelImage, ModelImage, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
constructor
- AlgorithmActiveContoursWithoutEdges - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmActiveContoursWithoutEdges(ModelImage, ModelImage, int, int, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- AlgorithmAdaptiveKuwaharaFilter - Class in gov.nih.mipav.model.algorithms.filters
-
This algorithm is created from the description provided in the article:
"Adaptive Kuwahara Filter" by Krzysztof Bartyzel, Published online
July 6, 2015.
- AlgorithmAdaptiveKuwaharaFilter() - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmAdaptiveKuwaharaFilter
-
- AlgorithmAdaptiveKuwaharaFilter(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmAdaptiveKuwaharaFilter
-
- AlgorithmAddMargins - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm to add or remove margins around the image.
- AlgorithmAddMargins(ModelImage, int[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
Add or remove margins from the srcImage.
- AlgorithmAddMargins(ModelImage, ModelImage, int[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
Add or remove margins from the srcImage and store the results in the destImage.
- AlgorithmAGCIE - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmAGCIE() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAGCIE
-
Reference: An Adaptive Gamma Correction for Image Enhancement by
Shanto Rahman, Md Mostafijur Rahman, M.
- AlgorithmAGCIE(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAGCIE
-
- AlgorithmAGVF - Class in gov.nih.mipav.model.algorithms
-
Snake-like algorithm deriviative.
- AlgorithmAGVF(ModelImage, ModelImage, float[], int, int, float, float, VOI, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Creates a new AlgorithmAGVF object.
- AlgorithmAHE - Class in gov.nih.mipav.model.algorithms
-
algorithm to apply an adaptive histogram to an image, placing it in a new ModelImage, or returning the changed
picture to the same image.
- AlgorithmAHE(ModelImage, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
Constructor for images in which changes are returned to the source image.
- AlgorithmAHE(ModelImage, ModelImage, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
Constructor for images in which changes are placed in a predetermined destination image.
- AlgorithmAHElocal - Class in gov.nih.mipav.model.algorithms
-
algorithm to apply an adaptive histogram to an image, placing it in a new ModelImage, or returning the changed
picture to the same image.
- AlgorithmAHElocal(ModelImage, int, int, boolean, boolean, float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Constructor for images in which changes are returned to the source image.
- AlgorithmAHElocal(ModelImage, ModelImage, int, int, boolean, boolean, float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Constructor for images in which changes are placed in a predetermined destination image.
- AlgorithmAINDANE - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmAINDANE() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAINDANE
-
- AlgorithmAINDANE(ModelImage, ModelImage, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAINDANE
-
- AlgorithmAnisotropicDiffusion - Class in gov.nih.mipav.model.algorithms.filters
-
This algorithm anisotropically diffuses an image.
- AlgorithmAnisotropicDiffusion(ModelImage, float[], int, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Creates a new AlgorithmAnisotropicDiffusion object.
- AlgorithmAnisotropicDiffusion(ModelImage, ModelImage, float[], int, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Creates a new AlgorithmAnisotropicDiffusion object.
- AlgorithmAntigradient2 - Class in gov.nih.mipav.model.algorithms
-
This is a port of the files anitgradient2.m and antigradient2.c created by Gunnar Farneback in the
Spatial domain toolbox at http://www.imt.liu.se/mi/Tools.
- AlgorithmAntigradient2() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- AlgorithmAntigradient2(ModelImage, ModelImage, boolean, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- AlgorithmAntigradient2(ModelImage, ModelImage, boolean, double, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- AlgorithmAnyTwoImagesSNR - Class in gov.nih.mipav.model.algorithms
- AlgorithmAnyTwoImagesSNR(ModelImage, ModelImage, boolean, boolean, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAnyTwoImagesSNR
-
Creates a new AlgorithmAnyTwoImagesSNR object.
- AlgorithmArcLength - Class in gov.nih.mipav.model.algorithms
-
This algorithm calculates the arc-length of a Bspline fit to user defined control points.
- AlgorithmArcLength(float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
Algorithm constructor.
- AlgorithmArcLength(float[], float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
Algorithm constructor.
- AlgorithmASM - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmASM() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- AlgorithmASM.AppData - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmASM.ASMData - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmASM.FileMATLAB - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmASM.LandData - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmASM.Options - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmASM.P - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmASM.PData - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmASM.SData - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmASM.TData - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmAutoCorrelation - Class in gov.nih.mipav.model.algorithms
-
Reference: Digital Image Processing, Second Edition by Rafael C.
- AlgorithmAutoCorrelation(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
Constructor for black and white image in which correlation coefficients are placed in a predetermined destination
image.
- AlgorithmAutoCorrelation(ModelImage, ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
Constructor for color image in which correlation coefficients are placed in predetermined destination images.
- AlgorithmAutoCorrelation.FitCorrelationModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmAutoCovariance - Class in gov.nih.mipav.model.algorithms
-
let deli(x,y) = (i(x,y) - )/ where the angle brackets are used to denote a spatial average.
- AlgorithmAutoCovariance(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
Constructor for black and white image in which covariance coefficients are placed in a predetermined destination
image.
- AlgorithmAutoCovariance(ModelImage, ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
Constructor for color image in which covariance coefficients are placed in predetermined destination images.
- AlgorithmAutoCovariance.FitCovarianceModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmAutoSeedWatershed - Class in gov.nih.mipav.model.algorithms
-
This is a port of the file AutoSeedWatershed.cpp which calls openCV written by Ravimal Bandara.
- AlgorithmAutoSeedWatershed(ModelImage, ModelImage, float, float, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
Constructs new watershed algorithm.
- AlgorithmBarrelDistortion - Class in gov.nih.mipav.model.algorithms
-
Corrects barrel and/or pin cushion distortion for 2D images.
- AlgorithmBarrelDistortion() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBarrelDistortion
-
AlgorithmBarrelDistortion - default constructor.
- AlgorithmBarrelDistortion(ModelImage, ModelImage, float, float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBarrelDistortion
-
AlgorithmBarrelDistortion.
- AlgorithmBase - Class in gov.nih.mipav.model.algorithms
-
Base abstract class for algorithms.
- AlgorithmBase() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Default constructor which sets thread stopped to false, source and destination images to null, and destination
flag to false.
- AlgorithmBase(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Constructor which sets thread stopped to false and sets source and destination images.
- AlgorithmBilateralFilter - Class in gov.nih.mipav.model.algorithms.filters
-
Bilateral filtering smooths an image or VOI region of the image while preserving edges with 2 Gaussian functions.
- AlgorithmBilateralFilter() - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- AlgorithmBilateralFilter(ModelImage, float[], float, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
Creates a new AlgorithmBilateralFilter object.
- AlgorithmBilateralFilter(ModelImage, ModelImage, float[], float, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
Constructor which sets the source and destination images, the minimum and maximum progress value.
- AlgorithmBoundaryAttenuation - Class in gov.nih.mipav.model.algorithms.filters
-
Attenuate around the boundary of an object defined by a VOI in an image volume.
- AlgorithmBoundaryAttenuation(ModelImage, int, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
Set up the algorithm.
- AlgorithmBoxCount - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmBoxCount(ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- AlgorithmBrainExtractor - Class in gov.nih.mipav.model.algorithms
-
A class for segmenting the brain from a 3D MRI.
- AlgorithmBrainExtractor(ModelImage, int, boolean, boolean, Vector3f) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Create an extractor for segmenting the brain from a 3D magnetic resonance image.
- AlgorithmBrainExtractor(ModelImage, int, TriMesh, int, Vector3f) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Create an extractor for segmenting the brain from a 3D magnetic resonance image.
- AlgorithmBrainExtractor.Edge - Class in gov.nih.mipav.model.algorithms
-
A representation of an edge for the vertex-edge-triangle table.
- AlgorithmBrainExtractor.UnorderedSetInt - Class in gov.nih.mipav.model.algorithms
-
An unordered set of 'int' stored in an array.
- AlgorithmBrainSurfaceExtractor - Class in gov.nih.mipav.model.algorithms
-
This class provides an implementation of a second method for segmentation of the brain from a 3D MRI, as opposed to
the BET algorithm implemented in AlgorithmBrainExtractor.
- AlgorithmBrainSurfaceExtractor(ModelImage, int, float, float, boolean, int, float, int, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Create an extractor for segmenting the brain from a 3D magnetic resonance image.
- AlgorithmBRISK - Class in gov.nih.mipav.model.algorithms
-
BRISK - Binary Robust Invariant Scalable Keypoints
Reference implementation of
[1] Stefan Leutenegger,Margarita Chli and Roland Siegwart, BRISK:
Binary Robust Invariant Scalable Keypoints, in Proceedings of
the IEEE International Conference on Computer Vision (ICCV2011).
- AlgorithmBRISK() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
AlgorithmBRISK - default constructor.
- AlgorithmBRISK(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- AlgorithmBRISK(ModelImage, ModelImage, boolean, int, int, int, boolean, boolean, double, Vector<Double>, Vector<Integer>, double, double, Vector<Integer>) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- AlgorithmBRISK.BriskLayer - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmBRISK.BriskLongPair - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmBRISK.BriskPatternPoint - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmBRISK.BriskShortPair - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmBRISK.KeyPoint - Class in gov.nih.mipav.model.algorithms
-
- algorithmBruteForce() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Compute the brute-force solution.
- algorithmBruteForce() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Compute the brute-force solution.
- AlgorithmBSmooth - Class in gov.nih.mipav.model.algorithms
-
Smoothing of VOI using 1 iteration of bSplines.
- AlgorithmBSmooth() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
- AlgorithmBSmooth(ModelImage, VOI, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Creates a new AlgorithmBSmooth object.
- AlgorithmBSnake - Class in gov.nih.mipav.model.algorithms
-
Snake-like algorithm derivative using BSplines.
- AlgorithmBSnake(ModelImage, float[], int, VOI) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Set up the snake algorithm so that it can be run.
- AlgorithmBSpline - Class in gov.nih.mipav.model.algorithms
-
Modified code from Aaron Carass's Java implementation of
Philippe Thevenaz's Cubic B-spline Interpolation.
- AlgorithmBSpline() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
default constructor.
- AlgorithmBSpline.ColorInterpolation - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmBSplineControlPointImageFilter - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmBSplineControlPointImageFilter(int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- AlgorithmBSplineScatteredDataPointSetToImageFilter - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmBSplineScatteredDataPointSetToImageFilter(int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- AlgorithmCannyEdgeDetection - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmCannyEdgeDetection() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCannyEdgeDetection
-
AlgorithmCannyEdgeDetection - default constructor.
- AlgorithmCannyEdgeDetection(ModelImage, ModelImage, double, double, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCannyEdgeDetection
-
AlgorithmCannyEdgeDetection.
- AlgorithmCellTrackingAGVF - Class in gov.nih.mipav.model.algorithms
-
Active Contour class optimized for Cell Tacking, based on the following paper:
- AlgorithmCellTrackingAGVF(ModelImage, ModelImage, float[], int, int, float, float, VOI, boolean, float, float, float, float, boolean, float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Creates a new AlgorithmCellTrackingAGVF object.
- AlgorithmCenterOfMass - Class in gov.nih.mipav.model.algorithms
-
This algorithm calculates the center of mass for 2D and 3D black and white images.
- AlgorithmCenterOfMass(ModelImage, float[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
Creates a new AlgorithmCenterOfMass object.
- AlgorithmCenterOfMassRGB - Class in gov.nih.mipav.model.algorithms
-
* This algorithm calculates the red, green, and blue center of mass for 2D and 3D color images.
- AlgorithmCenterOfMassRGB(ModelImage, float[], float[], float[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
Default constructor for running algorithm to calculate red, green, and blue centers of mass.
- AlgorithmChangeType - Class in gov.nih.mipav.model.algorithms.utilities
-
This is a convenience function to convert from one image type to another and remap the data into a new range.
- AlgorithmChangeType(ModelImage, int, double, double, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
Creates a new AlgorithmChangeType object.
- AlgorithmChangeType(ModelImage, ModelImage, double, double, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
Creates a new AlgorithmChangeType object.
- AlgorithmCircleGeneration - Class in gov.nih.mipav.model.algorithms
-
This module draws uniformly randomly positioned circles with a specified radius.
- AlgorithmCircleGeneration() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
AlgorithmCircleGeneration - default constructor.
- AlgorithmCircleGeneration(ModelImage, int, int, int, int, double, double, double, double, double, double, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
AlgorithmRandomCircleGeneration.
- AlgorithmCircleGeneration.erfcModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmCircleGeneration.erfcModel2 - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmCircleGeneration.IntTorquato95ModelMean - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmCircleGeneration.IntTorquato95ModelMean2 - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmCircleToRectangle - Class in gov.nih.mipav.model.algorithms
-
References: 1.)
- AlgorithmCircleToRectangle() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
AlgorithmCircleToRectangle - default constructor.
- AlgorithmCircleToRectangle(ModelImage, ModelImage, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
AlgorithmCircleToRectangle.
- AlgorithmCircularSectorToRectangle - Class in gov.nih.mipav.model.algorithms
-
This software uses 2D conformal mapping in converting a circular sector defined by 4 user points at the sector corners
to a rectangle of user specified size.
- AlgorithmCircularSectorToRectangle() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
AlgorithmCircularSectorToRectangle - default constructor.
- AlgorithmCircularSectorToRectangle(ModelImage, ModelImage, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
AlgorithmCircularSectorToRectangle.
- AlgorithmCoherenceEnhancingDiffusion - Class in gov.nih.mipav.model.algorithms.filters
-
Algorithm to apply Coherence Enhancing Anisotropic Diffusion
- AlgorithmCoherenceEnhancingDiffusion(ModelImage, int, float, float, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Creates a new AlgorithmCoherenceEnhancingDiffusion object.
- AlgorithmCoherenceEnhancingDiffusion(ModelImage, ModelImage, int, float, float, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Creates a new AlgorithmCoherenceEnhancingDiffusion object.
- AlgorithmColocalizationEM - Class in gov.nih.mipav.model.algorithms
-
An optional registration may be performed before colocalization.
- AlgorithmColocalizationEM(ModelImage, ModelImage, ModelImage, int, int, float, float, boolean, int, int, int, int, boolean, boolean, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
Constructor for images in which 2D histogram is placed in a predetermined destination image.
- AlgorithmColocalizationEM(ModelImage, ModelImage, ModelImage, ModelImage, int, int, float, float, boolean, int, int, int, int, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
Constructor for images in which 2D histogram is placed in a predetermined destination image.
- AlgorithmColocalizationRegression - Class in gov.nih.mipav.model.algorithms
-
This algorithm creates a 2D histogram from 2 colors of a single image or from 2 black and white images and uses an
orthogonal line fit of the histogram data to generate a correlation line thru the histogram.
- AlgorithmColocalizationRegression(ModelImage, ModelImage, ModelImage, BitSet, int, int, float, float, int, int, int, int, boolean, boolean, boolean, int, boolean, boolean, boolean, float, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
Constructor for images in which 2D histogram is placed in a predetermined destination image.
- AlgorithmColocalizationRegression(ModelImage, ModelImage, BitSet, int, int, float, float, int, int, int, int, boolean, boolean, boolean, boolean, boolean, boolean, int, boolean, boolean, boolean, float, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
Constructor for images in which 2D histogram is placed in a predetermined destination image.
- AlgorithmColorEdge - Class in gov.nih.mipav.model.algorithms.filters
-
This algorithm uses a hypercomplex filter to find the edges between a region of two
user specified colors.
- AlgorithmColorEdge(ModelImage, ModelImage, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmColorEdge
-
This constructor initialises a Color Edge algorithm for a source and destination image, and ensures that
the destination image is ModelStorageBase.UBYTE.
- AlgorithmColorSaturation - Class in gov.nih.mipav.model.algorithms
-
This algorithm changes the saturation of a color image while keeping the hue and intensity constant.
- AlgorithmColorSaturation() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmColorSaturation
-
AlgorithmColorSaturation - default constructor.
- AlgorithmColorSaturation(ModelImage, ModelImage, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmColorSaturation
-
AlgorithmColorSaturation.
- AlgorithmComplexConcat - Class in gov.nih.mipav.model.algorithms.utilities
-
Simple algorithm that generates a complex image from real data and imaginary data.
- AlgorithmComplexConcat(ModelImage, ModelImage, ModelImage, int, boolean, boolean, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Creates a new AlgorithmRGBConcat object.
- AlgorithmComplexConcat(ModelImage, ModelImage, ModelImage, ModelImage, boolean, boolean, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Creates a new AlgorithmRGBConcat object.
- AlgorithmComplexToReal - Class in gov.nih.mipav.model.algorithms.utilities
-
Simple algorithm that converts an RGB image to a single greyscale image.
- AlgorithmComplexToReal(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Creates a new AlgorithmComplexToReal object.
- AlgorithmComplexToReal(ModelImage, float, float, float, boolean, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Creates a new AlgorithmComplexToReal object.
- AlgorithmComplexToReal(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Creates a new AlgorithmComplexToReal object.
- AlgorithmComplexToReal(ModelImage, ModelImage, float, float, float, boolean, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Creates a new AlgorithmComplexToReal object.
- AlgorithmConcat - Class in gov.nih.mipav.model.algorithms.utilities
-
Assumes the pixel resolutions are equal.
- AlgorithmConcat(ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
Creates a new AlgorithmConcat object.
- AlgorithmConcatMult - Class in gov.nih.mipav.model.algorithms.utilities
-
- AlgorithmConcatMult() - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult
-
- AlgorithmConcatMult2Dto3D - Class in gov.nih.mipav.model.algorithms.utilities
-
- AlgorithmConcatMult2Dto3D(ModelImage[], ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult2Dto3D
-
constructor
- AlgorithmConcatMult2Dto3D(ModelImage[], ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult2Dto3D
-
constructor
- AlgorithmConcatMult3Dto3D - Class in gov.nih.mipav.model.algorithms.utilities
-
- AlgorithmConcatMult3Dto3D(ModelImage[], ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult3Dto3D
-
constructor
- AlgorithmConcatMult3Dto3D(ModelImage[], ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult3Dto3D
-
constructor
- AlgorithmConcatMult3Dto4D - Class in gov.nih.mipav.model.algorithms.utilities
-
- AlgorithmConcatMult3Dto4D(ModelImage[], ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult3Dto4D
-
constructor
- AlgorithmConcatMult3Dto4D(ModelImage[], ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult3Dto4D
-
constructor
- AlgorithmConstELSUNCOpt3D - Class in gov.nih.mipav.model.algorithms
-
Runs ELSUNC for a 3D image.
- AlgorithmConstELSUNCOpt3D(AlgorithmBase, Vector3f, int, AlgorithmOptimizeFunctionBase, double[], double[], int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- AlgorithmConstELSUNCOpt3D.FitOAR3DConstrainedModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmConstPowellOpt3D - Class in gov.nih.mipav.model.algorithms
-
Runs Powell's method for a 3D image.
- AlgorithmConstPowellOpt3D(AlgorithmBase, Vector3f, int, AlgorithmOptimizeFunctionBase, double[], double[], int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- AlgorithmConstPowellOptBase - Class in gov.nih.mipav.model.algorithms
-
Powell's Method
- AlgorithmConstPowellOptBase(AlgorithmBase, int, AlgorithmOptimizeFunctionBase, double[], double[], int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, and some
tolerance within that point to look for the minimum.
- AlgorithmConstrainedELSUNCOAR3D - Class in gov.nih.mipav.model.algorithms.registration
-
This is an automatic registration method based on FLIRT.
- AlgorithmConstrainedELSUNCOAR3D(ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, int, int, int, float[][], boolean, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmConstrainedELSUNCOAR3D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, int, int, int, float[][], boolean, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmConstrainedELSUNCOAR3D.MatrixListItem - Class in gov.nih.mipav.model.algorithms.registration
-
Helper class to make it easy to store the necessary information about a minimum.
- AlgorithmConstrainedOAR3D - Class in gov.nih.mipav.model.algorithms.registration
-
This is an automatic registration method based on FLIRT.
- AlgorithmConstrainedOAR3D(ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, int, int, int, float[][], boolean, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmConstrainedOAR3D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, int, int, int, float[][], boolean, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmConstrainedOAR3D.MatrixListItem - Class in gov.nih.mipav.model.algorithms.registration
-
Helper class to make it easy to store the necessary information about a minimum.
- AlgorithmContrastEnhancementUsingExposureFusion - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmContrastEnhancementUsingExposureFusion() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- AlgorithmContrastEnhancementUsingExposureFusion(ModelImage, ModelImage, double, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- AlgorithmContrastEnhancementUsingExposureFusion.kFitting - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmConvergenceField - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmConvergenceField(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConvergenceField
-
- AlgorithmConvert3Dto4D - Class in gov.nih.mipav.model.algorithms.utilities
-
Converts a 3D dataset that is really a 4D dataset into a 4D dataset.
- AlgorithmConvert3Dto4D(ModelImage, int, float, float, int, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert3Dto4D
-
Constructs new algorithm and sets source.
- AlgorithmConvert4Dto3D - Class in gov.nih.mipav.model.algorithms.utilities
-
The image is converted from a 4D to a 3D image.
- AlgorithmConvert4Dto3D(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert4Dto3D
-
Constructs new algorithm and sets source.
- AlgorithmConvert4Dto3D(ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert4Dto3D
-
Constructs new algorithm and sets source.
- AlgorithmConvolver - Class in gov.nih.mipav.model.algorithms
-
Convolves kernel with a 2D or 3D image - only pixels where the kernel is completely contained in the image are
convolved, otherwise they are set to zero.
- AlgorithmConvolver(ModelImage, float[], float[], float[], float[], float[], float[], float[], float[], float[], boolean, int[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- AlgorithmConvolver(ModelImage, float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], int[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- AlgorithmConvolver(ModelImage, float[], float[], float[], float[], float[], float[], float[], float[], float[], int[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- AlgorithmConvolver(ModelImage, float[], float[], float[], float[], float[], int[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- AlgorithmConvolver(ModelImage, float[], float[], float[], float[], float[], int[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- AlgorithmConvolver(ModelImage, float[], float[], float[], int[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- AlgorithmConvolver(ModelImage, float[], float[], int[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- AlgorithmConvolver(ModelImage, float[], int[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
Sets the source and kernel images and calls the appropriate method based on image dimensionality.
- AlgorithmConvolver(ModelImage, float[], int[], boolean, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- AlgorithmCorrectSpacing - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm to adjust image volume for cases when the slice spacing is not equal to the slice thickness.
- AlgorithmCorrectSpacing(ModelImage, ModelImage, int, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Import source image into the class.
- AlgorithmCostFunctions - Class in gov.nih.mipav.model.algorithms
-
CostFunction - class for specifying optimization function.
- AlgorithmCostFunctions(ModelSimpleImage, ModelSimpleImage, int, int, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Creates a new AlgorithmCostFunctions object.
- AlgorithmCostFunctions2D - Class in gov.nih.mipav.model.algorithms
-
CostFunction - class for specifying optimization function.
- AlgorithmCostFunctions2D(ModelSimpleImage, ModelSimpleImage, int, int, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
- AlgorithmCostFunctions2D(ModelSimpleImage, ModelSimpleImage, int, int, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Creates a new AlgorithmCostFunctions2D object.
- AlgorithmCrop - Class in gov.nih.mipav.model.algorithms.utilities
-
Crops 2D and 3D images using a supplied VOI.
- AlgorithmCrop(ModelImage, ModelImage, int, int[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Creates new algorithms to crop image by specified bounds.
- AlgorithmCropTilted - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm to crop a tilted rectangle
- AlgorithmCropTilted(ModelImage, double, double, double, double, double, double, double, double, double, double, double, double, double, double, double, double, double, double, double, double, double, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
Rotate tilted cuboid to remove tilt and crop cuboid.
- AlgorithmCropTilted(ModelImage, double, double, double, double, double, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
Rotate tilted rectangle to remove tilt and crop rectangle.
- AlgorithmCubicLagrangian - Class in gov.nih.mipav.model.algorithms
-
This is a polynomial p of degree 3 which interpolates a given function f at the points x(-1), x(0), x(1), and x(2),
and is given by p(x) = sum from i = -1 to i = 2 of li(x)*f(xi), where li, i = -1,0,1,2, which are called the
fundamental polynomials, are given by li(x) = product from k = -1 to k = 2 for k !
- AlgorithmCubicLagrangian() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
AlgorithmCubicLagrangian - default constructor.
- AlgorithmCumulativeHistogram - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmCumulativeHistogram(ModelHistogram, int, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCumulativeHistogram
-
Constructor for RGB image.
- AlgorithmCumulativeHistogram(ModelHistogram, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCumulativeHistogram
-
Constructor for grey scale image
- AlgorithmCyclicPermutation - Class in gov.nih.mipav.model.algorithms.utilities
-
- AlgorithmCyclicPermutation(ModelImage, ModelImage, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmCyclicPermutation
-
- AlgorithmDConvolver - Class in gov.nih.mipav.model.algorithms
-
Convolves kernel with a 2D or 3D image - only pixels where the kernel is completely contained in the image are
convolved, otherwise they are set to zero.
- AlgorithmDConvolver(ModelImage, double[], double[], double[], double[], double[], double[], double[], double[], double[], boolean, int[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- AlgorithmDConvolver(ModelImage, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], int[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- AlgorithmDConvolver(ModelImage, double[], double[], double[], double[], double[], double[], double[], double[], double[], int[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- AlgorithmDConvolver(ModelImage, double[], double[], double[], double[], double[], int[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- AlgorithmDConvolver(ModelImage, double[], double[], double[], double[], double[], int[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- AlgorithmDConvolver(ModelImage, double[], double[], double[], int[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- AlgorithmDConvolver(ModelImage, double[], double[], int[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- AlgorithmDConvolver(ModelImage, double[], int[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
Sets the source and kernel images and calls the appropriate method based on image dimensionality.
- AlgorithmDConvolver(ModelImage, double[], int[], boolean, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- AlgorithmDemonsLite - Class in gov.nih.mipav.model.algorithms.registration
-
Algorithm for non-linear registration with the DEMONS algorithm
- AlgorithmDemonsLite(ModelImage, ModelImage, int, int, float, float, String, String) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
Constructor for 3D images in which changes are placed in a predetermined destination image.
- AlgorithmDEMRI3 - Class in gov.nih.mipav.model.algorithms
-
3 model parameters are fit for each voxel in 3D:
1) K_trans in [0, 0.99]
2) User choice of k_ep in [0, 0.99] or ve
3) f_vp in [0, 0.99]
K_trans and k_ep default to rates per second, but the user changed select rates per minute.
- AlgorithmDEMRI3(ModelImage, ModelImage, double[], double[], double, boolean, double, int, double, ModelImage, double, double, boolean, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
Creates a new AlgorithmDEMRI3 object.
- AlgorithmDEMRI3.Fit24DModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmDEMRI3.Fit25HModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmDEMRI3.FitDEMRI3ConstrainedModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmDicomOrder - Class in gov.nih.mipav.model.algorithms.utilities
-
Put 3D dataset into dicom order.
- AlgorithmDicomOrder(ModelImage, int[]) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmDicomOrder
-
In place constructor.
- AlgorithmDICOMtoAVI - Class in gov.nih.mipav.model.algorithms.utilities
-
Recursively traverses a directory and its subfolders, converting all 3D DICOM files to AVI with MP42 Compression.
- AlgorithmDICOMtoAVI(String, String, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmDICOMtoAVI
-
Default Constructor.
- AlgorithmDistanceFilter - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmDistanceFilter(ModelImage, ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmDistanceFilter
-
- AlgorithmDTI2EGFA - Class in gov.nih.mipav.model.algorithms.DiffusionTensorImaging
-
Algorithm requires input of a Diffusion Tensor Image to calculate an Apparent Diffusion Coefficient Image,
Functional Anisotropy Image, Color Image, Eigen Value Image, Eigen Vector Image, Relative Anisotropy Image,
Trace Image, and Volume Ratio Image
This algorithm works in conjunction with AlgorithmDTITract to create the
MIPAV DTI Fiber Tracking/ Statistics Dialog
See: Introduction to Diffusion Tensor Imaging, by Susumu Mori
- AlgorithmDTI2EGFA(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Initialize the Algorithm with the input DTI Image:
- AlgorithmDTIColorDisplay - Class in gov.nih.mipav.model.algorithms.DiffusionTensorImaging
-
- AlgorithmDTIColorDisplay - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- AlgorithmDTIColorDisplay(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
constructor *
- AlgorithmDTIColorDisplay(ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
constructor *
- AlgorithmDTICreateListFile - Class in gov.nih.mipav.model.algorithms.DiffusionTensorImaging
-
- AlgorithmDTICreateListFile(String, String, String, String, String, JTextArea, boolean, boolean, int, int, int, int, float, float, float, float, float, float, float, float, float, float, float, float, boolean, boolean, boolean, boolean, int, int, int, JTextField) - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
constructor for dicom if registration is to be done first
- AlgorithmDTICreateListFile(String, String, String, String, JTextArea, boolean) - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
constructor for par/rec
- AlgorithmDTICreateListFile(String, String, String, String, JTextArea, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
constructor for dicom
- AlgorithmDTICreateListFile(String, String, String, String, JTextArea, boolean, int, int, int, int, int, float, float, float, float, boolean, boolean, boolean, int, int, int, JTextField) - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
constructor for par/rec if registration is to be done first
- AlgorithmDTICreateListFile.InstanceNumberComparator - Class in gov.nih.mipav.model.algorithms.DiffusionTensorImaging
-
This inner class is used to sort
the list by instance number
- AlgorithmDTICreateListFile.InstanceNumberVolComparator - Class in gov.nih.mipav.model.algorithms.DiffusionTensorImaging
-
This inner class is used to sort the list by instance number and vol. the vol is determined by the filename
- AlgorithmDTITract - Class in gov.nih.mipav.model.algorithms.DiffusionTensorImaging
-
Algorithm requires input of previous calculated FA, EigenVector and EigenValue images from
AlgorithmDTI2EGFA to calculate fiber bundle tracts
This algorithm works in conjunction with AlgorithmDTI2EGFA to create the
MIPAV DTI Fiber Tracking/ Statistics Dialog
See:Introduction to Diffusion Tensor Imaging, by Susumu Mori
- AlgorithmDTITract(ModelImage, ModelImage, ModelImage, ModelImage, String, boolean, boolean, boolean, float, float, float, int) - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Initialize the Algorithm with the input DTI Image:
- AlgorithmDTITract(ModelImage, ModelImage, ModelImage, String, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Initialize the Algorithm with the input DTI Image:
- AlgorithmDualContourSearch - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmDualContourSearch(ModelImage, int, int, int, int, double, double[], int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- AlgorithmDWI2DTI - Class in gov.nih.mipav.model.algorithms.DiffusionTensorImaging
-
Algorithm calculates a Diffusion Tensor Image from a series of Diffusion Weighted Images.
- AlgorithmDWI2DTI(ModelImage, boolean, int, int, int, int, int, float, String[][], int[], GMatrixd, String) - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Create a new AlgorithmDWI2DTI
- AlgorithmDWI2DTI(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- AlgorithmEdgeDetection3D - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmEdgeDetection3D() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
AlgorithmEdgeDetection3D - default constructor.
- AlgorithmEdgeDetection3D(ModelImage, ModelImage, double, double, double, int, int, int, double, double, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
AlgorithmEdgeDetection3D.
- AlgorithmEdgeLaplacian - Class in gov.nih.mipav.model.algorithms
-
Calculates the EdgeLap of an image at a scale defined by the user.
- AlgorithmEdgeLaplacian(ModelImage, ModelImage, float[], boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Creates a new AlgorithmEdgeLaplacian object.
- AlgorithmEdgeLaplacianSep - Class in gov.nih.mipav.model.algorithms
-
Calculates the EdgeLap of an image at a scale defined by the user.
- AlgorithmEdgeLaplacianSep(ModelImage, ModelImage, float[], boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Creates a new AlgorithmEdgeLaplacianSep object.
- AlgorithmEdgeNMSuppression - Class in gov.nih.mipav.model.algorithms
-
Calculates the non-maximum suppression of an image at a scale defined by the user.
- AlgorithmEdgeNMSuppression(ModelImage, ModelImage, float[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
Creates a new AlgorithmEdgeNMSuppression object.
- AlgorithmEdgePreservingSmoothing - Class in gov.nih.mipav.model.algorithms.filters
-
These are Maximum Homogeneity Neighbor Filters.
- AlgorithmEdgePreservingSmoothing(ModelImage, ModelImage, boolean, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmEdgePreservingSmoothing
-
- AlgorithmEfficientWatershed - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmEfficientWatershed(ModelImage, ModelImage, int, boolean, int, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- AlgorithmEfficientWatershed.indexValueComparator - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmEfficientWatershed.indexValueItem - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmEllipseGeneration - Class in gov.nih.mipav.model.algorithms
-
This module draws uniformly randomly positioned ellipses with a specified semi-major axis, semi-minor axis,
and angle phi between the x-axis and the major axis of the ellipse.
- AlgorithmEllipseGeneration() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
AlgorithmEllipseGeneration - default constructor.
- AlgorithmEllipseGeneration(ModelImage, int, int, double, int, int, int, double, double, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
AlgorithmEllipseGeneration.
- AlgorithmEllipseToCircle - Class in gov.nih.mipav.model.algorithms
-
This program performs the conformal mapping of an ellipse to a circle.
- AlgorithmEllipseToCircle() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
AlgorithmEllipseToCircle - default constructor.
- AlgorithmEllipseToCircle(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
AlgorithmEllipseToCircle.
- AlgorithmEllipseToRectangle - Class in gov.nih.mipav.model.algorithms
-
This program performs the conformal mapping of an ellipse to a rectangle.
- AlgorithmEllipseToRectangle() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEllipseToRectangle
-
AlgorithmEllipseToRectangle - default constructor.
- AlgorithmEllipseToRectangle(ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEllipseToRectangle
-
AlgorithmEllipseToRectangle.
- AlgorithmEllipsoidFit - Class in gov.nih.mipav.model.algorithms
-
This code fits data points to a 3D ellipsoid.
- AlgorithmEllipsoidFit(Vector<Vector3f>) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEllipsoidFit
-
Creates a new AlgorithmEllipsoidFit object.
- AlgorithmEllipticFilter - Class in gov.nih.mipav.model.algorithms.filters
-
This module contains a port from FORTRAN to Java of the FORTRAN program for designing elliptic-function
filters and a port from MATLAB to Java of the MATLAB program ellipap1 for designing an elliptic
analog lowpass filter prototype found in "Elliptic Functions for Filter Design" by H.
- AlgorithmEllipticFilter() - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
The FORTRAN example in the article of n = 7, apd = 0.1dB, k = 0.8 gives in Table VI:
Make FORTRAN zeros poles and FORTRAN poles zeros
Poles:
-0.0455944342 + j1.026557002
-0.1713670100 + j0.918389608
-0.3689660125 + j0.603979789
-0.4980421689 + j0.0
Zeros:
1.268831784
1.467798747
2.384834232
For the MATLAB example rs = 55.43dB.
- AlgorithmEllipticFilter(int, double, double, double[], double[], double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- AlgorithmEllipticFilter(int, double, double, double[], double[], double[], double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- AlgorithmEllipticFourierDescriptors - Class in gov.nih.mipav.model.algorithms
-
Smoothing VOI with Elliptic Fourier Descriptors.
- AlgorithmEllipticFourierDescriptors() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
- AlgorithmEllipticFourierDescriptors(ModelImage, VOI, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
Creates a new AlgorithmEllipticFourierDescriptors object.
- AlgorithmELSUNCOpt2D - Class in gov.nih.mipav.model.algorithms
-
Runs ELSUNC, LEVENBERG_MARQUARDT, or NL2SOL for a 2D image.
- AlgorithmELSUNCOpt2D(AlgorithmBase, Vector2f, int, AlgorithmOptimizeFunctionBase, double[], int, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- AlgorithmELSUNCOpt2D.FitOAR2DELSUNCModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmELSUNCOpt2D.FitOAR2DLMModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmELSUNCOpt3D - Class in gov.nih.mipav.model.algorithms
-
Runs ELSUNC, LEVENBERG_MARQUARDT, or NL2SOL for a 3D image.
- AlgorithmELSUNCOpt3D(AlgorithmBase, Vector3f, int, AlgorithmOptimizeFunctionBase, double[], int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- AlgorithmELSUNCOpt3D.FitOAR3DELSUNCModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmELSUNCOpt3D.FitOAR3DLMModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmEmbeddedConfidenceEdgeDetection - Class in gov.nih.mipav.model.algorithms
-
The java code is ported from C++ code downloaded from http://coewww.rutgers.edu/riul/research/code.html.
- AlgorithmEmbeddedConfidenceEdgeDetection(ModelImage, ModelImage, int, double, double, double, double, double, double, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- AlgorithmEmbeddedConfidenceEdgeDetection.BgEdge - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmEmbeddedConfidenceEdgeDetection.BgImage - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmEntropicEdgeDetection - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmEntropicEdgeDetection() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEntropicEdgeDetection
-
AlgorithmEntropicEdgeDetection - default constructor.
- AlgorithmEntropicEdgeDetection(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEntropicEdgeDetection
-
AlgorithmEntropicEdgeDetection.
- AlgorithmEntropyMinimization - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmEntropyMinimization(ModelImage, boolean, float, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
Creates a new AlgorithmEntropyMinimization object.
- AlgorithmEntropyMinimization(ModelImage, ModelImage, boolean, float, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
Creates a new AlgorithmEntropyMinimization object.
- AlgorithmEvaluateMaskSegmentation - Class in gov.nih.mipav.model.algorithms
-
Compares segmentation results of a test image to segmentation results of an ideal gold standard true image.
- AlgorithmEvaluateMaskSegmentation(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
Creates a new AlgorithmEvaluateMaskSegmentation object.
- AlgorithmEvaluateSegmentation - Class in gov.nih.mipav.model.algorithms
-
Compares segmentation results of a test image to segmentation results of an ideal gold standard true image.
- AlgorithmEvaluateSegmentation(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
Creates a new AlgorithmEvaluateSegmentation object.
- AlgorithmExtractSlices - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm that extracts the slices indicated in the list from the srcImage and puts them into the destImage.
- AlgorithmExtractSlices(ModelImage, ModelImage, String[]) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlices
-
Import source and destination images into the class.
- AlgorithmExtractSlicesVolumes - Class in gov.nih.mipav.model.algorithms.utilities
-
Title: AlgorithmExtractIndividualSlices
- AlgorithmExtractSlicesVolumes(ModelImage, boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
Import source and destination images into the class.
- AlgorithmExtractSurface - Class in gov.nih.mipav.model.algorithms
-
Extracts a surface using Tetrahedron Extraction.
- AlgorithmExtractSurface(ModelImage, float, int, boolean, boolean, float, String, float[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Creates a new AlgorithmExtractSurface object.
- AlgorithmExtractSurfaceCubes - Class in gov.nih.mipav.model.algorithms
-
Extracts a surface using Marching Cube Extraction.
- AlgorithmExtractSurfaceCubes(ModelImage, int, int, boolean, boolean, float, String) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Creates a new AlgorithmExtractSurfaceCubes object.
- AlgorithmFaceAnonymizer - Class in gov.nih.mipav.model.algorithms
-
FaceAnonymizer algorithm computes the "face" from a ModelImage based on input parameters that specify the min/max
voxel values for the face voxels, and the maximum skin thinkness.
- AlgorithmFaceAnonymizer(ModelImage, int[], int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Create a face Anonymizer.
- AlgorithmFaceAnonymizerBET - Class in gov.nih.mipav.model.algorithms
-
Anonymize an image of a patient's head by removing the face.
- AlgorithmFaceAnonymizerBET(ModelImage, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Construct the face anonymizer, but do not run it yet.
- AlgorithmFaceAnonymizerBET.BitSetUtility - Class in gov.nih.mipav.model.algorithms
-
Private utility class for operations on BitSets
- AlgorithmFacetModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmFacetModel(ModelImage, int, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- AlgorithmFacetModel(ModelImage, ModelImage, int, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- AlgorithmFastMarching - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFastMarching - Class in gov.nih.mipav.model.algorithms.levelset
-
DOCUMENT ME!
- AlgorithmFastMarching(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
Creates a new ViewJFrameFastMarching3 object.
- AlgorithmFastMarching(ModelImage, float[], int, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
AnisotropicDiffusion.
- AlgorithmFastMarching(ModelImage, int, int, float, float, float, float, float, int, float, float, float, float, float, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
Creates a new AlgorithmFastMarching3 object.
- AlgorithmFFT - Class in gov.nih.mipav.model.algorithms.filters
-
Processing images by filtering in the frequency domain is a 3 step process: 1.)
- AlgorithmFFT(ModelImage, int, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
- AlgorithmFFT(ModelImage, ModelImage, int, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
- AlgorithmFFT2 - Class in gov.nih.mipav.model.algorithms.filters
-
Processing images by filtering in the frequency domain is a 3 step process: 1.)
- AlgorithmFFT2(ModelImage, int, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
- AlgorithmFFT2(ModelImage, ModelImage, int, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
- AlgorithmFIREEdgeExtraction - Class in gov.nih.mipav.model.algorithms.filters
-
References:
1.)
- AlgorithmFIREEdgeExtraction(ModelImage, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFIREEdgeExtraction
-
Constructor for images in which changes are returned to the source image.
- AlgorithmFIREEdgeExtraction(ModelImage, ModelImage, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFIREEdgeExtraction
-
Constructor for images in which changes are placed in a predetermined destination image.
- AlgorithmFlip - Class in gov.nih.mipav.model.algorithms.utilities
-
Flips 2D, 3D or 4D grays scale or color dataset about X, Y, or Z axis (when applicable) when AlgorithmFlip.IMAGE is
passed to the constructor.
- AlgorithmFlip(ModelImage, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Flips 2D, 3D or 4D grays scale or color dataset about X or Y axis.
- AlgorithmFlip.ShapeHolder - Class in gov.nih.mipav.model.algorithms.utilities
-
DOCUMENT ME!
- AlgorithmFloodFill - Class in gov.nih.mipav.model.algorithms
-
Stack based flood-fill for 2D and 3D images.
- AlgorithmFloodFill(BitSet, int[], int, Point3D) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Stack based flood-fill for 2D and 3D images.
- AlgorithmFloodFill(BitSet, int[], int, Point) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Stack based flood-fill for 2D and 3D images.
- AlgorithmFRAP - Class in gov.nih.mipav.model.algorithms
-
Fluorescence Recovery after PhotoBleaching Only 1 color will be used from a
color image.
- AlgorithmFRAP(ModelImage, boolean, boolean, boolean, int, int, int, int, int, boolean, int, boolean, boolean, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
Creates a new AlgorithmFRAP object.
- AlgorithmFRAP.distanceIntensityComparator - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmFRAP.distanceIntensityItem - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmFRAP.Fit24DModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitDoubleExponentialModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitDoubleExponentialNoWholeConstrainedModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitDoubleExponentialNoWholeModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitExpModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitExpModelqd - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitFullIntModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitFullIntModel2i - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitFullIntModel2p - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitFullIntModel2s - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitFullModel2 - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitFullModelqd - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitIntensityProfile - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitPure1DModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitPure1DNoWholeModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitSineModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitSingleExponentialModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitSingleExponentialNoWholeModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitWholeNL2solInt2 - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitWholeNL2solModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitWholeNLConInt2 - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitWholeNLConModel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitWholeNLConModel2 - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitWholeNLConModel3 - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.FitWholeNLConModelqd - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmFRAP.IntModel - Class in gov.nih.mipav.model.algorithms
-
class IntModel extends Integration { public IntModel(double lower, double
upper, int routine, double eps) { super(lower, upper, routine, eps); }
public double intFunc(double x) { double function = 0.0; if ((x !
- AlgorithmFRAP.IntModel2 - Class in gov.nih.mipav.model.algorithms
-
class IntModel2 extends Integration2 { public IntModel2(double lower,
double upper, int routine, double breakPoints[], double epsabs, double
epsrel, int limit) { super(lower, upper, routine, breakPoints, epsabs,
epsrel, limit); } public double intFunc(double x) { double function =
0.0; if ((x !
- AlgorithmFRAP.IntModelBessel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmFRAP.IntModelI0NuclearArea - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmFrequencyFilter - Class in gov.nih.mipav.model.algorithms.filters
-
AlgorithmFrequencyFilter.java.
- AlgorithmFrequencyFilter(ModelImage, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Constructor used in Laplacian medialness option of live wire cost function.
- AlgorithmFrequencyFilter(ModelImage, boolean, boolean, int, int, double, double, int, int, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Creates a new AlgorithmFrequencyFilter object.
- AlgorithmFrequencyFilter(ModelImage, boolean, float, int, float, float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
This constructor is only used for HOMOMORPHIC filters.
- AlgorithmFrequencyFilter(ModelImage, float, float, float, float, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Constructor used for Gabor transform.
- AlgorithmFrequencyFilter(ModelImage, ModelImage, boolean, boolean, int, int, double, double, int, int, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Creates a new AlgorithmFrequencyFilter object.
- AlgorithmFrequencyFilter(ModelImage, ModelImage, boolean, float, int, float, float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
This constructor is only used for HOMOMORPHIC filters.
- AlgorithmFrequencyFilter(ModelImage, ModelImage, float, float, float, float, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Constructor used for Gabor transform.
- AlgorithmFrequencyFilterColor - Class in gov.nih.mipav.model.algorithms.filters
-
AlgorithmFrequencyFilterColor.java.
- AlgorithmFrequencyFilterColor(ModelImage, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Constructor used in Laplacian medialness option of live wire cost function.
- AlgorithmFrequencyFilterColor(ModelImage, boolean, boolean, int, int, double, double, int, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Creates a new AlgorithmFrequencyFilter object.
- AlgorithmFrequencyFilterColor(ModelImage, boolean, float, int, float, float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
This constructor is only used for HOMOMORPHIC filters.
- AlgorithmFrequencyFilterColor(ModelImage, float, float, float, float, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Constructor used for Gabor transform.
- AlgorithmFrequencyFilterColor(ModelImage, ModelImage, boolean, boolean, int, int, double, double, int, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Creates a new AlgorithmFrequencyFilter object.
- AlgorithmFrequencyFilterColor(ModelImage, ModelImage, boolean, float, int, float, float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
This constructor is only used for HOMOMORPHIC filters.
- AlgorithmFrequencyFilterColor(ModelImage, ModelImage, float, float, float, float, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Constructor used for Gabor transform.
- AlgorithmFRETAcceptorPhotobleach - Class in gov.nih.mipav.model.algorithms
-
Fluorescence Resonance Energy Transfer FRET refers to the nonradiative transfer of energy from an excited state donor
fluorescent molecule to a nearby acceptor fluorescent molecule.
- AlgorithmFRETAcceptorPhotobleach(ModelImage, ModelImage, boolean, boolean, boolean, int, int, int, boolean, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
Creates a new AlgorithmFRETAcceptorPhotobleach object.
- AlgorithmFRETBleedThrough - Class in gov.nih.mipav.model.algorithms
-
Fluorescence Resonance Energy Transfer FRET refers to the nonradiative transfer of energy from an excited state donor
fluorescent molecule to a nearby acceptor fluorescent molecule.
- AlgorithmFRETBleedThrough(ModelImage, ModelImage, ModelImage, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRETBleedThrough
-
Creates a new AlgorithmFRETBleedThrough object.
- AlgorithmFRETEfficiency - Class in gov.nih.mipav.model.algorithms
-
Fluorescence Resonance Energy Transfer FRET refers to the nonradiative transfer of energy from an excited state donor
fluorescent molecule to a nearby acceptor fluorescent molecule.
- AlgorithmFRETEfficiency(ModelImage, ModelImage, ModelImage, boolean, boolean, boolean, float, float, float, float, ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
Creates a new AlgorithmFRETEfficiency object.
- AlgorithmFuzzMinDeAndChatterji - Class in gov.nih.mipav.model.algorithms.filters
-
This algorithm performs minimization of fuzziness, a reduction of the amount of fuzziness.
- AlgorithmFuzzMinDeAndChatterji(ModelImage, double, boolean, double, double, double, double, double, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
Constructor for images in which changes are returned to the source image.
- AlgorithmFuzzMinDeAndChatterji(ModelImage, ModelImage, double, boolean, double, double, double, double, double, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
Constructor for images in which changes are placed in a predetermined destination image.
- AlgorithmFuzzyCMeans - Class in gov.nih.mipav.model.algorithms
-
Fuzzy C-Means Segmentation algorithm
- AlgorithmFuzzyCMeans(ModelImage[], ModelImage, int, int, int, int, float, float, float, boolean, int, boolean, float, int, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
Creates a new AlgorithmFuzzyCMeans object.
- AlgorithmFuzzyCMeans(ModelImage, int, int, int, int, float, float, float, boolean, int, boolean, float, int, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
Creates a new AlgorithmFuzzyCMeans object.
- AlgorithmFuzzyConnectednessSegmentation - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmFuzzyConnectednessSegmentation(ModelImage[], ModelImage, int, int, double, double, Vector<Integer>, Vector<Short>) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
- AlgorithmFuzzyMinimization - Class in gov.nih.mipav.model.algorithms.filters
-
This algorithm performs minimization of fuzziness, a reduction of the amount of fuzziness.
- AlgorithmFuzzyMinimization(ModelImage, int, double, double, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
Constructor for images in which changes are returned to the source image.
- AlgorithmFuzzyMinimization(ModelImage, ModelImage, int, double, double, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
Constructor for images in which changes are placed in a predetermined destination image.
- AlgorithmGaussianBlur - Class in gov.nih.mipav.model.algorithms.filters
-
The application of this algorithm blurs an image or VOI region of the image with a Gaussian function at a user
defined scale (sigma - standard deviation).
- AlgorithmGaussianBlur(ModelImage, float[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Creates a new AlgorithmGaussianBlur object.
- AlgorithmGaussianBlur(ModelImage, ModelImage, float[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Constructor which sets the source and destination images, the minimum and maximum progress value.
- AlgorithmGaussianBlurSep - Class in gov.nih.mipav.model.algorithms.filters
-
Calculates the gaussian blur of an image at a scale defined by the user (using separable convolutions).
- AlgorithmGaussianBlurSep(ModelImage, float[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
Creates a new AlgorithmGaussianBlurSep object.
- AlgorithmGaussianMixtureModelEM - Class in gov.nih.mipav.model.algorithms
-
Copyright (c) 1995 The Board of Trustees of Purdue University.
- AlgorithmGaussianMixtureModelEM() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- AlgorithmGaussianMixtureModelEM(int, int, String, String, String, String, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- AlgorithmGaussianMixtureModelEM(String, String, String, String, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- AlgorithmGaussianMixtureModelEM.ClassData - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmGaussianMixtureModelEM.ClassSig - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmGaussianMixtureModelEM.SigSet - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmGaussianMixtureModelEM.SubSig - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmGenerateIsolines - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmGenerateIsolines(ModelImage, ModelImage, double, float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- AlgorithmGradientInverseWeightedSmoothing - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmGradientInverseWeightedSmoothing(ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientInverseWeightedSmoothing
-
- AlgorithmGradientInverseWeightedSmoothing(ModelImage, ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientInverseWeightedSmoothing
-
- AlgorithmGradientMagnitude - Class in gov.nih.mipav.model.algorithms.filters
-
Calculates the gradient magnitude of an image at a scale defined by the user.
- AlgorithmGradientMagnitude(ModelImage, float[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Creates a new AlgorithmGradientMagnitude object.
- AlgorithmGradientMagnitude(ModelImage, ModelImage, float[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Creates a new AlgorithmGradientMagnitude object.
- AlgorithmGradientMagnitudeSep - Class in gov.nih.mipav.model.algorithms.filters
-
Calculates the gradient magnitude of an image at a scale defined by the user (using separable convolutions).
- AlgorithmGradientMagnitudeSep(ModelImage, float[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
Creates a new AlgorithmGradientMagnitudeSep object.
- AlgorithmGraphBasedSegmentation - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmGraphBasedSegmentation(ModelImage, ModelImage, float, float, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation
-
Constructs graph based segmentation algorithm.
- AlgorithmGraphBasedSegmentation.edge - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmGraphBasedSegmentation.edgeComparator - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmGraphBasedSegmentation.uni_elt - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmGraphBasedSegmentation.universe - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmGrayScaleMorphology25D - Class in gov.nih.mipav.model.algorithms
-
2.5D mathematical morphology class applied to Gray scale images. (2D morphology on 3D volumes).
- AlgorithmGrayScaleMorphology25D(ModelImage, int, float, int, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Creates a new AlgorithmMorphology25D object.
- AlgorithmGrayScaleMorphology25D(ModelImage, ModelImage, int, float, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Creates a new AlgorithmGrayScaleMorphology25D object.
- AlgorithmGrayScaleMorphology2D - Class in gov.nih.mipav.model.algorithms
-
Two-Dimensional mathematical morphology class applied to Gray scale images.
- AlgorithmGrayScaleMorphology2D(ModelImage, int, float, int, float, int, int, int, int, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Creates a new AlgorithmGrayScaleMorphology2D object.
- AlgorithmGrayScaleMorphology2D(ModelImage, int, float, int, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Creates a new AlgorithmMorphology2D object.
- AlgorithmGrayScaleMorphology2D(ModelImage, ModelImage, int, float, int, int, int, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Creates a new AlgorithmGrayScaleMorphology2D object.
- AlgorithmGrayScaleMorphology2D.intObject - Class in gov.nih.mipav.model.algorithms
-
Simple class to temporarily store the object's size, ID and seed index value.
- AlgorithmGrayScaleMorphology3D - Class in gov.nih.mipav.model.algorithms
-
Three-Dimensional mathematical morphology class applied to Gray scale images.
- AlgorithmGrayScaleMorphology3D(ModelImage, int, float, int, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Creates a new AlgorithmMorphology3D object.
- AlgorithmGrayScaleMorphology3D(ModelImage, ModelImage, int, float, int, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Creates a new AlgorithmMorphology3D object.
- AlgorithmGrayScaleMorphology3D(ModelImage, ModelImage, ModelImage, int, float, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Creates a new AlgorithmGrayScaleMorphology3D object.
- algorithmGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- algorithmGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- AlgorithmGuidedFilter - Class in gov.nih.mipav.model.algorithms.filters
-
The MIT License (MIT)
Copyright (c) 2014 Atilim Cetin
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
- AlgorithmGuidedFilter() - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- AlgorithmGuidedFilter(ModelImage, ModelImage, ModelImage, int, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- AlgorithmGVF - Class in gov.nih.mipav.model.algorithms
-
Snake-like algorithm derivative using BSplines.
- AlgorithmGVF(ModelImage, ModelImage, float[], int, int, float, VOI, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Creates a new AlgorithmGVF object.
- AlgorithmHaralickTexture - Class in gov.nih.mipav.model.algorithms.filters
-
DOCUMENT ME!
- AlgorithmHaralickTexture(ModelImage[], ModelImage, int, int, int, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
Creates a new AlgorithmHaralickTexture object for black and white image.
- AlgorithmHaralickTexture(ModelImage[], ModelImage, int, int, int, int, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
Creates a new AlgorithmHaralickTexture object for color image.
- AlgorithmHarrisCornerDetector - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmHarrisCornerDetector() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
AlgorithmHarrisCornerDetector - default constructor.
- AlgorithmHarrisCornerDetector(ModelImage, ModelImage, float, int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
AlgorithmHarrisCornerDetector.
- AlgorithmHarrisLaplace - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmHarrisLaplace() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
AlgorithmHarrisLaplace - default constructor.
- AlgorithmHarrisLaplace(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
AlgorithmHarrisLaplace.
- AlgorithmHeightFunction - Class in gov.nih.mipav.model.algorithms
-
The class generates a triangle or quad mesh of a 2D dataset (image) to be displayed in the surface viewer.
- AlgorithmHeightFunction(ModelImage, int, String, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHeightFunction
-
Sets up variables needed by algorithm to run.
- AlgorithmHepticLagrangian - Class in gov.nih.mipav.model.algorithms
-
This is a polynomial p of degree 7 which interpolates a given function f at the points x(-3), x(-2), x(-1), x(0),
x(1), x(2), x(3), and x(4) and is given by p(x) = sum from i = -3 to i = 4 of li(x)*f(xi), where li, i =
-3,-2,-1,0,1,2,3,4 which are called the fundamental polynomials, are given by li(x) = product from k = -3 to k = 4
for k !
- AlgorithmHepticLagrangian() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
AlgorithmHepticLagrangian - default constructor.
- AlgorithmHessian - Class in gov.nih.mipav.model.algorithms
-
Provides functions to convolve an image with the second derivitive of the Gaussian function to obtain the Hessian
matrix for a particular point on the image.
- AlgorithmHessian(ModelImage, float[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Creates a new AlgorithmHessian object.
- AlgorithmHilbertTransform - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmHilbertTransform(double[], int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmHilbertTransform
-
- AlgorithmHillClimbingWatershed - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmHillClimbingWatershed(ModelImage, ModelImage, int, boolean, int, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed
-
- AlgorithmHillClimbingWatershed.indexValueComparator - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmHillClimbingWatershed.indexValueItem - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmHistogram - Class in gov.nih.mipav.model.algorithms
-
Calculates the histogram for an image.
- AlgorithmHistogram(ModelHistogram, int, ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Constructs the histogram calculation object for an RGB image.
- AlgorithmHistogram(ModelHistogram, ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Constructs the histogram calculation object.
- AlgorithmHistogram(ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Constructs the histogram calculation object for an image.
- AlgorithmHistogram(ModelImage, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Constructs the histogram calculation object for an image.
- AlgorithmHistogram(ModelImage, int, boolean, boolean, boolean, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Constructs the histogram calculation object for an image.
- AlgorithmHistogram(ModelImage, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Constructs the histogram calculation object for an RGB image.
- AlgorithmHistogram(ModelImage, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Constructs the histogram calculation object for an RGB image.
- AlgorithmHistogram(ModelImage, int, int, boolean, boolean, boolean, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Constructs the histogram calculation object for an RGB image.
- AlgorithmHistogram(ModelImage, int, int, boolean, boolean, float, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Constructs the histogram calculation object for an image.
- AlgorithmHistogram(ModelImage, int, int, int, boolean, boolean, float, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Constructs the histogram calculation object for an RGB image.
- AlgorithmHistogram.GrayLevelClass - Class in gov.nih.mipav.model.algorithms
-
Used specifally by the Otsu threshold algorithm to define a gray level object for calculating probabilities.
- AlgorithmHistogram2Dim - Class in gov.nih.mipav.model.algorithms
-
This algorithm creates a two dimensional histogram of the data in 2 black and white images or 1 color image. if
doLinearRescale is true, the range of data in the second image is rescaled to be the same as the range of data in the
first image.
- AlgorithmHistogram2Dim(ModelImage, ModelImage, boolean, boolean, int, int, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
Constructor for images in which 2D histogram is placed in a predetermined destination image.
- AlgorithmHistogram2Dim(ModelImage, ModelImage, ModelImage, boolean, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
Constructor for images in which 2D histogram is placed in a predetermined destination image.
- AlgorithmHistogramMatch - Class in gov.nih.mipav.model.algorithms
-
Algorithm that matches the transforms a match or source image so as to make its histogram equal to the histogram of a
base image.
- AlgorithmHistogramMatch(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
Constructor for 3D images in which changes are returned to the source image.
- AlgorithmHistogramMatch(ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
Constructor for 3D images in which changes are placed in a predetermined destination image.
- AlgorithmHistogramSliceMatch - Class in gov.nih.mipav.model.algorithms
-
Algorithm that matches or transforms a match or source slice so as to make its histogram equal to the histogram of a
base slice.
- AlgorithmHistogramSliceMatch(ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
Constructor for 3D images in which changes are returned to the source image.
- AlgorithmHistogramSliceMatch(ModelImage, ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
Constructor for 3D images in which changes are placed in a predetermined destination image.
- AlgorithmHMRF_EM - Class in gov.nih.mipav.model.algorithms
-
This is a port of the MATLAB files HMRF_EM.m and MRF_MAP.m written by Quan Wang to Java
- AlgorithmHMRF_EM() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
AlgorithmHMRF_EM - default constructor.
- AlgorithmHMRF_EM(ModelImage, ModelImage, int, int, float, int, int, boolean, String) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
AlgorithmHMRF_EM.
- AlgorithmHoughCardioid - Class in gov.nih.mipav.model.algorithms
-
This Hough transform uses (xi, yi) points in the original image space to generate theta0, a0 points in the Hough
transform.
- AlgorithmHoughCardioid() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughCardioid
-
AlgorithmHoughCardioid - default constructor.
- AlgorithmHoughCardioid(ModelImage, ModelImage, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughCardioid
-
AlgorithmHoughCardioid.
- AlgorithmHoughCircle - Class in gov.nih.mipav.model.algorithms
-
This Hough transform uses (xi, yi) points in the original image space to generate x0, y0, rad points in the Hough
transform.
- AlgorithmHoughCircle() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughCircle
-
AlgorithmHoughCircle - default constructor.
- AlgorithmHoughCircle(ModelImage, ModelImage, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughCircle
-
AlgorithmHoughCircle.
- AlgorithmHoughEllipse - Class in gov.nih.mipav.model.algorithms
-
This Hough transform uses (xi, yi) points in the original image space to generate p, q, r1, r2, and theta points in the Hough
transform.
- AlgorithmHoughEllipse() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
AlgorithmHoughEllipse - default constructor.
- AlgorithmHoughEllipse(ModelImage, ModelImage, double, int, double, double, double, double, int, int, double, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
AlgorithmHoughEllipse.
- AlgorithmHoughHyperbola - Class in gov.nih.mipav.model.algorithms
-
This work is made possible by the following mathematical theorem proved by Professor Alan Horwitz
of Penn State University:
Finding the Center of a Hyperbola, H, given three nonparallel tangent lines to H and
the corresponding points of tangency.
- AlgorithmHoughHyperbola() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
AlgorithmHoughHyperbola - default constructor.
- AlgorithmHoughHyperbola(ModelImage, ModelImage, int, int, double, double, double, double, int, int, double, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
AlgorithmHoughHyperbola.
- AlgorithmHoughLine - Class in gov.nih.mipav.model.algorithms
-
This Hough transform uses (xi, yi) points in the original image space to generate rho, theta points in the Hough
transform.
- AlgorithmHoughLine() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughLine
-
AlgorithmHoughLine - default constructor.
- AlgorithmHoughLine(ModelImage, ModelImage, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughLine
-
AlgorithmHoughLine.
- AlgorithmHoughParabola - Class in gov.nih.mipav.model.algorithms
-
[(y - vy)*cos(phi) - (x - vx)*sin(phi)]**2 =
4*p*[(y - vy)*sin(phi) + (x - vx)*cos(phi)]
where vx, vy are the coordinates of the parabola vertex
p is the distance between the vertex and focus of the parabola
This Hough transform uses (xi, yi) points in the original image space to generate vx, vy, phi, p points in the Hough
transform.
- AlgorithmHoughParabola() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
AlgorithmHoughParabola - default constructor.
- AlgorithmHoughParabola(ModelImage, ModelImage, int, int, int, double, int, float, float, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
AlgorithmHoughParabola.
- AlgorithmHurstIndex - Class in gov.nih.mipav.model.algorithms.filters
-
DOCUMENT ME!
- AlgorithmHurstIndex(ModelImage, double, double, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
Creates a new AlgorithmHurstIndex object for black and white image.
- AlgorithmHurstIndex(ModelImage, int, double, double, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
Creates a new AlgorithmHurstIndex object for color image.
- AlgorithmHurstIndex(ModelImage, ModelImage, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
Creates a new AlgorithmHurstIndex object for black and white image.
- AlgorithmHurstIndex(ModelImage, ModelImage, int, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
Creates a new AlgorithmHurstIndex object for color image.
- AlgorithmHurstIndex.DistanceIntensity - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmHurstIndex.DistanceIntensityComparator - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmIAGCWD - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmIAGCWD() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmIAGCWD
-
- AlgorithmIAGCWD(ModelImage, ModelImage, double, double, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmIAGCWD
-
- AlgorithmIHN3Correction - Class in gov.nih.mipav.model.algorithms
-
N3 Inhomogeneity correction This is based on code by John G.
- AlgorithmIHN3Correction(ModelImage, ModelImage, ModelImage, float, int, float, float, float, float, float, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Creates a new AlgorithmIHN3Correction object.
- AlgorithmImageCalculator - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm that adds, subtracts, multiplies, or divides an image by by another image.
- AlgorithmImageCalculator(ModelImage, ModelImage[], int, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
constructor used for bulk images
- AlgorithmImageCalculator(ModelImage, ModelImage, int, int, boolean, String) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Creates a new AlgorithmImageCalculator object using srcImgA srcImgB.
- AlgorithmImageCalculator(ModelImage, ModelImage, ModelImage, int, int, boolean, String) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Creates a new AlgorithmImageCalculator object.
- AlgorithmImageHessian - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmImageHessian(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
Creates a new AlgorithmImageHessian object.
- AlgorithmImageHessian(ModelImage, ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
Creates a new AlgorithmImageHessian object.
- AlgorithmImageHessian(ModelImage, ModelImage, int, float[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
Creates a new AlgorithmImageHessian object.
- AlgorithmImageMath - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm that adds, subtracts, multiplies, or divides an image by some user specified value.
- AlgorithmImageMath(ModelImage, int, double, double, double, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Creates a new AlgorithmImageMath object.
- AlgorithmImageMath(ModelImage, ModelImage, int, double, double, double, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Creates a new AlgorithmImageMath object.
- AlgorithmImageMath.Operator - Enum in gov.nih.mipav.model.algorithms.utilities
-
- AlgorithmIndependentComponents - Class in gov.nih.mipav.model.algorithms
-
This algorithm operates on 2D and 3D black and white and color images.
- AlgorithmIndependentComponents(ModelImage[], ModelImage[], int, int, int, double, double, int, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
Creates a new AlgorithmIndependentComponents object.
- AlgorithmIndependentComponents(ModelImage[], ModelImage, int, int, int, double, double, int, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
Creates a new AlgorithmIndependentComponents object.
- AlgorithmInsertSlice - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm to insert a slice.
- AlgorithmInsertSlice(ModelImage, ModelImage, int, int, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Import source and destination images into the class.
- AlgorithmInsertVolume - Class in gov.nih.mipav.model.algorithms.utilities
-
- AlgorithmInsertVolume(ModelImage, ModelImage, int, int, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Import source and destination images into the class.
- AlgorithmInterface - Interface in gov.nih.mipav.model.algorithms
-
The interface used by all classes which want to respond to the conclusion of an algorithm.
- AlgorithmIsophoteCurvature - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmIsophoteCurvature(ModelImage, float[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- AlgorithmIsophoteCurvature(ModelImage, ModelImage, float[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- AlgorithmIteratedBlindDeconvolution - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmIteratedBlindDeconvolution(ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
Creates a new AlgorithmIteratedBlindDeconvolution object.
- AlgorithmKernelRegression - Class in gov.nih.mipav.model.algorithms.filters
-
This is a port of MATLAB routines contained in kernelRegressionBasedImageProcessingToolBox_ver1-2beta written by
Hiroyuki Takeda, Sina Farsiu, and Peyman Milanfar.
- AlgorithmKernelRegression(ModelImage, ModelImage, int, boolean, boolean, boolean, double, boolean, double, boolean, double, float, float, float, int, int, int, int, int, int, float, float, float, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
Creates a new AlgorithmKernelRegression object.
- AlgorithmKMeans - Class in gov.nih.mipav.model.algorithms
-
This program can be run on data of any dimensionality.
- AlgorithmKMeans(ModelImage, int, int, double[][], double[], int[], double[], double[][], String, int, float[], float[], float[], double, boolean, boolean, double[], boolean, double[], boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- AlgorithmKMeans.positionWeightComparator - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmKMeans.positionWeightItem - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmLaplacian - Class in gov.nih.mipav.model.algorithms.filters
-
Calculates the Laplacian of the gaussian of an image at a scale defined by the user.
- AlgorithmLaplacian(ModelImage, boolean, int, float[], boolean, boolean, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Constructs a Laplacian algorithm object.
- AlgorithmLaplacian(ModelImage, float[], boolean[], boolean, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Constructs a Laplacian algorithm object.
- AlgorithmLaplacian(ModelImage, float[], boolean, boolean, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Constructs a Laplacian algorithm object.
- AlgorithmLaplacian(ModelImage, ModelImage, boolean, int, float[], boolean, boolean, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Constructs a Laplacian algorithm object.
- AlgorithmLapMedianess - Class in gov.nih.mipav.model.algorithms
-
Calculates the Laplacian of the gaussian of an image at a scale defined by the user.
- AlgorithmLapMedianess(ModelImage, float[], boolean, boolean, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Constructs a Laplacian algorithm object.
- AlgorithmLapMedianess(ModelImage, float[], boolean, boolean, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Constructs a Laplacian algorithm object.
- AlgorithmLapMedianess(ModelImage, ModelImage, float[], boolean, boolean, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Constructs a Laplacian algorithm object.
- AlgorithmLapMedianess(ModelImage, ModelImage, float[], boolean, boolean, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Constructs a Laplacian algorithm object.
- AlgorithmLawsTexture - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmLawsTexture(ModelImage[], ModelImage, int, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
- AlgorithmLearnFromFailure64 - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmLearnFromFailure64(ModelImage, int, int, float, float, boolean, BufferedWriter, String) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- AlgorithmLearnFromFailure64(ModelImage, int, int, float, float, boolean, String) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- AlgorithmLearnFromFailure64.ClassType - Enum in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmLearnFromFailure64Knees - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmLearnFromFailure64Knees(ModelImage, int, int, float, float, boolean, BufferedWriter, String) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- AlgorithmLearnFromFailure64Knees(ModelImage, int, int, float, float, boolean, String) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- AlgorithmLearnFromFailure64Knees.ClassType - Enum in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmLevelSet - Class in gov.nih.mipav.model.algorithms
-
This algorithm iteratively expands or contracts one or more contours to a boundary.
- AlgorithmLevelSet(ModelImage, float[], int, int, float, float, float, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
LevelSet.
- AlgorithmLevelSetDiffusion - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmLevelSetDiffusion(ModelImage, float[], int, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
AnisotropicDiffusion.
- AlgorithmLLE - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmLLE(ModelImage, ModelImage, int, int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLLE
-
Creates a new AlgorithmLLE object.
- AlgorithmLLE.distanceIndexComparator - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmLLE.distanceIndexItem - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmLoadB() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLoadImage.AlgorithmLoadB
-
- AlgorithmLocalNormalization - Class in gov.nih.mipav.model.algorithms.filters
-
Local Normalisation equalises colour levels among pixels by removing variations due to lighting; this brings out
contrasts in detail.
- AlgorithmLocalNormalization(ModelImage, ModelImage, float[], double, int, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
This constructor initialises a Local normalisation algorithm for a source and destination image, and ensures that
the destination image is ModelStorageBase.FLOAT.
- AlgorithmLocalVariance - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmLocalVariance(ModelImage, ModelImage, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalVariance
-
Constructor for 3D images in which changes are placed in a predetermined destination image.
- AlgorithmLogSlopeMapping - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmLogSlopeMapping(ModelImage, ModelImage[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLogSlopeMapping
-
- AlgorithmLowerCompletion - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmLowerCompletion(ModelImage, ModelImage, int, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLowerCompletion
-
- AlgorithmLuminanceAdaptation - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmLuminanceAdaptation() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLuminanceAdaptation
-
- AlgorithmLuminanceAdaptation(ModelImage, ModelImage, double, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLuminanceAdaptation
-
- AlgorithmMarkovSegment - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMarkovSegment(ModelImage, ModelImage, int, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMarkovSegment
-
- AlgorithmMarkovSmooth - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmMarkovSmooth(ModelImage, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMarkovSmooth
-
- AlgorithmMarkovSmooth(ModelImage, ModelImage, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMarkovSmooth
-
- AlgorithmMask - Class in gov.nih.mipav.model.algorithms.utilities
-
Allow the user to fill a VOI or fill everything outside the VOI with a specific fill value.
- AlgorithmMask(ModelImage, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Creates a new AlgorithmMask object.
- AlgorithmMask(ModelImage, float, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Creates a new AlgorithmMask object.
- AlgorithmMask(ModelImage, float, float, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Creates a new AlgorithmMask object.
- AlgorithmMask(ModelImage, ModelImage, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Creates a new AlgorithmMask object.
- AlgorithmMask(ModelImage, ModelImage, float, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Creates a new AlgorithmMask object.
- AlgorithmMask(ModelImage, ModelImage, float, float, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Creates a new AlgorithmMask object.
- AlgorithmMask(ModelImage, Color, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Creates a new AlgorithmMask object.
- AlgorithmMatchForReference - Class in gov.nih.mipav.model.algorithms
-
Will take Two 2D images (one Reference, one Adjusted) and use the Reference image's Resolutions to transform the
adjusted Image into a new size and resolution that the Reference Image can then be matched to, while preserving all
Field of Views (there is no loss of FOV).
- AlgorithmMatchForReference(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
Constructor.. takes in a reference and adjusted modelImage
- AlgorithmMatchImages - Class in gov.nih.mipav.model.algorithms.utilities
-
Matches two ModelImages.
- AlgorithmMatchImages(ModelImage, ModelImage, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Create an AlgorithmMatchImages to match the two input images.
- AlgorithmMatchImages(ModelImage, ModelImage, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Create an AlgorithmMatchImages to match the two input images.
- AlgorithmMaximumIntensityProjection - Class in gov.nih.mipav.model.algorithms.utilities
-
Computes the maximum or the minimum intensity along each projection of a 3D image.
- AlgorithmMaximumIntensityProjection(ModelImage, int, int, int, double, double, boolean, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Estimates the maximum intensity projection in each direction of a 3D black and white image
- AlgorithmMaximumIntensityProjection(ModelImage, int, int, int, double, double, double, double, double, double, boolean, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Estimates the maximum intensity projection of a 3D color image
- AlgorithmMaximumLikelihoodIteratedBlindDeconvolution - Class in gov.nih.mipav.model.algorithms
-
An implementation of Maximum Likelihood Iterated Blind Deconvolution based on the following papers:
- AlgorithmMaximumLikelihoodIteratedBlindDeconvolution(ModelImage, int, int, float, float, float, boolean, int[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Creates a new AlgorithmMaximumLikelihoodIteratedBlindDeconvolution object.
- AlgorithmMean - Class in gov.nih.mipav.model.algorithms.filters
-
Algorithm to apply a mean filter to an image, placing it in a new ModelImage if New image is selected or returning
the changed picture to the same image if Replace image is selected.
- AlgorithmMean(ModelImage, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Constructor for 2D images in which changes are returned to the source image.
- AlgorithmMean(ModelImage, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Constructor for 3D images in which changes are returned to the source image.
- AlgorithmMean(ModelImage, ModelImage, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Constructor for 2D images in which changes are placed in a predetermined destination image.
- AlgorithmMean(ModelImage, ModelImage, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Constructor for 3D images in which changes are placed in a predetermined destination image.
- AlgorithmMeanShiftClustering - Class in gov.nih.mipav.model.algorithms
-
The java code is ported from C++ code downloaded from http://coewww.rutgers.edu/riul/research/code.html.
- AlgorithmMeanShiftClustering(ModelImage, int, int, int, String, String, int, int, double, boolean, float, boolean, float, int, int, boolean, int, int, float[], ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
File formats:
Files are all ASCII files.
- AlgorithmMeanShiftClustering.fams_cut - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMeanShiftClustering.fams_hash_entry - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMeanShiftClustering.fams_hash_entry2 - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMeanShiftClustering.fams_res_cont - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMeanShiftClustering.famsPoint - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMeanShiftSegmentation - Class in gov.nih.mipav.model.algorithms
-
The java code is ported from C++ code downloaded from http://coewww.rutgers.edu/riul/research/code.html.
- AlgorithmMeanShiftSegmentation(ModelImage, ModelImage, AlgorithmMeanShiftSegmentation.kernelType, AlgorithmMeanShiftSegmentation.kernelType, float, float, int, AlgorithmMeanShiftSegmentation.SpeedUpLevel, boolean, double, double[], boolean, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- AlgorithmMeanShiftSegmentation.ClassStateStruct - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMeanShiftSegmentation.kernelType - Enum in gov.nih.mipav.model.algorithms
-
- AlgorithmMeanShiftSegmentation.RAList - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMeanShiftSegmentation.REGION - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMeanShiftSegmentation.RegionList - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMeanShiftSegmentation.SpeedUpLevel - Enum in gov.nih.mipav.model.algorithms
-
- AlgorithmMeanShiftSegmentation.userWeightFunct - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMedian - Class in gov.nih.mipav.model.algorithms.filters
-
Algorithm to apply a median filter to an image, placing it in a new ModelImage, or returning the changed picture to
the same image.
- AlgorithmMedian(ModelImage, int, int, int, float, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Constructor for 2D images in which changes are returned to the source image.
- AlgorithmMedian(ModelImage, int, int, int, float, int, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Constructor for 3D images in which changes are returned to the source image.
- AlgorithmMedian(ModelImage, ModelImage, int, int, int, float, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Constructor for 2D images in which changes are placed in a predetermined destination image.
- AlgorithmMedian(ModelImage, ModelImage, int, int, int, float, int, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Constructor for 3D images in which changes are placed in a predetermined destination image.
- AlgorithmMidsagittal - Class in gov.nih.mipav.model.algorithms
-
Finds the midsagittal line of a brain MRI by:
Flipping the image horizontally.
Registering the flipped image against the original.
Getting the angle that the registration rotated the image.
Transforming the original image by half the registration rotation.
- AlgorithmMidsagittal(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
Construct the midsagittal algorithm.
- AlgorithmMinimumPerimeterPolygon - Class in gov.nih.mipav.model.algorithms
-
Smoothing VOI with minimum perimeter polygon.
- AlgorithmMinimumPerimeterPolygon() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMinimumPerimeterPolygon
-
- AlgorithmMinimumPerimeterPolygon(ModelImage, VOI, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMinimumPerimeterPolygon
-
Creates a new AlgorithmMinimumPerimeterPolygon object.
- AlgorithmMixGaussEM - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMixGaussEM() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- AlgorithmMixGaussEM.model - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMode - Class in gov.nih.mipav.model.algorithms.filters
-
AlgorithmMode applies one of the user specified kernels to a 2D or 3D BYTE, SHORT, INTEGER, UBYTE, USHORT, UINTEGER.
- AlgorithmMode(ModelImage, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Constructor for 2D images in which changes are returned to the source image.
- AlgorithmMode(ModelImage, int, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Constructor for 3D images in which changes are returned to the source image.
- AlgorithmMode(ModelImage, ModelImage, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Constructor for 2D images in which changes are placed in a predetermined destination image.
- AlgorithmMode(ModelImage, ModelImage, int, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Constructor for 3D images in which changes are placed in a predetermined destination image.
- AlgorithmMorphologicalFilter - Class in gov.nih.mipav.model.algorithms.filters
-
Performs morphological filtering on black and white images.
- AlgorithmMorphologicalFilter(ModelImage, int[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
Constructs a Morphological filter object.
- AlgorithmMorphologicalFilter(ModelImage, ModelImage, int[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
Constructs a Morphological filter object.
- AlgorithmMorphology25D - Class in gov.nih.mipav.model.algorithms
-
2.5D mathmatical morphology class (2D morphology on 3D volumes).
- AlgorithmMorphology25D(ModelImage, int, float, int, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Creates a new AlgorithmMorphology25D object.
- AlgorithmMorphology25D(ModelImage, ModelImage, int, float, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Creates a new AlgorithmMorphology25D object.
- AlgorithmMorphology2D - Class in gov.nih.mipav.model.algorithms
-
Two-Dimensional mathmatical morphology class.
- AlgorithmMorphology2D() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- AlgorithmMorphology2D(ModelImage, int, float, int, float, int, int, int, int, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Creates a new AlgorithmMorphology2D object.
- AlgorithmMorphology2D(ModelImage, int, float, int, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Creates a new AlgorithmMorphology2D object.
- AlgorithmMorphology2D(ModelImage, ModelImage, int, float, int, int, int, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Creates a new AlgorithmMorphology2D object.
- AlgorithmMorphology2D.intObject - Class in gov.nih.mipav.model.algorithms
-
Simple class to temporarily store the object's size, ID and seed index value.
- AlgorithmMorphology3D - Class in gov.nih.mipav.model.algorithms
-
Three-Dimensional mathmatical morphology class.
- AlgorithmMorphology3D(ModelImage, int, float, int, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Creates a new AlgorithmMorphology3D object.
- AlgorithmMorphology3D(ModelImage, ModelImage, int, float, int, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Creates a new AlgorithmMorphology3D object.
- AlgorithmMorphology3D(ModelImage, ModelImage, ModelImage, int, float, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Creates a new AlgorithmMorphology3D object.
- AlgorithmMorphology3D.intObject - Class in gov.nih.mipav.model.algorithms
-
Simple class to temporarily store the object's size, ID and seed index value.
- AlgorithmMosaicToSlices - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm requires input of 2D or 3D mosaics.
- AlgorithmMosaicToSlices(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmMosaicToSlices
-
Creates a new AlgorithmMosaicToSlices object.
- AlgorithmMRIShadingCorrection - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmMRIShadingCorrection(ModelImage, float, float, float, int, boolean, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMRIShadingCorrection
-
Creates a new AlgorithmMRIShadingCorrection object.
- AlgorithmMRIShadingCorrection(ModelImage, ModelImage, float, float, float, int, boolean, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMRIShadingCorrection
-
Creates a new AlgorithmMRIShadingCorrection object.
- AlgorithmMSER - Class in gov.nih.mipav.model.algorithms
- AlgorithmMSER(ModelImage, double, double, double, double, double, boolean, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- AlgorithmMSER.VlMserExtrReg - Class in gov.nih.mipav.model.algorithms
-
Extremal regions (ER) are extracted from the region forest.
- AlgorithmMSER.VlMserFilt - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMSER.VlMserReg - Class in gov.nih.mipav.model.algorithms
-
Extremal regions and maximally stable extremal regions are instances of image regions.
- AlgorithmMSER.VlMserStats - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMSpectralFuzzyCMeans - Class in gov.nih.mipav.model.algorithms
-
Fuzzy C-Means Segmentation algorithm
- AlgorithmMSpectralFuzzyCMeans(ModelImage[], ModelImage[], int, int, int, int, float, float, float, boolean, int, boolean, int, float, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
AlgorithmMSpectralFuzzyCMeans - Constructor.
- AlgorithmMultiExponentialFitting - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmMultiExponentialFitting() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- AlgorithmMultiExponentialFitting(int, int, int, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, int, double[], int, double[], double[], int[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- AlgorithmN4MRIBiasFieldCorrectionFilter - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmN4MRIBiasFieldCorrectionFilter(ModelImage, ModelImage, ModelImage, int, double, double, double, int, int, ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
Constructor which sets the source and destination images
- AlgorithmNearlyCircleToCircle - Class in gov.nih.mipav.model.algorithms
-
This program performs the conformal mapping of a nearly circular region to a circle.
- AlgorithmNearlyCircleToCircle() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNearlyCircleToCircle
-
AlgorithmNearlyCircleToCircle - default constructor.
- AlgorithmNearlyCircleToCircle(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNearlyCircleToCircle
-
AlgorithmNearlyCircleToCircle.
- AlgorithmNetworkSnake - Class in gov.nih.mipav.model.algorithms
-
Copyright (c) 2011, The University of Nottingham
All rights reserved.
- AlgorithmNetworkSnake(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake
-
- AlgorithmNetworkSnake.AnchorPosition - Enum in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.ContractingSnake - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.ContractingSnakeNode - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.ExtentionMath - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.IMetadataProvider - Interface in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.Metadata - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.NetworkSnake - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.Pixel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.PixelGrid - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.PixelGrid.PixelGridNode - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.SnakeInitialiser - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.SnakeInitialiser.KeyValuePair - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.SnakeInitialiser.Node - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.SnakeNode - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNetworkSnake.tuple2i - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNLNoiseReduction - Class in gov.nih.mipav.model.algorithms.filters
-
This is a port of the SUSAN Nonlinear Noise reduction program.
- AlgorithmNLNoiseReduction(ModelImage, double, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
AlgorithmNLNoiseReduction - Constructor.
- AlgorithmNLNoiseReduction(ModelImage, ModelImage, double, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
AlgorithmNLNoiseReduction - Constructor.
- AlgorithmNMSuppression - Class in gov.nih.mipav.model.algorithms.filters
-
Calculates the non-maximum suppression of an image at a scale defined by the user Edges are defined as the union of
points for which the gradient magnitude assumes a maximum in the gradient direction.
- AlgorithmNMSuppression(ModelImage, float[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
AlgorithmNMSuppression - Constructor.
- AlgorithmNMSuppression(ModelImage, ModelImage, float[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
AlgorithmNMSuppression - Constructor.
- AlgorithmNoise - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm used to add Gaussian, Poisson, Uniform, Rayleigh, or Rician noise to an image.
- AlgorithmNoise(ModelImage, int, double, double, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Creates a new AlgorithmNoise object.
- AlgorithmNoise(ModelImage, ModelImage, int, double, double, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Creates a new AlgorithmNoise object.
- AlgorithmNonlocalMeansFilter - Class in gov.nih.mipav.model.algorithms.filters
-
This is a port of the 09/03/2006 NLmeansfilter.m and UNLmeansfilter2.m on 02/15/2008 by Jose Vicente
Manjon Herrera & Antoni Buades.
- AlgorithmNonlocalMeansFilter(ModelImage, ModelImage, int, int, boolean, float, float, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
Creates a new AlgorithmNonlocalMeans object.
- AlgorithmNonMaxSuppts - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmNonMaxSuppts(ModelImage, ModelImage, VOIVector, int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNonMaxSuppts
-
- AlgorithmNonMaxSuppts(ModelImage, ModelImage, VOIVector, int, double, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNonMaxSuppts
-
- AlgorithmNonparametricSegmentation - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmNonparametricSegmentation(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNonparametricSegmentation
-
Creates a new AlgorithmNonparametricSegmentation object.
- AlgorithmNonparametricSegmentation(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNonparametricSegmentation
-
Creates a new AlgorithmNonparametricSegmentation object.
- AlgorithmObjectExtractor - Class in gov.nih.mipav.model.algorithms
-
A class for segmenting objects.
- AlgorithmObjectExtractor(ModelImage, VOI, boolean, boolean, TriMesh, float[], float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Create an extractor for segmenting an object from an image.
- AlgorithmObjectExtractor.Edge - Class in gov.nih.mipav.model.algorithms
-
A representation of an edge for the vertex-edge-triangle table.
- AlgorithmObjectExtractor.UnorderedSetInt - Class in gov.nih.mipav.model.algorithms
-
An unordered set of 'int' stored in an array.
- AlgorithmOptimizeFunctionBase - Interface in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmParameters - Class in gov.nih.mipav.view.dialogs
-
This class standardizes the parameter names given to many common parameters used in algorithms.
- AlgorithmParameters() - Constructor for class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Creates a new AlgorithmParameters object to be used to record the current parameters entered into the algorithm's
GUI by the user.
- AlgorithmParameters(ParameterTable) - Constructor for class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Creates a new AlgorithmParameters object to be used to set up the algorithm's GUI from stored parameters.
- AlgorithmPbBoundaryDetection - Class in gov.nih.mipav.model.algorithms
-
Compute probability of boundary using brightness gradient and texture gradient
Original MATLAB code written by David R.
- AlgorithmPbBoundaryDetection() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
AlgorithmPbBoundaryDetection - default constructor.
- AlgorithmPbBoundaryDetection(ModelImage, ModelImage, int, int, double, double, int, String, double, int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
AlgorithmPbBoundaryDetection.
- algorithmPerformed() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- algorithmPerformed(AlgorithmBase) - Method in interface gov.nih.mipav.model.algorithms.AlgorithmInterface
-
Called after an algorithm this listener is registered to exits (maybe successfully, maybe not).
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
alg performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
algorithmPerformed - this method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Respond to the completion or failure of the algorithm we called.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
algorithmPerformed - this method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
algorithmPerformed this method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
algorithmPerformed - this method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoMultiple3D
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
algorithmPerformed - this method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
This method is required if the AlgorithmInterface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCumulativeHistogram
-
method that is called after algorithm is finished.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
algorithmPerformed - this method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
Method for catching end of algorithm events.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Algorithm notifies dialog of status.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
When the morphology algorithm finish running, this method is invoked.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogGVF
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHessian
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Called when the AlgorithmMaximumLikelihoodIteratedBlindDeconvolution has
finished processing the source image.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMSER
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
algorithmPerformed - this method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogQuantifyMask
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
DOCUMENT ME!
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
If the destination image is not null, put in frame.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRotate
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSnake
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Method for catching end of algorithm events.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
algorithmPerformed - this method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogVABRA
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIExtraction
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIShapeInterpolation
-
alg performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
the standard thread-done event for AlgorithmBase.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
algorithmPerformed - when the alignment algorithm finishes, the transformed tile is blended with the reference
image and displayed:
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
algorithm performed
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Called when AlgorithmDWI2DTI is done creating the DTI image.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
This method is required if the AlgorithmPerformed interface is implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
empty function to implement the algorithm interface.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
This method is required if the AlgorithmPerformed interface is
implemented.
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- algorithmPerformed(AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
This method is required if the AlgorithmPerformed interface is
implemented.
- AlgorithmPhaseCongruency - Class in gov.nih.mipav.model.algorithms
-
Ported from Peter Kovesi's MATLAB code for Phase Congruency
Available from: http://www.csse.uwa.edu.au/~pk/research/matlabfns/PhaseCongruency/phasecong3.m
and: http://www.csse.uwa.edu.au/~pk/research/matlabfns/FrequencyFilt/lowpassfilter.m
in reference to the method lowpassFilter();
% References:
%
% Peter Kovesi, "Image Features From Phase Congruency".
- AlgorithmPhaseCongruency(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- AlgorithmPointArea - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmPointArea(ModelImage, int, int, int, int, boolean, boolean, boolean, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
Creates a new AlgorithmPointArea object.
- AlgorithmPointSetToImageFilter - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmPointSetToImageFilter(int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- AlgorithmPowellOpt2D - Class in gov.nih.mipav.model.algorithms
-
Runs Powell's method for a 2D image.
- AlgorithmPowellOpt2D(AlgorithmBase, Vector2f, int, AlgorithmOptimizeFunctionBase, double[], int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt2D
-
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- AlgorithmPowellOpt3D - Class in gov.nih.mipav.model.algorithms
-
Runs Powell's method for a 3D image.
- AlgorithmPowellOpt3D(AlgorithmBase, Vector3f, int, AlgorithmOptimizeFunctionBase, double[], int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, some tolerance
within that point to look for the minimum, and the maximum number of iterations.
- AlgorithmPowellOptBase - Class in gov.nih.mipav.model.algorithms
-
Powell's Method
- AlgorithmPowellOptBase(AlgorithmBase, int, AlgorithmOptimizeFunctionBase, double[], int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Constructs a new algorithm with the given centers of mass (needed for setting the transformations), the given
cost function (which was constructed with the proper images), the initial point we're looking at, and some
tolerance within that point to look for the minimum.
- AlgorithmPowerWatershed - Class in gov.nih.mipav.model.algorithms
-
This is a port of C code written by Camille Couprie in 2009.
- AlgorithmPowerWatershed(ModelImage, ModelImage, int, Vector<Integer>, Vector<Short>, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
Constructs Power watershed algorithm.
- AlgorithmPowerWatershed.Lifo - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmPowerWatershed.Rbt - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmPowerWatershed.RbtElt - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmPrincipalComponents - Class in gov.nih.mipav.model.algorithms
-
This algorithm operates on 3D black and white images and on 2D and 3D color images.
- AlgorithmPrincipalComponents(ModelImage[], ModelImage, boolean, boolean, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
Creates a new AlgorithmPrincipalComponents object.
- AlgorithmPrincipalComponents(ModelImage[], ModelImage, ModelImage, boolean, boolean, boolean, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
Creates a new AlgorithmPrincipalComponents object.
- AlgorithmProstateBoundaryExt - Class in gov.nih.mipav.model.algorithms.filters
-
This algorithm traces the prostate boundary from the target image, non prostate binary mask image and
prostate boundary binary mask image.
- AlgorithmProstateBoundaryExt(ModelImage, ModelImage, ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
Constructor
- AlgorithmProstateBoundaryExt.Edge - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmProstateBoundaryExt.PointAttribute - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmProstateBoundaryFeature2D - Class in gov.nih.mipav.model.algorithms.filters
-
DOCUMENT ME!
- AlgorithmProstateBoundaryFeature2D(ModelImage, ModelImage, ModelImage, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
Creates a new AlgorithmHaralickTexture object for black and white image.
- AlgorithmProstateFeatures - Class in gov.nih.mipav.model.algorithms.filters
-
DOCUMENT ME!
- AlgorithmProstateFeatures(ModelImage[], ModelImage[], ModelImage, int, int, int, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, float, float, float, float, float, boolean, int, boolean, boolean, int, int, int, int, float, float, float, boolean, int, boolean, float, int, float, boolean, float[]) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
Creates a new AlgorithmHaralickTexture object for black and white image.
- AlgorithmProstateFeatures(ModelImage[], ModelImage[], ModelImage, int, int, int, int, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, float, float, float, float, float, boolean, int, boolean, boolean, int, int, int, int, float, float, float, boolean, int, boolean, float, int, float, boolean, float[]) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
Creates a new AlgorithmHaralickTexture object for color image.
- AlgorithmProstateFeatures2D - Class in gov.nih.mipav.model.algorithms.filters
-
DOCUMENT ME!
- AlgorithmProstateFeatures2D(ModelImage, ModelImage, ModelImage, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
Creates a new AlgorithmHaralickTexture object for black and white image.
- AlgorithmProstateFeaturesSaveAutoTrain - Class in gov.nih.mipav.model.algorithms.filters
-
This class save the Coherence Enhanced Diffusion (CED) 2D slice based features, which are Hurst index
and Haralick features.
- AlgorithmProstateFeaturesSaveAutoTrain(ModelImage, ModelImage, ModelImage, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
Constructor.
- AlgorithmQuadraticFit - Class in gov.nih.mipav.model.algorithms
-
Approximate a set of points by a quadric surface.
- AlgorithmQuadraticFit(Vector<Vector3f>) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
Fit a set of 3D points with a quadric surface.
- AlgorithmQuantify - Class in gov.nih.mipav.model.algorithms
-
Quantify image data based on a mask image.
- AlgorithmQuantify(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmQuantify
-
Creates a new AlgorithmQuantify object.
- AlgorithmQuantifyMask - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm that does basic calculations on Mask images (boolean/ubyte/short)
calculates Center of Mass, area (in resolutions), and number of pixels per mask
- AlgorithmQuantifyMask(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmQuantifyMask
-
Creates a new AlgorithmMask object.
- AlgorithmQuinticLagrangian - Class in gov.nih.mipav.model.algorithms
-
This is a polynomial p of degree 5 which interpolates a given function f at the points x(-2), x(-1), x(0), x(1),
x(2), and x(3) and is given by p(x) = sum from i = -2 to i = 3 of li(x)*f(xi), where li, i = -2,-1,0,1,2,3 which are
called the fundamental polynomials, are given by li(x) = product from k = -2 to k = 3 for k !
- AlgorithmQuinticLagrangian() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
AlgorithmQuinticLagrangian - default constructor.
- AlgorithmRandSliceOrder - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm that randomizes the order of 3D dataset.
- AlgorithmRandSliceOrder(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRandSliceOrder
-
Constructs an algorithm object that randomizes the order of 3D image dataset.
- AlgorithmRandSliceOrder(ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRandSliceOrder
-
Constructs an algorithm object that randomizes the order of 3D image dataset.
- AlgorithmRegBSpline - Class in gov.nih.mipav.model.algorithms.registration
-
This is a common base class which provides common methods and data members for all BSpline based registration.
- AlgorithmRegBSpline(ModelImage, ModelImage, ModelImage, ModelImage, RegistrationMeasure, AlgorithmRegBSpline.Options, AlgorithmRegBSpline.Options) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline
-
Constructor.
- AlgorithmRegBSpline.Options - Class in gov.nih.mipav.model.algorithms.registration
-
Data structure which contains the parameters or options used to perform a BSpline based registration of two
images.
- AlgorithmRegBSpline25D - Class in gov.nih.mipav.model.algorithms.registration
-
BSpline based registration of 2.5D images.
- AlgorithmRegBSpline25D(ModelImage, ModelImage, int, ModelImage, RegistrationMeasure, AlgorithmRegBSpline.Options, AlgorithmRegBSpline.Options) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline25D
-
Constructor.
- AlgorithmRegBSpline2D - Class in gov.nih.mipav.model.algorithms.registration
-
BSpline based registration of 2D images.
- AlgorithmRegBSpline2D(ModelImage, ModelImage, ModelImage, ModelImage, RegistrationMeasure, AlgorithmRegBSpline.Options, AlgorithmRegBSpline.Options) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline2D
-
Constructor.
- AlgorithmRegBSpline3D - Class in gov.nih.mipav.model.algorithms.registration
-
BSpline registration of 3D images.
- AlgorithmRegBSpline3D(ModelImage, ModelImage, ModelImage, ModelImage, RegistrationMeasure, AlgorithmRegBSpline.Options, AlgorithmRegBSpline.Options) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline3D
-
Constructor.
- AlgorithmRegChamfer - Class in gov.nih.mipav.model.algorithms.registration
-
AlgorithmRegChamfer First slice is template (base image) to which match image is registered.
- AlgorithmRegChamfer(ModelImage, ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Constructs a new registration algorithm.
- AlgorithmRegChamfer(ModelImage, ModelImage, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Constructs new registration algorithm.
- AlgorithmRegChamfer.CostFunction - Class in gov.nih.mipav.model.algorithms.registration
-
Class for specifying optimization function for AlgorithmSimplexOpt.
- AlgorithmRegELSUNCOAR25D - Class in gov.nih.mipav.model.algorithms.registration
-
This is an automatic registration method based on FLIRT.
- AlgorithmRegELSUNCOAR25D(ModelImage, int, int, int, int, boolean, int, float, float, float, float, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Creates new automatic internal registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR25D(ModelImage, ModelImage, int, int, int, int, boolean, int, float, float, float, float, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Creates new automatic internal registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR2D - Class in gov.nih.mipav.model.algorithms.registration
-
This is an automatic registration method based on FLIRT.
- AlgorithmRegELSUNCOAR2D(ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR2D(ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR2D(ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR2D(ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR2D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR2D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR2D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR2D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR35D - Class in gov.nih.mipav.model.algorithms.registration
-
This is an automatic registration method based on FLIRT.
- AlgorithmRegELSUNCOAR35D(ModelImage, int, int, int, int, int, int, float, float, float, float, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Creates new automatic internal registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR35D(ModelImage, ModelImage, int, int, int, int, int, int, float, float, float, float, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Creates new automatic internal registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR35D.MatrixListItem - Class in gov.nih.mipav.model.algorithms.registration
-
Helper class to make it easy to store the necessary information about a minimum.
- AlgorithmRegELSUNCOAR3D - Class in gov.nih.mipav.model.algorithms.registration
-
This is an automatic registration method based on FLIRT.
- AlgorithmRegELSUNCOAR3D(ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, float, float, float, float, float, float, boolean, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR3D(ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, float, float, float, float, float, float, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR3D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, float, float, float, float, float, float, boolean, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegELSUNCOAR3D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, float, float, float, float, float, float, boolean, boolean, boolean, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegionGrow - Class in gov.nih.mipav.model.algorithms
-
Fills a region based on average intensity +or- standard deviation.
- AlgorithmRegionGrow(ModelImage, float, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
Creates a new AlgorithmRegionGrow object.
- AlgorithmRegionGrow(ModelImage, ModelImage, float, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
Creates a new AlgorithmRegionGrow object.
- AlgorithmRegionMergingViaBoundaryMelting - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmRegionMergingViaBoundaryMelting(ModelImage, ModelImage, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting
-
Creates a new AlgorithmRegionMergingViaBoundaryMelting object.
- AlgorithmRegionMergingViaBoundaryMelting.mergeItem - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmRegionsFromPartialBorders - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmRegionsFromPartialBorders(ModelImage, ModelImage, double, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmRegionsFromPartialBorders
-
Creates a new AlgorithmRegionsFromPartialBorders object.
- AlgorithmRegLeastSquares - Class in gov.nih.mipav.model.algorithms.registration
-
"Least-Squares Fitting of 2 3-D Point Sets", K.
- AlgorithmRegLeastSquares(double[][], double[][], int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
AlgorithmRegLeastSquares - Constructor.
- AlgorithmRegLeastSquares(Vector3f[], Vector3f[], int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
AlgorithmRegLeastSquares - Constructor.
- AlgorithmRegOAR25D2 - Class in gov.nih.mipav.model.algorithms.registration
-
This is an automatic registration method based on FLIRT.
- AlgorithmRegOAR25D2(ModelImage, int, int, int, int, boolean, int, float, float, float, float, boolean, boolean, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Creates new automatic internal registration algorithm and sets necessary variables.
- AlgorithmRegOAR25D2(ModelImage, ModelImage, int, int, int, int, boolean, int, float, float, float, float, boolean, boolean, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Creates new automatic internal registration algorithm and sets necessary variables.
- AlgorithmRegOAR2D - Class in gov.nih.mipav.model.algorithms.registration
-
This is an automatic registration method based on FLIRT.
- AlgorithmRegOAR2D(ModelImage, ModelImage, int, int, int, float, float, float, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegOAR2D(ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegOAR2D(ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegOAR2D(ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegOAR2D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegOAR2D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegOAR2D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegOAR2D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegOAR35D - Class in gov.nih.mipav.model.algorithms.registration
-
This is an automatic registration method based on FLIRT.
- AlgorithmRegOAR35D(ModelImage, int, int, int, int, int, int, float, float, float, float, boolean, boolean, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Creates new automatic internal registration algorithm and sets necessary variables.
- AlgorithmRegOAR35D(ModelImage, ModelImage, int, int, int, int, int, int, float, float, float, float, boolean, boolean, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Creates new automatic internal registration algorithm and sets necessary variables.
- AlgorithmRegOAR35D.MatrixListItem - Class in gov.nih.mipav.model.algorithms.registration
-
Helper class to make it easy to store the necessary information about a minimum.
- AlgorithmRegOAR3D - Class in gov.nih.mipav.model.algorithms.registration
-
This is an automatic registration method based on FLIRT.
- AlgorithmRegOAR3D(ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, float, float, float, float, float, float, boolean, boolean, boolean, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegOAR3D(ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, float, float, float, float, float, float, boolean, boolean, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegOAR3D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, float, float, float, float, float, float, boolean, boolean, boolean, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegOAR3D(ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, float, float, float, float, float, float, float, float, float, float, float, float, boolean, boolean, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Creates new automatic linear registration algorithm and sets necessary variables.
- AlgorithmRegPatientPos - Class in gov.nih.mipav.model.algorithms.registration
-
Use origin and image orientations to align images based on patient position.
- AlgorithmRegPatientPos(ModelImage, ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
Creates new algorithm.
- AlgorithmRegularizedIsotropicDiffusion - Class in gov.nih.mipav.model.algorithms.filters
-
Algorithm to apply Regularized Isotropic Nonlinear Diffusion as described by:
- AlgorithmRegularizedIsotropicDiffusion(ModelImage, ModelImage, int, float, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Creates a new AlgorithmRegularizedIsotropicDiffusion object.
- AlgorithmRegValidation - Class in gov.nih.mipav.model.algorithms.registration
-
Uses a selected RegistrationMeasure and the user-specified points to
output the relevant measure back to the user.
- AlgorithmRegValidation(double[][], double[][], int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
AlgorithmRegValidation - Constructor.
- AlgorithmRegValidation(Vector3f[], Vector3f[], int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
AlgorithmRegValidation - Constructor.
- AlgorithmRegVOILandmark - Class in gov.nih.mipav.model.algorithms.registration
-
AlgorithmRegVOILandmark First slice is template (base image) to which subsequent slices are registered.
- AlgorithmRegVOILandmark(ModelImage, ModelImage, float[], boolean, VOIBase, double, double, double, double, double, double, double, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
Constructor.
- AlgorithmRegVOILandmark.CostFunction - Class in gov.nih.mipav.model.algorithms.registration
-
CostFunction - class for specifying optimization function for AlgorithmSimplexOpt slice - current fluoroscopy
slice being operated on.
- AlgorithmRemoveSlices - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm verifies the z-th slice should be in included in the destination image, as defined in the list, remove.
- AlgorithmRemoveSlices(ModelImage, ModelImage, boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Import source and destination images into the class.
- AlgorithmRemoveTSlices - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm to run the remove T slices.
- AlgorithmRemoveTSlices(ModelImage, ModelImage, boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveTSlices
-
import source and destination images into the class.
- AlgorithmReplaceBlankSlicesWithAverages - Class in gov.nih.mipav.model.algorithms.utilities
-
- AlgorithmReplaceBlankSlicesWithAverages(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceBlankSlicesWithAverages
-
Creates a new AlgorithmReplaceSlice object.
- AlgorithmReplaceRemovedSlices - Class in gov.nih.mipav.model.algorithms.utilities
-
This algorithm is used to insert averaged slices where slices have been removed -If slices were removed at the
beginning of the original movie, these slices will not be replaced. - Slices are only inserted between the first and
last kept slices
- AlgorithmReplaceRemovedSlices(ModelImage, boolean[], boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
Constructor for algorithm.
- AlgorithmReplaceSlice - Class in gov.nih.mipav.model.algorithms.utilities
-
DOCUMENT ME!
- AlgorithmReplaceSlice(ModelImage, ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceSlice
-
Creates a new AlgorithmReplaceSlice object.
- AlgorithmReplaceValue - Class in gov.nih.mipav.model.algorithms.utilities
-
Title: AlgorithmReplaceValue
- AlgorithmReplaceValue(ModelImage, ModelImage, Vector<JDialogReplaceValue.Values>, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceValue
-
Default contructor.
- AlgorithmReslice - Class in gov.nih.mipav.model.algorithms.utilities
-
Reslices 3D image into (isotropic)cubic voxels.
- AlgorithmReslice(ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Creates new algorithm for reslicing to isotropic voxels.
- AlgorithmRGBConcat - Class in gov.nih.mipav.model.algorithms.utilities
-
Simple algorithm that generates an RGB image from three gray images.
- AlgorithmRGBConcat(ModelImage, ModelImage, ModelImage, int, boolean, boolean, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Creates a new AlgorithmRGBConcat object.
- AlgorithmRGBConcat(ModelImage, ModelImage, ModelImage, int, boolean, boolean, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Creates a new AlgorithmRGBConcat object.
- AlgorithmRGBConcat(ModelImage, ModelImage, ModelImage, ModelImage, boolean, boolean, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Creates a new AlgorithmRGBConcat object.
- AlgorithmRGBConcat(ModelImage, ModelImage, ModelImage, ModelImage, boolean, boolean, float, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Creates a new AlgorithmRGBConcat object.
- AlgorithmRGBtoGray - Class in gov.nih.mipav.model.algorithms.utilities
-
Simple algorithm that converts an RGB image to a single greyscale image.
- AlgorithmRGBtoGray(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Creates a new AlgorithmRGBtoGray object.
- AlgorithmRGBtoGray(ModelImage, float, float, float, boolean, float, boolean, boolean, float, float, float, float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Creates a new AlgorithmRGBtoGray object.
- AlgorithmRGBtoGray(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Creates a new AlgorithmRGBtoGray object.
- AlgorithmRGBtoGray(ModelImage, ModelImage, float, float, float, boolean, float, boolean, boolean, float, float, float, float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Creates a new AlgorithmRGBtoGray object.
- AlgorithmRGBtoGrays - Class in gov.nih.mipav.model.algorithms.utilities
-
Simple algorithm that converts an RGB image to a red, green, and blue greyscale images.
- AlgorithmRGBtoGrays(ModelImage, ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGrays
-
Creates a new AlgorithmRGBtoGrays object.
- AlgorithmRGBtoHSB - Class in gov.nih.mipav.model.algorithms.utilities
-
Simple algorithm that converts an RGB image to a hue, saturation and brightness greyscale images.
- AlgorithmRGBtoHSB(ModelImage, ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoHSB
-
Creates a new AlgorithmRGBtoHSB object.
- AlgorithmRiceWaveletTools - Class in gov.nih.mipav.model.algorithms.filters
-
This "rice-wlet-tools", version 2.4
Released -
CONDITIONS FOR USE:
Copyright (c) 2000 RICE UNIVERSITY.
- AlgorithmRiceWaveletTools() - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- AlgorithmRiceWaveletTools(ModelImage, double[]) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- AlgorithmRiceWaveletTools(ModelImage, int, boolean, int, boolean, int, int, int, boolean, double, int, double, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- AlgorithmRiceWaveletTools(ModelImage, ModelImage, int, boolean, int, boolean, int, int, int, boolean, double, int, double, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- AlgorithmRiceWaveletTools.EigenvalueComplex - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmRiceWaveletTools.EigenvalueComplexComparator - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmRotate - Class in gov.nih.mipav.model.algorithms.utilities
-
An Algorithm to rotate 3D or 4D dataset 90 or 180 degrees about X, Y, or Z axis. 2D Images can also be rotated.
- AlgorithmRotate(ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Creates new algorithm for rotating.
- AlgorithmRotate(ModelImage, int[], boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Creates new algorithm for rotating.
- AlgorithmRotate(ModelImage, int, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Creates new algorithm for rotating.
- AlgorithmRuleBasedContrastEnhancement - Class in gov.nih.mipav.model.algorithms.filters
-
This algorithm uses an equation with 3 membership functions, udark, ugray, and ubright, to transform a gray level g
to a new gray level g' for histogram enhancement.
- AlgorithmRuleBasedContrastEnhancement(ModelImage, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmRuleBasedContrastEnhancement
-
Constructor for images in which changes are returned to the source image.
- AlgorithmRuleBasedContrastEnhancement(ModelImage, ModelImage, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmRuleBasedContrastEnhancement
-
Constructor for images in which changes are placed in a predetermined destination image.
- AlgorithmScaleSaliency - Class in gov.nih.mipav.model.algorithms
-
Original source code in C and MATLAB is Copyright 1998-2004 by Timor Kadir Version 1.5
Kadir/Brady Feature detector (Scale Saliency) Code
For non-commercial use only
Ported by to Java by William Gandler
References:
1.)
- AlgorithmScaleSaliency() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
AlgorithmScaleSaliency - default constructor.
- AlgorithmScaleSaliency(ModelImage, int, int, int, int, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- AlgorithmScaleSaliency.sixItems - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmScaleSaliency.sixItemsComparator - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSCDSegmentation - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSCDSegmentation(ModelImage, ModelImage, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSCDSegmentation
-
- AlgorithmSeparableConvolver - Class in gov.nih.mipav.model.algorithms
-
Convolves an image with a separable (symmetric) kernel and returns the result.
- AlgorithmSeparableConvolver(float[], int[], float[][], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Sets destination, source, and kernel buffers.
- AlgorithmSeparableConvolver(float[], int[], float[], int[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- AlgorithmSequentialScanningWatershed - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSequentialScanningWatershed(ModelImage, ModelImage, int, boolean, int, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- AlgorithmSequentialScanningWatershed.indexValueComparator - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSequentialScanningWatershed.indexValueItem - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSFTA - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSFTA(ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
- AlgorithmShortestPathWatershed - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmShortestPathWatershed(ModelImage, ModelImage, int, boolean, int, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- AlgorithmShortestPathWatershed.indexValueComparator - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmShortestPathWatershed.indexValueItem - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSimulatedExposureFusion - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSimulatedExposureFusion() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- AlgorithmSimulatedExposureFusion(ModelImage, ModelImage, double, double, int, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- AlgorithmSingleMRIImageSNR - Class in gov.nih.mipav.model.algorithms
-
This program uses a mandatory signal 1 VOI, an optional signal 2 VOI, a mandatory noise background VOI, and the
number of NMR receivers to calculate the signal to noise ratio for the signal VOI(s).
- AlgorithmSingleMRIImageSNR(ModelImage, boolean, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
Creates a new AlgorithmSingleMRIImageSNR object.
- AlgorithmSkullRemoval - Class in gov.nih.mipav.model.algorithms
-
Algorithm Implementation
1.
- AlgorithmSkullRemoval(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Automatic DeSkulling initialization.
- AlgorithmSkullRemoval(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Automatic DeSkulling initialization.
- AlgorithmSliceAveraging - Class in gov.nih.mipav.model.algorithms.filters
-
This algorithm averages together slices of a 3D image.
- AlgorithmSliceAveraging(ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmSliceAveraging
-
Creates a new AlgorithmSliceAveraging object.
- AlgorithmSliceAveraging(ModelImage, ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmSliceAveraging
-
Creates a new AlgorithmSliceAveraging object.
- AlgorithmSM2 - Class in gov.nih.mipav.model.algorithms
-
Based on the document provided by Daniel Reich: Notes on DCE with SM2 (standard model, aka Tofts model,
2-compartment) 3 model parameters are fit for each voxel in 3D: 1) K_trans in [1.0E-5, 5.0] in /min On input ktrans
is converted from /min to /sec and on output ktrans is converted from /sec to /min. 2) ve in [1.0E-5, 0.99] 3) f_vp
in [0, 0.99]
srcImage is a dynamic "4D volume" of MRI signal (3D over time).
- AlgorithmSM2(ModelImage[], ModelImage, double[], double[], double[], ModelImage, double[], double, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
Creates a new AlgorithmDEMRI3 object.
- AlgorithmSM2.FitAll - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSM2.FitAllEP - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSM2.FitAllNL2 - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSM2.FitSM2ConstrainedModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSM2.FitSM2ConstrainedModelC - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSM2.FitSM2nl2solModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSM2.Integration2All - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSM2.Integration2EPAll - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSM2.IntModel - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSM2.sm2Task - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSnake - Class in gov.nih.mipav.model.algorithms
-
Snake-like algorithm deriviative.
- AlgorithmSnake(ModelImage, float[], int, float, VOI, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Set up the snake algorithm so that it can be run.
- AlgorithmSobel - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmSobel(ModelImage, ModelImage, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmSobel
-
- AlgorithmSpectralClustering - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSpectralClustering(ModelImage, double[][], double[], int[], double[][], String, float[], float[], float[], double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- AlgorithmSphereGeneration - Class in gov.nih.mipav.model.algorithms
-
This module draws uniformly randomly positioned spheres with a specified radius.
- AlgorithmSphereGeneration() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
AlgorithmSphereGeneration - default constructor.
- AlgorithmSphereGeneration(ModelImage, int, int, int, int, int, int, double, double, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
AlgorithmRandomSphereGeneration.
- AlgorithmSphereGeneration.IntModelMean - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSphereGeneration.IntModelMean2 - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSphereGeneration.IntModelMeanSquared - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSphereGeneration.IntModelMeanSquared2 - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSphereGeneration.IntTorquato95ModelMean - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSphereGeneration.IntTorquato95ModelMean2 - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSphereGeneration.IntTorquatoModelMean - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSphereGeneration.IntTorquatoModelMean2 - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSplitAndMergeWatershed - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSplitAndMergeWatershed(ModelImage, ModelImage, int, boolean, int, boolean, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- AlgorithmSplitAndMergeWatershed.indexValueComparator - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmSplitAndMergeWatershed.indexValueItem - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmStandardDeviationThreshold - Class in gov.nih.mipav.model.algorithms
-
The Standard Deviation Threshold works by first having an active VOI in which the standard deviation and other
statistics are calculated.
- AlgorithmStandardDeviationThreshold(ModelImage, float, float, float, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
constructor for grey scale image
- AlgorithmStandardDeviationThreshold(ModelImage, float, float, float, float, float, float, float, float, float, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
constructor for color image
- AlgorithmSubsample - Class in gov.nih.mipav.model.algorithms.utilities
-
Takes in an image and subsamples it to a new set of dimensions.
- AlgorithmSubsample(ModelImage, ModelImage, int[], int[], float[], boolean, boolean, TransMatrix, boolean) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Setup for a later subsampling of an image.
- AlgorithmSubset - Class in gov.nih.mipav.model.algorithms.utilities
-
Algorithm to create a 3D subset image from a 4D image.
- AlgorithmSubset(ModelImage, ModelImage, int, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubset
-
import source and destination images into the class.
- AlgorithmSubtractVOI - Class in gov.nih.mipav.model.algorithms
-
Algorithm that subtracts the mean or median value of a VOI from the image.
- AlgorithmSubtractVOI(ModelImage, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Creates a new AlgorithmSubtractVOI object.
- AlgorithmSubtractVOI(ModelImage, ModelImage, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Creates a new AlgorithmSubtractVOI object.
- AlgorithmSwap34 - Class in gov.nih.mipav.model.algorithms.utilities
-
Swaps third and fourth dimensions in 4D dataset.
- AlgorithmSwap34(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwap34
-
Constructs new algorithm and sets source.
- AlgorithmSwapDims - Class in gov.nih.mipav.model.algorithms.utilities
-
Swaps dimensions in 4D dataset.
- AlgorithmSwapDims(ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapDims
-
Constructs new algorithm and sets source.
- AlgorithmSwapSlicesVolume - Class in gov.nih.mipav.model.algorithms.utilities
-
Title: AlgorithmSwapSlicesVolume
- AlgorithmSwapSlicesVolume(ModelImage, JDialogSwapSlicesVolumes.SwapMode, int[][], ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Import source and destination images into the class.
- AlgorithmSWI - Class in gov.nih.mipav.model.algorithms.filters
-
This class recalculates mo and dceFullTre to provide better estimates using the inverse Ernst equation
- AlgorithmSWI(boolean, ModelImage, ModelImage, ModelImage, double, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
Constructor.
- AlgorithmSymmetricNearestNeighbor - Class in gov.nih.mipav.model.algorithms.filters
-
- AlgorithmSymmetricNearestNeighbor(ModelImage, ModelImage, boolean, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmSymmetricNearestNeighbor
-
- AlgorithmTalairachTransform - Class in gov.nih.mipav.model.algorithms
-
Performs original to ACPC, original to Talairach, ACPC to original, ACPC to Talairach, Talairach to original, or
Talairach to ACPC transformation.
- AlgorithmTalairachTransform(ModelImage, ModelImage, TalairachTransformInfo, int, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Creates a new AlgorithmTalairachTransform object.
- AlgorithmTamuraTexture - Class in gov.nih.mipav.model.algorithms.filters
-
DOCUMENT ME!
- AlgorithmTamuraTexture(ModelImage[], ModelImage, boolean, double, boolean, int, boolean, int, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
Creates a new AlgorithmTamuraTexture object for black and white image.
- AlgorithmTamuraTexture(ModelImage[], ModelImage, int, boolean, double, boolean, int, boolean, int, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
Creates a new AlgorithmTamuraTexture object for color image.
- AlgorithmTextureAnalysis - Class in gov.nih.mipav.model.algorithms
-
Overview
This code contains the texture analysis functions for the paper `Texture
Analysis and Segmentation Using Modulation Features, Generative Models, and
Weighted Curve Evolution', by I.
- AlgorithmTextureAnalysis(ModelImage[], ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- AlgorithmTextureSegmentation - Class in gov.nih.mipav.model.algorithms
-
This software implements the factorization-based segmentation algorithm.
- AlgorithmTextureSegmentation(ModelImage, ModelImage, int, int, Vector3f[], BitSet, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- AlgorithmThinning2D - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmThinning2D() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmThinning2D
-
AlgorithmThinning2D - default constructor.
- AlgorithmThinning2D(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmThinning2D
-
- AlgorithmThresholdDual - Class in gov.nih.mipav.model.algorithms
-
This algorithm has two modes of operation:
- AlgorithmThresholdDual(ModelImage, float[], float, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Creates a new AlgorithmThresholdDual object.
- AlgorithmThresholdDual(ModelImage, ModelImage, float[], float, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Creates a new AlgorithmThresholdDual object.
- AlgorithmThresholdDualRGB - Class in gov.nih.mipav.model.algorithms
-
Runs threshold (lower and upper) on color images and replaces values either outside (inverse) or inside (normal) with
the fill values specified.
- AlgorithmThresholdDualRGB(ModelImage, float[], float[], float[], float[], boolean[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Default constructor for running algorithm on and modifying source image.
- AlgorithmThresholdDualRGB(ModelImage, ModelImage, float[], float[], float[], float[], boolean[], boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Default constructor for running algorithm into a destination image.
- AlgorithmTiltCorrection - Class in gov.nih.mipav.model.algorithms.utilities
-
- AlgorithmTiltCorrection(ModelImage, ModelImage, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmTiltCorrection
-
- AlgorithmTimeFitting - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTimeFitting(ModelImage, ModelImage, ModelImage, boolean, int, int, boolean, double[], boolean[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
Creates a new AlgorithmTimeFitting object.
- AlgorithmTimeFitting(ModelImage, ModelImage, ModelImage, boolean, int, int, boolean, double[], boolean[], double[], double[], boolean, String) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
Creates a new AlgorithmTimeFitting object.
- AlgorithmTimeFitting.FitExponential - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTimeFitting.FitGaussian - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTimeFitting.FitLaplace - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTimeFitting.FitLine - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTimeFitting.FitLorentz - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTimeFitting.FitMultiExponential - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTimeFitting.FitRayleigh - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTimeFitting.fittingTask - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTProcess - Class in gov.nih.mipav.model.algorithms
-
This abstract class defines terms common to both T1 and T2 processing, such as thresholding and
multithreading management methods.
- AlgorithmTProcess() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- AlgorithmTProcess(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- AlgorithmTProcess.CalculateT - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTPSpline - Class in gov.nih.mipav.model.algorithms
-
Thin plate spline Warning: If the supplied (x,y) data set in setupTPSpline2D is nearly collinear, singular matrices
will result and a matrix inversion will fail.
- AlgorithmTPSpline() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
AlgorithmTPSpline - default constructor.
- AlgorithmTPSpline(double[], double[], double[], double[], double[], double[], float, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
AlgorithmTPSpline - constructor for 3D case.
- AlgorithmTPSpline(double[], double[], double[], double[], double[], double[], float, ModelImage, ModelImage, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
AlgorithmTPSpline - constructor for 3D case.
- AlgorithmTPSpline(double[], double[], double[], double[], float, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
AlgorithmTPSpline - constructor for 2D case.
- AlgorithmTPSpline(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
Constructor used when N, xDimA, yDimA, zDimA, x[], y[], z[], and C[][] are read from a file
- AlgorithmTranscode - Class in gov.nih.mipav.model.algorithms
-
Title:
- AlgorithmTranscode(URL, String, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
Creates a new AlgorithmTranscode object.
- AlgorithmTransform - Class in gov.nih.mipav.model.algorithms
-
Transforms Volume by resampling using transformation matrix and the choice of nearest-neighbor, trilinear
interpolation, 3rd order Bspline, 4th order Bspline, cubic Lagrangian, quintic Lagrangian, heptic Lagrangian, or
windowed sinc.
- AlgorithmTransform(ModelImage, TransMatrix, int, float, float, float, int, int, int, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
3D constructor for transformation algorithm.
- AlgorithmTransform(ModelImage, TransMatrix, int, float, float, float, int, int, int, int[], boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Creates a new $class.name$ object.
- AlgorithmTransform(ModelImage, TransMatrix, int, float, float, float, int, int, int, int[], boolean, boolean, boolean, boolean, Vector3f) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Creates a new $class.name$ object.
- AlgorithmTransform(ModelImage, TransMatrix, int, float, float, int, int, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
2D constructor for transformation algorithm.
- AlgorithmTransform(ModelImage, TransMatrix, int, float, float, int, int, int[], boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Creates a new AlgorithmTransform object.
- AlgorithmTransform(ModelImage, TransMatrix, int, float, float, int, int, int[], boolean, boolean, boolean, boolean, Vector3f) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Creates a new AlgorithmTransform object.
- AlgorithmTransformBSpline - Class in gov.nih.mipav.model.algorithms
-
TransformBSpline algorithm This algorithm takes a source image and uses information read in from a .nlt file to
perform a nonlinear B-Spline transformation on the image.
- AlgorithmTransformBSpline(ModelImage, float[], int[], int, int, float[][]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
AlgorithmTransformBSpline - Constructor.
- AlgorithmTransformBSpline(ModelImage, float[], int, int, float[][][]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
AlgorithmTransformBSpline - Constructor.
- AlgorithmTransformVOI - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTransformVOI(ModelImage, TransMatrix) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- AlgorithmTreParams - Interface in gov.nih.mipav.view.dialogs
-
This interface contains convenience enumerations for going between the dialog and algorithm of the TRE framework.
- AlgorithmTreParams.FieldStrength - Enum in gov.nih.mipav.view.dialogs
-
Specifies the magnetic field strength of the scanner used.
- AlgorithmTreParams.InversionType - Enum in gov.nih.mipav.view.dialogs
-
Specifies the inversion method used for the scan.
- AlgorithmTreParams.ScannerType - Enum in gov.nih.mipav.view.dialogs
-
Designates the brand of scanner used for processing.
- AlgorithmTreParams.Threshold - Enum in gov.nih.mipav.view.dialogs
-
A three way boolean operator to designate the thresholding option used.
- AlgorithmTreT1 - Class in gov.nih.mipav.model.algorithms
-
This class is adapted from the ImageJ version originally written by Sean Deoni while working at the
National Institutes of Health.
- AlgorithmTreT1(double, double, double, double, double, double, double[], double[], double[], double[], double[], double, double, double, double[], double[], int[], int[], int[], int, double, int, int, double, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, float, float, String[], String[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- AlgorithmTreT1(ModelImage, ModelImage, double, double, double, double, double, double, double[], double[], double[], double[], double[], double, double, double, double[], double[], int[], int[], int[], int, double, int, int, double, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, boolean, float, float, String[], String[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- AlgorithmTreT1.CalculateT1 - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTreT1.CalculateT1UsingConventionalTreT1Inner - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTreT1.CalculteT1UsingTreT1HIFIInner - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmTreT2 - Class in gov.nih.mipav.model.algorithms
-
This class is adapted from the ImageJ version originally written by Sean Deoni while working at the National
Institutes of Health.
- AlgorithmTreT2(ModelImage, ModelImage, JDialogTreT2, double[], double[], String[], String[], String, String, double[], double[], double[], double[], double[], double[], double[], double[][], double[], double[], double[], double[], double[], double[], double[], double[][], int[], String[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- AlgorithmTreT2(JDialogTreT2, double[], double[], String[], String[], String, String, double[], double[], double[], double[], double[], double[], double[], double[][], double[], double[], double[], double[], double[], double[], double[], double[][], int[], String[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- AlgorithmTrilateralFilter - Class in gov.nih.mipav.model.algorithms.filters
-
This is a port of openCVtrilateralFilter.h and openCVtrilateralFilter.cpp
written by Tobi Vaudrey.
- AlgorithmTrilateralFilter() - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- AlgorithmTrilateralFilter(ModelImage, ModelImage, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- AlgorithmTwoMRIImagesSNR - Class in gov.nih.mipav.model.algorithms
-
This module implements the National Electrical Manufacturers Association (NEMA) standard for SNR estimation in
diagnostic MRI.
- AlgorithmTwoMRIImagesSNR(ModelImage, ModelImage, int, int, int, boolean, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTwoMRIImagesSNR
-
Creates a new AlgorithmTwoMRIImagesSNR object.
- AlgorithmUnionFindComponentLabelling - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmUnionFindComponentLabelling(ModelImage, ModelImage, int, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmUnionFindComponentLabelling
-
- AlgorithmUnionFindWatershed - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmUnionFindWatershed(ModelImage, ModelImage, int, boolean, int, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- AlgorithmUnionFindWatershed.indexValueComparator - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmUnionFindWatershed.indexValueItem - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmUnsharpMask - Class in gov.nih.mipav.model.algorithms.filters
-
Calculates the Unsharp Mask of an image at a scale defined by the user ( unsharp image = original image - weight *
blurred image); weight < 1;
- AlgorithmUnsharpMask(ModelImage, float[], double, boolean, boolean, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
Constructor.
- AlgorithmUnsharpMask(ModelImage, ModelImage, float[], double, boolean, boolean, boolean, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
Constructor.
- AlgorithmVesselEnhancement - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmVesselEnhancement(ModelImage, ModelImage, double[][], double, double, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- AlgorithmVOIExtraction - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmVOIExtraction(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
Creates a new AlgorithmVOIExtraction object.
- AlgorithmVOIExtractionPaint - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- AlgorithmVOIExtractionPaint(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
Constructor for finding the borders of the paint on various slices of an image.
- AlgorithmVOIExtractionPaint(ModelImage, BitSet, int, int, int, short) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
Construct the extractor for paint extraction to a VOI.
- AlgorithmVOIHausdorffDistance - Class in gov.nih.mipav.model.algorithms
-
Algorithm class for finding Hausdorff distance on 2 VOIs
- AlgorithmVOIHausdorffDistance(ModelImage, ViewVOIVector) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOIHausdorffDistance
-
constructor
- AlgorithmVOILogicalOperations - Class in gov.nih.mipav.model.algorithms
-
Algorithm class for performing logical operations on VOIs
- AlgorithmVOILogicalOperations(ModelImage, ViewVOIVector, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
constructor
- AlgorithmVOIProps - Class in gov.nih.mipav.model.algorithms
-
This class calculates a properties of an image defined by a VOI.
- AlgorithmVOIProps(ModelImage, int, JPanelPixelExclusionSelector.RangeType, ViewVOIVector) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
constructor. note that if there are no VOIs to act on, this constructor returns quietly.
- AlgorithmVOIProps(ModelImage, int, ViewVOIVector) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
constructor.
- AlgorithmVOIProps(ModelImage, ViewVOIVector) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
constructor. sets the source image of the algorithm, and presets the algorithm to calculate properties of 3D
images as a volume of interest, rather than by slice.
- AlgorithmVOIProps.Calc34D - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmVOIProps.Calc34D.ContourStats - Class in gov.nih.mipav.model.algorithms
-
Stores the statistics for a single contour, color or grayscale.
- AlgorithmVOIShapeInterpolation - Class in gov.nih.mipav.model.algorithms
-
- AlgorithmVOIShapeInterpolation() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
constructor
- AlgorithmVOIShapeInterpolation(ModelImage, int, VOIContour, int, VOIContour, VOI) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
constructor
- AlgorithmVOISimplexOpt - Class in gov.nih.mipav.model.algorithms
-
Perform Simplex Optimization on a VOI that has been propagated to a slice to find a transformation which will make an
affine "fit" a structure which the VOI fit on the previous slice (used in RFASegTool when propagating liver
segmentation VOIs).
- AlgorithmVOISimplexOpt(ModelImage, float[], int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Set up the algorithm to perform optimizations on an image.
- AlgorithmVOISimplexOpt(ModelImage, VOIContour, float[], int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Set up the algorithm to perform optimizations on an image.
- AlgorithmVOISimplexOpt.CostFunction - Class in gov.nih.mipav.model.algorithms
-
Class for specifying optimization function for the simplex opt algorithm.
- AlgorithmWatershed - Class in gov.nih.mipav.model.algorithms
-
This program applies the watershed algorithm to the image.
- AlgorithmWatershed(ModelImage, ModelImage, ModelImage, float[], Vector<AlgorithmWatershed.Seed>) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
Constructs new watershed algorithm.
- AlgorithmWatershed(ModelImage, ModelImage, ModelImage, float[], Vector<AlgorithmWatershed.Seed>, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
Constructs new watershed algorithm.
- AlgorithmWatershed.Seed - Class in gov.nih.mipav.model.algorithms
-
Simple class to hold seed point and basin (object label) value.
- AlgorithmWaveletFuse - Class in gov.nih.mipav.model.algorithms.filters
-
MIT License
Copyright (c) 2021 Hans Brouwer, Riyo Wanagiri
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
- AlgorithmWaveletFuse() - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- AlgorithmWaveletFuse(ModelImage, ModelImage, ModelImage, int, PyWavelets.WAVELET_NAME[], int[], int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- AlgorithmWaveletThreshold - Class in gov.nih.mipav.model.algorithms.filters
-
In hard thresholding a wavelet coefficient whose magnitude is below the product of threshold and the maximum wavelet
magnitude is zeroed, and a wavelet coefficient whose magnitude is greater than or equal to the product is left
unchanged.
- AlgorithmWaveletThreshold(ModelImage, int, int, int, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
Creates a new AlgorithmWaveletThreshold object.
- AlgorithmWaveletThreshold(ModelImage, ModelImage, int, int, int, float, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
Creates a new AlgorithmWaveletThreshold object.
- AlgorithmWSinc - Class in gov.nih.mipav.model.algorithms
-
Sinc function windowed with Hanning window function used for interpolation This function will create images with
greater maximums and lower minimums than the original image, so if the input image type is BYTE or UBYTE, the output
image type should be a SHORT.
- AlgorithmWSinc() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
AlgorithmWSinc - default constructor.
- algoRotate - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- algoSelection - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- algoSelection - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- algoSepConvolver - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Handle to the separable convolution kernel.
- algoSepConvolverB - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Handle to the separable convolution kernel.
- algoSepConvolverG - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Handle to the separable convolution kernel.
- algoSepConvolverR - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Handle to the separable convolution kernel.
- algoSub - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- algoTal - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- algoTrans - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- algoTrans - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- algoTrans - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
or if the source image is to be replaced.
- algoTrans - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- algoTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- algoTransB - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- algoTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
The algorithm.
- algoVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
handle to algorithm
- algoVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Algorithm for computing VOI statistics
- alias - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- alias - Variable in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- aliasButton - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
Selection buttons
- aliasField - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- aliasField - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- aliasLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- alignAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
DOCUMENT ME!
- alignmentXfrm - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- AlignShapes() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Alight shapes
- AlignShapes(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Normalizes all shapes with respect to position, scale and orientation.
- AlignTo(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Wrapper to align this to ref.
- AlignTo(CAAMShape, double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Aligns this to 'ref' with respect to pose.
- AlignTo(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
- AlignTo(CDVector, double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Linear alignment of this vector to another vector using the L2 norm.
- AlignTransformation(CAAMShape, double[], double[], CAAMPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Returns the transformation that aligns this to 'ref' with respect to
pose.
- alim - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- alim - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- alist - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
The left end points of the subintervals in the partition of the given integration range (lower, upper).
- alist - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
The left end points of the subintervals in the partition of the given integration range (lower, upper).
- all - Variable in class gov.nih.mipav.model.algorithms.libdt.Range
-
- ALL - Static variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Move all the channel transfer functions.
- ALL - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Display all files.
- ALL - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Move all the channel transfer functions.
- all_covariance_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ALL_READERS - Variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegMetadataReader
-
- allActive - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Set to true when all contours of a VOI are active.
- ALLBACKGROUNDS - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- ALLBITS - Static variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- ALLBITS - Static variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- allButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- allclasses - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- allFiles - Variable in class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
- alloc - Variable in class gov.nih.mipav.model.algorithms.KDTree
-
- alloc_barray(libjpeg.jpeg_decompress_struct, int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- alloc_fs_workspace(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- alloc_funny_pointers(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- alloc_resnode() - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- alloc_sarray8(libjpeg.jpeg_decompress_struct, int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- alloc_sarray9to12(libjpeg.jpeg_decompress_struct, int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- allocate_edge_trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- allocate_face_trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- allocate_halfedge_trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- allocate_vertex_trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- allocateArrays() - Method in class gov.nih.mipav.model.algorithms.ODE
-
- allocateArrays() - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- allocateCompressStructures() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- allocateData() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Allocates data based on the data type and dataSize.
- allocateElement() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator.PixelConverter
-
Allocates a new element for the PixelConvertingSpliterator
(will be called once per split)
- allocateMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- allocateMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- allocateMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- allocateMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- allocateMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- allocateMemory(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms.ByteBuffer
-
Method that actually allocates the memory.
- AllocateMemory() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- allocatePredictMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- allocatePredictMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- allocatePredictMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- allocatePredictMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- allocatePredictMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- allocateTemporaryBufferInterleaved(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- allocateTemporaryBufferPlanar(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- AllocateUserFields() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Allocates room for the three user defined fields.
- Allocator<T> - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- Allocator - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- Allocator - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- Allocator() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
- AllocatorState - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- AllocatorState() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.AllocatorState
-
- allowableBlockSize - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- allowChangesMinMax - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
allow changes to the min and max boundaries *
- allowChangesWin - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
allow changes to the window and level boundaries *
- allowDataWindow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
If true, allow data window output
- allowLevel16 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- allowLevel16 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- allowLevel16 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- allowLevel16 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- allowLevel16XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel16XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- allowLevel16XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- allowLevel16XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel16XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- allowLevel16XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- allowLevel16Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel16Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- allowLevel16Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- allowLevel16Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel16Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- allowLevel16Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- allowLevel2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
- allowLevel2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- allowLevel2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
- allowLevel2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- allowLevel2XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel2XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- allowLevel2XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
- allowLevel2XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel2XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Flags are true if weighted image is not present or if weighted image subsampling occurred, false if weighted
image subsampling did not occur.
- allowLevel2XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- allowLevel2Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel2Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- allowLevel2Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- allowLevel2Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel2Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- allowLevel2Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- allowLevel4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- allowLevel4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- allowLevel4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- allowLevel4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- allowLevel4XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel4XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- allowLevel4XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- allowLevel4XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel4XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- allowLevel4XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- allowLevel4Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel4Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- allowLevel4Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- allowLevel4Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel4Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- allowLevel4Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- allowLevel8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- allowLevel8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- allowLevel8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- allowLevel8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- allowLevel8XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel8XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- allowLevel8XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- allowLevel8XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel8XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- allowLevel8XY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- allowLevel8Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel8Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- allowLevel8Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- allowLevel8Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- allowLevel8Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- allowLevel8Z - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- allowPaddedWarping - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- allPresent - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
true if no slices are missing.
- allRGBButton - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
R, G, B channel control buttons.
- allRGBButton - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- allSeamCellIDs - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- allSlices - Variable in class gov.nih.mipav.model.structures.VOIProtractor
-
Set to true, displays this protractor object for any z-value.
- allSlicesRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
DOCUMENT ME!
- allSlicesTouched() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
- allTimes - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- ALLTREEA - Static variable in class gov.nih.mipav.view.JPanelTreeController
-
- ALLTREEB - Static variable in class gov.nih.mipav.view.JPanelTreeController
-
- AllTripletsWithinBounds() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- allVOIBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- allVOIs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- allVolumesButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
A radio button to select calculation for all volumes
- allVolumesButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- allx - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< offset to center of patch.
- allx - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< offset to center of patch.
- allx - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- ally - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< all x-locations on step grid.
- ally - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< all x-locations on step grid.
- ally - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- allz - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< all y-locations on step grid.
- allz - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- alnrel(double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- aLog - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- aloneMenu - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Stores all stand-alone menus that have been created by the user.
- alpha - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModelBessel
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLuminanceAdaptation
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
Original code from dispersionMap.m, multiscaleBlending.m, remapFun.m, robustNormalization.m,
runsef.m, and sef.m located at https://github.com/chlsl/simulated-exposure-fusion-ipol was
written by Charles Hessel and is being ported to Java with his permission.
- alpha - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
The structure sensitive parameter
- alpha - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexMix
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.decision_function
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- alpha - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- alpha - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- alpha - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Bias learning rate.
- alpha - Variable in class gov.nih.mipav.model.file.FileImageXML.LUValue
-
DOCUMENT ME!
- alpha - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- alpha - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- alpha - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
alpha channel
- alpha - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- alpha - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- alpha - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Structure sensitive parameter
- alpha - Variable in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
- alpha - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- alpha - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Alpha smoothing factor.
- alpha - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- alpha - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware.sWarpEntry
-
- alpha - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- alpha - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm.decision_function
-
- ALPHA - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- ALPHA - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- ALPHA - Static variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ALPHA - Static variable in class gov.nih.mipav.model.algorithms.NMSimplex
-
- ALPHA - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The alpha channel transfer function.
- alpha_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- alpha_init - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- alpha_sq_norm_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Corrector
-
- alpha_status - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- alpha_status - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- alphaArray - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
arrays of 12 values used for Talairach conversions.
- alphaBlend - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- alphaBlend - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- alphaBlend - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
AlphaBlending values for compositing two images.
- alphaBlend - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
AlphaBlending values for compositing two images.
- alphaBlend - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Indicates the amount of blending when two images are loaded in the image frame.
- alphaBlend - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
alphaBlending values for compositing two images.
- alphaBlend - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
alphaBlending values for compositing two images.
- alphaBlend - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Value used to control the display when compositing two images.
- alphaBlend - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- alphaBlend - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Indicates the amount of blending when two images are loaded in the image frame.
- alphaBright - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIAGCWD
-
- alphaBright - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- alphaDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIAGCWD
-
- alphaDim - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- alphaLine - Variable in class gov.nih.mipav.model.structures.ModelLUT
-
Fucntion that attenuates image values.
- alphaMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- alphaMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- alphaMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- alphaMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- alphaMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- alphaMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- alphaMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- alphaMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- alphaPrime - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
AlphaBlending values for compositing two images.
- alphaPrime - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- alphaPrime - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Value used to control the display when compositing two images.
- alphaSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- alphaSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Alpha blend slider.
- alphaSlider - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- alphaSlider - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- alphaSlider - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- alphaText - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Text field for getting alpha smoothing factor.
- alphup - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- alphup - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- alsoAcpc - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- alsoOrig - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- altBox - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
DOCUMENT ME!
- altCommand - Variable in enum gov.nih.mipav.view.Argument.InstanceArgument
-
Alternate commands for a given action
- altCommand - Variable in enum gov.nih.mipav.view.Argument.StaticArgument
-
Alternate commands for a given action
- AlternateLinearSolverAndPreconditionerForSchurTypeLinearSolver(CeresSolver.SolverOptions) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionPreprocessor
-
- alternateRowCount - Variable in class gov.nih.mipav.view.AlternatingTableCellRenderer
-
DOCUMENT ME!
- AlternatingTableCellRenderer - Class in gov.nih.mipav.view
-
Title: AlternatingTableCellRenderer
- AlternatingTableCellRenderer() - Constructor for class gov.nih.mipav.view.AlternatingTableCellRenderer
-
Creates a new AlternatingTableCellRenderer object.
- altPressed - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- altTimeCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- altTimeDicomTag - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- altTimeTag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- altTimeTagField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- altTimeTagLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- always_split_variable_names - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- AmAl() - Constructor for class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.AmAl
-
- aMax - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- ambient - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
The colors associated with the light, typically all white.
- ambient - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareMaterial
-
DOCUMENT ME!
- AMBIENT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
- ambientColor - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
DOCUMENT ME!
- ambientColor - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- ambientColor - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- ambientColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Define attenuation lighting colors.
- ambientColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Attenuation lighting setup.
- ambientColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Ambient, emissive, sepcualar, diffuse color is used for the attenuation lighting.
- ambientColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Attenuation lighting setup.
- ambientColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Attenuation lighting colors.
- ambientRadio - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Radio button for different light type.
- ambientRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Radio button for different light type.
- Ami - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.AmAl
-
- Amj - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.AmAl
-
- amp - Variable in class gov.nih.mipav.model.algorithms.FitGaussian
-
Amplitude parameter
- amp - Variable in class gov.nih.mipav.model.algorithms.FitLaplace
-
Amplitude parameter
- amp - Variable in class gov.nih.mipav.model.algorithms.FitLorentz
-
Amplitude parameter
- amp - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.Background
-
- amp - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
-
- amp_max - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.Background
-
- amp_min - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.Background
-
- ampFactor - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- amplificationFactor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
- amplificationFactor - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
- amplificationFactor - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
An amplification factor greater than 1.0 causes this filter to act like a highpass filter.
- amplificationIndex - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- amplitude - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- AN - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- analuc(int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- analuc(int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- Analysis(double[], double[], String, String, String, int, String, double, boolean, boolean, String, String, String, String) - Constructor for class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- analysisGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- analyticalJacobian - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- analyticalJacobian - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- analyticContinuationUsed - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
If false, function used If true, analytic continuation of function used.
- analyticJacobian - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- Analyze(CAAMShape, ModelSimpleImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
Warpper to analyze the image.
- Analyze(CAAMShape, ModelSimpleImage, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
Analyze image.
- Analyze(CAAMShape, ModelSimpleImage, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
This method samples the image intensities under a user-supplied shape
into a texture vector.
- Analyze(CAAMShape, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
Warpper to analyze the image.
- Analyze(CAAMShape, CDVector, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
Analyze image
- Analyze(CAAMShape, CDVector, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
This method samples the image intensities under a user-supplied shape
into a texture vector.
- ANALYZE - gov.nih.mipav.model.algorithms.SIFT3D.im_format
-
- ANALYZE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Analyze format (Mayo). extension: .img, .hdr
- ANALYZE_AUX - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- ANALYZE_AXIS_ORIENTATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- ANALYZE_CAL - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- ANALYZE_DATATYPE - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- ANALYZE_DBNAME - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- ANALYZE_DESCRIPTION - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- analyze_dst_img() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ANALYZE_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Multiple files of type analyze.
- ANALYZE_ORIENTATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- ANALYZE_ORIGINATOR - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- analyze_src_img() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ANALYZE_VOX - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- analyzeFile - Variable in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Radio button to indicate that an analyze img file should be written out.
- AnalyzeTest(CAAMShape, CAAMShape, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Benchmarks the software warping method against the OpenGL.
- ANAT_BMAP_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ANAT_BMAP_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ANAT_BUCK_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ANAT_BUCK_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ANAT_CT_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ANAT_CT_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ANAT_DIFF_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ANAT_DIFF_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ANAT_EPI_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ANAT_EPI_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ANAT_FSE_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ANAT_FSE_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ANAT_MRA_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ANAT_MRA_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ANAT_MRAN_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ANAT_MRAN_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ANAT_OMRI_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ANAT_OMRI_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ANAT_PET_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ANAT_PET_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ANAT_SPECT_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ANAT_SPECT_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ANAT_SPGR_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
funcType for anatType == true.
- ANAT_SPGR_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
funcType for anatType == true.
- anatomicalRef - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
84 - 3 bytes - Anatomical Reference.
- anatomyParentnameString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- anatType - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- anchor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- anchor(int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Add an anchor point to the livewire contour.
- anchor(Point) - Method in class gov.nih.mipav.view.Rubberband
-
Anchors the rubberband to this point.
- anchor(Point) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Calls seed on this point to set up costGraph array; then anchors point.
- anchorBSpline(int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Add an anchor point to the BSpline line contour.
- anchorPane - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- anchorPolyline(int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Add an anchor point to the poly line contour.
- AnchorPosition() - Constructor for enum gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.AnchorPosition
-
- anchorPt - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- anchorPt - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- and - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
radio button
- AND - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- andButton - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- andTable - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- angCorrGT - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIGradTableCorrectionAfterTrans
-
- angCorrGT - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- angioFlag - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- angle - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
- angle - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- angle - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeatureOrientation
-
- angle - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedDisc
-
< radius or scale
- angle - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.polygon
-
- angle - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeyPoint
-
- angle(double[], boolean[], int[], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- angle(float[], float[], float[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculates the angle between two lines.
- angle(LSCM.Point) - Method in class gov.nih.mipav.model.algorithms.LSCM.Point
-
- angle(Point3, Point3, Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- Angle(double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- ANGLE - gov.nih.mipav.model.file.FileInfoBase.UnitType
-
- ANGLE7(double[], int, boolean) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- AngleAxisNearZeroRotatePointGivesSameAnswerAsRotationMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- AngleAxisRotatePoint(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- AngleAxisRotatePointGivesSameAnswerAsRotationMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- AngleAxisToQuaternion(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- AngleAxisToRotationMatrix(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- angleIncrement - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- angleIncrement - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- ANGLES(int, double[][], double[], int) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- anglesRequired - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- anglesRequired - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- ANGSTROMS - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement angstroms.
- ANGSTROMS - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement angstroms.
- ANGSTROMS_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - angstroms.
- angulationCorrection(double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- animate() - Method in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
Invoke the animation frame.
- Animate() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCheckerBoard.Animate
-
- animateAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- animateButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- animateCheckerboard() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard.Animate
-
- animateCurve - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- animateLatticeModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- animateLattices - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- animateSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- animateStep - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- animateStop - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- animateThread - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- animateTime - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- animating - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- animationFrame - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- animationThread - Variable in class gov.nih.mipav.view.LineMeter
-
monitor animation happens in its own thread.
- aniSampleRate - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- anisotropyBrowseButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
buttons *
- anisotropyBuffer - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
anisotropy file data buffer *
- anisotropyFilename - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
names of eigenvector and anisotropy files*
- anisotropyFilename - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
names of eigenvector and anisotropy files*
- anisotropyImage - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
anisotropy src image *
- anisotropyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
anisotropy src image *
- anisotropyLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- anisotropyMax - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
anisotropy max *
- anisotropyMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
anisotropy max *
- anisotropyMax - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
anisotropy max *
- anisotropyMaxPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- anisotropyMaxPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- anisotropyMaxSlider - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
various sliders in dialog *
- anisotropyMaxSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
various sliders in dialog *
- anisotropyMaxTextField - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
textfields *
- anisotropyMaxTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
textfields *
- anisotropyMin - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
anisotropy min *
- anisotropyMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
anisotropy min *
- anisotropyMin - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
anisotropy min *
- anisotropyMinPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- anisotropyMinPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- anisotropyMinSlider - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
various sliders in dialog *
- anisotropyMinSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
various sliders in dialog *
- anisotropyMinTextField - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
textfields *
- anisotropyMinTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
textfields *
- anisotropyPath - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
textfields *
- anlerr(int, int, int, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- annimationSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- annotatePtsCounter - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
number of annotate points along the specified path.
- annotatePtsList - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
annotate path planning points list
- annotateVideos() - Method in class gov.nih.mipav.model.algorithms.libdt
-
- Annotation - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- ANNOTATION - Static variable in class gov.nih.mipav.model.structures.VOI
-
Indicates that the VOI is of type ANNOTATION for adding text annotations to an image.
- ANNOTATION - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in annotation VOI mode
- annotationAnimationPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- annotationChanged() - Method in interface gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.AnnotationListener
-
AnnotationListeners are updated whenever annotations change in the LatticeModel.
- annotationChanged() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- annotationChanged(VOI, VOI) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- annotationDiameters - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- annotationGroupList - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- annotationGroupTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- annotationGroupTableModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- annotationHeight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- annotationLabelsDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- annotationList - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- annotationList - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- AnnotationListener - Interface in gov.nih.mipav.view.renderer.WildMagic.WormUntwisting
-
- annotationListeners - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- annotationListPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- annotationNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- annotationNextButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- annotationPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- annotationPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- annotationPositions - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- annotationPrefix - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- annotationPrefix() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- annotationPrevButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- annotations - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel.AnnotationSplineControlPts
-
- annotationSpheres - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- annotationSpheresColors - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- annotationSpheresDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- annotationSpheresIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- AnnotationSplineControlPts() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel.AnnotationSplineControlPts
-
- annotationsStraight - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- annotationTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- annotationTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- annotationTableModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- annotationTableModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- annotationTexture - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- annotationVector - Variable in class gov.nih.mipav.model.file.FileImageXML
-
DOCUMENT ME!
- annotationVector - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- annotationVOI - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- annotationVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- annotationVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- annotationVOIsUpdate(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- annotationWidth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- ANON_TAB - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- anonDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- anonymizationComplete(JDialogAnonymizeDirectory.AnonymizeDicomDirectories) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
A psuedo-event-handler.
- anonymize() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- anonymize() - Method in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
- anonymize(boolean[]) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Removes requested identifying info.
- anonymize(boolean[], boolean) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
removes any and all personal information in the info that a doctor, patient, researcher may want to have deleted
from the image, such as patient name or patient ID number--from this slice given by this fileInfoDicom.
- anonymize(boolean[], boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Anonymize the image by altering the sensitive data of each slice to something generic.
- anonymize(boolean[], boolean, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
New version of anonymize that allows you to replace the original tag value with a blank
string or zero depending on the data type.
- anonymizeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
buttons for toolbar *
- AnonymizeDicomDirectories(File[], File, String, int, int, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
sets up the anonymizer thread.
- anonymizeFace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Find face, blur face, commit, or cancel based on which buttons in the dialog are pressed.
- anonymizeFace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Executes the de-facing algorithm.
- anonymizeImage(File, File, int[], int) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
actually does the grunt-work of reading the designaated image-file, anonymizing it, and writing the file to
the deisgnated destination directory.
- anonymizePublicSequenceTags(FileDicomKey[], Vector<FileDicomSQItem>, boolean) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Method to anonymize public tags not in the DICOM Supplement 55 that may appear in
sequence tags.
- anonymizePublicSequenceTags(FileDicomKey[], Vector<FileDicomSQItem>, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method to anonymize public tags not in the DICOM Supplement 55 that may appear in
sequence tags.
- anonymizePublicTags(FileDicomKey[], boolean) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Method to anonymize public tags that do not appear in the DICOM Supplement 55.
- anonymizePublicTags(FileDicomKey[], boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method to anonymize public tags that do not appear in the DICOM Supplement 55.
- anonymizer - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Access to the running thread which is anonymising directories.
- anonymizeSequenceTags(boolean[], Vector<FileDicomSQItem>, boolean) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Method to anonymize the tags found in the DICOM supplement 55 that may appear in
sequence tags.
- anonymizeSequenceTags(boolean[], Vector<FileDicomSQItem>, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method to anonymize the tags found in the DICOM supplement 55 that may appear in
sequence tags.
- anonymizeTagIDs - Static variable in class gov.nih.mipav.model.file.FileInfoDicom
-
these are the DICOM tag ID numbers corresponding to the tags which are anonymized.
- anonymousName - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- aNormal - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- aNormal - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- ANOTHER_PT - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
AC-PC: Another midsagittal reference point.
- anotherCall() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- anotherCall() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- anotherMidSagPt - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- anotherPt - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- anotherPt - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- anotherPtDicom - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ansR - Variable in class gov.nih.mipav.model.algorithms.Statistics
-
- answer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Final answer after registration.
- answer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Final answer after registration.
- answer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Final answer after registration.
- answer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Final answer after registration.
- answer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Final answer after registration.
- answer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Final answer after registration.
- answer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Final answer after registration.
- answer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Final answer after registration.
- answer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Final answer after registration.
- answer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Final answer after registration.
- ANTERIOR_PT - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Talairach: Anterior reference point.
- anteriorPt - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
markers used for +ACPC to +tlrc transformation.
- anteriorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- anteriorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- anteriorPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- anteriorPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- ANTI_ALIASED_SAMPLING_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- ANTI_ALIASED_SAMPLING_MODE - Static variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- ANTI_SYMMETRIC - gov.nih.mipav.model.algorithms.filters.PyWavelets.SYMMETRY
-
- antialiasing - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- antigradient2Algo - Variable in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
DOCUMENT ME!
- antigradient2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- antigradient3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- AntipodalCornerIndex(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- ANY_DIR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Indicates boundary can move in or out.
- Aopt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
- ap - Variable in class gov.nih.mipav.model.file.FileZVI
-
- apCenter - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- apCenter - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- aperture - Variable in class gov.nih.mipav.model.file.FileSVS
-
- aperture - Variable in class gov.nih.mipav.model.file.FileTiff
-
- apertureToFStop(double) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.PhotographicConversions
-
Converts an aperture value to its corresponding F-stop number.
- apInvert - Variable in class gov.nih.mipav.model.file.FileNRRD
-
True for RAS and LAS, false for LPS.
- APLUSBI - gov.nih.mipav.view.Preferences.ComplexDisplay
-
Displays complex images in a + bi format
- apotomeAutoShutterUsed - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeAveragingCount - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeCamFilterHarmonics - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeCamGenericCameraName - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeCamNormalize - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeCamPhaseAngles - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeFilterName - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeFilterStrength - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeFullPhaseShift - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeGratingPeriod - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeGridName - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeGridPosition0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeGridPosition1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeGridPosition2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeGridPosition3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeGridPositionChannel0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeGridPositionChannel1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeGridPositionChannel2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeGridPositionChannel3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- apotomeProcessingMode - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- app0(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app0(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP0 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APP0 JPEG segment identifier.
- APP0 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP0 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- APP0_DATA_LEN - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- app1(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app1(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP1 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APP1 JPEG segment identifier.
- APP1 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP1 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app10(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app10(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP10 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP10 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app11(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app11(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP11 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP11 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app12(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app12(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP12 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP12 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app13(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app13(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP13 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP13 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app14(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app14(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP14 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP14 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- APP14_DATA_LEN - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- app15(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app15(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP15 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP15 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app2(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app2(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP2 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APP2 JPEG segment identifier.
- APP2 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP2 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app3(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app3(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP3 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APP3 JPEG segment identifier.
- APP3 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP3 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app4(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app4(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP4 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APP4 JPEG segment identifier.
- APP4 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP4 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app5(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app5(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP5 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APP5 JPEG segment identifier.
- APP5 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP5 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app6(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app6(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP6 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APP6 JPEG segment identifier.
- APP6 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP6 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app7(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app7(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP7 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APP7 JPEG segment identifier.
- APP7 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP7 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app8(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app8(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP8 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APP8 JPEG segment identifier.
- APP8 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP8 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- app9(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- app9(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- APP9 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APP9 JPEG segment identifier.
- APP9 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- APP9 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- APPA - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APPA (App10) JPEG segment identifier.
- APPB - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APPB (App11) JPEG segment identifier.
- appBody - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- APPC - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APPC (App12) JPEG segment identifier.
- appConeHead - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- appContext - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Application context PDU type.
- APPD - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APPD (App13) JPEG segment identifier.
- AppData() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmASM.AppData
-
- APPE - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APPE (App14) JPEG segment identifier.
- append(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Append an element to the end of the storage array.
- append(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Append an element to the end of the storage array.
- append(int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Append an element to the end of the storage array.
- append(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Append an element to the end of the storage array.
- append(String) - Method in class gov.nih.mipav.view.dialogs.JDialogText
-
Appends the text area with the message.
- append(String) - Method in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
Appends the text area with the message.
- append(String, int) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Appends the text area with the message.
- append(String, String) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Method to append text to an attached JTextArea (not DEBUG or DATA areas).
- APPEND - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- APPEND - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
File handler output mode - append.
- appendAgePart(StringBuilder, int, String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- AppendArrayToString(int, double[], String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- appendButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Button for appending selected rows to end of JTable
- AppendCols(CeresSolver.TripletSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- appendDefaultData(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
appends a non editable row to the end of the primary table.
- AppendDiagonal(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- AppendE(LODMesh.Vertices, LODMesh.Vertices) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- AppendI(int, IDList, IDList, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- appendImageDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoXML
-
Appends a string to the image description.
- appendInvestigatorData(String, String, int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
appends an editable row to the end of the investigators table.
- appendKey(String) - Method in class gov.nih.mipav.model.structures.CustomHashtable
-
Starts with a key that already exists in the hashtable and appends integers to its toString().
- appendLengthTag(FileDicomTag, HashMap<Integer, FileInfoDicom.LengthStorageUnit>) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
- appendMessage(String) - Method in class gov.nih.mipav.view.JPanelProgressBar
-
DOCUMENT ME!
- appendMessage(String) - Method in interface gov.nih.mipav.view.ProgressBarInterface
-
DOCUMENT ME!
- appendMessage(String) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Concatenates a message to the message area of the progress bar.
- AppendN(LODMesh.Triangle, LODMesh.Neighbor) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- AppendNE(LODMesh.Edge, LODMesh.NEList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- AppendNE(LODMesh.Edge, LODMesh.NEList, LODMesh.NEList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- appendParameter(String, String, String, String, String, String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
appends an editable row with the given parameter data to the proper set display table.
- appendPrimaryData(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
appends a row to the end of the editable table.
- appendPrimaryData(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
appends a non editable row to the end of the primary table.
- appendPrimaryData(String, String, int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
appends a row to the end of the primary info table. assigns this name/value pair to be editable and adds the
fileinfo to listen for this name.
- appendPrimaryData(String, String, int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
appends a row to the end of the primary info table. assigns this name/value pair to be editable and adds the
fileinfo to listen for this name.
- AppendRows(CeresSolver.BlockSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- AppendRows(CeresSolver.CompressedRowSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- AppendRows(CeresSolver.TripletSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- appendScanData(String, String, int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
appends an editable row to the end of the scan information table.
- appendSecondaryData(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
appends a row to the end of the Secondary Info table.
- appendSecondaryData(String, String, int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
appends a row to the end of the editable table.
- appendSendMessage(String) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Appends the text area with the message.
- appendSubjectData(String, String, int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
appends an editable row to the end of the subject information table.
- AppendT(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- appendTagData(String, String, String, int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
appends an editable row to the end of the tag table.
- appendToFile(BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- appendToFileInternal(BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- appendToFileInternal(BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- appendToFileInternal(BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- appendToFileInternal(BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- appendToFileInternal(BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- appendUserDefinedData(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
DOCUMENT ME!
- AppendV(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- AppendVF(int, IDList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- APPF - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
APPF (App15) JPEG segment identifier.
- appHead - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- AppleMakernoteDescriptor(MetadataExtractor.AppleMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDescriptor
-
- AppleMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDirectory
-
- AppleRunTimeMakernoteDescriptor(MetadataExtractor.AppleRunTimeMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDescriptor
-
- AppleRunTimeMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDirectory
-
- AppleRunTimeReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeReader
-
- AppletFrame - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- AppletFrame(String, Applet, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.AppletFrame
-
- applicationName - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- appliedCorrections - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- APPLY - Static variable in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- APPLY - Static variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- apply_Affine_xyz(SIFT3D.Affine, double, double, double, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- apply_loss_function - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateOptions
-
- apply_loss_function - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceOptions
-
- apply_Sep_FIR_filter(SIFT3D.Image, SIFT3D.Image, SIFT3D.Sep_FIR_filter, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- applyACPCButton - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- applyBackpropagation(Double[]) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- applyButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Apply button is used to apply the setting of the dialog.
- applyButton - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- applyButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Applies bounding box/shading/name display and other UI changes to ModelImage
- applyButton - Variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Apply button is used to apply the setting of the dialog.
- applyClipFilter(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- applyClosePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
The panels that make up this Dialog
- applyColorChange() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Update the color changes to the Before sphere and the original surface.
- applyColorChange() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Update the color changes to the Before sphere and the original surface.
- applyComponentOrientation(ComponentOrientation) - Method in class gov.nih.mipav.view.JScrollMenu
-
- applyDefField(ModelImage, ModelImage, int, Matrix, ModelImage, int[], float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Creates a deformation field from the input matrix and deformation field and applies it to the input image.
- applyDeformationField(int, TransMatrix, TransMatrix[], ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Applies the input B0 to T2 matrix, list of within-volume matrices and input deformation field to the 4D volume series.
- ApplyForAcceptance(CAAMInitializeStegmann.CAAMInitEntry) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitCandidates
-
Apply for acceptance of a new initialization hypothesis.
- applyGenericName() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
converts the name and sequence JTextFields into native types.
- applyK(double[][], double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- applyKColor(double[][][], double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- applyKernel() - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
Apply small kernel to smooth out data.
- applyKernel() - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
Apply small Gaussian kernel to smooth out data.
- ApplyOrdering(HashMap<double[], CeresSolver.ParameterBlock>, CeresSolver.OrderedGroups<double[]>, CeresSolver.Program, String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- applyppftfilter(double[][][][], double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- applyRotation(double[][], double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- applySculpt() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
applySculpt: abstract function, implementation depends on whether the instance is VolumeTextureSculptor or
VolumeSculptor.
- applySculpt() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.TextureSculptor
-
applySculpt: called by ViewJFrameVolumeView when the user presses the "Apply Sculpt" button.
- applySculpt() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
applySculpt: called by ViewJFrameVolumeView when the user presses the "Apply Sculpt" button.
- applySculpt(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Apply the sculpt region to the volume.
- applySculpt(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Apply the sculpt region to the volume.
- applySculpt(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Apply the sculpt region to the volume data.
- applySculptRegion() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Cull the sculpt region through the 3D volume.
- applySculptRegion(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Cull the sculpt region through the 3D volume.
- applyTalairachButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- applyTalairachButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- applyToAllBox - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
false = apply algorithm only to VOI regions apply same threshold to all.
- applyToAllBox - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
false = apply algorithm only to VOI regions apply same threshold to all.
- applyToAllSlices() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
accessor to see the value of the selected value of the applyToAllSlicesCheckBox.
- applyToAllSlices() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
accessor to see the value of the selected value of the applyToAllSlicesCheckBox.
- applyToAllSlices() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
accessor to see the value of the selected value of the applyToAllSlicesCheckBox.
- applyToAllSlicesCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
DOCUMENT ME!
- applyToAllSlicesCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
DOCUMENT ME!
- applyToAllSlicesCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
DOCUMENT ME!
- applyToBlueBox - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
enable blue threshold.
- applyToGreenBox - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
enable green threshold.
- applyToRedBox - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
enable red threshold.
- applyWindowLevel - Variable in class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Flag to indicate to apply window level or not.
- applyWorldToModelTransform(Matrix3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Apply a 3x3 transformation to the software world light position and direction which are in world coordinates so
that they are converted to model coordinates.
- applyWorldToModelTransform(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Apply a 3x3 transformation to the software world light position and direction which are in world coordinates so
that they are converted to model coordinates.
- APPN_DATA_LEN - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- approveSelection() - Method in class gov.nih.mipav.view.ViewFileChooserSubsample
-
DOCUMENT ME!
- approx1(double) - Method in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- approx1(double) - Method in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- approx2(double) - Method in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- approx2(double) - Method in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- approx3(double) - Method in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- approx3(double) - Method in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- ApproxExample(String, ModelSimpleImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Doing model approximation of an (unseen) example.
- approximate_eigenvalue_scale_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- appTip - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
DOCUMENT ME!
- appTip - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
DOCUMENT ME!
- appTip - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Thermal probe appearance.
- Aprod(int, int, int, int[], int[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- Aprod(int, int, int, int[], int[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- aps - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
set to give 2 digits to the right of the decimal.
- aps - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
set to give 2 digits to the right of the decimal.
- apser(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- APSI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- AQCOF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- aradd(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Accepts two arrays of numbers, a and b, and returns the sum of the array c.
- arbiMouseRotateBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Mouse Rotate behavior of the arbitrary clipping plane.
- arbiTG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Tranform group for arbitrary clipping plane.
- arbiTrans3d - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Transform3D group for clipSliceA frame box and ModelClip arbitrary clipping plane.
- arbitrary_SG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping plane switch group.
- ArbitratyEquation - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- ArbRotate() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Scene-graph node for rotating the arbitrary clipping plane.
- ARCH_ALPHA - gov.nih.mipav.view.Preferences.SystemArchitecture
-
Indicates an alpha system architecture.
- ARCH_AMD64 - gov.nih.mipav.view.Preferences.SystemArchitecture
-
Indicates an amd64 system architecture.
- ARCH_ARM - gov.nih.mipav.view.Preferences.SystemArchitecture
-
Indicates an arm system architecture.
- ARCH_IA64 - gov.nih.mipav.view.Preferences.SystemArchitecture
-
Indicates an ia64 (itanium) system architecture.
- ARCH_MIPS - gov.nih.mipav.view.Preferences.SystemArchitecture
-
Indicates a mips system architecture.
- ARCH_PA_RISC - gov.nih.mipav.view.Preferences.SystemArchitecture
-
Indicates a PA RISC system architecture.
- ARCH_PPC - gov.nih.mipav.view.Preferences.SystemArchitecture
-
Indicates a 32-bit power pc system architecture.
- ARCH_PPC64 - gov.nih.mipav.view.Preferences.SystemArchitecture
-
Indicates a 64-bit power pc system architecture.
- ARCH_SPARC - gov.nih.mipav.view.Preferences.SystemArchitecture
-
Indicates a sparc system architecture.
- ARCH_UNKNOWN - gov.nih.mipav.view.Preferences.SystemArchitecture
-
Indicates an unknown system architecture.
- ARCH_X86 - gov.nih.mipav.view.Preferences.SystemArchitecture
-
Indicates an x86 system architecture.
- architecture - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- ArcTan2(double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- ArctanLoss(double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ArctanLoss
-
- ARCTY - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- area - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- area - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserExtrReg
-
- area - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserReg
-
- area - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.PolygonShapeInfo
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ShapeFactor
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.PolygonShapeInfo
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ShapeFactor
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.PolygonShapeInfo
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ShapeFactor
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.PolygonShapeInfo
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ShapeFactor
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.PolygonShapeInfo
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ShapeFactor
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.PolygonShapeInfo
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ShapeFactor
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.PolygonShapeInfo
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ShapeFactor
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ShapeFactor
-
- area - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perShapeCost
-
- area() - Method in class gov.nih.mipav.model.structures.VOI
-
Finds the area of the entire VOI of the VOIContour type only.
- area() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- area() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Calculate the surface mesh area.
- area() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- area(float[], float[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Shape area computation
- area(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- area(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- Area() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Returns the total area of all triangles in the mesh.
- Area() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
- Area() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Returns the area.
- Area() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangle
-
- Area(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Returns the total area of the shape (with holes excluded).
- areaDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- areaFraction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.IntTorquato95ModelMean
-
- areaFraction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.IntTorquato95ModelMean2
-
- areal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- areal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- areaLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The area label.
- areaLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The area label.
- areaText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Displays the area of triangle.
- areaText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Displays the area of triangle.
- areaTwice(float, float, float, float, float, float) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Calculates twice the area (cross product of two vectors) of a triangle
given three points.
- areaTwice(float, float, float, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Calculates twice the area (cross product of two vectors) of a triangle given three points.
- areaTwice(float, float, float, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Determines which side of the line a point lies on, used for determining
if a point is inside or outside a closed loop.
- areMultipleAllowed() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- areSiblingsSelected(TreePath) - Method in class gov.nih.mipav.view.CheckTreeManager.CheckTreeSelectionModel
-
- arg - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- arg - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- arg - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- arg - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- argb(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- argb(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Packs 8bit ARGB color components into a single 32bit integer value.
- ARGB - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type ARGB where each channel (A = alpha, R = red, G = green, B =
blue) is represented by a unsigned byte value. (4 * UBYTE(8 bits) = 4 bytes)
- ARGB - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type ARGB where each channel (A = alpha, R = red, G = green, B =
blue) is represented by a unsigned byte value. (4 * UBYTE(8 bits) = 4 bytes)
- argb_bounded(int, int, int, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Packs 8bit ARGB color components into a single 32bit integer value.
- argb_bounded(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Packs 8bit ARGB color components into a single 32bit integer value.
- argb_fast(int, int, int, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Packs 8bit ARGB color components into a single 32bit integer value.
- argb_fast(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Packs 8bit ARGB color components into a single 32bit integer value.
- ARGB_FLOAT - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type ARGB where each channel (A = alpha, R = red, G = green, B =
blue) is represented by a float value. (4 * FLOAT(32 bits) = 16 bytes)
- ARGB_FLOAT - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type ARGB where each channel (A = alpha, R = red, G = green, B =
blue) is represented by a float value. (4 * FLOAT(32 bits) = 16 bytes)
- ARGB_FLOAT_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type color (ARGB - floats).
- argb_fromNormalized(double, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value.
- argb_fromNormalized(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value.
- ARGB_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type color (ARGB - unsigned bytes).
- ARGB_USHORT - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type ARGB where each channel (A = alpha, R = red, G = green, B =
blue) is represented by a unsigned short value. (4 * USHORT(16 bits) = 8 bytes)
- ARGB_USHORT - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type ARGB where each channel (A = alpha, R = red, G = green, B =
blue) is represented by a unsigned short value. (4 * USHORT(16 bits) = 8 bytes)
- ARGB_USHORT_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type color (ARGB - unsigned shorts).
- ARGIN1(double, double, int, double[], double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ARGUM(double, double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- Argument - Interface in gov.nih.mipav.view
-
- Argument.InstanceArgument - Enum in gov.nih.mipav.view
-
- Argument.StaticArgument - Enum in gov.nih.mipav.view
-
- arial13 - Variable in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.MyCellRenderer
-
- arial13 - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 13 point, plain, arial font.
- arial13B - Variable in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.MyCellRenderer
-
- arial13B - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 13 point, bold, arial font.
- arith_ac_K - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- arith_code - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- arith_dc_L - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- arith_dc_U - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- arith_decode(libjpeg.jpeg_decompress_struct, int[]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- arith_entropy_decoder() - Constructor for class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- arity_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BadTestTerm
-
- arity_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GoodTestTerm
-
- arity_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TestTerm
-
- ARMIJO - gov.nih.mipav.model.algorithms.CeresSolver.LineSearchType
-
- ArmijoLineSearch(CeresSolver.LineSearchOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ArmijoLineSearch
-
- armult(double[], double, double[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Accepts array a and scalar b, and returns the product array c.
- arrangeCTZ(int, int, int) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Arrange the table in CTZ order.
- arrangeCZT(int, int, int) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Arrange the table in CZT order.
- arrangeTCZ(int, int, int) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Arrange the table in TCZ order.
- arrangeTZC(int, int, int) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Arrange the table in TZC order.
- arrangeZCT(int, int, int) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Arrange the table in ZCT order.
- arrangeZTC(int, int, int) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Arrange the table in ZTC order.
- array - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayItem
-
- array - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayItem
-
- array - Variable in class gov.nih.mipav.model.algorithms.CVODES.UserData
-
- ARRAY - Static variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- array1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- array1 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayItem
-
- array2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayItem
-
- arrayCopy(double[], int, float[], int, int) - Static method in class gov.nih.mipav.util.ArrayUtil
-
Copy a double array to a float array.
- arrayCopy(float[], int, double[], int, int) - Static method in class gov.nih.mipav.util.ArrayUtil
-
Copy a float array to a double array
- ArrayIndexingOrderValues - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
- ArrayInfo() - Constructor for class gov.nih.mipav.model.algorithms.filters.PyWavelets.ArrayInfo
-
- arrayLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- arrayLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Size of buffers (realData and imagData).
- arrayLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Size of buffers (realData and imagData).
- arrayLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- arrayLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- arrayLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- ArrayListTransferable(ArrayList<String>) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler.ArrayListTransferable
-
Creates a new ArrayListTransferable object.
- ArrayListTransferHandler() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler
-
Creates a new ArrayListTransferHandler object.
- arrayLocationArray - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- arrayName - Variable in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- arrayPos - Variable in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- arraySizeArray - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- ArraySorter - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- ArraySorter() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.ArraySorter
-
- arrayTransMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIGradTableCorrectionAfterTrans
-
- arrayTransMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- ArrayUtil - Class in gov.nih.mipav.util
-
A class containing Array-related helper methods.
- ArrayUtil() - Constructor for class gov.nih.mipav.util.ArrayUtil
-
- ArrayUtilsFindInvalidIndex() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ArrayUtilsIsArrayValid() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Arrow(boolean, int, int) - Constructor for class gov.nih.mipav.model.structures.TableSorter.Arrow
-
Creates a new Arrow object.
- Arrows - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- arrythmiaRejectionRatio - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- arrythmiaRejectionRatio - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- arsub(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Accepts two arrays and subtracts each element in the second array b from the element in the first array a and
returns the solution c
- ARTERIAL_SEG - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Value which indicates a voxel that is part of the arterial vasculature tree.
- ARTERIAL_SEG - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Value which indicates a voxel that is part of the arterial vasculature tree.
- artist - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- artist - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- ARTIST - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- ARTIST - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- Arw - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
Sony camera raw.
- arydiv(double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Returns the complex number resulting from the division of four arrays, representing two complex numbers.
- AS - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- ASCENDING - Static variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- ASCII - gov.nih.mipav.model.file.FileSVS.Type
-
7 bit ASCII
- ASCII - gov.nih.mipav.model.file.FileTiff.Type
-
7 bit ASCII
- ASCII - Static variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- ASCII - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- ASCII - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- ASCII - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Charsets
-
- asciiFormat - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- asciiText - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- asciiTextArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- asComponent() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- asComponent() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
Implicit cast of this canvas to a class extending Component.
- aset - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
1D integer array of length param containing a code which indicates whether an unknown is active or not aset[i] =
0 when a[i] is free = +1 when a[i] == bl[i] = -1 when a[i] == bu[i].
- aset - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
1D integer array of length param containing a code which indicates whether an unknown is active or not aset[i] =
0 when a[i] is free = +1 when a[i] == bl[i] = -1 when a[i] == bu[i].
- Asf - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- ASF2PTS(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Converts AAM-API shape files (.asf) to the ISBE .pts format.
- asin() - Method in class gov.nih.mipav.util.DoubleDouble
-
For all -1 < x < 1, arcsin(x) = x + x**3/(2*3) + (1 * 3 * x**5)/(2 * 4 * 5) + (1 * 3 * 5 * x**7)/(2 * 4 * 6 * 7) + ...
- asinh(double) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- aSlice - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Which arbitray clipping slice is currently displayed.
- asm - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate angular second moment Sum over i,j of Probability(i,j) * Probability(i,j).
- asm - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate angular second moment Sum over i,j of Probability(i,j) * Probability(i,j).
- asm - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- asm - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- ASM_2D_example() - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- ASM_align_data_inverse2D(double[][], AlgorithmASM.TData) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- ASM_align_data2D(double[][], AlgorithmASM.TData) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- ASM_ApplyModel2D(ModelImage, AlgorithmASM.TData, AlgorithmASM.SData, AlgorithmASM.AppData[], AlgorithmASM.Options) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- ASM_GetContourNormals2D(double[][], int[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- ASM_getProfileAndDerivatives2D(ModelImage, double[][], double[][], int, double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- ASM_MakeAppearanceModel2D(AlgorithmASM.ASMData[], AlgorithmASM.Options, AlgorithmASM.AppData[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- ASM_MakeShapeModel2D(AlgorithmASM.ASMData[], AlgorithmASM.SData) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- asmCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- asmCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- ASMData() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmASM.ASMData
-
- ASONJ7(double, double, double[], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- asOpenGL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
hardware OpenGL synthesize, currently disabled.
- aspectRatio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ShapeFactor
-
- aspectRatio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ShapeFactor
-
- aspectRatio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ShapeFactor
-
- aspectRatio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ShapeFactor
-
- aspectRatio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ShapeFactor
-
- aspectRatio - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ShapeFactor
-
- aspectRatio - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ShapeFactor
-
- aspectRatio - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ShapeFactor
-
- AspectRatio() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangle
-
- ASPENCE - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- ASQUC7(double[], double[], double[], double[], int, int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- assemble_system_dirichlet(double, double, int, double[][], double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.ConjugateGradientTest
-
- assemble_system_mixed(double, double, int, double[][], double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.ConjugateGradientTest
-
- assert_almost_equal(double[][], double[][], int, String, String) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- AssertLossFunctionIsValid(CeresSolver.LossFunction, double, String) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- assess(double[], int[], int, double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- assign(byte) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- assign(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Assignment operator (double).
- assign(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Assignment operator (double).
- assign(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Assignment operator.
- assign(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- assign(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- assign(double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Assignment operator.
- assign(double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Assignment operator
- assign(CAAMLowerBounds) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
Assign operator.
- assign(CAAMMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Assignment operator.
- assign(CAAMModel) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Assignment operator.
- assign(CAAMOptState) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptState
-
Assignment operator
- assign(CAAMPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPoint
-
Assignment operator
- assign(CAAMPointInfo) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Assignment operator.
- assign(CAAMReferenceFrame) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Assignment operator.
- assign(CAAMReferenceFrame.sScanLinePart) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame.sScanLinePart
-
- assign(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Assignment operator (CAAMShape).
- assign(CAAMShapeCollection) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Assignment operator
- assign(CAAMTriangle) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Assignment operator
- assign(CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Assignment operator (CDMatrix).
- assign(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Assignment operator.
- assign(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Assignment operator (CVisDMatrix).
- assign(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- assign(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Assignment operator (CAAMShape).
- assign(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Assignment operator.
- assign(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- assign(CVisRect) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- assign(CVisRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- assign(CVisShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- assign(POINT) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.POINT
-
- assign(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- assign(RECT) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- assign(SIZE) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.SIZE
-
- assign(Box3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- assign(Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- assign(Link) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- assign(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- assign(JDialogProstateSegmentationRegBSpline3D.PolarPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.PolarPoint
-
- assign(JDialogProstateSegmentationRegBSpline3DFast.PolarPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.PolarPoint
-
- assign_eig_ori(SIFT3D.Image, SIFT3D.Cvec, double, SIFT3D.Mat_rm, double[]) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- assign_orientation_thresh(SIFT3D.Image, SIFT3D.Cvec, double, double, SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- assign_orientations(SIFT3D.SIFT3DC, SIFT3D.Keypoint_store) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- assignCalendar(Calendar, Calendar) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Assign source Calendar to target calendar.
- assignDirichletImageBorder() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Assign values to the 1-pixel-thick image border.
- assignDirichletImageBorder() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Assign values to the 1-voxel-thick image border.
- assignDirichletMaskBorder() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Assign values to the 1-pixel-thick borders that surround unmasked
regions.
- assignDirichletMaskBorder() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Assign values to the 1-voxel-thick borders that surround unmasked
regions.
- assigned - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FrontEdge
-
- assignNeumannImageBorder() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Assign values to the 1-pixel-thick image border.
- assignNeumannImageBorder() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Assign values to the 1-voxel-thick image border.
- assignNeumannMaskBorder() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Assign values to the 1-pixel-thick borders that surround unmasked
regions.
- assignNeumannMaskBorder() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Assign values to the 1-voxel-thick borders that surround unmasked
regions.
- assignTextons(int[][], double[][][][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- associateAC - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Associate accept object.
- associateRJ - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Associate reject object.
- associateRQ - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Associate request object.
- asSoftware - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
software synthesize
- asString() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Returns a String representation of this pixel at its current position.
- assume_full_rank_ete_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- assumed_blur - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- assumed_blur - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- assumed_blurText - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- ASYMMETRIC - gov.nih.mipav.model.algorithms.filters.PyWavelets.SYMMETRY
-
- asymmetryIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- asymmetryIndexDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- aSyncSubItem - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_UserInformation
-
DOCUMENT ME!
- AT - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- AtA - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- atan() - Method in class gov.nih.mipav.util.DoubleDouble
-
For -1 < x < 1, arctan(x) = x - x**3/3 + x**5/5 - x**7/7 + ...
- atan2(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
The atan of this(the imaginary y component) divided by the real component x
Value will range from -PI to PI.
- AtAP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- aText - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- aText - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
- aText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
DOCUMENT ME!
- AtF - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- AtFP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- ATLAS_AC_TO_ANT - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Dimensions used for Talairach coordinates - anterior.
- ATLAS_AC_TO_INF - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Dimensions used for Talairach coordinates - inferior.
- ATLAS_AC_TO_LAT - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ATLAS_AC_TO_LAT - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- ATLAS_AC_TO_LAT - Static variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- ATLAS_AC_TO_LAT - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Dimensions used for Talairach coordinates - lateral.
- ATLAS_AC_TO_PC - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
AC to PC dimension.
- ATLAS_AC_TO_SUP - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Dimensions used for Talairach coordinates - superior.
- ATLAS_AC_TO_TOP - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ATLAS_AC_TO_TOP - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- ATLAS_AC_TO_TOP - Static variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- ATLAS_BBOX_ANT - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Dimensions used for Talairach view clipping box - anterior.
- ATLAS_BBOX_INF - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Dimensions used for Talairach view clipping box - inferior.
- ATLAS_BBOX_INF_NEW - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Dimensions used for Talairach view clipping box - inferior new. 3/06/96: extra 10 mm for cerebellum .
- ATLAS_BBOX_LAT - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Dimensions used for Talairach view clipping box - lateral.
- ATLAS_BBOX_POS - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Dimensions used for Talairach view clipping box - posterior.
- ATLAS_BBOX_SUP - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Dimensions used for Talairach view clipping box - superior.
- ATLAS_BOT_TO_AC - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ATLAS_BOT_TO_AC - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- ATLAS_BOT_TO_AC - Static variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- ATLAS_COLLECTION - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- ATLAS_FRONT_TO_AC - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ATLAS_FRONT_TO_AC - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- ATLAS_FRONT_TO_AC - Static variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- ATLAS_PC_TO_BACK - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ATLAS_PC_TO_BACK - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- ATLAS_PC_TO_BACK - Static variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- ATLAS_PC_TO_POS - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Dimensions used for Talairach coordinates - posterior.
- atlasBasedImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
atlas image:
- atlasImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
- atLastPos - Variable in class gov.nih.mipav.view.ScrollCorrector
-
DOCUMENT ME!
- atof(String) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- atof(String) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- atof(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- atof(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- atof(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- atof(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_predict
-
- atof(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- atof(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- atoi(String) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- atoi(String) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- atoi(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- atoi(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- atoi(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- atoi(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_predict
-
- atoi(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- atoi(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- attach(Socket) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Attaches this DICOMSocket to a JAVA socket.
- attachChildTagTables(FileDicomTagTable[]) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Sets the list of tag tables which point to this as their reference tag table.
- attachedImages - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Text are for displaying the attached images
- attachFileInfo(FileInfoMGH, ModelImage) - Method in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- attachmentName - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Name of the image being attached.
- attachSurface(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Attach the generated surface to an image.
- ATTDelaunay(double[], double[], int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- attemptLoadFromPackage(String, String) - Static method in class gov.nih.mipav.model.scripting.ScriptableActionLoader
-
Trys to load a action's class, searching in a specific package.
- attenuation - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo.LightSourceRef
-
- attenuationAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
The attenuation algorithm.
- attenuationBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The attenuated VOI mask buffer.
- attenuationCorrection - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- ATTR_DIM_ALIGNMENT - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- ATTR_DIM_DIRECTION_COSINES - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- ATTR_DIM_LENGTH - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- ATTR_DIM_SPACETYPE - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- ATTR_DIM_START - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- ATTR_DIM_STEP - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- ATTR_DIM_UNITS - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- ATTR_IMAGE_DIM_ORDER - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- ATTR_IMAGE_VALID_RANGE - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- ATTR_INFO_SLICE_THICKNESS - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- ATTR_INFO_STUDY_MODALITY - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- attribStr - Static variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
attribute string (for image attributes).
- atv(int, int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- ATVMFButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- AUC - gov.nih.mipav.model.algorithms.StochasticForests.SplitRule
-
- AUC_IGNORE_TIES - gov.nih.mipav.model.algorithms.StochasticForests.SplitRule
-
- aupkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- aupkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- author - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- author - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- AUTO_POINT - Static variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The mode where paint grow seed points are automatically determined and chosen by the user.
- autoCapture() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Calculate the rotation matrix when the auto camera caputuring the images.
- autoCapture() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Override the parent autoCapture method to capture MIP image volume.
- autoCapture() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Overrides the parent autoCapture method.
- autoCapture() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Overrides the parent autoCapture method.
- autoCapture() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Override the parent autoCapture method to capture MIP image volume.
- autoCapture() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererRayCast
-
Override the parent autoCapture method to capture MIP image volume.
- autoCapture() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererShearWarp
-
Override the parent autoCapture method to capture MIP image volume.
- autoCenterFrequency - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- autoCenterFrequency - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- autoCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- autoConfigVOIsNumbers() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
After user manually draw the three VOIs on each axial, sagittal, coronal
image, the drawn VOIs slices number is auto configured to appear in the
dialog GUI interface.
- autoConfigVOIsNumbers() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
After user manually draw the three VOIs on each axial, sagittal, coronal
image, the drawn VOIs slices number is auto configured to appear in the
dialog GUI interface.
- autoContrast - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- AutoCorrelation(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the autocorrelation of the vector with a given lag (default
lag is 1).
- AutoDiffCostFunction(CostFunctor, int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.AutoDiffCostFunction
-
- AutoDiffCostFunction(CostFunctor, int, int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.AutoDiffCostFunction
-
- autofillButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- autofillRequiredFields() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Autofill the dicom required tags to loosely fullfill the dicom standard.
- autoLabel - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Automatically generate the label, unless it is set explicitly:
- autoLatticeGenerationOutput - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- autoManualPrescan - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- autoManualPrescan - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- automatic - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
- automatic - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
- AUTOMATIC_ERROR_REPORTING - gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder.BugType
-
- automaticCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
- autoRun() - Method in interface gov.nih.mipav.view.renderer.flythroughview.FlyThroughRenderInterface
-
Causes the FlyPathBehavior to fly down the current path from start to finish and back again.
- autoRun() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
One round trip path walk through.
- autoRun() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- autoRun() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
One round trip path walk through.
- autoRun() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- autoRun() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- autoRunButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Auto Run Button.
- autosaveMask() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
- autoSequence - Variable in class gov.nih.mipav.model.file.FileNRRD
-
True if data file: [] encountered
If true, autosequence using integer format specification varied according to , , and .
- autoShrinkDomain - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- autoShrinkDomainCheckbox - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- autoShrinkRange - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- autoShrinkRangeCheckbox - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- autoStartCBREngine - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- autoThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
If true determines the threshold by histogram analysis.
- autoThreshold - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
If true, ignore srcThreshold input and calculate best value
- autoThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
If true, ignore srcThreshold input and calculate best value
- autoThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- autoThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- autoThresholdCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- autoThresholdCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- autoXmtFreq - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
282 Auto Center Frequency (0.1 Hz).
- autoXmtGain - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
286 Auto Transmit Gain (0.1 dB).
- aux_file - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- aux_file - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
auxiliary file
- aux_file - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
DOCUMENT ME!
- aux_file - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- auxdata - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- auxTechnique - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo.LightSourceRef
-
- av(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- av2(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- av3(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- av4(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- av5(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- av6(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- available() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialByteArrayReader
-
- available() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Returns an estimate of the number of bytes that can be read (or skipped
over) from this
MetadataExtractor.SequentialReader without blocking by the next
invocation of a method for this input stream.
- available() - Method in class gov.nih.mipav.model.file.MetadataExtractor.StreamReader
-
- availableBits() - Method in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- availableBits() - Method in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- availableImageList - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- availableImagesToConcat - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
available images to concat...the ones that are open in mipav
- availableImagesToConcat - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
available images to concat...the ones that are open in mipav
- availableImagesToConcat - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
available images to concat...the ones that are open in mipav
- aVal - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- Aval - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
< Regularization method for S.
- aveH - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- average - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- average - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Radio button selected if inserted slices are a weighted average of surrounding slices.
- average - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- average - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- AVERAGE - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- AVERAGE - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- AVERAGE - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- AVERAGE - Static variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
average
- AVERAGE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- AVERAGE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- AVERAGE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Average slice type - the inserted slice is set equal to the mean of the 2 surrounding slices.
- AVERAGE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Average slice type - the inserted slice is set equal to the mean of the 2 surrounding slices.
- AVERAGE_DECON - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Average deconvolution is based on the arithmetical mean of the two estimates from A and B separately
- AVERAGE_SLICE - Static variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- AVERAGE_VOLUME - Static variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Average volume type - the inserted volume is set equal to the mean of the 2 surrounding volumes.
- averageB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- averagedImageCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- averageDistanceMaps - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
distance maps
- averageG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- averageGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- averageImageRButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- averageIntensities - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
DOCUMENT ME!
- averageIntensities - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- averageMode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- averageMode - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- averagePt - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Stores the average of the contour of a VOI.
- averageR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- averageSAR - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- averageSAR - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- averagesNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- averagesNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- AverageVariance(AlgorithmGaussianMixtureModelEM.ClassSig, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- averagingNumber - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSliceAveraging
-
DOCUMENT ME!
- averagingNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- AVGERAGE_WITH_STDEV - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
- avgInten - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- avgInten - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- avgIntenB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- avgIntenB - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- avgIntenG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- avgIntenG - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- avgIntenR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- avgIntenR - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- avgIntensity - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- avgIntensity - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
average intensities in VOI
- avgIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ShapeFactor
-
- avgIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ShapeFactor
-
- avgIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ShapeFactor
-
- avgIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ShapeFactor
-
- avgIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ShapeFactor
-
- avgIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ShapeFactor
-
- avgIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ShapeFactor
-
- avgIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ShapeFactor
-
- avgIntensityB - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
average intensities in VOI
- avgIntensityG - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
average intensities in VOI
- avgIntensityR - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
average intensities in VOI
- avgJ0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- avgPix(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
This method calculates the average pixel value based on the four neighbors (N, S, E, W).
- avgPix(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
This method calculates the average pixel value based on the four neighbors (N, S, E, W).
- avgVolIndex - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
Philips puts in one volume as the average of all the DWIs.
- Avi - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- AVI - Static variable in class gov.nih.mipav.model.file.FileUtility
-
AVI file type.
- AVI - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Filter avi files (*.avi).
- AVI_COMPRESSION - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the avi compression parameter.
- AVI_MODE - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
AVI is recording.
- AVICompression - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- AVIF_HASINDEX - Variable in class gov.nih.mipav.model.file.FileAvi
-
- AVIF_ISINTERLEAVED - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- AVIF_MUSTUSEINDEX - Variable in class gov.nih.mipav.model.file.FileAvi
-
globals needed for read - set in readHeader, used in readImage.
- aviField - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
DOCUMENT ME!
- aviFile - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- aviFile - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- aviPlayButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
AVI Recorder Play button.
- aviRecordButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
AVI Recorder record button.
- aviStopButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
AVI Recorder Stop button.
- avsimp(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- avsvd(int, int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- awtCondition - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Awt wake up condition .
- awtCondition - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Awt wake up condition .
- AWTImageSourceStream(int, int, int, Image[]) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
Creates a new AWTImageSourceStream object.
- axes - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- axes - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- axes - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
- axes - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- axes - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- axesRatio - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- axesRatio - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- axesRatioLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- axesRatioText - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
axis orientation.
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
axis orientation.
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
axis orientation.
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
axis orientation.
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
axis orientation.
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
axis orientation.
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
axis orientation.
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
axis oritentation.
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
axis orietation.
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Axial image type
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Axial image type
- Axial - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- AXIAL - gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- AXIAL - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Axial orientation.
- AXIAL_A - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- AXIAL_AB - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- AXIAL_B - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- axial_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- axial_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- axial_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- axial_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- axial_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- axial_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- axial_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- axial_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- axial_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- axial_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- axial_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- AXIAL_INDEX - Static variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- AXIAL_INDEX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- AXIAL_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
along the major axis (+).
- AXIAL_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
(3D only).
- AXIAL_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
(3D only).
- axialList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- axialList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- axialList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- axialList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- axialList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- axialList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- axialMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- axialMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- axialMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- axialMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- axialMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- axialOrientation - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Indicates that image orientation is unknown type or not.
- AxialVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Axial VOI instance
- axioCamAnalogGainEnable - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamBlackReference - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamColorModel - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamDelayTime - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamEnhanceColor - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamMicroScanning - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamNIRMode - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamResolution - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamSaturation - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamSelector - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamShutterControl - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamShutterSignal - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- axioCamType - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- AXION - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- AXION1(int[], int[], double[], int, int, int[], int[], int[], double[], double, boolean[], double[], int[], int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- axis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipsoidFit
-
DOCUMENT ME!
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- axis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- AXIS_DEC - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
DOCUMENT ME!
- AXIS_INC - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Render selected planes in order of increasing/decreasing coordinate.
- AXIS_ORIENTATIONS - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeOrientations
-
The label to use for the parameter indicating the new axis orientations
- AXIS_UNDEFINED - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Used to represent undefined AXIS_*.
- AXIS_X - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Render volume YZ planes in order of increasing/decreasing X.
- AXIS_Y - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Render volume ZX planes in order of increasing/decreasing Y.
- AXIS_Z - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Render volume XY planes in order of increasing/decreasing Z.
- axisAligned() - Method in class gov.nih.mipav.view.PatientSlice
-
Determines if a slice is axis-aligned, based on the m_kFourCorners[] four corners of the slice in 3D Model space.
- axisAngle - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Value attribute for the roation axis.
- axisAngle - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Save the current.
- axisCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- axisDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- axisDirA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- axisDirB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- axisFlip - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
- axisFlip - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- axisLabels - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Labels for the axes:.
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
axis region
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
axis region
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
axis region
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
axis region
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
axis region
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
axis region
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
axis region
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
axis panel.
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
axis region.
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
axis region
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- axisList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- axisMaxs - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Maximum axis value.
- axisMins - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Minimum axis value.
- axisOrder - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
- axisOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- axisOrient - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- axisOrientation - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
axis orientation used to support image ordering and display for medical images.
- axisOrientation - Static variable in class gov.nih.mipav.model.file.FileInfoMincHDF
-
The axis orientation static types
- axisOrientation - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- axisOrientation - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
R2L, L2R, A2P, P2A, I2S, and S2I orientations of x, y, and z axes.
- axisOrientation - Variable in class gov.nih.mipav.model.file.FileNRRD
-
For each axis R2L, L2R, A2P, P2A, I2S, or S2I
- axisOrientation - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- axisOrientation - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
- AxisOrientation(int, String) - Constructor for enum gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
- axisOrientation2 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
When both qform_code > 0 and sform_code > 0, the axis orientation information corresponding to sform_code > 0
is placed in axisOrientation2
- axisOrientationStr - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Array of axis orientation strings.
- axisPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- axisX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Value attribute for the roation axis.
- axisX - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Save the current.
- axisY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Value attribute for the roation axis.
- axisY - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Save the current.
- axisZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Value attribute for the roation axis.
- axisZ - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Save the current.
- az - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Svec
-
- AZETA - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- azetac - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- AZETAC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- azimuth - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- azimuthArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
B
- b - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBarrelDistortion
-
DOCUMENT ME!
- b - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
generated with randomly scrambled blocks of pixels having a linear correlation coefficient less than that of the
actual image.
- b - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- b - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
-
- b - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.tuple2i
-
- b - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- b - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearLeastSquaresProblem
-
- b - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- b - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Input parameter
- b - Variable in class gov.nih.mipav.model.algorithms.ConjugateGradient
-
- b - Variable in class gov.nih.mipav.model.algorithms.CubicEquation
-
- b - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
-
- b - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- b - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- b - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
- b - Variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
Input parameter
- b - Variable in class gov.nih.mipav.model.algorithms.NelderMead.param_t
-
- b - Variable in class gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
- b - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- b - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- b - Variable in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- b - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Edge
-
- b - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- b - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- b - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_VertAux
-
- b - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- b() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- b(int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- b(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- b(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- B - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- B() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- b_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ArctanLoss
-
- b_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CauchyLoss
-
- b_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.HuberLoss
-
- b_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- b_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NormalPrior
-
- b_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SoftLOneLoss
-
- b_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TolerantLoss
-
- b_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- b_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- b_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.LinearCostFunction2
-
- B_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- b_asDouble() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- b_asDouble() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Returns the blue value of this pixel at its current position.
- b_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- b_normalized(int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- b_normalized(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- b_s_info - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- b_s_info - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- b_s_open - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- b_s_open - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- B_SCALE - Variable in class gov.nih.mipav.model.file.libjpeg
-
- B_Y_OFF - Variable in class gov.nih.mipav.model.file.libjpeg
-
- b0CheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- B0extraction(ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
Extracts the reference sub-volume from the input 4D image.
- B0MatrixFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- b0MatrixFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
File name for the B0 to T2 transformation matrix (needed to populate the next panel in the DTIPipeline)
- b0ResultStack - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- b0ResultWindow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- b0toStructMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- b0toStructMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
The transformation matrix describing the transformation from registering B0 to T2 image.
- B0toStructTransPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- b1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- b1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- b1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- b1 - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Integer variable used to read/write in data so that they don't need to be allocated with each read/write.
- b1 - Variable in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- b1 - Variable in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- B1 - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- b1CheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- B1COF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- B1Combo - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- b1Field - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- b1ImageIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- b1ImageIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- b1ImageIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- b1ImageName - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- b1ResultData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- b1ResultStack - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- b1ResultWindow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- b2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- b2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- b2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- b2 - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Integer variable used to read/write in data so that they don't need to be allocated with each read/write.
- b2CheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- b3 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- b3 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- b3 - Variable in class gov.nih.mipav.model.file.FileDicom
-
- b3 - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Integer variable used to read/write in data so that they don't need to be allocated with each read/write.
- b3CheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- b4 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- b4 - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Integer variable used to read/write in data so that they don't need to be allocated with each read/write.
- b4CheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- b5 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- b5 - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Integer variable used to read/write in data so that they don't need to be allocated with each read/write.
- b5CheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- b6 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- b6 - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Integer variable used to read/write in data so that they don't need to be allocated with each read/write.
- b6CheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- b7 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- b7 - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Integer variable used to read/write in data so that they don't need to be allocated with each read/write.
- b8 - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Integer variable used to read/write in data so that they don't need to be allocated with each read/write.
- back - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- back - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- back - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.IDList
-
- back - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Edge
-
- back - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Neighbor
-
- back - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.NEList
-
- back - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- back - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Vertices
-
- back(IDList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- back(LODMesh.Edge) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- back(LODMesh.Neighbor) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- back(LODMesh.NEList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- back(LODMesh.Triangle) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- back(LODMesh.Vertices) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- BACK - Static variable in class gov.nih.mipav.model.structures.VOI
-
Static Variables for VOI and VOI Contour selection.
- back_transform(double[]) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- backBottomLeft - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- backBottomLeftIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- backBottomRight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- backBottomRightIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- backFace - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- BackfaceCull - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- backForthButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- backForthButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- background - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- background - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
The background node for the canvas.
- background - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.BoundingBoxEffect
-
- Background(double[][], double) - Constructor for class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.Background
-
- BACKGROUND - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- background1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
The minimum values that are considered as data values.
- background1 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- background2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- background2 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- backgroundB - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- backgroundButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- backgroundButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- backgroundButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- backgroundButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- backgroundButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- backgroundButton - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- backgroundColor - Variable in class gov.nih.mipav.model.structures.VOIText
-
The color used to draw behind the main text (so that the text will stand out)
- backgroundColor - Static variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
The default background color of JPanels (look and feel dependent).
- backgroundColor - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- backgroundColor - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The default background color of JPanels (look and feel dependent).
- BackgroundColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- backgroundColorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
button to bring up the background color chooser.
- backgroundDim - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- backgroundDistanceMap(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Euclidian distance map of the background.
- backgroundDistanceMap(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Generates a Euclidian distance map of the background.
- backgroundIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- backgroundIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- backgroundIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
DOCUMENT ME!
- backgroundIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
The index of a rerquired noise background VOI.
- backgroundIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- backgroundIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- backgroundIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- backgroundIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- backgroundIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- backgroundIndex2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- backgroundLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- backgroundPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- backgroundPresent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- backgroundsDim - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- backgroundVariance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
DOCUMENT ME!
- backing_store_info() - Constructor for class gov.nih.mipav.model.file.libjpeg.backing_store_info
-
- backInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- backInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- backInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- BackProject(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Back projects a set of PCA model parameters into the original space.
- Backpropagation - Class in gov.nih.mipav.model.algorithms
-
MIT License
Copyright (c) 2016 Jason Wu
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
- Backpropagation() - Constructor for class gov.nih.mipav.model.algorithms.Backpropagation
-
- Backpropagation.Connection - Class in gov.nih.mipav.model.algorithms
-
- Backpropagation.MainFrame - Class in gov.nih.mipav.model.algorithms
-
- Backpropagation.MainFrame.GPanel - Class in gov.nih.mipav.model.algorithms
-
- Backpropagation.NeuralNetwork - Class in gov.nih.mipav.model.algorithms
-
- Backpropagation.Neuron - Class in gov.nih.mipav.model.algorithms
-
- backSpaceButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- BackSubstitute(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- BackSubstitute(CeresSolver.BlockSparseMatrix, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- BackSubstitute(CeresSolver.BlockSparseMatrix, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminatorBase
-
- backTopLeft - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- backTopLeftIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- backTopRight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- backTopRightIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- backupColors() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Stores the per-vertex colors when the material is set -- used to
restore per-vertex color from the AdvancedMaterials dialog.
- backupData(ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Backup ModelImage data.
- backupImage(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Called by the TextureSculptor or VolumeSculptor objects.
- backupImage(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Called by the TextureSculptor or VolumeSculptor objects.
- backupImage(ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Called by the TextureSculptor or VolumeSculptor objects.
- backupMosaic() - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
backupMosaic -- Backs up the reference & tile polygon shapes, borders, ModelImages, and TransformGroups before
the registration is called, so that registration can be undone by the user:
- backupPaintBitmap() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Backs up the paintBitmap into the paintBitmapBU variable.
- backupSculptImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Backup the sculpt image.
- backupSecondGaussianRoutine() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- backupZDim - Variable in class gov.nih.mipav.model.file.FileZVI
-
- BACKWARD - Static variable in class gov.nih.mipav.model.structures.VOI
-
Static Variables for VOI and VOI Contour selection.
- bad_block - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TestTerm
-
- BAD_FAX_LINES - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- BAD_FAX_LINES - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- BAD_TEST_TERM_EXAMPLE - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- bad_variable - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TestTerm
-
- badBGLengths() - Static method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- badBlockHeader() - Static method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- badc1_dlatb4 - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
- badc1_zlatb4 - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- badc2_dlatb4 - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
- badc2_zlatb4 - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- badFaxLines - Variable in class gov.nih.mipav.model.file.FileSVS
-
- badFaxLines - Variable in class gov.nih.mipav.model.file.FileTiff
-
- BadJacobianCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BadJacobianCostFunction
-
- BadLocalParameterization() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BadLocalParameterization
-
- BadResidualCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BadResidualCostFunction
-
- BadTestTerm(int, int[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.BadTestTerm
-
- bAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
DOCUMENT ME!
- BallPivoting - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- BallPivoting(TriMesh, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- BallPivotingPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- BallPivotingPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- BAND_DQ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- BAND_USER - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- bandButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- bandno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_band_t
-
- bandPass - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- bandPass - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- bandPass - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- bandPass - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- bandPass - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- BANDPASS - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- BANDPASS - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- BANDPASS - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- BANDPASS - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- BANDPASS - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- BANDPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- BANDPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- BANDPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- BANDPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- BANDPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- bands - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_resolution_t
-
- BANDS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.AAMdef
-
define the number of bands used in the AAM model. 1 for single intensity
channel of MRI prostate grayscale image. 3 for the RGB channels.
- bandSpacing - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- bandSpacingCounter - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- bandStop - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- bandStop - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- bandStop - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- bandStop - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- bandStop - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- BANDSTOP - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- BANDSTOP - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- BANDSTOP - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- BANDSTOP - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- BANDSTOP - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- BANDSTOP - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- BANDSTOP - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- BANDSTOP - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- BANDSTOP - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- BANDSTOP - Static variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- bandtypeField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- bandwidth_frequency - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.ContinuousWavelet
-
- bar - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
JMenuBar for loading/saving defaults
- BARD - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- BARD - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- BARD - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- BARD - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- BardFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BardFunction
-
- baricenter - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- barMarker - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- barMarker - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- BarMeter - Class in gov.nih.mipav.view
-
BarMeter presents a vertical, block-style meter to present numerical information as a fraction of a number of
divisions (eg, progress or resource consumption).
- BarMeter() - Constructor for class gov.nih.mipav.view.BarMeter
-
Constructs a barmeter with a background color of black.
- barPanel - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
Panel containing all the progress bars as well as relevent
text labels
- bary_eps - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- BarycentricGradientPaint(double, double, double, double, double, double, Color, Color, Color) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- BarycentricGradientPaint(float[], float[], Color, Color, Color) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- BarycentricGradientPaint(float, float, float, float, float, float, Color, Color, Color) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- BarycentricGradientPaint(Point2D, Point2D, Point2D, Color, Color, Color) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- BarycentricGradientPaintContext(Point2D.Float, Point2D.Float, Point2D.Float, Color, Color, Color, AffineTransform, boolean) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- base - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.ContinuousWavelet
-
- base - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteWavelet
-
- base - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- base - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- base - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- base_dither_matrix - Variable in class gov.nih.mipav.model.file.libjpeg
-
- baseAfterNumber - Variable in class gov.nih.mipav.model.file.FileNRRD
-
In autosequencing number between a capital D and the last period used in generating filenames.
- baseBeforeNumber - Variable in class gov.nih.mipav.model.file.FileNRRD
-
In autosequencing number before percentage sign and period used in generating start of
autosequenced filename.
- baseBlockSize - Static variable in interface gov.nih.mipav.model.file.BZip2Constants
-
- baseBuffer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- baseFunction - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- baseFunctions - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- baseImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- baseImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- baseImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
Image for Y-axis of Histogram
- baseImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
DOCUMENT ME!
- baseImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- baseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
DOCUMENT ME!
- baseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
Register match image to base image.
- baseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Base image - register match image to base image.
- baseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Base image - register match image to base image.
- baseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- baseKernels - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- baseName - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- baseNameforReconstructedSlices - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- baseNumber - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Used if autosequencing.
- baseNumIter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
Limits the number of iterations of Powell's algorithm when registering the original image against the flipped
image.
- baseNumIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Advanced optimization settings maxIter in the call to ELSUNC will be an integer multiple of baseNumIter.
- baseNumIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Advanced optimization settings maxIter in the call to Powell's will be an integer multiple of baseNumIter.
- baseNumIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Limits number of iterations in ELSUNC, LEVENBERG_MARQUARDT, or NL2SOL optimization.
- baseNumIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
these numbers hard coded for constructors that don't include them.
- baseNumIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Limits number of iterations in elsunc optimization. maxIter in the call to elsunc will be an integer multiple
of baseNumIter
- baseNumIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- baseNumIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Limits number of iterations in Powell optimization. maxIter in the call to Powell's will be an integer multiple
of baseNumIter
- baseNumIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
these numbers hard coded for constructors that don't include them.
- baseNumIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Limits number of iterations in Powell optimization. maxIter in the call to Powell's will be an integer multiple
of baseNumIter
- baseNumIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- baseScale - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
< index of the first octave.
- baseScale - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
-
< Index of the last octave subdivision
- baseVOIGradMagSum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
The sum of the gradient magnitude along the polygon.
- baseVOIGradMagSum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- BaseWavelet() - Constructor for class gov.nih.mipav.model.algorithms.filters.PyWavelets.BaseWavelet
-
- BasicGrid - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
BasicGrid
Basic Class abstracting a gridded structure in a 3d space;
Usueful for having coherent float to integer conversion in a unique place:
Some Notes:
- bbox is the real occupation of the box in the space;
- siz is the number of cells for each side
OBJTYPE: Type of the indexed objects.
- BasicGrid() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- basicParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- basicParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- basicParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- basicParametersB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- basicParametersB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- basicParametersSurface - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- basicSize - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- basym(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- batchDistance(Vector<Vector<Double>>, Vector<Vector<Double>>, double[][], int[][], int, int, Vector<Double>, int, boolean) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- BatchDistInvoker(Vector<Vector<Double>>, Vector<Vector<Double>>, double[][], int[][], int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- batchSize - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.WorkDimensions
-
- BayesCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
- BayesCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- BayesCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- BayesShrinkThresholdComputation(double[], double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- BayesShrinkThresholdComputation(double[], double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bb_bounds() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- bbox - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- bbox - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- bbox() - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper.bbox
-
- bButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- bc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion.kFitting
-
- BCb - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- BCb - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- BCFSN - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- BCFSNG(int, int[], int[], int[], double[], double[], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- BCFVTF(double[], double[], int[], int[], int[], int[], int, int, double[], double[], double, double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- bChannel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
If true filter the blue channel.
- bChannel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
the blue channel.
- bChannel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
DOCUMENT ME!
- bChannel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
when true, indicates whether to process the colour channel.
- bChannel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- bChannel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
the blue channel.
- bcm - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- BCOEF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- BCOFC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- bColorListener() - Constructor for class gov.nih.mipav.view.ViewJFrameGraph.bColorListener
-
- bcorr(double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- bd(Vector<Double>, Vector<Double>, Vector<Double>, Vector<Double>, Vector<Double>, Vector<Double>, Vector<Double>, double[], double, double, double, double[], double, double[], int, int, int, int, boolean, int, double, int) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- BD - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- bdAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
DOCUMENT ME!
- bdbl - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
- BDF_Q_MAX - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- bdrBufferDepth - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Border buffer number of slices.
- bdrBufferDepth - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Border buffer number of slices.
- bdrBufferHeight - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Border buffer number of rows.
- bdrBufferHeight - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Border buffer number of rows.
- bdrBufferWidth - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Border buffer number of columns.
- bdrBufferWidth - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Border buffer number of columns.
- bdtr(int, int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- BDTR - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- bdtrc(int, int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- BDTRC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- bdtri(int, int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- BDTRI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- be_shrunk(int, double, double) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- be_shrunk(int, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- be_shrunk(int, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver_NU
-
- be_shrunk(int, double, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver_NU
-
- be_shrunk(int, int, int, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- BEALE - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- BEALE - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- BealeFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BealeFunction
-
- BEAMSPLITTER_ENTRY_FILTER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- BEAMSPLITTER_ENTRY_FILTER_SET - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- BEAMSPLITTER_ENTRY_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- beautifyTime(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- BEByteArrayInputStream - Class in gov.nih.mipav.model.file.rawjp2
-
Big Endian Input Array Stream, works as a replacement for BERandomAccessFile
at the input of Jpeg2K decoder.
- BEByteArrayInputStream(byte[]) - Constructor for class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- BEByteArrayInputStream(byte[], int, int) - Constructor for class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- BEByteArrayOutputStream - Class in gov.nih.mipav.model.file.rawjp2
-
Big Endian Output Array Stream, works as a replacement for FileFormatWriter
at the output of Jpeg2K encoder.
- BEByteArrayOutputStream() - Constructor for class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
- BEByteArrayOutputStream(ByteArrayOutputStream, int, int) - Constructor for class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
- BED - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- beenVisited(int) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- beep() - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Sound a beep.
- beep() - Static method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Sound a beep.
- beep() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Sound a beep.
- BEFORE - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Before/After index values for the two displayed spheres, canvases, and display panels:.
- BEFORE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Before/After index values for the two displayed spheres, canvases, and display panels:.
- beforeExecute() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- beforeExecute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Make the dimension be the power of two, and zero pad them.
- beforeExecute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Make the dimension be the power of two, and zero pad them.
- beforeExecute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
- beforeExecute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- beforeResampleAll(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorComposite
-
This is a callback to be executed before resampleAll is executed.
- beforeResampleAll(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorDRR
-
This is a callback to be executed before resampleAll is executed.
- beforeResampleAll(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorLighting
-
This is a callback to be executed before resampleAll is executed.
- beforeResampleAll(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorMIP
-
This is a callback to be executed before resampleAll is executed.
- beforeResampleAll(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensityDRR
-
This is a callback to be executed before resampleAll is executed.
- beforeResampleAll(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensityMIP
-
This is a callback to be executed before resampleAll is executed.
- beforeResampleAll(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
This is a callback to be executed before resampleAll is executed.
- beforeResampleSingle() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
This is a callback to be executed before resampleSingle is executed.
- beforeThreadedGenerateData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- beforeThreadedGenerateData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- begin - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- begin_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
-
- beginCoarse(int[]) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The region-growing fast march.
- beginCoarse(int[]) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The region-growing fast march.
- beginCoarse(int[]) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The region is grown from the input seeds.
- beginCoarse(int[]) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The region-growing fast march.
- beginCoarse(int[]) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The region-growing fast march.
- beginCoarse(int[]) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The region-growing fast march.
- beginCoarse(int[]) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The region-growing fast march.
- beginDistanceTransform(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The signed-distance-transform fast march.
- beginDistanceTransform(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The signed-distance-transform fast march.
- beginDistanceTransform(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
An annulus is computed about the boundary of the coarse-level
segmentation.
- beginDistanceTransform(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The signed-distance-transform fast march.
- beginDistanceTransform(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The signed-distance-transform fast march.
- beginDistanceTransform(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The signed-distance-transform fast march.
- beginDistanceTransform(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The signed-distance-transform fast march.
- beginEvolution(float, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The level-set evolution.
- beginEvolution(float, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The level-set evolution.
- beginEvolution(float, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Evolve the signed-distance transform in the annulus constructed
previously.
- beginEvolution(float, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The level-set evolution.
- beginEvolution(float, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The level-set evolution.
- beginEvolution(float, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The level-set evolution.
- beginEvolution(float, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The level-set evolution.
- beginSlice - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
3D options.
- beginTimePeriod - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
4D options.
- behaviorBG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
The BranchGroup to which the arbitrary behaviors are attached and rotate.
- behaviorfix - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- BEHead - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- BELOW - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- belowThreshold - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- bendingMatrix - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- Bennett5CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Bennett5CostFunction
-
- Bennett5Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Bennett5Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- bernard(double[], int, double) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- BernoulliA(int) - Method in class gov.nih.mipav.util.DoubleDouble
-
- BernoulliB(int) - Method in class gov.nih.mipav.util.DoubleDouble
-
- Bessel - Class in gov.nih.mipav.model.algorithms
-
This module computes Bessel functions of complex arguments and a nonnegative order.
- Bessel(int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.Bessel
-
Creates a new Bessel object.
- Bessel(int, double, double, double, int, int, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.Bessel
-
This construtor used for I, J, K, and Y Bessel functions.
- Bessel(int, double, double, double, int, int, int, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.Bessel
-
This constructor used for H functions of kind 1 and 2.
- Bessel(int, double, double, int, int, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.Bessel
-
This constructor is used for Ai and Bi Airy functions.
- BESSEL_H - Static variable in class gov.nih.mipav.model.algorithms.Bessel
-
Bessel functions of the third kind, Hankel functions.
- BESSEL_H - Static variable in class gov.nih.mipav.model.algorithms.BesselEP
-
Bessel functions of the third kind, Hankel functions.
- BESSEL_I - Static variable in class gov.nih.mipav.model.algorithms.Bessel
-
modified Bessel function of the first kind.
- BESSEL_I - Static variable in class gov.nih.mipav.model.algorithms.BesselEP
-
modified Bessel function of the first kind.
- BESSEL_J - Static variable in class gov.nih.mipav.model.algorithms.Bessel
-
Bessel function of the first kind.
- BESSEL_J - Static variable in class gov.nih.mipav.model.algorithms.BesselEP
-
Bessel function of the first kind.
- BESSEL_K - Static variable in class gov.nih.mipav.model.algorithms.Bessel
-
modified Bessel function of the second kind.
- BESSEL_K - Static variable in class gov.nih.mipav.model.algorithms.BesselEP
-
modified Bessel function of the second kind.
- BESSEL_Y - Static variable in class gov.nih.mipav.model.algorithms.Bessel
-
Bessel function of the second kind.
- BESSEL_Y - Static variable in class gov.nih.mipav.model.algorithms.BesselEP
-
Bessel function of the second kind.
- BesselEP - Class in gov.nih.mipav.model.algorithms
-
This module computes Bessel functions of complex arguments and a nonnegative order.
- BesselEP(int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.BesselEP
-
Creates a new BesselEP object.
- BesselEP(int, double, double, double, int, int, int, DoubleDouble[], DoubleDouble[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.BesselEP
-
This constructor used for H functions of kind 1 and 2.
- BesselEP(int, double, double, double, int, int, DoubleDouble[], DoubleDouble[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.BesselEP
-
This constructor used for I, J, K, and Y Bessel functions.
- BesselEP(int, double, double, int, int, DoubleDouble[], DoubleDouble[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.BesselEP
-
This constructor is used for Ai and Bi Airy functions.
- BesselType - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- BesselType - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- bessInt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- best_csnrs(double) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- bestDim(int, Point3, Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- bestGuessLevel2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- bestGuessLevel2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- bestGuessLevel2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- bestGuessLevel2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- bestImageIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.MatchSlices
-
- bestMax - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
/**.
- bestMin - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
/**.
- bestpg - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- bestpg - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- bestSliceIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.MatchSlices
-
- bestToWorst - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- bestToWorst - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- bestWeight - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- beta - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Total number of entries (= # active nodes)
- beta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- beta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- beta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- beta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- beta - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- beta - Variable in class gov.nih.mipav.model.algorithms.FitLaplace
-
Beta parameter
- beta - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
parameter in the weight function, beta.gt.(-1) if beta.le.(-1), the routine will end with ier[0] = 6.
- beta - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
parameter in the weight function, beta.gt.(-1) if beta.le.(-1), the routine will end with ier[0] = 6.
- beta - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
scalar containing the norm of the orthogonal projection of residuals onto the space spanned by the columns of the
Jacobian.
- beta - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
scalar containing the norm of the orthogonal projection of residuals onto the space spanned by the columns of the
Jacobian.
- beta - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- beta - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- beta - Variable in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.crpfun
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.depfun
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.dpfun
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEExtModel
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEModel
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODERectModel
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.hppfun
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODEHPModel
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODESTModel
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
- beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
- beta - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- beta - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- beta - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- beta - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- beta - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- beta - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- beta - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware.sWarpEntry
-
- beta(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- BETA - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- BETA - Static variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- BETA - Static variable in class gov.nih.mipav.model.algorithms.NMSimplex
-
- BETA - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- beta_c4 - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- beta_f_range - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- beta_hrbu - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- beta_init - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- beta_init - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- beta_init(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- beta_lrb - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- BETA_MAX - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- beta_np_bs - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- beta_p_bs - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- beta_range_init - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- betaArray - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- betaHalflife - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- BETail - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- betaj - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- betaln(double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- BetaRand(double, double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- betkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- betkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- betkm2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- betkm2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- BETWEEN - gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector.RangeType
-
Pixels between boundA and boundB (inclusive) will be excluded from a calculation.
- bf_flyPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Panel to hold the BrainSurfaceFlattener or Flythrough views.
- BFGS - gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionType
-
- BFGS(int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.BFGS
-
- BFGSUnFac(CDVector, CDVector, CDVector, CDVector, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBFGS
-
Algorithm A9.4.1 p. 355
Input: x, xplus, gc, gplus Input-Output: H
Description: The BFGS update is made unless either: i) y'*s <
(macheps)^0.5*||y|| or ii) for every i, |(y-Hs)[i]| is less than the
estimated noise in y[i].
- BFLOAT - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Extension: .hdr for header, .bfloat for data
- bfrac(double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- bfRun - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- bfRun - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- BFSNC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- BG - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- BG - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- BG_DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- BG_DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- BG_DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- BG_DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- BG_DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- BG_DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- bgButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- bgColor - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- BgEdge() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdge
-
- BgEdgeDetect(int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- BgEdgeList() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList
-
- BgImage(int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgImage
-
- BgImage(short[], int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgImage
-
- bgISort(int[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- Bgr192ComplexFloat - Static variable in class gov.nih.mipav.model.file.FileCZI
-
A triple of 2 x 4 byte IEE float, representing real and imaginary part of a complex number, for the color
channels blue, green, and red
- Bgr24 - Static variable in class gov.nih.mipav.model.file.FileCZI
-
8 bit triples, representing the color channels blue, green, and red
- Bgr48 - Static variable in class gov.nih.mipav.model.file.FileCZI
-
16 bit triples, representing the color channels blue, green, and red
- Bgr96Float - Static variable in class gov.nih.mipav.model.file.FileCZI
-
Triple of 4 byte IEEE float, representing the color channels blue, green, and red
- Bgra32 - Static variable in class gov.nih.mipav.model.file.FileCZI
-
8 bit triples followed by an alpha (transparency) channel
- bgrat(double, double, double, double, double[], double, int[]) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- bgSort(long[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- BGTG - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- BGTG - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- bgtgButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- bgVector - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
Vector to hold all toggle groups for VOI toggle (and custom toggle configurations)
- BH - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- BI_ALPHABITFIELDS - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
6 = RGBA bit fields
- BI_BITFIELDS - Static variable in class gov.nih.mipav.model.file.FileBMP
-
- BI_BITFIELDS - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
3 = Bit fields (not OS22XBITMAPHEADER (size 64))
- BI_CMYK - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
11 = CMYK
- BI_CMYKRLE4 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
13 = CMYK RLE-4
- BI_CMYKRLE8 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
12 = CMYK RLE-8
- BI_HUFFMAN_1D - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
3 = Huffman 1D (if OS22XBITMAPHEADER (size 64))
- BI_JPEG - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
4 = JPEG (not OS22XBITMAPHEADER (size 64))
- BI_PNG - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
5 = PNG
- BI_RGB - Static variable in class gov.nih.mipav.model.file.FileBMP
-
- BI_RGB - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
0 = None
- BI_RLE24 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
4 = RLE 24-bit/pixel (if OS22XBITMAPHEADER (size 64))
- BI_RLE4 - Static variable in class gov.nih.mipav.model.file.FileBMP
-
- BI_RLE4 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
2 = RLE 4-bit/pixel
- BI_RLE8 - Static variable in class gov.nih.mipav.model.file.FileBMP
-
- BI_RLE8 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
1 = RLE 8-bit/pixel
- bi_sigma_range0 - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- bi_sigma_spatial0 - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- bi_size - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- bias - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Model ($\bw$ vector).
- bias - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- bias - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Problem
-
If bias >= 0, we assume that one additional feature is added
to the end of each data instance
- bias - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- BIAS1 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- BIAS2 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- BIAS3 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- biasFieldFullWidthAtHalfMaximum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- biasLearningRate - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- biasMultiplier - Variable in class gov.nih.mipav.model.algorithms.SVM.svmtest
-
- biasMultiplier - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Bias.
- BICOC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- BICOF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- BICUBIC - gov.nih.mipav.view.Preferences.InterpolateDisplay
-
Bicubic interpolation
- BiCubicInterpolator(CeresSolver2.Grid2D) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.BiCubicInterpolator
-
- BiCubicInterpolatorTestDegree00Function() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BiCubicInterpolatorTestDegree01Function() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BiCubicInterpolatorTestDegree10Function() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BiCubicInterpolatorTestDegree11Function() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BiCubicInterpolatorTestDegree12Function() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BiCubicInterpolatorTestDegree21Function() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BiCubicInterpolatorTestDegree22Function() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BiCubicInterpolatorTestZeroFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- bidx - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Minimum distance to an entry
- big - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- big - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- big - Static variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- big - Static variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- BIG - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- BIG_ENDIAN - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Flag used to indicate Big Endianess.
- BIG_ENDIAN - Static variable in class gov.nih.mipav.model.file.FileBase
-
Byte order.
- BIG_ENDIAN - Static variable in class gov.nih.mipav.model.file.FileDicomBase
-
Byte order.
- big_parchk - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- BIGd - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- bigEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- bigEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Radio button to denote image is big endian.
- bigEndian - Variable in class gov.nih.mipav.model.file.FileBase
-
DOCUMENT ME!
- bigEndian - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Data
-
- bigEndian - Variable in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- bigEndian - Variable in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- BIGGS_EXP6 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- BIGGS_EXP6 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- BIGGS_EXP6Function() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BIGGS_EXP6Function
-
- biginv - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- bilaplace - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- bilateral - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- bilateral - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- bilateralFilter(double[][], int, int, double, double, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- bilateralFilterAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
DOCUMENT ME!
- BilateralGradientFilter(double[][], double[][], double[][], double, double, double, double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- BilateralGradientFilterLUT(double[][], double[][], double[][], double, double, double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- bilinear - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Radio buttons for interpolation methods.
- BILINEAR - gov.nih.mipav.view.Preferences.InterpolateDisplay
-
Bilinear interpolation
- BILINEAR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Biilinear interpolation.
- BILINEAR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Biilinear interpolation.
- BILINEAR - Static variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Action command for bilinear interpolation.
- bimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- bimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- bImageUpdate - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Update the LUT in real-time:
- bImageUpdate - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Update the LUT in real-time:
- bin1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- bin1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- bin1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
Number of bins for Image1
- bin1 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- bin1 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- bin1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Number of bins for first image.
- bin1 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Bin to use for pixel comparisons
- bin1 - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Number of bins for each image
- bin1 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- bin1Default - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Default number of bins for first image.
- bin1Label - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- bin1Label - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- bin1Label - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Label description for bin1.
- bin1Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- bin1Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- bin1Text - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Textfield for bin1.
- bin1Text - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
User input of bins
- bin2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- bin2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- bin2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
Number of bins for Image2
- bin2 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- bin2 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- bin2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Number of bins for second image.
- bin2 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- bin2 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- bin2Default - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Default number of bins for first image.
- bin2Label - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- bin2Label - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- bin2Label - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Label description for bin1.
- bin2Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- bin2Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- bin2Text - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Textfield for bin2.
- BINARY_TYPE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
DOCUMENT ME!
- binaryButton - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
- binaryButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
- binaryButton - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
- binaryButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
- binaryButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- binaryButton - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
- BinaryCostFunction(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction
-
- BinaryCostFunction2() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction2
-
- BinaryCostFunction3(int, int, int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction3
-
- BinaryCostFunction4(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction4
-
- binaryMorphology - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
- binaryMorphology - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
- binaryMorphology - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
- binaryMorphology - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
- binaryMorphology - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- binaryMorphology - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
- BinaryNode - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- BinaryNode() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.BinaryNode
-
- binCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- binCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- binCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- binCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- binCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- binCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- binCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- binCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- bincount(int[], int) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- binExt - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Data
-
Elements.
- binExternal - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF
-
must have either: Bin:External or Bin:BinData.
- BinExternal(String, String, Integer, URI) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Data.BinExternal
-
Creates a new BinExternal object.
- BinExternal(String, String, Integer, URI) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF.BinExternal
-
Creates a new BinExternal object.
- binning - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- binNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- binNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed
-
- binNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- binNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLowerCompletion
-
- binNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- binNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- binNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- binNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- binNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindComponentLabelling
-
- binNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- binNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- binNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- binNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- binNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- binNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- binNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- binNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- binNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- BinoRand(double, long) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- bins - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Hist
-
- bins - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- binSample(double[][], int) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- binsField - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- binsField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- binText - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- binWidth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Histogram bin width.
- BIOMAGNETIC_IMAGING - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality biomagnetic imaging.
- BIOMAGNETIC_IMAGING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality biomagnetic imaging.
- BIOR - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- bior_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior1_0_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior1_1_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior1_3_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior1_5_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior1_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior2_0_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior2_2_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior2_4_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior2_6_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior2_8_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior2_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior3_0_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior3_1_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior3_3_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior3_5_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior3_7_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior3_9_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior3_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior4_0_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior4_4_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior4_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior5_0_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior5_5_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior5_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior6_0_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior6_8_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- bior6_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- BIORAD - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Used by the Bio-Rad Pic format. extension: .pic && fileID(54L)==12345
- biorthogonal - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.BaseWavelet
-
- BiorthogonalWavelets - Class in gov.nih.mipav.model.algorithms.filters
-
Copyright (c) 2012, Brian Moore
Copyright (c) 2004, Ben Barrowes
All rights reserved.
- BiorthogonalWavelets(ModelImage, ModelImage, ModelImage, ModelImage, int, double, boolean, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- BiorthogonalWavelets.realImaginaryComparator - Class in gov.nih.mipav.model.algorithms.filters
-
- BiorthogonalWavelets.realImaginaryItem - Class in gov.nih.mipav.model.algorithms.filters
-
- birthField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- bisect(delaunay.Site, delaunay.Site) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- bisection(float, float, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
Returns Float which is null if no root is found; otherwise contains the value of the root.
- BISECTION - gov.nih.mipav.model.algorithms.CeresSolver.LineSearchInterpolationType
-
- BISNEW(int[], double, double, double, double[], double[], double[], double[], double[], double, int, double, double, double[], double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- bit - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- BIT - Static variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- BIT_BUF_SIZE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- BIT16 - Static variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- BIT8 - Static variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- bitBuffer - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGBitInputStream
-
- bitBuffer - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGBitInputStream
-
- bitCount - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- bitCount - Variable in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
DOCUMENT ME!
- bitCount - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGBitInputStream
-
- bitCount - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGBitInputStream
-
- bitDepth - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- bitDepth - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
The bit-depth of the input file (must be between 1 and 31)
- BitInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- BitInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- BitInputStream(InputStream, boolean) - Constructor for class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- BitInputStream(InputStream, boolean) - Constructor for class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- BITMAP - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.BitmapType
-
"BM" - Windows or OS/2 bitmap
- BITMAP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpReader
-
"BM" - Windows or OS/2 bitmap
- BitmapType(int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.BitmapType
-
- bitMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- bitMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- bitMask - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Useful bit mask for getting appropriate bits out of number.
- bitpix - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Bits per pixel.
- bitpix - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Bits per pixel
- bitpix - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Bits per pixel.
- bitpix - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- bitPointer - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- bitread_perm_state() - Constructor for class gov.nih.mipav.model.file.libjpeg.bitread_perm_state
-
- bitread_working_state() - Constructor for class gov.nih.mipav.model.file.libjpeg.bitread_working_state
-
- BITREV(double[], int) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- bitrevorder(double[]) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- bitrevorder(double[]) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- bitrv2(int, int[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- bitrv208(double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- bitrv208neg(double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- bitrv216(double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- bitrv216neg(double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- bitrv2conj(int, int[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- bits - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Read in DHT header.
- bits - Variable in class gov.nih.mipav.model.file.libjpeg.JHUFF_TBL
-
- bits() - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Determines the number of significant figures of machine precision to arrive at the size of the array the numbers
must be stored in to get the accuracy of the solution.
- BITS - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- BITS - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- BITS_IN_JSAMPLE - Variable in class gov.nih.mipav.model.file.libjpeg
-
- bits_left - Variable in class gov.nih.mipav.model.file.libjpeg.bitread_perm_state
-
- bits_left - Variable in class gov.nih.mipav.model.file.libjpeg.bitread_working_state
-
- BITS_PER_SAMPLE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- BITS_PER_SAMPLE - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- BITS_PER_SAMPLE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- BITS_PER_SAMPLE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- bitsAllocated - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
Bits allocated per pixel.
- bitsAllocated - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- bitsAllocated - Variable in class gov.nih.mipav.model.file.FileRaw
-
- bitsAllocated - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
- bitsAvail - Variable in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- bitsAvail - Variable in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- bitset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
bitset for src image
- BITSET - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
DOCUMENT ME!
- BitSetUtility() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- bitsLeft - Variable in class gov.nih.mipav.model.file.FileSVS
-
- bitsLeft - Variable in class gov.nih.mipav.model.file.FileTiff
-
- bitsPerPixel - Variable in class gov.nih.mipav.model.file.FileBase
-
DOCUMENT ME!
- bitsPerPixel - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- bitsPerPixel - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- bitsPerSample - Variable in class gov.nih.mipav.model.file.FileSVS
-
- bitsPerSample - Variable in class gov.nih.mipav.model.file.FileTiff
-
- bitsStored - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
Bits stored per pixel>
- bitsStored - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- bitsStored - Variable in class gov.nih.mipav.model.file.FileRaw
-
- bitsStored - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
- bitstate - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- bitsToGet - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- bitStreamEOF() - Static method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- BitSwapInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileSVS.BitSwapInputStream
-
- BitSwapInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileTiff.BitSwapInputStream
-
- bitSwapTable - Static variable in interface gov.nih.mipav.model.file.FileSVS.BitSwapTable
-
- bitSwapTable - Static variable in interface gov.nih.mipav.model.file.FileTiff.BitSwapTable
-
- bitwise_and(CVisShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- bitwise_and(RECT) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- bitwise_and_into(CVisShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- bitwise_and_into(RECT) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- bitwise_or(CVisShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- bitwise_or(RECT) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- bitwise_or_into(CVisShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- bitwise_or_into(RECT) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- bivariateCubicCoefficients(int, int, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- bivariateCubicCoefficients5By5(int, int, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- bKGD - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- bkvar - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- bkvarf - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- bl - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- bl - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- bl0 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- bl0 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- bLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- black - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- BLACK - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- BLACK - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModHuffmanTable
-
- BLACK - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModHuffmanTable
-
- BlackBody - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Customized LUTs
- blackEnd - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFIREEdgeExtraction
-
gray scale value at which the black membership function ends the linear transition from 1 at the
lowest gray scale value to 0
- blackEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
- blackImage - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
used to create the "selected" state of the buttons
- blackImage - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- blackValue0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- blackValue1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- blackValue2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- blackValue3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- blah - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
- blank - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
blank image
- blank - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Radio button selected if inserted slices are blank.
- blank - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- blank - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- blank - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- blank - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- blank - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- BLANK - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Blank slice type - the inserted slice is blank.
- BLANK - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Blank slice type - the inserted slice is blank.
- BLANK - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- BLANK - Static variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
BLANK String
- blank_continuous_wavelet() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- blank_discrete_wavelet(int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- BLANK_OVERLAY - Static variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
blank overlay string.
- BLANK_SLICE - Static variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- BLANK_VOLUME - Static variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Blank volume type - the inserted volume is blank.
- BlankCanvasFallback() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- blankCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
Custom cursor: no cursor.
- blankFramesSent - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- BlankJistHook - Class in gov.nih.mipav.view.dialogs
-
This class is an example class for tying existing plugins into the JIST interface.
- BlankJistHook() - Constructor for class gov.nih.mipav.view.dialogs.BlankJistHook
-
- blanklabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- BLEACH_ROI - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- bleachedROIShape - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- bleachedROIShape - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- bleachedROIShape - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- bleachKnotX - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- bleachKnotY - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- blend(int, int, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
- blend(String, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets blending between imageA and imageB.
- Blend - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- Blend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MipavLightingEffect
-
Set surface blend value.
- Blend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Sets surface blend/transparency value for alph-blending in the shader.
- Blend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Set object blend value.
- Blend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
Sets the blend factor shader parameter between imageA and imageB.
- Blend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePreRenderEffect
-
Set the blend value.
- Blend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Sets the blend factor shader parameter between imageA and imageB.
- Blend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
Sets the blend factor shader parameter between imageA and imageB.
- Blend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- Blend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOIEffect
-
Set the blend value.
- Blend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
Sets the blend factor shader parameter between imageA and imageB.
- blendBuffers(BufferedImage, BufferedImage) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Blend two BufferedImages, representing the left and right-eye views into a Red-Cyan stereo anaglyph.
- blendColor(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Blends two packed-integer colors (RGB) to create a Red-Cyan anaglyph.
- blendColor(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
blendColor: blends two colors in ARGB format from the BufferedImage class, using an alpha value of 0.5.
- BlendColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- blendComposite - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- blendParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- blendParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- blendSlider - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Opacity slider of texture 3D volume opacity changes.
- blendSlider - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Opacity slider of texture 3D volume opacity changes.
- BLGAM - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- blind_deconvolution_example() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- BlindDeblur - Class in gov.nih.mipav.model.algorithms
-
- BlindDeblur() - Constructor for class gov.nih.mipav.model.algorithms.BlindDeblur
-
- BlindDeblur(ModelImage, ModelImage, ModelImage, String, String, int) - Constructor for class gov.nih.mipav.model.algorithms.BlindDeblur
-
- BlindDeblur.Pair<T,U> - Class in gov.nih.mipav.model.algorithms
-
- blist - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
The right end points of the subintervals in the partition of the given integration range (lower, upper).
- blist - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
The right end points of the subintervals in the partition of the given integration range (lower, upper).
- blk_buffer - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- blob - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.tliop
-
- block - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedList
-
- block - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- Block() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Block
-
- Block(int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Block
-
- block_density - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrixRandomMatrixOptions
-
- block_density - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions
-
- block_diagonal_EtE_inverse() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- block_diagonal_EtE_inverse_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- block_diagonal_FtF_inverse() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- block_diagonal_FtF_inverse_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- block_id - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Cell
-
- block_layout_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDenseMatrix
-
- block_positions_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- BLOCK_SENSITIVE_PEAK_SIGNAL_TO_NOISE_RATIO - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- block_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_precinct_t
-
- block_size - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- block_structure() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- block_structure_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- blockCRC - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- BlockEvaluatePreparer() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.BlockEvaluatePreparer
-
- blockHalf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- blockInt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- BlockJacobianWriter(CeresSolver.EvaluatorOptions, CeresSolver.Program) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobianWriter
-
- BlockJacobiPreconditioner(CeresSolver.BlockSparseMatrix) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobiPreconditioner
-
- BlockJacobiPreconditionerTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockJacobiPreconditionerTest
-
- BlockJacobiPreconditionerTestLargeProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockJacobiPreconditionerTestSmallProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockOrderingToScalarOrdering(Vector<Integer>, Vector<Integer>, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- blockOverrun() - Static method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- BlockPermutationToScalarPermutation() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockRandomAccessDenseMatrix(Vector<Integer>) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDenseMatrix
-
- BlockRandomAccessDiagonalMatrix(Vector<Integer>) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- BlockRandomAccessDiagonalMatrixTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockRandomAccessMatrix() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessMatrix
-
- BlockRandomAccessSparseMatrix(Vector<Integer>, Set<CeresSolver.Pair<Integer, Integer>>) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- BlockRandomAccessSparseMatrixGetCell() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockRandomAccessSparseMatrixTestIntPairToLongOverflow() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockRandomAccessSparseMatrixTestLongToIntPair() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- blockRandomised - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- blockRandomised - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- blocks_in_MCU - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- blockSide - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- blockSide - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- blockSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
- blockSize100k - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- blockSize100k - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- BlockSparseMatrix() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- BlockSparseMatrix(CeresSolver.CompressedRowBlockStructure) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- BlockSparseMatrixCreateDiagonalMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockSparseMatrixCreateDiagonalMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- BlockSparseMatrixRandomMatrixOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrixRandomMatrixOptions
-
- BlockSparseMatrixTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- BlockSparseMatrixTestAppendAndDeleteBlockDiagonalMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- BlockSparseMatrixTestAppendAndDeleteBlockDiagonalMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockSparseMatrixTestAppendRows() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- BlockSparseMatrixTestAppendRows() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockSparseMatrixTestLeftMultiplyTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- BlockSparseMatrixTestLeftMultiplyTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockSparseMatrixTestRightMultiplyTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- BlockSparseMatrixTestRightMultiplyTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockSparseMatrixTestSetZeroTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- BlockSparseMatrixTestSetZeroTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockSparseMatrixTestSquaredColumnNormTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- BlockSparseMatrixTestSquaredColumnNormTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- BlockSparseMatrixTestToDenseMatrixTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- BlockSparseMatrixTestToDenseMatrixTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- blocksperrow - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- bloodGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- blue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- blue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- blue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Flags to indicate which color channels to process.
- blue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Flags indicate which color channel to process.
- blue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
Flags indicate which color channel to process.
- blue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.model.file.FileImageXML.LUValue
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
Border color, red, green, and blue components:
- blue - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- blue - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Blue channel value of the paint color.
- BLUE - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Sets up the transfer function colors to be monochrome-blue.
- BLUE - Static variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Blue channel.
- BLUE - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Component tag indicator.
- BLUE - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Component tag indicator.
- BLUE - Static variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
The blue channel transfer function.
- BLUE - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The blue channel transfer function.
- BLUE_CHANNEL - Static variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
BLUE CHANNEL String
- BLUE_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Blue channel.
- BLUE_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Blue channel.
- BLUE_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Blue channel.
- BLUE_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Blue channel.
- BLUE_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Blue channel.
- BLUE_OFFSET - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
Blue channel.
- BLUE_OFFSET - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Blue channel.
- BLUE_OFFSET - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
Blue channel.
- BLUE_WEIGHT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- blue1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmColorEdge
-
- blue1 - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- blue1Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- blue2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmColorEdge
-
- blue2 - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- blue2Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- BlueA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- blueArray - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- blueArray - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- BlueB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- blueBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The blue sphere branch group that branches underneath the vasculatureBG, and represents the blue sphere branch
group.
- blueBlackLevel - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- blueBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
- blueBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- blueBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- blueBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- blueBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- blueBuffer - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- blueBuffer - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- blueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- blueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- blueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- blueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- blueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- blueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- blueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
DOCUMENT ME!
- blueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- blueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- blueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
DOCUMENT ME!
- blueButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- blueChannel - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- blueChannel - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- blueChannelNumber - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- blueCheckbox - Variable in class gov.nih.mipav.view.components.JPanelColorChannels
-
DOCUMENT ME!
- blueCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- blueCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- blueCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Checkbox to select blue image.
- blueCheckBox - Variable in class gov.nih.mipav.view.JPanelHistogram
-
checkbox for turning on / off the blue component of the color look-up table.
- blueCheckBoxA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Update Blue channel histogram check box A, B.
- blueCheckBoxA - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- blueCheckBoxB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Update Blue channel histogram check box A, B.
- blueCheckBoxB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- blueGamma - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- blueLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- blueLine - Variable in class gov.nih.mipav.model.structures.ModelLUT
-
Function that maps the blue function of the LUT.
- blueLine - Variable in class gov.nih.mipav.model.structures.ModelRGB
-
Function that maps the blue function of the LUT.
- blueMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- blueMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- blueMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- blueMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- blueMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- blueMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- blueMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- blueMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- blueNorm - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
- blueOffset - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- BlueOnA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- BlueOnB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- blueRequested - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- blueRGBButton - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
R, G, B channel control buttons.
- blueRGBButton - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- blueShiftColors - Variable in class gov.nih.mipav.view.ColorWheel
-
array of r,g,b values after blue shifting
- blueShiftColors - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
arry of r,g,b after blue shift *
- blueSphere - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The geometry group of the blue sphere.
- blueSphereTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
blue sphere transform group that set up the translation.
- blueText - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- blueValue - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Weighting values for the red, green, and blue channels.
- blueValue - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Weighting values for the red, green, and blue channels.
- blueValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- blueValue - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
- blueValue - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- blueVector - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- blueWhiteLevel - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- blur - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
when true, blur the output
- blur - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
- blur(ModelImage, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Returns a blurred image of the input image.
- BLUR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- BLUR_KERNEL - Static variable in class gov.nih.mipav.model.GaussianKernelFactory
-
- BLUR_KERNEL_SIZE - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- BLUR_MIN - Static variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
minimum value for blurring, at 1.0.
- blur_x_lims - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- blur_y_lims - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- blur_z_lims - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- blurAllRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for blurring the face / skull.
- blurBox - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Blur image check box.
- blurCheck - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- blurFace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Blurs the face mask voxels The blurred face volume is copied into the ModelImage and displayed to the user.
- blurFaceRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for blurring just the face.
- blurFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
If true then the input image is blurred slightly.
- blurFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
If true then the input image is blurred slightly.
- blurFlag - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
If true then the input image is blurred slightly.
- blurFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- blurI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- bluring - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Blur the final image to reduce voxel contrast.
- blurR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- blurredImageSpectrum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- blurredInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Blurred input image.
- blurredInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Blurred input image.
- blurredInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Blurred input image.
- blurredInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Blurred input image.
- blurredInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Blurred input image.
- blurredInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Blurred input image.
- blurredReals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- blurredRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Blurred reference image.
- blurredRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Blurred reference image.
- blurredRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Blurred reference image.
- blurredRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Blurred reference image.
- blurredRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Blurred reference image.
- blurredRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Blurred reference image.
- blurredSpectrumImags - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- blurredSpectrumReals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- blurringDiameter - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- blurringDiameterText - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- blurringFreq - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
user-selectable variables used in the FFT-blurring operation used as interim variables in starting the algorithm
op.
- blurringFreqText - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- blurryImage - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- blurryImageExtension - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- blurryImageFileDirectory - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- blurryImageFileName - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- blurSigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
The amount to blur to smooth surface.
- blurSigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
The amount to blur to smooth surface.
- blurSigma - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
The amount to blur to smooth surface.
- blurTF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- blurValue - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- bm - Variable in class gov.nih.mipav.view.ViewJFrameMemory
-
DOCUMENT ME!
- BM3D - Class in gov.nih.mipav.model.algorithms.filters
-
- BM3D(ModelImage[], ModelImage, boolean, double, int, int, int, boolean, String, double, int, int, int, boolean, String) - Constructor for class gov.nih.mipav.model.algorithms.filters.BM3D
-
- bm3d_1st_step(double, ModelImage, int, int, int, int, double, double, boolean, String) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- bm3d_2nd_step(double, ModelImage, ModelImage, int, int, int, int, double, boolean, String) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- BM3D.indexValueComparator - Class in gov.nih.mipav.model.algorithms.filters
-
- BM3D.indexValueItem - Class in gov.nih.mipav.model.algorithms.filters
-
- bm3dAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- BM3Dwavedec2(double[][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- BM3Dwaverec2(double[][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- BMatrixButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- bmatrixFileName - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
B Matrix file name
- bmatrixPath - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
bmatrix path
- bMatrixVals - Variable in class gov.nih.mipav.model.file.DTIParameters
-
- bMatrixVals - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
- bmatValues - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- BMCANP(double, double[], double[], boolean, boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- BMCAP1(double[], double[], double, int, int, int[], int[], int[], int[], int[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double, double[], double[][], double[], double[][], boolean, boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- Bmp - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- BMP - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .bmp.
- BMP_DFMT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- BMP_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Bmp multifile
- BMPHC1(int, double[], double[], double[], int, int, int[], int[], int[], int[], int[], int[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[][], boolean, boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- BmpHeaderDescriptor(MetadataExtractor.BmpHeaderDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- BmpHeaderDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- BMPHYC(int, double[], double[], double[], boolean, boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- BmpMetadataReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BmpMetadataReader
-
- BmpReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BmpReader
-
- BmpReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.BmpReaderTest
-
- bmtxtFileBrowseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
browse button
- bmtxtFilePath - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This is the full path to the b matrix file
- bmtxtFilePathTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
path to bmatrix file
- bmtxtFileRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
b-matrix file option
- bmv(int, double[][], double[][], int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- bn - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- bn - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- BN - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- bNeedsRedraw - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Flag is set if one of the controls changed a value and the renderering needs to be redrawn when the mouse is
released.
- bodyPart - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- bogusBorderPaintButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- bogusBorderPaintButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The button used to toggle borders around painted areas.
- bogusShowPrivateButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
- boldBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
checkbox for bold style.
- bolus - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- BOn - Variable in class gov.nih.mipav.model.structures.ModelRGB
-
Flag indicating whether the blue channel should be displayed.
- BONE - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Sets up the transfer function to be yellow-ish orange which is supposed to make bones look good.
- BONE_SEG - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Value which indicates a bone in the image.
- BONE_SEG - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Value which indicates a bone in the image.
- boneBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The root branch group of the bone.
- bonePresetButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
DOCUMENT ME!
- BOOLEAN - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type Boolean (1 bit per voxel).
- BOOLEAN - Static variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- BOOLEAN - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type Boolean (1 bit per voxel).
- BOOLEAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- BOOLEAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- BOOLEAN_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type boolean.
- booleanBox - Variable in class gov.nih.mipav.view.JPanelEditBoolean
-
DOCUMENT ME!
- booleanGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- bootstrap() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- bootstrapClassWise() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- bootstrapClassWise() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- bootstrapClassWise() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- bootstrapClassWise() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- bootstrapClassWise() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- bootstrapWeighted() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- bootstrapWithoutReplacement() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- bootstrapWithoutReplacementClassWise() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- bootstrapWithoutReplacementClassWise() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- bootstrapWithoutReplacementClassWise() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- bootstrapWithoutReplacementClassWise() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- bootstrapWithoutReplacementClassWise() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- bootstrapWithoutReplacementWeighted() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- border - Variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- BORDER - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- BORDER_CLEARING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
- BORDER_CLEARING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- BORDER_CLEARING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- BORDER_CONSTANT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- BORDER_CONSTANT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- BORDER_CONSTANT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- BORDER_CONSTANT - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- BORDER_CONSTANT - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- BORDER_CONSTANT - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- BORDER_CONSTANT - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- BORDER_CONSTANT - Variable in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- BORDER_CONSTANT - Variable in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
This code is a port of the MATLAB Pyramid Toolbox
=========================== matlabPyrTools ============================
This package contains some MatLab tools for multi-scale image
processing.
- BORDER_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- BORDER_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- BORDER_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- BORDER_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- BORDER_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- BORDER_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- BORDER_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- BORDER_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- BORDER_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- BORDER_REFLECT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- BORDER_REFLECT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- BORDER_REFLECT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- BORDER_REFLECT - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- BORDER_REFLECT - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- BORDER_REFLECT - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- BORDER_REFLECT - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- BORDER_REFLECT - Variable in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- BORDER_REFLECT - Variable in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- BORDER_REFLECT_101 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- BORDER_REFLECT_101 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- BORDER_REFLECT_101 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- BORDER_REFLECT_101 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- BORDER_REFLECT_101 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- BORDER_REFLECT_101 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- BORDER_REFLECT_101 - Variable in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- BORDER_REFLECT_101 - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- BORDER_REFLECT_101 - Variable in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- BORDER_REFLECT_101 - Variable in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- BORDER_REPLICATE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- BORDER_REPLICATE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- BORDER_REPLICATE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- BORDER_REPLICATE - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- BORDER_REPLICATE - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- BORDER_REPLICATE - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- BORDER_REPLICATE - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- BORDER_REPLICATE - Variable in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- BORDER_REPLICATE - Variable in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- border_widthText - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- BORDER_WRAP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- BORDER_WRAP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- BORDER_WRAP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- BORDER_WRAP - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- BORDER_WRAP - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- BORDER_WRAP - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- BORDER_WRAP - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- BORDER_WRAP - Variable in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- BORDER_WRAP - Variable in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- BORDER0 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- BORDER1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- BORDER2 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- borderActiveImage - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- borderB - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
- borderB - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
false if column radio button selected.
- borderB - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- borderClearAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- borderClearAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- borderClearAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- borderClearing(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Removes objects that touch (i.e., are connected to) the border
- borderClearing(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Removes objects that touch (i.e., are connected to) the border
- borderClearing(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Removes objects that touch (i.e., are connected to) the border
- borderCol - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- borderCol - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
z slice.
- borderColor - Variable in class gov.nih.mipav.view.BorderedButton
-
DOCUMENT ME!
- borderColor - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- borderColor - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
color for the line border surrounding each image in the light-box.
- borderColor - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Color for the line border surrounding each image in the light-box.
- BorderedButton - Class in gov.nih.mipav.view
-
This class was created for use in the JDialogMultiPaint class.
- BorderedButton(String) - Constructor for class gov.nih.mipav.view.BorderedButton
-
Creates a new BorderedButton object.
- borderG - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
- borderImageSlider - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- borderOn - Variable in class gov.nih.mipav.view.BorderedButton
-
DOCUMENT ME!
- borderPaintButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- borderPaintButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The button used to toggle borders around painted areas.
- borderR - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
- borderSize - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- borderSize - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- borderSize - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
spacing for the line border surrounding each image in the light-box.
- borderSize - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Spacing for the line border surrounding each image in the light-box.
- bordersizeL - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- bordersizeText - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- borderTitles - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
DOCUMENT ME!
- bot - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- BOTH - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- BOTH_FUZZY_HARD - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
possible values for segmentation.
- BOTH_FUZZY_HARD - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
This code is ported from MATLAB routines adjacency, affinity, afc, and irfc written by Joakim Lindblad
References:
1.)
- BOTH_FUZZY_HARD - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
possible values for segmentation.
- BOTH_FUZZY_HARD - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
possible values for segmentation.
- BOTH_FUZZY_HARD - Static variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- BOTH_FUZZY_HARD - Static variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
DOCUMENT ME!
- BOTH_FUZZY_HARD - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- bothCondition - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
wake up condition for awt, component and mouse.
- bothCondition - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
wake up condition for awt, component and mouse.
- bothPanel - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- botPaddingFactor - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- botPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- botPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- bottom - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- Bottom() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- BOTTOM - Static variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- BOTTOM_EDGE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Bottom bounding edge of the canvas in world coordinates.
- BOTTOM_HAT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- BOTTOM_HAT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- BOTTOM_HAT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- bottomFace - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- bottomInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- bottomInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- bottomInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- bottomLeftBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- bottomPad - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- bottomPad - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- bottomPad - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- bottomPad - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- bottomPad - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- bottomPad - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- bottomPad - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- bottomPad - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- bottomPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- bottomPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- bottomPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- bottomRightBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- bottomSide - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- bottomSide - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- bottomsite - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- botX - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- botY - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- botZ - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- bound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
DOCUMENT ME!
- bound - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
finite bound of integration range used in dqagie (has no meaning if interval is doubly-infinite).
- bound - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
finite bound of integration range used in dqagie (has no meaning if interval is doubly-infinite).
- bound_list(GenericPolygonClipper.lmt_node[], double) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- boundA - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
The lower bound of the exclusion
- boundariesCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- boundariesImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- boundariesImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- boundary - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- boundary - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- boundary() - Method in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- boundary() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- Boundary - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- Boundary(LSCM.Mesh) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Boundary
-
- BOUNDARY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
DOCUMENT ME!
- BOUNDARY - Static variable in class gov.nih.mipav.model.structures.VOI
-
Indicates only the boundary of the VOI should be displayed.
- boundary_mode_mirror - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
boundary mode that will mirror the Img for out of bounds positions
- boundary_mode_repeat_edge - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
boundary mode that will repeat the edge of of an Img for out of
bounds positions.
- boundary_mode_repeat_image - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
boundary mode that will repeat the Img for out of bounds positions.
- boundary_mode_zero - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
boundary mode that will return 0 for out of bounds positions.
- boundaryDir - Variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
DOCUMENT ME!
- boundaryDir - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- boundaryDirBox - Variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
DOCUMENT ME!
- boundaryDirBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- BoundaryEmphasis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
contribution of the boundary emphasis slider and therefor the contribution of the 2nd derivative of the data.
- boundaryEmphasisSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Boundary emphasis slider slider.
- boundaryFinding(ModelImage, ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Dynamic narrow band tracing algorithm.
- boundaryImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
boundary image.
- boundaryIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Maximum iterations to generate new boundary.
- boundaryIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Maximum number of snake iterations.
- boundaryIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Maximum iterations to generate new boundary.
- boundaryIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Maximum number of snake iterations.
- boundaryIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- boundaryIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- boundaryIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- boundaryIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- boundB - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
The upper bound of the exclusion
- boundingBox - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- boundingBox - Variable in class gov.nih.mipav.model.structures.VOI
-
If true the bounding box of the VOI should be displayed.
- BoundingBoxColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- BoundingBoxEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- BoundingBoxEffect(Vector3f, Vector3f, Vector3f, Vector3f) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.BoundingBoxEffect
-
- boundingBoxField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- boundingBoxPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Bounding box control panel.
- boundingBoxPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Bounding box control panel.
- boundingCheck - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Check box for turning box on and off.
- boundingCheck - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Check box for turning bounding boxes on and off.
- boundingCheck - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Check box for turning box on and off.
- boundingCheck - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Check box for turning box on and off.
- boundingCheck - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Check box for turning bounding boxes on and off.
- boundingCheckA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary and static clipping plane check box.
- boundingCheckStatic - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary and static clipping plane check box.
- boundingCheckStaticInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary and static clipping plane check box.
- boundingCheckX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Check box to turn the clipping plane frame on and off.
- boundingCheckXInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X,Y,Z inverse clipping plane check box.
- boundingCheckY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Check box to turn the clipping plane frame on and off.
- boundingCheckYInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X,Y,Z inverse clipping plane check box.
- boundingCheckZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Check box to turn the clipping plane frame on and off.
- boundingCheckZInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X,Y,Z inverse clipping plane check box.
- boundLB - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
The lower blue bound of the exclusion
- boundLG - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
The lower green bound of the exclusion
- boundLR - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
The lower red bound of the exclusion
- bounds - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
integer scalar code for assessing the bounds bounds = 0 means an unconstrained problem bounds = 1 means the same
lower bounds for all unknowns and the same upper bounds for all unknowns.
- bounds - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
integer scalar code for assessing the bounds bounds = 0 means an unconstrained problem bounds = 1 means the same
lower bounds for all unknowns and the same upper bounds for all unknowns.
- bounds - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- bounds - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
A BoundingSphere that contains the entire scene.
- bounds - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- bounds - Variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
DOCUMENT ME!
- bounds_lower - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- bounds_type - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- bounds_upper - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- boundsConstrained() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- boundsForText(int, int, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- boundsForText(int, Font) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
Calculates the bounding rectangle for a specific number of characters in the specified font.
- boundUB - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
The upper blue bound of the exclusion
- boundUG - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
The upper green bound of the exclusion
- boundUR - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
The upper red bound of the exclusion
- box - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
DOCUMENT ME!
- box - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- box - Variable in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- box - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea.JTextFieldFilter
-
DOCUMENT ME!
- box - Static variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
DOCUMENT ME!
- box - Static variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- box - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FilePolyline_WM
-
DOCUMENT ME!
- box - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
image volume bounding box.
- box() - Constructor for class gov.nih.mipav.model.file.libjpeg.box
-
- Box(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Called by CreateBox.
- BOX_3D - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- BOX_3D - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- BOX_3D - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- BOX_C0_ELEMS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- BOX_C0_LOG - Variable in class gov.nih.mipav.model.file.libjpeg
-
- BOX_C0_SHIFT - Variable in class gov.nih.mipav.model.file.libjpeg
-
- BOX_C1_ELEMS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- BOX_C1_LOG - Variable in class gov.nih.mipav.model.file.libjpeg
-
- BOX_C1_SHIFT - Variable in class gov.nih.mipav.model.file.libjpeg
-
- BOX_C2_ELEMS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- BOX_C2_LOG - Variable in class gov.nih.mipav.model.file.libjpeg
-
- BOX_C2_SHIFT - Variable in class gov.nih.mipav.model.file.libjpeg
-
- box_x - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< vector of all patches, corresponding to loc.
- box_y - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< bounding box (x) for patch locations (top-left corner).
- box_z - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< bounding box (y) for patch locations.
- Box3 - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- Box3() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- Box3(Box3) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- Box3(Point3, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- Box3(Point3, Point3) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- Box3DFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.Box3DFunction
-
- boxA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static and static inverse, arbitrary clipping plane check box.
- BoxBODCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.BoxBODCostFunction
-
- BoxBODData - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- BoxBODObservations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- boxBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- boxCount2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- boxCount3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- boxCountAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
DOCUMENT ME!
- boxCountBoundary2D(int, int) - Method in class gov.nih.mipav.model.structures.VOIContour
-
- boxDialog - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Dialog for recording and playing back mouse events.
- boxdiv2(byte[][], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- boxdiv3(byte[][][], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- boxes - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizePresets
-
- boxfilter(double[][], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- boxFrame - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
The outside box frame.
- boxHeight - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- boxHeight - Variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Width and height of zoom box
- boxIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
DOCUMENT ME!
- boxPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Dialog to turn bounding box of surface renderer on and off, and to change the color of the frame.
- boxPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Dialog to turn bounding box of surface renderer on and off, and to change the color of the frame.
- boxSlices - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
The frame around the AXIAL, CORONAL, SAGITTAL slices:
- boxSlices - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
The frame around the AXIAL, CORONAL, SAGITTAL slices:
- boxSliceVertices - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
The transformed boxSlices frames used to sample the volume data along diagonal slices:
- boxSliceVertices - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
The transformed boxSlices frames used to sample the volume data along diagonal slices:
- boxSliceX - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
The frame around the x slice.
- boxStatic - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static and static inverse, arbitrary clipping plane check box.
- boxStaticInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static and static inverse, arbitrary clipping plane check box.
- BoxToIBox(Box3, Box3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- boxWidth - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- boxWidth - Variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Width and height of zoom box
- boxX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Check boxes that turn the image plane and the sliders on and off.
- boxX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Check boxes that turn the image plane on and off.
- boxX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Check boxes that turn the image plane on and off.
- boxXInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Check boxes that turn the image plane and the sliders on and off.
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- boxXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- boxXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- boxY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Check boxes that turn the image plane and the sliders on and off.
- boxY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Check boxes that turn the image plane on and off.
- boxY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Check boxes that turn the image plane on and off.
- boxYInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Check boxes that turn the image plane and the sliders on and off.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Cropped image region.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
Cropped image region.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Cropped image region.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
Cropped image region.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
Cropped image region.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Cropped image region.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Cropped image region.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
cropped image boundary info.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
cropped image boundary.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
bounding box for crop the image.
- boxYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Cropped image region.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
Cropped image region.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Cropped image region.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
Cropped image region.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
Cropped image region.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Cropped image region.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Cropped image region.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
cropped image boundary info.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
cropped image boundary.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
bounding box for crop the image.
- boxYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
bounding box for crop the image.
- boxZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Check boxes that turn the image plane and the sliders on and off.
- boxZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Check boxes that turn the image plane on and off.
- boxZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Check boxes that turn the image plane on and off.
- boxZInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Check boxes that turn the image plane and the sliders on and off.
- bp - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_bio_t
-
pointer to the present position in the buffer
- bp - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_t
-
- bp - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_raw_t
-
pointer to the current position in the buffer
- bpconv(double[], int, double[], double[], int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- BPLIST_HEADER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader
-
- BplistReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BplistReader
-
- bpp - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_cmptparm_t
-
image depth in bits
- bpp - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
image depth in bits
- bps - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- bps - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- bps - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- bps - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- bpsconv(double[], int, double[], double[], int, int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- bpser(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- bPtr - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Buffer pointer (aka file pointer).
- BQCOF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- br - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- br - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- br - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- bracketBound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
The initial bracket size for first iteration of ELSUNC.
- bracketBound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
The initial bracket size for first iteration of Powell.
- bracketBound - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Sets minimum and maximum limits as initial guess -+ unit_tolerance[i]*bracketBound.
- bracketBound - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
The bracket size around the minimum in multiples of unit_tolerance in the first iteration of Powell's algorithm.
- bracketBound - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- bracketBound - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- bracketBound_def - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- bracketBound_def - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- bracketBoundText - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- bracketBoundText - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- BracketingPhase(CeresSolver.FunctionSample, double, CeresSolver.FunctionSample, CeresSolver.FunctionSample, boolean[], CeresSolver.LineSearchSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WolfeLineSearch
-
- BRADLEY_FAYYAD_INIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- BRADLEY_FAYYAD_INIT - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- BradleyInit - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- brainMask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
Denotes which pixels undergo SWI processing.
- brainRegionSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The size of the region we have identified as the brain.
- brainRegionThresholdRatio - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The proportion of the total number of pixels in the volume that a region should be before we decide that it's
probably the brain.
- BRAINSURFACE_FLATTENER - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- brainsurfaceFlattenerRender - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Rendering the brainsurfaceFlattener objects.
- brainsurfaceFlattenerRender - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Rendering the brainsurfaceFlattener objects.
- branchButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- branchingFactor - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- BranchState(int, FlyPathGraphCurve) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Constructor.
- BranchState(int, FlyPathGraphCurve) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Constructor.
- BranchState(int, FlyPathGraphCurve) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Constructor.
- bratio(double, double, double, double, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- brcmp1(int, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- brcomp(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- breadth_first_search() - Method in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- breakDownArea - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
- breakPoints - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
Used in dqagpe This array must always be >= 2 in length.
- breakPoints - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Used in dqagpe This array must always be >= 2 in length.
- breakSize - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Defaults to the maximum buffer size in streaming.
- breal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- breal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- brickFloatFacs - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- brickKeywordsString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- brickLabsString - Variable in class gov.nih.mipav.model.file.FileAfni
-
Sub-brick names
- brickLabsString - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
Name for each sub-brick
- brickStatAux - Variable in class gov.nih.mipav.model.file.FileAfni
-
Each BLT is defined by a struct that contains two 3x3 matrices and four 3-vectors (2*3*3 + 4*3 = the 30 numbers).
- brickStatAux - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- brickStats - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- brickType - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- brickTypeNumber - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- BriefReport() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- BriefReport() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- bright_on_dark - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- bright_on_dark - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- brightness - Variable in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
DOCUMENT ME!
- brightness - Variable in class gov.nih.mipav.model.file.FileSVS
-
- brightness - Variable in class gov.nih.mipav.model.file.FileTiff
-
- brightness - Variable in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
DOCUMENT ME!
- brightness - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- brightness - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- brightness - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
offset ranging from -255 to 255 add to each scaled red, green, and
blue
- brightness - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- brightness - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- brightness - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
DOCUMENT ME!
- brightness - Variable in class gov.nih.mipav.view.ViewJFilterAnimate
-
DOCUMENT ME!
- brightness - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- brightness() - Method in class gov.nih.mipav.view.ViewJFilterAnimate
-
DOCUMENT ME!
- brightness(int) - Method in class gov.nih.mipav.view.ViewJFilterAnimate
-
DOCUMENT ME!
- brightnessBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
buffer for storing the original maximum of the OpenCL buffer
- brightnessContrastPanel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- brightnessLevel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
a pixel (no matter whether represented as a float or int), has a brightnessLevel, which is in the histogram as a
value between 0 and totalBins.
- brightnessSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
DOCUMENT ME!
- brightnessSlider - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- brightnessSlider - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- brightnessTable - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- brightOnDarkCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- brightPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- brightPanel - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- brightSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- brightSlider - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- brightThres - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- brikDataType - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- brikFileName - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- bringToFront(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Checks whether or not the dialog exists; if it does, it brings the dialog to front.
- bringToFront(String, Hashtable<String, JDialogEditor>) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
checks whether or not the dialog exists; if it does, it brings the dialog to front.
- bringToFront(String, Hashtable<String, JDialogEditor>) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
checks whether or not the dialog exists; if it does, it brings the dialog to front.
- BriskDescriptorExtractor() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- BriskLayer(AlgorithmBRISK.BriskLayer, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- BriskLayer(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- BriskLongPair() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- BriskPatternPoint() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
-
- briskScaleSpace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- BriskShortPair() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskShortPair
-
- BROWN_ALMOST_LINEAR - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- BROWN_ALMOST_LINEAR - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- BROWN_ALMOST_LINEAR - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- BROWN_ALMOST_LINEAR - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- BROWN_AND_DENNIS - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- BROWN_AND_DENNIS - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- BROWN_AND_DENNIS - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- BROWN_BADLY_SCALED - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- BROWN_BADLY_SCALED - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- BrownAndDennisFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BrownAndDennisFunction
-
- BrownBadlyScaledFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.BrownBadlyScaledFunction
-
- BROWSE - Static variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- BROWSE - Static variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- browseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
DOCUMENT ME!
- browseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- browseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- browseButton - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- browseDWIButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- browseOutputButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
DOCUMENT ME!
- browser - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
File chooser for the user to select an existing file for attachment
- BROYDEN_BANDED - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- BROYDEN_BANDED - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- BROYDEN_TRIDIAGONAL - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- BROYDEN_TRIDIAGONAL - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- BRUKER - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Bruker file format.
- bruteForceCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
CheckBox to turn brute-force registration on or off:.
- bruteForceDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Dialog to set the brute-force registration parameters:.
- Bs - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- bs_size - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- Bs2 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- bsBuff - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- bsBuff - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- bsFinishedWithStream() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- bsFinishedWithStream() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- bsGetint() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- bsGetInt32() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- bsGetIntVS(int) - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- bsGetUChar() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- bside - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- bsLive - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- bsLive - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- BSPENCE - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- bspline(ModelImage, ModelImage, int, TransMatrix, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Performs bspline interpolation on black and white image data.
- bSpline - Variable in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
DOCUMENT ME!
- bSpline - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
- Bspline - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- BSPLINE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- bSpline2D(int, int, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation.
- bSpline2DC(int, int, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation.
- BSPLINE3 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Cubic bspline interpolation.
- BSPLINE3 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Cubic bspline interpolation.
- bSpline3D(int, int, int, double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation.
- bSpline3DC(int, int, int, double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
This method is out of date, as it provides smoothed interpolation as opposed
to precise interpolation.
- BSPLINE4 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Quadratic bspline interpolation.
- BSPLINE4 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Quadratic bspline interpolation.
- bspline4D(ModelImage, ModelImage, int, TransMatrix, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Performs bspline interpolation on black and white image data in 4D image.
- BSplineButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
- bsplineC(ModelImage, ModelImage, int, TransMatrix, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Performs bspline interpolation on color image data.
- bsplineC4D(ModelImage, ModelImage, int, TransMatrix, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Performs bspline interpolation on color image data in 4D image.
- BSplineControlPointImageFilterTest - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- BsplineCurve(Vector3f[], int, int, int, Vector<Vector3f>) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Compute Bspline segment
- BSplineEpsilon - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- BSplineEpsilon - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- bSplineJet1D(byte, float, float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
This method can also be used to calculate derivatives of the Bspline.
- bSplineJetXY(int, float, float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
This method can also be used to calculate derivatives of the Bspline.
- bSplineJetXYZ(int, float, float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
This method can also be used to calculate derivatives of the Bspline.
- bSplineJetXYZ_double(int, float, float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
This method can also be used to calculate derivatives of the Bspline.
- BSplineKernelFunction - Class in gov.nih.mipav.model.structures
-
- BSplineKernelFunction() - Constructor for class gov.nih.mipav.model.structures.BSplineKernelFunction
-
- BSplineKernelFunction(int) - Constructor for class gov.nih.mipav.model.structures.BSplineKernelFunction
-
- BSplineKernelFunctionTest - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- BSplineLattice2Df - Class in gov.nih.mipav.model.structures
-
This class manages a 2D lattice of control points given a discretized B-Spline basis for each axis.
- BSplineLattice2Df(BSplineBasisDiscretef, BSplineBasisDiscretef) - Constructor for class gov.nih.mipav.model.structures.BSplineLattice2Df
-
Create 2D lattice of control points given a discretized B-Spline basis for each axis.
- BSplineLattice3Df - Class in gov.nih.mipav.model.structures
-
This class manages a 3D lattice of control points given a discretized B-Spline basis for each axis.
- BSplineLattice3Df(BSplineBasisDiscretef, BSplineBasisDiscretef, BSplineBasisDiscretef) - Constructor for class gov.nih.mipav.model.structures.BSplineLattice3Df
-
Create 3D lattice of control points given a discretized B-Spline basis for each axis.
- BSplineRegistration2Df - Class in gov.nih.mipav.model.algorithms.registration
-
This class is used to register a 2D source image to a 2D target image.
- BSplineRegistration2Df(ModelSimpleImage, ModelSimpleImage, BSplineBasisf, BSplineBasisf, RegistrationMeasure) - Constructor for class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Create instance to be used for registration.
- BSplineRegistration3Df - Class in gov.nih.mipav.model.algorithms.registration
-
This class is used to register a 3D source image to a 3D target image.
- BSplineRegistration3Df(ModelSimpleImage, ModelSimpleImage, BSplineBasisf, BSplineBasisf, BSplineBasisf, RegistrationMeasure) - Constructor for class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Create instance to be used for registration.
- BSplineRegistrationBasef - Class in gov.nih.mipav.model.algorithms.registration
-
This is a common base class for all BSpline-based registrations.
- BSplineRegistrationBasef(ModelSimpleImage, ModelSimpleImage, RegistrationMeasure) - Constructor for class gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
Create instance to be used for registration.
- BSplineScatteredDataPointSetToImageFilterTest - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- BSplineScatteredDataPointSetToImageFilterTest2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- BSplineShapeFunctions - Variable in class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- bsPutint(int) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- bsPutIntVS(int, int) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- bsPutUChar(int) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- bsR(int) - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- bsSetStream(InputStream) - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- bsSetStream(OutputStream) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- bsStream - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- bsStream - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- bstate - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- bSubsample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline.Options
-
Boolean flag set to true to indicate whether the registration is performed to a subsampled target image.
- bsW(int, int) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- bt - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- BT - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.StaticGrid
-
- bTableSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- btArrayList - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
this is the array list of the texts on the buttons
- BtB_method - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- btdtr(double, double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- BTDTR - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- bText - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- btnAdd - Variable in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- btnGpuComp - Variable in class gov.nih.mipav.view.ViewUserInterface
-
The button indicating that MIPAV is set to run OpenCL -- GPU based algorithms
- btnInvisible - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- btnMoveDown - Variable in class gov.nih.mipav.view.ViewDICOMDoubleListPanel
-
DOCUMENT ME!
- btnMoveUp - Variable in class gov.nih.mipav.view.ViewDICOMDoubleListPanel
-
DOCUMENT ME!
- btnMultiCore - Variable in class gov.nih.mipav.view.ViewUserInterface
-
The button indicating that MIPAV is set to run in a threaded environment
- btnRemove - Variable in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- btrack - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- btrunc(int[], boolean, double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- btrunc(int[], boolean, DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- bu - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- bu - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- bu0 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- bu0 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- BucketSort(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- BucketSortCroiss(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- buf - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint_store
-
- buf - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor_store
-
- buf - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Slab
-
- buf - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_bio_t
-
temporary place where each byte is read or written
- buf - Variable in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- buf - Variable in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- buf - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
The line buffer.
- buf - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
The line buffer.
- buf - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
The line buffer.
- buf_size - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Slab
-
- buff - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_t
-
- buffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- buffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Buffer for original source image.
- buffer - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- buffer - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.SVR_Q
-
- buffer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_t
-
- buffer - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_raw_t
-
buffer - not included in original class
- buffer - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGACInputStream
-
- buffer - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGACInputStream
-
- buffer - Variable in class gov.nih.mipav.model.file.libjpeg.bitread_working_state
-
- buffer - Variable in class gov.nih.mipav.model.file.libjpeg.my_source_mgr
-
- buffer - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- buffer - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVR_Q
-
- buffer - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- buffer_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- buffer_full - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- buffer_gc - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- buffer_gc - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- buffer_index - Variable in class gov.nih.mipav.model.file.libjpeg.bitread_working_state
-
- buffer_index - Variable in class gov.nih.mipav.model.file.libjpeg.my_source_mgr
-
- buffer_layout - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Chunk
-
- BUFFER_SIZE - Static variable in class gov.nih.mipav.model.file.FileDicomBase
-
The size of the buffer that contains the tags of the DICOM image.
- buffer_size_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- buffer_size_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- buffer2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- buffer2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- buffer8 - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- buffer8 - Variable in class gov.nih.mipav.model.file.libjpeg.my_post_controller
-
- buffer9to12 - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- buffer9to12 - Variable in class gov.nih.mipav.model.file.libjpeg.my_post_controller
-
- bufferA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- bufferA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- bufferA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- bufferA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- BufferBase - Class in gov.nih.mipav.model.structures
-
This is an abstract buffer class that indicates the required methods of the sub-classes.
- BufferBase() - Constructor for class gov.nih.mipav.model.structures.BufferBase
-
- bufferBitSet - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- BufferBoolean - Class in gov.nih.mipav.model.structures
-
This class extends the abstract BufferBase class.
- BufferBoolean() - Constructor for class gov.nih.mipav.model.structures.BufferBoolean
-
Default constructor.
- BufferBoolean(int) - Constructor for class gov.nih.mipav.model.structures.BufferBoolean
-
Constructor that allocates memory.
- BufferBoundsException(int, int, long) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.BufferBoundsException
-
- BufferBoundsException(String) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.BufferBoundsException
-
- bufferBrain(BitSet, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Appends the given brainMaskTemp by mmToPad in pixels in all directions.
- bufferByte - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
A byte array of the size of the NIFTI header + 4 extension bytes.
- bufferByte - Variable in class gov.nih.mipav.model.file.FilePackBit
-
Buffer used to store image of type byte.
- bufferByte - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- bufferByte - Variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- BufferByte - Class in gov.nih.mipav.model.structures
-
This class extends the abstract BufferBase class.
- BufferByte() - Constructor for class gov.nih.mipav.model.structures.BufferByte
-
Default constructor.
- BufferByte(int) - Constructor for class gov.nih.mipav.model.structures.BufferByte
-
Constructor that allocates memory.
- bufferByte2 - Variable in class gov.nih.mipav.model.file.FilePackBit
-
Second buffer used to store image of type byte.
- bufferData - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter.SliceTransferable
-
- bufferDouble - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- BufferDouble - Class in gov.nih.mipav.model.structures
-
This class extends the abstract BufferBase class.
- BufferDouble() - Constructor for class gov.nih.mipav.model.structures.BufferDouble
-
Default constructor.
- BufferDouble(int) - Constructor for class gov.nih.mipav.model.structures.BufferDouble
-
Constructor that allocates memory.
- buffered_image - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- BufferedImageFactory() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.BufferedImageFactory
-
- bufferFactor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- bufferFactor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Buffer factor, 1 usually, 4 for color images.
- bufferFactor - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- bufferFactor - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- bufferFactor - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
1 for black and white, 4 for color.
- bufferFloat - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- BufferFloat - Class in gov.nih.mipav.model.structures
-
This class extends the abstract BufferBase class.
- BufferFloat() - Constructor for class gov.nih.mipav.model.structures.BufferFloat
-
Default constructor.
- BufferFloat(int) - Constructor for class gov.nih.mipav.model.structures.BufferFloat
-
Constructor that allocates memory.
- bufferImageHeader - Variable in class gov.nih.mipav.model.file.FileAnalyze
-
Storage buffer for the header.
- bufferInt - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- BufferInt - Class in gov.nih.mipav.model.structures
-
This class extends the abstract BufferBase class.
- BufferInt() - Constructor for class gov.nih.mipav.model.structures.BufferInt
-
Default constructor.
- BufferInt(int) - Constructor for class gov.nih.mipav.model.structures.BufferInt
-
Constructor that allocates memory.
- bufferIW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- bufferIW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- bufferIW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- bufferIW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- bufferLong - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- BufferLong - Class in gov.nih.mipav.model.structures
-
This class extends the abstract BufferBase class.
- BufferLong() - Constructor for class gov.nih.mipav.model.structures.BufferLong
-
Default constructor.
- BufferLong(int) - Constructor for class gov.nih.mipav.model.structures.BufferLong
-
Constructor that allocates memory.
- bufferReader - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- bufferShort - Variable in class gov.nih.mipav.model.file.FilePackBit
-
Buffer used to store image of type short or unsigned byte.
- bufferShort - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- BufferShort - Class in gov.nih.mipav.model.structures
-
This class extends the abstract BufferBase class.
- BufferShort() - Constructor for class gov.nih.mipav.model.structures.BufferShort
-
Default constructor.
- BufferShort(int) - Constructor for class gov.nih.mipav.model.structures.BufferShort
-
Constructor that allocates memory.
- bufferSize - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms.ByteBuffer
-
The total capacity of the buffer.
- bufferSize - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- bufferSize - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- bufferSize - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- bufferSize - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- bufferSize - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- bufferSize - Variable in class gov.nih.mipav.model.file.FilePackBit
-
Size of buffer to be allocated.
- bufferSize - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- bufferSize - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- bufferSize - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- bufferToInt16(byte[], int, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Copies a 2 byte array into a 16 bit integer of proper endianess.
- bufferToInt32(byte[], int, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Copies a 4 byte array into a 32 bit integer of proper endianess.
- bufferType - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Type of image buffer (i.e.
- bufferTypeStr - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Deprecated.
- BufferUByte - Class in gov.nih.mipav.model.structures
-
This class extends the abstract BufferBase class.
- BufferUByte() - Constructor for class gov.nih.mipav.model.structures.BufferUByte
-
Default constructor.
- BufferUByte(int) - Constructor for class gov.nih.mipav.model.structures.BufferUByte
-
Constructor that allocates memory for the buffer.
- BufferUInt - Class in gov.nih.mipav.model.structures
-
This class extends the abstract BufferBase class.
- BufferUInt() - Constructor for class gov.nih.mipav.model.structures.BufferUInt
-
Default constructor.
- BufferUInt(int) - Constructor for class gov.nih.mipav.model.structures.BufferUInt
-
Constructor that allocates memory.
- BufferUShort - Class in gov.nih.mipav.model.structures
-
This class extends the abstract BufferBase class.
- BufferUShort() - Constructor for class gov.nih.mipav.model.structures.BufferUShort
-
Default constructor.
- BufferUShort(int) - Constructor for class gov.nih.mipav.model.structures.BufferUShort
-
Constructor that allocates memory.
- bufferW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- bufferW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- bufferW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- bufferW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- bufferWrite - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- bufMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
DOCUMENT ME!
- bufMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
maximum of the image buffer.
- bufMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
DOCUMENT ME!
- bufMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
DOCUMENT ME!
- bufMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
DOCUMENT ME!
- bufMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
minimum of the image buffer.
- bufMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
DOCUMENT ME!
- bufMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
DOCUMENT ME!
- BUG_MAIL_URL - Static variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
URL of the page we use to actually send the bug report email.
- BugType(String) - Constructor for enum gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder.BugType
-
- bugTypeComboBox - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
- build - Variable in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- build_3D_group(Vector<Vector<double[][]>>, int[][], int) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- build_bg_ycc_rgb_table(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- build_dog(SIFT3D.SIFT3DC) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- build_gpyr(SIFT3D.SIFT3DC) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- build_intersection_table(GenericPolygonClipper.it_node[], GenericPolygonClipper.edge_node, double) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- build_lmt(GenericPolygonClipper.lmt_node[], GenericPolygonClipper.sb_tree[], int[], VOIBaseVector, int, GenericPolygonClipper.gpc_op) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- build_rgb_y_table(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- build_sbt(int[], double[], GenericPolygonClipper.sb_tree) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- build_ycc_rgb_table(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- build3DMousePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Build the clipping control panel for the surface render.
- build3DVOIToolBar(JToolBar, int, int) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
- buildActiveImagePanel() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Builds the active image panel for choosing which image (A, B, or BOTH) to
perform operations on.
- buildActiveImagePanel() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Builds the active image panel for choosing which image (A, B, or BOTH) to
perform operations on.
- buildActiveImagePanel() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Builds the active image panel for choosing which image (A, B, or BOTH) to perform operations on.
- buildAdvancedDialog(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Build advanced settings dialog.
- buildAdvancedDialog(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Build advanced settings dialog.
- buildAdvancedDialog(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Build advanced settings dialog.
- buildAdvancedDialog(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Build advanced settings dialog.
- buildAdvancedDialog(int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Build advanced settings dialog.
- buildAdvancedDialog(int, int, int, boolean, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Build advanced settings dialog.
- BuildAllLevels(int, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Wrapper for automate model generation.
- BuildAllLevels(int, String, String, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Driver method for model generation.
- BuildAllLevels(int, Vector<String>, String, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Driver method for model generation.
- buildAlphaSlider() - Method in class gov.nih.mipav.view.ViewControlsImage
-
Builds the slider used to control the alpha blending.
- buildAnchorPane() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
- buildAnimateToolBar(ActionListener) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Method to build the toolbar for the Animate frame.
- buildAnimateToolBar(ActionListener) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Method to build the toolbar for the Animate frame.
- buildAnnotationTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
Creates the table that displays the annotation information.
- buildAnnotationTable(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
Creates the table that displays the annotation information.
- buildAnonDirectoryDialog() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Builds the anonymize directory dialog and displays it.
- buildApplyButton() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Builds the cancel button.
- buildApplyButton() - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Builds the cancel button.
- buildBasicLUTToolBar() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Builds a toolbar with just the basic lut buttons on it.
- buildBasicTableModel() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
- buildBlendPanel() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Build the blend slider control panel.
- buildBlendPanel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Build the blend slider control panel.
- buildBlurringPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
part of the algorithm rests on blurring the original image.
- buildBoneBG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Build the bone ( yellow sphere ) branch group image scene graph.
- buildBoundingBox() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Build the boudning box for X, Y, Z slices.
- buildBoundingBox() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Build the boudning box for X, Y, Z slices.
- buildBoundsPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- buildBrainsurfaceFlattener() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the Brainsurface Flattener panel:
- buildBrightContPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Initializes GUI components and displays dialog.
- buildBrightContPanel() - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Initializes GUI components and displays dialog.
- buildBrightnessContrastPanel() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Initializes GUI components and displays dialog.
- buildBrightnessContrastPanel() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- buildBruteForceDialog() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Builds the bruteForceDialog so the user can set the brute-force registration parameters:
- buildBurnPackingPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Build the tab panel containing ablation (sphere/ellipsoid) packing parameters, etc.
- buildBurnSceneGraph(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Build the image scene graph structure.
- buildBurnSceneGraph(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnCoolTipView
-
Build the image scene graph structure.
- buildBurnSceneGraph(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnHeatView
-
Build the image scene graph structure.
- buildBurnSceneGraph(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnRegularView
-
Build the image scene graph structure.
- buildBurnSceneGraph(float, float, Color3f, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Only used by the default burning point type to reset the image sence graph when the burning sphere radius and
time changes.
- buildBurnVisPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Build the tab containing the color, opac, picking, labels, etc for burns.
- buildButton(CustomUIBuilder.UIParams) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Creates a JButton using a UIParams parameters
- buildButton(String) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildButton(String, String, String) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Create a new toolbar button.
- buildButtonPanel() - Method in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
- buildButtons() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Builds button panel consisting of OK, Cancel and Help buttons.
- buildButtons() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Creates an OK Button, which is relabeled "Save", an "Ignore" button, a "Cancel" and
a "Help" button.
- buildButtons() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Builds button panel consisting of OK, Cancel and Help buttons.
- buildButtons() - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
Builds button panel consisting of OK, Cancel and Help buttons.
- buildButtons() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Builds button panel consisting of OK, Cancel and Help buttons.
- buildButtons() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
Builds button panel consisting of OK, Cancel and Help buttons.
- buildButtons(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
creates the buttons, USE PREFERENCES, OKAY, CANCEL, and HELP.
- buildButtons(GridBagConstraints) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Builds the close button.
- buildCameraPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Build the camera snap shot panel.
- buildCameraPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the camera control panel for the surface render.
- buildCancelButton() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Builds the cancel button.
- buildCancelButton() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Builds the cancel button.
- buildCancelButton() - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
Builds the cancel button.
- buildCancelButton() - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Builds the cancel button.
- buildCancelButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
Builds the cancel button.
- buildCancelButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Builds the cancel button.
- buildCancelButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
Builds the cancel button.
- buildCancelButton(String, ActionListener) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
- buildCenterPanel() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- buildCheckBox(String, boolean) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Builds a new check box component.
- buildCheckBox(String, boolean) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildCheckBox(String, boolean, ItemListener) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Builds a new check box component.
- buildCheckBoxMenuItem(String, String, boolean) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Builds a JCheckBox with the given parameters and adds it to the Vector of menu items.
- buildCheckBoxMenuItem(String, String, ActionListener, boolean) - Static method in class gov.nih.mipav.view.ViewMenuBuilder
-
Static method for building JCheckBoxes with the given parameters.
- buildCheckBoxPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- buildCirclePanel() - Method in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
- buildClamping(JPanel, GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
controls the entire creation of the clamping panel and all controls related to the display of the clamping
parameter. places the clamping panel into the holder panel.
- buildClipPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the clipping control panel for the surface render.
- buildClipPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Build the clipping control panel for the surface render.
- buildClipPlanesTree() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Build cliping planes tree structure.
- buildCloseButton() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Builds the close button.
- buildCloseButton() - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Builds the close button.
- buildColocalizeToolBar(ActionListener) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Method to build the toolbar for the Animate frame.
- buildColocalizeToolBar(ActionListener) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Method to build the toolbar for the Animate frame.
- buildColorMap() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Builds which cells to display as light blue and green.
- buildColorPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
part of the algorithm rests on finding the original image minus an estimation of the local mean.
- buildColorPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
builds the controls to set the color of the border the and color of the background.
- buildColorTable(Vector<File>) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Attempted to find dependencies of used files after they were temporarily added to the class path (included
unpacking jars)
- buildColourPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
makes the panel to allow user selection of colour channels to filter. nothing editable when image not in ARGB or
ARGB_USHORT or ARGB_FLOAT
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Builds kernel combo box.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
buildComboBox.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
buildComboBox.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Builds kernel combo box.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Builds kernel combo box.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Builds the ComboBox panel editing units of measure.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Builds a list of images to register to the template image.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Builds a list of images to register to the template image.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Builds kernel combo box.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Builds kernel combo box.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
buildComboBox.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
buildComboBox.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Builds kernel combo box.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Builds a list of images to register to the template image.
- buildComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
buildComboBox.
- buildComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
Builds a list of images.
- buildComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Builds a list of images.
- buildComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Builds a list of images.
- buildComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
Builds a list of images.
- buildComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Builds a list of images.
- buildComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Builds a list of images.
- buildComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Builds a list of images.
- buildComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Builds a list of images.
- buildComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Builds a list of images.
- buildComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Builds a list of images.
- buildComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
Builds a list of images.
- buildComboBox(String, Object[]) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildComboBox(String, Object[], int) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Builds a list of images to concatenate to image A.
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
Builds a list of images to operate on from the template image.
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Builds a list of images to operate on from the source image.
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Builds a list of images to operate on from the template image.
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Builds a list of images to operate on from the source image.
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Builds a list of images to operate on from the template image.
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Builds a list of images to operate on from the template image.
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
Builds a list of images to operate on from the template image.
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
Builds a list of images to operate on from the template image.
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogVABRA
-
Builds a list of images to operate on from the template image.
- buildComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Builds a list of images to operate on from the source image.
- buildComboBoxImage() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Builds a list of images to operate on from the template image.
- buildComboBoxImage(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Builds a list of images to register to the template image.
- buildConnections() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Builds a list of cross-references, so that connections[i] contains all the verticies that are connected to vertex
at i.
- buildConnections() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Builds a list of cross-references, so that connections[i] contains all the vertices that are connected to vertex
at i.
- buildContentPane(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogServer
-
Builds the content pane for the dialog, making the text fields and labels.
- buildControlPanel() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Creates the mouse control panels.
- buildControlPanel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Build the light control panel.
- buildControlPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Builds panel that has 3 sliders for the 3 planes shown, 3 checkboxes
for showing the planes, 3 text boxes for the current values of the
sliders, and a fourth slider and text box for the time dimension, if
necessary.
- buildControlPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Panel that has a slider for the image.
- buildControlPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Build the light control panel.
- buildControlPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Builds panel that has 3 sliders for the 3 planes shown, 3 checkboxes
for showing the planes, 3 text boxes for the current values of the
sliders, and a fourth slider and text box for the time dimension, if
necessary.
- buildControlPanel() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Panel that sets the at rest frame number and the desired frames per second and reports the actual frames per
second.
- buildControlPanel() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Panel that sets the at rest frame number and the desired frames per second and reports the actual frames per
second.
- buildControlPanel() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
panel that sets the at rest frame number and the desired frames per second.
- buildControlPanel(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
panel that sets the at rest frame number and the desired frames per second.
- buildControlPanel(ModelImage, boolean) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Builds the interface panel.
- buildConventionalTabs() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
This method builds the conventional tabs based on possibly pre-defined values.
- buildConventionalTreT1Panel() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildCubicBox() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Create the rotation control cubic box.
- buildCubicBox() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Create the rotation control cubic box.
- buildCubicBranch() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Build the cubic branch under the objRootBG.
- buildCubicBranch() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Build the cubic branch under the objRootBG.
- buildCursors() - Static method in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- buildCurveTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
Creates the table that displays the annotation information.
- buildCustomBlendPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- buildCustomToolBar(Vector<CustomUIBuilder.UIParams>) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
- buildDatePanel() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Builds the panel that designed for inputing study duration information.
- buildDecimalField(String, double) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildDefaultFonts() - Static method in class gov.nih.mipav.view.MipavUtil
-
This should only be called once when MIPAV starts, and then if the user changes the font options through Program
Options to rebuild the fonts used in GUI building.
- buildDefaultShortcuts() - Static method in class gov.nih.mipav.view.Preferences
-
Builds the default shortcut hashtable (not user modifiable).
- buildDialog() - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
setup the lightbox's control dialog.
- buildDialog(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
Builds the dialog
- buildDialog(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
Builds the dialog
- buildDialog(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Builds main dialog.
- buildDICOMDIRFrame() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Builds the image tree dialog and displays it.
- buildDICOMFrame() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Builds the image tree dialog and displays it.
- buildDicomSortOptions() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.JPanelListSelection
-
Method for building DICOM tag/name sorting options.
- buildDimensionNode(ModelImage, FileWriteOptions, FileFormat, FileMincHDF.HDFNode, DefaultTreeModel) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
Creates the dimension node for files that are not Minc2.0
- buildDimensionsPanel() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- buildDimPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
- buildDisabledTextButton(String, String, String, JToolBar) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Helper method to build a text button for the toolbar.
- buildDisplayPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the display control panel for the surface render.
- buildDisplayPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Build the display control panel for the surface render.
- buildDistancePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- buildDivisionComboBoxes() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Creates the combo-box that allows user to select the number of divisions in the image when building the
histogram.
- buildDTIColorLoadPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- buildDTILoadPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- buildDTILoadPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- buildDTIParametersPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- buildEditDICOMFrame() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Builds the edit dicom tag interface.
- buildEntryPoint() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Build the entry point image scene graph structure.
- buildEntryPointBG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Build the entry point ( green sphere ) branch group image scene graph.
- buildEPIPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- buildEValueLoadPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- buildEVLoadPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- buildExtentsPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- buildFacesDescription(MetadataExtractor.Face[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- buildFALoadPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- buildFiberTrackingPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- buildField(String, String) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildFileField(String, String, boolean, int) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildFileField(String, String, boolean, int, boolean) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildFileField(String, String, boolean, int, boolean, ActionListener) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildFileField(String, String, boolean, int, ActionListener) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildFilePanel(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
creates the source panel which consists of the directory line, the browse button, and a check box approving the
anonymize in sub-directories.
- buildFilterPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- buildFilterTypeComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- buildFilterTypeComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- buildFilterTypeComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- buildFilterTypeComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- buildFitFunctPanel() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Creates a panel to edit various fitted function features.
- buildFittingPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- buildFlythroughPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Build the flythru move control panel.
- buildFlythruMovePanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the flythru move control panel.
- buildFlythruPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the flythru control panel.
- buildFlyThruToolbar() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the fly through toolbar.
- buildFontPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
builds the panel that allows customization of font style/size/color.
- BuildFromFiles(CAAMModel, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Build the model from text based file
- BuildFromFiles(CAAMModel, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Build the model from text based file and AAM configuration file
- BuildFromFiles(CAAMModel, String, String, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Diver method for model generation.
- BuildFromFiles(CAAMModel, Vector<String>, String, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Diver method for model generation.
- BuildFromSACF(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Wrapper to build the sequential model from the given aam configuration
files.
- BuildFromSACF(String, String, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Driver method for model generation.
- BuildFromSACF(String, Vector<String>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Diver method for model generation.
- buildFunctionPanel() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Creates a panel where various features of the functions can be edited, such as showing the legend, and changing
function names.
- buildFuzzyCMeanPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- buildFuzzyPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- buildGaborPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- buildGeneralPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Builds the "edit image name" panel.
- buildGeneralToolBar(int, int) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Builds the general image toolbar, with buttons for saving the image, the histogram, etc., and a slider for a 3D
image.
- buildGeodesic() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the Geodesic control panel.
- buildGeodesic() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Build the Geodesic control panel.
- buildGrayTitledBorder(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- buildGrid(BitSet) - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
Builds the grid, with or without a pre-loaded BitSet (from an on-disk paintbrush)
- buildGroupElementMap(Hashtable<FileDicomKey, FileDicomTag>) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- buildGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSelectChannelSequence
-
DOCUMENT ME!
- buildGUI() - Method in class gov.nih.mipav.view.ViewDICOMDoubleListPanel
-
DOCUMENT ME!
- buildGUI() - Method in class gov.nih.mipav.view.ViewFileChooserSubsample
-
DOCUMENT ME!
- buildGUI() - Method in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- buildGUI() - Method in class gov.nih.mipav.view.ViewSplashScreen
-
GUI initialization.
- buildHaralickPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- buildHardThresholdPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
No border
- buildHelpButton() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Builds the help button.
- buildHelpButton() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Builds the help button.
- buildHelpButton() - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
Builds the help button.
- buildHelpButton() - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Builds the help button.
- buildHelpButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Builds the help button.
- buildHelpButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
Builds the help button.
- buildHelpText() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Constructs the helping manual in the help panel - one of the three panels in the tabbed panel.
- buildHIFIPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildHIFITabs() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildHistogram() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
make histogram uses the class-global vars kernel and histogram.
- buildHistoLUTPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The histogram control panel of the lookup table.
- buildHistoLUTPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
The histogram control panel of the lookup table.
- buildHostPanel() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Builds the host panel by calling methods to build the server and storage panels.
- buildHTMLMenuItem(String, String, int, ActionListener, String, boolean) - Static method in class gov.nih.mipav.view.ViewMenuBuilder
-
DOCUMENT ME!
- buildIconButton(String, String, String, String, JToolBar) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Helper method to build an icon button for the toolbar.
- buildIconButton(Icon, String, String, ActionListener) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Helper method to build a icon button.
- buildIgnoreButton() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Creates a button labelled "Ignore" and connects it to the action listener event list.
- buildImage(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Opens preview of image in frame
- buildImage(String, String) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- buildImageAlignToolBar() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- buildImageComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Builds a list of images.
- buildImageDependentComponents() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- buildImageDestObject(ModelLUT, boolean) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Shows the 2D histogram image.
- buildImageDestObject(ModelLUT, boolean) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Shows the 2D histogram image.
- buildImageDestPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
creates the destination panel which consists of the directory textline, the browse button, and a sub-panel to
provide the name of the randomized image.
- buildImageEvalComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Builds a list of images.
- buildImageEvalComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Builds a list of images.
- buildImageIndependentComponents() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- buildImageList() - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- buildImageNode(ModelImage, FileWriteOptions, FileFormat, FileMincHDF.HDFNode, DefaultTreeModel) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
Builds the image node (done for all filetypes when writing to MINC2.0 HDF5
- buildImageObject(int, int, ModelLUT, ModelLUT, boolean) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Shows the image.
- buildImageObject(int, String) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
For generating the display of 1 or 2 RGB images.
- buildImageOriginPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- buildImagePanel() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- buildImagePanel() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- buildImagePanel() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
- buildImagePanel() - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Sets up the image panel and the table that will store basic header info, and returns the panel containing these.
- buildImgComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Builds a list of images.
- buildImgComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Builds a list of images.
- buildImgComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Builds a list of images.
- buildImgComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Builds a list of images.
- buildImgComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Builds a list of images.
- buildImgComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Builds a list of images.
- buildImgComboBox(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Builds a list of images.
- buildImportDataPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- buildInfoNode(ModelImage, FileFormat, FileMincHDF.HDFNode, DefaultTreeModel) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
builds the Info node for files that were not originally MINC 2.0 HDF5
- buildIntegerField(String, int) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildInterface() - Method in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- buildIRSPGRPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildIRSPGRPanelGEInner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildIRSPGRPanelSiemensInner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildItem(JMenuItem, Object) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- BuildJacobianLayout(CeresSolver.Program, int, Vector<int[]>, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobianWriter
-
- buildKernelPanel(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Creates the panel that allow user to select the kernel size and shape of the image when building the histogram.
- buildKernelShape(JPanel, GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Creates the comboBox that allows user to define the way the neighboring pixels are chosen for the histogram.
- buildKernelShapeComboBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Creates the combo-box that allows user to select the shape of the kernel (mask).
- buildKernelShapeComboBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Creates the combo-box that allows user to select the shape of the kernel (mask).
- buildKernelSize(JPanel, GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Creates the editable text comboBox that allows user to define the number of neighboring pixels used for the
histogram. the number given may only be odd, as this is the total number of pixels chosen on both sides.
- buildKernelSizeComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Creates the combo-box that allows user to select the size of the kernel (mask).
- buildKernelSizeComboBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Creates the combo-box that allows user to select the size of the kernel (mask).
- buildKernelSizeComboBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Creates the combo-box that allows user to select the size of the kernel (mask).
- buildKernelSizeComboBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Creates the combo-box that allows user to select the size of the kernel (mask).
- buildKernelSizeComboBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Creates the combo-box that allows user to select the size of the kernel (mask).
- buildKernelSizeComboBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Creates the combo-box that allows user to select the size of the kernel (mask).
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Build the panel.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildKeyImagePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
Panel contains both the 3D image dir and saved 2D slices atlas dir.
- buildLabel(String) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Builds a label with the proper font and font color.
- buildLabel(String) - Method in class gov.nih.mipav.view.dialogs.JDialogServer
-
Build the label for the textField, try to standardize the label appearance in the GUI.
- buildLabel(String) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Builds the label for the textField, try to standardize the label appearance in the GUI.
- buildLabelPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The label panel of the x, y, z slider position.
- buildLabelPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- buildLabelPanel() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
The label panel of the x, y, z slider position.
- buildLabels() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Convenience method created to simplify configureFrame().
- buildLayout() - Method in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- buildLeftSubPanel() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- buildLevelSlider(JPanel, GridBagConstraints) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Builds the level slider and places it in the slider panel.
- buildLightPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the light control panel for the surface render.
- buildLightPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Build the light control panel for the surface render.
- buildList() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
DOCUMENT ME!
- buildListingPanel() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Builds the listing panel.
- buildListPanel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Build the light list panel.
- buildListPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Build the light list panel.
- buildLoadDialog() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Instantiates and shows the "Load label file" dialog, which is used to load a text file containing the names of
the colored labels.
- buildLoadDialog() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- buildLoadPanel(ActionListener, JPanel, JLabel, JTextField, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- buildLoadPanel(ActionListener, JPanel, JLabel, JTextField, String, String, JPanel) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- buildLocationPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- buildLogPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
creates a panel for the output log.
- buildLogPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
creates a panel for the output log.
- buildLUTPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Construct the panel LUT table viewing panel.
- buildLUTs() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Convenience method created to simplify configureFrame().
- buildLUTSelectionList(ActionListener) - Static method in class gov.nih.mipav.view.JPanelHistogram
-
Build the center part of the LUT toolbar.
- buildLUTSelectionList(ActionListener) - Static method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
- buildLUTThresholdToolBar() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Creates the LUT thresholding toolbar.
- buildLUTToolBarBottom() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Builds the LUT toolbar, with buttons for quick-changing the LUT of the image.
- buildLUTToolBarTop() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Build the top part of the LUT toolbar.
- buildMagSlider() - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
builds the image magnification slider.
- buildMagSliderLabels(float, float) - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
builds labels used by the magnification slider.
- buildMagToolBar(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Builds the image toolbar for zooming
- buildMainPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- buildMainPanel(float) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- buildMaskLoadPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- buildMatrixPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Builds the panel usd in the tabbed pane "transform" as appropriate for the number of dimensions of the image.
- buildMatrixPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Builds the matrixPanel.
- buildMaximumSizeComboBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Creates the combo-box that allows user to select the maximum size of the kernel (mask) when adaptive median
filtering is selected.
- buildMaxSlider(JPanel, GridBagConstraints) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- buildMenu() - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Builds the File menu for the HyperGraph interface.
- buildMenu() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Builds menu with load, save, and exit options.
- buildMenu() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Builds menus for the frame.
- buildMenu() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Builds menu.
- buildMenu() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Builds menus for the tri-planar view.
- buildMenu() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
This method builds a menu which contains the options for opening/saving a LUT or set of transfer functions,
closing the LUT, and utilities such as CT presets.
- buildMenu() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Builds menus for the tri-planar view.
- buildMenu() - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Builds a small menu with "New directory", "Refresh directory", "Reset file filter", and "Open image" options.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
This method builds a menu which contains the options Save image as and Close Animate.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
This method builds a menu which contains the options Save image as and Close Animate.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
This method builds a menu which contains the option Close Colocalization.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
This method builds a menu which contains the option Close ColocalizationRegression.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Builds the jmenubar and adds two options.. disregard series #s and exit/close
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Function that builds the menu of various tools to be used in conjunction with the graph. ie: opening / saving
files, changing gridlines, title / axis labels, etc.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
This method builds a menu which contains the options for opening/saving a LUT or set of transfer functions,
closing the LUT, and utilities such as CT presets.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
This method builds a menu which contains the options for opening/saving a LUT or set of transfer functions,
closing the LUT, and utilities such as CT presets.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Creates the needed menus.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
Creates the needed menus.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
this method builds a menu which contains the options Save image as and Close Registration.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
this method builds a menu which contains the options Save image as and Close Registration.
- buildMenu() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Builds menus for the tri-planar view.
- buildMenu() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Builds menus for the User Interface.
- buildMenu(String, int, boolean) - Static method in class gov.nih.mipav.view.ViewMenuBuilder
-
Static method for building a JMenu.
- buildMenu(JFrame) - Method in class gov.nih.mipav.view.JFrameHistogram
-
This method builds a menu which contains the options for opening/saving a LUT or set of transfer functions,
closing the LUT, and utilities such as CT presets.
- buildMenuBar() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Builds a simple menubar for this frame (ViewJFrameLightBox).
- buildMenuBar() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Builds a simple menubar for this frame (ViewJFrameLightBox).
- buildMenuEntries() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Creates the menu bar for the dialog.
- buildMenuEntries() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Builds a small menu with "Clear log" and "Overwrite" options.
- buildMenuItem(CustomUIBuilder.UIParams, boolean) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Build a menu item using a pre-made UIParams
- buildMenuItem(CustomUIBuilder.UIParams, ActionListener, boolean) - Static method in class gov.nih.mipav.view.ViewMenuBuilder
-
Creates a Menu Item using pre-packaged UIParams
- buildMenuItem(String, String, int, ActionListener, String, boolean) - Static method in class gov.nih.mipav.view.ViewMenuBuilder
-
DOCUMENT ME!
- buildMenuItem(String, String, int, String, boolean) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
DOCUMENT ME!
- buildMesh() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- buildMessageFrame() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Builds the message frame where user/program data can be displayed.
- buildMessagePanel() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Construct the Query retrieval message panel.
- buildMinimumTickSpacing() - Method in class gov.nih.mipav.view.ViewJSlider
-
Sets values for minimum allowable tick spacing depending on size of GUI.
- buildMinMaxImageStack(double[][], double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- buildMinMaxPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- buildMinSlider(JPanel, GridBagConstraints) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Builds the min slider and places it in the slider panel.
- buildModeComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- buildModel(Vector<ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeB
-
Build the model with the given model image and VOIs vector along
- buildModel(Vector<ModelImage>, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeB
-
Build the AAM model from the given image and VOIs vector
- BuildModel(CAAMModel, Vector<ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Build the model from prostate images and VOIs
- BuildModel(CAAMModel, Vector<ModelImage>, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Build the model in supervised way, with given prostate images and VOIs.
- buildModifyGraphPanel() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Creats a panel where various featuers of the graph can be edited, such as visbility of gridlines and minor tick
marks, number of gridlines, background color, range, and labels for the title, x and y axiis.
- buildMouseControlPanel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Creates the mouse control panels.
- buildMousePanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Build the mouse recorder panel.
- buildMousePanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the mouse control panel for the raycast render.
- buildMousePanel(double) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Builds the mouse panel.
- buildMoviePanel() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Build the mouse recorder button panel.
- buildName(String) - Method in class gov.nih.mipav.view.ViewVOIVector
-
Builds a new voi name by incrementing the given name.
- buildNamedTextButton(String, String, String, JToolBar) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Helper method to build a text button for the toolbar.
- buildNameSuggestionPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
creates a name-suggestion panel.
- buildNavigationModePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Builds the navigation mode control panel.
- buildNewSourceTree(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Creates a new directory tree starting with directory as the root.
- buildNoThresholdPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- buildNotResampleButton() - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Builds the Cancel button.
- buildOARButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- buildOkayCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
creates the planel which contains the OKAY and Cancel buttons. sets their sizes, colours and listeners.
- buildOkayCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
creates a JPanel to hold the Okay and Cancel buttons. in a FlowLayout; presets all the listeners to the buttons,
the fonts and text colour.
- buildOkayCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
creates the planel which contains the OKAY and Cancel buttons. sets their sizes, colours and listeners.
- buildOKButton() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Builds the OK button.
- buildOKButton() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Uses the super method to create a standard OK Button, but then resets the button text to read "Save"
leaving the action command string as normal: "OK".
- buildOKButton() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Builds the OK button.
- buildOKButton() - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
Builds the OK button.
- buildOKButton() - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Builds the OK button.
- buildOKButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Builds the OK button.
- buildOKButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
Builds the OK button.
- buildOKButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Builds the OK button.
- buildOKButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
Builds the OK button.
- buildOKButton(String, ActionListener) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Builds the OK button.
- buildOKCancelButtons() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Builds button panel consisting of OK, Cancel and Help buttons.
- buildOKCancelPanel() - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildOKCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Creates the panel which consists of the OKAY button and the Cancel button.
- buildOKCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
builds the panel which allows user to accept or decline using this algorithm.
- buildOKCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
builds the panel which allows user to accept or decline using this algorithm.
- buildOKCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
builds the panel which allows user to accept or decline using this algorithm.
- buildOKCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- buildOKCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
creates the panel which consists of the OKAY button and the Cancel button.
- buildOKCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
creates the panel which consists of the OKAY button and the Cancel button.
- buildOKCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
creates the panel which consists of the OKAY button and the Cancel button.
- buildOKCancelPanel() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- buildOpacityPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Builds panel for opacity control change on the triplanar X, Y, Z.
- buildOpacityPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the volume opacity control panel for the surface render.
- buildOpacityPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Builds panel for opacity control change on the triplanar X, Y, Z.
- buildOpacityPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Build the volume opacity control panel for the surface render.
- buildOptionPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
creates the random-button panel,which are two radio-buttons determining the naming actions for the output
directories.
- buildOptionPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Builds the OptionPanel.
- buildOptionsPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
part of the algorithm rests on finding the original image minus an estimation of the local mean.
- buildOrientPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Builds the "orientation edit" panel.
- buildOutputPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
- buildOverlayStrings(FileInfoBase, String, String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Builds the overlay Strings from the tag's value.
- buildPadButton() - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Builds the Pad button for padding the blank images.
- buildPage() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Builds the panels for a page and adds them to the page.
- buildPage() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Builds the panels for a page and adds them to the page.
- buildPaintToolBar(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Builds the paint toolbar
- buildPaintToolBar(int, int) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Builds the paint toolbar, with buttons for widths of paint brushes, color chooser, etc.
- buildPanel() - Method in class gov.nih.mipav.view.JPanelHistogram
-
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanel(int) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
builds each quadrant panel that has 4 buttons.
- buildPanel(int, String, int, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Build x slider control panel.
- buildPanelA() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Method that displays the histogram and controls to manipulate the opacity.
- buildPanelA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Build the arbitrary clipping slider control panel.
- buildPanelA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Method that displays the histogram and controls to manipulate the opacity.
- buildPanelA() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelA(ModelImage, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelA(ModelImage, boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelA(ModelImage, ModelLUT, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelA(ModelImage, ModelLUT, boolean) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelB() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Method that displays the histogram and controls to manipulate the opacity.
- buildPanelB() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Method that displays the histogram and controls to manipulate the opacity.
- buildPanelB() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelB(ModelImage, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelB(ModelImage, boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelB(ModelImage, ModelLUT, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelB(ModelImage, ModelLUT, boolean) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelGM_A() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Method that displays the histogram and controls to manipulate the opacity.
- buildPanelGM_A() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Method that displays the histogram and controls to manipulate the opacity.
- buildPanelGM_A() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelGM_B() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Method that displays the histogram and controls to manipulate the opacity.
- buildPanelGM_B() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Method that displays the histogram and controls to manipulate the opacity.
- buildPanelGM_B() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Method that displays the histogram and LUT and other controls to manipulate the LUT.
- buildPanelS() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Build static clipping slider control panel.
- buildPanelSInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Build static inverse clipping slider control panel.
- buildPanelX() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Build x slider control panel.
- buildPanelXInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Build x negative clipping slider control panel.
- buildPanelY() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Build the y clipping slider control panel.
- buildPanelYInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Build the y negative clipping slider control panel.
- buildPanelZ() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Build the z clipping slider control panel.
- buildPanelZInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Build the z negative clipping slider control panel.
- buildParameterPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- buildParameterPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- buildParSliceMap() - Method in class gov.nih.mipav.model.file.FilePARREC
-
- buildParSliceMap() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- buildParVolMap() - Method in class gov.nih.mipav.model.file.FilePARREC
-
- buildParVolMap() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- buildPasswordField() - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Helper method to create a password field with the proper font and font color.
- buildPasswordField(String, String) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildPlugInsMenu(ActionListener) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Called by either userInterface (this) or by another actionlistener (ViewJFrameImage) to build the plugins menu
bar.
- buildPluginsTree() - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
Starts process to build exact copy of installed plugin structure as tree nodes.
- buildPreprocessingPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- buildPresetPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Builds the preset panel to display the preset images and buttons.
- buildPresetPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Builds the preset panel to display the preset images and buttons.
- buildPressedButtonBorder() - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Builds a new border of the type used when a toggle button is depressed.
- buildProbeModelPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Build the tab which allows the user to change the currently used probe model.
- buildProbePanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the adding surface control panel for the surface render.
- buildProbePlacementPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Build the tab with controls / info used in probe placement before a burn.
- buildProbes(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Build the three types of probe.
- buildProbeSlider() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Setup the probe moving control panel that include x, y, z moving sliders.
- buildProgressBar(String, String, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Constructs progress bar.
- buildProgressBar(String, String, int, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Constructs progress bar.
- buildPtInfoPanel() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Constructs the patient information input panel.
- BuildPyr(ModelSimpleImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Builds an image pyramid (if its not cached beforehand).
- buildQueryPanel() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Builds the DICOM Query panel, one of the three tabbed Panels in the DICOMQuery GUI.
- buildQuickList() - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Builds the quicklist for the first time.
- buildRadioButton(String, boolean) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildRadioButton(String, boolean) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Constructs the radio button for fast input of study date range.
- buildRadioButton(String, boolean, ButtonGroup) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Builds a new radio button component.
- buildRadioButtonMenuItem(String, String, boolean) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
- buildRadioButtonMenuItem(String, String, boolean, ButtonGroup) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
- buildRAM() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- buildRandButtonPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
creates the random-button panel,which are two radio-buttons determining the naming actions for the output
directories.
- buildRandSelectionPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
puts together the panel of recursive box and directory-randomization level radio button.
- buildRawBuffer(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Fills the compData buffer from the vrBuffer.incomming buffers.
- buildRayCastCameraPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the camera control panel for the raycast render.
- buildRayCastOptions() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the view control panel for the raycast render.
- buildRayCastToolbar() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the raycast toolbar.
- buildRegistrationToolBar(ActionListener) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
builds the first registration toolbar.
- buildRegistrationToolBar(ActionListener, boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
builds the first registration toolbar.
- buildRenderModePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Builds the render mode control panel.
- buildResampleButton() - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Builds the OK button.
- buildResamplePanel() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Builds the resample panel.
- buildResetButton() - Method in class gov.nih.mipav.view.dialogs.JDialogCT
-
Builds the Edit button.
- buildResetButton() - Method in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Builds the Edit button.
- buildResetButton() - Method in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Builds the reset button.
- buildResetButton() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Build the reset button.
- buildResetDefaultsButton() - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Builds the reset to defaults button.
- BuildResidualLayout(CeresSolver.Program, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- buildResolutionPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Builds the panels which is edited in the tabbed pane "resolutions".
- buildRGBToolBar() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Creates the RGB histogram toolbar.
- buildRGBToolBar(ActionListener) - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Method to build the toolbar for the RGB frame.
- buildRowColPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
sets up the row and column panel.
- buildSavedFilePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- buildSavedFilePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- buildSavedFilePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- buildSaveDialog() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Instantiates and shows the "Save label file" dialog, which is used to save a text file containing the names of
the colored labels.
- buildSaveDialog() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- buildSaveGradBvalPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- buildScaleMax(JPanel, GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
define the possibilities of where the scale max comes from.
- buildScriptToolBar(boolean) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Builds the script toolbar, for quickly recording and playing back scripts.
- buildScrollPane() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Make a scroll frame and puts an image component into it.
- buildScrollPane() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Make a scroll frame and puts an image component into it.
- buildScrollPane() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Make a scroll frame and puts an image component into it.
- buildScrollPane() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Make a scroll frame and puts an image component into it.
- buildScrollPane() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Make a scroll frame and puts an image component into it.
- buildScrollPane(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- buildScrollPane(JComponent) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Create a new scroll pane, containing a component.
- buildScrollPane(JComponent, int, int) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Create a new scroll pane, containing a component.
- buildScrollPanes() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Make a scroll frame and puts an image component into it.
- buildScrollTextArea(Color) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
- buildSculpt() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the Sculpturing control panel.
- buildSculpt() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Build the Sculpturing control panel.
- buildSelectedListing() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
creates the visual display in which to list all selected directories in the directory tree.
- buildSelectedListing() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
creates the visual display in which to list all selected directories in the directory tree.
- buildSelectedListing() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
creates the visual display in which to list all selected directories in the directory tree.
- buildSelectedListing() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
creates the visual display in which to list all selected directories in the directory tree.
- buildSelectedListing() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
creates the visual display in which to list all selected directories in the directory tree.
- buildSelectOptionsPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- buildSendPanel() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Builds the host panel by calling methods to build the server and storage panels.
- buildSeqGroupElementMap(Hashtable<FileDicomKey, FileDicomTag>) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- buildSequenceInfoPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- buildSequencesPanel() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- buildServerPanel() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Builds the panel that contains the server table and four buttons.
- buildSetButton() - Method in class gov.nih.mipav.view.dialogs.JDialogCT
-
Builds the set button.
- buildSetButton() - Method in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Builds the set button.
- buildSetButton() - Method in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Builds the set button.
- buildSetButton(GuiBuilder, String) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- buildSettingsPanel(float, float) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- buildShearWarpCameraPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the camera control panel for the shearwarp render.
- buildShearWarpOptions() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the view control panel for the shearwarp render.
- buildShearWarpToolbar() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the shearwarp toolbar.
- buildShininessPanel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Build the shinness control panel.
- buildShortcutTable() - Static method in class gov.nih.mipav.view.Preferences
-
Builds a hashtable of actioncommands (keys) with associated keystrokes from the Preferences file.
- buildSimplePanel() - Method in class gov.nih.mipav.view.JPanelHistogram
-
- buildSimpleToolBar() - Method in class gov.nih.mipav.view.ViewControlsImage
-
Creates the main toolbar without any of the pre-made additional bars (no VOI etc) for use with addCustomToolBar()
to add custom-built bars to the main bar
- buildSimpleToolBar(ModelImage) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- buildSlicePanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the slices control panel for the surface render.
- buildSlicePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Build the slices control panel for the surface render.
- buildSlicePickPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Build the slice pickable panel
- buildSlider(String, int, String) - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- buildSlider(JPanel) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- buildSliderLabels(int) - Method in class gov.nih.mipav.view.ViewJSlider
-
Builds the slider labels for the slider.
- buildSmartThresholdPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- buildSourceListingPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Creates the panel holding the directory tree.
- buildSourceListingPanel(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
Creates the panel holding the directory tree.
- buildSourceListingPanel(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
Creates the panel holding the directory tree.
- buildSourceListingPanel(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Creates the panel holding the directory tree.
- buildSourcePanel() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Creates the source panel which consists of the directory line, the browse button, and a check box approving the
anonymize in sub-directories.
- buildSourcePanel(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
creates the source panel which consists of the directory line, the browse button, and a check box approving the
anonymize in sub-directories.
- buildSourcePanel(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
creates the source panel which consists of the directory line, the browse button, and a check box approving the
anonymize in sub-directories.
- buildSourcePanel(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
creates the source panel which consists of the directory line, the browse button, and a check box approving the
anonymize in sub-directories.
- buildSourcePanel(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
creates the source panel which consists of the directory line, the browse button, and a check box approving the
anonymize in sub-directories.
- buildSourceTreeListing(boolean) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Creates the tree that holds the image files and returns the panel containing the tree.
- buildSourceTreeListing(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Creates the panel holding the directory tree.
- buildSPGRPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildSPGRPanelInner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildSpyr(Vector<double[][]>, Vector<int[]>, Vector<int[]>, Vector<double[][]>, double[][], int, String, int) - Method in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- buildSpyrLevs(Vector<double[][]>, Vector<int[]>, double[][], int, double[][], double[][], int) - Method in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- buildSquarePanel() - Method in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
- buildStartButton() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Builds the cancel button.
- buildStartLocationsPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Builds the panels which is edited in the tabbed pane "Dataset Origin".
- buildStaticPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- buildStatusPanel() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Panel that builds the status display panel.
- buildStopButton() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Builds the Stop button.
- buildStoragePanel() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Builds the panel that contains the storage table and four buttons.
- buildSubsamplePanel() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- buildSurfaceBoxPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Build the options panel.
- buildSurfacePanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the adding surface control panel for the surface render.
- buildSurfacePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Build the adding surface control panel for the surface render.
- buildSurfaceTexturePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Builds the Surface texture panel.
- buildSurfaceViewToolbar() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The the top one volume view toolbar.
- buildSurRenderToolbar() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the surface render toolbar.
- buildSVMoptionsPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- buildT2LoadPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- buildTabbedPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Build the four tabbed panes, probe control pane, burn control pane, burn parameter control pane, and demo pane.
- buildTable() - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
Build the table to be used in the dialog (dicom or image attributes).
- buildTableModel() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
- buildTablePanel() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- buildTableScrollPane() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
A helper method to build a JScrollPane out of tagsTable
- buildTagInfoPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- buildTagSelectorPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- buildTagsModel() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
A helper method to build a ViewTableModel and fill in DICOM tag info
- buildTagsTable() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
A helper method to build a JTable out of a ViewTableModel
- buildTagsTableListSelector() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
A helper method to build the tagsTable list selection method
- buildTalairachPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Builds the Talairach Transform scrollpane with all talairach related data.
- buildTargetListPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Build the target surface (tumor) control panel.
- buildTargetPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Build the tab which allows the user to pick the current tumor to target, to load/remove tumor surfaces and show
tumor position and volume info.
- buildTDistLUT(int, double, ModelImage) - Static method in class gov.nih.mipav.model.structures.ModelLUT
-
Build LUT consisting of a student t-distribution at the specified level os significance for the given
degrees of freedom.
- buildTemplateList() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- buildTensorEstPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- buildTensorPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- buildText(int, String, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Attach some 3D text to a BranchGroup or TransformGroup.
- buildTextArea(String, boolean) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Builds a new text area.
- buildTextButton(String, String, String) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Helper method to build a text button for the toolbar.
- buildTextButton(String, String, String, ActionListener) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Helper method to build a text button.
- buildTextField(String) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Helper method to create a text field with the proper font and font color.
- buildTextPanel() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Constructs the panel that contains the query result table.
- BuildTextureVectors() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Samples all shapes in the training set and build the corresponding
texture vectores.
- BuildTextureVectorsFromImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Transform image to texture vector
- buildThreshold(JPanel, GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Creates the txt-box that allows user to insert the bottom-end pixels to skip.
- buildThresholdPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- buildThresholdPanel(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Builds each threshold panel (red, green, and blue).
- buildThresholdPanel(int) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Builds each threshold panel (red, green, and blue).
- buildTImageSliderLabels(int, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Builds the slider labels for the time slider.
- buildTimeSlider() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Builds the time (4D) slider.
- buildTimeSlider() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Builds the time (4D) slider.
- buildTinvTable() - Static method in class gov.nih.mipav.model.algorithms.StatisticsTable
-
Builds the t-statistic table, first numerical row is list of significant values, subsequent rows
are the t-statistic values for incremental degrees of freedom.
- buildTitledBorder(String) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Builds a titled border with the given title, an etched border, and the proper font and color.
- buildTitledBorder(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Builds a titled border with the given title, an etched border, and the proper font and color.
- buildTitledBorder(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Builds a titled border with the given title, an etched border, and the proper font and color.
- buildTitledBorder(String) - Static method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Builds a titled border with the given title, an etched border, and the
proper font and color.
- buildTitledBorder(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Builds a titled border with the given title, an etched border, and the
proper font and color.
- buildTitledBorder(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- buildTitledBorder(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- buildTitledBorder(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
Builds a titled border with the given title, an etched border, and the
proper font and color.
- buildTitledBorder(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
Builds a titled border with the given title, an etched border, and the
proper font and color.
- buildTitledBorder(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Builds a titled border with the given title, an etched border, and the
proper font and color.
- buildTitledBorder(String) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Builds a titled border with the given title, an etched border, and the proper font and color.
- buildTitledBorder(String) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Constructs the titled border for the panel.
- buildTitledBorder(String, Color) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Builds a titled border with the given title, an etched border, and the proper font and color.
- buildTitledBorder(String, Border) - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Builds a titled border with the given title, an etched border, and the proper font and color.
- buildToggleButton(CustomUIBuilder.UIParams, ButtonGroup) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Create a new toolbar togglable button.
- buildToggleButton(String, int, String, String, ButtonGroup) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Create a new toolbar togglable button.
- buildToggleButton(String, String, String) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Create a new toolbar togglable button.
- buildToggleButton(String, String, String, String, ButtonGroup, JToolBar) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Helper method to build a toggle button for the toolbar.
- buildToggleButton(String, String, String, String, ButtonGroup, JToolBar, boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Helper method to build a toggle button for the toolbar.
- buildToggleButton(String, String, String, ButtonGroup) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Create a new toolbar togglable button.
- buildToolbar() - Method in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Build the toolbar, for now, only one save button.
- buildToolbar() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Builds a simple toolbar for this frame (ViewJFrameLightBox).
- buildToolbar() - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Builds a toolbar with the same functionality as the menu.
- buildToolbar() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Builds a toolbar with the same functionality as the menu.
- buildToolbar() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Builds a simple toolbar for this frame (ViewJFrameLightBox).
- buildToolbar(boolean, JToolBar, ButtonGroup, JToggleButton, boolean) - Method in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- buildToolbar(boolean, JToolBar, ButtonGroup, JToggleButton, boolean, boolean) - Method in class gov.nih.mipav.view.ViewControlsImage
-
Builds the toolbars.
- buildToolBar() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Build the toolbar control.
- buildToolBar() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Builds the toolbar for the mouse recorder.
- buildToolBar() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Build the toolbar.
- buildToolBar() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Builds the toolbar for the mouse recorder.
- buildToolBar() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Builds the toolbar for the volume render frame.
- buildToolBar() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Builds the toolbar for the volume render frame.
- buildToolBar() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Build the probe toolbar control.
- buildToolBar() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Build the toolbar.
- buildToolBar() - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Builds the toolbar.
- buildToolBar() - Method in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
Builds the needed toolbar.
- buildToolBar(ModelImage) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Builds the toolbars.
- buildToolBar2(ActionListener) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
builds the second registration toolbar.
- buildToolBar2(ActionListener) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
builds the second registration toolbar.
- buildToolbarBorder() - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Builds a new border of the type used by toolbars.
- buildToolbarMenu(boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- buildToolBarPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
A helper method to build the toolbar with various buttons to help in the editing of DICOM tags
- buildToolbars() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Builds the toolbars for the tri-planar view.
- buildToolbars() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Builds the toolbars for the tri-planar view.
- buildTrainFilePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- buildTrainFilePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- buildTrainFilePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- buildTrainGroupPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- buildTransformTypePanel() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- buildTreatmentPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Build the tab containing ablation treatment information, including a list of burns; burn removal, position and
volume; comparison of current tumor vs current set of burns.
- buildTreeDialog() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Builds the image tree dialog and displays it.
- buildTreT1HIFISpecificsPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildTreT1HIFISpecificsPanelInner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildTreT1LongPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildTreT1LongPanelInner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildTreT1SpecificsPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildTreT1SpecificsPanelInner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- buildTriImage(ModelImage, ModelLUT, ModelRGB, ModelImage, ModelLUT, ModelRGB, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
This method creates an image from the two ModelImage objects and ModelLUT objects passed as parameters.
- buildTSlider() - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
builds the time (4th dimension) slider.
- buildTSliderLabels(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
builds labels used by the time slider.
- buildUndoTableModel(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
- buildUnsharpPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
part of the algorithm rests on finding the original image minus an estimation of the local mean.
- buildUserInterface() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- buildVasculatureBG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Build the vasculature ( blue sphere ) branch group image scene graph.
- buildViewPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Build the view control panel.
- buildViewPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Build the view control panel for the surface render.
- buildViewToolbar() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The the top one volume view toolbar.
- buildViewToolbar() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
The the top one volume view toolbar.
- buildVisuzalizationPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- buildVOIContourPane() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- buildVOIPanel(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
creates the source panel for the VOI tab which consists of the directory line, the browse button, and a check box
approving the anonymize in sub-directories.
- buildVOIPanel(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
creates the source panel for the VOI tab which consists of the directory line, the browse button, and a check box
approving the anonymize in sub-directories.
- buildVOIPanel(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
creates the source panel for the VOI tab which consists of the directory line, the browse button, and a check box
approving the anonymize in sub-directories.
- buildVOITree() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- buildVOITree() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- buildVOITree() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- buildVolumePositionPanel() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Builds the volume position panel, which is the panel that sits in the plug-in area of the 2x2 tri-planar layout.
- buildVolumeTriPlanarVOIToolBar(int, int, boolean, boolean, ButtonGroup) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Builds the VOI toolbar, with buttons for creating various types of VOIs (elliptical, square, etc.), and for cut
and paste operations.
- BuildWarpTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
Cache method, that caches triangle info.
- buildWaveletNameComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- buildWaveletNameComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- buildWaveletNameComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- buildWaveletNameComboBox() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- buildWaveletOrderComboBox(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- buildWaveletOrderComboBox(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- buildWaveletOrderComboBox(String) - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- buildWaveletOrderComboBox(String) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- buildWaveletPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- buildWindowLevelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Builds the slider Panel.
- buildWindowSlider(JPanel, GridBagConstraints) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Builds the window slider and places it in the slider panel.
- buildXfrm(double[], double[], Matrix) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
Builds 4x4 transformation matrix from R and T where T=p2-R*p1.
- buildXfrm(double[], double[], Matrix) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
Builds 4x4 transformation matrix from R and T where T=p2-R*p1.
- buildXfrm(double[], double[], Matrix) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Builds 4x4 transformation matrix from R and T T=p2-R*p1.
- buildXfrm(double[], double[], Matrix) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Builds 4x4 transformation matrix from R and T T=p2-R*p1.
- buildXLATdestPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
creates the destination panel which consists of the directory textline, the browse button for the translation key
file.
- bundle - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- BUNDLE_HEAD - gov.nih.mipav.model.structures.GenericPolygonClipper.bundle_state
-
- bundle_state() - Constructor for enum gov.nih.mipav.model.structures.GenericPolygonClipper.bundle_state
-
- BUNDLE_TAIL - gov.nih.mipav.model.structures.GenericPolygonClipper.bundle_state
-
- BundledPlugInInfo - Interface in gov.nih.mipav.plugins
-
This interface binds a PlugIn to a PlugInBundle.
- BUNIT - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- bup(double, double, double, double, int, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- BurnAttributes - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Class that holds the information about each surface; the BranchGroup which holds the surface subtree, the name of the
surface in the dialog, the color of the surface, the shininess of the surface, the level of detail (for clod meshes),
the number of triangles (changes with level of detail), the polygon mode (fill, line, or point), and a flag
indicating if this is a clod mesh.
- BurnAttributes(BranchGroup, String, Color4f, float, float, Point3f, float) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
Constructs new attributes structure to hold information needed for displaying each burn.
- BurnAttributes(BranchGroup, String, Color4f, float, float, Point3f, float, Point3f, boolean, boolean, boolean, BitSet, Point3f, Vector3f, Transform3D) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
Constructs new attributes structure to hold information needed for displaying each surface.
- burnBackFaceCB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point back face culling check box.
- burnBase - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Burn base reference.
- BurnBase - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Title: BurnBase
- BurnBase(SurfaceRender, JPanelProbe) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Constructor.
- BurnBaseView - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
The default probe burning type view.
- BurnBaseView(SurfaceRender, JPanelProbe, BranchGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Constructor.
- BurnBaseView.Edge - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
A representation of an edge for the vertex-edge-triangle table.
- BurnBaseView.UnorderedSetInt - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
DOCUMENT ME!
- burnBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
burn subtree, holds all the Shape3D objects that make up the surface.
- burnBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The root branch group of the probe burning geometry shape.
- burnClipCB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point clipping check box.
- burnColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Burning point surface color.
- BurnCoolTipView - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
The default probe burning type view.
- BurnCoolTipView(SurfaceRender, JPanelProbe, BranchGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnCoolTipView
-
Constructor.
- BurnHeatView - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
The default probe burning type view.
- BurnHeatView(SurfaceRender, JPanelProbe, BranchGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnHeatView
-
Constructor.
- burnIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Current burning point index.
- burnIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Current burning point index.
- burnIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Current burning point index being hightlighted.
- burningBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Burning point branch group array, used to switch between different buring point.
- burningPtTransVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Burning point coordinate vector in world coordinate system.
- burningTime - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
burning time.
- burnList - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Burn list that hold the burning point names.
- burnMask - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
BitSet burning sphere or ellposoid mask.
- burnPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
Burn center coordinate.
- BurnRegularView - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
The default probe burning type view.
- BurnRegularView(SurfaceRender, JPanelProbe, BranchGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnRegularView
-
Constructor.
- burnRootParentBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
The root branch group of the burning point.
- burnRootParentBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
The root branch group the default burning point.
- burns - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
List of burn attributes.
- burnType - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Burning type flag, default to the default burning point type.
- burnType - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Burning type.
- burnType - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.MaskBurnAttribute
-
Burning type, default, regular, heat, etc.
- BUTTERWORTH - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- BUTTERWORTH - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- BUTTERWORTH - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- BUTTERWORTH - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- BUTTERWORTH - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- BUTTERWORTH - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- BUTTERWORTH - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- BUTTERWORTH - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- BUTTERWORTH - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- BUTTERWORTH - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- BUTTERWORTH - Static variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- butterworthFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- butterworthFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- butterworthFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- butterworthFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- butterworthFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- butterworthOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- button - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip.OkColorListener
-
Button reference.
- button - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay.OkColorListener
-
DOCUMENT ME!
- button - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices.OkColorListener
-
DOCUMENT ME!
- button - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox.OkColorListener
-
DOCUMENT ME!
- button - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast.OkColorListener
-
DOCUMENT ME!
- button - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp.OkColorListener
-
DOCUMENT ME!
- button - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase.OkColorListener
-
Color Button
- button - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation.OkColorListener
-
Color Button
- button - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM.OkColorListener
-
Color Button
- button - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface.OkColorListener
-
Color Button
- button - Variable in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- button_change_clicked() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- button_change_clicked() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- button_clear_clicked() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- button_clear_clicked() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- button_load_clicked() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- button_load_clicked() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- button_run_clicked(String) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- button_run_clicked(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- button_save_clicked(String) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- button_save_clicked(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- BUTTON0 - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- BUTTON1 - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- buttonArray - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
DOCUMENT ME!
- buttonArray - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- buttonArray - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- buttonArray - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- buttonArray - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- buttonAxial - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Choose button for each VOI and ply file.
- buttonCoronal - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Choose button for each VOI and ply file.
- buttonCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Choose button for each VOI and ply file.
- buttonDilate - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonEnergyInput - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- buttonErode - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonExportToMask - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonExportToVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonFile - Variable in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
- buttonFillBackground - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonFillBackgrounds - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonfine - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- buttonGrid - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
Array of toggle buttons used to create the grid
- buttonGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- buttonGroup - Variable in class gov.nih.mipav.view.ViewMenuBuilder
-
- buttonGrowRegion - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonImage - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- buttonImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- buttonImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- buttonImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- buttonImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- buttonImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- buttonImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- buttonImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- buttonImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- buttonImageFATCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- buttonImageFATCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- buttonImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- buttonImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- buttonImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- buttonImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- buttonImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- buttonImageGRECED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- buttonImageGRECED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- buttonImageTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- buttonImageTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- buttonImageTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- buttonImportFromMask - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonImportFromVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonInputFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- buttonInputFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- buttonKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- buttonMatchFile - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
- buttonModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- buttonModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- buttonModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- buttonModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- buttonModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- buttonModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- buttonModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- buttonModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- buttonModelFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- buttonModelFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- buttonModelFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- buttonMpFile - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- buttonnormal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- buttonOutputFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- buttonOutputFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- buttonOutputFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- buttonPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
Panel to contain the okay/cancel/help buttons.
- buttonPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
DOCUMENT ME!
- buttonPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- buttonPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- buttonPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- buttonPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Button panel to hold the OK button, Cancel button, and Help button.
- buttonPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
Button panel to hold the OK button, Cancel button, and Help button.
- buttonPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogText
-
DOCUMENT ME!
- buttonPanel - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAction
-
Panel to contain the okay/cancel/help buttons.
- buttonPanel - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
Panel to contain the okay/cancel/help buttons.
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Button panel.
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.ChangeNameDialog
-
DOCUMENT ME!
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.ChangeNameDialog
-
DOCUMENT ME!
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Button Panel.
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Button Panel.
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Button panel to hold the OK button, Cancel button, and Help button.
- buttonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
Button panel to hold the OK button, Cancel button, and Help button.
- buttonPly - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Choose button for each VOI and ply file.
- buttonPly - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Choose button for each VOI and ply file.
- buttonPointsFile - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- buttonPointsFile - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- buttonPointsFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- buttonPress - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- buttonRevert - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonRmObject - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonRmObjects - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonSagittal - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Choose button for each VOI and ply file.
- buttonSavedFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- buttonSavedFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- buttonSavedFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- buttonSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- buttonShortkeys - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- buttonShortkeys - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- buttonsIdx - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- buttonSize - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
Make sure the button size is always this dimension
- buttonSVMModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- buttonTextArrayList - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
this is the array list of texts for the mask number buttons.
- buttonTimesFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- buttonTissueFile - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- buttonTissueFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- buttonTrainFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- buttonTrainFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- buttonTrainFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- buttonVOIFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- buttonVOIFile - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- buttonVOIFile2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- buttonWeightInput - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- buttonWeightInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- buttonWeightInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- buttonWeightInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- buttonWeightInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- buttonWeightRef - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- buttonWeightRef - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- buttonWeightRef - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- bVal - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- bvalGradAppButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- bvalGradFileLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- bValue - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- bValueArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- bValueIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- bValuePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
bFactorIndex
- bvalues - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- bValues - Variable in class gov.nih.mipav.model.file.DTIParameters
-
- bValues - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
- bValues - Variable in class gov.nih.mipav.model.file.FileImageXML
-
- bValues - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIGradTableCorrectionAfterTrans
-
- bValuesArrayList - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
this is an array of b-values that for each volume
- BValuesPerDirection - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- bValueTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- bw - Variable in class gov.nih.mipav.model.file.FileXML
-
Buffered writer for writing to XML file
- bW - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- bwAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- bwImageGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- bwlabel4(int[][]) - Method in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- bwSegmentedImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- bwSegmentedImage - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- bx - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- by - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- by2Button - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- by4Button - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- by8Button - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- byArea - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perShapeCost
-
- byContour - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
A radio button to select calculation by VOI contour.
- byContour - Variable in class gov.nih.mipav.view.JPanelStatisticsList
-
true if by contour or by slice and contour and show Totals is not selected
- byContourSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
A radio button to select calculation by VOI contour.
- bySlice - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
DOCUMENT ME!
- bySlice - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- bySlice - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- bySlice - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- bySlice - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
A radio button to select calculation by VOI slice.
- BYTE - gov.nih.mipav.model.file.FileSVS.Type
-
8 bit unsigned
- BYTE - gov.nih.mipav.model.file.FileTiff.Type
-
8 bit unsigned
- BYTE - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type signed byte (8 bits per voxel).
- BYTE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
TIFF Types.
- BYTE - Static variable in class gov.nih.mipav.model.file.FileSTK
-
TIFF Types.
- BYTE - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type signed byte (8 bits per voxel).
- byte_order - Variable in class gov.nih.mipav.model.algorithms.libdt.DatDescriptor
-
- BYTE_STRING - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
A string with VR "OB" is stored in the tag's value.
- BYTE_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type byte.
- byte2D - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- byte2DC - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- byte3D - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- byte3DC - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- byteArray1 - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
One byte array allocated once to speed process and reduced the need to reallocate memory.
- byteArray2 - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Two byte array allocated once to speed process and reduced the need to reallocate memory.
- byteArray4 - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Four byte array allocated once to speed process and reduced the need to reallocate memory.
- ByteArrayReader(byte[]) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ByteArrayReader
-
- ByteArrayReader(byte[], int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ByteArrayReader
-
- ByteArrayReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.ByteArrayReaderTest
-
- byteBuffer - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- byteBuffer - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
One byte array used to read/write in data so that one doesn't't need to be allocated with each read/write.
- byteBuffer - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
DOCUMENT ME!
- byteBuffer - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- byteBuffer - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- byteBuffer - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- byteBuffer - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- byteBuffer - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- ByteBuffer(int) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Comms.ByteBuffer
-
Allocates the byte buffer of the given size.
- byteBuffer2 - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Two byte array used to read/write in data so that one doesn't't need to be allocated with each read/write.
- byteBuffer4 - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Four byte array used to read/write in data so that one doesn't need to be allocated with each read/write.
- byteBuffer8 - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Eight byte array used to read/write in data so that they don't need to be allocated with each read/write.
- ByteConvert() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ByteConvert
-
- ByteConvertTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.ByteConvertTest
-
- byteCount - Variable in class gov.nih.mipav.model.file.FileLSM.Index
-
DOCUMENT ME!
- byteCount - Variable in class gov.nih.mipav.model.file.FileSTK.Index
-
DOCUMENT ME!
- byteCount - Variable in class gov.nih.mipav.model.file.FileSVS.Index
-
DOCUMENT ME!
- byteCount - Variable in class gov.nih.mipav.model.file.FileTiff.Index
-
DOCUMENT ME!
- byteDoubleBuffer - Variable in class gov.nih.mipav.model.algorithms.libdt
-
byte array for double *
- byteDoubleBuffer - Variable in class gov.nih.mipav.model.file.FileBase
-
byte array for double *
- byteFloatBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
byte array for float *
- byteFloatBuffer - Variable in class gov.nih.mipav.model.file.FileBase
-
byte array for float *
- byteFormat - Variable in class gov.nih.mipav.model.file.FileBioRad
-
if 1 data is UBYTE, otherwise data is SHORT.
- byteIntBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
byte array for int *
- byteIntBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
byte array for int *
- byteIntBuffer - Variable in class gov.nih.mipav.model.algorithms.libdt
-
byte array for int *
- byteIntBuffer - Variable in class gov.nih.mipav.model.file.FileBase
-
byte array for int *
- byteLongBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
byte array for long *
- byteLongBuffer - Variable in class gov.nih.mipav.model.algorithms.libdt
-
byte array for long *
- byteLongBuffer - Variable in class gov.nih.mipav.model.file.FileBase
-
byte array for long *
- byteOrder - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- bytePointer - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- bytes_in_buffer - Variable in class gov.nih.mipav.model.file.libjpeg.bitread_working_state
-
- bytes_in_buffer - Variable in class gov.nih.mipav.model.file.libjpeg.my_source_mgr
-
- bytes_left - Variable in class gov.nih.mipav.model.file.libjpeg.large_pool_struct
-
- bytes_left - Variable in class gov.nih.mipav.model.file.libjpeg.small_pool_struct
-
- bytes_read - Variable in class gov.nih.mipav.model.file.libjpeg.my_marker_reader
-
- bytes_used - Variable in class gov.nih.mipav.model.file.libjpeg.large_pool_struct
-
- bytes_used - Variable in class gov.nih.mipav.model.file.libjpeg.small_pool_struct
-
- byteShortBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
byte array for short *
- byteShortBuffer - Variable in class gov.nih.mipav.model.file.FileBase
-
byte array for short *
- bytesOut - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- bytesPerPixel - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
Number of bytes per pixel.
- bytesPerPixel - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- bytesPerPixel - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- bytesPerPixelIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- bytesPerRow - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- bytesPerValue - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- bytesToDouble(boolean, int, byte[]) - Static method in class gov.nih.mipav.model.file.FileBase
-
Converts from bytes to double
- bytesToFloat(boolean, int, byte[]) - Static method in class gov.nih.mipav.model.file.FileBase
-
Converts from bytes to float
- bytesToInt(boolean, int, byte[]) - Static method in class gov.nih.mipav.model.file.FileBase
-
Converts from bytes to int
- bytesToShort(boolean, int, byte[]) - Static method in class gov.nih.mipav.model.file.FileBase
-
Converts from bytes to short
- bytesV - Variable in class gov.nih.mipav.model.file.FileDicom
-
- ByteTrie() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie
-
- ByteTrieNode() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie.ByteTrieNode
-
- ByteTrieTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.ByteTrieTest
-
- ByteUtil() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ByteUtil
-
- ByteUtilTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.ByteUtilTest
-
- byteValue - Variable in enum gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
- byteValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Returns the value of the specified number as a byte.
- byTotalVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
A radio button to select calculation by total VOI.
- bz - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- bz2in - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- BZETAC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- BZip2Constants - Interface in gov.nih.mipav.model.file
-
Base class for both the compress and decompress classes.
C
- c - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBarrelDistortion
-
- c - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- c - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- c - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ParameterIgnoringCostFunction
-
- c - Variable in class gov.nih.mipav.model.algorithms.CubicEquation
-
- c - Variable in class gov.nih.mipav.model.algorithms.curev
-
- c - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- c - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
-
- c - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- c - Variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
Input argument
- c - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
Parameter in the weight function, c !
- c - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Parameter in the weight function, c !
- c - Variable in class gov.nih.mipav.model.algorithms.NelderMead.param_t
-
- c - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- c - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEExtModel
-
- c - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEModel
-
- c - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODERectModel
-
- c - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODEHPModel
-
- c - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODESTModel
-
- c - Variable in class gov.nih.mipav.model.algorithms.splev
-
- c - Variable in class gov.nih.mipav.model.algorithms.sproot
-
- c - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_t
-
- c - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_raw_t
-
temporary buffer where bits are coded or decoded
- c - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- c - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
The index of the component from where to get the data
- c - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- c - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- c - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptState
-
model parameters.
- c - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Edge
-
- C - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- C - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- C - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< transition matrix
- C - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- C - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- C - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_LrFunction
-
- C - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
- C - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- C - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- C() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitEntry
-
Returns the corresponding model parameters.
- c_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CauchyLoss
-
- c_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SoftLOneLoss
-
- c_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TolerantLoss
-
- c_a(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- C_AAMBUILDER - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- C_AAMBUILDER() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.C_AAMBUILDER
-
- C_AAMMODEL - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API (AAM_API).
- C_AAMMODEL() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.C_AAMMODEL
-
- c_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- C_MAX_BLOCKS_IN_MCU - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- c_next(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- c_prev(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- c_s(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- C_SVC - Static variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- C_SVC - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- c0 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
- c0 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- c0 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- C0 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
coefficents for DAUB4 wavelet filter.
- C0_SCALE - Variable in class gov.nih.mipav.model.file.libjpeg
-
- C0_SHIFT - Variable in class gov.nih.mipav.model.file.libjpeg
-
- c0max - Variable in class gov.nih.mipav.model.file.libjpeg.box
-
- c0min - Variable in class gov.nih.mipav.model.file.libjpeg.box
-
- c1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAINDANE
-
Reference: Adaptive and integrated neighborhood-dependent approach for
nonlinear enhancement of color images by Li Tao and Vijayan K.
- c1 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- c1 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
- c1 - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- c1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- c1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- c1 - Variable in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
- C1 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- C1 - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
private double BIG = 3.0E137; // 3.0E37.
- C1 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- C1_SCALE - Variable in class gov.nih.mipav.model.file.libjpeg
-
- C1_SHIFT - Variable in class gov.nih.mipav.model.file.libjpeg
-
- c12 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- C1CHI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- C1d - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- c1Factor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- c1max - Variable in class gov.nih.mipav.model.file.libjpeg.box
-
- c1min - Variable in class gov.nih.mipav.model.file.libjpeg.box
-
- c2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAINDANE
-
- c2 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- c2 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
- c2 - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- c2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- c2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- c2 - Variable in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
DOCUMENT ME!
- C2 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- C2 - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- C2 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- C2_SCALE - Variable in class gov.nih.mipav.model.file.libjpeg
-
- C2_SHIFT - Variable in class gov.nih.mipav.model.file.libjpeg
-
- c20 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- C2CHI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- C2d - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- c2max - Variable in class gov.nih.mipav.model.file.libjpeg.box
-
- c2min - Variable in class gov.nih.mipav.model.file.libjpeg.box
-
- c2x - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- c2y - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- c2z - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- c3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAINDANE
-
- c3 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- c3 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- c3 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- c3 - Variable in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
- C3 - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- C3 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- C3d - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- c3Factor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- c3x - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- c3y - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- c3z - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- c4 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- c4 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
coefficients for the PWT filter.
- C4 - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- C4 - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- C4 - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- C4C6 - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- C4C6 - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- C4d - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- C4Q - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- C4Q - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- C4R - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- C4R - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- c5 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- C5d - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- c6 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- C6 - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- C6 - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- C6d - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- c7 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- ca - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- ca_bckpbCrt - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_ckpntData - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_firstCVodeBcall - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_firstCVodeFcall - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_IMfree - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_IMget - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_IMinterpSensi - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_IMmalloc - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_IMmallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_IMnewData - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_IMstore - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_IMstoreSensi - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_IMtype - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_nbckpbs - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_nckpnts - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_np - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_nsteps - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_T - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_tfinal - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_tinitial - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_tstopCVodeF - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_tstopCVodeFcall - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_Y - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_YS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_yStmp - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ca_ytmp - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- CAAMAnalyzeSynthesize - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMAnalyzeSynthesize(CAAMReferenceFrame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
Constructor
- CAAMAnalyzeSynthesizeSoftware - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMAnalyzeSynthesizeSoftware(CAAMReferenceFrame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
Constructor
- CAAMAnalyzeSynthesizeSoftware.sWarpEntry - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- CAAMBuilder - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMBuilder() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Constructor.
- CAAMConsole - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsole(int, String[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsole
-
Console interface to pass the augments to varies modes
- CAAMConsoleMode - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleMode() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
constructor
- CAAMConsoleMode(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
Constructor
- CAAMConsoleModeB - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeB() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeB
-
Constructor
- CAAMConsoleModeB(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeB
-
Constructor
- CAAMConsoleModeCM - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeCM(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeCM
-
Constructor
- CAAMConsoleModeD - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeD(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeD
-
Constructor, Debug/Test console mode, not used.
- CAAMConsoleModeE - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeE() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeE
-
Constructor.
- CAAMConsoleModeE(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeE
-
Constructor.
- CAAMConsoleModeLOO - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeLOO(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeLOO
-
Constructor
- CAAMConsoleModeM - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeM(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeM
-
Constructor.
- CAAMConsoleModeP - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeP(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeP
-
Constructor
- CAAMConsoleModeR - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeR(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeR
-
Constructor.
- CAAMConsoleModeREG - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeREG(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeREG
-
Constructor.
- CAAMConsoleModeS - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeS(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeS
-
Constructor.
- CAAMConsoleModeSM - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeSM(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeSM
-
Constructor.
- CAAMConsoleModeT - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeT(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeT
-
Constructor.
- CAAMConsoleModeU - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeU(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeU
-
Constructor.
- CAAMConsoleModeW - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMConsoleModeW(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeW
-
Constructor.
- CAAMDeform - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMDeform() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- CAAMDeformPCA - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMDeformPCA() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
- CAAMDelaunay - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMDelaunay() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDelaunay
-
constructor
- CAAMEvalRes - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMEvalRes(CAAMShape, CAAMShape, double, CAAMOptRes) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvalRes
-
Constructor Compute the evaluation optimization results.
- CAAMEvaluationResults - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMEvaluationResults() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvaluationResults
-
- CAAMInitCandidates(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitCandidates
-
Allocates a pool with room for 'n' candidates.
- CAAMInitEntry(double, CAAMShape, CDVector) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitEntry
-
Constructor
- CAAMInitialize - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMInitialize() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitialize
-
Constructor.
- CAAMInitialize(CAAMModel) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitialize
-
Copy constructor.
- CAAMInitializeStegmann - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMInitializeStegmann(CAAMModel) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Constructor.
- CAAMInitializeStegmann(CAAMModel, ModelImage, ModelImage, CAAMShape) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
AAM initialization from given aam model, target imge, and sample image
and VOI
- CAAMInitializeStegmann.CAAMInitCandidates - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
Initialization candidate containiner.
- CAAMInitializeStegmann.CAAMInitEntry - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
Container for initialization results.
- CAAMLinearReg - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMLinearReg() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLinearReg
-
constructor
- CAAMLowerBounds - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMLowerBounds() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
Constructor.
- CAAMLowerBounds(CAAMModel) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
Constructor
- CAAMMathUtil - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMMathUtil() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
- CAAMMesh - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMMesh() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Constructor.
- CAAMMesh(CAAMMesh) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Copy constructor.
- CAAMModel - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMModel() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Constructor.
- CAAMModel(CAAMModel) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Copy constructor.
- CAAMModelMS - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMModelMS() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Default multi-scale constructor.
- CAAMModelSeq - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMModelSeq() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Default multi-scale constructor.
- CAAMObject - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMObject() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMObject
-
- CAAMOptimize - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMOptimize(CAAMModel, CAAMShape, ModelSimpleImage, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
Constructor for the AAM optimizer.
- CAAMOptRes - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMOptRes() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptRes
-
Constructor
- CAAMOptRes(double, int, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptRes
-
Constructor
- CAAMOptState - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMOptState() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptState
-
Constructor
- CAAMOptState(double, CAAMShape, CDVector, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptState
-
Constructor
- CAAMPoint - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMPoint() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPoint
-
Constructor
- CAAMPoint(double, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPoint
-
Constructor
- CAAMPointInfo - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMPointInfo() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Constructor
- CAAMPointInfo(int, int, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Constructor
- CAAMPropsReader - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API (AAM_API).
- CAAMPropsReader(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Constructor.
- CAAMReferenceFrame - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMReferenceFrame() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Constructor.
- CAAMReferenceFrame(CAAMReferenceFrame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Copy constructor.
- CAAMReferenceFrame.sScanLinePart - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
defines a sub-part of a horizontal line in an image
- CAAMShape - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMShape() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Default constructor.
- CAAMShape(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Constructs a shape with 'nbPoints' points.
- CAAMShape(CAAMShape) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Copy contructor.
- CAAMShape(CDVector) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Constructs a shape from a vector.
- CAAMShapeCollection - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMShapeCollection() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Constructor.
- CAAMTest - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMTest() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Constructor.
- CAAMTFIdentity - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMTFIdentity() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFIdentity
-
Constructor
- CAAMTFLookUp - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMTFLookUp() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFLookUp
-
Constructor.
- CAAMTFUniformStretch - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMTFUniformStretch() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFUniformStretch
-
Constructor.
- CAAMTransferFunction - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMTransferFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
Contructor
- CAAMTriangle - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMTriangle() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Constructor
- CAAMTriangle(int, int, int, Vector<CAAMPoint>) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Constructor
- CAAMUtil - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API (AAM_API).
- CAAMUtil() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
- CAAMVisualizer - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMVisualizer(CAAMModel) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
Constructor.
- CAAMWarp - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMWarp() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Constructor
- CAAMWarpLinear - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CAAMWarpLinear(boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarpLinear
-
Constructor.
- cache - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- cache - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.ONE_CLASS_Q
-
- cache - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.SVC_Q
-
- cache - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.SVR_Q
-
- cache - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.ONE_CLASS_Q
-
- cache - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVC_Q
-
- cache - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVR_Q
-
- Cache - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
Copyright (c) 2000-2014 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
- Cache(int, long) - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.Cache
-
- Cache(int, long) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache
-
- cache_detMt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexKalmanFilter
-
< cache for an instantiated Kalman filter: Kalman gain matrices [n x m x
tau].
- cache_dt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexKalmanFilter
-
< cache for an instantiated Kalman filter: inverse covariance matrix [m x m x
tau].
- cache_invMt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexKalmanFilter
-
< cache for an instantiated Kalman filter: determinant term [1 x tau].
- cache_Kt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexKalmanFilter
-
- cache_size - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- cache_size - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- CACHE_SIZE - Variable in class gov.nih.mipav.model.algorithms.Fastfit
-
- Cache.head_t - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- CACHED_MAX_DEBUG_LINES - Static variable in class gov.nih.mipav.view.Preferences
-
Constant used to identify the maximum number of lines in the debugging panel.
- cachedClass - Variable in class gov.nih.mipav.plugins.JarClassLoader
-
- cachedTab - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Cached value of selected tab
- cacheRaster(WritableRaster) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- cadvise() - Static method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- caField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- cal_max - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Range of calibration values.
- cal_max - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
The cal_min and cal_max fields (if nonzero) are used for mapping (possibly scaled) dataset values to display
colors: - Minimum display intensity (black) corresponds to dataset value cal_min. - Maximum display intensity
(white) corresponds to dataset value cal_max. - Dataset values below cal_min should display as black also, and
values above cal_max as white. - Colors "black" and "white", of course, may refer to any scalar display scheme
(e.g., a color lookup table specified via aux_file). - cal_min and cal_max only make sense when applied to
scalar-valued datasets (i.e., dim[0] < 5 or dim[5] = 1).
- cal_max - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Range of calibration values.
- cal_max - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- cal_min - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Values of 0.0 for both fields imply that no calibration min and max values are used !
- cal_min - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
values of 0.0 for both fields imply that no calibration min and max values are used !
- cal_min - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Values of 0.0 for both fields imply that no calibration min and max values are used !
- cal_min - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- cal_units - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Specifies the name of the calibration unit.
- cal_units - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- calc() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
Prepares the data and runs the algorithm for a 2D or 3D image.
- calc() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
Find the midsagittal line and transform the source image to align it along that line vertically.
- calc() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMinimumPerimeterPolygon
-
Prepares the data and runs the algorithm for a 2D or 3D image.
- calc(boolean) - Method in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
Starts the Gaussian calculation.
- calc(boolean) - Method in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Starts the Gaussian calculation.
- calc(ModelImage, ModelImage, ModelImage, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Performs a AlgorithmImageCalculator calculation on the two input images.
- calc_binomials(int, int, double[][]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- calc_binomials(int, int, DoubleDouble[][]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- Calc_dD() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Cache function.
- calc_powers(double, int, double[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- calc_powers(QuarticEquation.complex_t, int, QuarticEquation.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- calc_powers(QuarticEquationEP.complex_t, int, QuarticEquationEP.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- calc_powers(DoubleDouble, int, DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- calc_shifted_coefs(double, int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- calc_shifted_coefs(QuarticEquation.complex_t, int, QuarticEquation.complex_t[], QuarticEquation.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- calc_shifted_coefs(QuarticEquationEP.complex_t, int, QuarticEquationEP.complex_t[], QuarticEquationEP.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- calc_shifted_coefs(DoubleDouble, int, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- calc25D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Prepares the data and runs the algorithm for a 3D image.
- calc25D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Prepares the data and runs the algorithm for a 3D image on a slice by slice basis.
- calc25D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
calc25D - Calculates level set from contours, propagates level set, and obtains new contour voi from level set.
- calc25D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
calc25D - calculates the diffused image and creates the new VOI for the original image.
- calc25D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- calc2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Prepares the data and runs the algorithm for a 2D image.
- calc2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Prepares the data and runs the algorithm for a 2D image.
- calc2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Prepares the data and runs the algorithm for a 2D image.
- calc2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
This function produces a 2D histogram image with srcImage values represented across the x axis and baseImage
values represented across the y axis.
- calc2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
This function produces a 2D histogram image with srcImage values represented across the x axis and baseImage
values represented across the y axis.
- calc2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
calc2D - calculates the diffused image and creates the new VOI for the original image.
- calc2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Prepares the data and runs the algorithm for a 2D image.
- calc2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
calc2D - Calculates level set from contours, propagates level set, and obtains new contour voi from level set.
- calc2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
calc2D - calculates the diffused image and creates the new VOI for the original image.
- calc2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Prepares the data and runs the algorithm for a 2D image.
- calc2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
Calculates the watershed intialized by the VOI regions.
- calc2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- calc2D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmQuantifyMask
-
- calc2DBWStats() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- calc2DColorStats() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- calc34D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmQuantifyMask
-
- Calc34D(VOI) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
- calc35D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
- calc3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Prepares the data and runs the algorithm for a 3D image.
- calc3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Prepares the data and runs the algorithm for a 3D image.
- calc3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Prepares the data and runs the algorithm for a 3D image.
- calc3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
This function produces a 2D histogram image with srcImage values represented across the x axis and baseImage
values represented across the y axis.
- calc3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
This function produces a 2D histogram image with srcImage values represented across the x axis and baseImage
values represented across the y axis.
- calc3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
calc3D - calculates the diffused image and creates the new VOI for the original image.
- calc3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Prepares the data and runs the algorithm for a 3D image.
- calc3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
calc3D - Calculates level set from contours, propagates level set, and obtains new contour voi from level set.
- calc3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
calc3D - calculates the diffused image and creates the new VOI for the original image.
- calc3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Prepares the data and runs the algorithm for a 3D image.
- calc3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
Calculates the watershed intialized by the VOI regions.
- calc3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- calc3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- calcAsymmetryIndex(int, int) - Method in class gov.nih.mipav.model.structures.VOIContour
-
- calcAvgIntenStdDev() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
computes the avg intensity got 2d and 3d greyscale and color images
- calcAxisOrientation(int[], int[], boolean[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Calculate the new image AxisOrientation, based on re-ordering the axes using axisOrder and axisFlip.
- calcBand(TransferFunction, float[]) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Calculates the color band (i.e. red, green, blue) for the LUT using the the corresponding transfer function
- calcButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Performs statistics calculations
- calcButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Calculat button.
- calcCOG - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
- calcCOG - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
- calcCOG - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
- calcCOG - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
- calcCOG - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
- calcCOG - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
If true calculate the center of gravity (mass) and use the difference to intialize the translation.
- calcCOG - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- calcCOG - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- calcCOGCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- calcCOGCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- calcColor2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis.
- calcColor2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis.
- calcColor3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis.
- calcColor3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis.
- calcColorA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- calcColorAStart - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- calcColorB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- calcColorBStart - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- calcColorEnd - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- CalcConvexHull() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Calculates the convex hull of each path in the shape.
- calcCroppedShared() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- calcDistance() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmDistanceFilter
-
- calcEigenVectorFA() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Calculates the eigen vector data from the DTI.
- calcEigenVectorImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
Calls AlgorithmDTI2EGFA to create an Apparent Diffusion Coefficient Image,
Functional Anisotropy Image, Color Image, Eigen Value Image, Eigen Vector Image, Relative Anisotropy Image,
Trace Image, and Volume Ratio Image.
- calcEigenVectorImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Calls AlgorithmDTI2EGFA to create eigen vector and functional anisotropy images.
- CalcElementVar(Vector<CDVector>, CDVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
Wrapper to calculate element variables.
- CalcElementVar(Vector<CDVector>, CDVector, CDVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
Calculates the variance of each component in a set of vectors.
- calcEntropy() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- calcEntropy(ModelSimpleImage, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- calcEntropy(TransMatrixd, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- calcEntropy(TransMatrixd, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- calcEntropy(TransMatrix, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- calcEntropy(TransMatrix, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- calcEntropySmoothed(TransMatrixd, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- calcEntropySmoothed(TransMatrixd, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- calcEntropySmoothed(TransMatrix, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- calcEntropySmoothed(TransMatrix, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- calcEntropySmoothedWgt(TransMatrixd, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- calcEntropySmoothedWgt(TransMatrixd, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- calcEntropySmoothedWgt(TransMatrix, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- calcEntropySmoothedWgt(TransMatrix, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- calcError(TransMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- calcError(TransMatrixd) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- calcFFT(float[], boolean) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- calcFFT25D(float[][], boolean) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- calcGradMag() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- calcGroup - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
The top-level group of threads used for calculating.
- calcGVF(int, float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Calculate GVF from image buffer.
- calcGVF(int, float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Calculate GVF from image buffer.
- calcGVF3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Calculate GVF from 3D image buffer.
- calcGVF3D(float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Calculate GVF from 3D image buffer.
- calcGVF3D(float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Calculate GVF from 3D image buffer.
- calcHistogram() - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- calcHistogram(int, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Calculates histogram for the image(s).
- calcHistogram(int, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Calculates histogram for the image(s).
- calcHistogram(int, boolean, boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Calculates histogram for the image(s).
- calcHistogram(int, boolean, boolean) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Calculates histogram for the image(s).
- calcHistogram(ModelImage, boolean, int) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Calculates histogram for the image(s).
- calcHistogram(ModelImage, int) - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Calculates histogram for the image(s).
- calcHistogram(ModelImage, int, int) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Calculates histogram for the imageA, B.
- calcHistogramGM() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Calculates the histogram for the color images GM.
- calcHistograms() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Calculates histogram for the imageA, B.
- calcHistogramsGM() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Calculates histogram for the gradient magnitude imageA, B.
- calcImageNormals() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Create array of normal vectors corresponding to the voxels in the volume.
- calcImagePanelSize() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Calculate the individual image panel size based on the current magnification of the image.
- calcImagePanelSize() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Calculate the individual image panel size based on the current magnification of the image.
- calcInBuffer2D(float[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Calculates the laplacian medianess of a 2D image and returns it as a float buffer.
- calcInBuffer2D(float[], int[], boolean, float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Calculates the gradient magnitude of a 2D image and returns it as a float buffer.
- calcInBuffer2DUnnormalized(float[], int[], boolean, float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Calculates the gradient magnitude of a 2D image and returns it as a float buffer.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
Histogram matching of the source image to the base image.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
Histogram equalizing of slices to reference slice.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Generates the new data and places in the source image.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
Calculates the VOI extraction.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
Calculates the VOI extraction.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmColorEdge
-
Filters the source image.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
This function replaces the original image with a new image that is either the FFT, the filtered FFT, or the
inverse FFT of the original or filtered image.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
This function replaces the original image with a new image that is either the FFT, the filtered FFT, or the
inverse FFT of the original or filtered image.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
Filters the source image.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDicomOrder
-
Calculates the dicom ordered image and replaces the original image with the dicom ordered image.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Runs the calculation and stores the result into the same source buffer.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Generates the new data and places in the source image.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRandSliceOrder
-
Forms the reversed order image and places the result in original image.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Calculates the final output and stores it in the source image.
- calcInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Calculates the rotated image and replaces the source image with the rotated image.
- calcInPlace(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Generates the flipped image and replaces the source image with the flippeded image.
- calcInPlace2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
From text description in 4th edition Image Processing, Analysis, and Machine Vision International Edition
by Milan Sonka, Vaclav Hlavac, and Roger Boyle, Algorithm 6.6 Inner Boundary Tracing, pp. 191-192.
- calcInPlace25D(BitSet, float, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the source image with fill value.
- calcInPlace25D(BitSet, float, int, Vector<Integer>, boolean) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the source image with fill value.
- calcInPlace25DC(BitSet, Color, int, String, Vector<Integer>, boolean) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the color source image with fill color.
- calcInPlace25DCMask(BitSet, Color, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the color source image with fill color.
- calcInPlace25DMask(BitSet, float, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the source image with fill value.
- calcInPlace25DMask(BitSet, float, int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the source image with fill value.
- calcInPlace2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
Histogram equalization on the source image.
- calcInPlace2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Histogram equalization on the source image.
- calcInPlace2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
Calculate center of mass of 2D black and white image.
- calcInPlace2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
Calculate red, green, and blue centers of mass for 2D color image.
- calcInPlace2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Replace 2D source image with the thresholded image.
- calcInPlace2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Replace 2D source image with the thresholded image.
- calcInPlace2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Mean filters the source image.
- calcInPlace2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Median filters the source image.
- calcInPlace2D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
This function replaces the source image with the new type image and new data range.
- calcInPlace2D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of source image with fill value.
- calcInPlace2D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
This function replaces the 2D source image with an image that has noise added to it.
- calcInPlace2D(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Calculates the gradient image and replaces the source image with the new image.
- calcInPlace2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Calculates the diffused image and replaces the source image with the diffused image.
- calcInPlace2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Calculates the blurred image and replaces the source image with the blurred image.
- calcInPlace2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Calculates the gradient image and replaces the source image with the new image.
- calcInPlace2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Calculates the Laplacian image and replaces the source image with the new image.
- calcInPlace2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
Calculates the Morphological Filter image and replaces the source image with the new image.
- calcInPlace2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
Calculates the non-maximum suppression image and replaces the source image with the new image.
- calcInPlace2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
calculates the blurred image and replaces the source image with the blurred image.
- calcInPlace2DBuffer(int, float[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Calculates the Laplacian image and replaces the source image with the new image.
- calcInPlace2DBuffer(int, float[], int[], boolean, float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Calculates the gradient image and returns a float buffer with the new values.
- calcInPlace2DBufferUnnormalized(int, float[], int[], boolean, float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Calculates the gradient image and returns a float buffer with the new values.
- calcInPlace2DComplex() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of source image with fill value.
- calcInPlace2DRGB() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of source image with fill value.
- calcInPlace34D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Replace 3D or 4D source image with the thresholded image.
- calcInPlace34D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Replace 3D or 4D source image with the thresholded image.
- calcInPlace34D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Calculates the gradient magnitude image and replaces the source image with the new image.
- calcInPlace34D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
This function replaces the source image with the new type image and new data range.
- calcInPlace34D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
This function replaces the 3D or 4D source image with an image that has noise added to it.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
Histogram Equalization on the source image and replaces the source image with the processed image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Histogram Equalization on the source image and replaces the source image with the processed image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
Calculate center of mass of 3D black and white image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
Calculates red, green, and blue centers of mass in 3D color image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Calculates the Laplacian and replaces the source image with the new image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Calculates the diffused image and replaces the source image with the diffused image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Calculates the blurred image and replaces the source image with the blurred image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Calculates the Laplacian and replaces the source image with the new image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Mean filters the source image and replaces the source image with the mean filtered image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Median filters the source image and replaces the source image with the median filtered image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
Calculates the Morphological Filter and replaces the source image with the new image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
Calculates the non-maximum suppression and replaces the source image with the new image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
calculates the UnsharpMask and replaces the source image with the new image.
- calcInPlace3D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the source image with fill value.
- calcInPlace3DBuffer(float[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Calculates the Laplacian image and replaces the source image with the new image.
- calcInPlace3DComplex() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the source image with fill value.
- calcInPlace3DRGB() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the source image with fill value.
- calcInPlace4D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Calculates the blurred image and replaces the source image with the blurred image.
- calcInPlace4D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the source image with fill value.
- calcInPlace4DComplex() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the source image with fill value.
- calcInPlace4DRGB() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills VOI of the source image with fill value.
- calcInPlaceBorder2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Replaces the original image with the Median filtered image.
- calcInPlaceBorder2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Mode filters the 2D source image.
- calcInPlaceBorder3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Mode filters the source image and replaces the source image with the mode filtered image.
- calcInPlaceBorder3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Mode filters the 3D source image and replaces it with the mode filtered image.
- calcInPlaceColor() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Generates the new data and places in the source image.
- calcInPlaceColor() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
- calcInPlaceComplex() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Generates the new data and places in the source image.
- calcIntensity(ModelImage, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Calculated the total intensity contained within this contour.
- calcIntensity(ModelImage, Vector3f, float, float, JPanelPixelExclusionSelector.RangeType) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Finds values contained within this contour, based on the rangeFlag, ignorMin and ignoreMax.
- calcIntensityThreshold(ModelImage, float, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Calculates the total intensity contained within this contour, equal to of greater than the threshold.
- calcj(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
- calcj(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
- calcj(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel
-
- calcj(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DNoWholeModel
-
- calcj(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialNoWholeModel
-
- calcj(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
- calcj(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solModel
-
- calcj(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitAllNL2
-
- calcj(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2nl2solModel
-
- calcj(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- calcj(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- calcjTest(int, int, double[], int, double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- calcLargestDistance(BitSet, int[], float[]) - Method in class gov.nih.mipav.model.structures.VOI
-
Calculate the distance of the largest line segment contained entirely within the VOI
- calcLargestDistance(BitSet, int[], float, float, float, float[], float[], float[], Vector3f, Vector3f) - Static method in class gov.nih.mipav.model.structures.VOI
-
- calcLargestSliceDistance(int[], float[], Vector3f, Vector3f) - Method in class gov.nih.mipav.model.structures.VOIContour
-
Calculate the distance of the largest line segment contained entirely
within the slice of the VOI
- calcLevelSliderMax(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- calcLineMin() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- calcLineMinimization() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- calcLowerResol() - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
This method calculates the lower X, lower Y, and lower Z
coordinates(millimeters) for the CROP VOI region.
- calcLSBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- CalcMaskImage(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Calculates a reference mask image.
- CalcMaxAperture(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- calcMaxNormColors(ModelImage, int) - Method in class gov.nih.mipav.view.PatientSlice
-
calculates the color normalization factors.
- calcMaxNormColors(ModelImage, Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
calculates the color normalization factors
- calcMaxPagePanelSize() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Calculate the maximum page panel size based on the screen size, the size of the menubar and toolbars and whether
the columns or rows are independent.
- calcMaxPagePanelSize() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Calculate the maximum page panel size based on the screen size, the size of the menubar and toolbars and whether
the columns or rows are independent.
- calcMinMax() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Calculates the min and max values for the image array.
- calcMinMax() - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Calculates the min and max values for the image array.
- calcMinMax() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Calculates the min and max values for the image array.
- calcMinMax() - Method in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Calculate the maximum and minimum valuse to setup the window and level sliders.
- calcMinMax() - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Calculate the maximum and minimum valuse to setup the window and level sliders.
- calcMinMax(boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- calcMinMax(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Calculate the image range bounds for transfer function determination.
- CalcMinMaxEdgeLength(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- calcMinMaxMag(boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Calculates the min and max magnitude values for the image array.
- calcMinMaxNonZero() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Calculates the min and max nonzero values for the image array.
- calcMinMaxSlice(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
Calculates the min and max values for the image array, so that the image is displayed properly.
- calcMinMaxSlope(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- calcMIPBuffer(int, int, int) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Generates a MIP image from the volume.
- calcMSE() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
- calcNormals() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeNormals
-
Calculates the volume normals from the input source ModelImage.
- calcNormalsShared() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeNormals
-
Calculates the volume normals shared OpenGL texture.
- calcNormalsSlices() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeNormals
-
Calculates the volume normals from the input source ModelImage.
- CalcNParam(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Calulates the needed number of parameters to retain 'retained_variance'.
- calcNumPages() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Calculate the number of pages.
- calcObjX(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Calculate the world X coordinates from input MouseEvent coordinates.
- calcObjY(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Calculate the world Y coordinates from input MouseEvent coordinates.
- calcOriginalMarker(int) - Method in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- calcPagePanelSize() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Calculate the size of the page Panel.
- calcPagePanelSize() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Calculate the size of the page Panel.
- calcPaintedVolume(String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Calculates the volume of the painted voxels.
- CalcPixel2ShapeWeights() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Calculates the pixel-to-shape weights used in the combined PCA.
- calcQuadSurface() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHeightFunction
-
Calculates quad surface.
- calcQuadSurface(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Calculates quad surface.
- calcr(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
- calcr(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
- calcr(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel
-
- calcr(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DNoWholeModel
-
Fit to function - a1 + (1 - a1)*[1 - 1/sqrt(1 + 4*PI*a0*x)].
- calcr(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialNoWholeModel
-
Fit to function - bottom + (1 - bottom)*[1 - exp(-ln(2)*t/thalf)] a1
+ (1 - a1)*(1 - exp(-ln(2)*t/a0)).
- calcr(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
- calcr(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solModel
-
- calcr(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitAllNL2
-
- calcr(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2nl2solModel
-
- calcr(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- calcr(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- calcRBSpline(float) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Reslice data is Cubic Bspline where.
- calcRCUBIC(float) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Reslice using cubic convolution reslice where.
- calcRGBBand(TransferFunction, float[]) - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Calculates the color band (i.e. red, green, blue) for the LUT using the the corresponding transfer function
- calcRGBIntensity(ModelImage, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Calculates the total intensity contained within this contour for the input color channel.
- calcRGBIntensity(ModelImage, ColorRGB, ColorRGB, ColorRGB, float, float, float, float, float, float, JPanelPixelExclusionSelector.RangeType) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Finds values contained within this contour, based on the rangeFlag,
ignoreMinR, ignoreMaxR, ignoreMinG, ignoreMaxG, ignoreMinB, and ignoreMaxB.
- calcRGBIntensityThreshold(ModelImage, int, float) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Calculates the total intensity contained within this contour for the input color channel,
that is greater than or equal to the input threshold value.
- calcrTest(int, int, double[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- calcSalScale1D(short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- calcSalScale1DAA(short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- calcSalScale1DParzen(short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- calcSalScale2D(short[], short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- calcSalScale3D(short[], short[], short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- CalcScanLines() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Calculates the scanlines of the mask image.
- calcScreenSize() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Calculate the screen size in pixels.
- calcScreenSize() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Calculate the screen size in pixels.
- calcScreenX(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Calculate the screen X coordinates from input world coordinates.
- calcScreenY(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Calculate the screen Y coordinates from input world coordinates.
- calcSelectedVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
The VOI being used just for this calculation (may be a single curve of a single slice or entire VOI
- CalcShapeDistances(CAAMShape, CAAMShape, double[], double[], CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Calculates optimization results.
- CalcShapeDistances(CAAMShape, CAAMShape, double[], double[], CDVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Calculates optimization results.
- calcShearWarpImage(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Transform the image into shear warp image, which has the same resolution.
- calcSize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUItemType
-
Calculates the PDU item type size.
- calcSize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUType
-
Calculates the size of this PDU type.
- calcSize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
These methods must be implemented by each class that extends this class.
- calcSize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_UserInformation
-
Calculates the PDU item type size.
- calcSlopeAndB() - Method in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- calcStartLocations(float[], int[], boolean[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Calculates the new start locations based on image orientation.
- calcStats - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- calcStatsPerContour(FileInfoBase, VOIBase, int, String, String, float, float, VOIStatisticalProperties, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
Calculates statistics for a single contour.
- calcStatsPerContourRGB(FileInfoBase, VOIBase, int, String, String, float, float, float, float, float, float, VOIStatisticalProperties, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
Calculates statistics for a single contour.
- calcStatsTotal(VOI, VOIStatisticalProperties, FileInfoBase, String, String, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
Calculates the statistics for the VOI as a whole (across all contours within the VOI).
- calcStatsTotalRGB(VOI, VOIStatisticalProperties, FileInfoBase, String, String, float, float, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
This function produces a 2D histogram image with srcImage values represented across the x axis and baseImage
values represented across the y axis.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
This function produces a new image that has had itself histogram matched to the base image. places filtered image
in the destination image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
This function produces a new image that has had all slices histogram equalized to reference slice. places filtered image
in the destination image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Generates the new data and places in a new (destination) image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmColorEdge
-
This function produces a color edged image into a ModelImage that does not replace the original image-data.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFIREEdgeExtraction
-
This function produces a new image that has had edge extraction by FIRE operators
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
This function produces a new image that is either the FFT, the filtered FFT, or the inverse FFT of the original
or filtered image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
This function produces a new image that is either the FFT, the filtered FFT, or the inverse FFT of the original
or filtered image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
This function produces a new image that has had fuzzy minimization filtering
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
This function produces a new image that has had fuzzy minimization filtering
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
This function produces a local-normalized image into a ModelImage that does not replace the original image-data.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRuleBasedContrastEnhancement
-
This function produces a new image that has had rule based contrast enhancement
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
Adds image margins and stores result in destImage.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Concatenate the image and store the results in the destination image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Calculates the gray scale image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlices
-
DOCUMENT ME!
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Runs the calculation and stores it in a new ModelImage.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Generates the new data and places in a new (destination) image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Calculates the final output and puts it in a destination image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceValue
-
Replace the values and store into a new image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Concatenate the image and store the results in the destination image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Calculates the gray scale image.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGrays
-
Calculates the new images.
- calcStoreInDest() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoHSB
-
Calculates the new images.
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
This function produces a new image that has had itself histogram equalized. places filtered image in the
destination image.
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
This function produces a new image that has had itself histogram equalized. places filtered image in the
destination image.
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
This function calculates the autocorrelation coefficients and places them in the destination image for black and
white images.
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
This function calculates the autocovariance coefficients and places them in the destination image for black and
white images.
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Stores the thresholded image into the destination image.
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Stores the thresholded image into the destination image.
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
This function produces a new image that has been mean filtered and places filtered image in the destination
image.
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
This function produces a new image that has been median filtered and places filtered image in the destination
image.
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
This function produces a new image with the new data type and new data range.
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
This function produces a new image that has been cropped!
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills new image/VOI with new fill value;
- calcStoreInDest2D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
This function produces a new 2D image that is the sum of the source image and noise.
- calcStoreInDest2D(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
This function produces the Laplacian of input image.
- calcStoreInDest2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Calculates the diffused image and stores the resultant diffused image in the destination image model.
- calcStoreInDest2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
This function produces a new image that has been blurred.
- calcStoreInDest2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
This function produces the gradient magnitude of input image.
- calcStoreInDest2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
This function produces the Laplacian of input image.
- calcStoreInDest2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
This function produces the Morphological Filter of input image.
- calcStoreInDest2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
This function produces the non-maximum suppression of input image.
- calcStoreInDest2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
this function produces a new image that has been blurred.
- calcStoreInDest2D(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
This function produces the EdgeLap of input image.
- calcStoreInDest2D(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
This function produces the EdgeLap of input image.
- calcStoreInDest2D(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
This function produces the EdgeNMSup of input image.
- calcStoreInDest2DC() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
This function calculates the autocorrelation coefficients and places them in the destination image for color
images.
- calcStoreInDest2DC() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
This function calculates the autocovariance coefficients and places them in the destination images for color
images.
- calcStoreInDest2DComplex() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills new image/VOI with new fill value;
- calcStoreInDest2DRGB() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills new image/VOI with new fill value;
- calcStoreInDest34D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Stores the thresholded image into the destination image.
- calcStoreInDest34D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Stores the thresholded image into the destination image.
- calcStoreInDest34D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
This function produces the gradient magnitude of input image.
- calcStoreInDest34D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
This function produces a new image with the new data type and new data range.
- calcStoreInDest34D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
This function produces a new 3D or 4D image that is the sum of the source image and noise.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
This function produces a new volume image that has been histogram equalized.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
This function produces a new volume image that has been histogram equalized.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
This function calculates the autocorrelation coefficients and places them in the destination image for black and
white images.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
This function calculates the autocovariance coefficients and places them in the destination image for black and
white images.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
This function produces the Laplacian of input image.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Calculates the diffused image and stores the resultant diffused image in the destination image model.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Produces a new image that has been blurred.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
This function produces the Laplacian of input image.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
This function produces a new volume image that has been mean filtered.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
This function produces a new volume image that has been median filtered.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
This function produces the Morphological Filter of input image.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
This function produces the Non-maximum suppression of input image.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
this function produces the UnsharpMask of input image.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
This function produces a new image that has been cropped.
- calcStoreInDest3D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills new image/VOI with new fill value;
- calcStoreInDest3D(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
This function produces the Laplacian of input image.
- calcStoreInDest3D(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
This function produces the EdgeLap of input image.
- calcStoreInDest3D(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
This function produces the Non-maximum suppression of input image.
- calcStoreInDest3DC() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
This function calculates the autocorrelation coefficients and places them in the destination image for color
images.
- calcStoreInDest3DC() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
This function calculates the autocovariance coefficients and places them in the destination images for color
images.
- calcStoreInDest3DComplex() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills new image/VOI with new fill value;
- calcStoreInDest3DRGB() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills new image/VOI with new fill value;
- calcStoreInDest4D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
This function calculates the autocorrelation coefficients and places them in the destination image for black and
white images.
- calcStoreInDest4D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
This function calculates the autocovariance coefficients and places them in the destination image for black and
white images.
- calcStoreInDest4D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Produces a new image that has been blurred.
- calcStoreInDest4D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
This function produces a new image that has been cropped.
- calcStoreInDest4D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills new image/VOI with new fill value;
- calcStoreInDest4DC() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
This function calculates the autocorrelation coefficients and places them in the destination image for color
images.
- calcStoreInDest4DC() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
This function calculates the autocovariance coefficients and places them in the destination images for color
images.
- calcStoreInDest4DComplex() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills new image/VOI with new fill value;
- calcStoreInDest4DRGB() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Fills new image/VOI with new fill value;
- calcStoreInDestBorder2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
This method produces a new image that has been mode filtered and places filtered image in the destination image.
- calcStoreInDestBorder2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
This function produces a new image that has been mode filtered and places filtered image in the destination
image.
- calcStoreInDestBorder3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Median filters the source image and replaces the source image with the mode filtered image.
- calcStoreInDestBorder3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Mode filters the 3D source image and makes a new image for the mode filtered image.
- calcStoreInDestColor() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
This function produces a 2D histogram image with first color values represented across the x axis and second
color values represented across the y axis.
- calcStoreInDestColor() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Generates the new data and places in a new (destination) image.
- calcStoreInDestColor() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
- calcStoreInDestComplex() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Generates the new data and places in a new (destination) image.
- calcStoreInPlace() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFIREEdgeExtraction
-
Edge extraction by FIRE operators of the source image.
- calcStoreInPlace() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
Fuzzy minimization filtering of the source image.
- calcStoreInPlace() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
Fuzzy minimization filtering of the source image.
- calcStoreInPlace() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRuleBasedContrastEnhancement
-
Rule based contrast enhancement of the source image.
- calcStoreInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
Adds image margins and stores result in srcImage Must use getSrcImage after running this routine.
- calcStoreInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Concatenate the image Must run getImageR after running this routine.
- calcStoreInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Calculates the gray scale image.
- calcStoreInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceValue
-
Replace the values in place.
- calcStoreInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Concatenate the image Must run getImageR after running this routine.
- calcStoreInPlace() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Calculates the gray scale image.
- calcStoreInPlace2D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
This function crops srcImage Must use getSrcImage after running.
- calcStoreInPlace3D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
This function crops srcImage Must use getSrcImage after running.
- calcStoreInPlace4D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
This function crops srcImage Must use getSrcImage after running.
- calcTCoordX(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Calculate the X Texture Coordinates from world coordinates.
- calcTCoordY(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Calculate the Y Texture Coordinates from world coordinates.
- calcTensor - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- calcTensor(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- calcThreshold() - Method in class gov.nih.mipav.view.JPanelHistogram
-
Calculates the thresholded image based on the parameters of the threshold transfer function.
- calcThreshold() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Calculates the thresholded image based on the parameters of the threshold transfer function.
- calcThresholdVolume - Variable in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
DOCUMENT ME!
- calcThresholdVolume - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- calcThresholdVolume(float, float) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- calcTotalVolume(SurfaceAttributes, TreatmentInformation) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Calculate the burning points total volume.
- calcTracts(VOIBaseVector[], int, int, int, int, int, int, int, ModelImage, ViewJProgressBar) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- calcTriSurface() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHeightFunction
-
Calculates triangulated surface.
- calculate() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
DOCUMENT ME!
- calculate() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
DOCUMENT ME!
- calculate() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
DOCUMENT ME!
- calculate(libdt.CovMatrix, libdt.Mat, boolean) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- calculate_rho() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver_NU
-
- calculate_rho() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- calculate_rho() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver_NU
-
- calculate_rho() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- calculate2PResiduals(double[], double, double, double, double[], double[], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- calculateB0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- calculateBestToWorst(double[], int[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- calculateBin(double) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- calculateBin(double, double, double) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- calculateBoundingBox() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- calculateBoundingBox(ModelImage, ModelImage) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- calculateCenterOfMass2D(boolean) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Calculates the center of mass (gravity) of a 2D image using the intensity of each pixel as a weighting value.
- calculateCenterOfMass2D(ModelSimpleImage, ModelSimpleImage, boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Calculates the center of mass (gravity) of a 2D image.
- calculateCenterOfMass2D(ModelSimpleImage, ModelSimpleImage, boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Calculates the center of mass (gravity) of a 2D image.
- calculateCenterOfMass2D(ModelSimpleImage, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Calculates the center of mass (gravity) of a 2D image.
- calculateCenterOfMass2D(ModelSimpleImage, ModelSimpleImage, boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Calculates the center of mass (gravity) of a 2D image.
- calculateCenterOfMass3D(boolean) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Calculates the center of mass (gravity) of a 3D image.
- calculateCenterOfMass3D(ModelSimpleImage, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Calculates the center of mass (gravity) of a 3D image.
- calculateCenterOfMass3D(ModelSimpleImage, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Calculates the center of mass (gravity) of a 3D image.
- calculateCenterOfMass3D(ModelSimpleImage, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Calculates the center of mass (gravity) of a 3D image.
- calculateCenterOfMass3D(ModelSimpleImage, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Calculates the center of mass (gravity) of a 3D image.
- calculateCenterOfMass3D(ModelSimpleImage, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Calculates the center of mass (gravity) of a 3D image.
- calculateCenterOfMass3D(ModelSimpleImage, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Calculates the center of mass (gravity) of a 3D image.
- calculateChiSq() - Method in class gov.nih.mipav.model.algorithms.FitExponential
-
- calculateChiSq() - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
- calculateChiSq() - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
- calculateChiSq() - Method in class gov.nih.mipav.model.algorithms.FitLine
-
- calculateChiSq() - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
- calculateChiSq() - Method in class gov.nih.mipav.model.algorithms.FitMultiExponential
-
- calculateChiSq() - Method in class gov.nih.mipav.model.algorithms.FitRayleigh
-
- calculateChiSq() - Method in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
Calculates chi squared
- calculateCoherenceEnhancingDiffusion() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateCoherenceEnhancingDiffusion() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateCoherenceEnhancingDiffusion() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- calculateCoherenceEnhancingDiffusion() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
From the cropped images, apply Coherence Enhanced Diffusion filter to
each 2D slices.
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Calculate the CED image.
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Apply the coherence enhancing diffusion filter to the croppred MR image.
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Apply the coherence enhancing diffusion filter to the croppred MR image.
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- calculateCoherenceEnhancingDiffusion(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- calculateConformal() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Called on setup, when a new triangle mesh is loaded, or when the puncture triangle is selected and the
"recalculate conformal" button is pressed by the user:
- calculateConformal() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Called on setup, when a new triangle mesh is loaded, or when the puncture triangle is selected and the
"recalculate conformal" button is pressed by the user:
- calculateConvergenceMeasurement(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- calculateCostButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
- calculateCostButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- calculateCostFunctionValues() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- calculateCostFunctionValues() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- calculateCustomDomain() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- calculateCustomRange() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Calculates the range and domain (according to min and max y values). and expands range if necessary.
- calculateDefaultRangeDomain() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Calculates the default range and domain (according to min and max x and y values).
- calculateDerivativeImage(float[], int[], boolean, float[][], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- calculateDistance() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- calculateDTI(int, int, float[], float[][][], Matrix, Matrix) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- calculateDTIVoxel(float[], float[][], float[][][], int, int, int, Matrix) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- calculateDTIVoxel2(float[], float[][], float[][][], int, int, int, Matrix, int) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- calculateFittedY() - Method in class gov.nih.mipav.model.algorithms.FitExponential
-
- calculateFittedY() - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
- calculateFittedY() - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
- calculateFittedY() - Method in class gov.nih.mipav.model.algorithms.FitLine
-
- calculateFittedY() - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
- calculateFittedY() - Method in class gov.nih.mipav.model.algorithms.FitMultiExponential
-
- calculateFittedY() - Method in class gov.nih.mipav.model.algorithms.FitRayleigh
-
- calculateFittedY() - Method in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
Calculates yDataFitted
- calculateFreeRangeThreshold(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- calculateFuzzyCMean() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- calculateGabor() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateGabor() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateGabor() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
Generate Gabor filter.
- calculateGaborFilter() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- calculateGaussian() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateGaussian() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateGaussian() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
generate the gaussian filter.
- calculateGM() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateGM() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- calculateGM() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateGM() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
generate the gradient magnitude image.
- calculateHaralick() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
DOCUMENT ME!
- calculateHaralick() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateHaralick() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- calculateHaralick() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateHaralick() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
Genernate Haralick images.
- calculateHurstIndex() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateHurstIndex() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateHurstIndex() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
Generate hurst index image.
- calculateIHN3Correction() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateIHN3Correction() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateIHN3Correction() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- calculateImageSize(int[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Calculate the size of the image.
- calculateIntercept(double, double, double) - Static method in class gov.nih.mipav.model.file.FileInfoMinc
-
Calculates rescale intercept given a min and a slope value.
- calculateInvert() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateInvert() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateInvert() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
Generate the invert image.
- calculateLaws() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
DOCUMENT ME!
- calculateM0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- calculateM0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- calculateM0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- calculateMatrix(Matrix) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- calculateMaxAndMinVals() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- calculateMean() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateMean() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateMean() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
Generate mean image.
- calculateMedian() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
Generate the median image.
- calculateMinMaxValues(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Called by the TextureSculptor or VolumeSculptor objects.
- calculateMode() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateMode() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateMode() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- calculateNewOrigin(ModelImage, int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
Calculates the origin values for the modified image, based on the current origin values and the added margins.
- calculateNumberFeatures() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Calculate number of features being saved.
- calculateNumberFeatures() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- calculateNumberFeatures() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- calculateOutput() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- calculatePixelHurstIndex() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
DOCUMENT ME!
- calculatePrincipleAxis(ModelImage, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Working ...
- calculateProgressRatios(int, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Calculates the progress ratios for different algorithms.
- calculateProgressValueBoundary(int, float[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Calculates the boundary of progress value which is assigned to the indexth algorithm.
- calculateRadii() - Method in class gov.nih.mipav.view.ColorWheel
-
calculates radii of the interior circles
using Lambertian equal areas
equation used: r = 2 |sin(theta/2)|
- calculateREG(byte[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- calculateRegIsotropicDiffusion() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateRegIsotropicDiffusion() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateRegIsotropicDiffusion() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- calculateRelativeTime(double) - Method in class gov.nih.mipav.model.file.FileZVI
-
- calculateRescaleIntercept(double[], double[]) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
In MINC images, "real" values for pixels are calculated by taking the given image min and image max and rescaling
the data accordingly.
- calculateRescaleIntercept(double[], double[], double[], double[], double[], boolean) - Static method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
In MINC images, "real" values for pixels are calculated by taking the given image min and image max and rescaling
the data accordingly.
- calculateResiduals() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
CalculateResiduals.
- calculateResiduals() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
CalculateResiduals.
- calculateResiduals() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Calculates the residuals of the least squares fit.
- calculateResiduals() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Calculates the residuals of the least squares fit.
- calculateResiduals(double[], double, double, double[], double[], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- calculateSliceHurstIndex() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
- calculateSliceTamuraTexture() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
- calculateSlope(double, double, double, double) - Static method in class gov.nih.mipav.model.file.FileInfoMinc
-
Calculates rescale slope given a min and a max value.
- CalculateT(int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTProcess.CalculateT
-
- calculateT1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- calculateT1 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
The list of possible maps that can be calculated
- CalculateT1(ModelImage, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTreT1.CalculateT1
-
- calculateT1UsingConventionalTreT1() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- CalculateT1UsingConventionalTreT1Inner(ModelImage, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTreT1.CalculateT1UsingConventionalTreT1Inner
-
- calculateT1UsingTreT1HIFI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- calculateT2 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- calculateT2with0Phase() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- calculateT2with180Phase() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- calculateT2withApproximateModeling() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- calculateT2withFullModeling() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- calculateTagOffset(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TiffReader
-
Determine the offset of a given tag within the specified IFD.
- calculateThreshold() - Method in class gov.nih.mipav.view.JPanelHistogram
-
Calculates the volume (for 3D images) or area (for 2D images) of the image between the two values from the upper
and lower bounds text areas.
- calculateThreshold() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Calculates the volume (for 3D images) or area (for 2D images) of the image between the two values from the upper
and lower bounds text areas.
- calculateThreshold(float, float) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Calculates the volume or area of the image between the two values from the upper and lower bounds (inclusive).
- calculateThreshold(float, float) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Calculates the volume or area of the image between the two values from the upper and lower bounds (inclusive).
- calculateThreshold(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- calculateThreshold(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Extract the theshold from grount truth label.
- calculateThreshold(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- calculateThreshold(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- calculateThreshold(ModelImage, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTProcess.CalculateT
-
Performs smart thresholding for the given image at at certain slice k
- calculateThresholdArea(float, float) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Calculates the area of the image between the two values from the upper and lower bounds (inclusive).
- calculateThresholdArea(float, float) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Calculates the area of the image between the two values from the upper and lower bounds (inclusive).
- calculateThresholdVolume(float, float) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Calculates the volume of the image between the two values from the upper and lower bounds (inclusive).
- calculateThresholdVolume(float, float) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Calculates the volume of the image between the two values from the upper and lower bounds (inclusive).
- calculateTimeInSeconds() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDescriptor
-
- calculateTimeStampString(long) - Method in class gov.nih.mipav.model.file.FileZVI
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- calculateTransform(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- calculateTransform(ModelImage, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- calculateTransform(ModelImage, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- calculateTransform(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- calculateTransform(ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- calculateTransform_dim_fixed(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- calculateTransform_dim_fixed(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- calculateTransform_resol_fix(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- calculateTransform_resol_fix(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- calculateTransform_resol_fix(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- calculateTransform_resol_fix(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- calculateTransform_resol_fix_2D(ModelImage, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- calculateTransform_resol_fix_2D(ModelImage, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- calculateTransform_resol_fix_2D(ModelImage, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- calculateTransform_resol_fix_2D(ModelImage, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- calculateTransform_resol_fix_3D(ModelImage, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- calculateTransform_resol_fix_3D(ModelImage, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- calculateTransform_resol_fix_3D(ModelImage, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- calculateTransform_resol_fix_3D(ModelImage, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- calculateTwoPResiduals(double[], double, double, double, double[], double[], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- calculateValidEndZIndex() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- calculateValidStartZIndex() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- calculateVOIHurstIndex() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
- calculateVOIsVolume() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Compute the VOIs binary mask based volumes.
- calculateVOIsVolume() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Compute the VOIs binary mask based volumes.
- calculateVTDateTimeString(double) - Method in class gov.nih.mipav.model.file.FileZVI
-
- calculateWavelet() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- calculateWavelet() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- calculateWavelet() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
Generate the wavelet image
- calculator - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
DOCUMENT ME!
- CalculteT1UsingTreT1HIFIInner(ModelImage, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTreT1.CalculteT1UsingTreT1HIFIInner
-
- calcVolume(ModelImage, ModelTriangleMesh[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
- calcVolume(SurfaceAttributes, TreatmentInformation) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Calculate the current burning point volume.
- calcVolumeMask(BitSet, ModelImage, Vector3f[], int, int, int, int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- calcVoxels() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Identify all voxels that are inside or on the mesh that represents the brain surface.
- calcWindowSliderMax(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- calcWinLevTransferFunction(ModelImage, float, float, float[], float[]) - Static method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Calculate the x and y components of the transfer function, given the active image and the desired window and level.
- calcXProjection() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Calculates the X Projection for color or black and white images.
- calcYProjection() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Calculates the Y Projection for color or black and white images.
- calcZeroX(double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- calcZeroXMaskBitset(float[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Calculates the zero crossing mask of a 2D image and returns it as a BitSet buffer.
- calcZeroXMaskBitset(float[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Calculates the zero crossing mask of a 2D image and returns it as a BitSet buffer.
- calcZProjection() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Calculates the Z Projection for color or black and white images.
- calFldStr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
388 Calibrated Field Strength (x10 uGauss).
- cAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
DOCUMENT ME!
- cAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
DOCUMENT ME!
- cAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
DOCUMENT ME!
- cAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- cAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- CALIBRATED_RGB - Static variable in class gov.nih.mipav.model.file.FileBMP
-
- CalibrationDateDD - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- CalibrationDateMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- CalibrationDateYYYY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- CalibrationTimeHH - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- CalibrationTimeMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- CalibrationTimeSS - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- call(Vertex, Point3, float[], Point3) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PointDistanceFunctor
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Once all the necessary variables are set, call the Concat algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Once all the necessary variables are set, call the Frequency Filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Once all the necessary variables are set, call the Image Margins algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Once all the necessary variables are set, call the AGCIE algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Once all the necessary variables are set, call the algorithm based on what type of image this is and whether or
not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Once all the necessary variables are set, call the local AHE algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Once all the necessary variables are set, call the AINDANE algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Once all the necessary variables are set, call the median algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Calls the algorithm with the set variables.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Calls the algorithm with the set variables.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Once all the necessary variables are set, call the Barrel/Pincushion Distortion
Correction algorithm based on what type of image this is
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Once all the necessary variables are set, call the Bilateral Filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Once all the necessary variables are set, call the Fuzzy C Means algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Construct and run the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
Calls the algorithm with the set variables.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type
of image this is and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Once all the necessary variables are set, call the threshold rgb algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Once all the necessary variables are set, call the mean algorithm based on what type of image this is and whether
or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Once all the necessary variables are set, call the local normalization algorithm based on what type of image this
is and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Once all the necessary variables are set, call the Color Saturation
Adjustment algorithm based on what type of image this is
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Once all the necessary variables are set, call the Concat algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
calls algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
calls algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
calls algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Calls the algorithm with the set-up parameters.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Once all the necessary variables are set, call the contrast enhancement using exposure fusion algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Once all the necessary variables are set, call the convergence field algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Runs the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Runs the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoMultiple3D
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
Call Algorithm.....calls the RGBConcat algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Once all the necessary variables are set, call the Change Type algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
Call algorithm to copy appropriate images from original, and double where necessary.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCumulativeHistogram
-
Calls the CumulativeHistogram Algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Once all the necessary variables are set, call the Markov Segment algorithm which will create
a new segmented image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Once all the necessary variables are set, call the Gaussian Blur
algorithm based on what type of image this is and whether or not there
is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
Method for calling the Dicom to AVI algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Resample images to power of 2.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Once all the necessary variables are set, call the algorithm based on what type of image this is and whether or
not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Once all the necessary variables are set, call the algorithm based on
what type of image this is and whether or not there is a separate
destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Once all the necessary variables are set, call the Edge Preserving Smoothing algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Once all the necessary variables are set, call the Efficient Watershed algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
Once all the necessary variables are set, call the Mean Shift Segmentation algorithm based on what type of image
this is and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Once all the necessary variables are set, call the Entropy Minimization algorithm based on what type of image
this is and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Sets arrays appropriately and calls registration algorithm, running it in it's own thread.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Sets arrays appropriately and calls registration algorithm, running it in it's own thread.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
Run the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Once all the necessary variables are set, call the Remove Slices algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Once all the necessary variables are set, call the Extract Surface algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Once all the necessary variables are set, call the Frequency Filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Once all the necessary variables are set, call the FFT algorithm based on what type of image this is and whether
or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
When OK button is clicked, this method is invoked.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
Not used.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Once all the necessary variables are set, call the Frequency Filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Once all the necessary variables are set, call AlgorithmFRETBleedThrough.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Once all the necessary variables are set, call AlgorithmFRETEfficiency.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Once all the necessary variables are set, call the median algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Once all the necessary variables are set, call the Fuzzy C Means algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Once all the necessary variables are set, call the Fuzzy C Means algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Once all the necessary variables are set, call the median algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Once all the necessary variables are set, call the Frequency Filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Once all the necessary variables are set, call the Entropy Minimization algorithm based on what type of image
this is and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Once all the necessary variables are set, call the Gradient Magnitude algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Once all the necessary variables are set, call the Nonlocal Means filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Once all the necessary variables are set, call the Gaussian Haralick feature algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Once all the necessary variables are set, call the Harris corner detector algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHessian
-
Once all the necessary variables are set, call the mean algorithm based on what type of image this is and whether
or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Once all the necessary variables are set, call the HillClimbing Watershed algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Once all the necessary variables are set, call the Histogram algorithm based on whehter the image is color or
not.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Once all the necessary variables are set, call the Frequency Filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Once all the necessary variables are set, call the Hurst Index algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Once all the necessary variables are set, call the IAGCWD contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Once all the necessary variables are set, call the IDObjects algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Once all the necessary variables are set, call the IHN3 Correction algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Once all the necessary variables are set, call the Image Math algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Once all the necessary variables are set, call the Nonlocal Means filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Once all the necessary variables are set, call the Fuzzy C Means algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Once all the necessary variables are set, call the Insert Slice algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Once all the necessary variables are set, call the Insert Slice algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Once all the necessary variables are set, call the Insert Volume algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Once all the necessary variables are set, call the Change Type algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Once all the necessary variables are set, call the Isophote Curvature algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Once all the necessary variables are set, call the Kernel Regression algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Once all the necessary variables are set, call the Laws feature algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Once all the necessary variables are set, call the locally linear embedding algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Once all the necessary variables are set, call the local normalization algorithm based on what type of image this
is and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Once all the necessary variables are set, call the local variance algorithm based on what type of image this is and whether
or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Once all the necessary variables are set, call the Lower Completion algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Once all the necessary variables are set, call the LuminanceAdaptation algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Once all the necessary variables are set, call the Markov Segment algorithm which will create
a new segmented image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Once all the necessary variables are set, call the Markov Smooth algorithm based on whether or not there
is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Once all the necessary variables are set, call the Mask algorithm based on what type of image this is and whether
or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Once all the necessary variables are set, call the Match Images algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Once all the necessary variables are set, call the algorithm based on
what type of image this is and whether or not there is a separate
destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Once all the necessary variables are set, call the mean algorithm based on what type of image this is and whether
or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
Once all the necessary variables are set, call the Mean Shift Segmentation algorithm based on what type of image
this is and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Once all the necessary variables are set, call the median algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Once all the necessary variables are set, call the median algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Once all the necessary variables are set, call the Sizeian Blur algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Once all the necessary variables are set, call the gray scale morphology algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Once all the necessary variables are set, call the Concat algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Once all the necessary variables are set, call the Entropy Minimization algorithm based on what type of image
this is and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMSER
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type
of image this is and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Once all the necessary variables are set, call the Fuzzy C Means algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Once all the necessary variables are set, call the Nonlocal Means filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Once all the necessary variables are set, call the Nonlocal Means filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Once all the necessary variables are set, call the N4 MRI Bias Field Correction algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Once all the necessary variables are set, call the Frequency Filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Once all the necessary variables are set, call the NLAlgo
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Once all the necessary variables are set, call the Nonlocal Means filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Once all the necessary variables are set, call the Remove Slices algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Once all the necessary variables are set, call the Nonlocal Means filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
run.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Once all the necessary variables are set, call the Barrel/Pincushion Distortion
Correction algorithm based on what type of image this is
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Once all the necessary variables are set, call the quantify mask algorithm using the previously set file name.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogQuantifyMask
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
Locks the images, then runs the inverse slice order algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Once all the necessary variables are set, call the region merging via boundary melting
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Once all the necessary variables are set, call the regions from partial borders
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Runs the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
Calls the algorithm, assuming the variables are already set up.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Sets arrays appropriately and calls registration algorithm, running it in it's own thread.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Calls the algorithm with the set-up parameters.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Calls the algorithm with the set-up parameters.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Calls the algorithm with the set-up parameters.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Calls the algorithm with the set-up parameters.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Sets arrays appropriately and calls registration algorithm, running it in it's own thread.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Runs the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Calls the algorithm with the set-up parameters.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Once all the necessary variables are set, call the mean algorithm based on what type of image this is and whether
or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Once all the necessary variables are set, call the Remove Slices algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
Once all the necessary variables are set, call the Remove Slices algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Once all the necessary variables are set, call the Gaussian Blur
algorithm based on what type of image this is and whether or not there
is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Calls the algorithm using the mode.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Once all the necessary variables are set, call the RGBConcat algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Once all the necessary variables are set, call the Bilateral Filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Starts the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Calls the algorithm with the set variables.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Once all the necessary variables are set, call the SequentialScanning Watershed algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Once all the necessary variables are set, call the ShortestPath Watershed algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Calls the algorithm with the set-up parameters.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Once all the necessary variables are set, call the simulated exposure fusion contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Once all the necessary variables are set, call the median algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Once all the necessary variables are set, call the Split And Merge Watershed algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Method for calling the Subsample algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Runs the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Runs the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Once all the necessary variables are set, call the Swap Slices algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
Once all the necessary variables are set, call the kidney segmentation algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Once all the necessary variables are set, call the Symmetric Nearest Neighbor algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Once all the necessary variables are set, call the Tamura Texture algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Once all the necessary variables are set, call the texture segmentation algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Once all the necessary variables are set, call the rule based contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Once all the necessary variables are set, call the threshold rgb algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Once all the necessary variables are set, call the tilt correction algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Once all the necessary variables are set, call the Nonlocal Means filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Once all the necessary variables are set, call the Union Find Component Labelling algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Once all the necessary variables are set, call the UnionFind Watershed algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Once all the necessary variables are set, call the UnsharpMark algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogVABRA
-
Once all the necessary variables are set, call the Gaussian Blur algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Once all the necessary variables are set, call the simulated exposure fusion contrast enhancement algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIExtraction
-
Calls the algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIShapeInterpolation
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Once all the necessary variables are set, call the VOI Props algorithm to run the statistic calculation.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Once all the necessary variables are set, call the Nonlocal Means filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Once all the necessary variables are set, call the UnsharpMark algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Once all the necessary variables are set, call the UnsharpMark algorithm based on what type of image this is and
whether or not there is a separate destination image.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
call algorithm
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
Once all the necessary variables are set, call the Gaussian Haralick
feature algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Driver to do automatic feature extraction.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
Once all the necessary variables are set, call the Gaussian Haralick
feature algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
Once all the necessary variables are set, call the Gaussian Haralick
feature algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
Once all the necessary variables are set, call the Gaussian Haralick
feature algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Once all the necessary variables are set, call the Gaussian Haralick
feature algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
Once all the necessary variables are set, call the Gaussian Haralick
feature algorithm.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
Driver function to read image and VOIs, and convert each 3D image to 2D
slices.
- callAlgorithm(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Method for calling various cost algorithms, should only be called after registered image is created.
- callAlgorithm(int) - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
DOCUMENT ME!
- callAlgorithm(ModelImage, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Single thread based segmentation, which takes up to 40 minutes.
- callAlgorithm2() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Once all the necessary variables are set, call the FFT algorithm based on what type of image this is and whether
or not there is a separate destination image.
- callAlgorithmFrequencyFilter() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Once all the necessary variables are set, call the Frequency Filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callAlgorithmNonInteractive(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
method is meant to be used when the algorithm needs to be performed non-interactively, hence the hardcoding of
the variables.
- callAlgorithmRun() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
For prostate and knees projects, run the re-orientation algorithm to create three orthogonal images from either
axial image (prostate) or saggittal image(knees).
- callback - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseRotateExt
-
Mouse behavior callback reference.
- callback - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- callback - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
DOCUMENT ME!
- callback - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
DOCUMENT ME!
- callback - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
DOCUMENT ME!
- callback - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
DOCUMENT ME!
- callback - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
DOCUMENT ME!
- callback - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
DOCUMENT ME!
- callback_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingCostFunction
-
- CallbackReturnType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.CallbackReturnType
-
- callbacks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- callbacks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- callbacks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- callColorAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Once all the necessary variables are set, call the Frequency Filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callColorAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Once all the necessary variables are set, call the Frequency Filter algorithm based on what type of image this is
and whether or not there is a separate destination image.
- callDialog(int[], int, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Calls GUI dialogs based on what type of image this is and the number of dimensions.
- calledAppTitle - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
The called application entity name, must be 16 or less characters.
- callExtractAlgorithm() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
call the ExractSlices algorithm, building the dest image based on the type of the src image.
- callFrameDeleteAllButton - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Buttons for dealing with frame deletion.
- callFrameDeleteButton - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Buttons for dealing with frame deletion.
- callFrameToFrontButton - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Button for bringing frame to front
- callGCbutton - Variable in class gov.nih.mipav.view.ViewJFrameMemory
-
DOCUMENT ME!
- callGCButton - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Button for dealing with garbage collection
- callImageDeleteAllButton - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Buttons for dealing with image deletions
- callImageDeleteButton - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Buttons for dealing with image deletions
- callingAppTitle - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
The calling application entity name, must be 16 or less characters.
- callReg35Algorithm(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
Calls the algorithm with the set-up parameters.
- callRemoveAlgorithm() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
call the RemoveSlices algorithm, building the dest image based on the type of the src image.
- calls - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CallStatistics
-
- calls - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.RememberingCallback
-
- calls_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadLocalParameterization
-
- CallStatistics() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CallStatistics
-
- callT2Algorithm(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
Calls the algorithm with the set-up parameters.
- callTalAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- callVOIAlgo(ViewVOIVector, int, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- calPtArr() - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- camera - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- camera - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- camera - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- Camera - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- cameraAdapterMagnification - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraBinning - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraBitDepth - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraFrameHeight - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraFrameImageOrientation - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraFramePixelDistance - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraFrameScalingFactor - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraFrameStartLeft - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraFrameStartTop - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraFrameWidth - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraImageAcquisitionTime - Variable in class gov.nih.mipav.model.file.FileZVI
-
- cameraImageAcquisitionTime0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraImageAcquisitionTime1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraImageAcquisitionTime2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraImageAcquisitionTime3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraLiveScalingFactor - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- CameraLocation - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- cameraMake - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
- cameraMakeBlurry - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- cameraMakeTrue - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- cameraModel - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
- cameraModelBlurry - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- cameraModelList - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- cameraModelTrue - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- cameraNearPlane - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Slider for moving the camera near-plane in/out from the eye position.
- cameraPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- cameraPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- cameraPosition - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- cameraRotationDegreeLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
camera rotation degree label
- cameraRotationDegreeLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
camera rotation degree label
- cameraRotationDegreeSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
camera rotation degree slider
- cameraRotationDegreeSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
camera rotation degree slider
- CameraSettings() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- CameraSettings() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- cameraShadingCorrection - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraShutterLiveEnable - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- cameraViewRotationDegree - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- cameraXLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter labels
- cameraXTurnLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera turn parameter labels
- cameraYLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter labels
- cameraYTurnLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera turn parameter labels
- cameraZLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter labels
- cancel - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- cancel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Buttons used for the host tab
- CANCEL - gov.nih.mipav.view.dialogs.ExitStatus
-
Cancel button pressed
- CANCEL - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- CANCEL - Static variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- cancelACPCButton - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- cancelAction() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Calls the super.cancelAction.
- cancelAction() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Calls setVisible(false) to close the dialog.
- CancelAction() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBase.CancelAction
-
- cancelBrightness() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Resets current slice's brightness and contrast to original.
- cancelBrightness() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Resets current slice's brightness and contrast to original.
- cancelBrightness() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Resets current slice's brightness and contrast to original.
- cancelButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- cancelButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Cancel button is used on most dialogs.
- cancelButton - Variable in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- cancelButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.ChangeNameDialog
-
DOCUMENT ME!
- cancelButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.ChangeNameDialog
-
DOCUMENT ME!
- cancelButton - Variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Cancel button is used on most dialogs.
- cancelButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Cancel button is used on most dialogs.
- cancelButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
Cancel button is used on most dialogs.
- cancelButton - Variable in class gov.nih.mipav.view.ViewJProgressBar
-
Cancel button, if applicable.
- cancelButton - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- cancelCellEditing() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- CancelColorListener() - Constructor for class gov.nih.mipav.view.ViewJPanelHistoLUT.CancelColorListener
-
- cancelFlag - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
If true then the DICOM query is cancelled.
- cancelFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Flag indicating if the dialog had been cancelled or not.
- cancelFlag - Variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Flag indicating if the dialog had been cancelled or not.
- cancelFlag - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- cancelled - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Flag to indicate if the receive process should be cancelled.
- CancelListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnimate.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnnotation.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogGridOptions.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLightBox.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStats.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelClip.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelLights.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase.CancelListener
-
- CancelListener() - Constructor for class gov.nih.mipav.view.ViewJFrameGraph.CancelListener
-
- cancelPendingMoves() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Cancels pending moves.
- cancelPendingQuery() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Cancels pending query.
- cancelPressed - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- cancelPressed - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- cancelQ - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- cancelSorting() - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- cancelTalairachButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- cancelTalairachButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- canCloseImageBAfterLoad() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Returns whether or not the close image B option should appear after loading.
- canContainMetadata - Variable in enum gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
- canContainMetadataTypes - Static variable in enum gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
- Candidate(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitCandidates
-
- candidate_cost_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- candidate_cost_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
- candidate_x_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- canImport(JComponent, DataFlavor[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler
-
DOCUMENT ME!
- canImport(JComponent, DataFlavor[]) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter
-
- canImport(TransferHandler.TransferSupport) - Method in class gov.nih.mipav.view.ViewUserInterface.ImageTransferHandler
-
- CANNY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- CANNY - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- cannyAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
DOCUMENT ME!
- CannyButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- CannyPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- CANONICAL_VIEWS - gov.nih.mipav.model.algorithms.CeresSolver.VisibilityClusteringType
-
- CanonicalViewsClustering() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
-
- CanonicalViewsClusteringOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClusteringOptions
-
- CanonicalViewsTestComputeCanonicalViewsTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CanonicalViewsTestSimilarityPenaltyTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CanonicalViewsTestSizePenaltyTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CanonicalViewsTestViewScoreTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CanonMakernoteDescriptor(MetadataExtractor.CanonMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- CanonMakernoteDescriptorTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.CanonMakernoteDescriptorTest
-
- CanonMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- canProcessMouseClick - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- canReadImages() - Method in interface gov.nih.mipav.plugins.PlugInFile
-
Returns whether this plugin supports reading of images in its format.
- canSetTypeAmbient() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if light can be set to the ambient type.
- canSetTypeDirectional() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if light can be set to the directional type.
- canSetTypeNonAmbient() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if light can be set to any non-ambient type.
- canSetTypePoint() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if light can be set to the point type.
- canSetTypeSpot() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if light can be set to the spot type.
- canvas - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- canvas - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
- canvas - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
The Canvas3D object on which the surfaces are drawn and where the picking happens.
- canvasBounds - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Canvas boundary.
- canvasBounds - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Canvas boundary.
- canvasCenter - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Canvas center.
- canvasCenter - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Canvas center.
- canWeHandleTransferSyntax(DICOM_PDUItemType) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Determines wheather or not this transfer syntax is support by MIPAV.
- canWriteImages() - Method in interface gov.nih.mipav.plugins.PlugInFile
-
Returns whether this plugin supports writing of images in its format.
- capacity - Variable in class gov.nih.mipav.model.structures.IntVector
-
The initial number of elements to have space for in the vector.
- capacity - Variable in class gov.nih.mipav.model.structures.TransferFunction
-
The total capacity of the 2D point array.
- caps - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- capScreenHeight - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- capScreenWidth - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- captureComponent(Component) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- captureComponent(Component) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- captureFrame - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Camera snapshot frame.
- captureImage - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
The resulting ModelImage of the camera snapshot.
- captureImage() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Scrolls through all z slices of a 3d/4d image and captures them into a new ARGB ModelImage, then puts the
ModelImage in a ViewJFrameImage.
- captureImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Scrolls through all z slices of a 3d/4d image and captures them into a new ARGB ModelImage, then puts the
ModelImage in a ViewJFrameImage.
- captureImageButton - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
buttons *
- captureImageButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
buttons *
- captureScreen() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
Captures the canvas.
- captureScreen() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
Captures the canvas.
- captureTime - Variable in class gov.nih.mipav.model.file.FileAvi
-
- captureVersion - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- captureVersion - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- Cardiac - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- cardiacFrequency - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- cardiacFrequency - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- cardiacFrequencyIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- cardiacFrequencyPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- cardiacHeartRate - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- cardiacHeartRate - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- cardiacPhaseNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- cardiacPhaseNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- cardiacPhaseNumber - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- cardiacPhaseNumber - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- cardiacPhaseNumberIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- cardiacPhaseNumberPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- cardiacRepTime - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- cardiacRepTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- CARDIOLOGY - Static variable in class gov.nih.mipav.model.structures.VOI
-
Indicates that the VOI is of type CARDIOLOGY, special VOI for specific tasks needed in cardiology.
- caret - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- caretArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- cArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- CArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- cart2bary(SIFT3D.Cvec, SIFT3D.Tri, SIFT3D.Cvec, double[]) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- CartesianToPolar2D(ModelImage, ModelSimpleImage, ModelSimpleImage) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Convert the Cartesian coordinate into the Polar coordinate.
- CartesianToPolar2D(Vector2f, Vector2f, ModelImage) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Convert the Cartesian coordinate into the Polar coordinate, point based.
- CartesianToPolar2D(Vector2f, Vector2f, Vector3f) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Convert the Cartesian coordinate into the Polar coordinate, point based.
- cas - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dwt_t
-
- cas - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_v4dwt_t
-
- case_weights - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- case_weights - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- case_weights_file - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- CASE0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE10 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE11 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE12 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE13 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE14 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE15 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE4 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE5 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE6 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE7 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE8 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CASE9 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CasioType1MakernoteDescriptor(MetadataExtractor.CasioType1MakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- CasioType1MakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- CasioType2MakernoteDescriptor(MetadataExtractor.CasioType2MakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- CasioType2MakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
- cat2D_2D_3D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
This function produces a new image that has been concatenated.
- cat2D_3D_3D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
This function produces a new image that has been concatenated.
- cat3D_3D_3D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
This function produces a new image that has been concatenated.
- cat3D_3D_4D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
This function produces a new image that has been concatenated.
- cat3D_4D_4D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
cat.
- cat4D_4D_4D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
cat.
- categorizeByShape() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Shape based similarity measure.
- categorizeByTexture() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Texture bases similarity measure.
- category - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- category - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- Category - Static variable in interface gov.nih.mipav.plugins.PlugIn
-
- CATEGORY - Static variable in interface gov.nih.mipav.plugins.PlugInAlgorithm
-
- CATEGORY - Static variable in class gov.nih.mipav.plugins.PlugInBundle
-
- CATEGORY - Static variable in interface gov.nih.mipav.plugins.PlugInFile
-
- CATEGORY - Static variable in interface gov.nih.mipav.plugins.PlugInFileTransfer
-
- CATEGORY - Static variable in interface gov.nih.mipav.plugins.PlugInGeneric
-
- CATEGORY - Static variable in interface gov.nih.mipav.plugins.PlugInView
-
- CATFileName - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- CATPH4(int, double[][], double[][], int, int, int, int[], int[], int[], int[], int[], int[], int[], double[], double[], double[], double[], double[], double[], double[], double[], double, double[], double[], double[], double[], double, double[], double[][], double[], double[], double[][], double[][], double[][], boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- cauchy(int, double[], double[], double[], int[], double[], int[], int[], double[], double[], double[], int, double[][], double[][], double[][], double[][], double, int, int, double[], double[], double[], double[], int[], int, double, int[], double) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- CauchyLoss(double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CauchyLoss
-
- CB(double, double, double, double[]) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Binary interpolation call
- Cb_b_tab - Variable in class gov.nih.mipav.model.file.libjpeg.my_color_deconverter
-
- Cb_b_tab - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- Cb_g_tab - Variable in class gov.nih.mipav.model.file.libjpeg.my_color_deconverter
-
- Cb_g_tab - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- CBackForward() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimate.CBackForward
-
Creates a new CBackForward object.
- CBackForward() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimateClip.CBackForward
-
Creates a new CBackForward object.
- cbCount() - Method in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- cbCount() - Method in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- cbf_csvd - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- cbf_csvd_residual - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- cbf_osvd - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- cbf_osvd_OI - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- cbf_osvd_residual - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- cbf_svd - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- cbf_svd_residual - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- cbfStop() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimate.cbfStop
-
Creates a new cbfStop object.
- cbfStop() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimateClip.cbfStop
-
Creates a new cbfStop object.
- cbgEdgeDetect_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- cbgImage_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- cblkh - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
code-blocks height
- cblkh - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
code-blocks height
- cblksty - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
code-block coding style
- cblksty - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
code-block coding style
- cblkw - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
code-blocks width
- cblkw - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
code-blocks width
- cBoxRemap - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- CbReferenceBlack - Variable in class gov.nih.mipav.model.file.FileSVS
-
- CbReferenceBlack - Variable in class gov.nih.mipav.model.file.FileTiff
-
- CbReferenceWhite - Variable in class gov.nih.mipav.model.file.FileSVS
-
- CbReferenceWhite - Variable in class gov.nih.mipav.model.file.FileTiff
-
- CBRHostName - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- CBRImageDirectory - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- CBRProjectionDirectory - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- cbuf - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileReader
-
The cbuf.
- cbv - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- cbv_lc - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- CBZip2InputStream - Class in gov.nih.mipav.model.file
-
An input stream that decompresses from the BZip2 format (without the file
header chars) to be read as any other stream.
- CBZip2InputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.CBZip2InputStream
-
- CBZip2OutputStream - Class in gov.nih.mipav.model.file
-
An output stream that compresses into the BZip2 format (without the file
header chars) into another stream.
- CBZip2OutputStream(OutputStream) - Constructor for class gov.nih.mipav.model.file.CBZip2OutputStream
-
- CBZip2OutputStream(OutputStream, int) - Constructor for class gov.nih.mipav.model.file.CBZip2OutputStream
-
- CBZip2OutputStream.StackElem - Class in gov.nih.mipav.model.file
-
- cc - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- cc - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- cca - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- CCIR601_sampling - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- CCJACS(double[], int, double[], double[], double, double[][]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- cConnect - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Vertex connection array.
- cconvert - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- ccw - Variable in class gov.nih.mipav.model.file.FileSVS.RLEBitInputStream
-
- ccw - Variable in class gov.nih.mipav.model.file.FileTiff.RLEBitInputStream
-
- ccw(double[][], int, int, int) - Method in class gov.nih.mipav.model.structures.VOIContour
-
- ccw_rotate_about_source() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- ccw_rotate_about_target() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- ccwButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- ccwButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- cd - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- cd - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- CD - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- cData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassSig
-
- CDCI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- cdf() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
- CDF - Static variable in class gov.nih.mipav.model.algorithms.Gamma
-
- CDF_type - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- CDF_type - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
Use serialVersionUID for interoperability.
- CDFButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- cdff(int, double[], double[], double[], double[], double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- CDFLIB - Class in gov.nih.mipav.model.algorithms
-
Legalities
==========
We place our efforts in writing this package in the public domain.
- CDFLIB() - Constructor for class gov.nih.mipav.model.algorithms.CDFLIB
-
- cdft(double[]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cdft(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- CDFT_4THREADS_BEGIN_N - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cdft_arg_t() - Constructor for class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cdft_arg_t
-
- CDFT_THREADS_BEGIN_N - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
-------- DST (Discrete Sine Transform) / Inverse of DST --------
[definition]
IDST (excluding scale)
S[k] = sum_j=1^n A[j]*sin(pi*j*(k+1/2)/n), 0<=k DST
S[k] = sum_j=0^n-1 a[j]*sin(pi*(j+1/2)*k/n), 0
ip[0] = 0; // first time only
ddst(n, 1, a, ip, w);
ip[0] = 0; // first time only
ddst(n, -1, a, ip, w);
[parameters]
n :data length (int)
n >= 2, n = power of 2
a[0...n-1] :input/output data (double *)
input data
a[j] = A[j], 0
output data
a[k] = S[k], 0= 2+sqrt(n/2)
strictly,
length of ip >=
2+(1<<(int)(log(n/2+0.5)/log(2))/2).
- cdft2(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cdft2(double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cdft3(double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cdft3(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- CDFWavelets() - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- cdiv(double, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
- cdivi - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
- cdivr - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
- cdjpeg_progress_mgr() - Constructor for class gov.nih.mipav.model.file.libjpeg.cdjpeg_progress_mgr
-
- CDMatrix - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CDMatrix() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Constructors
- CDMatrix(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
- CDMatrix(int, int, double[][]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
- CDMatrix(CDMatrix) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
- CDMatrix(CVisDMatrix) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
- CDOptimizeBase - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CDOptimizeBase() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
Constructor
- CDOptimizeBFGS - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CDOptimizeBFGS() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBFGS
-
Constructor
- CDOptimizeCG - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CDOptimizeCG() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeCG
-
Constructor
- CDOptimizeFuncBase - Interface in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CDOptimizePS - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CDOptimizePS() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizePS
-
Constructor
- CDOptimizeSA - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CDOptimizeSA() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
constructor.
- CDOptimizeSD - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CDOptimizeSD() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSD
-
constructor
- CDVector - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the Java modified version of C++ active appearance model API
(AAM_API).
- CDVector() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
constructor
- CDVector(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
- CDVector(int, double[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
- CDVector(CDVector) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
- CDVector(CVisDVector) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
- ce2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- ce2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ceButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- cEchoRQ - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
Echo request object.
- cEchoRSP - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
Echo response object.
- ced_Table - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- cedHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- cedImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- cedImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- cedImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- cedImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- cedImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- cedImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- cedImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- cedImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- cedImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- cedImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- cedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- cedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- cedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- cedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- cedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- cedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- cedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- cedTableAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- cedTableAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- cedTableAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- cedTableAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- cedTableAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- cedTableAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- cedTableAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- cedTableAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- cedTableAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- cedTableCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- cedTableCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- cedTableCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- cedTableCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- cedTableCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- cedTableCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- cedTableCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- cedTableCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- cedTableCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- cedTableSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- cedTableSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- cedTableSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- cedTableSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- cedTableSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- cedTableSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- cedTableSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- cedTableSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- cedTableSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- ceil() - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns the smallest (closest to negative infinity) value
that is not less than the argument and is equal to a mathematical integer.
- Ceil() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Takes ceil() of each element.
- cel12(double, double) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Routine cel12 only calculates complete integrals of the first and second kind with complex arguments Based on the
arithmetic-geometric mean procedure Ported from Tohru Morita article.
- cell(StringBuilder, int, String, boolean) - Static method in class gov.nih.mipav.model.algorithms.OpenCLInfo
-
Adds the property values to the StringBuilder table, using the span for spacing.
- cell(StringBuilder, String) - Static method in class gov.nih.mipav.model.algorithms.OpenCLInfo
-
Adds the property name to the StringBuilder table.
- Cell() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Cell
-
- Cell(int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Cell
-
- CELL - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
The location of the sample is located in the interior of the grid element.
- cell_infos_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDenseMatrix
-
- cell_values_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- cellData - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
support for vtk
- cellEditor - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- CellInfo() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CellInfo
-
- CellInfo(double[], int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CellInfo
-
- CellLessThan() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CellLessThan
-
- cellRenderer - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- cells - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedList
-
- cellSpace - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
54 Cell spacing.
- celltype(boolean, boolean, boolean) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- celltype(boolean, boolean, boolean, boolean, boolean, boolean) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- cen_index(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- cenFreq - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
296 Center frequency method.
- cenMassPt - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Stores the black and white center of mass of the contour of a VOI.
- cenMassPtB - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Stores the blue center of mass of the contour of a VOI.
- cenMassPtG - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Stores the green center of mass of the contour of a VOI.
- cenMassPtR - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Stores the red center of mass of the contour of a VOI.
- censoring - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- CENSY - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- center - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- center - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- center - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- center - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- center - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
burn center.
- center - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Burning point coordinate.
- center - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.MaskBurnAttribute
-
Burning center coordinate.
- center - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- center() - Method in class gov.nih.mipav.view.PatientSlice
-
Calculate the volume center in PatientCoordinates and set the z-value for this slice.
- center() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Calculates and returns the center point of the Mesh:
- center() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- center(double[]) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
Centers the FFT for display purposes.
- center(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
- center(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
- center(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Centers the FFT for display purposes.
- center(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Centers the FFT for display purposes.
- center(SchwarzChristoffelMapping.scmap, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- Center - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Widget Center:
- Center - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- center_fix_mt - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- center_fix_quadnum - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- center_frequency - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.ContinuousWavelet
-
- CENTER_VOI - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- centerAndWidth(Point3D, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- CenterAndWidth(int, float[], float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.BinaryNode
-
- CenterAndWidth(int, int, float[], float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.BinaryNode
-
- CenterAndWidth(long, Point3D, float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- centerBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- centerButtonSelected - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- centerCenter - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- CenterCount(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.BinaryNode
-
- CENTERED1 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CENTERED2 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- centerGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- centerGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
- centerid - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
id of rotation center
- centerInComponent(Component, JDialog) - Static method in class gov.nih.mipav.view.MipavUtil
-
Sets the location of the dialog to the center of the parent component.
- centerIndex(int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- CenterIndex(int, int[], int, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VertexData
-
- CenterIndex(OctNode, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VertexData
-
- CenterIndex(OctNode, int, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VertexData
-
- centerInWindow(Window, Window) - Static method in class gov.nih.mipav.view.MipavUtil
-
Sets the location of the window to the center of the parent window.
- CENTERJSAMPLE - Variable in class gov.nih.mipav.model.file.libjpeg
-
- centerLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point center label.
- centerLine - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- CenterOfGravity(double[][]) - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- centerOfMass - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
The volume's center of mass computed from computeCenter(ModelImage, int, boolean)
- centerOfRotation - Variable in class gov.nih.mipav.model.file.FileInfoMetaImage
-
Use serialVersionUID for interoperability.
- centerOnScreen(Window) - Static method in class gov.nih.mipav.view.MipavUtil
-
Sets the location of the window to the center of the screen.
- CenterPoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Returns the center point of the triangle.
- CenterPointX - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- CenterPointY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- CenterPointZ - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- centerPositions - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- centerPtLocation - Variable in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
location of the center pt VOI (for registration rotation).
- centerRB - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- centerRootNode() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Centers the root node in the display.
- centerRootNodeButton - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- centers - Variable in class gov.nih.mipav.model.file.FileNRRD
-
May remain null or may be created as NONE, CELL, or NODE.
- centers_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- centerSpline - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- centerTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.MaskBurnAttribute
-
Burning center tranform.
- centerVOI - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
center rotation VOI
- centerWeightContribution - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.TreeNodeData
-
- centerX - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
angles are passed to setRotate.
- centerX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.StandardMouse
-
Canvas center coordinate.
- centerY - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
angles are passed to setRotate.
- centerY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.StandardMouse
-
Canvas center coordinate.
- centerZ - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
angles are passed to setRotate.
- CENTIMETERS - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement centimeters.
- CENTIMETERS - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement centimeters.
- CENTIMETERS_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - centimeters.
- CENTR - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- CENTRAL - gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffMethodType
-
- central_frequency(PyWavelets.ContinuousWavelet, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- central_frequency(PyWavelets.DiscreteWavelet, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- centralBuffer - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- CentralDifference - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- centroidDistances - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- centroidDistances - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- centroidPos - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- centroidPos - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- centroidPos - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- centroidPos - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- centroids - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- centroids - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- centroids - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- centroids - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- centroids - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- centroids - Variable in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
DOCUMENT ME!
- centroids - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- centroids - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- Cephes - Class in gov.nih.mipav.model.algorithms
-
Correct values for ndtri are taken from scipy-main/scipy/special/tests/test_ndtr.py under the BSD-3 license:
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
- Cephes() - Constructor for class gov.nih.mipav.model.algorithms.Cephes
-
- Cephes(double, double[], int, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Cephes
-
- Cephes(double, double, double, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Cephes
-
- Cephes(double, double, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Cephes
-
- Cephes(double, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Cephes
-
- Cephes(double, int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.Cephes
-
- Cephes(int, double, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Cephes
-
- Cephes(int, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Cephes
-
- Cephes(int, int, double, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Cephes
-
- CERES_CURVE_FITTING - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- CERES_NO_CXSPARSE - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- CERES_NO_SUITESPARSE - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- CERES_USE_EIGEN_SPARSE - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- CeresSolver - Class in gov.nih.mipav.model.algorithms
-
This is a port of the C++ files in ceres-solver-1.14.0 under the BSD license:
Ceres Solver - A fast non-linear least squares minimizer Copyright 2015
Google Inc.
- CeresSolver() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver
-
- CeresSolver.ArctanLoss - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ArmijoLineSearch - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.AutoDiffCostFunction<CostFunctor> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.BadTestTerm - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.BFGS - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Block - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.BlockEvaluatePreparer - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.BlockJacobianWriter - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.BlockJacobiPreconditioner - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.BlockRandomAccessDenseMatrix - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.BlockRandomAccessDiagonalMatrix - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.BlockRandomAccessMatrix - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.BlockSparseMatrix - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.BlockSparseMatrixRandomMatrixOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CallbackReturnType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.CallStatistics - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CauchyLoss - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Cell - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CellInfo - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CellLessThan - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CgnrLinearOperator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CgnrSolver - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Chunk - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ComposedLoss - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CompressedList - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CompressedRowBlockStructure - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CompressedRowJacobianWriter - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CompressedRowJacobianWriter.indexintintComparator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CompressedRowJacobianWriter.indexintintItem - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CompressedRowSparseMatrix - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ConjugateGradientsSolver - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Context - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CoordinateDescentMinimizer - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Corrector - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CostFunctorExample - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CovarianceAlgorithmType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.CRSMatrix - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.CurveFittingFunctorExample - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.DenseJacobianWriter - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.DenseLinearAlgebraLibraryType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.DenseNormalCholeskySolver - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.DenseQRSolver - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.DenseSchurComplementSolver - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.DenseSparseMatrix - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.DoglegStrategy - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.DoglegType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.DumpFormatType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.DynamicCompressedRowJacobianFinalizer - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.DynamicCompressedRowJacobianWriter - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.DynamicCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.DynamicNumericDiffCostFunction<T> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.EasyCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.EasyFunctor - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.EigenQuaternionParameterization - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.EvaluateOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.EvaluateScratch - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.EvaluationCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Evaluator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.EvaluatorOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.EventLogger - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ExecutionSummary - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ExponentialCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ExponentialFunctor - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.FirstOrderFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.FunctionSample - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.GoodTestTerm - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.GradientChecker - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.GradientCheckingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.GradientCheckingIterationCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.GradientProblem - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.GradientProblemEvaluator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.GradientProblemSolver - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.GradientProblemSolverOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.GradientProblemSolverStateUpdatingCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.GradientProblemSolverSummary - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Graph<Vertex> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.HomogeneousVectorParameterization - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.HuberLoss - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.IdentityParameterization - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ImplicitSchurComplement - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.indexValueItem<Vertex> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.IterationCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.IterationSummary - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.IterativeSchurComplementSolver - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LBFGS - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LevenbergMarquardtStrategy - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LinearCostFunction - Class in gov.nih.mipav.model.algorithms
-
Helper cost function that multiplies the parameters by the given jacobians
and adds a constant offset.
- CeresSolver.LinearLeastSquaresProblem - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LinearOperator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LinearSolver - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LinearSolverOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LinearSolverPerSolveOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LinearSolverSummary - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LinearSolverTerminationType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.LinearSolverType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearch - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearchDirection - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearchDirectionOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearchDirectionType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearchFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearchInterpolationType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearchMinimizer - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearchMinimizer.State - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearchOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearchPreprocessor - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearchSummary - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LineSearchType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.LocalParameterization - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LoggingCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LoggingType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.LossFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LossFunctionWrapper - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.LowRankInverseHessian - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Minimizer - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.MinimizerOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.MinimizerType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.MyCostFunctor - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.MyThreeParameterCostFunctor - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.NonlinearConjugateGradient - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.NonlinearConjugateGradientType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.NormalPrior - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.NullJacobianFinalizer - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.NumericDiffCostFunction<CostFunctor> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.NumericDiffMethodType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.NumericDiffOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.OnlyFillsOneOutputFunctor - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.OrderedGroups<T> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Ownership - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.Pair<T,U> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ParameterBlock - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.PartitionedMatrixView - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Preconditioner - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Preconditioner.Options - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.PreconditionerOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.PreconditionerType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.PreprocessedProblem - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Preprocessor - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ProbeResults - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ProblemImpl - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ProblemOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ProductParameterization - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Program - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ProgramEvaluator<EvaluatePreparer,JacobianWriter,JacobianFinalizer> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.QuaternionParameterization - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.RandomizedCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.RandomizedFunctor - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ResidualBlock - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ScaledLoss - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SchurComplementSolver - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SchurEliminator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SchurEliminatorBase - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SchurJacobiPreconditioner - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ScopedExecutionTimer - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.ScratchEvaluatePreparer - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SizedCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SizeTestingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SoftLOneLoss - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.Solver - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SolverOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SolverSummary - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SparseLinearAlgebraLibraryType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.SparseMatrix - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SparseMatrixPreconditionerWrapper - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.StateUpdatingCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SteepestDescent - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.SubsetParameterization - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TerminationType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.TestTerm - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TolerantLoss - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TranscendentalCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TranscendentalFunctor - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TripletSparseMatrix - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TripletSparseMatrixRandomMatrixOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TrivialLoss - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TrustRegionMinimizer - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TrustRegionPreprocessor - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TrustRegionStepEvaluator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TrustRegionStrategy - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TrustRegionStrategyOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TrustRegionStrategyPerSolveOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TrustRegionStrategySummary - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TrustRegionStrategyType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.TukeyLoss - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TypedLinearSolver<MatrixType> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.TypedPreconditioner<MatrixType> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.VertexDegreeLessThan<Vertex> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.VertexTotalOrdering<Vertex> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.VisibilityClusteringType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver.WeightedGraph<Vertex> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver.WolfeLineSearch - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2 - Class in gov.nih.mipav.model.algorithms
-
This is a port of the C++ files in ceres-solver-1.14.0 under the BSD license:
Ceres Solver - A fast non-linear least squares minimizer Copyright 2015
Google Inc.
- CeresSolver2() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2
-
- CeresSolver2.BiCubicInterpolator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.BlockRandomAccessSparseMatrix - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.CanonicalViewsClustering - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.CanonicalViewsClusteringOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.ConditionedCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.CovarianceImpl - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.CovarianceOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.CubicInterpolator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.DynamicCompressedRowSparseMatrix - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.Grid1D - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.Grid2D - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.indexArrayArrayComparator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.indexArrayArrayItem - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.indexArrayComparator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.indexArrayItem - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.indexIntegerdoubleArrayComparator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.indexIntegerdoubleArrayItem - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.indexRowColItem - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.RowColLessThanComparator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.SingleLinkageClusteringOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.StorageType - Enum in gov.nih.mipav.model.algorithms
-
- CeresSolver2.Triplet<T,U,V> - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.VertexTotalOrderingInteger - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.weighted_edgesComparator - Class in gov.nih.mipav.model.algorithms
-
- CeresSolver2.weighted_edgesItem - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- CeresSolverNISTTest.Bennett5CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.BoxBODCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Chiwrut1CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Chiwrut2CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.DanwoodCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Eckerle4CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.ENSOCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Gauss1CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Gauss2CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Gauss3CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Hahn1CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Kirby2CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Lanczos1CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Lanczos2CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Lanczos3CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.MisralaCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.MisralbCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.MisralcCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.MisraldCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.NelsonCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Rat42CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Rat43CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.Roszman1CostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverNISTTest.ThurberCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CeresSolverTest.AbortingIterationCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BadJacobianCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BadLocalParameterization - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BadResidualCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BardFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BealeFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BIGGS_EXP6Function - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BinaryCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BinaryCostFunction2 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BinaryCostFunction3 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BinaryCostFunction4 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BlockJacobiPreconditionerTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BlockSparseMatrixTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.Box3DFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BrownAndDennisFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.BrownBadlyScaledFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.CurveCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.CurveFittingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DenseSparseMatrixTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DestructorCountingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DoglegStrategyFixtureEllipse - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DoglegStrategyFixtureEllipseCorrectGaussNewtonStep - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DoglegStrategyFixtureEllipseTrustRegionObeyedSubspace - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DoglegStrategyFixtureEllipseTrustRegionObeyedTraditional - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DoglegStrategyFixtureEllipseValidSubspaceBasis - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DoglegStrategyFixtureValley - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepGlobalOptimumAlongGradient - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepLocalOptimumAlongGradient - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DummyCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DummyCostFunction2 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DummyCostFunction3 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DummyCostFunction4 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.DynamicProblem - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.EvaluatorTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.EvaluatorTestOptions - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.ExpCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.ExpectedEvaluation - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.FailingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.FakeIterationCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.Fixture - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.FreudensteinAndRothFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.FreudensteinAndRothJacobianFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.GaussianFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.GoodCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.GulfResearchAndDevelopmentFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.HelicalValleyFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.ImplicitSchurComplementTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.IterativeSchurComplementSolverTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.JennrichAndSampsonFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.KowalikAndOsborneFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.LinearCostFunction2 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.LinearSolverAndEvaluatorCreationTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.LocallyParameterizedCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.MatrixParameterization - Class in gov.nih.mipav.model.algorithms
-
Helper local parameterization that multiplies the delta vector by the given
jacobian and adds it to the parameter.
- CeresSolverTest.MeyerFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.MockCostFunctionBase - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.MockCostFunctionBase2 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.NoJacobianUpdateCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.NoOpEvaluationCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.NoResidualUpdateCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.NumParameterBlocksCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.Osborne1Function - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.Osborne2Function - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.ParameterIgnoringCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.ParameterSensitiveCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.PartitionedMatrixViewTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.PolynomialParameterization - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.PowellBadlyScaledFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.PowellEvaluator2 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.PowellSingularFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.PowellSingularJacobianFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.ProductParameterizationTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.QuadraticCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.QuadraticFirstOrderFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.QuadraticFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.QuadraticTestFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.RegularizationCheckingLinearSolver - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.RememberingCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.Rosenbrock - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.Rosenbrock2 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.SchurEliminatorTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.SchurOrderingTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.SucceedingIterationCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.TernaryCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.TernaryCostFunction2 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.TernaryCostFunction3 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.TernaryCostFunction4 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.TestParameterization - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.ThreeParameterCostFunctorTest - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.UnaryCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.UnaryCostFunction2 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.UnaryCostFunction3 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.UnaryCostFunction4 - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.UnaryIdentityCostFunction - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback.InnerClass - Class in gov.nih.mipav.model.algorithms
-
- CeresSolverTest.WoodFunction - Class in gov.nih.mipav.model.algorithms
-
- cerOff - Variable in class gov.nih.mipav.model.file.FileJP2
-
- cerOn - Variable in class gov.nih.mipav.model.file.FileJP2
-
- cf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- cFactor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Buffer size adjustment for color images.
- cFactor - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- cFactor - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- cFactor - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Used for construction of the preview.
- Cfbf - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- cFFp(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- cfft(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cfft2(double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cfft3(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cFindRq - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
cFind request object.
- cFindRsp - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
CResponse (Find response) object.
- CForward() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimate.CForward
-
Creates a new CForward object.
- CForward() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimateClip.CForward
-
Creates a new CForward object.
- cForwardButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- cForwardButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- cfrft(double[][], double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cfrftV2(double[][], double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cfrftV3(double[][][], double, double[][][], double[][][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cfrftV3_precomp(double[][][], double[][][], int, double[]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cfRun - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- cfRun - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- cfStop() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimate.cfStop
-
Creates a new cfStop object.
- cfStop() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimateClip.cfStop
-
Creates a new cfStop object.
- cftb040(double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftb1st(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftbsub(int, double[], int[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftf040(double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftf081(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftf082(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftf161(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftf162(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftf1st(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftfsub(int, double[], int[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftfx41(int, double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftleaf(int, int, double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftmdl1(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftmdl2(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftrec1_th(DiscreteSineTransform.cdft_arg_t) - Constructor for class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cftrec1_th
-
- cftrec2_th(DiscreteSineTransform.cdft_arg_t) - Constructor for class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cftrec2_th
-
- cftrec4(int, double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftrec4_th(int, double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cfttree(int, int, int, double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- cftx020(double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- CG - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- CG - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- CG(double[][][][], int[], double[], int[], double[], boolean, double[][][][], double[][][][], double, int, double[][][][], boolean, double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- CG(double[][][], int[], double[], int[], double[], double[][][], double, int, double[][][], boolean, double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- cgamma() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
This code is a port of the FORTRAN routine CGAMA from the book Computation of
Special Functions by Shanjie Zhang and Jianming Jin, John Wiley & Sons, Inc.,
1996, pp. 51-52.
- CGAMMA - Static variable in class gov.nih.mipav.model.algorithms.Gamma
-
Compute gamma function or log of gamma function for complex arguments
- cgau(double[], double[], double[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- CGAU - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- cgButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- cgmo(double[][][][], double[], ModelImage, double[], int, int, double, double, String, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
cgmo for color
Compute the color gradient at a single scale and multiple orientations
- cgmo(double[][][][], double[], ModelImage, double[], int, String, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- cgmo(double[][][], double[], ModelImage, double, int, int, double, String, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
cgmo for black and white
Compute the color gradient at a single scale and multiple orientations
- cgmo(double[][][], double[], ModelImage, double, int, String, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- CGNR - gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverType
-
- CgnrLinearOperator(CeresSolver.LinearOperator, double[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CgnrLinearOperator
-
- CgnrSolver(CeresSolver.LinearSolverOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CgnrSolver
-
- CGTG - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- CGTG - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- cgtgButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- ch - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- ch - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_precinct_t
-
- ch - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngMetadataReader
-
The PNG spec states that ISO_8859_1 (Latin-1) encoding should be used for:
"tEXt" and "zTXt" chunks, both for keys and values (https://www.w3.org/TR/PNG/#11tEXt)
"iCCP" chunks, for the profile name (https://www.w3.org/TR/PNG/#11iCCP)
"sPLT" chunks, for the palette name (https://www.w3.org/TR/PNG/#11sPLT)
Note that "iTXt" chunks use UTF-8 encoding (https://www.w3.org/TR/PNG/#11iTXt).
- ch - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- ch - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- ch2 - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- chamfer - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
Algorithm this dialog will call.
- chan - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- chan - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Use serialVersionUID for interoperability.
- changeAll - Variable in class gov.nih.mipav.model.scripting.actions.ActionChangeResolutions
-
Whether or not to change all fileinfos/slices.
- changeBounds(float, float, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
overrides and expands the min/max and or the window/level boundaries of an image based
on the transfer function being applied
- changeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
this is the action button to change
- changed - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
DOCUMENT ME!
- changeDicomFileSize(RandomAccessFile, long, long, int) - Method in class gov.nih.mipav.model.file.FileDicom
-
- changedMode - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
flag to indicate current mode being changed.
- changedMode - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
flag to indicate current mode being changed.
- changedMode - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
flag to indicate current mode being changed.
- changedUpdate(DocumentEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.TagInputListener
-
- changedUpdate(DocumentEvent) - Method in class gov.nih.mipav.view.MaximumLinesDocumentListener
-
- changedUpdate(DocumentEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- changedValues - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- changedValuesBitmap - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- changedValuesString - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- changeEvent - Variable in class gov.nih.mipav.view.ImageRegistryMonitor
-
DOCUMENT ME!
- changeEvent - Variable in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
DOCUMENT ME!
- changeExtents(int[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Changes the image dimensionality or extents.
- changeFilenameBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- changeIcon(String, String) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- changeImageName(String, String) - Method in class gov.nih.mipav.model.scripting.ImageVariableTable
-
Finds an image name in the table and changes it to a new value with the same variable placeholder (does nothing
if the value is not in the table).
- changeItoJ(LODMesh.Vertices, LODMesh.Vertices) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- changeLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
this is the text in the Dialog
- changeLAF(String) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- changeMaskNumberDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Ref to JDialogChangeMaskNumber
- changeMenuEnables() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Routine to enable some menu items and disable othter menu items when the dimensionality or type of the image is
changed.
- ChangeNameDialog(RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.ChangeNameDialog
-
Constructor of change name dialog.
- ChangeNameDialog(SurfaceRender) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.ChangeNameDialog
-
Constructor of change name dialog.
- changeOrientationOrigin - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Whether orientation and origin should change with flipping.
- changeOrientationOrigin - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
- changePolyMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Changes the polygon mode of the selected surface by detaching it, calling the appropriate method, and reattaching
it.
- changePolyMode(WireframeState.FillMode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Changes the polygon mode of the selected surface by detaching it, calling the appropriate method, and reattaching
it.
- changeRecordingStatus(int) - Method in interface gov.nih.mipav.model.scripting.ScriptRecordingListener
-
Alerts the listener to a change in whether the ScriptRecorder is currently recording a script.
- changeRecordingStatus(int) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Alerts the listener to a change in whether the ScriptRecorder is currently recording a script.
- changeRecordingStatus(int) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Alerts the listener to a change in whether the ScriptRecorder is currently recording a script.
- changeRemoveIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- changeRemoveIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- changeRemoveIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- changeResolutions(ModelImage, float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Changes the resolutions of the input image.
- changeSaturation(int, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ColorOperations
-
Changes the saturation of a color.
- changeScriptEditingAbility(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Changes whether the current script can be edited by hand (which pauses the script recording while the editing is being done.
- changeSize() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- changeToUnsignedInts - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- changeTypeAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- changeTypeAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!!
- changeTypeAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- changeVOIOrder(boolean, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- channel0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channel1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channel2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channel3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channelArray - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- channelButton - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- channelColorsComboBoxes - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
corresponding dropdown for each channel image
- ChannelComponent(String, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo.ChannelComponent
-
Creates a new ChannelComponent object.
- channelComponentNumber - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo.ChannelComponent
-
- channelComponents - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DOCUMENT ME!
- channelDataTypes - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- channelDataTypes - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- channelDescription - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- channelID - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- channelImages - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
extraced 3D Model Images from image...red Image is [0], green image is [1], blue image is [2] *
- channelImages - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
extraced 3D Model Images from src image
- channelImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
extraced 3D Model Images from image...red Image is [0], green image is [1], blue image is [2] *
- ChannelInfo(String, Integer, String, Integer, String, String, String, Integer, Integer, String, Float) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
Creates a new ChannelInfo object.
- channelInfos - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- channelMap - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- channelName - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- channelName0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channelName1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channelName2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channelName3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channelNameChannel0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channelNameChannel1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channelNameChannel2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channelNameChannel3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- channelNames - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- channelNames - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- channelNumber - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- channelNumber - Variable in class gov.nih.mipav.model.file.FileZVI
-
- channelOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaFileComparator
-
DOCUMENT ME!
- channelOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogSelectChannelSequence
-
DOCUMENT ME!
- channels - Variable in class gov.nih.mipav.model.algorithms.libdt.DatDescriptor
-
- channels - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- channels - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- channels - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- channels - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- channels - Variable in class gov.nih.mipav.model.file.FileTiff
-
- channels - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- channelsFound - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- channelWeight - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- CHAR - Static variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- CHAR - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- CharacterAtlas() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- characterCode - Variable in class gov.nih.mipav.model.file.FileSVS
-
- characterCode - Variable in class gov.nih.mipav.model.file.FileTiff
-
- characteristics() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- characteristics() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- characteristics() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator
-
- characteristics() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- characteristics() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
- characters(char[], int, int) - Method in class gov.nih.mipav.model.file.FileDataProvenance.ProvenanceXMLHandler
-
DOCUMENT ME!
- characters(char[], int, int) - Method in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
Text data callback from parser.
- characters(char[], int, int) - Method in class gov.nih.mipav.model.file.FileOME.MyXMLHandler
-
Text data callback from parser.
- characters(char[], int, int) - Method in class gov.nih.mipav.model.file.FilePolylineVOIXML.MyXMLHandler
-
DOCUMENT ME!
- characters(char[], int, int) - Method in class gov.nih.mipav.model.file.FileVOI.MyXMLHandler
-
DOCUMENT ME!
- characters(char[], int, int) - Method in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
DOCUMENT ME!
- characters(char[], int, int) - Method in class gov.nih.mipav.model.file.FileVOI.XMLCoordHandler
-
DOCUMENT ME!
- characters(char[], int, int) - Method in class gov.nih.mipav.view.dialogs.MyXMLHandler
-
DOCUMENT ME!
- characters(char[], int, int) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
- characters(char[], int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D.SurfaceRefXMLHandler
-
Text data callback from parser.
- characters(char[], int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Text data callback from parser.
- characters(char[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Text data callback from parser.
- characters(char[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM.SurfaceRefXMLHandler
-
Text data callback from parser.
- characters(char[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
DOCUMENT ME!
- CHARACTERS - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- CHARACTERS - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.SignedDistanceCharacters
-
- charField - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
DOCUMENT ME!
- charHeigth - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- charLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
DOCUMENT ME!
- Charsets() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Charsets
-
- chartHeight - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- chartWidth - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- chartXend - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- chartXstart - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- chartYend - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- chartYstart - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- charWidth - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- chbevl(double, double[], int) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- CHBEVL - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- chckbxfine - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- chckbxForwardsbackwards - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- chckbxLeftright - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- chckbxRotationRX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- chckbxRotationRy - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- chckbxRotationRz - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- chckbxUpdown - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- chder(double, int[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- chder(DoubleDouble, int[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- chdtr(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- CHDTR - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- chdtrc(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- CHDTRC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- chdtri(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- CHDTRI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- chebmo - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
array of dimension (maxp1,25) containing the chebyshev moments
- chebmo - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
array of dimension (maxp1,25) containing the chebyshev moments
- CHEBYQUAD - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- CHEBYQUAD - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- CHEBYQUAD - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- CHEBYQUAD - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- Chebyshev(int, double) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- Chebyshev(int, double) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- Chebyshev(int, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
- Chebyshev(int, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- Chebyshev(int, double) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- CHEBYSHEV_TYPE_I - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- CHEBYSHEV_TYPE_I - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- CHEBYSHEV_TYPE_I - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
- CHEBYSHEV_TYPE_I - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- CHEBYSHEV_TYPE_I - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- CHEBYSHEV_TYPE_I - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- CHEBYSHEV_TYPE_I - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- CHEBYSHEV_TYPE_I - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- CHEBYSHEV_TYPE_I - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- CHEBYSHEV_TYPE_I - Static variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- CHEBYSHEV_TYPE_II - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- CHEBYSHEV_TYPE_II - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- CHEBYSHEV_TYPE_II - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
- CHEBYSHEV_TYPE_II - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- CHEBYSHEV_TYPE_II - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- CHEBYSHEV_TYPE_II - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- CHEBYSHEV_TYPE_II - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- CHEBYSHEV_TYPE_II - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- CHEBYSHEV_TYPE_II - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- CHEBYSHEV_TYPE_II - Static variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- chebyshevIFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- chebyshevIFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- chebyshevIFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- chebyshevIFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- chebyshevIFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- chebyshevIIFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- chebyshevIIFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- chebyshevIIFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- chebyshevIIFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- chebyshevIIFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- chebzeros(int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- CHECK - Static variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- CHECK(double[], double[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- check_1() - Method in class gov.nih.mipav.model.algorithms.curfit
-
- check_ans(CVODES.NVector, double, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- check_coefficients(PyWavelets.DiscreteWavelet) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- check_coefficients_biorthogonal(PyWavelets.DiscreteWavelet) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- check_coefficients_orthogonal(PyWavelets.DiscreteWavelet) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- check_gradients - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- check_level(int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- check_reconstruction(PyWavelets.MODE, PyWavelets.DiscreteWavelet) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- check_svd(double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- checkAllButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
buttons for toolbar *
- CheckAllEvaluationCombinations(CeresSolverTest.ExpectedEvaluation) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- checkAllPaths() - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
Selects all the paths in the tree.
- checkAllPaths() - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- checkAutosave - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
- checkBlurring() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
check the variables of the unsharping-mask panel as they are translated from dialog inputs (ie.,
JTextFields) to more usable, native types.
- checkbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- checkBox - Variable in class gov.nih.mipav.view.CheckTreeManager.CheckTreeCellRenderer
-
- checkBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxRenderer
-
- checkBox - Variable in class gov.nih.mipav.view.ViewJFrameImage.DicomQueryListener
-
- checkBox - Variable in class gov.nih.mipav.view.ViewUserInterface.DicomQueryListener
-
- checkBox25D - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- checkBox25D - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- checkBoxArrList - Variable in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
This is the ArrayList of JCheckBoxes
- checkboxBoundingBox - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Whether to display bounding box around VOI
- checkboxDisplay - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- checkboxDisplay - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- CheckBoxEditor() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- checkboxEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- checkBoxes - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogTwo
-
- checkBoxHardSDWeighting - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- checkboxIncludeForProcessing - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Whether to include the selected VOI for statistics processing
- checkboxLabels - Variable in class gov.nih.mipav.view.JPanelChecklist
-
must be same size as listLength.
- checkboxList - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- checkboxList - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- checkboxList - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- checkboxList - Variable in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- checkboxNames - Variable in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
This is a list of the checkbox names that is used for validation of user input to make sure there are no
duplicates
- checkboxOpacity - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Whether to display VOI with shading
- checkboxPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
DOCUMENT ME!
- checkboxPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- checkboxPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- checkboxPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- checkboxPanel - Variable in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- checkBoxPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- checkBoxPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Panel holding statistics options.
- checkBoxPanel - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
A reference to the JDialogVOIStatistic or JDialogVOIStats check box panel.
- CheckBoxRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxRenderer
-
- checkboxSaveStats - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Whether to save statistics to a file
- checkBoxShowLight - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Check box to show the light bulb or not.
- checkboxVOIName - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Whether to display VOI name
- checkBoxWienerSDWeighting - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- checkBSTextField() - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
check border size of the frame, range (0,10).
- checkButton - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- checkButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- checkButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- checkButton - Variable in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- checkCalendar(Calendar) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
To check if the date is a valid date in the calendar.
- checkChildren - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- checkDate(int, int, int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Checks the date to be sure the user didn't enter the start after the end.
- checkDimensions - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- CheckDimensions(CeresSolver.ProbeResults, Vector<Integer>, Vector<Integer>, int, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CHECKED_EVEN - Static variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- CHECKED_ODD - Static variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- checkedFileTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
This a list is the list of checked check boxes that is populated when user hits apply
- checkEdge(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- checkEndSlices() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
From the target 2D slice, compare it with end slices based atlas.
- checkEndSlices() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
From the target 2D slice, compare it with end slices based atlas.
- checkEndSlices() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
From the target 2D slice, compare it with end slices based atlas.
- checkEOL() - Method in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- checkEOL() - Method in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- checkerboardApplied - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- checkerBoardButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The button used to enable checker board display of two images.
- checkerboardTypesCB - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- checkerboardTypesLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- checkerDialog - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Dialog used to set properties of the checkerboard display:(Image A displayed in alternating squares with Image B.
- checkError(int) - Method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Checks the OpenCL error status.
- CheckEvaluation(CeresSolver.CostFunction, boolean, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- checkEvenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- checkEvenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- checkFields() - Method in class gov.nih.mipav.view.JPanelEdit
-
Abstract method notifying the owner if the incorporated fields need to be re-entered.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditAxisOrientation
-
There is nothing to check in this Panel.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditBoolean
-
There is nothing to check in this Panel.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditChar
-
There is nothing to check in this Panel.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditDate
-
Because DICOM requires 4-digit years, we must check the year field.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditDefault
-
There is nothing to check in this Panel.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditImageOrientation
-
There is nothing to check in this Panel.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditModality
-
There is nothing to check in this Panel.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditOrientation
-
There is nothing to check in this Panel.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditRace
-
There is nothing to check in this Panel.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditSetOrParam
-
There is nothing to check in this Panel.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditSex
-
method does nothing in this class.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditTime
-
If owner were to check, this panel always checks out fine.
- checkFields() - Method in class gov.nih.mipav.view.JPanelEditValueType
-
There is nothing to check in this Panel.
- checkFields() - Method in class gov.nih.mipav.view.JPanelFileSelection
-
DOCUMENT ME!
- checkForActiveVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- checkForActiveVOIs() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- CheckForDuplicates(Vector<double[]>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- CheckForPairDuplicates(Vector<CeresSolver.Pair<double[], double[]>>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- checkFrontEdge(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- checkGSTextField() - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
checks the settings of grid size controls.
- checkHeapMaxAgainstPreferences() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Test for VM memory sizes being the same as last run in preferences: displays a user-warning that the preferences
& VM config files disagree and presents the JDialogMemoryAllocation dialog with "use preference" buttons to quicken
the matching process.
- checkIfNeedCalibration() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorPoller
-
- checkIfSpaceNavNeedsCalibration() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- checkIfSpaceNavNeedsCalibration() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- checkImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
Checks the dimensionality of the new image vs. the original source image.
- checkImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Checks the color and dimensionality of the new image vs. the original source image.
- checkImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Checks the color and dimensionality of the new image vs. the original source image.
- checkImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Checks the color and dimensionality of the new image vs. the original source image.
- checkImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Checks the color and dimensionality of the new image vs. the original source image.
- checkImage(ModelImage, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Checks that the two input images match extents, units of measure and resolutions.
- checkImages - Variable in class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
DOCUMENT ME!
- checkIncrementTextField() - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
check border size of the frame, range (0,10).
- checkInput(double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- CheckIntPairToLong(int, int, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- checkList - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
boolean array mirroring checkbox panel's selection.
- checkList - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- checkList - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- checkList - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- checkList - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- checkList - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- checkList - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- checkList - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- checkList - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
VOI properties check list.
- checkListExtract - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- checkListInsert - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Array of length totalSlices, false where slice is already present, true where slice must be inserted.
- checkListRemove - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- checkListRemove - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- CheckLongToIntPair(String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- checkMagicNumber() - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- CheckManifold() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
- checkMaxSlice(FileDicomTagTable, int, TreeSet<Integer>) - Method in class gov.nih.mipav.model.file.FileDicom
-
Helper method for enhanced dicom which finds the maximum slice number in the dataset.
- checkMeshPoints() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Check that the currently loaded proxy geometry is the default cube, if it is not
reload it onto the GPU.
- checkMinimum(AlgorithmConstrainedELSUNCOAR3D.MatrixListItem) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Check if the given minimum is within the translation and rotation bounds.
- checkMinimum(AlgorithmConstrainedOAR3D.MatrixListItem) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Check if the given minimum is within the translation and rotation bounds.
- checkName(String, VOI) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- checkOddButton - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- checkOddButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- checkOnEdge(ModelTriangleMesh, Point3f, int[], Vector3f, TexCoord3f, Color4f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Given a point which is known to be inside a triangle, and that triangle, this function determines which edge, if
any, that point falls on.
- checkOnEdge(TriMesh, Vector3f, int[], Vector3f, Vector3f, ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Given a point which is known to be inside a triangle, and that triangle, this function determines which edge, if
any, that point falls on.
- checkOnFrameClose - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- checkOptionInStr(String, String) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- checkOrigins - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- checkParentDir(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- checkParentDir(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
Creates the parent directory for the output images and data created by worm segmentation and untwisting:
- checkPixelProgram() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- checkPixelProgram() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- checkPopup(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- checkPopup(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer.MousePopupListener
-
- checkPopup(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer.MousePopupListener
-
- checkPopup(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPlugin
-
Checks whether the popup should be called
- checkPopup(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- checkPopup(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- checkPositiveIntegers(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- checkPrefDirCommand(String[], int) - Static method in class gov.nih.mipav.view.ViewUserInterface
-
If the preferences name command is about to be performed before an existing preferences directory command, this
guarantees that the directory command will be executed first.
- checkPreference(String) - Method in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
This method does the check with the preferencesFileTypes array to determine if the checkbox should be checked
initalially
- checkProgramText() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
- checkProximityToTransferFunction(float, float, boolean) - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Check to see if the position of the mouse is close to one of the points in the LUT transfer function or the line
drawn in between the points.
- checkProximityToTransferFunction(float, float, boolean) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
DOCUMENT ME!
- checkProximityToTransferFunction(float, float, boolean) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Check to see if the position of the mouse is close to one of the points in the LUT transfer function or the line
drawn in between the points.
- checkRCTextField() - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
checks the settings of light box row/column controls.
- CheckRotationMatrixToAngleAxisRoundTrip(double, double, double, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- checkSave - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- checkSeamCells(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- checkShow - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Check box for whether to display files that are not likely sources of MIPAV plugins
- checkSide(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- checkSiemens - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- checkSiemens3d() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- checkSize() - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Checks the size of the point array to make sure it is big enough.
- checkStatus() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- checkstop(double[][], double[][], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- checkstop(double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- checkSum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
54 - 16 bit end around carry sum of pixels **** (read as unsigned short).
- checkTag(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Checks the text field data for the proper format.
- checkText(JTextField, double, double) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
verify that the numeric value of the text of the submitted JTextField is between a and b.
- checkText(JTextField, float, float) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
verify that the numeric value of the text of the submitted JTextField is between a and b.
- checkThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
handling of intensity threshold.
- checkTree - Variable in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
The checkbox tree version of the tree in the panel.
- checkTree - Variable in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- CheckTreeCellRenderer(TreeCellRenderer, CheckTreeManager.CheckTreeSelectionModel) - Constructor for class gov.nih.mipav.view.CheckTreeManager.CheckTreeCellRenderer
-
- CheckTreeManager - Class in gov.nih.mipav.view
-
- CheckTreeManager(JTree) - Constructor for class gov.nih.mipav.view.CheckTreeManager
-
- CheckTreeManager.CheckTreeCellRenderer - Class in gov.nih.mipav.view
-
- CheckTreeManager.CheckTreeSelectionModel - Class in gov.nih.mipav.view
-
- CheckTreeSelectionModel(TreeModel) - Constructor for class gov.nih.mipav.view.CheckTreeManager.CheckTreeSelectionModel
-
- checkUnorderedVariables(StochasticForests.Data, Vector<String>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- checkUnpack - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Check box for unpacking container files
- checkUnsharping() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
check the variables of the unsharping-mask panel as they are translated from dialog inputs (ie.,
JTextFields) to more usable, native types.
- CheckValueAction() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCenterOfMass.CheckValueAction
-
- CheckValueAction() - Constructor for class gov.nih.mipav.view.dialogs.JDialogThreshold.CheckValueAction
-
- checkValues() - Method in class gov.nih.mipav.model.algorithms.libdt.PatchOptions
-
- CheckViewIntersection(Renderer, Culler) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
The volume data is rendered with a fragment (pixel) shader on the GPU.
- CHESHIRE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Cheshire file type (a kind of Analyze). extension: .imc Can also have .img extension
- CHESHIRE_OVERLAY - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Cheshire overlay file type.
- chf - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- chgubi(int[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- chguit(int[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- chgul(int[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- chgus(int[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- chi - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- CHI - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- CHI_SQUARED_CUMULATIVE_DISTRIBUTION_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.Statistics
-
- CHI_SQUARED_INVERSE_CUMULATIVE_DISTRIBUTION_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.Statistics
-
- CHI_SQUARED_PROBABILITY_DENSITY_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.Statistics
-
- chi2_cutoff(int, double) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- child_nodeIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- childDir(File) - Method in class gov.nih.mipav.model.file.FileBRUKER
-
Returns an ArrayList of all the names of subdirectories of the
directory denoted by currentDir.
- ChildOverlap(int, int, int, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- children - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- children - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- children() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- childTagTables - Variable in class gov.nih.mipav.model.file.FileDicomTagTable
-
A list of tag tables which point to this as their reference tag table.
- chInterpType - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- chInterpType - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- ChirpZ(double[][], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ChirpZTransform - Class in gov.nih.mipav.model.algorithms.filters
-
- ChirpZTransform() - Constructor for class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- ChirpZTransform(double[][], double[][], int, double[], double[], boolean, String, String, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- chisq - Variable in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
Total error as X^2
- chiSquared - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- chiSquared - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- chiSquaredCumulativeDistributionFunction() - Method in class gov.nih.mipav.model.algorithms.Statistics
-
- chiSquaredInverseCumulativeDistributionFunction() - Method in class gov.nih.mipav.model.algorithms.Statistics
-
- chiSquaredProbabilityDensityFunction() - Method in class gov.nih.mipav.model.algorithms.Statistics
-
- Chiwrut1CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Chiwrut1CostFunction
-
- Chiwrut1Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Chiwrut1Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Chiwrut2CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Chiwrut2CostFunction
-
- Chiwrut2Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Chiwrut2Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- chkForceUBYTE - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- chkMultiFile(int, boolean) - Static method in class gov.nih.mipav.model.file.FileIO
-
Sets specific types to be multifile based on the input argument.
- chkSave - Variable in class gov.nih.mipav.view.ViewFileChooserSubsample
-
DOCUMENT ME!
- chkShowTalairachGrid - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
"Show talairach grid" checkbox.
- chkShowTalairachGridMarkers - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
"Show talairach gridmarkers" checkbox.
- chkUnchkPanel - Variable in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- choiceCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- cholproj(double[][], boolean[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- choose(double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- choose(DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- chooseDirectory(String) - Method in class gov.nih.mipav.view.ViewDirectoryChooser
-
Shows the file dialogs with the given directory as the default.
- chooseGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- choosePoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- choosePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- chooser - Variable in class gov.nih.mipav.view.dialogs.InstanceVOI
-
- chooser - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- chooser - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- chooser - Variable in class gov.nih.mipav.view.JPanelFileSelection
-
DOCUMENT ME!
- chooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
- chooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- chooser - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- chooserButton - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- chooserButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- chooserButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- chooserButton - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- chooserButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- chooserButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- chooserButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- chooserButton2 - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- chooserButton2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- chooserButton2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- chosenFile - Variable in class gov.nih.mipav.view.JPanelFileSelection
-
DOCUMENT ME!
- chPrev - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- cHRM - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- chunk - Variable in class gov.nih.mipav.model.structures.IntVector
-
The number of elements to add to the total number allocated when more space is needed to store the data in the
vector.
- chunk - Variable in class gov.nih.mipav.model.structures.PointStack
-
DOCUMENT ME!
- Chunk() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Chunk
-
- chunk_outer_product_buffer_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- ChunkDiagonalBlockAndGradient(CeresSolver.Chunk, CeresSolver.BlockSparseMatrix, double[], int, double[][], double[], double[], CeresSolver.BlockRandomAccessMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- ChunkOuterProduct(int, CeresSolver.CompressedRowBlockStructure, double[][], double[], HashMap<Integer, Integer>, CeresSolver.BlockRandomAccessMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- chunks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- chunky - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- chunky - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- chunky - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- chunky - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- ci - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- Ci() - Method in class gov.nih.mipav.util.DoubleDouble
-
- CIELabButton - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
- CIELabButton - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- cieLabImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- CIELABSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- CIELABtoRGB(float[]) - Method in class gov.nih.mipav.model.file.FileSVS
-
- CIELABtoRGB(float[]) - Method in class gov.nih.mipav.model.file.FileTiff
-
- cimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- cimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- cImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- cine(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Loops through the images and displays them.
- cineRate - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- cinfo - Variable in class gov.nih.mipav.model.file.libjpeg.bitread_working_state
-
- cinfo - Variable in class gov.nih.mipav.model.file.libjpeg
-
- CINRAD(int, int, int, int[], int[], int[], int[], int[], int[], double[], double[], double[], double[], double[], double, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- Circle - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- Circle - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Current three types of widget:
- CIRCLE - gov.nih.mipav.view.dialogs.JDialogZoom.ZoomMode
-
- CIRCLE - Static variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- CIRCLE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- CIRCLE - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
- CIRCLE - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- CIRCLE_2D - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- CIRCLE_2D - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- Circle2f() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive.Circle2f
-
- circleButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- circleButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Buttons for selecting magnifying shape.
- CircleClassificationWidget - Class in gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer
-
Creates the circle widget for the multi-histogram interface.
- CircleClassificationWidget(int, int, Vector2f, Vector2f, Texture, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
- circleDiameter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- circleDiameter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
kernel diameter.
- circleDiameter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- circleDiameter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
kernel diameter.
- circleDiameterErode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Erosion kernel diameter.
- circleDiameterErode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Erosion kernel diameter.
- circleImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- circleRadius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- CircleUtil - Class in gov.nih.mipav.util
-
Public utility class for generating approximations to circles and spheres.
- CircleUtil() - Constructor for class gov.nih.mipav.util.CircleUtil
-
- circshift(double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- circularButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- circularity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- circularityDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- cisia(DoubleDouble, DoubleDouble, DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
This is a port of subroutine CISIA which computes cosine and sine integrals from
Computation of Special Functions by Shanjie Zhang and Jianming Jin.
- city - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- CITY_BLOCK - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- CITY_BLOCK - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- cityBlock - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- cityBlock() - Method in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- CJACSU(double[], int, double[], double[], double, double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ck_eta - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_etamax - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_gammap - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_h - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_hprime - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_hscale - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_l - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_L - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_mem - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- ck_next - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_Ns - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_nst - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_q - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_qprime - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_quadr - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_quadr_sensi - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_qwait - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_saved_tq5 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_sensi - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_t0 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_t1 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_tau - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_tq - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_tretlast - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_zn - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_znQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_znQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_znS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ck_zqm - Variable in class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- cki - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- CkpntMemRec() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.CkpntMemRec
-
- ckr - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- ckr2allRegular() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
Second order classic kernel regression function for regularly sampled data
- ckr2Irregular() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- ckr2IrregularCIELab() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- ckr2L1Regular() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
Second order classic kernel regression function with L1-norm for regularly sampled data
- ckr2Regular(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- ckr2RegularCIELab(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- cl - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- cl - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- cl - Variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- cl - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- cl - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- cl - Variable in enum gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
- CL_data() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.CL_data
-
- cl_image - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- cl_lrb - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- cl_valid - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- cLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- CLag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- clamp - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- clamp - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- clamp(double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
Clamps value between specified bounds
- clamp(float, float, float) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
Clamps value between specified bounds
- clamp(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- clamp(int, int, int) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ExtentionMath
-
- clamp(int, int, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
Clamps value between specified bounds
- clamp(int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- Clamp(double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Clamps the vector to [min,max].
- CLAMP(int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- clamp_0_1(double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Clamps a value to the range [0.0, 1.0].
- clamp_0_255(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Clamps a value to the range [0,255].
- clampCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- clamped - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
Perform a "contrast limited" AHE.
- clampImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- clampingIsNecessary - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
perform a "contrast limited" AHE.
- clampingValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- clampLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- clampNormalizedPathDistance(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Clamp the input normalized path distance to the range [0,1].
- clampNormalizedPathDistance(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Clamp the input normalized path distance to the range [0,1].
- clampNormalizedPathDistance(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- clampValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- clampValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- clampValueLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- clampValueText - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- CLASS - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Class Files (*.class).
- CLASS(int, double, double, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- class_id - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
- class_id - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeyPoint
-
- class_max - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- class_min - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- class_number - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMarkovSegment
-
- class_number - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Use serialVersionUID for interoperability.
- class_state - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- class_values - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- class_values - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- class_values - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- class_values - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- class_weights - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- class_weights - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- class_weights - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- class_weights - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- Class1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- Class1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- Class1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- Class1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- Class1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- Class1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- Class1_corner - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- Class1_corner - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- Class1_corner - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- Class1_corner - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- Class1_corner - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- Class1_corner - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- Class1_lowInten - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- Class1_lowInten - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- Class1_lowInten - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- Class1_lowInten - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- Class1_lowInten - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- Class1_lowInten - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- Class1_weak - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- Class1_weak - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- Class1_weak - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- Class1_weak - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- Class1_weak - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- Class1_weak - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- Class2 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- Class2 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- Class2 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- Class2 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- Class2 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- Class2 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- Class3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- Class3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- Class3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- Class3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- Class3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- Class3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- CLASS3_HIGH_INTEN - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- CLASS3_HIGH_INTEN - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- CLASS3_HIGH_INTEN - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- CLASS3_HIGH_INTEN - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- Class3_LowInten - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- Class3_LowInten - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- Class3_LowInten - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- Class3_LowInten - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- classAdd(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Features
-
- classAdd(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.FeaturesSVM
-
- classConsistencyCheck(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- ClassData() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassData
-
- classes - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexMix
-
- classicStepSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- classicStepSize - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- classification(C_AAMMODEL, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeE
-
Classification testing routine.
- classification(C_AAMMODEL, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeE
-
Classification testing routine.
- classification_table - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- classificationImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- classificationImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- classificationImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- classificationImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
classification image to hold the SVM readable features.
- classificationImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- classificationImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- classificationImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- ClassificationWidget - Class in gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer
-
This is the base class for the Multi-histogram widgets.
- ClassificationWidget() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Default Constructor
- ClassificationWidget(ClassificationWidget) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Copy Constructor.
- ClassificationWidget(Vector2f, Vector2f, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Create a new ClassificationWidget.
- ClassificationWidgetEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer
-
This class sets up and communicates with the GLSL shader program used to render the
interior of the widget in the multi-histogram panel.
- ClassificationWidgetEffect(Texture, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Creates a new ClassificationWidgetEffect with the texture specified.
- ClassificationWidgetState - Class in gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer
-
This class stores the information needed for calculating how the multi-histogram is applied to the volume
to create the rendered image.
- ClassificationWidgetState() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Default Constructor:
- classify - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Feature
-
- classify - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Features
-
- classify - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.FeaturesSVM
-
- classify() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- classLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
- ClassLogLikelihood(double[], double[], AlgorithmGaussianMixtureModelEM.SigSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- ClassLogLikelihood_init(AlgorithmGaussianMixtureModelEM.SigSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- className - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- classnum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassSig
-
- classNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- classNumber - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- ClassSelectorPanel() - Constructor for class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- ClassSig() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassSig
-
- ClassStateStruct() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.ClassStateStruct
-
- classText - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
- ClassType() - Constructor for enum gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64.ClassType
-
- ClassType() - Constructor for enum gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees.ClassType
-
- classUID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
Class UID.
- CLEAN_FAX_DATA - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- CLEAN_FAX_DATA - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- cleanBuffer(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- cleanData() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgImage
-
- cleanFaxData - Variable in class gov.nih.mipav.model.file.FileSVS
-
- cleanFaxData - Variable in class gov.nih.mipav.model.file.FileTiff
-
- cleanImageB - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- cleanImageBufferA - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Buffer used to store ARGB images of the image presently being displayed.
- cleanImageBufferB - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- cleanImageBufferB - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Buffer used to store ARGB images of the image presently being displayed.
- cleanLine(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Removes points (vectors) that form sharp angles (i.e. smoothes boudnary) Also adds points separated by some
distance and removes adjacent points
- cleanLine(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Removes points (vectors) that form sharp angles (i.e. smoothes boudnary) Also adds points separated by some
distance and removes adjacent points
- cleanLine(float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
- cleanLine(float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
- cleanMouseRecorder() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Clean mouse recorder for any existing event items.
- cleanMouseRecorder() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Clean mouse recorder for any existing event items.
- cleanPrunedModes() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- cleanSelected() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- cleanup() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Sets structures to null.
- cleanup() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Sets the structures to null.
- cleanup() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
cleanup
- cleanup() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
cleanup
- cleanup() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
cleanup
- cleanup() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- cleanup() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- cleanUp() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
DOCUMENT ME!
- cleanUp() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
Cleans up the memory usage.
- cleanUp() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Prepares this class for destruction.
- cleanUp() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
DOCUMENT ME!
- cleanUp() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
DOCUMENT ME!
- cleanUp() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Dispose of temporary images after the deconvolution process is completed:
- cleanUp() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
Cleans up the memory usage.
- cleanUp() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- cleanUp() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
Delete all member variables needed for the mesh segmentation, but not needed for getTriangleArrayIndices.
- cleanUp() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
cleanUp deletes the data stuctures used for the Dijkstra's search, but does not delete the array of points on the
Geodesic curve.
- cleanUp() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
cleanUp deletes the data stuctures used for the Dijkstra's search, but does not delete the array of points on the
Geodesic curve.
- cleanUp() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- cleanup_Affine(SIFT3D.Affine) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanup_Gauss_filter(SIFT3D.Gauss_filter) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanup_GSS_filters(SIFT3D.GSS_filters) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanup_Keypoint_store(SIFT3D.Keypoint_store) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanup_Mat_rm(SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanup_Mesh(SIFT3D.Mesh) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanup_Pyramid(SIFT3D.Pyramid) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanup_Reg_SIFT3D(SIFT3D.Reg_SIFT3D) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanup_Sep_FIR_filter(SIFT3D.Sep_FIR_filter) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanup_SIFT3D(SIFT3D.SIFT3DC) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanup_SIFT3D_Descriptor_store(SIFT3D.SIFT3D_Descriptor_store) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanup_Slab(SIFT3D.Slab) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cleanUpAndDispose() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
Clean up some things done by the dialog which may affect other parts of MIPAV.
- cleanUpAndDispose() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
Clean up some things done by the dialog which may affect other parts of MIPAV.
- cleanUpAndDispose() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Clean up some things done by the dialog which may affect other parts of MIPAV.
- cleanupAndExit() - Method in class gov.nih.mipav.view.ViewUserInterface
-
- cleanUpInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- cleanUpInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- cleanUpInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- cleanUpInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- cleanUpInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- cleanVolumePositionPanel() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Clears the volumePositionPanel, so it can be recreated when the volumePositionFrame is closed:.
- clear() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_res_cont
-
- clear() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
- clear() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- clear() - Method in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- clear() - Method in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- clear() - Method in class gov.nih.mipav.model.algorithms.LSCM.Homology
-
- clear() - Method in class gov.nih.mipav.model.algorithms.LSCM.Loop
-
- clear() - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- clear() - Method in class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- clear() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Removes all VRs from hash table.
- clear() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Removes all parameters from the table.
- clear() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PointerUpdater
-
- clear() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Neighbors
-
- clear() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Neighbors2
-
- clear() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- clear() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- clear(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Clear all geodesics curves drawn on the surface.
- clear(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Clear all geodesics curves drawn on the surface.
- clear(int) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Clears the text area.
- clear(int) - Method in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
Clears the text area.
- clear(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- Clear() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- Clear() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Deletes all points and triangles.
- clear_all() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- clear_all() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- clear_rec(KDTree.kdnode) - Static method in class gov.nih.mipav.model.algorithms.KDTree
-
- clear_results(KDTree.kdres) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- CLEAR_TAGS - Static variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
For removing all tags from the main dialog
- clear3DSelection() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- clear3DSelection() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- clear3DSelection() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- clear3DSelection() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Clears the selected VOI or Annotation point.
- clearACPCButton - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- clearAdditionalSets() - Method in class gov.nih.mipav.model.file.FileImageXML
-
Convenience method to clear any additional sets of the enumerated list that might be written into the header
file.
- clearAddLeftRightMarkers() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Enables user to start editing the lattice.
- clearAllContexts() - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- clearAllCuts() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Undoes all cuts and replaces the cut mesh with the original mesh.
- clearAllCuts() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Undoes all cuts and replaces the cut mesh with the original mesh.
- clearAllDataText() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to clear all of data frame.
- clearAllStartEnd() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
clears the all the points added in livewire mode when clear all is called from the user interface.
- clearAllStartEnd() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
clears the all the points added in livewire mode when clear all is called from the user interface.
- clearAllWidgets() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- clearArrays() - Method in class gov.nih.mipav.model.algorithms.ODE
-
- clearArrays() - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- clearB() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- ClearB(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- clearButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Buttons used by this dialog
- clearByteArray(byte[]) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Simple routine to fill a byte array with ' '
- clearChanged() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
- clearChanged() - Method in interface gov.nih.mipav.model.util.Observable
-
Marks this object as no longer having been changed.
- clearClippedVOIs() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Deprecated.
- clearCurves(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Resets the natural spline curves when the lattice changes.
- clearCut(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Clear the current geodesics curve drawn on the surface.
- clearCut(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Clear the current geodesics curve drawn on the surface.
- clearD() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- ClearD() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- ClearDataItems() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- ClearDataItems() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Deletes the data matrix.
- clearDataMask(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- clearDotTables(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- clearDWITableButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- clearedPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
- clearedPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
- ClearFF(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- clearFlags() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- ClearFlags() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- clearGeodesic(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
clearGeodesic: called when the "Clear Geodesic" Button is pressed.
- clearGeodesic(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
clearGeodesic: called when the "Clear Geodesic" Button is pressed.
- clearInflectionPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
- clearInflectionPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
- clearInflectionPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
- clearLastCut() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Undoes the last cut operation.
- clearLastCut() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Undoes the last cut operation.
- clearLastStartEnd() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
clears the last points added in livewire mode when clear last point is called from the user interface.
- clearLastStartEnd() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
clears the last points added in livewire mode when clear last point is called from the user interface.
- clearList() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- clearList(Vector<VOISaveState>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- clearMask() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets the entire mask object to false.
- CLEARMASK - Static variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- clearMatrices() - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Removes all matrices from the map.
- clearPath() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- clearPath() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Clear the annotated path
- clearPathButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
cleaning the planned path button.
- clearPicked() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Clears the current picked widget.
- clearPointsBox - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
- clearPresentationContexts() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Removes all elements from the presentation contexts vector list.
- clearProtractor() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
- clearR() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- ClearR() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- ClearRows(int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.DynamicCompressedRowSparseMatrix
-
- clearS() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- ClearS() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- clearSculpt() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
clearSculpt: called by ViewJFrameVolumeView when the user presses the "Clear Ouline" button, clearing the sculpt
outline from the canvas image.
- clearSculpt() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.TextureSculptor
-
clearSculpt: called by ViewJFrameVolumeView when the user presses the "Clear Ouline" button, clearing the sculpt
outline from the canvas image.
- clearSculpt() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
clearSculpt: called by ViewJFrameVolumeView when the user presses the "Clear Ouline" button, clearing the sculpt
outline from the canvas image.
- clearSculpt() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Clears the sculpt image.
- clearSculpt() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Clear the sculpt region.
- clearSculptRegion() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
clearwSculptRegion: called when the "Clear Outline" Button is pressed.
- clearSculptRegion() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
clearwSculptRegion: called when the "Clear Outline" Button is pressed.
- clearSortingState() - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- clearTalairachButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- clearTalairachButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- clearUndoRedo() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- clearUserBit(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- ClearUserBit(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- clearV() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- clearValueTables() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- clearVoxelLabel() - Method in class gov.nih.mipav.view.JPanelHistogram
-
Resets the threshold volume and area labels.
- clearVoxelLabel() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Clears (blanks out) the threshold voxel information (when RGB mode or not thresholding).
- clearVoxelLabel() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- clearW() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- ClearW() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- clength - Variable in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
Length of codestream
- CLFFTDataFormat() - Constructor for enum gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDataFormat
-
- CLFFTDim3(int[]) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDim3
-
- CLFFTDim3(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDim3
-
- CLFFTDirection() - Constructor for enum gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDirection
-
- CLFFTKernelDir() - Constructor for enum gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelDir
-
- CLFFTKernelInfo() - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelInfo
-
- CLFFTPlan - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- CLFFTPlan(cl_context, int[], CLFFTPlan.CLFFTDataFormat, cl_device_id) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
Create a new FFT plan.
- CLFFTPlan.CLFFTDataFormat - Enum in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- CLFFTPlan.CLFFTDim3 - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- CLFFTPlan.CLFFTDirection - Enum in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- CLFFTPlan.CLFFTKernelDir - Enum in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- CLFFTPlan.CLFFTKernelInfo - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- CLFFTPlan.fftPadding - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- CLFFTPlan.InvalidContextException - Exception in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- CLFFTPlan.WorkDimensions - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- CLGAM - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- CLICK_POINT - Static variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The mode where the user picks an arbitrary point to start a paint grow from.
- clickPoints - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- clickTimer - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- climb(AlgorithmMSER.VlMserReg[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
Climb the region forest to reach a root
The function climbs the regions' forest r[] starting from the node idx to the corresponding root.
- clindex - Variable in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- clindex - Variable in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- clip - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- clip - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- clip - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- clip - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- clip - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- clip - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- clip(int[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
after generating a histogram, clip will reduce the number of pixels attributed to that brightness
level.
- clip(int, int[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
after generating a histogram, clip will reduce the number of pixels attributed to that brightness
level.
- Clip - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- Clip - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- CLIP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- CLIP - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- CLIP - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- CLIP - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- CLIP_A - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- CLIP_A - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- CLIP_A - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- CLIP_A_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- clip_component(FileJPEG2000.opj_image_comp_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- CLIP_EYE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- CLIP_EYE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- CLIP_EYE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- CLIP_EYE_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- CLIP_EYE_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- CLIP_EYE_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- clip_line(delaunay.Edge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- CLIP_X - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- CLIP_X - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- CLIP_X - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- CLIP_X_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- CLIP_X_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- CLIP_X_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- CLIP_Y - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- CLIP_Y - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- CLIP_Y - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- CLIP_Y_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- CLIP_Y_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- CLIP_Y_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- CLIP_Z - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- CLIP_Z - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- CLIP_Z - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- CLIP_Z_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- CLIP_Z_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- CLIP_Z_INV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- clipAEParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- clipAEParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- clipAESetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- clipAESetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- clipAnisotropyBuffer() - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
clipAnisotropyBuffer
- clipAnnotations(VOIWormAnnotation) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- clipArb - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- clipBox - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- clipButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Button to invoke all the six clipping planes.
- clipButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Button to invoke all the six clipping planes.
- clipCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- clipColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- ClipColors - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- clipContributingStatus - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- clipCount - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Counters show the event number in the mouse recorder.
- clipDisableButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Button to disable all the six clipping planes.
- clipDisableButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Button to disable all the six clipping planes.
- ClipDisplayed - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- clipDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- clipEllipsoidSetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- clipEllipsoidSetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- ClipEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- clipEnd - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- clipEnd - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- clipEvents - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Mouse event vector that record the clipping plane sliders changes.
- clipEye - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- clipEyeI - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- clipGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- clipGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Clipping user-interface panel:
- clipI - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- clipLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- clipLattice - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- clipLevel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
DOCUMENT ME!
- clipLevel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- clipMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- clipMaskButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Button to crop the clip volume.
- clipMaskButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Button to crop the clip volume.
- clipMaskUndoButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Button to undo crop the clip volume.
- clipMaskUndoButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Button to undo crop the clip volume.
- clipMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Maximum clipping modes if data result value exceeds the capacity of image's data type.
- clipMax - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Minimum and maximum clipping modes.
- clipMax - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Maximum clipping modes if data result value exceeds the capacity of image's data type.
- clipMaxC - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- clipMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Minimum clipping modes if data result value exceeds the capacity of image's data type.
- clipMin - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Minimum and maximum clipping modes.
- clipMin - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Minimum clipping modes if data result value exceeds the capacity of image's data type.
- clipMinC - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- clipMode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Clipping mode.
- clipMode - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Clipping mode.
- clipMode - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Clipping mode.
- clipMode - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
clip mode
- clipMode - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- clipMode - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- clipMode - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- clipOBBParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- clipOBBParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- clipOBBSetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- clipOBBSetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- clipPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- clipPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Dialog to turn the clipping palne box on and off.
- clipPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Dialog to turn the clipping palne box on and off.
- clipPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- clipPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- clipParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- clipParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- clipped(float, float, float[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Support for clipping line segments against coordinate planes.
- clippedBuffer - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
anisotropy file data buffer *
- clippedMatrix - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Matrix for copy/paste actions in image's or between image's matrix edit panel.
- clippedPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- clippedScannerVectors - Variable in class gov.nih.mipav.view.ViewUserInterface
-
DOCUMENT ME!
- clippedVOIs - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Vector to hold clipped VOIs (multiple).
- clipping - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
burn surface clipped or not.
- clipping - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Burning surface being clipped or not.
- clipPlaneButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Button to invoke clipping planes.
- clipPlaneButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Button to invoke clipping planes.
- clipRegionXNeg - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
The clip plane position in the box.
- clipRegionXPos - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
The clip plane position in the box.
- clipRegionYNeg - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- clipRegionYPos - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- clipRegionZNeg - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- clipRegionZPos - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- clipSaveButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Button to save clipped region.
- clipSaveButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Button to save clipped region.
- clipSetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- clipSetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- clipSliceA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping plane yellow boundary indicator box.
- clipSliceA - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Clipping slider values for the triplanar clipping slider x, y, z, arbitrary.
- clipSliceA_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping branch group.
- clipSliceAIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping plane yellow boundary indicator box.
- clipSliceAIndicator_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping branch group.
- clipSliceStatic - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static clipping plane boundary box.
- clipSliceStaticInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static clipping plane boundary box.
- clipSliceX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
The bounding box frame around the clipping planes.
- clipSliceX - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Clipping slider values for the triplanar clipping slider x, y, z, arbitrary.
- clipSliceXInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X, Y, Z inverse clipping slice boundary box.
- clipSliceXNeg - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Clipping slider values for the triplanar clipping slider x, y, z negative.
- clipSliceY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
The bounding box frame around the clipping planes.
- clipSliceY - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Clipping slider values for the triplanar clipping slider x, y, z, arbitrary.
- clipSliceYInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X, Y, Z inverse clipping slice boundary box.
- clipSliceYNeg - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Clipping slider values for the triplanar clipping slider x, y, z negative.
- clipSliceZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
The bounding box frame around the clipping planes.
- clipSliceZ - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Clipping slider values for the triplanar clipping slider x, y, z, arbitrary.
- clipSliceZInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X, Y, Z inverse clipping slice boundary box.
- clipSliceZNeg - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Clipping slider values for the triplanar clipping slider x, y, z negative.
- clipSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- clipSliderStatic - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static, static inverse and arbitrary clipping plane boundary box.
- clipSliderStaticInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static, static inverse and arbitrary clipping plane boundary box.
- clipSliderX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders for the image planes.
- clipSliderY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders for the image planes.
- clipSliderZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders for the image planes.
- clipSphereParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- clipSphereParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- clipSphereSetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- clipSphereSetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- clipText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- ClipTree() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- clipValue - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- ClipValues - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- clipVOIButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- clipVOIIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- clone() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- clone() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- clone() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
- clone() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointeredPoint2D
-
- clone() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- clone() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TranslatedPoint2D
-
- clone() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
- clone() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- clone() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- clone() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Perform a deep copy of this tag table.
- clone() - Method in class gov.nih.mipav.model.file.FileMincAttElem
-
Creates a new MincAttElem with the same parameters and values as this one.
- clone() - Method in class gov.nih.mipav.model.file.FileMincDimElem
-
Returns a new MincDimElem with the same values as this one.
- clone() - Method in class gov.nih.mipav.model.file.FileMincVarElem
-
Creates a new version of this variable, copying all the important information.
- clone() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
Copies the object.
- clone() - Method in class gov.nih.mipav.model.provenance.ProvenanceHolder
-
Copies the object.
- clone() - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Copies the object.
- clone() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Copies the image and all data associated with the image (i.e.
- clone() - Method in class gov.nih.mipav.model.structures.ModelSerialCloneable
-
Copies the object that extends this class through use of Serialization.
- clone() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Copies the object.
- clone() - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Copies the object that extends this class.
- clone() - Method in class gov.nih.mipav.model.structures.TransMatrix
-
- clone() - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
- clone() - Method in class gov.nih.mipav.model.structures.VOI
-
Clone function that calls the super (modelserializable) clone and then manually copies references to the
transient VOIListeners (eventlistenerlist)
- clone() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- clone() - Method in class gov.nih.mipav.model.structures.VOIContour
-
- clone() - Method in class gov.nih.mipav.model.structures.VOILine
-
- clone() - Method in class gov.nih.mipav.model.structures.VOIPoint
-
- clone() - Method in class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
- clone() - Method in class gov.nih.mipav.model.structures.VOIProtractor
-
- clone() - Method in class gov.nih.mipav.model.structures.VOIText
-
- clone() - Method in class gov.nih.mipav.util.DoubleDouble
-
Creates and returns a copy of this value.
- clone() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Clone the current branch state.
- clone() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Clone the current branch state.
- clone() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Clone the current branch state.
- clone() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- clone() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- clone() - Method in class gov.nih.mipav.view.ViewTableModel
-
Copies the object that extends this class.
- clone(libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- clone(String) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Copies the image and all data associated with the image (i.e.
- Clone() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFIdentity
-
Clone this instance
- Clone() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFLookUp
-
Clone this instance.
- Clone() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFUniformStretch
-
Clone function (conveys type info).
- Clone() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
- Clone(CAAMReferenceFrame) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
Anyalyze/Synthesize object clone
- Clone(CAAMReferenceFrame) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
Clones itself.
- clonedImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
Model Images
- clonedImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
- clonedImage - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
image and cloned image
- cloneElementsAt(int, int) - Method in class gov.nih.mipav.model.structures.HQueue
-
cloneElementsAt();
- cloneFileInfo(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
This method gives clo the file info of orig.
- close() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
disposes of the GL resources of this text object,
i.e deletes the vertex array.
- close() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_FileIO
-
Closes both the input and output streams if not null.
- close() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Disconnect socket and free up memory.
- close() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Closes the socket.
- close() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- close() - Method in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- close() - Method in class gov.nih.mipav.model.file.FileDicom
-
Closes random access file associated with this object.
- close() - Method in class gov.nih.mipav.model.file.FileMagnetomVision
-
Closes random access file.
- close() - Method in class gov.nih.mipav.model.file.FileRaw
-
Closes random access file associated with this object.
- close() - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Closes the file.
- close() - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Closes the underlying RandomAccessFile from where the image data is
being read.
- close() - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Closes the underlying RandomAccessFile from where the image data is
being read.
- close() - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Closes the underlying file or netwrok connection to where the data is
written.
- close() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Closes the frame.
- close() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Closes the image.
- close() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Closes the image.
- close() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Closes the frame and calls disposeLocal and dispose.
- close() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Closes the frame.
- close() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
Close.
- close() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Closes the frame.
- close() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Closes both image A and image B (if it exists).
- close() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Closes both image A and image B (if it exists).
- close() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- close() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Closes window and disposes of frame and component.
- close() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Closes the frame.
- close() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Closes window and disposes of frame and component.
- close() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Disposes of components and frame.
- close() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Disposes of components and frame.
- close(boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Closes both image A and image B (if it exists).
- close(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Closes window and disposes of frame and component.
- CLOSE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- CLOSE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- CLOSE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- CLOSE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- CLOSE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- CLOSE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- CLOSE - Static variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Closes the dialog
- CLOSE - Static variable in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- close_backing_store(libjpeg.backing_store_info) - Method in class gov.nih.mipav.model.file.libjpeg
-
- close_backing_store(libjpeg.jpeg_decompress_struct, libjpeg.backing_store_info) - Method in class gov.nih.mipav.model.file.libjpeg
-
- close_length - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- close_length - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- close_to_1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv
-
- closeAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- closeAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- closeAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- closeAllImages() - Method in class gov.nih.mipav.view.ViewUserInterface
-
this method closes all registered images
- closeAllImages(boolean) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
closeAllImages -- clears the scenegraph of all displayed images and deletes references to the images:
- closeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Close button is used to close the dialog.
- closeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- closeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Buttons used by this dialog
- closeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- closeButton - Variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Close button is used to close the dialog.
- closed - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- closed - Variable in class gov.nih.mipav.model.structures.VOIBase
-
True when this is a closed contour.
- CLOSED_BEZIER - Static variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- CLOSED_BEZIER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- CLOSED_BEZIER - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- CLOSED_POLYLINE - Static variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- CLOSED_POLYLINE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- CLOSED_POLYLINE - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- closeDimension - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- closeDimension - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- closedOkay - Variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- closedTag(String, String) - Method in class gov.nih.mipav.model.file.FileXML
-
Simple function to write an xml formatted closed tag including the tag value.
- closedTag(String, String, Vector<FileXML.XMLAttributes>) - Method in class gov.nih.mipav.model.file.FileXML
-
Writes a closed tag (tag, end tag) with the addition of attributes (name="value")
from within a Vector (can do any number of XMLAttributes ...class included below)
- closedTag(String, Vector<FileXML.XMLAttributes>) - Method in class gov.nih.mipav.model.file.FileXML
-
Writes a closed tag where no value is specified, only attributes.
- closedTagGifti(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Simple function to write an xml formatted closed tag including the tag value.
- closedTagWithCDATA(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Simple function to write an xml formatted closed tag including the tag value.
- closeEyeTrackingLogfile() - Static method in class gov.nih.mipav.view.MipavUtil
-
close the eye tracking log.
- closeFiberTractGroup() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Called after a mouse drag on mouse release, when the user has drawn tracks interactively and then finishes.
- closeFrame() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Closes the stand-alone interface frame.
- closeImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Closes image and updates display.
- closeImageA() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Closes image A.
- closeImageB() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Closes imageB and removes the tabbed-pane interface, replacing it with a single interface panel.
- closeImageB() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Removes image B from the frame and resets image A to be the active frame for all image controls.
- closeImageB() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Closes image B.
- closeImageB() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Closes the image B and performs cleanup.
- closeIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The number of closings to perform.
- closeIterations - Static variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Number of closing operations to perform.
- closeKernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Use the sized circle kernel for the closing.
- closeKernelPixels - Static variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
The nuber of pixels to include in the initial closing kernel diameter.
- closeKernelSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The size of the kernel to use in closings.
- closeKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Size of the kernel used in the closing operations.
- closeKernelSizeTF - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Text field used to enter the number of closings to perform.
- closeLabel - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
The associated label to close the bar
- closeList - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
List to determine which progress bar to close
- closePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- closeQuietly(Closeable) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- CLOSERT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- closest_power_of_2(int[], int) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- ClosestIterator - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- ClosestIterator(StaticGrid, PointDistanceFunctor) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- closestPlanePointIndex(Point3f, int[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
For the plane, all vertices have z-value set to zero.
- closestPlanePointIndex(PickRecord) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
For the plane, all vertices have z-value set to zero.
- closeVOI() - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
Sets a POLYLINE VOI to closed CONTOUR(changes from polyline to polygon).
- CLOSING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- CLOSING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- CLOSING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- CLOSING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
- CLOSING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- CLOSING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- closingByReconstructionButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- clr - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- clr_const - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- clr_noise - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- clrBits(int) - Method in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- clrBits(int) - Method in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- clust() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- clust_invert(double[][], int, double[], int[], int[], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- CLUSTER_DIAG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- CLUSTER_FULL - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- CLUSTER_JACOBI - gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerType
-
- cluster_null - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- cluster_null_nodes(int[], int, double[], int) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
Null nodes are nodes with null probability and are not merged by AIB.
- CLUSTER_TRIDIAGONAL - gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerType
-
- clusterHierarchical(double[][], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- clusterImage - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- clusterMessageVerboseLevel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- clw_rotate_about_source() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- clw_rotate_about_target() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- cm - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- cm - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- cm2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- cmap - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.ColormapLabel
-
- cmaskn(double[], double[], double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- cMassX - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
X coordinate value of the center of mass for the image.
- cMassY - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Y coordinate value of the center of mass for the image.
- cMassZ - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Z coordinate value of the center of mass for the image.
- cmbFilter - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- cmd - Variable in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- cmdLineArguments - Variable in class gov.nih.mipav.view.ViewUserInterface
-
String holding the command line arguments for data provenance usage.
- cmdLineFloat - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine
-
- cmdLineFloat() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineFloat
-
- cmdLineFloat(float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineFloat
-
- cmdLineInt - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine
-
- cmdLineInt() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineInt
-
- cmdLineInt(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineInt
-
- cmdLineParse(int, String[], String[], int, cmdLineReadable[], int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.PoissonRun
-
- cmdLineParse(int, String[], String[], int, cmdLineReadable[], int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.test
-
- cmdLinePoint3D - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine
-
- cmdLinePoint3D() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLinePoint3D
-
- cmdLinePoint3D(float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLinePoint3D
-
- cmdLinePoint3D(Point3D) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLinePoint3D
-
- cmdLineReadable - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine
-
- cmdLineReadable() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineReadable
-
- cmdlines - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- cmdlines - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- cmdLineString - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine
-
- cmdLineString() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineString
-
- cMeans2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- cMeans2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- cMeans3() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
cMeans3.
- cMeans3() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- cmor(double[], double[], double[], int, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- CMOR - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- cMoveRq - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_StdRetrieve
-
Move request object.
- cMoveRsp - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_StdRetrieve
-
Move response object.
- CMP - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
View Mode Composite Constant:
- CMP_CUBE_GT(SIFT3D.Image, int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- CMP_CUBE_LT(SIFT3D.Image, int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- CMP_CUR_GT(SIFT3D.Image, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- CMP_CUR_LT(SIFT3D.Image, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- CMP_NEXT_GT(SIFT3D.Image, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- CMP_NEXT_LT(SIFT3D.Image, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- CMP_PREV_GT(SIFT3D.Image, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- CMP_PREV_LT(SIFT3D.Image, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- CMP_SUR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
View Mode Composite-Surface Constant:
- cmpadd(double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Takes two arrays representing one real and one imaginary part, and adds two arrays representing another complex
number and returns two arrays holding the complex sum.
- cmplx - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.dpfun
-
- cmplx - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
- cmplx - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.hppfun
-
- cmplx - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
- cmplx - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- cmplx - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
- cmplx - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
- CMPMode() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Invoke the composite rendering mode.
- CMPMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Display the volume in Composite mode.
- CMPMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Change to the Composite mode pixel shader program.
- CMPMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- CMPMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Display the volume in Composite mode.
- cmpmul(double[], double[], double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Takes 2 arrays, ar and ai representing one real and one imaginary part, and multiplies it with br and bi,
representing a complex number and returns the complex product
- cmprlb(int, int, double[], double[], double[][], double[][], double[][], double[][], double[], double[], double[], double[], int[], double, int, int, int, boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- CMTimeEpoch - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDirectory
-
- CMTimeFlags - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDirectory
-
- CMTimeScale - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDirectory
-
- CMTimeValue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDirectory
-
- cmyk_yk_convert(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- cmyk_yk_convert(libjpeg.jpeg_decompress_struct, short[][][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- CMYK_YK_CONVERT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- cn - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- Cn - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- Cn - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- CN - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- CN - Static variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- CNCI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- CNDPLT(boolean[], double[], double[], double[], double, String[], String[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- cnorm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- cnorm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- cnst - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SubSig
-
- cNum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- cNum - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
or if the source image is to be replaced.
- co - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- cO2Percent - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- COARG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- coarse - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Coarse and fine value text field.
- coarse - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- coarseAngle - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
The coarse angle step to use in each dimension when registering the original image against the flipped image.
- coarseCostFunction(double) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- coarseCostFunctionCommit(double, boolean) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- coarseGradient(int[], double[]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- coarseGradientParameters() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- coarseLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Coarse and fine value label.
- coarseLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- coarseLocalRegionCenter - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- coarsenessCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- coarsenessThreshold - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
coarsenessThreshold must be <= 1.0.
- coarsenessThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
coarsenessThreshold must be <= 1.0.
- coarseNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- coarseNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- coarseNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- coarseNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Number of passes that will be made in the coarse sampling and fine sampling.
- coarseNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- coarseNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- coarseNumX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- coarseNumX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- coarseNumX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- coarseNumX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- coarseNumY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- coarseNumY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- coarseNumY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- coarseNumY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- coarseNumZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- coarseNumZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- coarseNumZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- coarseNumZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- coarseOptimize(int[], double[]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- coarsePanelX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- coarsePanelX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- coarsePanelX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- coarsePanelY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- coarsePanelY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- coarsePanelY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- coarsePanelZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- coarsePanelZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- coarsePanelZ - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- coarseRate - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- coarseRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Coarse and fine sampling parameters.
- coarseRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Coarse and fine sampling parameters.
- coarseRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Coarse and fine sampling parameters.
- coarseRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Coarse and fine sampling parameters.
- coarseRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Coarse and fine sampling parameters.
- coarseRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Coarse and fine sampling parameters.
- coarseRate - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- coarseRate - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- coarseRate - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- coarseRate - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- coarseRateText - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- coarseRateText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- coarseRateText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- coarseRateText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- coarseRateTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- coarseRateTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- coarseRateTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- coarseRateTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- coarseRateTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- coarseRateTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- coarseRateX - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- coarseRateX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Coarse and fine sampling parameters.
- coarseRateX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Coarse and fine sampling parameters.
- coarseRateX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Coarse and fine sampling parameters.
- coarseRateX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Coarse and fine sampling parameters.
- coarseRateX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- coarseRateX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- coarseRateX - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- coarseRateY - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- coarseRateY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- coarseRateY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- coarseRateY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- coarseRateY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- coarseRateY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- coarseRateY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- coarseRateY - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- coarseRateZ - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- coarseRateZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- coarseRateZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- coarseRateZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- coarseRateZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- coarseRateZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- coarseRateZ - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- coarseRateZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- coarseValue - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Coarse and fine value.
- coarseValue - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- cod - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
If cod == 1 --> there was a COD marker for the present tile
- cod_format - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
output file format 0: PGX, 1: PxM, 2: BMP
- cod_format - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
output file format 0: PGX, 1: PxM, 2: BMP
- code - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- code - Variable in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- code - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- code - Variable in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- CODE_DOUBLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- CODE_INT16_S - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- CODE_INT16_U - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- CODE_INT32_S - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- CODE_INT32_U - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- CODE_INT8_S - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- CODE_INT8_U - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- CODE_RATIONAL_S - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- CODE_RATIONAL_U - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- CODE_SINGLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- CODE_STRING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- CODE_UNDEFINED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- codeline - Variable in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- codeline - Variable in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- codes - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- codes - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- codestream_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_codestream_index_t
-
codestream's size
- codeStrInfoOff - Variable in class gov.nih.mipav.model.file.FileJP2
-
- codeStrInfoOn - Variable in class gov.nih.mipav.model.file.FileJP2
-
- coef - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- coef - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- COEF_APPROX - gov.nih.mipav.model.algorithms.filters.PyWavelets.Coefficient
-
- coef_arrays - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_d_coef_controller
-
- coef_arrays - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- coef_bits - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- coef_bits_latch - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- COEF_DETAIL - gov.nih.mipav.model.algorithms.filters.PyWavelets.Coefficient
-
- coef_limit - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- coef0 - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- coef0 - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- coef0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- coef0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- coeff - Variable in class gov.nih.mipav.model.structures.RealPolynomial
-
- coeff(int, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.SparseMatrix
-
- Coefficient(int) - Constructor for enum gov.nih.mipav.model.algorithms.filters.PyWavelets.Coefficient
-
- coefficientCombo - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- coefficients - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
Number of coefficients.
- coefficients - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- coeffs_ok13or23(HashMap<String, double[][][]>) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coeffs_ok2(HashMap<String, double[][]>) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coeffs_ok3(HashMap<String, double[][][]>) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coff - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< coordinates of top-left of each patch.
- coff - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< value of curz that will form a new patch.
- coff - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- cog - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Center of Gravity :
- COG() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Calculates the center of gravity of the shape (actually it's the center
of the centroid).
- COG(double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Calculates the center of gravity of the shape (actually it's the center
of the centroid).
- coherenceEnhancingDiffusionAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- coherenceEnhancingDiffusionAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- coherenceEnhancingDiffusionAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- coherenceEnhancingDiffusionAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- coherenceEnhancingDiffusionFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- coherenceEnhancingDiffusionFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- coherenceEnhancingDiffusionFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- coherenceEnhancingDiffusionFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Coherence Enhancing Diffusion filter.
- coherenceEnhancingDiffusionFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- coherenceEnhancingDiffusionFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- coherenceEnhancingDiffusionImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- coherenceEnhancingDiffusionImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- coherenceEnhancingDiffusionImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- COIF - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- coif_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif1_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif10_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif11_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif12_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif13_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif14_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif15_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif16_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif17_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif2_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif3_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif4_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif5_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif6_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif7_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif8_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- coif9_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- CoilIDField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- coilName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- coilName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- coilName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
362 17 characters.
- coilType - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- coilType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- coilType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
360.
- col - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.indexRowColItem
-
- col - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- col - Static variable in class gov.nih.mipav.view.DICOMDisplayer
-
DOCUMENT ME!
- col(libdt.Mat, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- Col(int, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Return the i-th column of the matrix.
- col_begin_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- col_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrixRandomMatrixOptions
-
- col_blocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- col_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- col_end_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- col_sum(double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- col1 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- col2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- col3 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- col4 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- colEMFrame - Variable in class gov.nih.mipav.view.JFrameHistogram
-
reference to the colocalization frame for updatng the image.
- colEMFrame - Variable in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
DOCUMENT ME!
- colLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- COLLAPSE_COLUMNS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- COLLAPSE_ROWS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- collapseAlltoSinglePaint(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
This method is provided for the user to convert a masked area back to a painted area.
- collapseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Button that allows user to collapse masks/paint to single value
- collapseCausesFolding(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
A look-ahead test to determine if the requested edge collapse will cause the mesh to fold over itself.
- collapseEdge(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
The internal edge collapse function.
- collapseImage - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- collapseImage - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- collapsePhiLattice(double[], int[], double[], int[], double, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- collapsePhiLattice(double[], int[], double[], int[], double, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- collectFileInfos(int, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Gets the fileInfos from the specified position.
- collide(Box3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- colNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- colNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- colNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- colNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- colNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- colNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.PatternDetection
-
- colocalizationAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- colocalizationAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- colocalizationEMFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
DOCUMENT ME!
- colocalizationRegFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
DOCUMENT ME!
- colocCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- colocIntensity1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- colocIntensity1 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- colocIntensity1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- colocIntensity2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- colocIntensity2 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- colocIntensity2 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- colocSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
for all pixels with values either below color1 for buffer or below a*color1 + b for secondBuffer.
- colocSize - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- colocSize - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- COLON - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Predict
-
- color - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- color - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- color - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.GlyphLabel
-
- color - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.LineLabel
-
- color - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
- color - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- color - Variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- color - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- color - Variable in class gov.nih.mipav.model.structures.VOI
-
Indicates the color or the VOI.
- color - Variable in class gov.nih.mipav.view.ColorIcon
-
DOCUMENT ME!
- color - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
re f to Color array
- color - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- color - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
array of colors to use for the labels.
- color - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
Color of burn.
- color - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.BoundingBoxEffect
-
- color - Variable in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- color - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Color of the paint.
- Color - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Default color for the color transfer function is white:
- COLOR - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- color_buf8 - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- color_buf9to12 - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- color_cmyk_to_rgb(FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- color_convert - Variable in class gov.nih.mipav.model.file.libjpeg.my_color_deconverter
-
- color_esycc_to_rgb(FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- COLOR_FLOW_DOPPLER - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality color flow doppler.
- COLOR_FLOW_DOPPLER - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality color flow doppler.
- COLOR_MAP - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- COLOR_MAP - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- COLOR_MAP - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- COLOR_MAP - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- COLOR_PRESENTATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- COLOR_PRESENTATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- color_quantize - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- color_quantize - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- color_quantize(libjpeg.jpeg_decompress_struct, byte[][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- color_quantize(libjpeg.jpeg_decompress_struct, short[][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- COLOR_QUANTIZE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- color_quantize3(libjpeg.jpeg_decompress_struct, byte[][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- color_quantize3(libjpeg.jpeg_decompress_struct, short[][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- COLOR_QUANTIZE3 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- color_space - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_t
-
color space: sRGB, Greyscale or YUV
- color_standard_weights(ModelImage, int[], int[][], Vector<Integer>, int, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- color_standard_weights_PW(ModelImage, int[], int[][], Vector<Integer>, int, int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- color_sycc_to_rgb(FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- color_transform - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- color0 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- color1 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- color1 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- color1 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- color1 - Variable in class gov.nih.mipav.model.file.FileBioRad
-
LUT1 color status.
- color1 - Variable in class gov.nih.mipav.view.AlternatingTableCellRenderer
-
DOCUMENT ME!
- color2 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- color2 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- color2 - Variable in class gov.nih.mipav.model.file.FileBioRad
-
LUT2 color status.
- color2 - Variable in class gov.nih.mipav.view.AlternatingTableCellRenderer
-
DOCUMENT ME!
- color3 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- color3 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- color4 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- colorAnnotations - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- colorAnnotations() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Counts the annotations and colors them
based on the number of annotations.
- colorAnnotations(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- colorAnnotations(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- colorArray - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- colorBackground - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- colorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
button to bring up color chooser.
- colorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- colorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- colorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Allows VOI color to be selected
- colorButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Color button, checkBox On/Off.
- colorButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Color button for changing color.
- colorButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Color button for changing bounding box color.
- colorButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The color button, which calls a color chooser.
- colorButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Color button for changing color.
- colorButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Burning point color button.
- colorButton - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Color button for changing color.
- colorButton - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Color button for changing color.
- colorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- colorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Color button for changing color.
- colorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Color button, checkBox On/Off.
- colorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Color button for changing color.
- colorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Color button for changing bounding box color.
- colorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The color button, which calls a color chooser.
- colorButtonA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Color button for the arbitrary clipping plane frame.
- colorButtonBackground - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Color button for changing z color.
- colorButtonBackground - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Color button for changing z color.
- colorButtonBackground - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Color button for changing z color.
- colorButtonBackground - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Color button for changing z color.
- colorButtonBackground - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Color button for changing z color.
- colorButtonStatic - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Color button for the static clipping plane frame.
- colorButtonStaticInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Color button for the static clipping plane frame.
- colorButtonX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Color button for X clipping plane frame.
- colorButtonXInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Color button for X clipping plane frame.
- colorButtonY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Color button for Y clipping plane frame.
- colorButtonYInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Color button for Y clipping plane frame.
- colorButtonZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Color button for Z clipping plane frame.
- colorButtonZInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Color button for Z clipping plane frame.
- colorChanged(Color) - Method in interface gov.nih.mipav.model.structures.event.VOIListener
-
- colorChanged(Color) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.VOIHighlighter
-
- colorChanged(Color) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.VOIHighlighter
-
- colorChanged(Color) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.VOIHighlighter
-
- colorChanged(Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- colorChannelPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
for processing color images
- colorChannelPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
DOCUMENT ME!
- colorChannelPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- colorChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- colorChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
color chooser to select text color.
- colorChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- colorChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- colorChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- colorChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- colorChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Internal dialog box for selecting VOI color
- colorChooser - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
ColorChooser for changing graph colors.
- colorChooser - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Color chooser dialog.
- colorChooser - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Color choose dialog reference.
- colorChooser - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Color chooser dialog.
- colorChooser - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Color chooser dialog.
- colorChooser - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Color chooser for when the user wants to change the color of the surface.
- colorChooser - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Color chooser dialog.
- colorChooser - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Color chooser when the user changes the color of the surface.
- colorChooser - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Color chooser dialog.
- colorChooser - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Color chooser dialog.
- colorChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
Color chooser dialog.
- colorChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Reference to the color chooser.
- colorChooser - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- colorChooser - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Reference to the color chooser.
- colorChooser - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Color chooser to use when selecting paint color.
- colorChooser - Variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
The LUT color chooser.
- colorcount - Variable in class gov.nih.mipav.model.file.libjpeg.box
-
- colorData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline.ColorInterpolation
-
- colorDialog - Variable in class gov.nih.mipav.view.ViewJColorChooser
-
Main color dialog for display
- colorDialog - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- colorDomain - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo.ChannelComponent
-
- ColorEncoding(int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorEncoding
-
- colorFactor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
1 for black and white, 4 for color.
- colorFactor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
1 for black and white, 4 for color.
- colorFactor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
1 for black and white, 4 for color.
- colorFactor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
1 for black and white, 4 for color.
- colorFactor - Variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
- colorFactor - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
1 for black and white, 4 for color.
- colorFactor - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
- colorFactor - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- colorFactor - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
When the image is a color image, the colorFactor is set to 4, otherwise it defaults to 1.
- colorFactor - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceValue
-
DOCUMENT ME!
- colorFactor - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- colorFilterType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Either COMPONENT_FILTER, VECTOR_MAGNITUDE_FILTER, VECTOR_DIRECTION_FILTER, or ADAPTIVE_TRUNCATED_VECTOR_MEDIAN_FILTER
For a vector filter the new red, green, and blue will all come from the same pixel.
- colorFilterType - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
DOCUMENT ME!
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
- colorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
DOCUMENT ME!
- colorGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- colorHistogramBox - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- ColorIcon - Class in gov.nih.mipav.view
-
This is an icon which is a block of color with bounds specified in the constructor.
- ColorIcon() - Constructor for class gov.nih.mipav.view.ColorIcon
-
Constructor Makes a color icon with the default color of gray and default width and height values of 50 and 15,
respectively.
- ColorIcon(Color, int, int) - Constructor for class gov.nih.mipav.view.ColorIcon
-
Constructor Makes a color icon with the specified color, width, and height.
- colorIm_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgImage
-
- colorImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Flag to indicate if the source image is color.
- colorindex8 - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- colorindex9to12 - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- colorInter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- ColorInterpolation(double[][][][]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBSpline.ColorInterpolation
-
- colorization - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- colorLabel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Color label.
- colorLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The color button label.
- colorLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Burning point color label.
- colorLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Color label.
- colorLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The color button label.
- ColorListener() - Constructor for class gov.nih.mipav.view.ViewJFrameGraph.ColorListener
-
- colormap8 - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- colormap9to12 - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- colorMapA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- colorMapB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- colorMapGMA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- colorMapGMB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- ColorMapImageName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- ColormapLabel(String, ContourPlot.ColorMap, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Legend.ColormapLabel
-
- ColormapLabel(String, ContourPlot.ColorMap, boolean, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Legend.ColormapLabel
-
- ColormapLabel(String, ContourPlot.ColorMap, boolean, int, double[], String[]) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Legend.ColormapLabel
-
- colormapLabels - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- colorMask - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Color flags.
- colorMask - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Color flags.
- colorMask - Variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Color flags.
- colorMask(libdt.Mat[], libdt.Mat[], libdt.Mat, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- colorMax - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
- colorNode - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Current Node to color.
- colorOf(SoftwareMaterial, SoftwareVertexProperty, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Compute the contribution of color from this light on the specified material with specified vertex properties.
- colorOf(SoftwareMaterial, SoftwareVertexProperty, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightAmbient
-
Compute the contribution of color from this light on the specified material with specified vertex properties.
- colorOf(SoftwareMaterial, SoftwareVertexProperty, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
Compute the contribution of color from this light on the specified material with specified vertex properties.
- colorOf(SoftwareMaterial, SoftwareVertexProperty, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Compute the contribution of color from this light on the specified material with specified vertex properties.
- colorOf(SoftwareMaterial, SoftwareVertexProperty, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Compute the contribution of color from this light on the specified material with specified vertex properties.
- ColorOperations() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.ColorOperations
-
- colorPaintButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Button for changing the color of the paint.
- colorPaintButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The button used to select the color of the paint used.
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
DOCUMENT ME!
- colorPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- colorPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- colorParametersA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- colorParametersB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- colorRangePanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- colorRangePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- colorRangeSlider - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
various sliders in dialog *
- colorRangeSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
various sliders in dialog *
- colorRangeTextField - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
textfields *
- colorRangeTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
textfields *
- colors - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.SimpleColorMap
-
- colors - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- colors - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxFrame
-
Save the colors (typically the same for all vertices )of the bounding box.
- colors - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
Color - can change if user chooses different one.
- colors - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- colors - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- colors3f - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Holds colors for vertices.
- colorScheme - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- colorScheme - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- ColorScheme(int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
Constructor for defining a new color scheme.
- ColorScheme(Color, Color, Color, Color, Color, Color) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
Constructor for defining a new color scheme.
- colorSegmentInRGB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- colorSegmentInRGB - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- colorSpace - Variable in class gov.nih.mipav.model.file.FileSVS
-
- colorSpace - Variable in class gov.nih.mipav.model.file.FileTiff
-
- colorSpaceGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- ColorSpaceType(long) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorSpaceType
-
- colorSpacing - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- colorsPresent - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- colorsPresent - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- colorsPresent - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- colorsPresent - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- colorsPresent - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Number of colors present.
- colorTable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- colorText - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- colorToString(Color) - Method in class gov.nih.mipav.view.ShortCutted
-
Converts color to string.
- colorTrigger - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- colorUsed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
- colorVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
The current color of the selected VOI
- colorWeighting - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
- colorWeighting - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- colorWheel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Color Wheels *
- colorWheel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Color Wheels *
- ColorWheel - Class in gov.nih.mipav.view
-
- ColorWheel(String, int) - Constructor for class gov.nih.mipav.view.ColorWheel
-
constructor
- colorWheelChoicesPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- colorWheelChoicesPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- colorWheelComboBox - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
color wheel choices combo box *
- colorWheelComboBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
color wheel choices combo box *
- colorWheelPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- colorWheelPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- colPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- COLPR - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- colRegFrame - Variable in class gov.nih.mipav.view.JFrameHistogram
-
reference to the colocalization frame for updatng the image.
- colRegFrame - Variable in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
DOCUMENT ME!
- cols - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowBlockStructure
-
- cols - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CRSMatrix
-
- cols - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- cols - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- COLSC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- colSpliterator() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Creates a Spliterator that guarantees that each split will
at least cover an entire column of the Img.
- ColSpliterator(int, int, int, int, Supplier<P>) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
Creates a new RowSpliterator for iterating the pixels in the specified area.
- colText - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- column - Variable in class gov.nih.mipav.model.structures.TableSorter.Directive
-
DOCUMENT ME!
- Column(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- column_bounds_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- columnButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- columnComparators - Variable in class gov.nih.mipav.model.structures.TableSorter
-
- columnDerivativeMask5By5(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- columnDerivativeMask7By7(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- columnKeyTable - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- columnNames - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
- columnNames - Variable in class gov.nih.mipav.view.DICOMDisplayer
-
DOCUMENT ME!
- columnNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- columns - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
- columns - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- columns - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- Columns() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- ColumnVectorX - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- ColumnVectorY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- ColumnVectorZ - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- COM - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
JPEG comment segment identifier for comments.
- COM - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- COM - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- comAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- comAlgoRGB - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- combine(Point3f[], Point3f[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- combined2D3D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- combined2D3D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- Combined2ShapeParam(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Converts combined model parameters to shape parameters.
- Combined2TexParam(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Converts combined model parameters to texture parameters.
- combinedCRC - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- CombinedMovie(String, int, double, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
Generates movies files showing each mode of combined shape and texture
variation by adjusting the each mode of variation to:
+/- 'range' times
in 2*'step'+1 steps.
- CombinedPCA() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the combined PCA.
- comboBox2or3D - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
GUI components.
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- comboBoxCostFunct - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- comboBoxDOF - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- comboBoxDOF - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- comboBoxDOF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- comboBoxDOF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- comboBoxDOF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- comboBoxDOF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- comboBoxDOF - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- comboBoxDTI_Algorithm - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
menu for selecting dti algorithm:
- comboBoxEdge - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
DOCUMENT ME!
- comboBoxes - Variable in class gov.nih.mipav.view.dialogs.JDialogSelectChannelSequence
-
DOCUMENT ME!
- comboBoxFilterType - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- comboBoxFilterType - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxFilterType - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- comboBoxFilterType - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- comboBoxHeightDiv - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- comboBoxHigh - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Combo box with image names for choosing test image.
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Combo box with image names for choosing test image.
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Combo box with image names for choosing base image.
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Combo box with image names for choosing base image.
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
DOCUMENT ME!
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogVABRA
-
drop-down box for selecting available images
- comboBoxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- comboBoxImage - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- comboBoxImageA - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- comboBoxImageB - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- comboBoxImageBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- comboBoxImageGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- comboBoxImageRed - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- comboBoxInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- comboBoxInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- comboBoxInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
DOCUMENT ME!
- comboBoxInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- comboBoxInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- comboBoxInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- comboBoxInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- comboBoxInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- comboBoxInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Used for choosing interpolation.
- comboBoxInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- comboBoxInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
DOCUMENT ME!
- comboBoxInterp - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- comboBoxInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- comboBoxInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- comboBoxInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- comboBoxInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- comboBoxInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- comboBoxInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- comboBoxInterpolation - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- comboBoxKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- comboBoxKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- comboBoxKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- comboBoxKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- comboBoxKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- comboBoxKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- comboBoxKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- comboBoxKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- comboBoxKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- comboBoxKernelClose - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- comboBoxKernelErode - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- comboBoxKernelOpen - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- comboBoxKernelShape - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- comboBoxKernelShape - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- comboBoxKernelShape - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- comboBoxKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- comboBoxKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
- comboBoxKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
DOCUMENT ME!
- comboBoxKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- comboBoxKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- comboBoxKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- comboBoxKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogSobel
-
- comboBoxLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- comboBoxLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- comboBoxLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxLow - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- comboBoxMaximumSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- comboBoxModeX - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxModeY - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxModeZ - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxName - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- comboBoxName - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- comboBoxName - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- comboBoxNameX - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxNameY - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxNameZ - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxOperator - Variable in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
combo box of operations
- comboBoxOperator - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
operator combo box
- comboBoxOperator - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- comboBoxOperator - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- comboBoxOpt - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- comboBoxOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- comboBoxOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- comboBoxOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- comboBoxOrderX - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxOrderY - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxOrderZ - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxOrientX - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- comboBoxOrientY - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- comboBoxOrientZ - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- comboBoxOriginal - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
DOCUMENT ME!
- ComboBoxRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMipavOptions.ComboBoxRenderer
-
Creates a new ComboBoxRenderer object.
- ComboBoxRenderer2() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMipavOptions.ComboBoxRenderer2
-
Creates a new ComboBoxRenderer2 object.
- comboBoxSaveImgMethod - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Whether to save .img files as selected by dialog or always as analyze, interfile, or nifti.
- comboBoxSaveMethod - Variable in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Whether to save as selected by dialog or always as analyze, interfile, or nifti.
- comboBoxSaveMethod - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMincVersionChoice
-
Whether to save as selected by dialog or always as analyze, interfile, or nifti.
- comboBoxSaveMncMethod - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Whether to save .mnc files as selected by dialog or always as minc1 or minc2.
- comboBoxScaleMax - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- comboBoxSearchAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- comboBoxSearchAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
- comboBoxSearchAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- comboBoxSearchAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
- comboBoxSearchAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- comboBoxStartLevel - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- comboBoxSuppression - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- comboBoxTalTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- comboBoxTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- comboBoxUnitOfMeasure1 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- comboBoxUnitOfMeasure1 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- comboBoxUnitOfMeasure2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- comboBoxUnitOfMeasure3 - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- comboBoxUnitOfMeasure3 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- comboBoxUnitOfMeasure3 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- comboBoxUnitOfMeasure4 - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- comboBoxUnitOfMeasure4 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- comboBoxUnitOfMeasure4 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- comboBoxUnitOfMeasure5 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- comboBoxUnitOfMeasure5 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- comboBoxWidthDiv - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- comboConnectType - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- comboDilateDimType - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- comboErodeDimType - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- comboInterpType - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- comboLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The polygon mode combo box label.
- comboLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The polygon mode combo box label.
- comboOutput - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- comboRegType - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- comboResType - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- comboStructureType - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- comboTarget - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- comboTemplate - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- comboX - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- comboY - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- comboZ - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- CombVert(CVisDMatrix, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Composes the matrix of Top and Bottom (on top of each other).
- comelp(double) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Ported from Computation of Special Functions by Shanjie Zhang and Jianming Jin Computes complete first and second
elliptic integrals with a real modulus 0 <= mod <= 1, mod is the modulus.
- commaButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- command - Variable in enum gov.nih.mipav.view.Argument.InstanceArgument
-
The case-independent form of the command
- command - Variable in enum gov.nih.mipav.view.Argument.StaticArgument
-
The case-independent form of the command
- COMMAND - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
This field distinguishes the DIMSE-C operation conveyed by this message.
- COMMAND_BOGUS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- COMMAND_CEchoRQ - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- COMMAND_CEchoRSP - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- COMMAND_CFindCancelRQ - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- COMMAND_CFindRQ - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- COMMAND_CFindRSP - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- COMMAND_CMoveCancelRQ - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- COMMAND_CMoveRQ - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- COMMAND_CMoveRSP - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- COMMAND_CStoreRQ - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- COMMAND_CStoreRSP - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- CommandLineParser - Interface in gov.nih.mipav.view
-
A MIPAV command line parser reads the arguments provided to MIPAV at the command line.
- comment - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- comment - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
comment
- comment(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- comment(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- COMMENT_CHAR - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
- comments - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- comments - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- comments - Variable in class gov.nih.mipav.model.structures.VOI
-
- comments - Variable in class gov.nih.mipav.model.structures.VOIText
-
- commentStr - Variable in class gov.nih.mipav.model.file.FileInfoTMG
-
DOCUMENT ME!
- commitCount - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- commitGrow(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Tells the dialog to commit the current set of region grows and prepare for another set region grows, or the
closing of the dialog.
- commitMask(int, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Replace intensities in the image using painted mask.
- commitMask(int, boolean, boolean, Vector<Integer>, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Replace intensities in the image using painted mask.
- commitMask(int, boolean, boolean, Vector<Integer>, boolean, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Replace intensities in the image using painted mask.
- commitMask(ModelImage, boolean, boolean, Vector<Integer>, boolean, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Replace intensities in the image using painted mask.
- commitPaintToMask() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Creates a new short image from the paint mask.
- commitPaintToMask(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Converts the paint to a mask.
- commitPaintToUbyteMask() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Creates a new ubyte image from the paint mask.
- common - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting.mergeItem
-
- CommonEdge(OctNode, int, OctNode, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- commonMapping - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
If true, map all colors based on image min and max.
- commonMapping - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
If true, map all colors based on image min and max.
- commonMapping - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
- commonMapping - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
- CommonOptionsAreValid(String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- commonSet(String, String) - Static method in class gov.nih.mipav.model.file.FilenameSorter
-
This method determines whether two String objects have the same characters up to the beginning index of the last
numerical sequence of numerals.
- comp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- comp - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- comp - Variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.JPanelListSelection
-
DOCUMENT ME!
- comp - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
- COMP_A - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Component tag indicator.
- COMP_A - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Component tag indicator.
- COMP_B - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Component tag indicator.
- COMP_B - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Component tag indicator.
- COMP_GM_A - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Component tag indicator.
- COMP_GM_A - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Component tag indicator.
- COMP_GM_B - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Component tag indicator.
- COMP_GM_B - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Component tag indicator.
- comp_info - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- comp_t - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Temporary values for Tile parts, initialised in pi_create_encode
- COMPACT - gov.nih.mipav.model.algorithms.libdt.Verbose_mode
-
- compact_support - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.BaseWavelet
-
- compactify() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Use exactly the amount of array storage for the current elements in the set.
- compactify() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Use exactly the amount of array storage for the current elements in the set.
- compactify() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Use exactly the amount of array storage for the current elements in the set.
- compactify() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Use exactly the amount of array storage for the current elements in the set.
- compactness - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ShapeFactor
-
- compactness - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ShapeFactor
-
- compactness - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ShapeFactor
-
- compactness - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ShapeFactor
-
- compactness - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ShapeFactor
-
- compactness - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ShapeFactor
-
- compactness - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ShapeFactor
-
- compactness - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ShapeFactor
-
- COMPARABLE_COMPARATOR - Static variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- compare(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- compare(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NoiseLevel.rowComparator
-
DOCUMENT ME!
- compare(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SIFT.ikeysComparator
-
DOCUMENT ME!
- compare(AlgorithmEfficientWatershed.indexValueItem, AlgorithmEfficientWatershed.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed.indexValueComparator
-
DOCUMENT ME!
- compare(AlgorithmFRAP.distanceIntensityItem, AlgorithmFRAP.distanceIntensityItem) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.distanceIntensityComparator
-
DOCUMENT ME!
- compare(AlgorithmGraphBasedSegmentation.edge, AlgorithmGraphBasedSegmentation.edge) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edgeComparator
-
DOCUMENT ME!
- compare(AlgorithmHillClimbingWatershed.indexValueItem, AlgorithmHillClimbingWatershed.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed.indexValueComparator
-
DOCUMENT ME!
- compare(AlgorithmKMeans.positionWeightItem, AlgorithmKMeans.positionWeightItem) - Method in class gov.nih.mipav.model.algorithms.AlgorithmKMeans.positionWeightComparator
-
DOCUMENT ME!
- compare(AlgorithmLLE.distanceIndexItem, AlgorithmLLE.distanceIndexItem) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLLE.distanceIndexComparator
-
DOCUMENT ME!
- compare(AlgorithmScaleSaliency.sixItems, AlgorithmScaleSaliency.sixItems) - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItemsComparator
-
DOCUMENT ME!
- compare(AlgorithmSequentialScanningWatershed.indexValueItem, AlgorithmSequentialScanningWatershed.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed.indexValueComparator
-
DOCUMENT ME!
- compare(AlgorithmShortestPathWatershed.indexValueItem, AlgorithmShortestPathWatershed.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed.indexValueComparator
-
DOCUMENT ME!
- compare(AlgorithmSplitAndMergeWatershed.indexValueItem, AlgorithmSplitAndMergeWatershed.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed.indexValueComparator
-
DOCUMENT ME!
- compare(AlgorithmUnionFindWatershed.indexValueItem, AlgorithmUnionFindWatershed.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed.indexValueComparator
-
DOCUMENT ME!
- compare(CeresSolver.Cell, CeresSolver.Cell) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CellLessThan
-
- compare(CeresSolver.CompressedRowJacobianWriter.indexintintItem, CeresSolver.CompressedRowJacobianWriter.indexintintItem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintComparator
-
- compare(CeresSolver.indexValueItem<Vertex>, CeresSolver.indexValueItem<Vertex>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.VertexTotalOrdering
-
- compare(CeresSolver2.indexArrayArrayItem, CeresSolver2.indexArrayArrayItem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayComparator
-
- compare(CeresSolver2.indexArrayItem, CeresSolver2.indexArrayItem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayComparator
-
- compare(CeresSolver2.indexIntegerdoubleArrayItem, CeresSolver2.indexIntegerdoubleArrayItem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayComparator
-
- compare(CeresSolver2.indexRowColItem, CeresSolver2.indexRowColItem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.RowColLessThanComparator
-
- compare(CeresSolver2.weighted_edgesItem, CeresSolver2.weighted_edgesItem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesComparator
-
- compare(AlgorithmHurstIndex.DistanceIntensity, AlgorithmHurstIndex.DistanceIntensity) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex.DistanceIntensityComparator
-
- compare(AlgorithmRiceWaveletTools.EigenvalueComplex, AlgorithmRiceWaveletTools.EigenvalueComplex) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools.EigenvalueComplexComparator
-
- compare(BiorthogonalWavelets.realImaginaryItem, BiorthogonalWavelets.realImaginaryItem) - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets.realImaginaryComparator
-
DOCUMENT ME!
- compare(BM3D.indexValueItem, BM3D.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D.indexValueComparator
-
DOCUMENT ME!
- compare(PseudoPolarFourierTransform.indexValueItem, PseudoPolarFourierTransform.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform.indexValueComparator
-
DOCUMENT ME!
- compare(indexValue, indexValue) - Method in class gov.nih.mipav.model.algorithms.indexValueComparator
-
DOCUMENT ME!
- compare(libdt.indexValueItem, libdt.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.libdt.indexValueComparator
-
Sorts in descending order
- compare(NelderMead.point_t, NelderMead.point_t) - Method in class gov.nih.mipav.model.algorithms.NelderMead.pointComparator
-
DOCUMENT ME!
- compare(SchwarzChristoffelMapping.indexValueItem, SchwarzChristoffelMapping.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.indexValueComparator
-
DOCUMENT ME!
- compare(SIFTImageSimilarity.DMatch, SIFTImageSimilarity.DMatch) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatchComparator
-
- compare(SIFTImageSimilarity.KeyPoint, SIFTImageSimilarity.KeyPoint) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeypointComparator
-
- compare(StochasticForests.indexValueItem, StochasticForests.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.indexValueComparator
-
- compare(StochasticForests.indexValueItem, StochasticForests.indexValueItem) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.indexValueDescendingComparator
-
- compare(FileDicomKey, FileDicomKey) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CompareGroup
-
- compare(FileDicomKey, FileDicomKey) - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- compare(FileIO.LinkedNum, FileIO.LinkedNum) - Method in class gov.nih.mipav.model.file.FileIO.LinkedComparator
-
- compare(FileUtility.nameSliceItem, FileUtility.nameSliceItem) - Method in class gov.nih.mipav.model.file.FileUtility.nameSliceComparator
-
DOCUMENT ME!
- compare(FileVOI.VOISortItem, FileVOI.VOISortItem) - Method in class gov.nih.mipav.model.file.FileVOI.VOIComparator
-
DOCUMENT ME!
- compare(VOIContour.positionItem, VOIContour.positionItem) - Method in class gov.nih.mipav.model.structures.VOIContour.positionLowerComparator
-
DOCUMENT ME!
- compare(VOIContour.positionItem, VOIContour.positionItem) - Method in class gov.nih.mipav.model.structures.VOIContour.positionUpperComparator
-
DOCUMENT ME!
- compare(JDialogFuzzyConnectednessSegmentation.labelIndexItem, JDialogFuzzyConnectednessSegmentation.labelIndexItem) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation.labelIndexComparator
-
DOCUMENT ME!
- compare(JDialogPowerWatershed.labelIndexItem, JDialogPowerWatershed.labelIndexItem) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed.labelIndexComparator
-
DOCUMENT ME!
- compare(Object, Object) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile.InstanceNumberComparator
-
- compare(Object, Object) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile.InstanceNumberVolComparator
-
- compare(Object, Object) - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.TagComparator
-
DOCUMENT ME!
- compare(Object, Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Site
-
- compare(Object, Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- compare(Object, Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.StartingPolynomial
-
- compare(Object, Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.PolarPoint
-
- compare(Object, Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.PolarPoint
-
- compare(String, String) - Method in class gov.nih.mipav.model.file.FilenameSorter
-
- compare(String, String) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.StringUtil
-
- compare(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.NumberComparator
-
- compare(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaFileComparator
-
DOCUMENT ME!
- compare(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.StringVecComparator
-
DOCUMENT ME!
- compare(String, String) - Method in class gov.nih.mipav.view.ViewImageDirectory.ImageNameComparator
-
DOCUMENT ME!
- compare(Vertex, Vertex) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.VertexDegreeLessThan
-
- COMPARE_NAME - Static variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.TagComparator
-
DOCUMENT ME!
- COMPARE_NAME_REV - Static variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.TagComparator
-
DOCUMENT ME!
- COMPARE_TAG - Static variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.TagComparator
-
DOCUMENT ME!
- COMPARE_TAG_REV - Static variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.TagComparator
-
DOCUMENT ME!
- CompareBackwardDepths(Object, Object) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- CompareBackwardPointerDepths(Object, Object) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- compareCutRes(int[][], int[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- compareDimensions(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Compares the dimensionality of two images.
- compareDimensions(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Compares the dimensionality of two images.
- CompareEulerToAngleAxis(double[], double[], String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompareEvaluations(int, int, double, double[], double[], double[][], double, double[], double[], double[][], String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompareEvaluations(int, int, double, double[], double[], double[], double, double[], double[], double[], String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompareForwardDepths(Object, Object) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- CompareForwardPointerDepths(Object, Object) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- CompareGroup() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CompareGroup
-
- CompareMatrices(CeresSolver.SparseMatrix, CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- CompareMatrices(CeresSolver.SparseMatrix, CeresSolver.SparseMatrix, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- comparePolygon(poly, poly, double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- compareTo(AlgorithmConstrainedELSUNCOAR3D.MatrixListItem) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
-
Necessary to implement so that list may be sorted.
- compareTo(AlgorithmConstrainedOAR3D.MatrixListItem) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D.MatrixListItem
-
Necessary to implement so that list may be sorted.
- compareTo(AlgorithmRegELSUNCOAR35D.MatrixListItem) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D.MatrixListItem
-
Necessary to implement so that list may be sorted.
- compareTo(AlgorithmRegOAR35D.MatrixListItem) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D.MatrixListItem
-
Necessary to implement so that list may be sorted.
- compareTo(MatrixListItem) - Method in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Necessary to implement so that list may be sorted.
- compareTo(RegistrationUtilities.IndexedFloat) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities.IndexedFloat
-
- compareTo(FileDicomKey) - Method in class gov.nih.mipav.model.file.FileDicomKey
-
- compareTo(FileDicomKey) - Method in class gov.nih.mipav.model.file.PrivateFileDicomKey
-
- compareTo(FileDicomTag) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
- compareTo(MetadataExtractor.Rational) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
- compareTo(SliceSet) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.SliceSet
-
- compareTo(Object) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- compareTo(Object) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- compareTo(Object) - Method in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Implementation required by the Comparable interface.
- compareTo(Object) - Method in class gov.nih.mipav.model.structures.TableSorter.Row
-
DOCUMENT ME!
- compareTo(Object) - Method in class gov.nih.mipav.util.DoubleDouble
-
Compares two DoubleDouble objects numerically.
- compareTo(Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Entry
-
- compareTo(Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- compareTo(Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags.EdgeSorter
-
- compareTo(Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perImageCost
-
- compareTo(Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perShapeCost
-
- compareToLastNumericalSequence(String, String) - Static method in class gov.nih.mipav.model.file.FilenameSorter
-
The purpose of this method is to compare two filename strings on the basis of their last numerical sequence.
- compareType - Variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.TagComparator
-
DOCUMENT ME!
- compC(int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- compD(int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- compData - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Buffer used to hold image data.
- compE - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
End value, initialised in pi_initialise_encode
- compileReport(String, String, String, String, String, String, String) - Static method in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Pulls system specifications from the user's computer and then compiles all appropriate fields together into a
text document
- compilerVersion - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
java's version
- compImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- compins - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- compins - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- complementaryModulusUsed - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
k is the modulus k', the complementary modulus = sqrt(1 - k*k).
- complete - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- complete - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
When we're done drawing the rectangle, change the color.
- complete() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- completed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
This flag will be set to true when the algorithm has completed.
- completed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- completed_extra_passes - Variable in class gov.nih.mipav.model.file.libjpeg.cdjpeg_progress_mgr
-
- completed_passes - Variable in class gov.nih.mipav.model.file.libjpeg.cdjpeg_progress_mgr
-
- completed_passes - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_progress_mgr
-
- CompleteRenderer() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- COMPLEX - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type complex type floats (2 x 64 bits per voxel).
- COMPLEX - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of complex type floats (2 x 64 bits per voxel).
- complex_add(QuarticEquation.complex_t, QuarticEquation.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- complex_add(QuarticEquationEP.complex_t, QuarticEquationEP.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- complex_cwt - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.ContinuousWavelet
-
- complex_div(QuarticEquation.complex_t, QuarticEquation.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- complex_div(QuarticEquationEP.complex_t, QuarticEquationEP.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- complex_eq(QuarticEquation.complex_t, QuarticEquation.complex_t) - Static method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- complex_eq(QuarticEquationEP.complex_t, QuarticEquationEP.complex_t) - Static method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- complex_from_real(double) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- complex_from_real(DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- complex_inverse(QuarticEquation.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- complex_inverse(QuarticEquationEP.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- complex_mult(QuarticEquation.complex_t, QuarticEquation.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- complex_mult(QuarticEquationEP.complex_t, QuarticEquationEP.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- complex_mult_real(double, QuarticEquation.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- complex_mult_real(DoubleDouble, QuarticEquationEP.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- complex_negate(QuarticEquation.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- complex_negate(QuarticEquationEP.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- complex_pow_real(QuarticEquation.complex_t, double) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- complex_pow_real(QuarticEquationEP.complex_t, DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- COMPLEX_ROOTS - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- COMPLEX_ROOTS - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- complex_sqr_norm(QuarticEquation.complex_t) - Static method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- complex_sqr_norm(QuarticEquationEP.complex_t) - Static method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- complex_sqrt(QuarticEquation.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- complex_sqrt(QuarticEquationEP.complex_t) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- COMPLEX_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type complex (float).
- complex_t() - Constructor for class gov.nih.mipav.model.algorithms.QuarticEquation.complex_t
-
- complex_t() - Constructor for class gov.nih.mipav.model.algorithms.QuarticEquationEP.complex_t
-
- COMPLEX_VERSION - Static variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- COMPLEX_VERSION - Static variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
- COMPLEX_VERSION - Static variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- COMPLEX_VERSION - Static variable in class gov.nih.mipav.model.algorithms.Psi
-
- complexArgument() - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
This is a port of subroutine HYGFZ from Computation of Special Functions by Shanjie Zhang and Jianming Jin, pp.
380-385.
- complexArgument() - Method in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
From Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables edited by Milton
Abramowitz and Irene A.
- ComplexDisplay(String, int) - Constructor for enum gov.nih.mipav.view.Preferences.ComplexDisplay
-
- complexDisplayChoices - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
The available choices for displaying the numerical values of complex data
- complexFactor - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
1 for real images, 2 for complex.
- complexInverse - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
- complexInverse - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
- complexInverse - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- complexInverse - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Whether a complex inverse FFT should be computed
- complexInverseCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Whether the inverse FFT should return a complex image (appropriate when only when source image is complex)
- ComplexLinearEquations - Class in gov.nih.mipav.model.structures.jama
-
- ComplexLinearEquations() - Constructor for class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
Creates a new ComplexLinearEquations object.
- complexPsi() - Method in class gov.nih.mipav.model.algorithms.Psi
-
This code is a port of the FORTRAN routine CPSI from the book Computation of
Special Functions by Shanjie Zhang and Jianming Jin, John Wiley & Sons, Inc.,
1996, pp. 59-60.
- complexTestFirstKind() - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- compLUT - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Lookup table of image.
- compno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
component that identify the packet
- compno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
component index
- compno0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Resolution num start, Component num start, given by POC
- compno1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Layer num end,Resolution num end, Component num end, given by POC
- component - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityThreshold
-
DOCUMENT ME!
- component - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- COMPONENT_FILTER - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
- COMPONENT_FILTER - Static variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- component_id - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- component_index - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- component_needed - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- component0Precision - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- component1Precision - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- component2Precision - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- componentButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- componentDim - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
The outer dimension of the histogram component we will be drawing.
- componentDim - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The outer dimension of the histogram component we will be drawing.
- componentHidden(ComponentEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
- componentHidden(ComponentEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.FlipAngleChangeListener
-
- componentHidden(ComponentEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- componentHidden(ComponentEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
componentHidden.
- componentHidden(ComponentEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- componentHidden(ComponentEvent) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Unchanged.
- componentHidden(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Does nothing.
- componentHidden(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- componentHidden(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- componentHidden(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJSlider.ViewJSliderResizeTool
-
- componentHistogram - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Histogram component reference inside the JPanelHistoLUT.
- componentHistogram - Variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
The histogram LUT of the image.
- componentId - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Needed for color images.
- componentImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
component image *
- componentImage - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
ViewJComponentDTIImage *
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Component image which this dialog belongs to.
- componentImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
component image *
- componentImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
ViewJComponentDTIImage *
- componentImage - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
with complex images.
- componentImage - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
with complex images.
- componentImage - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Object where DICOM image, ... is converted and displayed as a Java image
- componentImage - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Display of the MIP image.
- componentImage - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- componentImage - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
for both images displayed together.
- componentImage1 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- componentImage2 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- componentImage2 - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- componentImageA - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
for images to be displayed separately.
- componentImageB - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- componentImageColEM - Variable in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
DOCUMENT ME!
- componentImageColReg - Variable in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
DOCUMENT ME!
- componentImageDicom - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- componentImageVector - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- componentImageXY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Main component found in this frame.
- componentImageXY - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Component holding the texture of the XY plane image.
- componentIndex - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Needed for color images.
- componentLUT - Variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Lookup table of image.
- componentMoved(ComponentEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Moves the currentRectangle to the location of the window on the screen to maintain the correct image
- componentMoved(ComponentEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.FlipAngleChangeListener
-
- componentMoved(ComponentEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- componentMoved(ComponentEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
componentMoved.
- componentMoved(ComponentEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- componentMoved(ComponentEvent) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Unchanged.
- componentMoved(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Does nothing.
- componentMoved(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- componentMoved(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- componentMoved(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJSlider.ViewJSliderResizeTool
-
- componentOpacityA - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Reference to component opacity control A.
- componentOpacityA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Reference to compoment opacity control A.
- componentOpacityB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Reference to component opacity control B.
- componentOpacityB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Reference to compoment opacity control B.
- componentOpacityGM_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Reference to component opacity control A GM Rescale.
- componentOpacityGM_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Reference to compoment opacity control A GM Rescale.
- componentOpacityGM_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Reference to component opacity control B GM Rescale.
- componentOpacityGM_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Reference to compoment opacity control B GM Rescale.
- componentPostImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Resizes the currentRectangle to the dimensions of the changed window
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.FlipAngleChangeListener
-
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
componentResized.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Method called when a component resize event is generated.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Method called when a component resize event is generated.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Method called when a component resize event is generated.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Tells the component image that the size of the image panel has changed, then repaints the component image.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Resizes frame and all components.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Resizes frame and all components.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Does nothing.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Resizes frame and all components.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Resizes frame and all components.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Does not allow component to be smaller than MINIMUM_SIZE.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Resets the bounds of component graph if the window is resized.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Resizes frame and all components.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Method called when a component resize event is generated.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Resizes frame and all components.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Resizes frame and all components.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Resizes frame and all components.
- componentResized(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJSlider.ViewJSliderResizeTool
-
- componentShown(ComponentEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
- componentShown(ComponentEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.FlipAngleChangeListener
-
- componentShown(ComponentEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- componentShown(ComponentEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
componentShown.
- componentShown(ComponentEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- componentShown(ComponentEvent) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Unchanged.
- componentShown(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Does nothing.
- componentShown(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- componentShown(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- componentShown(ComponentEvent) - Method in class gov.nih.mipav.view.ViewJSlider.ViewJSliderResizeTool
-
- componentsRequired - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- componentsRequired - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- componentVolImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Volume image object.
- componentY - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- componentY - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- componentY - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- componentY - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- componentY - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- ComposedLoss(CeresSolver.LossFunction, CeresSolver.Ownership, CeresSolver.LossFunction, CeresSolver.Ownership) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ComposedLoss
-
- composeString(byte[], byte) - Method in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
Append newString to the end of oldString.
- composite(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
The top level rendering call.
- compositeMatrix - Variable in class gov.nih.mipav.model.structures.MatrixHolder
-
The composite matrix formed by multiplying (in reverse order) all stored matrices.
- compositeMIP_DRR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- compound - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Panel Border view.
- compound - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Panel Border view.
- CompoundException(String) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.CompoundException
-
- CompoundException(String, Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.CompoundException
-
- CompoundException(Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.CompoundException
-
- CompoundExceptionTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.CompoundExceptionTest
-
- compRanks(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- compress - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
120 image compression type for allocation.
- compressed - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Indicates if compression is used.
- compressed - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Indicates if compression is used.
- compressed - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- CompressedColumnScalarMatrixToBlockMatrix(int[], int[], Vector<Integer>, Vector<Integer>, Vector<Integer>, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- compressedData - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- compressedDataSize - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- compressedFile - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- CompressedList() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CompressedList
-
- CompressedList(int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CompressedList
-
- CompressedRowBlockStructure() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowBlockStructure
-
- CompressedRowJacobianWriter(CeresSolver.EvaluatorOptions, CeresSolver.Program) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter
-
- CompressedRowSparseMatrix() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- CompressedRowSparseMatrix(double[], int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- CompressedRowSparseMatrix(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- CompressedRowSparseMatrixCreateBlockDiagonalMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixFromTripletSparseMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixFromTripletSparseMatrixTransposed() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixRandomMatrixOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions
-
- CompressedRowSparseMatrixSetUp(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixTestAppendAndDeleteBlockDiagonalMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixTestAppendRows() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixTestColumnNorm() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixTestDeleteRows() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixTestLeftMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixTestRightMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixTestScale() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixTestToCRSMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixTestToDenseMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CompressedRowSparseMatrixTranspose() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- compressedStreamEOF() - Static method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- compressedTransformImage - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- compressedTransformImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- compression - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDICOMtoAVI
-
DOCUMENT ME!
- compression - Variable in class gov.nih.mipav.model.file.FileAvi
-
0 for RGB 24 bit per pixel uncompressed 1 for RLE 8 bit per pixel compressed 1296126531 for Microsoft video 1
compression.
- compression - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- compression - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- compression - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- compression - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
20 0 as is 1 retangular 2 packed 3 compressed 4 compressed and packed.
- compression - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Data.BinExternal
-
- compression - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF.BinExternal
-
- compression - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
DOCUMENT ME!
- compression - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- compression - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- Compression(int, int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
- COMPRESSION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- COMPRESSION - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- COMPRESSION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
Compression: 1 = no compression 2 = modified huffman 3 = CCITT-T4(FAX3) 4 = CCITT-T6(FAX4) 5 = LZW 6 = old JPEG 7
= JPEG 8 or 32946 = zlib 32773 = packbits 32809 = thunderscan RLE. 34676 = SGI Log Luminance RLE 34677 = SGI Log
24-bit packed
- COMPRESSION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
Compression: 1 = no compression 2 = modified huffman 3 = CCITT-T4(FAX3) 4 = CCITT-T6(FAX4) 5 = LZW 6 = old JPEG 7
= JPEG 8 or 32946 = zlib 32773 = packbits 32809 = thunderscan RLE. 34676 = SGI Log Luminance RLE 34677 = SGI Log
24-bit packed
- COMPRESSION_BZIP2 - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Indicates bzip2 compression of an image.
- COMPRESSION_GZIP - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Indicates gzip compression of an image.
- COMPRESSION_NONE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Indicates no compression.
- COMPRESSION_ZIP - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Indicates zip compression of an image.
- compressionBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
Combo box to select compression.
- compressionBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
DOCUMENT ME!
- compressionBox - Variable in class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Combo box to select compression.
- compressionFactor - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- compressionFactor - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- compressionQuality - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- compressionText - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- compressionType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- compressionType - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Used to indicate if the raw data was also compression (0 = no, 1 = zip).
- compressionType - Variable in class gov.nih.mipav.model.file.FileRaw
-
DOCUMENT ME!
- compressionType - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- comps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_t
-
image components
- comps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
Components
- comps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tile_t
-
- comps - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- compS - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start value, initialised in pi_initialise_encode
- comps_in_scan - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- compsInScan - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Number of components in scan; 1 for black and white, 4 for color.
- compute() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.ParallelForEachExecutor
-
- compute(double) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- compute(double) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- Compute(Vector<double[]>, CeresSolver.ProblemImpl) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- compute_basis() - Method in class gov.nih.mipav.model.algorithms.LSCM.Homology
-
- compute_color(libjpeg.jpeg_decompress_struct, libjpeg.box, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- compute_constants(AlgorithmGaussianMixtureModelEM.ClassSig, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- compute_constants_col - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- compute_constants_first - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- compute_constants_indx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- compute_constants_y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- compute_edges(int[][], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- compute_residual2D(double[], double[], double[], double[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- compute_residual3D(double[], double[], double[], double[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- computeACPC - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- computeAdvection(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
Override this function to implement the desired advection for your
level-set evolver.
- computeAdvection(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour2
-
Compute the advection at pixel (x,y).
- computeAdvection(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
Override this function to implement the desired advection for your
level-set evolver.
- computeAdvection(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour3
-
Compute the advection at voxel (x,y,z).
- computeAggregateStats(libdt.Estats, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- computeAlphaCircle - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
GLSL computeAlpha function definition for the circle widgets:
- computeAlphaSquare - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
GLSL computeAlpha function definition for the square widgets:
- computeAlphaTriangle - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
GLSL computeAlpha function definition for the triangle widgets:
- ComputeAndCompareCovarianceBlocks(CeresSolver2.CovarianceOptions, double[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ComputeAndCompareCovarianceBlocksInTangentOrAmbientSpace(CeresSolver2.CovarianceOptions, boolean, double[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ComputeAndCompareCovarianceBlocksInTangentSpace(CeresSolver2.CovarianceOptions, double[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- computeAttenuation(float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Compute the attenuation factor as an inverse quadratic polynomial.
- computeAucSplit(double, double, double, double, double, double, int, Vector<Double>, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- computeBoundingBoxes() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- computeBSplineImage(float, float, float, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- ComputeCandidatePointAndEvaluateCost() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- ComputeCanonicalViewsClustering(CeresSolver2.CanonicalViewsClusteringOptions, CeresSolver.WeightedGraph<Integer>, Vector<Integer>, HashMap<Integer, Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- ComputeCauchyPoint(CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- computeCenter(ModelImage, int, boolean) - Static method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Calculate the center of the sphere / ellipsoid.
- ComputeCenter() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Compute the center of the surface.
- computeCentroids2D(float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
Determines the centroids of each cluster given fuzzy membership values.
- ComputeCentroids2D(float[], float[], float[], float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
ComputeCentroids2D - Determine the centroids of each cluster given fuzzy membership values.
- computeCentroids3D(float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
Determines the centroids of each cluster given fuzzy membership values.
- ComputeCentroids3D(float[], float[], float[], float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
ComputeCentroids3D - Determine the centroids of each cluster given fuzzy membership values.
- computeChildDeathCounts(int, int, Vector<Double>, int[], int[], int[], int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- computeClosestPoint - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
GLSL support function definition for the triangle widgets:
- ComputeClustering() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ComputeClustering(CeresSolver2.CanonicalViewsClusteringOptions, CeresSolver.WeightedGraph<Integer>, Vector<Integer>, HashMap<Integer, Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
-
- ComputeClusteringQualityDifference(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
-
- ComputeClusterMembership(Vector<Integer>, HashMap<Integer, Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
-
- computeConcordanceIndex(StochasticForests.Data, Vector<Double>, int, int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- computeConformalMapping() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
conformal mapping of mesh to plane and sphere, projection to cylinder.
- computeConformalMapping() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
conformal mapping of mesh to plane and sphere, projection to cylinder.
- computeContourBands(double[][], double[][], double[][], double, double, int, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Computes the contour bands from the grid samples of a bivariate function z(x,y).
- computeContourBands(double[][], double, double, int, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Computes the contour bands from the grid samples of a bivariate function z(x,y)
with implicit integer valued (x,y) = (i,j).
The resulting triangles are solutions to the equation { (x,y) | iso1 < z(x,y) < iso2 }
within the grid.
- computeContourLines(double[][], double[][], double[][], double, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Computes the contour lines from the grid samples of a bivariate function z(x,y).
- computeContourLines(double[][], double, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Computes the contour lines from the grid samples of a bivariate function z(x,y)
with implicit integer valued (x,y) = (i,j).
The resulting line segments are solutions to the equation { (x,y) | z(x,y)=iso }
within the grid.
- ComputeCovarianceSparsity(Vector<CeresSolver.Pair<double[], double[]>>, CeresSolver.ProblemImpl) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- ComputeCovarianceValues() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- ComputeCovarianceValuesUsingDenseSVD() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- computeCubicLagrangian(float, float, float, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- computeCurvature(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
Compute the product of length and curvature at the pixel (x,y).
- computeCurvature(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
Compute the product of length and mean curvature at the voxel (x,y,z).
- computeCurvatures() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Compute the curvatures at each vertex.
- computeCurvatureSpeed(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
Override this function to implement the desired curvature speed for
your level-set evolver.
- computeCurvatureSpeed(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour2
-
Compute the curvature speed at pixel (x,y).
- computeCurvatureSpeed(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseShapeDetection2
-
Compute the curvature speed at pixel (x,y).
- computeCurvatureSpeed(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseThreshold2
-
Compute the curvature speed at pixel (x,y).
- computeCurvatureSpeed(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
Override this function to implement the desired curvature speed for
your level-set evolver.
- computeCurvatureSpeed(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour3
-
Compute the curvature speed at voxel (x,y,z).
- computeCurvatureSpeed(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseShapeDetection3
-
Compute the curvature speed at voxel (x,y,z).
- computeCurvatureSpeed(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseThreshold3
-
Compute the curvature speed at voxel (x,y,z).
- COMPUTED_RADIOGRAPHY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality CR.
- COMPUTED_RADIOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality CR.
- COMPUTED_TOMOGRAPHY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality CT.
- COMPUTED_TOMOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality CT.
- computeDataSize() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Computes the datasize based on the type of buffer.
- computeDataThreads - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- computedBlockCRC - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- computedCombinedCRC - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- computeDeathCounts(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- computeDefFieldCommand - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- computeDeformationFieldButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
button for computing the deformation field:
- computeDimAndVoxel() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- computeDistance(int, int, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
compute distances within specified neighborhood size (size >= 1).
- computeDistance(int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
compute distances within specified neighborhood size (size >= 1).
- computeDistances(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
Computes the distances of vertex pairs for which an edge-path exists with at most iSize edges.
- computeDistances(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
Computes the distances of vertex pairs for which an edge-path exists with at most iSize edges.
- computeDx(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- computeDx3D(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- computeDy(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- computeDy3D(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- computeDz(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- computeEdgeStrengths() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- computeElapsedTime() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Computes the elapased time as the difference between the start time and the current time (both of which are in
milliseconds).
- computeElapsedTime() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
Computes the elapased time as the difference between the start time and the current time (both of which are in
milliseconds).
- computeElapsedTime(long) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Computes the elapased time as the difference between the start time and the current time (both of which are in
milliseconds).
- computeEll(libdt.Estats) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- computeEncode(int, int, int, byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Calculate the encoding table for the specified permutation.
- computeEpiCommand - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- computeEpiCorrectionButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
button for applying the deformation field to the input 4D image
- computeEpsilon() - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- computeEpsilon(int, int, int) - Static method in class gov.nih.mipav.util.CircleUtil
-
- computeEpsilonX(int, int, int) - Static method in class gov.nih.mipav.util.CircleUtil
-
- computeEpsilonXY(int, int, int, int, int) - Static method in class gov.nih.mipav.util.CircleUtil
-
- computeEpsilonY(int, int, int) - Static method in class gov.nih.mipav.util.CircleUtil
-
- computeExtremes() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- computeExtremes() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- ComputeFilters() - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- ComputeFrequencyResponse() - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- computeFunction(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
Evolution support.
- computeFunction(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
Evolution support.
- computeGaussian2D(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Compute the value of the 2D gaussian at a point.
- computeGaussian3D(double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Computes the gaussian weights for a particular point.
- ComputeGaussNewtonStep(CeresSolver.TrustRegionStrategyPerSolveOptions, CeresSolver.SparseMatrix, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- computeGeodesic(float, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Compute the Geodesic curve.
- computeGeodesic(float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Compute the Geodesic curve.
- computeGradient(float, float, float, double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
With given x, y, z point coordinate, compute the gradient magnitude and gradient direction
- computeGradient(float, float, float, double[], double[], double[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- computeGradient(float, float, float, double[], double[], double[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- computeGradient(float, float, float, double[], double[], double[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- computeGradient(float, float, float, double[], double[], double[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- computeGradient(float, float, float, double[], double[], double[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- computeGradient(ModelImage, float, float, float, double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- computeGradient(ModelImage, float, float, float, double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- computeGradient(ModelImage, float, float, float, double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- computeGradient(ModelImage, float, float, float, double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- computeGradient(ModelImage, float, float, float, double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- ComputeGradient(CeresSolver.SparseMatrix, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- computeGradientAtCenterPixel(double[][][]) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- computeGradients(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- computeHepticLagrangian(float, float, float, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- computeHessianAtCenterPixel(double[][][]) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- ComputeHouseholderVector(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- computeIdealWindowSize() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
private void computeIdealWindowSize() This method will enlarge or shrink the window size in response to the
componentImage being zoomed.
- computeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- computeImageBytes(float[], ModelRGB, RendererMapColor, JPanelVolumeOpacity) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
- computeImageBytes(float[], ModelRGB, RendererMapColor, JPanelVolOpacityRGB) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Deprecated.
- computeImageBytes(float[], TransferFunction) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Given an intensity volume and opacity map, fill in the byte and alpha values for each voxel.
- computeImageBytes(float[], TransferFunction, ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Given an intensity volume, opacity map, and color map, fill in the byte red, green, blue, and alpha values for
each voxel.
- computeImpl(ModelImage, Vector<AlgorithmBRISK.KeyPoint>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- computeIntegralNormalizationFactor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
In order to map line integrals of image intensity to RGB colors where each color channel is 8 bits, it is
necessary to make sure that the integrals are in [0,255].
- computeIntegralNormalizationFactor(byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
In order to map line integrals of image intensity to RGB colors where each color channel is 8 bits, it is
necessary to make sure that the integrals are in [0,255].
- computeIntersect(Vector3f, Vector3f, Vector3f, Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Computes the intersection between two lines.
- computeIntersections() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Compute the cube-plane intersection.
- computeJ1(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- ComputeJacobian(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.IdentityParameterization
-
- ComputeJacobian(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- ComputeJacobian(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- ComputeJacobian(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadLocalParameterization
-
- ComputeJacobian(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MatrixParameterization
-
- ComputeJacobian(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PolynomialParameterization
-
- ComputeJacobian(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TestParameterization
-
- ComputeJacobian(double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- ComputeJacobian(double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadLocalParameterization
-
- ComputeJacobian(double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MatrixParameterization
-
- ComputeJacobian(double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TestParameterization
-
- ComputeJacobian(double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- ComputeJacobian(double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.EigenQuaternionParameterization
-
- ComputeJacobian(double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.HomogeneousVectorParameterization
-
- ComputeJacobian(double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.IdentityParameterization
-
- ComputeJacobian(double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LocalParameterization
-
- ComputeJacobian(double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- ComputeJacobian(double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.QuaternionParameterization
-
- ComputeJacobian(double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- ComputeJacobian(double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadLocalParameterization
-
- ComputeJacobian(double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MatrixParameterization
-
- ComputeJacobian(double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PolynomialParameterization
-
- ComputeJacobian(double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TestParameterization
-
- ComputeJacobian(double[], Matrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MatrixParameterization
-
- computeKeypointsAndDescriptors(ModelImage, boolean) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- computeKeypointsWithOrientations(SIFTImageSimilarity.KeyPoint, int, ModelImage, double, int, double, double) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- computeLaplacianSpeed(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
Override this function to implement the desired Laplacian speed for
your level-set evolver.
- computeLaplacianSpeed(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
Override this function to implement the desired Laplacian speed for
your level-set evolver.
- computeMagnitude(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- computeMaximum - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
When true, computes the maximum intensity projection.
- computeMeanCurvature() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
mean curvature.
- computeMeanCurvature() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
mean curvature.
- computeMeanEdgeLength() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Compute the average length of all the edges in the triangle mesh.
- computeMeanEdgeLength() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Compute the average length of all the edges in the triangle mesh.
- computeMeanEdgeLength() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Compute the average length of all the edges in the triangle mesh.
- computeMeanEdgeLength(HashMap) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Compute the average length of all the edges in the triangle mesh.
- computeMedianIntensity() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Compute the median intensity of those voxels inside the initial ellipsoid.
- computeMedianIntensityInitial() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Compute the median intensity of those voxels inside the initial ellipsoid.
- computeMemberships2D(float[], float[], float[], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
Determines the membership of each feature vector in each cluster.
- ComputeMemberships2D(float[], float[], float[], float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
ComputerMemberships2D - Determine membership of each feature vector in each cluster.
- computeMemberships3D(float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
Determines the membership of each feature vector in each cluster.
- ComputeMemberships3D(float[], float[], float[], float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
ComputerMemberships3D - Determine membership of each feature vector in each cluster.
- computeMinimum - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
When true, computes the minimum intensity projection.
- computeNearestImage(double[], float, float, float, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Transforms and resamples volume using nearest neighbor interpolation.
- computeNewCenter() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
- computeNewExtents() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Calculates and returns the new extents based on the source image and the list of slices to be removed.
- computeNormalizedNormal(Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- computeNormalLine(Vector3f, Vector3f, Vector3f, Vector3f, Vector3f, float, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- computeNormalLine(Vector3f, Vector3f, Vector3f, Vector3f, Vector3f, float, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- computeNormalLine(Vector3f, Vector3f, Vector3f, Vector3f, Vector3f, float, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- computeNormalLine(Vector3f, Vector3f, Vector3f, Vector3f, Vector3f, float, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- computeNormalLine(Vector3f, Vector3f, Vector3f, Vector3f, Vector3f, float, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- computeNormalLine(Vector3f, Vector3f, Vector3f, Vector3f, Vector3f, float, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
When the line segment is drawn, take the mid point, create the normal line across the mid point.
- computeNormals() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
A normal vector at a vertex is computed by averaging the triangle normals for all triangles sharing the vertex.
- computeNormals() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
A normal vector at a vertex is computed by averaging the triangle normals for all triangles sharing the vertex.
- computeNormals() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
compute vertex normals as averages of triangle normals.
- computeNormals() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
compute vertex normals as averages of triangle normals.
- computeNumberOfOctaves(int[]) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- computeParam() - Method in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic2
-
Compute the average gradient magnitude squared for the current image
u(x,y,t).
- computeParam() - Method in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic3
-
Compute the average gradient magnitude squared for the current image
u(x,y,t).
- computePermutationImportance() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- computePermutationImportance(Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- computePilot(AlgorithmMeanShiftClustering.fams_hash_entry[][], int[], AlgorithmMeanShiftClustering.fams_cut[][], String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- computePositions(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Compute the vertex positions for the four voxels in the current slice to be bilinearly interpolated.
- computePrecisionRecall() - Method in class gov.nih.mipav.model.algorithms.libdt
-
- computePredictionAccuracyInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- computePredictionAccuracyInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- computePredictionAccuracyInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- computePredictionAccuracyInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- computePredictionAccuracyInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- computePredictionError() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- computePredictionErrorInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- computePredictionErrorInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- computePredictionErrorInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- computePredictionErrorInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- computePredictionErrorInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- computeProcessors() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- computeProcessors() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- computeProcessors() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- computePropagationSpeed(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
Override this function to implement the desired propagation speed for
your level-set evolver.
- computePropagationSpeed(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour2
-
Compute the propagation speed at pixel (x,y).
- computePropagationSpeed(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseShapeDetection2
-
Compute the propagation speed at pixel (x,y).
- computePropagationSpeed(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseThreshold2
-
Compute the propagation speed at pixel (x,y).
- computePropagationSpeed(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
Override this function to implement the desired propagation speed for
your level-set evolver.
- computePropagationSpeed(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour3
-
Compute the propagation speed at voxel (x,y,z).
- computePropagationSpeed(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseShapeDetection3
-
Compute the propagation speed at voxel (x,y,z).
- computePropagationSpeed(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseThreshold3
-
Compute the propagation speed at voxel (x,y,z).
- computeQuinticLagrangian(float, float, float, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- computeRadius(MjVector2f, MjVector2f, MjVector2f, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- computeRatios() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Computes the image scaling ratios.
- computeRealBandwidths(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- computeRecords() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
All collapse information is known when this is called.
- ComputeRecursiveIndependentSetOrdering(CeresSolver.Program, CeresSolver.OrderedGroups<double[]>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- ComputeReferenceSolution(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- computeRoots() - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- ComputeSchurOrdering(CeresSolver.Program, Vector<CeresSolver.ParameterBlock>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- computeScores(AlgorithmMeanShiftClustering.fams_hash_entry[][], int[], AlgorithmMeanShiftClustering.fams_cut[][], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- computeShapeDescriptor() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Compute the shape descriptor with roundness, compactness, aspectRatio,
and eccentricity.
- computeShapeDescriptor() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Compute the shape descriptor with roundness, compactness, aspectRatio,
and eccentricity.
- computeShapeDescriptor() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Compute VOI shape descriptors.
- ComputeSingleLinkageClustering(CeresSolver2.SingleLinkageClusteringOptions, CeresSolver.WeightedGraph<Integer>, HashMap<Integer, Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- computeSpot(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Compute the attenuation due to the spot cone geometry.
- ComputeStableSchurOrdering(CeresSolver.Program, Vector<CeresSolver.ParameterBlock>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- ComputeStep(CeresSolver.TrustRegionStrategyPerSolveOptions, CeresSolver.SparseMatrix, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- ComputeStep(CeresSolver.TrustRegionStrategyPerSolveOptions, CeresSolver.SparseMatrix, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- ComputeStep(CeresSolver.TrustRegionStrategyPerSolveOptions, CeresSolver.SparseMatrix, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategy
-
- ComputeSubspaceDoglegStep(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- ComputeSubspaceModel(CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- ComputeSubspaceStepFromRoot(double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- computeSurfaceArea() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
surface area of the mesh (input mesh is closed, manifold).
- computeSurfaceArea() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
surface area of the mesh (input mesh is closed, manifold).
- ComputeSurfaceArea() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Calculate the surface mesh area.
- ComputeSurfaceArea(TriMesh) - Method in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Calculate the surface mesh area.
- computeSurfaceImage(TriMesh, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- computeSurfaceImage(TriMesh, ModelImage, float, Vector3f, Vector3f) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- computeSurfaceMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Computes a volume mask of the triangle mesh surface.
- computeSurfaceMask(BitSet, TriMesh, ModelImage, float, Vector3f, Vector3f, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- computeSurfaceMask(TriMesh) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Computes a volume mask of the triangle mesh surface.
- computeSurfaceMask(TriMesh, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- computeSurfaceMask(TriMesh, ModelImage, float, Vector3f, Vector3f) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- computeSurvival(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- computeTalairachVoxelPosition(int, int) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Computes the talairach grid voxel from a screen coordinate.
- computeTextureWeights(double[][], double[][], double[][], int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- computeTImage - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- computeTime(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
Compute the visitation time for an image element.
- computeTime(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
Compute the visitation time for an image element.
- computeTimeExtremes() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Compute the minimum and maximum visitation times for the image
elements.
- computeTimeStep() - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Compute the time step for the next PDE solver update.
- computeTLRC - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- ComputeTraditionalDoglegStep(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- computeTreePermutationImportanceInThread(int, Vector<Double>, Vector<Double>) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.Forest.computeTreePermutationImportanceInThread
-
- computeTriangleNormals() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Compute the normal vector for each triangle as the normal vector to the plane containing the vertices associated
with the triangle and considering the vertices to be counterclockwise ordered for a RH rule oriented normal
vector.
- computeTrilinearImage(double[], float, float, float, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Transforms and resamples volume using trilinear interpolation.
- computeTrilinearImage(float[], float, float, float, int, int, int, float[], int, int, int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
Transforms and resamples volume using trilinear interpolation
- ComputeTrustRegionStep() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- computeUniformVariables() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Computes the input parameters to the GLSL shader program based on the ClassificationWidgetState and passes
them to the program to render the widget in the multi-histogram panel.
- computeVariance3dDouble(libdt.Mat[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- computeVertexInformation() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Let V[i] be a vertex in the triangle mesh.
- computeVertexInformation() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Let V[i] be a vertex in the triangle mesh.
- computeVertexInformation() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Let V[i] be a vertex in the triangle mesh.
- computeVertexInformation(float[], float, Vector3f[], Vector3f[], UnorderedSetInt[], Vector3f[], Vector3f[], float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Let V[i] be a vertex in the triangle mesh.
- computeVertexNormals() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Compute the vertex normals of the triangle mesh.
- computeVertexNormals() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Compute the vertex normals of the triangle mesh.
- computeVertexNormals() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Compute the vertex normals of the triangle mesh.
- computeVertexNormals() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Compute the normal vector for each vertex as the normalized average normal vector of all the triangles of which
the vertex belongs.
- computeVertexNormals(Vector3f[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Compute the vertex normals of the triangle mesh.
- ComputeVisibility(CeresSolver.CompressedRowBlockStructure, int, Vector<HashSet<Integer>>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- ComputeVolume() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Calculates volume of triangle mesh.
- computeVolumeBoundaryDist(Vector3f[]) - Method in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Compute the Euclidean distance from each sample "inside" the volume to the nearest point on the surface
surrounding the volume.
- computeWSincImage(float, float, float, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- conc - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- concatenate - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true, form only 1 result image by concatenating the original source to each of the
calculated features.
- concatenate - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true, form only 1 result image by concatenating the original source to each of the
calculated features.
- concatenate - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
If true, only one result image with the original source concatenated with the
calculated features.
- concatenateCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
- concatenatedSATSelection - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- concatenatedSATSelection - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- concatenateMatrix(TransMatrix[], int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Concatenates the matrices.
- CONCENTRATION - gov.nih.mipav.model.file.FileInfoBase.UnitType
-
- cond() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Two norm condition number
- condenserContrast - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- condenserContrast - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- condenserNumericalAperture - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- condenseVOI(ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- condenseVOI(ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- condenseVOI(ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- condenseVOI(ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- condenseVOI(ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- condition_variable - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- ConditionedCostFunction(CeresSolver.CostFunction, Vector<CeresSolver.CostFunction>, CeresSolver.Ownership) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.ConditionedCostFunction
-
- conditioners_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.ConditionedCostFunction
-
- coneDefault - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Cone shape part of the probe.
- coneHeadBottom - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- coneHeadBottomIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- coneHeadBottomIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- coneHeadBottomTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- coneHeadTop - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- coneHeadTopIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- coneHeadTopIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- coneHeadTopTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- coneIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Indicator probe cone shape.
- coneIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Indicator probe cone shape.
- coneIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Indicator probe cone shape.
- coneIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Tranformgroup of the indicator cone shape.
- coneIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Transform group of the indicator cone shape.
- coneIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Tranformgroup of the indicator cone shape.
- coneTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Transform group of the cone shape.
- coneTip - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Cone geometry shape part of the CoolTip probe.
- coneTip - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Cone geometry shape part of the regular probe.
- coneTip - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Thermal probe geometry shapes.
- coneTipIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Indicator probe geometry shapes.
- coneTipIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Indicator probe geometry shapes' transform groups.
- coneTipTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
The probe tip cone geometry shape.
- coneTipTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
The probe tip cone geometry shape.
- coneTipTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Thermal probe geometry shapes' transform groups.
- conf - Variable in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- conf - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- CONF_H - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- CONF_H - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- CONF_L - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- CONF_L - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- CONF_NMX - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- CONF_NMX - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- confidence - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- confidenceImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- confidenceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
- config - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
The config used to extends the Canvas3D class.
- config - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Configuration param, which will pass down to each render's constructor.
- config - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Configuration param, which will pass down to each render's constructor.
- CONFIG - gov.nih.mipav.view.Preferences.LogLevel
-
- config_name - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- ConfigFile(String) - Constructor for class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- configure(GraphPanel, Edge) - Method in class gov.nih.mipav.view.graphVisualization.MipavEdgeRenderer
-
- configure(GraphPanel, ModelPoint, Node) - Method in class gov.nih.mipav.view.graphVisualization.MipavNodeRenderer
-
- CONFIGURE_CHANNELS - Static variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- configured - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- configuredListener - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- configureFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Constructs main frame structures for the surface.
- configureFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Constructs main frame structures for 3 images.
- configureFrame() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Constructs main frame structures for image canvas.
- configureFrame() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Constructs main frame structures for 3 image planes.
- configureFrame() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Constructs main frame structures for image canvas.
- configureFrame() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Constructs main frame structures for 3 images (image A only) or 9 images (image A and image B).
- configureListPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- configureSliceFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Constructs main frame structures for 3 image planes.
- configureSliceFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Constructs main frame structures for 3 image planes.
- configureVolumeFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Constructs main frame structures for 3 image planes.
- configureVolumeFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Constructs main frame structures for 3 image planes.
- configVOIsNumbers(ModelImage, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- configVOIsNumbers(ModelImage, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- configVOIsNumbers(ModelImage, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- configVOIsNumbers(ModelImage, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- configVOIsNumbers(ModelImage, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- configVOIsNumbers(ModelImage, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- configVOIsNumbers(ModelImage, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Configure the mid, apex and base VOIs, sort them in order.
- configVOIsNumbers(ModelImage, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Configure the mid, apex and base VOIs, sort them in order.
- confirmFileType() - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Checks that the RandomAccessIO begins with 'P5'
- CONFLUENT_HYPERGEOMETRIC_FIRST_KIND - Static variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Confluent Hypergeometric Function of the First Kind.
- CONFLUENT_HYPERGEOMETRIC_SECOND_KIND - Static variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Confluent Hypergeometric Function of the Second Kind
- ConfluentHypergeometric - Class in gov.nih.mipav.model.algorithms
-
This code calculates the confluent hypergeometric function of the first and second kinds For the confluent
hypergeometric function of the first kind a typical usage for the routine requiring real parameters and a real
argument would be:
- ConfluentHypergeometric() - Constructor for class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- ConfluentHypergeometric(double, double, double, double[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- ConfluentHypergeometric(double, double, double, double, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- ConfluentHypergeometric(double, double, double, double, double, double, int, int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- ConfluentHypergeometric(int, double, double, double, double[]) - Constructor for class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- confTr_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- conjugate_lossFunction(int, double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- ConjugateGradient - Class in gov.nih.mipav.model.algorithms
-
MIT License
Copyright (c) 2018 Komahan Boopathy
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
- ConjugateGradient(double[][], double[], int, double, double[], int[], double[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.ConjugateGradient
-
- ConjugateGradientsSolver(CeresSolver.LinearSolverOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ConjugateGradientsSolver
-
- ConjugateGradientTest - Class in gov.nih.mipav.model.algorithms
-
MIT License
Copyright (c) 2018 Komahan Boopathy
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
- ConjugateGradientTest() - Constructor for class gov.nih.mipav.model.algorithms.ConjugateGradientTest
-
- ConjugateGradientTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- conjugateLossFn - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- connect - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Holds how vertices are connected.
- connect() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- connect() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
DOCUMENT ME!
- connect() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
DOCUMENT ME!
- connectClientToServer(String, boolean, String, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
This is a simple interface to establish an association over a socket from the client (i.e.
- connected - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
- connected - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Flag indicating whether of not the socket is connected.
- CONNECTED12 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- CONNECTED12 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- CONNECTED12 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- CONNECTED12 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- connected18Object3D(boolean[][][], int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
3D images: 18-neighborhood.
- CONNECTED24 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- CONNECTED24 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- CONNECTED26 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- CONNECTED26 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- connected26Object3D(boolean[][][], int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
3D images: 26-neighborhood.
- CONNECTED4 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- CONNECTED4 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- CONNECTED4 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- CONNECTED4 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- connected4Object2D(boolean[][], int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
2D images: 4-connectivity.
- CONNECTED6 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- CONNECTED6 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- connected6Object3D(boolean[][][], int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
3D images: 6-neighborhood.
- CONNECTED8 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- CONNECTED8 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- CONNECTED8 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- CONNECTED8 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- CONNECTED80 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- connected8Object2D(boolean[][], int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
2D images: 8-neighborhood.
- Connection(Backpropagation.Neuron) - Constructor for class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- Connectioncounter - Variable in class gov.nih.mipav.model.algorithms.Backpropagation
-
- connectionLookup - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- connections - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- connections - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
used in smoothing.
- connectivity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Vector to hold the connection index.
- connectNearNeighbors(int, BitSet, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
Set elements of the returned BitSet meet at least one of the following criteria:
Element is set in connectingRegion.
Walking up, down, right, and/or left from loc to this element requires less than or equal to maxNeighborDistance steps.
- connectNearNeighbors(int, BitSet, BitSet, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
A helper method for connectNearNeighbors(int, BitSet, int) that allows faster copies
- connectNearNeighborsUtil(int, BitSet, BitSet, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- connectToServer(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
connects to server with the supplied Application entity title.
- connectToServer(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Connects to the server with an Application Entity title provided.
- connectType - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- connectTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- CONSECUTIVE_BAD_FAX_LINES - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- CONSECUTIVE_BAD_FAX_LINES - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- consecutiveBadFaxLines - Variable in class gov.nih.mipav.model.file.FileSVS
-
- consecutiveBadFaxLines - Variable in class gov.nih.mipav.model.file.FileTiff
-
- consecutiveNegativeNeeded - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- Consistency(int, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- ConsistencyCheck() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Tests if any interior points has gone outside outer path of the shape.
- CONSOLE - gov.nih.mipav.model.algorithms.CeresSolver.DumpFormatType
-
- CONST_BITS - Static variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- CONST_BITS - Static variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- CONST_BITS - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- CONST_SCALE - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- constancy_mask_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- constant - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- CONSTANT - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- CONSTANT - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- constant_parameter_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- CONSTANT_RADIUS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- CONSTANT_TISSUE - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- constantButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- constantColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Randomly add group color.
- constantFOV - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
We use the constant to preserve the FOV.
- constantFOVradio - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Radio button for constant FOV interpolation.
- ConstantFunction() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- ConstantFunction(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- ConstantPolynomial(double) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- constantRadius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
Radius of uniform poriton of the initial bleach
- constantTissueRadioButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- constrainBoundsCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- constrainBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- CONSTRAINED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- CONSTRAINED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- CONSTRAINED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- constrainedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- constrainedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- constrainedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- ConstrainSearchParameters(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Constrain the pose and model parameters to be within some reasonable
limits.
- constraintAct - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
Number of active constraints.
- constraintAct - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
Number of active constraints.
- constraints(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Applies constraints to the input image kImage and writes the constrained values into the m_kPSFImage.
- construct(ModelStorageBase.DataType, int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Allocates buffer memory of the specified type.
- constructDialog() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
Creates a dialog to choose if histogram should be over all of image or just VOI regions.
- constructDialog(boolean) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Creates a dialog to choose if histogram should be over all of image or just VOI regions.
- CONSTRUCTION_NONE - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- CONSTRUCTION_NONE - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- CONSTRUCTION_NONE - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- CONSTRUCTION_NONE - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- CONSTRUCTION_NONE - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- CONSTRUCTION_NONE - Static variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- constructionGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- constructionGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- constructionGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- constructionGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- constructionGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- constructionMethod - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- constructionMethod - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- constructionMethod - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- constructionMethod - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- constructionMethod - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- constructionMethod - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- constructionMethod - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- constructionMethod - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- constructionMethod - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- constructionMethod - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- constructionPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- constructionPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- constructionPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- constructionPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- constructionPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- constructPoint(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Construct a full 7-dimension transformation vector from the partial transformation vector.
- constructPoint(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Construct a full 12-dimension transformation vector from the partial transformation vector.
- constructPoint(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt2D
-
Construct a full 7-dimension transformation vector from the partial transformation vector.
- constructPoint(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
Construct a full 12-dimension transformation vector from the partial transformation vector.
- constructPoint(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Construct a full transformation vector from the partial transformation vector.
- constructProblem(List<Double>, List<svm_node[]>, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- constructProblem(List<Integer>, List<FeatureNode[]>, int, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- constructPyramid(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- constructRenderers() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Construct the volume rendering methods based on the choices made from the resample dialog.
- constructRenderers(ViewJProgressBar) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
Construct the volume rendering methods based on the choices made from
the resample dialog.
- constructRenderers(ViewJProgressBar) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Construct the volume rendering methods based on the choices made from the resample dialog.
- constructUserInformation() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Fills the with MIPAV information.
- consume_data - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- consume_data(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- CONSUME_DATA - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- consume_input - Variable in class gov.nih.mipav.model.file.libjpeg.my_input_controller
-
- consume_markers(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- CONSUME_MARKERS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- contactEmail - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- contactExperimenterRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- contactFirstName - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- contactInstitution - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- contactIsPerson - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- contactLastName - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- contactPerson - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- contain(float, float) - Method in class gov.nih.mipav.model.structures.VOIBase
-
This is used by SVM boundary training to identify the prostate
boundary VOI landmark points.
- container - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
main container for this object:
- container - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
main container for this object, contains the scroll pane and the depth
slider:
- containingFrame - Variable in class gov.nih.mipav.view.JFrameHistogram
-
frame containing the lut interface (if display in a stand-alone window)
- containingPanel - Variable in class gov.nih.mipav.view.JFrameHistogram
-
panel containing the lut interface (used in the stand-alone frame or in an outside frame)
- contains(float, float) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns true if the input iX, iY is contained within this contour.
- contains(float, float) - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Returns true if the input iX, iY is contained within this contour.
- contains(float, float, float) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns true if the input iX,iY,iZ is contained within this contour.
- contains(float, float, float) - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Returns true if the input iX,iY,iZ is contained within this contour.
- contains(int, int, boolean) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- contains(int, int, VertexBuffer) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Determines if the supplied point can be found within the points that define the contour.
- contains(Point3D) - Method in class gov.nih.mipav.model.structures.CubeBounds
-
method tests seedPt parameter for inclusion inside this logical cube.
- contains(VOIBase, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Used to determine which contour is selected.
- contains(LinkedList, Point3i) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Contains determines if the linked list kTriList contains the input triangle, which is specified by three vertex
indices.
- contains(LinkedList, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Contains determines if the linked list kTriList contains the input triangle, which is specified by three vertex
indices.
- contains(Point2f[], Point2f) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
support for point-in-triangle tests; The akVertex array must have length 3.
- contains(Vector2f[], Vector2f) - Static method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
support for point-in-triangle tests; The akVertex array must have length 3.
- contains3D(Vector3f) - Method in class gov.nih.mipav.model.structures.VOIContour
-
- containsAnnotation(VOI, VOIWormAnnotation) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- containsDICM - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
True if the DICOM file has the ID DICM at beginning at file pointer 128.
- containsDirectoryOfType(Class<? extends MetadataExtractor.Directory>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
Indicates whether an instance of the given directory type exists in this Metadata instance.
- containsKey(String) - Method in class gov.nih.mipav.model.file.XMLPSet
-
Determines if the set contains a parameter with the given name.
- containsMesh(ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
containsMesh returns the SurfaceAttributes[] containing the input ModelTriangleMesh parameter, where the
SurfaceAttributes[] array is of length 1.
- containsParameter(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Checks to see if there is an entry in the parameter table for a particular label.
- ContainsPoint(int, int, ModelSimpleImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Check the point is inside the image or not
- containsSegment(byte) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Determines whether data is present for a given segment type.
- containsSegment(MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Determines whether data is present for a given segment type.
- containsSliceEntry(HashMap<Integer, int[]>, int) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Whether the slice is assigned to another slice elsewhere in the map
- containsTag(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Indicates whether the specified tag type has been set.
- containsTag(FileDicomKey) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Returns whether the dicom dictionary contains a tag with the given key identifier.
- containsTag(FileDicomKey) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns whether the tag table contains a tag with the given key identifier, either in the reference tag table or the slice-specific table
- containsTag(PrivateFileDicomKey) - Static method in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
Returns whether the dicom dictionary contains a tag with the given key identifier.
- containsTag(String) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns whether the tag table contains a tag with the given key identifier, either in the reference tag table or the slice-specific table
- containsType(int) - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Determines if the map contains a matrix of the given type (checks for String.contains()).
- containsUniqueTag(FileDicomKey) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns whether this specific tag table contains a tag with the given key identifier, does not check the reference tag
table
- containsUniqueTag(String) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns whether this specific tag table contains a tag with the given key identifier, does not check the reference tag
table
- containsVector(LinkedList<Vector3f>, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Return index of the Vector3f in the list.
- containsX(int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- containsY(int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- containsZ(int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- contButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Continue play button.
- contButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Continue play button.
- contButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Continue play button.
- content - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- content - Variable in class gov.nih.mipav.model.algorithms.CVODES.DtpntMemRec
-
- contentBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Box layout for control panel.
- contentBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Box layout for control panel.
- contentPane - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- contents - Variable in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- contentString - Variable in class gov.nih.mipav.model.file.FileInfoNRRD
-
Concise textual description of the information in the array
- ContentTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- context - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluatorOptions
-
- context - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- context - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- context - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemOptions
-
- context - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- context - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.CL_data
-
- context() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- Context() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Context
-
- context_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CoordinateDescentMinimizer
-
- context_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- CONTEXT_2_STYLE_2_TEXTUREREF - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- context_impl_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- context_impl_owned_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- context_state - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- contextLibrary - Static variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- contextStringToURL(String) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- contig - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
222 Continuous slices flag.
- contiguousSlices - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- contiguousSlices - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- continue_minimization(NelderMead.simplex_t, int, int) - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- continueUpdate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Flag indicates to continue update the surface render and plane render or not.
- continueUpdate - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Flag indicates to continue update the surface render and plane render or not.
- continuous_wavelet(PyWavelets.WAVELET_NAME, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- continuousVOIBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- ContinuousWavelet() - Constructor for class gov.nih.mipav.model.algorithms.filters.PyWavelets.ContinuousWavelet
-
- contour - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- contour - Variable in class gov.nih.mipav.view.RubberbandPolyline
-
DOCUMENT ME!
- Contour - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- CONTOUR - Static variable in class gov.nih.mipav.model.structures.VOI
-
Indicates that the VOI is of type CONTOUR.
- contourButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- contourColor - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- contourGraph - Variable in class gov.nih.mipav.model.structures.VOI
-
ViewJFrameGraph for graphing contours in this VOI
- contourMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- contourMask - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- contourOrderSubMenu - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- contourOrderSubMenu - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- ContourPlot - Class in gov.nih.mipav.model.algorithms
-
The Contours class provides methods to compute contour lines and contour bands
from a 2D regular grid of scalar values.
- ContourPlot() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot
-
- ContourPlot.AdaptableView - Interface in gov.nih.mipav.model.algorithms
-
- ContourPlot.BarycentricGradientPaint - Class in gov.nih.mipav.model.algorithms
-
The BarycentricGradientPaint class provides a way to fill a Shape
with a triangular color gradient.
- ContourPlot.BarycentricGradientPaintContext - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.BlankCanvasFallback - Class in gov.nih.mipav.model.algorithms
-
Fallback implementation for BlankCanvas for systems that do not support OpenGL 3
through org.lwjgl.opengl.awt.AWTGLCanvas (e.g. macOS).
- ContourPlot.BufferedImageFactory - Class in gov.nih.mipav.model.algorithms
-
Class providing convenience methods for converting Images to BufferedImages.
- ContourPlot.CharacterAtlas - Class in gov.nih.mipav.model.algorithms
-
The CharacterAtlas class is a texture atlas for looking up character textures.
- ContourPlot.ColorMap - Interface in gov.nih.mipav.model.algorithms
-
- ContourPlot.ColorOperations - Class in gov.nih.mipav.model.algorithms
-
The ColorOperations class contains methods for manipulating
32bit ARGB color values.
- ContourPlot.ColorScheme - Class in gov.nih.mipav.model.algorithms
-
The ColorScheme is responsible for storing and providing color information,
which other components can use.
- ContourPlot.CompleteRenderer - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.CoordinateViewListener - Interface in gov.nih.mipav.model.algorithms
-
- ContourPlot.CoordSysPanning - Class in gov.nih.mipav.model.algorithms
-
The CoordSysPanning class implements a
MouseListener
and
MouseMotionListener that realize panning functionality
for the coordinate view of the
ContourPlot.CoordSysRenderer.
- ContourPlot.CoordSysRenderer - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.CoordSysScrollZoom - Class in gov.nih.mipav.model.algorithms
-
The CoordSysScrollZoom class implements a
MouseWheelListener
that realize zooming functionality for the coordinate view of the
ContourPlot.CoordSysRenderer.
- ContourPlot.DefaultColorMap - Enum in gov.nih.mipav.model.algorithms
-
- ContourPlot.DefaultColorScheme - Enum in gov.nih.mipav.model.algorithms
-
- ContourPlot.ExtendedWilkinson - Class in gov.nih.mipav.model.algorithms
-
Implementation of the extended Wilkinson algorithm for tick label positioning.
- ContourPlot.FontProvider - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.GenericKey - Class in gov.nih.mipav.model.algorithms
-
The GenericKey class can be used as key in HashMaps when
multiple objects should be combined to a single key.
- ContourPlot.GenericRenderer<T extends ContourPlot.Renderable> - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.Glyph - Interface in gov.nih.mipav.model.algorithms
-
The Glyph interface has to be implemented by a class that realizes
a graphical representation of a 2D point (e.g. a cross or a circle).
- ContourPlot.ImageSaver - Class in gov.nih.mipav.model.algorithms
-
Class providing convenience methods for saving Images to file.
- ContourPlot.ImageSaver.ImageSaverException - Exception in gov.nih.mipav.model.algorithms
-
RuntimeException class for Exceptions that occur during image saving.
- ContourPlot.Img - Class in gov.nih.mipav.model.algorithms
-
Image class with data stored in an int array.
- ContourPlot.ImgBase<P extends ContourPlot.PixelBase> - Interface in gov.nih.mipav.model.algorithms
-
Base interface for imagingkit's Img classes.
- ContourPlot.InteractionConstants - Interface in gov.nih.mipav.model.algorithms
-
- ContourPlot.Iterators - Class in gov.nih.mipav.model.algorithms
-
Class holding all of the
Iterator and
Spliterator classes
used in the
ContourPlot.ImgBase interface.
- ContourPlot.Iterators.ColSpliterator<P extends ContourPlot.PixelBase> - Class in gov.nih.mipav.model.algorithms
-
Special Spliterator which guarantees that each split will cover at least
an entire column of the image.
- ContourPlot.Iterators.ImgAreaIterator<P extends ContourPlot.PixelBase> - Class in gov.nih.mipav.model.algorithms
-
The standard iterator class for iterating over an area of an image.
- ContourPlot.Iterators.ImgAreaSpliterator<P extends ContourPlot.PixelBase> - Class in gov.nih.mipav.model.algorithms
-
Spliterator class for images bound to a specific area
- ContourPlot.Iterators.ImgIterator<P extends ContourPlot.PixelBase> - Class in gov.nih.mipav.model.algorithms
-
The standard Iterator class for images.
- ContourPlot.Iterators.ImgSpliterator<P extends ContourPlot.PixelBase> - Class in gov.nih.mipav.model.algorithms
-
The standard Spliterator class for images.
- ContourPlot.Iterators.RowSpliterator<P extends ContourPlot.PixelBase> - Class in gov.nih.mipav.model.algorithms
-
Special Spliterator for images which guarantees that each split will cover at least
an entire row of the image.
- ContourPlot.JPlotterCanvas - Interface in gov.nih.mipav.model.algorithms
-
- ContourPlot.Legend - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.Legend.ColormapLabel - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.Legend.GlyphLabel - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.Legend.LineLabel - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.Lines - Class in gov.nih.mipav.model.algorithms
-
The Lines class is a collection of linear line segments.
- ContourPlot.LinesRenderer - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.Pair<T1,T2> - Class in gov.nih.mipav.model.algorithms
-
Pair class.
- ContourPlot.ParallelForEachExecutor<T> - Class in gov.nih.mipav.model.algorithms
-
CountedCompleter class for multithreaded execution of a Consumer on a
Spliterator.
- ContourPlot.PDFRenderer - Interface in gov.nih.mipav.model.algorithms
-
- ContourPlot.Pixel - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.PixelBase - Interface in gov.nih.mipav.model.algorithms
-
- ContourPlot.PixelConvertingSpliterator<P extends ContourPlot.PixelBase,T> - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.PixelConvertingSpliterator.PixelConverter<P extends ContourPlot.PixelBase,T> - Interface in gov.nih.mipav.model.algorithms
-
- ContourPlot.PixelManipulator<P extends ContourPlot.PixelBase,T> - Interface in gov.nih.mipav.model.algorithms
-
The PixelManipulator interface defines an action to be performed on a pixel.
- ContourPlot.PointDetails - Class in gov.nih.mipav.model.algorithms
-
Class for storing all the details of a single point to be rendered.
- ContourPlot.PointeredPoint2D - Class in gov.nih.mipav.model.algorithms
-
The PointeredPoint2D class is an implementation of the Point2D
class that uses two double arrays of size 1 to store its x and y coordinate.
- ContourPlot.Points - Class in gov.nih.mipav.model.algorithms
-
The Points class is a collection of 2D points that are to be represented
using the same
ContourPlot.Glyph (the graphical representation of a point).
- ContourPlot.Renderable - Interface in gov.nih.mipav.model.algorithms
-
- ContourPlot.Renderer - Interface in gov.nih.mipav.model.algorithms
-
The Renderer interface defines methods to
initialize the renderer,
execute a rendering pass,
close the renderer.
- ContourPlot.SegmentDetails - Class in gov.nih.mipav.model.algorithms
-
Specification of a line segment which comprises vertex locations, colors, picking color, and thicknesses.
- ContourPlot.SignedDistanceCharacters - Class in gov.nih.mipav.model.algorithms
-
The SignedDistanceCharacters class comprises signed distance fields
of a set of characters.
- ContourPlot.SimpleColorMap - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.Text - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.TextRenderer - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.TickMarkGenerator - Interface in gov.nih.mipav.model.algorithms
-
- ContourPlot.TranslatedPoint2D - Class in gov.nih.mipav.model.algorithms
-
The TranslatedPoint2D is an implementation of Point2D
that references another Point2D and has a certain fixed
translation from that point.
- ContourPlot.TriangleDetails - Class in gov.nih.mipav.model.algorithms
-
Specification of a triangle which comprises vertex locations, colors and picking color.
- ContourPlot.Triangles - Class in gov.nih.mipav.model.algorithms
-
The Triangles class is a collection of 2D triangles.
- ContourPlot.TrianglesRenderer - Class in gov.nih.mipav.model.algorithms
-
- ContourPlot.Utils - Class in gov.nih.mipav.model.algorithms
-
Class containing utility methods
- contourPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- contourPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- contourPolygon - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- ContourStats() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- contourTextArea - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Displays points and name of selected VOI or contour
- contourVector - Variable in class gov.nih.mipav.model.file.FileVOI.MyXMLHandler
-
The contours of the VOI we are building.
- contourVector - Variable in class gov.nih.mipav.model.file.FileVOI.XMLCoordHandler
-
The contours of the VOI we are building.
- contourVector - Variable in class gov.nih.mipav.view.dialogs.MyXMLHandler
-
The contours of the VOI we are building.
- contourVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
The contours of the VOI we are building.
- CONTRACT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
DOCUMENT ME!
- CONTRACT - Static variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- contractButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- ContractingSnake() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- ContractingSnakeNode() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- contraction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- contraction - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- contrast - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate contrast, also known as sum of squares variance Sum over i,j of Probability(i,j) * (i-j) *
(i-j).
- contrast - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate contrast, also known as sum of squares variance Sum over i,j of Probability(i,j) * (i-j) *
(i-j).
- contrast - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Diffusion contrast parameter.
- contrast - Variable in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
DOCUMENT ME!
- contrast - Variable in class gov.nih.mipav.model.file.FileSVS
-
- contrast - Variable in class gov.nih.mipav.model.file.FileTiff
-
- contrast - Variable in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
DOCUMENT ME!
- contrast - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- contrast - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- contrast - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- contrast - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- contrast - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- contrast - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
scale factor ranging from 0.1 to 10.0 by which to multiply each red,
green, and blue
- contrast - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- contrast - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- contrast - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
DOCUMENT ME!
- contrast - Variable in class gov.nih.mipav.view.ViewJFilterAnimate
-
DOCUMENT ME!
- contrast - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- contrast() - Method in class gov.nih.mipav.view.ViewJFilterAnimate
-
DOCUMENT ME!
- contrast(float) - Method in class gov.nih.mipav.view.ViewJFilterAnimate
-
DOCUMENT ME!
- CONTRAST - gov.nih.mipav.view.ViewJSlider.SliderType
-
- CONTRAST - Static variable in class gov.nih.mipav.view.ViewJSlider
-
- contrastAgent - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- contrastAgent - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- contrastAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- contrastAmount - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- contrastAmount - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- contrastBolusAgent - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- contrastBolusAgent - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusAgentIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusAgentPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusIngredient - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- contrastBolusIngredient - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusIngredientConcentration - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- contrastBolusIngredientConcentration - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusIngredientConcentrationIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusIngredientConcentrationPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusIngredientIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusIngredientPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusRoute - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- contrastBolusRoute - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusRouteIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusRoutePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusStartTime - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- contrastBolusStartTime - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusStartTimeIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusStartTimePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusTotalDose - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- contrastBolusTotalDose - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusTotalDoseIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusTotalDosePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusVolume - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- contrastBolusVolume - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusVolumeIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastBolusVolumePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- contrastCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- contrastCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- contrastDescription - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- contrastDescription - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- contrastManagerMode - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- contrastMethod - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- contrastMethod - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- contrastMode - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
106.
- contrastSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
DOCUMENT ME!
- contrastSlider - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- contrastSlider - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- contrastType - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- contrastType - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastTypeIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastTypePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- contrastUsed - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- contrastUsed - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- contributor - Variable in class gov.nih.mipav.model.file.FileInfoJSON
-
- controlFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- controlFrame - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- controlFrame - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- controlFrame - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- controller - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- controller - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- controllerUpdate(ControllerEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
Controller Listener.
- controllerUpdate(ControllerEvent) - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
Controller Listener.
- controllerUpdate(ControllerEvent) - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Controller Listener.
- controlMat - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- controlMat - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- controlMat25D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- controlMat25D - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- controlPanel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Control panel.
- controlPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Main panel for sliders.
- controlPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
the control panel that hold the z slider.
- controlPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Control panel.
- controlPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Main panel for sliders.
- controlPanel - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- controlPanel - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- controlPanel - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- controlPanel - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- controlPanelBox - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Control panel box that hold the control panel.
- controlPanelBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Control panel box that hold the control panel.
- controlPoints - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- controlPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
- controls - Variable in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Controls affected by opacity changes.
- controls - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- controls - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- controls - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- controls - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- controls - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Reference to the toolbars located in the controls object.
- controls - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- controls - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- controls - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- controls - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Used to obtain initial paint opacity and color.
- Controls(JDialogBase) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
Constructor which creates the controls.
- contSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- contSlider - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- conv(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- conv(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- CONV_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- conv12(double, double, double[][]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Converts a real and imaginary number pair to a form of a 2x2 real array.
- conv2(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- conv2(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- conv21(double[][]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Converts a number represented in a 2x2 real array to the form of a real and imaginary pair.
- ConvAndLinear(double[], int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.ConvAndLinear
-
- conventionField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- converged - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- CONVERGENCE - gov.nih.mipav.model.algorithms.CeresSolver.TerminationType
-
- convergenceAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
DOCUMENT ME!
- convergenceLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- convergenceThreshold - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- conversion() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- conversion() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Convert the SKI10 axial image to sagittal, coronal orientation image.
- conversion() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- conversion() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- conversion() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- conversion() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- conversionFactorCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
sigma conversion factor is by 1.0 / (2*Math.sqrt(2*Math.log(2)))
- conversionProgram - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- conversionSpaceTimeUnits - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Deprecated.
- convert(int) - Method in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- convert(int) - Method in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- CONVERT_FLOAT - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- convert_gray_to_rgb(FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- convert_Mat_rm(SIFT3D.Mat_rm, SIFT3D.Mat_rm, SIFT3D.Mat_rm_type) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- convert2D(ModelImage) - Static method in class gov.nih.mipav.model.structures.ModelImageToImageJConversion
-
converts 2D
- convert2D(ImageProcessor) - Static method in class gov.nih.mipav.model.structures.ImageJToModelImageConversion
-
Coverts 2D images
- convert3D(ModelImage) - Static method in class gov.nih.mipav.model.structures.ModelImageToImageJConversion
-
converts 3D
- convert3D(ImageStack) - Static method in class gov.nih.mipav.model.structures.ImageJToModelImageConversion
-
converts 3D images
- convert3Dto4D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert3Dto4D
-
Converts a 3D dataset that is really a 4D dataset into a 4D dataset.
- convert3Dto4DAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- convert4Dto3D - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlices
-
If true convert the selected images to 3D datasets.
- convert4Dto3D - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
DOCUMENT ME!
- convert4Dto3D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert4Dto3D
-
Converts the 4D image to a 3D image.
- convert4Dto3DAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
DOCUMENT ME!
- ConvertASFfromVOI(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Convert ASF shape from VOI
- convertButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTextGE
-
DOCUMENT ME!
- convertButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTextGE4X
-
DOCUMENT ME!
- convertBytesToGBytes(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
convert the number given by the string (assuming it is a number indicating a quantity of bytes) to a number
indicating a quantity of gigabytes.
- convertBytesToMBytes(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
convert the number given by the string (assuming it is a number indicating a quantity of bytes) to a number
indicating a quantity of megabytes.
- convertBytesToVersionString(int[], int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
Takes a series of 4 bytes from the specified offset, and converts these to a
well-known version number, where possible.
- convertCIELabtoRGB(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- convertCIELabtoRGB(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- convertCIELabtoRGB(float[], float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
- convertCIELabtoRGB(float[], float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
- convertCommandToString(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Converts DICOM command from and int code to a string
- convertCoordinate(Double[]) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- convertElementToPixel(T, P) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator.PixelConverter
-
converts the specified element back to the specified pixel
(set pixel value according to element).
- converter - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
- convertFnPtToScreenSpaceX(float) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
This method converts a transfer function point value into screen space so that it can be displayed on the
histogram.
- convertFrom(double, FileInfoBase.Unit) - Method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
Method converts the origValue that is currently in units of origUnit
to the units specified by this unit.
- convertFromGray(ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Called after the deconvolution algorithm is run.
- convertGBytesToBytes(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
convert the number given by the string (assuming it is a number indicating a quantity of gigabytes) to a number
indicating a quantity of bytes.
- convertGBytesToMBytes(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
convert the number given by the string (assuming it is a number indicating a quantity of gigabytes) to a number
indicating a quantity of megabytes.
- convertGraphToInt(int) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Takes a byte and gets appropriate addition from current position.
- convertGraphToInt(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Takes a byte and gets appropriate addition from current position.
- convertGroupElement(int, int) - Method in class gov.nih.mipav.model.file.FileDicom
-
Converts the integer values of the group word and element word into a string that is the hexadecimal
representation of group word and element word, separated by a comma.
- convertIntoFloat(String[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Takes an array of strings and converts each entry into a float value.
- convertISO2022CharsetToJavaCharset(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Iso2022Converter
-
Converts the given ISO2022 char set to a Java charset name.
- convertItemTypeToString(byte) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
Converts item type to a readable string.
- convertKBytesToGBytes(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
convert the number given by the string (assuming it is a number indicating a quantity of kilabytes) to a number
indicating a quantity of gigabytes.
- convertKBytesToMBytes(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
convert the number given by the string (assuming it is a number indicating a quantity of kilabytes) to a number
indicating a quantity of megabytes.
- convertKeypointsToInputImageSize(Vector<SIFTImageSimilarity.KeyPoint>) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- convertMBytesToBytes(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
convert the number given by the string (assuming it is a number indicating a quantity of megabytes) to a number
indicating a quantity of bytes.
- convertMBytesToGBytes(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
convert the number given by the string (assuming it is a number indicating a quantity of megabytes) to a number
indicating a quantity of gigabytes.
- convertmovie(libdt.Mat[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- convertNumbersToStr(String) - Method in class gov.nih.mipav.model.file.FileIO
-
- convertPatientInfo(FileInfoImageXML) - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Strips out the relevant patient info (if present) to insert into MIPAV's XML header
- convertPixelToElement(P, T) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator.PixelConverter
-
converts the specified pixel to the specified element
(initiliazation of previously allocated element).
- convertRGBtoCIELab() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- convertRGBtoCIELab() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- convertRGBtoCIELab(float[], float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
- convertRGBtoCIELab(float[], float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
- convertRGBtoCIELab(float[], float[], float[], float[], float[], float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- convertScreenSpaceXToFnPt(int) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
This method converts a point in screen space into a transfer function point value.
- convertSetToPoints(BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- convertTagsToTable() - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Returns all of the dicom-converted tags in the minc header as a tag-value hashtable.
- convertTagsToTable() - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Returns all of the dicom-converted tags in the minc header as a tag-value hashtable.
- convertTo(double, FileInfoBase.Unit) - Method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
Method converts the origValue quantity from the current units to the
resultUnit.
- convertTo4D(Matrix4f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- convertToACPC() - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Converts image to AC-PC image.
- convertToAlias(String) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_TransferSyntaxUtil
-
Converts a transfer syntax UID to one of the three transfer syntaxes.
- convertToARGB(ModelImage) - Static method in class gov.nih.mipav.model.file.FileIO
-
DOCUMENT ME!
- convertToASCII(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Simple utility to convert a number to ASCII.
- convertToDICOMInfo(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- convertToDICOMInfo(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
DOCUMENT ME!
- convertToDPString(ImageVariableTable) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
- convertToFileDicomKey() - Method in class gov.nih.mipav.model.file.PrivateFileDicomKey
-
- convertToFileURL(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Convert from a filename to a file URL.
- convertToFloat() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Disposes of old data and constructs a new buffer of the user specific type if the image in NOT locked.
- convertToGray(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Convert the input image, kImage, to a grayscale image using the AlgorithmRGBtoGray.
- convertToHex(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Simple utility to convert a number [0:15] to hex.
- ConvertToInterpolationCoefficients(double[], int, double[], int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- convertToMatrix(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
- convertToMatrix(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
- convertToMatrix(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Helper method that converts a vector with certain values set to a matrix.
- convertToMatrix(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Convert a transformation vector to a transformation matrix.
- convertToMatrix(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Convert a transformation vector to a transformation matrix.
- convertToMatrix(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Convert a transformation vector to a transformation matrix.
- convertToMatrix(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Convert a transformation vector to a transformation matrix.
- convertToMatrix(TransMatrixd, TransMatrixd, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Convert a 7-dimension transformation vector to a 3x3 transformation matrix.
- convertToMatrix(TransMatrixd, TransMatrixd, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Convert a 12-dimension transformation vector to a 4x4 transformation matrix.
- convertToMatrix(TransMatrixd, TransMatrixd, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt2D
-
Convert a 7-dimension transformation vector to a 3x3 transformation matrix.
- convertToMatrix(TransMatrixd, TransMatrixd, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
Convert a 12-dimension transformation vector to a 4x4 transformation matrix.
- convertToMatrix(TransMatrixd, TransMatrixd, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Convert a transformation vector to a transformation matrix about the origin.
- convertToMatrixHalf(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
- convertToMatrixHalf(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
- convertToMatrixMidsagittal(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
- convertToMatrixMidsagittal(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Helper method to take the "point" we've been working with as a vector, and convert it into a transformation
matrix.
- convertToMidsagittal(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Converts a full transformation vector into a midsagittal transformation vector.
- convertToMidsagittal(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
Converts a full transformation vector into a midsagittal transformation vector.
- ConvertToMIPAVConvention(TransMatrix) - Static method in class gov.nih.mipav.model.file.FilePARREC
-
Converts translation matrix to mipav specific format
- convertTomm - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- convertTomm - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- convertToMultifile(ModelImage, ModelImage, int[], int) - Method in class gov.nih.mipav.model.file.FileIO
-
- convertToReadableString(String) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_TransferSyntaxUtil
-
Converts a transfer syntax UID (i.e. "1.2.840.10008.1.2.4.50") to a more understandable string form ( i.e.
- convertToRPN(Vector<String>) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
method that converts the tokens to RPN
- convertToString() - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Retrieves the String representation of this Parameter, suitable for inclusion in a script line (e.g., "label
type value" (including the quotes)).
- convertToString() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Converts all of the parameters in the table into a comma delimited list of parameters, suitable for inclusion in
a script.
- convertToString() - Method in class gov.nih.mipav.model.scripting.ParsedActionLine
-
Returns this parsed action and its parameters in String form.
- convertToTalairach() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
Creates Talairach image based on points that were set in component images.
- convertToTalairach() - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
Creates Talairach image based on points that were set in component images.
- convertToUBYTE(ModelImage) - Static method in class gov.nih.mipav.model.file.FileIO
-
DOCUMENT ME!
- convertToWildKey(FileDicomKey) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Converts group numbers of 60xx or 50xx dicom key elements so that the dicom dictionary will be able to find them.
- convertToWildKey(PrivateFileDicomKey) - Static method in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
Converts group numbers of 60xx or 50xx dicom key elements so that the dicom dictionary will be able to find them.
- convertType(byte[], boolean, int) - Static method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Converts type.
- convertUIDToString(String) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Converts a transfer syntax UID (i.e. "1.2.840.10008.5.1.4.1.1.1") to a more understandable string form( i.e.
- convertValueToText(Object, boolean, boolean, boolean, int, boolean) - Method in class gov.nih.mipav.view.JTreeDICOM
-
- convertVertex(ModelImage, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Convert the vertex from display space to dicom space.
- convertVOITBI() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- convertVOIToDicomSpace(VOIVector, Vector<Vector3f>, ModelImage, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Conver the VOIs from image space to Dicom space
- convertVOIToDicomSpace(VOIVector, Vector<Vector3f>, ModelImage, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Conver the VOIs from image space to Dicom space
- convertVOItoMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- convertVOItoMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- convertVOItoMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- convertVOItoMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- convertWorldToModel(Tuple3f, Tuple3f) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Convert coordinates from world space to model space.
- convexHull - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Smooth button.
- convexHull() - Method in class gov.nih.mipav.model.structures.VOIContour
-
- convexHull(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- convexHull(TriMesh) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Compute the convex hull of the input mesh, return the convex hull.
- convexHull(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- convFactor - Variable in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- convFAFieldAr - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- convimageComboAr - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- convolution_method - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- convolution_method - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- convolutionButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- convolve(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- convolve(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
Perform one-dimension convolution.
- convolve(double[], float[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Perform one-dimension convolution.
- convolve(ModelImage, ModelImage, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Convolves two image by computing the fast fourier transforms of each image, multiplying the ffts and then
computing the inverse fft of the result:
- convolve_sep(SIFT3D.Image, SIFT3D.Image, SIFT3D.Sep_FIR_filter, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- convolve_sep_gen(SIFT3D.Image, SIFT3D.Image, SIFT3D.Sep_FIR_filter, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- convolve_sep_sym(SIFT3D.Image, SIFT3D.Image, SIFT3D.Sep_FIR_filter, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- convolve2D(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolve2D(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve2D(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
- convolve2D3D(int, int, double[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve2D3D(int, int, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolve2DBilateral(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolve2DBilateral(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve2DNMS(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolve2DNMS(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve2DNMSE(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolve2DNMSE(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve2DPt(int, int[], double[], int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPt(int, int[], float[], int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPt(Vector2d, int[], double[], int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPt(Vector2f, int[], double[], int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPt(Vector2f, int[], float[], int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPtMed(int, int[], double[], int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPtMed(int, int[], float[], int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPtNMS(int, int[], double[], int[], double[], double[], double[], double[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPtNMS(int, int[], float[], int[], float[], float[], float[], float[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPtNMSE(int, int[], double[], int[], double[], double[], double[], double[], double[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPtNMSE(int, int[], float[], int[], float[], float[], float[], float[], float[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPtSqrtXY(int, int[], double[], int[], double[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DPtSqrtXY(int, int[], float[], int[], float[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve2DRGBPt(int, int[], double[], int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an RGB image at a position.
- convolve2DRGBPt(int, int[], float[], int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an RGB image at a position.
- convolve2DRGBPtSqrtXY(int, int[], double[], int[], double[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an RGB image at a position.
- convolve2DRGBPtSqrtXY(int, int[], float[], int[], float[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an RGB image at a position.
- convolve2DSqrtXY(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolve2DSqrtXY(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve2DXY(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolve2DXY(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve3D(int, int, double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve3D(int, int, float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolve3D(int, int, float[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
- convolve3DBilateral(int, int, double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve3DBilateral(int, int, float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolve3DNMS(int, int, double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve3DNMS(int, int, float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolve3DNMSE(int, int, double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve3DNMSE(int, int, float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolve3DPt(double[], int[], double[], int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPt(float[], int[], float[], int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPt(int, int[], double[], int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPt(int, int[], float[], int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPt(Vector3f, ModelImage, int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPt(Vector3f, ModelImage, int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPtMed(int, int[], double[], int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPtMed(int, int[], float[], int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPtNMS(int, int[], double[], int[], double[], double[], double[], double[], double[], double[], double[], double[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPtNMS(int, int[], float[], int[], float[], float[], float[], float[], float[], float[], float[], float[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPtNMSE(int, int[], double[], int[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPtNMSE(int, int[], float[], int[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPtXYZ(int, int[], double[], int[], double[], double[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DPtXYZ(int, int[], float[], int[], float[], float[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolve3DRGB(int, int, float[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
- convolve3DRGBPt(int, int[], double[], int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an RGB image at a position.
- convolve3DRGBPt(int, int[], float[], int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an RGB image at a position.
- convolve3DRGBPtXYZ(int, int[], double[], int[], double[], double[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an RGB image at a position.
- convolve3DRGBPtXYZ(int, int[], float[], int[], float[], float[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an RGB image at a position.
- convolve3DXYZ(int, int, double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolve3DXYZ(int, int, float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolveBilateral2DCIELabPt(int, int[], double[], int[], double[], double) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an CIELab image at a position.
- convolveBilateral2DCIELabPt(int, int[], float[], int[], float[], double) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an CIELab image at a position.
- convolveBilateral2DPt(int, int[], double[], int[], double[], double) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolveBilateral2DPt(int, int[], float[], int[], float[], double) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolveBilateral3DCIELabPt(int, int[], double[], int[], double[], double) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with a CIELab image at a position.
- convolveBilateral3DCIELabPt(int, int[], float[], int[], float[], double) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with a CIELab image at a position.
- convolveBilateral3DPt(int, int[], double[], int[], double[], double) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolveBilateral3DPt(int, int[], float[], int[], float[], double) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolveBlock3D(int, int, int, double[], int[], int[], double[], ModelImage) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- convolveBlock3D(int, int, int, float[], int[], int[], float[], ModelImage) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- convolveNoColor(double[], float[], double[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Perform one-dimension convolution.
- convolveSep2D(cl_context, cl_device_id, cl_mem, cl_mem, int, int, int, int, Kernel, int, int[]) - Static method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmConvolver
-
- convolveSep3D(cl_context, cl_device_id, cl_mem, cl_mem, int, int, int, int, Kernel, int, int[], boolean) - Static method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmConvolver
-
- convolveWhole2DPt(int, int[], double[], int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position.
- convolveWhole2DPt(int, int[], float[], int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position.
- convolveWhole3DPt(int, int[], double[], int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
A static function that convolves a kernel with an image at a position The convolution is performed only if the
whole kernel fits inside the image.
- convolveWhole3DPt(int, int[], float[], int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
A static function that convolves a kernel with an image at a position The convolution is performed only if the
whole kernel fits inside the image.
- convolveX(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- convolveY(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- convolveZ(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- convRepTime - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- convrg - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- convSpec - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- COOLHOT - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Sets up the transfer function colors to be cool-hot.
- cooling - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- COOLTIP_PROBE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The cool-tip type probe, which trys to mimic the real CoolTip probe.
- coolTipBurn - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
CoolTip burning point reference that represents the CoolTip probe ablation type.
- COOLTIPBURN - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Define the CoolTip burn type value.
- coolTipProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
The root transform group the the CoolTip probe.
- coolTipProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Reference to the cool-tip probe geometry structures.
- CoolTipProbe - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
The CoolTip probe has its own geometry and type of burning.
- CoolTipProbe() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Constructor to build the CoolTip probe geometry shape.
- coolTipProbeBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
CoolTip probe branch group.
- coord - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Site
-
- coord - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
coordinate used to transform data point from image coordinate to dicom
coordinate
- coord_code - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
If qform_code > 0, coord_code = qform_code.
- coord_code - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
If qform_code > 0, coord_code = qform_code.
- coord_code2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
If qform_code > 0 and sform_code > 0, coord_code = qform_code and coord_code2 = sform_code. coord_code has values
for "Arbitrary X,Y,Z coordinate system", "Scanner based anatomical coordinates",
"Coordinates aligned to another file's or to anatomical truth", "Talairach X,Y,Z coordinate system", and
"MNI 152 normalized X,Y,Z coordinates".
- coordA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- coordArray - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
- coordB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- coordinateChanged(int, int, int) - Method in interface gov.nih.mipav.view.CoordinateChangeListener
-
A change has occurred to the current coordinates of an image frame.
- CoordinateChangeListener - Interface in gov.nih.mipav.view
-
This interface identifies a class which wants to know about changes to the current coordinates of another frame (such
as ViewJFrameTriImage).
- CoordinateDescentMinimizer(CeresSolver.Context) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CoordinateDescentMinimizer
-
- coordinateListeners - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
A list of CoordinateChangeListeners who want to know about changes to the coordinate currently pointed to by the
tri-image frame's crosshairs.
- coordinatePanel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- coordinates - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Vector to hold the 3D coordinate positions
- CoordinateSystemTransformMatrixStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under in the Gifti xml schema.
- coordinateView - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- coordinateViewChanged(ContourPlot.CoordSysRenderer, Rectangle2D) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.CoordinateViewListener
-
Method will be called when the source's coordinate view changed.
- coords - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Point3D
-
- coordsys - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- coordsys - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
- coordsysAreaLB - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- coordsysAreaLT - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- coordsysAreaRB - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- coordsysAreaRT - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- CoordSysPanning(ContourPlot.JPlotterCanvas, ContourPlot.CoordSysRenderer) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- CoordSysRenderer() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Sets up a CoordSysRenderer with the default color scheme
- CoordSysScrollZoom(ContourPlot.JPlotterCanvas, ContourPlot.CoordSysRenderer) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
- coordVector - Variable in class gov.nih.mipav.model.file.FilePolylineVOIXML.MyXMLHandler
-
The contours of the VOI we are building.
- coordviewListener - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- copiedFunct - Static variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- copiedName - Static variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- copiedXs - Static variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- copiedYs - Static variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- coplanar - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- copy - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Flag that indicates whether to copy capture to clipboard
- copy - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- copy() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ColorMap
-
- copy() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
- copy() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Returns a deep copy of this image.
- copy() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
- copy() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- copy() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Returns a shallow copy of this triangle.
- copy() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Makes a deep copy of the DICOM_DataObject.
- copy() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Returns a deep copy the VR.
- copy() - Method in class gov.nih.mipav.model.structures.IntVector
-
Clones the integer vector.
- copy() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Create a deep copy of this Light instance.
- copy() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightAmbient
-
Create a deep copy of this Light instance.
- copy() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
Create a deep copy of this Light instance.
- copy() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Create a deep copy of this Light instance.
- copy() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Create a deep copy of this Light instance.
- copy() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- copy() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- copy() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- copy(AlgorithmBrainExtractor.UnorderedSetInt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Make a deep copy of the input set.
- copy(AlgorithmObjectExtractor.UnorderedSetInt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Make a deep copy of the input set.
- copy(IntVector) - Method in class gov.nih.mipav.model.structures.IntVector
-
Copies this array into the array passed in as an argument.
- copy(ModelTriangleMesh.UnorderedSetInt) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Make a deep copy of the input set.
- copy(BurnBaseView.UnorderedSetInt) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Make a deep copy of the input set.
- copy(VOIWormAnnotation) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- copy(Object) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.UnoptimizedDeepCopy
-
Returns a copy of the object, or null if the object cannot
be serialized.
- copy(T) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
Copies the specified Point2D (calls clone) and
casts the copy to the class of the original.
- Copy(TransMatrix) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
copy, overwrite this.
- Copy(TransMatrixd) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
copy, overwrite this.
- Copy(ClassificationWidgetState) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Copies the input ClassificationWidgetState:
- copy_Affine(SIFT3D.Affine, SIFT3D.Affine) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- copy_and_downsample(float[], int, float[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
------------------------------------------------------------------
- copy_and_downsample(float[], int, float[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- copy_and_upsample(float[], int, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
------------------------------------------------------------------
- copy_and_upsample_rows(float[], int, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- copy_ClassSig(AlgorithmGaussianMixtureModelEM.ClassSig, AlgorithmGaussianMixtureModelEM.ClassSig, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- copy_discrete_wavelet(PyWavelets.DiscreteWavelet) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- copy_Keypoint(SIFT3D.Keypoint, SIFT3D.Keypoint) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- copy_Mat_rm(SIFT3D.Mat_rm, SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- copy_point(int, NelderMead.point_t, NelderMead.point_t) - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- copy_SubSig(AlgorithmGaussianMixtureModelEM.SubSig, AlgorithmGaussianMixtureModelEM.SubSig, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- copy2D(double[], int, int, int, double[], int, int, int, boolean) - Static method in class gov.nih.mipav.util.ArrayUtil
-
- copy2D(float[], int, int, int, float[], int, int, int, boolean) - Static method in class gov.nih.mipav.util.ArrayUtil
-
- copy2DSrcBufferToBdrBuffer(float[], float[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Method copies the data in srcBuffer centered in the border buffer That is, the src image is completely surrounded
by a border.
- copy2DSrcBufferToBdrBuffer(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Method copies the data in srcBuffer centered in the border buffer That is, the src image is completely surrounded
by a border.
- copy3D(double[], int, int, int, int, double[], int, int, int, int, boolean) - Static method in class gov.nih.mipav.util.ArrayUtil
-
- copy3D(float[], int, int, int, int, float[], int, int, int, int, boolean) - Static method in class gov.nih.mipav.util.ArrayUtil
-
- copy3DSrcBufferToBdrBuffer(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Method copies the data in srcBuffer so it is centered in the border buffer That is, the src image is completely
surrounded by a border.
- copy3DSrcBufferToBdrBuffer(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Method copies the data in srcBuffer centered in the border buffer That is, the src image is completely surrounded
by a border.
- copy4D(double[], int, int, int, int, double[], int, int, int, int, boolean) - Static method in class gov.nih.mipav.util.ArrayUtil
-
- copy4D(float[], int, int, int, int, float[], int, int, int, int, boolean) - Static method in class gov.nih.mipav.util.ArrayUtil
-
- copyAdjToRefButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- copyAlInfo - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert4Dto3D
-
- copyAllInfo - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult
-
Whether to copy all file information
- copyAllInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
Whether all info in the image's FileInfo is copied
- copyAllInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
Whether all info in the image's FileInfo is copied
- copyAllInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
Whether all info in the image's FileInfo is copied
- copyAllInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Whether all info in the image's FileInfo is copied
- copyAllInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
Whether all info in the image's FileInfo is copied
- copyAllInfoBox - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
Checkbox for representing whether FileInfo is copied
- copyAllInfoBox - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
Checkbox for representing whether FileInfo is copied
- copyAllInfoBox - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
Checkbox for representing whether FileInfo is copied
- copyAllInfoBox - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Checkbox for representing whether to copy all file info
- copyAllInfoBox - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
Checkbox for representing whether to copy all file info
- copyAllLights() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
- copyAllToRight() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.JPanelAddRemoveVOI
-
- copyAllToRight() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.JPanelAddRemoveVOI
-
- copyArea(int, int, int, int, ContourPlot.Img, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Copies specified area of this Img to the specified destination Img
at specified destination coordinates.
- copyBaseInfo(FileInfoBase[], FileInfoBase, float[], float[], int[], int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult
-
- copyBMatrixFile() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method copies the optional b matrix file that user provided, and copies it to proc dir and renames it to the
correct naming syntax.
- copyBuffers(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
Copies all values from the srcbuffer to the destination buffer. the format is intended to envision the
organisation of dest[i] := src[i] float dest destination array float src source array
- copyBuffers(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Copies all values from the srcbuffer to the destination buffer. the format is intended to envision the
Organization of dest[i] := src[i] float dest destination array float src source array
- copyByteArray(byte[], byte[]) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Copies the source byte array into the destination byte array.
- copyCheck - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Button for selecting copy to clipboard.
- copyClippedVOIs(ViewVOIVector) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Deprecated.
- copyCoreInfo(FileInfoBase[], FileInfoBase[]) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Helper method to copy important file info type to another file info type.
- copyCoreInfo(FileInfoBase[], FileInfoBase[], boolean[]) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Helper method to copy core information from one fileinfo into another, this method also has a list of fileinfos
NOT to copy (used by JDialogRemoveSlices).
- CopyData(CeresSolver.TripletSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- CopyData(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Copies all data from a shape to this.
- copyDataUnit(byte[], int, int, int, int[]) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- copyDataUnit(byte[], int, int, int, int[]) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- copyDataUnit(int[], int, int, int, int[]) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- copyDataUnit(int[], int, int, int, int[]) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- copyDicomInfo(FileInfoBase[], FileInfoBase, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult
-
Most efficient way of creating DICOM tags for 4-D.
- copyFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- copyFileInfoCommon() - Method in class gov.nih.mipav.model.file.FileMedVision
-
copyFileInfoCommon - copy common file info into new header Better must exist but this works.
- copyFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- copyFileTypeInfo(ModelImage) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Deep copies the file type info from the fromImage to the current image object.
- copyFloatData(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- copyFloatData(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- copyFloatData(ModelSimpleImage, ModelSimpleImage) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- copyFloatData(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- copyFromSrcColRange(libdt.Mat, libdt.Mat, int, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- copyFunct(int) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Copies the indicated function's properties, to be pasted later as a new function.
- copyFunctionSample(CeresSolver.FunctionSample, CeresSolver.FunctionSample) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- copyHist(int[]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- copyHist(int[][]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- copyHist(int[][][]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- copyin(byte[], FileSVS.ModHuffmanInputStream, int, boolean) - Method in class gov.nih.mipav.model.file.FileSVS
-
- copyin(byte[], FileTiff.ModHuffmanInputStream, int, boolean) - Method in class gov.nih.mipav.model.file.FileTiff
-
- copyMakeBorder(double[][], int, int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- copyMakeBorder(double[][], int, int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- copyMakeBorder(double[][], int, int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- copyMakeBorder(double[][], int, int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- copyMakeBorder(double[][], int, int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- copyMakeBorder(double[][], int, int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- copyMakeBorder(double[][], int, int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- copyMakeBorder(double[][], int, int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- copyMakeBorder2D(double[][], int, int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- copyMaterial(Material) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
- copyMatrix(double[][]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Copies provided transformation matrix.
- copyMatrix(double[][]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Copies provided transformation matrix.
- copyMenu - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- CopyNormalFiles(int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
When the ModelImage data is rendered as a solid surface, the Normal map is used in the rendering.
- copyOf(double[], int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
Java5 'backport' of Arrays.copyOf
- copyOf(int[], int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
Java5 'backport' of Arrays.copyOf
- copyOfCalendar(Calendar) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Constructs and new class and copy the year, month, day paramenters.
- CopyParameterBlockStateToUserState() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- copyPixel(byte[], int, int, int, int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- copyPixel(byte[], int, int, int, int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- copyPixel(int[], int, int, int, int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- copyPixel(int[], int, int, int, int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- copyPoint(double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Make a copy of the transformation vector
- copyPoint(double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Make a copy of the transformation vector
- copyRefToAdjButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- copyResolutions(ModelImage, ModelImage, int) - Static method in class gov.nih.mipav.model.file.FileIO
-
DOCUMENT ME!
- copyright - Variable in class gov.nih.mipav.model.file.FileSVS
-
- copyright - Variable in class gov.nih.mipav.model.file.FileTiff
-
- COPYRIGHT - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- COPYRIGHT - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- copySelected(JList, JList) - Method in class gov.nih.mipav.view.JPanelListController
-
Copies the selected items in list A and appends them to list B.
- copySelected(JTree, JTree) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.JPanelAddRemoveVOI
-
- copySelected(JTree, JTree) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.JPanelAddRemoveVOI
-
- copySelected(JTree, JTree) - Method in class gov.nih.mipav.view.JPanelTreeController
-
Copies the selected items in tree A and appends them to tree B.
- CopyShared() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Called by the init() function.
- copyState(CeresSolver.LineSearchMinimizer.State, CeresSolver.LineSearchMinimizer.State) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer
-
- copyTo(libdt.Mat[], libdt.Mat[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- copyTo(libdt.Mat, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- copyToDstColRange(libdt.Mat, libdt.Mat, int, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- copyVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- copyVOIList - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Vector to hold clipped VOIs (multiple).
- copyVOINameList - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Vector to hold VOI names (multiple).
- copyVOIs(Vector<VOIBase>) - Method in class gov.nih.mipav.view.ViewUserInterface
-
- COR - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Used by FreeSurfer software. extension: -.info or -.info~ for header file -.nnn for slice data file where nnn is
the slice number
- core - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
core library parameters
- CoredEdgeIndex - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- CoredEdgeIndex() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredEdgeIndex
-
- CoredMeshData - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- CoredMeshData() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredMeshData
-
- CoredPointIndex - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- CoredPointIndex() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredPointIndex
-
- CoredPointIndex(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredPointIndex
-
- CoredVectorMeshData - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- CoredVectorMeshData() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- corEnabled - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- corner(LSCM.Vertex, LSCM.Face) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- CORNER_DETECTOR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- CORNER_DETECTOR - Static variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- corner_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3DC
-
- corner_thresh_default - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cornerBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- cornerCropPt - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Crop Bounding Box Corners in Screen Coordinates:.
- cornerDetector - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- cornerDetector() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- cornerEdgePattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- cornerEdgePattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- cornerEdgePattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- cornerEdgePattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- cornerEdgePattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- CornerEdgePattern - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- CornerEdgePattern() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- CornerEdgePatternTest - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- CornerEdgePatternTest() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePatternTest
-
- cornerImage - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- CornerIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Square
-
- CornerIndex(int, int[], int, int, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VertexData
-
- CornerIndex(int, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- CornerIndex(int, int, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.BinaryNode
-
- CornerIndex(Point3D, Point3D) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- CornerIndex(OctNode, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VertexData
-
- CornerIndex(OctNode, int, int, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VertexData
-
- CornerIndexPosition(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.BinaryNode
-
- cornerMap - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- cornerNeighbor(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- cornerNeighbor(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- cornerPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- cornerRB - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- corners - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- corners - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
- corners - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
- corners(SchwarzChristoffelMapping.scmap) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- CORNERS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- CORNERS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Square
-
- cornerToCrop() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Creates the four corners of the crop bounding box, based on the two corner crop points:
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Coronal image type
- Coronal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Coronal image type
- CORONAL - gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- CORONAL - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Coronal orientation.
- CORONAL_A - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- CORONAL_AB - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- CORONAL_B - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- CORONAL_FLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- CORONAL_FLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- coronal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- coronal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- coronal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- coronal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- coronal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- coronal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- coronal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- coronal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- coronal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- coronal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- coronal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- CORONAL_INDEX - Static variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- CORONAL_INDEX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- CORONAL_UNFLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- CORONAL_UNFLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- coronalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- coronalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- coronalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- coronalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- coronalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- coronalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- coronalMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- coronalMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- coronalMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- coronalMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- coronalMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- CoronalVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Coronal VOI instance
- CoronalVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
- correct - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
enables JPWL correction at the decoder
- correctDims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
check for 2-dimensionality.
- correctedBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- correctedImage - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- correctGradTransCheckbox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- correctionFactorCheckbox - Variable in class gov.nih.mipav.view.components.JPanelSigmas
-
gui
- correctionFactorLabel - Variable in class gov.nih.mipav.view.components.JPanelSigmas
-
label
- correctionLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
- correctionText - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
- CorrectJacobian(int, int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Corrector
-
- CorrectJacobian(int, int, double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Corrector
-
- Corrector(double, double[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Corrector
-
- CorrectorMultidimensionalGaussNewtonApproximation() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CorrectorMultidimensionalGaussNewtonApproximationZeroResidual() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CorrectorNegativeGradientDeathTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CorrectorScalarCorrection() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CorrectorScalarCorrectionAlphaClamped() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CorrectorScalarCorrectionZeroResidual() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CorrectorZeroGradientDeathTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CorrectResiduals(int, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Corrector
-
- correctSpaceAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- correctSpaceLTthick(ModelImage, float) - Method in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
This method corrects spacing for cases where the space is less than the thickness.
- correlation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate glcm correlation Sum over i,j of Probability(i,j) * (i - glcm mean) * (j - glcm mean)/ glcm
variance.
- correlation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate glcm correlation Sum over i,j of Probability(i,j) * (i - glcm mean) * (j - glcm mean)/ glcm
variance.
- correlation - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- correlation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- CORRELATION_RATIO - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- CORRELATION_RATIO - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- CORRELATION_RATIO_SMOOTHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- CORRELATION_RATIO_SMOOTHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- CORRELATION_RATIO_SMOOTHED_WGT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- CORRELATION_RATIO_SMOOTHED_WGT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- correlationCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- correlationCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- correlationFilter(double[][]) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- correlationRatio(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Correlation ratio cost function.
- correlationRatio(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Correlation ratio cost function.
- correlationRatio(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Correlation ratio cost function.
- correlationRatio(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Correlation ratio cost function.
- correlationRatioSmoothed - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
- correlationRatioSmoothed(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Correlation ratio cost function.
- correlationRatioSmoothed(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Correlation ratio cost function.
- correlationRatioSmoothed(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Correlation ratio cost function.
- correlationRatioSmoothed(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Correlation ratio cost function.
- correlationRatioSmoothedWgt(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
- correlationRatioSmoothedWgt(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
- correlationRatioSmoothedWgt(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
- correlationRatioSmoothedWgt(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Correlation ratio cost function using weighting functions to mask out areas that should not be included in the
cost function calculations.
- correspButton - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
this is a ref to the corresponding button becasue they need to be in sync
- CORTES - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CorticalAnalysisRender - Class in gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM
-
Cortical analysis applet and viewer.
- CorticalAnalysisRender(GLCanvas, VolumeTriPlanarInterface, VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
- CorticalAnalysisRender(VolumeTriPlanarInterface, VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Construct the BrainSurfaceFlattener renderer.
- cos() - Method in class gov.nih.mipav.util.DoubleDouble
-
For all real x, cos(x) = 1 - x**2/2!
- cos(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- cos(double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- cos_alpha - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- cos_theta - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- cos0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- cos22 - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- cos45 - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- cosButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- coscof - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- cosh() - Method in class gov.nih.mipav.util.DoubleDouble
-
For all real x, cosh(x) = 1 + x**2/2!
- cosh(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
- cosh(double) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- cosines - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- cosm1(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- COSM1 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- cost - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAnyTwoImagesSNR
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTwoMRIImagesSNR
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateScratch
-
- cost - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- cost - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer.State
-
- cost - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ExpectedEvaluation
-
- cost - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- cost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
-
Cost of function at this minimum.
- cost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D.MatrixListItem
-
Cost of function at this minimum.
- cost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- cost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D.MatrixListItem
-
Cost of function at this minimum.
- cost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- cost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D.MatrixListItem
-
Cost of function at this minimum.
- cost - Variable in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Cost of function at this minimum.
- cost - Variable in class gov.nih.mipav.model.algorithms.Vectornd
-
Cost value
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- cost - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.SliceSet
-
- cost - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.TreeNode
-
Cost of position.
- cost - Variable in class gov.nih.mipav.view.RubberbandLivewire.TreeNode
-
Cost of position.
- cost(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Not implemented in this class.
- cost(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Not implemented in this class.
- cost(double[]) - Method in interface gov.nih.mipav.model.algorithms.AlgorithmOptimizeFunctionBase
-
DOCUMENT ME!
- cost(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt.CostFunction
-
Calcuated the cost function for a given simplex vertex. cost = intensity sum of errors = sum_i(I[i] - I'[i])
- cost(double[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer.CostFunction
-
Calculated cost.
- cost(double[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark.CostFunction
-
Cost cost = intensity sum of errors = sum_i(I[i] - I'[i]) x[] = row of p[][].
- cost(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- cost(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- cost(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Calculates the cost (dependent on the selected cost function) based on the reference image and the input image.
- cost(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Calculates the cost (dependent on the selected cost function) based on the reference image and the input image.
- cost(TransMatrix) - Method in interface gov.nih.mipav.model.algorithms.AlgorithmOptimizeFunctionBase
-
DOCUMENT ME!
- cost(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt.CostFunction
-
Deprecated.
- cost(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer.CostFunction
-
Filler to implement cost functions from AlgorithmOptimizeFunctionBase.
- cost(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark.CostFunction
-
DOCUMENT ME!
- cost(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Calculates the cost (dependent on the selected cost function) based on the reference image and the input image.
- cost(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Calculates the cost (dependent on the selected cost function) based on the reference image and the input image.
- cost(TransMatrixd) - Method in interface gov.nih.mipav.model.algorithms.AlgorithmOptimizeFunctionBase
-
- cost(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt.CostFunction
-
Deprecated.
- cost(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer.CostFunction
-
Filler to implement cost functions from AlgorithmOptimizeFunctionBase.
- cost(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark.CostFunction
-
DOCUMENT ME!
- cost_change - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- cost_CRS - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perImageCost
-
- cost_evaluation_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- cost_evaluation_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
- cost_fun(int, NelderMead.point_t, NelderMead.param_t) - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- cost_function - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- cost_function() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- cost_function(int, NelderMead.point_t) - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- cost_function_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- cost_function_ownership - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemOptions
-
- cost_function_ref_count_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- COST_FUNCTOR_EXAMPLE - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- cost_MIS - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perImageCost
-
- cost_NMIS - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perImageCost
-
- cost_NXS - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perImageCost
-
- costCalled - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- costCalled - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- costChoice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Choice of which cost function to use.
- costChoice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Choice of which cost function to use.
- costChoice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Choice of which cost function to use.
- costChoice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Choice of which cost function to use.
- costChoice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Choice of which cost function to use.
- costChoice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Choice of which cost function to use.
- costChoice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Choice of which cost function to use.
- costChoice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Choice of which cost function to use.
- costChoice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Choice of which cost function to use.
- costChoice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Choice of which cost function to use.
- costFunc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
The cost function to use when registering the original image against the flipped image.
- costFunc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Which cost function to use (MINDIFF or MAXSUM).
- costFunc - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- costFunctID - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- costFunctID - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- costFunction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Cost function called to measure cost - 1D.
- costFunction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Cost function called to measure cost - 1D.
- costFunction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Cost function called to measure cost - 1D.
- costFunction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Cost function called to measure cost - 1D.
- costFunction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Cost function called to measure cost - 1D.
- CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt.CostFunction
-
Empty constructor.
- CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer.CostFunction
-
CostFunction constructor.
- CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark.CostFunction
-
CostFunction constructor.
- costFunctionScrollPane - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
Scroll Pane for the Text Area
- costFunctionScrollPane - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Scroll Pane for the Text Area
- CostFunctionTestConditionedCostFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- costFunctionTextArea - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
- costFunctionTextArea - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- CostFunctorExample() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CostFunctorExample
-
- costGraph - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- costGraph - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- costName - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- costName - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- costNum - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- costs - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Array of parents
- costT2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- count - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- count - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- count - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- count - Variable in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- count - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGACInputStream
-
- count - Variable in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- count - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGACInputStream
-
- count - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- count - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- count - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- count - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- count - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear.GroupClassesReturn
-
- count - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- count_contours(GenericPolygonClipper.polygon_node) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- count_optimal_vertices(GenericPolygonClipper.gpc_vertex_list) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- countArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
- countArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
- countArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
- countedByteRead() - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Returns a byte read from the RandomAccessIO.
- counter - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- counter - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- counter - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- counter - Variable in class gov.nih.mipav.model.file.FilePARREC
-
counter
- counter_per_class - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- counter_per_class - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- counterClockwise(float[], float[], float[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Change the given VOI to counter clock wise order.
- counterClockwise(float[], float[], float[], int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Change the VOI points to counter clock wise order.
- counterClockwise(float[], float[], float[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- counterGC - Variable in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
DOCUMENT ME!
- counterLock - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- countMaskLabels() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Procedure that counts the number of labels in the mask image.
- countNonZero(libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- countObservers() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
- countObservers() - Method in interface gov.nih.mipav.model.util.Observable
-
Returns the number of the observers of this Observable object.
- country - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- counts - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
- countSinceLastUpdate - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- countTable - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- countText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
- countText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
- countThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- countThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- countThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Number of counts required to find an ellipse
- countThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Number of counts required to find a hyperbola
- courier10 - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 10 point, plain, courier font.
- courier10 - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 10 point, plain, courier font.
- courier12 - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 12 point, plain, courier font.
- courier12 - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 12 point, plain, courier font.
- courier12B - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 12 point, bold, courier font.
- courier12B - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 12 point, bold, courier font.
- courier13 - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 13 point, plain, courier font.
- courier13B - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 13 point, bold, courier font.
- cov_code - Variable in enum gov.nih.mipav.model.algorithms.libdt.cov_type
-
< iid covariance matrix.
- COV_DIAG - gov.nih.mipav.model.algorithms.libdt.cov_type
-
< Full covariance matrix.
- COV_FULL - gov.nih.mipav.model.algorithms.libdt.cov_type
-
- COV_IID - gov.nih.mipav.model.algorithms.libdt.cov_type
-
< diagonal covariance matrix.
- COV_ILLEGAL - gov.nih.mipav.model.algorithms.libdt.cov_type
-
- COV_REG_ADD - gov.nih.mipav.model.algorithms.libdt.cov_reg_type
-
< enforce a minimum eigenvalue of regval
- cov_reg_code - Variable in enum gov.nih.mipav.model.algorithms.libdt.cov_reg_type
-
- COV_REG_ILLEGAL - gov.nih.mipav.model.algorithms.libdt.cov_reg_type
-
< add a constant regval to the diagonal
- COV_REG_MIN - gov.nih.mipav.model.algorithms.libdt.cov_reg_type
-
< no regularization
- COV_REG_NONE - gov.nih.mipav.model.algorithms.libdt.cov_reg_type
-
- cov_reg_type(int) - Constructor for enum gov.nih.mipav.model.algorithms.libdt.cov_reg_type
-
- cov_type(int) - Constructor for enum gov.nih.mipav.model.algorithms.libdt.cov_type
-
- covar - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
-
- covar() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- covar() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- covar_callback_default(double[][]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- covar_callback_default_arr - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- COVAR_DYNAMIC_RANGE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- covariance - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMarkovSmooth
-
The known covariance of the Gaussian noise
- covariance - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
The known covariance of the Gaussian noise
- covariance_matrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- covariance_matrix_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- CovarianceAlgorithmType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.CovarianceAlgorithmType
-
- CovarianceImpl(CeresSolver2.CovarianceOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- CovarianceImplTestComputeCovarianceSparsity() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceImplTestComputeCovarianceSparsityWithConstantParameterBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceImplTestComputeCovarianceSparsityWithFreeParameterBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceOptions
-
- CovarianceSetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceTestComputeCovarianceFailure() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceTestConstantParameterBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceTestDenseCovarianceMatrixFromSetOfParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceTestDenseCovarianceMatrixFromSetOfParametersInTangentSpace() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceTestLocalParameterization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceTestLocalParameterizationInTangentSpace() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceTestLocalParameterizationInTangentSpaceWithConstantBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceTestNormalBehavior() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CovarianceTestTruncatedRank() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- covarMat - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
2D array of doubles of dimension nPts by max(4,param) containing the main part of the covariance matrix
(Jtranspose * J)inverse, where J is the Jacobian matrix computed at a.
- covclc(int[], double[], int[], double[][], int, int, int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- Covdet - Class in gov.nih.mipav.model.algorithms
-
Copyright (C) 2013-14 Andrea Vedaldi.
- Covdet() - Constructor for class gov.nih.mipav.model.algorithms.Covdet
-
- covdet_detector(float[][], boolean, Covdet.VlCovDetMethod, boolean, int, int, double, int, double, double, double, boolean, double, Covdet.vlCovDetDescriptorType, int, double, double, float[], float[], double[][], boolean, boolean, boolean, Vector<float[][]>, int, int, float, float, boolean, Vector<Covdet.VlScaleSpace>, Vector<Covdet.VlScaleSpace>, Vector<Float>, Vector<Float>, Vector<Float>, Vector<Float>) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- Covdet.VlCovDet - Class in gov.nih.mipav.model.algorithms
-
- Covdet.vlCovDetDescriptorType - Enum in gov.nih.mipav.model.algorithms
-
- Covdet.VlCovDetExtremum2 - Class in gov.nih.mipav.model.algorithms
-
- Covdet.VlCovDetExtremum3 - Class in gov.nih.mipav.model.algorithms
-
- Covdet.VlCovDetFeature - Class in gov.nih.mipav.model.algorithms
-
- Covdet.VlCovDetFeatureLaplacianScale - Class in gov.nih.mipav.model.algorithms
-
- Covdet.VlCovDetFeatureOrientation - Class in gov.nih.mipav.model.algorithms
-
- Covdet.VlCovDetMethod - Enum in gov.nih.mipav.model.algorithms
-
- Covdet.VlFrameDisc - Class in gov.nih.mipav.model.algorithms
-
- Covdet.VlFrameEllipse - Class in gov.nih.mipav.model.algorithms
-
- Covdet.VlFrameOrientedDisc - Class in gov.nih.mipav.model.algorithms
-
- Covdet.VlFrameOrientedEllipse - Class in gov.nih.mipav.model.algorithms
-
- Covdet.VlFrameType - Enum in gov.nih.mipav.model.algorithms
-
- Covdet.VlScaleSpace - Class in gov.nih.mipav.model.algorithms
-
- Covdet.VlScaleSpaceGeometry - Class in gov.nih.mipav.model.algorithms
-
- Covdet.VlScaleSpaceOctaveGeometry - Class in gov.nih.mipav.model.algorithms
-
- coverage(double, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- coverage_max(double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- CovMatrix() - Constructor for class gov.nih.mipav.model.algorithms.libdt.CovMatrix
-
cache the matrix square-root of the covariance matrix.
- CovMatrix(int, libdt.cov_type) - Constructor for class gov.nih.mipav.model.algorithms.libdt.CovMatrix
-
- covopt - Variable in class gov.nih.mipav.model.algorithms.libdt.CovMatrix
-
< storage for the covariance matrix. full matrix is [n x n]; diagonal matrix
is [n x 1]; iid matrix is [1 x 1].
- CoxDeBoorBSplineKernelFunction - Class in gov.nih.mipav.model.structures
-
- CoxDeBoorBSplineKernelFunction() - Constructor for class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- CoxDeBoorBSplineKernelFunction(int) - Constructor for class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- CoxDeBoorBSplineKernelFunctionTest - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- CoxDeBoorBSplineKernelFunctionTest2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- cp - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot
-
Example from source ContourPlot.java draws contour plot of function surface correctly.
- cp - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t2_t
-
pointer to the image coding parameters
- cp - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
coding parameters
- cP() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- cP(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- Cp - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- Cp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- cp_layer - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
Set the maximum number of quality layers to decode.
- cp_reduce - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
Set the number of highest resolution levels to be discarded.
- cP0(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- cP1(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- cP2(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- cpAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- CParamDispVectors(CDVector, Vector<CDVector>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Wrapper to generate damp displacement vectors
- CParamDispVectors(CDVector, Vector<CDVector>, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Generates a set combined model parameter displacement vectors where each
parameter is displaced at a time according to the values in vStdDisp.
- cpField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- cpGBC - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- cpGBC - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- cpGBC - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- cpGBC - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- cpGBC - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- cpGBL - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- cpGBL - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- cpGBL - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- cpGBL - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- cpGBL - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- cPhase - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- cPhase - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- cPhase - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
260 Total cardiac phase prescribed.
- cPhaseNum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
646 Cardiac phase number.
- CPJAC3(int, int, int, int[], double[], double[], double[], double[], double[], int[], int[], int[], int[], int[], double[], double[], double[], double[][], boolean[], int[], int[], double, int[], boolean) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- cplxpair(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- CQCOF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- CQT - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- CQT - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- CQT2 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- CQT2 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- cquantize - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- cquantize2 - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- cr - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- cr - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- CR - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
- Cr_g_tab - Variable in class gov.nih.mipav.model.file.libjpeg.my_color_deconverter
-
- Cr_g_tab - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- Cr_r_tab - Variable in class gov.nih.mipav.model.file.libjpeg.my_color_deconverter
-
- Cr_r_tab - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- Cr2 - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
Canon camera raw, version 2.
- cradius - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- craffine(double[][], double[], double[], SchwarzChristoffelMapping.qlgraph, double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- craffine_aff - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- craffine_wn - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- CRC - Class in gov.nih.mipav.model.file
-
A simple class the hold and calculate the CRC for sanity checking
of the data.
- CRC() - Constructor for class gov.nih.mipav.model.file.CRC
-
- crc32Table - Static variable in class gov.nih.mipav.model.file.CRC
-
- crcdt(double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crcError() - Static method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- crdiskAccuracy(SchwarzChristoffelMapping.scmap) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crdiskCenter(SchwarzChristoffelMapping.scmap, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crdiskevalinv(SchwarzChristoffelMapping.scmap, double[][], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crdiskmap(SchwarzChristoffelMapping.polygon, double, double[][], SchwarzChristoffelMapping.qlgraph) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crdiskplot(SchwarzChristoffelMapping.scmap, double[], double[], int, int, boolean, double[], int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- CRDOWN - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- creal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- creal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- create - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- create() - Static method in class gov.nih.mipav.view.ViewUserInterface
-
This method should only be called once, and it should only be called by MipavMain to during the initialization of
MIPAV.
- create(int, int[], int) - Method in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- create(int, int[], int, int) - Method in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- create(int, int, int) - Method in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- create(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- create(ModelSimpleImage, ModelSimpleImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- Create() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
A factory that is used for operations that create new meshes from the current one.
- Create(CeresSolver.EvaluatorOptions, CeresSolver.Program, String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Create(CeresSolver.LinearSolverOptions) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Create(CeresSolver.LineSearchDirectionOptions) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Create(CeresSolver.LineSearchType, CeresSolver.LineSearchOptions, String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Create(CeresSolver.MinimizerType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Create(CeresSolver.Program, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Create(CeresSolver.TrustRegionStrategyOptions) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- create_colorindex(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- create_colorindex8(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- create_colorindex9to12(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- create_colormap8(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- create_colormap9to12(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- create_contour_bboxes(VOIBaseVector) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- create_edge(LSCM.Vertex, LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- create_face(LSCM.Vertex[], int) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- create_odither_tables(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- create_vertex(int) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- create2DRandImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- create3DRandImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- create3DVOI(boolean) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- create3DVOI(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- create3DVOI(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- create3DVOI(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- create3DVOI(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- create3DVOI(boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- createActiveContourBinaryMask(BitSet, int, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Creates a binary mask at every slice.
- createADC - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- createAdOpDialog(ActionListener) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Builds the advanced function dialog - looks like a calculator.
- createAllDownButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
convenience Method.
- createAllDownButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
convenience Method.
- createAllLeftButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
convenience Method.
- createAllLeftButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
convenience Method.
- createAllListAButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
creates a button with either the image of an arrow (leftarrowcollection.gif) or with the text "Send
All left" or "Send All up".
- createAllListBButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
creates a button with either the image of an arrow (rightarrowcollection.gif) or with the text "Send
all right" or "Send all down".
- createAllRightButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
convenience Method.
- createAllRightButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
convenience Method.
- createAllTreeAButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
creates a button with either the image of an arrow (leftarrowcollection.gif) or with the text "Send
All left" or "Send All up".
- createAllTreeBButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
creates a button with either the image of an arrow (rightarrowcollection.gif) or with the text "Send
all right" or "Send all down".
- createAllUpButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
convenience Method.
- createAllUpButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
convenience Method.
- createAndRedistributePoints(ArrayList<Point>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- createAndRedistributePoints(ArrayList<Point>, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- createAnnotatePoint(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Create a new Annotation point at the position specified.
- createAnnotatePoint(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Create a new Annotation point at the position specified.
- createArray(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- createBinaryImage(ModelImage, boolean, boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Forms a binary representation of the VOI into the image.
- createBinaryMask(int, int, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Creates a binary mask at a slice for that slice only.
- createBinaryMask(int, int, int, VOIBase) - Method in class gov.nih.mipav.model.structures.VOI
-
Creates a binary mask at a slice for that slice and element only.
- createBinaryMask(int, int, int, BitSet, boolean, boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Creates a binary mask at a slice.
- createBinaryMask3D(BitSet, int, int, boolean, boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Creates a 3D binary mask.
- createBlankImage(FileInfoBase) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Creates a blank Image based on the information found in the fileInfo object and places it in a frame.
- createBlankImage(FileInfoBase, boolean, boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Creates a blank Image based on the information found in the fileInfo object.
- CreateBlockDiagonalEtE() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- CreateBlockDiagonalFtF() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- CreateBlockDiagonalMatrix(double[], Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- CreateBlockDiagonalMatrixLayout(int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- createBlurKernel() - Method in class gov.nih.mipav.model.GaussianKernelFactory
-
- createBMatrixFile() - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
create b-matrix file
- createBMatrixFileDICOM() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method creates the b-matrix file.
- createBMatrixFileParRec() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method creates the B-Matrix file
- createBoldLabel(String) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Creates a label in the proper (bold) font and color.
- createBoundariesImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- CreateBoundingBox() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Creates the bounding frames for the planes.
- CreateBox() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeBoundingBox
-
Creates the bounding box Polylines.
- CreateBox() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Called by CreateScene.
- createBoxFrame(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Creates a new box frame with the given dimensions.
- CreateBracketMesh() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- createBrainMask() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- createBranch(JMenu) - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
Helper method for creating sub-menus of the plugin.
- createBranchConnectGeometry(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Get the geometry to be used for rendering the connection of the specified branch to its parent branch.
- createBranchConnectGeometryScaled(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Get the geometry to be used for rendering the connection of the specified branch to its parent branch.
- createBranchPathGeometry(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Get the geometry to be used for rendering the path of the specified branch.
- createBranchPathGeometryScaled(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Get the geometry to be used for rendering the path of the specified branch.
- createBranchPathGeometryScaled(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Get the geometry to be used for rendering the path of the specified branch.
- createBranchPathGeometryScaled(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Translate the path points from image coordinate to view volume coordinate.
- createBuffers() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Create the buffers for imageA and imageB.
- createButton(String, JButton) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Makes a button.
- createButtonComponent() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Creates a display of the buttons (eg, OK, CANCEL, HELP) for the dialog.
- createBVGradBMatFileTXT() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
This method creates the B-Value/Gradient file for DTI Tab
- createCanvas(Node, JPanel) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Creates a canvas containing the input Node object, with the input viewing transformation.
- createCanvas(JPanel) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
createCanvas - Creates the Canvas3D for rendering the images.
- createCanvas3D() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Creates the canvas.
- CreateCircle(int, int, Texture) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
Creates the circle widget and control point:
- CreateClipPlanes() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Creates the clipping planes.
- createColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- createColorFunctionA(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- createColorFunctionB(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- createComboBox(Container, String[], int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Creates a combo box and adds it to the panel.
- createComboBoxX(GridBagLayout, GridBagConstraints, JPanel) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Creates a combo box and adds it to the panel.
- createComboBoxY(GridBagLayout, GridBagConstraints, JPanel) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Creates a combo box and adds it to the panel.
- createComboBoxZ(GridBagLayout, GridBagConstraints, JPanel) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Creates a combo box and adds it to the panel.
- createContainer(GLCanvas) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Creates the containing JPanel that will display this object.
- createContainer(GLCanvas) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Creates the containing JPanel that will display this object.
- createContext(ColorModel, Rectangle, Rectangle2D, AffineTransform, RenderingHints) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- createCopy() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Create a copy of this instance.
- createCopy() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Create a copy of this instance.
- createCopy() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Create a copy of this instance.
- CreateCube() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeOrientationCube
-
Creates the orientation cube.
- createCurve - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- createDataSink(Processor, MediaLocator) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
Create the DataSink.
- createDataSink(Processor, MediaLocator) - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
Create the data sink with the give processor and output media file location.
- createDataSink(Processor, MediaLocator) - Static method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Create the DataSink.
- createDecGui() - Method in class gov.nih.mipav.model.file.FileJP2
-
- CreateDefaultLinearSolverOrdering(CeresSolver.Program) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionPreprocessor
-
- createDeleteButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
creates a button with either the image of an 'X' (delete.gif) or with the text "delete selection".
- createDeleteButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
creates a button with either the image of an 'X' (delete.gif) or with the text "delete selection".
- createDerivedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
Creates the images derived from the tensor image.
- CreateDiagonalMatrix(double[], Vector<CeresSolver.Block>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- createDICOMFilesCommandLineHelp - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- createDimArray(int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Constructs the dimension array with the specified length.
- createDirectory() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Create flythru directory to save the captured images from AVI recorder.
- createDoGOperator(int, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- createDownButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
convenience Method.
- createDownButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
convenience Method.
- createDTIPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Creates the user-interface for the Diffusion Tensor Image dialog.
- createDWI() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- createDWIImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Second step in processing the diffusion weighted images.
- createDWIPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Creates the user-interface for the Diffusion Tensor Image dialog.
- createEdgeLists(ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Create the edges list from the given surface triangle mesh.
- createEdgeLists(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Create the edges list from the given surface triangle mesh.
- createEfficiencyImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- createEigenPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Creates the user-interface for the EigenVector FA dialog.
- createEmptyImage() - Static method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
Can be used by constructors to create an empty 3D image.
- createEmptyImage(FileInfoBase) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Creates a blank Image based on the information found in the default fileInfo object.
- createEmptyNode() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- createEmptyNodeInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- createEmptyNodeInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- createEmptyNodeInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- createEmptyNodeInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- createEmptyNodeInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- createEntryField(String) - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Builds a new JTextField, with the given String, sets its font (to MipavUtil.font12), sets the foreground colour
(to Color.black), sets column width to 7, then returns the newly made JTextField.
- createEntryField(String) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Builds a new JTextField, with the given String, sets its font (to MipavUtil.font12), sets the foreground colour
(to Color.black), sets column width to 7, then returns the newly made JTextField.
- CreateEvaluatePreparers(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobianWriter
-
- CreateEvaluatePreparers(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter
-
- CreateEvaluatePreparers(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseJacobianWriter
-
- CreateEvaluatePreparers(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DynamicCompressedRowJacobianWriter
-
- createEvaluateStringName() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CreateEvaluator(CeresSolver.Program) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- CreateEvaluatorScratch(CeresSolver.Program, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- createEvaluatorTestOptions() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- createEValue - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- createEVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- createFA - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- createFDivAImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- createFDivDImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- createFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
- createFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
- createFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
- createFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
- createFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
- createFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Create the feature image using the parameters set by the four
parameter-setting functions defined above.
- createField - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- createField - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- createFieldCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- createFieldCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- createFileInfo(File) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- createFileSelectorComponent() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Creates a single JPanelFileSelector which refers to the file "dicomsave.dictionary" in the user.home
(specified by java's properties) directory by default.
- createFileSelectorComponent() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Creates the basic layout of the file selectors to be used in the dialog.
- createFilteredImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- createFilters() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- createFrame() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Creates the JFrame.
- createFrame() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- createFrame() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Creates as stand-alone dialog with the interface:
- createFreeRangeArrays() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- createGabor - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- createGabor - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- createGabor - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- createGaborCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- createGattArray(int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Constructs the global attribute array with the specified length.
- createGeometry(Point3f[], Color4f[], int[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- createGlobalFFTKernelString(int, int, CLFFTPlan.CLFFTKernelDir, int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- createGM_Laplace(ModelImage, ModelImage, GraphicsImage, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- createGOperator(int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- CreateGradientCheckingCostFunction(CeresSolver.CostFunction, Vector<CeresSolver.LocalParameterization>, double, double, String, CeresSolver.GradientCheckingIterationCallback) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- CreateGradientCheckingProblemImpl(CeresSolver.ProblemImpl, double, double, CeresSolver.GradientCheckingIterationCallback) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- createGraphics() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Creates a Graphics2D, which can be used to draw into this image.
- createHanningWindow() - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- createHashtable() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Creates static hashtable to use to fill the tags in the dialog.
- CreateHessianGraph(CeresSolver.Program) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- CreateHistogramMesh(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- createIdentityMapControlPoints(BSplineBasisDiscretef) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
Create optimal placement of control points for each dimension which yields the identity mapping of the source
image, i.e., identity in that the output value to the Bspline function is the same as the input value.
- createiImage(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- createImage() - Method in class gov.nih.mipav.model.file.FilePARREC
-
DOCUMENT ME!
- createImageBorder() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
This method creates the compound image border array for each image in the light box.
- createImageBorder(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This method creates the compound image border array for each image in the light box.
- createImageDeformation() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Generate an image which contains the deformation value at each sample in the target image as it relates to how
the source image is transformed as a result of the registration.
- createImageDeformation() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Generate an image which contains the deformation value at each sample in the target image as it relates to how
the source image is transformed as a result of the registration.
- createImageDisplacement() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Generate an image which contains the magnitude of the displacement vector at each sample in the target image as
it relates to how the source image is transformed as a result of the registration.
- createImageDisplacement() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Generate an image which contains the magnitude of the displacement vector at each sample in the target image as
it relates to how the source image is transformed as a result of the registration.
- CreateImageFromTexture(GraphicsImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Read the current Volume Texture from the GPU and return a new ModelImage of that data.
- CreateImageFromTexture(GraphicsImage, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Copy the data from the input GraphicsImage and return a new ModelImage of that data.
- createImageMap(int, int) - Method in class gov.nih.mipav.model.structures.BSplineLattice2Df
-
Create an image of the specified dimensions and fill it to contain a mapping of the coordinates based on the 2D
lattice of B-spline control points.
- createImageMap(int, int, int) - Method in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
Create an image of the specified dimensions and fill it to contain a mapping of the coordinates based on the 3D
lattice of B-spline control points.
- CreateImageMesh(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- createImageNormals(float[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Create array of normal vectors corresponding to the voxels in the volume.
- createImagePointTable(JDialogProstateSegmentationRegBSpline3D.Edge, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Convert each image pixel to polar coordinate system, saved them in a
table.
- createImageSceneGraph() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Creates the scene graph, made up of a branch group parent, a transform
group under that which applies mouse behaviors to the scene, and a
branch groups under the transform group for the texture-mapped polygon.
- createImageSceneGraph() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Creates the scene graph.
- createImageSceneGraph() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Build the root of the burning point branch group, and attached the root to the parent scene root transform group.
- createImageSceneGraph() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Creates the scene graph, made up of a branch group parent, a transform group under that which applies mouse
behavior and lights to the scene, and three branch groups under the transform group for each of the three image
planes.
- createImageSceneGraph() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Creates the scene graph, made up of a branch group parent, a transform group under that which applies mouse
behavior and lights to the scene, and three branch groups under the transform group for each of the three image
planes.
- createImageSceneGraph() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Creates the scene graph, made up of a branch group parent, a transform group under that which applies mouse
behavior and lights to the scene, and three branch groups under the transform group for each of the three image
planes.
- createImageSceneGraph(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Create Java3D image scene graph structure.
- createImageSourceMap() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Generate an image the size of the target image in which each sample contains the 2D interpolated point
coordinates in the source image which "maps" or is registered with the corresponding point in the target image.
- createImageSourceMap() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Generate an image the size of the target image in which each sample contains the 3D interpolated point
coordinates in the source image which "maps" or is registered with the corresponding point in the target image.
- CreateImageTextures() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- createImg(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Creates the Java image to be displayed from the model image.
- createImg(int) - Method in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Creates the Java image to be displayed from the model image.
- createImg(int, int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Creates the Java image to be displayed from the model image.
- createInputImageParameter(boolean) - Method in class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
Creates a new image parameter for the action's input image, determining whether it needs to be externally-specified or will be generated from another script action.
- createInputPanel(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
creates the main panel with all the inputs.. argument true includes preferences if available.
- createInputParameters() - Method in interface gov.nih.mipav.view.dialogs.ActionDiscovery
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in #setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.BlankJistHook
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogAGCIE.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogAHE.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogBM3D.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogBRISK.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogClose.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogErode.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogFFT.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogFlip.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogLLE.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogMean.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogMode.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogNoise.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogOpen.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRotate
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogSM2.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogSobel.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogSWI.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
Returns a table listing the input parameters of this algorithm (which should match up with the scripting
parameters used in
JDialogTreT1.setGUIFromParams()).
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
- createInputParameters() - Method in class gov.nih.mipav.view.dialogs.MTryJistHook
-
- createIntensityImage() - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Create a new image with the same dimensions as this image which contains the intensity value from this image if
it is a color image or which contains the same values if the image is already an intensity image.
- createIntensityImage(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Create a new image with the same dimensions as this image which contains the intensity value from this image if
it is a color image or which contains the same values if the image is already an intensity image.
- CreateJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobianWriter
-
- CreateJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter
-
- CreateJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseJacobianWriter
-
- CreateJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- CreateJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- CreateJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- CreateJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- CreateJacobianBlockSparsityTranspose() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- createJava3dLight() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Access Java3D light instance based on current type.
- createJava3dLightDirection() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Create an instance which contains the normalized real space coordinates of the direction vector of the (Java3D)
Light.
- createJava3dLightPosition() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Create an instance which contains the normalized real space coordinates for the position of the (Java3D) Light.
- createKCenterImage(ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- createKernel() - Method in class gov.nih.mipav.model.GaussianKernelFactory
-
- createKernel() - Method in interface gov.nih.mipav.model.KernelFactory
-
- createKernelList() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- createkImage(ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- createLabel(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Helper method to create a label with the proper font and font color.
- createLabel(String) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Creates a label in the proper font and color.
- createLabel(String) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Creates a label in the proper font and color.
- createLabel(String) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Creates a label in the proper font and color.
- createLabel(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Creates a label in the proper font and color.
- createLabel(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Creates a label in the proper font and color.
- createLabel(String) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Helper method to create a label with the proper font and font color.
- createLabel(String) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Helper method to create a label with the proper font and font color.
- createLabel(String) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Helper method to create a label with the proper font and font color.
- createLabel(String) - Static method in class gov.nih.mipav.view.ViewJSlider
-
Helper method to create a label with the proper font and font color.
- createLabel(String, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Creates a label in the proper font and color.
- createLabel(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Creates a label in the proper font and color.
- createLabel(String, Container, int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Makes a label and adds it to the panel.
- createLabel(String, GridBagLayout, GridBagConstraints, JPanel) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Makes a label and adds it to the panel.
- CreateLabels() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Creates the TriMesh data structures for the axis arrows.
- CreateLabels() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Creates the TriMesh data structures for the axis arrows.
- createLeftButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
convenience Method.
- createLeftButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
convenience Method.
- CreateLinearLeastSquaresProblemFromId(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- createListAButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
creates a button with either the image of an arrow (leftarrow.gif) or with the text "Send left" or
"Send up".
- createListBButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
creates a button with either the image of an arrow (rightarrow.gif) or with the text "Send right" or
"Send down".
- createListComponent() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Creates the List Controller, and its associated lists, links them, and builds a horizontal display for all three
using the default JPanelListController.createListControllerDisplay(JPanelListController) method.
- createListControllerDisplay(JPanelListController) - Static method in class gov.nih.mipav.view.JPanelListController
-
Creates a simple List controller display. one with the the given controls and with the orientation defined by the
control panel.
- createListFile() - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
create list file
- createListFileDICOM() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method creates the list file.
- createListFileParRec() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method creates the list file.
- createLocalMemfftKernelString() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- createLookTable() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- createLoops() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- createLUT() - Method in class gov.nih.mipav.model.file.FileAvi
-
Creates a LUT to write.
- createLUTFromSurface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
Creates a LUT for the surface, where the curvature values are used in the look-up table instead of the ModelImage
values:
- createLUTFromSurface() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Creates a LUT for the surface, where the curvature values are used in
the look-up table instead of the ModelImage values:
- createManifestFile() - Method in class gov.nih.mipav.plugins.ManifestFile
-
- createMappedImage2d(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Create a mapping of this image.
- createMappedImage3d(ModelSimpleImage, ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Create a mapping of this image.
- createMask(int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Creates mask and maskBU of new length.
- createMask(ModelImage, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- createMask(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- createMask(Plane3f, Vector3f) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- createMask(TriMesh, boolean, String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- createMaskImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- createMaskImage - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
radio button
- createMaskImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Create the mask image.
- createMatrixFromAfni(ArrayList<Float>) - Static method in class gov.nih.mipav.model.structures.TransMatrix
-
- createMediaLocator(String) - Static method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
Create a media locator from the given string.
- createMenu() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
- createMesh(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- createMesh(BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- createModel() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
Creates a DefaultListModel and populates it with shortcuts read from a file in user's home directory.
- createModelImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
create result model image
- createModelImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
create result model image
- createModifyDialog() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Creates a dialog box in which the user can modify various features of the graph.
- createMosaicOpenDialog(boolean) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
createMosaicOpenDialog - Creates a file open dialog for image files (.jpg, tiff, etc.).
- createMouseControlPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Creates the mouse control panels.
- createMultifile(FileInfoBase, ModelImage, String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
- createNeuriteSurface(VOIContour, ColorRGB, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- createNew() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
Create a new instance of this measure.
- createNew() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Create a new instance of this measure.
- createNew() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureLeastSquares
-
Create a new instance of this measure.
- createNew() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Create a new instance of this measure.
- createNewLogModel() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
This method resets the logModel in preparation for writing new statistics values
- createNewMesh(ModelTriangleMesh, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
creates a new mesh after triangulation or when a mesh is cut along the geodesic.
- createNewMesh(TriMesh, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
creates a new mesh after triangulation or when a mesh is cut along the geodesic.
- createNewTracts() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- createNodes() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Creates nodes on the tree based on DICOMDIR
- createOME() - Method in class gov.nih.mipav.model.file.FileInfoOME
-
DOCUMENT ME!
- createOneContours(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- createOneContours(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- createOneContours(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- createOneContours(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- createOneContours(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- createOneElementBinaryMask3D(BitSet, int, int, boolean, boolean, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Creates a 3D binary mask.
- createOnePixelBorder(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- createOpenCLInfoHTML() - Static method in class gov.nih.mipav.model.algorithms.OpenCLInfo
-
Creates the table displayed in the information dialog.
- createOrderDialog() - Method in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- CreateOrdering(CeresSolver.Program) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- createOutputParameters() - Method in interface gov.nih.mipav.view.dialogs.ActionDiscovery
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.BlankJistHook
-
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Returns a table listing the output parameters of this algorithm (usually just labels used to obtain output image
names later).
- createOutputParameters() - Method in class gov.nih.mipav.view.dialogs.MTryJistHook
-
- createOvalVOI(int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- createPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Makes a panel with a grid layout with the parameters specified.
- createPanel() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Creates the display panel.
- createPanel(boolean) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- createPartitionedMatrixView(CeresSolver.LinearSolverOptions, CeresSolver.BlockSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- createPath(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
createPath starts with the results of Dijkstra's minimum path algorithm.
- createPath(TriMesh, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
createPath starts with the results of Dijkstra's minimum path algorithm.
- createPathButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
create path planning path button.
- createPathFile() - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
create path file
- createPathFileDICOM() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method creates the path file.
- createPathFileForInterleavedDICOM() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method creates the path file for interleaverd datasets
- createPathFileParRec() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method creates the path file
- createPatientPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Creates the panel for the patient tab.
- createPauseDialog(ActionListener) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- createPDFElement(PDPageContentStream) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Glyph
-
Creates PDF elements that will be appended to the content stream.
- CreatePlaneNode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- CreatePlaneNode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- CreatePlanes() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Creates the scene graph.
- createPNumberDialog(ActionListener) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
DOCUMENT ME!
- createPointVOI(int[], int[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- createPolygonVOI(int[], int[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- createPolyline(ModelImage, Vector<Vector3f>) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FilePolyline_WM
-
Create the polyline from the given polyline coordinates vector.
- createPolyline(VertexBuffer, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- createPopup(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- createPossibleSplitVarSubset(Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- CreatePreconditioner(CeresSolver.BlockSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.IterativeSchurComplementSolver
-
- CreatePreprocessor(CeresSolver.MinimizerType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- createPrivateKeyTree(ModelImage, Vector<FileDicomSQItem>) - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
Method to populate the tree structure from the input image
and provided sequence tags.
- createProcDirAndImageSlicesDirParRec() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
this method creates the proc dir in which the list file, path file, and b-matrix file go.
- createProcDirDICOM() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
this method creates the proc dir in which the list file, path file, and b-matrix file go.
- createProcessor(File, MovieMaker.ImageDataSource) - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Create video processor from the given source image files and output file.
- createProgramText() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
- createProgramText() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- createProgramText() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- createProgramText() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- createProgressBar(FileBase, String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Creates the progress bar and links (if not null) the progress bar to a FileBase for reading/writing if the
progress bar should not be updated within the FileBase's readImage/writeImage, pass in null to the fBase and
update within FileIO's read[ImageType] or write[ImageType] methods.
- createProgressBar(String, AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Creates the progress bar that will listen to an algorithm's progress changes
- createProgressBar(String, AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
Creates the progress bar that will listen to an algorithm's progress changes
- createProgressBar(String, String, AlgorithmBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Creates the progress bar (should be created within JDialog's callAlgorithm method
- createProgressBar(String, String, AlgorithmBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
Creates the progress bar (should be created within JDialog's callAlgorithm method
- createPSet(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Creates a new parameter set with a description.
- createPublicKeyTree(ModelImage, Vector<FileDicomSQItem>) - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
Method to populate the tree structure from the input image
and provided sequence tags.
- createRA - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- CreateRandomMatrix(CeresSolver.BlockSparseMatrixRandomMatrixOptions) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- CreateRandomMatrix(CeresSolver.TripletSparseMatrixRandomMatrixOptions) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- CreateRandomMatrix(CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- createRaster(int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- createReader(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ByteArrayReaderTest
-
- createReader(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessFileReaderTest
-
- createReader(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessStreamReaderTest
-
- createReader(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- createReader(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- createReader(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialByteArrayReaderTest
-
- createReader(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.StreamReaderTest
-
- CreateReducedProgram(Vector<double[]>, double[], String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- createRegCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- createRegCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- createRegCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- createRegCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- createRegImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAnyTwoImagesSNR
-
DOCUMENT ME!
- createRegImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- createRegImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
DOCUMENT ME!
- createRegImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTwoMRIImagesSNR
-
DOCUMENT ME!
- createRegImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- createRegImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- createRegImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- createRegImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- createRemoteImg(BufferedImage) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Creates an Img sharing the specified BufferedImage's data.
- CreateRenderTarget(GLAutoDrawable, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Creates the three render-to-texture targets for rendering
semi-transparent surfaces.
- CreateRenderTarget(GLAutoDrawable, String, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- CreateRenderTargetInit(GLAutoDrawable, String, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- createRequiredPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Creates the panel of required tags.
- createReverseCopy() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Create a copy of this instance which has the same information except that the state of the moving forward is
inverted.
- createReverseCopy() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Create a copy of this instance which has the same information except that the state of the moving forward is
inverted.
- createReverseCopy() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Create a copy of this instance which has the same information except
that the state of the moving forward is inverted.
- createRGBImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
test code for creating rgb image based on eigvev and anisot
- createRightButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
convenience Method.
- createRightButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
convenience Method.
- createSameMapping(ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Create a new registration with the same mapping as this one and which uses the same source image and the same
BSpline basis degree and number of control points.
- createSameMapping(ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Create a new registration with the same mapping as this one and which uses the same source image and the same
BSpline basis degree and number of control points.
- createSameMapping(ModelSimpleImage, BSplineBasisf, BSplineBasisf) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Create a new registration with the same mapping as this one and which uses the same source image and a possibly
resampled target image, however, this time the BSpline basis degree and/or the number of control points may be
different.
- createSameMapping(ModelSimpleImage, BSplineBasisf, BSplineBasisf, BSplineBasisf) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Create a new registration with the same mapping as this one and which uses the same source image and a possibly
resampled target image, however, this time the BSpline basis degree and/or the number of control points may be
different.
- createSamplePlane(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- createScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Called by the init() function.
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Called by the init() function.
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Initializes the display parameters.
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Initializes the display parameters.
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
Create the scene.
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageCrop
-
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeNode
-
Creates the scene graph.
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Called by the init() function.
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Creates the scene graph.
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Called by the init() function.
- CreateScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Called by the init() function.
- CreateScene(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- createSceneGraph(float, Material) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Creates the rendered spheres, setting the apprearance, material properties, and transparency.
- CreateSchurComplementGraph(Vector<HashSet<Integer>>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- createSchurEliminatorBase(CeresSolver.LinearSolverOptions) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- createScriptTree(String[], String[], String[], int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- createScriptTree(Document) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- createSelectedIcon(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- createSeriesPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Creates the panel for the series tab.
- createServerSocket() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Creates the initial server socket binded to the given port.
- createShortImage(ModelImage, int, boolean, boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Creates a short image of the VOI.
- createShortMask(short[], int, int, int, boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Creates a short mask at a slice.
- createSlices(OrderedGroup, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Create the z-axis aligned slices through the volume so that any rotation of the volume does not result in the
slices getting clipped by the texture volume.
- createSliderLabel(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Creates a label in the proper font and color.
- createSliderLabel(String) - Static method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
- createSoftwareLight(Point3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Access software light instance based on current type.
- createSoftwareLightModel() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Access current software light based on type.
- createSoftwareLightWorld() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Access current software light based on type.
- CreateSparseDiagonalMatrix(double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- CreateSquare(int, int, Texture) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
Creates the square widget and control points:
- createStore - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Buttons used for the host tab
- createStructuringElement2D() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
make the structuring element for morphology.
- createStructuringElement3D() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
make the structuring element for morphology.
- createStudyPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Creates the panel for the study tab.
- createSubDirsInRegisteredDir(File) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
- createSurface(ModelTriangleMesh[], Color4f, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Creates a surface in the scene graph from an array of triangle meshes.
- createSurface(SurfaceAttributes, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Creates a surface in the scene graph from an array of triangle meshes.
- createTargetDialog() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
First time this dialog is called, init() will be called to create the
GUI.
- createTargetDialog() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
First time this dialog is called, init() will be called to create the
GUI.
- createTargetDialog() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
First time, the dialog is invoked, the init() method is called to create
the GUI.
- createTask(ModelImage, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Parallel processing the automatic segmentation algorithm to all the three
images concurrently.
- createTask(ModelImage, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Parallel processing the automatic segmentation algorithm to all the three
images concurrently.
- createTensorWeights() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Creates the weighted data for the tensor calculation from the diffusion weighted images.
- createTerrain() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- createTerrain() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- createTerrain(double[], double, double, double, int, int, double, double, double, int, int, double, double, double, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- createTerrain(double, double, double, double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- createTerrain(float[], float, float, float, int, int, float, float, float, int, int, float, float, float, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- createTerrain(float, float, float, float, float, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- CreateTest(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Tests if a file can be created for writing.
- createTestImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- createTestingPatches() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- createTestingPatches() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- createTestingPatches() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- createTestingPatches() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- createTestingPatches() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- createTextField(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Helper method to create a text field with the proper font and font color.
- createTexture() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Create a single 3D texture coordinate generation function.
- createTexturedImage() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
createTexturedImage is added so that the size of the texture used to display the rendered image on the
texture-mapped polygon can be changed dynamically.
- createTexturedPolygon() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Creates the texture-mapped polygon displayed in the stereo canvas.
- createTexturedPolygon(TransformGroup, BufferedImage, int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
createTexturedPolygon - Creates a texture-mapped polygon with the BufferedImage displayed as the texture.
- createTextVOI(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Creates a new VOIText at the local point.
- createTrace - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- createTractDialog() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Creates the user-interface for the Fiber Bundle Tract dialog.
- createTractPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Creates the user-interface for the Fiber Bundle Tract panel.
- createTrainingPatches() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- createTrainingPatches() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- createTrainingPatches() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- createTrainingPatches() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- createTrainingPatches() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- createTransferable(JComponent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler
-
DOCUMENT ME!
- createTransferable(JComponent) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter
-
- CreateTransformMesh() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- createTreeAButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
creates a button with either the image of an arrow (leftarrow.gif) or with the text "Send left" or
"Send up".
- createTreeBButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
creates a button with either the image of an arrow (rightarrow.gif) or with the text "Send right" or
"Send down".
- createTreeControllerDisplay(JPanelTreeController) - Static method in class gov.nih.mipav.view.JPanelTreeController
-
Creates a simple Tree controller display. one with the the given controls and with the orientation defined by the
control panel.
- createTreeFromDictionary() - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- CreateTriangle(int, int, Texture) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Creates the triangle widget and control points:
- createTriangleMesh(Point3f[], Vector3f[], Color4f[], int[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- createTube(VOIContour) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- createTube(Polyline) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Generate the tube streamline from the given polyline.
- createTwoContours(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- createTwoContours(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- createTwoContours(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- createTwoContours(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- createTwoContours(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- createTwoContours(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- createUByteImage(ModelImage, int, boolean, boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Creates a short image of the VOI.
- createUIComponents() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- createUpButton(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
convenience Method.
- createUpButton(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
convenience Method.
- createVarArray(int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Constructs the variable array with the specified length.
- createVattArray(int) - Method in class gov.nih.mipav.model.file.FileMincVarElem
-
Creates a new variable attribute array.
- createVOI(int, boolean, boolean, Vector<Vector3f>) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Creates a new VOI Contour based on the input type.
- createVOI(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- createVOI(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Creates a new VOI Contour or adds a new point to the existing VOI Contour.
- createVoiImage - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
radio button
- createVOIPointTable(JDialogProstateSegmentationRegBSpline3D.Edge, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Create the VOI table in polar coodinate system.
- createVolumeMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Creates a BitSet mask that is the volume enclosed by the triangle mesh.
- createVolumePolyline(VertexBuffer) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- createVolumeTexture() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Creates a 3D Texture object for the ModelImage displayed in the SurfaceRender object.
- CreateVolumeTexture() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
The VolumeShaderEffect.CreateVolumeTexture() function constructs and
initializes the vertex and pixel shader programs for volume
rendering.
- CreateVolumeTexture() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
The VolumeShaderEffect.CreateVolumeTexture() function constructs and
initializes the vertex and pixel shader programs for volume
rendering.
- CreateVolumeTexture() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
The VolumeShaderEffect.CreateVolumeTexture() function constructs and
initializes the vertex and pixel shader programs for volume
rendering.
- createVolumeVOI(VolumeImage, Vector3f) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Creates the VolumeVOI data structure for rendering this contour in the GPU VolumeRenderer
- createVR - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- createWatershedCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- createWatershedLines - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- createWatershedLines - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- createWMLight() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Access Java3D light instance based on current type.
- createXDerivativeKernel() - Method in class gov.nih.mipav.model.GaussianKernelFactory
-
- createYDerivativeKernel() - Method in class gov.nih.mipav.model.GaussianKernelFactory
-
- createZDerivativeKernel() - Method in class gov.nih.mipav.model.GaussianKernelFactory
-
- creationDate - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- creationDate - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
Elements.
- creatorID - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- CreeLifoVide(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- CreeRbtVide(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- crembed(double[], SchwarzChristoffelMapping.qlgraph, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- CReverse() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimate.CReverse
-
Creates a new CReverse object.
- CReverse() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimateClip.CReverse
-
Creates a new CReverse object.
- cReverseButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- cReverseButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- crfixwc - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crfixwc(double[][], double[], double[], double[][][], SchwarzChristoffelMapping.qlgraph, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crfixwc_mt - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crfixwc_quadnum - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crgather(double[][], int[], int, double[], SchwarzChristoffelMapping.qlgraph, double[][][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crimap0(double[][], double[][], double[], double[][], double[][], boolean, boolean, double, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crinvmap(double[][], double[][], double[], double[], double[][][], int, double[][], SchwarzChristoffelMapping.qlgraph, double[][], boolean, boolean, double, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- CRIRGBFilter - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- crit - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexSplitParams
-
- CRITCO(int, double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- crmap(double[][], double[][], double[], double[], double[][][], int, double[][], SchwarzChristoffelMapping.qlgraph, double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crmap0(double[][], double[][], double[], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crNum - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Used to number XRay image file names so that they are numbered differently.
- crop() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- crop() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- crop() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- cropAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- cropAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- cropAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- cropAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- cropAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- cropAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- cropAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
DOCUMENT ME!
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
crop image algorithm
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
crop margin algorithm.
- cropAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
crop margin algorithm.
- cropBackground - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- cropBackground - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- cropBackground - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- cropBackground - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- cropBackground - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- cropBackground - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- cropCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- cropCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- cropCheckbox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- cropClipVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Crop the region of the clipped volume.
- cropClipVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Crop the region of the clipped volume.
- cropClipVolume() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Crop the clipped volume.
- cropColor - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Crop Bounding Box Colors:.
- cropImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- cropImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
DOCUMENT ME!
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
result cropped image.
- cropImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
result cropped image.
- cropImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
When we to NMI based image similarity measure, we crop the prostate 2D
slice image first, then apply the measure.
- cropImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
When we to NMI based image similarity measure, we crop the prostate 2D
slice image first, then apply the measure.
- cropImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Crop image for SVM classification.
- cropImage(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- cropImage(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- cropImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- cropImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- cropImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- cropImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- cropImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- cropImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- cropImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- cropImage_ext(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- cropImage_ext(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- cropImage_ext(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- cropImage_ext(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- cropImage_ext(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- cropImage_randomSample(ModelImage, ModelImage, int, PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- cropImage_randomSample(ModelImage, ModelImage, int, PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- cropImage_randomSample_voi_region(ModelImage, ModelImage, int, PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- cropImage_randomSample_voi_region(ModelImage, ModelImage, int, PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- cropImage_slidingWindow(ModelImage, ModelImage, int, PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- cropImage_slidingWindow(ModelImage, ModelImage, int, PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
cropped key image, crop from 512x512 to central prostate gland region.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
cropped key image vector.
- cropKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
cropped key image vector.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Crop the central prostate gland region from the 512x512 slices.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Crop key images.
- cropKeyImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Crop key images.
- cropKeyImagesCE - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
cropped CE image vector.
- cropOrPad - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- cropPoints - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Crop Bounding Box in Screen Coordinates:.
- cropRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- cropROI(ModelImage, int[], int[], int[], int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Crop MR image with specified X, Y, Z bounds Use the mid slice as the
initial guidance to find the bounds.
- cropROI(ModelImage, int[], int[], int[], int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Crop MR image with specified X, Y, Z bounds Use the mid slice as the
initial guidance to find the bounds.
- cropTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- cropTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- cropTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- cropTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- cropTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- cropTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- cropTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- cropTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- cropTargetImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- cropTargetImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- cropTargetImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- cropTargetImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Crop the target image 2D slice to focus on central gland.
- cropTargetImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Crop the target image 2D slice to focus on central gland.
- cropTargetImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Crop target image for SVM classification.
- cropVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- cropVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- cropVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- cropVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- cropVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- cropVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- cropVolume() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Mask the clipped volume region with image min intensity value.
- cross(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- Cross(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- CROSS_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
cross (+).
- CROSS_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
cross (2D only).
- CROSS_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
cross (2D only).
- cross_validation - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- cross_validation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- cross_validation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- crosshairButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
- crosshairChoices - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- crosshairCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
A crosshair cursor.
- crosshairCursor - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Crosshair cursor that can be changed per user preference (in Mipav Options).
- crosshairCursor - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- crosshairCursor - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Crosshair mouse cursor.
- crosshairNames - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- crosshairPixelGap - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
the gap (in one direction) between the center of the crosshair and the actual crosshair line
- crosshairPt - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
The x and y coordinate of the cursor position in screen space of this component.
- crosshairSpinner - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Spinner component for the crosshair gap size.
- crossProduct(Vector3f, Vector3f) - Method in class gov.nih.mipav.model.file.FileAfni
-
Finds crossproduct of two vectors.
- crossProduct(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Finds crossproduct of two vectors.
- CrossProduct(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Forms the cross product of two vectors and store the result in this.
- CrossProduct(Point3D, Point3D, Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- CrossProduct(Point3D, Point3D, Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- crossrat(double[][], SchwarzChristoffelMapping.qlgraph) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crossratio - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- CROSSRATIO_POLYGON_TO_CIRCLE - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- CROSSRATIO_POLYGON_TO_CIRCLE - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- CROSSRATIO_POLYGON_TO_RECTANGLE - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- CROSSRATIO_POLYGON_TO_RECTANGLE - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
- crossRatioCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- crossRatioCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
- crossVal - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
The crossover gray scale value at which u(crossVal) = 0.5
- crossVal - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- crossVal - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- crossValidation(Problem, Parameter, int, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- crossValidationTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- crossValidationTestExtra() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- crossValidationTestExtra() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- crossValidationTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- CrossVector(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- CrossVector(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- crparam(double[][], double[], double[][], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crparam_beta - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crparam_cr - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crparam_qdata - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crpfun(double[], int, double[], double[][], SchwarzChristoffelMapping.qlgraph, double[][]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.crpfun
-
- crplot(double[][], double[], double[], double[][][], int, double[][], SchwarzChristoffelMapping.qlgraph, double[], double[], int, int, int, boolean, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crpsdist(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crpsgd(double[], double[], double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crqgraph(double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crqgraph_Q - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crquad(double[][], int[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crrect(double[][], double[][][], double[][], double[], double[], double[][][], SchwarzChristoffelMapping.qlgraph, double[], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crrectmap(double[][], int[], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crrectplot(SchwarzChristoffelMapping.scmap, double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- CrReferenceBlack - Variable in class gov.nih.mipav.model.file.FileSVS
-
- CrReferenceBlack - Variable in class gov.nih.mipav.model.file.FileTiff
-
- CrReferenceWhite - Variable in class gov.nih.mipav.model.file.FileSVS
-
- CrReferenceWhite - Variable in class gov.nih.mipav.model.file.FileTiff
-
- crrmap(double[][][], int[][], double[][], double[][], double[], double[][], double[], double[], double[][][], double[][][], SchwarzChristoffelMapping.qlgraph, double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crrplot(double[][], double[], double[][], double[], double[], double[][][], double[][][], SchwarzChristoffelMapping.qlgraph, double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crrplot0(String, double[], double, double, int, double, double[][], double[], double[][], double[], double[], double[][][], double[][][], SchwarzChristoffelMapping.qlgraph, double[][], double[][], double[], double, Vector<Double>[][], Vector<Double>[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crrsort(Vector<Double>[], Vector<Double>[], int[][], SchwarzChristoffelMapping.qlgraph) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crRun - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- crRun - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- crsm - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CRSMatrix() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CRSMatrix
-
- crsplit(double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crsplit_neww - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crsplit_orig - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crspread(double[][][], double[][][], double[][], int, double[], SchwarzChristoffelMapping.qlgraph) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crStop() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimate.crStop
-
Creates a new crStop object.
- crStop() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimateClip.crStop
-
Creates a new crStop object.
- crtarget - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.crpfun
-
- crtedge_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList
-
- crtriang(double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crtriang_edge - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crtriang_edgetri - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- crtriang_triedge - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- Crw - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
Canon camera raw, version 1.
- Crx - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
Canon camera raw (version 3).
- cs - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- CS - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- CsaImageAcquisitionMatrixText - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageBandwidthPerPixelPhaseEncode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageEchoColumnPosition - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageEchoLinePosition - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageEchoPartitionPosition - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageGSWDDataType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageICE_Dims - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageImaAbsTablePosition - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageImaCoilString - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageImaPATModeText - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageImaRelTablePosition - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageMeasuredFourierLines - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageMosaicRefAcqTimes - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageMultistepIndex - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageNonPlanarImage - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageNumberOfImagesInMosaic - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImagePhaseEncodingDirectionPositive - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageProtocolSliceNumber - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageRealDwellTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageRFSWDDataType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageSequenceMask - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageSliceMeasurementDuration - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageSliceNormalVector - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageSlicePosition_PCS - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageTimeAfterStart - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaImageUsedChannelMask - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- csAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
DOCUMENT ME!
- CsaSeriesAbsTablePosition - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesB1rms - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesB1rmsSupervision - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesCoilForGradient - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesCoilForGradient2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesCoilId - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesCoilString - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesdBdt_limit - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesdBdt_max - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesdBdt_thresh - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesFlowCompensation - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesGradientDelayTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesGradientMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesIsocentered - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesLongModelName - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMiscSequenceParam - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolacFlowComp0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocoladFlipAngleDegree0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolalTE0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolalTR0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0aFFT_SCALEnbValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0aFFT_SCALEnflFactor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0aFFT_SCALEnlRxChannel - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnlElementSelected - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnlRxChannelConnected - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnsCoilElementIDlCoilCopy - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnsCoilElementIDtCoilID - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnsCoilElementIDtElement - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0iUsedRFactor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0sCOILPLUGSauiNmbrOfNibbles - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0sCOILPLUGSaulPlugId - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolasCoilSelectMeas0tNucleus - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocoldAveragesDouble - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocoldRefSNR - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocoldRefSNR_VOI - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocollAverages - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocollCombinedEchoes - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocollContrasts - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocollParadigmPeriodicity - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocollProtID - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocollRepetitions - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocollScanTimeSec - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocollTOM - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocollTotalScanTimeSec - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedInPlaneRot - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedPhaseFOV - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedReadoutFOV - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedThickness - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesNormaldCor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesNormaldSag - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesNormaldTra - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesPositiondCor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesPositiondSag - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesPositiondTra - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatauiAdjFreMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatauiAdjFreProtRelated - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatauiAdjMDSMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatauiAdjProtID - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatauiAdjRFMapMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatauiAdjShimMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatauiAdjTableTolerance - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatauiAdjVolumeValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAdjDatauiAdjWatSupMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAngiolDynamicReconMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAngiolTemporalInterpolation - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAngioucPCFlowMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAngioucTOFInflow - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAslulMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsAutoAligndAAMatrix - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsBladeParadBladeCoverage - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsBladeParaucMotionCorr - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsDiffusionulMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsDistortionCorrFilterucMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsEFISPECbEFIDataValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsFastImaginglEchoTrainDuration - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsFastImaginglEPIFactor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsFastImaginglSegments - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsFastImaginglShots - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsFastImaginglSliceTurboFactor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsFastImaginglTurboFactor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsFastImagingucSegmentationMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent3 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent4 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECbB0CompensationValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECbCrossTermCompensationValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECbDelayValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECbEddyCompensationValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECbOffsetValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECbSensitivityValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECbShimCurrentValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECflGSWDMinRiseTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECflSensitivityX - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECflSensitivityY - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECflSensitivityZ - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPEClDelayX - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPEClDelayY - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPEClDelayZ - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPEClOffsetX - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPEClOffsetY - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPEClOffsetZ - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflAmplitude1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflAmplitude2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflTimeConstant1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflTimeConstant2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflAmplitude1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflAmplitude2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflTimeConstant1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflTimeConstant2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflAmplitude1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflAmplitude2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflTimeConstant1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflTimeConstant2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXYaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXYaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXZaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXZaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYXaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYXaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYZaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYZaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZXaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZXaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZYaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZYaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude3 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude4 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant3 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant4 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude3 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude4 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant3 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant4 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude3 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude4 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant3 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant4 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGRADSPECucMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGroupArrayanMember - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGroupArrayasGroup0nSize - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGroupArraylSize - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGroupArraysPSatdGap - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsGroupArraysPSatdThickness - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacedAngioDynCentralRegionA - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacedAngioDynSamplingDensityB - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacedPhaseResolution - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacedSeqPhasePartialFourierForSNR - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacedSliceResolution - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacelBaseResolution - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacelImagesPerSlab - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacelLinesPerShot - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacelPartitions - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacelPhaseEncodingLines - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacelRadialInterleavesPerImage - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpacelRadialViews - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpaceucAsymmetricEchoMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpaceucAveragingMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpaceucDimension - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpaceucMultiSliceMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpaceucPhasePartialFourier - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpaceucPOCS - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpaceucSlicePartialFourier - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpaceucTrajectory - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpaceucViewSharing - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsKSpaceunReordering - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsMDSdMdsRangeExtension - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsMDSlmdsLinesPerSegment - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsMDSlTableSpeedNumerator - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsMDSsMdsEndPosSBCS_mmdTra - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsMDSulMdsModeMask - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsMDSulMdsReconMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsMDSulMdsVariableResolution - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsNavigatorParalBreathHoldMeas - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsNavigatorParalRespComp - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsParametricMappingucParametricMap - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPatlAccelFact3D - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPatlAccelFactPE - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPatlRefLinesPE - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPatucPATMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPatucRefScanMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPatucTPatAverageAllFrames - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImaginglMethod1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImaginglMethod2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImaginglPhases - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImaginglRetroGatedImages - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImaginglSignal1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImaginglSignal2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlArrhythmiaDetection - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlCardiacGateOffThreshold - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlCardiacGateOnThreshold - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlTriggerIntervals - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlTriggerPulses - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlTriggerWindow - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlArrhythmiaDetection - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlCardiacGateOffThreshold - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlCardiacGateOnThreshold - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlTriggerIntervals - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlTriggerPulses - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlTriggerWindow - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioNativeucFlowSenMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioNativeucMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselArrhythmiaDetection - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselCardiacGateOffThreshold - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselCardiacGateOnThreshold - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselTriggerIntervals - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselTriggerPulses - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselTriggerWindow - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioRespdGatingRatio - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioResplRespGatePhase - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioResplRespGateThreshold - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPrepPulsesdDarkBloodFlipAngle - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPrepPulsesdDarkBloodThickness - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPrepPulsesdIRPulseThicknessFactor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPrepPulsesdT2PrepDuration - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPrepPulsesucFatSat - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPrepPulsesucFatSatMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPrepPulsesucInversion - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPrepPulsesucSatRecovery - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPrepPulsesucT2Prep - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPrepPulsesucTIScout - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsPrepPulsesucWaterSat - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsProtConsistencyInfoflGMax - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsProtConsistencyInfoflNominalB0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsProtConsistencyInfoflRiseTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsProtConsistencyInfolMaximumNofRxReceiverChannels - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsProtConsistencyInfotBaselineString - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsProtConsistencyInfotSystemType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRawFilterlSlope_256 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRawFilterucMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRawFilterucOn - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRSatArrayasElm0dThickness - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRSatArrayasElm0sNormaldCor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRSatArrayasElm0sNormaldSag - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRSatArrayasElm0sNormaldTra - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRSatArrayasElm0sPositiondCor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRSatArrayasElm0sPositiondSag - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRSatArrayasElm0sPositiondTra - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRSatArraylSize - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRXSPECalDwellTime0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRXSPECbGainValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsRXSPEClGain - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayanAsc - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayanPos - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdInPlaneRot - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdPhaseFOV - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdReadoutFOV - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdThickness - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsNormaldCor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsNormaldSag - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsNormaldTra - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsPositiondCor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsPositiondSag - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsPositiondTra - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArraylConc - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArraylSize - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArraysTSatdThickness - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSliceArrayucMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSpecParalAutoRefScanNo - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSpecParalDecouplingType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSpecParalExcitationType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSpecParalNOEType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSpecParalPhaseCyclingType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSpecParalPhaseEncodingType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSpecParalRFExcitationBandwidth - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSpecParalSpecAppl - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSpecParalSpectralSuppression - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsSpecParaucRemoveOversampling - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECaRFPULSEnbAmplitudeValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECaRFPULSEnflAmplitude - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECaRFPULSEntName - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bAmplitudeCorrectionValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bFrequencyValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bReferenceAmplitudeValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bRFPAIndexValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0flAmplitudeCorrection - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0flReferenceAmplitude - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0lFrequency - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0tNucleus - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bAmplitudeCorrectionValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bFrequencyValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bReferenceAmplitudeValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bRFPAIndexValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1flAmplitudeCorrection - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1lRFPAIndex - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECbKDynValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeClipHigh - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeClipLow - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeMax - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeMin - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECflKDynPhaseClip - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECflKDynPhaseMax - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPEClBCExcitationMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPEClBCSeqExcitationMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPEClNoOfTraPulses - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECucBCExcitationModeValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECucExcitMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECucRFPulseType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsTXSPECucSimultaneousExcitation - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsWiPMemBlockadFree - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsWiPMemBlockalFree - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolsWiPMemBlocktFree - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocoltdefaultEVAProt - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocoltProtocolName - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocoltReferenceImage0 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocoltReferenceImage1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocoltReferenceImage2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocoltSequenceFileName - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucAAMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucAARefMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucAARegionMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucAutoAlignInit - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucBold3dPace - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucBOLDParadigmArray - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucCineMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucCoilCombineMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucDisableChangeStoreImages - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucDixon - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucDixonSaveOriginal - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucEnableIntro - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucEnableNoiseAdjust - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucFlipAngleMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucForcePositioningOnNDIS - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucInteractiveRealtime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucInternalTablePosValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucOneSeriesForAllMeas - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucPHAPSMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucReadOutMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucReconstructionMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucScanRegionPosValid - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucSequenceType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucTablePositioningMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolucWaitForPrepareCompletion - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolulVersion - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrPhoenixProtocolWaitForUserStart - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesMrProtocolVersion - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesNumberOfPrescans - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesOperation_mode_flag - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesPATModeText - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesPatReinPattern - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesPhaseGradientAmplitude - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesPositivePCSDirections - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesProtocolChangeHistory - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesReadoutGradientAmplitude - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesReadoutOS - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesRelTablePosition - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesRFSWDMostCriticalAspect - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesRFSWDOperationMode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesRfWatchdogMask - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesSARMostCriticalAspect - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesSed - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesSelectionGradientAmplitude - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesSequenceFileOwner - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesSliceArrayConcatenations - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesSliceResolution - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesStim_faktor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesStim_lim - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesStim_max_ges_norm_online - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesStim_max_online - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesStim_mon_mode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesSW_korr_faktor - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriest_puls_max - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesTablePositionOrigin - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesTalesReferencePower - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CsaSeriesTransmitterCalibration - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- CSB_LENGTH - Static variable in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
Length of Colour Specification Box
- CSCAL3(double[], int, int, double[], double[], double[], double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- csfThresholdMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Cerebrospinal Fluid (CSF) maximum threshold :
- csfThresholdMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Cerebrospinal Fluid (CSF) minimum threshold :
- cSig - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SigSet
-
- csIgnoreBox - Variable in class gov.nih.mipav.model.file.FileJP2
-
- cSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
- cSize - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- csMap - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Parses the inputstream to analyze the box structure of the JP2
file.
- csMap - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Parses the inputstream to analyze the box structure of the JP2
file.
- CSqrt(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- css - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
< Gaussian scale space.
- CSTATE_RAW_OK - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- CSTATE_SCANNING - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- CSTATE_START - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- CSTATE_WRCOEFS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- cStoreRq - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_StdStorage
-
Store request object.
- cStoreRsp - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_StdStorage
-
Store response object.
- cstr_index - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_t
-
helper used to write the index file
- csty - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
coding style
- csty - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
coding style
- csty - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
coding style
- csty - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_info_v2_t
-
coding style
- csvdCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- ct - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_bio_t
-
coder : number of bits free to write. decoder : number of bits read
- ct - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_t
-
- ct - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_raw_t
-
number of bits already read or free to write
- ct - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- CT - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
CT predefined tranfer function.
- ctButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The button for presets used only for CT images.
- ctDialog - Variable in class gov.nih.mipav.view.JPanelHistogram
-
- ctDialogA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Reference to CT dialog.
- ctDialogA - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- ctDialogB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Reference to CT dialog.
- ctDialogB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- cText - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- ctf(double) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ctMode(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Sets mode to CT and sets range to CT presets.
- ctMode(int, int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets mode to CT and sets range to CT presets.
- ctMode(int, int) - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Sets mode to CT and sets range to CT presets.
- ctrl - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
ctrl can have 3 different values on entry.
- ctrl - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
ctrl can have 3 different values on entry.
- ctrlBox - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
DOCUMENT ME!
- ctrlKey - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- ctrlKey - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- ctrlKey - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- ctrlMat - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
Wrapper for ctrl or lctrl communication with driver.
- ctrlMat - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
Wrapper for ctrl or lctrl communication with driver.
- CTX_POSTPONED_ROW - Variable in class gov.nih.mipav.model.file.libjpeg
-
- CTX_PREPARE_FOR_IMCU - Variable in class gov.nih.mipav.model.file.libjpeg
-
- CTX_PROCESS_IMCU - Variable in class gov.nih.mipav.model.file.libjpeg
-
- ctxs - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_t
-
- CTYPE1 - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- CTYPE2 - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- CTYPE3 - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- CTYPE4 - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- CTYPE5 - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- CTZ - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Int denoting CTZ sequence
- cu - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- cu2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- Cube - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes
-
- Cube() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- CUBE_BOUNDS - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- CUBE_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
(3D only).
- CUBE_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
(3D only).
- CubeBounds - Class in gov.nih.mipav.model.structures
-
Title: CubeBounds
- CubeBounds(int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.structures.CubeBounds
-
Creates a new CubeBounds object.
- cubePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Panel for the rotation cube.
- cubePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Panel for the rotation cube.
- cubePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Panel for the rotation cube.
- cubic - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
- cubic - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
- cubic - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Radio buttons for interpolation methods.
- CUBIC - gov.nih.mipav.model.algorithms.CeresSolver.LineSearchInterpolationType
-
- CUBIC - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Cubic interpolation mode.
- CUBIC - Static variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Action command for cubic interpolation.
- CUBIC_BSPLINE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Cubic b-spline interpolation mode.
- CUBIC_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- CUBIC_LAGRANGIAN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Cubic lagrangian interpolation.
- CUBIC_LAGRANGIAN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Cubic lagrangian interpolation.
- cubic_root(double) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- cubic_root(DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- cubicBehaviorBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
The cubic roational behavior branch group.
- cubicBehaviorBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
The cubic roational behavior branch group.
- cubicBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Cubic branch group.
- cubicBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Cubic branch group.
- cubicButton - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
- cubicCheck - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Check box for cubic control.
- cubicCheck - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Check box for cubic control.
- cubicCheck - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Check box for cubic control.
- cubicCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
- CubicEquation - Class in gov.nih.mipav.model.algorithms
-
This is a port of code written by Gerolamo Cardano under the Code Project Open Licence.
- CubicEquation() - Constructor for class gov.nih.mipav.model.algorithms.CubicEquation
-
- CubicEquation(double, double, double, double, double[], double[], double[], double[], double[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.CubicEquation
-
- CubicHermiteSpline(int, double[], double[], double[], double[], double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- CubicInterpolator(CeresSolver2.Grid1D) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.CubicInterpolator
-
- CubicInterpolatorTestConstantFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CubicInterpolatorTestLinearFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- CubicInterpolatorTestQuadraticFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- cubicLagrangian2D(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
2D cubic Lagrangian function.
- cubicLagrangian2DC(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
2D cubic Lagrangian function for color.
- cubicLagrangian3D(double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
3D cubic Lagrangian function.
- cubicLagrangian3DC(double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
3D cubic Lagrangian function for color (3 channel images).
- cubicReslice() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Reslices the data into isotropic voxels using one of two interpolation methods (cubic Bspline or cubic
convolution).
- cubicRotate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Cubic mouse rotation behavior.
- cubicRotate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Cubic mouse rotation behavior.
- cubicTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Cubic transform group.
- cubicTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Cubic transform group.
- CUBOID_EXTREMA - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- CUBOID_EXTREMA - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- cuboidCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- cullBackBottomLeft() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Creates a re-mapping of the cube corners so the
back bottom left corner is at position 0 in the reorderedList.
- cullBackBottomRight() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Creates a re-mapping of the cube corners so the
back bottom right corner is at position 0 in the reorderedList.
- cullBackTopLeft() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Creates a re-mapping of the cube corners so the
back top left corner is at position 0 in the reorderedList.
- cullBackTopRight() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Creates a re-mapping of the cube corners so the
back top right corner is at position 0 in the reorderedList.
- cullFrontBottomLeft() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Creates a re-mapping of the cube corners so the
front bottom left corner is at position 0 in the reorderedList.
- cullFrontBottomRight() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Creates a re-mapping of the cube corners so the
front bottom right corner is at position 0 in the reorderedList.
- cullFrontTopLeft() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Creates a re-mapping of the cube corners so the
front top left corner is at position 0 in the reorderedList.
- cullFrontTopRight() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Creates a re-mapping of the cube corners so the
front top right corner is at position 0 in the reorderedList.
- culling - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
Back face culling enabled or not.
- culling - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Burning surface being culled ( back face bulling ) or not.
- cullPoints(float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
1.
- cumf(double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- CumSum(CDVector, CDVector, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
Cumulative sum of elements.
- cumtrapz(double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- cumulative_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- CumulativeCenterCount(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.BinaryNode
-
- CUNIT1 - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- CUNIT2 - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- CUNIT3 - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- CUNIT4 - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- CUNIT5 - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- cur - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- cur - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RAList
-
- CUR - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .cur.
- cur_comp_info - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- cur_marker - Variable in class gov.nih.mipav.model.file.libjpeg.my_marker_reader
-
- cur_method - Variable in class gov.nih.mipav.model.file.libjpeg.my_idct_controller
-
- cur_pino - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
Current Packet iterator number
- cur_start_row - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- cur_start_row - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- cur_totnum_tp - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
Total number of tileparts of the current tile
- cur_tp_num - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
Current tile part number
- curAdjMark - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- curAdjMark - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- curctx - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_t
-
- curev - Class in gov.nih.mipav.model.algorithms
-
- curev(int, double[], int, double[], int, int, double[], int, double[], int, int[]) - Constructor for class gov.nih.mipav.model.algorithms.curev
-
- curfit - Class in gov.nih.mipav.model.algorithms
-
- curfit() - Constructor for class gov.nih.mipav.model.algorithms.curfit
-
- curfit(int, int, double[], double[], double[], double, double, int, double, int, int[], double[], double[], double[], int, int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.curfit
-
- curPercent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- currContourCost - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- currDir - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
current directory
- currDir - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
current directory *
- currDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
current directory *
- currDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
current directory *
- curRefMark - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- curRefMark - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- current - Variable in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
DOCUMENT ME!
- current - Variable in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
DOCUMENT ME!
- current - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- current - Variable in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Label that gives current value of slider.
- current - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- current - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
index to the item list.
- current - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Current event vector index.
- current - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
index to the item list.
- current - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Current event vector index.
- current - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- current - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- current_cost_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
- current_nb_tps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_index_t
-
current nb of tile part (allocated)
- current_tpsno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_index_t
-
current tile-part index
- current_value - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- current_value - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- current2 - Variable in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
DOCUMENT ME!
- current2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- current2 - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- current2 - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- currentAbsolutePositionLabels - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
The current values of the absolute position labels.
- currentAnnotationTableRow - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- currentButton - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
DOCUMENT ME!
- currentCenter - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOISaveState
-
- currentChar - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- currentChar - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- currentColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Restores the VOI color button after QuickLUT.
- currentColorWheelType - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
String indicating current color wheel type *
- currentColorWheelType - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
String indicating current color wheel type *
- currentCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Description of the cost function being performed
- currentCostFunct - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
The current cost function
- currentDataMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- currentDateL - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- currentDeformedSubject - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- currentDeformField - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- currentDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D.FitOAR3DConstrainedModel
-
- currentDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DELSUNCModel
-
- currentDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DLMModel
-
- currentDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
- currentDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DELSUNCModel
-
- currentDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DLMModel
-
- currentDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
- currentDownSampleFactor - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- currentElem - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- currentElement - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
- currentEntry - Variable in class gov.nih.mipav.model.file.FileDataProvenance.ProvenanceXMLHandler
-
the current provenance entry (to be inserted into the holder)
- currentEvent - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.StandardMouse
-
DOCUMENT ME!
- currentEvent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.StandardKey
-
DOCUMENT ME!
- currentEvent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseWheel
-
DOCUMENT ME!
- currentEvent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouse
-
DOCUMENT ME!
- currentEvent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouseDragged
-
DOCUMENT ME!
- currentEvent - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
DOCUMENT ME!
- currentEvent - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouse
-
DOCUMENT ME!
- currentEvent - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouseDragged
-
DOCUMENT ME!
- currentEvent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.KeyPressedEvent
-
DOCUMENT ME!
- currentEvent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
DOCUMENT ME!
- currentEvent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
DOCUMENT ME!
- currentEvent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.RightMouse
-
DOCUMENT ME!
- currentEventVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Current event vector used by the save AVI.
- currentEventVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Current event vector used by the save AVI.
- currentFrame - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- currentFrame - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- currentFuzzy - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- currentImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
The current DWI image in the pipeline
- currentImageNumber - Variable in class gov.nih.mipav.model.scripting.ImageVariableTable
-
The number to use for the next image placeholder variable to be added to the table.
- currentIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Current surface index being highlighted.
- currentInputImageLabelNumber - Variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Counter used to track the number of input images stored (aka used) by an algorithm.
- currentJointST - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- currentKey - Variable in class gov.nih.mipav.model.file.FileDataProvenance.ProvenanceXMLHandler
-
The current XML tag we are parsing.
- currentKey - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- currentKey - Variable in class gov.nih.mipav.model.file.FileOME.MyXMLHandler
-
The current XML tag we are parsing.
- currentKey - Variable in class gov.nih.mipav.model.file.FilePolylineVOIXML.MyXMLHandler
-
The current XML tag we are parsing.
- currentKey - Variable in class gov.nih.mipav.model.file.FileVOI.MyXMLHandler
-
The current XML tag we are parsing.
- currentKey - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
The current XML tag we are parsing.
- currentKey - Variable in class gov.nih.mipav.model.file.FileVOI.XMLCoordHandler
-
The current XML tag we are parsing.
- currentKey - Variable in class gov.nih.mipav.view.dialogs.MyXMLHandler
-
The current XML tag we are parsing.
- currentKey - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D.SurfaceRefXMLHandler
-
Current XML keyword:.
- currentKey - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Current XML keyword:.
- currentKey - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Current XML keyword:.
- currentKey - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM.SurfaceRefXMLHandler
-
Current XML keyword:.
- currentKey - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
The current XML tag we are parsing.
- currentLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Value of current slider number.
- currentLength - Variable in class gov.nih.mipav.model.structures.IntVector
-
The number of valid data elements added to the vector.
- currentLevel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- currentLevelIdx - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- currentLocation - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- currentLocation - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- currentMaskNumberIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
this represents the current index of the btArrayList
- currentMesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- currentName - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
DOCUMENT ME!
- currentName - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- currentNumberOfControlPoints - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- currentObject - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
current SceneState object being recorded by SaveAVI.
- currentObject - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
current SceneState object being recorded by SaveAVI.
- currentOffset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- currentOpacity - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
saved opacity parameter when hiding the paint
- currentOpacity - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Displays current opacity level in slider
- currentOrientation - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- currentPage - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Page information.
- currentParameterName - Variable in class gov.nih.mipav.model.file.XMLPSet
-
Current parameter name.
- currentPath - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- currentPSetDesc - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
String for the current PSet description (for key).
- currentRecognizedCode - Variable in class gov.nih.mipav.model.file.FileSVS
-
- currentRecognizedCode - Variable in class gov.nih.mipav.model.file.FileTiff
-
- currentRectangle - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
rectangle for screen capture*
- currentRectangle - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
The rectangle that will be captured from the screen to save to a file.
- currentRectangle - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreens
-
The rectangle that will be captured from the screen to save to a file.
- currentRectangle - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
rectangle for screen capture*
- currentResolutionIdx - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- currentResultImageSlicesLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- currentResultImageSlicesLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- currentScriptComboBox - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The combo box containing the possible choices for the current script in the script toolbar.
- currentScriptLineNumber - Variable in class gov.nih.mipav.model.scripting.ParserEngine
-
The number of the current (or last if not currently parsing) line being parsed (1-based).
- currentSeconds - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
DOCUMENT ME!
- currentSelectedScript - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The script currently selected in the scripting toolbar (null if no script is selected).
- currentSelectedSlice - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- currentSelectedSlice - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- currentShortcut - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
Keystroke built from shortcut editor dialog.
- currentShortcut - Static variable in class gov.nih.mipav.view.Preferences
-
The current shortcut
- currentSlice - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- currentSlice - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
The slice number the VOI is in.
- currentSlice - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- currentSlice - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Used for 3D loop control.
- currentSlice - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Used for 3D loop control.
- currentSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreens
-
- currentSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
DOCUMENT ME!
- currentSlice - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
current info -- this slice info refers to the *real* slice number, not the page index for a slice on a page.
- currentSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.MatchSlices
-
- currentSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.SliceSet
-
- currentSlice - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Current info -- this slice info refers to the *real* slice number, not the page index for a slice on a page.
- currentSlice - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- currentState - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- currentSurfacePath - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
Used to keep track of the current surface.
- currentText - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
- currentTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Current transform3D object used in Save AVI.
- currentTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Current transform3D object used in Save AVI.
- currentTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Current transform matrix.
- currentTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Current transform matrix.
- currentTransform - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Current transform matrix.
- currentTransformType - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Current transform changes type.
- currentTransformType - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Current transform changes type.
- currentTransType - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Current transform type.
- currentTSlice - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- currentViewPort - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- currentVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOISaveState
-
- currentVOIPath - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
Used to keep track of the current VOI.
- currEventTime - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Current mouse press event time stamp.
- currEventTime - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
current and previous key press time.
- currEventTime - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Current mouse press event time stamp.
- currEventTime - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
current and previous key press time.
- currEventTime - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
current and previous key press time.
- currImage - Static variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
The buffered image selected by the user
- currXform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- curScriptFile - Variable in class gov.nih.mipav.model.scripting.ScriptRunner.ScriptThread
-
The file name of the script to execute in this thread.
- cursorIndex - Variable in class gov.nih.mipav.view.JPanelHistogram
-
Active mouse cursor index of the imageA, B and GM image A, B.
- cursorIndex - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Active mouse cursor index of the imageA, B and GM image A, B.
- cursorIndex - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Active mouse cursor index of the imageA, B and GM image A, B.
- cursorIndexB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Active mouse cursor index of the imageA, B and GM image A, B.
- cursorIndexB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Active mouse cursor index of the imageA, B and GM image A, B.
- cursorMode - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
curreent cursor nevigation mode.
- cursorMode - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Used to describe the cursor mode.
- curvature - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- curvatureNormals - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- curve - Variable in class gov.nih.mipav.model.structures.UpdateVOIEvent
-
DOCUMENT ME!
- curve - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map.curvePair
-
- curve - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale.curvePair
-
- curve - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel.AnnotationSplineControlPts
-
- CURVE_FITTING_EXAMPLE - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- curveChanged() - Method in interface gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.CurveListener
-
CurveListener are updated whenever a curve changes in the LatticeModel.
- curveChanged() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- CurveCostFunction(int, double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.CurveCostFunction
-
- CurveFittingCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.CurveFittingCostFunction
-
- curveFittingData - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- CurveFittingFunctorExample() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CurveFittingFunctorExample
-
- curveFittingObservations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- curveIntersect(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- curveintersect_local(double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- curveList - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- CurveListener - Interface in gov.nih.mipav.view.renderer.WildMagic.WormUntwisting
-
- curveListeners - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- curvePair(VOIBase, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map.curvePair
-
- curvePair(VOIBase, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale.curvePair
-
- curves - Variable in class gov.nih.mipav.model.structures.VOI
-
A vector array of curves per slice.
- curvesList - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- curvesPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- curvesTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- curveTableModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- curveType - Variable in class gov.nih.mipav.model.structures.VOI
-
Indicates the type of VOI (i.e.
- curveVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel.AnnotationSplineControlPts
-
- curX - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- curY - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- curz - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< current z location of the patches (z of the first frame of the patch).
- curZ - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- cushion - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Extra space around VOI in x and y dimensions.
- CUSTOM - gov.nih.mipav.view.ViewJSlider.SliderType
-
- CUSTOM - Static variable in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- CUSTOM - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- CUSTOM - Static variable in class gov.nih.mipav.view.ViewJSlider
-
- custom_padd(int[], double[][], int, int, double) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- CustomAlpha - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- customBlendGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Multihistogram panel:
- CustomBlendMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- CustomCellRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptView.CustomCellRenderer
-
Creates a new CustomCellRenderer object.
- CustomHashtable<V> - Class in gov.nih.mipav.model.structures
-
CustomHashtable extends the Hashtable class and adds some methods for generating keys for new elements to the
Hashtable.
- CustomHashtable() - Constructor for class gov.nih.mipav.model.structures.CustomHashtable
-
Constructs a new, empty hashtable with a default capacity and load factor, which is 0.75.
- CustomHashtable(int) - Constructor for class gov.nih.mipav.model.structures.CustomHashtable
-
Constructs a new, empty hashtable with the specified initial capacity and default load factor, which is 0.75.
- CustomHashtable(int, float) - Constructor for class gov.nih.mipav.model.structures.CustomHashtable
-
Constructs a new, empty hashtable with the specified initial capacity and the specified load factor.
- CustomHashtable(Map<String, V>) - Constructor for class gov.nih.mipav.model.structures.CustomHashtable
-
Constructs a new hashtable with the same mappings as the given Map.
- customLUTsLocation - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Opens and returns a buffered reader for a given custom LUT name.
- customLUTsLocation - Static variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
- customProcessTag(int, Set<Integer>, int, MetadataExtractor.RandomAccessReader, int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- customProcessTag(int, Set<Integer>, int, MetadataExtractor.RandomAccessReader, int, int) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- customRegionComp(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- customRegionEval(float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- customRendered - Variable in class gov.nih.mipav.model.file.FileSVS
-
- customRendered - Variable in class gov.nih.mipav.model.file.FileTiff
-
- CustomUIBuilder - Class in gov.nih.mipav.view
-
- CustomUIBuilder() - Constructor for class gov.nih.mipav.view.CustomUIBuilder
-
- CustomUIBuilder.UIParams - Class in gov.nih.mipav.view
-
Class that holds the parameters for creating/catching common buttons and menu items
- custx_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- custy_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- cut() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Cut the m_kModified mesh.
- cut() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Cut the m_kModified mesh.
- cut() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- cutGeodesic() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Calls the Geodesic cut function to cut the triangle mesh along the geodesic curves.
- cutGeodesic() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Calls the Geodesic cut function to cut the triangle mesh along the geodesic curves.
- cutOff - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- cutOffPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- cutOffPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- cutOffPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- cutOffPointInner - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- cutOffPointInner - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- cutOffPointInner - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- cutOffPointOuter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- cutOffPointOuter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- cutOffPointOuter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- cV(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- CV_64F - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- CV_64FC - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- CV_64FC1 - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- CV_64FC3 - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- CV_8U - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- CV_8UC - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- CV_8UC1 - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- cv_acnrm - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_acnrmQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_acnrmQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_acnrmS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_acor - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_acorQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_acorQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_acorS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_ADAMS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_adj - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_adj_mem - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_adjMallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_ALLSENS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_BAD_DKY - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_BAD_IS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_BAD_K - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_BAD_T - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_BAD_TB0 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_BDF - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_CENTERED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_CONV_FAILURE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_convfail - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_crate - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_crateS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_DQrhomax - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_DQtype - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_e_data - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_EE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_efun(CVODES.NVector, CVODES.NVector, CVODES.UserData, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_efun_select - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_eh_data - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_ERR_FAILURE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_errconQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_errconQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_errconS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_errfp - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_est_parGV_peak1 - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- cv_est_parGV_peak2 - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- cv_eta - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_etamax - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_etaq - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_etaqm1 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_etaqp1 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ewt - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ewtQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ewtQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ewtS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_f - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- cv_f - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_f_withSensi - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- CV_FAIL_BAD_J - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_FAIL_OTHER - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_FIRST_QRHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_FIRST_QSRHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_FIRST_RHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_FIRST_SRHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_forceSetup - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_FORWARD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_fQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- cv_fQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_fQ_withSensi - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- cv_fQS_data - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_fQSDQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_fS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_fS_data - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_fS1 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_fSDQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ftemp - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ftempQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ftempS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_FUNCTIONAL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_FWD_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_gactive - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_gamma - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_gammap - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_gamrat - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_GETY_BADT - Static variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_gfun - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ghi - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_glo - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_grout - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_h - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_h0u - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_HERMITE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_hin - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_hmax_inv - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_hmin - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_hprime - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_hscale - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_hu - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ifS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_ILL_INPUT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_index - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- cv_indx_acor - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_irfnd - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_iroots - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ism - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_iter - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_itol - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_itolQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_itolQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_itolS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_jcur - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_l - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_L - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_lfree - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- cv_lfree(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_lfree_select - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_linit(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_LINIT_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_linit_select - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_liw - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_liw1 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_liw1Q - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_lmem - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- cv_lmem - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_lmm - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_lrw - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_lrw1 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_lrw1Q - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_lsetup(CVODES.CVodeMemRec, int, CVODES.NVector, CVODES.NVector, boolean[], CVODES.NVector, CVODES.NVector, CVODES.NVector, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_LSETUP_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_lsetup_select - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_lsolve(CVODES.CVodeMemRec, CVODES.NVector, CVODES.NVector, CVODES.NVector, CVODES.NVector, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_LSOLVE_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_lsolve_select - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_MallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_maxcor - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_maxcorS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_maxncf - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_maxnef - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_mem - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- CV_MEM_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_MEM_NULL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_mnewt - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_mxgnull - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_mxhnil - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_mxstep - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ncfn - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ncfnS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ncfnS1 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ncfS1 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_netf - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_netfQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_netfQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_netfS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_NEWTON - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_next - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- cv_next_h - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_next_q - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nfe - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nfeS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nfQe - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nfQeS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nfQSe - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nfSe - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nge - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nhnil - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nlscoef - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_NN - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_nni - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nniS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nniS1 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_NO_ADJ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_NO_BCK - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_NO_FAILURES - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_NO_FWD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_NO_MALLOC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_NO_QUAD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_NO_QUADSENS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_NO_SENS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_nor - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_NORMAL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_nrtfn - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_Ns - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nscon - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nsetups - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nsetupsS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nst - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_nstlp - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_ONE_STEP - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_ONESENS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_p - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_pbar - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_plist - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_POLYNOMIAL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_q - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_qmax - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_qmax_alloc - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_qmax_allocQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_qmax_allocQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_qmax_allocS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_qprime - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_QRHSFUNC_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_QSRHSFUNC_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_qu - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_QuadMallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_quadr - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_quadr_sensi - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_QuadSensMallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_qwait - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_REDUCE_AVG - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- CV_REDUCE_MAX - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- CV_REDUCE_MIN - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- CV_REDUCE_SUM - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- CV_REIFWD_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_reltol - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_reltolQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_reltolQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_reltolS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_REPTD_QRHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_REPTD_QSRHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_REPTD_RHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_REPTD_SRHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_RHSFUNC_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_rl1 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_ROOT_RETURN - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_rootdir - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_RTFUNC_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_Sabstol - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_SabstolQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_SabstolQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_SabstolQSMallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_SabstolS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_SabstolSMallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_saved_tq5 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_sensi - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_SensMallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_SIMULTANEOUS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_sldeton - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_SRHSFUNC_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_SS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_ssdat - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_STAGGERED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_STAGGERED1 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_stgr1alloc - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_SUCCESS - Static variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_SV - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_t0 - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- cv_taskc - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_tau - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_tempv - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_tempvQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_tempvQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_tempvS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_thi - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_tlo - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_tn - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_tolsf - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_TOO_CLOSE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_TOO_MUCH_ACC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_TOO_MUCH_WORK - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_tout - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- cv_toutc - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_tq - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_tretlast - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_trout - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_tstop - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_TSTOP_RETURN - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_tstopset - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_ttol - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_UNREC_QRHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_UNREC_QSRHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_UNREC_RHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_UNREC_SRHSFUNC_ERR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_uround - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_user_data - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- cv_user_data - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_user_efun - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_Vabstol - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_VabstolMallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_VabstolQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_VabstolQMallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_VabstolQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_VabstolQSMallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_VabstolS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_VabstolSMallocDone - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CV_WARNING - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CV_WF - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cv_y - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- cv_y - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_yQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_yQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_yS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_zn - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_znQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_znQS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cv_znS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- cV0(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- cV1(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- cV2(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- CVAbckpbDelete(CVODES.CVodeBMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVAckpntDelete(CVODES.CkpntMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVAckpntGet(CVODES.CVodeMemRec, CVODES.CkpntMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVAckpntInit(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVAckpntNew(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- cvAdamsFinish(CVODES.CVodeMemRec, double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvAdamsStart(CVODES.CVodeMemRec, double[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVAdataStore(CVODES.CVodeMemRec, CVODES.CkpntMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVadjCheckPointRec() - Constructor for class gov.nih.mipav.model.algorithms.CVODES_ASA.CVadjCheckPointRec
-
- CVadjMemRec() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- cvAdjustAdams(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvAdjustBDF(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvAdjustOrder(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvAdjustParams(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVAfindIndex(CVODES.CVodeMemRec, double, long[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVAhermiteFree(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVAhermiteFree_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVAhermiteGetY(CVODES.CVodeMemRec, double, CVODES.NVector, CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVAhermiteGetY_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVAhermiteMalloc(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVAhermiteMalloc_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVAhermiteStorePnt(CVODES.CVodeMemRec, CVODES.DtpntMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVAhermiteStorePnt_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvAllocVectors(CVODES.CVodeMemRec, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvAltSum(int, double[], int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVApolynomialFree(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVApolynomialFree_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVApolynomialGetY(CVODES.CVodeMemRec, double, CVODES.NVector, CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVApolynomialGetY_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVApolynomialMalloc(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVApolynomialMalloc_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVApolynomialStorePnt(CVODES.CVodeMemRec, CVODES.DtpntMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVApolynomialStorePnt_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVArhs(double, CVODES.NVector, CVODES.NVector, CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVArhs_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVArhsQ(double, CVODES.NVector, CVODES.NVector, CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVArhsQ_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvB_mem - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- cvBDFStab(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvChooseEta(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvCompleteStep(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvComputeEtaqm1(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvComputeEtaqp1(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVD_DGMAX - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVD_MSBJ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDecreaseBDF(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDLS_ILL_INPUT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDLS_JACFUNC_RECVR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDLS_JACFUNC_UNRECVR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDLS_LMEM_NULL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDLS_LMEMB_NULL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDLS_MEM_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDLS_MEM_NULL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDLS_NO_ADJ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDLS_SUCCESS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDLS_SUNMAT_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsDenseDQJac(double, CVODES.NVector, CVODES.NVector, double[][], CVODES.CVodeMemRec, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsDQJac - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsFree(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsFree_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsFreeB(CVODES.CVodeBMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsFreeB_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDlsGetWorkSpace(CVODES.CVodeMemRec, long[], long[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsInitialize(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsInitialize_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsInitializeCounters(CVODES.CVDlsMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsJacBWrapper(double, CVODES.NVector, CVODES.NVector, double[][], CVODES.CVodeMemRec, CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsJacBWrapper_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsLapackSetup_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsLapackSolve_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDlsMemRec() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- CVDlsMemRecB() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRecB
-
- CVDlsSetJacFn(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDlsSetJacFnB(CVODES.CVodeMemRec, int, int) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVDlsSetLinearSolver(CVODES.CVodeMemRec, CVODES.SUNLinearSolver, double[][]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVDlsSetLinearSolverB(CVODES.CVodeMemRec, int, CVODES.SUNLinearSolver, double[][]) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- cvDlsSetup(CVODES.CVodeMemRec, int, CVODES.NVector, CVODES.NVector, boolean[], CVODES.NVector, CVODES.NVector, CVODES.NVector, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsSetup_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsSolve(CVODES.CVodeMemRec, CVODES.NVector, CVODES.NVector, CVODES.NVector, CVODES.NVector, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDlsSolve_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvDoErrorTest(CVODES.CVodeMemRec, int[], double, double, int[], long[], double[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- Cvec() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Cvec
-
- Cvec_to_sbins(SIFT3D.Cvec, SIFT3D.Svec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- cverberOff - Variable in class gov.nih.mipav.model.file.FileJP2
-
- cverberOn - Variable in class gov.nih.mipav.model.file.FileJP2
-
- cVertex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Vertex array.
- CVertices - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.ASMData
-
- cvEwtSet(CVODES.NVector, CVODES.NVector, CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvEwtSet_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvEwtSetSS(CVODES.CVodeMemRec, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvEwtSetSV(CVODES.CVodeMemRec, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvEwtUser_select1 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cVFp() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- cVFp(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- cvFreeVectors(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvHandleFailure(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvHandleNFlag(CVODES.CVodeMemRec, int[], double, int[], long[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvHin(CVODES.CVodeMemRec, double) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvIncreaseBDF(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvInitialSetup(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVisDMatrix - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
* AAM-API LICENSE - file: license.txt
This software is freely available for non-commercial use such as
research and education.
- CVisDMatrix() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- CVisDMatrix(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- CVisDMatrix(int, int, double[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- CVisDMatrix(int, int, double[][]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- CVisDMatrix(CVisDMatrix) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- CVisDVector - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
* AAM-API LICENSE - file: license.txt
This software is freely available for non-commercial use such as
research and education.
- CVisDVector() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- CVisDVector(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- CVisDVector(int, double[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- CVisDVector(CVisDVector) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- CVisRect - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
CVisRect
* AAM-API LICENSE - file: license.txt
This software is freely available for non-commercial use such as
research and education.
- CVisRect() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- CVisRect(int, int, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- CVisRect(CVisRect) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- CVisRect(POINT, POINT) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- CVisRect(POINT, SIZE) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- CVisRGBA - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
* AAM-API LICENSE - file: license.txt
This software is freely available for non-commercial use such as
research and education.
- CVisRGBA() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- CVisRGBA(byte) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- CVisRGBA(byte, byte, byte) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- CVisRGBA(byte, byte, byte, byte) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- CVisRGBA(CVisRGBA) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- CVisShape - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
INTERNAL EXTERNAL VISSHAPE
Objects derived from which also contain a number of
bands.
- CVisShape() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- CVisShape(int, int, int, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- CVisShape(CVisShape) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- CVisShape(POINT, SIZE, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- CVisShape(RECT, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- cvNewtonIteration(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvNls(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvNlsFunctional(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvNlsNewton(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVode(CVODES.CVodeMemRec, double, CVODES.NVector, double[], int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeAdjFree(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeAdjInit(CVODES.CVodeMemRec, int, int) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeB(CVODES.CVodeMemRec, double, int) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeBMemRec() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.CVodeBMemRec
-
- CVodeCreate(int, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeCreateB(CVODES.CVodeMemRec, int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeF(CVODES.CVodeMemRec, double, CVODES.NVector, double[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeFree(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeGetAdjCheckPointsInfo(CVODES.CVodeMemRec, CVODES_ASA.CVadjCheckPointRec[]) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeGetAdjCVodeBmem(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeGetAdjY(CVODES.CVodeMemRec, double, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeGetB(CVODES.CVodeMemRec, int, double[], CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeGetDky(CVODES.CVodeMemRec, double, int, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeGetNumSteps(CVODES.CVodeMemRec, long[]) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeGetQuad(CVODES.CVodeMemRec, double[], CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeGetQuadB(CVODES.CVodeMemRec, int, double[], CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeGetQuadDky(CVODES.CVodeMemRec, double, int, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeGetRootInfo(CVODES.CVodeMemRec, int[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeGetSens(CVODES.CVodeMemRec, double[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeGetSensDky(CVODES.CVodeMemRec, double, int, CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeGetSensDky1(CVODES.CVodeMemRec, double, int, int, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeInit(CVODES.CVodeMemRec, int, double, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeInitB(CVODES.CVodeMemRec, int, int, double, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeMemRec() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.CVodeMemRec
-
- CVodeQuadFree(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeQuadInit(CVODES.CVodeMemRec, int, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeQuadInitB(CVODES.CVodeMemRec, int, int, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeQuadReInit(CVODES.CVodeMemRec, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeQuadReInitB(CVODES.CVodeMemRec, int, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeQuadSensFree(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeQuadSensReInit(CVODES.CVodeMemRec, CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeQuadSStolerances(CVODES.CVodeMemRec, double, double) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeQuadSStolerancesB(CVODES.CVodeMemRec, int, double, double) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeReInit(CVODES.CVodeMemRec, double, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeReInit(CVODES.CVodeMemRec, double, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeReInitB(CVODES.CVodeMemRec, int, double, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeRootInit(CVODES.CVodeMemRec, int, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVODES - Class in gov.nih.mipav.model.algorithms
-
- CVODES() - Constructor for class gov.nih.mipav.model.algorithms.CVODES
-
- CVODES_ASA - Class in gov.nih.mipav.model.algorithms
-
- CVODES_ASA() - Constructor for class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVODES_ASA.CVadjCheckPointRec - Class in gov.nih.mipav.model.algorithms
-
- CVODES.CkpntMemRec - Class in gov.nih.mipav.model.algorithms
-
- CVODES.CVadjMemRec - Class in gov.nih.mipav.model.algorithms
-
- CVODES.CVDlsMemRec - Class in gov.nih.mipav.model.algorithms
-
- CVODES.CVDlsMemRecB - Class in gov.nih.mipav.model.algorithms
-
- CVODES.CVodeBMemRec - Class in gov.nih.mipav.model.algorithms
-
- CVODES.CVodeMemRec - Class in gov.nih.mipav.model.algorithms
-
- CVODES.DtpntMemRec - Class in gov.nih.mipav.model.algorithms
-
- CVODES.HermiteDataMemRec - Class in gov.nih.mipav.model.algorithms
-
- CVODES.NVector - Class in gov.nih.mipav.model.algorithms
-
- CVODES.PolynomialDataMemRec - Class in gov.nih.mipav.model.algorithms
-
- CVODES.SUNLinearSolver - Class in gov.nih.mipav.model.algorithms
-
- CVODES.SUNLinearSolver_Type - Enum in gov.nih.mipav.model.algorithms
-
- CVODES.UserData - Class in gov.nih.mipav.model.algorithms
-
- CVodeSensEEtolerances(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeSensFree(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeSensInit1(CVODES.CVodeMemRec, int, int, int, CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeSensReInit(CVODES.CVodeMemRec, int, CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeSetIterType(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeSetMaxErrTestFails(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeSetMaxNumSteps(CVODES.CVodeMemRec, long) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeSetQuadErrConB(CVODES.CVodeMemRec, int, boolean) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeSetSensDQMethod(CVODES.CVodeMemRec, int, double) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeSetSensParams(CVODES.CVodeMemRec, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeSetStopTime(CVODES.CVodeMemRec, double) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeSetUserDataB(CVODES.CVodeMemRec, int, CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeSStolerances(CVODES.CVodeMemRec, double, double) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeSStolerancesB(CVODES.CVodeMemRec, int, double, double) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- CVodeSVtolerances(CVODES.CVodeMemRec, double, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- CVodeWFtolerances(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvPredict(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvPrepareNextStep(CVODES.CVodeMemRec, double) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvProcessError(CVODES.CVodeMemRec, int, String, String, String, double...) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadAllocVectors(CVODES.CVodeMemRec, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- cvQuadEwtSet(CVODES.CVodeMemRec, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadEwtSetSS(CVODES.CVodeMemRec, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadEwtSetSV(CVODES.CVodeMemRec, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadFreeVectors(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadNls(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadSensEwtSet(CVODES.CVodeMemRec, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadSensEwtSetEE(CVODES.CVodeMemRec, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadSensEwtSetSS(CVODES.CVodeMemRec, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadSensEwtSetSV(CVODES.CVodeMemRec, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadSensFreeVectors(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadSensNls(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadSensNorm(CVODES.CVodeMemRec, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadSensRhs1InternalDQ(CVODES.CVodeMemRec, int, double, CVODES.NVector, CVODES.NVector, CVODES.NVector, CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadSensRhsInternalDQ(int, double, CVODES.NVector, CVODES.NVector[], CVODES.NVector, CVODES.NVector[], CVODES.CVodeMemRec, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadSensUpdateNorm(CVODES.CVodeMemRec, double, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvQuadUpdateNorm(CVODES.CVodeMemRec, double, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvRcheck1(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvRcheck2(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvRcheck3(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvRescale(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvRestore(CVODES.CVodeMemRec, double) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvRootfind(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- Cvs - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< indicates am empty Dt
- cvsAdvDiff_FSA_non - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvsDirectDemo_ls_Problem_1 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensAllocVectors(CVODES.CVodeMemRec, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensEwtSet(CVODES.CVodeMemRec, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensEwtSetEE(CVODES.CVodeMemRec, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensEwtSetSS(CVODES.CVodeMemRec, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensEwtSetSV(CVODES.CVodeMemRec, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensFreeVectors(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensNorm(CVODES.CVodeMemRec, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensRhs1InternalDQ(int, double, CVODES.NVector, CVODES.NVector, int, CVODES.NVector, CVODES.NVector, CVODES.CVodeMemRec, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensRhs1InternalDQ_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensRhs1Wrapper(CVODES.CVodeMemRec, double, CVODES.NVector, CVODES.NVector, int, CVODES.NVector, CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensRhsInternalDQ(int, double, CVODES.NVector, CVODES.NVector, CVODES.NVector[], CVODES.NVector[], CVODES.CVodeMemRec, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensRhsInternalDQ_select - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensRhsWrapper(CVODES.CVodeMemRec, double, CVODES.NVector, CVODES.NVector, CVODES.NVector[], CVODES.NVector[], CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSensUpdateNorm(CVODES.CVodeMemRec, double, CVODES.NVector[], CVODES.NVector[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSet(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSetAdams(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSetBDF(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSetEta(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSetTqBDF(CVODES.CVodeMemRec, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvSLdet(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvsRoberts_ASAi_dns - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvsRoberts_dns - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvsRoberts_dns_uw - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvsRoberts_dnsL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvsRoberts_FSA_dns - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- cvStep(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvStgr1NewtonIteration(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvStgr1Nls(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvStgr1NlsFunctional(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvStgr1NlsNewton(CVODES.CVodeMemRec, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvStgrNewtonIteration(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvStgrNls(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvStgrNlsFunctional(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvStgrNlsNewton(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvUpperBoundH0(CVODES.CVodeMemRec, double) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cvYddNorm(CVODES.CVodeMemRec, double, double[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- cw - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_precinct_t
-
- cwButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- cwButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- cwt(double[], double[], PyWavelets.ContinuousWavelet, double, String) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- cwt_psi_single(double[], PyWavelets.ContinuousWavelet, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- cx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- CX_SPARSE - gov.nih.mipav.model.algorithms.CeresSolver.SparseLinearAlgebraLibraryType
-
- cXdim - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- cXres - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- cy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- cyan - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- cyan - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Define the cyan color.
- cycleActivePt(int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Cycles through the active points on the curve.
- cycleTime - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- cycleTime - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- cYdim - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- cyi - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- cyi - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- cyi - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- cyi - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- cyi - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- cyi - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- cylinderBody - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderBodyIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderBodyIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderBodyTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderDefault - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Cylinder shape part of the probe.
- cylinderHead - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderHeadIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderHeadIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderHeadTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Indicator probe cylinder shape.
- cylinderIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Indicator is used by the default probe to switch color between cyan and green.
- cylinderIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Indicator probe cylinder shape.
- cylinderIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Transformgroup of the indicator cylinder shape.
- cylinderIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Transform group of the indicator cylinder shape.
- cylinderIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Transformgroup of the indicator cylinder shape.
- cylinderReconstruction - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- Cylinders - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- cylinderTail - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderTailIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderTailIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderTailTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Transform group of the cylinder shape.
- cylinderTip - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Cylinder geometry shape part of the CoolTip probe.
- cylinderTip - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Cylinder geometry shape part of the regular probe.
- cylinderTip - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderTipIndicator - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderTipIndicatorTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderTipTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
The probe tip cylinder geometry shape.
- cylinderTipTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
The probe tip cylinder geometry shape.
- cylinderTipTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- cylinderX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
X cylinder of the red target sign.
- cylinderXTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
X cylinder transform group that hold the X cylinder translation.
- cylinderY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Y cylinder of the red target sign.
- cylinderYTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Y cylinder transform group that hold the Y cylinder translation.
- cylinderZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Z cylinder of the red target sign.
- cylinderZTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Z cylinder transform group that hold the Z cylinder translation.
- cyr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- cyr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- cyr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- cyr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- cyr - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- cyr - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- cYres - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- CZ_LSMINFO - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- czChannels - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- czDataType - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- czDataType2 - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- cZdim - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- czDimT - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- czDimX - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- czDimY - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- czDimZ - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- CZI - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Zeiss ZISRAW (CZI) file format extension .czi
- cZres - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- czScanType - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- czSpectralScan - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- CZT - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Int denoting CZT sequence
D
- d - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBarrelDistortion
-
- d - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLLE
-
- d - Variable in class gov.nih.mipav.model.algorithms.CubicEquation
-
- d - Variable in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- d - Variable in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- d - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- d - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
Arrays for internal storage of eigenvalues.
- d - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
- D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- D - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearLeastSquaresProblem
-
- D - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverPerSolveOptions
-
- D - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockJacobiPreconditionerTest
-
- D - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- D - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- D - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
-
- D - Variable in class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- D - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_LrFunction
-
- D_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CgnrLinearOperator
-
- D_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- D_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- D_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- D_COOL_WARM - gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
- d_derived_tbl() - Constructor for class gov.nih.mipav.model.file.libjpeg.d_derived_tbl
-
- D_DOT_FLAG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- d_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- D_MAX_BLOCKS_IN_MCU - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- D_VALUE_FLAG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- D0 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- d1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- d1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- D1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- d1km1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- d1km1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- d1Spline - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- d1sqs - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
scalar containing the predicted reduction in the objective function if gn-direction is used.
- d1sqs - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
scalar containing the predicted reduction in the objective function if gn-direction is used.
- d2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- d2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- d2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- D2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- D2_DOT_FLAG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- d2DotProduct(double, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- d2DotTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- d3 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- d4 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- d5 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- d6 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- d7 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- DA - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- DA_x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
Decoding area left boundary
- DA_x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
Decoding area left boundary
- DA_x1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
Decoding area right boundary
- DA_x1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
Decoding area right boundary
- DA_y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
Decoding area up boundary
- DA_y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
Decoding area up boundary
- DA_y1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
Decoding area bottom boundary
- DA_y1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
Decoding area bottom boundary
- dabsquad(double[][], double[][], int[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- DAC - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Define Arithmetic Coding conditioning segment identifier.
- DAC - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- DAC - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- DAgostinosKsquaredTest - Class in gov.nih.mipav.model.algorithms
-
This code calculates the Ksquared statistic of an input array x[].
- DAgostinosKsquaredTest() - Constructor for class gov.nih.mipav.model.algorithms.DAgostinosKsquaredTest
-
- DAgostinosKsquaredTest(double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.DAgostinosKsquaredTest
-
- dAMinAlpha - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- dAMinBlue - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- dAMinGreen - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- dAMinRed - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- damps - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptState
-
number of dampings used in the iteration.
- Dan_Ventura_sdca_linear_example() - Method in class gov.nih.mipav.model.algorithms.SVM
-
- Dan_Ventura_sdca_nonlinear_example() - Method in class gov.nih.mipav.model.algorithms.SVM
-
- Dan_Ventura_sgd_linear_example() - Method in class gov.nih.mipav.model.algorithms.SVM
-
- Dan_Ventura_sgd_nonlinear_example() - Method in class gov.nih.mipav.model.algorithms.SVM
-
- DanwoodCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.DanwoodCostFunction
-
- DanwoodData - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- DanwoodObservations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- DARK - gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorScheme
-
- dark_on_bright - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- dark_on_bright - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- darkHalftone - Variable in class gov.nih.mipav.model.file.FileSVS
-
- darkHalftone - Variable in class gov.nih.mipav.model.file.FileTiff
-
- darkObjectButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
- darkObjectOnWhiteBackground - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionsFromPartialBorders
-
- darkObjectOnWhiteBackground - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
- darkOnBrightCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- DArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- dashSpheres - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Spheres hold the probe detetion starting and ending point geometry shapes.
- dasType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
68 DAS type.
- data - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- data - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- data - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
-
- data - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- data - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- data - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
- data - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- data - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
data array of this Img containing a value for each pixel in row major order
- data - Variable in class gov.nih.mipav.model.algorithms.CVODES.NVector
-
- data - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdnode
-
- data - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- data - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Cache.head_t
-
- data - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- data - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- data - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.DataChar
-
- data - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.DataDouble
-
- data - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.DataFloat
-
- data - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.DataSparse
-
- data - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- data - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- data - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Regularizer multiplier.
- data - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmDataset
-
- data - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms.ByteBuffer
-
The byte type data buffer.
- data - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Actual data array of the the VR.
- data - Variable in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
- data - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_bio_t
-
- data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
image component data
- data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
- data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_seg_t
-
- data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- data - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_marker_struct
-
- data - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- data - Variable in class gov.nih.mipav.model.GaussianKernel
-
- data - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Data buffer that is used to store the image.
- data - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Storage location of image data.
- data - Variable in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
The hashtable of statistics.
- data - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler.ArrayListTransferable
-
DOCUMENT ME!
- data - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- data - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- data - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- data - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_TristripAux
-
- data - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_VertAux
-
- data - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache.head_t
-
- data(String) - Static method in class gov.nih.mipav.view.Preferences
-
Prints to data tab
- Data - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceExtractImage
-
- Data() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- Data(String, String, Boolean) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Data
-
Creates a new Data object.
- Data(Vector<String>, int, int) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- Data() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvaluationResults
-
return the segmentation results
- DATA - Static variable in class gov.nih.mipav.view.ViewJFrameMessage
-
Used to indicate which of the 2 JTextAreas the data (message) is to be displayed.
- data_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
-
- data_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- DATA_BOOLEAN - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- DATA_BYTE - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- DATA_COMPLEX - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- data_current_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- DATA_DCOMPLEX - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- DATA_DIMENSION - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.BiCubicInterpolator
-
- DATA_DIMENSION - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CubicInterpolator
-
- DATA_DIMENSION - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
-
- DATA_DIMENSION - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- data_double - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm
-
- DATA_DOUBLE - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- data_file_directory - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- data_file_name - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- data_file_name - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- data_file_name - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- data_float - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm
-
- DATA_FLOAT - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- data_generation_example() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- data_int - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm
-
- DATA_INTEGER - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- data_length - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_marker_struct
-
- DATA_LONG - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- data_max_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- data_peak1 - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- data_precision - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- DATA_PROVENANCE - Static variable in class gov.nih.mipav.model.file.FileDataProvenance
-
The MIPAV XML header comment.
- DATA_PROVENANCE - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
mipav data provenance (*.xmp) files
- DATA_PROVENANCE_SCHEMA - Static variable in class gov.nih.mipav.view.Preferences
-
The schema for the data provenance xml files
- data_sets - Variable in class gov.nih.mipav.model.algorithms.libdt.DatDescriptor
-
- DATA_SHORT - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- data_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- data_size_needed - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- data_stride - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
- data_type - Variable in class gov.nih.mipav.model.algorithms.libdt.DatDescriptor
-
- data_type - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use 10 chars.
- data_type - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use 10 chars.
- data_type - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DATA_UBYTE - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- DATA_UINTEGER - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- DATA_USHORT - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- dataArray - Variable in class gov.nih.mipav.model.structures.BufferBoolean
-
1D Data array of boolean stored in the BitSet object.
- dataArray - Variable in class gov.nih.mipav.model.structures.BufferByte
-
1D Data array of bytes.
- dataArray - Variable in class gov.nih.mipav.model.structures.BufferDouble
-
1D Data array of doubles.
- dataArray - Variable in class gov.nih.mipav.model.structures.BufferFloat
-
1D Data array of floats.
- dataArray - Variable in class gov.nih.mipav.model.structures.BufferInt
-
1D Data array of integers.
- dataArray - Variable in class gov.nih.mipav.model.structures.BufferLong
-
1D Data array of longs.
- dataArray - Variable in class gov.nih.mipav.model.structures.BufferShort
-
1D Data array of shorts.
- dataArray - Variable in class gov.nih.mipav.model.structures.BufferUByte
-
1D Data array of unsigned bytes (bytes).
- dataArray - Variable in class gov.nih.mipav.model.structures.BufferUInt
-
1D Data array of unsigned integers.
- dataArray - Variable in class gov.nih.mipav.model.structures.BufferUShort
-
1D Data array of unsigned shorts.
- DataArrayAttributes - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
- DataArrayStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under in the Gifti xml schema.
- dataBar - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess.CalculateT
-
- dataByteOffset - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_ACQUIRE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_BITSPERSAMPLE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_COLOR - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_DYE_FOLDER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_DYE_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_CHANNEL1 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_CHANNEL2 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_CONST1 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_CONST2 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_CONST3 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_CONST4 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_CONST5 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_CONST6 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_FIRST_IMAGES1 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_FIRST_IMAGES2 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_TRACK1 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_TRACK2 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_RATIO_TYPE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_SAMPLETYPE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATACHANNEL_ENTRY_SPECTRUM - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DataChar() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.DataChar
-
- DataChar(double[], Vector<String>, int, int, boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.DataChar
-
- dataCompression - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- dataConversion(FileInfoBase, FileInfoBase) - Method in class gov.nih.mipav.model.file.FileIO
-
Provides a method of conversion from FileInfoDicom to FileInfoImageXML, by filling the
FileInfoImageXML with sets of chosen image information (from the DICOM tags).
- dataDescription - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- DataDouble() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.DataDouble
-
- DataDouble(double[], Vector<String>, int, int) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.DataDouble
-
- dataEncode - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- dataEnd - Variable in class gov.nih.mipav.model.algorithms.FitGaussian
-
Location in xSeries where Gaussian data ends
- dataEnd - Variable in class gov.nih.mipav.model.algorithms.FitLaplace
-
Location in xSeries where Gaussian data ends
- dataEnd - Variable in class gov.nih.mipav.model.algorithms.FitLorentz
-
Location in xSeries where Gaussian data ends
- dataEndianess - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- dataExtents - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dataFile - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- dataFile - Variable in class gov.nih.mipav.model.file.FileSPM
-
- dataFileName - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- dataFileName - Variable in class gov.nih.mipav.model.file.FileImageXML
-
- dataFileName - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- dataFileName - Variable in class gov.nih.mipav.model.file.FileIO
-
For multi file formats where data is saved in a set of files
- dataFileName - Variable in class gov.nih.mipav.model.file.FileRaw
-
- dataFileName - Variable in class gov.nih.mipav.model.file.FileSPM
-
- DataFloat() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.DataFloat
-
- DataFloat(double[], Vector<String>, int, int) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.DataFloat
-
- dataFramesSent - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- dataFromRaster(WritableRaster) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- dataindex - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_seg_t
-
- dataLine1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- dataLine2 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- dataOffset - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- dataOffsets - Variable in class gov.nih.mipav.model.file.FileLSM
-
- dataOffsets - Variable in class gov.nih.mipav.model.file.FileSTK
-
- dataOffsets - Variable in class gov.nih.mipav.model.file.FileSVS
-
- dataOffsets - Variable in class gov.nih.mipav.model.file.FileTiff
-
- dataOrient - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dataOutput - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Flag indicating whether or not histogram data is output to the data window.
- dataPrecision - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Data precision.
- DataProvenanceParameters - Class in gov.nih.mipav.view.dialogs
-
This class standardizes the parameter names given to many common parameters used in algorithms.
- DataProvenanceParameters() - Constructor for class gov.nih.mipav.view.dialogs.DataProvenanceParameters
-
Creates a new DataProvenanceParameters object to be used to record the current parameters entered into the algorithm's
GUI by the user.
- Dataset(String, Integer, Boolean) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
Creates a new Dataset object.
- datasetAttributesStr - Static variable in class gov.nih.mipav.model.file.FileImageXML
-
array of strings representing the tags under in the xml schema.
- dataSetFileName - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- dataSetFileName - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- datasetID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
- datasetKeywordsString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- datasetName - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- datasetNameString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- datasetOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogOrder
-
Load image using dataset-specific ordering
- datasetRefs - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- datasets - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME
-
- dataSignature - Variable in class gov.nih.mipav.model.file.FileAvi
-
globals needed for write.
- dataSinkUpdate(DataSinkEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
Event handler for the file writer.
- dataSinkUpdate(DataSinkEvent) - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
Event handler for the file writer.
- dataSinkUpdate(DataSinkEvent) - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Event handler for the file writer.
- datasize - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
- dataSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- dataSize - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- dataSize - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Size of the data buffer (number of pixels in image).
- dataSize - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Total buffer length.
- dataSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Reference to the image data of the slice presently displayed.
- dataSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Reference to the image data of the slice presently displayed.
- DataSpaceValues - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
- DataSparse() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.DataSparse
-
- DataSparse(StochasticForests.SparseMatrix, Vector<String>, int, int) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.DataSparse
-
- dataStart - Variable in class gov.nih.mipav.model.algorithms.FitGaussian
-
Location in xSeries where Gaussian data starts
- dataStart - Variable in class gov.nih.mipav.model.algorithms.FitLaplace
-
Location in xSeries where Gaussian data starts
- dataStart - Variable in class gov.nih.mipav.model.algorithms.FitLorentz
-
Location in xSeries where Gaussian data starts
- dataStartingBlock - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- DataStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under in the Gifti xml schema.
- dataStruct - Class in gov.nih.mipav.model.algorithms
-
- dataStruct() - Constructor for class gov.nih.mipav.model.algorithms.dataStruct
-
- dataToString(DICOM_VR, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Build a string reprsentation of the Data based on the VR type.
- datatype - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Stores the image data type DT_NONE = 0; DT_UNKNOWN = 0; DT_BINARY = 1; DT_UNSIGNED_CHAR = 2; DT_SIGNED_SHORT = 4;
DT_UNSIGNED_SHORT = 4; DT_SIGNED_INT = 8; DT_FLOAT = 16; DT_COMPLEX = 32; DT_DOUBLE = 64; DT_RGB = 128; DT_ALL =
255;
- datatype - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Stores the image data type DT_NONE = 0; DT_UNKNOWN = 0; DT_BINARY = 1; DT_UNSIGNED_CHAR = 2; DT_SIGNED_SHORT = 4;
DT_UNSIGNED_SHORT = 4; DT_SIGNED_INT = 8; DT_FLOAT = 16; DT_COMPLEX = 32; DT_DOUBLE = 64; DT_RGB = 128; DT_ALL =
255;
- datatype - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- dataType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- dataType - Variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
data type
- dataType - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
ARGB, ARGB_USHORT, or ARGB_FLOAT
- dataType - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
ARGB, ARGB_USHORT, or ARGB_FLOAT
- dataType - Variable in class gov.nih.mipav.model.file.FileBase
-
DOCUMENT ME!
- dataType - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- dataType - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- dataType - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
The data type of the data (i.e. byte, short, float ...
- dataType - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- dataType - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- dataType - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogBlankImage
-
The ModelStorageBase.DataType of the blank image.
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
ARGB, ARGB_USHORT, or ARGB_FLOAT for color image
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
If blank image is to be loaded...need the type (for non-color images).
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
ARGB, ARGB_USHORT, or ARGB_FLOAT for color image
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- dataType - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- DataType(int, String, Number, Number) - Constructor for enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
- dataTypeArray - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- DataTypeValues - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
- DatDescriptor() - Constructor for class gov.nih.mipav.model.algorithms.libdt.DatDescriptor
-
- date - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
par/rec date
- date - Variable in class gov.nih.mipav.model.file.XMLParameter
-
Parameter date.
- DATE - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
Date/time data
- date_created - Variable in class gov.nih.mipav.model.file.FileInfoJSON
-
- DATE_TIME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DATE_TIME - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- DATE_TIME - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- DATE_TIME - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- dateAcquired - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- dateField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- dateOfBirth - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- dateProcessed - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- dateTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
14 allocation date time.
- dateTime - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- dateTime - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- dateTime - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- dateTime - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- dateTimeDigitized - Variable in class gov.nih.mipav.model.file.FileSVS
-
- dateTimeDigitized - Variable in class gov.nih.mipav.model.file.FileTiff
-
- dateTimeOriginal - Variable in class gov.nih.mipav.model.file.FileSVS
-
- dateTimeOriginal - Variable in class gov.nih.mipav.model.file.FileTiff
-
- DateUtil() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.DateUtil
-
- dateWritten - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- dati_peak2 - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- daub4(float[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- DAUB4 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
underlying wavelet filter For 4 coefficients the routine daub4 is considerably faster than pwt.
- DAUB4 - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
underlying wavelet filter For 4 coefficients the routine daub4 is considerably faster than pwt.
- daubcqf() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
Function computes the Daubechies' scaling and wavelet filters (normalized to sqrt(2)).
- dawsn(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- DAWSN - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- daxpy(int, double, double[], int, double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Port of 12/3/93 linpack routine daxpy Original version written by Jack Dongarra vector dy = vector dy + da *
vector dx.
- day - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
DOCUMENT ME!
- dayCombobox - Variable in class gov.nih.mipav.view.JPanelEditDate
-
DOCUMENT ME!
- dazzleProtection - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- db - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
A DataBlk, just used to avoid allocating a new one each time it is
needed
- DB - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- db_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db_name - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Name of file with a length of 18 chars.
- db_name - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Name of file with a length of 18 chars.
- db_name - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- db0 - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- db1 - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- db1_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db10_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db11_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db12_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db13_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db14_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db15_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db16_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db17_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db18_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db19_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db2 - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- db2_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db20_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db21_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db22_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db23_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db24_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db25_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db26_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db27_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db28_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db29_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db3_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db30_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db31_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db32_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db33_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db34_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db35_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db36_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db37_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db38_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db4_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db5_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db6_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db7_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db8_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- db9_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dbAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
DOCUMENT ME!
- dBaseFunction - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- dbdsqr(char, int, int, int, int, double[], double[], double[][], int, double[][], int, double[][], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DBDSQR.
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
January 2007
..
- dbdt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
838 peak rate of change in gradient field, tesla/sec.
- dBdt - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- dbdt01(int, int, int, double[][], int, double[][], int, double[], double[], double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK test routine DBDT01.
- dbdt02(int, int, double[][], int, double[][], int, double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK test routine DBDT02.
- dbdt03(char, int, int, double[], double[], double[][], int, double[], double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK test routine DBDT03.
- dbdtPer - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
842 limit in units of percent of theoretical curve.
- DBL_EPSILON - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- DBL_EPSILON - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- DBL_EPSILON - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- DBL_EPSILON - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- DBL_EPSILON - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- DBL_EPSILON - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
Project: Generic Polygon Clipper
A new algorithm for calculating the difference, intersection,
exclusive-or or union of arbitrary polygon sets.
- DBL_MAX - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- DBL_MIN - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
2**-1022 = D1MACH(1).
- dblSort3(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- dBMinAlpha - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- dBMinBlue - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- dBMinGreen - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- dBMinRed - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- DBSCANClusteringSegment - Class in gov.nih.mipav.model.algorithms
-
% Copyright (c) 2013 Peter Kovesi
% www.peterkovesi.com/matlabfns/
%
% Permission is hereby granted, free of charge, to any person obtaining a copy
% of this software and associated documentation files (the "Software"), to deal
% in the Software without restriction, subject to the following conditions:
%
% The above copyright notice and this permission notice shall be included in
% all copies or substantial portions of the Software.
%
% The Software is provided "as is", without warranty of any kind.
- DBSCANClusteringSegment(ModelImage, ModelImage, int, double, double, int, int, int, int, double) - Constructor for class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- DBSCANClusteringSegment.AmAl - Class in gov.nih.mipav.model.algorithms
-
- DBSCANClusteringSegment.Renum - Class in gov.nih.mipav.model.algorithms
-
- DBSCANClusteringSegment.SP - Class in gov.nih.mipav.model.algorithms
-
- dc - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- dc - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- DC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable.HuffmanTableClass
-
- dc_context - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- dc_cur_tbls - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- dc_derived_tbls - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- dc_huff_tbl_ptrs - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- DC_OFFSET - Static variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
DC offset value used when reading image
- DC_OFFSET - Static variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
DC offset value used when reading image
- DC_STAT_BINS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- dc_stats - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- dc_tbl_no - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- dca_updateFunction(int, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- dcalc(boolean) - Method in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Starts the Gaussian calculation.
- dcAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- dcaUpdateFn - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- dchkaa() - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
- dchkaa() - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dchkbd(int, int[], int[], int, boolean[], int, int[], double, double[][], int, double[], double[], double[], double[], double[][], int, double[][], double[][], double[][], int, double[][], int, double[][], double[][], double[], int, int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of most of version 3.1 LAPACK test routine DCHKBD.
- dchkbd_test() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This routine is an extraction from the FORTRAN program version 3.1.1 DCHKEE of the code needed to drive dchkbd in
order to run dchkbd to test the singular value decomposition routines, dgebrd, dorgbr, and dbdsqr.
- dchkge(boolean[], int, int[], int, int[], int, int[], int, int[], double, int, double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dchkgg(int, int[], int, boolean[], int[], double, boolean, double, double[][], int, double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], int, double[][], double[][], double[][], double[], double[], double[], double[], double[], double[], double[][], double[][], double[], int, boolean[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DCHKGG Original DCHKGG created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dchkgg checks the nonsymmetric generalized eigenvalue problem
routines.
- dchkgg_test() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This routine is an extraction from the FORTRAN program version 3.1.1 DCHKEE of the code needed to drive dchkgg in
order to run dchkgg to test the nonsymmetric generalized eigenvalue problem.
- dchkgk() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DCHKGK Original DCHKGK created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 Sample data values obtained from the file dgbak.in dchkgk tests
dggbak, a routine for backward balancing of a matrix pair (A, B).
- dchkgl() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DCHKGL Original DCHKGL created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 Sample data values obtained from the file dgbal.in
- dchkgt(boolean[], int, int[], int, int[], double, double[], double[], double[], double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dchkgt_test() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
This dchkgt_test routine is a port of a portion of the version 3.4.1 LAPACK test routine DCHKAA by Univ. of
Tennessee, Univ.
- dchklq(boolean[], int, int[], int, int[], int, int[], int[], int, double, boolean, int, double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK test routine DCHKLQ.
- dchklq_test() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This dchklq_test routine is a port of a portion of the version 3.1.1 LAPACK test routine DCHKAA by
Univ. of Tennessee, Univ.
- dchkpo(boolean[], int, int[], int, int[], int, int[], double, int, double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
- dchkq3(boolean[], int, int[], int, int[], int, int[], int[], double, double[][], double[][], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
- dchkq3_test() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
This dchkqr_test routine is a port of a portion of the version 3.1.1 LAPACK test routine DCHKAA by Univ. of
Tennessee, Univ.
- dchkqr(boolean[], int, int[], int, int[], int, int[], int[], int, double, boolean, int, double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DCHKQR Univ. of Tennessee, Univ. of California Berkeley and NAG
Ltd..
- dchkqr_test() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This dchkqr_test routine is a port of a portion of the version 3.1.1 LAPACK test routine DCHKAA by Univ. of
Tennessee, Univ.
- dchkst(int, int[], int, boolean[], int[], double, double[][], int, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[][], int, double[][], double[], double[], double[][], double[], int, int[], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the porions of LAPACK version 3.1 test routine DCHKST used to test the symmetric eigenvalue
routines dsytrd, dorgtr, dsteqr, dsterf, and dsteqr.
- dchkst(int, int[], int, boolean[], int[], double, double[][], int, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[][], int, double[][], double[], double[], double[][], double[], int, int[], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is a port of the portions of LAPACK version 3.4.0 test routine DCHKST used to test the symmetric eigenvalue
routines dstebz and dstein.
- dchkst(int, int[], int, boolean[], int[], double, double[][], int, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[][], int, double[][], double[], double[], double[][], double[], int, int[], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of the portions of LAPACK version 3.4.0 test routine DCHKST used to test the symmetric eigenvalue
routine dstemr.
- dchkst_test() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This routine is an extraction from the FORTRAN program version 3.1.1 DCHKEE of the code needed to drive dchkst,
that tests routines used in symmetric generalized eigenvalue problem.
- dchkst_test() - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This routine is an extraction from the FORTRAN program version 3.1.1 DCHKEE of the code needed to drive dchkst,
that tests routines used in symmetric generalized eigenvalue problem.
- dchkst_test() - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This routine is an extraction from the FORTRAN program version 3.1.1 DCHKEE of the code needed to drive dchkst,
that tests routines used in symmetric generalized eigenvalue problem.
- dcins - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- dcins - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- dcLength - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- dcm2q(double[][][]) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- dcmmeta_affine - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- dcmmeta_reorient_transform - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- dcmmeta_shape - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- dcmmeta_slice_dim - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- dcmmeta_version - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- dcnDensity - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
74 Decon kernel density.
- dcnLen - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
72 Number of elements in Decon kernel.
- dcnShiftCnt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
78 Decon kernel shift count.
- dcnStepSize - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
76 Decon kernel stepsize.
- DCOMPLEX - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type complex type of doubles (2 x 128 bits per voxel).
- DCOMPLEX - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of complex type of doubles (2 x 128 bits per voxel).
- DCOMPLEX_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type complex (double).
- dcrmPassed - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- dcrsm - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- dcscAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- dcsrch(double[], double[], double[], double, double, double, double, double, String[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- dcstep(double[], double[], double[], double[], double[], double[], double[], double, double, boolean[], double, double) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- DCT_h_scaled_size - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- dct_method - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- dct_table - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- DCT_v_scaled_size - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- DCTBlockSize - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- DCTBlockSize - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- DCTSize - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- DCTSize - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- DCTSIZE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DCTSIZE2 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- dd - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream.StackElem
-
- dd - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- DD_AccessionNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionContextDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionContextSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionDeviceProcessingCode - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionDeviceProcessingDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionMatrix - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionsInStudy - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionStartCondition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionStartConditionData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionTerminationCondition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionTerminationConditionData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AcquisitionTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ActionTypeID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ActiveSourceDiameter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ActiveSourceLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ActualFrameDuration - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ActualHumanPerformersSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AdditionalDrugSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AdditionalPatientHistory - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AdministrationRouteCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AdmissionID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AdmittingDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AdmittingDiagnosesCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AdmittingDiagnosesDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AdmittingTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AffectedSOPClassUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AffectedSOPInstanceUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AirKermaRateReferenceDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AirKermaRateReferenceTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AnatomicRegionModifierSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AnatomicRegionSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AnatomicStructureSpaceOrRegionSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AngioFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AngularPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AngularStep - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AngularViewVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AnnotationContentSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AnnotationDisplayFormatID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AnnotationFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AnnotationGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AnnotationPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AnodeTargetMaterial - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApplicableFrameRange - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApplicationSetupCheck - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApplicationSetupManufacturer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApplicationSetupName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApplicationSetupNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApplicationSetupSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApplicationSetupType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApplicatorDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApplicatorID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApplicatorSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApplicatorType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ApprovalStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AttachedContours - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AttenuationCorrectionMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AttributeIdentifierList - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AudioComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AudioSampleData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AudioSampleFormat - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AudioType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AveragePulseWidth - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AxialAcceptance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AxialMash - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AxisLabels - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_AxisUnits - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BasicColorImageSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BasicGrayscaleImageSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamDoseSpecificationPoint - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamLimitingDeviceAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamLimitingDeviceAngleTolerance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamLimitingDeviceLeafPairsSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamLimitingDevicePositionSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamLimitingDevicePositionTolerance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamLimitingDeviceRotationDirection - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamLimitingDeviceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamLimitingDeviceToleranceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamMeterset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamStopperPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeamType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BeatRejectionFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BillingItemSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BillingProcedureStepSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BillingSuppliesAndDevicesSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BiplaneAcquisitionSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BitsAllocated - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BitsStored - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BlockData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BlockDivergence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BlockName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BlockNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BlockNumberOfPoints - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BlockSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BlockThickness - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BlockTransmission - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BlockTrayID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BlockType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BluePaletteColorLookupTableData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BluePaletteColorLookupTableDescriptor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BodyPartExamined - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BodyPartThickness - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BoneThermalIndex - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BorderDensity - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyAccessoryDeviceID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyAccessoryDeviceName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyAccessoryDeviceNominalThickness - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyAccessoryDeviceNominalTransmission - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyAccessoryDeviceNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyAccessoryDeviceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyAccessoryDeviceType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyApplicationSetupDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyApplicationSetupDoseSpecificationPoint - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyControlPointDeliveredSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyControlPointSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyReferencedDoseReferenceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyTreatmentTechnique - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BrachyTreatmentType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BranchOfService - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_BurnedInAnnotation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CalculatedDoseReferenceDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CalculatedDoseReferenceDoseValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CalculatedDoseReferenceNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CalculatedDoseReferenceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CalibrationDataSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CalibrationGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CalibrationImage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CardiacNumberOfImages - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CassetteOrientation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CassetteSize - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CenterOfCircularCollimator - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CenterOfCircularShutter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CenterOfRotationOffset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CertificateOfSigner - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CertificateType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CertifiedTimestamp - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CertifiedTimestampType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ChannelLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ChannelNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ChannelSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ChannelShieldID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ChannelShieldName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ChannelShieldNominalThickness - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ChannelShieldNominalTransmission - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ChannelShieldNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ChannelShieldSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ChannelTotalTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CineRate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CodeMeaning - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CodeValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CodingSchemeDesignator - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CoincidenceWindowWidth - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CollationFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CollimatorGridName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CollimatorLeftVerticalEdge - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CollimatorLowerHorizontalEdge - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CollimatorRightVerticalEdge - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CollimatorShape - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CollimatorType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CollimatorUpperHorizontalEdge - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ColorImagePrintingFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ColumnAngulation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Columns - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CommandField - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CommentsOnPerformedProcedureStep - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CommentsOnRadiationDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CommentsOnScheduledProcedureStep - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CompensatorColumns - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CompensatorID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CompensatorNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CompensatorPixelSpacing - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CompensatorPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CompensatorRows - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CompensatorSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CompensatorThicknessData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CompensatorTransmissionData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CompensatorType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CompressionForce - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ConceptCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ConceptNameCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ConfidentialityCode - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ConfidentialityConstraintOnPatientDataDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ConfigurationInformation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ConfigurationInformationDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ConstraintWeight - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContentDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContentSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContentTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContourData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContourGeometricType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContourImageSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContourNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContourOffsetVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContourSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContourSlabThickness - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastAllergies - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastBolusAdministrationRouteSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastBolusAgent - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastBolusAgentSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastBolusIngredient - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastBolusIngredientConcentration - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastBolusRoute - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastBolusStartTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastBolusStopTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastBolusTotalDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastBolusVolume - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastFlowDuration - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastFlowRate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ContrastFrameAveraging - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ControlPoint3DPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ControlPointDeliverySequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ControlPointIndex - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ControlPointRelativePosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ControlPointSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ConversionType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ConvolutionKernel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CoordinateStartValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CoordinateStepValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CorrectedImage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CountRate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CountryOfResidence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CountsAccumulated - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CountsIncluded - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CountsSource - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CranialThermalIndex - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CreationDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CreationTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CumulativeDoseReferenceCoefficient - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CumulativeDoseToDoseReference - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CumulativeMetersetWeight - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CumulativeTimeWeight - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurrentFractionNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurrentPatientLocation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurrentTreatmentStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveDataDescriptor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveDimensions - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveLabel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveRange - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveReferencedOverlayGroup - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveReferencedOverlaySequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_CurveTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DataCollectionDiameter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DataElementsSigned - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DataInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DataSetTrailingPadding - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DataSetType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DataValueRepresentation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Date - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DateOfLastCalibration - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DateOfLastDetectorCalibration - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DateOfSecondaryCapture - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_dBdt - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeadTimeCorrectionFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeadTimeFactor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DecayCorrection - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DecayFactor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DecimateCropResult - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DefaultMagnificationType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DefaultPrinterResolutionID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DefaultSmoothingType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeliveredChannelTotalTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeliveredMeterset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeliveredNumberOfPulses - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeliveredPrimaryMeterset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeliveredPulseRepetitionInterval - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeliveredSecondaryMeterset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeliveredTreatmentTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeliveryMaximumDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeliveryWarningDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DepthOfScanField - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DerivationDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DestinationAE - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorActivationOffsetFromExposure - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorActiveDimensions - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorActiveOrigin - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorActiveShape - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorActiveTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorBinning - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorConditionsNominalFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorConfiguration - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorElementPhysicalSize - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorElementSize - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorElementSpacing - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorLinesOfResponseUsed - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorMode - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorPrimaryAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorSecondaryAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorTemperature - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorTimeSinceLastExposure - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DetectorVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeviceDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeviceDiameter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeviceDiameterUnits - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeviceLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeviceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeviceSerialNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DeviceVolume - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DiaphragmPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DigitalImageFormatAcquired - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DigitalSignatureDateTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DigitalSignaturesSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DigitalSignatureUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DigitizingDeviceTransportDirection - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DirectoryRecordSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DirectoryRecordType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DischargeDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DischargeDiagnosisCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DischargeDiagnosisDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DischargeTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DisplayWindowLabelVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DistanceSourceToDetector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DistanceSourceToEntrance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DistanceSourceToPatient - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DistanceSourceToSupport - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DistributionAddress - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DistributionName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DopplerCorrectionAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DopplerSampleVolumeXPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DopplerSampleVolumeYPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseCalibrationFactor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseComment - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseGridScaling - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseRateDelivered - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseRateSet - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseReferenceDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseReferenceNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseReferencePointCoordinates - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseReferenceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseReferenceStructureType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseReferenceType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseSummationType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseUnits - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DoseValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHDoseScaling - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHMaximumDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHMeanDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHMinimumDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHNormalizationDoseValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHNormalizationPoint - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHNumberOfBins - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHReferencedROISequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHROIContributionType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_DVHVolumeUnits - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EchoNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EchoTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EchoTrainLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EffectiveSeriesDuration - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EmptyImageDensity - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EndCumulativeMetersetWeight - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EndMessageSet - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EndMeterset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EnergyWindowInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EnergyWindowLowerLimit - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EnergyWindowName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EnergyWindowNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EnergyWindowRangeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EnergyWindowUpperLimit - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EnergyWindowVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EntranceDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EntranceDoseInmGy - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ErrorComment - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ErrorID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EstimatedRadiographicMagnificationFactor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EthnicGroup - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EventElapsedTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EventTimerName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_EventTypeID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExecutionStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExecutionStatusInfo - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExpectedCompletionDateAndTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposedArea - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Exposure - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposureControlMode - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposureControlModeDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposureDoseSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposureInuAs - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposureSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposuresOnDetectorSinceLastCalibration - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposuresOnDetectorSinceManufactured - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposuresOnPlate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposureStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposureTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ExposureTimeInuS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FailedSOPInstanceUIDList - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FailedSOPSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FailureReason - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FieldOfViewDimensions - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FieldOfViewHorizontalFlip - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FieldOfViewOrigin - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FieldOfViewRotation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FieldOfViewShape - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FileMetaInformationGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FileMetaInformationVersion - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FileSetCharacterSet - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FileSetConsistencyFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FileSetDescriptorFileID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FileSetGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FileSetID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FillerOrderNumberOfImagingServiceRequest - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilmBoxContentSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilmBoxGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilmConsumptionSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilmDestination - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilmOrientation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilmSessionGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilmSessionLabel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilmSizeID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilterMaterial - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilterThicknessMaximum - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilterThicknessMinimum - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FilterType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FinalCumulativeMetersetWeight - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FinalCumulativeTimeWeight - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FirstTreatmentDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FixationDeviceDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FixationDeviceLabel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FixationDevicePosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FixationDeviceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FixationDeviceType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FlipAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FocalDistance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FocalSpot - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FocusDepth - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FractionGroupNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FractionGroupSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FractionGroupSummarySequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FractionGroupType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FractionNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FractionPattern - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FractionStatusSummarySequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameDelay - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameIncrementPointer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameLabelVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameNumbersOfInterest - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameOfInterestDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameOfReferenceRelationshipSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameOfReferenceTransformationComment - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameOfReferenceTransformationMatrix - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameOfReferenceTransformationType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameOfReferenceUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FramePrimaryAngleVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameReferenceTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameSecondaryAngleVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FrameTimeVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_FramingType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GantryAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GantryAngleTolerance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GantryDetectorSlew - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GantryDetectorTilt - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GantryRotationDirection - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GatedInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GeneralPurposePerformedProcedureStepStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GeneralPurposeScheduledProcedureStepPriority - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GeneralPurposeScheduledProcedureStepStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GeneratorPower - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GreenPaletteColorLookupTableData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GreenPaletteColorLookupTableDescriptor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Grid - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GridAbsorbingMaterial - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GridAspectRatio - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GridFocalDistance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GridFrameOffsetVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GridPeriod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GridPitch - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GridSpacingMaterial - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GridThickness - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_GroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HalfValueLayer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HardcopyCreationDeviceID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HardcopyDeviceManufacturer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HardcopyDeviceManufacturerModelName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HardcopyDeviceSoftwareVersion - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HeartRate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HighBit - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HighDoseTechniqueType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HighRRValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HistogramBinWidth - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HistogramData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HistogramExplanation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HistogramFirstBinValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HistogramLastBinValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HistogramNumberOfBins - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HistogramSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HumanPerformerCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HumanPerformersName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_HumanPerformersOrganization - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IconImageSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IdentifyingGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Illumination - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageAreaDoseProduct - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageBoxContentSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageBoxGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageBoxPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageBoxPresentationLUTFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageDisplayFormat - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImagedNucleus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageFrameOrigin - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageIndex - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageLaterality - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageOrientationPatient - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageOverlayBoxContentSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageOverlayFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImagePlanePixelSpacing - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImagePositionPatient - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImagePresentationGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImagerPixelSpacing - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImagesInAcquisition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageTransformationMatrix - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageTranslationVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImageType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImagingDeviceSpecificAcquisitionParameters - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImagingFrequency - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImagingServiceRequestComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImplantPresent - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImplementationClassUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ImplementationVersionName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Impressions - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InPlanePhaseEncodingDirection - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InputAvailabilityFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InputInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InstanceAvailability - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InstanceCreationDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InstanceCreationTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InstanceCreatorUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InstanceNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InstitutionAddress - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InstitutionalDepartmentName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InstitutionCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InstitutionName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IntensifierSize - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterMarkerDistance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationApprovalDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationApprovalTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationApproverSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationAuthor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationDiagnosisCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationDiagnosisDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationIDIssuer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationRecordedDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationRecordedTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationRecorder - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationStatusID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationText - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationTranscriber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationTranscriptionDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationTranscriptionTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterpretationTypeID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IntervalsAcquired - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IntervalsRejected - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterventionDrugCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterventionDrugDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterventionDrugInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterventionDrugName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterventionDrugStartTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterventionDrugStopTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterventionStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InterventionTherapySequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_InversionTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IsocenterPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IssueDateOfImagingServiceRequest - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IssuerOfAdmissionID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IssuerOfPatientID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IssueTimeOfImagingServiceRequest - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Item - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ItemDelimitationItem - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ItemNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IVUSAcquisition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IVUSGatedRate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IVUSPullbackRate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IVUSPullbackStartFrameNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_IVUSPullbackStopFrameNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_KVP - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LargestImagePixelValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LargestPixelValueInPlane - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LargestPixelValueInSeries - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LastMenstrualDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LASTSEARCHED - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Laterality - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LeafJawPositions - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LeafPositionBoundaries - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LesionNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LossyImageCompression - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LossyImageCompressionRatio - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LowerLevelDirectoryOffset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LowRRValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LUTData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LUTDescriptor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LUTExplanation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_LUTNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MACAlgorithm - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MACCalculationTransferSyntaxUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MACIDNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MACParametersSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MagneticFieldStrength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MagnificationType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MagnifyToNumberOfColumns - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Manufacturer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ManufacturerModelName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MaskFrameNumbers - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MaskOperation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MaskOperationExplanation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MaskPointer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MaskSubPixelShift - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MaskSubtractionSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MaterialID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MaxDensity - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MaximumCollatedFilms - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MaximumCoordinateValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MaximumMemoryAllocation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MeasuredDoseDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MeasuredDoseReferenceNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MeasuredDoseReferenceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MeasuredDoseType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MeasuredDoseValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MeasurementUnitsCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MeasuringUnitsSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MechanicalIndex - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MediaInstalledSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MediaStorageSOPClassUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MediaStorageSOPInstanceUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MedicalAlerts - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MedicalRecordLocator - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MediumType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MemoryAllocation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MemoryBitDepth - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MessageID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MessageIDBeingRespondedTo - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MessageSetID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MetersetExposure - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MilitaryRank - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MinDensity - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MinimumCoordinateValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ModalitiesInStudy - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Modality - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ModalityLUTSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ModalityLUTType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MostRecentTreatmentDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MoveDestination - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MoveOriginatorApplicationEntityTitle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MoveOriginatorMessageID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MRAcquisitionType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MRDRDirectoryRecordOffset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_MultipleCopiesFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NamesOfIntendedRecipientsOfResults - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NextDirectoryRecordOffset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NominalBeamEnergy - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NominalBeamEnergyUnit - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NominalInterval - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NominalPriorDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NominalScannedPixelSpacing - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NonDICOMOutputCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NormalizationPoint - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NuclearAcquisitionGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfAverages - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfBeams - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfBlocks - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfBoli - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfBrachyApplicationSetups - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfChannels - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfCompensators - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfCompletedSuboperations - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfContourPoints - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfControlPoints - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfCopies - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfDetectors - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfEnergyWindows - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfEventTimers - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfFailedSuboperations - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfFilms - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfFractionPatternDigitsPerDay - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfFractionsDelivered - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfFractionsPlanned - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfFrames - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfFramesInOverlay - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfFramesInPhase - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfFramesInRotation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfLeafJawPairs - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfPatientRelatedInstances - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfPatientRelatedSeries - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfPatientRelatedStudies - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfPhaseEncodingSteps - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfPhases - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfPoints - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfPulses - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfReferences - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfRemainingSuboperations - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfRotations - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfRRIntervals - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfSamples - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfSeriesRelatedInstances - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfSlices - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfStages - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfStudyRelatedInstances - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfStudyRelatedSeries - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfTableBreakPoints - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfTableEntries - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfTemporalPositions - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfTimeSlices - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfTimeSlots - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfTomosynthesisSourceImages - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfTriggersInPhase - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfViewsInStage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfWarningSuboperations - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumberOfWedges - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_NumericValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ObservationNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Occupation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OffendingElement - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OperatorName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OrderCallbackPhoneNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OrderEnteredBy - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OrderEntererLocation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OrganAtRiskFullVolumeDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OrganAtRiskLimitDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OrganAtRiskMaximumDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OrganAtRiskOverdoseVolumeFraction - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OrganDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OrganExposed - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OriginalImageSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Originator - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OtherMagnificationTypesAvailable - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OtherMediaAvailableSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OtherPatientID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OtherPatientName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OtherSmoothingTypesAvailable - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OtherStudyNumbers - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OutputInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OutputPower - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayBackgroundDensity - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayBitPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayBitsAllocated - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayBlue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayBoxGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayColumns - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayDescriptorBlue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayDescriptorGray - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayDescriptorGreen - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayDescriptorRed - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayForegroundDensity - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayGray - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayGreen - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayLabel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayMagnificationType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayOrigin - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayOrImageMagnification - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayPixelDataSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayPlanes - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayRed - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayRows - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlaySmoothingType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlaySubtype - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverlayType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverrideParameterPointer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverrideReason - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OverrideSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_OwnerID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PageNumberVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PaletteColorLookupTableUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PartialView - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PartialViewDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientAdditionalPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientAddress - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientAge - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientBirthDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientBirthName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientBirthTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientGantryRelationshipCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientInstitutionResidence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientInsurancePlanCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientMotherBirthName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientOrientation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientOrientationCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientOrientationModifierCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientPrimaryLanguageCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientPrimaryLanguageModifierCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientReligiousPreference - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientSetupNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientSetupSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientSex - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientSize - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientState - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientSupportAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientSupportAngleTolerance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientSupportRotationDirection - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientTelephoneNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientTransportArrangements - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PatientWeight - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PauseBetweenFrames - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PercentPhaseFieldOfView - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PercentSampling - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedLocation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedProcedureStepDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedProcedureStepDiscontinuationReasonCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedProcedureStepEndDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedProcedureStepEndTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedProcedureStepID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedProcedureStepStartDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedProcedureStepStartTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedProcedureStepStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedProcedureTypeDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedProcessingApplicationsCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedProtocolCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedSeriesSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedStationAETitle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedStationClassCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedStationGeographicLocationCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedStationName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedStationNameCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformedWorkitemCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PerformingPhysicianName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PersonName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhaseDelay - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhaseInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhaseVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhosphorType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhotometricInterpretation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhototimerSetting - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhysicalDeltaX - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhysicalDeltaY - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhysicalUnitsXDirection - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhysicalUnitsYDirection - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhysicianApprovingInterpretation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhysicianOfRecord - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PhysicianReadingStudy - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelAspectRatio - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelBandwidth - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelComponentDataType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelComponentMask - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelComponentOrganization - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelComponentPhysicalUnits - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelComponentRangeStart - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelComponentRangeStop - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelDataGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelIntensityRelationship - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelIntensityRelationshipSign - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelPaddingValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelRepresentation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PixelSpacing - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PlacerOrderNumberOfImagingServiceRequest - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PlanarConfiguration - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PlaneOrigin - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Planes - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PlannedVerificationImageSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PlateID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PlateType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Polarity - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PositionerMotion - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PositionerPrimaryAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PositionerPrimaryAngleIncrement - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PositionerSecondaryAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PositionerSecondaryAngleIncrement - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PositionerType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PositionReferenceIndicator - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PostprocessingFunction - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PreferredPlaybackSequencing - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PregnancyStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PreMedication - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrescriptionDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PresentationIntentType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PresentationLUTContentSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PresentationLUTFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PresentationLUTSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PresentationLUTShape - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrimaryAnatomicStructureModifierSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrimaryAnatomicStructureSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrimaryDosimeterUnit - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrimaryPromptsCountsAccumulated - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrinterCharacteristicsSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrinterConfigurationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrinterGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrinterName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrinterPixelSpacing - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrinterResolutionID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrinterStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrinterStatusInfo - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrintingBitDepth - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrintJobDescriptionSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrintJobGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrintJobID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrintManagementCapabilitiesSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrintPriority - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrintQueueID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Priority - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrivateInformation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrivateInformationCreatorUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PrivateRecordUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ProcedureCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ProcessingFunction - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ProjectionEponymousNameCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ProposedStudySequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ProtocolName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PulseRepetitionFrequency - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PulseRepetitionInterval - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PurposeOfReferenceCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_PVCRejection - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_QualityControlImage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Quantity - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_QuantitySequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_QueryRetrieveLevel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_QueueStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadialPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiationMachineName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiationMachineSAD - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiationMachineSSD - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiationMode - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiationSetting - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiationType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadionuclideCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadionuclideHalfLife - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadionuclidePositronFraction - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadionuclideTotalDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Radiopharmaceutical - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiopharmaceuticalCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiopharmaceuticalInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiopharmaceuticalRoute - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiopharmaceuticalSpecificActivity - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiopharmaceuticalStartTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiopharmaceuticalStopTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiopharmaceuticalVolume - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiusOfCircularCollimator - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RadiusOfCircularShutter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RandomsCorrectionMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReasonForImagingServiceRequest - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReasonForRequestedProcedure - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReasonForStudy - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReceiveCoilName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RecommendedDisplayFrameRate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RecommendedViewingMode - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReconstructionDiameter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReconstructionMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RecordedBlockSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RecordedBrachyAccessoryDeviceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RecordedChannelSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RecordedChannelShieldSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RecordedCompensatorSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RecordedSourceApplicatorSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RecordedSourceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RecordedWedgeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RecordInUseFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RectificationType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RedPaletteColorLookupTableData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RedPaletteColorLookupTableDescriptor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferenceAirKermaRate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedBasicAnnotationBoxSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedBeamNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedBeamSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedBlockNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedBolusSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedBrachyAccessoryDeviceNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedBrachyApplicationSetupNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedBrachyApplicationSetupSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedCalculatedDoseReferenceNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedCalculatedDoseReferenceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedChannelShieldNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedCompensatorNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedControlPointIndex - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedCurveSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedDoseReferenceNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedDoseReferenceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedDoseSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedFileID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedFilmBoxSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedFilmSessionSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedFractionGroupNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedFractionGroupSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedFractionNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedFrameNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedFrameNumbers - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedFrameOfReferenceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedFrameOfReferenceUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedGeneralPurposeScheduledProcedureStepSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedGeneralPurposeScheduledProcedureStepTransactionUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedImageBoxSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedImageSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedInterpretationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedMeasuredDoseReferenceNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedMeasuredDoseReferenceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedNonImageCompositeSOPInstanceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedOverlayPlaneGroups - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedOverlayPlaneSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedOverlaySequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedPatientAliasSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedPatientSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedPatientSetupNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedPerformedProcedureStepSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedPresentationLUTSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedPrintJobSequencePull - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedPrintJobSequenceQueue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedProcedureStepSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedReferenceImageNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedReferenceImageSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedResultsSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedROINumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedRTPlanSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedSeriesSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedSOPClassUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedSOPClassUIDInFile - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedSOPInstanceUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedSOPInstanceUIDInFile - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedSOPSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedSourceApplicatorNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedSourceNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedStoredPrintSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedStructureSetSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedStudySequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedToleranceTableNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedTransferSyntaxUIDInFile - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedTreatmentRecordSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedVerificationImageSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedVisitSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencedWedgeNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferenceImageNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencePixelPhysicalValueX - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencePixelPhysicalValueY - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencePixelX0 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferencePixelY0 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferenceToRecordedSound - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferringPhysicianAddress - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferringPhysicianName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReferringPhysicianTelephoneNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReflectedAmbientLight - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RegionDataType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RegionFlags - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RegionLocationMaxX1 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RegionLocationMaxY1 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RegionLocationMinX0 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RegionLocationMinY0 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RegionOfResidence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RegionSpatialFormat - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RelatedFrameOfReferenceUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RelatedRTROIObservationsSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RelationshipGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RelativeXrayExposure - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RelevantInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RepeatFractionCycleLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RepetitionTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReportedValuesOrigin - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReportingPriority - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RepresentativeFrameNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReprojectionMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestAttributesSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedContrastAgent - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedDecimateCropBehavior - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedImageSize - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedImageSizeFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedProcedureCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedProcedureComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedProcedureDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedProcedureID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedProcedureLocation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedProcedurePriority - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedResolutionID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedSOPClassUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedSOPInstanceUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestedSubsequentWorkitemCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestingPhysician - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RequestingService - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RescaleIntercept - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RescaleSlope - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RescaleType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ResidualSyringeCounts - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ResultingGeneralPurposePerformedProcedureStepsSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ResultsComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ResultsDistributionListSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ResultsGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ResultsID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ResultsIDIssuer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RetrieveAETitle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReviewDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReviewerName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ReviewTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIArea - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIContourSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIDisplayColor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIGenerationAlgorithm - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIGenerationDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIInterpreter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIMean - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROINumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIObservationDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIObservationLabel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIPhysicalPropertiesSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIPhysicalProperty - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIPhysicalPropertyValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIStandardDeviation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ROIVolume - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RootDirectoryFirstRecord - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RootDirectoryLastRecord - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RotationDirection - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RotationInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RotationOfScannedFilm - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RotationVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RouteOfAdmissions - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Rows - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RRIntervalVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTBeamLimitingDeviceType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTDoseROISequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTImageDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTImageLabel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTImageName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTImageOrientation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTImagePlane - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTImagePosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTImageSID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTPlanDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTPlanDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTPlanGeometry - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTPlanLabel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTPlanName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTPlanRelationship - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTPlanTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTReferencedSeriesSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTReferencedStudySequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTRelatedROISequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTROIIdentificationCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTROIInterpretedType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTROIObservationsSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RTROIRelationship - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_RWavePointer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SafePositionExitDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SafePositionExitTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SafePositionReturnDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SafePositionReturnTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SampleRate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SamplesPerPixel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SAR - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScanArc - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScanLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScanningSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScanOptions - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScanVelocity - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScatterCorrectionMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScatterFractionFactor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledAdmissionDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledAdmissionTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledDischargeDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledDischargeTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledHumanPerformersSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledPatientInstitutionResidence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledPerformingPhysicianName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProcedureStepDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProcedureStepEndDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProcedureStepEndTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProcedureStepID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProcedureStepLocation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProcedureStepSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProcedureStepStartDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProcedureStepStartDateAndTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProcedureStepStartTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProcedureStepStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProcessingApplicationsCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledProtocolCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStationAETitle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStationClassCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStationGeographicLocationCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStationName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStationNameCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStepAttributesSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStudyLocation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStudyLocationAETitle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStudyStartDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStudyStartTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStudyStopDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledStudyStopTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ScheduledWorkitemCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SecondaryCaptureDeviceID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SecondaryCaptureDeviceManufacturer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SecondaryCaptureDeviceManufacturerModelName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SecondaryCaptureDeviceSoftwareVersion - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SecondaryCountsAccumulated - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SecondaryCountsType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SegmentedBluePaletteColorLookupTableData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SegmentedGreenPaletteColorLookupTableData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SegmentedRedPaletteColorLookupTableData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Sensitivity - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SequenceDelimitationItem - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SequenceName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SequenceOfUltrasoundRegions - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SequenceVariant - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SeriesDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SeriesDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SeriesInstanceUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SeriesInStudy - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SeriesNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SeriesTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SeriesType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SetupDeviceDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SetupDeviceLabel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SetupDeviceParameter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SetupDeviceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SetupDeviceType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SetupReferenceDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SetupTechnique - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SetupTechniqueDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ShieldingDeviceDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ShieldingDeviceLabel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ShieldingDevicePosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ShieldingDeviceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ShieldingDeviceType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ShutterLeftVerticalEdge - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ShutterLowerHorizontalEdge - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ShutterRightVerticalEdge - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ShutterShape - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ShutterUpperHorizontalEdge - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Signature - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SkipBeats - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SliceLocation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SliceLocationVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SliceSensitivityFactor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SliceThickness - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SliceVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SlideIdentifier - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SmallestImagePixelValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SmallestPixelValueInPlane - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SmallestPixelValueInSeries - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SmokingStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SmoothingType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SoftTissueFocusThermalIndex - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SoftTissueSurfaceThermalIndex - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SoftTissueThermalIndex - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SoftwareVersion - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SOPClassesSupported - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SOPClassUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SOPInstanceUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceApplicationEntityTitle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceApplicatorID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceApplicatorLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceApplicatorManufacturer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceApplicatorName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceApplicatorNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceApplicatorStepSize - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceApplicatorType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceApplicatorWallNominalThickness - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceApplicatorWallNominalTransmission - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceAxisDistance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceEncapsulationNominalThickness - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceEncapsulationNominalTransmission - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceImageSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceIsotopeHalfLife - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceIsotopeName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceManufacturer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceMovementType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceSerialNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceToBeamLimitingDeviceDistance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceToBlockTrayDistance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceToCompensatorTrayDistance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceToReferenceObjectDistance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceToSurfaceDistance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceToWedgeTrayDistance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SourceType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpacingBetweenSlices - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpatialResolution - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecialNeeds - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecificCharacterSet - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecifiedChannelTotalTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecifiedMeterset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecifiedNumberOfPulses - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecifiedPrimaryMeterset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecifiedPulseRepetitionInterval - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecifiedSecondaryMeterset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecifiedTreatmentTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecimenAccessionNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecimenIdentifier - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecimenSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SpecimenTypeCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StageCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StageName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StageNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StartAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StartCumulativeMetersetWeight - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StartMeterset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StartTrim - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StationName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Status - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SteeringAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StopTrim - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StorageGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StorageMediaFileSetID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StorageMediaFileSetUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StructureSetDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StructureSetDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StructureSetLabel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StructureSetName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StructureSetROISequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StructureSetTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyArrivalDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyArrivalTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyCompletionDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyCompletionTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyComponentStatusID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyIDIssuer - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyInstanceUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyPriorityID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyReadDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyReadTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyStatusID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyVerifiedDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_StudyVerifiedTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SupportedImageDisplayFormatsSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SurfaceEntryPoint - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SynchronizationFrameOfReference - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_SyringeCounts - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableHeight - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableLateralIncrement - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableLongitudinalIncrement - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableMotion - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableOfParameterValues - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableOfPixelValues - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableOfXBreakPoints - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableOfYBreakPoints - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopEccentricAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopEccentricAngleTolerance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopEccentricAxisDistance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopEccentricRotationDirection - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopLateralPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopLateralPositionTolerance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopLateralSetupDisplacement - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopLongitudinalPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopLongitudinalPositionTolerance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopLongitudinalSetupDisplacement - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopVerticalPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopVerticalPositionTolerance - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTopVerticalSetupDisplacement - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableTraverse - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TableVerticalIncrement - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TargetMaximumDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TargetMinimumDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TargetPrescriptionDose - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TargetUnderdoseVolumeFraction - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TemplateName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TemplateNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TemplateType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TemporalPositionIdentifier - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TemporalResolution - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TextString - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TextValue - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TherapyDescription - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TherapyType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TIDOffset - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Time - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TimeOfLastCalibration - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TimeOfLastDetectorCalibration - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TimeOfSecondaryCapture - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TimeSliceVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TimeSlotInformationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TimeSlotTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TimeSlotVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TimezoneOffsetFromUTC - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TMLinePositionX0 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TMLinePositionX1 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TMLinePositionY0 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TMLinePositionY1 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ToleranceTableLabel - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ToleranceTableNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ToleranceTableSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TomoAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TomoClass - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TomoLayerHeight - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TomoTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TomoType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TopicAuthor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TopicKeyWords - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TopicSubject - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TopicTitle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TotalBlockTrayFactor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TotalCompensatorTrayFactor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TotalNumberOfExposures - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TotalReferenceAirKerma - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TotalTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TotalTimeOfFlouroscopy - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransactionUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransducerData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransducerFrequency - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransducerOrientationModifierSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransducerOrientationSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransducerPositionModifierSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransducerPositionSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransducerType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransferSyntaxUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransferTubeLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransferTubeNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransmitCoilName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TransverseMash - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentControlPointDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentControlPointTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentDate - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentDeliveryType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentIntent - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentMachineName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentMachineSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentProtocols - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentSessionApplicationSetupSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentSessionBeamSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentSites - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentStatusComment - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentSummaryCalculatedDoseReferenceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentSummaryMeasuredDoseReferenceSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentTerminationCode - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentTerminationStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TreatmentVerificationStatus - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TriggerSourceOrType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TriggerTime - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TriggerVector - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TriggerWindow - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Trim - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- dd_type - Variable in class gov.nih.mipav.model.dicomcomm.RTCEntry
-
DOCUMENT ME!
- DD_TypeOfData - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TypeOfDetectorMotion - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_TypeOfFilters - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_UID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_UltrasoundColorDataPresent - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_UNDEFINED - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_Units - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_VariableFlipAngleFlag - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_VerticesOfPolygonalCollimator - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_VerticesOfPolygonalShutter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_VideoImageFormatAcquired - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ViewCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ViewModifierCodeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ViewName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ViewNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ViewPosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_VisitComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_VisitGroupLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_VisitStatusID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_VOILUTSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WedgeAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WedgeFactor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WedgeID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WedgeNumber - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WedgeOrientation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WedgePosition - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WedgePositionSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WedgeSequence - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WedgeType - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WholeBodyTechnique - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WindowCenter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WindowCenterWidthExplanation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_WindowWidth - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_XFocusCenter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_XRayImageReceptorAngle - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_XRayOutput - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_XrayTubeCurrent - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_XrayTubeCurrentInuA - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_YFocusCenter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ZoomCenter - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- DD_ZoomFactor - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- dderiv(double[][], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- ddnormalv3d - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- ddo - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
DICOM data object.
- ddo - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
The DICOM data object.
- ddof - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ddot(int, double[], int, double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Port of 12/3/93 linpack ddot routine Original version created by Jack Dongarra Forms the dot product of two
vectors.
- dDotProduct(double, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- dDotTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- ddrgev(int, int[], int, boolean[], int[], double, double[][], int, double[][], double[][], double[][], double[][], int, double[][], double[][], int, double[], double[], double[], double[], double[], double[], double[], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DDRGEV Original DDRGEV created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2007 ddrgev checks the nonsymmetric generalized eigenvalue problem
driver routine dggev.
- ddrvbd(int, int[], int[], int, boolean[], int[], double, double[][], int, double[][], int, double[][], int, double[][], double[][], double[][], double[], double[], double[], double[], int, int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SVD
-
- ddrvbd_test() - Method in class gov.nih.mipav.model.structures.jama.SVD
-
This routine is an extraction from the FORTRAN program version 3.4.1 DCHKEE of the code needed to drive ddrvbd in
order to run ddrvbd in order to test the singular value decomposition driver dgesvd.
- ddrvge(boolean[], int, int[], int, double, int, double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[], double[][], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- ddrvls(boolean[], int, int[], int, int[], int, int[], int, int[], int[], double, boolean, double[][], double[][], double[][], double[][], double[][], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of that part of version 3.1.1 LAPACK test routine DDRVLS used for
testing the least squares driver routine DGELSS.
- ddrvls_test() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This ddrvls_test routine is a port of a portion of the version 3.1.1 LAPACK test routine DCHKAA by
Univ. of Tennessee, Univ.
- ddrvpo(boolean[], int, int[], int, double, int, double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[], double[][], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
- ddrvsg(int, int[], int, boolean[], int[], double, double[][], int, double[][], int, double[], double[][], int, double[][], double[][], double[], double[], double[], int, int[], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of that portion of the version 3.1 LAPACK test routine DDRVSG that tests the DSYGV that computes
all eigenvalues and, optionally, eigenvectors of a real symmetric-definite generalized eigenproblem.
- ddrvst(int, int[], int, boolean[], int[], double, double[][], int, double[], double[], double[], double[], double[], double[], double[], double[], double[][], int, double[][], double[], double[][], double[], int, int[], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the part of version 3.1 LAPACK test routine DDRVST used to test dsyev.
- ddrvst(int, int[], int, boolean[], int[], double, double[][], int, double[], double[], double[], double[], double[], double[], double[], double[], double[][], int, double[][], double[], double[][], double[], int, int[], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is a port of the part of version 3.4.0 LAPACK test routine DDRVST used to test dsyevx.
- ddrvst(int, int[], int, boolean[], int[], double, double[][], int, double[], double[], double[], double[], double[], double[], double[], double[], double[][], int, double[][], double[], double[][], double[], int, int[], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of the part of version 3.4.0 LAPACK test routine DDRVST used to test dsyevr.
- ddrvst_test() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This routine is an extraction from the FORTRAN program version 3.1.1 DCHKEE of the code needed to drive ddrvst,
that tests symmetric generalized eigenvalue drivers.
- ddrvst_test() - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This routine is an extraction from the FORTRAN program version 3.1.1 DCHKEE of the code needed to drive ddrvst,
that tests symmetric generalized eigenvalue drivers.
- ddrvst_test() - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This routine is an extraction from the FORTRAN program version 3.1.1 DCHKEE of the code needed to drive ddrvst,
that tests symmetric generalized eigenvalue drivers.
- ddse - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- ddst(int, int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- ddst2D(int, int, double[][], double[][], int) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- ddType - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Inital DICOM type.
- ddTypeIndexes - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- de - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.NEList
-
- de() - Method in class gov.nih.mipav.model.algorithms.ODE
-
- de() - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- deadFactor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Canvas rescale factor.
- deadFactor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Canvas rescale factor.
- deads - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- deadXSize - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Canvas resacled X size.
- deadXSize - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Canvas resacled X size.
- deadYSize - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Canvs rescaled Y size.
- deadYSize - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Canvs rescaled Y size.
- debug - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- debug - Static variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- debug - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- debug(String) - Static method in class gov.nih.mipav.view.Preferences
-
If at least one debug level is turned on, output the string.
- debug(String, boolean, String, int) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, boolean, String, int, Preferences.LogLevel) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, char, String, int) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, char, String, int, Preferences.LogLevel) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, double, String, int) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, double, String, int, Preferences.LogLevel) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, int) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, int, Preferences.LogLevel) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, Object, String, int) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, Object, String, int, Preferences.LogLevel) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, String) - Static method in class gov.nih.mipav.view.Preferences
-
If at least one debug level is turned on, output the string.
- debug(String, String, int) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, String, int, Preferences.LogLevel) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, String, String) - Static method in class gov.nih.mipav.view.Preferences
-
If at least one debug level is turned on, output the string.
- debug(String, String, String, int) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, String, String, int, Preferences.LogLevel) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, String, String, String) - Static method in class gov.nih.mipav.view.Preferences
-
If at least one debug level is turned on, output the string.
- debug(String, String, String, String, int) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, String, String, String, int, Preferences.LogLevel) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, String, String, String, String) - Static method in class gov.nih.mipav.view.Preferences
-
If at least one debug level is turned on, output the string.
- debug(String, String, String, String, String, int) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- debug(String, String, String, String, String, int, Preferences.LogLevel) - Static method in class gov.nih.mipav.view.Preferences
-
If the debug is turned on for the given level, output to the messageFrame.
- DEBUG - gov.nih.mipav.view.Preferences.LogLevel
-
- DEBUG - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- DEBUG - Static variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Set this flag to allow the output of volume file which result as part of the computation.
- DEBUG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- DEBUG - Static variable in class gov.nih.mipav.view.ViewJFrameMessage
-
Used to indicate which of the 2 JTextAreas the data (message) is to be displayed.
- DEBUG_ALGORITHM - Static variable in class gov.nih.mipav.view.Preferences
-
Constant used to identify debugging category for general output by algorithms.
- DEBUG_COMMS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant used to identify debugging category for general output by communications.
- DEBUG_FILEIO - Static variable in class gov.nih.mipav.view.Preferences
-
Constant used to identify debugging category for general output by FileIO.
- DEBUG_MINOR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant used to identify debugging category for general output.
- DEBUG_OUTPUT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- DEBUG_SCRIPTING - Static variable in class gov.nih.mipav.view.Preferences
-
Constant used to identify debugging category for output of scripting system messages.
- debugAlgorithmBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Box to select logging level for Algorithm category
- debugArea - Variable in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
DOCUMENT ME!
- debugCommsBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Box to select logging level for Comms category
- DebugDump() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Writes some of the class data to disk.
- debugFileIOBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Box to select logging level for FileIO category
- debugFlag - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Debug flag.
- debugLauncherStr - Static variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- debugLevel(int) - Static method in class gov.nih.mipav.view.Preferences
-
Indicates whether debug is turned on for the given level.
- debugMatrix - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- debugMessageFrameAppend(String) - Static method in class gov.nih.mipav.view.Preferences
-
Appends the specified message to the message frame.
- debugMessages - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- debugMinorBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Box to select logging level for Minor category
- debugPoint(double[], String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Method to display current point values.
- debugScriptingBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Box to select logging level for Scripting category
- debugSPane - Variable in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
DOCUMENT ME!
- dec - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_precinct_t
-
- dec_a(double[], int, PyWavelets.DiscreteWavelet, double[], int, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dec_d(double[], int, PyWavelets.DiscreteWavelet, double[], int, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dec_hi - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteWavelet
-
- dec_len - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteWavelet
-
- dec_lo - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteWavelet
-
- DEC_TO_ZERO(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Convert deciam number to 0
- decayCorrected - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- decCancelBut - Variable in class gov.nih.mipav.model.file.FileJP2
-
- decDefBut - Variable in class gov.nih.mipav.model.file.FileJP2
-
- DecFac() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
get decreasing factor.
- decFrameEnd - Variable in class gov.nih.mipav.model.file.FileJP2
-
- decFrameStart - Variable in class gov.nih.mipav.model.file.FileJP2
-
- deciF - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- decim - Variable in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- decim - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- decImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
the eigvecSrcImage without the last 6 time volumes *
- decImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
the eigvecSrcImage without the last 6 time volumes *
- decimalButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- decimalToDegreesMinutesSeconds(double) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
Converts a decimal degree angle into its corresponding DMS (degrees-minutes-seconds) component values, as
a double array.
- decimalToDegreesMinutesSecondsString(double) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
Converts a decimal degree angle into its corresponding DMS (degrees-minutes-seconds) representation as a string,
of format: -1° 23' 4.56"
- decimate(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Decimate the selected surfaces.
- decimate(SurfaceAttributes[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Decimate the surface.
- decimate(Point3f[], int[], ViewJProgressBar, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
A triangle decimator for a triangle mesh.
- Decimate(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- decimateButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Decimate button.
- decimateButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Decimate button.
- Decimated(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- decimateFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
If true then the extracted surface is decimated into a continuous level of detail surface (clod).
- decimateFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
If true then the extracted surface is decimated into a continuous level of detail surface (clod).
- decimateFlag - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
If true then the extracted surface is decimated into a continuous level of detail surface (clod).
- decimateFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- decimateSurfaceCB - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- Decimation(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- Decimation(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- decimationPercentage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Decimation Percentage
- decipherInPlace(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyEncodedDataDirectoryBase
-
- decision_function() - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.decision_function
-
- decision_function() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm.decision_function
-
- decision_map(double[][][], double[][][], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- deciV - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- decod_format - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
input file format 0: J2K, 1: JP2, 2: JPT
- decod_format - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
input file format 0: J2K, 1: JP2, 2: JPT
- decode(byte[], byte[], int) - Method in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
Method to decode LZW compressed data.
- decode_mcu - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- decode_mcu - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- decode_mcu(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DECODE_MCU - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- decode_mcu_AC_first(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DECODE_MCU_AC_FIRST - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- decode_mcu_AC_first_huff(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- decode_mcu_AC_refine(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DECODE_MCU_AC_REFINE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- decode_mcu_AC_refine_huff(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- decode_mcu_DC_first(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DECODE_MCU_DC_FIRST - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- decode_mcu_DC_first_huff(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- decode_mcu_DC_refine(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DECODE_MCU_DC_REFINE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- decode_mcu_DC_refine_huff(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- decode_mcu_huff(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DECODE_MCU_SUB - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- decode_mcu_sub_huff(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- decodeCanonEv(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
Canon hex-based EV (modulo 0x20) to real number.
- decodeCfaPattern(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
Decode raw CFAPattern value
Converted from Exiftool version 10.33 created by Phil Harvey
http://www.sno.phy.queensu.ca/~phil/exiftool/
lib\Image\ExifTool\Exif.pm
The value consists of:
- Two short, being the grid width and height of the repeated pattern
- decodeFileHeader(boolean) - Method in class gov.nih.mipav.model.file.FileMedVision
-
readFileHeader - reader image file header that encodes info about image.
- decodeFirstRow(FileDicomJPEG.HuffTable, short[][]) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Decode the first raster line of samples at the start of the scan and at the beginning of each restart interval.
- decodeImage(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Decode the input stream.
- decodeImageData(byte[], int) - Method in class gov.nih.mipav.model.file.FileJP2
-
- decodeLine(RandomAccessFile, int, Matrix4d) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Decodes the line in the matrix file.
- decodeLine(RandomAccessFile, int, Matrix4f) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Decodes the line in the matrix file.
- decodeLine(RandomAccessFile, int, Matrix4f, int) - Static method in class gov.nih.mipav.model.structures.TransMatrix
-
Reads a row of the matrix from file
- decodeLine(String, Vector2f) - Method in class gov.nih.mipav.model.file.FileVOI
-
Converts string point (x,y) to Vector2f point.
- decodeMatrixString(String) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Decodes the matrix from a string into the matrix array.
- decodeMatrixString(String) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Decodes the matrix from a string into the matrix array.
- decodeResourceFooter(boolean) - Method in class gov.nih.mipav.model.file.FileMedVision
-
decodeResourceFooter - This is the tricky function that decodes the the resource footer at the end of the MAC
file The data is coded is very odd manner.
- decodeROI(byte[]) - Method in class gov.nih.mipav.model.file.FileSVS
-
- decodeROI(byte[]) - Method in class gov.nih.mipav.model.file.FileTiff
-
- DecoderRAW - Class in gov.nih.mipav.model.file.rawjp2
-
This class is the main class of JJ2000's decoder.
- DecoderRAW(ParameterList) - Constructor for class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Instantiates a decoder object, with the ParameterList object given as
argument.
- DecoderRAW(ParameterList, ImgScrollPane) - Constructor for class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Instantiates a decoder object, with the ParameterList object given as
argument and a component where to display the image if no output file
is specified.
- DecoderRAWColor - Class in gov.nih.mipav.model.file.rawjp2
-
This class is the main class of JJ2000's decoder.
- DecoderRAWColor(ParameterList) - Constructor for class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Instantiates a decoder object, with the ParameterList object given as
argument.
- DecoderRAWColor(ParameterList, ImgScrollPane) - Constructor for class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Instantiates a decoder object, with the ParameterList object given as
argument and a component where to display the image if no output file
is specified.
- decodeSliceHeader(long, FileInfoMedVision, boolean) - Method in class gov.nih.mipav.model.file.FileMedVision
-
decodeSliceHeader - reads image slice header that encodes info about specific image slice.
- decodeStr(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Decode a URL string using UTF-8 character encoding.
- decodingArea - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- decOkBut - Variable in class gov.nih.mipav.model.file.FileJP2
-
- decomp - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- decompose1DSignal() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- decomposeMatrix(Vector3d, Vector3d, Vector3d, Vector3d) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Decomposing a matrix into simple transformations TransMatrixd
transformation sequence:
Scale(Sx, Sy, Sz)*ShearXY*ShearXZ*ShearYZ*
RotateX*RotateY*RotateZ*Translate(tx, ty, tz)
( *Perspective(Px, Py, Pz, Pw), no longer supported)
- decomposeMatrix(Vector3f, Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Decomposing a matrix into simple transformations TransMatrix
transformation sequence:
Scale(Sx, Sy, Sz)*ShearXY*ShearXZ*ShearYZ*
RotateX*RotateY*RotateZ*Translate(tx, ty, tz)
( *Perspective(Px, Py, Pz, Pw), no longer supported)
- decompress_data - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- decompress_data(libjpeg.jpeg_decompress_struct, byte[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- decompress_data(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DECOMPRESS_DATA - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- decompress_onepass(libjpeg.jpeg_decompress_struct, byte[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- decompress_onepass(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DECOMPRESS_ONEPASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- decompress_smooth_data(libjpeg.jpeg_decompress_struct, byte[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- decompress_smooth_data(libjpeg.jpeg_decompress_struct, short[][][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DECOMPRESS_SMOOTH_DATA - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- decompressedFile - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- deconv(double[], double[], double[], Vector<Double>, Vector<Double>, Vector<Double>, double[], double, double[], double, boolean, double, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- deconv_cSVD_residual - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- deconv_cSVD_threshold - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- deconv_example() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- deconv_maxit - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- deconv_maxit_final - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- deconv_method - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- deconv_method - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- deconv_oSVD_OIthres - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- deconv_oSVD_residual - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- deconv_SS_residual - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- deconv_SVD_residual - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- deconv_SVD_threshold - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- deconvolution4D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Calls Deconvolution for each volume in the time series image.
- deconvolutionSep3D_2(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Single - Image deconvolution
- deconvolutionSep3D_2A(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Unused, for testing...
- deconvolutionSep3D_Dual(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Dual image deconvolution.
- decParsOff - Variable in class gov.nih.mipav.model.file.FileJP2
-
- decParsOn - Variable in class gov.nih.mipav.model.file.FileJP2
-
- decRateField - Variable in class gov.nih.mipav.model.file.FileJP2
-
- decrease_factor_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- decrease_threshold_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- decreaseFontButton - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- decResChkBox - Variable in class gov.nih.mipav.model.file.FileJP2
-
- decResTf - Variable in class gov.nih.mipav.model.file.FileJP2
-
- decSlice() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Decreases the slice to be displayed by one and updates title frame.
- decSliceEyeTracker() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- dederiv(double[][], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- DEEP_GREY_10 - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- DEEP_GREY_16 - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- DEEP_GREY_9 - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- deepCNNConvert() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- deepCNNMap() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- deepCNNTest() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- deepCNNTrain() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- deepKneesAtlas() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- deepKneesMap() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- defaceAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
The algorithm corresponding to this dialog box.
- defaceAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
The algorithm corresponding to this dialog box.
- Default - gov.nih.mipav.view.Preferences.DefaultDisplay
-
- DEFAULT - Static variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- DEFAULT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- DEFAULT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
Different DTI algorithms:
- DEFAULT - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Used to describe cursor mode, this means no VOIs will be drawn.
- DEFAULT_ALPHA - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_BIG_ENDIAN_BYTE_ORDER - Static variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- DEFAULT_CHUNK_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- DEFAULT_COLUMN_HEADERS_IMAGE_TABLE - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- DEFAULT_COLUMN_HEADERS_SERIES_TABLE - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- DEFAULT_COLUMN_HEADERS_STUDY_TABLE - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- default_config() - Method in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- DEFAULT_DATA_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- default_decompress_parms(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DEFAULT_DEPENDENT_ROW - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
default row is dependent, and column independent.
- DEFAULT_DEPENDENT_ROW - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Default row is dependent, and column independent.
- DEFAULT_DICTIONARY - Static variable in class gov.nih.mipav.model.file.DicomDictionary
-
DOCUMENT ME!
- DEFAULT_DICTIONARY - Static variable in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
DOCUMENT ME!
- DEFAULT_DICTIONARY_FILENAME - Static variable in class gov.nih.mipav.model.file.DicomDictionary
-
default dictionary file name, "dicom_dictionary.txt".
- DEFAULT_DICTIONARY_FILENAME - Static variable in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
default dictionary file name, "dicom_dictionary.txt".
- DEFAULT_EXTENTS - Static variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- DEFAULT_GROW - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
The default growth value for reallocations of the array representing the set.
- DEFAULT_GROW - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
The default growth value for reallocations of the array representing the set.
- DEFAULT_GROW - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
The default growth value for reallocations of the array representing the set.
- DEFAULT_GROW - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
The default growth value for reallocations of the array representing the set.
- DEFAULT_ICON_HEIGHT - Static variable in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- DEFAULT_ICON_WIDTH - Static variable in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- DEFAULT_IMAGE_MAX - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- DEFAULT_IMAGE_MIN - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- DEFAULT_IMAGE_MIN - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- DEFAULT_IMAGE_SIZE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
default values indicating minimum, maximum sizes are in PIXELS on a side for a magnification. this is to fix the
magnification problems of very small images for which the arbitrary limits of lightbox image sizes of 25%-75% of
the full size of an image. in practice the default max will reference the side with greatest magnitude ...
- DEFAULT_IMAGE_TYPE - Static variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- DEFAULT_IMPORTANCE_MODE - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_INTENSITY_THRESHOLD - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- DEFAULT_LOCALE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- DEFAULT_LOG_LEVEL - Static variable in class gov.nih.mipav.view.Preferences
-
The default log level
- DEFAULT_MIN_NODE_SIZE_CLASSIFICATION - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_MIN_NODE_SIZE_PROBABILITY - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_MIN_NODE_SIZE_REGRESSION - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_MIN_NODE_SIZE_SURVIVAL - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_MIN_YEAR - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- DEFAULT_MINPROP - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_NON_HEADER_START_LOCATION - Static variable in class gov.nih.mipav.model.file.FileMinc
-
The location, in bytes, of the portion of the minc file being written directly after the header.
- DEFAULT_NOTES - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
Default notes section text
- DEFAULT_NOTES - Static variable in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
Default notes section text
- DEFAULT_NUM_NEIGHBOURS - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- DEFAULT_NUM_RANDOM_SPLITS - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_NUM_SPATIAL_BINS - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- DEFAULT_NUM_THREADS - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_NUM_TREE - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_OPTIMAL_ZOOM - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Constant to determine how many pixels would be optimal for the image to be initially zoomed to.
- DEFAULT_PARAM - Static variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- DEFAULT_PARAM - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- DEFAULT_PREDICTIONTYPE - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_PROBE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The default probe type probe, which is in cyan color.
- DEFAULT_RADIUS - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- DEFAULT_RANDOM_SEED - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- default_relstep - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- default_relstep - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- DEFAULT_RES - Static variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- default_RTC_name - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
Default output file name for the RTC source output, "DICOM_RTC.java".
- DEFAULT_SIZE - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms.ByteBuffer
-
Static indicating the default size of the byte buffer.
- DEFAULT_SIZE - Variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
Describes the initial size of the textual display area when the dialog is created.
- DEFAULT_SIZE - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Describes the initial size of the textual display area when the dialog is created.
- DEFAULT_SIZE - Variable in class gov.nih.mipav.view.dialogs.JDialogText
-
Describes the initial size of the textual display area when the dialog is created.
- DEFAULT_SPLITRULE - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- DEFAULT_TAG_VERSION - Static variable in class gov.nih.mipav.model.file.FileDicomTagInfo
-
The default DICOM version string to assign to tags.
- DEFAULT_UNIT_INDEX - Static variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- DEFAULT_XSCREEN_SPACE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- DEFAULT_XSCREEN_SPACE - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- DEFAULT_YSCREEN_SPACE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- DEFAULT_YSCREEN_SPACE - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- defaultAcceleratorFont - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 10 point, serif font.
- defaultAxisOrient - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- defaultBlueInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- defaultBlueInput - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- defaultBurn - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Default burning point reference that represents the default probe ablation type.
- DEFAULTBURN - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Define the default burn type value.
- defaultButtonColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- defaultButtonSize - Static variable in class gov.nih.mipav.view.MipavUtil
-
The default size that all buttons should be.
- DefaultColorMap(int...) - Constructor for enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
- DefaultColorMap(int[], double[]) - Constructor for enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
- DefaultColorMap(ContourPlot.ColorMap) - Constructor for enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
- DefaultColorScheme(ContourPlot.ColorScheme) - Constructor for enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorScheme
-
- defaultCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
Standard cursor: default.
- defaultCursor - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- defaultCursor - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- defaultDirectory - Static variable in class gov.nih.mipav.view.JPanelFileSelection
-
Specifies the default directory for the panel editor, which is the "user.home" directory, with a
separator character appended at the end.
- defaultDirectory - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- DefaultDisplay(String) - Constructor for enum gov.nih.mipav.view.Preferences.DefaultDisplay
-
- defaultDisplayChoices - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Available choices for displaying brightness/color display correlations for pixel values.
- defaultFileData - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- defaultFileDataExists - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- defaultFileDataName - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- defaultGreenInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- defaultGreenInput - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- defaultImageSize - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- defaultImageSize - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- defaultImaginaryInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
- defaultLevel - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- defaultLevel - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- defaultLUTa - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Reference to LUT for image A and to the default LUT for image A.
- defaultLUTb - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Reference to LUT for image B and to the default LUT for image B.
- defaultMaxDomain - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- defaultMaxRange - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- defaultMenuFont - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 12 point, serif font.
- defaultMinDomain - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- defaultMinRange - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- defaultModeButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- defaultModeButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- defaultOrientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Checks the axisOrder and axisFlip data members.
- defaultPluginDir - Static variable in class gov.nih.mipav.plugins.PluginUtil
-
The default storage location of plugins
- defaultPreferredHeight - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
The default hight of the window, if it cannot be calculated.
- defaultProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
The root of the default probe.
- defaultProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Reference to the default probe geometry structures.
- DefaultProbe - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Title: DefaultPorbe
- DefaultProbe() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Constructor, initialize the probe shapes.
- defaultProbeBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
The root branch group of the cyan default robe.
- defaultProps - Static variable in class gov.nih.mipav.view.Preferences
-
A default list of properties used if the mipav.preferences file cannot be found.
- defaultPts - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- defaultPts - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- defaultPts - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- defaultRealInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
- defaultRedInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- defaultRedInput - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- defaultRTCclassName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
Default classname for the generated file being used in the Run Time Class, which allows access to information in
the DICOM data dictionary.
- defaults - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- defaultSet - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- defaultShortcutModel - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
DOCUMENT ME!
- defaultShortcutTable - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
DOCUMENT ME!
- defaultShortcutTable - Static variable in class gov.nih.mipav.view.Preferences
-
Hashtable that holds the default shortcuts
- defaultStorageDir - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
DOCUMENT ME!
- defaultThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- defaultThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- defaultThresholdDouble - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- defaultTSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- defaultTStart - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- defaultValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- defaultValueInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- defaultValueInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- defaultValueInput - Variable in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
DOCUMENT ME!
- defaultVelocityRotational - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- defaultVelocityTranslational - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
3D MOUSE MOTION CONSTANTS
- defaultVoxelSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- defaultWindow - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- defaultWindow - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- defaultXSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- defaultXStart - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Variables for holding default values.
- defaultYSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- defaultYStart - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- defaultZSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- defaultZStart - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- defFieldUpdateMode - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- DefHilite - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- defineArithmeticConditioning(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- defineArithmeticConditioning(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- defineBoundaries() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- defineHierarchicalProgression(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- defineHierarchicalProgression(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- defineHuffmanTables(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- defineHuffmanTables(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- defineInitialRegion(BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Defines an initial region for face de-identification.
- defineInterestRegion() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Defines the bounding region for face de-identification.
- defineLInput() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- defineNumberOfLines(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- defineNumberOfLines(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- defineQuantizationTables(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- defineQuantizationTables(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- defineRestartInterval(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- defineRestartInterval(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- DEFINITION_SEPARATOR - Static variable in class gov.nih.mipav.view.Preferences
-
The character that separates an item from its value in a definition or mapping (such as in the user file type
definitions).
- deflaterStream - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- DEFLATIONARY_ORTHOGONALIZATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- deflationaryOrthogonalization - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- DefLoadPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- DEFN - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- Deform(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- Deform(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Projects a set of PC scores to the original space.
- deformationB0T2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
deformation field from registering the B0 volume to the resampled T2 volume with VABRA
- deformationB0T2Text - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- deformationField - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraAlgorithm
-
- DeformationFieldResample3DM(float[], float[], int, int, int, int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- deformedDWI - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
DWI image series after applying the list of deformation fields
- deformedSubject - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- deformedSubjectBinned - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- deformedSubjectCopy - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- DeformImage3D(float[], float[], float[], int, int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- DeformImage3D(ModelImage, ModelImage, float[], int, int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- DeformImage3D(ModelImage, ModelImage, ModelImage, int, int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- defpl - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
The default parameter list (arguments)
- defpl - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
The default parameter list (arguments)
- defpl - Variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
The default parameter list (arguments)
- defpl - Variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
The default parameter list (arguments)
- defSTxMinus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- defSTxPlus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- defSTyMinus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- defSTyPlus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- defSTzMinus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- defSTzPlus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- defSxMinus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- defSxPlus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- defSyMinus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- defSyPlus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- defSzMinus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- defSzPlus - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- Deg2Rad(double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Converts from degrees to radians.
- degree - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- degree - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- degree - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- degree - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- degree - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- degree - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- degree - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- degree - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- Degree - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- Degree - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- Degree - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- Degree - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- Degree - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.StartingPolynomial
-
- Degree2MaximumSpanningForest(CeresSolver.WeightedGraph<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- Degree2MaximumSpanningForestPreserveWeights() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Degree2MaximumSpanningForestStarGraph() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- degreeArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- degreeIncrement - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- degreeIncrement - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- degreeIncrementButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- degreeIncrementButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- degreeLabel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Label of the rotation degree.
- degreeOfFiltering - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
Used only with Rician noise filter.
- degreeOfFiltering - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
- DEGREES - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Degrees
- DEGREES - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
used for setting rotation
- DEGREES - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
- DEGREES - Static variable in class gov.nih.mipav.model.structures.TransMatrix
-
used for setting rotation
- DEGREES - Static variable in class gov.nih.mipav.model.structures.TransMatrixd
-
used for setting rotation
- DEGREES_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - degrees.
- degreesMinutesSecondsToDecimal(MetadataExtractor.Rational, MetadataExtractor.Rational, MetadataExtractor.Rational, boolean) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
Converts DMS (degrees-minutes-seconds) rational values, as given in com.drew.metadata.exif.GpsDirectory,
into a single value in degrees, as a double.
- degreesWidthText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
- degreesWidthText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
- degreeText - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Textfield of the roation degree.
- deinvmap(double[][], double[][], double[], double[][], double[], double[][], double[][], boolean, boolean, double, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- DEJAC7(double[][], int, double, double[], int, int, double[], double[], double, double[][], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- delaunay - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
Edgeset of Delaunay triangulation ( L2-norm).
- delaunay() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- delaunay.Edge - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- delaunay.Halfedge - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- delaunay.Point - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- delaunay.Site - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- delaunay.Triangle - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- delay - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
autosave elements.
- DELAY - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorPoller
-
- delayBetweenVolumes - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- DELEG7(double[][], int, double, double[], double[], boolean, int, int, double[], double[], double, double[][], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- delegate - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- delegate - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
Spliterator<Pixel> acting as delegate of this spliterator
- delegate - Variable in class gov.nih.mipav.view.CheckTreeManager.CheckTreeCellRenderer
-
- delete - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- delete() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.universe
-
- delete(int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Deletes the specified position on the curve.
- delete(int) - Method in class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
- DELETE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- DELETE - Static variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- DELETE_INTENSITY_LINE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
used in the popup menu when the user right-clicks over a voi intensity line.
- DELETE_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- DELETE_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- DELETE_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- DELETE_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- DELETE_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- DELETE_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- DELETE_POINT - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- deleteActiveVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- deleteAdjRotVOIs() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Deletes all ROTATIONCENTER and ADJMARK VOIs.
- deleteAdjustableVOIs() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Deletes all ADJMARK VOIs.
- deleteAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
DOCUMENT ME!
- deleteAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
DOCUMENT ME!
- deleteAllFiles(File) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
- deleteAllVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- deleteAllVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- deleteAnnotations() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- deleteAnnotations() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- deleteBitFlag(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- DeleteBitFlag(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- DeleteBlock(CeresSolver.ParameterBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- DeleteBlock(CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- DeleteBlockInVector(Vector<CeresSolver.ParameterBlock>, CeresSolver.ParameterBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- DeleteBlockInVector(Vector<CeresSolver.ResidualBlock>, CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- deleteButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Delete the captured image button.
- deleteButton - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- deleteButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- deleteButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- deleteButton - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- DELETED - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- DELETED - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- DELETED - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Debugger to test dir deletion.
- deleteDir(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
Debugger to test dir deletion.
- deleteDirectory(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- deleteFace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Cancel Button has been pressed: Copy the unaltered original data into the ModelImage.
- deleteFrom(JList) - Method in class gov.nih.mipav.view.JPanelListController
-
Removes all selected items in the given list.
- deleteFrom(JTree) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.JPanelAddRemoveVOI
-
- deleteFrom(JTree) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.JPanelAddRemoveVOI
-
- deleteFrom(JTree) - Method in class gov.nih.mipav.view.JPanelTreeController
-
Removes all selected items in the given tree.
- deleteFunct(int) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Deletes the indicated function.
- deleteFunct(int) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Deletes the indicated function from the graph.
- deleteImages() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- deleteItem(String, boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Deletes the item specified by name.
- deleteItem(String, boolean, boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Deletes the item specified by name.
- deleteMenu - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- deleteMenu(JMenu) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Recursive deletion algorithm to delete JMenus which contain no JMenuItems exclusive of JMenus in any children.
- deleteNode(Node) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Delete the input node and it's children nodes:
Cannot delete the root node.
- deleteNode(Node, Node, Node, Vector<Node>) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Recursively deletes children from the tree.
- deleteObjects(int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Deletes objects larger than maximum size indicated and objects smaller than the indicated minimum size.
- deleteObjects(int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Deletes objects larger than maximum size indicated and objects smaller than the indicated minimum size.
- deleteObserver(Observer) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
- deleteObserver(Observer) - Method in interface gov.nih.mipav.model.util.Observable
-
Deletes an observer from the set of observers of this object.
- deleteObservers() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
- deleteObservers() - Method in interface gov.nih.mipav.model.util.Observable
-
Clears the observer list so that this object no longer has
any observer.
- deleteOrphans(File[]) - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
- deletePluginDependents(String) - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
- deletePluginFile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
- deletePoint(boolean) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
If a point is selected of the given type (reference or adjusted) delete the point and reset the.
- deletePts() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
- deleteReferenceVOIs() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Deletes all REFMARK VOIs.
- deleteRefRotVOIs() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Deletes all REFMARK and ROTATIONCENTER VOIs.
- DeleteRowBlocks(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- DeleteRows(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- deleteSelectedCurve() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- deleteSelectedCurve() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- deleteSelectedPoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- deleteSelectedPoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- deleteSelectedPoint(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Deletes the selected annotation or lattice point.
- deleteSelectedVOI(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- deleteSelectedVOI(boolean) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Deprecated.
- deleteSelection - Variable in class gov.nih.mipav.view.JPanelListController
-
'X'.
- deleteSelection - Variable in class gov.nih.mipav.view.JPanelTreeController
-
'X'.
- deleteSelection - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Delete menu icon item.
- deleteSelection - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- deleteSlices() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Delete selected slices.
- deleteStore - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Buttons used for the host tab
- deleteTagButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
buttons for toolbar *
- deleteTempFile() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessFileReaderTest
-
- deleteVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- deleteVOI(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from ViewJComponentTriImage to delete the VOIProtractor.
- deleteVOI(VOIBase, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Deletes the input VOIBase from the VOI.
- deleteVOIActivePt() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- deleteVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- deleteVOIs() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Deletes all VOIs.
- deleteVOIs() - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Delete all VOIs.
- deleteVOIs(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- deleteVolumeVOI() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- delim - Variable in class gov.nih.mipav.model.file.DelimitedRandomAccessFile
-
The delimiter that separates each str chunk.
- DELIM - Static variable in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
- DelimitedRandomAccessFile - Class in gov.nih.mipav.model.file
-
This class is a random access file that has an internal delimiter for fast
processing of text files.
- DelimitedRandomAccessFile(File, String, char) - Constructor for class gov.nih.mipav.model.file.DelimitedRandomAccessFile
-
This constructor first performs the same actions as RandomAccessFile(File file, String mode),
it then sets the file's delimiter to delim.
- DelimitedRandomAccessFile(String, String, char) - Constructor for class gov.nih.mipav.model.file.DelimitedRandomAccessFile
-
This constructor first performs the same actions as RandomAccessFile(String name, String mode),
it then sets the file's delimiter to delim.
- DELIMITER - Static variable in class gov.nih.mipav.plugins.ManifestFile
-
Standard delimiter after manifest file.
- DELIMITER - Static variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
DOCUMENT ME!
- delinkProgressToAlgorithm(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Disconnect this algorithm with the progress bar which holds a reference
to this algorithm.
- delinkProgressToAlgorithmMulti(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- dellocate_edge_trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- dellocate_face_trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- dellocate_halfedge_trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- dellocate_vertex_trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- delsn - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- delsn - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- delta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- delta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- delta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- delta - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Used in adaptive truncated vector median filter used on color images
If the changes in the RGB components are all less than a threshold
delta then the color image pixels are not changed, otherwise they are
replaced by the ATVMF.
- delta - Variable in class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- delta - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- delta - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- delta - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- DELTA - Static variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- delta_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- delta_gradient_history_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- delta_offset() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- delta_offset_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- delta_x_dot_delta_gradient_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- delta_x_history_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- deltaBackward - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- delTabButton - Variable in class gov.nih.mipav.view.ViewJFrameMessage
-
DOCUMENT ME!
- deltaForward - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- deltaLattice - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- deltaMinrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- deltaMinrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- deltap - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- deltaSetFromField - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Boolean which indicates that the seed point intensity bounds were changed from one of the text fields and not
from one of the sliders.
- deltat - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- deltaT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
Time step The defalut is 0.05 for 2D and 0.025 for 3D.
- deltaT - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- deltaWeight - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- deltax - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- deltay - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- demap(double[][], double[][], double[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- DeMap(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFIdentity
-
- DeMap(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFLookUp
-
The inverse of the lookup table transform.
- DeMap(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFUniformStretch
-
Maps the vector into [0;255].
- DeMap(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
- demo() - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- demoClassify() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- demoClustDiag() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- demoClustDiag5() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- demoClustFull() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- demoClustFull5() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- DemonsRegistrationLite - Class in gov.nih.mipav.model.algorithms.registration
-
This algorithm handles registration algorithms
of images with the Demons algorithm
and a simple multiscale technique
(Demons variant from Tom Vercauteren's 2009 paper,
"Diffeomorphic demons: Efficient non-parametric image registration by
Tom Vercauteren, Xavier Pennec, Aymeric Perchant, and Nicholas Ayache,
NeuroImage, 45, 2009, S61-S72.)
- DemonsRegistrationLite(float[], float[], int, int, int, float, float, float, int, int, int, float, float, float, float, float, int, int, int, float[][]) - Constructor for class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
constructor
note: the membership function mems_ must have sum = 0 on the masked areas
- demoSplitClasses() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- demri3Algo - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
DOCUMENT ME!
- denoiseBW() - Method in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- denoiseCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- denoiseColor() - Method in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- denom - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- denom - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- denom - Variable in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
denominator of gaussian coeff.
- denom - Variable in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
denominator of gaussian coeff.
- denom - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- dense - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- dense_ata - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockJacobiPreconditionerTest
-
- DENSE_DQ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- dense_linear_algebra_library_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- dense_linear_algebra_library_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- dense_linear_algebra_library_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- DENSE_NORMAL_CHOLESKY - gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverType
-
- DENSE_QR - gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverType
-
- dense_rotate - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3DC
-
- DENSE_SCHUR - gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverType
-
- DENSE_SVD - gov.nih.mipav.model.algorithms.CeresSolver.CovarianceAlgorithmType
-
- DENSE_USER - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- denseGETRF(double[][], int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- denseGETRS(double[][], int, int[], double[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- DenseJacobianWriter(CeresSolver.EvaluatorOptions, CeresSolver.Program) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DenseJacobianWriter
-
- DenseLinearAlgebraLibraryType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.DenseLinearAlgebraLibraryType
-
- DenseLinearSolverTest1() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DenseLinearSolverTest2() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DenseNormalCholeskySolver(CeresSolver.LinearSolverOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DenseNormalCholeskySolver
-
- DenseQRSolver(CeresSolver.LinearSolverOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DenseQRSolver
-
- DenseSchurComplementSolver(CeresSolver.LinearSolverOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DenseSchurComplementSolver
-
- DenseSparseMatrix(int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- DenseSparseMatrix(int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- DenseSparseMatrix(CeresSolver.TripletSparseMatrix) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- DenseSparseMatrix(Matrix) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- DenseSparseMatrixTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- DenseSparseMatrixTestColumnNorm() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- DenseSparseMatrixTestColumnNorm() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DenseSparseMatrixTestLeftMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- DenseSparseMatrixTestLeftMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DenseSparseMatrixTestRightMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- DenseSparseMatrixTestRightMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DenseSparseMatrixTestScale() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- DenseSparseMatrixTestScale() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DenseSparseMatrixTestToDenseMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- DenseSparseMatrixTestToDenseMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- density - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMean
-
- density - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMean2
-
- density - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMeanSquared
-
- density - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMeanSquared2
-
- density - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrixRandomMatrixOptions
-
- density(double, double, double, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- density_max(double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- density_unit - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- deparam(double[][], double[], double[][], double[][], double[], double[][], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- DEPENDENT_ENTRY - Static variable in class gov.nih.mipav.plugins.ManifestFile
-
Signifies manifest file lists a dependent after delimiter.
- dependent_variable_name - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- dependent_varID - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- dependent_varID - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- depfun(double[], int, double[], double[], double[][]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.depfun
-
- deplot(double[][], double[], double[][], double[], double[], double[], int, int, int, int, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- DEPPJ8(double, double[], int, int, double[], double[], double, double[][], double[], double[], int, double, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- DEPPJ9(double[][], int, double, double[], int, int, double[], double[], double, double[][], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- DEPPL8(double, double[], double[], boolean, int, int, double[], double[], double, double[][], double[], double[], int, double, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- DEPPL9(double[][], int, double, double[], double[], boolean, int, int, double[], double[], double, double[][], double[], double[], boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- depth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- depth - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- depth - Variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- depth - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
- depth - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
16 - number of bits.
- depth - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- depth - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
The maximum depth within the brain's surface to sample image intensities, by default set to 5.
- depth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- depth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RefineFunction
-
- depth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RestrictedLaplacianMatrixFunction
-
- depth() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- Depth() - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Used by AAM appearance model to get dimension
- Depth(long) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- DEPTH_THRESH - Static variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- depthAndOffset(int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- DepthAndOffset(int, int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.BinaryNode
-
- DepthAndOffset(long, int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- DepthMask - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- DepthShift - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- depthTF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Field for entering the maximum depth.
- dequad(double[][], double[][], int[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- deref(delaunay.Site) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- dereference() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- deRegister() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- deRegister() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
- deregisterAllListeners() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorPoller
-
- deRegisterListener(SpaceNavigatorListener) - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorPoller
-
- deriv_x_left(double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- deriv_x_right(double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- deriv_y_down(double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- deriv_y_up(double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- derivative - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- derivative() - Method in class gov.nih.mipav.model.structures.RealPolynomial
-
- derivative() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- derivative() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- DerivativeGrayProfiles - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.ASMData
-
- derivativeOrder - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
order of derivative, 0 or 1.
- derivativeOrder - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
order of derivative, 0 or 1.
- derivativeOrder - Variable in class gov.nih.mipav.model.GaussianKernelFactory
-
- derivativeScale - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Gaussian scale for derivative operations.
- derivativeScale - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- derivativeX - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
derivative buffer in OpenCL for convolving along the x-axis
- derivativeY - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
derivative buffer in OpenCL for convolving along the y-axis
- derivativeZ - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
derivative buffer in OpenCL for convolving along the z-axis
- derived_tbls - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- derivedImage - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- deriveGains - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- derivOrder - Variable in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
derivative order in each dimension.
- derivOrder - Variable in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
derivative order in each dimension.
- derrbd() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of that portion of version 3.1 LAPACK test routine DERRBD used to test the
error exits for dgebrd, dorgbr, dormbr, and dbdsqr.
- derred() - Method in class gov.nih.mipav.model.structures.jama.SVD
-
- derrge() - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- derrlq() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of a portion of version 3.1 LAPACK routine DERRLQ
- derrls() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of that portion of version 3.1 LAPACK test routine DERRLS used to test
the error exits of the least squares driver routine DGELSS.
- derrpo() - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
- derrqr() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of a portion of version 3.1 LAPACK routine DERRQR. * Univ. of Tennessee, Univ. of California
Berkeley and NAG Ltd..
- derrvx() - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
- derrvx() - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- Desc() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
Get the console mode description
- DESC_NUM_TOTAL_HIST - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- DESC_NUMEL - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- desc_rad_fctr - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- desc_ref - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
- desc_sig_fctr - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- desc_src - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
- DESCALE(int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- descending - Variable in class gov.nih.mipav.model.structures.TableSorter.Arrow
-
DOCUMENT ME!
- DESCENDING - Static variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- descrip - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
String with a max character length of 80 used to describe image.
- descrip - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Any text you like
- descrip - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
String with a max character length of 80 used to describe image.
- descrip - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- description - Variable in class gov.nih.mipav.model.dicomcomm.RTCEntry
-
DOCUMENT ME!
- description - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- description - Variable in class gov.nih.mipav.model.file.FileInfoJSON
-
Use serialVersionUID for interoperability.
- description - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
- description - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Experiment
-
Elements.
- description - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- description - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Project
-
Elements.
- description - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Screen
-
Elements.
- description - Variable in class gov.nih.mipav.model.file.FileTypeInfo
-
- description - Variable in class gov.nih.mipav.model.file.XMLParameter
-
Parameter description.
- description - Variable in class gov.nih.mipav.model.file.XMLPSet
-
Description of parameter.
- description - Variable in enum gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- description - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay
-
DOCUMENT ME!
- description - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- description - Variable in enum gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder.BugType
-
- descriptionField - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Text pane for user inputed bug description
- descriptions - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
description strings for each filterType.
- descriptorarg - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- descriptorarg - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- descriptors1 - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- descriptors2 - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- deselectMask() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Sets buttons to deselected, then calls refreshImagePaint to reset paint as mask.
- desired - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- desired_number_of_colors - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- desiredArraySize - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- desiredImageNumber - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- desiredPixelUnitsArray - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- destArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- destArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- destDirs - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- destExitStatusArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- destExitStatusArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- destExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- destExtents - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
result image extents *
- destExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
extents for extracted 3D subset
- destExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- destExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- destExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- destExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- destExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- destExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- destExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- destExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- destExtents - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
result image extents *
- destFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Destination flag indicating if a destination (result) image is generated.
- destFlag - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
DOCUMENT ME!
- destFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
DOCUMENT ME!
- destFormatStr - Variable in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
- destImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Destination image.
- destImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
Fuzzy images require 1 image for each class Hard images 1 image with assigned clusters.
- destImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
Fuzzy images require 1 image with double values Hard images 1 image with class numbers.
- destImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLogSlopeMapping
-
- destImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
Fuzzy images require 1 image for each class Hard images 1 image with assigned clusters.
- destImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- destImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- destImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
- destImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- destImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
- destImage - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- destImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- destImage - Variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
images
- destImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Destination image where results are to be stored.
- destImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult
-
final image
- destImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Destination image where results are to be stored.
- destImage - Variable in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
images
- destImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- destImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
The attenuated image.
- destImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
destination image
- destImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
destination image
- destImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
destination image
- destImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLLE
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- destImage - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- destImage - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
The image containing the 2D histogram.
- destImage - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
The image containing the 2D histogram.
- destImageB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
DOCUMENT ME!
- destImageB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
DOCUMENT ME!
- destImageB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGrays
-
Destination image (gray type) to store the Blue channel of the source image.
- destImageB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoHSB
-
Destination image (gray type) to store the Brightness channel of the source image.
- destImageG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
DOCUMENT ME!
- destImageG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
DOCUMENT ME!
- destImageG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGrays
-
Destination image (gray type) to store the Green channel of the source image.
- destImageH - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoHSB
-
Destination image (gray type) to store the Hue channel of the source image.
- destImageR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
DOCUMENT ME!
- destImageR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
DOCUMENT ME!
- destImageR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGrays
-
Destination image (gray type) to store the Red channel of the source image.
- destImageS - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoHSB
-
Destination image (gray type) to store the Saturation channel of the source image.
- destImagesTable - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
table
- destImagesTable - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
table
- destImagesTable - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
table
- DESTINATION - Static variable in class gov.nih.mipav.view.DICOMDisplayer
-
A destination type message is the file directory to which the images are going.
- DestinationBlend - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
or if the source image is to be replaced.
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
use later.
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- destinationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
panel that hold the new image radio button.
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
panels
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- destinationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
DOCUMENT ME!
- destinationRadioGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
radio groups
- destMinExtent - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- destNum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- destNum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
DOCUMENT ME!
- destNum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- destResolutions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- destroy_parameters(FileJPEG2000.opj_decompress_parameters) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- destroyFileCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRemovePlugin
-
Toggles whether or not the plugin file should be deleted from MIPAV's class directory.
- destroyOutput() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- destroyPreview() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- destroyRAM() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- DestructorCountingCostFunction(int[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DestructorCountingCostFunction
-
- destStub - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- destTableModel - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
table model
- destTableModel - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
table model
- destTableModel - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
table model
- destType - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- det(double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMinimumPerimeterPolygon
-
- det(double, double, double, double, double, double) - Method in class gov.nih.mipav.model.structures.VOIContour
-
- Det() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Calculates the determinant of a square matrix up to the 3rd order.
- det2(double[]) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- det2MM(double[][], double[][], double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- detach(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- detachVolRender() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Detach volume render branch group.
- detachVolRender() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Detach volume render branch group.
- DetailBilateralFilter(double[][], double[][], double[][], double[][], double, double, int, double, double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- DetailBilateralFilterLUT(double[][], double[][], double[][], double[][], double, double, int, double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- detailedDebugging - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- detailedSummaryPrinting - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- detailLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The level of detail slider label.
- detailLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The level of detail slider label.
- details - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- detailSlider - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Level of detail slider.
- detailSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Level of detail slider.
- detailSliderLabels - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The labels below the detail slider.
- detailSliderLabels - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The labels below the detail slider.
- detBG(double[][][], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- detBGTG(double[][][], double[][][], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- detCG(double[][][][], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- detCGTG(double[][][][], double[][][], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- DETCHANNEL_AMPLIFIER_GAIN_BC1 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_AMPLIFIER_GAIN_BC2 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_AMPLIFIER_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_AMPLIFIER_OFFSET_BC1 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_AMPLIFIER_OFFSET_BC2 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_DETECTION_CHANNEL_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_DETECTOR_GAIN_BC1 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_DETECTOR_GAIN_BC2 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_DYE_FOLDER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_DYE_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_ENTRY_ACQUIRE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_ENTRY_AMPLIFIER_GAIN_FIRST - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_ENTRY_AMPLIFIER_GAIN_LAST - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_ENTRY_AMPLIFIER_OFFS_FIRST - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_ENTRY_AMPLIFIER_OFFS_LAST - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_ENTRY_COUNTING_TRIGGER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_ENTRY_DETECTOR_GAIN_FIRST - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_ENTRY_DETECTOR_GAIN_LAST - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_ENTRY_INTEGRATION_MODE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_ENTRY_PINHOLE_DIAMETER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_ENTRY_SPECIAL_MODE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_FILTER_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_FILTER_SET_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_INTEGRATOR_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_PINHOLE_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_POINT_DETECTOR_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_SPECTRAL_SCAN_CHANNELS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_SPI_WAVELENGTH_END - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DETCHANNEL_SPI_WAVELENGTH_START - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- detect - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
44 detector type.
- detect(int[], Vector<Point2i>) - Method in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- detect_extrema(SIFT3D.SIFT3DC, SIFT3D.Keypoint_store) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- detectHoles(int[][], int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.HolesPattern
-
- detectImpl(ModelImage, Vector<AlgorithmBRISK.KeyPoint>, BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- detectionWavelength - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- Detector(String, String, String, Float, Float, Float, Integer, String) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Detector
-
Creates a new Detector object.
- detectorBinning - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- detectorDigitalGain - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- detectorEMGain - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- detectorGain - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- detectorHeadNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- detectorID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Detector
-
- detectorOffset - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- detectOrphans() - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
- detectorReadOutRate - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- detectorRefDetectorID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- detectorRefDocumentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DetectorRef.
- detectorRefGain - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- detectorRefOffset - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- detectors - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- detectorUseBrightnessContrastCorrection - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- detectorVoltage - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- DetectStructure(CeresSolver.CompressedRowBlockStructure, int, int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- detectTissue() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Detect the body tissue component.
- Determinant() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- Determinant(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- determineExtent(float) - Method in class gov.nih.mipav.model.GaussianKernelFactory
-
- determineKernelSize() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Associate one side of the kernel size with selectBox choice.
- determineKernelSize() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Associate one side of the kernel size with selectBox choice.
- determineKernelSize() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Associate one side of the kernel size with selectBox choice.
- determineKernelSize() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Associate one side of the kernel size with selectBox choice.
- determineKernelSize() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Associate one side of the kernel size with selectBox choice.
- determineKernelSize() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Associate one side of the kernel size with selectBox choice.
- determineMaxAvg(float, float, float, float[], float[], float[]) - Static method in class gov.nih.mipav.model.structures.VOI
-
Gathers max and average statistics to build guessing intervals
- determineMaximumSize() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Associate one side of the maximum kernel size with selectBox choice when adaptive median filtering is selected.
- determineNull() - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
When one of the text inputs has been left blank, trying to convert them to ints results in throwing a null
pointer exception.
- determineNull() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
When one of the text inputs has been left blank, trying to convert them to ints results in throwing a null
pointer exception.
- determineNull() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
When one of the text inputs has been left blank, trying to convert them to ints results in throwing a null
pointer exception.
- determineNull() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
When one of the text inputs has been left blank, trying to convert them to ints results in throwing a null
pointer exception.
- determineNull(JTextField, JTextField) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
When one of the text inputs has been left blank, trying to convert them to ints results in throwing a null
pointer exception.
- determineSOPClassUID(DICOM_Object, DICOM_Object) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Determines relevant SOP Class UID for a storage operation.
- determineSOPClassUIDAndPush(String, DICOM_Object, DICOM_Object, DICOM_Object) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Puts the required SOP class UID into the DICOMObject (Command).
- deterministic_varIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- deterministic_varIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- detGM(double[][], double[][], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- detTG(double[][][], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- deviationDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- device - Variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- DEVICE_DEPENDENT_CMYK - Static variable in class gov.nih.mipav.model.file.FileBMP
-
- DEVICE_DEPENDENT_RGB - Static variable in class gov.nih.mipav.model.file.FileBMP
-
- deviceField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- devices - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.CL_data
-
- deviceScalingName - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- df - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- df - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- df - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- df - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.ll_weib_beta_cen_r
-
- df - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.ll_weib_beta_uncen
-
- dfault(int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- dfault(int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- dfault(int[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- dfcapl - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- DFPintoAFP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- DFPintoAFP - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- DFPintoFRET - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- DFPintoFRET - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- DFS(int[][], int, int, int, int, int[], int[], int[], int[], boolean[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.PatternDetection
-
- DFS(int, int, ModelImage, int[][], int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- DFS(int, int, ModelImage, int[][], int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- DFS(int, int, ModelImage, int[][], int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- DFS(int, int, ModelImage, int[][], int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- DFS(int, int, ModelImage, int[][], int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- DFS_searchOnBottom(int[][], int, int, int, int, int[], int[], int[], int[], boolean[][], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- DFS_searchOnLeft(int[][], int, int, int, int, int[], int[], int[], int[], boolean[][], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- DFS_searchOnRight(int[][], int, int, int, int, int[], int[], int[], int[], boolean[][], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- DFS_searchOnTop(int[][], int, int, int, int, int[], int[], int[], int[], boolean[][], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- DFS_searchSingleIslandOnLeft(int[][], int, int, int, int, int[], int[], int[], int[], int[], int[], int[], int[], boolean[][], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternHorizontal
-
- DFS_searchSingleIslandOnRight(int[][], int, int, int, int, int[], int[], int[], int[], int[], int[], int[], int[], boolean[][], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternHorizontal
-
- dg(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- dg_mean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.LandData
-
- dgamln(double, int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DGAMLN COMPUTES THE NATURAL LOG OF THE GAMMA FUNCTION FOR Z.GT.0.
- dgamln(DoubleDouble, int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DGAMLN COMPUTES THE NATURAL LOG OF THE GAMMA FUNCTION FOR Z.GT.0.
- DGAMMA(double) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- dgaussianData - Variable in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
- dgaussPt(int[]) - Method in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Calculates the Gaussian function at a point.
- dgdA(double) - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
Partial derivative of gaussian with respect to A.
- dgdsigma(double) - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
Partial derivative of gaussian with respect to sigma.
- dgdx(double) - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
Partial derivative of gaussian with respect to x.
- dgebd2(int, int, double[][], int, double[], double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DGEBD2.
- dgebrd(int, int, double[][], int, double[], double[], double[], double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- dgecon(char, int, double[][], int, double, double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dgeequ(int, int, double[][], int, double[], double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dgelq2(int, int, double[][], int, double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DGELQ2
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
November 2006
..
- dgelqf(int, int, double[][], int, double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DGELQF
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
November 2006
..
- dgelqs(int, int, int, double[][], int, double[], double[][], int, double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK routine DGELQS.
- dgels(char, int, int, int, double[][], int, double[][], int, double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- dgelss(int, int, int, double[][], int, double[][], int, double[], double, int[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- Dgelss(int, int, double[][], int, double[][], double[], int[], double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- dgemm(char, char, int, int, int, double, double[][], int, double[][], int, double, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the 2/8/89 Blas routine Original version written by: Jack Dongarra, Argonne National Laboratory
Iain Duff, AERE Harwell.
- dgemv(char, int, int, double, double[][], int, double[], int, double, double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Routine ported from 10/22/86 blas dgemv subroutine Original version written by: Jack Dongarra, Argonne National
Lab.
- dgennd(int, int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DGENND.
- dgeqp3(int, int, double[][], int, int[], double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
- dgeqr2(int, int, double[][], int, double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK routine DGEQR2 Original DGEQR2 created by Univ. of Tennessee, Univ. of
California Berkeley, Univ. of Colorado Denver, and NAG Ltd.
- dgeqrf(int, int, double[][], int, double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK routine DGEQRF Original DGEQRF created by Univ. of Tennessee, Univ. of
California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dgeqrf computes a QR factorization of
a real m by n matrix A: A = Q * R.
- dgeqrs(int, int, int, double[][], int, double[], double[][], int, double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK routine DGEQRS.
- dger(int, int, double, double[], int, double[], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the 10/22/86 Blas routine DGER Original version written by: Jack Dongarra, Argonne National
Lab.
- dgerfs(char, int, int, double[][], int, double[][], int, int[], double[][], int, double[][], int, double[], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dgesv(int, int, double[][], int, int[], double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- Dgesv(int, double[][], int, double[], double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- dgesvd(char, char, int, int, double[][], int, double[], double[][], int, double[][], int, double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.SVD
-
- Dgesvd(int, int, double[][], char, char, double[][], double[], double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- dgesvx(char, char, int, int, double[][], int, double[][], int, int[], char[], double[], double[], double[][], int, double[][], int, double[], double[], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dget01(int, int, double[][], int, double[][], int, int[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dget02(char, int, int, int, double[][], int, double[][], int, double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DGET02.
- dget03(int, double[][], int, double[][], int, double[][], int, double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dget04(int, int, double[][], int, double[][], int, double, double[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version test routine 3.4.0 DGET04.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November 2011.
- dget06(double, double) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version test routine 3.4.0 DGET06.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November 2011.
- dget07(char, int, int, double[][], int, double[][], int, double[][], int, double[][], int, double[], boolean, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dget51(int, int, double[][], int, double[][], int, double[][], int, double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DGET51 Original DGET51 created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dget51 generally checks a decomposition of the form A = U B V'
where ' means transpose and U and V are orthogonal.
- dget52(boolean, int, double[][], int, double[][], int, double[][], int, double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DGET52 Original DGET52 created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dget52 does an eigenvector check for the generalized eigenvalue
problem.
- dgetf2(int, int, double[][], int, int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dgetrf(int, int, double[][], int, int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- Dgetrf(int, double[][], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- dgetri(int, double[][], int, int[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dgetrs(char, int, int, double[][], int, int[], double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dgetv0(int[], String, int, boolean, int, int, double[][], int, double[], double[], int[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgetv0_first - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgetv0_inits - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgetv0_iseed - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgetv0_iter - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgetv0_msglvl - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgetv0_orth - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgetv0_rnorm0 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgfl - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- dggbak(char, char, int, int, int, double[], double[], int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK routine DGGBAK Original DGGBAK created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dggbak forms the right or left eigenvectors of a real
generalized eigenvalue problem A*x = lambda*B*x, by backward transformation on the computed eigenvectors of the
balanced pair of matrices output by dggbal.
- dggbal(char, int, double[][], int, double[][], int, int[], int[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK routine DGGBAL Original DGGBAL created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dggbal balances a pair of general real matrices (A,B).
- dggev(char, char, int, double[][], int, double[][], int, double[], double[], double[], double[][], int, double[][], int, double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK driver routine DGGEV Original DGGEV created by Univ. of Tennessee, Univ.
- dggev_test() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This routine is an extraction from the FORTRAN program version 3.1.1 DCHKEE of the code needed to drive ddrgev in
order to test DGGEV, that handles the nonsymmetric generalized eigenvalue problem.
- dgghrd(char, char, int, int, int, double[][], int, double[][], int, double[][], int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK routine DGGHRD Original DGGHRD created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dgghrd reduces a pair of real matrices (A,B) to generalized
upper Hessenberg form using orthogonal transformations, where A is a general matrix and B is upper triangular.
- DGMAX - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- DGPOC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- DGPOL - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- dgride - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- dgridf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- dgtcon(char, int, double[], double[], double[], double[], int[], double, double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgtrfs(char, int, int, double[], double[], double[], double[], double[], double[], double[], int[], double[][], int, double[][], int, double[], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgtsl(int, double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the FORTRAN routine whose header is given below: c c dgtsl given a general tridiagonal matrix
and a right hand c side will find the solution. c c on entry c c n integer c is the order of the tridiagonal
matrix. c c c double precision(n) c is the subdiagonal of the tridiagonal matrix. c c(2) through c(n) should
contain the subdiagonal. c on output c is destroyed. c c d double precision(n) c is the diagonal of the
tridiagonal matrix. c on output d is destroyed. c c e double precision(n) c is the superdiagonal of the
tridiagonal matrix. c e(1) through e(n-1) should contain the superdiagonal. c on output e is destroyed. c c b
double precision(n) c is the right hand side vector. c c on return c c b is the solution vector. c c info integer
c = 0 normal value. c = k if the k-th element of the diagonal becomes c exactly zero. the subroutine returns when
c this is detected. c c linpack. this version dated 08/14/78 . c jack dongarra, argonne national laboratory.
- dgtsl(int, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the FORTRAN routine whose header is given below: c c dgtsl given a general tridiagonal matrix
and a right hand c side will find the solution. c c on entry c c n integer c is the order of the tridiagonal
matrix. c c c double precision(n) c is the subdiagonal of the tridiagonal matrix. c c(2) through c(n) should
contain the subdiagonal. c on output c is destroyed. c c d double precision(n) c is the diagonal of the
tridiagonal matrix. c on output d is destroyed. c c e double precision(n) c is the superdiagonal of the
tridiagonal matrix. c e(1) through e(n-1) should contain the superdiagonal. c on output e is destroyed. c c b
double precision(n) c is the right hand side vector. c c on return c c b is the solution vector. c c info integer
c = 0 normal value. c = k if the k-th element of the diagonal becomes c exactly zero. the subroutine returns when
c this is detected. c c linpack. this version dated 08/14/78 . c jack dongarra, argonne national laboratory.
- dgtt01(int, double[], double[], double[], double[], double[], double[], double[], int[], double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgtt02(char, int, int, double[], double[], double[], double[][], int, double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgtt05(char, int, int, double[], double[], double[], double[][], int, double[][], int, double[][], int, double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgttrf(int, double[], double[], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgttrs(char, int, int, double[], double[], double[], double[], int[], double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- DGTTS2(int, int, int, double[], double[], double[], double[], int[], double[][], int) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dgxfac_gqtstp - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- dh(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- DHDVText - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- dhgeqz(char, char, char, int, int, int, double[][], int, double[][], int, double[], double[], double[], double[][], int, double[][], int, double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK routine DHGEQZ Original DHGEQZ created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dhgeqz computes the eigenvalues of a real matrix pair (H,T),
where H is an upper Hessenberg matrix and T is upper triangular, using the double-shift QZ method.
- DHP - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Define Hierarchical Progression segment identifier.
- DHP - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- DHP - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- dhs(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- DHT - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Define Huffman Table segment identifier.
- DHT - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- DHT - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- di - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.ConvAndLinear
-
- di_pochhammer(double, double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- di_pochhammer(double, int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- diag - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
diag is an array of length n.
- diag - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
1D double array of length param conatiaing the diagonal elements of the diagonal matrix D if internalScaling is
true.
- diag - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
1D double array of length param conatiaing the diagonal elements of the diagonal matrix D if internalScaling is
true.
- diag() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- Diag(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Make the matrix a diagonal matrix containing 'vec'.
- DIAG - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- DIAG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- DIAGN4(double[], double[], double[], double[], double[], double[], int[], int[], int[], int[], int[], int[], int[], int[], double[], double[], double[], double[], double[], double[], boolean[], int[], int[], int[], int, int, int, int[], int, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- diagnosis - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- diagnostic1 - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- diagnostic1(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- diagnosticFn - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Optional owned dataset.
- diagnosticFnData - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- diagnosticFrequency - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- diagonal_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- diagonal_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- diagonal_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.RegularizationCheckingLinearSolver
-
- DiagonalizeMatrix(double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- diagRad - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
245 - 33 bytes Diagnostician/Radiologist.
- dialog - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
The dialog for accessing GUI specific information, also set during scripting.
- dialog - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- dialog - Variable in class gov.nih.mipav.view.ViewJFrameImage.DicomQueryListener
-
- dialog - Variable in class gov.nih.mipav.view.ViewUserInterface.DicomQueryListener
-
- DialogDefaultsInterface - Interface in gov.nih.mipav.view
-
Simple interface for loading and saving default settings for dialogs.
- DialogDTIColorDisplay - Class in gov.nih.mipav.view.dialogs
-
- DialogDTIColorDisplay(boolean) - Constructor for class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Constructor
- DialogDTIColorDisplay(ModelImage, ModelImage, ModelLUT, boolean) - Constructor for class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
- DialogThree() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- DialogTwo() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogTwo
-
- dialogWidthAdd - Static variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- diameter - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- DiameterBuffer - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- diameterField - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- diameterNeurite - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- DIAPHANOGRAPHY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality diaphanography.
- DIAPHANOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality diaphanography.
- DIAPHY(int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- DIB - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .dib.
- dichroic - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter
-
- dicom - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
flag indicates to read dicom matrix or not.
- DICOM - gov.nih.mipav.model.algorithms.SIFT3D.im_format
-
- DICOM - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Digital Imaging and COmmunications in Medicine file type.
- DICOM_AAbortRQ - Class in gov.nih.mipav.model.dicomcomm
-
DICOM Association Abort PDU Type.
- DICOM_AAbortRQ() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_AAbortRQ
-
Creates a new DICOM_AAbortRQ object.
- DICOM_AAssociateAC - Class in gov.nih.mipav.model.dicomcomm
-
Implements a DICOM Association Acceptance PDU Type.
- DICOM_AAssociateAC() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateAC
-
Creates a new DICOM_AAssociateAC object.
- DICOM_AAssociateRJ - Class in gov.nih.mipav.model.dicomcomm
-
DICOM Association Rejection.
- DICOM_AAssociateRJ() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRJ
-
Creates a new DICOM_AAssociateRJ object.
- DICOM_AAssociateRQ - Class in gov.nih.mipav.model.dicomcomm
-
DICOM Association Request PDU Type class.
- DICOM_AAssociateRQ() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Creates a new DICOM_AAssociateRQ object.
- DICOM_AReleaseRQ - Class in gov.nih.mipav.model.dicomcomm
-
DICOM Association Release Request.
- DICOM_AReleaseRQ() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_AReleaseRQ
-
Creates a new DICOM_AReleaseRQ object.
- DICOM_AReleaseRSP - Class in gov.nih.mipav.model.dicomcomm
-
DICOM Association Release Response.
- DICOM_AReleaseRSP() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_AReleaseRSP
-
Creates a new DICOM_AReleaseRSP object.
- DICOM_AsyncOpWindowSubItem - Class in gov.nih.mipav.model.dicomcomm
-
DICOM AsyncOpWindowSubItem PDU Item Type - Not supported but we read it in.
- DICOM_AsyncOpWindowSubItem() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_AsyncOpWindowSubItem
-
DICOM SCP/SCU Role Selection PDU Item Type.
- DICOM_Comms - Class in gov.nih.mipav.model.dicomcomm
-
This class is used as a base class for all DICOM file and network I/O.
- DICOM_Comms() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Constructor for DICOM network I/O class.
- DICOM_Comms.ByteBuffer - Class in gov.nih.mipav.model.dicomcomm
-
Simple inner class to facilitate the memory allocation of of a byte buffer used in DICOM_Comms to support I/O.
- DICOM_CommsLink - Class in gov.nih.mipav.model.dicomcomm
-
It is a bit odd since it both extends DICOM_Comms and has a DICOM_Comms object.
- DICOM_CommsLink() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_CommsLink
-
- DICOM_Constants - Class in gov.nih.mipav.model.dicomcomm
-
Useful DICOM constants.
- DICOM_Constants() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
- DICOM_CRequest - Class in gov.nih.mipav.model.dicomcomm
-
DIMSE-C service implementations.
- DICOM_CRequest(int) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
Creates a new DICOM_CRequest object.
- DICOM_CResponse - Class in gov.nih.mipav.model.dicomcomm
-
This is the base class for DIMSE-C response messages.
- DICOM_CResponse(int) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_CResponse
-
Creates a new DICOM_CResponse object.
- DICOM_ELEMENT_PREFIX - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- DICOM_Exception - Exception in gov.nih.mipav.model.dicomcomm
-
Used to for DICOM communication error handling.
- DICOM_Exception() - Constructor for exception gov.nih.mipav.model.dicomcomm.DICOM_Exception
-
Creates a new DICOM_Exception object.
- DICOM_Exception(String) - Constructor for exception gov.nih.mipav.model.dicomcomm.DICOM_Exception
-
Creates a new DICOM_Exception object.
- DICOM_FileIO - Class in gov.nih.mipav.model.dicomcomm
-
DICOM communication package reads the data from the socket and saves the data to a file stream.
- DICOM_FileIO() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_FileIO
-
- DICOM_GROUP_PREFIX - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- DICOM_MaximumSubLength - Class in gov.nih.mipav.model.dicomcomm
-
Simple class that implements a Maximum SubLength PDU type.
- DICOM_MaximumSubLength() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_MaximumSubLength
-
Simple class that implements a Maximum SubLength PDU type.
- DICOM_Move - Class in gov.nih.mipav.model.dicomcomm
-
This is the DICOM move class that defines functions to compose and send move requests to the server found in the
.preferences file.
- DICOM_Move() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Creates a new DICOM_Move object.
- DICOM_Object - Class in gov.nih.mipav.model.dicomcomm
-
The DICOM data object for storing DICOM tags (i.e. groups, elements).
- DICOM_Object() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
- DICOM_Object.GroupElements - Class in gov.nih.mipav.model.dicomcomm
-
Simple extension of the Hastable for use a GroupElements object.
- DICOM_ObjectList - Class in gov.nih.mipav.model.dicomcomm
-
Vector of DICOM_Objects.
- DICOM_ObjectList() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_ObjectList
-
- DICOM_PDataTF - Class in gov.nih.mipav.model.dicomcomm
-
Used to exchange application information (i.e.
- DICOM_PDataTF() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Creates a new DICOM_PDataTF object.
- DICOM_PDUItemType - Class in gov.nih.mipav.model.dicomcomm
-
This class implements a 2 byte item length (DICOM_PDUType implements 4 byte item length.
- DICOM_PDUItemType(byte) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_PDUItemType
-
Creates a new DICOM_PDUItemType object.
- DICOM_PDUService - Class in gov.nih.mipav.model.dicomcomm
-
The Protocol Data Units (PDU) - PDU_Service class is a wrapper of all the lower level DICOM messaging classes.
- DICOM_PDUService() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
PDU_Service constructor.
- DICOM_PDUType - Class in gov.nih.mipav.model.dicomcomm
-
This an abstract class implements a 4 byte item length (DICOM_PDUItemType implements 2 byte item length.
- DICOM_PDUType() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_PDUType
-
- DICOM_PDUTypeBase - Class in gov.nih.mipav.model.dicomcomm
-
DICOMPDUTypeBase abstract base class that is extended by DICOMPDUType and DICOMPDUItemType.
- DICOM_PDUTypeBase() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
- DICOM_PresentationContext - Class in gov.nih.mipav.model.dicomcomm
-
DICOM Presentation Context PDU Item Type.
- DICOM_PresentationContext() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContext
-
Creates a new DICOM_PresentationContext object.
- DICOM_PresentationContextAccept - Class in gov.nih.mipav.model.dicomcomm
-
DICOM Presentation Context Acceptance PDU Item Type.
- DICOM_PresentationContextAccept() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContextAccept
-
Creates a new DICOM_PresentationContextAccept object.
- DICOM_Query - Class in gov.nih.mipav.model.dicomcomm
-
This is the DICOM query class that defines functions to compose and send a patient root, patient level DICOM query
request to the image file server located in NIH's Clinical Center.
- DICOM_Query() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
DICOM_Query constructor.
- DICOM_Query(ViewJFrameDICOMQuery, int) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
DICOMQuery constructor.
- DICOM_Receiver - Class in gov.nih.mipav.model.dicomcomm
-
This is the DICOM server class that hangs a listener on a given port for incoming image store requests from a remote
DICOM client.
- DICOM_Receiver() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Constructor that starts the thread.
- DICOM_Receiver(String) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
- DICOM_Receiver.RunnerThread - Class in gov.nih.mipav.model.dicomcomm
-
Thread manager for running the DICOM receiver.
- DICOM_RTC - Class in gov.nih.mipav.model.dicomcomm
-
RTC - Run Time Class (although it is actually statically defined here) This allows access to information in the DICOM
data dictionary.
- DICOM_RTC() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
- DICOM_RTC_Generator - Class in gov.nih.mipav.model.dicomcomm
-
This class generates the DICOM_RTC class file from the master DICOM tag list file (whose entries are obtained through
calls to DicomDictionary).
- DICOM_RTC_Generator() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
- DICOM_SCPSCURoleSelect - Class in gov.nih.mipav.model.dicomcomm
-
DICOM SCP/SCU Role Selection PDU Item Type.
- DICOM_SCPSCURoleSelect() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_SCPSCURoleSelect
-
DICOM SCP/SCU Role Selection PDU Item Type.
- DICOM_Socket - Class in gov.nih.mipav.model.dicomcomm
-
Simple class to setup and the socket and streams.
- DICOM_Socket() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
DICOMSocket constructor.
- DICOM_SOP - Class in gov.nih.mipav.model.dicomcomm
-
This is a base class for all SOP Class implementations.
- DICOM_SOP() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_SOP
-
- DICOM_StdRetrieve - Class in gov.nih.mipav.model.dicomcomm
-
DICOM Retrieve SOP Class.
- DICOM_StdRetrieve(String) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_StdRetrieve
-
This implements a DICOM Retrieve SOP Class.
- DICOM_StdStorage - Class in gov.nih.mipav.model.dicomcomm
-
A DICOM Storage SOP Class.
- DICOM_StdStorage() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_StdStorage
-
Creates a new DICOM_StdStorage object.
- DICOM_Store - Class in gov.nih.mipav.model.dicomcomm
-
This is the DICOM store class that defines functions to compose and send a store request to a DICOM image file
archive such as the image file server located in NIH's Clinical Center.
- DICOM_Store(String, String, ViewJFrameDICOMQuery) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
Creates a new DICOM_Store object.
- DICOM_TransferSyntaxUtil - Class in gov.nih.mipav.model.dicomcomm
-
Simple utilities to convert transfer syntaxes to a different form.
- DICOM_TransferSyntaxUtil() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_TransferSyntaxUtil
-
- DICOM_UID - Class in gov.nih.mipav.model.dicomcomm
-
DICOM_UID.
- DICOM_UID(String) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
Creates a new DICOM_UID object.
- DICOM_UID(String, String) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
Creates a new DICOM_UID object.
- DICOM_UID(String, String, String) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
Creates a new DICOM_UID object.
- DICOM_UserInformation - Class in gov.nih.mipav.model.dicomcomm
-
DICOM User Information PDU Item Type (part 8 section 9.3).
- DICOM_UserInformation() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_UserInformation
-
Constructs a DICOM user information object.
- DICOM_Util - Class in gov.nih.mipav.model.dicomcomm
-
Static DICOM and general utilities to support DICOM interfacing.
- DICOM_Util() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
- DICOM_Verification - Class in gov.nih.mipav.model.dicomcomm
-
This is the DICOM verification class that defines functions to perform Verification to a DICOM image file archive
such as the Kodak PACS image file server located in NIH's Clinical Center.
- DICOM_Verification(String, ViewJFrameDICOMQuery) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
Constructor.
- DICOM_VR - Class in gov.nih.mipav.model.dicomcomm
-
DICOM Value Representation.
- DICOM_VR() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Default constructor.
- DICOM_VR(int, int, byte[], int) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Creates a new DICOM_VR object.
- DICOM_VR(int, int, int, int) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Creates a new DICOM_VR object.
- DICOM_VR(int, int, String, int) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Creates a new DICOM_VR object.
- dicomB0VolumeBrowseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
browse button to locate the dicom b0 volume if doing registration
- dicomB0VolumeLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
label for dicom b0 volume if doing registration
- dicomB0VolumePath - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
path to dicom B0 for registration purposes
- dicomB0VolumePath - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
- dicomB0VolumeTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
path to dicom b0 volume if doing registration
- dicomCatcher - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- DICOMcatcher - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Reference to the DICOM receiver that listens for DICOM formatted images sent by a DICOM server.
- dicomConvertedTagTable - Variable in class gov.nih.mipav.model.file.FileMinc
-
Table of tags extracted from a dicom file info to be written to the minc file.
- dicomDelta - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- DicomDictionary - Class in gov.nih.mipav.model.file
-
This class reads a text file that lists all the tags that the DICOM file reader will need to know about.
- DicomDictionary() - Constructor for class gov.nih.mipav.model.file.DicomDictionary
-
- DICOMDisplayer - Class in gov.nih.mipav.view
-
This class is simply a table that goes in the query GUI and displays progress and error messages.
- DICOMDisplayer() - Constructor for class gov.nih.mipav.view.DICOMDisplayer
-
Creates a new table and table model and sets up the headers.
- dicomEnabled - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- dicomFileInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- dicomGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- dicomH - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Height read in from DICOM file; only use if imageHeight isn't defined.
- dicomHighestX - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dicomHighestY - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dicomHighestZ - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dicomInfo - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
Array that holds the dicom tag info*
- dicomInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- dicomInfo - Variable in class gov.nih.mipav.view.JPanelAnonymizeImage
-
all the tags that contain personal info:.
- DicomInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- dicomInfoPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Dicom options panel
- dicomLowestX - Variable in class gov.nih.mipav.model.file.FileAfni
-
Dicom ordered bounding box in mm.
- dicomLowestY - Variable in class gov.nih.mipav.model.file.FileAfni
-
Dicom ordered bounding box in mm.
- dicomLowestZ - Variable in class gov.nih.mipav.model.file.FileAfni
-
Dicom ordered bounding box in mm.
- dicomMarker(Vector3f) - Method in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dicomMatrix - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractor
-
DOCUMENT ME!
- dicomMatrix - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractorCubes
-
DOCUMENT ME!
- dicomMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractor
-
Dicom Matrix
- dicomMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractorCubes
-
Dicom Matrix
- DICOMMATRIX - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Dicom Matrix info Files (*.dicomMatrix).
- dicomMatrixFile - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
dicom matrix file.
- dicomMessageDisplayer - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Reference to the DICOM GUI for displaying message information.
- dicomOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogOrder
-
Load image using dicom ordering (R-L, A-P, I-S)
- dicomOrientation - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dicomOrigin - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dicomQuery - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- DICOMQueryFrame - Variable in class gov.nih.mipav.view.ViewUserInterface
-
DICOM query frame for sending and receiving DICOM images.
- DicomQueryListener() - Constructor for class gov.nih.mipav.view.ViewJFrameImage.DicomQueryListener
-
- DicomQueryListener() - Constructor for class gov.nih.mipav.view.ViewUserInterface.DicomQueryListener
-
- dicomReceiverOnStart - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Dicom Receiver check box
- dicomSliceSize - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dicomTable - Variable in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Hashtable to hold the tags for conversion to->from dicom and to-> mipav XML format
- dicomTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- dicomTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- dicomTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- dicomTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- dicomTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- DicomTableModel(String[], int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.DicomTableModel
-
- DicomTagIdentifier(FileDicomKey, FileDicomTagInfo) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.DicomTagIdentifier
-
Creates a new DicomTagIdentifier object.
- DicomTagSelectorImpl - Interface in gov.nih.mipav.view.dialogs
-
Dialogs which implement this interface are eligible to use the JDialogDicomTagSelector for selecting DICOM tags within a given image file.
- dicomToMincVarMap - Static variable in class gov.nih.mipav.model.file.FileInfoMinc
-
Minc var equivalents to anonymizable Dicom tags.
- dicomType() - Method in class gov.nih.mipav.view.dialogs.JDialogEnhancedDicomChoice
-
Returns whether enhancedMR, enhancedCT, or enhancedXA
- DicomType - Interface in gov.nih.mipav.model.file
-
- dicomW - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Width read in from DICOM file; only use if imageWidth isn't defined.
- dicomXDim - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dicomYDim - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dicomZDim - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- didSucceed() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Returns whether or not a minimum was found.
- didSucceed() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Returns whether or not a minimum was found.
- diff(float[], float[], float[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation
-
- diffBinomial(int) - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- DIFFERENCE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- differenceButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- differentButton - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- DifferentiatePolynomial(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- differentSpheresButton - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- diffGaussians(double[]) - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.diffGaussians
-
- diffil_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- diffsum - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- diffuse - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
DOCUMENT ME!
- diffuse - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareMaterial
-
DOCUMENT ME!
- DIFFUSE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
- diffuseButton - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Diffuse color button for vertex material.
- diffuseColor - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
DOCUMENT ME!
- diffuseColor - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- diffuseColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- diffuseColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
DOCUMENT ME!
- diffuseColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
DOCUMENT ME!
- diffuseColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
DOCUMENT ME!
- diffuseColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- diffusion - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
Diffusion constant in um*um/sec.
- diffusion - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- diffusion - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- diffusion - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- DIFFUSION - Static variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- diffusionAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
DOCUMENT ME!
- diffusionAnisotropyType - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- diffusionAnisotropyType - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- diffusionAnisotropyTypeIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- diffusionAnisotropyTypePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- diffusionBFactor - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- diffusionBFactor - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- diffusionBValueNumber - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- diffusionBValueNumber - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- diffusionBValueNumberIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- diffusionBValueNumberPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- diffusionExperimentsPerDirection - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- diffusionGradientAmplitude - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- diffusionGradientDuration - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- diffusionGradientSeparation - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- diffusionGradientSwitchingScheme - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- diffusionMeasurementMode - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- diffusionModuleDuration - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- diffusionModuleEchoDelay - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- diffusionPreparation - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- diffusitivityDenom - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- diffusivity(float) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Returns the weighting for values used in computing new (diffused) pixel values.
- diffVolume - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
The volume difference btw the tumor surface and the buring sphere packings.
- diffVolumeLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Volume difference label for the current treatment.
- diffVolumeText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Volume difference text.
- diffVoxels - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Volume difference in voxels for the tumor surface and burning sphere, ellipsoid packings.
- digamma(double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- DIGITAL_RADIOGRAPHY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality digital radiography.
- DIGITAL_RADIOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality digital radiography.
- digitalGain - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- digitalZoomRatio - Variable in class gov.nih.mipav.model.file.FileSVS
-
- digitalZoomRatio - Variable in class gov.nih.mipav.model.file.FileTiff
-
- DijkstraCostItem - Class in gov.nih.mipav.model.structures
-
Contains information for a point used in the the Dijkstra minimum cost path algorithm.
- DijkstraCostItem(int) - Constructor for class gov.nih.mipav.model.structures.DijkstraCostItem
-
Setup to associate this instance with a particular sample in the volume.
- DijkstraMinCostPath - Class in gov.nih.mipav.view.renderer.flythroughview
-
Implementation of the Dijkstra minimum cost path algorithm through a binary volume.
- DijkstraMinCostPath(ModelImage3DLayout, short[], int, int, float[], int, int) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.DijkstraMinCostPath
-
Compute the minimum cost path through the 26-connected specified volume of samples, only considering those
samples which are marked with the specified mask and starting at the specified sample.
- dilate(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Dilates an image using the indicated kernel and the indicated number of
executions.
- dilate(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Dilates an image using the indicated kernel and the indicated number of
executions.
- dilate(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Dilates an image using the indicated kernel and the indicated number of
iterations.
- dilate(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Dilates a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- dilate(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Dilates a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- dilate(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Dilates a boolean, unsigned byte, or unsigned short image using the indicated kernel and the indicated number of
iterations.
- DILATE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- DILATE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- DILATE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- DILATE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- DILATE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- DILATE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- dilate2D(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Dilates an image slice using the indicated kernel and the indicated number of
executions.
- dilate2D(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Dilates a boolean, unsigned byte or unsigned short image slice using the indicated kernel and the indicated number of
executions.
- dilateAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- dilateAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- dilateAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- dilateDimType - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- dilateImage() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
dilation.
- dilateObject(BitSet, int, int, int, BitSet, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
dilate binary object with a custom kernel using the BitSet structure with indexing convention index = x + nx*y +
nx*ny*z.
- dilation - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
default dilation:.
- dim - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- dim - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdhyperrect
-
- dim - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdtree
-
- dim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
The number of dimensions (2D or 3D).
- dim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
The number of dimensions (2D or 3D).
- dim - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Sep_FIR_filter
-
- dim - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Tps
-
- dim - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- dim - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Number of available dimension.
- dim - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Used for construction of the preview.
- dim - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Number of dimensions in an image e.g 2D, 3D
- dim - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Number of dimensions in an image e.g 2D, 3D
- dim - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- dim - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
The histogram image dimension.
- dim - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- dim - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The histogram image dimension.
- dim - Variable in class gov.nih.mipav.view.ViewJSlider
-
Holds the old dimension to minimize redrawing of slider table
- dim() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- Dim - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- DIM - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- DIM - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- DIM - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
The number of dimensions in the image.
- DIM - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- DIM - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- DIM - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Number of dimensions in match image.
- DIM - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- dim_un0 - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unused.
- dim_un0 - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unused.
- dim_un0 - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- dimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- dimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- dimArray - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- dimArray - Variable in class gov.nih.mipav.model.file.FileInfoMinc
-
DOCUMENT ME!
- dimB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
private double dimA[], resA[];.
- dimB - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- dimension - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- dimension - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- dimension - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
< Weight threshold.
- dimension - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< SVM solver type.
- dimension - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmDataset
-
< Number of wrapped data.
- DIMENSION - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- DIMENSION - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- dimensionM - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
- dimensionM - Variable in class gov.nih.mipav.model.file.FileLSM
-
- dimensionNode - Variable in class gov.nih.mipav.model.file.FileInfoMincHDF
-
The dimension tree node that holds xspace, yspace, and (optionally) zspace nodes
- dimensionNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- dimensionOrder - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Data
-
Attributes.
- dimensionP - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
- dimensionP - Variable in class gov.nih.mipav.model.file.FileLSM
-
- dimensions - Variable in class gov.nih.mipav.model.algorithms.libdt.DatDescriptor
-
- Dimensions() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- Dimensions() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- Dimensions() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- dimensionsOK() - Method in class gov.nih.mipav.view.ViewFileChooserSubsample
-
DOCUMENT ME!
- dimensionsReserved - Variable in class gov.nih.mipav.model.file.FileLSM
-
- dimensionsSanityCheck() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Method checks the dimensions parameters entered by the user.
- dimExtents - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Bounds of the image where.
- dimExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- dimGreenPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- dimGreenPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- dimGreenSlider - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
various sliders in dialog *
- dimGreenSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
various sliders in dialog *
- dimGreenTextField - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
textfields *
- dimGreenTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
textfields *
- dimH - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- dimI - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- dimid - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- dimLengths - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Dimension sizes.
- dimLengths - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Dimension sizes.
- dimLengths - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- dimLengths - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- dimLengths - Variable in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
length of function in pixel in each dim.
- dimLengths - Variable in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
length of function in pixel in each dim.
- dimlenx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- dimleny - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- dimlenz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- dimLoc - Variable in enum gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.SwapMode
-
- dimM - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- dimOrder - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
The ordering of the dimensions.
- dimOriginalExtents - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Bounds of the image where.
- dimPowerOfTwo(int) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculate the dimension value to power of 2.
- dimPowerOfTwo(int) - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Convert the dimensions to Power of 2.
- dimR - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- dimReorderIndexes - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
- dimResolutions - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Pixel or voxel resolutions for each dimension - default = 1.0.
- dims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Dimensionality of the data.
- dims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- dims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- dims - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- dims - Variable in class gov.nih.mipav.model.algorithms.FloodFill
-
DOCUMENT ME!
- dims - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- dims - Variable in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- dims - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- dimS - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- dimStrings - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
- dimStringsReordered - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
- dimsub(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- dimsub(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- dimTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- dimV - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- dimX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- dimX() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- dimY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- dimY() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- dimZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- dimZ() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- dinvmap(double[][], double[][], double[][], double[], double[][], double[], double[][], double[][], boolean, boolean, double, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- dinvr(int[], double[], double[], boolean[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- diognostician - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- diognostician - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- diplayTract(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Constructs the Fiber Bundle Tracts from the dtiImage and the
eigenImage parameters.
- diplayTract(int, int, int, int, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- dipli - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- dir - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelInfo
-
- dir - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdnode
-
- dir - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
- dir - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- DIR_LABEL - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveTab
-
The (optional) label to use for the directory in which to save the tab contents.
- DIR_TAB - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- dircnt_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.dircnt_t
-
- dirCosines - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
direction cosines matrix
- direct - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- DirectBitsRect - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- direction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
DOCUMENT ME!
- direction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- direction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- direction - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
this is the gradient matrix that is populated when reading the gradient file
- direction - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- direction - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- direction - Variable in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- direction - Variable in class gov.nih.mipav.model.structures.TableSorter.Directive
-
DOCUMENT ME!
- direction - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- direction - Static variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
Java3D supports limiting the vertices to be processed by the call setValidVertexCount(int).
- direction - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractor
-
DOCUMENT ME!
- direction - Static variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- direction - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
the light's direction in the world.
- direction - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FilePolyline_WM
-
DOCUMENT ME!
- direction - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
image x, y, z orientation.
- direction - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractor
-
Surface direction
- direction() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- direction_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- directional_derivative - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer.State
-
- directionalDerivatives(double, double, double, double, double, double, double, double, double, double, double, double, double, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- directionalityCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- directionalRadio - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Directional light radio botton.
- directionalRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Directional light radio botton.
- directionGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- DirectionInfinityNorm() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- directionNeeded - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- directionPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- directionsOptmizationWeight - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- Directive(int, int) - Constructor for class gov.nih.mipav.model.structures.TableSorter.Directive
-
Creates a new Directive object.
- directoriesOnly - Variable in class gov.nih.mipav.view.ViewFileTreeNode
-
DOCUMENT ME!
- directory - Variable in class gov.nih.mipav.view.dialogs.InstanceVOI
-
- directory - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
directory of where dicom tags are save to *
- directory - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- directory - Variable in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
DOCUMENT ME!
- directory - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
- directory - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Text field for the directory of a file being attached from the user's computer
- directory - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- directory - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
File name and directory.
- directory - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
File name and directory.
- directory - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
- directory - Variable in class gov.nih.mipav.view.ViewDirectoryChooser
-
DOCUMENT ME!
- directory - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
String locations
- directory - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- directory - Variable in class gov.nih.mipav.view.ViewUserInterface.OpenFileInfo
-
Path to the file (no file name).
- Directory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
- DIRECTORY - gov.nih.mipav.model.algorithms.SIFT3D.im_format
-
- directoryInput - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- directoryInput - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- directoryMatch - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
- directoryMp - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- directoryOutput - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- directoryOutput - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- directoryPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- directoryPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- DirectoryTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- DirectoryTiffHandler(MetadataExtractor.Metadata, MetadataExtractor.Directory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- directoryTimes - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- directoryTissue - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- directoryTissue - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- directoryTree - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Actual things we can see...
- directoryTree - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- directoryVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- directoryVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- directoryVOI2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- directoryWInput - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- directoryWInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- directoryWInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- directoryWInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- directoryWInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- directoryWRef - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- directoryWRef - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- directoryWRef - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- directScaledSwitching - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- dirField - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
DOCUMENT ME!
- dirichlet(double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- dirichlet_fit(double[], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- dirichlet_fit_m(double[][], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- dirichlet_fit_newton(double[], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- dirichlet_fit_s(double[][], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- dirichlet_fit_simple(double[], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- dirichlet_logProb(double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- dirichlet_logProb_fast(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- dirichlet_moment_match(double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- dirichlet_sample(double[][], int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- dirichlet_sample_col(double[], int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- dirichletRnd(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- dirichletRnd(double, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- dirichletTest() - Method in class gov.nih.mipav.model.algorithms.ConjugateGradientTest
-
- dirInfo - Variable in class gov.nih.mipav.model.file.FileDicom
-
Holds sequence of files described in DICOMDIR.
- dirInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- dirPath - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDICOMtoAVI
-
Directory to recursively operate in.
- dirty - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- dirty - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- disable_all_safety_checks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemOptions
-
- disable6Planes() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Disable the 6 clipping planes.
- disable6Planes() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Disable the 6 clipping planes.
- disableCamera() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Set the captureFrame to null.
- disableCamera() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Set the captureFrame to null.
- disableClipA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Disable the arbitrary clipping.
- disableClipA() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Disable the arbitrary clipping.
- disableClipping() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Diable all the six clipping planes at a time.
- disableClipping() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Diable all the six clipping planes at a time.
- disableClipPlanes() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Disable clipping planes when dialog window closed.
- disableClipPlanes() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Disable clipping planes when dialog window closed.
- disableClipPlanesArbi() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Disable arbitrary clipping planes.
- disableClipPlanesArbi() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Disable arbitrary clipping planes.
- disableDebugOutput() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- disableSlices() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
When 3D texture volume render is invoked, disable all the slices and
bounding frame boxes.
- disableSliders - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- disableSlidersB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- disableSlidersG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- disableSlidersR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- disableStaticClipping() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Disable the eye clipping plane.
- disableStaticInvClipping() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Disable the eye inverse clipping plane.
- disableTargetPointPicking() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Disable target point for the RFA probe from within the plane renderer.
- discarded_bytes - Variable in class gov.nih.mipav.model.file.libjpeg.my_marker_reader
-
- disconnect() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
DOCUMENT ME!
- disconnect() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
DOCUMENT ME!
- DISCRETE_BOUNDARY_VALUE - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- DISCRETE_BOUNDARY_VALUE - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- DISCRETE_INTEGRAL - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- DISCRETE_INTEGRAL - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- discrete_wavelet(PyWavelets.WAVELET_NAME, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- DiscreteCosineTransform - Class in gov.nih.mipav.model.algorithms
-
This routines except the SLOW routines are ported from FORTRAN to Java from:
ALGORITHM 749, COLLECTED ALGORITHMS FROM ACM.
- DiscreteCosineTransform() - Constructor for class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- DiscreteCosineTransform(boolean, int[], int, boolean, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- DiscreteCosineTransform(ModelImage, ModelImage, ModelImage, int, int, double, double, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- discreteRnd(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- DiscreteSineTransform - Class in gov.nih.mipav.model.algorithms
-
- DiscreteSineTransform() - Constructor for class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- DiscreteSineTransform(boolean) - Constructor for class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- DiscreteSineTransform(ModelImage, ModelImage, ModelImage, boolean, int, int, double, double, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- DiscreteSineTransform.cdft_arg_t - Class in gov.nih.mipav.model.algorithms
-
- DiscreteSineTransform.cftrec1_th - Class in gov.nih.mipav.model.algorithms
-
- DiscreteSineTransform.cftrec2_th - Class in gov.nih.mipav.model.algorithms
-
- DiscreteTransformType(int) - Constructor for enum gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteTransformType
-
- DiscreteWavelet() - Constructor for class gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteWavelet
-
- DiscretInteg() - Constructor for class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.DiscretInteg
-
- diskAccuracy(SchwarzChristoffelMapping.scmap) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- diskeval(SchwarzChristoffelMapping.scmap, double[][], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- diskevaldiff(SchwarzChristoffelMapping.scmap, double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- diskevalinv(double[][], SchwarzChristoffelMapping.scmap, double[][], double[][], double[][], int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- diskid - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
6 - (internal use) Disk ID.
- diskmap(double[][], double[], double, double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- diskplot(SchwarzChristoffelMapping.scmap, double[], double[], int, int, double[], int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- dispatchSavedEvent(EventObject) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Dispatches event to appropriate object.
- dispatchSavedEvent(EventObject) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Dispatches event to appropriate object.
- dispatchSavedEvent(EventObject) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Dispatches event to appropriate object.
- Displace(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Displaces the shape around it's center of gravity using a displacement
vector.
- DisplacementSets(Vector<CDVector>, Vector<CDVector>, Vector<CDVector>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
- display - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- display - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- display - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
- display - Variable in class gov.nih.mipav.model.algorithms.NMSimplex
-
- display - Variable in class gov.nih.mipav.model.file.FileInfoImageXML.SurfaceLink
-
Should the surface be displayed.
- display - Variable in class gov.nih.mipav.model.file.FileInfoImageXML.VOILink
-
Display VOI with image.
- display - Variable in class gov.nih.mipav.model.structures.VOIBase
-
displays the voi in the volume renderer:
- display - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- display - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Flag that indicates whether to put capture in a new frame on screen.
- display() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Set the display to true and call GLCanvas.display;
- display(boolean) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Turns the display setting on/off for the
VolumeVOI displayed in the volume renderer.
- display(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
Turns the display setting on/off for the
VolumeVOI displayed in the volume renderer.
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageCrop
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- display(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- display3DWindowOnly() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- displayAboutInfo(FileInfoBase) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
makes the display frame. builds the layout.
- displayAboutInfo(FileInfoImageXML) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
makes the display frame. builds the layout.
- displayAboutInfo(ModelImage, FileInfoDicom, int) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
This method displays all the valid variables, that is, the ones that are no longer equal to their default values.
- displayAboutInfo(ModelImage, FileInfoMincHDF, int) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
This method displays all the valid variables, that is, the ones that are no longer equal to their default values.
- displayAboutInfo(JDialogBase) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Displays the file information.
- displayAboutInfo(JDialogBase, int, int, boolean, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Displays all information about an image.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoAvi
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Abstract method which is used by the extending class to display information about the window.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoBFLOAT
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoBioRad
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoBMP
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoCheshire
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoCOR
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Super requires displayAboutInfo to be defined display of this class is held by JDialogFileInfoDICOM.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoDM3
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoJP2
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoJSON
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoLattice
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
displayAboutInfo - displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoMATLAB
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoMedVision
-
displayAboutInfo - displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoMetaImage
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Displays important information about the image.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Displays important information about the image.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoNRRD
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoOME
-
DOCUMENT ME!
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoPGM
-
displayAboutInfo - displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoPPM
-
displayAboutInfo - displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoRaw
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoSPAR
-
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoSTK
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoSVS
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoTiff
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoTMG
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoVista
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoXML
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
Displays the file information.
- displayAboutInfo(JDialogBase, TransMatrix, int) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- displayAClipPlanePts() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Display the abitrary clipping plane corner points.
- displayAcpc() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
For debug: return the transform as a 4x4 matrix.
- displayAcpcInverse() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
For debug: return the transform inverse as a 4x4 matrix.
- displayADC - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- displayAdvancedMaterialOptions(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Display the Surface Material dialog for the selected surfaces.
- displayAdvancedMaterialOptions(SurfaceAttributes[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
For each file in the selected list, launch the AdvancedMaterialOptions dialog:
- displayAll - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- displayAll() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Causes redisplay of all components.
- displayAndAsk - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
DOCUMENT ME!
- displayAndAsk - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- displayAnnotation(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- displayAnnotationSpheres() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- DisplayArb() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Return true if the arbitrary clip plane is current being displayed.
- DisplayArb(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Turns displaying the arbitrary clip plane on/off.
- displayArbitraryClipPlane(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Displays the arbitrary clip plane position.
- displayAspectTime - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- displayAspectTime - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- displayAspectX - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- displayAspectX - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- displayAspectY - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- displayAspectY - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- displayAspectZ - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- displayAspectZ - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- displayAxes(boolean) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Sets whether axes (either anatomical or x,y,z if no orientation info) are shown or not in one of the corners of
the component.
- displayBoundingBox(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Called from JPanelDisplay.
- displayBreakDownInfo(Object[]) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TableListener
-
- displayBuffer - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- displayCameraParams(float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Display camera related parameters
- displayChanged(GLAutoDrawable, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- displayChanged(GLAutoDrawable, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- displayChanged(GLAutoDrawable, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- displayChannel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- displayCheck - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Button for selecting display in window.
- displayCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- displayCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- displayClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- displayClip(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- displayClipPlane(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Called from JPanelClip.
- displayClipPlane(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Called from JPanelClip.
- displayClipPlane(int, boolean, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Called from JPanelClip.
- displayColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- displayColorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- displayContours - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- displayContours2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- displayConvexityColors() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
toggle between display of mean curvature-based colors and average convexity-based colors.
- displayConvexityColors() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
toggle between display of mean curvature-based colors and average convexity-based colors.
- displayCorticalAnalysis() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
Resets the Mesh Display, when the file is reloaded:
- displayCorticalAnalysis(TriMesh, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
- displayCurvatureColors() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
toggle between display of mean curvature-based colors and average convexity-based colors.
- displayCurvatureColors() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
toggle between display of mean curvature-based colors and average convexity-based colors.
- displayDeformationField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
output image display options:
- displayDTIInfo_JDialogFileInfo(JDialogFileInfo) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- displayDTIInfo_JDialogText(JDialogText, int) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- displayedNeurite(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- displayEPIResult - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- displayError(String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Displays an error in a frame.
- displayError(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
Displays an error in a frame.
- displayError(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Pops up a message dialog to display an error.
- displayEValue - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- displayEVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- displayExit - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
Check boxes enable the user to save and display output images:
- DisplayEye(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Turns displaying the eye clip plane on/off.
- DisplayEyeInv(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Turns displaying the inverse-eye clip plane on/off.
- displayFA - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- displayFilters - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- displayFuzzy - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- displayFuzzy - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- DisplayGlyphs(ModelImage, Renderer, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Display a fiber bundle tract with a Glyph.
- displayGraph - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
- displayGraph - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- displayGroupLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- displayGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Display options panel:
- displayHelp() - Method in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- displayHistogram - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Whether images are updated in real-time based on histogram changes.
- displayImageAsTexture(SurfaceAttributes[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Displays the selected surfaces with the ModelImage as a 3D texture map on the surface triangle mesh.
- displayImagePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Gives user choices for displaying complex images.
- displayImages() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- displayImages() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
This method is used in both the conventional and HIFI case to display result images
- displayImages() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- displayInfo(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Pops up a message dialog to display information.
- displayInNewFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
- displayIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- displayInterpolatedContours - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- displayLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- displayLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- displayLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- displayLattice - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- displayLatticeLabels - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
result image in new frame
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Flag indicating if a new image is to be generated.
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Flag indicating if a new image is to be generated.
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
result image in new frame
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Flag indicating if a new image is to be generated or if the source image is to be replaced
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
DOCUMENT ME!
- displayLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- displayLogMag - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
The check box to indicate whether images are displayed using the log of their magnitude
- displayLUT - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Whether to auto-display lut associated with file.
- displayMasksButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
display masks toggle button.
- DisplayMatrixSize - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- displayMidline - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- displayMode - Variable in class gov.nih.mipav.model.structures.VOI
-
Indicates if the VOI should be shown as a boundary or a solid.
- displayMode - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Indicates which image is to be acted upon when two images are displayed.
- displayMode - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Indicates which image is to be acted upon when two images are displayed.
- displayMode - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Indicates which image is to be acted upon when two images are displayed.
- displayMode - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- displayMode - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Indicates which image is to be acted upon when two images are displayed.
- displayModeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- displayName - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- displayNeurite - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- displayNeurite(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- displayNode(Node, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Toggle display of the scene-graphe node on/off.
- displayNodes(DefaultMutableTreeNode, ViewTableModel) - Static method in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
Recursively parse and display (to JDialogText) the nodes
- displayNumbers(boolean) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
In 4D whether to show numbers for each z slice.
- displayNumbers(boolean) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
In 4D whether to show numbers for each z slice.
- displayObjectParams(float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Display object related parameters
- displayOptions - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- DisplayOptions(Float) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
Creates a new DisplayOptions object.
- displayOrientationCube(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Called from JPanelDisplay.
- displayOutput - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- displayPaintButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- displayPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
The panels that make up this Dialog
- displayPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
MIPAV global options private JPanel globalChangesPanel;.
- displayPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- displayPCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- displayPixelFormat(int) - Method in class gov.nih.mipav.model.file.FileZVI
-
- displayPlane() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Switch to displaying the plane:
- displayPlane() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Switch to displaying the plane:
- displayPrimaryInfo(JDialogText, TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Method called by many extending classes to display basic information in the dialog common to all images.
- displayProgressBar - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
display progress bar or not.
- displayProgressBar - Variable in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
display progress bar or not.
- displayProgressBar - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
display progress bar or not.
- displayQueryResults(int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Displays the query results.
- displayRA - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- displayRangeOfSlicesDialog - Variable in class gov.nih.mipav.model.file.FileIO
-
- DisplayRayCast - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- displayRegisteredB0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- displayReportForm() - Method in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Initializes GUI.
- displayResults() - Method in class gov.nih.mipav.model.algorithms.FitExponential
-
Display results of displaying exponential fitting parameters.
- displayResults() - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
Display results of displaying exponential fitting parameters.
- displayResults() - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
Display results of displaying exponential fitting parameters.
- displayResults() - Method in class gov.nih.mipav.model.algorithms.FitLine
-
Display results of displaying linear fitting parameters.
- displayResults() - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
Display results of displaying lorentz fitting parameters.
- displayResults() - Method in class gov.nih.mipav.model.algorithms.FitMultiExponential
-
Display results of displaying exponential fitting parameters.
- displayResults() - Method in class gov.nih.mipav.model.algorithms.FitRayleigh
-
Display results of displaying linear fitting parameters.
- displayResults() - Method in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
Displays results in a panel with relevant parameters.
- displaySClipPlanePts() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Display the static(eye) clipping plane corner points.
- displaySeam - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- displaySelected(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- displaySelectedLabel(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- displaySlices(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- displaySlices(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- displaySlices(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- displaySlices(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- displaySlices(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- DisplaySlices - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- displaySlicesRadical(ModelImage, ModelImage, ModelImage, ModelImage, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- displaySlicesRadical(ModelImage, ModelImage, ModelImage, ModelImage, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- displaySlicesRadical(ModelImage, ModelImage, ModelImage, ModelImage, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- displaySlicesRadical(ModelImage, ModelImage, ModelImage, ModelImage, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- displaySlicesRadical(ModelImage, ModelImage, ModelImage, ModelImage, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- displaySphere() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Switch to displaying the sphere:
- displaySphere() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Switch to displaying the sphere:
- displaySplash - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- displayStereo(SurfaceAttributes[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
For each file in the selected list, launch the stereo viewer:
- displaySurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- displaySurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- displaySurface(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- displaySurface(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- displaySurface(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Toggle surface display on/off.
- DisplaySurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- displayTable - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
The visible JTable for slice/volume reordering
- displayTensor - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- displayTlrc(int) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Unknown use and currently not being referenced within MIPAV
- displayTotalDialog() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- displayTrace - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- DisplayTract(Renderer, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Displays a polyline fiber bundle tract with the given shader attached.
- displayTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- displayTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- displayTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- DisplayTubes(ModelImage, Renderer, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Displays a tube fiber bundle tract with the given shader attached.
- displayType - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
Data type.
- displayUserInterfacePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- displayView() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- displayVOIs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- displayVOIs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Toggle surface display on/off.
- displayVolumeRaycast(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Toggle volume display on/off.
- displayVolumeSlices(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Toggle 3D Slice display on/off.
- displayVR - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- displayWarning(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Pops up a message dialog to display a warning.
- displayXHairs(boolean) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Sets whether or not crosshairs are shown in the images.
- DisposalMethod() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory.DisposalMethod
-
- dispose() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- dispose() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- dispose() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- dispose() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- dispose() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataChar
-
- dispose() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataDouble
-
- dispose() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataFloat
-
- dispose() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataSparse
-
- dispose() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- dispose() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- dispose() - Method in class gov.nih.mipav.model.file.FileIO
-
- dispose() - Method in class gov.nih.mipav.model.structures.HQueue
-
dispose - cleans up memory.
- dispose() - Method in class gov.nih.mipav.model.structures.VOI
-
- dispose() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Deletes local data members.
- dispose() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- dispose() - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
dispose - Removes member variables.
- dispose() - Method in class gov.nih.mipav.view.JPanelProgressBar
-
DOCUMENT ME!
- dispose() - Method in interface gov.nih.mipav.view.ProgressBarInterface
-
DOCUMENT ME!
- dispose() - Method in class gov.nih.mipav.view.renderer.flythroughview.DijkstraMinCostPath
-
Called to free up object memory for member data.
- dispose() - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelLUTHelper
-
Disposes of image memory and associated objects.
- dispose() - Method in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Called to free up resources.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Sets all variables to null.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Override called when window is closed.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
Called to cleanup any dynamically allocated data members.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Deletes all member variables, clean memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Deletes all local data members.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Removes this object from the ModelImage imageDisplayListener list.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Deletes all local data members.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Clean up memory of this class.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Clean up memory of this class.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Deletes all member variables, clean memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorMIP
-
Clean memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapColor
-
Disposes of image memory and associated objects.
- dispose() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapIntensity
-
Disposes of image memory and associated objects.
- dispose() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Abstract method to force extended classes to implement a disposal method to clean up memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityRGB
-
Sets variables to null and gets rid of frame.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
Dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
Dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDelaunay
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLinearReg
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Deletes any reference shape, mesh and mask image.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFIdentity
-
Dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFLookUp
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFUniformStretch
-
Dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarpLinear
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBFGS
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeCG
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizePS
-
dispose memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSD
-
Dispose memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.IDList
-
Dispose the local memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
Dispose the local memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
Dispose the local memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
Dispose the local memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Deletes all local data members.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Deletes all member variables, clean memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineString
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NeighborKey
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Neighbors2
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortedTreeNodes
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Deletes all member variables, clean memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
memory cleanup.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Dispose local memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Dispose local memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceExtractImage
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Delete memory
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
memory cleanup.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
memory cleanup.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
memory cleanup.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Memory cleanup.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
memory cleanup.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
memory cleanup.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
memory cleanup.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
memory cleanup.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Cleans up local memory.
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOISaveState
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Deletes this LatticeModel
- dispose() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- dispose() - Method in class gov.nih.mipav.view.Rubberband
-
Sets parent component image to null.
- dispose() - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Sets variables to null and gets rid of frame.
- dispose() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Abstract method to force extended classes to implement a disposal method to clean up memory.
- dispose() - Method in class gov.nih.mipav.view.ViewJComponentLUT
-
Sets the variables to null and gets rid of the frame.
- dispose() - Method in class gov.nih.mipav.view.ViewJComponentLUTTable
-
Sets the variables to null and gets rid of the frame.
- dispose() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Disposes of components and frame.
- dispose() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Disposes of components and frame.
- dispose() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Disposes of components and frame.
- dispose() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Disposes of components and frame.
- dispose() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Disposes of components and frame.
- dispose() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Disposes of components and frame.
- dispose() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Disposes of components and frame.
- dispose() - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- dispose() - Method in class gov.nih.mipav.view.VolumePositionFrame
-
DOCUMENT ME!
- dispose(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Dispose memory.
- dispose(boolean) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Dispose memory.
- dispose(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Dispose memory.
- dispose(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Sets all variables to null, disposes, and garbage collects if parameter is set.
- dispose(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Dispose memory.
- dispose(boolean) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Sets all variables to null, disposes, and garbage collects.
- dispose(boolean) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Sets all variables to null, disposes, and garbage collects.
- dispose(boolean) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- dispose(boolean) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Sets all variables to null, disposes, and garbage collects.
- dispose(boolean) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Sets all variables to null, disposes, and garbage collects.
- dispose(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets all variables to null, disposes, and garbage collects.
- dispose(boolean) - Method in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Sets buffers to null.
- dispose(boolean) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Sets all variables to null, disposes, and garbage collects.
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
memory cleanup.
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Clean memory.
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageCrop
-
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- dispose(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- dispose(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeBoundingBox
-
Delete local memory.
- dispose(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Delete local memory.
- dispose(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeNode
-
Delete local memory.
- dispose(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
delete local memory.
- dispose(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeOrientationCube
-
Delete local memory.
- dispose(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
delete local memory.
- dispose(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Delete local memory.
- dispose(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Delete local memory.
- dispose(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Delete local memory.
- disposeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Flag indicates if this object should dispose the input image.
- disposeImage - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
whether or not to dispose of imageA and imageB true unless
ViewJFrameAnimate was passed an unscaled 3D image
- disposeImage - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- disposeImageDependentComponents() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- disposeImageIndependentComponents() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Sets everything to null and prepares this class for destruction.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Sets everything to null and prepares this class for destruction.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Sets class global array variables to null and calls the garbage collector.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Sets class global array variables to null and calls the garbage collector.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Sets everything to null and prepares this class for destruction.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Sets everything to null and prepares this class for destruction.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Dispose of local variables.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
DOCUMENT ME!
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Sets everything to null and prepares this class for destruction.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
Prepares this class for destruction.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Clean up memory.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Clean up memory.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline
-
Prepares this class for destruction.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline25D
-
Prepares this class for destruction.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline2D
-
Prepares this class for destruction.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline3D
-
Prepares this class for destruction.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Dispose of local variables that may be taking up lots of room.
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
remove local memory
- disposeLocal() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
Local cleanup.
- disposeLocal() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- disposeLocal() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Unregisters image and disposes of image memory and associated objects.
- disposeLocal() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Dispose of memory and call the garbage collector.
- disposeLocal() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Removes this from the image display listeners.
- disposeLocal() - Method in class gov.nih.mipav.view.JPanelHistogram
-
Removes and deletes local memory.
- disposeLocal() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Clear memory and garbage collection.
- disposeLocal() - Method in class gov.nih.mipav.view.PatientSlice
-
Default dispose.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelRendererJ3D
-
Clear memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Clear memory and garbage collection.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Clear memory and garbage collection.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Clean memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Clean memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Sets all variables to null, disposes, and garbage collects.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Sets all variables to null, disposes, and garbage collects.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Sets variables to null and gets rid of frame.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Sets all variables to null, disposes.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
Clean memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Disposes of image memory and associated objects.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Clean up memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
DOCUMENT ME!
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorComposite
-
Deallocate memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorLighting
-
Deallocate memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorMIP
-
Clean memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
Clean memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Disposes of image memory and associated objects.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererRayCast
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererShearWarp
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Still needs more work Matt.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Still needs more work Matt.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Clear memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Disposes of components and frame.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Memory cleanup.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Clean up local memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
Dispose the local memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Sets all variables to null, disposes, and garbage collects.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Clear memory and garbage collection.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Sets all variables to null, disposes, and garbage collects.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Dispose the local memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Removes this object from the ModelImage imageDisplayListener list.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelVolume4D
-
Dispose the local memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Features
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.FeaturesSVM
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
dispose memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
dispose memory
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Clean memory.
- disposeLocal() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Memory cleanup.
- disposeLocal() - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Clean up some resources!
- disposeLocal() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Should be called when window is closing to perform cleanup.
- disposeLocal() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Should be called when window is closing to perform cleanup.
- disposeLocal() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Should be called when window is closing to perform cleanup.
- disposeLocal() - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Deletes local memory.
- disposeLocal() - Method in class gov.nih.mipav.view.WindowLevel
-
Clean memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Unregisters image and disposes of image memory and associated objects.
- disposeLocal(boolean) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Nulls the data fields so that memory can be recovered.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Clear memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Clear memory and garbage collection.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Sets all variables to null, disposes, and garbage collects.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Sets all variables to null, disposes, and garbage collects.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Clear memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Dispose memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets all variables to null, disposes, and garbage collects.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Sets all variables to null, disposes, and garbage collects.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Dispose the global variables.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Dispose memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Dispose global variables.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Dispose global variables.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
Clean memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorComposite
-
Clean memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorLighting
-
Clean memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorReflection
-
Clean memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensity
-
Clean memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Clean memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Sets all variables to null, disposes, and garbage collects.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Clean memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Clean memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
Sets all variables to null, disposes, and garbage collects.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Dispose memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
Dispose memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Dispose memory.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Deprecated.
- disposeLocal(boolean) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Sets all variables to null, disposes, and garbage collects (sometimes).
- disposeLocal(boolean) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Dispose of the implementing class.
- disposeMemory() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- disposeMemory() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- disposeMemory() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- disposeMemory() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- disposeMemory() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- disposeMemory() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- disposeMemory() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- disposeProgressBar() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Disposes of progress bar.
- disposeRenderers() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- disposeShared(VolumeImage, VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- disposeSlices(OrderedGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Remove all children (geometries) of the specified ordered group node.
- disposeThisImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Disposes of image memory and LUT Frame.
- dispString - Variable in enum gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
- dissimilarity - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate dissimilarity Sum over i,j of Probability(i,j) * Absolute value(i-j).
- dissimilarity - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate dissimilarity Sum over i,j of Probability(i,j) * Absolute value(i-j).
- dissimilarity - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- dissimilarity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- dissimilarityCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- dissimilarityCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- dist - Variable in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
DOCUMENT ME!
- dist - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Entry
-
- dist - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.Line
-
- dist - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.Line
-
- dist - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.Line
-
- dist - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.Line
-
- dist - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.Line
-
- dist() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- dist(double[], double[][][], int, int, double, double) - Method in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- dist(delaunay.Site, delaunay.Site) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- dist(Vector3f, Vector3f, float[]) - Method in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dist(Vector3f, Vector3f, float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Finds the distance between two points based on resolution.
- DIST(int, int, double[][], double[][], double[], int, int) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- dist_ant - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dist_funct - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- dist_inf - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dist_lef - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dist_med - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dist_pos - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dist_rig - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dist_sq - Variable in class gov.nih.mipav.model.algorithms.KDTree.res_node
-
- dist_sq(double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- dist_sup - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- distance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.distanceIntensityItem
-
DOCUMENT ME!
- distance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLLE.distanceIndexItem
-
DOCUMENT ME!
- distance - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex.DistanceIntensity
-
- distance - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatch
-
- distance(double, double, double, double) - Static method in class gov.nih.mipav.util.MipavMath
-
Finds the distance between two 2D points.
- distance(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Calculates the euclidian distance between two points.
- distance(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Calculates the euclidian distance between two points.
- distance(float, float, float, float) - Static method in class gov.nih.mipav.util.MipavMath
-
Finds the distance between two points.
- distance(float, float, float, float, float, float) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculates the actual distance between two 3D points.
- distance(float, float, float, float, float, float, float[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculates the actual distance between two 3D points using voxel resolutions.
- distance(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Calculates the distance between two points.
- distance(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Calculates the euclidian distance between two points.
- distance(int, int, int, int) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculates the 2D euclidian distance between two points.
- distance(int, int, int, int) - Static method in class gov.nih.mipav.view.Rubberband
-
Calculates the 2D euclidian distance between two points.
- distance(int, int, int, int) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Tests the distance between two points.
- distance(AlgorithmGaussianMixtureModelEM.SubSig, AlgorithmGaussianMixtureModelEM.SubSig, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- distance(Point3, Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- distance(Point3f, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Calculate the Euclidean distance between two points.
- distance(Vector3f, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- distance(Vector3f, Vector3f) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculates the 3D euclidian distance between two points.
- distance(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Calculate the Euclidean distance between two points.
- distance(Vector3f, Vector3f) - Static method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Calculates the 3D euclidian distance between two points.
- distance(Vector3f, Vector3f, float[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculates the 3D euclidian distance between two points.
- distance(Vector3f, Vector3f, float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- distance(Vector3f, Vector3f, float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- distance(Vector3f, Vector3f, float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- distance(Vector3f, Vector3f, float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- distance(Vector3f, Vector3f, float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- distance(Vector3f, Vector3f, float[][]) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculates the 3D euclidian distance between two points.
- Distance(Point3D, Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- Distance(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- distance_first - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- DISTANCE_MAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- DISTANCE_MAP_FOR_SHAPE_INTERPOLATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- DISTANCE_MAP_FOR_SHAPE_INTERPOLATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- DISTANCE_MAP_FOR_SHAPE_INTERPOLATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- DISTANCE_MAP_FOR_SHAPE_INTERPOLATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- distance_S - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- distance_Sig3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- distance_SubSig3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- distanceArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
- distanceCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- distanceDecline - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
- distanceDecline - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- distanceDeclineText - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- distanceFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmDistanceFilter
-
- distanceFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- distanceFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- distanceFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- distanceFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- distanceFilterAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- distanceFilterCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- distanceFilterPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- distanceFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Whether or not to calculate largest distance (only 3D), true by default
- DistanceFromIsocenter - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- distanceGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- distanceGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
- distanceImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- distanceIndexComparator() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLLE.distanceIndexComparator
-
- distanceIndexItem(double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmLLE.distanceIndexItem
-
Creates a new positionWieghtItem object.
- DistanceIntensity(double, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex.DistanceIntensity
-
- distanceIntensityComparator() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.distanceIntensityComparator
-
- DistanceIntensityComparator() - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex.DistanceIntensityComparator
-
- distanceIntensityItem(double, float) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.distanceIntensityItem
-
Creates a new distanceIntensityItem object.
- distanceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
- distanceMap - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- distanceMap - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- distanceMap(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Euclidian distance map.
- distanceMap(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Generates a Euclidian distance map.
- distanceMap1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
distance map 1
- distanceMap2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
distance map 2
- distanceMapAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
- distanceMapAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
DOCUMENT ME!
- distanceMapAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
DOCUMENT ME!
- distanceMapAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
- distanceMapAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
DOCUMENT ME!
- distanceMapAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
DOCUMENT ME!
- distanceMapForShapeInterpolation(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- distanceMapForShapeInterpolation(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- distanceMeasure - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- distanceMeasure - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- distancems2(float[], int, float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
This function performs a truncated FMV cycle.
- distancems3(float[], int, float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- distancePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
DOCUMENT ME!
- distancePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- DistanceS(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- distanceString - Variable in class gov.nih.mipav.model.structures.VOIPoint
-
Distance between segments shown only for active point in polyline_slices
- distanceString() - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Returns the distance string.
- distanceText - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
- distanceToVOI(int, int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the smallest distance from the input point to this contour.
- distanceTransform() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Chamfer matching: Distance transformation coverts binary surface image into grey-level image where each pixel's
intensity = distance to nearest surface pixel.
- distanceTransform25D() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Chamfer matching: Distance transformation coverts binary surface image into grey-level image where each pixel's
intensity = distance to nearest surface pixel.
- distBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- distBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- DistEuclidianAssBorder(CAAMShape, CAAMShape) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Wrapper to calculate the point to curve error.
- DistEuclidianAssBorder(CAAMShape, CAAMShape, CDVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Calculates the point to curve error between two shapes.
- DistEuclidianAssBorder(CDVector, CDVector, CDVector, CDVector, CDVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Calculates the point to curve error between two shapes.
- DistEuclidianPoints(CAAMShape, CAAMShape) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Calculates the point to point error between two shapes.
- DistEuclidianPoints(CDVector, CDVector, CDVector, CDVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Calculates the point to point error between two shapes.
- distL1(AlgorithmMeanShiftClustering.famsPoint, AlgorithmMeanShiftClustering.famsPoint) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- distL1Data(int[], AlgorithmMeanShiftClustering.famsPoint, double, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- disto - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_packet_info_t
-
packet distorsion
- distolayer - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tile_t
-
- distoratio - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
add fixed_quality
- distotile - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tile_t
-
- distsqr(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- distTransformed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- dither_mode - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- div(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- div(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- div(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- div(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- div(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- div(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- div(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- div(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- div(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- div(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- div(CVisRGBA, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- div(CVisRGBA, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- div(CVisRGBA, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- div(CVisRGBA, long) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- div_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- div_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- div_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- div_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- div_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- div_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- div_into(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- div_into(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- div_into(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- div_into(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- div_into(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- div_into(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- div_into(long) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- divButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- DivergenceFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- DivergenceFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.DivergenceFunction
-
- divide(double) - Method in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- divide(libdt.Mat, double) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- divide(libdt.Mat, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- divide(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns a DoubleDouble whose value is (this / y).
- Divide(double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- DIVIDE - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- DIVIDE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- DIVIDE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- divisions - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- dlabad(double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK auxiliary routine DLABAD Original DLABAD created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlabad takes as input the
values computed by dlamch for underflow and overflow, and returns the square root of each of these values if the
log of large is sufficiently big.
- dLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- dlabrd(int, int, int, double[][], int, double[], double[], double[], double[], double[][], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- dlacn2(int, double[], double[], int[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version auxiliary routine 3.4.2 DLACN2.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., September 2012.
- dlacpy(char, int, int, double[][], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of LAPACK version 3.2 auxiliary routine DLACPY.
- dladiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.7.0 LAPACK auxiliary routine DLADIV Original DLADIV created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., Januaary, 2013 dladiv performs complex division in real arithmetic
p + i*q = (a + i*b) / (c + i*d) The algorithm is due to Michael Baudin and RObert L.
- dladiv1(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
LAPACK auxiliary routine (version 3.7.0)
LAPACK is a software package provided by Univ. of Tennessee, Univ. of California Berkeley, Univ. of
Colorado Denver, and NAG Ltd, January, 2013.
- dladiv2(double, double, double, double, double, double) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
LAPACK auxiliary routine version 3.7.0
LAPACK is a software package provided by Univ. of Tennessee, Univ. of California Berkeley, Univ. of
Colorado Denver, and NAG Ltd, January, 2013.
- dlae2(double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK auxiliary routine DLAE2 Original DLAE2 created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlae2 computes the eigenvalues of a 2-by-2 symmetric
matrix [ A B ] [ B C ] On return, rt1[0] is the eigenvalue of the larger absolute value, and rt2[0] is the
eigenvalue of the smaller absolute value.
- dlaebz(int, int, int, int, int, int, double, double, double, double[], double[], double[], int[], double[][], double[], int[], int[][], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is a port of version 3.3.1 LAPACK routine DLAEBZ.
- dlaev2(double, double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary routine DLAEV2 Original DLAEV2 created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlaev2 computes the eigendecomposition of a 2-by-2
symmetric matrix [ a b ] [ b c ] On return rt1[0] is the eigenvalue of the larger absolute value, rt2[0] is the
eigenvalue of the smaller absolute value, and (cs1, sn1) is the unit right eigenvector for rt1[0], giving the
decomposition [ cs1 sn1 ] [ a b ] [cs1 -sn1] = [rt1 0 ] [-sn1 cs1 ] [ b c ] [sn1 cs1] [ 0 rt2]
- dlafts(String, int, int, int, int, double[], int[], double, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK auxiliary test routine DLAFTS Original DLAFTS created by Univ. of
Tennessee, Univ. of California Berkeley, and NAG Ltd., November, 2006 dlafts tests the result vector against the
threshold value to see which tests for this matrix type failed to pass the threshold.
- dlag2(double[][], int, double[][], int, double, double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK auxiliary routine DLAG2 Original DLAG2 created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlag2 computes eigenvalues of a 2 x 2 generalized
eigenvalue problem A - w B, with scaling as necessary to avoid over-/underflow.
- dlagge(int, int, int, int, double[], double[][], int, int[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary test routine DLAGGE Original DLAGGE created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlagge generates a real general m by n matrix A, by
pre- and post- multiplying a real diagonal matrix D with random orthogonal matrices: A = U*D*V.
- dlagsy(int, int, double[], double[][], int, int[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary test routine dlagsy Original DLAGSY created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlagsy generates a real symmetric matrix A, by pre-
and post- multiplying a real diagonal matrix D with a random orthogonal matrix: A = U*D*U'.
- dlagtf(int, double[], double, double[], double[], double, double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is a port of version 3.2 LAPACK routine DLAGTF.
- dlagtm(char, int, int, double, double[], double[], double[], double[][], int, double, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dlagts(int, int, double[], double[], double[], double[], int[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is a port of version 3.3.1 LAPACK routine DLAGTS.
- dlahd2(String) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Port of some code contained in the version 2.0 LAPACK auxiliary test routine DLAHD2 Original DLAHD2 created by
Univ. of Tennessee, Univ. of California Berkeley, and NAG Ltd., November, 2006 dlahd2 prints header information
for the different test paths
- dlaln2(boolean, int, int, double, double, double[][], int, double, double, double[][], int, double, double, double[][], int, double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary routine DLALN2 Original DLALN2 created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlaln2 solves a system of the form (ca A - w D) X = s
B or (ca A' - w D) X = s B with possible scaling ("s") and perturbation of A.
- DLAM - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- dlamc1(int[], int[], boolean[], boolean[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Port of version 3.2 LAPACK auxiliary routine DLAMC1 Original DLAMC1 created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dlamc1 determines the machine parameters given by beta, t, rnd,
and ieee1.
- dlamc2(int[], int[], boolean[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Port of LAPACK version 3.2 auxiliary routine DLAMC2 Original DLAMC2 created by Univ. of Tennessee, Univ. of
California Berkeley, nad NAG Ltd., November, 2006 Determines machine parameters 3 globals are determined: 1.) eps
double The smallest positive number such that computed value(1.0 - eps) < 1.0 2.) rmin double The smallest
normalized number for the machine, given by base**(emin - 1), where base is the floating point value of beta. 3.)
- dlamc3(double, double) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the LAPACK version 3.2 auxiliary routine DLAMC3 Original DLAMC3 created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlamc3 is intended to force a and b to be stored prior
to doing the addition of a and b, for use in situations where optimizers might hold one of these in a register
- dlamc4(int[], double, int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLAMC4 Original DLAMC4 created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlamc4 is a service routine for dlamc2
- dlamc5(int, int, int, boolean, int[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK auxiliary routine DLAMC5 Original DLAMC5 created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlamc5 attempts to compute rmax, the largest machine
floating-point number, without overflow.
- dlamch(char) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK auxiliary routine DLAMCH Original DLAMCH created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlamch determines double precision machine parameters.
- dlaneg(int, double[], double[], double, double, int) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.0 LAPACK auxiliary routine dlaneg.
- dlangb(char, int, int, int, double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLANGB Original DLANGB created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlangb returns the value of
the one norm, or the Frobenius norm, or the infinity norm, or the element of largest absolute value of an n by n
band matrix A, with kl sub-diagonals and ku super-diagonals.
- dlange(char, int, int, double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK auxiliary routine DLANGE Original DLANGE created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlange returns the value of
the one norm, or the Frobenius norm, or the infinity norm, or the element of the largest absolute value of a real
matrix A.
- dlangt(char, int, double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dlanhs(char, int, double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port the the version 3.1 LAPACK auxiliary routine DLANHS Original DLANHS created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlanhs returns the value of the one norm, or the
Frobenius norm, or the infinity norm, or the element of largest absolute value of a Hessenberg matrix A.
- dlansb(char, char, int, int, double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLANSB Original DLANSB created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlansb retruns the value of
the one norm, or the Frobenius norm, or the infinity norm, or the element of largest absolute value of an n by n
symmetric band matrix A, with k super-diagonals.
- dlansp(char, char, int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK auxiliary routine DLANSP Original DLANSP created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlansp returns the value of
the one norm, or the Frobenius norm, or the infinity norm, or the element of largest absolute value of a real
symmetric matrix A, supplied in packed form.
- dlanst(char, int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary routine DLANST Original DLANST created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlanst returns the value of the one norm, or the
Frobenius norm, or the infinity norm, or the element of the largest absolute value of a real symmetric
tridiagonal matrix A
- dlansy(char, char, int, double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK auxiliary routine DLANSY.
- dlantr(char, char, char, int, int, double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dlaord(char, int, double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK auxiliary routine DLAORD.
- dlapy2(double, double) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK auxiliary routine DLAPY2 Original DLAPY2 created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlapy2 returns sqrt(x**2 +
y**2), taking care not to cause unnecessary overflow.
- dlapy3(double, double, double) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
dlapy3 is a port of hte version 3.1 LAPLACK auxiliary routine DLAPY3 Original DLAPY3 created by Univ. of
Tennessee, Univ. of California Berkeley, and NAG Ltd., November, 2006 dlapy3 returns sqrt(x**2+y**2+z**2), taking
care not to cause unnecessary overflow.
- dlaqge(int, int, double[][], int, double[], double[], double, double, double, char[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dlaqp2(int, int, int, double[][], int, int[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
- dlaqps(int, int, int, int, int[], double[][], int, int[], double[], double[], double[], double[], double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
- dlaqsy(char, int, double[][], int, double[], double, double, char[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
- dlar1v(int, int, int, double, double[], double[], double[], double[], double, double, double[], boolean, int[], double[], double[], int[], int[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of the version 3.4.2 LAPACK DLAR1V auxiliary routine.
- dlaran(int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary routine DLARAN Original DLAAN created by Univ. of Tennessee, Univ.
- dlarf(char, int, int, double[], int, double, double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK auxiliary routine DLARF Original DLARF created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlarf applies a real
elementary reflector H to a real m by n matrix C, from either the left or right.
- dlarfb(char, char, char, char, int, int, int, double[][], int, double[][], int, double[][], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLARFB Original DLARFB created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlarfb applies a real block
reflector H or its transpose H' to a real m by n matrix C, from either the left or the right.
- dlarfg(int, double[], double[], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLARFG Original DLARFG created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlarfg generates a real elementary reflector H of
order n, such that H * (alpha) = (beta), H' * H = I. ( x ) ( 0 ) where alpha and beta are scalars, and x is an
(n-1)-element real vector.
- dlarfp(int, double[], double[], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLARFP Original DLARFP created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlarfp generates a real
elementary reflector H of order n, such that H * (alpha) = (beta), H' * H = I. ( x ) ( 0 ) where alpha and beta
are scalars, beta is non-negative, and x is an (n-1)-element real vector.
- dlarft(char, char, int, int, double[][], int, double[], double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK auxiliary routine DLARFT Original DLARFT created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlarft forms the triangular
factor T of a real block reflector H of order n, which is defined as the product of k elementary reflectors.
- dlarfy(char, int, double[], int, double, double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary test routine DLARFY Original DLARFY created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlarfy applies an elementary reflector, or Householder
matrix, H, to an n by n symmetric matrix C, from both the left and the right.
- dlarnd(int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary routine DLARND Original DLARND created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlarnd returns a random real number from a uniform or
normal distribution.
- dlarnv(int, int[], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLARNV Original DLARNV created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlarnv returns a vector of n
random real numbers from a uniform or normal distribution
- dlaror(char, char, int, int, double[][], int, int[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK auxiliary test routine DLAROR.
- dlarot(boolean, boolean, boolean, int, double, double, double[], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary test routine DLAROT Original DLAROT created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlarot applies a (Givens) rotation to two adjacent
rows or columns, where one element of the first and/or last column/row may be a separate variable.
- dlarra(int, double[], double[], double[], double, double, int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.0 LAPACK auxiliary routine dlarra.
- dlarrb(int, double[], double[], int, int, double, double, int, double[], double[], double[], double[], int[], double, double, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.0 LAPACK auxiliary routine dlarrb.
- dlarrc(char, int, double, double, double[], double[], double, int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.0 LAPACK auxiliary routine dlarrc.
- dlarrd(char, char, int, double, double, int, int, double[], double, double[], double[], double[], double, int, int[], int[], double[], double[], double[], double[], int[], int[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.0 LAPACK auxiliary routine dlarrd.
- dlarre(char, int, double[], double[], int, int, double[], double[], double[], double, double, double, int[], int[], int[], double[], double[], double[], int[], int[], double[], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.0 LAPACK auxiliary routine dlarre.
- dlarrf(int, double[], double[], double[], int, int, double[], double[], double[], double, double, double, double, double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.2 LAPACK auxiliary routine dlarrf.
- dlarrj(int, double[], double[], int, int, double, int, double[], double[], double[], int[], double, double, int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.2 LAPACK auxiliary routine dlarrj.
- dlarrk(int, int, double, double, double[], double[], double, double, double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.0 LAPACK auxiliary routine dlarrk.
- dlarrr(int, double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.0 LAPACK auxiliary routine dlarrr.
- dlarrv(int, double, double, double[], double[], double, int[], int, int, int, double, double, double, double[], double[], double[], int[], int[], double[], double[][], int, int[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.0 LAPACK auxiliary routine dlarrv.
- dlartg(double, double, double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLARTG Original DLARTG created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlartg generates a plane
rotation so that [ cs sn ] . [ f ] = [ r ] where cs*cs + sn*sn = 1. [ -sn cs ] [ g ] [ 0 ] If g = 0, then cs = 1
and sn = 0.
- dlaruv(int[], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLARUV Original DLARUV created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlaruv returns a vector of n
random real numbers from a uniform (0,1) distribution (n <= 128).
- dlas2(double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK auxiliary routine DLAS2.
- dlascl(char, int, int, double, double, int, int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK auxiliary routine DLASCL Original DLASCL created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlascl multiplies the m by n
real matrix A by the real scalar cto/cfrom.
- dlaset(char, int, int, double, double, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 auxiliary routine DLASET.
- dlasq1(int, double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DLASQ1. --
-- Contributed by Osni Marques of the Lawrence Berkeley National --
-- Laboratory and Beresford Parlett of the Univ. of California at --
-- Berkeley --
-- November 2008 --
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
..
- dlasq2(int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DLASQ2.
-- Contributed by Osni Marques of the Lawrence Berkeley National --
-- Laboratory and Beresford Parlett of the Univ. of California at --
-- Berkeley --
-- November 2008 --
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
..
- dlasq2(int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.2 LAPACK routine DLASQ2.
-- Contributed by Osni Marques of the Lawrence Berkeley National --
-- Laboratory and Beresford Parlett of the Univ. of California at --
-- Berkeley --
-- November 2008 --
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
..
- dlasq3(int[], int[], double[], int[], double[], double[], double[], double, int[], int[], int[], boolean, int[], double[], double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DLASQ3
-- Contributed by Osni Marques of the Lawrence Berkeley National --
-- Laboratory and Beresford Parlett of the Univ. of California at --
-- Berkeley --
-- November 2008 --
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
..
- dlasq3(int[], int[], double[], int[], double[], double[], double[], double, int[], int[], int[], boolean, int[], double[], double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.2 LAPACK routine DLASQ3
-- Contributed by Osni Marques of the Lawrence Berkeley National --
-- Laboratory and Beresford Parlett of the Univ. of California at --
-- Berkeley --
-- November 2008 --
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
..
- dlasq4(int, int, double[], int, int, double, double, double, double, double, double, double[], int[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DLASQ4.
-- Contributed by Osni Marques of the Lawrence Berkeley National --
-- Laboratory and Beresford Parlett of the Univ. of California at --
-- Berkeley --
-- November 2008 --
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
..
- dlasq4(int, int, double[], int, int, double, double, double, double, double, double, double[], int[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.2 LAPACK routine DLASQ4.
-- Contributed by Osni Marques of the Lawrence Berkeley National --
-- Laboratory and Beresford Parlett of the Univ. of California at --
-- Berkeley --
-- November 2008 --
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
..
- dlasq5(int, int, double[], int, double, double[], double[], double[], double[], double[], double[], boolean) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DLASQ5
-- Contributed by Osni Marques of the Lawrence Berkeley National --
-- Laboratory and Beresford Parlett of the Univ. of California at --
-- Berkeley --
-- November 2008 --
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
..
- dlasq5(int, int, double[], int, double, double[], double[], double[], double[], double[], double[], boolean) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.2 LAPACK routine DLASQ5
-- Contributed by Osni Marques of the Lawrence Berkeley National --
-- Laboratory and Beresford Parlett of the Univ. of California at --
-- Berkeley --
-- November 2008 --
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
..
- dlasq6(int, int, double[], int, double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DLASQ6.
-- Contributed by Osni Marques of the Lawrence Berkeley National --
-- Laboratory and Beresford Parlett of the Univ. of California at --
-- Berkeley --
-- November 2008 --
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
..
- dlasq6(int, int, double[], int, double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.2 LAPACK routine DLASQ6.
-- Contributed by Osni Marques of the Lawrence Berkeley National --
-- Laboratory and Beresford Parlett of the Univ. of California at --
-- Berkeley --
-- November 2008 --
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
..
- dlasr(char, char, char, int, int, double[], double[], double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLASR Original DLASR created by Univ. of Tennessee, Univ.
- dlasrt(char, int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK auxiliary routine DLASRT Original DLASRT created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlasrt sorts the numbers in
d in increasing order if id == 'I' or in decreasing order if id == 'D'.
- dlassq(int, double[], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLASSQ Original DLASSQ created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlassq returns the values
scl and smsq such that (scl**2)*smsq = x[0]**2 + x[incx]**2 + ... + x[(n-1)*incx]**2 + (scale**2)*sumsq The value
of sumsq is assumed to be non-negative and scl returns the value scl = max(scale,abs(x[i])). scale and sumsq
refer to the original supplied values in scale[] and sumsq[]. scl and smsq are the returned values in scale[] and
sumsq[] that overwrite the orginal values.
- dlasv2(double, double, double, double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK auxiliary routine DLASV2 Original DLASV2 created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dlasv2 computes the singular
value decomposition of a 2-by-2 triangular matrix [ f g ] [ 0 h ].
- dlaswp(int, double[][], int, int, int, int[], int) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- dlatb4(String, int, int, int, char[], int[], int[], double[], int[], double[], char[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.4.0 LAPACK test routine DLATB4.
- dlatm1(int, double, int, int, int[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary test routine DLATM1 Original DLATM1 created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlatm1 computes the entries of D[0...n-1] as specified
by mode, cond, and irsign. idist and iseed determine the generation of random numbers. dlatm1 is called by dlatmr
to generate random test matrices for LAPACK programs.
- dlatm2(int, int, int, int, int, int, int, int[], double[], int, double[], double[], int, int[], double) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary test routine DLATM2 Original DLATM2 created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlatm2 returns the (i,j) entry of a random matrix of
dimension (m,n) described by the other parameters.
- dlatm3(int, int, int, int, int[], int[], int, int, int, int[], double[], int, double[], double[], int, int[], double) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is the port of the version 3.1 LAPACK auxiliary test routine DLATM3 Original DLATM3 created by Univ. of
Tennessee, Univ. of California Berkeley, and NAG Ltd., November, 2006 dlatm3 returns the (isub, jsub) entry of a
random matrix of dimension (m,n) described by the other parameters.
- dlatm4(int, int, int, int, int, double, double, double, int, int[], double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary test routine DLATM4 Original DLATM4 created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlatm4 generates basic square matrices, which may
later be multiplied by others in order to produce test matrices.
- dlatmr(int, int, char, int[], char, double[], int, double, double, char, char, double[], int, double, double[], int, double, char, int[], int, int, double, double, char, double[][], int, int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DLATMR Original DLATMR created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dlatmr generates random matrices of various types for testing
LAPACK programs. dlatmr operates by applying the following sequence of operations: 1.)
- dlatms(int, int, char, int[], char, double[], int, double, double, int, int, char, double[][], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DLATMS Original DLATMS created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dlatms generates random matrices with specified singular values
(or symmetric/hermitian with specified eigenvalues) for testing LAPACK programs.
- dlatrd(char, int, int, double[][], int, double[], double[], double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary routine DLATRD Original DLATRD created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dlatrd reduces nb rows and columns of a real symmetric
matrix A to symmetric tridiagonal form by an orthogonal similarity transformation Q'*A*Q, and returns the
matrices V and W which are needed to apply the transformation to the unreduced part of A.
- dlatrs(char, char, char, char, int, double[][], int, double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version auxiliary routine 3.4.2 DLATRS.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., September 2012.
- dlauu2(char, int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version auxiliary routine 3.4.2 DLAUU2.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., September 2012.
- dlauum(char, int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version auxiliary routine 3.4.2 DLAUUM.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., September 2012.
- dLdA(double) - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
Partial derivative of laplace dist with respect to A.
- dLdA(double) - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
Partial derivative of Lorentz distribution with respect to A.
- dLdbeta(double) - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
Partial derivative of laplace dist with respect to beta.
- dLdgamma(double) - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
Partial derivative of Lorentz distribution with respect to gamma.
- dLdmu(double) - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
Partial derivative of laplace dist with respect to mu.
- dLdxMedian(double) - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
Partial derivative of Lorentz distribution with respect to xMedian.
- dloc_i - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- dloc_j - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- dlqt01(int, int, double[][], double[][], double[][], double[][], int, double[], double[], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of the version 3.1 LAPACK test routine DLQT01.
- dlqt02(int, int, int, double[][], double[][], double[][], double[][], int, double[], double[], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK routine DLQT02.
- dlqt03(int, int, int, double[][], double[][], double[][], double[][], int, double[], double[], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK test routine DLQT03.
- DM3 - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Gatan's Digital Micrograph version 3 file format. extension: .dm3
- dmap(double[][], double[][], double[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- DMatch() - Constructor for class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatch
-
- DMatch(int, int, int, double) - Constructor for class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatch
-
- DMatchComparator() - Constructor for class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatchComparator
-
- dMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- dMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- dMax - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- DMC - Variable in class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- DMCANP(int, double[][], double[][], boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- DMEY - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- dmey_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- dMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- dMin - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- dModel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
- DMPHYC(int, double[][], double[][], boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- dn - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dwt_t
-
- dn - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_v4dwt_t
-
- DN - Static variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- DNL - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Define Number of Lines segment identifier.
- DNL - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- DNL - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- dnormj(int, double[], int) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- dnormj(int, DoubleDouble[], int) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- dnrm2(int, double[], int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- dnrm2(int, double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the 10/14/93 DNRM2 function Original code written by Sven Hammarling, Nag Ltd. dnrm2 returns
the euclidean norm of a vector via the function sqrt(x'*x)
- dnrm2(int, DoubleDouble[], int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- do_barray_io(libjpeg.jpeg_decompress_struct, libjpeg.jvirt_barray_control, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- do_block_smoothing - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- do_color - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- do_cross_validation() - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- do_cross_validation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- do_cross_validation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- do_csvd - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- do_deblur - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- do_display - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- DO_ERROR_TEST - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- do_estimate_kernel - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- do_fancy_upsampling - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- DO_NOT_DISPOSE - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory.DisposalMethod
-
- DO_NOT_TAKE_OWNERSHIP - gov.nih.mipav.model.algorithms.CeresSolver.Ownership
-
- do_osvd - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- DO_OUTPUT_NEW_IMAGE - Static variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Label used for the parameter indicating whether an algorithm should output a new image.
- DO_PROCESS_3D_AS_25D - Static variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Label used for the parameter indicating whether an algorithm should process a 3D image as a set of 2D slices
instead of a 3D volume.
- DO_PROCESS_RGB - Static variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Label used for the parameter indicating whether to process the each channel of an RGB image (ignored for
grayscale images).
- DO_PROCESS_SEPARABLE - Static variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Label used for the parameter indicating whether separable convolution kernels should be used in an algorithm.
- DO_PROCESS_WHOLE_IMAGE - Static variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Label used for the parameter indicating whether the whole image should be processed (true), or
just areas within VOIs (false).
- do_sarray_io_byte(libjpeg.jpeg_decompress_struct, libjpeg.jvirt_sarray_control, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- do_sarray_io_short(libjpeg.jpeg_decompress_struct, libjpeg.jvirt_sarray_control, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- do_shrinking() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver_NU
-
- do_shrinking() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- do_shrinking() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver_NU
-
- do_shrinking() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- do_svd - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- do25D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Only applies to 3D, if true do slice by slice.
- do25D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Only applies to 3D, if true do slice by slice.
- do25D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
flag indicating 2.5D processing.
- do25D - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
Currently only do5D = true is implemented.
- do25D - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalVariance
-
- do25D - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
In 3D if do25D == true, process each slice separately.
- do25D - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Flag indicating 2.5D processing.
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- do25D - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- do25DCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- do25DCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- do2D - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- do3D - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- do4D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
Whether this algorithm will utilize 4D processing optimization
- doAdjacent - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- doAdjMark - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- doAIFTransfer - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- doAllVolumes - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- doAllVolumes - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- doAnnotations - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- doAutomaticLabels - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- doAutomaticLabels() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- doAutomaticLabels() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
Returns the automatic labels flag.
- doAutomaticLabels() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- doAverage - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityThreshold
-
DOCUMENT ME!
- doAveraging - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
if true create an image averaging together the slices in the filtered version.
- doAveraging - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- DOB - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- doBayesShrinkThresholdComputation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
- doBayesShrinkThresholdComputation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- doBayesShrinkThresholdComputation - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- doBayesShrinkThresholdComputation - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
- doBayesShrinkThresholdComputation - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- doBayesShrinkThresholdComputation - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- DOBDD - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- doBlue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- DOBMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- doByteAddClip(byte[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doByteAddPromote(byte[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doByteAverage(byte[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the average between 2 images
- doByteMax(byte[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the max between 2 4d-byte-images by doing math on an xyt buffer that is built from both images
- doByteMin(byte[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the minimum between 2 images
- doByteNormClip(byte[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doByteNormPromote(byte[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doByteStdDev(byte[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the standard deviation between 2 images
- DOBYYYY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- doCalcThresholdVolume() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Returns true if 'Calculate threshold volume' is selected.
- doCalcThresholdVolume() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Whether or not to calculate the threshold volume.
- doCellTracking - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
When true, do a Cell-tracking version of Active GVF Contours:.
- doCellTrackingCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
Checkbox to turn cell-tracking on/off:.
- doCenter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- doCenter - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- doCenter - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Whether to show the center of rotation point in the volume and allow the user to change it.
- doCheckerboardAnimate - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- doClip - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- doClip - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- doClip - Variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
whether to clip or promote
- doClip - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- doClip(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Calculates the rotation for the arbitrary clip plane.
- doClose - Variable in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
DOCUMENT ME!
- doClose - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
DOCUMENT ME!
- doCoarseness - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
- doCoarseness - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- doCollapse() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
The top-level edge collapse operation.
- doColocWithThresholds - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- doColocWithThresholds - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- doColor - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
- doColorCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
CheckBox to turn color registration on or off:.
- DoCombinedPCA() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Performs principal component analysis on the shape and the texture data.
- doContrast - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
- doContrast - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- doConv() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.FlipAngleChangeListener
-
- doConvTre - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- doCorrelationRatioSmoothed - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Whether the available cost functions should be performed
- doCorrelationRatioSmoothed - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Whether the available cost functions should be performed
- DoCParamExperiments(Vector<CDVector>, Vector<CDVector>, CDMatrix, CDMatrix, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Performs a set of model parameter displacement experiments on the
training set given a set of displacment vectors.
- doCrop - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- doCrop - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- DOCUMENT_NAME - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- DOCUMENT_NAME - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- documentGroup - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- documentID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Include
-
attributes.
- documentName - Variable in class gov.nih.mipav.model.file.FileSVS
-
- documentName - Variable in class gov.nih.mipav.model.file.FileTiff
-
- documentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.ExperimenterRef
-
- documentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.ExperimentRef
-
- documentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo.LightSourceRef
-
attributes.
- documentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.InstrumentRef
-
Attributes.
- documentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser.Pump
-
- documentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Plate.ScreenRef
-
- documentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.ProjectRef
-
- documentSubtype - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- documentType - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- doCurveIntersect - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- doDecimation(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- doDeleteRows(JTable) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Removes the currently selected rows from table.
- doDenoise - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- doDenoise - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- doDicom - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- doDicom() - Method in class gov.nih.mipav.view.dialogs.JDialogOrder
-
Accessor that returns flag for ordering to dicom.
- doDilate - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
When true, dilate the cell radius before finding the next contour:.
- doDilateCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
Checkbox to turn cell-tracking on/off:.
- doDimensions - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- doDirectionality - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
- doDirectionality - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- doDoubleAddClip(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doDoubleAddClipComplex(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doDoubleAverage(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the average between 2 images
- doDoubleAverageComplex(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the average between 2 images
- doDoubleMax(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the max between 2 images
- doDoubleMaxComplex(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the max between 2 images
- doDoubleMin(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the minimum between 2 images
- doDoubleMinComplex(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the minimum between 2 images
- doDoubleNormClip(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doDoubleStdDev(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the standard deviation between 2 images
- doDrag - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
no adjusted slice movements with mouseDrag
- doDrag - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- doDrag - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- doEdgeDetect(AlgorithmEmbeddedConfidenceEdgeDetection.BgImage, AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- doEllipticFourierDescription - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
- doEndSlices - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- doEnhanced - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
Whether dicom files are saved in enhanced format.
- doEnhanced() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Whether to save dicom files in enhanced format.
- doEnhanced(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Sets the flag for saving dicom files in enhanced format.
- doEnhanced(boolean, int[]) - Method in class gov.nih.mipav.model.file.FileDicom
-
- doErnst - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
The variable representing whether the blur should be performed.
- doesSubsetDicomTagTableExist() - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Quietly checks to see if the subset dicom dictionary exists on disk.
- doExitCmdLineOnError() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Tells whether or not to exit on an error when running from the command line
- dof - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
The number of degrees of freedom to use when registering the original image against the flipped image.
- dof - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- dof - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Degrees of freedom.
- dof - Variable in class gov.nih.mipav.model.file.FileAfni
-
FUNC_TT_TYPE Student t Degrees-of-Freedom (DOF).
- dof - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- dof - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- DOF - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- DOF - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Maximum degrees of freedom when running the optimization.
- DOF - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Maximum degrees of freedom when running the optimization.
- DOF - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Maximum degrees of freedom when running the optimization.
- DOF - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Maximum degrees of freedom when running the optimization.
- DOF - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Maximum degrees of freedom when running the optimization.
- DOF - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Maximum degrees of freedom when running the optimization.
- DOF - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Maximum degrees of freedom when running the optimization.
- DOF - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Maximum degrees of freedom when running the optimization.
- DOF - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Maximum degrees of freedom when running the optimization.
- DOF - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Maximum degrees of freedom when running the optimization.
- DOF - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- DOF - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- DOF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- DOF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- DOF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- DOF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- DOF - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- doFAMS(AlgorithmMeanShiftClustering.fams_hash_entry[][], int[], AlgorithmMeanShiftClustering.fams_cut[][], AlgorithmMeanShiftClustering.fams_hash_entry2[][], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- doFFT(double[], double[], int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Perform one dimension fast fourier transformation from start slice to end slice on given data, which includes x,
y or orientation.
- doFFT(float[], float[], int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Perform one dimension fast fourier transformation from start slice to end slice on given data, which includes x,
y or orientation.
- doFilter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
if true create a filtered version of the original image.
- doFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- doFindKLIteration(int, int, float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- doFloatAddClip(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doFloatAddClipARGB(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doFloatAddClipComplex(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doFloatAddPromote(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doFloatAddPromoteComplex(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doFloatAverage(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the average between 2 images
- doFloatAverageARGB(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the average between 2 images
- doFloatAverageComplex(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the average between 2 images
- doFloatMax(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the max between 2 images
- doFloatMaxARGB(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the max between 2 images
- doFloatMaxComplex(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the max between 2 images
- doFloatMin(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the minimum between 2 images
- doFloatMinARGB(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the minimum between 2 images
- doFloatMinComplex(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the minimum between 2 images
- doFloatNormClip(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doFloatNormClipARGB(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doFloatNormPromote(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doFloatStdDev(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the standard deviation between 2 images
- doFloatStdDevARGB(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the standard deviation between 2 images
- doForce - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
force precision to display at maximum.
- doForceInPlace() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Checks whether the dialog should force the algorithm to replace the image (no new frame)
- doForcePrecision() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
DOCUMENT ME!
- DOFT2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- doFuzzyCmean(ModelImage, Vector<Vector<ModelImage>>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- doFuzzyCmean(ModelImage, Vector<Vector<ModelImage>>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- doFuzzyCmean(ModelImage, Vector<Vector<ModelImage>>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- doFuzzyCmean(ModelImage, Vector<Vector<ModelImage>>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- doFuzzyCmean(ModelImage, Vector<Vector<ModelImage>>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- doFuzzyCmean(ModelImage, Vector<Vector<ModelImage>>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Generate the Fuzzy-C means classes from the CED image
- doFuzzyCmean(ModelImage, Vector<Vector<ModelImage>>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Generate the Fuzzy-C means classes from the CED image
- dog - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< current GSS data.
- dog - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3DC
-
- doGEBigEndianPixelData - Variable in class gov.nih.mipav.model.file.FileDicom
-
- doGeometricCenterLabel - Variable in class gov.nih.mipav.model.structures.VOIBase
-
If doGeometricCenterLabel = true and if active == false and if closed =
true, execute drawGeometricCenterLabel when in drawSelf
- DOGLEG - gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyType
-
- DOGLEG(int, double[], int, double[], double[], double, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- dogleg_step_norm_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- dogleg_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- dogleg_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- dogleg_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyOptions
-
- dogleg_type_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- DoglegStrategy(CeresSolver.TrustRegionStrategyOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- DoglegStrategyFixtureEllipse() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureEllipse
-
- DoglegStrategyFixtureEllipseCorrectGaussNewtonStep() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureEllipseCorrectGaussNewtonStep
-
- DoglegStrategyFixtureEllipseCorrectGaussNewtonStep() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DoglegStrategyFixtureEllipseTrustRegionObeyedSubspace() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureEllipseTrustRegionObeyedSubspace
-
- DoglegStrategyFixtureEllipseTrustRegionObeyedSubspace() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DoglegStrategyFixtureEllipseTrustRegionObeyedTraditional() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureEllipseTrustRegionObeyedTraditional
-
- DoglegStrategyFixtureEllipseTrustRegionObeyedTraditional() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DoglegStrategyFixtureEllipseValidSubspaceBasis() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureEllipseValidSubspaceBasis
-
- DoglegStrategyFixtureEllipseValidSubspaceBasis() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DoglegStrategyFixtureValley() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureValley
-
- DoglegStrategyFixtureValleyCorrectStepGlobalOptimumAlongGradient() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepGlobalOptimumAlongGradient
-
- DoglegStrategyFixtureValleyCorrectStepGlobalOptimumAlongGradient() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DoglegStrategyFixtureValleyCorrectStepLocalOptimumAlongGradient() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepLocalOptimumAlongGradient
-
- DoglegStrategyFixtureValleyCorrectStepLocalOptimumAlongGradient() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DoglegType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.DoglegType
-
- doGraph - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- doGraph - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Produce 2 output graphs - 1 for rotation and 1 for 2 translations.
- doGraph - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Produce 2 output graphs - 1 for 3 rotations and 1 for 3 translations.
- doGraph - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Produce 2 output graphs - 1 for rotation and 1 for 2 translations.
- doGraph - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Produce 2 output graphs - 1 for 3 rotations and 1 for 3 translations.
- doGraph - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- doGraph - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- doGraph - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- doGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- doHifiTre - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- doImageDivision(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
takes the data of the two images, one unsharp'd and the other gaussian blur'd, and divides the two pixel-by-pixel
to find the locally normalized value for each pixel.
- doInflation(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
surface inflation operation 0 = initialize 1 = inflate 2 = terminate.
- doInflation(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
surface inflation operation 0 = initialize 1 = inflate 2 = terminate.
- doInflationStep() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
surface inflation.
- doInflationStep() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
surface inflation.
- doInner - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- DoInnerIterationsIfNeeded() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- doIntAddClip(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doIntAddClipARGB(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doIntAddPromote(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doIntAddPromoteARGB(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doIntAverage(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the average between 2 images
- doIntAverageARGB(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the average between 2 images
- doIntensityOnLeftBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Check boxes for whether right and left mouse clicks produce default actions.
- doIntMax(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the max between 2 images
- doIntMaxARGB(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the max between 2 images
- doIntMin(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the minimum between 2 images
- doIntMinARGB(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the minimum between 2 images
- doIntNormClip(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doIntNormClipARGB(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doIntNormPromote(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doIntNormPromoteARGB(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 short images
- doIntStdDev(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the standard deviation between 2 images
- doIntStdDevARGB(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the standard deviation between 2 images
- doInvMat - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- doIRSPGR() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.FlipAngleChangeListener
-
- doIt(int, int, int, Vector, MediaLocator) - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
DOCUMENT ME!
- doJTEM - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- doJTEM - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- doJTEM - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Turns the full version of Powell's algorithm on/off.
- doJTEM - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Turns the full version of Powell's algorithm on/off.
- doJTEM - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- doJTEM - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
When true, the full version of JTEM Powell search is used in the registration algorithm.
- doJTEM - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
When true, the full version of JTEM Powell search is used in the registration algorithm.
- doLevelset(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- doLinearRescale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
Boolean value.
- doLinearRescale - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
If true, the range of second image is same as the range of the first image.
- DoLineSearch(Vector<Double>, Vector<Double>, double, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- doLinkedScrolling(int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- doLogResult - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
Boolean value.
- doLogResult - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
If true, calculates the log of the result image for better visualization.
- doLogX - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- doLogX - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- doLogY - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- doLogY - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- doLongAddClip(long[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doLongAddPromote(long[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doLongAverage(long[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the average between 2 images
- doLongMax(long[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the max between 2 images
- doLongMin(long[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the minimum between 2 images
- doLongNormClip(long[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doLongNormPromote(long[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doLongStdDev(long[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the standard deviation between 2 images
- doLS - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- doMahalanobisDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
- doMahalanobisDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
- domain - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- domainMax - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- domainMin - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- domainPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- doMatch - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- doMatch - Variable in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
DOCUMENT ME!
- doMeanShiftAdaptiveIteration(AlgorithmMeanShiftClustering.fams_res_cont, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- doMedian - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSymmetricNearestNeighbor
-
- doMedian - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- doMinimumPerimeterPolygon - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
- doMultiLevel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- doMultiLevel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- doMultiThread - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
- doMultiThread - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- doMultiThread - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
- doMultiThread - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- doMultiThread - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
- doMultiThread - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- doMultiThread - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- doMultiThread - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
- doMultiThread - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- doMultiThread - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- doMultiThread - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- doMultiThread - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- doMultiThread - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- doMutualInfoSmoothed - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Whether the available cost functions should be performed
- doMutualInfoSmoothed - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Whether the available cost functions should be performed
- doneButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Button to indicate that the painting is finished and the dialog and attached image frame should be closed.
- doneLeastSquares - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- doneLeastSquares - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- doneSignal - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- doneSignal - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- donorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- donorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- donorIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
DOCUMENT ME!
- donorIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- doNormMutualInfoSmoothed - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Whether the available cost functions should be performed
- doNormMutualInfoSmoothed - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Whether the available cost functions should be performed
- doNormXCorr - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Whether the available cost functions should be performed
- doNormXCorr - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Whether the available cost functions should be performed
- dontAskAgain - Variable in class gov.nih.mipav.view.dialogs.JDialogOrder
-
Whether to ask user next time choice is available for AFNI ordering.
- dontOpenFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- doOCL - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
- doOldLayout() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
This is an alternative layout arrangement.
- doOnlyActiveContours - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Boolean for if the algorithm should ONLY check active contours
- doOr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
If true, or thresholds.
- doOr - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- doOrients - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
flag for turning on/off using the image orientations to match the images
- doOrients - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- doOrients - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- doOrigins - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
flag for turning on/off using the image origins to match the images
- doOrigins - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- doOrigins - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- doOrigins - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
When loading an image into B slot, should origins and orients be matched?
- doOuter - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- doOutputNewImage() - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
DOCUMENT ME!
- doP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- doPad - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- doPad - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
The boolean value to determine whether to pad the original image or not.
- doPadding(int[], int[]) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Insert the blank images to the end of image.
- doParseFile() - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
- doParseFile() - Static method in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
- doPathStep(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Take the specified number of steps along the current path using the current path step size.
- doPathStep(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Take the specified number of steps along the current path using the current path step size.
- doPathStep(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- DoPCA() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Apply PCA analysis
- DoPCA(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Performs the principal component analysis on the data items.
- doPick(int, int, Vector3f, Vector3f, Vector3f, Vector3f, Vector3f, boolean[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- doPick(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Locate the surface that corresponds to a picking operation in the viewer window.
- DoPoseExperiments(Vector<CDVector>, Vector<CDVector>, CDMatrix, CDMatrix, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Performs a set of pose parameter displacement experiments on the training
set given a set of displacment vectors.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Register the result image(s) in the script runner.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Register the result image(s) in the script runner.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
Store the result image in the script runner's image table now that the
action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Store the algorithm's result image (if one has been created).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Store the result image in the script runner's image table now that the
action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Store the result image in the script runner's image table now that the
action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMSER
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Perform any actions required after the running of the algorithm is complete.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
DOCUMENT ME!
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Store the result image in the script runner's image table now that the action execution is finished.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Register the result image in the script runner.
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Used to perform actions after the execution of the algorithm is completed (e.g., put the result image in the
image table).
- doPostAlgorithmActions() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Store the result image in the script runner's image table now that the
action execution is finished.
- doPredict(int[][], Features[], Model, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Predict
-
Note: The streams are NOT closed
- doPredict(int[][], Features[], Model, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Predict
-
- doPredict(int[][], FeaturesSVM[], svm_model, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_predict
-
- doPredict(BufferedReader, Writer, Model) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Predict
-
Note: The streams are NOT closed
- doPreview - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Whether preview mode is turned on.
- doProcess3DAs25D() - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
DOCUMENT ME!
- doProcessRGB() - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
DOCUMENT ME!
- doProcessSeparable() - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
DOCUMENT ME!
- doProcessWholeImage() - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
DOCUMENT ME!
- doPseudoColor(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Turn curvature-based color map on/off.
- doPutInQuicklist() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Whether or not to put the file into the recently used image list after saving
- doPutInQuicklist(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Sets the flag for putting the image into the recently used image list
- doRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- doRefMark - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- doReg - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- doRegionB - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- doRegionB - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- doRegistrationEnd(ModelImage, ModelImage, Vector<Vector<ModelImage>>, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Near the base, base contour starts as the initial estimate, and repeat
the same process toward the end slices.
- doRegistrationEnd(ModelImage, ModelImage, Vector<Vector<ModelImage>>, int, int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Near the base, base contour starts as the initial estimate, and repeat
the same process toward the end slices.
- doRegistrationMid(ModelImage, ModelImage, Vector<Vector<ModelImage>>, int, int, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
The proposed model uses 2D registration to register 2D slices from the
middle slice to the adjacent slice.
- doRegistrationMid(ModelImage, ModelImage, Vector<Vector<ModelImage>>, int, int, int, int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
The proposed model uses 2D registration to register 2D slices from the
middle slice to the adjacent slice.
- doRegistrationStart(ModelImage, ModelImage, Vector<Vector<ModelImage>>, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Near the apex, apex contour starts as the initial estimate, and repeat
the same process toward the end slices.
- doRegistrationStart(ModelImage, ModelImage, Vector<Vector<ModelImage>>, int, int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Near the apex, apex contour starts as the initial estimate, and repeat
the same process toward the end slices.
- DoRegression(CDMatrix, CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLinearReg
-
Calculates the regression matrix, R from the set of experiments
in C and X, obtaining the relationship: C = RX.
- doRelative - Variable in class gov.nih.mipav.view.WindowLevel
-
If true, window/level adjusted relative to the current transfer function values
If false, window/level adjusted to the absolute image position values
- doRename - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- doReplace - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- doResample - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
The boolean value to determine whether to resample the original image or not.
- doResample(int[], float[], boolean, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Resample the images to power of 2.
- doReversibleTransformation() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- dorg2l(int, int, int, double[][], int, double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK routine DORG2L Original DORG2L created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dorg2l generates an m by n real matrix Q with orthonormal
columns, which is defined as the last n columns of a product of k elementary reflectors of order m Q = H[k-1] ...
- dorg2r(int, int, int, double[][], int, double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK routine DORG2R Original DORG2R created by Univ. of Tennessee, Univ. of
California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dorg2r generates an m by n real
matrix Q with orthonormal columns, which is defined as the first n columns of a product of k elementary
reflectors of order m Q = H[0] H[1] ...
- dorgbr(char, int, int, int, double[][], int, double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DORGBR.
- dorgl2(int, int, int, double[][], int, double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- dorglq(int, int, int, double[][], int, double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK routine DORGLQ.
- dorgql(int, int, int, double[][], int, double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK routine DORGQL Original DORGQL created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dorgql generates the m-by-n real matrix Q with orthonormal
columns, which is defined as the last n columns of a product of k elementary reflectors of order m Q = H[k-1] ...
- dorgqr(int, int, int, double[][], int, double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK routine DORGQR Original DORGQR created by Univ. of Tennessee, Univ. of
California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dorgqr generates an m-by-n real
matrix Q with orthonormal columns, which is defined as the first n columns of a product of k elementary
reflectors of order m Q = H[0] H[1] ...
- dorgtr(char, int, double[][], int, double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK routine DORGTR Original DORGTR created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dorgtr generates a real orthogonal matrix Q which is defined as
the product of n-1 elementary reflectors of order N, as returned by dsytrd: If uplo = 'U', Q = H[n-2] ...
- doRician - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
If true, use unbiased version of NLM to deal with Rician noise in MRI
- doRician - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
- doRicianCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
- dorm2l(char, char, int, int, int, double[][], int, double[], double[][], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK routine DORM2L Original DORM2L created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dorm2l overwrites the general real m by n matrix C with Q * C
if side == 'L' and trans == 'N', or Q' * C if side == 'L' and trans == 'T', or C * Q if side == 'R' and trans ==
'N', or C * Q' if side == 'R' and trans == 'T' where Q is a real orthogonal matrix defined as a product of k
elementary reflectors Q = H[k-1] ...
- dorm2r(char, char, int, int, int, double[][], int, double[], double[][], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.2 LAPACK routine DORM2R Original DORM2R created by Univ. of Tennessee, Univ. of
California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dorm2r overwrites the general real m
by n matrix C with Q * C if side = 'L' and trans = 'N', or Q'* C if side = 'L' and trans = 'T', or C * Q if side
= 'R' and trans = 'N', or C * Q' if side = 'R' and trans = 'T', where Q is a real orthogonal matrix defined as
the product of k elementary reflectors Q = H(0) H(1) . . .
- dormbr(char, char, char, int, int, int, double[][], int, double[], double[][], int, double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- dorml2(char, char, int, int, int, double[][], int, double[], double[][], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- dormlq(char, char, int, int, int, double[][], int, double[], double[][], int, double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- dormql(char, char, int, int, int, double[][], int, double[], double[][], int, double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is a port of version 3.3.1 LAPACK routine DORMQL.
- dormqr(char, char, int, int, int, double[][], int, double[], double[][], int, double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.2 LAPACK routine DORMQR Original DORMQR created by Univ. of Tennessee, Univ. of
California Berkeley, Univ. of Colorado Denver, and NAG Ltd., November, 2006 dormqr overwrites the general real m
by n matrix C with side = 'L' side = 'R' trans = 'N': Q * C C * Q trans = 'T': Q**T * C C * Q**T where Q is a
real orthogonal matrix defined as the product of k elementary reflectors Q = H(0) H(1) . . .
- dormtr(char, char, char, int, int, double[][], int, double[], double[][], int, double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is a port of version 3.2 LAPACK routine DORMTR.
- doRotateCenter - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- dort01(char, int, int, double[][], int, double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is the port of version 3.1 LAPACK test routine DORT01.
- dort01(char, int, int, double[][], int, double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is the port of version 3.1 LAPACK test routine DORT01.
- dort03(char, int, int, int, int, double[][], int, double[][], int, double[], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SVD
-
- doRun() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
For prostate and knees projects, run the re-orientation algorithm to create three orthogonal images from either
axial image (prostate) or saggittal image(knees).
- doSaveAllOutputs - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- doSaveEnhancedDicom() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- DoSearch(double, double, double, CeresSolver.LineSearchSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ArmijoLineSearch
-
- DoSearch(double, double, double, CeresSolver.LineSearchSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearch
-
- DoSearch(double, double, double, CeresSolver.LineSearchSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WolfeLineSearch
-
- doSecondIteration - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
If true, do second iteration excluded subtrhesholded region from first iteration.
- doSecondIteration - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- doSecondIteration - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- doSecondIteration - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- doSegmentation() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
First time the dialog called, this function is invoked to do
segmentation.
- doSegmentation() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
First time the dialog called, this function is invoked to do
segmentation.
- doSegmentation() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
First time the dialog called, this function is invoked to do
segmentation.
- doSegmentation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
First time the dialog called, this function is invoked to do
segmentation.
- doSegmentation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
First time the dialog called, this function is invoked to do
segmentation.
- doSegmentation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Driver to do automatic prostate segmentation.
- doSegmentation(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
First time the dialog called, this function is invoked to do
segmentation.
- doSegmentation(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
First time the dialog called, this function is invoked to do
segmentation.
- doSeparable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Whether to use the edge detection algorithm with a separable convolver.
- doSetupOnly - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
- DoShapeAlignment(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Alignes shapes and calc mean- and reference-shape.
- doShortAddClip(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doShortAddClipARGB(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doShortAddPromote(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doShortAddPromoteARGB(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates addition between 2 images
- doShortAverage(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the average between 2 images
- doShortAverageARGB(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the average between 2 images
- doShortMax(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the max between 2 images
- doShortMaxARGB(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the max between 2 images
- doShortMin(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the minimum between 2 images
- doShortMinARGB(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the minimum between 2 images
- doShortNormClip(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doShortNormClipARGB(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 images
- doShortNormPromote(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 short images
- doShortNormPromoteARGB(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the norm between 2 short images
- doShortStdDev(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the standard deviation between 2 images
- doShortStdDevARGB(short[]) - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Calculates the standard deviation between 2 images
- doSigmaResolutionCorrection() - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
DOCUMENT ME!
- doSpec() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.FlipAngleChangeListener
-
- doSpgr() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.FlipAngleChangeListener
-
- doSplit - Variable in class gov.nih.mipav.view.RubberbandLine
-
boolean for if this is a VOI Splitter (not line drawer)
- doStamp - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
Used for stamping DICOM images with MIPAV reference.
- doStamp() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Whether or not to stamp DICOM images.
- doStamp(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Sets the flag for stamping DICOM images with a reference to MIPAV as a secondary processor.
- doStampSecondary() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- doStampSecondary(boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Sets whether MIPAV will edit the DICOM tags of this image with a secondary stamp.
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
Whether to use subsampling when registering the original image against the flipped image.
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
If true subsample for levelEight, levelFour and levelTwo analyses.
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
If true subsample for levelEight, levelFour and levelTwo analyses.
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
if true subsample.
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
If true subsample.
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
if true subsample.
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
If true subsample for levelEight, levelFour and levelTwo analyses.
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
if true subsample.
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
If true subsample.
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
if true subsample.
- doSubsample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
If true subsample for levelEight, levelFour and levelTwo analyses.
- doSubsample - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- doSubsample - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- doSubsample - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- doSubsample - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- doSubsample - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- doSubsample - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- doSubsample - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- dot(int, float[], float[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
conjugate gradient methods.
- dot(LIBSVM.svm_node[], LIBSVM.svm_node[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- dot(LIBSVM.svm_node[], LIBSVM.svm_node[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- dot(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- dot(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- dot(svm_node[], svm_node[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- Dot(NVectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- Dot(VectorD) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- Dot(VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- DOT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.Iso2022Converter
-
- DOT_FLAG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- DOT_RANGE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- DOT_RANGE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- DOT_SIGN - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.Iso2022Converter
-
- doTalairach - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- doTest - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- doTest - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- doTIFFOrientation - Variable in class gov.nih.mipav.model.file.FileIO
-
- doTIFFOrientation - Variable in class gov.nih.mipav.model.file.FileSVS
-
- doTIFFOrientation - Variable in class gov.nih.mipav.model.file.FileTiff
-
- doTile - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- doTile - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- dotprd(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- dotProduct(double, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- dotProduct(Vector3f, Vector3f) - Method in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- dotProduct(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Finds dotproduct of two vectors.
- DotProduct(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- DoTransformCols(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- DoTransformRows(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- doTraverse(File) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- doTrilinear(ModelImage, ModelImage, float[], TransMatrix, ViewJProgressBar) - Static method in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
Performs trilinear interpolation on black and white image data.
- dotTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- DOUBLE - gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
An IEEE754:1985 64-bit double is stored in the tag's value.
- DOUBLE - gov.nih.mipav.model.file.FileSVS.Type
-
double precision 8 byte IEEE format
- DOUBLE - gov.nih.mipav.model.file.FileTiff.Type
-
double precision 8 byte IEEE format
- DOUBLE - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type double (64 bits per voxel).
- DOUBLE - gov.nih.mipav.view.dialogs.AlgorithmTreParams.InversionType
-
- DOUBLE - Static variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- DOUBLE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- DOUBLE - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- DOUBLE - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type double (64 bits per voxel).
- DOUBLE_IMAGE_TAG - Static variable in class gov.nih.mipav.model.file.FileDicom
-
The tag marking the start of the double image data.
- DOUBLE_STRING - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
A string with VR "OD" is stored in the tag's value.
- DOUBLE_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type signed double.
- double2D - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- double2DC - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- double3D - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- double3DC - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- DoubleArrayPointer - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- DoubleArrayPointer(double[], int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.DoubleArrayPointer
-
- doubleBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- doubleBuffer - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- doubleBuffer - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- doubleBuffer - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- doubleCheck - Variable in class gov.nih.mipav.model.structures.jama.LUSOL
-
- doubleDigits - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
I1MACH(14) = 53.
- DoubleDistance(double, double, double, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- DoubleDouble - Class in gov.nih.mipav.util
-
Immutable, extended-precision floating-point numbers
which maintain 106 bits (approximately 30 decimal digits) of precision.
- DoubleDouble() - Constructor for class gov.nih.mipav.util.DoubleDouble
-
Creates a new DoubleDouble with value 0.0.
- DoubleDouble(double) - Constructor for class gov.nih.mipav.util.DoubleDouble
-
Creates a new DoubleDouble with value x.
- DoubleDouble(double, double) - Constructor for class gov.nih.mipav.util.DoubleDouble
-
Creates a new DoubleDouble with value (hi, lo).
- DoubleDouble(DoubleDouble) - Constructor for class gov.nih.mipav.util.DoubleDouble
-
Creates a new DoubleDouble with value equal to the argument.
- DoubleDouble(String) - Constructor for class gov.nih.mipav.util.DoubleDouble
-
Creates a new DoubleDouble with value equal to the argument.
- DoubleDoubleDigits - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
I1MACH(14) = 106.
- doubleEntryBox - Variable in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- doubleInversion - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- doubleInvRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- doubleToBytes(double, boolean, byte[]) - Static method in class gov.nih.mipav.model.file.FileBase
-
converts from double to bytes
- doubleValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Returns the value of the specified number as a double.
- doubleValue() - Method in class gov.nih.mipav.util.DoubleDouble
-
Converts this value to the nearest double-precision number.
- DoublyConnectedSC - Class in gov.nih.mipav.model.algorithms
-
- DoublyConnectedSC() - Constructor for class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- DoublyConnectedSC(int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- DoublyConnectedSC(ModelImage, ModelImage, double[][], double[][], int, int, int, int, double) - Constructor for class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- DoublyEvenMagicSquare(int[][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- DoUntransformCols(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- DoUntransformRows(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- doUpdateOrigin - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- doVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- doVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- doVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- doVOI(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- doVOI(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Performs the VOI Action Command.
- doVOI(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from VOIManagerInterface.
- doVoiImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
flag indicating whether output should be VOI image or mask image
- doVOIImage - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
flag indicating whether output should be VOI image or mask image
- doVOISubtraction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
- doVOISubtraction - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- doWaveletImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- doWaveletImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- doWaveletImages - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- doWaveletImages - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
DOCUMENT ME!
- doWinLevOnRightBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Check boxes for whether right and left mouse clicks produce default actions.
- down - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- DOWN - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
The down arrow key.
- DOWN_EXP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- downButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- downButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- DownButton(String) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.DownButton
-
Creates new button with correct icon and given tool tip.
- DownButton(String) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelCamera.DownButton
-
Creates new button with correct icon and given tool tip.
- DownButton(String) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.DownButton
-
Creates new button with correct icon and given tool tip.
- downcoef(boolean, double[], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- downcoef(char, double[], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- downcoef_axis(double[][][], PyWavelets.ArrayInfo, double[][][], PyWavelets.ArrayInfo, PyWavelets.DiscreteWavelet, int, PyWavelets.Coefficient, PyWavelets.MODE, int, PyWavelets.DiscreteTransformType) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- downcoef_axis(double[][], PyWavelets.ArrayInfo, double[][], PyWavelets.ArrayInfo, PyWavelets.DiscreteWavelet, int, PyWavelets.Coefficient, PyWavelets.MODE, int, PyWavelets.DiscreteTransformType) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- downheap(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- downsample(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- downSample(int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- downsample_2 - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT_cl_kernels
-
- downsample_2x_3d - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Kernels
-
- downsample2D(double[], int, int, double[], int, int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- downsample3D(double[], int, int, int, double[], int, int, int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- downsampled_height - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- downsampled_width - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- downSampleFactor - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- downSampleResolutions - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- downsampling_convolution(double[], int, double[], int, double[], int, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- downsampling_convolution_periodization(double[], int, double[], int, double[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- downSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- downSlice() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Decrements the current slice in local coordinates and returns
the new position in the view-independent file coordinates.
- downSlice() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Decrements the current slice in local coordinates and returns the new position in the view-independent file
coordinates.
- doWriteAsUnknownLength() - Method in class gov.nih.mipav.model.file.FileDicomSQ
-
Whether the sequence should be written using an unknown length, can be set as a preference by user.
- doWriteAsUnknownLength() - Method in class gov.nih.mipav.model.file.FileDicomSQItem
-
Whether the sequence should be written using an unknown length, can be set as a preference by user.
- doX - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- doXY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- doXY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- doY - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- doZ - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- dp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry2
-
- DP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- dparam(double[][], double[], double[][], double[][], double[], double[][], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- DPARFN(int, double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- dpbsv(char, int, int, int, double[][], int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations3
-
- dpbtrf(char, int, int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations3
-
- dpColumnNames - Static variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
Column names for data provenance
- dpColumnNames - Static variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Column names for data provenance
- dpDialog - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Data provenance dialog
- dpDialog - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Dialog to display the mipav system data provenance
- dpfun(double[], int, double[], double[], int[], int[], boolean[], double[][]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.dpfun
-
- dph - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
phi (in degrees)
- dplot(double[][], double[], double[][], double[], double[], double[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- dpModel - Variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
The table model
- dpocon(char, int, double[][], int, double, double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version routine 3.4.0 DPOCON.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November, 2011.
- dpoequ(int, double[][], int, double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
- dpofa(double[][], int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- dporfs(char, int, int, double[][], int, double[][], int, double[][], int, double[][], int, double[], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version routine 3.4.0 DPORFS.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November, 2011.
- dposv(char, int, int, double[][], int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version routine 3.4.0 DPOSV.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November, 2011.
- Dposv(int, double[][], int, double[], double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- dposvx(char, char, int, int, double[][], int, double[][], int, char[], double[], double[][], int, double[][], int, double[], double[], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version routine 3.4.1 DPOSVX.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., April, 2012.
- dpot01(char, int, double[][], int, double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version test routine 3.4.0 DPOT01.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November 2011.
- dpot02(char, int, int, double[][], int, double[][], int, double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version test routine 3.4.0 DPOT02.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November 2011.
- dpot03(char, int, double[][], int, double[][], int, double[][], int, double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version test routine 3.4.0 DPOT03.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November 2011.
- dpot05(char, int, int, double[][], int, double[][], int, double[][], int, double[][], int, double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version test routine 3.4.0 DPOT05.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November 2011.
- dpotf2(char, int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK routine DPOTF2 Original DPOTF2 created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dpotf2 computes the Cholesky factorization of a real symmetric
positive definite matrix A.
- dpotf2(char, int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version routine 3.4.2 DPOTF2.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., September 2012.
- dpotrf(char, int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the DPOTRF version 3.1 LAPACK routine Original DPOTRF created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dpotrf computes the Cholesky factorization of a real symmetric
positive definite matrix A
- dpotrf(char, int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version routine 3.4.0 DPOTRF.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November, 2011.
- dpotri(char, int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version routine 3.4.0 DPOTRI.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November 2011.
- dpotrs(char, int, int, double[][], int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version routine 3.4.0 DPOTRS.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November, 2011.
- dqage() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqage c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c integrand examinator, globally adaptive, c gauss-kronrod c***author
piessens,robert,appl. math.
- dqage() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqage c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c integrand examinator, globally adaptive, c gauss-kronrod c***author
piessens,robert,appl. math.
- DQAGE - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Integral without singularities, discontinuities, or infinite bounds.
- DQAGE - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Integral without singularities, discontinuities, or infinite bounds.
- dqagie(double, int, double) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the orginal FORTRAN code whose header is given below: c***begin prologue dqagie c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1,h2a4a1 c***keywords automatic
integrator, infinite intervals, c general-purpose, transformation, extrapolation, c globally adaptive c***author
piessens,robert,appl. math & progr. div - k.u.leuven c de doncker,elise,appl. math & progr. div - k.u.leuven
c***purpose the routine calculates an approximation result to a given c integral i = integral of f over
(bound,+infinity) c or i = integral of f over (-infinity,bound) c or i = integral of f over
(-infinity,+infinity), c hopefully satisfying following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)) c***description c c integration over infinite intervals c standard
fortran subroutine
- dqagie(DoubleDouble, int, DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the orginal FORTRAN code whose header is given below: c***begin prologue dqagie c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1,h2a4a1 c***keywords automatic
integrator, infinite intervals, c general-purpose, transformation, extrapolation, c globally adaptive c***author
piessens,robert,appl. math & progr. div - k.u.leuven c de doncker,elise,appl. math & progr. div - k.u.leuven
c***purpose the routine calculates an approximation result to a given c integral i = integral of f over
(bound,+infinity) c or i = integral of f over (-infinity,bound) c or i = integral of f over
(-infinity,+infinity), c hopefully satisfying following claim for accuracy c
abs(i-result).le.max(epsabs,epsrel*abs(i)) c***description c c integration over infinite intervals c standard
fortran subroutine
- DQAGIE - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Integral over (bound, +infinity), (-infinity, bound), or (-infinity, +infinity).
- DQAGIE - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Integral over (bound, +infinity), (-infinity, bound), or (-infinity, +infinity).
- dqagpe() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
dqagpe.
- dqagpe() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
dqagpe.
- DQAGPE - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Integral over (lower, upper) with user specified break points.
- DQAGPE - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Integral over (lower, upper) with user specified break points.
- dqagse() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqagse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c (end point) singularities, extrapolation, c globally adaptive c***author
piessens,robert,appl. math.
- dqagse() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqagse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, general-purpose, c (end point) singularities, extrapolation, c globally adaptive c***author
piessens,robert,appl. math.
- DQAGSE - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Integral over (lower, upper) which can handle end point singularities.
- DQAGSE - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Integral over (lower, upper) which can handle end point singularities.
- dqawce() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawce c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,j4 c***keywords automatic
integrator, special-purpose, c cauchy principal value, clenshaw-curtis method c***author piessens,robert,appl.
- dqawce() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawce c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,j4 c***keywords automatic
integrator, special-purpose, c cauchy principal value, clenshaw-curtis method c***author piessens,robert,appl.
- DQAWCE - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Cauchy principal value
- DQAWCE - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Cauchy principal value
- dqawfe() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawfe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1 c***keywords automatic
integrator, special-purpose, c fourier integrals, c integration between zeros with dqawoe, c convergence
acceleration with dqelg c***author piessens,robert,appl. math.
- dqawfe() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawfe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a1 c***keywords automatic
integrator, special-purpose, c fourier integrals, c integration between zeros with dqawoe, c convergence
acceleration with dqelg c***author piessens,robert,appl. math.
- DQAWFE - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Automatic integrator, special-purpose, fourier integrals
- DQAWFE - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Automatic integrator, special-purpose, fourier integrals
- dqawoe(double, double, double, double, int, double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawoe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c integrand with oscillatory cos or sin factor, c clenshaw-curtis method, (end
point) singularities, c extrapolation, globally adaptive c***author piessens,robert,appl. math.
- dqawoe(DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, int, DoubleDouble[], DoubleDouble[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawoe c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c integrand with oscillatory cos or sin factor, c clenshaw-curtis method, (end
point) singularities, c extrapolation, globally adaptive c***author piessens,robert,appl. math.
- DQAWOE - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Automatic integrator, integrand with oscillatory cosine or sine factor
- DQAWOE - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Automatic integrator, integrand with oscillatory cosine or sine factor
- dqawse() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c algebraico-logarithmic end point singularities, c clenshaw-curtis method
c***author piessens,robert,appl. math.
- dqawse() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqawse c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1 c***keywords automatic
integrator, special-purpose, c algebraico-logarithmic end point singularities, c clenshaw-curtis method
c***author piessens,robert,appl. math.
- DQAWSE - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Adaptive integrator for integrands with algebraic or logarithmic singularities at endpoints.
- DQAWSE - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Adaptive integrator for integrands with algebraic or logarithmic singularities at endpoints.
- dqc25c(double, double, double, double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqc25c c***date
written 810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2,j4 c***keywords 25-point
clenshaw-curtis integration c***author piessens,robert,appl. math.
- dqc25c(DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is the port of the original FORTRAN routine whose header is given below: c***begin prologue dqc25c c***date
written 810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2,j4 c***keywords 25-point
clenshaw-curtis integration c***author piessens,robert,appl. math.
- dqc25f(double, double, double, int, int, double[], double[], int[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25f c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords integration rules for
functions with cos or sin c factor, clenshaw-curtis, gauss-kronrod c***author piessens,robert,appl. math.
- dqc25f(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25f c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords integration rules for
functions with cos or sin c factor, clenshaw-curtis, gauss-kronrod c***author piessens,robert,appl. math.
- dqc25s(double, double, double[], double[], double[], double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25s c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords 25-point clenshaw-curtis
integration c***author piessens,robert,appl. math.
- dqc25s(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqc25s c***date written
810101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a2 c***keywords 25-point clenshaw-curtis
integration c***author piessens,robert,appl. math.
- dqcheb(double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqcheb c***refer to
dqc25c,dqc25f,dqc25s c***routines called (none) c***revision date 830518 (yymmdd) c***keywords chebyshev series
expansion, fast fourier transform c***author piessens,robert,appl. math.
- dqcheb(DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqcheb c***refer to
dqc25c,dqc25f,dqc25s c***routines called (none) c***revision date 830518 (yymmdd) c***keywords chebyshev series
expansion, fast fourier transform c***author piessens,robert,appl. math.
- dqelg(int[], double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqelg c***refer to
dqagie,dqagoe,dqagpe,dqagse c***routines called d1mach c***revision date 830518 (yymmdd) c***keywords epsilon
algorithm, convergence acceleration, c extrapolation c***author piessens,robert,appl. math.
- dqelg(int[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqelg c***refer to
dqagie,dqagoe,dqagpe,dqagse c***routines called d1mach c***revision date 830518 (yymmdd) c***keywords epsilon
algorithm, convergence acceleration, c extrapolation c***author piessens,robert,appl. math.
- dqext() - Method in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
DOCUMENT ME!
- dqk15(double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
The is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math.
- dqk15(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
The is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math.
- DQK15 - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Gauss-Kronod quadrature rule
- DQK15 - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Gauss-Kronod quadrature rule
- dqk15i(double, int, double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15i c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a2,h2a4a2 c***keywords 15-point
transformed gauss-kronrod rules c***author piessens,robert,appl. math.
- dqk15i(DoubleDouble, int, DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk15i c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a3a2,h2a4a2 c***keywords 15-point
transformed gauss-kronrod rules c***author piessens,robert,appl. math.
- dqk15w(double, double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This a a port of the original FORTRAN whose header is given below: c***begin prologue dqk15w c***date written
810101 (yymmdd) c***revision date 830518 (mmddyy) c***category no. h2a2a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math.
- dqk15w(DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This a a port of the original FORTRAN whose header is given below: c***begin prologue dqk15w c***date written
810101 (yymmdd) c***revision date 830518 (mmddyy) c***category no. h2a2a2 c***keywords 15-point gauss-kronrod
rules c***author piessens,robert,appl. math.
- dqk21(double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk21 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 21-point gauss-kronrod
rules c***author piessens,robert,appl. math.
- dqk21(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk21 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 21-point gauss-kronrod
rules c***author piessens,robert,appl. math.
- DQK21 - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Gauss-Kronod quadrature rule
- DQK21 - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Gauss-Kronod quadrature rule
- dqk31(double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk31 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 31-point gauss-kronrod
rules c***author piessens,robert,appl. math.
- dqk31(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN whose header is given below: c***begin prologue dqk31 c***date written
800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 31-point gauss-kronrod
rules c***author piessens,robert,appl. math.
- DQK31 - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Gauss-Kronod quadrature rule
- DQK31 - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Gauss-Kronod quadrature rule
- dqk41(double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk41 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 41-point
gauss-kronrod rules c***author piessens,robert,appl. math.
- dqk41(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk41 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 41-point
gauss-kronrod rules c***author piessens,robert,appl. math.
- DQK41 - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Gauss-Kronod quadrature rule
- DQK41 - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Gauss-Kronod quadrature rule
- dqk51(double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk51 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 51-point
gauss-kronrod rules c***author piessens,robert,appl. math.
- dqk51(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk51 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 51-point
gauss-kronrod rules c***author piessens,robert,appl. math.
- DQK51 - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Gauss-Kronod quadrature rule
- DQK51 - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Gauss-Kronod quadrature rule
- dqk61(double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk61 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 61-point
gauss-kronrod rules c***author piessens,robert,appl. math.
- dqk61(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqk61 c***date
written 800101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a1a2 c***keywords 61-point
gauss-kronrod rules c***author piessens,robert,appl. math.
- DQK61 - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Gauss-Kronod quadrature rule
- DQK61 - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Gauss-Kronod quadrature rule
- dqmomo(double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqmomo c***date
written 820101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,c3a2 c***keywords modified
chebyshev moments c***author piessens,robert,appl. math.
- dqmomo(DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqmomo c***date
written 820101 (yymmdd) c***revision date 830518 (yymmdd) c***category no. h2a2a1,c3a2 c***keywords modified
chebyshev moments c***author piessens,robert,appl. math.
- dqng() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqng c***date
written 800101 (yymmdd) c***revision date 810101 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, smooth integrand, c non-adaptive, gauss-kronrod(patterson) c***author piessens,robert,appl. math.
- dqng() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqng c***date
written 800101 (yymmdd) c***revision date 810101 (yymmdd) c***category no. h2a1a1 c***keywords automatic
integrator, smooth integrand, c non-adaptive, gauss-kronrod(patterson) c***author piessens,robert,appl. math.
- DQNG - Static variable in class gov.nih.mipav.model.algorithms.Integration2
-
Non-adaptive integration.
- DQNG - Static variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Non-adaptive integration.
- dqpsrt(int, int, int[], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqpsrt c***refer
to dqage,dqagie,dqagpe,dqawse c***routines called (none) c***revision date 810101 (yymmdd) c***keywords
sequential sorting c***author piessens,robert,appl. math.
- dqpsrt(int, int, int[], DoubleDouble[], DoubleDouble[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
This is a port of the original FORTRAN routine whose header is given below: c***begin prologue dqpsrt c***refer
to dqage,dqagie,dqagpe,dqawse c***routines called (none) c***revision date 810101 (yymmdd) c***keywords
sequential sorting c***author piessens,robert,appl. math.
- dqpt01(int, int, int, double[][], double[][], int, double[], int[], double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
- dqrt01(int, int, double[][], double[][], double[][], double[][], int, double[], double[], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DQRT01.
- dqrt02(int, int, int, double[][], double[][], double[][], double[][], int, double[], double[], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DQRT02.
- dqrt03(int, int, int, double[][], double[][], double[][], double[][], int, double[], double[], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DQRT03.
- dqrt11(int, int, double[][], int, double[], double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
- dqrt12(int, int, double[][], int, double[], double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
- dqrt13(int, int, int, double[][], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- dqrt14(char, int, int, int, double[][], int, double[][], int, double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK test routine DQRT14.
- dqrt15(int, int, int, int, int, double[][], int, double[][], int, double[], int[], double[], double[], int[], double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK test routine DQRt15.
- dqrt16(char, int, int, int, double[][], int, double[][], int, double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK test routine DQRT16.
- dqrt17(char, int, int, int, int, double[][], int, double[][], int, double[][], int, double[][]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK test routine DQRT17.
- DQT - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Define Quantization Table segment identifier.
- DQT - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- DQT - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- dquad(double[][], double[][], int[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- dragBBpt - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
DOCUMENT ME!
- dragButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- dragCenterPt - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
DOCUMENT ME!
- draggingGlobal - Variable in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp
-
- dragPoint(ModelLUT) - Method in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Update the LUT view when drag the control points.
- dragPoint(MouseEvent) - Method in interface gov.nih.mipav.view.HistoLUTParent
-
Handle the dragging of a transfer function point.
- dragPoint(MouseEvent) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- dragPoint(MouseEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Placeholder.
- dragPoint(MouseEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Placeholder.
- dragPoint(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Drag a point on the Histo LUT to another value.
- dragPoint(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
DOCUMENT ME!
- dragPoint(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Placeholder.
- dragPoint(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Handle the dragging of a transfer function point.
- dragPoint(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Placeholder.
- DRAPER24D - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- DRAPER24D - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- DRAPER24D - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- DRAPER24D - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- draw(int, Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.Background
-
- draw(int, Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
-
- draw(VOIBase, float[], int[], int, Graphics, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draws the input VOI in the ViewJComponentEditImage
- draw(Vector<double[][]>, Vector<double[][][]>, double[], Vector<double[]>, GaussianMixtureModelsIncompleteSamples.GMM, int, String, boolean, int, String, GaussianMixtureModelsIncompleteSamples.Background, Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- draw_all_points() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- draw_all_points() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- draw_point(LIBSVM.svm_toy_frame.point) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- draw_point(svm_toy.point) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- draw3DVOIs(Graphics, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- drawArrow(VOIText, Graphics2D, int, int, int, int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draw the VOIText arror on screen.
- drawAxes(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Called from the display function.
- drawAxes(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Called from the display function.
- drawAxes(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Convenience method called by paintComponent().
- drawAxisAccoutrements(Graphics2D) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Draw the histogram border and the stationary marker ticks (function point ticks are drawn in
drawTransferFunctionHandleTicks(Graphics2D).
- drawBackgroundSizeLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- drawBoundingRect(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Draws the cropping rectangle.
- drawBrainSurfaceFlattenerPoint(Point3f, int[], int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Draws the point selected on the Mesh for the brainsurfaceFlattener.
- drawCenterMark(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Convenience method called by paintComponent().
- drawContour(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- drawContours() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- drawCrosshairLines(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Convenience method called by drawCrosshairsXY().
- drawCrosshairs(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Draws the crosshairs for this oriented tri-planar component.
- drawCrosshairStubs(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Convenience method called by drawCrosshairs.
- drawDijkstraEuclidianPath(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
drawPath draws the Dijkstra path and Euclidian paths and adds them to the corresponding m_kDijkstraGeodesicGroup
and m_kEuclidianGeodesicGroups.
- drawDijkstraEuclidianPath(TriMesh, TriMesh, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
drawPath draws the Dijkstra path and Euclidian paths and adds them to the corresponding m_kDijkstraGeodesicGroup
and m_kEuclidianGeodesicGroups.
- drawDijkstraEuclidianPoint(Point3f, Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Draw the user-selected point as a sphere on the triangle mesh, the sphere is added to all three drawing groups:
m_kSmoothedGeodesicGroup, m_kDijkstraGeodesicGroup, and m_kEuclidianGeodesicGroup.
- drawDijkstraEuclidianPoint(TriMesh, Vector3f, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Draw the user-selected point as a sphere on the triangle mesh, the sphere is added to all three drawing groups:
m_kSmoothedGeodesicGroup, m_kDijkstraGeodesicGroup, and m_kEuclidianGeodesicGroup.
- DrawEvolve(LseSegmenter, float[]) - Method in class gov.nih.mipav.view.ViewJFrameFastMarching2
-
DOCUMENT ME!
- DrawEvolve(LseSegmenter, float[]) - Method in class gov.nih.mipav.view.ViewJFrameFastMarching3
-
DOCUMENT ME!
- DrawEvolve2D(LseSegmenter) - Method in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
DOCUMENT ME!
- DrawEvolve3D(LseSegmenter) - Method in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
DOCUMENT ME!
- drawFallback(Graphics2D, float) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Glyph
-
Fallback rendering path when OpenGL is not available.
- DrawFastMarch(LseSegmenter, float[]) - Method in class gov.nih.mipav.view.ViewJFrameFastMarching2
-
DOCUMENT ME!
- DrawFastMarch(LseSegmenter, float[]) - Method in class gov.nih.mipav.view.ViewJFrameFastMarching3
-
DOCUMENT ME!
- DrawFastMarch2D(LseSegmenter) - Method in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
DOCUMENT ME!
- DrawFastMarch3D(LseSegmenter) - Method in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
DOCUMENT ME!
- drawGeodesic() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Enables picking points and drawing the Geodesic curve on the surfaces.
- drawGeodesic() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Enables picking points and drawing the Geodesic curve on the surfaces.
- drawGeodesicPath(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
drawPath draws the Geodesic path as a LineArray and adds it to the children of the m_kSmoothedGeodesicGroup
object, it also draws the Dijkstra path and Euclidian paths and adds them to the corresponding
m_kDijkstraGeodesicGroup and m_kEuclidianGeodesicGroups.
- drawGeodesicPath(TriMesh, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
drawPath draws the Geodesic path as a LineArray and adds it to the children of the m_kSmoothedGeodesicGroup
object, it also draws the Dijkstra path and Euclidian paths and adds them to the corresponding
m_kDijkstraGeodesicGroup and m_kEuclidianGeodesicGroups.
- drawGeodesicPoint(Point3f, Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Draw the user-selected point as a sphere on the triangle mesh, the sphere is added to all three drawing groups:
m_kSmoothedGeodesicGroup, m_kDijkstraGeodesicGroup, and m_kEuclidianGeodesicGroup.
- drawGeodesicPoint(TriMesh, Vector3f, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Draw the user-selected point as a sphere on the triangle mesh, the sphere is added to all three drawing groups:
m_kSmoothedGeodesicGroup, m_kDijkstraGeodesicGroup, and m_kEuclidianGeodesicGroup.
- drawGeometricCenter(VOIBase, Graphics) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draws the geometric center on screen.
- drawGradicules(Graphics, float, float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Draws the gradicules (the half-image lines which demarcate lengths in the image).
- drawImages(int[], int[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Note that alphaBlending is applied with 1 component taken as zero if both components are not present -for
example, if either imageA or imageB but not both has red, then the red component is alphaBlended with zero.
- drawImageText(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Draws text onto the image, such as the slice number.
- drawingElement - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- drawingHeight - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- drawingPane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Associate structure of the scroll pane to resize the panel properly.
- DrawingPane() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe.DrawingPane
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelCamera.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelClip.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelSculptor.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.JPanelHistoLUT.DrawingPanel
-
Deprecated.
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.JPanelHistoRGB.DrawingPanel
-
Deprecated.
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM.DrawingPanel
-
- DrawingPanel() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase.DrawingPanel
-
- drawingWidth - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- drawLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Geodesic line draw control label.
- drawLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Geodesic line draw control label.
- drawLabels() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Draws the Z box, the X bar and the Y bar:.
- drawLast(Graphics) - Method in class gov.nih.mipav.view.Rubberband
-
Draws the appropriate geometric shape at the last rubberband location.
- drawLast(Graphics) - Method in class gov.nih.mipav.view.RubberbandEllipse
-
Draws an arc based on the rubberband's last bounds.
- drawLast(Graphics) - Method in class gov.nih.mipav.view.RubberbandLine
-
Draws a line based on the rubberband's last bounds.
- drawLast(Graphics) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Draws a line based on the rubberband's last bounds.
- drawLast(Graphics) - Method in class gov.nih.mipav.view.RubberbandPolyline
-
Draws a line based on the rubberband's last bounds.
- drawLast(Graphics) - Method in class gov.nih.mipav.view.RubberbandProtractor
-
Draws a line based on the rubberband's last bounds.
- drawLast(Graphics) - Method in class gov.nih.mipav.view.RubberbandRectangle
-
Draws a rectangle based on the rubberband's last bounds.
- drawLength(Graphics, VOIBase, float[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draws length of the open contour.
- drawLine(int, int, int, double[], float, Vector<Point3D>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- drawLine(int, int, int, float[], float, Vector<Point3D>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- drawLine(Graphics, int, int) - Method in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- drawLine(Graphics, int, int, int, int) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- DrawLine(int[], int[], int[], int[], double[], boolean, ModelSimpleImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Draw lines
- drawMode - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- drawModeCheckBox - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- drawModeLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- drawNarrowBand(JDialogProstateSegmentationRegBSpline3D.Edge, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Draw the narrow band region.
- drawNext(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draws the livewire from the last anchor point to the current mouse position.
- drawNext(Graphics) - Method in class gov.nih.mipav.view.Rubberband
-
Draws the appropriate geometric shape at the next rubberband location.
- drawNext(Graphics) - Method in class gov.nih.mipav.view.RubberbandEllipse
-
Draws an arc based on the rubberband's bounds.
- drawNext(Graphics) - Method in class gov.nih.mipav.view.RubberbandLine
-
Draws a line based on the rubberband's present bounds.
- drawNext(Graphics) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Draws a line by following the graph from the current location back to the anchor point.
- drawNext(Graphics) - Method in class gov.nih.mipav.view.RubberbandPolyline
-
Draws a line based on the rubberband's bounds.
- drawNext(Graphics) - Method in class gov.nih.mipav.view.RubberbandProtractor
-
Draws a line based on the rubberband's present bounds.
- drawNext(Graphics) - Method in class gov.nih.mipav.view.RubberbandRectangle
-
Draws a rectangle based on the rubberband's bounds.
- drawNextPolyline(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draws the open contour from the last anchor point to the current mouse point.
- drawPanel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Scroll panel reference.
- drawPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Scroll panel reference.
- drawPath(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
drawPath draws the Geodesic path as a LineArray and adds it to the children of the m_kSmoothedGeodesicGroup
object, it also draws the Dijkstra path and Euclidian paths and adds them to the corresponding
m_kDijkstraGeodesicGroup and m_kEuclidianGeodesicGroups.
- drawPath(TriMesh, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
drawPath draws the Geodesic path as a LineArray and adds it to the children of the m_kSmoothedGeodesicGroup
object, it also draws the Dijkstra path and Euclidian paths and adds them to the corresponding
m_kDijkstraGeodesicGroup and m_kEuclidianGeodesicGroups.
- drawPicked(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Draw the user-selected point, either as a sphere on the triangle mesh, or as a black triangle, depending on which
picking is enabled:
- drawPicked(Point3f, int[], int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Draw the user-selected point, either as a sphere on the triangle mesh, or as a black triangle, depending on which
picking is enabled:
- drawPoint(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Draw the user-selected point as a sphere on the triangle mesh:
- drawPoint(Point3f, int[], int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Draw the user-selected point as a sphere on the triangle mesh:
- drawPoint(Point3f, Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Draw the user-selected point as a sphere on the triangle mesh, the sphere is added to all three drawing groups:
m_kSmoothedGeodesicGroup, m_kDijkstraGeodesicGroup, and m_kEuclidianGeodesicGroup.
- drawPoint(TriMesh, Vector3f, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Draw the user-selected point as a sphere on the triangle mesh, the sphere is added to all three drawing groups:
m_kSmoothedGeodesicGroup, m_kDijkstraGeodesicGroup, and m_kEuclidianGeodesicGroup.
- drawRectangleArea() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Draw rectangle shape object.
- drawRectangleArea() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Draw rectangle shape object.
- drawRFAPoint(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Given a point in FileCoordinates, transform the point to local
PatientCoordinates, and draw with a red sphere:
- drawRFAPoint(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Called from the parent class when the Probe Entry Point is selected in the PlaneRender object.
- drawRFAPoint(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Called from the parent class when the Probe Entry Point is selected in the PlaneRender object.
- drawRFAPoint(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Called from the PlaneRender class when a new Probe Entry Point has been selected.
- drawRotatedVerticalAxisLabel(Graphics2D) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- drawScale(Graphics2D, Double) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame.GPanel
-
- drawSculptRegion() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
drawSculptRegion: called when the "Draw Sculpt Outline" Button is pressed.
- drawSculptRegion() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
drawSculptRegion: called when the "Draw Sculpt Outline" Button is pressed.
- drawSelectedPoint(VOIPoint, Renderer, Vector3f, Vector3f, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawSelectedPoints(VOIBase, Renderer, Vector3f, Vector3f, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawShape - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Shape of the drawing rectangle.
- drawShape - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Shape of the drawing rectangle.
- drawSphere(int, float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Draw the red sphere with the given coordinate.
- drawString(Graphics, String, int, int) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- drawString(Graphics, String, int, int) - Method in class gov.nih.mipav.view.ViewJComponentLUTTable
-
Draw the string with the given position.
- drawStringBW(String, Graphics, int, int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Draws a white character on a black surround.
- drawTalairachGrid_AXIAL(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Convenience method called by paintComponent().
- drawTalairachGrid_CORONAL(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Convenience method called by paintComponent().
- drawTalairachGrid_SAGITTAL(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Convenience method called by paintComponent().
- drawText(int, int, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- drawText(GLAutoDrawable, int, int, ColorRGBA, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawText(GLAutoDrawable, Renderer, int, int, ColorRGBA, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawTickMarks(VOIBase, Graphics, int[], int, int, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draw the tick marks for the VOIProtractor
- drawTickMarks(VOIBase, Graphics, Color, int[], int, int, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draws the tick marks on the VOILine.
- drawTransferFunctionHandles(Graphics2D, TransferFunction) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Draw the transfer function handles (the little squares used to drag points).
- drawTransferFunctionHandleTicks(Graphics2D, TransferFunction) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
This method draws the transfer function handle marks on the axes of the histogram.
- drawTransferFunctionLine(Graphics2D, TransferFunction, Color) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
This method draws the transfer function line.
- drawTriangle(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Draw the user-selected triangle as a black triangle, save the original color so it can be restored:
- drawTriangle(Point3f, int[], int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Draw the user-selected triangle as a black triangle, save the original color so it can be restored:
- drawVersionString(Graphics) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Get the version string and draw it on the image.
- drawVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- drawVOI(GLAutoDrawable, VOIBase, PlaneRender_WM, Renderer, Culler, float[], int[], int[], Vector3f, int, int, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOI(VOIBase, float[], int[], Graphics) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draw the VOI Contour (open or closed).
- drawVOI(VOIBase, VolumeTriPlanarRenderBase, VolumeImage, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- drawVOIContour(GLAutoDrawable, Renderer, int, float[], int[], VOIBase, Vector3f, Vector3f, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOILine(GLAutoDrawable, VOIBase, Renderer, float[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOILine(GLAutoDrawable, VOIBase, Renderer, int, float[], int[], VolumeVOI, Vector3f, Vector3f, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOILine(VOIBase, float[], int[], Graphics, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draw the VOILine.
- drawVOIPoint(GLAutoDrawable, VOIBase, Renderer, int, VolumeVOI, Vector3f, Vector3f, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOIPoint(GLAutoDrawable, VOIPoint, Renderer, VolumeVOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOIPoint(VOIPoint, Graphics) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draw the input VOIPoint.
- drawVOIPoint(VOIPoint, Graphics, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draw the input VOIPoint with the input label.
- drawVOIPolyLineSlice(GLAutoDrawable, VOIPolyLineSlice, Renderer, int, float[], int[], VolumeVOI, Vector3f, Vector3f, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOIPolyLineSlice(VOIPolyLineSlice, float[], int[], Graphics) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draws the input VOIPolyLineSlice.
- drawVOIProtractor(GLAutoDrawable, VOIBase, Renderer, int, float[], int[], VolumeVOI, Vector3f, Vector3f, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOIProtractor(VOIBase, float[], int[], Graphics) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draws the input VOIProtractor.
- drawVOIProtractorAngle(GLAutoDrawable, VOIBase, Renderer, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOIProtractorLength(GLAutoDrawable, VOIBase, Renderer, float[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOIs - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Flag used to prohibit VOI drawing.
- drawVOIs(GLAutoDrawable, VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOIText(GLAutoDrawable, VOIBase, Renderer, int, VolumeVOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOIText(GLAutoDrawable, VOIText, Renderer, VolumeVOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- drawVOIText(VOIText, Graphics) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Draws the input VOIText.
- drawWithNbh(double[][], int[][], GaussianMixtureModelsIncompleteSamples.GMM, int, Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- drawWithoutReplacementFisherYates(Vector<Integer>, Random, int, Vector<Integer>, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- drawWithoutReplacementSimple(Vector<Integer>, Random, int, Vector<Integer>, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- drawWithoutReplacementSkip(Vector<Integer>, Random, int, Vector<Integer>, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- drawWithoutReplacementWeighted(Vector<Integer>, Random, int, int, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- drawWithoutReplacementWeighted(Vector<Integer>, Random, Vector<Integer>, int, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- dreal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- dreal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- drecursiveCalc(int, int) - Method in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Starts the Gaussian calculation.
- DRI - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Define Restart Interval segment identifier.
- DRI - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- DRI - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- DRIVE0() - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- DRIVE1() - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation.FitCorrelationModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance.FitCovarianceModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.erfcModel2
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.IntTorquato95ModelMean2
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D.FitOAR3DConstrainedModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion.kFitting
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit24DModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit25HModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.FitDEMRI3ConstrainedModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.Fit24DModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeConstrainedModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitIntensityProfile
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DNoWholeModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialNoWholeModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel3
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModelqd
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModel2
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModelBessel
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModelI0NuclearArea
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitAll
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitAllEP
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2nl2solModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMean2
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMeanSquared2
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquato95ModelMean2
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquatoModelMean2
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitExponential
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitGaussian
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLaplace
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLine
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLorentz
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitMultiExponential
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitRayleigh
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss1Fitting
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss2Fitting
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gaussStandardDeviationFitting
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVFitting
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVRecirculation
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.FitExponential
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.FitMultiExponential
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.InverseLaplace
-
driver.
- driver() - Method in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
driver.
- driver() - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
driver.
- driver() - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
driver.
- driver() - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- driver() - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- driver() - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- driver() - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- driver() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
driver.
- driver() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
driver.
- driver() - Method in class gov.nih.mipav.model.algorithms.NMSimplex
-
- driver() - Method in class gov.nih.mipav.model.algorithms.ODE
-
- driver() - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.crpfun
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.depfun
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.dpfun
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEExtModel
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEModel
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODERectModel
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.hppfun
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODEHPModel
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODESTModel
-
DOCUMENT ME!
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.SIFT.FitMosaicModel
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping.qaws
-
- driver() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.WeibullCostFunction2param
-
Starts the analysis.
- driver() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.WeibullCostFunction3param
-
Starts the analysis.
- driver1() - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- driver2() - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- driver3() - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- driverCalls() - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- driverCalls() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- driverCalls() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- drop(DropTargetDropEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.DropJListTarget
-
DOCUMENT ME!
- drop(DropTargetDropEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.DropJTreeTarget
-
DOCUMENT ME!
- drop_consume_input(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DROP_CONSUME_INPUT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- drop_start_input_pass(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DROP_START_INPUT_PASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- dropDownSamplePermuted(int, int, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- DropJListTarget() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptView.DropJListTarget
-
- DropJTreeTarget() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptView.DropJTreeTarget
-
- Dropper(Vector3f, ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Reads the surface color from the texture map at the given location.
- Dropper(PickRecord, ColorRGBA, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Paint can support.
- Dropper(PickRecord, ColorRGBA, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- DROPPER_PAINT - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
This mode is an active VOI mode used by the VOI Handler
- dropperPaintToggleButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Toggle buttons for voi/points
- dropSource - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- drot(int, double[], int, double[], int, double, double) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the 3/11/78 linpack routine drot Original code written by Jack Dongarra.
- DRR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
View Mode DRR Constant:
- DRRMode() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Invoke the DRR rendering mode.
- DRRMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Display the volume in DDR mode.
- DRRMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Change to the DDR mode pixel shader program.
- DRRMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- DRRMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Display the volume in DDR mode.
- drscl(int, double, double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.2 LAPACK auxiliary routine DRSCL.
-- LAPACK is a software package provided by Univ. of Tennessee, --
-- Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd..--
November 2006
..
- ds - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- ds - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.ll_weib_beta_cen_r
-
- DS - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- dsaitr(int[], String, int, int, int, int, double[], double[], double[][], int, double[][], int, int[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_first - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_ierr - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_ipj - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_irj - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_iter - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_itry - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_ivj - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_j - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_msglvl - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_orth1 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_orth2 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_rnorm1 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_rstart - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_safmin - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_step3 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_step4 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaitr_wnorm - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- dsapps(int, int, int, double[], double[][], int, double[][], int, double[], double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsapps_epsmch - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsapps_first - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2(int[], String, int, String, int[], int[], double[], double[], int, int, int, int[], double[][], int, double[][], int, double[], double[], double[][], int, double[], int[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_cnorm - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_eps23 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_getv0 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_initv - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_iter - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_kplusp - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_msglvl - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_nconv - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_nev0 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_np0 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_rnorm - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_update - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaup2_ushift - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd(int[], String, int, String, int, double[], double[], int, double[][], int, int[], int[], double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_bounds - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_ierr - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_ih - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_iq - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_ishift - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_iupd - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_iw - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_ldh - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_ldq - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_mode - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_msglvl - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_mxiter - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_nb - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_nev0 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_next - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_np - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsaupd_ritz - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsc - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
DOCUMENT ME!
- DSC_mri_aif() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_cbf() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_cbv() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_cbv_lc() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_conc() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_core() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_cSVD() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_fwhm() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_mask() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_mtt() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_oSVD() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_S0() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_slice_selection_figure() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_mri_SVD() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_MRI_toolbox - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox() - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_MRI_toolbox(double[][][][], double, double, int, String) - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_MRI_toolbox(ModelImage, String, double, double, int, String[]) - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- DSC_MRI_toolbox.diffGaussians - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox.gauss1Fitting - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox.gauss1FittingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox.gauss2Fitting - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox.gauss2FittingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox.gaussSecondStandardDeviationFittingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox.gaussStandardDeviationFitting - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox.gaussStandardDeviationFittingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox.GVFitting - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox.GVFittingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox.GVRecirculation - Class in gov.nih.mipav.model.algorithms
-
- DSC_MRI_toolbox.GVRecirculationCostFunction - Class in gov.nih.mipav.model.algorithms
-
- DSC_mri_ttp() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- dscal(int, double, double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Routine ported from 12/3/93 linpack dscal Original version written by Jack Dongarra Scales a vector by a
constant.
- DSCDATA(int, int[], int[], double[][], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- dscfun - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- DSCFUN(int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- dsconv(int, double[], double[], double, int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- DSCPRINT(int, int, double[], double, double[][], double[][], double[], double[], double, int) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- DSCSOLV(double, int, int, int, double[], double[], double[][], double[][], double[], double[], double[][], double[][], double[], double[], int, double[], int, int) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- DSCTEST(int, int, double, double[], double[][], double[][], double[][], double[][], double[], double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- dsdrv1() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsdrv2() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsdrv3() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsdrv4() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsdrv5() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsdrv6() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- DSDT(double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- dseigt(double, int, double[][], int, double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsesrt(String, boolean, int, double[], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dseupd(boolean, String, boolean[], double[], double[][], int, double, String, int, String, int, double, double[], int, double[][], int, int[], int[], double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsgets(int, String, int, int, double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsgt01(int, char, int, int, double[][], int, double[][], int, double[][], int, double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK test routine DSGT01 Original DSGT01 created by Univ. of Tennessee, Univ.
- dsigma0 - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< k-smoothing
- dsigmas - Variable in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
- dsign(double, double) - Method in class gov.nih.mipav.model.algorithms.ODE
-
- dsign(DoubleDouble, DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- dsm - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- dsortr(String, boolean, int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dssimp() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- DSTATE_BUFIMAGE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DSTATE_BUFPOST - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DSTATE_INHEADER - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DSTATE_PRELOAD - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DSTATE_PRESCAN - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DSTATE_RAW_OK - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DSTATE_RDCOEFS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DSTATE_READY - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DSTATE_SCANNING - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DSTATE_START - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DSTATE_STOPPING - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- dstats() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dstdnorm(double) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- dstebz(char, char, int, double, double, int, int, double, double[], double[], int[], int[], double[], int[], int[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is a port of version 3.3.1 LAPACK routine DSTEBZ.
- dstech(int, double[], double[], double[], double, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DSTECH Original DSTECH created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 Let T be the tridiagonal matrix with diagonal entries A[0]
,..., A[n-1] and offdiagonal entries B[0] ,..., B[n-2]). dstech checks to see if eig[0], ..., eig[n-1] are indeed
accurate eigenvalues of T.
- dstect(int, double[], double[], double, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DSTECT Original DSTECT created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dstect counts the number num of eigenvalues of a tridiagonal
matrix T which are less than or equal to shift.
- dstein(int, double[], double[], int, double[], int[], int[], double[][], int, double[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is a port of version 3.2 LAPACK routine DSTEIN.
- dstemr(char, char, int, double[], double[], double, double, int, int, int[], double[], double[][], int, int, int[], boolean[], double[], int, int[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of version 3.4.0 LAPACK routine dstemr.
- dsteqr(char, int, double[], double[], double[][], int, double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK routine DSTEQR Original DSTEQR created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dsteqr computes all eigenvalues and, optionally, eigenvectors
of a symmetric tridiagonal matrix using the implicit QL or QR method.
- dsterf(int, double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK routine DSTERF Original DSTERF created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dsterf computes all the eigenvalues of a symmetric tridiagonal
matrix using the Pal-Walker-Kahan variant of the QL or QR algorithm.
- dstIndex - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- dstinv(double, double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- dstqrb(int, double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dstsub(int, double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- dstt21(int, int, double[], double[], double[], double[], double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DSTT21 Original DSTT21 created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dstt21 checks a decomposition of the form A = U S U' where '
means transpose, A is symmetric tridiagonal, U is orthogonal, and S is diagonal (if kband == 0) or symmetric
tridagonal (if kband == 1).
- dstt22(int, int, int, double[], double[], double[], double[], double[][], int, double[][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
- DSTYPE_DATAPRESENT - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- DSTYPE_NODATAPRESENT - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- dstzr(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- dsubs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- dsvd() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- dsvdch(int, double[], double[], double[], double, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK test routine DSVDCH.
- dsvdct(int, double[], double[], double, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK test routine DSVDCT.
- dsxt1(int, double[], int, double[], int, double, double, double) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is the port of version 3.1 LAPACK test routine DSXT1.
- dsyev(char, char, int, double[][], int, double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK DSYEV routine Original DSYEV created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dsyev computes all eigenvalues and, optionally, eigenvectors of
a real symmetric matrix A.
- Dsyev(int, double[][], double[], double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Call the lapack routine
- Dsyev(int, double[][], double[], double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLinearReg
-
Call lapack routine
- Dsyev(int, double[][], double[], double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- dsyevr(char, char, char, int, double[][], int, double, double, int, int, double, int[], double[], double[][], int, int[], double[], int, int[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
This is a port of the version 3.2.2 LAPACK DSYEVR routine.
- dsyevx(char, char, char, int, double[][], int, double, double, int, int, double, int[], double[], double[][], int, double[], int, int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is a port of the version 3.2 LAPACK DSYEVX routine.
- dsygs2(int, char, int, double[][], int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the LAPACK version 3.1 DSYGS2 routine Original DSYGS2 created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 DSYGS2 reduces a real symmetric-definite generalized
eigenproblem to standard form.
- dsygst(int, char, int, double[][], int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This routine is a port of the version 3.1 LAPACK routine DSYGST Original DSYGST created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., November, 2006 dsygst reduces a real symmetric-definite generalized
eigenproblem to standard form.
- dsygv(int, char, char, int, double[][], int, double[][], int, double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DYSGV is ported from the version 3.1 LAPACK driver routine Original DSYGV created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 DSYGV computes all the eigenvalues, and optionally, the
eigenvectors of a real generalized symmetric-definite eigenproblem, of the form A*x = (lambda)*B*x, A*Bx =
(lambda)*x, or B*A*x = (lambda)*x.
- dsygv_test() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This routine is an extraction from the FORTRAN program version 3.1.1 DCHKEE of the code needed to drive ddrvsg in
order to test DSYGV, that handles the symmetric generalized eigenvalue problem.
- dsygv_test2() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- dsygv_test3(ViewUserInterface) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- dsymm(char, char, int, int, double, double[][], int, double[][], int, double, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the 2/8/89 Blas routine DSYMM Original version written by: Jack Dongarra, Argonne National Lab.
- dsymv(char, int, double, double[][], int, double[], int, double, double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the 10/22/86 Blas routine DSYMV Original code written by: Jack Dongarra, Argonne Nationa Lab.
- dsyr(char, int, double, double[], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of level 2 Blas routine DSYR Original routine written on 22-October-1986 by Jack Dongarra, Argonne
National Lab.
- dsyr2(char, int, double, double[], int, double[], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Port of 10/22/86 Blas DSYR2 routine Original version written by: Jack Dongarra, Argonne National Lab.
- dsyr2k(char, char, int, int, double, double[][], int, double[][], int, double, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the 2/8/89 Blas routine DSYR2K Original version written by: Jack Dongarra, Argonne National
Lab.
- dsyrk(char, char, int, int, double, double[][], int, double, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
dsyrk is the port of the 2/8/89 blas DSYRK routine.
- dsyt21(int, char, int, int, double[][], int, double[], double[], double[][], int, double[][], int, double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK test routine DSYT21 Original DSYT21 created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dsyt21 generally checks a decomposition of the form A = U S U'
where ' means transpose, A is symmetric, U is orthogonal, and S is diagonal (if kband == 0) or symmetric
tridiagonal (if kband == 1).
- dsyt22(int, char, int, int, int, double[][], int, double[], double[], double[][], int, double[][], int, double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
This is the port of version 3.1 LAPACK test routine DORT01.
- dsytd2(char, int, double[][], int, double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK routine DSYTD2 Original DSYTD2 created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dsytd2 reduces a real symmetric matrix A to symmetric
tridiagonal form T by an orthogonal similarity transformation: Q' * A * Q = T.
- dsytrd(char, int, double[][], int, double[], double[], double[], double[], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the version 3.1 LAPACK routine DSYTRD Original DSYTRD created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dsytrd reduces a real symmetric matrix A to a real symmetric
tridiagonal form T by an orthogonal similarity transformation.
- dt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- dt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexMix
-
- dt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Neighbor
-
- DT - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- DT_2FLOAT - Static variable in class gov.nih.mipav.model.file.FileSiemensText
-
SiemensText file format define use to indicate 2-byte float - Intel style.
- DT_2INTEGERI - Static variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
SiemensText file format define use to indicate 2-byte integer - Intel style.
- DT_2INTEGERI - Static variable in class gov.nih.mipav.model.file.FileSiemensText
-
SiemensText file format define use to indicate 2-byte integer - Intel style.
- DT_2INTEGERS - Static variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
SiemensText file format define use to indicate 2-byte integer - Sun style.
- DT_2INTEGERS - Static variable in class gov.nih.mipav.model.file.FileSiemensText
-
SiemensText file format define use to indicate 2-byte integer - Sun style.
- DT_4FLOAT - Static variable in class gov.nih.mipav.model.file.FileSiemensText
-
SiemensText file format define use to indicate 4-byte float - Sun style.
- DT_4FLOATI - Static variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
SiemensText file format define use to indicate 4-byte float - Intel style.
- DT_4FLOATS - Static variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
SiemensText file format define use to indicate 4-byte float - Sun style.
- DT_4INTEGERI - Static variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
SiemensText file format define use to indicate 4-byte integer - Intel style.
- DT_4INTEGERI - Static variable in class gov.nih.mipav.model.file.FileSiemensText
-
SiemensText file format define use to indicate 4-byte integer - Intel style.
- DT_4INTEGERS - Static variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
SiemensText file format define use to indicate 4-byte integer - Sun style.
- DT_4INTEGERS - Static variable in class gov.nih.mipav.model.file.FileSiemensText
-
SiemensText file format define use to indicate 4-byte integer - Sun style.
- DT_ALL - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze file format define use to indicate _ALL_ image data type.
- DT_ALL - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_BINARY - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze file format define use to indicate binary (1 bit) image data type.
- DT_BINARY - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Binary (1 bit/voxel)
- DT_BINARY - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_BINARY - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- DT_BYTE - Static variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
SiemensText file format define use to indicate Byte (8-bits) data type
- DT_BYTE - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_BYTE - Static variable in class gov.nih.mipav.model.file.FileSiemensText
-
SiemensText file format define use to indicate Byte (8-bits) data type
- DT_BYTE - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- DT_COMPLEX - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze file format define use to indicate complex (64 bit) image data type.
- DT_COMPLEX - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_COMPLEX - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- dt_double - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- DT_DOUBLE - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze file format define use to indicate double (64 bit) image data type.
- DT_DOUBLE - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_DOUBLE - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- DT_FLOAT - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze file format define use to indicate float (32 bit) image data type.
- DT_FLOAT - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_FLOAT - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- dt_mem - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVadjMemRec
-
- DT_NONE - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze file format define use to indicate no image data type.
- DT_NONE - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Unspecified original unscaled source data type
- DT_NONE - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_NONE - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- DT_RGB - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze file format define use to indicate color (RGB - 24 bits) image data type.
- DT_RGB - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_RGB - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- DT_SIGNED_INT - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze file format define use to indicate integer (32 bit) image data type.
- DT_SIGNED_INT - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_SIGNED_INT - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- DT_SIGNED_SHORT - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze file format define use to indicate short (16 bit) image data type.
- DT_SIGNED_SHORT - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_SIGNED_SHORT - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- DT_UNKNOWN - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
AAnalyze file format define use to indicate undefined image data type.
- DT_UNKNOWN - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Unknown original unscaled source data type
- DT_UNKNOWN - Static variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
SiemensText file format define use to indicate undefined image data type.
- DT_UNKNOWN - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_UNKNOWN - Static variable in class gov.nih.mipav.model.file.FileSiemensText
-
SiemensText file format define use to indicate undefined image data type.
- DT_UNSIGNED_CHAR - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze file format define use to indicate unsigned byte (char) (8 bit) image data type.
- DT_UNSIGNED_CHAR - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_UNSIGNED_CHAR - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- DT_UNSIGNED_INT - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_UNSIGNED_INT - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- DT_UNSIGNED_SHORT - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze file format define use to indicate short (16 bit) image data type.
- DT_UNSIGNED_SHORT - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- DT_UNSIGNED_SHORT - Static variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- dtComponent - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- dtComponentArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- dText - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- dtgevc(char, char, boolean[], int, double[][], int, double[][], int, double[][], int, double[][], int, int, int[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK routine DTGEVC Original DTGEVC created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., November, 2006 dtgevc computes some or all of the right and/or left
eigenvectors of a pair of real eigenvectors of a pair of real matrices (S,P), where S is a quasi-triangular
matrix and P is upper triangular.
- dthetaonsigma - Variable in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- dthetaonsigma - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- dti - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- DTI - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Diffusion Tensor image.
- DTI - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Diffusion Tensor Image dialog:
- DTIColorDisplay - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- DTIColorDisplay(boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Constructor
- DTIGradTableCorrectionAfterTrans - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
The DTI gradient table correction after transformation algorithm corrects gradients after their corresponding
DWI volumes have been registered using OAR35D to a B0 image.
- DTIGradTableCorrectionAfterTrans(float[][], float[], TransMatrix[], int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIGradTableCorrectionAfterTrans
-
- dtiParameters - Variable in class gov.nih.mipav.model.structures.ModelImage
-
Reference to DWI bvalue and gradient information.
- DTIParameters - Class in gov.nih.mipav.model.file
-
Object to store parameters in the ModelImage acquired from DWI image file or ImageInfo DTI tab
- DTIParameters(int) - Constructor for class gov.nih.mipav.model.file.DTIParameters
-
- DTIParameters(DTIParameters) - Constructor for class gov.nih.mipav.model.file.DTIParameters
-
Copy constructor, copies the entire input DTIParameters into this DTIParameters object.
- DTIParametersPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- dtiparams - Variable in class gov.nih.mipav.model.file.FileImageXML
-
- dtiparams - Variable in class gov.nih.mipav.model.file.FileIO
-
- dtiparams - Variable in class gov.nih.mipav.model.file.FilePARREC
-
Object to save DWI paramters to
- dtiparams - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- dtiparams - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- dtiParams - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
- DTIparamsPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- DTIPipeline - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- DTIPipeline() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- DTIPreprocessing - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- dtiStudioButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
Radio button to save gradBval text file in DTIStudio format
- dtj - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjblank - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_etaj_init - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_iA2 - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_LF - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_Lt - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_LtGt - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_phij_init - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_Phij_init - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_Psij_init - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_Q_foo - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_Q_Ft - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_Q_GtC2 - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_Q_Ht - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_Q_Jt - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_Q_logdet - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_Q_Wt - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_Szero - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtjsa_varphij_init - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- dtm - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- dtoler - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- dtopt - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
- DtpntMemRec() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.DtpntMemRec
-
- dtrmm(char, char, char, char, int, int, double, double[][], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the 2/8/89 Blas routine DTRMM Original code written by: Jack Dongarra, Argonne National
Laboratory Iain Duff, AERE Harwell.
- dtrmv(char, char, char, int, double[][], int, double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the 10/22/86 blas routine DTRMV Original version written by: Jack Dongarra, Argonne National
Lab.
- dtrsl(double[][], int, int, double[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- dtrsm(char, char, char, char, int, int, double, double[][], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the 2/8/89 Blas routine DTRSM Original code written by: Jack Dongarra, Argonne National
Laboratory Iain Duff, AERE Harwell.
- dtrsv(char, char, char, int, double[][], int, double[], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of the 10/22/86 Blas routine DTRSV Original version written by: Jack Dongarra, Argonne National
Lab.
- dtrti2(char, char, int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version routine 3.4.2 DTRTI2.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., September 2012.
- dtrtri(char, char, int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of LAPACK version routine 3.4.0 DTRTRI.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., November 2011.
- dtrtrs(char, char, char, int, int, double[][], int, double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- DUAL_THRESHOLD - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Dual threshold function.
- DUAL_THRESHOLD_INV - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Inverse dual threshold function.
- dualAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- dualContoursFinding(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- DualDividerLocation - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- dualImage - Variable in class gov.nih.mipav.view.JFrameHistogram
-
set to true when the lut interface contains two images (imageA and imageB)
- dualImagePane - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
dual image pane that holds the left and right panel.
- dualImagePanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The image panel to hold two Canvas3D.
- dualityGap - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
< Dual loss value.
- dualLeftPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Left panel of the dual panel view.
- dualLoss - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
< Dual objective value.
- dualObjective - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
< Loss value.
- dualPane - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
For displaying the BrainSurfaceFlattener or Flythrough renderers.
- DUALPANEL - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- dualRightPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Right panel of the dual panel view.
- dualThresholdMode(int) - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Switch the histogram component to (inverse or regular) dual threshold mode.
- dualThresholdMode(int) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Switch the histogram component to (inverse or regular) dual threshold mode.
- dualThresholdMode(int) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Switch the histogram component to (inverse or regular) dual threshold mode.
- DuckyDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.DuckyDirectory
-
- DuckyReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.DuckyReader
-
- DUFFINGS - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- DUFFINGS - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- DUFFINGS_WITH_DAMPING_AND_FORCING - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- DUFFINGS_WITH_DAMPING_AND_FORCING - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- dummy - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Dummy initial values used to create a ELSUNC algorithm instance before setting initial.
- dummy - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Dummy initial values used to create a Powell's algorithm instance before setting initial.
- dummy - Variable in class gov.nih.mipav.model.file.libjpeg.large_pool_struct
-
- dummy - Variable in class gov.nih.mipav.model.file.libjpeg.small_pool_struct
-
- dummy_consume_data(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- DUMMY_CONSUME_DATA - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- DummyCostFunction(int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction
-
- DummyCostFunction(int, int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction
-
- DummyCostFunction2(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction2
-
- DummyCostFunction3(int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction3
-
- DummyCostFunction3(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction3
-
- DummyCostFunction3(int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction3
-
- DummyCostFunction4(int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction4
-
- dummyQE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- dummyv1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- dummyv2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- dummyv3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- dummyv4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- dump() - Method in class gov.nih.mipav.util.DoubleDouble
-
Dumps the components of this number to a string.
- dump(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- dump(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- Dump(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Debug method that provides a human readable file dump of the object data.
- dump_filename_base - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyPerSolveOptions
-
- dump_format_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyPerSolveOptions
-
- DumpFormatType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.DumpFormatType
-
- DumpLinearLeastSquaresProblem(String, CeresSolver.DumpFormatType, CeresSolver.SparseMatrix, double[], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- DumpLinearLeastSquaresProblemToConsole(CeresSolver.SparseMatrix, double[], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- DumpLinearLeastSquaresProblemToTextFile(String, CeresSolver.SparseMatrix, double[], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- dumpMatSize(libdt.Mat[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- DumpModelDoc(Vector<CDVector>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Write additional documentation output.
- DumpPCA(Vector<CDVector>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Dumps the PC scores of the shape, texture and combined PCA.
- dumpPlan(OutputStream) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
Dump the planner result to the output stream.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation.FitCorrelationModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance.FitCovarianceModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D.FitOAR3DConstrainedModel
-
Display results of displaying OAR3DConstrained fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion.kFitting
-
Display results of kFitting.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit24DModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit25HModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.FitDEMRI3ConstrainedModel
-
Display results of displaying DEMRI3 fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DELSUNCModel
-
Display results of displaying OAR2D fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
Display results of displaying OAR2D fitting parameter.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DELSUNCModel
-
Display results of displaying OAR3D fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
Display results of displaying OAR3D fitting parameter.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.Fit24DModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeConstrainedModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitIntensityProfile
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DModel
-
Display results of displaying pure 1D fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DNoWholeModel
-
Display results of displaying pure 1D no whole organ normalization
fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialNoWholeModel
-
Display results of displaying exponential fitting parameters in the
case of no whole organ normalization.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel3
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModelqd
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitAll
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitAllEP
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModel
-
Display results of displaying SM2 fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
Display results of displaying SM2 fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2nl2solModel
-
Display results of displaying SM2 fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitExponential
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitGaussian
-
Display results of displaying Gaussian fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLaplace
-
Display results of displaying Laplace fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLine
-
Display results of displaying line fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLorentz
-
Display results of displaying Lorentz fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitMultiExponential
-
Display results of displaying multiExponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitRayleigh
-
Display results of displaying Rayleigh fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss1Fitting
-
Display results of gauss 1 curve Fitting.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss2Fitting
-
Display results of gauss 2 curve Fitting.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gaussStandardDeviationFitting
-
Display results of gaussStandardDeviationFitting.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVFitting
-
Display results of gammma-variate curve Fitting.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVRecirculation
-
Display results of GV recirculation curve Fitting.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.crpfun
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.depfun
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.dpfun
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.hppfun
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
Display results of displaying exponential fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.SIFT.FitMosaicModel
-
Display results of displaying SM2 fitting parameters.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.WeibullCostFunction2param
-
Display results of WeibullDistributionFitting.
- dumpResults() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.WeibullCostFunction3param
-
Display results of WeibullDistributionFitting.
- dumpTestResults() - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- dumpTestResults() - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- dumpTestResults() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- dumpTestResults() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- dupdat(double[], int[], double[][], int, int, int, double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- DUPLEX_DOPPLER - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality duplex doppler.
- DUPLEX_DOPPLER - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality duplex doppler.
- dur - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.Tracker
-
- durTime - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
DOCUMENT ME!
- dValueTables - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- dValueTables - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueAndNormalFunction
-
- DWI - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Diffusion Weighted Images dialog:
- DWIButtonPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- DWIDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- DWIframe - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- DWIImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
Diffusion weighted image read from file or from active image.
- DWIJonesKirbyDialog() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- dwiLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
dwi data label
- DWINewB0Image - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
Registered images, results from pre-processing tab:
- DWIOpenPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- dwiPathBrowseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
browse button for dwi file/folder
- dwiPathTextField - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
handle to dwi data textfield of main dialog
- dwiPathTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
path to dwi file/dir
- DWITransPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- DWMRI_B_VALUE - Variable in class gov.nih.mipav.model.file.FileInfoNRRD
-
"DWMRI_b-value:=b " : This key/value pair gives the (scalar) diffusion-weighting value,
in units of s/mm^2.
- dwmriGradient - Variable in class gov.nih.mipav.model.file.FileInfoNRRD
-
For every index position NNNN along the DWI axis (whichever is the non-spatial axis identified
by the "list" or "vector" kind field), either "DWMRI_gradient_NNNN:=x y z " or
"DWMRI_B-matrix_NNNN:=xx xy xz yy yz zz " must be given (except if "DWMRI_NEX_NNNN:= M " is used).
- dwmriGradient - Variable in class gov.nih.mipav.model.file.FileNRRD
-
"modality:=DWMRI" : This key/value pair explicitly indicates that the image is a
diffusion-weighted MRI scan, and it implies that all of the following key/value pairs
are also set in the header:
"DWMRI_b-value:=b " : This key/value pair gives the (scalar) diffusion-weighting value,
in units of s/mm^2.
- dwmriNex - Variable in class gov.nih.mipav.model.file.FileNRRD
-
"DWMRI_NEX_NNNN:=M " means that the information provided for image NNNN
(either gradient or B-matrix) is the same as for image NNNN+1, NNNN+2, up
to and including NNNN+M-1.
- dwt(double[][][], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwt(double[][], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwt(double[], PyWavelets.DiscreteWavelet, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwt_axis(double[][][], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwt_axis(double[][], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwt_buffer_length(int, int, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwt_coeff_len(int, int, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwt_max_level(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwt_max_level(int, PyWavelets.DiscreteWavelet) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwt_single(double[], PyWavelets.DiscreteWavelet, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- DWT_TRANSFORM - gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteTransformType
-
- dwt2(double[][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwt2(double[][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwt3(double[][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwtn(double[][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwtn2(double[][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwtn23(double[][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dwtn3(double[][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- dx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- dx - Variable in class gov.nih.mipav.model.algorithms.CVODES.UserData
-
- dx - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
double working areas 1D array of length param containing the solution of J * dx = -residuals.
- dx - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
double working areas 1D array of length param containing the solution of J * dx = -residuals.
- dx - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_cmptparm_t
-
XRsiz: horizontal separation of a sample of ith component with
respect to the reference grid
- dx - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
XRsiz: horizontal separation of a sample of ith component with
respect to the reference grid
- dx - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_comp_t
-
- dx - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
FIXME DOC
- dx - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start and end values of Tile width and height, initialised in
pi_initialise_encode
- dx - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- dx - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.st_node
-
- dx - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- dxKernelX - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Kernels for the X derivative.
- dxKernelY - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- dxKernelZ - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- dxnkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- dxnkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- dxnorm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- dxnorm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- dy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- dy - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_cmptparm_t
-
YRsiz: vertical separation of a sample of ith component with respect
to the reference grid
- dy - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
YRsiz: vertical separation of a sample of ith component with respect
to the reference grid
- dy - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_comp_t
-
- dy - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
FIXME DOC
- dy - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start and end values of Tile width and height, initialised in
pi_initialise_encode
- dy - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- DYADIC - Static variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- DYADIC - Static variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- dyadicButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- dyda - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- dyda - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- dyeDatabaseID - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- dyeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- dyeID - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- dyKernelX - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Kernels for the Y derivative.
- dyKernelY - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- dyKernelZ - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- DYNAMIC - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- DYNAMIC - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Filter made up on-the-fly.
- dynamic_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.DynamicCompressedRowSparseMatrix
-
- dynamic_sparsity - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluatorOptions
-
- dynamic_sparsity - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- dynamic_sparsity - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- dynamic_sparsity - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTestOptions
-
- dynamic_values_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.DynamicCompressedRowSparseMatrix
-
- DynamicCompressedRowJacobianFinalizer() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DynamicCompressedRowJacobianFinalizer
-
- DynamicCompressedRowJacobianWriter(CeresSolver.EvaluatorOptions, CeresSolver.Program) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DynamicCompressedRowJacobianWriter
-
- DynamicCompressedRowSparseMatrix(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.DynamicCompressedRowSparseMatrix
-
- DynamicCompressedRowSparseMatrixTestClearRows() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DynamicCompressedRowSparseMatrixTestInitialization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DynamicCompressedRowSparseMatrixTestInsertEntryAndFinalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DynamicCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DynamicCostFunction
-
- dynamicDescription - Variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Description of dynamic filter.
- dynamicExts - Variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Extensions to look at for the dynamic filter.
- DynamicNumericDiffCostFunction(T, CeresSolver.Ownership, CeresSolver.NumericDiffOptions, CeresSolver.NumericDiffMethodType) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.DynamicNumericDiffCostFunction
-
- DynamicNumericdiffCostFunctionTestJacobianWithFirstParameterBlockConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DynamicNumericdiffCostFunctionTestJacobianWithSecondParameterBlockConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DynamicNumericdiffCostFunctionTestTestJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DynamicNumericdiffCostFunctionTestTestResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DynamicompressedRowSparseMatrixSetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DynamicProblem(boolean, String) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- DynamicProblemRemoveInvalidResidualBlockDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- DynamicProblemRemoveInvalidResidualBlockDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DynamicProblemRemoveParameterBlockWithNoResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- DynamicProblemRemoveParameterBlockWithNoResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DynamicProblemRemoveParameterBlockWithResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- DynamicProblemRemoveParameterBlockWithResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- DynamicProblemRemoveResidualBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- DynamicProblemRemoveResidualBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- dynamicScanBeginTime - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- dynamicScanBeginTime - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- dynamicScanBeginTimeIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- dynamicScanBeginTimePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- dynamicScanNumber - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- dynamicScanNumber - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- dynamicScanNumberIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- dynamicScanNumberPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- dynamicStudyGeneral - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- Dytex() - Constructor for class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< Cvs computed
- Dytex(libdt.DytexOptions) - Constructor for class gov.nih.mipav.model.algorithms.libdt.Dytex
-
- dytex_kalman(libdt.Mat[], libdt.Dytex, String, Vector<libdt.Mat>, libdt.Mat[], libdt.Mat[], libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- dytex_mix_split(libdt.DytexMix, libdt.DytexSplitParams, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- dytex_perturb(libdt.Dytex, double, libdt.Split_mode, libdt.Split_vars) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- DytexKalmanFilter(libdt.Dytex, int) - Constructor for class gov.nih.mipav.model.algorithms.libdt.DytexKalmanFilter
-
< cache for an instantiated Kalman filter: DT reference (use a pointer).
- DytexMix() - Constructor for class gov.nih.mipav.model.algorithms.libdt.DytexMix
-
- DytexMix(libdt.DytexOptions) - Constructor for class gov.nih.mipav.model.algorithms.libdt.DytexMix
-
- DytexOptions() - Constructor for class gov.nih.mipav.model.algorithms.libdt.DytexOptions
-
< option to model observation mean.
- DytexOptions(int, int, libdt.cov_type, libdt.cov_type, libdt.Ymean_type) - Constructor for class gov.nih.mipav.model.algorithms.libdt.DytexOptions
-
- DytexRegOptions() - Constructor for class gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
< Regularization value for S.
- DytexRegOptions(libdt.cov_reg_type, double, libdt.cov_reg_type, double, libdt.cov_reg_type, double) - Constructor for class gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
- DytexRegOptions(libdt.cov_reg_type, double, libdt.cov_reg_type, double, libdt.cov_reg_type, double, libdt.cov_reg_type, double) - Constructor for class gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
- DytexSplitParams() - Constructor for class gov.nih.mipav.model.algorithms.libdt.DytexSplitParams
-
- dz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- dz - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- dzKernelX - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Kernels for the Z derivative.
- dzKernelY - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- dzKernelZ - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- dznrm2(int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
BLAS level1 routine version 3.7.0 December, 2016
This is a port of the 10/14/93 DZNRM2 function Original code written by Sven Hammarling, Nag Ltd. dznrm2 returns
the euclidean norm of a vector via the function sqrt(x**H*x)
- dzror(int[], double[], double[], double[], double[], boolean[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
E
- e - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- e - Variable in class gov.nih.mipav.model.algorithms.splev
-
- e - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
Arrays for internal storage of eigenvalues.
- E - Static variable in class gov.nih.mipav.util.DoubleDouble
-
The value nearest to the constant e (the natural logarithm base).
- E - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Triangle
-
DOCUMENT ME!
- E - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Vertex
-
DOCUMENT ME!
- e_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- e_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- E_fit() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitEntry
-
Returns the fit measure.
- e_l(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- e_mark(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- e_sharp(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- e_string(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- e_w(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- e0 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- e0 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- e1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- e1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- e11 - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameEllipse
-
< center y-coordinate
- e12 - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameEllipse
-
<
- e2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- e2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- e22 - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameEllipse
-
- e3 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- e3 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- E3 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Edge 3
- e4 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- e5 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- E5 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Edge 5
- e6 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- e7 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- E7 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Edge 7
- eadd(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Returns the sum of two numbers in the form of a base and an exponent.
- eAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
DOCUMENT ME!
- east - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- East - gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.AnchorPosition
-
- EASY_COST_FUNCTION - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- EASY_FUNCTOR_EXAMPLE - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- EasyCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.EasyCostFunction
-
- EasyFunctor() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.EasyFunctor
-
- EBlockRowOuterProduct(CeresSolver.BlockSparseMatrix, int, CeresSolver.BlockRandomAccessMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- Ec - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- Ec - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- EC - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Edge
-
- EC - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- EC - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Vertices
-
- ecAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
DOCUMENT ME!
- Ecc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- eccentricity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ShapeFactor
-
- eccentricity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ShapeFactor
-
- eccentricity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ShapeFactor
-
- eccentricity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ShapeFactor
-
- eccentricity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ShapeFactor
-
- eccentricity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ShapeFactor
-
- eccentricity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ShapeFactor
-
- eccentricity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ShapeFactor
-
- eccentricityDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- echo1Alpha - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
240.
- echo1Beta - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
244.
- echo1Level - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
250.
- echo1Window - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
248.
- echo2Alpha - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
252.
- echo2Beta - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
256.
- echo2Level - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
262.
- echo2Window - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
260.
- echo3Alpha - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
264.
- echo3Beta - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
268.
- echo3Level - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
274.
- echo3Window - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
272.
- echo4Alpha - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
276.
- echo4Beta - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
280.
- echo4Level - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
286.
- echo4Window - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
284.
- echo5Alpha - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
288.
- echo5Beta - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
292.
- echo5Level - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
298.
- echo5Window - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
296.
- echo6Alpha - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
300.
- echo6Beta - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
304.
- echo6Level - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
310.
- echo6Window - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
308.
- echo7Alpha - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
312.
- echo7Beta - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
316.
- echo7Level - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
322.
- echo7Window - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
320.
- echo8Alpha - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
324.
- echo8Beta - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
328.
- echo8Level - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
334.
- echo8Window - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
332.
- echoNum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
212 echo number.
- echoNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- echoNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- echoNumber - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- echoNumber - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- echoNumberIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- echoNumberPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- echoNumbers - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- echoStdout - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.PoissonRun
-
- echoStdout - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.test
-
- echoTime - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- echoTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
202 pulse echo time (usec).
- echoTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- echoTime - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- echoTime - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- EchoTime - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- echoTimeIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- echoTimePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- echoTrainLength - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- echoTrainLength - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- echoTrainLength - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- Eckerle4CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Eckerle4CostFunction
-
- Eckerle4Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Eckerle4Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- ecn - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
cn (u, hk)
- ecode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- ecode - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- ecodeArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- ecodeIntToString(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- ecpdiv(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Divides two numbers and returns the solution.
- ecpmul(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Multiplies two numbers which are each represented in the form of a two by two array and returns the solution in
the same form
- edge - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.qlgraph
-
- edge - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.st_node
-
- edge - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
DOCUMENT ME!
- edge() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
-
- edge() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- Edge - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- Edge() - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- Edge() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- Edge() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Edge
-
Creates a new Edge object.
- Edge() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Edge
-
- Edge() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Edge
-
- Edge() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Edge
-
- Edge() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- Edge() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- Edge(int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.Edge
-
Constructs an edge in the table.
- Edge(int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.Edge
-
Constructs an edge in the table.
- Edge(int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Edge
-
Constructs an edge in the table.
- Edge(int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.Edge
-
Constructs an edge in the table.
- Edge(int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.Edge
-
Constructs an edge in the table.
- Edge(LODMesh.Vertices, LODMesh.Vertices) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Edge
-
- Edge(LODMesh.Vertices, LODMesh.Vertices, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Edge
-
- edge_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdge
-
- edge_face_1(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- edge_face_2(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- edge_length(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- edge_node() - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- edge_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- edge_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< peak threshold.
- edge_thresh - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- edge_vertex_1(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- edge_vertex_2(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- edge_weights_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- edgeAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
DOCUMENT ME!
- edgeAttract - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
edgeAttract is the ratio of the maximum value of the absolute value of the edge attractive force to the maximum
value of the absolute value of the sum of the propagation and curvature forces.
- edgeAttract - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- EdgeAttribute() - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.EdgeAttribute
-
Construct an attribute for an edge.
- edgeBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- EdgeCollapse(float, Vector<TriangleIndex>, Vector<Point3D>, Vector<Point3D>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- EdgeCollapse(int, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- edgeComparator() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edgeComparator
-
- EdgeCorners(int, int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- EdgeCorners(int, int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Square
-
- edgeDetect(double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- edgeDetectionAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- edgeImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
DOCUMENT ME!
- edgeImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
If true an edge map image should be produced.
- edgeImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- edgeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
DOCUMENT ME!
- edgeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
DOCUMENT ME!
- edgeImg - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- edgeIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RootInfo
-
- EdgeIndex - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- EdgeIndex() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.EdgeIndex
-
- EdgeIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- EdgeIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Square
-
- EdgeIndex(int, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- EdgeIndex(OctNode, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VertexData
-
- EdgeIndex(OctNode, int, int, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VertexData
-
- edgeJunctions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- edgeKernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The size of the edge detection kernel.
- edgeKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Edge detection kernel size (.6 in Shattuck paper).
- edgeKernelSizeTF - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Text field used to enter the edge detection kernel size.
- EdgeKey(LSCM.Vertex, LSCM.Vertex) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.EdgeKey
-
- edgelist_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList
-
- edgeMap - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- edgeMask - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- edgeMask - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingSquares
-
- edgenbr - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Edge
-
- edgeNeighbor(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- edgeNeighbor(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- edgePattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- edgePattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- edgePattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- edgePattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- edgePattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- edgePixelCount - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RAList
-
- EdgeReflectCornerIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- EdgeReflectEdgeIndex(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- EdgeRootCount(OctNode, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- edges - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- edges - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingSquares
-
- edges - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FaceEdgesFunction
-
- edges() - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- EDGES - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- EDGES - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Square
-
- edges_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Graph
-
- edges_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- edgeScore - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum2
-
- edgeScore - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum3
-
- edgeScore - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeature
-
< peak score.
- EdgeSorter() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags.EdgeSorter
-
- edgeStrength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RAList
-
- edgeStrip(float[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
This function edge strips the realData after the inverse FFT to return to the original dimensions that were
present before the forward FFT was performed.
- edgeStrip(float[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
This function edge strips the realData after the inverse FFT to return to the original dimensions that were
present before the forward FFT was performed.
- edgeTable - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
- edgetd2Image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- edgetd3Image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- edgeThreshold - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
< peak threshold.
- EdgeTrait() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.EdgeTrait
-
- EdgeWeight(Vertex, Vertex) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- edgingType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Edge type.
- edgingType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Edge type.
- edgingType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Edge type.
- edgingType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Edge type.
- edgingType - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
DOCUMENT ME!
- edgingTypeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
DOCUMENT ME!
- edgingTypePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
DOCUMENT ME!
- edit - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- edit - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
edit button.
- edit - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- editAction(String) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Modify the Annotation field of the selected node.
- editAnnotations(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
Enable editing annotations in either 3D or 2D windows with the mouse.
- editBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- editButton - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
DOCUMENT ME!
- editCircleDiameter - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
- editCircleDiameter() - Method in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- editCircleDiameter(VOIBase, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from the JDialogEditCircleDiameter.
- editClip() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- edited - Variable in class gov.nih.mipav.model.file.FileBioRad
-
not used in disk files.
- editImageFrameA - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- editImageFrameB - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- editLattice() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- editLatticeOutput - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- editMenu - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- editNotes(String) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Modify the Annotation field of the selected node.
- editorDeleteTag - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
- editorDialogDicom - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- editorDialogDicomList - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- editorDialogTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- editorDialogTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
hashtable to store editor dialogs associated with the table.
- editorNewTag - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
- editSeamCellOutput - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- editSquareLength - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
- editSquareLength() - Method in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- editSquareLength(VOIBase, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from JDialogEditSquareLenth, changes the length of the selected square VOI.
- editStore - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Buttons used for the host tab
- editSubMenu - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- editSubMenu - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- editTagButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
buttons for toolbar *
- editTextField - Variable in class gov.nih.mipav.view.JPanelEditChar
-
DOCUMENT ME!
- editTextField - Variable in class gov.nih.mipav.view.JPanelEditDefault
-
DOCUMENT ME!
- editTextField - Variable in class gov.nih.mipav.view.JPanelEditSetOrParam
-
DOCUMENT ME!
- editUserDefButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Button to lasunch the Edit User Defined File Types Dialog
- ediv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Returns the solution in the form of the base and exponent of the division of two exponential numbers.
- edn - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
dn (u, hk)
- effEchoSpace - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
828 effective echo spacing for EPI.
- effectiveSpectralBandwidth - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- efficiencyImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- efficiencyImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- effImageCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- eftData - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- eftDims - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- eftEnd - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- eftName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- EG_FA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
EigenVector and Functional Anisotropy dialog:
- ei - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools.EigenvalueComplex
-
- EIGEN - gov.nih.mipav.model.algorithms.CeresSolver.DenseLinearAlgebraLibraryType
-
- eigen_Mat_rm(SIFT3D.Mat_rm, SIFT3D.Mat_rm, SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- eigen_sort3d_m(double[][][], double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- EIGEN_SPARSE - gov.nih.mipav.model.algorithms.CeresSolver.SparseLinearAlgebraLibraryType
-
- eigen2d_m(double[][], double[][], double[][], double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- eigen3d_m(double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- EigenQuaternionParameterization() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.EigenQuaternionParameterization
-
- EigenQuaternionParameterizationAwayFromZeroTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EigenQuaternionParameterizationNearZeroTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EigenQuaternionParameterizationTestHelper(double[], double[], double[], String) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EigenQuaternionParameterizationZeroTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EigenQuaternionProduct(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
Constructs and initializes the quaternion \f$ w+xi+yj+zk \f$ from
its four coefficients \a w, \a x, \a y and \a z.
- eigenSystemAlgo - Variable in class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
DOCUMENT ME!
- eigenSystemAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Eigensystem solver.
- eigenSystemAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- EigenvalueComplex(double, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools.EigenvalueComplex
-
- EigenvalueComplexComparator() - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools.EigenvalueComplexComparator
-
- EigenvalueDecomposition - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
Eigenvalues and eigenvectors of a real matrix.
- EigenvalueDecomposition(double[][]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
- EigenvalueDecomposition(CVisDMatrix) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
Check for symmetry, then construct the eigenvalue decomposition
- eigenValueImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- EigenValueImageName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- eigenvalues - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- EigenValues() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Returns the eigen values in vector form.
- EigenValuesOrg() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Returns the orignal eigen values in vector form.
- eigenvectorBrowseButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
buttons *
- eigenVectorImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- EigenVectorImageName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- eigenvectorLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- eigenvectorPath - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
textfields *
- EigenVectors() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Returns the eigen vectors in matrix form.
- eightButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- eightButton - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- eightButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- eightButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- eightButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- eightButton - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- eightButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- eightButton - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- eightButton - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- eighteenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- eighteenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- eighteenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- eighteenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- EIGSYS(int, double, double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- eigvecFilename - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
names of eigenvector and anisotropy files*
- eigvecFilename - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
names of eigenvector and anisotropy files*
- eigvecSrcImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
eigenvector src image *
- eigvecSrcImage - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
eigenvector src image *
- eigvecSrcImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
eigenvector src image *
- eigvecSrcImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
eigenvector src image *
- eimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- eimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- eIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.TriangulationTriangle
-
- elapsedStudyDuration - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- elapsedTime - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Elapsed time (in milliseconds) -- time it took for algorithm to run.
- elapsedTime - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
< Variance of the score updates.
- elapsedTime - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
Elapsed time (in milliseconds) -- time it took for algorithm to run.
- ELdelete(delaunay.Halfedge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ELedge - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Halfedge
-
- elem - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Entry
-
- elem() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- element - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
the element of this spliterator (reused on each pixel of the delegate)
- element - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Represents the DICOM element number.
- element - Variable in class gov.nih.mipav.model.dicomcomm.RTCEntry
-
DOCUMENT ME!
- element - Variable in class gov.nih.mipav.model.file.FileDicomTag
-
Integer element word (in hexadecimal).
- element - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
the VOIText element in the VOI to modify
- element - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
Matrix element array.
- element_find(int, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- element_link(int, int, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- element_link_geod_dilate(int, int, int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- element_to_group_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- elementAt(int) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Returns the parameter at a particular position in the list.
- elementBuffer - Variable in class gov.nih.mipav.model.file.FileDataProvenance.ProvenanceXMLHandler
-
The data for the current element being parsed.
- elementBuffer - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- elementBuffer - Variable in class gov.nih.mipav.model.file.FileOME.MyXMLHandler
-
The data for the current element being parsed.
- elementBuffer - Variable in class gov.nih.mipav.model.file.FilePolylineVOIXML.MyXMLHandler
-
The data for the current element being parsed.
- elementBuffer - Variable in class gov.nih.mipav.model.file.FileVOI.MyXMLHandler
-
The data for the current element being parsed.
- elementBuffer - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
The data for the current element being parsed.
- elementBuffer - Variable in class gov.nih.mipav.model.file.FileVOI.XMLCoordHandler
-
The data for the current element being parsed.
- elementBuffer - Variable in class gov.nih.mipav.view.dialogs.MyXMLHandler
-
The data for the current element being parsed.
- elementBuffer - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D.SurfaceRefXMLHandler
-
Current buffer:.
- elementBuffer - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Current buffer:.
- elementBuffer - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Current buffer:.
- elementBuffer - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM.SurfaceRefXMLHandler
-
Current buffer:.
- elementBuffer - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
The data for the current element being parsed.
- elementCombo - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Combo boxes used for sequence tags
- elementCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- elementCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RestrictedLaplacianMatrixFunction
-
- ElementDivide(CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element-wise matrix division.
- ElementDivide(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Divide two vectors element-wise.
- elementField - Variable in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- elementFocus - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- elementLength - Variable in class gov.nih.mipav.model.file.FileDicom
-
Length of the value field of data element.
- elementList - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Lists used to display available DICOM tags
- ElementMultiply(CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element-wise matrix multiply.
- ElementMultiply(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Multiplies two vectors element-wise.
- elementNum - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- elementNum - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
- elementNum - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
DOCUMENT ME!
- elementSeqText - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Text fields for displaying/entering a group/element tag
- elementString - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- elementText - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Text fields for displaying/entering a group/element tag
- elementTimes(libdt.Mat, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- elementWord - Variable in class gov.nih.mipav.model.file.FileDicom
-
Second number (DICOM element in a group) in ordered pair of numbers that uniquely identifies a data element.
- elems - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- elemSize - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- ELgethash(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ELhash - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ELhashsize - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ELI - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- elim - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- elim - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- Eliminate(CeresSolver.BlockSparseMatrix, double[], double[], CeresSolver.BlockRandomAccessMatrix, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- Eliminate(CeresSolver.BlockSparseMatrix, double[], double[], CeresSolver.BlockRandomAccessMatrix, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminatorBase
-
- EliminateSolveAndCompare(double[], boolean, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- elimination_groups - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- elimination_groups - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- eliminator_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- eliminator_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurJacobiPreconditioner
-
- ELinitialize() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ELinsert(delaunay.Halfedge, delaunay.Halfedge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- elist - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- elist - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
Estimates of the absolute errors on the subintervals.
- elist - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Estimates of the absolute errors on the subintervals.
- elit(double, double) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Ported from Computation of Special Functions by Shanjie Zhang and Jianming Jin Computes complete and incomplete
first and second elliptic integrals with a real modulus and real argument 0 <= mod <= 1, mod is the modulus arg
is the argument in radians.
- elit3(double, double, double) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Ported from Computation of Special Functions by Shanjie Zhang and Jianming Jin Computes complete and incomplete
elliptic integrals of the third kind with a real modulus real argument, and real parameter 0 <= mod <= 1, mod is
the modulus arg is the argument in radians c is the parameter, 0 <= c <= 1.
- ell - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- Ell - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- ell12(double, double, double, double, double, double, int) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Calculates complete and incomplete elliptic integrals of the first and second kind with complex arguments Ported
from the Tohru Morita article.
- ELleft - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Halfedge
-
- ELleft(delaunay.Halfedge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ELleftbnd(delaunay.Point) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ELleftend - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ellie(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- ELLIE - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- ellik(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- ELLIK - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- ellipap1() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- ellipjc(double[][], double[][], double[][], double[][], double, boolean) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- ellipkkp(double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- ELLIPSE - Static variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- ELLIPSE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- ELLIPSE - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- ELLIPSE - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in ellipse VOI mode
- ellipseBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- ellipseComp(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- ellipseCross - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- ellipseCross - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- ellipseCurves - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- ellipseCurvesVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- ellipseDiameter - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- ellipseEval(float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- ellipseModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- ellipseRangeTolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- ellipseRangeTolerance - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Maximum percent by which perimiter pixels can deviate from the ellipse equation
- ELLIPSES_ONLY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- ELLIPSES_ONLY - Static variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- ellipseScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- ellipsesOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- Ellipsoids - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- ELLIPTIC - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- ELLIPTIC - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- ELLIPTIC - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
- ELLIPTIC - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- ELLIPTIC - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- ELLIPTIC - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- ELLIPTIC - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- ELLIPTIC - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- ELLIPTIC - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- ELLIPTIC - Static variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- ellipticAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
- ellipticButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
- ellipticFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- ellipticFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- ellipticFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- ellipticFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- ellipticFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- EllipticIntegral - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- EllipticIntegral() - Constructor for class gov.nih.mipav.model.algorithms.EllipticIntegral
-
~ Constructors
---------------------------------------------------------------------------------------------------
- EllipticIntegral(boolean, double, double, boolean, boolean, double, double, double[], double[], double[], double[], boolean, int[]) - Constructor for class gov.nih.mipav.model.algorithms.EllipticIntegral
-
When calculating the complete integrals K(k) and E(K), we can make complete true or false, except when abs(k') <=
1.0E-10, in which case complete must be true and the complementary modulus must be used The only merit of the
alternative method over the standard method is that the code is simpler Both methods are based on modifications
of Carlson's algortihm.
- EllipticIntegral(double, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Used for complete elliptic integrals of first and second kind with real modulus 0 <= mod <= 1, mod is the
modulus.
- EllipticIntegral(double, double, boolean, boolean, double[], double[], double[], double[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Constructor only for complete integrals with phi = PI/2.
- EllipticIntegral(double, double, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Used for complete and incomplete elliptic integrals of first and second kind with real modulus and argument 0 <=
mod <= 1, mod is the modulus phi, argument in radians.
- EllipticIntegral(double, double, double, double[]) - Constructor for class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Used for complete and incomplete elliptic integrals of the third kind with real modulus, real argument phi, and
real parameter c 0 <= mod <= 1 phi, argument in radians c parameter, 0 <= c <=1.
- ellpe(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- ELLPE - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- ellpk(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- ELLPK - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- ELpm - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Halfedge
-
- ELrefcnt - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Halfedge
-
- ELright - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Halfedge
-
- ELright(delaunay.Halfedge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ELrightend - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ELSUNC - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- ELSUNC - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- ELSUNC - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
- ELSUNC - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- ELSUNC - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
- ELSUNC - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- elsuncEngine - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- elts - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.universe
-
- elts - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- email - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- email - Variable in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Investigator's email.
- email - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
- email - Variable in class gov.nih.mipav.model.file.FileInfoOME.Person
-
- emailField - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Text field for user inputed email
- emAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- emax - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
I1MACH(16) = 1024 The largest exponent for double precision.
- emax - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
I1MACH(16) = 1024 The largest exponent for DoubleDouble precision.
- emax - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- embeddedDimensions - Variable in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Use serialVersionUID for interoperability.
- embeddedPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
When this object exists as an embedded panel, this variable contains all necessary data elements.
- Emean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.PData
-
- emFilter - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter
-
- emfunction() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- emin - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
I1MACH(15) = -1021; The smallest exponent for double precision.
- emin - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
I1MACH(15) = -1021; The smallest exponent for DoubleDouble precision.
- emin - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- emissionFilterChangerArray - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- emissionWavelength - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- emissionWavelength0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- emissionWavelength1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- emissionWavelength2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- emissionWavelength3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- emissionWavelengthChannel0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- emissionWavelengthChannel1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- emissionWavelengthChannel2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- emissionWavelengthChannel3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- emissive - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareMaterial
-
Defaults colors set according to defaults for Java3D Material.
- EMISSIVE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
- emissiveColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- emissiveColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
DOCUMENT ME!
- emissiveColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
DOCUMENT ME!
- emissiveColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
DOCUMENT ME!
- emissiveColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
DOCUMENT ME!
- emissiveColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- emit_message(libjpeg.jpeg_decompress_struct, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- EMM - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- EMN - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- eModel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- eModel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- EMOptions(int, libdt.DytexRegOptions, double, libdt.Verbose_mode) - Constructor for class gov.nih.mipav.model.algorithms.libdt.EMOptions
-
- EMPTY_CELL - Static variable in class gov.nih.mipav.model.structures.SortingTableModel
-
DOCUMENT ME!
- EMPTY_DIRECTIVE - Static variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- EmptyButton(String) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.EmptyButton
-
Creates new button with correct icon and given tool tip.
- EmptyButton(String) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelCamera.EmptyButton
-
Creates new button with correct icon and given tool tip.
- emptyDisplayed - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
Whether or not emptyLabel is currently displayed
- emptyIcon - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeRenderer
-
DOCUMENT ME!
- emptyLabel - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
Label to display when there are no runnables to display or
listen for.
- emptySplitOpt - Variable in class gov.nih.mipav.model.algorithms.libdt.EMOptions
-
- emptySplitOpt - Variable in class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- emptyVector - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- emult(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Takes one base and exponent and multplies it by another number's base and exponent to give the product in the
form of base and exponent
- emWave - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- EMX - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- enable(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set whether light is enabled.
- ENABLE - Static variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- enable_1pass_quant - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- enable_2pass_quant - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- enable_external_quant - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- enable_fast_removal - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemOptions
-
- enable3DComponents(boolean) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Enables or disables the components in this panel which are 3D-related.
- enableAllMenuItems() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Enable all items in a menubar.
- enableArbitraryClipPlane(boolean, boolean, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enables the arbitrary clip plane position.
- enableBoth(boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- enableBurnLabels(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Attach or detach burn labels.
- enableBurnLabels(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Attach or detach burn labels.
- enableBurnTreatmentComponents(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Enable or disable the components on the target treatment panel.
- enableBurnVisComponents(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Enable or disable the components on the burn visualization panel.
- enableCalcButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- enableChannelSelection(boolean) - Method in class gov.nih.mipav.view.components.JPanelColorChannels
-
Enables or disables the color channel check boxes.
- enableCheckbox - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- enableClearLast(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
When a new line segment is added to the geodesic curve, the Geodesic object enables removing the last point
added.
- enableClearLast(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
When a new line segment is added to the geodesic curve, the Geodesic object enables removing the last point
added.
- enableClearLastCut(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
When a new line segment is added to the geodesic curve, the Geodesic object enables removing the last point
added.
- enableClearLastCut(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
When a new line segment is added to the geodesic curve, the Geodesic object enables removing the last point
added.
- enableClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- enableClip(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- EnableClip() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
Enable clipping.
- enableClipArbiBehavior(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Enable arbitrary clipping plane behavior.
- enableClipPlane(int, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enables the axis-aligned clipping planes.
- enableCloseImageB - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Tells whether the ViewMenuBuilder should allow Close Image(B) after loading image B.
- enableComputeButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- enableComputeEpiDistortion() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Checks that all the parameters necessary to run the epi-distortion correction are set
and enables the compute button and display check-box.
- enableComputeVabra() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Checks that all the parameters necessary to run the VABRA registration are set
and enables the compute button and display check-boxes.
- enableCut(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
The Geodesic object enables cutting the mesh when the line segments are finished, either finished open or
finished closed.
- enableCut(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
The Geodesic object enables cutting the mesh when the line segments are finished, either finished open or
finished closed.
- enableDebugOutput() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- enableDiffuse(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Enable/disable the optional diffuse color vertex property.
- enableDims(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- enabledList - Variable in class gov.nih.mipav.view.JPanelChecklist
-
the list of the choices that can be selected.
- enableDualPanelRender() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Enable dual panel renders.
- enableEntryPoint(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Set entry point rotation flag.
- enableEntryPoint(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Set entry point rotation flag.
- enableEntryPointRotation(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Enable the probe to rotate around the entry point.
- enableEntryPointRotation(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Enable the probe to rotate around the entry point.
- enableEntryPointRotation(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Enable the probe to rotate around the entry point.
- enableEntryPointRotation(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Enable the probe to rotate around the entry point.
- enableEntryPointRotation(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Enable the probe to rotate around the entry point.
- enableEyeClipPlane(boolean, boolean, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enables the eye clip plane.
- enableEyeInvClipPlane(boolean, boolean, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enables the inverse-eye clip plane.
- enableFlyThruRender() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Enable the fly through frame layout.
- enableGeodesic(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Enable geodesic calculations and display.
- enableGeodesic(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enable geodesic curve calculations/display.
- enableImageB(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Quick and simple way for ViewJFrameBase to tell the ViewJFrameImage it created to set the menu (right now only
for 2Dimensional) for image B.
- enableLabelGaussX(boolean) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
- enableLabelGaussY(boolean) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
- enableLight(int, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
- enableLight(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Enable the selected light.
- enableListeners(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- enableLoad() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- enableLoggingBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- enableObjBehavior(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Enable objBehavior branch group.
- enableObjBehavior(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Enable objBehavior branch group.
- enableOutputWindow(boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Toggles the display of the Output window and updates all JFrameImages so that the menu checkbox will reflect the
status of the output window.
- enablePackBitWrite - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- enablePaint(ColorRGBA, int, boolean, boolean, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Enable painting on TriMesh surfaces.
- enablePaint(ColorRGBA, int, boolean, boolean, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enable painting on TriMesh surfaces.
- enablePDFAsImageRendering(boolean) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- enablePDFAsImageRendering(boolean) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
En/disables PDF rendering as image.
- enableProbeBehavior(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Enable probe mouse behavior branch group.
- enableProbeBehavior(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Enable probe mouse behavior.
- EnableResidualBlockDependencies() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- enableResols(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- enableResolutionCorrection(boolean) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Enables or disables z-dimension sigma resolution correction.
- enables - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Enable flags for the 6 ( X, Y, Z and inverse ) clipping planes.
- enablesArbi - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Enable flags for the arbitrary clipping planes.
- enableSATransform - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- enableSculpt(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
enableSculpt: called by the ViewJFrameVolumeView object when the Draw Sculpt button is pressed.
- enableSculpt(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.TextureSculptor
-
enableSculpt: called by the ViewJFrameVolumeView object when the Draw Sculpt button is pressed.
- enableSculpt(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
enableSculpt: called by the ViewJFrameVolumeView object when the Draw Sculpt button is pressed.
- enableSculpt(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Turn sculpt drawing on/off.
- enableSculpt(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enables and disables sculpting.
- enableseCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- enableShearWarpRender() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Enable the shear warp render.
- enableSlicePickable(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
Enable the tri-planar slice pickable.
- enableSlices() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Enable slider X, Y, Z and triplanar.
- enableSpecular(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Enable/disable the optional specular color vertex property.
- enablesStatic - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Enable flags for the static clipping planes.
- enableStaticClipping() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Enable the eye clipping plane.
- enableStaticInvClipping() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Enable the eye inverse clipping plane.
- enableStaticLightBehavior(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Enable static light behavior.
- enableStepSize - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- enableSurfacePaint(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Enables/Disables the SurfacePaint per-vertex functions.
- enableSurfacePaint(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Enables/disables the Surface per-vertex paint user-interface
- enableSurfacePaint(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Enables/Disables the SurfacePaint per-vertex functions.
- enableSurfacePaint(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Enables/disables the Surface per-vertex paint user-interface
- enableSurfacePaintCan(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Enables/Disables the SurfacePaint Paint Can function.
- enableSurfacePaintCan(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Enables/disables the Paint Can user-interface
- enableSurfacePaintCan(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Enables/Disables the SurfacePaint Paint Can function.
- enableSurfacePaintCan(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Enables/disables the Paint Can user-interface
- enableSurfaceRender() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Enable surface render.
- enableSvgAsImageRendering(boolean) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- enableSvgAsImageRendering(boolean) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
En/disables SVG rendering as image.
- enableTargetPointPicking() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Enable target point for the RFA probe from within the plane renderer.
- enableTargetPointPicking(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Enable or disable target point for the RFA probe from within the plane
renderer:
- enableTextGaussX(boolean) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
- enableTextGaussY(boolean) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
- enableThresholdingItems(boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Enables the thresholding menu item(s).
- enableTranslationsYZ(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- enableTranslationX(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- enableVariableCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- enableVolRender - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Boolean flag to enable volume render button.
- enableVolumeRender() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Enable volume render.
- enableYSettings(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- encapJP2Checkbox - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Check box for specifying whether DICOM files should be saved as an encapsulated JPEG2000
- encapsulated - Variable in class gov.nih.mipav.model.file.FileDicom
-
When Dicom image data is 'encapsulated,' it may be in pieces, or 'fragments.' don't know quite why, or if pieces
should be kept together.
- encapsulatedImageData() - Method in class gov.nih.mipav.model.file.FileDicom
-
Starts with image tag. goes with OB/OW. image file must be open, file ptr: raFile.
- encapsulatedJP2 - Variable in class gov.nih.mipav.model.file.FileDicom
-
- encapsulatedJP2ImageData(int) - Method in class gov.nih.mipav.model.file.FileDicom
-
- encoder - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
- EncoderRAW - Class in gov.nih.mipav.model.file.rawjp2
-
This class is the main class of JJ2000's encoder.
- EncoderRAW(ParameterList) - Constructor for class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Instantiates an encoder object, width the ParameterList object given as
argument.
- EncoderRAW(ParameterList, ModelImage) - Constructor for class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
- EncoderRAWColor - Class in gov.nih.mipav.model.file.rawjp2
-
This class is the main class of JJ2000's encoder.
- EncoderRAWColor(ParameterList) - Constructor for class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Instantiates an encoder object, width the ParameterList object given as
argument.
- EncoderRAWColor(ParameterList, ModelImage) - Constructor for class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
- encodingString - Variable in class gov.nih.mipav.model.file.FileInfoNRRD
-
Data compression - raw, gzip
- EncodingTypes - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
- end - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task
-
- end - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask
-
- end - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- end - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- end - Variable in class gov.nih.mipav.model.algorithms.libdt.Range
-
- end - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_bio_t
-
pointer to the end of the buffer
- end - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_t
-
- end - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_raw_t
-
pointer to the end of the buffer
- end - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceEdgeIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceHalfedgeIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceVertexIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshEdgeIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshFaceIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshHalfEdgeIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshVertexIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexEdgeIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexFaceIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexInHalfedgeIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexOutHalfedgeIterator
-
- end() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexVertexIterator
-
- end() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- end(Point) - Method in class gov.nih.mipav.view.Rubberband
-
Sets the end point to this point.
- end_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
-
- end_header - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tp_index_t
-
end position of the header
- end_ph_pos - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_packet_info_t
-
end of packet header position (including EPH marker if it exists)
- end_pos - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_packet_info_t
-
packet end position
- end_pos - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tp_index_t
-
end position
- END_SLICE - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for last slice to save from an image parameter.
- END_TIME - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the parameter indicating the last time slice to save.
- endAngle - Variable in class gov.nih.mipav.view.RubberbandEllipse
-
DOCUMENT ME!
- endBlock() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- endBlock() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- endButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- endBytes - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- endCalendar - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- endCoarse() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Call endCoarse when you are finished with the region growing.
- endCompression() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- endDayBox - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- endDistanceTransform() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Call endDistanceTransform when you are finished with the distance
transform construction.
- endDocument() - Method in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
Do nothing.
- endDocument() - Method in class gov.nih.mipav.model.file.FileOME.MyXMLHandler
-
Handle the end of the XML document.
- endDocument() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
- endDocument() - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D.SurfaceRefXMLHandler
-
Do nothing.
- endDocument() - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Do nothing.
- endDocument() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Do nothing.
- endDocument() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM.SurfaceRefXMLHandler
-
Do nothing.
- ended - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
DOCUMENT ME!
- ended - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
DOCUMENT ME!
- ended - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
DOCUMENT ME!
- endElement(String, String, String) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- endElement(String, String, String) - Method in class gov.nih.mipav.model.file.FileDataProvenance.ProvenanceXMLHandler
-
Parser calls this when the end tag of each element is reached.
- endElement(String, String, String) - Method in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
Called by parser when the end of an element is reached in the document.
- endElement(String, String, String) - Method in class gov.nih.mipav.model.file.FileOME.MyXMLHandler
-
Parser calls this when the end tag of each element is reached.
- endElement(String, String, String) - Method in class gov.nih.mipav.model.file.FilePolylineVOIXML.MyXMLHandler
-
Parser calls this when the end tag of each element is reached.
- endElement(String, String, String) - Method in class gov.nih.mipav.model.file.FileVOI.MyXMLHandler
-
Parser calls this when the end tag of each element is reached.
- endElement(String, String, String) - Method in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
Parser calls this when the end tag of each element is reached.
- endElement(String, String, String) - Method in class gov.nih.mipav.model.file.FileVOI.XMLCoordHandler
-
Parser calls this when the end tag of each element is reached.
- endElement(String, String, String) - Method in class gov.nih.mipav.view.dialogs.MyXMLHandler
-
Parser calls this when the end tag of each element is reached.
- endElement(String, String, String) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
- endElement(String, String, String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D.SurfaceRefXMLHandler
-
Called by parser when the end of an element is reached in the document.
- endElement(String, String, String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Called by parser when the end of an element is reached in the document.
- endElement(String, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Called by parser when the end of an element is reached in the document.
- endElement(String, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM.SurfaceRefXMLHandler
-
Called by parser when the end of an element is reached in the document.
- endElement(String, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
Parser calls this when the end tag of each element is reached.
- endElementEdge() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
End Edge element.
- endElementGraph() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
Ends the Graph.
- endElementLabel() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
Called when the end of the Label element is found.
- endElementNode() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
Called when the end of the Node Element is found.
- endEvolution() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Call endEvolution when you are finished with the level-set evolution.
- endFloats - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- endian - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- endianess - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- endianess - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileAvi
-
true for big-endian and false for little-endian.
- endianess - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileCZI
-
- endianess - Variable in class gov.nih.mipav.model.file.FileDicom
-
Stores the endianess of the header, used for processing sequence tags
- endianess - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- endianess - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
The Endianess of the data.
- endianess - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileJP2
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- endianess - Variable in class gov.nih.mipav.model.file.FileJSON
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileMinc
-
The endianess of the image being written or read.
- endianess - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.model.file.FileZVI
-
- endianess - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Indicates the endianess of the image.
- endianess - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- endianess - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- ENDIANESS - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeEndianess
-
The label to use for the parameter indicating the endianess
- EndianValues - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
- endIndex - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator
-
- endIndex - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms.ByteBuffer
-
Pointer to the end of data in the buffer.
- endIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- endIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- endIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- endIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- endingIFD() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- endingIFD() - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- endLoc - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
128 - Last scan location (L/S).
- endMatchFOVradio - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Radio button for slice start & end matching interpolation.
- endMonthBox - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- endOfImage() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- endOfImage() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- endOfMonth(Calendar) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Calculates the last date of the month.
- endOfStream() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
DOCUMENT ME!
- endOfStream() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
DOCUMENT ME!
- endOfStream() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
DOCUMENT ME!
- ENDOSCOPY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality endoscopy.
- ENDOSCOPY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality endoscopy.
- ENDOSCOPY - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- endoscopyImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Loaded endoscopy image file.
- endoscopyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Loaded endoscopy image file.
- endpoint(delaunay.Edge, int, delaunay.Site) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- endPointTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Probe detection ending point transform group that represents the probe guide line ending point.
- endPt - Variable in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- endPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- endPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- endPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- endPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- endPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- endPt - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- endPtr - Variable in class gov.nih.mipav.model.structures.TransferFunction
-
Points to the next available storage location for the point.
- endPtTransVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
End point coordinate vector in the world coordinate system.
- endRange - Variable in class gov.nih.mipav.model.structures.ModelHistogram
-
DOCUMENT ME!
- endRange1 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
The ending range value of the input image.
- endRange2 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
The ending range value of the output image.
- endRAS - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
126 - 1 byte - RAS letter for last scan location (L/S).
- endShorts - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- endSlice - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
- endSlice - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- endSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- endSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Value of the end slice for the calculation (X,Y,Z).
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.Range
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.Range
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.Range
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.Range
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.Range
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.Range
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.Range
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.Range
-
- endSliceImageNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- endSliceImageNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- endSliceImageNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- endSliceImageNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- endSliceImageNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- endSliceImageNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- endSliceImageNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- endSliceImageNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Ending slice check references for apex and base.
- endSliceImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- endSliceImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- endSliceImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- endSliceImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- endSliceImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- endSliceImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- endSliceImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- endSliceImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- endSliceRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- endSliceRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- endSliceRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- endSliceRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- endSliceRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- endSliceRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- endSliceRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- endSliceRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- endSliceRangeNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- endSliceRangeNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- endSliceRangeNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- endSliceRangeNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- endSliceRangeNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- endSliceRangeNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- endSliceRangeNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- endSliceRangeNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- endTag - Static variable in class gov.nih.mipav.model.file.FileHistoLUT
-
Tag marking the end of a LUT or transfer file.
- endTime - Variable in class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
DOCUMENT ME!
- endTimePeriod - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- endTol - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
The measure used to terminate the iterations is the coefficient of variation of change in field estimates between
successive iterations.
- endTol - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- endTol - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- endTol - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- endTol - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- endTol - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- endTol - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- endTolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- endVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- endVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- endVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- endVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- endVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- endVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- endX - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- endX - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- endX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.Line
-
- endX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.Line
-
- endX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.Line
-
- endX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.Line
-
- endX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.Line
-
- endXexcl - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- endXinclusive - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- endXinclusive - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- endY - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- endY - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- endY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.Line
-
- endY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.Line
-
- endY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.Line
-
- endY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.Line
-
- endY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.Line
-
- endYearBox - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- endYinclusive - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- endYinclusive - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- endZ - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- endZ - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- ene - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Edge
-
- energy - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate energy Energy = square root(asm).
- energy - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate energy Energy = square root(asm).
- energy - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- energy - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- energyCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- energyCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- energyImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
DOCUMENT ME!
- energyNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- energyWindowName - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- energyWindowsNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- enforceDistinctVolumeWriting - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- enhancedCT - Variable in class gov.nih.mipav.view.dialogs.JDialogEnhancedDicomChoice
-
Radio button to indicate that an enhanced CT file should be written out.
- enhancedDicomButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
All frames in one file
- enhancedMR - Variable in class gov.nih.mipav.view.dialogs.JDialogEnhancedDicomChoice
-
Radio button to indicate that an enhanced MR file should be written out.
- enhancedNumSlices - Variable in class gov.nih.mipav.model.file.FileDicom
-
- enhancedNumVolumes - Variable in class gov.nih.mipav.model.file.FileDicom
-
- enhancedOther - Variable in class gov.nih.mipav.view.dialogs.JDialogEnhancedDicomChoice
-
- enhancedTagTables - Variable in class gov.nih.mipav.model.file.FileDicom
-
- enhancedThreshold - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
Enhanced image threshold
- enhancedThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Enhanced image threshold
- enhancedXA - Variable in class gov.nih.mipav.view.dialogs.JDialogEnhancedDicomChoice
-
Radio button to indicate that an enhanced XA file should be written out.
- ENHANCEMENT - gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder.BugType
-
- enop2D(double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- ENORM(int, double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- enphi - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- ENRIGHT_AND_PRYCE_A1 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_A1 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_A2 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_A2 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_A3 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_A3 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_A4 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_A4 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_A5 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_A5 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_B1 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_B1 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_B2 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_B2 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_B3 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_B3 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_B4 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_B4 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_B5 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_B5 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_C1 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_C1 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_C2 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_C2 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_C3 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_C3 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_C4 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_C4 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_C5 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_C5 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_D1 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_D1 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_D2 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_D2 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_D3 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_D3 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_D4 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_D4 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_D5 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_D5 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_E1 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_E1 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_E2 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_E2 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_E3 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_E3 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_E4 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_E4 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_E5 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_E5 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_F1 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_F1 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_F2 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_F2 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_F3 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_F3 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_F4 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_F4 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENRIGHT_AND_PRYCE_F5 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ENRIGHT_AND_PRYCE_F5 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ENSOCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.ENSOCostFunction
-
- ENSOData - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- ENSOObservations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- ensurePopupMenuCreated() - Method in class gov.nih.mipav.view.JScrollMenu
-
Lazily creates the popup menu.
- entireFlag - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Flag indicating if histogram should be done on all of image or not.
- entireFlag - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Flag indicating if histogram should be done on all of image or not.
- entireFlag - Variable in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
DOCUMENT ME!
- entireFlag - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- entireFlag - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
true means apply to entire image, false only region.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
if true, indicates that the VOIs should NOT be used and that entire image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
if true, indicates that the VOIs should NOT be used and that entire image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
If true the histogram should be calculated for the entire image.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Ideally the Weiner filter noise equals the white noise of the image.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
if true, indicates that the VOIs should NOT be used and that entire image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
if true, indicates that the VOIs should NOT be used and that entire image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Whether to convolve the whole image or just pixels inside a mask.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
If true, ignore VOIs and process entire image
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Whether to process the entire image, or just the portion within the currently selected VOI.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEdgePreservingSmoothing
-
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
true means apply to entire image, false only region.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
true means apply to entire image, false only region.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalVariance
-
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
true means apply to entire image, false only region.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
true means apply to entire image, false only region.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSymmetricNearestNeighbor
-
- entireImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Flag, if true, indicates that the whole image should be processed.
- entireImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceValue
-
- entireImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
- entireImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
- entireImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- entireImage - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
- entireImage - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- entireImage(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Sets a flag to indicate if the histogram is to be calculated for the entire image or just the VOI.
- Entries() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- entropicAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
DOCUMENT ME!
- entropy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- entropy - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calcuate entropy Sum over i,j of -Probability(i,j) * ln(Probability(i,j)).
- entropy - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calcuate entropy Sum over i,j of -Probability(i,j) * ln(Probability(i,j)).
- entropy - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- entropy - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- entropy_arith - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- entropy_huff - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- entropyCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- entropyCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- entropyFunction(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- entropySplit(int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Calculate maximum entropy split of a histogram.
- entry - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
80 - Patient Entry.
- entry - Variable in class gov.nih.mipav.model.provenance.ProvenanceChangeEvent
-
- Entry - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- Entry(Vertex, float, Point3) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Entry
-
- ENTRY_POINT - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Value which indicates the probe entry point color.
- ENTRY_POINT - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Value which indicates the probe entry point color.
- entryPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
entry point coordinate of the specified probe.
- entryPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The vector record the translation coordinate of the entry point.
- entryPointBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The root branch group of the enty point.
- entryPointLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
entry point label.
- entryPointPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Panel that hold the entry point roation check box.
- entryPointRotationCB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
entry point rotation check box.
- entrySet() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Returns the set of parameter entries.
- ENumGrad - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- EOBRUN - Variable in class gov.nih.mipav.model.file.libjpeg.savable_state
-
- eof - Variable in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- eof - Variable in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- EOF - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< Generic I/O error.
- EOFB - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- EOFB - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- EOI - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- EOI - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- eoi_reached - Variable in class gov.nih.mipav.model.file.libjpeg.my_input_controller
-
- EOL - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModHuffmanTable
-
- EOL - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModHuffmanTable
-
- EOLCW - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModHuffmanTable
-
- EOLCW - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModHuffmanTable
-
- eoptBFGS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- eoptConjugateGradient - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- EOptMethod - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- eoptPatternSearch - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- eoptSimulatedAnnealing - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- eoptSteepestDescent - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- eoptUnknown - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- ep - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Edge
-
- EP - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- epb_on - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
enables writing of EPB, in case of activated JPWL
- epc_on - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
enables writing of EPC in MH, thus activating JPWL
- EPI_DISTORTION - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- EPIpanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- EPIpanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- epmach - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
epmach = D1MACH(4) Machine epmach is the smallest positive epmach such that (1.0 + epmach) !
- epmach - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
epmach = D1MACH(4) Machine epmach is the smallest positive epmach such that (1.0 + epmach) !
- epoch - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
< Solver iteration.
- EPOCH_1_JAN_1904 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.DateUtil
-
The offset (in milliseconds) to add to a MP4 date/time integer value to
align with Java's Epoch.
- eps - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel3
-
DOCUMENT ME!
- eps - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- eps - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- eps - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- eps - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- eps - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- eps - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- eps - Variable in class gov.nih.mipav.model.algorithms.Poly
-
- eps - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- eps - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- eps - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- eps - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- eps - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- eps - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
stopping criteria
- eps - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- eps - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Tron
-
- eps - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- eps - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- Eps - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- EPS - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- EPS - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- EPS - Static variable in class gov.nih.mipav.util.DoubleDouble
-
The smallest representable relative difference between two {link @ DoubleDouble} values
- eps_dlatb4 - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
- eps_zlatb4 - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- EPS2 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- epsabs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
DOCUMENT ME!
- epsabs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
DOCUMENT ME!
- epsabs - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
If epsabs <= 0.0 and epsrel < Math.max(50*relative machine accuracy, 5.0E-29), the routine will exit with an
error message.
- epsabs - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
If epsabs <= 0.0 and epsrel < Math.max(50*relative machine accuracy, 5.0E-29), the routine will exit with an
error message.
- epsAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
- epsfcn - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
step used to calculate the jacobian
epsfcn is an input variable used in choosing a step length for
the forward-difference approximation.
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
epsilon is used to smooth high curvature regions. epsilon is between 0 and 1 with larger epsilon doing more
smoothing
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
D1MACH(4).
- epsilon - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
The smallest representable relative difference between two {link @ DoubleDouble} values
- epsilon - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.Fastfit
-
Original C and MATLAB code from fastfit and lightspeed packages by Tom Minka.
- epsilon - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
D1MACH(4).
- epsilon - Variable in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
D1MACH(4).
- epsilon - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.Quaternions
-
- epsilon - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Maximum number of iterations.
- epsilon - Variable in class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- epsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- epsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- epsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- epsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- epsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- epsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- epsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- epsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- epsilon() - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- EPSILON - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- EPSILON - Static variable in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
Minimum allowable distance between iterations of a coefficient before considered converged.
- EPSILON - Variable in class gov.nih.mipav.model.algorithms.NMSimplex
-
- EPSILON - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMathf
-
DOCUMENT ME!
- EPSILON - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- EPSILON() - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- EPSILON_SVR - Static variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- EPSILON_SVR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- epsilonLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- epsilonText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- epsl - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- epsl - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- epsrel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
DOCUMENT ME!
- epsrel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
DOCUMENT ME!
- epsrel - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
DOCUMENT ME!
- epsrel - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
DOCUMENT ME!
- Eq(double, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise equal to.
- Eq(double, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Equal - compares a vector and a double.
- Eq(CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise equal to.
- Eq(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Equal - compares a vector and a vector.
- EQ - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- EQ(double, double) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- EqDiff(CVisDMatrix, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- EqDiff(CVisDVector, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- eqManuf - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- eqnA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Vector4D clipping equation of each clipping plane.
- eqnPlanes - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Vetor holding the clipping plane equations.
- eqnPlanesArbi - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Vetor holding the clipping plane equations.
- eqnPlanesStatic - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Vetor holding the clipping plane equations.
- eqnX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Vector4D clipping equation of each clipping plane.
- eqnXInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Vector4D clipping equation of each clipping plane.
- eqnY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Vector4D clipping equation of each clipping plane.
- eqnYInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Vector4D clipping equation of each clipping plane.
- eqnZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Vector4D clipping equation of each clipping plane.
- eqnZInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Vector4D clipping equation of each clipping plane.
- EqProd(CVisDMatrix, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- EqProd(CVisDMatrix, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- EqSum(CVisDMatrix, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- EqSum(CVisDVector, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- eqType - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- EQUAL_WEIGHTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
- EQUAL_WEIGHTS - Static variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- equalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- equalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- equalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- equalCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- equalDistanceSmooth(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- equalDistanceSmooth(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- equalDistanceSmooth(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- equalRange - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
- equalRange - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- equalRangeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- equals(double[][][][][], double[][][][][], double, boolean[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- equals(double[][][][], double[][][][], double, boolean[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- equals(double[], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
don't use Arrays.equals(double[], double[]) here, cause 0.0 and -0.0 should be handled the same
- equals(MetadataExtractor.Rational) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Indicates whether this instance and other are numerically equal,
even if their representations differ.
- equals(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
Tests whether this value is equal to another DoubleDouble value.
- equals(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- equals(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- equals(CVisRect) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- equals(CVisRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- equals(CVisShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- equals(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- equals(Box3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- equals(Entry) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Entry
-
- equals(Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- equals(Link) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- equals(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- equals(UpdateFlags.EdgeSorter) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags.EdgeSorter
-
- equals(Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- equals(CoredPointIndex) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredPointIndex
-
- equals(Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- equals(JDialogProstateImageCategorize.perImageCost) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perImageCost
-
- equals(JDialogProstateImageCategorize.perShapeCost) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perShapeCost
-
- equals(ClassificationWidgetState) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
- equals(Object) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.Edge
-
Support for hashing into a map of edges.
- equals(Object) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Pixel
-
- equals(Object) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.Edge
-
Support for hashing into a map of edges.
- equals(Object) - Method in class gov.nih.mipav.model.algorithms.BlindDeblur.Pair
-
- equals(Object) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Pair
-
- equals(Object) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.Triplet
-
- equals(Object) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.GenericKey
-
- equals(Object) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pair
-
- equals(Object) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Pair
-
- equals(Object) - Method in class gov.nih.mipav.model.file.FileDicomKey
-
Objects are equal if both are of type FileDicomKey, and both refer to the same value; if the input type is a
String and the String representation of the key matches.
- equals(Object) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Tests whether a tag contains the same information as this tag.
- equals(Object) - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Tests whether a tag info object contains the same information as this tag info object.
- equals(Object) - Method in class gov.nih.mipav.model.file.FileIO.OrientStatus
-
Determines if the given orientation is the same as the current one.
- equals(Object) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- equals(Object) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- equals(Object) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
- equals(Object) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- equals(Object) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
- equals(Object) - Method in class gov.nih.mipav.model.file.PrivateFileDicomKey
-
Objects are equal if both are of type FileDicomKey, and both refer to the same value; if the input type is a
String and the String representation of the key matches.
- equals(Object) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- equals(Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Edge
-
Support for hashing into a map of edges.
- equals(Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Triangle
-
Support for hashing into a map of triangles.
- equals(Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Vertex
-
Support for hashing into a map of vertices.
- equals(Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.Edge
-
Support for hashing into a map of edges.
- equals(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjEdgeKey
-
Support for hashing into a map of edges.
- equals(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix.Index
-
override for Object method used for hashing.
- equals(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.Edge
-
Support for hashing into a map of edges.
- equals(Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Pair
-
- equals(Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.FeatureNode
-
- equals(Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- equals(Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_node
-
- equals(String) - Method in class gov.nih.mipav.model.structures.VOI
-
two VOIs are the same if they have the same name.
- equals(FileFilter) - Method in class gov.nih.mipav.view.ViewImageFileFilter
-
Determines if this file filter is equal (in value) to another.
- equalScale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- equalScaleImage() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- equalScaleImage() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- equalScaleImageLight() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- equalsExact(MetadataExtractor.Rational) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Indicates whether this instance and other have identical
Numerator and Denominator.
- equalsParameterBlock(CeresSolver.ParameterBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- equalSplit(Vector<Integer>, int, int, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- equalTimeSpacing - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- equalValue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- equalValue - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- equalVectorDouble(Vector<Double>, Vector<Double>, String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- equalVectorInteger(Vector<Integer>, Vector<Integer>, String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- equalVectorVectorDouble(Vector<Vector<Double>>, Vector<Vector<Double>>, String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- equalVectorVectorInteger(Vector<Vector<Integer>>, Vector<Vector<Integer>>, String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- Equation - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- EQUILIBRIUM_COMBUSTION - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- EQUILIBRIUM_COMBUSTION - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- EQUILIBRIUM_COMBUSTION - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- equipmentName - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
Scan attributes.
- equipmentUID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
400 - 32 bytes.
- er - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- er - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools.EigenvalueComplex
-
- erAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
DOCUMENT ME!
- ERARC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- erase(FrontEdge) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- Erase(Renderer, PickRecord, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Erase paint.
- Erase(Renderer, PickRecord, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- eraseAllPaint() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Erase all surface paint.
- eraseAllPaint() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Erase all surface paint.
- eraseAllPaint(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Erases all paint.
- EraseAllPaint(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Erase all paint.
- ERASER_PAINT - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
This mode is an active VOI mode used by the VOI Handler
- eraseRect - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- ereal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- ereal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- erf() - Method in class gov.nih.mipav.util.DoubleDouble
-
- erf(double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- erf(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- erf(double) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- erf(double) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- ERF - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- erfc(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- ERFC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- erfc1(int, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- erfcModel() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.erfcModel
-
Creates a new IntModel object.
- erfcModel2(double, int, int, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.erfcModel2
-
- erfinv(double) - Method in class gov.nih.mipav.model.algorithms.Erfinv
-
- Erfinv - Class in gov.nih.mipav.model.algorithms
-
- Erfinv() - Constructor for class gov.nih.mipav.model.algorithms.Erfinv
-
- erfinv_refine(double, int) - Method in class gov.nih.mipav.model.algorithms.Erfinv
-
- Erfinv.ppnd16_impl - Class in gov.nih.mipav.model.algorithms
-
- Erfinv.ppnd7_impl - Class in gov.nih.mipav.model.algorithms
-
- ergas() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ERGAS - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ergas_mean - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ERI - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- erlst - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
In dqawfe vector of dimension at least limlst erlst[k] contains the error estimate corresponding wiht rstlst[k].
- erlst - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
In dqawfe vector of dimension at least limlst erlst[k] contains the error estimate corresponding wiht rstlst[k].
- erode(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Erodes an image using the indicated kernel and the indicated number of
executions.
- erode(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Erodes an image using the indicated kernel and the indicated number of
executions.
- erode(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Erodes an image using the indicated kernel and the indicated number of
iterations.
- erode(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Erodes a boolean or unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- erode(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Erodes a boolean or unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- erode(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Erodes a boolean, unsigned byte, or unsigned short image using the indicated kernel and the indicated number of
iterations.
- erode(ModelImage, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
Erode an image and mark the pixels we erode for attenuation later.
- ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- erode2D(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Erodes an image slice using the indicated kernel and the indicated number of
executions.
- erode2D(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Erodes a boolean or unsigned byte or unsigned short image slice using the indicated kernel and the indicated number of
executions.
- erodeAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- erodeAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- erodeAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
DOCUMENT ME!
- erodeAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- erodeAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
DOCUMENT ME!
- erodeDimType - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- erodeImage() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
erosion.
- erodeObject(BitSet, int, int, int, BitSet, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
erode binary object with a custom kernel using the BitSet structure with indexing convention index = x + nx*y +
nx*ny*z.
- erodePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Erode panel.
- erosion25D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Whether to erode / dilate image slices independently.
- erosion25D - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Whether to process the slices of the 3D image separately while performing the erosion / dilation.
- erosion25DCB - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Check box for indicating whether erosion / dilation should process slices independently.
- erosionIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The number of erosions/dilations to perform.
- erosionIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Number of erosion / dilation operations to perform (2 in Shattuck paper).
- erosionIterationsTF - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Text field used to enter the number of erosions / dilations.
- erosionLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Label for the percentage entered for second stage edge erosion.
- erosionTF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Defines the allowable percentage for edge intensity values ub second stage edge erosion, default is 50 percent.
- err - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_common_struct
-
- err - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- err_con - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- err_est(int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- err_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Ransac
-
- errclb(int, int, double, double[], double[], int[], String[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- error - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- error - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- error - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
- error - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- error - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- error - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- error - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptState
-
error dependent upon the chosen similarity measure.
- error - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- error - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Vertices
-
- error(String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- error(String) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- error(String, int) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Prints the error message 'msg' to standard err, prepending "ERROR" to
it, and sets the exitCode to 'code'.
- error(String, int) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Prints the error message 'msg' to standard err, prepending "ERROR" to
it, and sets the exitCode to 'code'.
- error(String, int) - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Prints the error message 'msg' to standard err, prepending "ERROR" to
it, and sets the exitCode to 'code'.
- error(String, int) - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Prints the error message 'msg' to standard err, prepending "ERROR" to
it, and sets the exitCode to 'code'.
- error(String, int, Throwable) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Prints the error message 'msg' to standard err, prepending
"ERROR" to it, and sets the exitCode to 'code'.
- error(String, int, Throwable) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Prints the error message 'msg' to standard err, prepending
"ERROR" to it, and sets the exitCode to 'code'.
- error(SAXParseException) - Method in class gov.nih.mipav.model.file.XMLErrorHandler
-
Handles parse exception errors by passing the parse exception up as a SAXException.
- error(SAXParseException) - Method in class gov.nih.mipav.view.dialogs.XMLErrorHandler
-
Handles parse exception errors by passing the parse exception up as a SAXException.
- error(SAXParseException) - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.XMLErrorHandler
-
Handles parse exception errors by passing the parse exception up as a SAXException.
- ERROR - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- ERROR - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Ill defined file type.
- ERROR - Static variable in class gov.nih.mipav.view.DICOMDisplayer
-
An error type message is one thrown in an exception or if the files were not saved.
- ERROR_DIFFUSION - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingHalftoningAlgorithm
-
Error Diffusion Halftoning
- error_exit(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- error_limiter - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- error_log - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProbeResults
-
- error_log() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingIterationCallback
-
- error_log_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingIterationCallback
-
- error_msg - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- error_msg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- errorcheck(int, int, double, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- errorCleanUp(String, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Display string pass into the method.
- errorComponent - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- errorComponent - Variable in class gov.nih.mipav.view.JPanelEdit
-
when necessary To CheckFields, and there is a problem with the panel such that a valid panel value cannot be
made, the particular component which has a bad value will be pointed to here.
- ErrorDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ErrorDirectory
-
- ErrorDirectory(String) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ErrorDirectory
-
- errorFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- errorFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- errorFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- errorFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- errorFlag - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
errorFlag = 0, normal return - computation completed errorFlag = 1, input error - no computation errorFlag = 2,
overflow - no computation, Real(z) large on UNSCALED_FUNCTION errorFlag = 3, ABS(Z) or initialOrder +
sequenceNumber - 1 large, computation but losses of significance by arguemnt reduction produce less than half of
machine accuracy errorFlag = 4, ABS(Z) or initialOrder + sequenceNumber - 1 too large, No computation because of
complete losses of significance by argument reduction errorFlag = 5, Error, no computation, argument termination
condition not met Length of array passed in must be 1.
- errorFlag - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
errorFlag = 0, normal return - computation completed errorFlag = 1, input error - no computation errorFlag = 2,
overflow - no computation, Real(z) large on UNSCALED_FUNCTION errorFlag = 3, ABS(Z) or initialOrder +
sequenceNumber - 1 large, computation but losses of significance by arguemnt reduction produce less than half of
machine accuracy errorFlag = 4, ABS(Z) or initialOrder + sequenceNumber - 1 too large, No computation because of
complete losses of significance by argument reduction errorFlag = 5, Error, no computation, argument termination
condition not met Length of array passed in must be 1.
- errorFlag - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- errorInMaskRoutine - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- errorStatus - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- errorStatus - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- errorString - Variable in class gov.nih.mipav.view.JPanelEdit
-
when necessary To CheckFields, and there is a problem with the panel such that a valid panel value cannot be
made, the problem will be reported in this String.
- errStatus - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
DOCUMENT ME!
- errStatus - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
Parameter giving information on the termination of the algorithm errStatus[0] = 0 normal and reliable termination
of the routine errStatus[0] = 1 The computations are terminated because the bound on the number of evaluations of
the user supplied Laplace function has been achieved.
- ERRTOL - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- ERRTOLb - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- ESC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.Iso2022Converter
-
- escapeSpecialCharacters(String) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Escape special list characters with backslashes.
- esd - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
sd (u, hk) = sn (u, hk)/ dn(u, hk)
- esd_on - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
enables writing of ESD, in case of activated JPWL
- eseedNo - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
- eseedRandom - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
- eSeedToRandom - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
- esize - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- esize - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- esizeArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- esn - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
sn (u, hk)
- essedConstant - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
- est_type - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- Estats(Vector<libdt.Dytex>, Vector<libdt.Dytex>, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.libdt.Estats
-
- EstCParamGradientMatrix(Vector<CDVector>, Vector<CDVector>, CDMatrix, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Estimates the Jacobian of the model parameters given a set of
displacement vectors and the optimum model parameters for the training
set.
- estdbdtPer - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
846 PSD estimated limit in units of percent.
- estdbdtts - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
850 PSD estimated limit in Tesla/sec.
- estErr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
DOCUMENT ME!
- estErr - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
Estimate of the absolute error abs(f(t) - result[0]).
- estimate(float[][][][], double[], double[][], byte[][][], boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
estimate
Use LLMSE to estimate tensors from DW imaging data
on a voxel-wise basis.
- estimate(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- estimate(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- estimate(ModelImage, ModelImage, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
Uses LLMSE to estimate tensors from DW imaging data on a voxel-wise basis.
- estimate(ModelImage, ModelImage, GMatrixd, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- estimate_kernel_from - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- estimate_noise_fast(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- estimateBallAndStickCamino(float[][][][], byte[][][], BallStickInversion, float[][][][], float[][][][], float[][][][], float[][][][], float[][][][]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- estimateBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- estimateCamino(float[][][][], byte[][][], int, DW_Scheme, DT_Inversion, float[][][][], float[][][][], float[][][][]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- estimateCamino(ModelImage, ModelImage, int, boolean, boolean, boolean, boolean, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
Uses Camino algorithms to estimate tensors from DW imaging data on a voxel-wise basis.
- estimateCaminoRESTORE(float[][][][], byte[][][], float[][][], float[][][][], float[][][][], float[][][][], DW_Scheme) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- estimateCaminoThreeTensor(float[][][][], byte[][][], ThreeTensorInversion, float[][][][], float[][][][], float[][][][], float[][][][], float[][][][], float[][][][], float[][][][], float[][][][]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- estimateCaminoTwoTensor(float[][][][], byte[][][], TwoTensorInversion, float[][][][], float[][][][], float[][][][], float[][][][], float[][][][], float[][][][]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- estimatedFFT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- estimatedIFFT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- estimatedImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- estimatedImageSpectrum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- estimatedReals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- estimatedSpectrumImags - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- estimatedSpectrumReals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- estimateEllipsoid() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Approximate the brain surface by an ellipsoid.
- estimateEllipsoid() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Approximate the brain surface by an ellipsoid.
- estimateEllipsoid() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Approximate the brain surface by an ellipsoid.
- estimateInitial() - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
- estimateInitial() - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
- estimateInitial() - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
- EstimateK(CDMatrix, CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLinearReg
-
Performs k-estimation.
- estimateNoiseCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- estimateNoiseCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- estimateNoiseCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- estimateNoiseCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
- estimateNoiseStandardDeviation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
- estimateNoiseStandardDeviation - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- estimateNoiseStandardDeviation - Variable in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- estimateNoiseStandardDeviation - Variable in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- estimateNoiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- estimateNoiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- estimateNoiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- estimateNoiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
- estimateOffset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- estimateParameters() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
1.
- EstimatePose(ModelSimpleImage, CAAMShape, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Estimate the pose of a shape using the pose regression matrix.
- estimates - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- estimates - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- estimateScale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- estimateSize() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- estimateSize() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- estimateSize() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator
-
- estimateSize() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- estimateSize() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
- estimateSlope - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- estimateSphere() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Approximate the intial brain surface by an sphere.
- EstimateTensorLLMSE - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- EstimateTensorLLMSE() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- estimateWhiteMatter(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
5.
- estimateWithSphereBET - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Parameter for brain extraction by default set to false
- estimateWithSphereBET - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Flag indicates BET should approximate initial brain by sphere.
- estimateWithSphereCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Check box corresponding to estimateSphereBET.
- EstimateWorkSizeForQR(int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- EstPoseGradientMatrix(Vector<CDVector>, Vector<CDVector>, CDMatrix, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Estimates the Jacobian of the pose parameters given a set of displacement
vectors and the optimum model parameters for the training set.
- EstPredictionMatrices(Vector<CDVector>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Build the prediction matrices for pose and parameter prediction.
- EstRegressionMatrices(Vector<CDVector>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Build the regression matrices for pose and parameter prediction.
- estTensorPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- esub(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Returns the solution to the subtraction of two numbers in the form of base and exponent.
- esum(int, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- eta - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- eta - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- eta - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- eta - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyPerSolveOptions
-
- eta - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- eta_c4 - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- eta_f_range - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- eta_hrbu - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- eta_lrb - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- eta_np_bs - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- eta_p_bs - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- eta_range_init - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- ETACF - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- etaj - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- ETAMIN - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- ETAMX1 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- ETAMX2 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- ETAMX3 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- ETAMXF - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- etchedBorder - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Panel Border view.
- etchedBorder - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- etchedBorder - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- etchedBorder - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- etchedBorder - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- etchedBorder - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- etchedBorder - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- etchedBorder - Static variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
A border used for each toolbar.
- ETermCode - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- etermConsecMaxStepMax - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- etermDeltaFuncVal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- etermGradTol - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- etermLineSearch - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- etermMaxFuncEval - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- etermMaxIterations - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- etermNoStop - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- etermStepTol - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- etermUnknown - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- eTFid - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
Transfer function types.
- etheor(double, boolean, boolean, double[], double[], double[], double[], boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- ETHRESH - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- ETL - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
640 Echo train length.
- ETOptions - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- EUCLIDEAN_SQUARED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- EUCLIDEAN_SQUARED - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- EuclideanButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
- euclideanDistance(double[], double[]) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Calculates the Euclidean distance.
- euclideanDistance(double[], double[]) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Calculates the Euclidean distance.
- EuclideanDistance(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
EuclideanDistance.
- EuclideanDistance(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
EuclideanDistance.
- euclideanDistance2D(int, int) - Method in class gov.nih.mipav.model.structures.VOIContour
-
- euclideanSquared - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- EuclideanSquared() - Method in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- EUL - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- EulerAnglesToRotationMatrix(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- EulerAnglesToRotationMatrixIsOrthonormal() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EulerAnglesToRotationMatrixOnAxis() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EulerC - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- EulerToQuat(Vector3d, Quat4d) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Transform Euler angle to quaterion.
- eval - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- eval - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- eval(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.erfcModel
-
- eval(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.IntTorquato95ModelMean
-
- eval(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
- eval(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModel
-
- eval(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
- eval(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.IntModel
-
- eval(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- eval(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMean
-
- eval(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMeanSquared
-
- eval(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquato95ModelMean
-
- eval(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquatoModelMean
-
- eval(double) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- eval(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
- eval(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
- eval(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- eval(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
- eval(double[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
- eval(double[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
- eval(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
evaluate this polynomial for the specified value.
- evalCutRes(int[], AlgorithmMeanShiftClustering.fams_cut[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- evalCutRes(AlgorithmMeanShiftClustering.famsPoint, AlgorithmMeanShiftClustering.fams_cut[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- EvalFunction(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
Fuction to be optimized.
- EvalFunction(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
function and gradient evaluation methods
- EvalFunction(CDVector) - Method in interface gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeFuncBase
-
evaluates the function value at postion vX
- EvalGradient(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
evaluates the analytic gradient at postion vX (if exists)
- EvalGradient(CDVector, CDVector) - Method in interface gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeFuncBase
-
evaluates the analytic gradient at postion vX (if exists)
- EvalGradient(CDVector, CDVector, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
function and gradient evaluation methods
- evalObjfun(double[]) - Method in class gov.nih.mipav.model.algorithms.NMSimplex
-
- evalSeg - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Algorithm to run from this dialog.
- evalSeg - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Algorithm to run from this dialog.
- evaluate(double) - Method in class gov.nih.mipav.model.structures.BSplineKernelFunction
-
- evaluate(double) - Method in class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- evaluate(double) - Method in class gov.nih.mipav.model.structures.RealPolynomial
-
- evaluate(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- evaluate(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- Evaluate(boolean, double[], double[], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- Evaluate(boolean, double[], double[], double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- Evaluate(double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BadTestTerm
-
- Evaluate(double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GoodTestTerm
-
- Evaluate(double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearCostFunction
-
- Evaluate(double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TestTerm
-
- Evaluate(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.FirstOrderFunction
-
- Evaluate(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
- Evaluate(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.FreudensteinAndRothFunction
-
- Evaluate(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellSingularFunction
-
- Evaluate(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticFirstOrderFunction
-
- Evaluate(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticFunction
-
- Evaluate(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticTestFunction
-
- Evaluate(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.Rosenbrock
-
- Evaluate(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.Rosenbrock2
-
- Evaluate(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.diffGaussians
-
- Evaluate(double[], double[], double[], double[], CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- Evaluate(double, boolean, CeresSolver.FunctionSample) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ArctanLoss
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CauchyLoss
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ComposedLoss
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.HuberLoss
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LossFunction
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LossFunctionWrapper
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ScaledLoss
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SoftLOneLoss
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TolerantLoss
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrivialLoss
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TukeyLoss
-
- Evaluate(double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CubicInterpolator
-
- Evaluate(double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CubicInterpolator
-
- Evaluate(double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BiCubicInterpolator
-
- Evaluate(double, double, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BiCubicInterpolator
-
- Evaluate(CeresSolver.EvaluateOptions, double[], double[], double[], double[], CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- Evaluate(CeresSolver.EvaluateOptions, double[], double[], double[], double[], CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- Evaluate(CeresSolver.EvaluateOptions, double[], double[], double[], double[], CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- Evaluate(CeresSolver.EvaluateOptions, double[], double[], double[], double[], CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- Evaluate(CeresSolver.EvaluateOptions, double[], Vector<Double>, Vector<Double>, CeresSolver.CRSMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- Evaluate(CeresSolver.EvaluateOptions, Vector<Double>, double[], Vector<Double>, Vector<Double>, CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- Evaluate(CeresSolver.EvaluateOptions, Vector<Double>, double[], Vector<Double>, Vector<Double>, CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- Evaluate(CeresSolver.EvaluateOptions, Vector<Double>, double[], Vector<Double>, Vector<Double>, CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- Evaluate(CeresSolver.EvaluateOptions, Vector<Double>, double[], Vector<Double>, Vector<Double>, CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.AutoDiffCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BadTestTerm
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DynamicNumericDiffCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.EasyCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ExponentialCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GoodTestTerm
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.NormalPrior
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.RandomizedCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SizeTestingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TestTerm
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TranscendentalCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.ConditionedCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Bennett5CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.BoxBODCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Chiwrut1CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Chiwrut2CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.DanwoodCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Eckerle4CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.ENSOCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Gauss1CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Gauss2CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Gauss3CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Hahn1CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Kirby2CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Lanczos1CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Lanczos2CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Lanczos3CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisralaCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisralbCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisralcCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisraldCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.NelsonCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Rat42CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Rat43CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Roszman1CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.ThurberCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadJacobianCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadResidualCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BardFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BealeFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BIGGS_EXP6Function
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction3
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction4
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.Box3DFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BrownAndDennisFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BrownBadlyScaledFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.CurveCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.CurveFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DestructorCountingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction2
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction3
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction4
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ExpCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.FailingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.FreudensteinAndRothJacobianFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.GaussianFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.GoodCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.GulfResearchAndDevelopmentFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.HelicalValleyFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.JennrichAndSampsonFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.KowalikAndOsborneFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.LinearCostFunction2
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.LocallyParameterizedCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MeyerFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MockCostFunctionBase
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MockCostFunctionBase2
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.NoJacobianUpdateCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.NoResidualUpdateCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.NumParameterBlocksCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.Osborne1Function
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.Osborne2Function
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ParameterIgnoringCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ParameterSensitiveCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellBadlyScaledFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellSingularJacobianFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TernaryCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TernaryCostFunction2
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TernaryCostFunction4
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryCostFunction3
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryCostFunction4
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryIdentityCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.WoodFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss1FittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss2FittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gaussSecondStandardDeviationFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gaussStandardDeviationFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVRecirculationCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.ll_weib_beta_cen_r
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.ll_weib_beta_uncen
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.threeParameterFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.twoParameterFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TestTerm
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Bennett5CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.BoxBODCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Chiwrut1CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Chiwrut2CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.DanwoodCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Eckerle4CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.ENSOCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Gauss1CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Gauss2CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Gauss3CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Hahn1CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Kirby2CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Lanczos1CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Lanczos2CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Lanczos3CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisralaCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisralbCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisralcCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisraldCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.NelsonCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Rat42CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Rat43CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Roszman1CostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.ThurberCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadJacobianCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadResidualCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BardFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BealeFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BIGGS_EXP6Function
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction3
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.Box3DFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BrownAndDennisFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BrownBadlyScaledFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.CurveCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.CurveFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DestructorCountingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction2
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction3
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ExpCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.FailingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.FreudensteinAndRothJacobianFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.GaussianFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.GoodCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.GulfResearchAndDevelopmentFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.HelicalValleyFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.JennrichAndSampsonFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.KowalikAndOsborneFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.LocallyParameterizedCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MeyerFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MockCostFunctionBase
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MockCostFunctionBase2
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.NoJacobianUpdateCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.NoResidualUpdateCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.NumParameterBlocksCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.Osborne1Function
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.Osborne2Function
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ParameterIgnoringCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ParameterSensitiveCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellBadlyScaledFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellSingularJacobianFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TernaryCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TernaryCostFunction2
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryCostFunction3
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.WoodFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss1FittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss2FittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gaussSecondStandardDeviationFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gaussStandardDeviationFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVRecirculationCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.ll_weib_beta_cen_r
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.ll_weib_beta_uncen
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.threeParameterFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.twoParameterFittingCostFunction
-
- Evaluate(Vector<double[]>, double[], double[][], int[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction
-
- Evaluate(Vector<double[]>, double[], Vector<Matrix>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearCostFunction
-
- evaluate_last_parameter_hash - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- evaluate_num_calls - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- evaluate_options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- evaluate_polynomial(double[], double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- evaluate_preparers_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- evaluate_scratch_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- EvaluateAndCompare(CeresSolver.ProblemImpl, int, int, double, double[], double[], double[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- EvaluateCostFunction(CeresSolver.CostFunction, Vector<double[]>, Vector<CeresSolver.LocalParameterization>, Vector<Double>, Vector<Matrix>, Vector<Matrix>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- EvaluateCostFunctor(Vector<double[]>, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DynamicNumericDiffCostFunction
-
- evaluateDerivative(double) - Method in class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- EvaluatedFdc(Matrix, double, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluatedFdr(Matrix, double, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluateDynamic(Vector<double[]>, double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DynamicNumericDiffCostFunction
-
- EvaluateF(Matrix, double, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluateGradientAndJacobian(boolean) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- EvaluateGradientNorms(CeresSolver.Evaluator, double[], CeresSolver.LineSearchMinimizer.State, String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer
-
- EvaluateGradientNorms(CeresSolver.Evaluator, Vector<Double>, CeresSolver.LineSearchMinimizer.State, String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer
-
- EvaluateJacobianColumn(CeresSolver.NumericDiffMethodType, int, int, CostFunctor, int, double, int, int, int, double[], double[], double[][], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- EvaluateJacobianForParameterBlock(CeresSolver.NumericDiffMethodType, int, int, int, int, int, int, int, int, int, int, int, int, int, CostFunctor, double[], CeresSolver.NumericDiffOptions, int, int, int, double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- EvaluateJacobianForParameterBlock(CeresSolver.NumericDiffMethodType, int, int, int, int, int, int, int, int, int, int, int, int, int, CostFunctor, double[], CeresSolver.NumericDiffOptions, int, int, int, double[][], double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- EvaluateModel(CAAMModel, ModelImage, ModelImage, String, String, boolean, boolean, boolean, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Wrapper to optimizes a set of images and compares the result to a ground
truth annotation.
- EvaluateModel(CAAMModel, ModelImage, ModelImage, String, String, boolean, boolean, boolean, boolean, CAAMLowerBounds) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Optimizes a set of images and compares the result to a ground truth
annotation.
- EvaluateModel(CAAMModel, ModelImage, String, String, boolean, boolean, boolean, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Wrapper to optimizes a set of images and compares the result to a ground
truth annotation.
- EvaluateModel(CAAMModel, ModelImage, String, String, boolean, boolean, boolean, boolean, CAAMLowerBounds) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Wrapper to optimizes a set of images and compares the result to a ground
truth annotation.
- EvaluateModel(CAAMModel, String, String, boolean, boolean, boolean, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Optimizes a set of images and compares the result to a ground truth
annotation.
- EvaluateModel(CAAMModel, String, String, boolean, boolean, boolean, boolean, CAAMLowerBounds) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Optimizes a set of images and compares the result to a ground truth
annotation.
- EvaluateModelSeq(CAAMModelSeq, String, String, boolean, boolean, boolean, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Wrapper to optimize a set of images and compares the result to a ground
truth annotation using a sequence of AAMs.
- EvaluateModelSeq(CAAMModelSeq, String, String, boolean, boolean, boolean, boolean, CAAMLowerBounds) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Optimizes a set of images and compares the result to a ground truth
annotation using a sequence of AAMs.
- evaluateNthDerivative(double, int) - Method in class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- EvaluateOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateOptions
-
- EvaluatePolynomial(Vector<Double>, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- EvaluateRiddersJacobianColumn(CeresSolver.NumericDiffMethodType, int, int, CostFunctor, int, double, CeresSolver.NumericDiffOptions, int, int, int, double[], double[], double[][], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- evaluateRPNExpression(double, double, String) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Method that evaluates the RPN expression and returns the value
- EvaluateScratch() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateScratch
-
- evaluateShapeDescriptor() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Evaluate the auto segmentation generated VOIs shapes.
- evaluateShapeDescriptor() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Evaluate the auto segmentation generated VOIs shapes.
- evaluateShapeDescriptor() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Evaluate the AAM segmented VOIs with MIPAV VOI properties.
- EvaluateSubspaceModel(Vector2d) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- evaluateToRPN(String) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
method that determines the RPN
- evaluation_callback - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluatorOptions
-
- evaluation_callback - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- EvaluationCallback() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.EvaluationCallback
-
- EvaluationCallbackWithLineSearchMinimizerArmijoBisection() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluationCallbackWithLineSearchMinimizerArmijoCubic() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluationCallbackWithLineSearchMinimizerArmijoQuadratic() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluationCallbackWithLineSearchMinimizerWolfeBfgsCubic() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluationCallbackWithLineSearchMinimizerWolfeBfgsQuadratic() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluationCallbackWithLineSearchMinimizerWolfeLbfgsCubic() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluationCallbackWithLineSearchMinimizerWolfeLbfgsQuadratic() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluationCallbackWithTrustRegionMinimizer() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- evaluations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
DOCUMENT ME!
- evaluations - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
Number of evaluations of user supplied Laplace function.
- EvaluationToString(Vector<double[]>, double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- EvaluationToString(Vector<double[]>, double[], double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- evaluator - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- evaluator - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- Evaluator() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- evaluator_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- evaluator_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- evaluator_options - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- evaluator_options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CoordinateDescentMinimizer
-
- EvaluatorOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.EvaluatorOptions
-
- EvaluatorRespectsParameterChanges() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluatorTest(CeresSolverTest.EvaluatorTestOptions, String) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- EvaluatorTestEvaluatorAbortsForResidualsThatFailToEvaluate() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- EvaluatorTestEvaluatorAbortsForResidualsThatFailToEvaluate() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluatorTestMultipleResidualProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- EvaluatorTestMultipleResidualProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluatorTestMultipleResidualProblemWithSomeConstantParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- EvaluatorTestMultipleResidualProblemWithSomeConstantParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluatorTestMultipleResidualsWithLocalParameterizations() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- EvaluatorTestMultipleResidualsWithLocalParameterizations() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluatorTestOptions(CeresSolver.LinearSolverType, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTestOptions
-
- EvaluatorTestSingleResidualProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- EvaluatorTestSingleResidualProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluatorTestSingleResidualProblemWithNuisanceParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- EvaluatorTestSingleResidualProblemWithNuisanceParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- EvaluatorTestSingleResidualProblemWithPermutedParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- EvaluatorTestSingleResidualProblemWithPermutedParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Evalues - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.PData
-
- Evalues - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.SData
-
- evar(double[], int, double[], boolean, boolean[], double[], int, double, int, boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- evarCalled - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- Evectors - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.PData
-
- Evectors - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.SData
-
- evenDistribution() - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Evenly distributed the controls points of linear transfer function.
- evenDistribution() - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Evenly distributed the controls points of linear transfer function.
- evenDistribution() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Switch the histogram component to even distribution linear transfer mode.
- evenDistributionFunctions() - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Creates the R, G, and B transfer functions to produce a gray scale LUT.
- EVENT - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- EVENT() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.EVENT
-
- EVENT(double, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.EVENT
-
- EVENT_CHANGE_ALL - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
DOCUMENT ME!
- EVENT_CHANGE_ALL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
on a viewChanged event change both the view position and direction vector
- EVENT_CHANGE_ALL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
on a viewChanged event change both the view position and direction vector
- EVENT_CHANGE_BRANCH - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
DOCUMENT ME!
- EVENT_CHANGE_BRANCH - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
on a viewChanged event change the fly path branch
- EVENT_CHANGE_BRANCH - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
on a viewChanged event change the fly path branch
- EVENT_CHANGE_ORIENTATION - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
DOCUMENT ME!
- EVENT_CHANGE_POSITION - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
DOCUMENT ME!
- EVENT_CHANGE_POSITION - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
on a viewChanged event change just the view position
- EVENT_CHANGE_POSITION - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
on a viewChanged event change just the view position
- EVENT_CHANGE_VIEW - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
on a viewChanged event change just the view direction
- EVENT_CHANGE_VIEW - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
on a viewChanged event change just the view direction
- EVENT_REC - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- EVENT_REC() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.EVENT_REC
-
- EVENT_RESET_ORIENTATION - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
on a viewChanged event change just the view orientation
- EVENT_RESET_ORIENTATION - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
on a viewChanged event change just the view orientation
- eventDescription - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- eventDescription - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- eventDispatched(AWTEvent) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- EventLogger(String) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.EventLogger
-
- events - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Vector that holds mouse or change events.
- events - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Vector that holds mouse or change events.
- events - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- events_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EventLogger
-
- eventTime - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- eventTime - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- eventType - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- eventType - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- eventVector - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Seqence of mouse events ( press, shift,and release as individual mouse event).
- eventVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Global mouse event vector.
- eventVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Global mouse event vector.
- EVERY_POINT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- EVERY_POINT - Static variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- everyButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- everything - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Onscreen objects.
- everything - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
Tabbed pane that holds all components.
- everything - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
Tabbed pane that holds all components.
- everything - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Tabbed pane that holds all components.
- evolveBoundary2D(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- evolveContour(VOIBase) - Method in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
- evolveDirection - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Indicates boundary how the VOI boundary can move - in and/or out.
- evreuc(int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- evreuc(int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- evt - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.StandardMouse
-
int centerX, centerY;.
- evt - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.StandardMouse
-
Mouse event
- evt - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.StandardKey
-
int centerX, centerY;.
- evt - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseWheel
-
int centerX, centerY;.
- evt - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouse
-
int centerX, centerY;.
- evt - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouseDragged
-
int centerX, centerY;.
- evt - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.StandardMouse
-
DOCUMENT ME!
- evt - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
int centerX, centerY;.
- evt - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouse
-
int centerX, centerY;.
- evt - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouseDragged
-
int centerX, centerY;.
- evt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.KeyPressedEvent
-
int centerX, centerY;.
- evt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
int centerX, centerY;.
- evt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
int centerX, centerY;.
- evt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.RightMouse
-
int centerX, centerY;.
- ew - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true east-west direction calculated.
- ew - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true east-west direction calculated.
- ew - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- ew - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- ewCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- ewCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- ewt(CVODES.NVector, CVODES.NVector, CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- ewtTestMode(CVODES.NVector, CVODES.NVector, CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- ExactLineSearch(CDVector, double, CDVector, CDVector, CDVector, double[], boolean[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
Perform exact line search
Input: xc: parameter fc: function value at xc g: gradient at xc p: search
direction
Output: xplus: new parameter fplus: function value for new parameter
maxtaken: max taken in line search return termination code
- exAllocKey - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
334 - 13 bytes Process that allocated this record.
- examine_app0(libjpeg.jpeg_decompress_struct, byte[], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- examine_app14(libjpeg.jpeg_decompress_struct, byte[], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- examineClass(Class) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
- examName - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
par/rec examName
- examName - Variable in class gov.nih.mipav.model.file.FilePARREC
-
exam name
- examNum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
8 - Read as unsigned short.
- example - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- exampleLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- exampleLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- exampleLabel2 - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- exampleLabel2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- examType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
305 - 3 bytes i.e.
- examType - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- exceptions - Static variable in class gov.nih.mipav.view.ViewUserInterface
-
Exception logging file
- exchangeXY - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- exChecksum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
356 (internal use) Exam Record Checksum.
- excitationArray - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- excitationsNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- excitationsNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- excitationWavelength - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- excitationWavelength0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- excitationWavelength1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- excitationWavelength2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- excitationWavelength3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- excitationWavelengthChannel0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- excitationWavelengthChannel1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- excitationWavelengthChannel2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- excitationWavelengthChannel3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- Exclude - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel.VOIParams
-
- excluder - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
The Exclusion selector.
- excluder - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- ExcluderOptionsActionListener() - Constructor for class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector.ExcluderOptionsActionListener
-
- excludeSelection - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Lists available exclusion types
- exclusiveOrButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- exComplete - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
360 (internal use) Exam complete flag.
- exDateTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
208 - Exam date/time stamp.
- exDeltaCount - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
348 (internal use) Number of updates to header.
- exDesc - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
282 - 23 bytes Exam Description.
- exDiskID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
6 - 1 byte (internal use) Disk ID for this exam.
- exec() - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Do resampling.
- exec(float[], float[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
This is the method that calculates the FFT Perform a data centering operation after the forward FFT Perform a
data centering operation before the inverse FFT Note that a frequency filter operation performs a forward FFT.
- exec(float[], float[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
This is the method that calculates the FFT Perform a data centering operation after the forward FFT Perform a
data centering operation before the inverse FFT Note that a frequency filter operation performs a forward FFT.
- execute() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- execute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
- execute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
- execute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
- execute() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- Execute(int, String[], int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.test
-
- Execute(String, String, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.PoissonRun
-
- Execute(Spatial, Vector3f, Vector3f, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationPicker
-
- executeInterleaved(cl_command_queue, int, CLFFTPlan.CLFFTDirection, cl_mem, cl_mem, cl_event, cl_event) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
Calculate FFT on interleaved complex data.
- executePlanar(cl_command_queue, int, CLFFTPlan.CLFFTDirection, cl_mem, cl_mem, cl_mem, cl_mem, cl_event, cl_event) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
Calculate FFT of planar data.
- ExecuteRecursive(Spatial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationPicker
-
- execution_summary_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- execution_summary_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- execution_summary_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TypedLinearSolver
-
- ExecutionSummary() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ExecutionSummary
-
- exFilter - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter
-
must have these 3:.
- exFormat - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
308 Exam format.
- EXHAUSTIVEOPT - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- exhaustiveSearch(double[], AlgorithmRegVOILandmark.CostFunction) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
Exhaustive search for global minimum.
- eXIf - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- ExifDescriptorBase(T) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- ExifDirectoryBase() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- ExifDirectoryTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.ExifDirectoryTest
-
- EXIFIFD - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFIFD - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- ExifIFD0Descriptor(MetadataExtractor.ExifIFD0Directory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifIFD0Descriptor
-
- ExifIFD0DescriptorTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.ExifIFD0DescriptorTest
-
- ExifIFD0Directory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifIFD0Directory
-
- ExifImageDescriptor(MetadataExtractor.ExifImageDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifImageDescriptor
-
- ExifImageDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifImageDirectory
-
- ExifInteropDescriptor(MetadataExtractor.ExifInteropDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifInteropDescriptor
-
- ExifInteropDescriptorTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.ExifInteropDescriptorTest
-
- ExifInteropDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifInteropDirectory
-
- ExifReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifReader
-
- ExifReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- ExifSubIFDDescriptor(MetadataExtractor.ExifSubIFDDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDescriptor
-
- ExifSubIFDDescriptorTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.ExifSubIFDDescriptorTest
-
- ExifSubIFDDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
- EXIFTAG_APERTURE_VALUE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_APERTURE_VALUE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_BRIGHTNESS_VALUE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_BRIGHTNESS_VALUE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_COLOR_SPACE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_COLOR_SPACE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_CUSTOM_RENDERED - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_CUSTOM_RENDERED - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_DATE_TIME_DIGITIZED - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_DATE_TIME_DIGITIZED - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_DATE_TIME_ORIGINAL - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_DATE_TIME_ORIGINAL - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_DIGITAL_ZOOM_RATIO - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_DIGITAL_ZOOM_RATIO - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_EXIF_VERSION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_EXIF_VERSION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_EXPOSURE_BIAS_VALUE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_EXPOSURE_BIAS_VALUE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_EXPOSURE_MODE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_EXPOSURE_MODE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_EXPOSURE_PROGRAM - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_EXPOSURE_PROGRAM - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_EXPOSURE_TIME - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_EXPOSURE_TIME - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_FILE_SOURCE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_FILE_SOURCE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_FLASH - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_FLASH - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_FLASHPIX_VERSION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_FLASHPIX_VERSION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_FNUMBER - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_FNUMBER - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_FOCAL_PLANE_RESOLUTION_UNIT - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_FOCAL_PLANE_RESOLUTION_UNIT - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_FOCAL_PLANE_X_RESOLUTION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_FOCAL_PLANE_X_RESOLUTION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_FOCAL_PLANE_Y_RESOLUTION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_FOCAL_PLANE_Y_RESOLUTION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_GAIN_CONTROL - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_GAIN_CONTROL - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_ISO_SPEED_RATINGS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_ISO_SPEED_RATINGS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_LIGHT_SOURCE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_LIGHT_SOURCE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_MAKER_NOTE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_MAKER_NOTE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_MAX_APERTURE_VALUE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_MAX_APERTURE_VALUE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_METERING_MODE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_METERING_MODE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_PIXEL_X_DIMENSION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_PIXEL_X_DIMENSION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_PIXEL_Y_DIMENSION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_PIXEL_Y_DIMENSION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_SATURATION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_SATURATION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_SCENE_CAPTURE_TYPE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_SCENE_CAPTURE_TYPE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_SCENE_TYPE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_SCENE_TYPE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_SENSING_METHOD - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_SENSING_METHOD - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_SHUTTER_SPEED_VALUE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_SHUTTER_SPEED_VALUE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_USER_COMMENT - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_USER_COMMENT - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- EXIFTAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXIFTAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- ExifThumbnailDescriptor(MetadataExtractor.ExifThumbnailDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifThumbnailDescriptor
-
- ExifThumbnailDescriptorTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.ExifThumbnailDescriptorTest
-
- ExifThumbnailDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifThumbnailDirectory
-
- ExifTiffHandler(MetadataExtractor.Metadata, MetadataExtractor.Directory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- exifVersion - Variable in class gov.nih.mipav.model.file.FileSVS
-
- exifVersion - Variable in class gov.nih.mipav.model.file.FileTiff
-
- exists - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RAList
-
- exists(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Search the set to see if the input element currently exists.
- exists(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Search the set to see if the input element currently exists.
- exists(int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Search the set to see if the input element currently exists.
- exists(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Search the set to see if the input element currently exists.
- exists(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- exists(int, int[], int) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
Checks for the existance of the number rnum in the unsorted array rlist.
- exists(Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- exit - Variable in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- exit() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Exit the decoding process according to the isChildProcess variable
- exit() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Exit the decoding process according to the isChildProcess variable
- EXIT_FAILURE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- EXIT_FAILURE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.PoissonRun
-
- EXIT_FAILURE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.test
-
- exit_input_error(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- exit_input_error(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Predict
-
- exit_input_error(int, Throwable) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- exit_input_error(int, Throwable) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Predict
-
- EXIT_SUCCESS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.PoissonRun
-
- EXIT_SUCCESS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.test
-
- exit_with_help() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Predict
-
- exit_with_help() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- exit_with_help() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_predict
-
- exit_with_help() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- exit_with_help() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- exitCmdLineOnError - Variable in class gov.nih.mipav.view.ViewUserInterface
-
error handling for cmd line, if set to false will not exit on MipavUtil.displayError()
- exitCode - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
The exit code of the run method
- exitCode - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
The exit code of the run method
- exitCode - Variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
The exit code of the run method
- exitCode - Variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
The exit code of the run method
- exitStatus - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- exitStatus - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- exitStatus - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
integer scalar that indicates why the return was taken.
- exitStatus - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
integer scalar that indicates why the return was taken.
- ExitStatus - Enum in gov.nih.mipav.view.dialogs
-
These enumerations are used by the GuiBuilder to indicate the pre-processing results of user
entry fields for the user interface.
- ExitStatus() - Constructor for enum gov.nih.mipav.view.dialogs.ExitStatus
-
- exitStatusImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- exitStatusImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- exLastMod - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
328 Date/Time of Last Change.
- exModelCnt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
424 (internal use) Number of 3D Models.
- exModelNum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
420 (internal use) Last Model Number Used.
- exModelsData - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
432.
- exModelsLen - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
428.
- exNumArch - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
368 (internal use) Number of Series Archived.
- exNumSeries - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
372 (internal use) Number of Series Existing.
- exNumUnSer - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
384 (internal use) Number of Unstored series.
- exp() - Method in class gov.nih.mipav.util.DoubleDouble
-
For all real, x exp(x) = 1 + x + x**2/2!
- EXP - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
EXPand reference component(s) segment identifier.
- EXP - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- EXP - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- exp_comps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
expected number of components at the decoder
- exp_date - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
String with a max character length of 10 used to indicate the experiment date.
- exp_date - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
String with a max character length of 10 used to indicate the experiment date.
- exp_date - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- EXP_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- exp_time - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
String with a max character length of 10 used to indicate the experiment time.
- exp_time - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
String with a max character length of 10 used to indicate the experiment time.
- exp_time - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- exp0p1 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- exp0p1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- exPadding - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
508 - 516 bytes.
- expand(int, int, int[], int[][], int[][], int, int[], int[], int[], int[], int[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- Expand(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Expands the shape by moving each model point 'nPixels' perperdicular to
the shape contour (that is: along the model point normal).
- Expand(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Expands all shapes (contraction can be done by using a negative nPixels).
- EXPAND - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
DOCUMENT ME!
- EXPAND - Static variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- EXPAND_CONTRACT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
DOCUMENT ME!
- EXPAND_CONTRACT - Static variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- expand2(int, int, int[], int[], int[][], int, int[], int[], int[], int[], int[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- expandAll(JTree, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- expandAll(JTree, TreePath, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- expandButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- expandContractButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- expandedLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
(xDim2+2)*(yDim2+2)
- ExpandImg2DyadicSize(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Expands an image to have dynamic size.
- ExpandImg2DyadicSize(ModelSimpleImage, ModelSimpleImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Expands an image to have dyadic size.
- ExpandMatrix2DyadicSize(CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
This method expands a matrix to have dynamic size, i.e. nrows and ncols
that are powers of two.
- expandPoints() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
- expandReferenceComponents(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- expandReferenceComponents(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- expandTags - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
expand dicom tags button.
- expandVOI - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
final VOI
- expansion - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- expansion - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- expap1 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- expap1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- exparg(int) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- exparray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- exparray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
- expButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- expButton - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
- ExpCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.ExpCostFunction
-
- expectation(double[][], AlgorithmMixGaussEM.model) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- ExpectClose(double, double, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- ExpectCostFunctionEvaluationIsNearlyCorrect(CeresSolver.CostFunction, CeresSolver.NumericDiffMethodType, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.EasyFunctor
-
- ExpectCostFunctionEvaluationIsNearlyCorrect(CeresSolver.CostFunction, CeresSolver.NumericDiffMethodType, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TranscendentalFunctor
-
- ExpectCostFunctionEvaluationIsNearlyCorrect(CeresSolver.CostFunction, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ExponentialFunctor
-
- ExpectCostFunctionEvaluationIsNearlyCorrect(CeresSolver.CostFunction, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.RandomizedFunctor
-
- expected_jacobian_x_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- expected_jacobian_y_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- expected_jacobian_z_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- expected_num_nonzeros - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- expected_residuals_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- ExpectedEvaluation() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.ExpectedEvaluation
-
- expectedFmt - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- ExpectEmpty() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ExpectEqualToCompressedRowSparseMatrixReference() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ExpectEqualToDenseReference() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ExpectMatricesClose(double[], double[], double, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ExpectMatricesClose(Matrix, Matrix, double, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- expectNear(double, double, double, String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- ExpectParameterBlockContains(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- ExpectParameterBlockContains(double[], CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- ExpectParameterBlockContains(double[], CeresSolver.ResidualBlock, CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- ExpectParameterBlockContains(double[], CeresSolver.ResidualBlock, CeresSolver.ResidualBlock, CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- ExpectParameterBlockContains(double[], CeresSolver.ResidualBlock, CeresSolver.ResidualBlock, CeresSolver.ResidualBlock, CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- ExpectParameterBlockContainsResidualBlock(double[], CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- ExpectSize(double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- Experiment(Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Experiment
-
Creates a new Experiment object.
- Experimenter(Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
Creates a new Experimenter object.
- experimenterID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
Attributes.
- experimenterName - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- experimenterRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
- experimenterRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Experiment
-
- experimenterRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Project
-
- ExperimenterRef(Integer, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.ExperimenterRef
-
Creates a new ExperimenterRef object.
- experimenters - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- experimentID - Variable in class gov.nih.mipav.model.file.FileInfoOME.ExperimenterRef
-
- experimentID - Variable in class gov.nih.mipav.model.file.FileInfoOME.ExperimentRef
-
- experimentID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Experiment
-
- experimentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- ExperimentRef(Integer, String) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.ExperimentRef
-
Creates a new ExperimentRef object.
- experiments - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- expFuzzifier - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
Exponential fuzzifier between 1.0 and 2.0
- expFuzzifier - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
DOCUMENT ME!
- expGvfBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- expGvfBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- exPhotonCnt - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- exPhotonCnt - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- expImgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- expImgBuffer - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- EXPLICIT - gov.nih.mipav.model.file.FileInfoDicom.VRtype
-
Used to indicate that the DICOM tags are explicit (i.e they have VRs).
- EXPLICIT_BIG_ENDIAN - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_TransferSyntaxUtil
-
Static that defines EXPLICIT_BIG_ENDIAN.
- EXPLICIT_LITTLE_ENDIAN - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_TransferSyntaxUtil
-
Static that defines EXPLICIT_LITTLE_ENDIAN.
- explore() - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
Adds the children of this file to the this FileNode for display in a JTree. adjusts the explored
variable.
- explore() - Method in class gov.nih.mipav.view.VOIContourNode
-
Adds the children of this file to the this FileNode for display in a JTree. adjusts the explored
variable.
- explore() - Method in class gov.nih.mipav.view.VOIFrameNode
-
Adds the children of this file to the this FileNode for display in a JTree. adjusts the explored
variable.
- explore() - Method in class gov.nih.mipav.view.VOIGroupNode
-
Adds the children of this file to the this FileNode for display in a JTree. adjusts the explored
variable.
- explore() - Method in class gov.nih.mipav.view.VOIOrientationNode
-
Adds the children of this file to the this FileNode for display in a JTree. adjusts the explored
variable.
- explore(ViewImageFileFilter) - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
Adds the children of this file to the this FileNode for display in a JTree. adjusts the explored
variable.
- Explore(CDVector, CDVector, double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizePS
-
- explored - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- explored - Variable in class gov.nih.mipav.view.ViewFileTreeNode
-
DOCUMENT ME!
- exploreDirectoriesOnly() - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
Accessor to whether or not the FileNode is to only explore Directories.
- exploreDirectoriesOnly(boolean) - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
Sets the FileNode to view only directories when it goes exploring.
- expm1(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- EXPM1 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- expmax_calcrTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- expmin_calcjTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- expmin_calcrTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- expn - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_stepsize_t
-
exponent
- expn(int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- EXPN - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- EXPN_MAX - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< ::fast_expn table size @internal
- EXPN_SZ - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- expn_tab - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< ::fast_expn table max @internal
- exponent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
1/(qValue - 1).
- exponent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- exponent - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
1/(qValue - 1).
- EXPONENTIAL_COST_FUNCTION - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- EXPONENTIAL_FIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- EXPONENTIAL_FIT - Static variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- EXPONENTIAL_FUNCTOR - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- ExponentialCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ExponentialCostFunction
-
- exponentialFit - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- ExponentialFunctor() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ExponentialFunctor
-
- export(int[], boolean[], boolean, ViewJProgressBar, int, int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Exports data based on the mapping the current ModelImage to a new ModelImage oriented based on the axisOrder and
axisFlip arrays.
- export(int[], boolean[], int, int, float[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Exports data based on the mapping from ModelImage space to Patient space.
- export(int, int, int, float[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Exports data based on the mapping from ModelImage space to Patient space.
- exportAllPoints() - Method in class gov.nih.mipav.model.structures.VOI
-
Get Vector3fs from the VOI; can only use with Point.
- exportArrays(float[], float[]) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Exports the float arrays of the points of the curve.
- exportArrays(float[], float[], float[]) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Exports the float arrays of the points of the curve.
- exportArrays(int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Exports the arrays of the points of the curve in int array format.
- exportComplexData(int, int, float[], float[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data to the real values and the images values arrays.
- exportComplexSliceXY(int, float[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export XY slice magnitude data into values array.
- exportData(float[], int, int) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Simple accessor to copy data from this class's data buffer.
- exportData(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data into values array, in the native type of the model image.
- exportData(int, int, byte[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data into values array.
- exportData(int, int, double[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data in values array.
- exportData(int, int, float[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data to values array.
- exportData(int, int, int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data into values array.
- exportData(int, int, int, float[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export data to values array.
- exportData(int, int, long[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data into values array.
- exportData(int, int, short[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data into values array.
- exportData(int, int, Number[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data into values array.
- exportData(int, int, BitSet) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data into values array.
- exportDataNoLock(int, int, byte[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data into values array WITHOUT locking.
- exportDataNoLock(int, int, double[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export data into values array WITHOUT locking.
- exportDataNoLock(int, int, float[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export data in values array WITHOUT using locking.
- exportDataNoLock(int, int, int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data into values array WITHOUT locking.
- exportDataNoLock(int, int, long[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export data into values array WITHOUT locking.
- exportDataNoLock(int, int, short[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data into values array WITHOUT locking.
- exportDataNoLock(int, int, Number[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export data into values array WITHOUT locking.
- exportDataNoLock(int, int, BitSet) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export data into values array WITHOUT locking.
- exportDataUseMask(int, int, boolean, byte[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Export data into values array.
- exportDataUseMask(int, int, float[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Export data into values array.
- exportDComplexData(int, int, double[], double[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data to the real values and the imaginary values arrays.
- exportDiagonal(int, int, int[], Vector3f[], float[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
ShowDiagonal samples the ModelImage data along a non-axis aligned plane.
- exportDiagonal(int, int, int[], Vector3f[], float[], boolean, boolean, Vector<BitSet>, boolean[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
- exportDiagonal(int, int, int[], Vector3f[], float[], boolean, BitSet, Vector<BitSet>, boolean[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- exportDiagonal(BitSet, int, int, int[], Vector3f[], float, boolean, float[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
ShowDiagonal samples the ModelImage data along a non-axis aligned plane.
- exportDMagData(int, int, double[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export magnitude data to values array.
- exportIndexedLUT() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
This is a method to export a special int array where the alpha is stored in the most significant byte, then red,
green and blue.
- exportIndexedLUT(int[]) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
This is a method to export a special int array where the alpha is stored in the most significant byte, then red,
green and blue.
- exportIndexedLUTMin(ModelLUT, byte[]) - Static method in class gov.nih.mipav.model.structures.ModelLUT
-
- exportIndexedLUTMin(ModelLUT, byte[], int) - Static method in class gov.nih.mipav.model.structures.ModelLUT
-
- exportIndexedLUTMin(ModelRGB, byte[]) - Static method in class gov.nih.mipav.model.structures.ModelLUT
-
- exportIndexedRGB() - Method in class gov.nih.mipav.model.structures.ModelRGB
-
This is a method to export a special int array where the alpha is stored in the most significant byte, then red,
green and blue.
- exportMagData(int, int, double[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export magnitude data to values array.
- exportMagData(int, int, float[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export magnitude data to values array.
- exportPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- exportPoint() - Method in class gov.nih.mipav.model.structures.VOI
-
Returns the first point.
- exportPoint() - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Method to access point VOI coordinate
- exportPoint() - Method in class gov.nih.mipav.model.structures.VOIText
-
Method to access point VOI coordinate.
- exportPoints(int) - Method in class gov.nih.mipav.model.structures.VOI
-
Get Vector3fs from the VOI; can only use with Point.
- exportPolygon() - Method in class gov.nih.mipav.model.structures.PointStack
-
Repackages arrays into a java polygon returns points in polygon form.
- exportPolygon() - Method in class gov.nih.mipav.model.structures.VOIContour
-
Exports the points of the contour as a polygon (z data can not be encoded
in the polygon).
- exportPolygon(int) - Method in class gov.nih.mipav.model.structures.VOI
-
- exportRGB_LUT(boolean) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
This is a method to export a 2D float array of the LUT.
- exportRGBData(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export data in values array.
- exportRGBData(int, int, int, byte[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export data in values array.
- exportRGBData(int, int, int, double[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export data in values array.
- exportRGBData(int, int, int, float[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export data in values array.
- exportRGBData(int, int, int, short[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export data in values array.
- exportRGBDataNoLock(int, int, int, double[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data in values array WITHOUT using locking.
- exportRGBDataNoLock(int, int, int, float[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export data in values array WITHOUT using locking.
- exportSelectedVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- exportSliceXY(int, byte[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export XY slice into values array.
- exportSliceXY(int, double[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export XY slice into values array.
- exportSliceXY(int, float[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export XY slice into values array.
- exportSliceXY(int, int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export XY slice into values array.
- exportSliceXY(int, long[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
export XY slice into values array.
- exportSliceXY(int, short[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Export XY slice into values array.
- exportToClipboard(JComponent, Clipboard, int) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter
-
- exportToMask() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
export to Mask.
- exportToVOI() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
export to VOI.
- exportTransformedImage() - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
returns the transformed image
- exportTransformField() - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
returns the transform field v defined as X' = X+v (=s)
- exportVoiButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
button VOI export.
- exposureArray - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- exposureBias - Variable in class gov.nih.mipav.model.file.FileSVS
-
- exposureBias - Variable in class gov.nih.mipav.model.file.FileTiff
-
- exposureMode - Variable in class gov.nih.mipav.model.file.FileSVS
-
- exposureMode - Variable in class gov.nih.mipav.model.file.FileTiff
-
- exposureProgram - Variable in class gov.nih.mipav.model.file.FileSVS
-
- exposureProgram - Variable in class gov.nih.mipav.model.file.FileTiff
-
- exposureTime - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
- exposureTime - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- exposureTime - Variable in class gov.nih.mipav.model.file.FileSVS
-
- exposureTime - Variable in class gov.nih.mipav.model.file.FileTiff
-
- exposureTime0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- exposureTime1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- exposureTime2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- exposureTime3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- exposureTimeBlurry - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- exposureTimeChannel0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- exposureTimeChannel1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- exposureTimeChannel2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- exposureTimeChannel3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- exposureTimeTrue - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- exProspCnt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
408 (internal use) number of Prosp/Scout Series.
- exProspData - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
416.
- exProspLen - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
412 (internal use) Prosp/Scout Sers Keys in Exam.
- expsma(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- expx2(double, int) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- EXPX2 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- exSeriesCt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
364 (innternl use) Last Series Number Used.
- exSeriesData - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
380.
- exSeriesLen - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
376 (internal use) Series keys for this exam.
- exStat - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
436 Patient status.
- exSysID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
318 - 9 bytes Creator suite and host.
- ext - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- EXT_DELIM - Static variable in class gov.nih.mipav.model.file.FileTypeInfo
-
The string delimiter which should be used for extension lists passed into or generated by this class.
- ext_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- ext_gz - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- ext_wilk(double, double, int, int, double[], double[]) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- EXTENDED_POWELL_SINGULAR - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- EXTENDED_POWELL_SINGULAR - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- EXTENDED_ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- EXTENDED_ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- extendedBoundaryTracing() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
From text description in 4th edition Image Processing, Analysis, and Machine Vision International Edition
by Milan Sonka, Vaclav Hlavac, and Roger Boyle, Algorithm 6.8 Extended Boundary Tracing, pp. 195-196.
- extendedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
- ExtendedState - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- ExtendedWilkinson() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- extendName(String, VOI, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Changes voi name used for statistics retrieval based on processing mode
- extendOffset - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Entry n is (-1 << n) + 1; used to make a number negative.
- extendTest - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Entry n is 2**(n-1); used to test whether we need to make a number negative.
- extension - Variable in class gov.nih.mipav.model.file.FilePaintBitmap
-
- extension - Variable in class gov.nih.mipav.model.file.FileVOI
-
- extension - Variable in class gov.nih.mipav.model.structures.VOI
-
extension of voi file name of voi was read in through file
- extension - Variable in enum gov.nih.mipav.view.dialogs.JDialogMemoryAllocation.VMConfigType
-
- extensionList - Variable in class gov.nih.mipav.model.file.FileTypeInfo
-
- EXTENSIONS - Static variable in class gov.nih.mipav.model.file.FileAnalyze
-
The extensions of ANALYZE file.
- EXTENSIONS - Static variable in class gov.nih.mipav.model.file.FileSiemensText
-
The extensions of SiemensText file.
- EXTENSIONS - Static variable in class gov.nih.mipav.model.file.FileVista
-
The extensions of VISTA file.
- extent - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- extentDest - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Internal sorting variables for sorting slices on images of greater than 3 dimensions
- extentField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- ExtentionMath() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ExtentionMath
-
- extents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- extents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- extents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- extents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- extents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.model.file.FileDicom
-
The currently known extents of the image, as indicated by the header
- extents - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Should be 16384.
- extents - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image extents as decribed by the image file format.
- extents - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Should be 16384.
- extents - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.model.file.FileInfoVista
-
- extents - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- extents - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.model.GaussianKernelFactory
-
- extents - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
The dimensionality of the dataset.
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Original dimensions extents value array.
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Image extents.
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
The extents of original image
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- extents - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
The extents of original image
- extents - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
- extents - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Extents of image.
- extents - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Extents of image A, same as xDim, yDim, etc.
- extents - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Original dimensions extents value array.
- extents - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- extents - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Extents of image.
- extents - Variable in class gov.nih.mipav.view.VOIGroupNode
-
- EXTENTS - Static variable in class gov.nih.mipav.model.file.FileAnalyze
-
The extent size of the ANALYZE file.
- extents2D - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- extents3D - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- extents4D - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- extentScale - Variable in class gov.nih.mipav.model.GaussianKernelFactory
-
- extentsCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- extentsLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- extentsLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- extentSrc - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Internal sorting variables for sorting slices on images of greater than 3 dimensions
- extentsSlice - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- extentsSlice - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- extentX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
image extents.
- extentY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
image extents.
- extentZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
image extents.
- exterAccuracy(SchwarzChristoffelMapping.scmap) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- exteriorCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- exteriorevalinv(SchwarzChristoffelMapping.scmap, double[][], double[][], double[][], int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- exteriorFill - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- extermap(double[][], double[], double, double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- EXTERNAL_CAMERA_PHOTOGRAPHY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality external camera photography.
- EXTERNAL_CAMERA_PHOTOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality external camera photography.
- externalData - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- externalNodes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- externalShutter1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- externRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Plate
-
- externRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Screen
-
- exterplot(SchwarzChristoffelMapping.scmap, double[], double[], int, int, double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- exterRoutine - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- extModifierMask - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- exToArchCnt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
396 (internal use) number of Unarchived Series.
- exToArchiveData - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
404.
- exToArchiveLen - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
400 (internal use) Unarchived series Keys in Exam.
- extra_info_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingCostFunction
-
- EXTRA_SAMPLES - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- EXTRA_SAMPLES - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- extraBrainPaddingField - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Text field corresponding to brain padding parameter.
- extraBrainPaddingField - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Text field corresponding to brain padding parameter.
- extract - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
List of slices to remove from source image.
- extract - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- extract(byte[], MetadataExtractor.Metadata, MetadataExtractor.Directory) - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeReader
-
- extract(byte[], MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDnlReader
-
- extract(byte[], MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegReader
-
- extract(MetadataExtractor.RandomAccessReader, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifReader
-
- extract(MetadataExtractor.RandomAccessReader, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccReader
-
- extract(MetadataExtractor.RandomAccessReader, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifReader
-
- extract(MetadataExtractor.RandomAccessReader, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfxxReader
-
- extract(MetadataExtractor.RandomAccessReader, MetadataExtractor.Metadata) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.MetadataReader
-
- extract(MetadataExtractor.RandomAccessReader, MetadataExtractor.Metadata, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifReader
-
- extract(MetadataExtractor.RandomAccessReader, MetadataExtractor.Metadata, int, MetadataExtractor.Directory) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifReader
-
- extract(MetadataExtractor.RandomAccessReader, MetadataExtractor.Metadata, MetadataExtractor.Directory) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccReader
-
- extract(MetadataExtractor.SequentialReader, int, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopReader
-
- extract(MetadataExtractor.SequentialReader, int, MetadataExtractor.Metadata, MetadataExtractor.Directory) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopReader
-
- extract(MetadataExtractor.SequentialReader, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegReader
-
- extract(MetadataExtractor.SequentialReader, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpReader
-
- extract(MetadataExtractor.SequentialReader, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DuckyReader
-
- extract(MetadataExtractor.SequentialReader, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- extract(MetadataExtractor.SequentialReader, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDhtReader
-
- extract(MetadataExtractor.SequentialReader, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PsdReader
-
- extract(MetadataExtractor.SequentialReader, MetadataExtractor.Metadata, long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcReader
-
- extract(MetadataExtractor.SequentialReader, MetadataExtractor.Metadata, long, MetadataExtractor.Directory) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcReader
-
- extract(MetadataExtractor.SequentialReader, Set<MetadataExtractor.PngChunkType>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkReader
-
- extract_descrip(SIFT3D.SIFT3DC, SIFT3D.Image, SIFT3D.Keypoint, SIFT3D.SIFT3D_Descriptor) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- extract3DSubsets() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
method that extracts 3D subsets
from the 4D dataset
- extractAIF() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- extractBrain() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The segmentation function.
- extractBrain() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Isolate the brain from the rest of the MR image.
- extractBrain() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Performs the BET brain extraction using parameters specified from JDialogFaceAnonymizer.
- extractBrainAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Reference to the algorithm we will be running.
- extractBrainAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Algorithm used for brain extraction.
- extractButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Extract the selected image button.
- extractButton - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- extractButtonA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Extract arbitrary cliping plane button.
- extractButtonS - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Extract static eye cliping plane button.
- extractCEFeature() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- extractColor(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Makes a series of ints, corresponding to a color string stored in the Mipav.preferences file which looks like a
color string defined in web pages ("RRGGBB"). and returns a java.awt.Color based on those values.
- extractColor(String) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Makes a series of ints, corresponding to a color string stored in the Mipav.preferences file which looks like a
color string defined in web pages ("RRGGBB"). and returns a java.awt.Color based on those values.
- extractColor(String) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Makes a series of ints, corresponding to a color string stored in the Mipav.preferences file which looks like a
color string defined in web pages ("RRGGBB"). and returns a java.awt.Color based on those values.
- extractConnected - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Smooth button.
- extractConnectedComponents(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Decimate the selected surfaces.
- extractContents(String) - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- extractDicomTags(FileInfoBase) - Static method in class gov.nih.mipav.model.file.FileMinc
-
Extracts any Dicom tags from a given FileInfoBase (if the file info is dicom) and puts them into a Hashtable.
- extractedImages - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
DOCUMENT ME!
- extractedImages - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- extractExtents(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Inserts the values given by the preference file into the extents fields of the dialog.
- extractFace(BitSet, BitSet, BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Performs the face de-identification within the bounding area by approximating the given shape using
a geometry suitable for the given shape.
- extractFeatures() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Extract CE features.
- extractGroupAndSize(String, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- extractImage24bits(int, int, int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- extractImage24bits(int, int, int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- extractImage8bitsTest(int, int, int, int, AlgorithmLearnFromFailure64.ClassType, float, float) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- extractImage8bitsTest(int, int, int, int, AlgorithmLearnFromFailure64Knees.ClassType, float, float) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- extractImage8bitsTrain(int, int, int, int, AlgorithmLearnFromFailure64.ClassType) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- extractImage8bitsTrain(int, int, int, int, AlgorithmLearnFromFailure64Knees.ClassType) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- extractImages() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Extract the camera capture frame into the resulting ModelImage model.
- ExtractionIntensityLevel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- extractJPEGImage() - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Extracts the JPEG image by processing the byte image array.
- extractKey(int, String) - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- ExtractKeys() - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- extractList - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlices
-
List of slices to extract from source image.
- extractList - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
DOCUMENT ME!
- extractLossyJPEGImage(byte[]) - Method in class gov.nih.mipav.model.file.FileDicom
-
Brute force removal of 1st fragment of JPEG encoded image.
- extractMeshFromVolume() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Extract a TriMesh surface from the Volume Rendering.
- extractMultiJPEGImage() - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
- extractNewMesh(LinkedList) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Used in cutting closed paths and creating new meshes to export to the scene graph.
- extractNewMesh(LinkedList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Used in cutting closed paths and creating new meshes to export to the scene graph.
- extractNumber(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- extractObject() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
The segmentation function.
- extractObjectAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- extractPaint - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
If true, do not phyically segment the image but generate a paint mask.
- extractPaint - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
This flag is set when the algorithm is being used only to extract paint from the brain.
- extractPaint - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Whether to extract the brain to paint instead of removing image data.
- extractPaintCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Checkbox to extract the brain to paint instead of removing image data.
- ExtractPath(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Extracts one path from a shape into a new shape.
- extractPoint(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
- extractPoint(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
- extractPoint(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt2D
-
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
- extractPoint(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
- extractPoint(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Extract the partial or full transformation vector from the start transformation vector,
which will be optimized.
- extractResolutions(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Inserts the values given by the preference file into the resolutions fields of the dialog.
- extractSelection - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Extrace menu icon item.
- extractSelection - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- extractSignificantDigits(boolean, int[]) - Method in class gov.nih.mipav.util.DoubleDouble
-
Extracts the significant digits in the decimal representation of the argument.
- extractSlices() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
Calculates the final output and stores it in the source image.
- extractSlicesAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
DOCUMENT ME!
- extractSlicesAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- extractSubSets(String[]) - Static method in class gov.nih.mipav.model.file.FilenameSorter
-
This method will take a String array parameter and break it into a Vector of Vectors.
- extractSubVolume(ModelImage, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- extractSurAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- extractSurface() - Method in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Extracts a surface, in the form of triangles, from an image.
- extractSurface() - Method in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Extracts a surface, in the form of triangles, from an image.
- extractTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- extractTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- extractTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- extractTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- extractToPaint - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
When true, mask of extracted brain is painted over the source image.
- extractToPaintCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
When checked, mask of extracted brain is painted over the source image.
- extractUnitIndeces(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Inserts the values given by the preference file into the units of measure fields of the dialog.
- extractValue(int, String) - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- extractY(libdt.Mat[], Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- extraMMsToPad - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
FaceAnonymizer parameter.
- extraMMsToPad - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
FaceAnonymizer parameter.
- extraSamples - Variable in class gov.nih.mipav.model.file.FileSVS
-
- extraSamples - Variable in class gov.nih.mipav.model.file.FileTiff
-
- EXTRATREES - gov.nih.mipav.model.algorithms.StochasticForests.SplitRule
-
- extremityCoil - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- extremityCoil - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- extXInput - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Original X, Y, Z dimension extents values.
- extXInput - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Original X, Y, Z dimension extents values.
- extXOutput - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Power of 2 X, Y, Z dimension extents values.
- extXOutput - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Power of 2 X, Y, Z dimension extents values.
- extYInput - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Original X, Y, Z dimension extents values.
- extYInput - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Original X, Y, Z dimension extents values.
- extYOutput - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Power of 2 X, Y, Z dimension extents values.
- extYOutput - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Power of 2 X, Y, Z dimension extents values.
- extZInput - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Original X, Y, Z dimension extents values.
- extZInput - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Original X, Y, Z dimension extents values.
- extZOutput - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Power of 2 X, Y, Z dimension extents values.
- extZOutput - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Power of 2 X, Y, Z dimension extents values.
- exUniq - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
4 (internal use) The Make_Unique Flag.
- exUnSeriesData - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
392.
- exUnSeriesLen - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
388 (internal use) Unstored Sers Keys in Exam.
- exVersCre - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
352 - 2 bytes Genesis Version - Created.
- exVersCur - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
354 - 2 bytes Genesis Version - Now.
- exWave - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- Eye() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Converts the matrix in the identity matrix - i.e. zeros all-over except
the ones in the diagonal.
- eyeTrackerRecordingMode - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- eyetrackingOutStream - Static variable in class gov.nih.mipav.view.MipavUtil
-
eye tracking outstream writer .
F
- f - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- f - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Gauss_filter
-
- f - Variable in class gov.nih.mipav.model.file.FileJP2
-
- f - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_v4_t
-
- f - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags.EdgeSorter
-
- f(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- f(double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.ODE
-
- f(double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEExtModel
-
- f(double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEModel
-
- f(double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODERectModel
-
- f(double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODEHPModel
-
- f(double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODESTModel
-
- f(double, CVODES.NVector, CVODES.NVector, CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- f(DoubleDouble, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- f_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ComposedLoss
-
- f_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- f_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- f_inv - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- f_method - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- f_touched(LSCM.Face) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- f1 - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- f1 - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- f1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- f1 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- f1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- f1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- f1 - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- f1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- f1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- f1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- f1(double[], int) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- f10_DEGREES - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- f2 - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- f2 - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- f2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- f2 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- f2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- f2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- f2 - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- f2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- f2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- f2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- f3 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- f4 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- f5 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- F5(double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- f6 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- f7 - Variable in class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- FA - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality Fluorescein Angiography.
- FA - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality Fluorescein Angiography.
- fa_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- fac(int) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- FAC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- face - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
when true, compute face segmentation instead of skull
- face - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
- face - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FrontEdge
-
- face - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- face() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- Face - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- Face() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Face
-
- Face() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- Face(int, int, int, int, String, MetadataExtractor.Age) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- face_id(LSCM.Face) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- FaceAdjacentToEdges(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- FaceArray - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- faceBorderFromNone(TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags
-
- FaceCorners(int, int[], int[], int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- FaceEdgeIterator(LSCM.Face) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.FaceEdgeIterator
-
- FaceEdgesFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- FaceEdgesFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FaceEdgesFunction
-
- FaceHalfedgeIterator(LSCM.Face) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.FaceHalfedgeIterator
-
- FaceIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- FaceIndex(int, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- FaceIndex(OctNode, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VertexData
-
- FaceIndex(OctNode, int, int, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VertexData
-
- faceMostCcwHalfEdge(LSCM.Face) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- faceMostClwHalfEdge(LSCM.Face) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- faceNeighbor(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- faceNeighbor(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- faceNextCcwHalfEdge(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- faceNextClwHalfEdge(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- faceOrientation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
The orientation of an image.
- faceOrientation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Face Orientation is left:
- faceOrientation - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Indicates face orientation of the image.
- faceOrientation - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Indicates face orientation of the image.
- FaceOrig - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- FaceReflectCornerIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- FaceReflectEdgeIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- FaceReflectFaceIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- faces() - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- FacesAdjacentToEdge(int, int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- FACET_BASED_PEAK_NOISE_REMOVAL - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- FACET_BASED_PEAK_NOISE_REMOVAL - Static variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Use serialVersionUID for interoperability.
- facetAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- facetBasedPeakNoiseRemoval() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- FaceTmark - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- FaceTmark() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FaceTmark
-
- FaceTrait() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.FaceTrait
-
- FaceVertexIterator(LSCM.Face) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.FaceVertexIterator
-
- FACING_DOWN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
For indicating the axial image is facing down.
- FACING_DOWN - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Indicates axial image with y-axis oriented posterior to anterior.
- FACING_DOWN - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Indicates axial image with y-axis oriented posterior to anterior.
- FACING_INTO_SCREEN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
For indicating the coronal image is facing into the screen.
- FACING_INTO_SCREEN - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Indicates coronal image with z-axis oriented posterior to anterior.
- FACING_INTO_SCREEN - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Indicates coronal image with z-axis oriented posterior to anterior.
- FACING_LEFT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
For indicating the sagittal image is facing left.
- FACING_LEFT - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Indicates sagittal image with x-axis oriented anterior to posterior.
- FACING_LEFT - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Indicates sagittal image with x-axis oriented anterior to posterior.
- FACING_OUT_OF_SCREEN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
For indicating the coronal image is facing out of the screen.
- FACING_OUT_OF_SCREEN - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Indicates coronal image with z-axis oriented anterior to posterior.
- FACING_OUT_OF_SCREEN - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Indicates coronal image with z-axis oriented anterior to posterior.
- FACING_RIGHT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
For indicating the sagittal image is facing right.
- FACING_RIGHT - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Indicates sagittal image with x-axis oriented posterior to anterior.
- FACING_RIGHT - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Indicates sagittal image with x-axis oriented posterior to anterior.
- FACING_UNKNOWN - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Face orientation not obtained from file information.
- FACING_UNKNOWN - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Face orientation not obtained from file information.
- FACING_UP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
For indicating the axial image is facing up.
- FACING_UP - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Indicates axial with y-axis oriented anterior to posterior.
- FACING_UP - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Indicates axial with y-axis oriented anterior to posterior.
- facingDownRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for facing down image.
- facingDownRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Button for facing down image.
- facingIntoRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for facing into the screen image.
- facingIntoRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Button for facing into the screen image.
- facingLeftRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for facing left image.
- facingLeftRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Button for facing left image.
- facingOutRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for facing out image.
- facingOutRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Button for facing out image.
- facingRightRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for facing right image.
- facingRightRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Button for facing right image.
- facingUpRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for facing up image.
- facingUpRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Button for facing up image.
- factbl - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- factor - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
initial bound to steps in the outer loop
factor is a positive input variable used in determining the
initial step bound.
- factor - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
number of division by 2 of the out image compared to the original
size of image
- factor(int, int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- Factor - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- Factor() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- Factor(double, double, double[][], double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- Factor(double, double, double, double[][], double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- Factor(double, double, double, double, double[][], double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- Factor(double, double, double, double, double, double[][], double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- FactorCornerIndex(int, int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Square
-
- FactorCornerIndex(int, int[], int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- FactorEdgeIndex(int, int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Square
-
- FactorEdgeIndex(int, int[], int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- FactorFaceIndex(int, int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- FactorFaceIndex(int, int[], int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- factorial(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- factorial(int) - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
Returns the factorial of a nonnegative integer.
- factorial(int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- factorial(int) - Static method in class gov.nih.mipav.model.algorithms.RandomNumberGen
-
Returns the factorial of a nonnegative integer.
- factorial(int) - Method in class gov.nih.mipav.util.DoubleDouble
-
- FACTR - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- failed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- FailingCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.FailingCostFunction
-
- FAILURE - gov.nih.mipav.model.algorithms.CeresSolver.TerminationType
-
- failures - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- FAImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- FAImageName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- FakeIterationCallback() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.FakeIterationCallback
-
- falseNegative - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
where trueImage has the nonzero level.
- falseNegative - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
where trueImage has id but test image does not.
- falsePositive - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
where trueImage does not have the nonzero level.
- falsePositive - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
where trueImage does not have id but test image does.
- family_name - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.BaseWavelet
-
- family_number - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.ContinuousWavelet
-
- FAMS_ALPHA - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_BLOCKSIZE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_BLOCKSIZE2 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- fams_cut() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_cut
-
- FAMS_DO_SPEEDUP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_DO_SPEEDUP - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- FAMS_FKL_NEL - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_FKL_TIMES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_FLOAT_SHIFT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- fams_hash_entry() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
-
- fams_hash_entry2() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry2
-
- FAMS_MAX_K - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_MAX_L - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_MAXITER - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_PRUNE_HDIV - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_PRUNE_MAXM - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_PRUNE_MAXP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_PRUNE_MINN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- FAMS_PRUNE_WINDOW - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- fams_res_cont(int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_res_cont
-
- famsPoint() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
-
- fanlyz() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- fast_approx - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- fast_expn_init() - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- FAST_GLOBAL_K_MEANS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- FAST_GLOBAL_K_MEANS - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- fastAlgorithm - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- fastButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- fastButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- FastConvWaveletMult(double[][], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- Fastfit - Class in gov.nih.mipav.model.algorithms
-
- Fastfit() - Constructor for class gov.nih.mipav.model.algorithms.Fastfit
-
- fastfmmresample(double[][], double[], double[], double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- fastGlobalAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- fastGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- fastMode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
Whether to skip searching of the parameter space when registering the original image against the flipped image.
- fastMode - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- fastMode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
- fastMode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
- fastMode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
- fastMode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
- fastMode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
- fastMode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
- fastMode - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- fastMode - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- fastMode - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- fastMode - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- fastMode - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- fastModeCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- fastModeCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- fastModeCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- fastModeCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- fastplog - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- FATAL - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- fatalError - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- fatalError(SAXParseException) - Method in class gov.nih.mipav.model.file.XMLErrorHandler
-
Handles parse exception fatal errors by passing the parse exception up as a SAXException.
- fatalError(SAXParseException) - Method in class gov.nih.mipav.view.dialogs.XMLErrorHandler
-
Handles parse exception fatal errors by passing the parse exception up as a SAXException.
- fatalError(SAXParseException) - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.XMLErrorHandler
-
Handles parse exception fatal errors by passing the parse exception up as a SAXException.
- fatalProblem - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- fatCEDImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- fatCEDImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- fatCEDImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- fatCEDImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- fatCEDImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- fatCEDImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- fatImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- fatImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- fatImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- fatImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- fatImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- fatImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
target image variables.
- fatImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
target image variables.
- fatImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
target image variables.
- fatImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
target image variables.
- fatImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
target image variables.
- fatImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- fatImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- fatImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- fatImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- fatImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- fatImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- fatImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- fatImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- fatImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- fatImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- fatshiftBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- fatShiftLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- fax - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- fax34Decompresser(byte[], byte[]) - Method in class gov.nih.mipav.model.file.FileSVS
-
- fax34Decompresser(byte[], byte[]) - Method in class gov.nih.mipav.model.file.FileTiff
-
- fax34Init() - Method in class gov.nih.mipav.model.file.FileSVS
-
- fax34Init() - Method in class gov.nih.mipav.model.file.FileTiff
-
- fax3Compression - Variable in class gov.nih.mipav.model.file.FileSVS
-
- fax3Compression - Variable in class gov.nih.mipav.model.file.FileTiff
-
- fax4Compression - Variable in class gov.nih.mipav.model.file.FileSVS
-
- fax4Compression - Variable in class gov.nih.mipav.model.file.FileTiff
-
- fb - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
The number of fractional bits in the source data
- fb - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- fB(double, CVODES.NVector, CVODES.NVector, CVODES.NVector, CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- fb_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- fbig_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- fbRun(double[][][][], double[][][][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- fbRun(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- fbsp(double[], double[], double[], int, int, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- FBSP - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- fbsp_order - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.ContinuousWavelet
-
- fbtAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- fBTestMode(double, CVODES.NVector, CVODES.NVector, CVODES.NVector, CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- FC_CUSTOM - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- fc_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- FC_ELLIPSE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- FC_ELLIPSE - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- FC_HORIZ_LINE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- FC_HORIZ_LINE - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- FC_LINE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- FC_LINE - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- FC_SQUARE_BOX - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- FC_SQUARE_BOX - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- FC_VERT_LINE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- FC_VERT_LINE - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- fcmAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- fcmAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- fcmAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- fcomp(int, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- fConvergenceLimit - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline.Options
-
One iteration is defined such that all control points are moved once by gradient descent.
- fcsAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
DOCUMENT ME!
- FCT(double[], double[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- FCT2D(double[], int, int) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- fCURVE_CUTOFF - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- fd - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- FD - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- fd_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- FD4 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- FD8 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- fda_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- fData - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- fdb_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- fDISTANCE_SCALE_FACTOR - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- fDivACheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- fDivAImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- fDivAImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- fDivDCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- fDivDImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- fDivDImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- FDJAC1(int, int, double[], double[], double[][], int, int[], int, int, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- fdtr(int, int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- FDTR - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- fdtrc(int, int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- FDTRC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- fdtri(int, int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- FDTRI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- feature - Variable in class gov.nih.mipav.model.algorithms.libdt.DatDescriptor
-
- feature - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Features
-
- feature - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.FeaturesSVM
-
- Feature - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- Feature(int, int, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Feature
-
- Feature(String) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Feature
-
Creates a new Feature object.
- feature_max - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- feature_max - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- feature_min - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- feature_min - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- FEATURE0 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- FEATURE1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- FEATURE2 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- featureAdd(FeatureNode[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Features
-
- featureAdd(svm_node[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.FeaturesSVM
-
- featureArray - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- featureArraySVM - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- featureDirName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- featureDirName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- featureDirName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- featureImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNonparametricSegmentation
-
DOCUMENT ME!
- FeatureNode - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- FeatureNode(int, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.FeatureNode
-
- features - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- Features - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- Features() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Features
-
- FeaturesSVM - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- FeaturesSVM() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.FeaturesSVM
-
- featuresTrainingPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- feeAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
DOCUMENT ME!
- feffAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- feq - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- feq - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- feq - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- feq - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- ffail - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- FFi(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
Return the index that the face have in the j-th adjacent face.
- FFp(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
Return the pointer to the j-th adjacent face.
- FFp1(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- FFp2(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- ffR - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- fft() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- fft() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- fft(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
This is the method that calculates the FFT.
- fft(ModelImage, ModelImage, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Computes the fft of the input image, returns the fft.
- FFT - Static variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- FFT - Static variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- fft_dif(double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHilbertTransform
-
void fft_dif(double z[], int n)
Purpose:
Computes the forward discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-frequency FFT.
- fft_dif_iter(double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHilbertTransform
-
static void fft_dif_iter(double *z, unsigned long n)
Purpose:
Computes the forward discrete Fourier transform of a complex
sequence z, using an iterative radix 2 decimation-in-frequency
FFT.
- fft_dif_rec(double[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHilbertTransform
-
static void fft_dif_rec(double z[], int n, int nbranch)
Purpose:
Computes the forward discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-frequency FFT.
- FFT1D(CLFFTPlan.CLFFTKernelDir) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- FFTAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Float precision default, openCL enabled FFT algorithm
- FFTAlgo2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Double precision, openCL enabled FFT algroithm
- fftconv2(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- FFTer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
the AlgorithmFrequencyFilter, to lo-pass filter the image.
- fftPadding(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.fftPadding
-
- fftshift(double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- fftshift(double[][]) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- fftshift(double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- fftshift(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- fftshift(double[], int, int) - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- fftshift1d(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- FFTUtility - Class in gov.nih.mipav.model.algorithms.filters
-
This FFT should only be used when it is necessary to perform a N-dimensional FFT on non-power of two data without
adding padding.
- FFTUtility(double[], double[], int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
Creates a new FFTUtility object.
- FFTUtility(int) - Constructor for class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
This constructor should only be used for functionType == SELF_TEST.
- FFTUtilityEP - Class in gov.nih.mipav.model.algorithms.filters
-
This extended precision FFT should only be used when it is necessary to perform a N-dimensional FFT on non-power of
two data without adding padding.
- FFTUtilityEP(double[], double[], int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
Creates a new FFTUtility object.
- FFTUtilityEP(int) - Constructor for class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
This constructor should only be used for functionType == SELF_TEST.
- fGradientDescentMinimizeStepSize - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline.Options
-
Size of step in sample units when locating the minimum of the gradient descent.
- fGroupNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- fhat - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- fhatmx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- FHead - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- fHist - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fHistPaddedI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fHistPaddedR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fht_dif(double[], int) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
void fht_dif(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-frequency FHT.
- fht_dif_iter(double[], int) - Static method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
static void fht_dif_iter(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-frequency
FHT.
- fht_dif_iter_seq(double[], int) - Static method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
static void fht_dif_iter_seq(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-frequency
FHT.
- fht_dif_rec(double[], int, int) - Static method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
static void fht_dif_rec(double *x, unsigned long n, int nbranch)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-frequency FHT.
- fht_dit(double[], int) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
void fht_dit(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-time FHT.
- fht_dit_iter(double[], int) - Static method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
static void fht_dit_iter(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-time
FHT.
- fht_dit_iter_seq(double[], int) - Static method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
static void fht_dit_iter_seq(double *x, unsigned long n)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using an iterative radix 2 decimation-in-time
FHT.
- fht_dit_rec(double[], int, int) - Static method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
static void fht_dit_rec(double *x, unsigned long n, int nbranch)
Purpose:
Computes the discrete Hartley transform of a real sequence
x[0..n-1], using a radix 2 decimation-in-time FHT.
- fht_instance_count - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- fht_revbin_counts - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- fht_revbin_tables - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- fht_trig_tables - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- FHT_UNIT_STRIDE - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- fht2D(int, int, double[][], double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- fhtdya(double[], boolean) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- fhtdya2D(int, int, double[][], double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- fhtnat(double[], boolean) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- fhtnat2D(int, int, double[][], double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- fhtseq(double[], boolean) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- fhtseq2D(int, int, double[][], double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- fi - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.EVENT_REC
-
- fi - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.EVENT
-
- FIBER - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Fiber track files
- FIBER_TRACKING - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- fiberTrack - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- field - Variable in class gov.nih.mipav.view.dialogs.JDialogNColors
-
DOCUMENT ME!
- field - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSimpleText
-
Text field to enter name in.
- field - Variable in class gov.nih.mipav.view.ViewJFrameRegistration.JDialogIncrement
-
Text field to enter increment.
- field - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool.JDialogIncrement
-
Text field to enter increment.
- field_floor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Lowest allowable field value.
- field_skip - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown length.
- field_skip - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown length.
- field_skip - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- fieldBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fieldDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Characteristic distance over which the field varies.
- fieldDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- fieldDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- fieldImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fieldImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- fieldImage - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- fieldImage - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- fieldNames - Variable in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- fieldNames - Variable in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- fieldOfView - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- fieldOfView - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- fields - Variable in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- fieldSeparator - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- fieldSeparator - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
DOCUMENT ME!
- fieldStrength - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- fieldStrength - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- FieldStrength(String) - Constructor for enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.FieldStrength
-
- fieldStrengthGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- FieldType - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- FilamentArc(String, Float, Boolean) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.FilamentArc
-
Creates a new FilamentArc object.
- filarc - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource
-
- file - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlFileMeta
-
< Current file name
- file - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileBMP
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileCZI
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileDataProvenance
-
File reference.
- file - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileJSON
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileLIFF
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileMap
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileMicroCat
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
File object and input streams
needed for NIFTI compressed files
- file - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FilePaintBitmap
-
File reference, it and its components are able to be modified by extending classes.
- file - Variable in class gov.nih.mipav.model.file.FilePGM
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FilePPM
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileRaw
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileSVS
-
The file...
- file - Variable in class gov.nih.mipav.model.file.FileTiff
-
The file...
- file - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.model.file.FileVOI
-
File reference, it and its components are able to be modified by extending classes.
- file - Variable in class gov.nih.mipav.model.file.FileZVI
-
DOCUMENT ME!
- file - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- file - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- file - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- FILE_CHARSET - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- FILE_ERROR - gov.nih.mipav.model.algorithms.SIFT3D.im_format
-
- FILE_EXT_TABLE - Static variable in class gov.nih.mipav.model.file.FileTypeTable
-
- FILE_RAW_DATA_TYPE - Static variable in class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
Label of the parameter indicating the data type of the raw image.
- FILE_RAW_ENDIANESS - Static variable in class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
Label of the parameter indicating whether the raw image is big endian.
- FILE_RAW_EXTENTS - Static variable in class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
Label of the parameter indicating the extents of the raw image.
- FILE_RAW_OFFSET - Static variable in class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
Label of the parameter indicating the file offset.
- FILE_RAW_RESOLUTIONS - Static variable in class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
Label of the parameter indicating the resolutions of the raw image.
- FILE_RAW_UNITS - Static variable in class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
Label of the parameter indicating the units of measure of the raw image.
- FILE_READ - Static variable in class gov.nih.mipav.model.file.FileIO
-
DOCUMENT ME!
- FILE_STRING - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- file_suffix - Variable in class gov.nih.mipav.view.dialogs.InstanceVOI
-
- file_suffix - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- file_suffix - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
- file_suffix - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- FILE_TYPE_TABLE - Static variable in class gov.nih.mipav.model.file.FileTypeTable
-
- FILE_WRITE - Static variable in class gov.nih.mipav.model.file.FileIO
-
DOCUMENT ME!
- FileAfni - Class in gov.nih.mipav.model.file
-
Afni file format.
- FileAfni(String, String, boolean, boolean) - Constructor for class gov.nih.mipav.model.file.FileAfni
-
Afni reader constructor.
- FileAnalyze - Class in gov.nih.mipav.model.file
-
The class reads and writes Analyze Version 7.5.x files.
- FileAnalyze(String[]) - Constructor for class gov.nih.mipav.model.file.FileAnalyze
-
Creates a new FileAnalyze object.
- FileAnalyze(String, String) - Constructor for class gov.nih.mipav.model.file.FileAnalyze
-
Constructs new file object.
- FileAvi - Class in gov.nih.mipav.model.file
-
AVI file writer and reader.
- FileAvi(String, String) - Constructor for class gov.nih.mipav.model.file.FileAvi
-
Avi reader/writer constructor.
- FileBase - Class in gov.nih.mipav.model.file
-
FileBase is an abstract class that has many methods that support the reading/writing of files.
- FileBase() - Constructor for class gov.nih.mipav.model.file.FileBase
-
Empty constructor.
- FileBase(String[]) - Constructor for class gov.nih.mipav.model.file.FileBase
-
Creates a new FileBase object.
- FileBFLOAT - Class in gov.nih.mipav.model.file
-
- FileBFLOAT(String, String) - Constructor for class gov.nih.mipav.model.file.FileBFLOAT
-
Interfile reader/writer constructor.
- FileBioRad - Class in gov.nih.mipav.model.file
-
Reads BioRaD pic file format.
- FileBioRad(String, String) - Constructor for class gov.nih.mipav.model.file.FileBioRad
-
reader/writer constructor.
- fileBlocks - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- fileBlocks - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- FileBMP - Class in gov.nih.mipav.model.file
-
- FileBMP(String, String) - Constructor for class gov.nih.mipav.model.file.FileBMP
-
BMP reader/writer constructor.
- fileBrowse - Variable in class gov.nih.mipav.view.JPanelFileSelection
-
DOCUMENT ME!
- FileBRUKER - Class in gov.nih.mipav.model.file
-
Reads a BRUKER file by first reading in the d3proc header file or if the d3proc header file is not\
present the visu_pars file, second the reco header file, third the acqp file in the
same directory or up one or two two parent directories, then the method file,l and finally the 2dseq binary file.
- FileBRUKER(String, String) - Constructor for class gov.nih.mipav.model.file.FileBRUKER
-
BRUKER reader/writer constructor.
- fileButton - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- fileButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- filebvalGradTxtName - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
bValGrad test file name from user
- fileBytes - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- FileCellRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.FileCellRenderer
-
- FileCheshire - Class in gov.nih.mipav.model.file
-
The class reads Cheshire file images.
- FileCheshire(String, String, boolean) - Constructor for class gov.nih.mipav.model.file.FileCheshire
-
Creates a new FileCheshire object.
- FileCheshireVOI - Class in gov.nih.mipav.model.file
-
Addresses and lengths are always contained in 4 bytes.
- FileCheshireVOI(String, String, ModelImage) - Constructor for class gov.nih.mipav.model.file.FileCheshireVOI
-
FileCheshireVOI - VOI reader/writer constructor.
- fileChooser - Variable in class gov.nih.mipav.view.FileSelectorImpl
-
- fileClip - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- fileCoordinatesToPatient(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- fileCoordinatesToPatient(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Converts the input position from file coordinates to the local patient coordinates.
- FileCoordinatesToVOI(Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- FileCOR - Class in gov.nih.mipav.model.file
-
FreeSurfer COR files are used to store 3 dimensional unsigned byte data.
- FileCOR(String, String) - Constructor for class gov.nih.mipav.model.file.FileCOR
-
COR reader/writer constructor.
- FileCZI - Class in gov.nih.mipav.model.file
-
File written using Zeiss Release Version 1.1 for ZEN 2012
- FileCZI(String, String) - Constructor for class gov.nih.mipav.model.file.FileCZI
-
LIFF reader/writer constructor.
- FileDataProvenance - Class in gov.nih.mipav.model.file
-
- FileDataProvenance(String, String, ProvenanceHolder) - Constructor for class gov.nih.mipav.model.file.FileDataProvenance
-
VOI reader/writer constructor.
- FileDataProvenance.ProvenanceXMLHandler - Class in gov.nih.mipav.model.file
-
Handle events generated while parsing the XML file.
- fileDataType - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- fileDate - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- FileDeleter - Class in gov.nih.mipav.model.file
-
Class to safely delete a file using a looped thread.
- FileDeleter(String) - Constructor for class gov.nih.mipav.model.file.FileDeleter
-
Construct the file deleter.
- FileDicom - Class in gov.nih.mipav.model.file
-
This class reads and writes DICOM files.
- FileDicom(String) - Constructor for class gov.nih.mipav.model.file.FileDicom
-
DICOM reader/writer constructor.
- FileDicom(String, String) - Constructor for class gov.nih.mipav.model.file.FileDicom
-
DICOM reader/writer constructor.
- FileDicomBase - Class in gov.nih.mipav.model.file
-
FileDICOMBase is an class that supports the reading/writing of DICOM files.
- FileDicomBase() - Constructor for class gov.nih.mipav.model.file.FileDicomBase
-
Empty constructor.
- FileDicomJPEG - Class in gov.nih.mipav.model.file
-
Class that reads a lossless compressed JPEG file.
- FileDicomJPEG(byte[], int, int) - Constructor for class gov.nih.mipav.model.file.FileDicomJPEG
-
Assigns image buffer and creates the other arrays needed to read in image.
- FileDicomJPEG(Vector<byte[]>, Vector<int[]>, int, int) - Constructor for class gov.nih.mipav.model.file.FileDicomJPEG
-
Assigns image buffer and creates the other arrays needed to read in image.
- FileDicomJPEG.HuffTable - Class in gov.nih.mipav.model.file
-
This class reads and packs the bits appropriately for interpreting the huffman codes.
- FileDicomKey - Class in gov.nih.mipav.model.file
-
FileDicomKey goes along with FileDicomTag - it is the key into the hashtable that corresponds to a tag.
- FileDicomKey(int, int) - Constructor for class gov.nih.mipav.model.file.FileDicomKey
-
Creates a Key from the given group and element numbers provided.
- FileDicomKey(String) - Constructor for class gov.nih.mipav.model.file.FileDicomKey
-
Creates new key with the given String as the unique identifier.
- FileDicomSQ - Class in gov.nih.mipav.model.file
-
This is a class for reading in a DICOM sequence tag.
- FileDicomSQ() - Constructor for class gov.nih.mipav.model.file.FileDicomSQ
-
Creates a new DicomSQ object with initial length.
- FileDicomSQItem - Class in gov.nih.mipav.model.file
-
A table containing dicom tags.
- FileDicomSQItem(FileInfoDicom, FileDicomTagTable, FileInfoDicom.VRtype) - Constructor for class gov.nih.mipav.model.file.FileDicomSQItem
-
- FileDicomSQItem(FileInfoDicom, FileInfoDicom.VRtype) - Constructor for class gov.nih.mipav.model.file.FileDicomSQItem
-
- FileDicomTag - Class in gov.nih.mipav.model.file
-
This class holds all the important information about each DICOM tag.
- FileDicomTag(FileDicomTagInfo) - Constructor for class gov.nih.mipav.model.file.FileDicomTag
-
Constructor that creates a DicomTag empty except for the group and element fields.
- FileDicomTag(FileDicomTagInfo, Object) - Constructor for class gov.nih.mipav.model.file.FileDicomTag
-
Constructor that creates a DicomTag empty except for the name field. this is used for private tags and the name
field is the supposed value of the tag.
- FileDicomTagInfo - Class in gov.nih.mipav.model.file
-
Information about a DICOM tag, stored in the DicomDictionary table once for each DICOM tag.
- FileDicomTagInfo(int, int, FileDicomTagInfo.VR, int, String, String) - Constructor for class gov.nih.mipav.model.file.FileDicomTagInfo
-
Constructor that takes all the information needed about the tag except for the value and DICOM revision number.
- FileDicomTagInfo(int, int, String, FileDicomTagInfo.VR, int, String, String) - Constructor for class gov.nih.mipav.model.file.FileDicomTagInfo
-
Constructor that takes all the information needed about the tag except for the value.
- FileDicomTagInfo(FileDicomKey, FileDicomTagInfo.VR, int, String, String) - Constructor for class gov.nih.mipav.model.file.FileDicomTagInfo
-
Constructor that takes all the information needed about the tag except for the value and DICOM revision number
(which we assume to be 3).
- FileDicomTagInfo(FileDicomKey, String, FileDicomTagInfo.VR, int, String, String) - Constructor for class gov.nih.mipav.model.file.FileDicomTagInfo
-
Constructor that takes all the information needed about the tag except for the value and DICOM revision number.
- FileDicomTagInfo.NumType - Enum in gov.nih.mipav.model.file
-
- FileDicomTagInfo.StringType - Enum in gov.nih.mipav.model.file
-
- FileDicomTagInfo.VR - Enum in gov.nih.mipav.model.file
-
- FileDicomTagTable - Class in gov.nih.mipav.model.file
-
A table containing dicom tags.
- FileDicomTagTable(FileInfoDicom, FileDicomTagTable, FileInfoDicom.VRtype) - Constructor for class gov.nih.mipav.model.file.FileDicomTagTable
-
Creates a new FileDicomTagTable object.
- FileDicomTagTable(FileInfoDicom, FileInfoDicom.VRtype) - Constructor for class gov.nih.mipav.model.file.FileDicomTagTable
-
Creates a new FileDicomTagTable object.
- fileDigitNumber - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- fileDir - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- fileDir - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- fileDir - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- fileDir - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileAnalyze
-
File directory of the image.
- fileDir - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileBMP
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileCZI
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileDicom
-
Directory of the image file.
- fileDir - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileHistoLUT
-
The file directory containing the data files.
- fileDir - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileIO
-
Directory where the image file can be found.
- fileDir - Variable in class gov.nih.mipav.model.file.FileJP2
-
File directory.
- fileDir - Variable in class gov.nih.mipav.model.file.FileJSON
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileLIFF
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileMagnetomVision
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileMicroCat
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileMinc
-
The directory containing the minc file being written out or read in.
- fileDir - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
The directory containing the minc file being written out or read in.
- fileDir - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileOME
-
The directory where the xml header and raw image data file are located.
- fileDir - Variable in class gov.nih.mipav.model.file.FilePaintBitmap
-
File directory where the VOI is to read or written.
- fileDir - Variable in class gov.nih.mipav.model.file.FilePARREC
-
File directory of the image.
- fileDir - Variable in class gov.nih.mipav.model.file.FilePGM
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
File directory where the VOI is to read or written.
- fileDir - Variable in class gov.nih.mipav.model.file.FilePPM
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileSiemensText
-
File directory of the image.
- fileDir - Variable in class gov.nih.mipav.model.file.FileSpar
-
File directory of the image.
- fileDir - Variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileSVS
-
File directory.
- fileDir - Variable in class gov.nih.mipav.model.file.FileTiff
-
File directory.
- fileDir - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.model.file.FileVista
-
file name and file dir
- fileDir - Variable in class gov.nih.mipav.model.file.FileVOI
-
File directory where the VOI is to read or written.
- fileDir - Variable in class gov.nih.mipav.model.file.FileXML
-
Directory of XML file on disk.
- fileDir - Variable in class gov.nih.mipav.model.file.FileZVI
-
DOCUMENT ME!
- fileDir - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- fileDirectory - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- FileDM3 - Class in gov.nih.mipav.model.file
-
Some of this code is derived from DM3_Reader.java in ImageJ.
- FileDM3(String, String) - Constructor for class gov.nih.mipav.model.file.FileDM3
-
DM3 reader constructor.
- fileDone - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- fileDone - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
DOCUMENT ME!
- fileDone - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
DOCUMENT ME!
- FileExists(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Tests if a file exists.
- fileExtensionsTS - Variable in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
This is the alphabetically sorted collection of supported file extension names
- FileFiberTrack - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- FileFiberTrack() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.FileFiberTrack
-
- fileField - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
JTextField for the name of the file being attached
- fileFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- FileFilterExt - Class in gov.nih.mipav.view.renderer.flythroughview
-
A simple file filter to select only files with the specified extensions for display in a JFileChooser instance.
- FileFilterExt(String) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.FileFilterExt
-
Create file filter given no initial extensions.
- FileFilterExt(String[], String) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.FileFilterExt
-
Create file filter given the initial array of extensions.
- FileFilterExt(String, String) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.FileFilterExt
-
Create file filter given the initial single extension.
- FileFits - Class in gov.nih.mipav.model.file
-
Some of this code is derived from FITS.java in ImageJ.
- FileFits(String, String) - Constructor for class gov.nih.mipav.model.file.FileFits
-
FITS reader/writer constructor.
- fileFormat - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- fileFormat - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
File format as defined in the Filebase.
- fileFormat - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- fileFormat - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
will always use the HDF5 fileformat
- FileGESigna4X - Class in gov.nih.mipav.model.file
-
Fixed format header
Image data is not compressed
Image data fixed offset 14336 bytes
Data General host
The image files are of fixed layout, described here as a series of 256 by 16
bit word blocks (512 bytes), blocks numbered from 0.
- FileGESigna4X(String, String) - Constructor for class gov.nih.mipav.model.file.FileGESigna4X
-
reader/writer constructor.
- FileGESigna5X - Class in gov.nih.mipav.model.file
-
Reads both GE Neducak Systems MR 5X and LX.
- FileGESigna5X(String, String) - Constructor for class gov.nih.mipav.model.file.FileGESigna5X
-
reader/writer constructor.
- fileHeader - Variable in class gov.nih.mipav.model.file.FileAnalyze
-
Reference to the header file (*.hdr).
- fileHeader - Variable in class gov.nih.mipav.model.file.FileDicom
-
File object of the image.
- fileHeader - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
DOCUMENT ME!
- fileHeader - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- fileHeader - Variable in class gov.nih.mipav.model.file.FileMagnetomVision
-
DOCUMENT ME!
- fileHeader - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- fileHeader - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
DOCUMENT ME!
- fileHeader - Variable in class gov.nih.mipav.model.file.FileSiemensText
-
Reference to the header file (*.hdr).
- FileHistoLUT - Class in gov.nih.mipav.model.file
-
HistoLUT reader/writer.
- FileHistoLUT(String, String) - Constructor for class gov.nih.mipav.model.file.FileHistoLUT
-
LUT reader/writer constructor.
- FileHistoLUT(String, String, ModelImage, ModelLUT) - Constructor for class gov.nih.mipav.model.file.FileHistoLUT
-
LUT reader/writer constructor.
- FileHistoLUT(String, String, ModelImage, ModelRGB) - Constructor for class gov.nih.mipav.model.file.FileHistoLUT
-
RGB reader/writer constructor.
- FileHistoLUT(String, String, ModelImage, ModelStorageBase) - Constructor for class gov.nih.mipav.model.file.FileHistoLUT
-
LUT reader/writer constructor.
- FileHistoLUT(String, String, ModelLUT) - Constructor for class gov.nih.mipav.model.file.FileHistoLUT
-
LUT reader/writer constructor.
- FileHistoLUT(String, String, ModelRGB) - Constructor for class gov.nih.mipav.model.file.FileHistoLUT
-
RGB reader/writer constructor.
- FileICS - Class in gov.nih.mipav.model.file
-
Reference: 1.
- FileICS(String, String) - Constructor for class gov.nih.mipav.model.file.FileICS
-
ICS reader constructor.
- fileID - Variable in class gov.nih.mipav.model.file.FileBioRad
-
always set to 12345 in BioRad pic files.
- fileID - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- FileImageXML - Class in gov.nih.mipav.model.file
-
File class for reading/writing Image.XML file headers and their associated images.
- FileImageXML(String, String) - Constructor for class gov.nih.mipav.model.file.FileImageXML
-
Constructs new file object.
- FileImageXML.LUValue - Class in gov.nih.mipav.model.file
-
Stores LUT information (red, green, blue, alpha).
- FileImageXML.MyXMLHandler - Class in gov.nih.mipav.model.file
-
Used by the XML Parser to parse the xml header.
- FileImageXML.Thumbnail - Class in gov.nih.mipav.model.file
-
Holds an AWT Image and an int[] array of data for an XML Thumbnail image the thumbnail is stored in the XML's
header so that it may be read in independently from the actual image data. when an XML file is saved, the user
has the option to also saved a reduced resolution (max 64x64) image into the XML's header using standard XML
tagging
- fileinfo - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- fileinfo - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
file info xml to be displayed.
- fileInfo - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileAnalyze
-
Reference to the file info. for an Analyze header
- fileInfo - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileBMP
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileCZI
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileDicom
-
Meta data structure in which to save all the DICOM tags.
- fileInfo - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileJP2
-
File Info.
- fileInfo - Variable in class gov.nih.mipav.model.file.FileJSON
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileLIFF
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileMagnetomVision
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileMap
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileMinc
-
- fileInfo - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
- fileInfo - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileOME
-
The info for the image file.
- fileInfo - Variable in class gov.nih.mipav.model.file.FilePARREC
-
Reference to the file info. for an Analyze header
- fileInfo - Variable in class gov.nih.mipav.model.file.FilePGM
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FilePPM
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileRaw
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileSiemensText
-
Reference to the file info. for an SiemensText header
- fileInfo - Variable in class gov.nih.mipav.model.file.FileSpar
-
Reference fileinfo
- fileInfo - Variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileSVS
-
File Info.
- fileInfo - Variable in class gov.nih.mipav.model.file.FileTiff
-
File Info.
- fileInfo - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.file.FileTrackVis
-
Fileinfo for image
- fileInfo - Variable in class gov.nih.mipav.model.file.FileVista
-
FileInfo Vista
- fileInfo - Variable in class gov.nih.mipav.model.file.FileXML
-
the file info storing xml specific information, abstract base class of FileInfoImageXML or FileInfoSurfaceXML:
- fileInfo - Variable in class gov.nih.mipav.model.file.FileZVI
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Each image slice has a information that describes aspects of each slice of an image.
- fileInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- fileInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- fileInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Variables for holding and storing file information.
- fileInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogTextGE
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogTextGE4X
-
DOCUMENT ME!
- fileInfo - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D.SurfaceRefXMLHandler
-
fileInfo data structure for reading the surface information into:.
- fileInfo - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
fileInfo data structure for reading the surface information into:.
- fileInfo - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
fileInfo data structure for reading the surface information into:.
- fileInfo - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM.SurfaceRefXMLHandler
-
fileInfo data structure for reading the surface information into:.
- fileInfo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- fileInfo2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
- fileInfo2 - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- FileInfoAfni - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how an Afni image is stored on disk.
- FileInfoAfni(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoAfni
-
File info storage constructor.
- FileInfoAnalyze - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how an analyze image is stored on disk.
- FileInfoAnalyze(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoAnalyze
-
File info storage constructor.
- fileInfoArray - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- FileInfoAvi - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how an Avi image is stored on disk.
- FileInfoAvi(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoAvi
-
File info storage constructor.
- FileInfoBase - Class in gov.nih.mipav.model.file
-
This structure contains the basic information that describes how the image is stored on disk.
- FileInfoBase(FileInfoBase) - Constructor for class gov.nih.mipav.model.file.FileInfoBase
-
Internal constructor for clone usage.
- FileInfoBase(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoBase
-
fileInfo constructor.
- FileInfoBase.AxisOrientation - Enum in gov.nih.mipav.model.file
-
- FileInfoBase.ImageOrientation - Enum in gov.nih.mipav.model.file
-
- FileInfoBase.Modality - Enum in gov.nih.mipav.model.file
-
- FileInfoBase.Unit - Enum in gov.nih.mipav.model.file
-
- FileInfoBase.Unit.UnsupportedUnitConversion - Exception in gov.nih.mipav.model.file
-
- FileInfoBase.UnitType - Enum in gov.nih.mipav.model.file
-
Each unit has a unit type with a given base.
- FileInfoBFLOAT - Class in gov.nih.mipav.model.file
-
- FileInfoBFLOAT(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoBFLOAT
-
FileInfoInterfile - file info storage constructor.
- FileInfoBioRad - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a Biorad image is stored on disk.
- FileInfoBioRad(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoBioRad
-
FileInfoBioRad File info storage constructor.
- FileInfoBMP - Class in gov.nih.mipav.model.file
-
File info storage container.
- FileInfoBMP(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoBMP
-
File info storage constructor.
- FileInfoBRUKER - Class in gov.nih.mipav.model.file
-
File information related to the Bruker/Biospin scanner format.
- FileInfoBRUKER(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoBRUKER
-
File info storage constructor.
- fileInfoBuffer - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- FileInfoCheshire - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how an analyze image is stored on disk.
- FileInfoCheshire(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoCheshire
-
File info storage constructor.
- fileInfoCom - Variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- fileInfoCopy - Variable in class gov.nih.mipav.model.file.FileAfni
-
- fileInfoCopy - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
- fileInfoCopy - Variable in class gov.nih.mipav.model.file.FileBioRad
-
- fileInfoCopy - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
- fileInfoCopy - Variable in class gov.nih.mipav.model.file.FileCheshire
-
- fileInfoCopy - Variable in class gov.nih.mipav.model.file.FileDM3
-
- fileInfoCopy - Variable in class gov.nih.mipav.model.file.FileFits
-
- fileInfoCopy - Variable in class gov.nih.mipav.model.file.FileICS
-
- fileInfoCopy - Variable in class gov.nih.mipav.model.file.FileInterfile
-
- fileInfoCopy - Variable in class gov.nih.mipav.model.file.FileJSON
-
- fileInfoCopy - Variable in class gov.nih.mipav.model.file.FileMRC
-
- FileInfoCOR - Class in gov.nih.mipav.model.file
-
File info storage container.
- FileInfoCOR(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoCOR
-
File info storage constructor.
- FileInfoCZI - Class in gov.nih.mipav.model.file
-
File info storage container.
- FileInfoCZI(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoCZI
-
File info storage constructor.
- fileInfoDicom - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
- FileInfoDicom - Class in gov.nih.mipav.model.file
-
This class contains DICOM header information.
- FileInfoDicom(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoDicom
-
DICOM file information constructor.
- FileInfoDicom(String, String, int, FileInfoDicom) - Constructor for class gov.nih.mipav.model.file.FileInfoDicom
-
DICOM file information constructor.
- FileInfoDicom.LengthStorageUnit - Class in gov.nih.mipav.model.file
-
This class is a basic storage unit for a primitive integer variable.
- FileInfoDicom.VRtype - Enum in gov.nih.mipav.model.file
-
- FileInfoDM3 - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a DM3 image is stored on disk.
- FileInfoDM3(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoDM3
-
File info storage constructor.
- FileInfoFits - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a Fits image is stored on disk.
- FileInfoFits(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoFits
-
File info storage constructor.
- FileInfoGESigna4X - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a GE Signa 5X image is stored on disk.
- FileInfoGESigna4X(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoGESigna4X
-
File info storage constructor.
- FileInfoGESigna5X - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a GE Signa 5X image is stored on disk.
- FileInfoGESigna5X(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoGESigna5X
-
File info storage constructor.
- FileInfoICS - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how an ICS image is stored on disk.
- FileInfoICS(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoICS
-
File info storage constructor.
- fileInfoImageXML - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- FileInfoImageXML - Class in gov.nih.mipav.model.file
-
This structure contains the information that describes how an XML image is stored on disk.
- FileInfoImageXML(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoImageXML
-
Main constructor for FileInfoXML.
- FileInfoImageXML.Investigator - Class in gov.nih.mipav.model.file
-
Title: Investigator
- FileInfoImageXML.SurfaceLink - Class in gov.nih.mipav.model.file
-
Title: SurfaceLink
- FileInfoImageXML.VOILink - Class in gov.nih.mipav.model.file
-
Title: VOILink
- FileInfoInterfile - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how an Interfile image is stored on disk.
- FileInfoInterfile(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoInterfile
-
FileInfoInterfile - file info storage constructor.
- FileInfoJP2 - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a JP2 compressed image of 3D medical image is stored on disk.
- FileInfoJP2(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoJP2
-
File info storage constructor.
- FileInfoJSON - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a Fits image is stored on disk.
- FileInfoJSON(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoJSON
-
File info storage constructor.
- FileInfoLattice - Class in gov.nih.mipav.model.file
-
This structure contains the information that describes how a Lattice image is stored on disk.
- FileInfoLattice(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoLattice
-
File info storage constructor.
- FileInfoLIFF - Class in gov.nih.mipav.model.file
-
File info storage container.
- FileInfoLIFF(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoLIFF
-
File info storage constructor.
- FileInfoLSM - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a LSM image is stored on disk.
- FileInfoLSM(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoLSM
-
FileInfoLSM - file info storage constructor.
- FileInfoMagnetomVision - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a Siemens MagnetomVision image is stored on disk.
- FileInfoMagnetomVision(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
FileInfoMagnetomVision - file info storage constructor.
- FileInfoMATLAB - Class in gov.nih.mipav.model.file
-
File info storage container.
- FileInfoMATLAB(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoMATLAB
-
File info storage constructor.
- FileInfoMedVision - Class in gov.nih.mipav.model.file
-
This structure contains the information that describes how an MedVision image is stored on disk, as well as header
information.
- FileInfoMedVision(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoMedVision
-
FileInfoMedVision.
- FileInfoMetaImage - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a MetaImage image is stored on disk.
- FileInfoMetaImage(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoMetaImage
-
File info storage constructor.
- FileInfoMGH - Class in gov.nih.mipav.model.file
-
- FileInfoMGH(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoMGH
-
file info storage constructor.
- FileInfoMicroCat - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how.
- FileInfoMicroCat(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoMicroCat
-
File info storage constructor.
- FileInfoMinc - Class in gov.nih.mipav.model.file
-
This class holds all the file information for a MINC file.
- FileInfoMinc(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoMinc
-
MINC file information constructor.
- FileInfoMincHDF - Class in gov.nih.mipav.model.file
-
- FileInfoMincHDF(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoMincHDF
-
MINC file information constructor.
- FileInfoMRC - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a MRC image is stored on disk.
- FileInfoMRC(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoMRC
-
FileInfoMRC - file info storage constructor.
- fileInfoNIFTI - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- fileInfoNIFTI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- FileInfoNIFTI - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a NIFTI image is stored on disk.
- FileInfoNIFTI(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoNIFTI
-
file info storage constructor.
- FileInfoNRRD - Class in gov.nih.mipav.model.file
-
- FileInfoNRRD(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoNRRD
-
file info storage constructor.
- FileInfoOME - Class in gov.nih.mipav.model.file
-
Title:
- FileInfoOME(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoOME
-
Creates a new FileInfoOME object.
- FileInfoOME.ExperimenterRef - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.ExperimentRef - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Dataset - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Experiment - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Experimenter - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Group - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.GroupRef - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image.ChannelInfo - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image.ChannelInfo.ChannelComponent - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image.ChannelInfo.LightSourceRef - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image.Data - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image.Data.BinExternal - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image.DisplayOptions - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image.DisplayOptions.ROI - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image.Feature - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image.InstrumentRef - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image.PlateInfo - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Image.StageLabel - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Include - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument.Detector - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument.Filter - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument.Filter.FilterType - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument.LightSource - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument.LightSource.FilamentArc - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument.LightSource.Laser - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument.LightSource.Laser.Pump - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument.Microscope - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument.Objective - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument.OTF - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Instrument.OTF.BinExternal - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Plate - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Plate.ScreenRef - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Project - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.OME.Screen - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.Person - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileInfoOME.ProjectRef - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- fileInfoPARREC - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- FileInfoPARREC - Class in gov.nih.mipav.model.file
-
Created by IntelliJ IDEA.
- FileInfoPARREC(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoPARREC
-
- FileInfoPGM - Class in gov.nih.mipav.model.file
-
- FileInfoPGM(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoPGM
-
FileInfoPGM.
- FileInfoPPM - Class in gov.nih.mipav.model.file
-
- FileInfoPPM(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoPPM
-
FileInfoPPM.
- fileInfoPR - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
file info Par/Rec
- FileInfoRaw - Class in gov.nih.mipav.model.file
-
This structure contains the information that describes how a RAW image is stored on disk.
- FileInfoRaw(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoRaw
-
FileInfoRaw.
- FileInfoSiemensText - Class in gov.nih.mipav.model.file
-
- FileInfoSiemensText(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoSiemensText
-
File info storage constructor.
- FileInfoSPAR - Class in gov.nih.mipav.model.file
-
- FileInfoSPAR(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoSPAR
-
- FileInfoSPM - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how an SPM image is stored on disk.
- FileInfoSPM(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoSPM
-
file info storage constructor.
- FileInfoSTK - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a STK image is stored on disk.
- FileInfoSTK(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoSTK
-
File info storage constructor.
- fileInfoSub - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- FileInfoSurfaceGiftiXML_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
This structure contains the information that describes how an XML surface (see surface.xsd and FileSurfaceXML.java)
is stored on disk.
- FileInfoSurfaceGiftiXML_WM(String, String, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Main constructor for FileInfoSurfaceXML.
- FileInfoSurfaceRefXML - Class in gov.nih.mipav.model.file
-
This structure contains the information that describes how an XML surface (see surface.xsd and FileSurfaceXML.java)
is stored on disk.
- FileInfoSurfaceRefXML(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Main constructor for FileInfoSurfaceXML.
- FileInfoSurfaceRefXML_J3D - Class in gov.nih.mipav.view.renderer.J3D.model.file
-
This structure contains the information that describes how an XML surface (see surface.xsd and FileSurfaceXML.java)
is stored on disk.
- FileInfoSurfaceRefXML_J3D(String, String, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceRefXML_J3D
-
Main constructor for FileInfoSurfaceXML.
- FileInfoSurfaceRefXML_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
This structure contains the information that describes how an XML surface (see surface.xsd and FileSurfaceXML.java)
is stored on disk.
- FileInfoSurfaceRefXML_WM(String, String, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
Main constructor for FileInfoSurfaceXML.
- FileInfoSurfaceXML - Class in gov.nih.mipav.model.file
-
This structure contains the information that describes how an XML surface (see surface.xsd and FileSurfaceXML.java)
is stored on disk.
- FileInfoSurfaceXML(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Main constructor for FileInfoSurfaceXML.
- FileInfoSurfaceXML_J3D - Class in gov.nih.mipav.view.renderer.J3D.model.file
-
This structure contains the information that describes how an XML surface (see surface.xsd and FileSurfaceXML.java)
is stored on disk.
- FileInfoSurfaceXML_J3D(String, String, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Main constructor for FileInfoSurfaceXML.
- FileInfoSVS - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a SVS image is stored on disk.
- FileInfoSVS(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoSVS
-
File info storage constructor.
- FileInfoTiff - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a Tiff image is stored on disk.
- FileInfoTiff(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoTiff
-
File info storage constructor.
- FileInfoTMG - Class in gov.nih.mipav.model.file
-
This structures contains the information that describes how a TMG image is stored on disk.
- FileInfoTMG(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoTMG
-
FileInfoTMG - file info storage constructor.
- FileInfoTrackVis - Class in gov.nih.mipav.model.file
-
- FileInfoTrackVis(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoTrackVis
-
File info storage constructor.
- fileInfoVector - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
fileInfoVector represents images in image table but imageTableVector was needed also becasue this handles
multiple series in the same dir. fileInfoVector is all the images in the dir but imageTableVector represents all
the images that are in the image table at a particular instance or series
- FileInfoVista - Class in gov.nih.mipav.model.file
-
File Info Vista
- FileInfoVista(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoVista
-
constructor
- FileInfoXML - Class in gov.nih.mipav.model.file
-
Abstract base clase contains the information that contains the shared information for XML images and XML surfaces.
- FileInfoXML(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoXML
-
Main constructor for FileInfoXML.
- FileInfoZVI - Class in gov.nih.mipav.model.file
-
File info storage container.
- FileInfoZVI(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileInfoZVI
-
File info storage constructor.
- FileInterfile - Class in gov.nih.mipav.model.file
-
- FileInterfile(String, String) - Constructor for class gov.nih.mipav.model.file.FileInterfile
-
Interfile reader/writer constructor.
- fileInterp - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- fileIO - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
file IO
- fileIO - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- fileIO - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDICOMtoAVI
-
DOCUMENT ME!
- FileIO - Class in gov.nih.mipav.model.file
-
This class controls the file input/output of most formats that MIPAV supports, including tiff, raw, analyze, DICOM,
and Medvision.
- FileIO() - Constructor for class gov.nih.mipav.model.file.FileIO
-
Creates the FileIO and displays Choose File Type
unknown file dialog.
- FileIO(ModelLUT) - Constructor for class gov.nih.mipav.model.file.FileIO
-
Creates the FileIO and displays Choose File Type
unknown file dialog.
- FileIO.LinkedComparator - Class in gov.nih.mipav.model.file
-
- FileIO.LinkedNum - Class in gov.nih.mipav.model.file
-
- FileIO.OrientStatus - Class in gov.nih.mipav.model.file
-
Orientation information held by orientation.
- FileJP2 - Class in gov.nih.mipav.model.file
-
Jpeg2K reader/ writer for 3D images.
- FileJP2() - Constructor for class gov.nih.mipav.model.file.FileJP2
-
Tiff reader/writer constructor.
- FileJP2(String, String, ViewJProgressBar) - Constructor for class gov.nih.mipav.model.file.FileJP2
-
Tiff reader/writer constructor.
- FileJPEG2000 - Class in gov.nih.mipav.model.file
-
- FileJPEG2000() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000
-
- FileJPEG2000(String, String, String, String, int, int, String, boolean, int, int, int, int, int, int, int, int, int, int, int, boolean, boolean, boolean, boolean, boolean, int, int, boolean, boolean, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.file.FileJPEG2000
-
- FileJPEG2000.dircnt_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.img_fol_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_bio_t - Class in gov.nih.mipav.model.file
-
Individual bit input-output stream (BIO)
- FileJPEG2000.opj_codec_private_t - Class in gov.nih.mipav.model.file
-
Main codec handler used for compression or decompression.
- FileJPEG2000.opj_codestream_index_t - Class in gov.nih.mipav.model.file
-
Index structure of the codestream (FIXME should be expand and enhance)
- FileJPEG2000.opj_cp_t - Class in gov.nih.mipav.model.file
-
Coding parameters
- FileJPEG2000.opj_dec_memory_marker_handler_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_decoding_param_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_decompress_parameters - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_dparameters_t - Class in gov.nih.mipav.model.file
-
Decompression parameters
- FileJPEG2000.opj_dwt_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_encoding_param_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_image_cmptparm_t - Class in gov.nih.mipav.model.file
-
Component parameters structure used by the opj_image_create function
- FileJPEG2000.opj_image_comp_t - Class in gov.nih.mipav.model.file
-
Defines a single image component
- FileJPEG2000.opj_image_t - Class in gov.nih.mipav.model.file
-
Defines image data and characteristics
- FileJPEG2000.opj_j2k_dec_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_j2k_t - Class in gov.nih.mipav.model.file
-
JPEG-2000 codestream reader/writer
- FileJPEG2000.opj_marker_info_t - Class in gov.nih.mipav.model.file
-
Marker structure
- FileJPEG2000.opj_mct_data_t - Class in gov.nih.mipav.model.file
-
FIXME DOC
- FileJPEG2000.opj_mqc_state_t - Class in gov.nih.mipav.model.file
-
This struct defines the state of a context.
- FileJPEG2000.opj_mqc_t - Class in gov.nih.mipav.model.file
-
MQ coder
- FileJPEG2000.opj_packet_info_t - Class in gov.nih.mipav.model.file
-
Index structure : Information concerning a packet inside tile
- FileJPEG2000.opj_pi_comp_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_pi_iterator_t - Class in gov.nih.mipav.model.file
-
Packet iterator
- FileJPEG2000.opj_pi_resolution_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_poc_t - Class in gov.nih.mipav.model.file
-
Progression order changes
- FileJPEG2000.opj_ppx - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_precision - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_procedure_list_t - Class in gov.nih.mipav.model.file
-
A list of procedures.
- FileJPEG2000.opj_raw_t - Class in gov.nih.mipav.model.file
-
RAW encoding operations
- FileJPEG2000.opj_simple_mcc_decorrelation_data_t - Class in gov.nih.mipav.model.file
-
FIXME DOC
- FileJPEG2000.opj_stepsize_t - Class in gov.nih.mipav.model.file
-
Quantization stepsize
- FileJPEG2000.opj_t1_t - Class in gov.nih.mipav.model.file
-
Tier-1 coding (coding of code-block coefficients)
- FileJPEG2000.opj_t2_t - Class in gov.nih.mipav.model.file
-
Tier-2 coding
- FileJPEG2000.opj_tccp_info_t - Class in gov.nih.mipav.model.file
-
Tile-component coding parameters information
- FileJPEG2000.opj_tccp_t - Class in gov.nih.mipav.model.file
-
Tile-component coding parameters
- FileJPEG2000.opj_tcd_band_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_tcd_cblk_dec_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_tcd_image_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_tcd_precinct_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_tcd_resolution_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_tcd_seg_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_tcd_t - Class in gov.nih.mipav.model.file
-
Tile coder/decoder
- FileJPEG2000.opj_tcd_tile_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_tcd_tilecomp_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_tcp_t - Class in gov.nih.mipav.model.file
-
Tile coding parameters : this structure is used to store coding/decoding
parameters common to all tiles (information like COD, COC in main header)
- FileJPEG2000.opj_tgt_node_t - Class in gov.nih.mipav.model.file
-
Tag node
- FileJPEG2000.opj_tgt_tree_t - Class in gov.nih.mipav.model.file
-
Tag tree
- FileJPEG2000.opj_tile_index_t - Class in gov.nih.mipav.model.file
-
Index structure about a tile
- FileJPEG2000.opj_tile_info_v2_t - Class in gov.nih.mipav.model.file
-
Tile coding parameters information
- FileJPEG2000.opj_tp_index_t - Class in gov.nih.mipav.model.file
-
Index structure about a tile part
- FileJPEG2000.opj_v4_t - Class in gov.nih.mipav.model.file
-
- FileJPEG2000.opj_v4dwt_t - Class in gov.nih.mipav.model.file
-
- FileJSON - Class in gov.nih.mipav.model.file
-
- FileJSON(String, String) - Constructor for class gov.nih.mipav.model.file.FileJSON
-
JSON reader/writer constructor.
- fileLength - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- fileLength - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- fileLength - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- fileLength - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- fileLength - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- fileLength - Variable in class gov.nih.mipav.model.file.FileSVS
-
- fileLength - Variable in class gov.nih.mipav.model.file.FileTiff
-
- FileLIFF - Class in gov.nih.mipav.model.file
-
- FileLIFF(String, String) - Constructor for class gov.nih.mipav.model.file.FileLIFF
-
LIFF reader/writer constructor.
- fileLink - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- fileListData - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- fileLocation - Variable in class gov.nih.mipav.view.dialogs.ScriptImage
-
- FileLSM - Class in gov.nih.mipav.model.file
-
Reads Zeiss LSM 510 image files - an extension of the TIFF format.
- FileLSM(String, String, int) - Constructor for class gov.nih.mipav.model.file.FileLSM
-
LSM reader/writer constructor.
- FileLSM.Index - Class in gov.nih.mipav.model.file
-
Simple class to store image offsets and bytes located at the offset.
- FileMagnetomVision - Class in gov.nih.mipav.model.file
-
Class that reads Siemens Magnetom Vision files.
- FileMagnetomVision(String, String) - Constructor for class gov.nih.mipav.model.file.FileMagnetomVision
-
Magnetom Vision reader/writer constructor.
- FileMap - Class in gov.nih.mipav.model.file
-
Special for Benes.
- FileMap(String, String, FileInfoBase, int) - Constructor for class gov.nih.mipav.model.file.FileMap
-
Creates a new FileMap object.
- FileMATLAB - Class in gov.nih.mipav.model.file
-
- FileMATLAB(String, String) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
LIFF reader/writer constructor.
- FileMATLAB(String, String) - Constructor for class gov.nih.mipav.model.file.FileMATLAB
-
LIFF reader/writer constructor.
- fileMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- fileMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- FileMedVision - Class in gov.nih.mipav.model.file
-
The class reads MedVision files that have been saved as MAC bin files.
- FileMedVision(String, String) - Constructor for class gov.nih.mipav.model.file.FileMedVision
-
FileMedVision - MedVision reader/writer constructor.
- fileMenu - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- fileMenu - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- fileMenu - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- fileMenu - Variable in class gov.nih.mipav.view.ViewMenuBuilder
-
Link to the file menu so that quicklist can be rebuilt and added.
- FileMetaImage - Class in gov.nih.mipav.model.file
-
- FileMetaImage(String, String) - Constructor for class gov.nih.mipav.model.file.FileMetaImage
-
Constructs new file object.
- FileMGH - Class in gov.nih.mipav.model.file
-
The class reads MGH files.
- FileMGH(String, String) - Constructor for class gov.nih.mipav.model.file.FileMGH
-
Constructs new file object.
- FileMicroCat - Class in gov.nih.mipav.model.file
-
- FileMicroCat(String, String) - Constructor for class gov.nih.mipav.model.file.FileMicroCat
-
MicroCat reader/writer constructor.
- FileMinc - Class in gov.nih.mipav.model.file
-
The MINC file format is built on top of NetCDF.
- FileMinc(String, String) - Constructor for class gov.nih.mipav.model.file.FileMinc
-
MINC reader/writer constructor.
- FileMincAttElem - Class in gov.nih.mipav.model.file
-
This class represents a MINC atrribute element.
- FileMincAttElem(String, int, int) - Constructor for class gov.nih.mipav.model.file.FileMincAttElem
-
Constructor that creates the attribute element and initializes the array to the type of the parameter and the
length of the parameter.
- FileMincDimElem - Class in gov.nih.mipav.model.file
-
This class represents a MINC dimension element.
- FileMincDimElem(String, int) - Constructor for class gov.nih.mipav.model.file.FileMincDimElem
-
Constructor that creates a MINC dimension element with the given name and length.
- FileMincHDF - Class in gov.nih.mipav.model.file
-
HDF5 based reader/writer for MINC 2.0
Currently, for the image max and image min nodes: in the case of 3d images in which 1 image min and 1 image max is to
be written out per slice, the dimorder is hardcoded to zspace.
- FileMincHDF(String, String) - Constructor for class gov.nih.mipav.model.file.FileMincHDF
-
MINC reader/writer constructor.
- FileMincHDF.HDFNode - Class in gov.nih.mipav.model.file
-
- FileMincVarElem - Class in gov.nih.mipav.model.file
-
This class represents a MINC variable element.
- FileMincVarElem(String, int, int[]) - Constructor for class gov.nih.mipav.model.file.FileMincVarElem
-
Constructor for the MINC variable element.
- fileMiscPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- FileMRC - Class in gov.nih.mipav.model.file
-
Comments from David Mastronarde:
I am not familiar with the latest standards for MRC files, but typically the extra header information has been used
to save information about each section in the file.
- FileMRC(String, String) - Constructor for class gov.nih.mipav.model.file.FileMRC
-
MRC reader/writer constructor.
- filename - Variable in class gov.nih.mipav.model.file.FileDeleter
-
DOCUMENT ME!
- filename - Variable in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
.sur file name.
- filename - Variable in class gov.nih.mipav.model.file.FileJPEG2000.dircnt_t
-
- fileName - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- fileName - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
File name of the image to be stored.
- fileName - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileAnalyze
-
File name of the image.
- fileName - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileBMP
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileCZI
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileDicom
-
Name of the file to be read in.
- fileName - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
The file name which includes the path information.
- fileName - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileJP2
-
File name.
- fileName - Variable in class gov.nih.mipav.model.file.FileJSON
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileLIFF
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileMagnetomVision
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileMicroCat
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileMinc
-
The name of the minc file to be read in or written out.
- fileName - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
The name of the minc file to be read in or written out.
- fileName - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileOME
-
The name of the xml image header file.
- fileName - Variable in class gov.nih.mipav.model.file.FilePaintBitmap
-
File name of the VOI.
- fileName - Variable in class gov.nih.mipav.model.file.FilePARREC
-
File name of the image.
- fileName - Variable in class gov.nih.mipav.model.file.FilePGM
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
File name of the VOI.
- fileName - Variable in class gov.nih.mipav.model.file.FilePPM
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileRaw
-
- fileName - Variable in class gov.nih.mipav.model.file.FileSiemensText
-
File name of the image.
- fileName - Variable in class gov.nih.mipav.model.file.FileSpar
-
File name of the image.
- fileName - Variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileSVS
-
File name.
- fileName - Variable in class gov.nih.mipav.model.file.FileTiff
-
File name.
- fileName - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.model.file.FileVista
-
file name and file dir
- fileName - Variable in class gov.nih.mipav.model.file.FileVOI
-
File name of the VOI.
- fileName - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
All file options.
- fileName - Variable in class gov.nih.mipav.model.file.FileXML
-
Name of the XML header file on disk.
- fileName - Variable in class gov.nih.mipav.model.file.FileZVI
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.view.dialogs.InstanceVOI
-
- fileName - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
String to house the user inputed file name
- fileName - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
fileName of where dicom tags are save to *
- fileName - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
DOCUMENT ME!
- fileName - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- fileName - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
File name and directory.
- fileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
File name and directory.
- fileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
- fileName - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
String locations
- fileName - Variable in class gov.nih.mipav.view.ViewUserInterface.OpenFileInfo
-
The filename (no path).
- fileNameBase - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- fileNameInput - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- fileNameInput - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- fileNameList - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
DOCUMENT ME!
- fileNameMatch - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
- fileNameMp - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- fileNameOutput - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- fileNameOutput - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- fileNamePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- fileNamePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- filenames - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizePresets
-
- fileNames - Variable in class gov.nih.mipav.model.file.FileBase
-
The file names which are opened.
- fileNames - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- fileNames - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
ArrayList of all file names of report attachments
- fileNameSequence - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- fileNameSet - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- FilenameSorter - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FilenameSorter() - Constructor for class gov.nih.mipav.model.file.FilenameSorter
-
- filenameTable - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- fileNameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- fileNameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- fileNameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- filenameTableModel - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- filenameTableSorter - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- fileNameTimes - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- fileNameTissue - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- fileNameTissue - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- fileNameVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- fileNameVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- fileNameVOI2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- fileNameWInput - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- fileNameWInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- fileNameWInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- fileNameWInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- fileNameWInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- fileNameWRef - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- fileNameWRef - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- fileNameWRef - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- FileNIFTI - Class in gov.nih.mipav.model.file
-
The class reads and writes NIFTI files.
- FileNIFTI(String, String) - Constructor for class gov.nih.mipav.model.file.FileNIFTI
-
Constructs new file object.
- FileNRRD - Class in gov.nih.mipav.model.file
-
- FileNRRD(String, String) - Constructor for class gov.nih.mipav.model.file.FileNRRD
-
Constructs new file object.
- fileNum - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- fileNumber - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- FileOME - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileOME(String, String, boolean) - Constructor for class gov.nih.mipav.model.file.FileOME
-
Constructs new file object.
- FileOME.MyXMLHandler - Class in gov.nih.mipav.model.file
-
Private class used by the parser to parse the XML file.
- FilePackBit - Class in gov.nih.mipav.model.file
-
The class reads and writes packed bit files for tiff formatted images (including STK).
- FilePackBit(RandomAccessFile) - Constructor for class gov.nih.mipav.model.file.FilePackBit
-
Packbitconstructor.
- filePad - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- FilePaintBitmap - Class in gov.nih.mipav.model.file
-
- FilePaintBitmap(String, String, ModelImage) - Constructor for class gov.nih.mipav.model.file.FilePaintBitmap
-
VOI reader/writer constructor.
- filePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Logical construct to reuild a source tree...
- filePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- fileParRec - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
FileParRec handle
- FilePARREC - Class in gov.nih.mipav.model.file
-
The class reads and writes PAR/REC files.
- FilePARREC(String[]) - Constructor for class gov.nih.mipav.model.file.FilePARREC
-
Creates a new FileAnalyze object.
- FilePARREC(String, String) - Constructor for class gov.nih.mipav.model.file.FilePARREC
-
Constructs new file object.
- FilePARREC(String, String, FileInfoBase) - Constructor for class gov.nih.mipav.model.file.FilePARREC
-
Constructor used by FileIO to write an image
- FilePARREC(String, String, FileInfoPARREC[], boolean) - Constructor for class gov.nih.mipav.model.file.FilePARREC
-
Constructor used by FileIO to write an image
- filePath - Variable in class gov.nih.mipav.view.dialogs.ScriptTreeNode
-
- filePaths - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
ArrayList of all file paths of report attachments
- filePB - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- filePB - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- filePB - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- FilePGM - Class in gov.nih.mipav.model.file
-
- FilePGM(String, String) - Constructor for class gov.nih.mipav.model.file.FilePGM
-
File Portable Greymap Utilities reader/writer constructor.
- filePointer - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- filePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- filePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- filePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- FilePolyline_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
FilePolyline.
- FilePolyline_WM() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.FilePolyline_WM
-
- FilePolylineVOIXML - Class in gov.nih.mipav.model.file
-
- FilePolylineVOIXML(String, String) - Constructor for class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- FilePolylineVOIXML.MyXMLHandler - Class in gov.nih.mipav.model.file
-
Handle events generated while parsing the XML file.
- FilePPM - Class in gov.nih.mipav.model.file
-
- FilePPM(String, String) - Constructor for class gov.nih.mipav.model.file.FilePPM
-
File Portable Pixmap Utilities reader/writer constructor.
- FileRaw - Class in gov.nih.mipav.model.file
-
The class reads and writes raw files of all data types: boolean, byte, short, int, long, float, and double.
- FileRaw(FileInfoBase) - Constructor for class gov.nih.mipav.model.file.FileRaw
-
Constructor for Raw Files that will be used to write from 4D to 3D or from 3D to 2D.
- FileRaw(String, FileInfoBase, int) - Constructor for class gov.nih.mipav.model.file.FileRaw
-
Raw reader/writer constructor.
- FileRaw(String, String, FileInfoBase, int) - Constructor for class gov.nih.mipav.model.file.FileRaw
-
Raw reader/writer constructor..
- FileRawChunk - Class in gov.nih.mipav.model.file
-
The class reads and writes raw files of all data types: boolean, byte, short, int, long, float, and double.
- FileRawChunk(RandomAccessFile, FileInfoBase) - Constructor for class gov.nih.mipav.model.file.FileRawChunk
-
Raw reader/writer constructor.
- FileRawChunk(String, FileInfoBase, int, int) - Constructor for class gov.nih.mipav.model.file.FileRawChunk
-
Compressed raw reader/writer constructor.
- fileRW - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- fileRW - Variable in class gov.nih.mipav.model.file.FileRaw
-
DOCUMENT ME!
- fileRW - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- fileRW - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- fileRW - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- files - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- files - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
The class, zip, jar etc files that were selected before they were unzipped
- fileSavePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- filesColor - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
The results of working with the files in a temporary class environment
- FileSelector - Interface in gov.nih.mipav.view
-
The FileSelector interface defines the interface for file selector
which is used to select files.
- FileSelectorImpl - Class in gov.nih.mipav.view
-
The implementation of the FileSelector interface for the local file
system, for the remote file system you should have different implementation,
basically this class is a wrapper of the JFileChooser.
- FileSelectorImpl() - Constructor for class gov.nih.mipav.view.FileSelectorImpl
-
- fileSelectorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Panel to select files.
- FileSiemensText - Class in gov.nih.mipav.model.file
-
- FileSiemensText(String, String) - Constructor for class gov.nih.mipav.model.file.FileSiemensText
-
Constructs new file object.
- fileSize - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- fileSize - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- fileSource - Variable in class gov.nih.mipav.model.file.FileSVS
-
- fileSource - Variable in class gov.nih.mipav.model.file.FileTiff
-
- filesPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- FileSpar - Class in gov.nih.mipav.model.file
-
Reads a spar/sdat file.
- FileSpar(ModelImage, FileInfoBase, String, String) - Constructor for class gov.nih.mipav.model.file.FileSpar
-
- FileSpar(String, String) - Constructor for class gov.nih.mipav.model.file.FileSpar
-
- FileSPM - Class in gov.nih.mipav.model.file
-
The class reads and writes SPM files.
- FileSPM(String, String) - Constructor for class gov.nih.mipav.model.file.FileSPM
-
Constructs new file object.
- fileStartNumber - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- FileSTK - Class in gov.nih.mipav.model.file
-
The MetaMorph Stack (STK) file format is derived from the TIFF format.
- FileSTK(String, String) - Constructor for class gov.nih.mipav.model.file.FileSTK
-
STK reader/writer constructor.
- FileSTK.Index - Class in gov.nih.mipav.model.file
-
Simple class to store image offsets and bytes located at the offset.
- fileSuccess - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- fileSuccess - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
DOCUMENT ME!
- fileSuccess - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
DOCUMENT ME!
- fileSuffix - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
File suffix (ex.
- FileSurface_J3D - Class in gov.nih.mipav.view.renderer.J3D.model.file
-
FileSurface.
- FileSurface_J3D() - Constructor for class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
- FileSurface_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
FileSurface.
- FileSurface_WM() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
- FileSurfaceGiftiXML - Class in gov.nih.mipav.model.file
-
Inherits from FileXML, reads SurfaceRef.XML files based on the "surfaceref.xsd" file.
- FileSurfaceGiftiXML(String, String) - Constructor for class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
Constructs new file object.
- FileSurfaceGiftiXML_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Inherits from FileXML, reads gifti xml files based on the "gifti.xsd" file.
- FileSurfaceGiftiXML_WM(String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Constructs new file object.
- FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Used by the XML Parser to parse the Surface.XML header.
- FileSurfaceRefXML - Class in gov.nih.mipav.model.file
-
Inherits from FileXML, reads SurfaceRef.XML files based on the "surfaceref.xsd" file.
- FileSurfaceRefXML(String, String) - Constructor for class gov.nih.mipav.model.file.FileSurfaceRefXML
-
Constructs new file object.
- FileSurfaceRefXML_J3D - Class in gov.nih.mipav.view.renderer.J3D.model.file
-
Inherits from FileXML, reads SurfaceRef.XML files based on the "surfaceref.xsd" file.
- FileSurfaceRefXML_J3D(String, String) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D
-
Constructs new file object.
- FileSurfaceRefXML_J3D.SurfaceRefXMLHandler - Class in gov.nih.mipav.view.renderer.J3D.model.file
-
Used by the XML Parser to parse the Surface.XML header.
- FileSurfaceRefXML_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Inherits from FileXML, reads SurfaceRef.XML files based on the "surfaceref.xsd" file.
- FileSurfaceRefXML_WM(String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM
-
Constructs new file object.
- FileSurfaceRefXML_WM.SurfaceRefXMLHandler - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Used by the XML Parser to parse the Surface.XML header.
- FileSurfaceVTKXML - Class in gov.nih.mipav.model.file
-
This class facilitates reading and writing vtk xml
- FileSurfaceVTKXML(String, String) - Constructor for class gov.nih.mipav.model.file.FileSurfaceVTKXML
-
constructor
- FileSurfaceVTKXML_J3D - Class in gov.nih.mipav.view.renderer.J3D.model.file
-
This class facilitates reading and writing vtk xml
- FileSurfaceVTKXML_J3D(String, String) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceVTKXML_J3D
-
constructor
- FileSurfaceVTKXML_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
This class facilitates reading and writing vtk xml
- FileSurfaceVTKXML_WM(String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceVTKXML_WM
-
constructor
- FileSurfaceXML - Class in gov.nih.mipav.model.file
-
Inherits from FileXML, reads Surface.XML files based on the "surface.xsd" file.
- FileSurfaceXML(String, String) - Constructor for class gov.nih.mipav.model.file.FileSurfaceXML
-
Constructs new file object.
- FileSurfaceXML_J3D - Class in gov.nih.mipav.view.renderer.J3D.model.file
-
Inherits from FileXML, reads Surface.XML files based on the "surface.xsd" file.
- FileSurfaceXML_J3D(String, String) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D
-
Constructs new file object.
- FileSurfaceXML_J3D.SurfaceXMLHandler - Class in gov.nih.mipav.view.renderer.J3D.model.file
-
Used by the XML Parser to parse the Surface.XML header.
- FileSVS - Class in gov.nih.mipav.model.file
-
Tagged Image File Format (TIFF 6.0) reader/ writer.
- FileSVS(String, String) - Constructor for class gov.nih.mipav.model.file.FileSVS
-
SVS reader/writer constructor.
- FileSVS.BitInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.BitSwapInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.BitSwapTable - Interface in gov.nih.mipav.model.file
-
- FileSVS.Index - Class in gov.nih.mipav.model.file
-
Simple class to store image offsets and bytes located at the offset.
- FileSVS.IntFilterInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.JPEGACInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.JPEGBitInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.JPEGComponentInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.JPEGConstants - Interface in gov.nih.mipav.model.file
-
- FileSVS.JPEGDCInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.JPEGDCTInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.JPEGFastDCTInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.JPEGHuffmanInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.JPEGInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.ModHuffmanInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.ModHuffmanInputStream.ModHuffmanCodingException - Exception in gov.nih.mipav.model.file
-
- FileSVS.ModHuffmanTable - Interface in gov.nih.mipav.model.file
-
- FileSVS.ModModREADInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.ModREADInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.ModREADTable - Interface in gov.nih.mipav.model.file
-
- FileSVS.RLEBitInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.TIFFYCbCrInputStream - Class in gov.nih.mipav.model.file
-
- FileSVS.Type - Enum in gov.nih.mipav.model.file
-
Tiff Types.
- fileSystem - Static variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
File system view.
- FileSystemDescriptor(MetadataExtractor.FileSystemDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.FileSystemDescriptor
-
- FileSystemDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.FileSystemDirectory
-
- FileSystemMetadataReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.FileSystemMetadataReader
-
- fileTempDirBrowseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- fileTempDirField - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- fileTextField - Variable in class gov.nih.mipav.view.JPanelFileSelection
-
DOCUMENT ME!
- fileTF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- fileTFld - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- FileTiff - Class in gov.nih.mipav.model.file
-
Tagged Image File Format (TIFF 6.0) reader/ writer.
- FileTiff(String, String) - Constructor for class gov.nih.mipav.model.file.FileTiff
-
Tiff reader/writer constructor.
- FileTiff.BitInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.BitSwapInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.BitSwapTable - Interface in gov.nih.mipav.model.file
-
- FileTiff.Index - Class in gov.nih.mipav.model.file
-
Simple class to store image offsets and bytes located at the offset.
- FileTiff.IntFilterInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.JPEGACInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.JPEGBitInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.JPEGComponentInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.JPEGConstants - Interface in gov.nih.mipav.model.file
-
- FileTiff.JPEGDCInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.JPEGDCTInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.JPEGFastDCTInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.JPEGHuffmanInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.JPEGInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.ModHuffmanInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.ModHuffmanInputStream.ModHuffmanCodingException - Exception in gov.nih.mipav.model.file
-
- FileTiff.ModHuffmanTable - Interface in gov.nih.mipav.model.file
-
- FileTiff.ModModREADInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.ModREADInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.ModREADTable - Interface in gov.nih.mipav.model.file
-
- FileTiff.RLEBitInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.TIFFYCbCrInputStream - Class in gov.nih.mipav.model.file
-
- FileTiff.Type - Enum in gov.nih.mipav.model.file
-
Tiff Types.
- fileTimes - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- FileTMG - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileTMG(String, String) - Constructor for class gov.nih.mipav.model.file.FileTMG
-
TMG reader/writer constructor.
- fileToModel(int, ModelStorageBase) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
FileToModel transform.
- fileToModel(Vector3f, Vector3f, ModelStorageBase) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
FileToModel transform.
- fileToPatient(int, ModelStorageBase, int) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
FileToModel transform.
- fileToPatient(Vector3f, Vector3f, ModelStorageBase, boolean, int[], boolean[]) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
FileToPatient transform.
- fileToPatient(Vector3f, Vector3f, ModelStorageBase, int) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
FileToPatient transform.
- fileToPatient(Vector3f, Vector3f, ModelStorageBase, int, boolean) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
FileToPatient transform.
- fileToPatient(Vector3f, Vector3f, ModelStorageBase, int, boolean, int[], boolean[]) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
FileToPatient transform.
- fileToScanner(Vector3f, Vector3f, ModelImage) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Translates the input point into ScannerCoordinates, based on the input image, kImage.
- fileToScreen(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- fileToScreen(Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- fileToScreenVOI(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- fileToScreenVOI(Vector3f) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Converts image file X,Y,Z coordinates into local screen coordinates.
- fileToScreenVOI(Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- FileTrackVis - Class in gov.nih.mipav.model.file
-
Reads a .trk track file as a MIPAV mask image.
- FileTrackVis(String, String) - Constructor for class gov.nih.mipav.model.file.FileTrackVis
-
- fileTransMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- fileTransMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Stores the matrix read in from a file it then can be converted to the corrected axis orientation (i.e. world
coordinate and/or left-hand coordinate systems).
- fileTree - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- filetVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- fileType - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- fileType - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
File header data structure format.
- fileType - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
A FileUtility.Type
- fileType - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- fileType() - Method in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Returns whether analyze, interfile, or nifti
- fileType() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMincVersionChoice
-
Returns whether Minc1 CDF or Minc2 HDF5 has been selected.
- FileType(String, String, String, String...) - Constructor for enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- FILETYPE_ACRNEMA_VR_DUMP - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Read/write file types...
- FILETYPE_DICOM_CHAPTER_10_EXPLICIT - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- FILETYPE_DICOM_CHAPTER_10_IMPLICIT - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- fileTypeDescriptions - Variable in class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
- fileTypeExtensions - Variable in class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
- FileTypeInfo - Class in gov.nih.mipav.model.file
-
This class stores information about a file type, including the type description (i.e., 'NRRD') and allowed extensions
(i.e., '.nrrd,.nhdr').
- FileTypeInfo(String, String) - Constructor for class gov.nih.mipav.model.file.FileTypeInfo
-
Create a new FileTypeInfo.
- FileTypeInfo(String, String, String...) - Constructor for class gov.nih.mipav.model.file.FileTypeInfo
-
Create a new FileTypeInfo.
- FileTypeInfo(String, Vector<String>) - Constructor for class gov.nih.mipav.model.file.FileTypeInfo
-
Create a new FileTypeInfo.
- fileTypeInts - Variable in class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
- fileTypeList - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
surface file format list.
- fileTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
surface file formats.
- fileTypeStr - Static variable in class gov.nih.mipav.model.file.FileUtility
-
- FileTypeTable - Class in gov.nih.mipav.model.file
-
- FileTypeTable() - Constructor for class gov.nih.mipav.model.file.FileTypeTable
-
- FileTypeTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.FileTypeTest
-
- FileUtil() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.FileUtil
-
- FileUtility - Class in gov.nih.mipav.model.file
-
Constants and static methods which relate to file input, output or processing.
- FileUtility() - Constructor for class gov.nih.mipav.model.file.FileUtility
-
- FileUtility.nameSliceComparator - Class in gov.nih.mipav.model.file
-
- FileUtility.nameSliceItem - Class in gov.nih.mipav.model.file
-
- fileVersion - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- FileVista - Class in gov.nih.mipav.model.file
-
- FileVista(String, String) - Constructor for class gov.nih.mipav.model.file.FileVista
-
constructor
- fileVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- fileVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- FileVOI - Class in gov.nih.mipav.model.file
-
VOI reader/writer.
- FileVOI(String, String, ModelImage) - Constructor for class gov.nih.mipav.model.file.FileVOI
-
VOI reader/writer constructor.
- FileVOI.MyXMLHandler - Class in gov.nih.mipav.model.file
-
Handle events generated while parsing the XML file.
- FileVOI.VOIComparator - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileVOI.VOISortItem - Class in gov.nih.mipav.model.file
-
DOCUMENT ME!
- FileVOI.XMLAnnotationHandler - Class in gov.nih.mipav.model.file
-
Handle events generated while parsing the Annotation XML file.
- FileVOI.XMLCoordHandler - Class in gov.nih.mipav.model.file
-
Handle events generated while parsing the XML file.
- fileVOI2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- fileW - Variable in class gov.nih.mipav.model.file.FileAvi
-
- FileWriteOptions - Class in gov.nih.mipav.model.file
-
This structure contains information to direct file writing.
- FileWriteOptions(boolean) - Constructor for class gov.nih.mipav.model.file.FileWriteOptions
-
Constructs an options structure with the given saveAs value.
- FileWriteOptions(String, String, boolean) - Constructor for class gov.nih.mipav.model.file.FileWriteOptions
-
Constructs an options structure with the given file name, directory, and saveAs values.
- fileXdim - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- FileXML - Class in gov.nih.mipav.model.file
-
Abstract base class for reading/writing .XML file headers.
- FileXML(String, String) - Constructor for class gov.nih.mipav.model.file.FileXML
-
Constructs new file object.
- FileXML.XMLAttributes - Class in gov.nih.mipav.model.file
-
Class used to store an xml tag's attribute (name and value)
- fileXres - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- fileYdim - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- fileYres - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- fileZdim - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- fileZres - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- FileZVI - Class in gov.nih.mipav.model.file
-
Documentation used was the ZVI Format Specification V 2.0.5 - August, 2010.
- FileZVI(String, String) - Constructor for class gov.nih.mipav.model.file.FileZVI
-
ZVI reader constructor.
- fill(float[][], int[], int, int, int, ModelImage, BitSet, boolean, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Helper function for rendering this contour onto the z-plane.
- fill(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Fills the whole image with the specified value.
- fill(int[][], int[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
fill: fill the sculpt outline drawn by the user.
- fill(int[][], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
fill: fill the sculpt outline drawn by the user.
- fill(int[][], int[], int, int, int, int, int, ModelImage, boolean, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
fill: fill the sculpt outline drawn by the user.
- fill(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- fill(ModelImage, float, float, Vector<Vector3f>, BitSet, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- fill(ModelImage, Vector3f, Vector<Vector3f>, BitSet, BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- fill(BitSet, Vector<Vector3f>, BitSet, Vector3f, Vector3f, int, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- fill(Vector<Vector3f>, BitSet, BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- Fill - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- fill_A(double[], int[], int[], int[], int[], int[], int, int, int, int[][], boolean[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- fill_B(double[], int[], int[], int[], int[], int[], int, int, int, int[][], boolean[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- FILL_HOLES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- FILL_HOLES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- FILL_HOLES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- FILL_HOLES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- FILL_HOLES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- FILL_HOLES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- fill_input_buffer(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- fill_inverse_cmap8(libjpeg.jpeg_decompress_struct, int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- fill_inverse_cmap9to12(libjpeg.jpeg_decompress_struct, int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- FILL_NN - gov.nih.mipav.model.algorithms.libdt.fill_type
-
- FILL_NNFILL - gov.nih.mipav.model.algorithms.libdt.fill_type
-
< use nearest-neighbor.
- FILL_ORDER - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- FILL_ORDER - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- fill_type() - Constructor for enum gov.nih.mipav.model.algorithms.libdt.fill_type
-
- FILL_VOTE - gov.nih.mipav.model.algorithms.libdt.fill_type
-
< use nearest-neighbor (fill in patches).
- fill_X(float[][], int[], int, int, int, ModelImage, BitSet, boolean, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Helper function for rendering this contour onto the x-plane.
- fill_Y(float[][], int[], int, int, int, ModelImage, BitSet, boolean, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Helper function for rendering this contour onto the y-plane.
- fillAllBackgrounds(int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
background filling algorithm.
- fillBackground(int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
background filling algorithm.
- FillBlock(Vector<Integer>, Vector<Integer>, int, int, Vector<CeresSolver2.Triplet<Integer, Integer, Double>>) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- fillBox(IndexBuffer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Generates the triangle -index array connectivity for the default cube,
stores the index array in the input IndexBuffer.
- fillBox(VertexBuffer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Fills in the values for the default cube.
- fillBuffer() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGACInputStream
-
- fillBuffer() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- fillBuffer() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGACInputStream
-
- fillBuffer() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- fillButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- fillByteArray(byte[], char) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Fills a byte array with some "char" value.
- fillChooser() - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
no information available.
- fillDataFromFile() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Asks for a text file of tags, then loads them into the text fields.
- fillDataFromTable(Hashtable<String, String>) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Fill the values in the dialog from tag-value pairs in a hashtable.
- fillholes(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Fill holes inside the binary mask image.
- fillHoles - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Whether to fill in all internal holes in the extracted brain.
- fillHoles(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Fill the holes inside the cell region blocks.
- fillHoles(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Fill the holes inside the cell region blocks.
- fillHoles(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Fill the holes inside the cell region blocks.
- fillHolesCB - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Checkbox for indicating whether to close all of the interior holes in the extracted brain.
- fillHolesFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Whether to make an effort to fill in any interior holes in the final brain mask.
- fillHolesRegion(int, short, short) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
2D flood fill that fill the holes insize the cell region block.
- fillHolesRegion(int, short, short) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
2D flood fill that fill the holes insize the cell region block.
- fillHolesRegion(int, short, short) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
3D flood fill that fill the holes insize the cell region block.
- fillImageBuffer(int, boolean) - Method in class gov.nih.mipav.view.PatientSlice
-
Gets the image data based on the orientation, either AXIAL, CORONAL, SAGITTAL, UNKNOWN_ORIENT, or a diagonal
slice if the plane is a diagonal cut-plane through the ModelImage.
- fillImagesVOIs(Vector<Vector<String>>, Vector<Vector<String>>) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Gets the list of images selected by the user in this dialog.
- fillImageTable(Vector<String>) - Method in class gov.nih.mipav.model.scripting.ScriptRunner
-
Populate the image table based on a list of image names we want to use in the execution of the script.
- fillModeToPolygonIndex(WireframeState.FillMode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- fillOrder - Variable in class gov.nih.mipav.model.file.FileSVS
-
- fillOrder - Variable in class gov.nih.mipav.model.file.FileTiff
-
- FillPat - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- FillPixels(float) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
In model simple image, fill pixel with given intensity value.
- fillRaster(int, int, int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- fillRasterMSAA(int, int, int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- fillTable(List<String>, List<Properties>, StringBuilder) - Static method in class gov.nih.mipav.model.algorithms.OpenCLInfo
-
Calculates the spans in order to fill in a StringBuilder table with a list of keys, properties.
- fillTable(List<String>, List<Properties>, List<Integer>, StringBuilder) - Static method in class gov.nih.mipav.model.algorithms.OpenCLInfo
-
Fills in a StrinBuilder table with a list of keys, properties, and spans.
- fillValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
All values outside the thresholds are set to this value.
- fillValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Used for out of bounds values in the transformation routines.
- fillValue - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- fillValue - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- fillValue - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- fillValue - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- fillValue - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- fillValue - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- fillValue - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- fillValues - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Arrays containing fill values for each channel (red=0,green=1,blue=2).
- fillValues - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- fillValuesA - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- fillValuesB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- fillVolume(int, Polyline, ModelImage, boolean, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- fillVolume(ModelImage, BitSet, boolean, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Renders this contour into the input ModelImage or the input BitSet mask.
- fillVolume(BitSet, int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Renders this contour into the input mask.
- fillWhiteMatter(ModelImage, VOI) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Once the white-matter seed point is found it is used to initialize a flood-fill algorithm that segments
the white-matter of the brain.
- fillX(int, Vector<Vector3f>, BitSet, int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- fillY(int, Vector<Vector3f>, BitSet, int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- fillZ(int, Vector<Vector3f>, BitSet, int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- filter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- filter() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- filter(double[], int, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- filter(double[], int, double, double) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- filter(double[], int, double, double) - Method in class gov.nih.mipav.model.algorithms.SlantTransform
-
- filter(double[], int, double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- filter(double[], int, double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- filter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
just break up each RGB image into these separate monochrome images sliceFilter and then reassemble int aRGB.
- filter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
just break up each RGB image into these separate monochrome images sliceFilter and then reassemble int aRGB.
- Filter(Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter
-
constructor.
- Filter(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Projects an observation into the PCA space and back.
- FILTER - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- FILTER - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- FILTER - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- FILTER - Static variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- FILTER_GREATER - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- FILTER_GREATER - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- FILTER_GREATER - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- FILTER_GREATER - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- FILTER_GREATER - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- FILTER_GREATER - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- FILTER_GREATER - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- FILTER_GREATER - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- FILTER_GREATER - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- FILTER_HARD - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- FILTER_HARD - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- FILTER_HARD - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- FILTER_HARD - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- FILTER_HARD - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- FILTER_HARD - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- FILTER_HARD - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- FILTER_HARD - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- FILTER_HARD - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- FILTER_LESS - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- FILTER_LESS - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- FILTER_LESS - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- FILTER_LESS - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- FILTER_LESS - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- FILTER_LESS - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- FILTER_LESS - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- FILTER_LESS - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- FILTER_LESS - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- FILTER_NN_GARROTE - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- FILTER_NN_GARROTE - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- FILTER_NN_GARROTE - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- FILTER_NN_GARROTE - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- FILTER_NN_GARROTE - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- FILTER_NN_GARROTE - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- FILTER_NN_GARROTE - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- FILTER_NN_GARROTE - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- FILTER_NN_GARROTE - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- FILTER_NONE - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- FILTER_NONE - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- FILTER_NONE - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- FILTER_NONE - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- FILTER_NONE - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- FILTER_NONE - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- FILTER_NONE - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- FILTER_NONE - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- FILTER_NONE - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- FILTER_SOFT - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- FILTER_SOFT - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- FILTER_SOFT - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- FILTER_SOFT - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- FILTER_SOFT - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- FILTER_SOFT - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- FILTER_SOFT - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- FILTER_SOFT - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- FILTER_SOFT - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- FILTER_THRESHOLD_FIRM - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- FILTER_THRESHOLD_FIRM - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- FILTER_THRESHOLD_FIRM - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- FILTER_THRESHOLD_FIRM - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- FILTER_THRESHOLD_FIRM - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- FILTER_THRESHOLD_FIRM - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- FILTER_THRESHOLD_FIRM - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- FILTER_THRESHOLD_FIRM - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- FILTER_THRESHOLD_FIRM - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- filter2(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- filter2Same(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- filter2Same(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- filter2Same(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- filter2Same(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- filter2Same(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- filter2SameWithDownSample(double[][], double[][], int, int, int) - Method in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- filter2SameWithDownSample(double[][], double[][], int, int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- filter2Valid(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- filter3Same(double[][][], double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- filterbank_DCA_2D(double[][], double[][], double[], double[], int, String, int, double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- filterButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- filterCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- filteredCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- filteredImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- filteredImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- filteredImageCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- filterExposureTimeX - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- filterExposureTimeX - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- filterFileExtension(Vector<String>, File) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Method filters out the rawFileList based of the file extension of the parameter selectedFile.
- filterFluorophoreX - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- filterFluorophoreX - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- filterGaussianStdDev - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Standard deviation of the filter's gaussian kernel.
- filterGaussianStdDevTF - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Text field used to enter the standard deviation of the filter's gaussian kernel.
- filterI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- filterID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter
-
- filterID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF
-
- filterIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The number of filter passes to make.
- filterIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Number of filter iterations.
- filterIterationsTF - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Text field used to enter the number of filter iterations.
- filterKernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The size of the filter kernel to use.
- filterLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- filterLength - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- filterName - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- filterNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- filterOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- filterOrder - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- filterOrder - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- filterOrder - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- filterOrder - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- filterOrder - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- filterOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- filterOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- filterOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- filterOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- filterOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- filterPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- filterPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- filterPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- filterPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- filterPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- filterPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- filterPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- filterPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- filterPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- filterPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- filterR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- filterRefDocumentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
FilterRef.
- filterRefFilterID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- filterRGB(int, int, int) - Method in class gov.nih.mipav.view.ViewJFilterAnimate
-
DOCUMENT ME!
- filters - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- filterSet - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter
-
or this one:.
- filterSingleChannel(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- filterSingleColorChannel(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- filterTurretArray - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- filterType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- filterType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- filterType - Variable in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- filterType - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- filterType - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- filterType - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- filterType - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- filterType - Variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Filter type of this filter.
- filterType - Variable in class gov.nih.mipav.view.ViewOpenFileUI
-
Indicate what the current filter should be on opening the the dialog.
- FilterType(String, String, String, String) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter.FilterType
-
Creates a new FilterType object.
- filterTypeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- filterTypeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- filterTypeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- filterTypeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- filterTypeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- filterVal1 - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- filterVal1 - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- filterVal1 - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- filterVal1 - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- filterVal1 - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- filterVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- filterVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- filterVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- filterVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- filterVal2 - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- filterVal2 - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- filterVal2 - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- filterVal2 - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- filterVal2 - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- filterVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- filterVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- filterVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- filterVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- filtxy - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- filtz - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- fImageBMin - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- fImageMin - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Min and Max image intensity and color values:.
- final_cost - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- final_cost - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- final_level - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- finalBData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- finalColorA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- finalColorA_MIP - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- finalColorAB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- finalColorAB_MIP - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- finalColorB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- finalColorB_MIP - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- finalContours - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
final voi contour shapes
- finalData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
- finalData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
- finalData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- FinalFrror() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
Return scale fit of AAM
- finalGData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- finalImage - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
- finalImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAnyTwoImagesSNR
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBarrelDistortion
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Calls garbage collector to release system resources.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
Clean up memeory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCannyEdgeDetection
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColorSaturation
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Calls disposeLocal of this class to ensure this class nulls the references to global class variables so that
memory will be recovered.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Calls disposeLocal of this class to ensure this class nulls the references to global class variables so that
memory will be recovered.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
Calls garbage collector to release system resources.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToRectangle
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropicEdgeDetection
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Clean up memory used by the algorithm.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
finalize - sets class storages arrays to null so that System.gc() can free the memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRETBleedThrough
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHeightFunction
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughCardioid
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughCircle
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughLine
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
finalize - sets class storages arrays to null so that System.gc() can free the memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
finalize - sets class storages arrays to null so that System.gc() can free the memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLLE
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLogSlopeMapping
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMinimumPerimeterPolygon
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMRIShadingCorrection
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNearlyCircleToCircle
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNonMaxSuppts
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNonparametricSegmentation
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuantify
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
Calls garbage collector to release system resources.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSCDSegmentation
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Clean up memory used by the algorithm.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThinning2D
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTwoMRIImagesSNR
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
finalize
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
finalize -
- finalize() - Method in class gov.nih.mipav.model.algorithms.Bessel
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CellInfo
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ComposedLoss
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.FirstOrderFunction
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LossFunction
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LossFunctionWrapper
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ScaledLoss
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ScopedExecutionTimer
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SizedCostFunction
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.ConditionedCostFunction
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DestructorCountingCostFunction
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticTestFunction
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
finalize
- finalize() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
this method cleans up the proc dir if success is false and it sets the lists to null.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Sets class storages arrays to null so that System.gc() can free the memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
Clean up memory used by the algorithm.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmColorEdge
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmDistanceFilter
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Prepare this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Prepare this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFIREEdgeExtraction
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
finalize - sets class storages arrays to null so that System.gc() can free the memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRuleBasedContrastEnhancement
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSliceAveraging
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
Prepare this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
Prepare this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
Prepare this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeNormals
-
Prepare this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.FloodFill
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Prepare this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.Psi
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline25D
-
Override of Object method called by garbage collection.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline2D
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline3D
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
finalize - prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert3Dto4D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert4Dto3D
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCyclicPermutation
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDicomOrder
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMosaicToSlices
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRandSliceOrder
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveTSlices
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGrays
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoHSB
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubset
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwap34
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapDims
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmTiltCorrection
-
- finalize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms.ByteBuffer
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_FileIO
-
- finalize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
- finalize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Cleans up memory.
- finalize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Used to make sure socket has properly been closed.
- finalize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- finalize() - Method in class gov.nih.mipav.model.file.FileAfni
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileAvi
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileBase
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileBFLOAT
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileBioRad
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileBMP
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileBRUKER
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileCheshire
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileCOR
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileCZI
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileDicom
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileDicomKey
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileDicomSQ
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
- finalize() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileDM3
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileFits
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileICS
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileImageXML
-
Prepares class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
Cleans up the thumbnail AWT Image and int[] array.
- finalize() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Prepares the class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Prepares the class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Prepares the class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileInfoXML
-
Prepares the class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileInterfile
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileJP2
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileJSON
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileLIFF
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileLSM
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileMagnetomVision
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileMATLAB
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileMGH
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileMicroCat
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileMinc
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileMRC
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileNRRD
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FilePackBit
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FilePARREC
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileRaw
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileSiemensText
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileSPM
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileSTK
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
Prepares class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileSurfaceRefXML
-
Prepares class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileSurfaceXML
-
Prepares class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileSVS
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileTiff
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileTMG
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileXML
-
Prepares class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.file.FileZVI
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.scripting.ParserEngine
-
Clean up memory used by the parser engine and make sure the reader we used is closed.
- finalize() - Method in class gov.nih.mipav.model.structures.BSplineLattice2Df
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
Cleanup memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BufferBase
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BufferByte
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BufferInt
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BufferLong
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BufferShort
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.structures.event.VOIEvent
-
cleanup.
- finalize() - Method in class gov.nih.mipav.model.structures.event.VOIVectorEvent
-
cleanup.
- finalize() - Method in class gov.nih.mipav.model.structures.IntVector
-
Cleans the memory used by the int vector.
- finalize() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Calls disposeLocal of this class to ensure this class nulls the references to global class variables so that
memory will be recovered.
- finalize() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
- finalize() - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Calls disposeLocal of this class to ensure this class nulls the references to global class variables so that
memory will be recovered.
- finalize() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Calls disposeLocal of this class to ensure this class nulls the references to global class variables so that
memory will be recovered.
- finalize() - Method in class gov.nih.mipav.model.structures.RealPolynomial
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Prepares this class for cleanup.
- finalize() - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Cleans up memory.
- finalize() - Method in class gov.nih.mipav.model.structures.VOI
-
- finalize() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
finalize
- finalize() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
finalize
- finalize() - Method in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- finalize() - Method in class gov.nih.mipav.view.JPanelProgressBar
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.PatientSlice
-
Clean up memory used by the component.
- finalize() - Method in class gov.nih.mipav.view.renderer.flythroughview.DijkstraMinCostPath
-
Called by garbage collector to free up object memory.
- finalize() - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelLUTHelper
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Called by the garbage collector.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
finalize - calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Calls disposeLocal.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceRefXML_J3D
-
Prepares the class for cleanup.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D
-
Prepares class for cleanup.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D
-
Prepares class for cleanup.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Cleans memory.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
Delete all local member variables:
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
Called by the garbage collector.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Calls disposeLocal.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Calls finalize.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Used to call dispose of this class to clean up memory.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Used to call dispose of this class to clean up memory.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Finalize to free memory.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Cleans up memory from gc.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Calls disposeLocal.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Calls garbage collector to release system resources.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Calls garbage collector to release system resources.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Clean up some resources!
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
finalize - calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Cleans up memory from gc.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Call dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
finalize - calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorComposite
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorLighting
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorMIP
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorReflection
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensity
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapColor
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapIntensity
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Calls disposeLocal.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorComposite
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorLighting
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorMIP
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
Calls disposeLocal to clean up memory, and then call super.finalize();
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Calls disposeLocal of this class to ensure this class nulls the references to global class variables so that
memory will be recovered.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.TextureSculptor
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Cleans memory.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererRayCast
-
Call from the parent frame to dispose memory.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererShearWarp
-
Call from the parent frame to dispose memory.
- finalize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
Calls disposeLocal.
- finalize() - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Clear up memory from gc.
- finalize() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Calls finalize().
- finalize() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Calls dispose.
- finalize() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Clean up some resources.
- finalize() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityRGB
-
Clean up some resources!
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
finalize
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
finalize
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIGradTableCorrectionAfterTrans
-
Prepares this class for destruction.
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Prepares the class for cleanup.
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
Prepares the class for cleanup.
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Prepares class for cleanup.
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM
-
Prepares class for cleanup.
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
- finalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
- finalize() - Method in class gov.nih.mipav.view.ViewControlsImage
-
Clean up memory.
- finalize() - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Clean up some resources!
- finalize() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Calls dispose to dump this instance.
- finalize() - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Clean up some resources!
- finalize() - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Clean up some resources!
- finalize() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Clean up some resources.
- finalize() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Cleans up memory.
- finalize() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Clean up memory used by the component.
- finalize() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Cleans memory.
- finalize() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Cleans memory.
- finalize() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Cleans memory.
- finalize() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Cleans memory.
- finalize() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Finalizes and closes the window.
- finalize() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- finalize() - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Clean up the panel memory.
- finalize() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Clean up memory used by this class.
- finalize() - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Clean up memory used by the menu builder.
- Finalize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Finalize(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.DynamicCompressedRowSparseMatrix
-
- finalize1(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- finalize2(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- FinalizeIterationAndCheckIfMinimizerCanContinue() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- finalizeLocal() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Clean up some resources!
- finalizeLocal() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Clean up some resources!
- finalizeLocal() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Clean up some resources!
- finalizeLocal() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Clean up some resources!
- finalMaskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
Model Images
- FinalModel() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Get the final model
- finalPoint - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Final point when optimization is complete.
- finalPoint - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Final point when optimization is complete.
- finalRData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- finalXexcl - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- finalYincl - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- find(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie
-
Return the most specific value stored for this byte sequence.
- find(byte[], int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie
-
Return the most specific value stored for this byte sequence.
- find(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.universe
-
- find(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- find(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- find(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- find(Point2f, MjVector2f, Point2f, float, float[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive
-
Intersection of a the line P+t*D and the circle |X-C| = R.
- find(Point2f, MjVector2f, Point2f, MjVector2f, MjVector2f, float[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive
-
Intersection is a solution to P0+s*D0 = P1+t*D1.
- FIND - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- find_best_colors(libjpeg.jpeg_decompress_struct, int, int, int, int, byte[], byte[]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- find_best_colors(libjpeg.jpeg_decompress_struct, int, int, int, int, short[], short[]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- find_best_csnrs(double) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- find_biggest_color_pop(libjpeg.box[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- find_biggest_volume(libjpeg.box[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- FIND_EDGES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- FIND_EDGES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- FIND_EDGES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- FIND_EDGES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- FIND_EDGES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- FIND_EDGES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- find_nearby_colors(libjpeg.jpeg_decompress_struct, int, int, int, byte[]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- find_nearby_colors(libjpeg.jpeg_decompress_struct, int, int, int, short[]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- find_nearest(KDTree.kdnode, double[], double, KDTree.res_node, int, int) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- find_nearest_chebyshev(KDTree.kdnode, double[], double, KDTree.res_node, int, int) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- find_tform_ransac(SIFT3D.Ransac, SIFT3D.Mat_rm, SIFT3D.Mat_rm, SIFT3D.Affine) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- find3dBfrequency() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- findArbitraryClipping - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
flag indicates arbitrary clpping bounding frame being picked.
- findAverageDistance() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- findBestGradientChange(Vector3f, Vector3f, float, float[], float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
From the mid point of normal line, tracing both inward and outward diection along the normal line
- findBestGradientChange(Vector3f, Vector3f, float, float[], float[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findBestGradientChange(Vector3f, Vector3f, float, float[], float[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findBestGradientChange(Vector3f, Vector3f, float, float[], float[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findBestGradientChange(Vector3f, Vector3f, float, float[], float[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- findBestGradientChange(Vector3f, Vector3f, float, float[], float[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- findBestImageNMI(int, int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
NMI based 2D slice image similarity measure.
- findBestImageNMI(int, int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
NMI based 2D slice image similarity measure.
- findBestImageNMI(int, int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
NMI searching between target image and AAM atlas.
- findBestSplit(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- findBestSplit(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- findBestSplit(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- findBestSplit(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- findBestSplitExtraTrees(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- findBestSplitExtraTrees(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- findBestSplitExtraTrees(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- findBestSplitExtraTrees(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- findBestSplitMaxstat(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- findBestSplitMaxstat(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- findBestSplitValueAUC(int, int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- findBestSplitValueExtraTrees(int, int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- findBestSplitValueExtraTrees(int, int, double, int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- findBestSplitValueExtraTrees(int, int, int, int[], int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- findBestSplitValueExtraTrees(int, int, int, int[], int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- findBestSplitValueExtraTreesUnordered(int, int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- findBestSplitValueExtraTreesUnordered(int, int, double, int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- findBestSplitValueExtraTreesUnordered(int, int, int, int[], int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- findBestSplitValueExtraTreesUnordered(int, int, int, int[], int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- findBestSplitValueLargeQ(int, int, double, int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- findBestSplitValueLargeQ(int, int, int, int[], int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- findBestSplitValueLargeQ(int, int, int, int[], int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- findBestSplitValueLogRank(int, int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- findBestSplitValueLogRankUnordered(int, int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- findBestSplitValueSmallQ(int, int, double, int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- findBestSplitValueSmallQ(int, int, int, int[], int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- findBestSplitValueSmallQ(int, int, int, int[], int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- findBestSplitValueUnordered(int, int, double, int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- findBestSplitValueUnordered(int, int, int, int[], int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- findBestSplitValueUnordered(int, int, int, int[], int, double[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- findBlackRegionOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findBlackRegionOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findBlackRegionOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findBlackRegionOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- findBorders(byte[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
FINDBORDERS Returns an binary image with the regions' boundaries of the input
image I.
- findBoundaryNarrowBand() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
Voting based tracing for the final prostate boundary.
- findBoundingContour(int, VOI, VOI, VOI, Vector3f, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- findBoundingContour(int, VOI, VOI, VOI, Vector3f, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- findBoundingContour(int, VOI, VOI, VOI, Vector3f, ModelImage, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findBoundingContour(int, VOI, VOI, VOI, Vector3f, ModelImage, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findBoundingContour(int, VOI, VOI, VOI, Vector3f, ModelImage, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findBoundingContour(int, Vector3f, ModelImage, VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findBoundingContour(int, Vector3f, ModelImage, VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findBoundingContour(int, Vector3f, ModelImage, VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findBoundingContour_condyle(int, VOI, VOI, VOI, Vector3f, ModelImage, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findBoundingContour_condyle(int, VOI, VOI, VOI, Vector3f, ModelImage, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findBoundingContour_condyle(int, VOI, VOI, VOI, Vector3f, ModelImage, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findBounds() - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
This method finds the bounding box when CROP apply to 2D, 3D VOI images.
- findBranches(int, int, int, boolean[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- findBufferMinMax(float[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Finds the local maximum and minimum values in the given range in order, as given by the starting and stoping
values.
- findBufferMinMax(float[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
Finds the local maximum and minimum values in the given range in order, as given by the starting and stoping
values.
- findBufferMinMax(float[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
Finds the local maximum and minimum values in the given range in order, as given by the starting and stoping
values.
- findBurnPoint(Shape3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Check whether the burning sphere is picked or not.
- findBurnPoint(Shape3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Check whether the burning sphere is picked or not.
- findClass(String) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- findCompatibleType(ModelImage, VOIBase, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- findCompIndex(Component[], Component.Identifier, String) - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- FindConnectedComponent(Vertex, HashMap<Vertex, Vertex>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- findCornerEdge(int[][], int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- findCornerEdgeOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findCornerEdgeOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findCornerEdgeOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findCornerEdgeOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- findCornerEdgeOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- findCurveSegment(int, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- findDiffusion - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- findDiffusion - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
- findDiffusionCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
- finddisconnected(int[][]) - Method in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- findEdgeJunctions() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- findEdgeOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findEdgeOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findEdgeOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findEdgeOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- findEdgeOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- findEdges(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Finds the edges of the objects in an image.
- findEdges(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Finds the edges of objects.
- findEdges(int, boolean[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Go through the edge list find the the edge specified.
- findEdges(int, boolean[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Go through the edge list find the the edge specified.
- findEdgesAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
DOCUMENT ME!
- findEdgesAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
DOCUMENT ME!
- findEnergyFile() - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Tries to find the energy file that should have the name - sourceImageName_gm.xml and puts it into the text box
and sets the use precalculated checkbox to true.
- fIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FaceEdgesFunction
-
- findFace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Computes which voxels in the ModelImage are face voxels.
- findFaceX() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
The head points along the X axis: rays are traced in the +/- x direction:
- findFaceY() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
The head points along the Y axis: rays are traced in the +/- y direction:
- findFaceZ() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
The head points along the Z axis: rays are traced in the +/- z direction:
- findFilter(JFileChooser, int) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Finds the FileFilter that matches the file type.
- findFilter(JFileChooser, int) - Static method in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- findGain(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- findGreyRegionOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findGreyRegionOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findGreyRegionOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findGreyRegionOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- findGrowingPlate(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findHoles(int[][], int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.HolesPattern
-
- findHolesOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findHolesOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findHolesOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findHolesOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- findHolesOnImage(int, int, ModelImage, int, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- findImageOffset(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
gets the bottom end of the image. for any image but color images, the bottom end is defined as the buffer minimum
for all images except color images; there the offset is defined to be zero
- findImageOffset(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
gets the bottom end of the image. for any image but color images, the bottom end is defined as the buffer minimum
for all images except color images; there the offset is defined to be zero
- findInHash(AlgorithmMeanShiftClustering.fams_hash_entry2[][], int[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- findInitialFromData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- findInitialFromData - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- FindInterpolatingPolynomial(Vector<CeresSolver.FunctionSample>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- findIntersection(MjPrimitive.Ray2f, MjPrimitive.Segment2f, float[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive
-
The return quantity is 0 if the objects do not intersect, or is 1 or 2 if they do intersect.
- findIntersection(MjPrimitive.Segment2f, MjPrimitive.Circle2f, Point2f[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive
-
The value is 0 if the objects do not intersect.
- FindInvalidValue(int, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- findIsolines() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- findJunctionAppearanceWeight(int, int, byte[][], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- findJunctionNeighbours() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- findJunctions() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- findLargestRegion(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Find the largest region within a mask image.
- findLevel(Node, Node, int) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Finds the depth, or level of the target node from the Root node.
- FindLinearPolynomialRoots(Vector<Double>, Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- findMaskExtents(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- findMaskExtents(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- findMax() - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Finds the maximum allowable magnification for the image.
- findMax(int, int, Vector3f[], float, boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- findMaxMeshDistance(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- findMaxWidth(Vector3f, double[], boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
This is used by the method maxWidth.
- findMedian(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- findMin(Point3f, int, int, Point3f, Point4f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
findMin finds the point (newpoint) along the edge that connects the points Side-Middle that minimizes the
distance Start-newpoint-End.
- findMin(TriMesh, Vector3f, int, int, Vector3f, Vector4f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
findMin finds the point (newpoint) along the edge that connects the points Side-Middle that minimizes the
distance Start-newpoint-End.
- FindMinimumOnTrustRegionBoundary(Vector2d) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- findMinimumPowerOfTwo(int) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculate the minimum power of two which is greater or equal to the number.
- findMinRoot() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Returns the node with the smallest number of 'parent' nodes.
- findMissingSlices() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
DOCUMENT ME!
- findNarrowBand(JDialogProstateSegmentationRegBSpline3D.Edge, JDialogProstateSegmentationRegBSpline3D.Edge, JDialogProstateSegmentationRegBSpline3D.Edge) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Find the narrow band regions around VOI contours.
- findNearestAnnotation(VOI, Vector3f, Vector3f, Vector3f) - Static method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- findNeighbor(double, int[], int) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- findNewMeshes(ModelTriangleMesh, LinkedList) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Used in cutting closed paths and creating new meshes to export to the scene graph.
- findNewMeshes(TriMesh, LinkedList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Used in cutting closed paths and creating new meshes to export to the scene graph.
- findNextJunction(AlgorithmNetworkSnake.SnakeInitialiser.Node, AlgorithmNetworkSnake.SnakeInitialiser.Node) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- findNextJunctions(AlgorithmNetworkSnake.SnakeInitialiser.Node) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- findNode(DefaultMutableTreeNode, String) - Static method in class gov.nih.mipav.model.file.FileMincHDF
-
Recursively finds the node within a tree with a given name.
- findNodeColor(Node, int, int) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Recursively finds the node color at a target level of the tree.
- findOptimalKL - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- findOptimalKL - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- findPaintBorder(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
Finds a set of lines which surround the paint in the image.
- findPickedObject(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
One of the overrides necessary to be a MouseListener.
- findPickingPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- findPoint(VOI, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- findPointsOfLine(Vector<Vector3f>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- findPointsOfLine(Vector<Vector3f>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- FindPolynomialRoots(Vector<Double>, Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- findPositionAndCurvature(Vector<Vector3f>, Vector<Float>, boolean, double[], double[], double[], double, double, int[], int, double, double[]) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Finds the position/curvature along a VOI.
- findPositionAndIntensity(ModelImage, Vector<Vector3f>, Vector<ColorRGB>) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Finds the position/intensity along a VOI.
- findPositionAndIntensity(Vector3f, Vector3f, ModelImage, Vector<Vector3f>, Vector<ColorRGB>) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Finds the positions and intensities along a line-segment of the VOI.
- findProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
flag indicates the probe being picked.
- findProbe(Shape3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Check whether the probe being picked or not.
- findProbe(Shape3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Check whether the probe being picked or not.
- findProbe(Shape3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Find the probe with the given geometry shape.
- findProbe(Shape3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Check whether the probe being picked or not.
- findProbe(Shape3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Check whether the probe being picked or not.
- FindQuadraticPolynomialRoots(Vector<Double>, Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- findRangeX(Point, double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- findRangeX(Point, double, double, double, double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- findRegion(JDialogProstateSegmentationRegBSpline3D.Edge, float, float, Vector<JDialogProstateSegmentationRegBSpline3D.PolarPoint>, JDialogProstateSegmentationRegBSpline3D.Edge) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Looking for the narrow band region.
- findResource(String) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- findResources(String) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- findResults - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
List of the results of a DICOM query.
- findRoot() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Finds the Root of the tree.
- findRoot(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindComponentLabelling
-
- findScaleSpaceExtrema(ModelImage[][], ModelImage[][], int, double, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- findSections(VOI, float[][], Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- findSections(VOI, float[][], Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- findSections(Vector3f[], int, float[][], Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findSections(Vector3f[], int, float[][], Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findSections(Vector3f[], int, float[][], Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findSeedPoints(int) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Mark all points within the image which match a certain intensity with point VOIs.
- findSmallest() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
The findSmallest function searches through the list of vertices that are not yet relaxed but that have been
visited by the Dijkstra Search, so that the weight factor is not Float.MAX_VALUE, but also is not the minimum
value for that node.
- findSmallest() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The findSmallest function searches through the list of vertices that are not yet relaxed but that have been
visited by the Dijkstra Search, so that the weight factor is not Float.MAX_VALUE, but also is not the minimum
value for that node.
- findSpaceNavigator(Controller[]) - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- findSphere(Point3, Point3, Point3, Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- findStrokeInterval(double, double, short) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.LinesRenderer
-
- findThresholdedRegion(int, int, byte[], int, int, int, boolean, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- findThresholdedRegion(int, int, byte[], int, int, int, boolean, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- findToken(int[][]) - Method in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- findToken(int[][]) - Method in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- findTotalBins(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
finds the total number of bins based on the type of image.
- findTotalBins(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
finds the total number of bins based on the type of image.
- FindTriangle(CAAMPoint, int[], double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Find the corresponding triangle in the source mesh for a point.
- findTriPoints(int, int, LinkedList) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Find the next side triangle index.
- findTriPoints(int, int, LinkedList<Integer>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Find the next side triangle index.
- findTwoIslands(ModelImage, int[], int[], int[], VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findTwoIslands(ModelImage, int[], int[], int[], VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findTwoIslands(ModelImage, int[], int[], int[], VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findType(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Find the type able to contain the full range of the data.
- findType(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Find the type able to contain the full range of the data.
- findType(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Find the type able to contain the full range of the data.
- FindVacantFilename(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Finds a file name that is not 'occupied'.
- FindVacantFilename(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Finds a file name that is not 'occupied'.
- FindValidViews(HashSet<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
-
- findVisible() - Method in class gov.nih.mipav.view.JPanelStatisticsList
-
only mark a VOI property to be visible for certain kinds of images.
- findVisibleDicom() - Method in class gov.nih.mipav.view.JPanelAnonymizeImage
-
only mark a tag to be visible if it exists in the file info.
- findVisibleMinc() - Method in class gov.nih.mipav.view.JPanelAnonymizeImage
-
only mark a tag to be visible if it exists in the file info.
- findVOIIndentations2D(ModelImage, int, Vector<VOIBase>, boolean) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- findVOIpointsInRange(JDialogProstateSegmentationRegBSpline3D.Edge, Vector<JDialogProstateSegmentationRegBSpline3D.PolarPoint>, int, int, JDialogProstateSegmentationRegBSpline3D.Edge) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Tracing generated VOI tables, convert it from image coordinate to Polar
coordinate.
- findWall() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- findWall(AlgorithmNetworkSnake.SnakeNode) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- findWeakConnectedEdgeOnImageHorizontal(int, int, ModelImage, int, int, boolean, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findWeakConnectedEdgeOnImageHorizontal(int, int, ModelImage, int, int, boolean, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findWeakConnectedEdgeOnImageHorizontal(int, int, ModelImage, int, int, boolean, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findWeakConnectedEdgeOnImageHorizontal(int, int, ModelImage, int, int, boolean, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- findWeakConnectedEdgeOnImageHorizontal(int, int, ModelImage, int, int, boolean, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- findWeakConnectedEdgeOnImageVertical(int, int, ModelImage, int, int, boolean, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- findWeakConnectedEdgeOnImageVertical(int, int, ModelImage, int, int, boolean, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- findWeakConnectedEdgeOnImageVertical(int, int, ModelImage, int, int, boolean, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- findWeakConnectedEdgeOnImageVertical(int, int, ModelImage, int, int, boolean, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- findWeakConnectedEdgeOnImageVertical(int, int, ModelImage, int, int, boolean, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- findWeakEdge(int[][], int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- findWeakEdge(int[][], int, int, int, int, int, boolean, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternHorizontal
-
- FindWithDefault(HashMap<double[], CeresSolver.ParameterBlock>, double[], CeresSolver.ParameterBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- FindWithDefault(HashMap<String, CeresSolver.CallStatistics>, String, CeresSolver.CallStatistics) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- fine - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Coarse and fine value text field.
- fine - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- fineAngle - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
The fine angle step to use in each dimension when registering the original image against the flipped image.
- fineLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Coarse and fine value label.
- fineLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- fineMovement() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- fineNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- fineNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- fineNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- fineNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
- fineNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- fineNum - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- fineNumX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- fineNumX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- fineNumX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- fineNumX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Number of passes that will be made in the coarse sampling and fine sampling.
- fineNumY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- fineNumY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- fineNumY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- fineNumY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- fineNumZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- fineNumZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- fineNumZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- fineNumZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- finePanelX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- finePanelX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- finePanelY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- finePanelY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- finePanelZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- finePanelZ - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- fineRate - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- fineRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Coarse and fine sampling parameters.
- fineRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Coarse and fine sampling parameters.
- fineRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Coarse and fine sampling parameters.
- fineRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Coarse and fine sampling parameters.
- fineRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Coarse and fine sampling parameters.
- fineRate - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Coarse and fine sampling parameters.
- fineRate - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- fineRate - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- fineRate - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- fineRate - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- fineRateText - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- fineRateText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- fineRateText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- fineRateText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- fineRateTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- fineRateTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- fineRateTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- fineRateTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- fineRateTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- fineRateTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- fineRateX - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- fineRateX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Coarse and fine sampling parameters.
- fineRateX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Coarse and fine sampling parameters.
- fineRateX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Coarse and fine sampling parameters.
- fineRateX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Coarse and fine sampling parameters.
- fineRateX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- fineRateX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- fineRateX - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- fineRateY - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- fineRateY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- fineRateY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- fineRateY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- fineRateY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- fineRateY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- fineRateY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- fineRateY - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- fineRateZ - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- fineRateZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- fineRateZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- fineRateZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- fineRateZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- fineRateZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- fineRateZ - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- fineRateZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- fineValue - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Coarse and fine value.
- fineValue - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- fInfoBase - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- finish(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Closes the geodesic curve.
- finish(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Closes the geodesic curve.
- finish_input_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_input_controller
-
- finish_input_pass(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- FINISH_INPUT_PASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- finish_output_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_decomp_master
-
- finish_output_pass(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- FINISH_OUTPUT_PASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- finish_pass - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- finish_pass - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- finish_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- finish_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- finish_pass(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- FINISH_PASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- finish_pass_1_quant(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- FINISH_PASS_1_QUANT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- FINISH_PASS_2_QUANT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- finish_pass_huff(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- FINISH_PASS_HUFF - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- finish_pass1(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- FINISH_PASS1 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- finish_pass2(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- FINISH_PASS2 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- finishBlank - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- finishEPIPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- finishGeodesic(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
finishGeodesic, called when the "Finish Closed" or "Finish Open" buttons are pressed, finish the current geodesic
polyline.
- finishGeodesic(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
finishGeodesic, called when the "Finish Closed" or "Finish Open" buttons are pressed, finish the current geodesic
polyline.
- finishPreProcessingPanel(ModelImage, ModelImage, TransMatrix, String, TransMatrix[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- finishQuote - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- finishTensorPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- finishTensorPanel(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- finishWorkingLists(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Adds the working paths to the finished path lists, combining the segments in the working paths into one path.
- finishWorkingLists(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Adds the working paths to the finished path lists, combining the segments in the working paths into one path.
- finite_diff_cost_function_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientChecker
-
- fippft3(double[][][][], int[], double[], int[], double[][][][][], double, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- fireCoordinateChange(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Tell coordinate change listeners about a coordinate change (after changing the coordinate to image volume space
from the tri-planar space).
- fireImageRegistryChanged() - Method in class gov.nih.mipav.view.ImageRegistryMonitor
-
Notify all listeners that have registered interest for notification on this event type.
- fireMemoryChanged() - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
Notify all listeners that have registered interest for notification on this event type.
- fireProgressStateChanged(float, String, String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Updates listeners of progress status.
- fireProgressStateChanged(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Notifies all listeners that have registered interest for notification on this event type.
- fireProgressStateChanged(int) - Method in class gov.nih.mipav.model.file.FileBase
-
Notifies all listeners that have registered interest for notification on this event type.
- fireProgressStateChanged(int, String, String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Notifies all listeners that have registered interest for notification on this event type.
- fireProgressStateChanged(int, String, String) - Method in class gov.nih.mipav.model.file.FileBase
-
Notifies all listeners that have registered interest for notification on this event type.
- fireProgressStateChanged(String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Notifies listeners that have registered interest for notification on this event type.
- fireProgressStateChanged(String) - Method in class gov.nih.mipav.model.file.FileBase
-
- fireProgressStateChanged(String, String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Updates listeners of progress status.
- fireProvenanceStateChanged(ProvenanceEntry) - Method in class gov.nih.mipav.model.provenance.ProvenanceHolder
-
Notify the listeners (dialogs) that a provenance entry has been stored
- fireSpaceNavEvent() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorPoller
-
- fireVOIadded(VOI) - Method in class gov.nih.mipav.model.structures.VOIVector
-
Fires a VOI event based on the VOI. calls the listener's addedVOI() method.
- fireVOIBaseAdded(VOIBase) - Method in class gov.nih.mipav.model.structures.VOI
-
Fires a VOI event based on the VOI. calls the listener's addedVOI() method.
- fireVOIBaseRemoved(VOIBase) - Method in class gov.nih.mipav.model.structures.VOI
-
Fires a VOI event based on the VOI. calls the listener's removedVOI() method.
- fireVOIColorChange(Color) - Method in class gov.nih.mipav.model.structures.VOI
-
Deprecated.
- fireVOIremoved(VOI) - Method in class gov.nih.mipav.model.structures.VOIVector
-
Fires a VOI event based on the VOI. calls the listener's removedVOI() method.
- fireVOIselection() - Method in class gov.nih.mipav.model.structures.VOI
-
Fires a VOI event based on the VOI. calls the listener's removedVOI() method.
- fireVOISelectionChange(VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- fireVOISelectionChange(VOI) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Communicates a selection change to all UpdateVOISelectionListeners.
- fireVOISelectionChange(VOI, VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- fireVOISelectionChange(VOI, VOIBase) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Communicates a selection change to all UpdateVOISelectionListeners.
- first - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- first - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur.Pair
-
- first - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Pair
-
- first - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Triplet
-
- first - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Pair
-
- first - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- first - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Pair
-
- first - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
0 if the first packet
- first - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
------------------------ Class variables ------------------------ Double precision machine parameters found in
routine dlamch.
- first - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Flag to indicate first event.
- first - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Flag to indicate first event.
- first - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Flag to indicate first event.
- first - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
First time accessed.
- first - Variable in class gov.nih.mipav.view.renderer.MouseEventVector
-
First time accessed.
- first - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Pair
-
- first() - Method in class gov.nih.mipav.model.structures.HQueue
-
first - returns the last value in the first queue location that has image indexes in it.
- first_addon_message - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- first_bound - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.lmt_node
-
- FIRST_CALL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- first_dlartg - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Double precison machine variables found in routine dlartg.
- first_dlatb4 - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Found in routine dlatb4
- first_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- FIRST_ELEMENT - Variable in class gov.nih.mipav.model.file.FileDicom
-
Location of first element.
- first_gauss - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.GSS_filters
-
- first_level - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- first_level - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.GSS_filters
-
- first_level - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Pyramid
-
- first_marker(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- first_octave - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Pyramid
-
- FIRST_PT - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
AC-PC: First midsagittal reference point.
- first_undef_row - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- first_undef_row - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- FIRST_VOLUME_TISSUE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- FIRST_VOLUME_TISSUE - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- first_zlartg - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
Double precision machine variables found in routine zlartg.
- first_zlatb4 - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
Found in routine zlatb4
- first6ClipPlane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
flag indicate the first time 6 clipping plane branch switch.
- first6ClipPlane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
flag indicate the first time 6 clipping plane branch switch.
- firstAssigned - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- firstAssigned - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- firstAssigned - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- firstAssigned - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- firstAssigned - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- firstAt(int) - Method in class gov.nih.mipav.model.structures.HQueue
-
firstAt - removes and returns last element at a specific queue index.
- firstAttempt - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- firstAxTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
310 Start time(secs) of first axial in exam.
- firstChar - Variable in class gov.nih.mipav.model.file.FileSVS
-
- firstChar - Variable in class gov.nih.mipav.model.file.FileTiff
-
- firstClick - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- firstClipArbi - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
flag indicate the first time arbitrary clipping plane branch switch.
- firstClipArbi - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
flag indicate the first time arbitrary clipping plane branch switch.
- firstDraw - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- firstElement() - Method in class gov.nih.mipav.model.structures.IntVector
-
Gets the first element of array without removing it.
- firstFileInfoDicom - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
first fileinfo dicom...used for list file info
- firstGaussianAmplitude - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- firstGaussianMean - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- firstGaussianMeanBin - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- firstGaussianStandardDeviation - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- firsti - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- firstImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- firstImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- firstImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
First image (Source image).
- firstImage - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Active image when algorithm is called.
- firstIndex - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- firstKindComplex() - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Port of Algorithm 707, Collected Algorithms from ACM.
- firstKindComplexArgument() - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
This code is a port of the FORTRAN routine CCHG from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 400-402.
- firstKindRealArgument() - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
This code is a port of the FORTRAN routine CHGM from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 398-400.
- firstMidSagPt - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- firstMoment0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- firstMoment1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- firstName - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- firstName - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
Elements.
- firstName - Variable in class gov.nih.mipav.model.file.FileInfoOME.Person
-
- firstName - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- firstOctave - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
< number of octaves
- firstOctave - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
-
< Image height
- FirstOrderFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.FirstOrderFunction
-
- firstOrientValue - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
Slice Orientation Value (sag/cor/tra)
- firstPageButton - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- firstPageMenuItem - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- firstPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- firstPoint - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- firstPoint - Variable in class gov.nih.mipav.view.RubberbandPolyline
-
DOCUMENT ME!
- firstPt - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- firstPt - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- firstPtDicom - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- firstPtr - Variable in class gov.nih.mipav.model.structures.IntVector
-
The index of the first valid data element in the vector.
- firstr - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- firstResolutions - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- firstSliceAfterBleach - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- firstSliceAfterBleach - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- firstSliceAfterBleach - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- firstSliceNum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- firstSliceNum - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- firstSliceNumText - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- firstSlicePoint - Variable in class gov.nih.mipav.model.structures.VOIPoint
-
True if this point is the 1st point in a slice/frame of Polyline_Slice
- firstStretch - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- firstTime - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- firstTimeCheckMidShaft - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- firstTimeCheckMidShaft - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- firstTimeVolView - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Keep track of whether we're switching to the volume renderer for the first time.
- firstVal - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue.Values
-
DOCUMENT ME!
- firstVolumeTissueRadioButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- fis - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- fis - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- fisher(double, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- fisher_bounds() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- fit(int[][], GaussianMixtureModelsIncompleteSamples.GMM, double[][], double[][][], double[][][], String, double, double, String, int, String, GaussianMixtureModelsIncompleteSamples.Background, double, int, int, int[], int[], int[], int, Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- Fit24DModel(int, double[], float[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit24DModel
-
Creates a new Fit24DModel object.
- Fit24DModel(int, double[], float[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.Fit24DModel
-
Creates a new Fit24DModel object.
- Fit25HModel(int, double[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit25HModel
-
Creates a new Fit25HModel object.
- FitAll() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitAll
-
Creates a new Fit24DModel object.
- FitAllEP() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitAllEP
-
Creates a new Fit24DModel object.
- FitAllNL2() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitAllNL2
-
- FitCorrelationModel(int, float[], float[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation.FitCorrelationModel
-
Creates a new FitCorrelationModel object.
- FitCovarianceModel(int, float[], float[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance.FitCovarianceModel
-
Creates a new FitCovarianceModel object.
- FitdeHoog1(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog1
-
Creates a new FitExpModel object.
- FitdeHoog10(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog10
-
Creates a new FitExpModel object.
- FitdeHoog11(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog11
-
Creates a new FitExpModel object.
- FitdeHoog12(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog12
-
Creates a new FitExpModel object.
- FitdeHoog13(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog13
-
Creates a new FitExpModel object.
- FitdeHoog14(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog14
-
Creates a new FitExpModel object.
- FitdeHoog15(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog15
-
Creates a new FitExpModel object.
- FitdeHoog16(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog16
-
Creates a new FitdeHoog16 object.
- FitdeHoog2(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog2
-
Creates a new FitExpModel object.
- FitdeHoog3(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog3
-
Creates a new FitExpModel object.
- FitdeHoog4(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog4
-
Creates a new FitExpModel object.
- FitdeHoog5(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog5
-
Creates a new FitExpModel object.
- FitdeHoog6(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog6
-
Creates a new FitExpModel object.
- FitdeHoog7(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog7
-
Creates a new FitExpModel object.
- FitdeHoog8(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog8
-
Creates a new FitExpModel object.
- FitdeHoog9(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog9
-
Creates a new FitExpModel object.
- FitDEMRI3ConstrainedModel(int, double[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.FitDEMRI3ConstrainedModel
-
Creates a new FitDEMRI3ConstrainedModel object.
- FitDoubleExponentialModel(int, double[], float[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialModel
-
Creates a new FitDoubleExponentialModel object.
- FitDoubleExponentialNoWholeConstrainedModel(int, double[], float[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeConstrainedModel
-
Creates a new FitDoubleExponentialNoWholeConstrainedModel object.
- FitDoubleExponentialNoWholeModel(int, double[], float[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeModel
-
Creates a new FitDoubleExponentialNoWholeModel object.
- FitDoubleExponentialNoWholeNL2solModel(int, double[], float[], double[], int[], double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel
-
Creates a new FitDoubleExponentialNoWholeNL2solModel object.
- fitExp - gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
Mode indicates exponential fitting in progress
- FitExpModel(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitExpModel
-
Creates a new FitExpModel object.
- FitExpModelqd(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitExpModelqd
-
Creates a new FitExpModelqd object.
- FitExponential - Class in gov.nih.mipav.model.algorithms
-
FitExponential -fits an array of points to an exponential of the type y = a0 + a1*exp(a2*x).
- FitExponential() - Constructor for class gov.nih.mipav.model.algorithms.FitExponential
-
FitExponential - test constructor, builds and test function.
- FitExponential(int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.FitExponential
-
FitExponential.
- FitExponential(int, double[], double[], boolean[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitExponential
-
- FitExponential(int, float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.FitExponential
-
Constructs new fit exponential.
- FitFullIntModel(double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
Creates a new FitFullIntModel object.
- FitFullIntModel2i(double, double, double, double, int, int, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
Creates a new FitFullIntModel2i object.
- FitFullIntModel2p(double, double, double, double, double, int, double[], double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
Creates a new FitFullIntModel2p object.
- FitFullIntModel2s(double, double, double, double, double, int, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
Creates a new FitFullIntModel2s object.
- fitFullModel(double[], double[], double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- FitFullModel2(double[], double, double, double, double[], double[], int[], int[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModel2
-
Creates a new FitFullModel2 object.
- FitFullModelqd(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModelqd
-
Creates a new FitFullModelqd object.
- fitFunctions(ViewJFrameGraph.FitMode) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
- fitFunctPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- fitFunctTypePanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- fitFunctVisibleCheckbox - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- fitFunctVisiblePanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- fitGaussian - gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
Mode indicates Gaussian fitting in progress
- FitGaussian - Class in gov.nih.mipav.model.algorithms
-
FitGaussian -fits an array of points to a normal curve, general from f = a*exp(-(x-b)^2/2sigma^2)
Will also perform thresholding techniques to determine useful data points for fitting
- FitGaussian() - Constructor for class gov.nih.mipav.model.algorithms.FitGaussian
-
FitGaussian - test constructor, builds and test function.
- FitGaussian(int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.FitGaussian
-
FitGaussian.
- FitGaussian(int, double[], double[], boolean[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitGaussian
-
- FitGaussian(int, float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.FitGaussian
-
Constructs new fit gaussian.
- fitGV_peak1(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- fitGV_peak2(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- FitIntensityProfile(int, double[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitIntensityProfile
-
Creates a new FitWholeNLConModel object.
- fitLaplace - gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
Mode indicates Laplace fitting in progress
- FitLaplace - Class in gov.nih.mipav.model.algorithms
-
FitLaplace -fits an array of points to a normal curve, general from f = a*exp(Math.abs(x-mu)/beta)
Will also perform thresholding techniques to determine useful data points for fitting
- FitLaplace() - Constructor for class gov.nih.mipav.model.algorithms.FitLaplace
-
FitLaplace - test constructor, builds and test function.
- FitLaplace(int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.FitLaplace
-
FitLaplace.
- FitLaplace(int, double[], double[], boolean[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLaplace
-
- FitLaplace(int, float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.FitLaplace
-
Constructs new fit laplace distribution.
- FitLine - Class in gov.nih.mipav.model.algorithms
-
y = mx + b;.
- FitLine - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- FitLine() - Constructor for class gov.nih.mipav.model.algorithms.FitLine
-
Creates a new FitLine object.
- FitLine(int, double[], double[], boolean[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLine
-
- FitLine(int, float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.FitLine
-
FitLine.
- fitLinear - gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
Mode indicates linear fitting in progress
- fitLorentz - gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
Mode indicates Lorentz fitting in progress
- FitLorentz - Class in gov.nih.mipav.model.algorithms
-
FitLorentz -fits an array of points to a lorentz distribution, thresholding techniques come from ViewJFrameGraph,
no need to implement here
- FitLorentz() - Constructor for class gov.nih.mipav.model.algorithms.FitLorentz
-
FitLorentz - test constructor, builds and test function.
- FitLorentz(int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.FitLorentz
-
FitLorentz.
- FitLorentz(int, double[], double[], boolean[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLorentz
-
- FitLorentz(int, float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.FitLorentz
-
Constructs new fit lorentz distribution.
- fitMode - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
Current mode for fitting functions
- FitMode(String, Class) - Constructor for enum gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
- FitMosaicModel(int, double[][], int[], double[][], double[][]) - Constructor for class gov.nih.mipav.model.algorithms.SIFT.FitMosaicModel
-
- fitMultiExponential - gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
Mode indicates constant plus sum of decaying exponentials
- FitMultiExponential - Class in gov.nih.mipav.model.algorithms
-
FitMultiExponential -fits an array of points to an multiexponential of the type
y = a0 + a1*exp(a2*x) + a3*exp(a4*x) + ...
- FitMultiExponential() - Constructor for class gov.nih.mipav.model.algorithms.FitMultiExponential
-
FitMultiExponential - test constructor, builds and test function.
- FitMultiExponential(int, double[], double[], boolean[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitMultiExponential
-
- FitMultiExponential(int, int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.FitMultiExponential
-
FitMultiExponential assuming all exponentials are negative
- FitMultiExponential(int, int, float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.FitMultiExponential
-
Constructs new fit multiexponential assuming all exponentials are negative.
- fitNone - gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
Mode indicates no curve fitting is taking place
- FitOAR2DELSUNCModel(int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DELSUNCModel
-
Creates a new FitOAR3DConstrainedModel object.
- FitOAR2DLMModel(double[], int, double[], int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DLMModel
-
- FitOAR2DNL2solModel(double[], int[], double[], int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
Creates a new FitSM2nl2solModel object.
- FitOAR3DConstrainedModel(int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D.FitOAR3DConstrainedModel
-
Creates a new FitOAR3DConstrainedModel object.
- FitOAR3DELSUNCModel(int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DELSUNCModel
-
Creates a new FitOAR3DConstrainedModel object.
- FitOAR3DLMModel(double[], int, double[], int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DLMModel
-
- FitOAR3DNL2solModel(double[], int[], double[], int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
Creates a new FitSM2nl2solModel object.
- fitparab(double[][], double[][], double[][], double[][], double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- fitParameters_peak1 - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- fitParameters_peak2 - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- FitPiessens1(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens1
-
Creates a new FitSineModel object.
- FitPiessens10(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens10
-
Creates a new FitSineModel object.
- FitPiessens11(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens11
-
Creates a new FitSineModel object.
- FitPiessens12(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens12
-
Creates a new FitSineModel object.
- FitPiessens13(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens13
-
Creates a new FitSineModel object.
- FitPiessens14(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens14
-
Creates a new FitSineModel object.
- FitPiessens15(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens15
-
Creates a new FitSineModel object.
- FitPiessens16(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens16
-
Creates a new FitPiessens16 object.
- FitPiessens2(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens2
-
Creates a new FitSineModel object.
- FitPiessens3(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens3
-
Creates a new FitSineModel object.
- FitPiessens4(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens4
-
Creates a new FitSineModel object.
- FitPiessens5(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens5
-
Creates a new FitSineModel object.
- FitPiessens6(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens6
-
Creates a new FitSineModel object.
- FitPiessens7(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens7
-
Creates a new FitSineModel object.
- FitPiessens8(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens8
-
Creates a new FitSineModel object.
- FitPiessens9(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens9
-
Creates a new FitSineModel object.
- FitPure1DModel(int, double[], float[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DModel
-
Creates a new FitPure1DModel object.
- FitPure1DNoWholeModel(int, double[], float[], double[], int[], double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DNoWholeModel
-
Creates a new FitSM2nl2solModel object.
- Fitqd1(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd1
-
Creates a new FitExpModelqd object.
- Fitqd10(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd10
-
Creates a new FitExpModelqd object.
- Fitqd11(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd11
-
Creates a new FitExpModelqd object.
- Fitqd12(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd12
-
Creates a new FitExpModelqd object.
- Fitqd13(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd13
-
Creates a new FitExpModelqd object.
- Fitqd14(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd14
-
Creates a new FitExpModelqd object.
- Fitqd15(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd15
-
Creates a new FitExpModelqd object.
- Fitqd16(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd16
-
Creates a new FitExpModelqd object.
- Fitqd2(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd2
-
Creates a new FitExpModelqd object.
- Fitqd3(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd3
-
Creates a new FitExpModelqd object.
- Fitqd4(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd4
-
Creates a new FitExpModelqd object.
- Fitqd5(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd5
-
Creates a new FitExpModelqd object.
- Fitqd6(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd6
-
Creates a new FitExpModelqd object.
- Fitqd7(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd7
-
Creates a new FitExpModelqd object.
- Fitqd8(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd8
-
Creates a new FitExpModelqd object.
- Fitqd9(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd9
-
Creates a new FitExpModelqd object.
- fitRayleigh - gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
Mode indicates Rayleigh fitting in progress
- FitRayleigh - Class in gov.nih.mipav.model.algorithms
-
For -infinity < a < +infinity and b > 0
y = scale factor * (2/b)*(x - a)*exp(-((x-a)**2)/b)*u(x - a)
where u(x-a) = 0 for x < a and = 1 for x >= a.
- FitRayleigh() - Constructor for class gov.nih.mipav.model.algorithms.FitRayleigh
-
Creates a new FitRayleigh object.
- FitRayleigh(int, double[], double[], boolean[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitRayleigh
-
- FitRayleigh(int, float[], float[]) - Constructor for class gov.nih.mipav.model.algorithms.FitRayleigh
-
FitRayleigh.
- FITS - Static variable in class gov.nih.mipav.model.file.FileUtility
-
FITS file type. extension: .fits
- FitSineModel(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSineModel
-
Creates a new FitSineModel object.
- FitSingleExponentialModel(int, double[], float[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialModel
-
Creates a new FitSingleExponentialModel object.
- FitSingleExponentialNoWholeModel(int, double[], float[], double[], int[], double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialNoWholeModel
-
Creates a new FitSingleExponentialNoWholeModel object.
- FitSM2ConstrainedModel(int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModel
-
Creates a new FitDEMRI3ConstrainedModel object.
- FitSM2ConstrainedModelC(int, double[], double[], double[][], double[], double[], double[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
Creates a new FitDEMRI3ConstrainedModel object.
- FitSM2nl2solModel(int, double[], double[], int[], double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2nl2solModel
-
Creates a new FitSM2nl2solModel object.
- fitSplinesToVolumeLookup2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fitSplinesToVolumeLookup3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fitsToScreen() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- fittedFunctions - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- fitTestModel() - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- fitTestModel() - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- fitTestModel() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
Creates a new Fit24DModel object.
- fitTestModel() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
Creates a new Fit24DModel object.
- fittingEngine - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- fittingLevels - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- fittingLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
- fittingTask(int, int, int, double[], double[], boolean[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask
-
- fitToExternalFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- fitToExternalFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- fitToExternalFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- fitToExternalFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- fitToExternalFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- fitToExternalFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- fitToFunction(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialModel
-
Fit to function - a3 + a4*[1 - ao*exp(a1*x) - (1 - a0)*exp(a2*x)].
- fitToFunction(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
fitToFunction communicates
- fitToFunction(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- fitToFunction(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation.FitCorrelationModel
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance.FitCovarianceModel
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D.FitOAR3DConstrainedModel
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion.kFitting
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit24DModel
-
Fit to function - a0 - a1*(a2**x).
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit25HModel
-
Fit to function - Math.pow((a[0] * Math.log(xSeries[i])),a[1]) + a[2]
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.FitDEMRI3ConstrainedModel
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DELSUNCModel
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DELSUNCModel
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.Fit24DModel
-
Fit to function - a0 - a1*(a2**x).
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialModel
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeConstrainedModel
-
Fit to function - a3 + (1-a3)*[1 - ao*exp(a1*x) - (1 -
a0)*exp(a2*x)].
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeModel
-
Fit to function - Fit to function - a3 + (1-a3)*[1 - ao*exp(a1*x) -
(1 - a0)*exp(a2*x)].
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitIntensityProfile
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DModel
-
Fit to function - a1 + a2*[1 - 1/sqrt(1 + 4*PI*a0*x)].
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialModel
-
Fit to function - bottom + span*[1 - exp(-ln(2)*t/thalf)] a1 + a2*(1
- exp(-ln(2)*t/a0)).
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel3
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModelqd
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitAll
-
Fit to function - a0 - a1*(a2**x).
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModel
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitExponential
-
Fit to function - a0 + a1*exp(a2*x).
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitGaussian
-
Fit to function - a0*exp(-(t-a1)^2/(2*(a2)^2))
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLaplace
-
Fit to function - a0*exp(-|t-a1|/a2)
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLine
-
Fit line to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLorentz
-
Fit to function - a0/((t-a1)*(t-a1) + a2*a2)
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitMultiExponential
-
Fit to function - a0 + a1*exp(a2*t) + a3*exp(a4*t) + ...
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitRayleigh
-
Fit to function - a0 * (t-a1)*exp(-(t-a1)*(t-a1)/a2)*u(t - a1) with a2 > 0
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss1Fitting
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss2Fitting
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gaussStandardDeviationFitting
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVFitting
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVRecirculation
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.FitExponential
-
Fit to function - a0 + a1*exp(a2*x).
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.FitLine
-
Fit line to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.FitMultiExponential
-
Fit to function - a0 + a1*exp(a2*x) + a3*exp(a4*x) + ...
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.FitRayleigh
-
Fit Rayleigh to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.crpfun
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.depfun
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.dpfun
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.hppfun
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SIFT.FitMosaicModel
-
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.WeibullCostFunction2param
-
Fit to function.
- fitToFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.WeibullCostFunction3param
-
Fit to function.
- fitToFunction(double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DLMModel
-
- fitToFunction(double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DLMModel
-
- fitToFunction(double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- fitToFunction(DoubleDouble[], DoubleDouble[], DoubleDouble[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitAllEP
-
Fit to function - a0 - a1*(a2**x).
- fitToFunction(DoubleDouble[], DoubleDouble[], DoubleDouble[][]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
fitToFunction communicates with 3 protected variables param, nPts, and ctrlMat ctrlMat is used as a wrapper for
ctrl or lctrl.
- fitToFunction(DoubleDouble[], DoubleDouble[], DoubleDouble[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
- fitToHessian(double[], double[][][]) - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- fitToJacobian(double[][], int[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- fitToJacobian(double[][], int[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
- fitToJacobian(double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
fitToJacobian communicates
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitExpModel
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitExpModelqd
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModelqd
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplace
-
Returns 'a' coefficients in power series where the second index is 0 for the real part and 1 for the imaginary
part.
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
The second index is 0 for the real part and 1 for the imaginary part.
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog1
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog10
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog11
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog12
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog13
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog14
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog15
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog16
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog2
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog3
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog4
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog5
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog6
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog7
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog8
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitdeHoog9
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd1
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd10
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd11
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd12
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd13
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd14
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd15
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd16
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd2
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd3
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd4
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd5
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd6
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd7
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd8
-
DOCUMENT ME!
- fitToLaplace(double, double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.Fitqd9
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModel2
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSineModel
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens1
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens10
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens11
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens12
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens13
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens14
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens15
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens16
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens2
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens3
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens4
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens5
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens6
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens7
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens8
-
DOCUMENT ME!
- fitToLaplace(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest.FitPiessens9
-
DOCUMENT ME!
- fitToNumericalHessian(double[], double[][][]) - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- fitToNumericalJacobian(double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- fitToTestFunction(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
lm_enorm.
- fitToTestFunction(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- fitToTestFunction(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- fitToTestFunction(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- fitToTestFunction(DoubleDouble[], DoubleDouble[], DoubleDouble[][]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- fitToTestHessian(double[], double[][][]) - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- fitToTestJacobian(double[][], int[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- fitToTestJacobian(double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- fitType - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
Combo box for selecting the fitting function type
- FitWholeNL2solInt2(int, double[], float[], double[], int[], double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
Creates a new FitWholeNL2solInt2 object.
- FitWholeNL2solModel(int, double[], float[], double[], int[], double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solModel
-
Creates a new FitWholeNL2solModel object.
- FitWholeNLConInt2(int, double[], float[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
Creates a new FitWholeNLConInt2 object.
- FitWholeNLConModel(int, double[], float[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel
-
Creates a new FitWholeNLConModel object.
- FitWholeNLConModel2(int, double[], float[], double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
Creates a new FitWholeNLConModel2 object.
- FitWholeNLConModel3(int, double[], float[], double[], double, int, double, double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel3
-
Creates a new FitWholeNLConModel3 object.
- FitWholeNLConModelqd(int, double[], float[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModelqd
-
Creates a new FitWholeNLConModelqd object.
- FIVE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- fiveButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- fiveButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
- fiveButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- FIX(double) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX(double) - Method in class gov.nih.mipav.model.file.libjpeg
-
- FIX_0_298631336 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX_0_390180644 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX_0_541196100 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX_0_765366865 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX_0_899976223 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX_1_175875602 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX_1_501321110 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX_1_847759065 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX_1_961570560 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX_2_053119869 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX_2_562915447 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- FIX_3_072711026 - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- fix_output_length(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- fixConsistency() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- fixed - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- fixed - Variable in class gov.nih.mipav.model.structures.VOI
-
If true the VOI cannot be moved, if false this VOI can be moved.
- fixed - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Flag that indicates if the VOI is movable.
- fixed_bin - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- fixed_cost - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- fixed_cost - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- fixedCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- fixedColor - Static variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
set of colors for tree nodes, based on the mipav striped lut
- fixedColor - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The colors for the surfaces.
- fixedColor - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The colors for the surfaces.
- fixedWidth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- fixedWidth - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- fixErrorVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Replace the irregular shape or wrong shape VOI with adjacent neighbor
VOI.
- fixErrorVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Replace the irregular shape or wrong shape VOI with adjacent neighbor
VOI.
- fixErrorVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Fix the error VOIs from the Marked VOI vector.
- fixFileTypeInfo(ModelImage) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Fixes file information to resultant image structure.
- fixHuffmanTable(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Sets up Huffman table based on values read in header.
- fixMoveDestString(String) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
This is used to fix the padding (even length) of move destinations for some GE DICOM implementations.
- fixpointField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- Fixture() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.Fixture
-
- fjac - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
fjac is an OUTPUT m by n array.
- FL - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- flag - Variable in class gov.nih.mipav.model.algorithms.ConjugateGradient
-
- flag - Variable in class gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
- flag - Variable in class gov.nih.mipav.model.file.FileDicom
-
Header loop keeps executing when true
- flag - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
flag needed when performing restore defaults *
- flag - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Flag indicating if the red bounding box is on or off.
- flag - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Flag indicating if box is on or off.
- flag - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
flag needed when performing restore defaults *
- flag - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Flag indicating if the red bounding box is on or off.
- flag_predict_probability - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Predict
-
- flag_to_set_on_destruction_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticTestFunction
-
- flag_zm - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< the set of patches.
- flags - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- flags - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
- flags - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
- flags - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- flags - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- flags - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_VertAux
-
- flags() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- Flags() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- flags_stride - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
- flagsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDescriptor
-
- flagssize - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
- flash - Variable in class gov.nih.mipav.model.file.FileSVS
-
- flash - Variable in class gov.nih.mipav.model.file.FileTiff
-
- flashPixVersion - Variable in class gov.nih.mipav.model.file.FileSVS
-
- flashPixVersion - Variable in class gov.nih.mipav.model.file.FileTiff
-
- flax - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
574 Phase contrast flow axis.
- fLength - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Total length of the image file.
- FLETCHER_REEVES - gov.nih.mipav.model.algorithms.CeresSolver.NonlinearConjugateGradientType
-
- flg - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- flip - Variable in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- flip - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FilePolyline_WM
-
- flip - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
flag indicates to flip y, z coordinate or not.
- flip(int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard.Animate
-
flip
- flipAlgo - Variable in class gov.nih.mipav.model.file.FileFits
-
- flipAlgo - Variable in class gov.nih.mipav.model.file.FileSVS
-
- flipAlgo - Variable in class gov.nih.mipav.model.file.FileTiff
-
- flipAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Algorithm used by the dialog.
- flipAngle - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- flipAngle - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- flipAngle - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- flipAngle - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- flipAngle - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- flipAngle - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- flipAngle - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- FlipAngle - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- flipAngleAr - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- FlipAngleChangeListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreT1.FlipAngleChangeListener
-
- flipAngleFields0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- flipAngleFields180 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- flipAngleIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- flipAnglePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- flipAxis - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Axis to flip along.
- flipAxis - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Axis to flip around.
- flipAxisXRadioButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Image is flipped vertically when selected
- flipAxisYRadioButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Image is flipped horizontally when selected
- flipAxisZRadioButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Image is flipped by depth when selected
- flipHorizontal - Variable in class gov.nih.mipav.model.file.FileSVS
-
- flipHorizontal - Variable in class gov.nih.mipav.model.file.FileTiff
-
- flipLattice() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- flipLattice() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- flipLattice(VOI, VOI) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- FlipLR() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
FlipLR modifies the matrix with row preserved and columns flipped in the
left/right direction.
- flipMinimize(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- flipNIFTIReadCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- flipObject - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Type of object to flip.
- flipObject - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
The object to be flipped
- flipSubMenu - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- flipTopBottom(float[], FileInfoAnalyze) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Flips image.
- flipTopBottom(float[], FileInfoImageXML) - Static method in class gov.nih.mipav.model.file.FileImageXML
-
Flips image.
- flipTopBottom(float[], FileInfoNIFTI) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Flips image.
- flipTopBottom(float[], FileInfoSPM) - Method in class gov.nih.mipav.model.file.FileSPM
-
Flips image.
- flipTopBottom(ModelImage) - Static method in class gov.nih.mipav.model.file.FileAnalyze
-
Flips image.
- flipTopBottom(ModelImage) - Static method in class gov.nih.mipav.model.file.FileImageXML
-
Flips image.
- flipTopBottom(ModelImage) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Flips image.
- flipTopBottom(ModelImage) - Method in class gov.nih.mipav.model.file.FileSPM
-
Flips image.
- FlipUD() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Flip matrix in up/down direction.
- flipVertical - Variable in class gov.nih.mipav.model.file.FileSVS
-
- flipVertical - Variable in class gov.nih.mipav.model.file.FileTiff
-
- flipVoiCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
When checked, VOIs are flipped when image is flipped.
- FLOAT - gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
An IEEE754:1985 32-bit float is stored in the tag's value.
- FLOAT - gov.nih.mipav.model.file.FileSVS.Type
-
single precision 4 byte IEEE format
- FLOAT - gov.nih.mipav.model.file.FileTiff.Type
-
single precision 4 byte IEEE format
- FLOAT - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type float (32 bits per voxel).
- FLOAT - Static variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- FLOAT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- FLOAT - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- FLOAT - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type float (32 bits per voxel).
- FLOAT - Static variable in class gov.nih.mipav.view.dialogs.JDialogPointArea.JTextFieldFilter
-
DOCUMENT ME!
- FLOAT_ATTRIBUTE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FLOAT_IMAGE_TAG - Static variable in class gov.nih.mipav.model.file.FileDicom
-
The tag marking the start of the float image data.
- FLOAT_STRING - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
A string with VR "OF" is stored in the tag's value.
- FLOAT_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type signed float.
- FLOAT_STRING - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- floateq(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- floateq(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- floating - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages.ImageCellRenderer
-
DOCUMENT ME!
- floatsPerTag - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- floatToBytes(float, boolean, byte[]) - Static method in class gov.nih.mipav.model.file.FileBase
-
converts from float to bytes
- floatToShort - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
- floatToShort - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- floatToShortCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- floatValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Returns the value of the specified number as a float.
- floodCorrected - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- floodFill(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Identify voxels enclosed by the brain surface by using a flood fill.
- floodFill(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Identify voxels enclosed by the brain surface by using a flood fill.
- floodFill(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Identify voxels enclosed by the brain surface by using a flood fill.
- floodFill(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Identify voxels enclosed by the brain surface by using a flood
fill.
- floodFill(short[], int, short, short) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
2D flood fill that forms a short mask.
- floodFill(short[], int, short, short) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
2D flood fill that forms a short mask.
- floodFill(short[], int, short, short) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
3D flood fill that forms a short mask.
- floodFill(BitSet, Vector3f) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- FloodFill - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- FloodFill(BitSet, int[]) - Constructor for class gov.nih.mipav.model.algorithms.FloodFill
-
Creates a new FloodFill object.
- floodFill2D(Point) - Method in class gov.nih.mipav.model.algorithms.FloodFill
-
DOCUMENT ME!
- floodFill2DBitSet() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
2D flood fill that forms a binary(BitSet) mask.
- floodFill2DShort() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
2D flood fill that forms a short mask.
- floodFill3D(Point3D) - Method in class gov.nih.mipav.model.algorithms.FloodFill
-
DOCUMENT ME!
- floodFill3DBitSet() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
3D flood fill that forms a binary(BitSet) mask.
- floodFill3DShort() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
3D flood fill that forms a short mask.
- floodValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Flood value.
- floor() - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns the largest (closest to positive infinity)
value that is not greater than the argument
and is equal to a mathematical integer.
- Floor() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Takes floor() of each element.
- Flow - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- FLT_EPSILON - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- fltFmt - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- fltFmt - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- FLUID - Static variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- fluor - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- fluor - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- flush() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Sends all byte buffers of the outgoing buffer vector out the port. see DICOM PDUService.sendBinary and
DICOMSocket
- flush() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- flush() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- flush() - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Writes all buffered data to the file or resource.
- flush(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Sends specified number of bytes out the port. see DICOM PDUService.sendBinary and DICOMSocket
- flush(DICOM_Comms, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CommsLink
-
Send the data out the connection (pdu).
- flushRecentSamples() - Method in class gov.nih.mipav.view.LineMeter
-
removes the samples from the buffer and transfers them to the history buffer, and resets the recent history to
capture new samples.
- flushTriangles() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
When all edges have infinite weight, no further edge collapses are allowed.
- flushVertices() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
When all edges have infinite weight, no further edge collapses are allowed.
- Flv - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- FLY_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Fly mode of the camera manually snapshooting.
- FLY_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Fly through viewing mode.
- flyBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Fly behavior reference.
- FlyBehavior - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
This behavior is supposed to emulate a pilot directing an aircraft.
- FlyBehavior(JPanelView) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.FlyBehavior
-
Constructs new behavior and initializes wake up events.
- FlyBehaviorRenderer - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
This behavior is supposed to emulate a pilot directing an aircraft.
- FlyBehaviorRenderer(JPanelView) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.FlyBehaviorRenderer
-
Constructs new behavior and initializes wake up events.
- flyButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Raido Button group.
- flyButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Fly behaviro radio button.
- FlyPathAnnotateList - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Container which stores annotations which include the following: - point position and normal - branch and location
along branch when point annotated - geometry and appearance - description.
- FlyPathAnnotateList() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList
-
Constructor.
- FlyPathAnnotateList_WM - Class in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
Container which stores annotations which include the following: - point position and normal - camera location, view up and view direction, branch and location
along branch when point annotated - geometry and appearance - description.
- FlyPathAnnotateList_WM() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM
-
Constructor.
- FlyPathAnnotateList_WM.Item - Class in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
Single annotation item.
- FlyPathAnnotateList.Item - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Single annotation item.
- FlyPathBehavior - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Behavior which allows for flying down a specified path and looking around.
- FlyPathBehavior(FlyPathGraphCurve, FlyPathAnnotateList, TransformGroup, TransformGroup, TransformGroup, FlythruRender) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Setup to fly along the specified path and look around.
- FlyPathBehavior_WM - Class in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
Behavior which allows for flying down a specified path and looking around.
- FlyPathBehavior_WM(FlyPathGraphCurve, FlyPathAnnotateList_WM, FlyThroughRender) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Setup to fly along the specified path and look around.
- FlyPathBehavior_WM.BranchState - Class in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
Branch information.
- FlyPathBehavior_WM.Callback - Interface in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
Instances which want to be notified of updates to this behavior should implement this interface by providing the
viewChanged method implementation.
- FlyPathBehavior.BranchState - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
DOCUMENT ME!
- FlyPathBehavior.Callback - Interface in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Instances which want to be notified of updates to this behavior should implement this interface by providing the
viewChanged method implementation.
- FlyPathBehavior.StandardKey - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Class used to send Standard key events to the canvas.
- FlyPathGraph - Class in gov.nih.mipav.view.renderer.flythroughview
-
Basic graph structure which identifies relationship between nodes by their indexes.
- FlyPathGraph() - Constructor for class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Constructor.
- FlyPathGraph(FlyPathGraph) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Copy constructor.
- FlyPathGraphCurve - Class in gov.nih.mipav.view.renderer.flythroughview
-
This class is an implementation of a bidirectional graph of nodes where each node is a curve segment used to define
branched paths.
- FlyPathGraphCurve() - Constructor for class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraphCurve
-
Construct and empty list of curves.
- FlyPathGraphCurve(FlyPathGraphSamples, float, int) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraphCurve
-
Create a new graph with the same structure as this graph but with each node having a BSpline approximation for
each of the points (and boundary distances) for each node.
- FlyPathGraphCurve(Vector3f[], int, int) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraphCurve
-
Create a new graph with the same structure as this graph but with each node having a BSpline approximation for
each of the points (and boundary distances) for each node.
- FlyPathGraphSamples - Class in gov.nih.mipav.view.renderer.flythroughview
-
Extension of the FlyPathGraph class which allows for the storage of the samples used to generate the individual
curves where curves are the nodes of the graph.
- FlyPathGraphSamples() - Constructor for class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraphSamples
-
Constructor.
- flyText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
User message explain how the mouse moves in fly mode.
- FlyThroughRender - Class in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
- FlyThroughRender(GLCanvas, VolumeTriPlanarInterface, Animator, VolumeImage, VolumeImage, Vector3f) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Construct the FlyThroughRenderer.
- FlyThroughRender.MouseWheel - Class in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
Mouse middle button wheel roller event handler.
- FlyThroughRender.RightMouse - Class in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
RightMouse press event handler.
- FlyThroughRender.RightMouseDragged - Class in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
Right mouse button press down and drag event handler.
- FlyThroughRender.SetupOptions - Class in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
- FlyThroughRenderInterface - Interface in gov.nih.mipav.view.renderer.flythroughview
-
Interface between the graphics-independent Fly-through user-interface and the
graphics-dependent Fly-through renderers.
- flythruButtonLoadImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- flythruButtonLoadImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Load image button.
- flythruControl - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Fly through setup control panel.
- flythruControl - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Flythough setup panel:
- flythruGeodesic - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- flythruLabelFileName - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- flythruLabelFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Image file name label.
- flythruMoveControl - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Fly through movement control panel.
- flythruMoveControl - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Flythough Move panel:
- flythruMovePanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
View panel contains the fly thru control panel.
- flythruOptions - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Fly through options.
- flythruPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Fly through panel.
- flythruRender - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
FlythruRender reference.
- flythruRender - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Reference to fly through renderer.
- FlythruRender - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Virtual colonoscopy viewer.
- FlythruRender(ModelImage, GraphicsConfiguration, ViewJFrameVolumeView) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
View which renders virtual endoscopy fly through of a binarized volume.
- FlythruRender.MouseRotateExt - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Extend the MouseRotate class so that we can override the processMouseEvent method to ignore any events which
occur while the shift key is down.
- FlythruRender.MouseWheel - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Mouse middle button wheel roller event handler.
- FlythruRender.RightMouse - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
RightMouse press event handler.
- FlythruRender.RightMouseDragged - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Right mouse button press down and drag event handler.
- FlythruRender.SetupOptions - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
DOCUMENT ME!
- flythruSurfaceButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Surface load button.
- flythruTabVector - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- flyThruToolbar - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Flythru toolbar.
- fMax - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Maximum voxel resolution of X, Y, Z.
- FMAX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- FMAX(int, double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- fMaxX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Voxel resolution in the X direction.
- fMaxY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Voxel resolution in the Y direction.
- fMaxZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Voxel resolution in the Z direction.
- fMean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- fmodf(double, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- fMRIBlindDeconvolution - Class in gov.nih.mipav.model.algorithms
-
- fMRIBlindDeconvolution() - Constructor for class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- fMRIBlindDeconvolution.ConvAndLinear - Class in gov.nih.mipav.model.algorithms
-
- fMRIBlindDeconvolution.DiscretInteg - Class in gov.nih.mipav.model.algorithms
-
- fMRIBlindDeconvolution.Tracker - Class in gov.nih.mipav.model.algorithms
-
- fmriStatusIndication - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- fmriStatusIndication - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- fmriStatusIndicationIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- fmriStatusIndicationPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- fn - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- fn - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- FN4 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- FN8 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- fName - Variable in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- fName - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- fName - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
- fnorm - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
norm of the residue vector fvec
- fnul - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- fnul - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- fNumber - Variable in class gov.nih.mipav.model.file.FileSVS
-
- fNumber - Variable in class gov.nih.mipav.model.file.FileTiff
-
- FNumber - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
- FNumberBlurry - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- FNumberTrue - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- FNVAL(double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- fnvf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
false negative volume fraction.
- fnvf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
false negative volume fraction.
- focal_length_in_35mm_shake - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- focal_length_in_35mm_true - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- focalLength - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
- focalLength - Variable in class gov.nih.mipav.model.file.FileSVS
-
- focalLength - Variable in class gov.nih.mipav.model.file.FileTiff
-
- FocalLength() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.FocalLength
-
- focalLength35 - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
- focalLength35Blurry - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- focalLength35True - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- focalLengthBlurry - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- focalLengthTrue - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- focalPlaneResolutionUnit - Variable in class gov.nih.mipav.model.file.FileSVS
-
- focalPlaneResolutionUnit - Variable in class gov.nih.mipav.model.file.FileTiff
-
- focalPlaneXResolution - Variable in class gov.nih.mipav.model.file.FileSVS
-
- focalPlaneXResolution - Variable in class gov.nih.mipav.model.file.FileTiff
-
- focalPlaneYResolution - Variable in class gov.nih.mipav.model.file.FileSVS
-
- focalPlaneYResolution - Variable in class gov.nih.mipav.model.file.FileTiff
-
- focalRatio - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- focusCalibrated - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- focusDepth - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- focusGained(FocusEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
Do nothing.
- focusGained(FocusEvent) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Unchanged.
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Do nothing.
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
focus gained
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Unchanged.
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.ImageRegistryMonitor
-
focus gained.
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Focus Events:
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Unchanged.
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
focus gained
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Unchanged.
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Unchanged.
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
focus gained.
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Currently unused.
- focusGained(FocusEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Currently unused.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
Do nothing.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Unchanged.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
When the user clicks the mouse out of a text field, resets the neccessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
focus lost
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Unchanged.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
focusLost - when the user clicks the mouse out of a text field, resets the neccessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
When the user clicks the mouse out of a text field, resets the necessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
focusLost - when the user clicks the mouse out of a text field, resets the neccessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
When the user clicks the mouse out of a text field, resets the neccessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
When the user clicks the mouse out of a text field, resets the neccessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
When the user clicks the mouse out of a text field, resets the necessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSnake
-
When the user clicks the mouse out of a text field, resets the necessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
focusLost - when the user clicks the mouse out of a text field, resets the neccessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
When the user clicks the mouse out of a text field, resets the necessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Test the seed value and if appropriate, sets it.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
When the user clicks the mouse out of a text field, resets the neccessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.ImageRegistryMonitor
-
when focus is lost the source is assumed to be a JTextField, and it sets the sample period.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
If focus is lost from either threshold field (lower/upper), update the new value on the LUT.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Unchanged.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
focus lost
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
When the user clicks the mouse out of a text field, resets the neccessary variables.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Unchanged.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
when focus is lost the source is assumed to be a JTextField, and it sets the sample period.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Currently unused.
- focusLost(FocusEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Currently unused.
- focusPosition - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- focusPosition - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- focusPosition - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- fOffset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- foldover - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
par/rec PreparationDirection
- foldover - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- foldOverBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- foldOverLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- followBatchBox - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- followBatchWithIncremental - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- followBatchWithIncremental - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- followingScroll - Variable in class gov.nih.mipav.view.dialogs.JDialogText
-
DOCUMENT ME!
- followVOISelectionBox - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- font - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- font10 - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 10 point, plain, serif font.
- font10 - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 10 point, plain, serif font.
- font10 - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- font12 - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 12 point, plain, serif font.
- font12 - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- font12 - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 12 point, plain, serif font.
- font12 - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- font12 - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- font12 - Variable in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
DOCUMENT ME!
- font12 - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- font12 - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- font12B - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 12 point, bold, serif font.
- font12B - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- font12B - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- font12B - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- font12B - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 12 point, bold, serif font.
- font12B - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- font12B - Variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
DOCUMENT ME!
- font12B - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- font12B - Variable in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
DOCUMENT ME!
- font12I - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 12 point, italic, serif font.
- font12I - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 12 point, italic, serif font.
- font13 - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 13 point, plain, serif font.
- font13B - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 13 point, bold, serif font.
- font13B - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 13 point, bold, serif font.
- font13I - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 13 point, italic, serif font.
- font14 - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 14 point, plain, serif font.
- font14 - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 14 point, plain, serif font.
- font14B - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 14 point, bold, serif font.
- font14B - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 14 point, bold, serif font.
- font14I - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 14 point, italic, serif font.
- font16B - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 16 point, bold, serif font.
- font16B - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 16 point, bold, serif font.
- font18B - Static variable in class gov.nih.mipav.view.components.WidgetFactory
-
A 18 point, bold, serif font.
- font18B - Static variable in class gov.nih.mipav.view.MipavUtil
-
A 18 point, bold, serif font.
- FontBoxRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMipavOptions.FontBoxRenderer
-
Creates a new FontBoxRenderer object.
- fontButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- fontChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- fontDescriptors - Variable in class gov.nih.mipav.model.structures.VOIText
-
The descriptors for the font which start at PLAIN and are additive (PLAIN + BOLD = bold) (BOLD+ITALIC = bold and
italic) etc.
- fontDescriptors - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
descriptors for font (BOLD, PLAIN, ITALIC).
- FONTMETRIC_IMG - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- FONTMETRIC_IMG - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.SignedDistanceCharacters
-
- fontName - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- fontName - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
name of the font
- fontName - Variable in class gov.nih.mipav.model.structures.VOIText
-
The name (or type) of the font.
- fontName - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
name/style of the font.
- fontNames - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- FontProvider() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
- fontsize - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- fontSize - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- fontSize - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
size of the font
- fontSize - Variable in class gov.nih.mipav.model.structures.VOIText
-
The size of the font (half-sizes not allowed...int).
- fontSize - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
size of font (int).
- fontSizeField - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
textfield for font size (int only).
- fontSizeField - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- fontStyle - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
style of the font (bold/italic etc)
- fontTypeBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
combobox to hold the names of all available fonts.
- footprint - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.Background
-
- FOR_READING - gov.nih.mipav.view.GetPath.Purpose
-
File will be used only for reading.
- FOR_WRITING - gov.nih.mipav.view.GetPath.Purpose
-
File will be used for writing, and could be used for reading.
- force_orientations - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- force_orientations - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- force_rgb - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
- forceAlgorithmInPlace - Variable in class gov.nih.mipav.view.ViewUserInterface
-
boolean to force the algorithm to replace the image rather than opening a new frame
- forceDecimal - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
DOCUMENT ME!
- ForceExt(String, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Forces an extension onto a file name.
- forcePadding - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Flag to force the padding of blank images to the end of images.
- forceQuiet - Static variable in class gov.nih.mipav.view.MipavUtil
-
- forceResample - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Boolean flag to do resample images.
- forceResample - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Boolean flag to do resample images.
- forceRGB - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- forEach(boolean, int, int, int, int, ContourPlot.PixelManipulator<? super P, T>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Applies the specified manipulator to every pixel in the specified area of this image.
- forEach(boolean, int, int, int, int, Consumer<? super P>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Applies the specified action to every pixel in the specified area of this image.
- forEach(boolean, ContourPlot.PixelManipulator<? super P, T>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Applies the specified manipulator to every pixel of this image.
- forEach(boolean, Consumer<? super P>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Performs the specified action on each of the pixels of this image.
- forEach(int, int, int, int, ContourPlot.PixelManipulator<? super P, T>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Applies the specified manipulator to every pixel in the specified area of this image.
- forEach(int, int, int, int, Consumer<? super P>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Applies the specified action to every pixel in the specified area of this image.
- forEach(ContourPlot.PixelConvertingSpliterator.PixelConverter<? super P, T>, boolean, int, int, int, int, Consumer<? super T>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Applies the specified action to every pixel in the specified area of this image.
- forEach(ContourPlot.PixelConvertingSpliterator.PixelConverter<? super P, T>, boolean, Consumer<? super T>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Applies the specified action to every pixel of this image.
- forEach(ContourPlot.PixelManipulator<? super P, T>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Applies the specified manipulator to every pixel of this image.
- forEach(Consumer<? super P>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Performs the specified action on each of the pixels of this image.
- forEach_defaultimpl(Consumer<? super P>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
- forEachRemaining(Consumer<? super P>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- forEachRemaining(Consumer<? super P>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator
-
- forEachRemaining(Consumer<? super P>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- forEachRemaining(Consumer<? super P>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgIterator
-
- forEachRemaining(Consumer<? super P>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator
-
- forEachRemaining(Consumer<? super P>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- forEachRemaining(Consumer<? super T>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
- FOREGROUND - Static variable in class gov.nih.mipav.view.ColorIcon
-
- Forest() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- ForestClassification() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- ForestProbability() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- ForestRegression() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- ForestSurvival() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- forever - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.PlayMouse
-
DOCUMENT ME!
- forever - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.PlayMouse
-
DOCUMENT ME!
- forever - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.PlayMouse
-
DOCUMENT ME!
- forImgRev - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
190 foreign image revision.
- format - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- format - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- format - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
DOCUMENT ME!
- format_message(libjpeg.jpeg_decompress_struct, String[]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- formatCFAPattern(int[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- formatDoubleAsString(double, int, boolean) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- formatFixed1616(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- formatFixed1616(long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- formatFixed1616(Integer) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- formatFixed1616(Long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- formatHex(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- formatHex(long, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- formatHex(Integer, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- formatHex(Long, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- formatTable(int) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Ensures the table is drawn in the way specified by the dimensions parameters and the selected sequence.
- formattedLoad(StringBuilder, int, int, CLFFTPlan.CLFFTDataFormat) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- formattedStore(StringBuilder, int, int, CLFFTPlan.CLFFTDataFormat) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- formatTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- formFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ShapeFactor
-
- formFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ShapeFactor
-
- formFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ShapeFactor
-
- formFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ShapeFactor
-
- formFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ShapeFactor
-
- formFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ShapeFactor
-
- formFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ShapeFactor
-
- formFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ShapeFactor
-
- formk(int, int, int[], int, int, int[], int, boolean, double[][], double[][], int, double[][], double[][], double[][], double, int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- formt(int, double[][], double[][], double[][], int, double, int[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- FormTrait(LSCM.Mesh) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- FORTFL - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- forward - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- Forward - gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDirection
-
- Forward() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimate.Forward
-
Creates a new Forward object.
- Forward() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimateClip.Forward
-
Creates a new Forward object.
- FORWARD - gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffMethodType
-
- FORWARD - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
forward FFT
- FORWARD - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Forward FFT
- FORWARD - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Forward FFT
- FORWARD - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- FORWARD - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- FORWARD - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- FORWARD - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
Forward FFT
- FORWARD - Static variable in class gov.nih.mipav.model.structures.VOI
-
Static Variables for VOI and VOI Contour selection.
- FORWARD - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
FFT will run in forward direction, producing frequency domain image
- FORWARD_POINTS - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- FORWARD1 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- forward1D(double[]) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- forward1D(int, double[][]) - Method in class gov.nih.mipav.model.algorithms.SlantTransform
-
- FORWARD2 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- forward2D(int, int, double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- forwardButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- forwardButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- ForwardDifference - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- forwardFFT - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
User selects to indicate forward FFT processing should occur, resulting in frequency image
- forwardpoly(SchwarzChristoffelMapping.scmap) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- found - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- foundEOF - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- foundEOF - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- foundEOF - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- foundEOF - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- foundEOF - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- foundEOHeader - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- foundSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- foundTag43314 - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- foundTag43314 - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- four - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- FOUR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- fourButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- fourButton - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- fourButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- fourButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- fourButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- fourButton - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- fourButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- fourButton - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- fourButton - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- fourD - Variable in class gov.nih.mipav.view.dialogs.JDialogMask3D4D
-
Radio button indicating that the image should be masked in 4D
- FourD - gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.SwapMode
-
- fourDimEnabled - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- FOURTH - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- fouru - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- fouru - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- fov - Variable in class gov.nih.mipav.model.file.FileInfoCOR
-
DOCUMENT ME!
- fov - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- fov - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- FOVColumn - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- FOVRow - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- FOVX - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
34.
- FOVY - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
38.
- fp - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- FP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- FP2Image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETBleedThrough
-
DOCUMENT ME!
- FP2Image - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- fparam - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- fpback(double[][], double[], int, int, double[], int) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- fpbspl(double[], int, int, double, int, double[]) - Method in class gov.nih.mipav.model.algorithms.curev
-
- fpbspl(double[], int, int, double, int, double[]) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- fpbspl(double[], int, int, double, int, double[]) - Method in class gov.nih.mipav.model.algorithms.splev
-
- fpchec(double[], int, double[], int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- fpconv(double[], int, double[], double[], int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- fpcurf(int, double[], double[], double[], int, double, double, int, double, int, double, int, int, int, int[], double[], double[], double[], double[], double[], double[][], double[][], double[][], double[][], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- fpcuro(double, double, double, double, double[], int[]) - Method in class gov.nih.mipav.model.algorithms.sproot
-
- fpdisc(double[], int, int, double[][], int) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- fpgivs(double, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- fpknot(double[], int, double[], int[], double[], int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- fprati(double[], double[], double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- fprota(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- fpsconv(double[], int, double[], double[], int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- fpser(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- fpsSlider - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- fpsSlider - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- FPtP(double[][][][], double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- fpvf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
false positive volume fraction.
- fpvf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
false positive volume fraction.
- fQ(double, CVODES.NVector, CVODES.NVector, CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- fQB(double, CVODES.NVector, CVODES.NVector, CVODES.NVector, CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- fQBTestMode(double, CVODES.NVector, CVODES.NVector, CVODES.NVector, CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- fQTestMode(double, CVODES.NVector, CVODES.NVector, CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- frac - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fracEcho - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
642 Fractional echo-effective TE flag.
- fractalDimensionBoxCount - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- fractalDimensionBoxCountDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- fractalDimensionEuclideanDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- fractalDimensionEuclideanDistanceDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- fractionalEffectiveEcho - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- fractionalEffectiveEcho - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- frame - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- frame - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeature
-
- frame - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
Reference to the Query/Retrieve GUI object.
- frame - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
GUI frame where all DICOM messages are displayed.
- frame - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- frame - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- frame - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- frame - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- frame - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- frame - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- frame - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
Pointer back to frame that called this.
- frame - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Frame for the GUI in which the form is presented
- frame - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Frame where the plotted surface is displayed.
- frame - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Frame where the component image is displayed.
- frame - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Frame where the component image is displayed.
- frame - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- frame - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- frame - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
frame - frame where the component image is displayed.
- frame - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
frame - frame where the component image is displayed.
- frame - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
frame - frame where the component image is displayed.
- frame - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Frame where the component image is displayed.
- frame - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages.ImageCellRenderer
-
DOCUMENT ME!
- frame(libdt.Mat, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- frame_center - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< flag if vbuf_zm is used.
- frame_patches - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< center frame of the video buffer (reference to vbuf).
- frame_size - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- frameAnimate - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- frameB - Variable in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
DOCUMENT ME!
- frameB - Variable in class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
DOCUMENT ME!
- frameBorder - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- frameBorder - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- frameBorder - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- frameBorderCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- frameButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- frameColocalize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- frameControls - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Controls having color and opacity.
- frameFollowsSelection - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- frameGraphVOI - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- frameGroupImages - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- frameGroupImagesIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- frameGroupNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- frameHeight - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- frameHeight - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- frameHistogram - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- frameInsets - Variable in class gov.nih.mipav.view.ViewJFrameMessage
-
DOCUMENT ME!
- frameInsets - Variable in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
DOCUMENT ME!
- frameList - Variable in class gov.nih.mipav.model.structures.ModelImage
-
List of frames where this image is displayed.
- frameLocation - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Location of new image frames.
- frameNumber - Variable in class gov.nih.mipav.view.VOIFrameNode
-
The slice number of the VOI component
- frameRateField - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- frameRefNum - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- frames - Variable in class gov.nih.mipav.model.file.FileTiff
-
- framesarg - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- framesarg - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- framesPerSecond - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- framesPerSecond - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- frameStartLocation - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- framesToCapture - Variable in class gov.nih.mipav.model.file.FileAvi
-
- framesToSkip - Variable in class gov.nih.mipav.model.file.FileAvi
-
- frameWidth - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
frame information.
- frameWidth - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Frame information.
- framingMethod - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- framingMethodIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- frapAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- FREE - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- FREE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- free_discrete_wavelet(PyWavelets.DiscreteWavelet) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- free_nodes - Static variable in class gov.nih.mipav.model.algorithms.KDTree
-
- free_pool(libjpeg.jpeg_decompress_struct, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- free_resnode(KDTree.res_node) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- free_sbtree(GenericPolygonClipper.sb_tree[]) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- freeBlockLoc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RegionList
-
- FreeBuffer() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- FreeBuffer() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- freeMemory - Variable in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
DOCUMENT ME!
- freeRAList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- freeRangeButton - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- freeRangeColocIntensity1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- freeRangeColocIntensity1 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- freeRangeColocIntensity2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- freeRangeColocIntensity2 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- freeRangeColocSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- freeRangeColocSize - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- freeRangeMode - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- freeRangeMode - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- freeRangeRThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
The linear correlation coefficients for all pixels with values either below color1 for buffer or below color2 for
secondBuffer.
- freeRangeRThreshold - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- freeRegion - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RegionList
-
- FREESURFER - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
FreeSurfer ascii files (*.asc).
- freev(int, int[], int[], int[], int[], int[], int[], boolean[], boolean, boolean, int, int) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- FREQ_DEFAULT - Static variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
default frequency value for blurring frequency, at 0.2.
- freq_dim - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Bits 0 and 1 of the dim_info character contain the freq_dim information. 0 for
"No frequency encoding direction is present", 1 for "Frequency encoding in the x direction", 2 for
"Frequency encoding in the y direction", and 3 for "Frequency encoding in the z direction".
- freq_dim - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Bits 0 and 1 of the dim_info character contain the freq_dim information.
0 for "No frequency encoding direction is present", 1 for "Frequency encoding in the x direction",
2 for "Frequency encoding in the y direction", and 3 for "Frequency encoding in the z direction".
- FREQ_MIN - Static variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
minimum frequency value for blurring frequency, at 0.0.
- freq1 - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- freq1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- freq1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- freq1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- freq2 - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- freq2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- freq2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- freqDir - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
742 Frequency Direction.
- freqU - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Variables used in Gabor filter.
- freqU - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Variables used in Gabor filter.
- freqU - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- freqU - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
5 variables used in Gabor transform. - should be removed - redesigned
- freqU - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- freqU - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- frequency - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
FrequencyFilter's low-pass cut-off frequency.
- FREQUENCY - gov.nih.mipav.model.file.FileInfoBase.UnitType
-
- frequencyDoubled - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser
-
- frequencyFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- FrequencyFilterAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- FrequencyFilterAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- FrequencyFilterAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- FrequencyFilterAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- FrequencyFilterAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- FrequencyFilterColorAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- FrequencyFilterColorAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
- FrequencyMHz - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- freqV - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- freqV - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- freqV - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- freqV - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- freqV - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- freqV - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- freqz2(double[][], double[][], double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- fresnl(double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- FRESNL - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- fretAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- FRETImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETBleedThrough
-
private ModelImage FP1Image; // FP1 taken with FP1 filter.
- FRETImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
private ModelImage donorImage; // image taken with donor filter.
- FRETImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- FRETImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- FREUDENSTEIN_AND_ROTH - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- FREUDENSTEIN_AND_ROTH - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- FREUDENSTEIN_AND_ROTH - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- FREUDENSTEIN_AND_ROTH - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- FreudensteinAndRothFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.FreudensteinAndRothFunction
-
- FreudensteinAndRothJacobianFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.FreudensteinAndRothJacobianFunction
-
- frexp(double, int[]) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- frft(double[][], double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- fromAStoVisibleString() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
From age string to something that makes more sense. ages are DICOM as nnnT.
- fromByte(byte) - Static method in enum gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
- fromConverterAndConsumer(ContourPlot.PixelConvertingSpliterator.PixelConverter<P, T>, Consumer<T>) - Static method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelManipulator
-
- fromDAtoVisibleString() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
parses the DICOM v3 format tag to make a mm/dd/yyyy formatted date.
- FromFile(DataInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Reads a PCA object from a binary file.
- FromFile(DataInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Read point info from a file.
- FromFile(DataInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Reads the class data form disk.
- FromFile(DataInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Reads a shape from a file.
- FromFile(DataInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFLookUp
-
Reads the class info from file.
- FromFile(DataInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Reads a matrix from disk in binary format (from the current position of
the file pointer), as written from ToFile().
- FromFile(DataInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Reads a vector from disk in binary format.
- FromFile(DataInputStream, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
Reads an object from disk.
- FromFile(DataInputStream, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
Not used
- FromFile(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMObject
-
- FromFile(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Reads a matrix from disk in binary format, as written from ToFile().
- FromFile(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Reads a vector from disk in binary format.
- fromFloat(float) - Static method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Convert a 32-bit float to a 'byte' that represents an unsigned 8-bit integer (uint8).
- fromFunctions(Supplier<T>, BiConsumer<P, T>, BiConsumer<T, P>) - Static method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator.PixelConverter
-
Creates a new PixelConverter from the specified functions.
- fromInt(int) - Static method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Convert a 32-bit integer (int32) to a 'byte' that represents an unsigned 8-bit integer (uint8).
- fromLPS(ModelImage, int[], boolean[]) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Returns the axisOrder and axisFlip mapping of the input image from LPS coordinates.
- fromNumericValue(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngColorType
-
Each pixel is an R,G,B triple followed by an alpha sample.
- fromOAR3D - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
DOCUMENT ME!
- fromOrigin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
The transformation matrix from the origin of the input image.
- fromOrigin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
The transformation matrix from the origin of the input image.
- fromOrigin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
The transformation matrix from the origin of the input image.
- fromOrigin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
The transformation matrix from the origin of the input image.
- fromOrigin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
The transformation matrix from the origin of the input image.
- fromPanasonicString(String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
Parses an age object from the string format used by Panasonic cameras:
0031:07:15 00:00:00
- fromPatientOrientationToVisibleString() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
DOCUMENT ME!
- fromPatientSexToVisibleString() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Converts a DICOM patient sex tag (eg, "M") into a more understandable value (eg, "Male").
- fromStream(InputStream) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.StringUtil
-
- fromString(String) - Static method in enum gov.nih.mipav.view.Preferences.LogLevel
-
- fromTiffFormatCode(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- fromTMtoVisibleString() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Takes a DICOM tag with a TM value representation and returns it in the format HH:MM:SS.frac, or as much as is
available to convert (ie, HH:MM could be all that is currently stored).
- FromTripletSparseMatrix(CeresSolver.TripletSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- FromTripletSparseMatrix(CeresSolver.TripletSparseMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- FromTripletSparseMatrixTransposed(CeresSolver.TripletSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- fromVisibleStringToAS(String) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Converts the given readable string to a DICOM compliant age string.
- fromVisibleStringToDA(String) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Converts the given string into a DICOM-legal value for a DA value-representation (VR) tag. places a date
(yyyymmdd) into value that is in either yyyymmdd (DICOM v3) or yyyy.mm.dd (< DICOM v3) or mm/dd/yyyy format.
- fromVisibleStringToDS(String) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Takes the input string and forms a DICOM compliant decimal string out of it.
- fromVisibleStringToDT(String) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
setVisibleStringToDT.
- fromVisibleStringToPatientOrientation(String) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
DOCUMENT ME!
- fromVisibleStringToPatientSex(String) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Converts patient sex (eg, "Male") into a valid DICOM value (eg, "M").
- fromVisibleStringToPN(String) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Converts a DICOM person's name ("PN") tag into a more understandable value.
- fromVisibleStringToTM(String) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
setVisibleStringToTM.
- front - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- front - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- front - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- FRONT - Static variable in class gov.nih.mipav.model.structures.VOI
-
Static Variables for VOI and VOI Contour selection.
- frontBottomLeft - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- frontBottomLeftIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- frontBottomRight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- frontBottomRightIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- FrontEdge - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- FrontEdge() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FrontEdge
-
- FrontEdge(int, int, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FrontEdge
-
- frontFace - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- frontInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- frontInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- frontInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- frontTopLeft - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- frontTopLeftIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- frontTopRight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- frontTopRightIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- fRun - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- fRun - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- fs - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- fs(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- fS1(int, double, CVODES.NVector, CVODES.NVector, int, CVODES.NVector, CVODES.NVector, CVODES.UserData, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- fS1TestMode(int, double, CVODES.NVector, CVODES.NVector, int, CVODES.NVector, CVODES.NVector, CVODES.UserData, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- fSample_mouseDragged - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
sample rate when mouse is dragged.
- fSample_mouseReleased - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
sample rate when mouse is released.
- fsave - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- fserrors - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- fserrors - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- fslButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
Radio button to save gradBval text file in FSL format
- fsmall_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- fsqkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- fsqkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- fStop() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimate.fStop
-
Creates a new fStop object.
- fStop() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimateClip.fStop
-
Creates a new fStop object.
- fsum - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- fsum - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- fsumsq(double, double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- fsumsq(DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- ft - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- ftab - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- FTail - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- FTB_LENGTH - Static variable in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
Length of File Type Box
- fTestMode(double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.ODE
-
- fTestMode(double, CVODES.NVector, CVODES.NVector, CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
f routine.
- fTestMode(DoubleDouble, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- ftol - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
ftol is a nonnegative input variable.
- ftol(double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- ftrue - Variable in class gov.nih.mipav.model.algorithms.InverseLaplaceTest
-
- fudgeFactor - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Frame adjustment to keep the frame from being just small enough for the ScrollPane to display the scroll bars.
- FujifilmMakernoteDescriptor(MetadataExtractor.FujifilmMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- FujifilmMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- FUL - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- full - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- fullAnalysisMode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
- fullAnalysisMode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
- fullAnalysisMode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
- fullAnalysisMode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
If true this algorithm skips all subsample and goes directly to the level 1 optimization.
- fullDatesBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizePresets
-
- fullGtU(int, int) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- fullRangeRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- fullsize_upsample(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, byte[][], int, byte[][][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- fullsize_upsample(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[][], int, short[][][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- FULLSIZE_UPSAMPLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- fun(double[]) - Method in interface gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Function
-
- fun(double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- fun(double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_LrFunction
-
- fun_obj - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Tron
-
- fun2Icon - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- fun2PrintIcon - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- fun3Icon - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- fun3PrintIcon - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- fun4Icon - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- fun4PrintIcon - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- fun5Icon - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- fun5PrintIcon - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- func - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
- func - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
- func - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
- FUNC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- FUNC_BN_SCALE_SHORT - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_BN_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_BN_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- FUNC_BT_SCALE_BYTE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_BT_SCALE_SHORT - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_BT_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_BT_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- FUNC_BUCK_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_BUCK_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- FUNC_COR_SCALE_BYTE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_COR_SCALE_SHORT - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_COR_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_COR_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- FUNC_CT_SCALE_SHORT - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_CT_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_CT_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- FUNC_FIM_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
funcType for anatType == false.
- FUNC_FIM_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
1 value.
- FUNC_FT_SCALE_SHORT - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_FT_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_FT_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- FUNC_GT_SCALE_BYTE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_GT_SCALE_SHORT - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_GT_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_GT_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- FUNC_PT_SCALE_SHORT - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_PT_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_PT_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- FUNC_THR_SCALE_BYTE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
6 funcType of functional data have default scaling for byte data.
- FUNC_THR_SCALE_SHORT - Static variable in class gov.nih.mipav.model.file.FileAfni
-
Unfortunately, the func type codes overlap for Func and Anat datasets.
- FUNC_THR_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_THR_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- FUNC_TT_SCALE_BYTE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_TT_SCALE_SHORT - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_TT_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_TT_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- FUNC_ZT_SCALE_BYTE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_ZT_SCALE_SHORT - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_ZT_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- FUNC_ZT_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- funcC(double, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
This routine iterates to find the solution to the first moment equation for the Generalized Rice distribution.
- funcEval - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
integer scalar containing the total number of function evaluations done inside this routine.
- funcEval - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
integer scalar containing the total number of function evaluations done inside this routine.
- funcFileName - Variable in class gov.nih.mipav.model.file.FileHistoLUT
-
The file name of the transfer function data file.
- FUNCT - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Transfer Function Files (*.fun).
- funcTag - Static variable in class gov.nih.mipav.model.file.FileHistoLUT
-
Tag marking the beginning of a transfer function file.
- function - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
- Function - Interface in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- Function(OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointAdjacencyFunction
-
- Function(OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueAndNormalFunction
-
- Function(OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueFunction
-
- Function(OctNode, OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.AdjacencyCountFunction
-
- Function(OctNode, OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.AdjacencySetFunction
-
- Function(OctNode, OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.DivergenceFunction
-
- Function(OctNode, OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FaceEdgesFunction
-
- Function(OctNode, OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- Function(OctNode, OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianProjectionFunction
-
- Function(OctNode, OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NodeAdjacencyFunction
-
- Function(OctNode, OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RefineFunction
-
- Function(OctNode, OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RestrictedLaplacianMatrixFunction
-
- Function(OctNode, OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.TerminatingNodeAdjacencyFunction
-
- function_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientChecker
-
- function_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingCostFunction
-
- function_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
- function_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- function_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionOptions
-
- function_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- function_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- function_tolerance_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NonlinearConjugateGradient
-
- functionAtBest - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
The cost of the function at the best minimum.
- functionAtBest - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
The cost of the function at the best minimum.
- functionAtBest - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
The cost of the function at the best minimum.
- functionAtBest - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
The cost of the function at the best minimum.
- functionBox - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
DOCUMENT ME!
- functionCode - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
In lgamma and cgamma calculate gamma(x) for functionCode = 1 and calulate the ln(gamma(x)) for functionCode = 0
- FunctionData - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- FunctionData(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- functionFit - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- functionFit - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- functionGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- functionIndex - Variable in class gov.nih.mipav.model.file.FileImageXML
-
Index of LUT function when reading xml header.
- functionIndex - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- functionKeys - Static variable in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- functionLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- functionPropPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- functions - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- FunctionSample() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- FunctionSample(double, double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- FunctionSample(double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- functionStrings - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
DOCUMENT ME!
- FunctionToleranceReached() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- functionType - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- functionType - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- functionVector - Variable in class gov.nih.mipav.model.file.FileImageXML
-
Vector to store the LUT functions when reading xml header.
- functLineColorButton - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- functName - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- functor_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.AutoDiffCostFunction
-
- functor_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DynamicNumericDiffCostFunction
-
- functor_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EasyCostFunction
-
- functor_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ExponentialCostFunction
-
- functor_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- functor_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.RandomizedCostFunction
-
- functor_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TranscendentalCostFunction
-
- functVisibleCheckbox - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
the slope changes.
- funcType - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- funcType - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- funused1 - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
MIPAV uses this variable to define the X-axis origin.
- funused1 - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
MIPAV uses this variable to define the X-axis origin.
- funused2 - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
MIPAV uses this variable to define the Y-axis origin.
- funused2 - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
MIPAV uses this variable to define the Y-axis origin.
- funused3 - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
MIPAV uses this variable to define the Z-axis origin.
- funused3 - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
MIPAV uses this variable to define the Z-axis origin.
- fUpdate1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Factor used in controlling the input of the tangetial component of the surface evolution.
- fuse(double[][][], double[][][], int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- fuseImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- fuseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Use serialVersionUID for interoperability.
- FUZZ_FACTOR - Static variable in class gov.nih.mipav.model.algorithms.CVODES
-
- fuzzMinAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- FUZZY_ONLY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- FUZZY_ONLY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
DOCUMENT ME!
- FUZZY_ONLY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- FUZZY_ONLY - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- FUZZY_ONLY - Static variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- FUZZY_ONLY - Static variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
DOCUMENT ME!
- FUZZY_ONLY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- FuzzyC - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- FuzzyC - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- FuzzyC - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- FuzzyC - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- FuzzyC - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- FuzzyC - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- FuzzyC_ALL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- FuzzyC_class1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- FuzzyC_class1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- FuzzyC_class1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- FuzzyC_class1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- FuzzyC_GRE_LOW - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- FuzzyC_GRE_LOW - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- FuzzyC_GRE_LOW - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- fuzzyCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- fuzzyCMeanFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- fuzzyCMeanFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- fuzzyCMeanFilterCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- fuzzyCMeanImages - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- fuzzyCMeanPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- fuzzyImageCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- fuzzyMinAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- fuzzyOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- fuzzyOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- fuzzyOnly - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- fuzzyOnlyButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- fuzzySlider - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- fuzzyThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- fuzzyThreshold - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Region grow parameters fuzzyConnectedness is not used if fuzzyThreshold is less than 0.
- fuzzyTruncatedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- fvc - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- fvec - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
fvec is an output array of length m which contains the functions evaluated at
the output x.
- FWD_MIN(GenericPolygonClipper.edge_node[], int, int) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- fwhm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
Full width at half maximum of the autocorrelation.
- fwhm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
full width at half maximum of the autocovariance.
- fwhm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fwhm - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- fwhm(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- fwhm(double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- fwhmB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
DOCUMENT ME!
- fwhmFactor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fwhmG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
DOCUMENT ME!
- fwhmR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
DOCUMENT ME!
- fwhmScale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- fwht_normalize(int, int[]) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform2
-
- fwht_sum_absolute_difference(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- fwht_sum_absolute_difference(int, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform2
-
- fwht_transform(int, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform2
-
- fwht_transform2D(int, int, int[][], int[][]) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform2
-
- fx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- fx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- fx - Variable in class gov.nih.mipav.model.algorithms.NelderMead.point_t
-
- FX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- Fx2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- fXDelta - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
x, y, z delta value.
- Fxy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- fy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- fy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- FY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- Fy2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- fYDelta - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
x, y, z delta value.
- fz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- fz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- FZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- fZDelta - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
x, y, z delta value.
G
- g - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- g - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- g - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- g - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
1D array of length param containing the gradient of the objective at the current point.
- g - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
1D array of length param containing the gradient of the objective at the current point.
- g - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- g - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- g - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- g - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_VertAux
-
- g() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- g(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- g(double, CVODES.NVector, double[], CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- g(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- g(int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- g(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- G - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- G - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- G - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- G() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- g_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ComposedLoss
-
- g_asDouble() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- g_asDouble() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Returns the green value of this pixel at its current position.
- G_bar - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- G_bar - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- g_mask_lut - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- g_normalized(int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- g_normalized(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- g_rgbtable - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- G_SCALE - Variable in class gov.nih.mipav.model.file.libjpeg
-
- G_SIZE - Static variable in interface gov.nih.mipav.model.file.BZip2Constants
-
- g_tol - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- G_Y_OFF - Variable in class gov.nih.mipav.model.file.libjpeg
-
- g2d - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- g2d - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- GABOR - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- GABOR - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- GABOR - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- gaborAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- gaborAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- gaborAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- gaborFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- gaborFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- gaborFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- gaborFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- gaborFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
gabor filter.
- gaborFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- gaborFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- gaborFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- gaborFilterCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- gaborImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
- gaborImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- gaborImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- gaborImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- gaborImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- gaborImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- gaborImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
- gaborPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- gageodilate_union_find(int[], int[], int[], int[][], int, int, int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- gain - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- gain - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
- gain - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- gain - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Detector
-
- gain - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- gainControl - Variable in class gov.nih.mipav.model.file.FileSVS
-
- gainControl - Variable in class gov.nih.mipav.model.file.FileTiff
-
- gainText - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- galerkin2D(int, int, int, int, int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- galerkin3D(int, int, int, int, int, int, int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- gam1(double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- gAMA - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- gamln(double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- gamln1(double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- gamma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- gamma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- gamma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- gamma - Variable in class gov.nih.mipav.model.algorithms.FitLorentz
-
half width at half maximum
- gamma - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
- gamma - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
- gamma - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- gamma - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- gamma - Variable in class gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
- gamma - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- gamma - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- gamma - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- gamma - Variable in class gov.nih.mipav.view.ColorWheel
-
gamma correction
- gamma - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
gamma correction *
- gamma - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- gamma - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware.sWarpEntry
-
- gamma - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
gamma correction *
- gamma - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- gamma - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- gamma - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
gamma correction *
- gamma() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
This code is a port of the FORTRAN routine GAMMA from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 49-50.
- Gamma - Class in gov.nih.mipav.model.algorithms
-
This code calculates the gamma function of an input argument x.
- Gamma() - Constructor for class gov.nih.mipav.model.algorithms.Gamma
-
- Gamma(double, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Gamma
-
- Gamma(double, double, double[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.Gamma
-
- Gamma(double, double, double, boolean, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Gamma
-
- Gamma(double, double, int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.Gamma
-
- Gamma(double, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Gamma
-
- GAMMA - Static variable in class gov.nih.mipav.model.algorithms.Gamma
-
Compute gamma function for real x, x is not equal to 0 or a negative integer
- GAMMA - Static variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- GAMMA - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- GAMMA - Static variable in class gov.nih.mipav.model.algorithms.NMSimplex
-
- GAMMA(double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- gamma_fit(double[], double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- gammaArray - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- gammaHalflife - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- gammaj - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- Gammaj - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- gammaln(double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- gammaln2(double, double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- gammaPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- gammaPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- GammaRand(double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- gammaSlider - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
various sliders in dialog *
- gammaSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
various sliders in dialog *
- gammaTextField - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
textfields *
- gammaTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
textfields *
- gammaValue - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- gamrnd(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- gamrnd(double, double) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- gap - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- gapArray - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
If planeGap is not -1, then gapArray contains the values at which zero filling gaps are present.
- gapTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- garrote - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- gatedFrameMode - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
- gatedFrameModeIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
- gatedStudyGeneral - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- gatherBoundedPoints(ArrayList<Integer>, ArrayList<Integer>, double, double, float, float, float, float[], float[], float[]) - Static method in class gov.nih.mipav.model.structures.VOI
-
Gathers the points that fall within the required bounds
- gatherBytes(MetadataExtractor.SequentialReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- gatherBytes(MetadataExtractor.SequentialReader, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- gatherDependents(Class) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Gets the dependents of a given class, defined as those classes which exist solely in the pluginDir path and
should be uninstalled.
- gatherSubClassDependents(Class, int) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Attempts to go no further than third level.
- gatingType - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- gatingType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- gatingType2 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- gatingType2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- gatingTypeString - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- gattArray - Variable in class gov.nih.mipav.model.file.FileInfoMinc
-
DOCUMENT ME!
- gauc(int[], double, double[], double, double[], double[], double, double) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- gauc(int[], DoubleDouble, DoubleDouble[], DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble, DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- gaus(double[], double[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- GAUS - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- gauss(double) - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
Gaussian evaluated at a point with given parameters
- Gauss() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
make randomize gauss.
- Gauss_filter() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Gauss_filter
-
- GAUSS_INCREMENT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- gauss_ker2D() - Method in class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
- GAUSS_LIMIT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- gauss_newton_step() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- gauss_newton_step_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- GAUSS_NUM_ELS - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- gauss_octave - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.GSS_filters
-
- gauss_seidel2D(double[], double[], double[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- gauss_seidel3D(double[], double[], double[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- Gauss1CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Gauss1CostFunction
-
- Gauss1Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- gauss1Fitting(double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss1Fitting
-
- gauss1FittingCheck - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- gauss1FittingCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss1FittingCostFunction
-
- Gauss1Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Gauss2CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Gauss2CostFunction
-
- Gauss2Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- gauss2Fitting(double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss2Fitting
-
- gauss2FittingCheck - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- gauss2FittingCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gauss2FittingCostFunction
-
- gauss2FittingData - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- gauss2FittingObservations - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- Gauss2Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Gauss3CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Gauss3CostFunction
-
- Gauss3Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Gauss3Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- gaussBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
- gaussBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
- gaussData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
DOCUMENT ME!
- GaussData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
Storage location of the Gaussian kernel.
- GaussData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Storage location of the Gaussian kernel.
- GaussData_2D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Storage location of the 2D Gaussian kernel.
- GaussData_3D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
- gaussDiffFilter(AlgorithmEmbeddedConfidenceEdgeDetection.BgImage, float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- gaussFilter - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< current octave height.
- gaussFilterSigma - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< current Gaussian filter
- gaussFilterWidth - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< current Gaussian filter std
- Gaussian - gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.kernelType
-
- Gaussian - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
Static 4x4 Gaussian kernel
- GAUSSIAN - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- GAUSSIAN - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- GAUSSIAN - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- GAUSSIAN - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- GAUSSIAN - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- GAUSSIAN - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- GAUSSIAN - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- GAUSSIAN - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Used to indicate Gaussian distribution of noise.
- GAUSSIAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- GAUSSIAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- GAUSSIAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- GAUSSIAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- GAUSSIAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- GAUSSIAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- GAUSSIAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- GAUSSIAN_FIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- GAUSSIAN_FIT - Static variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- GAUSSIAN_INVERSE_CUMULATIVE_DISTRIBUTION_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.Statistics
-
- GAUSSIAN_PROBABILITY_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.Statistics
-
Also known as the normal probability function
- GAUSSIAN_PROBABILITY_INTEGRAL - Static variable in class gov.nih.mipav.model.algorithms.Statistics
-
- gaussian_pyramid(double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- gaussian2nd2d(double[][], double[][], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- gaussian2nd3d(double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- gaussianAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- gaussianAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- gaussianAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- gaussianangularfilter(double, double, double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- GaussianApproximation(double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- GaussianApproximation0(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- gaussianBlur25D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
2D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
- gaussianBlur3D(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
3D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
- gaussianBlur4D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Calls gaussianBlur3D for each volume in the time series image.
- gaussianBlurAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
DOCUMENT ME!
- gaussianBlurSep25D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
- gaussianBlurSep25DSlices() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
- gaussianBlurSep3D(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
- gaussianBlurSep3D(cl_context, cl_device_id, cl_mem, int, int, float[], int, int, int, int, int[]) - Static method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
- gaussianBlurSepAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
DOCUMENT ME!
- gaussianButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- gaussianData - Variable in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
data storage buffer.
- gaussianData - Variable in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
data storage buffer.
- gaussianFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- gaussianFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- gaussianFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- gaussianFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- gaussianFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- gaussianFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- gaussianFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- gaussianFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- gaussianFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
gussian filter.
- gaussianFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- gaussianFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- gaussianFit - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- GaussianFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.GaussianFunction
-
- GaussianHistogramMatching(CDVector, CDVector, int, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
Maps the distibution of v into an approximate Gaussian distribution.
- gaussianImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- gaussianImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- gaussianImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- gaussianInverseCumulativeDistributionFunction() - Method in class gov.nih.mipav.model.algorithms.Statistics
-
- gaussianKernel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
- gaussianKernel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- GaussianKernel - Class in gov.nih.mipav.model
-
- GaussianKernel() - Constructor for class gov.nih.mipav.model.GaussianKernel
-
- GaussianKernelFactory - Class in gov.nih.mipav.model
-
- GaussianKernelFactory(float[]) - Constructor for class gov.nih.mipav.model.GaussianKernelFactory
-
- gaussianLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- gaussianMap - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- gaussianMap - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- GaussianMixtureModelsIncompleteSamples - Class in gov.nih.mipav.model.algorithms
-
dirichletRnd ported from mixGaussRnd.m by Mo Chen
Copyright (c) 2016, Mo Chen
All rights reserved.
- GaussianMixtureModelsIncompleteSamples() - Constructor for class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- GaussianMixtureModelsIncompleteSamples(int, int) - Constructor for class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- GaussianMixtureModelsIncompleteSamples.Background - Class in gov.nih.mipav.model.algorithms
-
- GaussianMixtureModelsIncompleteSamples.GMM - Class in gov.nih.mipav.model.algorithms
-
- GaussianOneDimKernel - Class in gov.nih.mipav.model.algorithms
-
DOCUMENT ME!
- GaussianOneDimKernel() - Constructor for class gov.nih.mipav.model.algorithms.GaussianOneDimKernel
-
Creates a new GaussianOneDimKernel object.
- gaussianProbabilityFunction() - Method in class gov.nih.mipav.model.algorithms.Statistics
-
- gaussianProbabilityIntegral() - Method in class gov.nih.mipav.model.algorithms.Statistics
-
Formula found in Computation of Special Functions by Shanjie Zhang and Jianming Jin Chapter 16.3
Gaussian Probability Integral page 625.
- gaussians - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- gaussians - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- gaussianScale - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Gaussian scale for structure tensor smoothing.
- gaussianScale - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- gaussianScale - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- gaussianSigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
- gaussianSigma - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- gaussianSmooth(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- gaussianSmooth3D(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- gaussianStdDev - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFIREEdgeExtraction
-
Standard deviation of the gaussian used in determining the zero membership function from intensity
differences
- gaussianStdDev - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
- gaussianText - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- gaussj(double[], double[], int, double, double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- GAUSSJ(int, double, double, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- gaussKernel - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- gaussMask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- gaussPt(int[]) - Method in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
Calculates the Gaussian function at a point.
- gaussPt(int[]) - Method in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Calculates the Gaussian function at a point.
- gaussRnd(double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- gaussRnd(double[], double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- gaussSecondStandardDeviationFittingCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gaussSecondStandardDeviationFittingCostFunction
-
- gaussStandardDeviationCheck - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- gaussStandardDeviationFitting(double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gaussStandardDeviationFitting
-
- gaussStandardDeviationFittingCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.gaussStandardDeviationFittingCostFunction
-
- gazeDecreaseButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- gazeIncrButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- GB - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- GB - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- gbc - Variable in class gov.nih.mipav.view.components.PanelManager
-
DOCUMENT ME!
- gbc - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
GridbagConstraints *
- gbc - Static variable in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- gbc - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- gbc - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- gbc - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- gbc - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
grid bag constraints *
- gbc - Variable in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- gbc - Variable in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
DOCUMENT ME!
- gbc - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- gbc - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- gbc - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- gbc - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel.PropertiesDialog
-
- gbc - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
GridbagConstraints *
- gbc - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- gbc - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- gbc - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- gbc - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- gbc - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- gbc - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- gbc_1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- gbc_2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- gbc_3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- gbc_4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- gbc_5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- gbc2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
grid bag constraints *
- gbc2 - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- gbc2 - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- gbc2 - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- gbc2 - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- gbc3 - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
grid bag constraints *
- gbConstraints - Variable in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- gbcTP - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- gbcTP - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- gbcTP - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- gbcTP - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- gbl - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
GridBagLayout *
- gbl - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- gbl - Variable in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
DOCUMENT ME!
- gbl - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
GridBagLayout *
- gbLayout - Static variable in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- gbLayout - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- gbLayout - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- gbLayout - Variable in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- GCD(long, long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
- gCenterString - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- gChannel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
If true filter the green channel.
- gChannel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
the green channel.
- gChannel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
DOCUMENT ME!
- gChannel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
when true, indicates whether to process the colour channel.
- gChannel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- gChannel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
the green channel.
- gcPt - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Stores the geometric center of the contour of a VOI.
- gd - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- GD4 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- GD8 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- GDAL_METADATA - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- GDAL_METADATA - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- gdalMetadata - Variable in class gov.nih.mipav.model.file.FileSVS
-
- gdalMetadata - Variable in class gov.nih.mipav.model.file.FileTiff
-
- gdtr(double, double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- GDTR - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- gdtrc(double, double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- GDTRC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- ge - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- ge - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- ge - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
- ge - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- ge - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations
-
- ge - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- ge - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations3
-
- ge - Variable in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
- ge - Variable in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
- ge - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- ge - Variable in class gov.nih.mipav.model.structures.jama.SVD
-
- ge(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
Tests whether this value is greater than or equals to another DoubleDouble value.
- Ge(double, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise greater than or equal.
- Ge(double, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Greater Than or Equal - compares a double and a vector.
- Ge(CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise greater than or equal.
- Ge(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Greater Than or Equal - compares a vector and a vector.
- GE - gov.nih.mipav.view.dialogs.AlgorithmTreParams.ScannerType
-
- GE_GENESIS - Static variable in class gov.nih.mipav.model.file.FileUtility
-
GE Genesis 5X and LX. extension: .sig
- GE_GENESIS_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Multiple files of type GE_GENESIS
- GE_SIGNA4X - Static variable in class gov.nih.mipav.model.file.FileUtility
-
GE Signa 4.x.
- GE_SIGNA4X_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Multiple files of type GE_SIGNA4X
- ge2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- GEcolor - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- geGenesisEnabled - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- GEN - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
General( *.gif; *.jpeg; *.jpg; *.pict; *.psd; *.tif; *.tiff).
- GEN_ANAT_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
AFNI typeString general anatomical.
- GEN_FUNC_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
AFNI typeString general functional.
- gen_regular_ai_s(double[], double[], double[], int, double, double, boolean) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- gen_regular_bloc_bold(double[], double[], double[], double[], double[], double[], int, double, double, boolean, double[], double, boolean, long) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- gen_rnd_ai_s(double[], double[], double[], double, double, int, int, double, boolean, boolean, boolean, boolean, long, int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- gen_rnd_bloc_bold(double[], double[], double[], double[], double[], double[], double, double, boolean, double[], int, int, double, boolean, boolean, boolean, double, int, int, boolean, boolean, long) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- gen_rnd_event_bold(double[], double[], double[], double[], double[], int, double, boolean, double[], int, double, double, double, boolean, long) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- gen_rnd_i_s(double[], double[], int, double, int, double, double, boolean, long, int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- genContour(int, int, Point, BitSet) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Static method that generates a boundary of a general object.
- genContour(int, int, Point, BitSet) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Static method that generates a boundary of a general object.
- genContour(short[], int, int, Point, short) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Static method that generates a boundary of a general object.
- genContour(short[], int, int, Point, short) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Static method that generates a boundary of a general object.
- genContour(ModelImage, int, int, Point) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Static method that generates a boundary of a binary object.
- genContour(ModelImage, int, int, Point) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Static method that generates a boundary of a binary object.
- genContour(BitSet, int, int, Point) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Static method that generates a boundary of a binary object.
- genContour(BitSet, int, int, Point) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Static method that generates a boundary of a binary object.
- GENERAL_MICROSCOPY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality general microscopy.
- GENERAL_MICROSCOPY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality general microscopy.
- generalData - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- generalImageData - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- generalImageData() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- generalInfoList - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- GeneralizedEigenvalue - Class in gov.nih.mipav.model.structures.jama
-
This file contains 1 user callable eigenvalue function and 2 user callable generalized eigenvalue functions.
- GeneralizedEigenvalue() - Constructor for class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Creates a new GeneralizedEigenvalue object.
- GeneralizedEigenvalue2 - Class in gov.nih.mipav.model.structures.jama
-
- GeneralizedEigenvalue2() - Constructor for class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
- GeneralizedInverse2 - Class in gov.nih.mipav.model.structures.jama
-
- GeneralizedInverse2() - Constructor for class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- GeneralizedInverse2(double[][], int, int) - Constructor for class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- GeneralLight - Class in gov.nih.mipav.view.renderer.J3D
-
This class maintains an instance of a SoftwareLight and a (Java3D) Light where these instances are of the same type:
- GeneralLight(int, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Constructor.
- generalPanel - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- generalThresholdPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- generateAnonymousName() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
creates a string to use as a name out of the generic name, and the sequence.
- generateAtlasImage() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Read the 3D atlas images directory, convert each 3D image to 2D slices based atlas.
- generateBaseImage(ModelImage, double, double) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- generateBinaryImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Forms a solid (without holes) binary image from all VOIs in the image.
- generateBinaryImage(boolean, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Forms a binary image from VOIs.
- generateBoundaryContours(VOIBase) - Method in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Convert VOI from one contour to two contours
- generateBoundaryContours(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Convert VOI from one contour to two contours
- generateBSplineShapeFunctions(int) - Method in class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- generateButton - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- generateCmdUsageInfo() - Method in interface gov.nih.mipav.view.Argument
-
Prints usage info for specific command
- generateCmdUsageInfo() - Method in enum gov.nih.mipav.view.Argument.InstanceArgument
-
- generateCmdUsageInfo() - Method in enum gov.nih.mipav.view.Argument.StaticArgument
-
- generateCmdUsageInfo() - Static method in class gov.nih.mipav.view.ViewUserInterface
-
Generates automatic list of available commands.
- generateCodeTable(int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- generateCodeTable(int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Generate the VOI contours from the probablity maps.
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- generateContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- generateContours_MRI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Generate the VOI contours from MRI prediction only.
- generateContours_MRI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Generate the VOI contours from MRI prediction only.
- generateConvexHullMask(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Algorithm Implementation Steps:
7.
- generateCoordList() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Generates the coordinate list.
- generateCoordList25D(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Generates the coordinate list 2.5 D.
- generateCurves(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Generates the set of natural spline curves to fit the current lattice.
- generated - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- generated - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- generated - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- generateData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- generateData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- generateDecoderTable() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- generateDecoderTable() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- generateDescriptors(Vector<SIFTImageSimilarity.KeyPoint>, ModelImage[][], int, int, double, double) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- GenerateDGaussian - Class in gov.nih.mipav.model.algorithms
-
Calculates an n-dimensional gaussian volume at a given scale, kernel size, and normalized derivative (through the
fourth order) in any of the dimensions.
- GenerateDGaussian(double[], int[], double[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
Initializes class that calculates an n-dim Gaussian.
- GenerateDGaussian(double[], int[], double[], int[], double) - Constructor for class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
Initializes class that calculates an n-dim Gaussian.
- generateDoGImages(ModelImage[][]) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- generateEllipses(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- generateEllipsoidMesh() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Tessellate a unit sphere centered at the origin.
- generateEllipsoidMesh(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Tessellate a unit sphere centered at the origin.
- generateEllipsoidMesh(int, float, int, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Tessellate a unit sphere centered at the origin.
- generateEndingSlices() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- generateFFTIndices(int) - Static method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
In order to use FFT, first thing is to rearrange the order of signals.
- generateFFTIndices(int) - Static method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
In order to use FFT, first thing is to rearrange the order of signals.
- generateFinePoints(int[], int[][]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- GenerateGaussian - Class in gov.nih.mipav.model.algorithms
-
Calculates an n-dimensional gaussian volume at a given scale, kernel size, and normalized derivative (through the
fourth order) in any of the dimensions.
- GenerateGaussian(double[], int[], double[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Initializes class that calculates an n-dim Gaussian.
- GenerateGaussian(double[], int[], double[], int[], double) - Constructor for class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Initializes class that calculates an n-dim Gaussian.
- GenerateGaussian(float[], int[], float[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Initializes class that calculates an n-dim Gaussian.
- GenerateGaussian(float[], int[], float[], int[], double) - Constructor for class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Initializes class that calculates an n-dim Gaussian.
- generateGaussianImages(ModelImage, int, double[]) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- generateGaussianKernels(double, int) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- generateGaussianMap() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- generateGaussianMap() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- generateGaussianMap() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- generateGEID(FileDicomTagTable) - Static method in class gov.nih.mipav.model.file.FileIO
-
- generateGrid(int[]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- generateGrid(int[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- generateGTContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- generateGTContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- GenerateHistogram(GraphicsImage[], GraphicsImage[], String, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Generate 2D histogram from the input image and the gradient-magnitude
- generateIFinal(ModelImage, ModelImage, BitSet, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- generateInnerContour(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- generateInnerContour(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- generateInnerContour(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- generateInnerContour(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- generateInnerContour(VOIBase, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- generateInOutContours(VOIBase, float[], float[], Vector3f[], Vector3f[], Vector3f[], float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- generateInOutContours(VOIBase, float[], float[], Vector3f[], Vector3f[], Vector3f[], float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- generateInOutContours(VOIBase, float[], float[], Vector3f[], Vector3f[], Vector3f[], float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- generateInOutContours(VOIBase, float[], float[], Vector3f[], Vector3f[], Vector3f[], float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- generateInOutContours(VOIBase, float[], float[], Vector3f[], Vector3f[], Vector3f[], float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- generateJacobian() - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
Jacobian used for non-linear least squares fitting.
- generateJacobian() - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
Jacobian used for non-linear least squares fitting.
- generateJacobian() - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
Jacobian used for non-linear least squares fitting.
- generateKernel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- generateLookupTable() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- generateMagEnhanced(double[], ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- generateMap(int, int, ModelImage, int[][], int[][], int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- generateMap(int, int, ModelImage, int[][], int[][], int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- generateMap(int, int, ModelImage, int[][], int[][], int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- generateMap(int, int, ModelImage, int[][], int[][], int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- generateMap(int, int, ModelImage, int[][], int[][], int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- generateMaskAngle(double[], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- generateMenuItem - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- generateMTFValues() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- generateNewImages() - Method in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
Generates new images.
- generateNewTagValue(String, boolean) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Generates a new version of a particular tag that is DICOM compatible
- generateNewTagValue(String, FileDicomTagTable, boolean) - Static method in class gov.nih.mipav.model.file.FileInfoDicom
-
Generates a new version of a particular tag in the given tag table with same length that is DICOM compatible
- generateNewTagValue(String, String) - Static method in class gov.nih.mipav.model.file.FileInfoDicom
-
Generates a new version of a particular tag in the standard DICOM tag table with same length that is DICOM compatible
- generateNewTagValue(String, String, FileDicomTagInfo.VR) - Static method in class gov.nih.mipav.model.file.FileInfoDicom
-
Generates a new version of a particular tag given an arbitrary value and returns a DICOM compatible result
- generateNewTagValue(String, String, FileDicomTagInfo.VR, boolean) - Static method in class gov.nih.mipav.model.file.FileInfoDicom
-
- generateNewTextureCoords(ModelImage, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Generates new texture coordinates for all surfaces, based on the new ModelImage texture-source.
- GenerateNormalFiles(VolumeTriPlanarInterface) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
This function is called when the user selects the Surface or Composite Surface volume rendering option.
- generateOrthonormalBasis(MjVector3f, MjVector3f, MjVector3f, boolean) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector3f
-
Input W must be initialized to a nonzero vector, output is {U,V,W}, an orthonormal basis.
- generateOrthonormalBasis(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Generate a set (any set) of orthonormal basis vectors.
- generateOutputImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- generatePatches() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- generatePatches() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- generatePath() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Generate the path planning path.
- generatePhaseMask(BitSet, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- generatePoly() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- generatePoly(int, double[], int, int) - Method in class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- generateProgressValues(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Helper function to determine which values to pass on to linked algorithms (that will fire progress changes to the
same progress bar).
- generateRandomWeibull2param() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- generateRandomWeibull3param() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- generateRandString() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
generates a random, up to-5 character, hexadecimal string.
- generateResiduals() - Method in class gov.nih.mipav.model.algorithms.FitExponential
-
- generateResiduals() - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
- generateResiduals() - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
- generateResiduals() - Method in class gov.nih.mipav.model.algorithms.FitLine
-
- generateResiduals() - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
- generateResiduals() - Method in class gov.nih.mipav.model.algorithms.FitMultiExponential
-
- generateResiduals() - Method in class gov.nih.mipav.model.algorithms.FitRayleigh
-
- generateResiduals() - Method in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
Calculates the residuals for a given function, not implemented since some functions might prefer to only use
a subset of data points, or not use yDataFitted if working during an iteration
- generateRFACoordMaps() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Generates the texture coord map vectors for the three orthogonal slices.
- generateRFACoordMaps() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Generates the texture coord map vectors for the three orthogonal slices.
- generateRFACoordMaps(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
create texture coordmaps for the texture-mapped planes displaying the triSliceImages.
- generateRFACoordMaps(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
create texture coordmaps for the texture-mapped planes displaying the triSliceImages.
- generateSegContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- generateSegContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- generateSequentialWeibull2param() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- generateSequentialWeibull3param() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- generateShortImage(int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Generates a solid (no holes) short image of regions defined by VOIs.
- generateShortImage(int, boolean, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Exports a short mask of the VOI[index].
- generateSizeTable(int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- generateSizeTable(int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- generateSphereMesh(int, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Tessellate a unit sphere centered at the origin.
- generateTestImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- generateTestImages() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
A test of the diffeomorphic demons is to transform a circle image to a letter C image.
- generateTestImages() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
A test of the diffeomorphic demons is to transform a circle image to a letter C image.
- generateTestImages() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
A test of the diffeomorphic demons is to transform a circle image to a letter C image.
- generateTransformationMatrix(int) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- generateTriMesh(boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- generateTriMesh(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- generateTriMesh2(boolean, boolean, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- generateUnsignedByteImage(int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Generates a solid (no holes) unsigned byte image of regions defined by VOIs.
- generateUnsignedByteImage(int, boolean, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Exports an unsigned byte mask of the VOI[index].
- generateVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- generateVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- generateVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- generateVOI(VOI, BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
extract a VOI from a binary mask image.
- generateVOIMask() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Generates a BitSet mask of all the VOIs and sets ImageModel mask.
- generateVOIMask(boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Generates a BitSet mask of all the VOIs and sets ImageModel mask.
- generateVOIMask(boolean, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Generates a BitSet mask of all the VOIs and sets ImageModel mask.
- generateVOIMask(short[], int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Generates a mask of the type short - without XORing VOI contours.
- generateVOIMask(short[], int, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Exports a short mask of the VOI[index].
- generateVOImesh(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
From the current shape, generate the corresponding triagnle meshes view.
- generateVOIs(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
ASF writer version 0.90.
- generateVolumeTexture() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
generates an ImageComponent3D containing the ModelImage data.
- genericImageName - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Used as part of the image name; used in all processed image-sets.
- genericInit() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- GenericKey(Object...) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.GenericKey
-
Creates a new key from the specified objects
- genericName - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
portion of the file name for all anonymized images.
- GenericPolygonClipper - Class in gov.nih.mipav.model.structures
-
- GenericPolygonClipper() - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- GenericPolygonClipper(GenericPolygonClipper.gpc_op, VOI, VOI, VOI) - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- GenericPolygonClipper.bbox - Class in gov.nih.mipav.model.structures
-
- GenericPolygonClipper.bundle_state - Enum in gov.nih.mipav.model.structures
-
- GenericPolygonClipper.edge_node - Class in gov.nih.mipav.model.structures
-
- GenericPolygonClipper.gpc_op - Enum in gov.nih.mipav.model.structures
-
- GenericPolygonClipper.gpc_vertex - Class in gov.nih.mipav.model.structures
-
- GenericPolygonClipper.gpc_vertex_list - Class in gov.nih.mipav.model.structures
-
- GenericPolygonClipper.it_node - Class in gov.nih.mipav.model.structures
-
- GenericPolygonClipper.lmt_node - Class in gov.nih.mipav.model.structures
-
- GenericPolygonClipper.polygon_node - Class in gov.nih.mipav.model.structures
-
- GenericPolygonClipper.sb_tree - Class in gov.nih.mipav.model.structures
-
- GenericPolygonClipper.st_node - Class in gov.nih.mipav.model.structures
-
- GenericPolygonClipper.vertex_node - Class in gov.nih.mipav.model.structures
-
- GenericRenderer() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.GenericRenderer
-
- genFontSize - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.SignedDistanceCharacters
-
- genGaussianRandomNum(double, double) - Method in class gov.nih.mipav.model.algorithms.RandomNumberGen
-
Generates a Gaussian random number greater or equal to the stRange and less than or equal to the endRange.
- genGaussianRandomNum(float, float) - Method in class gov.nih.mipav.model.algorithms.RandomNumberGen
-
Generates a Gaussian random number greater or equal to the stRange and less than or equal to the endRange.
- genGaussianRandomNum(int, int) - Method in class gov.nih.mipav.model.algorithms.RandomNumberGen
-
Generates a Gaussian random number greater or equal to the stRange and less than or equal to the endRange.
- genLevelMask(int, int, float[], float, int) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
- genLevelMask(int, int, float[], float, int) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 where a zero crossing is detected.
- genLevelMask(int, int, float[], float, int) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
- genLevelMask(int, int, float[], BitSet, float) - Static method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
- genLevelMask(int, int, float[], BitSet, float) - Static method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
- genLevelMask(int, int, float[], BitSet, float) - Static method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Generates a zero crossing mask for a 2D function sets a Bitset object to 1 is a zero crossing is detected.
- genRTCclassRTCaddTypeHashComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCaddTypeHashMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCarrayDef - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCattributeDefComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCdddef0 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCdefineHashtables - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCEntry - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCgetDescriptionComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCgetDescriptionMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCgetElementComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCgetElementMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCgetGroupComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCgetGroupMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCgetIndexComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCgetIndexMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCgetTypeCodeComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCgetTypeCodeMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCsetRTCcodeName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCsetUnkownRTCcodeName - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCstaticSearchGroup - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCtypecodeComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCtypedef0 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCtypedefGeneral - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCunknownDDTypeComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCclassRTCunknownDDTypeMethod - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCimports - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCjavadocComments - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCpackage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genRTCwarning - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- genStandardGaussian() - Method in class gov.nih.mipav.model.algorithms.RandomNumberGen
-
- genTicksAndLabels(double, double, int, boolean) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- genTicksAndLabels(double, double, int, boolean) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.TickMarkGenerator
-
Generates a number of tick marks and corresponding labels.
- genUniformRandomNum(double, double) - Method in class gov.nih.mipav.model.algorithms.RandomNumberGen
-
Generates a uniform random number greater or equal to the stRange and less than or equal to the endRange.
- genUniformRandomNum(float, float) - Method in class gov.nih.mipav.model.algorithms.RandomNumberGen
-
Generates a uniform random number greater or equal to the stRange and less than or equal to the endRange.
- genUniformRandomNum(int, int) - Method in class gov.nih.mipav.model.algorithms.RandomNumberGen
-
Generates a uniform random number greater or equal to the stRange and less than or equal to the endRange.
- genZeroXMask(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Generates a zero crossing mask for a 2D function sets a ModelImage to 1 if a zero crossing is detected.
- genZeroXMask(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
Generates a zero crossing mask for a 2D function sets a ModelImage to 1 if a zero crossing is detected.
- genZeroXMask(int, float[], float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
Generates a zero crossing mask for a 2D function sets a ModelImage to 255 if a zero crossing is detected.
- genZeroXMask(int, float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Generates a zero crossing mask for a 2D function.
- genZeroXMask(int, float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Generates a zero crossing mask for a 2D function.
- geo - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- geo - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- geod - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- geod - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- Geodesic - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Introduction: The goal of this task is to add the ability for the user to draw a region of interest on a triangle
mesh surface, by allowing the user to select points on the mesh surface and calculating the connecting polyline on
the surface between the points.
- Geodesic() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Instantiation without initializing the progress bar, pickCanvas, GeodesicGroup, triangle mesh or sphere radius,
each of those can be set through individual member access functions:.
- Geodesic(PickCanvas, Group, ModelTriangleMesh, float) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Instantiaion of the Geodesic object, with the objects necessary for the Geodesic to serve as a MouseListener that
performs picking and with the Group kGeodesicGroup so that the Geodesic curve can be drawn directly on the
ModelTriangleMesh.
- GEODESIC_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- GEODESIC_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- GEODESIC_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- GEODESIC_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
- GEODESIC_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- GEODESIC_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- GEODESIC_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- GEODESIC_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- GEODESIC_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- GEODESIC_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
- GEODESIC_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- GEODESIC_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- Geodesic_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- Geodesic_WM() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Instantiation without initializing the progress bar, pickCanvas, GeodesicGroup, triangle mesh or sphere radius,
each of those can be set through individual member access functions:.
- Geodesic_WM(TriMesh, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Instantiation of the Geodesic object, with the objects necessary for the Geodesic to serve as a MouseListener that
performs picking and with the Group kGeodesicGroup so that the Geodesic curve can be drawn directly on the
TriMesh.
- geodesicAcceleration - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- geodesicCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- geodesicDilation(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicDilation(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicDilation(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicDilation(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicDilation(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicDilation(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
geodesic dilation of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicDilationButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- geodesicErosion(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicErosion(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicErosion(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicErosion(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicErosion(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicErosion(boolean, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
geodesic erosion of a boolean, unsigned byte or unsigned short image using the indicated kernel and the indicated number of
executions.
- geodesicErosionButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- geodesicGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Geodesic user-interface panel:
- geodesicPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Geodesic panel.
- geodesicPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Geodesic panel.
- geodesicSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Size of geodesic erosions and dilations
- geodesicSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Size of geodesic erosions and dilations
- geodesicSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Size of geodesic erosions and dilations
- geodesicSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Size of geodesic erosions and dilations
- geodesicSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Size of geodesic erosions and dilations
- geodesicSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Size of geodesic erosions and dilations
- geodesicSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- geodesicSizeLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- geodesicSizeText - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- GeoLocation() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
- GeoLocation(double, double) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
- GeoLocationTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.GeoLocationTest
-
- geom - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpace
-
- geomCenter1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
geom center voi1
- geomCenter2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
geom center voi2
- GEOMETRIC_ZOOM - Static variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Used to indicte geometric zoom steps (2x, 4x, 8x, 16x ...).
- geometricCenterDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- Geometry - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- Geometry() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- geominit() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- geoms - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- geomx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- geomy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- geomz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- geScanner - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- geScanner - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- geSigna4XEnabled - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- geSoftwareVersion - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
int telling software version if datset is GE
- gestl - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- get() - Method in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorScheme
-
- get() - Method in class gov.nih.mipav.model.file.FileInfoDicom.LengthStorageUnit
-
Gets the stored value of this storage unit to i.
- get() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- get() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- get() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- get(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractor
-
Construct a level surface from the 3D image managed by the extractor.
- get(float, ViewJProgressBar) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractor
-
Construct a level surface from the 3D image managed by the extractor.
- get(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Retrieve the element in the array location i.
- get(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Retrieve the element in the array location i.
- get(int) - Method in class gov.nih.mipav.model.algorithms.LSCM.Point
-
- get(int) - Method in class gov.nih.mipav.model.algorithms.Vectornd
-
- get(int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets a Number object at position in the data array.
- get(int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Gets the data in byte format.
- get(int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Gets the data in byte format.
- get(int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Gets the data in as Number.
- get(int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Gets the data in Number format.
- get(int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Gets the data as a Number object.
- get(int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Gets the data in as a Number object.
- get(int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Gets the data in as a Number object.
- get(int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Gets the data in as a Number object.
- get(int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Gets the data in as a Number object.
- get(int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Gets the data in as a Number object.
- get(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
function to get data where bounds checking is performed.
- get(int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- get(int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Retrieve the element in the array location i.
- get(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Retrieve the element in the array location i.
- get(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- get(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- get(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- get(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.StaticGrid
-
- get(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- get(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- get(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- get(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- get(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.DoubleArrayPointer
-
- get(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.IntArrayPointer
-
- get(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD get data fuction where bounds checking is performed.
- get(int, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- get(int, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataChar
-
- get(int, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataDouble
-
- get(int, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataFloat
-
- get(int, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataSparse
-
- get(int, int) - Method in class gov.nih.mipav.model.structures.jama.JamaMatrix
-
Get a single element.
- get(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is performed.
- get(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D get data fuction where bounds checking is performed.
- get(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is performed.
- get(FileDicomKey) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Accessor that returns the tag with a certain hexadecimal key.
- get(Image, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.BufferedImageFactory
-
Creates a new BufferedImage of the specified imgType and same size as
the provided image and draws the provided Image onto the new BufferedImage.
- get(String) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Accessor that returns the tag with a certain hexadecimal key.
- get_add_patch_matrix(int, int, int, int, double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- get_buffer - Variable in class gov.nih.mipav.model.file.libjpeg.bitread_perm_state
-
- get_buffer - Variable in class gov.nih.mipav.model.file.libjpeg.bitread_working_state
-
- get_byte(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- get_C(int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- get_C(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- get_centroid(NelderMead.simplex_t, NelderMead.point_t) - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- get_class(RandomAccessFile, AlgorithmGaussianMixtureModelEM.SigSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- get_dac(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- get_data(int, float[][], int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Cache
-
- get_data(int, float[][], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache
-
- get_dht(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- get_dqt(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- get_dri(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- get_file_format(String) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- get_frequency(double[], int) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- get_interesting_appn(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- GET_INTERESTING_APPN - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- get_kaiserWindow(int) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- get_keep_length(int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- get_lse(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- get_next_file(int, FileJPEG2000.dircnt_t, FileJPEG2000.img_fol_t, FileJPEG2000.opj_decompress_parameters) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- get_nr_variable() - Method in interface gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Function
-
- get_nr_variable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- get_nr_variable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_LrFunction
-
- get_num_images(String) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- get_permutation_index(int[], int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- get_Q(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- get_Q(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.ONE_CLASS_Q
-
- get_Q(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.QMatrix
-
- get_Q(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.SVC_Q
-
- get_Q(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.SVR_Q
-
- get_Q(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- get_Q(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.ONE_CLASS_Q
-
- get_Q(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.QMatrix
-
- get_Q(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVC_Q
-
- get_Q(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVR_Q
-
- get_QD() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- get_QD() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.ONE_CLASS_Q
-
- get_QD() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.QMatrix
-
- get_QD() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.SVC_Q
-
- get_QD() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.SVR_Q
-
- get_QD() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- get_QD() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.ONE_CLASS_Q
-
- get_QD() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.QMatrix
-
- get_QD() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVC_Q
-
- get_QD() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVR_Q
-
- get_right_extent_length(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- get_sof(libjpeg.jpeg_decompress_struct, boolean, boolean, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- get_soi(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- get_sos(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- get_subclass(RandomAccessFile, AlgorithmGaussianMixtureModelEM.SigSet, AlgorithmGaussianMixtureModelEM.ClassSig) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- get1DPointsInCircle(int, int, int, int, int, int) - Static method in class gov.nih.mipav.util.CircleUtil
-
Calculates the points of an approximate sphere whose center is at (xCenter, yCenter)
with a given radius.
- get1DPointsInSphere(int, int, int, int) - Static method in class gov.nih.mipav.util.CircleUtil
-
Calculates the points of an approximate sphere whose center is at value
with a given radius.
- get1DPointsInSphere(int, int, int, int, int, int) - Static method in class gov.nih.mipav.util.CircleUtil
-
Calculates the points of an approximate sphere whose center is at (xCenter, yCenter, zCenter)
with a given radius.
- get1Jan1904EpochDate(long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DateUtil
-
- get2DPointsInCircle(int, int, int) - Static method in class gov.nih.mipav.util.CircleUtil
-
Calculates the points of an approximate circle whose center is at (xCenter, yCenter)
with a given radius.
- get32BitNumberString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- get35mmFilmEquivFocalLengthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- get3DPointsInSphere(int, int, int, double, double, double, double) - Static method in class gov.nih.mipav.util.CircleUtil
-
- get3DPointsInSphere(int, int, int, int) - Static method in class gov.nih.mipav.util.CircleUtil
-
Calculates the points of an approximate sphere whose center is at (xCenter, yCenter, zCenter)
witha given radius.
- get7BitStringFromBytes(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- geta() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
-
- getAAssociateRQ() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Returns the association request.
- getABBlend() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- getABBlend() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- getABBlend() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getAbbrev() - Method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- getAboutInfo(TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Abstract method which is used by the extending class to return information about the file header.
- getAboutInfo(TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getAboutInfo(TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
- getAbserr() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
DOCUMENT ME!
- getAbserr() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
DOCUMENT ME!
- getAbserr() - Method in class gov.nih.mipav.model.algorithms.ODE
-
- getAbserr() - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- getAbsolute() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Returns the absolute value of this object as a new Rational.
- getAbsolutePath() - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
The absolute path of the FileNode, as taken from its File.
- getAccelerationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getAccelerationVectorDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDescriptor
-
- getAccelerometerXDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getAccelerometerYDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getAccelerometerZDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getAccessionNumber() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getACenter() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getACIns() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- getACIns() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- getAClipPlanePts() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get the arbitrary clipping plane four corners points.
- getAcpcAC() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets anterior commissure in acpc space.
- getAcpcDim() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets acpc image dimensions.
- getACPCImage() - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- getAcpcMax() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets acpc max extent.
- getAcpcMin() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets acpc min extent.
- getAcpcPC() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets posterior comissure in acpc space.
- getAcpcRes() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets resolution in acpc space.
- getAcqGradMat() - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- getAcquiredCardiacCycles() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getAcquiredStudyDuration() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getAcquisitionMatrix() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getAcquisitionNumber() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getAcquisitionTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getAction() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelManipulator
-
Returns the action performed by this manipulator
- getAction() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getAction() - Method in class gov.nih.mipav.model.scripting.ParsedActionLine
-
Returns the action which should be taken when this line is executed.
- getActionCommand() - Method in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- getActionField() - Method in class gov.nih.mipav.view.graphVisualization.JDialogAction
-
- getActionMetadata() - Method in interface gov.nih.mipav.view.dialogs.ActionDiscovery
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.BlankJistHook
-
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Return meta-information about this discoverable action for categorization and labeling purposes.
- getActionMetadata() - Method in class gov.nih.mipav.view.dialogs.MTryJistHook
-
- getActionName() - Method in class gov.nih.mipav.model.scripting.actions.ActionBase
-
Returns the script action command string for this action.
- getActionName(Class) - Static method in class gov.nih.mipav.model.scripting.actions.ActionBase
-
Returns the script command string for an action.
- getActionsForImagesUsedInScript(String) - Static method in class gov.nih.mipav.model.scripting.Parser
-
Returns an array of the actions in which external images are used in a given script.
- getActiveDLightingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getActiveImage() - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Get the active image we are growing in.
- getActiveImage() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that returns the active image.
- getActiveImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- getActiveImage() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- getActiveImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getActiveImage() - Method in class gov.nih.mipav.view.ViewControlsImage
-
Identifies which image is active.
- getActiveImage() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Accessor that returns the active image.
- getActiveImage() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the active image.
- getActiveImage() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Returns the reference to the currently active image.
- getActiveImage() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- getActiveImage() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- getActiveImage() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- getActiveImage() - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Returns the current active image.
- getActiveImageBuffer() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that returns the active image buffer.
- getActiveImageBuffer() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the active image buffer.
- getActiveImageFrame() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor that returns the active image frame vector.
- getActiveImageInfoDialog() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Returns a reference to the image info dialog for the active image.
- getActiveImageSliceBuffer() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the active image buffer for this slice.
- getActiveIndex() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- getActiveLookupTable() - Method in class gov.nih.mipav.view.PatientSlice
-
Returns the ModelLUT or ModelRGB based on which image is currently active, either imageA or imageB and they type
of image (color or grayscale).
- getActiveLookupTable(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Returns the ModelLUT or ModelRGB based on which image is currently active, either imageA or imageB and they type
of image (color or grayscale).
- getActiveLUT() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- getActiveLUT() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getActiveLUT() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the active image.
- getActiveLUT() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- getActiveLUT() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- getActiveLUT() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- getActiveLUT() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- getActiveMask() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
- getActivePt() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Gets the Vector3f of the active point.
- getActiveRGB() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- getActiveRGB() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getActiveRGB() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the active image.
- getActiveRGB() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- getActiveRGB() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- getActiveRGB() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- getActiveRGB() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- getActiveTransferFunction() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityRGB
-
Get the transfer function.
- getActiveVOICount() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- getActiveVOIs(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
This legacy code returns all active vois for a given source image.
- getActualReceiveFrequency() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getActualTransmitFrequency() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getAdaptiveMean(int, float[], boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Used for color images only when filterType == ADAPTIVE_VECTOR.
- getADCImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Returns the Apparent Diffusion Coefficient Image.
- getAddedVOI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
Retrieve the VOI generated by the mask to voi extraction.
- getAdditionalPluginDirectories() - Static method in class gov.nih.mipav.plugins.PluginUtil
-
- getAdditionalSets() - Method in class gov.nih.mipav.model.file.FileImageXML
-
Returns the enumerated list of additional sets to be written into the header file.
- getAdjMark() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Returns the adjust mark flag.
- getAdvancedSceneModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getAdvectionWeight() - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Get the advection weight 'b'.
- getAdvFunction() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Accessor to return the advanced function string.
- getAeLockDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getAESettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getAfAreaModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getAfAreasDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
coordinates range from 0 to 255
- getAfAssistLampDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getAffiliation() - Method in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Gets affiliation.
- getAffiliation() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getAffiliation() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getAffiliationString() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getAfFineTuneDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getAFIlluminatorDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getAFModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getAFNIOrigExtents() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns the dimensions of the dicom ordered +orig AFNI image.
- getAFNIOrigResolutions() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Return the resolutions of the dicom ordered +orig AFNI image return the array containing the dicom ordered +orig
image resolutions.
- getAFNITypeString() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns integer telling if file is AFNI HEAD_ANAT_TYPE, HEAD_FUNC_TYPE, GEN_ANAT_TYPE, or GEN_FUNC_TYPE.
- getAFNIViewType() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns integer telling if file is AFNI +orig, +acpc, or +tlrc.
- getAfPointDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getAfPointSelectedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getAfPointSelectedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
coordinates expressed as a percent
- getAFPointSelectedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getAfPointUsedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getAfSearchDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getAgastPoints(int, Vector<Point2i>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- getAgastScore(double, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- getAgastScore(double, double, int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- getAgastScore(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- getAgastScore_5_8(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- getAge() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- getAge(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
Attempts to convert the underlying string value (as stored in the directory) into an Age object.
- getAIF_voxels() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- getAlias() - Method in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- getAll(double[][]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- getAllConnections() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- getAllContourPoints() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- getAllEdgePoints(int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList
-
- getAllExtensions() - Method in enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- getAllFileTypeDefaultExtensions() - Static method in class gov.nih.mipav.model.file.FileTypeTable
-
- getAllFileTypeDescriptions() - Static method in class gov.nih.mipav.model.file.FileTypeTable
-
- getAllFileTypeExtensions() - Static method in class gov.nih.mipav.model.file.FileTypeTable
-
- getAllFileTypes() - Static method in class gov.nih.mipav.model.file.FileTypeTable
-
- getAllLights() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Returns all general lights.
- getAllowedBitDepths() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngColorType
-
- getAllowsChildren() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- getAllowsChildren() - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
Only directoies can allow children.
- getAllParameters() - Static method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Returns all the parameters used in the decoding chain.
- getAllParameters() - Static method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Returns all the parameters used in the decoding chain.
- getAllParameters() - Static method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Returns all the parameters used in the encoding chain.
- getAllParameters() - Static method in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Returns all the parameters used in the encoding chain.
- getAllSameDimUnits(int) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Deprecated.
- getAllSlices() - Method in class gov.nih.mipav.model.structures.VOIProtractor
-
Returns true if this protractor is displayed independent of z-value.
- getAllSlices() - Method in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- getAllValues(Vector<Double>, Vector<Integer>, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getAllWalls(ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node>, ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- getAlpha() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- getAlpha() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- getAlpha() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns T00, T01, and T02 in the transformation matrix.
- getAlpha() - Method in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Accessor that returns the alpha smoothing factor.
- getAlpha() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- getAlphaArray() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns array of T00, T01, and T02 in the transformation matrix.
- getalphaBlend() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Accessor that returns amount of alpha blending between two images.
- getAlphaBlend() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getAlphaBlend() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that returns the alphablend of the two image.
- getAlphaBlend() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Accessor that returns the alphablend of the two image.
- getAlphaBlend() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns float alphaBlend.
- getAlphaBlend() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Returns a default alphaBlend value for blending of two images.
- getAlphaBlend() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Returns the alphaBlend value for blending between imageA and imageB.
- getAlphaBlendSliderValue() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
This function returns the value of the blending slider.
- getAlphaBlendSliderValue() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
This function returns the value of the blending slider.
- getAlphaFunction() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Accessor that returns the alpha transfer function.
- getAnchor() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- getAnchor() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the anchor point.
- getAnchor() - Method in class gov.nih.mipav.view.Rubberband
-
Returns the anchor point of the rubberband.
- getAndMoveToFrontDecode() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- getAngioFlag() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getAngle() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
- getAngle() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getAngle() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Get the spot cone angle.
- getAngle() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Read the field of view angle.
- getAngleInDegree(float, float) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Get the polar theta angle in Degree [0, 360].
- getAngleInRadians(float, float) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Get the polar theta value in radians [0 , 2*PI].
- getAngleString(double) - Method in class gov.nih.mipav.model.structures.VOIProtractor
-
Returns the angle of the protractor as a string.
- getAngleString(float[]) - Method in class gov.nih.mipav.model.structures.VOIProtractor
-
Returns the angle of the protractor as a string.
- getAnimateFrame() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method that returns the animate frame if it exists else returns null.
- getAnimateTime() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- getAnnotationInfo(String, boolean[], Color[], float[], boolean[], Color[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- getAnnotationPrefix() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- getAnnotationPrefix() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getAnnotations() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
Returns list of annotations from lattice model.
- getAnnotations() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getAnnotationsPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- getAnnotationsPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- getAnnotationsStraight() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- getAnnotationsStraight() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getANormal() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getAnotherPt() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns another mid-sag marker point for +orig to +acpc transformation in dataset ordering.
- getAnswer() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Accessor that returns the final cost function.
- getAnswer() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Accessor that returns the final cost function.
- getAnswer() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
- getAnswer() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Accessor that returns the final cost function.
- getAnswer() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
- getAnswer() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Accessor that returns the final cost function.
- getAnteriorPt() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns most anterior point marker for +acpc to +tlrc transformation in dicom ordering.
- getAntiBlurDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getAPCenter() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getApertureValueDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getApertureValueDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getApexApertureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getApexBrightnessDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getApexFilmSpeedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getApexShutterSpeedTimeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getApplicationContext() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Accessor to return the application context.
- getAppliedCorrections() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getApplyWindowLevel() - Method in class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Accessor that gets the applyWindowLevel boolean.
- getAppName() - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- getAPPO(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Get APPO part of header.
- getApproximateFNumberDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDescriptor
-
- getAppTitle() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to get the title of this application.
- GetArbInverse(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- getArbitratyClip() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getArbitratyClipOn() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getArch() - Static method in enum gov.nih.mipav.view.Preferences.SystemArchitecture
-
Gets the system architecture.
- getArchitecture() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getArchString() - Static method in class gov.nih.mipav.util.NativeLibraryLoader
-
- getArea() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the area of the VOI; return area defined by the VOI.
- getArea() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Return the surface area of the ModelTriangleMesh objects.
- getAreaUnitsOfMeasureStr() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the area unit for the data.
- getArgument() - Method in interface gov.nih.mipav.view.Argument
-
Returns command in lower-case form.
- getArgument() - Method in enum gov.nih.mipav.view.Argument.InstanceArgument
-
- getArgument() - Method in enum gov.nih.mipav.view.Argument.StaticArgument
-
- getArgument(String) - Static method in enum gov.nih.mipav.view.Argument.StaticArgument
-
- getArgument(String, boolean) - Static method in enum gov.nih.mipav.view.Argument.InstanceArgument
-
- getArgument(String, boolean) - Static method in enum gov.nih.mipav.view.Argument.StaticArgument
-
- getArray() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayItem
-
- getArray() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayItem
-
- getArray1() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayItem
-
- getArray2() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayItem
-
- getArrayCopy() - Method in class gov.nih.mipav.model.structures.jama.JamaMatrix
-
Copy the internal two-dimensional array.
- getArrayCurvePosition() - Method in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraphCurve
-
Access the entire array of curves which define the positions of points along the path in 3D that is associated
with this node.
- getArrayName() - Method in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- getArrayPointPosition(int) - Method in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraphSamples
-
Access the array of 3D coordinates for the points which define the specified branch.
- getArrayTransMatrix() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
- getArrayTransMatrix() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Sorts the array of transformation matricies and returns the sorted array.
- getArrayTransMatrix2() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Sorts the array of transformation matricies and returns the sorted array.
- getArrythmiaRejectionRatio() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getArtFilterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getArtFilterEffectDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getAsBooleanArray() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Returns the contents of this list as an array of booleans, if the list contains ParameterBoolean elements.
- getAsDoubleArray() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Returns the contents of this list as an array of doubles, if the list contains ParameterDoubl elements.
- getAsFloatArray() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Returns the contents of this list as an array of floats, if the list contains ParameterFloat elements.
- getAsIntArray() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Returns the contents of this list as an array of ints, if the list contains ParameterInt elements.
- getAspectRatioDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDescriptor
-
- getAsymmetryIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- getAttenuation0() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Get the constant term of the attenuation polynomial.
- getAttenuation1() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Get the linear term of the attenuation polynomial.
- getAttenuation2() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Get the quadratic term of the attenuation polynomial.
- getAttenuationCorrection() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getAudioDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getAuthors() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getAuthors() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getAuthorsString() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getAutoBracketingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getAutoCenterFrequency() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getAutoExposureWarningDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getAutoFlashCompensationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getAutoFocusDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getAutoFocusPositionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getAutoManualPrescan() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getAutoPortraitFramedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getAuxdata() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- getAuxFile() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to the aux_file string.
- getAuxFile() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
accessor to the aux_file string.
- getAuxFile() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to the aux_file string.
- getAuxFile() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
accessor to the aux_file string.
- getAvailableCores() - Static method in class gov.nih.mipav.util.ThreadUtil
-
Return the available processors in your machine.
- getAvailableImageList() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- getAverage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- getAverage() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- getAverageIntensities() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
DOCUMENT ME!
- getAverageSAR() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getAveragesNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getAvgInten() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the average intensity of the VOI return average intensity of image defined by the VOI.
- getAvgInten() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getAvgIntenB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the average intensity of the Blue channel of VOI return average intensity of the Blue channel of image
defined by the VOI.
- getAvgIntenB() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getAvgIntenG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the average intensity of the Green channel of VOI return average intensity of the Green channel of image
defined by the VOI.
- getAvgIntenG() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getAvgIntenR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the average intensity of the Red channel of VOI return average intensity of the Red channel of image defined
by the VOI.
- getAvgIntenR() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getAVICompression() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Gets the AVI compression.
- getAVisible() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Return check box arbitrary selection value.
- getAVisible() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Return check box arbitrary selection value.
- getAvrConvexity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getAvrConvexity() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- getAxes() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipsoidFit
-
DOCUMENT ME!
- getAxialComponentSlice() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Gets the axial position of the slice.
- getAxis(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Read the current axis at index i.
- getAxis(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- getAxis(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Read the current axis at index i.
- getAxis(int, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Read the current axis at index i.
- getAxisAligned() - Method in class gov.nih.mipav.view.PatientSlice
-
Returns whether the current slice is axis-aligned or rotated.
- getAxisAligned() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Returns whether the slice is axis-aligned or rotated.
- getAxisAngle() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get rotation axis alpha value.
- getAxisAngle() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- getAxisDirection() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Get the direction for accessing each axis of data.
- getAxisFlip(ModelStorageBase, int) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Get the booean axisFlip array that describes how FileCoordinate axes are inverted in PatientCoordinates.
- getAxisFlip(ModelStorageBase, int, boolean) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Get the booean axisFlip array that describes how FileCoordinate axes are inverted in PatientCoordinates.
- getAxisOfChange() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Calculates and returns the axis of change based on the srcImage.
- getAxisOrder(ModelStorageBase, int) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Get the axisOrder array that describes how FileCoordinate axes are remapped for the PatientCoordinates.
- getAxisOrderInverse(int[], int[]) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Inverts the input axisOrder so that points can be mapped back from PatientCoordinates to FileCoordinates.
- getAxisOrientation() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns orientation of each axis.
- getAxisOrientation() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Returns the orientations of the 3 axes.
- getAxisOrientation() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the axis orientation of image.
- getAxisOrientation(float[][]) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Return the 3 axis orientation codes that correspond to the closest standard anatomical orientation of the (i,j,k)
axes.
- getAxisOrientation(int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns orientation of entered axis.
- getAxisOrientation(ModelStorageBase) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Gets the axisOrientation variables stored in the image.FileInfoBase object for the input ModelImage, image.
- getAxisOrientation(TransMatrix) - Static method in class gov.nih.mipav.model.file.FileInfoMinc
-
Return the 3 axis orientation codes that correspond to the closest standard anatomical orientation of the (i,j,k)
axes.
- getAxisOrientation(TransMatrix) - Static method in class gov.nih.mipav.model.file.FileMGH
-
Return the 3 axis orientation codes that correspond to the closest standard anatomical orientation of the (i,j,k)
axes.
- getAxisOrientation(TransMatrix) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
--------------------------------------------------------------------------- !
- getAxisOrientation(TransMatrix) - Method in class gov.nih.mipav.model.file.FileNRRD
-
Return the 3 axis orientation codes that correspond to the closest standard anatomical orientation of the (i,j,k)
axes.
- getAxisOrientationFromStr(String) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the axis orientation associated with a string.
- getAxisOrientationStr(int) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Return the string associated with an axis orientation.
- getAxisSlice() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Return which axis has been currently selected for slicing the volume for rendering.
- getAxisX() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get rotation axis X value.
- getAxisY() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get rotation axis Y value.
- getAxisZ() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get rotation axis Z value.
- getb() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
-
- getB0ResultStack() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- getB1ResultStack() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- getBabyAge1Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getBabyAgeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getBabyNameDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- GetBackface() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Return true if back-face culling is on, false otherwise.
- getBackground() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getBackgroundColor() - Method in class gov.nih.mipav.model.structures.VOIText
-
Gets background color.
- getBackgroundColor() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Read the background color used for rendering images.
- getBackgroundColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- getBackgroundColor() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that gets the background color.
- getBackgroundColorDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDescriptor
-
- getBandSpacing() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- getBandSpacingCounter() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- getBarycentric(Point2f, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
Support for conformal mapping to planar triangle mesh.
- getBarycentric(Vector2f, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
Support for conformal mapping to planar triangle mesh.
- getBase() - Method in enum gov.nih.mipav.model.file.FileInfoBase.UnitType
-
- getBase() - Method in class gov.nih.mipav.model.structures.event.VOIEvent
-
returns the reference VOI.
- getBaseNameforReconstructedSlices() - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to get baseNameforReconstructedSlices.
- getBasisVectors(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getBasisX() - Method in class gov.nih.mipav.model.structures.BSplineLattice2Df
-
Return the discretized B-Spline basis for the X axis.
- getBasisX() - Method in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
Return the discretized B-Spline basis for the X axis.
- getBasisY() - Method in class gov.nih.mipav.model.structures.BSplineLattice2Df
-
Return the discretized B-Spline basis for the Y axis.
- getBasisY() - Method in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
Return the discretized B-Spline basis for the Y axis.
- getBasisZ() - Method in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
Return the discretized B-Spline basis for the Z axis.
- getBBox(Box3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- GetBBox(Box3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- getBeginSlice() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns the slice to begin saving at.
- getBeginTime() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns the time slice to begin saving at.
- getBehaviorGroup() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Accessor for the branch group that holds the mouse behavior.
- GetBestSchurTemplateSpecialization(int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- getBestTickSpacing(int, double) - Method in class gov.nih.mipav.view.ViewJSlider
-
Gets the best tick spacing by finding the value that divides into rangeNeeded with the greatest number that is
still less than the maximum number of ticks that are allowed in the range
- getBeta() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- getBeta() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- getBeta() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns T10, T11, and T12 in the transformation matrix.
- getBetaArray() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns array of T10, T11, and T12 in the transformation matrix.
- getBetaHalflife() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getBias() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- getBias() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- getBilinear(int, double, double, int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
Performs bilinear interpolation of image data.
- getBilinear(int, double, double, int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
Performs bilinear interpolation of image data.
- getBilinear(int, float, float, int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Performs bilinear interpolation of image data.
- getBilinear(int, float, float, int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
Performs bilinear interpolation of image data.
- getBilinear(int, float, float, int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Performs bilinear interpolation of image data.
- getBiLinear(float[], int, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
getBiLinear - version of get that performs bi-linear interpoloation.
- getBiLinear(float[], int, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
getBiLinear - version of get that performs bi-linear interpoloation.
- getBiLinear(float, float) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Version of get that performs bi-linear interpoloation.
- getBiLinear(float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs bi-linear interpoloation.
- GetBillboardPosition() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- getBinaryDataString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getBit(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Gets whether a bit at a specific index is set or not.
- getBitFlagDescription(int, Object...) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
LSB first.
- getBitmapType() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- getBitmapTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- getBitPix() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to the bitpix value.
- getBitPix() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
accessor to the bitpix value.
- getBitPix() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to the bitpix value.
- getBitPix() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
accessor to the bitpix value.
- getBits(int) - Method in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- getBits(int) - Method in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- getBitsAllocated() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getBitSetBuffer() - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Gets the Bitset buffer (binary image).
- getBitSetMask() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Gets the Mask image returned as a Java Bitset object.
- getBitsPerChannelDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDescriptor
-
- getBitsPerPixel() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getBitsPerSample() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- getBitsPerSampleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getBitsStored() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getBlackAndWhiteFilterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getBleachedROIShape() - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- GetBlend() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
Sets the blend factor shader parameter between imageA and imageB.
- getBlendSliderValue() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Get the blender slider value
- getBlendValue() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Get the imageA and imageB blending value from the PlaneRender.
- getBlendValue() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Get the imageA and imageB blending value from the PlaneRender.
- getBlockConfigAndKernelString() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- getblue() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Accessor that returns int blue.
- getblue() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Accessor that returns int blue.
- getblue() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Accessor that returns int blue.
- getblue() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Accessor that returns int blue.
- getBlue() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getBlue() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
accessor that returns int blue.
- getBlueBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getBlueFunction() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Accessor that returns the blue transfer function.
- getBlueFunction() - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Accessor that returns the blue transfer function.
- getBlueX() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- getBlueY() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- getBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
Get the blurred curvature flow image.
- getBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
Get the blurred curvature flow image.
- getBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
Get the blurred curvature flow image.
- getBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
Get the blurred curvature flow image.
- getBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Get the blurred curvature flow image.
- getBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Get the blurred curvature flow image.
- getBlurWarningDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getbMatrixVals() - Method in class gov.nih.mipav.model.file.DTIParameters
-
- getBodyFirmwareVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getBodyPart() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get subject's body part (optional).
- getBOn() - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Returns the boolean indicating if the blue channel should be displayed.
- getBoolean(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a boolean, if possible.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets a boolean value at position in the data array.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Gets the data from the object.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Gets the data from the object.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Gets the data from the object.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Gets the data from the object.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Gets the data from the object.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Gets the data from the object as a boolean.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Gets the data from the object as a boolean.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Gets the data from the object as a boolean.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Gets the data from the object as a boolean.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Gets the data from the object as a boolean.
- getBoolean(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of get that does NOT perform bounds checking.
- getBoolean(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
n-Dimensional get data fuction where bounds checking is NOT performed.
- getBoolean(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is NOT performed.
- getBoolean(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D get data fuction where bounds checking is NOT performed.
- getBoolean(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is NOT performed.
- getBoolean(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the boolean value of one of the parameters from the table.
- getBoolean(StringTokenizer) - Static method in class gov.nih.mipav.view.MipavUtil
-
Get a boolean value from a string tokenizer.
- getBooleanObject(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a boolean.
- getBooleanString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getBorderBufferNeighborList(int, int[], boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
- getBorderBufferNeighborList(int, int, float[], boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
- getBorderColor() - Method in class gov.nih.mipav.view.BorderedButton
-
DOCUMENT ME!
- getBorderColor() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the color of the image border.
- getBorderSize() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the size of the image border.
- getBorderValue() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
Get the image border value.
- getBotX() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns array of bottom X boundaries for conversion to Talairach space.
- getBotY() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns array of bottom Y boundaries for conversion to Talairach space.
- getBotZ() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns array of bottom Z boundaries for conversion to Talairach space.
- getBound() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Accessor for the bounds sphere.
- getBoundary() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Get the indices of the boundary points of the current region.
- getBoundary() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
Get the indices of the boundary points of the current region.
- getBoundary() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
Get the indices of the boundary points of the current region.
- getBoundary() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The set of boundary points that were identified as part of the
coarse-level region growing.
- getBoundaryCode(BitSet, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- getBoundedVolume() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Returns the crop bounding volume as a CubeBounds object.
- getBoundingBox() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- getBoundingBoxColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- getBoundingBoxFlag() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the bounding box flag.
- getBoundingBoxLeftMiddle(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates and returns the bounding box middle left-edge point for the input VOI.
- getBoundingBoxLowerLeft(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates and returns the bounding box lower edge left corner for the input VOI.
- getBoundingBoxLowerMiddle(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates and returns the bounding box lower edge middle point for the input VOI.
- getBoundingBoxLowerRight(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates and returns the bounding box lower edge right corner for the input VOI.
- getBoundingBoxRightMiddle(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates and returns the bounding box middle right-edge point for the input VOI.
- getBoundingBoxUpperLeft(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates and returns the bounding box upper edge left corner for the input VOI.
- getBoundingBoxUpperMiddle(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates and returns the bounding box upper edge middle point for the input VOI.
- getBoundingBoxUpperRight(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates and returns the bounding box upper edge right corner for the input VOI.
- getBounds() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getBounds() - Method in class gov.nih.mipav.view.Rubberband
-
Gets a rectangle that is the bounds of the rubberband.
- getBounds() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that returns the bounds of the component.
- getBounds(float[], float[], float[]) - Method in class gov.nih.mipav.model.structures.VOI
-
Calculates the extents or boundary of the voi in x, y, and z.
- getBounds(float[], float[], float[]) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Calculates the bounds of the contour.
- getBounds(int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.VOI
-
Calculates the extents or boundary of the voi in x, y, and z.
- getBounds(int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Calculates the bounds of the contour.
- getBoundsDistance(Vector3f, Vector3f, Vector3f, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- getBoundsWithRotation() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getBoundXInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get the location of the negative X slice bound.
- getBoundXPos() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get the location of the positive X slice bound.
- getBoundYInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get the location of the negative Y slice bound.
- getBoundYPos() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get the location of the positive Y slice bound.
- getBoundZInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get the location of the negative Z slice bound.
- getBoundZPos() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get the location of the positive Z slice bound.
- getBox() - Method in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- getBox(double[][]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- getBoxSliceInScreen(Vector3f[], int[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
sets up the values for the ViewJComponentBoxSlice array.
- getBoxSliceInScreen(Vector3f[], int[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
sets up the values for the ViewJComponentBoxSlice array.
- getBoxWithHole(double[][]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- getBoxX() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Return the checkbox of X slider.
- getBoxX() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Return the checkbox of X slider.
- getBoxY() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Return the checkbox of Y slider.
- getBoxY() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Return the checkbox of Y slider.
- getBoxZ() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Return the checkbox of Z slider.
- getBoxZ() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Return the checkbox of Z slider.
- getBracketB() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- getBracketBound() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getBracketSettingsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getBracketStepDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getBrainMask() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Get the 3D image that represents the extracted brain.
- getBrainMask() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- getBrainSelection() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Get the current brain selection term, as described in BrainExtraction.pdf, that is part of the image term in the
surface evolution.
- getBrainVolume() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Get the 3D image that represents the extracted brain.
- getBrainVolume() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Returns the volume of the brain in units (typically millimeters).
- getBranch() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
returns the BranchGroup from the scene graph
- getBranchCurve() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Access the curve in the path graph currently positioned along.
- getBranchCurve() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Access the curve in the path graph currently positioned along.
- getBranchCurve() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Access the curve in the path graph currently positioned along.
- getBranchDistUnvisitedMax() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Access the normalized distance traveled from the end of the current branch path.
- getBranchDistUnvisitedMax() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Access the normalized distance traveled from the end of the current branch path.
- getBranchDistUnvisitedMax() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Access the normalized distance traveled from the end of the current branch path.
- getBranchDistUnvisitedMin() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Access the normalized distance traveled from the beginning of the current branch path.
- getBranchDistUnvisitedMin() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Access the normalized distance traveled from the beginning of the current branch path.
- getBranchDistUnvisitedMin() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Access the normalized distance traveled from the beginning of the current branch path.
- getBranchGroup() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Accessor for the branch group of this 3D object, the parent of the transform group.
- getBranchIndex() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
Return the index of the branch from which the item was seen and annotated.
- getBranchIndex() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Access the index of the curve in the path graph currrently positioned along.
- getBranchIndex() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Return the index of the branch from which the item was seen and annotated.
- getBranchIndex() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Access the index of the curve in the path graph currrently positioned along.
- getBranchIndex() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Access the index of the curve in the path graph currrently positioned along.
- getBranchingFactor() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getBranchParentIndex(int) - Method in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Return the index of the parent branch for the specified branch.
- getBranchParentNormalizedDist(int) - Method in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Return the normalized distance (in range [0,1]) along the parent branch where the specified branch starts.
- getBranchPathShape() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
For displaying the Path in the surface renderer:
- getBranchPointBranches(int, int) - Method in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Return the array of branch indexes for all of the child branches which start at the specified point along the
specified parent branch.
- getBranchPointEntryArray(int) - Method in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Return the array of TreeMap entries which stores all of the child branch information for the specified input
branch.
- getBranchPoints(int) - Method in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Return array of relative path distances (in range [0,1]) where branch points occur along the specified input
branch.
- getBranchPointSegment(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Return an index which identifies segment the specified normalized path distance belongs.
- getBranchPointSegment(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Return an index which identifies segment the specified normalized path distance belongs.
- getBranchPointSegment(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Return an index which identifies segment the specified normalized
path distance belongs.
- getBranchState() - Method in interface gov.nih.mipav.view.renderer.flythroughview.FlyThroughRenderInterface
-
- getBranchState() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Get the current state of traversing.
- getBranchState() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- getBranchState() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Get the current state of traversing.
- getBranchState() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- getBranchState() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Get the current state of traversing.
- getBrickLabsString() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns the brick labs string for identifying sub-bricks.
- getBrightnessValueDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getBrushSize() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- getBruteForce() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get whether or not to do the brute-force registration.
- getbSplineAlgo() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
- getBuffer() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- getBuffer() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- getBuffer3Bytes(byte[], int, boolean) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Converts byte data to int data.
- getBufferByte() - Method in class gov.nih.mipav.model.file.FileNIFTI
-
- getBufferDouble(byte[], int, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Converts byte data to double data.
- getBufferedRaster(int) - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Access texture data from the BufferedImage with given z slice number.
- getBufferFloat(byte[], int, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Converts byte data to float data.
- getBufferFloat(byte[], int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Converts byte data to float data.
- getBufferInt(byte[], int, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Converts byte data to int data.
- getBufferInt(byte[], int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Converts byte data to int data.
- getBufferLong(byte[], int, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Converts byte data to int data.
- getBufferShort(byte[], int, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Converts byte data to short data.
- getBufferShort(byte[], int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Converts byte data to short data.
- getBufferTypeStr(int) - Static method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the string for a particular buffer type.
- getBufferUShort(byte[], int, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Converts byte data to int data.
- getBufferValue(boolean, boolean, float[], int) - Method in class gov.nih.mipav.view.PatientSlice
-
Helper method for calculating complex values.
- getBugFromDescription(String) - Static method in enum gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder.BugType
-
- getBundledPlugIns() - Method in class gov.nih.mipav.plugins.PlugInBundle
-
Subclasses should override this method to return the list of plugins that they encompass.
- getBurn(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Return one of the treatment's burns.
- getBurnBase() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get the burn base reference inside the probe control panel.
- getBurnCenter(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Return the center point of a burn.
- getBurnEnum() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Return the list of burns as an enumeration.
- getBurnLabelFlag() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get the show burning point label's flag.
- getBurnMask() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Get the burnning point ( sphere packing or ellipsoid packing ) mask.
- getBurnName(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Return the name of a burn.
- getBurnPoint() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get the burning point world coordinate.
- getBurnRadius(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Return the diameter of a burn.
- getBurnRootParentBG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Get the root of the burning point.
- getBurnRootParentBG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get the burn root branch group.
- getBurnVolume(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Return the volume of a burn.
- getBurstModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDescriptor
-
- getBurstModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getButtonPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogText
-
Accessor to the JPanel which holds the buttons at the bottom of the dialog.
- getButtons() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Return all the buttons in a single array.
- getbValues() - Method in class gov.nih.mipav.model.file.DTIParameters
-
- getBWModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getByLineDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getByLineTitleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getByte() - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads unsigned bytes from file.
- getByte() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialByteArrayReader
-
- getByte() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Gets the next byte in the sequence.
- getByte() - Method in class gov.nih.mipav.model.file.MetadataExtractor.StreamReader
-
- getByte(byte[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- getByte(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteArrayReader
-
- getByte(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- getByte(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Gets the byte value at the specified byte index.
- getByte(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- getByte(int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets a byte value at position in the data array.
- getByte(int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Gets the data in byte format.
- getByte(int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Gets the data in byte format.
- getByte(int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Gets the data in byte format.
- getByte(int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Gets the data in byte format.
- getByte(int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Gets the data in byte format.
- getByte(int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Gets the data in byte format.
- getByte(int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Gets the data in byte format.
- getByte(int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Gets the data in byte format.
- getByte(int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Gets the data in byte format.
- getByte(int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Gets the data in byte format.
- getByte(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of get that does NOT perform bounds checking
- getByte(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD get data fuction where bounds checking is NOT performed.
- getByte(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is NOT performed.
- getByte(int, int, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a length of the data and deposits it into a single Short or an array of Short as needed by the tag's VM.
- getByte(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D get data fuction where bounds checking is NOT performed.
- getByte(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is NOT performed.
- getByteArray(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Gets the specified tag's value as an byte array, if possible.
- getByteBiLinear(float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs bi-linear interpoloation.
- getByteBuffer() - Method in class gov.nih.mipav.model.file.FilePackBit
-
Gets the byte buffer of the image data.
- getByteBuffer() - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Gets the byte buffer (image).
- getByteImageData(ModelImage, int, int) - Method in class gov.nih.mipav.model.file.FileIO
-
- getByteLengthDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getByteOrdering() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- getBytes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunk
-
- getBytes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.StringValue
-
- getBytes(byte[], int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialByteArrayReader
-
- getBytes(byte[], int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Retrieves bytes, writing them into a caller-provided buffer.
- getBytes(byte[], int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.StreamReader
-
- getBytes(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialByteArrayReader
-
- getBytes(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Returns the required number of bytes from the sequence.
- getBytes(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.StreamReader
-
- getBytes(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteArrayReader
-
- getBytes(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- getBytes(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Returns the required number of bytes from the specified index from the underlying source.
- getBytes(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- getBytes(MetadataExtractor.SequentialReader, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDhtReader
-
- getBytesPerPixel() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getByteTriLinear(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs tri-linear interpoloation.
- getC() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
- getC(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Color function to get data where bounds checking is performed.
- getCachedOrCreateRaster(int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- getCalledAppTitle() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Accessor to return the called application entity title.
- getCallingAppTitle() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Accessor to return the calling application entity title.
- getCalMax() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to cal-max.
- getCalMax() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
accessor to cal-max.
- getCalMax() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to cal-max.
- getCalMax() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
accessor to cal-max.
- getCalMin() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to cal_min.
- getCalMin() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
accessor to cal-min.
- getCalMin() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to cal_min.
- getCalMin() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
accessor to cal-min.
- getCalUnits() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the string for cal units.
- getCalUnits() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the string for cal units.
- getCameraControl() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Get the rotation control dialog box.
- getCameraControl() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Get the rotation control dialog box.
- getCameraControl() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Get the camera control panel.
- getCameraDirection() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Return the Camera direction vector at the Annotation point.
- getCameraDirection() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Return the camera direction vector.
- getCameraElevationAngleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getCameraIdDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getCameraLocation() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Return the Camera 3D position at the Annotation point.
- getCameraLocation() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Get the camera current location
- getCameraMake() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- getCameraModel() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- getCameraModelDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getCameraOrientationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getCameraPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Get the camera control panel.
- getCameraParameters() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Get the camera parameters.
- getCameraRight() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Return the Camera right vector at the Annotation point.
- getCameraSettingsVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getCameraTemperatureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDescriptor
-
- getCameraTemperatureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getCameraType2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getCameraTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getCameraUp() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Return the Camera up vector at the Annotation point.
- getCameraUp() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Return the camera up vector.
- getCancelButton() - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Get the cancel button
- getCanvas() - Method in interface gov.nih.mipav.view.renderer.flythroughview.FlyThroughRenderInterface
-
- getCanvas() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Returns the VolumeCanvas3D object.
- getCanvas() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Accessor for the canvas for this 3D object.
- getCanvas() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- getCanvas() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- GetCanvas() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Returns the GLCanvas in the m_pkRenderer object.
- GetCanvas() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- GetCanvas() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- GetCanvas() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
Return the GLCanvas for display.
- GetCanvas() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- getCanvasCenter() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Gets the canvas center.
- getCanvasCenter() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Gets the canvas center.
- getCaptionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getCaptureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getCardiacFrequency() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getCardiacHeartRate() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getCardiacPhaseNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getCardiacPhaseNumber() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getCardiacRepTime() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getCartesianX(float, float) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Givem Polar coordinate system r and theta, calculate the Cartesian coordinate X.
- getCartesianY(float, float) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Givem Polar coordinate system r and theta, calculate the Cartesian coordinate Y.
- getCasioPreviewThumbnailDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getCategory() - Method in interface gov.nih.mipav.plugins.BundledPlugInInfo
-
Specifies the menu structure of a particular plug-in.
- getCategory() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getCategory() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getCategoryDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getCc() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- getCcdIsoSensitivityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getCcdSensitivityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getCcdSensitivityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDescriptor
-
- getCDATA(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Converting string value to CDATA format.
- GetCell(int, int, int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDenseMatrix
-
- GetCell(int, int, int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- GetCell(int, int, int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessMatrix
-
- GetCell(int, int, int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- getCellColor(SoftwareMaterial, SoftwareVertexProperty, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Compute the "lighted" color of the cell at the specified position with the specified normal vector and base
color.
- getCellData() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- getCellEditorValue() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- getCenter() - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
Get the center of the quadric surface.
- getCenter() - Method in class gov.nih.mipav.view.PatientSlice
-
Return the current center of the volume in FileCoordinates.
- getCenter() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Returns the current center point of the 3 intersecting ModelImage
planes in FileCoordinates.
- getCenter() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Gets the three slider positions, representing the center point of the
three orthogonal planes.
- getCenter() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Gets the center of the ModelTriangleMesh objects.
- getCenter() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Gets the three slider positions, representing the center point of the
three orthogonal planes.
- getCenter() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
- getCenter() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Calculate and return the current center of the widget in world coordinates.
- getCenter() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getCenter() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Returns the current center point in FileCoordinates:
- getCenter() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the x coordinate of the point to be the center of the transformed
image.
- getCenter() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the x coordinate of the point to be the center of the transformed
image.
- getCenter() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the x coordinate of the point to be the center of the transformed image.
- getCenter(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- GetCenter() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Return center of the surface.
- getCenterCenter() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getCenterControlPoints() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getCenterOfMass() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
Returns the computed center of mass.
- getCenterOfMass() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the the center of mass of the VOI ; return center of mass defined by the VOI.
- getCenterOfMass(ModelImage) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Gets the center of mass of the contour for a given image
- getCenterOfMass(ModelImage, Vector3f, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Gets the center of mass of the contour for the image and color-channel c.
- getCenterOfMassB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the the blue center of mass of the VOI ; return blue center of mass defined by the VOI.
- getCenterOfMassB(ModelImage) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Gets the blue center of mass of the contour.
- getCenterOfMassG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the the green center of mass of the VOI ; return green center of mass defined by the VOI.
- getCenterOfMassG(ModelImage) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Gets the green center of mass of the contour.
- getCenterOfMassR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the the red center of mass of the VOI ; return red center of mass defined by the VOI.
- getCenterOfMassR(ModelImage) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Gets the red center of mass of the contour.
- getCenterOfRotation() - Method in class gov.nih.mipav.model.file.FileInfoMetaImage
-
- getCenterPointX() - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- getCenterPointY() - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- getCenterPointZ() - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- getCenterPt() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- getCenterPt() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getCenterPt() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- getCenterPt() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- getCenterPt() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- getCenterPt() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- getCenterPt() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- getCenterPt() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- getCenterPtLocation() - Method in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Gets the center point of rotation.
- getCenterValue(OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getCentroids() - Method in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
accessor that returns the array of initial centroid values.
- getCentroids() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Gets the minimum and maximum of each image and initializes the centroids dialog appropriately.
- getCentroids() - Method in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
Accessor that returns the array of initial centroid values.
- getCentroids() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Gets the minimum and maximum of each image and initializes the centroids dialog appropriately.
- getCentroids(ModelImage, AlgorithmFuzzyCMeans, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- getCentroids(ModelImage, AlgorithmFuzzyCMeans, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- getCentroids(ModelImage, AlgorithmFuzzyCMeans, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- getCentroids(ModelImage, AlgorithmFuzzyCMeans, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- getCentroids(ModelImage, AlgorithmFuzzyCMeans, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- getCentroids(ModelImage, AlgorithmFuzzyCMeans, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Gets the minimum and maximum of each image and initializes the centroids
dialog appropriately.
- getCentroids(ModelImage, AlgorithmFuzzyCMeans, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Gets the minimum and maximum of each image and initializes the centroids
dialog appropriately.
- getCentroidsThreshold() - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Gets the minimum and maximum of each image and initializes the centroids dialog appropriately.
- getCfaPattern2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
String description of CFA Pattern
Indicates the color filter array (CFA) geometric pattern of the image sensor when a one-chip color area sensor is used.
- getCfaPatternDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
String description of CFA Pattern
Converted from Exiftool version 10.33 created by Phil Harvey
http://www.sno.phy.queensu.ca/~phil/exiftool/
lib\Image\ExifTool\Exif.pm
Indicates the color filter array (CFA) geometric pattern of the image sensor when a one-chip color area sensor is used.
- getChangedCurveOfInterest() - Method in class gov.nih.mipav.model.structures.UpdateVOIEvent
-
DOCUMENT ME!
- getChangedValues() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getChangedVolumeOfInterest() - Method in class gov.nih.mipav.model.structures.UpdateVOIEvent
-
DOCUMENT ME!
- getChangeTab(String) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.ScannerChoiceListener
-
- getChannelCountDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDescriptor
-
- getChannelID() - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- getChannels() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- getCharset() - Method in class gov.nih.mipav.model.file.MetadataExtractor.StringValue
-
- getCheckbox() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- getCheckboxLabels() - Static method in class gov.nih.mipav.view.JPanelStatisticsList
-
- getCheckboxLength() - Method in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- getChf() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- getChf() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- getChildAt(int) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- getChildCount() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- getChildNodeIDs() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getChildNodeIDs() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- getChisq() - Method in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
- getChiSquared() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- getChiSquared() - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
getChiSquared - accessor to chi-squared value (goodness-of-fit measure).
- getChiSquared() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
getChiSquared - accessor to chi-squared value (goodness-of-fit measure).
- getChiSquared() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
getChiSquared - accessor to chi-squared value (goodness-of-fit measure).
- getCircleRadius() - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- getCircularity() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the circularity of the VOI.
- getCitations() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getCitations() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getCitationsString() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getCityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getCityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getClassArray() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Features
-
- getClassArray() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.FeaturesSVM
-
- getClasses(libdt.DytexMix, Vector<libdt.Mat>, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- getClasses(libdt.DytexMix, Vector<libdt.Mat>, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- getClassificationImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that returns the classification image.
- getClassValues() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- getClassValues() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- getCleanImageBufferB() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- getClearRetouchDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getClickCountToStart() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- getClip() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- getClip() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getClipAEEnable() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getClipArb() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- getClipArbInv() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- getClipColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- getClipColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getClipColors() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- getClipDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return clipPanel from parent frame.
- getClipDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return clipPanel from parent frame.
- getClipDisplay() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getClipDisplayed() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- GetClipEffect() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Return current clipping state.
- getClipEnable() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- getClipEnable() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getClipEnabled() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- getClipEye() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- getClipEyeInv() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- getClipInv() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- getClipInv() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getClipInvDisplay() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getClipInvEnable() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- getClipInvEnable() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- GetClipped() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- getClippedMatrix() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Retrieves the clipped matrix for paste action.
- getClippedScannerVectors() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Deprecated.
- getClippedVOIs() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Deprecated.
- getClippingPathNameString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- GetClipRadius() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- getClipValues() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- getCmdLineArguments() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Returns the Command line arguments (as one string, each separated by a space) .
- getCoarseBegin() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the coarse sample begin.
- getCoarseEnd() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the coarse sample end.
- getCoarseRate() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getCoarseRate() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the coarse sample rate.
- getCoarseRateX() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getCoarseRateY() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getCoarseRateZ() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getCoarseVal() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Get the coarse value.
- getCoarseVal() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEdit
-
abstract method returning the panel's value.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditAxisOrientation
-
If the information held by the panel is stored as a code (as in 'M' for "male" or 'F' for "female"), then this
code will be returned by this method.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditBoolean
-
If the information held by the panel is stored as a code (as in 'M' for "male" or 'F' for "female"), then this
code will be returned by this method.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditChar
-
If the information held by the panel is stored as a code (as in 'M' for "male" or 'F' for "female"), then this
code will be returned by this method.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditDate
-
If the information held by the panel is stored as a code (as in 'M' for "male" or 'F' for "female"), then this
code will be returned by this method.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditDefault
-
If the information held by the panel is stored as a code (as in 'M' for "male" or 'F' for "female"), then this
code will be returned by this method.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditImageOrientation
-
If the information held by the panel is stored as a code (as in 'M' for "male" or 'F' for "female"), then this
code will be returned by this method.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditModality
-
If the information held by the panel is stored as a code (as in 'M' for "male" or 'F' for "female"), then this
code will be returned by this method.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditOrientation
-
If the information held by the panel is stored as a code (as in 'M' for "male" or 'F' for "female"), then this
code will be returned by this method.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditRace
-
DOCUMENT ME!
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditSetOrParam
-
If the information held by the panel is stored as a code (as in 'M' for "male" or 'F' for "female"), then this
code will be returned by this method.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditSex
-
If the information held by the panel is stored as a code (as in 'M' for "male" or 'F' for "female"), then this
code will be returned by this method.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditTime
-
If the information held by the panel is stored as a code (as in 'M' for "male" or 'F' for "female"), then this
code will be returned by this method.
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelEditValueType
-
DOCUMENT ME!
- getCodedValue() - Method in class gov.nih.mipav.view.JPanelFileSelection
-
DOCUMENT ME!
- getCoeff(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
DOCUMENT ME!
- getCoefficient(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
Get the coefficients of the quadratic equation that represents the approximating quadric surface.
- getCoefficients() - Method in class gov.nih.mipav.model.structures.RealPolynomial
-
- getCoilName() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getCoilType() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getCol() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexRowColItem
-
- getCollapseImage() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getColor() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- getColor() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getColor() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the VOI's color.
- getColor() - Method in class gov.nih.mipav.model.structures.VOIText
-
Gets the font color (for copy/paste operations).
- getColor() - Method in class gov.nih.mipav.view.ColorIcon
-
getColor - gets the color of the icon.
- getColor() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query the current based color of the light.
- getColor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Get the current burning point color.
- getColor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Get the buring point surface color.
- getColor() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
Returns the color of the slice:
- getColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- getColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Returns the widget current color from the widget shader.
- getColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Returns the current color of the VOI.
- getColor() - Method in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- getColor() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
getColor - gets the color of the line on the graph.
- getColor(int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ColorMap
-
Returns the ith color
- getColor(int) - Method in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
- getColor(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SimpleColorMap
-
- getColor(int) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Gets a specific index of the LUT.
- getColor(int) - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Gets a specific index of the RGB table.
- getColor(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
- getColor(ModelTriangleMesh, int[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Calculates and returns the start point color for a new starting point
inside an existing triangle.
- getColor(ModelTriangleMesh, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Get the the triangle color from the given triangle index.
- getColor(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D.SurfaceRefXMLHandler
-
Called when reading the input surface.xml file: Parses the input string into a Color3f variable:
- getColor(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Called when reading the input surface.xml file: Parses the input string into a Color3f variable:
- getColor(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Called when reading the input surface.xml file: Parses the input string into a Color3f variable:
- getColor(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM.SurfaceRefXMLHandler
-
Called when reading the input surface.xml file: Parses the input string into a Color3f variable:
- getColor(TriMesh, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Calculates and returns the start point color for a new starting point
inside an existing triangle.
- getColor(TriMesh, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Get the the triangle color from the given triangle index.
- GetColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Returns the color of the widget color transfer function.
- GetColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- getColor1() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- getColor2() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- getColor3() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- getColor3() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Gets a Color3f copy of the surface color.
- getColor4() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- getColor4f() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Gets the surface color.
- getColorA() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getColorAdjustmentModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getColorB() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getColorBackground() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- getColorChange(Color) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
This is called when the user chooses a new color for the surface.
- getColorChange(Color) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
This is called when the user chooses a new color for the surface.
- getColorCopy() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Make a copy of the colors of a triangle mesh.
- getColorCopy() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getColorCreatorEffectDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getColorDialog() - Method in class gov.nih.mipav.view.ViewJColorChooser
-
- getColorEffectDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getColorEncoding() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- getColorEncodingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- getColorFactor() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
Calculates and returns the color factor based on the srcImage.
- getColorFactor() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Calculates and returns the color factor based on the srcImage.
- getColorFactor() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Calculates and returns the color factor based on the srcImage.
- getColorFilterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getColorG() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getColorimage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- getColorImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Returns the Color Map Image.
- getColorLocal(int, Color4f) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Gets the stored local color.
- getColorMapImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- getColorMapped(int[], Color3f, float, Color4f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Get the color from the RGB lookup table:
- getColorMapped(ModelRGB, int[], int, float[], int, ColorRGBA) - Method in class gov.nih.mipav.view.PatientSlice
-
Get the color from the RGB lookup table:
- GetColorMapTarget() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the Color Map Texture.
- getColorMatrix2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDescriptor
-
- getColorMatrixDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDescriptor
-
- getColorMatrixDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getColorModeCameraSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getColorModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDescriptor
-
- getColorModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDescriptor
-
- getColorModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getColorModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getColorModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getColorModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDescriptor
-
- getColorModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getColorModel() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- getColorPallete(FileDicomTagTable, FileDicomKey) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a pallete (look-up table) out of the given DICOM key and interprets the data based on the data-size
specification tag.
- getColorR() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getColorRGBA() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Gets the surface color.
- getColors() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ColorMap
-
- getColors() - Method in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
- getColors() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SimpleColorMap
-
- getColors() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getColors(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Called when reading the input surface.xml file: Parses the input string into a an array of Color4f[],
representing the mesh per-vertex colors:
- getColorSaturationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getColorScheme() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- getColorSpaceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getColorSpaceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getColorSpaceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getColorSpaceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getColorSpaceType() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- getColorSpaceTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- getColorString() - Method in class gov.nih.mipav.model.structures.VOIText
-
Gets a string describing the font's color (for saving in XML header).
- getColorString() - Method in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- getColorString(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D.SurfaceRefXMLHandler
-
Called when writing the surface.xml file: Converts the input Color3f to a String for writing:
- getColorString(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Called when writing the surface.xml file: Converts the input Color3f to a String for writing:
- getColorString(Color4f[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Called when writing the surface.xml file: Converts the input array of Color4f[] to a String for writing:
- getColorString(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Called when writing the surface.xml file: Converts the input Color3f to a String for writing:
- getColorString(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM.SurfaceRefXMLHandler
-
Called when writing the surface.xml file: Converts the input Color3f to a String for writing:
- getColorTemperatureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getColorText() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.ColorScheme
-
- getColorToneDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getColorTransformDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDescriptor
-
- getColorType() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- getColorTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDescriptor
-
- getColour(int) - Method in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- getColour(int) - Method in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- getColourDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getColourModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getColumn(int, double[]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Copy our data into the provided double array
- getColumn(int, double[]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Copy our data into the provided double array
- GetColumn(int, int, double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- getColumnBaseIndex(String) - Method in class gov.nih.mipav.view.ViewTableModel
-
Gets the index of the given column name.
- getColumnClass(int) - Method in class gov.nih.mipav.model.structures.SortingTableModel
-
DOCUMENT ME!
- getColumnClass(int) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- getColumnClass(int) - Method in class gov.nih.mipav.view.ViewTableModel
-
Returns the class of the item in the column.
- getColumnCount() - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- getColumnIndex(String) - Method in class gov.nih.mipav.view.ViewTableModel
-
Gets the index of the given column name.
- getColumnName(int) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- getColumnNames() - Method in class gov.nih.mipav.model.structures.SortingTableModel
-
DOCUMENT ME!
- getColumnNames() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- getColumns() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getColumnStartsWithIndex(String) - Method in class gov.nih.mipav.view.ViewTableModel
-
Gets the index of a column name that starts with the given string
- getCOMInfo() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Return the information found in the COM marker segments encountered in
the decoded codestream.
- getCOMInfo() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Return the information found in the COM marker segments encountered in
the decoded codestream.
- getCommand(String) - Static method in enum gov.nih.mipav.view.Argument.InstanceArgument
-
- getComments() - Method in class gov.nih.mipav.model.structures.VOI
-
- getComments() - Method in class gov.nih.mipav.model.structures.VOIText
-
- getCommon() - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting.mergeItem
-
- getCommonExtension() - Method in enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- getCompA() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Return the opacity histrogram component of the imageA.
- getCompA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Return the opacity histrogram component of the imageA.
- getCompA_GM() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Return the opacity histrogram component of the Gradient Magnitude imageA.
- getCompA_GM() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Return the opacity histrogram component of the Gradient Magnitude imageA.
- getComparator(int) - Method in class gov.nih.mipav.model.structures.TableSorter
-
Gets an appropriate comparator for sorting the particular column
- getCompareType() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.TagComparator
-
DOCUMENT ME!
- getCompB() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Return the opacity histrogram component of the imageB.
- getCompB() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Return the opacity histrogram component of the imageB.
- getCompB_GM() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Return the opacity histrogram component of the Gradient Magnitude imageB.
- getCompB_GM() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Return the opacity histrogram component of the Gradient Magnitude imageB.
- getCompData(DataBlk, int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Returns, in the blk argument, a block of image data containing the
specifed rectangular area, in the specified component.
- getCompData(DataBlk, int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Returns, in the blk argument, a block of image data containing the
specifed rectangular area, in the specified component.
- getCompleteFileNameList(String) - Static method in class gov.nih.mipav.model.file.FileAnalyze
-
Returns the complete list of file names according to given file name.
- getCompleteFileNameList(String) - Static method in class gov.nih.mipav.model.file.FilePARREC
-
Returns the complete list of file names according to given file name.
- getCompleteFileNameList(String) - Static method in class gov.nih.mipav.model.file.FileSiemensText
-
Returns the complete list of file names according to given file name.
- getCompleteFileNameList(String) - Static method in class gov.nih.mipav.model.file.FileSpar
-
Returns the complete list of file names according to given file name.
- getCompleteFileNameListDefault(String) - Method in class gov.nih.mipav.model.file.FilePARREC
-
Gets the header and image file names given a header or image file name
- getComplexDisplay() - Static method in class gov.nih.mipav.view.Preferences
-
Returns how pixel values are displayed on the MIPAV toolbar for complex images.
- getComponent() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- getComponent() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from VOIManagerInterface.
- getComponent(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.GenericKey
-
Returns the component at specified index
- getComponent(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
- getComponent(int, Class<T>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.GenericKey
-
Returns the component at specified index
casted to the specified type
- getComponent(JComponent, int) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp
-
- getComponentByName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- getComponentConfigurationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getComponentDataDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
- getComponentHistoLUT(int) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
DOCUMENT ME!
- getComponentId() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegComponent
-
- getComponentImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
get component image
- getComponentImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
get component image
- getComponentImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- getComponentImage() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Returns the reference to the component image.
- getComponentImage() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Returns the reference to the component image.
- getComponentImage() - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Returns the Component displaying the current active image.
- getComponentImageDicom() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
- getComponentImageXY() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Accessor that returns the reference to componentImageXY.
- getComponentName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegComponent
-
Returns the component name (one of: Y, Cb, Cr, I, or Q)
- getComponentName(Component, String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
- getComponentName(Object, Component, String, String) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
- getComponentPreviewImage() - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Gets the ViewJComponentPreviewImage that contains the currently selected model image.
- getComponents() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Construct the connected components of the mesh.
- getComponents() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Construct the connected components of the triangle mesh.
- getComponents(Vector) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Construct the connected components of the mesh by factoring the connectivity array into disjoint subarrays.
- getComponentSizeBytes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- getCompositeImageA() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Access to retrieve the array ARGB composite 3D texture values for image A.
- getCompositeMatrix(boolean) - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Gets the composite (dynamically built) matrix made by multiplying in forward order the image's matrices.
- getCompressed() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the compressed value.
- getCompressed() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the compressed value.
- getCompressed() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the compressed value.
- getCompressedAverageBitsPerPixelDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getCompression() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- getCompression() - Method in class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
Returns an int (based on AlgorithmTranscode's static variables) representing the compression type to be used.
- getCompression() - Method in class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Returns an int (based on AlgorithmTranscode's static variables) representing the compression type to be used.
- getCompressionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- getCompressionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getCompressionType() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Gets the compression type.
- getCompressionType() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- getCompressionTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDescriptor
-
- getComputedPaintMask() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Method is used when the "extract paint" option is set.
- getConcatenatedSATSelection() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getConnect() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- getConnection(int) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- getConnectivity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getConnectivity() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Get the connectivity vector.
- getConnectivity(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Called when reading the input surface.xml file: Parses the input string into a an array of int[] to represent
the mesh connectivity:
- getConnectivity(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Parse the connectivity index from the section.
- getConnectivityCopy() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getConsistentComponents() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Construct the connected components of the mesh.
- getConsistentComponents() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Construct the connected components of the triangle mesh.
- getConstant() - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
Get the constant term for the factored quadratic equation.
- getConstrainedValues(double[], int) - Method in class gov.nih.mipav.model.algorithms.NMSimplex
-
- getConstraints() - Method in class gov.nih.mipav.view.components.PanelManager
-
Returns the current constraints of this panel manager.
- getConstructionInfo() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Creates a string with the parameters that the image was constructed with.
- getConstructionInfo() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Creates a string with the parameters that the image was constructed with.
- getConstructionInfo() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Creates a string with the parameters that the image was constructed with.
- getConstructionInfo() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Creates a string with the parameters that the image was constructed with.
- getConstructionInfo() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Creates a string with the parameters that the image was constructed with.
- getConstructionInfo() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Creates a string with the parameters that the image was constructed with.
- getConstructionInfo() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Creates a string with the parameters that the image was constructed with.
- getConstructionInfo() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Creates a string with the parameters that the image was constructed with.
- getConstructionInfo() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Creates a string with the parameters that the image was constructed with.
- getConstructionInfo() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Creates a string with the parameters that the image was constructed with.
- getContactPerson() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getContainingPanel() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Returns the main interface panel for display in another interface.
- getContainingPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Returns the container for this object.
- getContainingPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Returns the container for this object.
- getContainingTriangle(Point2f, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
Support for conformal mapping to planar triangle mesh.
- getContainingTriangle(Vector2f, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
Support for conformal mapping to planar triangle mesh.
- getContentDescriptor() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
DOCUMENT ME!
- getContentDescriptor() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
DOCUMENT ME!
- getContentDescriptor() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
DOCUMENT ME!
- getContentLength() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
DOCUMENT ME!
- getContentLength() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
DOCUMENT ME!
- getContentLength() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
DOCUMENT ME!
- getContentTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getContentType() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
Content type is of RAW since we are sending buffers of video frames without a container format.
- getContentType() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
Content type is of RAW since we are sending buffers of video frames without a container format.
- getContiguousSlices() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getContinuousDriveModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getContinuousUpdate() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Return whether to update the Volume Tri-Planar view continuously as the fly path changes.
- getContourFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getContourGraph() - Method in class gov.nih.mipav.model.structures.VOI
-
Returns the contour graph associated with this voi.
- getContourID() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the contour ID: the index of this contour into the VOI.
- getContourLength(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- getContourStatistic(String, String) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
Gets the statistic for a particular contour of a VOI without reference to the slice
a contour may exist on.
- getContourVector() - Method in class gov.nih.mipav.view.dialogs.MyXMLHandler
-
Get the whole contour vector generated from the xml file.
- getContourVector() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
Get the whole contour vector generated from the xml file.
- getContourX(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- getContourY(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- getContrastAgent() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getContrastAmount() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getContrastBolusAgent() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getContrastBolusIngredient() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getContrastBolusIngredientConcentration() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getContrastBolusRoute() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getContrastBolusStartTime() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getContrastBolusTotalDose() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getContrastBolusVolume() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getContrastCameraSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getContrastDescription() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getContrastDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getContrastDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getContrastDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getContrastDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getContrastDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getContrastDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getContrastDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getContrastDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getContrastModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getContrastSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getContrastType() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getContrastUsed() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getControl(String) - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
DOCUMENT ME!
- getControl(String) - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
DOCUMENT ME!
- getControl(String) - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
DOCUMENT ME!
- getControl(String) - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
DOCUMENT ME!
- getControl(String) - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
DOCUMENT ME!
- getControlPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Get the main control panel.
- getControlPoint(int, int, int, Vector3f) - Method in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
Retrieve the position of the specified control point.
- getControlPoint(int, int, Vector2f) - Method in class gov.nih.mipav.model.structures.BSplineLattice2Df
-
Retrieve the position of the specified control point.
- getControlPointMaxMoveDist(int, int, int, Vector3f, float) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Compute the maximum distance the control point can be moved in the specified direction while keeping the control
point relative to its 26 neighboring control points such that "folding" does not occur.
- getControlPointMaxMoveDist(int, int, Vector2f, float) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Compute the maximum distance the control point can be moved in the specified direction while keeping the control
point relative to its 8 neighboring control points such that "folding" does not occur.
- getControls() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
get controls
- getControls() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
DOCUMENT ME!
- getControls() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
DOCUMENT ME!
- getControls() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
DOCUMENT ME!
- getControls() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
DOCUMENT ME!
- getControls() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
DOCUMENT ME!
- getControls() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- getControls() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Gets control widgets for frame.
- getControls() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Required by the parent super class, do nothing.
- getControls() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
get controls
- getControls() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Get control widgets for frame.
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Get control widgets for frame.
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Gets the control widgets for the frame.
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Get control widgets for frame.
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Get control widgets for frame.
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Gets the control widgets for the frame.
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Gets the control widgets for the frame.
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Get control widgets (toolbars, sliders) for the image frame.
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Gets control widgets for frame.
- getControls() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Placeholder.
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Gets control widgets for frame.
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Gets control widgets for frame.
- getControls() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Gets reference to control widgets for frame.
- getConverged() - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- getConversionFactor(int, int) - Static method in class gov.nih.mipav.model.structures.ModelImage
-
- getConversionFactor(FileInfoBase.Unit) - Method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- getConversionLensDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getConversionProgram() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getConverter() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelManipulator
-
Returns the converter that converts a pixel to the element
accepted by this manipulators action (and the element back to the pixel).
- getConverterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDescriptor
-
- getConvertStartLocationsToDICOM(double[], double[][], boolean[], int, double[]) - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Converts from the minc start location to the dicom start locations
- getConvertStartLocationsToDICOM(int, int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Accessor that gets the "start" variable values, adjusted so that [0] holds the image x axis value, [1] the image
y axis value, and [2] the image z axis value.
- getConvFactor() - Method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- getConvolve() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor method for the m_bConvolve data memeber.
- getCoordCode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Returns type of x, y, z coordinates.
- getCoordCode2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Returns type of x, y, z coordinates 2.
- getCoordinate() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The red target sign's x cylinder transform group, which regards as the center of the burning point.
- getCoordinate() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Get the coordinate vector.
- getCoordinate(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Parse the coordinate point value from the section.
- getCoordinateIndices() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Get the array of connectivity among the vertices which define the triangles of the mesh.
- getCoordinates() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Get the array of coordinates at each vertex.
- getCoordinates(float[]) - Method in class gov.nih.mipav.model.structures.VOIPoint
-
This method gets the coordinates of the point
- getCoordinateView() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Returns the coordinate view, which is the range of x and y coordinates visible in the
coordinate system.
- getCoordMapX() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Access functions for Mapping from texture coordinates to model coordinates and vice versa: getCoordMapX:
- getCoordMapY() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
getCoordMapY:
- getCoordMapZ() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
getCoordMapZ:
- getCoords(Vector3f, Vector3f, float, VertexBuffer, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Sets up the line annotations.
- getCoordsLine(float[], float[], double, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates the screen coordinates for the VOILine tickmarks.
- getCoordsProtractor(float[], float[], double, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates and returns the screen location for the angle and length display for the VOIProtractor.
- getCoordSysArea() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- getCopies(Point3f[], Vector3f[], Color4f[], TexCoord3f[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Copies the components of a ModelTriangleMesh into the parameters.
- getCopyrightNoticeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getCopyVOINames() - Method in class gov.nih.mipav.view.ViewUserInterface
-
- getCopyVOIs() - Method in class gov.nih.mipav.view.ViewUserInterface
-
- getCORFileList(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Only for FreeSurfer COR volume files Looks in the image directory and returns all images with the same root up to
the hyphen, sorted in lexicographical order.
- getCorners() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- getCornerScore(int[], int) - Method in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- getCornerScore(int[], int) - Method in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- getCornerValue(OctNode, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getCornerValueAndNormal(OctNode, int, float[], Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getCoronalComponentSlice() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Gets the y position of the slice.
- getCorrectedGradients() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIGradTableCorrectionAfterTrans
-
- getCorrectionFactor() - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Returns the amount of correction which should be applied to the z-direction sigma (assuming that correction is
requested).
- getCorrectionFactor(ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Returns the amount of correction which should be applied to the z-direction sigma (assuming that correction is
requested).
- getCorrectionFactorString() - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Returns a string indicating the z-direction sigma after applying the resolution correction factor.
- getCorrespondingPoint(float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
- getCorrespondingPoint(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
- getCORSuffixFrom(String) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Only used for COR volume files with hyphen in name Breaks the filename into basename and suffix, then returns the
suffix.
- getCost() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Returns the cost of the best transformation.
- getCost() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Returns the cost of the best transformation.
- getCost() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- getCost() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- getCost() - Method in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Returns the cost.
- getCost() - Method in class gov.nih.mipav.model.algorithms.Vectornd
-
- getCost() - Method in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Get the current accumulated cost.
- getCost() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getCost(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Returns the cost for the transformation vector.
- getCost(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Returns the cost for the transformation vector.
- getCost(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Returns the cost for the transformation vector.
- getCostCalled() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Accessor that returns how many times the cost function has been called.
- getCostCalled() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Accessor that returns how many times the cost function has been called.
- getCostChoice() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the choice of cost function.
- getCostFunction() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- getCostFunction() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
- getCostFunction() - Method in interface gov.nih.mipav.model.algorithms.AlgorithmOptimizeFunctionBase
-
- getCostFunction() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt.CostFunction
-
- getCostFunction() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer.CostFunction
-
- getCostFunction() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark.CostFunction
-
- GetCostFunctionForResidualBlock(CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- getCosts() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
accessor for costs.
- getCosts() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
accessor for costs.
- getCount(JComponent) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp
-
- getCounter() - Method in interface gov.nih.mipav.view.renderer.flythroughview.FlyThroughRenderInterface
-
- getCounter() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- getCounter() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- getCountryDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getCountryOrPrimaryLocationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getCov_reg_type(int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- getCov_type(int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- getCovariance() - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- GetCovarianceBlock(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- GetCovarianceBlockAndCompare(double[], double[], boolean, CeresSolver2.CovarianceImpl, double[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GetCovarianceBlockInTangentOrAmbientSpace(double[], double[], boolean, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- GetCovarianceBlockInTangentSpace(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- GetCovarianceMatrix(Vector<double[]>, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- GetCovarianceMatrixInTangentOrAmbientSpace(Vector<double[]>, boolean, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- GetCovarianceMatrixInTangentSpace(Vector<double[]>, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- getCPhase() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getCreditDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getCrosshairPoint() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Returns the current cross hair position in screen coordinates.
- getCsaImageAcquisitionMatrixText() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageBandwidthPerPixelPhaseEncode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageEchoColumnPosition() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageEchoLinePosition() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageEchoPartitionPosition() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageGSWDDataType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageICE_Dims() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageImaAbsTablePosition() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageImaCoilString() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageImaPATModeText() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageImaRelTablePosition() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageMeasuredFourierLines() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageMosaicRefAcqTimes() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageMultistepIndex() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageNonPlanarImage() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageNumberOfImagesInMosaic() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImagePhaseEncodingDirectionPositive() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageProtocolSliceNumber() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageRealDwellTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageRFSWDDataType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageSequenceMask() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageSliceMeasurementDuration() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageSliceNormalVector() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageSlicePosition_PCS() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageTimeAfterStart() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaImageUsedChannelMask() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesAbsTablePosition() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesB1rms() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesB1rmsSupervision() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesCoilForGradient() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesCoilForGradient2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesCoilId() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesCoilString() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesdBdt_limit() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesdBdt_max() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesdBdt_thresh() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesFlowCompensation() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesGradientDelayTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesGradientMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesIsocentered() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesLongModelName() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMiscSequenceParam() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolacFlowComp0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocoladFlipAngleDegree0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolalTE0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolalTR0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0aFFT_SCALEnbValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0aFFT_SCALEnflFactor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0aFFT_SCALEnlRxChannel() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnlElementSelected() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnlRxChannelConnected() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnsCoilElementIDlCoilCopy() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnsCoilElementIDtCoilID() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnsCoilElementIDtElement() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0iUsedRFactor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0sCOILPLUGSauiNmbrOfNibbles() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0sCOILPLUGSaulPlugId() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolasCoilSelectMeas0tNucleus() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocoldAveragesDouble() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocoldRefSNR() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocoldRefSNR_VOI() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocollAverages() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocollCombinedEchoes() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocollContrasts() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocollParadigmPeriodicity() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocollProtID() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocollRepetitions() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocollScanTimeSec() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocollTOM() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocollTotalScanTimeSec() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedInPlaneRot() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedPhaseFOV() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedReadoutFOV() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedThickness() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesNormaldCor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesNormaldSag() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesNormaldTra() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesPositiondCor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesPositiondSag() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesPositiondTra() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatauiAdjFreMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatauiAdjFreProtRelated() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatauiAdjMDSMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatauiAdjProtID() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatauiAdjRFMapMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatauiAdjShimMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatauiAdjTableTolerance() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatauiAdjVolumeValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAdjDatauiAdjWatSupMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAngiolDynamicReconMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAngiolTemporalInterpolation() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAngioucPCFlowMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAngioucTOFInflow() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAslulMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsAutoAligndAAMatrix() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsBladeParadBladeCoverage() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsBladeParaucMotionCorr() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsDiffusionulMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsDistortionCorrFilterucMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsEFISPECbEFIDataValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsFastImaginglEchoTrainDuration() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsFastImaginglEPIFactor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsFastImaginglSegments() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsFastImaginglShots() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsFastImaginglSliceTurboFactor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsFastImaginglTurboFactor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsFastImagingucSegmentationMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent3() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent4() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECbB0CompensationValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECbCrossTermCompensationValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECbDelayValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECbEddyCompensationValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECbOffsetValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECbSensitivityValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECbShimCurrentValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECflGSWDMinRiseTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECflSensitivityX() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECflSensitivityY() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECflSensitivityZ() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPEClDelayX() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPEClDelayY() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPEClDelayZ() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPEClOffsetX() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPEClOffsetY() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPEClOffsetZ() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflAmplitude1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflAmplitude2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflTimeConstant1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflTimeConstant2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflAmplitude1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflAmplitude2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflTimeConstant1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflTimeConstant2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflAmplitude1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflAmplitude2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflTimeConstant1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflTimeConstant2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXYaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXYaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXZaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXZaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYXaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYXaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYZaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYZaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZXaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZXaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZYaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZYaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude3() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude4() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant3() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant4() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude3() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude4() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant3() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant4() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude3() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude4() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant3() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant4() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGRADSPECucMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGroupArrayanMember() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGroupArrayasGroup0nSize() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGroupArraylSize() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGroupArraysPSatdGap() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsGroupArraysPSatdThickness() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacedAngioDynCentralRegionA() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacedAngioDynSamplingDensityB() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacedPhaseResolution() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacedSeqPhasePartialFourierForSNR() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacedSliceResolution() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacelBaseResolution() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacelImagesPerSlab() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacelLinesPerShot() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacelPartitions() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacelPhaseEncodingLines() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacelRadialInterleavesPerImage() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpacelRadialViews() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpaceucAsymmetricEchoMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpaceucAveragingMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpaceucDimension() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpaceucMultiSliceMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpaceucPhasePartialFourier() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpaceucPOCS() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpaceucSlicePartialFourier() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpaceucTrajectory() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpaceucViewSharing() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsKSpaceunReordering() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsMDSdMdsRangeExtension() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsMDSlmdsLinesPerSegment() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsMDSlTableSpeedNumerator() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsMDSsMdsEndPosSBCS_mmdTra() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsMDSulMdsModeMask() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsMDSulMdsReconMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsMDSulMdsVariableResolution() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsNavigatorParalBreathHoldMeas() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsNavigatorParalRespComp() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsParametricMappingucParametricMap() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPatlAccelFact3D() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPatlAccelFactPE() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPatlRefLinesPE() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPatucPATMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPatucRefScanMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPatucTPatAverageAllFrames() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImaginglMethod1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImaginglMethod2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImaginglPhases() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImaginglRetroGatedImages() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImaginglSignal1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImaginglSignal2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlArryhythmiaDetection() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlCardiacGateOffThreshold() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlCardiacGateOnThreshold() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlTriggerIntervals() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlTriggerPulses() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlTriggerWindow() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlArryhythmiaDetection() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlCardiacGateOffThreshold() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlCardiacGateOnThreshold() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlTriggerIntervals() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlTriggerPulses() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlTriggerWindow() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioNativeucFlowSenMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioNativeucMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselArryhythmiaDetection() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselCardiacGateOffThreshold() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselCardiacGateOnThreshold() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselTriggerIntervals() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselTriggerPulses() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselTriggerWindow() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioRespdGatingRatio() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioResplRespGatePhase() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioResplRespGateThreshold() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPrepPulsesdDarkBloodFlipAngle() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPrepPulsesdDarkBloodThickness() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPrepPulsesdIRPulseThicknessFactor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPrepPulsesdT2PrepDuration() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPrepPulsesucFatSat() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPrepPulsesucFatSatMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPrepPulsesucInversion() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPrepPulsesucSatRecovery() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPrepPulsesucT2Prep() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPrepPulsesucTIScout() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsPrepPulsesucWaterSat() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsProtConsistencyInfoflGMax() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsProtConsistencyInfoflNominalB0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsProtConsistencyInfoflRiseTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsProtConsistencyInfolMaximumNofRxReceiverChannels() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsProtConsistencyInfotBaselineString() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsProtConsistencyInfotSystemType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRawFilterlSlope_256() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRawFilterucMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRawFilterucOn() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRSatArrayasElm0dThickness() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sNormaldCor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sNormaldSag() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sNormaldTra() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sPositiondCor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sPositiondSag() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sPositiondTra() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRSatArraylSize() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRXSPECalDwellTime0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRXSPECbGainValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsRXSPEClGain() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayanAsc() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayanPos() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdInPlaneRot() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdPhaseFOV() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdReadoutFOV() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdThickness() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsNormaldCor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsNormaldSag() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsNormaldTra() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsPositiondCor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsPositiondSag() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsPositiondTra() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArraylConc() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArraylSize() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArraysTSatdThickness() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSliceArrayucMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSpecParalAutoRefScanNo() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSpecParalDecouplingType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSpecParalExcitationType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSpecParalNOEType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSpecParalPhaseCyclingType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSpecParalPhaseEncodingType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSpecParalRFExcitationBandwidth() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSpecParalSpecAppl() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSpecParalSpectralSuppression() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsSpecParaucRemoveOversampling() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECaRFPULSEnbAmplitudeValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECaRFPULSEnflAmplitude() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECaRFPULSEntName() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bAmplitudeCorrectionValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bFrequencyValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bReferenceAmplitudeValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bRFPAIndexValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0flAmplitudeCorrection() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0flReferenceAmplitude() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0lFrequency() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0tNucleus() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bAmplitudeCorrectionValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bFrequencyValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bReferenceAmplitudeValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bRFPAIndexValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1flAmplitudeCorrection() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1lRFPAIndex() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECbKDynValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeClipHigh() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeClipLow() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeMax() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeMin() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECflKDynPhaseClip() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECflKDynPhaseMax() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPEClBCExcitationMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPEClBCSeqExcitationMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPEClNoOfTraPulses() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECucBCExcitationModeValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECucExcitMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECucRFPulseType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsTXSPECucSimultaneousExcitation() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsWiPMemBlockadFree() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsWiPMemBlockalFree() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolsWiPMemBlocktFree() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocoltdefaultEVAProt() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocoltProtocolName() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocoltReferenceImage0() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocoltReferenceImage1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocoltReferenceImage2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocoltSequenceFileName() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucAAMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucAARefMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucAARegionMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucAutoAlignInit() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucBold3dPace() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucBOLDParadigmArray() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucCineMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucCoilCombineMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucDisableChangeStoreImages() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucDixon() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucDixonSaveOriginal() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucEnableIntro() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucEnableNoiseAdjust() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucFlipAngleMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucForcePositioningOnNDIS() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucInteractiveRealtime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucInternalTablePosValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucOneSeriesForAllMeas() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucPHAPSMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucReadOutMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucReconstructionMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucScanRegionPosValid() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucSequenceType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucTablePositioningMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolucWaitForPrepareCompletion() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolulVersionRfWatchdogMask() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrPhoenixProtocolWaitForUserStart() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesMrProtocolVersion() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesNumberOfPrescans() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesOperation_mode_flag() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesPATModeText() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesPatReinPattern() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesPhaseGradientAmplitude() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesPositivePCSDirections() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesProtocolChangeHistory() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesReadoutGradientAmplitude() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesReadoutOS() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesRelTablePosition() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesRFSWDMostCriticalAspect() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesRFSWDOperationMode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesRfWatchdogMask() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesSARMostCriticalAspect() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesSed() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesSelectionGradientAmplitude() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesSequenceFileOwner() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesSliceArrayConcatenations() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesSliceResolution() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesStim_faktor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesStim_lim() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesStim_max_online() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesStim_mon_mode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesSW_korr_faktor() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriest_puls_max() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesTablePositionOrigin() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesTalesReferencePower() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaSeriesTransmitterCalibration() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCsaStim_max_ges_norm_online() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getCurrentChannelInfo() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- getCurrentDataset() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- getCurrentExperiment() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- getCurrentExperimenter() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- getCurrentFilter() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- getCurrentGroup() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- getCurrentImage() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- getCurrentInclude() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- getCurrentIndex() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- getCurrentIndex() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getCurrentInstrument() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- getCurrentLightSource() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- getCurrentLineNumber() - Method in class gov.nih.mipav.model.scripting.ParserEngine
-
Returns the line number of the last line parsed by the parser engine.
- getCurrentNMI() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- getCurrentObjective() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- getCurrentOrErrorDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- getCurrentOrientation() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- getCurrentOTF() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- getCurrentParameter() - Method in class gov.nih.mipav.model.file.XMLPSet
-
Returns the current parameter to be modified.
- getCurrentPlate() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- getCurrentPositionLabels() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Get the last point that the position labels got set to.
- getCurrentProject() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- getCurrentPSet() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets current parameter set.
- getCurrentRowOrder(TableSorter) - Static method in class gov.nih.mipav.view.ViewDICOMDoubleListPanel
-
DOCUMENT ME!
- getCurrentScreen() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- getCurrentSurface() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Returns the SurfaceLink object for the current surface.
- getCurrentTransform() - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- getCurrentTSlice() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the current tslice.
- getCurrentUpdate() - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- getCurrentVal(double[]) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- getCurrentVOI() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get's the VOILink for the current VOI.
- getCursorMode() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the VOI mode.
- getCurSurface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get the current highlight surface.
- getCurTreatment() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get the treatment info that matches the currently selected target surface.
- getCurvatureWeight() - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Get the curvature weight 'c'.
- getCurve() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map.curvePair
-
- getCurve() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale.curvePair
-
- getCurve(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- getCurvePosition(int) - Method in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraphCurve
-
Access the curve which defines the positions of points along the path in 3D that is associated with this node.
- getCurves() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the curves making up the VOI.
- getCurvesPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- getCurveType() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the curve type.
- getCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
Get the curvature flow image.
- getCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
Get the curvature flow image.
- getCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
Get the curvature flow image.
- getCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
Get the curvature flow image.
- getCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Get the curvature flow image.
- getCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Get the curvature flow image.
- getCustomLUTList() - Static method in class gov.nih.mipav.view.JPanelHistogram
-
Creates a Vector or LUT names representing different color look-up tables.
- getCustomLUTList() - Static method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
- getCustomRenderedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getCustomSaturationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getCut(double[][]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- getCylinder() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- getCylinderCoordinates() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getCylinderCoordinates() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- getCylinderXTG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Get the red target sign x cylinder transform group.
- getD() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
- getD() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
Return the block diagonal eigenvalue matrix
- getDashedStroke() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Builds the dashed stroke used to render the minor talairach grid lines.
- getData() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
-
- getData() - Method in interface gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.IMetadataProvider
-
- getData() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- getData() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
- getData() - Method in class gov.nih.mipav.model.algorithms.CVODES.NVector
-
- getData() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- getData() - Method in class gov.nih.mipav.model.GaussianKernel
-
- getData() - Method in interface gov.nih.mipav.model.Kernel
-
- getData() - Static method in class gov.nih.mipav.view.Preferences
-
Gets all the text printed to the data panel.
- getData() - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Gets text area which data tab prints to.
- getData(ModelSurfaceTopology.Edge) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Get the attribute data associated with the specified edge.
- getData(ModelSurfaceTopology.Triangle) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Get the attribute data associated with the specified triangle.
- getData(ModelSurfaceTopology.Vertex) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Get the attribute data associated with the specified vertex.
- getDataCompression() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getDataDescription() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getDataDimension() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
-
- getDataDimension() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- getDataEncode() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getDataFileName() - Method in class gov.nih.mipav.model.file.FileImageXML
-
Accessor that returns the array of data file names
- getDataFileName() - Method in class gov.nih.mipav.model.file.FileRaw
-
Accessor that returns the array of data file names
- getDataLength() - Method in class gov.nih.mipav.model.file.FileDicomSQ
-
Returns the size of the data held in this sequence in number of bytes, including the number of bytes required to
delimit each item.
- getDataLength() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Calculates the number of bytes that the data (the object value) will take to be stored.
- getDataLength(boolean) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Calculates the number of bytes that the data (the object value) takes to be stored.
- getDataPrecisionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
- getDataSet(int, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a set of DICOM tags from a DICOM sequence item, ending with the data-element end tag
FFFE,E00D.
- getDataSize() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Get total buffer length.
- getDataType() - Method in class gov.nih.mipav.model.file.FileBase
-
Gets datatype
- getDataType() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns data type.
- getDataType() - Method in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- getDataType() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the image buffer type as an enum.
- getDataType() - Method in class gov.nih.mipav.view.dialogs.JDialogBlankImage
-
Accessor that returns the data type.
- getDataType() - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Accessor that returns the data type.
- getDataType() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Accessor that returns the data type.
- getDataType() - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Accessor that returns the data type.
- getDataType(int) - Static method in enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
- getDataTypeCode() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to coded datatype value.
- getDataTypeCode() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to coded datatype value.
- getDataTypeCode() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
accessor to coded datatype value.
- getDataTypeFromStr(String) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the image data type associated with a string.
- getDataTypeName() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to the 10 character string of data-type.
- getDataTypeName() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to the 10 character string of data-type.
- getDataTypeName() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
Accessor to the 10 character string of data-type.
- getDate() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getDate() - Method in class gov.nih.mipav.model.file.XMLParameter
-
Gets the parameter's date.
- getDate(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a java.util.Date.
- getDate(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- getDate(int, String, TimeZone) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a java.util.Date.
- getDate(int, TimeZone) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a java.util.Date.
- getDateCreated() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
Parses the Date Created tag and the Time Created tag to obtain a single Date object representing the
date and time when this image was captured.
- getDateCreatedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getDateDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getDateDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getDateDigitized() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
Parses the date/time tag, the subsecond tag and the time offset tag to obtain a single Date
object with milliseconds representing the date and time when this image was digitized.
- getDateDigitized(TimeZone) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
Parses the date/time tag, the subsecond tag and the time offset tag to obtain a single Date
object with milliseconds representing the date and time when this image was digitized.
- getDateModified() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
Parses the date/time tag, the subsecond tag and the time offset tag to obtain a single Date
object with milliseconds representing the date and time when this image was modified.
- getDateModified(TimeZone) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
Parses the date/time tag, the subsecond tag and the time offset tag to obtain a single Date
object with milliseconds representing the date and time when this image was modified.
- getDateOriginal() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
Parses the date/time tag, the subsecond tag and the time offset tag to obtain a single Date
object with milliseconds representing the date and time when this image was captured.
- getDateOriginal(TimeZone) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
Parses the date/time tag, the subsecond tag and the time offset tag to obtain a single Date
object with milliseconds representing the date and time when this image was captured.
- getDateSent() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
Parses the Date Sent tag and the Time Sent tag to obtain a single Date object representing the
date and time when the service sent this image.
- getDateSentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getDateTimeUTCDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getDays() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- getDaysBefore(Calendar, int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Returns the new date of num days before date.
- getDBdt() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getDBname() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to DB_name.
- getDBname() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to DB_name.
- getDBname() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
accessor to DB_name.
- getDCIns() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- getDCIns() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- getDcmmeta_affine() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getDcmmeta_reorient_transform() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getDcmmeta_shape() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getDcmmeta_slice_dim() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getDcmmeta_version() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getDctEncodeVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDescriptor
-
- getDDType() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Gets the index for this VR.
- getDebug() - Static method in class gov.nih.mipav.view.Preferences
-
Gets all the text printed to the debug panel.
- getDebug() - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Gets text area which debug tab prints to.
- getDebugPreferences() - Static method in class gov.nih.mipav.view.Preferences
-
Gets the LogConfiguration for logging categories (minor, algorithm, fileIO, comms, scripting).
- getDecayCorrected() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getDecimalRational(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getDecimatedFace() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- getDecimatedIBuffer() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- getDecimatedPoints() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- getDecimatedVBuffer() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- getDecoder(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS
-
- getDecoder(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff
-
- getDecryptedIntArray(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
decryption algorithm adapted from exiftool
- getDecSwitchPositionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getDefaultButtonSize() - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Returns the default size used for most text buttons.
- getDefaultCentroids(ModelImage, int, boolean, BitSet, boolean, float) - Static method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
- getDefaultDirectory() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Accessor that gets the default directory.
- getDefaultDirectory() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to get directory location of last file access.
- getDefaultDisplay() - Static method in class gov.nih.mipav.view.Preferences
-
Returns how pixel values of images are displayed in terms or brightness values and possible colors.
- getDefaultExtension() - Method in class gov.nih.mipav.model.file.FileTypeInfo
-
Returns the primary extension which should be used for this file type (i.e., '.nii' for NIFTI).
- getDefaultFrameRate() - Static method in class gov.nih.mipav.view.Preferences
-
Gets the default frame rate used in saving AVI movies.
- getDefaultHostKey() - Static method in class gov.nih.mipav.view.Preferences
-
Accessor to get the default chat/file server host key.
- getDefaultLevel() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getDefaultLUTa() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that returns the default LUTa for the frame.
- getDefaultLUTb() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that returns the default LUTb for the frame.
- getDefaultMax(FileInfoBase) - Static method in class gov.nih.mipav.model.file.FileMinc
-
Return the default volume maximum for different file data types.
- getDefaultMaxDomain() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Returns the default maximum point for the domain (previously calculated).
- getDefaultMaxRange() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Returns the default maximum point for the range (previously calculated).
- getDefaultMin(FileInfoBase) - Static method in class gov.nih.mipav.model.file.FileMinc
-
Return the default volume minimum for different file data types.
- getDefaultMinDomain() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Returns the default minimum point for the domain (previously calculated).
- getDefaultMinRange() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Returns the default minimum point for the range (previously calculated).
- getDefaultPluginDirectory() - Static method in class gov.nih.mipav.plugins.PluginUtil
-
- getDefaultScriptDirectory() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to get directory location of script files.
- getDefaultServerKey() - Static method in class gov.nih.mipav.view.Preferences
-
Accessor to get default DICOM image server key.
- getDefaultShape() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList
-
Return access to the default shape to use for rendering all subsequent annotated items.
- getDefaultShortcutTable() - Static method in class gov.nih.mipav.view.Preferences
-
Gets the Default Hashtable used to store the shortcut keystrokes and commands.
- getDefaultStorageDir() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Returns the default storage directory for the received dicom files.
- getDefaultStorageKey() - Static method in class gov.nih.mipav.view.Preferences
-
Accessor to get default DICOM image storage location.
- getDefaultWindow() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getDeformationField() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraAlgorithm
-
- getDeformationField() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- getDeformationField() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- getDeformedSubject() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- getDeformedSubject() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- getDegree() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
DOCUMENT ME!
- getDegreesMinutesSecondsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getDelimiter() - Method in class gov.nih.mipav.model.file.DelimitedRandomAccessFile
-
- getDenominator() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Returns the denominator.
- getDependentVarId() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getDepth(Renderer, Culler) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- getDepth(Renderer, Culler) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- getDerivative() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
return new instance which is the derivative of this instance.
- getDescription() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to the current analyze-image description.
- getDescription() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
accessor to the current analyze-image description.
- getDescription() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to the current SiemensText-image description.
- getDescription() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
accessor to the current SPM-image description.
- getDescription() - Method in class gov.nih.mipav.model.file.FileTypeInfo
-
Retrieve the description for this file type.
- getDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngColorType
-
- getDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Tag
-
Get a description of the tag's value, considering enumerated values
and units.
- getDescription() - Method in class gov.nih.mipav.model.file.XMLParameter
-
Gets the parameter's description.
- getDescription() - Method in class gov.nih.mipav.model.file.XMLPSet
-
Get the parameter set description.
- getDescription() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getDescription() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay
-
Gets the set display's description.
- getDescription() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- getDescription() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getDescription() - Method in class gov.nih.mipav.view.renderer.flythroughview.FileFilterExt
-
FileFilter override.
- getDescription() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Get description associated with this light.
- getDescription() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
Return the description associated with the annotated point.
- getDescription() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Return the description associated with the annotated point.
- getDescription() - Method in class gov.nih.mipav.view.ViewImageFileFilter
-
One of the overrides to FileFilter.
- getDescription(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
Gets the description of a given integer hash index.
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Provides a description of a tag's value using the descriptor set by
setDescriptor(Descriptor).
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifThumbnailDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.FileSystemDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifAnimationDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfxxDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.KyoceraMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Descriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Descriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PrintIMDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RicohMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType6MakernoteDescriptor
-
- getDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
Returns a descriptive value of the specified tag for this image.
- getDescription(int) - Static method in class gov.nih.mipav.view.ViewImageFileFilter
-
Returns the description of the given file filter.
- getDescriptionLong() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getDescriptionLong() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getDescriptions() - Static method in class gov.nih.mipav.view.ViewImageFileFilter
-
Returns the list of descriptions.
- getDestImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Accessor to return the destination image
- getDestination() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- getDetectedFaces() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- getDetectedFacesDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getDetectorHeadNumber() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getDeviceTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getDHT(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Get the Huffman table.
- getDiagnosis() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get diagnosis for subject (optional).
- getDiagonal(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
Get a diagonal entry for the quadric surface.
- getDialogActionString(Class<? extends JDialogScriptableBase>) - Static method in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Extracts the scripting action string which should be used for a given class.
- getDialogName() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Returns the name of the dialog (e.g.
- getDiameter(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getDICOMBrowserTableConfiguration() - Static method in class gov.nih.mipav.view.Preferences
-
Gets the user-configured columns that indicate the DICOM tags that are displayed in the DICOM browser table.
- getDICOMCatcher() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to get the DICOM receiver.
- getDICOMQueryFrame() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to get the DICOM query frame.
- getDICOMSaveDictionary() - Static method in class gov.nih.mipav.view.Preferences
-
Accessor to get the default DICOM Save Dictionary (which tags to save into XML header.
- getDicomSaveList(FileInfoDicom, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Returns a list of tags that are a subset of the DICOM dictionary.
- getDicomTable() - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Retrieves the dicom converted tag hashtable
- getDicomTagTable() - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Returns a reference to the DICOM Hashtable.
- getDicomTagTable(boolean) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Returns a reference to the DICOM Hashtable.
- getDicomValue(String) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Get the value from the minc info based on a given dicom tag id.
- getDicomValueAsString(FileDicomTag) - Static method in class gov.nih.mipav.model.file.FileMinc
-
Returns the value of a dicom tag, represented as a string.
- getDiffuse() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Query current optional diffuse color for vertex.
- getDiffusion() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getDiffusionAnisotropyType() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getDiffusionBFactor() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getDiffusionBValueNumber() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getDiffVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Get the volume difference btw the tumor surface and burning sphere packings.
- getDiffVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Get the volume difference btw tumor surface and burning sphere packings.
- getDiffVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Return the diff volume of the current treatment.
- getDigitalDateCreated() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
Parses the Digital Date Created tag and the Digital Time Created tag to obtain a single Date object
representing the date and time when the digital representation of this image was created.
- getDigitalDateCreatedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getDigitalTimeCreatedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getDigitalZoomCameraSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getDigitalZoomDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getDigitalZoomDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getDigitalZoomDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDescriptor
-
- getDigitalZoomDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getDigitalZoomDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getDigitalZoomDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getDigitalZoomDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getDigitalZoomOnDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getDigitalZoomRatioDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getDigitNumber() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns the number of digits to use when appending to the multi file save (i.e., if you want
test00.tif to be the first file, 0 is the start number and 2 is the digit number).
- getDilationSize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Get the dilation size for dilating the voxelized brain surface obtained by rasterizing the triangle mesh.
- getDilationSize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Get the dilation size for dilating the voxelized object surface obtained by rasterizing the triangle mesh.
- getDim() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to the dim_un0.
- getDim() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to the dim_un0.
- getDim() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- getDim() - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Return dimension passed to constructor.
- getDim() - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Return dimension passed to constructor.
- getDim() - Method in enum gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.SwapMode
-
- getDimArray() - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Gets the array with the dimension information.
- getDimElem(int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Accessor that returns the dimension element at the indicated index in the dimension array.
- getDimension() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
- getDimension() - Method in class gov.nih.mipav.model.algorithms.Vectornd
-
- getDimensionNode() - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Returns the dimension node (only 1 exists at fileinfo[0] position
- getDimensionNumber() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getDiognostician() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getDirection() - Method in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- getDirection() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query the current direction of the light.
- getDirection() - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
DOCUMENT ME!
- getDirection() - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- getDirection() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
Get the light direction.
- getDirection() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Get the light direction.
- getDirective(int) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- getDirectories() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
- getDirectoriesOfType(Class<T>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
- getDirectory() - Method in class gov.nih.mipav.view.ViewDirectoryChooser
-
Displays a dialog to select a directory, with the script directory as the default.
- getDirectory() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- getDirectory() - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
The directory of the FileNode, as taken from its File.
- getDirectory() - Method in class gov.nih.mipav.view.ViewUserInterface.OpenFileInfo
-
Get the directory containg the file.
- getDirectoryCount() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
Returns the count of directories in this metadata collection.
- getDirectoryName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Tag
-
Get the name of the com.drew.metadata.Directory in which the tag exists, such as
Exif, GPS or Interoperability.
- getDirFileInfo() - Method in class gov.nih.mipav.model.file.FileDicom
-
Accessor that returns the DICOMDIR sequence file info.
- getDirUIDs(File) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
- getDiscoverableActionList() - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- getDiscoverableActionList(String) - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- getDisplay() - Method in class gov.nih.mipav.model.file.FileInfoImageXML.SurfaceLink
-
Gets whether the surface should be displayed.
- getDisplay() - Method in class gov.nih.mipav.model.file.FileInfoImageXML.VOILink
-
Gets whether or not the VOI should be displayed.
- getDisplay() - Method in class gov.nih.mipav.model.structures.VOIText
-
- getDisplay() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- GetDisplay() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Get the object display either on/off.
- getDisplayApertureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getDisplayArb() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- getDisplayDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return the diaplay dialog.
- getDisplayDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return the diaplay dialog.
- getDisplayEye() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- getDisplayFuzzy() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor that returns displayFuzzy.
- getDisplayFuzzy() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Placeholder.
- getDisplayFuzzy() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor that returns displayFuzzy.
- getDisplayInv() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- getDisplayList() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Called by the doPick() method in Navigation behavior.
- getDisplayMode() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the display mode.
- getDisplayMode() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Get the LUT panel current display mode.
- getDisplayMode() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Accessor that indicates which image is active:
- getDisplayMode() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that returns displayMode.
- getDisplayMode3D() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return the current volume display mode.
- getDisplayMode3D() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return the current volume display mode.
- getDisplayName() - Method in class gov.nih.mipav.view.ShortCutted
-
Formats shortcut's name for display.
- getDisplayOptions() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- GetDisplayTract() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Returns if there are tracts to display.
- getDisplayTransform() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the display transform flag.
- getDisplayValue() - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
this editor's okay editable value.
- getDisplayValueForInfo() - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
used when editing images associated with a project.
- getDisplayValueForParam() - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- getDisposalMethod() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory
-
- getDistance() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.distanceIntensityItem
-
DOCUMENT ME!
- getDistance() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLLE.distanceIndexItem
-
DOCUMENT ME!
- getDistance() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex.DistanceIntensity
-
- getDistance() - Method in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Get the current accumulated distance.
- getDistance(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
Vertex-vertex distance measured along the shortest edge-path connecting the two vertices.
- getDistance(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
Vertex-vertex distance measured along the shortest edge-path connecting the two vertices.
- getDistanceInMeters(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getDistanceMap() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
access to the distance map - stored in map from MjEdgeKey to Float.
- getDistanceNeighbors27(float[]) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Fill an array of distances to the 26-connected neighbors for any given sample where the distances are the
Euclidean distances in sample coordinates.
- getDistortionCorrection2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDescriptor
-
- getDistortionCorrectionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getDistortionCorrectionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDescriptor
-
- getDistortionCorrectionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getDistortionParam02Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDescriptor
-
- getDistortionParam04Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDescriptor
-
- getDistortionParam08Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDescriptor
-
- getDistortionParam09Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDescriptor
-
- getDistortionParam11Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDescriptor
-
- getDistortionScaleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDescriptor
-
- GetDivergence(int[], Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getDOB() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get subject's date of birth (optional).
- getDOF() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getDOF() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the degrees of freedom.
- getDoGeometricCenterLabel() - Method in class gov.nih.mipav.model.structures.VOIBase
-
If doGeometricCenterLabel = true and active == false and closed = true,
execute drawGeometricCenterLabel when in drawSelf
- getDomainMax() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- getDomainMin() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- getDomainTolerance() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- GetDotProduct(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getDouble(boolean) - Method in class gov.nih.mipav.model.algorithms.libdt
-
Reads eight unsigned bytes from file.
- getDouble(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Reads eight unsigned bytes from file.
- getDouble(boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads eight unsigned bytes from file.
- getDouble(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a double, if possible.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets a double value at position in the data array.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Gets the acquire data in double format.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Gets the data in double format.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Gets the data in double format.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Gets the data in double format.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Gets the data in double format.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Gets the data in double format.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Gets the data in double format.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Gets the data in double format.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Gets the data in double format.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Gets the data in double format.
- getDouble(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
The interpolated value from the data array.ersion of get that does NOT perform bounds checking.
- getDouble(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD get data fuction where bounds checking is NOT performed.
- getDouble(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is NOT performed.
- getDouble(int, int, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a length of the data and deposits it into a single Double or an array of Double as needed by the tag's VM.
- getDouble(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D get data fuction where bounds checking is NOT performed.
- getDouble(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is NOT performed.
- getDouble(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the double value of one of the parameters from the table.
- getDouble(StringTokenizer) - Static method in class gov.nih.mipav.view.MipavUtil
-
Get a double value from a string tokenizer.
- getDouble64() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
- getDouble64(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
- getDoubleArrayConverter() - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
- getDoubleBiLinear(float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs bi-linear interpoloation.
- getDoubleBuffer() - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Gets the double buffer (image).
- getDoubleObject(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a Double.
- getDoubletArrayElementSpliterator(Spliterator<? extends ContourPlot.PixelBase>) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
Example implementation of a PixelConvertingSpliterator<double[]>.
- getDoubleTriLinear(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs tri-linear interpoloation.
- getDoubleValOrAsciiVal(String) - Method in class gov.nih.mipav.model.file.FileIO
-
- getDoubleValueOfKey(String) - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- getDownSampleResolutions() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- getDrawingContext() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- getDrawVOIflag() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- getDRI(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Get DRI part of header.
- getDriveModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
2 or 3 numbers: 1.
- getDRRNorm() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the normalization factor for DDR rendering mode.
- getDTI() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Return the DTI Image.
- getDTIimage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- getDTIParameters() - Method in class gov.nih.mipav.model.file.FileBRUKER
-
- getDTIParameters() - Method in class gov.nih.mipav.model.structures.ModelImage
-
- getDuration() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
We could have derived the duration from the number of frames and frame rate.
- getDuration() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
DOCUMENT ME!
- getDWI() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- getDynamicRangeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getDynamicRangeOptimizerDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getDynamicRangeSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getDynamicScanBeginTime() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getDynamicScanNumber() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getDynamicStudyGeneral() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getEast() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- getEasyShootingModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getEccentricity() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the eccentricity of the VOI: 1 = line, 0 = circle; return eccentricity of the VOI.
- getEchoNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getEchoNumber() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getEchoNumbers() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getEchoTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getEchoTime() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getEchoTrainLength() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getEchoTrainLength() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getEdgeJunctions() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- GetEdgeLoops(Vector<Pair<Long, Long>>, Vector<Vector<Pair<Long, Long>>>) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getEdgeMap() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Access the hash map of edges.
- getEdgePoints(BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
Finds the points of the given BitSet which has at least one neighbor (not including diagonals) not in the BitSet.
- getEdgeQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
The number of edges currently in the table.
- getEdges() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- getEdges() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getEigenValueImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Returns the Eigen Value Image.
- getEigenValueImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- getEigenVectorImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Returns the Eigen Vector Image.
- getEigenVectorImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- getElapsedStudyDuration() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getElapsedTime() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Returns the elapsed time in seconds.
- getElement() - Method in class gov.nih.mipav.model.file.FileDicomKey
-
returns only the element portion of the DICOM key.
- getElement() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Accessor that returns the element word of the tag (hex).
- getElement(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
Gets the element number of a given integer hash index.
- getElement(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
Get the element value at the specified row,col.
- getElementAt(int) - Method in class gov.nih.mipav.model.structures.IntVector
-
Gets a value from the array.
- getElementNumber() - Method in class gov.nih.mipav.model.file.FileDicomKey
-
Returns the element portion of a DICOM key as an integer.
- getEllipseCurves() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getelts(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.universe
-
- getElts() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- getElts(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- getEltsLength() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- getEmail() - Method in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Gets email.
- getEmailDefault() - Static method in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
- getEmbeddedPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- getEnable() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Access on when picking with the mouse is enabled.
- getEnable() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- getEnable() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Access on when picking with the mouse is enabled.
- getEnable() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Return the sculpt enabled status.
- getEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Returns whether the ModelTriangleMesh is to be displayed with the ModelImage data as a texture or not.
- getEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Returns true if the user has enabled the paint brush.
- getEnabled() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- getEnabled() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Returns true if the user has enabled the paint brush.
- getEncodedTextDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getEnd() - Method in class gov.nih.mipav.view.Rubberband
-
Returns the end point of the rubberband.
- getEndCalendar() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets all the ending date of the patient's study from the all three comboboxes.
- getEndDay() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets the ending day of the study in the endDayBox combobox.
- getEndianess() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Descibes file endianess.
- getEndianess() - Method in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- getEndianess() - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Accessor that returns the endianess.
- getEndianessFromStr(String) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the endianess associated with a string.
- getEndLines(Vector3f, Vector3f, VertexBuffer, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Sets up the line annotations for the end-points of the line (arrows).
- getEndLines2(Vector3f, Vector3f, VertexBuffer, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Sets up the protractor annotations for the end-points of the protractor (arrows).
- getEndLinesLine(float[], float[], int, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates and returns the inverted-arrow coordinates for the VOILine tickmark display.
- getEndLinesProtractor(float[], float[], int, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates and returns the arrow-head coordinates for the VOIProtractor tickmark display.
- getEndMonth() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets the ending month of the study in the endMonthBox combobox.
- getEndPoint() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get the end point world coordinate vector.
- getEndPointCoordinate() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Get the end point transform.
- getEndRange() - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Gets the starting range of pixels.
- getEndSlice() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns the slice to stop saving at.
- getEndTime() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns the time slice to stop saving at.
- getEndX() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getEndY() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getEndYear() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets the ending year of the study in the endYearBox combobox.
- getEndZ() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getEnergy(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- getEnergy(LODMesh.Vertices, LODMesh.Vertices) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- getEnergyWindow() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getEnergyWindowLowerLevel() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getEnergyWindowsNumber() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getEnergyWindowUpperLevel() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getEnhancedNumSlices() - Method in class gov.nih.mipav.model.file.FileDicom
-
- getEnhancedNumVolumes() - Method in class gov.nih.mipav.model.file.FileDicom
-
- getEnhancedTagTables() - Method in class gov.nih.mipav.model.file.FileDicom
-
- getEnhancementDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getEntropy() - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- getEntropy(int[], double) - Static method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Standard entropy calculation.
- getEntry() - Method in class gov.nih.mipav.model.provenance.ProvenanceChangeEvent
-
Retrieves the provenance entry
- getEntry(Class) - Method in class gov.nih.mipav.plugins.ManifestFile
-
Gets the dependents of class c.
- getEntryPoint() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get the entry ponit world coordinate.
- getEntryPoint() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Get the entry pont transform group.
- getEntrySet() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.PropertyListResults
-
- getEpochTimeDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getEps() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
- getEQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getEquation() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- getEquipmentName() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get the scan Equipment Model Name associated with image.
- getEquipmentVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getError() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
Return the current error measure computeas the root mean squared error.
- getError() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
Return the current error measure between the target image and the registered source image.
- getError() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Return the current error measure between the target image and the registered source image.
- getError() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureLeastSquares
-
Return the current error measure between the target image and the registered source image.
- getError() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Return the current error measure between the target image and the registered source image.
- getError() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Accessor that returns error String if an error has occured.
- getError() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- getErrorComponent() - Method in class gov.nih.mipav.view.JPanelEdit
-
method returns the Component (visual GUI interface) that has an error making the panel value in an attempt to
allow the user the chance to correct the problem.
- getErrorCount() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the count of error messages in this directory.
- getErrorDeriv(int, int, int, Vector3f) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Computes the derivative of the error function at a control point by approximating with finite differences where
the control point is moved small amounts in each orthgonal direction.
- getErrorDeriv(int, int, Vector2f) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Computes the derivative of the error function at a control point by approximating with finite differences where
the control point is moved small amounts in each orthgonal direction.
- getErrorMessage() - Method in class gov.nih.mipav.model.algorithms.ODE
-
- getErrorMessage() - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- getErrors() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Used to iterate over any error messages contained in this directory.
- getErrorStatus() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
DOCUMENT ME!
- getErrorStatus() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
DOCUMENT ME!
- getErrorString() - Method in class gov.nih.mipav.view.JPanelEdit
-
method returns the String describing an error making the panel value.
- getEsize() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getEValueimage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- getEVDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getEventType() - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- getEVimage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- getExamName() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getExamType() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getExceptions() - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- getExcitationsNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getExcluder() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
- getExifImageHeightDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getExifImageWidthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getExifVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getExifVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getExitCode() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Returns the exit code of the class.
- getExitCode() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Returns the exit code of the class.
- getExitCode() - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Returns the exit code of the class.
- getExitCode() - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Returns the exit code of the class.
- getExitStatus() - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- getExitStatus() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- getExitStatus() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- getExitStatus() - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- getExperimentDate() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the current experiment date string.
- getExperimentDate() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the current experiment date string.
- getExperimentDate() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the current experiment date string.
- getExperimentTime() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the current experiment time string.
- getExperimentTime() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the current experiment time string.
- getExperimentTime() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the current experiment time string.
- getExpirationDate() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
Parses the Expiration Date tag and the Expiration Time tag to obtain a single Date object representing
that this image should not used after this date and time.
- getExpirationDateDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getExpirationTimeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getExponent() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Get the spot cone exponent.
- getExposureBiasDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getExposureCompensationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getExposureDifferenceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getExposureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getExposureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getExposureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDescriptor
-
- getExposureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getExposureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getExposureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDescriptor
-
- getExposureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getExposureProgramDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getExposureShiftDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getExposureTime() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- getExposureTimeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getExposureTuningDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getExrAutoDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getExrModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- GetExt(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Returns the extension of a file name.
- getExtendedDescription() - Method in class gov.nih.mipav.model.file.FileTypeInfo
-
Return the description and file extension list for this file type.
- getExtendedWBDetectDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getExtenderDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getExtension() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the VOI extension.
- getExtension(String) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Returns the extension of the file name (including the dot), if file name does not have extension, then return empty string.
- getExtensionCode() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfxxDirectory
-
- getExtensionCodeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfxxDescriptor
-
- getExtensionList() - Method in class gov.nih.mipav.model.file.FileTypeInfo
-
Retrieve the list of extensions supported by this file type.
- getExtensionsString() - Method in class gov.nih.mipav.model.file.FileTypeInfo
-
Retrieve a string listing all of the extensions supported by this file type, separated by EXT_DELIM.
- getExtention() - Method in enum gov.nih.mipav.view.dialogs.JDialogMemoryAllocation.VMConfigType
-
- getExtents() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the dimensionality of the image.
- getExtents() - Method in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- getExtents() - Method in class gov.nih.mipav.model.GaussianKernel
-
- getExtents() - Method in interface gov.nih.mipav.model.Kernel
-
- getExtents() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the extents of the image.
- getExtents() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- getExtents() - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Accessor that returns the extents.
- getExtents() - Method in class gov.nih.mipav.view.PatientSlice
-
Returns the local image extents for the PatientSlice orientation.
- getExtents() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Query information which describes the bounds of the volume.
- getExtents() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Returns the extents of the tri planar component (in the component's order, not the image volume's).
- getExtents(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the image extents translated into the Patient-Coordinate systsm:
- getExtents(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the image extents translated into the Patient-Coordinate system:
- getExtentsSize(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getExternalDirs() - Static method in class gov.nih.mipav.util.MipavInitGPU
-
Get the default Shader directory.
- getExternalFlashBounceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getExternalFlashDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getExternalFlashZoomDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getExternalNodes() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- getExternalSensorBrightnessValueDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDescriptor
-
- getExtractedImages() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
Return the images extracted from the source image.
- getExtractedVOI() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
get the final VOI
- getExtractList() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlices
-
Method to return the extract list since local copies may change while the algorithm runs.
- getExtraSamplesDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getExtreme() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Read the view port extreme value e.
- getExtremityCoil() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getEyeDist() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Read the z value of the eye point (0,0,z).
- getEyePoint() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Return the world space coordinates for the eye point.
- getEyePoint() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Return access to the current eye point in world coordinates.
- getEyePoint() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Return access to the current eye point in world coordinates.
- getFace(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- getFaceDetectDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- GetFaceIndex(double[], double, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- GetFaceIndex(float[], float, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- GetFaceIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- getFaceOrientation(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Return the guess at the face's orientation based on the image orientation information.
- getFaceOrientation(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Return the guess at the face's orientation based on the image orientation information.
- getFaceQuatity() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- getFaceQuatityOrig() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- getFaceRecognitionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
Return the y-axis movement multipler.
- getFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
Return the y-axis movement multipler.
- getFAimage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- getFAImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Returns the Functional Anisotropy Image.
- getFAImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- getFastMarcher() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Get the fast marching object.
- getFeatureArray() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Features
-
- getFeatureArray() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.FeaturesSVM
-
- getFeatureImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNonparametricSegmentation
-
DOCUMENT ME!
- getFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
Get the feature image.
- getFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
Get the feature image.
- getFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
Get the feature image.
- getFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
Get the feature image.
- getFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Get the feature image.
- getFeatureImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Get the feature image.
- getFeatureType() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- getFeatureWeights() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
The nr_feature*nr_class array w gives feature weights.
- getFieldOfView() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getFieldSkip() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the current field_skip value.
- getFieldSkip() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the current field_skip value.
- getFieldSkip() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the current field_skip value.
- getFieldStrength() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getFile() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- getFile() - Method in exception gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.InvalidInputDataException
-
- getFile() - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
Returns the File that is this node on the tree.
- getFile(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the file value of one of the parameters from the table.
- getFileBlocks() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getFileChooser() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
Get the active file chooser.
- getFileDialog() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- getFileDir() - Method in class gov.nih.mipav.model.file.FileAvi
-
Returns fileDir.
- getFileDir() - Method in class gov.nih.mipav.model.file.FileBRUKER
-
This convenience method is needed to establish the location of the 2dseq file
- getFileDirectory() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns counter to start of image data.
- getFileDirectory() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns the directory to be written to.
- getFileDirectory(String) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Returns the path information from the file name with the path information.
- getFileExtents() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Analyze _extents_ value of 16,384.
- getFileExtents() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
SiemensText _extents_ value of 16,384.
- getFileExtents() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- getFileFilter() - Method in interface gov.nih.mipav.view.FileSelector
-
Returns the file filter used by FileSelector.
- getFileFilter() - Method in class gov.nih.mipav.view.FileSelectorImpl
-
- getFileFilter() - Static method in class gov.nih.mipav.view.Preferences
-
Returns the index of the latest used file filter.
- getFileFilter() - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.SurfaceLoaderSUR
-
Get access to FileFilter (to be used in JFileChooser) for the types of files that can be loaded by this class.
- getFileFilter(int) - Method in class gov.nih.mipav.view.FileSelectorImpl
-
A private helper function to get the current used FileFilter from JFileChooser.
- getFileFilter(JFileChooser, int) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
A private helper function to get the current used FileFilter from JFileChooser.
- getFileFilter(JFileChooser, int) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
A private helper function to get the current used FileFilter from JFileChooser.
- getFileFilter(JFileChooser, int) - Method in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
A private helper function to get the current used FileFilter from JFileChooser.
- getFileFormat() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns file format.
- getFileFormatDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getFileIndex(String) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Trims off the file extension and file name, but leaves the file index.
- getFileInfo() - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileAfni
-
getFileInfo - accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Returns the FileInfoAnalyze read from the file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileAvi
-
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileBFLOAT
-
Returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileBMP
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileBRUKER
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileCheshire
-
Returns the FileInfoCheshire read from the file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileCOR
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileCZI
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileDicom
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
DOCUMENT ME!
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileICS
-
getFileInfo - accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileImageXML
-
Returns the FileInfoXML read from the file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileInterfile
-
Returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileJP2
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileLIFF
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileLSM
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileMagnetomVision
-
Get the file info generated by reading in the magnetom vision file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileMATLAB
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileMGH
-
Returns the FileInfoMGH read from the file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileMinc
-
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileMincHDF
-
Returns the FileInfoXML read from the file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Returns the FileInfoNIFTI read from the file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileNRRD
-
Returns the FileInfoNRRD read from the file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FilePARREC
-
Returns the FileInfoAnalyze read from the file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileSiemensText
-
Returns the FileInfoSiemensText read from the file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileSpar
-
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileSPM
-
Returns the FileInfoSPM read from the file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileSTK
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileSurfaceXML
-
Returns the FileInfoSurfaceXML read from the file.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileSVS
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileTiff
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileTrackVis
-
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileVista
-
- getFileInfo() - Method in class gov.nih.mipav.model.file.FileZVI
-
Accessor that returns the file info.
- getFileInfo() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the fileInfo array (one per slice).
- getFileInfo() - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D
-
Returns the FileInfoSurfaceRefXML read from the file.
- getFileInfo() - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D
-
Returns the FileInfoSurfaceXML read from the file.
- getFileInfo() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Returns the FileInfoSurfaceRefXML read from the file.
- getFileInfo() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM
-
Returns the FileInfoSurfaceRefXML read from the file.
- getFileInfo(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the fileInfo of a specific image slice.
- getFileInfoVector() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
- getFileLength() - Method in class gov.nih.mipav.model.file.FileDicomBase
-
- getFileList() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- getFileList(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileMicroCat
-
Looks in the image directory and returns all images with the same suffix as fileName, sorted in
lexicographical order.
- getFileList(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Looks in the image directory and returns all images with the same suffix as fileName, sorted in
lexicographical order.
- getFileLocation() - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- getFilename() - Method in exception gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.InvalidInputDataException
-
Deprecated.
- getFileName() - Method in class gov.nih.mipav.model.file.FileAvi
-
Returns fileName.
- getFileName() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the file name.
- getFileName() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns the file name to be written to.
- getFileName() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- getFileName() - Method in class gov.nih.mipav.view.ViewUserInterface.OpenFileInfo
-
Get the file name (no path).
- getFileName(boolean) - Static method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
Calls a dialog to get a file name.
- getFileName(boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
Calls a dialog to get a file name.
- getFileName(boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Calls a dialog to get a file name.
- getFileName(String) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Returns the file name without path information from file name with the path information.
- GetFilename(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Returns the file name of a path+file name string.
- getFileNameList(FileInfoBase[]) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Gets the file name list from which this ModelImage is opened.
- getFileNameList(ModelImage) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Gets the file name list from which this ModelImage is opened.
- getFileNames() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- getFileNumberMemoryDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFilePath() - Method in class gov.nih.mipav.view.dialogs.ScriptTreeNode
-
- getFilePointer() - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Gets the file/buffer pointer and returns it.
- getFileReader(String) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Gets a buffered reader for a given file name.
- getFileReader(String) - Static method in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
Gets a buffered reader for a given file name.
- getFiles(int[]) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
- getFileSizeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FileSystemDescriptor
-
- getFileSourceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getFileSuffix() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the file suffix.
- getFileTempDir() - Static method in class gov.nih.mipav.view.Preferences
-
Returns the temporary directory which is used to store files to be deleted.
- getFileTree() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreePanel
-
- getFileType() - Method in class gov.nih.mipav.model.file.FileIO
-
Presents a dialog for a user-entered definition of the image type.
- getFileType() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor to get what type of file this is, such as analyze, raw, DICOM, etc.
- getFileType() - Method in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
Accessor that returns the image type.
- getFileType(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Sets the FileBase.
- getFileType(String, String, boolean, boolean, boolean[]) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Sets the FileBase.
- getFileTypeFromStr(String) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Returns the file type associated with a string.
- getFileTypeFromSuffix(String) - Static method in class gov.nih.mipav.model.file.FileTypeTable
-
Gets the file type based upon the suffix.
- getFileTypeInfo(int) - Static method in class gov.nih.mipav.model.file.FileTypeTable
-
- getFileTypeStr(int) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Return the string associated with a file type.
- getFileTypeTable() - Static method in class gov.nih.mipav.model.file.FileTypeTable
-
- getFillOrderDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getFilmModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getFilter() - Method in class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
Accessor that gets the file filter.
- getFilterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getFilterDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- getFilterIndex(String) - Static method in class gov.nih.mipav.view.ViewImageFileFilter
-
DOCUMENT ME!
- getFilterMethod() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- getFilterMethodDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDescriptor
-
- getFilterName() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getFiltersDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getFilterType() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
returns type of filter - low, high, bandpass, or bandstop. - TO BE MOVED
- getFinal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- getFinal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- getFinal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Returns the final point with translations, rotations, scales, and skews representing the best
Transformation.
- getFinal(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- getFinal(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- getFinal(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Returns the final point with translations, rotations, scales, and skews representing the best
Transformation.
- getFinal(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- getFinal(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- getFinal(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- getFinal(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Accessor that returns the final point with translations, rotations, scales, and skews representing the best
tranformation.
- getFinalCRC() - Method in class gov.nih.mipav.model.file.CRC
-
- getFinalMaskImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
returns the mask image
- getFinePixColorDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getFineRate() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getFineRate() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the fine sample rate.
- getFineRateX() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getFineRateY() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getFineRateZ() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getFineVal() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Get the fine value.
- getFirmwareVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getFirst() - Method in class gov.nih.mipav.model.algorithms.BlindDeblur.Pair
-
- getFirst() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Pair
-
- getFirst() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.Triplet
-
- getFirst() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Pair
-
- getFirst() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Pair
-
- getFirstDirectoryOfType(Class<T>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
- getFirstExifSubIFDDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
- getFirstFile(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
DOCUMENT ME!
- getFirstHuffmanTablesDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
- getFirstPt() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns first mid-sag point marker point for +orig to +acpc transformation in dataset ordering.
- getFirstSliceAfterBleach() - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- getFitFunctionVisible() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
getFitFunctionVisible - accessor that gets the visible flag of the fitted function.
- getFittedFunctionsVisible() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that gets the visible flag.
- getFittedFuncts() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that gets the fitted functions for this graph.
- getFittedY() - Method in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
- GetFixedDepthLaplacian(SparseSymmetricMatrix, int, SortedTreeNodes) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getFixedPoint(int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Returns the position of the fixed point in the specified component
(i.e. the number of fractional bits), which is always 0 for this
ImgReader.
- getFixedPoint(int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Returns the position of the fixed point in the specified component
(i.e. the number of fractional bits), which is always 0 for this
ImgReader.
- getFlashActivityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getFlashBiasDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getFlashBracketCompensationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getFlashCompensationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFlashControlModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
3 or 4 values
- getFlashCurtainDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getFlashDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getFlashDetailsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getFlashDistanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getFlashExposureCompensationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getFlashExposureCompensationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getFlashExposureValueDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getFlashFiredDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDescriptor
-
- getFlashFiredDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFlashFiredDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getFlashIntensityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getFlashIntensityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
3 or 4 values
- getFlashLevelDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getFlashModeCameraSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFlashModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getFlashModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getFlashModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getFlashModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDescriptor
-
- getFlashModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getFlashModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFlashModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getFlashModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getFlashModelDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getFlashPixVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getFlashRemoteControlDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getFlashStatusDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDescriptor
-
- getFlashTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getFlashUsedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getFlashWarningDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getFlickerReduceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getFlip() - Method in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- getFlipAngle() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getFlipAngle() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getFlipAngle() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getFloat(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
Reads four unsigned bytes from file.
- getFloat(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Reads four unsigned bytes from file.
- getFloat(boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads four unsigned bytes from file.
- getFloat(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a float, if possible.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets a float value at position in the data array.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Gets the data in float format.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Gets the data in float format.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Gets the data in float format.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Gets the data in float format.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Gets the data in float format.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Gets the data in float format.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Gets the data in float format.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Gets the data in float format.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Gets the data in float format.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Gets the data in float format.
- getFloat(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of get that does NOT perform bounds checking.
- getFloat(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD get data function where bounds checking is NOT performed.
- getFloat(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is NOT performed.
- getFloat(int, int, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a length of the data and deposits it into a single Float or an array of Float as needed by the tag's VM.
- getFloat(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D get data fuction where bounds checking is NOT performed.
- getFloat(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is NOT performed.
- getFloat(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the float value of one of the parameters from the table.
- getFloat(StringTokenizer) - Static method in class gov.nih.mipav.view.MipavUtil
-
Get a float value from a string tokenizer.
- getFloat32() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
- getFloat32(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
- getFloatBiLinear(float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs bi-linear interpoloation.
- getFloatBuffer() - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Gets the float buffer (image).
- getFloatC(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D color get data fuction where bounds checking is NOT performed.
- getFloatC(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D color get data fuction where bounds checking is NOT performed.
- getFloatC(int, int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is NOT performed.
- getFloatObject(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a float.
- getFloatToShort() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
- getFloatToShort() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- getFloatTriLinear(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs tri-linear interpoloation.
- getFloatTriLinearBounds(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Get a value using tri-linear interpoloation.
- getFloatTriLinearBounds(float, float, float, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Get a value using tri-linear interpoloation.
- getFloatTriLinearBoundsTime(float, float, float, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Get a value using tri-linear interpoloation.
- getFloodCorrected() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getFmriStatusIndication() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getFNumber() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- getFNumberDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getFocalLength() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- getFocalLength35() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- getFocalLengthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getFocalLengthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getFocalLengthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFocalLengthDescription(double) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getFocalPlaneDiagonalDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getFocalPlaneDiagonalDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFocalPlaneResolutionUnitDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getFocalPlaneXResolutionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getFocalPlaneYResolutionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getFocalUnitsPerMillimetreDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getFocusAreaDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFocusContinuousDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getFocusDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDescriptor
-
- getFocusDistanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getFocusDistanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFocusInfoVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getFocusingModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getFocusMode1Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getFocusMode1Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getFocusMode2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getFocusMode2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getFocusModeCameraSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFocusModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getFocusModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDescriptor
-
- getFocusModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getFocusModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFocusModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getFocusModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getFocusModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getFocusProcessDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getFocusRangeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFocusTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getFocusWarningDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getFolderNameDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getFontDescriptors() - Method in class gov.nih.mipav.model.structures.VOIText
-
Gets the font's descriptors (PLAN, BOLD, ITALIC).
- getFontName() - Method in class gov.nih.mipav.model.structures.VOIText
-
Gets the name (type) of the font.
- getFontSize() - Method in class gov.nih.mipav.model.structures.VOIText
-
Returns the size of the font.
- getForceQuiet() - Static method in class gov.nih.mipav.view.MipavUtil
-
Returns whether all error/warning/info dialogs should be suppressed.
- getFormat() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
Return the format of each video frame.
- getFormat() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
Return the format of each video frame.
- getFormat() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
Return the format of each video frame.
- getFormattedFloat(int, String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getFormattedInt(int, String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getFormattedString(int, String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getFormattedThumbnailLine(int[], int) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Returns a String for writing the thumbnail data (r,g,b) to the XML header.
- getForwardNormalizedPosition(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Return the position of the curve of the point further down the curve the specified distance in the current
heading.
- getForwardNormalizedPosition(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Return the position of the curve of the point further down the curve the specified distance in the current
heading.
- getForwardNormalizedPosition(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Return the position of the curve of the point further down the curve
the specified distance in the current heading.
- getForwardNormalizedTime(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Return the normalized path distance of a point further down the branch curve in the current heading.
- getForwardNormalizedTime(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Return the normalized path distance of a point further down the branch curve in the current heading.
- getForwardNormalizedTime(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Return the normalized path distance of a point further down the
branch curve in the current heading.
- getFractalDimensionBoxCount() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- getFractalDimensionEuclideanDistance() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- getFractionalEffectiveEcho() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getFrame() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterImage
-
Return the frame containing the image that this image placeholder refers to.
- getFrame() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
***************************************************************************************************** Various
util type functions.*********************************************************************************************
********
- getFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Accessor that returns the parent frame for the component.
- getFrame() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that returns the frame holding this component.
- getFrame() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- getFrame() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- getFrame() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getFrame() - Method in class gov.nih.mipav.view.ViewControlsImage
-
Accessor for the ViewJFrameBase used.
- getFrame() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the frame.
- getFrame() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- getFrame() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- getFrame() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- getFrame() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- getFrame() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- getFrame() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- getFrameBuffer() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Grab the canvas image, and copy into the m_kSculptImage data members.
- getFrameBuffer(BufferedImage, VolumeCanvas3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Read the frame buffer from the input VolumeCanvas3D and store the result in the input BufferedImage:
- getFrameContainingImage(ModelImage) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor that returns the active image frame vector.
- getFrameGraphics() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
- getFrameGroupImages() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getFrameGroupNumber() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getFrameHeight() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Return the height that the frame should have.
- getFrameLandMarkPoints() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Get the frame four corner landmark points.
- getFrameNumber() - Method in class gov.nih.mipav.view.VOIFrameNode
-
Gets the slice number of this VOI.
- getFrameRate() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Accessor that gets the frame rate.
- getFrameRate() - Method in class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Accessor that gets the frame rate.
- getFramesInfo() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- getFramesInfo() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- getFrameSize() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Return the preferred size for the frame.
- getFrameSize(Dimension) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Return the preferred size for the frame.
- getFrameWidth() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Return the width that the frame should have.
- getFramingMethod() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getFree() - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
The amount of free memory the thread found.
- getFreeHeapMemory() - Static method in class gov.nih.mipav.view.MipavUtil
-
Return the amount of heap memory still available.
- getFreq1() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
returns frequency 1 of filter.
- getFreq2() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
returns frequency 2 of filter.
- getFreqDim() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- getFreqU() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
returns frequency U of filter.
- getFreqV() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
returns frequency V of filter.
- getFromOrigin() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- getFStopDescription(double) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getFullBuffer(InputStream, byte[], int, int) - Method in class gov.nih.mipav.model.file.FileImageXML
-
- getFullBuffer(InputStream, byte[], int, int) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
- getFullFileName() - Method in class gov.nih.mipav.view.ViewUserInterface.OpenFileInfo
-
Get the full file name (path and file name).
- getFullPath() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Returns the file pathname of the surface, if the surface was loaded from file.
- GetFuncEvalBase() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
get point to func eval. base.
- getFunction() - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Gets the points that describe the function.
- getFunctionsVisible() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that gets the visible flag of the functions.
- getFunctionVisible() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
getFunctionVisible - accessor that gets the visible flag of the function.
- getFunctName() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
getFunctNames - gets the names of the functions.
- getFuncts() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that gets the functions for this graph.
- getFuncType() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Gets the function type.
- getFunused1() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
MIPAV hack to the ANALYZE standard.
- getFunused1() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
MIPAV hack to the SiemensText standard.
- getFunused2() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
MIPAV hack to the ANALYZE standard.
- getFunused2() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
MIPAV hack to the SiemensText standard.
- getFunused3() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
MIPAV hack to the ANALYZE standard.
- getFunused3() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
MIPAV hack to the SiemensText standard.
- getFuzzyThreshold() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor that returns the fuzzy threshold.
- getFuzzyThreshold() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Placeholder.
- getFuzzyThreshold() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor that returns the fuzzy threshold.
- getFWHM() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
Returns the full width at half maximum of the autocorrelation.
- getFWHM() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
returns the full width at half maximum of the autocovariance.
- getFWHMB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
returns the full width at half maximum of the blue autocovariance.
- getFWHMG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
returns the full width at half maximum of the green autocovariance.
- getFWHMR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
returns the full width at half maximum of the red autocovariance.
- getGabor() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- getGabor() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- getGainControlDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getGamma() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- getGamma() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- getGamma() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns T20, T21, and T22 in the transformation matrix.
- getGamma() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Get the gamma correction.
- getGammaArray() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns array of T20, T21, and T22 in the transformation matrix.
- getGammaHalflife() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getGapArray() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns array of coordinate values at which gap is present.
- getGatedFrameMode() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- getGatedStudyGeneral() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getGatingType() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getGatingType2() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getGattArray() - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Gets the array with the attribute information.
- getGattElem(int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Accessor that returns the global attribute element at the indicated index in the global attribute array.
- getGazeDistance() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Get the current distance ahead for looking down the path.
- getGazeDistance() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Get the current distance ahead for looking down the path.
- getGeneralData() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getGeneralInfoList() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getGeneralLight(int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
The the general light with the given index.
- getGeneralLights() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Returns all general lights.
- getGenerated() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the current generated string.
- getGenerated() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the current generated string.
- getGenerated() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the current generated string.
- getGenerator() - Method in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
-
Get the generator for the heap record.
- getGenerator() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Support for regenerating an ModelTriangleMesh from an ModelClodMesh whenever the level of detail is changed for
the ModelClodMesh.
- getGeodesicGroup() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Return access to the Group data member m_kGeodesicGroup so Geodesic object can draw on the triangle mesh:
- getGeodesicGroup() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Return access to the Group data member m_kGeodesicGroup so Geodesic object can draw on the triangle mesh.
- getGeodesicPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Get the geodesic control panel.
- getGeodesicPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Get the geodesic control panel.
- getGeoLocation() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Parses various tags in an attempt to obtain a single object representing the latitude and longitude
at which this image was captured.
- getGeoLocationDimension(int, int, String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGeometricCenter() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the the geometric center of the VOI ; return geometric center defined by the VOI.
- getGeometricCenter() - Method in class gov.nih.mipav.model.structures.VOI
-
Returns the geometric center of the VOI (only contour).
- getGeometricCenter() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Gets the geometric center of the contour.
- getGeometricCenter() - Method in class gov.nih.mipav.model.structures.VOILine
-
Gets the geometric center of the contour.
- getGeometricCenter() - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Gets the geometric center of the contour.
- getGeometricCenterA() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- getGLmax() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the value of glmax.
- getGLmax() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the value of glmax.
- getGLmax() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the value of glmax.
- getGLmin() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the value of glmin.
- getGLmin() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the value of glmin.
- getGLmin() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the value of glmin.
- getGlobalAlphaMultiplier() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- getGlobalAlphaMultiplier() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- getGlobalCRC() - Method in class gov.nih.mipav.model.file.CRC
-
- getGlobalRadixInfo(int, int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- getGlobalSaturationMultiplier() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- getGlobalSaturationMultiplier() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- getGlobalThicknessMultiplier() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- getGOn() - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Returns the boolean indicating if the green channel should be displayed.
- getGpsAltitudeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsAltitudeRefDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsAreaInformationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsDate() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Parses the date stamp tag and the time stamp tag to obtain a single Date object representing the
date and time when this image was captured.
- getGpsDestDistanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsDestinationReferenceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsDestLatitudeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsDestLongitudeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsDifferentialDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsDirectionDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsDirectionReferenceDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsDopDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsHPositioningErrorDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsLatitudeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsLongitudeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsMeasureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsProcessingMethodDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsSpeedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsSpeedRefDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsStatusDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsTimeStampDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGpsVersionIdDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- getGradationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
3 or 4 values
- getGradientEpsilon() - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Get The gradient magnitude epsilon value.
- getGradientMagnitude() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getGradientMagnitude(ModelImage, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Calculates and stores the gradient magnitude images (3D or 4D) for the input image.
- GetGradientMagnitude() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- GetGradientMagnitude() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- GetGradientMagnitudeImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- GetGradientMagnitudeMax() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- GetGradientMagnitudeMin() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- GetGradientMagnitudeMinMax() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- GetGradientMapTarget() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the Gradient Magnitude Texture.
- getGradientOrientationNumber() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getGradients() - Method in class gov.nih.mipav.model.file.DTIParameters
-
- getGradMagA() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Get the gradient magnitude imageA.
- getGradMagA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Get the gradient magnitude imageA.
- getGradMagA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Get the gradient magnitude imageA.
- getGradMagA() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Get the gradient magnitude imageA.
- getGradMagB() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Get the gradient magnitude imageB.
- getGradMagB() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Get the gradient magnitude imageB.
- getGradMagB() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Get the gradient magnitude imageB.
- getGradMagB() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Get the gradient magnitude imageA.
- getGradMagBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
Get the gradient magnitude of the blurred curvature flow image.
- getGradMagBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
Get the gradient magnitude of the blurred curvature flow image.
- getGradMagBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
Get the gradient magnitude of the blurred curvature flow image.
- getGradMagBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
Get the gradient magnitude of the blurred curvature flow image.
- getGradMagBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Get the gradient magnitude of the blurred curvature flow image.
- getGradMagBlurCurvFlowImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Get the gradient magnitude of the blurred curvature flow image.
- getGraph() - Method in class gov.nih.mipav.view.graphVisualization.MipavSAXReader
-
Returns the Graph.
- getGraph() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
- getGraphBounds() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- getGraphicallyPrescribed() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getGraphPanel() - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Access to the graph panel.
- getGraphSystem() - Method in class gov.nih.mipav.view.graphVisualization.MipavSAXReader
-
Returns the GraphSystem.
- getGraphXML() - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Returns an xml description of the graph as a String.
- getGrayIndices() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaFileComparator
-
DOCUMENT ME!
- getgreen() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Accessor that returns int green.
- getgreen() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Accessor that returns int green.
- getgreen() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Accessor that returns int green.
- getgreen() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Accessor that returns int green.
- getGreen() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getGreen() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Accessor that returns int green.
- getGreenFunction() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Accessor that returns the green transfer function.
- getGreenFunction() - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Accessor that returns the green transfer function.
- getGreenX() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- getGreenY() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- getGrey(int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Calculates the grey value of this pixel using specified weights.
- getGrey(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Calculates a grey value from an RGB or ARGB value using specified
weights for each R,G and B channel.
- getGridColor() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
get the color of the grid.
- getGridColor() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the color of the background of the grid panel.
- getGridColumn() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
getLightBoxCol - return the number of columns.
- getGridHeight() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- getGridHeight() - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- getGridLabeling() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Whether or not labels should be drawn on the grid overlay.
- getGridLabelOrientation() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- getGridlinesVisible() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that gets the visible flag.
- getGridOverlay() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
returns whether grid overlay is being displayed.
- getGridRow() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the number of rows.
- getGridSpacing() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the size of the space between image borders.
- getGridSpacingX() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
returns the grid spacing in terms of resolution.
- getGridSpacingY() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
returns the grid spacing in terms of resolution.
- getGridWidth() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- getGridWidth() - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- getGroup() - Method in class gov.nih.mipav.model.file.FileDicomKey
-
returns only the group portion of the DICOM key.
- getGroup() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Accessor that returns the group word of the tag (hex).
- getGroup() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the VOI object that contains this contour.
- getGroup(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
Gets the group number of a given integer hash index.
- getGroupColor(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Get the group color with given group ID.
- getGroupColor(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Get the group color with given group ID.
- getGroupMean() - Method in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- getGroupNumber() - Method in class gov.nih.mipav.model.file.FileDicomKey
-
returns the group portion of the DICOM key as an integer.
- getGroupStdDev() - Method in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- getGrow() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
The growth value for reallocations.
- getGrow() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
The growth value for reallocations.
- getGrow() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
The growth value for reallocations.
- getGrow() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
The growth value for reallocations.
- getHalf(double[][]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- getHaralickImagesNumber() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- getHardNoiseThreshold() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- getHasIndex() - Method in class gov.nih.mipav.model.file.FileAvi
-
- getHaveDcmMeta() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getHaveWindowed() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- getHaveZResol() - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
Accessor to get the flag for having a z resolution.
- getHBrushSize() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- getHDRDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getHdrImageTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDescriptor
-
- getHdrSize() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getHeaderFile() - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Returns the header file.
- getHeaderFile() - Method in class gov.nih.mipav.model.file.FilePARREC
-
<<<<<<< .working Returns the header file.
- getHeaderFile() - Method in class gov.nih.mipav.model.file.FileSiemensText
-
Returns the header file.
- getHeaderFile(String[]) - Static method in class gov.nih.mipav.model.file.FileAnalyze
-
Returns the header file (ends in .hdr) as a string.
- getHeaderFile(String[]) - Static method in class gov.nih.mipav.model.file.FilePARREC
-
======= Returns the header file.
- getHeaderFile(String[]) - Static method in class gov.nih.mipav.model.file.FileSiemensText
-
Returns the header file (ends in .hdr) as a string.
- getHeaderFile(String[]) - Static method in class gov.nih.mipav.model.file.FileSpar
-
======= Returns the header file.
- getHeaderRendererIcon(int, int) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- getHeaderSize() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
- getHeadlineDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getHeapMemoryUsage() - Static method in class gov.nih.mipav.view.MipavUtil
-
Get an object containing information on the current memory usage.
- getHeight() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
- getHeight() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
- getHeight() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
DOCUMENT ME!
- getHeight() - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- getHeight() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get subject's height (optional).
- getHeight() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- getHeight() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- getHeight() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- getHeight() - Method in interface gov.nih.mipav.view.renderer.flythroughview.FlyThroughRenderInterface
-
- getHeight() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- getHeight() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- getHeight() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- getHeight() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Returns the height of the display canvas.
- getHeight(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the image height, based on the Patient Coordinates orientation from which the data will be viewed:
- getHelp() - Method in interface gov.nih.mipav.view.Argument
-
Returns help for using command.
- getHelp() - Method in enum gov.nih.mipav.view.Argument.InstanceArgument
-
- getHelp() - Method in enum gov.nih.mipav.view.Argument.StaticArgument
-
- getHigh() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getHighBit() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getHighIsoNoiseReductionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getHighIsoNoiseReductionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getHighISONoiseReductionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getHighOP_24prev() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getHighOP_25post() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getHighOP_rel25() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getHighValue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
DOCUMENT ME!
- getHighXmm() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns the highest x location in millimeters.
- getHighYmm() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns the highest y location in millimeters.
- getHighZmm() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns the highest z location in millimeters.
- getHist() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to get the Analyze's hist_un0 string.
- getHist() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to get the SiemensText's hist_un0 string.
- getHist() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- getHistoBuffer() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCumulativeHistogram
-
This method returns the histogram array values
- getHistoBuffer() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
The buffer of all histogram values.
- getHistogram() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Access to the 2D Histogram display class so it can be updated from outside this class.
- getHistogramDialog() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
- getHistogramFrame() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method that returns the Histogram frame if it exists else returns null.
- getHistogramLUTTexture(int, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getHistogramLUTTextureIndex(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getHistogramPresent() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getHistoLUTActiveImage() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Returns which image is active in the HistoLUT -- either imageA or imageB.
- getHistoLUTActiveImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Returns which image is active in the HistoLUT -- either imageA or imageB.
- getHistoLUTComponent() - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Get the histogram LUT component.
- getHistoLUTComponentA() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Get the histogram component for imageA.
- getHistoLUTComponentA() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Get the histogram component for imageA.
- getHistoLUTComponentA() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Get the histogram component for imageA.
- getHistoLUTComponentA() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Get the histogram component for imageA.
- getHistoLUTComponentA() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Get the histogram component for imageA.
- getHistoLUTComponentB() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Get the histogram component for imageB.
- getHistoLUTComponentB() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Get the histogram component for imageB.
- getHistoLUTComponentB() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Get the histogram component for imageB.
- getHistoLUTComponentB() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Get the histogram component for imageB.
- getHistoLUTComponentB() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Get the histogram component for imageB.
- getHistoLUTFrame() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Deprecated.
- getHistoRGBActiveImage() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Returns which image is active in the HistoRGB -- either imageA or imageB.
- getHistoRGBActiveImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Returns which image is active in the HistoRGB -- either imageA or imageB.
- getHistoRGBFrame() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Deprecated.
- getHistory() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getHistory() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets the image history string.
- getHistoryInfo() - Method in class gov.nih.mipav.model.file.FileInfoVista
-
- GetHistoTarget() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Returns the multi-histogram histogram Texture.
- GetHistoTCoords() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the texture coordinates for the multi-histogram histogram texture.
- getHkey() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to get the Analyze's hkey_un0 string.
- getHkey() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to get the SiemensText's hkey_un0 string.
- getHkey() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- getHole(double[][]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- getHorizontalLandmark() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getHorizontalSamplingFactor() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegComponent
-
- getHospitalName() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getHostImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Get host image.
- GetHostImage(ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Retrives the image connected to the shape.
- GetHostImage(ModelSimpleImage, String, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Retrives the image connected to the shape.
- getHostIP(String) - Static method in class gov.nih.mipav.view.Preferences
-
Accessor to get host (chat/file) server Internet Protocol for selected Name.
- getHostName() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getHours() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- getHueAdjustmentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getHumidityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- getI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskShortPair
-
- GETI(byte[], int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- GETI(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- getiCenter() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- getIcon(String) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Finds the icon of the specified name.
- getIcon(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Finds the icon of the specified name.
- getIconBase() - Method in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- getIconHeight() - Method in class gov.nih.mipav.model.structures.TableSorter.Arrow
-
DOCUMENT ME!
- getIconHeight() - Method in class gov.nih.mipav.view.ColorIcon
-
getIconHeight - gets the height of the icon.
- getIconImage(String) - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Finds the image of the specified name.
- getIconImage(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Finds the image of the specified name.
- getIconName() - Static method in class gov.nih.mipav.view.Preferences
-
Returns the name of the application icon.
- getIconWidth() - Method in class gov.nih.mipav.model.structures.TableSorter.Arrow
-
DOCUMENT ME!
- getIconWidth() - Method in class gov.nih.mipav.view.ColorIcon
-
getIconWidth - gets the width of the icon.
- getId() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- getId() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- getID() - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Returns the unique id for the surface:
- getID() - Method in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Returns the unique id for the surface:
- getID() - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
- getID() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the ID.
- getID() - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Returns ID in PolyLineSlice object.
- getIdealWidth(float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
Calculate idealWidth for bins.
- getIdealWidth(float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
find the ideal bin width
- getIdentifier() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- getIDFromRow(int) - Static method in class gov.nih.mipav.view.DICOMDisplayer
-
Returns the ID from the specificed row.
- getiFinal() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- getIflag() - Method in class gov.nih.mipav.model.algorithms.ODE
-
- getIflag() - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- getiImage() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- getImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- getImage() - Method in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
returns the newly created image
- getImage() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterImage
-
Return the image that this image placeholder refers to.
- getImage() - Method in class gov.nih.mipav.view.dialogs.JDialogBlankImage
-
Accessor that returns the image.
- getImage() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
gets the image that was imported from the frame or taken from files (ie., "browse files").
- getImage() - Method in interface gov.nih.mipav.view.renderer.flythroughview.FlyThroughRenderInterface
-
- getImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- getImage() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Get the buffered image.
- getImage() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Get the current model image.
- getImage() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Gets the Java image.
- getImage() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Access the associated image.
- getImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- getImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageModel
-
- getImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageModelSVM
-
- getImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- getImage() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Gets Java image.
- getImage() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Gets Java image.
- getImage() - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Gets the Java image.
- getImage() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Access the associated image.
- getImage() - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- getImage(String) - Method in class gov.nih.mipav.model.scripting.ImageVariableTable
-
Returns the image associated with a image placeholder variable.
- getImage(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the model image assigned to one of the image parameters from the table.
- getImage(String) - Method in class gov.nih.mipav.model.scripting.ScriptRunner
-
Retrieves an image from the image table being used by the current script we are running.
- GetImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the ModelImage volume data.
- getImage2() - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- getImage25D() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the boolean indicating if 3D images are processed one slice at a time.
- getImage3DMultiBuffer() - Method in class gov.nih.mipav.model.file.FileLSM
-
Accessor that returns the image buffer.
- getImageA() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Returns imageA, which may have changed during the match.
- getImageA() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
get image a
- getImageA() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Accessor that returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Accessor that returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Accessor that returns the reference to image A.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Accessor that returns the reference to image A.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Accessor that returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Accessor that returns the image A.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Accessor that returns the reference to image A.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Accessor that returns the reference to image A.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that returns the image A.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Accessor that returns the image A.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Get the image A reference.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Accessor that returns the reference to image A.
- getImageA() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Accessor that returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Accessor that returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Return ModelImage A.
- getImageA() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
get image a
- getImageA() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Get the image A reference.
- getImageA() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Accessor that returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Accessor that returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Accessor that returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Accessor that returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Get source image
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Accessor that returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Accessor that returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Accessor that returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Accessor that returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Accessor that returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Accessor that returns the imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Accessor that returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Accessor that returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Returns the reference to mipImage.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Returns the reference to imageA.
- getImageA() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Accessor that returns the reference to imageA.
- getImageAdjustmentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDescriptor
-
- getImageAngulation() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getImageArray() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- getImageB() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Returns imageB, which may have changed during the match.
- getImageB() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getImageB() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
get image b
- getImageB() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Accessor that returns the image.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Accessor that returns the image.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Accessor that returns the reference to image B.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Accessor that returns the reference to image B.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Does nothing but must instantiate for this to be a subclass of RenderViewBase.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Accessor that returns the reference to image B.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Accessor that returns the reference to image B.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that returns the image B.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Accessor that returns the image B.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Returns the reference to imageB.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Get the imageB reference.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Returns the imageB.
- getImageB() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Accessor that returns the reference to image B.
- getImageB() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Accessor that returns the imageB.
- getImageB() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Accessor that returns the imageB.
- getImageB() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Return ModelImage B.
- getImageB() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
get image b
- getImageB() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Get the imageB reference.
- getImageB() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Accessor that returns the imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Accessor that returns the imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Accessor that returns the imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Accessor that returns the reference to imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Accessor that returns the reference to imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that returns the imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Accessor that returns the reference to imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Accessor that returns the reference to imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Accessor that returns the imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Accessor that returns the imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Returns the reference to imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the reference to imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Accessor that returns the reference to imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Accessor that returns the reference to imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Deprecated.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Returns the reference to imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Returns the reference to imageB.
- getImageB() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Accessor that returns the reference to imageB.
- getImageBoundingBox() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the contour bounding-box.
- getImageBuffer() - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileAfni
-
getImageBuffer - accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileBFLOAT
-
Returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileBMP
-
Accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileCOR
-
Accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileCZI
-
Accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileICS
-
getImageBuffer - accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileInterfile
-
Returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileJP2
-
Accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileLIFF
-
Accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileLSM
-
Accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileMATLAB
-
Accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileSTK
-
Accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileSVS
-
Accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileTiff
-
Accessor that returns the image buffer.
- getImageBuffer() - Method in class gov.nih.mipav.model.file.FileZVI
-
Accessor that returns the image buffer.
- getImageBufferA() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Gets imageA's image buffer of intensities.
- getImageBufferB() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Gets imageB's image buffer of intensities.
- getImageCenter() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Calculates translation offset for transforming image about the center of the image.
- getImageCentermm(boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Calculates translation offset for transforming image about the center of the image in the resolution space.
- getImageComponent() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Accessor that returns the reference to m_kImageComponent.
- getImageCompressionTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
- getImageCreationDate() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageCreationTime() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageDataDescription() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getImageDataFileName() - Method in class gov.nih.mipav.model.file.FileInfoXML
-
Returns the name of the image data file (not the xml header).
- getImageDescription() - Method in class gov.nih.mipav.model.file.FileInfoXML
-
Returns description of the image.
- getImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- getImageDirectory() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Returns the directory where the image file is located.
- getImageDirectory() - Static method in class gov.nih.mipav.view.Preferences
-
Returns the image directory used last time.
- getImageDirectory() - Method in class gov.nih.mipav.view.ViewDirectoryChooser
-
Displays a dialog to select a directory, with the image directory as the default.
- getImagedNucleus() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getImageDTIParams() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getImageDuration() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getImageFieldStrength() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageFileName() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Returns the file name of the image.
- getImageFileName() - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- getImageFileName() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- getImageFiles() - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Returns the image file list.
- getImageFiles() - Method in class gov.nih.mipav.model.file.FilePARREC
-
Returns the image file list.
- getImageFiles() - Method in class gov.nih.mipav.model.file.FileSiemensText
-
Returns the image file list.
- getImageFiles(String[]) - Static method in class gov.nih.mipav.model.file.FileAnalyze
-
Returns the image file list.
- getImageFiles(String[]) - Static method in class gov.nih.mipav.model.file.FilePARREC
-
Returns the image file list.
- getImageFiles(String[]) - Static method in class gov.nih.mipav.model.file.FileSiemensText
-
Returns the image file list.
- getImageFrameVector() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns.
- getImageFrameVector() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor that returns frame vector.
- getImageHeaderBlocks() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageHeaderCreatorProcess() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageHeaderCreatorTask() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageHeaderDisclaimer() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageHeaderID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageHeaderRevisionNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageHeight() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
Deprecated.
- getImageHeight() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
- getImageHeight() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- getImageHeightDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getImageHeightDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
- getImageHeightDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDescriptor
-
- getImagEigenvalues() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
Return the imaginary parts of the eigenvalues
- getImageIndex(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
- getImageInfoDialogB() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Returns the image info dialog for image B.
- getImageInfoList() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getImageLabelsUsedInScript(String) - Static method in class gov.nih.mipav.model.scripting.Parser
-
Returns an array of image parameters labels used in a given script.
- getImageLink() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Returns The SurfaceRender ModelImage imageA for linking to the LUT.
- getImageLink() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Returns The SurfaceRender ModelImage imageA for linking to the LUT.
- getImageList() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- getImageLocation() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- getImageLocation() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageMargins(ModelImage, TransMatrix, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Calculate necessary padding for image given applied transform.
- getImageMargins(ModelImage, TransMatrix, float, float, float) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Calculate necessary padding for image given applied transform.
- getImageMatrix() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Returns the menu that contains all image and overlay commands
- getImageModality() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Returns the type of image.
- getImageMode() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageName() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns the name of the image.
- getImageName() - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- getImageName() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageAttribute
-
- getImageName(ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getImageName(String) - Method in class gov.nih.mipav.model.scripting.ImageVariableTable
-
Retrieves the image name linked to an image variable.
- getImageNameA() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that returns the title of image A.
- getImageNameArray() - Method in class gov.nih.mipav.model.structures.ModelImage
-
- getImageNameB() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that returns the title of image B.
- getImageNameFromInfo() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
Returns the image name which should be used for the image this file info is attached to (studyNum_seriesNum).
- getImageNameFromInfo() - Method in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
Returns the image name which should be used for the image this file info is attached to (studyNum_seriesNum).
- getImageNameFromInfo() - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
Returns the image name which should be used for the image this file info is attached to.
- getImageNode() - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Returns the image node (image info and data)
- getImageNumber() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
DOCUMENT ME!
- getImageNumber() - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- getImageNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageOffcentre() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getImageOffset() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageOn(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- GetImageOn(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- getImageOrder() - Method in class gov.nih.mipav.model.structures.ModelImage
-
For multiple image viewers this indicates order of the image.
- getImageOrientation() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the image orientation.
- getImageOrientation() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Gets the image orientation (sagittal, axial, ...).
- getImageOrientationFromStr(String) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the image orientation associated with a string.
- getImageOrientationPatient() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getImageOrientationStr(int) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Return the string associated with an image orientation.
- getImageOriginal() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Get a reference to the original image we passed into the renderer from MIPAV (non-cloned).
- getImageParameter(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return one of the image parameters from the table.
- getImagePath() - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
Returns the path to the last opened image.
- getImagePositionPatient() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getImageProcessingVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDescriptor
-
- getImageQuality1Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getImageQuality2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getImageQuality2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getImageQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getImageQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getImageR() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Accessor to get imageR.
- getImageR() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Accessor to get imageR.
- getImageRawDataSystemID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageRegistered() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
Access the image containing the registered source values.
- getImageRelativeStartTime() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getImageResUnitsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDescriptor
-
- getImageResXDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDescriptor
-
- getImageResYDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDescriptor
-
- getImagesAllocated() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageSeparate() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Returns the ModelImage associated with the independent LUT.
- getImageSeparate() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Returns the ModelImage associated with the independent LUT.
- getImageShape() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImagesInfo() - Method in class gov.nih.mipav.model.file.FileInfoVista
-
- getImageSize() - Method in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Gets the size of the image (width * height).
- getImageSizeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getImageSizeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getImageSizeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getImageSource() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
Return access to input source image data values which is the same as was passed to the constructor.
- getImageSpacing() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImagesPerCardiacCycle() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImagesPerEWindow() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getImageStabilizationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getImageStabilizationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getImageStabilizationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getImageStabilizationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getImageStartTime() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getImageSystemGenerationID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageTable() - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Returns a reference to the image table being used to run the current script.
- getImageTable() - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Returns a reference to the image table being used to run the current script.
- getImageTable() - Method in class gov.nih.mipav.model.scripting.ScriptRunner
-
Returns a reference to the image table being used to run the current script.
- getImageTableVector() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
- getImageTarget() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
Return access to input target image data values which is the same as was passed to the constructor.
- getImageTimeStamp() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Get the system timestamp.
- getImageType() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImageType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getImageTypeMR() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getImageVariable(String) - Method in class gov.nih.mipav.model.scripting.ImageVariableTable
-
Returns the image variable that an image name is associated with.
- getImageVarsUsedInScript(String) - Static method in class gov.nih.mipav.model.scripting.Parser
-
Returns an array of image placeholder variables used in a given script.
- getImageVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDescriptor
-
- getImageWidth() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
Deprecated.
- getImageWidth() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
- getImageWidth() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- getImageWidthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getImageWidthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
- getImageWidthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDescriptor
-
- getImaginary() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools.EigenvalueComplex
-
- getImaginary() - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets.realImaginaryItem
-
DOCUMENT ME!
- getImaginaryData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmDistanceFilter
-
Returns reference to imaginary data array.
- getImaginaryData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Returns reference to imaginary data array.
- getImaginaryData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Returns reference to imaginary data array.
- getImaginaryData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Returns reference to imaginary data array.
- getImaginaryData() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
Returns reference to imaginary data array.
- getImaginaryiData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Returns reference to imaginaryi data array.
- getImaginaryjData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Returns reference to imaginaryj data array.
- getImaginarykData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Returns reference to imaginaryk data array.
- getImagingFrequency() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getImagingModality() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getImgBLHC_A() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- getImgBLHC_A() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImgBLHC_R() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- getImgBLHC_R() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImgBLHC_S() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- getImgBLHC_S() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImgExtents() - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- getImgModality() - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- getImgOrientation() - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- getImgResolution() - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- getImgTLHC_A() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- getImgTLHC_A() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImgTLHC_R() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- getImgTLHC_R() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImgTLHC_S() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- getImgTLHC_S() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImgTRHC_A() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- getImgTRHC_A() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImgTRHC_R() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- getImgTRHC_R() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImgTRHC_S() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- getImgTRHC_S() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getImgType() - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
- getImgType() - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- getImpl() - Method in enum gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
- getImpl() - Method in enum gov.nih.mipav.view.ViewJSlider.SliderType
-
- getImplementationClassUID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Implementation class uid.
- getImplementationVersion() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Implementation version uid.
- getInbagCounts() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getInbagCounts() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- getIncomingEndian() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Returns constant indicating endianess of incoming data.
- getIncomingSize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Returns the incoming data size.
- getIncreasingOrder() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Return the increasing order flag.
- getIncrement() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the increment between displayed slices
- getIncrement() - Method in class gov.nih.mipav.view.ViewJFrameRegistration.JDialogIncrement
-
Accessor that returns the new increment value.
- getIncrement() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool.JDialogIncrement
-
Accessor that returns the new increment value.
- getIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed.indexValueItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed.indexValueItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLLE.distanceIndexItem
-
DOCUMENT ME!
- getIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed.indexValueItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed.indexValueItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed.indexValueItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed.indexValueItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.indexValueItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexRowColItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- getIndex() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Returns this pixel's index.
- getIndex() - Method in class gov.nih.mipav.model.algorithms.filters.BM3D.indexValueItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform.indexValueItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.indexValue
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
-
Get the index of the heap record within the records array.
- getIndex() - Method in class gov.nih.mipav.model.algorithms.libdt.indexValueItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.indexValueItem
-
- getIndex() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.indexValueItem
-
DOCUMENT ME!
- getIndex() - Method in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
Returns index that we're at.
- getIndex() - Method in class gov.nih.mipav.model.file.FileIO.OrientStatus
-
Provides the index.
- getIndex() - Method in class gov.nih.mipav.model.file.FileVOI.VOISortItem
-
DOCUMENT ME!
- getIndex() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation.labelIndexItem
-
DOCUMENT ME!
- getIndex() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed.labelIndexItem
-
DOCUMENT ME!
- getIndex(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- getIndex(int, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getIndex(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
A convenience function for mapping the 3D voxel position (iX,iY,iZ) to a 1D array index.
- getIndex(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
A convenience function for mapping the 3D voxel position (iX,iY,iZ) to a 1D array index.
- getIndex(int, int, int) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Compute the index in a linear data array dimensioned to store all the samples of this volume.
- getIndex(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
A convenience function for mapping the 3D voxel position (iX,iY,iZ) to a 1D array index.
- getIndex(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
A convenience function for mapping the 3D voxel position (iX,iY,iZ) to
a 1D array index.
- getIndex(Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- getIndex(TreeNode) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- GetIndex(double[], double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- GetIndex(double[], double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingSquares
-
- GetIndex(float[], float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- getIndexChecked(int, int, int) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Compute the index in a linear data array dimensioned to store all the samples of this volume.
- getIndexCopy() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Make a copy of the connectivity array of a triangle mesh.
- getIndexedDescription(int, int, String...) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getIndexedDescription(int, String...) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getIndexedLUT() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
- getIndexFurthestDistance() - Method in class gov.nih.mipav.view.renderer.flythroughview.DijkstraMinCostPath
-
Get the index of the volume sample stored in a linear array which is at the end of the longest minimum cost path.
- getIndexIncX() - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Get the amount to increment the linear array index for each increment in the x coordinate index.
- getIndexIncY() - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Get the amount to increment the linear array index for each increment in the y coordinate index.
- getIndexIncZ() - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Get the amount to increment the linear array index for each increment in the z coordinate index.
- getIndexNeighbors27(int, int[]) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Fill an array of indexes for a linear array of volume values.
- getIndexNeighbors27(int, int, int, int[]) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Fill an array of indexes for a linear array of volume values.
- getIndexNeighborsGradient(int, int, int, ModelImage3DLayout.GradientNeighbors) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Retrieve the indexes for the 6-connected neighbors of the specified sample which are used to compute the
gradient.
- getIndexNeighborsVoxel(int, int, int, int[]) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Fill an array of indexes for a linear array of volume values.
- getIndexNestingLevel() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getIndexPath() - Method in class gov.nih.mipav.view.renderer.flythroughview.DijkstraMinCostPath
-
Get the indexes of the samples extracted along the longest minimum cost path.
- getIndexString(int[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Called when writing the surface.xml file: Converts the input array of int[] to a String for writing:
- getIndexX(int) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Get X sample coordinate from a linear array index for volume data.
- getIndexY(int) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Get Y sample coordinate from a linear array index for volume data.
- getIndexZ(int) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Get Z sample coordinate from a linear array index for volume data.
- getIndices() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
Get indices for reordering data from Image B to the Axial coordinate system (LPS) and to the coordinate system of
Image A.
- getInferiorEdge() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns PC inferior edge marker point for +orig to +acpc transformation in dataset ordering.
- getInferiorPt() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns most inferior point marker for +acpc to +tlrc transformation in dicom ordering.
- getInfo() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Return a reference to information about this tag in the dicom dictionary.
- getInfo(FileDicomKey) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Return information about a key in the dicom dictionary.
- getInfo(PrivateFileDicomKey) - Static method in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
Return information about a key in the dicom dictionary.
- getInfoNode() - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Returns the information node with dicom/patient info
- getInnerClass() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- getInnerException() - Method in exception gov.nih.mipav.model.file.MetadataExtractor.CompoundException
-
- getInPlanePhaseEncodingDirection() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getInputImageLabel(int) - Static method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Returns the label which should be used for an input image parameter.
- getInputImageRequirements() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getInputImageRequirements() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getInputImageRequirementsString() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getInputStream(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
DOCUMENT ME!
- getInputStream(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
DOCUMENT ME!
- getInsideMeshImage(BitSet) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getInsideMeshImage(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getInsideVoxels() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Identify all voxels that are inside or on the mesh that represents the brain surface.
- getInsideVoxels() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Identify all voxels that are inside or on the mesh that represents the brain surface.
- getInsideVoxels(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Identify all voxels that are inside or on the mesh that represents the brain surface.
- getInSphere(PointDistanceFunctor, VertTmark, Point3, float, Vector<Vertex>, Vector<Float>, Vector<Point3>) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.StaticGrid
-
- getInSphereVertex(TriMesh, StaticGrid, Point3, float, Vector<Vertex>, Vector<Float>, Vector<Point3>) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- getInstance(float[]) - Static method in class gov.nih.mipav.model.GaussianKernelFactory
-
- getInstanceCreationTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getInstanceNumber() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getInstanceTitle() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
- getInt(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
Reads four signed bytes from file.
- getInt(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
Reads four signed bytes from file.
- getInt(boolean) - Method in class gov.nih.mipav.model.algorithms.libdt
-
Reads four signed bytes from file.
- getInt(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Reads four signed bytes from file.
- getInt(boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads four signed bytes from file.
- getInt(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as an int, if possible.
- getInt(int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets a int value at position in the data array.
- getInt(int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Gets the data in int format.
- getInt(int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Gets the data in int format.
- getInt(int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Gets the data in int format.
- getInt(int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Gets the data in int format.
- getInt(int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Gets the data in int format.
- getInt(int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Gets the data in int format.
- getInt(int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Gets the data in int format.
- getInt(int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Gets the data in int format.
- getInt(int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Gets the data in int format.
- getInt(int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Gets the data in int format.
- getInt(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of get that does NOT perform bounds checking.
- getInt(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD get data fuction where bounds checking is NOT performed.
- getInt(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is NOT performed.
- getInt(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D get data fuction where bounds checking is NOT performed.
- getInt(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is NOT performed.
- getInt(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the integer value of one of the parameters from the table.
- getInt(StringTokenizer) - Static method in class gov.nih.mipav.view.MipavUtil
-
Get an integer value from a string tokenizer.
- getInt(cl_device_id, int) - Static method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Returns the value of the device info parameter with the given name
- getINT_ARGB(int, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.BufferedImageFactory
-
Instancing method for BufferedImage of type BufferedImage.TYPE_INT_ARGB
- getINT_ARGB(Dimension) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.BufferedImageFactory
-
Instancing method for BufferedImage of type BufferedImage.TYPE_INT_ARGB
- getINT_ARGB(Image) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.BufferedImageFactory
-
shortcut for get(img, BufferedImage.TYPE_INT_ARGB).
- getInt16() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Returns a signed 16-bit int calculated from two bytes of data (MSB, LSB).
- getInt16(byte[], int, boolean) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteUtil
-
- getInt16(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Retrieves an integer (16 bit) value from a DICOM object.
- getInt16(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Returns a signed 16-bit int calculated from two bytes of data at the specified index (MSB, LSB).
- getInt24(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Get a 24-bit unsigned integer from the buffer, returning it as an int.
- getInt32() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Returns a signed 32-bit integer from four bytes of data.
- getInt32(byte[], int, boolean) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteUtil
-
- getInt32(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Returns a signed 32-bit integer from four bytes of data at the specified index the buffer.
- getInt32FromString(String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- getInt64() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Get a signed 64-bit integer from the buffer.
- getInt64(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Get a signed 64-bit integer from the buffer.
- getInt8() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Returns a signed 8-bit int calculated from the next byte the sequence.
- getInt8(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Returns a signed 8-bit int calculated from one byte of data at the specified index.
- getIntArray(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Gets the specified tag's value as an int array, if possible.
- getIntBiLinear(float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs bi-linear interpoloation.
- getIntBuffer() - Method in class gov.nih.mipav.model.file.FileRawChunk
-
gGets the integer buffer (image).
- getInteger(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as an Integer, if possible.
- getInteger(int, int, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a length of the data and deposits it into a single Integer or an array of Integer as needed by the tag's
VM.
- getIntegral() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
DOCUMENT ME!
- getIntegral() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
DOCUMENT ME!
- getIntegratedMarkerAnnotations(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- getIntegratedMarkerAnnotationsPath(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- getIntelligentDRangeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getIntelligentExposureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getIntelligentResolutionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getIntensifiedColor() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Get the light color scaled with the intensity factor.
- getIntensity() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.distanceIntensityItem
-
DOCUMENT ME!
- getIntensity() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex.DistanceIntensity
-
- getIntensity() - Method in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
Accessor that returns current intensity value to commit.
- getIntensity() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query the current light intensity.
- getIntensityDropper() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Gets the intensityDropper intensity.
- getIntensityLevel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- getIntensityPaintName() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Accessor that returns the current intensity paint name (that is, the text of the intensity button, 0, 1, etc.).
- getIntensityValue() - Method in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
Accessor that returns current intensity value to commit in the form of a string.
- getIntentCode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Accessor that returns the intent code.
- getIntentName() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- getIntentP1() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Accessor that returns first statistical parameter.
- getIntentP2() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Accessor that returns second statistical parameter.
- getIntentP3() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Accessor that returns third statistical parameter.
- getInterfileDataType() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getInterImageDelay() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getInterior() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Get the indices of the interior points of the current region.
- getInterior() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The set of interior points that were identified as part of the
coarse-level region growing.
- getInterlaceMethod() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- getInterlaceMethodDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDescriptor
-
- getInternalFlashDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getInternalNodes() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- getInternalSerialNumberDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getInternalSerialNumberDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDescriptor
-
- getInternCompData(DataBlk, int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Returns, in the blk argument, the block of image data containing the
specifed rectangular area, in the specified component.
- getInternCompData(DataBlk, int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- getInternCompData(DataBlk, int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Returns, in the blk argument, the block of image data containing the
specifed rectangular area, in the specified component.
- getInteropIndexDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getInteropVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getInterp() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getInterp() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the initial interpolation.
- getInterp2() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getInterp2() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the final interpolation.
- getInterpMode() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Gets the interpolation mode.
- getInterpMode() - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Gets the interpolation mode.
- getInterpolateDisplay() - Static method in class gov.nih.mipav.view.Preferences
-
Returns how pixel values are interpolated for displayed slices.
- getInterpType() - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- getInterScaleSaliency() - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- getIntersectingTriangles(Rectangle2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
Returns the triangles that intersect or contain the specified rectangle.
- getIntersectX(Point3f, Point3f, Point3f, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and
the triangle defined by the three input points.
- getIntersectX(Point3f, Point3f, Point3f, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and the triangle defined by the three input
points.
- getIntersectX(Vector3f, Vector3f, Vector3f, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and
the triangle defined by the three input points.
- getIntersectX(Vector3f, Vector3f, Vector3f, float, float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and
the triangle defined by the three input points.
- getIntersectX(Vector3f, Vector3f, Vector3f, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and the triangle defined by the three input
points.
- getIntersectX(Vector3f, Vector3f, Vector3f, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Compute the point of intersection between a line (0,iY,iZ)+t(1,0,0) and the triangle defined by the three input
points.
- getIntersectY(Point3f, Point3f, Point3f, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and
the triangle defined by the three input points.
- getIntersectY(Point3f, Point3f, Point3f, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and the triangle defined by the three input
points.
- getIntersectY(Vector3f, Vector3f, Vector3f, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and
the triangle defined by the three input points.
- getIntersectY(Vector3f, Vector3f, Vector3f, float, float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and
the triangle defined by the three input points.
- getIntersectY(Vector3f, Vector3f, Vector3f, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and the triangle defined by the three input
points.
- getIntersectY(Vector3f, Vector3f, Vector3f, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Compute the point of intersection between a line (iX,0,iZ)+t(0,1,0) and the triangle defined by the three input
points.
- getIntersectZ(Point3f, Point3f, Point3f, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and
the triangle defined by the three input points.
- getIntersectZ(Point3f, Point3f, Point3f, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and the triangle defined by the three input
points.
- getIntersectZ(Vector3f, Vector3f, Vector3f, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and
the triangle defined by the three input points.
- getIntersectZ(Vector3f, Vector3f, Vector3f, float, float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and
the triangle defined by the three input points.
- getIntersectZ(Vector3f, Vector3f, Vector3f, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and the triangle defined by the three input
points.
- getIntersectZ(Vector3f, Vector3f, Vector3f, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Compute the point of intersection between a line (iX,iY,0)+t(0,0,1) and the triangle defined by the three input
points.
- getIntervalLengthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getIntervalModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getIntervalNumberDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getIntervals() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- getInts(cl_device_id, int, int) - Static method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Returns the values of the device info parameter with the given name
- getIntTriLinear(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of get that performs tri-linear interpoloation.
- getIntValueOfKey(String) - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- getInverseDicomArray() - Method in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- getInversionDelay() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getInversionTime() - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
Gets the inversion time of the scan.
- getInvertXStr() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getInvertYStr() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getInvertZStr() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getInvestigator(int) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets the specified investigator.
- getInvestigators() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets an array (3) of Investigator data.
- getInvestigatorsComplete() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get an array (3) of booleans that tell whether the investigator data for that index is complete.
- getIP(String) - Static method in class gov.nih.mipav.view.Preferences
-
Accessor to get DICOM image server Internet Protocol for selected AETitle.
- getIPD() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the inter-pupillary distance for stereo rendering.
- getIs2_5D() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Return whether or not the image's slices are time based.
- getIs2D() - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- getIsClodMesh() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Returns if the mesh is type ClodMesh or ModelTriangleMesh.
- getIsInitialised() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- getIsInitialised() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- getIsoDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getIsoEquivalentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getIsOrderedVariable() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getIsOrderedVariable() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getIsoSensitivityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getIsoSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getIsoSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getIsoSpeedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getISOSpeedRating() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- getIsotopeName() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getIsotopeNumber() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- GetIsoValue() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getIsoValueDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getIsSrgbColorSpaceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDescriptor
-
- getItem() - Method in class gov.nih.mipav.view.ViewMenuBuilder.MipavMenuItem
-
DOCUMENT ME!
- getItem(int) - Method in class gov.nih.mipav.model.file.FileDicomSQ
-
Gets the specified item from the sequence vector.
- getItem(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList
-
Return the specified annotation item.
- getItem(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM
-
Return the specified annotation item.
- getItemsToRender() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.GenericRenderer
-
- getIterationCountDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifAnimationDescriptor
-
- getIterations() - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- getIterations() - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- getIterations() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- getIterations() - Method in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Accessor that returns the number of iterations.
- getJ() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- getJ() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskShortPair
-
- getJacobianLayout() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockEvaluatePreparer
-
- getJarClassLoader() - Method in class gov.nih.mipav.view.ViewUserInterface
-
- getJavaVersion() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getJMenuBar() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- getJOCTET(byte) - Method in class gov.nih.mipav.model.file.libjpeg
-
- getJones30() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getJones30VMS() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getJpegCommentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegCommentDescriptor
-
- getJpegProcDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getJpegQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getJpegQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getJpegQualityString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getJSAMPLE(byte) - Method in class gov.nih.mipav.model.file.libjpeg
-
- getJSAMPLE(short) - Method in class gov.nih.mipav.model.file.libjpeg
-
- getJunctionNeighbours() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- getJunctions() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- getJunctionWalls(AlgorithmNetworkSnake.SnakeInitialiser.Node, ArrayList<ArrayList<Point>>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- getkCenterImage() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- getKernel(float) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Computes a 1D Gaussian kernel for the given sigma value.
- getKernelType() - Method in class gov.nih.mipav.model.GaussianKernelFactory
-
- getKernelWorkDimensions(CLFFTPlan.CLFFTKernelInfo, int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- getKExtents() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- getKey() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- getKey() - Method in class gov.nih.mipav.model.file.FileDicomKey
-
Gets the unique identifier.
- getKey() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Return the key object (group,element info) for this tag.
- getKey() - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Return the dicom tag key ('group,element') that this information object describes.
- getKey() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KeyValuePair
-
- getKey() - Method in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Get the unique key identifier associated with this point.
- getKey() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.DicomTagIdentifier
-
Accessor to the DICOM Key held.
- getKey() - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- getKeyFromTagName(String) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Find the key of the corresponding tag name in the hashtable.
- getKeyList() - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- getKeyList() - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- getKeyLog() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
provides the string key of translations between source filename and destination filename.
- getKeypoints(Vector<AlgorithmBRISK.KeyPoint>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- getKeyPrev() - Method in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Get the unique key value for the point which is used to get to this point along the minimum cost path.
- getKeys() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- getKeys() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- getKeys() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- getKeysDate() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getKeystoneCompensationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDescriptor
-
- getKeystoneDirectionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDescriptor
-
- getKeyString(String) - Method in class gov.nih.mipav.model.file.FileMicroCat
-
DOCUMENT ME!
- getKeysVersion() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getKeyword() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Return the keyword for this tag.
- getKeyword() - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Returns the keyword for this tag, a word with no spaces.
- getKeyword(FileDicomKey) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Find the keyword of the tag given by the key in the hashtable.
- getKeywords() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
Returns any keywords contained in the IPTC data.
- getKeywordsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getkImage() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- getKnots() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Subpath
-
- getKnotX() - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- getKnotY() - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- getKurtosis() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the coefficient of kurtosis of the pixel values in the VOI
- getKurtosisB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the coefficient of kurtosis of the blue pixel values in the VOI
- getKurtosisG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the coefficient of kurtosis of the green pixel values in the VOI
- getKurtosisR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the coefficient of kurtosis of the red pixel values in the VOI
- getLabel() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getLabel() - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Returns the parameter's label/name.
- getLabel() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Gets the label of the VOI.
- getLabel() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getLabel() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay
-
Gets the label.
- getLabel() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay
-
Gets the label.
- getLabel() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation.labelIndexItem
-
DOCUMENT ME!
- getLabel() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed.labelIndexItem
-
DOCUMENT ME!
- getLabel() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getLabels() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- getLabelTableA() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Build the hash table for the imageA opacity slider.
- getLabelTableA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Build the hash table for the imageA opacity slider.
- getLabelTableB() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Build the hash table for the imageB opacity slider.
- getLabelTableB() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Build the hash table for the imageB opacity slider.
- getLabelTableGM_A() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Build the hash table for the imageA GM opacity slider.
- getLabelTableGM_A() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Build the hash table for the imageA GM opacity slider.
- getLabelTableGM_B() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Build the hash table for the imageA GM opacity slider.
- getLabelTableGM_B() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Build the hash table for the imageA GM opacity slider.
- getLabelType() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getLambda() - Method in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Accessor that returns the positive scale factor lambda.
- getLandmarkCounter() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getLandmarkDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- GetLaplacian(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getLaplacianWeight() - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Get the Laplacian weight 'd'.
- getLargest(BitSet, int[], ArrayList<Integer>, ArrayList<Integer>, float, float, float, float[], float[], float[], Vector3f, Vector3f) - Static method in class gov.nih.mipav.model.structures.VOI
-
Finds the largest line that lies within entirely within the VOI.
- getLargestDistance() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the largest line segment totally contained within a 3D VOI (in terms of res).
- getLargestImagePixelValue() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getLargestSliceDistance() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the largest line segment totally contained within a VOI slice (in terms of res).
- getLaser() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource
-
DOCUMENT ME!
- getLast() - Method in class gov.nih.mipav.view.Rubberband
-
Returns the last point of the rubberband.
- getLastFileNumberDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getLastImageAt(int) - Static method in class gov.nih.mipav.view.Preferences
-
Returns the image name of "last X images" at the given index.
- getLastMouseX() - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Get the x position of the last place we drew something from a mouse event.
- getLastMouseY() - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Get the y position of the last place we drew something from a mouse event.
- getLastNumPixels() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Accessor that returns the number of points used in the most recent
intensity calculation of this contour.
- getLastOpenSequenceChannels() - Static method in class gov.nih.mipav.view.Preferences
-
Used by ViewOpenImageSequence to get the saved number of channels used when opening an image sequence.
- getLastOpenSequenceOrdering() - Static method in class gov.nih.mipav.view.Preferences
-
Used by ViewOpenImageSequence to get the Z-C-T ordering of data used when opening an image sequence.
- getLastOpenSequencePath() - Static method in class gov.nih.mipav.view.Preferences
-
Used by ViewOpenImageSequence to get the last path used when opening an image sequence.
- getLastOpenSequencePath() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Reads the preferences file to determine the path that was last used in opening a file sequence.
- getLastOpenSequenceSlices() - Static method in class gov.nih.mipav.view.Preferences
-
Used by ViewOpenImageSequence to get the saved number of slices used when opening an image sequence.
- getLastOpenSequenceTimePoints() - Static method in class gov.nih.mipav.view.Preferences
-
Used by ViewOpenImageSequence to get the saved number of time points used when opening an image sequence.
- getLastScript() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Returns the last script file used from the preferences.
- getLastSliceBeforeBleach() - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- getLastStackFlag() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getLastStackFlag() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Gets the last checkbox entry for "multi-file" for opening images.
- getLastState() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
getLastState.
- getLastState() - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Gets the display state of the Frame ( either Frame.NORMAL or Frame.ICONIFIED ).
- getLastXImages() - Static method in class gov.nih.mipav.view.Preferences
-
Gets the names of the last X number of images that were loaded from the Preferences file.
- getLateralChromaticAberrationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getLatitude() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
- getLatitude(float, float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
Produce polylines that are superimposed on the input cortical mesh, sphere, and plane.
- getLatitude(float, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
Produce polylines that are superimposed on the input cortical mesh, sphere, and plane.
- getLattice() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Return access to the 2D discretized B-Spline internally created given the size of tbe input target image, and the
specified number of control points and degree of basis function for each B-Spline basis axis.
- getLattice() - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Return access to the 3D discretized B-Spline internally created given the size of tbe input target image, and the
specified number of control points and degree of basis function for each B-Spline basis axis.
- getLattice() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- getLattice() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getLatticeCurveLength() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- getLatticeCurveLength() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getLatticePickedPoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- getLatticeSegment() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- getLatticeStraight() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- getLatticeStraight() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getLaxStartupFile(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
This method returns the startup file which contains the MIPAV start-up options.
- getLeft() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- getLeftCurve() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getLeftList() - Method in class gov.nih.mipav.view.JPanelListController
-
Convience method to get list A.
- getLeftNeuron() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- getLeftPt() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns most left point marker for +acpc to +tlrc transformation in dicom ordering.
- getLeftTable() - Method in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- getLeftTree() - Method in class gov.nih.mipav.view.JPanelTreeController
-
Convience method to get tree A.
- getLegacyNum() - Method in enum gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- getLegacyNum() - Method in enum gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
- getLegacyNum() - Method in enum gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- getLegacyNum() - Method in enum gov.nih.mipav.model.file.FileInfoBase.Modality
-
- getLegacyNum() - Method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- getLegacyNum() - Method in enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
- getLegacyVal() - Method in enum gov.nih.mipav.model.file.FileInfoDicom.VRtype
-
- getLegendVisible() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that gets the visible flag.
- getLength() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Returns the length of this tag.
- getLength() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteArrayReader
-
- getLength() - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- getLength() - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Returns the length of the data source in bytes.
- getLength() - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
Reads to the end of the stream, in order to determine the total number of bytes.
- getLength(boolean, byte, byte, byte, byte) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads in four integers, then tests for implicit Value Representation(VR) or explicit VR.
- getLengthBytes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- getLengthPtToPt(float[]) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the total length of this contour, based on the input resolutions.
- getLengthPtToPt(float[]) - Method in class gov.nih.mipav.model.structures.VOIProtractor
-
Returns the total length of this contour, based on the input resolutions.
- getLengthPtToPt(float[][]) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the total length of this contour, based on the input resolutions.
- getLengthString(int, int, float[], int[]) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the length of this contour between the two positions along the contour.
- getLensDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getLensFirmwareVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getLensFirmwareVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getLensFocusDistance() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getLensPropertiesDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getLensSpecificationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getLensSpecificationDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getLensStopsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getLensTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getLensTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getLensTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getLensTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getLevel1Factor() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- getLevel1Factor() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- getLevel1FactorXY() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- getLevel1FactorXY() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- getLevel1FactorZ() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- getLevel1FactorZ() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- getLevel2Factor() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- getLevel2Factor() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- getLevel2FactorXY() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- getLevel2FactorXY() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- getLevel2FactorZ() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- getLevel2FactorZ() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- getLevel4Factor() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- getLevel4Factor() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- getLevel4FactorXY() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- getLevel4FactorXY() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- getLevel4FactorZ() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- getLevel4FactorZ() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- getLevelDetail() - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Returns the surface level of detail.
- getLevelDetail() - Method in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Returns the surface level of detail.
- getLevelDetail() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
returns the level of detail
- getLevels() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- getLevelSetEvolver() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Get the level-set evolver object.
- getLevelSurface(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractorCubes
-
Construct a level surface from the 3D image managed by the extractor.
- getLevelSurface(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractorCubes
-
Construct a level surface from the 3D image managed by the extractor.
- getLevelSurface(int, ViewJProgressBar) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractorCubes
-
Construct a level surface from the 3D image managed by the extractor.
- getLevelSurface(int, Vector<int[]>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractor
-
- getLevelSurface(int, Vector<int[]>, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractorCubes
-
Construct a level surface from the 3D image managed by the extractor.
- getLevelValue() - Method in class gov.nih.mipav.view.WindowLevel
-
- getLibre() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- getLight(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
The the general light with the given index.
- getLightBoxFrame() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method that returns the lightbox frame if it exists else returns null.
- getLightColor(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The only caller of this method is the light attribute dialog, an object from class JDialogSurfaceLight.
- getLightControl() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- getLightControlPanel() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Get the light control panel.
- getLightCount() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The number of lights supported by the viewer (currently 9).
- getLightDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Return the surface light control dialog box.
- GetLights() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- GetLights() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Return the Light[] used in the volume/surface display.
- getLightSourceSpecialDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getLine() - Method in exception gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.InvalidInputDataException
-
- getLineCount(int) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Gets the number of lines in the specified text area.
- getLineNumber() - Method in exception gov.nih.mipav.model.scripting.ParserException
-
Return the line number in the script where the problem occurred.
- getLink(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.StaticGrid
-
- getLinkedImagePath() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets the full path + name of the linked image.
- getLinkedTriFrame() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Gets the linked ViewJFrameTriImage.
- getLinkedTriFrame() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Gets the linked ViewJFrameTriImage.
- getLinkedTriFrame() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Gets the linked ViewJFrameTriImage.
- getLinkingNodes() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- getList() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Return the parameter list.
- getList() - Method in class gov.nih.mipav.view.ViewMenuBuilder.QuickList
-
Returns the vector of quicklist items (JMenuItems w\ actionlistener attached).
- getList(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the one of the parameters from the table (cast as a ParameterList).
- getListA() - Method in class gov.nih.mipav.view.JPanelListController
-
there is no programmatic way to determine which arrow is pointing where.
- getListB() - Method in class gov.nih.mipav.view.JPanelListController
-
there is no programmatic way to determine which arrow is pointing where.
- getListCellRendererComponent(JList, Object, int, boolean, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.MyCellRenderer
-
- getListCellRendererComponent(JList, Object, int, boolean, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.FileCellRenderer
-
- getListCellRendererComponent(JList, Object, int, boolean, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions.ComboBoxRenderer
-
This method finds the image and text corresponding to the selected value and returns the label, set up to
display the text and image.
- getListCellRendererComponent(JList, Object, int, boolean, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions.ComboBoxRenderer2
-
This method finds the image and text corresponding to the selected value and returns the label, set up to
display the text and image.
- getListCellRendererComponent(JList, Object, int, boolean, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions.FontBoxRenderer
-
This method finds the image and text corresponding to the selected value and returns the label, set up to
display the text and image.
- getListCellRendererComponent(JList, Object, int, boolean, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.CustomCellRenderer
-
Set the attributes of the class and return a reference.
- getListCellRendererComponent(JList, Object, int, boolean, boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegisteredImages.ImageCellRenderer
-
Return a component that has been configured to display the specified value.
- getListCellRendererComponent(JList, Object, int, boolean, boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage.PaintBoxRenderer
-
This method finds the image and text corresponding to the selected value and returns the label, set up to
display the text and image.
- getListCellRendererComponent(JList, Object, int, boolean, boolean) - Method in class gov.nih.mipav.view.ViewToolBarBuilder.PaintBoxRenderer
-
This method finds the image and text corresponding to the selected value and returns the label, set up to
display the text and image.
- getListenerList() - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- getListeners() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorPoller
-
- getListLayout() - Method in class gov.nih.mipav.view.JPanelListController
-
Returns the layout of the associated display panel or "how the arrows point", not the layout
of the buttons themselves.
- getListLength() - Method in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- getListPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- getListSize() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Return the size of the parameter list.
- getListType() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Return the type of parameters in this parameter list.
- getListTypeFromString(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Returns the type of the parameters contained in this list, based on the full type string for the list.
- getLoc() - Method in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
- getLocal(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- getLocalAppTitle() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Returns the AETitle we use to identify ourself (our local AppTitle name).
- getLocalCenter(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- getLocalCosts(ModelImage, int, float[], float[], float[], ViewJProgressBar) - Static method in class gov.nih.mipav.view.RubberbandLivewire
-
- getLocalImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Returns a ModelImage in the local image space, if a local ModelImage has already been created it is returned.
- getLocation() - Method in class gov.nih.mipav.model.file.FileIO.OrientStatus
-
Provides the value of the location.
- getLocation(int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ColorMap
-
Returns the location of the ith color within the unit interval.
- getLocation(int) - Method in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
- getLocation(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SimpleColorMap
-
- getLocationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getLocations() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ColorMap
-
- getLocations() - Method in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
- getLocations() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SimpleColorMap
-
- getLocationString() - Method in class gov.nih.mipav.model.structures.VOIText
-
Gets a string describing the text location (in the slice, does not include which slice).
- getLocator() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
DOCUMENT ME!
- getLocator() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
DOCUMENT ME!
- getLockStatus() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the lock status of the image.
- getLOD() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
The current level of detail C with 0 <= C <= getMaximumLOD().
- getLogFileName() - Static method in class gov.nih.mipav.view.LogStdStreams
-
Get the name of the logfile.
- getLogLevel(int) - Method in class gov.nih.mipav.view.Preferences.LogConfig
-
- getLogMagDisplay() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the boolean indicating if log magnitude displays are used in complex images.
- getLogStream() - Static method in class gov.nih.mipav.view.LogStdStreams
-
Get the PrintStream being used for this logfile.
- getLong(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
Reads eight unsigned bytes from file.
- getLong(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Reads eight unsigned bytes from file.
- getLong(boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads eight unsigned bytes from file.
- getLong(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a long, if possible.
- getLong(int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets a long value at position in the data array.
- getLong(int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Gets the data in long format.
- getLong(int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Gets the data in long format.
- getLong(int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Gets the data in long format.
- getLong(int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Gets the data in long format.
- getLong(int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Gets the data in long format.
- getLong(int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Gets the data in long format.
- getLong(int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Gets the data in long format.
- getLong(int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Gets the data in long format.
- getLong(int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Gets the data in long format.
- getLong(int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Gets the data in long format.
- getLong(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of get that does NOT perform bounds checking.
- getLong(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD get data fuction where bounds checking is NOT performed.
- getLong(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is NOT performed.
- getLong(int, int, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a length of the data and deposits it into a single Integer or an array of Integer as needed by the tag's
VM.
- getLong(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D get data fuction where bounds checking is NOT performed.
- getLong(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is NOT performed.
- getLong(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the long value of one of the parameters from the table.
- getLong(cl_device_id, int) - Static method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Returns the value of the device info parameter with the given name
- getLong64(byte[], int, boolean) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteUtil
-
- getLongBiLinear(float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs bi-linear interpoloation.
- getLongBuffer() - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Gets the long buffer (image).
- getLongExposureNoiseReductionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getLongExposureNoiseReductionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getLongFocalLengthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getLongitude() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
- getLongitude(float, float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getLongitude(float, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- getLongitudinalAnatomicalReference() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getLongName() - Method in enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- getLongObject(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a long.
- getLongs(cl_device_id, int, int) - Static method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Returns the values of the device info parameter with the given name
- getLongTriLinear(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of get that performs tri-linear interpoloation.
- GetLossFunctionForResidualBlock(CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- getLow() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getLowerBound() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor to the lower bound slider.
- getLowerBound() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Accessor to the lower bound slider.
- getLowerBound() - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Returns the lower bound text as a number.
- getLowerBound() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor to the lower bound slider.
- getLowerBoundB() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor to the lower bound blue slider.
- getLowerBoundB() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
DOCUMENT ME!
- getLowerBoundB() - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Returns the lower bound text as a number.
- getLowerBoundB() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor to the lower bound blue slider.
- getLowerBoundG() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor to the lower bound green slider.
- getLowerBoundG() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
DOCUMENT ME!
- getLowerBoundG() - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Returns the lower bound text as a number.
- getLowerBoundG() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor to the lower bound green slider.
- getLowerBoundR() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor to the lower bound red slider.
- getLowerBoundR() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
DOCUMENT ME!
- getLowerBoundR() - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Returns the lower bound text as a number.
- getLowerBoundR() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor to the lower bound red slider.
- getLowerList() - Method in class gov.nih.mipav.view.JPanelListController
-
Convience method to get list B.
- getLowerThreshold() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Returns the lower threshold image value for whichever image is current selected.
- getLowerThreshold() - Method in class gov.nih.mipav.view.JPanelHistogram
-
- getLowerThreshold() - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
DOCUMENT ME!
- getLowerThreshold() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Returns the lower threshold value.
- getLowerThreshold() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Returns the lower threshold value.
- getLowerTree() - Method in class gov.nih.mipav.view.JPanelTreeController
-
Convience method to get Tree B.
- getLowOP() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getLowOP2() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getLowValue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
DOCUMENT ME!
- getLowXmm() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns the lowest x location in millimeters.
- getLowYmm() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns the lowest Y location in millimeters.
- getLowZmm() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns the lowest Z location in millimeters.
- getLPSOrigin() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
DOCUMENT ME!
- getLSCompleted() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Accessor that returns whether or not the algorithm successfully completed.
- getLumaBlue() - Method in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- getLumaBlue() - Method in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- getLumaGreen() - Method in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- getLumaGreen() - Method in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- getLumaRed() - Method in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- getLumaRed() - Method in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- getLuminance() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- getLuminance(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- getLUT() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the LUT.
- getLUT() - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
returns the ModelLUT, if there, which might be specified by the 0028,1201, 0028,1202,
0028,1203 tags.
- getLUT() - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- getLUT() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Return the current ModelLUT:.
- getLUT() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This method returns the current LUT.
- getLUT() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Return the current ModelLUT.
- getLUT() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the Volume RGBT.
- getLUT() - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Get the lookup table associated with the image and histogram.
- getLUT() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
This method returns the current LUT.
- getLUT() - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
Returns the model LUT from the file.
- GetLUT() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the ModelImage LUT.
- getLUT2() - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
Returns the model LUT2 from the file.
- getLUTa() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getLUTa() - Method in class gov.nih.mipav.view.PatientSlice
-
Accessor that returns the LUT for image A.
- getLUTa() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Accessor that gets the model LUT for image A.
- getLUTa() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that returns the model lut for the image A.
- getLUTa() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Accessor that returns the model lut for the imageA.
- getLUTa() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Get the imageA histo component lut.
- getLUTa() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the model lut for the imageA.
- getLUTa() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that returns LUTa.
- getLUTa() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Get the imageA histo component lut.
- getLUTb() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getLUTb() - Method in class gov.nih.mipav.view.PatientSlice
-
Accessor that returns the LUT for image B.
- getLUTb() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that returns the model lut for the image B.
- getLUTb() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Accessor that returns the model lut for the imageB.
- getLUTb() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Get the imageB histo component lut.
- getLUTb() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the model lut for the imageB.
- getLUTb() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that returns LUTb.
- getLUTb() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Get the imageB histo component lut.
- getLUTComponent() - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Get the LUT component.
- getLUTComponentA() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Get the imageA LUT.
- getLUTComponentA() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Get the imageA LUT.
- getLUTComponentA() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Get the imageA LUT.
- getLUTComponentB() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Get the imageB LUT.
- getLUTComponentB() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Get the imageB LUT.
- getLUTComponentB() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Get the imageB LUT.
- getLUTDialog() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Deprecated.
- getLUTDialog() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Get the LUT panel (only should be used with grayscale images).
- getLUTIndex() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Returns the index of the color look-up table color map.
- GetLUTIndex() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Returns the index of the color look-up table color map.
- getLUTPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getLUTRecorder() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Get the JDialogRecordLUT reference from ViewJPanelLUT.
- getLUTRecorder() - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Get the LUT recorder reference.
- getLUTRecorder() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Get the LUT recorder reference.
- getLUTType() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Accessor to get LUT type.
- getM_akLev() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- getM_kMultiHistogram() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- getM0ResultStack() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- getM0ResultStack() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- getMacroDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getMacroDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getMacroDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getMacroLedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getMacroModeCameraSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getMacroModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getMacroModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getMacroModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getMacroModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getMagData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Returns reference to magnitude data array.
- getMagData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Returns reference to magnitude data array.
- getMagicFilterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getMagMax() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the maximum magnification of the image.
- getMagMin() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the minimum magnificaiton of the image.
- getMagneticFieldStrength() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getMagnification() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the present magnification of the image.
- getMagnitude() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- getMainBox() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
- getMainBox() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
- getMainFrame() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor that returns the main user interface frame.
- getMainPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Get the dialog main panel.
- getMainPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
returns the mainPanel so this interface can be displayed inside another
panel.
- getMainPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
DOCUMENT ME!
- getMainPanel() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Return the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Get the main control Panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Get the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
Return the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Return the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Get the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Get the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Get the main control panel interface.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Return the control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Return the main surface panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Returns the mainPanel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Returns the contentPane of this dialog.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
DOCUMENT ME!
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Get the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Get the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Return the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Get the control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Each panel class extends their own get the main control panel method.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Return the main panel display.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Return the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Get the main control Panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Return the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
Get the main control panel.
- getMainPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
- getMainPanel(float) - Method in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Deprecated.
- getMainPanel(String, int) - Method in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
Initializes GUI components and displays dialog.
- getMajorAxis() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the major axis of VOI (only valid for 2D object); return major axis length of the VOI.
- getMakernoteThumbVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType6MakernoteDescriptor
-
- getMakernoteVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getMakernoteVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getMakernoteVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getMakernoteVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getManometerPressureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getManometerReadingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getManualFlashDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getManualFlashOutputDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getManualFlashStrengthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getManufacturer() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getManufacturerModelName() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getMarkerType() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Returns the marker type.
- getMarksFlag() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- getMarksFlags() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- getMask() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Gets the Bitset mask object.
- getMask() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns.
- getMask() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Get the burning sphere or ellipsoid mask.
- getMask() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
returns the surface mask data
- getMask(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Get the mask value at pixel (x,y).
- getMask(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the mask value at voxel (x,y,z).
- getMaskBU() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns.
- getMaskExtents() - Method in class gov.nih.mipav.model.file.FileInfoSPAR
-
- getMaskImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- getMaskPositions() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- getMaskTreeSet(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Determines the intensities of image B.....populates the treeset and returns it.
- getMatchOrients() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- getMatchOrigins() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- getMaterial() - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceRefXML_J3D
-
Returns the material properties for the surface:
- getMaterial() - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Returns the material properties for the surface:
- getMaterial() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Gets the material properties of the mesh:
- getMaterial() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
returns a new copy of the Material.
- getMaterial() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Returns the material properties for the surface:.
- getMaterial() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
Returns the material properties for the surface:.
- getMaterial(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Return the material properties of the given surface.
- getMaterial(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Return the material properties of the given surface.
- GetMaterial() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Return the surface material properties.
- GetMaterialState() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Called from the JPanelDisplay dialog.
- getMatrices() - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Gets a cloned copy of the image's matrices stored in a vector.
- getMatrix() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Accessor that returns the matrix representing the best transformation.
- getMatrix() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Accessor that returns the matrix representing the best transformation.
- getMatrix() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Returns the matrix representing the best transformation.
- getMatrix() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets the matrix associated with the FileInfo.
- getMatrix() - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- getMatrix() - Method in class gov.nih.mipav.model.file.FileInfoOME
-
Gets the transition matrix.
- getMatrix() - Method in class gov.nih.mipav.model.file.FileNIFTI
-
- getMatrix() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns transformation matrix.
- getMatrix() - Method in class gov.nih.mipav.view.dialogs.JDialogOrientMatrix
-
Returns the matrix.
- getMatrix(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Accessor that returns the matrix representing the best transformation.
- getMatrix(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Returns the matrix representing the best transformation.
- getMatrix(double[], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
- getMatrix(double[], float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- getMatrix(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Accessor that returns the matrix representing the best transformation.
- getMatrix(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Obtain the transformation vector and convert to the matrix representation.
- getMatrix(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Obtain the transformation vector and convert to the matrix representation.
- getMatrix(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Obtain the transformation vector and convert to the matrix representation.
- getMatrix(int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt2D
-
- getMatrix(int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
- getMatrix(int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Obtain the transformation vector and convert to the matrix representation,
then scale the translation by sample.
- getMatrix(int, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- getMatrix(int, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- getMatrix(DTIParameters) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- getMatrix(Object) - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Accessor that gets a matrix based on the key (for the linkedhashmap)
- getMatrix2() - Method in class gov.nih.mipav.model.file.FileNIFTI
-
- getMatrixHalf() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixHalf() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixHalf(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixHalf(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixHalf(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix.
- getMatrixHalf(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix.
- getMatrixHalf(int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix and scale the translations by sample parameter.
- getMatrixHalf(int, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Obtain the transformation vector, scale it by 0.5, then convert it to transformation
matrix and scale the translations by sample parameter.
- getMatrixHolder() - Method in class gov.nih.mipav.model.structures.ModelImage
-
DOCUMENT ME!
- getMatrixMap() - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Gets the matrix map.
- getMatrixMidsagittal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixMidsagittal() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixMidsagittal(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixMidsagittal(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixMidsagittal(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixMidsagittal(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixMidsagittal(int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixMidsagittal(int, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Accessor that returns the matrix representing the best tranformation.
- getMatrixSize1() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getMatrixSize2() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getmax() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- getMax() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
- getMax() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- getMax() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- getMax() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns max pixel value of the image.
- getMax() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the maximum value in the dataArray.
- getMax() - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- getMax(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
gets the image max based on 1st) whether or not the image is color. 2) the color.
- getMaxA() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the maximum alpha value in the dataArray.
- getMaxAdvectionChange() - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Get the maximum advection change allowed in the PDE solver update.
- getMaxAdvPropTimeStep() - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Get the maximum advection-propagation time step.
- getMaxApertureAtFocalLengthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getMaxApertureAtMaxFocalDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getMaxApertureAtMinFocalDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getMaxApertureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getMaxApertureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- getMaxApertureValueDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getMaxAverageConvexity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- getMaxAvrConvexity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getMaxB() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns max blue pixel value of the image.
- getMaxB() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the maximum blue value in the dataArray.
- getMaxBound() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
The maximum of the x-, y-, and z-dimensions of the image.
- getMaxBoundaryDistance() - Method in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Access the maximum distance of any "inside" point to the boundary.
- getMaxCurvature() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
return the max mean curvature:
- getMaxCurvature() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
return the max mean curvature:
- getMaxCurvatureChange() - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Get the maximum curvature change allowed in the PDE solver update.
- getMaxCurvatures() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- getMaxCurvatureTimeStep() - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Get the maximum curvature time step.
- getMaxDebugLines() - Static method in class gov.nih.mipav.view.Preferences
-
- getMaxDepth() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Get the maximum depth, as described in BrainExtraction.pdf, that is part of the image term in the surface
evolution.
- getMaxDepth() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie
-
Gets the maximum depth stored in this trie.
- getMaxDim() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- getMaxDim() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- getMaxDirections() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- getMaxDistance() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor that returns the maximum distance from the seed point to a point in the object.
- getMaxDistance() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Placeholder.
- getMaxDistance() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor that returns the maximum distance from the seed point to a point in the object.
- getMaxDistance() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getMaxDomain() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- getMaxEntropyThreshold() - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Gets the maximum entropy threshold.
- GetMaxExtent() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- getMaxExtents() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- getMaxG() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns max green pixel value of the image.
- getMaxG() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the maximum green value in the dataArray.
- getMaxHeapMemory() - Static method in class gov.nih.mipav.view.MipavUtil
-
Return the maximum amount of heap memory that MIPAV can use.
- getMaximumIgnore() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the maximum of the range of intensities to ignore.
- getMaximumIgnoreB() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the maximum of the range of blue intensities to ignore.
- getMaximumIgnoreG() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the maximum of the range of green intensities to ignore.
- getMaximumIgnoreR() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the maximum of the range of red intensities to ignore.
- getMaximumLOD() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
The maximum level of detail supported by the mesh.
- getMaximumPixelCount() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getMaximumPixelCountInGroup() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getMaximumRRInterval() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getMaximumSize() - Method in class gov.nih.mipav.view.BarMeter
-
Maximum size of this panel.
- getMaximumSize() - Method in class gov.nih.mipav.view.LineMeter
-
returns the panels maximum size.
- getMaximumTimeStep() - Method in class gov.nih.mipav.model.algorithms.levelset.LseGaussianBlur2
-
Get the maximum time step for numerical stabilty of the filter.
- getMaximumTimeStep() - Method in class gov.nih.mipav.model.algorithms.levelset.LseGaussianBlur3
-
Get the maximum time step for numerical stabilty of the filter.
- getMaxIntensity() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the maximum intensity of the VOI return average intensity of image defined by the VOI.
- getMaxIntensity() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- getMaxIntensityBlue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the maximum intensity of the Blue channel for the VOI return average intensity of image defined by the VOI.
- getMaxIntensityGreen() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the maximum intensity of the Green channel for the VOI return average intensity of image defined by the VOI.
- getMaxIntensityRed() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the maximum intensity of the Red channel for the VOI return average intensity of image defined by the VOI.
- getMaxIterations() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- getMaxIterations() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- getMaxIterations() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getMaxIterations() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get maxIterations.
- getMaxKernelWorkGroupSize(cl_device_id) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- getMaxLength() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_MaximumSubLength
-
Accessor that returns the maximum sublength.
- getMaxLines() - Method in class gov.nih.mipav.view.MaximumLinesDocumentListener
-
- getMaxM0() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- getMaxMeanCurvature() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getMaxMeanCurvature() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- getMaxMemoryUsed(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Determines the amount of memory used for the OpenCL buffers
required for the gaussian kernels for the given sigmas.
- getMaxMemoryUsed(int, int, float[]) - Method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Determines the amount of memory used for the OpenCL buffers
required for the gaussian kernels for the given sigmas.
- getMaxMemSize(long, long[]) - Static method in class gov.nih.mipav.model.algorithms.OpenCLInfo
-
- getMaxNumUniqueValues() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getMaxProgressValue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Returns the max progress value.
- getMaxPropagationChange() - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Get the maximum propagation change allowed in the PDE solver update.
- getMaxQuantity() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
The maximum quantity of elements in the set.
- getMaxQuantity() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
The maximum quantity of elements in the set.
- getMaxQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
The maximum quantity of elements in the set.
- getMaxQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
The maximum quantity of elements in the set.
- getMaxR() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns max red pixel value of the image.
- getMaxR() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the maximum red value in the dataArray.
- getMaxRange() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Returns the current maximum point for the range.
- getMaxRenExtent() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
DOCUMENT ME!
- getMaxSize() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor that returns the maximum size of the object.
- getMaxSize() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Placeholder.
- getMaxSize() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor that returns the maximum size of the object.
- getMaxT2() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- getMaxTime() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Get the maximum visitation time for the image elements.
- getMaxutil() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- getMaxValuesChange() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraRBF
-
- GetMCIsoEdges(OctNode, HashMap<Long, Integer>, HashMap<Long, Integer>, int, Vector<Pair<Long, Long>>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- GetMCIsoTriangles(float, CoredMeshData, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- GetMCIsoTriangles(OctNode, CoredMeshData, HashMap<Long, Integer>, HashMap<Long, Integer>, Vector<Point3D>, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- GetMCIsoTriangles(Float, int, CoredMeshData, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getMean() - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Gets the mean pixel intensity.
- getMean(int, float[], boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- getMeanCurvature() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- getMeanCurvature() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getMeanCurvature() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- getMeanCurvatures() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Get the array of mean curvature values at each vertex.
- getMeanCurvaturesLUT() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Access the pseudocolor mapping specified to use when rendering the computed mean curvatures values for the
specified surface.
- getMeanNegativeCurvature() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- getMeasuredLvDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDescriptor
-
- getMedian() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the median
- getMedian(double[]) - Method in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
get median of given array
- getMedian(float[]) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- getMedianB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the median of the Blue channel of image
defined by the VOI.
- getMedianG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the median of the Green channel of image
defined by the VOI.
- getMedianIntensity(ModelImage, BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- getMedianR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the median of the Red channel of image defined
by the VOI.
- getMedianStatistics(AlgorithmVOIProps.Calc34D.ContourStats) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
Calculates the median statistics for a grayscale image.
- getMedianStatisticsRGB(AlgorithmVOIProps.Calc34D.ContourStats) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
Calculates the median statistics for a color image.
- getMedium() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getMediumOP() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getMediumOP2() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- getMedVisionDouble(boolean) - Method in class gov.nih.mipav.model.file.FileMedVision
-
getMedVisionDouble - extracts double value from MedVision MAC resource fork.
- getMenuBar(ActionListener, int, int, boolean) - Method in class gov.nih.mipav.view.ViewMenuBar
-
Creates general menus based on dimensionality and data type (byte, short,
argb, etc) of image and attaches them to a menu bar.
- getMenuBuilder() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Returns the interface's menu builder.
- getMenuComponent(int) - Method in class gov.nih.mipav.view.JScrollMenu
-
- getMenuComponentCount() - Method in class gov.nih.mipav.view.JScrollMenu
-
- getMenuComponents() - Method in class gov.nih.mipav.view.JScrollMenu
-
- getMenuItem(String) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
DOCUMENT ME!
- getMergeThreshold() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- getMesh() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
- getMesh() - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Returns the ModelTriangleMesh representing the surface:
- getMesh() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
Accessor for the triangle mesh that corresponds to the current level of detail in the ModelClodMesh.
- getMesh() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Display the mesh in the SurfaceRenderer:
- getMesh() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
returns the array of ModelTriangleMesh objects.
- getMesh() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
- getMesh() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- GetMesh() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Return the TriMesh object (if, any) associated with this object.
- GetMesh() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- getMeshLines() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Display the mesh lines in the SurfaceRenderer:
- getMeshLines() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
- getMessage() - Method in enum gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- getMessage() - Method in class gov.nih.mipav.view.ProgressChangeEvent
-
Returns the progress message
- getMessage(int, int, long) - Static method in exception gov.nih.mipav.model.file.MetadataExtractor.BufferBoundsException
-
- getMessageBar() - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Get the message label.
- getMessageFrame() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor that returns the message frame.
- getMessageText() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to get text of message field.
- getMetadata() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
- getMeteringModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getMeteringModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getMeteringModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getMeteringModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getMeteringModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDescriptor
-
- getMetric(ModelSurfaceTopology.Edge, ModelSurfaceTopology.EdgeAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
Computes the weight associated with an edge.
- getMicroSecPerFrame() - Method in class gov.nih.mipav.model.file.FileAvi
-
- getMicroSecPerFrame() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getMimeType() - Method in enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- getMin() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- getMin() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns min pixel value of the image.
- getMin() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the minimum value in the dataArray.
- getMin() - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- getMin(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
gets the image max based on 1st) whether or not the image is color. 2) the color.
- getMinA() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the minimum alpha value in the dataArray.
- getMinAllowableMajorTickSpacing() - Method in class gov.nih.mipav.view.ViewJSlider
-
- getMinAllowableMinorTickSpacing() - Method in class gov.nih.mipav.view.ViewJSlider
-
- getMinApertureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getMinAverageConvexity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- getMinAvrConvexity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getMinB() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns min blue pixel value of the image.
- getMinB() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the minimum blue value in the dataArray.
- getMinBound() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
The minimum of the x-, y-, and z-dimensions of the image.
- getMinBuffer() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLowerCompletion
-
- getMincModality(int) - Static method in class gov.nih.mipav.model.file.FileMinc
-
Get the minc modality string from the mipav modality type.
- getMincSliceThickness() - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Return the slice thickness value stored in the minc header (var = 'acquisition', attrib = 'slice_thickness').
- getMinCurvature() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
return the min mean curvature:
- getMinCurvature() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
return the min mean curvature:
- getMinCurvatures() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- getMinDirections() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- getMinDistance() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getMinDistance(int, BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
Calculates the distance between the closest point in this BitSet and the given value.
- getMinDistance(int, Vector<Point3D>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
Calculates the distance between the closest point in this Vector and the given value.
- getMinDomain() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- getMinG() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns min green pixel value of the image.
- getMinG() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
getMinG - Accessor that returns the minimum green value in the dataArray.
- getMinimumDelay() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getMinimumIgnore() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the minimum of the range of intensities to ignore.
- getMinimumIgnoreB() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the minimum of the range of blue intensities to ignore.
- getMinimumIgnoreG() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the minimum of the range of green intensities to ignore.
- getMinimumIgnoreR() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the minimum of the range of red intensities to ignore.
- getMinimumRRInterval() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getMinimumSize() - Method in class gov.nih.mipav.view.BarMeter
-
Minimum size of this panel.
- getMinimumSize() - Method in class gov.nih.mipav.view.LineMeter
-
returns the displays minimum size.
- getMinimumSize() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Gets minimum size equal to object size.
- getMinimumSize() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that returns the minimum size of this component.
- getMinimumSize() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Gets minimum size equal to object size.
- getMinIntensity() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the minimum intensity of the VOI return average intensity of image defined by the VOI.
- getMinIntensity() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- getMinIntensityBlue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the minimum intensity of the Blue channel for the VOI return average intensity of image defined by the VOI.
- getMinIntensityGreen() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the minimum intensity of the Green channel for the VOI return average intensity of image defined by the VOI.
- getMinIntensityRed() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the minimum intensity of the Red channel for the VOI return average intensity of image defined by the VOI.
- getMinMax() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Returns the min/max bounding box coordinates for the mesh in volume-index coordinates.
- getMinMaxValues(double[], double[], Vector<Integer>, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getMinMeanCurvature() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getMinMeanCurvature() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- getMinNodeSize() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getMinorAxis() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the minor axis of VOI (only valid for 2D object); return minor axis length of the VOI.
- getMinorTickMarksVisible() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that gets the visible flag.
- getMinProgressValue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Returns the min progress value.
- getMinR() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns min red pixel value of the image.
- getMinR() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the minimum red value in the dataArray.
- getMinRange() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Returns the current minimum point for the range.
- getMinTime() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Get the minimum visitation time for the image elements.
- getMinUnused(Vector<Integer>) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Gets a new fiber bundle index.
- getMinutes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- getMipavOrderFromDimNode(String) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
Gets the proper MIPAV dimension ordering index for a given Minc dim node string using the image info.
- getMipavProps() - Static method in class gov.nih.mipav.view.Preferences
-
- getMipavVersion() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getMIPZValue(int) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Gets the Z value where a pixel in the MIP image occurred in the volume.
- getMJPEGQuality() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getMJPEGQuality() - Method in class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
Accessor for m-jpeg quality.
- getMJPEGQuality() - Method in class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Accessor for m-jpeg quality.
- getMnemonic() - Method in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- getModality() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the modality.
- getModality(FileDicom) - Method in class gov.nih.mipav.model.file.FileIO
-
Gets the value of the Dicom modality tag, 0008,0060.
- getModalityFromDicomStr(String) - Static method in class gov.nih.mipav.model.file.FileInfoDicom
-
Returns the MIPAV modality constant for a given DICOM modality string.
- getModalityFromStr(String) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the modality associated with a string.
- getModalityStr() - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Return all the modality strings as an array.
- getModalityStr(int) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Return the string associated with a modality.
- getModalityString() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getMode() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the mode
- getMode() - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Gets the mode of the pixel intensities.
- getMode() - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- getMode() - Method in class gov.nih.mipav.view.JPanelHistogram
-
- getMode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Returns the mouse pointer mode at the beginning of events.
- getMode() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
Returns the type of box being drawn, x,y, or z slice:
- getMode() - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Returns the mouse pointer mode at the beginning of events.
- getMode() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Get the histogram mode (ie - RED, GREEN, BLUE ).
- getMode() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Get the histogram mode (ie - RED, GREEN, BLUE ).
- getModeB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the mode of the Blue channel of image
defined by the VOI.
- getModeCount() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the mode
- getModeCountB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the mode of the Blue channel of image
defined by the VOI.
- getModeCountG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the mode of the Green channel of image
defined by the VOI.
- getModeCountR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the mode of the Red channel of image defined
by the VOI.
- getModeG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the mode of the Green channel of image
defined by the VOI.
- getModel() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay
-
Gets the table model.
- getModel() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay
-
Gets the table model.
- getModel() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeB
-
Get the built AAM model
- getModel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- getModel() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- getModelColor(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Display the ModelImage color in the JDialogPaintGrow interface.
- getModelDirections(ModelStorageBase) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Returns the direction vectors for displaying the surface so that it aligns properly with the input ModelImage.
- getModelHistogram() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Accessor to the histogram.
- getModelImageColor(ModelImage, float, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Given a triangle vertex point from a ModelTriangleMesh, determines the
corresponding ModelImage index point, and recreates the color that
would have originally been assigned to the vertex.
- getModelImagePoint(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Given a triangle vertex point from a ModelTriangleMesh, determines the
corresponding ModelImage index point.
- getModelLUT() - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Rreturns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileAfni
-
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileAvi
-
Returns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileBMP
-
Rreturns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileBRUKER
-
returns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileCOR
-
Rreturns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileDM3
-
returns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileFits
-
returns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileICS
-
getModelLUT - returns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileImageXML
-
Gets the LUT.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileInterfile
-
Returns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileIO
-
Returns LUT associated with the image file.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileJP2
-
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileLIFF
-
Rreturns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileLSM
-
Rreturns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileMagnetomVision
-
Returns null.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileMATLAB
-
Rreturns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileMRC
-
returns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileSTK
-
Rreturns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileSVS
-
Rreturns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileTiff
-
Rreturns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileTMG
-
returns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.model.file.FileZVI
-
Rreturns LUT if defined.
- getModelLUT() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- getModelLUT() - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelLUTHelper
-
Get access to the associated ModelLUT instance.
- getModelLUT() - Method in class gov.nih.mipav.view.ViewJComponentLUT
-
Returns the model LUT.
- getModelLUT() - Method in class gov.nih.mipav.view.ViewJComponentLUTTable
-
Returns the model LUT.
- getModelLUTArray() - Method in class gov.nih.mipav.model.file.FileJSON
-
returns LUT if defined.
- getModelRGB() - Method in class gov.nih.mipav.model.file.FileImageXML
-
Gets the modelRGB.
- getModelRGB() - Method in class gov.nih.mipav.model.file.FileIO
-
Gets the model RGB.
- getModelToView() - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- getModeR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the mode of the Red channel of image defined
by the VOI.
- getModifiedSaturationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getModifyFlag() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- getMonths() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- getMonthsBefore(Calendar, int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Returns the new date of num months before date.
- getMouseControl() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Return mouseDialog from parent frame.
- getMouseDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return mousePanel from parent frame.
- getMouseDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return mousePanel from parent frame.
- getMouseEvents() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Returns the mouse events vector.
- getMouseEvents() - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Returns the mouse events vector.
- getMouseInput - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- getMouseMode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Accessor that returns the current mouse mode of the dialog.
- getMouseMode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Gets the mouse pointer mode - standard or fly - from the view dialog.
- getMouseMode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Gets the mouse pointer mode - standard or fly - from the view dialog.
- getMouseMode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Gets the mouse pointer mode - standard or fly - from the view dialog.
- getMousePanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Get the mouse recorder control panel.
- getMovingSliderValue() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- getMRAcquisitionType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getMRIProcessName() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getMsgID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
Accessor to the the message ID.
- getMsgID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Accessor to get the message ID for the current message.
- getMsgID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
getMsgID - This returns the msgID for the outgoing C-Move Request.
- getMsgID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_StdRetrieve
-
Returns the msgID for the outgoing C-Move Request.
- getMtry() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getMu() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
DOCUMENT ME!
- getMu() - Method in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Accessor that returns the negative scale factor mu.
- getMultiFile() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns whether or not the image is in multiple files (tiff).
- getMultiHistoEnabled() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- getMultiHistogramFile(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- getMultiHistogramFunctions() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Returns the combined GLSL code and support functions for the histogram widgets.
- getMultipleExposureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDescriptor
-
- getMustUseIndex() - Method in class gov.nih.mipav.model.file.FileAvi
-
- getName() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
Return the name of the particular registration measure.
- getName() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Return the name of the particular registration measure.
- getName() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureLeastSquares
-
Return the name of the particular registration measure.
- getName() - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Return the name of the particular registration measure.
- getName() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Return the name of this tag.
- getName() - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Accessor that returns the real world name of this tag.
- getName() - Method in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Gets name.
- getName() - Method in class gov.nih.mipav.model.file.FileUtility.nameSliceItem
-
- getName() - Method in class gov.nih.mipav.model.file.FileXML.XMLAttributes
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Provides the name of the directory, for display purposes.
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DuckyDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ErrorDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifIFD0Directory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifImageDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifInteropDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifThumbnailDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FileSystemDirectory
-
- getName() - Method in enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifAnimationDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifCommentDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfxxDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegCommentDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KyoceraMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PrintIMDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.RicohMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType6MakernoteDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.MockDirectory
-
- getName() - Method in class gov.nih.mipav.model.file.XMLParameter
-
Gets the parameter's name.
- getName() - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Get the simple image name
- getName() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the name of the VOI.
- getName() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Gets the name of the VOI that contains this contour, null if this contour is not contained in a VOI.
- getName() - Method in interface gov.nih.mipav.plugins.BundledPlugInInfo
-
Returns the name of the plug-in.
- getName() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getName() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- getName() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- getName() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getName() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSimpleText
-
Accessor that returns the name entered in this dialog.
- getName() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.ChangeNameDialog
-
Get the text field string.
- getName() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.ChangeNameDialog
-
Get the text field string.
- getName() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Returns the current vector title name.
- getName() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Returns the file name of the surface, if the surface was loaded from file.
- getName() - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Returns the current vector title name.
- getName() - Method in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- getName() - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
The name of the FileNode, as taken from its File.
- getName() - Method in class gov.nih.mipav.view.ViewMenuBuilder.MipavMenuItem
-
DOCUMENT ME!
- getName() - Method in class gov.nih.mipav.view.VOIContourNode
-
the string returned is the name of the VOI returns the name of the VOI if the VOI exists, or null if
it doesn't.
- getName() - Method in class gov.nih.mipav.view.VOIFrameNode
-
the string returned is the name of the VOI returns the name of the VOI if the VOI exists, or null if
it doesn't.
- getName() - Method in class gov.nih.mipav.view.VOIGroupNode
-
the string returned is the name of the VOI returns the name of the VOI if the VOI exists, or null if
it doesn't.
- getName() - Method in class gov.nih.mipav.view.VOIOrientationNode
-
the string returned is the name of the VOI returns the name of the VOI if the VOI exists, or null if
it doesn't.
- getName(Covdet.VlCovDetMethod) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- getName(FileDicomKey) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Find the realworld name of the tag given by the key in the hashtable.
- GetName() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- GetName() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeNode
-
- GetName() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Return the name of this object.
- GetName() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- GetName() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- getNameDefault() - Static method in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
- getNameField() - Method in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
- getNameList() - Method in class gov.nih.mipav.view.JPanelChecklist
-
Returns a new list of the tag names of all checkboxes selected.
- getNamesCompatibleTargetImages(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Find the frame images that are compatible as targets with the specified source image for the purpose of B-spline
registration.
- getNativeLibTmpDir() - Static method in class gov.nih.mipav.util.NativeLibraryLoader
-
- getNaviCheckBox() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
Get the navigation checkbox, fly-thru checkbox
- getNavigationGUI() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Get the navigation mode interface panel.
- getNColors() - Method in class gov.nih.mipav.view.dialogs.JDialogNColors
-
Accessor to get the number of colors.
- getNDARData() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Retrieves the NDAR data for use in populating XML fields
- getNdFilterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getNDims() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the dimensionality of the image.
- getNear() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Read the distance from the eye point to the view plane.
- getNearBoundPoint() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- getNearestLeaf(Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- getNearestNeighborPos2D(float, float) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Translates a point from the result image to the source image.
- getNearestNeighborPos3D(float, float, float) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Translates a point from the result image to the source image.
- getNearestNeighbours(AlgorithmMeanShiftClustering.famsPoint, AlgorithmMeanShiftClustering.fams_hash_entry[][], int[], AlgorithmMeanShiftClustering.fams_cut[][], AlgorithmMeanShiftClustering.fams_res_cont, int, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- getNearestNeighbours2H(int[], AlgorithmMeanShiftClustering.fams_hash_entry[][], int[], AlgorithmMeanShiftClustering.fams_cut[][], AlgorithmMeanShiftClustering.fams_res_cont, int[][], AlgorithmMeanShiftClustering.fams_hash_entry2[][], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- getNearPlane() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Get the near plane
- getNearPoint() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the point on the curve nearest the cursor, calculated by nearLine, etc.
- getNEFCompressionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getNegGradientImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
Get the negative of the gradient.
- getNegGradientImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
Get the negative of the gradient.
- getNeigbours() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- getNeighborList(int, float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
- getNeighborList(int, int, float[], boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
- getNeighbors(OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NeighborKey
-
- getNeighbors(OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NeighborKey2
-
- getNeighbourCount() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- getNeighbourCount() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- getNeighbourLink() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- getNeighbourLink() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- getNeighbours() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- getNeighbours() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- getNel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_res_cont
-
- getNeval() - Method in class gov.nih.mipav.model.algorithms.Integration2
-
DOCUMENT ME!
- getNeval() - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
DOCUMENT ME!
- getNewAdjustedImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
Gets the new adjusted image created.
- getNewFrameLocation(int, int) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Changes location of image when first displayed.
- getNewFrameYLocation() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Changes vertical location of image when first displayed.
- getNewIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
On a call to remove or removeAt, the last element in the array is potentially moved to the array location
vacated by the removed element.
- getNewIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
On a call to remove or removeAt, the last element in the array is potentially moved to the array location
vacated by the removed element.
- getNewIndex() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
On a call to remove or removeAt, the last element in the array is potentially moved to the array location
vacated by the removed element.
- getNewIndex() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
On a call to remove or removeAt, the last element in the array is potentially moved to the array location
vacated by the removed element.
- getNewInfo() - Method in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
Calculates the new slice thickness (newThick), number of times to repeat each original image (numRepIm), the
number of blanks to insert between the image duplicates (numBlank), and the new z coordinate origin for the image
volume (newZStart).
- getNewOrientBox() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- getNewReferenceImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
Gets the new reference image created.
- getNewSubfileTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getNewSurfaceColor(int) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
static function returns the next default surface color, based on the current number of surfaces displayed.
- getNewSurfaceColor(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
static function returns the next default surface color, based on the current number of surfaces displayed.
- getNewXs() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
getNewXs - accessor that gets the array of x coordinates to be plotted; used by the graphics for the actual
plotting of the graph.
- getNewXsLength() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
Accessor that gets the number of x coordinates to be plotted.
- getNewYs() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
getNewYs - accessor that gets the array of y coordinates to be plotted used by the graphics for the actual
plotting of the graph.
- getNewYsLength() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
Accessor that gets the number of y coordinates to be plotted.
- getNext() - Method in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
Gets the next byte, skipping over 0s padded in after FF.
- getNextCode() - Method in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
Returns the next 9, 10, 11 or 12 bits.
- getNextElem(int, boolean) - Method in class gov.nih.mipav.model.file.FileMinc
-
Gets the next element, switching on the type.
- getNextElement(boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Increments the location, then reads the elementWord, groupWord, and elementLength.
- getNextHostKey() - Static method in class gov.nih.mipav.view.Preferences
-
Returns the next host key.
- getNextServerKey() - Static method in class gov.nih.mipav.view.Preferences
-
Returns the next server key.
- getNextStorageKey() - Static method in class gov.nih.mipav.view.Preferences
-
Returns the next storage key.
- getNextTag(boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
- getNextVOIPath(String) - Method in class gov.nih.mipav.model.scripting.VOITable
-
Returns the path to the next VOI which should be opened for a given image.
- getNfa_phase0() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- getNfa_phase180() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- getNiceDICOMTags() - Method in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- getNIFTICompositeMatrices() - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Returns up to two composite TransMatrices that are NIFTI specific
- getNIFTIExtension() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
- getNil() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- getNImages() - Method in class gov.nih.mipav.model.file.FileRaw
-
Accessor that returns the number of image slices saved.
- getNMIGradients(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- getNode(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- GetNode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeNode
-
Return the scene-graph Node.
- GetNode(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Sets blending between imageA and imageB.
- getNodeColor(int) - Static method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- getNodeColor(Node, int) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Finds the current color for the input level of the tree.
- getNodeList() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- getNodes() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- getNodes() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- getNodeType() - Method in class gov.nih.mipav.view.dialogs.ScriptTreeNode
-
- getNoiseFilterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getNoiseReduction2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDescriptor
-
- getNoiseReductionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getNoiseReductionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getNoiseReductionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getNoiseScale() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- getNoLogMax() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the maximum value without log processing in the dataArray.
- getNoLogMin() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the minimum value without log processing in the dataArray.
- getNoLogMinNonZero() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the minimum nonzero value without log processing in the dataArray.
- getNomRangeBits(int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Returns the number of bits corresponding to the nominal range of the
data in the specified component.
- getNomRangeBits(int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- getNomRangeBits(int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Returns the number of bits corresponding to the nominal range of the
data in the specified component.
- getNonZeroMax() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the smallest magnitude negative value in the dataArray.
- getNonZeroMaxB() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the maximum nonzero blue value in the dataArray.
- getNonZeroMaxG() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the maximum nonzero green value in the dataArray.
- getNonZeroMaxR() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the maximum nonzero red value in the dataArray.
- getNonZeroMin() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the minimum nonzero value in the dataArray.
- getNonZeroMinB() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the minimum nonzero blue value in the dataArray.
- getNonZeroMinG() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the minimum nonzero green value in the dataArray.
- getNonZeroMinR() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the minimum nonzero red value in the dataArray.
- getNorm_type(int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- getNormal() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Query current normal vector for vertex.
- getNormal(ModelTriangleMesh, int[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Calculates and returns the start point normal for a new starting point inside an existing triangle.
- getNormal(ModelTriangleMesh, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Get the the triangle normal from the given triangle index.
- getNormal(TriMesh, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Calculates and returns the start point normal for a new starting point inside an existing triangle.
- getNormal(TriMesh, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Get the the triangle normal from the given triangle index.
- getNormalCopy() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Make a copy of the normals of a triangle mesh.
- getNormalCopy() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getNormalizedPathDist() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
Return the relative distance (in the [0,1] range) along the branch path from which the item was seen and
annotated.
- getNormalizedPathDist() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Return the relative distance (in the [0,1] range) along the branch path from which the item was seen and
annotated.
- getNormalizedPathDistance() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Get the normalized distance along the current path.
- getNormalizedPathDistance() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Get the normalized distance along the current path.
- getNormalizedPathDistance() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Get the normalized distance along the current path.
- getNormalizedSigmas() - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Returns the sigmas to use in the algorithm, with the z-dim normalized if the user has requested it.
- getNormalizedXDim() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Called by the NavigationBehavior to get normalized bounding box, x dim
- getNormalizedYDim() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Called by the NavigationBehavior to get normalized bounding box, y dim
- getNormalizedZDim() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Called by the NavigationBehavior to get normalized bounding box, z dim
- GetNormalMapTarget() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the Normal map Texture.
- getNormals() - Static method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Get the normal vector arrays.
- getNormals() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getNormals() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
derived quantites from the input mesh.
- getNormals(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Called when reading the input surface.xml file: Parses the input string into a an array of Vector3f[],
representing the mesh normals:
- getNormalString(Vector3f[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Called when writing the surface.xml file: Converts the input array of Vector3f[] to a String for writing:
- getNormalVectors() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getNorth() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- getNoSel(double[][]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- getNoSplitVariables() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getNote() - Method in class gov.nih.mipav.model.structures.VOIText
-
Gets the contained note.
- getNoteField() - Method in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
- getNotes() - Method in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
- getNrClass() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- getNrFeature() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- getNTimePeriods() - Method in class gov.nih.mipav.model.file.FileRaw
-
Accessor that returns the number of time periods saved.
- getNullTerminatedBytes(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Returns the sequence of bytes punctuated by a \0 value.
- getNullTerminatedBytes(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Returns the sequence of bytes punctuated by a \0 value.
- getNullTerminatedString(int, int, Charset) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Creates a String from the _data buffer starting at the specified index,
and ending where byte=='\0' or where length==maxLength.
- getNullTerminatedString(int, Charset) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Creates a String from the stream, ending where byte=='\0' or where length==maxLength.
- getNullTerminatedStringValue(int, int, Charset) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
- getNullTerminatedStringValue(int, Charset) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Creates a String from the stream, ending where byte=='\0' or where length==maxLength.
- getnum() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.universe
-
- getNumberFormat() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getNumberMatchPts() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Gets the number of match points.
- getNumberMatchPts25D(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Get number of match points 2.5 D.
- getNumberOfAverages() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getNumberOfAverages() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getNumberOfComponents() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
- getNumberOfEchos() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getNumberOfElements() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Gets the number of elements in the data set (# of tags in item).
- getNumberOfIndentationsCurvture() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- getNumberOfIndentationsHull() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- getNumberOfPhaseEncodingSteps() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getNumberOfRequiredVOIsForScriptImages() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- getNumberOfTables() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- getNumberOfTablesDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDescriptor
-
- getNumberOfThreads() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- getNumberOfThreads() - Static method in class gov.nih.mipav.view.Preferences
-
The number of threads available for MIPAV for processing.
- getNumberOfValues() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Provides the number of items held by the tag, as opposed the value specified by Value Multiplicity(VM).
- getNumberOfVariables() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
- getNumberOfVariables() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
- getNumberOfVariables() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- getNumberOfVariables() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
- getNumberOfVariables() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
- getNumberOfVariables() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
- getNumberOfVOIsRequiredForImageVar(String, String) - Static method in class gov.nih.mipav.model.scripting.Parser
-
Returns the number of VOIs which will be opened for a given image (imageVarName) when a particular
script is run.
- getNumberOfXGridLines() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that gets the number of gridlines for paint.
- getNumberOfYGridLines() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that gets the number of gridlines for paint.
- getNumberSelected() - Method in class gov.nih.mipav.view.JPanelChecklist
-
This method finds the number of checked checkboxes in the list.
- getNumberShapeParameters() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Get the the number of eigen values in PCA.
- getNumberTriangles() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Gets the number of triangles of the ModelTriangleMesh objects.
- getNumberVisible() - Method in class gov.nih.mipav.view.JPanelChecklist
-
This method finds the number of enabled checkboxes in the list.
- getNumBranches() - Method in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Return the number of branches stored for this path graph.
- getNumBurns() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Return the number of burns in this treatment's burn list.
- getNumBytes() - Method in enum gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
- getNumCols() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getNumComponents() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- getNumComponents() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- getNumContours() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- getNumDirections() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- getNumDirections() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- getNumerator() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Returns the numerator.
- getNumericValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngColorType
-
- getNumFrames() - Method in class gov.nih.mipav.model.file.FileInfoAvi
-
DOCUMENT ME!
- getNumImages() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- getNumIndependentVariables() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getNumItems() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList
-
Return the number of annotation items stored.
- getNumItems() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM
-
Return the number of annotation items stored.
- getNumIterations() - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
DOCUMENT ME!
- getNumLights() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Get the number of lights.
- getNumLights() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Get the number of lights.
- getNumMinima() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getNumMinima() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get numMinima.
- getNumOfBytesPerPixel(int) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the number of bytes per pixel based on the data type.
- getNumOfSlices() - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- getNumOperators() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- getNumOperators() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
DOCUMENT ME!
- getNumOperators() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- getNumParts() - Method in enum gov.nih.mipav.view.Preferences.ComplexDisplay
-
- getNumPathPoints() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Returns the number of points in the geodesic curve.
- getNumPathPoints() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Returns the number of points in the geodesic curve.
- getNumPixels() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getNumPixels
- getNumPixels() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getNumPixelsB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getNumPixelsB
- getNumPixelsG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getNumPixelsG
- getNumPixelsR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getNumPixelsR
- getNumPoints() - Method in class gov.nih.mipav.model.structures.VOI
-
Get the number of points in the VOI file.
- getNumPoints() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
- getNumPoints() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Finds the number of points in the active VOI contour.
- getNumPoints() - Method in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Finds the number of points in the active VOI contour.
- getNumPrev() - Method in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Get the number of samples along the current minimum cost path that preceed this sample in the volume.
- getNumProp() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getNumPSets() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets the # of parameter sets stored.
- getNumRemoved() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
computes and returns the number of slices to remove.
- getNumRows() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getNumSamples() - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Query the total number of samples for a volume with these parameters.
- getNumSamplesOob() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- getNumScalar() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getNumSlices() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getNumSurfaces() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets the number of surfaces attached to the image.
- getNumTotalSlices() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the number of images in the volume.
- getNumTracts() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getNumTrees() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getNumTriangles() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Get the number of triangles used to defined the mesh.
- getNumTSlices() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the number of time slices.
- getNumUniqueDataValues(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getNumVertices() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Get the number of vertices used to define the mesh.
- getNumVOIAdded() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
- getNumVOIs() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get number of VOIs.
- getNumVolumes() - Method in class gov.nih.mipav.model.file.DTIParameters
-
- getNumVolumes() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getNumVoxels() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- getNumWeights() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
the number of weights
- getnVOI() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the number of VOIs in the active image.
- getnVOI() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Returns the number of VOIs.
- getNVoxels() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the the number of pixels return number of pixels defined by the VOI.
- getObjBoxSlice_BG(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return the X box color frame.
- getObject(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the object hashed for the particular tag type specified, if available.
- getObjectDistanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getObjectDistanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getObjectMask() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Get the 3D image that represents the extracted object.
- getObjectNameDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getObjectParameters() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Get the object parameters.
- getObjectRotation() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Get the object rotation matrix.
- getObjects() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.PropertyListResults
-
- getObjPlane_BG(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Gets the objXYPlaneBG branch group.
- getObjPlane_BG(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Gets the objXYPlaneBG branch group.
- getObjTransXY() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Accessor that returns the reference to objTransXY.
- getObliquePlane() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getObliqueReconstruction() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getObservedCardiacCycles() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getOffCentre() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getOffCentre() - Method in class gov.nih.mipav.model.file.FileInfoSPAR
-
- getOffset() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- getOffset() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraRBF
-
- getOffset() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the header offset.
- getOffset() - Method in class gov.nih.mipav.model.file.FileMGH
-
Helper method to calculate the offset for getting only the middle NIFTI image slice from the 3D file.
- getOffset() - Method in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- getOffset() - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
- getOffset() - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Accessor that returns the offset.
- getOffset(int, int[], int, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Calculate and return the offset for the given image and time slice.
- getOffset(FileInfoAnalyze) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Helper method to calculate the offset for getting only the middle analyze image slice from the 3D file.
- getOffset(FileInfoImageXML) - Static method in class gov.nih.mipav.model.file.FileImageXML
-
Helper method to calculate the offset for getting only the middle analyze image slice from the 3D file.
- getOffset(FileInfoNIFTI) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Helper method to calculate the offset for getting only the middle NIFTI image slice from the 3D file.
- getOffset(FileInfoNRRD) - Method in class gov.nih.mipav.model.file.FileNRRD
-
Helper method to calculate the offset for getting only the middle NRRD image slice from the 3D file.
- getOffset(FileInfoPARREC) - Method in class gov.nih.mipav.model.file.FilePARREC
-
Helper method to calculate the offset for getting only the middle analyze image slice from the 3D file.
- getOffset(FileInfoSPM) - Method in class gov.nih.mipav.model.file.FileSPM
-
Helper method to calculate the offset for getting only the middle SPM image slice from the 3D file.
- getOffset(ModelImage, int, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
Calculate and return the offset for the given image and time slice.
- getOffset(ModelImage, int, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Calculate and return the offset for the given image and time slice.
- getOffsetXYZNeighbors27(Point3D[]) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Fill in the array of offsets to the 26-connected neighbors for any given sample in the volume.
- getOKCancelPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
makes the panel which displays the ok and cancel buttons.
- getOldIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
On a call to remove or removeAt, the last element in the array is moved to the array location vacated by the
removed element.
- getOldIndex() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
On a call to remove or removeAt, the last element in the array is moved to the array location vacated by the
removed element.
- getOldIndex() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
On a call to remove or removeAt, the last element in the array is moved to the array location vacated by the
removed element.
- getOldIndex() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
On a call to remove or removeAt, the last element in the array is moved to the array location vacated by the
removed element.
- getOlympusLightSourceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDescriptor
-
- getOmax() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides current omax value.
- getOmax() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides current omax value.
- getOmax() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides current omax value.
- getOME() - Method in class gov.nih.mipav.model.file.FileInfoOME
-
DOCUMENT ME!
- getOmega() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
DOCUMENT ME!
- getOmin() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides current omin value.
- getOmin() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides current omin value.
- getOmin() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides current omin value.
- getOneFile() - Method in class gov.nih.mipav.view.dialogs.JDialogMetaImageChoice
-
DOCUMENT ME!
- getOneFile() - Method in class gov.nih.mipav.view.dialogs.JDialogNIFTIChoice
-
DOCUMENT ME!
- getOneTailInvTStatsitic(int, double) - Static method in class gov.nih.mipav.model.algorithms.StatisticsTable
-
Finds the value of the one-tail t-statistic that produces the given level of significance for the given
number of degrees of freedom.
- getOneTouchWbDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getOnlyActive() - Method in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- getOobSampleIDs() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- getOpacity() - Method in class gov.nih.mipav.model.file.FileInfoImageXML.SurfaceLink
-
Gets the opacity of the surface.
- getOpacity() - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Returns the surface opacity value.
- getOpacity() - Method in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Returns the surface opacity value.
- getOpacity() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getOpacity() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the opacity of the VOI.
- getOpacity() - Method in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Accessor that returns the new opacity.
- getOpacity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
returns the surface opacity
- getOpacity() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns float opacity.
- getOpacity() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Returns the opacity used in alpha blending between the input image and
the reference image.
- getOpacity() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Accessor that returns the current opacity of the paint.
- getOpacity(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
- getOpacity(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Return the opacity properties of the given surface.
- getOpacity(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Return the opacity properties of the given surface.
- getOPACITY() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Accessor that returns float OPACITY.
- getOPACITY() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Accessor that returns float OPACITY.
- getOPACITY() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Accessor that returns float OPACITY.
- getOPACITY() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Accessor that returns float OPACITY.
- GetOpacity() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Return the surface opacity value.
- getOpacityAfn(int) - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Returns the opacity transfer function for image A.
- getOpacityBfn(int) - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Returns the opacity transfer function for image B.
- getOpacityFn() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- getOpacityGM_Afn(int) - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Returns the opacity transfer function for image A.
- getOpacityGM_Bfn(int) - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Returns the opacity transfer function for image B.
- GetOpacityMapGMTarget() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the gradient magnitude opacity transfer function Texture.
- getOpacityPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getOpacitySlider() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Get the current surface opacity slider.
- getOpacitySliderX() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Return the X opacity slider.
- getOpacitySliderX() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Return the X opacity slider.
- getOpacitySliderY() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Return the Y opacity slider.
- getOpacitySliderY() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Return the Y opacity slider.
- getOpacitySliderZ() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Return the Z opacity slider.
- getOpacitySliderZ() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Return the Z opacity slider.
- getOpacityTransferFunction() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- getOpenedFile() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
Return the file being opened.
- getOperator() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getOperatorFromLegacyNum(int) - Static method in enum gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- getOpName(int) - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Return the correct extension for the new image based on the given opType.
- getOpticalZoomModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getOptimalZoom(int, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Calculates the optimal zoom value for an image based on the two parameters desiredWidth and desiredHeight.
- getOptimalZoomOnDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getOptions() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Accessor that returns the write options set up in this dialog.
- getOptions() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Get the view control panel.
- getOptionsPanel() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Get the option control panel.
- getOrCreateSegmentList(byte) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
- GetOrderedParameterBlocks(CeresSolver.Program, int, Vector<CeresSolver.Pair<Integer, Integer>>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter
-
- getOrgan() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- getOrient() - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
Get the orientation of the quadric surface.
- getOrient() - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- getOrientation() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the current orientation value.
- getOrientation() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getOrientation() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the current orientation value.
- getOrientation() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the current orientation value.
- getOrientation() - Method in class gov.nih.mipav.view.PatientSlice
-
This indicates which of the 3 tri-image components we are currently in; either AXIAL, SAGITTAL, or CORONAL.
- getOrientation() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Accessor that returns the component's orientation either
FileInfoBase.AXIAL, FileInfoBase.CORONAL, FileInfoBase.SAGITTAL, or
FileInfoBase.UNKNOWN_ORIENT
- getOrientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- getOrientation() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the image's orientation.
- getOrientationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getOrientationDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getOrientations() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- getOrigAC() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets anterior comissure in original space.
- getOrigDim() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets original dims.
- getOrigImageOrientLabel() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Determines the image orienation in the forward direction...orig to acpc or acpc to tlrc.
- getOrigin() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getOrigin() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the origin.
- getOrigin() - Method in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- getOrigin() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the origin of the image.
- getOrigin(int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the origin value of the requested axis.
- getOrigin(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the image origin for the image translated into the Patient-Coordinate systsm:
- getOriginalCropCheckbox() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- getOriginalDataType() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getOriginalDoCrop() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- getOriginalEnd() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- getOriginalEndianess() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- getOriginalEpsilon() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getOriginalExtents() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the original extents of the image.
- getOriginalFilterConstruction() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
returns integer telling filter construction method.
- getOriginalFilterOrder() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
returns integer telling filter order. - TO BE MOVED
- getOriginalInstitution() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getOriginalKernelDimension() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
returns kernel diameter chosen on forward FFT.
- getOriginalPosteriorMargin() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns AC posterior margin marker point for +orig to +acpc transformation in dicom ordering using numbers not
adjusted for resolution and origin.
- getOriginalRs() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Decibels stopband is down in Elliptic
- getOriginalScreenScale() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return the original ScreenScale for orthographic projection:
- getOriginalScreenScale() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return the original ScreenScale for orthographic projection:
- getOriginalSeriesNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getOriginalStart() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- getOriginalSuperiorEdge() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns AC superior edge marker point for +orig to +acpc transformation in dicom ordering using numbers not
adjusted for resolution and origin.
- getOriginalTransmissionReferenceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getOriginalXs() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
getOriginalXs - accessor that gets the array of x coordinates to be plotted; used by the zoom to reset the graph.
- getOriginalYs() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
getOriginalYs - accessor that gets the array of y coordinates to be plotted used by the zoom for the rest of the
graph.
- getOriginatingProgramDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getOriginatingSystem() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getOriginator() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the current originator string.
- getOriginator() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the current originator string.
- getOriginAtSlice() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
Gets the origin of a particular slice; resets for the z dimension.
- getOriginAtSlice() - Method in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
Gets the origin of a particular slice; resets for the z dimension.
- getOriginAtSlice(int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Gets the origin of a particular slice; resets for the z dimension.
- getOriginLoc() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- getOrigOrient() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets the orienatations from original space.
- getOrigOrientLabelsInverse() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
When going from acpc to orig or tlrc to orig, this method is used to determine what he new axis orienations.
- getOrigOrigin() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets original origin.
- getOrigPC() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets posterior comissure in original space.
- getOrigRes() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets resolution in original space.
- getOS() - Static method in enum gov.nih.mipav.view.Preferences.OperatingSystem
-
Gets the operating system.
- getOtsuThreshold() - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Gets the otsu threshold as calculated in AlgorithmThreshold.
- getOutgoingEndian() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Returns constant indicating endianess of outgoing data.
- getOutgoingSize() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Returns the outgoing data size.
- getOutput() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- getOutput() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- getOutputBuffer() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
Returns the output buffer
- getOutputBuffer() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
Returns the output buffer
- getOutputBuffer() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- getOutputBuffer() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- getOutputDir() - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- getOutputDirectory() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
Returns the output directory for the derived image calculations.
- getOutputDirectory(ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- getOutputImageName(String) - Method in interface gov.nih.mipav.view.dialogs.ActionDiscovery
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.BlankJistHook
-
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Returns the name of an image output by this algorithm, the image returned depends on the parameter label given
(which can be used to retrieve the image object from the image registry).
- getOutputImageName(String) - Method in class gov.nih.mipav.view.dialogs.MTryJistHook
-
- getOutputKind(ArrayList<Double[]>, int, double) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- getOverallPredictionError() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getOverlayNames(boolean) - Static method in class gov.nih.mipav.view.Preferences
-
Retrieves the list of overlay names (user can type whatever).
- getOverlayOn() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns if image/dicom overlay should be shown.
- getOverlays(boolean) - Static method in class gov.nih.mipav.view.Preferences
-
Gets the image overlay codes (they identify what to display in the corners of the image), from the preference
file.
- getp1() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintItem
-
- getp2() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintItem
-
- getPackedColor(int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
If no LUT or RGB color table is defined, this returns the packed int value for the color at iIndexs for the input
ModelImage kImage:
- getPad1() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getPad2() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getPadding(int) - Method in class gov.nih.mipav.model.file.FileMinc
-
Returns the amount of padding needed (to the nearest 4 byte boundary) after a variable of length
size.
- getPadding(int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- getpaintBitmap() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Accessor that returns BitSet paintBitmap.
- getPaintBitmap() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getPaintBitmap() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns BitSet paintBitmap.
- getpaintBitmapDest() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Accessor that returns BitSet paintBitmap.
- getpaintBitmapDest() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Accessor that returns BitSet paintBitmap.
- getPaintBrush() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Returns the selected paint brush's index.
- getPaintBrushName(int) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Returns the name of the paintbrush at the given index.
- getPaintBuffer() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Gets the paint buffer.
- getPaintColor() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Accessor that returns the current color of the paint.
- getPaintImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Returns the ModelImage to paint into.
- getPaintImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Returns the ModelImage to paint into.
- getPaintList() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
DOCUMENT ME!
- getPaintMask() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Gets the paint mask.
- getPaletteHasTransparencyDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDescriptor
-
- getPanel() - Method in class gov.nih.mipav.view.components.PanelManager
-
Returns the managed panel.
- getPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
- getPanelSize() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- getPanelSize() - Method in interface gov.nih.mipav.view.PreviewImageContainer
-
The method returns the size of the panel into which the ViewJComponentPreviewImage will be drawing itself.
- getPanelSize() - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Called by the component image to get the real-time size of the panel before centering.
- getPanelSize() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Method is required by PreviewImageContainer interface to draw a preview image.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEdit
-
abstract method returning the panel's value.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditAxisOrientation
-
gets the data which the user could redefine within this panel.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditBoolean
-
gets the data which the user could redefine within this panel.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditChar
-
gets the data which the user could redefine within this panel.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditDate
-
concatonates the date as MM/DD/YYYY; padding any years < 1000 with leading zeros.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditDefault
-
gets the data which the user could redefine within this panel.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditImageOrientation
-
gets the data which the user could redefine within this panel.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditModality
-
gets the data which the user could redefine within this panel.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditOrientation
-
gets the data which the user could redefine within this panel.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditRace
-
gets the data which the user could redefine within this panel.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditSetOrParam
-
gets the data which the user could redefine within this panel.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditSex
-
returns an empty String when the panel has been set to "No Value" otherwise, it returns the value.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditTime
-
returns as much of the time as was set.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelEditValueType
-
gets the data which the user could redefine within this panel.
- getPanelValue() - Method in class gov.nih.mipav.view.JPanelFileSelection
-
DOCUMENT ME!
- getPannedAxes() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- getPanoramaModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
2 numbers: 1.
- getParallel() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Read the current camera model.
- getParallel() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Change the camera model.
- getParallel() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Change the camera model.
- getParameter() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- getParameter(String) - Method in class gov.nih.mipav.model.file.XMLPSet
-
Gets the parameter with the given name.
- getParameter(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the Object value of one of the parameters from the table.
- GetParameterBlock(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- GetParameterBlocks(Vector<double[]>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- getParameterCount() - Method in class gov.nih.mipav.model.scripting.ParsedActionLine
-
Returns the number of parameters which will be passed to this action.
- getParameterInfo() - Static method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Returns the parameters that are used in this class.
- getParameterInfo() - Static method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Returns the parameters that are used in this class.
- getParameterInfo() - Static method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Returns the parameters that are used in this class and
implementing classes.
- getParameterInfo() - Static method in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Returns the parameters that are used in this class and
implementing classes.
- GetParameterization(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- getParameterKeys() - Method in class gov.nih.mipav.model.file.XMLPSet
-
Get an enumeration for the list of parameter names.
- getParameterLabel() - Method in exception gov.nih.mipav.model.scripting.parameters.ParameterException
-
Return the parameter label which caused this parameter exception.
- getParameters() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- getParameters() - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
Get the current level-set evolution parameters.
- getParameters() - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
Get the current level-set evolution parameters.
- getParameters() - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- getParameters() - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
getParameters accessor to function parameters.
- getParameters() - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- getParameters() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
getParameters accessor to function parameters.
- getParameters() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
getParameters accessor to function parameters.
- getParameters() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Get an array containing all of the parameters in the parameter table.
- getParameterString(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Construct a delimited string that contains the parameters to this algorithm.
- getParameterTable() - Method in class gov.nih.mipav.model.scripting.ParsedActionLine
-
Returns the table of parameters which will be passed to this action when it is executed.
- getParameterTable(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets the parameter table associated with a Parameter set with the given description.
- getParamPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- getParams() - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Retrieves the list of parameters to either be used to run the script or store settings for future executions of
the algorithm in a script.
- getParent() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- getParent() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
- getParent() - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Returns a reference to another Parameter upon which this Parameter depends.
- getParent() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- getParent() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from ViewJComponentEditImage.
- getParentConditionValueString() - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Returns the parent Parameter condition value to test against when deciding whether to ask for a value for this
Parameter when using the ActionDiscovery interface.
- getParentDialog() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- getParentDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- getParentFrame() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Returns the parent frame of this image.
- getParentFrame() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Return the parent frame.
- getParentFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return the parent frame.
- getParentFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return the parent frame.
- getParentFrame() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Returns a reference to the ViewJFrameImage object that is the parent of
this frame.
- getParentFrame() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Returns a reference to the ViewJFrameImage object that is the parent of
this frame.
- getParentFrame() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Get the parent frame of this MIP image frame.
- getParentFrame() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Returns a reference to the ViewJFrameImage object that is the parent of this frame.
- getParentTags() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- getPARRECMatrix() - Method in class gov.nih.mipav.model.file.FileInfoSPAR
-
- getParsedFileName() - Method in exception gov.nih.mipav.model.scripting.ParserException
-
Return the file that the script was read in from ('-' if no file on disk).
- getParseExceptionInfo(SAXParseException) - Method in class gov.nih.mipav.model.file.XMLErrorHandler
-
Returns a string describing parse exception details.
- getParseExceptionInfo(SAXParseException) - Method in class gov.nih.mipav.view.dialogs.XMLErrorHandler
-
Returns a string describing parse exception details.
- getParseExceptionInfo(SAXParseException) - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.XMLErrorHandler
-
Returns a string describing parse exception details.
- getPatches(libdt.PatchExtractor) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- getPatchingRequired(cl_device_id) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- getPath() - Method in class gov.nih.mipav.model.file.FileInfoImageXML.SurfaceLink
-
Gets the path for the surface.
- getPath() - Method in class gov.nih.mipav.model.file.FileInfoImageXML.VOILink
-
Gets the path for the VOI.
- getPath() - Method in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- getPath(String, GetPath.Purpose) - Static method in class gov.nih.mipav.view.GetPath
-
* Determine the best path for the indicated file.
- GetPath - Class in gov.nih.mipav.view
-
This is a static helper class for finding the path to a number of important files to the MIPAV application.
- GetPath() - Constructor for class gov.nih.mipav.view.GetPath
-
- GetPath(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Returns the path of a filename.
- GetPath.Purpose - Enum in gov.nih.mipav.view
-
- getPathDist() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Get the current position distance along the path.
- getPathDist() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- getPathDist() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Get the current position distance along the path.
- getPathDistance() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Get the current distance along the path.
- getPathDistance() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Get the current distance along the path.
- getPathDistance() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Get the current distance along the path.
- getPathGraph(int, float) - Method in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Given previously determined starting point, compute the tree-structured skeleton path through the volume where no
branch is shorter than the specified amount.
- getPathIndex(LinkedList, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
getPathIndex returns what the new vertex index should be.
- getPathIndex(LinkedList, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
getPathIndex returns what the new vertex index should be.
- getPathLength() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Get the total length of the current path.
- getPathLength() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Get the total length of the current path.
- getPathLength() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- getPathPoint(int, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Access to the ith point on the Geodesic curve.
- getPathPoint(int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Access to the i-th point on the Geodesic curve.
- getPathPoints(Point3f[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Access to the all the points on the Geodesic curve.
- getPathPoints(Vector3f[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Access to the all the points on the Geodesic curve.
- getPathPosition() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Get the location of the current position along the path.
- GetPaths() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Extracts the starting positions of each path in the shape by a simple
linear search.
- getPathStep() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Get the current distance increment for moving along the path.
- getPathStep() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Get the current distance increment for moving along the path.
- getPathStep() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Get the current distance increment for moving along the path.
- getPathString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getPatientAge() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPatientDOB() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPatientID() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the current patient id.
- getPatientID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPatientID() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPatientID() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the current patient id.
- getPatientID() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the current patient id.
- getPatientName() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- getPatientName() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPatientName() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPatientName() - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- getPatientName() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getPatientOrientation() - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
This method extracts directional cosines from the DICOM image header (tag = "0020, 0037").
- getPatientOrientation() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPatientOrientation(double[], double[], ModelImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
Extract orientation info from file header.
- getPatientOrientationString() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Return String put in DICOM 0020,0037 field
- getPatientPosition() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getPatientPosition(double[], ModelImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
Extracts the origin from image file info.
- getPatientRotation() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPatientSex() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPatientSex() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPatientStatus() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPatientTextureCoordinates(Vector3f, ModelStorageBase, int, boolean) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
- getPatientWeight() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPauseBetweenFrameGroups() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPauseBetweenImages() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPauseInterval() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPauseTime() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getpcie() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns posterior commissure inferior edge for +acpc to +tlrc transformation in dicom ordering.
- getPCVelocityEncoding() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPDU() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery.MoveRequestInfo
-
DOCUMENT ME!
- getPeakSAR() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPercentage() - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
The percentage of used memory to total memory the thread found.
- getPercentageLabel() - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Get the percentage label.
- getPercentPhaseFieldOfView() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getPercentSampling() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getPerformedProcedureStepStartTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getPerimeter() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the perimeter of the VOI (in terms of res).
- getPermutedSampleID(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getPerspective() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- getPerVertexColor() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- getPerVertexColorArray() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Get the per-vertex color array.
- getPETDataType() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPETStudyGeneral() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPETStudyImageData() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPFSwapped() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPhaseContrastFlowAxis() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPhaseData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Returns reference to phase data array.
- getPhaseData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Returns reference to phase data array.
- getPhaseDim() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- getPhaseMask() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- getPhi() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- getPhiLattice() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- getPhone() - Method in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Gets phone number.
- getPhotoEffectDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getPhotometric() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Photometric interpretion.
- getPhotometricInterpretation() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getPhotometricInterpretationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getPhotoStyleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getPhysName() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets the physician's name from the physText field.
- GetPickable() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Get the object display either on/off.
- getPickCanvas() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Get the pick canvas.
- getPickCanvas() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Get the pick canvas.
- getPickColor() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getPickColorA() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getPickColorB() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getPickColorG() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getPickColorR() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getPicked() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Returns the ID of the currently picked Widget.
- getPicked() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Returns the currently selected point, either on the lattice or from the
annotation list.
- getPicked(Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Finds the closest point to the input point and sets it as the currently selected lattice or annotation point.
- getPickedAnnotation() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- getPickedAnnotation() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getPickedLight(Shape3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Determine if a given shape is the sphere for one of the lights.
- getPickResult(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Returns the pick result based on the input mouse event.
- getPictureEffectDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getPictureModeBWFilterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getPictureModeContrastDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getPictureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getPictureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
1 or 2 values
- getPictureModeEffectDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getPictureModeSaturationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getPictureModeSharpnessDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getPictureModeToneDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getPImage2() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPitchAngleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
converted to degrees of upward camera tilt
- getPitchAngleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getPixBuffer() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Gets the buffer used to store ARGB images of the image presently being displayed.
- getPixBufferB() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Gets the buffer used to store ARGB images of the image presently being displayed.
- getPixel() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Creates a new Pixel object for this Img with position {0,0}.
- getPixel() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Creates a new pixel object (instance of
ContourPlot.PixelBase) for this Img
with initial position (0,0) i.e. top left corner.
- getPixel(int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Creates a new Pixel object for this Img at specified position.
- getPixel(int, int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Creates a new Pixel object for this Img at specified position
- getPixel(int, int, boolean, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- getPixel(int, int, boolean, int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
Reads the color value of the pixel at the specified location if areaSize == 1.
- getPixelAspectRatioString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getPixelBandwidth() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getPixelPadValue() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns pixel pad value.
- getPixelRepresentation() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getPixels() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- getPixelSize() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPixelSpacing() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getPlanarConfigurationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getPlane() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Determines if the points on the contour lie on either the x,y,or z-planes.
- getPlane() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Returns the plane this VOIManager is drawing into.
- getPlane(Vector3f, Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Deprecated.
- getPlaneCoordinates() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getPlaneGap() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns -1 if no plane gap is present, 0 = x gap, 1 = y gap, 2 = z gap.
- getPlaneMax() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getPlaneMin() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getPlaneName() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPlanes() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getPlaneType() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPlateInfo() - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- getPlatform() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getPlatformDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- getPlatformVersion() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getPlistStartupFile(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
This method returns the startup file which contains the MIPAV start-up options.
- getPluginClassLoader() - Static method in class gov.nih.mipav.plugins.PluginUtil
-
- getPluginInstallDirectory() - Static method in class gov.nih.mipav.view.Preferences
-
Returns the directory last used for installing plugins.
- getPluginInterfaces(Class<?>) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
- getPlugInMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Return the menu containing the list of installed plugins.
- getPluginUserDir() - Static method in class gov.nih.mipav.view.Preferences
-
Returns String indicating the directory where plugin class files are stored.
- getPngChunkType() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- getPoint() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Returns the optimized point, with length == degrees of freedom.
- getPoint() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Returns the optimized point, with length == degrees of freedom.
- getPoint() - Method in class gov.nih.mipav.model.algorithms.Vectornd
-
- getPoint(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Return the full transformation vector.
- getPoint(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Return the full transformation vector.
- getPoint(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Return the full transformation vector.
- getPoint(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Knot
-
Get an individual coordinate value (x or y)
- getPoint(int) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Get the point at the specified index.
- getPoint(int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Obtain the transformation vector and adjust its translation by sample parameters.
- getPoint(int, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Obtain the transformation vector and adjust its translation by sample parameters.
- getPoint(int, int[], int[]) - Method in class gov.nih.mipav.model.structures.PointStack
-
Get a point and stores it in the two input arrays.
- GetPoint(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Returns the i'th point.
- GetPoint(int, double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Returns the i'th point.
- getPointCoordinates(float[]) - Method in class gov.nih.mipav.model.structures.VOI
-
This method is used to get the coordinates of a single VOIPoint.
- getPointCopy() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getPointDetails() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- getPointerButton() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Returns the pointer button, used by VOIManager to determine
if the pointer button is active.
- getPointerButton() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
- getPointNormal(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
Return the normal vector for the annotated point.
- getPointNormal(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Return the normal vector for the annotated point.
- getPointPosition(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
Return the 3D coordinates for the annotated point.
- getPointPosition(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Return the 3D coordinates for the annotated point.
- getPoints() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Return an array of transformation vector.
- getPoints() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Return an array of transformation vector.
- getPoints() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Return an array of transformation vector.
- getPoints() - Method in class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
Returns the list of VOIPoint in this polyline.
- getPoints() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
attribute member access.
- getPointsAndLinesDisplay() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that gets the visible flag.
- GetPointUS(int, double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
un-safe (and dirty) since it depends on assumptions regarding the
- getPointVOI() - Method in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
All VOIPoints are stored in one VOI contained in this class.
- getPointx() - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- getPointX(int) - Method in class gov.nih.mipav.model.structures.PointStack
-
Gets the x coordinate of a point.
- getPointy() - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- getPointY(int) - Method in class gov.nih.mipav.model.structures.PointStack
-
Gets the y coordinate of a point.
- getPolarity() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns.
- getPolygonMode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Returns the polgyon mode.
- GetPolygonMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Return the Wireframe fill mode (FILL, LINE, POINT).
- getPolylines(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
- getPolylines(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getPopupMenu() - Method in class gov.nih.mipav.view.JScrollMenu
-
- getPort(String) - Static method in class gov.nih.mipav.view.Preferences
-
Accessor to get DICOM image server's port for selected AETitle.
- getPos() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- getPosition() - Method in class gov.nih.mipav.model.algorithms.AlgorithmKMeans.positionWeightItem
-
DOCUMENT ME!
- getPosition() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPosition() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialByteArrayReader
-
- getPosition() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
- getPosition() - Method in class gov.nih.mipav.model.file.MetadataExtractor.StreamReader
-
- getPosition() - Method in class gov.nih.mipav.model.structures.VOIPoint
-
- getPosition() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query the current position of the light.
- getPosition() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Get the light source position.
- getPosition() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Query current position of vertex.
- getPosition(float, float, float, Vector3f) - Method in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
Return the B-Spline evaluation for the given input values.
- getPosition(float, float, Vector2f) - Method in class gov.nih.mipav.model.structures.BSplineLattice2Df
-
Return the B-Spline evaluation for the given input values.
- getPosition(int, int, int, Vector3f) - Method in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
Return the B-Spline evaluation for the given input values.
- getPosition(int, int, Vector2f) - Method in class gov.nih.mipav.model.structures.BSplineLattice2Df
-
Return the B-Spline evaluation for the given input values.
- getPositionAndIntensity(int, int, Vector3f[], float[], float[], int) - Method in class gov.nih.mipav.model.structures.VOI
-
Gets the position and intensity for this VOI if it's a line.
- getPositionAndIntensity(Vector3f[], float[], float[], int) - Method in class gov.nih.mipav.model.structures.VOIContour
-
Gets position/intensity along the boundary of this contour VOI.
- getPositionAndIntensity(Vector3f[], float[], float[], int) - Method in class gov.nih.mipav.model.structures.VOILine
-
Gets the position/intensity along a line VOI.
- getPositionAndIntensityIndex(int[], float[], float[], int) - Method in class gov.nih.mipav.model.structures.VOIContour
-
Gets the position/intensity along the boundary of this contour VOI.
- getPositionScaled() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Scaled coordinates for the current position along the path for viewing.
- getPositionScaled(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Scaled coordinates for the current position along the path for viewing.
- getPositionScaled(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Scaled coordinates for the current position along the path for viewing.
- getPositionUnScaled(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Scaled coordinates for the current position along the path for viewing.
- getPositionX() - Method in class gov.nih.mipav.model.structures.VOIContour.positionItem
-
DOCUMENT ME!
- getPositionY() - Method in class gov.nih.mipav.model.structures.VOIContour.positionItem
-
DOCUMENT ME!
- getPosteriorMargin() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns AC posterior margin marker point for +orig to +acpc transformation in dataset ordering.
- getPosteriorPt() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns most posterior point marker for +acpc to +tlrc transformation in dicom ordering.
- getPostfix(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- getPostfix(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- GetPostfix() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the postfix for this VolumeImage.
- getPowerUpTimeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getppfiltname(int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- getPrecision() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
DOCUMENT ME!
- getPrediction(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- getPrediction(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- getPrediction(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- getPrediction(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- getPredictions() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getPredictionTerminalNodeID(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- getPredictionTerminalNodeID(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- getPredictionTerminalNodeID(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- getPredictionTerminalNodeID(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- getPreferencesDir() - Static method in class gov.nih.mipav.view.Preferences
-
Return the directory where mipav-generated, user-specific files should be placed.
- getPreferredSize() - Method in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
Gets the preferred size based on the parent (container's) size.
- getPreferredSize() - Method in class gov.nih.mipav.view.BarMeter
-
Preferred size of this panel.
- getPreferredSize() - Method in class gov.nih.mipav.view.LineMeter
-
returns the panels preferred size.
- getPreferredSize() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Gets preferred size to set object size to.
- getPreferredSize() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- getPreferredSize() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Size set to object size.
- getPreferredSize() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Size set to object size.
- getPreferredSize() - Method in class gov.nih.mipav.view.ViewJComponentBase
-
size set to object size.
- getPreferredSize() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Size set to object size.
- getPreferredSize() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Size set to object size.
- getPreferredSize() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that returns the preferred size of the component.
- getPreferredSize() - Method in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
Accessor that returns the preferred size of the component.
- getPreferredSize() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Gets preferred size to set object size to.
- getPreferredSize() - Method in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Size set to object size.
- getPrefix(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- getPrefix(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- getPrefix(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getPreparationDirection() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getPrescanReceiveAttenuation1() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPrescanReceiveAttenuation2() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPrescribedImageNumbers() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPrescribedSeriesNumbers() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPresentationContextes() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateAC
-
Returns the list of presentation contexts.
- getPresentationContextFromID(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Gets a presentation context ID for a given abstrax syntax.
- getPresentationContextID(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Gets a presentation context ID for a given abstrax syntax.
- getPresentationContextID(String, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Gets a presentation context ID for a given abstrax syntax.
- getPresentationContexts() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Accessor to return the presentation context.
- getPressedStart() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- getPressureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getPrevDeltaWeight() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- getPreviewExtents() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- getPreviewImageType() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- getPreviewImageValidDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getPreviewImageValidDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getPrimaryInfo(TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Method called by many extending classes to return basic information in the dialog common to all images.
- getPrime(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- getPrincipalAxis() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the principle axis of VOI (only valid for 2D object); return pricipal axis angle of the VOI.
- getPrintScaleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getPrivateDicomTagTable(boolean) - Static method in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
Returns a reference to the DICOM Hashtable.
- getProbe() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Get the root transform group of the CoolTip probe.
- getProbe() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Get the root of the default probe.
- getProbe() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Get the root transform group of the regular probe.
- getProbe() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Get the thermal probe root tranform group.
- getProbeBase() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get the probe base reference inside the burning control panel.
- getProbeDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return probePanel from parent frame.
- getProbeDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return probePanel from parent frame.
- getProbeDialog() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Return the rfa probe panel.
- getProbesRootBG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Return the root to the probes branches.
- getProbesRootBG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Return the root to the probes branches.
- getProbeTransform() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Return the probe position transformation.
- getProbeType() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Return the current active probe type.
- getProblem() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- getProbRootParentTG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Get the probe's transform group.
- getProbX() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- getProbXOld() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- getProcess() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns whether voi is included in processing.
- getProcess() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Accessor that returns the process.
- getProcessLog() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
provides the string key of translations between source filename and destination filename.
- getProcessStatus() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getProcessType() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Reports if algorithm is performing calcs per slice, per contour, or for entire VOI.
- getProcessType() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
Gets the output calculation type.
- getProfileClassDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- getProfiles() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Searches for all profiles in the MIPAV preferences that
start with profileAnonymizeDICOM.
- getProfiles() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
Searches for all profiles in the MIPAV preferences that
start with profileAnonymizeDICOM.
- getProfileVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- getProgramAuthor() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getProgramDate() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getProgramInputs() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getProgramName() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getProgramOutputs() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getProgramShiftDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getProgramVersion() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getProgress() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- getProgressBar() - Method in class gov.nih.mipav.view.JPanelProgressBar
-
Get the progress bar.
- getProgressBar() - Method in interface gov.nih.mipav.view.ProgressBarInterface
-
DOCUMENT ME!
- getProgressBar() - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Get the progress bar.
- getProgressBarPrefix() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Gets the string "Opening " or "Loading " based on what the progress bar should be displaying.
- getProgressChangeListener() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
If there is a progress bar that is listening to the algorithm's progress change events, this will retrieve that
progress bar.
- getProgressChangeListeners() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Returns the progress change event listener list.
- getProgressChangeListeners() - Method in class gov.nih.mipav.model.file.FileBase
-
- getProgressFromFloat(int, int, float) - Static method in class gov.nih.mipav.view.ViewJProgressBar
-
DOCUMENT ME!
- getProgressFromInt(int, int, int) - Static method in class gov.nih.mipav.view.ViewJProgressBar
-
DOCUMENT ME!
- getProgressModulus() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- getProgressStep() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- getProgressValues() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Gets the current stored min and max progress values.
- getProjectionAngle() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getProjectionDirection() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- getProjectionNumber() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getProjectionTime() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getPropagationWeight() - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Get the propagation weight 'b'.
- getProperties() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getPropertiesDialog() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- getProperty(Object) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
- getProperty(String) - Static method in class gov.nih.mipav.view.Preferences
-
Accessor to return a specfic properties given a key.
- getPropertyName() - Method in class gov.nih.mipav.view.JPanelEdit
-
Returns the current name used to identify PropertyChangeEvents.
- getPropNames() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getProprietaryThumbnailDataDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KyoceraMakernoteDescriptor
-
- getProtocol() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get scan Protocol for equipment associated with image.
- getProtocolName() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getProtractorCommonVertex() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
- getProvenanceHolder() - Method in class gov.nih.mipav.model.structures.ModelImage
-
- getProvenanceHolder() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor for the mipav's data provenance .
- getProvinceOrStateDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getPSDDay() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPSDFileName() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPSDHour() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPSDMinute() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPSDMonth() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPSDName() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPSDSeconds() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPSDYear() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPSeries2() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPSet(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets a parameter set from the hashtable using a description.
- getPSetDescription() - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- getPSetHashtable() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets the hashtable that holds all sets of parameters.
- getPSetKeys() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets an enumeration for the list of parameter set keys.
- getPSetsHashMap() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
gets the psets hashmap
- getPSFImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Returns the point spread function image.
- getPt() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
- getPt() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
-
- getPtID() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets the Patient's ID from the ptIDText field.
- getPtName() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets the Patient name from the ptNameText field.
- getPts(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
- getPublisher() - Method in class gov.nih.mipav.model.file.PrivateFileDicomKey
-
- getPulseSequence() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPulseSequenceMode() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getPulseSequenceSubtype() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getQMesh() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Accessor that returns the quad mesh, which represents the plotted surface.
- getQTs() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- getQTs() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- getQuadrantBoundaryPoints(int, int) - Static method in class gov.nih.mipav.util.CircleUtil
-
Generates 2D data points in a given quadrant for a specified radius
- getQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDescriptor
-
- getQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDescriptor
-
- getQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDescriptor
-
- getQualityLevelDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getQualityModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getQualityModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getQuantificationUnits() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getQuantity() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
The current number of valid elements in the array.
- getQuantity() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
The current number of valid elements in the array.
- getQuantity() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Get the number of image elements.
- getQuantity() - Method in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap
-
Get the current number of active heap records.
- getQuantity() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
Get the number of image elements.
- getQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
The current number of valid elements in the array.
- getQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
The current number of valid elements in the array.
- getQuantizationTableNumber() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegComponent
-
- getQuickShotDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getR1() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getR1ResultStack() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- getR2() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getR2ResultStack() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- getRace() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets the subject's race.
- getRadiologicalView() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Gets the radiological view flag:
- getRadiopharmaceutical() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getRadius() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Get the burning sphere radius as a point format ( semiX, Y, Z ).
- getRadius() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Get the radius( semiX, semiY, semiZ).
- getRadius(float, float) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Get the radius for the polar coordinate from the given Cartesian coordinate
- getRadixArray(int, int[], int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- getRaFile() - Method in class gov.nih.mipav.model.file.FileBase
-
- getRAImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Returns the Relative Anisotropy Image.
- getRandomNumber(Double, Double) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- getRandomOrder() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRandSliceOrder
-
Accessor returns randomOrder.
- getRangeFlag() - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
- getRangeString(int) - Method in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
- getRangeString(int) - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- getRASScannerPositionLabels(ModelImage, Vector3f) - Static method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Gets position data to display in message bar - for DICOM and MINC images, gives patient position as well.
- getRaster(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- getRate() - Method in class gov.nih.mipav.model.file.FileAvi
-
- getRational(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a Rational.
- getRationalArray(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as an array of Rational.
- getRationalOrDoubleString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getRawDataByteOrderDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getRawDataCFAPatternDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getRawDataStudyNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getRawDataSystemID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getRawDevArtFilterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- getRawDevColorSpaceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- getRawDevColorSpaceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDescriptor
-
- getRawDevEditStatusDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDescriptor
-
- getRawDevEngineDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- getRawDevEngineDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDescriptor
-
- getRawDevExposureBiasValueDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- getRawDevNoiseReductionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- getRawDevNoiseReductionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDescriptor
-
- getRawDevPictureModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- getRawDevPmBwFilterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- getRawDevPmPictureToneDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- getRawDevSettingsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDescriptor
-
- getRawDevVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- getRawDevVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDescriptor
-
- getRawFileInfo(ParameterTable) - Static method in class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
Reads in the necessary file info from a set of parameters to read a RAW file.
- getRawImageInfo() - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- getRawImageInfo() - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
- getRawImageInfo() - Method in class gov.nih.mipav.view.ViewUserInterface.OpenFileInfo
-
DOCUMENT ME!
- getRayDelta() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Get the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution.
- getRayDelta() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Get the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution.
- getRayTracerA() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Accessor that returns the reference to rayTracerA.
- getRBF() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- getRCenter() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getREADCode() - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- getREADCode() - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- getReader() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
Returns the MipavSAXReader.
- getReaderString(MetadataExtractor.RandomAccessReader, int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
Read a given number of bytes from the stream
This method is employed to "suppress" attempts to read beyond end of the
file as may happen at the beginning of processMakernote when we read
increasingly longer camera makes.
- getReal() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools.EigenvalueComplex
-
- getReal() - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets.realImaginaryItem
-
DOCUMENT ME!
- getRealData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Returns reference to real data array.
- getRealData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Returns reference to real data array.
- getRealData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Returns reference to real data array.
- getRealData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Returns reference to real data array.
- getRealData() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
Returns reference to real data array.
- getRealDistance(int, int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Given the coordinates of two points in sample space of the volume, compute the real distance betwen them by
taking into consideration the spacing between samples in the volume along each axis.
- getRealDistanceNeighbors27(float[]) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Fill an array of distances to the 26-connected neighbors for any given sample where the distances are the real
Euclidean distances scaled by the size of the sample along each axis.
- getRealEigenvalues() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
- getRealPoint(int, int, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Compute the "real" coordinates of the sample in the volume at the specified sample coordinate indexes.
- getReceiveAttenuatorSetting() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getReciprocal() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Returns the reciprocal value of this object as a new Rational.
- getRecognizedFaces() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- getRecognizedFacesDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getRecoInpSize() - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- getRecommendedReceiveAttenuation() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getRecommendedReceiveFrequency() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getRecommendedTransmitAttenuation() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getRecommendedTransmitFrequency() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getReconstructedImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Returns the reconstructed image:
- getReconstructionMethod() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getRecord(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap
-
Get a record from the heap records.
- getRecorderStatus() - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Returns the current status of the script recorder.
- getRecorderStatus() - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Returns the current status of the script recorder.
- getRecordingModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getRecordModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getRecordModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getRecordModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getRecordRate() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- getRecords() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
The collapse records that have been created by the constructor for ModelSurfaceDecimator.
- getRecordShutterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getRecordVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getRecoSize() - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
Gets the size of the reconstruction.
- getred() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Accessor that returns int red.
- getred() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Accessor that returns int red.
- getred() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Accessor that returns int red.
- getred() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Accessor that returns int red.
- getRed() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getRed() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Returns int red.
- getRedBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getRedFunction() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Accessor that returns the red transfer function.
- getRedFunction() - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Accessor that returns the red transfer function.
- getReductionX() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- getReductionX() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- getReductionY() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- getReductionY() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- getReductionZ() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- getReductionZ() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- getRedX() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- getRedY() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- getReference() - Static method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Returns a reference to the provenance recorder.
- getReference() - Static method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Returns a reference to the script recorder.
- getReference() - Static method in class gov.nih.mipav.model.scripting.ScriptRunner
-
Returns a reference to the script recorder.
- getReference() - Static method in class gov.nih.mipav.model.scripting.VariableTable
-
Returns a reference to the variable table singleton.
- getReference() - Static method in class gov.nih.mipav.plugins.ManifestFile
-
Gets the default manifest, guaranteed to be latest default version unless working in threaded environment.
- getReference() - Static method in class gov.nih.mipav.view.ViewJPopupPlugin
-
- getReference() - Static method in class gov.nih.mipav.view.ViewUserInterface
-
Get a reference to the ViewUserInterface object.
- getReferenceBlackWhiteDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getReferenceDateDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getReferenceFrameNumber() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getReferenceTagTable() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
- getReferringPhysician() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getRefMark() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Returns the reference mark flag.
- getRegisteredFramedImages(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Returns the Vector of Registered Framed Images that are of the same number of dimensions as the active image and
same extents for dimesions 3, 4, and 5.
- getRegisteredFramedImages4D3D(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
If active image is 4D, this returns all 3d images that have same x,y,and z dimensionality as the 4d image
- getRegisteredFramedImagesNum() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Return an num of images with frames(elements) from the image hashtable.
- getRegisteredFramedImagesSize() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Returns the size of the RegisteredFramedImages Vector.
- getRegisteredImageByName(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Return a registered image from the image hashtable based on the name of the image.
- getRegisteredImageNames() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Return an enumeration of keys (image names) from the image hashtable.
- getRegisteredImages() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Return an enumeration of images (elements) from the image hashtable.
- getRegisteredImagesNum() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Return an num of images (elements) from the image hashtable.
- getRegisteredNames() - Method in class gov.nih.mipav.view.ImageRegistryMonitor
-
The name of images currently registered.
- getRegisteredResults() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraAlgorithm
-
- getRegisterTo() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getRegistrationFrame() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method that returns the registration frame if it exists else returns null.
- getRegular() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the value of regular character.
- getRegular() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the value of regular character.
- getRegular() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the value of regular character.
- getReleaseDate() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
Parses the Release Date tag and the Release Time tag to obtain a single Date object representing the
date and time when this image was released.
- getReleaseDateDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getReleasedSliderValue() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- getReleaseModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getReleaseTimeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getRelerr() - Method in class gov.nih.mipav.model.algorithms.ODE
-
- getRelerr() - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- getRemappedValue(float, int) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Method to remapped a value using the transfer function.
- getRemoteBufferedImage() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Creates a BufferedImage that shares the data of this Img.
- getRemoteBufferedImage() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Creates a BufferedImage that shares the data of this image.
- getRemove() - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting.mergeItem
-
DOCUMENT ME!
- getRemoveLength() - Method in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- getRenderedImage(Image) - Method in class gov.nih.mipav.model.file.FileIO
-
- getRenderer() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- getRenderer() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
- getRendererGUI() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Get the render mode interface panel.
- getRendererProgressBar() - Static method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Retrieve the progress bar used in the volume renderer (the one in the upper right hand corner).
- getRendererProgressBar() - Static method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Retrieve the progress bar used in the volume renderer (the one in the upper right hand corner).
- getRendering() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- getRenderingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- getRenderingHint() - Method in enum gov.nih.mipav.view.Preferences.InterpolateDisplay
-
- getRenderingIntent() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- getRenderingIntentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDescriptor
-
- getRenderingIntentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- getRenderMode() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Get the rendering mode.
- getRenderMode() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Change the camera model.
- getRenderMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- getRepetitionTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getRepetitionTime() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getRequestedNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getResavedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getRescaleIntercept() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the intercept.
- getRescaleSlope() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the slope.
- getResearchMode() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- getReserved() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- GetResidualBlock(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- GetResidualBlocks(Vector<CeresSolver.ResidualBlock>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- getResiduals() - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
DOCUMENT ME!
- getResiduals() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- getResiduals() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- getResolution(int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the resolution of the requested dimension.
- getResolutionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getResolutionInfoDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getResolutions() - Method in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
Accessor to return the resolutions per slice as parsed from the XML header.
- getResolutions() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns each dimension's resolution.
- getResolutions() - Method in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- getResolutions() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- getResolutions() - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Accessor that returns the resolutions.
- getResolutions() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Returns the ModelImage resolutions.
- getResolutions() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Returns the ModelImage resolutions.
- getResolutions() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
DOCUMENT ME!
- getResolutions(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the resolutions for the image without regarding resolution difference between slices.
- getResolutions(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the resolutions for the image translated into the Patient-Coordinate systsm:
- getResolutions(int, int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the resolutions for the image translated into the Patient-Coordinate systsm:
- getResolutionSwitches() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- getResolutionX() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- getResolutionX() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Returns the image resolution factor in the screen x-direction.
- getResolutionX() - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Resolution correction factor in the x - dimension.
- getResolutionY() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- getResolutionY() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Returns the image resolution factor in the screen y-direction.
- getResolutionY() - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Resolution correction factor in the y - dimension.
- getResource(String) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- getResourceAsStream(String) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- getResources(String) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- GetRestrictedFixedDepthLaplacian(SparseSymmetricMatrix, int, int[], int, OctNode, float, SortedTreeNodes) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getResult() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Returns the distortion-corrected DWI 4D image series.
- getResultBuffer() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
- getResultBuffer() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Get the final result image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToRectangle
-
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
Get the midsagittal aligned image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getResultImage
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
get Result Image
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
Return the attenuated image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
Accessor that returns the result image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
Accessor that returns the result image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert3Dto4D
-
Returns result image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Returns corrected image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
This method returns the projection images in a Vector.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMosaicToSlices
-
Accessor that returns the result image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
Retrieves the result image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceValue
-
Gets the result image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Accessor to get interpolated image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Return the result image (or null if not created yet).
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwap34
-
Returns result image.
- getResultImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapDims
-
Returns result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Accessor that returns the image after adding image margins.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
get result image
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to get the result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Accessor that returns the image after adding image margins.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Accessor that returns the image after adding image margins.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Accessor that returns the image after adding image margins.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
Accessor that returns the image after adding image margins.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Accessor that returns the image after adding image margins.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
Accessor that returns the result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Accessor that returns the image after filling holes.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Accessor to get the result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Accessor to get the result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
get result image
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
get result image
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
get result image
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Accessor that returns the result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to get the result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Gets the result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Accessor that returns the result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Accessor that returns the result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
get result image
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
get result image
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Accessor to get the result image.
- getResultImage() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Accessor that returns the image.
- getResultImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
get Result Image
- getResultImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- getResultImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that returns the image.
- getResultImageA() - Method in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
Accessor that returns the image.
- getResultImageA() - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Accessor that returns the image.
- getResultImageB() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Accessor that returns the blue image.
- getResultImageB() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Accessor that returns the blue image.
- getResultImageB() - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Accessor that returns the image.
- getResultImageB() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
Accessor that returns the Blue result image.
- getResultImageB() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
Accessor that returns the Brightness result image.
- getResultImageG() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Accessor that returns the green image.
- getResultImageG() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Accessor that returns the green image.
- getResultImageG() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
Accessor that returns the Green result image.
- getResultImageH() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
Accessor that returns the Hue result image.
- getResultImageR() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Accessor that returns the red image.
- getResultImageR() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Accessor that returns the red image.
- getResultImageR() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
Accessor that returns the Red result image.
- getResultImages() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
for output of results
- getResultImageS() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
Accessor that returns the Saturation result image.
- getResultMatrix() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Gets the result matrix (only used by OAR3D).
- getResultVOI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Returns the resultant VOI.
- getResultVOI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Accessor that returns a voi that is a smoothed version of the original.
- getResultVOI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Accessor that returns the resultant VOI.
- getResultVOI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
Accessor that returns the resultant VOI.
- getResultVOI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
Accessor that returns a voi that is a smoothed version of the original.
- getResultVOI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Accessor that returns the resultant VOI.
- getResultVOI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMinimumPerimeterPolygon
-
Accessor that returns a voi that is a smoothed version of the original.
- getResultVOI() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Returns the resultant VOI.
- getResultVOI() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
Returns the resultant VOI.
- getResUnits() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- getResX() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- getResY() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- getReversedOrderMesh() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Reverse the order of each triangle in the mesh.
- GetRGB() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the Volume RGBT.
- getRGB_OpacityA() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Returns the opacity transfer function via the ModelRGB object for image B.
- getRGB_OpacityA_GM() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Returns the opacity transfer function for the gradient magnitude image via the ModelRGB object for image A.
- getRGB_OpacityB() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Returns the opacity transfer function via the ModelRGB object for image B.
- getRGB_OpacityB_GM() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Returns the opacity transfer function for the gradient magnitude image via the ModelRGB object for image B.
- getRGBAverageIntensities() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
DOCUMENT ME!
- getRGBDialog() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Deprecated.
- getRGBPaintComponents() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- getRGBT() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Return the current ModelRGBT:.
- getRGBTa() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getRGBTa() - Method in class gov.nih.mipav.view.PatientSlice
-
Accessor that returns the RGBT for image A.
- getRGBTA() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Gets the RGB LUT table for ARGB image A.
- getRGBTA() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Get the RGB table of imageA.
- getRGBTA() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that returns the RGB table for image A.
- getRGBTA() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Accessor that returns the ModelRGB RGBTA for imageA.
- getRGBTA() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Gets the RGB LUT table for ARGB image A.
- getRGBTA() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the ModelRGB RGBTA for imageA.
- getRGBTA() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Get the RGB table for image A.
- getRGBTA() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Gets the RGB LUT table for ARGB image A.
- getRGBTA() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Gets the RGB LUT table for ARGB image A.
- getRGBTb() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- getRGBTb() - Method in class gov.nih.mipav.view.PatientSlice
-
Accessor that returns the RGBT for image B.
- getRGBTB() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Get the RGB table of imageB.
- getRGBTB() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that returns the RGB table for image B.
- getRGBTB() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Accessor that returns the ModelRGB for imageB.
- getRGBTB() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the ModelRGB for imageB.
- getRGBTB() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Get the RGB table for image B.
- getRGBTB() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Gets the RGB LUT table for ARGB image B.
- getRGBTB() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Deprecated.
- getRight() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- getRightCurve() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getRightList() - Method in class gov.nih.mipav.view.JPanelListController
-
Convience method to get list B.
- getRightPt() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns most right point marker for +acpc to +tlrc transformation in dicom ordering.
- getRightTable() - Method in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- getRightTree() - Method in class gov.nih.mipav.view.JPanelTreeController
-
Convience method to get Tree B.
- getRightVectors() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getRLCenter() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getRLETAMARencapsulatedOffset() - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
- getRNormal() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getRollAngleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
converted to degrees of clockwise camera rotation
- getRollAngleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getROn() - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Returns the boolean indicating if the red channel should be displayed.
- getRoot() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- getRoot() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Accessor that returns the root node for the light bulbs.
- GetRoot(RootInfo, float, int, Point3D, HashMap<Long, Pair<Float, Point3D>>, Point3D, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- GetRoot(RootInfo, float, Point3D, HashMap<Long, Pair<Float, Point3D>>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getRootBisection() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
Called by computeRadius, finds the root of the <= 8 degree polynomial through bisection method:
- getRootDir() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreePanel
-
- GetRootIndex(OctNode, int, int, int, RootInfo) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- GetRootIndex(OctNode, int, int, RootInfo) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- GetRootIndex(Long, HashMap<Long, Integer>, HashMap<Long, Integer>, CoredPointIndex) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- GetRootPair(RootInfo, int, RootInfo) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- getRootsOnInterval(float, float, float[], int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
afRoot should have length 2; returns number roots found, which are returned in the afRoot array.
- getRot() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
accessor for rot.
- getRot() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
accessor for rot.
- getRot() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
accessor for rot.
- getRot() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
accessor for rot.
- getRotAngle(Transform3D) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- getRotateBegin() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getRotateBeginX() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getRotateBeginY() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getRotateBeginZ() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getRotateEnd() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getRotateEndX() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getRotateEndY() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getRotateEndZ() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- getRotation() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- getRotation() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- GetRotation(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Returns the rotation between ref and this (in radians).
- getRotationBruteForce() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the rotation range for brute force registration:
- getRotationCutoffValue() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- getRotationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getRotationExtent() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getRotationScaleFactor() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- GetRotationTest(CAAMShape, CAAMShape) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Tests CAAMShape:GetRotation() for rotations in the range [0;360].
- getRound() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getRow() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexRowColItem
-
- getRow() - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- getRow(int) - Method in class gov.nih.mipav.model.structures.SortingTableModel
-
DOCUMENT ME!
- getRow(int) - Method in class gov.nih.mipav.view.ViewTableModel
-
- getRow(JTable, VOIWormAnnotation) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- GetRow(int, int, double[][][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- getRowBegin() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayItem
-
- getRowCount() - Method in class gov.nih.mipav.model.structures.TableSorter
-
TableModel interface methods.
- getRowDependent() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the row dependent flag.
- getRowFromID(int) - Static method in class gov.nih.mipav.view.DICOMDisplayer
-
Returns the row number that has a matching ID.
- getRowLength(int) - Method in class gov.nih.mipav.view.ViewTableModel
-
Gets the length of a row in the model
- getRows() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getRowsPerStripDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getrr() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns the location of the Talairach center in the dicom order +orig anatomical image in voxel indices.
- getrrArray() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns array of the location of the Talairach center in the dicom order +orig anatomical image in voxel indices.
- getRRCycles() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getRRHistogram() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getRSquared() - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
- getRX() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
X Rotation
- getRY() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Y Rotation
- getRZ() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Z Rotation
- getS() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Return the diagonal matrix of singular values
- getS15Fixed16() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Gets a s15.16 fixed point float from the buffer.
- getS15Fixed16(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Gets a s15.16 fixed point float from the buffer.
- getSafmin() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
- getSagittalComponentSlice() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Gets the x position of the slice.
- getSaliency() - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- getSampleFormatDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getSamplePoint(float, float, float) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Convert the input "real" coordinates into sample coordinates.
- getSamplePosition() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Return the interpolated sample coordinates in the volume of the current position along the path for viewing.
- getSampleSize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Get the sample factor.
- getSampleSize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Accessor that returns the sample size that created the quad mesh.
- getSamplesPerPixel() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSamplesPerPixelDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getSamplingPlanes(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getSamsungModelIdDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getSanyoQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getSAR() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSARMonitored() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSATSelections() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSaturationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getSaturationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getSaturationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getSaturationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getSaturationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getSaturationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getSATXLoc1() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSATXLoc2() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSATXThick() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSATYLoc1() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSATYLoc2() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSATYThick() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSATZLoc1() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSATZLoc2() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSATZThick() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSaveableImageFileFormats() - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
-
- getSaveAsEncapJP2() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- getSavedWidgetState() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Returns the widget state read from file, so it can initialize a new shader effect.
- getSaveImageOptions(ParameterTable, ModelImage, boolean) - Static method in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Create a new set of image saving options from a save action's parameters.
- getSaveListData() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Generates and returns the list data for the Source list from the dicom dictionary specified by the save panel as
a Vector of DicomTagIdentifier.
- getSaveTable() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Returns a hashtable of the keys and associated DICOM tags that are in the right-list.
- getSaveTagFilePanel() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Returns the SelectFileB panel.
- getSBuffer() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
DOCUMENT ME!
- getScalarNames() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getScale() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- getScale() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraRBF
-
- getScale() - Method in class gov.nih.mipav.model.file.FileAvi
-
- getScale() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- getScaledX(int) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Converts the screen cursor x-coordinate to scaled version using the
image's pixel resolution and zoom.
- getScaledY(int) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Converts the screen cursor y-coordinate to scaled version using the
image's pixel resolution and zoom.
- GetScaleMax() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
The ModelImage Volume max-scale factor.
- getScaleSlope() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getScaleStepsBruteForce() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the y scale range for brute force registration:
- getScaleType() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
Get the type of image scaling.
- GetScaleX() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
The ModelImage Volume x-scale factor.
- GetScaleY() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
The ModelImage Volume y-scale factor.
- GetScaleZ() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
The ModelImage Volume z-scale factor.
- getScalingFactor1() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getScalingFactor2() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getScanAcquisitionNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getScanARRs() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getScanDate() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get the date the image was taken.
- getScanID() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets the scan ID.
- getScanMatrixX() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getScanMatrixY() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getScannerCoordLPS(int, int, int, float[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Deprecated.
- getScannerCoordRAS(int, int, int, float[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Deprecated.
- getScannerPositionLabels(ModelImage, Vector3f) - Static method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Gets position data to display in message bar - for DICOM and MINC images, gives patient position as well.
- getScannerPositionLabels(Vector3f) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets position data to display in message bar - for DICOM and MINC images, gives patient position as well.
- getScannerQuantificationFactor() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getScanningSequence() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getScanningSequence() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getScanNum() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the current scannum string.
- getScanNum() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the current scannum string.
- getScanNum() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the current scannum string.
- getScanOptions() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getScanPercentage() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getScanProtocolName() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getScanTime() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get the time the image was taken.
- getScatterCorrected() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getScatterCorrectionMethod() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- GetScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Get the object's parent node in the scene graph.
- GetScene() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- getSceneCaptureTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getSceneModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getSceneModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getSceneModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getSceneRootTG() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Accessor for the transform group of the scene, which is the parent of everything displayed.
- GetSceneRotation() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- getSceneSelectDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getSceneState() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Gets the scene state in terms of slices visible, which slice number, etc.
- getSceneState() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Gets the scene state in terms of slices visible, which slice number, etc.
- getSceneState() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Gets the current scene state, in terms of what number the slice is on and if it is visible.
- getSceneState() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Gets the current scene state, in terms of what numbers the slices are on and whether or not they are visible.
- getSceneState() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Gets the current scene state, in terms of what numbers the slices are on and whether or not they are visible.
- getSceneState() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Gets the current scene state, in terms of what numbers the slices are on and whether or not they are visible.
- getSceneToWorldMatrix() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Get the world matrix.
- getSceneTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getSCenter() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getScIma() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSclInter() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Gets the data additive factor.
- getSclSlope() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Gets the data scaling multiplicative factor.
- getScore() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map.curvePair
-
- getScore() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale.curvePair
-
- getScore(ModelImage, ModelImage, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- getScore(ModelImage, ModelImage, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- getScoreMaxAbove(int, int, int, int, boolean[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- getScoreMaxBelow(int, int, int, int, boolean[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- GetScratchTarget() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- getScreenCoordinates(Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Accepts a point in volume space and converts it to screen space.
- getScreenRatioToComp(Component) - Method in class gov.nih.mipav.view.JScrollPopupMenu
-
- getScript() - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Returns the current script.
- getScriptableAction(String) - Static method in class gov.nih.mipav.model.scripting.ScriptableActionLoader
-
Returns a new instance of the class associated with a given script action.
- getScriptActionLocations() - Static method in class gov.nih.mipav.model.scripting.ScriptableActionLoader
-
Gets the script action location vector, needed for figuring out the possible short name of a non-MIPAV scriptable
tool.
- getScriptFile() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- getScriptFile() - Static method in class gov.nih.mipav.view.Preferences
-
DOCUMENT ME!
- getScriptImage(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- getScriptImageActions() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- getScriptImageLabels() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- getScriptImageVars() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- getScriptNodeChildCount() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Returns the number of child nodes the script node has
- getScriptsDirectory() - Static method in class gov.nih.mipav.view.Preferences
-
Returns the default script directory. if null, returns the user's current working directory + "scripts"
- getScriptVOI(String) - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- getScriptVOIs() - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- getScrollBar() - Method in class gov.nih.mipav.view.JScrollPopupMenu
-
- getScrollPane() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- getScrollPaneHeight() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Get the height of the scroll pane holding the component image.
- getScrollPaneSize() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Get the size of the scroll pane holding the component image.
- getScrollPaneSize(Dimension) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Return the preferred size for the component image scroll pane.
- getScrollPaneWidth() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Get the width of the scroll pane holding the component image.
- getScSer() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSculpt() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- getSculpt(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Get the sculpt on/off at the position.
- getSculptEnabled() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Returns true when sculpting is enabled.
- getSculptImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Return sculpt image for display.
- getSculptorPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return the sculptor panel.
- getSculptShape() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
- getSData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- getSData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- getSecond() - Method in class gov.nih.mipav.model.algorithms.BlindDeblur.Pair
-
- getSecond() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Pair
-
- getSecond() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.Triplet
-
- getSecond() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Pair
-
- getSecond() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Pair
-
- getSecondaryPluginsDir() - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- getSecondImage() - Method in class gov.nih.mipav.model.file.FileIO
-
Returns address of TIFF header of second image if present in CZ-Private Tag of LSM 510 file Returns zero if not
present.
- getSecondImage() - Method in class gov.nih.mipav.model.file.FileLSM
-
Accessor that returns the address of the TIF header of the second image if present Returns zero if not present.
- getSeconds() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- GetSeed(long[], long[], long[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- getSeedIntensity() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Get the current seed intensity.
- getSeedPoints() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Return the points that have been marked on the MIP as possible seed points.
- getSegImage() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Accessor that returns the image.
- getSegment(byte) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Gets the first JPEG segment data for the specified type.
- getSegment(byte, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Gets segment data for a specific occurrence and type.
- getSegment(float[], float[], int) - Method in class gov.nih.mipav.model.file.FileSVS
-
- getSegment(float[], float[], int) - Method in class gov.nih.mipav.model.file.FileTiff
-
- getSegment(float[], float[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- getSegment(MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Gets the first JPEG segment data for the specified type.
- getSegment(MetadataExtractor.JpegSegmentType, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Gets segment data for a specific occurrence and type.
- getSegmentationImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return the segmentation region map image which contains info on where the vascualture, etc are located.
- getSegmentationImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return the segmentation region map image which contains info on where the vascualture, etc are located.
- getSegmentationImage() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Return the segmentation region map image which contains info on where the vascualture, etc are located.
- getSegmentCount(byte) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Returns the count of segment data byte arrays stored for a given segment type.
- getSegmentCount(MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Returns the count of segment data byte arrays stored for a given segment type.
- getSegmentList(byte) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
- getSegments() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- getSegments(byte) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Returns all instances of a given JPEG segment.
- getSegments(MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Returns all instances of a given JPEG segment.
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegReader
-
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DuckyReader
-
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifReader
-
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccReader
-
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcReader
-
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifReader
-
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfxxReader
-
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegCommentReader
-
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDhtReader
-
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDnlReader
-
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegReader
-
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Gets the set of JPEG segment type identifiers.
- getSegmentTypes() - Method in interface gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentMetadataReader
-
Gets the set of JPEG segment types that this reader is interested in.
- getSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopReader
-
- getSelected() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
- getSelected() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- getSelected() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- getSelected(int, int, JTable, VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- getSelected(String, VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- getSelectedBorderColor() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Returns the color of the selected image border.
- getSelectedBranchIndex() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Access the index of the currently selected branch at a branch point.
- getSelectedBranchIndex() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Access the index of the currently selected branch at a branch point.
- getSelectedComponent() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Return the selected tabbbed pane component.
- getSelectedComponent() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Return the selected tabbbed pane component.
- getSelectedComponent(int) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Return the active image component.
- getSelectedComponent(int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Return the active image component.
- getSelectedFile() - Method in class gov.nih.mipav.view.JPanelFileSelection
-
we are enforcing existance at the calling/owning object level this panel doens't care if the file exists, nor if
there are read rights or write rights there. returns the File pointed to by the text field, unless it is empty;
at that point, we assume the file chooser was used to point to a file and the chosen file is stored there.
- getSelectedFileNames() - Method in interface gov.nih.mipav.view.FileSelector
-
Returns the selected file names.
- getSelectedFileNames() - Method in class gov.nih.mipav.view.FileSelectorImpl
-
- getSelectedFiles() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- getSelectedGrouping() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- getSelectedImage() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Returns an integer which represents the image that is selected.
- getSelectedKeys() - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
Method to retrieve the private keys selected in this
panel.
- getSelectedKeys() - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- getSelectedKeysBool() - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
Alternate method for retrieving private keys that were
selected.
- getSelectedKeysBool() - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- getSelectedList() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Accessor to the list used to display the selected list.
- getSelectedList() - Method in class gov.nih.mipav.view.JPanelChecklist
-
Returns a new list of all checkboxes selected.
- getSelectedList(int) - Method in class gov.nih.mipav.view.JPanelChecklist
-
Returns whether or not a particular checkbox has been selected.
- getSelectedList(String) - Method in class gov.nih.mipav.view.JPanelChecklist
-
Returns whether or not a particular checkbox has been selected.
- getSelectedLUT() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Returns which LUT is currently visible.
- getSelectedNodes(JTree) - Method in class gov.nih.mipav.view.JPanelTreeController
-
- getSelectedPaintColor(ViewJFrameBase) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Gets the color of the paint the user has selected from the paint
toolbar.
- getSelectedPanel() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Returns the currently selected interface panel.
- getSelectedPlugins() - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
- getSelectedPoint() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the last selected point.
- getSelectedScriptFileName() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Returns the full path and file name of the currently selected script file in the scripting toolbar.
- getSelectedSequence() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- getSelectedSurface() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Return the name of the selected surface.
- getSelectedSurfaces() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Return the names of the selected surfaces.
- getSelectedSurfaces(int[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Returns an array of SurfaceAttributes based on which surfaces are selected by the user in the surfaceList
combo-box.
- getSelectedTabIndex() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Returns the index of the selected panel in the tabbed pane.
- getSelectedTabIndex() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
- getSelectedVOI(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- getSelection() - Method in class gov.nih.mipav.view.dialogs.JDialogLivewire
-
Accessor that returns the selected cost function.
- getSelection(String, double[][], Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- getSelectionModel() - Method in class gov.nih.mipav.view.CheckTreeManager
-
- getSelectionOffset() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- getSelfTimerDelayDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getSelfTimerDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getSelfTimerDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getSelfTimerDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getSensingMethodDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getSensitivityTypeRangeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getSensorTemperatureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- getSeparateLUT() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- getSeqTagList() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns a list of the sequence tags in this tag table (and reference tag table).
- getSequence() - Method in class gov.nih.mipav.model.file.FileDicomSQ
-
- getSequence(boolean, int) - Method in class gov.nih.mipav.model.file.FileDicom
-
Gets the sequence in a sequence tag.
- getSequenceDisplay() - Method in class gov.nih.mipav.model.file.FileDicomSQ
-
Gets a series of Strings that are the human readable version of the data.
- getSequenceLength() - Method in class gov.nih.mipav.model.file.FileDicomSQ
-
Gets the length of the sequence vector.
- getSequenceName() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSequenceNumberDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getSequenceShotIntervalDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getSequenceTags() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
Method to retrieve the sequence tags from the file info.
- getSequenceTags(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
- getSequenceValues() - Method in class gov.nih.mipav.model.file.FileDicomSQItem
-
Return the tag values store in this sequence tag.
- getSequenceVariant() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSequentialShotDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getSerialNumberDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getSeries() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesDate() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesDescription() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesHeaderBlocks() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesHeaderID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesHeaderRevisionNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesInstanceUID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
Gets the Series Instance UID.
- getSeriesNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesNumber() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSeriesProcessName() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesPSDName() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesRawDataSystemID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesSystemGenerationID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesTaskID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesTime() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSeriesTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSeriesType() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSessionErr() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provide the value of session err.
- getSessionErr() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provide the value of session err.
- getSessionErr() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provide the value of session err.
- getSex() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get subject's sex (optional).
- GetShaderEffect() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Returns the VolumeShaderEffect.
- getShadingCompensation2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDescriptor
-
- getShadingCompensationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getShadingCompensationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getShape() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
Return access to the shape for rendering the annotated point.
- getShape() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
returns the array of Shape3D objects.
- getShape(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
-
DOCUMENT ME!
- getShape(BranchGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Get the shape of the burning point surface.
- getShape(BranchGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Get the shape burning point surface.
- getShapeFunctionsInZeroToOneInterval() - Method in class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- getShapesAtSlice(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
-
DOCUMENT ME!
- getSharpnessCameraSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getSharpnessDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getSharpnessDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getSharpnessDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getSharpnessDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getSharpnessDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getSharpnessDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDescriptor
-
- getSharpnessDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getSharpnessDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getSharpnessSettingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getShootingModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getShootingModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getShort(int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets a short value at position in the data array.
- getShort(int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Gets the data in short format.
- getShort(int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Gets the data in short format.
- getShort(int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Gets the data in short format.
- getShort(int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Gets the data in short format.
- getShort(int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Gets the data in short format.
- getShort(int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Gets the data in short format.
- getShort(int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Gets the data in short format.
- getShort(int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Gets the data in short format.
- getShort(int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Gets the data in short format.
- getShort(int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Gets the data in short format.
- getShort(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of get that does NOT perform bounds checking.
- getShort(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD get data fuction where bounds checking is NOT performed.
- getShort(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is NOT performed.
- getShort(int, int, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a length of the data and deposits it into a single Short or an array of Short as needed by the tag's VM.
- getShort(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D get data fuction where bounds checking is NOT performed.
- getShort(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is NOT performed.
- getShort(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the signed short value of one of the parameters from the table.
- getShortBiLinear(float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs bi-linear interpoloation.
- getShortBuffer() - Method in class gov.nih.mipav.model.file.FilePackBit
-
Gets the short buffer of the image.
- getShortBuffer() - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Gets the short buffer (image).
- getShortcut(String) - Static method in class gov.nih.mipav.view.Preferences
-
Returns a keystroke shortcut for the given command.
- getShortcutCommand(KeyStroke) - Static method in class gov.nih.mipav.view.Preferences
-
Gets the command associated with the shortcut (if there is one).
- getShortDescription(int) - Static method in class gov.nih.mipav.view.ViewImageFileFilter
-
Returns the dshort escription of the given file filter.
- getShortFocalLengthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getShortLabel() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getShortLabel() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getShortMask() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Gets the mask image (array of short values).
- getShortOp() - Method in enum gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- getShortTriLinear(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs tri-linear interpoloation.
- getShowBound(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
- GetShowBoundingBox(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Return the current display status for the bounding box for the given plane.
- getShowMagIntensityEnabled(int, int, float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Determines whether to enable the showIntensity checkbox for magnification box.
- getShowMagIntensityEnabled(Graphics, int, int, float, int, double, double) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Returns whether to enable the showIntensity checkbox for mag. box
- getShowOrientationCube() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- getShowSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
- GetShowSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Return the current display status for the bounding box for the given plane.
- getShutterModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDescriptor
-
- getShutterSpeedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getShutterSpeedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getShutterSpeedDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getShutterTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getSICenter() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSigma() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
-
- getSigmaU() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
returns standard deviation U of filter.
- getSigmaV() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
returns standard deviation V of filter.
- getSignaFileFormat() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSignedByte() - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads signed bytes from file.
- getSignedDistanceImage() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Get the signed distance transform.
- getSignedDistanceMask() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Get the signed distance transform mask.
- getSignedShort(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Reads two byte signed short from file.
- getSignedShort(boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads two byte signed short from file.
- getSimpleRational(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getSimpleString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getSimplifiedInstance() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
- getSimplifiedInstance_FlipsSignsIfNeeded() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RationalTest
-
- getSimplifiedInstance_RemovesSignsIfNeeded() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RationalTest
-
- getSinc(float[], double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- getSingularValues() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Return the one-dimensional array of singular values
- getsize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.uni_elt
-
- getSize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
- getSize() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the size of the slice image in byte which represented by this object.
- getSize() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the total size(length) of the data array.
- getSize() - Method in class gov.nih.mipav.model.structures.VOI
-
Returns the number of contours in this VOI.
- getSize(int) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- getSize(Dimension) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Gets the size of the object taking into account the zoom.
- getSize(Dimension) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Gets the size of the object taking into account the zoom.
- getSize(Dimension) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
gets the size of the object taking into account the zoom.
- getSize(Dimension) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Gets the size of the object taking into account the zoom.
- getSize(Dimension) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Gets the size of the object taking into account the zoom.
- getSizeArray() - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- getSizeOfExportedDicomTags(Hashtable<String, Hashtable<String, String>>) - Method in class gov.nih.mipav.model.file.FileMinc
-
Get the size, in bytes, of the data which would be written to the header to store a set of dicom tags.
- getSizeOfHeader() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the current scannum string.
- getSizeOfHeader() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- getSizeOfHeader() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the current scannum string.
- getSizeOfHeader() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- getSizeOfWrittenName(String, int) - Method in class gov.nih.mipav.model.file.FileMinc
-
Returns the number of bytes that would be written to disk by calling writeName() on a given
string.
- getSkeletonizedArray(int, float) - Method in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Given previously determined starting point, compute the tree-structured skeleton path through the volume where no
branch is shorter than the specified amount.
- getSkewness() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the coefficient of skewness of the pixel values in the VOI
- getSkewnessB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the coefficient of skewness of the blue pixel values in the VOI
- getSkewnessG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the coefficient of skewness of the green pixel values in the VOI
- getSkewnessR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the coefficient of skewness of the red pixel values in the VOI
- getSlice() - Method in class gov.nih.mipav.model.file.FileUtility.nameSliceItem
-
- getSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- getSlice() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Returns the currently displayed image slice.
- getSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- getSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- getSlice() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the slice of the image.
- getSlice(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
-
DOCUMENT ME!
- getSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Get the current slider value for the slider that matches the
orientation input parameter.
- getSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Get the current slider value for the slider that matches the
orientation input parameter.
- getSlice(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- getSlice(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Returns the slice of the input VOI in the patient coordinates displayed locally.
- getSliceA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get arbitray slider value.
- getSliceAngulation() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getSliceAngulation() - Method in class gov.nih.mipav.model.file.FileInfoSPAR
-
- getSliceCode() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- getSliceContourStatistic(String, int, String) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
Gets the statistic for a particular contour on a particular slice of a VOI.
- getSliceCurves(int) - Method in class gov.nih.mipav.model.structures.VOI
-
Returns a list of contours on a given slice.
- getSliceCurves(int, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Returns a list of contours for the given image orientation and slice.
- getSliceDim() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- getSliceDuration() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
provides the sliceDuration value.
- getSliceEnd() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- getSliceFileInfo(int, int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Build and return the fileInfo for the current slice based on the source slice, the destination slice and time
slice.
- getSliceInfo() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getSliceLocation() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSliceMultiplier() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSliceNumber() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- GetSliceOpacity() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- GetSliceOpacity(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Return the opacity for the given plane.
- getSliceOrient() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getSliceOrientation() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- getSlicePanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
return the current active slicePanel interface.
- getSlicePanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
return the current active slicePanel interface.
- getSlicePos(int) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- getSliceQuantity() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSliceRangeString(boolean[]) - Static method in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Converts from a boolean array marking which slices should be extracted to a (more compact) range string
indicating which slices should be extracted.
- getSlicesCheck() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Get the slice check box.
- getSlicesDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getSliceSize() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Get the nuber of pixels in a slice of the image.
- getSliceSize(int) - Method in class gov.nih.mipav.model.structures.VOI
-
Returns the number of contours for a given slice.
- getSliceSize(int, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Returns the number of contours for a given image orientation and slice in a 3D image.
- getSliceSpacingCoarse() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Retrieve the current "coarse" spacing between slices.
- getSliceSpacingCoarse() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Retrieve the current "coarse" spacing between slices.
- getSliceSpacingFine() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Retrieve the current "fine" spacing between slices.
- getSliceSpacingFine() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Retrieve the current "fine" spacing between slices.
- getSliceStart() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- getSliceStatistic(String, int) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
Gets the statistic for all the contours of a VOI that exist on a particular
slice.
- getSliceStructure() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageAttribute
-
- getSlicesWithTimeOffsets() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Gets slicesWithTimeOffsets.
- getSliceThickness() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the thickness of the image slices.
- getSliceThicknessDisclaimer() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSliceX() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get x slider value.
- getSliceXInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get x negative slider value.
- getSliceY() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get y slider value.
- getSliceYInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get y negative slider value.
- getSliceZ() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get z slider value.
- getSliceZInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get z negative slider value.
- getSliderA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get arbitrary slider.
- getSliderEvents() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
- getSliderX() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get x slider.
- getSliderX() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Return the X slider.
- getSliderX() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Return the X slider.
- getSliderXInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get x negative slider.
- getSliderY() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get y slider.
- getSliderY() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Return the Y slider.
- getSliderY() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Return the Y slider.
- getSliderYInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get y negative slider.
- getSliderZ() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get z slider.
- getSliderZ() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Return the Z slider.
- getSliderZ() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Return the Z slider.
- getSliderZInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Get z negative slider.
- getSlopeSel(double[][], Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- getSlowSyncDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- GetSmallest() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Get the smallest model
- getSmallestImagePixelValue() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSmallestMagnitudeNegative() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the smallest magnitude negative value in the dataArray.
- getSmallestMagnitudeNegativeB() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the smallest magnitude negative blue value in the dataArray.
- getSmallestMagnitudeNegativeG() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the smallest magnitude negative green value in the dataArray.
- getSmallestMagnitudeNegativeR() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the smallest magnitude negative red value in the dataArray.
- getSmallestMagnitudePositive() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the smallest magnitude positive value in the dataArray.
- getSmallestMagnitudePositiveB() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the smallest magnitude positive blue value in the dataArray.
- getSmallestMagnitudePositiveG() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the smallest magnitude positive green value in the dataArray.
- getSmallestMagnitudePositiveR() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the smallest magnitude positive red value in the dataArray.
- getSmartRangeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getSmax() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides current smax value.
- getSmax() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides current smax value.
- getSmax() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides current smax value.
- getSmin() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides current smin value.
- getSmin() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides current smin value.
- getSmin() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides current smin value.
- getSNormal() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSOF(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Get the SOF part of header.
- getSoftSkinEffectDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getSoftwareLightsModel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Get the software light model.
- getSoftwareLightsWorld() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Get the software light world.
- getSoftwareVersions() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSolidity() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the solidity of the VOI.
- getSolutions(double, Vector<Double>, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- getSolutions(double, Vector<Double>, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- getSolValue() - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- getSolverType() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
- getSolX() - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- getSonyExposureTimeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDescriptor
-
- getSonyModelIdDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getSOPInstanceUID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
Gets the SOP Instance UID.
- getSortedCurves(int) - Method in class gov.nih.mipav.model.structures.VOI
-
Sorts the contours based on the image default orientation.
- getSortedCurves(int, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Sorts the contours based on a given image orientation and the desired image depth for that orientation.
- getSortingStatus(int) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- getSOS(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Get the SOS part of header.
- getSource() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- getSource() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Returns the underlying image of this pixel (the image referenced by this pixel)
- getSource() - Method in class gov.nih.mipav.model.structures.UpdateVOIEvent
-
DOCUMENT ME!
- getSource() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- getSourceActions(JComponent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler
-
DOCUMENT ME!
- getSourceBitPix() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
accessor to the sourceBitPix value.
- getSourceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getSourceFile() - Method in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- getSourceList() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Accessor to the list used to display the Source.
- getSourceListData() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Generates and returns the list data for the Source list from the dicom dictionary as a Vector of
DicomTagIdentifier.
- getSourceType() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
accessor to coded datatype value.
- getSouth() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- getSp() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
- getSpaceNavValues() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Helper method
sets the values tX, tY, tZ, rX, rY, and rZ to the current space navigator values normalized on a -100 to 100 scale.
- getSpaceSize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Get the raytrace region space size.
- getSpaceSize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Get the ray trace space size.
- getSpacingBetweenSlices() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSpecialInstructionsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getSpecialModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getSpecialNumberString() - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns the string for this value if it has a known representation.
- getSpecificCharacterSet() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSpectStudyGeneral() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getSpectStudyReconstructedData() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getSpecular() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Query current optional specular color for vertex.
- getSphere() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- getSphereBG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
The the burning point geometry sphere branch group.
- getSphereBG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Get the current burning point brach group.
- getSphereCoordinates() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getSplineCurves() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- getSplineCurves() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getSpliteratorMinimumSplitSize() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Returns the minimum number of elements in a split of a Spliterator
of this Img.
- getSpliteratorMinimumSplitSize() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Returns the minimum number of elements in a split of a Spliterator
of this Img.
- getSplitValues() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getSplitValues() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- getSplitVarIDs() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getSplitVarIDs() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- getSpotFocusPointXCoordinateDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getSpotFocusPointYCoordinateDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getSpotMeteringModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- GetSquared(Vector3f, Ellipsoid3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getSRawQualityDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getSrcImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Gets the current source image for the algorithm
- getSrcImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
Returns the source image.
- getSrcImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
DOCUMENT ME!
- getSrcImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
DOCUMENT ME!
- getStackedImageDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getStackTrace(Throwable) - Static method in class gov.nih.mipav.util.MipavExceptionHandler
-
- getStartAdjust() - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- getStartCalendar() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets all the starting date of the patient's study from the all three comboboxes.
- getStartDay() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets the starting day of the study in the startDayBox combobox.
- getStartEnd(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
In livewire mode the endpoints of each path segment along Dijkstra's curve -- between each of the user-selected
points -- are stored so that the smoothed geodesic may be calculated and displayed later.
- getStartEnd(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
In livewire mode the endpoints of each path segment along Dijkstra's curve -- between each of the user-selected
points -- are stored so that the smoothed geodesic may be calculated and displayed later.
- getStartField() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the current value for the start_field.
- getStartField() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the current value for the start_field.
- getStartField() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the current value for the start_field.
- getStartHorizontalBedPosition() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getStartLocation() - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
DOCUMENT ME!
- getStartLocation() - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- getStartLocations() - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Accessor that gets the "start" variable values, with the "xspace" in 0, "yspace" in 1, and "zspace" in 2.
- getStartMonth() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets the starting Month of the study in the startMonthBox combobox.
- getStartNumber() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns the number to append to the multi file save (i.e., if you want test00.tif to be the first
file, 0 is the start number and 2 is the digit number).
- getStartPoint() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get the start point world coordinate vector.
- getStartPointCoordinate() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Get the start point transform.
- getStartRange() - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Gets the starting range of pixels.
- getStartSlice() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- getStartupFile() - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
This method returns the startup file which contains the MIPAV start-up options.
- getStartX() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getStartY() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getStartYear() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets the starting year of the study in the startYearBox combobox.
- getStartZ() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getState() - Method in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- getState() - Method in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- getState() - Method in class gov.nih.mipav.model.structures.event.VOIEvent
-
if the VOI were to have state, this would return it. currently returns true
- getState() - Method in class gov.nih.mipav.model.structures.event.VOIVectorEvent
-
if the VOIVector were to have state, this would return it. currently returns true
- getState() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Returns the state at the beginning of events.
- getState() - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Returns the state at the beginning of events.
- getState() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
This method returns the memory state of the allocator.
- getState() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Returns the current state of the widget shader effect.
- getState() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Returns the current ClassificationWidgetState GLSL Shader program parameters.
- GetState(double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- getStateDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getStateVector() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Returns the state vector.
- getStateVector() - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Returns the state vector.
- getStaticInvVisible() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Return check box static inverse selection value.
- getStaticName() - Static method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Return the name of the particular registration measure without having an instance.
- getStaticName() - Static method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureLeastSquares
-
Return the name of the particular registration measure without having an instance.
- getStaticName() - Static method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Return the name of the particular registration measure without having an instance.
- getStaticStudyGeneral() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getStaticVisible() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Return check box static selection value.
- getStats(Vector<VOIContour>) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileFiberTrack
-
Gets the stats.
- getStatsData(Vector<VOIStatisticalProperties>, VOIVector, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Generate the VOI shape statistics.
- getStatsData(Vector<VOIStatisticalProperties>, VOIVector, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Generate the VOI shape statistics.
- getStatsData(Vector<VOIStatisticalProperties>, VOIVector, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Generate the VOI statistics data.
- getStatus() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- getStatus() - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- getStatusVarId() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- getStdDev() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the standard deviation of image intensities return standard deviation of image intensities defined by the
VOI.
- getStdDevB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the get standard deviation of image intensities (blue channel) return standard deviation of image
intensities defined by the VOI.
- getStdDevCurvature() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- getStdDevG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the standard deviation of image intensities (green channel) return standard deviation of image intensities
defined by the VOI.
- getStdDeviation() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getStdDeviationB() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getStdDeviationG() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getStdDeviationR() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getStdDevR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the standard deviation of image intensities (red channel) return standard deviation of image intensities
defined by the VOI.
- getStdSkewStatistics(AlgorithmVOIProps.Calc34D.ContourStats, Vector<Vector3f>, String, String, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
Calculates the standard deviation, coefficient of skewness, coefficient of kurtosis and center of mass
for a grayscale image.
- getStdSkewStatisticsRGB(AlgorithmVOIProps.Calc34D.ContourStats, Vector<Vector3f>, String, String, float, float, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
Calculates the standard deviation, coefficient of skewness, coefficient of kurtosis and center of mass
for a color image.
- getStepSize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Get raytrace step size.
- getStepSize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Get the ray trace step size.
- getStereo() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- getStereographicRadius() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
support for unfolding.
- getStereographicRadius() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
support for unfolding.
- getStiffness() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution.
- getStiffness() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution.
- getStiffness() - Method in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Accessor that returns the stiffness.
- getStopSlice() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- getStr(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Retrieves a string value from a DICOM object.
- getStraightAnnotationsPath(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- getStreams() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
Return the ImageSourceStreams.
- getStreams() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
Return the ImageSourceStreams.
- getStretched() - Method in class gov.nih.mipav.view.Rubberband
-
Returns the stretched point of the rubberband.
- getString(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
Reads a string from a file of given length.
- getString(int) - Method in class gov.nih.mipav.model.file.FileBase
-
Reads a string from a file of given length.
- getString(int) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads a string from a file of given length.
- getString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the specified tag's value as a String.
- getString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
- getString(int, int, String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
- getString(int, int, Charset) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
- getString(int, String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
- getString(int, String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
- getString(int, Charset) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
- getString(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the string value of one of the parameters from the table.
- getString(cl_device_id, int) - Static method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Returns the value of the device info parameter with the given name
- getString(cl_platform_id, int) - Static method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Returns the value of the platform info parameter with the given name
- getStringArray(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Gets the specified tag's value as a String array, if possible.
- getStringFromBytes(int, Charset) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getStringFromFile(int) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads a string from a file of given length.
- getStringFromInt32(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccReader
-
- getStringValue(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
- getStringValue(int, int, Charset) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
- getStringValue(int, Charset) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
- getStringValueArray(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Gets the specified tag's value as a StringValue array, if possible.
- getStringValueOfKey(String) - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- getStripByteCountsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getStripSize(ModelImage, int, int) - Method in class gov.nih.mipav.model.file.FilePackBit
-
This method returns the packed bit strip size.
- getStrokeLength() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
Returns the stroke length in pixels, which is by default 16 pixels.
- getStrokePattern() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- getStudyDate() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getStudyDate() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getStudyDescription() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getStudyDuration() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getStudyHeaderBlocks() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getStudyHeaderID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getStudyHeaderRevisionNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getStudyID() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getStudyInstanceUID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
gets the Study Instance UID.
- getStudyNo() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Gets the study id from the studyNOText field.
- getStudyNumber() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getStudyTaskID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getStudyTime() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getStudyTime() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getStudyTime() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getSubElements() - Method in class gov.nih.mipav.view.JScrollMenu
-
- getSubfileTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getSubjectDistanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getSubjectDistanceRangeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getSubjectID() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get's the subject's ID.
- getSubjectName() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Get's the subject's name.
- getSubjectProgramDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getSubsample() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get whether or not subsampling occurs.
- getSubSample() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Accessor that gets the subsample size.
- getSubsampleDimension() - Method in class gov.nih.mipav.view.ViewFileChooserSubsample
-
DOCUMENT ME!
- getSubsampleDimensions() - Static method in class gov.nih.mipav.view.Preferences
-
Used by ViewOpenImageSequence to get the subsample dimensions that were saved in the preferences file.
- getSubsetDicomTagTable() - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Returns a reference to the subset dicom tag table.
- getSubsetDicomTagTable(boolean) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Returns a reference to the subset dicom tag table.
- getSubtype() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- getSucceeded() - Static method in class gov.nih.mipav.view.DICOMDisplayer
-
Static method that returns a boolean indicating if the program succeeded in saving the images to the home
directory.
- getSuccess() - Method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- getSuffix() - Method in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
Accessor that returns the suffix.
- getSumIntensities() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
get sum intensities
- getSumIntensities() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the sum of image intensities defined by the VOI
- getSumIntensitiesB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
get sum intensities B
- getSumIntensitiesB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the sum of blue channel mage intensities defined by the VOI
- getSumIntensitiesG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
get sum intensities G
- getSumIntensitiesG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the sum of green channel image intensities defined by the VOI
- getSumIntensitiesR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
get sum intensities R
- getSumIntensitiesR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the sum of red channel image intensities defined by the VOI
- getSumPixelInten() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getSumPixelIntenB() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getSumPixelIntenG() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getSumPixelIntenR() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- getSuperiorEdge() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns AC superior edge marker point for +orig to +acpc transformation in dataset ordering.
- getSuperiorPt() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns most superior point marker for +acpc to +tlrc transformation in dicom ordering.
- getSupplementalCategoriesDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getSuppressionTechnique() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSurface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Access the surface to be rendered when moving along the path.
- getSurface(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Returns a SurfaceLink to a surface attached to this image.
- getSurface(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Return the TriMesh surface with the given name.
- getSurfaceArea() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the surfaceArea of the VOI; return surfaceArea defined by the VOI.
- getSurfaceArea() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getSurfaceArea() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- getSurfaceArea(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Return the size of the surface-area of the given surface.
- getSurfaceArea(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Return the surface area for the given TriMesh surface.
- GetSurfaceArea() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Return the surface area.
- getSurfaceAreaString(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Return the size of the surface-area of the given surface.
- getSurfaceAreaString(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Return the surface area for the given TriMesh surface.
- GetSurfaceAreaString() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Return the surface area.
- getSurfaceBoxPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Get the surface box control ???
- getSurfaceCenter(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Return the center of the TriMesh surface.
- getSurfaceCheck() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Get the surface check box.
- getSurfaceClipCB() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Get the surface clip check box.
- getSurfaceCoilIntensityCorrection() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSurfaceCoilsCorrectionType() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSurfaceCoilType() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSurfaceControl() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- getSurfaceCurvatures() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Access the computed curvatures for the specified triangle mesh surface.
- getSurfaceDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return surfacePanel from parent frame.
- getSurfaceDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return surfacePanel from parent frame.
- getSurfaceFileName() - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Return .sur file reference name.
- getSurfaceKeys() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets paths to surface files for this image.
- getSurfaceList() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Get the reference to the surface list.
- getSurfaceMask() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Returns the SurfaceMask object.
- getSurfaceMask(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the surface mask from this image.
- getSurfaceMaskColor(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the surface mask from this image.
- getSurfaceOpacity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Get the current surface opacity value.
- getSurfacePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Return the surface panel.
- getSurfaceRender() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelRendererJ3D
-
Accessor to set the render base object This reference used to update volumes according to the render view base
instance type.
- getSurfaces() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Returns the surface hashtable for this image.
- getSurfaceStates() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- GetSurfaceTarget() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the surface mask Texture.
- getSurfaceTexture() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Returns the surface texture panel interface.
- getSurfaceTexture() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Returns the surface texture panel interface.
- getSurfaceTexturePanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Returns the surface texture panel mainPanel interface.
- getSurfaceTexturePanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Returns the surface texture panel mainPanel interface.
- getSurfaceVector() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Return the surface vector reference.
- getSurfaceVolume(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Return the volume of the TriMesh surface.
- getSurfaceVolumeString(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Return the volume of the TriMesh surface.
- getSVNChangedDate(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Get the date from auto populated SVN date string.
- getSVNRevisionNum(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Get the revision number from auto populated SVN revision string.
- getSwappedVolume() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Return the images extracted from the source image.
- getSwapPF() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSwapXY() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getSwapXZ() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getSwapYZ() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getSweepPanoramaDirectionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getSystemConfigHospitalName() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSystemGenerationID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getSystemID() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getT() - Method in class gov.nih.mipav.model.algorithms.ODE
-
- getT() - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- getT1ResultStack() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- getT2ResultStack() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- getTabbedPane() - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- getTabbedPane() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Accessor to the tabbed pane.
- getTabbedPane() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Accessor to the tabbed pane.
- getTabbedPane() - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
- getTable() - Method in class gov.nih.mipav.model.file.XMLPSet
-
Gets the hashtable of parameters.
- getTable() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay
-
Gets the table of parameters.
- getTable() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay
-
Gets the table of surfaces.
- getTable(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- getTableCellEditorComponent(JTable, Object, boolean, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- getTableCellRendererComponent(JTable, Object, boolean, boolean, int, int) - Method in class gov.nih.mipav.model.structures.TableSorter.SortableHeaderRenderer
-
DOCUMENT ME!
- getTableCellRendererComponent(JTable, Object, boolean, boolean, int, int) - Method in class gov.nih.mipav.view.AlternatingTableCellRenderer
-
DOCUMENT ME!
- getTableCellRendererComponent(JTable, Object, boolean, boolean, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D.JButtonCellRenderer
-
- getTableCellRendererComponent(JTable, Object, boolean, boolean, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D.JButtonCellRenderer
-
- getTableCellRendererComponent(JTable, Object, boolean, boolean, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D.JButtonCellRenderer
-
- getTableCellRendererComponent(JTable, Object, boolean, boolean, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxRenderer
-
- getTableCellRendererComponent(JTable, Object, boolean, boolean, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TagCodeRenderer
-
- getTableCellRendererComponent(JTable, Object, boolean, boolean, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TagReferenceRenderer
-
- getTableCellRendererComponent(JTable, Object, boolean, boolean, int, int) - Method in class gov.nih.mipav.view.MIPAVTableCellRenderer
-
DOCUMENT ME!
- getTableClass() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- getTableDestinationId() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- getTableHeader() - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- getTableIntLog() - Static method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
DOCUMENT ME!
- getTableLength() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- getTableLocation() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getTableModel() - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- getTablePosition() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getTables() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- getTag() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.DicomTagIdentifier
-
Accessor to the DICOM tag held.
- getTag() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- getTagAfPointsInFocus() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getTagCount() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the number of tags set in this Directory.
- getTagDataString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- getTagElem(String) - Static method in class gov.nih.mipav.model.file.FileInfoMinc
-
Extract the element identifier (removing the group id).
- getTagGroup(String) - Static method in class gov.nih.mipav.model.file.FileInfoMinc
-
Extract the group to which a dicom or minc element belongs to.
- getTagKey() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
returns the key to the edited tag (group,element) for the tag (ie., "0010,0040").
- getTagKey() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
returns the key to the edited tag (group,element) for the tag (ie., "0010,0040").
- getTagKey() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
returns the key to the edited tag (group,element) for the tag (ie., "0010,0040").
- getTagList() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Deprecated.
- getTagList() - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- getTagList() - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- getTagListCopy() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns a copy of all of the tags in this table, including tags from the reference tag table.
- getTagListTextField() - Method in interface gov.nih.mipav.view.dialogs.DicomTagSelectorImpl
-
- getTagListTextField() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- getTagListUnique() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns only the tags stored directly in this tag table, not including tags from the reference tag table.
- getTagName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Tag
-
Get the name of the tag, such as Aperture, or
InteropVersion.
- getTagName() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- getTagName(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns the name of a specified tag as a String.
- getTagName(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ErrorDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Provides the map of tag names, hashed by tag type identifier.
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DuckyDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ErrorDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifIFD0Directory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifImageDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifInteropDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifThumbnailDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FileSystemDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifAnimationDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifCommentDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfxxDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegCommentDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KyoceraMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PrintIMDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.RicohMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType6MakernoteDirectory
-
- getTagNameMap() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.MockDirectory
-
- getTags() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Returns an Iterator of Tag instances that have been set in this Directory.
- getTagTable() - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Returns a reference to the tag table for this dicom file info.
- getTagTable() - Method in interface gov.nih.mipav.view.dialogs.DicomTagSelectorImpl
-
- getTagTable() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- getTagType() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Tag
-
Gets the tag type as an int
- getTagTypeHex() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Tag
-
Gets the tag type in hex notation as a String with padded leading
zeroes if necessary (i.e.
- getTagValue() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- getTagVids(Vector<Integer>, String, Vector<Vector<String>>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- getTalairachCenter() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns Talairach center for +acpc to +tlrc transformation in dicom ordering.
- getTalairachTransformInfo() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns the talairach transform information.
- getTarget() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query the current target of the light.
- getTarget() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Returns the TransformGroup this behavior acts on.
- getTarget() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Returns the TransformGroup this behavior acts on.
- getTargetSurface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Return the currently targeted surface.
- getTAxisOffsets() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Gets time axis offsets.
- getTE() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getTE2() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getTeleconverterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getTemperatureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getTensorImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
Return the tensor image.
- getTerminalClassCounts() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- getTerminalClassCounts() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- GetTestFrameRate() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
- GetTestFrameRate() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
- getTexCoord(ModelTriangleMesh, int[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Calculates and returns the start point texture coordinate for a new
starting point inside an existing triangle.
- getTexCoord(ModelTriangleMesh, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Get the the triangle texture coordinate from the given triangle index.
- getTexCoord(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- getTexCoord(TriMesh, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Calculates and returns the start point texture coordinate for a new
starting point inside an existing triangle.
- getTexCoord(TriMesh, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Get the the triangle texture coordinate from the given triangle index.
- getTexCoordCopy() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Make a copy of the texture coordinates of a triangle mesh.
- getTexCoordGeneration() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Access automatic texture coordinate generation parameters associated with volume for a 3D texture.
- getText() - Method in class gov.nih.mipav.model.structures.VOIText
-
Gets the displayed text.
- getText() - Method in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- getTextArea() - Method in class gov.nih.mipav.view.components.WidgetFactory.ScrollTextArea
-
JTextArea accessor
- getTextArea() - Method in class gov.nih.mipav.view.ViewJFrameMessage.ScrollTextArea
-
DOCUMENT ME!
- getTextFont() - Method in class gov.nih.mipav.model.structures.VOIText
-
Returns the Font.
- getTextImageNumber() - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- getTextSize() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getTextStamp1Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getTextStamp2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getTextStamp3Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getTextStampDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getTextString() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- getTextualDataDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDescriptor
-
- getTexture() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Access 3D texture object.
- getTextureImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Returns the ModelImage used to generate the Texture3D.
- getTextureImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Returns The ModelImage that is the data source for the Texture3D.
- getTextureImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Returns The ModelImage that is the data source for the Texture3D.
- getTextureImageOn() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- getTextureLUTOn() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- getTextureOn() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- getTextureStatus() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Returns the texture status, either TEXTURE, VERTEX_COLOR, or NONE.
- getTextureStatus() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Returns the texture status, either TEXTURE, VERTEX_COLOR, or NONE.
- getTextureUnitState() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Returns the volume texture TextureUnitState.
- getTextVOI() - Method in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
- getTextWidth() - Method in class gov.nih.mipav.model.structures.VOIText
-
- getTheta() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- getTheta() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns roation angle theta in radians of filter.
- getTheta() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Accessor that returns the protractor angle.
- getTheta(float[]) - Method in class gov.nih.mipav.model.structures.VOIProtractor
-
Gets the angle between the two lines of the protractor.
- getThickness() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getThickness() - Method in class gov.nih.mipav.model.structures.VOI
-
Returns the thickness of the VOI
- getThird() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.Triplet
-
- getThread() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery.MoveRequestInfo
-
DOCUMENT ME!
- getThreshold() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
DOCUMENT ME!
- getThreshold() - Method in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
getThreshold - accessor that returns the threshold value.
- getThresholdB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
- getThresholdFill() - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
DOCUMENT ME!
- getThresholdG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
- getThresholdingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getThresholdMode() - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
DOCUMENT ME!
- getThresholdNeighborList(int, float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
- getThresholdR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
- getThumbnail() - Method in class gov.nih.mipav.model.file.FileImageXML
-
Returns the thumbnail associated with the xml file (saved in header).
- getThumbnailBytes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- getThumbnailDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getThumbnailDimensionsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getThumbnailLengthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifThumbnailDescriptor
-
- getThumbnailOffsetDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getThumbnailOffsetDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifThumbnailDescriptor
-
- getThumbnailSizeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getTI() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getTicks(double, double, int, double[], double[]) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- getTiffFormatCode() - Method in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- getTImageSlider() - Method in class gov.nih.mipav.view.ViewControlsImage
-
- getTime() - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
getTime.
- getTime() - Method in class gov.nih.mipav.model.algorithms.libdt
-
- getTime() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getTime() - Method in class gov.nih.mipav.model.file.XMLParameter
-
Gets the parameter's time.
- getTime() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Get the system timestamp.
- getTime(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Get the time of visitation for an image element.
- getTimeCreatedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getTimeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getTimeDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getTimeFrames() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getTimeFunction() - Method in class gov.nih.mipav.model.algorithms.InverseLaplace
-
getTimeFunction.
- getTimeFunction() - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
getTimeFunction.
- getTimerRecordingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getTimeSentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getTimeSlice() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns the time slice to save at; for TIFF, because TIFF only saves to 3D.
- getTimeSlice() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Gets the time slice of the image.
- GetTimeSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Returns the current rendered time-slice for 4D images.
- getTimeStamp() - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- getTimeStamp() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getTimeStep() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
Get the time step for the PDE solver.
- getTimeStep() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Gets timeStep.
- getTimeWindowImages() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getTimeWindowLowerLimit() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getTimeWindows() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getTimeWindowUpperLimit() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getTimeZone(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
- getTimeZoneDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getTitle() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
- getTitle() - Method in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Gets title.
- getTitle() - Method in enum gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.SwapMode
-
- getTitle() - Method in class gov.nih.mipav.view.ProgressChangeEvent
-
Returns the title of the progress dialog
- getTitle() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Gets the title for the graph.
- getTitleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getTlrcAC() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets anterior comissure in tlrc space.
- getTlrcDim() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets dims in tlrc space.
- getTlrcPC() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets posterior comissure in tlrc space.
- getTlrcRes() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Gets resoltion in tlrc space.
- getTMesh() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Display the mesh in the SurfaceRenderer:
- getTolerance(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- getTolerance(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- getTolerance(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and.
- getTolerance(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of
freedom).
- getTolerance(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- getTolerance(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- getTolerance(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and.
- getTolerance(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of
freedom).
- getTolerance(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- getTolerance(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Gets the tolerance vector based on the degrees of freedom (the length of the tolerance is the degrees of freedom)
and the level of subsampling (1, 2, 4, 8).
- getTolerance(int, boolean, float) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
- getToneDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getToneLevelDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getToolBar() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
- getToolBar() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Return paint tool-bar.
- getToolBar() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Returns the VOIToolbar.
- getTools() - Method in class gov.nih.mipav.view.ViewControlsImage
-
Accessor for the tool bar held by these controls.
- getToolTip() - Method in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- getToOrigin() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- getTopX() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns array of top X boundaries for conversion to Talairach space.
- getTopY() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns array of top Y boundaries for conversion to Talairach space.
- getTopZ() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns array of top Z boundaries for conversion to Talairach space.
- getTotal() - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
The amount of total memory the thread found.
- getTotalArcLength() - Method in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
Returns total arc-length of the segment.
- getTotalArea() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getTotalArea
- getTotalAreaB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getTotalAreaB
- getTotalAreaG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getTotalAreaG
- getTotalAreaR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getTotalAreaR
- getTotalCounts() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getTotalFrames() - Method in class gov.nih.mipav.model.file.FileInfoAvi
-
DOCUMENT ME!
- getTotalImageNumber() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getTotalLengthString(float[], int[]) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the total length of this contour as a string.
- getTotalPixels() - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Gets the total pixel count.
- getTotalPostTriggerDelayTime() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getTotalStatistic(String) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
Gets the total statistics for all elements of the VOIs that are included in this properties object.
- getTotalVolume() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getTotalVolume
- getTotalVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Return the total volume of all this treatment set's burns.
- getTotalVolumeB() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getTotalVolumeB
- getTotalVolumeG() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getTotalVolumeG
- getTotalVolumeR() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
getTotalVolumeR
- getTouchAeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getTQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getTQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- getTR() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getTraceImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Returns the Trace Image.
- getTrackingPoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
return the tracking point location
- getTrackProperties(int) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getTrailer() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.PropertyListResults
-
- getTrans() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
accessor for trans.
- getTrans() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
accessor for trans.
- getTrans() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
accessor for trans.
- getTrans() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
accessor for trans.
- getTransArray() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Access that returns an array containing the transformation parameters.
- getTransArray() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Access that returns an array containing the transformation parameters.
- getTransArray() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Access that returns an array containing the transformation parameters.
- getTransferData(DataFlavor) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.ImageConverter
-
- getTransferData(DataFlavor) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler.ArrayListTransferable
-
DOCUMENT ME!
- getTransferData(DataFlavor) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter.SliceTransferable
-
- getTransferDataFlavors() - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.ImageConverter
-
- getTransferDataFlavors() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler.ArrayListTransferable
-
DOCUMENT ME!
- getTransferDataFlavors() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter.SliceTransferable
-
- GetTransferedValue(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- getTransferFunction() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Accessor that returns the transfer function.
- getTransferFunction() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Get the current transfer function we are working with.
- getTransferFunction() - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Get the current transfer function we are working with.
- getTransferFunction() - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Get the current transfer function we are working with.
- getTransferFunction() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Get the current transfer function we are working with.
- getTransferFunction(int) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityRGB
-
Get the transfer function.
- getTransferLine() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This method is used to obtain the VOIBase Single Transfer Line.
- getTransferLine() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
This method is used to obtain the VOIBase Single Transfer Line from ViewJFrameComponentHistoLut.
- getTransferSyntaxID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Gets the transfer syntax ID of the data.
- getTransform() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Accessor that returns the matrix calculated in this algorithm.
- getTransform() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Accessor that returns the matrix calculated in this algorithm.
- getTransform() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Accessor that returns the matrix calculated in this algorithm.
- getTransform() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
- getTransform() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Accessor that returns the matrix calculated in this algorithm.
- getTransform() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Accessor that returns the matrix calculated in this algorithm.
- getTransform() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
- getTransform() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Accessor that returns the matrix calculated in this algorithm.
- getTransform() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
Get transformation matrix from Image B to Image A.
- getTransform() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Get the current probe transform position.
- getTransform(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Converts a row of p into 3x3 transformation matrix.
- getTransform(double[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
Converts row of p into 3x3 matrix.
- getTransform1Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getTransformBtoA() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
Accesses xfrm from point set B to point set A.
- getTransformBtoA() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
Accesses xfrm from point set B to point set A.
- getTransformDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getTransformDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getTransformedImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Returns transformed volume.
- getTransformedImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- getTransformedImage() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
accessor to get the internally registered image.
- getTransformedImage() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
accessor to get the internally registered image.
- getTransformedImage() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
accessor to get the internally registered image.
- getTransformedImage() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
accessor to get the internally registered image.
- getTransformFromX(double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Converts row of p into 3x3 matrix.
- getTransformHalf() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Accessor that returns the matrix calculated in this algorithm divided by 2.
- getTransformHalf() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Accessor that returns the matrix calculated in this algorithm divided by 2.
- getTransformHalf() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Accessor that returns the matrix calculated in this algorithm divided by 2.
- getTransformHalf() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Accessor that returns the matrix calculated in this algorithm divided by 2.
- getTransformID() - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Returns the transform ID associated with the matrix.
- getTransformID() - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Returns the transform ID associated with the matrix.
- getTransformIDFromStr(String) - Static method in class gov.nih.mipav.model.structures.TransMatrix
-
Returns the transform ID associated with a string.
- getTransformIDFromStr(String) - Static method in class gov.nih.mipav.model.structures.TransMatrixd
-
Returns the transform ID associated with a string.
- getTransformIDStr() - Static method in class gov.nih.mipav.model.structures.TransMatrix
-
Return the list of transform ID strings (for edit attributes combo box.
- getTransformIDStr() - Static method in class gov.nih.mipav.model.structures.TransMatrixd
-
Return the list of transform ID strings (for edit attributes combo box.
- getTransformIDStr(int) - Static method in class gov.nih.mipav.model.structures.TransMatrix
-
Return the string associated with the matrix transform ID.
- getTransformIDStr(int) - Static method in class gov.nih.mipav.model.structures.TransMatrixd
-
Return the string associated with the matrix transform ID.
- getTransformMatchtoBase() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Accessor that returns the transformation from match to base.
- getTransformMatchtoBase(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Accessor that returns the transformation from match to base.
- getTransformMigsagittal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Accessor that returns the z rot and x and y trans from the matrix calculated in this algorithm.
- getTransformMigsagittal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Accessor that returns the z rot and x and y trans from the matrix calculated in this algorithm.
- getTransformMigsagittal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Accessor that returns the z rot and x and y trans from the matrix calculated in this algorithm.
- getTransformMigsagittal() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Accessor that returns the z rot and x and y trans from the matrix calculated in this algorithm.
- getTranslate() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Get the burning point center coordinates.
- getTranslate() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Get the burning point center coordinates.
- getTranslate() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- GetTranslate() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeNode
-
Return the translation vector.
- GetTranslate() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Return the translation vector.
- GetTranslate() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Returns the translation vector.
- getTranslateSurface(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Return the translation vector for the surface with the given name.
- getTranslateSurface(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Return the translation vector for the surface with the given name.
- getTranslateToCenter(Shape3D) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- getTranslation() - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Returns T03, T13, and T23 in the transformationmatrix.
- getTranslationBruteForce() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the translation range for brute force registration:
- getTranslationCutoffValue() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- getTranslationScaleFactor() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- getTransmitAttenuatorSetting() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getTransmitCoilName() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getTransparency() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- getTransparency() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Gets the mesh transparency.
- getTreatmentInfo(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Get information about a treatment.
- getTreeA() - Method in class gov.nih.mipav.view.JPanelTreeController
-
there is no programmatic way to determine which arrow is pointing where.
- getTreeB() - Method in class gov.nih.mipav.view.JPanelTreeController
-
there is no programmatic way to determine which arrow is pointing where.
- getTreeCellRendererComponent(JTree, Object, boolean, boolean, boolean, int, boolean) - Method in class gov.nih.mipav.view.CheckTreeManager.CheckTreeCellRenderer
-
- getTreeCellRendererComponent(JTree, Object, boolean, boolean, boolean, int, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreePanel.JFileTreeCellRenderer
-
- getTreeCellRendererComponent(JTree, Object, boolean, boolean, boolean, int, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeRenderer
-
DOCUMENT ME!
- getTreeCellRendererComponent(JTree, Object, boolean, boolean, boolean, int, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.VOITreeRenderer
-
DOCUMENT ME!
- getTreeCellRendererComponent(JTree, Object, boolean, boolean, boolean, int, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.VOITreeRenderer
-
DOCUMENT ME!
- getTreeCellRendererComponent(JTree, Object, boolean, boolean, boolean, int, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreeRenderer
-
DOCUMENT ME!
- getTreeLayout() - Method in class gov.nih.mipav.view.JPanelTreeController
-
Returns the layout of the associated display panel or "how the arrows point", not the layout
of the buttons themselves.
- getTreeRoot() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Method to return tree root.
- getTreTR() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- getTriangleArrayIndices(int, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- getTriangleDetails() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- getTriangleMap() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Access the hash map of triangles.
- getTriangleMesh() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- getTriangleMesh() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.SurfaceLoaderSUR
-
Access the triangle mesh representation for the loaded surface data.
- getTriangleNormals() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Get the array of normal vectors for each triangle.
- getTriangleQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
The number of triangles currently in the table.
- getTriangles() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getTriggerTime() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getTriImage(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Returns a reference to one of the component tri-image components.
- getTriImageFrame() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method that returns the tri image frame if it exists else returns null.
- getTriImg() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Get the ViewJFrameTriImage reference.
- getTrilinear(int, double, double, double, int[], double[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
Performs trilinear interpolation of image data.
- getTrilinear(int, float, float, float, int[], float[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
Performs trilinear interpolation of image data.
- getTriLinear(float[], int, int, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
getTriLinear - version of get that performs trilinear interpoloation.
- getTriLinear(float[], int, int, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
getTriLinear - version of get that performs trilinear interpoloation.
- getTriLinear(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Version of get that performs tri-linear interpoloation.
- getTriLinear(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs tri-linear interpoloation.
- getTriLinear(float, float, float, float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- getTrilinearC(int, double, double, double, int[], byte[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
Performs trilinear interpolation of image data.
- getTrilinearC(int, float, float, float, int[], byte[]) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
Performs trilinear interpolation of image data.
- getTriLinearVal3D(float, float, float, int, int, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Version of get that performs tri-linear interpoloation.
- getTriLinearVal3D(float, float, float, int, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Version of get that performs tri-linear interpoloation.
- getTrimAdjacient() - Static method in class gov.nih.mipav.view.Preferences
-
Accessor to get the trim parameter (trimming contour of adjacent points).
- getTrimMask() - Static method in class gov.nih.mipav.view.Preferences
-
Accessor to get the TRIM parameter (trimming VOIcontour of points).
- getTrimVoi() - Static method in class gov.nih.mipav.view.Preferences
-
Accessor to get the TRIM parameter (trimming VOIcontour of points).
- getTriPlanarViewBG() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Return the triplanar view branch group.
- getTS() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getTSpace() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns value of T Space text field.
- getTStart() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns value of T Start text field.
- gettTalVoxLabel() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- getTurobFactor() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getTwoTailInvTStatsitic(int, double) - Static method in class gov.nih.mipav.model.algorithms.StatisticsTable
-
Finds the value of the two-tail t-statistic that produces the given level of significance for the given
number of degrees of freedom.
- getTX() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
X Translation
- getTY() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Y Translation
- getType() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Return the type of this tag (determined from its value representation (vr)).
- getType() - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Accessor that returns the type of tag, depending on the value representation.
- getType() - Method in enum gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- getType() - Method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- getType() - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Returns the surface type keyword:
- getType() - Method in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Returns the surface type keyword:
- getType() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Knot
-
Get the type of knot (linked or unlinked)
- getType() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunk
-
- getType() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Subpath
-
- getType() - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Returns the parameter data type.
- getType() - Method in class gov.nih.mipav.model.structures.BufferBase
-
Get the primitive type of the buffer.
- getType() - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Return byte.class, type returned by get()
- getType() - Method in class gov.nih.mipav.model.structures.BufferByte
-
Return byte.class
- getType() - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Return double.class
- getType() - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Return float.class
- getType() - Method in class gov.nih.mipav.model.structures.BufferInt
-
Return int.class
- getType() - Method in class gov.nih.mipav.model.structures.BufferLong
-
Return long.class
- getType() - Method in class gov.nih.mipav.model.structures.BufferShort
-
Return short.class
- getType() - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Return byte.class
- getType() - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Return int.class
- getType() - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Return short.class
- getType() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the image buffer type.
- getType() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the type of this contour.
- getType() - Method in class gov.nih.mipav.view.ColorWheel
-
- getType() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Returns the type of widget (Circle, Triangle, Square).
- getType(FileDicomKey) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Accessor that returns the type of the tag (different from, but related to the vr).
- getType(FileDicomTagInfo.VR) - Static method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Accessor that returns the type of tag, depending on a value representation value.
- getTypeCode() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Gets the type code for this VR.
- getTypeCode(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
Gets the type code of a given integer hash index.
- getTypeCodeName(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
gets the type code name of a given integer hash index for example: getTypeCodeName( RTC.DD_PatientID ) returns
"LO"
- getTypeDefaultExtensions() - Static method in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
Accessor that returns the static list of type extensions (just the default extension).
- getTypeFromNum(int) - Static method in enum gov.nih.mipav.model.file.FileSVS.Type
-
- getTypeFromNum(int) - Static method in enum gov.nih.mipav.model.file.FileTiff.Type
-
- getTypeFromString(String) - Static method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Extracts and returns the base data type (e.g., PARAM_LIST if 'list_float') from a type String read
in from a script.
- getTypeInts() - Static method in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
Accessor that returns the static list of type integers.
- getTypeMax() - Method in enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
This method return the max value allowed of the type.
- getTypeMax(int) - Static method in class gov.nih.mipav.model.structures.ModelStorageBase
-
This method return the max value allowed of the type
- getTypeMin() - Method in enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
This method returns the min value allowed of the type.
- getTypeMin(int) - Static method in class gov.nih.mipav.model.structures.ModelStorageBase
-
his method return the min value allowed of the type
- getTypeNames() - Static method in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
Accessor that returns the static list of type names.
- getTypeString() - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Returns the String representation of the parameter's data type.
- getTypeString() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Return the full type of this parameter (e.g.
- getTypeString() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the image type.
- getTypeString() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Return a string which describes the type of light.
- getTypeString(int) - Static method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Returns the String which should be used to indicate a given parameter data type when writing it to a script.
- getTZ() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Z Translation
- getU() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Return the left singular vectors
- getU(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Get the image value at pixel (x,y), call it u(x,y).
- getU(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the image value at voxel (x,y,z), call it u(x,y,z).
- getUbuntuMono(float, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
Returns the Ubuntu Mono font for the specified font size and style
- getUByte(int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets a short value (unsigned byte[0:255]) at position in the data array.
- getUByte(int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Gets the data in byte format.
- getUByte(int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Gets the data in unsigned byte format.
- getUByte(int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Gets the data in unsigned byte format.
- getUByte(int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Gets the data in unsigned byte format.
- getUByte(int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Gets the data in unsigned byte format.
- getUByte(int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Gets the data in short format.
- getUByte(int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Gets the data in short format.
- getUByte(int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Gets the data in short format.
- getUByte(int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Gets the data in short format.
- getUByte(int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Gets the data in short format.
- getUByte(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that does NOT perform bounds checking.
- getUByte(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD get data fuction where bounds checking is NOT performed.
- getUByte(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is NOT performed.
- getUByte(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D get data fuction where bounds checking is NOT performed.
- getUByte(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is NOT performed.
- getUByteBiLinear(float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of get that performs bi-linear interpoloation.
- getUByteTriLinear(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of get that performs tri-linear interpoloation.
- getUID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
Gets the UID for a simple PDU type.
- getUID() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that returns the Unique ID (original hash code for object).
- getUIDs(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
Read in the DICOM file and parses the header to find the UIDs needed to send the image.
- getUInt(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Reads four unsigned bytes from file.
- getUInt(boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads four unsigned bytes from file.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets a long value (unsigned int) at position in the data array.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Gets the data in int format.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Gets the data in long format.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Gets the data in unsigned short format.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Gets the data in unsigned short format.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Gets the data in unsigned long format.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Gets the data in long format.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Gets the data in long format.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Gets the data in long format.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Gets the data in long format.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Gets the data in long format.
- getUInt(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that does NOT perform bounds checking.
- getUInt(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD get data fuction where bounds checking is NOT performed.
- getUInt(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is NOT performed.
- getUInt(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D get data fuction where bounds checking is NOT performed.
- getUInt(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is NOT performed.
- getUInt16() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Returns an unsigned 16-bit int calculated from the next two bytes of the sequence.
- getUInt16(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Returns an unsigned 16-bit int calculated from two bytes of data at the specified index.
- getUInt32() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Get a 32-bit unsigned integer from the buffer, returning it as a long.
- getUInt32(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Get a 32-bit unsigned integer from the buffer, returning it as a long.
- getUInt8() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Returns an unsigned 8-bit int calculated from the next byte of the sequence.
- getUInt8(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Returns an unsigned 8-bit int calculated from one byte of data at the specified index.
- getUIntBiLinear(float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs bi-linear interpoloation.
- getUIntTriLinear(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs tri-linear interpoloation.
- getUnequalDim() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that returns the boolean indicating if unequal dimensions are allowed in complex images.
- getUnicodeDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
The Windows specific tags uses plain Unicode.
- getUniqueDataValue(int, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getUniqueID() - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Returns a unique number for DICOM communiciton.
- getUniqueID() - Method in class gov.nih.mipav.view.ViewVOIVector
-
- getUniqueID16() - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Returns a unique number for DICOM communiciton.
- getUniqueID8() - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Returns a unique number for DICOM communiciton.
- getUniqueOddID() - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Returns an ODD unique number for DICOM communiciton.
- getUniqueOddID16() - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Returns an ODD unique number for DICOM communiciton.
- getUniqueOddID8() - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Returns an ODD unique number for DICOM communiciton.
- getUniqueTimepoints() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- getUnit(String) - Static method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- getUnitFromAbbrev(String) - Static method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- getUnitFromLegacyNum(int) - Static method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- getUnitFromString(String) - Static method in class gov.nih.mipav.model.file.FileMincHDF
-
Return the proper unit based on a given unit string (abbrevation or full word).
- getUnits() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- getUnitsOfMeasure() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the units of measure.
- getUnitsOfMeasure() - Method in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- getUnitsOfMeasure() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the units used to measure all dimensions of the image.
- getUnitsOfMeasure() - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Accessor that returns the units of measure for each dimension.
- getUnitsOfMeasure(int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the units of measure for the given dimension.
- getUnitsOfMeasure(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the unit used to measure the specific dimension of image.
- getUnitsOfMeasure(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the units of measure for the image translated into the Patient-Coordinate systsm:
- getUnitsOfMeasureAbbrevStr() - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Deprecated.
- getUnitsOfMeasureAbbrevStr(int) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Deprecated.
- getUnitsOfMeasureFromStr(String) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Deprecated.
- getUnitsOfMeasureStr() - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Deprecated.
- getUnitsOfMeasureStr(int) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Deprecated.
- getUnitsOfType() - Method in enum gov.nih.mipav.model.file.FileInfoBase.UnitType
-
- getUnitsOfType(FileInfoBase.UnitType) - Static method in enum gov.nih.mipav.model.file.FileInfoBase.UnitType
-
- getUnitSpecifierDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngDescriptor
-
- getUniverse() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Accessor for the universe for this 3D object.
- getUnknownDataDumpDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getUnnormalized3DSigmas() - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Returns the un-normalized sigmas in three dimensions (even if the input image is 2D).
- getUnnormalizedSigmas() - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
DOCUMENT ME!
- getUnpermutedVarID(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getUnsignedByte(byte[], int) - Method in class gov.nih.mipav.model.file.FileBase
-
Converts byte data to unsigned int.
- getUnsignedShort(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
Reads two unsigned bytes from file.
- getUnsignedShort(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Reads two unsigned bytes from file.
- getUnsignedShort(boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads two unsigned bytes from file.
- getUntwistTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- getUntwistTestNoBounds() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- getUnused1() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
provides current unused1 value.
- getUnused2() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides current unused2 value.
- getUnused3() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides current unused3 value.
- getUpperBound() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor to the upper bound slider.
- getUpperBound() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Accessor to the upper bound slider.
- getUpperBound() - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Returns the upper bound text as a number.
- getUpperBound() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor to the upper bound slider.
- getUpperBoundB() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor to the upper bound blue slider.
- getUpperBoundB() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
DOCUMENT ME!
- getUpperBoundB() - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Returns the upper bound text as a number.
- getUpperBoundB() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor to the upper bound blue slider.
- getUpperBoundG() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor to the upper bound green slider.
- getUpperBoundG() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
DOCUMENT ME!
- getUpperBoundG() - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Returns the upper bound text as a number.
- getUpperBoundG() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor to the upper bound green slider.
- getUpperBoundR() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor to the upper bound red slider.
- getUpperBoundR() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
DOCUMENT ME!
- getUpperBoundR() - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Returns the upper bound text as a number.
- getUpperBoundR() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor to the upper bound red slider.
- getUpperList() - Method in class gov.nih.mipav.view.JPanelListController
-
Convience method to get list A.
- getUpperThreshold() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Returns the upper threshold image value for whichever image is current selected.
- getUpperThreshold() - Method in class gov.nih.mipav.view.JPanelHistogram
-
- getUpperThreshold() - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
DOCUMENT ME!
- getUpperThreshold() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Returns the upper threshold value.
- getUpperThreshold() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Returns the upper threshold value.
- getUpperTree() - Method in class gov.nih.mipav.view.JPanelTreeController
-
Convience method to get Tree A.
- getUptimeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getUpVectors() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- getUrgencyDefault() - Static method in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
- getUrgencyDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getURLs() - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- getUsed() - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
The amount of used memory the thread found.
- getUsedFlag() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
-
- getUsedHeapMemory() - Static method in class gov.nih.mipav.view.MipavUtil
-
Return the amount of heap memory that MIPAV is currently using.
- getUser() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- getUser0() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getUser1() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- getUser2() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getUser3() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getUser4() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getUser5() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getUser6() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getUser7() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getUser8() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getUser9() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getUserCommentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getUserDefaultDir() - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- getUserInformation() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Accessor to return User Information.
- getUserInterface() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Deprecated.
- getUserInterface() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that returns the user interface.
- getUserProfileDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDescriptor
-
- getUserShortcutTable() - Static method in class gov.nih.mipav.view.Preferences
-
Gets the User defined Hashtable used to store the shortcut keystrokes and commands.
- getUseVOI() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor that returns useVOI.
- getUseVOI() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Placeholder.
- getUseVOI() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor that returns useVOI.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets a int value (unsigned short) at position in the data array.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Gets the data in unsigned short format.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Gets the data in unsigned short format.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Gets the data in unsigned short format.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Gets the data in unsigned short format.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Gets the data in unsigned short format.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Gets the data in unsigned short format.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Gets the data in unsigned short format.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Gets the data in unsigned short format.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Gets the data in unsigned short format.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Gets the data in unsigned short format.
- getUShort(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that does NOT perform bounds checking.
- getUShort(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD get data fuction where bounds checking is NOT performed.
- getUShort(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is NOT performed.
- getUShort(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D get data fuction where bounds checking is NOT performed.
- getUShort(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is NOT performed.
- getUShort(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Return the unsigned short value of one of the parameters from the table.
- getUShortBiLinear(float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of get that performs bi-linear interpoloation.
- getUShortTriLinear(float, float, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of get that performs tri-linear interpoloation.
- getUtil() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- getUx(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Get the first-order x-derivative of the image value at pixel (x,y),
call it u_x(x,y).
- getUx(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the first-order x-derivative of the image value at voxel (x,y,z),
call it u_x(x,y,z).
- getUxx(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Get the second-order x-derivative of the image value at pixel (x,y),
call it u_xx(x,y).
- getUxx(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the second-order x-derivative of the image value at voxel (x,y,z),
call it u_xx(x,y,z).
- getUxy(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Get the second-order mixed-derivative of the image value at pixel
(x,y), call it u_xy(x,y).
- getUxy(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the second-order xy-mixed-derivative of the image value at voxel
(x,y,z), call it u_xy(x,y,z).
- getUxz(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the second-order xz-mixed-derivative of the image value at voxel
(x,y,z), call it u_xz(x,y,z).
- getUy(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Get the first-order y-derivative of the image value at pixel (x,y),
call it u_y(x,y).
- getUy(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the first-order y-derivative of the image value at voxel (x,y,z),
call it u_y(x,y,z).
- getUyy(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Get the second-order y-derivative of the image value at pixel (x,y),
call it u_yy(x,y).
- getUyy(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the second-order y-derivative of the image value at voxel (x,y,z),
call it u_yy(x,y,z).
- getUyz(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the second-order yz-mixed-derivative of the image value at voxel
(x,y,z), call it u_yz(x,y,z).
- getUz(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the first-order z-derivative of the image value at voxel (x,y,z),
call it u_z(x,y,z).
- getUzz(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the second-order z-derivative of the image value at voxel (x,y,z),
call it u_zz(x,y,z).
- getV() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
Return the eigenvector matrix
- getV() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Return the right singular vectors
- getV(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.NEList
-
- getV(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- getV_index(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- getV1(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- getV2(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- getv6Num() - Method in enum gov.nih.mipav.model.file.FileSVS.Type
-
- getv6Num() - Method in enum gov.nih.mipav.model.file.FileTiff.Type
-
- getVal(float[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Returns the value in a 2D image buffer of the pixel at location row, col.
- getVal(float[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Returns the value in a 2D image buffer of the pixel at location col, row.
- getVal(float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Returns the value in a 3D image buffer of the pixel at location slice, row, col.
- getVal(float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Returns the value in a 3D image buffer of the pixel at location col, row, slice.
- getValidRange() - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Gets the valid range for image data values
- getValString(String) - Method in class gov.nih.mipav.model.file.FileMicroCat
-
DOCUMENT ME!
- getValue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed.indexValueItem
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed.indexValueItem
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed.indexValueItem
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed.indexValueItem
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed.indexValueItem
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed.indexValueItem
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.indexValueItem
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Gets the value of the Img at the position currently referenced by
this Pixel.
- getValue() - Method in class gov.nih.mipav.model.algorithms.filters.BM3D.indexValueItem
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform.indexValueItem
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.indexValue
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
-
Get the numeric value for the heap record.
- getValue() - Method in class gov.nih.mipav.model.algorithms.libdt.indexValueItem
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.indexValueItem
-
- getValue() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.indexValueItem
-
DOCUMENT ME!
- getValue() - Method in class gov.nih.mipav.model.file.FileXML.XMLAttributes
-
- getValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.BitmapType
-
- getValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorEncoding
-
- getValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorSpaceType
-
- getValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
- getValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingHalftoningAlgorithm
-
- getValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingIntent
-
- getValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KeyValuePair
-
- getValue() - Method in class gov.nih.mipav.model.file.XMLParameter
-
Gets the parameter's value.
- getValue() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterBoolean
-
Returns the parameter value.
- getValue() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterDouble
-
Returns the parameter value.
- getValue() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterFloat
-
Returns the parameter value.
- getValue() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterInt
-
Returns the parameter value.
- getValue() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterLong
-
Returns the parameter value.
- getValue() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterShort
-
Returns the parameter value.
- getValue() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterString
-
Returns the parameter value.
- getValue() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
Returns the parameter value.
- getValue() - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
panel may have many seperate fields of entry for the user to speeratetly enter some values.
- getValue() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- getValue() - Method in class gov.nih.mipav.view.JPanelProgressBar
-
Used to get the present value of the progress bar.
- getValue() - Method in interface gov.nih.mipav.view.ProgressBarInterface
-
public void setValue( int value, boolean separateThread ); public void setValueImmed( int value );
- getValue() - Method in class gov.nih.mipav.view.ProgressChangeEvent
-
Returns the value of the progress bar.
- getValue() - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Used to get the present value of the progress bar.
- getValue() - Method in class gov.nih.mipav.view.ViewJSlider
-
- getValue(boolean) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Translates the tag value into an understandable string so no other class need understand how to parse this
information.
- getValue(double) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- getValue(int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Returns the value of this Img at the specified position.
- getValue(int, int) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Get the value at the x, y position of the data array.
- getValue(int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Returns the value of this Img at the specified position.
- getValue(FileDicomKey) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns the value matching the key as a meaningful (ie., non-coded) string .
- getValue(FileDicomKey, boolean) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns the value matching the key as a Java data element
get(key).getValue(parse).
- getValue(String) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns the value matching the key as a meaningful (ie., non-coded) string .
- getValue(String, boolean) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns the value matching the key as a Java data element
get(keyStr).getValue(parse).
- GetValue(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Returns the value of the specified axis-aligend clip plane.
- GetValue(int, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
-
- GetValue(int, int, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- getValue2D(float, float, float, int, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Get the value of a 2D point.
- getValue3D(float, float, float, int, int, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Get the value of a 4D point.
- getValue3D(float, float, float, int, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Get the value of a 3D point.
- getValueAt(int, int) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- getValueBytes() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- getValueList() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Returns the value(s) as an array so that each tag with a value multiplicity of more than 1 -- ie, TypeString
items separated by '\' -- is its own element in the array.
- getValueMinMaxDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getValueMultiplicity() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Accessor that returns the value multiplicity of the tag.
- getValueMultiplicity() - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Accessor that returns the value multiplicity of the tag.
- getValueRepresentation() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Return the value representation (vr) of this tag.
- getValueRepresentation() - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Accessor that returns the value representation of the tag.
- getValues() - Method in class gov.nih.mipav.view.dialogs.JDialogServer
-
Returns the values entered into the text fields.
- getValues(AlgorithmRegBSpline.Options, int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
Extract the values from the specified set of controls and store them into the options structure used by the
algorithm.
- getValueString() - Method in class gov.nih.mipav.model.file.FileMincAttElem
-
Returns the value stored in this minc attribute as a String.
- getValueString() - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Returns the value of the Parameter converted into String form (suitable for writing out to a script).
- getValueString() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterBoolean
-
Returns the parameter value as a string.
- getValueString() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterDouble
-
Returns the parameter value as a string.
- getValueString() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterFloat
-
Returns the parameter value as a string.
- getValueString() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterInt
-
Returns the parameter value as a string.
- getValueString() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Returns the parameter list in String form, separated by commas (with commas in the list elements escaped with
backslashes ('\')).
- getValueString() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterLong
-
Returns the parameter value as a string.
- getValueString() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterShort
-
Returns the parameter value as a string.
- getValueString() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterString
-
Returns the parameter value as a string.
- getValueString() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
Returns the parameter value as a string.
- getValueType() - Method in class gov.nih.mipav.model.file.XMLParameter
-
Gets the parameter's value-type.
- getVarArray() - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Gets the array with the variable information.
- getVarElem(int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Accessor that returns the variable element at the indicated index in the variable array.
- getVariableBandwidth() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getVariableFlipAngleFlag() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getVariableID(String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getVariableImportance() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- getVariableNames() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- getVariablesFromDialog(JDialogRegistrationOAR2D, boolean) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Called from inside the JDialogRegistrationOAR2D class when the user has set the parameters and closes the dialog.
- getVariableThresholds() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Accessor that tells if the thresholds vary with region growth.
- getVariableThresholds() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
DOCUMENT ME!
- getVariableThresholds() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Accessor to checkbox that tells if thresholds vary with region growth.
- getVariance(int, double, double) - Static method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Compute the variance given the total number of samples along with the sum of values and sum of squared values.
- getVascularImagingFlags() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getVasMode() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getVattArray(int, FileInfoMinc) - Method in class gov.nih.mipav.model.file.FileMinc
-
Gets the attribute array within a variable.
- getVattElem(int) - Method in class gov.nih.mipav.model.file.FileMincVarElem
-
Returns the variable attribute located at index in the array.
- getVec() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_res_cont
-
- getVectorNeighborList(int, int, float[], boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Compiles a list of the values neighboring the desired pixel, that are defined in the kernel.
- getVencScalingFactor() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getVerified() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the verified value.
- getVerified() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the verified value.
- getVerified() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the verified value.
- getVersion() - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Accessor that returns the DICOM version of the tag.
- getVersion() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getVersion() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getVersion() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- getVersion() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getVersion() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getVersion() - Static method in class gov.nih.mipav.view.MipavUtil
-
Gets the MIPAV Version number from the about.txt file.
- getVersionBytesDescription(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- getVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- getVersionNumber() - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Accessor to the DICOM version number for this tag.
- getVertex1() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesItem
-
- getVertex2() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesItem
-
- getVertexCopy() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Make a copy of the vertices of a triangle mesh.
- getVertexCopyAsVector3f() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Make a copy of the vertices of a triangle mesh.
- getVertexData() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- getVertexData(int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- getVertexMap() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Access the hash map of vertices.
- getVertexNormals() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Get the array of normal vectors at each vertex.
- getVertexQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
The number of vertices currently in the table.
- GetVertexQuantity(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- getVertexString(Point3f[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Called when writing the surface.xml file: Converts the input array of Point3f[] to a String for writing:
- GetVertical(int, int, double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- getVerticalAnatomicalReference() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getVerticalLandmark() - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- getVerticalSamplingFactor() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegComponent
-
- getVertices() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- getVertices() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- getVertices() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
Returns a reference to the box vertices:
- getVertices(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Called when reading the input surface.xml file: Parses the input string into a an array of Point3f[],
representing the mesh vertices:
- getVFace(Vector3f[], int[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- getVFace(Vector3f[], int[][], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- getView() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Returns the view stored in this structure.
- getView() - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Returns the view stored in this structure.
- getViewableSlice() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Get the top-most slice.
- getViewableTimeSlice() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Gets the current Time slice which is being viewed.
- getViewDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return the viewPanel from parent frame.
- getViewDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return the viewPanel from parent frame.
- getViewDirection() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Retrieve the current base direction vector for viewing.
- getViewDirection() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Returns the view direction vector at the current position on the path.
- getViewDirection() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Returns the view direction vector at the current position on the path.
- getViewMenuBar() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- getViewOrientation() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Retrieve the current relative orientation transform matrix for viewing which is relative to the current base
direction transform for viewing.
- getViewPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Get the view control panel.
- getViewPanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Return the image panel.
- getViewPoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Returns the current position on the path.
- getViewPoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Returns the current position on the path.
- getViewRight() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- getViews() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides current views value.
- getViews() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides current views value.
- getViews() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides current views value.
- getViewToModel() - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- getViewUp() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Returns the view up vector at the current position on the path.
- getViewUp() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Returns the view up vector at the current position on the path.
- getVignetteControlDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- getVignettingCorrectionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getVisible() - Method in class gov.nih.mipav.view.JPanelChecklist
-
Gets the values of which boxes are visible.
- getVisible(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
slice slider visible or not.
- getVisible(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
slice slider visible or not.
- getVisibleLength() - Method in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- getVistaParamTextfields() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
- getVM(FileDicomKey) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Accessor that returns the value multiplicity of the tag.
- getVMOptionsMaxHeap(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- getVMOptionsStartupFile(String, boolean) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- getVOI() - Method in class gov.nih.mipav.model.structures.event.VOIEvent
-
- getVOI() - Method in class gov.nih.mipav.model.structures.event.VOIVectorEvent
-
returns the reference VOI.
- getVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Returns the VOIBase object rendered by this VolumVOI object.
- getVOI() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
gets the voi associated with this function if it corresponds to a point, otherwise returns null.
- getVOI() - Method in class gov.nih.mipav.view.VOIContourNode
-
Returns this node's user object.
- getVOI() - Method in class gov.nih.mipav.view.VOIFrameNode
-
Returns this node's user object.
- getVOI() - Method in class gov.nih.mipav.view.VOIOrientationNode
-
Returns this node's user object.
- getVOI(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Returns a VOILink to a VOI attached to this image.
- getVOI_ID() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- getVOI_ID() - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Deprecated.
- getVOIBase() - Method in class gov.nih.mipav.model.file.FileVOI.VOISortItem
-
DOCUMENT ME!
- getVoiceMemoDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getVOICheck() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Get the VOI check box.
- getVOIColorButton() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Returns the VOI Color/properties button
- getVOIColorIncrement() - Static method in class gov.nih.mipav.view.Preferences
-
Gets the VOI color increment value.
- getVOIDrawColor() - Static method in class gov.nih.mipav.view.Preferences
-
Gets the VOI draw color.
- getVoiFileLocation() - Method in class gov.nih.mipav.view.dialogs.ScriptVOI
-
- getVOIforProcessing(VOI) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- getVOIgroup() - Method in class gov.nih.mipav.view.VOIGroupNode
-
Returns this node's user object.
- getVOIHandler() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- getVOIKeys() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets paths to VOI files for this image.
- getVOIList() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
gets the selected VOIset
- getVOIList() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- getVOIManager() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- getVOIManager() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getVOIManager() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- getVOIManager() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- getVOIManager() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- getVOIManager() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- getVOIManager() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- getVOIManager(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Returns the VOIManager at the given position.
- getVOIManagerNum() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Returns the number of VOIManagers controlled by this VOIHandler.
- getVOIMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Return the menu containing the list VOI commands.
- getVoiName() - Method in class gov.nih.mipav.view.dialogs.ScriptVOI
-
- getVOIname() - Method in class gov.nih.mipav.view.VOIOrientationNode
-
Returns the name of the parent voi
- getVOIParentImage(ParsedActionLine) - Static method in class gov.nih.mipav.model.scripting.Parser
-
Returns the image placeholder variable referenced by an 'OpenVOI' action.
- getVOIProperties(VOI) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
DOCUMENT ME!
- getVOIRedoButton() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
- getVOIs() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Returns the VOI hashtable for this image.
- getVOIs() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns.
- getVOIsCopy() - Method in class gov.nih.mipav.model.structures.ModelImage
-
- getVOISlices() - Method in class gov.nih.mipav.model.structures.VOI
-
Returns the number of z slices actually containing part of the voi
- getVOIState() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- getVOIStatistic(String) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
Gets the statistic for the whole VOI.
- getVOITable() - Method in class gov.nih.mipav.model.scripting.ScriptRunner
-
Returns a reference to the VOI table being used to run the current script.
- getVOIThickness() - Static method in class gov.nih.mipav.view.Preferences
-
DOCUMENT ME!
- getVOIUndoButton() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
- getVolOpacity() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Get the opacity histrogram control panel.
- getVolOpacityPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return volume opacity control Dialog from parent frame.
- getVolOpacityPanel() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return volume opacity control Dialog from parent frame.
- getVolParameters() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
getter for vol parameters
- getVolRenderBG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return volume render Branch Group.
- getVolRenderBG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return volume render Branch Group.
- getVolRenderOG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return volume render Order Group.
- getVolRenderOG() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Return volume render Order Group.
- getVolsAdded() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the current vols_added value.
- getVolsAdded() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the current vols_added value.
- getVolsAdded() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the current vols_added value.
- getVolume() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Gets the volume of the VOI; return volume defined by the VOI.
- getVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Get the burning point volume.
- getVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Get the total tumor voxels of the current treatment in mm^3.
- getVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Gets the surface volume.
- getVolume(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- getVolume(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Return the size of the volume of the given surface.
- GetVolume() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Return the volume of this surface.
- getVolumeCheck() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Get the volume display checkbox.
- getVolumeDisplayRange() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- getVolumeGPU() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getVolumeImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- getVolumeImageA() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getVolumeImageB() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- getVolumeImageB() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getVolumeIterationFactors() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Get the factors needed to iterate through the image volume.
- getVolumeLimit() - Method in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Accessor that returns whether or not iterations are stopped after the
present volume is different from the initial volume by volumePercent or
more.
- getVolumeMask() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Get the current added surface bit mask.
- getVolumePercent() - Method in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Accessor that returns the percentage difference from the initial volume
at which iterations stop.
- getVolumePosition(float, float, float) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Translate a point on the x-y tri-image component into image volume space.
- getVolumePosition(int, int, int) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Translate a point on the x-y tri-image component into image volume space.
- getVolumeRenderStateFile(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getVolumeSize() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Gets the number of pixels in a volume of the image.
- getVolumeSizeX() - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to get volumeSizeX.
- getVolumeSizeY() - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to get volumeSizeY.
- getVolumeSizeZ() - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to get volumeSizeZ.
- getVolumeSlicesPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- getVolumeString(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- GetVolumeString() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Return the volume of this surface.
- getVolumeSurface(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Return the TriMesh surface with the given name.
- GetVolumeTarget() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the Texture containing the volume data.
- GetVolumeTargetBuffer() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return the Buffer containing the volume data, which is stored in the Texture GrapicsImage.
- getVolumeTexture() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Return texture, the VolumeTexture member variable.
- getVolumeTextureCopy(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Returns the left of right eye copy of the NodeVolumeTextureRender:
- getVolumeType() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
- getVolumeUnitsOfMeasureStr() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Returns the volume unit for the data.
- getVolumeVOI() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the VolumeVOI data member used to draw this contour in the GPU VOlumeRenderer.
- getVoxelOrder() - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- getVoxelSizeX() - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to get voxelSizeX.
- getVoxelSizeY() - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to get voxelSizeY.
- getVoxelSizeZ() - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to get voxelSizeZ.
- getVoxOffset() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
accessor to the vox offset value.
- getVoxOffset() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
accessor to the vox offset value.
- getVoxUnits() - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Provides the string for vox-units.
- getVoxUnits() - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Provides the string for vox-units.
- getVoxUnits() - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
provides the string for vox-units.
- getVQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
topology member access.
- getVQuantity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
input values from the constructor.
- getVQuantity() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
- getVR(int, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Gets the value representation.
- getVR(FileDicomKey) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Accessor that returns the value representation of the tag.
- getVr_type() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
- getVr_type() - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
- getVRImage() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Returns the Volume Ratio Image.
- getVRLinkedBuffer() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Gets the communication linkbuffer.
- getVRString(int, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Returns the string representation of the VR.
- getw() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
-
- getWall(AlgorithmNetworkSnake.SnakeInitialiser.Node, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- getWallPositions() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- getWaterDepthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getWatershedID() - Method in class gov.nih.mipav.model.structures.VOI
-
getWatershedID - accessor that returns the watershedID.
- getWaveletImage() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
Accessor that returns the image.
- getWaveletImages() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
Accessor that returns the image.
- getWbModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getWbTypeDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Descriptor
-
- getWbTypeDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDescriptor
-
- getWeak() - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting.mergeItem
-
- getWebsite() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- getWebsite() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- getWeight() - Method in class gov.nih.mipav.model.algorithms.AlgorithmKMeans.positionWeightItem
-
DOCUMENT ME!
- getWeight() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- getWeight() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesItem
-
- getWeight() - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Gets the subject's weight.
- getWeighted_dx() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- getWeighted_dy() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- getWeightLabels() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
- getWeights() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
- getWest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- getWhere() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_cut
-
- getWhich() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_cut
-
- getWhich2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
-
- getWhichCut() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
-
- getWhiteBalance1Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getWhiteBalance2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getWhiteBalance2Description() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getWhiteBalanceBiasDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDescriptor
-
- getWhiteBalanceBlueDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getWhiteBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
- getWhiteBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDescriptor
-
- getWhiteBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getWhiteBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDescriptor
-
- getWhiteBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDescriptor
-
- getWhiteBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDescriptor
-
- getWhiteBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDescriptor
-
- getWhiteBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getWhiteBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getWhiteBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- getWhiteBalanceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getWhiteBalanceDescription(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getWhiteBalanceGreenDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getWhiteBalanceModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getWhiteBalanceRedDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getWhiteBalanceSetupDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- getWhiteBalanceTemperatureDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- getWhitePointX() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- getWhitePointY() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- getWholeImageFlag() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Returns whether the whole image is being examined or just the VOI region.
- getWideFocusZoneDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- getWideRangeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- getWidget() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Returns the Widget scene graph Node.
- getWidgets() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Returns the current Widgets.
- getWidth() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
- getWidth() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
- getWidth() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
DOCUMENT ME!
- getWidth() - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- getWidth() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- getWidth() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- getWidth() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- getWidth() - Method in interface gov.nih.mipav.view.renderer.flythroughview.FlyThroughRenderInterface
-
- getWidth() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- getWidth() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- getWidth() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- getWidth() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Returns the width of the display canvas.
- getWidth(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the image width, based on the Patient Coordinates orientation from which the data will be viewed:
- getWindow() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- getWindowA() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- getWindowB() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- getWindowC() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- getWindowCenter() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getWindowCenter() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getWindowCenterWidthExplanation() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getWindowsAuthorDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getWindowsCommentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getWindowsKeywordsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getWindowsSubjectDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getWindowsTitleDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getWindowValue() - Method in class gov.nih.mipav.view.WindowLevel
-
- getWindowWidth() - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- getWindowWidth() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- getWinMax() - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- getWithOverride(String, int) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Returns a parameter from the table, possibly overriding it with a value stored in the global VariableTable.
- GetWorld() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- getWorldTimeLocationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- getWritableLength() - Method in class gov.nih.mipav.model.file.FileDicomSQ
-
Gets the length as read in by the header (possibly undefined).
- getWritableLength(boolean) - Method in class gov.nih.mipav.model.file.FileDicomSQItem
-
Gets the length as read in by the header (possibly undefined).
- getWriteOptions() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Returns the necessary options that the user set in this dialog.
- getWriterDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- getX() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
-
- getX() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- getX() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- getX() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- getX() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- getX() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- getX() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
- getX() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointeredPoint2D
-
- getX() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TranslatedPoint2D
-
- getX() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- getX1Vector() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- getX2Vector() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- getxAxisLabel() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- getXBound() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
Get the x-bound for the image.
- getXBound() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
Get the x-bound for the image.
- getXBound() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Get the x-bound for the image.
- getXBound() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the x-bound for the image.
- getXBound() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
The x-dimension of the image.
- getXComponent() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- getXCoords() - Method in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Returns an array containing the list of X coordinates for the VOIPoints.
- getXDerivativeDirections() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- getXDim() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- getXFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
Return the x-axis movement multipler.
- getXFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
Return the x-axis movement multipler.
- getXFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
Return the x-axis movement multipler.
- getXFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
Return the x-axis movement multipler.
- getXFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
Return the x-axis movement multipler.
- getXFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
Return the x-axis movement multipler.
- getXLabel() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Gets the label for the x axis.
- getXMLLinkedFilename() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Gets the filename for the linked file for the XML header.
- getxMod() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- getXN() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- getXnormalized() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Returns the normalized x coordinate of this Pixel.
- getXOpacitySlice() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Get the x opacity slider value.
- getXOpacitySlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Get the x opacity slider value.
- getxOrg() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Returns the X origin.
- getXOrient() - Method in enum gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- getxPres() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- getXProbePos() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Get the probe x coordinate.
- getXProbePos() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Get the probe x coordinate.
- getXResolutionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getXs() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
getXs - accessor that gets the array of x coordinates to be plotted.
- getXScaleBruteForce() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the x scale range for brute force registration:
- getxSep() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- getXSlice() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Get the X slider value.
- getXSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Get the X slider value.
- getXSliceHairColor() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Get the color for the crosshairPt.X crosshair.
- getXSliceHairColor() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Gets the color of the X slice crosshair.
- getXSpace() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns value of X Space text field.
- getXSpacing() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Get the x-spacing for the image.
- getXSpacing() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the x-spacing for the image.
- getxStart() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- getXStart() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns value of X Start text field.
- getXTranslate() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Get the x translation.
- getXVisible() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Return check box X selection value.
- getXVisibleInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Return check box X negative selection value.
- getXYCoords() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
- getY() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
-
- getY() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- getY() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- getY() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- getY() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- getY() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- getY() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
- getY() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointeredPoint2D
-
- getY() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TranslatedPoint2D
-
- getY() - Method in class gov.nih.mipav.model.algorithms.ODE
-
- getY() - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- getY() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- getY1Vector() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- getY2Vector() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- getyAxisLabel() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- getYBound() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
Get the y-bound for the image.
- getYBound() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
Get the y-bound for the image.
- getYBound() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Get the y-bound for the image.
- getYBound() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the y-bound for the image.
- getYBound() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
The y-dimension of the image.
- getYCbCrCoefficientsDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDescriptor
-
- getYCbCrPositioningDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getYCbCrSubsamplingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getYComponent() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- getYCoords() - Method in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Returns an array containing the list of Y coordinates for the VOIPoints.
- getYDerivativeDirections() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- getYDim() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- getYears() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- getYearsBefore(Calendar, int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Returns the new date of num years before date.
- getYFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
Return the y-axis movement multipler.
- getYFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
Return the y-axis movement multipler.
- getYFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
Return the y-axis movement multipler.
- getYFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
Return the y-axis movement multipler.
- getYFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
Return the y-axis movement multipler.
- getYFactor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
Return the y-axis movement multipler.
- getYLabel() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Gets the label for the y axis.
- getYmean_type(int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- getyMod() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- getYN() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- getYnormalized() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Returns the normalized y coordinate of this Pixel.
- getYOpacitySlice() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Get the y opacity slider value.
- getYOpacitySlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Get the y opacity slider value.
- getyOrg() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Returns the Y origin.
- getYOrient() - Method in enum gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- getyPres() - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- getYProbePos() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Get the probe y coordinate.
- getYProbePos() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Get the probe y coordinate.
- getYResolutionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
- getYs() - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
getYs - accessor that gets the array of y coordinates to be plotted.
- getYScaleBruteForce() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to get the y scale range for brute force registration:
- getySep() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- getYSlice() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Get the y slider value.
- getYSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Get the y slider value.
- getYSliceHairColor() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Get the color for the ySlice crosshair.
- getYSliceHairColor() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Gets the color of the Y slice crosshair.
- getYSpace() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns value of Y Space text field.
- getYSpacing() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Get the y-spacing for the image.
- getYSpacing() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the y-spacing for the image.
- getyStart() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- getYStart() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns value of Y Start text field.
- getYTranslate() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Get the y translation.
- getYVisible() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Return check box Y selection value.
- getYVisibleInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Return check box Y negative selection value.
- getZAxisFilter() - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- getZBound() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
Get the z-bound for the image.
- getZBound() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the z-bound for the image.
- getZBound() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
The z-dimension of the image.
- getZComponent() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- getZeroXMask() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Accessor to return mask indicating zero crossings.
- getZeroXMask() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Accessor to return mask indicating zero crossings.
- getZeroXMask() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
Accessor to return mask indicating zero crossings.
- getZeroXMask() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Accessor to return mask indicating zero crossings.
- getZeroXMask() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
Accessor to return mask indicating zero crossings.
- getZImageSlider() - Method in class gov.nih.mipav.view.ViewControlsImage
-
- getZN() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- getZoneMatchingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- getZoom() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Get the zoom factor.
- getZoom() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- getZoomedAxes() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
- getZoomFactor() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
- getZoomMagnitude(float, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Returns the magnitude zoom depending on the zoom mode.
- getZoomMagnitudeX(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- getZoomMagnitudeY(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- getZoomX() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- getZoomX() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Returns the image magnification factor in the screen x-direction.
- getZoomX() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Magnification in the x - dimension.
- getZoomX() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Magnification in the x - dimension.
- getZoomX() - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Magnification in the x - dimension.
- getZoomX() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Magnification in the x - dimension.
- getZoomX() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Magnification in the x - dimension.
- getZoomY() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- getZoomY() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Returns the image magnification factor in the screen y-direction.
- getZoomY() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Magnification in the y - dimension.
- getZoomY() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Magnification in the y - dimension.
- getZoomY() - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Magnification in the y - dimension.
- getZoomY() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Magnification in the y - dimension.
- getZoomY() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Magnification in the y - dimension.
- getZOpacitySlice() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Get the z opacity slider value.
- getZOpacitySlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Get the z opacity slider value.
- getZOrient() - Method in enum gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- getZProbePos() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Get the probe z coordinate.
- getZProbePos() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Get the probe z coordinate.
- getZSlice() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Get the z slider value.
- getZSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Get the z slider value.
- getZSliceHairColor() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Get the color for the zSlice crosshair.
- getZSliceHairColor() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Gets the color of the Z slice crosshair.
- getZSpace() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns value of Z Space text field.
- getZSpacing() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Get the z-spacing for the image.
- getZStart() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns value of Z Start text field.
- getZVisible() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Return check box Z selection value.
- getZVisibleInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Return check box Z negative selection value.
- gf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- gfstl - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- gi - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations
-
- gi - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- gi - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations3
-
- gi - Variable in class gov.nih.mipav.model.structures.jama.SVD
-
- gi - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.EVENT_REC
-
- gi - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.EVENT
-
- gi2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- gi2 - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
- Gif - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- GIF - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .gif.
- GIF_87A_VERSION_IDENTIFIER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- GIF_89A_VERSION_IDENTIFIER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- GifAnimationDescriptor(MetadataExtractor.GifAnimationDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifAnimationDescriptor
-
- GifAnimationDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifAnimationDirectory
-
- GifCommentDescriptor(MetadataExtractor.GifCommentDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifCommentDescriptor
-
- GifCommentDirectory(MetadataExtractor.StringValue) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifCommentDirectory
-
- GifControlDescriptor(MetadataExtractor.GifControlDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifControlDescriptor
-
- GifControlDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory
-
- GifHeaderDescriptor(MetadataExtractor.GifHeaderDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDescriptor
-
- GifHeaderDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- GifImageDescriptor(MetadataExtractor.GifImageDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifImageDescriptor
-
- GifImageDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- GifReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- GifReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.GifReaderTest
-
- GIFTI_HEADER - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Gifti header string (for top of xml header).
- GiftiAttributes - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
- GiftiStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under in the Gifti xml schema.
- gImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- GKN(double[][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- GKN3(double[][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- gl_height - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- gl_width - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- glassPane - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.GlassPaneListener
-
Pane of glass this listener is tied to.
- GlassPaneListener(JDialogCaptureScreen.MyGlassPane) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.GlassPaneListener
-
Creates new listener that captures mouse and mouse motion events and sends them to the glass pane to draw a
partial or completed rectangle.
- glmax - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Maximum pixel values for the entire dataset.
- glmax - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Maximum pixel values for the entire dataset.
- glmax - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- glmin - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Minimum pixel values for the entire database.
- glmin - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Minimum pixel values for the entire database.
- glmin - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- global_J_local - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.MatrixParameterization
-
- GLOBAL_K_MEANS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- GLOBAL_K_MEANS - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- global_size_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- global_state - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_common_struct
-
- global_state - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- globalAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- globalAlphaMultiplier - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- globalAlphaMultiplier - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- globalAlphaMultiplier - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- globalCounter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- globalCounter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- globalCrc - Variable in class gov.nih.mipav.model.file.CRC
-
- globalSaturationMultiplier - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- globalSaturationMultiplier - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- globalSaturationMultiplier - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- globalScaling - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- GlobalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.EigenQuaternionParameterization
-
- GlobalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.HomogeneousVectorParameterization
-
- GlobalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.IdentityParameterization
-
- GlobalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LocalParameterization
-
- GlobalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- GlobalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.QuaternionParameterization
-
- GlobalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- GlobalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadLocalParameterization
-
- GlobalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MatrixParameterization
-
- GlobalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PolynomialParameterization
-
- GlobalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TestParameterization
-
- globalThicknessMultiplier - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- globalToLocal(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- glp - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- glue(FrontEdge) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- glue(FrontEdge, FrontEdge) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- glyph - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.GlyphLabel
-
- glyph - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- glyph2points - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- GlyphLabel(String, ContourPlot.Glyph, int, int) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Legend.GlyphLabel
-
- glyphLabels - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- glyphName() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Glyph
-
- glyphs - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- glyphSize - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- glyphsList - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
list to hold the glyphs type name
- glyphState - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- GM - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- GM - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- GM2 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- GM2 - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- gm2Button - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- gmAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- gmAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- gmAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- gmat - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
param by param array If secondAllowed if false, gmat can be used as a singly subscripted array of dimension param
by setting all second indices to 0.
- gmat - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
param by param array If secondAllowed if false, gmat can be used as a singly subscripted array of dimension param
by setting all second indices to 0.
- gmax - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
The new maximum level gmax >= srcMax
- gmax - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
The new maximum level gmax >= srcMax
- gmax - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRuleBasedContrastEnhancement
-
The new image maximum.
- gmax - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- gmax - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- gmax - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
- gmAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- gmButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- GMCheckBox - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Gradient Magnitude Check box of the grey scale image.
- GMCheckBox - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Gradient Magnitude Check box of the grey scale image.
- gmDirectory - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- gmFileName - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- gmFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- gmFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- gmFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- gmFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
gradient magnitude filter.
- gmFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- gmFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- gmid - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRuleBasedContrastEnhancement
-
Gray scale value at which ugray(g) = 1.0.
- gmid - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
DOCUMENT ME!
- gmImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- gmImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- gmImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- gmImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- gmImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- gmin - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
The new minimum level gmin <= srcMin
- gmin - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
The new minimum level gmin <= srcMin
- gmin - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRuleBasedContrastEnhancement
-
The new image minimum.
- gmin - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- gmin - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- gmin - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
- GMM(int, int) - Constructor for class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
-
- GMMSel(double[][], double[][][], GaussianMixtureModelsIncompleteSamples.GMM, double, Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- gmTextFile - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- gmThresholdMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Gray Matter maximum threshold :
- gmThresholdMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Gray Matter minimum threshold :
- gn - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- GN4 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- GN8 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- gnavuc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- gnavuc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- gNb - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- gndok - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- gndok - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- gndunc(boolean, int[], double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- gndunc(boolean, int[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- gnorm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
scalar containing norm of the gradient divided by norm of Jacobian.
- gnorm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
scalar containing norm of the gradient divided by norm of Jacobian.
- goBackButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
DOCUMENT ME!
- goButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Go to button.
- goButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Go to button.
- gOffsetX - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
818 gradient offset in x-direction.
- gOffsetY - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
820 gradient offset in y-direction.
- gOffsetZ - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
822 gradient offset in z-direction.
- GOn - Variable in class gov.nih.mipav.model.structures.ModelRGB
-
Flag indicating whether the green channel should be displayed.
- good_step_quality - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- GOOD_TEST_TERM_EXAMPLE - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- GoodCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.GoodCostFunction
-
- goodRASFlag - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- GoodTestTerm(int, int[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.GoodTestTerm
-
- goOptimize(float[], VOIContour) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Run the simplex opt algorithm on a polygon (VOI) in a slice of an image.
- goToSliceText - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- gov.nih.mipav.model - package gov.nih.mipav.model
-
- gov.nih.mipav.model.algorithms - package gov.nih.mipav.model.algorithms
-
- gov.nih.mipav.model.algorithms.DiffusionTensorImaging - package gov.nih.mipav.model.algorithms.DiffusionTensorImaging
-
- gov.nih.mipav.model.algorithms.filters - package gov.nih.mipav.model.algorithms.filters
-
- gov.nih.mipav.model.algorithms.filters.OpenCL.filters - package gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- gov.nih.mipav.model.algorithms.levelset - package gov.nih.mipav.model.algorithms.levelset
-
- gov.nih.mipav.model.algorithms.registration - package gov.nih.mipav.model.algorithms.registration
-
- gov.nih.mipav.model.algorithms.registration.vabra - package gov.nih.mipav.model.algorithms.registration.vabra
-
- gov.nih.mipav.model.algorithms.utilities - package gov.nih.mipav.model.algorithms.utilities
-
- gov.nih.mipav.model.dicomcomm - package gov.nih.mipav.model.dicomcomm
-
- gov.nih.mipav.model.file - package gov.nih.mipav.model.file
-
- gov.nih.mipav.model.file.rawjp2 - package gov.nih.mipav.model.file.rawjp2
-
- gov.nih.mipav.model.provenance - package gov.nih.mipav.model.provenance
-
- gov.nih.mipav.model.provenance.actions - package gov.nih.mipav.model.provenance.actions
-
- gov.nih.mipav.model.scripting - package gov.nih.mipav.model.scripting
-
- gov.nih.mipav.model.scripting.actions - package gov.nih.mipav.model.scripting.actions
-
- gov.nih.mipav.model.scripting.parameters - package gov.nih.mipav.model.scripting.parameters
-
- gov.nih.mipav.model.structures - package gov.nih.mipav.model.structures
-
- gov.nih.mipav.model.structures.event - package gov.nih.mipav.model.structures.event
-
This package carries the different events and listeners arranged around
the structure Objects within MIPAV.
- gov.nih.mipav.model.structures.jama - package gov.nih.mipav.model.structures.jama
-
- gov.nih.mipav.model.util - package gov.nih.mipav.model.util
-
- gov.nih.mipav.plugins - package gov.nih.mipav.plugins
-
Objects in this package hold the basic interface to build external
plugins for use with MIPAV.
- gov.nih.mipav.util - package gov.nih.mipav.util
-
- gov.nih.mipav.view - package gov.nih.mipav.view
-
The gov.nih.mipav.view package contains Objects which are displayed on the
screen.
- gov.nih.mipav.view.components - package gov.nih.mipav.view.components
-
- gov.nih.mipav.view.dialogs - package gov.nih.mipav.view.dialogs
-
- gov.nih.mipav.view.dialogs.reportbug - package gov.nih.mipav.view.dialogs.reportbug
-
- gov.nih.mipav.view.graphVisualization - package gov.nih.mipav.view.graphVisualization
-
- gov.nih.mipav.view.icons - package gov.nih.mipav.view.icons
-
- gov.nih.mipav.view.input.spacenav - package gov.nih.mipav.view.input.spacenav
-
- gov.nih.mipav.view.renderer - package gov.nih.mipav.view.renderer
-
- gov.nih.mipav.view.renderer.flythroughview - package gov.nih.mipav.view.renderer.flythroughview
-
- gov.nih.mipav.view.renderer.J3D - package gov.nih.mipav.view.renderer.J3D
-
- gov.nih.mipav.view.renderer.J3D.model.file - package gov.nih.mipav.view.renderer.J3D.model.file
-
- gov.nih.mipav.view.renderer.J3D.model.structures - package gov.nih.mipav.view.renderer.J3D.model.structures
-
- gov.nih.mipav.view.renderer.J3D.surfaceview - package gov.nih.mipav.view.renderer.J3D.surfaceview
-
- gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview - package gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
- gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview - package gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
- gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview - package gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
- gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview - package gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
- gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse - package gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse
-
- gov.nih.mipav.view.renderer.J3D.volumeview - package gov.nih.mipav.view.renderer.J3D.volumeview
-
- gov.nih.mipav.view.renderer.WildMagic - package gov.nih.mipav.view.renderer.WildMagic
-
- gov.nih.mipav.view.renderer.WildMagic.AAM - package gov.nih.mipav.view.renderer.WildMagic.AAM
-
- gov.nih.mipav.view.renderer.WildMagic.BallPivoting - package gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM - package gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM
-
- gov.nih.mipav.view.renderer.WildMagic.Decimate - package gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork - package gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- gov.nih.mipav.view.renderer.WildMagic.flythroughview - package gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
- gov.nih.mipav.view.renderer.WildMagic.Interface - package gov.nih.mipav.view.renderer.WildMagic.Interface
-
- gov.nih.mipav.view.renderer.WildMagic.Knees - package gov.nih.mipav.view.renderer.WildMagic.Knees
-
- gov.nih.mipav.view.renderer.WildMagic.Navigation - package gov.nih.mipav.view.renderer.WildMagic.Navigation
-
- gov.nih.mipav.view.renderer.WildMagic.Poisson - package gov.nih.mipav.view.renderer.WildMagic.Poisson
-
- gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine - package gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine
-
- gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry - package gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes - package gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes
-
- gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree - package gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- gov.nih.mipav.view.renderer.WildMagic.ProstateFramework - package gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm - package gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
- gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm - package gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity - package gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
- gov.nih.mipav.view.renderer.WildMagic.Render - package gov.nih.mipav.view.renderer.WildMagic.Render
-
- gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer - package gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer
-
- gov.nih.mipav.view.renderer.WildMagic.TBI - package gov.nih.mipav.view.renderer.WildMagic.TBI
-
- gov.nih.mipav.view.renderer.WildMagic.VOI - package gov.nih.mipav.view.renderer.WildMagic.VOI
-
- gov.nih.mipav.view.renderer.WildMagic.WormUntwisting - package gov.nih.mipav.view.renderer.WildMagic.WormUntwisting
-
- GPanel() - Constructor for class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame.GPanel
-
- GPC_DIFF - gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_op
-
- GPC_EPSILON - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- GPC_INT - gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_op
-
- gpc_op() - Constructor for enum gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_op
-
- GPC_UNION - gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_op
-
- gpc_vertex() - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_vertex
-
- gpc_vertex_list() - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_vertex_list
-
- GPC_XOR - gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_op
-
- gpre - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
400 Graphically prescribed.
- GpsDescriptor(MetadataExtractor.GpsDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GpsDescriptor
-
- GpsDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
- gpuCompEnabledCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
GPU computing enabled check box
- gpuInfoButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- gpuPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
The image panel to hold one Canvas3D.
- GPURenderBase - Class in gov.nih.mipav.view.renderer.WildMagic
-
- GPURenderBase() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Default GPURenderBase constructor.
- GPURenderBase(VolumeTriPlanarInterface, Animator, VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- gpyr - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3DC
-
- GQCANP(double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- GQPHYC(int, double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- gqtstp(double[], double[], double[], int[], double[], int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- gr - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- GR - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- GR - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- grad - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< size of Gaussian window (in spatial bins)
- grad - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.TracingPoint
-
- grad - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.TracingPoint
-
- grad - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.TracingPoint
-
- grad - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.TracingPoint
-
- grad - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.TracingPoint
-
- grad(double[], double[]) - Method in interface gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Function
-
- grad(double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- grad(double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_LrFunction
-
- grad_dir_bins - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- grad_dir_quant - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- grad_o - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< GSS gradient data.
- grad_thresh_decrease - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- grad_weight - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- grad_weight - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- gradAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
DOCUMENT ME!
- gradBvalText - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
int to determine which format user selects for gradBval test file
- gradCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
- gradCreatetable - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- gradFileRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
gradient file option
- gradient - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateScratch
-
- gradient - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- gradient - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer.State
-
- gradient - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ExpectedEvaluation
-
- gradient() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- gradient_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- gradient_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- GRADIENT_ALL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
chooses all the gradient cost functions
- GRADIENT_ALL - Static variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- GRADIENT_BASED_FACET_EDGE_DETECTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- GRADIENT_BASED_FACET_EDGE_DETECTION - Static variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- gradient_check_numeric_derivative_relative_step_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- gradient_check_relative_precision - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- gradient_checker_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingCostFunction
-
- gradient_checking_problem - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- gradient_dir_b - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- gradient_dir_non - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- gradient_dir_src - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- gradient_error_detected() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingIterationCallback
-
- gradient_error_detected_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingIterationCallback
-
- gradient_evaluation_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- gradient_evaluation_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
- gradient_is_valid - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- GRADIENT_MAG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
chooses the gradient magnitude cost
- GRADIENT_MAG - Static variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- gradient_mag_b - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- GRADIENT_MAG_INT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
chooses the gradient magnitude and intensity based cost functions
- GRADIENT_MAG_INT - Static variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- GRADIENT_MAG_MED - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
chooses the gradient magnitude and medialness cost functions
- GRADIENT_MAG_MED - Static variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- gradient_mag_non - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- gradient_mag_src - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- gradient_max_norm - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- gradient_max_norm - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer.State
-
- gradient_norm - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- gradient_squared_norm - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer.State
-
- gradient_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- gradient_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- gradient_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- gradient2(double[], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- gradientBasedFacetEdgeDetection() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- gradientButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- GradientChecker(CeresSolver.CostFunction, Vector<CeresSolver.LocalParameterization>, CeresSolver.NumericDiffOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.GradientChecker
-
- GradientCheckerSmokeTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GradientCheckerTestCorrectnessWithLocalParameterizations() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GradientCheckingCostFunction(CeresSolver.CostFunction, Vector<CeresSolver.LocalParameterization>, CeresSolver.NumericDiffOptions, double, String, CeresSolver.GradientCheckingIterationCallback) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingCostFunction
-
- GradientCheckingCostFunctionResidualsAndJacobiansArePreservedTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GradientCheckingCostFunctionSmokeTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GradientCheckingIterationCallback() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingIterationCallback
-
- GradientCheckingProblemImplProblemDimensionsMatch() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- gradientDirectionThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- gradientDirectionThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- gradientEdge - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- gradientFileBrowseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
browse button
- gradientFilePath - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This is the full path to the gradient file
- gradientFilePathTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
path to gradient file
- gradientGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- gradientMagAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- gradientMagAlgo - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- gradientMagAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- gradientMagnitude(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Computes the gradient magnitude of the buffer passed in.
- gradientMagnitude25D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
2D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
- gradientMagnitude3D(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Computes the gradient magnitude of the buffer passed in.
- gradientMagnitude3D(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
3D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
- gradientMagnitude4D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Calls gradientMagnitude3D for each volume in the time series.
- gradientMagnitudeCompositeA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- gradientMagnitudeCompositeB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- gradientMagnitudeCompositeOpacityA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- gradientMagnitudeParametersA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- gradientMagnitudeParametersB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- gradientMagnitudeSep25D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
25D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
- gradientMagnitudeSep25DSlices() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
- gradientMagnitudeSep3D(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
3D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
- gradientMagSepAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- GradientNeighbors() - Constructor for class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout.GradientNeighbors
-
- gradientOrientationNumber - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- gradientOrientationNumber - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- gradientOrientationNumberIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- gradientOrientationNumberPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- gradientPath - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
gradient path
- GradientProblem(CeresSolver.FirstOrderFunction) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
- GradientProblem(CeresSolver.FirstOrderFunction, CeresSolver.LocalParameterization) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
- GradientProblemEvaluationWithoutParameterizationAndWithGradient() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GradientProblemEvaluationWithoutParameterizationOrGradient() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GradientProblemEvaluationWithParameterizationAndWithGradient() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GradientProblemEvaluator(CeresSolver.GradientProblem) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- GradientProblemEvalutaionWithParameterizationAndNoGradient() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GradientProblemSolver() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolver
-
- GradientProblemSolverOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- GradientProblemSolverOptionsToSolverOptions() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- GradientProblemSolverOptionsToSolverOptions(CeresSolver.GradientProblemSolverOptions) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- GradientProblemSolverSolvesRosenbrockWithDefaultOptions() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GradientProblemSolverStateUpdatingCallback(int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverStateUpdatingCallback
-
- GradientProblemSolverSummary() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- GradientProblemTakesOwnershipOfFirstOrderFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- gradients - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- gradients - Variable in class gov.nih.mipav.model.file.DTIParameters
-
- gradients - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
- gradients - Variable in class gov.nih.mipav.model.file.FileImageXML
-
- gradients - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIGradTableCorrectionAfterTrans
-
- gradients - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- gradientTableCreator() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- GradientToleranceReached() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- gradientType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- gradientType - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- gradientWeight - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
- gradientWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- gradientWeightText - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- gradIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- gradMag - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- gradMagBuf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
The gradient magnitude of the slice.
- gradMagBuf - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- gradMagRescale_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Model image of the gradient magnitude of image A rescaled to have value in the range [0:255].
- gradMagRescale_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Model image of the gradient magnitude of image A rescaled to have value in the range [0:255].
- gradMagRescale_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Model image of the gradient magnitude of image B rescaled to have value in the range [0:255].
- gradMagRescale_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Model image of the gradient magnitude of image B rescaled to have value in the range [0:255].
- gradMagVol - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- gradMatArray - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIGradTableCorrectionAfterTrans
-
- gradOPBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- gradOPLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- gradPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
bFactorIndex
- gradResBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- gradResLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- gradResWOP - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- graph - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
- graph - Variable in class gov.nih.mipav.view.graphVisualization.MipavSAXReader
-
- graph - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- Graph() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Graph
-
- Graph(LSCM.Mesh) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- graph_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.VertexDegreeLessThan
-
- graph_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.VertexTotalOrdering
-
- graph_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
-
- graph_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.VertexTotalOrderingInteger
-
- graph_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- graph25VOI_CalcInten(boolean, boolean, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- graph25VOI_CalcInten(boolean, boolean, float) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Generates and displays a 1D graph of the average or total intensity of
2.5 VOI of 2.5D image (3D).
- GraphAddVertexAndEdge() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GraphAddVertexIdempotence() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- graphBounds - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- graphCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- graphCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- GraphDieOnNonExistentVertex() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GraphEmptyGraph() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- GRAPHIC_WEIGHTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
- GRAPHIC_WEIGHTS - Static variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- graphicallyPrescribed - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- graphicallyPrescribed - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- graphicsButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- graphicsButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- graphPanel - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Displays the graph.
- graphPanel2 - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- graphPointVOI(VOI, VOIPoint, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- graphSubMenu - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- graphSubMenu - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- graphSystem - Variable in class gov.nih.mipav.view.graphVisualization.MipavSAXReader
-
- graphVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- graphVOICurvature(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- grat1(double, double, double, double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- GRAY - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Sets up the transfer function colors to be gray.
- GRAY_BR - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Sets up the transfer function colors to be gray, with blue in the first location, red in the last location.
- GRAY_LUT - Static variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Indicates a grayscale LUT.
- GRAY_PRESENTATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- GRAY_PRESENTATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- gray_rgb_convert(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- gray_rgb_convert(libjpeg.jpeg_decompress_struct, short[][][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- GRAY_RGB_CONVERT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- Gray16 - Static variable in class gov.nih.mipav.model.file.FileCZI
-
16 bit unsigned
- Gray32 - Static variable in class gov.nih.mipav.model.file.FileCZI
-
32 bit integer [planned]
- Gray32Float - Static variable in class gov.nih.mipav.model.file.FileCZI
-
32 bit IEEE float
- Gray64 - Static variable in class gov.nih.mipav.model.file.FileCZI
-
Double precision floating point [planned]
- Gray64ComplexFloat - Static variable in class gov.nih.mipav.model.file.FileCZI
-
2 x 4 byte IEEE float, representing the real and imaginary part of a complex number
- Gray8 - Static variable in class gov.nih.mipav.model.file.FileCZI
-
8 bit unsigned
- grayCount - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- grayImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- grayIndices - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaFileComparator
-
DOCUMENT ME!
- GrayLevelClass(boolean, float[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
Creates a new GrayLevelClass object.
- GrayProfiles - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.ASMData
-
- GrayRainbow - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- GRAYSCALE - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- grayscale_convert(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- grayscale_convert(libjpeg.jpeg_decompress_struct, short[][][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- GRAYSCALE_CONVERT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- grayScaleArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- grayScaleArray - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- grayScaleButton - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
- grayScaleButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
- grayScaleButton - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
- grayScaleButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
- grayScaleButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- grayScaleButton - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
- grayScaleNumber - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- GRE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GRE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GRE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GRE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- GRE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- GRE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- GRE_BLACK - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GRE_BLACK - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GRE_BLACK - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- GRE_BLACK - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- GRE_FUZZY_CLASS1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GRE_FUZZY_CLASS1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GRE_FUZZY_CLASS1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- GRE_FUZZY_CLASS3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GRE_FUZZY_CLASS3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GRE_FUZZY_CLASS3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- GRE_GREY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GRE_GREY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GRE_GREY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GRE_GREY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- GRE_GREY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- GRE_HIGH_INTEN - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GRE_HIGH_INTEN - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GRE_HIGH_INTEN - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GRE_HIGH_INTEN - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- GRE_SECTION3_DARK - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- GRE_SECTION4_HIGH_THRESHOLD - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- greater(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- greater(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- greater(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- greater(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.SlantTransform
-
- greater(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- greater(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- GREATER_ICOST - Static variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- greaterEqualCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- greaterEqualThan(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- greaterEqualThan(Link) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- greaterEqualThan(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- greaterEqualValue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- greaterEqualValue - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- greaterThan(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- greaterThan(Link) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- greaterThan(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- greaterThan(Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- greCEDImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- greCEDImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- greCEDImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- greCEDImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- greCEDImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- greCEDImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- greedyCluster(Vector<AlgorithmScaleSaliency.sixItems>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- green - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- green - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- green - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Flags to indicate which color channels to process.
- green - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Flags indicate which color channel to process.
- green - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
Flags indicate which color channel to process.
- green - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.model.file.FileImageXML.LUValue
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
The indicator probe's green color.
- green - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Define the green color.
- green - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
The indicator probe's green color.
- green - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
Border color, red, green, and blue components:
- green - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- green - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Green channel value of the paint color.
- GREEN - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Sets up the transfer function colors to be monochrome-green.
- GREEN - Static variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Green channel.
- GREEN - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Component tag indicator.
- GREEN - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Component tag indicator.
- GREEN - Static variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
The green channel transfer function.
- GREEN - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The green channel transfer function.
- GREEN_CHANNEL - Static variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
GREEN CHANNEL String
- GREEN_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Green channel.
- GREEN_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Green channel.
- GREEN_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Green channel.
- GREEN_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Green channel.
- GREEN_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Green channel.
- GREEN_OFFSET - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
Green channel.
- GREEN_OFFSET - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Green channel.
- GREEN_OFFSET - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
Green channel.
- GREEN_WEIGHT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- green1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmColorEdge
-
- green1 - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- green1Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- green2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmColorEdge
-
- green2 - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- green2Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- GreenA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- greenAdjColors - Variable in class gov.nih.mipav.view.ColorWheel
-
array of r,g,b values after green adj
- greenAdjColors - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
arry of r,g,b after green adj *
- greenArray - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- greenArray - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- GreenB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- greenBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The green sphere branch group that branches underneath the entryPointBG, and represents the green sphere.
- greenBlackLevel - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- greenBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
- greenBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- greenBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- greenBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- greenBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- greenBuffer - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- greenBuffer - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- greenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- greenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- greenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- greenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- greenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- greenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- greenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
DOCUMENT ME!
- greenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- greenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- greenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
DOCUMENT ME!
- greenButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- greenChannel - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- greenChannel - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- greenChannelNumber - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- greenCheckbox - Variable in class gov.nih.mipav.view.components.JPanelColorChannels
-
DOCUMENT ME!
- greenCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- greenCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- greenCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Checkbox to select green image.
- greenCheckBox - Variable in class gov.nih.mipav.view.JPanelHistogram
-
checkbox for turning on / off the green component of the color look-up table.
- greenCheckBoxA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Update Green channel histogram check box A, B.
- greenCheckBoxA - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- greenCheckBoxB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Update Green channel histogram check box A, B.
- greenCheckBoxB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- greenGamma - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- greenLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- greenLine - Variable in class gov.nih.mipav.model.structures.ModelLUT
-
Function that maps the green function of the LUT.
- greenLine - Variable in class gov.nih.mipav.model.structures.ModelRGB
-
Function that maps the green function of the LUT.
- greenMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- greenMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- greenMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- greenMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- greenMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- greenMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- greenMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- greenMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- greenNorm - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
- greenOffset - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- GreenOnA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- GreenOnB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- greenRequested - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- greenRGBButton - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
R, G, B channel control buttons.
- greenRGBButton - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- greenSphere - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The geometry group of the green sphere.
- greenSphereTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Green sphere transform group that set up the translation.
- greenText - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- greenValue - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Weighting values for the red, green, and blue channels.
- greenValue - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Weighting values for the red, green, and blue channels.
- greenValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- greenValue - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- greenVector - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- greenWhiteLevel - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- greImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- greImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- greImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- greImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- greImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- greImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- greImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- greImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- greImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- greImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- greImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- greImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- greImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- greImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- greImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- greImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- greImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- greImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- greImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- greImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- grey_weights(ModelImage, int[], int[][], Vector<Integer>, int, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- grey_weights_PW(ModelImage, int[][], Vector<Integer>, int, int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- greyBlackLevel - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- greyChannelNumber - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
for Grey:.
- greyColorMap - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- greyGamma - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- greyLevels - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
Number of grey levels used if rescaling performed.
- greyLevels - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
Number of grey levels used if rescaling performed.
- greyLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Number of grey levels used if data must be rescaled
- greyLevels - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Number of grey levels used if data must be rescaled
- greyWhiteLevel - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- grid - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- grid - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- grid - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.StaticGrid
-
- grid(int, int, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.StaticGrid
-
- grid_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.BiCubicInterpolator
-
- grid_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CubicInterpolator
-
- Grid1D(double[], int, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
-
- Grid1D(int[], int, boolean, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
-
- Grid1DOneDataDimension() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Grid1DOneDataDimensionOutOfBounds() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Grid1DTwoDataDimensionIntegerDataInterleaved() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Grid1DTwoDataDimensionIntegerDataStacked() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Grid2D(double[], int, boolean, boolean, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- Grid2D(int[], int, boolean, boolean, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- Grid2DOneDataDimensionRowMajor() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Grid2DOneDataDimensionRowMajorOutOfBounds() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Grid2DTwoDataDimensionColMajorInterleaved() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Grid2DTwoDataDimensionColMajorStacked() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Grid2DTwoDataDimensionRowMajorInterleaved() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Grid2DTwoDataDimensionRowMajorStacked() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- gridColor - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- gridColor - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
color for the region in-between the images in the light-box.
- gridColor - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
color of grid.
- gridColor - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Color for the region in-between the images in the light-box.
- gridColorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- gridColumn - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- gridColumn - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- gridDialog - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
The grid resize dialog
- gridGetInSphere(StaticGrid, PointDistanceFunctor, VertTmark, Point3, float, Vector<Vertex>, Vector<Float>, Vector<Point3>) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.StaticGrid
-
- gridHeight - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- gridHeight - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
grid's height
- gridLabelingOn - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
if number/lettering should be displayed for grid boxes.
- gridLabelOrientation - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
boolean to determine the orientation: true is x-axis numbered false is
x-axis lettered.
- gridLines - Variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
DOCUMENT ME!
- gridlinesCheckbox - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- gridOptions - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Only want one gridoptions dialog per jframeimage.
- gridOverlayOn - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Flag to indicate if NEI grid overlay should be displayed.
- gridP(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- gridPanel - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
Panel that holds the grid (stored as private variable so as to remove/rebuild the grid as needed
- gridPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- gridPoints - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- gridRow - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
value for the number of rows (number of images along the y-axis) and columns (number of images along the x-axis)
in the light-box.
- gridRow - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Value for the number of rows (number of images along the y-axis) and columns (number of images along the x-axis)
in the light-box.
- gridSize - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- gridsizeL - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- gridsizeText - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- gridSpacing - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
spacing between images in the light-box.
- gridSpacing - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Spacing between images in the light-box.
- gridSpacingX - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- gridSpacingX - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
spacing of the grid (horizontal) in terms of resolution.
- gridSpacingY - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- gridSpacingY - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
spacing of the grid (vertical) in terms of resolution.
- gridSpacingZ - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- gridVisited - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- gridWidth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- gridWidth - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
grid's width
- group - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Represents the DICOM group number.
- group - Variable in class gov.nih.mipav.model.dicomcomm.RTCEntry
-
DOCUMENT ME!
- group - Variable in class gov.nih.mipav.model.file.FileDicomTag
-
Integer group word (in hexadecimal).
- group - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- group - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- group - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- group - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- group - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- group - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- group - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- group - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- Group(String, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
Creates a new Group object.
- GROUP_1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GROUP_1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GROUP_1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group_1_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- group_1_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- group_1_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GROUP_10 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GROUP_10 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GROUP_10 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group_10_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- group_10_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- group_10_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GROUP_2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GROUP_2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GROUP_2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group_2_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- group_2_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- group_2_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GROUP_3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GROUP_3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GROUP_3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group_3_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- group_3_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- group_3_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GROUP_4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GROUP_4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GROUP_4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group_4_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- group_4_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- group_4_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GROUP_5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GROUP_5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GROUP_5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group_5_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- group_5_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- group_5_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GROUP_6 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GROUP_6 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GROUP_6 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group_6_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- group_6_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- group_6_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GROUP_7 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GROUP_7 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GROUP_7 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group_7_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- group_7_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- group_7_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GROUP_8 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GROUP_8 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GROUP_8 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group_8_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- group_8_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- group_8_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- GROUP_9 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GROUP_9 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- GROUP_9 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group_9_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- group_9_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- group_9_endSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- group_to_elements() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- group_to_elements_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- group1 - Variable in class gov.nih.mipav.view.dialogs.JDialogBlankImage
-
The composed group of radio buttons.
- group1 - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- group1 - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- group3_2D_Coding - Variable in class gov.nih.mipav.model.file.FileSVS
-
- group3_2D_Coding - Variable in class gov.nih.mipav.model.file.FileTiff
-
- group3Fillbits - Variable in class gov.nih.mipav.model.file.FileSVS
-
- group3Fillbits - Variable in class gov.nih.mipav.model.file.FileTiff
-
- group3Uncompressed - Variable in class gov.nih.mipav.model.file.FileSVS
-
- group3Uncompressed - Variable in class gov.nih.mipav.model.file.FileTiff
-
- group4Uncompressed - Variable in class gov.nih.mipav.model.file.FileSVS
-
- group4Uncompressed - Variable in class gov.nih.mipav.model.file.FileTiff
-
- groupBackground - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- groupBackgrounds - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- groupChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
group variables.
- groupClasses(Problem, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- GroupClassesReturn(int, int[], int[], int[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear.GroupClassesReturn
-
- groupColorMap - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Maps the group word to a displayed color, private tags are not specified
- groupCombo - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Combo boxes used for sequence tags
- groupCropImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- groupCropImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- groupCropImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- groupDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- GroupElements() - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Object.GroupElements
-
- groupField - Variable in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- groupGrowRegion - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- groupID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- groupID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.GroupRef
-
Attributes.
- GroupId(T) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- groupImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Group images and exhaustively train the AAM model.
- groupIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
group index.
- grouping - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
- grouping - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- grouping - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- groupLengthInfo - Static variable in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
- groupList - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Lists used to display available DICOM tags
- groupMean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- groupName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- groupNameInfo - Static variable in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
- groupNum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- groupNum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
DOCUMENT ME!
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
DOCUMENT ME!
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- groupNum - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
number for id of VOI
- groupNum - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
DOCUMENT ME!
- groupObject - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- groupObjects - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- groupRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
- groupRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- groupRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Project
-
- GroupRef(Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.GroupRef
-
Creates a new GroupRef object.
- groupRefImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- groupRefImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- groupRefImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- groupRefs - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
DOCUMENT ME!
- groups - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
A hash table of the DICOM groups
- groups - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- groupSeqText - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Text fields for displaying/entering a group/element tag
- GroupSize(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- groupStdDev - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- groupString - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- groupSubMenu - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- groupTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- groupTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- groupTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- groupText - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Text fields for displaying/entering a group/element tag
- groupToElement - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
List of all file's elements for each group of a FileDicomKey set
- groupToElementSeq - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
List of all file's elements for each group of a FileDicomKey set
- groupVOIs() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Forms a single VOI structure from all the active VOIs presently loaded in the imageModel.
- groupWord - Variable in class gov.nih.mipav.model.file.FileDicom
-
First number (DICOM group) in ordered pair of numbers that uniquely identifies a data element.
- grow() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- grow(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- growButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Button which indicates that a region grow has been initiated / is being adjusted.
- growDialog - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- growDialog - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Dialog used to control region growing of the paint tool.
- growingPlate - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- GrowingPlatePattern - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- GrowingPlatePattern() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.GrowingPlatePattern
-
- growInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- growInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- growInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- growInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- growInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- growRegion(int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
region growing algorithm.
- GROWREGION - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- growTreesInThread(int, Vector<Double>) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.Forest.growTreesInThread
-
- grpLength - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Object.GroupElements
-
Stores length of group.
- grx_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- gry - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- gry_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- gry_const - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- gry_noise - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- gsBottomHatAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
- gsBottomHatAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Use serialVersionUID for interoperability.
- gsBottomHatAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
- gsCloseAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
- gsCloseAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
- gsCloseAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
- gsDilateAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
- gsDilateAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
- gsDilateAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
- gse - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- gsErodeAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
- gsErodeAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
- gsErodeAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
- gsMorphGradAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
- gsMorphGradAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
- gsMorphGradAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
- gsMorphLaplacianAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
- gsMorphLaplacianAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
- gsMorphLaplacianAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
- gsOpenAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
- gsOpenAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
- gsOpenAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
- gsReconAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- gsReconAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- gsReconAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- gss - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- gss - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3DC
-
- GSS_filters() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.GSS_filters
-
- gssarg - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- gssarg - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- gsTopHatAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
- gsTopHatAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Use serialVersionUID for interoperability.
- gsTopHatAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
- gsumln(double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- gt - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- gt(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
Tests whether this value is greater than another DoubleDouble value.
- Gt(double, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise greater than.
- Gt(double, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Greater Than - compares a double and a vector.
- Gt(CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise greater than.
- Gt(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Greater Than - compares a vector and a vector.
- gTestMode(double, CVODES.NVector, double[], CVODES.UserData) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
g routine.
- gthresh(double[], double, double[]) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- gtol - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
gtol is a nonnegative input variable.
- gtTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- GtwImag - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- GtwReal - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- gues - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- gues - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- guessCharSet(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Iso2022Converter
-
Attempts to guess the Charset of a string provided as a byte array.
- guessGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- guessImageLength(int[]) - Method in class gov.nih.mipav.model.file.FileDicom
-
Helper method for dicom files that do not specify a valid extents
- GUI_BUILDER_OK_ID - Static variable in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- guiBuilder - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- guiBuilder - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- GuiBuilder - Class in gov.nih.mipav.view.dialogs
-
Provides methods for quickly building panel components.
- GuiBuilder(JDialogBase) - Constructor for class gov.nih.mipav.view.dialogs.GuiBuilder
-
- guid - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
Attributes.
- guideColor - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- guidedFilterAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
DOCUMENT ME!
- GuidedFilterColor() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- GuidedFilterMono() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- guidedGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- guidedImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- guidedImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- guides - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- guidField - Variable in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- GULF_RESEARCH_AND_DEVELOPMENT - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- GULF_RESEARCH_AND_DEVELOPMENT - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- GulfResearchAndDevelopmentFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.GulfResearchAndDevelopmentFunction
-
- gunzip - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- gunzip - Variable in class gov.nih.mipav.model.file.FileNRRD
-
If true, data has gzip compression.
- gVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- gVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- gvfAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- gvfBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- gvfBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- gvfBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- gvfImage - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- gvfIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Maximum iterations to generate generalized gradient vector field.
- gvfIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Maximum iterations to generate generalized gradient vector field.
- gvfIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- gvfIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- GVFitting(double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVFitting
-
- GVFittingCheck - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- GVFittingCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVFittingCostFunction
-
- gvfModel - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- gvfName - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- GVfunction(double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- GVfunction_peak1(double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- GVfunction_recirculation(double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- GVRecirculation(double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVRecirculation
-
- GVRecirculationCheck - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- GVRecirculationCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.GVRecirculationCostFunction
-
- GWAVELIFT_NORM_1_1 - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- GwImag - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- gWorkItems - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.WorkDimensions
-
- GwReal - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- Gx2Data - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Storage location of the first derivative of the Gaussian in the X direction for 2D images;
- Gx2Data - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Storage location of the first derivative of the Gaussian in the X direction for 2D images;
- GxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxData - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- GxData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GxData - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Storage location of the first derivative of the Gaussian in the X direction.
- GxxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Storage location of the second derivative of the Gaussian in the X direction.
- GxxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Storage location of the second derivative of the Gaussian in the X direction.
- GxxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GxxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Storage location of the second derivative of the Gaussian in the XX direction.
- GxxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Storage location of the second derivative of the Gaussian in the X direction.
- GxxData - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- GxxData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- GxxData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Storage location of the second derivative of the Gaussian in the X direction.
- GxxData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GxxData - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Storage location of the second derivative of the Gaussian in the X direction for the 3D kernel.
- GxxData2D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Storage location of the second derivative of the Gaussian in the X direction for the 2D kernel.
- GxxxData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GxxxData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GxxyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GxxyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GxxzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GxyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GxyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Storage location of the second derivative of the Gaussian in the XY direction.
- GxyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- GxyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GxyyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GxyyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GxyzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GxzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GxzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Storage location of the second derivative of the Gaussian in the XZ direction.
- GxzData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GxzzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GY - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- GY - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- Gy2Data - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Storage location of the first derivative of the Gaussian in the Y direction for 2D images;
- Gy2Data - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Storage location of the first derivative of the Gaussian in the Y direction for 2D images;
- GyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GyData - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Storage location of the first derivative of the Gaussian in the Y direction.
- GyyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Storage location of the second derivative of the Gaussian in the Y direction.
- GyyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Storage location of the second derivative of the Gaussian in the Y direction.
- GyyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GyyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Storage location of the second derivative of the Gaussian in the YY direction.
- GyyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Storage location of the second derivative of the Gaussian in the Y direction.
- GyyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- GyyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Storage location of the second derivative of the Gaussian in the Y direction.
- GyyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GyyData - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Storage location of the second derivative of the Gaussian in the Y direction for the 3D kernel.
- GyyData2D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Storage location of the second derivative of the Gaussian in the Y direction for the 2D kernel.
- GyyyData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GyyyData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GyyzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GyzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GyzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Storage location of the second derivative of the Gaussian in the YZ direction.
- GyzData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GyzzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Storage location of the first derivative of the Gaussian in the Z direction.
- GzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Storage location of the first derivative of the Gaussian in the Z direction.
- GzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
Storage location of the first derivative of the Gaussian in the Z direction.
- GzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Storage location of the first derivative of the Gaussian in the Z direction.
- GzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
Storage location of the first derivative of the Gaussian in the Z direction.
- GzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
Storage location of the first derivative of the Gaussian in the Z direction.
- GzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Storage location of the first derivative of the Gaussian in the Z direction.
- GzData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Storage location of the first derivative of the Gaussian in the Z direction.
- GzData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Storage location of the first derivative of the Gaussian in the Z direction.
- GzData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
Storage location of the first derivative of the Gaussian in the Z direction.
- GzData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GzData - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Storage location of the first derivative of the Gaussian in the Z direction.
- gzin - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- GzzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Storage location of the second derivative of the Gaussian in the Z direction.
- GzzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Storage location of the second derivative of the Gaussian in the Z direction.
- GzzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- GzzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Storage location of the second derivative of the Gaussian in the ZZ direction.
- GzzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Storage location of the second derivative of the Gaussian in the Z direction.
- GzzData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Storage location of the second derivative of the Gaussian in the Z direction.
- GzzData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- GzzData - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Storage location of the second derivative of the Gaussian in the Z direction for the 3D kernel.
- GzzzData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
H
- h - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- h - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- h - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- h - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- h - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- h - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_cmptparm_t
-
data height
- h - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
data height
- h - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
- h - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- h - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- h - Variable in class gov.nih.mipav.view.ColorIcon
-
DOCUMENT ME!
- h(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- H - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- H - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- H - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- H - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
Array for internal storage of nonsymmetric Hessenberg form.
- H - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- H_BIAS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- h_expand - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- h_samp_factor - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- h_t0min(TURN_REP, TURN_REP, double, double, double, int, double[], EVENT[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- H0VAL - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- H0VLC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- h1 - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- h2v1_merged_upsample(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- h2v1_merged_upsample(libjpeg.jpeg_decompress_struct, short[][][], int, short[][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- H2V1_MERGED_UPSAMPLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- h2v1_upsample(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, byte[][], int, byte[][][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- h2v1_upsample(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[][], int, short[][][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- H2V1_UPSAMPLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- h2v2_merged_upsample(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- h2v2_merged_upsample(libjpeg.jpeg_decompress_struct, short[][][], int, short[][]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- H2V2_MERGED_UPSAMPLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- h2v2_upsample(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, byte[][], int, byte[][][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- h2v2_upsample(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[][], int, short[][][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- H2V2_UPSAMPLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- h5File - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
the file to be read/written
- H5Write(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- HAAR - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- HaarTransform - Class in gov.nih.mipav.model.algorithms
-
- HaarTransform() - Constructor for class gov.nih.mipav.model.algorithms.HaarTransform
-
- HaarTransform(ModelImage, ModelImage, ModelImage, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.HaarTransform
-
- Hahn1CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Hahn1CostFunction
-
- Hahn1Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Hahn1Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- HALEN - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- HALF - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- halfBin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- halfedge() - Method in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- halfedge() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- halfedge(int) - Method in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- Halfedge() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Halfedge
-
- HalfEdge() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- halfedge_face(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- halfedge_vertex(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- halfedges() - Method in class gov.nih.mipav.model.algorithms.LSCM.Loop
-
- HalfEdgeTrait() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.HalfEdgeTrait
-
- halfK - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- halfK - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalVariance
-
- halfK - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- halfK - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
The kernel radius.
- halfK - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
The kernel radius.
- halfMajor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- halfMajor - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- halfMajor - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- halfMatrix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
-
Matrix with the best transformation divided by half.
- halfMatrix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D.MatrixListItem
-
Matrix with the best transformation divided by half.
- halfMatrix - Variable in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Matrix with the best transformation divided by half.
- halfMatrixd - Variable in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Matrix with the best transformation divided by half.
- halfMinor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- halfMinor - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- halfMinor - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- HALFSAMPLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- HALFTONE_HINTS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- HALFTONE_HINTS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- halfWindow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.userWeightFunct
-
- hAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
DOCUMENT ME!
- hAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
DOCUMENT ME!
- hAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
DOCUMENT ME!
- hAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
DOCUMENT ME!
- hAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
DOCUMENT ME!
- hAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
DOCUMENT ME!
- hAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
DOCUMENT ME!
- HammingDistanceThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- HammingDistanceThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- hammingKernel2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Builds a hamming kernel in 2 dimensions.
- hammingKernel2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Builds a hamming kernel in 2 dimensions.
- hammingKernel3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Builds a hamming kernel in 3 dimensions.
- hammingKernel3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Builds a hamming kernel in 3 dimensions.
- handCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
A hand cursor.
- handCursor - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Hand-shaped mouse cursor.
- handleConnectionFromServer(Socket) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Establishes an association over a socket from the server (SCP) side.
- handleData(int, byte, MetadataExtractor.SequentialByteArrayReader, ArrayList<Object>) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader
-
- handleDict(int, byte, MetadataExtractor.SequentialByteArrayReader, ArrayList<Object>) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader
-
- handleInt(int, byte, MetadataExtractor.SequentialByteArrayReader, ArrayList<Object>) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader
-
- handleIntensityLineBtn3(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Opens the VOIIntensity line drawing popup menu.
- HandleInvalidStep() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- handleLeastSquares() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Method handles transformations for least squares algorithm in the tri-planar frame.
- handleMaskPopupMenu(Component, MouseEvent) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Handles the popup menu for the Quick Mask buttons
- handleMaskToPaint(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
This method is provided for the user to convert a masked area back to a painted area.
- handlePaintToMaskPopupMenu(Component, MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Handles the pop-up menu for Paint to Mask buttons (inside/outside)
- handleParserException(ParserException) - Method in class gov.nih.mipav.model.scripting.ScriptRunner
-
Handle a script parser exception by printing out the location of the problem and stopping script execution.
- handlePluginPanelSelection() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
This method will load a plug-in into the plug-in area of the tri-planar frame.
- handlePrintIM(MetadataExtractor.Directory, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- handler - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dec_memory_marker_handler_t
-
action linked to the marker
- handler - Variable in class gov.nih.mipav.view.dialogs.InstanceVOI
-
- handler - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
- HandleSuccessfulStep() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- handleTPSpline() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- HandleUnsuccessfulStep() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- handleZoomPopupMenu(Component, MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
DOCUMENT ME!
- HankelKind - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
real and imaginary outputs Length of arrays passed in must be sequenceNumber Kind of Kankel function = 1 or 2.
- HankelKind - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
real and imaginary outputs Length of arrays passed in must be sequenceNumber Kind of Kankel function = 1 or 2.
- hanning(double, int) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- hanw - Variable in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- haralickBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- haralickBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- haralickBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- haralickFeatureNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Haralick feature numbers.
- haralickFeatureNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- haralickFeatureNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- haralickFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- haralickFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- haralickFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- haralickFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
haralick filter.
- haralickFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- haralickFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- haralickImagesNumber - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- haralickImagesNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- haralickImagesNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- haralickImagesNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- haralickPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- hard - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- hard(double[][], double[][], double, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- hard(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- hard(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- hard(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- hard(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- hard(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.SlantTransform
-
- hard(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- hard(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- hard(double[], double[], double, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- hard(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- hard(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- hard(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.SlantTransform
-
- hard(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- hard(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- HARD - gov.nih.mipav.view.dialogs.AlgorithmTreParams.Threshold
-
- HARD - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
thresholding estimator.
- HARD - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
thresholding estimator.
- HARD_ONLY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- HARD_ONLY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
DOCUMENT ME!
- HARD_ONLY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- HARD_ONLY - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- HARD_ONLY - Static variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- HARD_ONLY - Static variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
DOCUMENT ME!
- HARD_ONLY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- HARD_THRESHOLDING - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- HARD_THRESHOLDING - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- hardBIORButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- hardButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- hardButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- hardButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- hardCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- HARDCOPY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality hard copy.
- HARDCOPY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality hard copy.
- hardDCTButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- hardFuzzyBoth - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- hardFuzzyBoth - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- hardFuzzyBoth - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- hardFuzzyButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- hardInterrupt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- hardNoiseField - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- hardNoiseThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- hardNoiseThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- hardNoiseThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- hardOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- hardOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- hardOnly - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- hardOnlyButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- hardTransformGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- HarrisAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
DOCUMENT ME!
- hartley_multiply(double[], double[], boolean) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- HartleyTransform - Class in gov.nih.mipav.model.algorithms
-
The MIT License (MIT)
Copyright (c) 2015 Eugeniy Sokol
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"),
to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute,
sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
- HartleyTransform() - Constructor for class gov.nih.mipav.model.algorithms.HartleyTransform
-
- HartleyTransform(int) - Constructor for class gov.nih.mipav.model.algorithms.HartleyTransform
-
- HartleyTransform(ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.HartleyTransform
-
- HartleyTransform2 - Class in gov.nih.mipav.model.algorithms
-
Smithsonian Astrophysical Observatory
Submillimeter Receiver Laboratory
am
transform.c S.
- HartleyTransform2() - Constructor for class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- HartleyTransform2(ModelImage, ModelImage, ModelImage, int, int, double, double, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- has_diagonal_appended_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- has_diagonal_reserved_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- has_multiple_scans - Variable in class gov.nih.mipav.model.file.libjpeg.my_input_controller
-
- hasAlias() - Method in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- hasAlpha - Variable in class gov.nih.mipav.model.file.FileImageXML.LUValue
-
- hasChanged() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
- hasChanged() - Method in interface gov.nih.mipav.model.util.Observable
-
Test if this object has changed.
- hasDataMask(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- HasEdgeRoots(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- hasEqual - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
True if irregularly sampled data uses numbers == equalValue for missing samples
- hasEqual - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- hasErrors() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Gets a value indicating whether this directory has any error messages.
- hasErrors() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
Indicates whether any errors were reported during the reading of metadata values.
- hasExitAction(String) - Static method in class gov.nih.mipav.model.scripting.Parser
-
Search the script file for an Exit action (required when running in hidden GUI mode from the command line).
- HasFaceRoots(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- HasFFAdjacency() - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- hasFollowerIfd() - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- hasFollowerIfd() - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- hasGreaterEqual - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
True if irregularly sampled data uses numbers >= greaterEqualValue for missing samples
- hasGreaterEqual - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- hash(byte[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- hashCode() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.Edge
-
Support for hashing into a map of edges.
- hashCode() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Pixel
-
- hashCode() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.Edge
-
Support for hashing into a map of edges.
- hashCode() - Method in class gov.nih.mipav.model.algorithms.BlindDeblur.Pair
-
Define a hash code based on the first and second's hash code
- hashCode() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Pair
-
Define a hash code based on the first and second's hash code
- hashCode() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.Triplet
-
Define a hash code based on the first and seconds and third's hash code
- hashCode() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.GenericKey
-
- hashCode() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pair
-
- hashCode() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Pair
-
Define a hash code based on the first and second's hash code
- hashCode() - Method in class gov.nih.mipav.model.file.FileDicomKey
-
Returns the unique identifier's hash code.
- hashCode() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Returns the unique identifier's hash code.
- hashCode() - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Returns the unique identifier's hash code.
- hashCode() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- hashCode() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- hashCode() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
- hashCode() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- hashCode() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
- hashCode() - Method in class gov.nih.mipav.model.file.PrivateFileDicomKey
-
- hashCode() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Edge
-
Support for hashing into a map of edges.
- hashCode() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Triangle
-
Support for hashing into a map of triangles.
- hashCode() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Vertex
-
Support for hashing into a map of vertices.
- hashCode() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.Edge
-
Support for hashing into a map of edges.
- hashCode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjEdgeKey
-
Support for hashing into a map of edges.
- hashCode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix.Index
-
override for Object method used for hashing.
- hashCode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.Edge
-
Support for hashing into a map of edges.
- hashCode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Pair
-
Define a hash code based on the first and second's hash code
- hashCode() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.FeatureNode
-
- hashCode() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- hashCode() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_node
-
- hashCoeffs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- hasHeaderBeenRead - Variable in class gov.nih.mipav.model.file.FileDicom
-
True if the DICOM image header has been read.
- hashFunction(int[], int, int, int, int, int[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- hashKeywordEntries() - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- hashRTCentries(Hashtable) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- hashVREntries() - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
Builds a hashtable of "TYPE_"+FileDicomTag.getVR.
- hasIm_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgImage
-
- hasImageMinMaxDimOrder - Variable in class gov.nih.mipav.model.file.FileInfoMincHDF
-
- hasInfinity - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
True if irregularly sampled data uses infinities for missing samples
- hasInfinity - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- hasInputData() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
Return indication as to whether or not the input image data has been specified yet.
- hasInputData() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensity
-
Return indication as to whether or not the input image data has been specified yet.
- hasInputData() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Return indication as to whether or not the input image data has been specified yet.
- hasInputData() - Method in interface gov.nih.mipav.view.renderer.J3D.volumeview.RendererInterfaceColor
-
Return indication as to whether or not the input image data has been specified yet.
- hasInputData() - Method in interface gov.nih.mipav.view.renderer.J3D.volumeview.RendererInterfaceIntensity
-
Return indication as to whether or not the input image data has been specified yet.
- hasInputData() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
Return indication as to whether or not the input image data has been specified yet.
- hasInputData() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
Return indication as to whether or not the input image data has been specified yet.
- hasInputMap() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
Return indication as to whether or not a map has been defined for mapping input colors to intensity.
- hasInputMap() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensity
-
Return indication as to whether or not a LUT to use for mapping input intensity values to colors has been
specified.
- hasInputMap() - Method in interface gov.nih.mipav.view.renderer.J3D.volumeview.RendererInterfaceColor
-
Return indication as to whether or not a map has been defined for mapping input colors to intensity.
- hasInputMap() - Method in interface gov.nih.mipav.view.renderer.J3D.volumeview.RendererInterfaceIntensity
-
Return indication as to whether or not a LUT to use for mapping input intensity values to colors has been
specified.
- hasInputMap() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
Return indication as to whether or not a map has been defined for mapping input colors to intensity.
- hasInputMap() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
Return indication as to whether or not a LUT to use for mapping input intensity values to colors has been
specified.
- hasInstanceOf(SpaceNavigatorListener) - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorPoller
-
- hasLesserEqual - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
True if irregularly sampled data uses numbers <= lesserEqualValue for missing samples
- hasLesserEqual - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- hasListener(VOIListener) - Method in class gov.nih.mipav.model.structures.VOI
-
- hasLocalArrayListFlavor(DataFlavor[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler
-
DOCUMENT ME!
- hasMark() - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags
-
- hasMoreLinesToParse() - Method in class gov.nih.mipav.model.scripting.ParserEngine
-
Returns whether there are more lines in the script to be parsed.
- hasNaN - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
True if irregularly sampled data uses NaNs for missing samples
- hasNaN - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- hasNewAdj - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
was a new adjusted image created.
- hasNewRef - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
was a new reference image created.
- hasNext() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator
-
- hasNext() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgIterator
-
- hasNormal() - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- hasNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Return indication as to whether or not the normal vectors for each voxel in the volume has been specified.
- HasNormals(OctNode, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- hasOrientation - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
true if the imageActive has an orientation, false if imageActive is of FileInfoBase.UNKNOWN_ORIENT.
- HasParameterBlock(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- hasPerFaceFlags(TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags
-
- hasPerVertexNormal() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- hasPicked() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- HasResidualBlock(CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- hasRGB - Variable in class gov.nih.mipav.model.file.FileICS
-
- HasRoots(double[], double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- HasRoots(double[], double, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- HasRoots(float[], float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- HasRoots(float[], float, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- HasRoots(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- hasSameDimension(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
- hasSameDimension(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
- hasSelectedPoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- hasSelectedPoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- hasSerialArrayListFlavor(DataFlavor[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler
-
DOCUMENT ME!
- hasSpaceNavigator() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- hasSpecular() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareMaterial
-
Query whether the material has specular properties.
- HasSrcShape() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarpLinear
-
Returns true if the source shape has been set.
- hasStrokePattern() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
Whether this Lines object has a stroke pattern other than 0xffff (completely solid).
- hasTagName() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Tag
-
Get whether this tag has a name.
- hasTagName(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Gets whether the specified tag is known by the directory and has a name.
- hasTagName(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ErrorDirectory
-
- hasThreshold1 - Variable in class gov.nih.mipav.view.PatientSlice
-
Flag indicating whether to use the threshold1 value:.
- hasThreshold2 - Variable in class gov.nih.mipav.view.PatientSlice
-
Flag indicating whether to use the threshold2 value:.
- HasTwoV(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- hasValidChildren(ViewImageFileFilter) - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
Checks if this directory ought to be added to the list based on whether it has any children that satisfy the
filter.
- hasValidTag - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TagCodeRenderer
-
- hasValidTag() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TagCodeRenderer
-
- HasVertexRef() - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- HasVFAdjacency() - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- hasXMLLinked() - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
Indicates whether there is an xml linked image.
- HATFLDB - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- HATFLDB - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- HATFLDB - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- HATFLDC - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- HATFLDC - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- HATFLDC - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- hausDim(byte[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
HAUSDIM Returns the Haussdorf fractal dimension of an object represented by
a binary image.
- have25D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- have25D - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- have3DColor - Variable in class gov.nih.mipav.model.file.FileTiff
-
- have4DColor - Variable in class gov.nih.mipav.model.file.FileTiff
-
- haveAnotherPt - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- haveAnteriorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- haveAnteriorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- haveBlank - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- haveBleachedBezier - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- haveBleachedCircle - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- haveBleachedCirclePerim3 - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- haveBleachedEllipse - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- haveBleachedPolyline - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- haveBleachedRectangle - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- haveBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- haveBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- haveBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- haveBytesPerPixel - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveCentered - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
- haveChangedPhotometricTo1 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- haveChangedPhotometricTo1 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- haveColor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
DOCUMENT ME!
- haveColor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
DOCUMENT ME!
- haveColor - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSliceAveraging
-
DOCUMENT ME!
- haveColor - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- haveDataByteOffset - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveDataStartingBlock - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveDcmMeta - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- haveDecayCorrected - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveDetectorHeadNumber - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveDoublePixelData - Variable in class gov.nih.mipav.model.file.FileDicom
-
- haveEndianess - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveEnergyWindowsNumber - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveFileName - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveFiltered - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
whether or not the brightness/contrast filter has been invoked
- haveFiltered - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- haveFiltered - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- haveFirstPt - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- haveFloatPixelData - Variable in class gov.nih.mipav.model.file.FileDicom
-
- haveFloodCorrected - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveFreeRangeThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
If true, the freeRangeRThreshold value has been calculated.
- haveFreeRangeThreshold - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- haveFreeRangeThreshold - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
true for pixels with calculated freeRangeRThreshold values.
- haveGated - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- haveGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- haveGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- haveGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- haveImagesPerEWindow - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveImported - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- haveInferiorEdge - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- haveInferiorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- haveInferiorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- haveLeftPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- haveLeftPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- haveLZWInit - Variable in class gov.nih.mipav.model.file.FileSVS
-
- haveLZWInit - Variable in class gov.nih.mipav.model.file.FileTiff
-
- haveMultiSpectraImage - Variable in class gov.nih.mipav.model.file.FileSVS
-
- haveMultiSpectraImage - Variable in class gov.nih.mipav.model.file.FileTiff
-
- haveNonPointVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- haveNumberFormat - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveNumericArrayCharacter - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- haveOne - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- haveOne - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- haveOrientation - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- havePeeked - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Flag indicating whether the first byte has been looked at.
- havePerm_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- havePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- havePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- havePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- havePosteriorMargin - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- havePosteriorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- havePosteriorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- haveReadACPC - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- haveReadOrig - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- haveReconstructed - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- haveReconstructed - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveRed - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- haveRed - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- haveRed - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- haveReferenceFrameNumber - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveResolsT - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveResolsX - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveResolsY - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveResolsZ - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveResolutionUnit - Variable in class gov.nih.mipav.model.file.FileSVS
-
- haveResolutionUnit - Variable in class gov.nih.mipav.model.file.FileTiff
-
- haveRightPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- haveRightPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- haveRowsPerStrip - Variable in class gov.nih.mipav.model.file.FileSVS
-
- haveRowsPerStrip - Variable in class gov.nih.mipav.model.file.FileTiff
-
- haveSliceThickness - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveStaticStudy - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- haveStaticStudy - Variable in class gov.nih.mipav.model.file.FileInterfile
-
- haveSuperiorEdge - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- haveSuperiorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- haveSuperiorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- haveTDim - Variable in class gov.nih.mipav.model.file.FileInterfile
-
- haveThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- haveThreshold - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- haveThreshold - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- haveTileLength - Variable in class gov.nih.mipav.model.file.FileSVS
-
- haveTileLength - Variable in class gov.nih.mipav.model.file.FileTiff
-
- haveTileOffsets - Variable in class gov.nih.mipav.model.file.FileSVS
-
- haveTileOffsets - Variable in class gov.nih.mipav.model.file.FileTiff
-
- haveTileWidth - Variable in class gov.nih.mipav.model.file.FileSVS
-
- haveTileWidth - Variable in class gov.nih.mipav.model.file.FileTiff
-
- haveTomographic - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- haveTomographic - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveTotalImageNumber - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveTwo - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- haveTwo - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- haveVOIPoints - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- haveWindowed - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- haveXDim - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveYDim - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveZDim - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- haveZResol - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
Whether the z resolution is set in the acqp or reco files
- haveZResolution - Variable in class gov.nih.mipav.model.file.FileSVS
-
- haveZResolution - Variable in class gov.nih.mipav.model.file.FileTiff
-
- hbAssignCodes(int[], char[], int, int, int) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- hbCreateDecodeTables(int[], int[], int[], char[], int, int, int) - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- hbMakeCodeLengths(char[], int[], int, int) - Static method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- Hbuild(double[], int[], int[], int, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- Hbuild(DoubleDouble[], int[], int[], int, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- HCACTable - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- HCACTable - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- HCDCTable - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- HCDCTable - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- hcephes_hyp2f1_neg_c_equal_bc(double, double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- hcephes_hyp2f1ra(double, double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- Hchange(double[], int[], int[], int, int, int, double, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- Hchange(DoubleDouble[], int[], int[], int, int, int, DoubleDouble, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- hComplexRoots - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- hcustx_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- hcusty_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- Hdelete(double[], int[], int[], int, int[], int, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- Hdelete(DoubleDouble[], int[], int[], int, int[], int, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- HDFNode(Group) - Constructor for class gov.nih.mipav.model.file.FileMincHDF.HDFNode
-
- hDivisions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
number of divisions to make in the height.
- Hdown(double[], int[], int[], int, int, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- Hdown(DoubleDouble[], int[], int[], int, int, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- hdrEXTENSIONS - Static variable in class gov.nih.mipav.model.file.FilePARREC
-
The extensions of ANALYZE file.
- hdrEXTENSIONS - Static variable in class gov.nih.mipav.model.file.FileSpar
-
The extensions of ANALYZE file.
- hdrSize - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Size of header, should be 1000
- he_next() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- he_prev() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- he_sym() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- head - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- head - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Cache
-
- head - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache
-
- HEAD_ANAT_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
AFNI typeString head anatomical.
- HEAD_FUNC_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
AFNI typeString head functional.
- head_t() - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.Cache.head_t
-
- head_t() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache.head_t
-
- HEADER(String, String, RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- HEADER_SIZE - Static variable in class gov.nih.mipav.model.file.FileAnalyze
-
The size of the header, always 348 for Analyze images.
- headerFile - Variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- headerFile - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
DOCUMENT ME!
- headerFileName - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- headerFileName - Variable in class gov.nih.mipav.model.file.FileInfoOME
-
- headerFileName - Variable in class gov.nih.mipav.model.file.FileInterfile
-
- headerFileName - Variable in class gov.nih.mipav.model.file.FileSPM
-
- HeaderListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.HeaderListener
-
- HeaderListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay.HeaderListener
-
- HeaderListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay.HeaderListener
-
- HeaderListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay.HeaderListener
-
- HeaderOp - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- headerSize - Variable in class gov.nih.mipav.model.file.FileAnalyze
-
Header size for an Analyze image is 348.
- headerSize - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- headerSize - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
The size of the NIFTI-2 header must be set to 540 bytes.
- headerSize - Variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- headerSize - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
- headerString - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
DOCUMENT ME!
- headerTextField - Variable in class gov.nih.mipav.model.file.FileInfoMATLAB
-
Use serialVersionUID for interoperability.
- headLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- headLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- headLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- headMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- headMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- headMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- headMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- headMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- headMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- HEAP - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- HeapNode() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue.HeapNode
-
- HeapNode(int, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue.HeapNode
-
- HeapPointerN - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- HeapRecord() - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator.HeapRecord
-
Creates a new HeapRecord object.
- HeapUpdate(int, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- heartRate - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
224 cardiac heart rate (beats per minute).
- heatBurn - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Heat burning point reference that represents the thermal probe ablation type.
- HEATBURN - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Define the heat burn type value.
- Heaviside(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- HEcreate(delaunay.Edge, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- hed_Table - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- hedCNNMap() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- Heif - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- height - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- height - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- height - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserReg
-
- height - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- height - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess.CalculateT
-
- height - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
width and height of this image
- height - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator
-
- height - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
-
< Image width
- height - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceOctaveGeometry
-
< Width (number of pixels)
- height - Variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- height - Variable in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- height - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlPgmImage
-
< image width.
- height - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< image width.
- height - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- height - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- height - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- height - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
12 - height of image.
- height - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- height - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- height - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- height - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- height - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- height - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- height - Variable in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
Image height
- height - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Dimensions of rectangle to draw.
- height - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- height - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- height - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
DOCUMENT ME!
- height - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
DOCUMENT ME!
- height - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
DOCUMENT ME!
- height - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- Height() - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Used by AAM appearance model to get dimension
- Height() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Shape height
- Height() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- height_in_blocks - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- heightButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Buttons for width, height values
- heightDivisions - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- heightField - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- heightField - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- heightField - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- heightRange - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Scale the height of the vertice - typically relative the image size.
- heightResFactor - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Storage for correction parameters where datasets have non isotropic values.
- heightResFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Storage for correction parameters where datasets have non isotropic values.
- heightResFactor - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Storage for correction parameters where datasets have non isotropic values.
- heightResFactor - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Storage for correction parameters where datasets have non isotropic values.
- heightText - Variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Text fields for zoom box
- HELICAL_VALLEY - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- HELICAL_VALLEY - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- HELICAL_VALLEY - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- HELICAL_VALLEY - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- helicalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
- helicalCorrection() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmTiltCorrection
-
- HelicalValleyFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.HelicalValleyFunction
-
- help - Variable in enum gov.nih.mipav.view.Argument.InstanceArgument
-
Help for using a command.
- help - Variable in enum gov.nih.mipav.view.Argument.StaticArgument
-
Help for using a command.
- Help - gov.nih.mipav.view.Argument.StaticArgument
-
- HELP - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Displays help this dialog
- help1 - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Buttons used for the host tab
- help2 - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Buttons used for the host tab
- help3 - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Buttons used for the host tab
- help4 - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Buttons used for the host tab
- HelpAction() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBase.HelpAction
-
- helpBroker - Static variable in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- helpButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Help button is used on most dialogs.
- helpButton - Variable in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- helpButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Displays Stats dialog help
- helpButton - Variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Help button is used on most dialogs.
- helpDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- helpMenu - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- helpMenu - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- helpPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- helpPluginSearch(File, String) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
- helpPluginSearch(File, String) - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
- hematocrit - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- HEMOptions(int, libdt.DytexRegOptions, double, libdt.Ymean_type, libdt.Verbose_mode) - Constructor for class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- HEPTIC_LAGRANGIAN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Heptic lagrangian interpolation.
- HEPTIC_LAGRANGIAN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Heptic lagrangian interpolation.
- hepticLagrangian2D(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
2D heptic Lagrangian function.
- hepticLagrangian2DC(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
2D heptic Lagrangian function for color.
- hepticLagrangian3D(double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
3D heptic Lagrangian function.
- hepticLagrangian3DC(double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
3D heptic Lagrangian function for color (3 channel images).
- hermite(int, double) - Method in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
Factor to include when calculating derivatives.
- hermite(int, double) - Method in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Factor to include when calculating derivatives.
- hermiteContent - Variable in class gov.nih.mipav.model.algorithms.CVODES.DtpntMemRec
-
- HermiteDataMemRec() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.HermiteDataMemRec
-
- hess() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- hess() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- hess00 - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- hess01 - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- hess02 - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- hess10 - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- hess11 - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- hess12 - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- hess20 - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- hess21 - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- hess22 - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- hessian_times_gradient(double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- hessian_times_gradient2(double[], double[][], double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- hessian2d(double[][], double[][], double[][], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- hessian2D(float[], int[], float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Convolves the source image at the point (x,y,z) with the hessian of the gaussian function.
- hessian2D(float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Convolves the source image at the point (x,y) with the hessian of the gaussian function.
- hessian3D(double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- hessian3D(float[], int[], float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Convolves the source image at the point (x,y,z) with the hessian of the gaussian function.
- hessian3D(float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Convolves the source image at the point (x,y,z) with the hessian of the gaussian function.
- hessianAlgo - Variable in class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
DOCUMENT ME!
- hessianAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- HESTENES_STIEFEL - gov.nih.mipav.model.algorithms.CeresSolver.NonlinearConjugateGradientType
-
- heuristicParametersPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- heuristicParametersPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- hex(int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- Hf - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- Hf - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- hFOVTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- hh - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream.StackElem
-
- hhA - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- hi - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Information contained in the codestream's headers
- hi - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Information contained in the codestream's headers
- hi - Variable in class gov.nih.mipav.util.DoubleDouble
-
The high-order component of the double-double precision value.
- hidden - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- hidden - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- hidden - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- hidden - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- hidden - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- hiddenLayerLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- hiddenLayers - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- hiddenTextField - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- hide() - Method in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
Hide only the progress bar and the percentage text
- hide(boolean) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- Hide - gov.nih.mipav.view.Argument.InstanceArgument
-
- hideBoxFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Makes the box frame invisible.
- hideBoxFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Makes the box frame invisible.
- hideBoxFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Makes the box frame invisible.
- hideClipSliceA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Hides the slice frame on arbitrary clipping plane slice.
- hideClipSliceStatic() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Hides the static clipping plane box frame.
- hideClipSliceStaticInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Hides the static inverset clipping plane box frame.
- hideClipSliceX() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Hides the slice frame on clipping plane slice x.
- hideClipSliceXInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Hides the slice frame on clipping plane slice -x.
- hideClipSliceY() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Hides the slice frame on clipping plane slice y.
- hideClipSliceYInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Hides the slice frame on clipping plane slice -y.
- hideClipSliceZ() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Hides the slice frame on clipping plane slice z.
- hideClipSliceZInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Hides the slice frame on clipping plane slice -z.
- hideLabel - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
The associated label to hide/show the bar
- hideList - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
List to determine which progress bar to hide/show
- hideMenus() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- HIERARCHICAL_GROUPING_INIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- HIERARCHICAL_GROUPING_INIT - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- hierarchicalInit - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- hifiPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- hifiSpec - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- high - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- HIGH - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
Flag indicating high priority transfer.
- HIGH_SPEEDUP - gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.SpeedUpLevel
-
- high0Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high0TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high1Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high1TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high2Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high2TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high3Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high3TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high4Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high4TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high5Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high5TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high6Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- high6TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- highBit - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
- highBit - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- highBit - Variable in class gov.nih.mipav.model.file.FileRaw
-
- highBit - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
- highBounds - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask
-
- highBounds - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- highBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- highestForbiddenLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- highestForbiddenLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- highestForbiddenLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- highestForbiddenNNDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- highestForbiddenNNDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- highestForbiddenNNDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- highestForbiddenNNDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- highestForbiddenNNDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- highestForbiddenNNDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- highestForbiddenText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- highestForbiddenText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- highestForbiddenText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- highestRegenerationLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- highestRegenerationLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- highestRegenerationLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- highestRegenerationNNDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- highestRegenerationNNDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- highestRegenerationNNDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- highestRegenerationNNDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- highestRegenerationNNDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- highestRegenerationNNDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- highestRegenerationText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- highestRegenerationText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- highestRegenerationText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- highestX - Variable in class gov.nih.mipav.model.file.FileAfni
-
Dataset ordered bounding box in mm.
- highestY - Variable in class gov.nih.mipav.model.file.FileAfni
-
Dataset ordered bounding box in mm.
- highestZ - Variable in class gov.nih.mipav.model.file.FileAfni
-
Dataset ordered bounding box in mm.
- highGain - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- highGain - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- highGain - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- highlight() - Method in class gov.nih.mipav.view.JPanelFileSelection
-
gets the focus on the textfield and selects all text there.
- highlighter - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
Operator to provide listener access... could be done by /this/
- highlighter - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
Operator to provide listener access... could be done by /this/
- highlighter - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Operator to provide listener access... could be done by /this/
- highlightTitledBorder(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- highPass - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- highPass - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- highPass - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- highPass - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- highPass - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- HIGHPASS - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- HIGHPASS - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- HIGHPASS - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- HIGHPASS - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- HIGHPASS - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- HIGHPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- HIGHPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- HIGHPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
A highpass filter will be applied to the source image
- HIGHPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- HIGHPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- highRadius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- highRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- highSpeedUpButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- highThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCannyEdgeDetection
-
- highThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
- highTruncated - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- highTruncated - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- highTruncated - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- highValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
DOCUMENT ME!
- highX - Variable in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- highX() - Method in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- highXmm - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- highY - Variable in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- highY() - Method in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- highYmm - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- highZ - Variable in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- highZ() - Method in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- highZmm - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- hiIdx(int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- hindex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- hinge_conjugate_loss - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- hinge_dca_update - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- hinge_loss - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- hinge_loss_derivative - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- hinge2_conjugate_loss - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- hinge2_dca_update - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- hinge2_loss - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- hinge2_loss_derivative - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- Hinsert(double[], int[], int[], int[], int, double, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- Hinsert(DoubleDouble[], int[], int[], int[], int, DoubleDouble, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- HIOLD - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- hist - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- hist - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
134 - 61 bytes Patient history.
- hist - Variable in class gov.nih.mipav.view.dialogs.JDialogCumulativeHistogram
-
MoelHistogram object
- hIST - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- Hist() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Hist
-
- Hist(CDVector, double, double, CDVector, int, boolean, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
Calculates the histogram of a vector within [min;max] with optional
nomalization.
- HIST_C0_BITS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- HIST_C0_ELEMS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- HIST_C1_BITS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- HIST_C1_ELEMS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- HIST_C2_BITS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- HIST_C2_ELEMS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- HIST_NUMEL - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- hist_un0 - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- hist_un0 - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- hist_un0 - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- hist_zero(SIFT3D.Hist) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- histAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- histFactor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- histMean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- histoBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCumulativeHistogram
-
int array of histogram values
- histoBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
DOCUMENT ME!
- histoBuffer - Variable in class gov.nih.mipav.view.dialogs.JDialogCumulativeHistogram
-
int array of histogram values.
- histoEqual(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- histoEqual(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- histoEqual(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- histoEqual(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- histoEqual(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- histoEqual(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- histOffset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- histoForceUBYTE - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- histogram - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
(cumulative) histogram.
- histogram - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCumulativeHistogram
-
Reference to the histogram storage object.
- histogram - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Reference to the histogram storage object.
- histogram - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- histogram - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- histogram - Variable in class gov.nih.mipav.view.JPanelHistogram
-
red, green and blue histograms:
- histogram - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
The image histogram.
- histogram - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The image histogram.
- histogram - Variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Model histogram.
- histogram2DimAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Instance of AlgorithmHistogram2Dim.
- Histogram3D(float[], int, int[], int[], int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- Histogram3D(float[], int, int, int[], int[][], int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- histogramA - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Histogram reference for image A.
- histogramA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Histogram reference for image A.
- histogramA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Model histogram A.
- histogramA - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- histogramABlue - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
imageA histogram of the Blue channel.
- histogramABlue - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageA histogram of the Blue channel.
- histogramABlue - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- histogramAGreen - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
imageA histogram of the Green channel.
- histogramAGreen - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageA histogram of the Green channel.
- histogramAGreen - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- histogramAnalysis() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Analyze the histogram of the 10-bit binned 3D MRI.
- histogramAnalysis() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Analyze the histogram of the 10-bit binned 3D MRI.
- histogramAnalysis(int[]) - Static method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Analyze the histogram of the 10-bit binned 3D MRI.
- histogramARed - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
imageA histogram of the Red channel.
- histogramARed - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageA histogram of the Red channel.
- histogramARed - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- histogramAvailable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
Number of pixels available for histogram formation.
- histogramB - Variable in class gov.nih.mipav.view.JPanelHistogram
-
red, green and blue histograms:
- histogramB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Histogram reference for image B.
- histogramB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Histogram reference for image B.
- histogramB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Model histogram B.
- histogramB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- histogramBBlue - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
imageB histogram, the Blue channel.
- histogramBBlue - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageB histogram, the Blue channel.
- histogramBBlue - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- histogramBGreen - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
imageB histogram, the Green channel.
- histogramBGreen - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageB histogram, the Green channel.
- histogramBGreen - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- histogramBins - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
- histogramBins - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- histogramBRed - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
imageB histogram of the Red channel.
- histogramBRed - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageB histogram of the Red channel.
- histogramBRed - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- histogramBuffer - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- histogramBuffer - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- histogramFrameVector - Variable in class gov.nih.mipav.model.structures.ModelHistogram
-
DOCUMENT ME!
- histogramG - Variable in class gov.nih.mipav.view.JPanelHistogram
-
red, green and blue histograms:
- histogramGM_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Histogram reference for imageA GM.
- histogramGM_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Histogram reference for imageA GM.
- histogramGM_ABlue - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageA histogram of the Blue channel.
- histogramGM_AGreen - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageA histogram of the Green channel.
- histogramGM_ARed - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageA histogram of the Red channel.
- histogramGM_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Histogram reference for imageB GM.
- histogramGM_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Histogram reference for imageB GM.
- histogramGM_BBlue - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageB histogram, the Blue channel.
- histogramGM_BGreen - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageB histogram, the Green channel.
- histogramGM_BRed - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
imageB histogram of the Red channel.
- histogramLUT(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
Makes a histogram LUT by calling ViewJFrameHistoLUT.
- histogramLUT(boolean, boolean) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Creates the user interface for LUT changes.
- histogramLUT(boolean, boolean, boolean) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- histogramMax - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- histogramMax - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- histogramMaxLog - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- histogramMaxLog - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- HistogramOfOrientedGradients - Class in gov.nih.mipav.model.algorithms
-
Copyright (C) 2007-11, Andrea Vedaldi and Brian Fulkerson
Copyright (C) 2012-13, The VLFeat Team
All rights reserved.
- HistogramOfOrientedGradients() - Constructor for class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- HistogramOfOrientedGradients(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- HistogramOfOrientedGradients.tImage - Class in gov.nih.mipav.model.algorithms
-
- HistogramOfOrientedGradients.VlHog - Class in gov.nih.mipav.model.algorithms
-
- HistogramOfOrientedGradients.VlHogVariant - Enum in gov.nih.mipav.model.algorithms
-
- histogramPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Panel containing the 2D Histogram display canvas:
- histogramPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- histogramParent - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The container of this histogram component.
- histogramPresent - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- histogramPresent - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- histogramThreshold - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
- histogramThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- histoLUTPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Control panel for the surface renderer.
- HistoLUTParent - Interface in gov.nih.mipav.view
-
Common interface for swing containers which hold a HistoLUT component so that the image frames and thresholding text
areas can be updated correctly.
- histoLUTType - Variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
The type of histogram component to show.
- histomap - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
the scaled histogram.
- histoPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
- histoPanel - Variable in class gov.nih.mipav.view.JPanelHistogram
-
histogram panel interface.
- histoPanelA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Panel containing the histogram and lut components for image A.
- histoPanelA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
The panel containing the RGB histogram component.
- histoPanelA - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- histoPanelA - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- histoPanelB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Panel containing the histogram and lut components for image B.
- histoPanelB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
The panel containing the RGB histogram component.
- histoPanelB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- histoPanelB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- history - Variable in class gov.nih.mipav.model.algorithms.libdt.DatDescriptor
-
- history - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- history - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- history - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- history - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- history - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
The image history.
- historyInfo - Variable in class gov.nih.mipav.model.file.FileInfoVista
-
history info
- historyNoteString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- historyNumber - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- hists - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor
-
- histSum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Sum of contents of hisotogram bins.
- HISUB - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- HITES - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- hiThres - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Lower and upper threshold values used in the generation of the edge map.
- hiThres - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- HIVAL - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- HIVLC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- hk - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
Input modulus
- hkey_un0 - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- hkey_un0 - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- hkey_un0 - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- HL - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- hlA - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- HLACTable - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- HLACTable - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- HLag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- HLB_FACTOR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- HLDCTable - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- HLDCTable - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- hlim_nl2sno - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- hlist - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- HMax - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- HMax - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- HMAX_INV_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- hmin - Variable in class gov.nih.mipav.model.structures.HQueue
-
DOCUMENT ME!
- HMIN_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- hmodes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- hmult - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- hmult - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- HOCK1 - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- HOCK1 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- HOCK1 - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- HOCK1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- HOCK21_MODIFIED - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- HOCK21_MODIFIED - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- HOCK21_MODIFIED - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- HOCK25 - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- HOCK25 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- HOCK25 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- HOCK25 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- HOCK3 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- HOCK3 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- HOCK4 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- HOCK4 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- hog - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- hogHeight - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- hogNorm - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- hogWidth - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- hold - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- hold - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- holder - Variable in class gov.nih.mipav.model.file.FileDataProvenance.ProvenanceXMLHandler
-
the provenance holder to read information into
- holdout - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- holdout - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- holdout - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- hole - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.polygon_node
-
- holes - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- holes - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- holes_small - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- holes_small - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- holesAndSmallCircularButton - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- holesButton - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- holesPattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- holesPattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- holesPattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- holesPattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- holesPattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- HolesPattern - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- HolesPattern() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.HolesPattern
-
- HolesPatternTest - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- HolesPatternTest() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.HolesPatternTest
-
- hom - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmDataset
-
< Data point dimension.
- homBuffer - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmDataset
-
< Homogeneous kernel map (optional).
- homDimension - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmDataset
-
< Homogeneous kernel map buffer.
- homeButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- HomeDir - gov.nih.mipav.view.Argument.StaticArgument
-
- homogeneity - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate homogeneity, also called the Inverse Difference Moment of Order 2 Sum over i,j of
Probability(i,j)/(1 + (i-j)*(i-j)).
- homogeneity - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate homogeneity, also called the Inverse Difference Moment of Order 2 Sum over i,j of
Probability(i,j)/(1 + (i-j)*(i-j)).
- homogeneity - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- homogeneity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- homogeneityCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- homogeneityCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- HomogeneousVectorParameterization(int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.HomogeneousVectorParameterization
-
- HomogeneousVectorParameterizationAwayFromZeroTest1() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HomogeneousVectorParameterizationAwayFromZeroTest2() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HomogeneousVectorParameterizationAwayFromZeroTest3() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HomogeneousVectorParameterizationAwayFromZeroTest4() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HomogeneousVectorParameterizationAwayFromZeroTest5() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HomogeneousVectorParameterizationHelper(double[], double[], String) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HomogeneousVectorParameterizationNearZeroTest1() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HomogeneousVectorParameterizationNearZeroTest2() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HomogeneousVectorParameterizationZeroTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Homology(LSCM.Mesh) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Homology
-
- HOMOMORPHIC - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- HOMOMORPHIC - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- horizonMode() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Resets mode to linear horizontal and shows component.
- HORIZONTAL - Static variable in class gov.nih.mipav.view.ViewJComponentLUT
-
Create horizontal LUT.
- HORIZONTAL - Static variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
Create horizontal LUT.
- horizontalFOVString - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
horizontal FOV
- horizontalGradient - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- horizontalLandmark - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- horizontalLandmark - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- horizontalLineComp(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- horizontalLineEval(float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- horizontalSpacing - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- horizontalTalGridPts - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
DOCUMENT ME!
- HORZ_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
horizontal (2D only).
- HORZ_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
horizontal (2D only).
- hospitalName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- hospitalName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- hospName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
10 - 33 characters hospital name.
- HOST_COMPUTER - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- HOST_COMPUTER - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- hostComputer - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- hostComputer - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- HostImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Host image (if any).
- hostName - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
the machine host name
- HotGreen - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- HotIron - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- HotMetal - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- HOTMETAL - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Sets up the transfer function colors to be hotmetal.
- hotspot - Variable in class gov.nih.mipav.view.CheckTreeManager
-
- houghImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughLine
-
- hour - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
DOCUMENT ME!
- hourCheckBox - Variable in class gov.nih.mipav.view.JPanelEditTime
-
permits whether or not to set this field.
- hourComboBox - Variable in class gov.nih.mipav.view.JPanelEditTime
-
value to add to this time field.
- HOURS - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement hours.
- HOURS - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement hours.
- HOURS_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - hours.
- HouseholderTestHelper(double[], String) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HouseholderVectorLastElementZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HouseholderVectorNearZeroNegative() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HouseholderVectorNearZeroPositive() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HouseholderVectorNonZeroNegative() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HouseholderVectorNonZeroPositive() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HouseholderVectorNonZeroPositive_Size4() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HouseholderVectorZeroNegative() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- HouseholderVectorZeroPositive() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- hpaccuracy(SchwarzChristoffelMapping.scmap) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- hpderiv(double[][], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- hpevalinv(double[][], SchwarzChristoffelMapping.scmap, double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- hpinvmap(double[][], double[][], double[][], double[], double[][], double[], double[][], double[][], boolean, boolean, double, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- hplmap(SchwarzChristoffelMapping.polygon, double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- hplot(SchwarzChristoffelMapping.scmap, double[], double[], int, boolean, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- hpmap(double[][], double[][], double[][], double[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- hpointerM - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- hpparam(double[][], double[], double[][], double[][], double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- hppfun(double[], int, double[], double[], int[], int[], boolean[], double[][]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.hppfun
-
- hpplot(double[][], double[], double[][], double[], double[], double[], int, boolean, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- hpquad(double[][], double[][], int[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- hprot_MH - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
error protection method for MH (0,1,16,32,37-128)
- hprot_TPH - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
error protection methods for TPHs (0,1,16,32,37-128)
- hprot_TPH_tileno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
tile number of header protection specification (>=0)
- hpsolb(int, double[], int[], int) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- hqr2() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
- HQueue - Class in gov.nih.mipav.model.structures
-
This class is used specifically for the watershed algorithm.
- HQueue(float, float, int, int) - Constructor for class gov.nih.mipav.model.structures.HQueue
-
Hierarcial Queue - constructor.
- HQueue(float, float, int, int[]) - Constructor for class gov.nih.mipav.model.structures.HQueue
-
Hierarcial Queue - constructor.
- hRealRoots - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- hRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Data.BinExternal
-
- hRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Include
-
- hRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF.BinExternal
-
- hrf_estim(double[], Vector<Double>, double[], double[], double, double, int) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- hrf_fit_err(double, double[], double[], double, double) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- hs - Static variable in class gov.nih.mipav.view.MipavUtil
-
Displays the Java Help dialog indexed directly to the section identified by the ID passed in.
- hs(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- hSampFactor - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Horizontal sample factor.
- hsb - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- HSBAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
DOCUMENT ME!
- ht - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- ht_filtering_hadamard(double[][][], double, double, boolean, double[]) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- ht1 - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- htAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- htAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- htColumnClass - Variable in class gov.nih.mipav.model.structures.SortingTableModel
-
DOCUMENT ME!
- htComplexRoots - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- HTML_FORMAT - Static variable in class gov.nih.mipav.view.dialogs.JDialogText
-
Specifis the output display of the text-box to be formatted using basic HTML rules, as defined by MIME-format
"text/html".
- htRealRoots - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- HtwImag - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- HtwReal - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- HUB_FACTOR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- HuberLoss(double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.HuberLoss
-
- hue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- hue - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- Hue1 - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- Hue2 - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- huff_entropy_decoder() - Constructor for class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- HUFF_LOOKAHEAD - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- HUFFCODE - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- HUFFCODE - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- huffDecode(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
Returns the appropriate value after reading 8 bits and interpreting the Huffman code.
- HuffmanTable(int, int, byte[], byte[]) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- HuffmanTableClass() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable.HuffmanTableClass
-
- HuffmanTablesDescriptor(MetadataExtractor.HuffmanTablesDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDescriptor
-
- HuffmanTablesDescriptorTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDescriptorTest
-
- HuffmanTablesDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- HuffmanTablesDirectoryTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDirectoryTest
-
- HUFFSIZE - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- HUFFSIZE - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- HuffTable(byte[], int) - Constructor for class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
Creates a new table with the image and the index where we stopped reading the image so far.
- huffval - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Read in DHT header.
- huffval - Variable in class gov.nih.mipav.model.file.libjpeg.JHUFF_TBL
-
- HUFFVAL - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- HUFFVAL - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- huge - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- huge - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- huge - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- hullArea - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- humidity - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- HUNDRED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- Hup(double[], int[], int[], int, int, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- Hup(DoubleDouble[], int[], int[], int, int, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- hurstAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- hurstAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- hurstAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- hurstAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
DOCUMENT ME!
- hurstFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- hurstFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- hurstFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- hurstFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Hurst index.
- hurstFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- hurstFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- hurstImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- hurstImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- hurstImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- Hv(double[], double[]) - Method in interface gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Function
-
- Hv(double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- Hv(double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_LrFunction
-
- HwImag - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- HwReal - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- HX - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- HX - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- hy1f1a(double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- hy1f1p(double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- HYBRD(int, int, double[], double[], double, int, int, int, double, double[], int, double, int, int[], int[], double[][], int, double[], int, double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- hyp2f0(double, double, double, int, double[]) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- hyp2f1(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- HYP2F1 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- hyperbolaRangeTolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- hyperbolaRangeTolerance - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Maximum percent by which perimiter pixels can deviate from the hyperbola equation
- hyperg(double, double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- HYPERG - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- Hypergeometric - Class in gov.nih.mipav.model.algorithms
-
The function 2F1(a,b,c,x) is the hypergeometric function or Gauss's hypergeometric function.
- Hypergeometric() - Constructor for class gov.nih.mipav.model.algorithms.Hypergeometric
-
- Hypergeometric(double, double, double, double, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Hypergeometric
-
- Hypergeometric(double, double, double, double, double, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.Hypergeometric
-
- hyperrect_create(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- hyperrect_dist_sq(KDTree.kdhyperrect, double[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- hyperrect_duplicate(KDTree.kdhyperrect) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- hyperrect_extend(KDTree.kdhyperrect, double[]) - Static method in class gov.nih.mipav.model.algorithms.KDTree
-
- hyperrect_free(KDTree.kdhyperrect) - Static method in class gov.nih.mipav.model.algorithms.KDTree
-
- hyperstack - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- hyperstack - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- hyperStack - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- hyperstackColormap - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- hyperstackColormap - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- hyperstackColormap - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- hypot(double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
Calculates sqrt(x*x + y*y) which is the hypotenuse length given catheti x and y.
- hypot(double, double) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculates the hypotenuse equal to the sqrt(a^2 + b^2) without under/overflow
- hys2f1(double, double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- HYST_LOW_CUT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- hysteresisHighConfidenceText - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- hysteresisHighRankText - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- hysteresisLowConfidenceText - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- hysteresisLowRankText - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- hystTypeHigh - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- hystTypeHigh - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- hystTypeLow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- hystTypeLow - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- hyt2f1(double, double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- HZ - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement hertz.
- HZ - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement hertz.
- HZ_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - hertz.
I
- i - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- i - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskShortPair
-
- i - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- i - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- i - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- i - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- i - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction3
-
- i - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryCostFunction3
-
- i - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- i - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- i - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- i - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- i - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- i - Variable in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
DOCUMENT ME!
- i - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- i - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- i - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- I - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.ASMData
-
- I - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.P
-
- I - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- I - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
True if data is present at a point, false if data is missing at a point
- I - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- I - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- I_AllocClassData(AlgorithmGaussianMixtureModelEM.SigSet, AlgorithmGaussianMixtureModelEM.ClassSig, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_DeallocClassData(AlgorithmGaussianMixtureModelEM.SigSet, AlgorithmGaussianMixtureModelEM.ClassSig) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_DeallocClassSig(AlgorithmGaussianMixtureModelEM.SigSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_DeallocSigSet(AlgorithmGaussianMixtureModelEM.SigSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_DeallocSubSig(AlgorithmGaussianMixtureModelEM.ClassSig) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_GetClassTitle(AlgorithmGaussianMixtureModelEM.ClassSig) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_GetSigTitle(AlgorithmGaussianMixtureModelEM.SigSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_InitSigSet(AlgorithmGaussianMixtureModelEM.SigSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_NewClassSig(AlgorithmGaussianMixtureModelEM.SigSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_NewSubSig(AlgorithmGaussianMixtureModelEM.SigSet, AlgorithmGaussianMixtureModelEM.ClassSig) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_ReadSigSet(RandomAccessFile, AlgorithmGaussianMixtureModelEM.SigSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_SetClassTitle(AlgorithmGaussianMixtureModelEM.ClassSig, String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_SetSigTitle(AlgorithmGaussianMixtureModelEM.SigSet, String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_SigSetNBands(AlgorithmGaussianMixtureModelEM.SigSet, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I_WriteSigSet(RandomAccessFile, AlgorithmGaussianMixtureModelEM.SigSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- I1(double[][][], int, double, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- I1(double[][], int, int, double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- i2 - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- I2(double[][][], int, int, double, int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- I2(double[][], int, double, int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- I3(double[][][], int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- i99999_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- i99999_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- iagcwdAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
DOCUMENT ME!
- ibase - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- ibdAlgor - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
The MaximumLikelihood Blind Deconvolution algorithm:
- IBNDS - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- IBoxToBox(Box3, Box3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- iBSplineDegree - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline.Options
-
Degree of the BSpline basis functions.
- iBSplineNumControlPoints - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline.Options
-
Number of control points to use for the open/uniform BSpline basis functions.
- icAlgorithm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- icAlgorithm - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- icAlgorithmGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- icAlgorithmPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- icall - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
if dqawoe is to be used only once, icall must be set to 1. assume that during this call, the c chebyshev moments
(for clenshaw-curtis integration c of degree 24) have been computed for intervals of c lenghts
(abs(b-a))*2**(-l), l=0,1,2,...momcom-1. c if icall.gt.1 this means that dqawoe has been c called twice or more
on intervals of the same c length abs(b-a). the chebyshev moments already c computed are then re-used in
subsequent calls. c if icall.lt.1, the routine will end with ier[0] = 6.
- icall - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
if dqawoe is to be used only once, icall must be set to 1. assume that during this call, the c chebyshev moments
(for clenshaw-curtis integration c of degree 24) have been computed for intervals of c lenghts
(abs(b-a))*2**(-l), l=0,1,2,...momcom-1. c if icall.gt.1 this means that dqawoe has been c called twice or more
on intervals of the same c length abs(b-a). the chebyshev moments already c computed are then re-used in
subsequent calls. c if icall.lt.1, the routine will end with ier[0] = 6.
- ICC_PROFILE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- ICC_PROFILE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- icc_profile_buf - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_t
-
'restricted' ICC profile
- icc_profile_len - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_t
-
size of ICC profile
- ICC_TAG_TYPE_CURV - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- ICC_TAG_TYPE_DESC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- ICC_TAG_TYPE_MEAS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- ICC_TAG_TYPE_MLUC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- ICC_TAG_TYPE_SIG - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- ICC_TAG_TYPE_TEXT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- ICC_TAG_TYPE_XYZ_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- IccDescriptor(MetadataExtractor.IccDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.IccDescriptor
-
- IccDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- iCCP - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- IccReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.IccReader
-
- IccReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.IccReaderTest
-
- icdft(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- iCenter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- icfft(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- icfft2(double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- icfft3(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ICG - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality IndoCyanine Green.
- ICG - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality IndoCyanine Green.
- Ichannels - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- icNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
number of independent components to be retained.
- icNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Number of independent components
- Ico - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- ICO - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .ico.
- iComponent() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
DOCUMENT ME!
- ICON_LINE - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- ICON_LINE - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- ICON_LINE - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- ICON_MEDICAL_FRAME - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- ICON_MEDICAL_FRAME - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- ICON_MEDICAL_FRAME - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- ICON_POINT - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- ICON_POINT - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- ICON_POINT - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- ICON_POLYGON - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- ICON_POLYGON - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- ICON_POLYGON - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- ICON_POLYLINE - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- ICON_POLYLINE - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- ICON_POLYLINE - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- ICON_PROTRACTOR - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- ICON_PROTRACTOR - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- ICON_PROTRACTOR - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- ICON_X_AXIS - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- ICON_X_AXIS - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- ICON_X_AXIS - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- ICON_Y_AXIS - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- ICON_Y_AXIS - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- ICON_Y_AXIS - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- ICON_Z_AXIS - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- ICON_Z_AXIS - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- ICON_Z_AXIS - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- iconbase - Variable in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- iconCache - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreePanel.JFileTreeCellRenderer
-
- iconHeight - Variable in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
- iconWidth - Variable in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
- ICOPY - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ICOQR1(int, int, int, int, int, double, double[], double[], double[], double[], double[], double[], double[], double[], double[], int[], int[], double[], double[], int, double[], double[], double[], double[][], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ICOS_HIST - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- ICOS_HIST - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- icos_hist_bin(SIFT3D.SIFT3DC, SIFT3D.Cvec, SIFT3D.Cvec, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- ICOS_NFACES - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- ICOS_NVERT - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- icosahedralCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- icount - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
Variables used for restart information.
- icount - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
Variables used for restart information.
- ICOUNT - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- icp - Variable in class gov.nih.mipav.model.file.FileZVI
-
- icp2 - Variable in class gov.nih.mipav.model.file.FileZVI
-
- icp3 - Variable in class gov.nih.mipav.model.file.FileZVI
-
- icp4 - Variable in class gov.nih.mipav.model.file.FileZVI
-
- icp5 - Variable in class gov.nih.mipav.model.file.FileZVI
-
- icp6 - Variable in class gov.nih.mipav.model.file.FileZVI
-
- icp7 - Variable in class gov.nih.mipav.model.file.FileZVI
-
- icpOriginalX - Variable in class gov.nih.mipav.model.file.FileZVI
-
- icpOriginalY - Variable in class gov.nih.mipav.model.file.FileZVI
-
- icpX - Variable in class gov.nih.mipav.model.file.FileZVI
-
- icpY - Variable in class gov.nih.mipav.model.file.FileZVI
-
- ICS - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Image Cytometry Standard. extension: .ics, .ids
- id - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D.intObject
-
- id - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D.intObject
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D.intObject
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- id - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- id - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dec_memory_marker_handler_t
-
marker value
- id - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- id - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- id - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
id for the VOI
- id - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.StandardMouse
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.StandardMouse
-
MouseEvent id.
- id - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.StandardKey
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseWheel
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouse
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouseDragged
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.StandardMouse
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouse
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouseDragged
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.KeyPressedEvent
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.RightMouse
-
DOCUMENT ME!
- id - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- id() - Method in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- id() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- ID - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- ID - Variable in class gov.nih.mipav.model.structures.VOI
-
ID of the VOI, also used when choosing the display color.
- ID - Static variable in class gov.nih.mipav.view.DICOMDisplayer
-
DOCUMENT ME!
- ID - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.IDList
-
- ID - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Vertices
-
- id_face(int) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- ID_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- ID_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- ID_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- ID_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- ID_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- ID_OBJECTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- ID_OFFSET - Variable in class gov.nih.mipav.model.file.FileDicom
-
Location of 'DICM'.
- id_vertex(int) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- IDAT - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- idcodeAnatParentString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- idcodeDate - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- idcodeDateString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- idcodeString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- idcodeString - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- idcodeWarpParentString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- idct - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- idealBPKernel2D(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Builds the idealized bandpass kernel in 2 dimensions.
- idealBPKernel2D(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Builds the idealized bandpass kernel in 2 dimensions.
- idealBPKernel3D(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Builds the idealized bandpass kernel in 2 dimensions.
- idealBPKernel3D(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Builds the idealized bandpass kernel in 2 dimensions.
- idealBSKernel2D(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Builds the idealized bandstop kernel in 2 dimensions.
- idealBSKernel2D(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Builds the idealized bandstop kernel in 2 dimensions.
- idealBSKernel3D(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Builds the idealized bandstop kernel in 3 dimensions.
- idealBSKernel3D(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Builds the idealized bandstop kernel in 3 dimensions.
- idealBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
Buffer holding calculation for noiseless U(x,y).
- idealHPKernel2D(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Builds the idealized highpass kernel in 2 dimensions.
- idealHPKernel2D(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Builds the idealized highpass kernel in 2 dimensions.
- idealHPKernel3D(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Builds the idealized highpass kernel in 3 dimensions.
- idealHPKernel3D(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Builds the idealized highpass kernel in 3 dimensions.
- idealLPKernel2D(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Builds the idealized lowpass kernel in 2 dimensions.
- idealLPKernel2D(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Builds the idealized lowpass kernel in 2 dimensions.
- idealLPKernel3D(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Builds the idealized lowpass kernel in 3 dimensions.
- idealLPKernel3D(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Builds the idealized lowpass kernel in 3 dimensions.
- identicalDesiredArraySize - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- identifyGroups(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- identifyGroups(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- identifyGroups(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- identifyObjects(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Labels each object in an image with a different integer value.
- identifyObjects(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Labels each object in an image with a different integer value.
- identifyRegions() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- IDENTITY - gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerType
-
- IdentityParameterization(int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.IdentityParameterization
-
- idim - Variable in class gov.nih.mipav.model.algorithms.curev
-
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
- iDimMax - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Max Dimension of X, Y, and Z.
- iDimX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
X Dimension.
- iDimY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Y Dimension.
- iDimZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Z Dimension.
- IDList - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- IDList() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.IDList
-
- IDList(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.IDList
-
- IDobjects() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- IDobjects(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Eliminate the small binary mask components.
- idObjectsAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Morphology25D algorithm reference.
- idObjectsAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Morphology2D algorithm reference.
- idObjectsAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- idObjectsAlgo2D - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- idObjectsAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Morphology3D algorithm reference.
- idObjectsAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- IDTagFileName - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- idType - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- idwt(double[], int, double[], int, double[], int, PyWavelets.DiscreteWavelet, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwt_axis(double[][][], double[][][], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwt_axis(double[][], double[][], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwt_axis(double[], PyWavelets.ArrayInfo, double[], PyWavelets.ArrayInfo, double[], PyWavelets.ArrayInfo, PyWavelets.DiscreteWavelet, int, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwt_buffer_length(int, int, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwt_single(double[], double[], PyWavelets.DiscreteWavelet, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwt13(double[][][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwt2(double[][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwt23(double[][][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwt3(double[][][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwtn13(HashMap<String, double[][][]>, PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwtn2(HashMap<String, double[][]>, PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwtn23(HashMap<String, double[][][]>, PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idwtn3(HashMap<String, double[][][]>, PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- idx - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.Tracker
-
- idx - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Tri
-
- idx - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Edge
-
- idx - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue.HeapNode
-
- idx - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredEdgeIndex
-
- idx - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.EdgeIndex
-
- idx - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.TriangleIndex
-
- idx1Position - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- ie - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.it_node
-
- ieeeck(int, double, double) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Version 3.2 auxiliary routine ported form LAPACK Original IEEECK created by Univ. of Tennessee, Univ. of
California Berkeley, University of Colorado Denver, and NAG Ltd., November, 2006 ieeeck is called form the ilaenv
routine to verify that infinity and possibly NaN arithmetic is safe (i.e. will not trap)
- IEND - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- ier - Variable in class gov.nih.mipav.model.algorithms.curev
-
- ier - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- ier - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
ier[0] = 0 for normal and reliable termination of the routine.
- ier - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
ier[0] = 0 for normal and reliable termination of the routine.
- ier - Variable in class gov.nih.mipav.model.algorithms.splev
-
- ier - Variable in class gov.nih.mipav.model.algorithms.sproot
-
- IER - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ierlst - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
In dqawfe vector of dimension at least limlst ierlst[k] contains the error flag corresponding with rstlst[k].
- ierlst - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
In dqawfe vector of dimension at least limlst ierlst[k] contains the error flag corresponding with rstlst[k].
- IERTXT(int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- iev - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- iev - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- ifail - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- IFCT(double[], double[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- IFCT2D(double[], int, int) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- IFD - gov.nih.mipav.model.file.FileSVS.Type
-
The IFD type is identical to LONG, except that it is only used to point to other valid IFDs
- IFD - gov.nih.mipav.model.file.FileTiff.Type
-
The IFD type is identical to LONG, except that it is only used to point to other valid IFDs
- IFDoffsets - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- IFDoffsets - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- IFDoffsets - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- IFDoffsets - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- ifft_dit(double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHilbertTransform
-
void ifft_dit(double z[], int n)
Purpose:
Computes the inverse discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-time FFT.
- ifft_dit_iter(double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHilbertTransform
-
static void ifft_dit_iter(double *z, unsigned long n)
Purpose:
Computes the inverse discrete Fourier transform of a complex
sequence z, using an iterative radix 2 decimation-in-time FFT.
- ifft_dit_rec(double[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHilbertTransform
-
static void ifft_dit_rec(double z[], int n, int nbranch)
Purpose:
Computes the inverse discrete Fourier transform of a complex
sequence z, using a radix 2 decimation-in-time FFT.
- ifft2(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- ifftshift(double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- ifftshift(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- ifftshift(double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ifftshift(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ifftShift(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- ifftshift1d(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- iFinal - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- iflag - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- iflag - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ifree - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- ifree - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- ifSuccess - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- igam(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- IGAM - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- igamc(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- IGAMC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- igami(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- IGAMI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- IGEOM - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- IGNLVL(double[], double[], double[], double[], double[], double[], int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ignore - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexSplitParams
-
- Ignore - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel.VOIParams
-
- ignoreAction() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Empties the right-list, then closes the dialog.
- ignoreCOG - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
whether or not to use center of gravity for first translation.
- ignoreCOG - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
whether or not to use center of gravity for first translation.
- ignoreMax - Variable in class gov.nih.mipav.model.structures.VOI
-
Sets the maximum intensity value for operations on B & W images segmented by this VOI
- ignoreMaxB - Variable in class gov.nih.mipav.model.structures.VOI
-
Sets the maximum blue intensity value for operations on RGB images segmented by this VOI
- ignoreMaxG - Variable in class gov.nih.mipav.model.structures.VOI
-
Sets the maximum green intensity value for operations on RGB images segmented by this VOI
- ignoreMaxR - Variable in class gov.nih.mipav.model.structures.VOI
-
Sets the maximum red intensity value for operations on RGB images segmented by this VOI
- ignoreMin - Variable in class gov.nih.mipav.model.structures.VOI
-
Sets the minimum intensity value for operations on B & W images segmented by this VOI
- ignoreMinB - Variable in class gov.nih.mipav.model.structures.VOI
-
Sets the minimum blue intensity value for operations on RGB images segmented by this VOI
- ignoreMinG - Variable in class gov.nih.mipav.model.structures.VOI
-
Sets the minimum green intensity value for operations on RGB images segmented by this VOI
- ignoreMinR - Variable in class gov.nih.mipav.model.structures.VOI
-
Sets the minimum red intensity value for operations on RGB images segmented by this VOI
- ignoreMouseMotion - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
flag to invoke the mouse motion event or not.
- ignoreMouseMotion - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
flag to invoke the mouse motion event or not.
- ignoreSlice - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
set true if deleteSlice hit in ViewJFrameAnimate
- ignoreSlice - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- ignoreSlice() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Method to ensure img[slice] is not displayed.
- ignoreSlice() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Method to ensure img[slice] is not displayed.
- iGradientDescentMinimizeMaxSteps - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline.Options
-
Maximum number of steps to test when locating the minimum of the gradient descent.
- IGUESS - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- IGUESS - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- IHB_LENGTH - Static variable in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
Length of Image Header Box
- IHDR - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- IHead - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- IHN3Correction2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
IHN3Correction2().
- IHN3Correction3() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
IHN3Correction3.
- IHN3CorrectionAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- IHN3CorrectionAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- IHN3CorrectionAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- IHN3CorrectionFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- IHN3CorrectionFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- IHN3CorrectionFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- IHN3CorrectionFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Inhomogeneity N3 correction.
- IHN3CorrectionFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- IHN3CorrectionFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- IHN3CorrectionImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- IHN3CorrectionImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- IHN3CorrectionImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- iImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- iKernel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- iKernel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- ikeysComparator() - Constructor for class gov.nih.mipav.model.algorithms.SIFT.ikeysComparator
-
- il - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- iladlc(int, int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of LAPACK auxiliary routine (version 3.2.1) ILADLC, April 2009 Original ILADLC created by Univ. of
Tennessee, Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd.
- iladlr(int, int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of LAPACK auxiliary routine (version 3.2.1) ILADLR, April 2009 Original ILADLR created by Univ. of
Tennessee, Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd.
- ilaenv(int, String, String, int, int, int, int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
ilaenv is ported from the version 3.2.1 LAPACK auxiliary routine Original ILAENV created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver and NAG Ltd., April, 2009
- ilast - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- ILI - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- ILLEGAL_YMEAN - gov.nih.mipav.model.algorithms.libdt.Ymean_type
-
< model non-zero observation mean.
- ILLUMCHANNEL_DETCHANNEL_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- ILLUMCHANNEL_ENTRY_ACQUIRE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- ILLUMCHANNEL_ENTRY_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- ILLUMCHANNEL_ENTRY_POWER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- ILLUMCHANNEL_ENTRY_WAVELENGTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- ILLUMCHANNEL_POWER_BC1 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- ILLUMCHANNEL_POWER_BC2 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- illuminationType - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- illuminationType - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- illuminationWavelength - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- iLoc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- ilog2(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- im - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.tImage
-
- im - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3DC
-
- im - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizePresets
-
- im_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgImage
-
- im_alloc_key - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
506 13 characters Process that allocated this record.
- im_archived - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
544 (internal use) Image Archive Flag.
- im_checksum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
540 (internal use) AcqRecon record checksum.
- im_complete - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
548 (Internal use) Image Complete Flag.
- im_copy_data(SIFT3D.Image, SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im_copy_dims(SIFT3D.Image, SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im_default_stride(SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im_downsample_2x(SIFT3D.Image, SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im_format() - Constructor for enum gov.nih.mipav.model.algorithms.SIFT3D.im_format
-
- im_free(SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- IM_GET_GRAD_ISO(SIFT3D.Image, int, int, int, int, SIFT3D.Cvec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im_inv_transform(SIFT3D.Affine, SIFT3D.Image, SIFT3D.interp_type, int, SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im_lastmod - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
520.
- im_max_abs(SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- IM_NDIMS - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im_pds_a - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
528 PixelData size - as stored.
- im_pds_c - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
532 PixelData size - compressed.
- im_pds_u - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
536 PixelData size - Uncompressed.
- im_permute(SIFT3D.Image, int, int, SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im_resize(SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im_scale(SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im_subtract(SIFT3D.Image, SIFT3D.Image, SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im_verscre - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
524 2 characters Genesis Version - Created.
- im_verscur - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
526 2 characters Genesis Version - Now.
- im_zero(SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- im2mm(SIFT3D.Mat_rm, double[], SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- imag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation.complex_t
-
- imag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP.complex_t
-
- imagA - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- imagB - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- imagData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmDistanceFilter
-
DOCUMENT ME!
- imagData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Imaginary data.
- imagData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Imaginary data.
- imagData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- imagData - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
Imaginary data.
- image - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The source image.
- image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCumulativeHistogram
-
Reference to the image.
- image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Reference to the image.
- image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
source image.
- image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIHausdorffDistance
-
Model Images
- image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
The source image.
- image - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- image - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- image - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- image - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
source image.
- image - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- image - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- image - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- image - Variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
images
- image - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileAnalyze
-
The image read in from the file.
- image - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileBMP
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileCZI
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileDicom
-
Reference to the image read into the application.
- image - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Image data we're reading.
- image - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileImageXML
-
Model Image associated with the file.
- image - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileJP2
-
Model Image.
- image - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t2_t
-
Encoding: pointer to the src image.
- image - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
image header
- image - Variable in class gov.nih.mipav.model.file.FileJSON
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileLIFF
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileOME
-
The image to read or write.
- image - Variable in class gov.nih.mipav.model.file.FilePaintBitmap
-
Image used to reference properties of the image to aid reading and writing of the VOI.
- image - Variable in class gov.nih.mipav.model.file.FilePARREC
-
The image read in from the file.
- image - Variable in class gov.nih.mipav.model.file.FilePGM
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FilePPM
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileSiemensText
-
The image read in from the file.
- image - Variable in class gov.nih.mipav.model.file.FileSpar
-
The image read in from the file.
- image - Variable in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.FileTrackVis
-
Created image
- image - Variable in class gov.nih.mipav.model.file.FileVista
-
image
- image - Variable in class gov.nih.mipav.model.file.FileVOI
-
Image used to reference properties of the image to aid reading and writing of the VOI.
- image - Variable in class gov.nih.mipav.model.file.FileZVI
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
- image - Variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
- image - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
image store
- image - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
image store
- image - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
images
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBlankImage
-
The blank image to be created.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Use serialVersionUID for interoperability.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
The source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
ref to image
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoMultiple3D
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
src image
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Reference to the image that will be affected by the adjust of the window and level.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCumulativeHistogram
-
Source Image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Model images A and B.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Source image for extracting brain, default image is null.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Source Image
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
model image associated with the FileInfo.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogLLE
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Source Image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
source image
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogQuantifyMask
-
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
ModelImage reference.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Image to reslice.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Source image for algorithm.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
image
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
source image
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSobel
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
This source image is typically set by the constructor
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTextGE
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTextGE4X
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Source image.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
image and cloned image
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
image and cloned image
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Global image reference to the currently active image during script running and recording.
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Internal reference to the currently selected ModelImage
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Reference to the image that will be affected by the adjust of the window and level.
- image - Variable in class gov.nih.mipav.view.dialogs.MultiPaintAutoSave
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.PaintAutoSave
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Image file used to store images created through the screen capture function
- image - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- image - Variable in class gov.nih.mipav.view.JPanelHistogram
-
input image
- image - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Reference to the image as ModelImage instance.
- image - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
The image whose histo lut we are displaying.
- image - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- image - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageModel
-
- image - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageModelSVM
-
- image - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- image - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- image - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The image whose histo lut we are displaying.
- image - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
The model image this preview image is derived from.
- image - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- image - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
The image.
- image - Variable in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- image - Variable in class gov.nih.mipav.view.ViewSplashScreen
-
The splash screen image.
- Image - gov.nih.mipav.view.Argument.InstanceArgument
-
- Image() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- Image(String, String, String, Integer, Integer, Integer, Integer, Integer, Float, Float, Float, Float, Integer, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
Creates a new Image object.
- IMAGE - gov.nih.mipav.view.dialogs.JDialogZoom.ZoomMode
-
- IMAGE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Denotes image should be flipped without VOI.
- IMAGE_A - Static variable in class gov.nih.mipav.model.structures.ModelImage
-
Used to indicate that this image object is Image A when two images are displayed in the same frame.
- IMAGE_A - Static variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- IMAGE_A - Static variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- IMAGE_A - Static variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Display mode image A.
- IMAGE_A - Static variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Display mode image A.
- IMAGE_A - Static variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Display mode image A.
- IMAGE_A - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- IMAGE_A - Static variable in class gov.nih.mipav.view.ViewJFrameBase
-
Display mode image A.
- IMAGE_A_B - Static variable in class gov.nih.mipav.view.ViewJFrameBase
-
Display mode image A and B.
- IMAGE_ALIGN_TOOLBAR - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- IMAGE_AND_VOI - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Image and all VOIs should be flipped.
- IMAGE_B - Static variable in class gov.nih.mipav.model.structures.ModelImage
-
Used to indicate that this image object is Image B when two images are displayed in the same frame.
- IMAGE_B - Static variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- IMAGE_B - Static variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- IMAGE_B - Static variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Display mode image B.
- IMAGE_B - Static variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Display mode image B.
- IMAGE_B - Static variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Display mode image B.
- IMAGE_B - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- IMAGE_B - Static variable in class gov.nih.mipav.view.ViewJFrameBase
-
Display mode image B.
- image_border_width - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- image_border_width - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- IMAGE_DESCRIPTION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- IMAGE_DESCRIPTION - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- IMAGE_DESCRIPTION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- IMAGE_DESCRIPTION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- IMAGE_DROP - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- image_format - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.CL_data
-
- image_height - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- IMAGE_LENGTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- IMAGE_LENGTH - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- IMAGE_LENGTH - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- IMAGE_LENGTH - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- IMAGE_LEVEL - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- image_method - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- image_method_final - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- IMAGE_NAME_ACTION_LABEL - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
The label to use for the parameter indicating whether the image name should be replaced, prepended to, or
appended to.
- IMAGE_NAME_LABEL - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
The label to use for the parameter indicating the new image name.
- IMAGE_ORIENTATION - Static variable in class gov.nih.mipav.model.file.FileDicom
-
- IMAGE_ORIENTATION - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeOrientations
-
The label to use for the parameter indicating the new orientation
- IMAGE_ORIENTATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- IMAGE_ORIGIN - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeOrigin
-
The label to use for the parameter indicating the new origin
- IMAGE_POSITION - Static variable in class gov.nih.mipav.model.file.FileDicom
-
- IMAGE_RESOLUTIONS - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeResolutions
-
The label to use for the parameter indicating the new resolutions.
- IMAGE_SOURCE_DATA - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- IMAGE_SOURCE_DATA - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- IMAGE_STR - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Used for XML tag for an image.
- IMAGE_TAG - Static variable in class gov.nih.mipav.model.file.FileDicom
-
The tag marking the start of the image data.
- image_type - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
584 Magnitude, Phase, Imaginary, or Real.
- image_uid - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
746 32 characters Image Unique ID.
- IMAGE_UNITS - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeUnits
-
The label to use for the parameter indicating the new units
- image_width - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- image1 - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- image1 - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- image1Slice - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- image2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAnyTwoImagesSNR
-
private ModelImage srcImage;.
- image2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
- image2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTwoMRIImagesSNR
-
private ModelImage srcImage;.
- image2 - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- image2 - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- image2 - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- image2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- image2 - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- image2 - Variable in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
If true process each image of a 3D volume independently.
- image25D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
If image25D is true in 3D images, process each slice separately
- image25D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
If true in 3D images, process each slice separately
- image25D - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
If true process each slice one at a time in 3D image.
- image25D - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
If true process each slice one at a time in 3D image.
- image25D - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
If true process each slice one at a time in 3D image.
- image25D - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Boolean telling if 3D images are processed 1 slice at a time.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Flag indicating if slices should be blurred independently.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
false = apply algorithm only to VOI regions.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
false = apply algorithm only to VOI regions.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Whether algorithm should run seperately on each slice of a 3D image
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Flag indicating if slices should be blurred independently.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
Flag indicating if slices should be blurred independently.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
Flag indicating if slices should be blurred independently.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
false = apply algorithm only to VOI regions.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
false = apply algorithm only to VOI regions.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
false = apply algorithm only to VOI regions.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
true means do each slice individually, false means do them all together.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Flag indicating if slices should be blurred independently.
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- image25D - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Process each slice independently, or as a 3D image.
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
User can indicate whether the FFT of each slice of a 3D image is computed seperately
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
of similar brightness voxels is empty, a local median filter is used.
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogSobel
-
DOCUMENT ME!
- image25DCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
DOCUMENT ME!
- image25DCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- image25DCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- image2patches(ModelImage, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- Image2Vector(ModelSimpleImage, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Conversion from shape-free image to a texture vector.
- image4D - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
ModelImage of 4D par/rec dataset
- imageA - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.model.file.FileIO
-
- imageA - Variable in class gov.nih.mipav.model.file.FileSpar
-
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
source image.
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
source image.
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
source image.
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
Image to transform.
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogVABRA
-
source image.
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIExtraction
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIShapeInterpolation
-
src image
- imageA - Variable in class gov.nih.mipav.view.JFrameHistogram
-
source image A
- imageA - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Model image A.
- imageA - Variable in class gov.nih.mipav.view.PatientSlice
-
imageA:.
- imageA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Model image A.
- imageA - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Reference to the image A of this frame.
- imageA - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Structure holding image.
- imageA - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Current image A.
- imageA - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Current image A.
- imageA - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Model for image A.
- imageA - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Model for image A.
- imageA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Current image A.
- imageA - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Model images A and B.
- imageA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
image A reference.
- imageA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Model image A, B.
- imageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
- imageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- imageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- imageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- imageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- imageA - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
imageA - model for image A.
- imageA - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
imageA - model for image A.
- imageA - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
imageA - model for image A.
- imageA - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
model image *
- imageA - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Model for image A.
- imageA - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Reference to the image A of this frame.
- imageA - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- imageA - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- ImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- imageA_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageActive - Variable in class gov.nih.mipav.view.PatientSlice
-
The current active image:.
- imageActive - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Model for active image.
- imageActive - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Model for active image.
- imageActive - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
Which image is currently active
- imageActive - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Active image.
- imageActiveIndex - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- imageActiveIndex - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- imageAInfo - Variable in class gov.nih.mipav.model.file.FileSpar
-
imageA file info
- imageAlignToolBar - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- imageAn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageAn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageAngulation - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- imageAngulation - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageAngulationIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageAngulationPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageAnSWT - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageAnSWT_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageAOriginal - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Reference to the imageA original copy.
- imageAOriginal - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
The non-cloned image which we want to load into the renderer.
- ImageAsTexture(boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Turn surface texture on/off.
- imageAttacher - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Boolean indicating if JDialogCaptureScreen has been initialized through ReportBugBuilder
- ImageAttribute(String, String, Hashtable<String, Vector>) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageAttribute
-
- ImageAttributes(String, String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase.ImageAttributes
-
- ImageAttributes(String, String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile.ImageAttributes
-
- ImageAttributes(String, String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase.ImageAttributes
-
- ImageAttributes(String, String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase.ImageAttributes
-
- imageAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- imageAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- imageAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Graph axes helper classes for displaying the axes of the 2D Histogram:
- imageB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
blue channel image
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Source image.
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Model images A and B.
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
Image B to transform, can be null.
- imageB - Variable in class gov.nih.mipav.view.dialogs.JDialogVABRA
-
target image
- imageB - Variable in class gov.nih.mipav.view.JFrameHistogram
-
source image B
- imageB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Model image B.
- imageB - Variable in class gov.nih.mipav.view.PatientSlice
-
imageB:.
- imageB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Model image B.
- imageB - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Reference to the image Bof this frame.
- imageB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Current image B.
- imageB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Current image B.
- imageB - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Model for image A.
- imageB - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Model for image A.
- imageB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Current image B.
- imageB - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Model images A and B.
- imageB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
image B reference.
- imageB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
ImageB reference.f
- imageB - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
imageB - model for image B.
- imageB - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
imageB - model for image B.
- imageB - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
imageB - model for image B.
- imageB - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Model for image B.
- imageB - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Reference to the image B of this frame.
- imageB - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- imageB - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- ImageB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- imageB0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
The B0 image from the original 4D DWI image series, extracted from the DWI volume:
- imageBInit() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- imageBlackValueArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageBorder - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- imageBorderVector - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- imageBranch - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Branch parent of the image in the scene, needed so image can be made invisible when another surface is loaded.
- imageBuffer - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Buffer used to store image intensities the presently viewed slice of image.
- imageBuffer2 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
- imageBufferA - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- imageBufferA - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Buffer used to store image intensities the presently viewed slice of image A.
- imageBufferA - Variable in class gov.nih.mipav.view.PatientSlice
-
The imageBuffer that stores the current ModelImage slice data for imageA:.
- imageBufferA - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Buffer which holds the pixel data.
- imageBufferA - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Buffer holding image data for image A.
- imageBufferA - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- imageBufferA - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Buffer used to store image intensities the presently viewed slice of image A.
- imageBufferA - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Buffer for image A, raw intensity.
- imageBufferA - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- imageBufferA - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Buffer used to store image intensities the presently viewed slice of image A.
- imageBufferA - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- imageBufferA - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- imageBufferA - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- imageBufferA_GM - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Buffer holding image data for imageA GM.
- imageBufferActive - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Buffer holding image data for active image.
- imageBufferActive - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- imageBufferActive - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Buffer for active image.
- imageBufferB - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- imageBufferB - Variable in class gov.nih.mipav.view.PatientSlice
-
The imageBuffer that stores the current ModelImage slice data for imageB:.
- imageBufferB - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Buffer holding image data for image B.
- imageBufferB - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Buffer for image B, raw intensity.
- imageBufferB - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- imageBufferB - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Buffer used to store image intensities the presently viewed slice of image B.
- imageBufferB - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- imageBufferB - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- imageBufferB - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- imageBufferB_GM - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Buffer holding image data for imageB GM.
- imageBufferColocalize - Variable in class gov.nih.mipav.view.PatientSlice
-
colocalization imageBuffer:.
- imageBufferDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- imageBufferDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- imageBufferDest - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- imageBufferDest - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- imageBufferOriginalB - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- imageBufferOriginalB - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- imageC2Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageC3Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageC6Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageC7Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- ImageCellRenderer() - Constructor for class gov.nih.mipav.view.ViewJFrameRegisteredImages.ImageCellRenderer
-
Identifies components that can be used as "rubber stamps" to paint the cells in a JList.
- imageCenter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
image center
- imageCenterButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
- imageChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- imageChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- imageChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- imageColocalize - Variable in class gov.nih.mipav.view.PatientSlice
-
colocalization image:.
- imageComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- imageComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- imageComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- imageComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- imageComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- imageComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Combobox to select the second image.
- imageComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- imageComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- imageComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Image list for user to pick registered image
- imageComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- imageComp - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- imageComp - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- ImageConverter(Image) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.ImageConverter
-
- imageCopy - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
A copy of the source image to run the algorithm on.
- imageCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- imageCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- imageCount - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageCounter - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- imageCountFieldOne - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogTwo
-
- imageCountFieldTwo - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogTwo
-
- imageCreationDate - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageCreationDate - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageCreationTime - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageCreationTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageCrop - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- imageCrop - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- imageCrop - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- imageCrop - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- imageCropCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- imageCropCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- imageD - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageD_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageDataDescription - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- imageDataFileName - Variable in class gov.nih.mipav.model.file.FileInfoXML
-
Name (not path) of the (usually raw) image data file.
- ImageDataSource(int, int, int, Image[]) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
Constructor for creating movies out of Images NOTE - this is all done IN MEMORY, so you'd better have enough.
- ImageDataSource(int, int, int, File[]) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
Constructor for creating movies out of jpegs.
- ImageDataSource(int, int, int, Vector) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
Creates a new ImageDataSource object.
- ImageDateDD - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- ImageDateMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- ImageDateYYYY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- imageDescription - Variable in class gov.nih.mipav.model.file.FileInfoBioRad
-
DOCUMENT ME!
- imageDescription - Variable in class gov.nih.mipav.model.file.FileInfoJP2
-
DOCUMENT ME!
- imageDescription - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
- imageDescription - Variable in class gov.nih.mipav.model.file.FileInfoSTK
-
DOCUMENT ME!
- imageDescription - Variable in class gov.nih.mipav.model.file.FileInfoSVS
-
DOCUMENT ME!
- imageDescription - Variable in class gov.nih.mipav.model.file.FileInfoTiff
-
DOCUMENT ME!
- imageDescription - Variable in class gov.nih.mipav.model.file.FileInfoXML
-
Brief description of the image - optional XML tag.
- imageDescription - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- imageDescription - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- imageDescription - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- imageDescription - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- imageDestBrowse - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- imageDestDirectory - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
private File srcDirectory; // Defined by the.
- imageDestDirText - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- imageDestinationDirectory - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- imageDim - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- imageDims - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- imageDimX - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
42.
- imageDimY - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
46.
- imageDn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageDn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imagedNucleus - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- ImagedNucleus - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- imageDuration - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- imageDurationIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- imageElementLength - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
- imageElementWord - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
- imageExtentMax - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- imageExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
DOCUMENT ME!
- imageExtents - Variable in class gov.nih.mipav.model.file.FileBMP
-
DOCUMENT ME!
- imageExtents - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- imageExtents - Variable in class gov.nih.mipav.model.file.FileCZI
-
DOCUMENT ME!
- imageExtents - Variable in class gov.nih.mipav.model.file.FileLIFF
-
DOCUMENT ME!
- imageExtents - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
DOCUMENT ME!
- imageExtents - Variable in class gov.nih.mipav.model.file.FileZVI
-
DOCUMENT ME!
- imageExtents - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Extents of the image.
- imageExtents - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Extents of the 3D image.
- imageExtents - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
The dimensionality of the image.
- imageFactor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Controls how much the image influences the surface evolution.
- imageFieldStrength - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageFieldStrength - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageFileName - Variable in class gov.nih.mipav.model.file.FileImageXML
-
Name of the RAW (or IMG) file associated with the XML header.
- imageFileName - Variable in class gov.nih.mipav.model.file.FileOME
-
The name of the raw image data file.
- imageFileName - Variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- imageFill - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Set the mask areas to this value.
- imageFillB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
DOCUMENT ME!
- imageFillG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
DOCUMENT ME!
- imageFillI - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
- imageFillR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
DOCUMENT ME!
- imageFilter - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This is the image filter needed to select the correct dicom images
- imageFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
DOCUMENT ME!
- imageFilter - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- imageFocusPositionArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageFrame - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
on the contour VOI occurs.
- imageFrame - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
- imageFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreens
-
The parent image frame.
- imageFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- imageFrame - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- imageFrame - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- imageFrame - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- imageFrame2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
- imageFrame3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
- imageFrame4 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
- imageFrameVector - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Stores array of images frames the first of which is the active image frame.
- imageFullName - Variable in class gov.nih.mipav.view.dialogs.InstanceVOI
-
- imageFuzzyCMeanNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- imageG - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
green channel image
- imageG - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- imageGroupWord - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
- imageH - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageH_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- imageHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- imageHashtable - Variable in class gov.nih.mipav.view.ViewUserInterface
-
A list of image models currently open in MIPAV.
- imageHashtableCg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- imageHashtableCg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- imageHashtableCg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- imageHashtableCg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- imageHashtableCg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- imageHashtableCg_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- imageHashtableCg_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- imageHashtableCg_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- imageHashtableCg_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- imageHashtableCg_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- imageHashtableCg_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- imageHashtableExtra - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- imageHashtableExtra - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- imageHashtableExtra - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- imageHashtableExtra - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- imageHashtableWp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- imageHashtableWp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- imageHashtableWp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- imageHashtableWp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- imageHashtableWp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- imageHashtableWp_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- imageHashtableWp_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- imageHashtableWp_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- imageHashtableWp_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- imageHashtableWp_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- imageHashtableWp_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- imageHeaderBlocks - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageHeaderBlocks - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageHeaderCreatorProcess - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageHeaderCreatorProcess - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageHeaderCreatorTask - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageHeaderCreatorTask - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageHeaderDisclaimer - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageHeaderDisclaimer - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageHeaderID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageHeaderID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageHeaderRevisionNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageHeaderRevisionNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageHeight - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Image height.
- imageHeight - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageHeight - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- imageHeight - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- imageHH - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHH_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHHH - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHHH_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHHHn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHHHn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHHL - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHHL_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHHLn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHHLn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHHn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHHn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHL - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHL_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHLH - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHLH_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHLHn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHLHn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHLL - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHLL_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHLLn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHLLn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHLn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHLn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageHn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageIcon - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeRenderer
-
DOCUMENT ME!
- imageIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.SliceSet
-
- imageIndexCombos0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- imageIndexCombos180 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- imageInfluenceBET - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Parameter for brain extraction by default set to .1
- imageInfluenceBET - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
the depth to calculate in approximating brain maximum and minimum intensities.
- imageInfluenceField - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
The text field corresponding to imageInfluenceField.
- imageInfoList - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- imageInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Isotropic input image.
- imageInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Isotropic input image.
- imageInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Isotropic input image.
- imageInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Isotropic input image.
- imageInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Isotropic input image.
- imageInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Isotropic input image.
- imageIntensityFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- imageIntensityFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- imageIntensityFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
flag to indicate the image intensity filter enabled or not.
- imageIntensityFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
image intensity.
- imageIntensityFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- imageIntensityFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- ImageJ - gov.nih.mipav.view.Preferences.DefaultDisplay
-
ImageJ default setting
- ImageJToModelImageConversion - Class in gov.nih.mipav.model.structures
-
- ImageJToModelImageConversion() - Constructor for class gov.nih.mipav.model.structures.ImageJToModelImageConversion
-
- imageL - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageL_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLength - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- imageLength - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- imageLH - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLH_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLHH - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLHH_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLHHn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLHHn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLHL - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLHL_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLHLn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLHLn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLHn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLHn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageList - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- imageList - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- imageList - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- imageList - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- imageList - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- imageList - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- imageList - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- imageList - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- imageList - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- imageList - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- imageList - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
The list of images and frames
- imageList2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- imageList2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- imageLL - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLL_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLH - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLH_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLHn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLHn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLL - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLL_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLLn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLLn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLLnSWT - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLLnSWT_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLLn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageLoadReady - Variable in class gov.nih.mipav.model.file.FileDicom
-
Whether adequate processing of the file has occurred to allowed image to be extracted, this includes getting
offset and pixel representation.
- imageLocation - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageLocation - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageMarginsAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- imageMathAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
- imageMatrix - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageMatrix - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
- imageMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
- imageMax - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- imageMax - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
DOCUMENT ME!
- imageMax - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- imageMax - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- imageMax - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- imageMax - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- imageMax - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- imageMax - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- imageMax - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- imageMax - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- imageMax - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- imageMemoryUsage - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- imageMenu - Variable in class gov.nih.mipav.view.ViewMenuBar
-
The menu listing image and overlay commands
- imageMin - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
DOCUMENT ME!
- imageMin - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
DOCUMENT ME!
- imageMin - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- imageMin - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- imageMin - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- imageMin - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- imageMin - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- imageMin - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- imageMin - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- imageMin - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- imageMin - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- imageMinA - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- imageMode - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageMode - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- ImageModel(int, ModelImage, Hashtable<String, Vector<Model>>) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageModel
-
- ImageModelSVM(int, ModelImage, Hashtable<String, Vector<svm_model>>) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageModelSVM
-
- imageName - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- imageName - Variable in class gov.nih.mipav.model.structures.ModelImage
-
ImageName is patient's name when using DICOM images.
- imageName - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- imageName - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- imageName - Variable in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
DOCUMENT ME!
- imageName - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
DOCUMENT ME!
- imageName - Variable in class gov.nih.mipav.view.dialogs.ScriptImage
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ModelString
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ModelString
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ModelString
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase.ImageAttributes
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ModelString
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ModelString
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ModelString
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ModelString
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageAttribute
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ModelString
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile.ImageAttributes
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase.ImageAttributes
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase.ImageAttributes
-
- imageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- imageNameArray - Variable in class gov.nih.mipav.model.structures.ModelImage
-
If imageNameArray is not null, then a different image name will appear on every slice
- ImageNameComparator() - Constructor for class gov.nih.mipav.view.ViewImageDirectory.ImageNameComparator
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- imageNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- imageNameHashtable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- imageNameHashtable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- imageNameHashtable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- imageNameHashtableExtra - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- imageNameHashtableExtra - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- imageNameHashtableExtra - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- imageNameHashtableExtra - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- imageNames - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- imageNames - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- imageNamesIndex - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- imageNamesIndex - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- imageNameText - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- imageNode - Variable in class gov.nih.mipav.model.file.FileInfoMincHDF
-
The image node that holds information about the image data (rescaling, dimorder, actual data).
- imageNode - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
the image node of the HDF file tree that contains the image data, and min max per slice information
- IMAGENODE - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Image node type, falls under an imageplaceholder node, created and deleted by user.
- imageNum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- imageNum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- imageNum - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- imageNum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
12.
- imageNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- imageNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageNumber - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- imageNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- imageNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageAttribute
-
- imageNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageModel
-
- imageNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageModelSVM
-
- imageObserver(int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
Creates an ImageObserver that checks the for the specified infoflags.
- imageOffcentre - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- imageOffcentre - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageOffcentreIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageOffcentrePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageOffset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
DOCUMENT ME!
- imageOffset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
image minimum; used as offset for images to build histogram.
- imageOffset - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageOffset - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageOffset - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- imageOn - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- imageOptionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
panels
- imageOrder - Variable in class gov.nih.mipav.model.structures.ModelImage
-
Indicates the image order when two images are displayed in the same frame.
- imageOrientation - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- imageOrientation - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Indicates the image orientation (i.e.
- imageOrientation - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- imageOrientation - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Image orientation: coronal, sagittal, axial, unknown.
- ImageOrientation(int, FileInfoBase.AxisOrientation, FileInfoBase.AxisOrientation, FileInfoBase.AxisOrientation) - Constructor for enum gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- imageOrientationPatient - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- imageOrientationStr - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Array of image orientation strings.
- imageOrientationString - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
image orientation
- imageOriginalStagePositionXArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageOriginalStagePositionYArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageOriginalZXArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageOriginalZYArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageOriginCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- imageOriginFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- imageOriginFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- imageOriginNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- imageOriginNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- imageOriginNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- imageOriginPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- imagePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- imagePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- imagePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- imagePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- imagePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- imagePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- imagePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
The image panel to hold one Canvas3D.
- imagePanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The image panel to hold one Canvas3D.
- imagePanel - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- imagePanel - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- imagePanel2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- imagePanel2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- imagePanelSizeX - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
per num visible images information.
- imagePanelSizeX - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Per num visible images information.
- imagePanelSizeY - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
per num visible images information.
- imagePanelSizeY - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Per num visible images information.
- imagePanelVector - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- imagePix - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
The image selected by the user
- imagePix - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- imagePix - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- imagePixelFormat - Variable in class gov.nih.mipav.model.file.FileZVI
-
- IMAGEPLACEHOLDERNODE - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Image placeholder node type never created nor deleted by user.
- imagePlaneTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- imagePositionPatient - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- ImageProcessingException(String) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.ImageProcessingException
-
- ImageProcessingException(String, Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.ImageProcessingException
-
- ImageProcessingException(Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.ImageProcessingException
-
- imagePtr - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- ImageQuality - Class in gov.nih.mipav.model.algorithms
-
- ImageQuality() - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- ImageQuality(ModelImage, ModelImage, double, int[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- ImageQuality(ModelImage, ModelImage, int[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- ImageQuality(ModelImage, ModelImage, int[], double, double[]) - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- ImageQuality(ModelImage, ModelImage, int[], double, int[], int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- ImageQuality(ModelImage, ModelImage, int[], double, int, double, double, double, double, int, int[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- ImageQuality(ModelImage, ModelImage, int[], int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- ImageQuality(ModelImage, ModelImage, int[], int, double[][], double[]) - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- ImageQuality(ModelImage, ModelImage, int[], int, double, double[]) - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- ImageQuality(ModelImage, ModelImage, int[], int, double, double, double, double[]) - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- ImageQuality(ModelImage, ModelImage, int[], int, double, double, double, double, double[][], double, int[], int, int, double[], int, double, double, int, double, double, double, double, int, int[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- ImageQuality(ModelImage, ModelImage, int[], int, double, double, double, int, double[], int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.ImageQuality
-
- imageR - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
red channel image
- imageR - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- imageRangeLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- imageRatio - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Image influence ratio for controlling the sampling depth used to calculate intensity extrema, by default set to .1.
- imageRatioTF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Field for entering the image influence ratio.
- imageRawDataSystemID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageRawDataSystemID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- ImageReduceEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- ImageReduceEffect(Texture, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.ImageReduceEffect
-
- imageRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Isotropic reference image.
- imageRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Isotropic reference image.
- imageRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Isotropic reference image.
- imageRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Isotropic reference image.
- imageRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Isotropic reference image.
- imageRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Isotropic reference image.
- ImageRegistrationGPU - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- ImageRegistrationGPU(ModelSimpleImage, ModelSimpleImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- ImageRegistryMonitor - Class in gov.nih.mipav.view
-
Tracks registered images, and notifies anybody who is interested in finding out about them.
- ImageRegistryMonitor() - Constructor for class gov.nih.mipav.view.ImageRegistryMonitor
-
Constructor.
- imageRegistryMonitoring() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Display image registry frame.
- imageRelativeStartTime - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- imageRelativeStartTimeIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- imageRelativeTime - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageRelativeTime0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- imageRelativeTime1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- imageRelativeTime2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- imageRelativeTime3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- imageRelFocusPosition1Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageRelFocusPosition2Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- ImageReorientation - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- ImageReorientation(ModelImage, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- ImageRequirements(String) - Constructor for enum gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- imageRevisionSubnumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- ImageRotateScale(double[][], double, double, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- images - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult
-
array of images
- images - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- images - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
DOCUMENT ME!
- images - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
DOCUMENT ME!
- images - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- images - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- imagesAdded - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
- imageSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- imageSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- imagesAllocated - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imagesAllocated - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- ImageSaver() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
-
- ImageSaverException() - Constructor for exception gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver.ImageSaverException
-
- ImageSaverException(String) - Constructor for exception gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver.ImageSaverException
-
- ImageSaverException(String, Throwable) - Constructor for exception gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver.ImageSaverException
-
- ImageSaverException(Throwable) - Constructor for exception gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver.ImageSaverException
-
- imageScale - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- imagesChooser - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
target image variables.
- imagesChooser - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
target image variables.
- imageScroll - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- imageScroll - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- imagesData - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
212.
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
image panel.
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
2D slices image selection panel.
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- imageSelectionPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- imagesFound - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
DOCUMENT ME!
- imageShape - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageShape - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imagesInfo - Variable in class gov.nih.mipav.model.file.FileInfoVista
-
image info
- imageSize - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- imageSize - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
DOCUMENT ME!
- imageSize - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- imageSize - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- imagesLen - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
208 - (internal use) Image keys for this Series.
- imageSlice - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- imageSlice - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- imageSlice - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- imageSlice - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- imageSlice - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- imageSlice1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
2d image containing voi1
- imageSlice2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
2d image containing voi2
- imageSlicesDirPath - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
path for imageSlicesDir
- imageSliderPane - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- imageSliderPane - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- ImageSourceStream(int, int, int, Vector) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
Creates a new ImageSourceStream object.
- imageSpacing - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageSpacing - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imagesPerCardiacCycle - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imagesPerCardiacCycle - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imagesPerEWindow - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- imageStackFuzzyC - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- imageStackFuzzyC - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- imageStackFuzzyC - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- imageStackFuzzyCfat - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- imageStackFuzzyCfat - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- imageStackFuzzyCgre - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- imageStackFuzzyCgre - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- imageStagePositionXArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageStagePositionYArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageStartTime - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- imageStartTimeIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- imageStatList - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Statistics dialog VOI->Statistics generator...
- imageStatList - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- imagesToConcat - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
images to concat
- imagesToConcat - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
images to concat
- imagesToConcat - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
images to concat
- imagesToFront() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Brings all images and message frame to the front.
- imageStr - Static variable in class gov.nih.mipav.model.file.FileImageXML
-
array of strings representing the tags under in the xml schema.
- imageSystemGenerationID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageSystemGenerationID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageT2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
The T2 image that the B0 image is registered to.
- imageT2Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageT3Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageT6Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageT7Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageTable - Variable in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
The table containing image-placeholder-to-image-name mappings for the script we are currently recording.
- imageTable - Variable in class gov.nih.mipav.model.scripting.ScriptRecorder
-
The table containing image-placeholder-to-image-name mappings for the script we are currently recording.
- imageTable - Variable in class gov.nih.mipav.model.scripting.ScriptRunner
-
The table containing image-placeholder-to-image-name mappings for the script we want to run.
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- imageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- imageTable - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- imageTableModel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- imageTableSorter - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- imageTableVector - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
- imageTagLocation - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
- imageTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
- ImageTimeHH - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- ImageTimeMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- ImageTimeSS - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- imagetobmp(FileJPEG2000.opj_image_t, String) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- imageToFront(String) - Method in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Using the supplied name as the image name, this method finds the frame associated with the image and brings it to
the front.
- imageToMovie - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- imageToolBar - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Image control toolbar.
- imagetopgx(FileJPEG2000.opj_image_t, String) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- imagetopnm(FileJPEG2000.opj_image_t, String, boolean) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- imagetoraw_common(FileJPEG2000.opj_image_t, String, boolean) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- imagetotga(FileJPEG2000.opj_image_t, String) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- ImageTransferHandler() - Constructor for class gov.nih.mipav.view.ViewUserInterface.ImageTransferHandler
-
- imageType - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imageType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imageType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- imageType - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- imageType - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- imageType - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- imageType - Variable in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
DOCUMENT ME!
- imageTypeEDES - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- imageTypeEDES - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageTypeEDES() - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- imageTypeEDESIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageTypeEDESPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageTypeMR - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- imageTypeMR - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageTypeMRIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageTypeMRPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- imageUpdatedDWI - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
After the B0 image is registered to the T2 image the B0 sub-volume is replaced in the original DWI image,
creating a new 4D DWI image:
- imageV - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageV_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageVariablePrefix - Static variable in class gov.nih.mipav.model.scripting.ImageVariableTable
-
The base image placeholder variable string prefix.
- ImageVariableTable - Class in gov.nih.mipav.model.scripting
-
Stores image names, which are referenced by placeholder variable strings (e.g., '$image1').
- ImageVariableTable() - Constructor for class gov.nih.mipav.model.scripting.ImageVariableTable
-
Creates a new ImageVariableTable object.
- imageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.SliceSetString
-
- imageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
image and voi string vector.
- imageVn - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageVn_filter - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- imageVOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- imageVOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
DOCUMENT ME!
- imageVOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- imageVOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- imageVOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- imageVOIGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- imageVOIPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- imageVOIPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
used later.
- imageVOIPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- imageVOIPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- imageVOIPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- imageVOIPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- imageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
VOI vector.
- imageVolBufferA - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Buffer that holds image A volume data.
- imageVolBufferB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Buffer that holds image B volume data.
- imageWeightInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Isotropic weighted input image.
- imageWeightInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Isotropic weighted input image.
- imageWeightInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Isotropic weighted input image.
- imageWeightInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Isotropic weighted input image.
- imageWeightInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Isotropic weighted input image.
- imageWeightInputIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Isotropic weighted input image.
- imageWeightIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- imageWeightIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- imageWeightIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- imageWeightIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- imageWeightRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Isotropic weighted reference image.
- imageWeightRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Isotropic weighted reference image.
- imageWeightRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Isotropic weighted reference image.
- imageWeightRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Isotropic weighted reference image.
- imageWeightRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Isotropic weighted reference image.
- imageWeightRefIso - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Isotropic weighted reference image.
- imageWhiteValueArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageWidth - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Image width.
- imageWidth - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageWidth - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- imageWidth - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- imageZ2Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageZ3Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageZ4Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageZ5Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageZ6Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageZ7Array - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageZArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageZXArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imageZYArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- imagiData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- imaginary - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets.realImaginaryItem
-
DOCUMENT ME!
- imaginaryValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
- imaginaryValue - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Used as both imaginary value and blue value
- imagingFrequency - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- imagingModality - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- imagjData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- imagkData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- imagKernelData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- imagKernelData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- imagResult - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- imagResult - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
Imaginary part of outputted result
- imagResult - Variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
- imagResult - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- imagResult - Variable in class gov.nih.mipav.model.algorithms.Psi
-
Imaginary part of output result
- imagX - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
Imaginary part of input argument
- imagX - Variable in class gov.nih.mipav.model.algorithms.Psi
-
Imaginary part of input argument
- imagZ - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- imagZ - Variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
- imagZ - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- imark - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- imark - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- imark - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- iMark() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
Access function to the incremental mark.
- iMark() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- IMark() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- imax - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
Variables used for restart information.
- imax - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
Variables used for restart information.
- imax - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- iMaxIterations - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline.Options
-
Maximum number of iterations to perform if convergence limit condition is still not satisfied.
- IMCENTER - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- imCenterRB - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- iMCU_row_ctr - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- imData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- imdwt(double[][], int) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- imFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- img - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Img this pixel belongs to
- img - Variable in class gov.nih.mipav.model.file.FileHistoLUT
-
ModelImage to use for reference
- img - Variable in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
DOCUMENT ME!
- img - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- img - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- img - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
BufferedImage to hold the slice image.
- img - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- img - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- img - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
the image rendered in 2D graphics:
- img - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- img - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- img - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- Img(int, int) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Creates a new Img of specified dimensions.
- Img(int, int, int[]) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Creates a new Img of specified dimensions.
- Img(Dimension) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Creates a new Img of specified Dimension.
- Img(Dimension, int[]) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Creates a new Img of specified dimensions.
- Img(BufferedImage) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Creates a new Img of same dimensions as provided BufferedImage.
- img_fol_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.img_fol_t
-
- img2Buffer - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- img3DMultiBuffer - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- ImgAreaIterator(int, int, int, int, P) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator
-
Creates a new ImgAreaIterator for iterating the pixels in the specified area of an image.
- ImgAreaSpliterator(int, int, int, int, int, int, int, Supplier<P>) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- ImgAreaSpliterator(int, int, int, int, int, Supplier<P>) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
Constructs a new ImgAreaSpliterator for the specified area
- imgB - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- imgBegin - Variable in class gov.nih.mipav.model.file.FileMinc
-
The location, in bytes, of the image data in the minc file being written out.
- imgBLHC_A - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imgBLHC_A - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imgBLHC_R - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imgBLHC_R - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imgBLHC_S - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imgBLHC_S - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imgBRHC_A - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
182 Bottom Right Hand Corner Anterior.
- imgBRHC_R - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
178 Bottom Right Hand Corner Right.
- imgBRHC_S - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
186 Bottom Right Hand Corner Superior.
- imgBSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
The size, in voxels, of the mask.
- imgBuf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- imgBuf2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
imgBuffer that hold pixel value for the 2D slice.
- imgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
imgBuffer that hold voxel value for the 3D slices.
- imgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
imgBuffer that hold pixel value for the 2D slice.
- imgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
imgBuffer that hold voxel value for the 3D slices.
- imgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- imgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- imgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- imgBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileBMP
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileCZI
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileLIFF
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- imgBuffer - Variable in class gov.nih.mipav.model.file.FileZVI
-
DOCUMENT ME!
- imgBuffer2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- imgBuffer2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- imgBuffer2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- imgBuffer2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
- imgBuffer2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- imgBuffer2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- imgBuffer2 - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgBufferI - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgBufferI2 - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgCtrA - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
134 Anterior(i.e.
- imgCtrR - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
130 Right (i.e.
- imgCtrS - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
138 Superior(i.e.
- imgDBuffer - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgDBuffer - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- imgDBuffer2 - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgDBufferI - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgDBufferI2 - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- imgDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- imgdirpath - Variable in class gov.nih.mipav.model.file.FileJPEG2000.img_fol_t
-
The directory path of the folder containing input images
- imgEXTENSIONS - Static variable in class gov.nih.mipav.model.file.FilePARREC
-
- imgEXTENSIONS - Static variable in class gov.nih.mipav.model.file.FileSpar
-
- imgExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
The dimensions of the both source and destination images.
- imgExtents - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- imgExtents - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- imgExtents - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- imgExtents - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- imgExtents - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- imgExtents - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgExtents - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- imgExtents - Variable in class gov.nih.mipav.model.file.FileMagnetomVision
-
DOCUMENT ME!
- imgExtents - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- imgExtents - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- imgExtents - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- imgExtents - Variable in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- imgHdrExamNum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
8 - Read as unsigned short.
- imgHdrSeriesNum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
10.
- imgHdrSuiteID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
0 - 4 bytes - suite ID.
- imgHeight - Variable in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
DOCUMENT ME!
- imgHeight - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
DOCUMENT ME!
- imgHessianAlgor - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- imgIdx - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatch
-
- ImgIterator(P) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgIterator
-
Creates a new ImgIterator over the image of the specified pixel.
- imgLBuffer - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgLBuffer - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- imgLBuffer2 - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- imgLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- imgLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- imgLength2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- imgLevel - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
654 Level value.
- imgLoc - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
126.
- imgModality - Variable in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- imgMonitorFrame - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Frame that monitors the registered images.
- imgName - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
The original image name.
- imgOrient - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- imgOrientation - Variable in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- imgOrigin - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- imgPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- imgPCycle - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
246 Images per cardiac .1 cycle.
- ImgReaderRAW - Class in gov.nih.mipav.model.file.rawjp2
-
This class implements the ImgData interface for reading 16 bit unsigned data
from a binary RAW file.
- ImgReaderRAW(ModelImage) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
- ImgReaderRAW(File) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Creates a new PGM file reader from the specified file.
- ImgReaderRAW(RandomAccessFile) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Creates a new PGM file reader from the specified RandomAccessFile
object.
- ImgReaderRAW(String) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Creates a new PGM file reader from the specified file name.
- ImgReaderRAWColorSlice - Class in gov.nih.mipav.model.file.rawjp2
-
- ImgReaderRAWColorSlice(ModelImage, int, boolean) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- ImgReaderRAWColorSlice(ModelImage, int, int, boolean) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- ImgReaderRAWColorSlice(File, int) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- ImgReaderRAWColorSlice(RandomAccessFile, int) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- ImgReaderRAWColorSlice(String, int) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- ImgReaderRAWSlice - Class in gov.nih.mipav.model.file.rawjp2
-
This class implements the ImgData interface for reading slices of 16 bit unsigned data
from a 3D RAW image file.
- ImgReaderRAWSlice(ModelImage, int, boolean) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
- ImgReaderRAWSlice(ModelImage, int, int, boolean) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
- ImgReaderRAWSlice(File, int) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Creates a new PGM file reader from the specified file.
- ImgReaderRAWSlice(RandomAccessFile, int) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Creates a new PGM file reader from the specified RandomAccessFile
object.
- ImgReaderRAWSlice(String, int) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Creates a new PGM file reader from the specified file name.
- imgRes - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileBMP
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileCZI
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileLIFF
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileMagnetomVision
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- imgResols - Variable in class gov.nih.mipav.model.file.FileZVI
-
DOCUMENT ME!
- imgResolution - Variable in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- imgrx - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
110 - image from which prescribed.
- imgSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The size, in voxels, of the volume.
- imgSize - Variable in class gov.nih.mipav.model.file.FileMinc
-
The size of the image data that will be written out, in bytes.
- ImgSpliterator(int, int, int, Supplier<P>) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator
-
Constructs a new ImgSpliterator for the specified index range
- imgSubTarPairs - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- imgTLHC_A - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imgTLHC_A - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imgTLHC_A - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
158 Top Left Hand Corner Anterior.
- imgTLHC_R - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imgTLHC_R - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imgTLHC_R - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
154 Top Left Hand Corner Right.
- imgTLHC_S - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imgTLHC_S - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imgTLHC_S - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
162 Top Left Hand Corner Superior.
- imgTRHC_A - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imgTRHC_A - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imgTRHC_A - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
170 Top Right Hand Corner Anterior.
- imgTRHC_R - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imgTRHC_R - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imgTRHC_R - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
166 Top Right Hand Corner Right.
- imgTRHC_S - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- imgTRHC_S - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- imgTRHC_S - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
174 Top Right Hand Corner Superior.
- imgType - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
- imgType - Variable in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- imgWidth - Variable in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
DOCUMENT ME!
- imgWidth - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
DOCUMENT ME!
- imgWindow - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
652 Window value.
- ImgWriterRAW - Class in gov.nih.mipav.model.file.rawjp2
-
This class extends the ImgWriter abstract class for writing JP2 3D files.
- ImgWriterRAW(ModelImage, BlkImgDataSrc, boolean) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
- ImgWriterRAW(File, BlkImgDataSrc, int, boolean) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Creates a new writer to the specified File object, to write data from
the specified component.
- ImgWriterRAW(String, BlkImgDataSrc, int, boolean) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Creates a new writer to the specified file, to write data from the
specified component.
- ImgWriterRAWColor - Class in gov.nih.mipav.model.file.rawjp2
-
- ImgWriterRAWColor(ModelImage, BlkImgDataSrc, boolean) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- ImgWriterRAWColor(File, BlkImgDataSrc, int, boolean) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- ImgWriterRAWColor(String, BlkImgDataSrc, int, boolean) - Constructor for class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- imin - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- IMM - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- IMN - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- iMode - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
298 Imaging mode.
- IMP_GINI - gov.nih.mipav.model.algorithms.StochasticForests.ImportanceMode
-
- IMP_GINI_CORRECTED - gov.nih.mipav.model.algorithms.StochasticForests.ImportanceMode
-
- IMP_NONE - gov.nih.mipav.model.algorithms.StochasticForests.ImportanceMode
-
- IMP_PERM_BREIMAN - gov.nih.mipav.model.algorithms.StochasticForests.ImportanceMode
-
- IMP_PERM_LIAW - gov.nih.mipav.model.algorithms.StochasticForests.ImportanceMode
-
- IMP_PERM_RAW - gov.nih.mipav.model.algorithms.StochasticForests.ImportanceMode
-
- implement - Variable in enum gov.nih.mipav.view.ViewJSlider.SliderType
-
- implementationClass - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_UserInformation
-
DOCUMENT ME!
- implementationVersion - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_UserInformation
-
DOCUMENT ME!
- IMPLICIT - gov.nih.mipav.model.file.FileInfoDicom.VRtype
-
Used to indicate that the DICOM tags are implicit (i.e.
- IMPLICIT_LITTLE_ENDIAN - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_TransferSyntaxUtil
-
Static that defines IMPLICIT_LITTLE_ENDIAN.
- ImplicitSchurComplement(CeresSolver.LinearSolverOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- ImplicitSchurComplementTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- ImplicitSchurComplementTestSchurMatrixValuesTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- ImplicitSchurComplementTestSchurMatrixValuesTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- impliedFlagBytes - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- IMPORT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- importance - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.computeTreePermutationImportanceInThread
-
- importance_mode - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- importance_mode - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- importance_mode - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- ImportanceMode() - Constructor for enum gov.nih.mipav.model.algorithms.StochasticForests.ImportanceMode
-
- importArrays(float[], float[], float[], int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Imports new position values into this contour.
- importArrays(float[], float[], int) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Import points into the contour.
- importArrays(int[], int[], int[], int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Imports new position values into this contour.
- importComplexData(int, float[], float[], boolean, boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import Complex data (in 2 float units) into data array.
- importCurve(float[], float[], float[]) - Method in class gov.nih.mipav.model.structures.VOI
-
Imports a new curve into this voi.
- importCurve(int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.VOI
-
- importCurve(VOIBase) - Method in class gov.nih.mipav.model.structures.VOI
-
Imports the curve into the VOI.
- importCurve(Vector3f[]) - Method in class gov.nih.mipav.model.structures.VOI
-
Imports the curve into the VOI, testing for which type.
- importData - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- importData(float[], int, int) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
For AAM model only, import buffer to the simple image data.
- importData(int, boolean[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Import boolean data into data array.
- importData(int, byte[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Import byte data into data array.
- importData(int, double[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import double data into data array.
- importData(int, float[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import float data into data array.
- importData(int, int[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import integer data into data array.
- importData(int, long[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import long data into data array.
- importData(int, short[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import short data into data array.
- importData(int, Number[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import Number data into data array.
- importData(int, BitSet, boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Import boolean (BitSet) data into data array.
- importData(Object) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Import Object.
- importData(JComponent, Transferable) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter
-
- importData(TransferHandler.TransferSupport) - Method in class gov.nih.mipav.view.ViewUserInterface.ImageTransferHandler
-
- importDComplexData(int, double[], double[], boolean, boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import Complex data (in 2 double units) into data array.
- importFileInfos(ModelImage, FileInfoBase[], int, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Inserts the fileInfos into the specified position.
- importFromMask() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
import from Mask.
- importFromVOI() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
import from VOI.
- importImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
image taken from the frame to be imported:.
- importImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
image taken from the frame to be imported:.
- importImage(int[]) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Creates a Image object from an array of ints that have been formatted (packed) properly (ie, aRGB).
- importImage(int[]) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Creates a Image object form an array of ints that have been formatted (packed) properly (i.e. aRGB)
- importImage(int[]) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Creates a Image object from an array of ints that have been formatted (packed) properly (i.e. aRGB)
- importImage(int[]) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Creates a Image object from an array of ints that have been formatted (packed) properly (ie, aRGB).
- importImage(int[], boolean) - Method in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Creates a Image object form an array of ints that have been formatted (packed) properly (i.e. aRGB)
- importImage(String) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Creates a Image object form an array of ints that have been formatted (packed) properly (i.e. aRGB)
- importImageB(int[]) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Creates a Image object from an array of ints that have been formatted (packed) properly (i.e. aRGB) for the
magnifier in image B
- importImageDest(int[]) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Creates a Image object form an array of ints that have been formatted (packed) properly (i.e. aRGB)
- importImageDest(int[]) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Creates a Image object form an array of ints that have been formatted (packed) properly (i.e. aRGB)
- importLUT - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
- importNewVOI(int, int, VOI, boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Imports just the VOIs in a slice into this VOI.
- importPoint(Vector3f) - Method in class gov.nih.mipav.model.structures.VOI
-
Import a new point into this VOI.
- importPoint(Vector3f, boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Import a new point into this VOI.
- importPoints(Vector3f[]) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Imports new position values into this contour.
- importPolygon(Polygon, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Imports the polygon into the VOI (must be a contour).
- importPolygon(Polygon, int) - Method in class gov.nih.mipav.model.structures.VOIContour
-
Saves the polygon in the contour.
- importRGB - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
- importRGBData(int, int, byte[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Import byte data into data array.
- importRGBData(int, int, float[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import float data into data array.
- importRGBData(int, int, short[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Import byte data into data array.
- importTags(FileInfoDicom) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Sets the tags in this tag table to match the tags contained in the tag table of a dicom file info.
- importUData(int, int[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import int data into data array.
- importUData(int, long[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import int data into data array.
- importUData(int, short[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
import short data into data array.
- importVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- importVoiButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
button VOI import.
- ImRegPOC - Class in gov.nih.mipav.model.algorithms.registration
-
- ImRegPOC(ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- ImRegPOC(ModelImage, ModelImage, ModelImage, double, double) - Constructor for class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- imRegPOCAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
DOCUMENT ME!
- imResolutions - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Source Image Resolutions
- imsbtree - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_precinct_t
-
- imSmall - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.tImage
-
- imSmallFlipped - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.tImage
-
- IMTQL2(int, double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- IMTQLH(int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- imtranslate(double[][], double, double, double) - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- imUnitsOfMeasure - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Source Image Units of Measure
- IMX - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- in - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- in - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGACInputStream
-
- in - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- in - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGDCInputStream
-
- in - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- in - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- in - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGACInputStream
-
- in - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- in - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGDCInputStream
-
- in - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- in - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- in - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Where to read the data from
- in - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Where to read the data from
- in - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Buffered Reader for loading params *
- in - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Java Scanner API.
- in - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- in - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Buffered Reader for loading params *
- in - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileReader
-
The in.
- IN_CORE_FLAG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredMeshData
-
- IN_DIR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Indicates boundary can move in.
- IN_EXP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- in_place_possible - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelInfo
-
- INACTIVE - Static variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- INACTIVE - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- inbag_counts - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- inBetweenBooleanShapes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
tween shape s
- inBounds(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- inBuffersLength - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Length of the total input data (Not buffer size but total length of data ).
- incbcf(double, double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- incbd(double, double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- incbet(double, double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- INCBET - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- incbi(double, double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- INCBI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- INCHES - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement inches.
- INCHES - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement inches.
- INCHES_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - inches.
- incIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- incltree - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_precinct_t
-
- include - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
precise if the packet has been already used (useful for progression
order change)
- Include - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel.VOIParams
-
- Include(Integer, URI, String) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Include
-
Creates a new Include object.
- include_edge(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- include_vertex(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- includeB1Map - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- Includes(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- Includes(CVisShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- Includes(POINT, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- Includes(RECT, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- includeString - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Include
-
elements.
- incog() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
This code is a port of the FORTRAN routine INCOG from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 63-64.
- INCOG - Static variable in class gov.nih.mipav.model.algorithms.Gamma
-
Compute incompete gamma functions and regularized gamma P function
- incomingBuffers - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Vector of ByteBuffer's of incoming data.
- INCOMPLETE - gov.nih.mipav.view.dialogs.ExitStatus
-
Gui has yet to exit
- inCore - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredPointIndex
-
- inCorePoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredMeshData
-
- incr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- increase_threshold_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- increaseFontButton - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- increaseTextSize(boolean) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Increases or decreases the displayed text size.
- increment - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- increment - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
- increment - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
- increment - Variable in class gov.nih.mipav.view.ViewJFrameRegistration.JDialogIncrement
-
Increment value.
- increment - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool.JDialogIncrement
-
Increment value.
- incrementCommon() - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting.mergeItem
-
- incrementLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
- incrementText - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
- IncrementTimeBy(String, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ExecutionSummary
-
- incrementVOIRequestCount(String) - Method in class gov.nih.mipav.model.scripting.VOITable
-
Increments the count of VOI-file-open requests for a given image in the script.
- incrementWeak() - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting.mergeItem
-
- incs - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- incSlice() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Increases the slice to be displayed by one and updates title frame.
- incSliceEyeTracker() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- INCST - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- IND - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- ind_initialize(int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- Indd - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- indentationVOIs2D() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- independent_set_offsets_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CoordinateDescentMinimizer
-
- IndependentSetOrdering(CeresSolver.Graph<Vertex>, Vector<Vertex>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- IndependentSetOrderingChain() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- IndependentSetOrderingStar() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- indeterminateProgressBar - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed.indexValueItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D.intObject
-
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed.indexValueItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLLE.distanceIndexItem
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D.intObject
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D.intObject
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserExtrReg
-
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed.indexValueItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed.indexValueItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed.indexValueItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed.indexValueItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.indexValueItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.indexRowColItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgIterator
-
- index - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
index of the value this pixel references
- index - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D.indexValueItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform.indexValueItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.indexValue
-
- index - Variable in class gov.nih.mipav.model.algorithms.libdt.indexValueItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_node
-
- index - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.SVR_Q
-
- index - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities.IndexedFloat
-
- index - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- index - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.indexValueItem
-
- index - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.indexValueItem
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.file.FileIO.LinkedNum
-
- index - Variable in class gov.nih.mipav.model.file.FileIO.OrientStatus
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.file.FileLSM.Index
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.file.FileSTK.Index
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.file.FileSVS.Index
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- index - Variable in class gov.nih.mipav.model.file.FileTiff.Index
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- index - Variable in class gov.nih.mipav.model.file.FileVOI.VOISortItem
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation.labelIndexItem
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Used for construction of the preview.
- index - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed.labelIndexItem
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- index - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredPointIndex
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.AllocatorState
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.DivergenceFunction
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianProjectionFunction
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueAndNormalFunction
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueFunction
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RestrictedLaplacianMatrixFunction
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Feature
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perImageCost
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perShapeCost
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.FeatureNode
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_node
-
- index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVR_Q
-
- index - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- index - Variable in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- index() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- index() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- index(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
Compute the 1-dimensional index for the pixel (x,y).
- index(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
Compute the 1-dimensional index for the voxel (x,y,z).
- Index(int) - Constructor for class gov.nih.mipav.model.file.FileSTK.Index
-
Creates a new Index object.
- Index(int) - Constructor for class gov.nih.mipav.model.file.FileSVS.Index
-
Creates a new Index object.
- Index(int) - Constructor for class gov.nih.mipav.model.file.FileTiff.Index
-
Creates a new Index object.
- Index(int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix.Index
-
Creates a new Index object.
- Index(long) - Constructor for class gov.nih.mipav.model.file.FileLSM.Index
-
Creates a new Index object.
- Index(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.BinaryNode
-
- Index(int, int[], short[], short[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- index_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- index_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- index_data - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- index_labels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
- index_labels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- index_labels - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- index_labels - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- index_seeds - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
- index_seeds - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- index_seeds - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- index_seeds - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- index1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- index1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Triangle
-
- index2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Triangle
-
- index2Axial - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- index2ImgA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- index3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Triangle
-
- indexArrayArrayComparator() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayComparator
-
- indexArrayArrayItem(int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayArrayItem
-
- indexArrayComparator() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayComparator
-
- indexArrayItem(int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.indexArrayItem
-
- indexChange - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- indexChange - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- indexColorATextF - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Color LUT A, B textfield.
- indexColorATextF - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- indexColorBTextF - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Color LUT A, B textfield.
- indexColorBTextF - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- indexColorTextF - Variable in class gov.nih.mipav.view.JPanelHistogram
-
displays the selected LUT color
- indexCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Connectivity index counter.
- IndexedFloat(float, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities.IndexedFloat
-
- indexedLUT - Variable in class gov.nih.mipav.model.structures.ModelLUT
-
Special int array where the LUT is packed with alpha in the most significant byte of the int, followed red,
green, and blue.
- indexedRGB - Variable in class gov.nih.mipav.model.structures.ModelRGB
-
DOCUMENT ME!
- indexfilename - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
index file name
- indexIntegerdoubleArrayComparator() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayComparator
-
- indexIntegerdoubleArrayItem(int, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayItem
-
- indexintintComparator() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintComparator
-
- indexintintItem(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintItem
-
- indexName - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- indexNestingLevel - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- indexOf(Object) - Method in class gov.nih.mipav.model.structures.VOIBaseVector
-
- indexOf(String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- indexOf(Vector<Vector<Vector3f>>, Vector3f) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- indexOf(Vector<Vector<Vector3f>>, Vector3f) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- indexPointer - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- indexRetrace - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Contour Retrace:
- indexRowColItem(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.indexRowColItem
-
- indexSize - Variable in class gov.nih.mipav.model.file.FileAvi
-
Size of the index block in bytes.
- indexTable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- indexTable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RegionList
-
- indexValue - Class in gov.nih.mipav.model.algorithms
-
- indexValue(int, double) - Constructor for class gov.nih.mipav.model.algorithms.indexValue
-
- indexValueComparator - Class in gov.nih.mipav.model.algorithms
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed.indexValueComparator
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed.indexValueComparator
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed.indexValueComparator
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed.indexValueComparator
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed.indexValueComparator
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed.indexValueComparator
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.filters.BM3D.indexValueComparator
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform.indexValueComparator
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.indexValueComparator
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.libdt.indexValueComparator
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.indexValueComparator
-
- indexValueComparator() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.indexValueComparator
-
- indexValueDescendingComparator() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.indexValueDescendingComparator
-
- indexValueItem(int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed.indexValueItem
-
- indexValueItem(int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed.indexValueItem
-
- indexValueItem(int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed.indexValueItem
-
- indexValueItem(int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed.indexValueItem
-
- indexValueItem(int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed.indexValueItem
-
- indexValueItem(int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed.indexValueItem
-
- indexValueItem(int, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.BM3D.indexValueItem
-
- indexValueItem(int, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform.indexValueItem
-
- indexValueItem(int, double) - Constructor for class gov.nih.mipav.model.algorithms.libdt.indexValueItem
-
- indexValueItem(int, double) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.indexValueItem
-
- indexValueItem(int, double) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.indexValueItem
-
Creates a new indexValueItem object.
- indexValueItem(int, Vertex) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.indexValueItem
-
- indexVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
vector stack to record the burning index.
- indic - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- indic - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- indicatorBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The root branch group of the indicator.
- indicatorProbeBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Indicator probe branch group.
- indicatorProbeBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
The root branch group of the green indicator probe.
- indicatorProbeBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Indicator probe branch group.
- indicatorProbeBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
The root branch group of the indicator probe.
- indices_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- Indics - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- IndicsInit(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- indicTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- indivMagButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
refs to indiviadual frame zooming in and out buttons.
- indivMinButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
refs to indiviadual frame zooming in and out buttons.
- inds_g - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- inds_gt - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- inds_h - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- inds_ht - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- inEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- inEndianess - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Endianess of the input stream.
- inf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
DOCUMENT ME!
- inf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
DOCUMENT ME!
- inf - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
In dqagie indicates the kind of integration range involved inf = 1 corresponds to (bound, +infinity) inf = -1
corresponds to (-infinity, bound) inf = 2 corresponds to (-infinity, +infinity).
- inf - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
In dqagie indicates the kind of integration range involved inf = 1 corresponds to (bound, +infinity) inf = -1
corresponds to (-infinity, bound) inf = 2 corresponds to (-infinity, +infinity).
- INF - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- INF - Static variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- INF - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- inf_norm(double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- inf_norm(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- INFERIOR_EDGE - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
AC-PC: Inferior Edge reference point.
- INFERIOR_PT - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Talairach: Inferior reference point.
- inferiorEdge - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- inferiorEdge - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- inferiorEdgePt - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- inferiorPt - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- inferiorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- inferiorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- inferiorPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- inferiorPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- infile - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
input file name
- infile - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
input file name
- infile - Variable in class gov.nih.mipav.model.file.libjpeg.my_source_mgr
-
- infile_format(String) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- inFileStream - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_FileIO
-
File input stream object.
- infinityCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- InflateRect(int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- inflaterStream - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- inflation() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
perform inflation step and then render shapes using the average convexity colors.
- inflation() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
perform inflation step and then render shapes using the average convexity colors.
- info - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- info - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
status of minimization
info is an integer OUTPUT variable that indicates the termination
status of lm_lmdif as follows:
info < 0 termination requested by user-supplied routine *evaluate;
info = 0 fnorm almost vanishing;
info = 1 both actual and predicted relative reductions
in the sum of squares are at most ftol;
info = 2 relative error between two consecutive iterates
is at most xtol;
info = 3 conditions for info = 1 and info = 2 both hold;
info = 4 the cosine of the angle between fvec and any
column of the jacobian is at most gtol in
absolute value;
info = 5 number of calls to lm_fcn has reached or
exceeded maxfev;
info = 6 ftol is too small: no further reduction in
the sum of squares is possible;
info = 7 xtol is too small: no further improvement in
the approximate solution x is possible;
info = 8 gtol is too small: fvec is orthogonal to the
columns of the jacobian to machine precision;
info =10 improper input parameters;
- info - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
Consistently use 1 base indexing rather than 0 based indexing
- info - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
Consistently use 1 base indexing rather than 0 based indexing
- info(String) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- info(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- info(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- info(String, Object...) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- INFO - gov.nih.mipav.view.Preferences.LogLevel
-
- INFO - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- INFO - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- INFO - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- info_on - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
enables writing of informative techniques of ESD, in case of
activated JPWL
- infoDialogA - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
reference to the JDialogImageInfo for updating slice/resolutions.
- infoDialogB - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- informationNode - Variable in class gov.nih.mipav.model.file.FileInfoMincHDF
-
The information node that holds acquisition information, dicom tags, and more
- inheaders - Variable in class gov.nih.mipav.model.file.libjpeg.my_input_controller
-
- INIFCT(double[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- inImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- init - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- init() - Method in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
DOCUMENT ME!
- init() - Method in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
DOCUMENT ME!
- init() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
Initializes local variables that are internal to tre.
- init() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Initialize buffers and kernels.
- init() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- init() - Method in class gov.nih.mipav.plugins.ManifestFile
-
- init() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
init
- init() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
init
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Initializes the GUI components and places them in the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
Initializes GUI variables and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Creates and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
Initializes the dialog box to a certain size and adds the components.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Initializes dialog by setting up components and placing them in dialog frame.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizePresets
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Initializes the dialog box to a certain size and adds the components.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Initializes the dialog box to a certain size and adds the components.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Set up the algorithm GUI.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
Initializes the dialog box to a certain size and adds the components.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Makes the GUI elements of the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
Sets up the d(Color.black);GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
init
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Initialize GUI.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
init
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
init
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
init
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Initializes the GUI components and displays the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
init
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
Sets up GUI variables and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Initializes the GUI components and places them in the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Initializes the GUI components and places them in the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Initializes the GUI components and places them in the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
Initializes the GUI components and places them in the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Initializes the GUI components and places them in the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
Sets up the dialog window and makes it visible.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Build the resample dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Initializes the GUI components and displays the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
init
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEnhancedDicomChoice
-
Creates and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Makes the GUI elements of the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
Makes the GUI elements of the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Makes the GUI elements of the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Makes the GUI elements of the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Initializes GUI dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Initial control panel.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
Initializes the dialog and adds the GUI components.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
Initialize the GUI (defaults to NOT using double data entry)
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogGVF
-
Initializes GUI variables and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHessian
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
init
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
Creates and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
Creates and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
Creates and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
Creates and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
Creates and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
Creates and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Sets up GUI dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
DOCUMENT ME!
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogIntensityThreshold
-
DOCUMENT ME!
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
init
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLivewire
-
Initialized GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
init
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMask3D4D
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Initializes the GUI components and places them in dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Initializes the user-interface components of the dialog:
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
init
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMetaImageChoice
-
Creates and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMSER
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Initializes the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogNColors
-
Initializes GUI components and adds them to the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogNIFTIChoice
-
Creates and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
initialize the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
initialize the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Initializes GUI components and adds them to the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Initializes GUI components and adds them to the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
Does nothing at the moment, no dialog is created.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Initializes the GUI components and makes the dialog visible.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Build the dialog panel.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
Sets up the GUI components.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Initializes GuserInterface components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Initializes the GUI components and displays the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Initializes the GUI components and displays the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Initializes the GUI components and displays the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Initializes the GUI components and displays the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Initializes the GUI components and displays the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
Sets up GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRemovePlugin
-
Sets up GUI dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
DOCUMENT ME!
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Set up the dialog GUI.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Sets up GUI and displays the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Initializes the GUI components and puts them in the dialog, attaching necessary actions.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMincVersionChoice
-
Creates and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Sets up GUI and displays the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
init
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Initializes the dialog box to a certain size and adds the components.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
makes the display frame. builds the layout.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
DOCUMENT ME!
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSnake
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
init Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
init
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Sets up the dialog window and makes it visible.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
Sets up GUI and displays the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
Initializes GUI components of dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
Set up GUI parameters.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
Initializes GUI components of dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Makes the GUI elements of the dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Makes slider to set opacity of VOI.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
Sets up GUI dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogVABRA
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
Initializes GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
DOCUMENT ME!
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Sets up GUI components - buttons, checkboxes, sliders, etc.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Sets up GUI components and displays dialog.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Creates a JFrame asking if the user is a developer and then runs the method displayReportForm, which displays the
appropriate form for the selected type.
- init() - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Initialize the HyperGraph visualization.
- init() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel.PropertiesDialog
-
- init() - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- init() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Initialize the control panel.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Initialize the buttons layout.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Initializes capabilities and temporary variables.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Creates the scene graph and initializes the SimpleUniverse and the Viewing transformations.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
Initialize the user-interface, buttons and ActionCommands.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Initializes the GUI components and displays the control panel.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Initilize the mainPanel with the geodesic drawing buttons.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Initializes the GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Initializes the interface, and generates the first default texture.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Initializes the GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Initializes wake up events.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Initializes wake up events.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Initialize the the frame layout.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Setup the initial image scene graph structure.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Initialize the CoolTip probe geometry shape.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Initialize the probe geometry shapes.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Initialize the whole probe panel control layout.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Create image scene graph.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Initialize the regular probe geometry shape.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Initialize the therml probe's geometry shapes and indictor probe's geometry shapes.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
- init() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Build the resample dialog.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Initialize the user-interface, buttons and ActionCommands.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
init
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
init
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
init
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
Initializes the GUI components and displays the dialog.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
User-interface intialization.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Initializes the GUI components and displays the control panel.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Initializes the GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
Initializes the GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Initialize the mainPanel with the geodesic drawing buttons.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
Initializes the GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Initializes the GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Initializes GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Initializes the GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Initializes the interface, and generates the first default texture.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelVolume4D
-
Initializes the GUI components.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Initialize user-interface
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Init() function to create the GUI dialog.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
Init() function to create the GUI dialog.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Init() function to create the GUI dialog.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
Init() function to create the GUI dialog.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
Init() function to create the GUI dialog.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Init() function to create the GUI dialog.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Init() function to create the GUI dialog.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
GUI panel initialization.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Dialog GUI initialization.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Dialog GUI interface initialization.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Create the dialog interface.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Create the dialog interface.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
Initial panel
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Sets up GUI and displays the dialog.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
Sets up GUI and displays the dialog.
- init() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- init() - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Initializes the GUI components and adds them to the main frame.
- init() - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
- init() - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- init() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Initializes scroll panes, tables, and models and adds them to the frame.
- init() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Creates the GUI.
- init() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Initialize the the image orientations and call the frame layout method 'configureFrame()'.
- init() - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- init(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
Creates and displays dialog.
- init(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Initialize GUI for the bug report form.
- init(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Builds the panel that the tag dialog frame contains, and optionally builds
the standalone frame that encompasses all functionality of this class.
- init(boolean) - Method in class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Creates and displays dialog.
- init(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- init(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- init(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Initializes GUI components.
- init(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Initialize the buttons layout.
- init(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- init(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistration.JDialogIncrement
-
Initializes GUI based on whether this is the pixel or degree dialog.
- init(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool.JDialogIncrement
-
Initializes GUI based on whether this is the pixel or degree dialog.
- init(boolean, int) - Method in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Initializes GUI components based on the type parameter..
- init(double) - Method in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- init(double) - Method in class gov.nih.mipav.util.DoubleDouble
-
- init(double, double) - Method in class gov.nih.mipav.util.DoubleDouble
-
- init(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
- init(float) - Method in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Makes slider to set opacity of VOI.
- init(float) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
DOCUMENT ME!
- init(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
- init(int) - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- init(int) - Method in class gov.nih.mipav.model.file.FileSVS.ModREADInputStream
-
- init(int) - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- init(int) - Method in class gov.nih.mipav.model.file.FileTiff.ModREADInputStream
-
- init(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
The JDialogDTIInput interface.
- init(int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogOrder
-
Creates and displays dialog.
- init(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
Initializes GUI components and displays dialog.
- init(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
- init(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
- init(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- init(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- init(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- init(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- init(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- init(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- init(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- init(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Part of the GLEventListener interface.
- init(StochasticForests.Data, int, int, int, long, Vector<Integer>, Vector<Integer>, Vector<Double>, StochasticForests.ImportanceMode, int, boolean, boolean, StochasticForests.SplitRule, Vector<Double>, boolean, Vector<Double>, double, double, boolean, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- init(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
- init(ModelImage, VolumeTexture) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Initialize the scene graph node for the rendering of the volume data, everything except the textures from the
volume data to be applied to the slices through the volume.
- init(ModelLUT, Dimension, boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Initializes the frame and variables.
- init(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
- init(Point3, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- init(ViewJProgressBar, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Initialize the VolumeImage with the ModelImage data.
- init(ViewJProgressBar, VolumeCanvas3D) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Initialize the renderer.
- init(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
Initializes the dialog box and adds the components.
- init(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
Initializes the dialog box to a certain size and adds the components.
- init(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Initializes the dialog box to a certain size and adds the components.
- init(String) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Initializes the dialog box and adds the components.
- init(String) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintRGBComponents
-
Makes slider to set opacity of VOI.
- init(String) - Method in class gov.nih.mipav.view.dialogs.JDialogText
-
Initializes the dialog box to a certain size and adds the components.
- init(String) - Method in class gov.nih.mipav.view.graphVisualization.JDialogAction
-
Initializes the dialog box and adds the components.
- init(String) - Method in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
Initializes the dialog box and adds the components.
- init(String) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Initializes the dialog box to a certain size and adds the components.
- init(String) - Method in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
Initializes the dialog box to a certain size and adds the components.
- init(String) - Method in class gov.nih.mipav.view.ViewJSlider
-
Init method that creates slider
- init(String, int) - Method in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
Initializes GUI components and displays dialog.
- init(String, StochasticForests.MemoryMode, StochasticForests.Data, int, String, int, long, int, StochasticForests.ImportanceMode, int, String, boolean, boolean, Vector<String>, boolean, StochasticForests.SplitRule, boolean, Vector<Double>, double, double, boolean, StochasticForests.PredictionType, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- init(URL[], ClassLoader, URLStreamHandlerFactory) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- init(Vector<String>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- init(BranchGroup, BranchGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Initialize the scene graphs and left, right, and stereo canvases for this JStereoWindow.
- init(JButton, JButton, ArrayList<Integer>, Color[], ModelLUT, ModelImage, int, Vector<Integer>) - Method in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
- init(JFrame, ModelImage, ModelImage, Component, ScreenCoordinateListener, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Initialize the VOIManager.
- Init() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- Init() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
Initializes the ShaderEffect vertex and pixel shader programs.
- Init(double[], int, int, CeresSolver.LocalParameterization) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- Init(double[], Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- Init(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ScratchEvaluatePreparer
-
- Init(int[][], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockEvaluatePreparer
-
- Init(int, boolean, CeresSolver.CompressedRowBlockStructure) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- Init(int, boolean, CeresSolver.CompressedRowBlockStructure) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminatorBase
-
- Init(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateScratch
-
- Init(CeresSolver.BlockSparseMatrix, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- Init(CeresSolver.MinimizerOptions, double[], CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- Init(CeresSolver.Program, HashMap<double[], CeresSolver.ParameterBlock>, CeresSolver.OrderedGroups<double[]>, String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CoordinateDescentMinimizer
-
- Init(CeresSolver.SolverOptions) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- Init(IDList, IDList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- Init(Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- INIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- INIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- INIT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- init_Affine(SIFT3D.Affine, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_cl_SIFT3D(SIFT3D.SIFT3DC) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_error_limit(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- init_events(TURN_REP, TURN_REP) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- init_Gauss_filter(SIFT3D.Gauss_filter, double, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_Gauss_incremental_filter(SIFT3D.Gauss_filter, double, double, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_geometry(SIFT3D.SIFT3DC) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_GSS_filters(SIFT3D.GSS_filters) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_im(SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_Keypoint(SIFT3D.Keypoint) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_Keypoint_store(SIFT3D.Keypoint_store) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_Mat_rm(SIFT3D.Mat_rm, int, int, SIFT3D.Mat_rm_type, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_Mat_rm_p(SIFT3D.Mat_rm, double[][], int, int, SIFT3D.Mat_rm_type, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_Mesh(SIFT3D.Mesh) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_multiple_dt(libdt.DytexMix) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- init_num_of_subclasses - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- init_pattern() - Method in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- init_pattern() - Method in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- init_Pyramid(SIFT3D.Pyramid) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_Ransac(SIFT3D.Ransac) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_Reg_SIFT3D(SIFT3D.Reg_SIFT3D) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_Sep_FIR_filter(SIFT3D.Sep_FIR_filter, int, int, double[], int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_SIFT3D(SIFT3D.SIFT3DC) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_SIFT3D_Descriptor_store(SIFT3D.SIFT3D_Descriptor_store) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_Slab(SIFT3D.Slab) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- init_source(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- init_vals(TURN_REP, TURN_REP, double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- initAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
All of this stuff was being done in the constructor...why?
- initAlignTo(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Init ref to this.
- initAlignTo(CAAMShape, double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Aligns this to 'ref' with respect to pose.
- initAxes() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Initializes the Axis labels based on the ModelImage orientation.
- initBlankPaint(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Initializes a new blank paint mask to the color indexed by the parameter 'num'
- initBlendSliderLabels() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Initialize the blend slider labels.
- initBlendSliderLabels() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Initialize the blend slider labels.
- initBlock() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- initBlock() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- initBoundingBox() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Initializes the bounding box for the mesh.
- initBuffers() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Initializes the buffers that hold the image data.
- initBuffers() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Initializes the buffers that hold the image data.
- initCameraModelList() - Method in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- initCenterPoint - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Either the volume's center of mass or a user indicated point depending on the value of useCenterOfMass.
- initCenterX - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Used to denote the brain's center of mass y-coordinate.
- initCenterXLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Label for the x-coordinate of the user-defined center.
- initCenterXTF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
An optional field for denoting a desired initial x-corrdinate for the mesh.
- initCenterY - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Used to denote the brain's center of mass y-coordinate.
- initCenterYLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Label for the y-coordinate of the user-defined center.
- initCenterYTF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
An optional field for denoting a desired initial y-corrdinate for the mesh.
- initCenterZ - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Used to denote the brain's center of mass y-coordinate.
- initCenterZLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Label for the z-coordinate of the user-defined center.
- initCenterZTF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
An optional field for denoting a desired initial z-corrdinate for the mesh.
- initChildren() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- initCL(long, GL3) - Method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- initClass() - Static method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- initClipSliceA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Move the arbitrary clipping bounding frame to initial position.
- initClipSliceStatic() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Move the static clipping bounding frame to initial position.
- initClipSliceStaticInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Move the static inverse clipping bounding frame to initial position.
- initClipSliceX() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Move the X clipping bounding frame to initial position.
- initClipSliceXInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Move the X Invative clipping bounding frame to initial position.
- initClipSliceY() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Move the Y clipping bounding frame to initial position.
- initClipSliceYInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Move the Y Nagative clipping bounding frame to initial position.
- initClipSliceZ() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Move the Z clipping bounding frame to initial position.
- initClipSliceZInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Move the Z Invative clipping bounding frame to initial position.
- initcluster_doretto(Vector<libdt.Mat>, libdt.DytexOptions) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- initColorMap() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- InitColorMap(Texture, GraphicsImage, ModelStorageBase, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Initialize the textures for the color lookup table.
- initColors() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Initializes the colors for the first point on the curve, and the successive points.
- initColors() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Initializes the colors for the first point on the curve, and the successive points.
- initComponentImage() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Construct the component image which contains the MIP image (should be called after calcMIPBuffer).
- initComponentImage(int[]) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Creates and initializes the component image for the given image.
- initConstraints() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Initializes the constraint variables for the PSF deconvolution, based on the microscope parameters (numerical
aperature, wavelength, and refractive index).
- initConstraints() - Method in class gov.nih.mipav.view.components.PanelManager
-
Create a new set of grid bag constraints.
- initContextProperties(cl_context_properties, GL) - Static method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Initializes the given context properties so that they may be
used to create an OpenCL context for the given GL object.
- initControls() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Initializes the GUI components and displays the dialog.
- initConvolutionBuffers(int, float[]) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Creates the Convolution kernels (data arrays) in OpenCL.
- initCpp(String, StochasticForests.MemoryMode, String, int, String, int, boolean, long, int, String, StochasticForests.ImportanceMode, int, String, Vector<String>, String, boolean, Vector<String>, boolean, StochasticForests.SplitRule, String, boolean, double, double, double, boolean, StochasticForests.PredictionType, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- initCreateMemoryUsagePanel() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Construct the panel which displays the current memory usage/limit and a garbage collection button.
- initCreateMessageBar() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Create the panel containing components which show the application title initially, and will later be used to show
image coordinates and intensities.
- initCreateMessageField(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Creates the message field for the main frame using the title given.
- initCreateMultiCoreGpuIndicatorPanel() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Construct the panel which displays whether the CPU and GPU could be utilized by algorithms based on the
preferences settings by the user.
- initCube(GaussianMixtureModelsIncompleteSamples.GMM, double, Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- InitCubicTextures() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeOrientationCube
-
Create the rotation control cubic box.
- initData() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Allocates local memory.
- initData() - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
initData -- Initializes the selected, open, reference and tile indexes.
- initDataBuffer() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- initDebugPreferences() - Static method in class gov.nih.mipav.view.Preferences
-
this method must be invoked very early on in the startup sequence (typically in
the startup main method or ViewUserInterface.
- initDicomReceiver() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Starts the DICOM receiver if the flag in the preference file is true.
- initDir - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- initDirection() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Makes the GUI elements of the dialog.
- initDisplayAnnotationsPanel(VOILatticeManagerInterface, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
The annotations panel is added to the VolumeTriPlanarInterface for display.
- initDisplayAnnotationsPanel(VOILatticeManagerInterface, VolumeImage, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
The annotations panel is added to the VolumeTriPlanarInterface for display.
- initDisplayAnnotationsPanel(VOILatticeManagerInterface, VolumeImage, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
The annotations panel is added to the VolumeTriPlanarInterface for display.
- initDisplayCurvesPanel(VOILatticeManagerInterface, VolumeImage, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
The curve panel is added to the VolumeTriPlanarInterface for display.
- InitEliminator(CeresSolver.CompressedRowBlockStructure) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurJacobiPreconditioner
-
- initEstimate(cl_command_queue, long, cl_mem, cl_mem, cl_mem) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Creates the first estimate image for dual-image deconvolution
estimate = 0.5 * (imageBufferA + imageBufferB).
- initExtents(ModelImage) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Get the extents of an image.
- initExtentsVariables(ModelImage) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Initializes the variables based on the image extents.
- initExtentsVariables(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Initializes the variables based on the image extents.
- initExtentsVariables(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Initializes the variables based on the image extents.
- initEyeTrackingLogfile(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Initialize the file IO for eye tracking log file
- initEyeTrackingLogfile(String, ViewJComponentEditImage) - Static method in class gov.nih.mipav.view.MipavUtil
-
Initialize the file IO for eye tracking log file
- initFaceIMark() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- initFrame(Dimension) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Initializes the 2D MIP image frame.
- initFromDataAtRandom(GaussianMixtureModelsIncompleteSamples.GMM, double[][], double[][][], double, int[], Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- initFromDataMinMax(GaussianMixtureModelsIncompleteSamples.GMM, double[][], double[][][], double, int[], Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- initFromKMeans(GaussianMixtureModelsIncompleteSamples.GMM, double[][], Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- initGB() - Static method in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- initGB() - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- initGB() - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- InitGPU() - Static method in class gov.nih.mipav.util.MipavInitGPU
-
- initGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- initGUI() - Method in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
Construct the panel's GUI.
- initGUI() - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Initialize the panel's GUI.
- initGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Construct the dialog interface.
- initGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Initializes the dialog box and adds the components.
- initGUI() - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
initGUI - Initializes GUI toolbar and buttons and displays the registration window.
- initGUI() - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Construct the panel.
- initGUI() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Set up the panel components.
- initGUI(boolean, boolean, boolean) - Method in class gov.nih.mipav.view.components.JPanelColorChannels
-
Initializes the panel's GUI.
- initGUI(int, boolean, String) - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Initialize the Sigma Panel
- initHash(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- InitHessUnFac(double, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBFGS
-
intialize the hessian Algorithm A9.4.3 p. 359
- initial - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- initial - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- initial - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task
-
- initial - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask
-
- initial - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- initial - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
-
Rotations, translations, scales, and skews that make up transformation.
- initial - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D.MatrixListItem
-
Rotations, translations, scales, and skews that make up transformation.
- initial - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D.MatrixListItem
-
Rotations, translations, scales, and skews that make up transformation.
- initial - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D.MatrixListItem
-
Rotations, translations, scales, and skews that make up transformation.
- initial - Variable in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Rotations, translations, scales, and skews that make up transformation.
- initial - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- initial - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- INITIAL - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
DOCUMENT ME!
- initial_cost - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- initial_cost - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- initial_evaluator_jacobian_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- initial_evaluator_residual_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- initial_lambda - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- initial_radius - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyOptions
-
- initial_setup(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- initial_trust_region_radius - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- initial_x - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- initialActiveVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- InitialAntiCausalCoefficient(double[], int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- InitialCausalCoefficient(double[], int, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- initialCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- initialCirclesLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- initialCirclesText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- initialCost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- initialCost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- initialCost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- initialCost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- initialData() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- initialDelta - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- initialDeltaB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- initialDeltaG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- initialDeltaR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- initialEllipsesLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- initialEllipsesText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- initialGlobalSmoothing - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- initialGlobalSmoothing - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
0.8 for STEERING_KERNEL_SECOND_ORDER_L1_NORM
- Initialise(AlgorithmNetworkSnake.SnakeInitialiser, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- initialiseCRC() - Method in class gov.nih.mipav.model.file.CRC
-
- InitialiseData() - Method in interface gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.IMetadataProvider
-
- InitialiseData() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- initialiseDataHolders(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
DOCUMENT ME!
- InitialiseDenseReference() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- InitialiseSparseMatrixReferences() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- initialization(double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- initialization(double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- initialization(double[][], AlgorithmMixGaussEM.model) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- initialize() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- initialize() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Implementation of the Behavior abstract method.
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Required to be a ViewPlatformBehavior.
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Required to be a ViewPlatformBehavior.
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
Initializes the behavior.
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
DOCUMENT ME!
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
DOCUMENT ME!
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
DOCUMENT ME!
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
DOCUMENT ME!
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
DOCUMENT ME!
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
DOCUMENT ME!
- initialize() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
DOCUMENT ME!
- initialize(boolean) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Sets up the GUI (panels, buttons, etc) and displays it on the screen.
- initialize(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
Initialization of the 2D fast marching object.
- initialize(int, int[]) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Partial initialization of the fast marching object.
- initialize(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
Initialization of the 3D fast marching object.
- initialize(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- initialize(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- initialize(ArrayList<Point>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- Initialize(ModelSimpleImage, CAAMShape, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitialize
-
General initialization function.
- Initialize(ModelSimpleImage, CAAMShape, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Performs a somewhat brute force initialization of an AAM.
- Initialize(ModelSimpleImage, CAAMShape, CDVector, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Performs a somewhat brute force initialization of an AAM.
- initialize_data_precision(int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- InitializeContext(CeresSolver.Context, CeresSolver.Context, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- initialized_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BFGS
-
- InitializeData(int, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- initializeDisplayImages(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
This method initializes the final images as near-clones of the largest image in the set
- initializeEncodeSkip(byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Calculate the encoding of the specified channel.
- initializeErrorLogging(String) - Static method in class gov.nih.mipav.view.LogStdStreams
-
The static initialization method
Also redirects System.out, rewrites output file.
- initializeErrorLogging(String, String) - Static method in class gov.nih.mipav.view.LogStdStreams
-
The static initialization method which writes heading
Also redirects System.out, rewrites output file.
- initializeErrorLogging(String, String, boolean) - Static method in class gov.nih.mipav.view.LogStdStreams
-
The static initialization method which writes heading
Rewrites output file.
- initializeErrorLogging(String, String, boolean, boolean) - Static method in class gov.nih.mipav.view.LogStdStreams
-
The static initialization method.
- initializeFullRead() - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Setups the allocation of memory for the byte buffer to load the entire image.
- initializeGeodesic(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
initializeGeodesic copies the triangle mesh and initializes the data structures for Dijkstra's Single-Source
shortest path algorithm.
- initializeGeodesic(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
initializeGeodesic copies the triangle mesh and initializes the data structures for Dijkstra's Single-Source
shortest path algorithm.
- initializeGui() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Initializes the user interface.
- initializeHeap() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
Allocate the heap and initialize all the heap elements.
- initializeImages(int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
create an image pyramid from the original data, initialize Jacobians, etc
- initializeImages2D(int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
create an image pyramid from the original data, initialize Jacobians, etc
- initializeImageTable(MouseListener) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- initializeInterpolation(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- initializeLayout() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Creates the basic layout and adds it to the content pane.
- initializeLocalImages(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTProcess.CalculateT
-
- initializeLocalImages(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1.CalculateT1
-
This method initializes the intermediate images as a near-clone of the largest image in the set.
- initializeNelderMead(double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
- initializeOutput() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- initializeSeriesTable(MouseListener) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- initializeSpeed(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Partial initialization of the fast marching object.
- initializeSpeed(float[]) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Partial initialization of the fast marching object.
- initializeStringTable() - Method in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
Initialize the string table.
- initializeStudyTable(MouseListener) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- initializeTransform(int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
initialize the transform from previous estimate, if exists
- initializeTransform2D(int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
initialize the transform from previous estimate, if exists
- initialJacobianIdentity - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- initialKernelSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
The kernel must be initialKernelSize by initialKernelSize
- initialKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- initialMesh - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
- initialMessage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- initialMessage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- initialOrder - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- initialOrder - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- initialOrder - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- initialOrder - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- initialOrder - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
order of initial function.
- initialOrder - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
order of initial function.
- initialRandomCircles - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- initialRandomCircles - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- initialRandomEllipses - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- initialRandomEllipses - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- initialRandomSpheres - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- initialRandomSpheres - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- initialSideLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSCDSegmentation
-
- initialSideLength - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
- initialSpheresLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- initialSpheresText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- initialSummaryBins - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- initialThresholdLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- initialTitle - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- initialUserMax - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- initialUserMin - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- initialV - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- initialValidate(String) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
method that does some initial validation of the expression
- initialVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- initialWeightsRangeLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- initImage(ViewJFrameImage) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Initialize the HyperGraph interface based on the ViewJFrameImage parent.
- initImageBuffer(int[], boolean) - Static method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Create the intensity buffer for an image.
- initImageBuffer(int[], boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Create the intensity buffer for an image.
- initImageBuffer(int[], boolean, int) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Create the intensity buffer for an image.
- initImageLUTs(ModelLUT, ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Initializes the LUTs for the images.
- initImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Intializes the Textures and GraphicsImages used to render the ModelImage this
VolumeImage represents.
- initImages(ModelSimpleImage, ModelSimpleImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- initImagesColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- initImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- initImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- initIMark() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- InitIMark() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- initInternal(String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- initInternal(String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- initInternal(String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- initInternal(String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- initInternal(String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- initLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- initLayout() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- initLayout() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- initLevelSet(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Initializes the Levelset VOI calculation.
- initLineMin(Matrix4f, Matrix4f, float, float, double[], double[], int, double[], double, double, double, double, double, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- initLiveWire(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Initializes the Livewire VOI calculation.
- initLowerSlider() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Construct the lower intensity bound slider panel.
- initLUT() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Initializes or re-initializes the Histogram LUT interface based on the currently-loaded ModelImage.
- initLUT() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Initializes or re-initializes the Histogram LUT interface based on the currently-loaded ModelImage.
- initLUT() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Create a new LUT for the input image.
- initLUT() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Creates and initializes the LUT for the first image (imageA) if it hasn't been already.
- initLUT(ModelImage) - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Creates and initializes the LUT for an image.
- initLUT(ModelImage) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Creates and initializes the LUT for an image.
- initLUT(Texture[], ModelLUT, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- initMacintoshJDKversionCheck() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Method checks to verify that when running on a Machintosh, the JDK version is at least 1�x2e;4.
- initMaterialPreset() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Up to 6 preset materials can be defined.
- initMaterialPreset() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Up to 6 preset materials can be defined.
- initMaxPreview() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- initMinPreview() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- initNewLine() - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- initNewLine() - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- initNumSlices(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Get the total number of time slices and volume slices.
- initNumSlices(ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Get the total number of time slices and volume slices.
- initNumSlices(ModelImage) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Get the total number of time slices and volume slices.
- InitOpacityMap(ModelImage, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Initialize the GraphicsImage for the opacity lookup table.
- initPanel() - Method in class gov.nih.mipav.view.components.PanelManager
-
Create a new panel.
- initParams() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- initPixelBuffer(int[]) - Static method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Create the pixel buffer for an image.
- initPixelBuffer(int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Create the pixel buffer for an image.
- initPixelBuffer(int[]) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Create the pixel buffer for an image.
- initPolyhedronTrimeshConnectivity(int, int, int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Called by the constructor to add the relative control point offset indices for triangle mesh representation of
the bounding polyhedron formed by the neighboring 26 control points.
- initPrefsFile() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Set the preferences file to use (Preferences defaults to mipav.preferences).
- initPrefsTrim() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Gets the TRIM_VOI, TRIM_MASK and TRIM_FLAG values from the preferences file, and if it cannot find them, it sets
to some default value: TRIM_VOI will be 0.3, TRIM_MASK will be 0.0, and TRIM_FLAG will be true.
- initPresets() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Initializes the GUI components, based on the preset values set by the class calling the constructor.
- initProgressBar() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Initializes progress bar.
- initProgressBar() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Initializes the progress bar.
- initPSF(int, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Initialize the first PSF guess as a 3x3 Gaussian.
- initR(String, StochasticForests.Data, int, int, boolean, long, int, StochasticForests.ImportanceMode, int, Vector<Vector<Double>>, Vector<String>, String, boolean, boolean, Vector<String>, boolean, StochasticForests.SplitRule, Vector<Double>, boolean, boolean, Vector<Double>, double, double, boolean, StochasticForests.PredictionType, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- initReductionKernel(cl_command_queue, long, cl_mem) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Inializes the reduction kernel to calculate the maximum of the estimateBuffer
during the dual-image deconvolution.
- initResFactor(float[], int[]) - Static method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Get the resolution correction needed for non-isotropic images.
- initResFactor(float[], int[]) - Static method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Get the resolution correction needed for non-isotropic images.
- initResFactor(float[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Get the resolution correction needed for non-isotropic images.
- initResFactor(float[], int[]) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Get the resolution correction needed for non-isotropic images.
- initResolutions() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Initializes the resolutions and units from the image.
- initResolutions(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
init resolutions
- initResolutions(ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
init resolutions
- initResolutions(ModelImage) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
DOCUMENT ME!
- initRGB(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Creates and initializes the ModelRGB for an image.
- initRGB(ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Creates and initializes the ModelRGB for an image.
- initRGB(ModelImage) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Creates and initializes the ModelRGB for an image.
- InitScale() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Initialize the scale factors.
- initScaleKernel(cl_command_queue, long, cl_mem) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Initialize the scale OpenCL kernel which calculates
estimateBuffer *= max(estimateBuffer)
- initSegm - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- initSelection - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- initSelection - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- initSetMainFrameDefaults(LayoutManager, boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets the layout of the Main Frame with the given, preferred layout manager; makes the main frame resizable as
given; makes this class a window-listener; sets the default operation to do nothing on close; and the icon is
set.
- initSetTitles(String, String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets the titles for for the main frame and the application using the strings given.
- initShared(VolumeTriPlanarInterface) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- initSlicePositions(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Get the initial time and volume slice positions.
- initSlicePositions(ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Get the initial time and volume slice positions.
- initSlicePositions(ModelImage) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Get the initial time and volume slice positions.
- initSnakeConstants(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Initializes the H, G, and Q matrices once per image sequence on the first frame.
- initSphere() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Initialize the sphere scene graph objects for the sphere showing where the user clicked in the surface.
- initSphereBranch() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Initialize the red sphere image scene graph structure.
- InitStorage(CeresSolver.CompressedRowBlockStructure) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSchurComplementSolver
-
- InitStorage(CeresSolver.CompressedRowBlockStructure) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- initSubset() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Initializes the GUI by creating the components, placing them in the dialog, and displaying them.
- initSurfaceBuffers() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Initialize the global vertext and connection arrays.
- InitT() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- initTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- initTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- initTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- initTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- initToolbar() - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Create a blank toolbar and set it up.
- initToolbar() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Construct the dialog toolbar (including zoom, lut, and paint clearing tools).
- initToolBar() - Static method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Create a blank toolbar and set it up.
- initToVOIType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- initTreeLoc - Static variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
- initUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- initUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogTwo
-
- initUnits(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
init units
- initUnits(ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
init units
- initUnits(ModelImage) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
DOCUMENT ME!
- initUpperSlider() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Construct the upper intensity bound slider panel.
- initUsingPreferences() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Performs a variety of start-up operations based on user-preferences; First, it tries to read from the preferences
file; if it cannot, it sets the user directory.
- InitV() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- initVars() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Initializes the variables (resolutions) needed for the algorithm.
- initVars() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Initializes the variables (resolutions) needed for the algorithm.
- initVertexIMark() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- initView(Point3f, SoftwareVertexProperty) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Calculate the view direction based on the vertex and the eye point (in model coordinates).
- initVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- initVOI() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Initialize the 3D VOI interface.
- initVOI() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- initVOI() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- initVOI() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Initialize the 3D VOI interface.
- initVOIManagers(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- initVOIManagers(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- initVolumeData(ModelImage, int, Texture, String, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- initVolumeSculptor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Initialize the Mouse listener.
- initVolumeSculptor(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Initialize the Mouse events, store the progress bar, and get the original canvas widths.
- initVR(int, int, byte[], int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Initializes the VR.
- initWinLevelGray(ModelLUT, ModelImage) - Method in class gov.nih.mipav.view.WindowLevel
-
initWinLevelGray, initializes the ModelLUT for gray-scale images before
window-level operations.
- initWinLevelRGB(ModelRGB, ModelImage) - Method in class gov.nih.mipav.view.WindowLevel
-
initWinLevelRGB, initializes the ModelRGB for window-level changes.
- initZoom() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Initializes the zoom variables for the first image (imageA).
- initZoom(ModelImage, float, float, int, int) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Initializes the zoom variables for an image.
- initZoomFactor - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- INK_NAMES - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- INK_NAMES - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- INK_SET - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- INK_SET - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- inkNames - Variable in class gov.nih.mipav.model.file.FileSVS
-
- inkNames - Variable in class gov.nih.mipav.model.file.FileTiff
-
- inkSet - Variable in class gov.nih.mipav.model.file.FileSVS
-
- inkSet - Variable in class gov.nih.mipav.model.file.FileTiff
-
- inMax - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- inMenu - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- inMin - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- INNER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- INNER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- INNER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Parameter used in Find_Edges.
- INNER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- INNER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- INNER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Parameter used in Find_Edges.
- inner_iteration_minimizer - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- inner_iteration_minimizer - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- inner_iteration_ordering - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- inner_iteration_ordering_given - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- inner_iteration_ordering_used - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- inner_iteration_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- inner_iteration_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- inner_iteration_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- inner_iteration_x_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- inner_iterations_are_enabled_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- inner_iterations_given - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- inner_iterations_used - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- inner_iterations_were_useful_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- inner_product - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- inner_product_hom - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- inner_productFunction(int, SVM.VlSvmDataset, int, double[]) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- innerButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- innerButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- innerClass - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- InnerClass() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback.InnerClass
-
- innerCurveCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- innerDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- innerDistanceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- innerDistanceText - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- innerEdging - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
DOCUMENT ME!
- innerIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- innerIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- innerPanel - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- innerPanel - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- innerPanel - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- innerPanel - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- InnerProduct(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- innerProductFn - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- INOQ - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- inOrder() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.ActiveTree
-
Prints out tree in sorted order.
- inOrder() - Method in class gov.nih.mipav.view.RubberbandLivewire.ActiveTree
-
Prints out tree in sorted order.
- inOrder(VOIManager.TreeNode, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.ActiveTree
-
Prints out tree in sorted order.
- inOrder(RubberbandLivewire.TreeNode, int) - Method in class gov.nih.mipav.view.RubberbandLivewire.ActiveTree
-
Prints out tree in sorted order.
- inp_minbnd(double[][], double) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- inp_minbnd(double[], double) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- inPlace - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Whether to perform alg in place
- inPlanePhaseEncodingDirection - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- input - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- input - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- input(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- input(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- INPUT_BUF_SIZE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- input_directory - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- input_directory - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- input_file - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- input_file_directory - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- input_file_name - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- input_file_name - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- input_file_name - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- INPUT_IMAGE_LABEL - Static variable in class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
The label to use for the input image parameter.
- INPUT_IMAGE_LABEL_BASE - Static variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
The base of parameter labels used for an algorithm's input image(s).
- input_iMCU_row - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- INPUT_LUT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
Types of LUTS.
- input_scan_number - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- input1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Image used to import a slice from inputImage.
- input1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Image used to import a volume from inputImage.
- input1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Image used to import a slice from inputImage.
- input1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Image used to import a volume from inputImage.
- input2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Image used to import a slice from inputImage2.
- input2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Image used to import a slice from inputImage2.
- input2Bytes(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- input3 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Image used to import a slice from inputImage3.
- input3 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Image used to import a slice from inputImage3.
- inputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Holds the original image data.
- inputBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
- inputByte(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- inputctl - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- InputDir - gov.nih.mipav.view.Argument.StaticArgument
-
- inputEvent(InputEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- inputFilename - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- inputFileName - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- inputFileName - Variable in class gov.nih.mipav.model.algorithms.LSCM
-
- inputGon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
The polygon of the VOI we are fitting.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- inputImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- inputImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- inputImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
This image is to registered to the reference image.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
This image is to registered to the reference image.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
This is the image in which internal registration will be performed.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
This image is to registered to the reference image.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
This is the image in which internal registration will be performed.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
This image is to registered to the reference image.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
This is the image in which internal registration will be performed.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
This image is to registered to the reference image.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
This is the image in which internal registration will be performed.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
This image is to registered to the reference image.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
This image is to registered to the reference image.
- inputImage - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
This image is to registered to the reference image.
- inputImage2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Other images which will not determine the registration, but which will undergo the same transformations as input
image.
- inputImage2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Other images which will not determine the registration, but which will undergo the same transformations as input
image.
- inputImage3 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- inputImage3 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- inputImageDirectory - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- inputImages - Variable in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Vector of Strings holding the registers of images used as input
- inputLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
DOCUMENT ME!
- inputLayer - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- inputMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- inputMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- inputMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Holds the original image mask data.
- inputMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- inputMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- inputMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- inputMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- inputMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- inputMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- inputMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- inputMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- inputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
input panel of dialog
- inputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- inputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- inputPointData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- inputRangeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- inputRanges - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceValue
-
DOCUMENT ME!
- inputs - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- inputs - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- inputSource - Variable in class gov.nih.mipav.view.graphVisualization.MipavSAXReader
-
- inputTensorImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
Input image for tensor estimation
- inputText - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
DOCUMENT ME!
- inputType - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- inputType - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- inputType - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- inputURL - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- inputVal - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- inputw_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Image used to import a slice from inputWeight.
- inputw_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Image used to import a volume from inputWeight.
- inputw_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Image used to import a slice from inputWeight.
- inputw_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Image used to import a volume from inputWeight.
- inputWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
- inputWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
- inputWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
- inputWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
- inputWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
- inputWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
- inputWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
- inputWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
- inputWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
- inputWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
This gives weights for the input image - higher weights mean a greater impact in that area on the registration.
- inputWeightImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- inputWeightImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- inputWeightImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- inputWeightImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- inputWeightImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- inputWgtImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- inputWgtImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- inRange(float, float, float, JPanelPixelExclusionSelector.RangeType) - Static method in class gov.nih.mipav.view.MipavUtil
-
Determines if a value is within the given pixel intensity range.
- inRange(JDialogProstateSegmentationRegBSpline3D.Edge, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Check whether the given x, y pixel fall withing the narrow band region.
- inScript - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
Denotes whether the algorithm is run in a script/JIST, if so showInterImages just stores images for later access.
- insert - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Boolean indicating if the Insert button has been pressed
- insert(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Insert an element into the set.
- insert(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Insert an element into the set.
- insert(int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Insert an element into the set.
- insert(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Insert an element into the set.
- insert(int, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap
-
Insert a numeric value into the min-heap data structure.
- insert(int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.ActiveTree
-
Inserts node with given position and cost at the appropriate location in the tree.
- insert(int, float) - Method in class gov.nih.mipav.view.RubberbandLivewire.ActiveTree
-
Inserts node with given position and cost at the appropriate location in the tree.
- insert(int, int, double) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.SparseMatrix
-
- insert(int, int, float, float) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- insert(int, int, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- insert(int, int, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- insert(AlgorithmMeanShiftSegmentation.RAList, AlgorithmMeanShiftSegmentation.RAList[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- insert(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- insert(String, int) - Method in class gov.nih.mipav.view.JScrollMenu
-
- insert(Action, int) - Method in class gov.nih.mipav.view.JScrollMenu
-
- insert(JMenuItem, int) - Method in class gov.nih.mipav.view.JScrollMenu
-
- Insert(CAAMPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Adds a point to the end.
- Insert(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Inserts a shape into the collection.
- Insert(CAAMTriangle) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Adds a triangle to the end.
- insert_bound(GenericPolygonClipper.edge_node[], GenericPolygonClipper.edge_node[], int) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- insert_rec(KDTree.kdnode, boolean, double[], double[], int, int) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- insertAveragedSlices(float[], float[], int, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
Insert weighted averaged slices between the two indices.
- insertBlank - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
If true, insert a blank rather than a weighted average.
- insertBlank - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
If true insert blank slices, if false insert weighted average slices.
- insertBlank - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
If true, insert a blank rather than a weighted average
- insertBlankSlices(float[], int, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
Insert blank slices between the two indices.
- insertButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Button for inserting the image into the body of a bug report
- InsertDataItem(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Inserts a data vector
- INSERTED_IMAGE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Original slice type - a 2D image is inserted.
- INSERTED_IMAGE_VOLUME - Static variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Original volume type - a 2D image is inserted.
- InsertEdge(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Vertex
-
DOCUMENT ME!
- insertedImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Image inserted for slice type == ORIGINAL.
- insertedImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Image inserted for slice type == ORIGINAL.
- insertedImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- insertedImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- insertedImgButton - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- insertElementAt(VOIBase, int) - Method in class gov.nih.mipav.model.structures.VOIBaseVector
-
- insertElementAt(VOI, int) - Method in class gov.nih.mipav.model.structures.VOIVector
-
Override the Vector method to ensure that object is a voi, and that the new voi's name is unique.
- insertEnhancedSequence(FileInfoDicom, FileInfoDicom[][], int) - Method in class gov.nih.mipav.model.file.FileIO
-
- InsertEntry(int, int, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.DynamicCompressedRowSparseMatrix
-
- insertfftKernel(StringBuilder, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- insertFlythruTab(String, JPanel) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Insert tab into the flythru tab list ( flythru render ) for backup.
- insertGlobalLoadsAndTranspose(StringBuilder, int, int, int, int, int, CLFFTPlan.CLFFTDataFormat) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- insertGlobalStoresAndTranspose(StringBuilder, int, int, int, int, int, int, CLFFTPlan.CLFFTDataFormat) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- insertHeader(StringBuilder, String, CLFFTPlan.CLFFTDataFormat) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- insertIntoHash(AlgorithmMeanShiftClustering.fams_hash_entry2[][], int[], int, int, int[][], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- INSERTION_SORT_THRESHOLD - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortUtil
-
The size at or below which we will use insertion sort because it's
probably faster.
- insertLocalLoadIndexArithmatic(StringBuilder, int, int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- insertLocalLoads(StringBuilder, int, int, int, int, int, int, int, int, String) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- insertLocalStoreIndexArithmatic(StringBuilder, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- insertLocalStores(StringBuilder, int, int, int, int, int, String) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- insertNoCheck(Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- insertNode(int, int, AlgorithmNetworkSnake.AnchorPosition, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- insertNode(int, int, AlgorithmNetworkSnake.AnchorPosition, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- InsertNonZeroEntriesFromDenseReference() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- insertPoint(float, float, int) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Inserts a point to the transfer function at the specified index.
- insertPoint(Vector2f, int) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Inserts a point to the transfer function at the specified index.
- insertRaycastTab(String, JPanel) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Insert tab into the raycast tab list ( raycast render ) for backup.
- insertScriptLine() - Method in class gov.nih.mipav.model.provenance.actions.ActionOpenImage
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.provenance.actions.ActionStartMipav
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.provenance.actions.ActionStopMipav
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionBase
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeEndianess
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeModality
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeOrientations
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeOrigin
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeResolutions
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeTalairachInfo
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeTransformInfo
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeUnits
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionClone
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionCloseFrame
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionCollectGarbage
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionExit
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionExtractImageB
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionMaskToPaint
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionMaskToVOI
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionOpenAllVOIs
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionOpenVOI
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionPaintToMask
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionPaintToVOI
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveAllVOIs
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveImage
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveImageAs
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveTab
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveVOIIntensities
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionSelectAllVOIs
-
- insertScriptLine() - Method in class gov.nih.mipav.model.scripting.actions.ActionVOIToMask
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in interface gov.nih.mipav.model.scripting.ScriptableActionInterface
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertScriptLine() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
If a script is being recorded and the action (read: algorithm) is done, add an entry for this action.
- insertSeparator(int) - Method in class gov.nih.mipav.view.JScrollMenu
-
- insertShearwarpTab(String, JPanel) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Insert tab into the shear warp tab list ( shear warp render ) for backup.
- insertShortcut(ShortCutted) - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
Inserts a new shortcut into the list so that list's alphabetical order is preserved.
- insertSlice - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Number of slice before which another slice is inserted.
- insertSlice - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Number of slice before which another slice is inserted.
- insertSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- insertSliceAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- insertString(int, String, AttributeSet) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea.JTextFieldFilter
-
DOCUMENT ME!
- insertSurfaceTab(String, JPanel) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Insert tab into the surface tab list ( SurfaceRender ) for backup.
- insertTab(String, JPanel) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Insert the new tab into the current visible tab list.
- insertTab(String, JPanel) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Insert the new tab into the current visible tab list.
- insertTab(String, JPanel) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Insert the new tab into the current visible tab list.
- insertTriangle(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Insert triangle into the mesh.
- insertTriangle(ModelSurfaceTopology.Triangle) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Convenience function for inserting triangles into the mesh.
- InsertTriangle(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Vertex
-
DOCUMENT ME!
- insertTwiddleKernel(StringBuilder, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- insertUpdate(DocumentEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.TagInputListener
-
- insertUpdate(DocumentEvent) - Method in class gov.nih.mipav.view.MaximumLinesDocumentListener
-
- insertUpdate(DocumentEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- insertVariables(StringBuilder, int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- insertVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- insertVolumeAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- insertVolumePos - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
- insets - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- insideComponent(int, GaussianMixtureModelsIncompleteSamples.GMM, double[][], double[][][], double) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- insideCount - Variable in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp
-
- insideTri(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Determines if the input position is inside the triangle widget.
- insideValue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- installPlugins() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
- InstanceArgument(String, String, String...) - Constructor for enum gov.nih.mipav.view.Argument.InstanceArgument
-
- InstanceCreationTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- instanceNumber - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
DICOM instance number.
- InstanceNumber - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- InstanceNumberComparator() - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile.InstanceNumberComparator
-
- InstanceNumberVolComparator() - Constructor for class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile.InstanceNumberVolComparator
-
- instanceTitle - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
- instanceUID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
The instance UID.
- InstanceVOI - Class in gov.nih.mipav.view.dialogs
-
The VOI instance holds the file name and directory name for each type of the VOIs (Axial, Sagittal, Coronal)
Additionally, myContourVector is the chunk vector to hold the 3D coordinate points of VOIs for each type.
- InstanceVOI - Class in gov.nih.mipav.view.renderer.WildMagic.TBI
-
The VOI instance holds the file name and directory name for each type of the VOIs (Axial, Sagittal, Coronal)
Additionally, myContourVector is the chunk vector to hold the 3D coordinate points of VOIs for each type.
- InstanceVOI(String, String) - Constructor for class gov.nih.mipav.view.dialogs.InstanceVOI
-
- InstanceVOI(String, JTextField) - Constructor for class gov.nih.mipav.view.dialogs.InstanceVOI
-
- InstanceVOI(String, JTextField) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
- inStart - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- institution - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- institution - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- institution - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
- institution - Variable in class gov.nih.mipav.model.file.FileInfoOME.Person
-
- InstitutionName - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- inStream - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Input stream object acquired from the socket.
- instructionLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
DOCUMENT ME!
- instructions - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Instructions on how to use screen capture, line 1.
- instructions2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Instructions on how to use screen capture, line 2.
- instructions3 - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Instructions on how to use screen capture, line 3.
- instrument - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- Instrument(Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
Creates a new Instrument object.
- instrumentID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.InstrumentRef
-
- instrumentID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
Attributes.
- instrumentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- InstrumentRef(Integer, Integer, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image.InstrumentRef
-
Creates a new InstrumentRef object.
- instruments - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- insufficient_data - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- INT_STRING - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- int_upsample(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, byte[][], int, byte[][][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- int_upsample(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[][], int, short[][][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- INT_UPSAMPLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- int16ToBuffer(byte[], int, int, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Copies a 16 bit (2 bytes) integer into the specified portion of the byte array of proper endianess.
- int32ToBuffer(byte[], int, int, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Copies a 32 bit (4 bytes) integer into the specified portion of the byte array of proper endianess.
- IntArrayPointer - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- IntArrayPointer(int[], int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.IntArrayPointer
-
- intBlk - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Temporary DataBlkInt object (needed when encoder uses floating-point
filters).
- intBlk - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Temporary DataBlkInt object (needed when encoder uses floating-point
filters).
- intBuffer - Variable in class gov.nih.mipav.model.file.FileJP2
-
DOCUMENT ME!
- intBuffer - Variable in class gov.nih.mipav.model.structures.IntVector
-
The vector data.
- INTEGER - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type signed integer (32 bits per voxel).
- INTEGER - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type signed integer (32 bits per voxel).
- INTEGER_ATTRIBUTE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
attribute types.
- INTEGER_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type signed integer.
- integerDistanceRound - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
- integerDistanceRound - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
If true, take rounding of Euclidean distance as distance
If false, take Euclidean distance as distance
- integerDistanceRoundCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- integr - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
With dqawoe: indicates which of the weight functions is to be used integr = 1 w(x) = cos(omega*x) integr = 2 w(x) =
sin(omega*x) if integr.ne.1 and integr.ne.2, the routine will end with ier[0] = 6.
- integr - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
With dqawoe: indicates which of the weight functions is to be used integr = 1 w(x) = cos(omega*x) integr = 2 w(x) =
sin(omega*x) if integr.ne.1 and integr.ne.2, the routine will end with ier[0] = 6.
- integral - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- integral() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- integral() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- integral(double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- integral(double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- Integral() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- INTEGRAL_ORDER - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
DOCUMENT ME!
- integrate_wavelet(PyWavelets.ContinuousWavelet, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- integrate_wavelet(PyWavelets.DiscreteWavelet, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- INTEGRATED_DIRECTIONAL_DERIVATIVE_ANGLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- INTEGRATED_DIRECTIONAL_DERIVATIVE_ANGLE - Static variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- INTEGRATED_DIRECTIONAL_DERIVATIVE_MAGNITUDE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- INTEGRATED_DIRECTIONAL_DERIVATIVE_MAGNITUDE - Static variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- integratedAngle - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- integratedAnnotationOutput - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- integratedDirectionalDerivative() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- integratedExists(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- integratedMagnitude - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- integrateTransforms() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.FlyBehavior
-
Sets up the new transform by creating transforms from the determined pitch, yaw, and roll angles and multiplying
these with the velocity.
- integrateTransforms() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.FlyBehaviorRenderer
-
Sets up the new transform by creating transforms from the determined pitch, yaw, and roll angles and multiplying
these with the velocity.
- integrateTransforms() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Creates a new transform and sets it in the canvas.
- integrateTransforms() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Creates a new transform and sets it in the canvas.
- integrateTransforms() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.PointerBehaviorRenderer
-
Creates a new transform for the image by multiplying the appropriate rotations and translations.
- Integration2 - Class in gov.nih.mipav.model.algorithms
-
This is a port of FORTRAN numerical integration routines in QUADPACK found at http://www.netlib.org/quadpack
Reference: R.
- Integration2() - Constructor for class gov.nih.mipav.model.algorithms.Integration2
-
Constructor for running self tests.
- Integration2(double, double, double, int, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2
-
Constructor for Integration2 Used with routine = DQAWCE.
- Integration2(double, double, int, double[], double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2
-
Constructor for Integration Used with routine = DQAGPE.
- Integration2(double, double, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.Integration2
-
Constructor for Integration Used with routine = DQNG.
- Integration2(double, double, int, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2
-
Constructor for Integration Used with routine = DQAGSE.
- Integration2(double, double, int, double, double, int, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2
-
This constructor must be used with routine DQAWSE.
- Integration2(double, double, int, double, int, double, double, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2
-
Constructor must be used with routine dqawoe
- Integration2(double, double, int, int, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2
-
Constructor for Integration Used with routine = DQAGE.
- Integration2(double, int, double, int, double, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2
-
Constructor must be used with routine dqawfe
- Integration2(double, int, int, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2
-
Constructor used with routine = DQAGIE.
- Integration2All() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSM2.Integration2All
-
- Integration2EP - Class in gov.nih.mipav.model.algorithms
-
This is a port of FORTRAN numerical integration routines in QUADPACK found at http://www.netlib.org/quadpack
Reference: R.
- Integration2EP() - Constructor for class gov.nih.mipav.model.algorithms.Integration2EP
-
Constructor for running self tests.
- Integration2EP(DoubleDouble, int, int, DoubleDouble, DoubleDouble, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2EP
-
Constructor used with routine = DQAGIE.
- Integration2EP(DoubleDouble, int, DoubleDouble, int, DoubleDouble, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2EP
-
Constructor must be used with routine dqawfe
- Integration2EP(DoubleDouble, DoubleDouble, int, int, DoubleDouble, DoubleDouble, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2EP
-
Constructor for Integration Used with routine = DQAGE.
- Integration2EP(DoubleDouble, DoubleDouble, int, DoubleDouble[], DoubleDouble, DoubleDouble, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2EP
-
Constructor for Integration Used with routine = DQAGPE.
- Integration2EP(DoubleDouble, DoubleDouble, int, DoubleDouble, int, DoubleDouble, DoubleDouble, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2EP
-
Constructor must be used with routine dqawoe
- Integration2EP(DoubleDouble, DoubleDouble, int, DoubleDouble, DoubleDouble) - Constructor for class gov.nih.mipav.model.algorithms.Integration2EP
-
Constructor for Integration Used with routine = DQNG.
- Integration2EP(DoubleDouble, DoubleDouble, int, DoubleDouble, DoubleDouble, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2EP
-
Constructor for Integration Used with routine = DQAGSE.
- Integration2EP(DoubleDouble, DoubleDouble, int, DoubleDouble, DoubleDouble, int, DoubleDouble, DoubleDouble, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2EP
-
This constructor must be used with routine DQAWSE.
- Integration2EP(DoubleDouble, DoubleDouble, DoubleDouble, int, DoubleDouble, DoubleDouble, int) - Constructor for class gov.nih.mipav.model.algorithms.Integration2EP
-
Constructor for Integration2 Used with routine = DQAWCE.
- Integration2EPAll() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSM2.Integration2EPAll
-
- integrationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- integrity - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
736 GE Image Integrity.
- inTempMax - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- inTempMax - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- inTempMin - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- inTempMin - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- intensity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.distanceIntensityItem
-
DOCUMENT ME!
- intensity - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- intensity - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex.DistanceIntensity
-
- intensity - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- intensity - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- intensity - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
The intensity of the light, typically in [0,1].
- INTENSITY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
chooses the intensity magnitude
- INTENSITY - Static variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- intensityAverage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
If true indicates that the result image is an average of the three channels.
- intensityAverage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
If true indicates that the result image is an average of the three channels.
- intensityAverage - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- intensityB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- intensityB - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- intensityB - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- intensityCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Checkbox for displaying intensity values.
- intensityDialog - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- intensityDouble - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
DOCUMENT ME!
- intensityDropper - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Used in paint to indicate intensity painted into the image.
- intensityField - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- intensityFraction - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
units of intensity range; it is multiplied by the intensity range to create intensitySigma
- intensityFraction - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
- intensityG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- intensityG - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- intensityG - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- intensityGaussianDenom - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- intensityGaussianDenom - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- intensityGaussianDenom - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- intensityLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
- intensityLabel - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
If true then the x,y location and pixel/voxel intensity should be displayed (x,y: intensity).
- intensityLabelBackgroundButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- intensityLabelBackgroundColor - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- intensityLabelColor - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- intensityLabelColorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- intensityLevelRB - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- intensityLockVector - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
ref to IntensityLockVector
- intensityLockVector - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- intensityPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
- intensityR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- intensityR - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- intensityR - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- intensitySlider - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Intensity slider.
- intensitySlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Intensity slider.
- intensitySpinner - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Spinner component for the paint intensity.
- intensitySpinner - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The spinner for indicating the intensity to fill the image with when commiting paint in an image.
- intensityStep - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The amount to change the value in the intensity spinner by when the user clicks it.
- intensityStringValue - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
DOCUMENT ME!
- intensityText - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
- intensityTF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- intensityTF - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Text field containing the seed value intensity.
- intensityThreshold - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
< Number of bins.
- intensityValue - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The value of seed points to use.
- intensityValue - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The current value chosen in the intensity spinner.
- intent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Intent value in the attributes.
- intentCode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
The intent_code field can be used to indicate that the voxel data has some particular meaning.
- intentName - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
The intent_name field provides space for a 15 character (plus 0 byte) name string for the type of data stored.
- intentName - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
The intent_name field provides space for a 15 character (plus 0 byte)
name string for the type of data stored.
- intentP1 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
If present, first auxiliary parameter used with intentCode
- intentP2 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
If present, second auxiliary parameter used with intentCode
- intentP3 - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
If present, third auxiliary parameter used with intentCode
- IntentValues - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
- INTER - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- interchangeXY - Variable in class gov.nih.mipav.model.file.FileSVS
-
- interchangeXY - Variable in class gov.nih.mipav.model.file.FileTiff
-
- INTERFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Interfile file format used in Nuclear Medicine. extension: .hdr
- INTERFILE_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Multiple files of type INTERFILE
- interfileDataType - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- interfileFile - Variable in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Radio button to indicate that an Interfile img file should be written out.
- interImageDelay - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- interImageDelay - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- InteriorFaceRootCount(OctNode, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- interiorFill - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- InterleavedComplexFormat - gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDataFormat
-
- intermediateBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Reference to intermediate buffer.
- internal_parameters_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverStateUpdatingCallback
-
- InternalAddParameterBlock(double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- internalClassLoader - Variable in class gov.nih.mipav.plugins.JarClassLoader
-
- internalDialog - Variable in class gov.nih.mipav.view.dialogs.BlankJistHook
-
- internalDialog - Variable in class gov.nih.mipav.view.dialogs.MTryJistHook
-
- internalNodes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- InternalRemoveResidualBlock(CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- internalScaling - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
If true, the columns of the Jacobian are scaled to have unit length.
- internalScaling - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
If true, the columns of the Jacobian are scaled to have unit length.
- internalUse1 - Variable in class gov.nih.mipav.model.file.FileLSM
-
- interp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
The interpolation method to use when registering the original image against the flipped image.
- interp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- interp - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- interp - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Interpolation method.
- interp - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Interpolation method.
- interp - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Interpolation method used in transformations.
- interp - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Interpolation method.
- interp - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Interpolation method used in transformations.
- interp - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Interpolation method.
- interp - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Interpolation method used in transformations.
- interp - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Interpolation method.
- interp - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Interpolation method used in transformations.
- interp - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Interpolation method.
- interp - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- interp - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
DOCUMENT ME!
- interp - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- interp - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- interp - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- interp - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- interp - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- interp - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Interpolation method
- interp - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- interp_type() - Constructor for enum gov.nih.mipav.model.algorithms.SIFT3D.interp_type
-
- interp1(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- interp2 - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- interp2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Interpolation method used in output.
- interp2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Interpolation method used in output.
- interp2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Interpolation method used in output.
- interp2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Interpolation method used in output.
- interp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- interp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- interp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- interp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- interp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- interp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- interpCheckBox - Variable in class gov.nih.mipav.view.JPanelHistogram
-
turns interpolation on/off
- interpCheckBoxA - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- interpCheckBoxB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- interpFOVgroup - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Button group for interpolation type, contant FOV or start, end matching.
- interpMode - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Interpolation mode (Linear, Cubic Bspline, Cubic Convolution).
- interpMode - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- interpMode - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
Interpolation mode for image display
- interpMode - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Creates histogram with ellipses around most prominent clusters.
- interpMode - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- interpolate(double) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ColorMap
-
linearly interpolates colors for the specified location of the unit interval.
- interpolate(double, double[], double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Performs a bilinear interpolation on points.
- interpolate(double, double[], double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Performs a bilinear interpolation on points.
- interpolate(double, double[], double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Performs a bilinear interpolation on points.
- interpolate(double, double[], double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Performs a bilinear interpolation on points.
- interpolate(double, double[], double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Performs a bilinear interpolation on points.
- interpolate(double, double[], double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Performs a bilinear interpolation on points.
- interpolate(double, double[], double[][], boolean, int) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
- interpolate(double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline.ColorInterpolation
-
- interpolate(double, double, double) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- interpolate(double, double, double, double[], double[][][][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Performs a trilinear interpolation on points.
- interpolate(double, double, double, double[], double[][][][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Performs a trilinear interpolation on points.
- interpolate(double, double, double, double[], double[][][][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Performs a trilinear interpolation on points.
- interpolate(double, double, double, double[], double[][][][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Performs a trilinear interpolation on points.
- interpolate(double, double, double, double[], double[][][][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Performs a trilinear interpolation on points.
- interpolate(double, double, double, double[], double[][][][], boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Performs a trilinear interpolation on points.
- interpolate(String) - Method in class gov.nih.mipav.model.scripting.VariableTable
-
Interpolates and returns the value of a given variable.
- interpolate(Point3f, byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Trilinear interpolation of the image to produce image values at points P that are not at the integer voxel
locations.
- Interpolate(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
When set to true, the m_kPatientSlice.showDiagonal function does
tri-linear interpolation of the ModelImage data:
- Interpolate(double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- Interpolate(double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingSquares
-
- Interpolate(float, float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- INTERPOLATE_A - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Image interpolation only done for image A
- INTERPOLATE_B - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Image interpolation only done for image B
- INTERPOLATE_BOTH - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Image interpolation only done for both images A and B
- interpolate2D(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline.ColorInterpolation
-
- interpolateARGB(double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Returns a bilinearly interpolated ARGB value of the image for the
specified normalized position (x and y within [0,1]).
- interpolateBSpline(double[][][], double, double, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
Do the B-Spline Interpolation
- interpolateBSpline2D(double[][][], double, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- interpolateColor(int, int, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ColorOperations
-
Linearly interpolates between the two specified colors.
c = c1*(1-m) + c2*m
- interpolateColor(int, int, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Linearly interpolates between the two specified colors.
c = c1*(1-m) + c2*m
- interpolateColor(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
Trilinear interpolation of the image to produce image values at points P that are not at the integer voxel
locations.
- interpolateColors(int, int, int, int, double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
- interpolateContour(VOIContour) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Interpolates the input contour so that the spacing between contour points is <= 1 voxel.
- InterpolateDisplay(String, Object) - Constructor for enum gov.nih.mipav.view.Preferences.InterpolateDisplay
-
- interpolateDisplayChoices - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Available options for image interpolation
- interpolateImage() - Method in class gov.nih.mipav.view.JPanelHistogram
-
- interpolateLattice(boolean, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Entry point in the lattice-based straightening algorithm.
- interpolateShapesButton - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- interpolateToValue(double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Returns m of the equation: iso = lower*(1-m) + upper*m
which is: m = (iso-lower)/(upper-lower)
- interpolateVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- InterpolatingPolynomialMinimizingStepSize(CeresSolver.LineSearchInterpolationType, CeresSolver.FunctionSample, CeresSolver.FunctionSample, CeresSolver.FunctionSample, double, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearch
-
- interpolation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- interpolation - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- interpolation - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- interpolation - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- Interpolation(float[], int, int, int, double, double, double, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- Interpolation(float[], int, int, int, double, double, double, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- Interpolation(ModelImage, int, int, int, double, double, double, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- interpolation_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
- InterpolationType() - Constructor for class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities.InterpolationType
-
- interpPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- interpretLAX(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
reads the given line of a LAX file to search for the initial heap size and maximum heap size Strings.
- interpretXML(String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
reads the given line of a plist file to search for the initial heap size and maximum heap size Strings.
- interpT2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- interpType - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- interpType - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Method of interpolation
- interpTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- interrogateAAssociateAC() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Decompose association ack.
- interrogateAAssociateRQ() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Decompose association request and send proper response.
- interScaleSaliency - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- interScaleSaliencyText - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- intersect - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
GLSL support function definition for the triangle widgets:
- intersect(delaunay.Halfedge, delaunay.Halfedge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- intersect(Box3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- IntersectedWith(CVisShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- IntersectedWith(RECT) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- intersection - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Entry
-
- intersectionButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- intersectionPts - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
intersectioin points coordinate.
- intersects(Rectangle2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
Always return false.
- intersects(Rectangle2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- intersects(Rectangle2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- intersects(Rectangle2D) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Renderable
-
- intersects(Rectangle2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- intersects(Rectangle2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- intersects(Vector3f, Vector3f, Vector3f, Vector3f, Vector3f) - Static method in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- intersectsBox(Vector3f, Point3f, Point3f, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Clip the current ray against the oriented bounding box of the 3D image.
- interval - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- interval - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- interval - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- interval_x - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- interval_y - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- interval_z - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- intervalsD - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- IntFilterInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileSVS.IntFilterInputStream
-
- IntFilterInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileTiff.IntFilterInputStream
-
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.erfcModel
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.erfcModel2
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.IntTorquato95ModelMean
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.IntTorquato95ModelMean2
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModel
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModel2
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModelBessel
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModelI0NuclearArea
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.Integration2All
-
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.IntModel
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMean
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMean2
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMeanSquared
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMeanSquared2
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquato95ModelMean
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquato95ModelMean2
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquatoModelMean
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquatoModelMean2
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
DOCUMENT ME!
- intFunc(double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping.qaws
-
- intFunc(DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.Integration2EPAll
-
- intFunc(DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
DOCUMENT ME!
- intFuncTest(double) - Method in class gov.nih.mipav.model.algorithms.Integration2
-
- intFuncTest(DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.Integration2EP
-
- intialThreeParameterApproximation(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- IntModel() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModel
-
Creates a new IntModel object.
- IntModel(double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSM2.IntModel
-
Creates a new IntModel object.
- IntModel2(double, double, int, int, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModel2
-
Creates a new IntModel2 object.
- IntModelBessel(double, double, int, int, double, double, int, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModelBessel
-
Creates a new IntModel2 object.
- IntModelI0NuclearArea(double, double, int, int, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModelI0NuclearArea
-
Creates a new IntModel2 object.
- IntModelMean(double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMean
-
Creates a new IntModelMean object.
- IntModelMean2(double, int, int, double, double, int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMean2
-
- IntModelMeanSquared(double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMeanSquared
-
Creates a new IntModelMeanSquared object.
- IntModelMeanSquared2(double, int, int, double, double, int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntModelMeanSquared2
-
- intObject(int, short, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D.intObject
-
Initializes object with supplied parameters.
- intObject(int, short, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D.intObject
-
Initializes object with supplied parameters.
- intObject(int, short, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D.intObject
-
Creates a new intObject object.
- IntPairToLong(int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- intr_del - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
402 Interimage/interloc delay (uSec).
- INTRAORAL_RADIOGRAPH - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality intraoral radiography.
- INTRAORAL_RADIOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality intraoral radiography.
- intrp() - Method in class gov.nih.mipav.model.algorithms.ODE
-
- intrp() - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- intTemp - Variable in class gov.nih.mipav.model.structures.IntVector
-
The temporary array used when increasing the storage space of the vector.
- intToBytes(int, boolean, byte[]) - Static method in class gov.nih.mipav.model.file.FileBase
-
converts from int to bytes
- IntToPtr(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- IntTorquato95ModelMean(double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.IntTorquato95ModelMean
-
Creates a new IntTorquato95ModelMean object.
- IntTorquato95ModelMean(double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquato95ModelMean
-
Creates a new IntTorquato95ModelMean object.
- IntTorquato95ModelMean2(double, int, int, double, double, int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.IntTorquato95ModelMean2
-
- IntTorquato95ModelMean2(double, int, int, double, double, int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquato95ModelMean2
-
- IntTorquatoModelMean(double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquatoModelMean
-
Creates a new IntTorquatoModelMean object.
- IntTorquatoModelMean2(double, int, int, double, double, int, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquatoModelMean2
-
- intValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Returns the value of the specified number as an int.
- intValue() - Method in class gov.nih.mipav.util.DoubleDouble
-
Converts this value to the nearest integer.
- intVect - Variable in class gov.nih.mipav.model.structures.HQueue
-
DOCUMENT ME!
- IntVector - Class in gov.nih.mipav.model.structures
-
Integer Vector is very similar to the Vector class except that it is designed specifically to store integers.
- IntVector() - Constructor for class gov.nih.mipav.model.structures.IntVector
-
Create an list or stack of ints.
- IntVector() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface.IntVector
-
- IntVector(int) - Constructor for class gov.nih.mipav.model.structures.IntVector
-
Create an list or stack of ints.
- IntVector(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface.IntVector
-
- IntVector(int, int) - Constructor for class gov.nih.mipav.model.structures.IntVector
-
Create an list or stack of ints.
- iNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- iNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- iNumLights - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
12 possible intersection points.
- inUse - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- inUse - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- inv(libdt.CovMatrix) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- inv_digamma(double, int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- inv_posdef(double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- inv_triu(double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- INVALID - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory.DisposalMethod
-
- INVALID_INPUT - Static variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- INVALID_MNEMONIC - Static variable in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- InvalidateArray(int, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- InvalidateArray(int, double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- InvalidateArray(int, int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- InvalidateArray(int, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- InvalidateEvaluation(double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- InvalidateEvaluation(double[], double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- InvalidContextException() - Constructor for exception gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.InvalidContextException
-
- InvalidInputDataException - Exception in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- InvalidInputDataException(String, File, int) - Constructor for exception gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.InvalidInputDataException
-
- InvalidInputDataException(String, File, int, NumberFormatException) - Constructor for exception gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.InvalidInputDataException
-
- InvalidInputDataException(String, String, int) - Constructor for exception gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.InvalidInputDataException
-
- InvalidInputDataException(String, String, int, NumberFormatException) - Constructor for exception gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.InvalidInputDataException
-
- InvalidWeight() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- invariantCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- invariantCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- invariantDir - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true spatially invariant direction calculated.
- invariantDir - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true spatially invariant direction calculated.
- invariantDir - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- invariantDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- invariantMoment1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- invariantMoment1Description - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- invariantMoment2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- invariantMoment2Description - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- invariantMoment3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- invariantMoment3Description - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- invariantMoment4 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- invariantMoment4Description - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- invariantMoment5 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- invariantMoment5Description - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- invariantMoment6 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- invariantMoment6Description - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- invariantMoment7 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- invariantMoment7Description - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- invariantMoments(int, int) - Method in class gov.nih.mipav.model.structures.VOIContour
-
- invbb - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- invDecimatedFreqs(double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- inverse() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
Inverse the matrix this.m = inverse(m);
- Inverse - gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDirection
-
- Inverse() - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Matrix inversion that replaces this objects matrix with an inverted
matrix.
- Inverse() - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Matrix inversion that replaces this objects matrix with an inverted
matrix.
- INVERSE - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- INVERSE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
inverse FFT
- INVERSE - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Inverse FFT
- INVERSE - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Inverse FFT
- INVERSE - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- INVERSE - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- INVERSE - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
FORWARD and INVERSE are 2 possible transformDir values
- INVERSE - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
Inverse FFT
- INVERSE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- INVERSE - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
FFT will run in inverse direction, producing spatial domain image
- INVERSE_CDF - Static variable in class gov.nih.mipav.model.algorithms.Gamma
-
- inverse_DCT - Variable in class gov.nih.mipav.model.file.libjpeg.my_idct_controller
-
- inverse_filter_bank(PyWavelets.DiscreteWavelet) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- inverse_hessian_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BFGS
-
- INVERSE_POINTS - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- inverse_weibull(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- inverse1D(double[]) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- inverse1D(int, double[][]) - Method in class gov.nih.mipav.model.algorithms.SlantTransform
-
- inverse2D(int, int, double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- inverseCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- inverseCumulativeDistributionFunction() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
- inverseDCT(int[]) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- inverseDCT(int[]) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- inverseDCT(int[]) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- inverseDCT(int[]) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- inverseDiagonal(ModelImage, int, int, Vector3f[], Vector3f) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- inverseDicomArray - Variable in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- inverseDicomArray - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FilePolyline_WM
-
- inverseDicomArray - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
inverse dicom matrix array.
- inverseDicomMatrix - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
inverset dicom matrix.
- inverseFFT - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- inverseImage - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- inverseImage - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- inverseImage - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- inverseImage - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- inverseImage - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- inverseImage - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- inverseImage - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- inverseImage - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform2
-
- inverseImage - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- inverseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- inverseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- inverseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- inverseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- inverseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- inverseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- InverseLaplace - Class in gov.nih.mipav.model.algorithms
-
This is a port of the MATLAB INVLAP.M, a numerical inverse Laplace transform using the de Hoog algorithm, copyright
by Karl Hollenbeck on November 22, 1996, Department of Hydrodynamics and Water Resources, Technical University of
Denmark, DK-2800 Lyngby email:karl@isv16.isva.dtu.dk Downloaded from MATLAB central in ECP1 Software.zip.
- InverseLaplace(double[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplace
-
Constructor for InverseLaplace.
- InverseLaplace(double[], double, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplace
-
Constructor for InverseLaplace.
- InverseLaplace2 - Class in gov.nih.mipav.model.algorithms
-
This is a port of the numerical inverse Laplace transform found as the FORTRAN implementation of Algorithm 619 from
the collected algorithms from the ACM found at http://www.netlib.org/toms/619.
- InverseLaplace2(double[], double, double, double, double[], double[], int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplace2
-
Creates a new InverseLaplace2 object.
- InverseLaplaceqd - Class in gov.nih.mipav.model.algorithms
-
This is a port of niltqd.m, a fast numerical inverse Laplace transform based on FFT and quotient-difference algorithm
by Lubomir Brancik, 2001, Brno University of Technology.
- InverseLaplaceqd(int, double) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
Constructor for InverseLaplaceqd.
- InverseLaplaceqd(int, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
Constructor for InverseLaplaceqd.
- InverseLaplaceTest - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest() - Constructor for class gov.nih.mipav.model.algorithms.InverseLaplaceTest
-
- InverseLaplaceTest.FitdeHoog1 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog10 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog11 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog12 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog13 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog14 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog15 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog16 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog2 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog3 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog4 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog5 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog6 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog7 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog8 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitdeHoog9 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens1 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens10 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens11 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens12 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens13 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens14 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens15 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens16 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens2 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens3 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens4 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens5 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens6 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens7 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens8 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.FitPiessens9 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd1 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd10 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd11 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd12 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd13 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd14 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd15 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd16 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd2 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd3 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd4 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd5 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd6 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd7 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd8 - Class in gov.nih.mipav.model.algorithms
-
- InverseLaplaceTest.Fitqd9 - Class in gov.nih.mipav.model.algorithms
-
- inverseOptionBox - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
choose inverse or no inverse threshold.
- inverseOrder1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate inverse difference moment of order 1 Sum over i,j of Probability(i,j)/(1 + abs(i-j)).
- inverseOrder1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate inverse difference moment of order 1 Sum over i,j of Probability(i,j)/(1 + abs(i-j)).
- inverseOrder1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- inverseOrder1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- inverseOrder1CheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- inverseOrder1CheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- inverseThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
flags for destination, threshold, inverse, and color image
- inverseThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
boolean for inverse threshold
- inverseThresholdButton - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Toggle buttons for transfer, threshold and threshold inverse.
- inverseThresholdCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
checkbox for inverse threshold
- inversionDelay - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- inversionDelay - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- inversionDelayIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- inversionDelayPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- inversionGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- inversionTime - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
The inversion time of an MR scan.
- inversionType - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- InversionType(String) - Constructor for enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.InversionType
-
- invert - Variable in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
DOCUMENT ME!
- invert - Variable in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
DOCUMENT ME!
- invert - Variable in class gov.nih.mipav.model.file.FileSVS.RLEBitInputStream
-
- invert - Variable in class gov.nih.mipav.model.file.FileTiff.RLEBitInputStream
-
- invert - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- invert(double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- Invert() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- Invert() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- INVERT_INPUT - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
Set this flag if you want to invert the inputs.
- invertAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- invertAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- invertAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- invertCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- Inverted() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- invertedBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- invertedLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- invertFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- invertFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- invertFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- invertFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Haralick invert filter.
- invertFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- invertFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- invertImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- invertImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- invertImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- inverTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
198 pulse inversion time (usec).
- invertLUT() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Inverts the LUT using the values stored in the band arrays and not the transfer functions.
- InvertLUT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
- invertMesh() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Invert the mesh z-coord, reorder the triangles, and recompute the
normals:
- invertNormals - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Smooth button.
- invertNormals(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Decimate the selected surfaces.
- InvertPSDMatrix(boolean, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- invertRX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
used to invert the settings of the mouse
- invertRX() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- invertRY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
used to invert the settings of the mouse
- invertRY() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- invertRZ - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
used to invert the settings of the mouse
- invertRZ() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- invertSculpt() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
invertSculpt: called by ViewJFrameVolumeView when the user presses the "Invert Sculpt Region" button, inverting
the sculpt region.
- invertSculpt() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Inverts the sculpt image.
- invertSculpt() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Invert the sculpt region.
- invertSculpt(int, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Invert the sculpt image at the position
- invertSculptRegion() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
clearwSculptRegion: called when the "Clear Outline" Button is pressed.
- invertSculptRegion() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
clearwSculptRegion: called when the "Clear Outline" Button is pressed.
- invertSelections() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Method to invert the selection of slices in an image.
- invertSelections(boolean) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Method to invert the selection of slices in an image.
- invertT1toR1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- invertT1toR1 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- invertT2toR2 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- invertTX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
used to invert the settings of the mouse
- invertTX() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- invertTY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
used to invert the settings of the mouse
- invertTY() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- invertTZ - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
used to invert the settings of the mouse
- invertTZ() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- invertX - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- invertXStr - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Internal trakcVis use
- invertY - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- invertY - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- invertYStr - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Internal trakcVis use
- invertZ - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- invertZStr - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Internal trakcVis use
- invest - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- Investigator(String) - Constructor for class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Creates a new Investigator with given name.
- investigatorEditorHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
- investigatorModel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
model associated with investigator information.
- investigators - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
Investigators (up to 3).
- investigatorsStr - Static variable in class gov.nih.mipav.model.file.FileImageXML
-
array of strings representing the tags under in the xml schema.
- investigatorTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
investigator information table.
- investigatorTypeHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
- invgb - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- invgg - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- INVJCO(double[][], double[], double, double[], double[], double[], double, double[], double[], double[], double, double, double[], double, int, int, double, double, double, double, double, int[], boolean, double[], int, double, double, int, int, double[], double[], double[][], double, double, double[], double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- invlen(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
Finds the point at some percentage along the curve using simple midpoint root finding algorithm.
- INVLEN_MAXITER - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
DOCUMENT ME!
- INVLEN_TOLERANCE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
DOCUMENT ME!
- invlenNewton(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
Finds the point at some percentage along the curve using Newtons method of root finding.
- invnormcdf(double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- invokeClipping() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Enable the six clipping planes at a time.
- invokeClipping() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Enable the six clipping planes at a time.
- invokeClippingPlanes() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Invokes all the 6 clipping when 6 clipping checkbox is checked.
- invokeClippingPlanes() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Invokes all the 6 clipping when 6 clipping checkbox is checked.
- invokeDisplayFunction() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- invokeMeasure() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- invokeMeasure() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- invokeSaveImgAs(int) - Method in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
Invoking the ViewJFrameAnimate saveImageAs action.
- inVolExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- inVolume - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- inVolume3d - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- invrb - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- invrespfn_canon - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- invrespfn_default - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- invrespfn_linear - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- invrg - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- invrr - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- inWindow(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- io - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- ioBuffer - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Buffer used in sending DICOM image.
- ioff - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- iopt - Variable in class gov.nih.mipav.model.algorithms.curfit
-
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
- iOptions - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
300 Imaging options.
- iord - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
The first k elements of iord are pointers to the error estimates over the subintervals, such that elist[iord[0]],
..., elist[iord[k-1]] form a decreasing sequence, with k = last if last <= (limit/2 + 2) , and k = limit + 1 -
last otheriwse.
- iord - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
The first k elements of iord are pointers to the error estimates over the subintervals, such that elist[iord[0]],
..., elist[iord[k-1]] form a decreasing sequence, with k = last if last <= (limit/2 + 2) , and k = limit + 1 -
last otheriwse.
- ip - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Specifies how many array positions are desired (usually 10 is sufficient).
- ip - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- ip(double[][][][][], double[][][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ip(double[][][][], double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ip(double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ip(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- iparms - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- iparms - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- iparms - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
- iparms - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
Found in routine xlaenv
- iparms - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations
-
- iparms - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- iparms - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations3
-
- iparms - Variable in class gov.nih.mipav.model.structures.jama.SVD
-
- IPD - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- ipField - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- IPIVT - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ipLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- ipmpar(int) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- IPOLY - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- IPOW - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- ippft(double[][][], int[], double[], int[], double[][][], double[][][], double, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ippft3(double[][][][], int[], double[], int[], double[][][][][], double, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ippft3_ref(double[][][][], int[], double[], int[], double[][][][][], double, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ippftconsts(double[][][], double[][][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ippftd(double[][][], double[][][], double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ippftprecomp(int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- IPTC - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- IPTC - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- IptcDescriptor(MetadataExtractor.IptcDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.IptcDescriptor
-
- IptcDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- IptcDirectoryTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.IptcDirectoryTest
-
- IptcMarkerByte - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcReader
-
- IptcReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.IptcReader
-
- IptcReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.IptcReaderTest
-
- IPToP(Point3, Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- ipvt - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
ipvt is an integer OUTPUT array of length n.
- IQUCA - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- IQUPH - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- iRadon(double[][][], int[], double[], int[], double[][][], double[][][], double, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- iradon3(double[][][][], int[], double[], int[], double[][][][], double, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- irank - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
Variables used for restart information.
- irank - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
Variables used for restart information.
- irc - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- ired - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- iResols - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
The voxel resolutions of the input image.
- iResols - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
The voxel resolutions of the input image.
- iResols - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
The voxel resolutions of the input image.
- iResols - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
The voxel resolutions of the input image.
- irfc(Vector<Integer>, Vector<Short>, Vector<Integer>, Vector<Integer>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
- irfft(double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- IRI - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- irspgrCombo - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- irspgrData - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrFA - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- irspgrFA - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrFAField - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrField - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrGeneralPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrImageIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- irspgrImageIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrKy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- irspgrKy - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrNum - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrSlices - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1.CalculteT1UsingTreT1HIFIInner
-
- irspgrTI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- irspgrTI - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrTr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- irspgrTr - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrTR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- irspgrTR - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- irspgrTRField - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- is - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- is - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftKeypoint
-
< Integer unnormalized y coordinate.
- is(String) - Static method in class gov.nih.mipav.view.Preferences
-
Gets the boolean state of the property, where in the preferences file the "yes", "on",
"true" all return true, but anything else (or non-existent property) returns
false.
- IS - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- is_baseline - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- is_boundary(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- is_boundary(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- is_boundary(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- is_computed_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- is_constant_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- is_constrained - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- is_constrained - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- is_decompressor - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_codec_private_t
-
- is_decompressor - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_common_struct
-
- is_decompressor - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- is_discrete_wavelet(PyWavelets.WAVELET_NAME) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- is_dummy_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_decomp_master
-
- is_free(int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- is_free(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- is_lower_bound(int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- is_lower_bound(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- is_not_silent_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- is_ordered_variable - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- is_padded - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- is_positive_definite_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BFGS
-
- is_positive_definite_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LBFGS
-
- is_raw - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlPgmImage
-
< pixel maximum value (<= 2^16-1).
- is_silent - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
- is_silent - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- is_toggle - Variable in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- is_upper_bound(int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- is_upper_bound(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- is_valid_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- is_valid_geometry(Covdet.VlScaleSpaceGeometry) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- is2d - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
Images that are solely 2D images set this to true; images with other dimensionality are false.
- is2D - Variable in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- is2D - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- is2DImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
- is3DImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
- is3DKernel() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- is3DSelectionEnabled() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- is3DSelectionEnabled() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- is3DSelectionEnabled() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- is4D - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
- is4DImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
- is6PlaneClipping - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Flag to indicate 6 plane clipping is active.
- is6PlaneClipping - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean flag to indicate if the 6 plane clipping mode is active.
- is6PlaneClipping() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Indicate whether the 6 clipping plane is active or not.
- isAAinFallbackEnabled() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
Return true when anti-aliasing is enabled for fallback (AWT) rendering (default=false).
- IsAbs() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Returns true if the shape is in absolute coordinates.
- isAcpc - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
True if we have the data to compute orig <-> acpc.
- isAcpc() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Returns true if we have data to compute orig <-> acpc.
- isAcpc(boolean) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets isACPC flag.
- isActionComplete() - Method in interface gov.nih.mipav.view.dialogs.ActionDiscovery
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.BlankJistHook
-
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Returns whether the action has successfully completed its execution.
- isActionComplete() - Method in class gov.nih.mipav.view.dialogs.MTryJistHook
-
- isActive() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that tells if the VOI is active.
- isActive() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Accessor to flag that indicates if an VOI is active.
- isActive() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Returns true if the VOIManager is currently drawing a VOI, or if the defaultPointer button in the
VOIManagerInterface is selected.
- isActive() - Method in class gov.nih.mipav.view.Rubberband
-
Returns a boolean indicating activity.
- isActiveImage - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
- isActiveImage - Variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
DOCUMENT ME!
- isActivePoint - Variable in class gov.nih.mipav.model.structures.VOIPoint
-
True only for the active point of a polyline_slice structure (display's coordinates)
- isActivePoint() - Method in class gov.nih.mipav.model.structures.VOIPoint
-
True if this is the active point in the PolyLineSlice object.
- isAJavaContainer(File) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
Whether file qualifies as being a Java container (this is anything that may include or is a class file).
- isAlive() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Checks to see if the thread controlling the receivers execution is alive.
- isAllActive() - Method in class gov.nih.mipav.model.structures.VOI
-
Returns true iff all contours in this VOI are active.
- isAlpha(byte) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Determines if a byte is an alpha character.
- IsAmbiguous(double[], double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingSquares
-
- IsAmbiguous(double[], double, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- IsAmbiguous(float[], float, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- IsAmbiguous(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- isAnalyzeOrSPM(String) - Static method in class gov.nih.mipav.model.file.FileAnalyze
-
Determines whether this file is ANALYZE file or not based on three fields of the header file: sizeof_hdr, extent
and regular.
- isAnalyzeOrSPM(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Tests if the unknown file is of type Analyze.
- isAncillary() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- isAnimating() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- isAnnotateEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
is annotation mode is enabled or not.
- isAnnotationEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- isAnyCategoryEnabled() - Method in class gov.nih.mipav.view.Preferences.LogConfig
-
- isAnyModelLightEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Determine if any "model" relative lights are enabled.
- isAnyWorldLightEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Determine if any "world" positioned lights are enabled.
- isAppend - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- isAppFrameVisible - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Whether the mipav GUI should be shown; set by the -hide command line option.
- isAppFrameVisible() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to check whether the application frame visible or not.
- isArbitraryClipping(Shape3D) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Called by the JDialogSurface to find the current mouse event is from the arbitrary frame box moving or not.
- isArbitraryRotation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Flag indicates that arbitrary clipping plane is triggered or not.
- IsArrayValid(int, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- IsArrayValid(int, double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- IsArrayValid(int, int, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- IsArrayValid(int, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- isAVI - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
AVI option.
- isAVI() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- isAVIRecording() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Returns whether the AVI is recording.
- isB() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- IsB(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- isBackground - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
toggle between background and text color changing.
- isBGImageShowing - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- isBGImageShowing() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- isBigendian() - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- isBigEndian() - Method in class gov.nih.mipav.model.file.FileBase
-
Return true if the byte order is big endian.
- isBlue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- isBlue() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- isBlueProcessingRequested() - Method in class gov.nih.mipav.view.components.JPanelColorChannels
-
Returns whether the algorithm should process the input image's blue channel.
- isBmatFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- IsBorder(Face, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
Return a boolean that indicate if the j-th edge of the face is a border.
- isBorderOn() - Method in class gov.nih.mipav.view.BorderedButton
-
DOCUMENT ME!
- isBoundary(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
An image element is a boundary point when it is on the boundary
of the current region.
- isBoundary(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
An image element is a boundary point when it is on the boundary
of the current region.
- isBoundary(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
An image element is a boundary point when it is on the boundary
of the current region.
- IsBoundaryEdge(OctNode, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- IsBoundaryEdge(OctNode, int, int, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- IsBoundaryFace(OctNode, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- isBoundaryPoint(BitSet, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- IsBoundsConstrained() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- isBrainsurfaceFlattenerEnable - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Indicate if the brainsurface flattener render is enabled from the resample dialog or not.
- isBrainSurfaceFlattenerPickEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Returns the pick enabled state of the brainsurfaceFlattener.
- isBufferedImageOfType(Image, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
-
- isButton(Component) - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Return true if the component is a digital/absolute button, and
its identifier name ends with "Button" (i.e. the
identifier class is Component.Identifier.Button).
- isButtonPressed() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseRotateExt
-
Return whether the button press state is set which can be used as an indication of whether or not the associated
TransformGroup instance is being interactively updated.
- isButtonPressed(int) - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- isBW10 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isBW10 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isBW12 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isBW12 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isBW14 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isBW14 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isBW2 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isBW2 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isBW24 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isBW24 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isBW4 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isBW4 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isBW6 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isBW6 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isByContour() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
Method to retrieve the selected value for contour-only calculation.
- isBySlice() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
Method to retrieve the selected value for slice-only calculation.
- isByVOI() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
Method to retrieve the selected value for VOI-only calculation.
- isBz2zip - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
- isBz2zip() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
- isCalculateB0() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isCalculateM0() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isCalculateT2() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isCalibrations - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- isCancelled() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Accessor that returns whether or not the dialog has been cancelled.
- isCancelled() - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Accessor that returns whether or not the dialog has been cancelled.
- isCategoryAndLevelEnabled(int, Preferences.LogLevel) - Method in class gov.nih.mipav.view.Preferences.LogConfig
-
- isCategoryEnabled(int) - Method in class gov.nih.mipav.view.Preferences.LogConfig
-
- isCellEditable(int, int) - Method in class gov.nih.mipav.model.structures.SortingTableModel
-
DOCUMENT ME!
- isCellEditable(int, int) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- isCellEditable(int, int) - Method in class gov.nih.mipav.model.structures.UneditableTableModel
-
Called by table renderer.
- isCellEditable(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.DicomTableModel
-
- isCellEditable(int, int) - Method in class gov.nih.mipav.view.ViewTableModel
-
Returns false for all cells, so none can be edited.
- isCellEditable(EventObject) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- isCentered - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
whether each axis is centered
- isChanging - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
- isChanging() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
- isCheckerboardAnimate() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- isCheckerboardApplied() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- isCheckerboarded() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Tells whether or not the image is being displayed in checkerboard mode.
- isCheshire(String, String) - Static method in class gov.nih.mipav.model.file.FileCheshire
-
Method to test to determine if the image format is Cheshire, so appropriate read method may be called.
- isChildProcess - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
False if the DecoderRAW instance is self-contained process, false if
thrown by another process (i.e by a GUI)
- isChildProcess - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
False if the DecoderRAW instance is self-contained process, false if
thrown by another process (i.e by a GUI)
- isCIELAB - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isCIELAB - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isClip() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- isClipAE() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- isClipArbiPicked - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping plane frame being picked or not.
- isClipArbiPicked - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean flag to indicate if the arbitary clipping mode is active.
- isClipArbiPicked() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Return the flag for the arbitrary clipping plane frame being picked or not.
- isClipOBB() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- isClipSphere() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- isClockRotation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouse
-
flag indicate if the rotation is clockwise or counter clockwise.
- isClockRotation - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouse
-
flag indicate if the rotation is clockwise or counter clockwise.
- isClockRotation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.RightMouse
-
flag indicate if the rotation is clockwise or counter clockwise.
- IsClose(double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- isClosed() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Flag used to indicate type of contour: true = closed contour (i.e.
- isClosed() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Determine if the triangle mesh is closed.
- IsClosed() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Point info method, is closed point
- isCloseOkay - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Indicates that we are done with the current grow, and can close the MIP when the done button is next clicked.
- isClosing - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Whether the frame's close() method is being called.
- isCMYK - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isCMYK - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isColor - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- isColor - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- isColor - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Indicates whether is image is a color image or not.
- isColor - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
is color boolean
- isColor - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- isColor - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- isColor - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
is color boolean
- isColor() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Accessor that indicates if the source image is a color image.
- isColorImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
Indicates the image being messed with is a color image.
- isColorImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
indicates the image is a color image.
- isColorImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
DOCUMENT ME!
- isColorImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
DOCUMENT ME!
- isColorImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
flags for destination, threshold, inverse, and color image
- isColorImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- isColorImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
indicates the image is a color image.
- isColorImage - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
boolean for color image
- isColorImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns whether or not the image is a color image.
- isColorImage(int) - Static method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns whether or not the given data type is a color data type.
- IsColorImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Return true if the Volume image is a color image.
- isColorPlanar2D - Variable in class gov.nih.mipav.model.file.FileFits
-
- isColourImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
Colour images set this to true; monochromatic should be false;.
- isCommentLine(String) - Static method in class gov.nih.mipav.model.scripting.ParserEngine
-
Checks to see if a line is a comment.
- isCompactDisplay - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
- isComplete - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Indicates whether the scripted algorithm completed successfully.
- isComplete() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Returns whether the algorithm completed successfully.
- isComplete() - Method in class gov.nih.mipav.view.JPanelProgressBar
-
Used to determine if the progress bar is at 100%.
- isComplete() - Method in interface gov.nih.mipav.view.ProgressBarInterface
-
DOCUMENT ME!
- isComplete() - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Used to determine if the progress bar is at 100%.
- isCompleted - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- isCompleted() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Returns flag that indicates that the algorithm has been sucessfully completed.
- isCompleted() - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- isComplex - Variable in class gov.nih.mipav.model.file.FileDicom
-
- isComplexImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns whether or not the image is a COMPLEX or DCOMPLEX image.
- isCompositeXYZPositionColumn(String) - Static method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
The purpose of this method is to determine whether the parameter represents one of the special table columns.
- isComputeMaximum() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- isComputeMinimum() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- isConnected() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Determine if the triangle mesh is connected.
- IsConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- IsConstrainedApproximateMinimumDegreeOrderingAvailable() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionPreprocessor
-
- isConstructed - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
-
DOCUMENT ME!
- isConstructed() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
-
DOCUMENT ME!
- isContext(String) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- IsConvex() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Tests if the shap is convex w.r.t. each path.
- IsConvexHullUsed() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns true if the texture model is based on the convex hull.
- isCorrespondencePickEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Return whether or not picking correspondence points is enabled:
- isCorrespondencePickEnabled() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Return whether or not picking correspondence points is enabled:
- isCounterClockwise() - Method in class gov.nih.mipav.model.structures.VOIContour
-
Determines if the points are ordered in a counterClockwise manner.
- isCritical() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- isCurrentTagSQ - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
Whether the tag currently being processed and read in is a sequence tag.
- isCurveAnnotation - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- isCurveAnnotation() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- isCurveSelected(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- isCurveSelected(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- isCvs - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< Cvs precomputed value
- isD() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- IsD() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- isData - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- isDataAlpha(byte[]) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Determines if data byte array is a string of characters.
- isDataFlavorSupported(DataFlavor) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.ImageConverter
-
- isDataFlavorSupported(DataFlavor) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler.ArrayListTransferable
-
DOCUMENT ME!
- isDataFlavorSupported(DataFlavor) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter.SliceTransferable
-
- isDataType - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- isDebug() - Static method in class gov.nih.mipav.view.Preferences
-
Returns flag indicating if the debug flag is true or false.
- isDefault() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns whether or not this is the default save.
- isDefaultCharacter(String, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Checks that all the characters of the string are in the default character repertoire.
- isDefaultCommand(String) - Static method in class gov.nih.mipav.view.Preferences
-
DOCUMENT ME!
- isDefaultKeyStroke(KeyStroke) - Static method in class gov.nih.mipav.view.Preferences
-
DOCUMENT ME!
- IsDeleted() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- isDescendant(TreePath, TreePath) - Method in class gov.nih.mipav.view.CheckTreeManager.CheckTreeSelectionModel
-
- isDialogOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
check the dialog so that if all the fields are okay (have the right number of digits, etc) and there are no
messages to send back to the user about correctness.
- isDialogOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
check the dialog so that if all the fields are okay (have the right number of digits, etc) and there are no
messages to send back to the user about correctness.
- isDialogVisible() - Method in class gov.nih.mipav.view.ViewJColorChooser
-
DOCUMENT ME!
- isDicom - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
DOCUMENT ME!
- isDicom - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- isDicom - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
DOCUMENT ME!
- isDicom(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Tests if the unknown file is of type Dicom.
- isDICOM - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
boolean indicating if we are dealing with dicom or par/rec
- isDICOM - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
boolean indicating if we are dealing with dicom or par/rec
- isDICOM - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- isDICOM() - Method in class gov.nih.mipav.model.file.FileDicom
-
Looks for the DICM _tag_ in the File header.
- isDicom_ver2(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
tests if unknown file is of type 2.0 dicom
- isDICOM_ver2() - Method in class gov.nih.mipav.model.file.FileDicom
-
Dicom version 2: Does not have a preamble in which to search for "DICM" So...the solution will be to search that
it has at least a couple of beginning "08" tags However, we do not know if its Little Endian or Big Endian..so
need to handle both
- isDicomImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns whether or not the image is a DICOM image.
- isDicomOrdered() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
isDicomOrdered() returns true if the file is in dicom order, false otherwise.
- isDicomRecv - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
- isDiffusionSeries(FileInfoDicom) - Method in class gov.nih.mipav.model.file.FileIO
-
- isDigit(char) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
determines if char is a digit
- isDimension - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- isDimensions - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- isDir() - Method in class gov.nih.mipav.model.file.FileDicom
-
- isDirectionFixed() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if updates to direction affect the target while keeping the direction fixed.
- isDirectionNeeded() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- isDirectory() - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
Returns true if this fileNode is a directory and not a normal file.
- isDirty - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- isDirty - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- isDirty - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- isDirty - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- isDirty - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- isDirty - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- isDirty() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- isDirty() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- isDirty() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- isDirty() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Renderable
-
if true, indicates that a call to #updateGL(boolean) is necessary to sync
this objects GL resources to its current state.
- isDirty() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- isDirty() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- isDivisible(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Check if the extent value is divisible by 2, 4 or 8.
- isDoMultiThread() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- isDoPicking - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- isDoSubsample() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- isDouble - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- isDrawCommand(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- isDTISort - Variable in class gov.nih.mipav.model.file.FileIO
-
- isDWICellEditBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- isEdgePixel(double, double, double, double, double, double, double, double, double, double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- isEditAnnotations() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- isEditAnnotations() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- isEDTI - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
boolean telling if dataset is eDTI
- iSelect - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
index of currently selected one.
- iSelect - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
index of currently selected one.
- isempty - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< for synthesis, number of columns in a frame (0 if unknown).
- isEmpty() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Gets a value indicating whether the directory is empty, meaning it contains no errors and no tag values.
- isEmpty() - Method in class gov.nih.mipav.model.structures.HQueue
-
isEmpty - returns a flag indicating if the entire hierarcial queue is empty.
- isEmpty() - Method in class gov.nih.mipav.model.structures.IntVector
-
Returns flag indicating if the array is empty.
- isEmpty() - Method in class gov.nih.mipav.model.structures.VOI
-
Test whether or not the VOI is empty.
- isEmpty() - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- isEmpty() - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- isEmpty() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- isEmpty() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.EdgeAttribute
-
Test if the set of adjacent triangles is empty.
- isEmpty() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.VertexAttribute
-
Test if the sets of adjacent edges and triangles are empty.
- isEmpty() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- isEmpty() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.ActiveTree
-
Returns a flag indicating if this tree is empty.
- isEmpty() - Method in class gov.nih.mipav.view.RubberbandLivewire.ActiveTree
-
Returns a flag indicating if this tree is empty.
- isEmptyAt(int) - Method in class gov.nih.mipav.model.structures.HQueue
-
isEmptyAt - returns a flag indicating if a specific queue is empty.
- isEnabled - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- isEnabled - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- isEnabled - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.GenericRenderer
-
- isEnabled - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- isEnabled() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- isEnabled() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- isEnabled() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.GenericRenderer
-
- isEnabled() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- isEnabled() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Renderer
-
Whether this renderer is enabled or not.
- isEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if light is currently enabled.
- isEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseRotateExt
-
Return indication of whether or not this behavior is enabled.
- isEnabledDiffuse() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Query if the vertex diffuse color property is enabled.
- isEnabledSpecular() - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Query if the vertex specular color property is enabled.
- isEndoscopyEnable - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Indicate if the fly through render is enabled from the resample dialog or not.
- isEndpoint(int) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Decides whether parameter 'index' is an endpoint of this transfer function.
- isEndpoint(int, short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
- isEndpoint(int, short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
- isEndpoint(int, short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
- isEndpoint(int, short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
This method returns whether or not pix is the index of an endpoint in tmpBuffer (it is assumed that location pix
is not the intensity of the background in tmpBuffer).
- isEnhanced - Variable in class gov.nih.mipav.model.file.FileDicom
-
- isEnhanced() - Method in class gov.nih.mipav.model.file.FileDicom
-
- isEnhanced4D - Variable in class gov.nih.mipav.model.file.FileDicom
-
- isEnhanced4D() - Method in class gov.nih.mipav.model.file.FileDicom
-
- isEnhancedDicom - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
whether it is enhanced dicom or not
- isEnhancedDicom() - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
- isEntryPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Flag indicates that probe rotate around the entry point or not.
- isEntryPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Flag indicates that probe rotate around the entry point or not.
- isEqualOrGreaterThan(Preferences.LogLevel) - Method in enum gov.nih.mipav.view.Preferences.LogLevel
-
- IsEvaluationValid(Vector<double[]>, double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- IsEvaluationValid(Vector<double[]>, double[], double[], double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- isEvenSelected() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Returns true if only the even image slices have been selected.
- isExitRequired() - Static method in class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Returns whether the way that the plug-in is being run requires us to exit MIPAV when the window closes.
- isExitRequired() - Static method in class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Returns whether the way that the plug-in is being run requires us to exit MIPAV when the window closes.
- isExpanded - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
are the dicom tags expanded *
- isExplored() - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
Whether or not this node has been 'explored', and its subdirectories and file-children have been found.
- isExtensionSupported(String) - Method in interface gov.nih.mipav.plugins.PlugInFile
-
Checks whether a particular file extension is supported by this plugin.
- isEyeTrackingEnabled - Static variable in class gov.nih.mipav.view.MipavUtil
-
- isEyeTrackingEnabled() - Static method in class gov.nih.mipav.view.MipavUtil
-
Check eye tracking is enabled or not.
- isFar(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
An image element is a far element when its visitation time t
is infinite: t = Float.MAX_VALUE.
- isFastMode() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- IsFeasible(String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- IsFF(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- isFilament - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.FilamentArc
-
DOCUMENT ME!
- isFilled() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Glyph
-
- isFilterSet - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter
-
- isFinalized() - Method in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Test whether or not the sample has had its cost finalized.
- isFinished() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Called by the dialog.
- isFinite(double) - Static method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- isFirst - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- isFirst() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Returns flag indicating if this is the first mouse event vector in a series.
- isFirst() - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Returns flag indicating if this is the first mouse event vector in a series.
- isFirstSlicePoint() - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Returns true if this is the first point in the PolyLineSlice object.
- isFirstTimeBuildTree - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
First time to build the clipping plane tree.
- isFirstTimeBuildTree() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Return whether the clipping planes tree branch being built the first time.
- isFittingComplete - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- isFixed() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that tells if VOI is fixed.
- isFixed() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Accessor to flag that indicates if an VOI is fixed (movable).
- isFloat - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- isFocusable() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Always returns true.
- isFormatBWOnly(String) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
-
- isFormatRGBOnly(String) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
-
returns if specified image format supports rgb values only.
- isFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- isFromFrame() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- isFunction(String) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
method determining if token is function
- isGE - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
boolean telling if datset is GE
- isGE_GenesisImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns whether or not the image is a GE_GENESIS image.
- isGE_Signa4XImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns whether or not the image is a GE_SIGNA4X image.
- isGEButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- isGeodesicEnable() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Check whether the Geodesic drawing is enabled or not.
- isGeodesicEnable() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Check whether the Geodesic drawing is enabled or not.
- isGeodesicEnable() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Check whether the Geodesic drawing is enabled or not.
- isGeScanner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isGESigna4X() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
Looks for the image header ID "IMAGE HEADER" and number of image header blocks
(usually 2 in units of 512 bytes )in GE Signa 4.X file in the File header.
- isGESigna4X(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Tests if the unknown file is of type GE Signa 4X type.
- isGESigna5X() - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
Looks for the magic number "IMGF" in image header for GE Signa 5.X type file.
- isGESigna5X(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Tests if the unknown file is of type GE Signa 5X type.
- isGLDoublePrecision - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- isGpuCompEnabled() - Static method in class gov.nih.mipav.view.Preferences
-
Indicates whether GPU-computing should be enabled.
- isGPULineMin() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- isGPULineMin() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
- isGradientMagnitudeOpacityEnabled() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Return whether or not the opacity mapping based on gradient magnitude is enabled.
- isGradientMagnitudeOpacityEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Return whether or not the opacity mapping based on gradient magnitude is enabled.
- isGreen() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- isGreen() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- isGreenProcessingRequested() - Method in class gov.nih.mipav.view.components.JPanelColorChannels
-
Returns whether the algorithm should process the input image's green channel.
- isGzip - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
- isGzip() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
- ISHAPE - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- ISHAPE2 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- isHasImageMinMaxDimOrder() - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
- isHeaderFile(String) - Static method in class gov.nih.mipav.model.file.FileAnalyze
-
Return true if the file specified by absolutePath is header file of ANALYZE.
- isHeaderFile(String) - Static method in class gov.nih.mipav.model.file.FilePARREC
-
Return true if the file specified by absolutePath is header file of PARREC.
- isHeaderFile(String) - Static method in class gov.nih.mipav.model.file.FileSiemensText
-
Return true if the file specified by absolutePath is header file of SiemensText.
- isHeaderFile(String) - Static method in class gov.nih.mipav.model.file.FileSpar
-
Return true if the file specified by absolutePath is header file of ANALYZE.
- isHeaderOnlyRead() - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Returns whether this Dicom read is only interested in the header tags and not the image data (if it exists).
- IsHelpSwitch(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsole
-
Parse help augments
- isHexadecimal(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- isHidden() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- isHidden() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Renderable
-
Indicates whether this Renderable is hidden i.e. will not be drawn.
- isHidden() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- isHidden() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- isHighlight() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- isHistogramDisplay() - Static method in class gov.nih.mipav.view.Preferences
-
Indicates whether the image display should be updated in real-time as histogram LUTs are changed
- isHistoInit() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Returns true if the multi-histogram histogram texture has been initialized, false otherwise.
- IsHole() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Point info method.
- isIdentity() - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Reports whether transform is Identity transform, to within a small epsilon.
- isIdentity() - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Reports whether transform is Identity transform, to within a small epsilon.
- isign(int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- isIgnoreMouseMotion() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Indicates whether or not the canvas is ignoring mouse events.
- isIgnoreMouseMotion() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Indicates whether or not the canvas is ignoring mouse events.
- isImage(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- isImage25D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Returns flag that indicates if the image should be processed slice by slice.
- isImageASelected() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Returns whether the imageA LUT panel is currently visible and active.
- isImageASelected() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Returns whether the imageA LUT panel is the one being worked on.
- isImageASelected() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Returns whether the imageA LUT panel is the one being worked on.
- isImageBSelected() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Returns whether the imageB LUT panel is currently visible and active
- isImageBSelected() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Returns whether the imageB LUT panel is the one being worked on.
- isImageBSelected() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Returns whether the imageB LUT panel is the one being worked on.
- isImageData - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- isImageDestinationOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Makes the image destination directory.
- isImageFile(String) - Static method in class gov.nih.mipav.model.file.FileAnalyze
-
Return true if the file specified by absolutePath is image file of ANALYZE.
- isImageFile(String) - Static method in class gov.nih.mipav.model.file.FilePARREC
-
Return true if the file specified by absolutePath is image file of PARREC.
- isImageFile(String) - Static method in class gov.nih.mipav.model.file.FileSiemensText
-
Return true if the file specified by absolutePath is image file of SiemensText.
- isImageFile(String) - Static method in class gov.nih.mipav.model.file.FileSpar
-
Return true if the file specified by absolutePath is image file of ANALYZE.
- isImageHashtableEmpty() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Indicates if the image hashtable is empty.
- isImageJPluginClass(Class) - Static method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Deprecated.
- isImageJPluginClass(Class<?>) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
Returns whether the given class is an ImageJ plugin.
- isImageOpenedByScriptDialog - Variable in class gov.nih.mipav.view.dialogs.ScriptImage
-
- isImageRegistered(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Indicates if the image name is found in the hashtable.
- isImageResampleable(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Returns whether an image can be resampled to match imageA for loading into the imageB slot of the frame.
- isImageStored(String) - Method in class gov.nih.mipav.model.scripting.ImageVariableTable
-
Checks to see if an image has been stored somewhere in the image table.
- isImageStoredInRecorder(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Returns whether an image has been registered in the script recorder.
- isImageStoredInRecorder(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.DataProvenanceParameters
-
Returns whether an image has been registered in the script recorder.
- isImageStoredInRecorder(ModelImage, boolean) - Static method in class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
Returns whether an image has been registered in the script recorder.
- isImageUpdate() - Method in interface gov.nih.mipav.view.HistoLUTParent
-
Indicates if real-time update of the image should take place.
- isImageUpdate() - Method in class gov.nih.mipav.view.JPanelHistogram
-
- isImageUpdate() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Indicates if real-time update of the image should take place.
- isImageUpdate() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Indicates if real-time update of the image should take place.
- isImageUpdate() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Indicates if real-time update of the image should take place.
- isImageUpdate() - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Indicates if real-time update of the image should take place.
- isImageUpdate() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Indicates if real-time update of the image should take place.
- isImageVariableSet(String) - Method in class gov.nih.mipav.model.scripting.ImageVariableTable
-
Checks to see if an image variable has been added to the table.
- isIn(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- isIncludeB1Map() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isInEx(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- isInfinite() - Method in class gov.nih.mipav.util.DoubleDouble
-
- IsInit - Static variable in class gov.nih.mipav.util.MipavInitGPU
-
- isInitialised - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- isInitialised - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- isInMenu() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- isInPluginFolder(Class) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Deprecated.
- isInPluginFolder(Class) - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
Determines whether c is in the current plugin folder.
- isInPluginFolder(Class<?>) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
Determines whether c is in the current plugin folder.
- isInPluginFolder(String) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
Determines whether the className is in the plugin folder.
- isInPluginFolder(String) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Deprecated.
- isInPluginFolder(String) - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
Determines whether the className is in the plugin folder.
- isinpoly(boolean[], boolean[][], double[][], double[][], double[], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- isinpoly2(int[], boolean[][], double[][], double[][], double[], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- isInScan(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- IsInside(CAAMPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Performs a hit test on the point p.
- IsInside(CAAMPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Wrapper to check is point p is inside the shape
- IsInside(CAAMPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Returns true if the point 'p' is inside the triangle.
- IsInside(CAAMPoint, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Tests if the point 'p' belongs to the shape.
- IsInside(CAAMPoint, double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Performs a hit test on the point p.
- IsInside(CAAMPoint, int[], double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Performs a hit test on the point p.
- isInsideIntensityThreshold(int, int, int, ModelImage, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
check if point (x,y,z) has same intensity as (xS,yS,zS)
- IsInsidePath(CAAMPoint, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Tests if the point 'p' is inside the path starting at position
'path_start'.
- isInsideVOI(int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
check if given pixl location is inside VOI or not.
- isInstanceNumberRecalculated() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns whether or not the Instance Number (0020,0013) should be recalculated before saving.
- isInteger() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
- isInterfile(String, String) - Static method in class gov.nih.mipav.model.file.FileInterfile
-
Method to test to determine if the image format is Cheshire, so appropriate read method may be called.
- isInterfile(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Tests if the unknown file is of type Interfile.
- isInterior(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
An image element is an interior element when it is valid
and not a trial element.
- isInterleaved - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
boolean if dataset is interelaved
- isInterleaved - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
boolean if interleaved
- isInterpolateDisplay() - Static method in class gov.nih.mipav.view.Preferences
-
Maintained for backwards compatibility.
- isIntervalMode() - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- isInverse - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Inverse threshold: false means turn all pixels outside of the lower and upper thresholds to the given fill value,
true means turn all data within the lower and upper thresholds to the fill value (fill value can also be binary
(0)).
- isInverse - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
fill values are for values outside (inverse) or inside (normal/false).
- isInverse - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- isInverse - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
inverse?
- isInvertT2toR2() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isJonesBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- isKirbyBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- isLabelVisible() - Method in class gov.nih.mipav.view.graphVisualization.MipavEdgeRenderer
- isLaxFile(File) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- isLeaf() - Method in class gov.nih.mipav.model.file.FileMincHDF.HDFNode
-
- isLeaf() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- isLeaf() - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
Leaves are not directories.
- isLogAlgorithmEnabled() - Static method in class gov.nih.mipav.view.Preferences
-
- isLogCommsEnabled() - Method in class gov.nih.mipav.view.Preferences
-
- isLogFileIOEnabled() - Static method in class gov.nih.mipav.view.Preferences
-
- isLogL - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isLogL - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isLogLuv - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isLogLuv - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isLogMinorEnabled() - Static method in class gov.nih.mipav.view.Preferences
-
- isLogScriptingEnabled() - Method in class gov.nih.mipav.view.Preferences
-
- isLowerCase(byte) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- isLowerLeftCorner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isLowerRightCorner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isLPS - Variable in class gov.nih.mipav.model.file.FileVOI.XMLCoordHandler
-
The default is to read the voi coodinates as LPS coordinates.
- isLUT1Based(ModelLUT) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
end HistoLUTParent.
- isLUT1Based(ModelStorageBase) - Static method in class gov.nih.mipav.view.JPanelHistogram
-
returns true if the first entry in the color look-up table
is (1,1,1), false otherwise.
- isM_bUpdateBounds() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- isM_bUpdateGeometricCenter() - Method in class gov.nih.mipav.model.structures.VOIBase
-
- isMagnetomVision() - Method in class gov.nih.mipav.model.file.FileMagnetomVision
-
Looks for the string "MAGNETOM VISION" in image header ID.
- isMagnetomVision(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Tests if the unknown file is of type Siemens Magnetom Vision.
- isMakingCheckerboard() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- isManifold() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Determine if the triangle mesh is manifold.
- IsManifold(Face, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
Return a boolean that indicate if the face is complex.
- isMarked(Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FaceTmark
-
- isMarked(Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
Check if the face incremental mark matches the one of the mesh.
- isMarked(Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
Check if the vertex incremental mark matches the one of the mesh.
- isMarked(Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.VertTmark
-
- isMarker() - Method in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
Returns flag indicating if we've read in a marker.
- isMATLABVersion - Variable in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- isMax2D(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- isMaxOfMinResol() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- IsMember(T) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- isMenuCommand(Component[], String) - Static method in class gov.nih.mipav.view.ViewMenuBar
-
determines if there is a matching action command
- isMenuCommand(JMenu, String) - Static method in class gov.nih.mipav.view.ViewMenuBar
-
determines if there is a matching action command
- isMenuItemEnabled(String) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Provides a method of checking the state of specified menu.
- isMenuItemSelected(String) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Provides a method of checking the state of specified menu.
- isMinc() - Method in class gov.nih.mipav.model.file.FileMinc
-
Looks for the CDF tag at the start of the image 'C''D''F''\001' in image header ID.
- isMinc(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Tests if the unknown file is of type Minc.
- isMincHDF(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Determines whether the file on disk is of type MINC 2.0
- isMincImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that returns whether or not the image is a MINC image.
- isMipavPluginClass(Class) - Static method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Deprecated.
- isMipavPluginClass(Class<?>) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
Returns whether the given class is a MIPAV plugin.
- IsModeAllowed(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsole
-
Checks if the given mode is allowed.
- isModelDisplayed() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- isModelDisplayed() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- isMotorolaByteOrder() - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Gets the endianness of this reader.
- isMotorolaByteOrder() - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Gets the endianness of this reader.
- isMouseControlEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
is mouse control enabled or not.
- isMouseFlythru - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- isMouseFlythru - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- isMulti - Variable in class gov.nih.mipav.view.ViewUserInterface.OpenFileInfo
-
Whether the file is opened as a multifile image.
- isMulti() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- isMulti() - Method in class gov.nih.mipav.view.ViewUserInterface.OpenFileInfo
-
Return whether the file should be opened as a multifile image.
- isMultifile - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
boolean isMultifile
- isMultifile - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
boolean isMultifile
- isMultifile - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
boolean isMultifile
- isMultifile - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
boolean isMultifile
- isMultifile - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
boolean isMultifile
- isMultiFile - Variable in class gov.nih.mipav.view.dialogs.ScriptImage
-
- isMultiFile() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns whether or not this is an image to be stored as multiple files.
- isMultiFile() - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- isMultiFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
- isMultiFrame() - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Accessor for the status of this dicom info.
- isMultipleImages() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Helper method to establish if there are other images so that a dialog can be created.
- isMultipleSameSizeImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Helper method to establish if there are images of the same dimensionality so that a dialog can be created.
- isMultipleSameSizeTriImages() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Helper method to establish if there are images of the same dimensionality so that a dialog can be created.
- isMultiply - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
boolean for truncate/multiply *
- isMultiply - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
boolean for truncate/multiply *
- isMultiply - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
boolean for truncate/multiply *
- isMultiThreadingEnabled() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- isMultiThreadingEnabled() - Static method in class gov.nih.mipav.view.Preferences
-
Indicates whether multi-threading should be enabled for algorithms.
- isn - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- isn - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- isNaN() - Method in class gov.nih.mipav.util.DoubleDouble
-
Tests whether this value is NaN.
- isNavigationEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
is nagivation mode enabled or not.
- ISNCA - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- IsNear3x3Matrix(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- IsNearAngleAxis(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- isNearLine(int, int) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Determines whether the mouse cursor is near the active transfer function line.
- IsNearQuaternion(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- isNegative() - Method in class gov.nih.mipav.util.DoubleDouble
-
Tests whether this value is less than 0.
- isNegativeFinite() - Method in class gov.nih.mipav.util.DoubleDouble
-
- isNegativeInfinity() - Method in class gov.nih.mipav.util.DoubleDouble
-
- isNegativeSpeed() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- isNeighbor(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Check the neighbor pix.
- isNeighbor(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Check the neighbor pix.
- isNewVoiNeeded(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- isNewVoiNeeded(int) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Deprecated.
- isNIFTI() - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Tells whether this matrix is associated with a NIFTI image
this only matters when the matrix is being saved/when the composite matrix is
being generated in MatrixHolder
- isNIFTI() - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Tells whether this matrix is associated with a NIFTI image
this only matters when the matrix is being saved/when the composite matrix is
being generated in MatrixHolder
- isNIFTI(String, String) - Static method in class gov.nih.mipav.model.file.FileNIFTI
-
Method determines if the image format is NIFTI, so FileIO will call the appropriate FileNIFTI read method.
- isNIFTI(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Tests if the unknown file is of type Nifti.
- isnold - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- isnold - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- isNormalized() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- IsNormalizedQuaternion(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- isnormq(double[][]) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- ISNPH - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- isNull() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- ISO_8859_1 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Charsets
-
- ISO_8859_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.Iso2022Converter
-
- Iso2022Converter() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Iso2022Converter
-
- Iso2022ConverterTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.Iso2022ConverterTest
-
- isoAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- isOCL_CPU_Available - Static variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- isOCL_GPU_Available - Static variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- isOCLAvailable - Static variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- isOCLAvailable() - Static method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- isoCurvAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
DOCUMENT ME!
- isOddSelected() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Returns true if only the odd image slices have been selected.
- isoImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
new to this version: must keep isoImage around if image needed to be transformed.
- isoImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
new to this version: must keep isoImage around if image needed to be transformed.
- isoImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
new to this version: must keep isoImage around if image needed to be transformed.
- isoImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
new to this version: must keep isoImage around if image needed to be transformed.
- isoImageA - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Isotropic version image A, B, used by the shear warp renderer.
- isoImageB - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Isotropic version image A, B, used by the shear warp renderer.
- isOldVersion - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
boolean identifying if par/rec datset is older than version 4.1
- ISOLV - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- isoNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- isOpenContour(boolean) - Method in class gov.nih.mipav.view.JPanelStatisticsList
-
Controls whether non-closed contours are being used for statistics calculations.
- isOpenedByDialog - Variable in class gov.nih.mipav.view.dialogs.ScriptVOI
-
- isOpenedByDialog() - Method in class gov.nih.mipav.view.dialogs.ScriptVOI
-
- isOpenedByScript() - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- isOpenVOIAction(String) - Static method in class gov.nih.mipav.model.scripting.Parser
-
Returns whether a action string would result in the opening of a VOI.
- isOperator(String) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
method determining if token is an operator
- isOptimized() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- isOptimized() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- isOptional - Variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Whether the parameter needs to be given a value by the user in the ActionDiscovery system.
- isOptional() - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Returns whether this parameter needs to be set by the user when using the ActionDiscovery system.
- isOrderedVariable(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- IsOrderingValid(CeresSolver.Program, CeresSolver.OrderedGroups<double[]>, String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- IsOriginal() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Point info method.
- isOrigSigned(int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Returns true if the data read was originally signed in the specified
component, false if not.
- isOrigSigned(int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
Returns true if the data read was originally signed in the specified
component, false if not.
- isOrigSigned(int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Returns true if the data read was originally signed in the specified
component, false if not.
- IsOrthonormal(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ISOSpeedRating - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
- ISOSpeedRatingBlurry - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- isoSpeedRatings - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isoSpeedRatings - Variable in class gov.nih.mipav.model.file.FileTiff
-
- ISOSpeedRatingTrue - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- isotopeName - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- isotopeNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- isotopeNumber - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- IsOuterEdge() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Point info method, is outer edge or not.
- isOutputNewImageSet() - Method in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
Returns whether a new image should be produced by the dialog this panel is a part of.
- isoValue - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
- isp - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
The component where the image is to be displayed
- isp - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
The component where the image is to be displayed
- isPackBitEnabled() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns whether or not it is possible to write with packed bits compression (only possible with
TIFF byte images).
- isParallelPowell() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- IsParameterBlockConstant(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- IsParameterBlockSetIndependent(Set<double[]>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- isParentConditionValueMet() - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Tests whether the value of the parent parameter is the same as the parent value that this Parameter requires.
- isPartiallySelected(TreePath) - Method in class gov.nih.mipav.view.CheckTreeManager.CheckTreeSelectionModel
-
- isPathFlythru - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- isPathFlythru - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- isPathMoveForward() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
Return the flag indicating whether moving was forward, as opposed to in reverse, down the path.
- isPathMoveForward() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Get indication of whether the movement along the current path is in the forward or reverse direction.
- isPathMoveForward() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Return the flag indicating whether moving was forward, as opposed to in reverse, down the path.
- isPathMoveForward() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Get indication of whether the movement along the current path is in the forward or reverse direction.
- isPathMoveForward() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Get indication of whether the movement along the current path is in the
forward or reverse direction.
- isPathPlanningEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
is path planning mode enabled or not.
- isPathRecorded() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- isPathRecorded() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- isPathSelected(TreePath, boolean) - Method in class gov.nih.mipav.view.CheckTreeManager.CheckTreeSelectionModel
-
- isPaused() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Returns whether the mouse recorder is paused.
- isPaused() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Returns whether the mouse recorder is paused.
- isPDFAsImageRenderingEnabled() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- isPDFAsImageRenderingEnabled() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
- isPerformApproxModeling() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isPerformConventionalModeling() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isPerformConventionalWith0Phase() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isPerformConventionalWith180Phase() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isPerformFullModeling() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- ispg - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- isPickEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Returns whether or not picking is enabled:
- isPixelAnExtremum(double[][][], double) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- isPlaying - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Flag to indicating play mouse is running or not.
- isPlaying - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Flag to indicating play mouse is running or not.
- isPlaying - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Flag to indicating play mouse is running or not.
- isPlaying() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Returns whether the mouse recorder is playing saved events.
- isPlaying() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Returns whether the mouse recorder is playing saved events.
- isPLineSliceVOI() - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- isPListFile(File) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- isPluginClass(Class) - Static method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Deprecated.
- isPluginClass(Class<?>) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
Returns whether the given class is a MIPAV/ImageJ plugin.
- isPlugInFrameVisible - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Whether a plugin standalone frame is visible
- isPlugInFrameVisible() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to see if a stand-alone plugin frame is visible (not app frame)
- isPluginSelected() - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
Whether plugins are selected in the JTree, equivalent to whether a leaf is selected in the JTree
- isPopupMenuVisible() - Method in class gov.nih.mipav.view.JScrollMenu
-
- isPositive() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
True if the value is non-zero and numerator and denominator are either both positive or both negative.
- isPositive() - Method in class gov.nih.mipav.util.DoubleDouble
-
Tests whether this value is greater than 0.
- isPositiveFinite() - Method in class gov.nih.mipav.util.DoubleDouble
-
- isPositiveInfinity() - Method in class gov.nih.mipav.util.DoubleDouble
-
- isPowerOf2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Check if the dimension value is already a power of 2.
- isPowerOfTwo() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Returns true if the ModelImage 3D dimensions combine to be a power of two.
- isPowerOfTwo(int) - Static method in class gov.nih.mipav.util.MipavMath
-
Determines if the input is an exact power of two.
- isPreference(String) - Static method in class gov.nih.mipav.view.Preferences
-
Gets the boolean state of the property, where in the preferences file the "yes", "on",
"true" all return true, but anything else (or non-existent property) returns
false.
- isPreferenceSet(String) - Static method in class gov.nih.mipav.view.Preferences
-
Returns whether the user has a preference indicated for a particular property.
- isPreview() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- isPreview() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- isPrivate() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- isProbePicked() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
If probe being picked or not.
- isProbeRootParentBGLive() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Check the probe root branch group is attached or not.
- isProcDirCreated - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
boolean if proc dir was created
- isProcessWholeImageSet() - Method in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
Returns whether the whole image should be processed (as opposed to just VOI regions).
- IsProgramValid(CeresSolver.Program, String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchPreprocessor
-
- IsProgramValid(CeresSolver.Program, String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionPreprocessor
-
- isProgressBarVisible() - Method in class gov.nih.mipav.model.file.FileBase
-
Returns flag that indicates that the progressBar is visible.
- isProgressBarVisible() - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Returns flag that indicates that the progressBar is visible.
- isProgressBarVisible() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Returns flag that indicates that the progressBar is visible.
- isProvidedOutputDir() - Static method in class gov.nih.mipav.view.ViewUserInterface
-
This is the getter for providedOutputDir providedOutputDir: This boolean tells if the user has provided an
ouputDir parameter as a command line argument when running a script
- isProvidedUserDefaultDir() - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- ISPRT - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- ISPRT - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- isPuncturePickEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Return whether or not picking the puncture triangle is enabled:
- isPuncturePickEnabled() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Return whether or not picking the puncture triangle is enabled:
- isPutInFrame() - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
Returns whether or not the new image will be put into a frame.
- isq(double[][]) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- isQform() - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Tells whether a NIFTI matrix is a qform matrix or a sform matrix
- isQform() - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Tells whether a NIFTI matrix is a qform matrix or a sform matrix
- isQuickLUT() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns true if this is a QuickLUT contour.
- isQuiet() - Method in class gov.nih.mipav.model.file.FileDicom
-
gets the quiet option on the class.
- isQuiet() - Method in class gov.nih.mipav.model.file.FileIO
-
Refers to whether or not the FileIO will send alerts to the user about progress or errors.
- isQuietRunning() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
- isR() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- IsR() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- isRange - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue.Values
-
DOCUMENT ME!
- isRangeUniform - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- israw - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- israw_blurry - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- israw_true - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- isRayCastEnable - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Indicate if the raycast render is enabled from the resample dialog or not.
- isReadComplete() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Returns true if the reading is complete else false.
- isRecording() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Returns whether the mouse recorder is recording.
- isRecording() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Returns whether the mouse recorder is recording.
- isRed() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- isRed() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- isRedProcessingRequested() - Method in class gov.nih.mipav.view.components.JPanelColorChannels
-
Returns whether the algorithm should process the input image's red channel.
- isReference - Variable in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
if the image is in a registration window, is the image the reference (and not the adjusted).
- isReference() - Method in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Returns true if this is the reference image.
- isReferenceLine - Variable in class gov.nih.mipav.model.file.FileSVS.ModREADInputStream
-
- isReferenceLine - Variable in class gov.nih.mipav.model.file.FileTiff.ModREADInputStream
-
- isReferenceTagTable - Variable in class gov.nih.mipav.model.file.FileDicomTagTable
-
Whether this tag table is a reference table (meaning it contains all of the tags for a given fileInfo and does
not need to refer anywhere else when retrieving values).
- isReferenceTagTable() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns true if this dicom tag table is a root tag table, not attached to a reference table.
- isRefImageSourceSlice() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Convenience method to determine if this is a 2.5D registration where the reference (target) image is once of the
slices in the source image.
- isRegistered - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
whether this is an existing or new VOIText (isRegistered = existing).
- isRegistered(VOI) - Method in class gov.nih.mipav.model.structures.ModelImage
-
- isRemovalSelectionOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
checks to see if the JPanelAnonymizeImage has had any selections made to it.
- isRenderPDFAsImage - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- isRenderSvgAsImage - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- isResampleNeeded(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Returns whether a image should be resampled to match the extents and resolutions of imageA.
- isResolutionCorrectionEnabled() - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Returns whether the z-dimension sigma should be corrected based on the image resolution.
- isRGB10 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isRGB10 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isRGB12 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isRGB12 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isRGB14 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isRGB14 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isRGB2 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isRGB2 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isRGB24UINTtoFLOAT - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isRGB24UINTtoFLOAT - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isRGB32UINTtoFLOAT - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isRGB32UINTtoFLOAT - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isRGB4 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isRGB4 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isRGBA - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isRGBA - Variable in class gov.nih.mipav.model.file.FileTiff
-
- isRoot - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
Whether root of file system
- isRotate - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Flag indicating mouse rotation, avoid image disappearing problem.
- isRunInSeparateThread() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Returns whether this dialog's algorithm should be run in a new thread.
- isRunning - Variable in class gov.nih.mipav.model.scripting.ScriptRunner
-
Indicates whether a script is currently being run by mipav.
- isRunning - Variable in class gov.nih.mipav.model.structures.ReminderThread
-
DOCUMENT ME!
- isRunning - Variable in class gov.nih.mipav.model.structures.TimeoutThread
-
DOCUMENT ME!
- isRunning() - Method in class gov.nih.mipav.model.scripting.ScriptRunner
-
Returns whether we are currently running a script.
- isRunningInSeparateThread() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Should be set to true if NOT in a single thread (i.e., the main gui and this algo are in different threads) -
will NOT force a graphics update of the progress bar.
- isRunningInSeparateThread() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- isRW() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- IsRW() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- isS() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- IsS() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- isSafe(int[][], int, int, int, int, boolean[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.PatternDetection
-
- isSafe(int, int, int[][], ModelImage, int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- isSafe(int, int, int[][], ModelImage, int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- isSafe(int, int, int[][], ModelImage, int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- isSafe(int, int, int[][], ModelImage, int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- isSafe(int, int, int[][], ModelImage, int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- isSafe(int, int, int[][], ModelImage, int, int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- isSafe(int, int, int[][], ModelImage, int, int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- isSafe(int, int, int[][], ModelImage, int, int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- isSafe(int, int, int[][], ModelImage, int, int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- isSafe(int, int, int[][], ModelImage, int, int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- isSafe_searchOnBottom(int[][], int, int, int, int, boolean[][], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- isSafe_searchOnLeft(int[][], int, int, int, int, boolean[][], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- isSafe_searchOnRight(int[][], int, int, int, int, boolean[][], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- isSafe_searchOnTop(int[][], int, int, int, int, boolean[][], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- isSafeToCopy() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- isSameImageAs(ParameterImage) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterImage
-
Checks to see if this image placeholder variable is the same as another image placeholder (e.g., '$image1' ==
'$image1'; does not check image name).
- isSATransform - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
flag for determining if the transform is for scanner anatomical (->AXIAL).
- isSATransform - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
is this a scanner anatomical transform (->AXIAL)
- isSaveAs() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns whether or not this is a Save or SaveAs operation.
- isSaveInSubdirectory() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns whether or not the save should be into a subdirectory of imagename (without extension).
- isSaveMasksAs4D() - Method in class gov.nih.mipav.view.dialogs.JDialogMask3D4D
-
- isScale - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- IsSchurType(CeresSolver.LinearSolverType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- isScreenCapAttached - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Hack-ish boolean to avoid double adding screen captures to the attachment list.
- isScript - Variable in class gov.nih.mipav.model.file.FileAvi
-
for saving within scripts.
- isScript - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
For Scripts.
- isScript - Variable in class gov.nih.mipav.model.scripting.actions.ActionBase
-
- isScript() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Checks to see if this is being run from a script.
- isScript() - Method in class gov.nih.mipav.model.scripting.actions.ActionBase
-
- isScriptRunning() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Returns whether the current dialog is being run from within a script.
- IsSculptDrawn() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Return true if the sculpt image has been drawn.
- isSeamCell - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- isSeamCell() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- isSelected() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- isSelectedPathsOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Records all paths chosen in the source tree.
- isSet - Variable in class gov.nih.mipav.view.JPanelEditSetOrParam
-
DOCUMENT ME!
- isSet() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns whether all of the options have been previously set (usually by the script parser).
- IsSet(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- isShearWarpEnable - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Indicate if the shear warp render is enabled from the resample dialog or not.
- isShift() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- isShiftDown - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
boolean indicating if shift button is down.
- isShiftSelected - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- isShorcutRecording() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Determines if the UserInterface is currently recording an action command as a shortcut.
- isShowBoundingRect() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Returns whether the bounding rectangle should be drawn.
- isShowTotals() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
Method to retrieve the selected value for totals calculation.
- isSiemens - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
boolean telling if datset is SIEMENS
- isSiemensButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- isSiemensScanner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isSiemensText(String) - Static method in class gov.nih.mipav.model.file.FileSiemensText
-
- isSigned - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Whether the data must be signed when writing or not.
- isSinglePoint(int, short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Check if the given pix is a single point or not.
- isSinglePoint(int, short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Check if the given pix is a single point or not.
- isSlicePowerOfTwo() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Returns true if the ModelImage 2D dimensions (slice size) combine to be a power of two.
- isSnapToTarget() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Return whether the user wants to snap to the treatment target surface.
- IsSolutionUsable() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- IsSolutionUsable(CeresSolver.GradientProblemSolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- IsSolutionUsable(CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- isSorted(Iterator<T>) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
Checks if specified iterator is sorted according to natural ordering.
- isSortedByVolumes - Variable in class gov.nih.mipav.model.file.FilePARREC
-
normal par/rec are sorted by volumes...sometime, they are not sorted like this...instead they are based on slices
if that is true, then we need to change around the image dataarray to make it sorted by volumes
- isSorting() - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- isSpaceNavCodeRunning - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- isSpatialUniform - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- isSplit - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
DOCUMENT ME!
- isSplit() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns true if this is a split-line contour.
- isSplitter() - Method in class gov.nih.mipav.view.RubberbandLine
-
- isSPM(String) - Static method in class gov.nih.mipav.model.file.FileSPM
-
Determines whether this file is SPM file or not based on three fields of the header file: sizeof_hdr, extent and
regular.
- isSPM(String, String, boolean) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Tests if the unknown file is of type SPM.
- isStandalone - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- isStateChangedEvent - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Flag to indicate StateChangeEvent invoked.
- isStaticLightEnabled() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Check static light is enable or not.
- isStaticPicked() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Indicates whether the static light bulb being picked by the mouse.
- isStatisticSelectionOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
checks to see if the checklist has had any selections made to it.
- IsStepSuccessful() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- isStopped - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- isStopped() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Returns whether the mouse recorder is stopped.
- isStopped() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Returns whether the mouse recorder is stopped.
- isStopRequested - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.PlayMouse
-
DOCUMENT ME!
- isSuccessful() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
Accessor that returns the whether or not the algorithm completed successfully.
- isSuccessful() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
Accessor that returns the whether or not the algorithm completed successfully.
- isSuccessful() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Accessor that returns the whether or not the algorithm completed successfully.
- isSurfacePickableSelected() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Check if the surface pickable checkbox be selected or not.
- isSurfacePickableSelected() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Check if the surface pickable checkbox be selected or not.
- isSurfaceRenderEnable - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Indicate if the surface render is enabled from the resample dialog or not.
- isSurfaceViewEnable - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Indicate if the surface view is enabled from the resample dialog or not.
- isSvgAsImageRenderingEnabled() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- isSvgAsImageRenderingEnabled() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
- issymmetric - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
Symmetry flag.
- IsSymmetric() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- isSystem - Variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
boolean determining if this is the system's data provenance, or an open image's
- isSystemOutRedirected() - Static method in class gov.nih.mipav.view.LogStdStreams
-
Is the System.Out being redirected to this logfile.
- isTabDelimited() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticFileFormatOptions
-
Provides the state of the tab-delimited option.
- isTableDestinationOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Locates the translation/key-file destination directory.
- isTagSameAsReferenceTag(FileDicomTag) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns true if a given tag is in the reference tag table and has the same value as the tag in the reference
table.
- isTargetFixed() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if updates to position affect direction while keeping the target fixed.
- istart - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- istart - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- isThreadStopped() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Returns flag that indicates that the algorithm thread has been stopped.
- isThreadStopped() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- isThresholding() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Returns true if image A or B is in dual threshold inverse mode (for JDialogConvertType input ranges).
- isThresholding() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Returns true if comphist A or B is in dual threshold inverse mode (for JDialogConvertType input ranges).
- isTlrc - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
True if we ahve the data to compute acpc <-> tlrc.
- isTlrc() - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
returns true if we have data to compute acpc <-> tlrc.
- isTlrc(boolean) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets isTLRC flag.
- isTLRCBox - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- isToggle() - Method in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- isTransformChanged - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Flag to indicate tranformChanged event invoked.
- isTransparent() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory
-
- isTreeReadyForScriptExecution() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Checks tree to see that all place holders have been replaced with actual images and VOIs if not, it prompts the
user with a warning message, and highlights the first node that still contains a placeholer.
- isTrial(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
An image element is a trial element when its visitation time t
is invalid (t < 0), its inverse speed is finite, and the element is
adjacent to the boundary of the current region.
- isTriggerMouseEvent(MouseEvent, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- isTriPlanarVolView - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Mode is tri-planar volume view or not.
- IsTruncated() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- IsTrustRegionSolveSuccessful(boolean, boolean, boolean, boolean, CeresSolver.TrustRegionStrategyType, int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- isTypeAmbient() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if current light type is ambient.
- isTypeDirectional() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if current light type is directional.
- isTypePoint() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if current light type is point.
- isTypeSpot() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Query if current light type is spot.
- isTypical() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
Evaluates whether this table is a "typical" Huffman table.
- isTypical() - Method in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- iSubdivisions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- isUnits - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- isUpperCase(byte) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- isUpperLeftCorner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isUpperRightCorner() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isUseHardThresholding() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isUseMouseRotationCutoffs() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- isUseMouseTranslationCutoffs() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- isUserBit(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- IsUserBit(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- isUseSmartThresholding() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- isUshape - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- isUshape - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- isUshape - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- isUsingSliceSpacingCoarse() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Retrieves whether the "coarse" slice sampling is currently selected.
- isUsingSliceSpacingFine() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Retrieves whether the "fine" slice sampling is currently selected.
- isUsingVolumeColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
flag to indicate to use volume color or not
- isV() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- isValid(byte[]) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader
-
Ensure that a BPLIST is valid.
- isValid(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
An image element is valid whenever its visitation time t
satisfies the conditions: 0 ≤ t < Float.MAX_VALUE).
- IsValid() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- IsValid() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- IsValid() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Returns true if the file is valid.
- IsValid(String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- IsValid(String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- isValidByte(byte) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- isValidDate(int, int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DateUtil
-
- isValidIndex(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteArrayReader
-
- isValidIndex(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- isValidIndex(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
- isValidIndex(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- isValidNumber(String) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
- isValidTime(int, int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DateUtil
-
- isValueAssigned - Variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Whether a value has been set for this parameter.
- isValueAssigned() - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Returns whether a value has been set for this parameter.
- isValueValid(short) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
Checks whether a prospective value is valid.
- isVariableSet(String) - Method in class gov.nih.mipav.model.scripting.VariableTable
-
Checks to see if a variable has been added to the variable table.
- isVertexRoundingEnabled() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- isViewTextureAligned - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Flag to indicate whether the view volume texture is aligned or not.
- isVisible - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
Is dialog visible or not.
- isVisible - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Flag indicating if the image is currently visible.
- isVisible() - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that tells if the VOI is visible.
- isVisible() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- isVisibleMask - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
- isVisiblePaint - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
- isVMOptionsFile(File) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- isVOIOpen() - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
Checks to see if the active VOI is a polyline.
- isVOIsCloseEnough(int, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Check the registration accuracy.
- isVOIsCloseEnough(int, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Check the registration accuracy.
- isVolOpacityChanged - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean indicator for volume opacity changed.
- isVolOpacityChanged() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- isVolumeDisplayMode3D - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean indicator for the current diaplay mode, volume render mode or slice render mode.
- isVolViewMode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Check is volume view frame or not.
- isW() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- IsW() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- isWorking - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- isWorking() - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- isWritePackBit() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that returns whether or not to write with packed bits compression (only possible with TIFF byte images).
- iswt(double[][], PyWavelets.DiscreteWavelet) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- iswt2(double[][][], PyWavelets.DiscreteWavelet[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- iswtn(HashMap<String, double[][][]>[], PyWavelets.DiscreteWavelet[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- iswtn2(HashMap<String, double[][]>[], PyWavelets.DiscreteWavelet[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- isXLATdestinationOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Locates the translation/key-file destination directory.
- isXML - Variable in class gov.nih.mipav.model.file.FileVOI
-
Flag indicating whether the VOI should be written in MIPAV's XML format.
- isYCbCr - Variable in class gov.nih.mipav.model.file.FileSVS
-
- isYCbCr - Variable in class gov.nih.mipav.model.file.FileTiff
-
- ISYGP - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- isZero() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
- isZero() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Checks if either the numerator or denominator are zero.
- isZero() - Method in class gov.nih.mipav.util.DoubleDouble
-
Tests whether this value is equal to 0.
- isZero() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- isZeroSpeed(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
An image element is never visited when its corresponding speed is
zero.
- isZeroToOneLUTAdj() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- isZip - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
- isZip() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
- it - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
index of the time variable being used.
- it - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- it_node() - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper.it_node
-
- ITail - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- italicBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
checkbox for italic style.
- iTalLabel - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
talaraich intensity label*
- iTdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
- item - Variable in class gov.nih.mipav.model.algorithms.KDTree.res_node
-
- item - Variable in class gov.nih.mipav.view.ViewMenuBuilder.MipavMenuItem
-
DOCUMENT ME!
- Item - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- Item() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.Item
-
- Item(int, float, boolean, Point3f, Vector3f, Shape3D, String) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
Constructor.
- Item(int, float, boolean, Vector3f, Vector3f, Vector3f, Vector3f, Vector3f, Vector3f, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Constructor.
- ITEM_SEPARATOR - Static variable in class gov.nih.mipav.view.Preferences
-
The character that separates items (such as in the user file type definitions).
- itemClose - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- itemClose - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- itemClose - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- itemClose - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- itemClose - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- itemCrop - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- itemHelp - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- itemHelp - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- itemLine - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Check box menu item indicating if surface should be in line mode or full mode.
- itemLine - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Image line mode check box.
- itemModifyGraph - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- itemNormalize - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- itemOpenNewGraph - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- itemOpenSameGraph - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- itemOutputDistance - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- itemPasteFunct - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- itemPrintGraph - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- itemProps - Variable in class gov.nih.mipav.view.ViewJPopupPlugin
-
The uninstall menu item
- itemProps - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- itemResetDomain - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- itemResetGraph - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- itemResetRange - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- itemSaveGraph - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- itemShowGraph - Variable in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- itemShowPAAIDialog - Variable in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- itemShowVOIName - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Changes resolution normalization label based on whether or not the resolution normalization check box is checked.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
item state changed
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
DOCUMENT ME!
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
item state changed
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
Method to handle item events - currently unused.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
Watches the font descriptor checkboxes (bold/italic) and the font name (style) combo box, updates displayed font
with each change.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
Check to see if M-JPEG was selected so that the quality field will be enabled.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Changes labels based on whether or not check box is checked.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Sets text fields enabled depending upon which item in the combo box is selected.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
itemStateChanged - unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
itemStateChanged - method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
item staate changed
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Sets save, copy, and display flags based on whether or not they are selected.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Monitors the checkboxes and handles events according (enable/disable).
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
item state changed
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
itemStateChanged - unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Changes the interpolation box to enabled or disabled depending on if the transform box is checked or not.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Sets the flags for the checkboxes and resets labels.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCT
-
Sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
If the M-JPEG option is selected, enable the compression quality field, otherwise turn it off.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Enables text boxes depending on selection in combo box.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Changes the interpolation box to enabled or disabled depending on if the transform box is checked or not.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
itemStateChanged - method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Sets text fields enabled depending upon which item in the combo box is selected.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Initial center position checkbox listener.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Sets text field enabled or disabled depending on source.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Changes labels based on whether or not check box is checked.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Resets labels if checkboxes are checked or unchecked.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Watches the font descriptor checkboxes (bold/italic) and the font name (style) combo box, updates displayed font
with each change.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
Check to see if cardioid was selected or deselected
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
Check to see if line was selected or deselected
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
Check to see if line was selected or deselected
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
Check to see if line was selected or deselected
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
Check to see if line was selected or deselected
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
Check to see if line was selected or deselected
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Changes chosen operator based on combo box's selected index.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
itemStateChanged - unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Sets the flags for the checkboxes and resets labels.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Resets labels if checkboxes are checked or unchecked.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
item state changed
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Resets labels if checkboxes are checked or unchecked.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
Changes scale based on resolution check box.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
Changes scale based on resolution check box.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
item staate changed
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Resets labels if checkboxes are checked or unchecked.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Sets text fields enabled depending upon which item in the combo box is selected.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Sets text fields enabled depending upon which item in the combo box is selected.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
itemStateChanged - unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
DOCUMENT ME!
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMSER
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
itemStateChanged - method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
itemStateChanged - unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Enables text boxes depending on selection in combo box.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Implementation of JDialogBase abstract method.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Changes the interpolation box to enabled or disabled depending on if the transform box is checked or not.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Changes the interpolation box to enabled or disabled depending on if the transform box is checked or not.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Changes the interpolation box to enabled or disabled depending on if the transform box is checked or not.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Changes the interpolation box to enabled or disabled depending on if the transform box is checked or not.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Changes the interpolation box to enabled or disabled depending on if the transform box is checked or not.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Changes the interpolation box to enabled or disabled depending on if the transform box is checked or not.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
Sets labels and text fields enabled or disabled depending on checkbox.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Handle selection changes to the user defined value/preset radio buttons.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Changes labels based on whether or not check box is checked.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
DOCUMENT ME!
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSnake
-
Sets corrected label if resolution checkbox is checked.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
item staate changed
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Respond to checkbox item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
itemStateChanged - unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Sets the fill value text box to enabled or disabled depending on if the binary checkbox is selected.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Monitors the checkboxes and handles events according (enable/disable).
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
item state changed
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
itemStateChanged - unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
itemStateChanged - method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Updates the VOI when the checkboxes for title, boundary, processing, and opacity are changed
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Changes value of corrected scale based on resolution checkbox; sets buttons to enabled or disabled based on
choice checkbox.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Method to handle item events.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Sets the flags for the checkboxes and resets labels.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Sets the flags for the getOptionses and resets labels.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Sets the flags for the checkboxes and resets labels.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Sets the flags for the checkboxes and resets labels.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Check to see if M-JPEG was selected so that the quality field will be enabled.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
item state changed
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Sets border painted or not painted depending on if the button was selected or deselected.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Sets border painted or not painted depending on if the button was selected or deselected.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Sets border painted or not painted depending on if the button was selected or deselected.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Unchanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
itemStateChanged.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Does setBorderPainted for the appropriate button.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Does setBorderPainted for the appropriate button.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Sets the flags for the checkboxes.
- itemStateChanged(ItemEvent) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Sets border painted or not painted depending on if the button was selected or deselected.
- itemsToRender - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.GenericRenderer
-
- itemTableOutput - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- itemToInteger(Object) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Converts the combo box item to its corresponding integer.
- itemTrim - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
- itemType - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- iter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- iter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- iter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- iter - Variable in class gov.nih.mipav.model.algorithms.ConjugateGradient
-
- iter - Variable in class gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
- iter - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- Iterables() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Iterables
-
- iterate() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Run one iteration of the fast marching algorithm.
- iterate() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
Run one iteration of the fast marching algorithm.
- iterate() - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
Run one iteration of the fast marching algorithm.
- iterate(byte[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- iterate(byte[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- iterate(float, float, float, float, byte[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- iterate(float, float, float, float, byte[], int, int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- iterateCoarse() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Apply a single iteration of the region-growing fast march.
- ITERATED_FACET_MODEL - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- ITERATED_FACET_MODEL - Static variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- iteratedFacetModel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- iterateDistanceTransform() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Apply a single iteration of the annulus construction.
- iteratedModel - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- iterateEvolution() - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Apply a single iteration of the evolution.
- iteration - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- iteration - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- iteration - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
< Solver status.
- ITERATION_POWER - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- iteration_start_time_in_secs_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- iteration_summary_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- iteration_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- IterationCallback() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.IterationCallback
-
- iterationLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- iterationnum - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- iterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- iterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
Number of iterations of the diffusion.
- iterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- iterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
Number of iterations of the diffusion.
- iterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
Number of iterations of the diffusion.
- iterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMarkovSegment
-
- iterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- iterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Number of iterations of the diffusion.
- iterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEdgePreservingSmoothing
-
- iterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
number of times to filter the image.
- iterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientInverseWeightedSmoothing
-
- iterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
The total number of iterations
- iterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMarkovSmooth
-
The number of iterations to perform
- iterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
number of times to filter the image.
- iterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSymmetricNearestNeighbor
-
- iterations - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- iterations - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
number of iterations in the deconvolution:
- iterations - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- iterations - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- iterations - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- iterations - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
- iterations - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
DOCUMENT ME!
- iterations - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Total number of iterations
- iterations - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
- iterations - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
The number of iterations to perform
- iterations - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Number of iterations for smoothing formula.
- iterations - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- iterations2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
Iterations of the steepest descent method in L1 steering kernel regression in skr2L1_regular in
STEERING_KERNEL_SECOND_ORDER_L1_NORM
- iterations2 - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Iterations in skr2L1_regular for steepest descent method in L1 steering kernel regression in
STEERING_KERNEL_SECOND_ORDER_L1_NORM.
- iterationsD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- iterationsD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Dilation iteration times.
- iterationsD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Dilation iteration times.
- iterationsD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- iterationsD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Dilation iteration times.
- iterationsD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Dilation iteration times.
- iterationsE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- iterationsE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Erosion iteration times.
- iterationsE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Erosion iteration times.
- iterationsE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- iterationsE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Erosion iteration times.
- iterationsE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Erosion iteration times.
- iterationsErodeDilate - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- iterationsLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
DOCUMENT ME!
- iterationsOpen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- iterationsText - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- iterationsText - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
DOCUMENT ME!
- iterationsText - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Text field for getting iterations.
- IterationSummary() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- iterationText - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- IterationZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- ITERATIVE_SCHUR - gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverType
-
- ITERATIVE_STEERING_KERNEL_SECOND_ORDER - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- ITERATIVE_STEERING_KERNEL_SECOND_ORDER_IRREGULAR - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- iterativeGlobalSmoothing - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- iterativeGlobalSmoothing - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
1.5 for STEERING_KERNEL_SECOND_ORDER_L1_NORM
- iterativeGlobalSmoothing2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
Global smoothing parameter in skr2L1_regular in STEERING_KERNEL_SECOND_ORDER_L1_NORM
- iterativeGlobalSmoothing2 - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- iterativeKernelSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- iterativeKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- IterativeSchurComplementSolver(CeresSolver.LinearSolverOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.IterativeSchurComplementSolver
-
- IterativeSchurComplementSolverTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- IterativeSchurComplementSolverTestNormalProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- IterativeSchurComplementSolverTestNormalProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- IterativeSchurComplementSolverTestProblemWithNoFBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- IterativeSchurComplementSolverTestProblemWithNoFBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- iterator() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Returns an iterator over the pixels of this image.
- iterator() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
Return iterator to non-zero elements in the matrix.
- iterator(int, int, int, int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Returns an Iterator for the specified area of the image.
- Iterators() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Iterators
-
- iterCt - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- iterIrregular - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- iters - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- iters - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMRIShadingCorrection
-
Number of iterations.
- iters - Variable in class gov.nih.mipav.model.algorithms.FitGaussian
-
- iters - Variable in class gov.nih.mipav.model.algorithms.FitLaplace
-
- iters - Variable in class gov.nih.mipav.model.algorithms.FitLorentz
-
Iterations performed
- iters - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
integer scalar containing the number of iterations until termination.
- iters - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
integer scalar containing the number of iterations until termination.
- iters - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
DOCUMENT ME!
- iters - Variable in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
DOCUMENT ME!
- iters - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
or if the source image is to be replaced.
- iters - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
or if the source image is to be replaced.
- iters - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
DOCUMENT ME!
- iters - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- iters - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- iters - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- iters - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- itersCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- itersClose - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
- itersD - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
or if the source image is to be replaced.
- itersD - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
or if the source image is to be replaced.
- itersD - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
or if the source image is to be replaced.
- itersD - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
or if the source image is to be replaced.
- itersD - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
or if the source image is to be replaced.
- itersE - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- itersE - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- itersE - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- itersE - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- itersE - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- itersErode - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
- itersOpen - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
- iterSteering2 - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- Itest - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- itncount - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- itotal - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
Variables used for restart information.
- itotal - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
Variables used for restart information.
- itr - Variable in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- itr - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- itsmry(double[], int[], int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- iTXt - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- iu - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- IU - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- iv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
- iv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
- iv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel
-
- iv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DNoWholeModel
-
- iv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialNoWholeModel
-
- iv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
- iv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solModel
-
- iv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2nl2solModel
-
- iv - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- iv - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- ival - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
Variables used for restart information.
- ival - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
Variables used for restart information.
- IVCntrstAgent - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
72 - 17 bytes.
- iwork - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- iwork1 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- iwork1 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- iwrk - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- iwt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- iwtsgn - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- ix - Static variable in class gov.nih.mipav.model.algorithms.Fastfit
-
- ix - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftKeypoint
-
< o coordinate (octave).
- Ix - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- Ix - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- ix_lsvmin - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- Ix2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- iXdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- iXres - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- ixy(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- Ixy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- iy - Static variable in class gov.nih.mipav.model.algorithms.Fastfit
-
- iy - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftKeypoint
-
< Integer unnormalized x coordinate.
- Iy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- Iy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- Iy2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- iYdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- iYres - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- iz - Static variable in class gov.nih.mipav.model.algorithms.Fastfit
-
- iZdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
- IZigZagTable - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- IZigZagTable - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- iZres - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
J
- j - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- j - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskShortPair
-
- j - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- j - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- j - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- J - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion.kFitting
-
- J - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.Tracker
-
- J - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- J_BUF_MODE() - Constructor for enum gov.nih.mipav.model.file.libjpeg.J_BUF_MODE
-
- J_COLOR_SPACE() - Constructor for enum gov.nih.mipav.model.file.libjpeg.J_COLOR_SPACE
-
- J_COLOR_TRANSFORM() - Constructor for enum gov.nih.mipav.model.file.libjpeg.J_COLOR_TRANSFORM
-
- j_common_ptr - Variable in class gov.nih.mipav.model.file.libjpeg
-
- J_data - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- J_DCT_METHOD() - Constructor for enum gov.nih.mipav.model.file.libjpeg.J_DCT_METHOD
-
- j_decompress_ptr - Variable in class gov.nih.mipav.model.file.libjpeg
-
- J_DITHER_MODE() - Constructor for enum gov.nih.mipav.model.file.libjpeg.J_DITHER_MODE
-
- J_MESSAGE_CODE(String) - Constructor for enum gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- j2 - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- J2K_CCP_CBLKSTY_LAZY - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_CCP_CBLKSTY_RESET - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Selective arithmetic coding bypass
- J2K_CCP_CBLKSTY_SEGSYM - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Predictable termination
- J2K_CCP_CBLKSTY_TERMALL - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Reset context probabilities on coding pass boundaries
- J2K_CCP_CBLKSTY_VSC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Termination on each coding pass
- J2K_CCP_CSTY_PRT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_CCP_QNTSTY_NOQNT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Segmentation symbols are used
- J2K_CCP_QNTSTY_SIQNT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_CFMT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_CP_CSTY_EPH - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_CP_CSTY_PRT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_CP_CSTY_SOP - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- j2k_destroy_cstr_index(FileJPEG2000.opj_codestream_index_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- j2k_memory_marker_handler_tab - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_MS_CBD - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< COM marker value
- J2K_MS_COC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< COD marker value
- J2K_MS_COD - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< SIZ marker value
- J2K_MS_COM - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< CRG marker value
- J2K_MS_CRG - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< EPH marker value
- J2K_MS_EOC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< SOD marker value
- J2K_MS_EPB - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< EPC marker value (Part 11: JPEG 2000 for Wireless)
- J2K_MS_EPC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< UNKNOWN marker value
- J2K_MS_ESD - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< EPB marker value (Part 11: JPEG 2000 for Wireless)
- J2K_MS_INSEC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< SEC marker value (Part 8: Secure JPEG 2000)
- J2K_MS_MCC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< CBD marker value
- J2K_MS_MCO - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< MCT marker value
- J2K_MS_MCT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< MCC marker value
- J2K_MS_PLM - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< TLM marker value
- J2K_MS_PLT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< PLM marker value
- J2K_MS_POC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< QCC marker value
- J2K_MS_PPM - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< PLT marker value
- J2K_MS_PPT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< PPM marker value
- J2K_MS_QCC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< QCD marker value
- J2K_MS_QCD - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< RGN marker value
- J2K_MS_RED - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< ESD marker value (Part 11: JPEG 2000 for Wireless)
- J2K_MS_RGN - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< COC marker value
- J2K_MS_SEC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< RED marker value (Part 11: JPEG 2000 for Wireless)
- J2K_MS_SIZ - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< EOC marker value
- J2K_MS_SOC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< the decoding process has encountered an error (FIXME warning V1 =
0x0080)
- J2K_MS_SOD - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< SOT marker value
- J2K_MS_SOP - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< PPT marker value
- J2K_MS_SOT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< SOC marker value
- J2K_MS_TLM - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< POC marker value
- J2K_MS_UNK - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< MCO marker value
- J2K_READ_EPB - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_READ_EPC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_READ_ESD - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_READ_INSEC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_READ_RED - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_READ_SEC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- J2K_STATE_EOC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< the decoding process must not expect a EOC marker because the
codestream is truncated
- J2K_STATE_MH - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< a SIZ marker is expected
- J2K_STATE_MHSIZ - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< a SOC marker is expected
- J2K_STATE_MHSOC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< a SOC marker is expected
- J2K_STATE_NEOC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< the EOC marker has just been read
- J2K_STATE_TPH - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< the decoding process is in a tile part header and expects a SOT marker
- J2K_STATE_TPHSOT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< the decoding process is in the main header
- jac - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- Jac(double, CVODES.NVector, CVODES.NVector, double[][], CVODES.UserData, CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- JACANP(double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- jacB - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRecB
-
- JacB(double, CVODES.NVector, CVODES.NVector, CVODES.NVector, double[][], CVODES.UserData, CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- jacBS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRecB
-
- JacBTestMode(double, CVODES.NVector, CVODES.NVector, CVODES.NVector, double[][], CVODES.UserData, CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- jacdif(int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- jacdif(int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- jacDQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- JACIN - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- JACOBI - gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerType
-
- jacobi_scaling - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- jacobi_scaling - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- jacobian - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- jacobian - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ExpectedEvaluation
-
- jacobian - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- jacobian - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
2D array of doubles of dimension nPts by max(4,param) containing the main part of the covariance matrix
(Jtranspose * J)inverse, where J is the Jacobian matrix computed at a.
- jacobian_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- jacobian_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.Fixture
-
- jacobian_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryCostFunction3
-
- jacobian_block_ptrs - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateScratch
-
- jacobian_evaluation_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- jacobian_layout_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockEvaluatePreparer
-
- jacobian_layout_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobianWriter
-
- jacobian_layout_storage_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobianWriter
-
- jacobian_offsets_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearCostFunction
-
- jacobian_scaling_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- jacobian_scratch_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ScratchEvaluatePreparer
-
- jacobian_writer_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- jacobian1_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction3
-
- jacobian2_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.BinaryCostFunction3
-
- JacobianElliptic - Class in gov.nih.mipav.model.algorithms
-
Calculate Jacobian Elliptic functions.
- JacobianElliptic() - Constructor for class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- JacobianElliptic(double, double, double[], double[], double[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- JacobianElliptic(double, double, double, int, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- jacobianEval - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
integer scalar containing the number of function evaluations caused by computing Jacobians with difference
methods.
- jacobianEval - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
integer scalar containing the number of function evaluations caused by computing Jacobians with difference
methods.
- jacobians - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProbeResults
-
- jacobiIters1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
jacobiIters1 and jacobiIter2 are only used with gain correction.
- jacobiIters1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
jacobiIters1 and jacobiIter2 are only used with gain field correction.
- jacobiIters1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
jacobiIters1 and jacobiIter2 are only used with gain correction.
- jacobiIters2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
- jacobiIters2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
- jacobiIters2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- JACSUC(double, int, double[], double[], double, double[][]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- JACSUM(double, int, double[], double[], double, double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- JacTestMode(double, CVODES.NVector, CVODES.NVector, double[][], CVODES.UserData, CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
Jacobian routine.
- JAINC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- JamaMatrix - Class in gov.nih.mipav.model.structures.jama
-
Wrapper around Jama package, @see src/Jama/
Provides access to features unique to Jama lib,
otherwise use WildMagic Matrix3f, Matrix4f and GMatrix classes.
- JamaMatrix(double[][]) - Constructor for class gov.nih.mipav.model.structures.jama.JamaMatrix
-
- JamaMatrix(int, int) - Constructor for class gov.nih.mipav.model.structures.jama.JamaMatrix
-
Initial value set to 0.0 for all elements
- JamaMatrix(int, int, double) - Constructor for class gov.nih.mipav.model.structures.jama.JamaMatrix
-
- JamaMatrix(Matrix) - Constructor for class gov.nih.mipav.model.structures.jama.JamaMatrix
-
Convert results from Jama lib
- JAPAR7(double[], double, double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- JAPHYC() - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- jarClassLoader - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Class/resource loader for plugins that are in jars
- JarClassLoader - Class in gov.nih.mipav.plugins
-
- JarClassLoader(ClassLoader) - Constructor for class gov.nih.mipav.plugins.JarClassLoader
-
- JarClassLoader(URL[]) - Constructor for class gov.nih.mipav.plugins.JarClassLoader
-
- JarClassLoader(URL[], ClassLoader) - Constructor for class gov.nih.mipav.plugins.JarClassLoader
-
- JarClassLoader(URL[], ClassLoader, URLStreamHandlerFactory) - Constructor for class gov.nih.mipav.plugins.JarClassLoader
-
- JArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- JATYP - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- javaImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- javaImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- JavaStrToCStr(String) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- JBLOCK - Variable in class gov.nih.mipav.model.file.libjpeg
-
- JBLOCKARRAY - Variable in class gov.nih.mipav.model.file.libjpeg
-
- JBLOCKIMAGE - Variable in class gov.nih.mipav.model.file.libjpeg
-
- JBLOCKROW - Variable in class gov.nih.mipav.model.file.libjpeg
-
- JBUF_CRANK_DEST - gov.nih.mipav.model.file.libjpeg.J_BUF_MODE
-
- JBUF_PASS_THRU - gov.nih.mipav.model.file.libjpeg.J_BUF_MODE
-
- JBUF_SAVE_AND_PASS - gov.nih.mipav.model.file.libjpeg.J_BUF_MODE
-
- JBUF_SAVE_SOURCE - gov.nih.mipav.model.file.libjpeg.J_BUF_MODE
-
- JButtonCellRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D.JButtonCellRenderer
-
- JButtonCellRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D.JButtonCellRenderer
-
- JButtonCellRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D.JButtonCellRenderer
-
- JCFIM5(int[], int[], int[], int[], double[], int[], double[][], int, double[], double[], double[], double[], double[], double[], double[], double[], double[], int[], double[], double[], double[], double[], double[], boolean, double[], double[], int[], double, int[], double[], int, int, int, int, int[], double[], double[], double[], double[], double, double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- JCOEF - Variable in class gov.nih.mipav.model.file.libjpeg
-
- JCOEFPTR - Variable in class gov.nih.mipav.model.file.libjpeg
-
- jcopy_sample_rows(byte[][], int, byte[][], int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jcopy_sample_rows(short[][], int, short[][], int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- JCOPYRIGHT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JCS_BG_RGB - gov.nih.mipav.model.file.libjpeg.J_COLOR_SPACE
-
- JCS_BG_YCC - gov.nih.mipav.model.file.libjpeg.J_COLOR_SPACE
-
- JCS_CMYK - gov.nih.mipav.model.file.libjpeg.J_COLOR_SPACE
-
- JCS_GRAYSCALE - gov.nih.mipav.model.file.libjpeg.J_COLOR_SPACE
-
- JCS_RGB - gov.nih.mipav.model.file.libjpeg.J_COLOR_SPACE
-
- JCS_UNKNOWN - gov.nih.mipav.model.file.libjpeg.J_COLOR_SPACE
-
- JCS_YCbCr - gov.nih.mipav.model.file.libjpeg.J_COLOR_SPACE
-
- JCS_YCCK - gov.nih.mipav.model.file.libjpeg.J_COLOR_SPACE
-
- JCT_NONE - gov.nih.mipav.model.file.libjpeg.J_COLOR_TRANSFORM
-
- JCT_SUBTRACT_GREEN - gov.nih.mipav.model.file.libjpeg.J_COLOR_TRANSFORM
-
- jdamax(int, double[], int) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- jdamax(int, DoubleDouble[], int) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- JDCT_FLOAT - gov.nih.mipav.model.file.libjpeg.J_DCT_METHOD
-
- JDCT_IFAST - gov.nih.mipav.model.file.libjpeg.J_DCT_METHOD
-
- JDCT_ISLOW - gov.nih.mipav.model.file.libjpeg.J_DCT_METHOD
-
- JDCT_ISLOW - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JDialog3DMosaicTo4DSlices - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialog3DMosaicTo4DSlices() - Constructor for class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialog3DMosaicTo4DSlices(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Creates new Mosaic To Slices dialog.
- JDialog4DImageCalculator - Class in gov.nih.mipav.view.dialogs
-
- JDialog4DImageCalculator() - Constructor for class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialog4DImageCalculator(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
Creates new image calculator dialog and displays.
- JDialogAAMClassification - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The class is the driver for the AAM classification.
- JDialogAAMClassification(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Constructor. the parent frame
- JDialogAAMClassification.ModelString - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogAAMClassification.PolygonShapeInfo - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Polygon shape info class to do shape comparison after the AAM
classification applied to do the segmentation.
- JDialogAAMClassification.Range - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Ending slice start and end indexes.
- JDialogAAMClassification.ShapeFactor - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
shape descriptor class.
- JDialogAAMClassificationExt - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The class is the driver for the AAM classification.
- JDialogAAMClassificationExt(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Constructor. the parent frame
- JDialogAAMClassificationExt.ModelString - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogAAMClassificationExt.PolygonShapeInfo - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Polygon shape info class to do shape comparison after the AAM
classification applied to do the segmentation.
- JDialogAAMClassificationExt.Range - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Ending slice start and end indexes.
- JDialogAAMClassificationExt.ShapeFactor - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
shape descriptor class.
- JDialogAAMplusSVM - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class is the combined Atlas based AAM and SVM model to automatically
segment the MRI prostate.
- JDialogAAMplusSVM(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Constructor
- JDialogAAMplusSVM.ImageAttribute - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Image attribute for AAM model.
- JDialogAAMplusSVM.ImageModel - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Image model of AAM.
- JDialogAAMplusSVM.ImageModelSVM - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Image SVM model.
- JDialogAAMplusSVM.ModelString - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Model string struct.
- JDialogAAMplusSVM.Range - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Segmentation processing range
- JDialogAAMplusSVM.ShapeFactor - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Shape factor struct.
- JDialogAAMplusSVM.SliceSetString - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
AAM model slice struct.
- JDialogACPC - Class in gov.nih.mipav.view.dialogs
-
Dialog to enter points for creating an ACPC image.
- JDialogACPC(ViewJFrameTriImage, ModelImage, ModelImage, TalairachTransformInfo, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogACPC
-
This method creates a dialog for selecting markers used for generating an AC-PC aligned view image from an
original image
- JDialogAction - Class in gov.nih.mipav.view.graphVisualization
-
- JDialogAction(MipavGraphPanel, Node, String, boolean) - Constructor for class gov.nih.mipav.view.graphVisualization.JDialogAction
-
- JDialogActiveContoursWithoutEdges - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogActiveContoursWithoutEdges() - Constructor for class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogActiveContoursWithoutEdges(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Used primarily for the script to store variables and run the algorithm.
- JDialogActiveContoursWithoutEdges(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Creates a new JDialogActiveContoursWithoutEdges object.
- JDialogAdaptiveKuwaharaFilter - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogAdaptiveKuwaharaFilter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogAdaptiveKuwaharaFilter(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Creates new dialog for entering parameters for Adaptive Kuwahara Filter.
- JDialogAddMargins - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to add margins around the image.
- JDialogAddMargins() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogAddMargins(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Constructor that makes dialog and displays it.
- JDialogAddNode - Class in gov.nih.mipav.view.graphVisualization
-
Dialog used by the MipavGraphPanel to add a node to the graph, or to modify the Notes
attribute of a node.
- JDialogAddNode(MipavGraphPanel, Node, String, boolean, boolean) - Constructor for class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
- JDialogAddNode(MipavGraphPanel, String, boolean) - Constructor for class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
- JDialogAGCIE - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogAGCIE() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogAGCIE(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Creates new dialog for entering parameters for AGCIE enhanced image.
- JDialogAGVF - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the snake-like algorithm.
- JDialogAGVF(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAGVF
-
Creates new dialog for finding the GVF.
- JDialogAHE - Class in gov.nih.mipav.view.dialogs
-
Adaptive Histogram Equlization.
- JDialogAHE() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAHE
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogAHE(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAHE
-
Creates a new JDialogAHE object.
- JDialogAHElocal - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogAHElocal() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogAHElocal(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Creates a new JDialogAHElocal object.
- JDialogAINDANE - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogAINDANE() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogAINDANE(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Creates new dialog for entering parameters for AINDANE.
- JDialogAnalyzeNIFTIChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to write an analyze file , interfile file, or a nifti file.
- JDialogAnalyzeNIFTIChoice(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Creates new dialog.
- JDialogAnimate - Class in gov.nih.mipav.view.dialogs
-
Dialog to get scale factor and interpolation method to create initial image forwarded to ViewJFrameAnimate.
- JDialogAnimate(Frame, ModelImage, ModelLUT, ModelImage, ModelLUT) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnimate
-
Creates a new JDialogAnimate object.
- JDialogAnimate(Frame, ModelImage, ModelLUT, ModelImage, ModelLUT, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnimate
-
Creates a new JDialogAnimate object.
- JDialogAnimate.CancelListener - Class in gov.nih.mipav.view.dialogs
-
Does nothing at the moment.
- JDialogAnimate.OkBorderListener - Class in gov.nih.mipav.view.dialogs
-
Pick up the selected color and change the image border color.
- JDialogAnisotropicDiffusion - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogAnisotropicDiffusion() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogAnisotropicDiffusion(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Creates a new JDialogAnisotropicDiffusion object.
- JDialogAnnotation - Class in gov.nih.mipav.view.dialogs
-
Dialog for creating new/editing existing on-screen annotations.
- JDialogAnnotation(ModelImage, VOI, int, boolean, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
Constructs a new annotation dialog, displays it, and turns recording on.
- JDialogAnnotation(ModelImage, VOI, int, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
- JDialogAnnotation.CancelListener - Class in gov.nih.mipav.view.dialogs
-
Does nothing.
- JDialogAnnotation.OkColorListener - Class in gov.nih.mipav.view.dialogs
-
Pick up the selected color and call method to change the VOI color.
- JDialogAnnotation.UpdateTextAction - Class in gov.nih.mipav.view.dialogs
-
Update the displayed text accourding to the current settings of the window.
- JDialogAnonymizeDirectory - Class in gov.nih.mipav.view.dialogs
-
Visual Interface to anonymize DICOM images by the directory-full.
- JDialogAnonymizeDirectory(String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
builds and packs the frame. does not set it visible.
- JDialogAnonymizeDirectory.AnonymizeDicomDirectories - Class in gov.nih.mipav.view.dialogs
-
This thread anonymization processes all the Dicom files in the submitted source directories and places them into
the submitted destination directory.
- JDialogAnonymizeImage - Class in gov.nih.mipav.view.dialogs
-
REALLY like JDialogRemoveSlices except it does not have an "algorithm"
- JDialogAnonymizeImage() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
- JDialogAnonymizeImage(Dialog, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
constructor to build a dialog allowing user to find which tags are available to anonymize.
- JDialogAnonymizePresets - Class in gov.nih.mipav.view.dialogs
-
- JDialogAnonymizePresets(Dialog, boolean, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnonymizePresets
-
- JDialogAntigradient2 - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogAntigradient2() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogAntigradient2(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Creates a new JDialogAntigradient2 object.
- JDialogAnyTwoImagesSNR - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input any two images SNR Algorithms are executed in their own thread.
- JDialogAnyTwoImagesSNR(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
Creates a new JDialogFRET object.
- JDialogAnyTwoImagesSNR(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
Creates new dialog.
- JDialogAutoCorrelation - Class in gov.nih.mipav.view.dialogs
-
Dialog to call AlgorithmAutoCorrelation.
- JDialogAutoCorrelation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogAutoCorrelation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Constructs new transform dialog and sets up GUI components.
- JDialogAutoCovariance - Class in gov.nih.mipav.view.dialogs
-
Dialog to call AlgorithmAutoCovariance.
- JDialogAutoCovariance() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogAutoCovariance(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Constructs new transform dialog and sets up GUI components.
- JDialogAutoSeedWatershed - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogAutoSeedWatershed() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogAutoSeedWatershed(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Creates new dialog for entering parameters for Auto Seed Watershed.
- JDialogAVIChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to choose what type of compression to use when saving to AVI format.
- JDialogAVIChoice(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
Creates new dialog.
- JDialogAVIChoice(Frame, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
Creates a new JDialogAVIChoice object.
- JDialogBarrelDistortion - Class in gov.nih.mipav.view.dialogs
-
Dialog for correcting barrel and/or pincushion distortion
- JDialogBarrelDistortion() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Empty constructor needed for dynamic instantiation.
- JDialogBarrelDistortion(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Construct the barrel/pin cushion correction dialog.
- JDialogBase - Class in gov.nih.mipav.view.dialogs
-
This class is the base for all the other dialogs.
- JDialogBase() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBase
-
Constructor that sets the dialog to not modal.
- JDialogBase(boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBase
-
Constructor that only sets the dialog to modal or not modal.
- JDialogBase(Dialog, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBase
-
Constructor that forwards the parent dialog whether or not the dialog is modal.
- JDialogBase(Dialog, boolean, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBase
-
Constructor that forwards the parent dialog whether or not the dialog is modal.
- JDialogBase(Frame, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBase
-
Constructor that sets the parent frame of the dialog and whether or not the dialog is modal.
- JDialogBase(Frame, boolean, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBase
-
Constructor that sets the parent frame of the dialog and whether or not the dialog is modal.
- JDialogBase.CancelAction - Class in gov.nih.mipav.view.dialogs
-
Handler for keys which should invoke the Cancel button (such as ESC).
- JDialogBase.HelpAction - Class in gov.nih.mipav.view.dialogs
-
Handler for keys which should invoke the Help button (such as F1).
- JDialogBase.OKAction - Class in gov.nih.mipav.view.dialogs
-
Handler for keys which should invoke the OK button (such as ENTER).
- JDialogBGAndFGDistanceMap - Class in gov.nih.mipav.view.dialogs
-
- JDialogBGAndFGDistanceMap() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
- JDialogBGAndFGDistanceMap(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
- JDialogBGDistanceMap - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm for BG distance map.
- JDialogBGDistanceMap() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogBGDistanceMap(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Creates new dialog for finding bg distance map.
- JDialogBilateralFilter - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogBilateralFilter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Empty constructor needed for dynamic instantiation.
- JDialogBilateralFilter(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Construct the bilateral filter dialog.
- JDialogBiorthogonalWavelets - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogBiorthogonalWavelets() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
Empty constructor needed for dynamic instantiation.
- JDialogBiorthogonalWavelets(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
Construct the biorthogonal wavelets dialog.
- JDialogBlankImage - Class in gov.nih.mipav.view.dialogs
-
Dialog to get image type for blank image.
- JDialogBlankImage(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBlankImage
-
Creates new dialog to get image type of blank image.
- JDialogBM3D - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogBM3D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogBM3D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Creates a new JDialogBM3D object.
- JDialogBorderClearing - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogBorderClearing() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogBorderClearing(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Creates new Border clearing dialog.
- JDialogBottomHat - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogBottomHat() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogBottomHat(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Constructor.
- JDialogBoundaryAttenuation - Class in gov.nih.mipav.view.dialogs
-
Dialog for an algorithm which reduces the intensity of an image near the boundary of the VOIs within an image volume.
- JDialogBoundaryAttenuation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Empty constructor needed for dynamic instantiation.
- JDialogBoundaryAttenuation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Set up the algorithm dialog.
- JDialogBoundingVOIs - Class in gov.nih.mipav.view.dialogs
-
- JDialogBoundingVOIs(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
Creates new dialog for entering parameters for algorithm.
- JDialogBoundingVOIs(Frame, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
Creates new dialog for entering parameters for algorithm.
- JDialogBoxCount - Class in gov.nih.mipav.view.dialogs
-
Dialog to call AlgorithmBoxCount.
- JDialogBoxCount() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogBoxCount(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
Constructs new transform dialog and sets up GUI components.
- JDialogBrainSurfaceExtractor - Class in gov.nih.mipav.view.dialogs
-
This dialog collects parameters for the BSE algorithm and then starts it up.
- JDialogBrainSurfaceExtractor() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogBrainSurfaceExtractor(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Sets the appropriate variables.
- JDialogBrightness - Class in gov.nih.mipav.view.dialogs
-
This class creates a simple dialog in which the user can specify a brightness integer and a contrast float using
sliders.
- JDialogBrightness(JFrame, ViewJComponentAnimate, int, float) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBrightness
-
Creates new dialog for entering brightness and contrast.
- JDialogBrightness(JFrame, ViewJComponentColocalizationEM, int, float) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBrightness
-
Creates new dialog for entering brightness and contrast.
- JDialogBrightness(JFrame, ViewJComponentColocalizationRegression, int, float) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBrightness
-
Creates new dialog for entering brightness and contrast.
- JDialogBRISK - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogBRISK() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogBRISK(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Creates new dialog for entering parameters for BRISK.
- JDialogBSmooth - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm for smoothing VOIs.
- JDialogBSmooth(Frame, ModelImage, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
Creates new dialog for entering parameters for algorithm.
- JDialogBSmooth(Frame, VOIManagerInterface, ModelImage, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
Creates new dialog for entering parameters for algorithm.
- JDialogBSnake - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogBSnake(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBSnake
-
Creates new dialog for entering parameters for algorithm.
- JDialogBulkImageCalculator - Class in gov.nih.mipav.view.dialogs
-
- JDialogBulkImageCalculator() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
empty constructor..needed for scripting
- JDialogBulkImageCalculator(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
- JDialogBurnParameter - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
DOCUMENT ME!
- JDialogBurnParameter(JPanelProbe, ViewJFrameBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
Creates a new JDialogBurnParameter object.
- JDialogCannyEdgeDetection - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogCannyEdgeDetection() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogCannyEdgeDetection(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Creates new dialog for entering parameters for Canny edge detection.
- JDialogCaptureScreen - Class in gov.nih.mipav.view.dialogs
-
Dialog for creating and saving a screen capture to a TIFF file.
- JDialogCaptureScreen(ViewJFrameImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Creates new dialog for screen capture.
- JDialogCaptureScreen(ViewJFrameImage, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
- JDialogCaptureScreen.GlassPaneListener - Class in gov.nih.mipav.view.dialogs
-
Listener for the glass panes.
- JDialogCaptureScreen.ImageConverter - Class in gov.nih.mipav.view.dialogs
-
changes an image to a Transferable
- JDialogCaptureScreen.MyGlassPane - Class in gov.nih.mipav.view.dialogs
-
Our special glass panes draw rectangles based on how the user traces them using the mouse.
- JDialogCaptureScreen.WindowProperties - Enum in gov.nih.mipav.view.dialogs
-
- JDialogCaptureScreens - Class in gov.nih.mipav.view.dialogs
-
Dialog (invisible) for capturing slices of a 3d/4d image into a new image.
- JDialogCaptureScreens(ViewJFrameImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCaptureScreens
-
Invisible dialog used through script or from the Main frame that captures slices of a 3d/4d Image into a new
frame.
- JDialogCenterOfMass - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogCenterOfMass() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogCenterOfMass(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
Creates a new JDialogCenterOfMass object.
- JDialogCenterOfMass.CheckValueAction - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogCenterOfMassRGB - Class in gov.nih.mipav.view.dialogs
-
Title: JDialogCenterOfMassRGB
- JDialogCenterOfMassRGB() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogCenterOfMassRGB(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Used primarily for the script to store variables and run the algorithm.
- JDialogCenterOfMassRGB(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Creates a new JDialogCenterOfMassRGB object.
- JDialogCentroidThreshold - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to input inital centroid values and threshold value for each class for
AlgorithmMSpectralFuzzyCMeans.
- JDialogCentroidThreshold(Frame, String, int, float, float) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
Constructor.
- JDialogChangeMaskNumber - Class in gov.nih.mipav.view.dialogs
-
This is a dialog that allows the user to change the mask number on the buttons
- JDialogChangeMaskNumber(JButton, JButton, ArrayList<Integer>, Color[], ModelLUT, ModelImage, int, Vector<Integer>) - Constructor for class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
- JDialogCheckerBoard - Class in gov.nih.mipav.view.dialogs
-
Dialog to get the row and column numbers of checkerboard squares
- JDialogCheckerBoard(Frame, ViewJComponentEditImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
Creates new dialog and sets up GUI components.
- JDialogCheckerBoard(Frame, ViewJComponentRegistration) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
Creates new dialog and sets up GUI components.
- JDialogCheckerBoard.Animate - Class in gov.nih.mipav.view.dialogs
-
- JDialogChooseOverlay(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
Creates a new JDialogChooseOverlay object.
- JDialogCircleGeneration - Class in gov.nih.mipav.view.dialogs
-
Dialog to create an image with randomly spaced, aggregated, regular or uniform, or constrained circles of the same size
- JDialogCircleGeneration(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
Creates new dialog.
- JDialogCircleToRectangle - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input of circle center and point on circle curve and output xDim and yDim of rectangle created
from transformed circle.
- JDialogCircleToRectangle(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
Creates a new JDialogCircleToRectangle object.
- JDialogCircleToRectangle(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
Creates new dialog.
- JDialogCircularSectorToRectangle - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input of 4 bounding sector points and output xDim and yDim of rectangle created from transformed
sector.
- JDialogCircularSectorToRectangle(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
Creates a new JDialogCircularSectorToRectangle object.
- JDialogCircularSectorToRectangle(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
Creates new dialog.
- JDialogClose - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogClose() - Constructor for class gov.nih.mipav.view.dialogs.JDialogClose
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogClose(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogClose
-
Constructor.
- JDialogCoherenceEnhancingDiffusion - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call a specified diffusion algorithm.
- JDialogCoherenceEnhancingDiffusion() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogCoherenceEnhancingDiffusion(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Initialize the dialog.
- JDialogColocalizationEM - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input Identify colocalized pixels Algorithms are executed in their own thread.
- JDialogColocalizationEM() - Constructor for class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogColocalizationEM(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Creates a new JDialogColocalizationEM object.
- JDialogColocalizationEM(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Creates new dialog.
- JDialogColocalizationRegression - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input Calculate Pearson's correlation coefficient Calculate P value for this correlation
coefficient Identify colocalized pixels Algorithms are executed in their own thread.
- JDialogColocalizationRegression() - Constructor for class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogColocalizationRegression(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Creates a new JDialogColocalizationRegression object.
- JDialogColocalizationRegression(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Creates new dialog.
- JDialogColorEdge - Class in gov.nih.mipav.view.dialogs
-
GUI for entering parameters for the Color Edge algorithm and making it scriptable.
- JDialogColorEdge() - Constructor for class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogColorEdge(JFrame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Creates an modal extension of JDialogBase, using the title, "Local Normalization".
- JDialogColorSaturation - Class in gov.nih.mipav.view.dialogs
-
Dialog for adjusting color saturation
- JDialogColorSaturation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Empty constructor needed for dynamic instantiation.
- JDialogColorSaturation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Construct the saturation adjustment dialog.
- JDialogConcat - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogConcat() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConcat
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogConcat(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConcat
-
Creates new concatenatation dialog.
- JDialogConcatMult2Dto3D - Class in gov.nih.mipav.view.dialogs
-
- JDialogConcatMult2Dto3D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
empty constructor..needed for scripting
- JDialogConcatMult2Dto3D(Frame, ArrayList<ModelImage>) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
- JDialogConcatMult2Dto3D.JButtonCellRenderer - Class in gov.nih.mipav.view.dialogs
-
- JDialogConcatMult3Dto3D - Class in gov.nih.mipav.view.dialogs
-
- JDialogConcatMult3Dto3D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
empty constructor..needed for scripting
- JDialogConcatMult3Dto3D(Frame, ArrayList<ModelImage>) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
- JDialogConcatMult3Dto3D.JButtonCellRenderer - Class in gov.nih.mipav.view.dialogs
-
- JDialogConcatMult3Dto4D - Class in gov.nih.mipav.view.dialogs
-
- JDialogConcatMult3Dto4D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
empty constructor..needed for scripting
- JDialogConcatMult3Dto4D(Frame, ArrayList<ModelImage>) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
- JDialogConcatMult3Dto4D.JButtonCellRenderer - Class in gov.nih.mipav.view.dialogs
-
- JDialogConstrainedOAR3D - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call algorithm RegistrationOAR3D.
- JDialogConstrainedOAR3D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogConstrainedOAR3D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Creates new dialog for user to choose type of linear image registration algorithm to run.
- JDialogContrastEnhancementUsingExposureFusion - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogContrastEnhancementUsingExposureFusion() - Constructor for class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogContrastEnhancementUsingExposureFusion(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Creates new dialog for entering parameters for contrast enhancement using exposure fusion.
- JDialogConvergenceField - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogConvergenceField() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogConvergenceField(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Creates new dialog for entering parameters for creating convergence field image.
- JDialogConvert3Dto4D - Class in gov.nih.mipav.view.dialogs
-
Dialog to call the AlgorithmConvert3Dto4D to convert a 3D data set into a 4D data set.
- JDialogConvert3Dto4D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogConvert3Dto4D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Creates new dialog, but dialog is not visible.
- JDialogConvert4Dto3D - Class in gov.nih.mipav.view.dialogs
-
Dialog to call the AlgorithmConvert4Dto3D to convert the current image from a 4D one to a 3D one.
- JDialogConvert4Dto3D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogConvert4Dto3D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Creates new dialog, but dialog is not visible.
- JDialogConvert4DtoMultiple3D - Class in gov.nih.mipav.view.dialogs
-
- JDialogConvert4DtoMultiple3D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvert4DtoMultiple3D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogConvert4DtoMultiple3D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvert4DtoMultiple3D
-
Creates new dialog, but dialog is not visible.
- JDialogConvert4DtoRGB - Class in gov.nih.mipav.view.dialogs
-
- JDialogConvert4DtoRGB() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
Empty Constructor (needed for scripting)
- JDialogConvert4DtoRGB(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
Constructor
- JDialogConvertType - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to convert the type of an image.
- JDialogConvertType() - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogConvertType(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Creates new dialog for converting type of image.
- JDialogConvertVOITBI - Class in gov.nih.mipav.view.renderer.WildMagic.TBI
-
This dialog converts the VOI lines or VOI contour lines into .ply file format as the point cloud based file.
- JDialogConvertVOITBI(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Constructor for Merging the 3 VOIs and save into one cloudy points file.
- JDialogConvexHull2D - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm for smoothing VOIs.
- JDialogConvexHull2D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
Creates new dialog for entering parameters for algorithm.
- JDialogConvexHull2D(Frame, VOIManagerInterface, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
Creates new dialog for entering parameters for algorithm.
- JDialogCopyFiles - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogCopyFiles(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Constructor.
- JDialogCorrectSpacing - Class in gov.nih.mipav.view.dialogs
-
Algorithm to adjust image volume for cases when the slice spacing is not equal to the slice thickness.
- JDialogCorrectSpacing() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogCorrectSpacing(JFrame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
Constructor that creates new dialog for Correct Spacing.
- JDialogCreateHEDpngFiles - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogCreateHEDpngFiles(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
Constructor.
- JDialogCreateHEDpngFilesTest - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogCreateHEDpngFilesTest(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
Constructor.
- JDialogCreateProbMap - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
This code is used to create VOI from Alexnet generated energy maps.
- JDialogCreateProbMap(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Constructor.
- JDialogCreateProbMap64 - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogCreateProbMap64(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Constructor.
- JDialogCreateProbMapConvert - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogCreateProbMapConvert(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Constructor.
- JDialogCrop - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the crop algorithm.
- JDialogCrop() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCrop
-
Empty constructor needed for dynamic instantiation (used during
scripting).
- JDialogCrop(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCrop
-
Used primarily for the script to store variables and run the algorithm.
- JDialogCrop(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCrop
-
Creates new dialog for cropping image.
- JDialogCrop(Frame, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCrop
-
Constructor for doing non-interactive cropping (border will be zero)
primarily used by VOI's pop-up menu
- JDialogCropBoundaryParam - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to crop pixels around the image.
- JDialogCropBoundaryParam() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogCropBoundaryParam(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Constructor that makes dialog and displays it.
- JDialogCropPointParam - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to crop pixels around the selected point.
- JDialogCropPointParam() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogCropPointParam(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Constructor that makes dialog and displays it.
- JDialogCropTiltedCuboid - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to crop pixels around the 8 selected tilted cuboid points.
- JDialogCropTiltedCuboid() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogCropTiltedCuboid(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Constructor that makes dialog and displays it.
- JDialogCropTiltedRectangle - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to crop pixels around the 4 selected tilted rectangle points.
- JDialogCropTiltedRectangle() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogCropTiltedRectangle(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
Constructor that makes dialog and displays it.
- JDialogCT - Class in gov.nih.mipav.view.dialogs
-
Simple dialog for CT window presets.
- JDialogCT(ViewJPanelHistoLUT, ModelLUT) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCT
-
- JDialogCTHistoLUT - Class in gov.nih.mipav.view.dialogs
-
Simple dialog for CT window presets.
- JDialogCTHistoLUT(ViewJComponentHistoLUT) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Creates new dialog and sets up GUI components.
- JDialogCTPreset - Class in gov.nih.mipav.view.dialogs
-
Simple dialog for CT window presets.
- JDialogCTPreset(Frame, ModelImage, ModelLUT) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Creates new dialog and sets up GUI components.
- JDialogCumulativeHistogram - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogCumulativeHistogram(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCumulativeHistogram
-
Constructor.
- JDialogCyclicPermutation - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to cyclically permute pixels around the image.
- JDialogCyclicPermutation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogCyclicPermutation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Constructor that makes dialog and displays it.
- JDialogDataProvenance - Class in gov.nih.mipav.view.dialogs
-
Simple dialog used to show the image or system data provenance (by passing in a provenanceholder
Displays data in table format, and the currently selected item will show up in the JTextArea (not editable, but selectable)
- JDialogDataProvenance(Frame, String, String, ProvenanceHolder, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
Default constructor for displaying data provenance (image or system)
- JDialogDataProvenance.SelectionListener - Class in gov.nih.mipav.view.dialogs
-
Listens to selection changes in the data provenance JTable
and updates the textarea with the current selection
- JDialogDBSCANClusteringSegment - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogDBSCANClusteringSegment() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogDBSCANClusteringSegment(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Creates a new JDialogDBSCANClusteringSegment object.
- JDialogDeconvolution - Class in gov.nih.mipav.view.dialogs
-
- JDialogDeconvolution() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Empty constructor needed for dynamic instantiation.
- JDialogDeconvolution(Frame, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Construct the deconvolution blur dialog.
- JDialogDeleteObjects - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogDeleteObjects() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogDeleteObjects(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Constructor.
- JDialogDemonsLite - Class in gov.nih.mipav.view.dialogs
-
Dialog box for Demons
- JDialogDemonsLite() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Empty constructor needed for dynamic instantiation.
- JDialogDemonsLite(ViewUserInterface, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Used primarily for the script to store variables and run the algorithm.
- JDialogDemonsLite(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Creates dialog for plugin.
- JDialogDEMRI3 - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input for 3 parameter dynamic (contrast) enhanced MRI model or DEMRI model
- JDialogDEMRI3(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
Creates a new JDialogDEMRI3 object.
- JDialogDEMRI3(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
Creates new dialog.
- JDialogDicom2XMLSelection - Class in gov.nih.mipav.view.dialogs
-
Dialog to select DICOM files to convert to MIPAV XML or Minc 2.0 HDF format.
- JDialogDicom2XMLSelection(FileInfoDicom, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Creates a new instance of JDialogDicom2XMLSelection.
- JDialogDicom2XMLSelection.DicomTagIdentifier - Class in gov.nih.mipav.view.dialogs
-
DicomTagIdentifiers allow collecting both the FileDicomTag with the associated FileDicomKey (the Group and
element numbers, properly formatted) of the Dicom Tag in one place, and to ensure that they only display the key
and the name string of the Tag in toString().
- JDialogDicom2XMLSelection.MyCellRenderer - Class in gov.nih.mipav.view.dialogs
-
This inner class is the font style renderer for the dicom tags The left panel will display all possible DICOM
tags...however, if the image has that particular tag, it will be bold font
- JDialogDICOMDeleteTagEditor - Class in gov.nih.mipav.view.dialogs
-
dialog for deleting DICOM tag information currently allows a limited number of special tags (procssing of which must
be performed by the DICOM tag itself), but allows editing seperate multiplicity values.
- JDialogDICOMDeleteTagEditor(Dialog, String, FileDicomTagTable, boolean, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
builds a dialog box with as many input panels as is needed to allow changing each value (when there are more than
one values (vm > 1). as in "v1\v2\v3") independantly of any other value in the tag.
- JDialogDicomDir - Class in gov.nih.mipav.view.dialogs
-
Simple dialog used to show the contents of a selected DICOMDIR file.
- JDialogDicomDir(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Default constructor for DICOMDIR
- JDialogDicomDir(Frame, File, FileDicom) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- JDialogDICOMNewTagEditor - Class in gov.nih.mipav.view.dialogs
-
dialog for adding new DICOM tag information currently allows a limited number of special tags (procssing of which must
be performed by the DICOM tag itself), but allows editing seperate multiplicity values.
- JDialogDICOMNewTagEditor(Dialog, FileDicomTagTable, boolean, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
builds a dialog box with as many input panels as is needed to allow changing each value (when there are more than
one values (vm > 1). as in "v1\v2\v3") independantly of any other value in the tag.
- JDialogDICOMTagEditor - Class in gov.nih.mipav.view.dialogs
-
dialog for editing DICOM tag information currently allows a limited number of special tags (procssing of which must
be performed by the DICOM tag itself), but allows editing seperate multiplicity values.
- JDialogDICOMTagEditor(Dialog, String, FileDicomTagTable, boolean, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
builds a dialog box with as many input panels as is needed to allow changing each value (when there are more than
one values (vm > 1). as in "v1\v2\v3") independantly of any other value in the tag.
- JDialogDicomTagMultiEditor - Class in gov.nih.mipav.view.dialogs
-
- JDialogDicomTagMultiEditor() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
Blank constructor needed for scripting
- JDialogDicomTagMultiEditor(Hashtable<FileDicomKey, FileDicomTag>, JDialogBase, boolean, File[], FileInfoDicom) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- JDialogDicomTagSelector - Class in gov.nih.mipav.view.dialogs
-
This class allows for DICOM tags to be selected.
- JDialogDicomTagSelector() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Blank constructor needed for scripting
- JDialogDicomTagSelector(JDialogBase, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- JDialogDicomTagSelector.DicomTableModel - Class in gov.nih.mipav.view.dialogs
-
- JDialogDicomTagSelector.NumberComparator - Class in gov.nih.mipav.view.dialogs
-
- JDialogDicomTagSelector.TagInputListener - Class in gov.nih.mipav.view.dialogs
-
- JDialogDICOMtoAVI - Class in gov.nih.mipav.view.dialogs
-
Title: JDialogDICOMtoAVI
- JDialogDICOMtoAVI() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
Constructor for running the DICOM to AVI algorithm.
- JDialogDilate - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogDilate() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDilate
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogDilate(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDilate
-
Creates new dialog.
- JDialogDirectResample - Class in gov.nih.mipav.view.dialogs
-
Dialog to ask user to resample the images or not.
- JDialogDirectResample() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Empty Contructor for script running.
- JDialogDirectResample(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Creates the dialog, using the input parameters to place it on the screen.
- JDialogDiscreteCosineTransform - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogDiscreteCosineTransform() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
Empty constructor needed for dynamic instantiation.
- JDialogDiscreteCosineTransform(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
Construct the Discrete Cosine Transform dialog.
- JDialogDiscreteSineTransform - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogDiscreteSineTransform() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
Empty constructor needed for dynamic instantiation.
- JDialogDiscreteSineTransform(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
Construct the Discrete Sine Transform dialog.
- JDialogDistanceMap - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogDistanceMap() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogDistanceMap(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Creates new dialog to get input for running the algorithm.
- JDialogDoublyConnectedSC - Class in gov.nih.mipav.view.dialogs
-
Dialog to get Schwarz-Christoffel mapping of region between 2 polygons to an annulus
- JDialogDoublyConnectedSC(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
Creates a new JDialogFRAP object.
- JDialogDoublyConnectedSC(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
Creates new dialog.
- JDialogDSC_MRI_toolbox - Class in gov.nih.mipav.view.dialogs
-
- JDialogDSC_MRI_toolbox() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
Empty constructor needed for dynamic instantiation.
- JDialogDSC_MRI_toolbox(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
Construct the bilateral filter dialog.
- JDialogDTICreateListFile - Class in gov.nih.mipav.view.dialogs
-
- JDialogDTICreateListFile() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
- JDialogDTICreateListFileRegOAR35DOptions - Class in gov.nih.mipav.view.dialogs
-
- JDialogDTICreateListFileRegOAR35DOptions(boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Creates new dialog for user to choose variables for internal registration.
- JDialogDTIEstimateTensor - Class in gov.nih.mipav.view.dialogs
-
- JDialogDTIEstimateTensor() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
constructor
- JDialogDTIInput - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Dialog for specifying Diffusion Tensor Images.
- JDialogDTIInput(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Create a new JDialogDTIInput of one of the four types:
- JDialogDualContourSearch - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user search for best boundary between 2 contours
- JDialogDualContourSearch(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
Creates a new JDialogDualContourSearch object.
- JDialogDualContourSearch(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
Creates new dialog.
- JDialogDualTriImageCrop - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogDualTriImageCrop() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDualTriImageCrop
-
- JDialogDualTriImagePaintGrow - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogDualTriImagePaintGrow() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDualTriImagePaintGrow
-
- JDialogDualTriImageTransformation - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogDualTriImageTransformation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDualTriImageTransformation
-
- JDialogEdgeDetection3D - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogEdgeDetection3D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogEdgeDetection3D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Creates new dialog for entering parameters for Sonka-Brejl 3D edge detection.
- JDialogEdgeLaplacian - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogEdgeLaplacian() - Constructor for class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogEdgeLaplacian(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Creates new dialog and displays it.
- JDialogEdgeNMSuppression - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogEdgeNMSuppression() - Constructor for class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Empty constructor needed for dynamic instantiation (used during
scripting).
- JDialogEdgeNMSuppression(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Creates new dialog and displays it.
- JDialogEdgePreservingSmoothing - Class in gov.nih.mipav.view.dialogs
-
- JDialogEdgePreservingSmoothing() - Constructor for class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Empty constructor needed for dynamic instantiation.
- JDialogEdgePreservingSmoothing(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Construct the Edge Preserving Smoothing dialog.
- JDialogEditCircleDiameter - Class in gov.nih.mipav.view.dialogs
-
- JDialogEditCircleDiameter(Component, String, String, String, float[], VOIBase, VOIManager) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- JDialogEditor - Class in gov.nih.mipav.view.dialogs
-
Simple editor using JPanelEdits.
- JDialogEditor(Dialog, Object, Object[], int[]) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEditor
-
sadly, the dialog doesn't know how to figure out what editor panels to apply to the different inputs, so old
values must be sent as an array of objects.
- JDialogEditSquareLength - Class in gov.nih.mipav.view.dialogs
-
- JDialogEditSquareLength(Component, String, String, String, float[], VOIBase, VOIManager) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- JDialogEditUserDefinedFileTypes - Class in gov.nih.mipav.view.dialogs
-
This class is the dialog that allows the user to edit the user defined file extensions filter
- JDialogEditUserDefinedFileTypes() - Constructor for class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
Constructor.
- JDialogEfficientWatershed - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogEfficientWatershed() - Constructor for class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Empty constructor needed for dynamic instantiation.
- JDialogEfficientWatershed(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Creates a new JDialogEfficientWatershed object.
- JDialogEllipseGeneration - Class in gov.nih.mipav.view.dialogs
-
Dialog to create an image with randomly spaced, aggregated, regular or uniform, or constrained ellipses of the same size
- JDialogEllipseGeneration(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
Creates new dialog.
- JDialogEllipseToCircle - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input of ellipse which will be conformally mapped to a circle.
- JDialogEllipseToCircle(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
Creates a new JDialogEllipseToCircle object.
- JDialogEllipseToCircle(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
Creates new dialog.
- JDialogEllipseToRectangle - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input of ellipse which will be conformally mapped to a rectangle.
- JDialogEllipseToRectangle(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
Creates a new JDialogEllipseToRectangle object.
- JDialogEllipseToRectangle(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
Creates new dialog.
- JDialogEmbeddedConfidenceEdgeDetection - Class in gov.nih.mipav.view.dialogs
-
- JDialogEmbeddedConfidenceEdgeDetection() - Constructor for class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogEmbeddedConfidenceEdgeDetection(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
Creates new dialog for entering parameters for embedded confidence edge detection.
- JDialogEnhancedDicomChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to write an enhanced dicom MR, CT, XA, or Other file.
- JDialogEnhancedDicomChoice(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEnhancedDicomChoice
-
Creates new dialog.
- JDialogEntropicEdgeDetection - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogEntropicEdgeDetection() - Constructor for class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogEntropicEdgeDetection(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Creates new dialog for entering parameters for entropic edge detection.
- JDialogEntropyMinimization - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogEntropyMinimization() - Constructor for class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogEntropyMinimization(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Creates new dialog for entering parameters for entropy minimization.
- JDialogErode - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogErode() - Constructor for class gov.nih.mipav.view.dialogs.JDialogErode
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogErode(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogErode
-
Creates new erode dialog.
- JDialogEvaluateMaskSegmentation - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call AlgorithmEvaluateMaskSegmentation.
- JDialogEvaluateMaskSegmentation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogEvaluateMaskSegmentation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Creates new evaluate segmentation dialog to get test image name.
- JDialogEvaluateSegmentation - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call AlgorithmEvaluateSegmentation.
- JDialogEvaluateSegmentation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogEvaluateSegmentation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Creates new evaluate segmentation dialog to get test image name.
- JDialogEvolveBoundaryManual - Class in gov.nih.mipav.view.dialogs
-
- JDialogEvolveBoundaryManual(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
Creates new dialog for entering parameters for algorithm.
- JDialogEvolveBoundaryManual(Frame, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
Creates new dialog for entering parameters for algorithm.
- JDialogExtractBrain - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogExtractBrain() - Constructor for class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogExtractBrain(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Sets the appropriate variables.
- JDialogExtractObject - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogExtractObject(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
Sets the appropriate variables.
- JDialogExtractSlices - Class in gov.nih.mipav.view.dialogs
-
Dialog to call the extractSlices.
- JDialogExtractSlices() - Constructor for class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogExtractSlices(Frame, ModelImage, Vector<String>) - Constructor for class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
Constructor.
- JDialogExtractSlicesVolumes - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to remove separate slices in an image.
- JDialogExtractSlicesVolumes() - Constructor for class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogExtractSlicesVolumes(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Creates new dialog for removing slices.
- JDialogExtractSurfaceCubes - Class in gov.nih.mipav.view.dialogs
-
Extracts a surface using Cube Extraction.
- JDialogExtractSurfaceCubes() - Constructor for class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Empty constructor needed for dynamic instantiation (during script execution).
- JDialogExtractSurfaceCubes(JFrame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Create a dialog to set variables to extract surface.
- JDialogExtractSurfaceCubes(JFrame, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Creates a subset of the extract surface dialog.
- JDialogFaceAnonymize - Class in gov.nih.mipav.view.dialogs
-
- JDialogFaceAnonymize() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFaceAnonymize(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Creates the face anonymizer dialog.
- JDialogFaceAnonymizerBET - Class in gov.nih.mipav.view.dialogs
-
Dialog used to input parameters and start the BET-based face anonymizer.
- JDialogFaceAnonymizerBET() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFaceAnonymizerBET(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Creates the face anonymizer dialog.
- JDialogFacetModel - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogFacetModel() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFacetModel(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Used primarily for the script to store variables and run the algorithm.
- JDialogFacetModel(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Creates a new JDialogFacetModel object.
- JDialogFastMarching - Class in gov.nih.mipav.view.dialogs
-
- JDialogFastMarching() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFastMarching(Frame, ModelImage, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Creates new dialog for finding the level set.
- JDialogFemurTraceSectionsNetherland - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
The class is the driver for the AAM classification.
- JDialogFemurTraceSectionsNetherland(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Constructor. the parent frame
- JDialogFemurTraceSectionsNetherland.Line - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogFemurTraceSectionsNetherland.ModelString - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogFemurTraceSectionsNetherland.PolygonShapeInfo - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Polygon shape info class to do shape comparison after the AAM
classification applied to do the segmentation.
- JDialogFemurTraceSectionsNetherland.Range - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Ending slice start and end indexes.
- JDialogFemurTraceSectionsNetherland.ShapeFactor - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
shape descriptor class.
- JDialogFemurTraceSectionsNetherland.TracingPoint - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogFemurTraceSectionsNIH - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
The class is the driver for the AAM classification.
- JDialogFemurTraceSectionsNIH(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
Constructor. the parent frame
- JDialogFemurTraceSectionsNIH.Line - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogFemurTraceSectionsNIH.ModelString - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogFemurTraceSectionsNIH.PolygonShapeInfo - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Polygon shape info class to do shape comparison after the AAM
classification applied to do the segmentation.
- JDialogFemurTraceSectionsNIH.Range - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Ending slice start and end indexes.
- JDialogFemurTraceSectionsNIH.ShapeFactor - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
shape descriptor class.
- JDialogFemurTraceSectionsNIH.TracingPoint - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogFemurTraceSectionsSeparateNetherland - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
The class is the driver for the AAM classification.
- JDialogFemurTraceSectionsSeparateNetherland(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Constructor. the parent frame
- JDialogFemurTraceSectionsSeparateNetherland.Line - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogFemurTraceSectionsSeparateNetherland.ModelString - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogFemurTraceSectionsSeparateNetherland.PolygonShapeInfo - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Polygon shape info class to do shape comparison after the AAM
classification applied to do the segmentation.
- JDialogFemurTraceSectionsSeparateNetherland.Range - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Ending slice start and end indexes.
- JDialogFemurTraceSectionsSeparateNetherland.ShapeFactor - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
shape descriptor class.
- JDialogFemurTraceSectionsSeparateNetherland.TracingPoint - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogFFT - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogFFT() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFFT
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFFT(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFFT
-
Creates new FFT dialog.
- JDialogFileInfo - Class in gov.nih.mipav.view.dialogs
-
This class shows the dialog which conatains the file-info header information as used in the FileInfoBase class.
- JDialogFileInfo(Frame, String, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
This method displays all the valid variables, that is, the ones that are no longer equal to their default values.
- JDialogFileInfoDICOM - Class in gov.nih.mipav.view.dialogs
-
This class shows the dialog which contains the DICOM header information as contained in the FileInfoDicom class.
- JDialogFileInfoDICOM() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Default Constructor
- JDialogFileInfoDICOM(Frame, String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Constructs new dialog with given title and parent, non modal.
- JDialogFileInfoDICOM.CheckBoxEditor - Class in gov.nih.mipav.view.dialogs
-
- JDialogFileInfoDICOM.CheckBoxRenderer - Class in gov.nih.mipav.view.dialogs
-
- JDialogFileInfoDICOM.CompareGroup - Class in gov.nih.mipav.view.dialogs
-
- JDialogFileInfoDICOM.HeaderListener - Class in gov.nih.mipav.view.dialogs
-
Simple listener for the table header.
- JDialogFileInfoDICOM.RowData - Class in gov.nih.mipav.view.dialogs
-
- JDialogFileInfoDICOM.TableListener - Class in gov.nih.mipav.view.dialogs
-
- JDialogFileInfoDICOM.TagCodeRenderer - Class in gov.nih.mipav.view.dialogs
-
- JDialogFileInfoDICOM.TagReferenceRenderer - Class in gov.nih.mipav.view.dialogs
-
- JDialogFileInfoMinc - Class in gov.nih.mipav.view.dialogs
-
Text dialog filled with the a minc image's file info.
- JDialogFileInfoMinc(Frame, String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoMinc
-
Constructs resizable dialog with text area in the middle.
- JDialogFileInfoMincHDF - Class in gov.nih.mipav.view.dialogs
-
- JDialogFileInfoMincHDF() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
Default Constructor
- JDialogFileInfoMincHDF(Frame, String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
Constructs new dialog with given title and parent, non modal.
- JDialogFileInfoXML - Class in gov.nih.mipav.view.dialogs
-
This class shows the dialog which conatains the file-info header information as used in the FileInfoBase class.
- JDialogFileInfoXML(Frame, String, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
Creates a new JDialogFileInfoXML object.
- JDialogFileInfoXML.PSetDisplay - Class in gov.nih.mipav.view.dialogs
-
Class to hold one table, model, & label per parameter set There can be infinite parameter sets, and the sets are
deletable, so each set display must be stored in a hashtable for easy access/deletion.
- JDialogFileInfoXML.PSetDisplay.HeaderListener - Class in gov.nih.mipav.view.dialogs
-
Simple listener for the table header.
- JDialogFileInfoXML.SurfaceDisplay - Class in gov.nih.mipav.view.dialogs
-
Class to hold one table, model, & label per parameter set There can be infinite parameter sets, and the sets are
deletable, so each set display must be stored in a hashtable for easy access/deletion.
- JDialogFileInfoXML.SurfaceDisplay.HeaderListener - Class in gov.nih.mipav.view.dialogs
-
Simple listener for the table header.
- JDialogFillObjects - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogFillObjects() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFillObjects(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Creates new dialog.
- JDialogFilterChoice - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to choose the filter for the view image directory.
- JDialogFilterChoice(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
Initializes the dialog.
- JDialogFindEdges - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogFindEdges() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFindEdges(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Used primarily for the script to store variables and run the algorithm.
- JDialogFindEdges(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Creates new dialog to find edges.
- JDialogFIREEdgeExtraction - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogFIREEdgeExtraction() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFIREEdgeExtraction(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Creates new dialog for entering parameters for FIRE Edge Extraction.
- JDialogFlip - Class in gov.nih.mipav.view.dialogs
-
Dialog to call the image flip.
- JDialogFlip() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFlip
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFlip(Frame, ModelImage, int, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFlip
-
Sets the appropriate variables.
- JDialogFrameLinker - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogFrameLinker(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
Used primarily for the script to store variables and run the algorithm.
- JDialogFrameLinker(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
Creates new image calculator dialog and displays.
- JDialogFRAP - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input Fluorescence recovery after photobleaching Algorithms are executed in their own thread.
- JDialogFRAP(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFRAP
-
Creates a new JDialogFRAP object.
- JDialogFRAP(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFRAP
-
Creates new dialog.
- JDialogFrequencyFilter - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogFrequencyFilter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFrequencyFilter(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Used primarily for the script to store variables and run the algorithm.
- JDialogFrequencyFilter(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Creates a new JDialogFrequencyFilter object.
- JDialogFRET - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input Fluorescence resonance energy transfer Algorithms are executed in their own thread.
- JDialogFRET(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFRET
-
Creates a new JDialogFRET object.
- JDialogFRET(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFRET
-
Creates new dialog.
- JDialogFRETBleedThrough - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogFRETBleedThrough() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFRETBleedThrough(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Used primarily for the script to store variables and run the algorithm.
- JDialogFRETBleedThrough(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Creates a new JDialogFRETBleedThrough object.
- JDialogFRETEfficiency - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogFRETEfficiency() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFRETEfficiency(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Used primarily for the script to store variables and run the algorithm.
- JDialogFRETEfficiency(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Creates a new JDialogFRETEfficiency object.
- JDialogFuzzMinDeAndChatterji - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogFuzzMinDeAndChatterji() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFuzzMinDeAndChatterji(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Creates a new JDialogFuzzyMinimization object.
- JDialogFuzzyCMeans - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogFuzzyCMeans() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFuzzyCMeans(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Creates a new JDialogFuzzyCMeans object.
- JDialogFuzzyConnectednessSegmentation - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogFuzzyConnectednessSegmentation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFuzzyConnectednessSegmentation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Creates new dialog for entering parameters for Power watershed.
- JDialogFuzzyConnectednessSegmentation.labelIndexComparator - Class in gov.nih.mipav.view.dialogs
-
- JDialogFuzzyConnectednessSegmentation.labelIndexItem - Class in gov.nih.mipav.view.dialogs
-
- JDialogFuzzyMinimization - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogFuzzyMinimization() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogFuzzyMinimization(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Creates a new JDialogFuzzyMinimization object.
- JDialogGaborFilter - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogGaborFilter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogGaborFilter(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Creates a new JDialogGaborFilter object.
- JDialogGaussianBlur - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogGaussianBlur() - Constructor for class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Empty constructor needed for dynamic instantiation.
- JDialogGaussianBlur(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Construct the gaussian blur dialog.
- JDialogGenerateEndingSlices - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogGenerateEndingSlices(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- JDialogGenerateGrid - Class in gov.nih.mipav.view.dialogs
-
- JDialogGenerateGrid() - Constructor for class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogGenerateGrid(Frame, ViewJComponentEditImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- JDialogGenerateIsolines - Class in gov.nih.mipav.view.dialogs
-
- JDialogGenerateIsolines() - Constructor for class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogGenerateIsolines(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- JDialogGradientInverseWeightedSmoothing - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogGradientInverseWeightedSmoothing() - Constructor for class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogGradientInverseWeightedSmoothing(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Creates new dialog for entering parameters for gradient inverse weighted smoothing.
- JDialogGradientMagnitude - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogGradientMagnitude() - Constructor for class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogGradientMagnitude(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Construct the gradient magnitude dialog.
- JDialogGraphBasedSegmentation - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogGraphBasedSegmentation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogGraphBasedSegmentation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Creates new dialog for entering parameters for graph based segmentation on 2D color images.
- JDialogGridOptions - Class in gov.nih.mipav.view.dialogs
-
Sets options for overlaying a grid on the image.
- JDialogGridOptions(Frame, ViewJComponentEditImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
Creates new dialog for entering parameters for entropy minimization.
- JDialogGridOptions.CancelListener - Class in gov.nih.mipav.view.dialogs
-
Does nothing.
- JDialogGridOptions.OkColorListener - Class in gov.nih.mipav.view.dialogs
-
Pick up the selected color and call method to change the VOI color.
- JDialogGridSize(JFrame) - Constructor for class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- JDialogGUIDClient - Class in gov.nih.mipav.view.dialogs
-
Title:
- JDialogGUIDClient(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- JDialogGuidedFilter - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogGuidedFilter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogGuidedFilter(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Creates a new JDialogGuidedFilter object.
- JDialogGVF - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogGVF(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogGVF
-
Creates new dialog for finding the GVF.
- JDialogHaarTransform - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogHaarTransform() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
Empty constructor needed for dynamic instantiation.
- JDialogHaarTransform(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
Construct the Haar Transform dialog.
- JDialogHaralickTexture - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogHaralickTexture() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Empty constructor needed for dynamic instantiation.
- JDialogHaralickTexture(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Creates a new JDialogHaralickTexture object.
- JDialogHarrisCornerDetector - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogHarrisCornerDetector() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogHarrisCornerDetector(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Creates new dialog for entering parameters for Harris corner detection.
- JDialogHarrisLaplace - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogHarrisLaplace() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogHarrisLaplace(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
Creates new dialog for entering parameters for BRISK.
- JDialogHartleyTransform - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogHartleyTransform() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
Empty constructor needed for dynamic instantiation.
- JDialogHartleyTransform(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
Construct the Hartley Transform dialog.
- JDialogHessian - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogHessian(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHessian
-
Creates a new JDialogHessian object.
- JDialogHillClimbingWatershed - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogHillClimbingWatershed() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Empty constructor needed for dynamic instantiation.
- JDialogHillClimbingWatershed(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Creates a new JDialogHillClimbingWatershed object.
- JDialogHistogram2Dim - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input Create 2D histogram of images with equal dimensions or 2D histograms with 2 colors inside a
RGB image.
- JDialogHistogram2Dim() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogHistogram2Dim(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Creates new dialog.
- JDialogHistogramLUT - Class in gov.nih.mipav.view.dialogs
-
Deprecated.
- JDialogHistogramLUT(Frame, ModelImage, ModelImage, ModelLUT, ModelLUT) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
- JDialogHistogramLUT(Frame, ModelImage, ModelImage, ModelRGB, ModelRGB) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
- JDialogHistogramLUT(Frame, ViewJComponentRegistration, ModelImage, ModelImage, ModelLUT, ModelLUT) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
- JDialogHistogramLUT(Frame, ViewJComponentRegistration, ModelImage, ModelImage, ModelRGB, ModelRGB) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
- JDialogHistogramMatch - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input Selected image is match image, the image that gets transformed until it is histogram matched
to the base image.
- JDialogHistogramMatch() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogHistogramMatch(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Creates new dialog.
- JDialogHistogramSliceMatch - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input reference slice.
- JDialogHistogramSliceMatch() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogHistogramSliceMatch(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Creates new dialog.
- JDialogHistogramSummary - Class in gov.nih.mipav.view.dialogs
-
Dialog to choose images, then call the RGBConcat algorithm.
- JDialogHistogramSummary() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogHistogramSummary(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Creates new dialog to enter parameters for RGBConcat algorithm.
- JDialogHMRF_EM - Class in gov.nih.mipav.view.dialogs
-
- JDialogHMRF_EM() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
Empty constructor needed for dynamic instantiation.
- JDialogHMRF_EM(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
Creates a new JDialogHMRF_EM object.
- JDialogHomomorphicFilter - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogHomomorphicFilter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogHomomorphicFilter(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Creates a new JDialogHomomorphicFilter object.
- JDialogHoughCardioid - Class in gov.nih.mipav.view.dialogs
-
Dialog to create Hough transform with x0, y0, rad output for cardioid detection in
binary image, where sqrt((x - x0)**2 + (y - y0)**2) = a*(1 - cos(theta + theta0))
sqrt((x - x0)**2 + (y - y0)**2) = a*(1 + cos(theta)) for cusp on left
sqrt((x - x0)**2 + (y - y0)**2) = a*(1 - cos(theta)) for cusp on right
sqrt((x - x0)**2 + (y - y0)**2) = a*(1 + sin(theta)) for cusp on top
sqrt((x - x0)**2 + (y - y0)**2) = a*(1 - sin(theta)) for cusp on bottom
- JDialogHoughCardioid(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
Creates a new JDialogHoughCardioid object.
- JDialogHoughCardioid(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
Creates new dialog.
- JDialogHoughCardioidChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to choose which cardioids to draw.
- JDialogHoughCardioidChoice(Frame, double[], int, double[], int, double[], double, double[], int[], boolean[]) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
Creates a new JDialogHoughCardioidChoice object.
- JDialogHoughCircle - Class in gov.nih.mipav.view.dialogs
-
Dialog to create Hough transform with x0, y0, rad output for circle detection in
binary image, where (x - x0)**2 + (y - y0)**2 = rad**2
- JDialogHoughCircle(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
Creates a new JDialogHoughCircle object.
- JDialogHoughCircle(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
Creates new dialog.
- JDialogHoughCircleChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to choose which circles to draw.
- JDialogHoughCircleChoice(Frame, double[], int, double[], int, double[], double, int[], boolean[]) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
Creates a new JDialogHoughCircleChoice object.
- JDialogHoughEllipse - Class in gov.nih.mipav.view.dialogs
-
Dialog to create Hough transform with p, q, r1, r2, and theta output for ellipse detection in
binary image, where p is the x coordinate of the ellipse center, q is the y coordinate of the
ellipse center, r1 is the semimajor axis (or major radius), r2 is the semiminor axis (or
minor radius), and theta is the angle of the major axis with the x axis.
- JDialogHoughEllipse(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Creates a new JDialogHoughEllipse object.
- JDialogHoughEllipse(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Creates new dialog.
- JDialogHoughEllipseChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to choose which ellipses to draw.
- JDialogHoughEllipseChoice(Frame, float[], int, float[], int, float[], double, double, float[], double, double, float[], short[], boolean[]) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
Creates a new JDialogHoughEllipseChoice object.
- JDialogHoughHyperbola - Class in gov.nih.mipav.view.dialogs
-
Dialog to create Hough transform with p, q, r1, r2, and theta output for hyperbola detection in
binary image, where p is the x coordinate of the hyperbola center, q is the y coordinate of the
hyperbola center, r1 is the 1/2 the transverse axis, r2 is 1/2 the conjugate axis, and theta is
the angle of the transverse axis with the x axis.
- JDialogHoughHyperbola(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Creates a new JDialogHoughHyperbola object.
- JDialogHoughHyperbola(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Creates new dialog.
- JDialogHoughHyperbolaChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to choose which hyperbolas to draw.
- JDialogHoughHyperbolaChoice(Frame, float[], int, float[], int, float[], double, double, float[], double, double, float[], short[], boolean[]) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
Creates a new JDialogHoughHyperbolaChoice object.
- JDialogHoughLine - Class in gov.nih.mipav.view.dialogs
-
Dialog to create Hough transform with rho, theta output for line detection of binary image
- JDialogHoughLine(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
Creates a new JDialogHoughLine object.
- JDialogHoughLine(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
Creates new dialog.
- JDialogHoughLineChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to choose which lines to fill gaps on and
the maximum distance of the gap to be filled for each line..
- JDialogHoughLineChoice(Frame, int[], int, int[], int, int[], boolean[], float[]) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
Creates a new JDialogHoughLineChoice object.
- JDialogHoughParabola - Class in gov.nih.mipav.view.dialogs
-
Dialog to create Hough transform with xv, yv, phi, p output for parabola detection in
binary image, where [(y - yv)*cos(phi) - (x - xv)*sin(phi)]**2 =
4*p*[(y - vy)*sin(phi) + (x - vx)*cos(phi)]
where vx, vy are the coordinates of the parabola vertex
p is the distance between the vertex and focus of the parabola
- JDialogHoughParabola(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
Creates a new JDialogHoughParabola object.
- JDialogHoughParabola(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
Creates new dialog.
- JDialogHoughParabolaChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to choose which parabolas to draw.
- JDialogHoughParabolaChoice(Frame, float[], int, float[], int, double[], int, float[], float, float, int[], boolean[]) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
Creates a new JDialogHoughParabolaChoice object.
- JDialogHurstIndex - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogHurstIndex() - Constructor for class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Empty constructor needed for dynamic instantiation.
- JDialogHurstIndex(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Creates a new JDialogHurstIndex object.
- JDialogHyperGraph - Class in gov.nih.mipav.view.graphVisualization
-
Frame and user interface for displaying a HyperGraph in MIPAV.
- JDialogHyperGraph() - Constructor for class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Default Constructor.
- JDialogHyperGraph(ViewJFrameImage) - Constructor for class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Creates a HyperGraph using the ViewJFrameImage active image and menu bars as the
root and tree of the graph.
- JDialogHyperGraph(String, String) - Constructor for class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Creates a HyperGraph visualization from the graph located in the given directory and file.
- JDialogIAGCWD - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogIAGCWD() - Constructor for class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogIAGCWD(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Creates new dialog for entering parameters for IAGCWD contrast enhancement.
- JDialogIDObjects - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogIDObjects() - Constructor for class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogIDObjects(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Creates new dialog.
- JDialogIHN3Correction - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogIHN3Correction() - Constructor for class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogIHN3Correction(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Create new dialog to set parameters for IHN3 algorithm.
- JDialogImageCalculator - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogImageCalculator() - Constructor for class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogImageCalculator(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Creates new image calculator dialog and displays.
- JDialogImageInfo - Class in gov.nih.mipav.view.dialogs
-
The image attribute input dialog, which consists of six tabbled panes allowing the user to edit image name,
resolutions, orientations, dataset origin, history, and transformation matrix.
- JDialogImageInfo(Frame, ModelImage, int, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Builds the image attribute input dialog, with three tabbled panes allowing the user to edit image name,
orientation, resolutions, and transformation matrix.
- JDialogImageMath - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogImageMath() - Constructor for class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogImageMath(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Creates new dialog.
- JDialogImRegPOC - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogImRegPOC() - Constructor for class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogImRegPOC(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Creates a new JDialogImRegPOC object.
- JDialogIncrement(Frame, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameRegistration.JDialogIncrement
-
Creates new dialog for incrementing either the pixel or the degree.
- JDialogIncrement(Frame, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameRegistrationTool.JDialogIncrement
-
Creates new dialog for incrementing either the pixel or the degree.
- JDialogIndependentComponents - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogIndependentComponents() - Constructor for class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogIndependentComponents(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Creates a new JDialogIndependentComponents object.
- JDialogInitialCentroids - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to input inital centroid values for each class for AlgorithmFuzzyCMeans.
- JDialogInitialCentroids(Frame, int, float, float) - Constructor for class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
Creates the dialog.
- JDialogInitialCentroids(Frame, int, float, float, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
- JDialogInsertMissingSlices - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to insert missing slices into an image.
- JDialogInsertMissingSlices() - Constructor for class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogInsertMissingSlices(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Creates new dialog for inserting a slice.
- JDialogInsertSlice - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to insert slice into an image.
- JDialogInsertSlice() - Constructor for class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogInsertSlice(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Creates new dialog for inserting a slice.
- JDialogInsertVolume - Class in gov.nih.mipav.view.dialogs
-
- JDialogInsertVolume() - Constructor for class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogInsertVolume(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Creates new dialog for inserting a volume.
- JDialogInstallPlugin - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to install a plugin.
- JDialogInstallPlugin(JFrame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Creates new dialog.
- JDialogInstallPlugin.ClassSelectorPanel - Class in gov.nih.mipav.view.dialogs
-
- JDialogInstallPlugin.FileCellRenderer - Class in gov.nih.mipav.view.dialogs
-
- JDialogInstallPlugin.JFileTreeNode - Class in gov.nih.mipav.view.dialogs
-
A node in the file tree.
- JDialogInstallPlugin.JFileTreePanel - Class in gov.nih.mipav.view.dialogs
-
A generic file tree.
- JDialogInstallPlugin.JFileTreePanel.JFileTreeCellRenderer - Class in gov.nih.mipav.view.dialogs
-
Renderer for the file tree.
- JDialogIntensityHistogram - Class in gov.nih.mipav.view.dialogs
-
Title:
- JDialogIntensityHistogram(JFrame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
Creates a new JDialogIntensityHistogram object.
- JDialogIntensityPaint - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to change desired intensity level for painting.
- JDialogIntensityPaint(Frame, String, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
Creates new dialog for getting the intensity of the paint.
- JDialogIntensityPaint(Frame, String, int, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
Creates new dialog for getting the intensity of the paint.
- JDialogIntensityThreshold - Class in gov.nih.mipav.view.dialogs
-
Title:
- JDialogIntensityThreshold(JFrame, ViewJComponentEditImage, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogIntensityThreshold
-
Creates a new JDialogIntensityThreshold object.
- JDialogIntensityThreshold(JFrame, VOIHandlerInterface, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogIntensityThreshold
-
Creates a new JDialogIntensityThreshold object.
- JDialogInvert - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to invert an image - substitute light intensities for dark intensities and dark intensities for light
intensities.
- JDialogInvert() - Constructor for class gov.nih.mipav.view.dialogs.JDialogInvert
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogInvert(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogInvert
-
Creates new dialog for converting type of image.
- JDialogIsophoteCurvature - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogIsophoteCurvature() - Constructor for class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogIsophoteCurvature(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Creates a new JDialogIsophoteCurvature object.
- JDialogKernelRegression - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogKernelRegression() - Constructor for class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogKernelRegression(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Creates a new JDialogKernelRegression object.
- JDialogKMeans - Class in gov.nih.mipav.view.dialogs
-
- JDialogKMeans() - Constructor for class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- JDialogKnees_3DReconstrucion - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
For knees project, reconstruct the 3D surface from VOIs.
- JDialogKnees_3DReconstrucion(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
Constructor.
- JDialogKnees_90_data_train_extraction - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
This class converts the original knees MRI images into isotropic images.
1) Convert the VOIs into binary image masks.
2) Convert the original images into isotropic images
3) Convert the isotropic images from sagittal to axial; sagittal to coronal.
4) Along each orietation, generate the CED image in addition to MRI.
5) Save all the images (isotropic axial, sagittal, coronal images with corresponding binary masks).
- JDialogKnees_90_data_train_extraction(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
Constructor.
- JDialogKnees2DSlicesAtlasPngConverter - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
This class convert the 3D images to 2D slices based png files for single MRI GRE image alone.
- JDialogKnees2DSlicesAtlasPngConverter(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
Constructor.
- JDialogKneesLearnFromFailure64TestCase - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Test case: generate the femur VOI contours from Alexnet generated deep learning energy maps.
--------------------------------------------------------
No longer need it.
- JDialogKneesLearnFromFailure64TestCase(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Constructor.
- JDialogKneesLearnFromFailure64TestCase.ImageAttributes - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogKneesMapFromMRIandCED - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
This class generates the knees VOI contours from the deep learning HED MRI and CED energy maps.
- JDialogKneesMapFromMRIandCED(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
Constructor.
- JDialogLaplacian - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogLaplacian() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogLaplacian(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Creates a new JDialogLaplacian object.
- JDialogLawsTexture - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogLawsTexture() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Empty constructor needed for dynamic instantiation.
- JDialogLawsTexture(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Creates a new JDialogLawsTexture object.
- JDialogLearnFromFailure64Knees - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Generate the 2D 32x32 patches for both training and testing cased.
1) AAM generates the initial contours.
2) Alone each normal line of the contour point, extract 32x32 patches for both training and testing cases
--------------------------------------------------------
No longer need it.
- JDialogLearnFromFailure64Knees(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Constructor.
- JDialogLevelSet - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogLevelSet(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
Creates new dialog for finding the level set.
- JDialogLevelSetDiffusion - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogLevelSetDiffusion(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
Creates new dialog for finding the level set.
- JDialogLightBox - Class in gov.nih.mipav.view.dialogs
-
This class builds the control dialog used in ViewJFrameLightbox class.
- JDialogLightBox(ViewJFrameLightBox) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLightBox
-
constructs new control dialog of the Lightbox View.
- JDialogLightBox.CancelListener - Class in gov.nih.mipav.view.dialogs
-
does nothing at the moment.
- JDialogLightBox.OkBgListener - Class in gov.nih.mipav.view.dialogs
-
pick up the selected color and call method to change the grid color.
- JDialogLightBox.OkBorderListener - Class in gov.nih.mipav.view.dialogs
-
Pick up the selected color and change the image border color For use by the color chooser.
- JDialogLightboxGen - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm...
- JDialogLightboxGen() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogLightboxGen(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Creates new match image dialog and displays.
- JDialogListSaveSelection - Class in gov.nih.mipav.view.dialogs
-
A basic dialog to read and parse the two options files, display the options in the files, and allow file action
between the two.
- JDialogListSaveSelection() - Constructor for class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Creates a non-modal dialog, initializes the layout (@see initializeLayout) and registers the
PropertyChangeListeners to connect the lists with the file structure.
- JDialogListSaveSelection(boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Creates a dialog with the given modality, and will initialize the layout and register changes, but it will not
populate the lists.
- JDialogListSaveSelection.JPanelListSelection - Class in gov.nih.mipav.view.dialogs
-
A type of JPanelListController which spefically defines the left-direction buttons to be disabled and the delete
button to be enabled.
- JDialogListSaveSelection.TagComparator - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogLivewire - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to choose which cost function to use for the live wire.
- JDialogLivewire(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLivewire
-
Creates dialog for choosing cost function for live wire.
- JDialogLLE - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogLLE() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLLE
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogLLE(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLLE
-
Creates new dialog for entering parameters for locally linear embedding.
- JDialogLoadImage - Class in gov.nih.mipav.view.dialogs
-
JDialogLoadImage allows the MIPAV user to import an image (namely, ImageA) from another image frame.
- JDialogLoadImage() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
Empty Constructor for script.
- JDialogLoadImage(Frame, ModelImage, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
Creates a new JDialogLoadImage object.
- JDialogLoadImage.AlgorithmLoadB - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogLoadImageForRegistration - Class in gov.nih.mipav.view.dialogs
-
JDialogLoadImage allows the MIPAV user to import an image (namely, ImageA) from another image frame.
- JDialogLoadImageForRegistration(ViewJFrameImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
Creates a new JDialogLoadImageForRegistration object.
- JDialogLoadLeica - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to remove separate slices in an image.
- JDialogLoadLeica(Frame, File) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
Creates a new JDialogLoadLeica object.
- JDialogLoadLeica(File) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
Creates a new JDialogLoadLeica object.
- JDialogLoadLeica.LeicaFileComparator - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogLoadLeica.LeicaSeries - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogLoadProstateMask - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogLoadProstateMask(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- JDialogLocalNormalization - Class in gov.nih.mipav.view.dialogs
-
This is the dialog to permit user to perform Local Normalization.
- JDialogLocalNormalization() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogLocalNormalization(JFrame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Creates an modal extension of JDialogBase, using the title, "Local Normalization".
- JDialogLocalVariance - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogLocalVariance() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogLocalVariance(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Creates a new JDialogLocalVariance object.
- JDialogLogSlopeMapping - Class in gov.nih.mipav.view.dialogs
-
- JDialogLogSlopeMapping() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
- JDialogLowerCompletion - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogLowerCompletion() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Empty constructor needed for dynamic instantiation.
- JDialogLowerCompletion(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Creates a new JDialogLowerCompletion object.
- JDialogLuminanceAdaptation - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogLuminanceAdaptation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogLuminanceAdaptation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Creates new dialog for entering parameters for LuminanceAdaptation.
- JDialogMagnificationControls - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to change Magnification Box Settings.
- JDialogMagnificationControls(Frame, ViewJComponentEditImage, float, String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Creates new magnification controls dialog.
- JDialogMarkovSegment - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMarkovSegment() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMarkovSegment(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Creates a new JDialogMarkovSegment object.
- JDialogMarkovSmooth - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMarkovSmooth() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMarkovSmooth(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Creates a new JDialogMarkovSmooth object.
- JDialogMask - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMask() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMask
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMask(ModelImage, boolean, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMask
-
Creates a new JDialogMask object.
- JDialogMask(ModelImage, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMask
-
- JDialogMask(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMask
-
Creates a new JDialogMask object.
- JDialogMask3D4D - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMask3D4D(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMask3D4D
-
Creates a new JDialogMask3D4D object.
- JDialogMatchImages - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm...
- JDialogMatchImages() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMatchImages(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Creates new match image dialog and displays.
- JDialogMaximumIntensityProjection - Class in gov.nih.mipav.view.dialogs
-
Dialog to call Maximum Intensity Projection.
- JDialogMaximumIntensityProjection() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMaximumIntensityProjection(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the appropriate variables.
- JDialogMaximumLikelihoodIteratedBlindDeconvolution - Class in gov.nih.mipav.view.dialogs
-
Dialog that launches the Maximum likelihood iterated blind deconvolution
algorithm.
- JDialogMaximumLikelihoodIteratedBlindDeconvolution(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Creates a new JDialogMaximumLikelihoodIteratedBlindDeconvolution object.
- JDialogMean - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMean() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMean
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMean(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMean
-
Creates a new JDialogMean object.
- JDialogMeanShiftClustering - Class in gov.nih.mipav.view.dialogs
-
- JDialogMeanShiftClustering() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- JDialogMeanShiftSegmentation - Class in gov.nih.mipav.view.dialogs
-
- JDialogMeanShiftSegmentation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMeanShiftSegmentation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
Creates new dialog for entering parameters for mean shift segmentation.
- JDialogMedian - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMedian() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMedian
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMedian(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMedian
-
Creates a new JDialogMedian object.
- JDialogMemoryAllocation - Class in gov.nih.mipav.view.dialogs
-
Dialog to alter memory allocation of the runtime environment.
- JDialogMemoryAllocation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
builds the dialog interface to get user to change the lax-file settings for the JVM to use on java start-up.
- JDialogMemoryAllocation(ViewUserInterface, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
strictly reads the memory settings from the LAX-file.
- JDialogMemoryAllocation.VMConfigType - Enum in gov.nih.mipav.view.dialogs
-
- JDialogMetaImageChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to choose what type of MetaImage file to write.
- JDialogMetaImageChoice(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMetaImageChoice
-
Creates new dialog.
- JDialogMidsagittal - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the midsagittal alignment algorithm.
- JDialogMidsagittal() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Empty constructor needed for dynamic instantiation.
- JDialogMidsagittal(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Set up the dialog (nothing right now), and run the algorithm (since there really is no dialog).
- JDialogMipavOptions - Class in gov.nih.mipav.view.dialogs
-
This dialog contains access to MIPAV preferences.
- JDialogMipavOptions() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
creates a dialog, builds in the options:
splash page option
Swing file-dialog option
Active image color high-light option
Debugging options
- JDialogMipavOptions.ComboBoxRenderer - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogMipavOptions.ComboBoxRenderer2 - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogMipavOptions.FontBoxRenderer - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogMode - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call AlgorithmMode.
- JDialogMode() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMode
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMode(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMode
-
Creates a new JDialogMode object.
- JDialogMorphologicalFilter - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMorphologicalFilter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMorphologicalFilter(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Creates a new JDialogMorphologicalFilter object.
- JDialogMorphologicalGradient - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMorphologicalGradient() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMorphologicalGradient(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Creates new Morphological gradient dialog.
- JDialogMorphologicalLaplacian - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMorphologicalLaplacian() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMorphologicalLaplacian(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Creates new Morphological laplacian dialog.
- JDialogMorphologicalReconstruction - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMorphologicalReconstruction() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMorphologicalReconstruction(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Constructor.
- JDialogMosaicToSlices - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMosaicToSlices() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMosaicToSlices(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Creates new Mosaic To Slices dialog.
- JDialogMRIShadingCorrection - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMRIShadingCorrection() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Empty constructor needed for dynamic instantiation.
- JDialogMRIShadingCorrection(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Creates a new JDialogMRIShadingCorrection object.
- JDialogMSER - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogMSER() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMSER
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMSER(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMSER
-
Creates new dialog for entering parameters for BRISK.
- JDialogMSFuzzyCMeans - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMSFuzzyCMeans() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMSFuzzyCMeans(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Creates a new JDialogMSFuzzyCMeans object.
- JDialogMultiPaint - Class in gov.nih.mipav.view.dialogs
-
.
- JDialogMultiPaint(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Used primarily for the script to store variables and run the algorithm.
- JDialogMultiPaint(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Creates dialog for plugin.
- JDialogMultiResolutionBilateralFilter - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMultiResolutionBilateralFilter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMultiResolutionBilateralFilter(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Creates a new JDialogMultiResolutionBilateralFilter object.
- JDialogMultiResolutionGuidedFilter - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogMultiResolutionGuidedFilter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogMultiResolutionGuidedFilter(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Creates a new JDialogMultiResolutionGuidedFilter object.
- JDialogN4MRIBiasFieldCorrection - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogN4MRIBiasFieldCorrection() - Constructor for class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogN4MRIBiasFieldCorrection(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Create new dialog to set parameters for N4 MRI Bias Field Correction algorithm.
- JDialogNColors - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to change the number of colors in the histogram LUT.
- JDialogNColors(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogNColors
-
Creates modal dialog for entering number of colors for histogram LUT.
- JDialogNearlyCircleToCircle - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input of a nearly circular region which will be conformally mapped to a circle.
- JDialogNearlyCircleToCircle(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
Creates a new JDialogNearlyCircleToCircle object.
- JDialogNearlyCircleToCircle(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
Creates new dialog.
- JDialogNIFTIChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to choose what type of NIFTI file to write.
- JDialogNIFTIChoice(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogNIFTIChoice
-
Creates new dialog.
- JDialogNLMeans_filt2D - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogNLMeans_filt2D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogNLMeans_filt2D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Creates a new JDialogNLMeans_filt2D object.
- JDialogNLNoiseReduction - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogNLNoiseReduction() - Constructor for class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogNLNoiseReduction(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Creates a new JDialogNLNoiseReduction object.
- JDialogNMSuppression - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogNMSuppression() - Constructor for class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogNMSuppression(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Creates a new JDialogNMSuppression object.
- JDialogNoise - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogNoise() - Constructor for class gov.nih.mipav.view.dialogs.JDialogNoise
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogNoise(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogNoise
-
Constructor.
- JDialogNoiseLevel - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogNoiseLevel() - Constructor for class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogNoiseLevel(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Creates new dialog for entering parameters for Noise Level.
- JDialogNonlocalMeansFilter - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogNonlocalMeansFilter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogNonlocalMeansFilter(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Creates a new JDialogNonlocalMeansFilter object.
- JDialogOpacityControls - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to change Opacity Settings (1 = opaque, 0 = transparent).
- JDialogOpacityControls(Frame, float) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Creates new dialog with a slider and close button.
- JDialogOpacityControls(Frame, float, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Deprecated.
- JDialogOpacityControls(Frame, SurfacePaint, float) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Creates new dialog with a slider and close button.
- JDialogOpacityControls(Frame, SurfacePaint_WM, float) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Creates new dialog with a slider and close button.
- JDialogOpacityControls(Frame, VOIManagerInterface, float) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
- JDialogOpacityControls(Frame, ViewControlsImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Creates new dialog with a slider and close button.
- JDialogOpacityControls(Frame, ViewControlsImage, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Deprecated.
- JDialogOpen - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogOpen() - Constructor for class gov.nih.mipav.view.dialogs.JDialogOpen
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogOpen(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOpen
-
Constructor.
- JDialogOrder - Class in gov.nih.mipav.view.dialogs
-
Confirmation dialog used in AFNI to decide whether to reorder the image to dicom order.
- JDialogOrder(Frame, int[]) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOrder
-
Creates new dialog.
- JDialogOrientMatrix - Class in gov.nih.mipav.view.dialogs
-
Dialog used to determine how the transformation matrix should be adjusted to account for different coordinate
systems.
- JDialogOrientMatrix(Frame, JDialogBase) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOrientMatrix
-
Constructor.
- JDialogOverlay - Class in gov.nih.mipav.view.dialogs
-
Title: JDialogOverlay
- JDialogOverlay(Frame, boolean, String, ViewJComponentEditImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogOverlay
-
constructor to be called from ViewJFrameImage.
- JDialogOverlay.JDialogChooseOverlay - Class in gov.nih.mipav.view.dialogs
-
Title: JDialogDICOMTags
- JDialogOverlay.JDialogChooseOverlay.HeaderListener - Class in gov.nih.mipav.view.dialogs
-
class that will sort the table when header is clicked.
- JDialogPadImages - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to pad blank images to an active image.
- JDialogPadImages() - Constructor for class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogPadImages(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Creates new dialog for removing slices.
- JDialogPaintGrow - Class in gov.nih.mipav.view.dialogs
-
Dialog to get the upper and lower bounds for the region grow used by the paint functions.
- JDialogPaintGrow(Frame, SurfacePaint, Vector<PaintGrowListener>) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Creates new dialog and sets up GUI components.
- JDialogPaintGrow(Frame, SurfacePaint_WM, Vector<PaintGrowListener>) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Creates new dialog and sets up GUI components.
- JDialogPaintGrow(Frame, Frame, Vector<PaintGrowListener>) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Creates new dialog and sets up GUI components.
- JDialogPaintGrow(Frame, Vector<PaintGrowListener>) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Creates new dialog and sets up GUI components.
- JDialogPaintGrow(Frame, Vector<PaintGrowListener>, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Creates new dialog and sets up GUI components.
- JDialogPaintGrow(Frame, Vector<PaintGrowListener>, boolean, String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Creates new dialog and sets up GUI components.
- JDialogPaintRGBComponents - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to change Opacity Settings (1 = opaque, 0 = transparent).
- JDialogPaintRGBComponents(Frame, String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPaintRGBComponents
-
Creates new dialog with a slider and close button.
- JDialogPaintVasculature - Class in gov.nih.mipav.view.dialogs
-
Dialog to facilitate the painting of a region of an image (such as the vascualture in a liver mip).
- JDialogPaintVasculature(ViewJFrameBase) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Create the paint vasculature dialog.
- JDialogParticleAnalysisNew - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogParticleAnalysisNew() - Constructor for class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogParticleAnalysisNew(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Creates new dialog.
- JDialogPatellaTraceSectionsNetherland - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Patella segmentation for Netherland data.
- JDialogPatellaTraceSectionsNetherland(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
Constructor. the parent frame
- JDialogPatellaTraceSectionsNetherland.Line - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogPatellaTraceSectionsNetherland.ModelString - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogPatellaTraceSectionsNetherland.PolygonShapeInfo - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Polygon shape info class to do shape comparison after the AAM
classification applied to do the segmentation.
- JDialogPatellaTraceSectionsNetherland.Range - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Ending slice start and end indexes.
- JDialogPatellaTraceSectionsNetherland.ShapeFactor - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
shape descriptor class.
- JDialogPatellaTraceSectionsNetherland.TracingPoint - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogPatellaTraceSectionsNIH - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
The class is the driver for the AAM classification.
- JDialogPatellaTraceSectionsNIH(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
Constructor. the parent frame
- JDialogPatellaTraceSectionsNIH.Line - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogPatellaTraceSectionsNIH.ModelString - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogPatellaTraceSectionsNIH.PolygonShapeInfo - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Polygon shape info class to do shape comparison after the AAM
classification applied to do the segmentation.
- JDialogPatellaTraceSectionsNIH.Range - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
Ending slice start and end indexes.
- JDialogPatellaTraceSectionsNIH.ShapeFactor - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
shape descriptor class.
- JDialogPatellaTraceSectionsNIH.TracingPoint - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogPbBoundaryDetection - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogPbBoundaryDetection() - Constructor for class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogPbBoundaryDetection(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Creates new dialog for entering parameters for Pb boundary detection.
- JDialogPhaseCongruency - Class in gov.nih.mipav.view.dialogs
-
- JDialogPhaseCongruency(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- JDialogPhasePreservingDenoising - Class in gov.nih.mipav.view.dialogs
-
- JDialogPhasePreservingDenoising() - Constructor for class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogPhasePreservingDenoising(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Creates a new JDialogPhasePreservingDenoising object.
- JDialogPointArea - Class in gov.nih.mipav.view.dialogs
-
Dialog that will call AlgorithmPointArea in order to calculate the average intensity through a volume around an area
with a given size (x by y) at a given point.
- JDialogPointArea() - Constructor for class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogPointArea(Frame, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Constructor called from a ViewJFrameImage.
- JDialogPointArea(Frame, ModelImage, int, int, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Constructor called from ViewJComponentEditImage (by clicking on a point and selecting from menu).
- JDialogPointArea.JTextFieldFilter - Class in gov.nih.mipav.view.dialogs
-
Filter that allows only integers or floating point numbers into a textfield while monitoring the numbers
themselves in order to activate/deactivate related JCheckboxes.
- JDialogPointArea.UpdateYSpaceAction - Class in gov.nih.mipav.view.dialogs
-
Make the x and y space bounds match if the constrain checkbox is selected.
- JDialogPolygonToCircle - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input of 3 or more counterclockwise ordered polygon points
for polygon to circle conformal mapping.
- JDialogPolygonToCircle(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
Creates a new JDialogPolygonToCircle object.
- JDialogPolygonToCircle(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
Creates new dialog.
- JDialogPolygonToRectangle - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input of counterclockwise ordered polygon points,
followed by selecting 4 of these vertices in counterclockwise order to be
the corners of the rectangle.
- JDialogPolygonToRectangle(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
Creates a new JDialogPolygonToRectangle object.
- JDialogPolygonToRectangle(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
Creates new dialog.
- JDialogPowerPaint - Class in gov.nih.mipav.view.dialogs
-
Dialog box for the paint power tools: morphology operations, object delete, etc.
- JDialogPowerPaint(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
Creates dialog for plugin.
- JDialogPowerWatershed - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogPowerWatershed() - Constructor for class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogPowerWatershed(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Creates new dialog for entering parameters for Power watershed.
- JDialogPowerWatershed.labelIndexComparator - Class in gov.nih.mipav.view.dialogs
-
- JDialogPowerWatershed.labelIndexItem - Class in gov.nih.mipav.view.dialogs
-
- JDialogPrincipalComponents - Class in gov.nih.mipav.view.dialogs
-
Dialog to create a filtered image using only selected principal components in the reconstruction and also to create
an averaged image slice by simple averaging of the reconstructed image.
- JDialogPrincipalComponents() - Constructor for class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogPrincipalComponents(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Creates new dialog to get info to run principal components algorithm.
- JDialogPromise12_2DVolumetrieHED - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For Miccai promise 12 prostate data, we apply wp segmentation using HED deep learning model.
- JDialogPromise12_2DVolumetrieHED(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
Constructor.
- JDialogPromise12_2DVolumetrieHED_map - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogPromise12_2DVolumetrieHED_map(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Constructor.
- JDialogPromise12_2DVolumetrieHED_map.curvePair - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogPromise12_mhg_to_nii - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the first try to 3D convolution deep learning models. 3D-Unet.
- JDialogPromise12_mhg_to_nii(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
Constructor.
- JDialogPromise12ConvertMask - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class simply convert the prostate images into isotropic (same x, y resolution ) images.
- JDialogPromise12ConvertMask(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
Constructor.
- JDialogPromise12ConvertRestoOnePointFiveTest - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Atfer N4 correction, take those images with binary masks, transform again
to 0.5mm x 0.5mm x 1.5 mm images.
- JDialogPromise12ConvertRestoOnePointFiveTest(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
Constructor.
- JDialogPromise12ConvertRestoOnePointFiveTrain - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Atfer N4 correction, take those images with binary masks, transform again
to 0.5mm x 0.5mm x 1.5 mm images.
- JDialogPromise12ConvertRestoOnePointFiveTrain(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
Constructor.
- JDialogPromise12CropAndNormalizeTest - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
After 0.5mm x 0.5mm x 1.5 mm transform, apply the intensity normalization [0, 1000], save image and masks.
- JDialogPromise12CropAndNormalizeTest(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
Constructor.
- JDialogPromise12CropAndNormalizeTrain - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
After 0.5mm x 0.5mm x 1.5 mm transform, apply the intensity normalization [0, 1000], save image and masks.
- JDialogPromise12CropAndNormalizeTrain(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
Constructor.
- JDialogPromise12NIHDataToNii - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the first try to 3D convolution deep learning models. 3D-Unet.
- JDialogPromise12NIHDataToNii(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
Constructor.
- JDialogPromise12Train3DCnns - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the first try to 3D convolution deep learning models. 3D-Unet.
- JDialogPromise12Train3DCnns(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
Constructor.
- JDialogPromise12Train3DCnnsSmall - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the first try to 3D convolution deep learning models. 3D-Unet.
- JDialogPromise12Train3DCnnsSmall(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
Constructor.
- JDialogProstate2DHEDmap - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogProstate2DHEDmap(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Constructor.
- JDialogProstate2DHEDmapCg - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogProstate2DHEDmapCg(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Constructor.
- JDialogProstate2DHEDmapMICCAI - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class generates the VOIs from HED prediction maps.
- JDialogProstate2DHEDmapMICCAI(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
Constructor.
- JDialogProstate2DHEDmapMICCAI_ced_scale - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class generates the VOIs from HED prediction maps.
- JDialogProstate2DHEDmapMICCAI_ced_scale(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
Constructor.
- JDialogProstate2DHEDmapMICCAI_ced_scale.curvePair - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstate2DHEDmapMICCAI_conversion - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class generates the VOIs from HED prediction maps.
- JDialogProstate2DHEDmapMICCAI_conversion(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
Constructor.
- JDialogProstate2DHEDmapSPIE_2017 - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class generates the VOIs from HED prediction maps.
- JDialogProstate2DHEDmapSPIE_2017(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
Constructor.
- JDialogProstate2DSlicesAtlasConverter - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogProstate2DSlicesAtlasConverter(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Constructor.
- JDialogProstate2DSlicesAtlasCopyGTstl - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class copy ground truth stl file to destination directory.
- JDialogProstate2DSlicesAtlasCopyGTstl(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverter - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogProstate2DSlicesAtlasPngConverter(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverter_JMI - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogProstate2DSlicesAtlasPngConverter_JMI(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverter3DSurface - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For ISBI 2017 paper:
Data given: Dr.
- JDialogProstate2DSlicesAtlasPngConverter3DSurface(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class attempts to generate the VOI from the HED predicted edge map (boundary map).
- JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For ISBI 2017 paper:
ISBI, we only use MR images slices, no CED involved.
- JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For ISBI 2017 paper:
This class converts the HED generated energy maps into VOI contours.
- JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class is the trial-and-error approach for HED deep learning experiment.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class is the trial-and-error approach for HED deep learning experiment.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class is the trial-and-error approach for HED deep learning experiment.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class is the trial-and-error approach for HED deep learning experiment.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class is the trial-and-error approach for HED deep learning experiment.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the trial-and-error test, which applying the NIH data for training, Prostate promise 12 data for testing.
- JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the first attempt to apply prostate segmentation on Promise 12 data.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the third attempt to apply prostate segmentation on Promise 12 data.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the third attempt to apply prostate segmentation on Promise 12 data.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the third attempt to apply prostate segmentation on Promise 12 data.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the third attempt to apply prostate segmentation on Promise 12 data.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the third attempt to apply prostate segmentation on Promise 12 data.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is the second attempt to apply prostate segmentation on Promise 12 data.
- JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterTest - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class is for SPIE paper: HED prostate MRI segmentation.
- JDialogProstate2DSlicesAtlasPngConverterTest(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterTest_JMI - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For JMI 2017 paper: this class uses image processing methods that are different to the SPIE paper.
1) Read the MRI image with VOIs
2) Generate the binary masks
2) Crop the image with the 25% deduction
3) Scale image intensity to range 0 to 1000.
4) Generate the CED image.
5) Extract MRI image and CED image slices with corresponding binary image masks for HED to train the
deep learning model.
- JDialogProstate2DSlicesAtlasPngConverterTest_JMI(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterTrain - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This is for the SPIE paper: HED prostate segmentation.
- JDialogProstate2DSlicesAtlasPngConverterTrain(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Constructor.
- JDialogProstate2DSlicesAtlasPngConverterTrain_JMI - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For JMI 2017 paper: this class uses image processing methods that are different to the SPIE paper.
1) Read the MRI image with VOIs
2) Generate the binary masks
2) Crop the image with the 25% deduction
3) Scale image intensity to range 0 to 1000.
4) Generate the CED image.
5) Extract MRI image and CED image slices with corresponding binary image masks for HED to train the
deep learning model.
- JDialogProstate2DSlicesAtlasPngConverterTrain_JMI(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Constructor.
- JDialogProstate2DSlicesPngTextFileConverter - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For rest of the papers: this class generates the training list from the training fold.
5 fold cross-validation, each training fold contains the png slices from all other folds.
- JDialogProstate2DSlicesPngTextFileConverter(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
Constructor.
- JDialogProstate2DSlicesPngTextFileConverterCentralGland - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The class converts the 2D-volumetric approach axial, sagittal and coronal MRI and CED png slices
into a file list.
- JDialogProstate2DSlicesPngTextFileConverterCentralGland(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
Constructor.
- JDialogProstate2DSlicesPngTextFileConverterMICCAI - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class simply converts the MRI and CED slices png files into a list file.
- JDialogProstate2DSlicesPngTextFileConverterMICCAI(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
Constructor.
- JDialogProstate2DSlicesPngTextFileConverterTest - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The class generates the png file list for test cases.
- JDialogProstate2DSlicesPngTextFileConverterTest(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
Constructor.
- JDialogProstate2DSlicesPngTextFileConverterTestCentralGland - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The class converts the MRI and CED png slices into a file list.
- JDialogProstate2DSlicesPngTextFileConverterTestCentralGland(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
Constructor.
- JDialogProstate2DSlicesReconstrucion - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The class reconstructs the 3D surface from the axial, coronal, sagittal VOI contours.
- JDialogProstate2DSlicesReconstrucion(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
Constructor.
- JDialogProstate2DVolumetricHEDMiccaiProstate12 - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For the Miccai promise 12 data, this class simply read the png files and generates
the png file list for HED to train the deep learning model.
- JDialogProstate2DVolumetricHEDMiccaiProstate12(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
Constructor.
- JDialogProstate3DReconstruction - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The class reconstruct the 3D prostate surface from the Deep learning generated VOIs.
- JDialogProstate3DReconstruction(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
Constructor.
- JDialogProstateBoundaryFeatureTrain - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateBoundaryFeatureTrain() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
Empty constructor needed for dynamic instantiation.
- JDialogProstateBoundaryFeatureTrain(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
Creates a new JDialogHaralickTexture object.
- JDialogProstateCheckPngFile - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogProstateCheckPngFile(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Constructor.
- JDialogProstateCheckPngFile.ImageAttributes - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateEvaluationSegmentation - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The class reads the nii binary masks and generates the comparison list for shell script.
- JDialogProstateEvaluationSegmentation(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
Constructor.
- JDialogProstateEvaluationSegmentation_jmi - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class generates the EvaluateSegmentation shell script to evaluate the binary masks between
AAM vs.
- JDialogProstateEvaluationSegmentation_jmi(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
Constructor.
- JDialogProstateExtractCEFeature - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
After the 3D images convert to 2D slices ( 512x512 ), this class picks the 2D
slices, extracts the Coherence Enhanced diffusion based features, and saves
those features with linear SVM readable file formats.
- JDialogProstateExtractCEFeature(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Constructor.
- JDialogProstateFeaturesClassification - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateFeaturesClassification() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
Empty constructor needed for dynamic instantiation.
- JDialogProstateFeaturesClassification(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
Creates a new JDialogHaralickTexture object.
- JDialogProstateFeaturesTrain - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateFeaturesTrain() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
Empty constructor needed for dynamic instantiation.
- JDialogProstateFeaturesTrain(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
Creates a new JDialogHaralickTexture object.
- JDialogProstateImageCategorize - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class exhaustively trains the 2D slices based Active Appearance Model
(AAM).
- JDialogProstateImageCategorize(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Constructor
- JDialogProstateImageCategorize.perImageCost - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
NMI based image similarity measure cost class.
- JDialogProstateImageCategorize.perShapeCost - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Shape similarity measure cost class.
- JDialogProstateISBIfinalSurfaceCompare - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class converts 3D prostate surface into VOIs; saving them for comparison.
- JDialogProstateISBIfinalSurfaceCompare(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
Constructor.
- JDialogProstateISBIfinalSurfaceConvertNII - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class converts 3D prostate surface into nii binary mask images.
- JDialogProstateISBIfinalSurfaceConvertNII(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
Constructor.
- JDialogProstateISBIfinalSurfaceEvalSeg - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class read nii binary mask files, convert them into a shell script list.
- JDialogProstateISBIfinalSurfaceEvalSeg(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
Constructor.
- JDialogProstateJMI_2017_HEDmap - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For testing phase: This class reads the original MRI images and HED deep learning model predicted
MRI and CED energy map results, generates the final VOI contours.
- JDialogProstateJMI_2017_HEDmap(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
Constructor.
- JDialogProstateJMI_2017_VOI_converter - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For the JMI paper, this class converts VOI contours back to binary image masks.
- JDialogProstateJMI_2017_VOI_converter(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
Constructor.
- JDialogProstateLearnFromFailure64TestCase - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogProstateLearnFromFailure64TestCase(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Constructor.
- JDialogProstateLearnFromFailure64TestCase.ImageAttributes - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateLearnFromFailure64TrainingCase - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class convert the 3D images to 2D slices based atlas.
- JDialogProstateLearnFromFailure64TrainingCase(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Constructor.
- JDialogProstateLearnFromFailure64TrainingCase.ImageAttributes - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateSaveBoundaryFeature2D - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateSaveBoundaryFeature2D() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
Empty constructor needed for dynamic instantiation.
- JDialogProstateSaveBoundaryFeature2D(Frame, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
Creates a new JDialogHaralickTexture object.
- JDialogProstateSaveFeatures - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateSaveFeatures() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Empty constructor needed for dynamic instantiation.
- JDialogProstateSaveFeatures(Frame, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Creates a new JDialogHaralickTexture object.
- JDialogProstateSaveFeatures2D - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateSaveFeatures2D() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
Empty constructor needed for dynamic instantiation.
- JDialogProstateSaveFeatures2D(Frame, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
Creates a new JDialogHaralickTexture object.
- JDialogProstateSegmentationRegBSpline3D - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Semi-automatic MR Prostate segmentation - Registration and Fuzzy-C guided
segmentation model.
- JDialogProstateSegmentationRegBSpline3D(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
GUI interface for semi-automatic MR prostate segmentation.
- JDialogProstateSegmentationRegBSpline3D.Edge - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateSegmentationRegBSpline3D.PolarPoint - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateSegmentationRegBSpline3DFast - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Semi-automatic MR Prostate segmentation - Registration guided segmentation
model.
- JDialogProstateSegmentationRegBSpline3DFast(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
GUI interface for semi-automatic MR prostate segmentation.
- JDialogProstateSegmentationRegBSpline3DFast.Edge - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateSegmentationRegBSpline3DFast.PolarPoint - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateSPIEcancerChallenge - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class is for ProstateX 2017 MICCAI challenge.
- JDialogProstateSPIEcancerChallenge(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Constructor.
- JDialogProstateSPIEcancerChallenge_HEDmap_image_alone - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class generates the VOI contours from HED predicted energy maps.
- JDialogProstateSPIEcancerChallenge_HEDmap_image_alone(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
Constructor.
- JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For MICCAI ProstateX 2017 challenge testing cases,
this file generates the VOI contours from HED predicted MRI+CED energy maps.
- JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
Constructor.
- JDialogProstateSPIEcancerChallenge_noCED - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The MICCAI ProstateX challenge is the first try on MRI image alone.
- JDialogProstateSPIEcancerChallenge_noCED(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
Constructor.
- JDialogProstateSPIEcancerChallengeNIH_boundary_train - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
After the MICCAI ProstateX challenge, I try to apply the prostate boundary based training on HED model.
- JDialogProstateSPIEcancerChallengeNIH_boundary_train(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
Constructor.
- JDialogProstateSPIEcancerChallengeNIH_train - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The MICCAI ProstateX challenge is rolling over to prostate segmentation, which includes the
whole prostate(wp) and central gland(cg).
- JDialogProstateSPIEcancerChallengeNIH_train(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
Constructor.
- JDialogProstateSPIEcancerChallengeNIH_train_ced - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The MICCAI ProstateX challenge is rolling over to prostate segmentation, which includes the
whole prostate(wp) and central gland(cg).
- JDialogProstateSPIEcancerChallengeNIH_train_ced(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
Constructor.
- JDialogProstateSPIEcancerChallengeNIH_train_ced_ext - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The MICCAI ProstateX challenge is rolling over to prostate segmentation, which includes the
whole prostate(wp) and central gland(cg).
- JDialogProstateSPIEcancerChallengeNIH_train_ced_ext(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
Constructor.
- JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
The MICCAI ProstateX challenge is rolling over to prostate segmentation, which includes the
whole prostate(wp) and central gland(cg).
- JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
Constructor.
- JDialogProstateXReRunWholeProstate - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
For NIH prostate data, we apply wp and cg segmentation using HED deep learning model.
- JDialogProstateXReRunWholeProstate(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
Constructor.
- JDialogProstateXReRunWholeProstateTestPatches - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogProstateXReRunWholeProstateTestPatches(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
Constructor.
- JDialogProstateXReRunWholeProstateTrainPatches - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class simply read the MR, CED images with corresponding binary image masks, converting them
into image pairs ( MR slice with binary mask, CED slice with binary mask ).
- JDialogProstateXReRunWholeProstateTrainPatches(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
Constructor.
- JDialogPyWavelets - Class in gov.nih.mipav.view.dialogs
-
- JDialogPyWavelets() - Constructor for class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Empty constructor needed for dynamic instantiation.
- JDialogPyWavelets(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Construct the PyWavelets dialog.
- JDialogQuantify - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogQuantify() - Constructor for class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogQuantify(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Creates a new JDialogQuantify object.
- JDialogQuantifyMask - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to change the number of colors in the histogram LUT.
- JDialogQuantifyMask() - Constructor for class gov.nih.mipav.view.dialogs.JDialogQuantifyMask
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogQuantifyMask(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogQuantifyMask
-
Creates modal dialog for entering number of colors for histogram LUT.
- JDialogRandomizeSliceOrder - Class in gov.nih.mipav.view.dialogs
-
Dialog to call the randomize the order of 3D dataset.
- JDialogRandomizeSliceOrder() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRandomizeSliceOrder(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
Run the algorithm.
- JDialogRawIO - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to indicate type, dimensionality, of a raw image or image with a fixed length header in front of the
image data.
- JDialogRawIO(Frame, String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Creates new dialog for entering necessary info to read in RAW image.
- JDialogRecordLUT - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogRecordLUT(ModelImage, ModelLUT) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Create the LUT recorder dialog to record LUT.
- JDialogRegionMergingViaBoundaryMelting - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogRegionMergingViaBoundaryMelting() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRegionMergingViaBoundaryMelting(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Creates new dialog for entering parameters for region merging via boundary melting.
- JDialogRegionsFromPartialBorders - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogRegionsFromPartialBorders() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRegionsFromPartialBorders(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Creates new dialog for entering parameters for regions from partial borders.
- JDialogRegistrationBSpline - Class in gov.nih.mipav.view.dialogs
-
This class is used to display the options to the user for performing 2D, 3D, and 2.5D B-Spline registration.
- JDialogRegistrationBSpline() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Empty constructor needed for dynamic instantiation.
- JDialogRegistrationBSpline(Frame, ModelImage, String[]) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Creates new registration dialog.
- JDialogRegistrationBSpline.Controls - Class in gov.nih.mipav.view.dialogs
-
Private class which holds dialog controls associated with the values in the AlgorithmRegBSpline.Options class for
a "pass" of registration.
- JDialogRegistrationChamfer - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call algorithmChamfer.
- JDialogRegistrationChamfer(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
Creates dialog and calls init(), which sets up GUI.
- JDialogRegistrationLeastSquares - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call algorithmRegLeastSquares.
- JDialogRegistrationLeastSquares() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRegistrationLeastSquares(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Creates new registration dialog to get base image name.
- JDialogRegistrationLeastSquares(Frame, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Creates a new JDialogRegistrationLeastSquares object.
- JDialogRegistrationOAR25D - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call AlgorithmRegOAR25D.
- JDialogRegistrationOAR25D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRegistrationOAR25D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Creates new dialog for user to choose variables for internal registration.
- JDialogRegistrationOAR2D - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call AlgorithmRegOAR2D.
- JDialogRegistrationOAR2D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRegistrationOAR2D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Creates new dialog for user to choose type of 2D image registration algorithm to run.
- JDialogRegistrationOAR2D(Frame, ModelImage, ModelImage, int, int, int, float, float, float, float, boolean, int, int, int, boolean, float, float, float, int, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Creates new dialog for user to choose type of 2D image registration algorithm to run.
- JDialogRegistrationOAR35D - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call AlgorithmRegOAR35D.
- JDialogRegistrationOAR35D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRegistrationOAR35D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Creates new dialog for user to choose variables for internal registration.
- JDialogRegistrationOAR3D - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call algorithm RegistrationOAR3D.
- JDialogRegistrationOAR3D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRegistrationOAR3D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Creates new dialog for user to choose type of linear image registration algorithm to run.
- JDialogRegistrationSIFT3D - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call algorithmRegLeastSquares.
- JDialogRegistrationSIFT3D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRegistrationSIFT3D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Creates new registration dialog to get base image name.
- JDialogRegistrationSIFT3D(Frame, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Creates a new JDialogRegistrationSIFT3D object.
- JDialogRegistrationTPSpline - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input Selected image is match image, the image that gets transformed until it is registered to the
base image.
- JDialogRegistrationTPSpline() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Empty constructor for scripts.
- JDialogRegistrationTPSpline(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Creates new dialog.
- JDialogRegistrationValidation - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call algorithmRegValidation.
- JDialogRegistrationValidation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRegistrationValidation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Creates new registration dialog to get base image name.
- JDialogRegistrationValidation(Frame, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Creates a new JDialogRegistrationValidation object, used for bypassing the GUI.
- JDialogRegPatientPos - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call algorithmRegPatientPos.
- JDialogRegPatientPos() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRegPatientPos(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Creates new dialog for registration.
- JDialogRegularizedIsotropicDiffusion - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call a specified diffusion algorithm.
- JDialogRegularizedIsotropicDiffusion() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRegularizedIsotropicDiffusion(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Creates a new JDialogRegularizedIsotropicDiffusion object.
- JDialogRegVOILandmark - Class in gov.nih.mipav.view.dialogs
-
Dialog to register Kidney images, same spacial location, over time.
- JDialogRegVOILandmark(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
Creates new dialog to register images.
- JDialogRemovePlugin - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to remove a plugin.
- JDialogRemovePlugin(JFrame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRemovePlugin
-
Constructs new dialog to remove plugins.
- JDialogRemoveSlices - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to remove separate slices in an image.
- JDialogRemoveSlices() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRemoveSlices(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Creates new dialog for removing slices.
- JDialogRemoveTSlices - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to remove separate time slices in an image.
- JDialogRemoveTSlices() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRemoveTSlices(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
Creates new dialog for removing time slices.
- JDialogRenameDirs - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- JDialogRenameDirs(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- JDialogRendererAVI - Class in gov.nih.mipav.view.renderer
-
Dialog that gets input needed for saving the 3D rendering motions to an AVI file.
- JDialogRendererAVI() - Constructor for class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Used primarily for the script to store variables and run the algorithm.
- JDialogRendererAVI(Frame) - Constructor for class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Creates a new JDialogRendererAVI object.
- JDialogReorient - Class in gov.nih.mipav.view.dialogs
-
Dialog box for basic image processing tools
- JDialogReorient() - Constructor for class gov.nih.mipav.view.dialogs.JDialogReorient
-
Empty constructor needed for dynamic instantiation.
- JDialogReorient(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogReorient
-
- JDialogReorient(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogReorient
-
Creates dialog for plugin.
- JDialogReplaceBlankSlicesWithAverages - Class in gov.nih.mipav.view.dialogs
-
Dialog to replace the blank slices in 3D images with averages.
- JDialogReplaceBlankSlicesWithAverages() - Constructor for class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogReplaceBlankSlicesWithAverages(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
Sets the appropriate variables.
- JDialogReplaceSlice - Class in gov.nih.mipav.view.dialogs
-
Title:
- JDialogReplaceSlice(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
Creates a new JDialogReplaceSlice object.
- JDialogReplaceValue - Class in gov.nih.mipav.view.dialogs
-
Dialog which replaces all occurances of one value in an image with another value.
- JDialogReplaceValue() - Constructor for class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Empty constructor used for running scripts.
- JDialogReplaceValue(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Construct the replace value dialog window and wait for user action.
- JDialogReplaceValue.Values - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogReslice - Class in gov.nih.mipav.view.dialogs
-
Dialog to get interpolation choice, then call reslice algorithm.
- JDialogReslice() - Constructor for class gov.nih.mipav.view.dialogs.JDialogReslice
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogReslice(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogReslice
-
Creates new reslice dialog.
- JDialogRGBConcat - Class in gov.nih.mipav.view.dialogs
-
Dialog to choose images, then call the RGBConcat algorithm.
- JDialogRGBConcat() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRGBConcat(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Creates new dialog to enter parameters for RGBConcat algorithm.
- JDialogRGBtoGray - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogRGBtoGray() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRGBtoGray(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Sets variables needed to call algorithm.
- JDialogRGBtoGrays - Class in gov.nih.mipav.view.dialogs
-
Dialog to call a algorithm to convert an RGB to a grayscale images.
- JDialogRGBtoGrays() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRGBtoGrays(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
Sets variables needed to call algorithm.
- JDialogRGBtoHSB - Class in gov.nih.mipav.view.dialogs
-
Dialog to separate RGB channels into grayscale Hue, Saturation, and Brightness channels.
- JDialogRGBtoHSB() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRGBtoHSB(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
Sets variables needed to call algorithm.
- JDialogRotate - Class in gov.nih.mipav.view.dialogs
-
Dialog to call the image rotate.
- JDialogRotate() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRotate
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRotate(Frame, ModelImage, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRotate
-
Sets up variables but does not show dialog.
- JDialogRuleBasedContrastEnhancement - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogRuleBasedContrastEnhancement() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogRuleBasedContrastEnhancement(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Creates new dialog for entering parameters for wavelet threshold.
- JDialogRunScriptController - Class in gov.nih.mipav.view.dialogs
-
- JDialogRunScriptController(String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptController
-
JDialogRunScriptController Constructor.
- JDialogRunScriptModel - Class in gov.nih.mipav.view.dialogs
-
- JDialogRunScriptModel() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
Creates a new JDialogRunScriptModel object.
- JDialogRunScriptView - Class in gov.nih.mipav.view.dialogs
-
- JDialogRunScriptView(JDialogRunScriptController, JDialogRunScriptModel) - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Creates a new JDialogRunScriptView object.
- JDialogRunScriptView.ArrayListTransferHandler - Class in gov.nih.mipav.view.dialogs
-
Transfer handler used for dragging the images and vois into the tree.
- JDialogRunScriptView.ArrayListTransferHandler.ArrayListTransferable - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogRunScriptView.CustomCellRenderer - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogRunScriptView.DropJListTarget - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogRunScriptView.DropJTreeTarget - Class in gov.nih.mipav.view.dialogs
-
Class used to handle the dragging/dropping of images/vois into the script tree.
- JDialogRunScriptView.PopupListener - Class in gov.nih.mipav.view.dialogs
-
- JDialogRunScriptView.TreeMouseAdapter - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogRunScriptView.TreeMouseDragAdapter - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogRunScriptView.TreeRenderer - Class in gov.nih.mipav.view.dialogs
-
***************************************************************************************************** Inner
classes to follow************************************************************************************************
***** protected class ModelImageForScripting{ ModelImage modelImage; ModelImageForScripting(ModelImage
modelImage){ this.modelImage = modelImage; } public ModelImage getModelImage(){ return this.modelImage; } public
String toString(){ return modelImage.getImageName(); } }.
- JDialogSaveDicom - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to tell the program important information necessary for saving the DICOM file.
- JDialogSaveDicom(Frame, FileInfoBase, FileInfoDicom, boolean, boolean, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Creates dialog for setting tag information for DICOM image.
- JDialogSaveMergedVOIs - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to save the 3 VOIs ( Sagittal, Coronal, Axial ) for each view, and merge them into one cloud points.
- JDialogSaveMergedVOIs(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Constructor for Merging the 3 VOIs and save into one cloudy points file.
- JDialogSaveMergedVOIs(Frame, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Constructor that sets the parent frame of the dialog and whether or not the dialog is modal.
- JDialogSaveMergedVOIs(Frame, String, String, String, String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
- JDialogSaveMinc - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to tell the program important information about the MINC file.
- JDialogSaveMinc(Frame, FileInfoBase, FileWriteOptions) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Constructs a new dialog to set necessary information for saving a MINC file.
- JDialogSaveMincVersionChoice - Class in gov.nih.mipav.view.dialogs
-
Confirmation Dialog giving user the choice to write an analyze file , interfile file, or a nifti file.
- JDialogSaveMincVersionChoice(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSaveMincVersionChoice
-
Creates new dialog.
- JDialogSaveSlices - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to indicate which slices should be saved.
- JDialogSaveSlices(Frame, int, int, int, int, FileWriteOptions, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Constructs a save dialog meant for a 4D image.
- JDialogSaveSlices(Frame, int, int, FileWriteOptions, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Constructs a save dialog meant for a 3D image.
- JDialogSaveVistaParams - Class in gov.nih.mipav.view.dialogs
-
- JDialogSaveVistaParams(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
constructor
- JDialogScaleSaliency - Class in gov.nih.mipav.view.dialogs
-
- JDialogScaleSaliency(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
Creates a new JDialogScaleSaliency object.
- JDialogScaleSaliency(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
Creates new dialog.
- JDialogSCDSegmentation - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogSCDSegmentation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Empty constructor needed for dynamic instantiation.
- JDialogSCDSegmentation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Construct the SCD segmentation dialog.
- JDialogScriptableBase - Class in gov.nih.mipav.view.dialogs
-
All scriptable dialogs should inherit from this abstract class.
- JDialogScriptableBase() - Constructor for class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Passthrough to JDialogBase constructor.
- JDialogScriptableBase(boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Passthrough to JDialogBase constructor.
- JDialogScriptableBase(Dialog, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Passthrough to JDialogBase constructor.
- JDialogScriptableBase(Dialog, boolean, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Passthrough to JDialogBase constructor.
- JDialogScriptableBase(Frame, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Passthrough to JDialogBase constructor.
- JDialogScriptableTransform - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call algorithmTransform.
- JDialogScriptableTransform() - Constructor for class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogScriptableTransform(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Constructs new transform dialog and sets up GUI components.
- JDialogScriptableTransform(Frame, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Constructs new transform dialog and sets up GUI components.
- JDialogScriptRecorder - Class in gov.nih.mipav.view.dialogs
-
This is the "record script" dialog.
- JDialogScriptRecorder() - Constructor for class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Constructs a new script recorder dialog and turns recording on.
- JDialogSelectChannelSequence - Class in gov.nih.mipav.view.dialogs
-
The purpose of this dialog is to allow the user to rearrange the channel order of an image before it is loaded.
- JDialogSelectChannelSequence(ViewOpenImageSequence, int[]) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSelectChannelSequence
-
Creates a new JDialogSelectChannelSequence object.
- JDialogSelectDICOMColumnHeaders - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogSelectDICOMColumnHeaders(ViewJFrameDICOMParser) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
Creates a new JDialogSelectDICOMColumnHeaders object.
- JDialogSequentialScanningWatershed - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogSequentialScanningWatershed() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Empty constructor needed for dynamic instantiation.
- JDialogSequentialScanningWatershed(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Creates a new JDialogSequentialScanningWatershed object.
- JDialogServer - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to set certain values for the new or edited server or destination.
- JDialogServer(JFrame, String, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogServer
-
Creates new dialog for setting server.
- JDialogServer(JFrame, String, String[], boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogServer
-
Creates new dialog for setting server.
- JDialogShortcutEditor - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogShortcutEditor() - Constructor for class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
Default constructor...no arguments required.
- JDialogShortcutEditor.ShortcutDialog - Class in gov.nih.mipav.view.dialogs
-
Title: Shortcut Dialog
- JDialogShortcutEditor.StringVecComparator - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogShortestPathWatershed - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogShortestPathWatershed() - Constructor for class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Empty constructor needed for dynamic instantiation.
- JDialogShortestPathWatershed(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Creates a new JDialogShortestPathWatershed object.
- JDialogShowCosts - Class in gov.nih.mipav.view.dialogs
-
Calculate costs for various voxel similarity cost functions that are used in registration and output them to the data
window.
- JDialogShowCosts() - Constructor for class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogShowCosts(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Creates new dialog.
- JDialogShuffleList - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
This class simply shuffle the H5 list randomly.
- JDialogShuffleList(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
Constructor.
- JDialogSIFT - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogSIFT() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSIFT
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogSIFT(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSIFT
-
Creates a new JDialogMSFuzzyCMeans object.
- JDialogSIFTImageSimilarity - Class in gov.nih.mipav.view.dialogs
-
- JDialogSIFTImageSimilarity() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogSIFTImageSimilarity(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
Creates new SIFTImageSimilarity dialog and displays.
- JDialogSimpleText - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Simple dialog that requests a name for the view.
- JDialogSimpleText(JPanelRendererJ3D, RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSimpleText
-
Creates the dialog, using the input parameters to place it on the screen.
- JDialogSimpleText(JPanelMouse, RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSimpleText
-
Creates the dialog, using the input parameters to place it on the screen.
- JDialogSimulatedExposureFusion - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogSimulatedExposureFusion() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogSimulatedExposureFusion(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Creates new dialog for entering parameters for simulated exposure fusion contrast enhancement.
- JDialogSingleMRIImageSNR - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input signal 1 VOI, optional signal 2 VOI, background VOI or signal to use fuzzy c means to
separate all pixels into signal and background and number of NMR receivers needed for
MRI image SNR calculation.
- JDialogSingleMRIImageSNR(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
Creates a new JDialogSingleMRIImageSNR object.
- JDialogSingleMRIImageSNR(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
Creates new dialog.
- JDialogSK10_MRI_CED_map_pre - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
This class generates the knees VOI contours from the deep learning (HNN) MRI
and CED energy maps.
- JDialogSK10_MRI_CED_map_pre(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Constructor.
- JDialogSK10_MRI_map_nopre - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
This class generates the knees VOI contours from the deep learning HED MRI maps.
- JDialogSK10_MRI_map_nopre(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Constructor.
- JDialogSkeletonize - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogSkeletonize() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogSkeletonize(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Creates new skeletonize dialog.
- JDialogSKI_10_2D_axial_no_pre - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogSKI_10_2D_axial_no_pre(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
Constructor.
- JDialogSKI_10_3D_orthogonal_pre - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- JDialogSKI_10_3D_orthogonal_pre(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Constructor.
- JDialogSKI10_femur_eval_no_pre - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
The class prepare the evalution masks for segmentation result and ground truth label.
- JDialogSKI10_femur_eval_no_pre(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
Constructor.
- JDialogSKI10_femur_eval_pre - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
This class converts the original knees MRI images into isotropic images.
1) Convert the VOIs into binary image masks.
2) Transform the binary mask images to original image resolution.
3) Then, save the binary mask into .nii file format for comparison.
- JDialogSKI10_femur_eval_pre(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
Constructor.
- JDialogSlantTransform - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogSlantTransform() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
Empty constructor needed for dynamic instantiation.
- JDialogSlantTransform(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
Construct the Slant Transform dialog.
- JDialogSliceAveraging - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogSliceAveraging() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogSliceAveraging(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Creates a new JDialogSliceAveraging object.
- JDialogSM2 - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input for 3 parameter dynamic (contrast) enhanced MRI model or SM2 model
- JDialogSM2(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSM2
-
Creates a new JDialogSM2 object.
- JDialogSM2(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSM2
-
Creates new dialog.
- JDialogSmoothMesh - Class in gov.nih.mipav.view.dialogs
-
User-interface for smoothing the ModelTriangleMesh surfaces.
- JDialogSmoothMesh(Frame, boolean, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Creates new dialog to get iterations and alpha for smoothing a mesh surface.
- JDialogSnake - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogSnake(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSnake
-
Creates new dialog for entering parameters for algorithm.
- JDialogSnake(Frame, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSnake
-
Creates new dialog for entering parameters for algorithm.
- JDialogSobel - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogSobel() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSobel
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogSobel(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSobel
-
Creates a new JDialogSobel object.
- JDialogSpectralClustering - Class in gov.nih.mipav.view.dialogs
-
- JDialogSpectralClustering() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- JDialogSphereGeneration - Class in gov.nih.mipav.view.dialogs
-
Dialog to create an image with randomly spaced, aggregated, regular or uniform, or constrained spheres of the same size
- JDialogSphereGeneration(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
Creates new dialog.
- JDialogSplitAndMergeWatershed - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogSplitAndMergeWatershed() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Empty constructor needed for dynamic instantiation.
- JDialogSplitAndMergeWatershed(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Creates a new JDialogSplitAndMergeWatershed object.
- JDialogStandalonePlugin - Class in gov.nih.mipav.plugins
-
This is an abstract class which should be subclassed by Generic plug-in dialogs which want to support being run with
the -p command line switch without the rest of MIPAV (using the -hide option).
- JDialogStandalonePlugin() - Constructor for class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Passthrough to JDialogBase constructor.
- JDialogStandalonePlugin(boolean) - Constructor for class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Passthrough to JDialogBase constructor.
- JDialogStandalonePlugin(Dialog, boolean) - Constructor for class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Passthrough to JDialogBase constructor.
- JDialogStandalonePlugin(Frame, boolean) - Constructor for class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Passthrough to JDialogBase constructor.
- JDialogStandaloneScriptablePlugin - Class in gov.nih.mipav.plugins
-
This is an abstract class which should be subclassed by Generic plug-in dialogs which want to support being run with
the -p command line switch without the rest of MIPAV (using the -hide option).
- JDialogStandaloneScriptablePlugin() - Constructor for class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Passthrough to JDialogScriptableBase constructor.
- JDialogStandaloneScriptablePlugin(boolean) - Constructor for class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Passthrough to JDialogScriptableBase constructor.
- JDialogStandaloneScriptablePlugin(Dialog, boolean) - Constructor for class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Passthrough to JDialogScriptableBase constructor.
- JDialogStandaloneScriptablePlugin(Frame, boolean) - Constructor for class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Passthrough to JDialogScriptableBase constructor.
- JDialogStandardDeviationThreshold - Class in gov.nih.mipav.view.dialogs
-
The Standard Deviation Threshold works by first having an active VOI in which the standard deviation and other
statistics are calculated.
- JDialogStandardDeviationThreshold() - Constructor for class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
empty constructor
- JDialogStandardDeviationThreshold(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
constructor
- JDialogSubsample - Class in gov.nih.mipav.view.dialogs
-
Dialog for subsampling a 2D or 3D or 4D image by 2, 4, or 8.
- JDialogSubsample() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogSubsample(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Constructor for creating the dialog via a parent frame.
- JDialogSubset - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog to create a 3D subset image from a 4D image.
- JDialogSubset() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSubset
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogSubset(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSubset
-
Creates new dialog for getting subset.
- JDialogSubtractVOI - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogSubtractVOI() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Constructor required for dynamic instantiation (during script execution).
- JDialogSubtractVOI(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Creates new dialog.
- JDialogSurfaceAVI - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Dialog that gets input needed for saving the 3D rendering motions to an AVI file.
- JDialogSurfaceAVI(Frame) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Constructor to create surface AVI dialog.
- JDialogSurfaceReconstruction - Class in gov.nih.mipav.view.dialogs
-
- JDialogSurfaceReconstruction(Frame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
Constructor for Merging the 3 VOIs and save into one cloudy points file.
- JDialogSurfaceReconstruction(Frame, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- JDialogSurfaceReconstructionTBI - Class in gov.nih.mipav.view.renderer.WildMagic.TBI
-
- JDialogSurfaceReconstructionTBI(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
Constructor for Merging the 3 VOIs and save into one cloudy points file.
- JDialogSwap34 - Class in gov.nih.mipav.view.dialogs
-
Dialog to call the AlgorithmSwap34 to delete the current image and create a new image with the third and fourth
dimensions swapped.
- JDialogSwap34() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogSwap34(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Used primarily for the script to store variables and run the algorithm.
- JDialogSwap34(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Creates new dialog, but dialog is not visible.
- JDialogSwapDims - Class in gov.nih.mipav.view.dialogs
-
Dialog to call the AlgorithmSwap34 to delete the current image and create a new image with the third and fourth
dimensions swapped.
- JDialogSwapDims() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogSwapDims(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Used primarily for the script to store variables and run the algorithm.
- JDialogSwapDims(Frame, ModelImage, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Creates new dialog, but dialog is not visible.
- JDialogSwapSlicesVolumes - Class in gov.nih.mipav.view.dialogs
-
Creates the dialog for swapping slices/volumes.
- JDialogSwapSlicesVolumes() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogSwapSlicesVolumes(Frame, ModelImage, JDialogSwapSlicesVolumes.SwapMode) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Creates new dialog for removing slices.
- JDialogSwapSlicesVolumes.ActionKeyListener - Class in gov.nih.mipav.view.dialogs
-
- JDialogSwapSlicesVolumes.SwapMode - Enum in gov.nih.mipav.view.dialogs
-
- JDialogSwapSlicesVolumes.TableTransferImporter - Class in gov.nih.mipav.view.dialogs
-
Imports by cut/copy/paste/drag/drop slice elements from part of parent JTable
to another part of the JTable.
- JDialogSwapSlicesVolumes.TableTransferImporter.SliceTransferable - Class in gov.nih.mipav.view.dialogs
-
Describes how the TransferHandler should handle slice transfers.
- JDialogSWI - Class in gov.nih.mipav.view.dialogs
-
This class displays a basic dialog for a MIPAV plug-in.
- JDialogSWI() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSWI
-
Constructor used for instantiation during script execution (required for dynamic loading).
- JDialogSWI(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSWI
-
Creates new dialog for kidney segmentation from an abdominal cavity image using a plugin.
- JDialogSymmetricNearestNeighbor - Class in gov.nih.mipav.view.dialogs
-
- JDialogSymmetricNearestNeighbor() - Constructor for class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Empty constructor needed for dynamic instantiation.
- JDialogSymmetricNearestNeighbor(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Construct the symmetric nearest neighbor smoothing dialog.
- JDialogTalairach - Class in gov.nih.mipav.view.dialogs
-
Dialog to enter points for creating an Talaraich image.
- JDialogTalairach(ViewJFrameTriImage, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTalairach
-
This method creates a dialog for selecting markers used for generating a Talairach view image from an AC-PC
aligned view image.
- JDialogTalairachTransform - Class in gov.nih.mipav.view.dialogs
-
Interface for the TalairachTransform plugin.
- JDialogTalairachTransform(ViewUserInterface, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
Used primarily for the script to store variables and run the algorithm.
- JDialogTalairachTransform(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
Creates dialog for plugin.
- JDialogTamuraTexture - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogTamuraTexture() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Empty constructor needed for dynamic instantiation.
- JDialogTamuraTexture(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Creates a new JDialogTamuraTexture object.
- JDialogText - Class in gov.nih.mipav.view.dialogs
-
This is simple text dialog that displays in the center of the screen.
- JDialogText(Frame, String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogText
-
Constructs resizable dialog with text area in the middle.
- JDialogText(Frame, String, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogText
-
Constructs a resizable dialog with a text area which can be filled; the scrollbar can be set to keep up with the
updates (at the bottom).
- JDialogTextGE - Class in gov.nih.mipav.view.dialogs
-
This is simple text dialog that displays in the center of the screen.
- JDialogTextGE(Frame, String, ModelImage, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTextGE
-
Constructs resizable dialog with text area in the middle.
- JDialogTextGE4X - Class in gov.nih.mipav.view.dialogs
-
This is simple text dialog that displays in the center of the screen.
- JDialogTextGE4X(Frame, String, ModelImage, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTextGE4X
-
Constructs resizable dialog with text area in the middle.
- JDialogTextureAnalysis - Class in gov.nih.mipav.view.dialogs
-
- JDialogTextureAnalysis() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
Empty constructor needed for dynamic instantiation.
- JDialogTextureAnalysis(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
Creates a new JDialogTextureAnalysis object.
- JDialogTextureSegmentation - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogTextureSegmentation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogTextureSegmentation(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Creates new dialog for entering parameters for texture segmentation.
- JDialogThinning2D - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogThinning2D() - Constructor for class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogThinning2D(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Creates new dialog for entering parameters for 2D thinning.
- JDialogThreshold - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogThreshold() - Constructor for class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogThreshold(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Creates a new JDialogThreshold object.
- JDialogThreshold.CheckValueAction - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogThresholdLUT - Class in gov.nih.mipav.view.dialogs
-
Dialog is used by the ViewJFrameHistoLUT frame.
- JDialogThresholdLUT(Frame, ModelImage, float, float) - Constructor for class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
Creates new threshold LUT dialog.
- JDialogThresholdRGB - Class in gov.nih.mipav.view.dialogs
-
Title: JDialogThresholdRGB
- JDialogThresholdRGB() - Constructor for class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogThresholdRGB(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Used primarily for the script to store variables and run the algorithm.
- JDialogThresholdRGB(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Creates a new JDialogThresholdRGB object.
- JDialogTiltCorrection - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogTiltCorrection() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogTiltCorrection(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Creates a new JDialogTiltCorrection object.
- JDialogTimeFitting - Class in gov.nih.mipav.view.dialogs
-
- JDialogTimeFitting() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- JDialogTLRC - Class in gov.nih.mipav.view.dialogs
-
Dialog to enter points for creating an Talaraich image.
- JDialogTLRC(ViewJFrameTriImage, ModelImage, ModelImage, ModelImage, TalairachTransformInfo, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTLRC
-
This method creates a dialog for selecting markers used for
generating a Talairach view image from an AC-PC aligned view image
- JDialogTopHat - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogTopHat() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogTopHat(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Constructor.
- JDialogTrainingListGenerator - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
The class converts the 2D-volumetric approach axial, sagittal and coronal MRI and CED png slices (or MRI png slices alone)
into a file list.
- JDialogTrainingListGenerator(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
Constructor.
- JDialogTransformBSpline - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogTransformBSpline() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
- JDialogTransformBSpline(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Sets the appropriate variables.
- JDialogTransformBSpline(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Sets the appropriate variables.
- JDialogTransformVOI - Class in gov.nih.mipav.view.dialogs
-
- JDialogTransformVOI(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- JDialogTreMethod - Class in gov.nih.mipav.view.dialogs
-
- JDialogTreMethod() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- JDialogTreMethod(Frame, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- JDialogTreMethod.ThresholdChoiceListener - Class in gov.nih.mipav.view.dialogs
-
This listener focuses on the user's choice of hard or smart thresholding.
- JDialogTreT1 - Class in gov.nih.mipav.view.dialogs
-
- JDialogTreT1() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreT1
-
Blank constructor needed for dynamic instantiation.
- JDialogTreT1(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreT1
-
Construct the TRE dialog.
- JDialogTreT1.FlipAngleChangeListener - Class in gov.nih.mipav.view.dialogs
-
- JDialogTreT1.ProcessChoiceListener - Class in gov.nih.mipav.view.dialogs
-
This listener focuses on the TRE processing choice chosen.
- JDialogTreT1.ScannerChoiceListener - Class in gov.nih.mipav.view.dialogs
-
This listener focuses on the type of scanner used to acquire the images.
- JDialogTreT2 - Class in gov.nih.mipav.view.dialogs
-
The dialog for the calculation of Tre methods.
- JDialogTreT2() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreT2
-
Empty constructor needed for dynamic instantiation.
- JDialogTreT2(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreT2
-
Construct the barrel/pin cushion correction dialog.
- JDialogTreT2.DialogThree - Class in gov.nih.mipav.view.dialogs
-
- JDialogTreT2.DialogTwo - Class in gov.nih.mipav.view.dialogs
-
- JDialogTriFrameLinker - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogTriFrameLinker(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
Used primarily for the script to store variables and run the algorithm.
- JDialogTriFrameLinker(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
Creates new image calculator dialog and displays.
- JDialogTriImageTransformation - Class in gov.nih.mipav.view.dialogs
-
Dialog to transform an image in the tri planar view based on a bounding box.
- JDialogTriImageTransformation(ViewJFrameTriImage, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
Creates confirmation dialog for transforming triplanar image.
- JDialogTriImageTransformation(ViewJFrameTriImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
Creates confirmation dialog for cropping triplanar image.
- JDialogTrilateralFilter - Class in gov.nih.mipav.view.dialogs
-
- JDialogTrilateralFilter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogTrilateralFilter(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Creates a new JDialogTrilateralFilter object.
- JDialogTrim - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to change trim parameters.
- JDialogTrim(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTrim
-
Creates new trim parameter dialog with slider.
- JDialogTwoMRIImagesSNR - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input two MRI image SNR Algorithms are executed in their own thread.
- JDialogTwoMRIImagesSNR(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
Creates a new JDialogFRET object.
- JDialogTwoMRIImagesSNR(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
Creates new dialog.
- JDialogUltErode - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogUltErode() - Constructor for class gov.nih.mipav.view.dialogs.JDialogUltErode
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogUltErode(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogUltErode
-
Constructor.
- JDialogUninstallPlugin - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to uninstall a plugin.
- JDialogUninstallPlugin(String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
Does not create the uninstall dialog, instead performs the install algorithm as if only the name plugin
had been selected, but confirmation has not occurred.
- JDialogUninstallPlugin(JFrame) - Constructor for class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
Creates new dialog.
- JDialogUnionFindComponentLabelling - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogUnionFindComponentLabelling() - Constructor for class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Empty constructor needed for dynamic instantiation.
- JDialogUnionFindComponentLabelling(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Creates a new JDialogUnionFindComponentLabelling object.
- JDialogUnionFindWatershed - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogUnionFindWatershed() - Constructor for class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Empty constructor needed for dynamic instantiation.
- JDialogUnionFindWatershed(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Creates a new JDialogUnionFindWatershed object.
- JDialogUnknownIO - Class in gov.nih.mipav.view.dialogs
-
Simple dialog to indicate type of image when the program doesn't recognize the name.
- JDialogUnknownIO(Frame, String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
Creates and displays dialog.
- JDialogUnsharpMask - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogUnsharpMask() - Constructor for class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogUnsharpMask(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Constructor.
- JDialogVABRA - Class in gov.nih.mipav.view.dialogs
-
- JDialogVABRA() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVABRA
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogVABRA(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVABRA
-
Creates new image calculator dialog and displays.
- JDialogVesselEnhancement - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogVesselEnhancement() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogVesselEnhancement(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Creates new dialog for entering parameters for multiscale vessel enhancement filtering.
- JDialogVOIBoolean - Class in gov.nih.mipav.view.dialogs
-
Dialog to use difference, intersection, exclusive or, or intersection on 2 VOIs
- JDialogVOIBoolean(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
Creates a new JDialogVOIBoolean object.
- JDialogVOIBoolean(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
Creates new dialog.
- JDialogVOIBoolean(Frame, VOIManagerInterface, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
Creates new dialog for entering parameters for algorithm.
- JDialogVOIExtraction - Class in gov.nih.mipav.view.dialogs
-
Dialog to call the VOI extraction.
- JDialogVOIExtraction(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIExtraction
-
Sets variables needed for calling algorithm.
- JDialogVOIHausdorffDistance - Class in gov.nih.mipav.view.dialogs
-
- JDialogVOIHausdorffDistance(VOIHandlerInterface, VOIVector) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
constructor
- JDialogVOIHausdorffDistance.JPanelAddRemoveVOI - Class in gov.nih.mipav.view.dialogs
-
controllas the lists between left and right side.
- JDialogVOIHausdorffDistance.VOIHighlighter - Class in gov.nih.mipav.view.dialogs
-
An active listener for VOIEvents and ListSelectionEvents, this class will ensure the selected state of the VOI
and its name in a dialog's list is the same.
- JDialogVOIHausdorffDistance.VOITreeRenderer - Class in gov.nih.mipav.view.dialogs
-
- JDialogVOILogicalOperations - Class in gov.nih.mipav.view.dialogs
-
- JDialogVOILogicalOperations(VOIHandlerInterface, VOIVector) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
constructor
- JDialogVOILogicalOperations.JPanelAddRemoveVOI - Class in gov.nih.mipav.view.dialogs
-
controllas the lists between left and right side.
- JDialogVOILogicalOperations.JPanelImageOptions - Class in gov.nih.mipav.view.dialogs
-
- JDialogVOILogicalOperations.JPanelLogicalOptions - Class in gov.nih.mipav.view.dialogs
-
- JDialogVOILogicalOperations.VOIHighlighter - Class in gov.nih.mipav.view.dialogs
-
An active listener for VOIEvents and ListSelectionEvents, this class will ensure the selected state of the VOI
and its name in a dialog's list is the same.
- JDialogVOILogicalOperations.VOITreeRenderer - Class in gov.nih.mipav.view.dialogs
-
- JDialogVOIShapeInterpolation - Class in gov.nih.mipav.view.dialogs
-
- JDialogVOIShapeInterpolation() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIShapeInterpolation
-
constructor
- JDialogVOIShapeInterpolation(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIShapeInterpolation
-
constructor
- JDialogVOIShapeInterpolation(ModelImage, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIShapeInterpolation
-
constructor
- JDialogVOISplitter - Class in gov.nih.mipav.view.dialogs
-
Title:
- JDialogVOISplitter(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- JDialogVOISplitter(Frame, ModelImage, Vector3f, Vector3f) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- JDialogVOIStatistics - Class in gov.nih.mipav.view.dialogs
-
Dialog for calculating statistics of a (set of) Volumes of Interest.
- JDialogVOIStatistics() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Empty constructor needed for dynamic instantiation.
- JDialogVOIStatistics(ModelImage, VOIVector) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
builds and packs the frame. does not set it visible.
- JDialogVOIStatistics(VOIVector) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
builds and packs the frame. does not set it visible.
- JDialogVOIStatistics.JPanelAddRemoveVOI - Class in gov.nih.mipav.view.dialogs
-
controllas the lists between left and right side.
- JDialogVOIStatistics.JPanelStatisticFileFormatOptions - Class in gov.nih.mipav.view.dialogs
-
File-format options panel to select output format for the display of the statistics output file.
- JDialogVOIStatistics.JPanelStatisticsOptions - Class in gov.nih.mipav.view.dialogs
-
Panel holding all statistics options and allowing the user-selection.
- JDialogVOIStatistics.JPanelStatisticsOptions.StatisticsOptionsActionListener - Class in gov.nih.mipav.view.dialogs
-
An action listener for the statistics options that also controls which statistics can
be calculated.
- JDialogVOIStatistics.VOIHighlighter - Class in gov.nih.mipav.view.dialogs
-
An active listener for VOIEvents and ListSelectionEvents, this class will ensure the selected state of the VOI
and its name in a dialog's list is the same.
- JDialogVOIStats - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogVOIStats() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Empty constructor needed for dynamic instantiation.
- JDialogVOIStats(VOIHandlerInterface, ModelImage, VOI) - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Constructor for the JDialogVOIStats.
- JDialogVOIStats.CancelListener - Class in gov.nih.mipav.view.dialogs
-
Does nothing.
- JDialogVOIStats.OkColorListener - Class in gov.nih.mipav.view.dialogs
-
Pick up the selected color and call method to change the VOI color.
- JDialogVOIStats.VOITreePopup - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogVOIStats.VOITreeRenderer - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogVolumeAnnotation - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- JDialogVolumeAnnotation(ModelImage, VOI, int, boolean, boolean, boolean, JPanelAnnotationAnimation) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogVolumeAnnotation
-
- JDialogVolViewResample - Class in gov.nih.mipav.view.renderer
-
Dialog to ask user to resample the images to power of 2 before volume rendering.
- JDialogVolViewResample(ModelImage, ModelImage, String) - Constructor for class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Creates the dialog, using the input parameters to place it on the screen.
- JDialogWalshHadamardTransform - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogWalshHadamardTransform() - Constructor for class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
Empty constructor needed for dynamic instantiation.
- JDialogWalshHadamardTransform(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
Construct the Walsh Hadamard Transform dialog.
- JDialogWatershed - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogWatershed() - Constructor for class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Empty constructor for scripting.
- JDialogWatershed(JFrame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Creates new watershed dialog.
- JDialogWaveletFuse - Class in gov.nih.mipav.view.dialogs
-
Dialog to get user input, then call the algorithm.
- JDialogWaveletFuse() - Constructor for class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogWaveletFuse(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Creates a new JDialogWaveletFuse object.
- JDialogWaveletMultiscaleProducts - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogWaveletMultiscaleProducts() - Constructor for class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogWaveletMultiscaleProducts(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Creates new dialog for entering parameters for wavelet multiscale products.
- JDialogWaveletThreshold - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- JDialogWaveletThreshold() - Constructor for class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Empty constructor needed for dynamic instantiation (used during scripting).
- JDialogWaveletThreshold(Frame, ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Creates new dialog for entering parameters for wavelet threshold.
- JDialogWinLevel - Class in gov.nih.mipav.view.dialogs
-
Dialog creates 2 sliders which adjust the level and window of an image.
- JDialogWinLevel(ModelImage, ModelLUT, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Constructor.
- JDialogWinLevel(Frame, ModelImage, ModelLUT) - Constructor for class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Constructor.
- JDialogWinLevel(Frame, ModelImage, ModelLUT, float[]) - Constructor for class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Constructor.
- JDialogZoom - Class in gov.nih.mipav.view.dialogs
-
This is a custom swing dialog that sets variables for zooming in and out.
- JDialogZoom(Frame, ViewJComponentEditImage, float) - Constructor for class gov.nih.mipav.view.dialogs.JDialogZoom
-
Creates new zoom dialog.
- JDialogZoom.ZoomMode - Enum in gov.nih.mipav.view.dialogs
-
- JDITHER_FS - gov.nih.mipav.model.file.libjpeg.J_DITHER_MODE
-
- JDITHER_NONE - gov.nih.mipav.model.file.libjpeg.J_DITHER_MODE
-
- JDITHER_ORDERED - gov.nih.mipav.model.file.libjpeg.J_DITHER_MODE
-
- jdiv_round_up(int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- JENNRICH_AND_SAMPSON - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- JENNRICH_AND_SAMPSON - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- JENNRICH_AND_SAMPSON - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- JENNRICH_AND_SAMPSON - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- JennrichAndSampsonFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.JennrichAndSampsonFunction
-
- JERR_BAD_ALIGN_TYPE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_ALLOC_CHUNK - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_BUFFER_MODE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_COMPONENT_ID - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_CROP_SPEC - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_DCT_COEF - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_DCTSIZE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_DROP_SAMPLING - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_HUFF_TABLE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_IN_COLORSPACE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_J_COLORSPACE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_LENGTH - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_LIB_VERSION - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_MCU_SIZE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_POOL_ID - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_PRECISION - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_PROG_SCRIPT - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_PROGRESSION - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_SAMPLING - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_SCAN_SCRIPT - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_STATE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_STRUCT_SIZE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BAD_VIRTUAL_ACCESS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_BUFFER_SIZE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_CANT_SUSPEND - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_CCIR601_NOTIMPL - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_COMPONENT_COUNT - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_CONVERSION_NOTIMPL - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_DAC_INDEX - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_DAC_VALUE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_DHT_INDEX - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_DQT_INDEX - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_EMPTY_IMAGE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_EMS_READ - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_EMS_WRITE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_EOI_EXPECTED - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_FILE_READ - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_FILE_WRITE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_FRACT_SAMPLE_NOTIMPL - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_HUFF_CLEN_OUTOFBOUNDS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_HUFF_MISSING_CODE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_IMAGE_TOO_BIG - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_INPUT_EMPTY - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_INPUT_EOF - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_MISMATCHED_QUANT_TABLE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_MISSING_DATA - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_MODE_CHANGE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_NO_ARITH_TABLE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_NO_BACKING_STORE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_NO_HUFF_TABLE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_NO_IMAGE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_NO_QUANT_TABLE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_NO_SOI - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_NOT_COMPILED - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_NOTIMPL - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_OUT_OF_MEMORY - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_QUANT_COMPONENTS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_QUANT_FEW_COLORS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_QUANT_MANY_COLORS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_SOF_BEFORE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_SOF_DUPLICATE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_SOF_NO_SOS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_SOF_UNSUPPORTED - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_SOI_DUPLICATE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_TFILE_CREATE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_TFILE_READ - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_TFILE_SEEK - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_TFILE_WRITE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_TOO_LITTLE_DATA - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_UNKNOWN_MARKER - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_VIRTUAL_BUG - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_WIDTH_OVERFLOW - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_XMS_READ - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JERR_XMS_WRITE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JFIF_major_version - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- JFIF_minor_version - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- JfifDescriptor(MetadataExtractor.JfifDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JfifDescriptor
-
- JfifDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- JfifReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JfifReader
-
- JfifReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.JfifReaderTest
-
- JFileTreeCellRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreePanel.JFileTreeCellRenderer
-
- JFileTreeNode(File) - Constructor for class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
Creates a new file tree node.
- JFileTreeNode(File, boolean, TreeNode) - Constructor for class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
Creates a new file tree node.
- JFileTreePanel() - Constructor for class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreePanel
-
- JFrameHistogram - Class in gov.nih.mipav.view
-
Lookup table interface for either grayscale or color (RGB) images.
- JFrameHistogram(Frame, ModelImage, ModelImage, ModelStorageBase, ModelStorageBase) - Constructor for class gov.nih.mipav.view.JFrameHistogram
-
Creates the JFrameHistogram class.
- JFrameHistogram(Frame, ViewJComponentRegistration, ModelImage, ModelImage, ModelStorageBase, ModelStorageBase) - Constructor for class gov.nih.mipav.view.JFrameHistogram
-
Creates the JFrameHistogram class.
- JFrameRegistrationMosaic - Class in gov.nih.mipav.view.dialogs
-
JFrameRegistrationMosaic is a window/gui that enables the user to manually align two images with the mouse and then
call the AlgorithmRegOAR2D registration algorithm to create a mosaic image with the two aligned images.
- JFrameRegistrationMosaic() - Constructor for class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
JFrameRegistrationMosaic - Creates new window for manual (mouse-based) registration of two images.
- JFrameSurfaceMaterialProperties - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Window for setting the surface material properties.
- JFrameSurfaceMaterialProperties(JPanelSurface, int, GeneralLight[], float, Material) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Creates the Surface Material Editor window.
- JFrameSurfaceMaterialProperties_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Window for setting the surface material properties.
- JFrameSurfaceMaterialProperties_WM(JPanelSurface_WM, int, Light[], MaterialState) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Creates the Surface Material Editor window.
- JfxxDescriptor(MetadataExtractor.JfxxDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JfxxDescriptor
-
- JfxxDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JfxxDirectory
-
- JfxxReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JfxxReader
-
- jgeadd - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- JHUFF_TBL() - Constructor for class gov.nih.mipav.model.file.libjpeg.JHUFF_TBL
-
- JIMI - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Java Image Manangement Interface file type.
- jinit_1pass_quantizer(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_2pass_quantizer(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_arith_decoder(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_color_deconverter(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_d_coef_controller(libjpeg.jpeg_decompress_struct, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_d_main_controller(libjpeg.jpeg_decompress_struct, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_d_post_controller(libjpeg.jpeg_decompress_struct, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_huff_decoder(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_input_controller(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_inverse_dct(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_marker_reader(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_master_decompress(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_memory_mgr(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_merged_upsampler(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jinit_upsampler(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- JInterfaceBase - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- JInterfaceBase() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
Default constructor.
- JInterfaceBase(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
Construct Base.
- JInterfaceBase.CancelListener - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Does nothing.
- JInterfaceBase.DrawingPanel - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JInterfaceBase.OkColorListener - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Pick up the selected color and call method to change the color.
- jlamp1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- JMSG_COPYRIGHT - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JMSG_LASTMSGCODE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JMSG_LENGTH_MAX - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- JMSG_NOMESSAGE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JMSG_STR_PARM_MAX - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- JMSG_VERSION - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- jobName - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- jobz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- JOCTET - Variable in class gov.nih.mipav.model.file.libjpeg
-
- joff - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- join(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.universe
-
- join(Iterable<? extends CharSequence>, String) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.StringUtil
-
- join(T[], String) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.StringUtil
-
- joining_points - Variable in class gov.nih.mipav.model.algorithms.Erfinv
-
- joins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- JOINT_DECON - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Default case
- JointHistogram3D(float[], float[], int, int[], int[][], int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- JointHistogram3D(float[], float[], int, int[], int[], int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- JointHistogram3D(float[], float[], int, int, int[], int[][][], int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- JP2 - Static variable in class gov.nih.mipav.model.file.FileUtility
-
- JP2_CFMT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- JPanel3DMouse_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- JPanel3DMouse_WM(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Constructor.
- JPanelAddRemoveVOI() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.JPanelAddRemoveVOI
-
Sets the Add/Remove VOI panel to Y-Axis layout and with images.
- JPanelAddRemoveVOI() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.JPanelAddRemoveVOI
-
Sets the Add/Remove VOI panel to Y-Axis layout and with images.
- JPanelAddRemoveVOI() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelAddRemoveVOI
-
Sets the Add/Remove VOI panel to Y-Axis layout and with images.
- JPanelAlgorithmOutputOptions - Class in gov.nih.mipav.view.components
-
This panel encapsulates radio buttons which allow the user to indicate whether a new image should be generated by the
algorithm dialog parent of the panel and whether the whole image or a VOI region should be processed.
- JPanelAlgorithmOutputOptions(ModelImage) - Constructor for class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
Create the algorithm output options panel.
- JPanelAnnotationAnimation - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- JPanelAnnotationAnimation(VolumeTriPlanarRender, int, Vector<String>) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- JPanelAnnotationAnimation.OkColorListener - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Pick up the selected color and call method to change the color.
- JPanelAnnotations - Class in gov.nih.mipav.view.renderer.WildMagic.WormUntwisting
-
- JPanelAnnotations(VOILatticeManagerInterface, VolumeTriPlanarRender, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- JPanelAnonymizeImage - Class in gov.nih.mipav.view
-
Custom panel for anonymizing DICOM images.
- JPanelAnonymizeImage() - Constructor for class gov.nih.mipav.view.JPanelAnonymizeImage
-
constructor to build a panel allowing user to find which tags are available to anonymize.
- JPanelAnonymizePrivateTags - Class in gov.nih.mipav.view
-
The panel class used in anonymize image/directory that displays the private
tags in a tree format along with check boxes so that the organization between
groups is apparent.
- JPanelAnonymizePrivateTags() - Constructor for class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
The default constructor that occurs in the anonymize directory
dialog before a profile has been loaded to populate the tree
- JPanelAnonymizePrivateTags(ModelImage, Vector<FileDicomSQItem>) - Constructor for class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
The constructor used in the anonymize image dialog that will
populate the tree and assign the layout based on the file info.
- JPanelAnonymizePublicTags - Class in gov.nih.mipav.view
-
The panel class used in anonymize image/directory that displays the public
tags in a tree format along with check boxes so that the organization between
groups is apparent.
- JPanelAnonymizePublicTags() - Constructor for class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
The default constructor that occurs in the anonymize directory
dialog before a profile has been loaded to populate the tree
- JPanelAnonymizePublicTags(ModelImage, Vector<FileDicomSQItem>) - Constructor for class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
The constructor used in the anonymize image dialog that will
populate the tree and assign the layout based on the file info.
- JPanelAVIChoice - Class in gov.nih.mipav.view.renderer
-
Title: JDialogAVIChoice
- JPanelAVIChoice(Frame) - Constructor for class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Creates new dialog.
- JPanelAVIChoice(Frame, boolean) - Constructor for class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Creates a new JPanelAVIChoice object.
- JPanelBrainSurfaceFlattener - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
DOCUMENT ME!
- JPanelBrainSurfaceFlattener(MjCorticalAnalysis, ModelImage, ViewJFrameVolumeView) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
Create the control-panel for the brainsurfaceFlattener interface:
- JPanelBrainSurfaceFlattener_WM - Class in gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM
-
- JPanelBrainSurfaceFlattener_WM(CorticalAnalysisRender, VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Create the control-panel for the brainsurfaceFlattener interface:
- JPanelCamera - Class in gov.nih.mipav.view.renderer.J3D
-
JPanelCamera creates the camera control panel for the 3D visulization frame.
- JPanelCamera(RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Creates new dialog for converting type of image.
- JPanelCamera.DownButton - Class in gov.nih.mipav.view.renderer.J3D
-
Helper class which sets the appropriate icons for the down button.
- JPanelCamera.DrawingPanel - Class in gov.nih.mipav.view.renderer.J3D
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelCamera.EmptyButton - Class in gov.nih.mipav.view.renderer.J3D
-
Helper class which create the empty button.
- JPanelCamera.LeftButton - Class in gov.nih.mipav.view.renderer.J3D
-
Helper class which sets the appropriate icons for the left button.
- JPanelCamera.RightButton - Class in gov.nih.mipav.view.renderer.J3D
-
Helper class which sets the appropriate icons for the right button.
- JPanelCamera.StandardMouse - Class in gov.nih.mipav.view.renderer.J3D
-
Class used to send Standard mouse events to the canvas.
- JPanelCamera.UpButton - Class in gov.nih.mipav.view.renderer.J3D
-
Helper class which sets the appropriate icons for the up button.
- JPanelChecklist - Class in gov.nih.mipav.view
-
Creates a JPanel to hold a scrolling list of checkboxes.
- JPanelChecklist() - Constructor for class gov.nih.mipav.view.JPanelChecklist
-
Constructor to build a panel allowing user to find which tags are available to anonymize.
- JPanelClip - Class in gov.nih.mipav.view.renderer.J3D
-
Title: JPanelClip
- JPanelClip(SurfaceRender, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
3D texture surface renderer clipping dialog control.
- JPanelClip_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- JPanelClip_WM(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
3D clipping dialog control.
- JPanelClip_WM(VolumeTriPlanarRender) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
3D clipping dialog control.
- JPanelClip.CancelListener - Class in gov.nih.mipav.view.renderer.J3D
-
Does nothing.
- JPanelClip.DrawingPanel - Class in gov.nih.mipav.view.renderer.J3D
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelClip.OkColorListener - Class in gov.nih.mipav.view.renderer.J3D
-
Pick up the selected color and call method to change the VOI color.
- JPanelColorChannels - Class in gov.nih.mipav.view.components
-
A panel containing checkboxes which allow the user to indicate which channels of a color image should be processed.
- JPanelColorChannels(ModelImage) - Constructor for class gov.nih.mipav.view.components.JPanelColorChannels
-
Construct the panel, with all of the channels marked to be processed by default.
- JPanelColorChannels(ModelImage, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.view.components.JPanelColorChannels
-
Construct the panel.
- JPanelCurves - Class in gov.nih.mipav.view.renderer.WildMagic.WormUntwisting
-
- JPanelCurves(VOILatticeManagerInterface, VolumeTriPlanarRender, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- JPanelCustomBlend - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- JPanelCustomBlend(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
Constructor.
- JPanelDisplay - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
The display panel control the red bounding box frame ( on/off ), texture aligned rendering mode, cubic controk,
perspective and parrallel viewing mode, and back ground color.
- JPanelDisplay(RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Creates new dialog for turning bounding box frame on and off.
- JPanelDisplay_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
The display panel control the red bounding box frame ( on/off ), texture aligned rendering mode, cubic controk,
perspective and parallel viewing mode, and back ground color.
- JPanelDisplay_WM(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Creates new dialog for turning bounding box frame on and off.
- JPanelDisplay.CancelListener - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Does nothing.
- JPanelDisplay.DrawingPanel - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelDisplay.OkColorListener - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Pick up the selected color and call method to change the color.
- JPanelDTIEstimateTensor - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- JPanelDTIEstimateTensor(DTIPipeline) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- JPanelDTIFiberTracking - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- JPanelDTIFiberTracking(DTIPipeline) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
Constructs the Fiber Tracking input panel:
- JPanelDTIFiberTracking(JDialog, DTIPipeline) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
Constructs the Fiber Tracking input panel:
- JPanelDTIImportData - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
The copyright below only pertains to methods within JDialogImageInfo that relate to the Gradient Table Creator for
Philips PAR/REC files V3/V4 that is displayed in the DTI tab.
- JPanelDTIImportData(DTIPipeline) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- JPanelDTIParametersPanel - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- JPanelDTIParametersPanel(VolumeTriPlanarInterfaceDTI, VolumeTriPlanarRender) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- JPanelDTIParametersPanel.CancelListener - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
Cancel the color dialog, change nothing.
- JPanelDTIParametersPanel.OkColorListener - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
Pick up the selected color and call method to change the fiber bundle
color.
- JPanelDTIParametersPanel.VOIParams - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- JPanelDTIPreprocessing - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- JPanelDTIPreprocessing(DTIPipeline) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- JPanelDTIVisualization - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- JPanelDTIVisualization(JDialog, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Creates the DTI Visualization panel inside the parent dialog.
- JPanelEdit - Class in gov.nih.mipav.view
-
An abstract class for editing a single, specfic value.
- JPanelEdit() - Constructor for class gov.nih.mipav.view.JPanelEdit
-
Builds a standard JPanel.
- JPanelEditAxisOrientation - Class in gov.nih.mipav.view
-
An EditPanel which allows the user to select among the Analyze possibilities for image orientation.
- JPanelEditAxisOrientation(String) - Constructor for class gov.nih.mipav.view.JPanelEditAxisOrientation
-
Sets the panel to contain a standard, white JComboBox.
- JPanelEditBoolean - Class in gov.nih.mipav.view
-
An EditPanel which allows the user to select a boolean value ('true' or 'false').
- JPanelEditBoolean(String) - Constructor for class gov.nih.mipav.view.JPanelEditBoolean
-
Sets the panel to contain a standard, white JComboBox.
- JPanelEditChar - Class in gov.nih.mipav.view
-
Very simple EditPanel which merely edit a letter at a time.
- JPanelEditChar(char) - Constructor for class gov.nih.mipav.view.JPanelEditChar
-
Sets the panel to contain a standard, white JTextField.
- JPanelEditDate - Class in gov.nih.mipav.view
-
panel contains 3 fields: 2 comboboxes (day, month), 1 text field (year), panel handles proper day/month and leap-year
input.
- JPanelEditDate(String, boolean) - Constructor for class gov.nih.mipav.view.JPanelEditDate
-
Builds the panel with 3 fields.
- JPanelEditDefault - Class in gov.nih.mipav.view
-
Very simple EditPanel which merely contains some text.
- JPanelEditDefault(String) - Constructor for class gov.nih.mipav.view.JPanelEditDefault
-
Sets the panel to contain a standard, white JTextField.
- JPanelEditImageOrientation - Class in gov.nih.mipav.view
-
An EditPanel which allows the user to select among the Analyze possibilities for image orientation.
- JPanelEditImageOrientation(String) - Constructor for class gov.nih.mipav.view.JPanelEditImageOrientation
-
Sets the panel to contain a standard, white JComboBox.
- JPanelEditModality - Class in gov.nih.mipav.view
-
An EditPanel which allows the user to select from a list of modalities (from FileInfoBase.modalityStr).
- JPanelEditModality(String) - Constructor for class gov.nih.mipav.view.JPanelEditModality
-
Sets the panel to contain a standard, white JComboBox.
- JPanelEditOrientation - Class in gov.nih.mipav.view
-
An EditPanel which allows the user to select among the Analyze possibilities for image orientation.
- JPanelEditOrientation(String) - Constructor for class gov.nih.mipav.view.JPanelEditOrientation
-
Sets the panel to contain a standard, white JComboBox.
- JPanelEditRace - Class in gov.nih.mipav.view
-
An EditPanel which allows the user to select from a list of races.
- JPanelEditRace(String) - Constructor for class gov.nih.mipav.view.JPanelEditRace
-
Sets the panel to contain a standard, white JComboBox.
- JPanelEditSetOrParam - Class in gov.nih.mipav.view
-
Very simple EditPanel which merely contains some text.
- JPanelEditSetOrParam(String) - Constructor for class gov.nih.mipav.view.JPanelEditSetOrParam
-
Sets the panel to contain a standard, white JTextField.
- JPanelEditSex - Class in gov.nih.mipav.view
-
adds panel with combobox to change field containing the patient's sex.
- JPanelEditSex(String) - Constructor for class gov.nih.mipav.view.JPanelEditSex
-
allows the user to select a DICOM allowable sex: Male, Female, Other; also allows "no value" and will return ""
when asked about that value.
- JPanelEditTime - Class in gov.nih.mipav.view
-
panel contains 4 fields:
3 comboboxes (hour, minute, second),
1 text field (decimal fraction of a second),
- JPanelEditTime(String, boolean) - Constructor for class gov.nih.mipav.view.JPanelEditTime
-
builds a panel containing 4 fields:
3 comboboxes (hour, minute, second),
1 text field (decimal fraction of a second),
- JPanelEditValueType - Class in gov.nih.mipav.view
-
An EditPanel which allows the user to select from a list of parameter value types.
- JPanelEditValueType(String) - Constructor for class gov.nih.mipav.view.JPanelEditValueType
-
Sets the panel to contain a standard, white JComboBox.
- JPanelEPIDistortionCorrection - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- JPanelEPIDistortionCorrection(DTIPipeline) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Creates the EPI-Distortion correction panel for the DTI Pipeline
- JPanelFileSelection - Class in gov.nih.mipav.view
-
provides a nice plug-in swing panel to simplify the file-selection process.
- JPanelFileSelection() - Constructor for class gov.nih.mipav.view.JPanelFileSelection
-
basic constructor, creates a panel with textfield and browser. defaults to pointing at the user's default
directory, There is no title for either the file chooser or the panel itself, and the file chooser will search
for both files and directories.
- JPanelFileSelection(boolean) - Constructor for class gov.nih.mipav.view.JPanelFileSelection
-
custom constructor -- selects the preference for the file chooser to permit choice of selection of directories
only or both files and directories.
- JPanelFileSelection(File, String) - Constructor for class gov.nih.mipav.view.JPanelFileSelection
-
custom constructor -- Selection of the starting directory, and the title on the border.
- JPanelFileSelection(File, String, boolean) - Constructor for class gov.nih.mipav.view.JPanelFileSelection
-
custom constructor -- Selection of the starting directory, and the title on the border.
- JPanelFlythruMove - Class in gov.nih.mipav.view.renderer.flythroughview
-
Title: JPanelFlythruMove
- JPanelFlythruMove(FlyThroughRenderInterface) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
User interface to control the fly through renderer events.
- JPanelFlythruMove.DownButton - Class in gov.nih.mipav.view.renderer.flythroughview
-
Helper class which sets the appropriate icons for the down button.
- JPanelFlythruMove.DrawingPanel - Class in gov.nih.mipav.view.renderer.flythroughview
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelFlythruMove.EmptyButton - Class in gov.nih.mipav.view.renderer.flythroughview
-
DOCUMENT ME!
- JPanelFlythruMove.LeftButton - Class in gov.nih.mipav.view.renderer.flythroughview
-
Helper class which sets the appropriate icons for the left button.
- JPanelFlythruMove.LeftRotateButton - Class in gov.nih.mipav.view.renderer.flythroughview
-
Helper class which sets the appropriate icons for the left button.
- JPanelFlythruMove.PlayMouse - Class in gov.nih.mipav.view.renderer.flythroughview
-
Thread that plays.
- JPanelFlythruMove.RightButton - Class in gov.nih.mipav.view.renderer.flythroughview
-
Helper class which sets the appropriate icons for the right button.
- JPanelFlythruMove.RightRotateButton - Class in gov.nih.mipav.view.renderer.flythroughview
-
Helper class which sets the appropriate icons for the left button.
- JPanelFlythruMove.StandardMouse - Class in gov.nih.mipav.view.renderer.flythroughview
-
Class used to send Standard mouse events to the canvas.
- JPanelFlythruMove.UpButton - Class in gov.nih.mipav.view.renderer.flythroughview
-
Helper class which sets the appropriate icons for the up button.
- JPanelGeodesic - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Title: JPanelGeodesic
- JPanelGeodesic(RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Contructor to initialize the geodesic control panel and create geodesic image scene graph.
- JPanelGeodesic_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Title: JPanelGeodesic
- JPanelGeodesic_WM(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Constructor to initialize the geodesic control panel and create geodesic image scene graph.
- JPanelGeodesic.DrawingPanel - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelGPU(BorderLayout) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase.JPanelGPU
-
- JPanelHistogram - Class in gov.nih.mipav.view
-
- JPanelHistogram(ModelImage, ModelStorageBase, boolean) - Constructor for class gov.nih.mipav.view.JPanelHistogram
-
Creates the JPanelHistogram.
- JPanelHistogram(JFrameHistogram, ModelImage, ModelStorageBase, boolean) - Constructor for class gov.nih.mipav.view.JPanelHistogram
-
Creates the JPanelHistogram, with the JFrameHistogram as the containing class.
- JPanelHistogram(JFrameHistogram, ModelImage, ModelStorageBase, boolean, boolean) - Constructor for class gov.nih.mipav.view.JPanelHistogram
-
Creates the JPanelHistogram, with the JFrameHistogram as the containing class.
- JPanelHistoLUT - Class in gov.nih.mipav.view.renderer
-
Deprecated.
- JPanelHistoLUT(ModelImage, ModelImage, ModelLUT, ModelLUT, boolean) - Constructor for class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
- JPanelHistoLUT(ModelImage, ModelImage, ModelLUT, ModelLUT, boolean, boolean) - Constructor for class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
- JPanelHistoLUT.DrawingPanel - Class in gov.nih.mipav.view.renderer
-
Deprecated.
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelHistoRGB - Class in gov.nih.mipav.view.renderer
-
Deprecated.
- JPanelHistoRGB(ModelImage, ModelImage, ModelRGB, ModelRGB, boolean) - Constructor for class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
- JPanelHistoRGB(ModelImage, ModelImage, ModelRGB, ModelRGB, boolean, boolean) - Constructor for class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
- JPanelHistoRGB(ViewJComponentRegistration, ModelImage, ModelImage, ModelRGB, ModelRGB, boolean) - Constructor for class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
- JPanelHistoRGB.DrawingPanel - Class in gov.nih.mipav.view.renderer
-
Deprecated.
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelImageOptions() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.JPanelImageOptions
-
- JPanelLattice - Class in gov.nih.mipav.view.renderer.WildMagic.WormUntwisting
-
- JPanelLattice(VOILatticeManagerInterface, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- JPanelLights - Class in gov.nih.mipav.view.renderer.J3D
-
Dialog to turn slices bounding box of surface renderer on and off, and to change the color of the frame.
- JPanelLights(JPanelSurface, SurfaceRender) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Constructor.
- JPanelLights_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Dialog to turn slices bounding box of surface renderer on and off, and to change the color of the frame.
- JPanelLights_WM(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Constructor.
- JPanelLights_WM(VolumeTriPlanarRender) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
- JPanelLights.CancelListener - Class in gov.nih.mipav.view.renderer.J3D
-
Cancel the color dialog, change nothing.
- JPanelLights.OkColorListener - Class in gov.nih.mipav.view.renderer.J3D
-
Pick up the selected color and call method to change the surface color.
- JPanelListController - Class in gov.nih.mipav.view
-
panel to hold and transfer items between two lists. extend to modify the application of the 'left', 'right', and
'delete' or 'up', 'down' and 'delete'.
- JPanelListController() - Constructor for class gov.nih.mipav.view.JPanelListController
-
defualt position is all buttons vertical.
- JPanelListController(boolean) - Constructor for class gov.nih.mipav.view.JPanelListController
-
Creates a list controller, with the buttons in the default layout, but which can be set to display images only or
text.
- JPanelListController(int) - Constructor for class gov.nih.mipav.view.JPanelListController
-
Creates a list controller, with the buttons in the given layout, but which defaults to display images only.
- JPanelListController(int, boolean) - Constructor for class gov.nih.mipav.view.JPanelListController
-
Creates a list controller, with the buttons in the given layout, and which can be set to display images only or
text.
- JPanelListSelection() - Constructor for class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.JPanelListSelection
-
Creates a new JPanelListSelection object.
- JPanelListSelection(boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.JPanelListSelection
-
I don't want to bother with any other layouts right now.
- JPanelListSelection(int, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.JPanelListSelection
-
Creates a new JPanelListSelection object.
- JPanelLogicalOptions() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.JPanelLogicalOptions
-
Creates a default layout, of the radio button options laid-out vertically.
- JPanelMouse - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Mouse recorded dialog.
- JPanelMouse(RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Constructs a new mouse recorder dialog.
- JPanelMouse.ChangeNameDialog - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Change the name of the selected item in the item list.
- JPanelMouse.DrawingPanel - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelMouse.PlayMouse - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
* Thread that plays.
- JPanelMouse.RecordMouse - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Thread that records screen capture.
- JPanelMousePlotter - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
Mouse recorded dialog.
- JPanelMousePlotter(RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Constructs a new mouse recorder dialog.
- JPanelMousePlotter.ChangeNameDialog - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
Change the name of the selected item in the item list.
- JPanelMousePlotter.PlayMouse - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
Thread that plays.
- JPanelMousePlotter.RecordMouse - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
Thread that records screen capture.
- JPanelMultiDimensionalTransfer - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
This panel contains the display panel for the 2D Histogram user-interface.
- JPanelMultiDimensionalTransfer(GLCanvas, VolumeTriPlanarInterface, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Creates new dialog for turning bounding box frame on and off.
- JPanelNavigation - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
The navigation (for virtual bronchoscopy) fly-thru control panel.
- JPanelNavigation(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
Constructor.
- JPanelPixelExclusionSelector - Class in gov.nih.mipav.view.dialogs
-
A dialog to permits choosing a range (positive or negative, and floating-point) of values with the intention of the
selection indicating a range of values.
- JPanelPixelExclusionSelector(JPanelStatisticsList, boolean) - Constructor for class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Creates an exclusion panel which has a checkbox to make the range controls available, a selector to choose the
range controls ("Between", "Above" and "Below"), and the range inputs for these
controls.
- JPanelPixelExclusionSelector.ExcluderOptionsActionListener - Class in gov.nih.mipav.view.dialogs
-
This class listens to excluder options, changing the available statistics calculation options depending on
whether all contours are still closed.
- JPanelPixelExclusionSelector.RangeType - Enum in gov.nih.mipav.view.dialogs
-
- JPanelPositions - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- JPanelPositions(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
3D clipping dialog control.
- JPanelProbe - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Dialog to turn slices bounding box of surface renderer on and off, and to change the color of the frame.
- JPanelProbe(SurfaceRender, ViewJFrameBase, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Constructor to initialize the probe control panel.
- JPanelProbe.CancelListener - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Cancel the color dialog, change nothing.
- JPanelProbe.DrawingPane - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Helper class for resizing.
- JPanelProbe.OkColorListener - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Pick up the selected color and call method to change the surface color.
- JPanelProgressBar - Class in gov.nih.mipav.view
-
Title: JPanelProgressBar
- JPanelProgressBar() - Constructor for class gov.nih.mipav.view.JPanelProgressBar
-
Creates a new JPanelProgressBar object.
- JPanelProgressBar(int, int) - Constructor for class gov.nih.mipav.view.JPanelProgressBar
-
Creates a new JPanelProgressBar object.
- JPanelRendererBase - Class in gov.nih.mipav.view.renderer
-
This class is the base for all the other dialogs.
- JPanelRendererBase() - Constructor for class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Constructor that sets the parent frame of the dialog and whether or not the dialog is modal.
- JPanelRendererJ3D - Class in gov.nih.mipav.view.renderer.J3D
-
This class is the base for all the other dialogs.
- JPanelRendererJ3D() - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelRendererJ3D
-
Constructor that sets the parent frame of the dialog and whether or not the dialog is modal.
- JPanelRendererJ3D(RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelRendererJ3D
-
Constructor that sets the parent frame of the dialog and whether or not the dialog is modal.
- JPanelRenderMode_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- JPanelRenderMode_WM(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Constructor.
- JPanelRenderOptionsRayCast - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Dialog to turn bounding box of surface renderer on and off, and to change the color of the frame.
- JPanelRenderOptionsRayCast(VolumeRendererRayCast) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Creates new dialog for turning bounding box frame on and off.
- JPanelRenderOptionsRayCast.CancelListener - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Does nothing.
- JPanelRenderOptionsRayCast.DrawingPanel - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelRenderOptionsRayCast.OkColorListener - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Pick up the selected color and call method to change the VOI color.
- JPanelRenderOptionsShearWarp - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Dialog to turn bounding box of surface renderer on and off, and to change the color of the frame.
- JPanelRenderOptionsShearWarp(VolumeRendererShearWarp) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Creates new dialog for turning bounding box frame on and off.
- JPanelRenderOptionsShearWarp.CancelListener - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Does nothing.
- JPanelRenderOptionsShearWarp.DrawingPanel - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelRenderOptionsShearWarp.OkColorListener - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Pick up the selected color and call method to change the VOI color.
- JPanelSculptor - Class in gov.nih.mipav.view.renderer.J3D
-
Title: JPanelSculptor
- JPanelSculptor(RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Contructor.
- JPanelSculptor_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Title: JPanelSculptor
- JPanelSculptor_WM(VolumeTriPlanarInterface, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Contructor.
- JPanelSculptor.DrawingPanel - Class in gov.nih.mipav.view.renderer.J3D
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelSigmas - Class in gov.nih.mipav.view.components
-
A panel containing fields which allow the user to input sigmas in three dimensions (of, for example, a gaussian
kernel).
- JPanelSigmas(ModelImage) - Constructor for class gov.nih.mipav.view.components.JPanelSigmas
-
Construct the sigma panel.
- JPanelSlices - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Dialog to turn slices bounding box of surface renderer on and off, and to
change the color of the frame.
- JPanelSlices(SurfaceRender) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Creates new dialog for turning slices bounding box frame on and off.
- JPanelSlices_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Dialog to turn slices bounding box of surface renderer on and off, and to
change the color of the frame.
- JPanelSlices_WM(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Constructor.
- JPanelSlices.CancelListener - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Does nothing.
- JPanelSlices.DrawingPanel - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelSlices.OkColorListener - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Pick up the selected color and call method to change the VOI color.
- JPanelStatisticFileFormatOptions() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticFileFormatOptions
-
Creates a default layout, of the radio button options laid-out vertically.
- JPanelStatisticsList - Class in gov.nih.mipav.view
-
Custom panel for placing statistics in a selectable checklist panel.
- JPanelStatisticsList() - Constructor for class gov.nih.mipav.view.JPanelStatisticsList
-
constructor to build a panel allowing user to find which tags are available to anonymize.
- JPanelStatisticsOptions() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
Creates a default view of the panel, including all options displayed.
- JPanelSurface - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
A Java3D-based dialog for surfaces represented as triangle meshes.
- JPanelSurface(SurfaceRender, Canvas3D, TransformGroup, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Creates the Java3D scene graph for the application.
- JPanelSurface_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- JPanelSurface_WM(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Constructor.
- JPanelSurface_WM.OkColorListener - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
Pick up the selected color and call method to change the color.
- JPanelSurface.CancelListener - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Cancel the color dialog, change nothing.
- JPanelSurface.OkColorListener - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Pick up the selected color and call method to change the surface color.
- JPanelSurfaceBox - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
Dialog to turn bounding box of surface renderer on and off, and to change the color of the frame.
- JPanelSurfaceBox(RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Creates new dialog for turning bounding box frame on and off.
- JPanelSurfaceBox.CancelListener - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
Does nothing.
- JPanelSurfaceBox.OkColorListener - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
Pick up the selected color and call method to change the VOI color.
- JPanelSurfaceTexture - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
JPanelSurfaceTexture.
- JPanelSurfaceTexture(SurfaceRender, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Constructor:
- JPanelSurfaceTexture_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
JPanelSurfaceTexture.
- JPanelSurfaceTexture_WM(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Constructor.
- JPanelTreeController - Class in gov.nih.mipav.view
-
panel to hold and transfer items between two trees. extend to modify the application of the 'left', 'right', and
'delete' or 'up', 'down' and 'delete'.
- JPanelTreeController() - Constructor for class gov.nih.mipav.view.JPanelTreeController
-
defualt position is all buttons vertical.
- JPanelTreeController(boolean) - Constructor for class gov.nih.mipav.view.JPanelTreeController
-
Creates a tree controller, with the buttons in the default layout, but which can be set to display images only or
text.
- JPanelTreeController(int) - Constructor for class gov.nih.mipav.view.JPanelTreeController
-
Creates a tree controller, with the buttons in the given layout, but which defaults to display images only.
- JPanelTreeController(int, boolean) - Constructor for class gov.nih.mipav.view.JPanelTreeController
-
Creates a tree controller, with the buttons in the given layout, and which can be set to display images only or
text.
- JPanelView - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Dialog to control the view of the 3D surface viewer and renderer.
- JPanelView(RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Constructs a new dialog for controlling the view of the renderer.
- JPanelView.DownButton - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Helper class which sets the appropriate icons for the down button.
- JPanelView.DrawingPanel - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelView.LeftButton - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Helper class which sets the appropriate icons for the left button.
- JPanelView.RightButton - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Helper class which sets the appropriate icons for the right button.
- JPanelView.StandardMouse - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Class used to send Standard mouse events to the canvas.
- JPanelView.UpButton - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Helper class which sets the appropriate icons for the up button.
- JPanelVirtualEndoscopySetup - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Control panel to set up the virtual endoscopy volume view.
- JPanelVirtualEndoscopySetup(FlythruRender) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Used primarily for the script to store variables and run the algorithm.
- JPanelVirtualEndoscopySetup(FlythruRender, ViewJFrameVolumeView) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Creates endoscopy registration control panel.
- JPanelVirtualEndoscopySetup_WM - Class in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
Control panel to set up the virtual endoscopy volume view.
- JPanelVirtualEndoscopySetup_WM(FlyThroughRender) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Creates endoscopy registration control panel.
- JPanelVirtualEndoscopySetup_WM.DrawingPanel - Class in gov.nih.mipav.view.renderer.WildMagic.flythroughview
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelVirtualEndoscopySetup.DrawingPanel - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Wrapper in order to hold the control panel layout in the JScrollPane.
- JPanelVolOpacity - Class in gov.nih.mipav.view.renderer.J3D
-
Deprecated.
- JPanelVolOpacity(RenderViewBase, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
- JPanelVolOpacity(VolumeTriPlanarInterface, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
- JPanelVolOpacityBase - Class in gov.nih.mipav.view.renderer.J3D
-
Deprecated.
- JPanelVolOpacityBase(RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
- JPanelVolOpacityBase(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
- JPanelVolOpacityRGB - Class in gov.nih.mipav.view.renderer
-
Deprecated.
- JPanelVolOpacityRGB(RenderViewBase, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
- JPanelVolOpacityRGB(VolumeTriPlanarInterface, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
- JPanelVolume4D - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- JPanelVolume4D(VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelVolume4D
-
Constructor.
- JPanelVolumeOpacity - Class in gov.nih.mipav.view
-
Simple panel containing the volume renderer opacity controls.
- JPanelVolumeOpacity(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.JPanelVolumeOpacity
-
Creates new dialog for converting type of image.
- JPanelVolumeOpacity(ModelImage, ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.JPanelVolumeOpacity
-
Creates new dialog for converting type of image.
- JPanelVolumeOpacity(ModelImage, ModelImage, ModelImage, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.JPanelVolumeOpacity
-
- jpeg - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGBitInputStream
-
- jpeg - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGBitInputStream
-
- Jpeg - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- JPEG - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .jpeg, .jpg.
- jpeg_abort(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_alloc_huff_table(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_alloc_quant_table(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_APP0 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_aritab - Variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_calc_output_dimensions(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_color_quantizer() - Constructor for class gov.nih.mipav.model.file.libjpeg.jpeg_color_quantizer
-
- jpeg_color_space - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- JPEG_COM - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_common_struct() - Constructor for class gov.nih.mipav.model.file.libjpeg.jpeg_common_struct
-
- jpeg_component_info() - Constructor for class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- jpeg_consume_input(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_core_output_dimensions(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_CreateDecompress(libjpeg.jpeg_decompress_struct, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_d_coef_controller() - Constructor for class gov.nih.mipav.model.file.libjpeg.jpeg_d_coef_controller
-
- jpeg_decompress_struct() - Constructor for class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- jpeg_destroy(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_destroy_decompress(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_entropy_decoder() - Constructor for class gov.nih.mipav.model.file.libjpeg.jpeg_entropy_decoder
-
- JPEG_EOI - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_error_mgr() - Constructor for class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- jpeg_fill_bit_buffer(libjpeg.bitread_working_state, int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_finish_decompress(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_HEADER_OK - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_HEADER_TABLES_ONLY - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_huff_decode(libjpeg.bitread_working_state, int, int, libjpeg.d_derived_tbl, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_10x10(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_10x10(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_10X10 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_10x5(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_10x5(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_10X5 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_11x11(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_11x11(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_11X11 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_12x12(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_12x12(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_12X12 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_12x6(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_12x6(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_12X6 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_13x13(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_13x13(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_13X13 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_14x14(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_14x14(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_14X14 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_14x7(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_14x7(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_14X7 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_15x15(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_15x15(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_15X15 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_16x16(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_16x16(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_16X16 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_16x8(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_16x8(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_16X8 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_1x1(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_1x1(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_1X1 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_1x2(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_1x2(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_1X2 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_2x1(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_2x1(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_2X1 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_2x2(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_2x2(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_2X2 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_2x4(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_2x4(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_2X4 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_3x3(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_3x3(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_3X3 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_3x6(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_3x6(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_3X6 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_4x2(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_4x2(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_4X2 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_4x4(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_4x4(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_4X4 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_4x8(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_4x8(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_4X8 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_5x10(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_5x10(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_5X10 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_5x5(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_5x5(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_5X5 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_6x12(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_6x12(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_6X12 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_6x3(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_6x3(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_6X3 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_6x6(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_6x6(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_6X6 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_7x14(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_7x14(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_7X14 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_7x7(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_7x7(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_7X7 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_8x16(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_8x16(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_8X16 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_8x4(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_8x4(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_8X4 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_9x9(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_9x9(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_9X9 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_idct_islow(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- jpeg_idct_islow(libjpeg.jpeg_decompress_struct, libjpeg.jpeg_component_info, short[], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- JPEG_IDCT_ISLOW - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_LIB_VERSION - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_LIB_VERSION_MAJOR - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_LIB_VERSION_MINOR - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_make_d_derived_tbl(libjpeg.jpeg_decompress_struct, boolean, int, libjpeg.d_derived_tbl[]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_marker_struct() - Constructor for class gov.nih.mipav.model.file.libjpeg.jpeg_marker_struct
-
- JPEG_MAX_DIMENSION - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_mem_available(libjpeg.jpeg_decompress_struct, long, long, long) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_mem_init(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_mem_term(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_message_table - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- jpeg_natural_order - Variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_natural_order2 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_natural_order3 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_natural_order4 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_natural_order5 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_natural_order6 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_natural_order7 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_progress_mgr() - Constructor for class gov.nih.mipav.model.file.libjpeg.jpeg_progress_mgr
-
- JPEG_REACHED_EOI - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_REACHED_SOS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_read_header(libjpeg.jpeg_decompress_struct, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_read_scanlines(libjpeg.jpeg_decompress_struct, byte[][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_read_scanlines(libjpeg.jpeg_decompress_struct, short[][], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_resync_to_restart(libjpeg.jpeg_decompress_struct, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_ROW_COMPLETED - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_RST0 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_SCAN_COMPLETED - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_SEGMENT_PREAMBLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.DuckyReader
-
- JPEG_SEGMENT_PREAMBLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifReader
-
Exif data stored in JPEG files' APP1 segment are preceded by this six character preamble "Exif\0\0".
- JPEG_SEGMENT_PREAMBLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccReader
-
- JPEG_SEGMENT_PREAMBLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopReader
-
- jpeg_start_decompress(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_std_error(libjpeg.jpeg_error_mgr) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_std_huff_table(libjpeg.jpeg_decompress_struct, boolean, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_stdio_src(libjpeg.jpeg_decompress_struct, RandomAccessFile) - Method in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_SUSPENDED - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPEG_TABLES - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- JPEG_TABLES - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- jpeg_zigzag_order - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_zigzag_order2 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_zigzag_order3 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_zigzag_order4 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_zigzag_order5 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_zigzag_order6 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg_zigzag_order7 - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jpeg2000Compression - Variable in class gov.nih.mipav.model.file.FileSVS
-
- JPEGACInputStream(FileSVS.JPEGHuffmanInputStream, int[]) - Constructor for class gov.nih.mipav.model.file.FileSVS.JPEGACInputStream
-
- JPEGACInputStream(FileTiff.JPEGHuffmanInputStream, int[]) - Constructor for class gov.nih.mipav.model.file.FileTiff.JPEGACInputStream
-
- JPEGBitInputStream(InputStream, FileSVS.JPEGInputStream) - Constructor for class gov.nih.mipav.model.file.FileSVS.JPEGBitInputStream
-
- JPEGBitInputStream(InputStream, FileTiff.JPEGInputStream) - Constructor for class gov.nih.mipav.model.file.FileTiff.JPEGBitInputStream
-
- JpegCommentDescriptor(MetadataExtractor.JpegCommentDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegCommentDescriptor
-
- JpegCommentDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegCommentDirectory
-
- JpegCommentReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegCommentReader
-
- JpegComponent(int, int, int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegComponent
-
- JPEGComponentInputStream(int) - Constructor for class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- JPEGComponentInputStream(int) - Constructor for class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- JpegComponentTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.JpegComponentTest
-
- jpegCompression - Variable in class gov.nih.mipav.model.file.FileSVS
-
- jpegCompression - Variable in class gov.nih.mipav.model.file.FileTiff
-
- jpegData - Variable in class gov.nih.mipav.model.file.FileDicom
-
Buffer used when reading in encapsulated JPEG images.
- JPEGDCInputStream(FileSVS.JPEGHuffmanInputStream) - Constructor for class gov.nih.mipav.model.file.FileSVS.JPEGDCInputStream
-
- JPEGDCInputStream(FileTiff.JPEGHuffmanInputStream) - Constructor for class gov.nih.mipav.model.file.FileTiff.JPEGDCInputStream
-
- JPEGDCTInputStream(FileSVS.JPEGHuffmanInputStream, FileSVS.JPEGHuffmanInputStream, int[], int) - Constructor for class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- JPEGDCTInputStream(FileTiff.JPEGHuffmanInputStream, FileTiff.JPEGHuffmanInputStream, int[], int) - Constructor for class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- jpegDecompresser(byte[], byte[], int) - Method in class gov.nih.mipav.model.file.FileSVS
-
- jpegDecompresser(byte[], byte[], int) - Method in class gov.nih.mipav.model.file.FileTiff
-
- JpegDescriptor(MetadataExtractor.JpegDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
- JpegDescriptorTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDescriptorTest
-
- JpegDhtReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegDhtReader
-
- JpegDhtReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDhtReaderTest
-
- JpegDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
- JpegDirectoryTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDirectoryTest
-
- JpegDnlReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegDnlReader
-
- JPEGFastDCTInputStream(FileSVS.JPEGHuffmanInputStream, FileSVS.JPEGHuffmanInputStream, int[], int) - Constructor for class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- JPEGFastDCTInputStream(FileTiff.JPEGHuffmanInputStream, FileTiff.JPEGHuffmanInputStream, int[], int) - Constructor for class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- jpegFiles - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
DOCUMENT ME!
- JPEGHuffmanInputStream(FileSVS.JPEGBitInputStream, InputStream) - Constructor for class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- JPEGHuffmanInputStream(FileTiff.JPEGBitInputStream, InputStream) - Constructor for class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- JPEGHuffmanInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- JPEGHuffmanInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- JpegImagesToMovie - Class in gov.nih.mipav.view.renderer.flythroughview
-
This program takes a list of JPEG image files and convert them into a QuickTime movie.
- JpegImagesToMovie() - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
- JpegImagesToMovie.ImageDataSource - Class in gov.nih.mipav.view.renderer.flythroughview
-
A DataSource to read from a list of JPEG image files and turn that into a stream of JMF buffers.
- JpegImagesToMovie.ImageSourceStream - Class in gov.nih.mipav.view.renderer.flythroughview
-
The source stream to go along with ImageDataSource.
- JPEGInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- JPEGInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- JPEGInputStream(InputStream, int[][], FileSVS.JPEGHuffmanInputStream[], FileSVS.JPEGHuffmanInputStream[]) - Constructor for class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- JPEGInputStream(InputStream, int[][], FileTiff.JPEGHuffmanInputStream[], FileTiff.JPEGHuffmanInputStream[]) - Constructor for class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- JpegMetadataReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegMetadataReader
-
- JpegMetadataReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.JpegMetadataReaderTest
-
- JpegProcessingException(String) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.JpegProcessingException
-
- JpegProcessingException(String, Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.JpegProcessingException
-
- JpegProcessingException(Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.JpegProcessingException
-
- JpegReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegReader
-
- JpegReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.JpegReaderTest
-
- JpegSegmentData() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
- JpegSegmentDataTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentDataTest
-
- JpegSegmentReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentReader
-
- JpegSegmentReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentReaderTest
-
- JpegSegmentType(byte, boolean) - Constructor for enum gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
- JpegSourceStream(int, int, int, File[]) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
Creates a new JpegSourceStream object.
- jpegTables - Variable in class gov.nih.mipav.model.file.FileSVS
-
- jpegTables - Variable in class gov.nih.mipav.model.file.FileTiff
-
- JpegXrFile - Static variable in class gov.nih.mipav.model.file.FileCZI
-
- JPG - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Reserved for JPEG extensions.
- JPG - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG0 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG0 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG1 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG1 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG10 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG10 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG11 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG11 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG12 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG12 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG13 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG13 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG2 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG2 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG3 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG3 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG4 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG4 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG5 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG5 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG6 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG6 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG7 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG7 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG8 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG8 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JPG9 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- JPG9 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- JpgFile - Static variable in class gov.nih.mipav.model.file.FileCZI
-
- JPOOL_IMAGE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPOOL_NUMPOOLS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPOOL_PERMANENT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- JPT_CFMT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- jpwl_correct - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
activates the JPWL correction capabilities
- jpwl_correct - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
activates the JPWL correction capabilities
- jpwl_exp_comps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
expected number of components
- jpwl_exp_comps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
expected number of components
- JPWL_EXPECTED_COMPONENTS - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- JPWL_MAX_NO_PACKSPECS - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Maximum number of tile parts expected by JPWL: increase at your will
- JPWL_MAX_NO_TILESPECS - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Expect this maximum number of tiles, to avoid some crashes
- jpwl_max_tiles - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
maximum number of tiles
- jpwl_max_tiles - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
maximum number of tiles
- JPWL_MAXIMUM_TILES - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Expect this number of components, so you'll find better the first EPB
- JPWLAssume - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
Assume a basic codestream structure, so you can resort better from
uncorrected errors
- JPWLCorrection - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- JPWLMaximumTiles - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- JPWLNumComponents - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- JQUANT_TBL() - Constructor for class gov.nih.mipav.model.file.libjpeg.JQUANT_TBL
-
- jround_up(int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- JScriptToolBar() - Constructor for class gov.nih.mipav.view.ViewToolBarBuilder.JScriptToolBar
-
- JScrollMenu - Class in gov.nih.mipav.view
-
- JScrollMenu() - Constructor for class gov.nih.mipav.view.JScrollMenu
-
Constructs a new JMenu with no text.
- JScrollMenu(String) - Constructor for class gov.nih.mipav.view.JScrollMenu
-
Constructs a new JMenu with the supplied string as its text.
- JScrollMenu(Action) - Constructor for class gov.nih.mipav.view.JScrollMenu
-
Constructs a menu whose properties are taken from the Action supplied.
- JScrollPopupMenu - Class in gov.nih.mipav.view
-
- JScrollPopupMenu() - Constructor for class gov.nih.mipav.view.JScrollPopupMenu
-
- JScrollPopupMenu(String) - Constructor for class gov.nih.mipav.view.JScrollPopupMenu
-
- JScrollPopupMenu.ScrollPopupMenuLayout - Class in gov.nih.mipav.view
-
- JSON - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension .json
- JSON - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
- jsonArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- jsp - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- jsp - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- JStereoWindow - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Class JStereoWindow:
- JStereoWindow(SurfaceAttributes, Transform3D) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Constructs a JStereoWindow with a ModelTriangleMesh and Transform3D representing the model transformation for the
surface.
- JStereoWindow(Group, Group, Transform3D, SurfaceRender) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Constructs a JStereoWindow with two nodes, one copy for each of the left and right eye views.
- jtemCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Turns on the JTEM full version of Powell's algorithm on or off
- jtemCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Turns on the JTEM full version of Powell's algorithm on or off
- jtemCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- JTextFieldFilter(String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPointArea.JTextFieldFilter
-
Creates a new JTextFieldFilter object.
- JTRC_16BIT_TABLES - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_ADOBE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_APP0 - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_APP14 - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_DAC - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_DHT - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_DQT - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_DRI - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_EMS_CLOSE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_EMS_OPEN - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_EOI - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_HUFFBITS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_JFIF - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_JFIF_BADTHUMBNAILSIZE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_JFIF_EXTENSION - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_JFIF_THUMBNAIL - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_MISC_MARKER - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_PARMLESS_MARKER - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_QUANT_3_NCOLORS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_QUANT_NCOLORS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_QUANT_SELECTED - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_QUANTVALS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_RECOVERY_ACTION - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_RST - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_SMOOTH_NOTIMPL - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_SOF - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_SOF_COMPONENT - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_SOI - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_SOS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_SOS_COMPONENT - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_SOS_PARAMS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_TFILE_CLOSE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_TFILE_OPEN - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_THUMB_JPEG - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_THUMB_PALETTE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_THUMB_RGB - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_UNKNOWN_IDS - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_XMS_CLOSE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTRC_XMS_OPEN - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JTreeDICOM - Class in gov.nih.mipav.view
-
- JTreeDICOM(DefaultMutableTreeNode) - Constructor for class gov.nih.mipav.view.JTreeDICOM
-
- jtrj(int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- jtrj(int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- JTYPC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- jump - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- jump - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- jumpButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- jumpLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- jumpText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- junctionNeighbours - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- junctions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- justEllipse - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
When true, image mask is set to the initial ellipsoid approximation of the brain calculated from the volume's center of mass.
- justification() - Method in annotation type gov.nih.mipav.model.file.MetadataExtractor.SuppressWarnings
-
An explanation of why it is valid to suppress the warning in a particular situation/context.
- justified - Variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- justInit - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- justInitCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- justInitEllipsoidCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
When checked, justEllipse is set to true.
- JVERSION - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- jvirt_barray_control() - Constructor for class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- jvirt_sarray_control() - Constructor for class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- JWRN_ADOBE_XFORM - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JWRN_ARITH_BAD_CODE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JWRN_BOGUS_PROGRESSION - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JWRN_EXTRANEOUS_DATA - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JWRN_HIT_MARKER - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JWRN_HUFF_BAD_CODE - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JWRN_JFIF_MAJOR - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JWRN_JPEG_EOF - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JWRN_MUST_RESYNC - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JWRN_NOT_SEQUENTIAL - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JWRN_TOO_MUCH_DATA - gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- JYNDD(int, double, double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- JYZO(int, int, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
K
- k - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.Options
-
- k - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- k - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.IntModelBessel
-
- k - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation
-
- k - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- k - Variable in class gov.nih.mipav.model.algorithms.curev
-
- k - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- k - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- k - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
diffusitivity denominator.
- k - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- k - Variable in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- k - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.ConvAndLinear
-
- k - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- k - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- k - Variable in class gov.nih.mipav.model.algorithms.splev
-
- k - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- k - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- k - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- K - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- K - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.ConvAndLinear
-
- K - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
-
- K - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- K - Variable in class gov.nih.mipav.model.algorithms.libdt.EMOptions
-
- K - Variable in class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- K - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- K - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- K - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- K_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- k_a_bound - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- k_function(LIBSVM.svm_node[], LIBSVM.svm_node[], LIBSVM.svm_parameter) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- k_function(LIBSVM.svm_node[], LIBSVM.svm_node[], LIBSVM.svm_parameter) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- k_function(svm_node[], svm_node[], svm_parameter) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- k_H - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- K_init - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- K_MEANS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- K_MEANS - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- k_neigh - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- k_neigh - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- K_T - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.ConvAndLinear
-
- k_W - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- k1 - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- k1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- k2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
diffusitivity denominator squared.
- k2 - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- k2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- kaiser(int, double) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- kAlgorithm - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
handle to algorithm *
- kAnnotationLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kappa(double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- kBinaryLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kBlackChannelLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kBlueChannelLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kBrightFieldLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- kCenterImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- kCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- kCheckSubsample - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
DOCUMENT ME!
- kComboBoxBSplineDegree - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
DOCUMENT ME!
- kCyanChannelLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kd_clear(KDTree.kdtree) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_create(int) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_free(KDTree.kdtree) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_insert(KDTree.kdtree, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_insert3(KDTree.kdtree, double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_insert3f(KDTree.kdtree, float, float, float, double[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_insertf(KDTree.kdtree, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_nearest(KDTree.kdtree, double[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_nearest_i(KDTree.kdnode, double[], KDTree.kdnode, double[], KDTree.kdhyperrect) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_nearest_range(KDTree.kdtree, double[], double) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_nearest_range_chebyshev(KDTree.kdtree, double[], double) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_nearest_range3(KDTree.kdtree, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_nearest_range3f(KDTree.kdtree, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_nearest_rangef(KDTree.kdtree, float[], float) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_nearest3(KDTree.kdtree, double, double, double) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_nearest3f(KDTree.kdtree, float, float, float) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_nearestf(KDTree.kdtree, float[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_res_end(KDTree.kdres) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_res_free(KDTree.kdres) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_res_item(KDTree.kdres, double[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_res_item_data(KDTree.kdres) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_res_item3(KDTree.kdres, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_res_item3f(KDTree.kdres, float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_res_itemf(KDTree.kdres, float[]) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_res_next(KDTree.kdres) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_res_rewind(KDTree.kdres) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kd_res_size(KDTree.kdres) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- kDarkFieldLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kDeepMaskLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kDefaultAppearance - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Original Appearance obj of the ImageComponent2D texture.
- kdhyperrect() - Constructor for class gov.nih.mipav.model.algorithms.KDTree.kdhyperrect
-
- kDialogSmooth - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Surface smooth control panel reference.
- kDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- kDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Kernel dimension.
- kDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- kDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Kernel dimension.
- kDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- kDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- kDimXY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Kernel dimension.
- kDimXY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Kernel dimension.
- kDimXY - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The erosion kernel x and y dims.
- kDimZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- kDimZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- kDimZ - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The erosion kernel z dimension.
- kdnode() - Constructor for class gov.nih.mipav.model.algorithms.KDTree.kdnode
-
- kdres() - Constructor for class gov.nih.mipav.model.algorithms.KDTree.kdres
-
- kdtree() - Constructor for class gov.nih.mipav.model.algorithms.KDTree.kdtree
-
- KDTree - Class in gov.nih.mipav.model.algorithms
-
Original code Copyright (C) 2007-2011 John Tsiombikas
Ported to Java by William Gandler
Redistribution and use in source and binary forms, with or without
modification, are permitted provided that the following conditions are met:
1.
- KDTree() - Constructor for class gov.nih.mipav.model.algorithms.KDTree
-
- KDTree.kdhyperrect - Class in gov.nih.mipav.model.algorithms
-
- KDTree.kdnode - Class in gov.nih.mipav.model.algorithms
-
- KDTree.kdres - Class in gov.nih.mipav.model.algorithms
-
- KDTree.kdtree - Class in gov.nih.mipav.model.algorithms
-
- KDTree.res_node - Class in gov.nih.mipav.model.algorithms
-
- kEBlockSize - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- kEBlockSize - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- keep(double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- keep_inbag - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- keep_inbag - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- keepGoing - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Boolean that tells the thread whether or not it should keep going.
- keepGoing - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver.RunnerThread
-
DOCUMENT ME!
- keepGoing() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver.RunnerThread
-
DOCUMENT ME!
- keepSelected() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Method keep selected items from the file list.
- kepButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- kEpsilon - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- kEpsilon - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- kEpsilon - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- kEpsilon - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- kEpsilonLoose - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- kernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- kernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- kernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Kernel for both erosion and dilation.
- kernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Kernel for both erosion and dilation.
- kernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- kernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- kernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Kernel for both erosion and dilation.
- kernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Kernel for both erosion and dilation.
- kernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
- kernel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The erosion kernel.
- kernel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- kernel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- kernel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
mask to determine the region of pixels used in a median filter.
- kernel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
mask to determine the region of pixels used in the mode filter.
- kernel - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelInfo
-
- kernel - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Sep_FIR_filter
-
- kernel - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- kernel - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- kernel - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- kernel - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- kernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- kernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- kernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- kernel - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- kernel - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- kernel(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- Kernel - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- Kernel - Interface in gov.nih.mipav.model
-
- Kernel(int, LIBSVM.svm_node[][], LIBSVM.svm_parameter) - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- Kernel(int, svm_node[][], svm_parameter) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- kernel_dilate_radius - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- kernel_function(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- kernel_function(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- kernel_list - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- kernel_method - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- kernel_name - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelInfo
-
- kernel_size - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- kernel_size - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- KERNEL_SIZE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- KERNEL_SIZE - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- kernel_string - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- kernel_threshold - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- kernel_type - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- kernel_type - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- kernel_type - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- kernel_type - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- kernel_type_table - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- kernel_type_table - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- kernelBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- kernelBufferX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferX2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferX2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferXX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferXX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferXXX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferXXX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferXXY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferXXY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferXXZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferXXZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferXY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferXY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferXYY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferXYY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferXYZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferXYZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferXZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferXZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferXZZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferXZZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferY2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferY2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferYY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferYY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferYYY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferYYY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferYYZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferYYZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferYZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferYZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferYZZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferYZZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferZZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferZZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelBufferZZZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- kernelBufferZZZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- kernelCenter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- kernelCenter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
The index of the kernel center.
- kernelCenter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
The index of the kernel center.
- kernelClose - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- kernelDiameter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
Required by the low pass filter, but is unused with these options.
- kernelDiameter - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- kernelDiameter - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- kernelErode - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- kernelExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
The dimensions of the kernel.
- KernelFactory - Interface in gov.nih.mipav.model
-
- kernelfwhm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Width of deconvolution kernel used to sharpen the histogram.
- kernelfwhm - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- kernelfwhm - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- kernelMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
mask to determine the region of pixels used in a median filter.
- kernelMask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
The kernel.
- kernelMask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
The kernel.
- kernelNumber - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Number of kernels used, more than 1 if adaptive filtering is used
- kernelOpen - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- kernelOrder0 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- kernelOrder0 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- kernelOrder1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- kernelOrder1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- kernelOrder2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- kernelOrder2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- kernelOrder3 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- kernelOrder3 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- kernelRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- kernelRegressionAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- Kernels() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Kernels
-
- kernelShape - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
user-selectable shape of the region for neighbor-selection.
- kernelShape - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
user-selectable shape of the region for neighbor-selection.
- kernelShape - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
user-selectable shape of the region for neighbor-selection.
- kernelShape - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- kernelShape - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- kernelShape - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).
- kernelSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- kernelSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
- kernelSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).
- kernelSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
dimension of the kernel (ie., 5 = 5x5, 7 = 7x7, 9 = 9x9, etc.).
- kernelSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSobel
-
5 x 5 Sobel template found in Feature Extraction & Image Processing for Computer Vision Third Edition
by Mark S.
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogSobel
-
- kernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- kernelSizeClose - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- kernelSizeErode - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- kernelSizeOpen - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- kernelType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- kernelType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
kernel size (i.e. connectedness)
- kernelType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
kernel size (i.e. connectedness)
- kernelType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
- kernelType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
kernel size (i.e. connectedness)
- kernelType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
kernel size (i.e. connectedness)
- kernelType - Variable in class gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
- kernelType - Variable in class gov.nih.mipav.model.GaussianKernelFactory
-
- kernelType() - Constructor for enum gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.kernelType
-
- kernelTypeErode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Erosion kernel type.
- kernelTypeErode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Erosion kernel type.
- kernelVal(double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- kernelVectorMask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
- kernelWidth - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- kernXBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- kernYBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- kernZBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
The image data to convolve.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
The image data to convolve.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Extents of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- kExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Dimensionality of the kernel.
- kExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- kExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
DOCUMENT ME!
- kExtents - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
extents for the gaussian kernels
- kExtents_2D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Extents of the 2D kernel.
- kExtents_2D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Extents of the 2D kernel.
- kExtents_2D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Extents of the 2D kernel.
- kExtents_3D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Extents of the 3D kernel.
- kExtents_3D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Extents of the 3D kernel.
- kExtents_3D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Extents of the 3D kernel.
- key - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.KeyValuePair
-
- key - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- key - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
In dqage key selects the local integration rule A gauss-kronrod pair is used with 7 - 15 points if key < 2 10 -
21 points if key = 2 15 - 31 points if key = 3 20 - 41 points if key = 4 25 - 51 points if key = 5 30 - 61 points
if key > 5.
- key - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
In dqage key selects the local integration rule A gauss-kronrod pair is used with 7 - 15 points if key < 2 10 -
21 points if key = 2 15 - 31 points if key = 3 20 - 41 points if key = 4 25 - 51 points if key = 5 30 - 61 points
if key > 5.
- key - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ValuePair
-
- key - Variable in class gov.nih.mipav.model.file.FileDicomKey
-
The dicom tag identifier in the format 'group,element'.
- key - Variable in class gov.nih.mipav.model.file.FileDicomTagInfo
-
The DICOM tag 'group,element' key indicating what tag this information pertains to.
- key - Variable in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.DicomTagIdentifier
-
The key (held here because it is properly formatted) of the DicomTag held.
- key - Variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
the representative key of this object; must be unique.
- key - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RootInfo
-
- KEY_UNDEFINED - Static variable in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Identifies an undefined key value.
- keyArray - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- keycontents - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.GenericKey
-
- keyExists(String) - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
2D slice images file chooser.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
key images variables.
- keyImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
2D slices image directory.
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- keyImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- keyImageMasksTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- keyImageMasksTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- keyImageMasksTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- keyImageMasksTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- keyImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- keyImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
key images vector.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
image vector to hold the actual images.
- keyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
image vector to hold the actual images.
- keyImagesCrop - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- keyImagesCrop - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- keyImagesCrop - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- keyImagesCrop - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- keyImagesCrop - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- keyImagesCrop - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- keyImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- keyImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- keyImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- keyImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- keyImagesN4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- keyImagesN4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- keyImagesN4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- keyImagesN4Crop - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- keyImagesN4Crop - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- keyImagesN4Transform - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- keyImagesOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- keyImagesOrientationCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- keyImagesOrientationCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- keyImagesOrientationCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- keyImagesOrientationCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- keyImagesOrientationCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- keyImagesOrientationMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- keyImagesOrientationMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- keyImagesOrientationMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- keyImagesOrientationMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- keyImagesOrientationMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- keyImagesOrientationMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- keyImagesOrientationMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- keyImagesOrientationMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- keyImagesScaleIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- keyImagesScaleIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- keyImagesScaleIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- keyImagesScaleIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- keyImagesScaleIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- keyImagesScaleIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- keyImagesScaleIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- keyImagesScaleIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- keyImagesTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- keyImagesTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- keyImagesTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- keyImagesTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- keyImagesTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- keyImagesTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
image vector to hold the image names.
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
image vector to hold the image names.
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
image vector to hold the image names.
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
image vector to hold the image names.
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
image vector to hold the image names.
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
image vector to hold the image names.
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
image vector to hold the image names.
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
image vector to hold the image names.
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
key images names vector.
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
image vector to hold the image names.
- keyImageVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
image vector to hold the image names.
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- keyImageVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- keyImageVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- keyImageVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- keyImageVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- keyImageVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- keyImageVectorMap - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- keyImageVectorOrigImg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
key image VOIs vector.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
voi vector to hold the actual vois.
- keyImageVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
voi vector to hold the actual vois.
- keyImageVOIsTransformN4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
voi vector to hold the VOI names.
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
voi vector to hold the VOI names.
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
voi vector to hold the VOI names.
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
voi vector to hold the VOI names.
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
voi vector to hold the VOI names.
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
voi vector to hold the VOI names.
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
voi vector to hold the VOI names.
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
key image VOI names vector.
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
voi vector to hold the VOI names.
- keyImageVOIVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
voi vector to hold the VOI names.
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- keyImageVOIVector1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- keyImageVOIVector2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- keyImageVOIVector3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- keyImageVOIVector4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- keyImageVOIVector5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- keyImageVOIVectorAAM - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- keyImageVOIVectorAAM - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- keyImageVOIVectorAAM - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- keyImageVOIVectorAAM - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- keyImageVOIVectorAAM - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- keyImageVOIVectorMap - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- keyImageVOIVectorOrigImg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- keyList - Variable in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
The list of private keys in the image
- keyList - Variable in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- keyLog - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- keyLog - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Translation key, stored in "patient.key.doc".
- Keypoint() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint
-
- KeyPoint() - Constructor for class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeyPoint
-
- KeyPoint(double, double, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
- KeyPoint(Point2d, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeyPoint
-
- Keypoint_store() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint_store
-
- KeypointComparator() - Constructor for class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeypointComparator
-
- keypoints1 - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- keypoints2 - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- keyPressdown - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
key pressed
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Handle the key pressed event.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Allow the user to use left and right keys to adjust the intensity bounds sliders, and update the region grow when
the user hits enter from within the bounds text fields.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
Handle the key pressed event.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.ActionKeyListener
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Handle the key pressed event from the text field.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Invoked when a key has been pressed.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Unchanged.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Unchanged.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Unchanged.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
key pressed
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Handle the key pressed event from the text field.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Part of the KeyListener interface.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Handle the key pressed event from the text field.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
keyPressed callback.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
keyPressed callback.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
keyPressed callback.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Part of the KeyListener interface.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Part of the KeyListener interface.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
keyReleased event method for KeyListener.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameFastMarching2
-
keyPressed.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameFastMarching3
-
keyPressed.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
********************************************************************* **************************** Key Events ***
**************************
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
keyPressed event method for KeyListener.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
keyPressed event method for KeyListener.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
keyPressed event method for KeyListener.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Unchanged.
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- keyPressed(KeyEvent) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Pass the key event to the selected image frame (if one exists).
- KeyPressedEvent(KeyEvent) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.KeyPressedEvent
-
Creates new thread and sets up mouse event variables appropriately.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
key released
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Handle the key released event.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Placeholder required by KeyListener.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Placeholder required by KeyListener.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
Handle the key released event.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.ActionKeyListener
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Handle the key released event from the text field.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Invoked when a key has been released.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Unchanged.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Unchanged.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Unchanged.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
key released
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameFastMarching2
-
keyReleased.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameFastMarching3
-
keyReleased.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
keyReleased event method for KeyListener.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
keyReleased event method for KeyListener.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
keyReleased event method for KeyListener.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Unchanged.
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- keyReleased(KeyEvent) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Pass the key event to the selected image frame (if one exists).
- keys - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< current Gaussian filter width
- keys_res - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< number of detected keypoints.
- keysDate - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- keySet() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Returns the set of parameter names.
- keysVersion - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- keyToName - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
FileDicomTag to its name in the Dicom dictionary
- keyToNameSeq - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
FileDicomTag to its name in the Dicom dictionary
- keyToValue - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
FileDicomTag to its value in the file
- keyToValueSeq - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
FileDicomTag to its value in the file
- keyTyped - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
key typed
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
DOCUMENT ME!
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Handle the key typed event.
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Placeholder required by KeyListener.
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Placeholder required by KeyListener.
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
Handle the key typed event.
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.ActionKeyListener
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
key typed
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Does nothing.
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Invoked when a key has been typed.
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
When the user enter the coarse and fine value, invoke this event to update fine or coarse sampling.
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
If the ENTER key is hit while in threshold boxes, update the LUT's threshold (for dual threshold).
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
OK or Cancel should be in focus and if the return key pressed the appropriate action takes place.
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
key typed
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameFastMarching2
-
keyTyped.
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameFastMarching3
-
keyTyped.
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
If the ENTER key is hit while in threshold boxes, update the LUT's threshold (for dual threshold).
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
DOCUMENT ME!
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
DOCUMENT ME!
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
If the ENTER key is hit while in threshold boxes, update the LUT's threshold (for dual threshold).
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- keyTyped(KeyEvent) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Pass the key event to the selected image frame (if one exists).
- KeyValuePair(AlgorithmNetworkSnake.tuple2i, AlgorithmNetworkSnake.SnakeInitialiser.Node) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.KeyValuePair
-
- KeyValuePair(String, MetadataExtractor.StringValue) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.KeyValuePair
-
- keyword - Variable in class gov.nih.mipav.model.file.FileDicomTagInfo
-
The tag keyword (no spaces).
- keywords - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- KF_CACHE - gov.nih.mipav.model.algorithms.libdt.kf_mode
-
- KF_COMPUTE_WITH_CACHE - gov.nih.mipav.model.algorithms.libdt.kf_mode
-
< cache filter matrices.
- KF_COMPUTE_WITHOUT_CACHE - gov.nih.mipav.model.algorithms.libdt.kf_mode
-
< compute LL from cache.
- kf_exponent - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- kf_lambda - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- kf_mode() - Constructor for enum gov.nih.mipav.model.algorithms.libdt.kf_mode
-
- kFactor - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ParameterIgnoringCostFunction
-
- kfb - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexMix
-
- kFBlockSize - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- kFBlockSize - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- kFile - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
File to open the mask suface.
- kFitting(double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion.kFitting
-
- kGeneralImageLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kGeometryBranchPath - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- kGraph - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- kGreenChannelLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- killEdge(FrontEdge) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- KILOMETERS - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement kilometers.
- KILOMETERS - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement kilometers.
- KILOMETERS_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - kilometers.
- kImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- kImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- kImageAref - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.TextureSculptor
-
References to the sculpt images.
- kImageAref - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
References to the sculpt image.
- kImageBref - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.TextureSculptor
-
DOCUMENT ME!
- kImageBref - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
DOCUMENT ME!
- kImpossibleValue - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- kind - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Tells whether confluent hypergeometric function is of first or second kind
- kind - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- kindsString - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Kind of information represented by the samples along each axis.
- kInterleaved - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
-
- kInterleaved - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- kInvalid - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- Kirby2CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Kirby2CostFunction
-
- Kirby2Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Kirby2Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Kjump - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- Kjump - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- KjumpLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- KjumpText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- klapExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Dimensionality for the Laplacian kernel.
- kLBFGSSecantConditionHessianUpdateTolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- kLuminosityLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kMagentaChannelLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kMaskLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kMasterImageLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kMaxMu - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- kMaxRowBlocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- kMeansAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- Kmin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- Kmin - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- KminLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- kMinMu - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- KminText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- kMovieLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kMVertex - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM.Polylines
-
Array of mesh points.
- KNEE_PROBLEM - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- KNEE_PROBLEM - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- Knees_90_data_train_extraction - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
This class converts the original knees MRI images into isotropic images.
1) Convert the VOIs into binary image masks.
2) Convert the original images into isotropic images
3) Convert the isotropic images from sagittal to axial; sagittal to coronal.
4) Along each orietation, generate the CED image in addition to MRI.
5) Save all the images (isotropic axial, sagittal, coronal images with corresponding binary masks).
- Knees_90_data_train_extraction(Frame) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
Constructor.
- kNoiseFactor - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Knot(String) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Knot
-
- KnotInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- knots - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- knotX - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- knotX - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- knotX - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- knotY - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- knotY - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- knowDirection - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- known - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tgt_node_t
-
- kNumResiduals - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.AutoDiffCostFunction
-
- kNumResiduals - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- kNumResiduals - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction3
-
- kNumResiduals - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction4
-
- kNumResiduals - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.MockCostFunctionBase2
-
- kNumTrials - Static variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- kod - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- kod - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- KodakMakernoteDescriptor(MetadataExtractor.KodakMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDescriptor
-
- KodakMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- kodkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
The suffices km2 and km1 in the names of the variables represent time step k-2 and k-1 respectively.
- kodkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
The suffices km2 and km1 in the names of the variables represent time step k-2 and k-1 respectively.
- kodkm2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
The suffices km2 and km1 in the names of the variables represent time step k-2 and k-1 respectively.
- kodkm2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
The suffices km2 and km1 in the names of the variables represent time step k-2 and k-1 respectively.
- koff - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- koff - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- koff - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- koff - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- koff - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModel2
-
DOCUMENT ME!
- koff - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModelqd
-
DOCUMENT ME!
- kold - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- kold - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- kolmogi(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- KOLMOGI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- kolmogorov(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- KOLMOGOROV - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- kon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- kon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- kon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- kon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- kon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModel2
-
DOCUMENT ME!
- kon - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModelqd
-
DOCUMENT ME!
- konsnt - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Controls the diffusion rate.
- konst - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
DOCUMENT ME!
- kOrigins - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
center positions for the gaussian kernels
- kOrigins_2D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Origins of the 2D kernel.
- kOrigins_2D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Origins of the 2D kernel.
- kOrigins_2D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Origins of the 2D kernel.
- kOrigins_3D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Origins of the 3D kernel.
- kOrigins_3D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Origins of the 3D kernel.
- kOrigins_3D - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Origins of the 3D kernel.
- KOWALIK_AND_OSBORNE - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- KOWALIK_AND_OSBORNE - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- KOWALIK_AND_OSBORNE - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- KOWALIK_AND_OSBORNE - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- KowalikAndOsborneFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.KowalikAndOsborneFunction
-
- kp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- kp_src - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Tps
-
- kPanelButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Button panel.
- kPanelButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Button panel.
- kPickDirection - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
PickDirection, the direction of the PickShape.
- kPoly - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- kPolyNode - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- kPVertex - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM.Polylines
-
Array of plane points.
- kRadius - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Width of the derivative buffer.
- kRandomSeed - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- kRedChannelLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kRGBChannelLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- Kron(CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Forms the Kronecker tensor product of two matrices.
- kross(Vector2f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector2f
-
Returns Cross((x,y,0),(V.x,V.y,0)) = x*V.y - y*V.x.
- kRowBlockSize - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- kRowBlockSize - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- kRowMajor - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- Kruskal - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- Kruskal - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- KruskalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- kScrollPane - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- kShape - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Shape object of the volume renderer.
- ksize - Variable in class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
- ksize - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Neighbor window size
- kStringDimension - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
DOCUMENT ME
- kSucceeds - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ParameterIgnoringCostFunction
-
- kSVertex - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM.Polylines
-
Array of sphere points.
- KText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- kTextBSplineNumControlPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
DOCUMENT ME!
- kTextConvergenceLimit - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
DOCUMENT ME!
- kTextGradientDescentMinimizeMaxSteps - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
DOCUMENT ME!
- kTextGradientDescentMinimizeStepSize - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
DOCUMENT ME!
- kTextMaxIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
DOCUMENT ME!
- kTolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureEllipseValidSubspaceBasis
-
- kTolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- kTolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.RegularizationCheckingLinearSolver
-
- kTolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- kToleranceLoose - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureEllipseCorrectGaussNewtonStep
-
- kToleranceLoose - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepGlobalOptimumAlongGradient
-
- kToleranceLoose - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureValleyCorrectStepLocalOptimumAlongGradient
-
- ktrans - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.IntModel
-
- ktransDivVe - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- ktransTotal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- kUninitialized - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- kUnitsOther - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- kurtosis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- kurtosisB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- kurtosisDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- kurtosisG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- kurtosisR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- kuwaharaAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
DOCUMENT ME!
- kValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
In the paper "Generalized gradient vector flow external forces for active contours" by Chenyang Xu and Jerry
Prince values of 0.05, 0.15, and 0.2 were used for k.
- kValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
Controls the diffusion rate.
- kValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
In the paper "Generalized gradient vector flow external forces for active contours" by Chenyang Xu and Jerry
Prince values of 0.05, 0.15, and 0.2 were used for k.
- kValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
Controls the diffusion rate.
- kValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- kValue - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- kValue - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- kVertexIds - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- kWorldInv - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- kx - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- ky - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- kYellowChannelLayer - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- KyoceraMakernoteDescriptor(MetadataExtractor.KyoceraMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.KyoceraMakernoteDescriptor
-
- KyoceraMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.KyoceraMakernoteDirectory
-
- kz - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
L
- l - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- l - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Cache
-
- l - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- l - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- l - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_problem
-
- l - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.SVR_Q
-
- l - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Problem
-
the number of training data
- l - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- l - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache
-
- l - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- l - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_model
-
- l - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_problem
-
- l - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVR_Q
-
- L - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- L - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- L - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- L - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RegionList
-
- L - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- L - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Size of the arrays
- L - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
-
- L - Variable in class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- L - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODERectModel
-
- L - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- L - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- L - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- L - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
DOCUMENT ME!
- L - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- L - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- L_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- L_BFGS_B - Class in gov.nih.mipav.model.algorithms
-
This is a port of the FORTRAN 77 L-BFGS-B code to Java
L-BFGS-B is released under the “New BSD License” (aka “Modified BSD License”
or “3-clause license”)
=========== L-BFGS-B (version 3.0.
- L_BFGS_B() - Constructor for class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- L_MAX - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- L1_CACHE_BYTES - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- l1_conjugate_loss - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- l1_dca_update - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- l1_loss - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- l1_loss_derivative - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- L1Distance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
- L1Distance - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- L1DistanceText - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- L1R_L2LOSS_SVC - gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverType
-
L1-regularized L2-loss support vector classification
- L1R_LR - gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverType
-
L1-regularized logistic regression
- l2_conjugate_loss - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- l2_dca_update - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- l2_loss - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- l2_loss_derivative - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- l2dist(double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- L2R_L1LOSS_SVC_DUAL - gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverType
-
L2-regularized L1-loss support vector classification (dual)
(fka L1LOSS_SVM_DUAL)
- L2R_L2_SvcFunction - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- L2R_L2_SvcFunction(Problem, double, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- L2R_L2LOSS_SVC - gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverType
-
L2-regularized L2-loss support vector classification (primal)
(fka L2LOSS_SVM)
- L2R_L2LOSS_SVC_DUAL - gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverType
-
L2-regularized L2-loss support vector classification (dual)
(fka L2LOSS_SVM_DUAL)
- L2R_LR - gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverType
-
L2-regularized logistic regression
(fka L2_LR)
- L2R_LrFunction - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- L2R_LrFunction(Problem, double, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_LrFunction
-
- L3 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Level 3
- L5 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Level 5
- L7 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Level 7
- label - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RAList
-
- label - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.REGION
-
- label - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- label - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- label - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- label - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- label - Variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
The label/name of the parameter.
- label - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Label (Name) for this member of the VOI.
- label - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation.labelIndexItem
-
DOCUMENT ME!
- label - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
labels for the painted objects.
- label - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed.labelIndexItem
-
DOCUMENT ME!
- label - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear.GroupClassesReturn
-
- label - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
label of each class
- label - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_model
-
- label - Variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
DOCUMENT ME!
- label1 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- label1 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Label for slider, "1".
- label1 - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- label100 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Label for slider, "100".
- label1String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- label2 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- label2 - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- label2OriginalExtentX - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Label for displaying the original extent X
- label2OriginalExtentY - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Label for displaying the original extent Y
- label2OriginalExtentZ - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Label for displaying the original extent Z
- label2String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- label3 - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- label3D - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
difference between x,y resolutions (in plane) and z resolution (between planes).
- label4 - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- label5 - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- label5 - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- label50 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Label for slider, "50".
- label6 - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- label7 - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- label8 - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- labelA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static cliiping slider labels.
- labela0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- labela1 - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
- labela1 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- labela2 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- labela3 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- labela4 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- labela5 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- labela6 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- labelAdjustedSlice - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- labelAEnd - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping slider labels.
- labelAlpha - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- labelAlpha - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelAMid - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping slider labels.
- labelAmpFact - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- labelAnimationFrame - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- labelAnimationFrame - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- labelAStart - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping slider labels.
- labelAxialVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelAxis - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- labelB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- labelBins - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- labelBins - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- labelBins - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- labelBins - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- labelBins - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- labelBins - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- labelBins - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- labelBins - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- labelBloodIntrinsicRelaxivityRate - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelBloodIntrinsicRelaxivityRate2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelBox - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- labelBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- labelBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- labelBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- labelClassicStep - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelClassNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
DOCUMENT ME!
- labelCoarse - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- labelCoarse - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- labelCoarseDegrees - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- labelCoarseDegrees - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- labelCoarsenessThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- labelColor - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- labelColumnNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- labelComponents - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelConnectType - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- labelContrastRelaxivityRate - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
DOCUMENT ME!
- labelControlPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
- labelCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelCoronalVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
- labelCoronalVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
- labelCorrected - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- labelCorrected - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- labelCorrected - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- labelCorrected - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- labelCorrected - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- labelCost - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- labelCost - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- labelCost - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- labelCost - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- labelCost - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- labelCost - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- labelCost - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- labelCovariance - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- labelCross - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- labelCSize - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- labelCurrent - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- labelCurrentColoc - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
private JLabel labelLineFunction;.
- labelCurrentIntensity1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- labelCurrentIntensity2 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- labelDegree - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
- labelDelta - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- labelDelta - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- labelDeltaT - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- labelDestinationMean - Variable in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
DOCUMENT ME!
- labelDiffusion - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- labelDigitNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- labelDilation - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
user-interface for setting the cell-radius dilation (multiple of cell expected radius).
- labelDimensionality - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- labelDimX - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelDimY - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelDimZ - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- labelDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- labelDOF - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- labelDtheta - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- labelEc - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- labelEdgeAttract - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- labelEdgeThresh - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- labelEnd - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- labelEndTol - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- labelEndTol - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- labelEndTol - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- labelEndTol - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- labelEndTol - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- labelEndTol - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelEndVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelEndVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelEndVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelEndVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelEndVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelEndVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelEnhancedThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- labelEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- labelEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- labelEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- labelEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- labelEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- labelEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- labelEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- labelErrorThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- labelExpFuzzifier - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
DOCUMENT ME!
- labelExpo - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- labelExpo - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- labelExpo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- labelF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- labelF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- labelF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- labelF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- labelF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- labelF2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- labelF2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- labelF2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- labelF2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- labelF2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- labelField - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- labelFine - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- labelFine - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- labelFineDegrees - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- labelFineDegrees - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- labelFirstOctave - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- labelFirstSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- labelFirstSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- labelFirstTimePeriod - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- labelFittingLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
- labelFlipAngle - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelFramesPerSecond - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- labelFramesPerSecond - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- labelFU - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- labelFU - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelFV - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- labelFV - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelG - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- labelGaussianWidth - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- labelGaussX - Variable in class gov.nih.mipav.view.components.JPanelSigmas
-
- labelGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- labelGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- labelGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- labelGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- labelGaussY - Variable in class gov.nih.mipav.view.components.JPanelSigmas
-
- labelGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- labelGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- labelGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- labelGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- labelGaussZ - Variable in class gov.nih.mipav.view.components.JPanelSigmas
-
label
- labelGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- labelGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- labelGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- labelGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- labelGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- labelgmax - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- labelgmax - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- labelgmin - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- labelgmin - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- labelGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Save group directory.
- labelGuided - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- labelHammingDistanceThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- labelHardCoefficient - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- labelHardSearchSize - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- labelHardSimilar - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- labelHardStep - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- labelHardTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- labelHematocrit - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- labelHighGain - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- labelHighTruncated - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- labelHistogramBins - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- labelHistogramThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- labelICNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- labelImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- labelImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- labelImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- labelImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- labelImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Image label.
- labelImage - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
The registered image
- labelImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- labelImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Target image directory.
- labelImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
Target image directory.
- labelImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Target image directory.
- labelImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
Target image directory.
- labelImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
Target image directory.
- labelImageFATCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Target image directory.
- labelImageFATCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Target image directory.
- labelImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
GRE image directory.
- labelImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
GRE image directory.
- labelImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
GRE image directory.
- labelImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
GRE image directory.
- labelImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
GRE image directory.
- labelImageGRECED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Target image directory.
- labelImageGRECED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Target image directory.
- labelImageTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Target image directory.
- labelImageTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Target image directory.
- labelImageTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Target image directory.
- labelIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- labelIndexComparator() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation.labelIndexComparator
-
- labelIndexComparator() - Constructor for class gov.nih.mipav.view.dialogs.JDialogPowerWatershed.labelIndexComparator
-
- labelIndexItem(short, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation.labelIndexItem
-
Creates a new labelIndexItem object.
- labelIndexItem(short, int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogPowerWatershed.labelIndexItem
-
Creates a new labelIndexItem object.
- labelInitial0 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- labelInitial1 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- labelInitial2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- labelInitialGlobal - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelInitialKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelIntensity - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light intensity label.
- labelIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light intensity label.
- labelIntensityBegin - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light intensity label begin.
- labelIntensityBegin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light intensity label begin.
- labelIntensityEnd - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light intensity label end.
- labelIntensityEnd - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light intensity label end.
- labelIntensityMid - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light intensity label middle.
- labelIntensityMid - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light intensity label middle.
- labelInternal - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- labelInterp - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- labelInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- labelInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- labelInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- labelInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- labelInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- labelInterp2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- labelInterpNPts - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
- labelInterpolation - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- labelInterpType - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- labelIter - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- labelIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
- labelIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
- labelIterations2 - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelIterativeGlobal - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelIterativeGlobal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelIterativeKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelIters - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- labelIters - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- labelIters - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- labelJacobi - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelk - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
DOCUMENT ME!
- labelK - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- labelK - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- labelK - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- labelKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- labelKernelClose - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- labelKernelDiameter - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- labelKernelDiameter - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- labelKernelErode - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- labelKernelOpen - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- labelKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- labelKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- labelKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- labelKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
- labelKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- labelKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- labelKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- labelKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- labelKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- labelKernelSizeClose - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- labelKernelSizeErode - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- labelKernelSizeOpen - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
2D Slices key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Key image related variables.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
key image directory.
- labelKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- labelKSize - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- labelLambda - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelLastSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- labelLastTimePeriod - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- labelLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- labelLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- labelLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelLinearCorrelation - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- labelLowGain - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- labelLowTruncated - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- labelm - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
DOCUMENT ME!
- labelMagnification - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- labelMaskSD - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- labelMatch - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- labelMatchingThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- labelMax - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
DOCUMENT ME!
- labelMax - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- labelMax - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- labelMaxArea - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- labelMaxB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- labelMaxConstr0 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelMaxConstr0 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- labelMaxConstr1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelMaxConstr1 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- labelMaxConstr2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelMaxConstr2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- labelMaxDiff - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- labelMaxDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- labelMaxG - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- labelMaximumSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- labelMaxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- labelMaxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- labelMaxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- labelMaxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- labelMaxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- labelMaxIter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelMaxR - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- labelmaxRz - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- labelmaxTx - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- labelmaxTy - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- labelMaxVariation - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- labelMed - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- labelMid - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- labelMidVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelMidVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelMidVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelMidVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelMidVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelMidVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelMin - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
DOCUMENT ME!
- labelMin - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- labelMin - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- labelMinArea - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- labelMinB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- labelMinConstr0 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelMinConstr0 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- labelMinConstr1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelMinConstr1 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- labelMinConstr2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelMinConstr2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- labelMinDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- labelMinDiversity - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- labelMinG - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- labelMinR - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- labelminRz - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- labelminTx - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- labelminTy - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- labelMinwave - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- labelModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
key image directory.
- labelModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
key image directory.
- labelModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
key image directory.
- labelModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
key image directory.
- labelModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
key image directory.
- labelModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
key image directory.
- labelModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
key image directory.
- labelModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
key image directory.
- labelModeX - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelModeY - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelModeZ - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelMp - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelMult - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- labelMult - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- labelmw1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- labelmw2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- labelName - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- labelName - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- labelName - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- labelNameX - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelNameY - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelNameZ - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelNClasses - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- labelNClasses - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- labelNClasses - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelNFirst - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelNIter - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- labelNIterClose - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- labelNIterD - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- labelNIterD - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- labelNIterD - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- labelNIterD - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- labelNIterD - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- labelNIterE - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- labelNIterE - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- labelNIterE - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- labelNIterE - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- labelNIterE - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- labelNIterErode - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- labelNIterErode - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- labelNIterOpen - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- labelNLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- labelNOctaves - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- labelNoise - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- labelNoise - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- labelNoise - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- labelNoiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- labelNoiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- labelNoiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- labelNorm - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- labelNormThresh - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- labelNPyramid - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- labelNumberIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- labelO2D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- labelO3D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- labelOctaves - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- labelOffset - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- labelOffsetDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- labelOffsetDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelOperator - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- labelOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- labelOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- labelOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- labelOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- labelOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- labelOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- labelOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- labelOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- labelOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- labelOrderX - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelOrderY - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelOrderZ - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelOrient - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- labelOrientations - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- labelOrigin - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- labelOutput - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- labelP1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- labelP2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- labelPaddedExtentX - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Label for displaying the padded extent X
- labelPaddedExtentY - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Label for displaying the padded extent Y
- labelPaddedExtentZ - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
label for displaying the padded extent Z
- labelParamsToFit - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
Use serialVersionUID for interoperability.
- labelParamsToFit - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Use serialVersionUID for interoperability.
- labelPeakThresh - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- labelPlyFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
- labelPlyFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
- labelPotential - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
DOCUMENT ME!
- labelPrune - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- labelPValue - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- labelR - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- labelRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
user-interface for setting the estimated cell-radius (pixels).
- labelReceiver - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- labelRef - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- labelReference - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- labelReferenceSlice - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- labelRegister - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- labelRegIter - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- labelRegLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- labelRegType - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- labelResampling - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
user-interface for setting the uniform-resampling constraint contribution:.
- labelRescaling - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
- labelRescaling - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- labelResType - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- labelResX - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelResY - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelResZ - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelRotateDegrees - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- labelRotateDegrees - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- labelRotateRange - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- labelRotateRange - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- labelRotateRangeTo - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- labelRotateRangeTo - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- labelRowNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- labelRs - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- labelRs - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- labelRs - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- labelRs - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- labelRs - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- labelRx - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelRy - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelRz - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- labels - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- labels - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- labels - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- labels - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- labels - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
speed control slider labels.
- LABELS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- LABELS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- labelSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelSagittalVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
saved 2D slices dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Save features directory.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
saved 2D slices atlas dir.
- labelSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
saved 2D slices atlas dir.
- labelScale - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- labelScale - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- labelse - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- labelSearchWindowSide - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- labelSegmentNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- labelsForTicks(double[]) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
Uses either decimal or scientific notation for the labels and strips unnecessary
trailing zeros.
- labelsGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- labelShape - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
user-interface for setting the shape constraint contribution:.
- labelShape - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- labelShininess - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light shinness label.
- labelShininessBegin - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Shinness label begin.
- labelShininessEnd - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Shinness label end.
- labelShininessMid - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Shinness lable middle.
- labelShrink - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- labelShrink - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- labelSigma - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- labelSigma - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- labelSigmaon - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- labelSigmaX - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- labelSigmaY - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- labelSignal - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- labelSignal - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- labelSignal - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- labelSignal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelSimilarityWindowSide - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- labelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
user-interface for setting the size constraint contribution:.
- labelSizeX - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- labelSizeY - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- labelSizeZ - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- labelSKx - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelSKy - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelSKz - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- labelSmooth - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelSmoothing - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- labelSoft - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- labelSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- labelSrcThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- labelSSize - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- labelsTable - Variable in class gov.nih.mipav.view.JPanelHistogram
-
- labelsTable - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Historgram dialog slider labels of the imageA, B and GM imageA, B.
- labelsTable - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Historgram dialog slider labels of the imageA, B and GM imageA, B.
- labelsTable - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Histogram dialog slider labels of the imageA, B and GM imageA, B.
- labelsTable - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Histogram dialog slider labels of the imageA, B and GM imageA, B.
- labelsTableB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Historgram dialog slider labels of the imageA, B and GM imageA, B.
- labelsTableB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Historgram dialog slider labels of the imageA, B and GM imageA, B.
- labelsTableB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Histogram dialog slider labels of the imageA, B and GM imageA, B.
- labelsTableB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Histogram dialog slider labels of the imageA, B and GM imageA, B.
- labelsTableGM_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Historgram dialog slider labels of the imageA, B and GM imageA, B.
- labelsTableGM_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Historgram dialog slider labels of the imageA, B and GM imageA, B.
- labelsTableGM_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Historgram dialog slider labels of the imageA, B and GM imageA, B.
- labelsTableGM_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Historgram dialog slider labels of the imageA, B and GM imageA, B.
- labelStart - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- labelStartLevel - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelStartNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- labelStartVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelStartVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelStartVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelStartVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelStartVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- labelStartVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- labelStatic - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static cliiping slider labels.
- labelStaticEnd - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static clipping plane labels.
- labelStaticInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static cliiping slider labels.
- labelStaticInvEnd - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static inverse clipping plane labels.
- labelStaticInvMid - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static inverse clipping plane labels.
- labelStaticInvStart - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static inverse clipping plane labels.
- labelStaticMid - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static clipping plane labels.
- labelStaticStart - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static clipping plane labels.
- labelSTDDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- labelSteeringStep - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelStep - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- LabelStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under
- labelString - Variable in class gov.nih.mipav.model.file.FileInfoNRRD
-
Axis names such as X, Y, or Z
- labelStructureType - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- labelStructuring - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- labelSU - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- labelSU - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelSV - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- labelSV - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelSVMModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- labelSx - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelSy - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelSz - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelT - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels next to sliders.
- labelT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels next to sliders.
- labelTable - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- labelTable - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- labelTable - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- labelTable - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- labelTable2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- labelTable2 - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- LabelTableStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under in the Gifti xml schema.
- labelTarget - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- labelTemplate - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- labelTestIters - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- labelText - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.ColormapLabel
-
- labelText - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.GlyphLabel
-
- labelText - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.LineLabel
-
- labelTheta - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- labelTheta - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelTheta1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- labelTheta2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- labelThres2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- labelThres2 - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- labelThresh - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- labelThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- labelThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- labelThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- labelThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- labelThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- labelThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- labelThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- labelThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- labelThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- labelTimeBetweenShots - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelTissueIntrinsicRelaxivityRate - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelTissueIntrinsicRelaxivityRate2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- labelTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- labelTranslateRangeX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- labelTranslateRangeY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- labelTranslateRangeZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- labelTx - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelTy - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelType - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- labelType - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- labelTypeIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- labelTypePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- labelTz - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- labelUpscale - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- labelVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- labelVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- labelVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- labelVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- labelVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- labelVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- labelValue - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Used for single value, real part of complex, and red part of color
- labelValueB - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Used for blue part of color
- labelValueI - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Used for imaginary part of complex and green part of color
- labelVelocity - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
user-interface for setting the initial cell velocity:.
- labelVisible - Variable in class gov.nih.mipav.view.graphVisualization.MipavEdgeRenderer
-
Indicates whether the label of the edge has to be shown or not.
- labelVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- labelVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- labelVolumeLength - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- labelWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
- labelWeightDiff - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
- labelWhichLeg - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- labelWhichLeg - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- labelWhichLeg - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- labelWienerSearchSize - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- labelWienerSimilar - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- labelWienerStep - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- labelWienerTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- labelWindowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- labelWindowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- labelWindowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- labelWindowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- labelWindowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- labelWindowSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- labelX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
X, Y, Z labels inside the rotation panel.
- labelX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders labels.
- labelX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels next to sliders.
- labelX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels next to sliders.
- labelX1 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels beneath sliders.
- labelX1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Labels beneath sliders.
- labelX1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels beneath sliders.
- labelXAlphaButton - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- labelXEnd - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Slider tick labels.
- labelXEnd - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels beneath sliders.
- labelXEnd - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Labels beneath sliders.
- labelXEnd - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels beneath sliders.
- labelXEndInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X clipping slider labels.
- labelXInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders labels.
- labelXMid - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Slider tick labels.
- labelXMid - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels beneath sliders.
- labelXMid - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Labels beneath sliders.
- labelXMid - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels beneath sliders.
- labelXMidInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X clipping slider labels.
- labelXNumButton - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- labelXStart - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Slider tick labels.
- labelXStartInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X clipping slider labels.
- labelXTal - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Label the Talairach position x value in the image volume.
- labelY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
X, Y, Z labels inside the rotation panel.
- labelY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders labels.
- labelY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels next to sliders.
- labelY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels next to sliders.
- labelY1 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels beneath sliders.
- labelY1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels beneath sliders.
- labelYEnd - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Y clipping slider labels.
- labelYEnd - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels beneath sliders.
- labelYEnd - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels beneath sliders.
- labelYEndInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Y inverse clipping slider labels.
- labelYInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders labels.
- labelYMid - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Y clipping slider labels.
- labelYMid - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels beneath sliders.
- labelYMid - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels beneath sliders.
- labelYMidInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Y inverse clipping slider labels.
- labelYStart - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Y clipping slider labels.
- labelYStartInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Y inverse clipping slider labels.
- labelYTal - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Label the Talairach position y value in the image volume.
- labelZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
X, Y, Z labels inside the rotation panel.
- labelZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders labels.
- labelZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels next to sliders.
- labelZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Label that says "Z (1-100)".
- labelZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels next to sliders.
- labelZ1 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels beneath sliders.
- labelZ1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels beneath sliders.
- labelZEnd - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Z clipping slider labels.
- labelZEnd - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels beneath sliders.
- labelZEnd - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels beneath sliders.
- labelZEndInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Z clipping slider labels.
- labelZInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders labels.
- labelZMid - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Z clipping slider labels.
- labelZMid - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Labels beneath sliders.
- labelZMid - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Labels beneath sliders.
- labelZMidInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Z clipping slider labels.
- labelZStart - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Z clipping slider labels.
- labelZStartInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Z clipping slider labels.
- labelZTal - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Label the Talairach position z value in the image volume.
- lambda - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- lambda - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- lambda - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
The regularization for the elongation parameter
- lambda - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Contrast multiplied by the maximum gradient.
- lambda - Static variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- lambda - Variable in class gov.nih.mipav.model.algorithms.SVM.svmtest
-
- lambda - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Bias feature multiplier.
- lambda - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Regularization for the elongation parameter
- lambda - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- lambda - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
positive scale factor.
- lambda_decrease - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- lambda_increase - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- lambda3D_H - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- lambda3D_H - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- lambdaEm - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- lambdaEm - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- lambdaEx - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- lambdaEx - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- Lambdaj - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- lambdaText - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Text field for getting lambda for smoothing.
- lamf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- lamnmx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- lamst - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- lanczos(double, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- Lanczos1CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Lanczos1CostFunction
-
- Lanczos1Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Lanczos1Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- LANCZOS2 - gov.nih.mipav.model.algorithms.SIFT3D.interp_type
-
- Lanczos2CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Lanczos2CostFunction
-
- Lanczos2Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Lanczos2Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Lanczos3CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Lanczos3CostFunction
-
- Lanczos3Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Lanczos3Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- LandData() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmASM.LandData
-
- landmarkCounter - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- landmarkCounter - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- Landmarks - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.AppData
-
- landmarkUID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
368 - 32 bytes.
- LAPACK - gov.nih.mipav.model.algorithms.CeresSolver.DenseLinearAlgebraLibraryType
-
- lapData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Storage location of the Laplacian data.
- laplace - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- laplace(double) - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
Gaussian evaluated at a point with given parameters
- LAPLACE_FIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- LAPLACE_FIT - Static variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- laplaceFit - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- LAPLACIAN - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- LAPLACIAN - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- laplacian_pyramid(double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- laplacian25D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
2D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
- laplacian3D(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
3D Implementation: Create the OpenCL Buffers, Kernel, and CommandQueue.
- laplacian4D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Calls laplacian3D for each volume in the time series image.
- laplacianAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
DOCUMENT ME!
- laplacianAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- LaplacianMatrixFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- LaplacianMatrixFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- LaplacianMatrixIteration(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- LaplacianProjectionFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- LaplacianProjectionFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianProjectionFunction
-
- laplacians - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- laplacianScaleScore - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeature
-
< orientation score.
- laplacianSep25D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
- laplacianSep25DSlices() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
- laplacianSep3D(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
- laplacianSepAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
DOCUMENT ME!
- lapPatch - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- lapPeakThreshold - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
< edge threshold.
- large - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- large - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- large_dlatb4 - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
- large_list - Variable in class gov.nih.mipav.model.file.libjpeg.my_memory_mgr
-
- large_pool_struct() - Constructor for class gov.nih.mipav.model.file.libjpeg.large_pool_struct
-
- large_zlatb4 - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- largeCircularButton - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- largest_input_value(libjpeg.jpeg_decompress_struct, int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- largestContourDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- largestDistanceDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
Largest line segment contained entirely within a 3D VOI
- largestImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- largestImagePixelValue - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- largestPole - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace
-
Don't include a time == 0.
- largestPole - Variable in class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
largest pole of Laplace space function (default zero) Note that InverseLaplace may give incorrect results if the
default value of largestPole is used.
- largestSliceDistanceDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
Largest line segment contained entirely within a slice of a VOI
- laser - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource
-
Elements has one of the following...laser, filament, or arc.
- Laser(String, String, Integer, Boolean, Boolean, String, Float) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser
-
Creates a new Laser object.
- LASER_ENTRY_ACQUIRE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- LASER_ENTRY_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- LASER_ENTRY_POWER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- LASER_SURFACE_SCAN - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality laser surface scan.
- LASER_SURFACE_SCAN - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality laser surface scan.
- last - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- last - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
The number of subintervals actually called in the subdivision process.
- last - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
The number of subintervals actually called in the subdivision process.
- last - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- last - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- last_addon_message - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- last_batch_size - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- last_col_width - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- last_dc_val - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- last_dc_val - Variable in class gov.nih.mipav.model.file.libjpeg.savable_state
-
- last_event_time_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EventLogger
-
- last_flag - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- last_flag - Variable in class gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver
-
- last_jpeg_message - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- last_row_height - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- last_rowsperchunk - Variable in class gov.nih.mipav.model.file.libjpeg.my_memory_mgr
-
- last_seed - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- lastBitFlag() - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- LastBitFlag() - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- lastBorderSize - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- lastBounds() - Method in class gov.nih.mipav.view.Rubberband
-
Gets the last bounds of the rubberband.
- lastCol - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- lastElement() - Method in class gov.nih.mipav.model.structures.IntVector
-
Gets last element of array without removing it.
- lastGridSize - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- lastIncrement - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
- lastMax - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
lastMin and lastMax store the last min and max values for an image. these are used as a trigger for resetting the
transfer function.
- lastMax - Variable in class gov.nih.mipav.view.ScrollCorrector
-
DOCUMENT ME!
- lastMin - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
lastMin and lastMax store the last min and max values for an image. these are used as a trigger for resetting the
transfer function.
- lastModifiedBy - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- lastMouseClickNode - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- lastMouseEvent - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- lastMouseX - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
used by the repaintPaintBrushCursorFast method
- lastMouseY - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
used by the repaintPaintBrushCursorFast method
- LastMoveDateDD - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- LastMoveDateMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- LastMoveDateYYYY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- LastMoveTimeHH - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- LastMoveTimeMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- LastMoveTimeSS - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- lastName - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- lastName - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
- lastName - Variable in class gov.nih.mipav.model.file.FileInfoOME.Person
-
- lastName(String) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Finds the last name of the current patient.
- lastNameString - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- lastNameString - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- lastNameString - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- lastNameStringX - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- lastNameStringY - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- lastNameStringZ - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- lastNumericalSequenceBegin(String) - Static method in class gov.nih.mipav.model.file.FilenameSorter
-
Alternative to lastNumericalSequenceBegin(String, int), this method should be called if you don't already have
the index of the end of the last numerical sequence in the String parameter.
- lastNumericalSequenceBegin(String, int) - Static method in class gov.nih.mipav.model.file.FilenameSorter
-
The purpose of this method is to find the index location of a String that is the beginning of the last numerical
sequence.
- lastNumericalSequenceEnd(String) - Static method in class gov.nih.mipav.model.file.FilenameSorter
-
The purpose of this method is to find the index location of a String that is the end of the last numerical
sequence.
- lastOctave - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
-
< Index of the fisrt octave
- lastPageButton - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- lastPageMenuItem - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- lastPoint - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Keeps track of the last near point value (for keyboard moving of individual pts.
- lastPt - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- lastRow - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- lastRowBFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- lastRunTimeMillis - Variable in class gov.nih.mipav.view.MaximumLinesDocumentListener
-
- lastSearchElement - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- lastSearchGroup - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- lastSearchIndex - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- lastSelectedSlice - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- lastSelectedSlice - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- lastSliceBeforeBleach - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- lastSliceBeforeBleach - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- lastStackFlag - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- lastStackFlag - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Indicates the user's last choice of whether to open images as multi-file (stack) or single file in the file open
dialog.
- lastState - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Save if last state was iconified or normal.
- lastState - Variable in class gov.nih.mipav.view.ViewJFrameMessage
-
Indicates last state of frame - NORMAL or ICONIFIED.
- lastUnits - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- lastWinRegionSlice - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Last slice the image was at when win region was ON. its necessary because otherwise, a new cleanImageB would have
to be created upon every repaint. should be initialized to a negative number
- lastx - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- lastX - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- lasty - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- lastY - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- lastZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- latch_quant_tables(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- lateralities - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- laterality - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- latestVolumePt - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- LATIN_CAPITAL_A - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.Iso2022Converter
-
- LATIN_CAPITAL_G - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.Iso2022Converter
-
- lattice - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- lattice - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- latticeChanged() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- latticeChanged() - Method in interface gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeListener
-
LatticeListener are updated whenever the lattice changes in the LatticeModel.
- latticeChanged() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- latticeClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- latticeClipAxes - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- latticeClipBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- latticeClipExtents - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- latticeClipPos - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- latticeContours - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- latticeExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- latticeExtentsLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- latticeGrid - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- latticeInterpolationInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- LatticeListener - Interface in gov.nih.mipav.view.renderer.WildMagic.WormUntwisting
-
- latticeListeners - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- latticeModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- LatticeModel - Class in gov.nih.mipav.view.renderer.WildMagic.WormUntwisting
-
Supports the worm-straightening algorithms that use a 3D lattice as the basis of the straightening process.
- LatticeModel(ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Creates a new LatticeModel
- LatticeModel(ModelImage, VOIVector) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Creats a new LatticeModel with the given input lattice.
- LatticeModel.AnnotationSplineControlPts - Class in gov.nih.mipav.view.renderer.WildMagic.WormUntwisting
-
- latticePosition - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- latticepositionMarker - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- latticeSegment - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- latticeSlices - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- latticeStraight - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- lattry - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
Variables used for restart information.
- lattry - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
Variables used for restart information.
- launchFileChooser - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
- LAX - gov.nih.mipav.view.dialogs.JDialogMemoryAllocation.VMConfigType
-
- laxExt - Static variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- lay_t - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Temporary values for Tile parts, initialised in pi_create_encode
- layE - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
End value, initialised in pi_initialise_encode
- layers - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- layerString - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
Use serialVersionUID for interoperability.
- layno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
layer that identify the packet
- layno0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Layer num start,Precinct num start, Precinct num end
- layno1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Layer num end,Resolution num end, Component num end, given by POC
- layout - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- layout - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- layout_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- layout_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- layoutContainer(Container) - Method in class gov.nih.mipav.view.JScrollPopupMenu.ScrollPopupMenuLayout
-
- layoutPanel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- layS - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start value, initialised in pi_initialise_encode
- lbeta(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- LBETA - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- LBFGS - gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionType
-
- LBFGS(int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LBFGS
-
- lblOrigDim - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- lblRotation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- lblRotations - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- lblTranslation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- lblTranslations - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- lcAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
DOCUMENT ME!
- LCOPY - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- LCS_CALIBRATED_RGB - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorSpaceType
-
0 = Calibrated RGB
- LCS_GM_ABS_COLORIMETRIC - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingIntent
-
Match, Absolute Colorimetric
- LCS_GM_BUSINESS - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingIntent
-
Graphic, Saturation
- LCS_GM_GRAPHICS - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingIntent
-
Proof, Relative Colorimetric
- LCS_GM_IMAGES - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingIntent
-
Picture, Perceptual
- LCS_sRGB - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorSpaceType
-
"sRGB" = sRGB Color Space
- LCS_WINDOWS_COLOR_SPACE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorSpaceType
-
"Win " = System Default Color Space, sRGB
- lcustx_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- lcusty_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- ldn - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- le - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- le - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- le - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- le - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations3
-
- le - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- le - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- le(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
Tests whether this value is less than or equal to another DoubleDouble value.
- Le(double, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise less than or equal.
- Le(double, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Less Than or Equal - compares a double and a vector.
- Le(CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise less than or equal.
- Le(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Less Than or Equal - compares a vector and a vector.
- le2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- leaderEmail - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- leaderExperimenterRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- leaderFirstName - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- leaderInstitution - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- leaderIsPerson - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- leaderLastName - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
- leadString - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- LEAF_ACQUISITION - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- LEAF_IMAGE - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- LEAF_IMAGE_MAX - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- LEAF_IMAGE_MIN - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- LEAF_PATIENT - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- LEAF_PROCESSING - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- LEAF_STUDY - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- LEAF_T_SPACE - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- LEAF_X_SPACE - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- LEAF_Y_SPACE - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- LEAF_Z_SPACE - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- learn_linear_SVM_on_double_data() - Method in class gov.nih.mipav.model.algorithms.SVM
-
- learnBaseDTM() - Method in class gov.nih.mipav.model.algorithms.libdt
-
- learnBaseDTMBoS() - Method in class gov.nih.mipav.model.algorithms.libdt
-
- learnDTM(libdt.VidSegm, String, boolean) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- learnFromFailure() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- learnFromFailure() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- learningLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- learningRate - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- learningRate - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- learningTextField - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- learnLeastSquares(libdt.Dytex, Vector<libdt.Mat>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- learnTagDTM() - Method in class gov.nih.mipav.model.algorithms.libdt
-
- learnWithSplitting(libdt.DytexMix, Vector<libdt.Mat[]>, libdt.EMOptions) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- LEAST_SQUARES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- LEAST_SQUARES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- LEAST_SQUARES_COLOR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- LEAST_SQUARES_COLOR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- LEAST_SQUARES_SMOOTHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- LEAST_SQUARES_SMOOTHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- LEAST_SQUARES_SMOOTHED_COLOR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- LEAST_SQUARES_SMOOTHED_COLOR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- LEAST_SQUARES_SMOOTHED_WGT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- LEAST_SQUARES_SMOOTHED_WGT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- LEAST_SQUARES_SMOOTHED_WGT_COLOR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- LEAST_SQUARES_SMOOTHED_WGT_COLOR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- leastSquares() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
This code comes from matchBtoA() and buildXfrm(double p1[],double p2[], Matrix R) in AlgorithmRegLeastSquares.
- leastSquares() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
This code comes from matchBtoA() and buildXfrm(double p1[],double p2[], Matrix R) in AlgorithmRegLeastSquares.
- leastSquares(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function.
- leastSquares(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function.
- leastSquares(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function.
- leastSquares(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function.
- leastSquaresButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- leastSquaresCheck - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- leastSquaresColor(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function.
- leastSquaresColor(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function.
- leastSquaresColor(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function.
- leastSquaresColor(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function.
- leastSquaresSmoothed(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function.
- leastSquaresSmoothed(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function.
- leastSquaresSmoothed(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function.
- leastSquaresSmoothed(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function.
- leastSquaresSmoothedColor(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function.
- leastSquaresSmoothedColor(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function.
- leastSquaresSmoothedColor(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function.
- leastSquaresSmoothedColor(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function.
- leastSquaresSmoothedWgt(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function with weighting.
- leastSquaresSmoothedWgt(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function with weighting.
- leastSquaresSmoothedWgt(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function with weighting.
- leastSquaresSmoothedWgt(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function with weighting.
- leastSquaresSmoothedWgtColor(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function with weighting.
- leastSquaresSmoothedWgtColor(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function with weighting.
- leastSquaresSmoothedWgtColor(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Least squares cost function with weighting.
- leastSquaresSmoothedWgtColor(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Least squares cost function with weighting.
- leaves() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- LED - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- LEFileReader - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
Created by IntelliJ IDEA.
- LEFileReader(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileReader
-
Instantiates a new lE file reader.
- LEFileWriter - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
The Class LEFileWriter.
- LEFileWriter(String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
Instantiates a new lE file writer.
- left - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- left - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdnode
-
- left - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.dpfun
-
- left - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
- left - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.hppfun
-
- left - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
- left - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- left - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
- left - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
- left - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- left - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- left - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.TreeNode
-
Node to the left in the tree.
- left - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- left - Variable in class gov.nih.mipav.view.RubberbandLivewire.TreeNode
-
Node to the left in the tree.
- Left() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- LEFT - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- LEFT - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
The left arrow key.
- LEFT - Static variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- LEFT_EDGE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Left bounding edge of the canvas in world coordinates.
- LEFT_EXP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- LEFT_LEG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- LEFT_LEG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- LEFT_LEG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- LEFT_MIDDLE - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
- LEFT_PT - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Talairach: Left reference point.
- leftButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- leftButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- LeftButton(String) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.LeftButton
-
Creates new button with correct icon and given tool tip.
- LeftButton(String) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelCamera.LeftButton
-
Creates new button with correct icon and given tool tip.
- LeftButton(String) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.LeftButton
-
Creates new button with correct icon and given tool tip.
- leftCenter - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- leftContour - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- leftDown - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- leftDownButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Left panel mouse button down.
- leftDownButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
DOCUMENT ME!
- leftDownButtonEmpty - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Left panel empty button.
- leftFace - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- leftHandRuleCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogOrientMatrix
-
DOCUMENT ME!
- leftHandSystem - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
If true change matrix to the left-hand coordinate system.
- leftHandSystem - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
If true change matrix to the left-hand coordinate system.
- leftLeftButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Left panel mouse button left.
- leftLeftButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
DOCUMENT ME!
- leftLegRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- leftLegRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- leftLegRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- leftLine - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- LeftLine - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Transfer function left line:
- leftMarker - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- LeftMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- LeftMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CgnrLinearOperator
-
- LeftMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- LeftMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- LeftMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- LeftMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearOperator
-
- LeftMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- LeftMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Preconditioner
-
- LeftMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- LeftMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- LeftMultiplyE(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- LeftMultiplyF(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- leftNeuron - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- leftPad - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
Space padding around the histogram data area.
- leftPad - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
Space padding around the histogram data area.
- leftPad - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- leftPad - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- leftPad - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- leftPad - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- leftPad - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- leftPad - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
The spaces around the histogram bin area.
- leftPad - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
The spaces around the histogram bin area.
- leftPadBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- leftPaddingFactor - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- leftPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Left panel and right panels corresponding to original and expected extents.
- leftPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- leftPanel - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- leftPanelRenderMode - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The left panel renderer mode.
- leftPanelRenderMode - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
The left panel renderer mode.
- leftParButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- leftPositions - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- leftPt - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- leftPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- leftPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- leftPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- leftPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- leftreg(delaunay.Halfedge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- leftRightButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Left panel mouse button right.
- leftRightButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
DOCUMENT ME!
- leftRighticon - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- leftRighticon_1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- leftRightPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- LeftRotate(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.RbtElt) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- leftRotateButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- LeftRotateButton(String) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.LeftRotateButton
-
Creates new button with correct icon and given tool tip.
- leftSide - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- leftSide - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- leftSideInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- leftSideInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- leftSideInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- leftSpace - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
if x is an even number, use the extra space on left half (otherwise right).
- leftTable - Variable in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- leftTableModel - Variable in class gov.nih.mipav.view.ViewDICOMDoubleListPanel
-
DOCUMENT ME!
- leftTableSorter - Variable in class gov.nih.mipav.view.ViewDICOMDoubleListPanel
-
DOCUMENT ME!
- leftUp - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- leftUpButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Left panel mouse button up.
- leftUpButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Arrow button references.
- leftUpButtonEmpty - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Empty button group.
- leg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.TURN_REP_REC
-
- leg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.turnrep
-
- LEG - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- LEG() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.LEG
-
- legacyName - Variable in enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
- legacyNum - Variable in enum gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- legacyNum - Variable in enum gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
- legacyNum - Variable in enum gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- legacyNum - Variable in enum gov.nih.mipav.model.file.FileInfoBase.Modality
-
The legacy number that can be used to reference a modality.
- legacyNum - Variable in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- legacyNum - Variable in enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
These variables preserve the legacy ordering of these enums.
- legacyVal - Variable in enum gov.nih.mipav.model.file.FileInfoDicom.VRtype
-
- Legend() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- legendBottom - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- legendBottomHeight - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- legendBottomViewPort - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- legendCheckbox - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- legendPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- legendRight - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- legendRightViewPort - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- legendRightWidth - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- legibility(double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- leicaCondenserTurret - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- LeicaFileComparator(int[], String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaFileComparator
-
Creates a new LeicaFileComparator object.
- leicaFilterCubeArray - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- leicaFIMArray - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- leicaICTurret - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- leicaMagnificationChanger - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- LeicaMakernoteDescriptor(MetadataExtractor.LeicaMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDescriptor
-
- LeicaMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- LeicaSeries() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
Creates a new LeicaSeries object.
- LeicaType5MakernoteDescriptor(MetadataExtractor.LeicaType5MakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDescriptor
-
- LeicaType5MakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDirectory
-
- len - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Cache.head_t
-
- len - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_marker_info_t
-
length, marker val included
- len - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_raw_t
-
length decoded
- len - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_seg_t
-
- len - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- len - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache.head_t
-
- len - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.LEG
-
- lenCmprsnHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
76 - length of.
- lenDBHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
108 - length of.
- lenExamHdr - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- lenExamHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
136 - length of.
- lenGraphics - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
100 - length of.
- length - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- length - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
DOCUMENT ME!
- length - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
DOCUMENT ME!
- length - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- length - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- length - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- length - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
dimensions and length
- length - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
xDim2*yDim2.
- length - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Create arrays of size length+2
- length - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- length - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- length - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- length - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- length - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- length - Variable in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- length - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- length - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- length - Variable in class gov.nih.mipav.model.file.FileDicomTag
-
Length of the tag as defined in the input image.
- length - Variable in class gov.nih.mipav.model.file.FileMincDimElem
-
DOCUMENT ME!
- length - Variable in class gov.nih.mipav.model.file.FilePaintBitmap
-
- length - Variable in class gov.nih.mipav.model.file.FileSVS
-
- length - Variable in class gov.nih.mipav.model.file.FileTiff
-
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAbortRQ
-
Accessor that returns the length in bytes of the AbortRQ (4).
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateAC
-
Calculates length of message.
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRJ
-
Calculates size of message.
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Calculates length of message.
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AReleaseRQ
-
Calculates size of message.
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AReleaseRSP
-
Calculates length of message.
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AsyncOpWindowSubItem
-
Calculates length of message.
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms.ByteBuffer
-
This method returns the length of valid data in the array.
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_MaximumSubLength
-
Accessor that returns the length in bytes.
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
Calculates the PDU item's body size (not including the header).
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContext
-
Calculates length of message.
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContextAccept
-
Calculates length of message.
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_SCPSCURoleSelect
-
Calculates length of message.
- length() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_UserInformation
-
Accessor that returns the length in bytes.
- length() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- length() - Method in class gov.nih.mipav.model.structures.BufferBase
-
Gets the length of the data array.
- length() - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Returns the length of the data array.
- length() - Method in class gov.nih.mipav.model.structures.BufferByte
-
Returns the length of the data array.
- length() - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Returns the length of the data array.
- length() - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Returns the length of the data array.
- length() - Method in class gov.nih.mipav.model.structures.BufferInt
-
Returns the length of the data array.
- length() - Method in class gov.nih.mipav.model.structures.BufferLong
-
Returns the length of the data array.
- length() - Method in class gov.nih.mipav.model.structures.BufferShort
-
Returns the length of the data array.
- length() - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Returns the length of the data array.
- length() - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Returns the length of the data array.
- length() - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Returns the length of the data array.
- length() - Method in class gov.nih.mipav.model.structures.IntVector
-
Length of the array (ie - how many data points are stored).
- length(double[], double[], float[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Returns the real length (adjusted by the image resolution) of the line between (x[0], y[0]) and (x[1], y[1]).
- length(double, double, double, double, float[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Returns the real length (adjusted by the image resolution) of the line between (x0, y0) and (x1, y1).
- length(float[], float[], float[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Returns the real length (adjusted by the image resolution) of the line between (x[0], y[0]) and (x[1], y[1]).
- length(float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
The length is calculated between to points a,b using Romberg integration.
- length(float, float, float, float, float[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Returns the real length (adjusted by the image resolution) of the line between (x0, y0) and (x1, y1).
- Length() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- Length() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Edge
-
- Length() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- Length() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- Length() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- Length(Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- Length(Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- LENGTH - gov.nih.mipav.model.file.FileInfoBase.UnitType
-
- LENGTH - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- length_limit_APPn - Variable in class gov.nih.mipav.model.file.libjpeg.my_marker_reader
-
- length_limit_COM - Variable in class gov.nih.mipav.model.file.libjpeg.my_marker_reader
-
- lengthLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
- LengthStorageUnit(int) - Constructor for class gov.nih.mipav.model.file.FileInfoDicom.LengthStorageUnit
-
Creates a storage wrapper for a primitive integer variable.
- lengthText - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
- lenHistoHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
84 - length of.
- lenImageHdr - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- lenImageHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
152 - length of.
- lenmax - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_raw_t
-
maximum length to decode
- lens - Variable in class gov.nih.mipav.model.file.FileBioRad
-
Integer part of the lens magnification.
- lens - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- lenSeriesHdr - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- lenSeriesHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
144 - length of.
- lensNA - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Objective
-
- lenSuiteHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
128 - length of.
- lent - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- lenText - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- lenTextPlane - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
92 - length of.
- lentText - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- lenUID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
60 - length of UID.
- lenUnpackHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
68 - length of.
- lenUsrDefData - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
120 - length of.
- less - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.sb_tree
-
- less - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- less - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- less(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- less(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- less(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- less(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.SlantTransform
-
- less(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- less(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- less_than(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- lessB - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- lessEqualThan(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- lessEqualThan(Link) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- lessEqualThan(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- lessEqualThan(Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- LESSER_ICOST - Static variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- lesserEqualCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- lesserEqualValue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- lesserEqualValue - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- lessG - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- lessR - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- lessThan(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- lessThan(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- lessThan(Entry) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Entry
-
- lessThan(Link) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- lessThan(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- lessThan(UpdateFlags.EdgeSorter) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags.EdgeSorter
-
- lessThan(Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- lessThan(JDialogProstateImageCategorize.perImageCost) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perImageCost
-
- lessThan(JDialogProstateImageCategorize.perShapeCost) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perShapeCost
-
- lessThan(Object, Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- LessThan(StartingPolynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.StartingPolynomial
-
- LEVCUR(int, double[], int, double[], double[], double[], double[], double[], double[], String[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- level - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Indicates level surface to be extracted.
- level - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Indicates level surface to be extracted.
- level - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- level - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
level contains the subdivision levels of the subinterval, i.e., if (aa, bb) is a subinterval of (p1, p2) where p1
as well as p2 is a user-provided break point or integration limit, then (aa, bb) has level 1 if abs(bb - aa) =
abs(p2 - p1) * 2**(-1).
- level - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
level contains the subdivision levels of the subinterval, i.e., if (aa, bb) is a subinterval of (p1, p2) where p1
as well as p2 is a user-provided break point or integration limit, then (aa, bb) has level 1 if abs(bb - aa) =
abs(p2 - p1) * 2**(-1).
- level - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Noise level to be added to the image.
- level - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- level - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Average of the min and max extents of the transfer window that describes the window size.
- LEVEL_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Extract surface based on intensity level.
- LEVEL_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Extract surface based on intensity level.
- level1Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Multiplication factor for level 1 - will be set based on subsampling.
- level1Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Multiplication factor for level 1 - will be set based on subsampling.
- level1Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Multiplication factor for level 1 - will be set based on subsampling.
- level1Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Multiplication factor for level 1 - will be set based on subsampling.
- level1FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Multiplication factor for level 1 - will be set based on subsampling.
- level1FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Multiplication factor for level 1 - will be set based on subsampling.
- level1FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Multiplication factor for level 1 - will be set based on subsampling.
- level1FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Multiplication factor for level 1 - will be set based on subsampling.
- level1FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Multiplication factor for level 1 - will be set based on subsampling.
- level1FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Multiplication factor for level 1 - will be set based on subsampling.
- level1FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- level1FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- level1FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- level1FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- level1FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- level1FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- level2Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Multiplication factor for level 2 - will be set based on subsampling.
- level2Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Multiplication factor for level 2 - will be set based on subsampling.
- level2Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Multiplication factor for level 2 - will be set based on subsampling.
- level2Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Multiplication factor for level 2 - will be set based on subsampling.
- level2FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Multiplication factor for level 2 - will be set based on subsampling.
- level2FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Multiplication factor for level 2 - will be set based on subsampling.
- level2FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Multiplication factor for level 2 - will be set based on subsampling.
- level2FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Multiplication factor for level 2 - will be set based on subsampling.
- level2FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Multiplication factor for level 2 - will be set based on subsampling.
- level2FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Multiplication factor for level 2 - will be set based on subsampling.
- level2FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- level2FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- level2FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- level2FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- level2FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- level2FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- level4Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Multiplication factor for level 4 - will be set based on subsampling.
- level4Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Multiplication factor for level 4 - will be set based on subsampling.
- level4Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Multiplication factor for level 4 - will be set based on subsampling.
- level4Factor - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Multiplication factor for level 4 - will be set based on subsampling.
- level4FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Multiplication factor for level 4 - will be set based on subsampling.
- level4FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Multiplication factor for level 4 - will be set based on subsampling.
- level4FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Multiplication factor for level 4 - will be set based on subsampling.
- level4FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Multiplication factor for level 4 - will be set based on subsampling.
- level4FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Multiplication factor for level 4 - will be set based on subsampling.
- level4FactorXY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Multiplication factor for level 4 - will be set based on subsampling.
- level4FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- level4FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- level4FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- level4FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- level4FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- level4FactorZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- level5Format - Variable in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- levelCount - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- levelEight(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Takes two images that have been subsampled by a factor of eight.
- levelEight(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Takes two images that have been subsampled by a factor of eight.
- levelEight(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Takes two slices that have been subsampled by a factor of 8 or 16.
- levelEight(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Takes two images that have been subsampled by a factor of eight.
- levelEight(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Takes two images that have been subsampled by a factor of eight.
- levelEight(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Takes two slices that have been subsampled by a factor of 8 or 16.
- levelEight(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Takes two images that have been subsampled by a factor of eight.
- levelEight(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Takes two images that have been subsampled by a factor of eight.
- levelEight(ModelSimpleImage, ModelSimpleImage, float, float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Takes two images that have been subsampled by a factor of eight.
- levelEight(ModelSimpleImage, ModelSimpleImage, float, float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Takes two images that have been subsampled by a factor of eight.
- levelEightMultiThread(ModelSimpleImage, ModelSimpleImage, int, boolean, float, int, float, float, float, float, int, int, int, boolean, boolean, boolean, boolean, ModelSimpleImage, ModelSimpleImage, ModelSimpleImage, ModelSimpleImage) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
- levelFour(ModelSimpleImage, ModelSimpleImage, Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem>, Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
- levelFour(ModelSimpleImage, ModelSimpleImage, Vector<AlgorithmConstrainedOAR3D.MatrixListItem>, Vector<AlgorithmConstrainedOAR3D.MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
- levelFour(ModelSimpleImage, ModelSimpleImage, Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem>, Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
- levelFour(ModelSimpleImage, ModelSimpleImage, Vector<AlgorithmRegOAR35D.MatrixListItem>, Vector<AlgorithmRegOAR35D.MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
- levelFour(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>, Vector<MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Takes two slices that have been subsampled by a factor of four, and two vectors of minima.
- levelFour(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>, Vector<MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
- levelFour(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>, Vector<MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Takes two slices that have been subsampled by a factor of four, and two vectors of minima.
- levelFour(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>, Vector<MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
- levelFour(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>, Vector<MatrixListItem>, float, float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
- levelFour(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>, Vector<MatrixListItem>, float, float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Takes two images that have been subsampled by a factor of four, and two vectors of minima.
- levelFourMultiThread(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>, Vector<MatrixListItem>, int, int, boolean, float, int, float, float, float, float, int, int, int, boolean, boolean, boolean, float, ModelSimpleImage, ModelSimpleImage) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
- levelImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
DOCUMENT ME!
- levelImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
DOCUMENT ME!
- levelMaxFloat - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
the maxes and mins for window and level *
- levelMinFloat - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
the maxes and mins for window and level *
- levelOne(ModelSimpleImage, ModelSimpleImage, AlgorithmConstrainedELSUNCOAR3D.MatrixListItem, int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Takes the two images, no subsampling, and the best minimum so far.
- levelOne(ModelSimpleImage, ModelSimpleImage, AlgorithmConstrainedOAR3D.MatrixListItem, int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Takes the two images, no subsampling, and the best minimum so far.
- levelOne(ModelSimpleImage, ModelSimpleImage, AlgorithmRegELSUNCOAR35D.MatrixListItem, int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Takes the two images, no subsampling, and the best minimum so far.
- levelOne(ModelSimpleImage, ModelSimpleImage, AlgorithmRegOAR35D.MatrixListItem, int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Takes the two images, no subsampling, and the best minimum so far.
- levelOne(ModelSimpleImage, ModelSimpleImage, MatrixListItem) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Takes the two images, no subsampling, and the best minimum so far.
- levelOne(ModelSimpleImage, ModelSimpleImage, MatrixListItem) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Takes the two images, no subsampling, and the best minimum so far.
- levelOne(ModelSimpleImage, ModelSimpleImage, MatrixListItem, int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Takes the two slices, no subsampling, and the best minimum so far.
- levelOne(ModelSimpleImage, ModelSimpleImage, MatrixListItem, int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Takes the two slices, no subsampling, and the best minimum so far.
- levelOne(ModelSimpleImage, ModelSimpleImage, MatrixListItem, int, float, float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Takes the two images, no subsampling, and the best minimum so far.
- levelOne(ModelSimpleImage, ModelSimpleImage, MatrixListItem, int, float, float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Takes the two images, no subsampling, and the best minimum so far.
- levelOne2D(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
This routine is used only with DOF = 2, translations only.
- levelOne2D(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Only used for translations only = 2 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling.
- levelOne2D(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
This routine is used only with DOF = 2, translations only.
- levelOne2D(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Only used for translations only = 2 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling.
- levelOne2DMultiThread(ModelSimpleImage, ModelSimpleImage, int, int, boolean, float, int, float, float, float, float, int, int, int, boolean, boolean, boolean, float, ModelSimpleImage, ModelSimpleImage, double[]) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
- levelOne2DRotation(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Only used for rotations only = 1 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling.
- levelOne2DRotation(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Only used for rotations only = 1 degrees of freedom levelEight, levelFour, and levelTwo are skipped Takes the
two images, no subsampling.
- levelOneMultiThread(ModelSimpleImage, ModelSimpleImage, MatrixListItem, int, int, boolean, float, int, float, float, float, float, int, int, int, boolean, boolean, boolean, float, ModelSimpleImage, ModelSimpleImage, double[]) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
- levels - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- levels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- levels - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- levels - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- levels - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Pyramid
-
- levels - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- levels - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- levelSButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Save surface button.
- LEVELSET - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- LEVELSET - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in levelset VOI mode
- levelSet3D() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- levelSetAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- levelSetAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- levelSetStack - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- levelSetStack - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Used to calculate the levelset contour.
- levelshift - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- levelshift - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- levelShift() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- levelShift() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- levelSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- levelSliderMax - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Stores the maximum slider value.
- levelsMatch - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
DOCUMENT ME!
- levelTwo(ModelSimpleImage, ModelSimpleImage, Vector<AlgorithmConstrainedELSUNCOAR3D.MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
- levelTwo(ModelSimpleImage, ModelSimpleImage, Vector<AlgorithmConstrainedOAR3D.MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
- levelTwo(ModelSimpleImage, ModelSimpleImage, Vector<AlgorithmRegELSUNCOAR35D.MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
- levelTwo(ModelSimpleImage, ModelSimpleImage, Vector<AlgorithmRegOAR35D.MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
- levelTwo(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Takes two slices that have been subsampled by a factor of 2 and a vector of minima.
- levelTwo(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
- levelTwo(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Takes two slices that have been subsampled by a factor of 2 and a vector of minima.
- levelTwo(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
- levelTwo(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>, float, float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
- levelTwo(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>, float, float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Takes two images that have been subsampled by a factor of 2 and a vector of minima.
- levelTwoMultiThread(ModelSimpleImage, ModelSimpleImage, Vector<MatrixListItem>, int, int, boolean, float, int, float, float, float, float, int, int, int, boolean, boolean, boolean, float, ModelSimpleImage, ModelSimpleImage) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
- levelValTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
textfield inputs for window and level *
- levelVButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Save surface button.
- levelWButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Save surface button.
- levelXMLButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Save surface button.
- LEVENBERG_MARQUARDT - gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyType
-
- LEVENBERG_MARQUARDT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- LEVENBERG_MARQUARDT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- LEVENBERG_MARQUARDT - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
- LEVENBERG_MARQUARDT - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- LEVENBERG_MARQUARDT - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
- LEVENBERG_MARQUARDT - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- LevenbergMarquardtStrategy(CeresSolver.TrustRegionStrategyOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- LEVMAR_ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- LEVMAR_ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- LEVMAR_ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- LEVMAR_ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- levShift - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Used with level-shifting
- levShift - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- LEXICAL_COMPARATOR - Static variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- LEXICAL_NUMS_COMPARATOR - Static variable in class gov.nih.mipav.model.structures.TableSorter
-
This is comparator such that it also determines if the string has numbers leading the string....if it does have
numbers, it sorts using the numbers also
- LexicographicallyOrderResidualBlocks(int, CeresSolver.Program, String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- LF - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
- lfDisplayChoices - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Look and feel choices.
- lgam(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- LGAM - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- lgamma() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
This code is a port of the FORTRAN routine LGAMA from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 50-51.
- LGAMMA - Static variable in class gov.nih.mipav.model.algorithms.Gamma
-
Compute gamma function or log of gamma function for real x > 0
- LGGAM(double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- lhA - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- lhs - Variable in class gov.nih.mipav.model.algorithms.dataStruct
-
- lhs() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- lhs_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DenseQRSolver
-
- lhs_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- lhs_expected - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- lhs_row_layout_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- libdt - Class in gov.nih.mipav.model.algorithms
-
libdt - OpenCV library for Dynamic Textures - version 1.0
Copyright (c) 2011-2014 Antoni B.
- libdt() - Constructor for class gov.nih.mipav.model.algorithms.libdt
-
- libdt.ConfigFile - Class in gov.nih.mipav.model.algorithms
-
- libdt.cov_reg_type - Enum in gov.nih.mipav.model.algorithms
-
regularization method.
- libdt.cov_type - Enum in gov.nih.mipav.model.algorithms
-
type of covariance matrix.
- libdt.CovMatrix - Class in gov.nih.mipav.model.algorithms
-
- libdt.DatDescriptor - Class in gov.nih.mipav.model.algorithms
-
Structure to represent Dat file Descriptor parameters
- libdt.Dytex - Class in gov.nih.mipav.model.algorithms
-
Dynamic Texture class.
- libdt.DytexKalmanFilter - Class in gov.nih.mipav.model.algorithms
-
class for running the Kalman filter for dynamic texture inference.
- libdt.DytexMix - Class in gov.nih.mipav.model.algorithms
-
- libdt.DytexOptions - Class in gov.nih.mipav.model.algorithms
-
- libdt.DytexRegOptions - Class in gov.nih.mipav.model.algorithms
-
Class for specifying the regularization methods for a Dytex.
- libdt.DytexSplitParams - Class in gov.nih.mipav.model.algorithms
-
- libdt.EMOptions - Class in gov.nih.mipav.model.algorithms
-
- libdt.Estats - Class in gov.nih.mipav.model.algorithms
-
- libdt.fill_type - Enum in gov.nih.mipav.model.algorithms
-
- libdt.HEMOptions - Class in gov.nih.mipav.model.algorithms
-
- libdt.indexValueComparator - Class in gov.nih.mipav.model.algorithms
-
- libdt.indexValueItem - Class in gov.nih.mipav.model.algorithms
-
- libdt.kf_mode - Enum in gov.nih.mipav.model.algorithms
-
- libdt.Mat - Class in gov.nih.mipav.model.algorithms
-
- libdt.norm_type - Enum in gov.nih.mipav.model.algorithms
-
Normalization mode for each patch.
- libdt.PatchBatchExtractor - Class in gov.nih.mipav.model.algorithms
-
Class for extracting spatio-temporal patches (cubes) from a video (batch
mode).
- libdt.PatchExtractor - Class in gov.nih.mipav.model.algorithms
-
Class for extracting spatio-temporal patches (cubes) from a video (online
mode).
- libdt.PatchOptions - Class in gov.nih.mipav.model.algorithms
-
Class for specifying spatio-temporal patches (cubes).
- libdt.Range - Class in gov.nih.mipav.model.algorithms
-
- libdt.Split_crit - Enum in gov.nih.mipav.model.algorithms
-
- libdt.Split_mode - Enum in gov.nih.mipav.model.algorithms
-
- libdt.Split_vars - Enum in gov.nih.mipav.model.algorithms
-
- libdt.Verbose_mode - Enum in gov.nih.mipav.model.algorithms
-
- libdt.VidSegm - Class in gov.nih.mipav.model.algorithms
-
- libdt.VidSeqSegmParams - Class in gov.nih.mipav.model.algorithms
-
- libdt.Ymean_type - Enum in gov.nih.mipav.model.algorithms
-
Options for modeling the observation mean, Ymean.
- libjpeg - Class in gov.nih.mipav.model.file
-
Ported from C to Java by William Gandler
LEGAL ISSUES
============
In plain English:
1.
- libjpeg() - Constructor for class gov.nih.mipav.model.file.libjpeg
-
- libjpeg_IDCT - Class in gov.nih.mipav.model.file
-
Ported from C to Java by William Gandler
LEGAL ISSUES
============
In plain English:
1.
- libjpeg_IDCT() - Constructor for class gov.nih.mipav.model.file.libjpeg_IDCT
-
- libjpeg.arith_entropy_decoder - Class in gov.nih.mipav.model.file
-
- libjpeg.backing_store_info - Class in gov.nih.mipav.model.file
-
- libjpeg.bitread_perm_state - Class in gov.nih.mipav.model.file
-
- libjpeg.bitread_working_state - Class in gov.nih.mipav.model.file
-
- libjpeg.box - Class in gov.nih.mipav.model.file
-
- libjpeg.cdjpeg_progress_mgr - Class in gov.nih.mipav.model.file
-
- libjpeg.d_derived_tbl - Class in gov.nih.mipav.model.file
-
- libjpeg.huff_entropy_decoder - Class in gov.nih.mipav.model.file
-
- libjpeg.J_BUF_MODE - Enum in gov.nih.mipav.model.file
-
- libjpeg.J_COLOR_SPACE - Enum in gov.nih.mipav.model.file
-
- libjpeg.J_COLOR_TRANSFORM - Enum in gov.nih.mipav.model.file
-
- libjpeg.J_DCT_METHOD - Enum in gov.nih.mipav.model.file
-
- libjpeg.J_DITHER_MODE - Enum in gov.nih.mipav.model.file
-
- libjpeg.J_MESSAGE_CODE - Enum in gov.nih.mipav.model.file
-
- libjpeg.JHUFF_TBL - Class in gov.nih.mipav.model.file
-
- libjpeg.jpeg_color_quantizer - Class in gov.nih.mipav.model.file
-
- libjpeg.jpeg_common_struct - Class in gov.nih.mipav.model.file
-
- libjpeg.jpeg_component_info - Class in gov.nih.mipav.model.file
-
- libjpeg.jpeg_d_coef_controller - Class in gov.nih.mipav.model.file
-
- libjpeg.jpeg_decompress_struct - Class in gov.nih.mipav.model.file
-
- libjpeg.jpeg_entropy_decoder - Class in gov.nih.mipav.model.file
-
- libjpeg.jpeg_error_mgr - Class in gov.nih.mipav.model.file
-
- libjpeg.jpeg_marker_struct - Class in gov.nih.mipav.model.file
-
- libjpeg.jpeg_progress_mgr - Class in gov.nih.mipav.model.file
-
- libjpeg.JQUANT_TBL - Class in gov.nih.mipav.model.file
-
- libjpeg.jvirt_barray_control - Class in gov.nih.mipav.model.file
-
- libjpeg.jvirt_sarray_control - Class in gov.nih.mipav.model.file
-
- libjpeg.large_pool_struct - Class in gov.nih.mipav.model.file
-
- libjpeg.my_coef_controller - Class in gov.nih.mipav.model.file
-
- libjpeg.my_color_deconverter - Class in gov.nih.mipav.model.file
-
- libjpeg.my_cquantizer - Class in gov.nih.mipav.model.file
-
- libjpeg.my_cquantizer2 - Class in gov.nih.mipav.model.file
-
- libjpeg.my_decomp_master - Class in gov.nih.mipav.model.file
-
- libjpeg.my_idct_controller - Class in gov.nih.mipav.model.file
-
- libjpeg.my_input_controller - Class in gov.nih.mipav.model.file
-
- libjpeg.my_main_controller - Class in gov.nih.mipav.model.file
-
- libjpeg.my_marker_reader - Class in gov.nih.mipav.model.file
-
- libjpeg.my_memory_mgr - Class in gov.nih.mipav.model.file
-
- libjpeg.my_post_controller - Class in gov.nih.mipav.model.file
-
- libjpeg.my_source_mgr - Class in gov.nih.mipav.model.file
-
- libjpeg.my_upsampler_jdmerge - Class in gov.nih.mipav.model.file
-
- libjpeg.my_upsampler_jdsample - Class in gov.nih.mipav.model.file
-
- libjpeg.savable_state - Class in gov.nih.mipav.model.file
-
- libjpeg.small_pool_struct - Class in gov.nih.mipav.model.file
-
- libList - Static variable in class gov.nih.mipav.util.NativeLibraryLoader
-
- libre - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- LIBSVM - Class in gov.nih.mipav.model.algorithms
-
Copyright (c) 2000-2023 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
- LIBSVM() - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM
-
- LIBSVM_VERSION - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- LIBSVM_VERSION - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- LIBSVM.Cache - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.Cache.head_t - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.decision_function - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.Kernel - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.ONE_CLASS_Q - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.QMatrix - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.Solver - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.Solver_NU - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.Solver.SolutionInfo - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.SVC_Q - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.svm_model - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.svm_node - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.svm_parameter - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.svm_print_interface - Interface in gov.nih.mipav.model.algorithms
-
- LIBSVM.svm_problem - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.svm_toy_frame - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.svm_toy_frame.point - Class in gov.nih.mipav.model.algorithms
-
- LIBSVM.SVR_Q - Class in gov.nih.mipav.model.algorithms
-
- LIFF - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Do not confuse with Leica image file format .lif
- Lifo() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
- LifoFlush(AlgorithmPowerWatershed.Lifo) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- LifoPop(AlgorithmPowerWatershed.Lifo) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- LifoPrint(AlgorithmPowerWatershed.Lifo) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- LifoPush(AlgorithmPowerWatershed.Lifo, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- LifoTermine(AlgorithmPowerWatershed.Lifo) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- lifoTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- LifoVide(AlgorithmPowerWatershed.Lifo) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- LIGHT - gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorScheme
-
- LIGHT_INDEX_AMBIENT - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Ambient light index.
- LIGHT_INDEX_AMBIENT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Ambient light index.
- LIGHT_INDEX_MAX - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Max number of light.
- LIGHT_INDEX_MAX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Max number of light.
- LIGHT_INDEX_MODEL_X0Y0Z0 - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
light for corner X0Y0Z0.
- LIGHT_INDEX_MODEL_X0Y0Z0 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
light for corner X0Y0Z0.
- LIGHT_INDEX_MODEL_X0Y0Z1 - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
light for corner X0Y0Z1.
- LIGHT_INDEX_MODEL_X0Y0Z1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
light for corner X0Y0Z1.
- LIGHT_INDEX_MODEL_X0Y1Z0 - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
light for corner X0Y1Z0.
- LIGHT_INDEX_MODEL_X0Y1Z0 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
light for corner X0Y1Z0.
- LIGHT_INDEX_MODEL_X0Y1Z1 - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
light for corner X0Y1Z1.
- LIGHT_INDEX_MODEL_X0Y1Z1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
light for corner X0Y1Z1.
- LIGHT_INDEX_MODEL_X1Y0Z0 - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
light for corner X1Y0Z0.
- LIGHT_INDEX_MODEL_X1Y0Z0 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
light for corner X1Y0Z0.
- LIGHT_INDEX_MODEL_X1Y0Z1 - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
light for corner X1Y0Z1.
- LIGHT_INDEX_MODEL_X1Y0Z1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
light for corner X1Y0Z1.
- LIGHT_INDEX_MODEL_X1Y1Z0 - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
light for corner X1Y1Z0.
- LIGHT_INDEX_MODEL_X1Y1Z0 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
light for corner X1Y1Z0.
- LIGHT_INDEX_MODEL_X1Y1Z1 - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
light for corner X1Y1Z1.
- LIGHT_INDEX_MODEL_X1Y1Z1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
light for corner X1Y1Z1.
- LIGHT_INDEX_STATIC - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Static light index.
- LIGHT_INDEX_STATIC - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Static light index.
- lightArray - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
An array of eight lights that can be used for illuminating the surfaces in the scene.
- lightArrayBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The branch groups to which the lights are attached.
- LightboxGenerator - Class in gov.nih.mipav.model.algorithms
-
The class creates a RGB image of a 3d image in a Lightbox type format.
- LightboxGenerator(ModelImage, int, int, double, int, int, int, int, int, boolean, int) - Constructor for class gov.nih.mipav.model.algorithms.LightboxGenerator
-
Constructor for Lightbox Image Files that will be used to create a lightBox image.
- lightBoxOptions - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- lightBulbs - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The structure for the light bulbs.
- lightControl - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
light control panel.
- lightDirection - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- lightGen - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
DOCUMENT ME!
- lightHalftone - Variable in class gov.nih.mipav.model.file.FileSVS
-
- lightHalftone - Variable in class gov.nih.mipav.model.file.FileTiff
-
- lightingFunctions - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- lightingParametersBasic - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- lightingParametersBasicColorA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- lightingParametersBasicColorB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- lightManagerEnabled - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- lightManagerMode - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- lightMode - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- lightPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- lightParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- lightRed - Static variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Light red color (used for private tags).
- Lights - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- LightSelected - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- lightSource - Variable in class gov.nih.mipav.model.file.FileSVS
-
- lightSource - Variable in class gov.nih.mipav.model.file.FileTiff
-
- LightSource(String, String, String, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource
-
Creates a new LightSource object.
- lightSourceAttenuation - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- lightSourceID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo.LightSourceRef
-
- lightSourceID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser.Pump
-
- lightSourceID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource
-
DOCUMENT ME!
- lightSourceIntensity - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- LightSourceRef(Integer, Integer, String, Float, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo.LightSourceRef
-
Creates a new LightSourceRef object.
- lightSourceRefs - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
Elements.
- lightsources - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- lightSourceWavelength - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- lim_Se - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- limit - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
DOCUMENT ME!
- limit - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
DOCUMENT ME!
- limit - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
Gives an upper bound on the number of subintervals in the partition of lower, upper.
- limit - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Gives an upper bound on the number of subintervals in the partition of lower, upper.
- limit - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- LIMIT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- limitBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- limitBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed
-
- limitBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLowerCompletion
-
- limitBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- limitBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- limitBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- limitBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindComponentLabelling
-
- limitBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- limitBins - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- limitBins - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- limitBins - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- limitBins - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- limitBins - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- limitBins - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- limitBins - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- limitBins - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- limitCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
If limitCheckBox is selected iterations stop when volume change from
initial volume is greater than or equal to volumePercent.
- limits - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Translation limits.
- limits - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Translation limits.
- limits_mm - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- limits_mm - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- limitTranslation - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- limitTranslationCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- limlst - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
In dqawfe limlst gives an upper bound on the number of cycles, limlst >= 1.
- limlst - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
In dqawfe limlst gives an upper bound on the number of cycles, limlst >= 1.
- LIN - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- line - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- line - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- line(float, float, int, float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- line(float, float, int, float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- line(int, int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
This function draws a 2D line on the canvas image -- ontop of the currently rendered image.
- line(int, int, int, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
This function draws a 2D line on the canvas image -- on top of the currently rendered image.
- Line(float, float, float, float, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.Line
-
- Line(float, float, float, float, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.Line
-
- Line(float, float, float, float, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.Line
-
- Line(float, float, float, float, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.Line
-
- Line(float, float, float, float, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.Line
-
- LINE - Static variable in class gov.nih.mipav.model.structures.VOI
-
Indicates that the VOI is of type Line made up of two points.
- LINE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- LINE - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in 2D line VOI mode
- LINE_DELIM - Static variable in class gov.nih.mipav.plugins.ManifestFile
-
System-dependent line delimiter.
- LINE_SEARCH - gov.nih.mipav.model.algorithms.CeresSolver.MinimizerType
-
- LINE_SEARCH - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- line_search_cost_evaluation_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- line_search_direction_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- line_search_direction_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- line_search_direction_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- line_search_direction_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- line_search_direction_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- line_search_function_evaluations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- line_search_gradient_evaluation_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- line_search_gradient_evaluations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- line_search_interpolation_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- line_search_interpolation_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- line_search_interpolation_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- line_search_interpolation_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- line_search_interpolation_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- line_search_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- line_search_polynomial_minimization_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- line_search_polynomial_minimization_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- line_search_sufficient_curvature_decrease - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- line_search_sufficient_curvature_decrease - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- line_search_sufficient_curvature_decrease - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- line_search_sufficient_function_decrease - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- line_search_sufficient_function_decrease - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- line_search_sufficient_function_decrease - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- line_search_total_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- line_search_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- line_search_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- line_search_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- line_search_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- line_search_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- LINE_SEPARATOR - Static variable in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
The line separator to use for scripts.
- LINE_SEPARATOR - Static variable in class gov.nih.mipav.model.scripting.ScriptRecorder
-
The line separator to use for scripts.
- lineAnnotations(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Creates the line annotations.
- Linear - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- Linear() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- LINEAR - gov.nih.mipav.model.algorithms.SIFT3D.interp_type
-
- LINEAR - Static variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- LINEAR - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Linear interpolation mode.
- LINEAR - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate linear (ie. bilinear, trilinear) interpolation.
- LINEAR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- LINEAR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- LINEAR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- LINEAR - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Linear tranfer function mode (grayscale).
- LINEAR_COST_FUNCTION_EXAMPLE - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- LINEAR_FIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- LINEAR_FIT - Static variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
This dialog only allows 1 constant and 3 exponentials in the MULTIEXPONENTIAL_FIT at the present.
- LINEAR_FULL_RANK - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- LINEAR_FULL_RANK - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- LINEAR_FULL_RANK - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- LINEAR_RANK1 - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- LINEAR_RANK1 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- LINEAR_RANK1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- LINEAR_RANK1_WITH_ZERO_COLUMNS_AND_ROWS - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- LINEAR_RANK1_WITH_ZERO_COLUMNS_AND_ROWS - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- LINEAR_RANK1_WITH_ZERO_COLUMNS_AND_ROWS - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- linear_solver - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- linear_solver - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyOptions
-
- linear_solver_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- linear_solver_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- LINEAR_SOLVER_FAILURE - gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverTerminationType
-
- LINEAR_SOLVER_FATAL_ERROR - gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverTerminationType
-
- linear_solver_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- LINEAR_SOLVER_NO_CONVERGENCE - gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverTerminationType
-
- linear_solver_options - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- linear_solver_ordering - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- linear_solver_ordering_given - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- linear_solver_ordering_used - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- LINEAR_SOLVER_SUCCESS - gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverTerminationType
-
- linear_solver_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- linear_solver_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluatorOptions
-
- linear_solver_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- linear_solver_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTestOptions
-
- linear_solver_type_given - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- linear_solver_type_used - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- LINEAR_ZOOM - Static variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Used to indicte linear zoom steps (2x, 3x, 4x, 5x ...).
- Linear.GroupClassesReturn - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
used as complex return type
- linear2srgb(double) - Method in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- linearBackSlashMode() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Sets mode to linear and shows component.
- LINEARC - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- LINEARC - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- LINEARC2 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- linearCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Checkbox to select linear rescaling of second image.
- linearCorrelation - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- linearCorrelation - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
The linear correlation coefficient for all points with either buffer[i] >= threshold1 or secondBuffer[i] >=
threshold2.
- LinearCostFunction(Vector<Double>) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LinearCostFunction
-
- LinearCostFunction2(double, double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.LinearCostFunction2
-
- LinearEquations - Class in gov.nih.mipav.model.structures.jama
-
- LinearEquations() - Constructor for class gov.nih.mipav.model.structures.jama.LinearEquations
-
Creates a new LinearEquations object.
- LinearEquations2 - Class in gov.nih.mipav.model.structures.jama
-
- LinearEquations2() - Constructor for class gov.nih.mipav.model.structures.jama.LinearEquations2
-
Creates a new LinearEquations2 object.
- LinearEquations3 - Class in gov.nih.mipav.model.structures.jama
-
- LinearEquations3() - Constructor for class gov.nih.mipav.model.structures.jama.LinearEquations3
-
Creates a new LinearEquations3 object.
- linearFit - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- LinearIndexToUpperTriangularIndex(int, int, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- linearInterpGetY(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
get y based on equation of linear interpolation
- linearInterpolation(float[], float, float, float, float, int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
linear interpolation, with value outside the image
- linearInterpolation(float[], float, float, float, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
linear interpolation, with value outside the image
- LINEARIZED_DAMPED_PENDULUM - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- LINEARIZED_DAMPED_PENDULUM - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- LinearLeastSquaresProblem() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LinearLeastSquaresProblem
-
- LinearLeastSquaresProblem0() - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- LinearLeastSquaresProblem1() - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- LinearLeastSquaresProblem2() - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- LinearLeastSquaresProblem3() - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- LinearLeastSquaresProblem4() - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- linearMode() - Method in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Sets mode to linear and shows component.
- linearMode() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Resets mode to linear and shows component.
- linearMode() - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Sets mode to linear and shows component.
- linearMode() - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Resets mode to linear and shows component.
- linearMode() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Switch the histogram component to linear line mode.
- LinearOperator() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LinearOperator
-
- linearReslice() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Reslices the data into isotropic voxels using linear interpolation.
- LinearSolver() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolver
-
- LinearSolverAndEvaluatorCreationTest(CeresSolver.ProblemImpl, double[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.LinearSolverAndEvaluatorCreationTest
-
- LinearSolverAndEvaluatorCreationTestCGNR() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestDenseNormalCholesky() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestDenseQR() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestDenseSchur() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestInnerIterationsWithTwoParameterBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestInvalidInnerIterationsOrdering() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestIterativeSchur() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestMinimizerIsAwareOfBounds() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestSchurTypeSolverWithBadOrdering() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestSchurTypeSolverWithEmptyFirstEliminationGroup() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestSchurTypeSolverWithEmptySecondEliminationGroup() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestSchurTypeSolverWithGoodOrdering() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverAndEvaluatorCreationTestValidInnerIterationsOrdering() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LinearSolverForZeroEBlocks(CeresSolver.LinearSolverType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- LinearSolverOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- LinearSolverPerSolveOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverPerSolveOptions
-
- LinearSolverSummary() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverSummary
-
- LinearSolverTerminationType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverTerminationType
-
- LinearSolverType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverType
-
- LinearSolverTypeToString(CeresSolver.LinearSolverType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- LinearStretchClamp(CDVector, double, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
Maps a vector linearly from [x1;x2] to [new_min;new_max].
- LinearStretchMinMax(CDVector, double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
Maps a vector linearly from [min;max] to [new_min;new_max].
- lineBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Red guide line branch group.
- linebuf - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- lineButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- lineButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Line shape button.
- lineButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Line shape button.
- lineColor - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- lineColor - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- lineComp(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- lineEval - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
integer scalar containing the number of function evaluations caused by the linesearch algorithm.
- lineEval - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
integer scalar containing the number of function evaluations caused by the linesearch algorithm.
- lineEval(float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- lineJustify - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- LineLabel(String, double, int, int) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Legend.LineLabel
-
- LineLabel(String, double, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Legend.LineLabel
-
- lineLabels - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- lineMax1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
The endpoints of the line segment in (buffer,secondBuffer) values.
- lineMax2 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
The endpoints of the line segment in (buffer,secondBuffer) values.
- LineMeter - Class in gov.nih.mipav.view
-
LineMeter is a history-graph panel which updates its display once a second, drawing a curve of the history of inputs
to setAmplitude().
- LineMeter() - Constructor for class gov.nih.mipav.view.LineMeter
-
This is the history graph, and sets up and animation thread.
- lineMin - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- lineMin(Matrix4f, Matrix4f, float, float, double[], double[], int, double[], double, double, double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- lineMin(Matrix4f, Matrix4f, float, float, double[], double[], int, double[], double, double, double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
- lineMin1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- lineMin1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
The endpoints of the line segment in (buffer,secondBuffer) values.
- lineMin2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- lineMin2 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
The endpoints of the line segment in (buffer,secondBuffer) values.
- lineMinimization(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Minimizes the point along the given vector direction.
- LineMinimizationEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- LineMinimizationEffect(Texture, boolean, Matrix4f, Matrix4f, float, float, float[], float[], float, float[], float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- LineMinimizationEffect(Texture, Texture, float, float, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- LineMinimizationEffect(Texture, Texture, Texture, float, float, float, float, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- lineMode - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Flag indicating if the surface is currently in line mode (true) or fill mode (false).
- lineNumber - Variable in exception gov.nih.mipav.model.scripting.ParserException
-
The line number in the script where this error occurred.
- lineOffset - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- linePoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- linePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- linePosition - Variable in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
- lines - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- Lines - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.ASMData
-
- Lines - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- Lines - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.SData
-
- Lines() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- LINES - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- LINES - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Free-hand sculpting
- LINESCAN_OVERLAY - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- LineSearch(CeresSolver.LineSearchOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LineSearch
-
- LineSearch(CDVector, double, CDVector, CDVector, CDVector, double[], boolean[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
Warpper for line search
- LineSearch(CDVector, double, CDVector, CDVector, CDVector, double[], boolean[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- LineSearchDirection() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirection
-
- LineSearchDirectionOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionOptions
-
- LineSearchDirectionType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionType
-
- LineSearchDirectionTypeToString(CeresSolver.LineSearchDirectionType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- LineSearchFunction(CeresSolver.Evaluator) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- LineSearchInterpolationType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.LineSearchInterpolationType
-
- LineSearchInterpolationTypeToString(CeresSolver.LineSearchInterpolationType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- LineSearchMinimizer() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer
-
- LineSearchMinimizerTestFinalCostIsZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LineSearchOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
- LineSearchOptionsAreValid(String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- LineSearchPreprocessor() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchPreprocessor
-
- LineSearchPreprocessorNormalOperation() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LineSearchPreprocessorParameterBlockHasBounds() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LineSearchPreprocessorProblemWithInvalidParameterBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LineSearchPreprocessorRemoveParameterBlocksFailed() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LineSearchPreprocessorRemoveParameterBlocksSucceeds() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LineSearchPreprocessorZeroProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LineSearchSummary() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
- LineSearchType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.LineSearchType
-
- LineSearchTypeToString(CeresSolver.LineSearchType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- lineSlope - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- linesOnlyButton - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- lineSpacing - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- LinesRenderer() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.LinesRenderer
-
- lineuc(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- lineuc(DoubleDouble[], DoubleDouble, DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- lineVOI - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- linhx - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- linhx - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- linhy - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- linhy - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- link - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
Linking information for sub-algorithms
- link - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti.Linking
-
- Link - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- Link() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- Link(Vertex, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- linkButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
DOCUMENT ME!
- linkButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
DOCUMENT ME!
- LinkedComparator() - Constructor for class gov.nih.mipav.model.file.FileIO.LinkedComparator
-
- linkedFilename - Variable in class gov.nih.mipav.model.file.FileImageXML
-
Name of the file linked to this file (separate from fileName).
- linkedImageButton - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- linkedImageField - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- linkedImagePath - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
linked image path (optional).
- LinkedNum(float, int) - Constructor for class gov.nih.mipav.model.file.FileIO.LinkedNum
-
- linkedScrolling - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Variable indicating if images of like dimensions should be scrolled simult.
- linkFrame - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Holds a reference (link) to another frame so that it be updated with this frame.
- Linking(Runnable, int, int) - Constructor for class gov.nih.mipav.view.ViewJProgressBarMulti.Linking
-
- linkingNodes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- linkJunctionNodes(AlgorithmNetworkSnake.SnakeInitialiser.Node, AlgorithmNetworkSnake.SnakeInitialiser.Node) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- linkNodes(AlgorithmNetworkSnake.SnakeInitialiser.Node, AlgorithmNetworkSnake.SnakeInitialiser.Node) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- linkProgress(FileBase) - Method in class gov.nih.mipav.model.file.FileBase
-
- linkProgressToAlgorithm(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Helper function to link the currently listening progress bar with an algorithm created within an algorithm.
- linkProgressToAlgorithm(AlgorithmBase, String, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
New helper function for use with the ViewJProgressBarMulti.
- links - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.StaticGrid
-
- linkToComms - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_CommsLink
-
Reference to the link communications object.
- linkTriFrame - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Holds a reference (link) to another frame so that it can be updated with this frame.
- LINSEG(boolean[], int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- linspace(double, double, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- Linspace(double, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Generates a vector of linearly equally spaced points between x1 and x2
(inclusive).
- linspace_multi(double[], double[], int, double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- linuc2(double[], double, double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- linuc2(DoubleDouble[], DoubleDouble, DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- linvrt(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- list - Variable in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
The list of parameters.
- list - Variable in class gov.nih.mipav.view.dialogs.JDialogRemovePlugin
-
List of installed plugins.
- list - Variable in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
DOCUMENT ME!
- list - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
List of lights.
- list - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
List of lights.
- list - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- LIST2Size - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- LIST2subchunkSize - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- listA - Variable in class gov.nih.mipav.view.JPanelListController
-
upper or left-most list.
- listB - Variable in class gov.nih.mipav.view.JPanelListController
-
lower or right-most list.
- listButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- listener - Variable in class gov.nih.mipav.view.ViewMenuBuilder
-
The class which wants to listen to the menu items generated.
- listener - Variable in class gov.nih.mipav.view.ViewMenuBuilder.QuickList
-
DOCUMENT ME!
- listenerList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
A list of the ChangeListeners which are interested in the ChangeEvent.
- listenerList - Variable in class gov.nih.mipav.model.file.FileBase
-
A list of the ChangeListeners which are interested in the ChangeEvent.
- listenerList - Variable in class gov.nih.mipav.model.provenance.ProvenanceHolder
-
A list of the ChangeListeners which are interested in the ChangeEvent.
- listenerList - Variable in class gov.nih.mipav.model.structures.VOI
-
VOIListeners that are updated when this VOI changes
- listenerList - Variable in class gov.nih.mipav.model.structures.VOIVector
-
holds all interfaces listening to this vector.
- listenerList - Variable in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- listenerList - Variable in class gov.nih.mipav.view.ImageRegistryMonitor
-
DOCUMENT ME!
- listenerList - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
created to handle VOI updates.
- listenerList - Variable in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
DOCUMENT ME!
- listeners - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorPoller
-
- listEntry - Variable in enum gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
- listFile - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
list file *
- listFileName - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
List file name
- listFiles(File) - Method in class gov.nih.mipav.view.ViewImageFileFilter
-
Returns a list of the files in the directory that satisfy the file filter.
- listLayout - Variable in class gov.nih.mipav.view.JPanelListController
-
DOCUMENT ME!
- listLength - Variable in class gov.nih.mipav.view.JPanelChecklist
-
must be given a nonzero number on instantiation. must be of same size as checkboxLabels.
- listModel - Variable in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- listModel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
List to record info for each mouse, change events.
- listModel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
List to record info for each mouse, change events.
- listModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- listPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- listPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- listPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
The list of statistics to calculate
- listPanel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- listScrollPane - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- listSelectorDicom - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- listType - Variable in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
The data type of the elements in this parameter list.
- litArray - Variable in class gov.nih.mipav.model.file.FilePackBit
-
Temporary buffer.
- LITTLE_ENDIAN - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Flag used to indicate Little Endianess.
- LITTLE_ENDIAN - Static variable in class gov.nih.mipav.model.file.FileBase
-
Byte order.
- LITTLE_ENDIAN - Static variable in class gov.nih.mipav.model.file.FileDicomBase
-
Byte order.
- littleEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- littleEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Radio button to denote image is little endian.
- litvmu(int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- liverPresetButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Liver segmentation preset opacity transform function control button.
- liveWire(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from VOIManagerInterface.
- LIVEWIRE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- LIVEWIRE - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in livewire VOI mode
- livmul(int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- ll - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream.StackElem
-
- ll_full(double[][], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- ll_full(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- ll_full_no_cens(double[][], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- ll_full_no_cens(double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- ll_weib_beta_cen_r(double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.WeibullDistribution.ll_weib_beta_cen_r
-
- ll_weib_beta_uncen(double[]) - Constructor for class gov.nih.mipav.model.algorithms.WeibullDistribution.ll_weib_beta_uncen
-
- ll8 - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- llA - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- lleAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogLLE
-
DOCUMENT ME!
- llh - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- LLMSE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- LLMSE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- lm - Variable in class gov.nih.mipav.view.ViewJFrameMemory
-
DOCUMENT ME!
- lm_diagonal_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- lm_diagonal_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- LM_DWARF - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- lm_enorm(int, double[], int) - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- lm_infmsg - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
Set message texts (indexed by info)
- lm_lmdif() - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- lm_lmpar(int, double[], int, int[], double[], double[], double, double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- LM_MACHEP - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
resolution of arithmetic
- lm_printout_std(double[], double[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- lm_qrfac(int, int, double[], int, int[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- lm_qrsolv(int, double[], int, int[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- lm_shortmsg - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- LM_SQRT_DWARF - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
Square should not underflow
- LM_SQRT_GIANT - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
Square should not overflow
- LM_USERTOL - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- Lmax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
- Lmax - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- lmem_size - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelInfo
-
- lMemSize - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.fftPadding
-
- lmHor - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
88 - Horizontal landmark.
- Lmin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
- Lmin - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- Lmmin - Class in gov.nih.mipav.model.algorithms
-
To run self tests in another module put:
if (testMode) {
new FitAll();
setCompleted(false);
return;
}
class FitAll extends Lmmin {
public FitAll() {
super();
}
public void fitToFunction(double x[], double fvec[], int info[]) {
return;
}
}
- Lmmin() - Constructor for class gov.nih.mipav.model.algorithms.Lmmin
-
- Lmmin(int, int) - Constructor for class gov.nih.mipav.model.algorithms.Lmmin
-
- Lmmin(int, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Lmmin
-
- lmModel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- lmModel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- lmstep(double[], double[], int[], int[], int[], int, double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- lmt_node() - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper.lmt_node
-
- lnButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- Lnchf - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Tells how the result should be represented A '0' will return the result in standard exponential form.
- Lneg - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- LNSEG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- lnsrlb(int, double[], double[], int[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], int, int[], int[], int[], int[], String[], boolean, boolean, String[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- LNSY11(double[][][], double[], int, int, int, boolean, int, int, int[], int[], int[], int[], int[], int[], int[], double, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[][], boolean, boolean[], double[], int[], double[], double[], double[], double[], double, double, double[], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- lo - Variable in class gov.nih.mipav.util.DoubleDouble
-
The low-order component of the double-double precision value.
- LO - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- load() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Loads the mouse actions as an object file.
- load() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Loads the mouse actions as an object file.
- load() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Calls a file chooser then loads the quad mesh from that file.
- load(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- load(RandomAccessFile) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelCollapseRecord
-
Support for loading the collapse records from a binary file.
- load(RandomAccessFile) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Support for loading the collapse records from a binary file.
- load(Reader) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- load(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- LOAD_BLANK - Static variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- LOAD_DEFAULT - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Loads default for this dialog
- load_forest_filename - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- LOAD_FROM_FILE - Static variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- LOAD_FROM_FRAME - Static variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- load_images(FileJPEG2000.dircnt_t, String) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- LOAD_PROFILE - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Loads profile for this dialog
- loadAllImageJVOIsFrom(String, boolean, VOIVector, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
This method loads all ImageJ VOIs to the active image from a given directory.
- loadAllMatrixComand - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- loadAllVOIs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
This method loads all VOIs to the active image from the default VOI directory for that image.
- loadAllVOIs(boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method loads all VOIs to the active image from the default VOI directory for that image.
- loadAllVOIsFrom(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
This method loads all VOIs to the active image from a given directory.
- loadAllVOIsFrom(String, boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method loads all VOIs to the active image from a given directory.
- loadAllVOIsFrom(String, boolean, VOIVector, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
This method loads all VOIs to the active image from a given directory.
- loadAnisotropyFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
browses and loads anisotropy file
- loadAnisotropyFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Launches the JFileChooser for the user to select the functional anisotropy file.
- loadAxisDefaults - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
- loadB - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- loadB0MatrixComand - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- loadBandwidths(String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- loadBMatrixFile(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
Loads the BMatrix file.
- loadBMatrixFile(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Loads the BMatrix file.
- loadButton - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- loadButton - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
buttons *
- loadButton - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- loadButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- loadButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- loadButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
buttons *
- loadButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Button enabled when all required images are loaded.
- loadButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Read new multi-histogram widgets from file.
- loadBValGradFileButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- loadCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
- loadClass(String) - Static method in class gov.nih.mipav.model.scripting.ScriptableActionLoader
-
Trys to find and load an action's corresponding class from a list of package prefixes.
- loadClass(String) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- loadClass(String, boolean) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- loadCMesh(RandomAccessFile, ViewJProgressBar, int, int) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
Load the clod mesh from a binary file.
- loadCMesh(RandomAccessFile, ViewJProgressBar, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Load the clod mesh from a binary file.
- loadCMesh(RandomAccessFile, JProgressBar, int, int) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
Load the clod mesh from a binary file.
- loadComponents(Component, String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
- loadConsts(double[][][], double[][][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- loaddat(String, String) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- LoadDataSetNiceContour(String, int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- loadDataThreads - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- loaddatinfo(String, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- loadDefaults() - Method in interface gov.nih.mipav.view.DialogDefaultsInterface
-
Method for loading dialog defaults.
- loadDefaults() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Loads the defaults of profile 0.
- loadDefaults(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Loads default values for gui components in the dialog.
- loadDeformationFieldCommand - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- loadDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- loadDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- loadDiameters(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- loadDoubleVectorFromFile(Vector<Double>, String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- loadDTIColorFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- loadDTIFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Launches the JFileChooser for the user to select the Diffusion Tensor Image.
- loadDTIFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Launches the JFileChooser for the user to select the Diffusion Tensor Image.
- loadDTIStudioPolyline(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileFiberTrack
-
- loadDWICommand - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- loadDWIFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- loadDWIListFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
Launches the JFileChooser for the user to select the Diffusion Weighted Images .path file.
- loadDWIListFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Launches the JFileChooser for the user to select the Diffusion Weighted Images .path file.
- loadDWIMaskFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Launches the JFileChooser for the user to select the Diffusion Weighted Images .path file.
- loadDynamicLib(String, String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Loads a dynamic library of the given name and path and places it in the Java temp directory.
- loadEigenVectorFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
browses and loads eigen vector file
- loadEigenVectorFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Launches the JFileChooser for the user to select the Eigen Vector file..
- loadEValueFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- loadEVFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- loadFAFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- loadFieldDefaults() - Method in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Tries to set the bug report field defaults based on system properties or last-entered data.
- loadFile(JFileChooser) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- loadFile(JTextField) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Loads a user-selected image file.
- loadFileActionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Handles the action event generated by the "Load label file" dialog.
- loadFileActionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
load image files and voi files
- loadFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
load image files and voi files
- loadFinalData(ModelImage, double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- loadForest(int, int, Vector<Vector<Vector<Integer>>>, Vector<Vector<Integer>>, Vector<Vector<Double>>, int, Vector<Vector<Vector<Double>>>, Vector<Double>, Vector<Boolean>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- loadForest(int, int, Vector<Vector<Vector<Integer>>>, Vector<Vector<Integer>>, Vector<Vector<Double>>, Vector<Boolean>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- loadForest(int, int, Vector<Vector<Vector<Integer>>>, Vector<Vector<Integer>>, Vector<Vector<Double>>, Vector<Double>, Vector<Boolean>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- loadForest(int, int, Vector<Vector<Vector<Integer>>>, Vector<Vector<Integer>>, Vector<Vector<Double>>, Vector<Double>, Vector<Vector<Vector<Double>>>, Vector<Boolean>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- loadFromFile(String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- loadFromFile(String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- loadFromFileInternal(BufferedReader) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- loadFromFileInternal(BufferedReader) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- loadFromFileInternal(BufferedReader) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- loadFromFileInternal(BufferedReader) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- loadFromFileInternal(BufferedReader) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- loadFromFileOther(BufferedReader, String, String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- loadGiftiXMLMesh(String, String, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Read Gifti mesh from file.
- loadGM() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Calculates histogram for the gradient magnitude imageA, B.
- loadGMImage(String, String, boolean) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Loads the gradient magnitude image instead of recalculating the image.
- loadGMImage(String, String, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Loads the gradient magnitude image instead of recalculating the image.
- loadImage() - Method in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- loadImage() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- loadImage() - Method in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- loadImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- loadImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Ask the user for an image to load and return it.
- loadImage(Object, ViewJComponentEditImage, boolean, boolean, boolean, double, double, double, double, boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Loads an image into imageB slot of frame.
- loadImageFile(String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Reads in an image icon from either the set of mipav icons or the user's $HOME/mipav/brushes/ directory.
- LOADING_STR - Static variable in class gov.nih.mipav.view.ViewUserInterface
-
String to use as the progress bar loading prefix.
- loadingImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
Load a new ModelImage for the brainsurface flattener scene:
- loadingImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Method to load the mask image.
- loadingImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Load a new ModelImage to use for the 3D Texture display:
- loadingImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Method to load the mask image.
- loadingImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Load a new ModelImage to use for the 3D Texture display:
- loadingSurface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
Load a new surface file for the brainsurface flattener scene:
- loadingSurface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Mask to load the surface image.
- loadLabelsButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- loadLeica(JDialogLoadLeica.LeicaSeries) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
Loads the selected Leica series into a new ViewJFrameImage uses the FileTiff to read each Tiff image and
construct the appropriate model image based on the LeicaSeries attributes which were read in from the text
header.
- loadLUT(boolean, boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method loads the LUT for the active image.
- LoadLUT(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFLookUp
-
Loads the lookup table and generates the inverse, i.e. assumes that
the LUT monotonic.
- loadLUTandTransferFunctionFrom(boolean, String, String, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This method loads the LUT for the active image.
- loadLUTandTransferFunctionFrom(boolean, String, String, boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method loads the LUT for the active image.
- loadLUTandTransferFunctionFrom(ModelImage, ModelStorageBase, boolean, String, String, boolean) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Reads the input LUT (ModelLUT or ModelRGB) from file.
- loadLUTFrom(boolean, String, String, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This method loads the LUT for the active image.
- loadLUTFrom(boolean, String, String, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
This method loads the LUT for the active image.
- loadMaskButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
button *
- loadMaskButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- loadMaskImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- loadMenuItem - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- loadModel(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
Loads the model from the file with ISO-8859-1 charset.
- loadModel(Reader) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
Loads the model from inputReader.
- loadMouseDrivers() - Method in class gov.nih.mipav.view.ViewUserInterface
-
- loadMultiHistograms(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- loadName - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
the name of the loaded brush (used with the above wasLoaded parameter)
- loadNativeLibraries() - Static method in class gov.nih.mipav.util.NativeLibraryLoader
-
Loads the MIPAV native libraries after extracting them.
- loadOK - Variable in class gov.nih.mipav.view.ViewSplashScreen
-
Whether the splash screen was loaded from disk successfully.
- loadOK() - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Method determines whether image loading failed.
- loadPage() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Loads the images for a page into component images and then loads the page.
- loadPage() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Loads the currentPage images see loadPage(int page).
- loadPage(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Loads the images for a page into component images and then loads the page.
- loadPaintBrush(String, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Loads built-in (.gif) or custom (.png) paint brushes based on the last-used paint brush in preferences.
- loadParameters() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Load camera and object viewing parameters.
- loadParams() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
loads heuristic parameter values
- loadParams() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
loads heuristic parameter values
- loadPathFile(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
Loads the .path file.
- loadPathFile(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Loads the .path file.
- loadPixelGrid(AlgorithmNetworkSnake.PixelGrid) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- loadPixels(ArrayList<AlgorithmNetworkSnake.Pixel>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- loadPlugin(String) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
- loadPlugin(String, Object, String) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
- loadPluginClass(String) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
- loadPluginClass(String, Object, String) - Static method in class gov.nih.mipav.plugins.PluginUtil
-
- LoadPly_FaceAux - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- LoadPly_FaceAux() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- LoadPly_TristripAux - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- LoadPly_TristripAux() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_TristripAux
-
- LoadPly_VertAux - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- LoadPly_VertAux() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_VertAux
-
- loadPlyAsciiMesh(File, ModelImage, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Read a TriMesh from a Ply ascii file.
- loadPlyAsciiMesh(File, ModelImage, int, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- loadPolyline() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- loadPositions(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- loadppftfilter(int[], double[][][][], String, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- loadPreferences() - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Loads the graph preferences file from the Preferences.grtPreferencesDir directory.
- loadProfile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Parses through the profile in the MIPAV preferences to
determine which Supplement 55 tags are selected, which
public tags exists (and were selected), and which private
tags exist (and were selected).
- loadProfile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
Parses through the profile in the MIPAV preferences to
determine which tags were selected and set them correctly
in the respective panels.
- loadProfiles() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Loads profile names that are available for the dialog
- loadProstateMask() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- loadQMesh(RandomAccessFile, ViewJProgressBar, int, int) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Load the quad mesh from a binary file.
- loadResampledImage(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Resamples an image and loads it into the imageB slot.
- loadSamplePlanes(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- loadsaveLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- loadsavePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- LoadShapes(CAAMShapeCollection, Vector<ModelImage>, int, boolean, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Load all training shapes from prostate image vector VOIs.
- LoadShapes(Vector<String>, CAAMShapeCollection, int, boolean, double, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Loads (and preprocess) all training shapes.
- loadShared() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- LoadState() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- loadSTLAsciiMesh(File, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Load the STL ASCII file.
- loadSTLBinaryMesh(File, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Load the STL ASCII file.
- loadSTLBinaryMesh(File, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- loadSTLBinaryMesh(File, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- loadSTLBinaryMesh(File, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- loadSTLBinaryMesh(File, ModelImage, int, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- loadSTLBinaryMesh(File, ModelImage, int, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- loadSTLBinaryMesh(File, ModelImage, int, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- loadT2Command - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
button commands
- loadT2File() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- loadT2File() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- loadTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- loadTagBuffer(int) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Setups the allocation of memory for the byte buffer to load tags.
- loadTMesh(RandomAccessFile, ViewJProgressBar, int, int, boolean) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Load the triangle mesh from a binary file.
- loadTMesh(RandomAccessFile, ViewJProgressBar, int, int, boolean, MaterialState, float[], float[], float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Load the TriMesh from a binary file.
- loadTMesh(RandomAccessFile, JProgressBar, int, int) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Load the triangle mesh from a binary file.
- loadTractFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Launches the JFileChooser for the user to select the tract file.
- loadType - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
are we loading from frame, file, or blank.
- loadValue - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- loadVisualizationButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Load button for the opacity transform function.
- loadVisualizationDataFrom(boolean, String, String, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
This method loads the LUT and opacity transfer function for the active image.
- loadVisualizationSettings(TransferFunction, TransferFunction) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Loads visualization settings for this image.
- loadVRMLMesh(RandomAccessFile, ViewJProgressBar, int, int, boolean) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Load the triangle mesh from a VRML file specifically written by MIPAV!.
- loadVRMLMesh(RandomAccessFile, ViewJProgressBar, int, int, boolean, float[], float[], float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Load the triangle mesh from a VRML file specifically written by MIPAV.
- loadVTKLegacyMesh(RandomAccessFile, ViewJProgressBar, int, int, boolean, String) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- loadVTKLegacyMesh(RandomAccessFile, ViewJProgressBar, int, int, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Load legacy VTK mesh.
- loadVTKLegacyPolyline(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileFiberTrack
-
- loadVTKXMLMesh(String, ViewJProgressBar, int, int, boolean, String, String) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- loadVTKXMLMesh(String, String, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Read VTK mesh from file.
- loc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- loc - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< patch options.
- loc_ras - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
124 1 byte RAS letter of image location.
- Local - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- local_column_bounds_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- local_jacobians - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProbeResults
-
- local_numeric_jacobians - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProbeResults
-
- local_parameterization() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- local_parameterization_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- local_parameterization_jacobian_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- local_parameterization_ownership - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemOptions
-
- local_parameterizations_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientChecker
-
- local_parameterizations_to_delete_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- local_params_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- local_size_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- local_size_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- localAppTitle - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Local application entity of the
- localArrayListFlavor - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler
-
DOCUMENT ME!
- localArrayListType - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler
-
DOCUMENT ME!
- localCoarseGradient - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- localCosts - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- localCosts - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- localImageExtents - Variable in class gov.nih.mipav.view.PatientSlice
-
image extents in the local coordinate system:.
- localImageExtents - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Extents of the 3D image.
- localImageExtents - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
imageActive extents in the local (Patient) coordinate system:.
- LocalIntensityOrderPattern - Class in gov.nih.mipav.model.algorithms
- LocalIntensityOrderPattern() - Constructor for class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- LocalIntensityOrderPattern.tliop - Class in gov.nih.mipav.model.algorithms
-
- LocalIntensityOrderPattern.VlLiopDesc - Class in gov.nih.mipav.model.algorithms
-
- localizeExtremumViaQuadraticFit(int[], int, int, int, int, int, ModelImage[], double, double, int, double, int) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- localizeFrame - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- locall - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< size of the video.
- locall - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- locall_mask - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< coordinates of top-left of all patches.
- locall_mask - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- LocallyParameterizedCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.LocallyParameterizedCostFunction
-
- LocallyParameterizedCostFunction(int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.LocallyParameterizedCostFunction
-
- LocallyParameterizedCostFunction(int, int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.LocallyParameterizedCostFunction
-
- LocalParameterization() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LocalParameterization
-
- LocalParameterizationJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- localROI - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.EigenQuaternionParameterization
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.HomogeneousVectorParameterization
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.IdentityParameterization
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LocalParameterization
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.QuaternionParameterization
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadLocalParameterization
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MatrixParameterization
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PolynomialParameterization
-
- LocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TestParameterization
-
- localTime - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
newmsWait = msWait - msElapsed is passed to the sleep function.
- localTime - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
newmsWait = msWait - msElapsed is passed to the sleep function.
- localTime2 - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- localTime2 - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- localToGlobal(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- LocalToPatient(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
- LocalToPatient(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- LocalToPatient(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- localToScannerCoords(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Converts the input point from local coordinates used to display the object in the volume renderer to scanner coordinates.
- LocalToScreen(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- LocalToScreen(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- LocalToScreen(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
LocalToScreen converts a point from local coordinates to screen coordinates.
- localToVolumeCoords(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Converts the input point from local coordinates used to display the object in the volume renderer into volume-index coordinates.
- LocalVolumeVOI(Polyline, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- LocalVolumeVOIVector() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOIVector
-
- locate_loops() - Method in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- locateDialog() - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Setting location of window-level adjustment panel based on the amount of space available near the image window.
- locateImageTag(int, int, int) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Locates a DICOM image beginning at the given offset.
- locateVOIPoint(int, int, int, int, int, int) - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Sets the point at (xP,yP,zP).
- location - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
- location - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- location - Variable in class gov.nih.mipav.model.file.FileIO.OrientStatus
-
DOCUMENT ME!
- location - Variable in class gov.nih.mipav.model.file.FileMinc
-
TODO: THIS VARIABLE MUST BE REMOVED!
- locationCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- locationEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- locationField - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- locationFilterPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- locationPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- locations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- locations - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.SimpleColorMap
-
- locationX - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- locationY - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- locationZ - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- LOCK_PROGRESS_MESSAGE - Static variable in class gov.nih.mipav.view.ViewJProgressBar
-
Constant indicating whether to lock the message string so that
other algorithms will not change this (sub-algorithms)
- lockAll() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
locks all masks
- lockAllButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
lock all masks checkbox *
- locked - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
- lockPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
lock panel
- lockSize(JFrame) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Only allow resizing the frame horizontally.
- lockStatus - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Locking status of the image.
- locyx - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< number of columns in the video frame.
- locyx_mask - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< (y,x) coordinates of top-left of each patch.
- locz - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< patch mask depending on pixel variance.
- LODMesh - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- LODMesh(int, int, int[][], Vector3f[], int[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- LODMesh.Edge - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- LODMesh.Neighbor - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- LODMesh.NEList - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- LODMesh.PriorityQueue - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- LODMesh.PriorityQueue.HeapNode - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- LODMesh.Quadric - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- LODMesh.Triangle - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- LODMesh.Vertices - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- log - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- log() - Method in class gov.nih.mipav.util.DoubleDouble
-
For x > 0, ratio = (x-1)/(x+1), log(x) = 2(ratio + ratio**3/3 + ratio**5/5 + ...)
- Log() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Takes the natural logarithm (base e=2.71..) of each matrix element.
- Log() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Takes the natural logarithm of each element.
- LOG - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- LOG - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- LOG_TAB - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- LOG_TAB - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Logging Tab.
- log_to_stdout_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LoggingCallback
-
- log1p(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- LOG1P - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- log2(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGCIE
-
- log2(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- log2(double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- log2(double) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- log2(double) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- log2(double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- log2(double) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- log2(double) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- log2(double) - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- log2(double) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- log2(double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- log2(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- log2(int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- logAlgorithm - Variable in class gov.nih.mipav.view.Preferences.LogConfig
-
- logBiasFieldControlPointLattice - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- logBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Log transformed data.
- logButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- logCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- logCheckBox - Variable in class gov.nih.mipav.view.JPanelHistogram
-
turns log display on/off
- logCheckBoxA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
The histogram log view Check box.
- logCheckBoxA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
The histogram log view check box.
- logCheckBoxA - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- logCheckBoxA - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- logCheckBoxB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
The histogram log view Check box.
- logCheckBoxB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
The histogram log view check box.
- logCheckBoxB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- logCheckBoxB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- logComms - Variable in class gov.nih.mipav.view.Preferences.LogConfig
-
- logConfig - Static variable in class gov.nih.mipav.view.Preferences
-
The current logging configuration
- LogConfig() - Constructor for class gov.nih.mipav.view.Preferences.LogConfig
-
- logdet(double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- logdetiid(libdt.Mat, double, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- logDisplayButton - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- logDisplayButton - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- logDisplayCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
private JPanel optionsPanel;.
- logFile - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- logFile - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- logFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- logFileButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- logFileIO - Variable in class gov.nih.mipav.view.Preferences.LogConfig
-
- logFilename - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- logFileName - Static variable in class gov.nih.mipav.view.LogStdStreams
-
The name of the output log file.
- logFileText - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- logFileText - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
The text of the log process to be written to file.
- logFlag - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Whether to transform the histogram data by log10.
- logFlag - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Whether to transform the histogram data by log10.
- loggabor(double, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- loggausspdf(double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- logger - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- logger - Variable in class gov.nih.mipav.model.GaussianKernelFactory
-
- logging_callback - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- logging_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- logging_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- LoggingCallback(CeresSolver.MinimizerType, boolean) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LoggingCallback
-
- LoggingType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.LoggingType
-
- logicalOperation - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- logicalOperation - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- logicalOptionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
panels
- logistic_conjugate_loss - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- logistic_dca_update - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- logistic_loss - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- logistic_loss_derivative - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- logL(double[][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
-
- logL_k(int, double[][], double[][][], boolean) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
-
- LogL16Decompresser(byte[], byte[], int, int) - Method in class gov.nih.mipav.model.file.FileSVS
-
- LogL16Decompresser(byte[], byte[], int, int) - Method in class gov.nih.mipav.model.file.FileTiff
-
- LogLevel(int) - Constructor for enum gov.nih.mipav.view.Preferences.LogLevel
-
- loglike(double[], AlgorithmGaussianMixtureModelEM.SubSig, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- loglike(Vector<libdt.Mat>, libdt.Mat, boolean) - Method in class gov.nih.mipav.model.algorithms.libdt.DytexKalmanFilter
-
- loglike_internal(libdt.Dytex, Vector<libdt.Mat>, libdt.Mat, int, libdt.Mat[], libdt.Mat, libdt.Mat[], boolean, libdt.kf_mode) - Method in class gov.nih.mipav.model.algorithms.libdt.DytexKalmanFilter
-
- LogLuv24Decompresser(byte[], byte[], int, int) - Method in class gov.nih.mipav.model.file.FileSVS
-
- LogLuv24Decompresser(byte[], byte[], int, int) - Method in class gov.nih.mipav.model.file.FileTiff
-
- LogLuv32Decompresser(byte[], byte[], int, int) - Method in class gov.nih.mipav.model.file.FileSVS
-
- LogLuv32Decompresser(byte[], byte[], int, int) - Method in class gov.nih.mipav.model.file.FileTiff
-
- logMagDisp - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Boolean telling if log magnitude display is used for the data buffer
- logMagDisplay - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
If true display log10 of 1 + magnitude.
- logMagDisplay - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
If true display log10 of 1 + magnitude.
- logMagDisplay - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
If true display log10 of 1 + magnitude.
- logMagDisplay - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- logMagDisplay - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- logMagDisplay - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- logMagDisplay - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Flag for displaying logMag.
- logMagDisplay - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- logMagDisplay - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- logMagDisplay - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- logMagDisplay - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Flag indicating whether or not that the image should be displayed in Log scale.
- logMagDisplay - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Flag indicating whether or not that the image should be displayed in Log scale.
- logMagDisplay - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- logMagDisplay - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- logMinor - Variable in class gov.nih.mipav.view.Preferences.LogConfig
-
- logModel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Model where data is stored for the table.
- logmulexp(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- logo - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- logOffset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
If minimum value of shrunken buffer < 1.0f, amount that must be added to make it 1.0f.
- logOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- logPane - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
holds output log; updated as processed.
- LOGPI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- logprop - Static variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- LOGRANK - gov.nih.mipav.model.algorithms.StochasticForests.SplitRule
-
- logrankScores(Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- logScale - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- logScaleCheckboxX - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- logScaleCheckboxY - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- logScripting - Variable in class gov.nih.mipav.view.Preferences.LogConfig
-
- LogStdStreams - Class in gov.nih.mipav.view
-
Title:
- LogStdStreams(FileOutputStream, boolean) - Constructor for class gov.nih.mipav.view.LogStdStreams
-
Private constructor to create PrintStream an redirect standard streams.
- logStream - Static variable in class gov.nih.mipav.view.LogStdStreams
-
The only instance of this class.
- logsum(double[]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- logsum(double[][]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- logsumexp(double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- logsumexp(double[][], int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- logT - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace
-
DOCUMENT ME!
- logTable - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Table holding log of statistics calculated.
- logtrick(libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- logWriting(File) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
convienience method to add the filename to the log-string.
- LONG - gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
A signed or unsigned integer in 2's complement is stored in the tag's value.
- LONG - gov.nih.mipav.model.file.FileSVS.Type
-
32 bit unsigned, 4 bytes like C
- LONG - gov.nih.mipav.model.file.FileTiff.Type
-
32 bit unsigned, 4 bytes like C
- LONG - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type signed long integer (64 bits per voxel).
- LONG - Static variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- LONG - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- LONG - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- LONG - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type signed long integer (64 bits per voxel).
- LONG_FLOAT - Static variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- LONG_STRING - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
A string with VR "OL" is stored in the tag's value.
- LONG_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type signed long.
- LONG_WAIT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- LongComment - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- LongDesc() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
Get the console mode long description
- longitudinalAnatomicalReference - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- longitudinalAnatomicalReference - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- longPairs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- longToBytes(long, boolean, byte[]) - Static method in class gov.nih.mipav.model.file.FileBase
-
converts from long to bytes
- LongToIntPair(long, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- longValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Returns the value of the specified number as a long.
- look_nbits - Variable in class gov.nih.mipav.model.file.libjpeg.d_derived_tbl
-
- look_sym - Variable in class gov.nih.mipav.model.file.libjpeg.d_derived_tbl
-
- lookdown - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- lookdown - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- lookleft - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- lookleft - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- lookright - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- lookright - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- lookTable_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- lookup - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- lookup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- lookUp27(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Copy the source data to temporary storage in order to avoid redundant
array accesses.
- lookUp5(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Copy the source data to temporary storage in order to avoid redundant
array accesses.
- lookUp7(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Copy the source data to temporary storage in order to avoid redundant
array accesses.
- lookUp9(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Copy the source data to temporary storage in order to avoid redundant
array accesses.
- LOOLD - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- Loop(LSCM.Mesh, LSCM.HalfEdge) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Loop
-
- loopBandSpacing() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- loopBandSpacingReverse() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- loops() - Method in class gov.nih.mipav.model.algorithms.LSCM.Boundary
-
- loops() - Method in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- LOQSB - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- lorentz(double) - Method in class gov.nih.mipav.model.algorithms.FitLorentz
-
Lorentz distribution evaluated at a point with given parameters
- LORENTZ_FIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- LORENTZ_FIT - Static variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- lorentzFit - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- LORENZ_SYSTEM - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- LORENZ_SYSTEM - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- loss - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
< Regularizer value.
- loss_derivativeFunction(int, double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- loss_function() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- loss_function_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- loss_function_ownership - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemOptions
-
- loss_function_ref_count_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- lossDerivativeFn - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- lossFn - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Frequency of diagnostic.
- lossFunction(int, double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- LossFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LossFunction
-
- LossFunctionArctanLoss() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LossFunctionCauchyLoss() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LossFunctionComposedLoss() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LossFunctionHuberLoss() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LossFunctionLossFunctionWrapper() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LossFunctionScaledLoss() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LossFunctionSoftLOneLoss() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LossFunctionTolerantLoss() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LossFunctionTrivialLoss() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LossFunctionTukeyLoss() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- LossFunctionWrapper(CeresSolver.LossFunction, CeresSolver.Ownership) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LossFunctionWrapper
-
- lossy - Variable in class gov.nih.mipav.model.file.FileDicom
-
JPEG compression may be lossy or lossless.
- lostOwnership(Clipboard, Transferable) - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter
-
- LOSUB - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- LOTES - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- loThres - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Lower and upper threshold values used in the generation of the edge map.
- loThres - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- LOTKA_VOLTERRA_PREDATOR_PREY - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- LOTKA_VOLTERRA_PREDATOR_PREY - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- lotNumber - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter.FilterType
-
- low - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- low - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tgt_node_t
-
- LOW - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
Flag indicating low priority transfer.
- low_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- low_rank_inverse_hessian_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LBFGS
-
- low0Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low0TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low1Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low1TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low2Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low2TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low3Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low3TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low4Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low4TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low5Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low5TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low6Label - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- low6TextField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- lowBounds - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask
-
- lowBounds - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- lowBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- lower - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
DOCUMENT ME!
- lower - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
DOCUMENT ME!
- lower - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- lower - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
DOCUMENT ME!
- lower - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
DOCUMENT ME!
- lower - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- lower - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- lower - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- lower_bound - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.ContinuousWavelet
-
- LOWER_BOUND - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- LOWER_BOUND - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- lower_bounds_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- LOWER_LEFT - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
- LOWER_MIDDLE - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
- LOWER_RIGHT - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
- LOWER_TRIANGULAR - gov.nih.mipav.model.algorithms.CeresSolver2.StorageType
-
- LowerBoundForParameter(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- lowerDeltaSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Slider which adjusts the lower bound of the region grow.
- lowerDeltaTF - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Text field containing the lower bound of the region grow.
- loweredbevel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Panel Border view.
- loweredbevel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Panel Border view.
- lowerIncompleteGamma - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
- lowerLeftCorner - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- lowerLeftCorner - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- lowerLeftCorner - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- lowerLevel - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- lowerLimit - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
The lower limit of the exclusion
- lowerLimitB - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
- lowerLimitG - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
- lowerLimitR - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
- lowerMid - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowerMidB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowerMidG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowerMidR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowerPanel - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- lowerRightCorner - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- lowerRightCorner - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- lowerRightCorner - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- lowerThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
handling of intensity threshold.
- lowerThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- lowestForbiddenLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- lowestForbiddenLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- lowestForbiddenLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- lowestForbiddenNNDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- lowestForbiddenNNDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- lowestForbiddenNNDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- lowestForbiddenNNDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- lowestForbiddenNNDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- lowestForbiddenNNDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- lowestForbiddenText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- lowestForbiddenText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- lowestForbiddenText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- lowestX - Variable in class gov.nih.mipav.model.file.FileAfni
-
Dataset ordered bounding box in mm.
- lowestY - Variable in class gov.nih.mipav.model.file.FileAfni
-
Dataset ordered bounding box in mm.
- lowestZ - Variable in class gov.nih.mipav.model.file.FileAfni
-
Dataset ordered bounding box in mm.
- lowGain - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- lowGain - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- lowGain - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- lowIdx(int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- lowPass - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- lowPass - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- lowPass - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- lowPass - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- lowPass - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- LOWPASS - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- LOWPASS - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- LOWPASS - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- LOWPASS - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- LOWPASS - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- LOWPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- LOWPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- LOWPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
A lowpass filter will be applied to the source image
- LOWPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- LOWPASS - Static variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- lowpassFilter(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- lowRadius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- lowRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- LowRankInverseHessian(int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- lowSetFromField - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowSetFromFieldB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowSetFromFieldG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowSetFromFieldR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowSliderB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowSliderField - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowSliderFieldB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowSliderFieldG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowSliderFieldR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowSliderG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowSliderR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- lowThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCannyEdgeDetection
-
- lowThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
DOCUMENT ME!
- lowTruncated - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- lowTruncated - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- lowTruncated - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- lowValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
DOCUMENT ME!
- lowX - Variable in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- lowX() - Method in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- lowXmm - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- lowXmm - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- lowY - Variable in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- lowY() - Method in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- lowYmm - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- lowYmm - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- lowZ - Variable in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- lowZ() - Method in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- lowZmm - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- lowZmm - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- LP - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- lps - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
- LPS - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
A patient-based right-handed coordinate frame, with ordered basis vectors pointing towards left, posterior, and
superior, respectively.
- LPSOrigin - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
The MIPAV origin value which is obtained from qoffset_x, qoffset_y, and qoffset_z
when qform_code > 0 or from srow_x[3], srow_y[3], and srow_z[3] when sform_code > 0.
- LPSOrigin2 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
When qform_code > 0 and sform_code > 0, LPSOrigin derives the MIPAV origin from
the qform information and LPSOrigin2 derives MIPAV origin from the sform
information.
- LPST - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
Like LPS, but with time along the fourth axis.
- LQ - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- LQSBF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- LQSBG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- LQT - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- LQT - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- LQT2 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- LQT2 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- lrb() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- lru_delete(LIBSVM.Cache.head_t) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Cache
-
- lru_delete(Cache.head_t) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache
-
- lru_head - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Cache
-
- lru_head - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache
-
- lru_insert(LIBSVM.Cache.head_t) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Cache
-
- lru_insert(Cache.head_t) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache
-
- LS - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- LS(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- LS(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- LS2PI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- LSCM - Class in gov.nih.mipav.model.algorithms
-
Port of LSCM, Least squares conformal mapping
This package includes the prototype code for implementing least squares conformal maps.
- LSCM(String, String) - Constructor for class gov.nih.mipav.model.algorithms.LSCM
-
- LSCM.Boundary - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Edge - Class in gov.nih.mipav.model.algorithms
-
- LSCM.EdgeKey - Class in gov.nih.mipav.model.algorithms
-
- LSCM.EdgeTrait - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Face - Class in gov.nih.mipav.model.algorithms
-
- LSCM.FaceEdgeIterator - Class in gov.nih.mipav.model.algorithms
-
- LSCM.FaceHalfedgeIterator - Class in gov.nih.mipav.model.algorithms
-
- LSCM.FaceTrait - Class in gov.nih.mipav.model.algorithms
-
- LSCM.FaceVertexIterator - Class in gov.nih.mipav.model.algorithms
-
- LSCM.FormTrait - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Graph - Class in gov.nih.mipav.model.algorithms
-
- LSCM.HalfEdge - Class in gov.nih.mipav.model.algorithms
-
- LSCM.HalfEdgeTrait - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Homology - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Loop - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Mesh - Class in gov.nih.mipav.model.algorithms
-
- LSCM.MeshEdgeIterator - Class in gov.nih.mipav.model.algorithms
-
- LSCM.MeshFaceIterator - Class in gov.nih.mipav.model.algorithms
-
- LSCM.MeshHalfEdgeIterator - Class in gov.nih.mipav.model.algorithms
-
- LSCM.MeshVertexIterator - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Parser - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Point - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Point2 - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Token - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Trait - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Triplet - Class in gov.nih.mipav.model.algorithms
-
- LSCM.Vertex - Class in gov.nih.mipav.model.algorithms
-
- LSCM.VertexEdgeIterator - Class in gov.nih.mipav.model.algorithms
-
- LSCM.VertexFaceIterator - Class in gov.nih.mipav.model.algorithms
-
- LSCM.VertexInHalfedgeIterator - Class in gov.nih.mipav.model.algorithms
-
- LSCM.VertexOutHalfedgeIterator - Class in gov.nih.mipav.model.algorithms
-
- LSCM.VertexTrait - Class in gov.nih.mipav.model.algorithms
-
- LSCM.VertexVertexIterator - Class in gov.nih.mipav.model.algorithms
-
- lsCompleted - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
DOCUMENT ME!
- lsCompleted - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- LseCurvatureFlow2 - Class in gov.nih.mipav.model.algorithms.levelset
-
This class implements the curvature flow filter for 2D images
using a finite-difference-based solver for the partial differential
equation:
du/dt = |grad(u)|*divergence(grad(u)/|grad(u)|)
where u(x,y,t) is the evolved image at time t, du/dt is the time
derivative of u, and grad(u) is the gradient of u with respect to the
spatial variables.
- LseCurvatureFlow2(int, int, float, float, float[], boolean[], float, int) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseCurvatureFlow2
-
Creates a new LseCurvatureFlow2 object.
- LseCurvatureFlow3 - Class in gov.nih.mipav.model.algorithms.levelset
-
This class implements the curvature flow filter for 3D images
using a finite-difference-based solver for the partial differential
equation:
du/dt = |grad(u)|*divergence(grad(u)/|grad(u)|)
where u(x,y,z,t) is the evolved image at time t, du/dt is the time
derivative of u, and grad(u) is the gradient of u with respect to the
spatial variables.
- LseCurvatureFlow3(int, int, int, float, float, float, float[], boolean[], float, int) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseCurvatureFlow3
-
Creates a new LseCurvatureFlow3 object.
- LseEvolve2 - Class in gov.nih.mipav.model.algorithms.levelset
-
The abstract base class for level-set evolution of 2D images.
- LseEvolve2(int, int, float, float, float[], boolean[], float, int) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
Create a new level-set evolver for 2D images.
- LseEvolve3 - Class in gov.nih.mipav.model.algorithms.levelset
-
The abstract base class for level-set evolution of 3D images.
- LseEvolve3(int, int, int, float, float, float, float[], boolean[], float, int) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
Create a new level-set evolver for 3D images.
- LseFastMarch - Class in gov.nih.mipav.model.algorithms.levelset
-
The abstract base class for fast-marching methods of images.
- LseFastMarch(int, float[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Create a new fast-marching object, where the speed varies per image
element.
- LseFastMarch(int, float, int[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Create a new fast-marching object, where the speed is constant for all
image elements.
- LseFastMarch2 - Class in gov.nih.mipav.model.algorithms.levelset
-
The fast-marching method for 2D images.
- LseFastMarch2(int, int, float[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
Create a new fast marching object for a 2D image.
- LseFastMarch2(int, int, float, int[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
Create a new fast marching object for a 2D image.
- LseFastMarch3 - Class in gov.nih.mipav.model.algorithms.levelset
-
The fast-marching method for 3D images.
- LseFastMarch3(int, int, int, float[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
Create a new fast marching object for a 3D image.
- LseFastMarch3(int, int, int, float, int[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
Create a new fast marching object for a 3D image.
- LseGaussianBlur2 - Class in gov.nih.mipav.model.algorithms.levelset
-
This class implements the Gaussian blur filter for 2D images
using a finite-difference-based solver for the partial differential
equation:
du/dt = Laplacian(u)
where u(x,y,t) is the evolved image at time t, du/dt is the time
derivative of u, and Laplacian(u) = u_xx + u_yy, a sum of second-order
derivatives of u.
- LseGaussianBlur2(int, int, float, float, float[], boolean[], float, int) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseGaussianBlur2
-
Creates a new LseGaussianBlur2 object.
- LseGaussianBlur3 - Class in gov.nih.mipav.model.algorithms.levelset
-
This class implements the Gaussian blur filter for 3D images
using a finite-difference-based solver for the partial differential
equation:
du/dt = Laplacian(u)
where u(x,y,z,t) is the evolved image at time t, du/dt is the time
derivative of u, and Laplacian(u) = u_xx + u_yy + u_zz, a sum of
second-order derivatives of u.
- LseGaussianBlur3(int, int, int, float, float, float, float[], boolean[], float, int) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseGaussianBlur3
-
Creates a new LseGaussianBlur3 object.
- LseGeodesicActiveContour2 - Class in gov.nih.mipav.model.algorithms.levelset
-
A level-set evolver for 2D images.
- LseGeodesicActiveContour2(int, int, float, float, float[], boolean[], float, int, float[], float[][], float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour2
-
Create a new level-set evolver for 2D images.
- LseGeodesicActiveContour3 - Class in gov.nih.mipav.model.algorithms.levelset
-
A level-set evolver for 3D images.
- LseGeodesicActiveContour3(int, int, int, float, float, float, float[], boolean[], float, int, float[], float[][], float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour3
-
Create a new level-set evolver for 2D images.
- LseGradientAnisotropic2 - Class in gov.nih.mipav.model.algorithms.levelset
-
This class implements the gradient anistropic curvature flow
filter for 2D images using a finite-difference-based solver for the
partial differential equation:
du/dt = divergence(exp(-0.5*|grad(u)|^2/(k^2*average(|grad(u)|^2))*grad(u))
where u(x,y,t) is the evolved image at time t, du/dt is the time
derivative of u, and grad(u) is the gradient of u with respect to the
spatial variables.
- LseGradientAnisotropic2(int, int, float, float, float[], boolean[], float, int, float) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic2
-
Creates a new LseCurvatureFlow2 object.
- LseGradientAnisotropic3 - Class in gov.nih.mipav.model.algorithms.levelset
-
This class implements the gradient anistropic curvature flow
filter for 3D images using a finite-difference-based solver for the
partial differential equation:
du/dt = divergence(exp(-0.5*|grad(u)|^2/(k^2*average(|grad(u)|^2))*grad(u))
where u(x,y,z,t) is the evolved image at time t, du/dt is the time
derivative of u, and grad(u) is the gradient of u with respect to the
spatial variables.
- LseGradientAnisotropic3(int, int, int, float, float, float, float[], boolean[], float, int, float) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic3
-
Creates a new LseCurvatureFlow3 object.
- LseMinHeap - Class in gov.nih.mipav.model.algorithms.levelset
-
A class that encapsules a min-heap data structure.
- LseMinHeap(int) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseMinHeap
-
Create a new min-heap data structure.
- LseMinHeap.Record - Class in gov.nih.mipav.model.algorithms.levelset
-
Each heap record stores a numeric value, the index of the record
within the records array, and a generator which acts as an
identifier for the application to use to store information about how
the numeric value was generated in the application.
- LseParameters - Class in gov.nih.mipav.model.algorithms.levelset
-
This class is a simple wrapper for the parameters that occur in the
level-set evolution, which is controlled by the partial differential
equation:
du/dt = -a*A(x).grad(u) - b*P(x)*|grad(u)| + c*Z(x)*K(u)*|grad(u)|
+ d*Laplacian(u)
where u(x,t) is the evolved image at time t, du/dt is the time derivative
of u, grad(u) is the gradient of u with respect to the x-variable, A(x) is
the advection term with advection weight a, P(x) is the propagation
term with propagation weight b, Z(x) is the curvature term with
curvature weight c, K(u) is the mean curvature of level curves
(in 2D) or surfaces (in 3D), and Laplacian(u) is the sum of second-order
unmixed derivatives with Laplacian weight d.
- LseParameters() - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Creates a new LseParameters object.
- LsePdeFilter - Class in gov.nih.mipav.model.algorithms.levelset
-
The abstract base class for finite-difference-based solvers for partial
differential equations.
- LsePdeFilter(int, float[], float, int) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
Creates a new PDE filter object.
- LsePdeFilter2 - Class in gov.nih.mipav.model.algorithms.levelset
-
The abstract base class for finite-difference-based solvers for partial
differential equations in 2D.
- LsePdeFilter2(int, int, float, float, float[], boolean[], float, int) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Create a new PDE filter object for 2D images.
- LsePdeFilter3 - Class in gov.nih.mipav.model.algorithms.levelset
-
The abstract base class for finite-difference-based solvers for partial
differential equations in 3D.
- LsePdeFilter3(int, int, int, float, float, float, float[], boolean[], float, int) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Create a new PDE filter object for 3D images.
- LseSegGeodesicActiveContour2 - Class in gov.nih.mipav.model.algorithms.levelset
-
A segmenter for 2D images based on the PDE described in
LseGeodesicActiveContour2.
- LseSegGeodesicActiveContour2(int, int, float, float, float[], boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
Create a geodesic-active-contour-based segmenter.
- LseSegGeodesicActiveContour3 - Class in gov.nih.mipav.model.algorithms.levelset
-
A segmenter for 3D images based on the PDE described in
LseGeodesicActiveContour3.
- LseSegGeodesicActiveContour3(int, int, int, float, float, float, float[], boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
Create a geodesic-active-contour-based segmenter.
- LseSegmenter - Class in gov.nih.mipav.model.algorithms.levelset
-
The abstract base class for segmentation via level-set evolution.
- LseSegmenter(int, float[], boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Create a new level-set segmenter object.
- LseSegShapeDetection2 - Class in gov.nih.mipav.model.algorithms.levelset
-
A segmenter for 2D images based on the PDE described in LseShapeDetection2.
- LseSegShapeDetection2(int, int, float, float, float[], boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
Create a shape-detection-based segmenter.
- LseSegShapeDetection3 - Class in gov.nih.mipav.model.algorithms.levelset
-
A segmenter for 3D images based on the PDE described in LseShapeDetection3.
- LseSegShapeDetection3(int, int, int, float, float, float, float[], boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
Create a shape-detection-based segmenter.
- LseSegThreshold2 - Class in gov.nih.mipav.model.algorithms.levelset
-
A segmenter for 2D images based on the PDE described in LseThreshold2.
- LseSegThreshold2(int, int, float, float, float[], boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Create a threshold-based segmenter.
- LseSegThreshold3 - Class in gov.nih.mipav.model.algorithms.levelset
-
A segmenter for 3D images based on the PDE described in LseThreshold3.
- LseSegThreshold3(int, int, int, float, float, float, float[], boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Create a shape-detection-based segmenter.
- LseShapeDetection2 - Class in gov.nih.mipav.model.algorithms.levelset
-
A level-set evolver for 2D images.
- LseShapeDetection2(int, int, float, float, float[], boolean[], float, int, float[], float, float) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseShapeDetection2
-
Create a new level-set evolver for 2D images.
- LseShapeDetection3 - Class in gov.nih.mipav.model.algorithms.levelset
-
A level-set evolver for 3D images.
- LseShapeDetection3(int, int, int, float, float, float, float[], boolean[], float, int, float[], float, float) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseShapeDetection3
-
Create a new level-set evolver for 3D images.
- LseThreshold2 - Class in gov.nih.mipav.model.algorithms.levelset
-
A level-set evolver for 2D images.
- LseThreshold2(int, int, float, float, float[], boolean[], float, int, float[], float, float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseThreshold2
-
Create a new level-set evolver for 2D images.
- LseThreshold3 - Class in gov.nih.mipav.model.algorithms.levelset
-
A level-set evolver for 3D images.
- LseThreshold3(int, int, int, float, float, float, float[], boolean[], float, int, float[], float, float, float, float) - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseThreshold3
-
Create a new level-set evolver for 2D images.
- lsImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- LSM - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Used by the Zeiss LSM 510 Dataserver. extension: .lsm
- LSM_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Used by the Zeiss LSM 510 Dataserver.
- LSMatch - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Algorithm to run from this dialog.
- lsMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- LSMDataConversion(FileInfoLSM, FileInfoImageXML) - Method in class gov.nih.mipav.model.file.FileIO
-
Provides a method of conversion from FileInfoLSM to FileInfoImageXML, by filling the
FileInfoImageXML with sets of chosen image information.
- LSMDataType - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- LSMDataType2 - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- lsPerformed - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- LsqFit - Class in gov.nih.mipav.model.algorithms
-
LsqFit.jl is licensed under the MIT License:
Returns the argmin over x of `sum(f(x).^2)` using the Levenberg-Marquardt
algorithm, and an estimate of the Jacobian of `f` at x.
- LsqFit() - Constructor for class gov.nih.mipav.model.algorithms.LsqFit
-
To run LsqFit() use:
boolean fullTest = true;
if (fullTest) {
FitAll fa = new FitAll();
return;
}
class FitAll extends LsqFit {
public FitAll() {
// nPoints data points, 3 coefficients, and exponential fitting
super();
}
public void fitToFunction(double[] x, double[] residuals) {
return;
}
public void fitToJacobian(double[] x, double[][] jacobian) {
return;
}
public void fitToHessian(double[] x, double[][][] hessian) {
// n,n,m hessian
return;
}
}
- LsqFit(int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.LsqFit
-
- lsqrt(int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- lst - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
In dqawfe number of subintervals needed for the integration.
- lst - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
In dqawfe number of subintervals needed for the integration.
- lstsqr(double[], int, boolean, int, int, int, int, boolean, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- LSUBC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- lsunc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- lsunc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- lsvmin(int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- lt - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- lt(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
Tests whether this value is less than another DoubleDouble value.
- Lt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- Lt(double, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise less than.
- Lt(double, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Less Than - compares a double and a vector.
- Lt(CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise less than.
- Lt(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Less Than - compares a vector and a vector.
- LT - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- LText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- ltsqar(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- lu1DCP(double[][], int, int, int, double, int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1DCP(DoubleDouble[][], int, int, int, DoubleDouble, int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1DPP(double[][], int, int, int, double, int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1DPP(DoubleDouble[][], int, int, int, DoubleDouble, int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1fac(int, int, int, int, int[], double[], double[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1fac(int, int, int, int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1fad(int, int, int, int, int[], double[], double[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], double[], int, double[], int[], int[], double[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1fad(int, int, int, int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], DoubleDouble[], int, DoubleDouble[], int[], int[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1ful(int, int, int, int, int, boolean, int, int, int, int, int[], int[], int[], boolean, double, double[], int, int[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1ful(int, int, int, int, int, boolean, int, int, int, int, int[], int[], int[], boolean, DoubleDouble, DoubleDouble[], int, int[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1gau(int, int, int, int, double, int, int, int[], int, int, int, int[], int[], int[], int[], int[], int[], double[], int[], int[], int[], int[], int[], int[], int[], int, int) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1gau(int, int, int, int, DoubleDouble, int, int, int[], int, int, int, int[], int[], int[], int[], int[], int[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int, int) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1mar(int, int, int, int, boolean, double, double, int, int, int[], int[], int[], double[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1mar(int, int, int, int, boolean, DoubleDouble, DoubleDouble, int, int, int[], int[], int[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1mRP(int, int, int, int, double, int, int, int[], int[], int[], double[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1mRP(int, int, int, int, DoubleDouble, int, int, int[], int[], int[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], DoubleDouble[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1mSP(int, int, int, int, double, int, int[], int[], int[], double[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1mSP(int, int, int, int, DoubleDouble, int, int[], int[], int[], DoubleDouble[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1mxc(int, int, int[], double[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1mxc(int, int, int[], DoubleDouble[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1mxr(int, int, int, int, int, int, double[], int[], int[], int[], int[], int[], int[], int[], int[], int[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1mxr(int, int, int, int, int, int, DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], int[], DoubleDouble[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1or1(int, int, int, int, double, double[], int[], int[], int[], int[], double[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1or1(int, int, int, int, DoubleDouble, DoubleDouble[], int[], int[], int[], int[], DoubleDouble[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1or2(int, int, int, double[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1or2(int, int, int, DoubleDouble[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1or3(int, int, int, int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1or3(int, int, int, int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1or4(int, int, int, int, int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1or4(int, int, int, int, int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1pen(int, int, int, int, int[], int, int, int, int, int[], int[], int[], int[], int[], int[], int[], int, int) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1pen(int, int, int, int, int[], int, int, int, int, int[], int[], int[], int[], int[], int[], int[], int, int) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1pq1(int, int, int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1pq1(int, int, int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1pq2(int, int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1pq2(int, int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1pq3(int, int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1pq3(int, int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1rec(int, boolean, int[], int[], int, double[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1rec(int, boolean, int[], int[], int, DoubleDouble[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu1slk(int, int, int, int[], int[], double[], int[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu1slk(int, int, int, int[], int[], DoubleDouble[], int[], DoubleDouble[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu6chk(int, int, int, double[], int, int[], double[], double[], int[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu6chk(int, int, int, DoubleDouble[], int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu6L(int[], int, int, double[], int, int[], double[], double[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu6L(int[], int, int, DoubleDouble[], int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu6LD(int[], int, int, int, double[], int, int[], double[], double[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu6LD(int[], int, int, int, DoubleDouble[], int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu6Lt(int[], int, int, double[], int, int[], double[], double[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu6Lt(int[], int, int, DoubleDouble[], int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu6mul(int, int, int, double[], double[], int, int[], double[], double[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu6mul(int, int, int, DoubleDouble[], DoubleDouble[], int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu6prt(int, int, double[], double[], int, int[], double[], double[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu6sol(int, int, int, double[], double[], int, int[], double[], double[], int[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu6sol(int, int, int, DoubleDouble[], DoubleDouble[], int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu6U(int[], int, int, double[], double[], int, int[], double[], double[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu6U(int[], int, int, DoubleDouble[], DoubleDouble[], int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu6Ut(int[], int, int, double[], double[], int, int[], double[], double[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu6Ut(int[], int, int, DoubleDouble[], DoubleDouble[], int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu7add(int, int, int, double[], int, int[], double[], int[], int[], int[], int, double[], int[], int[], int[], int[], int[], int[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu7add(int, int, int, DoubleDouble[], int, int[], DoubleDouble[], int[], int[], int[], int, DoubleDouble[], int[], int[], int[], int[], int[], int[], DoubleDouble[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu7cyc(int, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu7cyc(int, int, int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu7elm(int, int, int, double[], int, int[], double[], int[], int, int[], int, double[], int[], int[], int[], int[], int[], int[], int[], int[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu7elm(int, int, int, DoubleDouble[], int, int[], DoubleDouble[], int[], int, int[], int, DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], DoubleDouble[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu7for(int, int, int, int, int, int[], double[], int[], int[], int[], double[], int[], int[], int[], int[], int[], int[], int[], int[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu7for(int, int, int, int, int, int[], DoubleDouble[], int[], int[], int[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], DoubleDouble[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu7rnk(int, int, int, int, double[], int[], int[], int[], int[], double[], int[], int[], int[], int[], int[], int[], int[], int[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu7rnk(int, int, int, int, DoubleDouble[], int[], int[], int[], int[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], DoubleDouble[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu7zap(int, int, int, int[], int, int[], int[], int, double[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu7zap(int, int, int, int[], int, int[], int[], int, DoubleDouble[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lu8rpc(int, int, int, int, int, double[], double[], int, int[], double[], double[], int[], int[], int[], int[], int[], int[], int[], int[], int[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lu8rpc(int, int, int, int, int, DoubleDouble[], DoubleDouble[], int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], int[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lubksb(double[][], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- luchek(int, int, int, double[][], int[], double[], double[], double[], double[], double[], int, int[], double[], double[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- luchek(int, int, int, DoubleDouble[][], int[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- ludcmp(double[][], int, int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- ludlAuxWheel1 - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- ludlMainWheel1Array - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- luinit(int, int, int, double[][], int[], int, int[], double[], int[], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- luinit(int, int, int, DoubleDouble[][], int[], int, int[], DoubleDouble[], int[], DoubleDouble[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- LumaBlue - Variable in class gov.nih.mipav.model.file.FileSVS
-
- LumaBlue - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- LumaBlue - Variable in class gov.nih.mipav.model.file.FileTiff
-
- LumaBlue - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- LumaGreen - Variable in class gov.nih.mipav.model.file.FileSVS
-
- LumaGreen - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- LumaGreen - Variable in class gov.nih.mipav.model.file.FileTiff
-
- LumaGreen - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- LumaRed - Variable in class gov.nih.mipav.model.file.FileSVS
-
- LumaRed - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- LumaRed - Variable in class gov.nih.mipav.model.file.FileTiff
-
- LumaRed - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- luminanceAdaptationAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
DOCUMENT ME!
- lungLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- lungLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- lungLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- lungMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- lungMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- lungMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- lungMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- lungMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- lungMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- LUSOL - Class in gov.nih.mipav.model.structures.jama
-
LUSOL maintains LU factors of a square or rectangular sparse matrix.
- LUSOL() - Constructor for class gov.nih.mipav.model.structures.jama.LUSOL
-
- LUSOLEP - Class in gov.nih.mipav.model.structures.jama
-
LUSOL maintains LU factors of a square or rectangular sparse matrix.
- LUSOLEP() - Constructor for class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lut - Variable in class gov.nih.mipav.model.file.FileHistoLUT
-
The (grayscale) LUT to save.
- lut - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
ModelLUT associated with fileinfo
- lut - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
LUT for pre-processing of dicom file
- lut - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
LUT table renference.
- lut - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- lut - Variable in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
DOCUMENT ME!
- lut - Variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
The grayscale lookup table for the image.
- LUT - gov.nih.mipav.view.Preferences.DefaultDisplay
-
Lookuptable table and associated transfer function
- LUT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileBMP
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileImageXML
-
Lookup Table associated with the file (grayscale).
- LUT - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileIO
-
If a LUT is to be saved with the image it is stored here.
- LUT - Variable in class gov.nih.mipav.model.file.FileJSON
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileLIFF
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileOME
-
The image's lut.
- LUT - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.model.file.FileZVI
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
- LUT - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Reference to the LUT used to display the image.
- LUT - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Reference to the LUT used to display the image.
- LUT - Variable in class gov.nih.mipav.view.JPanelHistogram
-
input LUT, either ModelLUT or ModelRGB
- LUT - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Holds current LUT which dictates colors for vertices.
- LUT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- LUT - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Look-Up-Table Files (*.lut).
- LUT - Variable in class gov.nih.mipav.view.ViewJComponentLUT
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- LUT - Variable in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- lut_ctxno_sc - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- lut_ctxno_zc - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- lut_spb - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- LUT2 - Variable in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- LUTa - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- LUTa - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- LUTa - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- LUTa - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
DOCUMENT ME!
- LUTa - Variable in class gov.nih.mipav.view.JFrameHistogram
-
lut a
- LUTa - Variable in class gov.nih.mipav.view.PatientSlice
-
ModelLUT lookup table for gray-scale ModelImages: imageA lut.
- LUTa - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Reference to LUT for image A.
- LUTa - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
LUT that dictates how the vertices of the quad mesh are colored.
- LUTa - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Lookup table for image.
- LUTa - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Lookup table for image A.
- LUTa - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Lookup table for (intensity) image A.
- LUTa - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Lookup table of the imageA, B.
- LUTa - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Model LUT A.
- LUTa - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
LUT of input image *
- LUTa - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- LUTa - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Lookup table for image A.
- LUTa - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- LUTa - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Reference to LUT for image A and to the default LUT for image A.
- LUTa - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- LUTa - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- LUTa - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- lutAdjustCheckboxA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
LutA table adjust check box.
- lutAdjustCheckboxB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
LutB table adjust check box.
- lutAdjustCheckboxB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME
- lutB - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
lutB
- lutB - Static variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- LUTb - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- LUTb - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- LUTb - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
DOCUMENT ME!
- LUTb - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- LUTb - Variable in class gov.nih.mipav.view.JFrameHistogram
-
lut b
- LUTb - Variable in class gov.nih.mipav.view.PatientSlice
-
ModelLUT lookup table for gray-scale ModelImages: imageB lut.
- LUTb - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Reference to LUT for image B.
- LUTb - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Lookup table for image A.
- LUTb - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Lookup table for (intensity) image B.
- LUTb - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Lookup table of the imageA, B.
- LUTb - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Model LUT B.
- LUTb - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- LUTb - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Lookup table for image B.
- LUTb - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- LUTb - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Reference to LUT for image B and to the default LUT for image B.
- LUTb - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- lutBuffer - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- lutBufferRemapped - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- lutBufferRemapped - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
DOCUMENT ME!
- lutBufferRemapped - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Used to remap the LUT appropriately.
- lutBufferRemappedDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- lutBufferRemappedDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- LUTButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- LUTdest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
LUTa - lookup table for destImage.
- LUTdest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
LUTa - lookup table for destImage.
- LUTdest - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
The LUT for the 2D histogram.
- LUTdest - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
The LUT for the 2D histogram.
- LUTDims - Variable in class gov.nih.mipav.view.ViewJComponentLUT
-
DOCUMENT ME!
- LUTDims - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- lutest(int, int, int, int, int, int[], int[], double[][], double[], double[], double[], double[], double[], int, int[], double[], double[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lutest(int, int, int, int, int, int[], int[], DoubleDouble[][], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], int, int[], DoubleDouble[], DoubleDouble[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lutest_driver() - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- lutest_driver() - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- lutFileName - Variable in class gov.nih.mipav.model.file.FileHistoLUT
-
The file name of the LUT data file.
- LUTIndex - Variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
The LUT index used when chaning the LUT color by clicking on the ViewJComponentLUT.
- lutIndexBuffer - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- lutIndexBuffer - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityRGB
-
DOCUMENT ME!
- lutIndexBuffer - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- LUTIndexBuffer - Variable in class gov.nih.mipav.view.ViewJComponentLUT
-
DOCUMENT ME!
- LUTIndexBuffer - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- lutKind - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- LUTOffset - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- LUTOffset - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- LUTOffset - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- lutPanel - Variable in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
DOCUMENT ME!
- lutRecorder - Variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
LUT recorder.
- LUTS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- LUTS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- lutTablePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
LUT table panel.
- lutTag - Static variable in class gov.nih.mipav.model.file.FileHistoLUT
-
Tag marking the beginning of a LUT data file.
- lutVector - Variable in class gov.nih.mipav.model.file.FileImageXML
-
Vector to store LUT values when reading xml header.
- LUV_data - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- LUV_threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- LUValue(float, float, float) - Constructor for class gov.nih.mipav.model.file.FileImageXML.LUValue
-
Creates a new LUValue object.
- LUValue(float, float, float, float) - Constructor for class gov.nih.mipav.model.file.FileImageXML.LUValue
-
Creates a new LUValue object.
- LUVtoRGB(float[], int, byte[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- lwork - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- lWorkItems - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.WorkDimensions
-
- lwrk - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- LZW - Static variable in class gov.nih.mipav.model.file.FileCZI
-
- lzwCompression - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- lzwCompression - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- lzwCompression - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- lzwDecoder - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- LZWDecompresser(byte[], int, byte[], int, int, int) - Method in class gov.nih.mipav.model.file.FileSVS
-
Method to decode LZW compressed data.
- LZWDecompresser(byte[], int, byte[], int, int, int) - Method in class gov.nih.mipav.model.file.FileTiff
-
Method to decode LZW compressed data.
M
- m - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.Options
-
- m - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- m - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CellInfo
-
- m - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingIterationCallback
-
- m - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
integer scalar containing the number of data points.
- m - Variable in class gov.nih.mipav.model.algorithms.curev
-
- m - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- m - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- m - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexOptions
-
< dimension of the state space, x_t.
- m - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
m is a positive integer input variable set to the number of functions.
- m - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
integer scalar containing the number of data points.
- m - Variable in class gov.nih.mipav.model.algorithms.splev
-
- m - Variable in class gov.nih.mipav.model.algorithms.sproot
-
- m - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- m - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Row and column dimensions.
- m - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FaceTmark
-
- m - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.VertTmark
-
- M - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- M - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- M - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- M - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- M - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- M - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- M - Variable in class gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
- M - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- M - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- m_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobiPreconditioner
-
- m_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- m_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurJacobiPreconditioner
-
- m_3dbufferMap_float - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- m_3dbufferMap_int - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- m_4dbufferMap_float - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- m_4dbufferMap_int - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- m_aaaasEncode - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
encoding of voxels based on transparent runs.
- m_aaabMask - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Voxels may be masked out so that the PDE solver does not process them.
- m_aaafDst - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Successive iterations of the PDE solver toggle between two buffers.
- m_aaafFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour3
-
The feature image to control the segmentation.
- m_aaafFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseShapeDetection3
-
The feature image to control the segmentation.
- m_aaafFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseThreshold3
-
The feature image to control the segmentation.
- m_aaafPropagation - Variable in class gov.nih.mipav.model.algorithms.levelset.LseThreshold3
-
The propagation image to control the segmentation.
- m_aaafSrc - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Successive iterations of the PDE solver toggle between two buffers.
- m_aaaiConnectivity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
The array of indexed triangle array coordinate indices.
- m_aaaiOrderedGroupChildIndexOrder - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
This contains the childIndexOrder arrays for the axis' OrderedGroup, one for each possible way to slice the
volume (by axis and by direction).
- m_aaakAdvection - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour3
-
The advection field to control the segmentation.
- m_aaakControlPoint - Variable in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
DOCUMENT ME!
- m_aaasVolumeEncode - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_aabMask - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Pixels may be masked out so that the PDE solver does not process them.
- m_aabReference - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
For masking, set to true if the reference image is written into the same location:.
- m_aabReferenceBackup - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
backup:.
- m_aafBox - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_aafBreakPoints - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
The aray of points (defined in time) where the curvature of the spline is highest.
- m_aafClipData - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
stores t=clip plane information:
- m_aafD2 - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
The second-order derivatives of the current pixel.
- m_aafD2 - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
The second-order derivatives of the current pixel.
- m_aafDst - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Successive iterations of the PDE solver toggle between two buffers.
- m_aafFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour2
-
The feature image to control the segmentation.
- m_aafFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseShapeDetection2
-
The feature image to control the segmentation.
- m_aafFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseThreshold2
-
The feature image to control the segmentation.
- m_aafLight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_aafM - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_aafMaxDist - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
Approximate "width" of the tube at the sample points on each curve.
- m_aafPropagation - Variable in class gov.nih.mipav.model.algorithms.levelset.LseThreshold2
-
The propagation image to control the segmentation.
- m_aafRelativeLengths - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
Values that are used in multiple functions, are stored so that they are calculated only once.
- m_aafSrc - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Successive iterations of the PDE solver toggle between two buffers.
- m_aaiColorSwap - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Axis labels color assignments.
- m_aaiColorSwap - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Axis labels color assignments.
- m_aaiIndex - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
permutations that just store voxel indices.
- m_aaiNumTris - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
The number of triangles in each sub-mesh.
- m_aakAdvection - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour2
-
The advection field to control the segmentation.
- m_aakAxisFiles - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeOrientationCube
-
Orientation cube texture names:
- m_aakColors - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Set of colors used to draw the axis labels.
- m_aakColors - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Set of colors used to draw the axis labels.
- m_aakControlPoint - Variable in class gov.nih.mipav.model.structures.BSplineLattice2Df
-
DOCUMENT ME!
- m_aakCurvePos - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
Positions on the sample curve.
- m_aakDWIList - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
List of file names for the Diffusion Weighted Images, from the .path file.
- m_aakDWIList - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
List of file names for the Diffusion Weighted Images, from the .path *
- m_aakDWIList - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_aakDWIList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
List of file names for the Diffusion Weighted Images, from the .path file.
- m_aakTangent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
Tangent vectors for each position on the sample curve.
- m_aasSliceEncode - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_abAxisFlip - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
ModelImage axis flip.
- m_abAxisFlip - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
ModelImage axis flip.
- m_abAxisFlip - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_abDisplayPolyline - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
enables/disables displaying clip planes
- m_abInitLevelSet - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_abInitLiveWire - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_abMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
face mask to keep track of which voxels are in the face:.
- m_abMask - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Masks to indicate which image elements are to be processed by the
segmenter.
- m_abRemoveTris - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_abRemoveTris - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
List of triangles to remove.
- m_abShowBoundingBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Displaying each bounding-box:
- m_abShowPlanes - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Displaying each plane:
- m_abSignedDistanceMask - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The mask that indicates which image elements have been included in
the signed distance transform.
- m_abSolid - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- m_abVisited - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Which tensor nodes are already on the fiber bundle tract
- m_acImageA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
DOCUMENT ME!
- m_acImageA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensity
-
DOCUMENT ME!
- m_acImageA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
DOCUMENT ME!
- m_acImageA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
DOCUMENT ME!
- m_acImageA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
DOCUMENT ME!
- m_acImageB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
DOCUMENT ME!
- m_acImageB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensity
-
DOCUMENT ME!
- m_acImageB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
DOCUMENT ME!
- m_acImageB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
DOCUMENT ME!
- m_acImageB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
byte and alpha channels for the image.
- m_acImageG - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
DOCUMENT ME!
- m_acImageG - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
DOCUMENT ME!
- m_acImageG - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
DOCUMENT ME!
- m_acImageI - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorMIP
-
intensity channel computed for combination of RGB channels.
- m_acImageI - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorMIP
-
intensity channel computed for combination of RGB channels.
- m_acImageR - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
color channels of the image (R = red, G = green, B = blue, A = alpha).
- m_acImageR - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
DOCUMENT ME!
- m_acImageR - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
color channels of the image (R = red, G = green, B = blue, A = alpha).
- m_adBinSum1 - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Sum of the intensities in bin.
- m_adBinSum2 - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Sum of the squared intensities in bin.
- m_adCos - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_adCos - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_adCos - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_adSin - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_adSin - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_adSin - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_afA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_afABBlendParam - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_afAdvection - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
The advection for the current pixel.
- m_afAdvection - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
The advection for the current pixel.
- m_afArbEquation - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Arbitrary clip plane equation:
- m_afArbEquationInv - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_afAverages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_afAvrConvexity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_afAvrConvexity - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_afB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_afBlendParam - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_afBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The blurred curvature flow image (intermediate image).
- m_afBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The blurred curvature flow image (intermediate image).
- m_afBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The blurred curvature flow image (intermediate image).
- m_afBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The blurred curvature flow image (intermediate image).
- m_afBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The blurred curvature flow image (intermediate image).
- m_afBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The blurred curvature flow image (intermediate image).
- m_afBoundarySampleDistMin - Variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Array of Euclidean distances to the nearest boundary for each inside voluem sample.
- m_afBracket - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_afBracketB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_afBranchPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
List of branch points (normalized path distances where one or more branches starts).
- m_afBranchPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
List of branch points (normalized path distances where one or more branches starts).
- m_afBranchPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
List of branch points (normalized path distances where one or more
branches starts).
- m_afClipAll - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
Turn clipping on/off per-axis aligned clip plane, eye-clip planes and arbitrary plane.
- m_afClipOBBAxis0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- m_afClipOBBAxis1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- m_afClipOBBAxis2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- m_afClipOBBExtent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- m_afClipSphereCenter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- m_afClipSphereScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- m_afCoeff - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
the coeffficients of the approximating quadratic equation.
- m_afCoeff - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
DOCUMENT ME!
- m_afCurvature - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Stores curvature information of the surface.
- m_afCurvature - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_afCurvature - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_afCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The curvature flow image (intermediate image).
- m_afCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The curvature flow image (intermediate image).
- m_afCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The curvature flow image (intermediate image).
- m_afCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The curvature flow image (intermediate image).
- m_afCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The curvature flow image (intermediate image).
- m_afCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The curvature flow image (intermediate image).
- m_afD1 - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
The first-order derivatives of the current pixel.
- m_afD1 - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
The first-order derivatives of the current pixel.
- m_afD1Bwd - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
Backward finite-difference approximations to the first-order
derivatives of the current pixel.
- m_afD1Bwd - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
Backward finite-difference approximations to the first-order
derivatives of the current pixel.
- m_afD1Fwd - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
Forward finite-difference approximations to the first-order
derivatives of the current pixel.
- m_afD1Fwd - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
Forward finite-difference approximations to the first-order
derivatives of the current pixel.
- m_afData - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The image elements.
- m_afData - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
DOCUMENT ME!
- m_afDiagonal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
DOCUMENT ME!
- m_afDistanceNeighbors27 - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Array of exact Euclidean distances (in sample coordinates) to each of the 26-connected neighbors corresponding to
the relative indexes in m_aiOffsetNeighbors27 array.
- m_afDoClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
Turn clipping on/off.
- m_afFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The feature image.
- m_afFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The feature image.
- m_afFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The feature image.
- m_afFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The feature image.
- m_afFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The feature image.
- m_afFeature - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The feature image.
- m_afGradMagBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The gradient magnitude of the blurred curvature flow image
(intermediate image).
- m_afGradMagBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The gradient magnitude of the blurred curvature flow image
(intermediate image).
- m_afGradMagBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The gradient magnitude of the blurred curvature flow image
(intermediate image).
- m_afGradMagBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The gradient magnitude of the blurred curvature flow image
(intermediate image).
- m_afGradMagBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The gradient magnitude of the blurred curvature flow image
(intermediate image).
- m_afGradMagBlurCurvFlow - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The gradient magnitude of the blurred curvature flow image
(intermediate image).
- m_afImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
The 3D MRI image stored as a 1D array.
- m_afImageErr - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureLeastSquares
-
Current error at each sample (registered-target).
- m_afInterB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
DOCUMENT ME!
- m_afInterB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
intermediate 2D image.
- m_afInterG - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
DOCUMENT ME!
- m_afInterI - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorMIP
-
DOCUMENT ME!
- m_afInterR - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
intermediate 2D images.
- m_afInvSpeed - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
The inverse speeds associated with the image elements.
- m_afJointHisto - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- m_afLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Triangle edge length.
- m_afLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_afLength - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_afLutIn - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelLUTHelper
-
DOCUMENT ME!
- m_afLutIn - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapIntensity
-
DOCUMENT ME!
- m_afLutOut - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelLUTHelper
-
DOCUMENT ME!
- m_afLutOut - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapIntensity
-
DOCUMENT ME!
- m_afLutSlope - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelLUTHelper
-
DOCUMENT ME!
- m_afLutSlope - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapIntensity
-
DOCUMENT ME!
- m_afMask - Variable in class gov.nih.mipav.view.PatientSlice
-
Mask data when a surface is loaded into the SurfaceRender, for blending with the PlaneRender image.
- m_afMaxCurvature - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- m_afMeanCurvature - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_afMeanCurvature - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_afMeanCurvatures - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Array of mean curvature values at each vertex.
- m_afMinCurvature - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- m_afMinMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
stores the gradient magnitude filter on/off value:
- m_afNewResolutions - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- m_afNormColor - Variable in class gov.nih.mipav.view.PatientSlice
-
Color normalization factor:.
- m_afOffset - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
for resampling a slice.
- m_afPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_afPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_afRealDistanceNeighbors27 - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Array of exact Euclidean distances to each of the 26-connected neighbors scaled by the size of each sample along
each axis and corresponding to the relative indexes in m_aiOffsetNeighbors27 array.
- m_afResolutions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_afResolutions - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_afScreenResolutions - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Sets the correct resolutions for the image that is created by captureImage.
- m_afShear - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
for resampling a slice.
- m_afSignedDistance - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The signed distance transform computed from the coarse-level region
grown by the fast marching method.
- m_afStartLocation - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractorCubes
-
DOCUMENT ME!
- m_afStartLocation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractorCubes
-
Surface 3D location
- m_afStartPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_afStartPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_afTime - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
The times at which the image elements are visited by moving boundaries.
- m_afUnitDirections - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_afUnitDirections - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_afVolumeMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- m_afX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Previous snake results (X-position):.
- m_afXWin - Variable in class gov.nih.mipav.view.WindowLevel
-
Member variables used to adjust the window and level (contrast and
brightness) by dragging with the right-mouse button:.
- m_afY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Previous snake results (Y-position):.
- m_afYWin - Variable in class gov.nih.mipav.view.WindowLevel
-
Member variables used to adjust the window and level (contrast and
brightness) by dragging with the right-mouse button:.
- m_aiAxis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
parameters for finding and bluring the face:.
- m_aiAxisOrder - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
ModelImage axis orientation.
- m_aiAxisOrder - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
ModelImage axis orientation.
- m_aiAxisOrder - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Local orientation of the displayed image, used in the volume renderer and tri-planar views.
- m_aiBinReg - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Bins used to hold the histograms.
- m_aiBinRegTrg - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
DOCUMENT ME!
- m_aiBinSum0 - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Bins used to hold cummulative summations for computing the variances.
- m_aiBound - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Parallel viewing model.
- m_aiBoundary - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The boundary of the segmented result from region growing.
- m_aiBranchIndexUnvisitedMax - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_aiBranchIndexUnvisitedMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
This is the range of path samples for each branch that are unvisited.
- m_aiBranchIndexUnvisitedMin - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
This is the range of path samples for each branch that are unvisited.
- m_aiBranchIndexUnvisitedMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
This is the range of path samples for each branch that are unvisited.
- m_aiClipMax - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
for clipping.
- m_aiClipMin - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
for clipping.
- m_aiColorMap - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelLUTHelper
-
DOCUMENT ME!
- m_aiColorMap - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapIntensity
-
DOCUMENT ME!
- m_aiColorSculpt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
The sculpt region color.
- m_aiCompositeImageA - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Buffer for holding volume texture composite values for image A.
- m_aiConnect - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Surface triangle connection.
- m_aiConnect - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_aiConnect - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
DOCUMENT ME!
- m_aiConnect - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_aiConnect - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_aiConnect - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- m_aiConnect - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_aiCurrentI - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_aiDirection - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractorCubes
-
DOCUMENT ME!
- m_aiDirection - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractorCubes
-
Surface direction
- m_aiElement - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
The array storage for the set.
- m_aiElement - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
The array storage for the set.
- m_aiElement - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
The array storage for the set.
- m_aiElement - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
The array storage for the set.
- m_aiEndIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_aiEndIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The indices of the triangle containing the end of the new line.
- m_aiExtents - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_aiExtents - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- m_aiFirstIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_aiFirstIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The indices of the triangle containing the first point on the new line.
- m_aiImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The 3D MRI image stored as a 1D array.
- m_aiImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
The 3D MRI image stored as a 1D array.
- m_aiImageA_backup - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Backup of the data for undo:.
- m_aiImageA_backup - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Backup of the data for undo:.
- m_aiImageB_backup - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
ImageB backup buffer.
- m_aiImageB_backup - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_aiImageBin - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Image corresponding to the samples in the target image which identifies to which bin the sample belongs.
- m_aiImageBinReg - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Image corresponding to the samples in the registered source image which identifies to which bin the sample
belongs.
- m_aiImageBinTrg - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Image corresponding to the samples in the target image which identifies to which bin the sample belongs.
- m_aiIndex - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Triangle mesh connectivity (index) array.
- m_aiIndex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelCollapseRecord
-
DOCUMENT ME!
- m_aiIndex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_aiIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
vertices array.
- m_aiIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
vertices array.
- m_aiIndexShift - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_aiIndexShift - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
For shifting the triangle indices after removing triangles from the mesh.
- m_aiIndexValues - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_aiIndices - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Array of triangle vertex connectivity.
- m_aiInterC - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
intermediate image indicating that the number of times each pixels is processed.
- m_aiInterior - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The interior of the segmented result from region growing.
- m_aiLightScale - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light scale factor array.
- m_aiLightScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light scale factor array.
- m_aiLocalImageExtents - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
The image dimensions in x,y,z:.
- m_aiLocalImageExtents - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
The image dimensions in x,y,z:.
- m_aiLocalImageExtents - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
The image dimensions in x,y,z:.
- m_aiLocalImageExtents - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
The image extents in the local orientation.
- m_aiLocalImageFactors - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
The image dimension factors in x,y,z:.
- m_aiMapIndexToJPanelLightsIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The index of the lights in JPanelLights is different from the order maintained here.
- m_aiMapJPanelLightsIndexToIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The index of the lights in JPanelLights is different from the order maintained here.
- m_aiMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Brain segmenation mask.
- m_aiMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
object mask creation.
- m_aiMask - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_aiMatrixEntries - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
keeps track of unique entries in the BMatrix
- m_aiMatrixEntries - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
keeps track of unique entries in the BMatrix
- m_aiMatrixEntries - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_aiMatrixEntries - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
keeps track of unique entries in the BMatrix
- m_aiMeshConnectivity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_aiNewConnect - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_aiNewExtents - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- m_aiNumBreakPoints - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
The number of break points on the spline.
- m_aiOffsetNeighbors27 - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Array of 27 index offsets used by the getOffsetXYZNeighbors27 method.
- m_aiOffsetNeighborsVoxel - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Array of 8 index offsets used by the getIndexNeighborsVoxel method.
- m_aiPaintBuffer - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
buffer used for image to draw to display.
- m_aiPreviousStartIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_aiPreviousStartIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The indices of the triangle containing the previous start point.
- m_aiRGBIndexBufferA - Variable in class gov.nih.mipav.view.PatientSlice
-
lookup table for mapping ModelImage data values to color for imageA:.
- m_aiRGBIndexBufferB - Variable in class gov.nih.mipav.view.PatientSlice
-
lookup table for mapping ModelImage data values to color for imageB:.
- m_aiRImage - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Final rendered image (24-bit RGB stored in int). 2D: m_iRBound-by-m_iRBound image
- m_aiSliceBound - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_aiSliceMax - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_aiSliceMin - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_aiStartIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
The index values in the Vertex array for the triangle that the Start, First, and End points fall in, if they are
inside a triangle and not on a triangle vertex:.
- m_aiStartIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The indices of the triangle containing the start of the new line.
- m_aiTriIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_aiTriIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Point indices of the puncture triangle.
- m_aiUnits - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_aiUnits - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_aiVOrdered - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_aiVPermute - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_aiXPoints - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Mouse positions in x,y for drawing the sculpt region:.
- m_aiXPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Mouse positions in x,y for drawing the sculpt region:.
- m_aiYPoints - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_aiYPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Mouse positions in x,y for drawing the sculpt region:.
- m_akAdjacent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Surface adjacentcy list.
- m_akAdjacent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_akAdjacent - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_akAdjacent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_akAxis - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
For track ball rotation.
- m_akBackupBorders - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Backup shape for Undo:.
- m_akBackupColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Backup of the per-vertex colors.
- m_akBackupImages - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Backup Image for Undo:.
- m_akBackupPolygons - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Backup shape for Undo:.
- m_akBackupTG - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Backup Transform for Undo:.
- m_akBorderShapes - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Reference to the border shape data structure for changing the color based on which image is selected:.
- m_akBoundingBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeBoundingBox
-
The bounding box Polyline array.
- m_akBoundingBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
The three plane bounding-box Polylines.
- m_akBoundingBoxEffect - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeBoundingBox
-
The ShaderEffect for the bounding box.
- m_akBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Bounding box for a group of selected VOIs for group-move.
- m_akBranchChoice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
When a branch point along the current branch is reached, this array is filled with the possible BranchState
instances that the user can select from for following.
- m_akBranchChoice - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
When a branch point along the current branch is reached, this array is filled with the possible BranchState
instances that the user can select from for following.
- m_akBranchChoice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_akBranchState - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Identifies the current state of traversing the current branch.
- m_akBranchState - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Identifies the current state of traversing the current branch.
- m_akBranchState - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_akClip - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
Axis-aligned clip plane shader parameter names:
- m_akCLoc - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Camera Locations, for rendering the different Axial, Sagittal and Coronal views.
- m_akCLoc - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Camera Locations, for rendering the different Axial, Sagittal and Coronal views.
- m_akCollapse2D - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_akCollapseColumns - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_akCollapseRows - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_akColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_akColorBackup - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Original surface color for undoing the pseudo-color curvature map.
- m_akColors - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Triangle mesh colors (may be null).
- m_akColors - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Set of colors used to draw the X and Y Bars and the Z box:.
- m_akColors - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
triangle color array.
- m_akColors - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Set of colors used to draw the X and Y Bars and the Z box:.
- m_akCoordinates - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Array of vertex coordinates.
- m_akCoordinates - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
triangle index coordinate array.
- m_akCoords - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Camera Direction, UP, and Right vectors, for rendering the different Axial, Sagittal and Coronal views.
- m_akCoords - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Camera Direction, UP, and Right vectors, for rendering the different Axial, Sagittal and Coronal views.
- m_akCurvePosition - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
The array of possible curves to use for segmenting the mesh.
- m_akCylinder - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
projection of sphere onto cylinder.
- m_akCylinder - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
projection of sphere onto cylinder.
- m_akEdge - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_akEdge - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_akEdgeList - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Data members used in Dijkstra's search.
- m_akEdgeList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Data members used in Dijkstra's search.
- m_akGeodesicNodes - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Contains geodesic display components.
- m_akGradientMagMinMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
3D sub-images (4D data)
- m_akHeap - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_akHistoTCoord - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Texture coordinates for displaying histogram in 2D
- m_akImage - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Image buffer for each image slice.
- m_akImageComponent - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Image component 2D.
- m_akImageMinMax - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Current contour bounding-box.
- m_akImageReduceEntropy - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_akImages - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Reference to the model images:.
- m_akImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
ImageA and ImageB
- m_akImageTransforms - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Reference and tile image transformations:.
- m_akLevWidget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_akLightArrows - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Arrows representing light bulb directions.
- m_akLightBG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Parent of each light bulb.
- m_akLightBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Parent of each light bulb.
- m_akLightMaterials - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Material properties for each light bulb.
- m_akLightMaterials - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Material properties for each light bulb.
- m_akLights - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
The structure for the light bulbs.
- m_akLights - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The description of the lights so they can be duplicated in the "Advanced Material Properties" dialog:.
- m_akLights - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Lights from JPanelLight
- m_akLights - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
The structure for the light bulbs.
- m_akLights - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- m_akLightsModel - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Array of software lights in model coordinates.
- m_akLightSpheres - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Shapes representing light bulbs.
- m_akLightSpheres - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Shapes representing light bulbs.
- m_akLightsWorldDirection - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Array of world coordinate vectors for software world lights.
- m_akLightsWorldDirectionInModelSpace - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Array of model coordinate vectors for software world lights corresponding to the entries in the
m_akLightsWorldDirection array.
- m_akLightsWorldInModelSpace - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Array of software lights converted from world coordinates to model coordinates.
- m_akLightsWorldPosition - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Array of world coordinate positions for software world lights.
- m_akLightsWorldPositionInModelSpace - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Array of model coordinate positions for software world lights corresponding to the entries in the
m_akLightsWorldPosition array.
- m_akLightTransformGroup - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Parent transform group.
- m_akLightTransformGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Parent transform group.
- m_akMaterialPreset - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Pre-defined materials
- m_akMaterialPreset - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Pre-defined materials
- m_akMaxDirection - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- m_akMinDirection - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- m_akModelLights - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
General light array.
- m_akNamesCompatibleTargetImages - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Contains names of compatible target images that can be registered to the input source image for 2D/3D
registration.
- m_akNegGradient - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The negative of the gradient of the image is used for advection.
- m_akNegGradient - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The negative of the gradient of the image is used for advection.
- m_akNewVertex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_akNormal - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_akNormal - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- m_akNormal - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
unit-length normal vectors at the voxels.
- m_akNormals - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Triangle mesh normals (may be null).
- m_akNormals - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Array of vertex normals.
- m_akNormals - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
triangle normal array.
- m_akNormalsImageA - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Buffer for holding the most recently computed normal vectors of image A.
- m_akOffset - Variable in class gov.nih.mipav.view.PatientSlice
-
Color offset factor:.
- m_akOffsetXYZNeighbors27 - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Array of 27 index offsets used by the getIndexNeighbors27 method.
- m_akOrderedGroupNodeSlices - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
The contents of each slice that can be rendered will be contained in an OrderedGroup node.
- m_akOrientationCube - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeOrientationCube
-
Orientation cube geometry:
- m_akPickColors - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Colors for the picked points:.
- m_akPickColors - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Colors for the picked points:.
- m_akPlane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
Conformal mapping to a plane.
- m_akPlane - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
Conformal mapping to a plane.
- m_akPlaneEffect - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
ShaderEffects for the planes.
- m_akPlaneEffectTransparent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- m_akPlaneRender - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The three slice views displayed as texture-mapped polygons:.
- m_akPlaneRender - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
The three slice views displayed as texture-mapped polygons:.
- m_akPlanes - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
The three orthogonal plane TriMeshes.
- m_akPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
mesh attributes.
- m_akPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
- m_akPolygonShapes - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Reference to the texture-mapped polygon on which the image is displayed:.
- m_akPolyline - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
axis-aligned clip plane polylines:
- m_akRecord - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
the incremental changes representing the decimation.
- m_akRecord - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
the incremental changes representing the decimation.
- m_akRecords - Variable in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap
-
The record storage for the heap, allocated in one large chunk.
- m_akSceneTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_akSlicesColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_akSNormal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Surface normals.
- m_akSNormal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_akSNormal - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_akSoftwareLightsModel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Soft light array.
- m_akSoftwareLightsWorld - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Lighting objects needed for software rendering.
- m_akSphere - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
Conformal mapping to a sphere. rho is the radius of the stereographic sphere.
- m_akSphere - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
Conformal mapping to a sphere. rho is the radius of the stereographic sphere.
- m_akSTangent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Surface tangents.
- m_akSTangent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_akSTangent - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_akSteps - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_akSurfaceMaterial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
- m_akSurfaceShape - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_akSurfaceStates - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- m_akTexCoords - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
triangle texture coordinate array.
- m_akTrial - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Those image elements that are adjacent to the current region boundary
points are tracked to allow fast updates of the boundary.
- m_akTriangle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_akTriangle - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_akTriangleNormals - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Array of triangle normals.
- m_akTriColors - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_akTriColors - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
puncture triangle color
- m_akUnitsLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_akUniverse - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Three SimpleUniverses, one for each canavas:.
- m_akVertex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Surface vertex list.
- m_akVertex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_akVertex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
the highest level of detail data.
- m_akVertex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_akVertex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_akVertex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- m_akVertex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_akVertex - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_akVertices - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Vertex, Normal, and Connectivity arrays to read into from the file:.
- m_akVMean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Average vector.
- m_akVMean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_akVMean - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_akVNormal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Vertex normal.
- m_akVNormal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_akVNormal - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_akVolumeCost - Variable in class gov.nih.mipav.view.renderer.flythroughview.DijkstraMinCostPath
-
Array of cost information for each sample.
- m_akWidgets - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
The list of widgets displayed on the 2D Histogram.
- m_akWorldLights - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
World general light array.
- m_AlignedShapes - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
The aligned shapes.
- m_angle - Variable in class gov.nih.mipav.model.algorithms.LSCM.HalfEdgeTrait
-
- M_APP0 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Required marker in this standard.
- M_APP0 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP1 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP10 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP11 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP12 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP13 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP14 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP15 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP2 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP3 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP4 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP5 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP6 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP7 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP8 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_APP9 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_argv - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsole
-
C style argv
- m_array_type - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mct_data_t
-
- m_asOriginal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
the original unblurred data:.
- m_asSkip - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
support for skipping opaque intermediate pixels.
- m_asVolumeData - Variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Volume of bitmasked values associated with each sample.
- m_atElement - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- m_aucData - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_aucSavedImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Backup image
- m_aucSculptImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
m_kSculptImage is a screen shot of the canvas image.
- m_aucTextureImageDataA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Texture data for ModelImage A in byte
- m_aucTextureImageDataB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Texture data for ModelImage B in byte
- m_b4D - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- m_bAbsPointCoordinates - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Indicates if the point coordinates is in relative or absolute format.
- m_bAdded - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
When true a new Widget was added with the mouse.
- m_bArbClipOn - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enable Arbitrary clip plane:
- m_bAttenuate - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- m_bAxisAligned - Variable in class gov.nih.mipav.view.PatientSlice
-
Flag indicating whether the slice is axis-aligned or diagonal (for RFA probe rotataions).
- m_bBruteForce - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
If true, calculate the brute-force solution:.
- m_bBruteForce - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
If true, calculate the brute-force solution:.
- m_bBruteForce - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Brute force default is off:.
- m_bCalcLineMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_bChooseBranch - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
When a branch point along the current branch is reached, this flag is set until the user selects a branch to
follow.
- m_bChooseBranch - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
When a branch point along the current branch is reached, this flag is set until the user selects a branch to
follow.
- m_bChooseBranch - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_bCleanup - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_bCleanUp - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_bClipOBB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- m_bClipped - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_bClippedA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_bClipSphere - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- m_bCollapsing - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_bColorApplied - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
keeps track of whether or not color has been applied to surface (for
backup on cancel)
- m_bColorApplied - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
keeps track of whether or not color has been applied to surface (for
backup on cancel)
- m_bCompositeForward - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorComposite
-
The actual order of compositing - true if front-to-back.
- m_bCompositeForward - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorLighting
-
The actual order of compositing - true if front-to-back.
- m_bConstraintsInit - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_bConvolve - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Set to true when the image is the product of the ffts of two images, so that on an inverse_fft this image will be
centered properly.
- m_bCostFinalized - Variable in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Flag is set once this sample's minimum cost has been finalized.
- m_bCreateDeformationImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Flag set if the deformation computation is to be performed.
- m_bCreateMaskImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- m_bCrop - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Set to true when cropping the volume in the shader.
- m_bCtrlDown - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_bCurvatureColors - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Flag set to indicate whether curvature colors are rendered on the mesh surface.
- m_bCurvatureColors - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Flag set to indicate whether curvature colors are rendered on the mesh surface.
- m_bDefaultImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- m_bDependentInterfaceInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- m_bDilate - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
whether or not to dilate the cell contour before solving for the cell on the next frame (dilation helps capture
cells that are moving fast).
- m_bDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_bDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_bDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
boolean to turn rendering on/off for this object.
- m_bDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_bDisplayAllGlyphs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
When true display the DTI volume with glyphs:
- m_bDisplayArrows - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
When true display the fiber tracts with arrows instead of lines:
- m_bDisplayB0 - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Whether to just display the B0 weighted image and return, or to do a full calculation:
- m_bDisplayCylinders - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
When true display the fiber tracts with cylinders instead of lines:
- m_bDisplayDijkstra - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
toggle for displaying Dijkstra's path as well as the smoothed path:.
- m_bDisplayEllipsoids - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
When true display the fiber tracts with ellipsoids instead of lines:
- m_bDisplayFirst - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- m_bDisplayLines - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Toggle latitude/longitude display on/off.
- m_bDisplaySecond - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- m_bDisplaySecond - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enables/Disables rendering the second pass.
- m_bDisplayTransform - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Display transfromed image in separate window: set to false (no display).
- m_bDisplayTubes - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
When true display the fiber tracts with tubes instead of lines:
- m_bDispose - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_bDispose - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_bDispose - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_bDisposeComplete - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_bDoClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_bDoEncodeSkip - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
flag set by derived class that uses encoding and skipping.
- m_bDoMultiThread - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
- m_bDoSubsample - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Default subsample set to true:.
- m_bDrawAxes - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
when true, the axis labels (P-> L-> S->) will be drawn
- m_bDrawAxes - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
when true, the axis labels (P-> L-> S->) will be drawn
- m_bDrawAxes - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
when true, the axis labels (P-> L-> S->) will be drawn
- m_bDrawLevelSet - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_bDrawOval - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_bDrawPolyline - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_bDrawRect - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_bDrawVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_bDrawVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Set to true when the user is actively drawing or modifying a VOI contour.
- m_bDrawXHairs - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Turns on drawing of the X,Y bars and the Axis labels:.
- m_bDrawXHairs - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Turns on drawing of the X,Y bars and the Axis labels:.
- m_bDrawXHairs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Turns on drawing of the X,Y bars and the Axis labels:.
- m_bDropper - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_bEnabled - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
General properties which can be shared by all lights types.
- m_bEnabled - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Turned on when picking with the mouse is enabled:.
- m_bEnabled - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Enables painting
- m_bEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Enables painting
- m_bEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Turned on when picking with the mouse is enabled:.
- m_bEndpointChanged - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Flag to indicates end ponit changes.
- m_bEndpointChanged - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Flag to indicates end point changes.
- m_bEntryPointSelect - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Boolean to turn on/off the RFA probe entry point selection with mouse:.
- m_bErase - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_bExtract - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_bFileLoaded - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Boolean to check that a file is loaded before mouse operations are allowed to occur.
- m_bFileLoaded - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_bFileLoaded - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Set to true when a surface has been loaded
- m_bFinish - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
m_bFinish is set to true on an OK or Cancel message:.
- m_bFinished - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Closing the Geodesic path:.
- m_bFinished - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Closing the Geodesic path:.
- m_bFirst - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
For blending the reference and tile images, reference image is not blended with background, reset when initData()
is called.
- m_bFirst - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
First time the scene is rendered.
- m_bFirstAdded - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- m_bFirstDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_bFirstDrag - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Change the mouse cursor with the first mouseDrag event
- m_bFirstDrag - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Change the mouse cursor with the first mouseDrag event
- m_bFirstDrag - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Change the mouse cursor with the first mouseDrag event
- m_bFirstDrag - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Change the mouse cursor with the first mouseDrag event
- m_bFirstRender - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_bFirstRender - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
The first time the frame is rendererd use the shader to calculate the
normals for the volume data.
- m_bFirstScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_bFirstSurface - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_bFirstSurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Causes the surface LUT to be calculated for the first time.
- m_bFirstVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_bFirstVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculations for the oval voi are calculated one time:
- m_bFirstWire - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_bFirstWire - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
- m_bFirstWrite - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
When saving the fiber bundle tracts.
- m_bFixTarget - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Properties shared by directional and spot lights.
- m_bGeodesicEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Geodesic enabled on/off.
- m_bGMInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Set to true if the Gradient Magnitude texture map has been initialized.
- m_bGPURenderer - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Set to true if this VOIManagerInterface is used for the GPU-based Volume Renderer
- m_bGradientMag - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_bGroupAdded - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Flag for clearing the Geodesic curves, if it is false, no curves have been added to the GeodesicGroup.
- m_bGroupAdded - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Flag for clearing the Geodesic curves, if it is false, no curves have been added to the GeodesicGroup.
- m_bHistoInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Set to true when the multi-histogram histogram texture has been initialized.
- m_bImage25D - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
Calculate per-slice:
- m_bImage25D - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_bIncreasingOrder - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Render the slices by increasing or decreasing coordinate.
- m_bInflationInitialized - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Flag set once inflation processing has been initialized.
- m_bInflationInitialized - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Flag set once inflation processing has been initialized.
- m_bInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Set to true when init() is called:
- m_bInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_bInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- m_bInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_bInterpolate - Variable in class gov.nih.mipav.view.PatientSlice
-
Flag indicating whether to do TriLinear interpolation when exporting a diagonal slice:.
- m_bIsColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
When true the volume data is color.
- m_bIsMouseActive - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_bIterate - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
DOCUMENT ME!
- m_bIterate - Variable in class gov.nih.mipav.view.ViewJFrameFastMarching2
-
DOCUMENT ME!
- m_bIterate - Variable in class gov.nih.mipav.view.ViewJFrameFastMarching3
-
DOCUMENT ME!
- m_bLastWire - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_bLastWire - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Live wire last point.
- m_bLeftMousePressed - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
True when the left mouse has been pressed, set to false when the left
mouse button is released.
- m_bLeftMousePressed - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
True when the left mouse has been pressed, set to false when the left
mouse button is released.
- m_bLeftMousePressed - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
True when the left mouse has been pressed, set to false when the left mouse button is released.
- m_bLeftMousePressed - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Set to true when the left mouse is pressed.
- m_bLevelSetInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_bLivewire - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Live wire or point and click mode:.
- m_bLivewire - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Live wire or point and click mode.
- m_bLiveWire - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Whether the livewire properties (e.g. gradient magnitude) should be recalculated
- m_bLiveWireInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_bMain - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- m_bMakeDocumentation - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
- m_bMemoryUsage - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Whether to store all the data in ImageComponent2D array or not:.
- m_bModified - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Minimizes rendering, only render when modified is true.
- m_bMouseDrag - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
keeps track if the user is currently dragging with the mouse
- m_bMouseDrag - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Set to true if the left mouse is pressed during drag.
- m_bMouseListen - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Flag to turn mouseListener on or off.
- m_bMouseMotion - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_bMousePressed - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Mouse events.
- m_bMousePressed - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Mouse events.
- m_bMousePressed - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
m_bMousePressed is set to true when the mousePressed callback is activated and the left mouse button is down.
- m_bMousePressed - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
m_bMousePressed is set to true when the mousePressed callback is activated and the left mouse button is down.
- m_bMouseReleased - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_bMouseReleased - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_bMoveForward - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Current direction.
- m_bMoveForward - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Current direction.
- m_bMoveForward - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Current direction.
- m_bMoveForward - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_bMultiHisto - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_bNegX - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
- m_bNegY - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
- m_bNegZ - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
- m_bNext - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
DOCUMENT ME!
- m_bNext - Variable in class gov.nih.mipav.view.ViewJFrameFastMarching2
-
DOCUMENT ME!
- m_bNext - Variable in class gov.nih.mipav.view.ViewJFrameFastMarching3
-
DOCUMENT ME!
- m_bNormalsInit - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Set to true if the Normal Map has been initialized.
- m_bOpen - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Close path or not.
- m_bOpen - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Close path or not.
- m_boundary - Variable in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- m_bPaint - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_bPaintCan - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_bPainted - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Set to true when the surface has been painted.
- m_bPaintEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Painting parameters:
- m_bParallel - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Left-handed camera coordinate system that is initially set up to view the z=0 slice of the 3D image.
- m_bPathMoveForward - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
DOCUMENT ME!
- m_bPathMoveForward - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Annotation flag indicating whether moving was forward
- m_bPatientOrientation - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Actual image orietation.
- m_bPatientOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Actual image orientation.
- m_bPatientOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Actual image orientation.
- m_bPerPixelLighting - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_bPickable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
boolean to turn picking on/off for this object.
- m_bPickCorrespondence - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
BrainSurfaceFlattener pick correspondence enabled on/off.
- m_bPickCorrespondenceEnabled - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Turned on when picking with the mouse is enabled:.
- m_bPickCorrespondenceEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Turned on when picking with the mouse is enabled:.
- m_bPickPending - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Set to true when there is a pending pick operation
- m_bPickPending - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
When true there is a pending mouse pick to process.
- m_bPickPunctureEnabled - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_bPickPunctureEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Enable/disable picking puncture triangle
- m_bPickSetFlyThru - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Initialzied to true when the the Geodesic.setPickCanvas funtion is called.
- m_bPickSetSurface - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_bPlay4D - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_bPlay4DVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_bPointer - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_bPrint - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- m_bQuickLUT - Variable in class gov.nih.mipav.model.structures.VOIBase
-
True is this is a QuickLUT contour.
- m_bQuickLUT - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
True if the user has selected the quick lut feature:
- m_bRadiologicalView - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
When true, display the data in the Radiological View, when false display the Neurological View:.
- m_bRelaxed - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_bRelaxed - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
For Dijkstra search.
- m_bReloadInput - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
For indicating that the volume input data should be reloaded.
- m_bReloadPoints - Variable in class gov.nih.mipav.model.structures.VOIBase
-
- m_bRenderModeLighting - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Flag set when texture volume is being rendered using lights.
- m_bRenderModeLighting - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Flag set when texture volume is being rendered using lights.
- m_bResetAlpha - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
To reset m_kReferenceAlpha:.
- m_bResetImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_bReverseX - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Flag set to reverse order of "real" X coordinates assigned to samples.
- m_bReverseY - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Flag set to reverse order of "real" Y coordinates assigned to samples.
- m_bReverseZ - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Flag set to reverse order of "real" Z coordinates assigned to samples.
- m_bRightMousePressed - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Flag indicating if the right mouse button is currently pressed
down:
- m_bRightMousePressed - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Flag indicating if the right mouse button is currently pressed
down:
- m_bRightMousePressed - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Flag indicating if the right mouse button is currently pressed down:
- m_bSculptDrawn - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_bSculptDrawn - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
True when a sculpt region has been drawn.
- m_bSculptEnabled - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
m_bSculptEnabled is turned on when the user presses the "Draw Sculpt Outline" button.
- m_bSculptEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
m_bSculptEnabled is turned on when the user presses the "Draw Sculpt Outline" button.
- m_bSelected - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_bSelected - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Set to true when the user has selected a VOI contour.
- m_bSetScale - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
True when scale factor should be used:.
- m_bShared - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_bShear - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
DOCUMENT ME!
- m_bShowDiagonal - Variable in class gov.nih.mipav.view.PatientSlice
-
Flag indicating whether or not the slice represents an axis-aligned orientation or a diagonal orientation through
the ModelImage volume: true when the RFA probe is activated in the SurfaceRender:.
- m_bShowMeanCurvatures - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Flag indicates to show pseudo color or not.
- m_bShowMeanCurvatures - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Flag indicates to show pseudo color or not.
- m_bShowSurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_bShowSurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_bShowSurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- m_bShowText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_bShowVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_bSlicePickEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
- m_bSlicePickPending - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
- m_bSnapshot - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Set to true when recording.
- m_bSplit - Variable in class gov.nih.mipav.model.structures.VOIBase
-
True is this is a split-line contour.
- m_bStandAlone - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_bStatus - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_bSubsetDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
If true the dialog for this instance of JDialogRegistrationOAR2D will not activate the AlgorithmRegOAR2D:.
- m_bSurfaceMaskUpdate - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Set to true when the surface mask should be recalculated.
- m_bSurfaceUpdate - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Set to true when the surface has been added or modified.
- m_bTestFrameRate - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
- m_bTestFrameRate - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
- m_bTestFrameRate - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
For testing the frame rate:
- m_bTextureOn - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Set to true when texture mapping is on.
- m_bTransparent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- m_bTransparent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- m_bUpdate - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- m_bUpdateAverage - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Set to true if the geometric center needs updating.
- m_bUpdateBounds - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Set to true if the contour bounding-box needs updating.
- m_bUpdateCenterOnDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_bUpdateDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_bUpdateGeometricCenter - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Set to true if the geometric center needs updating.
- m_bUpdateImage - Variable in class gov.nih.mipav.view.PatientSlice
-
Flag indicating whether the slice or LUT changed:.
- m_bUpdateLev - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- m_bUpdateMask - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Set to true if the contour changes, so the mask will update when needed.
- m_bUpdatePBar - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Flag indicating whether or not to update the progres bar:.
- m_bUpdatePlane - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Set to true if the contour plane needs updating.
- m_bUpdateSpacing - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_bUpdateSpacing - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_bUpdateVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_bUseConvexHull - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
flag to use convexhull.
- m_bUseConvexHull - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
flag to use convex hull.
- m_bUseConvexHull - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Allows warping inside the convex hull.
- m_bUseDTIParameters - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
When true, use the ModelImage DTI parameters.
- m_bUseMicroscopeConstraints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Boolean to use constraints:.
- m_bUseNewImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_bUseNewLUT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_bUseSrcDelaunay - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarpLinear
-
flag to indicate use src Delaunay.
- m_bUseTangentSpace - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
flag to use targent space.
- m_bUseVelocity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
boolean when true, use the velocity vector:.
- m_bUseXRes - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_bUseXRes - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Set to true if the slice resolution is read from the .list file: (xRes)
- m_bUseYRes - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_bUseYRes - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Set to true if the slice resolution is read from the .list file: (yRes)
- m_bUseZRes - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_bUseZRes - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Set to true if the slice resolution is read from the .list file: (zRes)
- m_bValid - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- m_bVerbose - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
current default to false, not used
- m_bVisible - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Flag for indicating the that Java Container is visible or not:
- m_bWriteImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_bWriteRegMovie - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
- m_bWriteVarImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
- m_can_decode - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
to tell that a tile can be decoded.
- m_codec - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_codec_private_t
-
- m_col - Variable in class gov.nih.mipav.model.algorithms.LSCM.Triplet
-
- M_COM - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_CombinedPCA - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The combined PCA.
- m_cp - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_t
-
Coding parameters
- m_current_max_segs - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- m_current_tile_number - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_t
-
number of the tile curently concern by coding/decoding
- m_DA_x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
Decoded area set by the user
- m_DA_x1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- m_DA_y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- m_DA_y1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- M_DAC - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_dAccumulatedTime - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Framerate Performance parameters:
- m_dAccumulatedTime - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Framerate Performance parameters:
- m_dAddExtents - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
flag to add extents.
- m_dAMFVersion - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The AMF format version.
- m_data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mct_data_t
-
- m_data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_ppx
-
- m_data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
data for the tile
- m_data - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- m_data - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- m_data_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mct_data_t
-
- m_data_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_ppx
-
- m_data_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
size of data
- m_dAvgSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
The average shape size (calculated during alignment).
- m_dBuildTime - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
model build time.
- m_dc_level_shift - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
the dc_level_shift
- m_dD - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
- m_dDeltaFuncVal - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
value for stop criterion: abs(f - fplus) < m_dDeltaFuncVal
- m_dE_fit - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitEntry
-
fit measure
- m_dec - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
- m_decoder - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_t
-
- m_decorrelation_array - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_simple_mcc_decorrelation_data_t
-
- m_default_tcp - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
store decoding parameters common to all tiles (information like COD,
COC in main header)
- m_dEntropyImageTrg - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Precomputed entropy for the target image.
- m_Desc - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
console mode description
- m_dEta - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
machine precision.
- m_dEyeSeparation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Original eye separation, read from the canvas.view.physicalbody.
- m_dFit - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
scale fit of AAM
- m_dFrameRate - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Framerate Performance parameters:
- m_dFrameRate - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Framerate Performance parameters:
- m_dGradTol - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
A positive scalar giving the tolerance at which the scaled gradient in
considered close enough to zero to terminate the algorithm
- M_DHP - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_DHT - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_DHT - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_dHx - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_dHxy - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_dHy - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_discard_tiles - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- m_DisplacementPCA - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
deform displacement PCA.
- m_disto_alloc - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_encoding_param_t
-
allocation by rate/distortion
- m_dK - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
decrease factor in the temperature scheme.
- m_dLastTime - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Framerate Performance parameters:
- m_dLastTime - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Framerate Performance parameters:
- m_dMachEps - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
Machine precision
- m_dMaha - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptRes
-
The Mahalanobis Distance of the model parameters.
- m_dMaxStep - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
A positive scalar giving the maximum allowable scaled steplength at any
iteration. maxstep is used to prevent steps that would cause the
optimazation algorithm to overflow or leave the domain of interest, as
well as to detect divergence.
- m_dMeanShapeSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
mean shape size.
- m_dMinFit - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
The minimum fit.
- m_dMinValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
m_iMinValue is used to set the minimum value in the face and blurred face images so that the image is displayed
"nicely" in the image window.
- M_DNL - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_dNumSamples - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageReduceEffect
-
- m_dNumSamples - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_dOriginalScreenScale - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Zoomfactor, zooming in screen scale space, and is relative to original position, this stores that original
position:.
- m_dOriginalScreenScale - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Zoomfactor, zooming in screen scale space, and is relative to original position, this stores that original
position:.
- m_dOverlap - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvalRes
-
- m_dOverlap - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_dPtCrv - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvalRes
-
Average point to curve landmark error.
- m_dPtPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvalRes
-
Average point to point landmark error.
- M_DQT - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_DQT - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_DRI - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_DRI - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_dSimilarityMeasure - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptRes
-
The similarity measure value at optimum.
- m_dSrcShapeMaxX - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Source shape extents.
- m_dSrcShapeMaxY - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Source shape extents.
- m_dSrcShapeMinX - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Source shape extents.
- m_dSrcShapeMinY - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Source shape extents.
- m_dStartTemperature - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
start temperature.
- m_dStepTol - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
A positive scalar giving the tolerance at which the scaled distance
between two successive iterated is considered close enough to zero to
terminate the algorithm
- m_dSum1 - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
DOCUMENT ME!
- m_dSum2 - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
DOCUMENT ME!
- m_dSumSquaredError - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureLeastSquares
-
Current sum of squared error measure.
- m_dTime - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvalRes
-
- m_dTypF - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
positive scalar estimating the magnitude of f(x) near he minimizer
x-star.
- m_dXmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
search range, currently not used.
- m_dXmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
search range, currently not used.
- m_dXspacing - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
stepping length, currently not used.
- m_dYmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
search range, currently not used.
- m_dYmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
search range, currently not used.
- m_dYspacing - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
stepping length, currently not used.
- m_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- m_edge - Variable in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- m_edge_traits - Variable in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- m_edges - Variable in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- m_edges - Variable in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- m_element_type - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mct_data_t
-
- m_enc - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
- m_end_tile_x - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- m_end_tile_y - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- m_eNumGrad - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
methods for estimating the gradient nummericaly
- M_EOI - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_EOI - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_ERROR - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_eScaleType - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
The type of image scaling used during filter construction.
- m_eScaleType - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The scaling type of the image (default = LsePdeFilter.NONE).
- m_eScaleType - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The scaling type of the image (default = LsePdeFilter.NONE).
- m_eScaleType - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The scaling type of the image (default = LsePdeFilter.NONE).
- m_eScaleType - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The scaling type of the image (default = LsePdeFilter.NONE).
- m_eScaleType - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The scaling type of the image (default = LsePdeFilter.NONE).
- m_eScaleType - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The scaling type of the image (default = LsePdeFilter.NONE).
- m_eSeedToRand - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
flag for random seed in random walk.
- M_EXP - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_fA0 - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Attenuation coefficients (inverse quadratic attenuation).
- m_fA1 - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Attenuation coefficients (inverse quadratic attenuation).
- m_fA2 - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Attenuation coefficients (inverse quadratic attenuation).
- m_face - Variable in class gov.nih.mipav.model.algorithms.LSCM.FaceEdgeIterator
-
- m_face - Variable in class gov.nih.mipav.model.algorithms.LSCM.FaceHalfedgeIterator
-
- m_face - Variable in class gov.nih.mipav.model.algorithms.LSCM.FaceVertexIterator
-
- m_face - Variable in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- m_face_traits - Variable in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- m_faces - Variable in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- m_fAdvectionWeight - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
The advection coefficient 'a' in the PDE that controls the evolution.
- m_fAdvectionWeight - Variable in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
The advection weight 'a'.
- m_fAdvectionWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_fAlpha - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fAlpha - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fAlpha - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fAlpha - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fAlpha - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fAlpha - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fAlpha - Variable in class gov.nih.mipav.view.WindowLevel
-
Default alpha blending value:
- m_fAlphaBlend - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
alphaBlending values for compositing two images.
- m_fAnalyticGrad - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
flag indicating if the gradient is to be calc. analyticaly or nummericaly
- m_fAngle - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
the spot cone angle and exponent.
- m_fAngle - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_fAngleMax - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
- m_fAnimateRate - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_fAnnotationScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_father - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexTrait
-
- m_fAttenuate - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Attenuation for point and spot lights based on distance of the vertex from the light source.
- m_fAttenuationC0 - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Attenuation factor red channel.
- m_fAttenuationC1 - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Attenuation factor green channel.
- m_fAttenuationC2 - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Attenuation factor blue channel.
- m_fAverageEdgesPerVertex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Statistics
-
self-explanatory statistics.
- m_fAverageTrianglesPerEdge - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Statistics
-
DOCUMENT ME!
- m_fAverageTrianglesPerVertex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Statistics
-
DOCUMENT ME!
- m_fAxialBandLimit - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_fBeta - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fBeta - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fBeta - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fBeta - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fBeta - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fBeta - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fBlend - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_fBlend - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- m_fBlend - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_fBorderValue - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
When set to Float.MAX_VALUE, Neumann conditions are in use
(zero-valued derivatives on the image border).
- m_fBorderValue - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The border value of the image (default = Float.MAX_VALUE).
- m_fBorderValue - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The border value of the image (default = Float.MAX_VALUE).
- m_fBorderValue - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The border value of the image (default = Float.MAX_VALUE).
- m_fBorderValue - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The border value of the image (default = Float.MAX_VALUE).
- m_fBorderValue - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The border value of the image (default = Float.MAX_VALUE).
- m_fBorderValue - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The border value of the image (default = Float.MAX_VALUE).
- m_fBrainSelection - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Factored used to adjust image influence - this is a fixed value.
- m_fCenterScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
Distance scale used to position the center sphere control-point out from the
center of the circle/ellipse.
- m_fCenterX - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
The center of the X,Y bar cross hairs, in plane coordinates:.
- m_fCenterX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
Current parameterized coordinates for the center control point in X
(used to maintain relative position when resizing the widget).
- m_fCenterX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Current parameterized coordinates for the center control point in X
(used to maintain relative position when resizing the widget).
- m_fCenterY - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
The center of the X,Y bar cross hairs, in plane coordinates:.
- m_fCenterY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
Current parameterized coordinates for the center control point in Y
(used to maintain relative position when resizing the widget).
- m_fCenterY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Current parameterized coordinates for the center control point in Y
(used to maintain relative position when resizing the widget).
- m_fCoarseRate - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Default rotation coarse rate, set to 2 degrees:.
- m_fConstant - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
DOCUMENT ME!
- m_fCosAngle - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
cosine of the spot cone angle, to avoid computing cosine repeatedly.
- m_fCost - Variable in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Current accumulated cost in the Dijkstra algorithm.
- m_fCubeSize - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Maximum size of any side of cube for rendering slices.
- m_fCurrentDistance - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The current distance for boundary pixels in the region growing
involving the signed distance transform.
- m_fCurvatureWeight - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
The curvature coefficient 'c' in the PDE that controls the evolution.
- m_fCurvatureWeight - Variable in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
The curvature weight 'c'.
- m_fCurvatureWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_fD0 - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
The image value of the current pixel.
- m_fD0 - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
The image value of the current pixel.
- m_fDeltaX - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout.GradientNeighbors
-
Scale factors to use for normalizing the finite differences by axis.
- m_fDeltaY - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout.GradientNeighbors
-
DOCUMENT ME!
- m_fDeltaZ - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout.GradientNeighbors
-
DOCUMENT ME!
- m_fDijkstraCurrent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_fDijkstraCurrent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Current Dijkstra path length.
- m_fDijkstraPathLength - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Path length statistics for each type of path:.
- m_fDijkstraPathLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Path length statistics for each type of path:.
- m_fDijkstraPrevious - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_fDijkstraPrevious - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Previous Dijkstra path length.
- m_fDijkstraTotal - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_fDijkstraTotal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Total Dijkstra path length.
- m_fDilationFactor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Amount to dilate the cell (multiple of the cell radius).
- m_fDim - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_fDim - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_fDistance - Variable in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Current accumulated distance in the Dijkstra algorithm.
- m_fDistUnvisitedMax - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
DOCUMENT ME!
- m_fDistUnvisitedMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Range of normalized path distances that have not been visited.
- m_fDistUnvisitedMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Range of normalized path distances that have not been visited.
- m_fDistUnvisitedMin - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Range of normalized path distances that have not been visited.
- m_fDistUnvisitedMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Range of normalized path distances that have not been visited.
- m_fDistUnvisitedMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Range of normalized path distances that have not been visited.
- m_fDRRNormalize - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- m_fEParam - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
DOCUMENT ME!
- m_fEParam - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_fEParam - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_fEpsilon - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Error correction Epsilon.
- m_fEuclidianCurrent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Values for the current path length between the last two selected points:
- m_fEuclidianCurrent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Values for the current path length between the last two selected points:
- m_fEuclidianPrevious - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Values for the previous current path length between the last two selected points:
- m_fEuclidianPrevious - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Values for the previous current path length between the last two selected points:
- m_fEuclidianTotal - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Values for the total path lengths:.
- m_fEuclidianTotal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Values for the total path lengths:.
- m_fExponent - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- m_fExternalStorage - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- m_fExternalStorage - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- m_fExtreme - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_fFAMax - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
- m_fFAMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_fFAMin - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
- m_fFAMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_fFineRate - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Default rotation fine rate, set to 1 degree:.
- m_fFMult - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_fFourthInvDxDy - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
invFourthDxDy = 1/(4*dx*dy)
- m_fFourthInvDxDy - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
invFourthDxDy = 1/(4*dx*dy)
- m_fFourthInvDxDz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
invFourthDxDz = 1/(4*dx*dz)
- m_fFourthInvDyDz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
invFourthDyDz = 1/(4*dy*dz)
- m_fFParam - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
DOCUMENT ME!
- m_fFParam - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_fFParam - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_fFraction - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_fFractionNumControlPoints - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.SetupOptions
-
Percentage of path samples points to use for the number of control points for a BSpline curve fit.
- m_fFractionNumControlPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.SetupOptions
-
Percentage of path samples points to use for the number of control points for a BSpline curve fit.
- m_fGamma - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_fGazeDist - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
How far ahead down the path should the view be aimed.
- m_fGazeDist - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
How far ahead down the path should the view be aimed.
- m_fGazeDist - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_fGeodesicSmoothCurrent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_fGeodesicSmoothCurrent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Current Geodesic path length
- m_fGeodesicSmoothPrevious - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_fGeodesicSmoothPrevious - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Previous Geodesic path length
- m_fGeodesicSmoothTotal - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_fGeodesicSmoothTotal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Total Geodesic path length
- m_fGMScale - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_fGradientEpsilon - Variable in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
A small, positive constant added to the gradient magnitude when it is
used in a division.
- m_fGradientMagnitudeScale - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
The scale to use in computing the blurred gradient magnitude of the curvature flow image.
- m_fGradMagSqr - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
The squared magnitude of the gradient vector for the current pixel.
- m_fGradMagSqr - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
The squared magnitude of the gradient vector for the current pixel.
- m_fHalfInvDx - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
halfInvDx = 1/(2*dx)
- m_fHalfInvDx - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
halfInvDx = 1/(2*dx)
- m_fHalfInvDy - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
halfInvDy = 1/(2*dy)
- m_fHalfInvDy - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
halfInvDy = 1/(2*dy)
- m_fHalfInvDz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
halfInvDz = 1/(2*dz)
- m_fIntensity - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Light intensity scale factor.
- m_fInv255 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_fInvDx - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
invDx = 1/dx
- m_fInvDx - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
invDx = 1/dx
- m_fInvDxDx - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
invDxDx = 1/(dx*dx)
- m_fInvDxDx - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
invDxDx = 1/(dx*dx)
- m_fInvDy - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
invDy = 1/dy
- m_fInvDy - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
invDy = 1/dy
- m_fInvDyDy - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
invDyDy = 1/(dy*dy)
- m_fInvDyDy - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
invDyDy = 1/(dy*dy)
- m_fInvDz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
invDz = 1/dz
- m_fInvDzDz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
invDzDz = 1/(dz*dz)
- m_fInvXDelta - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
The inverse delta values are for scaling back to original coordinates for correct interpolation of the image.
- m_fInvYDelta - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
The inverse delta values are for scaling back to original coordinates for correct interpolation of the image.
- m_fInvZDelta - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
The inverse delta values are for scaling back to original coordinates for correct interpolation of the image.
- m_fIPD - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
IPD number.
- m_fix_vertices - Variable in class gov.nih.mipav.model.algorithms.LSCM
-
- m_fixed_alloc - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_encoding_param_t
-
allocation by fixed layer
- m_fixed_quality - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_encoding_param_t
-
add fixed_quality
- m_fK - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
expected cell radius:.
- m_fK - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic2
-
The local curvature parameter, call it k.
- m_fK - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic3
-
The local curvature parameter, call it k.
- m_fLambda1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Constraint factor for the cell shape:.
- m_fLambda2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Constraint factor for the cell size:.
- m_fLambda3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Constraint factor for sampling:.
- m_fLaplacianWeight - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
The Laplacian coefficient 'd' in the PDE that controls the evolution.
- m_fLaplacianWeight - Variable in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
The Laplacian weight 'd'.
- m_fLaplacianWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_fLogFuncValues - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
Logical variable which determines whether function parameters and
corresponding return values should be stored for later analysis.
- m_fLower - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Parameters for the threshold segmentation.
- m_fLower - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Parameters for the threshold segmentation.
- m_fMax - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMax - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMax - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMax - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMax - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMax - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Normalized volume extents:
- m_fMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Maximum dimension.
- m_fMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Image scale factors for display in 3D
- m_fMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Normalized volume extents:
- m_fMax - Variable in class gov.nih.mipav.view.WindowLevel
-
image max value
- m_fMaxAdvectionChange - Variable in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
The stability of the numerical PDE solver depends heavily on the data
being processed.
- m_fMaxAdvPropTimeStep - Variable in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
The stability of the numerical PDE solver depends heavily on the data
being processed.
- m_fMaxAngle - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_fMaxAvrConvexity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_fMaxAvrConvexity - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_fMaxBoundarySampleDistMin - Variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
DOCUMENT ME!
- m_fMaxBox - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Numbers dicatating the size of the plane based on the extents and
resolutions of the image.
- m_fMaxBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Numbers dictating the size of the plane based on the extents and
resolutions of the image.
- m_fMaxBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Numbers dictating the size of the plane based on the extents and resolutions of the image.
- m_fMaxCurvatureChange - Variable in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
The stability of the numerical PDE solver depends heavily on the data
being processed.
- m_fMaxCurvatureTimeStep - Variable in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
The stability of the numerical PDE solver depends heavily on the data
being processed.
- m_fMaxDistance - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
The maximum distance to allow when computing the signed distance transform.
- m_fMaxDistance - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The maximum allowed distance for the signed distance transform.
- m_fMaxDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_fMaxDistance - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_fMaxDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_fMaximumTimeStep - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGaussianBlur2
-
The maximum time step allowed for numerical stability of the filter.
- m_fMaximumTimeStep - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGaussianBlur3
-
The maximum time step allowed for numerical stability of the filter.
- m_fMaxLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_fMaxMeanCurvature - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_fMaxMeanCurvature - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_fMaxPropagationChange - Variable in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
The stability of the numerical PDE solver depends heavily on the data
being processed.
- m_fMaxTime - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
The maximum time in m_afTime[].
- m_fMeanEdgeLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Mean length of the vector.
- m_fMeanEdgeLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
update parameters.
- m_fMeanEdgeLength - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_fMeanNoise - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
The mean noise value:
- m_fMeanNoise - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Mean noise vale read from the .list file
- m_fMeanNoise - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_fMeanNoise - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Mean noise vale read from the .list file
- m_fMetric - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator.HeapRecord
-
DOCUMENT ME!
- m_fMHalfParam - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic2
-
-0.5/(k^2*average(|grad(u)|^2))
- m_fMHalfParam - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic3
-
-0.5/(k^2*average(|grad(u)|^2))
- m_fMin - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
The minimum image value.
- m_fMin - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMin - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMin - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMin - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMin - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMin - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The default parameters used in the sigmoid function that modifies
the gradient magnitude (default alpha = 1, default beta = 0,
default min = 0, default max = 1).
- m_fMin - Variable in class gov.nih.mipav.view.WindowLevel
-
image min value
- m_fMin1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_fMin1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- m_fMin2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_fMin2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- m_fMinAvrConvexity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_fMinAvrConvexity - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_fMinBranchLength - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.SetupOptions
-
Minimum length of branch to extract.
- m_fMinBranchLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.SetupOptions
-
Minimum length of branch to extract.
- m_fMinDist - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_fMinDist - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_fMinDistance - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_fMinDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_fMinMeanCurvature - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_fMinMeanCurvature - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_fMinTime - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
The minimum time in m_afTime[].
- m_fMouseX - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
For zooming with the mouse.
- m_fMouseX - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Last/current mouse position.
- m_fMouseY - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
For zooming with the mouse.
- m_fMouseY - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_fMouseY - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_fNear - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_fNewRes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
The new resolutions in each dimension if resample is true.
- m_fNormalize - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityDRR
-
Factor used to scale the computed sum along each ray for the purpose of normalizing the integral.
- m_fNormalize - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
Factor used to scale the intermediate values during the mapping to the final image.
- m_fNormalizedPathDist - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
DOCUMENT ME!
- m_fNormalizedPathDist - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Current position along the path.
- m_fNormalizedPathDist - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Annotation relative distance (in the [0,1] range) along the branch path
- m_fNormalizedPathDist - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Current position along the path.
- m_fNormalizedPathDist - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Current position along the path.
- m_fObjectiveNumericalAperature - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
numerical aperature of the imaging lens:.
- m_fOffset - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
The offset used in scaling the image data.
- m_fOffsetX - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
"Real" coordinate of sample at the 0 index along the X axis.
- m_fOffsetY - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
"Real" coordinate of sample at the 0 index along the X axis.
- m_fOffsetZ - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
"Real" coordinate of sample at the 0 index along the X axis.
- m_fOldX - Variable in class gov.nih.mipav.view.WindowLevel
-
previous mouse x-position
- m_fOldY - Variable in class gov.nih.mipav.view.WindowLevel
-
previous mouse y-position
- m_fOpacity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_fOpacity - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Opacity for setting the JDialogOpacityControls, used for VOI opacity.
- m_fPageMargin - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
page margin
- m_fPageWidth - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
page width
- m_fParam - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic2
-
1/(k^2*average(|grad(u)|^2))
- m_fParam - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic3
-
1/(k^2*average(|grad(u)|^2))
- m_fParentBranchPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
DOCUMENT ME!
- m_fParentBranchPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Normalized distance (in range [0,1]) along parent branch where the specified
branch starts.
- m_fParentBranchPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Normalized distance (in range [0,1]) along parent branch where the
specified branch starts.
- m_fPathStep - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
What is the increment in distance along the path that each step takes.
- m_fPathStep - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
What is the increment in distance along the path that each step takes.
- m_fPathStep - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_fPropagationWeight - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
The propagation coefficient 'b' in the PDE that controls the evolution.
- m_fPropagationWeight - Variable in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
The propagation weight 'b'.
- m_fPropagationWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_fPtLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_fPtLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_fRadialBandLimit - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
3).
- m_fRadius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_fRadius - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive.Circle2f
-
DOCUMENT ME!
- m_fRadius - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Radius of the sphere displayed to mark the points on the Geodesic.
- m_fRadius - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Radius of the sphere displayed to mark the points on the Geodesic.
- m_fRadiusX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
The radius of the circle in the x-direction.
- m_fRadiusY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
The radius of the circle in the y-direction.
- m_fRangeMax - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
DOCUMENT ME!
- m_fRangeMin - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
Remember the range of input values for the progress bar.
- m_fRayDelta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
DOCUMENT ME!
- m_fRayDelta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_fReductionX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Reduce the size of the 1st axis of the ellipsoid so that it fits entirely into brain.
- m_fReductionX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_fReductionY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Reduce the size of the 2st axis of the ellipsoid so that it fits entirely into brain.
- m_fReductionY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_fReductionZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Reduce the size of the 3st axis of the ellipsoid so that it fits entirely into brain.
- m_fReductionZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_fRefractiveIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
sample index of refraction:.
- m_fRemainingWeight - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Weights, relaxed flags, and previous vertex index for Dijkstra's search:.
- m_fRemainingWeight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Weights, relaxed flags, and previous vertex index for Dijkstra's search:.
- m_fReset - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeCG
-
reset flag.
- m_fResX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Slice thickness read from .list file
- m_fResX - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_fResX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Slice thickness read from .list file
- m_fResY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Slice thickness read from .list file
- m_fResY - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_fResY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Slice thickness read from .list file
- m_fResZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Slice thickness read from .list file
- m_fResZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_fResZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Slice thickness read from .list file
- m_fRho - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_fRho - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_fRigid - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_fRigid - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_fRotateBegin - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Default rotation start, set to negative 5 degrees:.
- m_fRotateEnd - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Default rotation end, set to postive 5 degrees:.
- m_fRotationRange - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
The range of rotations to try in brute-force mode:.
- m_fRotationRange - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
The range of rotations to try in brute-force mode:.
- m_fRotationRange - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
default rotation range (0).
- m_fRScaleX - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_fRScaleY - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_fSAlpha - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_fSamples - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_fSBeta - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_fScale - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
The scale factor used in scaling the image data.
- m_fScale - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The scale used for computing the blurred gradient magnitude image
(default = 0).
- m_fScale - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The scale used for computing the blurred gradient magnitude image
(default = 0).
- m_fScale - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The scale used for computing the blurred gradient magnitude image
(default = 0).
- m_fScale - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The scale used for computing the blurred gradient magnitude image
(default = 0).
- m_fScale - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The scale used for computing the blurred gradient magnitude image
(default = 0).
- m_fScale - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The scale used for computing the blurred gradient magnitude image
(default = 0).
- m_fScale - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Scale factor for large images:.
- m_fScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ScaledTextureEffect
-
- m_fScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Ellipsoids scale factor, based on the DTI volume:
- m_fScale1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_fScale1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- m_fScale2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_fScale2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- m_fScaleB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapColor
-
Scale factors to apply to each RGB channel.
- m_fScaleG - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapColor
-
Scale factors to apply to each RGB channel.
- m_fScaleR - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapColor
-
Scale factors to apply to each RGB channel.
- m_fShininess - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Shinness factor, exponential power value for Phong type shading model.
- m_fShininess - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
specular coefficient
- m_fShininess - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
specular coefficient
- m_fSigmoidAlpha - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- m_fSigmoidBeta - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- m_fSigmoidMax - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- m_fSigmoidMin - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
The parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- m_fSizeMax - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Maximum coordinate scale factor for real positions.
- m_fSizeX - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Scale factors for placing [-1,+1] normalized positions and targets into real world space with dimensions.
- m_fSizeX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Size of each axis in the original volume.
- m_fSizeY - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
float Y coordinate scale factor for real positions.
- m_fSizeY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Size of each axis in the original volume.
- m_fSizeZ - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
float Y coordinate scale factor for real positions.
- m_fSizeZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Size of each axis in the original volume.
- m_fSliceSpacingCoarse - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
DOCUMENT ME!
- m_fSliceSpacingFine - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Spacing between slices.
- m_fSliceThickness - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Sets the correct slice thickness
- m_fSMax - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_fSMin - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_fSmoothedPathLength - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_fSmoothedPathLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Length of the smoothed geodesic path
- m_fSpacingX - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Spacing between each sample along X axis.
- m_fSpacingY - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Spacing between each sample along Y axis.
- m_fSpacingZ - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Spacing between each sample along Z axis.
- m_fSpot - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Attenuation for spot lights based on angle between the unit-length axis of the spot cone and the vector from the
spot light position to the vertex.
- m_fSpotAngle - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Properties for spot lights only.
- m_fSpotExponent - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Spot light exponential factor.
- m_fSrcMin - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Given a value in the registered source image, these values are used in this equation to determine the actual
histogram bin: int iBinReg = (int)((value - m_fSrcMin) * m_fSrcScale);.
- m_fSrcScale - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
DOCUMENT ME!
- m_fStiffness - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Stiffness of the surface.
- m_fStiffness - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_fStiffness - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_fSurfaceArea - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_fSurfaceArea - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_fSurfaceArea - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Surface area.
- m_fT0 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
the parameters for clipped rays.
- m_fT1 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
the parameters for clipped rays.
- m_fTanTheta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_fTimeStep - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
The time step for the PDE solver.
- m_fTimeStep - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The time step of the PDE solver (default = 0.001).
- m_fTimeStep - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The time step of the PDE solver (default = 0.001).
- m_fTimeStep - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The time step of the PDE solver (default = 0.001).
- m_fTimeStep - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The time step of the PDE solver (default = 0.001).
- m_fTimeStep - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The time step of the PDE solver (default = 0.001).
- m_fTimeStep - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The time step of the PDE solver (default = 0.001).
- m_fTMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationPicker
-
- m_fTMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationPicker
-
- m_fTolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
tolerance factor for snake evolution:.
- m_fTransparency - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
store the mesh transparency:
- m_fTwistAmount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
DOCUMENT ME!
- m_fUmm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Temporary storage for 3x3 neighborhood.
- m_fUmmm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUmmp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUmmz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUmp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Temporary storage for 3x3 neighborhood.
- m_fUmpm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUmpp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUmpz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUmz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Temporary storage for 3x3 neighborhood.
- m_fUmzm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUmzp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUmzz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUnitTolerance - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_fUnitTolerance - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_fUpm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Temporary storage for 3x3 neighborhood.
- m_fUpmm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUpmp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUpmz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUpp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Temporary storage for 3x3 neighborhood.
- m_fUpper - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Parameters for the threshold segmentation.
- m_fUpper - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Parameters for the threshold segmentation.
- m_fUppm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUppp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUppz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUpz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Temporary storage for 3x3 neighborhood.
- m_fUpzm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUpzp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUpzz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUseZSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- m_fUzm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Temporary storage for 3x3 neighborhood.
- m_fUzmm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUzmp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUzmz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUzp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Temporary storage for 3x3 neighborhood.
- m_fUzpm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUzpp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUzpz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUzz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Temporary storage for 3x3 neighborhood.
- m_fUzzm - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUzzp - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fUzzz - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Temporary storage for 3x3x3 neighborhood.
- m_fValue - Variable in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
-
The numeric value of the heap record.
- m_fVolume - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Surface volume.
- m_fVolumeDiv - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- m_fVolumeMult - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- m_fWavelength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
wavelength of the reflected or fluorescing light:.
- m_fWeight - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_fWeight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
For Dijkstra search.
- m_fX - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Normalized volume extents:
- m_fX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Image scale factors for display in 3D
- m_fX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Volume coordinates of the data (extents * resolutions):
- m_fX0 - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
lower x-bound of the texture-mapped polygon:
- m_fX0 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
The plane coordinate x,y dimensions:
- m_fX0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
lower x-bound of the texture-mapped polygon:
- m_fX0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
lower x-bound of the texture-mapped polygon:
- m_fX1 - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
upper x-bound of the texture-mapped polygon:
- m_fX1 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
The plane coordinate x,y dimensions:
- m_fX1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
upper x-bound of the texture-mapped polygon:
- m_fX1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
upper x-bound of the texture-mapped polygon:
- m_fXBox - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Numbers dicatating the size of the plane based on the extents and
resolutions of the image.
- m_fXBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Numbers dictating the size of the plane based on the extents and
resolutions of the image.
- m_fXBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Numbers dictating the size of the plane based on the extents and resolutions of the image.
- m_fXDelta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The size of a voxel, in voxel units.
- m_fXDelta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
The size of a voxel, in voxel units.
- m_fXDelta - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractor
-
DOCUMENT ME!
- m_fXDelta - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractorCubes
-
DOCUMENT ME!
- m_fXDelta - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
The size of a voxel, in voxel units.
- m_fXDelta - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractor
-
Relative voxel size.
- m_fXDelta - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractorCubes
-
Relative voxel size.
- m_fXRange - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Width of the texture-mapped polygon:
- m_fXRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Width of the texture-mapped polygon:
- m_fXRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Width of the texture-mapped polygon:
- m_fXScaleRange - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
The range of scales in x to try in brute-force mode:.
- m_fXScaleRange - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
The range of scales in x to try in brute-force mode:.
- m_fXScaleRange - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
default x scale range (0).
- m_fXSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
The x-spacing of the image, call it dx.
- m_fXSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
The x-spacing of the image, call it dx.
- m_fXSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The x-spacing of the image.
- m_fXSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The x-spacing of the image.
- m_fXSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The x-spacing of the image.
- m_fXSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The x-spacing of the image.
- m_fXSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The x-spacing of the image.
- m_fXSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The x-spacing of the image.
- m_fXTranslate - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
X direction mouse translation.
- m_fXTrn - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
For zooming and panning.
- m_fY - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Normalized volume extents:
- m_fY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Image scale factors for display in 3D
- m_fY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Volume coordinates of the data (extents * resolutions):
- m_fY0 - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
lower y-bound of the texture-mapped polygon:
- m_fY0 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
The plane coordinate x,y dimensions:
- m_fY0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
lower y-bound of the texture-mapped polygon:
- m_fY0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
lower y-bound of the texture-mapped polygon:
- m_fY1 - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
upper y-bound of the texture-mapped polygon:
- m_fY1 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
The plane coordinate x,y dimensions:
- m_fY1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
upper y-bound of the texture-mapped polygon:
- m_fY1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
upper y-bound of the texture-mapped polygon:
- m_fYBox - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Numbers dicatating the size of the plane based on the extents and
resolutions of the image.
- m_fYBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Numbers dictating the size of the plane based on the extents and
resolutions of the image.
- m_fYBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Numbers dictating the size of the plane based on the extents and resolutions of the image.
- m_fYDelta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The size of a voxel, in voxel units.
- m_fYDelta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
The size of a voxel, in voxel units.
- m_fYDelta - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractor
-
DOCUMENT ME!
- m_fYDelta - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractorCubes
-
DOCUMENT ME!
- m_fYDelta - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
The size of a voxel, in voxel units.
- m_fYDelta - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractor
-
Relative voxel size.
- m_fYDelta - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractorCubes
-
Relative voxel size.
- m_fYRange - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Height of the texture-mapped polygon:
- m_fYRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Height of the texture-mapped polygon:
- m_fYRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Height of the texture-mapped polygon:
- m_fYScaleRange - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
The range of scales in y to try in brute-force mode:.
- m_fYScaleRange - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
The range of scales in y to try in brute-force mode:.
- m_fYScaleRange - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
default y scale range (0).
- m_fYSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
The y-spacing of the image, call it dy.
- m_fYSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
The y-spacing of the image, call it dy.
- m_fYSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The y-spacing of the image.
- m_fYSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The y-spacing of the image.
- m_fYSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The y-spacing of the image.
- m_fYSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The y-spacing of the image.
- m_fYSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The y-spacing of the image.
- m_fYSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The y-spacing of the image.
- m_fYTranslate - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Y direction mouse translatioin.
- m_fYTrn - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
For zooming and panning.
- m_fZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Normalized volume extents:
- m_fZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Image scale factors for display in 3D
- m_fZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Volume coordinates of the data (extents * resolutions):
- m_fZ0 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
The plane coordinate x,y dimensions:
- m_fZ1 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
The plane coordinate x,y dimensions:
- m_fZDelta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The size of a voxel, in voxel units.
- m_fZDelta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
The size of a voxel, in voxel units.
- m_fZDelta - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractor
-
DOCUMENT ME!
- m_fZDelta - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractorCubes
-
DOCUMENT ME!
- m_fZDelta - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
The size of a voxel, in voxel units.
- m_fZDelta - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractor
-
Relative voxel size.
- m_fZDelta - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractorCubes
-
Relative voxel size.
- m_fZeroTolerance - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour2
-
The threshold below which the feature image values are clamped to this
tolerance.
- m_fZeroTolerance - Variable in class gov.nih.mipav.model.algorithms.levelset.LseGeodesicActiveContour3
-
The threshold below which the feature image values are clamped to this
tolerance.
- m_fZeroTolerance - Variable in class gov.nih.mipav.model.algorithms.levelset.LseShapeDetection2
-
The threshold below which the feature image values are clamped to this
tolerance.
- m_fZeroTolerance - Variable in class gov.nih.mipav.model.algorithms.levelset.LseShapeDetection3
-
The threshold below which the feature image values are clamped to this
tolerance.
- m_fZeroTolerance - Variable in class gov.nih.mipav.model.algorithms.levelset.LseThreshold2
-
The threshold below which the feature image values are clamped to this
tolerance.
- m_fZeroTolerance - Variable in class gov.nih.mipav.model.algorithms.levelset.LseThreshold3
-
The threshold below which the feature image values are clamped to this
tolerance.
- m_fZoom - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
For zooming and panning.
- m_fZoomScale - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Image scaling from Zoom:.
- m_fZoomScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Image scaling from Zoom:.
- m_fZoomScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Image scaling from Zoom:.
- m_fZSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- m_fZSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
The z-spacing of the image, call it dz.
- m_fZSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The z-spacing of the image.
- m_fZSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The z-spacing of the image.
- m_fZSpacing - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The z-spacing of the image.
- m_graph - Variable in class gov.nih.mipav.model.algorithms.LSCM.Homology
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.FaceEdgeIterator
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.FaceHalfedgeIterator
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.FaceVertexIterator
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.Loop
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexEdgeIterator
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexFaceIterator
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexInHalfedgeIterator
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexOutHalfedgeIterator
-
- m_halfedge - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexVertexIterator
-
- m_halfedge_traits - Variable in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- m_halfedges - Variable in class gov.nih.mipav.model.algorithms.LSCM.Loop
-
- m_header_data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- m_header_data_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- m_header_offset - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- m_i_ - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_i0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.Edge
-
DOCUMENT ME!
- m_i0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.Edge
-
DOCUMENT ME!
- m_i0 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.Edge
-
DOCUMENT ME!
- m_i0 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.Edge
-
DOCUMENT ME!
- m_i1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.Edge
-
DOCUMENT ME!
- m_i1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.Edge
-
DOCUMENT ME!
- m_i1 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.Edge
-
DOCUMENT ME!
- m_i1 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.Edge
-
DOCUMENT ME!
- m_iAccumulatedFrameCount - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Framerate Performance parameters:
- m_iAccumulatedFrameCount - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Framerate Performance parameters:
- m_iActive - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
The index of the current active VOIManager.
- m_iAnchorIndex - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Anchor point.
- m_iAnimateCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_iAnnotateListItemSelected - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
DOCUMENT ME!
- m_iAnnotateListItemSelected - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Current annotation in the list.
- m_iArrayLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Original data size:.
- m_iAxisDirection - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Keep track of which direction along the currently selected slicing axis has been selected for rendering the
slices.
- m_iAxisSlice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Keep track of which axis has been currently selected for slicing the volume for rendering.
- m_iBackThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Backgroung threshold.
- m_iBackThreshold - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_iBlend - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_iBlur - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- m_iBOrig - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Number of different entries in the BMatrix:
- m_iBOrig - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Number of different BMatrix rows:
- m_iBOrig - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_iBOrig - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Number of different BMatrix rows:
- m_iBranch - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
DOCUMENT ME!
- m_iBranch - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Annotation branch index
- m_iBranchChoiceIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
DOCUMENT ME!
- m_iBranchChoiceIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Index of the closest branch at a fork in the path.
- m_iBranchChoiceIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_iBranchIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Identifies the current curve in the path graph.
- m_iBranchIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Identifies the current curve in the path graph.
- m_iBranchIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Identifies the current curve in the path graph.
- m_iBrightThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
High threshold.
- m_iBrightThreshold - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_iBrushSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_iBSplineDegree - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- m_iBSplineNumControlPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- m_iCapacity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- m_iCaptureFPS - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_iCirclePts - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_iCirclePts - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_iCirclePts - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_iCoarseMax - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_iCol - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix.Index
-
DOCUMENT ME!
- m_iColorSculpt - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
The sculpt region color.
- m_iCombinedTrunc - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
combined truncation.
- m_iConnectFrom - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
point connect from index.
- m_iConnectTo - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
point connect to index.
- m_iCost - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Default cost function, set to correlation ratio (smoothed, weighted):.
- m_iCurrent - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- m_iCurrent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
The ID of the active and previously active widget.
- m_iCurrentFontSize - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
current font size
- m_iCurrentGeodesic - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Current displayed geodesic component.
- m_iCurrentGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Number of currently loaded fiber bundle groups.
- m_iCurrentRecord - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
current level of detail record, 0 <= m_iCurrentRecord <= m_akRecord.length-1.
- m_iCurrentTrackCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_iCurrentUniverse - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
The current universe to be initialized:.
- m_iCurrentVOIPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_id - Variable in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- m_id - Variable in class gov.nih.mipav.model.algorithms.LSCM.MeshHalfEdgeIterator
-
- m_id - Variable in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- m_Id - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
Synthesize ID
- m_Id - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
Transfer function id.
- m_iDegree - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
DOCUMENT ME!
- m_iDeviceType - Variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- m_iDiffusionIterations - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
The number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
- m_iDijkstraCount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_iDijkstraGeodesicGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The number of line segments on the Dijkstra curve.
- m_iDimX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Constraint parameters:.
- m_iDimX - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
X Dimension of the input images:
- m_iDimX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
X-dimensions for Diffusion Weighted Images.
- m_iDimX - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Number of samples in volume along X axis.
- m_iDimX - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_iDimX - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_iDimX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
X-dimensions for Diffusion Weighted Images.
- m_iDimX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
The DTI volume extents:
- m_iDimY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_iDimY - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Y Dimension of the input images:
- m_iDimY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Y-dimensions for Diffusion Weighted Images.
- m_iDimY - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Number of samples in volume along Y axis.
- m_iDimY - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_iDimY - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_iDimY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Y-dimensions for Diffusion Weighted Images.
- m_iDimY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
The DTI volume extents:
- m_iDimZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_iDimZ - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Number of samples in volume along Z axis.
- m_iDimZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_iDimZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
The DTI volume extents:
- m_iDIterations - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
- m_iDIterations - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
- m_iDIterations - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
- m_iDIterations - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
- m_iDIterations - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
- m_iDIterations - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The number of iterations to use in the nonlinear diffusion used to
create the feature image (default = 0).
- m_iDMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Dilation size used in generating boundary from the surface.
- m_iDMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_iDMax - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_iDOF - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Default degrees of freedom:.
- m_iDrawType - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_iDstBlend - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_iEllipsoidMod - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
In the display all ellipsoids mode the ellipsoids are displayed every
m_iEllipsoidMod steps.
- m_iEnd - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_iEnd - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The index of the vertex in the triangle mesh where the Geodesic curve is to end.
- m_iEQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_iEQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Statistics
-
DOCUMENT ME!
- m_iEQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_iEQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_iEQuantity - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
DOCUMENT ME!
- m_iEuclidianGeodesicGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The number of line segments on the Euclidian curve.
- m_iEvolveMax - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_iExtractLevel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
Intensity level for GPU-surface extraction.
- m_iExtractLevel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Intensity level for GPU-surface extraction.
- m_iFaceDeleted - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- m_iFaceFound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- m_iFilter - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Resample filter type, default: Trilinear Interpoloation.
- m_iFilterType - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
Type of level set diffusion filter to apply.
- m_iFilterType - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_iFirst - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_iFirstX - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_iFirstX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
First x mouse position
- m_iFirstY - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_iFirstY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
First y mouse position
- m_iFrameCount - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Framerate Performance parameters:
- m_iFrameCount - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Framerate Performance parameters:
- m_iGenerator - Variable in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
-
The generator for the heap record.
- m_iGridY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_iGridY - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Keeps track of the user-interface position in the main panel.
- m_iGrow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
On a reallocation, the old maximum quantity is incremented by this value.
- m_iGrow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
On a reallocation, the old maximum quantity is incremented by this value.
- m_iGrow - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
On a reallocation, the old maximum quantity is incremented by this value.
- m_iGrow - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
On a reallocation, the old maximum quantity is incremented by this value.
- m_iGrowBy - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- m_iHeight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_iHeight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Canvas width and height
- m_iHeight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- m_iHIndex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator.HeapRecord
-
DOCUMENT ME!
- m_iHQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
collapse support.
- m_iI0 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Temporary quantities used in the inner loop of resampleSingle().
- m_iID - Variable in class gov.nih.mipav.model.structures.VOIPoint
-
ID if this VOIPoint is contained in a PolyLineSlice object.
- m_iIndex - Variable in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
-
The index of the heap record in the records array.
- m_iIndexCount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
index count.
- m_iIndexCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
index count.
- m_iIndexFurthestDistance - Variable in class gov.nih.mipav.view.renderer.flythroughview.DijkstraMinCostPath
-
Linear array index of the sample that is the furthest away from the starting sample.
- m_iIndexPathStart - Variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
This the linear array index for the sample from which all computed paths will originate.
- m_iInterBound - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
intermediate 2D image supporting quantities.
- m_iInterBoundM1 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
intermediate 2D image supporting quantities.
- m_iInterIndex - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Temporary quantities used in the inner loop of resampleSingle().
- m_iInterOffset - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_iInterp - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Default image interpolation, set to be bilinear interpolation:.
- m_iInterp2 - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Default interpolation for the transform algorithm:.
- m_iInterQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
intermediate 2D image supporting quantities.
- m_iIQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelCollapseRecord
-
connectivity array indices in [0..TQ-1] that contain VThrow.
- m_iIters - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- m_iKey - Variable in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Non-negative unique key value identifying this point.
- m_iKeyPrev - Variable in class gov.nih.mipav.model.structures.DijkstraCostItem
-
This value is KEY_UNDEFINED until such time that the point has been marked visited as part of the Dijkstra
algorithm.
- m_iLabelX_SpacingX - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_iLabelX_SpacingX - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_iLabelX_SpacingY - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_iLabelX_SpacingY - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_iLabelY_SpacingX - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_iLabelY_SpacingX - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_iLabelY_SpacingY - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_iLabelY_SpacingY - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_iLastSelectedBranchIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Keep track of the last branch that was selected (at a branch point).
- m_iLastSelectedBranchIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Keep track of the last branch that was selected (at a branch point).
- m_iLastValue - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
Remember the value passed to the setValue method of the JProgressBar.
- m_iLastX - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_iLastX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Last x mouse position
- m_iLastY - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_iLastY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Last y mouse position
- m_iLearningMethod - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
which learning method to use.
- m_iLineClosed - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_iLineClosed - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The index of the last node on a closed path.
- m_iLiveWireSelection - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Type of livewire cost function, gradient magnitude, laplace, intensity.
- m_iLUTIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- m_iM - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_iMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- m_iMaxBound - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iMaxBranches - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.SetupOptions
-
Maximum number of branches to extract.
- m_iMaxBranches - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.SetupOptions
-
Maximum number of branches to extract.
- m_iMaxCoarse - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
Number of coarse iterations
- m_iMaxDepth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The length of the vector _normal_ to the surface to sample along.
- m_iMaxEvolution - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
Number of evolution iterations
- m_iMaxExtent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- m_iMaxGroups - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
maximum number of fiber tracts currently displayed.
- m_iMaximumEdgesPerVertex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Statistics
-
DOCUMENT ME!
- m_iMaximumTrianglesPerEdge - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Statistics
-
DOCUMENT ME!
- m_iMaximumTrianglesPerVertex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Statistics
-
DOCUMENT ME!
- m_iMaxIterations - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Default number of iteration set to 2:.
- m_iMaxQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
The maximum number of elements in the array.
- m_iMaxQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
The maximum number of elements in the array.
- m_iMaxQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
The maximum number of elements in the array.
- m_iMaxQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
The maximum number of elements in the array.
- m_iMaxThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Histogram maximum intensity parameter.
- m_iMaxThreshold - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_iMaxTimer - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Framerate Performance parameters:
- m_iMaxTimer - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Framerate Performance parameters:
- m_iMaxTractLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_iMaxUndo - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- m_iMedianIntensity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Histogram median intensity parameter.
- m_iMedianIntensity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_iMedianIntensity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_iMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- m_iMinBound - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iMinLength - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
- m_iMinThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Histogram minimum intensity parameter.
- m_iMinThreshold - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
histogram parameters.
- m_iMinTractLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_iMM - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_iMode - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
type of box (X_SLICE, Y_SLICE, Z_SLICE).
- m_iModelReduction - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
flag for model reduction.
- m_iMouseButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Stores which button was pressed during mouse drag.
- m_iMouseX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Stores the mouse position for picking.
- m_iMouseY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Stores the mouse position for picking.
- m_iMovieCounter - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_iNbPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
The number of points.
- m_index - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexTrait
-
- m_index - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mct_data_t
-
- m_index - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_simple_mcc_decorrelation_data_t
-
- m_iNearStatus - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
The near status of the mouse, used to set the mouse cursor.
- m_iNewIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Support for remove and removeAt.
- m_iNewIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Support for remove and removeAt.
- m_iNewIndex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Support for remove and removeAt.
- m_iNewIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Support for remove and removeAt.
- m_iNextItemKey - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList
-
DOCUMENT ME!
- m_iNextItemKey - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM
-
Annotation item number.
- m_iNMaxCand - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitCandidates
-
max candidate number.
- m_iNShapes - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
the number of shapes.
- m_iNumberIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Number of iterations for the deconvolution:.
- m_iNumberPoints - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_iNumberPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Number of points in the free-hand line.
- m_iNumberProgress - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Show the deconvolved image in progress every m_iNumberProgress steps:.
- m_iNumBins - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Number of bins to use for computation.
- m_iNumBins - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Number of bins to use for computation.
- m_iNumCurves - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
The number of curves.
- m_iNumGeodesicVertices - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_iNumGeodesicVertices - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Number of vertices in the geodesic curve.
- m_iNumLat - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
- m_iNumLon - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
- m_iNumMinima - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Default number of minima to test from level 8 at level 4 (set to 3):.
- m_iNumNewMeshes - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Number of meshes.
- m_iNumNewMeshes - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Number of meshes.
- m_iNumNotRemoved - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Number of triangles not removed during a cut mesh operation.
- m_iNumPicked - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
number of picked points displayed.
- m_iNumPicked - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Keeps track of the of picking, so that when a pair of points has been picked the Geodesic is calculated:.
- m_iNumPicked - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
number of picked points displayed.
- m_iNumPicked - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Keeps track of the of picking, so that when a pair of points has been picked the Geodesic is calculated:.
- m_iNumPreset - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Preset Material's examples:.
- m_iNumPreset - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Preset Material's examples:.
- m_iNumPrev - Variable in class gov.nih.mipav.model.structures.DijkstraCostItem
-
This is the number of samples along the minimum cost path it takes to get from the starting sample to this
sample.
- m_iNumRemoved - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Number of triangles removed during a cut mesh operation.
- m_iNumSamples - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
Total number of samples in the target image.
- m_iNumSamplesSrcX - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
DOCUMENT ME!
- m_iNumSamplesSrcX - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
DOCUMENT ME!
- m_iNumSamplesSrcXY - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
DOCUMENT ME!
- m_iNumSamplesSrcY - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
DOCUMENT ME!
- m_iNumSamplesSrcY - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
DOCUMENT ME!
- m_iNumSamplesSrcZ - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
DOCUMENT ME!
- m_iNumSamplesTrg - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
Total number of samples in target, registered source, and error images.
- m_iNumSamplesTrgX - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Number of samples in source and target images.
- m_iNumSamplesTrgX - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Number of samples in source and target images.
- m_iNumSamplesTrgXY - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
DOCUMENT ME!
- m_iNumTriangles - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Number of triangles in the mesh, after the new triangles are added:.
- m_iNumTriangles - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Number of triangles in the mesh, after the new triangles are added:.
- m_iNumVoxels - Static variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Image volume size and x, y, z extents.
- m_iNumVoxels - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Dimensions of the volume.
- m_iNumWorking - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
number of vertices in the path.
- m_iNumWorking - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
number of vertices in the path.
- m_InvLUT - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFLookUp
-
Inverse LUT function.
- m_iOldIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Support for remove and removeAt.
- m_iOldIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Support for remove and removeAt.
- m_iOldIndex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Support for remove and removeAt.
- m_iOldIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Support for remove and removeAt.
- m_iOpen - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
index of the non-selected image:.
- m_iOpenSave - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Backup of the open index:.
- m_iOriginalHeight - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_iOriginalWidth - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
The original canvas size.
- m_iP - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_iParentBranchIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Information about the parent branch, if one exists.
- m_iParentBranchIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Information about the parent branch, if one exists.
- m_iParentBranchIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Information about the parent branch, if one exists.
- m_iPasses - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_iPathID - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
shape path ID to indicate which shape.
- m_iPermute - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorLighting
-
the current permutation of the voxel indices (0, 1, or 2).
- m_iPermute - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
the current permutation of the voxel indices (0, 1, or 2).
- m_iPicked - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
The ID of the
- m_iPixel - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Temporary quantities used in the inner loop of resampleSingle().
- m_iPlane - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Current plane of this contour.
- m_iPlane - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Set to XPLANE, YPLANE, or ZPLANE, depending on the image orientation.
- m_iPlaneOrientation - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Which dimension of the ModelImage to render.
- m_iPlaneOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Which dimension of the ModelImage to render.
- m_iPlaneOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Which dimension of the ModelImage to render.
- m_iPP - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_iPrevious - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_iPrevious - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
For Dijkstra search.
- m_iPrevious - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
The ID of the active and previously active widget.
- m_iPreviousX - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Previous and first mouse positions:.
- m_iPreviousX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Previous and first mouse positions:.
- m_iPreviousY - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_iPreviousY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Previous and first mouse positions:.
- m_iPrevTriangle - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
previous triangle index.
- m_iPunctureTri - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
The index of the puncture triangle for computing the conformal mapping:.
- m_iPunctureTri - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
The index of the puncture triangle for computing the conformal mapping:.
- m_iQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The MRI image bounds and quantity of voxels.
- m_iQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
The number of valid elements in the array.
- m_iQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- m_iQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
The MRI image bounds and quantity of voxels.
- m_iQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
The number of valid elements in the array.
- m_iQuantity - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
The number of image elements.
- m_iQuantity - Variable in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap
-
The number of active records in the heap.
- m_iQuantity - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
The number of image elements.
- m_iQuantity - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The number of image elements.
- m_iQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
The number of valid elements in the array.
- m_iQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
The MRI image bounds and quantity of voxels.
- m_iQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
The number of valid elements in the array.
- m_iQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Product of the image dimensions.
- m_iQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Parallel viewing model.
- m_iRange - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- m_iRBound - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iReference - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Index of the reference image:.
- m_iReferenceSave - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Backup of the reference index:.
- m_iRenderLoops - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_iReverseFace - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_iRow - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix.Index
-
DOCUMENT ME!
- m_iRunningNumPicked - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_iRunningNumPicked - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Cycle through the number of correspondence points.
- m_is_decoder - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
tells if the parameter is a coding or decoding one
- m_is_decoder - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_t
-
- m_is_decoder - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
tell if the tcd is a decoder.
- m_is_irreversible - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_simple_mcc_decorrelation_data_t
-
- m_Is2D - Variable in class gov.nih.mipav.model.structures.TransMatrix
-
Transform was constructed to transform 2D vectors, instead of 3D
- m_Is2D - Variable in class gov.nih.mipav.model.structures.TransMatrixd
-
Transform was constructed to transform 2D vectors, instead of 3D
- m_iScaleSteps - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
The number of steps to divide scale ranges:.
- m_iScaleSteps - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
The number of steps to divide scale ranges:.
- m_iScaleSteps - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
default number of divisions for scale optimazation:.
- m_iScreenCaptureCounter - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Screen capture counter.
- m_iScreenCaptureCounter - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_iScreenCaptureCounter - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_iSculptHeight - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
DOCUMENT ME!
- m_iSculptHeight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Window width information for Sculpting.
- m_iSculptImageHeight - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_iSculptImageHeight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
sculpt image height
- m_iSculptImageWidth - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Size of the m_kSculptImage, when it is captured.
- m_iSculptImageWidth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
sculpt image width
- m_iSculptWidth - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Window information for Sculpting:.
- m_iSculptWidth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Window width information for Sculpting.
- m_iSegmentSurfaceBranchSamplesReductionFactor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.SetupOptions
-
The number of samples which define each branch path is reduced by this factor for the purpose of speeding up
the segmentation of the surface.
- m_iSegmentSurfaceBranchSamplesReductionFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.SetupOptions
-
The number of samples which define each branch path is reduced by this factor for the purpose of speeding up
the segmentation of the surface.
- m_iSelected - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
index of the selected image:
- m_iShapeTrunc - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
shape truncation.
- m_iSimilarityMeasure - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
The similarity measure to be used.
- m_iSIndex - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Temporary quantities used in the inner loop of resampleSingle().
- m_iSize - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- m_iSizeX - Static variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Image volume size and x, y, z extents.
- m_iSizeX - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
DOCUMENT ME!
- m_iSizeY - Static variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Image volume size and x, y, z extents.
- m_iSizeY - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
DOCUMENT ME!
- m_iSizeZ - Static variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Image volume size and x, y, z extents.
- m_iSizeZ - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
DOCUMENT ME!
- m_iSlice - Variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
- m_iSlice - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Which slice is currently displayed in the XY plane.
- m_iSlice - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_iSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Which slice is currently displayed in the XY plane.
- m_iSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Which slice is currently displayed in the XY plane.
- m_iSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_iSliceQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_iSlices - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Number of slices in the input images:
- m_iSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Number of slices in the Diffusion Weighted Images series.
- m_iSlices - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_iSlices - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Number of slices in the Diffusion Weighted Images series.
- m_iSliceTarget - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline25D
-
Index of the slice in the input source image to use as the target.
- m_iSmoothedGeodesicGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Root group for different path.
- m_IsNIFTI - Variable in class gov.nih.mipav.model.structures.TransMatrix
-
boolean indicating whether this matrix is associated with a NIFTI
image (special case handling)
- m_IsNIFTI - Variable in class gov.nih.mipav.model.structures.TransMatrixd
-
boolean indicating whether this matrix is associated with a NIFTI
image (special case handling)
- m_IsQform - Variable in class gov.nih.mipav.model.structures.TransMatrix
-
If true, nifti matrix codes for a qform matrix
If false, nifti matrix codes for a sform matrix
Value has no effect if not a nifti matrix
- m_IsQform - Variable in class gov.nih.mipav.model.structures.TransMatrixd
-
If true, nifti matrix codes for a qform matrix
If false, nifti matrix codes for a sform matrix
Value has no effect if not a nifti matrix
- m_iSrcBlend - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_iStart - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
The start, first, and end index values for the pair of points:.
- m_iStart - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The start index value for the pair of points.
- m_iState - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
state variables to keep track of which step the algorithm is on:.
- m_iStereo - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Stereo on/off.
- m_iStereoUpdateCount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
First time the stereo canvas is rendered, set to true:.
- m_iStopCriteria - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
holds the stop criteria in use, e.g m_iStopCriteria = etermMaxFuncEval |
etermMaxIterations
- m_iSum0 - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Cummulative summations for computing the total variance.
- m_iSurfaceIndex - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
the index of the surface that is being changed in the JPanelSurface
- m_iSurfaceIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
the index of the surface that is being changed in the JPanelSurface
- m_iTargetSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Index of the slice from the source image to use for 2.5 registration.
- m_iTCurrent - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_iter - Variable in class gov.nih.mipav.model.algorithms.LSCM.MeshEdgeIterator
-
- m_iter - Variable in class gov.nih.mipav.model.algorithms.LSCM.MeshFaceIterator
-
- m_iter - Variable in class gov.nih.mipav.model.algorithms.LSCM.MeshHalfEdgeIterator
-
- m_iter - Variable in class gov.nih.mipav.model.algorithms.LSCM.MeshVertexIterator
-
- m_iTextureID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
- m_iTextureSamples - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The number of texture samples in the model.
- m_iTextureSamples - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
number of texture samples.
- m_iTextureSizeX - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
This are the actual dimensions of the texture associated with each dimension of the volume.
- m_iTextureSizeY - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
DOCUMENT ME!
- m_iTextureSizeZ - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
DOCUMENT ME!
- m_iTextureTrunc - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
texture truncation.
- m_iTile - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Index of the tile image:.
- m_iTimer - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Framerate Performance parameters:
- m_iTimer - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Framerate Performance parameters:
- m_iTimeSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Current position in time (4D data)
- m_iTimeSteps - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Total number of time-slices (4D data)
- m_iTQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The number of triangle in the ellipsoid.
- m_iTQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_iTQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelCollapseRecord
-
number of triangles after edge collapse.
- m_iTQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_iTQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Statistics
-
DOCUMENT ME!
- m_iTQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_iTQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- m_iTQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_iTranslationRange - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
The range of x,y translations to try in brute-force mode:.
- m_iTranslationRange - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
The range of x,y translations to try in brute-force mode:.
- m_iTranslationRange - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
default x,y translation range (0).
- m_iTSSubsampling - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
- m_iType - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Type of light and limit for available light types which can be selected.
- m_iType - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Dialog type.
- m_iTypeFlags - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
point type flag.
- m_iTypeMask - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Light type mask.
- m_iUnique_ID - Variable in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Unique ID, for the surface:.
- m_iUnique_ID - Variable in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Unique ID, for the surface:.
- m_iUsedWidgets - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_iV - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Vertex
-
DOCUMENT ME!
- m_iV0 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Edge
-
DOCUMENT ME!
- m_iV0 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Triangle
-
DOCUMENT ME!
- m_iV1 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Edge
-
DOCUMENT ME!
- m_iV1 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Triangle
-
DOCUMENT ME!
- m_iV2 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Triangle
-
DOCUMENT ME!
- m_iVCurrent - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
for reordering vertices and triangles.
- m_iVertexCount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Local copies of the Vertex and Index arrays: a local copy is kept so that when the start or end points fall
inside a triangle, a new vertex is added to the vertex array, and three new triangles are added to the triangle
index array, new normals are added to the Normal array:.
- m_iVertexCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Local copies of the Vertex and Index arrays: a local copy is kept so that when the start or end points fall
inside a triangle, a new vertex is added to the vertex array, and three new triangles are added to the triangle
index array, new normals are added to the Normal array:.
- m_iVKeep - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelCollapseRecord
-
edge collapses so that VThrow is replaced by VKeep.
- m_iVOICount - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_iVOICount - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- m_iVOIType - Variable in class gov.nih.mipav.model.structures.VOIBase
-
VOI type of this contour.
- m_iVQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The number of vertices in the ellipsoid.
- m_iVQuantity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
mesh data.
- m_iVQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelCollapseRecord
-
number of vertices after edge collapse.
- m_iVQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
triangle mesh to be decimated.
- m_iVQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Statistics
-
number of vertices, edge, and triangles in the mesh.
- m_iVQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
mesh topology.
- m_iVQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
DOCUMENT ME!
- m_iVQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
mesh data.
- m_iVThrow - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelCollapseRecord
-
DOCUMENT ME!
- m_iWarpMethod - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
- m_iWeights - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Number of images in the weighted series:
- m_iWeights - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Number of weights in the Diffusion Weighted Images series.
- m_iWeights - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_iWeights - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Number of weights in the Diffusion Weighted Images series.
- m_iWhich - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_iWhichButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Which button is pressed to activate the JColorChooser:.
- m_iWhichButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Which button is pressed to activate the JColorChooser:.
- m_iWhichShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Indicates which shader to use (MIP, DDR, CMP, SUR, CMP_SUR, MULTIHISTO):
- m_iWidth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_iWidth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Canvas width and height
- m_iWidth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- m_iX0 - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout.GradientNeighbors
-
Indexes into linear array for X-axis finite difference computed by array[m_iX1] - array[m_iX0];.
- m_iX1 - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout.GradientNeighbors
-
DOCUMENT ME!
- m_iXBm1 - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
XBm1 = XBound - 1
- m_iXBm1 - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
XBm1 = XBound - 1
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The MRI image bounds and quantity of voxels.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
image parameters:.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
The MRI image bounds and quantity of voxels.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
The x-bound of the image, call it XBound.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
The x-bound of the image, call it XBound.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
The x-bound of the image.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
The x-bound of the image.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The x-bound of the image.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The x-bound of the image.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The x-bound of the image.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The x-bound of the image.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The x-bound of the image.
- m_iXBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The x-bound of the image.
- m_iXBound - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
The MRI image bounds and quantity of voxels.
- m_iXBound - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Dimensions of imageA.
- m_iXBound - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iXBoundM1 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iXBoundM2 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iXClick - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
x,y positions of the mouse when one of the mouse buttons is pressed:.
- m_iXMax - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_iXMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
The min and max x,y mouse values
- m_iXMin - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
The min and max x,y mouse values:.
- m_iXMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
The min and max x,y mouse values
- m_iXPick - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Picking support:
- m_iXPick - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Picking support:
- m_iXYBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
XYBound = XBound*YBound
- m_iXYProduct - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iXYZProduct - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iY0 - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout.GradientNeighbors
-
Indexes into linear array for Y-axis finite difference computed by array[m_iY1] - array[m_iY0];.
- m_iY1 - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout.GradientNeighbors
-
DOCUMENT ME!
- m_iYBm1 - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
YBm1 = YBound - 1
- m_iYBm1 - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
YBm1 = YBound - 1
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The MRI image bounds and quantity of voxels.
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
The MRI image bounds and quantity of voxels.
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch2
-
The y-bound of the image, call it YBound.
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
The y-bound of the image, call it YBound.
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
The y-bound of the image.
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
The y-bound of the image.
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
The y-bound of the image.
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The y-bound of the image.
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
The y-bound of the image.
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The y-bound of the image.
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The y-bound of the image.
- m_iYBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The y-bound of the image.
- m_iYBound - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
The MRI image bounds and quantity of voxels.
- m_iYBound - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Dimensions of imageA.
- m_iYBound - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iYBoundM1 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iYBoundM2 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iYClick - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
x,y positions of the mouse when one of the mouse buttons is pressed:.
- m_iYMax - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_iYMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
The min and max x,y mouse values
- m_iYMin - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_iYMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
The min and max x,y mouse values
- m_iYPick - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Picking support:
- m_iYPick - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Picking support:
- m_iZ0 - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout.GradientNeighbors
-
Indexes into linear array for Z-axis finite difference computed by array[m_iZ1] - array[m_iZ0];.
- m_iZ1 - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout.GradientNeighbors
-
DOCUMENT ME!
- m_iZBm1 - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
ZBm1 = ZBound - 1
- m_iZBound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The MRI image bounds and quantity of voxels.
- m_iZBound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- m_iZBound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
The MRI image bounds and quantity of voxels.
- m_iZBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch3
-
The z-bound of the image, call it ZBound.
- m_iZBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
The z-bound of the image.
- m_iZBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
The z-bound of the image.
- m_iZBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
The z-bound of the image.
- m_iZBound - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The z-bound of the image.
- m_iZBound - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
The MRI image bounds and quantity of voxels.
- m_iZBound - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Dimensions of imageA.
- m_iZBound - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iZBoundM1 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_iZBoundM2 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- M_JPG - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_JPG - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_JPG0 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_JPG13 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_JPG8 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_k4DSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelVolume4D
-
- m_kActiveImage - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Current active image for manipulating the LUT by dragging with the
right-mouse down.
- m_kActiveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Current active image for manipulating the LUT by dragging with the
right-mouse down.
- m_kActiveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Current active image for manipulating the LUT by dragging with the right-mouse down.
- m_kActiveList - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
List of active VOIBase for a moving several selected VOIs.
- m_kActiveLookupTable - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
The current active lookup table:
- m_kActiveLookupTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
The current active lookup table:
- m_kActiveLookupTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
The current active lookup table:
- m_kADCImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Output Trace (ADC) Image (before diagonalization of diffusion tensor):
- m_kAdvancedMaterialOptionsButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The material options button, which launches the material editor window.
- m_kAdvancedMaterialOptionsButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The material options button, which launches the material editor window.
- m_kAdvancedOptionsButton - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Launches the JDialogRegistrationOAR2D dialog to set registration options:.
- m_kAlgorithmReg - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Flag set if the deformation computation is to be performed.
- m_kAlpha - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kAlpha - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Alpha blending for this object.
- m_kAlphaTransparency - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Alpha blending for this object.
- m_kAmbient - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Current color values:.
- m_kAmbient - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Current color values:.
- m_kAmbientColorButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Material Properties color buttons:.
- m_kAmbientColorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Material Properties color buttons:.
- m_kAnimator - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Animator object, displays scene in rendering loop (similar to GLUTMainLoop()
- m_kAnimator - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
- m_kAnimator - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_kAnisotropyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Anisotropy image *
- m_kAnisotropyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
Anisotropy image
- m_kAnisotropyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Anisotropy image *
- m_kAnisotropyPath - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Anisotropy file input path name text box.
- m_kAnnotateList - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Keep reference to instance which describes the annotation points.
- m_kAnnotateList - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
This is for the collection of annotation points.
- m_kAnnotateList - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Keep reference to instance which describes the annotation points.
- m_kAnnotateList - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Annotations along the fly path.
- m_kAnnotatePointGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kAnnotationAnimationPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- m_kAppearance - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
The same appearance properties used to render each slice.
- m_kAppearance - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
The same appearance properties used to render each slice.
- m_kApplyAllButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Button to apply sculpt region to the volume.
- m_kApplySculptButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Button to apply sculpt region to the volume.
- m_kApplySculptButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Button to apply sculpt region to the volume.
- m_kArbitraryClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_kArbitraryClipInv - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_kArbRotate - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Node for rotating the arbitrary clip plane with the mouse trackball:
- m_kArrow - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
arrow glyphs
- m_kAxis - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
the spot cone unit-length axis.
- m_kAxisAngle - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Axis angle vector.
- m_kB0Frame - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
ViewJFrameImage for displaying the B0 weighted image:
- m_kB0Image - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
B0 weighted image:
- m_kBackgroundColor - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Background color of rendered image.
- m_kBackgroundColor - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- m_kBackupVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- m_kBallPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_kBallPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_kBasicMesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
- m_kBasisX - Variable in class gov.nih.mipav.model.structures.BSplineLattice2Df
-
DOCUMENT ME!
- m_kBasisX - Variable in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
DOCUMENT ME!
- m_kBasisY - Variable in class gov.nih.mipav.model.structures.BSplineLattice2Df
-
DOCUMENT ME!
- m_kBasisY - Variable in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
DOCUMENT ME!
- m_kBasisZ - Variable in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
DOCUMENT ME!
- m_kBillboardPos - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_kBlendColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_kBlendEquationColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
The combo box for the Blend Equation mode to display.
- m_kBMatrix - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
General matrix storing BMatrix values.
- m_kBMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
General matrix storing BMatrix values.
- m_kBMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_kBMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
General matrix storing BMatrix values.
- m_kBorder - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Data memebr for Dijkstra's search.
- m_kBorder - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Data member for Dijkstra's search.
- m_kBoundingBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_kBoundingBoxShaderSolid - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- m_kBoundingBoxShaderTransparent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- m_kBracketNewOut - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kBracketOut - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kBracketPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kBrainsurfaceFlattenerPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Control panels for the Brainsurface Flattener:.
- m_kBranchConnectShape - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kBranchCurve - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
DOCUMENT ME!
- m_kBranchCurve - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Branch curve
- m_kBranchCurve - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Branch curve
- m_kBranchPathShape - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
This is the Java3D geometry for the path.
- m_kBranchState - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
DOCUMENT ME!
- m_kBranchState - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Current branch state of traversing the fly path.
- m_kBranchState - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_kBSpline2D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- m_kBSpline2D - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
DOCUMENT ME!
- m_kBSpline3D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- m_kBSpline3D - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
DOCUMENT ME!
- m_kBSplineBasisX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
2D and 3D B-Spline basis definitions.
- m_kBSplineBasisX - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
2D B-Spline basis definitions.
- m_kBSplineBasisX - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
3D B-Spline basis definitions.
- m_kBSplineBasisY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- m_kBSplineBasisY - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
DOCUMENT ME!
- m_kBSplineBasisY - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
DOCUMENT ME!
- m_kBSplineBasisZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- m_kBSplineBasisZ - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
DOCUMENT ME!
- m_kButtonLoadImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kButtonLoadSurface - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kButtonLoadSurface - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kC - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Cos matrix: = cos( 2*pi*i/n).
- m_kCalcImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- m_kCalcImage2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- m_kCalcResult1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_kCalcResult2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_kCalcResult3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_kCalcTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kCallback - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Instance which implements the Callback interface whose viewChanged method is to be called whenever anything about
this behavior changes.
- m_kCallback - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Instance which implements the Callback interface whose viewChanged method is to be called whenever anything about
this behavior changes.
- m_kCallback - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Instance which implements the Callback interface whose viewChanged method
is to be called whenever anything about this behavior changes.
- m_kCameraDVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Camera direction vector at Annotation point.
- m_kCameraLocation - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Camera location at Annotation point.
- m_kCameraRVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Camera right vector at Annotation point.
- m_kCameraUVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Camera up vector at Annotation point.
- m_kCanvas - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Drawing canvas:.
- m_kCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
The Canvas3D object on which the plane is drawn.
- m_kCanvas - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Canvas reference for drawing :.
- m_kCanvas3D - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Canvas3D reference for drawing :.
- m_kCenter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
initial ellipsoid parameters.
- m_kCenter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
initial ellipsoid parameters.
- m_kCenter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
The center G, orientation R, diagonal matrix D, and constant L in the factorization (P-G)^T R^T D R (P-G) = L.
- m_kCenter - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kCenter - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive.Circle2f
-
DOCUMENT ME!
- m_kCenter - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_kCenter - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Center of Mesh
- m_kCenter - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_kCenter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_kCenter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Center of surface.
- m_kCenterDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
Direction used to position the center sphere control-point out from the
center of the circle/ellipse.
- m_kCenterScanner - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_kCExclude - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kCheckBoxShowCurvatures - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kCheckBoxShowCurvatures - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Show curvature colors check box.
- m_kCheckBoxShowCurvatures_actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Show the psesudo color.
- m_kCheckBoxShowCurvatures_actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Show the psesudo color.
- m_kCheckCreateDeformationImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
DOCUMENT ME!
- m_kCheckLivewire - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Toggle between LiveWire Interaction and point & click interaction:.
- m_kCheckLivewire - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Toggle between LiveWire Interaction and point & click interaction:.
- m_kCheckMultiPass - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
DOCUMENT ME!
- m_kCIgnore - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kCInclude - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kClearAllCutsButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kClearAllCutsButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Clearsall cuts.
- m_kClearAllGeodesicButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kClearAllGeodesicButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Clearsall Geodesic components.
- m_kClearDrawOutlineButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Button for clearing the sculpt region.
- m_kClearDrawOutlineButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Button for clearing the sculpt region.
- m_kClearLastCutButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kClearLastCutButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Clear the last cut.
- m_kClearLastGeodesicButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Button for deleting the geodesic.
- m_kClearLastGeodesicButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Button for deleting the geodesic.
- m_kClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Sets the Color.
- m_kClipEffect - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageCrop
-
- m_kClipEffect - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- m_kClipInv - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_kCloseAllButton - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Close all images and remove them from the scene:.
- m_kColor - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Contour color.
- m_kColor - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
The color m_kColor is the object returned in the colorOf functions.
- m_kColor - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorComposite
-
DOCUMENT ME!
- m_kColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_kColorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Color button for changing the color of the fiber bundles.
- m_kColorChooser - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Color Chooser dialog:.
- m_kColorChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Color chooser for when the user wants to change the color of the fiber
bundle tracts.
- m_kColorChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Color Chooser dialog:.
- m_kColorEllipse - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Volume-based color for the ellipsoids:
- m_kColorImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Output Color mapped Image:
- m_kColorMap - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Data storage for color map:
- m_kColorMapNew - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_kColorMapTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Texture object for color map:
- m_kColors - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Store the mesh colors:
- m_kColorVector - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Surface color vector. - TO BE MOVED - redesigned
- m_kComboBoxCostFunction - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
DOCUMENT ME!
- m_kComboBoxTargetImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Controls displayed in the dialog box.
- m_kComboBoxTargetSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
DOCUMENT ME!
- m_kComboSegmentSurfaceBranchSamplesReductionFactor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Surface sample reduction factor.
- m_kComboSegmentSurfaceBranchSamplesReductionFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Surface sample reduction factor.
- m_kComponent - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
The canvas
- m_kContinueUpdate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kContinueUpdate - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Continuous update check box.
- m_kContinueUpdate_actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Continue update the surface render and the plane render.
- m_kContinueUpdate_actionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Continue update the surface render and the plane render.
- m_kControlFrame - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
This is the control frame which may need to be updated as the view changes.
- m_kControlFrame - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
This is the control frame which may need to be updated as the view changes.
- m_kControlsPass1 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Container for controls to select the parameters for the first pass of registration.
- m_kControlsPass2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Container for controls to select the parameters for the optional second pass of registration.
- m_kCoordMapX - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
These vectors are used for mapping each coordinate from its real range into the range [0,1] where real coordinate
0 maps to texture coordinate 0, and real coordinate at the maximum sample index along that axis maps to 1.
- m_kCoordMapY - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
DOCUMENT ME!
- m_kCoordMapZ - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
DOCUMENT ME!
- m_kCopyVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_kCopyVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
The contour to copy.
- m_kCortical - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Cortical mesh to be used in rendering scene.
- m_kCortical - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Cortical mesh to be used in rendering scene.
- m_kCortical - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Calculating the mesh curvatures.
- m_kCross - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
temporary variables to avoid 'new' calls.
- m_kCubeTranslate - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeOrientationCube
-
Orientation cube translation offset:
- m_kCull - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_kCull - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Culling of this object (front-face, back-face, none)
- m_kCuller - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Culling out-of-view objects:
- m_kCuller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- m_kCuller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_kCullPlane - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- m_kCurrentColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
The current color to use to create a new Widget.
- m_kCurrentDir - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
current directory
- m_kCurrentFont - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
current font
- m_kCurrentStartList - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kCurrentText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Current GLSL code for the widget program.
- m_kCurrentTransform - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
current transformation based on mouseDragged event:.
- m_kCurrentTransform - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
current zoom transformation
- m_kCurrentVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_kCurrentVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Current active voi contour.
- m_kCurrentVOIGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
The current active VOI
- m_kCutGeodesicButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Button for cutting the mesh along the geodesic:.
- m_kCutGeodesicButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Button for cutting the mesh along the geodesic:.
- m_kCylinder - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Cylinder renderer
- m_kCylinder - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Cylinders is a sphere with a non-uniform scale based on the eigen
vectors and values.
- m_kCylinderLines - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Cylinder longitude/latitude lines.
- m_kCylinderMesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
- m_kCylinderPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Scene-graph node for displaying correspondence points on the cylinder.
- m_kD - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
BufferedImage Dimensions (power of two).
- m_kData - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.EdgeAttribute
-
support for application-specific data.
- m_kData - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.TriangleAttribute
-
support for application-specific data.
- m_kData - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.VertexAttribute
-
support for application-specific data.
- m_kDecimalFormat - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Used to create text representations of numbers.
- m_kDecimalFormat - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Used to create text representations of numbers.
- m_kDefaultShape - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList
-
DOCUMENT ME!
- m_kDeleteList - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_kDeleteList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- m_kDescription - Variable in class gov.nih.mipav.view.renderer.flythroughview.FileFilterExt
-
The description for this filter.
- m_kDescription - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Description associated with this light.
- m_kDescription - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
DOCUMENT ME!
- m_kDescription - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Annotation description
- m_kDiff - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
temporary variables to avoid 'new' calls.
- m_kDiffuse - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
DOCUMENT ME!
- m_kDiffuse - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
diffuse color
- m_kDiffuse - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
diffuse color
- m_kDiffuseColorButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
diffuse color button
- m_kDiffuseColorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
diffuse color button
- m_kDijkstraDistance - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kDijkstraDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Label displaying the current Dijkstra path length.
- m_kDijkstraDistanceValueLast - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kDijkstraDistanceValueLast - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Label displaying the previous Dijkstra path length.
- m_kDijkstraDistanceValueTotal - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kDijkstraDistanceValueTotal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Label displaying the total Dijkstra path length.
- m_kDijkstraGeodesicGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Directory for calculated images
- m_kDirection - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Light direction.
- m_kDirection - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
To avoid memory allocations.
- m_kDirection - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive.Ray2f
-
DOCUMENT ME!
- m_kDirection - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive.Segment2f
-
DOCUMENT ME!
- m_kDirection - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationPicker
-
- m_kDisablePick - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kDisablePick - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Enable/disable correspondence picking
- m_kDisplayButtonGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kDisplayButtonGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kDisplayButtonGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
ButtonGroup for the plane/surface display selection.
- m_kDisplayButtonGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
ButtonGroup for the different path display options.
- m_kDisplayDijkstra - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kDisplayDijkstra - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Display Dijkstra's path.
- m_kDisplayedImage - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
The current displayed texture, based on the value of m_iSlice.
- m_kDisplayEuclidian - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kDisplayEuclidian - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Display the Euclidian path.
- m_kDisplayGeodesic - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Radio buttons for displaying the smoothed geodesic, dijkstra's path, or the euclidian path:.
- m_kDisplayGeodesic - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Radio buttons for displaying the smoothed geodesic, dijkstra's path, or the euclidian path:.
- m_kDisplayList - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
List of objects displayed in the scene.
- m_kDisplayList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- m_kDisplayPane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
The JSplitPane displaying the left and right eye views:.
- m_kDisplayPlane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kDisplayPlane - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Toggle displaying the plane on/off
- m_kDisplaySlicesCheck - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Turn display 3D Slices on/off
- m_kDisplaySlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
User-control over the number of glyphs displayed in GPUVolumeRender
- m_kDisplaySphere - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kDisplaySphere - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Toggle displaying the sphere on/off
- m_kDisplaySurfaceCheck - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Turn display 3D TriMesh Surface on/off
- m_kDisplayVOICheck - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Turn display VOIs on/off
- m_kDisplayVolumeCheck - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Turn display volume on/off
- m_kDistance - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
vertex-vertex distances measured along edge paths.
- m_kDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
vertex-vertex distances measured along edge paths.
- m_kDrawGeodesicButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Geodesic drawing interface Toggle button is down while points are added to the curve:.
- m_kDrawGeodesicButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Geodesic drawing interface Toggle button is down while points are added to the curve:.
- m_kDrawingContext - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
ScreenCoordinateListener translates between the current image dimensions, canvas size, and mouse
coordinates for correct mouse interaction.
- m_kDrawOutlineButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Toggle button is down while the mouse is used to draw the sculpt outline.
- m_kDrawOutlineButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Toggle button is down while the mouse is used to draw the sculpt outline.
- m_kDstBlend - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- m_kDTI - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Input Diffusion Tensor Image:
- m_kDTI - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Input Diffusion Tensor Image:
- m_kDTI - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Output DTI Image:
- m_kDTIColorImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
result image *
- m_kDTIColorImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
Diffusion Tensor image.
- m_kDTIDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
DTI renderer.
- m_kDTIImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kDTIImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Diffusion Tensor image.
- m_kDTIImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
Diffusion Tensor image.
- m_kDTIImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Diffusion Tensor image.
- m_kDTIPath - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Diffusion Tensor file input path name text box.
- m_kDWIImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
DWI Image 4D series of weighted diffusion images
- m_kDWIImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_kDWIImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
Diffusion Tensor image.
- m_kDWIMaskImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Mask image for calculating the DTI image.
- m_kDWIMaskPath - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Diffusion Weighted Images Mask file input path name text box.
- m_kDWIPath - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Diffusion Weighted Images .list file input path name text box.
- m_kE0 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Temporary variables to avoid 'new' calls.
- m_kE0 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
temporary variables to avoid 'new' calls.
- m_kE0 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_kE1 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Temporary variables to avoid 'new' calls.
- m_kE1 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
temporary variables to avoid 'new' calls.
- m_kE1 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_kEDelete - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_kEdge - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator.HeapRecord
-
DOCUMENT ME!
- m_kEigenValue - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
- m_kEigenValueImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Output EigenValue Image:
- m_kEigenValueImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Input EigenValue Image:
- m_kEigenValueImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
EigenValue image *
- m_kEigenValueImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
EigenValue image
- m_kEigenValueImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
EigenValue image *
- m_kEigenVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
EigenVector values for displaying ellipsoids.
- m_kEigenVectorImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Output EigenVector Image:
- m_kEigenVectorImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Input EigenVector Image:
- m_kEigenVectorImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Eigenvector image *
- m_kEigenVectorImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
Eigenvector image
- m_kEigenVectorImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Eigenvector image *
- m_kEigenVectorPath - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
EigenVector file input path name text box.
- m_kEllipseMaterial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Material properties of the ellipsoids.
- m_kEMap - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Edge map.
- m_kEMap - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_kEMap - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
map of .
- m_kEMap - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_kEMap - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_kEmissive - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
emissive color
- m_kEmissive - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
emissive color
- m_kEmissiveColorButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
emissive color button
- m_kEmissiveColorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
emissive color button
- m_kEndPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kEndPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
End point on the curve.
- m_kEndSurface - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kEndSurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Surface the End point is on.
- m_kEntropyOut - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kEntropyPoints2D - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kESet - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.VertexAttribute
-
set of .
- m_kEstimatedImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
estimated of the reconstructed image:.
- m_kEuclidianDistance - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Labels to indicate the path length between the picked points, in Euclidian distance, geodesic smoothed distance,
and Dijkstra's path mesh distance.
- m_kEuclidianDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Label displaying the current Euclidian path length.
- m_kEuclidianDistanceValueLast - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kEuclidianDistanceValueLast - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Label displaying the previous Euclidian path length.
- m_kEuclidianDistanceValueTotal - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kEuclidianDistanceValueTotal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Label displaying the total Euclidian path length.
- m_kEuclidianGeodesicGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kExclude - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kExtensionsVector - Variable in class gov.nih.mipav.view.renderer.flythroughview.FileFilterExt
-
An array of possible extensions.
- m_kExtent - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Oriented bounding box of image, centered at (0,0,0), axes are stored as the columns of a rotation matrix, and
half-widths are specified.
- m_kExtractTriMesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Button for extracting a TriMesh surface based on the ray-cast volume rendered in Surface mode
- m_key - Variable in class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- m_key - Variable in class gov.nih.mipav.model.algorithms.LSCM.Token
-
- m_kEyeModel - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_kEyeSep_Slider - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Focal-length, (eye separation) slider.
- m_kEyeWorld - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
eye point in world and model space.
- m_kFAImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Output Functional Anisotropy Image:
- m_kFAImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Input FA Image:
- m_kFAMaxThreshold - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kFAMinThreshold - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kFastMarcher - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The fast marching object used for region growing and for signed
distance transforms.
- m_kFBO - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_kFiberTractGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
For displaying the fiber bundle tracts in the orthogonal slice view:
- m_kFile - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kFileName - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
current file name
- m_kFilePoint - Variable in class gov.nih.mipav.view.PatientSlice
-
current slice positions in FileCoordinates:.
- m_kFilterType - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Resample filter selection box.
- m_kFinishClosedGeodesicButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kFinishClosedGeodesicButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Close and finish the Geodesic path.
- m_kFinished - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kFinished - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The finished TriMesh
- m_kFinishOpenGeodesicButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kFinishOpenGeodesicButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Finish the Geodesic path without closing.
- m_kFirstPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
First point, for closing the Geodesic curve:.
- m_kFirstPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
First point, for closing the Geodesic curve:.
- m_kFlyPathBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Keep track of the FlyPathBehavior because it knows about the view from the path.
- m_kFlyPathBehavior - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Fly path behavior.
- m_kFlyPathGraph - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Keep reference to instance which describes the path.
- m_kFlyPathGraph - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Keep reference to instance which describes the path.
- m_kFlyPathGraph - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_kFlyPathGraphCurve - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kFlyPathGraphCurve - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Fly path curve.
- m_kFlyPathGraphCurve - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Fly path curve.
- m_kFlyPathGraphSamples - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
This is the path extracted from the skeletonization.
- m_kFlyThroughRender - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Flythrough renderer:
- m_kFourCorners - Variable in class gov.nih.mipav.view.PatientSlice
-
The rotated non-axis aligned corners of the slice, from the RFA probe rotation in the SurfaceRender:.
- m_kFrame - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kFrame - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_kFrameRateSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelVolume4D
-
- m_kFromOrigin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kFromOrigin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_kFromOriginInv - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
G Matrix, equation 19:.
- m_kGenerator - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
The ModelClodMesh object that generated the ModelTriangleMesh object, null otherwise.
- m_kGeodesic_Finished - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
For finished paths, either open or closed:.
- m_kGeodesic_Finished - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
For finished paths, either open or closed:.
- m_kGeodesic_Working - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
LinkedLists to contain the working paths in progress, and all finished paths, open and closed for the smoothed
geodesics and dijkstra's geodesics.
- m_kGeodesic_Working - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
LinkedLists to contain the working paths in progress, and all finished paths, open and closed for the smoothed
geodesics and dijkstra's geodesics.
- m_kGeodesic_Working_Left - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kGeodesic_Working_Left - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
LinkedLists to contain the working paths in progress, and all finished paths, open and closed for the smoothed
geodesics and dijkstra's geodesics.
- m_kGeodesic_Working_Right - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kGeodesic_Working_Right - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
LinkedLists to contain the working paths in progress, and all finished paths, open and closed for the smoothed
geodesics and dijkstra's geodesics.
- m_kGeodesicGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kGeodesicGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Group for drawing the Geodesic on the triangle mesh, assumes that the Group is created in the same branch tree as
the triangle mesh surface, so when the mesh is transformed (rotated,scaled,translated) the polyline drawn and
stored in the Group m_kSmoothedGeodesicGroup will be transformed in the same way:.
- m_kGeodesicGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
For drawing the geodesic lines on the triangle mesh:.
- m_kGeodesicPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Control panel for drawing geodesic curves.
- m_kGeodesicSmoothDistance - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kGeodesicSmoothDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Label displaying the current Geodesic path length.
- m_kGeodesicSmoothDistanceValueLast - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kGeodesicSmoothDistanceValueLast - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Label displaying the previous Geodesic path length.
- m_kGeodesicSmoothDistanceValueTotal - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kGeodesicSmoothDistanceValueTotal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Label displaying the total Geodesic path length.
- m_kGeodesicToggleWireframe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
DOCUMENT ME!
- m_kGeodesicToggleWireframe - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Toggle wireframe
- m_kGeodesicVertices - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
The final list of points in the Geodesic curve.
- m_kGeodesicVertices - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The final list of points in the Geodesic curve.
- m_kGeometryArrayPlane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kGeometryArraySphere - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kGL - Variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- m_kGlyphs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Hashmap for multiple fiber bundles:
- m_kGPUCost - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- m_kGPUCost - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
- m_kGPUCost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- m_kGPUCost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- m_kGPUCost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- m_kGPUCost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- m_kGPUVolumeRender - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
- m_kGraphCurve - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- m_kGraphSamples - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- m_kGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Button group for the widget type:
- m_kGroupList - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Keeps track of the groups of polylines loaded.
- m_kH - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
H Matrix, equation 19:.
- m_kHandler - Variable in class gov.nih.mipav.model.file.FileXML
-
DOCUMENT ME!
- m_kHeadOriginal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- m_kHeap - Variable in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
A min-heap data structure used to keep track of the times so that the
image element corresponding to the minimum time becomes the next
processed boundary point.
- m_kHelpButton - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Open the mosaic image help.
- m_kHisto - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Histogram data for multi-histogram interface
- m_kHistogramOutput - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kHistogramOutputB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kHistogramPoints2D - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kHistoTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Texture object for data:
- m_kIgnore - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kImage - Variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Contains the image being skeletonized.
- m_kImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kImage - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Input volume.
- m_kImage - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
DOCUMENT ME!
- m_kImage - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- m_kImage - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Buffer image for the volume renderer.
- m_kImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Reference to ModelImage image
- m_kImageA - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Current image A.
- m_kImageA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Images to be renderer.
- m_kImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
ModelImage A
- m_kImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Reference to imageA
- m_kImageActive - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Current active image.
- m_kImageARedo - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Single-level undo/redo for image masks, re-do-imageA:
- m_kImageAUndo - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Single-level undo/redo for image masks, undo-imageA:
- m_kImageB - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Current image B.
- m_kImageB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- m_kImageB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kImageB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
ModelImage B
- m_kImageB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Reference to imageB
- m_kImageBackupA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Backup of ModelImage A
- m_kImageBackupB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Backup of ModelImage B
- m_kImageBRedo - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Single-level undo/redo for image masks, re-do-imageB:
- m_kImageBUndo - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Single-level undo/redo for image masks, undo-imageB:
- m_kImageComponent - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Image component 3D reference which contains the 3D texture volume.
- m_kImageComponent - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Image component 2D to hold the volume renderer properties.
- m_kImageDef - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Reference to new image creatd with computed deformation resulting from registration.
- m_kImageDeformation - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline
-
Reference to an image to store the computed deformation.
- m_kImageDim - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- m_kImageDir - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kImageEffectDual - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kImageFile - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kImageFrame - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
The ViewJFrameImage connect to this Graph, may be null.
- m_kImageGM - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- m_kImageGradMag - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
DOCUMENT ME!
- m_kImageLineMinDual - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kImageLineMinPass2a - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kImageNew - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_kImagePane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Split pane for displaying the canvases side-by-side:.
- m_kImagePane - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Split pane for displaying the canvases side-by-side:.
- m_kImagePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Canvas display panels:.
- m_kImagePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Canvas display panels:.
- m_kImagePointsDual - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kImageReg - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
Information and data for the registered image.
- m_kImageReg - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Reference to new image created with result of registration of source image.
- m_kImageResult - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- m_kImageResult - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline
-
Reference to an image to store the registered source image.
- m_kImageSource - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- m_kImageSource - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline
-
Reference to the original input image to use as the registration source.
- m_kImageSpectrum1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Images to store FFT and Calc results.
- m_kImageSpectrum2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_kImageSpectrum3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_kImageSrc - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
DOCUMENT ME!
- m_kImageSrc - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Reference to the input source image.
- m_kImageTarget - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline
-
Reference to the original input image to use as the registration target.
- m_kImageTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kImageTransform - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- m_kImageTransformd - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kImageTransformd - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- m_kImageTrg - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
DOCUMENT ME!
- m_kImageTrg - Variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
Information and data for the target (reference) image.
- m_kImageTrg - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Reference to the selected target image.
- m_kInclude - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kIndexKeyTmp - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
Instantiate once instead of each time a value key (Index) is needed.
- m_kInitDistance - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
surface inflation.
- m_kInitDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
surface inflation.
- m_kInsidePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Panel container.
- m_kIntensityRGB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
RGB intensity map for color images only.
- m_kIntensityTF - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Text box for setting the intensity level for extraction.
- m_kInterface - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Reference to the containing JPanel.
- m_kInvertOutlineButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Button for inverting the sculpt region.
- m_kInvertOutlineButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Button for inverting the sculpt region.
- m_kIPDSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Opacity slider.
- m_kLabelBranch - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kLabelBranch - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Branch label.
- m_kLabelDirection - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kLabelDirection - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
View direction label.
- m_kLabelDistance - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kLabelDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Path distance label.
- m_kLabelFileName - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kLabelFileName - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Automatically inserted by JBuilder Designer.
- m_kLabelFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Automatically inserted by JBuilder Designer.
- m_kLabelFileNameImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kLabelIterationsPass1 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
DOCUMENT ME!
- m_kLabelIterationsPass2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
DOCUMENT ME!
- m_kLabelOptionsPass1 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
DOCUMENT ME!
- m_kLabelOptionsPass2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
DOCUMENT ME!
- m_kLabelOrientation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kLabelOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Orientation label.
- m_kLabelPosition - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kLabelPosition - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Current path position label.
- m_kLabelPosX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Label for slider X position.
- m_kLabelPosX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Label for slider X position.
- m_kLabelPosY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Label for slider Y position.
- m_kLabelPosY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Label for slider Y position.
- m_kLabelPosZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Label for slider Z position.
- m_kLabelPosZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Label for slider Z position.
- m_kLabelStepGaze - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kLabelStepGaze - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Step gaze label.
- m_kLabelTrgX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Label for X light target position.
- m_kLabelTrgX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Label for X light target position.
- m_kLabelTrgY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Label for Y light target position.
- m_kLabelTrgY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Label for Y light target position.
- m_kLabelTrgZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Label for Z light target position.
- m_kLabelTrgZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Label for Z light target position.
- m_kLabelX - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
x-axis label:
- m_kLabelX - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
x-axis label:
- m_kLabelX - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
x-axis label:
- m_kLabelXDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_kLabelXDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_kLabelY - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
y-axis label:
- m_kLabelY - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
y-axis label:
- m_kLabelY - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
y-axis label:
- m_kLastCommand - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Last command, used for determining the action the color chooser is associated with.
- m_kLastCut - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kLastCut - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Previous cut mesh
- m_kLastFinished - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kLastFinished - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Previous mesh with a finished curve
- m_kLatLonLines - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kLatLonLines - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Toggle display of latitude/longitude lines on/off.
- m_kLeftCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Left-eye view canvas:.
- m_kLeftImagePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Left Image Panel, holds the canvas for the left-eye view:.
- m_kLeftSphere - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
- m_kLevelDetail - Variable in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
surface level of detail:.
- m_kLevelDetail - Variable in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
surface level of detail:.
- m_kLevelSetEvolver - Variable in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
The level-set evolver.
- m_kLight - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Lighting in the scene.
- m_kLightColor - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Light color.
- m_kLightRoot - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Parent of all the light bulbs.
- m_kLightRoot - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Parent of all the light bulbs.
- m_kLightsControl - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Light dialog for when the user clicks the light button.
- m_kLightSet - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
used for lighting-based rendering.
- m_kLightShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Lighting effect.
- m_kLightShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- m_kLightShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
- m_kLightShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Surface light shader for rendering objects without volume-texture mapping.
- m_kLightShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Surface shader effect.
- m_kLightShaderTransparent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_kLightsPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Light panel
- m_kLinesMaterial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Material properties of the tract lines.
- m_kList - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList
-
DOCUMENT ME!
- m_kList - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM
-
Annotation list
- m_kListArrayPointKey - Variable in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraphSamples
-
Storage for the arrays of keys and , positions for each curve.
- m_kListArrayPointPosition - Variable in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraphSamples
-
DOCUMENT ME!
- m_kListBranchChildList - Variable in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Each item is a TreeMap instance which stores all of the child branches for a given branch.
- m_kListBranchParentIndex - Variable in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Each item is an Integer which contains the index of the parent branch to which this branch is connected.
- m_kListBranchParentNormalizedDist - Variable in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraph
-
Each item in a Float which contains the normalized path distance (in range [0,1]) for the parent branch where
this branch started.
- m_kListCurvePosition - Variable in class gov.nih.mipav.view.renderer.flythroughview.FlyPathGraphCurve
-
Storage for the arrays of position for each curve.
- m_kLoadButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- m_kLocalCenter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- m_kLocalCropLower - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Lower Crop Bounding Box in Patient Coordinates:.
- m_kLocalCropUpper - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Upper Crop Bounding Box in Patient Coordinates:.
- m_kLocalImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
A re-oriented version of the active image, re-oriented so it matches the currently
displayed image orientations in either the tri-planar or volume render views.
- m_kLocalPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- m_kLocalScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- m_kLogicOp - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
The combo box for the Logic Operation mode to display.
- m_kLowerSphere - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
The lower-sphere control point of the widget, controls the shape/size of the widget
- m_kLUT - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
ModelLUT for getModelImageColor w/LUT changes:
- m_kLUT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
ModelLUT
- m_kLUTa - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kLUTa - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Color LUT based on Volume Data
- m_kLUTa - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
LUT of input image *
- m_kLUTConvexity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kLUTConvexity - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
LUT for the triangle mesh convexity colors.
- m_kLUTCurvature - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
local reference to ModelLUT.
- m_kLUTCurvature - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
local reference to ModelLUT.
- m_kLUTImageA - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kLUTImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Volume data for LUT
- m_kLUTMap - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
color look-up table Texture:
- m_kLUTName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
color look-up table name.
- m_kLUTNew - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_kMainPane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Split pane for displaying the rendered spheres above the interface:.
- m_kMainPane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
The JSplitPane displaying different views and the user-interface:.
- m_kMainPane - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Split pane for displaying the rendered spheres above the interface:.
- m_kMap - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
Mapping of Index(row,col).
- m_kMap - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
map to convert RGB channel values to intensity.
- m_kMap - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensity
-
DOCUMENT ME!
- m_kMap - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
map to convert RGB channel values to intensity.
- m_kMap - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
Map to convert intensity values to colors.
- m_kMaskColorVector - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Surface mask color vector. - TO BE MOVED - redesigned
- m_kMaskImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Mask Image for masking brain regions during tensor calculation:
- m_kMaskImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
ModelImage used to generate the fly path.
- m_kMaskVector - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Surface mask vector.- TO BE MOVED - redesigned.
- m_kMaterial - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceRefXML_J3D
-
Material properties of the surface:.
- m_kMaterial - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Material properties of the surface:.
- m_kMaterial - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
store the Material properties of the mesh:
- m_kMaterial - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_kMaterial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Material properties of the surface:.
- m_kMaterial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
Material properties of the surface:.
- m_kMaterial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Material properties for Volume Surface (and Composite Surface) mode
- m_kMaterial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Surface material properties.
- m_kMaterialNew - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Materials for new vales and backup:.
- m_kMaterialNew - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Materials for new vales and backup:.
- m_kMaterialPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Window display panels: Material properties buttons/slider panel:.
- m_kMaterialPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Window display panels: Material properties buttons/slider panel:.
- m_kMaterialSave - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Saved Material for backup
- m_kMaterialSave - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Saved Material for backup
- m_kMaterialStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceRefXML
-
array of strings representing the tags under in the xml schema.
- m_kMaterialStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceXML
-
array of strings representing the tags under in the xml schema.
- m_kMaxAngle - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kMaxBB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_kMaxLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kMDir - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- m_kMeanCurvaturesLUT - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kMeanCurvaturesLUT - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
kMean curvature LUT.
- m_kMeanCurvaturesLUT - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
kMean curvature LUT.
- m_kMesh - Variable in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Surface triangle mesh:.
- m_kMesh - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
the triangle mesh corresponding to the current level of detail.
- m_kMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
The input triangle mesh to be segmented.
- m_kMesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
- m_kMesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Volume proxy-geometry (cube)
- m_kMesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
TriMesh
- m_kMeshBranchRoot - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
BranchGroups for the Meshlines, for deleting and recreating the meshlines when the user changes the number of
latitude and longitude lines:.
- m_kMeshCurvatures - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kMeshLines - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
TriMesh longitude/latitude lines.
- m_kMeshLinesBranchRoot - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kMeshPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Scene-graph node for displaying correspondence points on the TriMesh surface.
- m_kMeshStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceXML
-
array of strings representing the tags under in the xml schema.
- m_kMiddleSphere - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
The middle-sphere control point of the widget, controls the color transfer function inside the widget.
- m_kMinBB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_kMinDegree - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
If there is no Root node, this is the Node with the smallest number of parent nodes,
and serves as a default Root for the Graph.
- m_kMinLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kMirrorImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_kModelLUT - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelLUTHelper
-
DOCUMENT ME!
- m_kModified - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kModified - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Current modified mesh
- m_kMOrig - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Ray in box (model) coordinates.
- m_kMouseEvent - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Reference to the mousePressed event:.
- m_kMouseEvent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kMouseEvent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kMouseOffset - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Mouse offset used for dragging the widget.
- m_kMouseOffset - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
m_kMouseOffset is used to determine movements.
- m_kMouseRotateBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kMouseTranslate - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Mouse translate behavior.
- m_kMouseZoom - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Mouse zoom behavior.
- m_kMoving - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kMultiHistogram - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Displays the 2D Histogram and widgets:
- m_kN - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- m_kN0 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
temporary variables to avoid 'new' calls.
- m_kN1 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Temporary variables to avoid 'new' calls.
- m_kN1 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
temporary variables to avoid 'new' calls.
- m_kNameA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kNameB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kNewCenter - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_kNewColors - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
New Colors link list.
- m_kNewColors - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
New Colors link list.
- m_kNewNormals - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
New normal link list.
- m_kNewNormals - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
New normal link list.
- m_kNewTexCoords - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
New texCoords link list.
- m_kNewTexCoords - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
New texCoords link list.
- m_kNewTriangles - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
new triangle link list.
- m_kNewTriangles - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
new triangle link list.
- m_kNewVerts - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
New vertices link list.
- m_kNewVerts - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
New vertices link list.
- m_kNode - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeNode
-
- m_kNormal - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
DOCUMENT ME!
- m_kNormal - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
DOCUMENT ME!
- m_kNormal - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorComposite
-
To avoid memory reallocations.
- m_kNormal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Data storage for normals:
- m_kNormalColorPathUnvisited - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kNormalColorPathUnvisited - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Color for the parts of the path that have not yet been visited (Dark Green)
- m_kNormalColorPathUnvisited - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Color for the parts of the path that have not yet been visited (Dark Green)
- m_kNormalColorPathVisited - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
These are the colors to use when rendering the normal/selected branch that is unvisited/visited.
- m_kNormalColorPathVisited - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Color for the parts of the path that have been visited (Light Green)
- m_kNormalizeB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
DOCUMENT ME!
- m_kNormalizeB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
DOCUMENT ME!
- m_kNormalizeG - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
DOCUMENT ME!
- m_kNormalizeG - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
DOCUMENT ME!
- m_kNormalizeR - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
Factor used to scale the computed sum along each ray for the purpose of normalizing the integral.
- m_kNormalizeR - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
Factor used to scale the computed sum along each ray for the purpose of normalizing the integral.
- m_kNormalMapTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Texture object for normal map:
- m_kNumLatText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kNumLatText - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Text box for entering the number of latitude lines.
- m_kNumLonText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kNumLonText - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Text box for entering the number of longitude lines.
- m_kObjBoxSliceProbe_TG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
TransformGroup[] used to rotate the AXIAL, CORONAL, SAGITTAL slice BOXES:
- m_kObjBoxSliceProbe_TG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
TransformGroup[] used to rotate the AXIAL, CORONAL, SAGITTAL slice BOXES:
- m_kObjPlaneProbe_TG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
TransformGroup[] used to rotate the AXIAL, CORONAL, SAGITTAL slice PLANES:
- m_kObjPlaneProbe_TG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
TransformGroup[] used to rotate the AXIAL, CORONAL, SAGITTAL slice PLANES:
- m_kObjRootBG - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
The BranchGroup root of the scene managed by the simple universe.
- m_kOffsetNeighborsGradient - Variable in class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Index offsets used by the getIndexNeighborsGradient method.
- m_kOldTransform - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Accumulated transformation prior to current mouseDrag:.
- m_kOpacity - Variable in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
surface opacity:.
- m_kOpacity - Variable in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
surface opacity:.
- m_kOpacity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Surface opacity value.
- m_kOpacityMap_GM - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
GraphicsImage contains GM opacity transfer function data:
- m_kOpacityMapTarget_GM - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Texture contains texture filter modes and GraphicsImage for opacity transfer function:
- m_kOpacityRGB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
RGB opacity map for color images only.
- m_kOpenB0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
- m_kOpenReferenceButton - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Open reference image:.
- m_kOpenTileButton - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Open tile image:.
- m_kOptions - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
These are the setup options passed to the constructor which we need to keep track of in case we need to use them
outside the constructor.
- m_kOptions - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Image option panel.
- m_kOptions - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Setup options.
- m_kOptions - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Image option panel.
- m_kOptionsPass1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline
-
Options to use for a first pass of registration.
- m_kOptionsPass1 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Reference to parameters to use for first pass of registration.
- m_kOptionsPass2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline
-
Options to use for a second pass of registration.
- m_kOptionsPass2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Reference to parameters to use for optional second pass of registration.
- m_kOrderedGroup - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Root order group of the image scene graph.
- m_kOrderedGroupSlicesCoarse - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
DOCUMENT ME!
- m_kOrderedGroupSlicesFine - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
The slicing through the volume will be contained in an OrderedGroup to ensure that the slices are rendered
back-to-front for correct blending effect.
- m_kOrient - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuadraticFit
-
DOCUMENT ME!
- m_kOrigin - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive.Ray2f
-
DOCUMENT ME!
- m_kOrigin - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive.Segment2f
-
DOCUMENT ME!
- m_kOrigin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationPicker
-
- m_kOriginal - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Data members for the Geodesic Class: Triangle mesh:.
- m_kOriginal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Data members for the Geodesic Class: Triangle mesh:.
- m_kOriginalSourceImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
source image to be reconstructed!
- m_kOutline - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Polyline outlines the widget in red when selected, or blue when non selected.
- m_kOutputFile - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
The name of the tract output file, specified by the user.
- m_kOutputImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- m_kOutputMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- m_kP0 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
the intersection points of ray with box.
- m_kP00 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
To avoid memory reallocations.
- m_kP01 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_kP1 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
the intersection points of ray with box.
- m_kP10 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_kP11 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_kPaintColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_kPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Reference to the JPanelGeodesic:.
- m_kPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Reference to the JPanelSurface:
- m_kPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
BrainSurfaceFlattener User-Interface panel
- m_kPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Surface panel.
- m_kPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Reference to the JPanelGeodesic:.
- m_kPanelBrainsurfaceFlattenerLUT - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kPanelBrainsurfaceFlattenerLUT - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
LUT Panel based on surface curvature.
- m_kPanelSurface - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
surface panel reference.
- m_kParameters - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
The parameters associated with level-set evolution.
- m_kParameters - Variable in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
The parameters associated with level-set evolution.
- m_kParent - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Reference to the parent frame:.
- m_kParent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Parent class:.
- m_kParent - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Parent user-interface and display frame.
- m_kParent - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Parent user-interface and display frame.
- m_kParent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Parent class:.
- m_kParent - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Parent user-interface and display frame.
- m_kParent - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Parent user-interface and display frame.
- m_kParent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_kParent - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
A reference to the VOIManagerInterface
- m_kParent - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Reference to the parent frame.
- m_kParent - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Parent user-interface and display frame.
- m_kParentDir - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
paren tdir *
- m_kParentDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- m_kParentDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
parent directory for the DTI output images.
- m_kParentFrame - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kPathPositionTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
For drawing the flythru path in the triangle mesh:.
- m_kPatientPoint - Variable in class gov.nih.mipav.view.PatientSlice
-
current slice positions in local coordinates:.
- m_kPatientPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_kPatientPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_kPatientSlice - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
PatientSlice contains all the Patient Coordinate System view-specific
data for rendering this component:
- m_kPatientSlice - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
PatientSlice contains all the Patient Coordinate System view-specific
data for rendering this component:
- m_kPatientSlice - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
PatientSlice contains all the Patient Coordinate system view-specific
data for rendering this component:
- m_kPatientSlice - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
PatientSlice contains all the Patient Coordinate system view-specific data for rendering this component:.
- m_kPatientSlice - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
PatientSlice interfaces with the ModelImage class to render the image w/LUT changes for this component.
- m_kPBar - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Volume renderer progress bar:.
- m_kPBar - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Volume renderer progress bar:.
- m_kPDiff - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- m_kPickButtonGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kPickButtonGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Picking button group -- switch between picking correspondence points
and the puncture triangle.
- m_kPickCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kPickCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Used for picking.
- m_kPickCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
PickCanvas, created by the class that creates the triangle mesh and the geodesic group:.
- m_kPickCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
PickCanvas, for triangle picking.
- m_kPickColors - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Color of the first and sucessive points on the Geodesic curve:.
- m_kPickColors - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Color of the first and successive points on the Geodesic curve:.
- m_kPickCorrespondence - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kPickCorrespondence - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Correspondence point picking.
- m_kPicked - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Currently picked, or active part of this widget, may be the mesh or one of the control-point spheres.
- m_kPicker - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
For processing picking:
- m_kPickPuncture - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kPickPuncture - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Puncture triangle picking.
- m_kPlaneMax - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_kPlaneMin - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
DOCUMENT ME!
- m_kPointerButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
The Default pointer button is set from outside this class if the
default pointer button is not part of the VOI toolbar, or if the VOI toolbar is not displayed.
- m_kPointLight - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kPointNormal - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
DOCUMENT ME!
- m_kPointNormal - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Normal vector for the annotated point
- m_kPointPosition - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
DOCUMENT ME!
- m_kPointPosition - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
3D coordinates for the annotated point
- m_kPoints - Variable in class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
List of VOIPoint that make up the polyline.
- m_kPolygonOffset - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
PolygonOffset blending for this object.
- m_kPopupPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Popup Menu for VOIPoints.
- m_kPopupVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Popup Menu for VOIs (non-point).
- m_kPos - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePreRenderEffect
-
- m_kPosition - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Properties shared by point and spot lights.
- m_kPosition - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
By default, vertex diffuse and specular colors are optional.
- m_kPosition - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
DOCUMENT ME!
- m_kPositionSum - Variable in class gov.nih.mipav.model.structures.VOIBase
-
- m_kPostfix - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Image name post-fix typically either 'A' or 'B'
- m_kPPixelLighting - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_kPreviousSnake - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Previous snake polygon:.
- m_kPreviousStartPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kPreviousStartPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Previous start point on the new line segment.
- m_kProbeTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
The Transform3D used to position the planes based on the Probe position and angle.
- m_kProbeTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
The Transform3D used to position the planes based on the Probe position and angle.
- m_kProbeTwistLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
DOCUMENT ME!
- m_kProbeTwistSlider - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Rotation/Twist around the direction of the probe:.
- m_kProgress - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Green Progress bar at the top right hand corner of the ViewJFrameVolumeView window.
- m_kPSFImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
point spread function image:.
- m_kPSFImageCopy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Used for color image.
- m_kPShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- m_kPShaderCMP - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
PixelShader program and data for Composite mode:
- m_kPVertexLighting - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_kPVWMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_kQ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Q Matrix, equation 24 (inverse calculated once per image sequence on the inital frame):.
- m_kRadioGroupMaxRenExtent - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
DOCUMENT ME!
- m_kRadioMaxRenExtent_1024 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
DOCUMENT ME!
- m_kRadioMaxRenExtent_128 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
DOCUMENT ME!
- m_kRadioMaxRenExtent_256 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
DOCUMENT ME!
- m_kRadioMaxRenExtent_512 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
DOCUMENT ME!
- m_kRadioMaxRenExtent_64 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Radio Button Group for the Render Image Target size of the raycast rendered image.
- m_kRadioSliceAdjacent - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
DOCUMENT ME!
- m_kRadioSliceReference - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
DOCUMENT ME!
- m_kRAImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Output RA (Relative Anisotropy) Image:
- m_kRawFormat - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
raw image format read from the .list file:
- m_kRawFormat - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- m_kRawFormat - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
raw image format read from the .list file:
- m_kRawImageFormat - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Format of the raw data: (float, int, dicom, etc.)
- m_kReconstructTracts - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Checkbox for tract reconstruction.
- m_kRecordToggle - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- m_kRedoCommands - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
List of re-do commands
- m_kRedoList - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Saved VOI states for re-do.
- m_kReferenceAlpha - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
For blending between refernce and transformed tile images:.
- m_kReferenceAlphaBackup - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
For blending between refernce and transformed tile images:.
- m_kReflect - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
To avoid memory re allocations.
- m_kRegisterButton - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Initialize and start the registration based on how the user positioned the two images:.
- m_kRegMeasure - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline
-
Reference to the particular cost measure to use for this registration.
- m_kRegMeasure - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
Defines the cost measure for comparing the target image with the registered image.
- m_kRegMeasure - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Reference to concrete implementation of the RegistrationMeasure abstract class which defines the particular
measure to use during registration.
- m_kRemoveTriangles - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Removed triangle link list.
- m_kRemoveTriangles - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Removed triangle link list.
- m_kRenderer - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- m_kRendererImageDataA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Manages the renderer data for each image.
- m_kRendererImageDataB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- m_kRenderSurface - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Parent render frame reference.
- m_kResolutions - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- m_kRFA_BranchGroup - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Branch group for the RFA indicator point.
- m_kRFACoordMaps - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Texture mapping for the RFA probe rotation:
- m_kRFACoordMaps - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Texture mapping for the RFA probe rotation:
- m_kRGBT - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
ModelRGB for getModelImageColor w/RGB LUT changes:
- m_kRGBT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
ModelRGB
- m_kRGBT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_kRGBTA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
model of a RGB Table.
- m_kRGBTB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- m_kRGStereo - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
BufferedImage containing the Anagyphy stereo image:.
- m_kRightCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Right-eye view canvas:.
- m_kRightImagePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Right Image Panel, holds the canvas for the right-eye view:.
- m_kRotate - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Used to rotate the initial mesh into the same orientation as the data.
- m_kRotate - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- m_kRotate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- m_kRotate - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- m_kRotation - Variable in class gov.nih.mipav.model.structures.VOIPoint
-
- m_kRotation - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Mouse rotation.
- m_kRotationInverse - Variable in class gov.nih.mipav.model.structures.VOIPoint
-
- m_kS - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Sin matrix: = sin( 2*pi*i/n).
- m_kSaveButton - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Save the mosaic image:.
- m_kSaveButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- m_kSavedImage - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_kSaveSculptButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Button to save the sculpt image.
- m_kSaveSculptButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Button to save the sculpt image.
- m_kScene - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Scene graph root node:.
- m_kScene - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
the scene-graph node containing the rendered object.
- m_kSceneRoot - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
These are part of the scene and view.
- m_kSceneTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Reference to the SceneImage texture:
- m_kSceneToWorld - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_kScratchTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Texture object for GPU computations:
- m_kSculptImage - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
m_kSculptImage is a screen shot of the canvas image.
- m_kSculptImageOpaque - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- m_kSculptor - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
New sculpting object for WM-based sculpting.
- m_kSculptPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Control panel for volume sculpting.
- m_kSelectColorPathUnvisited - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kSelectColorPathUnvisited - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Color for selecting previously-unvisited parts of the path at a branch (Dark Red)
- m_kSelectColorPathVisited - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kSelectColorPathVisited - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Color for selecting previously-visited parts of the path at a branch (Red)
- m_kShaders - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Hashmap for multiple fiber bundles:
- m_kShape - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
DOCUMENT ME!
- m_kShapeMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kShapePlane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kShapeSphere - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kShared - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_kShininessSlider - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Shininess slider.
- m_kShininessSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Shininess slider.
- m_kSimpleImageSource - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- m_kSkeleton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
This it skeletonization of the binary volume.
- m_kSkeleton - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
3D Skeleton of the ModelImage.
- m_kSlices - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
3D Slice renderer.
- m_kSliderLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kSliderPosX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light x position slider.
- m_kSliderPosX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light x position slider.
- m_kSliderPosY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light y position slider.
- m_kSliderPosY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light y position slider.
- m_kSliderPosZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light z position slider.
- m_kSliderPosZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light z position slider.
- m_kSliderTrgX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light x target position slider.
- m_kSliderTrgX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light x target position slider.
- m_kSliderTrgY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light y target position slider.
- m_kSliderTrgY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light y target position slider.
- m_kSliderTrgZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light z target position slider.
- m_kSliderTrgZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light z target position slider.
- m_kSmoothedGeodesicGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Root group for different path.
- m_kSoftwareLightSet - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Used to compute software lighting of composite texture volume.
- m_kSoftwareLightSet - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Used to compute software lighting of composite texture volume.
- m_kSoftwareLightSet - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Set of lights to use for software-based lighting.
- m_kSoftwareMaterial - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
DOCUMENT ME!
- m_kSoftwareMaterial - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
DOCUMENT ME!
- m_kSoftwareMaterial - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Material properties to use for software-based lighting.
- m_kSourceBlue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_kSourceGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
DOCUMENT ME!
- m_kSourceImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
source image to be reconstructed!
- m_kSourceRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
For color images: the source is converted to gray for the deconvolution.
- m_kSpecular - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
DOCUMENT ME!
- m_kSpecular - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Specular color component
- m_kSpecular - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Specular color component
- m_kSpecularColorButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Specular color button
- m_kSpecularColorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Specular color button
- m_kSphere - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Sphere renderer.
- m_kSphere - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Ellipsoids is a sphere with a non-uniform scale based on the eigen
vectors and values.
- m_kSphereLines - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Sphere longitude/latitude lines.
- m_kSphereMesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
- m_kSpherePoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Scene-graph node for displaying correspondence points on the sphere.
- m_kSrcBlend - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- m_kStartEndList - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
link list to hold the path.
- m_kStartEndList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
link list to hold the path.
- m_kStartPoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Start and End points -- pair of points for which a Geodesic is calculated, must be in TriangleMesh coordinates:.
- m_kStartPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Start and End points -- pair of points for which a Geodesic is calculated, must be in TriangleMesh coordinates:.
- m_kStartSurface - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kStartSurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
TriMesh containing the start point on the new line segment
- m_kStereoButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Stereo render button, launches the JStereoWindow for viewing the ModelTriangleMesh in stereo:.
- m_kStereoCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Stereo canvas:.
- m_kStereoModeCB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
The combo box for the polygon mode to display.
- m_kStereoPane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
The JSplitPane displaying the left and right eye views and the stereo view:.
- m_kStereoPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Stereo Image Panel, holds the canvas for the Anaglyph stereo view:.
- m_kStereoShape - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Texture-mapped polygon for displaying the Anaglyph stereo image as a texture:.
- m_kSurface - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
This is the surface geometry and its properties.
- m_kSurface - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kSurface - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.TextureSculptor
-
Reference to the SurfaceRender containing the TextureVolume:.
- m_kSurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
The surface to fly through.
- m_kSurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Current TriMesh surface
- m_kSurfaceBackup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kSurfaceBackup - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Backup surface.
- m_kSurfaceClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- m_kSurfaceCurveSegments - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kSurfaceDir - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kSurfaceGeometry - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kSurfaceGeometryInfo - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
This is the Java3D geometry for the surface.
- m_kSurfaceImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Data storage for surfaces:
- m_kSurfaceMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_kSurfaceMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kSurfacePaint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Paint tool-bar (contained in the SurfacePaint class)
- m_kSurfacePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Surface panel.
- m_kSurfacePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Surface panel
- m_kSurfaceShape - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- m_kSurfaceState - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_kSurfaceStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceRefXML
-
array of strings representing the tags under in the xml schema.
- m_kSurfaceStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceXML
-
array of strings representing the tags under in the xml schema.
- m_kSurfaceTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Texture object for surfaces:
- m_kSurfaceTextureButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Opens SurfaceTexture dialog:.
- m_kSurfaceTextureButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Opens SurfaceTexture dialog:.
- m_kSwitch - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
This is the only node attached to this TransformGroup.
- m_kSwitch - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
This is the only node attached to the TransformGroup.
- m_kSwitchDisplay - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Switch between displaying the Sphere and the Plane:.
- m_kSwitchDisplay - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
DOCUMENT ME!
- m_kSwitchLinesMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
This node contains the latitude/longitude renderings for the mesh which can be enabled/disabled.
- m_kSwitchLinesPlane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
This node contains the latitude/longitude renderings for the plane which can be enabled/disabled.
- m_kSwitchLinesPlaneBranch - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kSwitchLinesSphere - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
This node contains the latitude/longitude renderings for the sphere which can be enabled/disabled.
- m_kSwitchLinesSphereBranch - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kT2Image - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
T2 image.
- m_kT2Image - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Anisotropy image *
- m_kTarget - Variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Light shooting target position.
- m_kTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kTempImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- m_kTempLocalViewTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
DOCUMENT ME!
- m_kTempPlane - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
These are declared in the class to avoid allocating temporary instances each call into methods of this class.
- m_kTempRotateMatrix - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
DOCUMENT ME!
- m_kTempWorldToLocalTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
These are declared in the class to avoid allocating temporary instances each call into methods of this class.
- m_kTexCoordGeneration - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
in any direction.
- m_kTexCoordGenerationAxisAligned - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Default axis-aligned texture coordinate generation function.
- m_kTextBranch - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kTextBranch - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Current branch text box.
- m_kTextBranchGroup - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Branch group to hold the texture image.
- m_kTextDirection - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kTextDirection - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
View direction text box.
- m_kTextDistance - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kTextDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Distance along path text box.
- m_kTextEffect - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_kTextMaxNumBranches - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
maximum number of branches created for the endoscopy view.
- m_kTextMaxNumBranches - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
maximum number of branches created for the endoscopy view.
- m_kTextMinBranchLength - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
minimum branch length.
- m_kTextMinBranchLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
minimum branch length.
- m_kTextOrientation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kTextOrientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Orientation text box.
- m_kTextPercentBSplineNumControlPoints - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
BSpline control points fraction of branch samples.
- m_kTextPercentBSplineNumControlPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
BSpline control points fraction of branch samples.
- m_kTextPosition - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kTextPosition - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Position text box.
- m_kTextPosX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
X position text field.
- m_kTextPosX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
X position text field.
- m_kTextPosY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Y position text field.
- m_kTextPosY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Y position text field.
- m_kTextPosZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Z position text field.
- m_kTextPosZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Z position text field.
- m_kTextStepGaze - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
DOCUMENT ME!
- m_kTextStepGaze - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Step gaze text box.
- m_kTextTransformGroup - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Transform group to hold the texture images.
- m_kTextTrgX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
X target position text field.
- m_kTextTrgX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
X target position text field.
- m_kTextTrgY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Y target position text field.
- m_kTextTrgY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Y target position text field.
- m_kTextTrgZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Z target position text field.
- m_kTextTrgZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Z target position text field.
- m_kTexture - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
The 2D texture for the texture-mapped polygon.
- m_kTexture - Variable in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
3D texture of the entire volume.
- m_kTexture - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Texture used in the histogram.
- m_kTextureA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kTextureB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kTextureID - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeNormals
-
OpenGL Texture ID containing the volume data.
- m_kTextureSculptor - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
DOCUMENT ME!
- m_kTextureXY - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
2D texture of the volume renderer.
- m_kTileAlpha - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
For blending between refernce and transformed tile images:.
- m_kTMap - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
map of .
- m_kTMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Maximum texture coordinates for the 2D histogram.
- m_kTMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- m_kTMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Minimum texture coordinates for the 2D histogram.
- m_kTMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
The bounds on the 2D Histogram texture coordinates used to display the 2D Histogram.
- m_kToggleSelectedButton - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Toggle which image is currently selected:.
- m_kToOrigin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kToOrigin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- m_kToOriginInv - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kTraceImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Output Trace Image (before diagonalization of diffusion tensor):
- m_kTractFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Tract input file.
- m_kTractList - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
The list box in the dialog for fiber bundle tracts.
- m_kTractPath - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Fiber bundle tract file input path name text box.
- m_kTracts - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Hashmap for multiple fiber bundles:
- m_kTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Transform created for multiple use to avoid new'ing it each time.
- m_kTransformDirection - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
View direction component for this view transform.
- m_kTransformGroupActive - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Currently selected transform that gets modified by the handler for the keyboard behavior.
- m_kTransformGroupMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kTransformGroupPlane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kTransformGroupPoseMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
This node contains all of the cortical mesh related nodes in the scene which can be manipulated as a group.
- m_kTransformGroupPosePlane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
This node contains all of the plane related nodes in the scene which can be manipulated as a group.
- m_kTransformGroupPoseSphere - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
This node contains all of the sphere related nodes in the scene which can be manipulated as a group.
- m_kTransformGroupSphere - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- m_kTransformOrientation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Orientation (yaw/pitch) component for this view transform.
- m_kTransformOut - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kTransformPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- m_kTransformPosition - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Position-only component for this view transform.
- m_kTransformRot - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
DOCUMENT ME!
- m_kTranslate - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Scene translation, centers the scene:
- m_kTranslate - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
local translation in the parent scene-graph.
- m_kTranslationTG - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Group dictating how the plane is translated.
- m_kTriangleMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kTriangleMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Geometry for the rendering of the cortical mesh is maintained here so that the scene can be updated when the mesh
is inflated.
- m_kTriangleMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Keep a copy of the loaded triangle mesh and any other properties associated with the surface.
- m_kTriangleMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.SurfaceLoaderSUR
-
Triangle mesh representation for the surface.
- m_kTriangleMesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Brain Surface TriMesh
- m_kTSet - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.EdgeAttribute
-
set of .
- m_kTSet - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.VertexAttribute
-
set of .
- m_kTubes - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Hashmap for multiple tube type fiber bundles:
- m_kTubesMaterial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Material properties of the Tubes.
- m_kTwist - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Transform3D to twist the volume about the Probe axis:.
- m_kType - Variable in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Type keyword for the surface:.
- m_kType - Variable in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Type keyword for the surface:.
- m_kUI - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Used for scripting and to access the currently registered images.
- m_kUndoAllButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
- m_kUndoButton - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Undo the last registration for the mosaic image:.
- m_kUndoCommands - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
List of undo commands
- m_kUndoList - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Saved VOI states for undo.
- m_kUndoSculptButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Button to undo the sculpt and restor the original volume.
- m_kUndoSculptButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Button to undo the sculpt and restor the original volume.
- m_kUniverse - Variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
SimpleUniverse:.
- m_kUniverse - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
The SimpleUniverse object which is the parent of everything else in the scene.
- m_kUniverse - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
The simple universe contains a single canvas, a viewing platform, and a scene graph.
- m_kUpperSphere - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
The upper-sphere control point of the widget, controls the shape/size of the widget
- m_kUseEllipsoids - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Checkbox for switching between polylines and ellipsoids.
- m_kUseVOICheck - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
When selected, only tracts that intersect the VOI are displayed.
- m_kUseVolumeColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Checkbox for turning on/off volume color for the polylines.
- m_kV - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Avoid memory reallocations.
- m_kV - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Intersection of ray with view plane.
- m_kV0 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Temporary variables to avoid 'new' calls.
- m_kV0 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
temporary variables to avoid 'new' calls.
- m_kV0 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
temporary variables to avoid 'new' calls.
- m_kV1 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Temporary variables to avoid 'new' calls.
- m_kV1 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
temporary variables to avoid 'new' calls.
- m_kV1 - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
temporary variables to avoid 'new' calls.
- m_kV2 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Temporary variables to avoid 'new' calls.
- m_kV2 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
temporary variables to avoid 'new' calls.
- m_kV3 - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
temporary variables to avoid 'new' calls.
- m_kVCross - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
temporary variables to avoid 'new' calls.
- m_kVDelete - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DOCUMENT ME!
- m_kVelocity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Velocity vector (either the initial user-defined guess, or the calculated velocity (new snake center - previous
snake center):.
- m_kVertexColor3Shader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeBoundingBox
-
The Pre - ShaderEffect for the bounding box.
- m_kVertexColor3Shader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
ShaderEffect for displaying the clip planes.
- m_kVertexProperty - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorLighting
-
DOCUMENT ME!
- m_kView - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Values updated in the initView method which must be called by all lights (except AmbientLight).
- m_kView - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
DOCUMENT ME!
- m_kView - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Applet that is associated with the controls in this frame.
- m_kView - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Brain Surface Renderer.
- m_kView - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Renderer for displaying the scene-graph.
- m_kViewDirection - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Current view direction along the path.
- m_kViewDirection - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Current view direction along the path.
- m_kViewPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Current view position along the path.
- m_kViewPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Current view position along the path.
- m_kViewRight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_kViewUp - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Current view up vector.
- m_kViewUp - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Current view up vector.
- m_kViewup1 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
The desired view up vector is a normalized average of these two orthogonal axes vectors.
- m_kViewup1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
The desired view up vector is a normalized average of these two orthogonal axes vectors.
- m_kViewup1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_kViewup2 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
DOCUMENT ME!
- m_kViewup2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
For calculating the view up vector.
- m_kViewup2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- m_kVMap - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
map of .
- m_kVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_kVOIAttr - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_kVOIAttr - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_kVOIDialog - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
VOI Properties dialog -- from the popup menu or drop-down menu.
- m_kVOIHausdorffDistanceDialog - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- m_kVOIInterface - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- m_kVOIInterface - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- m_kVOIInterface - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- m_kVOILine - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_kVOIList - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
The list box in the dialog for 3D VOIs.
- m_kVOIList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_kVOILogicalOperationsDialog - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- m_kVOIManagers - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
List of VOIManagers, one per canvas displayed.
- m_kVOIParamsList - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kVOIPreShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_kVOIShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_kVOITicMarks - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_kVOIToolbar - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Reference to the VOI toolbar.
- m_kVolOpacityPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Opacity panel.
- m_kVolume - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Data storage for volume:
- m_kVolume4DGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- m_kVolumeBlendSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Volume alpha-blending slider.
- m_kVolumeBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Volume bounding box renderer.
- m_kVolumeClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Clipping planes renderer
- m_kVolumeCube - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Orientation cube renderer
- m_kVolumeDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kVolumeGM - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Data storage for volume gradient magnitude:
- m_kVolumeGMTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Texture object for volume gradient magnitude data:
- m_kVolumeImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_kVolumeImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_kVolumeImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
VolumeImage for ModelImageA, contains data and textures.
- m_kVolumeImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
a reference to the VolumeImage containing the shared data and textures for display.
- m_kVolumeImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
Shared volume data and textures.
- m_kVolumeImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Shared volume data and textures.
- m_kVolumeImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
VolumeImage contains data and textures for ModelImage A.
- m_kVolumeImageA_New - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_kVolumeImageA_Old - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_kVolumeImageB - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
VolumeImage for ModelImageB, contains data and textures.
- m_kVolumeImageB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
a reference to the VolumeImage containing the shared data and textures for display.
- m_kVolumeImageB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
Shared volume data and textures.
- m_kVolumeImageB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Shared volume data and textures.
- m_kVolumeImageB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
VolumeImage contains data and textures for ModelImage B.
- m_kVolumeImageB_New - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_kVolumeImageB_Old - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- m_kVolumeImageNew - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_kVolumeLayout - Variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Describes the organization of the volume data in a linear array.
- m_kVolumeLayout - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Describes the organization of the volume data in a linear array.
- m_kVolumeLayout - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
3D Layout of the ModelImage.
- m_kVolumeLUTNew - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_kVolumeMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_kVolumePoint - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Cursor 3D point in FileCoordinates.
- m_kVolumePreShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
ShaderEffect for the pre-render stage the bounding-box and the slice share the same pre-render effect.
- m_kVolumePreShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
ShaderEffect for the plane bounding-boxes.
- m_kVolumePreShaderTransparent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- m_kVolumePreShaderTransparent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- m_kVolumePt - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- m_kVolumeRayCast - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
GPU-based ray cast renderer.
- m_kVolumeRenderer - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Reference to the ShearWarpVolumeRenderer which hold this as an instance.
- m_kVolumeRenderer - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
The volume renderer that is currently rendering the volume data:.
- m_kVolumeSamplesSliderMouseDragged - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Volume number of samples slider when mouse Dragged.
- m_kVolumeSamplesSliderMouseReleased - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Volume number of samples slider when mouse released.
- m_kVolumeScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_kVolumeScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_kVolumeScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- m_kVolumeScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_kVolumeScaleInv - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_kVolumeScaleInv - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_kVolumeSculptor - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Sculptor object enables, draws and sculpts the volume based on the outline region drawn on screen.
- m_kVolumeShaderEffect - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
VolumeShaderEffect applied to proxy-geometry:
- m_kVolumeTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Texture object for data:
- m_kVolumeTexture - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Keep track of the texture instance.
- m_kVolumeTextureNew - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_kVolumeTrans - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- m_kVolumeViewer - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Render base.
- m_kVolumeViewer - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Parent user-interface frame.
- m_kVolumeViewer - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
Render base.
- m_kVolumeViewMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageCrop
-
- m_kVolumeVOI - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Data structure for drawing this contour in the GPU VolumeRenderer
- m_kVolViewType - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Type of ViewJFrameVolumeView object (using WildMagic or not)
- m_kVoxelStepsize - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- m_kVPixelLighting - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_kVRImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Output VR (Volume Radio) Image:
- m_kVVertexLighting - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- m_kWakeupCondition - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Conditions which contain the events we want to "wakeup" on.
- m_kWDir - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- m_kWidget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
The top-level node containing the widget graphic data structures (triangle meshes and transformations)
- m_kWidgetEfect - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
The shader effect used to render the inside color transfer function of the widget,
based on the position of the widget and the
position of the middle (green) sphere control-point.
- m_kWidgetMesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
The TriMesh representing the shape of the widget.
- m_kWidgetState - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Shader effect state, for reading from disk:
- m_kWidgetState - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Current state of the widget encapsulated in the GLSL parameters needed for the Volume renderer GLSL program:
- m_kWidgetType - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Defines the current selected widget type.
- m_kWinLevel - Variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
- m_kWinLevel - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Window-level interface.
- m_kWinLevel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Window-level interface.
- m_kWinLevel - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
window / level mouse control:.
- m_kWireframe - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Wire-frame for this object.
- m_kWOrig - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Ray in world coordinates.
- m_kWVPMatrix - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
World-view-project matrix for applying the sculpt to the volume.
- m_kXArrow - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
x-axis arrow
- m_kXArrow - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
x-axis arrow
- m_kXRotate - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Basic rotations for fixed input use:
- m_kYArrow - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
y-axis arrow
- m_kYArrow - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
y-axis arrow
- m_kYRotate - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Basic rotations for fixed input use:
- m_kZBuffer - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- m_kZBufferTransparency - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Zbuffer for this object.
- m_kZeroVector - Static variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Set the zero vector.
- m_kZeroVector - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
DOCUMENT ME!
- m_kZRotate - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Basic rotations for fixed input use:
- m_kZState - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- m_kZState - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- m_kZState - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- m_last_sot_read_pos - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
Position of the last SOT marker read
- m_last_tile_part - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
Indicate that the current tile-part is assume as the last tile part
of the codestream.
- m_layer - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decoding_param_t
-
if !
- m_left_edges - Variable in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- m_length - Variable in class gov.nih.mipav.model.algorithms.LSCM.EdgeTrait
-
- m_length - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- m_line - Variable in class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- m_LongDesc - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
console mode long description
- m_loops - Variable in class gov.nih.mipav.model.algorithms.LSCM.Boundary
-
- m_loops - Variable in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- m_loops - Variable in class gov.nih.mipav.model.algorithms.LSCM.Homology
-
- m_LUT - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFLookUp
-
Transfer function lookup table.
- m_map_edge - Variable in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- m_map_face - Variable in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- m_map_vertex - Variable in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- m_mark - Variable in class gov.nih.mipav.model.algorithms.LSCM.EdgeTrait
-
- m_matrice - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_encoding_param_t
-
fixed layer
- m_max_comp_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_encoding_param_t
-
Maximum rate for each component.
- m_mcc_records - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
mcc records
- m_mct_coding_matrix - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
the mct coding matrix
- m_mct_decoding_matrix - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
the mct decoding matrix
- m_mct_records - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
mct records
- m_MeanShapeBeforeTS - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
The meanshape prior to tangent space projection (calculated during
alignment).
- m_mEigenVec - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLinearReg
-
eigen value matrix.
- m_mEigenVectors - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
- m_mesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.Boundary
-
- m_mesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- m_mesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- m_mesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.Homology
-
- m_mesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.Loop
-
- m_mesh - Variable in class gov.nih.mipav.model.algorithms.LSCM
-
- m_Mesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarpLinear
-
The Delaunay Triangulization of the source or dest shape.
- m_Modes - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsole
-
Console mode vector
- m_mQgEV - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The texture part of the combined eigenvectors.
- m_mQsEV - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The shape part of the combined eigenvectors.
- m_mShape2PixelWeights - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The shape-to-pixel weights.
- m_mShapeInstance - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Cache shape matrix.
- m_mTextureInstance - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Cache texture matrix.
- m_N - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- m_N - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- m_N - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- m_Name - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
console mode name
- m_nb_comps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_simple_mcc_decorrelation_data_t
-
- m_nb_max_mcc_records - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
the max number of mct records.
- m_nb_max_mct_records - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
the max number of mct records.
- m_nb_max_procedures - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_procedure_list_t
-
The number of the array of validation procedures.
- m_nb_mcc_records - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
the number of mct records.
- m_nb_mct_records - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
the number of mct records.
- m_nb_procedures - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_procedure_list_t
-
The number of validation procedures.
- m_nb_tile_parts - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
number of tile parts for the tile.
- m_nb_tile_parts_correction - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- m_nb_tile_parts_correction_checked - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
TNsot correction : see issue 254
- m_nbands - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- m_nCandidates - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
number of candidates.
- m_nCols - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- m_nConsecMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
Number of conseccutive past steps whose scaled length was equal to
maxstep
- m_nConsecMaxStepMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
max number of conseccutive past steps whose scaled length was equal to
maxstep to terminate
- m_nExperiments - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLinearReg
-
number of experiments.
- m_next - Variable in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- m_next - Variable in class gov.nih.mipav.model.algorithms.LSCM.HalfEdgeTrait
-
- m_nFDigits - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
A positive integer specifying the number of reliable digits returned by
the objective function FN. fdigits is used to set the parameter n (eta)
that is used in the code to specify the relative noise in f(x); the main
use of eta is in calculation finite difference step size. eta is set to
macheps if fdigits = -1.
- m_nFuncEval - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
counter to the number of function evaluations.
- m_nGradEval - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
counter to the number of gradient evaluations.
- m_nIterations - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptRes
-
The number of iterations.
- m_nIterations - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
counter to the number of iterations.
- m_nIterations1stPass - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
number of iterations.
- m_nIterations2ndPass - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
number of iterations.
- m_nMaxFuncEval - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
limit for number of function evaluations.
- m_nMaxIterations - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
A positive integer specifying the maximum number of iterations that may
be performed before the algorithm is halted.
- m_NMaxParam - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
max number of parameters
- m_NMinParam - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
min number of parameters
- m_normal - Variable in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- m_nParams - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLinearReg
-
number of parameters.
- m_nPixelsDiffs - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLinearReg
-
number of pixel difference.
- m_nResetIteN - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeCG
-
reset every n iterations.
- m_nRows - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- m_numA - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- m_numB - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- m_numG - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- m_numR - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- m_offset_array - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_simple_mcc_decorrelation_data_t
-
- m_OptRes - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvalRes
-
optimizatino resutls
- m_output_image - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_t
-
- m_PaintMode - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Curent paint mode.
- m_pAnalyzeImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
reference to analyze image
- m_pAnalyzeSynthesize - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
AAM synthesize analysis.
- m_pData - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
un-safe pointer to the first point data element.
- m_pFuncEvalBase - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
pointer to the function to be minimized.
- m_pImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
The image where the optimization shuold be done.
- m_pkMaterial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- m_pkPlane - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_pkPlane - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_pkScreenCamera - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_pkVolumeCalcTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- m_pkVolumeCalcTarget2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- m_pkVShader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- m_pMaskImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
mask image.
- m_pMesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.MeshEdgeIterator
-
- m_pMesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.MeshFaceIterator
-
- m_pMesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.MeshHalfEdgeIterator
-
- m_pMesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.MeshVertexIterator
-
- m_pMesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexInHalfedgeIterator
-
- m_pMesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexOutHalfedgeIterator
-
- m_pModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
the model we're building.
- m_pModel - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitialize
-
AAM model
- m_pModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
AAM model
- m_pModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
The AAM model.
- m_pModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
AAM model reference.
- m_point - Variable in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- m_ppElements - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- m_pPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
The point vector from which the triangle is defined.
- m_pReferenceFrame - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
reference frame
- m_pReferenceFrame - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
AAM reference frame.
- m_pReferenceMesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
- m_pReferenceShape - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
reference shape.
- m_prev - Variable in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- m_prev - Variable in class gov.nih.mipav.model.algorithms.LSCM.HalfEdgeTrait
-
- m_private_image - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_t
-
pointer to the internal/private encoded / decoded image
- m_procedure_list - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_t
-
the list of procedures to exec
- m_procedures - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_procedure_list_t
-
The array of procedures.
- m_ProgName - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
console mode programm name
- m_pShape - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
The initial shape pose.
- m_pShapeBasis - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The shape basis.
- m_pt - Variable in class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- m_pt_index - Variable in class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- m_pTextureBasis - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The texture basis.
- m_pTextureTF - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The texture transfer function.
- m_pV - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- m_pV - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- m_pV - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- m_R_c - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The parameter prediction matrix
- m_R_t - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
- m_reduce - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decoding_param_t
-
if !
- m_root - Variable in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- m_row - Variable in class gov.nih.mipav.model.algorithms.LSCM.Triplet
-
- M_RST0 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_RST0 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_RST1 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_RST1 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_RST2 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_RST2 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_RST3 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_RST3 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_RST4 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_RST4 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_RST5 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_RST5 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_RST6 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_RST6 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_RST7 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_RST7 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_s - Variable in class gov.nih.mipav.model.algorithms.LSCM.HalfEdgeTrait
-
- m_ScanlineParts - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
scan lines.
- m_scControlPointPolygonX - Static variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Defines the relative offset in control point indices to the 8 neighboring control points which form a bounding
polygon.
- m_scControlPointPolygonY - Static variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
DOCUMENT ME!
- m_sCentredRefshape - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Centered reference shape.
- m_sCurrentAnalyzeId - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Current analyzer name.
- m_sGroundTruth - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvalRes
-
ground truth shape
- m_Shape - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitEntry
-
shape
- m_ShapePCA - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The shape PCA.
- m_Shapes - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
The raw (unaligned) shapes.
- m_sharp - Variable in class gov.nih.mipav.model.algorithms.LSCM.EdgeTrait
-
- m_skip_data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- m_sMeanAShape - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Cached mean shape.
- m_sMinShape - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
The minimum fit shape.
- m_sModelShape - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvalRes
-
model shape
- M_SOF0 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Marker tags in JPEG header.
- M_SOF0 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF1 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF1 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF10 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF10 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF11 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF11 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF13 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF13 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF14 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF14 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF15 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF15 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF2 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF2 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF3 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF3 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF5 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF5 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF6 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF6 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF7 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF7 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOF9 - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOF9 - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOI - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOI - Variable in class gov.nih.mipav.model.file.libjpeg
-
- M_SOS - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_SOS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_sot_length - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
to tell the tile part length
- m_spkCull - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Culling: turns backface/frontface culling on/off:
- m_spkEffect - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_spkEffect2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- m_spkEyeCamera - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Screen camera for displaying the eye clip planes in screen-coordinates:
- m_spkPlaneEffect - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- m_spkScene - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Scene-graph root node:
- m_spkScene - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- m_spkScene - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- m_spkScreenCamera - Variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Drawing the axis arrows in screen-space.
- m_spkScreenCamera - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Drawing the axis arrows in screen-space.
- m_spkSphere - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- m_spkVertexColor3Shader - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Vertex-color shader effect used for the polylines and the first-pass
rendering of the proxy-geometry:
- m_SrcShape - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
source shape voi
- m_start_tile_x - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
Only tiles index in the correct range will be decoded.
- m_start_tile_y - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- m_state - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
locate in which part of the codestream the decoder is (main header,
tile header, end)
- m_string - Variable in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- m_string - Variable in class gov.nih.mipav.model.algorithms.LSCM.EdgeTrait
-
- m_string - Variable in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- m_string - Variable in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- m_string - Variable in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- m_szASFVer - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Current ASF version number.
- m_szHostImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Optional 'host image' filename including full path.
- m_szPath - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Path to the .asf files (if any).
- m_tcd - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_t
-
the current tile coder/decoder
- M_TEM - Static variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
DOCUMENT ME!
- M_TEM - Variable in class gov.nih.mipav.model.file.libjpeg
-
- m_TexturePCA - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The texture PCA.
- m_tile_ind_to_dec - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
Index of the tile to decode (used in get_tile)
- m_tokens - Variable in class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- m_touched - Variable in class gov.nih.mipav.model.algorithms.LSCM.FaceTrait
-
- m_touched - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexTrait
-
- m_tp_flag - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_encoding_param_t
-
Flag determining tile part generation
- m_tp_on - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_encoding_param_t
-
Enabling Tile part generation
- m_tp_pos - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_encoding_param_t
-
Position of tile part flag in progression order
- m_trait - Variable in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- m_trait - Variable in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- m_trait - Variable in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- m_trait - Variable in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- m_TransformID - Variable in class gov.nih.mipav.model.structures.TransMatrix
-
Transform ID associated with the matrix.
- m_TransformID - Variable in class gov.nih.mipav.model.structures.TransMatrixd
-
Transform ID associated with the matrix.
- m_Usage - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
console mode usage
- m_uv - Variable in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- m_uv - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexTrait
-
- m_v - Variable in class gov.nih.mipav.model.algorithms.LSCM.Point
-
- m_v - Variable in class gov.nih.mipav.model.algorithms.LSCM.Point2
-
- m_v1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Index to point 1.
- m_v2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Index to point 2.
- m_v3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Index to point 3.
- m_vACF - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
AAM configuration vector.
- m_valence - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexTrait
-
- m_validation_list - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_t
-
the list of validation procedures to follow to make sure the code is
valid
- m_value - Variable in class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- m_value - Variable in class gov.nih.mipav.model.algorithms.LSCM.Token
-
- m_value - Variable in class gov.nih.mipav.model.algorithms.LSCM.Triplet
-
- m_vC - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitEntry
-
model parameters vector.
- m_vDataMean - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
- m_vDestPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarpLinear
-
The points of the destination shape.
- m_vDiff - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
The difference vector.
- m_vEigenVal - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLinearReg
-
eigen value vector.
- m_vEigenValues - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
- m_vEigenValuesOrg - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
- m_verbose - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
Verbose mode
- m_verbose - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
Verbose mode
- m_vertex - Variable in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- m_vertex - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexEdgeIterator
-
- m_vertex - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexFaceIterator
-
- m_vertex - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexInHalfedgeIterator
-
- m_vertex - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexOutHalfedgeIterator
-
- m_vertex - Variable in class gov.nih.mipav.model.algorithms.LSCM.VertexVertexIterator
-
- m_vertex_traits - Variable in class gov.nih.mipav.model.algorithms.LSCM.FormTrait
-
- m_vertices - Variable in class gov.nih.mipav.model.algorithms.LSCM.EdgeKey
-
- m_vertices - Variable in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- m_vertices - Variable in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- m_vFuncVal - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- m_vImagePyr - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Image VOIs vector.
- m_vInitEntries - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitCandidates
-
initial entry vector.
- m_vMeanTexture - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The mean texture.
- m_vMeanTextureOrg - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
the mean texture original.
- m_vMethodPar - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
special parameters used by each optimization method e.g. step size used
for calc. nummerical gradient
- m_vMinC - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
The minimum fit model parameters.
- m_vModelParameterSteps - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Model parameters changes steps.
- m_vModels - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Model vector.
- m_vModels - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
model vector.
- m_vNFuncEval - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- m_vOverlap - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
vector to hold the overlap region.
- m_vPointAux - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Auxillary point data.
- m_vPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
A vector of points.
- m_vPoseParameterUpdateConstraints - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
pose parameters update.
- m_vPtCrv - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
vector to average point to curve landmark error.
- m_vPtCrvDists - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvalRes
-
curve landmark vector
- m_vPtPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
vector to hold the average point to point landmark error.
- m_vRotationSteps - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
model rotation steps.
- m_vScaleSteps - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
model scale steps.
- m_vSegResults - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvaluationResults
-
vector of segmentation results
- m_vShapeParameterConstraintsMean - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
shape parameters upate.
- m_vShapeParameterConstraintsSD - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
- m_vTexture - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
The texture samples.
- m_vTextureErrorSeparate - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
vector to hold the texture error separable.
- m_vTextureVar - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The variance of each normalized pixel in the texture model.
- m_vTriangles - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
A vector of triangles.
- m_vUser1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
User-defined field 1.
- m_vUser2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
User-defined field 2.
- m_vUser3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
User-defined field 3.
- m_vvData - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
- m_vvFuncParm - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- m_WarpTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
warp table
- m_weight - Variable in class gov.nih.mipav.model.algorithms.LSCM.EdgeTrait
-
- m0ResultData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- m0ResultStack - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- m0ResultStack - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- m0ResultWindow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- m0ResultWindow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- M2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- M2 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- m2Button - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- m3Button - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- mA - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- ma2Button - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- MAC_1_BIT - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- MAC_16_BIT_COLOR - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- MAC_16_COLORS - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- MAC_16_GREYS - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- MAC_24_BIT_COLOR - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- MAC_256_COLORS - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- MAC_256_GREYS - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- MAC_4_GREYS - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- macAppVMOptions - Static variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- MACHEP - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- MACHEP - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- MACRO_t1_flags(FileJPEG2000.opj_t1_t, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- mad(double[], double) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- MAD - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- MAD - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- mad_daub_noise_est(double[], double) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- MADButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- MADSEN - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- MADSEN - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- mag - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Svec
-
- MAG_REGION - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- magButton - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
buttons *
- magButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
buttons *
- magButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
refs to the magnify and minimize button
- magData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- magData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- magFactor - Variable in class gov.nih.mipav.model.file.FileBioRad
-
magnification factor.
- MAGIC_NUMBER - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- MAGIC_NUMBER - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- magicNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
0x494d4746 or "IMGF" or 1229801286.
- MagicSquare(int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- magImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- magImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- magImage() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
magnifies image
- magImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
magnifies image
- magLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- magLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- magMax - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- magMax - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- magMin - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- magMin - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- MAGNETIC_RESONANCE - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality MR.
- MAGNETIC_RESONANCE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality MR.
- MAGNETIC_RESONANCE_ANGIOGRAPHY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality MR angiography.
- MAGNETIC_RESONANCE_ANGIOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality MR angiography.
- MAGNETIC_RESONANCE_SPECTROSCOPY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality MR SPECT.
- MAGNETIC_RESONANCE_SPECTROSCOPY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality MR SPECT.
- magneticFieldStrength - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- MagneticFieldStrength - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- MAGNETOM_VISION - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Siemens MAGNETOM VISION. extension: .ima
- MAGNETOM_VISION_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Multiple files of type MAGNETOM_VISION
- magnif - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- magnif - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< norm threshold.
- magnif - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- magnification - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- magnification - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Objective
-
- magnification - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- magnification - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
magnification of images in the light-box (mag is a percentage).
- magnification - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Magnification of images in the light-box (mag is a percentage).
- MAGNIFICATION - gov.nih.mipav.view.ViewJSlider.SliderType
-
- MAGNIFICATION - Static variable in class gov.nih.mipav.view.ViewJSlider
-
- magnifyCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- magnitude() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Calculates magnitude from real and imaginary parts magnitude = ( (realData)^2 + (imagData)^2 )^(1/2);
- magnitude() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Calculates magnitude from real and imaginary parts magnitude = ( (realData)^2 + (imagData)^2 )^(1/2);
- magnitude(double) - Static method in class gov.nih.mipav.util.DoubleDouble
-
Determines the decimal magnitude of a number.
- magnitude(float[], int, float[], float[], float[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- magnitude(float, float) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculates magnitude from real and imaginary parts magnitude = ( (real)^2 + (imaginary)^2 )^(1/2);
- MAGNITUDE - gov.nih.mipav.view.Preferences.ComplexDisplay
-
Displays the magnitude of complex images
- magnitudeCombo - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- magnitudeRequired - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- magnitudeRequired - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- magniWindow - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- MAGR_HEIGHT - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Default size of magnifier window = 120 pixels.
- MAGR_MAG - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Magnification value of magnifier window -- default = 4.0.
- MAGR_WIDTH - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
default = 120 pixels.
- magRegionCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
Custom cursor: magnify region.
- magRegionCursor - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
Custom cursor: magnify region.
- magSettings - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Dialog used to control the magnification of the image.
- magSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- magSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- magSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Slider used for zooming.
- magSliderDictionary - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- magSliderPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- magStrength - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
80 Magnet strength (in gauss).
- magWgtFlag - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
730 Magnitude Weighting Flag.
- mahalanobis - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- Mahalanobis() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptRes
-
Returns the Mahalanobis Distance of the model parameters.
- MAHALANOBIS_SQUARED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- MAHALANOBIS_SQUARED - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- MahalanobisButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
- MahalanobisDistance(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Returns the Mahalanobis distance of a set of PCA parameters.
- MahalanobisSquared() - Method in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- main - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- main() - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- main(GLCanvas, VolumeTriPlanarInterface, VolumeImage, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Iridescence.main creates the Iridescence object and window frame to contain the GLCanvas.
- main(GLCanvas, VolumeTriPlanarInterface, VolumeImage, VolumeClipEffect, float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageCrop
-
- main(GLCanvas, VolumeTriPlanarInterface, VolumeImage, VolumeClipEffect, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- main(GLCanvas, VolumeTriPlanarInterface, VolumeImage, VolumeImage, int, VolumeSlices, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- main(GLCanvas, VolumeTriPlanarInterface, VolumeImage, VolumeImage, Vector3f, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- main(GLCanvas, VolumeTriPlanarInterface, VolumeImage, Vector<VolumeObject>, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- main(VolumeTriPlanarInterface, VolumeImage, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- main(String[]) - Static method in class gov.nih.mipav.model.algorithms.OpenCLInfo
-
Queries the OpenCL Platforms and launches an information dialog with the OpenCL Platform and Device information:
- main(String[]) - Static method in class gov.nih.mipav.model.file.DelimitedRandomAccessFile
-
- main(String[]) - Static method in class gov.nih.mipav.view.FileSelectorImpl
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.aamc
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Test
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePatternTest
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.HolesPatternTest
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.PatternDetectionTest
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegularEdgePatternTest
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternHorizontalTest
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVerticalTest
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.test
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- main(String[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Test
-
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
C style anchor for console mode invocation
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeB
-
C style anchor to invoke the B console mode.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeCM
-
C style anchor to invoke the CM console mode.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeD
-
Debug function.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeE
-
C style anchor to invoke the E console mode, evaluation mode.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeLOO
-
C style anchor to invoke the loo console mode.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeM
-
C style anchor to invoke the M console mode.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeP
-
C style anchor to invoke the P console mode.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeR
-
C style anchor to invoke the R console mode.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeREG
-
C style anchor to invoke the REG console mode.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeS
-
C style anchor to invoke the s console mode.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeSM
-
C style anchor to invoke the SM console mode.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeT
-
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeU
-
C style anchor to invoke the U console mode.
- Main(int, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeW
-
C style anchor to invoke the W console mode.
- main_head_end - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_codestream_index_t
-
main header end position (first SOT position)
- main_head_start - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_codestream_index_t
-
main header start position (SOC position)
- mainBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
The main panel that is accessed.
- mainBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
The main panel that is accessed.
- mainDialogPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
The main panel of the dialog.
- MainDividerLocation - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- mainEnd - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- mainEnd - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- mainFields - Variable in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- mainFrame - Variable in class gov.nih.mipav.view.ViewUserInterface
-
The main menu bar that runs MIPAV.
- MainFrame() - Constructor for class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- mainLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- mainLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
- mainLabel2 - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- mainLabel2 - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
- mainLabel3 - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
- mainLabel4 - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
- mainLabel5 - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
- mainlb(int, int, double[], double[], double[], int[], double[], double[], double, double, double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[], double[], double[], double[], double[], double[], double[], double[], double[], int[], int[], int[], String[], int, String[], boolean[], int[], double[], RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- mainPane - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
main panel of dialog
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
main panel *
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
dialog elements.
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
dialog elements.
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
panels
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
main panel containing interface:
- mainPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
panels
- mainPanel - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- mainPanel - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel.PropertiesDialog
-
- mainPanel - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
The main control.
- mainPanel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Control panel for volume sculpting.
- mainPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
the main control panel.
- mainPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
The main control panel.
- mainPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
The main control panel.
- mainPanel - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
The main GUI control panel.
- mainPanel - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
The main GUI control panel.
- mainPanel - Variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
The main control.
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
The main control.
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
main panel *
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
main panel
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
main panel *
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
main panel *
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
main panel
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
The main control.
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- mainPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- mainPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- mainPixelShader1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
First part of the GLSL code for the pixel shader program for all widgets:
- mainPixelShader2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
GLSL main code part 2 for all widget types.
- mainPixelShaderCircle - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
GLSL function call for the circle widget:
- mainPixelShaderSquare - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
GLSL function call for the square widget:
- mainPixelShaderTriangle - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
GLSL function call for the triangle widget:
- mainRenderBuffer - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- mainSetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- mainSetup - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- mainSort() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- MajorAxis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- majorAxisDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- majority_filter(boolean[][][], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- make - Variable in class gov.nih.mipav.model.file.FileSVS
-
- make - Variable in class gov.nih.mipav.model.file.FileTiff
-
- make(float) - Method in class gov.nih.mipav.model.algorithms.GaussianOneDimKernel
-
DOCUMENT ME!
- MAKE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- MAKE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- make_affine_matrix(SIFT3D.Mat_rm, int, SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- make_chain(double[][], int, int, boolean) - Method in class gov.nih.mipav.model.structures.VOIContour
-
- make_funny_pointers(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- make_gss(SIFT3D.GSS_filters, SIFT3D.Pyramid) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- make_kernel_pyramid(Vector<double[][][]>, Vector<double[][][][]>, Vector<double[]>, double[], double[], double[], double[], double, int, boolean, double[][][], boolean, double[][]) - Method in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- make_odither_array(libjpeg.jpeg_decompress_struct, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- make2UnitsOfMeasureIdentical(int, int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
- make3DVOI(boolean, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Creates a 3D Surface out of the VOIs.
- make3DVOI(boolean, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- make3DVOI(boolean, ModelImage, ModelImage, BitSet, VOIManager, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- makeActiveColorBorderSizeOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- makeActiveColorOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
makes the active-colour option line in the globalChangesPanel, to allow user to select the colour used to denote
the active image.
- makeAdjustableVOI(Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Constructs reference point VOI from the refPoint passed in.
- makeAlgorithmsMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Construct the algorithms menu.
- makeApplyClosePanel() - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
makes the Apply/Close button panel, with the Apply button on the left and the Close button on the right.
- makeAppropriateInputPanel(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
allows editing of the input value as allowed by kind of VR or keyword.
- makeAppropriateInputPanel(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
allows editing of the input value as allowed by kind of VR or keyword.
- makeAppropriateInputPanel(String, int) - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
Selects the panel for a given inputted edType, filling it the given string.
- MakeArrayData() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- MakeArrayObj(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- MakeArrow() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
- makeBlueTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Creates the R, G, and B transfer functions to produce a blue scale LUT.
- makeBoneTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Creates the R, G, and B transfer functions to produce a bone scale LUT.
- MakeBorderShape(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Converts a one path shape into a border shape by adding two symmetric
borders: an inside (a hole) and an outside border.
- makeButterworthFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
DOCUMENT ME!
- makeButterworthFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
DOCUMENT ME!
- makeButterworthFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
DOCUMENT ME!
- makeButterworthFilter(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- makeButterworthFilter(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- makeCaptureMenu(boolean) - Method in class gov.nih.mipav.view.ViewMenuBar
-
Create the image capture/print File submenu.
- makeChebyshevTypeIFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- makeChebyshevTypeIFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- makeChebyshevTypeIFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- makeChebyshevTypeIFilter(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
- makeChebyshevTypeIFilter(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- makeChebyshevTypeIIFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- makeChebyshevTypeIIFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- makeChebyshevTypeIIFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- makeChebyshevTypeIIFilter(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
- makeChebyshevTypeIIFilter(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- makeCheckboxLabels() - Method in class gov.nih.mipav.view.JPanelAnonymizeImage
-
Creates the list of labels to use in the checkboxes.
- makeCheckboxLabels() - Method in class gov.nih.mipav.view.JPanelChecklist
-
Creates the list of labels to use in the checkboxes.
- makeCheckboxLabels() - Method in class gov.nih.mipav.view.JPanelStatisticsList
-
Creates the list of labels to use in the checkboxes.
- makeCheckBoxList() - Method in class gov.nih.mipav.view.JPanelChecklist
-
Builds all checkboxes; prepare for this step by having an array of Strings with the names to use.
- makeCheckContainer() - Method in class gov.nih.mipav.view.JPanelChecklist
-
Builds the display of the container which holds the display of checkboxes.
- makeCheckerboard() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the number of checkers in a row and a column.
- makeCheckOnCloseFrameOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the "Check on frame close" option line in the globalChangesPanel If checked the user is required to reply
to a dialog to close the frame.
- makeCheckUncheckPanel() - Method in class gov.nih.mipav.view.JPanelChecklist
-
Builds the panel with the "check all"/"uncheck all" buttons.
- makeCircularKernel(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Generates a circular kernel of a specific diameter.
- makeCircularKernel(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Generates a cicular kernel of a specific diameter.
- makeCircularKernel(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Generates a cicular kernel of a specific diameter.
- makeCircularKernel(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Generates a cicular kernel of a specific diameter.
- makeClockwise() - Method in class gov.nih.mipav.model.structures.VOIContour
-
Make contour clockwise.
- makeColorString(Color) - Static method in class gov.nih.mipav.view.MipavUtil
-
Takes a java.awt.Color and forms a string representing its color. the string appears as 6 hex digits and looks
like the color coding used in html files, as in: "RRGGBB".
- makeColorString(Color) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Takes a java.awt.Color and forms a string representing its color. the string appears as 6 hex digits and looks
like the color coding used in html files, as in: "RRGGBB".
- makeComplexData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
makeComplexData -
- makeComplexImageOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the options for displaying complex image information
- makeCoolHotTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Creates the R, G, and B transfer functions to produce a "Cool hot" scale LUT.
- makeCounterClockwise() - Method in class gov.nih.mipav.model.structures.VOIContour
-
Checks to see if Contour is counter-clockwise.
- makeCounterClockwise(int) - Method in class gov.nih.mipav.model.structures.VOIContour
-
Checks to see if Contour is counter-clockwise.
- makeCrosshairOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the options for crosshair display.
- makect(int, int[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- makeCTThighTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Makes a LUT specifically for viewing CT thigh images
- makeCustomizedLUT(String) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
makeVR with customized LUT
- makeCustomMenu(String, Vector<CustomUIBuilder.UIParams>) - Method in class gov.nih.mipav.view.ViewMenuBar
-
Creates a custom menu with a given Vector of UIParams
- makeCutL(AlgorithmMeanShiftClustering.fams_cut[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- makeCuts(AlgorithmMeanShiftClustering.fams_cut[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- makeDataEven(byte[]) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Make the length of the data buffer even by adding a space or null.
- makeDebugOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
makes the debug option line in the globalChangesPanel.
- makeDebugOptionsHelper(JPanel, String, JComboBox, Preferences.LogLevel) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- makeDefaultLoadImageOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the options for displaying how images should be displayed on default.
- makeDicomMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Create the Dicom File submenu.
- makeDicomNodeTable() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
- makeDicomReceiverOnStartOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- makeDiffusionTensorMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Create the Diffusion Tensor File submenu.
- makeDimensionNodeTable() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
- makeDirectory(File, JTextField) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
makes the submitted directory as given by the inputted File, or the text as given in the given given textField.
- makeEllipse(Vector3f, Vector3f, Vector3f, float, float, VOIContour) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Generates the 3D 1-voxel thick ellipsoids used in the intial worm model.
- makeEllipse2DA(Vector3f, Vector3f, Vector3f, float, VOIContour) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- makeEllipse2DA(Vector3f, Vector3f, Vector3f, float, Vector3f, float, VOIContour, boolean, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- makeEllipticFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- makeEllipticFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- makeEllipticFilter(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- makeEllipticFilter(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
- makeEllipticFilter(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- makeEssentialImageInfoTable() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
- makeEven(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Makes length even.
- makeExtentDivisibleByDenom(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Calculate the nearest extent value divisible by 2, 4 or 8
- makeExtentsString() - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Makes a single string out of the extents.
- MakeFace(int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- MakeFace(int, int, int, int, Vector3f[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- makeFileFilterOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the file filter option line in the globalChangesPanel.
- makeFileMenu(boolean) - Method in class gov.nih.mipav.view.ViewMenuBar
-
Construct the file menu.
- makeFileTemporaryDirectory(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the temporary file directory fields in fileMiscPanel.
- makeFirstDerivative(float) - Method in class gov.nih.mipav.model.algorithms.GaussianOneDimKernel
-
DOCUMENT ME!
- makeFlipNIFTIReadOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the "Flip Y axis on NIFTI read of IS and PA" option line in the globalChangesPanel.
- makeFloatingPointOnly(JTextField) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Takes a text field, and forces the textfield to accept numbers, backspace and delete-key entries.
- makeFloatString(float, int) - Static method in class gov.nih.mipav.view.MipavUtil
-
Makes a string of a float with a specific number of decimal points.
- makeFontOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- makeFrameRateOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes options for default frame rate for saving AVIs.
- makeGaborFilter(float, float, float, float, float, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- makeGaborFilter(float, float, float, float, float, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- makeGaussianFilter(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- makeGaussianFilter(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- makeGaussianFilter(double[], double) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- makeGaussianFilter(double[], double) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- makeGaussianFilter(double[], double) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- makeGpuCompEnabledOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- makeGrayBRTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Creates the R, G, and B transfer functions to produce a gray scale LUT.
- makeGrayTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Creates the R, G, and B transfer functions to produce a gray scale LUT.
- makeGrayTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Creates the R, G, and B transfer functions to produce a gray scale LUT.
- makeGreenTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Creates the R, G, and B transfer functions to produce a green scale LUT.
- makeGxKernels1D() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- makeGxxKernels1D() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
Creates Gaussian derivative kernels.
- makeHeapMaxCheckOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the "VM Heap Max/Preferences memory check" option line in the globalChangesPanel If checked, the initial heap size and maximum
heap size in the VM startup file is checked against what is in the preferences for this option.
- makeHelpMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Construct the help menu.
- makeHistogramImageOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes checkbox for whether to update image in real-time as histogram luts are changed
- makeHomomorphicFilter(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- makeHomomorphicFilter(double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- makeHorizonTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Creates the R, G, and B transfer functions to produce a horizontal linear scale LUT.
- makeHotMetalTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Creates the R, G, and B transfer functions to produce a spectrum scale LUT.
- makeHTMLFontString(Color, String, int, int, boolean, String) - Static method in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- makeHyperComplexData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
makeHyperComplexData -
- makeImage() - Method in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
Converts gaussian double buffer to image model object.
- makeImage() - Method in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Converts gaussian float buffer to image model object.
- makeImage() - Method in class gov.nih.mipav.view.dialogs.JDialogBlankImage
-
Creates new image with given data type.
- makeImage(float[][][][], String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
Creates and returns a ModelImage with the tensor data.
- makeImageMenu(boolean) - Method in class gov.nih.mipav.view.ViewMenuBar
-
Construct the image menu.
- makeImageName(String, String) - Static method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Helper method for making the result image's name.
- makeImageName(String, String) - Static method in class gov.nih.mipav.model.structures.ModelImage
-
Helper method for making the result image's name.
- makeImageName(String, String) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Helper method for making the result image's name.
- makeImageNodeTable() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
- makeImagePanel(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- makeIndexedLUT(int[]) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Special LUT to be used to display java image.
- makeIndexedRGB() - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Special RGB table to be used to display java image.
- makeInformationNodeTable() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
- makeInfoStruct(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- makeIntensityLabelColorOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the drop down list for color options for the intensity label text color
- makeInterpolateImageOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes checkbox for whether to display the image with interpolation on user's screen
- makeipt(int, int[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- makeKernel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Makes the kernel.
- makeKernel() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Forms kernel.
- makeKernel() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Forms kernel.
- makeKernel(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Generates a kernel of the indicated type.
- makeKernel(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Generates a kernel of the indicated type.
- makeKernel(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Generates a kernel of the indicated type.
- makeKernel(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Generates a kernel of the indicated type.
- makeKernel(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Generates a kernel of the indicated type.
- makeKernel(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Generates a kernel of the indicated type.
- makeKernel(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
Generates a kernel of the indicated type.
- makeKernelData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
sets the kernel variables.
- makeKernelData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
sets the kernel variables.
- makeKernelMask() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Forms kernel.
- makeKernelMask() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Makes the kernel mask.
- makeKernelMask() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Makes the kernel mask.
- makeKernels1D(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Makes derivative kernels to be used in the calculation of the gradient magnitude.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Makes 2D derivative kernels to be used in the calculation of the gradient magnitude.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
Makes derivative kernels to be used in the calculation of the gradient magnitude.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Creates Gaussian derivative kernels.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Creates Gaussian derivative kernels.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
Creates Gaussian derivative kernels.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
makeKernals2D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Makes 2D derivative kernels to be used in the calculation of the gradient magnitude.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Makes 2D derivative kernels to be used in the calculation of the hessian.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
makeKernals2D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
makeKernals2D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Makes derivative kernels to be used in the calculation of the gradient magnitude.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Creates the derivative kernels used to calculate the gradient magnitude and kernel for the diffusion process.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
Creates 2D Gaussian kernels for the blurring process.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Creates 2D Gaussian kernels for the blurring process.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Creates Gaussian derivative kernels.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
makeKernals2D - creates the derivative kernels used to calculate the gradient magnitude.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Creates Gaussian derivative kernels.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
Creates 2D Gaussian derivative kernels.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
creates Gaussian kernels for the blurring process.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Creates 2D Gaussian kernels for the blurring process.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Creates Gaussian derivative kernels.
- makeKernels2D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Creates Gaussian derivative kernels.
- makeKernels2D(float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Creates Gaussian derivative kernels.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Makes 3D derivative kernels to be used in the calculation of the gradient magnitude.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Makes 3D derivative kernels to be used in the calculation of the gradient magnitude.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Creates Gaussian derivative kernels.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Creates Gaussian derivative kernels.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
Creates Gaussian derivative kernels.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
makeKernals3D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Makes 3D derivative kernels to be used in the calculation of the gradient magnitude.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Makes 3D derivative kernels to be used in the calculation of the hessian.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
makeKernals3D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
makeKernals3D - creates the derivative kernels used to calculate the gradient magnitude and kernel for the
diffusion process.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Makes derivative kernels to be used in the calculation of the gradient magnitude.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Creates the 3D derivative kernels used to calculate the gradient magnitude and kernel for the diffusion process.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
Creates 3D Gaussian kernels for the blurring process.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Creates 3D Gaussian kernels for the blurring process.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Creates Gaussian derivative kernels.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
makeKernals3D - creates the derivative kernels used to calculate the gradient magnitude.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Creates Gaussian derivative kernels.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
Creates 3D Gaussian derivative kernels.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
creates Gaussian kernels for the blurring process.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Creates 3D Gaussian kernels for the blurring process.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Creates Gaussian derivative kernels.
- makeKernels3D() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Creates Gaussian derivative kernels.
- makeKernels3D(float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Creates Gaussian derivative kernels.
- makeLatticeContours() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- makeLFOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes option for look and feel
- makeLoadBMenu(boolean) - Method in class gov.nih.mipav.view.ViewMenuBar
-
Create the Load image B File submenu.
- makeLoggingOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the Logging option line with checkbox/button in the globalChangesPanel.
- makeLogMagImageOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes checkbox for whether to display the log of image magnitude on user's screen
- makeLUT(int) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
This method uses the A, R, G, B transfer functions to build the desired LUT.
- makeLUT(ModelLUT, int) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Updates the number of colors in the LUT and updates the displays.
- makeLUT(ModelLUT, int, boolean) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Updates the number of colors in the LUT and updates the displays.
- makeLUTImageOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes checkbox for whether to display image using lut that is modality or image specific.
- makeLUTMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Construct the LUT menu.
- makeMaps() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- makeMaps() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- makeMaxDebugLineOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes options for max number of lines in debug panel
- makeMenu(Object, boolean, JComponent[]) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Makes a menu out of the menu components, using parentMenu as the base for this menu.
- makeMenu(Object, char, boolean, Vector<JComponent>) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
- makeMenu(Object, char, boolean, JComponent[]) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Makes a menu out of the menu components, using parentMenu as the base for this menu and adding a
mnemonic.
- MakeMesh(CAAMShape, CAAMMesh, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDelaunay
-
Generates a triangular mesh, where all triangles satisfies the Delaunay
property.
- makemmVector3f(Vector3f, float[]) - Method in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- makemmVector3f(Vector3f, float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Makes a mm (physical space) point from a pixel space point.
- makeMouseClickOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes options for how user interface will react when the left or right mouse buttons are clicked.
- makeMove(String) - Method in interface gov.nih.mipav.view.renderer.flythroughview.FlyThroughRenderInterface
-
Passes move command from the JPanelFlythruMove to the FlyPathBehavior class.
- makeMove(String) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- makeMove(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- makeMove(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- makeMovie() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Method actually does the transcoding from JPeg images file to AVI.
- makeMultiThreadingEnabledOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- makeNeuriteList(String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- makeNumericsOnly(boolean) - Method in class gov.nih.mipav.view.JPanelEditDefault
-
permit only numbers, backspace and delete-key entries in the panel.
- makeNumericsOnly(JTextField) - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Takes a text field, and forces the textfield to accept numbers, backspace and delete-key entries.
- makeNumericsOnly(JTextField) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Takes a text field, and forces the textfield to accept numbers, backspace and delete-key entries.
- makeNumericsOnly(JTextField) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
takes a txt field, and forces the textfield to accept numbers, backspace, period and delete-key entries.
- makeNumericsOnly(JTextField) - Method in class gov.nih.mipav.view.ViewJFrameMemory
-
Takes a txt field, and forces the textfield to accept numbers, backspace and delete-key entries.
- makeNumericsOnly(JTextField) - Method in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Takes a txt field, and forces the textfield to accept numbers, backspace and delete-key entries.
- makeNumericsOnly(JTextField, boolean) - Static method in class gov.nih.mipav.view.MipavUtil
-
Takes a text field and forces the text field to accept numbers, backspace and delete-key entries.
- makeNumericsOnly(JTextField, boolean, boolean) - Static method in class gov.nih.mipav.view.MipavUtil
-
Takes a txt field, and forces the textfield to accept numbers, backspace and delete-key entries.
- makeOutputWindowOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the checkbox where the user can decide whether the output window should appear on startup.
- makePaintBitmapBorder(int[], BitSet, int, ViewJFrameBase) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
This method adds an opaque border to the painted area on-screen.
- makePaintImage(int[], BitSet, int, ViewJFrameBase, boolean) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
This method creates a buffer that will be used to make an image of the
painted area on-screen.
- makePaintImage(int[], BitSet, int, ViewJFrameBase, boolean) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
This method creates a buffer that will be used to make an image of the painted area on-screen.
- MakePolynomialForBoundaryConstrainedProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- makeppftfilter(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- makePreview(String, String) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Makes an image preview of the image currentPath/selectedFilename and draws it in the image preview area.
- makeProgress(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- makeProtractor() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Constructs and initializes one of the 3 protractors, depending on which component this is.
- makeProvenanceOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the Data provenance option line in the globalChangesPanel.
- makeQuickListOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the quicklist option line in the otherPanel.
- makeRangeSymmetric() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- makeRedTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Creates the R, G, and B transfer functions to produce a red scale LUT.
- makeReferenceVOI(Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Constructs reference point VOI from the refPoint passed in.
- makeregionsdistinct(int[][], int) - Method in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- makeResolutionString() - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Makes a single string out of the resolutions.
- makeRGB(int) - Method in class gov.nih.mipav.model.structures.ModelRGB
-
This method uses the R, G, B transfer functions to build the desired RGB tables.
- makerNote - Variable in class gov.nih.mipav.model.file.FileSVS
-
- makerNote - Variable in class gov.nih.mipav.model.file.FileTiff
-
- MAKERNOTE_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
Version number used for identifying makernotes from Reconyx UltraFire cameras.
- MAKERNOTE_PUBLIC_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
Version number used for identifying the public portion of makernotes from Reconyx UltraFire cameras.
- MAKERNOTE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
Version number used for identifying makernotes from Reconyx HyperFire cameras.
- makeRotationMatrix(int[], double[]) - Static method in class gov.nih.mipav.model.file.FilePARREC
-
Makes rotation matrix based on image angulations that were stored in header and converted to orientation-specific values.
- makeSaveAllOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the "Save All on Save" option line in the otherPanel.
- makeSaveDefaultsOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
makes the "Save dialog defaults" option line in the otherPanel.
- makeSaveHdrImgOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the "Always save .hdr/.img files from dialog/ in Analyze format/ in Interfile format/ in Nifti format"
combo box in the otherPanel.
- makeSaveMncOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the "Always save .mnc files from dialog/ in Minc-1.0 CDF format/ in Minc-2.0 HDF5 format" combo box in the
otherPanel.
- makeSaveOverwriteOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the option to prompt on overwrite for saving.
- makeSaveXMLThumbnailOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the "Save Thumbnail for XML Files" option line in the globalChangesPanel.
- makeScriptingMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Create the Scripting menu.
- makeSecondDerivative(float) - Method in class gov.nih.mipav.model.algorithms.GaussianOneDimKernel
-
DOCUMENT ME!
- makeSelectionFrame(Vector3f, Vector3f, Vector3f, float, VOIContour) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Generates the VOI that highlights which point (lattice or annotation) is currently selected by the user.
- makeSelectionFrame(Vector3f, Vector3f, Vector3f, float, VOIContour) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
Generates the VOI that highlights which point (lattice or annotation) is currently selected by the user.
- makeSeparator() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Makes a separator for the use in the toolbars.
- makeSeparator() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Makes a separator for the use in the toolbars.
- makeSeparator() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Makes a separator for the use in the toolbars.
- makeSeparator() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Makes a separator for the use in the toolbars.
- makeSeparator() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Makes a separator for the use in the toolbars.
- makeSeparator() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Makes a separator for the use in the toolbars.
- makeSeparator() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
makes a separator for the use in the toolbars.
- makeSeparator() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
makes a separator for the use in the toolbars.
- makeSeparator() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Makes a separator for the use in the toolbars.
- makeSeparator() - Static method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Makes a separator for the use in the toolbars - a button with the proper icon.
- makeShapeFromArray(float[], Vector<Vector<Integer>>, Vector<Vector<Integer>>) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- makeSig(String, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- makeSkinTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Creates the R, G, and B transfer functions to produce a skin scale LUT.
- makeSpectrumTransferFunctions() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Creates the R, G, and B transfer functions to produce a spectrum scale LUT.
- makeSphericalKernel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Generates a spherical kernel of a specific diameter.
- makeSphericalKernel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Generates a spherical kernel of a specific diameter.
- makeSplashOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
makes the splash-screen option line in the otherPanel.
- makeStatisticListDescriptions() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Creates the list of labels to use in the checkboxes.
- makeString(float, int) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Makes a string of a floating point number with a specific number of decimal points.
- makeString(float, int) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Makes a string of a float with a specific number of decimal points.
- makeString(float, int) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Makes a string of a floating point number with a specific number of decimal points.
- makeString(float, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Makes a string of a floating point number with a specific number of decimal points.
- makeString(float, int) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Makes a string of a float with a specific number of decimal points.
- makeString(float, int) - Method in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
Makes a string of a float with a specific number of decimal points.
- makeString(float, int) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Makes a string of a float with a specific number of decimal points.
- makeString(String[]) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Makes the .preferences string out of the array.
- makeStripedLUT() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
makeStripedLUT -
- makeSystemsAnalysisMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
- makeTensorImage(float[][][][], float[][][][], String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
Creates and returns a ModelImage with the tensor data.
- makeTitle() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Constructs the title of the frame with the image name and the slice location.
- makeToolbarSeparator() - Static method in class gov.nih.mipav.view.components.WidgetFactory
-
Makes a separator for the use in the toolbars - a button with the proper icon.
- makeToolbarsMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Construct the toolbar menu.
- makeTranslationMatrix(double[]) - Static method in class gov.nih.mipav.model.file.FilePARREC
-
Makes rotation matrix based on image off-centres that were stored in header and converted to orientation-specific values.
- makeUbyteHistoOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- makeUniqueKey(String) - Method in class gov.nih.mipav.model.structures.CustomHashtable
-
Returns a unique key string for the hashtable based on a given key string.
- makeUnitsOfMeasureIdentical() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Make all spatial units the same, all time units the same, and all frequency units the same
- makeUnitString() - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Makes a single string out of the units of measure.
- makeUpBlack - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModHuffmanTable
-
- makeUpBlack - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModHuffmanTable
-
- makeUpWhite - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModHuffmanTable
-
- makeUpWhite - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModHuffmanTable
-
- makeUtilitiesMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Construct the utilities menu.
- makeVector(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- makevertex(delaunay.Site) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- makeVOIColorOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- makeVOIContinuousOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the options for displaying the angle for active line VOIs.
- makeVOIDrawColorOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- makeVOILineAngleOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Makes the options for displaying the angle for active line VOIs.
- makeVOIMenu() - Method in class gov.nih.mipav.view.ViewMenuBar
-
Construct the VOI menu.
- makeVOIPointDrawTypeOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Sets the graphic type for VOI points (4 types, each with a corresponding gif).
- makeVOISaveLPSOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- makeVoxelCoord3Df(Vector3f, float[]) - Method in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- makeVoxelCoord3Df(Vector3f, float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Makes a pixel space point from a physical space point.
- makeWindowLevelOptions(GridBagConstraints, GridBagLayout) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- makewt(int, int[], double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- makingCheckerboard - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- mAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- mallocFrame - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Dialog that allows changes to the amount of heap requested of the system by the java Virtual Machine for MIPAV
during java start.
- MAMMOGRAPHY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality mammography.
- MAMMOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality mammography.
- managedPanel - Variable in class gov.nih.mipav.view.components.PanelManager
-
DOCUMENT ME!
- manifest - Variable in class gov.nih.mipav.plugins.ManifestFile
-
- MANIFEST_LOC - Static variable in class gov.nih.mipav.plugins.ManifestFile
-
- ManifestFile - Class in gov.nih.mipav.plugins
-
Stores the default manifest file as a static reference, or optionally can be used for creating custom manifest files.
- ManifestFile() - Constructor for class gov.nih.mipav.plugins.ManifestFile
-
Gets/creates manifest file in default location.
- ManifestFile(String) - Constructor for class gov.nih.mipav.plugins.ManifestFile
-
- manifestInfo - Variable in class gov.nih.mipav.plugins.ManifestFile
-
The manifest file as a set of class files.
- mant - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_stepsize_t
-
mantissa
- MANUAL_WAKEUP - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
Set this flag if you want to manually wakeup the behavior.
- manufacturer - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- manufacturer - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Detector
-
attributes.
- manufacturer - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter.FilterType
-
- manufacturer - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource
-
Attributes.
- manufacturer - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Microscope
-
Attributes.
- manufacturer - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Objective
-
- Manufacturer - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- manufacturerModelName - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- manySpectrums - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- map - Variable in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
- map - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- map - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Used to calculate the levelset contour.
- Map(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFIdentity
-
- Map(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFLookUp
-
Maps an input vector using the current lookup table.
- Map(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFUniformStretch
-
Does nothing.
- Map(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
- MAP - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Benes Trus special file type. extension: .map
- mapC - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- mapchannel - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- mapchannel - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- mapIntermediateToFinal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
Map the intermediate images to the final color image.
- mapIntermediateToFinal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
Map the intermediate images to the final color image.
- mapIntermediateToFinal() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Map the intermediate images to the final color image.
- mapR - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- mapS - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- MapTextures() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Performs a mapping of all textures in 'm_vTexture'.
- mapValue(float) - Method in class gov.nih.mipav.view.renderer.flythroughview.ModelLUTHelper
-
Return an ARGB value stored as an integer which represents the color corresponding to the input value.
- mapValue(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapIntensity
-
Return an ARGB value stored as an integer which represents the color corresponding to the input value.
- mapValue(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapColor
-
Map input RGB values to an intensity value.
- MapValuesToContiguousRange(int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- MapValuesToContiguousRangeContiguousEntries() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- MapValuesToContiguousRangeNonContiguousEntries() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- MapValuesToContiguousRangeNonContiguousRepeatingEntries() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- MARCHING_SQUARES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Perform zero crossing detection using the marching squares method.
- MARCHING_SQUARES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Perform zero crossing detection using the marching squares method.
- MARCHING_SQUARES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
Perform zero crossing detection using the marching squares method.
- MarchingCubes - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes
-
- MarchingCubes() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- marchingCubes3D(int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
- MarchingSquares - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes
-
- MarchingSquares() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingSquares
-
- mArea - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Total area of triangle meshes.
- marginColor - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
- margins - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- marginT - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
marginT indicating the number of slices to be padded in time at the start and end of T dimension
- marginX - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
marginX indicating the number of pixels to be padded on left and the right of X dimension
- marginX - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- marginY - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
marginY indicating the number of pixels to be padded on top and the bottom of Y dimension
- marginY - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
- marginZ - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
marginZ indicating the number of slices to be padded in front and the back of Z dimension
- marginZ - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
- mark(Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FaceTmark
-
- mark(Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
Set the face incremental mark of the vertex to the one of the mesh.
- mark(Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- mark(Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
Set the vertex incremental mark of the vertex to the one of the mesh.
- mark(Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.VertTmark
-
- MARK - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- MARK - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- markedVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- markedVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- markedVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
VOI vector to fix the wrong segmentation contour after AAM segmentation.
- marker - Variable in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
DOCUMENT ME!
- marker - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_codestream_index_t
-
list of markers
- marker - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_index_t
-
list of markers
- marker - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- marker - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_marker_struct
-
- MARKER_ENTRY_DESCRIPTION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- MARKER_ENTRY_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- MARKER_ENTRY_TRIGGER_IN - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- MARKER_ENTRY_TRIGGER_OUT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- MARKER_EOI - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentReader
-
Private, because one wouldn't search for it.
- marker_list - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- markerCenters - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- markerLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- markerLatticeSegments - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- markerNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- markErrorOne() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Go through the auto segmented VOIs, filter out the irregular shape or
wrong shapes.
- markErrorOne() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Go through the auto segmented VOIs, filter out the irregular shape or
wrong shapes.
- markErrorOne() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Mark the error segmented VOIs.
- markerSlices - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- markerType - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- markerType - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- markFinalized() - Method in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Mark the sample as having its cost finalized, meaning that it can no longer be updated.
- marknum - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_codestream_index_t
-
number of markers
- marknum - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_index_t
-
number of markers
- markPossibleSkeletonSamples(Vector3f[]) - Method in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Mark all inside samples that have nonuniform boundary distance gradients and then "connect" such samples by
following the gradient.
- markProbe() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Mark the probing guide line.
- markRegion(int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Start at a point in an image and grow to all connected points, marking them and counting as we go.
- MARKSET_ALIGN - Static variable in class gov.nih.mipav.model.file.FileAfni
-
marker types.
- MARKSET_BOUNDING - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- marksFlag - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- marksFlag - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- marksFlags - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- marksFlags - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- marksHelpString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- markSkeletonPoint(int, float) - Method in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Mark the specified volume sample as being part of the skeleton and mark all the connected samples within the
specified radius of the specified sample as being neighbors.
- marksLabString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- markStart() - Method in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Mark this sample as the beginning of the minimum cost path.
- marksXYZ - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- markVisited(int) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- mask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- mask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- mask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Mask indicating which voxels to process.
- mask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
DOCUMENT ME!
- mask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- mask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
bitset of vois mask
- mask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- mask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- mask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEdgePreservingSmoothing
-
contains VOI.
- mask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
contains VOI.
- mask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
contains VOI.
- mask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- mask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
contains VOI.
- mask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSymmetricNearestNeighbor
-
contains VOI.
- mask - Variable in class gov.nih.mipav.model.algorithms.FloodFill
-
DOCUMENT ME!
- mask - Static variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- mask - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- mask - Variable in class gov.nih.mipav.model.structures.ModelImage
-
Mask is a binary object that is true interior to a VOI and false otherwise used in algorithms to process only on
VOIs if indicated by the user.
- mask - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- mask - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- mask - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- MASK - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- MASK - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
DOCUMENT ME!
- mask_aif - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- mask_aif_slice - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- MASK_ALL - Static variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
All light types mask
- MASK_AMBIENT - Static variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Bit mask used to identify light types in combination.
- MASK_BINARY - Static variable in class gov.nih.mipav.model.scripting.actions.ActionPaintToMask
-
Indicates that a binary mask should be generated from an image's paint.
- MASK_BINARY - Static variable in class gov.nih.mipav.model.scripting.actions.ActionVOIToMask
-
Indicates that a binary mask should be generated from an image's VOI(s).
- mask_data - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- MASK_DATA_TYPE - Static variable in class gov.nih.mipav.model.scripting.actions.ActionPaintToMask
-
The label to use for the mask output image data type parameter.
- MASK_DATA_TYPE - Static variable in class gov.nih.mipav.model.scripting.actions.ActionVOIToMask
-
The label to use for the mask output image data type parameter.
- MASK_DIRECTIONAL - Static variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Directional light mask
- MASK_METHOD - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- MASK_METHOD - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- MASK_METHOD - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- MASK_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Extract surface from mask image.
- MASK_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Extract surface from mask image.
- mask_npixel - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- MASK_POINT - Static variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Point light mask.
- MASK_SHORT - Static variable in class gov.nih.mipav.model.scripting.actions.ActionPaintToMask
-
Indicates that a short mask should be generated from an image's paint.
- MASK_SHORT - Static variable in class gov.nih.mipav.model.scripting.actions.ActionVOIToMask
-
Indicates that a short mask should be generated from an image's VOI(s).
- MASK_SPOT - Static variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Spot light mask.
- MASK_UBYTE - Static variable in class gov.nih.mipav.model.scripting.actions.ActionPaintToMask
-
Indicates that a unsigned byte mask should be generated from an image's paint.
- MASK_UBYTE - Static variable in class gov.nih.mipav.model.scripting.actions.ActionVOIToMask
-
Indicates that a unsigned byte mask should be generated from an image's VOI(s).
- mask11 - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- mask13 - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- mask2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- mask2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- mask2 - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- mask2Border(libdt.Mat, int, byte[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- mask3 - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- mask5 - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- mask7 - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- mask9 - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- maskAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- maskAll - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- maskAll - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- maskAll - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- maskBU - Variable in class gov.nih.mipav.model.structures.ModelImage
-
Backup of mask for undoing.
- maskBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- maskBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- maskBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- maskBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
- maskBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- maskBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- MaskBurnAttribute - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Title: MaskBurnAtribute
- MaskBurnAttribute(Point3f, Transform3D, int, float) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.MaskBurnAttribute
-
Constructor for the burn attributes.
- maskBurnVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Mask burning center attribute.
- maskBurnVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Reference to Mask burning attribute.
- maskButton - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- maskButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- maskButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- maskButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- maskButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- maskCenter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- maskCenter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
The kernel.
- maskCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- maskCurrent - Variable in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Labels for values of the mask trim points property
- maskDisplay(int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Display binary mask images.
- maskE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- maskE - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- maskExpanded - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
- maskExpanded - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
- maskExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- maskExtents - Variable in class gov.nih.mipav.model.file.FileInfoSPAR
-
Mask extents
- maskFileDir - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- maskFileInfo - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
- maskFileInfo - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- maskFileInfo2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
- maskFileInfo2 - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- maskFileName - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- maskFlag - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
- maskGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- maskGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- maskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
- maskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Mask image to extract surface from.
- maskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Mask image to extract surface from.
- maskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
- maskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
- maskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
- maskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
- maskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
- maskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Used in geodesic dilation, geodesic erosion, morphological reconstruction
by dilation, and morphological reconstruction by erosion
Not used in opening by reconstruction and closing by reconstruction
- maskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuantify
-
The mask image.
- maskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- maskImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The mask image generated from the VOIs within the image.
- maskImage - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- maskImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- maskImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
mask Image *
- maskImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- maskImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- maskImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- maskImage - Variable in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
DOCUMENT ME!
- maskImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
Mask image for the tensor calculation
- MaskImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Returns the mask image.
- maskImage1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
mask image 1
- maskImage2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
- maskImage2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
mask imag 2
- maskImage2 - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- maskImageRB - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- maskImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- maskImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- maskImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- maskImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- maskImageTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- maskIndex - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- maskInsideVoxels(int, ModelImage, ModelTriangleMesh[], boolean, boolean, boolean, float, ColorRGBA) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Mask the mesh surface volume in voxels.
- maskLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- maskLargest - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- maskList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- maskList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- maskMaximum - Variable in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Labels for values of the mask trim points property
- maskMinimum - Variable in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Labels for values of the mask trim points property
- maskN - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- maskN - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- maskName - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- maskName - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- maskOrigin - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- maskPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- maskPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- maskPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- maskPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- maskPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- maskPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- maskPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- maskPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- maskPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- maskPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- maskPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- maskPanelClose - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Close declearation.
- maskPanelErode - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- maskPanelOpen - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- maskPanelSkeletonize - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- maskPositions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- maskRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- maskS - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- maskS - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- maskSD - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- maskSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- maskStdDev - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- maskSupplied - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- maskTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- maskText - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- maskThresAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- maskThresAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- maskThresAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- maskThreshold - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- maskThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- maskThresholdField - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- maskToPaint() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- maskToPaint() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- maskToPaint() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- maskToPaint() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- maskToPaint() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- maskToPaint() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- maskToVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- maskToVOI(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Convert mask image to VOI
- maskTrimSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Sliders for setting the mask and voi trim parameters
- maskType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- maskType - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- maskVOIFill(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Fill pixels inside VOI.
- maskVOIImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- maskVOIImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- maskW - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- maskW - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- massCenterDescription - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- massCenterDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- massCenterDescriptionB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- massCenterDescriptionG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- massCenterDescriptionR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- massI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- master - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- master_selection(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- masterHashtable - Static variable in class gov.nih.mipav.model.file.DicomDictionary
-
Hashtable filled with known DICOM tags with empty value attributes.
- masterImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- masterPrivateTreeMap - Static variable in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
TreeMap filled with known DICOM tags with empty value attributes.
- masterScrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
master scroll pane in which to display all information.
- masterScrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
master scroll pane in which to display all information.
- mat - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- Mat() - Constructor for class gov.nih.mipav.model.algorithms.libdt.Mat
-
- Mat(double[][]) - Constructor for class gov.nih.mipav.model.algorithms.libdt.Mat
-
- Mat(int, int[], int) - Constructor for class gov.nih.mipav.model.algorithms.libdt.Mat
-
- Mat(int, int[], int, int) - Constructor for class gov.nih.mipav.model.algorithms.libdt.Mat
-
- Mat(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.libdt.Mat
-
- Mat_rm() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm
-
- Mat_rm_type() - Constructor for enum gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm_type
-
- mat33_colnorm(Matrix) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
max column norm of 3x3 matrix.
- mat33_polar(Matrix) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Polar decomposition of a 3x3 matrix: finds the closest orthogonal matrix to input A (in both Frobenius and L2
norms).
- mat33_rownorm(Matrix) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
max row norm of 3x3 matrix.
- mat4 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
Blending matrix for a 4th degree Bspline.
- matB0T2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Transformation matrix from registering B0 to T2.
- match - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- match(Color, Color) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- match_desc(SIFT3D.SIFT3D_Descriptor, SIFT3D.SIFT3D_Descriptor_store, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- match_ref - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
- match_src - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
- match1d(Vector<Integer>, Vector<Integer>, int[], int[], boolean) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- matchAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- matchBtoA() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
matchBtoA pA and pB are 2 3D point sets (pointSetA and B).
- matchBtoA() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
matchBtoA pA and pB are 2 3D point sets (pointSetA and B).
- matchCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- matched(int[], boolean[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
- matches(int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- matches(FileFilter, int) - Static method in class gov.nih.mipav.view.ViewImageFileFilter
-
Determines if the given file filter's description matches the description associated with the given filterType.
- matchHistogramAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
DOCUMENT ME!
- matchHistogramSliceAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
DOCUMENT ME!
- matchImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
If this 2D black and white image is present, it is matched to the closest slice and/or color in the
source image model by looking for the closest match of the weights of the principal components.
- matchImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- matchImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
model images
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
DOCUMENT ME!
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
DOCUMENT ME!
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
Register match image to base image.
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Match image - register match image to base image.
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Match image - register match image to base image.
- matchImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- matchImages(ModelImage, ModelImage, boolean, boolean, double, double, double, double) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
- matchOrientation(int[], int[], int[], boolean[]) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Returns the axisOrder and axisFlip arrays for mapping axisB image orientation onto axisA image orientation.
- matchOrients - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- matchOrigBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
DOCUMENT ME!
- matchOrigin() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
Add image margins to image B, or crop to match Image A.
- matchOrigins - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- matchOriginsExtents(ModelImage, ModelImage, int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Matches the origins and extents of the two input images.
- matchPts - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- matchResolutions(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Match the resolutions of the two images.
- MatchSlices - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- MatchSlices(int, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.MatchSlices
-
- MatchSlices(int, int, int, Model) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.MatchSlices
-
- matchUnits(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Matches the units of measure for the two input images.
- Material - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- mathAlgo - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
ref to AlgorithmRGBConcat*
- mathAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
DOCUMENT ME!
- mathAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- mathAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
ref to AlgorithmRGBConcat
- mathAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- mathAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- mathAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
DOCUMENT ME!
- mathAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- mathAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
ref to AlgorithmRGBConcat*
- MATLAB - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension .mat
- matlab_mod(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- matMult(int, double[][], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- matr1 - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- matr1 - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- matr2 - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- matr2 - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- matRegistered - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Array of transformation matrices after registering the DWI image series to the B0 reference volume.
- matricesFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- matrix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
-
Matrix that gives best transformation.
- matrix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D.MatrixListItem
-
Matrix that gives best transformation.
- matrix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D.MatrixListItem
-
Matrix that gives best transformation.
- matrix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D.MatrixListItem
-
Matrix that gives best transformation.
- matrix - Variable in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Matrix that gives best transformation.
- matrix - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- matrix - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
Transformation matrix.
- matrix - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- matrix - Variable in class gov.nih.mipav.model.file.FileInfoOME
-
DOCUMENT ME!
- matrix - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- matrix - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- matrix - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
MIPAV matrix used for storing qform or sform transformation information.
- matrix - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- matrix - Variable in class gov.nih.mipav.model.structures.jama.JamaMatrix
-
- matrix - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- matrix - Variable in class gov.nih.mipav.view.dialogs.JDialogOrientMatrix
-
DOCUMENT ME!
- matrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobiPreconditioner
-
- matrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- matrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- matrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- Matrix() - Constructor for class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
Constructor to create identity matrix.
- MATRIX - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
.tps contains int N and float C[][] for thin plate spline
- matrix_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- matrix_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrixPreconditionerWrapper
-
- matrix2 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
When qform_code > 0 and sform_code > 0, the qform transformation information
is stored in matrix and the sform transformation information is stored in
matrix2.
- matrixBox - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Box to hold the matrices parsed from the MatrixHolder.
- matrixCol - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- matrixComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- matrixComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- matrixComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- matrixComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- matrixComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
- matrixComboBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- matrixd - Variable in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Matrix that gives best transformation.
- MatrixDataStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under in the Gifti xml schema.
- matrixDeterminationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- matrixDirectory - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- matrixDirectory - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- matrixDirectory - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- matrixDirectory - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- matrixDirectory - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
- matrixDirectory - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- matrixDirText - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- MatrixEntry - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- MatrixEntry() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.MatrixEntry
-
- MatrixEntry(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.MatrixEntry
-
- matrixFile - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- matrixFile - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- matrixFileMenu() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Allows the user to select matrix file.
- matrixFileMenu() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Allows the user to select matrix file.
- matrixFName - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- matrixFName - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- matrixHolder - Variable in class gov.nih.mipav.model.structures.ModelImage
-
Holds all of the images associated matrices.
- MatrixHolder - Class in gov.nih.mipav.model.structures
-
Class that stores matrices (owned by ModelImage) with accessor functions to the matrix map/adding and changing
matrices.
- MatrixHolder(int) - Constructor for class gov.nih.mipav.model.structures.MatrixHolder
-
Default constructor.
- matrixLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- matrixLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- matrixLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- matrixLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- matrixLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
- MatrixListItem - Class in gov.nih.mipav.model.algorithms.registration
-
Helper class to make it easy to store the necessary information about a minimum.
- MatrixListItem(double) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
-
Creates new minimum object, with identity transMatrix and a given cost.
- MatrixListItem(double) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D.MatrixListItem
-
Creates new minimum object, with identity transMatrix and a given cost.
- MatrixListItem(double, TransMatrixd, double[]) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
-
Creates new minimum object, setting the data and copying the point array explicitly.
- MatrixListItem(double, TransMatrixd, double[]) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D.MatrixListItem
-
Creates new minimum object, setting the data and copying the point array explicitly.
- MatrixListItem(double, TransMatrixd, double[]) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D.MatrixListItem
-
Creates new minimum object, setting the data and copying the point array explicitly.
- MatrixListItem(double, TransMatrixd, double[]) - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D.MatrixListItem
-
Creates new minimum object, setting the data and copying the point array explicitly.
- MatrixListItem(double, TransMatrixd, double[]) - Constructor for class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Creates new minimum object, setting the data and copying the point array
explicitly.
- MatrixListItem(double, TransMatrix, double[]) - Constructor for class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Creates new minimum object, setting the data and copying the point array
explicitly.
- matrixMap - Variable in class gov.nih.mipav.model.structures.MatrixHolder
-
Linked hash map that will store all of the images associated matrices.
- MatrixMatrixMultiply(int, double[], int, int, double[][], int, int, double[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- MatrixMatrixMultiply(int, double[], int, int, double[], int, int, double[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- MatrixMatrixMultiply(int, double[], int, int, int, double[][], int, int, double[], int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- MatrixMatrixMultiply(int, int, int, int, int, double[], int, int, int, double[], int, int, int, double[], int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- matrixMultiply(double[][], double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- matrixMultiply(TransMatrix, float[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIGradTableCorrectionAfterTrans
-
- MatrixParameterization() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.MatrixParameterization
-
- matrixQ - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- matrixRow - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- matrixS - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- matrixSize1 - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- matrixSize1Index - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- matrixSize2 - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- matrixSize2Index - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- matrixSizeX - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
30.
- matrixSizeY - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
32.
- matrixToDICOMString(TransMatrix) - Static method in class gov.nih.mipav.model.structures.ModelImage
-
Convert the matrix to the String format (decimal string) to be stored in the DICOM tag (0020,0037) image
(patient) orientation.
- matrixtoInverseArray(TransMatrix) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Converts matrix to inverse array.
- matrixToString(int, int) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Produces a string of the matrix values.
- matrixToString(int, int) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Produces a string of the matrix values.
- MatrixTransposeMatrixMultiply(int, int, int, int, int, double[], int, int, int, double[], int, int, int, double[], int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- MatrixTransposeVectorMultiply(int, int, int, double[], int, int, int, double[], int, double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- matrixTwoDim - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
MIPAV matrix used for storing qform or sform transformation information
for 2D images.
- matrixVector - Variable in class gov.nih.mipav.model.file.FileImageXML
-
Vector to hold matrices while they are being read in for the header (until they are added to the image
- matrixVector - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
- MatrixVectorMultiply(int, int, int, double[], int, int, int, double[], int, double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- MATRX - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- matupd(int, int, double[][], double[][], double[][], double[][], double[], double[], int[], int, int[], int[], double[], double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- max - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
maximum, minimum size of objects.
- max - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
maximum, minimum size of objects.
- max - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
maximum, minimum size of objects.
- max - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
maximum, minimum size of objects.
- max - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- max - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Used to store the image maximum.
- max - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
- max - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdhyperrect
-
- max - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Used to store the image maximum.
- max - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Storage or min and max values.
- max - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image maximum intensity for single channel image.
- max - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Maximum intensity values of image.
- max - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum image intensity.
- max - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- max - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
or if the source image is to be replaced.
- max - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- max - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- max - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- max - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- max - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- max - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- max - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- max - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- max - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- max - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
DOCUMENT ME!
- max - Variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- max - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti.Linking
-
- max(double[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Returns the maximum value found in a double array.
- max(float[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Returns the maximum value found in a float array.
- max(float, float) - Static method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Computes the maximum of two floating point numbers passed in.
- max(short[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Returns the maximum value found in a short array.
- max(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
- Max - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
- Max - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceExtractImage
-
- Max() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Finds the maximum element in the vector.
- MAX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- MAX - Variable in class gov.nih.mipav.model.structures.HQueue
-
DOCUMENT ME!
- max_98P - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Value representing 98% of the histogram count:
- max_alloc_chunk - Variable in class gov.nih.mipav.model.file.libjpeg.my_memory_mgr
-
- MAX_ALLOC_CHUNK - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- MAX_ALLOWED_DEVIATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- MAX_ALLOWED_DEVIATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- MAX_ALPHA_SIZE - Static variable in interface gov.nih.mipav.model.file.BZip2Constants
-
- max_angle - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- MAX_ANGLE - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Maxium rotation angle.
- MAX_ANGLE - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Maxium rotation angle.
- max_area - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- max_area - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- max_area - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- MAX_CLIP_PLANES - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- MAX_CLIP_PLANES - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- MAX_CLIP_PLANES - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- MAX_CMDS - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- MAX_CODE_LEN - Static variable in interface gov.nih.mipav.model.file.BZip2Constants
-
- max_col_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrixRandomMatrixOptions
-
- max_col_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions
-
- MAX_COMPONENTS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- MAX_COMPS_IN_SCAN - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- max_consecutive_nonmonotonic_steps - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- max_consecutive_nonmonotonic_steps - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- max_consecutive_nonmonotonic_steps_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
- max_constr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- max_constr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- max_constr - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- max_constr - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- MAX_CUSTT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- MAX_DEGREE - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- MAX_DEGREE - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- MAX_DELTA - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- max_depth - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- max_depth - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- max_diagonal_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- max_diagonal_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- max_diff - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMarkovSmooth
-
The maximum contribution to the potential of the difference between two neighboring pixel values.
- max_diff - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
The maximum contribution to the potential of the difference between two neighboring pixel values.
- max_dim - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- max_dist - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- max_edge - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- MAX_EDGES - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingSquares
-
- max_eig_ratio - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- MAX_ENT - Static variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- max_eval - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- MAX_FILTS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- MAX_FLOAT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- MAX_FLOAT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- MAX_FLOAT - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- MAX_GRID_BORDER - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
maximum spacing of the border surrounding images in the light-box.
- MAX_GRID_BORDER - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Maximum spacing of the border surrounding images in the light-box.
- MAX_GRID_COL - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
maximum column value (when it is the independent variable).
- MAX_GRID_COL - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Maximum column value (when it is the independent variable).
- MAX_GRID_ROW - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
maximum row value (when it is the independent variable).
- MAX_GRID_ROW - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Maximum row value (when it is the independent variable).
- MAX_GRID_SIZE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
maximum spacing in-between images in the light-box.
- MAX_GRID_SIZE - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Maximum spacing in-between images in the light-box.
- max_h_samp_factor - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- MAX_IFD_LENGTH - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- MAX_IFD_LENGTH - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- max_index - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- max_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- MAX_INITIAL_TRI_IMAGES - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Maximum number of initial tri-images!
- max_it - Variable in class gov.nih.mipav.model.algorithms.ConjugateGradient
-
- max_it - Variable in class gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
- MAX_IT - Static variable in class gov.nih.mipav.model.algorithms.NMSimplex
-
- max_iter - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- max_iter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- max_iter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Tron
-
- MAX_ITERATIONS - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- MAX_ITERS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MAX_ITR - Static variable in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
Max number of iterations to perform.
- max_lbfgs_rank - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- max_lbfgs_rank - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- max_lbfgs_rank - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionOptions
-
- max_lbfgs_rank - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- max_lbfgs_rank - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- max_lbfgs_rank - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- max_levels - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- MAX_LEVELS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- max_line_search_step_contraction - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- max_line_search_step_contraction - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- max_line_search_step_contraction - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- max_line_search_step_expansion - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- max_line_search_step_expansion - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- max_line_search_step_expansion - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- max_linear_solver_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- max_lm_diagonal - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- max_lm_diagonal - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyOptions
-
- max_localmem_fft_size - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- MAX_LOG_LEVEL - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- MAX_MAGNIFICATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Maximum possible magnification.
- MAX_MAGNIFICATION - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- MAX_MAGNIFICATION - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Maximum amount of magnification in the light-box.
- max_memory_to_use - Variable in class gov.nih.mipav.model.file.libjpeg.my_memory_mgr
-
- max_mu_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- max_nonzeros_w - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- max_num_consecutive_invalid_steps - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- max_num_consecutive_invalid_steps - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- MAX_NUM_COORDS - Static variable in class gov.nih.mipav.view.ViewJComponentFunct
-
Maximum size of the coordinate arrays.
- max_num_corrections_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- MAX_NUM_FUNCTS - Static variable in class gov.nih.mipav.view.ViewJComponentGraph
-
Maximum number of functions that the graph may display.
- max_num_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- max_num_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- max_num_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
- max_num_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- max_num_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- max_num_line_search_direction_restarts - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- max_num_line_search_direction_restarts - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- max_num_line_search_direction_restarts - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- max_num_line_search_step_size_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- max_num_line_search_step_size_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- max_num_line_search_step_size_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- max_num_nonzeros() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- max_num_nonzeros_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- max_num_nonzeros_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- max_num_ridders_extrapolations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffOptions
-
- max_num_unique_values - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- MAX_POINTS - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- MAX_POINTS - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Maximum number of correspondence points.
- MAX_PRINT_DIGITS - Static variable in class gov.nih.mipav.util.DoubleDouble
-
- MAX_PROCESS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- max_progress - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.showProgress
-
- MAX_PTS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.poly
-
- MAX_Q_COMPS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- max_radius - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyOptions
-
- max_radius_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- max_radius_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- max_radix - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- MAX_READ_LENGTH - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
The maximum read buffer size.
- MAX_ROTATION - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
values returned by the device during poll (may not be correct)
- max_row_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrixRandomMatrixOptions
-
- max_row_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions
-
- MAX_SAMP_FACTOR - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- MAX_SAMPLE_VALUE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- MAX_SAMPLE_VALUE - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- MAX_SAMPLE_VALUE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- MAX_SAMPLE_VALUE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- MAX_SELECTED_GRID_BORDER - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
maximum spacing of the selection border surrounding images in the light-box.
- MAX_SELECTED_GRID_BORDER - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Maximum spacing of the selection border surrounding images in the light-box.
- MAX_SELECTORS - Static variable in interface gov.nih.mipav.model.file.BZip2Constants
-
- max_solver_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- max_solver_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- max_solver_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- max_stable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserExtrReg
-
- max_step_contraction - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
- max_step_expansion - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
- max_step_solver_retries - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- max_tiles - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
maximum number of tiles at the decoder
- max_tol - Variable in class gov.nih.mipav.model.algorithms.ConjugateGradient
-
- max_tol - Variable in class gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
- MAX_TRANSLATION - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- MAX_TRIANGLES - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- max_trust_region_radius - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- MAX_USER_DATA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PlyReader
-
- max_v_samp_factor - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- max_value - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlPgmImage
-
< image height.
- max_variation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- max_variation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- max_variation - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- MAX_VELOCITY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Maxium rotation velocity.
- MAX_VELOCITY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Maxium rotation velocity.
- MAX_WIDGETS - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
The maximum number of widgets that can be added to the display.
- max_work_item_per_workgroup - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- max1 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- max1 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- max1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Minimum and maximum buffer and secondBuffer areas.
- max1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Minimum and maximum buffer and secondBuffer areas.
- max2 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- max2 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- max2 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Minimum and maximum buffer and secondBuffer areas.
- max2 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Minimum and maximum buffer and secondBuffer areas.
- max2DPt(int, float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
A function that finds the maximum value in a local image rectangle.
- max3(double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
Returns the maximum of 3 values
- max3DPt(int, float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
A function that finds the maximum value in a local image volume.
- maxA - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
/**.
- maxA - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum for a color image.
- maxA - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
- maxAB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- maxaccess - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- maxaccess - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- maxAdjustExp - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxAdjustExp - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxAdjustExpLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- maxAdjustExpLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- maxAG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- maxAngle - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- maxAngle - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- maxAnisotropyMax - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxAnisotropyMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxAnisotropyMaxLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- maxAnisotropyMaxLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- maxAnisotropyMin - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxAnisotropyMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxAnisotropyMinLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- maxAnisotropyMinLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- maxAperture - Variable in class gov.nih.mipav.model.file.FileSVS
-
- maxAperture - Variable in class gov.nih.mipav.model.file.FileTiff
-
- maxAR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- maxAttenuation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The maximum amount of attenuation to perform (between 0 and 1).
- maxAttenuation - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
The maximum amount of attenuation to apply to the image (0 = no attenuation, 1 = full attenuation).
- maxAttenuationTF - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Maximum attenuation text field.
- maxAvailableEntry - Variable in class gov.nih.mipav.model.file.FileSVS
-
- maxAvailableEntry - Variable in class gov.nih.mipav.model.file.FileTiff
-
- maxB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
/**.
- maxB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
- maxB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
- maxB - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image maximum intensity for the blue channel of an RGB image.
- maxB - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Maximum intensity values of image.
- maxB - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum for a color image.
- maxB - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- maxB - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- maxB - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- maxB - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- maxB - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- maxB - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- maxB - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Max intensity values in Red, Green and Blue images respectively.
- maxB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maxB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- maxb1 - Variable in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- maxb1 - Variable in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- maxBB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- maxBG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- maxBins - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- maxBins - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- maxBound - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
maxBound is a bound on the number of terms used in the Durbin formula.
- maxBox - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
The largest of xBox,yBox,and zBox.
- maxBox - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
x, y, z box size.
- maxBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
ModelImage max dimension: (Extents * resolutions).
- maxBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
MaxBox value from the parent frame.
- maxBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
The maximum of the fram box values.
- maxBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- maxBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- maxBox - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- maxBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
x, y, z box size.
- maxBR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- maxBufferSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- maxBufferSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- maxBufferSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
The maximum Hough transform size in megabytes - default is currently 256
- maxBufferSize - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
The maximum Hough transform size in megabytes - default is currently 256
- maxBufferSize - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
The maximum Hough transform size in megabytes - default is currently 256
- maxBufferSize - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
The maximum Hough transform size in megabytes - default is currently 256
- maxBufferText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
- maxBufferText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
- maxBufferText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- maxBV - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- maxC - Variable in class gov.nih.mipav.model.file.FileZVI
-
- maxcall - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
maximum number of iterations
- maxChange - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- maxChange - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- MAXCHUNK - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModHuffmanTable
-
- MAXCHUNK - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModHuffmanTable
-
- maxcode - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
mincode[index] = minimum legal code at that index.
- maxcode - Variable in class gov.nih.mipav.model.file.libjpeg.d_derived_tbl
-
- maxCode - Variable in class gov.nih.mipav.model.file.FileSVS
-
- maxCode - Variable in class gov.nih.mipav.model.file.FileTiff
-
- MAXCODE - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- MAXCODE - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- MAXCOL - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- maxColorRange - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxColorRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxColorRangeLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- maxColorRangeLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- maxColumn - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- maxCount - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- maxCountB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- maxCountG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- maxCountR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- maxCyclesText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
- maxCyclesText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
- maxDebugLineField - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- maxDegreesBinWidth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- maxDegreesBinWidth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- maxDegreesBinWidth - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
For theta must have bin width <= maxDegreesBinWidth
- maxDegreesBinWidth - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
For theta must have bin width <= maxDegreesBinWidth
- maxDelta - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The most we can get away from the initial seed point intensity value (151).
- maxDepth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FaceEdgesFunction
-
- maxDepth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortedTreeNodes
-
- maxDepth() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- maxDepthLeaves(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- MaxDerivativesPerResidualBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- maxDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- maxDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- maxDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- maxDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- maxDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- maxDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- maxDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- maxDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- maxDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- maxDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- maxDim - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
The largest dimension of xDim, yDim and zDim.
- maxDim() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- maxDimensions - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- maxDimGreen - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxDimGreen - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxDimGreenLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- maxDimGreenLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- maxDist - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
- maxDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- maxDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
- maxDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- maxDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
- maxDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- maxDistance - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- maxDistLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maxDistTextF - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maxDomain - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- maxDomainField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- maxDomainLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- maxEllipseFindCycles - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- maxEllipseFindCycles - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Maximum number of pointSetsRequired triplet point acqusitions that is allowed to occur
- maxEMIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
- maxEMIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- maxenergy - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- maxEntCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- maxEntropyEnhance(ModelImage, boolean[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- maxEntropyEnhanceColor(ModelImage, boolean[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- maxEntropyThreshold - Variable in class gov.nih.mipav.model.structures.ModelHistogram
-
DOCUMENT ME!
- MAXER - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- maxExponent - Variable in class gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
- maxExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- maxExtents - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- MAXFAC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- maxfev - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
maxfev is a positive integer input variable.
- maxField - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- maxField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- MaxFuncEval() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
get the number of evaluations
- maxG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
- maxG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
- maxG - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image maximum intensity for the green channel of an RGB image.
- maxG - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Maximum intensity values of image.
- maxG - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum for a color image.
- maxG - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- maxG - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- maxG - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- maxG - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- maxG - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- maxG - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- maxG - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Max intensity values in Red, Green and Blue images respectively.
- maxG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maxG - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- MAXGAM - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- maxGamma - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxGamma - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxGammaLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- maxGammaLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- maxGV - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- maxHeapLAX - Static variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
Flag to the java-runtime (as used in the LAX-files) to indicate an maximum heap-size memory-option.
- maxHeapOption - Static variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
Flag to the java-runtime (as used in the XML-files) to indicate an maximum heap-size memory-option.
- maxHeapText - Variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
DOCUMENT ME!
- maxHor - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- maxHor - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- maxHyperbolaFindCycles - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- maxHyperbolaFindCycles - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Maximum number of pointSetsRequired triplet point acquisitions that is allowed to occur
- maxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Image's maximum intensity.
- maxImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Image's maximum intensity.
- maximization(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- maximum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
original image maximum.
- maximum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- maximum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- maximum - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- maximum - Variable in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
DOCUMENT ME!
- maximum - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
When true, calculate the maximum (X,Y,Z) slices.
- maximum - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- MAXIMUM - Static variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
maximum
- MAXIMUM - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- MAXIMUM_LIKELIHOOD_ESTIMATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- MAXIMUM_PHASE - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- MAXIMUM_PHASE - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- maximum_relative_error - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProbeResults
-
- maximumB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- maximumButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- maximumCheck - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
CheckBox turns on/off calculating the maximum projection.
- maximumConvergenceLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- maximumCorrection - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
- maximumCorrection - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
- maximumDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionsFromPartialBorders
-
- maximumDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
- maximumDistanceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- maximumDistanceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- maximumDistanceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- maximumDistanceText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- maximumDistanceText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- maximumDistanceText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- maximumFuzzy - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- maximumIterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- maximumL - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Labels to display max/min slider values.
- maximumLB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumLevel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- maximumLevel - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- maximumLevelsButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- maximumLG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumLikelihoodEstimation - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- MaximumLinesDocumentListener - Class in gov.nih.mipav.view
-
- MaximumLinesDocumentListener(int) - Constructor for class gov.nih.mipav.view.MaximumLinesDocumentListener
-
- MaximumLinesDocumentListener(int, long) - Constructor for class gov.nih.mipav.view.MaximumLinesDocumentListener
-
- maximumLR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumNearestNeighborDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- maximumNearestNeighborDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- maximumNearestNeighborDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- maximumNearestNeighborDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- maximumNearestNeighborDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- maximumNearestNeighborDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- maximumNoise - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- maximumNonZeroElements - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- maximumNumberOfIterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- maximumNumberOfLevels - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- maximumNumberOfLevels - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- maximumPixelCount - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- maximumPixelCountIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- maximumPixelCountInGroup - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- maximumPixelCountInGroupIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- maximumPossibleBValue - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- maximumR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- maximumRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
DOCUMENT ME!
- maximumRRInterval - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- maximumRRInterval - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- maximumRRIntervalIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- maximumRRIntervalPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- maximumSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
When adaptiveSize is true, the maximum size the kernel mask can be increased to.
- maximumSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- maximumText - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
DOCUMENT ME!
- maximumThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- maximumThresholdDouble - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- maximumU - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumUB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumUG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumUR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumValue - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumValueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumValueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Buttons to set max/min slider values.
- maximumValueField - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maximumValueField - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Text fields for user to enter max/min slider values.
- maximumx - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- maxInput - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
JTextfield for maximum value of threshold.
- maxInputB - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
JTextfield for maximum Blue value of threshold.
- maxInputG - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
JTextfield for maximum Green value of threshold.
- maxInputR - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
JTextfield for maximum Red value of threshold.
- maxIntenBlue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- maxIntenGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- maxIntenRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- maxIntensity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
max intensities for threshold
- maxIntensity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- maxIntensity - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- maxIntensity - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- maxIntensity - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Maximum intensity threshold value.
- maxIntensity - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- maxIntensity - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Maximum intensity threshold.
- maxIntensity - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
max intensities calculatd using std dev
- maxIntensity - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The maximum value which can be chosen in the intensity spinner.
- maxIntensityB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
max intensities for threshold
- maxIntensityB - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Maximum Blue intensity threshold.
- maxIntensityB - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
max intensities calculatd using std dev
- maxIntensityG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
max intensities for threshold
- maxIntensityG - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Maximum Green intensity threshold.
- maxIntensityG - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
max intensities calculatd using std dev
- maxIntensityR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
max intensities for threshold
- maxIntensityR - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Maximum Red intensity threshold.
- maxIntensityR - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
max intensities calculatd using std dev
- maxiter - Variable in class gov.nih.mipav.model.algorithms.libdt.EMOptions
-
- maxiter - Variable in class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- maxIter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- maxIter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- maxIter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- maxIter - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- maxIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Advanced optimization settings maxIter in the call to ELSUNC will be an integer multiple of baseNumIter.
- maxIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Advanced optimization settings maxIter in the call to Powell's will be an integer multiple of baseNumIter.
- maxIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Limits number of iterations in ELSUNC, LEVENBERG_MARQUARDT, or NL2SOL optimization.
- maxIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Limits number of iterations in ELSUNC optimization. maxIter in the call to ELSUNC will be an integer multiple
of baseNumIter
- maxIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Limits number of iterations in elsunc optimization. maxIter in the call to elsunc will be an integer multiple
of baseNumIter
- maxIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Advanced optimization settings maxIter in the call to ELSUNC will be an integer multiple of baseNumIter.
- maxIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Limits number of iterations in Powell optimization. maxIter in the call to Powell's will be an integer multiple
of baseNumIter
- maxIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Limits number of iterations in Powell optimization. maxIter in the call to Powell's will be an integer multiple
of baseNumIter
- maxIter - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Advanced optimization settings maxIter in the call to Powell's will be an integer multiple of baseNumIter.
- maxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- maxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- maxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- maxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- maxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- maxIter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- maxIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
The maximum number of iterations the optimization allows.
- maxIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
The maximum number of iterations the optimization allows.
- maxIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
The maximum number of iterations the optimization allows.
- maxIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
The maximum number of iterations the optimization allows.
- maxIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- maxIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
The maximum number of iterations the optimization allows.
- maxIterations - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- maxIterations - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- maxIterations - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- maxIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- maxIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- maxIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- maxIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- maxIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- maxIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- maxIterations - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- MaxIterations() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
get limit for the number of iterations
- maxIterations_def - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- maxIterations_def - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- maxIterations_def - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- maxIterations_def - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- maxIterations_def - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- maxIterations_def - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- maxIterationsText - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- maxIterationsText - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- maxIterationsText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- maxIterationsText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- maxIterationsText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- maxIterationsText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- maxIters - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Maximum number of iterations.
- MAXJSAMPLE - Variable in class gov.nih.mipav.model.file.libjpeg
-
- MAXL2 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- maxLabel - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.Renum
-
- maxLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- maxLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- maxLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- maxLength - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_MaximumSubLength
-
The maximum length - default is zero.
- maxLength - Variable in class gov.nih.mipav.view.JPanelEditDefault
-
DOCUMENT ME!
- maxLength - Variable in class gov.nih.mipav.view.JPanelEditSetOrParam
-
DOCUMENT ME!
- MAXLGM - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- maxLimits - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
when done debugging: private boolean limitTranslation = false, oneTransLimit = false;.
- maxLines - Variable in class gov.nih.mipav.view.MaximumLinesDocumentListener
-
- maxLinesListener - Variable in class gov.nih.mipav.view.ViewJFrameMessage.ScrollTextArea
-
- MAXLOG - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- maxM0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- maxM0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- maxM0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- maxM0Field - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- maxM0Field - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogTwo
-
- maxMAPIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
- maxMAPIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- maxmarknum - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_codestream_index_t
-
actual size of markers array
- maxmarknum - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_index_t
-
actual size of markers array
- maxMemoryUsage - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- MAXMIN_INIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- MAXMIN_INIT - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- maxMinInit - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- maxNoiseLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- maxNoiseLabel2 - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- maxnum - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- maxnum - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- MAXNUM - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- MAXNUMCOLORS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- maxNumIterations - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Current iterations number.
- maxNumOpsInvoked - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AsyncOpWindowSubItem
-
Indicates the maximum number of operations invoked.
- maxNumOpsPerformed - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AsyncOpWindowSubItem
-
Indicates the maximum number of operations performed.
- maxNumOrientations - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
< the base scale of the gss.
- MaxObject - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- maxOfMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
Whether to use the maximum of the minimum resolutions of the 2 images when respampling during registration
against the flipped image.
- maxOfMinResol - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- maxOfMinResol - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- maxOfMinResol - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- maxOfMinResol - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- maxOfMinResol - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- maxp1 - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
gives an upper bound on the number of chebyshev c moments which can be stored, i.e. for the c intervals of
lenghts abs(b-a)*2**(-l), c l=0,1, ..., maxp1-2, maxp1.ge.1. c if maxp1.lt.1, the routine will end with ier[0] =
6.
- maxp1 - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
gives an upper bound on the number of chebyshev c moments which can be stored, i.e. for the c intervals of
lenghts abs(b-a)*2**(-l), c l=0,1, ..., maxp1-2, maxp1.ge.1. c if maxp1.lt.1, the routine will end with ier[0] =
6.
- maxPagePanelSizeX - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- maxPagePanelSizeX - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- maxPagePanelSizeY - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- maxPagePanelSizeY - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- maxPanelWidth - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The max width of the control panels.
- maxPanelWidth - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
The max width of the control panels.
- MaxParametersPerResidualBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- maxpasses - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_seg_t
-
- maxPixelBinWidth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- maxPixelBinWidth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- maxPixelBinWidth - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
For xCenter, yCenter, r1, and r2 must bin width <= maxPixelBinWidth
- maxPixelBinWidth - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
For xCenter, yCenter, r1, and r2 must bin width <= maxPixelBinWidth
- maxPointDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- maxPointDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- maxPointDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Largest allowable distance between 2 of 3 picked points
- maxPointDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Largest allowable distance between 2 of 3 picked points
- maxPointText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
- maxPointText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
- maxPosition - Variable in class gov.nih.mipav.model.file.FileZVI
-
- maxPossibleCost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- maxPossibleCost - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- MAXPOW - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- maxProbability - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate maximum probability maximum probability is the largest probability value within the window.
- maxProbability - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate maximum probability maximum probability is the largest probability value within the window.
- maxProbability - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- maxProbability - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- maxProbabilityCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- maxProbabilityCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- maxProgressValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Used to store the maximum value of the progress bar.
- maxPyrHt(int, int, int) - Method in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- maxR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
- maxR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
- maxR - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image maximum intensity for the red channel of an RGB image.
- maxR - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Maximum intensity values of image.
- maxR - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum for a color image.
- maxR - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- maxR - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- maxR - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- maxR - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- maxR - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- maxR - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- maxR - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Max intensity values in Red, Green and Blue images respectively.
- maxR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maxR - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- maxR1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- maxR1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- maxR2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- maxR2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- maxRad - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
- maxRadius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- maxRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- maxRadiusLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- maxRadiusText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- maxRange - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- maxRange - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- maxRangeField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- maxRangeLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- maxRegions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RegionList
-
- maxRenExtent - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
max Extent of X, Y dimensions.
- MaxResidualsPerResidualBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- maxResol - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Flag to determine if the maximum of the minimum resolutions of the two datasets should be used.
- maxResol - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Flag to determine if the maximum of the minimum resolutions of the two datasets should be used.
- maxResol - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Flag to determine if the maximum of the minimum resolutions of the two datasets should be used.
- maxResol - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Flag to determine if the maximum of the minimum resolutions of the two datasets should be used.
- maxResultImageSlicesLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- maxResultImageSlicesLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- maxRow - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- maxRV - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- maxRz - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- maxs - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- maxs - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- maxSatBlue - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxSatBlue - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxSatBlueLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- maxSatBlueLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- maxSatVsTheta - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxSatVsTheta - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxSatVsThetaLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- maxSatVsThetaLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- maxScale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
range of max - min over local kernel, slice, or entire image.
- maxScaleRule - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
flag how/when to set the maximum scale. default per slice
- MaxScratchDoublesNeededForEvaluate() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- maxSizeLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maxSizeTextF - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maxSlicePreview - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Single slice preview images
- maxSliceWindow - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Windows containing preview images
- maxSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- MaxSolverIterationsReached() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- MaxSolverTimeReached() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- maxSplineLength - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- maxstat(Vector<Double>, Vector<Double>, Vector<Integer>, double[], double[], double, double) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- MAXSTAT - gov.nih.mipav.model.algorithms.StochasticForests.SplitRule
-
- maxstatPValueLau92(double, double, double) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- maxstatPValueLau94(double, double, double, int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- maxstatPValueUnadjusted(double) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- maxStevensBeta - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxStevensBeta - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- maxStevensBetaLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- maxStevensBetaLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- MAXSTIR - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- maxSubLength - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_UserInformation
-
DOCUMENT ME!
- MAXSUBLENGTH - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- maxSum - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- MAXSUM - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Indicates that the maximum summation cost function should be used (this is the perferred cost function).
- MAXSUM - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- maxT - Variable in class gov.nih.mipav.model.file.FileZVI
-
- maxT1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- maxT1 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- maxT1Field - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- maxT2 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- maxT2Field - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogTwo
-
- maxText - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
Min, max text fields.
- maxText - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Min, max text fields.
- maxText - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Min, max text fields.
- maxTimes - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- maxTimesValue - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- maxTimeValue - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- maxTransTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- maxTransTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- maxTransTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- maxTx - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- maxTy - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- maxutil - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- maxV - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- maxVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- maxVal - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Used during saturation (2^bitdepth-1 if unsigned, 2^(bitdepth-1)-1 if
signed)
- maxVal - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- maxVal - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- maxValsD - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- maxValTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
textfield inputs for window and level *
- maxValue - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- maxValue - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maxValue - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- maxValueB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maxValueG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maxValueR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- maxValuesChange - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraRBF
-
- maxVert - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- maxVert - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- maxvotefilt(libdt.Mat[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- maxWidth(boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Finds 2 points that form the maximum width of the VOI.
- maxWidthDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- maxWorkSize - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Maximum number of work items in a work group on OpenCL.
- maxx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- maxX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- MaxX() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Find the maximum x component of the shape.
- MaxX() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Find the maximum x component of all shapes.
- maxy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- maxY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- MaxY() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Find the maximum y component of the shape.
- MaxY() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Find the maximum y component of all shapes.
- maxZ - Variable in class gov.nih.mipav.model.file.FileZVI
-
- maxZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- MaybeReorderSchurComplementColumnsUsingEigen(int, HashMap<double[], CeresSolver.ParameterBlock>, CeresSolver.Program) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- MaybeReorderSchurComplementColumnsUsingSuiteSparse(CeresSolver.OrderedGroups<double[]>, CeresSolver.Program) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- mB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- mb_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- mBMean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- mBrushSize - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
current paint brush size
- mBrushSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
current paint brush size
- mBrushSizeText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Paint brush size text field
- mBrushSizeText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Paint brush size text field
- mButtonGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Button group for paint functions:
- mButtonGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Button group for paint functions:
- mc - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Global model clip object.
- mc1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc10 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc11 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc12 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc13 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc14 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc15 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc16 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc17 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc18 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc19 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc4 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc5 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc6 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc7 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc8 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mc9 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mcArbi - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Global model clip object.
- mcArbiBG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Branch group of the arbitrary clipping plane.
- mcArbiExtendBG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Branch group of the arbitrary clipping plane.
- mcArbiTG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
ModelClip arbitrary TransformGroup.
- mcArbiTrans3D - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Transform3D group for clipSliceA frame box and ModelClip arbitrary clipping plane.
- mcBG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Branch group of the 6 clipping planes.
- mCenter - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Surface center.
- mcExtendBG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Branch group of the arbitrary clipping plane.
- mcIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.TreeNodeData
-
- mcleanupregions(int[][], double) - Method in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- mColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Color of surface.
- mColorChooser - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Color Chooser dialog.
- mColorChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Color Chooser dialog.
- mColorPaintButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Color selection button
- mColorPaintButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Color selection button
- mComparator - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.QuickSort
-
- mComparator - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.QuickSort
-
- mcp_bounds() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- mCrc - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- mCrc - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- mcStatic - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Global model clip object.
- mcStaticBG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Branch group of the static clipping plane.
- MCSVM_CS - gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverType
-
multi-class support vector classification by Crammer and Singer
- mct - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
multi-component transform identifier
- mct - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_info_v2_t
-
multi-component transform identifier
- MCT_ELEMENT_SIZE - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- mct_norms - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
encoding norms
- MCT_TYPE_DOUBLE - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- MCT_TYPE_FLOAT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- MCT_TYPE_INT16 - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- MCT_TYPE_INT32 - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- MCU_blocks - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- MCU_buffer - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- MCU_ctr - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- MCU_height - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- MCU_membership - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- MCU_rows_in_scan - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- MCU_rows_per_iMCU_row - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- MCU_sample_width - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- MCU_vert_offset - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- MCU_width - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- mcuCols - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- mcuCols - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- mcuHeight - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- mcuHeight - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- mcuRows - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- mcuRows - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- MCUs_per_row - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- mcuWidth - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- mcuWidth - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- MD - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- md1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md10 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md11 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md12 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md13 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md14 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md15 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md16 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md17 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md18 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md19 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md4 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md5 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md6 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md7 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md8 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- md9 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- mdg - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
Leading dimension of array gmat mdg must be >= param if secondAllowed is true.
- mdg - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
Leading dimension of array gmat mdg must be >= param if secondAllowed is true.
- mdima - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- MDNBT(double, double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- mDropperButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Paint dropper button
- mDropperButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Paint dropper button
- MDStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under in the Gifti xml schema.
- mdwt() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- me - Variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegMetadataReader
-
- mean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- mean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- mean - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate gray level co-occurrence matrix mean Sum over i,j of i * Probability(i,j) = Sum over i,j of j *
Probability(i,j).
- mean - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate gray level co-occurrence matrix mean Sum over i,j of i * Probability(i,j) = Sum over i,j of j *
Probability(i,j).
- mean - Variable in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
-
- mean - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
For Poisson out = gain * Poisson(mean) + offset
- mean - Variable in class gov.nih.mipav.model.structures.ModelHistogram
-
DOCUMENT ME!
- mean - Variable in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
DOCUMENT ME!
- mean - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- mean - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- mean - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- mean - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- mean - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
red, green, and blue origContrast remains constant until applyButton is pressed, restores contrast if
cancelButton is pressed.
- mean(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Finds the mean value (average) in the list.
- Mean() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Calcs the mean value of the matrix.
- Mean() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the mean value of the vector.
- MEAN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- MEAN_CENTER - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- MEAN_CENTER - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Use serialVersionUID for interoperability.
- mean_I - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- mean_I_b - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- mean_I_g - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- mean_I_r - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- MEAN_SQUARED_ERROR - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- MEAN_SQUARED_ERROR - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
- meanAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- meanAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- meanAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- meanAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- meanBlueSquareError - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- meanButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- meanButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- meanCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- meanCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- MeanCol(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Calc the mean of each column into a vector.
- meanCurvature - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- meanCurvatureDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- MeanDataItem() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Returns the mean of all sample vectors.
- meanFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- meanFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- meanFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- meanFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Haralick mean filter.
- meanFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- meanFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- MeanFilter(CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
Performs a 3x3 mean filtering of a matrix.
- meanGreenSquareError - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- meanImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- meanImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- meanImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- meanNegativeCurvature - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- meanNegativeCurvatureDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- MEANOFROIS_OVERLAY - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- meanOfStdVector(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- meanOld - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- meanRedSquareError - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- means - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SubSig
-
- MeanShape() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the mean shape.
- MeanShape(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Calcs the mean shape of all shapes.
- meanShapePolygon - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
mean shape polygon.
- MeanShapeSize() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the mean shape size, i.e. the size of the reference shape.
- meanShift() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- MeanSize() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Returns the average shape size *before* the aligment process.
- meanSquareError - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- meanText - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- MeanTexture() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the mean texture.
- measure1 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- measure3 - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- measure3 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- measure4 - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- measure4 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- measure5 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- measureCost() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Calls cost function with point and saves result in functionAtBest.
- measureCost() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Calls cost function with point and saves result in functionAtBest.
- measureCost() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Calls cost function with inputed point and saves result in functionAtBest.
- measureCost(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Measure the cost value for the given transformation vector.
- measureCost(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- measureCost(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Measure the cost value for the given transformation vector.
- measureCost(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Measure the cost value for the given transformation matrix.
- measureCost(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Measure the cost value for the given transformation matrix.
- measuredWidthString - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- measuredWidthString - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- measurementFrame - Variable in class gov.nih.mipav.model.file.FileNRRD
-
The measurement frame is a basic (per-array) field specification (not per-axis), which
identifies a spaceDim-by-spaceDim matrix, where spaceDim is the dimension of the word space
(implied by space or given by space dimension).
- measureTime - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- measureTime - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- MeasureTime() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Measure time
- MeasureTime() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Measure time
- measureTimeCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- med - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- med - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- MED_SPEEDUP - gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.SpeedUpLevel
-
- med3(char, char, char) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- med3(double[], int, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.ArraySorter
-
Returns the index of the median of the three indexed doubles.
- medCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- MEDIALNESS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
chooses the medialness cost
- MEDIALNESS - Static variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- median - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- median - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
Median
- median(double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- median(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Finds the median value of the list.
- Median() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the median.
- MEDIAN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- MEDIAN_CENTER - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- MEDIAN_CENTER - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- median_cut(libjpeg.jpeg_decompress_struct, libjpeg.box[], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- median_rank(double) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- median_rank_cens(double) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- median2D(float[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
Simple 3x3 median filter.
- median3D(float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
Simple 3x3x3 median filter.
- medianAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- medianAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- medianAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- medianAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- medianB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- medianButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- medianButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- medianCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
The mask is basically Gaussian with standard deviation in image units - e.g. mm set by the user.
- medianFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- medianFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- medianFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- medianFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Haralick median filter.
- medianFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- medianFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- medianG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- medianImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- medianImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- medianImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- medianImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- medianR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- medianVal - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- mediaPlayerButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
MS media player button to play AVI file.
- mediastinumLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- mediastinumLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- mediastinumLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- mediastinumMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- mediastinumMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- mediastinumMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- mediastinumMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- mediastinumMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- mediastinumMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- medium - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- medium - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser
-
- medium - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- MEDIUM - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
Flag indicating medium priority transfer.
- mediumCircularButton - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- mediumSpeedUpButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- MEDIVISION - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .bin.
- mem - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dwt_t
-
- mem - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_common_struct
-
- mem - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- mem_buffer - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- mem_buffer8 - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- mem_buffer9to12 - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- MEM_CHAR - gov.nih.mipav.model.algorithms.StochasticForests.MemoryMode
-
- MEM_DOUBLE - gov.nih.mipav.model.algorithms.StochasticForests.MemoryMode
-
- mem_flags - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.CL_data
-
- MEM_FLOAT - gov.nih.mipav.model.algorithms.StochasticForests.MemoryMode
-
- membership_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- memCount - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- memImage - Variable in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
DOCUMENT ME!
- memImage - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
DOCUMENT ME!
- memImageA - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- memImageB - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- memImageDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- memImageDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- memory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
- MEMORY_ALLOCATOR_BLOCK_SIZE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- memory_mode - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- memory_mode - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- memory_saving_splitting - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- memory_saving_splitting - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- memory_saving_splitting - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- memoryallocation(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- memoryAllocation() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Display memory allocation frame (request more from the JVM on next JVM-start).
- MemoryAllocation() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- memoryFrame - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Dialog that displays the used and available memory.
- memoryFrame() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Display memory usage frame.
- MemoryMode() - Constructor for enum gov.nih.mipav.model.algorithms.StochasticForests.MemoryMode
-
- MemoryMonitor() - Constructor for class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
Constructor.
- memoryUsageLabel - Variable in class gov.nih.mipav.view.ViewUserInterface
-
The label showing the current memory usage of MIPAV.
- memoryUsageThread - Variable in class gov.nih.mipav.view.ViewUserInterface
-
The periodic thread which updates the memory usage display once every second.
- memRec - Variable in class gov.nih.mipav.model.algorithms.CVODES.UserData
-
- mems - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- mems - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- memsBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- memsBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- memSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- memSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- MEMZERO(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- menu - Variable in class gov.nih.mipav.view.ViewJFrameMessage
-
DOCUMENT ME!
- menu - Variable in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
DOCUMENT ME!
- menu - Variable in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp
-
- MENU_Y_PADDING - Static variable in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- menuBar - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
variables for the menubar.
- menuBar - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Menu bar.
- menuBar - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Menu bar.
- menuBar - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Reference to the frame's menu bar.
- menuBar - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Variables for the menubar.
- menuBarMaker - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Constructs the image menu bar.
- menuBuilder - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
This object contains a number of useful functions for building a menu and querying the state of menu items.
- menuBuilder - Variable in class gov.nih.mipav.view.ViewMenuBar
-
Menu and menu item generator.
- menuBuilder - Variable in class gov.nih.mipav.view.ViewUserInterface
-
The object used to build and enable/select the menus.
- menuDragMouseDragged(MenuDragMouseEvent) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp
-
- menuDragMouseEntered(MenuDragMouseEvent) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp
-
- menuDragMouseExited(MenuDragMouseEvent) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp
-
- menuDragMouseReleased(MenuDragMouseEvent) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp
-
- MenuDragOp() - Constructor for class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp
-
- menuItemVector - Variable in class gov.nih.mipav.view.ViewMenuBuilder
-
Holder of all the menu items.
- MenuMouse(int, JComponent, int) - Constructor for class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- menuObj - Variable in class gov.nih.mipav.view.JFrameHistogram
-
menu builder
- menuObj - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Menu items storage.
- menuObj - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Not used now.
- menuObj - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Not used now.
- menuObj - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Menu items storage.
- menuObj - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- menuObj - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- menuObj - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- menuObj - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- menuObj - Variable in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
DOCUMENT ME!
- menuObj - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- menuObj - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Menu items storage.
- mer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- mEraseAllButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Erase all button
- mEraseAllButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Erase all button
- mEraserButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Eraser paint button
- mEraserButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Eraser paint button
- merge - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- merge - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed
-
- merge - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- merge - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- merge - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- merge - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- merge - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- merge - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- merge - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- merge - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- merge - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- merge - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- merge_left(GenericPolygonClipper.polygon_node, GenericPolygonClipper.polygon_node, GenericPolygonClipper.polygon_node) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- merge_node(int, int, int[], int[], float[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- merge_right(GenericPolygonClipper.polygon_node, GenericPolygonClipper.polygon_node, GenericPolygonClipper.polygon_node) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- mergeCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
- mergeCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- mergeCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- mergeCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- mergeCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- mergeCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- mergeCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- merged - Variable in class gov.nih.mipav.model.file.FileBioRad
-
merged format.
- merged_1v_upsample(libjpeg.jpeg_decompress_struct, byte[][][], int[], int, byte[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- merged_1v_upsample(libjpeg.jpeg_decompress_struct, short[][][], int[], int, short[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- MERGED_1V_UPSAMPLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- merged_2v_upsample(libjpeg.jpeg_decompress_struct, byte[][][], int[], int, byte[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- merged_2v_upsample(libjpeg.jpeg_decompress_struct, short[][][], int[], int, short[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- MERGED_2V_UPSAMPLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- mergedClassifier() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
After apply the AAM segmentation.
- mergeItem(int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting.mergeItem
-
Creates a new mergeItem object.
- mergeNearbyJunctionNodes(AlgorithmNetworkSnake.SnakeInitialiser.Node, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- mergeNodes() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- mergeSegments() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- mergeSimilar - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- mergeSimilar - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- mergeThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- mergeThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- mesh - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHeightFunction
-
DOCUMENT ME!
- mesh - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3DC
-
- mesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- mesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- Mesh - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- Mesh() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- Mesh() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Mesh
-
- Mesh(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- MESH - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- MeshEdgeIterator(LSCM.Mesh) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.MeshEdgeIterator
-
- MeshFaceIterator(LSCM.Mesh) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.MeshFaceIterator
-
- MeshHalfEdgeIterator(LSCM.Mesh) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.MeshHalfEdgeIterator
-
- meshIndex - Variable in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
mesh index.
- MeshModel - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- MeshModel() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- meshName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- MeshVertexIterator(LSCM.Mesh) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.MeshVertexIterator
-
- message - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- message - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverSummary
-
- message - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- message - Variable in enum gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
- message - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
DOCUMENT ME!
- message - Variable in class gov.nih.mipav.view.dialogs.JDialogText
-
DOCUMENT ME!
- message - Variable in class gov.nih.mipav.view.ProgressChangeEvent
-
The message which will be shown with the progress bar
- message - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.ChangeNameDialog
-
DOCUMENT ME!
- message - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.ChangeNameDialog
-
DOCUMENT ME!
- message_id - Static variable in class gov.nih.mipav.view.DICOMDisplayer
-
DOCUMENT ME!
- messageField - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Message line at the bottom of the mainFrame.
- messageFrame - Static variable in class gov.nih.mipav.view.Preferences
-
Reference to the message frame where debug information can be displayed.
- messageFrame - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Message area for multi-line text output.
- messageLocked - Variable in class gov.nih.mipav.view.ViewJProgressBar
-
indicates if the message string (in the progress bar) is locked so that it wont be updated
- messageLocked - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- messagePBar - Variable in class gov.nih.mipav.view.ViewJProgressBar
-
Label directly above the bar that is updated during operation if necessary.
- messageTable - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- mest - Variable in class gov.nih.mipav.model.algorithms.sproot
-
- META_DATA - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- META_DATA - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- META_DATA_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
Adobe Tiff Tags
- META_DATA_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
Adobe Tiff Tags
- metaarg - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- metaarg - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- Metadata() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
- Metadata(String, String) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
- metaDataCounts - Variable in class gov.nih.mipav.model.file.FileSVS
-
- metaDataCounts - Variable in class gov.nih.mipav.model.file.FileTiff
-
- MetadataException(String) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.MetadataException
-
- MetadataException(String, Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.MetadataException
-
- MetadataException(Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.MetadataException
-
- MetadataExtractor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor
-
- MetadataExtractor.AdobeJpegDescriptor - Class in gov.nih.mipav.model.file
-
Provides human-readable string versions of the tags stored in an AdobeJpegDirectory.
- MetadataExtractor.AdobeJpegDirectory - Class in gov.nih.mipav.model.file
-
Contains image encoding information for DCT filters, as stored by Adobe.
- MetadataExtractor.AdobeJpegReader - Class in gov.nih.mipav.model.file
-
Decodes Adobe formatted data stored in JPEG files, normally in the APPE (App14) segment.
- MetadataExtractor.Age - Class in gov.nih.mipav.model.file
-
Represents an age in years, months, days, hours, minutes and seconds.
- MetadataExtractor.AppleMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.AppleMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Apple cameras.
- MetadataExtractor.AppleRunTimeMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.AppleRunTimeMakernoteDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.AppleRunTimeReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.BmpHeaderDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.BmpHeaderDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.BmpHeaderDirectory.BitmapType - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.BmpHeaderDirectory.ColorEncoding - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.BmpHeaderDirectory.ColorSpaceType - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.BmpHeaderDirectory.Compression - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.BmpHeaderDirectory.RenderingHalftoningAlgorithm - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.BmpHeaderDirectory.RenderingIntent - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.BmpMetadataReader - Class in gov.nih.mipav.model.file
-
Obtains metadata from BMP files.
- MetadataExtractor.BmpReader - Class in gov.nih.mipav.model.file
-
Reader for Windows and OS/2 bitmap files.
- MetadataExtractor.BplistReader - Class in gov.nih.mipav.model.file
-
A limited-functionality binary property list (BPLIST) utility.
- MetadataExtractor.BplistReader.PropertyListResults - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.BplistReader.Trailer - Class in gov.nih.mipav.model.file
-
A data structure to hold the BPLIST trailer data.
- MetadataExtractor.BufferBoundsException - Exception in gov.nih.mipav.model.file
-
A checked replacement for IndexOutOfBoundsException.
- MetadataExtractor.ByteArrayReader - Class in gov.nih.mipav.model.file
-
Provides methods to read specific values from a byte array, with a consistent, checked exception structure for
issues.
- MetadataExtractor.ByteConvert - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.ByteTrie<T> - Class in gov.nih.mipav.model.file
-
Stores values using a prefix tree (aka 'trie', i.e. reTRIEval data structure).
- MetadataExtractor.ByteTrie.ByteTrieNode<T> - Class in gov.nih.mipav.model.file
-
A node in the trie.
- MetadataExtractor.ByteUtil - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.CanonMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.CanonMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Canon cameras.
- MetadataExtractor.CanonMakernoteDirectory.AFInfo - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.CanonMakernoteDirectory.CameraSettings - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.CanonMakernoteDirectory.FocalLength - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.CanonMakernoteDirectory.Panorama - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.CanonMakernoteDirectory.ShotInfo - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.CasioType1MakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.CasioType1MakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Casio (type 1) cameras.
- MetadataExtractor.CasioType2MakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.CasioType2MakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Casio (type 2) cameras.
- MetadataExtractor.Charsets - Class in gov.nih.mipav.model.file
-
Holds a set of commonly used character encodings.
- MetadataExtractor.CompoundException - Exception in gov.nih.mipav.model.file
-
Represents a compound exception, as modelled in JDK 1.4, but
unavailable in previous versions.
- MetadataExtractor.DateUtil - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.Directory - Class in gov.nih.mipav.model.file
-
Abstract base class for all directory implementations, having methods for getting and setting tag values of various
data types.
- MetadataExtractor.DirectoryTiffHandler - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.DuckyDirectory - Class in gov.nih.mipav.model.file
-
Holds the data found in Photoshop "ducky" segments, created during Save-for-Web.
- MetadataExtractor.DuckyReader - Class in gov.nih.mipav.model.file
-
Reads Photoshop "ducky" segments, created during Save-for-Web.
- MetadataExtractor.ErrorDirectory - Class in gov.nih.mipav.model.file
-
A directory to use for the reporting of errors.
- MetadataExtractor.ExifDescriptorBase<T extends MetadataExtractor.Directory> - Class in gov.nih.mipav.model.file
-
Base class for several Exif format descriptor classes.
- MetadataExtractor.ExifDirectoryBase - Class in gov.nih.mipav.model.file
-
Base class for several Exif format tag directories.
- MetadataExtractor.ExifIFD0Descriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.ExifIFD0Directory - Class in gov.nih.mipav.model.file
-
Describes Exif tags from the IFD0 directory.
- MetadataExtractor.ExifImageDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.ExifImageDirectory - Class in gov.nih.mipav.model.file
-
Describes One of several Exif directories.
- MetadataExtractor.ExifInteropDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.ExifInteropDirectory - Class in gov.nih.mipav.model.file
-
Describes Exif interoperability tags.
- MetadataExtractor.ExifReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.ExifSubIFDDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.ExifSubIFDDirectory - Class in gov.nih.mipav.model.file
-
Describes Exif tags from the SubIFD directory.
- MetadataExtractor.ExifThumbnailDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.ExifThumbnailDirectory - Class in gov.nih.mipav.model.file
-
One of several Exif directories.
- MetadataExtractor.ExifTiffHandler - Class in gov.nih.mipav.model.file
-
Implementation of com.drew.imaging.tiff.TiffHandler used for handling TIFF tags according to the Exif
standard.
- MetadataExtractor.Face - Class in gov.nih.mipav.model.file
-
Class to hold information about a detected or recognized face in a photo.
- MetadataExtractor.FileSystemDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.FileSystemDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.FileSystemMetadataReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.FileType - Enum in gov.nih.mipav.model.file
-
Enumeration of supported file types.
- MetadataExtractor.FileUtil - Class in gov.nih.mipav.model.file
-
A series of utility methods for working with the file system.
- MetadataExtractor.FujifilmMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.FujifilmMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Fujifilm cameras.
- MetadataExtractor.GeoLocation - Class in gov.nih.mipav.model.file
-
Represents a latitude and longitude pair, giving a position on earth in spherical coordinates.
- MetadataExtractor.GifAnimationDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.GifAnimationDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.GifCommentDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.GifCommentDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.GifControlDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.GifControlDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.GifControlDirectory.DisposalMethod - Class in gov.nih.mipav.model.file
-
Disposal method indicates the way in which the graphic is to be treated
after being displayed.
- MetadataExtractor.GifHeaderDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.GifHeaderDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.GifImageDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.GifImageDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.GifReader - Class in gov.nih.mipav.model.file
-
Reader of GIF encoded data.
- MetadataExtractor.GpsDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.GpsDirectory - Class in gov.nih.mipav.model.file
-
Describes Exif tags that contain Global Positioning System (GPS) data.
- MetadataExtractor.HuffmanTablesDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.HuffmanTablesDirectory - Class in gov.nih.mipav.model.file
-
Directory of tables for the DHT (Define Huffman Table(s)) segment.
- MetadataExtractor.HuffmanTablesDirectory.HuffmanTable - Class in gov.nih.mipav.model.file
-
An instance of this class holds a JPEG Huffman table.
- MetadataExtractor.HuffmanTablesDirectory.HuffmanTable.HuffmanTableClass - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.IccDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.IccDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.IccReader - Class in gov.nih.mipav.model.file
-
Reads an ICC profile.
- MetadataExtractor.ImageProcessingException - Exception in gov.nih.mipav.model.file
-
An exception class thrown upon an unexpected condition that was fatal for the processing of an image.
- MetadataExtractor.IptcDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.IptcDirectory - Class in gov.nih.mipav.model.file
-
Describes tags used by the International Press Telecommunications Council (IPTC) metadata format.
- MetadataExtractor.IptcReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.Iso2022Converter - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.Iterables - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.JfifDescriptor - Class in gov.nih.mipav.model.file
-
Provides human-readable string versions of the tags stored in a JfifDirectory.
- MetadataExtractor.JfifDirectory - Class in gov.nih.mipav.model.file
-
Directory of tags and values for the SOF0 Jfif segment.
- MetadataExtractor.JfifReader - Class in gov.nih.mipav.model.file
-
Reader for JFIF data, found in the APP0 JPEG segment.
- MetadataExtractor.JfxxDescriptor - Class in gov.nih.mipav.model.file
-
Provides human-readable string versions of the tags stored in a JfxxDirectory.
- MetadataExtractor.JfxxDirectory - Class in gov.nih.mipav.model.file
-
Directory of tags and values for the SOF0 JFXX segment.
- MetadataExtractor.JfxxReader - Class in gov.nih.mipav.model.file
-
Reader for JFXX (JFIF extensions) data, found in the APP0 JPEG segment.
- MetadataExtractor.JpegCommentDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.JpegCommentDirectory - Class in gov.nih.mipav.model.file
-
Describes tags used by a JPEG file comment.
- MetadataExtractor.JpegCommentReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.JpegComponent - Class in gov.nih.mipav.model.file
-
Stores information about a JPEG image component such as the component id, horiz/vert sampling factor and
quantization table number.
- MetadataExtractor.JpegDescriptor - Class in gov.nih.mipav.model.file
-
Provides human-readable string versions of the tags stored in a JpegDirectory.
- MetadataExtractor.JpegDhtReader - Class in gov.nih.mipav.model.file
-
Reader for JPEG Huffman tables, found in the DHT JPEG segment.
- MetadataExtractor.JpegDirectory - Class in gov.nih.mipav.model.file
-
Directory of tags and values for the SOF0 JPEG segment.
- MetadataExtractor.JpegDnlReader - Class in gov.nih.mipav.model.file
-
Decodes JPEG DNL data, adjusting the image height with information missing from the JPEG SOFx segment.
- MetadataExtractor.JpegMetadataReader - Class in gov.nih.mipav.model.file
-
Obtains all available metadata from JPEG formatted files.
- MetadataExtractor.JpegProcessingException - Exception in gov.nih.mipav.model.file
-
An exception class thrown upon unexpected and fatal conditions while processing a JPEG file.
- MetadataExtractor.JpegReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.JpegSegmentData - Class in gov.nih.mipav.model.file
-
Holds a collection of JPEG data segments.
- MetadataExtractor.JpegSegmentMetadataReader - Interface in gov.nih.mipav.model.file
-
Defines an object that extracts metadata from in JPEG segments.
- MetadataExtractor.JpegSegmentReader - Class in gov.nih.mipav.model.file
-
Performs read functions of JPEG files, returning specific file segments.
- MetadataExtractor.JpegSegmentType - Enum in gov.nih.mipav.model.file
-
An enumeration of the known segment types found in JPEG files.
- MetadataExtractor.KeyValuePair - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.Knot - Class in gov.nih.mipav.model.file
-
Represents a knot created by Photoshop:
Linked knot
Unlinked knot
- MetadataExtractor.KodakMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.KodakMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Kodak cameras.
- MetadataExtractor.KyoceraMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.KyoceraMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Kyocera and Contax cameras.
- MetadataExtractor.LeicaMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.LeicaMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to certain Leica cameras.
- MetadataExtractor.LeicaType5MakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.LeicaType5MakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to certain Leica cameras.
- MetadataExtractor.Metadata - Class in gov.nih.mipav.model.file
-
A top-level object that holds the metadata values extracted from an image.
- MetadataExtractor.MetadataException - Exception in gov.nih.mipav.model.file
-
Base class for all metadata specific exceptions.
- MetadataExtractor.MetadataReader - Interface in gov.nih.mipav.model.file
-
- MetadataExtractor.NikonType1MakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.NikonType1MakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Nikon (type 1) cameras.
- MetadataExtractor.NikonType2MakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.NikonType2MakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Nikon (type 2) cameras.
- MetadataExtractor.NotNull - Annotation Type in gov.nih.mipav.model.file
-
- MetadataExtractor.Nullable - Annotation Type in gov.nih.mipav.model.file
-
- MetadataExtractor.NullOutputStream - Class in gov.nih.mipav.model.file
-
An implementation of OutputSteam that ignores write requests by doing nothing.
- MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.OlympusCameraSettingsMakernoteDirectory - Class in gov.nih.mipav.model.file
-
The Olympus camera settings makernote is used by many manufacturers (Epson, Konica, Minolta and Agfa...), and as such contains some tags
that appear specific to those manufacturers.
- MetadataExtractor.OlympusEquipmentMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.OlympusEquipmentMakernoteDirectory - Class in gov.nih.mipav.model.file
-
The Olympus equipment makernote is used by many manufacturers (Epson, Konica, Minolta and Agfa...), and as such contains some tags
that appear specific to those manufacturers.
- MetadataExtractor.OlympusFocusInfoMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.OlympusFocusInfoMakernoteDirectory - Class in gov.nih.mipav.model.file
-
The Olympus focus info makernote is used by many manufacturers (Epson, Konica, Minolta and Agfa...), and as such contains some tags
that appear specific to those manufacturers.
- MetadataExtractor.OlympusImageProcessingMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.OlympusImageProcessingMakernoteDirectory - Class in gov.nih.mipav.model.file
-
The Olympus image processing makernote is used by many manufacturers (Epson, Konica, Minolta and Agfa...), and as such contains some tags
that appear specific to those manufacturers.
- MetadataExtractor.OlympusMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.OlympusMakernoteDirectory - Class in gov.nih.mipav.model.file
-
The Olympus makernote is used by many manufacturers (Epson, Konica, Minolta and Agfa...), and as such contains some tags
that appear specific to those manufacturers.
- MetadataExtractor.OlympusMakernoteDirectory.CameraSettings - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory - Class in gov.nih.mipav.model.file
-
The Olympus raw development 2 makernote is used by many manufacturers (Epson, Konica, Minolta and Agfa...), and as such contains some tags
that appear specific to those manufacturers.
- MetadataExtractor.OlympusRawDevelopmentMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory - Class in gov.nih.mipav.model.file
-
The Olympus raw development makernote is used by many manufacturers (Epson, Konica, Minolta and Agfa...), and as such contains some tags
that appear specific to those manufacturers.
- MetadataExtractor.OlympusRawInfoMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.OlympusRawInfoMakernoteDirectory - Class in gov.nih.mipav.model.file
-
These tags are found only in ORF images of some models (eg.
- MetadataExtractor.PanasonicMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PanasonicMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Panasonic and Leica cameras.
- MetadataExtractor.PanasonicRawDistortionDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PanasonicRawDistortionDirectory - Class in gov.nih.mipav.model.file
-
These tags can be found in Panasonic/Leica RAW, RW2 and RWL images.
- MetadataExtractor.PanasonicRawIFD0Descriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PanasonicRawIFD0Directory - Class in gov.nih.mipav.model.file
-
These tags are found in IFD0 of Panasonic/Leica RAW, RW2 and RWL images.
- MetadataExtractor.PanasonicRawWbInfo2Descriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PanasonicRawWbInfo2Directory - Class in gov.nih.mipav.model.file
-
These tags can be found in Panasonic/Leica RAW, RW2 and RWL images.
- MetadataExtractor.PanasonicRawWbInfoDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PanasonicRawWbInfoDirectory - Class in gov.nih.mipav.model.file
-
These tags can be found in Panasonic/Leica RAW, RW2 and RWL images.
- MetadataExtractor.PentaxMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PentaxMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Pentax and Asahi cameras.
- MetadataExtractor.PhotographicConversions - Class in gov.nih.mipav.model.file
-
Contains helper methods that perform photographic conversions.
- MetadataExtractor.PhotoshopDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PhotoshopDirectory - Class in gov.nih.mipav.model.file
-
Holds the metadata found in the APPD segment of a JPEG file saved by Photoshop.
- MetadataExtractor.PhotoshopReader - Class in gov.nih.mipav.model.file
-
Reads metadata created by Photoshop and stored in the APPD segment of JPEG files.
- MetadataExtractor.PngChromaticities - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PngChromaticitiesDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PngChunk - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PngChunkReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PngChunkType - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PngColorType - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PngDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PngDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PngHeader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PngMetadataReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PngProcessingException - Exception in gov.nih.mipav.model.file
-
An exception class thrown upon unexpected and fatal conditions while processing a JPEG file.
- MetadataExtractor.PrintIMDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PrintIMDirectory - Class in gov.nih.mipav.model.file
-
These tags can be found in Epson proprietary metadata.
- MetadataExtractor.PsdHeaderDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.PsdHeaderDirectory - Class in gov.nih.mipav.model.file
-
Holds the basic metadata found in the header of a Photoshop PSD file.
- MetadataExtractor.PsdReader - Class in gov.nih.mipav.model.file
-
Reads metadata stored within PSD file format data.
- MetadataExtractor.RandomAccessFileReader - Class in gov.nih.mipav.model.file
-
Provides methods to read specific values from a RandomAccessFile, with a consistent, checked exception structure for
issues.
- MetadataExtractor.RandomAccessReader - Class in gov.nih.mipav.model.file
-
Base class for random access data reading operations of common data types.
- MetadataExtractor.RandomAccessStreamReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.Rational - Class in gov.nih.mipav.model.file
-
Immutable class for holding a rational number without loss of precision.
- MetadataExtractor.ReconyxHyperFire2MakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.ReconyxHyperFire2MakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Reconyx HyperFire 2 cameras.
- MetadataExtractor.ReconyxHyperFireMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.ReconyxHyperFireMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Reconyx HyperFire cameras.
- MetadataExtractor.ReconyxUltraFireMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.ReconyxUltraFireMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Reconyx UltraFire cameras.
- MetadataExtractor.RicohMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.RicohMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Ricoh cameras.
- MetadataExtractor.SamsungType2MakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.SamsungType2MakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific certain 'newer' Samsung cameras.
- MetadataExtractor.SanyoMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
Provides human-readable string representations of tag values stored in a com.drew.metadata.exif.makernotes.SonyType6MakernoteDirectory.
- MetadataExtractor.SanyoMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Sanyo cameras.
- MetadataExtractor.SequentialByteArrayReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.SequentialReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.SigmaMakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.SigmaMakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Sigma / Foveon cameras.
- MetadataExtractor.SonyEncodedDataDirectoryBase - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.SonyTag9050bDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.SonyTag9050bDirectory - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.SonyType1MakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.SonyType1MakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Sony cameras that use the Sony Type 1 makernote tags.
- MetadataExtractor.SonyType6MakernoteDescriptor - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.SonyType6MakernoteDirectory - Class in gov.nih.mipav.model.file
-
Describes tags specific to Sony cameras that use the Sony Type 6 makernote tags.
- MetadataExtractor.StreamReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.StreamUtil - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.StringUtil - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.StringValue - Class in gov.nih.mipav.model.file
-
- MetadataExtractor.Subpath - Class in gov.nih.mipav.model.file
-
Represents a subpath created by Photoshop:
Closed Bezier knot, linked
Closed Bezier knot, unlinked
Open Bezier knot, linked
Open Bezier knot, unlinked
- MetadataExtractor.SuppressWarnings - Annotation Type in gov.nih.mipav.model.file
-
Used to suppress specific code analysis warnings produced by the Findbugs tool.
- MetadataExtractor.Tag - Class in gov.nih.mipav.model.file
-
Models a particular tag within a com.drew.metadata.Directory and provides methods for obtaining its value.
- MetadataExtractor.TagDescriptor<T extends MetadataExtractor.Directory> - Class in gov.nih.mipav.model.file
-
Base class for all tag descriptor classes.
- MetadataExtractor.TiffDataFormat - Class in gov.nih.mipav.model.file
-
An enumeration of data formats used by the TIFF specification.
- MetadataExtractor.TiffHandler - Interface in gov.nih.mipav.model.file
-
- MetadataExtractor.TiffProcessingException - Exception in gov.nih.mipav.model.file
-
An exception class thrown upon unexpected and fatal conditions while processing a TIFF file.
- MetadataExtractor.TiffReader - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest
-
- MetadataExtractorTest.AdobeJpegReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.AgeTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.BmpReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.ByteArrayReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.ByteConvertTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.ByteTrieTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.ByteUtilTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.CanonMakernoteDescriptorTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.CompoundExceptionTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.DirectoryTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.ExifDirectoryTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.ExifIFD0DescriptorTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.ExifInteropDescriptorTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.ExifReaderTest - Class in gov.nih.mipav.model.file
-
JUnit test case for class ExifReader.
- MetadataExtractorTest.ExifSubIFDDescriptorTest - Class in gov.nih.mipav.model.file
-
JUnit test case for class ExifSubIFDDescriptor.
- MetadataExtractorTest.ExifThumbnailDescriptorTest - Class in gov.nih.mipav.model.file
-
JUnit test case for class ExifThumbnailDescriptor.
- MetadataExtractorTest.FileTypeTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.GeoLocationTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.GifReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.HuffmanTablesDescriptorTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.HuffmanTablesDirectoryTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.IccReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.IptcDirectoryTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.IptcReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.Iso2022ConverterTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.JfifReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.JpegComponentTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.JpegDescriptorTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.JpegDhtReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.JpegDirectoryTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.JpegMetadataReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.JpegReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.JpegSegmentDataTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.JpegSegmentReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.MetadataTest - Class in gov.nih.mipav.model.file
-
JUnit test case for class Metadata.
- MetadataExtractorTest.MockDirectory - Class in gov.nih.mipav.model.file
-
A mock implementation of Directory used in unit testing.
- MetadataExtractorTest.NikonType1MakernoteTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.NikonType2MakernoteTest1 - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.NikonType2MakernoteTest2 - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.NullOutputStreamTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.PanasonicMakernoteDescriptorTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.PngChunkReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.PngChunkTypeTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.PngDescriptorTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.PngMetadataReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.PsdReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.RandomAccessFileReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.RandomAccessStreamReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.RandomAccessTestBase - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.RationalTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.SequentialAccessTestBase - Class in gov.nih.mipav.model.file
-
Base class for testing implementations of com.drew.lang.SequentialReader.
- MetadataExtractorTest.SequentialByteArrayReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.SonyType1MakernoteTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.SonyType6MakernoteTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.StreamReaderTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.StringUtilTest - Class in gov.nih.mipav.model.file
-
- MetadataExtractorTest.TestHelper - Class in gov.nih.mipav.model.file
-
- MetaDataStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under in the Gifti xml schema.
- MetadataTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.MetadataTest
-
- metaGroupLength - Variable in class gov.nih.mipav.model.file.FileDicom
-
Number of bytes following this File Meta Element (end of the Value field) up to and including the last File Meta
Element of the Group 2 File Meta Information.
- METAIMAGE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Metaimage files are either
separate .mhd header and .raw image data files or
combined .mha header and image data file
- meteringMode - Variable in class gov.nih.mipav.model.file.FileSVS
-
- meteringMode - Variable in class gov.nih.mipav.model.file.FileTiff
-
- METERS - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement meters.
- METERS - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement meters.
- METERS_PER_SEC - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Meters per second
- METERS_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - meters.
- method - Variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- method - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DynamicNumericDiffCostFunction
-
- method - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- method - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Method used in calculating the confluent hypergeometric function of the second kind.
- method - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
< Cornerness scale space.
- method - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
1 of 4 possible sets of routines to be executed
- method - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- method - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
- method - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- method - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- method - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- method - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- method - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- method - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- method - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- method - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
- method - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- method - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- methodBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- methodGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- methodGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- methodGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- methodGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- methodGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- methodPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- MethodPar() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
get numerical gradient function
- methods - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- metric - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perShapeCost
-
- metrics - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- mexh(double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- MEXH - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- MEYER - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- MEYER - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- MEYER - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- MEYER - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- MeyerFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.MeyerFunction
-
- mfAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- mFullPath - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
The full path to the surface file.
- mgetv0 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- MGH - Static variable in class gov.nih.mipav.model.file.FileUtility
-
MGH/MGZ volume format.
- mghType - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- mGMean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- mgp - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel.PropertiesDialog
-
- mHistogram - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Display the independent LUT for Black/White images.
- mHistogram - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Display the independent LUT for Black/White images.
- mi - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- mi(double[][]) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- MI(int[], int[], int[][], int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- miCOMPRESSED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Compressed Data
- miCOMPRESSED - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
Compressed Data
- MICRO_CAT - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Micro CT format for small animal imaging. extension: .log, .ct
- microfocusPosition - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- MICROMETERS - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement micrometers.
- MICROMETERS - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement micrometers.
- MICROMETERS_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - micrometers.
- microscope - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- microscope - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
Elements.
- Microscope(String, String, String, String) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Microscope
-
Creates a new Microscope object.
- microscopeIllumination - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- microscopeMagnification - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- microscopeName - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- microscopePort - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- microscopeSystem - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- microscopeType - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- microscopeType - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- MICROSCOPY - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Microscopy files (*.avi; *.ics; *.liff; *.lsm; *.pic; *.stk; *.tif; *.tiff; *.xml).
- MICROSEC - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement microseconds.
- MICROSEC - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement microseconds.
- MICROSEC_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - microseconds.
- microSecPerFrame - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- microSecPerFrame - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- mid - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- MID_PHASE - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- MID_PHASE - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- midButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- middleDownButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- middleDownButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Middle panel down button.
- middleDownButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
DOCUMENT ME!
- middleLabelValueA - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- middleLabelValueA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- middleLabelValueB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- middleLabelValueB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- middleLabelValueGM_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- middleLabelValueGM_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- middleLabelValueGM_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- middleLabelValueGM_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- middleLeftButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- middleLeftButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Middel panel left button.
- middleLeftButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
DOCUMENT ME!
- middleLeftButtonEmpty - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Empty button group.
- middleLeftButtonEmpty - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Middle panel empty button.
- middleName - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- middleRightButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- middleRightButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Middle panel right button.
- middleRightButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
DOCUMENT ME!
- middleRightButtonEmpty - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Middle panel right button empty.
- middleUpButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- middleUpButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Middel panel up button.
- middleUpButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
DOCUMENT ME!
- midGray - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
- MidLine - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Transfer function mid-line:
- miDOUBLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
IEEE 754 double format
- miDOUBLE - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
IEEE 754 double format
- midPad - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.fftPadding
-
- midpointLine(Vector3f, Vector3f, Vector<Point3D>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- midpointLine(Vector3f, Vector3f, Vector<Point3D>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- midPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- midPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- midPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- midPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- midPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- MIDPT - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- midsagMatrix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
-
Matrix with the best transformation's z rot and xy translations.
- midsagMatrix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D.MatrixListItem
-
Matrix with the best transformation's z rot and xy translations.
- midsagMatrix - Variable in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Matrix with the best transformation's z rot and xy translations.
- midsagMatrixd - Variable in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Matrix with the best transformation's z rot and xy translations.
- MidToBegin - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- MidToEnd - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- midVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- midVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- midVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- midVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- midVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- midVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- midwt() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- miINT16 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
16-bit, signed
- miINT16 - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
16-bit, signed
- miINT32 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
32-bit signed
- miINT32 - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
32-bit signed
- miINT64 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
64-bit, signed
- miINT64 - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
64-bit, signed
- miINT8 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
8 bit, signed
- miINT8 - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
8 bit, signed
- MILES - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement miles.
- MILES - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement miles.
- MILES_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - miles.
- MILLIMETERS - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement millimeters.
- MILLIMETERS - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement millimeters.
- MILLIMETERS_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - millimeters.
- MILLISEC - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement milliseconds.
- MILLISEC - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement milliseconds.
- MILLISEC_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - milliseconds.
- MILS - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Units of measurement mil (thousandth of an inch)
- MILS - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Units of measurement mil (thousandth of an inch)
- MILS_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - mils.
- mImageA - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
ModelImage used to generate the 3D texture:.
- mImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
ModelImage used to generate the 3D texture:.
- mImageALink - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Reference to ModelImage A for linking the texture to the imageA LUT.
- mImageALink - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Reference to ModelImage A for linking the texture to the imageA LUT.
- mImageAsTextureCheck - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
RadioButton for turing on the surface image texture:.
- mImageAsTextureRadioButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
RadioButton for turing on the surface image texture:.
- mImageAsVertexColorRadioButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
RadioButton for turing on the surface image per-vertex color:.
- mImageButtonGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Grouping the radio buttons:.
- mImageDirName - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Stores the currently-loaded ModelImage directory name:.
- mImageDirName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Stores the currently-loaded ModelImage directory name:.
- mImageFileName - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Stores the currently-loaded ModelImage file name:.
- mImageFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Stores the currently-loaded ModelImage file name:.
- mImageFileNameLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Display the currently-loaded ModelImage file name:.
- mImageFileNameLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Display the currently-loaded ModelImage file name:.
- mImageNoneRadioButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
RadioButton for turing off the surface image:.
- miMATRIX - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
MATLAB ARRAY
- miMATRIX - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
MATLAB ARRAY
- mimeType - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- min - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
maximum, minimum size of objects.
- min - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
maximum, minimum size of objects.
- min - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
maximum, minimum size of objects.
- min - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
maximum, minimum size of objects.
- min - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Used to store the image minimum.
- min - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
- min - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdhyperrect
-
- min - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Used to store the image minimum.
- min - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Storage or min and max values.
- min - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image minimum intensity for single channel image.
- min - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Minimum intensity values of image.
- min - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum image intensity.
- min - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- min - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
or if the source image is to be replaced.
- min - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- min - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- min - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- min - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- min - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- min - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- min - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- min - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- min - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- min - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
DOCUMENT ME!
- min - Variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- min - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti.Linking
-
- min(double[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Returns the minimum value found in a double array.
- min(float[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Finds minimum sum under mask.
- min(float[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Returns the minimum value found in a float array.
- min(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- min(short[]) - Static method in class gov.nih.mipav.util.MipavMath
-
Returns the minimum value found in a short array.
- min(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
- Min - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceExtractImage
-
- Min() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Finds the minimum element in the vector.
- Min(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Finds the minimum element in the vector and its position.
- min_2P - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Value representing 2% of the histogram count:
- MIN_ALLOWED_DEVIATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- MIN_ALLOWED_DEVIATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- min_area - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- min_area - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- min_area - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- min_col_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrixRandomMatrixOptions
-
- min_col_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions
-
- min_constr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- min_constr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- min_constr - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- min_constr - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- min_DCT_h_scaled_size - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- min_DCT_v_scaled_size - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- MIN_DELTA - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
Reference:
Hamza Cherkaoui, Thomas Moreau, Abderrahim Halimi, Philippe Ciuciu.
- min_diagonal_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- min_diagonal_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- min_diversity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- min_diversity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- min_diversity - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- min_edge - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- MIN_GET_BITS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- MIN_HEAP_SIZE - Static variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- MIN_INC_MULT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MIN_ITR - Static variable in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
Min number of iterations to perform.
- min_line_search_step_contraction - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- min_line_search_step_contraction - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- min_line_search_step_contraction - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- min_line_search_step_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- min_line_search_step_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- min_line_search_step_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- min_linear_solver_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- min_lm_diagonal - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- min_lm_diagonal - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyOptions
-
- MIN_MAGNIFICATION - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
default magnification of images in the light-box.
- MIN_MAGNIFICATION - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Minimum amount of magnification in the light-box.
- min_mem_coalesce_width - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- min_mu_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- min_node_size - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- min_node_size - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- min_node_size - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- min_num_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- MIN_RADIUS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
May no longer be necessary.
- min_reciprocal_condition_number - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceOptions
-
- min_relative_decrease - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- min_relative_decrease - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- min_row_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrixRandomMatrixOptions
-
- min_row_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions
-
- MIN_SAMPLE_VALUE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- MIN_SAMPLE_VALUE - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- MIN_SAMPLE_VALUE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- MIN_SAMPLE_VALUE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- min_similarity - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.SingleLinkageClusteringOptions
-
- min_step_contraction - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
- min_step_quality - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- min_step_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
- min_trust_region_radius - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- min_trust_region_radius - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- min_views - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClusteringOptions
-
- min1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- min1 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- min1 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- min1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Minimum and maximum buffer and secondBuffer areas.
- min1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Minimum and maximum buffer and secondBuffer areas.
- min2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- min2 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- min2 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- min2 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Minimum and maximum buffer and secondBuffer areas.
- min2 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Minimum and maximum buffer and secondBuffer areas.
- min2DPt(int, float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
A function that finds the minimum value in a local image rectangle.
- min3(double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
Returns the minimum of 3 values
- min3DPt(int, float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
A function that finds the minimum value in a local image volume.
- minA - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
/**.
- minA - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum for a color image.
- minAB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- minAdjustExp - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- minAdjustExp - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- minAdjustExpLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- minAdjustExpLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- minAG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- minAllowableMajorTickSpacing - Variable in class gov.nih.mipav.view.ViewJSlider
-
- minAllowableMinorTickSpacing - Variable in class gov.nih.mipav.view.ViewJSlider
-
The closest number of pixels that major/minor ticks may be next to each other.
- minAnisotropyMax - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- minAnisotropyMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- minAnisotropyMaxLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- minAnisotropyMaxLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- minAnisotropyMin - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- minAnisotropyMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- minAnisotropyMinLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- minAnisotropyMinLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- minAR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- minarea - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- minB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- minB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
/**.
- minB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
- minB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
- minB - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image minimum intensity for the blue channel of an RGB image.
- minB - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Minimum intensity values of image.
- minB - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum for a color image.
- minB - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- minB - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- minB - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- minB - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- minB - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- minB - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- minB - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Min. intensity values in Red, Green and Blue images respectively
- minB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- minBB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- minBG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- minBR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- minBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLowerCompletion
-
- minButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
refs to the magnify and minimize button
- minBV - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- minC - Variable in class gov.nih.mipav.model.file.FileZVI
-
- MINC - Static variable in class gov.nih.mipav.model.file.FileUtility
-
MINC file type.
- MINC_HDF - Static variable in class gov.nih.mipav.model.file.FileUtility
-
MINC 2.0 (HDF5)
- MINC_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Multiple files of type MINC.
- minc1File - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMincVersionChoice
-
Radio button to indicate that an Minc1 CDF mnc file should be written out.
- minc2File - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMincVersionChoice
-
Radio button to indicate that a Minc2 HDF5 mnc file should be written out.
- mincEnabled - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- minCheckBox - Variable in class gov.nih.mipav.view.JPanelEditTime
-
permits whether or not to set this field.
- mincInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
DOCUMENT ME!
- mincInfo - Variable in class gov.nih.mipav.view.JPanelAnonymizeImage
-
DOCUMENT ME!
- mincode - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
mincode[index] = minimum legal code at that index.
- MINCODE - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- MINCODE - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- minColorRange - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- minColorRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- minColorRangeLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- minColorRangeLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- minComboBox - Variable in class gov.nih.mipav.view.JPanelEditTime
-
value to add to this time field.
- minCoverage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- minCoverage - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Minimum percentage of the perimiter of a found ellipse that must be covered by points for it to be valid.
- minCoverageText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
DOCUMENT ME!
- mincStartLoc - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
- minDAT - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
256 minimum delay after trigger (usec).
- mindIdent - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- mindIdentArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- MINDIFF - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Indicates that the minimum difference cost function should be used (MAXSUM is perferred).
- MINDIFF - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- minDim() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- minDimGreen - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- minDimGreen - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- minDimGreenLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- minDimGreenLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- minDist - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
- minDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- minDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- minDomain - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- minDomainField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- minDomainLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- minError - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- minErrorTextField - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- minExponent - Variable in class gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
- minField - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
DOCUMENT ME!
- minField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- minFunctionAtBest - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
- minFunctionAtBest - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- minFunctionAtBest - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- minG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- minG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
- minG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
- minG - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image minimum intensity for the green channel of an RGB image.
- minG - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Minimum intensity values of image.
- minG - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum for a color image.
- minG - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- minG - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- minG - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- minG - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- minG - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- minG - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- minG - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Min. intensity values in Red, Green and Blue images respectively
- minG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minG - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- minGamma - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- minGamma - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- minGammaLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- minGammaLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- minGV - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- minImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Image's minimum intensity.
- minImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Image's minimum intensity.
- minimax_test(VOIBaseVector, VOIBaseVector, GenericPolygonClipper.gpc_op) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- Minimize(CeresSolver.MinimizerOptions, double[], CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CoordinateDescentMinimizer
-
- Minimize(CeresSolver.MinimizerOptions, double[], CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer
-
- Minimize(CeresSolver.MinimizerOptions, double[], CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- Minimize(CeresSolver.MinimizerOptions, Vector<Double>, CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CoordinateDescentMinimizer
-
- Minimize(CeresSolver.PreprocessedProblem, CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Minimize(CDVector, CDOptimizeFuncBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
the Minimize function using analytic gradient
- Minimize(CDVector, CDOptimizeFuncBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBFGS
-
Algorithm D6.1.1 (look at page 274-275 for code) Input: start point for x
Output in x: x* - optimal point
- Minimize(CDVector, CDOptimizeFuncBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeCG
-
the Minimize function using Conjugate Gradient
- Minimize(CDVector, CDOptimizeFuncBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizePS
-
Minimization using pattern search.
- Minimize(CDVector, CDOptimizeFuncBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
minimization using steepest annealing.
- Minimize(CDVector, CDOptimizeFuncBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSD
-
Steepest decent minimization.
- minimizeControlPoint(int, int, int, float) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Move the specified control point using a gradient descent approach to minimize the error.
- minimizeControlPoint(int, int, int, int, float) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Move the specified control point using a gradient descent approach to minimize the error.
- MinimizeInterpolatingPolynomial(Vector<CeresSolver.FunctionSample>, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- MinimizeNum(CDVector, CDOptimizeFuncBase, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- MinimizePolynomial(Vector<Double>, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Minimizer() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Minimizer
-
- Minimizer(CeresSolver.SolverOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Minimizer
-
- minimizer_options - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- minimizer_progress_to_stdout - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- minimizer_progress_to_stdout - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- minimizer_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- minimizer_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LoggingCallback
-
- minimizer_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- minimizer_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- MinimizerInitializationCopiesCallbacks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- MinimizerOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- MinimizerOptions(CeresSolver.SolverOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- MinimizerType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.MinimizerType
-
- MinimizerUserAbortUpdatesSummaryMessage() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- MinimizerUserSuccessUpdatesSummaryMessage() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- minimum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
original image minimum.
- minimum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- minimum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- minimum - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- minimum - Variable in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
DOCUMENT ME!
- minimum - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
When true, calculate the minimum (X,Y,Z) slices.
- minimum - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- MINIMUM - Static variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
minimum
- MINIMUM - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- minimum_cost_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- minimum_cost_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
- MINIMUM_HEIGHT - Static variable in class gov.nih.mipav.view.ViewJFrameGraph
-
Minimum height of the graph panel
- minimum_num_resolutions - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- MINIMUM_PHASE - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- MINIMUM_PHASE - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Use serialVersionUID for interoperability.
- MINIMUM_SIZE - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- MINIMUM_WIDTH - Static variable in class gov.nih.mipav.view.ViewJFrameGraph
-
Minimum width of the graph panel
- minimumB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- minimumBitsMinus1 - Variable in class gov.nih.mipav.model.file.FileRaw
-
Used in reading and writing boolean
- minimumBitsMinus1 - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
Used in reading and writing boolean
- minimumButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- minimumCheck - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
CheckBox turns on/off calculating the minimum projection.
- minimumDelay - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- minimumDelay - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- minimumDistanceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- minimumDistanceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- minimumDistanceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- minimumDistanceText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- minimumDistanceText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- minimumDistanceText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- minimumFuzzy - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minimumG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- minimumHeight - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- minimumHeight - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- minimumHeight - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- minimumHeight - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- minimumL - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minimumLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Labels to display max/min slider values.
- minimumLayoutSize(Container) - Method in class gov.nih.mipav.view.JScrollPopupMenu.ScrollPopupMenuLayout
-
- minimumLB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minimumLevel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- minimumLevel - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- minimumLG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minimumLR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minimumMSELabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- minimumNearestNeighborDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- minimumNearestNeighborDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- minimumNearestNeighborDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- minimumNearestNeighborDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- minimumNearestNeighborDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- minimumNearestNeighborDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- minimumPerimeterPolygonButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
- minimumR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- minimumRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- minimumRRInterval - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- minimumRRInterval - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- minimumRRIntervalIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- minimumRRIntervalPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- minimumSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Smallest kernel size used in adaptive filtering
- minimumSplitSize - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- minimumSplitSize - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator
-
- minimumText - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- minimumThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- minimumToolBarWidth - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- minimumToolBarWidth - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- minimumToolBarWidth - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- minimumToolBarWidth - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- minimumToolBarWidth - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- minimumU - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minimumUB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minimumUG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minimumUR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minimumValueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Buttons to set max/min slider values.
- minimumValueField - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Text fields for user to enter max/min slider values.
- minimumx - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- minimumZForSub - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- minimumZForSub - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- minimumZForSub - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- minimumZForSub - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- minimumZForSub - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- minimumZForSub - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- minInput - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
JTextfield for minimum value of threshold.
- minInputB - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
JTextfield for minimum Blue value of threshold.
- minInputG - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
JTextfield for minimum Green value of threshold.
- minInputR - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
JTextfield for minimum Red value of threshold.
- minIntenBlue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- minIntenGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- minIntenRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- minIntensity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
min intensities for threshold
- minIntensity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- minIntensity - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- minIntensity - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- minIntensity - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Minimum intensity threshold value.
- minIntensity - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- minIntensity - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Minimum intensity threshold.
- minIntensity - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
min intensities calculatd using std dev
- minIntensity - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The minimum value which can be chosen in the intensity spinner.
- minIntensityB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
min intensities for threshold
- minIntensityB - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Minimum Blue intensity threshold.
- minIntensityB - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
min intensities calculatd using std dev
- minIntensityG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
min intensities for threshold
- minIntensityG - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Minimum Green intensity threshold.
- minIntensityG - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
min intensities calculatd using std dev
- minIntensityR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
min intensities for threshold
- minIntensityR - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Minimum Red intensity threshold.
- minIntensityR - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
min intensities calculatd using std dev
- minLabel - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.Renum
-
- minLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- minLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- minLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- minLens - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- MINLOG - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- minMax() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase.JPanelGPU
-
- MinMax - gov.nih.mipav.view.Preferences.DefaultDisplay
-
Minimum and maximum settings
- minMaxBInt - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
b intercept for mapping of min/max sliders *
- minMaxCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- minMaxCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- minMaxCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- minMaxLoc(double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- minMaxPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- minMaxSlope - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
slope for mapping of min/max sliders *
- MinNonZeroGroup() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- minOfStdVector(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- MinorAxis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- minorAxisDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- minorTickMarksCheckbox - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- MinParameterBlock(CeresSolver.ResidualBlock, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- minPixels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- minPixels - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Minimum number of points found on a hyperbola for it to be valid.
- minPixelsText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
DOCUMENT ME!
- minPointDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- minPointDistance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- minPointDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Smallest allowable distance between 2 of 3 picked points
- minPointDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Smallest allowable distance between 2 of 3 picked points
- minPointText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
- minPointText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
- minPosition - Variable in class gov.nih.mipav.model.file.FileZVI
-
- minProgressValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Used to store the minimum value of the progress bar.
- minprop - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- minprop - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- minprop - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- minR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- minR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
- minR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
- minR - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image minimum intensity for the red channel of an RGB image.
- minR - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Minimum intensity values of image.
- minR - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum for a color image.
- minR - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- minR - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- minR - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- minR - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- minR - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- minR - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- minR - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Min. intensity values in Red, Green and Blue images respectively
- minR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minR - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- minR1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- minR1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- minR2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- minR2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- minRadius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- minRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- minRange - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- minRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOIEffect
-
- minRange - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- minRange - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- minRangeField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- minRangeLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- minRegion - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- minRegion - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- minRegionText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- minResultImageSlicesLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- minResultImageSlicesLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- minrm(double[], double, double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- minrm(DoubleDouble[], DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- minrm1(double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- minrm1(DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- minrm2() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- minrm2() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- minrn(double, double, double, double, double, double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- minrn(DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- minRV - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- minRz - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- mins - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Minimum and maximum values for red/gree/blue.
- mins - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Minimum and maximum values for red/gree/blue.
- minSatBlue - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- minSatBlue - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- minSatBlueLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- minSatBlueLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- minSatVsTheta - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- minSatVsTheta - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- minSatVsThetaLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- minSatVsThetaLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- minSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation
-
- minSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- minSize - Variable in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
DOCUMENT ME!
- minSlicePreview - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Single slice preview images
- minSliceWindow - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Windows containing preview images
- minSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- minStevensBeta - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mins and maxes for heuristic parameters*
- minStevensBeta - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mins and maxes for heuristic parameters*
- minStevensBetaLabel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- minStevensBetaLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- minSum - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- minT - Variable in class gov.nih.mipav.model.file.FileZVI
-
- minter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- minText - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
Min, max text fields.
- minText - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Min, max text fields.
- minText - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Min, max text fields.
- minThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- minThresholdLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- minThresholdText - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- minThresholdValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- minThresholdValueL - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- minThresholdValueRGB - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- minTimeValue - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- minTransTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- minTransTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- minTransTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- MinTrustRegionRadiusReached() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- minTx - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- minTy - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- minUntwistDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- minUntwistPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- minus(libdt.Mat, double) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- minus(libdt.Mat, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- minute - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
DOCUMENT ME!
- minuteButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- MINUTES - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement minutes.
- MINUTES - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement minutes.
- MINUTES_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - minutes.
- minV - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- minVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- minVal - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Used during saturation (0 if unsigned, -2^(bitdepth-1) if signed)
- minVal - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- minVal - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- minValsD - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- minValTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
textfield inputs for window and level *
- minValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
min over local kernel, slice, or entire image.
- minValue - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- minValue - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minValue - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- minValueB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minValueG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minValueR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- minvar - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchOptions
-
< normalization method.
- minvarf - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchOptions
-
< minimum variance.
- minwavelength - Variable in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- minwavelength - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- minWaveLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- minx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- minX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- MinX() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Find the maximum x component of the shape.
- MinX() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Find the minimum x component of all shapes.
- miny - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- minY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- MinY() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Find the minimum y component of the shape.
- MinY() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Find the minimum x component of all shapes.
- minZ - Variable in class gov.nih.mipav.model.file.FileZVI
-
- minZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- MIP - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
View Mode MIP Constant:
- Mipav - gov.nih.mipav.view.Preferences.DefaultDisplay
-
MIPAV default setting
- MIPAV - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Not presently implemented.
- MIPAV_CRASH - gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder.BugType
-
- MIPAV_FROZEN - gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder.BugType
-
- MIPAV_HEADER - Static variable in class gov.nih.mipav.model.file.FileXML
-
Mipav header string (for top of xml header).
- MipavActionMetadata - Class in gov.nih.mipav.view.dialogs
-
- MipavActionMetadata() - Constructor for class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- mipavBuild - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
probably unused
- MipavCoordinateSystem - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- MipavCoordinateSystem - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- MipavCoordinateSystem - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- MipavCoordinateSystem - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- MipavCoordinateSystem - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- MipavCoordinateSystems - Class in gov.nih.mipav.util
-
MipavCoordinateSystems class.
- MipavCoordinateSystems() - Constructor for class gov.nih.mipav.util.MipavCoordinateSystems
-
- mipavDataType - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- mipavDimensions - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- MipavEdgeRenderer - Class in gov.nih.mipav.view.graphVisualization
-
- MipavEdgeRenderer() - Constructor for class gov.nih.mipav.view.graphVisualization.MipavEdgeRenderer
-
- MipavExceptionHandler - Class in gov.nih.mipav.util
-
- MipavExceptionHandler() - Constructor for class gov.nih.mipav.util.MipavExceptionHandler
-
- MipavGraphPanel - Class in gov.nih.mipav.view.graphVisualization
-
Displays the Mipav HyperGraph.
- MipavGraphPanel(Graph, ViewJFrameImage, JDialogHyperGraph) - Constructor for class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Creates the GraphPanel display.
- MipavGraphPanel.PropertiesDialog - Class in gov.nih.mipav.view.graphVisualization
-
launches the dialog to add info
- MipavGraphXMLContentHandler - Class in gov.nih.mipav.view.graphVisualization
-
Parses the MIPAX Graph XML file.
- MipavGraphXMLContentHandler() - Constructor for class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
Creates the content handler.
- MipavGraphXMLWriter - Class in gov.nih.mipav.view.graphVisualization
-
Writes the mipav graph to .xml format.
- MipavGraphXMLWriter(File) - Constructor for class gov.nih.mipav.view.graphVisualization.MipavGraphXMLWriter
-
Writes the Graph in the Mipav Graph XML format.
- MipavInitGPU - Class in gov.nih.mipav.util
-
- MipavInitGPU() - Constructor for class gov.nih.mipav.util.MipavInitGPU
-
- mipavInputs - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
mipav cmd line arguments
- mipavLabels - Variable in class gov.nih.mipav.model.file.FileNRRD
-
MIPAV axis names such as X, Y, or Z
- MipavLightingEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
MipavLightingEffect uses the lights defined in the Volume/Surface/Tri-Planar view in the light shader.
- MipavLightingEffect() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.MipavLightingEffect
-
Creates a MIPAV lighting effect.
- MipavMath - Class in gov.nih.mipav.util
-
Math functions not found in Java's Math class or they are slow.
- MipavMath() - Constructor for class gov.nih.mipav.util.MipavMath
-
- MipavMenuItem(String, JMenuItem) - Constructor for class gov.nih.mipav.view.ViewMenuBuilder.MipavMenuItem
-
Creates a new MipavMenuItem object.
- MipavNodeRenderer - Class in gov.nih.mipav.view.graphVisualization
-
Overrides how the Nodes are displayed in the HyperGraph.
- MipavNodeRenderer() - Constructor for class gov.nih.mipav.view.graphVisualization.MipavNodeRenderer
-
- mipavOutputs - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
probably unused
- mipavProps - Static variable in class gov.nih.mipav.view.Preferences
-
A list of MIPAV properties.
- mipavReceiver() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Starts the DICOM image receiver.
- MipavSAXReader - Class in gov.nih.mipav.view.graphVisualization
-
SAX Reader for the HyperGraph display.
- MipavSAXReader(GraphSystem, URL) - Constructor for class gov.nih.mipav.view.graphVisualization.MipavSAXReader
-
Creates the MipavSAXReader which sets up the XML parser for the graph xml file.
- mipavStandardButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
Radio button to save gradBval text file in mipavStandard format
- MIPAVTableCellRenderer - Class in gov.nih.mipav.view
-
Title: MIPAVTableCellRenderer
- MIPAVTableCellRenderer() - Constructor for class gov.nih.mipav.view.MIPAVTableCellRenderer
-
Creates a new MIPAVTableCellRenderer object.
- mipavThreadPool - Static variable in class gov.nih.mipav.util.ThreadUtil
-
- mipavUnits - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- MipavUtil - Class in gov.nih.mipav.view
-
A collection of static methods and frequently used and useful constants are in this utility class.
- MipavUtil() - Constructor for class gov.nih.mipav.view.MipavUtil
-
- MipavUtil.ActionAdapter - Class in gov.nih.mipav.view
-
Static abstract class similar to mouseAdapter to allow the catching of actionevents from components without
having to implement ActionListener.
- mipavVersion - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
mipav's version
- mipBuffer - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Buffer to store the MIP image that results from the raytrace.
- mipExtents - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
The dimensions of the MIP image.
- mipImage - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
MIP image generated from the volume.
- MIPMode() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Invoke the mip rendering mode.
- MIPMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Display the volume in MIP mode.
- MIPMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Change to the MIP mode pixel shader program.
- MIPMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- MIPMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Display the volume in MIP mode.
- mipZTable - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Table which holds the z coordinate on the 3D volume for a point (x,y) on the 2D MIP image.
- mirdwt() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- mirror(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Does a mirror operation on an image, so that x, y, and z values are mirrored Calls JDialogFlip.
- MirrorEdge(ModelSimpleImage, ModelSimpleImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Mirrors the edge of an arbitrary shape mask in an image using poor-mans mirroring.
- MirrorEdge(ModelSimpleImage, ModelSimpleImage, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Mirrors the edge of an arbitrary shape.
- MirrorEdge(CDMatrix, ModelSimpleImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Mirrors the edge of an arbitrary shape mask in a matrix using poor-mans mirroring.
- MirrorEdge(CDMatrix, ModelSimpleImage, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Mirrors the edge of an arbitrary shape.
- mirrorSymm(int, float[]) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
mirror symmetry
- MISC - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Misc.(*.bmp; *.pcx; *.png; *.tga; *.xbm; *.xpm).
- mIsClodMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
true indicates that this surface is a clod mesh,
false that it is a standard triangle mesh; clod meshes can
change level of detail, triangle meshes cannot.
- miSINGLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
IEEE 754 single format
- miSINGLE - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
IEEE 754 single format
- MisralaCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisralaCostFunction
-
- MisralaData - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- MisralaObservations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- MisralbCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisralbCostFunction
-
- MisralbData - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- MisralbObservations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- MisralcCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisralcCostFunction
-
- MisralcData - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- MisralcObservations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- MisraldCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.MisraldCostFunction
-
- MisraldData - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- MisraldObservations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- missingNumberArray - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
DOCUMENT ME!
- missingPositions - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
DOCUMENT ME!
- missingSliceArray - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
DOCUMENT ME!
- missingSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
DOCUMENT ME!
- miUINT16 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
16-bit, unsigned
- miUINT16 - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
16-bit, unsigned
- miUINT32 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
32-bit, unsigned
- miUINT32 - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
32-bit, unsigned
- miUINT64 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
64-bit, unsigned
- miUINT64 - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
64-bit, unsigned
- miUINT8 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
8 bit, unsigned
- miUINT8 - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
8 bit, unsigned
- miUTF16 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Unicode UTF-16 Encoded Character Data
- miUTF16 - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
Unicode UTF-16 Encoded Character Data
- miUTF32 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Unicode UTF-32 Encoded Character Data
- miUTF32 - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
Unicode UTF-32 Encoded Character Data
- miUTF8 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Unicode UTF-8 Encoded Character Data
- miUTF8 - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
Unicode UTF-8 Encoded Character Data
- mixColor3(int, int, int, float, float, float) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- mixColor4(int, int, int, int, float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- mixedTest() - Method in class gov.nih.mipav.model.algorithms.ConjugateGradientTest
-
- mixGaussEm(double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- mixGaussEm_demo() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- mixGaussOut - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- mixGaussPred(double[][], double[][], AlgorithmMixGaussEM.model) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- mixGaussRnd(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- MjCorticalAnalysis - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
Cortical analysis applet and viewer.
- MjCorticalAnalysis(ModelImage, ModelImage, GraphicsConfiguration, ViewJFrameVolumeView) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
A simple universe is created that contains a viewing platform.
- MjCorticalMesh - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
DOCUMENT ME!
- MjCorticalMesh(int, Point3f[], int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
Creates a new MjCorticalMesh object.
- MjCorticalMesh_WM - Class in gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM
-
- MjCorticalMesh_WM(TriMesh, Vector3f) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
Creates a new MjCorticalMesh object.
- MjCorticalMesh_WM.Polylines - Class in gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM
-
DOCUMENT ME!
- MjCorticalMesh.Edge - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
DOCUMENT ME!
- MjCorticalMesh.Polylines - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
DOCUMENT ME!
- MjCorticalMesh.Triangle - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
DOCUMENT ME!
- MjCorticalMesh.Vertex - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
DOCUMENT ME!
- MjEdgeKey - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
DOCUMENT ME!
- MjEdgeKey() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjEdgeKey
-
Creates a new MjEdgeKey object.
- MjEdgeKey(int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjEdgeKey
-
Creates a new MjEdgeKey object.
- MjMathf - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
DOCUMENT ME!
- MjMathf() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMathf
-
- MjMeshCurvature - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
DOCUMENT ME!
- MjMeshCurvature(int, Point3f[], int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjMeshCurvature
-
The caller is responsible for deleting the input arrays.
- mjpegQuality - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- mjpegQuality - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Param to save AVI.
- mjpegQuality - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
DOCUMENT ME!
- mjpegQuality - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- MjPolynomial1f - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
Limited implementation of a floating-point polynomial of 1 variable.
- MjPolynomial1f() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
Creates a new MjPolynomial1f object.
- MjPolynomial1f(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
Creates a new MjPolynomial1f object.
- MjPrimitive - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
DOCUMENT ME!
- MjPrimitive() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive
-
- MjPrimitive.Circle2f - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
DOCUMENT ME!
- MjPrimitive.Ray2f - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
Ray is R(t) = P+t*D for t >= 0.
- MjPrimitive.Segment2f - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
Segment is S(t) = P+t*D for 0 <= t <= 1.
- MjSparseMatrix - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
Sparse matrix implemented with a hash map.
- MjSparseMatrix() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
Matrix of undefined dimensions.
- MjSparseMatrix.Index - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
Used to reference a single element in the matrix.
- MjVector2f - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
Add methods which make the Vector2f more robust and flexible to use.
- MjVector2f() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector2f
-
Constructors.
- MjVector2f(float, float) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector2f
-
Creates a new MjVector2f object.
- MjVector2f(Tuple2f) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector2f
-
Creates a new MjVector2f object.
- MjVector3f - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview
-
Add methods which make the Vector3f more robust and flexible to use.
- MjVector3f() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector3f
-
Constructors.
- MjVector3f(float, float, float) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector3f
-
Creates a new MjVector3f object.
- MjVector3f(Tuple3f) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector3f
-
Creates a new MjVector3f object.
- mk - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- mk - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- mk - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- mk - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- mkCurrent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Label that gives current value of slider.
- mlammx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- mle() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- mLevelDetail - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Detail level of surface; only applies to clod meshes.
- mLoadImageButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Load a new ModelImage:.
- mLoadImageButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Load a new ModelImage:.
- mLUTButtonGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Grouping the radio buttons:.
- mLUTButtonGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Grouping the radio buttons:.
- mLUTImageA - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Independent ModelImage for independent LUT.
- mLUTImageA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Independent ModelImage for independent LUT.
- mLUTModel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
The LUT associated with the ModelImage imageA:.
- mLUTModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
The LUT associated with the ModelImage imageA:.
- mLUTSeparate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
The LUT associated with the independent texture LUT:.
- mLUTSeparate - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
The LUT associated with the independent texture LUT:.
- MM_ALL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_CAMERA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_FACECOLOR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_FACEFACETOPO - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_FACEFLAG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_FACEFLAGBORDER - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_FACEFLAGSELECT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_FACEMARK - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_FACENORMAL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_FACEQUALITY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_FACEVERT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_NONE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTCOLOR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTCOORD - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTCURV - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTCURVDIR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTFACETOPO - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTFLAG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTFLAGBORDER - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTFLAGSELECT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTMARK - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTNORMAL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTQUALITY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTRADIUS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_VERTTEXCOORD - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_WEDGCOLOR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_WEDGNORMAL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- MM_WEDGTEXCOORD - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.MeshModel
-
- mm2im(double[], double[], SIFT3D.Affine) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- mMaterial - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Surface Material.
- mMean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- mminvinterp(double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- mmLabelX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- mmLabelY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- mmLabelZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- mModelImageRadioButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Use the ModelImage LUT.
- mModelLUTRadioButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Use the ModelImage LUT.
- mModelLUTRadioButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Use the ModelImage LUT.
- mMouseRotate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Rotation transform for transforming the triangle normal into world coordinates.
- mmToPad - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Length to buffer brain by in millimeters.
- MN - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- mN_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- mName - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Name of surface displayed in list box.
- MNARC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- mnemonic - Variable in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- MNEQN - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- mNewImageRadioButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Use a separate LUT.
- mNewLUTRadioButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Use a separate LUT.
- mNewLUTRadioButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Use a separate LUT.
- MNJXS - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- MNQUA - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- MNSUA - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- mNumberTriangles - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Total number of triangles in the meshes.
- mobileLoc - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
470 - 4 bytes.
- MockCostFunctionBase(int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.MockCostFunctionBase
-
- MockCostFunctionBase(int, int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.MockCostFunctionBase
-
- MockCostFunctionBase2(int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.MockCostFunctionBase2
-
- MockDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.MockDirectory
-
- mod - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
modulus, 0 <= mod <= 1.
- mod - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.StandardMouse
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.StandardMouse
-
Mouseevent mask
- mod - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.StandardKey
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseWheel
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouse
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouseDragged
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.StandardMouse
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouse
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouseDragged
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.KeyPressedEvent
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
DOCUMENT ME!
- mod - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.RightMouse
-
DOCUMENT ME!
- mod(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
- modalities - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- modality - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Indicates the modality (medical image type) of the dataset.
- modality - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- modality - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- Modality(int, String) - Constructor for enum gov.nih.mipav.model.file.FileInfoBase.Modality
-
- MODALITY - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeModality
-
The label to use for the parameter indicating the new units
- modalityBox - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- modalityBox - Variable in class gov.nih.mipav.view.JPanelEditModality
-
DOCUMENT ME!
- modalityField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- modalityStr - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Deprecated.
- modalityStr - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- modalityString - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- modalityString - Variable in class gov.nih.mipav.model.file.FileInfoNRRD
-
Diffusion weighted MRI is currently the only value that has been seen for modality
in our samples.
- modButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- mode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Indicates mode - VOI, LEVELSET, or MASK.
- mode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Indicates mode - VOI, LEVELSET, or MASK.
- mode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Indicates the type of result mask: BITSET or SHORT.
- mode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- mode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- mode - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexSplitParams
-
- mode - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
mode is an integer input variable.
- mode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- mode - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- mode - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Swap mode, either 3D or 4D.
- mode - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- mode - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- mode - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_precision
-
- mode - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- mode - Variable in class gov.nih.mipav.model.structures.ModelHistogram
-
DOCUMENT ME!
- mode - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
Mode
- mode - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Mode - region or window
- mode - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- mode - Variable in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Interpolation mode.
- mode - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- mode - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Swap mode, either 3D or 4D
- mode - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Mode of operation for the dialog
- mode - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Current mode, init to stop.
- mode - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Current mode std or fly.
- mode - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Current mode, init to stop.
- mode - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Current behavior mode.
- mode - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Current mode, init to stop.
- mode - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Current mode.
- mode - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
mode - used to describe the cursor mode.
- mode - Variable in class gov.nih.mipav.view.renderer.MouseEventVector
-
Current mode.
- mode - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
The current mode of the histogram component.
- mode - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
mode - used to describe the cursor mode.
- mode - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The current mode of the histogram component.
- mode - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- mode - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- mode(int[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Finds the mode value of the list.
- MODE(int) - Constructor for enum gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- MODE_ANTIREFLECT - gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- MODE_ANTISYMMETRIC - gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- MODE_CONSTANT_EDGE - gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- MODE_INVALID - gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- MODE_MAX - gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- MODE_PERIODIC - gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- MODE_PERIODIZATION - gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- MODE_REFLECT - gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- MODE_SMOOTH - gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- MODE_SYMMETRIC - gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- MODE_ZEROPAD - gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- mode0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- mode1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- mode2 - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- modeAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- modeAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- modeAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- modeAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- modeB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- ModeCOMPOSITE - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
COMPOSITE rendering mode constant.
- modeCount - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
Mode Count
- modeFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- modeFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- modeFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- modeFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Haralick mode filter.
- modeFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- modeFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- modeG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- modeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- modeGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Radio button group reference.
- modeImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- modeImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- modeImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- model - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- model - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Model dimension.
- model - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Detector
-
- model - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter.FilterType
-
- model - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Microscope
-
- model - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Objective
-
- model - Variable in class gov.nih.mipav.model.file.FileSVS
-
- model - Variable in class gov.nih.mipav.model.file.FileTiff
-
- model - Variable in class gov.nih.mipav.view.CheckTreeManager.CheckTreeSelectionModel
-
- model - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptController
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- model - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.view.DICOMDisplayer
-
DOCUMENT ME!
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleModeB
-
AAM model reference.
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
AAM model reference.
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
AAM model reference.
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
AAM model reference.
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
AAM model reference.
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
AAM model reference.
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
AAM model reference.
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
AAM model reference.
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
AAM model reference.
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.MatchSlices
-
- model - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- model - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- model(double[][], double[][][], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM.model
-
- Model - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- Model() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- Model(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Get the model at level i.
- Model(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Get the model at level i.
- MODEL - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- MODEL - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- model_cost_change_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- model_file_name - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- model_file_name - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- MODEL_PIXEL_SCALE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- MODEL_PIXEL_SCALE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- model_residuals_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- MODEL_TIEPOINT - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- MODEL_TIEPOINT - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- model2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- model2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- modelBessel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- modelBessel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- modelBessel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- modelBessel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- modelChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
key images variables.
- modelChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
key images variables.
- modelChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
key images variables.
- modelChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
key images variables.
- modelChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
key images variables.
- modelChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
key images variables.
- modelChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
key images variables.
- modelChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
key images variables.
- ModelClodMesh - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
A triangle mesh that represents a level surface.
- ModelClodMesh(Point3f[], int[], ModelCollapseRecord[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
A triangle mesh whose vertices have a common vertex color and vertex normal vectors that are computed from the
geometry of the mesh itself.
- ModelCollapseRecord - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
A simple triangle mesh that represents a level surface.
- ModelCollapseRecord() - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelCollapseRecord
-
The default constructor is used by ModelClodMesh for creating a record before loading its data from disk.
- ModelCollapseRecord(int, int, int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelCollapseRecord
-
This constructor is only used by the class ModelSurfaceDecimator for creating records from edge collapse data
during the edge collapse process.
- modelDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- modelDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- modelDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- modelDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- modelDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- modelDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- modelDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- modelDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- modelDirName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- modelDirName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- ModelDisplacement(ModelSimpleImage, CAAMShape, CDVector, CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Performs one model parameter regression experiment.
- modelDisplayed - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Enables the user to visualize the simple ellipse-based model of the worm during lattice construction.
- ModelEstimateTexDiff(ModelSimpleImage, CDVector, CAAMShape, CDVector, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Wrapper to calculate the pixel difference from a model instance and an
image.
- ModelEstimateTexDiff(ModelSimpleImage, CDVector, CAAMShape, CDVector, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Calculates the pixel difference from a model instance and an image.
- modelFileDirAbs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- modelFileDirAbs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- modelFileDirAbs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- modelFilename - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- modelFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- modelFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- modelFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- modelFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- modelFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- modelFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- ModelHess(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBFGS
-
Algorithm D5.5.1 (look at page 315-318 for code)
Description: Make Hc has positive definite Only step 13 is implemented,
because of shortcut by the use of LAPACK
- ModelHistogram - Class in gov.nih.mipav.model.structures
-
Histogram model extends ModelStorageBase and stores and processes information about histograms.
- ModelHistogram(int, int[]) - Constructor for class gov.nih.mipav.model.structures.ModelHistogram
-
ModelHistogram.
- ModelImage - Class in gov.nih.mipav.model.structures
-
This class extends the generic buffer class ModelStorageArray and is used to store n-dimensional images and buffer
class that supports boolean, byte, short, int, long, float, double, etc. data types.
- ModelImage(int, int[], String) - Constructor for class gov.nih.mipav.model.structures.ModelImage
-
Creates a new ModelImage object, registering it to the default user interface.
- ModelImage(int, int[], String, ViewUserInterface) - Constructor for class gov.nih.mipav.model.structures.ModelImage
-
Deprecated.
- ModelImage(ModelSimpleImage, String) - Constructor for class gov.nih.mipav.model.structures.ModelImage
-
Creates a new ModelImage object based on an existing ModelSimpleImage, only exists as a FLOAT datatype.
- ModelImage(ModelStorageBase.DataType, int[], String) - Constructor for class gov.nih.mipav.model.structures.ModelImage
-
Creates a new ModelImage object, registering it to the default user interface.
- ModelImage(CDVector, ModelSimpleImage, CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Generate model instance (match pose to 'shape') and render the instance
into the image 'img'.
- ModelImage(CDVector, ModelSimpleImage, CAAMShape, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Generates a model image based on the parameters in 'c' with various
options.
- ModelImage3DLayout - Class in gov.nih.mipav.view.renderer.flythroughview
-
Used to store the information and layout which describes a volume of data.
- ModelImage3DLayout(int, int, int, float, float, float, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.ModelImage3DLayout
-
Create a volume with the specified dimensions.
- ModelImage3DLayout.GradientNeighbors - Class in gov.nih.mipav.view.renderer.flythroughview
-
Stores the indexes into a linear array for the samples to use in computing finite difference based gradients as
follows:
- ModelImageEx(CAAMShape, CDVector, ModelSimpleImage, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Generates a synthetic image from the AAM using the model parameters in
'c'.
- ModelImageToImageJConversion - Class in gov.nih.mipav.model.structures
-
- ModelImageToImageJConversion() - Constructor for class gov.nih.mipav.model.structures.ModelImageToImageJConversion
-
- modelImageVector - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- modelIndex - Variable in class gov.nih.mipav.model.structures.TableSorter.Row
-
DOCUMENT ME!
- modelIndex(int) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- modelingComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- modelList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- ModelLUT - Class in gov.nih.mipav.model.structures
-
Model of a Lookup Table (LUT).
- ModelLUT() - Constructor for class gov.nih.mipav.model.structures.ModelLUT
-
Default Constructor.
- ModelLUT(int, int, int[]) - Constructor for class gov.nih.mipav.model.structures.ModelLUT
-
Constructor.
- ModelLUTHelper - Class in gov.nih.mipav.view.renderer.flythroughview
-
A helper class to map image values to RGB colors.
- ModelLUTHelper(ModelLUT) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.ModelLUTHelper
-
Constructor.
- modelName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ModelString
-
- modelName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ModelString
-
- modelName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ModelString
-
- ModelName - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- ModelQuadMesh - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
A simple quadrilateral mesh that represents a level surface.
- ModelQuadMesh(Point3f[], int[], int, int, float[][], float) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
A quad mesh whose vertex normal vectors are computed from the geometry of the mesh itself.
- ModelQuadMesh(Point3f[], Vector3f[], int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
A quad mesh whose vertex normal vectors have been precomputed.
- ModelReduction() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Return model reduction.
- modelRGB - Variable in class gov.nih.mipav.model.file.FileImageXML
-
RGB lookup table associated with the file.
- modelRGB - Variable in class gov.nih.mipav.model.file.FileIO
-
DOCUMENT ME!
- modelRGB - Variable in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- ModelRGB - Class in gov.nih.mipav.model.structures
-
Model of a RGB Table. 256 length red, green, and blue tables are constructed from the red, green, and blue transfer
functions.
- ModelRGB() - Constructor for class gov.nih.mipav.model.structures.ModelRGB
-
Default constructor.
- ModelRGB(int[]) - Constructor for class gov.nih.mipav.model.structures.ModelRGB
-
constructor.
- modelRGB2 - Variable in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- models - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
SVM model.
- ModelScale(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
- ModelSerialCloneable - Class in gov.nih.mipav.model.structures
-
This class clones (copies) by serializing the object (providing it can be serialized).
- ModelSerialCloneable() - Constructor for class gov.nih.mipav.model.structures.ModelSerialCloneable
-
- ModelSet - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
Used in ModelSurfaceDecimator and ModelSurfaceTopology.
- ModelSet() - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
Creates a new ModelSet object.
- ModelSet(int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
Creates a new ModelSet object.
- ModelSet(ModelSet) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
Creates a new ModelSet object.
- ModelSimpleImage - Class in gov.nih.mipav.model.structures
-
This is very simple class to store a float type image of up to four dimensions.
- ModelSimpleImage() - Constructor for class gov.nih.mipav.model.structures.ModelSimpleImage
-
Add the empty default contructor.
- ModelSimpleImage(int[]) - Constructor for class gov.nih.mipav.model.structures.ModelSimpleImage
-
Creates a class to hold the minimum information about an image - the extents with the resolutions defaulted to 1.
- ModelSimpleImage(int[], float[]) - Constructor for class gov.nih.mipav.model.structures.ModelSimpleImage
-
Creates a class to hold the minimum information about an image - the extents and the resolutions.
- ModelSimpleImage(int[], float[], boolean) - Constructor for class gov.nih.mipav.model.structures.ModelSimpleImage
-
Creates a class to hold the minimum information about an image - the extents, the resolutions.
- ModelSimpleImage(int[], float[], ModelImage) - Constructor for class gov.nih.mipav.model.structures.ModelSimpleImage
-
Creates a class to hold the minimum information about an image - the extents, the resolutions, and optionally,
the image data.
- ModelSimpleImage(int[], float[], ModelImage, int) - Constructor for class gov.nih.mipav.model.structures.ModelSimpleImage
-
Creates a class to hold the minimum information about an image - the extents, the resolutions, and the image
data.
- ModelSimpleImage(ModelImage) - Constructor for class gov.nih.mipav.model.structures.ModelSimpleImage
-
Creates a class to hold the minimum information about an image - the extents, the resolutions, and optionall, the
image data.
- ModelSimpleImage(ModelImage, int) - Constructor for class gov.nih.mipav.model.structures.ModelSimpleImage
-
Creates a class to hold the minimum information about an image - the extents, the resolutions, and the image
data.
- modelsSVM - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
SVM model vector.
- ModelStorageBase - Class in gov.nih.mipav.model.structures
-
- ModelStorageBase() - Constructor for class gov.nih.mipav.model.structures.ModelStorageBase
-
Default constructor.
- ModelStorageBase(int, int[]) - Constructor for class gov.nih.mipav.model.structures.ModelStorageBase
-
Allocates buffer memory of the specified type.
- ModelStorageBase(ModelStorageBase.DataType, int[]) - Constructor for class gov.nih.mipav.model.structures.ModelStorageBase
-
Allocates buffer memory of the specified type.
- ModelStorageBase.DataType - Enum in gov.nih.mipav.model.structures
-
- ModelString(String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ModelString
-
- ModelString(String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ModelString
-
- ModelString(String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ModelString
-
- ModelString(String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ModelString
-
- ModelString(String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ModelString
-
- ModelString(String, String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ModelString
-
- ModelString(String, String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ModelString
-
- ModelString(String, String, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ModelString
-
- modelStructure - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
SVM model vector.
- ModelSurfaceDecimator - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
A triangle decimator that is used for continuous level of detail of a triangle mesh.
- ModelSurfaceDecimator(int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
The decimator constructed by this method is designed to be reused, if necessary, for decimating multiple meshes.
- ModelSurfaceDecimator.HeapRecord - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
The representation of a heap element.
- ModelSurfaceExtractor - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
A level surface extractor that is based on decomposing voxels into tetrahedra, assuming a linear interpolation on the
tetrahedra, and extracting triangular level sets for those tetrahedra.
- ModelSurfaceExtractor(int, int, int, int[], float, float, float, int[], float[], TransMatrix) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractor
-
Create a level surface extractor for a 3D image.
- ModelSurfaceExtractorCubes - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
A level surface extractor that is based on decomposing voxels into cubes, assuming a linear interpolation on the
cubes, and extracting triangular level sets for those cubes.
- ModelSurfaceExtractorCubes(int, int, int, int[], float, float, float, int[], float[], TransMatrix) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractorCubes
-
Create a level surface extractor for a 3D image.
- ModelSurfaceTopology - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
This is an implementation of a vertex-edge-triangle table.
- ModelSurfaceTopology() - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
The default constructor whose job is solely to allocate the hashmaps for the vertex-edge-triangle table.
- ModelSurfaceTopology(int, float, int, float, int, float) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Creates a new ModelSurfaceTopology object.
- ModelSurfaceTopology.Edge - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
A representation of an edge for the vertex-edge-triangle table.
- ModelSurfaceTopology.EdgeAttribute - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
The attributes associated with an edge.
- ModelSurfaceTopology.Statistics - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
For debugging and testing.
- ModelSurfaceTopology.Triangle - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
A representation of a triangle for the vertex-edge-triangle table.
- ModelSurfaceTopology.TriangleAttribute - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
The attributes associated with a triangle.
- ModelSurfaceTopology.Vertex - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
A representation of a vertex for the vertex-edge-triangle table.
- ModelSurfaceTopology.VertexAttribute - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
The attributes associated with a vertex.
- modelToFile(Vector3f, Vector3f, ModelStorageBase) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
ModelToFile transform.
- ModelToScreen(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Translate from Model coordinates to normalized plane coordinates:
- ModelToScreen(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Translate from Model coordinates to normalized plane coordinates:
- modelToView - Variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- ModelTriangleMesh - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
A simple triangle mesh that represents a level surface.
- ModelTriangleMesh(ModelTriangleMesh) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Copies a ModelTriangleMesh by copying it's components.
- ModelTriangleMesh(Point3f[], int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
A triangle mesh whose vertex normal vectors are computed from the geometry of the mesh itself.
- ModelTriangleMesh(Point3f[], Vector3f[], int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
A triangle mesh whose vertex normal vectors have been precomputed.
- ModelTriangleMesh(Point3f[], Vector3f[], int[], Color4f[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
A triangle mesh whose vertex normal vectors have been precomputed.
- ModelTriangleMesh(Point3f[], Vector3f[], Color4f[], int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
A triangle mesh whose vertex normal vectors have been precomputed.
- ModelTriangleMesh(Point3f[], Vector3f[], Color4f[], TexCoord3f[], int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
A triangle mesh whose vertex normal vectors have been precomputed.
- ModelTriangleMesh(Point3f[], Vector3f[], TexCoord3f[], int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
A triangle mesh whose vertex normal vectors have been precomputed.
- ModelTriangleMesh(Vector3f[], int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
A triangle mesh whose vertex normal vectors are computed from the geometry of the mesh itself.
- ModelTriangleMesh.Edge - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
A representation of an edge for the vertex-edge-triangle table.
- ModelTriangleMesh.UnorderedSetInt - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
DOCUMENT ME!
- ModelTriangleMeshCurvatures - Class in gov.nih.mipav.view.renderer.J3D.model.structures
-
Storage representation for a triangle mesh.
- ModelTriangleMeshCurvatures(ModelTriangleMesh) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Create a set of the min/max curvatures computed for each vertex in the triangle mesh.
- ModelTriangleMeshCurvatures(Point3f[], int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Create a set of the min/max curvatures computed for each vertex in the triangle mesh.
- ModelTriangleMeshCurvatures(Point3f[], Vector3f[], int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMeshCurvatures
-
Create a set of the min/max curvatures computed for each vertex in the triangle mesh.
- ModelTriangleMeshCurveSegments - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
DOCUMENT ME!
- ModelTriangleMeshCurveSegments(ModelTriangleMesh, FlyPathGraphSamples, FlyPathGraphCurve, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
Creates a new ModelTriangleMeshCurveSegments object.
- modelViewLabel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Labels for the current position in 3D ModelView coordinates:.
- modelViewLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Labels for the current position in 3D ModelView coordinates.
- modelViewLabelVals - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- modelViewLabelVals - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Displayed values for the current position in 3D ModelView coordinates.
- ModeMIP - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
MIP rendering mode constant.
- MODEP - gov.nih.mipav.model.algorithms.libdt.Split_mode
-
- modePointCounts - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- modeR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- modes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- modes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- modes - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- modes - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- modesImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- modesImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- ModeSURFACE - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
SURFACE rendering mode constant.
- ModeSURFACEFAST - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Surface faset rendering mode constant.
- modeTable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- ModeXRAY - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DRR rendering mode constant.
- ModHuffmanCodingException(String) - Constructor for exception gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream.ModHuffmanCodingException
-
- ModHuffmanCodingException(String) - Constructor for exception gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream.ModHuffmanCodingException
-
- modHuffmanCompression - Variable in class gov.nih.mipav.model.file.FileSVS
-
- modHuffmanCompression - Variable in class gov.nih.mipav.model.file.FileTiff
-
- modHuffmanDecompresser(byte[], byte[]) - Method in class gov.nih.mipav.model.file.FileSVS
-
- modHuffmanDecompresser(byte[], byte[]) - Method in class gov.nih.mipav.model.file.FileTiff
-
- ModHuffmanInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- ModHuffmanInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- modi - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Imaginary part of modulus or complementary modulus.
- modifDatesBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizePresets
-
- modified - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- modified() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- modified(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- MODIFIED - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- MODIFIED_ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- MODIFIED_ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- MODIFIED_ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- ModifiedCholeskyFactorization - Class in gov.nih.mipav.model.algorithms
-
Copyright (c) 2015, Sheung Hun Cheng and Nicholas J.
- ModifiedCholeskyFactorization() - Constructor for class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- ModifiedCholeskyFactorization(double[][], double, double[][], double[][], double[][], double[][], double[]) - Constructor for class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- modify3DMarker(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- modify3DMarker(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- modifyAnnotation(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Enables the user to move an annotation point with the mouse.
- modifyAnnotations(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- modifyDialog - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- modifyEntry(Class, Class...) - Method in class gov.nih.mipav.plugins.ManifestFile
-
Inserts all the dependents that are not currently a dependent into c's entry into the manifest.
- modifyFlag - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Used to "lock" display when an algorithm is in the calculation process.
- modifyGraphPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- modifyLattice(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- modifyLattice(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Enables the user to modify the lattice point with the mouse.
- modifyLeftRightMarker(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Sets the currently selected point (lattice or annotation).
- modifyStatusPanel() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Panel that builds the status display panel.
- modifyTriangle(ModelSurfaceTopology.Triangle, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
When an edge is collapsed, all triangles sharing the edge have been removed.
- modImg - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Model image pointer
- modImgOffset - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
The current offset of the raw pixel data in the RAW file
- ModModREADInputStream(InputStream, int) - Constructor for class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- ModModREADInputStream(InputStream, int) - Constructor for class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- modr - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Real part of modulus or complementary modulus.
- ModREADInputStream(InputStream, int) - Constructor for class gov.nih.mipav.model.file.FileSVS.ModREADInputStream
-
- ModREADInputStream(InputStream, int) - Constructor for class gov.nih.mipav.model.file.FileTiff.ModREADInputStream
-
- modulateAlphaImageBytes(float[], TransferFunction) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Given a single value volume and opacity map, modulate the alpha channel values for each value.
- modulateAlphaImageBytes(float[], RendererMapColor, ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Given an RGB value volume and opacity map for each channel, modulate the alpha channel values for each value.
- moebius(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- momcom - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
indicating that the chebyshev moments c have been computed for intervals of lengths c (abs(b-a))*2**(-l),
l=0,1,2, ..., momcom-1, c momcom.lt.maxp1
- momcom - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
indicating that the chebyshev moments c have been computed for intervals of lengths c (abs(b-a))*2**(-l),
l=0,1,2, ..., momcom-1, c momcom.lt.maxp1
- momentI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- momentR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- momentum - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- momentum - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- momentumLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- momentumTextField - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- mono - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- mono - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- monoSliceEqualizer(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Allows a single monochrome image slice to be filtered.
- monoSliceFilter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
Allows a single monochrome image slice to be filtered.
- monSar - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
238 Monitor SAR Flag.
- month - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
DOCUMENT ME!
- monthCombobox - Variable in class gov.nih.mipav.view.JPanelEditDate
-
DOCUMENT ME!
- monthIndex - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
DOCUMENT ME!
- monthString - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- mOpacity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
opacity of surface.
- mOpacity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Current paint opacity
- mOpacity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Current paint opacity
- mOpacityPaintButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Opacity paint button
- mOpacityPaintButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Opacity paint button
- more - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.sb_tree
-
- more - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- more - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- moreB - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- moreG - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- moreR - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- MORITA_SOURCE - Static variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
F(k, phi) INCOMPLETE1 E(k, phi) INCOMPLETE2 K(k) COMPLETE1 E(k) COMPLETE2 Complex arguments for first and second
complete and incomplete elliptic integrals.
- morl(double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- MORL - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- morphGradAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- morphGradAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- morphGradAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- MORPHOLOGICAL_GRADIENT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- MORPHOLOGICAL_GRADIENT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- MORPHOLOGICAL_GRADIENT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- MORPHOLOGICAL_GRADIENT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
- MORPHOLOGICAL_GRADIENT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- MORPHOLOGICAL_GRADIENT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- MORPHOLOGICAL_LAPLACIAN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- MORPHOLOGICAL_LAPLACIAN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- MORPHOLOGICAL_LAPLACIAN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_DILATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- MORPHOLOGICAL_RECONSTRUCTION_BY_EROSION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- morphologyGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
- morphologyGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
- morphologyGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
- morphologyGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
- morphologyGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- morphologyGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
- morphologyPostProcessing() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- morphologyPostProcessing(ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Apply the morphology filter the generate binary mask image from Fuzz-C
segmentation.
- morphoPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- mosaic - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- mosaic - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- mosaicCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- mosaicToSliceAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- most_ccw_in_halfedge() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- most_ccw_out_halfedge() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- most_clw_in_halfedge() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- most_clw_out_halfedge() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- mostFrequentClass(Vector<Integer>, Random) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Returns the most frequent class index of a vector with counts for the classes.
- mostFrequentDClass(Vector<Double>, Random) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Returns the most frequent class index of a vector with counts for the classes.
- mostFrequentValue(HashMap<Double, Integer>, Random) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- mostProbableClass - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- mostProminentColor(int[], int) - Static method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
Determines the most prominent value in a square shaped area.
- mostRecentUpdate - Variable in class gov.nih.mipav.model.structures.event.VOIEvent
-
holds reference because referring to a VOI held by the ViewVOIVector would cause all kinds of memory clean-up
concerns. may be null.
- mostRecentUpdate - Variable in class gov.nih.mipav.model.structures.event.VOIVectorEvent
-
holds reference because referring to a VOI held by the ViewVOIVector would cause all kinds of memory clean-up
concerns. may be null.
- motion - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Motion, standard, fly thrugh, point.
- motion - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Motion, standard, fly thrugh, point.
- mouse - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- MouseBehavior - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Abstract class which implements much of the event tracking and state updating shared between Fly and Pointer
behavior.
- MouseBehavior - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse
-
Title: MouseBehavior
- MouseBehavior(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
Initializes standard fields.
- MouseBehavior(int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
Same as constructor above but with behaviorfix.
- MouseBehavior(int, TransformGroup, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
Creates a new MouseBehavior object.
- MouseBehavior(JPanelView) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Creates new parent class with the dialog set for easy access between the user and the behaviors.
- MouseBehavior(TransformGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
Creates a mouse behavior object with a given transform group.
- MouseBehavior(TransformGroup, TransformGroup, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
Creates a new MouseBehavior object.
- MouseBehaviorCallback - Interface in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse
-
Also added this line: public final static int SELECTION=4; And this method: public void transformClicked Also added
this line: public final static int PROPERTIES=5; Added this method: public void transformDoubleClicked.
- MouseBehaviorRenderer - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Abstract class which implements much of the event tracking and state updating shared between Fly and Pointer
behavior.
- MouseBehaviorRenderer(JPanelView) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Creates new parent class with the dialog set for easy access between the user and the behaviors.
- mouseBehaviorRotate - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Mouse rotate behavior.
- mouseBehaviorTranslate - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Mouse translate behavior.
- mouseBehaviorZoom - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Mouse zoom behavior.
- mouseCallback - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Mouse behavior callback.
- mouseCallback - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Mouse behavior callback.
- MouseClickAdapter() - Constructor for class gov.nih.mipav.view.ViewJFrameRegisteredImages.MouseClickAdapter
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.model.structures.TableSorter.MouseHandler
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.CheckTreeManager
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mouse clicked
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.GlassPaneListener
-
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.HeaderListener
-
When the user clicks on a header, sorts the column.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TableListener
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay.HeaderListener
-
When the user right clicks on a header, sorts the column. when the user left clicks, a popup menu gives
the option to add a parameter to the table, triggering a JDialog
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay.HeaderListener
-
When the user right clicks on a header, sorts the column. when the user left clicks, a popup menu gives
the option to add a parameter to the table, triggering a JDialog
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay.HeaderListener
-
When the user clicks on a header, sorts the column.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
Listening to mouse events when updating paint.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
mouseClicked.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Not used method.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Not used method.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
One of the overrides necessary to be a MouseListener.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Implement MouseInterface abstract method.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
One of the overrides necessary to be a MouseListener.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
One of the overrides necessary to be a MouseListener.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
One of the overrides necessary to be a MouseListener.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
A mouse event.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Handle the double mouse click event when the use swith between the dual image panel view.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
One of the overrides necessary to be a MouseListener.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
One of the overrides necessary to be a MouseListener.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
One of the overrides necessary to be a MouseListener.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mouse clicked
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.Rubberband
-
Gets the end point of the rubberband.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandPolyline
-
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
mouse clicked
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
A mouse event.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
mouse clicked
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
When the mouse is clicked in the image, several different things may happen.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
When an image is double-clicked with the right-mouse button, the slice of the parent image is updated to match
the current volume slice.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser.TableListener
-
When the user clicks on a header, sorts the column.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
When the user double clicks on a selection, sends a query at the next query level; when the user clicks on a
header, sorts the column.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer.MousePopupListener
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer.MousePopupListener
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegisteredImages.MouseClickAdapter
-
Responds only on double-clicked events from the JList.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
unchanged.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Calls color chooser.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPlugin
-
Checks whether the mouse event is a normal system event for popups.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
This listens for when the buttons to hide or close a progress bar
are clicked.
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- mouseClicked(MouseEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Do nothing.
- mouseControlRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
Radio check button for mouse control.
- mouseCount - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Mouse event counter.
- mouseCount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Mouse event counter.
- mouseCount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Mouse event counter.
- mouseCriterion - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- mouseDialog - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Mouse recorder dialog associated with surface plotter.
- mouseDragged - Variable in class gov.nih.mipav.view.RubberbandPolyline
-
DOCUMENT ME!
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.GlassPaneListener
-
Sets the width and height variables in the glass pane based upon how far the mouse has been dragged and
repaints the glass pane.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.HeaderListener
-
Unchanged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay.HeaderListener
-
Unchanged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay.HeaderListener
-
Unchanged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay.HeaderListener
-
Unchanged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeMouseDragAdapter
-
DOCUMENT ME!
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
mouseDragged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
If recording, adds this mouse event to the mouseEvents vector found at location current.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
One of the overrides necessary to be a MouseListener.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
The mouseDragged event is used when the right mouse button press down and dragged to adjust the camera viewing direction.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
mouseDragged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
If recording, adds this mouse event to the mouseEvents vector found at location current.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
One of the overrides necessary to be a MouseMotionListener.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
mouseDragged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
If recording, adds this mouse event to the mouseEvents vector found at location current.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
mouseDragged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Invoked when the mouse is dragged while a button is held down.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
One of the overrides necessary to be a MouseMotionListener.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
One of the overrides necessary to be a MouseListener.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Unchanged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Continually updates the image depending on where the mouse is.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
Rotates the object with a virtual trackball:
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Invoked when the mouse is dragged while a button is held down.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Rotates the object with a virtual trackball:
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Rotates the object with a virtual trackball:
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.Rubberband
-
Gets the stretch point of the rubberband.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandEllipse
-
Gets the stretch point of the rubberband.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Makes a contour out of the curve drawn.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandPolyline
-
Makes a contour out of the curve drawn.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandRectangleVOI
-
Gets the stretch point of the rubberband.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
mouseDragged only updates the histogram display header when the mouse passes over a point for which the linear
correlation coefficient and colocalizations have already been calculated.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
mouse dragged
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
A mouse event.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
******************* Mouse Motion Events ***************************.*********************************************
***********************
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Continually updates the image depending on where the mouse is.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
mouse dragged
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Drags an VOI real time by calling a series of translations and draws.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
A mouse-dragged event.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser.TableListener
-
Unchanged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
continually updates the image depending on where the mouse is - unchanged.
- mouseDragged(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Continually updates the image depending on where the mouse is.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mouse entered
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.GlassPaneListener
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.HeaderListener
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TableListener
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay.HeaderListener
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay.HeaderListener
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay.HeaderListener
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Do nothing.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
mouseEntered.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Not used method.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Not used method.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
One of the overrides necessary to be a MouseListener.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Implement MouseInterface abstract method.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
One of the overrides necessary to be a MouseListener.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
One of the overrides necessary to be a MouseListener.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
One of the overrides necessary to be a MouseListener.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Methods do nothing, implemented mouseListener.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
One of the overrides necessary to be a MouseListener.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
One of the overrides necessary to be a MouseListener.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
One of the overrides necessary to be a MouseListener.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mouse entered
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.Rubberband
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandPolyline
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
mouse entered
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Store the lastMouse position.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
************************ Mouse Events *****************************.*********************************************
***********************
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
mouse entered
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Mouse entry handler: tells the parent tri-image frame about the current component orientation.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser.TableListener
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Unchanged.
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPlugin
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- mouseEntered(MouseEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Do nothing.
- mouseEvents - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Sequence of mouse events( press, shift and release as a whole mouse event).
- mouseEvents - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Vector to record mouse events.
- mouseEvents - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- mouseEvents - Variable in class gov.nih.mipav.view.renderer.MouseEventVector
-
Vector to record mouse events.
- MouseEventVector - Class in gov.nih.mipav.view.renderer
-
This class holds the necessary information for each "mouse event" that shows up in the list.
- MouseEventVector(String, double[], boolean, Object, int) - Constructor for class gov.nih.mipav.view.renderer.MouseEventVector
-
Creates a new structure to hold necessary information, with the name in the list and the beginning view saved.
- MouseEventVectorPlotter - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
This class holds the necessary information for each "mouse event" that shows up in the list.
- MouseEventVectorPlotter(String, Transform3D, boolean, Object, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Creates a new structure to hold necessary information, with the name in the list and the beginning view saved.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mouse exited
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.GlassPaneListener
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.HeaderListener
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TableListener
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay.HeaderListener
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay.HeaderListener
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay.HeaderListener
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
mouseExited.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Not used method.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Not used method.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
One of the overrides necessary to be a mouselistener.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Implement MouseInterface abstract method.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
One of the overrides necessary to be a MouseListener.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
One of the overrides necessary to be a MouseListener.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
One of the overrides necessary to be a MouseListener.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Resets the level set stack.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Methods do nothing, implemented mouseListener.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Invoked when the mouse leaves a component.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
One of the overrides necessary to be a MouseListener.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
One of the overrides necessary to be a MouseListener.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mouse exited
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Invoked when the mouse leaves a component.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.Rubberband
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandPolyline
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
mouse exited
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Resets the level set stack.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
mouse exited
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Mouse exit handler: repaints the image to get rid of the cursor if we are in a mode that custom draws the mouse
cursor.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser.TableListener
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Unchanged.
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPlugin
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- mouseExited(MouseEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Do nothing.
- mouseFlythru - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- mouseGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
3D mouse user-interface panel:
- MouseHandler() - Constructor for class gov.nih.mipav.model.structures.TableSorter.MouseHandler
-
- mouseIntensityLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The intensity of the current mouse position within the mip.
- mouseLabel - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
The opacity slider label.
- mouseLabel - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
The opacity slider label.
- mouseLabelB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
The opacity slider label.
- mouseLabelB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
The opacity slider label.
- mouseListener - Variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- mouseMax - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
logical min and max mouse values for calculations, this is the range of the normalized input values
- mouseMin - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
logical min and max mouse values for calculations, this is the range of the normalized input values
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.GlassPaneListener
-
Unchanged.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
mouseMoved.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Unchanged.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
One of the overrides necessary to be a MouseMotionListener.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
mouseMoved.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Unchanged.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
One of the overrides necessary to be a MouseMotionListener.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
mouseMoved.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Unchanged.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Invoked when the mouse moves.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
One of the overrides necessary to be a MouseMotionListener.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
One of the overrides necessary to be a MouseMotionListener.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
One of the overrides necessary to be a MouseMotionListener.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Unchanged.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Changes the cursor so that function can add points depending on how near the line it is.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.Rubberband
-
Unchanged.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Stretches if the VOI is active.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandPolyline
-
Stretches if the VOI is active.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
mouse moved
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
A mouse event.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Changes the cursor to crosshair and enables the zoom box rubberband if the cursor is in the graph; also sees if
cursor is near a valid point and prints it out.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Changes the cursor so that function can add points depending on how near the line it is.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
mouse moved
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
If the mode is level set, draws level sets as user moves
mouse.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
A mouse event.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Changes the LUT text field display based on the Y value of the mouse when inside ViewJComponentLUT - unchanged.
- mouseMoved(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Changes the LUT text field display based on the Y value of the mouse when inside ViewJComponentLUT.
- MouseOrbit - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse
-
DOCUMENT ME!
- MouseOrbit() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
Creates a new MouseOrbit object.
- MouseOrbit(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
Creates a new MouseOrbit object.
- MouseOrbit(int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
Creates a new MouseOrbit object.
- MouseOrbit(int, TransformGroup, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
Creates a new MouseOrbit object.
- MouseOrbit(TransformGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
Creates a new MouseOrbit object.
- mousePanel - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Panel holds the mouse move buttons.
- mousePanel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Panel holds the mouse move buttons.
- mousePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- mousePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Dialog for recording and playing back mouse events.
- mousePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Dialog for recording and playing back mouse events.
- mousePanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- mousePathPlanning - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- MousePopupListener() - Constructor for class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer.MousePopupListener
-
- MousePopupListener() - Constructor for class gov.nih.mipav.view.ViewJFrameMultimodalityViewer.MousePopupListener
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mouse pressed
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.GlassPaneListener
-
Sets the x and y variables in the glass pane to indicate that we've begun drawing a rectangle.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
When the user presses the mouse in any valid frame of the GUI, causes all the glass panes to repaint.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.HeaderListener
-
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TableListener
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay.HeaderListener
-
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay.HeaderListener
-
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay.HeaderListener
-
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Do nothing.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.PopupListener
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeMouseAdapter
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
mousePressed, store the current transformation for the selected image so the new transformations calculated in
the mouseDragged function can be concatenated onto the current transform.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Not used method.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Not used method.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
One of the overrides necessary to be a MouseListener.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Implement MouseInterface abstract method.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
One of the overrides necessary to be a MouseListener.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
If mode is RECORD_MODE, saves the current view and creates a new MouseEventVector.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
If mode is RECORD_MODE, saves the current view and creates a new MouseEventVectorPlotter.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
One of the overrides necessary to be a MouseListener.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Checks for making new points or not.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
A mouse event.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Methods do nothing, implemented mouseListener.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Invoked when a mouse button is pressed.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
One of the overrides necessary to be a MouseListener.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
One of the overrides necessary to be a MouseListener.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
************************************************************************ ***************************** Mouse
Events *****************************
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mouse pressed
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
Rotates the object with a virtual trackball:
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Invoked when a mouse button is pressed.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Rotates the object with a virtual trackball:
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.Rubberband
-
Gets the anchor point of the rubberband.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandPolyline
-
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
mouse pressed
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
A mouse event.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Checks for making new points or not.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
mouse pressed
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Sets the mode of the program depending on the cursor mode.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
A mouse-pressed event.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser.TableListener
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer.MousePopupListener
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer.MousePopupListener
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
unchanged.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Checks whether the user is making new points in the lut function or not.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPlugin
-
Checks whether the mouse event is a normal system event for popups.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Wakes up the VUI thread on a user's mouse click in the image if it is sleeping while waiting for the splash
screen to be displayed.
- mousePressed(MouseEvent) - Method in class gov.nih.mipav.view.ViewToolBarBuilder.PopupListener
-
DOCUMENT ME!
- mousePressedPaint(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
mouse pressed paint
- mousePressedPaint(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
When a mousePressed event is triggered and the mode is DROPPER_PAINT, ERASER_PAINT, PAINT_VOI, or MAG_REGION this
function is called.
- mousePressedPaint(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
mouse pressed paint
- mousePressIsShiftDown - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Keep track of state of shift for mouse Pressed events.
- MouseProperties - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse
-
Converting a copy of MouseSelection to be used to with DoubleClicking (PickProperties).
- MouseProperties() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
Creates a default mouse Selection behavior.
- MouseProperties(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
Creates a Selection behavior.
- MouseProperties(int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
Same as above but with boolean fix.
- MouseProperties(int, TransformGroup, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
Same as above but with Viewer Transform Group and boolean fix.
- MouseProperties(TransformGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
Creates a rotate behavior given the transform group.
- mouseReleased - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Flag to indicate whether the mouseReleased event triggered or not.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mouse released
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.GlassPaneListener
-
Sets the width and height variables appropriately, and lets the glass pane know that we are done drawing the
rectangle.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Unchanged.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.HeaderListener
-
Unchanged.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TableListener
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay.HeaderListener
-
Unchanged.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay.HeaderListener
-
Unchanged.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay.HeaderListener
-
Unchanged.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Do nothing.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.PopupListener
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
mouseReleased.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Mouse release event.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Used in MouseRecorder to stop one series of slide moves.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Used in MouseRecorder to stop one series of slide moves.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Mouse release event.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
One of the overrides necessary to be a MouseListener.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Implement MouseInterface abstract method.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
One of the overrides necessary to be a MouseListener.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
If recording, adds this mouse event to the mouseEvents vector found at location current.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Used in MouseRecorder to stop one series of slide moves.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Translates the event to the appropriate version on the canvas, then sends it to the canvas.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseRotateExt
-
Override mouse release so that we can force another update of the current transform to the callback.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
If recording, adds this mouse event to the mouseEvents vector found at location current.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Used in MouseRecorder to stop one series of slide moves.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
One of the overrides necessary to be a MouseListener.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Updates image and shows it.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
A mouse event.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Methods do nothing, implemented mouseListener.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Invoked when a mouse button is released.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
One of the overrides necessary to be a MouseListener.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
One of the overrides necessary to be a MouseListener.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Unchanged.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mouse released
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
Rotates the object with a virtual trackball:
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Invoked when a mouse button is released.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Rotates the object with a virtual trackball:
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.Rubberband
-
Gets the end point of the rubberband.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandEllipse
-
Makes an elliptical using an contour VOI upon a mouse release.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandLine
-
Makes a line VOI upon mouse release.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Makes a VOI out of the contours upon a mouse release event.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandPolyline
-
Makes an VOI out of the contours.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandProtractor
-
Makes a VOI.PROTRACTOR.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.RubberbandRectangleVOI
-
Makes a VOI out of the contours.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
If the correlation coefficient and colocalizations have not already been calculated at the mouse release point,
then a call to AlgorithmColocalizationRegression calculates them.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
mouse released
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
A mouse event.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Checks to see that the zoom box is valid, then redraws the graph using the zoom box as bounds.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Updates image and shows it.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
mouse released
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
This function sets up and draws the VOI according to the mode.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
A mouse-released event.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser.TableListener
-
Unchanged.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer.MousePopupListener
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer.MousePopupListener
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
unchanged.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Updates the image and shows it in case a new point has been added to the function (or removed).
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPlugin
-
Checks whether the mouse event is a normal system event for popups.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Do nothing.
- mouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.ViewToolBarBuilder.PopupListener
-
DOCUMENT ME!
- mouseRot - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- MouseRotate - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse
-
MouseRotate is a Java3D behavior object that lets users control the rotation of an object via a mouse.
- MouseRotate() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
Creates a default mouse rotate behavior.
- MouseRotate(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
Creates a rotate behavior.
- MouseRotate(int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
Same as above but with boolean fix.
- MouseRotate(int, TransformGroup, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
Same as above but with Viewer Transform Group and boolean fix.
- MouseRotate(TransformGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
Creates a rotate behavior given the transform group.
- MouseRotate(TransformGroup, TransformGroup, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
Creates a new MouseRotate object.
- mouseRotateBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Mouse Rotate behavior.
- mouseRotateBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Mouse Rotate behavior.
- mouseRotateBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Mouse Rotate behavior.
- MouseRotateExt - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
MouseRotateExt extends the MouseRotate class by providing public access to certain states of the MouseBehavior that
are stored as protected values with no other public accesss.
- MouseRotateExt() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseRotateExt
-
Creates a new MouseRotateExt object.
- MouseRotateExt() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseRotateExt
-
Creates a default mouse rotate behavior.
- MouseRotateExt(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseRotateExt
-
Creates a rotate behavior.
- MouseRotateExt(Component) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseRotateExt
-
Creates a rotate behavior that uses AWT listeners and behavior posts rather than WakeupOnAWTEvent.
- MouseRotateExt(Component, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseRotateExt
-
Creates a rotate behavior that uses AWT listeners and behavior posts rather than WakeupOnAWTEvent.
- MouseRotateExt(Component, TransformGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseRotateExt
-
Creates a rotate behavior that uses AWT listeners and behavior posts rather than WakeupOnAWTEvent.
- MouseRotateExt(TransformGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseRotateExt
-
Creates a rotate behavior given the transform group.
- mouseRotationCutoffSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Mouse rotation sensitivity cutoff slider
- mouseRotationSpeedSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Mouse rotation speed slider.
- mouseRotationSpeedSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Mouse rotation speed slider.
- MouseSelection - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse
-
Converting a copy of MouseRotation to be used to with picking (PickSelection).
- MouseSelection() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
Creates a default mouse Selection behavior.
- MouseSelection(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
Creates a Selection behavior.
- MouseSelection(int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
Same as above but with boolean fix.
- MouseSelection(int, TransformGroup, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
Same as above but with Viewer Transform Group and boolean fix.
- MouseSelection(TransformGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
Creates a rotate behavior given the transform group.
- mouseSelection3D - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- mouseSlider - Variable in class gov.nih.mipav.view.JPanelHistogram
-
slider for small LUT changes
- mouseSlider - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- mouseSlider - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- mouseSlider - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Opacity X scale sliders.
- mouseSlider - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Opacity X scale sliders.
- mouseSliderB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- mouseSliderB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- mouseSliderB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Opacity X scale sliders.
- mouseSliderB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Opacity X scale sliders.
- mouseSliderGM_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- mouseSliderGM_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- mouseSliderGM_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- mouseSliderGM_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- mouseSliderLabels - Variable in class gov.nih.mipav.view.JPanelHistogram
-
- mouseSliderLabels - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
The labels below the opacity slider.
- mouseSliderLabels - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
The labels below the opacity slider.
- mouseSliderLabelsB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
The labels below the opacity slider.
- mouseSliderLabelsB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
The labels below the opacity slider.
- mouseSpeedScaler - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
used to change the speed that the 3D mouse moves the camera
- mouseText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Text field reference that hold the user message.
- MouseTranslate - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse
-
MouseTranslate is a Java3D behavior object that lets users control the translation (X, Y) of an object via a mouse
drag motion with the third mouse button (alt-click on PC).
- MouseTranslate() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
Creates a default translate behavior.
- MouseTranslate(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
Creates a translate behavior.
- MouseTranslate(int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
Same as above but with boolean fix.
- MouseTranslate(int, TransformGroup, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
Same as above but with Viewer Transform Group and boolean fix.
- MouseTranslate(TransformGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
Creates a mouse translate behavior given the transform group.
- mouseTranslateBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Mouse Translate behavior.
- mouseTranslateBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Mouse Translate behavior.
- mouseTranslateBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Mouse Translate behavior.
- MouseTranslation - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse
-
MouseTranslate is a Java3D behavior object that lets users control the translation (X, Y) of an object via a mouse
drag motion with the third mouse button (alt-click on PC).
- MouseTranslation() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
Creates a default translate behavior.
- MouseTranslation(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
Creates a translate behavior.
- MouseTranslation(int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
Same as above but with boolean fix.
- MouseTranslation(int, TransformGroup, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
Same as above but with Viewer Transform Group and boolean fix.
- MouseTranslation(TransformGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
Creates a mouse translate behavior given the transform group.
- mouseTranslationCutoffSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- mouseTranslationSpeedSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Mouse translation speed slider.
- mouseTranslationSpeedSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Mouse translation speed slider.
- MouseWheel(MouseWheelEvent) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseWheel
-
Creates new thread and sets up mouse event variables appropriately.
- MouseWheel(MouseWheelEvent) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
Creates new thread and sets up mouse event variables appropriately.
- MouseWheelMouseControl(MouseWheelEvent) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
Creates new thread and sets up mouse event variables appropriately.
- mouseWheelMoved(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
mouse wheel moved
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Mouse wheel event invoked from the middle mouse button roller.
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
mouse wheel moved
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Mouse wheel event invoked from the middle mouse button roller.
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
mouse wheel moved
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
************************************************************************ ************************** Mouse Wheel
Events *************************
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
mouse wheel moved
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Mouse wheel movement handler, used to change the displayed slice in the component.
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- mouseWheelMoved(MouseWheelEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- MouseWheelPathPlanning(MouseWheelEvent) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
Creates new thread and sets up mouse event variables appropriately.
- mouseXLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The x position of the current mouse position within the mip.
- mouseYLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The y position of the current mouse position within the mip.
- mouseZLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The z position of the current mouse position within the mip (the z position of the volume voxel put into the
mip).
- MouseZoom - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse
-
MouseZoom is a Java3D behavior object that lets users control the Z axis translation of an object via a mouse drag
motion with the second mouse button.
- MouseZoom() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
Creates a default mouse zoom behavior.
- MouseZoom(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
Creates a zoom behavior.
- MouseZoom(int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
Same as above but with boolean fix.
- MouseZoom(int, TransformGroup, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
Same as above but with Viewer Transform Group and boolean fix.
- MouseZoom(TransformGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
Creates a zoom behavior given the transform group.
- mouseZoomBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Mouse Zoom behavior.
- mouseZoomBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Mouse Zoom behavior.
- mouseZoomBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Mouse Zoom behavior.
- MouseZoomBehavior - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse
-
MouseZoom is a Java3D behavior object that lets users control the Z axis translation of an object via a mouse drag
motion with the second mouse button.
- MouseZoomBehavior() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
Creates a default mouse zoom behavior.
- MouseZoomBehavior(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
Creates a zoom behavior.
- MouseZoomBehavior(int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
Same as above but with boolean fix.
- MouseZoomBehavior(int, TransformGroup, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
Same as above but with Viewer Transform Group and boolean fix.
- MouseZoomBehavior(TransformGroup) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
Creates a zoom behavior given the transform group.
- mouseZoomSpeedSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Mouse zoom speed slider.
- move - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- move(VOIBase, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Moves the input VOI by the input Vector amount.
- move(String) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Call from the JPanelFlythruMove.
- move(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Call from the JPanelFlythruMove.
- move(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Call from the JPanelFlythruMove.
- move(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- Move() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- Move() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Updates the camera and displayed objects for rendering.
- Move() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- MOVE - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- MOVE_INTERSECTION_POINT - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- MOVE_POINT - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- MOVE_RIGHT - Static variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- MOVE_VOIPOINT - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- moveAlongPath(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Move along the path step width.
- moveAlongPath(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Move along the path step width.
- moveAlongPath(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Move along the path step width.
- moveBack(FrontEdge) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- moveControlPoint(int, int, int, Vector3f) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Move the control point from its current location to the requested location.
- moveControlPoint(int, int, Vector2f) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Move the control point from its current location to the requested location.
- moveCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
A move cursor.
- moveCursor - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Movement mouse cursor.
- moveCursor - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- moveFiles() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
- moveForward - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseWheel
-
- moveForward - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
- moveForward - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
- moveForward - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
- moveFront(FrontEdge) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- movement - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
EXPAND, EXPAND_CONTRACT, or CONTRACT.
- movement - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- movementGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- movementGroup - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- movementGroup - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- movePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- moveRequestHash - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- MoveRequestInfo(DICOM_PDUService, Thread) - Constructor for class gov.nih.mipav.view.ViewJFrameDICOMQuery.MoveRequestInfo
-
Creates a new MoveRequestInfo object.
- moveResults - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
list of the results of a DICOM move.
- moveSelectedPoint(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- moveSelectedPoint(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- moveSelectedPoint(Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Enables the user to move the selected point (lattice or annotation) with the arrow keys.
- moveThread - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery.MoveRequestInfo
-
DOCUMENT ME!
- moveToFrontCodeAndSend() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- moveToNextLine() - Method in class gov.nih.mipav.view.components.PanelManager
-
Force new components which are added to appear on the next line in the panel (vertically).
- moveTrackBall(float, float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
A virtual track ball.
- moveVOI(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- moveVOI(int, int, int, int, int, int, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Move VOI to a new position.
- moveVOI(VOIManager, Vector3f, int, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called from the VOIManager class when multiple contours are selected and moved as
a group.
- moveVOI(String, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- moveVOIPoint(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- moveVOIPoint(int, int, int) - Method in class gov.nih.mipav.model.structures.VOIText
-
Moves the point to the new location.
- moveVOIPoint(int, int, int, int, int, int) - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Moves the point to the new location.
- moveVOIPoint(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called when the left-mouse is used to drag a point on the VOI.
- moveVOIPosition(int, int) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Moves VOIs to new position by deltaX and deltaY.
- moveVOITo(int, int, int) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Moves VOI with ID == id to a new position (x,y).
- movieButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Save AVI button .
- movieButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Save AVI button .
- movieMake - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- MovieMaker - Class in gov.nih.mipav.view.renderer.flythroughview
-
This class creates AVIs (.avi) out of a list of JPEG files or out of an array of java.awt.Image objects.
- MovieMaker(int, int, int, File, Image[]) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Constructor.
- MovieMaker(int, int, int, File, File[]) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Constructor.
- MovieMaker(File, MovieMaker.ImageDataSource) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Constructor.
- MovieMaker.AWTImageSourceStream - Class in gov.nih.mipav.view.renderer.flythroughview
-
The java.awt.Image-based source stream to go along with ImageDataSource.
- MovieMaker.ImageDataSource - Class in gov.nih.mipav.view.renderer.flythroughview
-
A DataSource to read from a list of JPEG image files or java.awt.Images, and turn that into a stream of JMF
buffers.
- MovieMaker.JpegSourceStream - Class in gov.nih.mipav.view.renderer.flythroughview
-
The jpeg-based source stream to go along with ImageDataSource.
- moviePanel - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Movie control panel that hold mouse recorder and AVI movie control.
- moving - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- MovingAverage(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- movingPickedPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- moviPosition - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- moviSubchunkPosition - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- mp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
1D Mp(t) data from sagittal sinus VOI
- Mp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- Mp3 - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- Mp4 - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- mPaintBrushButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Paint brush button
- mPaintBrushButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Paint brush button
- mPaintCanButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Paint can button
- mPaintCanButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Paint can button
- mPaintColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Current paint color
- mPaintColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Current paint color
- mPaintGrowDialog - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Paint Grow Dialog.
- mPaintGrowDialog - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Paint Grow Dialog.
- mPaintToolBar - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Paint user-interface ToolBar
- mPaintToolBar - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Paint user-interface ToolBar
- mPatientSlice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Renders the ModelImage data with LUT changes.
- mPerVertexColors_Backup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Color of surface.
- mPickShape - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
PickShape, for picking
- MPIL_vista_0Field - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- mPolygonMode - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Polygon mode of surface, one of PolygonAttribute.POLYGON_FILL,
PolygonAttribute.POLYGON_LINE, or PolygonAttribute.POLYGON_POINT.
- mppAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
- mps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_state_t
-
the Most Probable Symbol (0 or 1)
- mQ_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- mqc - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
MQC component
- MQC_NUMCTXS - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- MQC_PERF_OPT - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- mqc_states - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- MQIN1 - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- MQUCA - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- MQUPH - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- mr_flip - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
254 Flip angle for grass scans (degrees).
- mr_padding - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
990 spare space.
- MRAcquisitionType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- mrbFilterAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
DOCUMENT ME!
- MRC - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .mrc.
- mrdwt() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- mRGBModel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
The RGB LUT associated with the ModelImage imageA:.
- mRGBSeparate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
The RGB LUT associated with the independent texture LUT:.
- mrgFilterAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
DOCUMENT ME!
- MRI_BITMAP - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- MRI_FLOAT - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- MRI_INT - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- MRI_LONG - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- MRI_SHORT - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- MRI_TENSOR - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- MRI_UCHAR - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- mri15T - gov.nih.mipav.view.dialogs.AlgorithmTreParams.FieldStrength
-
- mri3T - gov.nih.mipav.view.dialogs.AlgorithmTreParams.FieldStrength
-
- MRIProcessName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- MRIProcessName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- mriStrength - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
The following GUI choices change algorithm operation using enums
- mRMean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- mrr() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- ms_aaaiPolyhedronTriangleControlPointOffset - Static variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Defines the relative offset in control point indices for the triangle mesh associated with the bounding
polyhedron formed by the 26 neighboring control points.
- ms_aiBSplineDegreeOptions - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
DOCUMENT ME!
- ms_akLUTTexture - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- ms_fInvLog2 - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
DOCUMENT ME!
- ms_fLog10 - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
DOCUMENT ME!
- ms_fSqrt3 - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
DOCUMENT ME!
- ms_fThird - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
DOCUMENT ME!
- ms_fTolerance - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
DOCUMENT ME!
- ms_fTwentySeventh - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
DOCUMENT ME!
- ms_iMaxSamples - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- ms_iNumLev - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- ms_iSurface - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- ms_kFileFilter - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.SurfaceLoaderSUR
-
FileFilter instance for this file loader which works with the JFileChooser.
- ms_kInvalid - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationPicker
-
- ms_MaxLights - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- ms_NumHistogramLUTs - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- MSAA_SAMPLES - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- msaitr - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- msAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
DOCUMENT ME!
- msAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- msAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- msapps - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- msaup2 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- msaupd - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- MSBP - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- mse() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- mseigt - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- msElapsed - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- msElapsed - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- mserAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
DOCUMENT ME!
- mseupd - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- MSEValue - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- MSF_Kruskal(int[][], int[], int, Vector<Integer>, Vector<Short>, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- MSF_Prim(int[][], int[], Vector<Integer>, Vector<Short>, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- msg_code - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- MSG_ID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
Message ID - Used to distinguish this message from other messages.
- MSG_ID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Unique message identifier for the C-MOVE request.
- MSG_ID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
The DICOM message ID.
- MSG_ID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_StdRetrieve
-
Uniquely identifies the current C-Move RQ
- MSG_TIME - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSG_TIME_H - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSG_TIME_INT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSG_TIME_TOUT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSG_TIME_TSTOP - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BACK_ERROR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ABSTOL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ABSTOLQ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ABSTOLQS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ABSTOLS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_DQRHO - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_DQTYPE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_EWT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_EWTQ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_EWTQS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_EWTS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_H0 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_HMIN_HMAX - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_IFS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_INTERP - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_IS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ISM - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ISM_IFS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ITASK - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ITASKB - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ITER - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ITOLQ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ITOLQS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_ITOLS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_K - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_LMM - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_MAXORD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_NS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_NVECTOR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_PBAR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_PLIST - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_RELTOL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_RELTOLQ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_RELTOLQS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_RELTOLS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_SENSI - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_STEPS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_T - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_TB0 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_TBOUT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_TINTERP - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_TOUT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_TSTOP - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_BAD_WHICH - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_CLOSE_ROOTS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_CONV_FAILS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_CVMEM_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_ERR_FAILS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_EWT_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_EWT_NOW_BAD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_EWT_NOW_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_EWTQ_NOW_BAD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_EWTQS_NOW_BAD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_EWTS_NOW_BAD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_HNIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_HNIL_DONE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_INACTIVE_ROOTS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_LINIT_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_LSOLVE_NULL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_MAX_STEPS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_MEM_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NEG_HMAX - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NEG_HMIN - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NEG_MAXORD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_ADJ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_BCK - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_FWD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_MALLOC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_MEM - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_QUAD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_QUADSENSI - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_ROOT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_SENSI - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_TOL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_TOLQ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_TOLQS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NO_TOLS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_ABSTOL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_ABSTOLQ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_ABSTOLQS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_ABSTOLS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_DKY - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_DKYA - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_F - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_FQ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_G - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_P - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_Y0 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_YQS0 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_NULL_YS0 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_QRHSFUNC_FAILED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_QRHSFUNC_FIRST - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_QRHSFUNC_REPTD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_QRHSFUNC_UNREC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_QSRHSFUNC_FAILED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_QSRHSFUNC_FIRST - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_QSRHSFUNC_REPTD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_QSRHSFUNC_UNREC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_RHSFUNC_FAILED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_RHSFUNC_FIRST - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_RHSFUNC_REPTD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_RHSFUNC_UNREC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_RTFUNC_FAILED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_SENSINIT_2 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_SET_SLDET - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_SETUP_FAILED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_SOLVE_FAILED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_SRHSFUNC_FAILED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_SRHSFUNC_FIRST - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_SRHSFUNC_REPTD - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_SRHSFUNC_UNREC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_TOO_CLOSE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_TOO_MUCH_ACC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_TRET_NULL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_WRONG_INTERP - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGCV_YOUT_NULL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_BAD_NVECTOR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_BAD_SIZES - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_BAD_TINTERP - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_BAD_WHICH - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_CVMEM_NULL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_JACFUNC_FAILED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_LMEM_NULL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_LMEMB_NULL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_MATCOPY_FAILED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_MATSCALEADDI_FAILED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_MATZERO_FAILED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_MEM_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MSGD_NO_ADJ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- msgets - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- msgPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Msg box to show the Prostate surface analysis related info.
- msgPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
Msg box to show the Prostate surface analysis related info.
- msgPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
Msg box to show the Prostate surface analysis related info.
- msort(Object[], Object[], int, int, int, Comparator) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortUtil
-
Implements the actual merge sort.
- msort(Object[], Object[], int, int, Comparator) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortUtil
-
Merge sorts the supplied array using the specified comparator.
- msort(Object[], Object[], Comparator) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortUtil
-
Merge sorts the supplied array using the specified comparator.
- msRawData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- msssim() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- mSurfaceBranchGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Surface subtree, holds all the Shape3D objects that make up the
surface.
- mSurfaceMask - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Surface mask.
- mSurfaceMask - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
mSurfaceMask represents the intersection of the ModelImage volume data
with the triangle-meshes.
- mSurfacePaint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Paint interface/algorithm for allowing the user to interactively paint the vertices of the ModelTriangleMesh.
- mSurfaceShape - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Shape3D[] array
- mSurfaceTextureImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
The ModelImage texture with LUT changes, used with the Texture3D.
- msWait - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- msWait - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- mt - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
DOCUMENT ME!
- mt - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- mTexture - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
3D Texture used to display the ModelImage data as a texture mapped onto the ModelTriangleMesh.
- mTextureButtonGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Grouping the radio buttons:.
- mTextureStatus - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Currently selected ModelImage display type:.
- mTextureUnitState - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
TextureUnitState contains texture information for the rendered surfaces:.
- mtfFreq - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- mTriangleMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
ModelTriangleMesh.
- mtry - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- mtry - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- mtry - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- mtry - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- MTryJistHook - Class in gov.nih.mipav.view.dialogs
-
This class is an example class for tying existing plugins into the JIST interface.
- MTryJistHook() - Constructor for class gov.nih.mipav.view.dialogs.MTryJistHook
-
- mtt_csvd - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- mtt_osvd - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- mtt_svd - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- mtx - Variable in class gov.nih.mipav.model.algorithms.libdt.CovMatrix
-
< dimension of the (square) covariance matrix.
- mu - Variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- mu - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- mu - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
DOCUMENT ME!
- mu - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM.model
-
- mu - Variable in class gov.nih.mipav.model.algorithms.FitLaplace
-
Center parameter
- mu - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- mu - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- mu - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
negative scale factor.
- mu_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- mu_increase_factor_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- mu0 - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< observation matrix
- mul(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- mul(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- mul(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- mul(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- mul(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- mul(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- mul(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- mul(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- mul(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- mul(MjPolynomial1f, MjPolynomial1f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
set this polynomial to the product of two polynomials.
- mul(Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- mul(Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- mul(PPolynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- mul(SparseMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- mul(StartingPolynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.StartingPolynomial
-
- mul(VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- mul(VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseSymmetricMatrix
-
- mul_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- mul_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- mul_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- mul_into(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- mul_into(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- mul_into(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- mul_into(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- mul_into(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- mult - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- mult - Variable in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- mult - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- mult(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- mult(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- mult(double, CVisRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult(float, CVisRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult(int, double, int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- mult(int, CVisRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult(long, CVisRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- mult(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- mult(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- mult(CVisRGBA, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult(CVisRGBA, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult(CVisRGBA, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult(CVisRGBA, long) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- mult_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- mult_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult_into(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult_into(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult_into(long) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- mult_into(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- multButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- multFactor - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- multFactor - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- multFactorField - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- MULTI_SCALE_STRUCTURAL_SIMILARITY_INDEX - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- multiBox - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- multiButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- multiButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- multiButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- multichannelColor0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- multichannelColor1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- multichannelColor2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- multichannelColor3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- multichannelColorChannel0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- multichannelColorChannel1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- multichannelColorChannel2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- multichannelColorChannel3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- multichannelWeight - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- multiclass_probability(int, double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- multiclass_probability(int, double[][], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- MULTIEXPONENTIAL_FIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
From Exponential analysis in physical phenomena by Andrei A.
- MULTIEXPONENTIAL_FIT - Static variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- multiExponentialFit - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- multiFile - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Flag that indicates whether or not the image is in multiple files (tiff).
- multiFile - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- multiFileCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- multiFileDicomButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
- multiFrame - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
True indicates image has multiple image planes in a single file.
- MultiFrameEyetrackerMode - Static variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- MultiGuidedFilter - Class in gov.nih.mipav.model.algorithms.filters
-
This is a port of multi_guided_est.py by Yiqian Wang.
- MultiGuidedFilter(ModelImage, ModelImage, PyWavelets.WAVELET_NAME, int, int, boolean, double, int, int) - Constructor for class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- MultiHistogram - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- multiHistogramCompositeCircle - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- multiHistogramCompositeColorMap - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- multiHistogramCompositeSquare - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- multiHistogramCompositeTriangle - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- multiHistogramFinish - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- multiHistogramFunctions - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
combined GLSL code for the histogram widgets:
- multiHistogramGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Multihistogram panel:
- multiHistogramInitA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- multiHistogramInitB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- multiHistogramInitMap - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- multiHistogramInitMapColor - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- multiHistogramReadColorMap - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- multiHistogramWidgetColorParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- multiHistogramWidgetParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- MULTIHISTOMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Display the volume in Multi-histo mode.
- MULTIHISTOMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Change to the Multi-histogram mode pixel shader program.
- MULTIHISTOMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- MULTIHISTOMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Display the volume in Mullti-histo mode.
- multiHistoSurfaceCompositeInit - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- MultiHistoWidgets - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- MultiImage - gov.nih.mipav.view.Argument.InstanceArgument
-
- MULTILEVEL_DWT - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- MULTILEVEL_DWT - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- multiLevelDWTButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- MultiPaintAutoSave - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- MultiPaintAutoSave(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.MultiPaintAutoSave
-
Creates a new PaintAutoSave object.
- multipaintDialog - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
reference to the JDialogMultiPaint for shortcuts
- multiPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- MULTIPLICATION_DECON - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Multiplication deconvolution is based on the geometrical mean of the two estimates from A and B separately
- multiply(double) - Method in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- multiply(int, float[], float[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
DOCUMENT ME!
- multiply(RealPolynomial) - Method in class gov.nih.mipav.model.structures.RealPolynomial
-
- multiply(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns a DoubleDouble whose value is (this * y).
- multiply(RenderViewBase.Matrix) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
Matrix multiplication, row based. this.m = this.m * m
- Multiply(double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- Multiply(SparseMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- Multiply(VectorD) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseSymmetricMatrix
-
- Multiply(VectorD, VectorD) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseSymmetricMatrix
-
- Multiply(VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- Multiply(VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseSymmetricMatrix
-
- Multiply(VectorF, VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- Multiply(VectorF, VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseSymmetricMatrix
-
- MULTIPLY - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- MULTIPLY - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- MULTIPLY - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- MultiplyByJacobian(double[], int, double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LocalParameterization
-
- MultiplyByJacobian(double[], int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.IdentityParameterization
-
- MultiplyByJacobian(double[], int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LocalParameterization
-
- MultiplyByJacobian(double[], int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- multiProcessor - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- multiProcessor - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
Use serialVersionUID for interoperability.
- multiProcessor - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
Use serialVersionUID for interoperability.
- MultiResolutionBilateralFilter - Class in gov.nih.mipav.model.algorithms.filters
-
This is a port of multi_bilateral.py by Yiqian Wang.
- MultiResolutionBilateralFilter(ModelImage, ModelImage, PyWavelets.WAVELET_NAME, int, int, boolean, double, int, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- multiscaleBlending(double[][][], double[][][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- multiThreadCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- multiThreadCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- multiThreadCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- multiThreadingEnabled - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Indicates if multi-threading will be used to optimize the algorithm.
- multiThreadingEnabled - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
- multiThreadingEnabledCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Multi-Threading Enabled Check Box
- multRadio - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
radio buttons for truncate/multiply *
- multRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
radio buttons for truncate/multiply *
- mulTransposed(libdt.Mat, libdt.Mat, boolean) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- mutable_col_blocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- mutable_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- mutable_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- mutable_local_parameterization() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- mutable_matrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- mutable_matrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- mutable_matrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- mutable_parameter_block_sizes() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- mutable_parameter_blocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- mutable_program() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- mutable_residual_blocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- mutable_residual_blocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- mutable_row_blocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- mutable_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- mutable_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- mutable_user_state() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- mutable_values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDenseMatrix
-
- mutable_values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- mutable_values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- mutable_values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- mutable_values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- mutable_values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- mutex - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- mutex_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ExecutionSummary
-
- muText - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Volume text field.
- MUTUAL_INFORMATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- MUTUAL_INFORMATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- MUTUAL_INFORMATION_SMOOTHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- MUTUAL_INFORMATION_SMOOTHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- MUTUAL_INFORMATION_SMOOTHED_WGT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- MUTUAL_INFORMATION_SMOOTHED_WGT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- mutualInformation(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- mutualInformation(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- mutualInformation(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- mutualInformation(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- MutualInformation(CDVector, CDVector, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
Calulates the Mutual Information (MI) between two vectors.
- mutualInformationSmoothed(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- mutualInformationSmoothed(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- mutualInformationSmoothed(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- mutualInformationSmoothed(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- mutualInfoSmoothed - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
- MV_CHUNK - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Vertex
-
DOCUMENT ME!
- mv3(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- mv4(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- mv5(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- mv6(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- mvnormpdf(double[][], double[][], double[][], double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- mvnormpdfln(double[][], double[][], double[][], double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- mVolume - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Total volume of triangle meshes.
- mVolumeMask - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Volume-Filled TriangleMesh mask.
- mw1 - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- mw1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- mw2 - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- mw2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- mx - Variable in class gov.nih.mipav.model.algorithms.curev
-
- mx - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- mX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- mxCELL_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Cell array
- mxCELL_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
Cell array
- mxCHAR_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Character array
- mxCHAR_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
Character array
- mxDOUBLE_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Double precision array
- mxDOUBLE_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
Double precision array
- Mxf - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- MXHNIL_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- mxINT16_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
16-bit, signed integer
- mxINT16_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
16-bit, signed integer
- mxINT32_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
32-bit, signed integer
- mxINT32_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
32-bit, signed integer
- mxINT64_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
64-bit, signed integer
- mxINT64_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
64-bit, signed integer
- mxINT8_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
8-bit, signed integer
- mxINT8_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
8-bit, signed integer
- MXNCF - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MXNEF - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- MXNEF1 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- mxOBJECT_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Object
- mxOBJECT_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
Object
- mxSINGLE_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Single precision array
- mxSINGLE_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
Single precision array
- mxSPARSE_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Sparse array
- mxSPARSE_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
Sparse array
- MXSTEP_DEFAULT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- mxSTRUCT_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Structure
- mxSTRUCT_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
Structure
- mxUINT16_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
16-bit, unsigned integer
- mxUINT16_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
16-bit, unsigned integer
- mxUINT32_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
32-bit, unsigned integer
- mxUINT32_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
32-bit, unsigned integer
- mxUINT64_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
64-bit, unsigned integer
- mxUINT64_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
64-bit, unsigned integer
- mxUINT8_CLASS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
8-bit, unsigned integer
- mxUINT8_CLASS - Static variable in class gov.nih.mipav.model.file.FileMATLAB
-
8-bit, unsigned integer
- my - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- mY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- my_addr - Variable in class gov.nih.mipav.model.algorithms.CVODES_ASA.CVadjCheckPointRec
-
- my_coef_controller() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- my_color_deconverter() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_color_deconverter
-
- my_convmtx2(double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- MY_COST_FUNCTOR - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- my_cquantizer() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- my_cquantizer2() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- my_decomp_master() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_decomp_master
-
- my_idct_controller() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_idct_controller
-
- my_input_controller() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_input_controller
-
- my_main_controller() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- my_marker_reader() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_marker_reader
-
- my_memory_mgr() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_memory_mgr
-
- my_post_controller() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_post_controller
-
- my_round(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- my_sign(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- my_source_mgr() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_source_mgr
-
- MY_THREE_PARAMETER_COST_FUNCTOR - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- my_upsampler_jdmerge() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- my_upsampler_jdsample() - Constructor for class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- MyCellRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.MyCellRenderer
-
- myContourVector - Variable in class gov.nih.mipav.view.dialogs.InstanceVOI
-
- myContourVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
- MyCostFunctor() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.MyCostFunctor
-
- mydecimate - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- myEyePoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Initial center viewing point of the image.
- myEyePoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Initial center viewing point of the image.
- myEyePoint - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Initial center viewing point of the image.
- MyGlassPane() - Constructor for class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Creates new glass pane and adds the listeners.
- myGlassPanes - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Special glass panes for all the valid frames in the GUI so that the user can draw rectangles on top of objects in
the GUI.
- myHostImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
host image.
- myobj - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- myParent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Reference to ViewJFrameSurfaceRenderer.
- myParent - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
DOCUMENT ME!
- myParent - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Volume rendering parent frame.
- myParent - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Volume rendering parent frame.
- myParentPlotter - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Reference to ViewJFrameSurfacePlotter.
- myProgressBar - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Progress bar that may be set for long optimization runs.
- myProgressBar - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Progress bar that may be set for long optimization runs.
- MyThreeParameterCostFunctor() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.MyThreeParameterCostFunctor
-
- MyXMLHandler - Class in gov.nih.mipav.view.dialogs
-
Handle events generated while parsing the XML file.
- MyXMLHandler - Class in gov.nih.mipav.view.renderer.WildMagic.TBI
-
Handle events generated while parsing the XML file.
- MyXMLHandler() - Constructor for class gov.nih.mipav.model.file.FileOME.MyXMLHandler
-
Create a handler to fill out the image info in the parent class from the xml header data.
- MyXMLHandler() - Constructor for class gov.nih.mipav.view.dialogs.MyXMLHandler
-
Construct our custom XML data handler.
- MyXMLHandler() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
Construct our custom XML data handler.
- MyXMLHandler(FileInfoImageXML, Vector<VOI>, Vector<TransMatrix>, TalairachTransformInfo) - Constructor for class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
Creates a new MyXMLHandler object.
- MyXMLHandler(VOI) - Constructor for class gov.nih.mipav.model.file.FileVOI.MyXMLHandler
-
Construct our custom XML data handler.
- MyXMLHandler(Vector<Vector3f>) - Constructor for class gov.nih.mipav.model.file.FilePolylineVOIXML.MyXMLHandler
-
Construct our custom XML data handler.
- mz - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- mZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
N
- n - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.P
-
- n - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- n - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- n - Variable in class gov.nih.mipav.model.algorithms.curev
-
- n - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- n - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cdft_arg_t
-
- n - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- n - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHilbertTransform
-
- n - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- n - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- n - Variable in class gov.nih.mipav.model.algorithms.InverseLaplaceTest
-
This is an implementation of the 16 test cases listed in Numerical Inversion of the Laplace Transform:
a Survey of and Comparison of Methods by Brian Davies and Brian Martin, Journal of Computational
Physics, Vol. 33, pp. 1- 32, 1979.
- n - Variable in class gov.nih.mipav.model.algorithms.libdt.CovMatrix
-
- n - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexOptions
-
- n - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- n - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- n - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
n is a positive integer variable set to the number of variables; n must not exceed m.
- n - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
variables integer scalar containing the number of unknowns.
- n - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- n - Variable in class gov.nih.mipav.model.algorithms.NelderMead.simplex_t
-
- n - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- n - Variable in class gov.nih.mipav.model.algorithms.NMSimplex
-
- n - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.crpfun
-
- n - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.depfun
-
- n - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.dpfun
-
- n - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
- n - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.hppfun
-
- n - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
- n - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- n - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
- n - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
- n - Variable in class gov.nih.mipav.model.algorithms.splev
-
- n - Variable in class gov.nih.mipav.model.algorithms.sproot
-
- n - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- n - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
Row and column dimension (square matrix).
- n - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Row and column dimensions.
- n - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- n - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_VertAux
-
- n - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Problem
-
the number of features (including the bias feature if bias >= 0)
- n - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.poly
-
- n - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.TURN_REP_REC
-
- n - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.turnrep
-
- n - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- n - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- N - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SubSig
-
- N - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- N - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- N - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- N - Variable in class gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver
-
- N - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
-
- N - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- N - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- N - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- N - Variable in class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- N - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- N - Variable in class gov.nih.mipav.model.algorithms.WishartVariateGenerator
-
- N - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
DOCUMENT ME!
- N - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- N - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- N - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.MatrixEntry
-
- N - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NMatrixEntry
-
- N() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- N() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- N(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- n_choose_k(int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- n_events - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- N_GROUPS - Static variable in interface gov.nih.mipav.model.file.BZip2Constants
-
- n_H - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- n_H - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- N_H - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- N_H - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- N_ITERS - Static variable in interface gov.nih.mipav.model.file.BZip2Constants
-
- n_rot - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- N_VAbs_Serial(CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VAddConst_Serial(CVODES.NVector, double, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VClone(CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VClone_Serial(CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VCloneEmpty_Serial(CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VCloneVectorArray_Serial(int, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VConst_Serial(double, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VDestroy(CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VDestroyVectorArray(CVODES.NVector[], int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VDestroyVectorArray_Serial(CVODES.NVector[], int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VDiv_Serial(CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VInv_Serial(CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VLinearSum_Serial(double, CVODES.NVector, double, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VMaxNorm_Serial(CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VMin_Serial(CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VNew_Serial(CVODES.NVector, int) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VScale_Serial(double, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VSpace_Serial(CVODES.NVector, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VSpace_Serial(CVODES.NVector, long[], long[]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- N_VWrmsNorm_Serial(CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- n_W - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- n_W - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- N_W - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- N_W - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- n0 - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cdft_arg_t
-
- N0 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
variables integer scalar containing the number of unknowns.
- N0 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- N0 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.MockCostFunctionBase2
-
- N0 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- n1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughLine
-
- n1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
Number of rho cells
- n1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
- N1 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- N1 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction3
-
- N1 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.MockCostFunctionBase2
-
- n2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughLine
-
- n2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- n2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
Number of theta cells
- n2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
- N2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- N2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction3
-
- N2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.MockCostFunctionBase2
-
- N2 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- N2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- n3 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- N3 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- N3 - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DummyCostFunction3
-
- N3Algo - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- N4 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- N4Algo - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- N4Step(double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- N5 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- N6 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- N7 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- N8 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- N9 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- NACondenser - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- name - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.BaseWavelet
-
- name - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- name - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- name - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlFileMeta
-
< File protocol
- name - Variable in enum gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- name - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- name - Variable in class gov.nih.mipav.model.file.FileDicomTagInfo
-
The real world DICOM tag name.
- name - Variable in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Name of investigator.
- name - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
- name - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
Attributes.
- name - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
attributes.
- name - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- name - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.StageLabel
-
- name - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Plate
-
- name - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Project
-
Attributes.
- name - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Screen
-
- name - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
- name - Variable in class gov.nih.mipav.model.file.FileMincAttElem
-
DOCUMENT ME!
- name - Variable in class gov.nih.mipav.model.file.FileMincDimElem
-
DOCUMENT ME!
- name - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- name - Variable in class gov.nih.mipav.model.file.FileUtility.nameSliceItem
-
- name - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
- name - Variable in class gov.nih.mipav.model.file.FileXML.XMLAttributes
-
- name - Variable in class gov.nih.mipav.model.file.XMLParameter
-
Parameter name.
- name - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
add simple image name for AAM model only.
- name - Variable in class gov.nih.mipav.model.structures.VOI
-
Name of the VOI stored as a string.
- name - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- name - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSimpleText
-
Name for the view.
- name - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Name of the events.
- name - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView.TabbedItem
-
DOCUMENT ME!
- name - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
Name of surface displayed in list box.
- name - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView.TabbedItem
-
DOCUMENT ME!
- name - Variable in class gov.nih.mipav.view.renderer.MouseEventVector
-
Name of the events.
- name - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface.TabbedItem
-
Panel name
- name - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel.AnnotationSplineControlPts
-
- name - Variable in class gov.nih.mipav.view.ViewMenuBuilder.MipavMenuItem
-
DOCUMENT ME!
- Name - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel.VOIParams
-
- Name - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- Name - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- Name() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
Get the console mode name
- Name() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
name of optimization methode
- Name() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeCG
-
name of optimization method
- Name() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizePS
-
name of optimization methode
- Name() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
name of optimization method.
- Name() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSD
-
name of optimization method
- name_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ScopedExecutionTimer
-
- NAME_ACTION_APPEND - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
The value that can be used with the 'image_name_action' parameter to indicate that the 'new_image_name' parameter
should be appended to the current image name.
- NAME_ACTION_PREPEND - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
The value that can be used with the 'image_name_action' parameter to indicate that the 'new_image_name' parameter
should be prepended to the current image name.
- NAME_ACTION_REPLACE - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
The value that can be used with the 'image_name_action' parameter to indicate that the current image name should
be replaced with the 'new_image_name' parameter value.
- nameArray - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
DOCUMENT ME!
- nameChangeVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Used by name change dialog to change name of the selected item.
- nameChangeVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Used by name change dialog to change name of the selected item.
- namedSeamCellOutput - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- nameField - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
NameField that will contain the string to be displayed.
- nameField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- nameField - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Text field for user inputed name
- nameField - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
NameField that will contain the string to be displayed.
- nameField - Variable in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- nameField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- names - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- names - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- names - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- nameSliceComparator() - Constructor for class gov.nih.mipav.model.file.FileUtility.nameSliceComparator
-
- nameSliceItem(String, int) - Constructor for class gov.nih.mipav.model.file.FileUtility.nameSliceItem
-
- nameSQ - Variable in class gov.nih.mipav.model.file.FileDicom
-
Name of the sequence tag.
- namesTable - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- nameStr - Variable in class gov.nih.mipav.model.file.FileInfoTMG
-
DOCUMENT ME!
- NameStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under in the Gifti xml schema.
- nameString - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- nameString - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- nameTable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- nameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- nameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- nameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- nameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- nameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- nameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- nameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- nameTableImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- nameTableImagesCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- nameTableImagesCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- nameTableImagesCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- nameTableImagesCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- nameTableImagesCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- nameTableImagesCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- nameTableImagesCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- nameTableImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- nameTableImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- nameTableImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- nameTableImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- nameTableImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- nameTableImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- nameTableImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- nameTableImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- nameTableImagesMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- nameText - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- nameValue - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Name and property labels that describe a DICOM tag for a particular file
- nameValueSeq - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Name and property labels that describe a DICOM tag for a particular file
- nameVOI_GT_Table - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- nameVOI_GT_Table - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- nameVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- nameVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- nameVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- nameVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- nameVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- nameVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- nameVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- NaN - Static variable in class gov.nih.mipav.util.DoubleDouble
-
A value representing the result of an operation which does not return a valid number.
- NaNCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- NANOMETERS - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement nanometers.
- NANOMETERS - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement nanometers.
- NANOMETERS_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - nanometers.
- NANOSEC - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement nanoseconds.
- NANOSEC - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement nanoseconds.
- NANOSEC_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - nanoseconds.
- NARCS - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- NARM - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- nArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Number of basis functions in each dimension.
- NARROW_BAND_2D - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
Diffusion models.
- NARROW_BAND_2D - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
Diffusion models.
- nativeClone() - Method in class gov.nih.mipav.model.structures.ModelSerialCloneable
-
Does not use serialization for cloning, exists for performance comparison and shallow copies.
- NativeLibraryLoader - Class in gov.nih.mipav.util
-
Static methods for extracting and loading native libraries that were previously loaded directly in the MIPAV JRE.
- NativeLibraryLoader() - Constructor for class gov.nih.mipav.util.NativeLibraryLoader
-
- NATURAL - Static variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- NATURAL - Static variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- natural_order - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- naturalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- navigation() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Detach and attach the probe root branch group.
- navigationBehavior - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
navigation behavior.
- NavigationBehavior - Class in gov.nih.mipav.view.renderer.WildMagic.Navigation
-
Behavior which allows for flying down a specified path and looking around.
- NavigationBehavior(VolumeTriPlanarRender, Camera) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- NavigationBehavior.BranchState - Class in gov.nih.mipav.view.renderer.WildMagic.Navigation
-
Branch information.
- NavigationBehavior.Callback - Interface in gov.nih.mipav.view.renderer.WildMagic.Navigation
-
Instances which want to be notified of updates to this behavior should
implement this interface by providing the viewChanged method
implementation.
- NavigationBehavior.KeyPressedEvent - Class in gov.nih.mipav.view.renderer.WildMagic.Navigation
-
- NavigationBehavior.MouseWheelMouseControl - Class in gov.nih.mipav.view.renderer.WildMagic.Navigation
-
- NavigationBehavior.MouseWheelPathPlanning - Class in gov.nih.mipav.view.renderer.WildMagic.Navigation
-
- NavigationBehavior.RightMouse - Class in gov.nih.mipav.view.renderer.WildMagic.Navigation
-
- navigationCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
Navigation (fly-thru) checkbox
- navigationGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Navigation mode user-interface panel
- NavigationPicker - Class in gov.nih.mipav.view.renderer.WildMagic.Navigation
-
Navigation fly-thru mode picker, which pick the fly-thru direction.
- NavigationPicker() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationPicker
-
- naviPicker - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- nb - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
- nb - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- nb - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
- nb - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
- nb - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- nb_of_tiles - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_codestream_index_t
-
- nb_packet - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_index_t
-
packet number
- nb_precision - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
- nb_tile_to_decode - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
Nb of tile to decode
- nb_tile_to_decode - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
Nb of tile to decode
- nb_tps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_index_t
-
number of tile parts
- nbands - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SigSet
-
- NBands() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the number of bands in the model
- NBands() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- nbandsField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- nbdtr(int, int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- NBDTR - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- nbdtrc(int, int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- NBDTRC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- nbdtri(int, int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- NBDTRI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- nbinom - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- nbins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- nbins - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- nBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- nBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- nBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Number of histogram bins for shrunken buffer.
- NBINS_AZ - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- NBINS_PO - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- nbinsLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- nbinsText - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
DOCUMENT ME!
- nBits - Variable in class gov.nih.mipav.model.file.FileSVS
-
- nBits - Variable in class gov.nih.mipav.model.file.FileTiff
-
- nBitsMask - Variable in class gov.nih.mipav.model.file.FileSVS
-
- nBitsMask - Variable in class gov.nih.mipav.model.file.FileTiff
-
- nBlocksRandomised - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- NBO - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- nBoundingVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- nBoundingVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- nBoundingVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- nBoundingVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- nBoundingVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- nBoundingVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- nBoundingVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- NBP - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- nBrainVoxels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The number of voxels that define the brain.
- nbx - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- nbx - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
number of paint masks initially.
- nby - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
number of paint masks initially.
- nBytesPerVoxel - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- nc - Variable in class gov.nih.mipav.model.algorithms.curev
-
- nc - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- nc - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
The number of layers/components
- nC - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- NC_ATTRIBUTE - Static variable in class gov.nih.mipav.model.file.FileInfoMinc
-
NetCDF defined data type - attribute.
- NC_BYTE - Static variable in class gov.nih.mipav.model.file.FileInfoMinc
-
NetCDF defined data type - byte.
- NC_CHAR - Static variable in class gov.nih.mipav.model.file.FileInfoMinc
-
NetCDF defined data type - character.
- NC_DIMENSION - Static variable in class gov.nih.mipav.model.file.FileInfoMinc
-
NetCDF defined data type - dimension.
- NC_DOUBLE - Static variable in class gov.nih.mipav.model.file.FileInfoMinc
-
NetCDF defined data type - double.
- NC_FLOAT - Static variable in class gov.nih.mipav.model.file.FileInfoMinc
-
NetCDF defined data type - float.
- NC_INT - Static variable in class gov.nih.mipav.model.file.FileInfoMinc
-
NetCDF defined data type - integer.
- NC_SHORT - Static variable in class gov.nih.mipav.model.file.FileInfoMinc
-
NetCDF defined data type - short.
- nc_type - Variable in class gov.nih.mipav.model.file.FileMincAttElem
-
DOCUMENT ME!
- nc_type - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- NC_VARIABLE - Static variable in class gov.nih.mipav.model.file.FileInfoMinc
-
NetCDF defined data type - variable.
- ncAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
DOCUMENT ME!
- NCandidates() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitCandidates
-
- nChecked - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- nchoosek(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- nClass - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- nClass - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- nClass - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- nclasses - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SigSet
-
- nClasses - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- nClasses - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- nClasses - Variable in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
DOCUMENT ME!
- nClasses - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- nClasses - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- ncmds - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- ncolors - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- nColors - Variable in class gov.nih.mipav.model.structures.ModelLUT
-
Number of colors in the LUT.
- nColors - Variable in class gov.nih.mipav.model.structures.ModelRGB
-
Number of colors in the LUT.
- nColors - Variable in class gov.nih.mipav.view.dialogs.JDialogNColors
-
DOCUMENT ME!
- Ncolors - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- nColorsATextF - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Update check box.
- nColorsATextF - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- nColorsBTextF - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Update check box.
- nColorsBTextF - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- nColorsTextF - Variable in class gov.nih.mipav.view.JPanelHistogram
-
displays the number of colors in the LUT
- ncols - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- NCols() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- nColumn - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
in 4D row and column numbers for z slices
- nColumn - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- nColumn - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- nColumn - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- nColumnCheckers - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
The number columns when two images are displayed in the checker board mode.
- ncolumnsField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- ncomp - Variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
- ncust_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- nd1 - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- nd2 - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- ndarData - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
- NDARWriteData - Class in gov.nih.mipav.model.file
-
- NDARWriteData() - Constructor for class gov.nih.mipav.model.file.NDARWriteData
-
- NDataItems() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Returns the number of data items this basis is based on.
- ndFilter - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- NDFilter - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- ndim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Number of dimensions.
- ndim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Number of dimensions.
- ndim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- ndim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- ndim - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.ArrayInfo
-
- nDim - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Number of available dimension.
- NDIM_2 - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- NDIM_3 - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- NDIM_4 - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- NDIM_5 - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- NDIM_6 - gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
- nDimensions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- nDimensions - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- nDimensions - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- nDimensions - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- ndims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- ndims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- nDims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Degress of freedom.
- nDims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Degress of freedom.
- nDims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Degress of freedom.
- nDims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Degress of freedom.
- nDims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
The number of dimensions.
- nDims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- nDims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- nDims - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- nDims - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- nDims - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- nDims - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- nDims - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- nDims - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- nDims - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- nDims - Variable in class gov.nih.mipav.model.algorithms.FloodFill
-
DOCUMENT ME!
- nDims - Variable in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
number of dimensions.
- nDims - Variable in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
number of dimensions.
- nDims - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- nDims - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- nDims - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- nDims - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Number of dimensions of the image.
- nDims - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Number of dimensions of the data.
- nDims - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- nDims - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- nDims - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Image dimension, must be 3.
- nDims - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- nDims - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- nDims - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- nDims - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- ndin - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
After the first integration over the intervals (pts[i], pts[i+1]), i = 0, 1, ..., npts2 - 2, the error estimates
over some of the intervals may have been increased artificially, in order to put their subdivision forward.
- ndin - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
After the first integration over the intervals (pts[i], pts[i+1]), i = 0, 1, ..., npts2 - 2, the error estimates
over some of the intervals may have been increased artificially, in order to put their subdivision forward.
- nDirEntries - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- nDirEntries - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- nDirEntries - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- ndof - Variable in class gov.nih.mipav.model.file.FileAfni
-
FUNC_FT_TYPE F ratio Numerator DOF, Denominator DOF.
- ndtr(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- NDTR - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- ndtri(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- NDTRI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- ne(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
- Ne(double, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise not equal to.
- Ne(double, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Not Equal - compares a double and a vector.
- Ne(CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Element wise not equal to.
- Ne(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Not Equal - compares a vector and a vector.
- NEAR_SYMMETRIC - gov.nih.mipav.model.algorithms.filters.PyWavelets.SYMMETRY
-
- nearBoundPoint - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Flag used to indicate if the cursor is near a point on the VOI bounding box.
- nearBoundPoint(VOIBase, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Calculates the bounding box of the voi contour and returns true if the input
point is near the bounding box.
- NearBoundPoint - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- nearBoundsPoint(int, int, int, int) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Returns true if mouse point is close to bounds point.
- nearest - Variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Radio buttons for interpolation methods.
- NEAREST - gov.nih.mipav.view.Preferences.InterpolateDisplay
-
Displays using nearest-neighbor
- NEAREST - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate nearest neighbor interpolation.
- NEAREST - Static variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Action command for nearest neighbor interpolation.
- NEAREST_BOTH - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Nearest neighbor interpolation applied to both images
- NEAREST_NEIGHBOR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Nearest neighbor interpolation.
- NEAREST_NEIGHBOR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Nearest neighbor interpolation.
- NEAREST_NEIGHTBOR - Static variable in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities.InterpolationType
-
- nearestPoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- nearLine(int, int, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Tests if a point is near a line.
- nearLine(int, int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns true if the input position is near the outline of this contour.
- nearLine(int, int, int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns true if the input position is near the outline of this contour.
- nearLine(int, int, VertexBuffer) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Tests if a point is near the curve.
- nearLine(VOIBase, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called when the user is selecting a VOI or during MouseDrag to show if a VOI can be selected, or
for selected VOIs, to show if the Mouse is close enough to the contour for the user to add a point
to the contour line.
- NearLine - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- NearNone - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
VOI contour near status:
- nearPlane - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- nearPoint - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Flag used to indicate if the cursor is near a point of the VOI member.
- nearPoint(int, int, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Tests if a point is near a point.
- nearPoint(int, int, int) - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Returns true if the input position is near one of the points on this contour.
- nearPoint(int, int, VertexBuffer) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- nearPoint(VOIBase, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called when the user is selecting a VOI or during MouseDrag to show if a VOI can be selected, or
for selected VOIs, to show if the Mouse is close enough to one of the points on the contour
for the user to move that contour point
- NearPoint - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- NEARW(int, int, double[][], double[][], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- NEARZ(int, int, double[][], double[][], double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- nebroyuf(double[][], double[], double[], double[], double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- nechdcmp(double[][], double[], double[][], double) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- nEchoes - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
210 number of echoes.
- neconest(double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- nedges - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- nEdges_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList
-
- need_context_rows - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- need_context_rows - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- needBits(int) - Method in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- needBits(int) - Method in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- needs_zeroed - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- needsUpdate() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- needsUpdate(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- needUpdate() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PointerUpdater
-
- Nef - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
Nikon camera raw.
- nefdjac(double[][], int[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- nefn(double[], double[], int[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- neg() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- neg() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- neg() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- neg() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- neg() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- neg() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- NEG - gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64.ClassType
-
- NEG - gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees.ClassType
-
- negate() - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns a DoubleDouble whose value is -this.
- negate() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- negate() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- Negate(Polynomial, Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- NEGATIVE_EDGES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Mark negative areas of the laplacian image as edges (makes thicker edges - used in BSE).
- NEGATIVE_EDGES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Mark negative areas of the laplacian image as edges (makes thicker edges - used in BSE).
- negative_gradient_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- NEGATIVE_INFINITY - Static variable in class gov.nih.mipav.util.DoubleDouble
-
- negativeAccepted - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea.JTextFieldFilter
-
DOCUMENT ME!
- negativeCurvatureNeeded - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- negativeHysteresisFraction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- negativeSpeed - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- negclamp - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- negclamp - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- negInterchangeXY - Variable in class gov.nih.mipav.model.file.FileSVS
-
- negInterchangeXY - Variable in class gov.nih.mipav.model.file.FileTiff
-
- negScanSpacing - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
858 Negative scan spacing for overlap slices.
- negXCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- negYCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- negZCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- NEHead - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- nehook(int[], double[], double[], double[], boolean[], double[], double[], int[], double[], double[], double[], double[][], double[][], double[], double[], double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- neigh - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- neigh_cmp(LocalIntensityOrderPattern.VlLiopDesc, int, int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- neigh_sort(LocalIntensityOrderPattern.VlLiopDesc, int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- neigh_sort_recursive(LocalIntensityOrderPattern.VlLiopDesc, int, int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- neigh_swap(LocalIntensityOrderPattern.VlLiopDesc, int, int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- neighbor(int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- Neighbor() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Neighbor
-
- Neighbor(LODMesh.Triangle) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Neighbor
-
- neighbor_edge(int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- neighbor_edge_3D(int, int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- neighbor_node_edge(int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- neighborF - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- neighborGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- neighborGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- neighborGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- neighborGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- neighborGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- neighborGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- neighborGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- neighborGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- neighborI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- neighborKey - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- NeighborKey - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- NeighborKey() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NeighborKey
-
- neighborKey2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- NeighborKey2 - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- NeighborKey2() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NeighborKey2
-
- neighborPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
DOCUMENT ME!
- neighborPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
DOCUMENT ME!
- neighborPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
DOCUMENT ME!
- neighborPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
DOCUMENT ME!
- neighborPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
DOCUMENT ME!
- neighborPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
DOCUMENT ME!
- neighborPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
DOCUMENT ME!
- neighborPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
DOCUMENT ME!
- neighbors - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- neighbors - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- neighbors - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NeighborKey
-
- neighbors - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NeighborKey2
-
- neighbors - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Neighbors
-
- neighbors - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Neighbors2
-
- Neighbors - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- Neighbors() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Neighbors
-
- Neighbors(Vertex) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Graph
-
- Neighbors(Vertex) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- NEIGHBORS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Cube
-
- NEIGHBORS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Square
-
- Neighbors2 - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- Neighbors2() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Neighbors2
-
- neighbors2DGreatest(float, float[], int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- neighbors2DLeast(float, float[], int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- neighbors3DGreatest(float, float[], int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- neighbors3DLeast(float, float[], int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- neighborText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- neighborV - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- neighbourLink - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- neighbourLink - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- neighbours - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- neighbours - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- neighbours - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- neighIntensities - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
< Point to neighbour radius (distance).
- neighPermutation - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
- neighRadius - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
- neighSamplesX - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
- neighSamplesY - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
- neinck(double[], double[], double[], int[], double[], double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- nel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_res_cont
-
- nel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- nelder_mead(NelderMead.point_t, NelderMead.point_t) - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- NelderMead - Class in gov.nih.mipav.model.algorithms
-
Nelder-Mead original code copyright 2017 by Matteo Maggioni under the MIT Licence.
- NelderMead(int, double[], double, double, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.NelderMead
-
- NelderMead.param_t - Class in gov.nih.mipav.model.algorithms
-
- NelderMead.point_t - Class in gov.nih.mipav.model.algorithms
-
- NelderMead.pointComparator - Class in gov.nih.mipav.model.algorithms
-
- NelderMead.simplex_t - Class in gov.nih.mipav.model.algorithms
-
- nelems - Variable in class gov.nih.mipav.model.file.FileMincAttElem
-
DOCUMENT ME!
- nelems - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- NEList() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.NEList
-
- NEList(LODMesh.Edge) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.NEList
-
- nell - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- nelnsrch(int[], double[], double[], double[], boolean[], int[], double[], double[], double, double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- NelsonCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.NelsonCostFunction
-
- NelsonData - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- NelsonObservations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- nemodel(double[][], double[][], double[], double[], double[][], double[], double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- nEndFrameDec - Variable in class gov.nih.mipav.model.file.FileJP2
-
- nentries - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Entires to nodes
- nEPI - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
826 number of EPI shots.
- neqn - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- neqn - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- neqrdcmp(double[][], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- neqrsolv(double[], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- nersolv(double[], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- NESolve - Class in gov.nih.mipav.model.algorithms
-
This is a port of nesolve.m and supporting files coded in MATLAB by Richard T.
- NESolve() - Constructor for class gov.nih.mipav.model.algorithms.NESolve
-
- NESolve(boolean, double[], double[], boolean, double[][], Vector<Double>, double[], int, int, int, double, double, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.NESolve
-
- nest - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- nestop(int[], int[], double[], double[], double[], double[], double[], double[], double[], int, double[], int, boolean) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- nesw - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true northeast-southwest direction calculated.
- nesw - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true northeast-southwest direction calculated.
- nesw - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- nesw - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- neswCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- neswCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- NETail - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- netrust(double[], double[], double[], boolean[], int[], double[], double[], double[], double[], int[], double[], double[], double[], double[][], double[], double[], double[], boolean, int, double[][], boolean, double[]) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- network - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- NetworkSnake() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- NeuralNetwork(ArrayList<Double[]>, ArrayList<Double>, String, double, double, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- neuriteColorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- neuriteCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- neuriteData - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- neuriteDisplay - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- neuriteList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- neuriteNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- neuriteOutput - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- neuriteSurfaces - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- neuriteTabbedPane - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- neuriteVOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- neurologicalView - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
- Neuron() - Constructor for class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- Neuroncounter - Variable in class gov.nih.mipav.model.algorithms.Backpropagation
-
- neval - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
Number of integrand evaluations.
- neval - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Number of integrand evaluations.
- NEW - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
NEW indicates a new image is created after the algorithm is run.
- NEW - Static variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
NEW indicates a new image is created after the algorithm is run.
- new_color_map - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- new_color_map - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- NEW_COLOR_MAP_1_QUANT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- NEW_COLOR_MAP_2_QUANT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- new_evaluation_point - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateOptions
-
- new_num_nonzeros - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- new_num_nonzeros - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- NEW_POINT - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- NEW_SUBFILE_TYPE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
TIFF Tags.
- NEW_SUBFILE_TYPE - Static variable in class gov.nih.mipav.model.file.FileSTK
-
TIFF Tags.
- NEW_SUBFILE_TYPE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
Tiff Tags.
- NEW_SUBFILE_TYPE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
Tiff Tags.
- NEW_VOI - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates that a VOI has just been created, is not related to the various
possible VOI modes that the handler deals with
- newAdjImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
new adjusted image.
- newAdjustedCreated() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
tells if new adjusted image was created during run().
- newAlphaBlend - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- newAlphaBlend - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- newArrayLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Size of zero padded buffers.
- newArrayLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Size of zero padded buffers.
- newArrayLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- newArrayLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- newArrayLength - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- newBase - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PointerUpdater
-
- newBitFlag() - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- NewBitFlag() - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- newBoolean(String, boolean) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new boolean parameter with a given label and value.
- newButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
This button add at head of the list.
- newButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
This button add at head of the list.
- newChannelMap(int[]) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- newCompressionType - Variable in class gov.nih.mipav.model.file.FileAvi
-
2 for .mov, 3 for mjpeg, 4 for mp4v2.
- NEWDG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- newDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- newDimLengths - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Zero padded dimension sizes.
- newDimLengths - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Zero padded dimension sizes.
- newDimLengths - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- newDimLengths - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- newDouble(String, double) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new double precision parameter with a given label and value.
- newDTIparams - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- newEdge(FrontEdge) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- newEdgeFollow(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- newElements(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
This method returns a pointer to an array of elements objects.
- newEnd - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PointerUpdater
-
- neweps - Variable in class gov.nih.mipav.model.algorithms.Quaternions
-
- newExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- newExtents - Variable in class gov.nih.mipav.model.file.FileMinc
-
- newExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
The extents of transformed (to the power of 2) image
- newExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- newExtents - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- newExtents - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- newExternalImage(String, String) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new externally-specified image placeholder variable parameter with a given label and value (e.g.,
'$image1').
- newFile(String, String) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new file parameter with a given label and value.
- newFloat(String, float) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new floating point parameter with a given label and value.
- newFrameBeenCreated() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
- newFrameCreated - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- newGrayScale - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- newHeight - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
Height of new image in pixels
- NEWHL - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- newHysteresisTr(float[], float[], AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList, int, float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
new image radio button.
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
generate new image
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Radio buttons for alg output options.
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- newImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- newImage - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- newImage(String, String) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new image placeholder variable parameter with a given label and value (e.g., '$image1').
- newImage(String, String, boolean) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new image placeholder variable parameter with a given label and value (e.g., '$image1').
- newImageDestination - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
flags for destination, threshold, inverse, and color image
- newImageDestination - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
flags for destination and threshold
- newImageName - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- newImagePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- newImageRadio - Variable in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
DOCUMENT ME!
- newImageRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
radio buttons
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- newImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- newImDTIparams - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMosaicToSlices
-
- newInputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
DOCUMENT ME!
- newInstance() - Static method in class gov.nih.mipav.view.FileSelectorImpl
-
- newInstance(URL[]) - Static method in class gov.nih.mipav.plugins.JarClassLoader
-
- newInt(String, int) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new integer parameter with a given label and value.
- newKeyLog() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
creates a new keylog, writing which tags are to be removed from the image information; the table header for the
image read/write logging is added. the string created here is not automatically turned into the keylog string.
- newLabelList(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Purpose: unknown.
- newlen - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_seg_t
-
- newList() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- newLong(String, long) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new long integer parameter with a given label and value.
- newLZW - Variable in class gov.nih.mipav.model.file.FileSVS
-
- newLZW - Variable in class gov.nih.mipav.model.file.FileTiff
-
- newMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
DOCUMENT ME!
- newMask - Variable in class gov.nih.mipav.model.algorithms.FloodFill
-
DOCUMENT ME!
- newMax - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
When the image data is rescaled by
y = scl_slope * x + scl_inter,
the image minimum or image maximum is rescaled to newMax.
- newMin - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
When the image data is rescaled by
y = scl_slope * x + scl_inter,
the image minimum or image maximum is rescaled to newMin.
- newmsWait - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- newmsWait - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- newNonListParameter(String, int, String) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new parameter with a given label and value.
- newNonMaxSupress(float[], float[], float[], float[], float[], float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- newNonOptimizedFilter(float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- newNumIm - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- newOptimizedFilter1(float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- newOptimizedFilter2(float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- newOr - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- newOr - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- newOrientBox - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- newOrientBoxX - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- newOrientBoxY - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- newOrientBoxZ - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- newOrientTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- newParameter(String, boolean) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new boolean parameter with a given label and value.
- newParameter(String, boolean[]) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new ParameterList of ParameterBooleans from an array of booleans.
- newParameter(String, double) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new double precision parameter with a given label and value.
- newParameter(String, double[]) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new ParameterList of ParameterFloats from an array of doubles.
- newParameter(String, float) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new floating point parameter with a given label and value.
- newParameter(String, float[]) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new ParameterList of ParameterFloats from an array of floats.
- newParameter(String, int) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new integer parameter with a given label and value.
- newParameter(String, int[]) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new ParameterList of ParameterInts from an array of ints.
- newParameter(String, long) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new long integer parameter with a given label and value.
- newParameter(String, short) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new signed short parameter with a given label and value.
- newParameter(String, Object) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new parameter with a given label and value.
- newParameter(String, Object[]) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new parameter with a given label and value.
- newParameter(String, String) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new string parameter with a given label and value.
- newPointIndex - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- newProgressValue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- NEWQU - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- newReferenceCreated() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
tells if new reference image was created during run().
- newRefImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
new reference image.
- newRes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- newRes - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Resample resolutioin corresponding to Power of 2.
- newRes - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Resample resolutioin corresponding to Power of 2.
- newResol - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- newSelection - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
This represents the button the user selects to..initally at 1
- newSharedCanvas() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- newShort(String, short) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new signed short parameter with a given label and value.
- newShortMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Reference to short mask.
- newSliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- newSliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- newSliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- newSliceSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- newSliceSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- newString(String, String) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new string parameter with a given label and value.
- newTagButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Button for inserting new tags
- newTargetTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
New target transform.
- newTargetTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
New target transform.
- newThick - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- newTimeStepVolume - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Volume for each time step.
- newToOld() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- newType - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
Indicates the new data type which the image should be converted to.
- newunc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- newunc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- newUShort(String, short) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new unsigned short parameter with a given label and value.
- newValue - Variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- newVOI - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- newVOI(boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Initiate a new VOI.
- newVOI(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- newVOI(float) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Initiate a new VOI.
- newVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- newVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- newVolSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- newVolSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- newWidth - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
Width of new image in pixels
- newX - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- newX - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- newX - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
adjustable slice VOI.
- newXDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- newXDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- newXDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- newXLength - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- newXY - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- newY - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- newY - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- newY - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
adjustable slice VOI.
- newYDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- newYDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- newYDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- newYLength - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- newZdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
New Z dimension.
- newZDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- newZDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- newZDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- newZStart - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- nex - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
DOCUMENT ME!
- nex - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- NEX - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
218 Number of excitations.
- next - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RAList
-
- next - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.userWeightFunct
-
- next - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- next - Variable in class gov.nih.mipav.model.algorithms.KDTree.res_node
-
- next - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Cache.head_t
-
- next - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- next - Variable in class gov.nih.mipav.model.file.FileSVS
-
- next - Variable in class gov.nih.mipav.model.file.FileTiff
-
- next - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_marker_struct
-
- next - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- next - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- next - Variable in class gov.nih.mipav.model.file.libjpeg.large_pool_struct
-
- next - Variable in class gov.nih.mipav.model.file.libjpeg.small_pool_struct
-
- next - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- next - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.it_node
-
- next - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.lmt_node
-
- next - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.polygon_node
-
- next - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.vertex_node
-
- next - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FrontEdge
-
- next - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.IDList
-
- next - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Edge
-
- next - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Neighbor
-
- next - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.NEList
-
- next - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- next - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Vertices
-
- next - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- next - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- next - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache.head_t
-
- next() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator
-
- next() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgIterator
-
- next(IDList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- next(LODMesh.Edge) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- next(LODMesh.Neighbor) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- next(LODMesh.NEList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- next(LODMesh.Triangle) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- next(LODMesh.Vertices) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- Next(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- next_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdge
-
- next_addr - Variable in class gov.nih.mipav.model.algorithms.CVODES_ASA.CVadjCheckPointRec
-
- next_bound - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- next_buffer - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.SVR_Q
-
- next_buffer - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVR_Q
-
- next_char() - Method in class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- next_event() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- next_h_state - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- NEXT_INDEX(int, int) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- next_marker(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- next_restart_num - Variable in class gov.nih.mipav.model.file.libjpeg.my_marker_reader
-
- next_row - Variable in class gov.nih.mipav.model.file.libjpeg.my_post_controller
-
- next_row_out - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- next_t() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- nextBits - Variable in class gov.nih.mipav.model.file.FileSVS
-
- nextBits - Variable in class gov.nih.mipav.model.file.FileTiff
-
- nextBits - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- nextBranch(OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- nextButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
DOCUMENT ME!
- nextByteMoreSignificant - Variable in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- nextByteMoreSignificant - Variable in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- nextData - Variable in class gov.nih.mipav.model.file.FileSVS
-
- nextData - Variable in class gov.nih.mipav.model.file.FileTiff
-
- nextData - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- NextDirection(CeresSolver.LineSearchMinimizer.State, CeresSolver.LineSearchMinimizer.State, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BFGS
-
- NextDirection(CeresSolver.LineSearchMinimizer.State, CeresSolver.LineSearchMinimizer.State, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LBFGS
-
- NextDirection(CeresSolver.LineSearchMinimizer.State, CeresSolver.LineSearchMinimizer.State, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirection
-
- NextDirection(CeresSolver.LineSearchMinimizer.State, CeresSolver.LineSearchMinimizer.State, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.NonlinearConjugateGradient
-
- NextDirection(CeresSolver.LineSearchMinimizer.State, CeresSolver.LineSearchMinimizer.State, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SteepestDescent
-
- nextFreeEntry - Variable in class gov.nih.mipav.model.file.FileSVS
-
- nextFreeEntry - Variable in class gov.nih.mipav.model.file.FileTiff
-
- nextImage - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
DOCUMENT ME!
- nextImage - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
DOCUMENT ME!
- nextImage - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
DOCUMENT ME!
- nextLeaf(OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- nextMarker(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Gets the next marker in the header.
- nextMaskList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- nextMaskList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- nextNode(OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- nextone() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- nextOutOfCorePoint(Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredMeshData
-
- nextOutOfCorePoint(Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- nextPageButton - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
elements of paging toolbar.
- nextPageMenuItem - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- nextPowerOfTwo(int) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculates and returns the integer >= input value that is an exact power of two.
- nextRestartNum - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Numbers needed for restart.
- Nexts(Face, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- nextTriangle(TriangleIndex, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredMeshData
-
- nextTriangle(TriangleIndex, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- nextTriangle(TriangleIndex, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- nextz - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< z location for next frame added.
- nf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- nf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
DOCUMENT ME!
- nf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Formatting for float values into strings.
- nf - Variable in class gov.nih.mipav.model.structures.jama.LUSOL
-
- nf - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- nf - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- nf - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- nf - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- nf - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- Nfa_phase0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- Nfa_phase180 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- nfc - Variable in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
DOCUMENT ME!
- nfc - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- nfc - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- nfc - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- nfe - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- nfeDQ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- nfev - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
actual number of iterations
- nFirst - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
nfirst injection TR index of input dataset (0 - 1000)
Number of TRs before Gd injection
- nFirst - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- nFirstMax - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- nFirstMin - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- nFrames - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- nframesField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- nfrm - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- nfrm - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- nftry - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- nfx - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- nfy - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- nfz - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- ngrid2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- NH - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- nhcust_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- NHead - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- NHIST_PER_DIM - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- ni - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.Options
-
- Ni - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- NIFTI - gov.nih.mipav.model.algorithms.SIFT3D.im_format
-
- NIFTI - Static variable in class gov.nih.mipav.model.file.FileUtility
-
NIFTI format. extension: .img, .hdr, .nii
- NIFTI_ECODE_AFNI - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
ASCII XML-ish elements
- NIFTI_ECODE_B_VALUE - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
A B_Value field contains a single 32-bit floating point value representing a diffusion-weighing b-value in units
of s/mm-squared.
- NIFTI_ECODE_CARET - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- NIFTI_ECODE_COMMENT - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Plain ASCII text only
- NIFTI_ECODE_DT_COMPONENT - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
The contents of a DT_COMPONENT field are a set of 32-bit integers which specify the indices of a single diffusion
tensor component.
- NIFTI_ECODE_MIND_IDENT - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
The contents of a MIND_IDENT field are character data which serve to identify the type of DWI data structure
represented by the MIND extended header fields whcih follow.
- NIFTI_ECODE_SHC_DEGREEORDER - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
The SHC_DEGREEORDER field specifies the degree (l) and order (m) of a spherical harmonic basis function as a pair
of 32-bit integers, with the degree preceding the order. m can take values between -l and +l, inclusive.
- NIFTI_ECODE_SPHERICAL_DIRECTION - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
A SPHERICAL_DIRECTION field contains two 32-bit floating point values which represent a direction in spherical
coordinates.
- NIFTI_EXTENSION - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the parameter indicating whether .nii or .hdr/.img is used in nifti file writes
- NIFTI_FIRST_STATCODE - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Smallest intent code that indicates a statistic.
- NIFTI_INTENT_BETA - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Beta distribution (2 params): p1 = a, p2 = b Density (x) proportional to x^(a-1) * (1-x)^(b-1).
- NIFTI_INTENT_BINOM - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Binomial distribution (2 params): p1 = number of trials, p2 = probability per trial Prob(x) = (p1 choose x) *
p2^x * (1-p2)^(p1-x), for x = 0,1,...p1.
- NIFTI_INTENT_CHI - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Chi distribution (1 param): p1 = DOF Density (x) proportional to x^(p1-1) * exp(-x^2/2) for x > 0 p1 = 1 = 'half
normal distribution p1 = 2 = Rayleigh distribution p1 = 3 = Maxwell_Boltzmann distribution.
- NIFTI_INTENT_CHISQ - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Chi-squared (1 param): p1 = DOF Density(x) proportional to exp(-x/2) * x^(p1/2 - 1).
- NIFTI_INTENT_CHISQ_NONC - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Noncentral chi-squared statistic (2 params): p1 = DOF, p2 = noncentrality parameter.
- NIFTI_INTENT_CORREL - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Correlation coefficient R (1 param): p1 = degrees of freedom R/sqrt(1-R*R) is t-distributed with p1 DOF.
- NIFTI_INTENT_DIMLESS - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Dimensionless value - no params - although, as in _ESTIMATE the name of the parameter may be stored in
intent_name.
- NIFTI_INTENT_DISPVECT - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
To signify that the vector value at each voxel is to be taken as a displacement field or vector: Dataset must
have a 5th dimension dim[5] must be the dimensionality of the displacement vector (e.g., 3 for spatial
displacement, 2 for in-plane).
- NIFTI_INTENT_ESTIMATE - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
The value at each voxel is an estimate of some parameter The name of the parameter may be stored in intentName.
- NIFTI_INTENT_EXTVAL - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Extreme value type I (2 params): p1 = location, p2 = scale cdf(x) = exp(-exp(-(x-p1)/p2)).
- NIFTI_INTENT_FTEST - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Fisher F statistic (2 params): p1 = numerator DOF, p2 = denominator DOF.
- NIFTI_INTENT_FTEST_NONC - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Noncentral F statistic (3 params): p1 = numerator DOF, p2 = denominator DOF, p3 = numerator noncentrality
parameter.
- NIFTI_INTENT_GAMMA - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Gamma distribution (2 params): p1 = shape, p2 = scale Density (x) proportional to x^(p1-1) * exp(-p2*x).
- NIFTI_INTENT_GENMATRIX - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
To store an M x N matrix at each voxel Dataset must have a 5th dimension (dim[0] = 5 and dim[5] > 1) dim[5] must
be M*N intentP1 must be M (in float format) intentP2 must be N (in float format) the matrix values A[i][j] are
stored in row order: A[0][0] A[0][1] ...
- NIFTI_INTENT_INVGAUSS - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Inverse Gaussian (2 params): p1 = mu, p2 = lambda Density (x) proportional to exp(-p2*(x-p1)^2/(2*p1^2*x)) / x^3
for x > 0.
- NIFTI_INTENT_LABEL - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
The value at each voxel is an index into some set of labels The filename with the labels may be stored in
auxFile.
- NIFTI_INTENT_LAPLACE - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Laplace distribution (2 params): p1 = location, p2 = scale Density (x) proportional to exp(-abs(x-p1)/p2).
- NIFTI_INTENT_LOG10PVAL - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Data is log10(p-value) (no params).
- NIFTI_INTENT_LOGISTIC - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Logistic distribution (2 params): p1 = location, p2 = scale Density (x) proportional to sech^2((x-p1)/(2*p2)).
- NIFTI_INTENT_LOGPVAL - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Data is ln(p-value) (no params).
- NIFTI_INTENT_NEURONAME - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
The value at each voxel is an index into the NeuroNames labels set.
- NIFTI_INTENT_NODE_INDEX - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
To signify that the value at each location is a node index, from a complete surface dataset.
- NIFTI_INTENT_NONE - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Default, no intent indicated.
- NIFTI_INTENT_NORMAL - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Normal distribution (2 params): p1 = mean, p2 = standard deviation.
- NIFTI_INTENT_POINTSET - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
To signify that the vector value at each voxel is really a spatial coordinate (e.g., the verticies or nodes of a
surface mesh): dim[0] = 5 dim[1] = number of points dim[2] = dim[3] = dim[4] = 1 dim[5] must be the
dimensionality of space (e.g., 3 => 3D space) intentName may describe the object these points come from (e.g.,
"pial", "gray/white", "EEG", "MEG").
- NIFTI_INTENT_POISSON - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Poisson distribution (1 param): p1 = mean Prob(x) = exp(-p1) * p1^x/x!
- NIFTI_INTENT_PVAL - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Data is a 'p-value' (no params).
- NIFTI_INTENT_QUATERNION - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
To signify that the vector value at each voxel is a quaternion: Dataset must have a 5th dimension dim[0] = 5
dim[5] = 4 dataType should be a floating point type.
- NIFTI_INTENT_RGB_VECTOR - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
To signify that the vector value at each location is an RGB triplet, of whatever type. - dataset must have a 5th
dimension - dim[0] = 5 - dim[1] = number of nodes - dim[2] = dim[3] = dim[4] = 1 - dim[5] = 3
- NIFTI_INTENT_RGBA_VECTOR - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
To signify that the vector value at each location is a 4 valued RGBA vector, of whatever type. - dataset must
have a 5th dimension - dim[0] = 5 - dim[1] = number of nodes - dim[2] = dim[3] = dim[4] = 1 - dim[5] = 4
- NIFTI_INTENT_SHAPE - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
To signify that the value at each location is a shape value, such as the curvature.
- NIFTI_INTENT_SYMMATRIX - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
To store an NxN symmetric matrix at each voxel Dataset must have a 5th dimension dim[5] must be N*(N+1)/2
intentP1 must be N (in float format) The matrix values A[i][j] are stored in row order A[0][0] A[1][0] A[1][1]
A{2][0] A[2][1] A[2][2].
- NIFTI_INTENT_TIME_SERIES - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
To signify that each value at each location is from a time series.
- NIFTI_INTENT_TRIANGLE - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
To signify that the vector value at each voxel is really a triple of indexes (e.g., forming a triangle) from a
pointset dataset: Dataset must have a fifth dimension dim[0] = 5 dim[1] = number of triangles dim[2] = dim[3] =
dim[4] = 1 dim[5] = 3 dataType should be an integer type (preferably DT_INT32) The data values are indexes
(0,1,...) into a pointset dataset.
- NIFTI_INTENT_TTEST - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Student t statistic (1 param): p1 = DOF.
- NIFTI_INTENT_TTEST_NONC - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Noncentral t statistic (2 params): p1 = DOF, p2 = noncentrality parameter.
- NIFTI_INTENT_UNIFORM - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Uniform distribution: p1 = lower end, p2 = upper end.
- NIFTI_INTENT_VECTOR - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- NIFTI_INTENT_WEIBULL - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Weibull distribution (3 params): p1 = location, p2 = scale, p3 = power Density (x) proportional to
((x-p1)/p2)^(p3-1) * exp(-((x-p1)/p2)^p3) for x > p1.
- NIFTI_INTENT_ZSCORE - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Standard normal (0 params): Density = N(0,1).
- NIFTI_LAST_STATCODE - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Largest intent code that indicates a statistic.
- NIFTI_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
NIFTI multi-file format.
- NIFTI_SLICE_ALT_DEC - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Alternating decreasing pattern of slice acquisition slice timing starts at slice_end
- NIFTI_SLICE_ALT_DEC2 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Alternating decreasing pattern of slice acquisition # 2 Slice timing starts at slice_end - 1
- NIFTI_SLICE_ALT_INC - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Alternating increasing pattern of slice acquisition Slice timing starts at slice_start
- NIFTI_SLICE_ALT_INC2 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Alternating increasing pattern of slice acquisition # 2 Slice timing starts at slice_start + 1
- NIFTI_SLICE_SEQ_DEC - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sequential decreasing pattern of slice acquisition
- NIFTI_SLICE_SEQ_INC - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sequential increasing pattern of slice acquisition
- NIFTI_TYPE_COMPLEX128 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
128 bit COMPLEX = 2 64 bit floats.
- NIFTI_TYPE_COMPLEX256 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
256 bit COMPLEX = 2 128 bit floats.
- NIFTI_TYPE_COMPLEX64 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
64 bit COMPLEX = 2 32 bit floats.
- NIFTI_TYPE_FLOAT128 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
128 bit floating point number - MIPAV cannot handle
- NIFTI_TYPE_FLOAT32 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Float (32 bits/voxel)
- NIFTI_TYPE_FLOAT64 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Double (64 bits/voxel)
- NIFTI_TYPE_INT16 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Signed short (16 bits/voxel)
- NIFTI_TYPE_INT32 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Signed int (32 bits/voxel)
- NIFTI_TYPE_INT64 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Signed long (64 bits/voxel)
- NIFTI_TYPE_INT8 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Signed char (8 bits/voxel)
- NIFTI_TYPE_RGB24 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
RGB triple (24 bits/voxel)
- NIFTI_TYPE_UINT16 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Unsigned short (16 bits/voxel)
- NIFTI_TYPE_UINT32 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Unsigned integer (32 bits/voxel)
- NIFTI_TYPE_UINT64 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Unsigned long (64 bits/voxel)
- NIFTI_TYPE_UINT8 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Unsigned character (8 bits/voxel)
- NIFTI_UNITS_HZ - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Temporal units are in Hertz
- NIFTI_UNITS_METER - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Spatial units are in meters
- NIFTI_UNITS_MICRON - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Spatial units are in micrometers
- NIFTI_UNITS_MM - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Spatial units are in millimeters
- NIFTI_UNITS_MSEC - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Temporal units are in milliseconds
- NIFTI_UNITS_PPM - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Temporal units are in parts per million
- NIFTI_UNITS_RADS - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Temporal units are in radians per second
- NIFTI_UNITS_SEC - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Temporal units are in seconds
- NIFTI_UNITS_UNKNOWN - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Unknown spatial or temporal units
- NIFTI_UNITS_USEC - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Temporal units are in microseconds
- NIFTI_XFORM_ALIGNED_ANAT - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Coordinates aligned to another file's or to anatomical "truth".
- NIFTI_XFORM_MNI_152 - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
MNI 152 normalized coordiantes.
- NIFTI_XFORM_SCANNER_ANAT - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Scanner based anatomical coordinates.
- NIFTI_XFORM_TALAIRACH - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Coordinates aligned to Talairach-Tournoux Atlas; (0,0,0) = AC, etc.
- NIFTI_XFORM_UNKNOWN - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Arbitrary coordinates.
- niftiExtension - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
- niftiFile - Variable in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Radio button to indicate that a nifti img file should be written out.
- niftiParExtraction(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- NIH - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- NikonType1MakernoteDescriptor(MetadataExtractor.NikonType1MakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDescriptor
-
- NikonType1MakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- NikonType1MakernoteTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType1MakernoteTest
-
- NikonType2MakernoteDescriptor(MetadataExtractor.NikonType2MakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDescriptor
-
- NikonType2MakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- NikonType2MakernoteTest1() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest1
-
- NikonType2MakernoteTest2() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest2
-
- nil - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- nim - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
this is the number of gradient quantities that is obtained by reading first line of gradient file
- nImage - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Number of slices in a 3D dataset.
- nImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Number of slices in a 3D dataset.
- nImage - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- nImage - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- nImage - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Number of slices in a 3D dataset.
- nImage - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- nImages - Variable in class gov.nih.mipav.model.file.FileRaw
-
DOCUMENT ME!
- nimCounter - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
this counter is used for version 4 of Par/Rec...nim is calculated from gradient file
- nimString - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
t dim
- nineButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- nint - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- nint - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- nintmx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
This is a port of the Fortran program discrete.for version 2B (December, 1990) written by Stephen Provencher, PhD.
- nInUse - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- nInUse - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- Niter - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- NIter() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptRes
-
Returns the number of iterations.
- nIterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Number of surface evolutions.
- nIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Number of surface evolutions to perform, by default set to 500.
- nIterationsTF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Field for inputting the number of surface evolutions to perform.
- nItr - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- nItr - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- nitref - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- nix - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- nix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- nix - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- niy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- niy - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- niy - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- niz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- niz - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- niz - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- nje - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- NJIND - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- njoins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- nkeys - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< detected keypoints.
- nL - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.Renum
-
- NL - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.LinesRenderer
-
- NL - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.TextRenderer
-
- NL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
platform-independent new-line string
- nl2itr(double[], int[], double[][], int, int, int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- nl2sno() - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- nl2sol() - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- NL2sol - Class in gov.nih.mipav.model.algorithms
-
This is a port of the source code nl2sol.f90 and the nl2sol_prb2.f90 extensive set of tests from FORTRAN into Java.
- NL2sol() - Constructor for class gov.nih.mipav.model.algorithms.NL2sol
-
- NL2sol(int, int, double[], int[], double[], boolean, int[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.NL2sol
-
- NL2SOL - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- NL2SOL - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- NL2SOL - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
- NL2SOL - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- NL2SOL - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
- NL2SOL - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- nl2solEngine - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- nlabels - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Number of feature values
- NLAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
DOCUMENT ME!
- nlammx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- NLConstrainedEngine - Class in gov.nih.mipav.model.algorithms
-
Display results of displaying exponential fitting parameters.
- NLConstrainedEngine() - Constructor for class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- NLConstrainedEngine(int, int) - Constructor for class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
NLConstrainedEngine - non-linear fit to a function.
- NLConstrainedEngineEP - Class in gov.nih.mipav.model.algorithms
-
Display results of displaying exponential fitting parameters.
- NLConstrainedEngineEP() - Constructor for class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- NLConstrainedEngineEP(int, int) - Constructor for class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
NLConstrainedEngine - non-linear fit to a function.
- nlcust_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- Nlevels - Variable in class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
- NLevels() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Get the number of levels.
- NLFittedFunction - Class in gov.nih.mipav.model.algorithms
-
- NLFittedFunction(int, int) - Constructor for class gov.nih.mipav.model.algorithms.NLFittedFunction
-
- NLMeans_filt2D - Class in gov.nih.mipav.model.algorithms
-
- NLMeans_filt2D() - Constructor for class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
AlgorithmBRISK - default constructor.
- NLMeans_filt2D(ModelImage, ModelImage, double, double, int, int, double) - Constructor for class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
- NLMeansAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- nlMeansFilterAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- nlnrAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- nlps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_state_t
-
next state if the next encoded symbol is the LPS
- NLS_MAXCOR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- NLT - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
B-Spline Nonlinear Transformation Files (*.nlt).
- nltest(String, boolean, int, int) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- nltFile - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
- nltName - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- NMatrixEntry<T> - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- NMatrixEntry(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NMatrixEntry
-
- NMatrixEntry(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NMatrixEntry
-
- nMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- NMAX - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- NMAXSQRT - Static variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- nmer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- NMI(int[][], int[][], int[][][], int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- NMI(int[], int[], int[][], int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- NMI(int[], int[], int[], int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- nMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- nMin - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- NMIN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- NMIN - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- nMinText - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- nmlen - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.depfun
-
- nmlen - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.dpfun
-
- nmlen - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
- nmlen - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.hppfun
-
- nmlen - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
- nmlen - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- nmlen - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
- nmlen - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
- nModel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- nModel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- NModels() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Get the number of models.
- nmps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_state_t
-
next state if the next encoded symbol is the MPS
- nms2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- nms2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- nms2e - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- nms2e - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- nms3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- nms3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- nms3e - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- nms3e - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- NMSimplex - Class in gov.nih.mipav.model.algorithms
-
Example
public class Objfunc implements Objfun
{
public double evalObjfun(double x[]){
return (100*(x[1]-x[0]*x[0])*(x[1]-x[0]*x[0])+(1.0-x[0])*(1.0-x[0]));
}
}
public class Constraint implements Constraints
{
double round2(double num, int precision)
{
double rnum;
int tnum;
rnum = num*Math.pow(10,precision);
tnum = (int)(rnum < 0 ?
- NMSimplex(double[], int, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.NMSimplex
-
- nmSupAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
DOCUMENT ME!
- nmSuppressionAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
DOCUMENT ME!
- nMTF - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- nmx - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- nmxc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- nmxc - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- nmxr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- nmxr - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- nmxType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- nmxType - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- nmy - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- nmz - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- nn_garrote(double[], double[], double, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- nn_garrote(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- nn_garrote(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- nn_garrote(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.SlantTransform
-
- nn_garrote(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- nn_garrote(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- nn_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
- NNInterpolation(float[], int, int, int, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- NNInterpolation(float[], int, int, int, double, double, double, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- NNInterpolation(ModelImage, int, int, int, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- NNInterpolationBool(boolean[][][], int, int, int, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- NNInterpolationLoc(ModelImage, int, int, int, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- nnlog - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
vector of dimension at least limit, containing the c subdivision levels of the subintervals, i.e. c iwork(i) = l
means that the subinterval c numbered i is of length abs(b-a)*2**(1-l)
- nnlog - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
vector of dimension at least limit, containing the c subdivision levels of the subintervals, i.e. c iwork(i) = l
means that the subinterval c numbered i is of length abs(b-a)*2**(1-l)
- nnres1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- nnres2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- no - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- NO - gov.nih.mipav.view.dialogs.ExitStatus
-
No button pressed
- NO_ANGLES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- NO_AXIS - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- NO_CANCEL - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Show progress bar without a cancel button.
- NO_CONVERGENCE - gov.nih.mipav.model.algorithms.CeresSolver.TerminationType
-
- NO_PROGRESS - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Do no show progress bar.
- NO_PUBLISHER - Static variable in class gov.nih.mipav.model.file.PrivateFileDicomKey
-
- NO_RAND_PART_A_STATE - Static variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- NO_RAND_PART_B_STATE - Static variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- NO_RAND_PART_C_STATE - Static variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- NO_RANDOM_NAMES - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- NO_RANGE - gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector.RangeType
-
No pixels will be excluded from a calculation.
- NO_SCALING - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- NO_SPARSE - gov.nih.mipav.model.algorithms.CeresSolver.SparseLinearAlgebraLibraryType
-
- NO_SPEEDUP - gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.SpeedUpLevel
-
- no_split_variables - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- NO_THRESHOLD - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Not using a tranfer function (grayscale).
- NO_TICKS - Static variable in interface gov.nih.mipav.model.algorithms.ContourPlot.TickMarkGenerator
-
- nobase - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- noCasesList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
List of patients need work.
2966L 3225L 6205L 6909R 9717L 9808R 3022L 8868R 5733L 8121L 8136L 9808L
7654R (wrong fem VOI, it's FAT GRE VOI) 2911L (miss patella) 5271R (miss
femur) 4983L (miss femur) 5026L (miss femur,need work) 9808R (miss femur)
1959L (femur VOI wrong)
- noCasesList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
List of patients need work.
2966L 3225L 6205L 6909R 9717L 9808R 3022L 8868R 5733L 8121L 8136L 9808L
7654R (wrong fem VOI, it's FAT GRE VOI) 2911L (miss patella) 5271R (miss
femur) 4983L (miss femur) 5026L (miss femur,need work) 9808R (miss femur)
1959L (femur VOI wrong)
- noCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- node - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RootInfo
-
- node - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- Node() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- NODE - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
The location of the sample is at the boundary between grid elements.
- NODE_DIMENSIONS - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- NODE_IMAGE - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- NODE_INFO - Static variable in class gov.nih.mipav.model.file.FileMincHDF
-
- NODE_MULTIPLE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- NodeAdjacencyFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- NodeAdjacencyFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NodeAdjacencyFunction
-
- NodeAlignedVolumeTextureRender - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Used to generate a scene node item that that represents the rendering of the volume using texture maps.
- NodeAlignedVolumeTextureRender(ModelImage, VolumeTexture) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Create the scene graph node for the rendering of the volume data, everything except the textures from the volume
data to be applied to the slices through the volume.
- nodeClicked(int, Node) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Called if the node is clicked.
- nodeColorChooser - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
ColorChooser for changing graph colors.
- nodeCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortedTreeNodes
-
- nodeData - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- nodeIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.TreeNodeData
-
- nodeList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- nodeN - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- nodes - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
- nodes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- nodes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- nodes - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tgt_tree_t
-
- nodes() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- nodes_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tgt_tree_t
-
- nodeType - Variable in class gov.nih.mipav.view.dialogs.ScriptTreeNode
-
- NodeVolumeTextureRender - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Used to generate a scene node item that that represents the rendering of the volume using texture maps.
- NodeVolumeTextureRender(ModelImage, VolumeTexture) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Create the scene graph node for the rendering of the volume data, everything except the textures from the volume
data to be applied to the slices through the volume.
- NodeVolumeTextureRender(ModelImage, VolumeTexture, int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Create the scene graph node for the rendering of the volume data, everything except the textures from the volume
data to be applied to the slices through the volume.
- NoEBlockRowOuterProduct(CeresSolver.BlockSparseMatrix, int, CeresSolver.BlockRandomAccessMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- NoEBlockRowsUpdate(CeresSolver.BlockSparseMatrix, double[], int, CeresSolver.BlockRandomAccessMatrix, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- noExt - Variable in class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
- nofun - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- noFutureDates - Variable in class gov.nih.mipav.view.JPanelEditDate
-
DOCUMENT ME!
- noise - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Noise used in Weiner filter.
- noise - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- noise - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- noise - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- noise - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- noise_factor_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.RandomizedFunctor
-
- NOISE_M2 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
Quadratic multiplicative noise.
- NOISE_M3 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
Cubic multiplicative noise.
- NOISE_MA2 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
The user can choose to use thresholding to exclude the background from any processing.
- noise_std - Variable in class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
- noise_std - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- noiseGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- NoiseLevel - Class in gov.nih.mipav.model.algorithms
-
- NoiseLevel(ModelImage, ModelImage, int, int, double, int) - Constructor for class gov.nih.mipav.model.algorithms.NoiseLevel
-
- NoiseLevel.rowComparator - Class in gov.nih.mipav.model.algorithms
-
- noiseMethod - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- noiseRemoval - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- noiseScale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- noiseScale - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- noiseScale - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- noiseStandardDeviation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
Noise standard deviation
- noiseStandardDeviation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- noiseStandardDeviation - Variable in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- noiseStandardDeviation - Variable in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- noiseStandardDeviation - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- noiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- noiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- noiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Should be set equal to the noise standard deviation
- noiseType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
NOISE_MA2 or NOISE_M2.
- noiseType - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Noise type.
- noiseType - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- noiseType - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- noisyProcess - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Noisy means notifying the user of stupid errors.
- noisyProcess - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Flag where true means notifying the user of stupid errors.
- NoJacobianUpdateCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.NoJacobianUpdateCostFunction
-
- noLogMax - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum image intensity with log magnitude operation removed. - TO BE MOVED
- noLogMin - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum image intensity with log magnitude operation removed. - TO BE MOVED
- noLogMinNonZero - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum image intensity with log magnitude operation removed. - TO BE MOVED
- noLSH - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- nomalRedlineBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Normal rotation red line branch group.
- nomalRedLineShape - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Nomal red line shape.
- nominalScale - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
-
< Base smoothing (smoothing of octave 0, level 0)
- NON_LINEAR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- NON_LINEAR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- non_uniform - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- None - gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.AnchorPosition
-
- NONE - gov.nih.mipav.model.file.FileInfoBase.UnitType
-
- NONE - gov.nih.mipav.view.dialogs.AlgorithmTreParams.Threshold
-
- NONE - Static variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
Scale type: no scaling.
- NONE - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
Centering information for this axis is either meaningless or unknown.
- NONE - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingHalftoningAlgorithm
-
No halftoning algorithm
- NONE - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- NONE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
No display:.
- NONE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
cursor default nevigation mode.
- NONE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Render mode values.
- NONE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- NONE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- NONE_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Do not perform triangle consistency checking - all counter clockwise or all clockwise.
- noneButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- noneButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- noneButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- noneButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- nonequalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- noneRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- noneRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- noneRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- noneRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- noneRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- nonExtremaSuppression - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
< max number of detected orientations.
- nonHelical - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmTiltCorrection
-
- nonHelical - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Use serialVersionUID for interoperability.
- nonHelicalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
- nonHelicalCorrection() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmTiltCorrection
-
- nonLinear - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
- nonLinear - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
- NONLINEAR_CONJUGATE_GRADIENT - gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionType
-
- nonlinear_conjugate_gradient_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- nonlinear_conjugate_gradient_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- nonlinear_conjugate_gradient_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionOptions
-
- nonlinear_conjugate_gradient_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- nonlinear_conjugate_gradient_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- nonlinear_conjugate_gradient_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- NONLINEAR_DAMPED_PENDULUM - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- NONLINEAR_DAMPED_PENDULUM - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- nonLinearCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
- NonlinearConjugateGradient(CeresSolver.NonlinearConjugateGradientType, double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.NonlinearConjugateGradient
-
- NonlinearConjugateGradientType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.NonlinearConjugateGradientType
-
- NonlinearConjugateGradientTypeToString(CeresSolver.NonlinearConjugateGradientType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- nonlinearFunction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- nonlinearFunction - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
- nonlinearFunctionGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- nonlinearFunctionPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- NonLinearGetSampleDepthAndWeight(OctNode, Point3D, float, float[], float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- NonLinearGetSampleWeight(OctNode, Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- NonLinearSplatOrientedPoint(Point3D, Point3D, int, float, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- NonLinearSplatOrientedPoint(OctNode, Point3D, Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- NonLinearUpdateWeightContribution(OctNode, Point3D, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- nonmax(double[][], double[][], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- nonmax(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- nonneg - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- NONNEGATIVE_GARROTE - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
- NONNEGATIVE_GARROTE - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- nonNegativity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- nonNegativity - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- nonNegativityCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- nonProstateImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
non-prostate image
- nonredundantButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- NONZERO_YMEAN - gov.nih.mipav.model.algorithms.libdt.Ymean_type
-
< assume observations are already zero-mean, i.e.
- nonZeroMax - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum nonzero intensity. - TO BE MOVED - redesigned
- nonZeroMaxB - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum nonzero image RGB. - TO BE MOVED - redesigned
- nonZeroMaxG - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum nonzero image RGB. - TO BE MOVED - redesigned
- nonZeroMaxR - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum nonzero image RGB. - TO BE MOVED - redesigned
- nonZeroMin - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum nonzero intensity. - TO BE MOVED - redesigned
- nonZeroMinB - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum nonzero image RGB. - TO BE MOVED - redesigned
- nonZeroMinG - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum nonzero image RGB. - TO BE MOVED - redesigned
- nonZeroMinR - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Minimum and maximum nonzero image RGB. - TO BE MOVED - redesigned
- NoOfBands - Variable in class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
- NoOpEvaluationCallback() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.NoOpEvaluationCallback
-
- NOP - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- noPastDates - Variable in class gov.nih.mipav.view.JPanelEditDate
-
DOCUMENT ME!
- nopx - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- noRandButton - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- noReadPrivateTags - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- NoResidualUpdateCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.NoResidualUpdateCostFunction
-
- norient - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- norient - Variable in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- norient - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- norm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMRIShadingCorrection
-
Normalization constant used to normalize the point force.
- norm - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
temporary image-data buffer to store (hi-pass)/(lo-pass) data.
- norm - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- norm() - Method in class gov.nih.mipav.model.algorithms.LSCM.Point
-
- norm() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- norm(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- norm(double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- norm(int) - Method in class gov.nih.mipav.model.algorithms.LSCM.Point
-
- norm(Vector3f) - Method in class gov.nih.mipav.model.file.FileAfni
-
Finds the normal to the vector.
- norm(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Finds the normal to the vector.
- Norm() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- Norm(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- Norm(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- Norm(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- NORM - Static variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
norm
- norm_A - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
146 Normal A coordinate.
- norm_code - Variable in enum gov.nih.mipav.model.algorithms.libdt.norm_type
-
- NORM_ILLEGAL - gov.nih.mipav.model.algorithms.libdt.norm_type
-
< each pixel is zero-mean in time, and all pixels have unit-variance.
- norm_inf(int, double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Tron
-
- NORM_L2 - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- NORM_NONE - gov.nih.mipav.model.algorithms.libdt.norm_type
-
- norm_R - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
142 Normal R coordinate.
- norm_S - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
150 Normal S coordinate.
- norm_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- norm_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< edge threshold.
- norm_thresh - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- norm_type(int) - Constructor for enum gov.nih.mipav.model.algorithms.libdt.norm_type
-
- NORM_ZM - gov.nih.mipav.model.algorithms.libdt.norm_type
-
< no normalization.
- NORM_ZMUV - gov.nih.mipav.model.algorithms.libdt.norm_type
-
< each pixel is zero-mean in time.
- Norm1() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the one-norm (L1) of the vector.
- norm2() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Two norm
- norm2(double[]) - Method in class gov.nih.mipav.model.algorithms.curfit
-
- norm2(libdt.Mat[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- Norm2() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the two-norm (L2) of the vector.
- Norm2() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- normal - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Holds normals in the mesh.
- normal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.DivergenceFunction
-
- normal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueAndNormalFunction
-
- normal() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- normal() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- normal() - Method in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- normal() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- Normal(int, CAAMPoint, CAAMPoint, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Finds the normal to the i'th point on the shape.
- NORMAL_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- NORMAL_MODE - Static variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- normalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- NormalDisplacement(int, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Displaces the i-th point along the normal.
- normalize - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- normalize() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
works depending on the extent of the image and the colourisation of the source image in question.
- normalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- normalize(int[]) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- normalize(int[]) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- normalize(int[]) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- normalize(int[]) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- normalize(Double, Double, Double) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- normalize(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Replace a vector by a unit-length vector in the same direction.
- normalize(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Replace a vector by a unit-length vector in the same direction.
- Normalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Normalizes the shape by translating it's center of gravity to origo and
scale by the reciprocal of the 2-norm.
- Normalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- Normalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- Normalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- Normalize() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- normalize_desc(SIFT3D.SIFT3D_Descriptor) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- normalize_histogram(float[], int, int) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- normalize_pi(AlgorithmGaussianMixtureModelEM.ClassSig) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- Normalize2() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Normalizes the vector to unit length, using the 2-norm.
- normalized - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- NORMALIZED_MUTUAL_INFORMATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- NORMALIZED_MUTUAL_INFORMATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- NORMALIZED_MUTUAL_INFORMATION_GPU - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- NORMALIZED_MUTUAL_INFORMATION_GPU - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
- NORMALIZED_MUTUAL_INFORMATION_GPU_LM - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- NORMALIZED_MUTUAL_INFORMATION_GPU_LM - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
- NORMALIZED_MUTUAL_INFORMATION_SMOOTHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- NORMALIZED_MUTUAL_INFORMATION_SMOOTHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- NORMALIZED_MUTUAL_INFORMATION_SMOOTHED_WGT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- NORMALIZED_MUTUAL_INFORMATION_SMOOTHED_WGT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- NORMALIZED_XCORRELATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- NORMALIZED_XCORRELATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- NORMALIZED_XCORRELATION_SINC - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- NORMALIZED_XCORRELATION_SINC - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- NORMALIZED_XCORRELATION_SMOOTHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- NORMALIZED_XCORRELATION_SMOOTHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- NORMALIZED_XCORRELATION_SMOOTHED_WGT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- NORMALIZED_XCORRELATION_SMOOTHED_WGT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- normalizedMutualInformation(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- normalizedMutualInformation(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- normalizedMutualInformation(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- normalizedMutualInformation(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- normalizedMutualInformationSmoothed(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- normalizedMutualInformationSmoothed(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- normalizedMutualInformationSmoothed(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- normalizedMutualInformationSmoothed(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- normalizedMutualInformationSmoothedWgt(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- normalizedMutualInformationSmoothedWgt(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- normalizedMutualInformationSmoothedWgt(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- normalizedMutualInformationSmoothedWgt(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- normalizedNoraml(Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- normalizedXCorrelation(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Normalized cross-correlation cost function.
- normalizedXCorrelation(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Normalized cross-correlation cost function.
- normalizedXCorrelation(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Normalized cross-correlation cost function.
- normalizedXCorrelation(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Normalized cross-correlation cost function.
- normalizedXCorrelationSinc(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Normalized cross-correlation cost function.
- normalizedXCorrelationSinc(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Normalized cross-correlation cost function.
- normalizedXCorrelationSmoothed(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Normalized cross-correlation cost function.
- normalizedXCorrelationSmoothed(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Normalized cross-correlation cost function.
- normalizedXCorrelationSmoothed(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Normalized cross-correlation cost function.
- normalizedXCorrelationSmoothed(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Normalized cross-correlation cost function.
- normalizedXCorrelationSmoothedWgt(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Normalized cross-correlation cost function with weighting.
- normalizedXCorrelationSmoothedWgt(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Normalized cross-correlation cost function with weighting.
- normalizedXCorrelationSmoothedWgt(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Normalized cross-correlation cost function with weighting.
- normalizedXCorrelationSmoothedWgt(TransMatrixd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Normalized cross-correlation cost function with weighting.
- normalizeQE(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- NormalizeRect() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- normalizeSafe() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector2f
-
Normalize this vector in place.
- normalizeSafe() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector3f
-
Normalize this vector in place.
- normalizeSafe(Vector2f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector2f
-
Sets the value of this vector to the normalization of the specified vector.
- normalizeSafe(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector3f
-
Sets the value of this vector to the normalization of the specified vector.
- normalizeSpaceNavValue(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
takes a value from the spaceNavigotorController and normalizes the value between -1 to 1
got formula from http://www.mathworks.com/matlabcentral/newsreader/view_thread/256540
- normalizeTable(double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- NormalizeTexture(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Normalizes a texture vector.
- NormalizeTextureVectors() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Iterative normalization of the texture samples.
- normalizeValue(double, double, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
got this formula from the video at http://www.youtube.com/watch?
- NormalKernel(float[], float[], int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- normalMovement() - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- NormalPrior(Matrix, Vector<Double>) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.NormalPrior
-
- NormalPriorTestResidualAtRandomPosition() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NormalPriorTestResidualAtRandomPositionNullJacobians() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- normals - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- Normals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.ASMData
-
- NormalVector() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PlyWriter.NormalVector
-
- normalVectors - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- NormalVectorX - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- NormalVectorY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- NormalVectorZ - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- normArray - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
- normcdf(double, double, double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- normcdfln(double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- normcdflogit(double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- normFactor - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- normFactor - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- normFactor - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- normFactor - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- normFactor - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- NormInf() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the infinity-norm (Linf) of the vector.
- normMutualInfoSmoothed - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
- normopt - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchOptions
-
< step size between patches (x, y, z).
- NORMX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- normXCorr - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
- NORMY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- NORMZ - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- nornd - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- nornd - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- noRoiOff - Variable in class gov.nih.mipav.model.file.FileJP2
-
- noRoiOn - Variable in class gov.nih.mipav.model.file.FileJP2
-
- north - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- North - gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.AnchorPosition
-
- noScalingD - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- noScalingDCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
- noSpatialCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- noSpeedUpButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- noSymm(int, float[]) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
no symmetry
- NOT_A_PLANE - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
If the points on the contour are not on the x,y, or z-plane.
- NOT_A_POINT - Variable in class gov.nih.mipav.model.structures.VOI
-
int indicating that no point was found.
- NOT_A_POINT - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
Used in places which usually remember an index into a point vector.
- not_equals(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- not_equals(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- not_equals(Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- NOT_FMAX(GenericPolygonClipper.edge_node[], int, int) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- NOT_RMAX(GenericPolygonClipper.edge_node[], int, int) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- NOT_SORTED - Static variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- NOT_SPECIFIED - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory.DisposalMethod
-
- noTargetTreatment - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Treatment information to be used if the user wants to burn without any target surface.
- notDir - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
If file is a DICOMDIR this is false *
- noteDate001 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- noteDate001String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- noteDate002 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- noteDate002String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- noteDate003 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- noteDate003String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- noteDate004 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- noteDate004String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- noteDate005 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- noteDate005String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- noteField - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
NoteField for providing a note about this marker.
- noteField - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
NoteField for providing a note about this marker.
- noteNumber001 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- noteNumber001String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- noteNumber002 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- noteNumber002String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- noteNumber003 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- noteNumber003String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- noteNumber004 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- noteNumber004String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- noteNumber005 - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- noteNumber005String - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- notEq(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- noteqauls(Box3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- notequals(CVisRect) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- notequals(CVisRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- notequals(CVisShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- notequals(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- notequals(Link) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- notequals(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- notequals(CoredPointIndex) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredPointIndex
-
- notEquals(UpdateFlags.EdgeSorter) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags.EdgeSorter
-
- notes - Variable in class gov.nih.mipav.model.file.FileBioRad
-
if 0 no notes are present if nonzero 96 byte notes follow after the image data at the end of the file.
- notes - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
Current notes for the node.
- notesCount - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- noteString - Variable in class gov.nih.mipav.model.structures.VOIText
-
The note stored in VOIText, has same font as textString
- noThreshold() - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
DOCUMENT ME!
- notifierList - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- notifyCallback(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Call the implementation of the callback's notification method, if a callback instance has been defined.
- notifyCallback(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Call the implementation of the callback's notification method, if a callback instance has been defined.
- notifyCallback(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Call the implementation of the callback's notification method, if a
callback instance has been defined.
- notifyImageDisplayListeners() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Used to notify all frames that display this image model need to be updated.
- notifyImageDisplayListeners() - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- notifyImageDisplayListeners(boolean, int, ModelRGB) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Deprecated.
- notifyImageDisplayListeners(boolean, ModelRGB) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Used to notify all frames that display this image model need to be updated for RGB (color) images.
- notifyImageDisplayListeners(ModelLUT, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Used to notify all frames that display this image model need to be updated.
- notifyImageDisplayListeners(ModelLUT, boolean, int, int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Used to notify all listeners that the image is to be redisplayed.
- notifyImageDisplayListeners_notTriFrame() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Used to notify all frames except the triImage frames that display this image model need to be updated.
- notifyImageExtentsListeners() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Used to notify all frames that display this image model that this image's extents have changed.
- notifyListeners(AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Used to notify all listeners that the algorithm has completed.
- notifyListenersOfScriptChange() - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Notifies any ScriptRecorderListeners of the current script text, after it has changed in some manner.
- notifyListenersOfScriptStatus() - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Notifies any ScriptRecorderListeners of the current recording status of the script recorder.
- notifyObservers(Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
- notifyObservers(Object) - Method in interface gov.nih.mipav.model.util.Observable
-
If this object has changed, as indicated by the hasChanged
method, then notify all of its observers and then call the
clearChanged method to indicate that this object has no
longer changed.
- notifyOfUpdate(ModelLUT, int) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Enable button to indicate image has changed and the histogram should be recalculated.
- notifyOfUpdate(ModelLUT, int) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Enable button to indicate image has changed and the histogram should be recalculated.
- notifyOfUpdate(ModelLUT, int) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Enable button to indicate image has changed and the histogram should be recalculated.
- notifyPaintListeners(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Tells images which are watching the paint region grow to update themselves.
- notifyPaintListeners(boolean, boolean, BitSet) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Tells images which are watching the paint region grow to update themselves.
- notifyPaintListeners(boolean, boolean, BitSet) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Tells images which are watching the paint region grow to update themselves.
- notifyPaintListeners(boolean, boolean, BitSet) - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Tells images which are watching the paint region grow to update themselves.
- notifyParentVOIProcess(boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Allows VOIBase's to set their parent's process flag without affecting other contours.
- notifyProcessLogs(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
called when an update is made to the output log, this method updates all the process logging JTextAreas.
- noTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- NOTREAD - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- NOTREAD - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- NOTWRITE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- NOTWRITE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- nout - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- noVOIsButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- np_bootstrap(double[], double[], double[], int, String) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- NParameters() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- NParameters() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Returns the number of principal parameters.
- NParametersOrg() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- NParametersOrg() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Returns the number of princal parameters before any truncation.
- nParams - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
Numbering of shading correction parameters.
- npbb_bounds(String) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- nperg2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- nPhase - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
738 Number of Phases.
- npixels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassData
-
- nPlanes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
number of image planes present.
- nPlanes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
number of image planes present.
- nPlanes - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- npm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- nPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- nPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- nPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- nPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
- nPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- nPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- nPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- NPoints() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Returns the total number of points in the mesh.
- NPoints() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
The number of shape points.
- NPoints() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
The number of points in each of shape.
- nPoints_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdge
-
- NPPQF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- NPPQG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- nPresent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
number of principal components displayed 10 or less than 10 if fewer exist.
- nprob - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- nProduct - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- nProperties - Variable in class gov.nih.mipav.model.file.FileTrackVis
-
Number of properties associated with each track
- nprunedmodes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- npt_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- NPTQ - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- NPTQ - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- NPTQ2 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- nptqText - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- npts - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
npts = npts2 - 2.
- npts - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
npts = npts2 - 2.
- nPts - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Number of interpolation points.
- nPts - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- nPts - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
integer scalar containing the number of data points.
- nPts - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
integer scalar containing the number of data points.
- nPts - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- nPts - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- npts2 - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
npts2 = breakPoints.length.
- npts2 - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
npts2 = breakPoints.length.
- nPyramid - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- nPyramid - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- nPyramid - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- nqm() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- NQM - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- nqm_value - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- NQPTS - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- NQUAD - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- nR - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- nr_class - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- nr_class - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear.GroupClassesReturn
-
- nr_class - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- nr_class - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- nr_class - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_model
-
- nr_feature - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- nr_fold - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- nr_fold - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- nr_fold - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- nr_weight - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- nr_weight - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- nreal - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- nrep - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- nres - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
DOCUMENT ME!
- nrorth - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- nRow - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
in 4D row and column numbers for z slices
- nRow - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- nRow - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- nRow - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- nRowCheckers - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Checkerboard display parameters.
- nrows - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- NRows() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- nrowsField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- NRRD - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Nearly raw raster data.
- NRRD_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Nearly raw raster data.
- nrrdDataType - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Does not tell if color or black and white.
- nrrdDimensions - Variable in class gov.nih.mipav.model.file.FileNRRD
-
May not be the same as MIPAV dimensions because in nrrd color is a dimension.
- nrrdLabels - Variable in class gov.nih.mipav.model.file.FileNRRD
-
nrrd axis names such as X, Y, or Z
- nrrdSizes - Variable in class gov.nih.mipav.model.file.FileNRRD
-
The number of samples along each nrrd axis
- nrrdSpaceUnits - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- nrrdUnits - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Units of measurement of nrrd axis
- nrstrt - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- nrx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- nry - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- nrz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- ns - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.Options
-
- ns - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true north-south direction calculated.
- ns - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true north-south direction calculated.
- ns - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ns - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ns - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- ns - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- nS - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- nS - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- Ns - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- Nsa - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- Nsa - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- nScalars - Variable in class gov.nih.mipav.model.file.FileTrackVis
-
Number of scalars for each datapoint
- nscale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- nscale - Variable in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
Phase preserving wavelet image denoising
MIT License
Copyright (c) 2018 Peter Kovesi
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
- nscale - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- nScale - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- nscales - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.Options
-
- nScales - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- nScales - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- nScales - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- nsCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- nsCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- nsearch - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.Options
-
- nseg - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- nseg - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- nsel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- NSHAPE - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- NShapes() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
The number of shapes in the collection.
- nsites - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- nSlices - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
The number of slices in the largest volume
- nSlices - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Number of slices in mode.
- nSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- nSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
- nSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Number of slices in original 3D image.
- nSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- nSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
number of slices in image
- nSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- nSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- nSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Number of slices in mode
- nspn - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- nspn - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- nStartFrameDec - Variable in class gov.nih.mipav.model.file.FileJP2
-
- nstep - Variable in class gov.nih.mipav.model.algorithms.CVODES_ASA.CVadjCheckPointRec
-
- nstlj - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- nsubclasses - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassSig
-
- nSV - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- nSV - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_model
-
- nSymbt - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- nt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- nt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
Copyright (c) 2013, Alceu Costa
Copyright (c) 2013, GBDI-ICMC-USP
All rights reserved.
- nT - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- Nt - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- NTail - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- nTestVOIs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
DOCUMENT ME!
- ntexcoord - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- NTextureSamples() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the number of samples in the texture model.
- NTextureSamples() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Returns the number of texture samples in the texture model.
- nTfine - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- nthreads - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
The number of threads will be used to execute the algorithm if multi-threading is enabled
- nthreads - Variable in class gov.nih.mipav.model.algorithms.registration.BSplineRegistrationBasef
-
The number of threads.
- nthreads - Static variable in class gov.nih.mipav.util.ThreadUtil
-
- nthreads - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
- nthresh - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- nthresh - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- Nti - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- Nti - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- nTImage - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Number of time sequences in a 4D dataset.
- nTImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Number of time sequences in a 4D dataset.
- nTImage - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Number of time sequences in a 4D dataset.
- nTimePeriods - Variable in class gov.nih.mipav.model.file.FileRaw
-
DOCUMENT ME!
- ntimestepsField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- NTriangles() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Returns the total number of triangles in the mesh.
- nTrueVOIs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
DOCUMENT ME!
- ntry - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ntx - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- ntx - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- NTX - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- nty - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- nty - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- ntype - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- ntz - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- ntz - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- nu - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- nu - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- NU_SVC - Static variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- NU_SVC - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- NU_SVR - Static variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- NU_SVR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- NUCLEAR_MEDICINE - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality nuclear medicine.
- NUCLEAR_MEDICINE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality nuclear medicine.
- nuclearRadius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
Radius of nuclear membrane in um.
- nufft_3d(double[][][][], double[][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- nufft3dauxmx(int, int, int, int, int[], double[], double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- NUL - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- NULL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- null_convert(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- null_convert(libjpeg.jpeg_decompress_struct, short[][][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- NULL_CONVERT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- null_space_rank - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceOptions
-
- nullChar - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
- NullJacobianFinalizer() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.NullJacobianFinalizer
-
- NullOutputStream() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.NullOutputStream
-
- NullOutputStreamTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.NullOutputStreamTest
-
- num - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.universe
-
- num - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Mesh
-
- num - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor_store
-
- num - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Slab
-
- num - Variable in class gov.nih.mipav.model.file.FileIO.LinkedNum
-
- num - Variable in enum gov.nih.mipav.view.Preferences.LogLevel
-
- num_abs_unstable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserStats
-
- num_active_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- num_additional_elements - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NUM_ARITH_TBLS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- NUM_BRUSHES_INTERNAL - Static variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
DOCUMENT ME!
- NUM_BUTTONS - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- num_cg_iters - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- num_col_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrixRandomMatrixOptions
-
- num_col_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions
-
- num_col_blocks_e() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- num_col_blocks_e_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- num_col_blocks_f() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- num_col_blocks_f_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- num_cols - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CRSMatrix
-
- num_cols - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrixRandomMatrixOptions
-
- num_cols - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- num_cols - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ExpectedEvaluation
-
- num_cols - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- num_cols - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm
-
- num_cols - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- num_cols - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.SparseMatrix
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobiPreconditioner
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDenseMatrix
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessMatrix
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CgnrLinearOperator
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearOperator
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Preconditioner
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- num_cols() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- num_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- num_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- num_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- num_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- num_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- num_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- num_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- num_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.RegularizationCheckingLinearSolver
-
- num_cols_e() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- num_cols_e_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- num_cols_f() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- num_cols_f_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- num_cols_no_snp - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- num_components - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- num_consecutive_invalid_steps_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- num_consecutive_nonmonotonic_steps_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
- num_cost_evaluations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- num_deaths - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- num_destructions_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DestructorCountingCostFunction
-
- num_devices - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.CL_data
-
- num_duplicates - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserStats
-
- num_effective_parameters - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_effective_parameters_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- num_effective_parameters_reduced - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_eliminate_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluatorOptions
-
- num_eliminate_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearLeastSquaresProblem
-
- num_eliminate_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTestOptions
-
- num_eliminate_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- num_eliminate_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- num_eliminate_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- num_eliminate_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- num_eliminate_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- num_eliminate_cols - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- num_extremal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserStats
-
- NUM_FIELDS - Static variable in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- num_filters - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.GSS_filters
-
- num_function_evaluations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
- num_gradient_evaluations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- num_gradient_evaluations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
- num_horz_regions - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- NUM_HUFF_TBLS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- num_independent_variables - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- num_inner_iteration_steps - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_intervals - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- num_intervals - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- num_intervalsText - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- NUM_INVISIBLE_BUTTONS - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
We want to be able to toggle the bounding box button, but don't want it to be part of any other button group.
- num_iter - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Ransac
-
- num_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverSummary
-
- num_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
- num_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategySummary
-
- NUM_ITERATIONS - Static variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Label used for the parameter indicating the number of iterations to perform in a script action.
- num_iters - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- num_jacobian_evaluations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_kp_levels - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Pyramid
-
- num_kp_levels_default - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- num_layers_to_decode - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
- num_levels - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Pyramid
-
- num_line_search_steps - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_linear_solver_threads - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- num_linear_solver_threads_given - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_linear_solver_threads_used - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_linear_solves - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_local_mem_banks - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- num_local_parameters - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- num_nonzero_values - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.SparseMatrix
-
- num_nonzeros - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- num_nonzeros - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- num_nonzeros() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- num_nonzeros() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- num_nonzeros() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- num_nonzeros() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- num_nonzeros() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- num_nonzeros_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- num_nonzeros_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- num_octaves - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Pyramid
-
- NUM_OVERSHOOT_BYTES - Static variable in interface gov.nih.mipav.model.file.BZip2Constants
-
- num_parameter_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_parameter_blocks_reduced - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_parameters - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- num_parameters - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionOptions
-
- num_parameters - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_parameters_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BFGS
-
- num_parameters_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverStateUpdatingCallback
-
- num_parameters_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- num_parameters_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- num_parameters_reduced - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- NUM_QUANT_TBLS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- num_random_splits - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- num_random_splits - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- num_random_splits - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- num_residual_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_residual_blocks_reduced - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_residual_evaluations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_residuals - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.AutoDiffCostFunction
-
- num_residuals - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- num_residuals - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_residuals() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- num_residuals_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- num_residuals_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- num_residuals_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- num_residuals_reduced - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_row_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrixRandomMatrixOptions
-
- num_row_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CompressedRowSparseMatrixRandomMatrixOptions
-
- num_row_blocks_e_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- num_rows - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CRSMatrix
-
- num_rows - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrixRandomMatrixOptions
-
- num_rows - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- num_rows - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ExpectedEvaluation
-
- num_rows - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- num_rows - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm
-
- num_rows - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- num_rows - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.SparseMatrix
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobiPreconditioner
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDenseMatrix
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessMatrix
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CgnrLinearOperator
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearOperator
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Preconditioner
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurJacobiPreconditioner
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrixPreconditionerWrapper
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- num_rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- num_rows_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDenseMatrix
-
- num_rows_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- num_rows_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- num_rows_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- num_rows_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- num_rows_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- num_rows_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- num_rows_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- num_rows_rounded - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- num_samples - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- num_samples - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- num_samples_at_risk - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- num_samples_oob - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- num_sols - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- num_sols - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- num_successful_steps - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- NUM_TESTS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- num_threads - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateOptions
-
- num_threads - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluatorOptions
-
- num_threads - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- num_threads - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- num_threads - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- num_threads - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- num_threads - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceOptions
-
- num_threads - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- num_threads - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- num_threads_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- num_threads_given - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_threads_used - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_timepoints - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- num_too_big - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserStats
-
- num_too_small - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserStats
-
- num_trees - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- num_trees - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- num_unstable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserStats
-
- num_unsuccessful_steps - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- num_values_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid1D
-
- num_values_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- num_variables - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- num_vert_regions - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- num_vertices - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_vertex_list
-
- num_vertices_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.CurveCostFunction
-
- num_warnings - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- num_workgroups - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelInfo
-
- num_workitems_per_workgroup - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelInfo
-
- num_xforms_per_workgroup - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelInfo
-
- numAperture - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- numAperture - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- numbands - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_resolution_t
-
- number_of_clusters - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- number_of_iterations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- numberCharacterClasses - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- numberChecked() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
This method finds the number of checked checkboxes in the list.
- numberClusters - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
- numberClusters - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- numberClusters - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- numberClusters - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- numberClusters - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- numberClusters - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- numberCoarseTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- numberCoarseTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- numberCoarseTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- numberColors - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- NumberComparator() - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.NumberComparator
-
- numberDicomSlices - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- numberE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- numberF - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- numberF - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- numberFeatures - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- numberFeatures - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- numberFeatures - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
number features.
- numberFeatures - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
number features being saved.
- numberFeatures - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- numberFeatures - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- numberField - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
this is the input for the user to enter what number they want to change to
- numberFiltersAdditional - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- numberFiltersAdditional - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- numberFOrig - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- numberFormat - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- numberFormat - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- numberFormatIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- numberGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- numberImages - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
- numberImages - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- numberImagesPerEWindow - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- numberIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
The number of iterations for calculating the deconvolution:
- numberLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- numberList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- numberList - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- numberOfA0Images - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- numberOfAverages - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- numberOfAverages - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- numberOfAverages - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- numberOfAverages - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- numberOfAveragesIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- numberOfAveragesPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- numberOfControlPoints - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- numberOfControlPoints - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- numberOfDiffusionDirections - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- numberOfDivisions - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- numberOfEchos - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- numberOfEchos - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- numberOfHistogramBins - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- numberOfImagesInMosaic - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
- numberOfIndentationsCurvature - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- numberOfIndentationsCurvatureDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- numberOfIndentationsHull - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- numberOfIndentationsHullDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- numberOfLevels - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- numberOfLevels - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- numberOfLevels - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- numberOfLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- numberOfNeighbors - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLLE
-
This is a port of the file lle.m created by Professor Lawrence K.
- numberOfNeighbors - Variable in class gov.nih.mipav.view.dialogs.JDialogLLE
-
- numberOfObjects - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- numberOfPhaseEncodingSteps - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- numberOfProjections - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- numberOfRepetitions - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- numberOfRequiredInputs - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- numberOfRequiredVOIsForScriptImages - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- numberOfSamplesDisplayed - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- numberOfSamplesPerDivision - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- numberOfSegments - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- numberOfSlices - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- numberOfSlices - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- numberOfSlices - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Used for 3D loop control.
- numberOfSlices - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Used for 3D loop control.
- numberOfStatistics - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
number of statistics in the list.
- numberPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- numberSlices - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- numberSlices - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- numberSlices - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- numberSlices - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- numberSlices - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- numberSlices - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- numberSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- numberSpaceSlices - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- numberV - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- numberV - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- numberVOrig - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- numberXField - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
resize x value.
- numberYField - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
resize y value.
- numBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
- numBins - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- numbits - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
number of bits needed for code at index.
- numBlank - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- numBlanks - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Number of blank images, to make up gap.
- numboundary - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- numbps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_band_t
-
- numbps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- numBurn - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Initialized the number of burning point.
- numBytes - Variable in enum gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
- numCANCEL - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- numCardioids - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughCardioid
-
- numCardioids - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
- numCardioidsFound - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
- numCardioidsText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
- numCells - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
46 Number of cells in det.
- numChannels - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- numChannels - Variable in class gov.nih.mipav.model.file.FileRaw
-
- numChannels - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
- numChecked - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- numChecked - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- numCircles - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- numCircles - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughCircle
-
- numCircles - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- numCircles - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
- numCirclesFound - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
- numCirclesText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- numCirclesText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
- numClasses - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSCDSegmentation
-
- numClasses - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
- numCoarseX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- numCoarseY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- numCoarseZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- numColors - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
- numColors - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- numColors - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- numColors() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ColorMap
-
- numColors() - Method in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
- numColors() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SimpleColorMap
-
- numComponents - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Number of components - 1 for black and white, 4 for color.
- numComponents - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- numComponents() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.GenericKey
-
- numcomps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_t
-
number of components in the image
- numcomps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
number of components in the image
- numcomps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tile_t
-
- numContours - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- numControlPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- numCoords - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
DOCUMENT ME!
- numCoords - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
DOCUMENT ME!
- numData - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- numData - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmDataset
-
< Pointer to data.
- numDcnK - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
70 Number of Decon kernels.
- NUMDER - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- numDestColors - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- numDigits(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- numDigits(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- numDimArray - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- numDirections - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- numDirections - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- numE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- numEdges() - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- NumEffectiveParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- NumEffectiveParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- NumEffectiveParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- NumEffectiveParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- NumEffectiveParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- numEigenvaluesFound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- NumElements() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- numEllipsePts - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- numEllipses - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- numEllipses - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- numEllipses - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- numEllipses - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
number of ellipses to be found
- numEllipsesFound - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- numEllipsesText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- numEllipsesText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
- numEmbeddedImages - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
The number of images inside of this file which are not the main displayable image (may be icon, RT planning, etc.
- numEquations - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DLMModel
-
- numEquations - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
- numEquations - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DLMModel
-
- numEquations - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
- NUMERIC - Static variable in class gov.nih.mipav.view.dialogs.JDialogPointArea.JTextFieldFilter
-
DOCUMENT ME!
- numeric_jacobians - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProbeResults
-
- NumericDiffCostFunction(CostFunctor, CeresSolver.NumericDiffMethodType, CeresSolver.Ownership, CeresSolver.NumericDiffOptions, int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- NumericDiffCostFunction(CostFunctor, CeresSolver.NumericDiffMethodType, CeresSolver.Ownership, CeresSolver.NumericDiffOptions, int, int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- NumericDiffCostFunctionEasyCaseCostFunctionCentralDifferences() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionEasyCaseCostFunctionForwardDifferences() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionEasyCaseCostFunctionRidders() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionEasyCaseFunctorCentralDifferences() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionEasyCaseFunctorCentralDifferencesAndDynamicNumResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionEasyCaseFunctorForwardDifferences() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionEasyCaseFunctorRidders() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionEigenRowMajorColMajorTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionExponentialCostFunctionRidders() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionExponentialFunctorRidders() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionPartiallyFilledResidualShouldFailEvaluation() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionRandomizedCostFunctionRidders() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionRandomizedFunctorRidders() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionTranscendentalCaseCostFunctionCentralDifferences() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionTranscendentalCaseCostFunctionForwardDifferences() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionTranscendentalCaseCostFunctionRidders() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionTranscendentalCaseFunctorCentralDifferences() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionTranscendentalCaseFunctorForwardDifferences() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffCostFunctionTranscendentalCaseFunctorRidders() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- NumericDiffMethodType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffMethodType
-
- NumericDiffOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffOptions
-
- numErosions - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The number of erosions to perform (and the number of levels of attenuation to do).
- numErosions - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
The number of levels of attenuation to perform (done through morphological erosion).
- numErosionsTF - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Number of erosions text field.
- numFaces() - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- numFeatureBufferSize - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- numFeatures - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- numFeaturesWithNumScales - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- numFitParam - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- numFrames - Variable in class gov.nih.mipav.model.file.FileInfoAvi
-
DOCUMENT ME!
- numgbits - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
number of guard bits
- numgbits - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
number of guard bits
- NumGrad(CDVector, CDVector, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
calculate nummerical gradient function usingdecided gradient calculation
method
input: x: parameter dFuncVal: function value in x
output: gradient: gradient
- NumGroups() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- numHorizontal - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- numHyperbolas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- numHyperbolas - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
number of hyperbolas to be found
- numHyperbolasFound - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- numHyperbolasText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
- numIm - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- numImages - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- numInvestigators - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- numIter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- numIterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
The number of iterations.
- numIterations - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
The number of iterations.
- numIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- numIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- numlayers - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
number of layers
- numlayers - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_info_v2_t
-
number of layers
- numleafsh - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tgt_tree_t
-
- numleafsv - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tgt_tree_t
-
- numlenbits - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- numLinesFound - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
- NumLocalParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
- numLongPairs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- numMatches - Variable in class gov.nih.mipav.model.algorithms.SIFT.FitMosaicModel
-
- numMinima - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
Number of minima from level 8 to test at level 4 when registering the original image against the flipped image.
- numMinima - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- numMinima - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Number of minima from level 8 to test at level 4.
- numMinima - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Number of minima from level 8 to test at level 4.
- numMinima - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Number of minima from level 8 to test at level 4.
- numMinima - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Number of minima from level 8 to test at level 4.
- numMinima - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Number of minima from level 8 to test at level 4.
- numMinima - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Number of minima from level 8 to test at level 4.
- numMinima - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Number of minima from level 8 to test at level 4.
- numMinima - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Number of minima from level 8 to test at level 4.
- numMinima - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Number of minima from level 8 to test at level 4.
- numMinima - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Number of minima from level 8 to test at level 4.
- numMinima - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- numMinima - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- numMinima - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- numMinima - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- numMinima - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- numMinima - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- numMinima - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- numMinima_def - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- numMinima_def - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- numMinima_def - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- numMinima_def - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- numMinima_def - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- numMinima_def - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- numMinText - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- numMinText - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- numMinText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- numMinText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- numMinText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- numMinText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- numNeighbor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- numNeighbor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed
-
- numNeighbor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLowerCompletion
-
- numNeighbor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- numNeighbor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- numNeighbor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- numNeighbor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindComponentLabelling
-
- numNeighbor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- numNeighbor - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- numNeighbor - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- numNeighbor - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- numNeighbor - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- numNeighbor - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- numNeighbor - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- numNeighbor - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- numNeighbor - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- numNeighbours - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
- numnewpasses - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- numnewpasses - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_seg_t
-
- numnodes - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tgt_tree_t
-
- numNonExtremaSuppressed - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- numNuisanceParam - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- numObjects - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.Trailer
-
- numOctaves - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
< resolution of each octave.
- numOfBins - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- numOfBins - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- numOfSlices - Variable in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- numOK - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- numOperators - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- numOperators - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
DOCUMENT ME!
- numOperators - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- numOrientations - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- numOrientations - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- numOrientations - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- numPages - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- numParabolas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
- numParabolas - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- numParabolasFound - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- numParabolasText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- numParam - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- NumParameterBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- NumParameterBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- NumParameterBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- NumParameterBlocksCostFunction(int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.NumParameterBlocksCostFunction
-
- numParameters - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DLMModel
-
- numParameters - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
- numParameters - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DLMModel
-
- numParameters - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
- numParameters - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.FirstOrderFunction
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.FreudensteinAndRothFunction
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellSingularFunction
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticFirstOrderFunction
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticFunction
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticTestFunction
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.Rosenbrock
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.Rosenbrock2
-
- NumParameters() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.diffGaussians
-
- numParts - Variable in enum gov.nih.mipav.view.Preferences.ComplexDisplay
-
How many parts the complex display has
- numpasses - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_seg_t
-
- numpix - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tile_t
-
- numpix - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- numPixels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
num pixels in threshold
- numPixels - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- numPixels - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Number of pixels in the array used in graphing intensity along the
boundary.
- numPixels - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
- numPixelsB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
num pixels in threshold
- numPixelsG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
num pixels in threshold
- numPixelsR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
num pixels in threshold
- numpocs - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
number of progression order changes
- numPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- numPoints() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- numProbes - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Since we have three type of probes, we set three the number of probes.
- numProp - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Number of scalars per track point and number of properties per track
- numPruningPixels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Number pixels to prune.
- numPruningPixels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Number pixels to prune.
- numPruningPixels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Number pixels to prune.
- numPruningPixels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Number pixels to prune.
- numPruningPixels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Number pixels to prune.
- numPruningPixels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Number pixels to prune.
- numPruningPixels - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Number of pixels to prune
- numReceivers - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
The number of NMR receivers.
- numReceivers - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- numrecs - Variable in class gov.nih.mipav.model.file.FileInfoMinc
-
DOCUMENT ME!
- numRegions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RegionList
-
- numRepIm - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Number of repeated images, to compensate for gap.
- numRepIm - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- NumResidualBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- NumResidualBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- NumResidualBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- NumResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- NumResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- NumResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- NumResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- NumResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- NumResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- NumResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- numresolutions - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_comp_t
-
number of resolution levels
- numresolutions - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
number of resolutions
- numresolutions - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
number of resolutions
- numresolutions - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- numSamples - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- numSamplesLeftOfCutpoint(Vector<Double>, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- numScalar - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Number of scalars per track point and number of properties per track
- NumScratchDoublesForEvaluate() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- numSegments() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- numsegs - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- numSets - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
counter for number of sets within file info.
- numShortPairs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- numSlice - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Number of slices in 3D image
- numSlices - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
numSlices
- numSlices - Variable in class gov.nih.mipav.model.file.FilePARREC
-
num slices per volume
- numSlices - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
num slices for result image *
- numSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreens
-
Number of slices in the image.
- numSlices - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
num slices for result image *
- numSlicesField - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- numSlicesInBetween - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
num slice in between voi1 and voi2
- numSlicesPerVolume - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
this is the number of image slices per volume
- numSlicesString - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
z dim
- numSlicesTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- numSpaceKinds - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Number of nrrd dimensions for which the kinds string equals "SPACE".
- numSpatialBins - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
< Number of neighbours.
- numSpheres - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- numSpheres - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- numSpheresText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- numStdDev - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
number of standard deviations used in thresholding
- numStdDevB - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
number of standard deviations used in thresholding
- numStdDevG - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
number of standard deviations used in thresholding
- numStdDevR - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
number of standard deviations used in thresholding
- numSteps - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- numSteps - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- numSubdivisions - Variable in class gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
- numSurfaceSegments - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- numThicknesses - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Number of axes for which thicknesses values found
- numTileSheets - Variable in class gov.nih.mipav.view.ViewUserInterface
-
if user selects to open images as tiles, then this counter tells us how many tile sheets there are*
- numTimes - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- numTimes - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- numTotalSlices - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- numTotalSlices - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- numTracks - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Number of tracts
- numTracks - Variable in class gov.nih.mipav.model.file.FileTrackVis
-
If 0 then # of tracks is unknown
- numTrials - Variable in class gov.nih.mipav.model.file.FileAfni
-
FUNC_BN_TYPE Binomial # Trials, Probability per trial.
- numTriangles() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- numTSlices - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- NumType(String, int, FileDicomTagInfo.VR...) - Constructor for enum gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
- numUnImg - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
216 - (internal use) Number of Unstored Images.
- numValues - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion.kFitting
-
- numValues - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgIterator
-
- numValues - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- numValues - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- numValues() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
- numValues() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
- numVariables - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- numVariables - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- numVariables - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- numVariablesField - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- numVariablesField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- numVariablesLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- numVariablesLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- numVertical - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- numVertices() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Glyph
-
- numVertices() - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- numVertsTable - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
- numVisibleSlices - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- numVOIAdded - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
- numVOIs - Variable in class gov.nih.mipav.model.file.FileVOI
-
The number of VOIs in the image.
- numVolumes - Variable in class gov.nih.mipav.model.file.DTIParameters
-
- numVolumes - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
- numVolumes - Variable in class gov.nih.mipav.model.file.FileImageXML
-
- numVolumes - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
numSlices
- numVolumes - Variable in class gov.nih.mipav.model.file.FilePARREC
-
num vols in 4d dataset
- numVolumes - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
number of Volumes in DWI Image
- numVolumesTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- numVoxels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- numXColors - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- numYColors - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- nvalues - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Marginal.
- NVector() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.NVector
-
- NVectorF - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson
-
- NVectorF() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- NVectorF(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- NVectorF(int, int, float[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- NVectorF(int, NVectorF) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- nvertices - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- nvgrid - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- nVOI - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
number of vois
- nVOI - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- nVOI - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- nVOI - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- nVOIs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- nVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
- nVolumes - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- nVox - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- nVoxels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- nVoxels - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
factor above median at which edge values are taken to zero.
- nw - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cdft_arg_t
-
- nwave - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- nwhich - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< List of entries to update
- nx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- nx - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- nx - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint_store
-
- nx - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor_store
-
- nx - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- nx - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- nx - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- Nx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- nXStart - Variable in class gov.nih.mipav.model.file.FileMRC
-
- ny - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- ny - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- ny - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint_store
-
- ny - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor_store
-
- ny - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- ny - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- ny - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- nYStart - Variable in class gov.nih.mipav.model.file.FileMRC
-
- nz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- nz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- nz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- nz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- nz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- nz - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
Number of components set to zero due to underflow nz[0] = 0, normal return nz[0] > 0, Last nz components of cy
set to zero due to underflow, cy[j] = 0.0 + i*0.0 for j = sequenceNumber - nz, ..., sequenceNumber-1 Length of
array passed in must be 1.
- nz - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
Number of components set to zero due to underflow nz[0] = 0, normal return nz[0] > 0, Last nz components of cy
set to zero due to underflow, cy[j] = 0.0 + i*0.0 for j = sequenceNumber - nz, ..., sequenceNumber-1 Length of
array passed in must be 1.
- nz - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- nz - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint_store
-
- nz - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor_store
-
- nz - Variable in class gov.nih.mipav.model.file.FileMRC
-
DOCUMENT ME!
- nz - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- nz - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- nZStart - Variable in class gov.nih.mipav.model.file.FileMRC
-
O
- o - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftKeypoint
-
- o - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint
-
- O - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- O - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< image height.
- O - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- o_cur - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< maximum level index.
- o_min - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< number of levels per octave.
- O7 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Oscillation 7
- OARTolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Array of tolerances for each dimension.
- OARTolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Array of tolerances for each dimension.
- OARTolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Array of tolerances for each dimension.
- oastDetector - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- OastDetector9_16 - Class in gov.nih.mipav.model.algorithms
-
oast9 - OAST, an optimal corner detector based on the
accelerated segment test for a 16 pixel mask
Copyright (c) 2010, Elmar Mair
All rights reserved.
- OastDetector9_16(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- OB - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- obj - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver.SolutionInfo
-
- obj - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver.SolutionInfo
-
- objBehaviorBG - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
The BranchGroup to which the standard behaviors are attached, zoom and rotate.
- objBoxFrameBG - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Parent of the whole box frame.
- objBoxSlices_BG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
BranchGroup[] containing the slice BOXES:
- objBoxSliceX - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Parent of the x slice.
- objBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- objClipSliceA_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping branch group.
- objClipSlices_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
root of all the clipping slices branch group.
- objClipSliceStatic_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static clipping branch group.
- objClipSliceStaticInv_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static clipping branch group.
- objClipSliceX_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Parent for each individual clip slices branch group, childen of objClipSlices_BG.
- objClipSliceXInv_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Parent of the -x, -y, -z clip slices branchgroup.
- objClipSliceY_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Parent for each individual clip slices branch group, childen of objClipSlices_BG.
- objClipSliceYInv_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Parent of the -x, -y, -z clip slices branchgroup.
- objClipSliceZ_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Parent for each individual clip slices branch group, childen of objClipSlices_BG.
- objClipSliceZInv_BG - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Parent of the -x, -y, -z clip slices branchgroup.
- object - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- objectBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- objectGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
- objective - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
< Solver epoch (iteration / num samples).
- Objective(String, String, String, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Objective
-
Creates a new Objective object.
- objectiveContrastMethod - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- objectiveID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.InstrumentRef
-
- objectiveID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Objective
-
- objectiveID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF
-
- objectiveID - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- objectiveImmersionType - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- objectiveMagnification - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- objectiveNA - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- objectiveName - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- objectiveName - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- objectiveNumericalAperature - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
The object numerical aperature, a property of the lens used to image the
sample:
- objectivePosition - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- objectives - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- objectiveSphereCorrection - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- objectiveSphereCorrection - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- objectiveTurretPosition - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- objectiveWorkingDistance - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- objectList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Vector list of AlgorithmInterface objects.
- ObjectLocation - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- objectPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- objectRefSize - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.Trailer
-
- ObjectRotation - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- objects - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Vector that holding the current available objects in the 2D image.
- objects - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Vector that holding the current available objects in the 2D image.
- objects - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Vector that holding the current available objects in the 3D image.
- objects - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.PropertyListResults
-
- objectType - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- objectXRotLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Object rotation parameter labels.
- objectYRotLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Object rotation parameter labels.
- objectZRotLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Object rotation parameter labels.
- objMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- objMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- objPlane_BG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
BranchGroup[] containing the image planes.
- objPlane_BG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
BranchGroup[] containing the image planes.
- objRootBG - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
The BranchGroup root of the scene managed by the simple universe.
- objTransSlices_TG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Group dictating how the XY plane is translated.
- objTransSlices_TG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Group dictating how the XY plane is translated.
- objTransSliceX - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Member variables used to display the rendered image on the texture-mapped polygon, stored so that they can be
updated as the render target image size is changed by the user-interface:.
- objTransXY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Transform group guiding how image is displayed.
- objTransXY - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Group dictating how the XY plane is translated.
- objXYPlane - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Parent of the XY plane image.
- obliquePlane - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- obliquePlane - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- obliquePlane - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
270.
- obliqueReconstruction - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- obs_allbits - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- Observable - Interface in gov.nih.mipav.model.util
-
An interface for the Observable
- observedCardiacCycles - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- observer - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- Observer - Interface in gov.nih.mipav.model.util
-
An interface for the Observer pattern.
- observerList - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
DOCUMENT ME!
- obtainBValuesDICOM() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method obtains the b-values for each volume from either the public tag or the private tag.
- obtainListFileDataParRec() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method obtains list file data mostly from the 1st slice
- octave - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
- octave - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< temporary pixel buffer.
- octave - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeyPoint
-
- octave_height - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< current octave width.
- octave_width - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< current DoG data.
- octaveFirstSubdivision - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
-
< Number of octave subdivisions
- octaveLastSubdivision - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
-
< Index of the first octave subdivision
- octaveResolution - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
< peak threshold for Laplacian scale selection.
- octaveResolution - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
-
< Index of the last octave
- octaves - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- octaves - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpace
-
< Geometry of the scale space
- octaves - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- OCTET - Static variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- OctNode - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- OctNode() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- Octree - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- Octree(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- ocularTotalMagnification - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- OD - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- OddMagicSquare(int[][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ODE - Class in gov.nih.mipav.model.algorithms
-
- ODE() - Constructor for class gov.nih.mipav.model.algorithms.ODE
-
Creates a new ODE object.
- ODE(int, double[], double[], double, double[], double[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.ODE
-
- ODEEP - Class in gov.nih.mipav.model.algorithms
-
- ODEEP() - Constructor for class gov.nih.mipav.model.algorithms.ODEEP
-
Creates a new ODEEP object.
- ODEEP(int, DoubleDouble[], DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, int[]) - Constructor for class gov.nih.mipav.model.algorithms.ODEEP
-
- ODEExtModel(int, double[], double[], double, double[], double[], int[], double[][], double[][], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEExtModel
-
- ODEHPModel(int, double[], double[], double, double[], double[], int[], double[][], double[][], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODEHPModel
-
- ODEModel(int, double[], double[], double, double[], double[], int[], double[][], double[][], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEModel
-
- ODERectModel(int, double[], double[], double, double[], double[], int[], double[][], double[][], double[], double[], double[][], double[]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODERectModel
-
- ODESTModel(int, double[], double[], double, double[], double[], int[], double[][], double[][], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODESTModel
-
- odither - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- ODITHER_CELLS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- ODITHER_MASK - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- ODITHER_SIZE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- oeFilter(double[][], double, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- oeFilter(double[][], double, double, int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- oeFilter(double[][], double, double, int, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- oeFilter(double[][], double, double, int, double, int, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
Compute unit L1- norm 2D filter.
- of(T1, T2) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Pair
-
syntactic sugar
- OF - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- off - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- OFF - gov.nih.mipav.view.Preferences.LogLevel
-
- offCentre - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
Off-centre translation
- offCentre - Variable in class gov.nih.mipav.model.file.FileInfoSPAR
-
Off-centre translations
- offGraphics - Variable in class gov.nih.mipav.view.ColorWheel
-
offscreen graphics handle
- offImage - Variable in class gov.nih.mipav.view.ColorWheel
-
offscreen image
- offscreenImage - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- offset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- offset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- offset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- offset - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.fftPadding
-
- offset - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraRBF
-
- offset - Static variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- offset - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
- offset - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Number of bytes to the start the image data - ie. the header length
- offset - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- offset - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Data.BinExternal
-
- offset - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Detector
-
- offset - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF.BinExternal
-
- offset - Variable in class gov.nih.mipav.model.file.FileVista
-
offset to image data
- offset - Variable in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- offset - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
The offset of the raw pixel data in the RAW file
- offset - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
The offset of the raw pixel data in the RAW file
- offset - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
The current offset of the raw pixel data in the RAW file
- offset - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- offset - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- offset - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileReader
-
The offset.
- offset - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
The offset.
- offset - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- offset - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RestrictedLaplacianMatrixFunction
-
- offset - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- offset(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- offset(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- offSet - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Optional offset (in mm) boundary around the segmented region
- OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.FocalLength
-
- OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.Panorama
-
- OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- offset1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- offset1 - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- offset2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- offsetAcquisitionParameters - Variable in class gov.nih.mipav.model.file.FileLSM
-
- offsetArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- offsetBleachRoi - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetChannelColors - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetChannelDataTypes - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetChannelFactors - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetChannelWavelength - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetCharacteristics - Variable in class gov.nih.mipav.model.file.FileLSM
-
- offsetConstant - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- offsetDistance - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
Distance between the 2 pixels in the pair - almost always 1.
- offsetDistance - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
Distance between the 2 pixels in the pair - almost always 1.
- offsetDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- offsetDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- offsetEventList - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetFreq - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
862 offset Frequency_Mag.
- offsetInputLut - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetIntSize - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.Trailer
-
- offsetKsData - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetLinescanOverlay - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- OffsetMask - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- offsetMeanOfRoisOverlay - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetOutputLut - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetPalette - Variable in class gov.nih.mipav.model.file.FileLSM
-
- offsetPositions - Variable in class gov.nih.mipav.model.file.FileLSM
-
- offsetr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.TData
-
- offsetRoi - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsets - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.TData
-
- offsetScanInformation - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- OffsetShift - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- OffsetShift1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- OffsetShift2 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- OffsetShift3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- offsetSp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- offsetStep - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- offsetTableOffset - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.Trailer
-
- offsetText - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- offsetTilePositions - Variable in class gov.nih.mipav.model.file.FileLSM
-
- offsetTimeStamps - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetTopolsolineOverlay - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetTopoProfileOverlay - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetUnmixParameters - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.TData
-
- offsetVectorOverlay - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- offsetX - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- offsetX - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Offset to draw the tick mark and value label.
- offsetX - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- offsetX - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- offsetX - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
Offset to draw the tick mark and value label.
- offsetY - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- offsetY - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
DOCUMENT ME!
- offsetY - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- offsetY - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- offsetY - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- offsetZ - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- oflow - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
D1MACH(2) = 2**(emax)*(1 - 2**(-doubleDigits)) = 2**1024*(1 - 2**-53) D1MACH(2) = Double.MAX_VALUE.
- oflow - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
D1MACH(2) = 2**(emax)*(1 - 2**(-doubleDigits)) = 2**1024*(1 - 2**-53) D1MACH(2) = Double.MAX_VALUE.
- oflow - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
emax = 1024, the largest exponent E for double precision, is I1MACH(16) D1MACH(2) = 2**(emax)*(1 -
2**(-doubleDigits)) = 2**1024*(1 - 2**-53) D1MACH(2) = Double.MAX_VALUE.
- ok - Variable in class gov.nih.mipav.model.algorithms.SIFT.FitMosaicModel
-
- ok - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Boolean indicating if the OK button has been pressed when JDialogCaptureScreen is launched through the report bug form
- ok - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- OK - gov.nih.mipav.view.dialogs.ExitStatus
-
Ok button pressed
- OK - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- OK - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- OK - Static variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- OK_FAIL - gov.nih.mipav.view.dialogs.ExitStatus
-
Ok button pressed and listener conditions failed
- OK_SUCCESS - gov.nih.mipav.view.dialogs.ExitStatus
-
Ok button pressed and listener conditions passed
- okAction() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Saves the list on the left side of the dialog, then closes the dialog.
- okAction() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
When an OK action occurs, it calls this method, which is included for subclasses to cause independant actions,
without needing to over-ride the action handler.
- OKAction() - Constructor for class gov.nih.mipav.view.dialogs.JDialogBase.OKAction
-
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Whether the window was closed through the user clicking the OK button (and not just killing the dialog).
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
DOCUMENT ME!
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogEnhancedDicomChoice
-
Whether the window was closed through the user clicking the OK button (and not just killing the dialog).
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
DOCUMENT ME!
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
DOCUMENT ME!
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
DOCUMENT ME!
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
DOCUMENT ME!
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
DOCUMENT ME!
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
DOCUMENT ME!
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogMetaImageChoice
-
DOCUMENT ME!
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogNIFTIChoice
-
DOCUMENT ME!
- okayPressed - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMincVersionChoice
-
Whether the window was closed through the user clicking the OK button (and not just killing the dialog).
- okayPressed - Variable in class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Indicator for OK button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogEnhancedDicomChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogMetaImageChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogNIFTIChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMincVersionChoice
-
Was the okay button pressed.
- okayPressed() - Method in class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Was the okay button pressed.
- OkBgListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLightBox.OkBgListener
-
- OkBorderListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnimate.OkBorderListener
-
- OkBorderListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogLightBox.OkBorderListener
-
- okButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.ChangeNameDialog
-
DOCUMENT ME!
- okButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.ChangeNameDialog
-
DOCUMENT ME!
- okButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
buttons *
- OKButton - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- OKButton - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
DOCUMENT ME!
- OKButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- OKButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
OK button is used on most dialogs.
- OKButton - Variable in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- OKButton - Variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
OK button is used on most dialogs.
- OKButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
OK button is used on most dialogs.
- OKButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- OKButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
OK button is used on most dialogs.
- OKCancelPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
ok/cancel panel of dialog
- OkColorListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnnotation.OkColorListener
-
- OkColorListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogGridOptions.OkColorListener
-
- OkColorListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStats.OkColorListener
-
- OkColorListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelLights.OkColorListener
-
- OkColorListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface.OkColorListener
-
- OkColorListener() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe.OkColorListener
-
- OkColorListener() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel.OkColorListener
-
- OkColorListener() - Constructor for class gov.nih.mipav.view.ViewJFrameImage.OkColorListener
-
- OkColorListener() - Constructor for class gov.nih.mipav.view.ViewJFrameTriImage.OkColorListener
-
- OkColorListener() - Constructor for class gov.nih.mipav.view.ViewJPanelHistoLUT.OkColorListener
-
- OkColorListener(JButton) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelClip.OkColorListener
-
Creates a new OkColorListener object.
- OkColorListener(JButton) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay.OkColorListener
-
Creates a new OkColorListener object.
- OkColorListener(JButton) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices.OkColorListener
-
Creates a new OkColorListener object.
- OkColorListener(JButton) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox.OkColorListener
-
Creates a new OkColorListener object.
- OkColorListener(JButton) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast.OkColorListener
-
Creates a new OkColorListener object.
- OkColorListener(JButton) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp.OkColorListener
-
Creates a new OkColorListener object.
- OkColorListener(JButton) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase.OkColorListener
-
Creates a new OkColorListener object.
- OkColorListener(JButton) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation.OkColorListener
-
Creates a new OkColorListener object.
- OkColorListener(JButton) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM.OkColorListener
-
Creates a new OkColorListener object.
- OkColorListener(JButton) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface.OkColorListener
-
Creates a new OkColorListener object.
- okFace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
OK Button has been pressed: Copy the blurred face volume and the original data into the ModelImage.
- okPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- OL - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- OLD_DETECTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Perform zero crossing detection using Matt's old method.
- OLD_DETECTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Perform zero crossing detection using Matt's old method.
- OLD_DETECTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
Perform zero crossing detection using Matt's old method.
- old_fLevel - Variable in class gov.nih.mipav.view.WindowLevel
-
- old_fWindow - Variable in class gov.nih.mipav.view.WindowLevel
-
- OLD_LAYOUT - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
A constant for which to test in the actionPerformed.
- oldBarMarker - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- oldBarMarker - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- oldBase - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PointerUpdater
-
- oldContour - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- oldEnd - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PointerUpdater
-
- olderVersion - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
True is image format < DICOM 3.0.
- oldFrame - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
Used to set old or new mode of registration.
- oldFrames - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
All the valid JFrames in the GUI.
- oldLayout - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- oldMember - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- oldMember - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- oldPanes - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Old glass panes to reset to after drawing is done.
- oldRubberband - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- oldSeedIntensity - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The intensity value to use to recalculate the possible seed points when switching from CLICK_POINT mode back to
AUTO_MODE.
- oldTdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveTSlices
-
Original T dimension of the image.
- oldTimeStepVolume - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Volume for each time step.
- oldUVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- oldValue - Variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- oldVersionGradientsAL - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
arraylist of gradients for version 4 of Par/Rec
- oldVVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- oldWVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- oldX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- oldX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- oldY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- oldY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- oldZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- oldZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- oldZdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Original Z dimension of the image.
- oldZdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlices
-
Original Z dimension of the image.
- oldZdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
Original Z dimension of the image.
- oldZdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Original Z dimension of the image.
- oldZdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Original Z dimension of the image.
- OLEDB_RECORDING_ENTRY_SCAN_MODE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- OlympusCameraSettingsMakernoteDescriptor(MetadataExtractor.OlympusCameraSettingsMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- OlympusCameraSettingsMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- OlympusCameraTypes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
These values are currently decoded only for Olympus models.
- OlympusEquipmentMakernoteDescriptor(MetadataExtractor.OlympusEquipmentMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- OlympusEquipmentMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- OlympusFocusInfoMakernoteDescriptor(MetadataExtractor.OlympusFocusInfoMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDescriptor
-
- OlympusFocusInfoMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- OlympusImageProcessingMakernoteDescriptor(MetadataExtractor.OlympusImageProcessingMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDescriptor
-
- OlympusImageProcessingMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- OlympusMakernoteDescriptor(MetadataExtractor.OlympusMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDescriptor
-
- OlympusMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- OlympusRawDevelopment2MakernoteDescriptor(MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- OlympusRawDevelopment2MakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- OlympusRawDevelopmentMakernoteDescriptor(MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDescriptor
-
- OlympusRawDevelopmentMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- OlympusRawInfoMakernoteDescriptor(MetadataExtractor.OlympusRawInfoMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDescriptor
-
- OlympusRawInfoMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- omax - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- omax - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- omax - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- ome - Variable in class gov.nih.mipav.model.file.FileInfoOME
-
DOCUMENT ME!
- OME() - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME
-
- omega - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
DOCUMENT ME!
- omega - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- omega - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
parameter in the integrand weight function
- omega - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
parameter in the integrand weight function
- omega0 - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- omega1 - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- omega2 - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- omegaLattice - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- omeName - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
- omin - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- omin - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- omin - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- omin - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- omin - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- on - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
A flag indicating whether or not the light is on.
- on_odd_row - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- on_odd_row - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- ONE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- ONE - Static variable in class gov.nih.mipav.util.DoubleDouble
-
- ONE_CLASS - Static variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- ONE_CLASS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- ONE_CLASS_Q - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- ONE_CLASS_Q(LIBSVM.svm_problem, LIBSVM.svm_parameter) - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.ONE_CLASS_Q
-
- ONE_CLASS_Q(svm_problem, svm_parameter) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.ONE_CLASS_Q
-
- ONE_HALF - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- oneBasedLUTCheckBoxImage - Variable in class gov.nih.mipav.view.JPanelHistogram
-
sets the minimum LUT value to (1,1,1)
- oneBasedLUTCheckBoxImageB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- oneButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- oneDButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- OnEdgeInsert(ModelSurfaceTopology.Edge, boolean, ModelSurfaceTopology.EdgeAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
An override of the base class ModelSurfaceTopology member function.
- OnEdgeInsert(ModelSurfaceTopology.Edge, boolean, ModelSurfaceTopology.EdgeAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Stub provided for overriding in derived classes.
- OnEdgeRemove(ModelSurfaceTopology.Edge, boolean, ModelSurfaceTopology.EdgeAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
An override of the base class ModelSurfaceTopology member function.
- OnEdgeRemove(ModelSurfaceTopology.Edge, boolean, ModelSurfaceTopology.EdgeAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Stub provided for overriding in derived classes.
- onef2(double, double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- oneFile - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
If true, header and data both stored in .mha file.
- oneFile - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
If true, header and data both stored in .nii file.
- oneFile - Variable in class gov.nih.mipav.model.file.FileNRRD
-
If true, header and data both stored in .nrrd file.
- oneFile - Variable in class gov.nih.mipav.view.dialogs.JDialogMetaImageChoice
-
DOCUMENT ME!
- oneFile - Variable in class gov.nih.mipav.view.dialogs.JDialogNIFTIChoice
-
DOCUMENT ME!
- oneFileStorage - Variable in class gov.nih.mipav.model.file.FileNRRD
-
True for .nrrd file with header and data in the same file.
- onefiveTField - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- oneJacobiIter - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- oneJacobiIter - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- oneJacobiIter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- onePixel(short[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Used by ultimate erode to simplify code a little.
- onePixel(short[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Used by ultimate erode to simplify code a little.
- onePixel(short[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Used by ultimate erode to simplify code a little.
- ONEPSM - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- oner(double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- oner(DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- oneSmooth - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- oneSmooth - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- oneSmooth - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- oneToZeroLUTAdjust() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
The purpose of this method is to adjust the zero index of the LUT from (1, 1, 1) to (0, 0, 0) The reason is so
image A and image B are not blended throughout by default.
- oneTransLimit - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- OneWayANOVA(double[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
One-way analysis of variance (ANOVA).
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.BoundingBoxEffect
-
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageReduceEffect
-
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MipavLightingEffect
-
This function is called in LoadPrograms once the shader programs are
created.
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ScaledTextureEffect
-
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePreRenderEffect
-
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
This function is called in LoadPrograms once the shader programs are
created.
- OnLoadPrograms(int, Program, Program, Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOIEffect
-
- ONLY_FILLS_ONE_OUTPUT_FUNCTOR - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- ONLY_REAL_ROOTS - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- ONLY_REAL_ROOTS - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- onlyActiveRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- OnlyFillsOneOutputFunctor() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.OnlyFillsOneOutputFunctor
-
- onlyFrequencyFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
- onlyFrequencyFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- onlyFrequencyFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- onlyInit - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- onlyWhitespace(String) - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- onOffCheckBox - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light turn on/off check box.
- onOffCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light turn on/off check box.
- onOffLabel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light turn on/off label.
- onOffLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light turn on/off label.
- onPostUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
An abstract function that allows derived classes to implement any
desired behavior after the PDE solver applies its update function.
- onPostUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Swap the buffers for the next pass of the PDE solver.
- onPostUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Swap the buffers for the next pass of the PDE solver.
- onPreUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
The override of LsePdeFilter2.onPreUpdate.
- onPreUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
The override of LsePdeFilter3.onPreUpdate.
- onPreUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic2
-
The function onPreUpdate was abstractly defined in the LsePdeFilter
base class.
- onPreUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic3
-
The function onPreUpdate was abstractly defined in the LsePdeFilter
base class.
- onPreUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
An abstract function that allows derived classes to implement any
desired behavior before the PDE solver applies its update function.
- onPreUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Recompute the boundary values when Neumann conditions are in effect.
- onPreUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Recompute the boundary values when Neumann conditions are in effect.
- onRight(ModelTriangleMesh, int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
onRight determines if a given point on a triangle, kSide, is to the right of or to the left of the vector
specified by the vertices kPrev - kPoint.
- onRight(TriMesh, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
onRight determines if a given point on a triangle, kSide, is to the right of or to the left of the vector
specified by the vertices kPrev - kPoint.
- onTop - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
for the use of the user-notifier.
- OnTriangleInsert(ModelSurfaceTopology.Triangle, boolean, ModelSurfaceTopology.TriangleAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
An override of the base class ModelSurfaceTopology member function.
- OnTriangleInsert(ModelSurfaceTopology.Triangle, boolean, ModelSurfaceTopology.TriangleAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Stub provided for overriding in derived classes.
- OnTriangleRemove(ModelSurfaceTopology.Triangle, boolean, ModelSurfaceTopology.TriangleAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
An override of the base class ModelSurfaceTopology member function.
- OnTriangleRemove(ModelSurfaceTopology.Triangle, boolean, ModelSurfaceTopology.TriangleAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Stub provided for overriding in derived classes.
- onUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
An abstract function for the update function of the PDE solver.
- onUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
Iterate over all the pixels and call onUpdate(x,y) for each pixel that
is not masked out.
- onUpdate() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
Iterate over all the voxels and call onUpdate(x,y,z) for each voxel
that is not masked out.
- onUpdate(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseCurvatureFlow2
-
The per-pixel update function of the PDE solver.
- onUpdate(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve2
-
The override of LsePdeFilter2.onUpdate.
- onUpdate(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseGaussianBlur2
-
The per-pixel update function of the PDE solver.
- onUpdate(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic2
-
The per-pixel update function of the PDE solver.
- onUpdate(int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter2
-
An abstract function that allows per-pixel processing by the PDE
solver.
- onUpdate(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseCurvatureFlow3
-
The per-voxel update function of the PDE solver.
- onUpdate(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseEvolve3
-
The override of LsePdeFilter3.onUpdate.
- onUpdate(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseGaussianBlur3
-
The per-voxel update function of the PDE solver.
- onUpdate(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseGradientAnisotropic3
-
The per-voxel update function of the PDE solver.
- onUpdate(int, int, int) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter3
-
An abstract function that allows per-voxel processing by the PDE
solver.
- OnVertexInsert(ModelSurfaceTopology.Vertex, boolean, ModelSurfaceTopology.VertexAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
An override of the base class ModelSurfaceTopology member function.
- OnVertexInsert(ModelSurfaceTopology.Vertex, boolean, ModelSurfaceTopology.VertexAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Stub provided for overriding in derived classes.
- OnVertexRemove(ModelSurfaceTopology.Vertex, boolean, ModelSurfaceTopology.VertexAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
An override of the base class ModelSurfaceTopology member function.
- OnVertexRemove(ModelSurfaceTopology.Vertex, boolean, ModelSurfaceTopology.VertexAttribute) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Stub provided for overriding in derived classes.
- oob_prediction - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictTreesInThread
-
- oob_sampleIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- oocPointIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- oocPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- op - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
278 - 4 bytes operator.
- op - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
- op - Variable in class gov.nih.mipav.view.ViewMenuBuilder
-
Menu dragging listener
- op(double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.ConvAndLinear
-
- op(double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.DiscretInteg
-
- opacity - Variable in class gov.nih.mipav.model.file.FileInfoImageXML.SurfaceLink
-
Opacity of surface.
- opacity - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- opacity - Variable in class gov.nih.mipav.model.structures.VOI
-
When in the solid display mode indicates how opaque the VOI should be.
- opacity - Variable in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Opacity number.
- opacity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
opacity of burn.
- opacity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- opacity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Burning point opacity.
- opacity - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImageShearWarp
-
opacity value used by the paint brush.
- opacity - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Opacity value of the paint color.
- opacity - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The opacity of the paint, between 0 (transparent) and 1 (opaque).
- Opacity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- Opacity - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- OPACITY - gov.nih.mipav.view.ViewJSlider.SliderType
-
- OPACITY - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
Opacity value used by the paint brush. value = 1.0 - opaque value =
0.25 - default (mostly see through)
- OPACITY - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Opacity value used by the paint brush. value = 1.0 - opaque value = 0.25 - default (mostly see through)
- OPACITY - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Opacity value used by the paint brush. value = 1.0 - opaque value = 0.25 - default (mostly see through)
- OPACITY - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Opacity value used by the paint brush. value = 1.0 - opaque value = 0.25 - default (mostly see through)
- OPACITY - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
Opacity value used by the paint brush. value = 1.0 - opaque value = 0.25 - default (mostly see through)
- OPACITY - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Opacity of paint.
- OPACITY - Static variable in class gov.nih.mipav.view.ViewJSlider
-
- OPACITY_COMPONENT_TAB_A - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- OPACITY_COMPONENT_TAB_A - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- OPACITY_COMPONENT_TAB_A_GM - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- OPACITY_COMPONENT_TAB_A_GM - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- OPACITY_COMPONENT_TAB_B - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- OPACITY_COMPONENT_TAB_B - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- OPACITY_COMPONENT_TAB_B_GM - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- OPACITY_COMPONENT_TAB_B_GM - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- OpacityA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- OpacityB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- opacityControlPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Opacity control panel.
- opacityControlPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Opacity control panel.
- opacityCount - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Opacity slider event count.
- opacityDialog - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- opacityEvents - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Opacity slider changed events, which is used by the mouse recorder.
- opacityFunctA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- opacityFunctB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- opacityFunction - Variable in class gov.nih.mipav.model.file.FileHistoLUT
-
The opacity transfer function, saved if non-null.
- OpacityGMA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- OpacityGMB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- OpacityGMOnA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- OpacityGMOnB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- opacityLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The opacity slider label.
- opacityLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
The opacity slider label.
- opacityLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The opacity slider label.
- opacityLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- opacityLabelX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
The opacity slider label.
- opacityLabelX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
The opacity slider label.
- opacityLabelY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
The opacity slider label.
- opacityLabelY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
The opacity slider label.
- opacityLabelZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
The opacity slider label.
- opacityLabelZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
The opacity slider label.
- opacityPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- opacitySlider - Variable in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Opacity slider.
- opacitySlider - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
The opacity slider for the selected VOI
- opacitySlider - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Opacity slider, not enabled yet.
- opacitySlider - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point surface opacity slider.
- opacitySlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Opacity slider, not enabled yet.
- opacitySlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Opacity sliders for when this renderer is displayed as a stand-alone app.
- opacitySliderLabels - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The labels below the opacity slider.
- opacitySliderLabels - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point surface opacity slider label.
- opacitySliderLabels - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The labels below the opacity slider.
- opacitySliderLabelsA - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
The labels below the opacity slider.
- opacitySliderLabelsA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
The labels below the opacity slider.
- opacitySliderLabelsB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
The labels below the opacity slider.
- opacitySliderLabelsB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
The labels below the opacity slider.
- opacitySliderLabelsGM_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- opacitySliderLabelsGM_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- opacitySliderLabelsGM_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- opacitySliderLabelsGM_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- opacitySliderLabelsX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
The labels below the opacity slider.
- opacitySliderLabelsX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
The labels below the opacity slider.
- opacitySliderLabelsY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
The labels below the opacity slider.
- opacitySliderLabelsY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
The labels below the opacity slider.
- opacitySliderLabelsZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
The labels below the opacity slider.
- opacitySliderLabelsZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
The labels below the opacity slider.
- opacitySliderX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Opacity slider, not enabled yet.
- opacitySliderX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Opacity slider, not enabled yet.
- opacitySliderY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Opacity slider, not enabled yet.
- opacitySliderY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Opacity slider, not enabled yet.
- opacitySliderZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Opacity slider, not enabled yet.
- opacitySliderZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Opacity slider, not enabled yet.
- opacityTransferFn - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- open() - Method in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
- open() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Open new DICOMDIR file, if successful then close current box
- open() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
Open an image based on the suffix of the file.
- open() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Open an image based on the suffix of the file.
- open() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Open an image based on the suffix of the file.
- open() - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Open an image based on the suffix of the file.
- open() - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Open an image based on the suffix of the file.
- open() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Opens the script as a text file and dumps it to the text area.
- open() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Open an image based on the suffix of the file.
- open(boolean) - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
Open an image based on the suffix of the file.
- open(ModelImage) - Method in class gov.nih.mipav.view.ViewOpenPaintUI
-
Open a VOI array based on the suffix of the file.
- open(ModelImage, boolean) - Method in class gov.nih.mipav.view.ViewOpenVOIUI
-
Open a VOI array based on the suffix of the file.
- open(String, boolean, FileInfoBase) - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
Open an image based on the suffix of the file.
- open(String, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Open (and connect) a socket.
- OPEN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- OPEN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- OPEN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- OPEN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- OPEN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- OPEN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- openAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- openAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- openAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- openAndRegisterNextVOI(String) - Method in class gov.nih.mipav.model.scripting.VOITable
-
Opens the next VOI for a given image from disk, then registers that VOI in the appropriate image.
- openAnnotations(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- openBrush(String) - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
Opens a brush stored on disk (.png)
- OpenCLAlgorithmBase - Class in gov.nih.mipav.model.algorithms
-
Abstract base class for implementing Algorithms in OpenCL.
- OpenCLAlgorithmBase() - Constructor for class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- OpenCLAlgorithmBase(ModelImage, ModelImage, boolean, long) - Constructor for class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- OpenCLAlgorithmConvolver - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
OpenCL Algorithm convolves a kernel with a 2D, 3D or 4D image.
- OpenCLAlgorithmConvolver() - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmConvolver
-
- OpenCLAlgorithmDeconvolution - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
OpenCL Algorithm computes Deconvolution for a 3D or 4D image.
- OpenCLAlgorithmDeconvolution(ModelImage, int, float[], boolean, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
New Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
- OpenCLAlgorithmDeconvolution(ModelImage, ModelImage, int, float[], boolean, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
New Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
- OpenCLAlgorithmDeconvolution(ModelImage, ModelImage, int, float[], boolean, int, boolean, long) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
New Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
- OpenCLAlgorithmDeconvolution(ModelImage, ModelImage, int, float[], float[], boolean, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
New Dual image Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
- OpenCLAlgorithmDeconvolution(ModelImage, ModelImage, ModelImage, int, float[], float[], boolean, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
New Dual image Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
- OpenCLAlgorithmDeconvolution(ModelImage, ModelImage, ModelImage, int, float[], float[], boolean, int, boolean, long) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
New Dual image Deconvolution algorithm, applies the deconvolution based on the
sigma values and iterations to the input image.
- OpenCLAlgorithmFFT - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- OpenCLAlgorithmFFT(ModelImage, int, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- OpenCLAlgorithmFFT(ModelImage, ModelImage, int, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- OpenCLAlgorithmGaussianBlur - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
OpenCL Algorithm computes the GaussianBlur of a 2D, 3D or 4D image.
- OpenCLAlgorithmGaussianBlur(ModelImage, float[], boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Creates a new AlgorithmGaussianBlur object.
- OpenCLAlgorithmGaussianBlur(ModelImage, ModelImage, float[], boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Constructor which sets the source and destination images, the minimum and maximum progress value.
- OpenCLAlgorithmGaussianBlur(ModelImage, ModelImage, float[], boolean, boolean, boolean, long) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Constructor which sets the source and destination images, the minimum and maximum progress value.
- OpenCLAlgorithmGradientMagnitude - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
OpenCL Algorithm computes the Gradient Magnitude of a 2D, 3D or 4D image.
- OpenCLAlgorithmGradientMagnitude(ModelImage, float[], boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Creates a new AlgorithmGradientMagnitude object.
- OpenCLAlgorithmGradientMagnitude(ModelImage, ModelImage, float[], boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Creates a new AlgorithmGradientMagnitude object.
- OpenCLAlgorithmLaplacian - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
OpenCL Algorithm computes the Laplacian of a 2D, 3D or 4D image.
- OpenCLAlgorithmLaplacian(ModelImage, float[], boolean, boolean, boolean, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Constructs a Laplacian algorithm object.
- OpenCLAlgorithmLaplacian(ModelImage, ModelImage, float[], boolean, boolean, boolean, float) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Constructs a Laplacian algorithm object.
- OpenCLAlgorithmMarchingCubes - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- OpenCLAlgorithmMarchingCubes(ModelImage, int, boolean, boolean, boolean, float, String) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
- OpenCLAlgorithmVolumeCrop - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
- OpenCLAlgorithmVolumeCrop(ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- OpenCLAlgorithmVolumeNormals - Class in gov.nih.mipav.model.algorithms.filters.OpenCL.filters
-
OpenCL Algorithm implementation calculate the volume normals of a 3D image.
- OpenCLAlgorithmVolumeNormals(ModelImage, long) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeNormals
-
Create an OpenCL Algorithm for calculating the volume normals.
- OpenCLAlgorithmVolumeNormals(ModelImage, GL3bc, TextureID) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeNormals
-
Create an OpenCL Algorithm for calculating the volume normals.
- OpenCLAlgorithmVolumeNormals(ModelImage, ModelImage, long) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeNormals
-
Create an OpenCL Algorithm for calculating the volume normals.
- OpenCLInfo - Class in gov.nih.mipav.model.algorithms
-
Queries the OpenCL Platforms and launches an information dialog with the OpenCL Platform and Device information:
- OpenCLInfo() - Constructor for class gov.nih.mipav.model.algorithms.OpenCLInfo
-
- openCLTypeLibrary - Static variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- openContour - Variable in class gov.nih.mipav.view.JPanelStatisticsList
-
Whether this list is dealing with open contours.
- openDicomMatrixFiles(boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Returns a dicomMatrix file objects, based on the user-selected filed from the
FileChooser dialog.
- openDirButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- OpEndPic - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- openDWIButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- openedFile - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- openedImageCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- opener - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- openFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- OpenFileInfo(String, String, boolean) - Constructor for class gov.nih.mipav.view.ViewUserInterface.OpenFileInfo
-
Creates a new OpenFileInfo object.
- openFiles(boolean) - Static method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
Returns an array of File objects, based on the user-selected files from the FileChooser dialog.
- openFiles(boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
Returns an array of File objects, based on the user-selected files from the FileChooser dialog.
- openFiles(boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileFiberTrack
-
- openFiles(boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FilePolyline_WM
-
Returns an array of File objects, based on the user-selected files from the FileChooser dialog.
- openFiles(boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Returns an array of File objects, based on the user-selected files from the
FileChooser dialog.
- openFiles(String, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PlyReader
-
- openFiles(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PlyWriter
-
- openForRead(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_FileIO
-
Open file input stream for file.
- openForWrite(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_FileIO
-
Open file output stream for the file.
- openFrame(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
ViewOpenFrameInterface function to create a new frame from a result image (jdialog produced)
- openFrame(ModelImage) - Method in interface gov.nih.mipav.view.ViewOpenFrameInterface
-
- openGVF() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
Open an image based on the suffix of the file.
- openIFD(FileInfoLSM) - Method in class gov.nih.mipav.model.file.FileLSM
-
Reads and decodes IFDs (Image File Directory).
- openIFD(FileInfoSTK) - Method in class gov.nih.mipav.model.file.FileSTK
-
Reads and decodes IFDs (Image File Directory).
- openIFD(FileInfoSVS) - Method in class gov.nih.mipav.model.file.FileSVS
-
Reads and decodes IFDs (Image File Directory).
- openIFD(FileInfoTiff) - Method in class gov.nih.mipav.model.file.FileTiff
-
Reads and decodes IFDs (Image File Directory).
- openImage() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- openImage(int, int, int, Dimension) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Will read a series of images and put them into a frame.
- openImageFrame() - Method in class gov.nih.mipav.view.ViewUserInterface
-
This method opens an image and puts it into a frame.
- openImageFrame(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Open an image and put it into a new frame, given the image file name.
- openImageFrame(String, boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Open an image or images and put it into a new frame, given the image file name.
- openImageFrame(String, String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Open an image and put it into a new frame, given the image file name.
- openImageNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- openImagesInTiledFormatBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
opens images in tiled format
- openImageWithFrame(ScriptImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptController
-
DOCUMENT ME!
- OPENING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- OPENING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- OPENING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- OPENING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
- OPENING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- OPENING_BY_RECONSTRUCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
- OPENING_STR - Static variable in class gov.nih.mipav.view.ViewUserInterface
-
String to use as the progress bar opening prefix.
- openingByReconstructionButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- openingMenuBar - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Menu bar.
- openingMenuBar - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Menu bar.
- openingMenuBar - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- openingMenuBar - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- openingMenuBar - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- openingMenuBar - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- openingMenuBar - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- openingMenuBar - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- openingMenuBar - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- openingMenuBar - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Initial menubar for MIPAV.
- openItem - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
Menu item that holds the list of paintbrushes to open (for editing)
- openJSON() - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
- openJSONImageFrames() - Method in class gov.nih.mipav.view.ViewUserInterface
-
- openLastImage(int) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Attempts to open an image from the quicklist.
- openLattice(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- openLUTFile(String) - Static method in class gov.nih.mipav.model.structures.ModelLUT
-
- openLUTFile(String) - Static method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
- openNeuriteCurves(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- openNeuriteCurves(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- openNew() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Opens Excel data (tab-delimited fields) into a new graph.
- openNewFrame(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
JDialogs that create result image's in new frame should call this method instead of creating a new ViewJFrameImage
- openNLT() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
- openOtherOrientation(ModelImage) - Method in class gov.nih.mipav.view.ViewOpenVOIUI
-
Open a VOI array based on the suffix of the file.
- openOtherOrientationVOI(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- openPaint(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- openPolylines(ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FilePolyline_WM
-
The action taken when the Add button is clicked in the JPanelSurface class.
- openSame() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Opens Excel data (tab-delimited fields) into this graph.
- openScriptFile(String) - Method in class gov.nih.mipav.model.scripting.ParserEngine
-
Open a script file and prepare a reader for it.
- openScriptString(String) - Method in class gov.nih.mipav.model.scripting.ParserEngine
-
Prepare a reader for a given string of script data.
- openSeparate - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- openSeparateOption - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- openStraightAnnotations(String, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- openStraightNeuriteCurves(ModelImage, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- openSurfaces(ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
The action taken when the Add button is clicked in the JPanelSurface class.
- openSurfaces(ModelImage, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
The action taken when the Add button is clicked in the JPanelSurface class.
- openSurfaces(ModelImage, int) - Static method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
The action taken when the Add button is clicked in the JPanelSurface class.
- openT2Button - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- openTag(String, boolean) - Method in class gov.nih.mipav.model.file.FileXML
-
Simple function to write an xml formatted open ended tag (value not included).
- openTag(String, Vector<FileXML.XMLAttributes>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Writes a closed tag where no value is specified, only attributes.
- openUDLUTandTransferFunct() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Open the user defined LUT table and transfer function.
- openURLInBrowser(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Opens a URL in the user's default browser
- openVOI(boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
This method opens an existing VOI.
- openVOI(boolean, boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method opens an existing VOI.
- openVOI(ModelImage, boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method opens an existing VOI.
- operating_system - Variable in class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
DOCUMENT ME!
- operating_system - Variable in class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Operating system type windows or Mac.
- OperatingSystem() - Constructor for enum gov.nih.mipav.view.Preferences.OperatingSystem
-
- operation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
operation type
- operation - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.showProgress
-
- operationType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
- operationType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- operationType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- operationType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- operationType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- operationType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
- operationType - Variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
operation type
- operator - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- operator - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceEdgeIterator
-
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceHalfedgeIterator
-
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceVertexIterator
-
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshEdgeIterator
-
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshFaceIterator
-
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshHalfEdgeIterator
-
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshVertexIterator
-
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexEdgeIterator
-
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexFaceIterator
-
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexInHalfedgeIterator
-
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexOutHalfedgeIterator
-
- operator() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexVertexIterator
-
- operator(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunctorExample
-
- operator(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CurveFittingFunctorExample
-
- operator(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ExponentialFunctor
-
- operator(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OnlyFillsOneOutputFunctor
-
- operator(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.RandomizedFunctor
-
- operator(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.EasyFunctor
-
- operator(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TranscendentalFunctor
-
- operator(int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.VertexTotalOrderingInteger
-
- operator(CeresSolver.IterationSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingIterationCallback
-
- operator(CeresSolver.IterationSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverStateUpdatingCallback
-
- operator(CeresSolver.IterationSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.IterationCallback
-
- operator(CeresSolver.IterationSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LoggingCallback
-
- operator(CeresSolver.IterationSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.StateUpdatingCallback
-
- operator(CeresSolver.IterationSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.AbortingIterationCallback
-
- operator(CeresSolver.IterationSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.FakeIterationCallback
-
- operator(CeresSolver.IterationSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.RememberingCallback
-
- operator(CeresSolver.IterationSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SucceedingIterationCallback
-
- operator(CeresSolver.TripletSparseMatrix, CeresSolver.TripletSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- operator(Vector<double[]>, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.MyCostFunctor
-
- operator(Vector<double[]>, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.MyThreeParameterCostFunctor
-
- Operator(int, String, String) - Constructor for enum gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- operatorplusplus() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceEdgeIterator
-
- operatorplusplus() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceHalfedgeIterator
-
- operatorplusplus() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceVertexIterator
-
- operatorplusplus() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshEdgeIterator
-
- operatorplusplus() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshFaceIterator
-
- operatorplusplus() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshHalfEdgeIterator
-
- operatorplusplus() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshVertexIterator
-
- operatorplusplus() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexEdgeIterator
-
- operatorplusplus() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexFaceIterator
-
- operatorplusplus() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexInHalfedgeIterator
-
- operatorplusplus() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexVertexIterator
-
- operatorplusplus(int) - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshEdgeIterator
-
- operatorplusplus(int) - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshFaceIterator
-
- operatorplusplus(int) - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshVertexIterator
-
- opj_alloc_tile_component_data(FileJPEG2000.opj_tcd_tilecomp_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_bio_bytein(FileJPEG2000.opj_bio_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_bio_getbit(FileJPEG2000.opj_bio_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_bio_inalign(FileJPEG2000.opj_bio_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_bio_init_dec(FileJPEG2000.opj_bio_t, byte[], int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_bio_numbytes(FileJPEG2000.opj_bio_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_bio_read(FileJPEG2000.opj_bio_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_bio_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_bio_t
-
- opj_c13318 - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_CLRSPC_CMYK - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_CLRSPC_EYCC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_CLRSPC_GRAY - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_CLRSPC_SRGB - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_CLRSPC_SYCC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_codec_private_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_codec_private_t
-
- opj_codestream_index_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_codestream_index_t
-
- opj_copy_image_header(FileJPEG2000.opj_image_t, FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Copy only header of image and its component header (no data are copied)
if dest image have data, they will be freed
- opj_cp_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
- OPJ_CPRL - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_D_(int[], int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_DD_(int[], int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dec_memory_marker_handler_t(int, int, int) - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_dec_memory_marker_handler_t
-
- opj_decoding_param_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_decoding_param_t
-
- opj_decompress_main() - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
OPJ_DECOMPRESS MAIN
- opj_decompress_parameters() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
- opj_destroy_codec(FileJPEG2000.opj_codec_private_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_DISABLE_TPSOT_FIX - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dparameters_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
- opj_dwt_alpha - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_beta - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_decode(FileJPEG2000.opj_tcd_tilecomp_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_decode_1(FileJPEG2000.opj_dwt_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_DWT_DECODE_1 - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_decode_1_(int[], int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_decode_real(FileJPEG2000.opj_tcd_tilecomp_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_decode_tile(FileJPEG2000.opj_tcd_tilecomp_t, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_delta - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_gamma - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_getgain(int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_DWT_GETGAIN - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_getgain_real(int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_DWT_GETGAIN_REAL - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_interleave_h(FileJPEG2000.opj_dwt_t, int[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_interleave_v(FileJPEG2000.opj_dwt_t, int[], int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_dwt_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_dwt_t
-
- opj_encoding_param_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_encoding_param_t
-
- opj_get_all_encoding_parameters(FileJPEG2000.opj_image_t, FileJPEG2000.opj_cp_t, int, int[], int[], int[], int[], int[], int[], int[], int[], int[][]) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Gets the encoding parameters needed to update the coding parameters and
all the pocs.
- OPJ_HAVE_LIBLCMS1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_HAVE_LIBLCMS2 - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_image_cmptparm_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_image_cmptparm_t
-
- opj_image_comp_header_update(FileJPEG2000.opj_image_t, FileJPEG2000.opj_cp_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Updates the components characteristics of the image from the coding
parameters.
- opj_image_comp_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
- opj_image_create(int, FileJPEG2000.opj_image_cmptparm_t[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_image_destroy(FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_image_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_image_t
-
- opj_int_clamp(int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Clamp an integer inside an interval
- opj_j2k_add_mct(FileJPEG2000.opj_tcp_t, FileJPEG2000.opj_image_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_add_mhmarker(FileJPEG2000.opj_codestream_index_t, int, long, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_add_tlmarker(int, FileJPEG2000.opj_codestream_index_t, int, long, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_allocate_tile_element_cstr_index(FileJPEG2000.opj_j2k_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_copy_default_tcp_and_create_tcd(FileJPEG2000.opj_j2k_t, RandomAccessFile) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_copy_tile_component_parameters(FileJPEG2000.opj_j2k_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_copy_tile_quantization_parameters(FileJPEG2000.opj_j2k_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_dec_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_dec_t
-
- opj_j2k_decode(FileJPEG2000.opj_j2k_t, RandomAccessFile, FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_decode_one_tile(FileJPEG2000.opj_j2k_t, RandomAccessFile) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_decode_tile(FileJPEG2000.opj_j2k_t, int, byte[], int[], int, RandomAccessFile) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_decode_tiles(FileJPEG2000.opj_j2k_t, RandomAccessFile) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_J2K_DEFAULT_CBLK_DATA_SIZE - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_J2K_DEFAULT_HEADER_SIZE - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Number of maximum sub-band linked to number of resolution level
- OPJ_J2K_DEFAULT_NB_SEGS - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Maximum allowed size for filenames
- opj_j2k_get_marker_handler(int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_get_sot_values(byte[], int, int[], int[], int[], int[]) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_get_tile(FileJPEG2000.opj_j2k_t, RandomAccessFile, FileJPEG2000.opj_image_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_J2K_MAXBANDS - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Number of maximum resolution level authorized
- OPJ_J2K_MAXRLVLS - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Maximum number of packet parts expected by JPWL: increase at your will
- OPJ_J2K_MCC_DEFAULT_NB_RECORDS - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_J2K_MCT_DEFAULT_NB_RECORDS - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_merge_ppm(FileJPEG2000.opj_cp_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Merges all PPM markers read (Packed headers, main header)
- opj_j2k_merge_ppt(FileJPEG2000.opj_tcp_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Merges all PPT markers read (Packed packet headers, tile-part header)
- opj_j2k_need_nb_tile_parts_correction(RandomAccessFile, int, boolean[]) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_cbd(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a CBD marker (Component bit depth definition)
- OPJ_J2K_READ_CBD - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_coc(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a COC marker (Coding Style Component)
- OPJ_J2K_READ_COC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_cod(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a COD marker (Coding Styke defaults)
- OPJ_J2K_READ_COD - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_com(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a COM marker (comments)
- OPJ_J2K_READ_COM - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_crg(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a CRG marker (Component registration)
- OPJ_J2K_READ_CRG - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_float32_to_float(byte[], float[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_float32_to_int32(byte[], int[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_float64_to_float(byte[], float[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_float64_to_int32(byte[], int[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_header_procedure(FileJPEG2000.opj_j2k_t, RandomAccessFile) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_int16_to_float(byte[], float[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_int16_to_int32(byte[], int[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_int32_to_float(byte[], float[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_int32_to_int32(byte[], int[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_mcc(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a MCC marker (Multiple Component Collection)
- OPJ_J2K_READ_MCC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_mco(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a MCO marker (Multiple Component Transform Ordering)
- OPJ_J2K_READ_MCO - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_mct(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a MCT marker (Multiple Component Transform)
- OPJ_J2K_READ_MCT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_plm(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a PLM marker (Packet length, main header marker)
- OPJ_J2K_READ_PLM - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_plt(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a PLT marker (Packet length, tile-part header)
- OPJ_J2K_READ_PLT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_poc(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a POC marker (Progression Order Change)
- OPJ_J2K_READ_POC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_ppm(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a PPM marker (Packed packet headers, main header)
- OPJ_J2K_READ_PPM - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_ppt(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a PPT marker (Packed packet headers, tile-part header)
- OPJ_J2K_READ_PPT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_qcc(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a QCC marker (Quantization component)
- OPJ_J2K_READ_QCC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_qcd(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a QCD marker (Quantization defaults)
- OPJ_J2K_READ_QCD - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_rgn(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a RGN marker (Region Of Interest)
- OPJ_J2K_READ_RGN - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_siz(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a SIZ marker (image and tile size)
- OPJ_J2K_READ_SIZ - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_soc(FileJPEG2000.opj_j2k_t, RandomAccessFile) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a SOC marker (Start of Codestream)
- opj_j2k_read_sod(FileJPEG2000.opj_j2k_t, RandomAccessFile) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_sot(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_J2K_READ_SOT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< INSEC marker value (Part 8: Secure JPEG 2000)
- opj_j2k_read_SPCod_SPCoc(FileJPEG2000.opj_j2k_t, int, byte[], int, int[]) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_SQcd_SQcc(FileJPEG2000.opj_j2k_t, int, byte[], int, int[]) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a SQcd or SQcc element, i.e. the quantization values of a band in
the QCD or QCC.
- opj_j2k_read_tile_header(FileJPEG2000.opj_j2k_t, int[], int[], int[], int[], int[], int[], int[], boolean[], RandomAccessFile) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_tlm(FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reads a TLM marker (Tile Length Marker)
- OPJ_J2K_READ_TLM - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_read_unk(FileJPEG2000.opj_j2k_t, RandomAccessFile, int[]) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_set_decode_area(FileJPEG2000.opj_j2k_t, FileJPEG2000.opj_image_t, int, int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_j2k_t
-
- opj_j2k_tcp_data_destroy(FileJPEG2000.opj_tcp_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_tcp_destroy(FileJPEG2000.opj_tcp_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_j2k_update_image_data(FileJPEG2000.opj_tcd_t, byte[], int[], FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_K - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_LRCP - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_lrintf(float) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_marker_info_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_marker_info_t
-
- opj_mct_data_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_mct_data_t
-
- opj_mct_decode(int[], int[], int[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mct_decode_custom(float[], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mct_decode_real(int[], int[], int[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mqc_bytein(FileJPEG2000.opj_mqc_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mqc_create() - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mqc_decode(FileJPEG2000.opj_mqc_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mqc_destroy(FileJPEG2000.opj_mqc_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mqc_init_dec(FileJPEG2000.opj_mqc_t, byte[], int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mqc_lpsexchange(FileJPEG2000.opj_mqc_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mqc_mpsexchange(FileJPEG2000.opj_mqc_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mqc_renormd(FileJPEG2000.opj_mqc_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mqc_resetstates(FileJPEG2000.opj_mqc_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mqc_setcurctx(FileJPEG2000.opj_mqc_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Set the current context used for coding/decoding
- opj_mqc_setstate(FileJPEG2000.opj_mqc_t, int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_mqc_state_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_state_t
-
- opj_mqc_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_t
-
- opj_packet_info_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_packet_info_t
-
- OPJ_PATH_LEN - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_PCRL - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_pi_comp_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_comp_t
-
- opj_pi_create(FileJPEG2000.opj_image_t, FileJPEG2000.opj_cp_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_pi_create_decode(FileJPEG2000.opj_image_t, FileJPEG2000.opj_cp_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_pi_destroy(FileJPEG2000.opj_pi_iterator_t[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_pi_iterator_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
- opj_pi_next(FileJPEG2000.opj_pi_iterator_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_pi_next_cprl(FileJPEG2000.opj_pi_iterator_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_pi_next_lrcp(FileJPEG2000.opj_pi_iterator_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_pi_next_pcrl(FileJPEG2000.opj_pi_iterator_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_pi_next_rlcp(FileJPEG2000.opj_pi_iterator_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_pi_next_rpcl(FileJPEG2000.opj_pi_iterator_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_pi_resolution_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_resolution_t
-
- opj_pi_update_decode_not_poc(FileJPEG2000.opj_pi_iterator_t[], FileJPEG2000.opj_tcp_t, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_pi_update_decode_poc(FileJPEG2000.opj_pi_iterator_t[], FileJPEG2000.opj_tcp_t, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_poc_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
- opj_ppx() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_ppx
-
- OPJ_PREC_MODE_CLIP - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_PREC_MODE_SCALE - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_precision() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_precision
-
- opj_procedure_list_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_procedure_list_t
-
- OPJ_PROG_UNKNOWN - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
Supported codec
- opj_raw_decode(FileJPEG2000.opj_raw_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_raw_init_dec(FileJPEG2000.opj_raw_t, byte[], int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_raw_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_raw_t
-
- OPJ_RLCP - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_RPCL - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- OPJ_S_(int[], int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_set_default_decoder_parameters(FileJPEG2000.opj_dparameters_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_simple_mcc_decorrelation_data_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_simple_mcc_decorrelation_data_t
-
- OPJ_SS_(int[], int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_stepsize_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_stepsize_t
-
- opj_stream_create_default_file_stream(String, boolean) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_stream_get_number_byte_left(RandomAccessFile) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_allocate_buffers(FileJPEG2000.opj_t1_t, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_create(boolean) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Creates a new Tier 1 handle and initializes the look-up tables of the
Tier-1 coder/decoder
- opj_t1_dec_clnpass(FileJPEG2000.opj_t1_t, int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_clnpass_step(FileJPEG2000.opj_t1_t, short[], int, int[], int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_clnpass_step_partial(FileJPEG2000.opj_t1_t, short[], int, int[], int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_clnpass_step_vsc(FileJPEG2000.opj_t1_t, short[], int, int[], int, int, int, boolean, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_refpass_mqc(FileJPEG2000.opj_t1_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_refpass_mqc_vsc(FileJPEG2000.opj_t1_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_refpass_raw(FileJPEG2000.opj_t1_t, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_refpass_step_mqc(FileJPEG2000.opj_t1_t, short[], int, int[], int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_refpass_step_mqc_vsc(FileJPEG2000.opj_t1_t, short[], int, int[], int, int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_refpass_step_raw(FileJPEG2000.opj_t1_t, short[], int, int[], int, int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_sigpass_mqc(FileJPEG2000.opj_t1_t, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_sigpass_mqc_vsc(FileJPEG2000.opj_t1_t, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_sigpass_raw(FileJPEG2000.opj_t1_t, int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_sigpass_step_mqc(FileJPEG2000.opj_t1_t, short[], int, int[], int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_sigpass_step_mqc_vsc(FileJPEG2000.opj_t1_t, short[], int, int[], int, int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_dec_sigpass_step_raw(FileJPEG2000.opj_t1_t, short[], int, int[], int, int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_decode_cblk(FileJPEG2000.opj_t1_t, FileJPEG2000.opj_tcd_cblk_dec_t, int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_decode_cblks(FileJPEG2000.opj_t1_t, FileJPEG2000.opj_tcd_tilecomp_t, FileJPEG2000.opj_tccp_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_destroy(FileJPEG2000.opj_t1_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Destroys a previously created T1 handle
- opj_t1_getctxno_mag(int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_getctxno_sc(int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_getctxno_zc(int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_getspb(int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t1_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
- opj_t1_updateflags(short[], int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t2_create(FileJPEG2000.opj_image_t, FileJPEG2000.opj_cp_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Creates a Tier 2 handle
- opj_t2_decode_packet(FileJPEG2000.opj_t2_t, FileJPEG2000.opj_tcd_tile_t, FileJPEG2000.opj_tcp_t, FileJPEG2000.opj_pi_iterator_t, byte[], int[], int[], int, FileJPEG2000.opj_packet_info_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t2_decode_packets(FileJPEG2000.opj_t2_t, int, FileJPEG2000.opj_tcd_tile_t, byte[], int[], int, FileJPEG2000.opj_codestream_index_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t2_destroy(FileJPEG2000.opj_t2_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t2_getcommacode(FileJPEG2000.opj_bio_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t2_getnumpasses(FileJPEG2000.opj_bio_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t2_init_seg(FileJPEG2000.opj_tcd_cblk_dec_t, int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t2_read_packet_data(FileJPEG2000.opj_t2_t, FileJPEG2000.opj_tcd_tile_t, FileJPEG2000.opj_pi_iterator_t, byte[], int[], int[], int, FileJPEG2000.opj_packet_info_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t2_read_packet_header(FileJPEG2000.opj_t2_t, FileJPEG2000.opj_tcd_tile_t, FileJPEG2000.opj_tcp_t, FileJPEG2000.opj_pi_iterator_t, boolean[], byte[], int[], int[], int, FileJPEG2000.opj_packet_info_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t2_skip_packet(FileJPEG2000.opj_t2_t, FileJPEG2000.opj_tcd_tile_t, FileJPEG2000.opj_tcp_t, FileJPEG2000.opj_pi_iterator_t, byte[], int[], int[], int, FileJPEG2000.opj_packet_info_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t2_skip_packet_data(FileJPEG2000.opj_t2_t, FileJPEG2000.opj_tcd_tile_t, FileJPEG2000.opj_pi_iterator_t, int[], int, FileJPEG2000.opj_packet_info_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_t2_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_t2_t
-
- opj_tccp_info_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
- opj_tccp_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
- opj_tcd_band_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_band_t
-
- opj_tcd_cblk_dec_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- opj_tcd_code_block_dec_allocate(FileJPEG2000.opj_tcd_cblk_dec_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Allocates memory for a decoding code block.
- opj_tcd_create(boolean) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Create a new TCD handle
- opj_tcd_dc_level_shift_decode(FileJPEG2000.opj_tcd_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tcd_decode_tile(FileJPEG2000.opj_tcd_t, byte[], int, int, FileJPEG2000.opj_codestream_index_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tcd_dwt_decode(FileJPEG2000.opj_tcd_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tcd_get_decoded_tile_size(FileJPEG2000.opj_tcd_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tcd_image_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_image_t
-
- opj_tcd_init(FileJPEG2000.opj_tcd_t, FileJPEG2000.opj_image_t, FileJPEG2000.opj_cp_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tcd_init_decode_tile(FileJPEG2000.opj_tcd_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tcd_init_tile(FileJPEG2000.opj_tcd_t, int, boolean, float) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tcd_mct_decode(FileJPEG2000.opj_tcd_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tcd_precinct_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_precinct_t
-
- opj_tcd_resolution_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_resolution_t
-
- opj_tcd_seg_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_seg_t
-
- opj_tcd_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
- opj_tcd_t1_decode(FileJPEG2000.opj_tcd_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tcd_t2_decode(FileJPEG2000.opj_tcd_t, byte[], int[], int, FileJPEG2000.opj_codestream_index_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tcd_tile_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tile_t
-
- opj_tcd_tilecomp_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- opj_tcd_update_tile_data(FileJPEG2000.opj_tcd_t, byte[], int[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tcp_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
- opj_tgt_create(int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tgt_decode(FileJPEG2000.opj_bio_t, FileJPEG2000.opj_tgt_tree_t, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tgt_destroy(FileJPEG2000.opj_tgt_tree_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tgt_init(FileJPEG2000.opj_tgt_tree_t, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Reinitialises a tag-tree from an existing one.
- opj_tgt_node_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tgt_node_t
-
- opj_tgt_reset(FileJPEG2000.opj_tgt_tree_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_tgt_tree_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tgt_tree_t
-
- opj_tile_index_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_index_t
-
- opj_tile_info_v2_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_info_v2_t
-
- opj_tp_index_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_tp_index_t
-
- opj_uint_floorlog2(int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
Get logarithm of an integer and round downwards
- opj_v4_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_v4_t
-
- opj_v4dwt_decode(FileJPEG2000.opj_v4dwt_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_v4dwt_decode_step1(FileJPEG2000.opj_v4_t[], int, int, float) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_v4dwt_decode_step2(FileJPEG2000.opj_v4_t[], int, FileJPEG2000.opj_v4_t[], int, int, int, float) - Static method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_v4dwt_interleave_h(FileJPEG2000.opj_v4dwt_t, float[], int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_v4dwt_interleave_v(FileJPEG2000.opj_v4dwt_t, float[], int, int, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_v4dwt_t() - Constructor for class gov.nih.mipav.model.file.FileJPEG2000.opj_v4dwt_t
-
- OPJ_VALIDATION_SIZE - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- opj_version() - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- oppositeOrient(int) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Helper method that returns the opposite axis orientation of the one sent in; that is, R2L for L2R, A2P for P2A,
etc.
- OPQUD1(int, int, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- opt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexMix
-
- opt - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- opt_corner_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- opt_num_kp_levels - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- opt_peak_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- opt_sigma_n - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- opt_sigma0 - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- OPTICAL - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Optical Files (for ophthalmology) (*.avi; *.bmp; *.jpg; *.pict; *.tif; *.tiff; *.img; *.psd).
- opticalAxisAvrg - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF
-
- OPTIMAL(GenericPolygonClipper.gpc_vertex[], int, int) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- optimal_point - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
- optimal1Label - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- optimal2Label - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- optimalCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- optimalPath - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
The optimal path.
- optimalPath - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
The optimal path.
- OptimizationMovie(Vector<CAAMOptState>, ModelSimpleImage, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
Wrapper to visualizes the iterations during a model search.
- OptimizationMovie(Vector<CAAMOptState>, ModelSimpleImage, String, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
Visualizes the iterations during a model search.
- optimize(Vectornd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Finds optimal point for the given initial point
- optimizeAtGridPoints() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- optimizeBlock(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Optimize several initial points.
- optimizeContours(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- optimizeContours(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- OptimizedAdjPPFT(double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- OptimizedPPFT(double[][][], double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- optimizedtansum(double[][], double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- OptimizeModel(ModelSimpleImage, CAAMShape, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Wrapper for model optimization.
- OptimizeModel(ModelSimpleImage, CAAMShape, CDVector, int, Vector<CAAMOptState>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Wrapper for model optimization
- OptimizeModel(ModelSimpleImage, CAAMShape, CDVector, int, Vector<CAAMOptState>, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Performs AAM optimization of a shape containing initial pose and a set of
model parameters (c).
- OptimizeModel(ModelSimpleImage, CAAMShape, CDVector, int, Vector<CAAMOptState>, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Performs AAM optimization of a shape containing initial pose using a
model pyramid.
- OptimizeModelByFineTuning(ModelSimpleImage, CAAMShape, CDVector, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Perform general-purpose optimization of the AAM using simulated
annealing, conjugate gradient, steepest descent, BGFS or pattern search.
- optionalPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
panels
- optionalStructuresLocation - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- optionFlag - Static variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
Flag to the java-runtime (as used in the XML-files) to indicate a memory-option.
- optionPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- options - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- options - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolver
-
- options - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirection
-
- options - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Preconditioner
-
- options - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- options - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Solver
-
- options - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategy
-
- options - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- options - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- options() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearch
-
- options() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- options() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Display Options dialog for all mipav options (including image specific options) to allow user to adjust display
in one place.
- Options() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmASM.Options
-
- Options() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Preconditioner.Options
-
- Options() - Constructor for class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline.Options
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ConjugateGradientsSolver
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DynamicNumericDiffCostFunction
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterativeSchurComplementSolver
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolver
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearch
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Minimizer
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurJacobiPreconditioner
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.Fixture
-
- options_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- options_conc - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- optionsDialog - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Dialog that allows changes to the amount of heap requested of the system by the java Virtual Machine for MIPAV
during java start.
- optionsGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
button group for radio buttons
- optionsGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
button group for radio buttons
- optionsGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
button group for radio buttons
- optionsPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- optionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
DOCUMENT ME!
- optionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
- optionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
DOCUMENT ME!
- optionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- optionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- optionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- optionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- optionsPanel - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Dialog to turn bounding box of surface renderer on and off, and to change the color of the frame.
- optionsPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- optionsSet - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- optionsValid - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- OptMethod() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
name of optimization method
- OptMethod() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeCG
-
Optimization method type
- OptMethod() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizePS
-
Optimization function type.
- OptMethod() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
optimizaitn method type.
- OptMethod() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSD
-
type of optimization method.
- optovar - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- OptResults(CDVector, CAAMShape, double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
Returns the optimisation results as c, shape and error.
- opType - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Operation to be performed on the images (i.e.
- opType - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Operation to be performed on the images (i.e.
- opType - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
operation type....for now set to ADD
- opType - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- opType - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- or - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- or - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- or - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
radio button
- or - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- OR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
operation constants
- OR - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- OralCntrstAgent - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
89 - 17 bytes.
- orange - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- orange - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
DOCUMENT ME!
- orange - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- orangeColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- ORBIT - Static variable in interface gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehaviorCallback
-
DOCUMENT ME!
- orButton - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- order - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- order - Variable in class gov.nih.mipav.model.algorithms.CVODES_ASA.CVadjCheckPointRec
-
- order - Variable in class gov.nih.mipav.model.algorithms.CVODES.PolynomialDataMemRec
-
- order - Variable in class gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
- order - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- order - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- order(Vector<Double>, boolean) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- orderAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
DOCUMENT ME!
- orderArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- OrderedGroups() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- OrderedGroupsEmptyOrderedGroupBehavesCorrectly() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- OrderIndpTransparencyEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
This class sets up the final pass in rendering multiple semi-transparent surfaces.
- OrderIndpTransparencyEffect(Texture[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.OrderIndpTransparencyEffect
-
Creates a new OrderIndpTransparencyEffect for the final rendering pass.
- OrderingToGroupSizes(CeresSolver.OrderedGroups<double[]>, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- orders - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- orders - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- orders - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- orderSubMenu - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- orderSubMenu - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- Orf - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
Olympus camera raw.
- organ - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
- orgDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- orgImDTIparams - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMosaicToSlices
-
- orgResol - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Distance per pixel in millimeters.
- orgResol - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- orgResol - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- orgSlice - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- orgSlice - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- orgVol - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- orgVol - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- orgXDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- orgXDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- ori - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Axes orientations.
- ORI_A2P_TYPE - gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
Axis orientation Anterior to Posterior.
- ORI_A2P_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Axis orientation Anterior to Posterior.
- ori_grad_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- ORI_I2S_TYPE - gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
Axis orientation Inferior to Superior.
- ORI_I2S_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Axis orientation Inferior to Superior.
- ORI_L2R_TYPE - gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
Axis orientation Left to Right.
- ORI_L2R_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Axis orientation Left to Right.
- ori_ncolumnsField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- ori_nrowsField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- ORI_P2A_TYPE - gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
Axis orientation Posterior to Anterior.
- ORI_P2A_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Axis orientation Posterior to Anterior.
- ORI_R2L_TYPE - gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
Axis orientation Right to Left.
- ORI_R2L_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Axis orientation Right to Left.
- ori_rad_fctr - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- ORI_S2I_TYPE - gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
Axis orientation Superior to Inferior.
- ORI_S2I_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Axis orientation Superior to Inferior.
- ori_sig_fctr - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- ORI_UNKNOWN_TYPE - gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
Axis orientation unknown.
- ORI_UNKNOWN_TYPE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Axis orientation unknown.
- orient - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDicomOrder
-
Axis orientations of image.
- orient - Variable in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- orient - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- orient - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- orient - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- orient - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
DOCUMENT ME!
- orient - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- orient - Variable in class gov.nih.mipav.model.file.FileMagnetomVision
-
DOCUMENT ME!
- orient - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- orient - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- orient - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- orient - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Orientations of the three axes.
- orientA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- orientA_inv - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- orientation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- orientation - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- orientation - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
Orientation - SAGITTAL, CORONAL, AXIAL.
- orientation - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- orientation - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- orientation - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Orientation value corresponding to not the value of AlgorithmBrainExtractor.SAT_COR
- orientation - Variable in class gov.nih.mipav.view.PatientSlice
-
This indicates which of the Patient coordinate systems the slice represents: either AXIAL, SAGITTAL, CORONAL, or
UNKNOWN.
- orientation - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Orientation of this component image.
- orientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- orientation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- orientation - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
orientation of the slice, may be AXIAL, CORONAL, SAGITTAL, or UNKNOWN_ORIENT.
- orientation - Variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- orientation - Variable in class gov.nih.mipav.view.ViewJComponentLUT
-
DOCUMENT ME!
- orientation - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- orientation - Variable in class gov.nih.mipav.view.VOIOrientationNode
-
- ORIENTATION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- ORIENTATION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- orientationBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- orientationBox - Variable in class gov.nih.mipav.view.JPanelEditAxisOrientation
-
DOCUMENT ME!
- orientationBox - Variable in class gov.nih.mipav.view.JPanelEditImageOrientation
-
DOCUMENT ME!
- orientationBox - Variable in class gov.nih.mipav.view.JPanelEditOrientation
-
DOCUMENT ME!
- orientationBox1 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- orientationBox2 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- orientationBox3 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- orientationField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- orientationFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Indicated the orientation of the dataset.
- orientationOriginCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
When checked, change orientation and origin upon flipping.
- orientationRank - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- orientationRank - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- orientationRank - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- orientations - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- orientationsCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- orientationScore - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeature
-
< edge score.
- OrientationSet1Back - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- OrientationSet1Left - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- OrientationSet1Top - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- OrientationSet2Down - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- OrientationSet2Front - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- OrientationSet2Right - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- orientationX - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- orientationY - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- orientAxis - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- orientB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- orientB_inv - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- orientBox - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- orientCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
When checked, denotes that the images orientation does not correspond to AlgorithmBrainExtractor.SAT_COR
- orientedImgB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- orientFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- orientLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Variables for the actual GUI; not all need to be global, but just as easy.
- orientMatrixA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- orientMatrixB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- orients - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- orientSpecific - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- OrientStatus(int, float) - Constructor for class gov.nih.mipav.model.file.FileIO.OrientStatus
-
Creates an Orientation Status with a given index and location.
- orientTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- ORIG_TO_ACPC - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- ORIG_TO_ACPC - Static variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- ORIG_TO_TLRC - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- ORIG_TO_TLRC - Static variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- origAC - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- origAC - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- origAC - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Anterior Comissure in original space.
- origACCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- origACFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
ACPC Specific info.
- origBrightness - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- origBrightness - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- origBrightness - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- origBrightness - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- origBrightness - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- origBrightness - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- origContrast - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- origContrast - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- origContrast - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
red, green, and blue origBrightness remains constant until applyButton is pressed, restores brightness if
cancelButton is pressed.
- origContrast - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
red, green, and blue origBrightness remains constant until applyButton is pressed, restores brightness if
cancelButton is pressed.
- origContrast - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
red, green, and blue origBrightness remains constant until applyButton is pressed, restores brightness if
cancelButton is pressed.
- origContrast - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- origDeformedSubject - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- origDelta - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- origDicom - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- origDicom - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- origDim - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- origDim - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Original image dimensions.
- origDimCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- origDimFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- origExtents - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- origExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- origImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- origImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- origImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- origImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- origImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- origImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- origImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- origImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- origImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- origImageTableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- origImageTableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- origImageTableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- origImageTableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- origImageTableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- origImageTableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- origImageTableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- origImageTableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- origin - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- origin - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.TranslatedPoint2D
-
- origin - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- origin - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- origin - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- origin - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- origin - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- origin - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
The origin to support image locations (ie.
- origin - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- origin - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- origin - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
DOCUMENT ME!
- origin - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- origin - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
DOCUMENT ME!
- origin - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- origin - Variable in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- origin - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- origin - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.BoundingBoxEffect
-
- origin - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- origin - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- ORIGIN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- original - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
- original - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- original - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- original - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
DOCUMENT ME!
- ORIGINAL - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Original slice type - a 2D image is inserted.
- original_length - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_marker_struct
-
- ORIGINAL_SLICE - Static variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- ORIGINAL_TYPE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
DOCUMENT ME!
- originalAxis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
stores the original image orientation axis
- originalAxisTargetAtlas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
stores the original image orientation axis (used for the target image when an atlas image is present)
- originalBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmDistanceFilter
-
- originalBuffer - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- originalColumnsString - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
x dim
- originalCropCheckbox - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- originalDataType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- originalDataType - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- originalDataType - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- originalDimLengths - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Original dimension sizes.
- originalDimLengths - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Original dimension sizes.
- originalDismissDelay - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
Delay types
- originalDoCrop - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- originalEnd - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- originalEndianess - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Used for checking for endianess changes in the ModelImage.reallocate(final int type) function.
- originalEpsilon - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
The maximum filter ripple in Chebyshev I and II
The passband ripple in decibels in Elliptic
- originalFileName - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- originalFileName - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- originalFileName - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- originalFilterConstruction - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- originalFilterOrder - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- originalImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
The original data image to be reconstructed:
- originalImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- originalInitialDelay - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
Delay types
- originalInstitution - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- originalKernelDimension - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
This are variables used by the FFT filter algorithm. - should be removed - redesigned
- originalLineOffset - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- originalLineSlope - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- originalName(String) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Transforms the name from the usual form to the DICOM form.
- originalNumberOfControlPoints - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- originalNumberOfFittingLevels - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- originalPath - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- originalPath - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- OriginalPosteriorMargin - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- originalRowsString - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
y dim
- originalRs - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Decibels stopband is down in Elliptic
- originalScanData - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- originalsearch - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.Options
-
- originalSeriesNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- originalSeriesNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- originalSrc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
original source image
- originalStagePositionX - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- originalStagePositionY - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- originalStart - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- OriginalSuperiorEdge - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- originalTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
DOCUMENT ME!
- originalTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
DOCUMENT ME!
- originalVolPowerOfTwo - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Boolean flag to indicate the original image is in Power of 2.
- originalX - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- originalX - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- originalY - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- originalY - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- originalZDim - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
the number of z slices in a 4D image equal to zDim before the
JDialogAnimate 4D to 3D conversion
- originalZDim - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- originalZDim - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
for 4D originalXDim and originalYDim are xDim and yDim before 4D to 3D conversion.
- originatingSystem - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- originator - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- originator - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- originButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
- originImg2LPS(float[], ModelImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Switch origin order from image order to LPS order.
- originLPS(ModelImage) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Returns the image origin in LPS space.
- originLPS2Img(float[], ModelImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Switch origin order from LPS order to Img order.
- originToStraight(ModelImage, ModelImage, Vector3f, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Given a point in the twisted volume, calculates and returns the corresponding point in the straightened image.
- originX - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
The x-offset of the center of the image in meter relative to the optical axis.
- originX - Variable in class gov.nih.mipav.model.file.FileLSM
-
The x-offset of the center of the image in meter relative to the optical axis.
- originY - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
The y-offset of the center of the image in meter relative to the optical axis.
- originY - Variable in class gov.nih.mipav.model.file.FileLSM
-
The y-offset of the center of the image in meter relative to the optical axis.
- origJointST - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- origName - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- origNDims - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- origNPts - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
Single Transfer Line size.
- origNPts - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Single Transfer Line size.
- origOrient - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
ACPC orientation in original image.
- origOrientation - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- origOrientationCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- origOrigin - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- origOrigin - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
- origOrigin - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Original image origin.
- origOriginCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
- origOriginFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
- origPC - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- origPC - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Posterior Comissure in original space.
- origPCCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- origPCFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- origPtr - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- origPtr - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- origRes - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- origRes - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Original image voxel resolutions.
- origResCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- origResFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- origSubjectList - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- origTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- origTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- origTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- origTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- origTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- origTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- origTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- origTarget - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- origTargetList - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- origToAcpc(int, int, int, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from orig to acpc.
- origToAcpc(Vector3f, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from orig to acpc.
- origToTlrc(int, int, int, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from orig to tlrc.
- origToTlrc(Vector3f, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from orig to tlrc.
- origVOITableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- origVOITableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- origVOITableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- origVOITableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- origVOITableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- origVOITableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- origVOITableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- origVOITableName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- origX - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
x, y, z arrays of the LUT transfer function.
- origX - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
x, y, z arrays of the LUT transfer function.
- origXDim - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- origY - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
x, y, z arrays of the LUT transfer function.
- origY - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
x, y, z arrays of the LUT transfer function.
- origYDim - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- origZDim - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ort - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
Working storage for nonsymmetric algorithm.
- orthes() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
- orthogonal - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.BaseWavelet
-
- orthonormalize(Vector3f[]) - Static method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
The axis vectors for the oriented bounding box are rotated in place.
- OS_MAC - gov.nih.mipav.view.Preferences.OperatingSystem
-
Operating system enum for the MAC.
- OS_UNIX - gov.nih.mipav.view.Preferences.OperatingSystem
-
Operating system enum for Unix - DEFAULT for unrecognized OS.
- OS_WINDOWS - gov.nih.mipav.view.Preferences.OperatingSystem
-
Operating system enum for Windows.
- OS2_BITMAP_ARRAY - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.BitmapType
-
"BA" - OS/2 Bitmap array (multiple bitmaps)
- OS2_BITMAP_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpReader
-
"BA" - OS/2 Bitmap array (multiple bitmaps)
- OS2_COLOR_ICON - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.BitmapType
-
"CI" - OS/2 Color icon
- OS2_COLOR_ICON - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpReader
-
"CI" - OS/2 Color icon
- OS2_COLOR_POINTER - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.BitmapType
-
"CP" - OS/2 Color pointer
- OS2_COLOR_POINTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpReader
-
"CP" - OS/2 Color pointer
- OS2_ICON - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.BitmapType
-
"IC" - OS/2 Icon
- OS2_ICON - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpReader
-
"IC" - OS/2 Icon
- OS2_POINTER - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.BitmapType
-
"PT" - OS/2 Pointer
- OS2_POINTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpReader
-
"PT" - OS/2 Pointer
- OSBORNE1 - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- OSBORNE1 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- OSBORNE1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- OSBORNE1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- Osborne1Function() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.Osborne1Function
-
- OSBORNE2 - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- OSBORNE2 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- OSBORNE2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- OSBORNE2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- Osborne2Function() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.Osborne2Function
-
- osBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- osLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- OSM - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Washington University OSM dataset structure. extension: .wu
- osvdCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- ot - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.DivergenceFunction
-
- ot - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- ot - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianProjectionFunction
-
- ot - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RestrictedLaplacianMatrixFunction
-
- oTdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- OTF(Integer, Integer, Integer, String, Boolean, Integer, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF
-
Bin:BinData base64binary??
- otfID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF
-
- otfRefDocumentRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
OTF Ref.
- otfRefOTFID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- otfs - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- other(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- OTHER - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality other.
- OTHER - gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder.BugType
-
- OTHER - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality other.
- OtherBlue - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- OtherGreen - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- otherImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- OtherImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- OtherImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- otherLabel - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- OtherLUT - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- otherMetrics() - Method in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- otherPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- OtherRed - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- OtherTransfer - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- otsu(int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
- OTSU - Static variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- otsuCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- otsurec(short[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
OTSUREC Returns a set of thresholds for the input image using the multi-level
otsu algorith.
- otsurec_helper(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
- otsuThreshold - Variable in class gov.nih.mipav.model.structures.ModelHistogram
-
DOCUMENT ME!
- otsuThreshold(ModelImage, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
This algorithm is an implementation of Otsu thresholding technique based on the minimization of inter-class
variance [otsu79].
- OULVL - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- oUnits - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- OUPTCL(int[], int[], double, int[], int, int[], int[], double[], double[][], int, boolean, double, int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- out - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- out - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Where to write the data
- out - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Buffered Writer for saving params *
- out - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Buffered Writer for saving params *
- out - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
The out.
- out_bisector(delaunay.Edge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- out_color_components - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- out_color_space - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- OUT_DIR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Indicates boundary can move out.
- out_ep(delaunay.Edge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- OUT_EXP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- out_format - Variable in class gov.nih.mipav.model.file.FileJPEG2000.img_fol_t
-
Output format
- OUT_OF_BOUNDS - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- out_row_width - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- out_site(delaunay.Site) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- out_triple(delaunay.Site, delaunay.Site, delaunay.Site) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- out_vertex(delaunay.Site) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- outarg - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- outarg - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- outBlockSize - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Size of the output data
- outBuffersLength - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Length of the total output data (Not buffer size but total length of data ).
- outEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- outEndianess - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Endianess of the output stream.
- OUTER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- OUTER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- OUTER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Parameter used in Find_Edges.
- OUTER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- OUTER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- OUTER_EDGING - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Parameter used in Find_Edges.
- outerBoundaryTracing() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
From text description in 4th edition Image Processing, Analysis, and Machine Vision International Edition
by Milan Sonka, Vaclav Hlavac, and Roger Boyle, Algorithm 6.7 Outer Boundary Tracing, p. 193.
- outerButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- outerButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- outerCurveCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- outerDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- outerDistanceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- outerDistanceText - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- outerEdging - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
DOCUMENT ME!
- outerIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- outerIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- OuterProduct(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Forms the outer product of two vectors and store the result in this.
- outfile - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
output file name
- outfile - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
output file name
- outFileStream - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_FileIO
-
File output stream object.
- outgoingBuffers - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Vector of ByteBuffer's of outgoing data.
- outImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- outInfo - Variable in class gov.nih.mipav.model.file.FilePARREC
-
file info
- outInfo - Variable in class gov.nih.mipav.model.file.FileSpar
-
file info
- outlineRegion(float[][], int[], int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Helper function computes the set of spans indicated by column crossings for rendering this contour into the z-plane.
- outlineRegion(int[][], int[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
This function computes the set of spans indicated by column crossings for the sculpt outline drawn by the user,
by doing a polygon scan conversion in gridded space.
- outlineRegion(int[][], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
This function computes the set of spans indicated by column crossings for the sculpt outline drawn by the user,
by doing a polygon scan conversion in gridded space.
- outlineRegion(int[][], int[], int, int, int, int, Vector3f[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
This function computes the set of spans indicated by column crossings for the sculpt outline drawn by the user,
by doing a polygon scan conversion in gridded space.
- outlineRegion_X(float[][], int[], int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Helper function computes the set of spans indicated by column crossings for rendering this contour into the x-plane.
- outlineRegion_Y(float[][], int[], int, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Helper function computes the set of spans indicated by column crossings for rendering this contour into the y-plane.
- outMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- outMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- outMax - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- outMax - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
DOCUMENT ME!
- outMax - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
image type max
- outMax - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- outMin - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- outMin - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
DOCUMENT ME!
- outMin - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
image type min
- outMin - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- outML - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Media locator for the output file.
- outOfBoundsComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- outOfBoundsComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- outOfBoundsComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- outOfBoundsComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- outOfBoundsComboBox - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- outOfBoundsIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Tells how to select fill value for out of bounds data
0 for image minimum
1 for NaN for float, zero otherwise.
2 for user defined
3 for image maximum
- outOfBoundsIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Tells how to select fill value for out of bounds data
0 for image minimum
1 for NaN for float, zero otherwise.
2 for user defined
3 for image maximum
- outOfBoundsIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Tells how to select fill value for out of bounds data
0 for image minimum
1 for NaN for float, zero otherwise.
2 for user defined
3 for image maximum
- outOfBoundsIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Tells how to select fill value for out of bounds data 0 for image minimum 1 for NaN for float, zero otherwise. 2
for user defined 3 for image maximum
- outOfBoundsIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Tells how to select fill value for out of bounds data 0 for image minimum 1 for NaN for float, zero otherwise. 2
for user defined 3 for image maximum
- outOfBoundsLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- outOfBoundsLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- outOfBoundsLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- outOfBoundsLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- outOfBoundsLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- outOfCorePointCount() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredMeshData
-
- outOfCorePointCount() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- outp - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- output - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- output - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- output - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- output - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- output(double[], double, int, int, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- output(double[], int, int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- output(int, double) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- output(int, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- output_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- output_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- output_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- output_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- output_2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- output_2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- output_3 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- output_3 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- output_components - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- OUTPUT_DEFINED - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.ClassStateStruct
-
- output_directory - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- output_directory_name - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- output_gamma - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- output_height - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- output_iMCU_row - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- OUTPUT_LUT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- output_message(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- OUTPUT_MUTEX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- output_name - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- output_pass_setup8(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- output_pass_setup9to12(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- output_prefix - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- output_prefix - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- output_scan_number - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- output_scanline - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- output_target(double) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- output_target(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- output_value(libjpeg.jpeg_decompress_struct, int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- output_width - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- outputBox - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Holds the choices for the outputType.
- outputBox - Variable in class gov.nih.mipav.view.JPanelHistogram
-
enables the user to set the image output type or LUT-based image extration
- outputBox - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- outputBoxB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
Stores result of AlgorithmConvolver
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
Stores output of AlgorithmConvolver
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
Stores output of AlgorithmConvolver
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Holds the result image data.
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Receives output of AlgorithmConvolver
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Receives output of AlgorithmConvolver
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
- outputBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
- outputBufferX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
- outputBufferX - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
- outputBufferY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
- outputBufferY - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
- outputBufferZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
- outputBufferZ - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
- outputCommand - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
action command when the user presses the browse button to select the output directory:
- outputCommand - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- outputDeletedAsNew() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
creating new meshes to export to the scene graph.
- outputDeletedAsNew(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
creating new meshes to export to the scene graph.
- outputDimsGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- outputDir - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- outputDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
output directory enables user to choose where to save files to.
- outputDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- outputDir - Static variable in class gov.nih.mipav.view.ViewUserInterface
-
This is the outputDir path that the user entered as a command line argument when running a script *
- OutputDir - gov.nih.mipav.view.Argument.StaticArgument
-
- outputDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- outputDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- outputDirTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- outputDirTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
output directory
- outputDirTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- outputField - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- outputFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.PoissonRun
-
- outputFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.test
-
- outputFileDirAbs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- outputFileDirectory - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- outputFileDirectoryText - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- outputFileName - Variable in class gov.nih.mipav.model.algorithms.LSCM
-
- outputFileName - Variable in class gov.nih.mipav.model.file.FileAvi
-
- outputFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- outputFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- outputFilePath - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- outputFormatExtension - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- outputGainField - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
- outputGainField - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
- outputGainField - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- outputGainField - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
private JCheckBox calcGainFieldCheckbox;.
- outputGainField - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
private JCheckBox calcGainFieldCheckbox;.
- outputGainField - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
private JCheckBox calcGainFieldCheckbox;.
- outputImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- outputImages - Variable in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Vector of Strings holding the registers of images used as output
- outputImagesDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- outputImageType - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
- outputKinds - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- outputKinds - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- outputLayer - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- outputLog - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- outputLog - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
String to hold all file checks, changes and ignores.
- outputMes - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- outputMes - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- outputName - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- outputOptionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
DOCUMENT ME!
- outputOptionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
output to a new image or overwite the current image
- outputOptionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
output to a new image or overwite the current image
- outputOptionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
DOCUMENT ME!
- outputOptionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- outputOptionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
- outputOptionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
output to a new image or overwite the current image
- outputOptionsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Panel holding statistics output options.
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Contains radio buttons used to indicate whether the whole image/just VOI regions should be processed, and whether
a new image should be produced.
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
DOCUMENT ME!
- outputPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
DOCUMENT ME!
- OutputPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- outputParameters - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- outputParametersTransparency - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- outputPath - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDICOMtoAVI
-
Output path to build new tree.
- outputPointData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- outputPrefix - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- outputTextArea - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
TextArea of main dialog for text output
- outputTextArea - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
output text area
- outputTextArea - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
TextArea of main dialogfor text output
- outputTract(Vector<Integer>, int, int, int, FileOutputStream) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Writes the fiber bundle tract to disk.
- outputType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Type of output (same type, binary, or unsigned byte).
- outputType - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- outputType - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Same data-type, binary, or unsigned byte mask.
- outputType - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- outputType - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
Same data-type, binary, or unsigned byte mask.
- outputTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- outputVal - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceValue
-
DOCUMENT ME!
- outputVal - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- outputVOIType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- outputVOIType - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- outResolutions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
DOCUMENT ME!
- OUTSIDE - gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector.RangeType
-
Pixels outside the range of boundA to boundB (inclusive) will be excluded from a calculation.
- outsidePreReferenceSlice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- outsidePreReferenceSlice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- outsidePreReferenceVolume - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- outsidePreReferenceVolume - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- outsideReferenceSlice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- outsideReferenceSlice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- outsideReferenceVolume - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- outsideReferenceVolume - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- outsideValue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- outStart - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- outStream - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- outStream - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- outStream - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Output stream object acquired from the socket.
- outTempMax - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- outTempMax - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- outTempMin - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- outTempMin - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- outTriangles - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- outuc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- outuc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- OV - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- OVAL - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- overall_mssim - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- overall_prediction_error - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- overflowTest - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- overflowTest - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- Overlap(int, int, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- Overlap2(int, int[], float, int, int[], float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- overlay - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- OVERLAY - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- OVERLAY - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- overlayButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
buttons for toolbar *
- overlayNames - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
DOCUMENT ME!
- overlayOn - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Flag to indicate if DICOM overlay should be displayed.
- OVERLAYS - Static variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- overlayText - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Overlay text to show on the image.
- overlayValues - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
DOCUMENT ME!
- OVERWRITE - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- OVERWRITE - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
File handler output mode - overwriteBox.
- overwriteBox - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Check box item indicating if we're to always overwriteBox the statistics file.
- OW - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- own_data - Variable in class gov.nih.mipav.model.algorithms.CVODES.NVector
-
- ownDataset - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Data weights.
- owner - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel.PropertiesDialog
-
- ownerDialog - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- Ownership() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.Ownership
-
- ownership_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DynamicNumericDiffCostFunction
-
- ownership_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LossFunctionWrapper
-
- ownership_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffCostFunction
-
- ownership_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ScaledLoss
-
- ownership_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.ConditionedCostFunction
-
- ownership_f_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ComposedLoss
-
- ownership_g_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ComposedLoss
-
- owningCanvasID - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- ownsData - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- oX - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
Stores output of AlgorithmConvolver
- oXdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- oXdim - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- oXres - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- oXres - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- oXres - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- oXX - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- oXY - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- oY - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- oYdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- oYdim - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- oYres - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- oYres - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- oYres - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- oYY - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- oZ - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- oZdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- oZdim - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- oZres - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
- oZres - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- oZres - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
P
- p - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- p - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassData
-
- p - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.uni_elt
-
- p - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- p - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cftrec1_th
-
- p - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cftrec2_th
-
- p - Variable in class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
DOCUMENT ME!
- p - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- p - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- p - Variable in class gov.nih.mipav.model.algorithms.NelderMead.simplex_t
-
- p - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- p - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- p - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- p - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- p - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_VertAux
-
- p - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Edge
-
- p - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangle
-
- p - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.StartingPolynomial
-
- p - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- p - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- p() - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.Background
-
- P - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- P - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- P - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- P - Variable in class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- P - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- P - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- P - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- P() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmASM.P
-
- P() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- P(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- P(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- p_bootstrap(double[], double[], double[], int, String) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- p_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- p_H - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- p_H - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- p_W - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- p_W - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- p0 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- p0 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
- P0 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- P0(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- P0VAL - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- p1 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintItem
-
- p1 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- p1 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- p1 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
- p1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
Black region exponent, 0 <= p1 <= 1.0
- p1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Black region exponent, 0 <= p1 <= 1.0
- P1 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- P1(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- P1_DTOUT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- P1_ETA - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- P1_NEQ - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- P1_NOUT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- P1_T0 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- P1_T1 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- P1_TOL_FACTOR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- p1evl(double, double[], int) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- P1EVL - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- p1sqrtem5 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- p1sqrtem5 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- p2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter.indexintintItem
-
- p2 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- p2 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
- p2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
White region exponent, 0 <= p2 <= 1.0
- p2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
White region exponent, 0 <= p2 <= 1.0
- P2 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- P2(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- p3 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaint
-
- packBit - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- packBit - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- packBit - Variable in class gov.nih.mipav.model.file.FileSVS
-
Pack Bit: true if the read data file has pack bit compression.
- packBit - Variable in class gov.nih.mipav.model.file.FileTiff
-
Pack Bit: true if the read data file has pack bit compression.
- packBitCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- packBitEnable - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- PackBitsRect - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- packBytes - Variable in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
The pack length of one sample (in bytes, according to the output
bit-depth
- packet_index - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_index_t
-
information concerning packets inside tile
- packno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tile_t
-
- pad - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- PAD_BACK - Static variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Pad the image by adding blank slices to the back:
- PAD_FRONT - Static variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Pad the image by adding blank slices to the front:
- PAD_HALF - Static variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Pad the image by adding blank slices to the front and back:
- PAD_SIZE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- pad1 - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Paddings
- pad2 - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Paddings
- padAndOrTruncate(String, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Pads with spaces and/or truncates string.
- padButton - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Pad button is used for inserting blank images to the end of the image.
- padded - Variable in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
DOCUMENT ME!
- padded_size - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- paddedImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Padded image.
- paddedSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
number of slices in padded image
- padding - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.SignedDistanceCharacters
-
- padding() - Method in class gov.nih.mipav.model.file.FileMinc
-
Pads to the nearest 4 byte boundary.
- paddingBot - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- paddingFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- paddingImageA - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Padding imageA with blank images feeding.
- paddingImageB - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Padding imageB with blank images feeding.
- paddingLeft - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- paddingNumber - Variable in class gov.nih.mipav.model.file.FileNRRD
-
In autosequencing if the sequence number length is less than the padding number, zeroes are added
to the front of the sequence number until the sequence number length equals the padding number.
- paddingRight - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- paddingTop - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- padExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
The extents of padded image
- padImage(ModelImage, int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
- padImage(ModelImage, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Adds or removes margins to the input image.
- padMode - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Padding mode, defaults to front.
- padRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- padReflect(double[][], double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- padSlicesAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Algorithm that adds slices to front/back of image.
- padToBack - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Select padding to the back:
- padToFront - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Select padding to the front:
- padToHalf - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Select padding to the front and back:
- padValTxt - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- padValue - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
image values to use for padding the images, if necessary
- padValue - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- PAGE_NAME - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- PAGE_NAME - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- PAGE_NUMBER - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- PAGE_NUMBER - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- pageName - Variable in class gov.nih.mipav.model.file.FileSVS
-
- pageName - Variable in class gov.nih.mipav.model.file.FileTiff
-
- pagePanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Number of pages in this frame will always be one.
- pagePanel - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- pagePanelSizeX - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- pagePanelSizeX - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- pagePanelSizeY - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- pagePanelSizeY - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- pageScrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Scroll panel to handle the frame scolling.
- pagingTBar - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- paint(Graphics) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- paint(Graphics) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- paint(Graphics) - Method in class gov.nih.mipav.view.ColorWheel
-
paint method
- paint(Graphics) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Paints a yellow rectangle based on the dimensions if not complete; if complete, paints a red rectangle.
- paint(Graphics) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- paint(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Override for Canvas3D method which uses the paint callback to track when it is possible to render into the canvas
but makes sure that the default Toolkit's graphics state is synchronized just in case the window system has
buffered graphics events.
- paint(Graphics) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- paint(Graphics) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Paint the image into the frame.
- paint(Consumer<Graphics2D>) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Uses the specified paintInstructions to draw into this image.
- Paint(Renderer, PickRecord, ColorRGBA, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Painting support.
- Paint(Renderer, PickRecord, ColorRGBA, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- PAINT_CAN - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the cursor is in paint can mode
- PAINT_TOOLBAR - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- PAINT_VASC - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- PAINT_VOI - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in paint VOI mode
- paintAbsValColorWheel() - Method in class gov.nih.mipav.view.ColorWheel
-
Paints the Absolute Value Color Wheel
- PaintAutoSave - Class in gov.nih.mipav.view.dialogs
-
DOCUMENT ME!
- PaintAutoSave(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.PaintAutoSave
-
Creates a new PaintAutoSave object.
- paintBitmap - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- paintBitmap - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
Buffer used to indicate if the pixel location is painted (true) or
unpainted (false).
- paintBitmap - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Buffer used to indicate if the pixel location is painted (true) or unpainted (false).
- paintBitmap - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Reference to the BitSet map used in painting the image.
- paintBitmapBU - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Backup of paint buffer for undo.
- paintBitmapDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Buffer used to indicate if the pixel location is painted (true) or unpainted (false).
- paintBitmapDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Buffer used to indicate if the pixel location is painted (true) or unpainted (false).
- paintBitmapSwitch - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
if true do not getMask on a setActiveImage command so as to keep the mask from the old active image.
- paintBox - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Box holding the list of available paint brushes.
- paintBox - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
Combo box to hold all of the paint brushes.
- PaintBoxRenderer() - Constructor for class gov.nih.mipav.view.ViewJFrameTriImage.PaintBoxRenderer
-
Creates a new ComboBoxRenderer2 object.
- PaintBoxRenderer() - Constructor for class gov.nih.mipav.view.ViewToolBarBuilder.PaintBoxRenderer
-
Creates a new ComboBoxRenderer2 object.
- paintBrush - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
BitSet used for painting (brushes on/off).
- paintBrushButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
DOCUMENT ME!
- paintBrushDim - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Dimension of the paint.
- paintBrushDimPrevious - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- paintBrushLocked - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
used in conjuction with the above variable, stating that the paint brush has been changed but will change back to
previous.
- paintBrushLocked - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
used with the above to say the paint brush has been changed, waiting to change back.
- paintBrushNames - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
List of built-in and user-defined paint brushes.
- paintBrushNames - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
DOCUMENT ME!
- paintBrushPrevious - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- paintBrushSize - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Paint brush size.
- paintBuffer - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Paint buffer.
- paintBuffer - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
Buffer that displays the combined paintBitmap and pixBuffer
buffers.
- paintBuffer - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- paintBuffer - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
DOCUMENT ME!
- paintBuffer - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- paintBufferDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Buffer that displays the combined paintBitmap and pixBuffer buffers.
- paintBufferDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Buffer that displays the combined paintBitmap and pixBuffer buffers.
- paintBufferDest - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- paintBufferDest - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- paintCanToggleButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Toggle buttons for voi/points
- paintChildren(Graphics) - Method in class gov.nih.mipav.view.JScrollPopupMenu
-
- paintColor - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The paint color to be used when the user paints in the image.
- paintComponent(Graphics) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame.GPanel
-
- paintComponent(Graphics) - Method in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
Draws the component.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.BarMeter
-
Draws the vertical bar, or all 100% of posible amplitude values.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.BorderedButton
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.LineMeter
-
repaints the history graph.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.DrawingPanel
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.DrawingPanel
-
Wrapper to call the paintComponent.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip.DrawingPanel
-
Wrapper to repaint the panel.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor.DrawingPanel
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup.DrawingPanel
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay.DrawingPanel
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic.DrawingPanel
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.DrawingPanel
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices.DrawingPanel
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.DrawingPanel
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe.DrawingPane
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast.DrawingPanel
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp.DrawingPanel
-
DOCUMENT ME!
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT.DrawingPanel
-
Deprecated.
Wrapper to repaint the panel.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB.DrawingPanel
-
Deprecated.
Wrapper to repaing the panel.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Paints the component.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM.DrawingPanel
-
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase.DrawingPanel
-
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Paints the image and border.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Paints the image and border.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Paints the image and border.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Paints the image and border.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Paints the image and border.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Paints the image and calls drawSelf for all VOIs.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Paints the graph.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
Paints the graph.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Paints the component.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Paints the component.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Paints the image and border.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentLUTTable
-
Paints the image and border.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Paints the component using the previous set image width and height.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Paints the image and calls drawSelf for all VOIs.
- paintComponent(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Paints the image, optionally draws the axis, the center of rotation point, the talairach grid, etc., and calls
drawSelf for all VOIs.
- paintComponentForPrinter(int, int, Graphics) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Paints the image and calls drawSelf for all VOIs and also resizes the image if it is too big for printer.
- paintComponentForPrinter(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Paints the graph for the Printer.
- paintCursorBoxComponent(Graphics, int, int, int, int) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Paints a box over the image centered about the cursor.
- paintDialog - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Dialog to facilitate vasculature painting.
- paintGrowDialog - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Control panels of the triplanar view.
- PaintGrowListener - Interface in gov.nih.mipav.view
-
Interface to allow different types of ViewJComponents* to work with region grow dialogs.
- paintGrowListeners - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- paintGrowListeners - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
List of frames that want to know about paint updates.
- paintGrowMode - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The point selection mode.
- paintIcon(Component, Graphics, int, int) - Method in class gov.nih.mipav.model.structures.TableSorter.Arrow
-
DOCUMENT ME!
- paintIcon(Component, Graphics, int, int) - Method in class gov.nih.mipav.view.ColorIcon
-
paintIcon - paints the icon with a balck border.
- paintImage - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
buffered image that is transparent to show the paintbrush cursor.
- paintImageBuffer - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
- paintImageBuffer - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
This image indicates which images have been painted.
- paintImagePrevious - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- paintMagComponent(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Paints a magnified window over the image centered about the cursor.
- paintMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The actual paint bitmap.
- paintMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- paintMask - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- paintMask - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- paintMirrorSymmColorWheel() - Method in class gov.nih.mipav.view.ColorWheel
-
Paints the Mirror Symmetry Color Wheel
- paintNoSymmColorWheel() - Method in class gov.nih.mipav.view.ColorWheel
-
Paints the No Symmetry Color Wheel
- paintRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
radio buttons
- paintRotationalSymmColorWheel() - Method in class gov.nih.mipav.view.ColorWheel
-
Paints the Rotational Symmetry Color Wheel
- paintToolBar - Variable in class gov.nih.mipav.view.ViewControlsImage
-
Paint toolbar.
- paintToolBar - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Paint tool bar.
- paintToPDF(PDDocument, PDPage, int, int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
- paintToShortMask() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- paintToShortMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- paintToShortMask() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- paintToShortMask() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- paintToShortMask() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- paintToShortMask() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- paintToUbyteMask() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- paintToUbyteMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- paintToUbyteMask() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- paintToUbyteMask() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- paintToUbyteMask() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- paintToUbyteMask() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- paintToVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- paintWindowComponent(Graphics, int, int, int, int, float) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- paintWindowComponent(Graphics, int, int, int, int, float, Image) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Paints a image B in a window over the image centered about the cursor.
- paintWindowComponent(Graphics, MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Paints the image and calls drawSelf for all VOIs.
- Pair<T,U> - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- Pair(T1, T2) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Pair
-
Creates a pair
- Pair(T, U) - Constructor for class gov.nih.mipav.model.algorithms.BlindDeblur.Pair
-
- Pair(T, U) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Pair
-
- Pair(T, U) - Constructor for class gov.nih.mipav.model.algorithms.WeibullDistribution.Pair
-
- Pair(T, U) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Pair
-
- pairCompute(Vector<CeresSolver.Pair<double[], double[]>>, CeresSolver.ProblemImpl) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- palpha - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- PanasonicMakernoteDescriptor(MetadataExtractor.PanasonicMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- PanasonicMakernoteDescriptorTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.PanasonicMakernoteDescriptorTest
-
- PanasonicMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- PanasonicRawDistortionDescriptor(MetadataExtractor.PanasonicRawDistortionDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDescriptor
-
- PanasonicRawDistortionDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- PanasonicRawIFD0Descriptor(MetadataExtractor.PanasonicRawIFD0Directory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Descriptor
-
- PanasonicRawIFD0Directory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- PanasonicRawWbInfo2Descriptor(MetadataExtractor.PanasonicRawWbInfo2Directory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Descriptor
-
- PanasonicRawWbInfo2Directory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- PanasonicRawWbInfoDescriptor(MetadataExtractor.PanasonicRawWbInfoDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDescriptor
-
- PanasonicRawWbInfoDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- PANDA - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingHalftoningAlgorithm
-
Processing Algorithm for Noncoded Document Acquisition
- panel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView.TabbedItem
-
DOCUMENT ME!
- panel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView.TabbedItem
-
DOCUMENT ME!
- panel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface.TabbedItem
-
Panel
- panel - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- PANEL_OFFSET - Static variable in class gov.nih.mipav.view.ViewJFrameGraph
-
Minimum distance between frame and subpanels
- PANEL_PLUGIN - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
A constant for which to test in the actionPerformed.
- panelA - Variable in class gov.nih.mipav.view.JFrameHistogram
-
histogram interface panels for imageA and imageB
- panelA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary and static control panels.
- panelA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Tabbed panel A.
- panelA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Tabbed control panel A, B.
- panelA - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- panelA - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- panelActiveImage - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- panelActiveImage - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Panel for deciding which image is active; appears when 2 images are loaded.
- panelAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Axial view panel.
- panelAxisMode - Variable in class gov.nih.mipav.view.dialogs.JDialogOrientMatrix
-
DOCUMENT ME!
- panelB - Variable in class gov.nih.mipav.view.JFrameHistogram
-
histogram interface panels for imageA and imageB
- panelB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Tabbed panel B.
- panelB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Tabbed control panel A, B.
- panelB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- panelB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- panelCoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Coronal view panel.
- panelGU - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- panelHeight - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- panelHeight - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
DOCUMENT ME!
- panelHistogram - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
LUT control panel of the gray scale image.
- panelImageSlider - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- panelImageType - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- panelLabels - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Panel containing the position labels:.
- panelLabels - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Panel containing the position labels:.
- PanelManager - Class in gov.nih.mipav.view.components
-
Manages the adding of components to a panel, automatically tranlating between logical element placement and the
panel's layout.
- PanelManager() - Constructor for class gov.nih.mipav.view.components.PanelManager
-
Construct the panel manager with a new panel.
- PanelManager(String) - Constructor for class gov.nih.mipav.view.components.PanelManager
-
Construct the panel manager with a new panel that has a titled border.
- PanelManager(JPanel) - Constructor for class gov.nih.mipav.view.components.PanelManager
-
Construct the panel manager and attach it to a panel which has already been created.
- panelOpacityA - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Panels that hold the the control components (opacity maps).
- panelOpacityA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Panels that hold the the control components (opacity maps).
- panelOpacityB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- panelOpacityB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- panelOpacityGM_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- panelOpacityGM_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- panelOpacityGM_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
DOCUMENT ME!
- panelOpacityGM_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
DOCUMENT ME!
- panelOptionToolbars - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- panelParent - Variable in class gov.nih.mipav.view.JPanelHistogram
-
containing parent class.
- panelParent - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- panelPO - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- panelRayleigh - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- panelRician - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- panelRowColumn - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- panelS - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary and static control panels.
- panelSagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sagittal view panel.
- panelSInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary and static control panels.
- panelThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- panelToolbar - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Panel that holds the toolbars.
- panelToolbar - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Toolbar panel.
- panelToolbar - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Panel that holds the toolbars.
- panelToolbar - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Panel that holds the toolbars.
- panelToolbar - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Panel that holds the toolbars.
- panelToolBarGBC - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Constraints on panelToolbar layout:
- panelToolBarGBC - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- panelToolbars - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- panelWidth - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- panelWidth - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
DOCUMENT ME!
- panelX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Declare each clipping plane control panel.
- panelXInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Declare each clipping plane control panel.
- panelY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Declare each clipping plane control panel.
- panelYInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Declare each clipping plane control panel.
- panelZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Declare each clipping plane control panel.
- panelZInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Declare each clipping plane control panel.
- panic() - Static method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- Panorama() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.Panorama
-
- PANORAMIC_XRAY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality panoramtic X ray.
- PANORAMIC_XRAY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality panoramtic X ray.
- panSysID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
59 - 9 bytes - Archiver Suite and Host.
- paperColor - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- par - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- par_kh - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- par_kvoi - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- par_rho - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- par1 - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- par2 - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- par3 - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- par4 - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- par5 - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- par6 - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- par7 - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- PARALLEL_VECTOR - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
- PARALLEL_VECTOR - Static variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- parallelButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Rendering parallel rotation button.
- ParallelForEachExecutor(ContourPlot.ParallelForEachExecutor<T>, Spliterator<T>, Consumer<? super T>) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.ParallelForEachExecutor
-
- ParallelForEachExecutor(Spliterator<T>, Consumer<? super T>) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.ParallelForEachExecutor
-
Creates a new ParallelForEachExecutor that executes the
specified Consumer (action) on the elements of the specified Spliterator.
- parallelize(Stream<T>, boolean) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
Syntactic sugar for conditional stream.parallel().
- parallelPowell - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
The flag for parallel powell's method
- parallelRotation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Parallel rotation flag.
- parallelRotation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Parallel rotation flag.
- parallelRotation - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Parallel rotation flag.
- parallelScaleT3D - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Transformation matrix.
- parallelScaleT3D - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Transformation matrix.
- parallelScaleT3D - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Transformation matrix.
- parallelVectorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- param - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- param - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- param - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- param - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- param - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
variables integer scalar containing the number of unknowns.
- param - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
variables integer scalar containing the number of unknowns.
- param - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- param - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_model
-
- param - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- PARAM_BET_DO_SPHERE_ESTIMATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Flag indicates BET should approximate initial brain by sphere.
- PARAM_BET_IMG_INFLUENCE - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
BET based parameter for the depth to calculate in approximating brain maximum and minimum intensities.
- PARAM_BET_STIFFNESS - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Controls the stiffness of the brain approximation mesh.
- PARAM_BOOLEAN - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating a boolean value.
- PARAM_CONTOUR_BACK - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_CONTOUR_BACKWARD - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_CONTOUR_FORWARD - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_CONTOUR_FRONT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Contour ordering:
- PARAM_CONTOUR_SELECT_ALL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_DATA_DICOMDIR_OPEN_DICOMDIR - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
DICOMDIR buttons
- PARAM_DATA_DICOMDIR_OPEN_Images - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_DATA_PROVENANCE_OPEN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Data provenance buttons
- PARAM_DATA_PROVENANCE_SAVE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- param_decrease - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- PARAM_DOUBLE - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating a double value.
- PARAM_EXPORT_SELECTED_CONTOURS_AS_POLYGON - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_EXTERNAL_IMAGE - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating an externally-specified (not script produced) image placeholder variable string
value.
- PARAM_EXTRA_MMS_TO_PAD - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Millimeters to add to brain mask.
- PARAM_FACE_ORIENTATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
The face orientation parameter.
- PARAM_FACE_ORIENTATION - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
The face orientation parameter.
- PARAM_FILE - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating a file variable string value.
- PARAM_FLOAT - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating a float value.
- PARAM_IMAGE - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating an image placeholder variable string value.
- PARAM_IMAGE_ALIGN_VOI_PROTRACTOR - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_ATTRIBUTES - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_CAPTURE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_FLIP_HORIZONTAL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Image flipping buttons
- PARAM_IMAGE_FLIP_VERTICAL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_GPU - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_HEADER - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_INTENSITY - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_LIGHTBOX - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_LINK - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_MAG - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Image Magnifying related buttons
- PARAM_IMAGE_MAG_CHECKER - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_MAG_CUSTOM - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_MAG_ONE_TO_ONE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_MAG_REGION - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_MAG_WINDOW - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_MULTI - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_OPEN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Image toolbar Buttons
- PARAM_IMAGE_PRINT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_SAVE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_SLICE_NEXT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_SLICE_PREVIOUS - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Image slider/frame related buttons
- PARAM_IMAGE_SYNC - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_TRIPLANAR - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Image alternate views (triplanar/volume renderer) related buttons
- PARAM_IMAGE_UNMAG - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_VOLUME_RENDERER_DTI - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGE_VOLUME_RENDERER_GPU - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMAGEJ_TO_MIPAV - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_IMPORT_VOI_POLYGON - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_INT - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating a integer value.
- PARAM_LAUNCH_IMAGEJ - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
image J icons
- PARAM_LIST - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating a list of values of a second type.
- PARAM_LONG - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating a long value.
- PARAM_LUT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
LUT buttons
- PARAM_LUT_BLUE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_BONE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_COOL_HOT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_CT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_CT_PRESETS - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_EDIT_ALPHA - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
LUT channel edit
- PARAM_LUT_EDIT_BLUE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_EDIT_GREEN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_EDIT_RED - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_EDIT_RGB - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_GENERATE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_GRAY - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
LUT Color buttons
- PARAM_LUT_GRAY_BLUE_RED - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_GREEN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_HOTMETAL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_INVERT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_OPEN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
LUT Save/open buttons
- PARAM_LUT_QUICK - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_RED - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_RESET - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_SAVE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_SKIN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_SPECTRUM - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_STRIPED - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_THRESHOLD - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_THRESHOLD_INVERSE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_THRESHOLD_INVERSE_RUN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_THRESHOLD_MAX_ENT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_THRESHOLD_OTSU - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_THRESHOLD_RUN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_TRANSFER - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
LUT transfer/thresholding
- PARAM_LUT_TRANSFER_EVEN_DIST - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_LUT_TRANSFER_RESET - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_MIPAV_TO_IMAGEJ - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_OPEN_PAINT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_OPEN_VOI - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_OPEN_VOI_ALL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_OPEN_VOI_ALL_FROM - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_OPEN_VOI_CSV - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_OPEN_VOI_FREESURFER_BINARY_PATCH - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_OPEN_VOI_IMAGEJ - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_OPEN_VOI_IMAGEJ_ALL_FROM - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_OPEN_VOI_LABEL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_ADD_MASK - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Paint Mask toolbar buttons
- PARAM_PAINT_ADVANCED - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_AND_OP_MASK - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_BORDER - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_BRUSH - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Painting buttons
- PARAM_PAINT_BRUSH_EDITOR - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Misc Paint actions
- PARAM_PAINT_COLOR - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_DROPPER - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_ERASE_ALL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_ERASE_SLICE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_ERASER - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_FILL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_MASK_INSIDE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Paint mask ops
- PARAM_PAINT_MASK_OUTSIDE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_OPACITY - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_OPEN_MASK - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_POWERPAINT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_PROPAGATE_ALL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_PROPAGATE_DOWN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Paint propagate actions
- PARAM_PAINT_PROPAGATE_UP - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_RGB_CHOOSER - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_SAVE_MASK - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_UNDO - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_PAINT_VOLUME_CALCULATOR - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_ALL_LABEL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_ALL_VOI - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_ALL_VOI_TO - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_PAINT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_PAINT_AS - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_SELECTED_CONTOURS - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_SELECTED_CONTOURS_AS - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_SELECTED_LABEL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_VOI - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_VOI_AS - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_VOI_CSV - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_VOI_INTENSITIES - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SAVE_VOI_INTENSITIES_TO - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SCRIPT_REFRESH - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Script buttons
- PARAM_SCRIPT_RUN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_SHORT - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating a signed short value.
- PARAM_STRING - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating a boolean value.
- PARAM_STRINGS_TABLE - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
String values for all of the parameter value data types (the strings written out to the script).
- param_t() - Constructor for class gov.nih.mipav.model.algorithms.NelderMead.param_t
-
- PARAM_TRANSFORMATION_APPLY - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
image rotation/crop/algorithm fitting buttons
- PARAM_TRANSFORMATION_LEAST_SQUARES - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_TRIIMAGE_BOUNDING_BOX - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_TRIIMAGE_CENTER - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_TRIIMAGE_MAG - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
Tri-planar specific buttons
- PARAM_TRIIMAGE_TRAVERSE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_TRIIMAGE_UNMAG - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_USHORT - Static variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Parameter data type indicating a unsigned short value.
- PARAM_VOI_3D_INTERSECTION - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_3D_RECTANGLE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_3D_UNION - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_BACK - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_BACKWARD - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_BSPLINE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_CLOSE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
POPUpVOI:
- PARAM_VOI_COLOR - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_COPY - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_CROP - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_CUT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_DEFAULT_POINTER - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_DELETE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_EDIT_CIRCLE_DIAM - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_EDIT_SQUARE_LENGTH - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_ELLIPSE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_FLIPX - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_FLIPY - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_FLIPZ - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_FORWARD - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_FRONT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
VOI ordering:
- PARAM_VOI_GRAPH_AVERAGE_INTENSITY - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_GRAPH_AVERAGE_INTENSITY_THRESHOLD - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_GRAPH_BOUNDARY_CURVATURE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_GRAPH_BOUNDARY_INTENSITY - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_GRAPH_INTENSITY_HISTOGRAM - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_GRAPH_OPEN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
VOI Graphing:
- PARAM_VOI_GRAPH_PAAI - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_GRAPH_SHOW - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_GRAPH_TOTAL_INTENSITY - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_GRAPH_TOTAL_INTENSITY_THRESHOLD - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_GROUP - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_HAUSDORFF_DISTANCE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_LEVELSET - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_LINE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_LIVEWIRE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_LOGICAL_OPERATIONS - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_NEW - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_PASTE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_POINT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_POINT_DELETE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_POLY_SLICE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_POLYGON - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_POLYLINE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_PROPAGATE_3D_LEVELSET - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_PROPAGATE_ALL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_PROPAGATE_DOWN - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_PROPAGATE_UP - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_PROPERTIES - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
VOI Actions/Properties
- PARAM_VOI_PROTRACTOR - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_PSLICE_DISTANCE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_QUICK_AND_OP - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_QUICK_NOT_OP - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_RECTANGLE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_REDO - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_SELECT_ALL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_SELECT_NONE - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_SHOW_CONTOUR_BOUNDING_BOX - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_SPLITTER - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_STATISTICS - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_TEXT - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
VOI Types
- PARAM_VOI_TRIM - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_UNDO - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_VOI_UNGROUP - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- PARAM_WINDOW_LEVEL - Static variable in class gov.nih.mipav.view.CustomUIBuilder
-
- param1_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- param2_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- param2Coordinates(double, double, double, double, double, double, double, double, double, Vector<Vector3f>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- param2Coordinates(double, double, double, double, double, double, double, double, double, Vector<Vector3f>) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- Param2PoseVec(double, double, double, double, CDVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Converts pose parameters: scale, theta, tx, ty to a pose vector.
- param3_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- param4_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- paramAverage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- Parameter - Class in gov.nih.mipav.model.scripting.parameters
-
This is an abstract base class for all script action parameters.
- Parameter - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- Parameter(SolverType, double, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
- Parameter(String, int) - Constructor for class gov.nih.mipav.model.scripting.parameters.Parameter
-
Creates a new Parameter object.
- Parameter(String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.Parameter
-
Creates a new Parameter object.
- parameter_block_map_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- parameter_block_sizes() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- parameter_block_sizes_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- parameter_block_to_row_index_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- parameter_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateOptions
-
- parameter_blocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- parameter_blocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- parameter_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CoordinateDescentMinimizer
-
- parameter_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- parameter_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- parameter_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- parameter_input_file_directory - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- parameter_input_file_name - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- parameter_map() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- parameter_output_file_directory - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- parameter_output_file_name - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- parameter_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- parameter_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- parameter_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- ParameterBlock(double[], int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- ParameterBlock(double[], int, int, CeresSolver.LocalParameterization) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- ParameterBlockDefaultBounds() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockDetectBadLocalParameterization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockLocalSize(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- ParameterBlockPlusWithBoundsConstraints() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockPlusWithNoLocalParameterization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlocksAreEquivalent(CeresSolver.ParameterBlock, CeresSolver.ParameterBlock, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlocksAreFinite(String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- ParameterBlockSetBounds() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockSetLocalParameterizationAndNormalOperation() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockSetLocalParameterizationDiesOnNullParameterization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockSetLocalParameterizationDiesOnSizeMismatch() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockSetLocalParameterizationDiesWhenResettingToDifferentParameterization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockSetLocalParameterizationDiesWhenResettingToNull() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockSetLocalParameterizationWithSameExistingParameterization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockSetParameterizationDiesOnZeroLocalSize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockSetStateUpdatesLocalParameterizationJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterBlockSize(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- ParameterBlocksToStateVector(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- ParameterBlocksToStateVector(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- ParameterBoolean - Class in gov.nih.mipav.model.scripting.parameters
-
A boolean parameter used in either the recording or execution of a script action.
- ParameterBoolean(String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterBoolean
-
Creates a new ParameterBoolean object with no value.
- ParameterBoolean(String, boolean) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterBoolean
-
Creates a new ParameterBoolean with a new value.
- ParameterBoolean(String, int, boolean) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterBoolean
-
Creates a new ParameterBoolean object.
- ParameterBoolean(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterBoolean
-
Creates a new ParameterBoolean object.
- ParameterBoolean(String, String, boolean) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterBoolean
-
Creates a new ParameterBoolean object.
- ParameterBoolean(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterBoolean
-
Creates a new ParameterBoolean object.
- parameterChanged(Vector<String>) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Updates the FileInfo with new parameter data contained within the vector passed in [0] is the set description,
[1] is the name of the parameter to be changed [2] is the description of the parameter [3] is the value type of
the parameter [4] is the date for the parameter [5] is the time for the parameter.
- parameterColumnNames - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
array of strings for parameter column names.
- parameterConvergence - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
parameter convergence constant Used to test for convergence by the relative change in a[] being less than the
parameterConvergence.
- parameterConvergence - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
parameter convergence constant Used to test for convergence by the relative change in a[] being less than the
parameterConvergence.
- ParameterDouble - Class in gov.nih.mipav.model.scripting.parameters
-
A double parameter used in either the recording or execution of a script action.
- ParameterDouble(String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterDouble
-
Creates a new ParameterDouble object without any value.
- ParameterDouble(String, double) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterDouble
-
Creates a new ParameterDouble with a new value.
- ParameterDouble(String, int, double) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterDouble
-
Creates a new ParameterDouble object.
- ParameterDouble(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterDouble
-
Creates a new ParameterDouble object.
- ParameterDouble(String, String, double) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterDouble
-
Creates a new ParameterDouble object.
- ParameterDouble(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterDouble
-
Creates a new ParameterDouble object.
- ParameterException - Exception in gov.nih.mipav.model.scripting.parameters
-
Exception indicating an error encounted while retrieving a script parameter (i.e., it doesn't exist or is of an unexpected type).
- ParameterException(String, String) - Constructor for exception gov.nih.mipav.model.scripting.parameters.ParameterException
-
Create a new ParameterException.
- ParameterExternalImage - Class in gov.nih.mipav.model.scripting.parameters
-
A image placeholder variable parameter used in either the recording or execution of a script action.
- ParameterExternalImage(String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterExternalImage
-
Creates a new ParameterImage object.
- ParameterExternalImage(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterExternalImage
-
Creates a new ParameterExternalImage object.
- ParameterExternalImage(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterExternalImage
-
Creates a new ParameterExternalImage object.
- ParameterFactory - Class in gov.nih.mipav.model.scripting.parameters
-
Factory methods for the creation of various types of Parameters.
- ParameterFactory() - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
- ParameterFile - Class in gov.nih.mipav.model.scripting.parameters
-
A file parameter used in either the recording or execution of a script action.
- ParameterFile(String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFile
-
Creates a new ParameterFile object without any value.
- ParameterFile(String, int) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFile
-
Creates a new ParameterFile object without any value.
- ParameterFile(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFile
-
Creates a new ParameterFile object.
- ParameterFile(String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFile
-
Creates a new ParameterFile with a new value.
- ParameterFile(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFile
-
Creates a new ParameterFile object.
- ParameterFloat - Class in gov.nih.mipav.model.scripting.parameters
-
A floating point parameter used in either the recording or execution of a script action.
- ParameterFloat(String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFloat
-
Creates a new ParameterFloat object without any value.
- ParameterFloat(String, float) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFloat
-
Creates a new ParameterFloat with a new value.
- ParameterFloat(String, int, float) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFloat
-
Creates a new ParameterFloat object.
- ParameterFloat(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFloat
-
Creates a new ParameterFloat object.
- ParameterFloat(String, String, float) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFloat
-
Creates a new ParameterFloat object.
- ParameterFloat(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterFloat
-
Creates a new ParameterFloat object.
- ParameterIgnoringCostFunction(int, int, int, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.ParameterIgnoringCostFunction
-
- ParameterImage - Class in gov.nih.mipav.model.scripting.parameters
-
A image placeholder variable parameter used in either the recording or execution of a script action.
- ParameterImage(String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterImage
-
Creates a new ParameterImage object.
- ParameterImage(String, int) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterImage
-
Creates a new ParameterImage object.
- ParameterImage(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterImage
-
Creates a new ParameterImage object.
- ParameterImage(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterImage
-
Creates a new ParameterImage object.
- ParameterInt - Class in gov.nih.mipav.model.scripting.parameters
-
A integer parameter used in either the recording or execution of a script action.
- ParameterInt(String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterInt
-
Creates a new ParameterInt object without any value.
- ParameterInt(String, int) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterInt
-
Creates a new ParameterInt with a new value.
- ParameterInt(String, int, int) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterInt
-
Creates a new ParameterInt object.
- ParameterInt(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterInt
-
Creates a new ParameterInt object.
- ParameterInt(String, String, int) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterInt
-
Creates a new ParameterInt object.
- ParameterInt(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterInt
-
Creates a new ParameterInt object.
- parameterization_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
- parameterLabel - Variable in exception gov.nih.mipav.model.scripting.parameters.ParameterException
-
The label of the parameter which there was an error retrieving.
- ParameterList - Class in gov.nih.mipav.model.scripting.parameters
-
This is a special kind of script parameter, which contains other parameters.
- ParameterList(String, int) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Creates a new ParameterList object.
- ParameterList(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Creates a new ParameterList object.
- ParameterList(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Creates a new ParameterList object.
- ParameterLong - Class in gov.nih.mipav.model.scripting.parameters
-
A long parameter used in either the recording or execution of a script action.
- ParameterLong(String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterLong
-
Creates a new ParameterLong object without any value.
- ParameterLong(String, int, long) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterLong
-
Creates a new ParameterLong object.
- ParameterLong(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterLong
-
Creates a new ParameterLong object.
- ParameterLong(String, long) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterLong
-
Creates a new ParameterLong with a new value.
- ParameterLong(String, String, long) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterLong
-
Creates a new ParameterLong object.
- ParameterLong(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterLong
-
Creates a new ParameterLong object.
- parameterPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- parameterPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
- parameters - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- parameters_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.StateUpdatingCallback
-
- parameters_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- parameters_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ParameterSensitiveCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.ParameterSensitiveCostFunction
-
- ParameterShort - Class in gov.nih.mipav.model.scripting.parameters
-
A singed short parameter used in either the recording or execution of a script action.
- ParameterShort(String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterShort
-
Creates a new ParameterShort object without any value.
- ParameterShort(String, int, short) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterShort
-
Creates a new ParameterShort object.
- ParameterShort(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterShort
-
Creates a new ParameterShort object.
- ParameterShort(String, short) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterShort
-
Creates a new ParameterShort with a new value.
- ParameterShort(String, String, short) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterShort
-
Creates a new ParameterShort object.
- ParameterShort(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterShort
-
Creates a new ParameterShort object.
- parameterStr - Static variable in class gov.nih.mipav.model.file.FileImageXML
-
array of strings representing the tags under
in the xml schema.
- ParameterString - Class in gov.nih.mipav.model.scripting.parameters
-
A string parameter used in either the recording or execution of a script action.
- ParameterString(String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterString
-
Creates a new ParameterString object without any value.
- ParameterString(String, int) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterString
-
Creates a new ParameterString object without any value.
- ParameterString(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterString
-
Creates a new ParameterString object.
- ParameterString(String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterString
-
Creates a new ParameterString with a new value.
- ParameterString(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterString
-
Creates a new ParameterString object.
- parameterTable - Variable in class gov.nih.mipav.model.file.XMLPSet
-
Parameter hashtable.
- ParameterTable - Class in gov.nih.mipav.model.scripting.parameters
-
A lookup table containing Parameters keyed by a label/name.
- ParameterTable() - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
- ParameterToleranceReached() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- ParameterUShort - Class in gov.nih.mipav.model.scripting.parameters
-
A unsigned short parameter used in either the recording or execution of a script action.
- ParameterUShort(String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
Creates a new ParameterUShort object without any value.
- ParameterUShort(String, int, short) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
Creates a new ParameterUShort object.
- ParameterUShort(String, int, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
Creates a new ParameterUShort object.
- ParameterUShort(String, short) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
Creates a new ParameterUShort with a new value.
- ParameterUShort(String, String, short) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
Creates a new ParameterUShort object.
- ParameterUShort(String, String, String) - Constructor for class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
Creates a new ParameterUShort object.
- ParameterWeight(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- ParameterWeight(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Returns the eigenvalue of the i-th parameter in absolute numbers or as
percentage.
- ParameterWeightOrg(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- ParameterWeightOrg(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Returns the eigenvalue of the i-th parameter in absolute numbers or as
percentage.
- paramInf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- paramInf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- paramInfoRegex - Static variable in class gov.nih.mipav.model.scripting.ParserEngine
-
This regular expression pattern breaks apart an action parameter string into three parts: param label, param data type, and param data.
- paramList - Variable in class gov.nih.mipav.model.scripting.ParsedActionLine
-
A table of parameters which may/will be used when the action is performed.
- paramListDelimiter - Static variable in class gov.nih.mipav.model.scripting.ParserEngine
-
The delimiter used to split up a String containing all of the parameters which should be parsed and passed to an action.
- paramMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- paramMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- paramMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- paramMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- paramNaN - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- paramNaN - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
- paramPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- params - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- params - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- params - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Tps
-
- params - Variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
The list of parameters selected by the user in an algorithm's dialog, or the list of parameters to use to setup
the dialog GUI.
- paramsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
DOCUMENT ME!
- paramsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
DOCUMENT ME!
- paramTable - Variable in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
The parameter table.
- paramTotal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- paramVary - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- paramVary - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- paramVaryCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- parchk(int[], int, int, int, double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- parDTIParams - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- parent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Parent algorithm that called this optimization.
- parent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Parent algorithm that called this optimization.
- parent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Parent algorithm that called this optimization.
- parent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Parent algorithm that called this optimization.
- parent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserExtrReg
-
- parent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserReg
-
- parent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Parent algorithm that called this optimization.
- parent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- parent - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tgt_node_t
-
- parent - Variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
A reference to another Parameter who this parameter relies on.
- parent - Variable in class gov.nih.mipav.model.structures.VOIBaseVector
-
- parent - Variable in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- parent - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreeNode
-
- parent - Variable in class gov.nih.mipav.view.dialogs.JDialogSelectChannelSequence
-
DOCUMENT ME!
- parent - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter
-
- parent - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAction
-
Parent graph panel to update on 'OK'
- parent - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
Parent graph panel to update on 'OK'
- parent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
JPanel view reference.
- parent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
JPanel view reference.
- parent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Controls for the image.
- parent - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Controls for the image.
- parent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- parent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- parent - Variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
DOCUMENT ME!
- parent - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Parent frame of this frame.
- parent - Variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
The component containing this panel.
- parent - Variable in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp.MenuMouse
-
- parentBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindComponentLabelling
-
- parentComponent - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- parentComponent - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- parentDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
The parent dialog which receives text from this dicom tag editor
- parentFileInfo - Variable in class gov.nih.mipav.model.file.FileDicomTagTable
-
The dicom file info that this tag table belongs to.
- parentFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Parent frame of this dialog, usually of type ViewJFrameImage.
- parentFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- parentFrame - Variable in class gov.nih.mipav.view.JFrameHistogram
-
Parent frame of this dialog, usually of type ViewJFrameImage.
- parentFrame - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- parentFrame - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Keep a reference to the ViewJFrameVolumeView.
- parentFrame - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Volume view frame work reference.
- parentFrame - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- parentFrame - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
Parent dialog, when this panel is created as a stand-alone dialog: *
- parentFrame - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- parentFrame - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Parent dialog, when this panel is created as a stand-alone dialog: *
- parentFrame - Variable in class gov.nih.mipav.view.ViewDirectoryChooser
-
DOCUMENT ME!
- parentFrame - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- parentFrame - Variable in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Parent frame
- parentFrame - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Reference to the parent window.
- parentFrame - Variable in class gov.nih.mipav.view.VolumePositionFrame
-
Reference to the parentFrame, to notify when this window closes:.
- parentListener - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
- parentPanel - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
The container of this histogram component.
- parentPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogVolumeAnnotation
-
- parents - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Number of labels
- parentScene - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
The parent fly thru render reference.
- parentScene - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Parent frame.
- parentScene - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Parent frame references.
- parentScene - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Parent scene.
- parentScene - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The parent object that holds necessary the structures to which the surfaces will be added and modified.
- parentScene - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Parent scene.
- parentScene - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Parent frame references.
- parentScene - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Parent frame references.
- parentTags - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- parentValueString - Variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
The value to check the parent Parameter against before enabling this Parameter, in string format.
- parfocalCorrection - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- PARFUN(int, double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- PARGEN() - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- parNExamName - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- parNfoldover - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- parNoffCentre - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- parNorient - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- parNPatientPosition - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- parNProtocolName - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- parNsliceAng - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- PARNT - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- parNversion - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- PARREC - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: "par","parv2","rec","frec".
- PARREC_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: "par","parv2","rec","frec".
- PARRECMatrix - Variable in class gov.nih.mipav.model.file.FileInfoSPAR
-
- parse() - Method in class gov.nih.mipav.view.graphVisualization.MipavSAXReader
-
Parses the XML file with the Graph description.
- parse(byte[]) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader
-
- parse(File) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
this method parses the study dir sort into lists using series number that is available in dicom tag. then based
on the filename, get vol number (for example mipav_dicom_dti_series11_volume10005.dcm), and sort within lists
using vol number and instance number that comes from dicom tag.
- parse(File) - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Parses study directory
- parse(File) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Parses the files in the directory.
- parse(String) - Method in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- parse(String) - Method in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- parse(String) - Static method in class gov.nih.mipav.util.DoubleDouble
-
Converts a string representation of a real number into a DoubleDouble value.
- parse(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- parse_command_line(String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- parse_command_line(String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- parse_command_line(String[], boolean) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- parseArguments(String[], int) - Method in interface gov.nih.mipav.view.CommandLineParser
-
The parseArguments method parses command line arguments.
- parseArguments(String[], int) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Required by the CommandLineParser interface.
- parseBuffer(short[], ModelImage) - Method in class gov.nih.mipav.model.file.FileMap
-
parseImage 03 00 or 00 03 is the delimiter.
- parseColor(String) - Method in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- ParsedActionLine - Class in gov.nih.mipav.model.scripting
-
This object holds data parsed from a single line in a script, including the action to be taken and the parameters to pass to that action.
- ParsedActionLine(String, ParameterTable) - Constructor for class gov.nih.mipav.model.scripting.ParsedActionLine
-
Creates a new ParsedActionLine object.
- parsedFileName - Variable in exception gov.nih.mipav.model.scripting.ParserException
-
The file name of the script where this error occurred ('-' if no corresponding file on disk).
- parseDICOMintoBuffer(DICOM_Object, DICOM_Comms, DICOM_FileIO) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
- parseDICOMIntoRawVR(DICOM_Object, DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Converts a DICOMObject into an outgoing DICOM data stream.
- parseDims(DefaultMutableTreeNode) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
Determines the dimensions, dirCosines, isCentered, step, and alignment
- parseDouble(String) - Static method in class gov.nih.mipav.model.file.FileSpar
-
- parseFile(int) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Method called once when the user opens MIPAV.
- parseFile(int) - Static method in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
Method called once when the user opens MIPAV.
- parseFloatParameters(String, int) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Parsing utility.
- parseHDFHeader(DefaultMutableTreeNode) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
recursively parses the HDF tree into the given file info
- parseImage(DefaultMutableTreeNode) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
Parses the image node and reads in the image data (and image min and max per slice)
- parseImageDimOrder(DefaultMutableTreeNode) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
parses the dim order
- parseInfo(DefaultMutableTreeNode) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
Parses the info node (right now only grabs the modality)
- parseInt(String) - Static method in class gov.nih.mipav.model.file.FileSpar
-
- parseIntParameters(String, int) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Parsing Parameters Utility
- parseLine(String) - Method in class gov.nih.mipav.model.scripting.ParserEngine
-
Parses a line from a script.
- parseLine(String, int) - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- parseList(String, int) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Extracts individual parameter list elements from a comma delimited String.
- parseManifestInfo() - Method in class gov.nih.mipav.plugins.ManifestFile
-
- parseName(String) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Transforms the name from the DICOM form to a more usual form.
- parseNextLine() - Method in class gov.nih.mipav.model.scripting.ParserEngine
-
Parse and return the next line in the script.
- parseParameter(String, String, String) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterFactory
-
Creates a new parameter with a given label and value.
- parseParameterInfo(String) - Method in class gov.nih.mipav.model.scripting.ParserEngine
-
Parse out the individual parameter information from a string.
- parseParameters(String) - Method in class gov.nih.mipav.model.scripting.ParserEngine
-
Splits a list of parameters into individual parameter information strings, parses the individual parameter strings, and puts the parameters into a look up table.
- Parser - Class in gov.nih.mipav.model.scripting
-
This is the main class used to parse and run scripts.
- Parser() - Constructor for class gov.nih.mipav.model.scripting.Parser
-
- Parser(String) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- parseRanges() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- parseRangeString(int, String) - Static method in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Extract the slices that should be extracted from a range string.
- parseRawVRIntoDICOM(DICOM_Comms, DICOM_Object) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Convert an incoming DICOM network data stream into a DICOMObject.
- ParserEngine - Class in gov.nih.mipav.model.scripting
-
Performs the heavy-lifting of parsing out individual lines from a script.
- ParserEngine(String, boolean) - Constructor for class gov.nih.mipav.model.scripting.ParserEngine
-
Creates a new ParserEngine object.
- ParserException - Exception in gov.nih.mipav.model.scripting
-
Provides information about an error encountered while parsing a script.
- ParserException(String) - Constructor for exception gov.nih.mipav.model.scripting.ParserException
-
Creates a new ParserException object.
- ParserException(String, int, String) - Constructor for exception gov.nih.mipav.model.scripting.ParserException
-
Creates a new ParserException object.
- parseServerInfo(String) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Parses the server info string and returns a tokenized array of strings that where deliniated by ";" (See MIPAV
preference file).
- parseSQTags(ViewTableModel, String, FileDicomSQ, boolean) - Static method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
- parseStaticArguments(String[], int) - Static method in class gov.nih.mipav.view.ViewUserInterface
-
Required by the CommandLineParser interface.
- parseString(String, int) - Static method in class gov.nih.mipav.model.file.FileHistoLUT
-
Parses a string and returns an array of floats.
- parseString(String, int) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- parseTagValue(String) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Parse the string for Objects seperated by "\".
- parseTreeToXML(TreeNode) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptController
-
DOCUMENT ME!
- parseVRMLMesh(RandomAccessFile) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Parses the VRML to see how many surfaces there are.
- parseVRMLMesh(RandomAccessFile) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Parses the VRML to see how many surfaces there are.
- PARTICLE_ANALYSIS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- PARTICLE_ANALYSIS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- PARTICLE_ANALYSIS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- PARTICLE_ANALYSIS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- PARTICLE_ANALYSIS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- PARTICLE_ANALYSIS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- PARTICLE_ANALYSIS_NEW - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- PARTICLE_ANALYSIS_NEW - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- PARTICLE_ANALYSIS_NEW - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- PARTICLE_ANALYSIS_NEW - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- particleAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- particleAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- particleAlgo2D - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- particleAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- particleAnalysis() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- particleAnalysis() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Take a mask like image and performs an analysis.
- particleAnalysisNew(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
particleAnalysis = Ult erode & (bg dist map AND orig image) => watershed(ultErodePts, ANDED Bg Dist) =>
IDobjects.
- particleSystem() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- particleSystem(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Particle system analysis.
- PartitionedMatrixView(int, int, int, CeresSolver.BlockSparseMatrix, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- PartitionedMatrixViewTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- PartitionedMatrixViewTestBlockDiagonalEtE() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- PartitionedMatrixViewTestBlockDiagonalEtE() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PartitionedMatrixViewTestBlockDiagonalFtF() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- PartitionedMatrixViewTestBlockDiagonalFtF() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PartitionedMatrixViewTestDimensionsTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- PartitionedMatrixViewTestDimensionsTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PartitionedMatrixViewTestLeftMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- PartitionedMatrixViewTestLeftMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PartitionedMatrixViewTestRightMultiplyE() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- PartitionedMatrixViewTestRightMultiplyE() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PartitionedMatrixViewTestRightMultiplyF() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- PartitionedMatrixViewTestRightMultiplyF() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Partitionner(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- Partitionner_dec(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- Partitionner_inc(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- PartitionStochastique(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- PartitionStochastique_dec(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- PartitionStochastique_inc(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- parts - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- PARZEN_WINDOW_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- PARZEN_WINDOW_MODE - Static variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- parzenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- pass_counter - Variable in class gov.nih.mipav.model.file.libjpeg.cdjpeg_progress_mgr
-
- pass_counter - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_progress_mgr
-
- pass_limit - Variable in class gov.nih.mipav.model.file.libjpeg.cdjpeg_progress_mgr
-
- pass_limit - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_progress_mgr
-
- pass_number - Variable in class gov.nih.mipav.model.file.libjpeg.my_decomp_master
-
- PASS1_BITS - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- pass2_fs_dither(libjpeg.jpeg_decompress_struct, byte[][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- pass2_fs_dither(libjpeg.jpeg_decompress_struct, short[][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- PASS2_FS_DITHER - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- pass2_no_dither(libjpeg.jpeg_decompress_struct, byte[][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- pass2_no_dither(libjpeg.jpeg_decompress_struct, short[][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- PASS2_NO_DITHER - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- passed - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockJacobiPreconditionerTest
-
- passed - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- passed - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- passed - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- passed - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
- passed - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- passedListeners - Variable in class gov.nih.mipav.view.dialogs.GuiBuilder
-
- passedReg - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.RegularizationCheckingLinearSolver
-
- passFreeRangeArrays(boolean[], float[], float[], float[], float[]) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Passes arrays needed in free range mode.
- passFreeRangeArrays(boolean[], float[], float[], float[], float[]) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Passes arrays needed in free range mode.
- paste() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- pasteAll() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- pasteAllVOI(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from VOIManagerInterface.
- pasteFromViewUserInterface() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- pasteFunct() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Adds the previously copied copied function to the graph.
- pastelnormal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- pasteVOI(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- pasteVOI(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- pasteVOI(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from VOIManagerInterface.
- pasteVOI(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Paste the input VOIBase.
- patch - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- patch - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.tliop
-
- patch_cmp(LocalIntensityOrderPattern.VlLiopDesc, int, int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- patch_sort(LocalIntensityOrderPattern.VlLiopDesc, int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- patch_sort_recursive(LocalIntensityOrderPattern.VlLiopDesc, int, int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- patch_swap(LocalIntensityOrderPattern.VlLiopDesc, int, int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- PatchBatchExtractor(libdt.Mat[], libdt.PatchOptions, libdt.Range, libdt.Range, libdt.Range) - Constructor for class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< mask for all patches.
- patchBufferSize - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- patches - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< all z-locations on step grid.
- patches - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< video buffer w/o mean [vrows,vcols,patopt.win.z] type=OPT_MAT_TYPE.
- patchesall - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< vector of all patches, corresponding to loc.
- PatchExtractor(libdt.PatchOptions, int, int) - Constructor for class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< center frames of the video buffer (reference to vbuf).
- patchIntensities - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
- patchNum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- patchNum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- PatchOptions(int, int, int, int, libdt.norm_type, double, int) - Constructor for class gov.nih.mipav.model.algorithms.libdt.PatchOptions
-
< frames to skip in checking variance.
- PatchOptions(libdt.PatchOptions) - Constructor for class gov.nih.mipav.model.algorithms.libdt.PatchOptions
-
- patchPermutation - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
- patchPixels - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
- patchSideLength - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
< LIOP descriptor size.
- patchSize - Variable in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
- patchSize - Variable in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- patchSize - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- path - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- path - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- path - Variable in class gov.nih.mipav.model.file.FileInfoImageXML.SurfaceLink
-
Path to surface.
- path - Variable in class gov.nih.mipav.model.file.FileInfoImageXML.VOILink
-
Path to VOI.
- path - Variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
The path to the provenance file
- path - Variable in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- Path() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Returns the path of all shapes.
- pathCompress(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindComponentLabelling
-
- pathFileName - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
Path File name
- PathLen(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Returns the length of a path.
- pathPlanningRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
Radio check button the path planning.
- pathRecorded - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
The flag to indicate whether the searching path need to be recorded.
- pathRecorded - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
The flag to indicate whether the searching path need to be recorded.
- paths - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Store the paths for every thread.
- paths - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Store the paths for every thread.
- paths - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Used to store all paths for levelEigth, levelFour, levelTwo and levelOne.
- paths - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Used to store all paths for levelEigth, levelFour, levelTwo and levelOne.
- paths(int, int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Generates the possible paths of the level set and pushes them onto a stack.
- paths(int, int, int, int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Generates the possible paths of the level set and pushes them onto a stack.
- patian - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
124 Patient Age notation.
- patient_id - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Patient's ID.
- patient_id - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Patient's ID.
- patient_id - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- PATIENT_LEVEL - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- patientAge - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- patientAge - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- patientAge - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
122.
- PatientAge - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- PatientAgeUnits - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- patientBirthDate - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- patientBirthTime - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- patientComments - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- patientCoordinatesToFile(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Converts the local patient point into file coordinates.
- patientDOB - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- patientEthnicGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- patientField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- patientID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- patientID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- patientID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
84 - 13 bytes.
- patientID - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- patientID - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- PatientID - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- patientName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- patientName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- patientName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
97 - 25 bytes.
- patientName - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- patientName - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
Info data structure format.
- patientName - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- patientName - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- patientName - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- PatientName - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- patientOrientation - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- patientOrientation - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- patientOrientationString - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- patientOrientationString - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- patientOrientBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- patientOrientLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- patientOtherIDs - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- patientOtherNames - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- patientPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- patientPosBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- patientPosition - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- patientPosition - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
par/rec patientPosition
- patientPosition - Variable in class gov.nih.mipav.model.file.FilePARREC
-
patient position
- patientPosLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- patientRotation - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- patientSex - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- patientSex - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- patientSex - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
126.
- patientSex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- patientSex - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- PatientSlice - Class in gov.nih.mipav.view
-
PatientSlice provides oriented or non-oriented interface to the ModelImage data for rendering, with LUT changes.
- PatientSlice(ModelImage, ModelLUT, ModelImage, ModelLUT, int) - Constructor for class gov.nih.mipav.view.PatientSlice
-
Constructs a PatientSlice with the given ModelImages, LUTs, and orientation.
- patientSliceLabel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Labels for the current position in PatientSlice coordinates:.
- patientSliceLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Labels for the current position in PatientSlice coordinates.
- patientSliceLabelVals - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- patientSliceLabelVals - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Displayed values for the current position in PatientSlice coordinates.
- patientStatus - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- patientStatus - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- patientToFile(Vector3d, Vector3d, ModelStorageBase, int) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
PatientToFile transform.
- patientToFile(Vector3d, Vector3d, ModelStorageBase, int, boolean) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
PatientToFile transform.
- patientToFile(Vector3f, Vector3f, ModelStorageBase, boolean, int[], boolean[]) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
PatientToFile transform.
- patientToFile(Vector3f, Vector3f, ModelStorageBase, int) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
PatientToFile transform.
- patientToFile(Vector3f, Vector3f, ModelStorageBase, int, boolean) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
PatientToFile transform.
- PatientToLocal(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Convert the position in PatientCoordinates into Local rendering
coordinates:
- PatientToLocal(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- PatientToLocal(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- patientToScreen(int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- patientToScreen(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- patientToScreen(Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- patientToScreenVOI(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- patientToScreenVOI(Vector3f) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Converts local patient coordinate view (Axial, Coronal, Sagittal) of the image into the screen coordinates.
- patientToScreenVOI(Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- patientWeight - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- patientWeight - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- patopt - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
- patopt - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
fill type for generating images from patch labels.
- pattern - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- pattern - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- pattern - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- pattern - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlFileMeta
-
< Is the file active?
- pattern - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- pattern - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- pattern - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- pattern2lines - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- PatternDetection - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- PatternDetection() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.PatternDetection
-
- PatternDetectionTest - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- PatternDetectionTest() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.PatternDetectionTest
-
- patternGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- patternGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- patternGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- patternPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- patternScale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- patternScale - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- patWeight - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
128 Patient Weight.
- pause - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- pause - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- pause() - Static method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- pause() - Static method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Pause function for testing and debugging purpose.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
debug function
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Pauses the display until the user hits enter.
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- pause() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- PAUSE_MODE - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Recorder/Player is paused.
- PAUSE_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Recorder/Player is paused.
- PAUSE_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Recorder/Player is paused.
- pauseAnimator(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- pauseBetweenFrameGroups - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- pauseBetweenFrameGroupsIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- pauseBetweenImages - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- pauseBetweenImagesIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- pauseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
DOCUMENT ME!
- pauseButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Pause button.
- pauseButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Pause button.
- pauseButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Pause button.
- pauseButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- pauseButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- pauseButton - Variable in class gov.nih.mipav.view.ViewJFrameMemory
-
DOCUMENT ME!
- pauseButton - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Button for pausing updating of currently registered images
- pauseButton2 - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
DOCUMENT ME!
- paused - Variable in class gov.nih.mipav.view.ViewJFrameMemory
-
DOCUMENT ME!
- paused - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Whether currently registered images list is updating
- PAUSED - Static variable in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Status indicating that the script recorder is currently paused.
- PAUSED - Static variable in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Status indicating that the script recorder is currently paused.
- pauseDialog - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- pauseInterval - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- pauseInterval - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- pauseInterval - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
264 Pause interval (slices).
- pauseRecording() - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Pauses the recording of the script we are currently recording.
- pauseRecording() - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Pauses the recording of the script we are currently recording.
- pauseTime - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- pauseTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- pauseTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
266.
- PAxis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- pB - Variable in class gov.nih.mipav.view.ColorWheel
-
blue saturation
- pB - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
blue saturation *
- pB - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
blue saturation *
- pB - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
blue saturation *
- pb_bounds(String) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- pb2MM(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- pb2MM2(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- pbAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
DOCUMENT ME!
- pBar - Variable in class gov.nih.mipav.view.JPanelProgressBar
-
Actual bar which fills with color as the percentage of completion increases.
- pBar - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Actual bar which fills with color as the percentage of completion increases.
- pBar - Variable in class gov.nih.mipav.view.ViewJProgressBar
-
Actual bar which fills with color as the percentage of completion increases.
- pBar - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
The progress bar
- pBarVisible - Variable in class gov.nih.mipav.model.file.FileBase
-
Flag indicating if the progress bar should be shown.
- pBarVisible - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Flag indicating if the progress bar should be shown.
- pBarVisible - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Flag indicating if a whether of not the progress bar is visible.
- pbBG(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- pbBGTG(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- pbCanny(double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- pbCG(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- pbCGTG(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- pbGM(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- pbGM2(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- pBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
- pBins - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- pbTG(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- pC - Variable in class gov.nih.mipav.view.ColorWheel
-
color range
- pC - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
color range *
- pC - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
color range *
- pC - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
color range *
- Pc - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Marginal.
- PCA(double[][], double[], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- PCAData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.AppData
-
- pcDicom - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- pcerr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- pcie - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
The posterior commisure inferior edge. pcie is the coordinated transformed inferiorEdge
- pComponent() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
DOCUMENT ME!
- pComponentAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- pctLabel - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
The percentage displayed next to the progress bar
- PCVelocityEncoding - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- PCVelocityEncoding - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- Pcx - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- Pcx - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Number of entries to update
- PCX - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .pcx.
- PData() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmASM.PData
-
- pDataTF - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Data transfer object.
- Pdf - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- pDloc_i - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- pDloc_j - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- pdtr(int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- PDTR - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- pdtrc(int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- PDTRC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- pdtri(int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- PDTRI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- pdu - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
PDU service object.
- pdu - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
The PDU service object.
- pdu - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
Protocol Data Units (PDU) object.
- pdu - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
PDU service object.
- pdu - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery.MoveRequestInfo
-
DOCUMENT ME!
- PDUTYPE_AAbortRQ - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_AAssociateAC - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_AAssociateRJ - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_AAssociateRQ - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_AbstractSyntax - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_ApplicationContext - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_AReleaseRQ - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_AReleaseRSP - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_AsyncOpWindowSubItem - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_ImplementationClass - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_ImplementationVersion - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_MaximumSubLength - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_PDataTF - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_PresentationContext - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_PresentationContextAccept - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_SCPSCURoleSelect - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_TransferSyntax - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_UNKNOWN - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDUTYPE_UserInformation - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- PDVLength - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Presentation Data Value length.
- PDVMsgHeader - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Presentation Data Value message header. 01H Accociate request. 02H Associate ack. 03H Associate reject. 04H PData
PDU 05H Release request 06H Release response 07H Abort 10H Application context item 20H Presetation context item
21H Pr 30H Abstract Syntax sub-item 40H Trnasfer Syntax sub-item 50H User information item
- PDVPresContID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Presentation Data Value presentation context ID.
- pdx - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_resolution_t
-
- pdy - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_resolution_t
-
- PEAK_SIGNAL_TO_NOISE_RATIO - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- peak_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- peak_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< size of the keys buffer.
- peak_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3DC
-
- peak_thresh - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- peak_thresh_default - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- peakSAR - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- peakSAR - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- peakScore - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum2
-
- peakScore - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum3
-
- peakScore - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeature
-
< feature frame.
- peakSignalToNoiseRatio - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- peakThreshold - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
< feature extraction method.
- pEdge - Variable in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- peekedByte - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Storage for the first byte (i.e. the PDU type )
- peekFirstByte() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Typically used to determine the PDUTYPE (i.e.
- peekForEndOfSequence() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
DOCUMENT ME!
- PELLPE - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- PELLPK - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- PENALTY_FUNCTION_I - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- PENALTY_FUNCTION_I - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- PENALTY_FUNCTION_II - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- PENALTY_FUNCTION_II - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- penColor - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- PentaxMakernoteDescriptor(MetadataExtractor.PentaxMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDescriptor
-
- PentaxMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
- PER_MINIMIZER_ITERATION - gov.nih.mipav.model.algorithms.CeresSolver.LoggingType
-
- per_scan_setup(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- percent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- percent - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- percent - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- percent_done - Variable in class gov.nih.mipav.model.file.libjpeg.cdjpeg_progress_mgr
-
- PERCENT_SIGN - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.Iso2022Converter
-
- percentage - Variable in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
DOCUMENT ME!
- percentage - Variable in class gov.nih.mipav.view.ViewJProgressBar
-
Percentage label, puts a number next to the bar with the actual percent completed.
- percentButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- percentLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- percentPhaseFieldOfView - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- percentSampling - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- percentText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- percentUsed - Variable in class gov.nih.mipav.view.ViewJFrameMemory
-
DOCUMENT ME!
- perform() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Begins the excution of the 3D convolver.
- perform() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
This is the method that calculates the FFT Perform a data centering operation after the forward FFT Perform a
data centering operation before the inverse FFT Note that a frequency filter operation performs a forward FFT.
- perform() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
This is the method that calculates the FFT Perform a data centering operation after the forward FFT Perform a
data centering operation before the inverse FFT Note that a frequency filter operation performs a forward FFT.
- performApproxModeling - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- performBoundsChecking - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
flag for performing bounds checking...normally should be set to true unless negative numbers are desired
- performBoundsChecking - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
flag for performing bounds checking...normally should be set to true unless negative numbers are desired
- performBulkAdding() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
perform bulk adidng
- performBulkAveraging(boolean) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
perform bulk averaging
- performBulkMax() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
perform bulk adidng
- performBulkMin() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
perform bulk adidng
- performConventionalModeling - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- performConventionalWith0Phase - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- performConventionalWith180Phase - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- performDelete() - Method in class gov.nih.mipav.view.JPanelListController
-
Programmatically performs a 'delete' button click, based on however the implemented class performs it.
- performDelete() - Method in class gov.nih.mipav.view.JPanelTreeController
-
Programmatically performs a 'delete' button click, based on however the implemented class performs it.
- performedProcedureStepStartTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- performEPICheckbox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- performFullModeling - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- performHeapMaxCheck - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- performMT() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
- performMT() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
The multi-threading version of FFT algorithm.
- performMT() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
The multi-threading version of FFT algorithm.
- performPaint(MouseEvent) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- performPaint(MouseEvent, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
This method will set or clear the paint bitmap as the user paints on-screen.
- performRegistration - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
boolean for performing registration
- performRegistrationCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
checkbox for performing registration
- performRegistrationDICOM() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
regsitration of DICOM DWI dataset
- performRegistrationPARREC() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
regsitration of PAR REC DWI dataset
- performSendToListA() - Method in class gov.nih.mipav.view.JPanelListController
-
Programmatically performs a 'Send to list a' button click, based on however the implemented class performs it.
- performSendToListB() - Method in class gov.nih.mipav.view.JPanelListController
-
Programmatically performs a 'Send to list b' button click, based on however the implemented class performs it.
- performSendToTreeA() - Method in class gov.nih.mipav.view.JPanelTreeController
-
Programmatically performs a 'Send to tree a' button click, based on however the implemented class performs it.
- performSendToTreeB() - Method in class gov.nih.mipav.view.JPanelTreeController
-
Programmatically performs a 'Send to tree b' button click, based on however the implemented class performs it.
- performStraightTreT1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- performStraightTreT1 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- performTreT1HIFI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- performTreT1HIFI - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- performTreT1withPreCalculatedB1Map - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- performTreT1withPreCalculatedB1Map - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- perImageCost(int, double, double, double, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perImageCost
-
- perimeter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- perimeter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ShapeFactor
-
- perimeter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ShapeFactor
-
- perimeter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ShapeFactor
-
- perimeter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ShapeFactor
-
- perimeter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ShapeFactor
-
- perimeter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ShapeFactor
-
- perimeter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ShapeFactor
-
- perimeter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ShapeFactor
-
- perimeterDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statics to calculate.
- period - Variable in class gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
- perm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- perm - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- permConf_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- permGx_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- permGy_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- perMin - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- perMinute - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
If perMinute == false, K_trans and k_ep are per second
If perMinute == true, K_trans and k_ep are per minute
- permitExclusion - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Whether pixels will be excluded from a calculation based on intensity values
- permNmxConf_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- permNmxRank_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- permRank_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- permutation - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- permuteAndPredictOobSamples(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- permuted_sampleIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- permuteSampleIDs(Random) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- perp(Vector2f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector2f
-
Set this vector to the 'perp' of the specified vector.
- perShapeCost(int, double, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perShapeCost
-
- perSolveOptions - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolver
-
- perSolveOptions - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategy
-
- Person(String, String, String, String) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.Person
-
Creates a new Person object.
- Perspective - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- pert - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexSplitParams
-
- perVertexColor - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Per vertex color array, which store the color data saved in .sur file.
- PETDataType - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- PETStudyGeneral - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- PETStudyImageData - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- pFace - Variable in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- pFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogOrientMatrix
-
DOCUMENT ME!
- pfSwapped - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- pfSwapped - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- pG - Variable in class gov.nih.mipav.view.ColorWheel
-
green adj
- pG - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
green saturation *
- pG - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
green saturation *
- pG - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
green adj *
- PGAMMA - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- pgb1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- pgb1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- pgb2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- pgb2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- PGM - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- PGM - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Portable Gray Map extension .pgm
- PGX_DFMT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- ph - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_resolution_t
-
- ph - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_resolution_t
-
- ph0q - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- ph180q - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- pHalfEdge - Variable in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- phase - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- phase - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- phase(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Calculates phase from real and imaginary parts.
- phase(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Calculates phase from real and imaginary parts.
- phase(float, float) - Static method in class gov.nih.mipav.util.MipavMath
-
Calculates phase from real and imaginary parts.
- phase_dim - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Bits 2 and 3 of the dim_info character contain the phase_dim information. 0 for
"No phase encoding direction is present", 1 for "Phase encoding in the x direction", 2 for
"Phase encoding in the y direction", and 3 for "Phase encoding in the z direction".
- phase_dim - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Bits 2 and 3 of the dim_info character contain the phase_dim information.
0 for "No phase encoding direction is present", 1 for "Phase encoding in the x direction",
2 for "Phase encoding in the y direction", and 3 for "Phase encoding in the z direction".
- phase1 - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- phase1 - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- phaseBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- phaseCombo - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- phaseContrastFlowAxis - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- phaseContrastFlowAxis - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- PhaseCorrelation(double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- phaseData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- phaseData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- phaseEncodingString - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
phase encoding...hard coded to vertical
- phaseEncodingTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- phaseImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- phaseImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- phaseMask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- PhasePreservingDenoising - Class in gov.nih.mipav.model.algorithms.filters
-
- PhasePreservingDenoising() - Constructor for class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- PhasePreservingDenoising(ModelImage, int, int, double, double, double, double, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- PhasePreservingDenoising(ModelImage, ModelImage, int, int, double, double, double, double, double, double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- phaseRadios - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- phi - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- phi - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- phi - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- phi - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
double scalar containging the value of the objective function = (0.5 * chisquare) at the termination point a.
- phi - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
double scalar containging the value of the objective function = (0.5 * chisquare) at the termination point a.
- phi - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- phi - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- phi - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- phi - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- PHI02 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- PHI12 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- phiBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
- phiBins - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- phiBins - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- phiConstant - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
- phiConstant - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- phiConstantText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- phii - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- phij - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- Phij - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- phikp1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- phikp1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- phiLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- philat - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- philat - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- phiLattice - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- PHILIPS - gov.nih.mipav.view.dialogs.AlgorithmTreParams.ScannerType
-
- philipsDicomGradExtract() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- philRelBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- philRelLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- phiMAX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- phir - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
For complete integrals phir = PI/2, phii = 0.
- phiTable - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- phiText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- phiText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- phiText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
DOCUMENT ME!
- pHolder - Variable in class gov.nih.mipav.model.file.FileDataProvenance
-
The provenance holder to write from and read into
- pHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
The provenance holder to display (or inject provenance data for "open provenance")
- phone - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- phone - Variable in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Investigator's phone number.
- PHOTO_INTERP - Static variable in class gov.nih.mipav.model.file.FileLSM
-
3 = CCITT-T4, 4 = CCITT-T6, 5 = LZW, 32773 = packbits.
- PHOTO_INTERP - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- PHOTO_INTERP - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- PHOTO_INTERP - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- photoBleachedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- photoBleachedIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- photoBleachedIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- photoBleachedVOI - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- PhotographicConversions() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PhotographicConversions
-
- photometric - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image minimum intensity for single channel image.
- photometricInterp - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
Type of image - color, monochrome etc.
- photometricInterpretation - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- photometricInterpretation - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- PHOTOSHOP - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- PHOTOSHOP - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- PhotoshopDescriptor(MetadataExtractor.PhotoshopDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDescriptor
-
- PhotoshopDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- PhotoshopReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopReader
-
- PHPAS - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- PHTCA1(int, double[][], double[][], int, int, int, int[], int[], int[], int[], int[], int[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[][], boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- pHYs - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- physText - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- pi - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SubSig
-
- pi - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- PI - Static variable in class gov.nih.mipav.util.DoubleDouble
-
The value nearest to the constant Pi.
- PI - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- PI_2 - Static variable in class gov.nih.mipav.util.DoubleDouble
-
The value nearest to the constant Pi / 2.
- PI_MULT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- PI_SEARCH - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Used for angle searches in line VOI creation
- pi4 - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- PIAP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- piButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- Pic - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- PIC - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .pic.
- Pick() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Picking.
- Pick() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
- Pick() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Picking support for adding Annotation points to the scene.
- Pick() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Picking.
- Pick() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Picking.
- Pick(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Determine which widget is selected with the mouse/
- Pick(Renderer, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
- Pick(Renderer, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Abstract picking.
- Pick(Renderer, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
- Pick(Renderer, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
- Pick(Renderer, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Picking.
- pickable - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
burn surface pickabel or not.
- Pickable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- pickCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The PickCanvas object that ties together the canvas and the surfaces branch group to allow pick operations on the
scene.
- pickCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Agent to set the burning point sphere pickable.
- pickCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Agent to set the CoolTip probe pickable.
- pickCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Agent to set the probe pickable.
- pickCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Used to set the probe red guiding line pickable.
- pickCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Agent to set the regular probe pickable.
- pickCanvas - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Agent to set the theraml probe pickable.
- pickColor - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.ColormapLabel
-
- pickColor - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.GlyphLabel
-
- pickColor - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.LineLabel
-
- pickColor - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
- pickColor - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- pickColor - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- pickColor - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
- pickCorrespondence(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enables/disables picking correspondence points between the mesh and
BrainSurfaceFlattener render.
- PickCorrespondence(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Enables picking correspondence points between the surface renderer and the BrainSurfaceFlattener renderer.
- PickCorrespondence(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Passes the triangle indices of the picked triangle to the BrainSurfaceFlattener renderer for display.
- pickedColor - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Default color to highlight the selected nodes on control- mouse-click:
- pickedEdge - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Current selected Edge.
- pickedNode - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAction
-
- pickedNode - Variable in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
- pickedNode - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Current selected Node.
- pickedNodePrev - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
previously selected Node.
- pickedPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- pickImageFile() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Brings up a FileChooser to pick a file.
- pickingRenderBuffer - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- PickSlice3D(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- PickVolume3D(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- picListingPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- PICT - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .pict.
- piDivTwo - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
pi div two *
- pihf - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- pimag - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- pImage2 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- pImage2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- pIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.TriangulationEdge
-
- pinfo - Static variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
The parameter information for this class
- pinfo - Static variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
The parameter information for this class
- pinfo - Static variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
The parameter information for this class
- pinfo - Static variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
The parameter information for this class
- pinholeGeometry - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- pinholeRadius - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- pinholeRadius - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- pinholeSize - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- pinholeSize - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- pinholeSizeAiry - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- pink - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- pinpol(double, double, boolean[], int[], int[]) - Method in class gov.nih.mipav.model.structures.VOIContour
-
- pInterface - Variable in class gov.nih.mipav.model.file.FileXML
-
progress bar implementation (either through a JProgressBar or JPanel) passed in for reading/saving file.
- pinv() - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
Slight modification of pinv in dtiFitTensor.c.
- PIO2 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- PIO4 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- pipeline - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
parent dialog
- pipeline - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
Parent DTI pipeline framework
- pipeline - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- pipeline - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- pipeline - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
reference to the DTI Pipeline
- pitchAngle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Rotation pitch angle.
- pitchAngle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Rotation pitch angle.
- pitchTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Spin transform.
- pitchTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Spin transform.
- pivalp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- pivec(double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- pivec(DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- pivit - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
array of integers of dimension param containing the permutation matrix E in the decomposition QTranspose * J * D
E = (R) (0) pivit[i] contains the index of the column that was moved into column i.
- pivit - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
array of integers of dimension param containing the permutation matrix E in the decomposition QTranspose * J * D
E = (R) (0) pivit[i] contains the index of the column that was moved into column i.
- pivot(double[][], int, int, boolean, boolean, boolean, double, double, double[], double[], double[], boolean[], double[], boolean[], int, double[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- pivot1(double[][], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- pivots - Variable in class gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver
-
- pixBuffer - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Integer buffer (4 bytes that stores the concatenated Alpha (1 byte), Red (1 byte), Green ( 1 byte ), Blue (1 byte )
data.
- pixBuffer - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Buffer used to store ARGB images of the image presently being displayed.
- pixBuffer - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- pixBuffer - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- pixBuffer - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Integer buffer (4 bytes that stores the concatenated Alpha (1 byte), Red (1 byte), Green ( 1 byte ), Blue (1 byte )
data.
- pixBuffer - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
The buffer used to store the ARGB image of the image presently being displayed.
- pixBuffer - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- pixBuffer - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- pixBuffer - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Integer buffer (4 bytes that stores the concatenated Alpha (1 byte), Red (1 byte), Green ( 1 byte ), Blue (1 byte
) data.
- pixBuffer - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- pixBuffer - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Integer buffer (4 bytes that stores the concatenated Alpha (1 byte), Red (1 byte), Green ( 1 byte ), Blue (1 byte
) data.
- pixBuffer - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- pixBuffer - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- pixBufferA_XY - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Buffer that holds image A pixel data for the XY plane, used to build displayable image.
- pixBufferB - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- pixBufferB - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Buffer used to store ARGB image of the windowed imageB.
- pixBufferB - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Integer buffer (4 bytes that stores the concatenated Alpha (1 byte), Red (1 byte), Green ( 1 byte ), Blue (1 byte
) data.
- pixBufferB - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- pixBufferB - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- pixBufferB - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- pixBufferB_XY - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Buffer that holds image B pixel data for the XY plane, used to build displayable image.
- pixBufferCompA - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- pixBufferCompB - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- pixBufferDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Buffer used to store ARGB images of the image presently being displayed.
- pixBufferDest - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Buffer used to store ARGB images of the image presently being displayed.
- pixBufferDest - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- pixBufferDest - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- pixdim - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
qfac is stored in the otherwise unused pixdim[0].
- pixDist - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- pixDist - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- pixDist - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- pixDist - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- pixel - Variable in class gov.nih.mipav.view.ViewJFrameRegistration.JDialogIncrement
-
Pixel or degree.
- pixel - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool.JDialogIncrement
-
Pixel or degree.
- Pixel(int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Pixel
-
- Pixel(ContourPlot.Img, int) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Creates a new Pixel object referencing the value
of specified Img at specified index.
- Pixel(ContourPlot.Img, int, int) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Creates a new Pixel object referencing the value
of specified Img at specified position.
- PIXEL_BASED_VISUAL_INFORMATION_FIDELITY - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- PIXEL_GROUPING - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
- PIXEL_GROUPING - Static variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- PIXEL_MEASURES_SEQUENCE - Static variable in class gov.nih.mipav.model.file.FileDicom
-
- PIXEL_SPACING - Static variable in class gov.nih.mipav.model.file.FileDicom
-
- Pixel1(float, float) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Used by AAM appearance model to get bilinear interpolation.
- pixelBandwidth - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- pixelButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- PixelConvertingSpliterator(Spliterator<? extends P>, ContourPlot.PixelConvertingSpliterator.PixelConverter<P, T>) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
- PixelConvertingSpliterator(Spliterator<? extends P>, Supplier<T>, BiConsumer<P, T>, BiConsumer<T, P>) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
Constructs a new PixelConvertingSpliterator.
- pixelField - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- pixelField - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- PixelGrid(int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- PixelGridNode(int, int, AlgorithmNetworkSnake.PixelGrid.PixelGridNode, AlgorithmNetworkSnake.PixelGrid.PixelGridNode, AlgorithmNetworkSnake.PixelGrid.PixelGridNode, AlgorithmNetworkSnake.PixelGrid.PixelGridNode) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- pixelID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
58 - 14 bytes.
- pixelIncrement - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
pixelIncrement is increased above 1 if subsampling.
- pixelIncrement - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- pixelIncrement - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- pixelIncrementButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- pixelIncrementButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- pixelLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- pixelLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- pixelOrVOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- pixelPaddingValue - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
Pixel Padding Value (0028, 0120).
- pixelPadValue - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Some file formats have a pad value for pixels outside the acquisition domain.
- pixelRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- pixelRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- pixelRepresentation - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
DICOM tag (0028, 0103)
-1 = undefined
0 = unsigned
1 = signed
- pixelRepresentation - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- pixelResX - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
50.
- pixelResY - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
54.
- pixels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- pixels - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- pixels - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- pixels - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- pixels_per_theta_step - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- pixelScaleArray - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- pixelsContract - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- pixelsContract - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- pixelsExpand - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- pixelsExpand - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- pixelsInRange - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Variable that will store the total number of pixels in thresholding range
- pixelsInRangeB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Variable that will store the total number of blue pixel values in thresholding range
- pixelsInRangeG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Variable that will store the total number of green pixel values in thresholding range
- pixelsInRangeR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Variable that will store the total number of red pixel values in thresholding range
- pixelSize - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- pixelSize - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- pixelSize() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Glyph
-
- pixelSizeH - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- pixelSizeV - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
hDat dataStructure format public long version;.
- pixelSizeX - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- pixelSizeY - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- pixelSizeZ - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- pixelSpacing - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- pixelSupplier - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- pixelSupplier - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- pixelSupplier - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator
-
- pixelSupplier - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- pixelsWidePerSample - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- pixelType - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Data
-
- pixelType - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF
-
- pixelUnitsArray - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- pixelUnitsNumber - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- pixelWidthText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
- pixelWidthText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
- pl - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
The parameter list (arguments)
- pl - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
The parameter list (arguments)
- pl - Variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
The parameter list (arguments)
- pl - Variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
The parameter list (arguments)
- place(FrontEdge, FrontEdge[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront.AdvancingTest
-
- place(FrontEdge, FrontEdge[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- place(FrontEdge, FrontEdge[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- PlaceHolder - Class in gov.nih.mipav.view.icons
-
Simple class located in the icons directory (package).
- PlaceHolder() - Constructor for class gov.nih.mipav.view.icons.PlaceHolder
-
- PLACEHOLDER_STR - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Used for XML tag for an image placeholder.
- PLAIN_FORMAT - Static variable in class gov.nih.mipav.view.dialogs.JDialogText
-
Specifies that the textbox not format the text in the display, as is defined by MIME type "text/plain".
- plam - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- PLANAR_CONFIG - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- PLANAR_CONFIG - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- PLANAR_CONFIG - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- PLANAR_CONFIG - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- planarConfig - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
0 = RGB, RGB, 1 = R R R, G G G, B B B.
- planarConfig - Variable in class gov.nih.mipav.model.file.FileNRRD
-
0 indicates pixels are RGB, RGB chunky 1 indicates pixels are RRR, GGG, BBB planar.
- planarConfig - Variable in class gov.nih.mipav.model.file.FileRaw
-
DOCUMENT ME!
- planarConfig - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- plane - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.BoundingBoxEffect
-
- plane - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- PLANE - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- PLANE_ORIENTATION_SEQUENCE - Static variable in class gov.nih.mipav.model.file.FileDicom
-
- PLANE_POSITION_SEQUENCE - Static variable in class gov.nih.mipav.model.file.FileDicom
-
- planeConstant - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- planeConstantSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Slider to adjust the front clipping plane constant.
- planeFit() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Fits a plane to the points in this contour and returns the plane.
- planeGap - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
Used to show a zero filling gap in functional AFNI images -1 if no gap is present, 0 = x gap, 1 = y gap, 2 = z
gap Interpolation is not performed across zero filling gaps.
- planeName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- planeName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- planeName - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- planeOffset - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- PlaneRender - Class in gov.nih.mipav.view.renderer.J3D
-
Class PlaneRender: renders a single dimension of the ModelImage data as a
texture-mapped polygon.
- PlaneRender(ViewJFrameVolumeView, ModelImage, ModelLUT, ModelImage, ModelLUT, GraphicsConfiguration, int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Creates a new PlaneRender object.
- PlaneRender_WM - Class in gov.nih.mipav.view.renderer.WildMagic
-
Class PlaneRenderWM: renders a single dimension of the ModelImage data as a
texture-mapped polygon.
- PlaneRender_WM(GLCanvas, VolumeTriPlanarInterface, Animator, VolumeImage, VolumeImage, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- PlaneRenderProstate - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Class PlaneRenderWM: renders a single dimension of the ModelImage data as a texture-mapped polygon.
- PlaneRenderProstate() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Default PlaneRender interface.
- PlaneRenderProstate(VolumeTriPlanarInterface, Animator, VolumeImage, VolumeImage, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- PlaneRenderProstate.LocalVolumeVOI - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- PlaneRenderProstate.LocalVolumeVOIVector - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- PlaneRenderProstate.PolylineVector - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- PlanesDividerLocation - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- PlaneSize(Vector3f, Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- planeType - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- planeType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- planeType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
114.
- planeVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- PlaneZoom - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- Plate(Integer, String, String) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Plate
-
Creates a new Plate object.
- plateChamberID - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- plateChamberID - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- plateID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
attributes.
- plateID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Plate
-
Attributes.
- plateInfo - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- PlateInfo(Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
Creates a new PlateInfo object.
- plates - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- plateVesselID - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- plateVesselID - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- platform - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.CL_data
-
- platform - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
the name of the operating system
- platformIndex - Static variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- platformVersion - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
the operating system's version
- play(boolean, boolean) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
If there is no other thread running, starts a new thread to play the mouse events.
- play(boolean, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
If there is no other thread running, starts a new thread to play the mouse events.
- play(boolean, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
If there is no other thread running, starts a new thread to play the mouse events.
- PLAY_MODE - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Recorder/Player is playing.
- PLAY_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Recorder/Player is playing.
- PLAY_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Recorder/Player is playing.
- play4D(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- play4D(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- play4DVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- play4DVOIs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- play4DVOIs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- playButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Display button.
- playButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Display button.
- playButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Display button.
- playMouse - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Reference to PlayMouse class object.
- playMouse - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Reference to PlayMouse class object.
- playMouse - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Reference to PlayMouse class object.
- PlayMouse(boolean, boolean) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.PlayMouse
-
Constructs a new thread and initializes the parameters which dictate what kind of play this is
- PlayMouse(boolean, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.PlayMouse
-
Constructs a new thread and initializes the parameters which dictate what kind of play this is
- PlayMouse(boolean, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.PlayMouse
-
Constructs a new thread and initializes the parameters which dictate what kind of play this is.
- PLIST - gov.nih.mipav.view.dialogs.JDialogMemoryAllocation.VMConfigType
-
- PLIST_DTD - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader
-
- plistExt - Static variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- plmtry - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- pLocation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- pLocation2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- plogp(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- pLogP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- pLogP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- PLOGP(double) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- plogpArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- plogpres - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- plot - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- plot() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- plot(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- plot(double, double[], double[], int, int, int, double[][], double[][], double[][], double[][], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- PLOT - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Graphs (*.plt).
- plot_mrr() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- plot_title - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- plotClass(double[][], int[], String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- plotDifferences(double[][], double[][], GaussianMixtureModelsIncompleteSamples.GMM[], GaussianMixtureModelsIncompleteSamples.GMM, double[]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- plotGraph(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Plots the graph by calling PolyLine.
- plotGraphForPrinter(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Same as the plotGraph method, except the points used in this method are readable when sent to the printer.
- plotinit() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PlotMeshIntoImage(ModelSimpleImage, CAAMMesh, double[], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Plots a mesh into an image.
- plotpoly(float[], float[], double[][], double[], boolean, double[], int, boolean, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- plotResults(double[][], double[][], GaussianMixtureModelsIncompleteSamples.GMM, String, double) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- plotrs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- plotSchwarzChristoffel(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- PlotShapeIntoImage(ModelSimpleImage, CAAMShape, double[], double[], boolean, boolean, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Wrapper to draw shape onto image
- PlotShapeIntoImage(ModelSimpleImage, CAAMShape, double[], double[], boolean, boolean, boolean, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Draws the shape into an image with a given color.
- plottedRoot - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Branch group that is the parent of the plotted surface.
- plotterRender - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Surface plotter view.
- plottree(int, int, int[], int) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- PLTE - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- Plugin - gov.nih.mipav.view.Argument.InstanceArgument
-
- PlugIn - Interface in gov.nih.mipav.plugins
-
DOCUMENT ME!
- PLUGIN - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
All plugin related files (.class, .jar, .zip, .tar, .tar.gz).
- PLUGIN_ENTRY - Static variable in class gov.nih.mipav.plugins.ManifestFile
-
Signifies manifest file lists a plugin after delimiter.
- PlugInAlgorithm - Interface in gov.nih.mipav.plugins
-
This is the MIPAV plugin interface for Algorithms.
- PlugInBundle - Class in gov.nih.mipav.plugins
-
An abstract class for a plugin which reports other available plugins bundled inside of it.
- PlugInBundle() - Constructor for class gov.nih.mipav.plugins.PlugInBundle
-
- PluginDir - gov.nih.mipav.view.Argument.StaticArgument
-
- pluginDirClassLoader - Static variable in class gov.nih.mipav.plugins.PluginUtil
-
- PluginEyetrackerMode - Static variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- PlugInFile - Interface in gov.nih.mipav.plugins
-
An interface for a plugin which reads/writes images.
- PlugInFileTransfer - Interface in gov.nih.mipav.plugins
-
An interface for a plugin which transfers files between two file systems.
- PlugInGeneric - Interface in gov.nih.mipav.plugins
-
An interface for generic MIPAV Plug-Ins which don't require an open image and can be run from the ViewUserInterface
menu.
- plugInMenu - Variable in class gov.nih.mipav.view.ViewMenuBar
-
The menu listing installed plugins in the user's home directory.
- pluginName - Variable in class gov.nih.mipav.view.ViewJPopupPlugin
-
String text of the button representing the plugin to be uninstalled.
- pluginPanel - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Reference to the plug-in panel in the 2x2 (old) layout.
- pluginsMenu - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Stores the plugins menu so that it can be removed/updated when plugins are installed.
- pluginTree - Variable in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
The JTree that describes the plugin structure
- PluginUtil - Class in gov.nih.mipav.plugins
-
- PluginUtil() - Constructor for class gov.nih.mipav.plugins.PluginUtil
-
- PlugInView - Interface in gov.nih.mipav.plugins
-
DOCUMENT ME!
- plus(libdt.Mat, double) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- plus(libdt.Mat, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- plus(Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.EigenQuaternionParameterization
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.HomogeneousVectorParameterization
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.IdentityParameterization
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LocalParameterization
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.QuaternionParameterization
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadLocalParameterization
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MatrixParameterization
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PolynomialParameterization
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- Plus(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TestParameterization
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.EigenQuaternionParameterization
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.HomogeneousVectorParameterization
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.IdentityParameterization
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LocalParameterization
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.QuaternionParameterization
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BadLocalParameterization
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.MatrixParameterization
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PolynomialParameterization
-
- Plus(Vector<Double>, int, Vector<Double>, int, Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.TestParameterization
-
- Plus(Vector<Double>, Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- Plus(Vector<Double>, Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
- Plus(Vector<Double>, Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- Plus(Vector<Double>, Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- Plus(Vector<Double>, Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- Plus(Vector<Double>, Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- plusplus() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- plyInputFilePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- plyInputFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- PlyInstance - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Ply file instance.
- PlyInstance - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Ply file instance.
- plyOutputFilePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- plyOutputFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- PlyReader - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- PlyReader() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PlyReader
-
- PlyWriter - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- PlyWriter() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PlyWriter
-
- PlyWriter.NormalVector - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- PlyWriteTriangles(String, CoredVectorMeshData, int, Point3D, float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.PoissonRun
-
- PlyWriteTriangles(String, CoredVectorMeshData, int, Point3D, float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.test
-
- pMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
- pMax - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- pMax - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- pMaxText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- pMesh - Variable in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- pMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
- pMin - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- pMin - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- pMinrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- pMinrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- pMinText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- pmv_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- PN - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- PNEWQ - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- Png - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- PNG - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .png.
- PNG_DFMT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- PNG_SIGNATURE_BYTES - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkReader
-
- PngChromaticities(byte[]) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- PngChromaticitiesDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- PngChunk(MetadataExtractor.PngChunkType, byte[]) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngChunk
-
- PngChunkReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngChunkReader
-
- PngChunkReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkReaderTest
-
- PngChunkType(byte[]) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- PngChunkType(String) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- PngChunkType(String, boolean) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- PngChunkTypeTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkTypeTest
-
- PngColorType(int, String, int...) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngColorType
-
- PngDescriptor(MetadataExtractor.PngDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngDescriptor
-
- PngDescriptorTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- PngDirectory(MetadataExtractor.PngChunkType) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- PngHeader(byte[]) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- PngMetadataReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PngMetadataReader
-
- PngMetadataReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.PngMetadataReaderTest
-
- PngProcessingException(String) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.PngProcessingException
-
- PngProcessingException(String, Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.PngProcessingException
-
- PngProcessingException(Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.PngProcessingException
-
- pntsIndex - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
Connections between verticies, won't change.
- pNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
number of principal components to be retained.
- pNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- pNumberDialog - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
DOCUMENT ME!
- po - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Svec
-
- poc - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
progression order change information
- POC - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
indicates if a POC marker has been used O:NO, 1:YES
- poc2warp(double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- pochhammer(double, double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- pochhammer(double, int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- pockelCellSetting - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- pocs - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
progression order changes
- pOffset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- point - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Point that is currently being optimized.
- point - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Point that is currently being optimized.
- point - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DELSUNCModel
-
- point - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DLMModel
-
- point - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
- point - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DELSUNCModel
-
- point - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DLMModel
-
- point - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
- point - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWatershed.Seed
-
DOCUMENT ME!
- point - Variable in class gov.nih.mipav.model.algorithms.Vectornd
-
N-dimension vector
- point - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.it_node
-
- point - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- point - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- point(double, double, byte) - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame.point
-
- point(double, double, byte) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy.point
-
- point() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- Point() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Point
-
- Point() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Point
-
- Point(double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Point
-
- POINT - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- POINT - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- POINT - Static variable in class gov.nih.mipav.model.structures.VOI
-
Indicates that the POINT is of type Line made up of a single point.
- POINT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- POINT() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.POINT
-
- POINT() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.POINT
-
- POINT(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.POINT
-
- POINT(POINT) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.POINT
-
- POINT(SIZE) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.POINT
-
- point_list - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- point_list - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- point_t() - Constructor for class gov.nih.mipav.model.algorithms.NelderMead.point_t
-
- POINT_VOI - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in point VOI mode
- point1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- point1 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- point1Label - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- point1Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- point2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- point2 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- Point2() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Point2
-
- Point2(double, double) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Point2
-
- Point2(LSCM.Point2) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Point2
-
- POINT2 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- point2Label - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- point2Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- Point3 - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- Point3 - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- Point3() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- Point3() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- Point3(float[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- Point3(float[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- Point3(float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- Point3(float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- Point3(Point3) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- Point3(Point3) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- Point3D - Class in gov.nih.mipav.model.structures
-
Simple integer 3D point.
- Point3D - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- Point3D() - Constructor for class gov.nih.mipav.model.structures.Point3D
-
Initializes structure to (0,0,0).
- Point3D() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Point3D
-
- Point3D(float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Point3D
-
- Point3D(int, int, int) - Constructor for class gov.nih.mipav.model.structures.Point3D
-
Initializes structure to the supplied values.
- Point3dSize(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- PointAdjacencyFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- PointAdjacencyFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointAdjacencyFunction
-
- pointAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- PointAttribute(float, float, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- PointAttribute(int, int, double, double, double, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- PointAux() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Returns the complete point aux vector of the shape.
- pointButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- pointCalculate() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- pointCalculation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
If pointCalculation is true, go to free range mode and set location at point1, point2.
- pointCalculation - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- pointCalculation - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- pointCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- pointComparator() - Constructor for class gov.nih.mipav.model.algorithms.NelderMead.pointComparator
-
- pointCount - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- pointCount - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.REGION
-
- pointCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
Standard cursor: point (resize, NE).
- pointCursor - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- pointData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- PointDetails(Point2D) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
- pointDistance(Point, Point) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- PointDistanceFunctor - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- PointDistanceFunctor() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PointDistanceFunctor
-
- PointerActive(boolean) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- PointerActive(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- PointerActive(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- PointerActive(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- PointerActive(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- PointerActive(boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- pointerBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Pointer behavior reference, not used now.
- PointerBehaviorRenderer - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
This behavior is supposed to "fly by pointer" - that is, zoom in, translate, and rotate to where the mouse is
currently pointing.
- PointerBehaviorRenderer(JPanelView) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.PointerBehaviorRenderer
-
Creates new pointer behavior, sets parent dialog, and resets MAX_ANGLE to the true start value.
- PointeredPoint2D() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.PointeredPoint2D
-
Creates point at (0,0)
- PointeredPoint2D(double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.PointeredPoint2D
-
Creates point using the specified arrays as pointers for this point's coordinates
- PointeredPoint2D(double, double) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.PointeredPoint2D
-
Creates point at (x,y)
- PointerUpdater<E> - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- PointerUpdater() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PointerUpdater
-
- pointerVOIButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The button for the "default" mode of the mouse, where clicking in the image shows the intensity of that
voxel.
- pointID - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.Line
-
- pointID - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.Line
-
- pointID - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.Line
-
- pointID - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.Line
-
- pointID - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.Line
-
- PointIndexValueAndNormalFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- PointIndexValueAndNormalFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueAndNormalFunction
-
- PointIndexValueFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- PointIndexValueFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueFunction
-
- pointInTri(double, double, double, double, double, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
- pointLineDistance(double, double, double, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- pointLineDistance(double, double, double, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- pointLineDistance(double, double, double, double, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- pointList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- pointList - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- pointList - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- pointLocation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- pointMarker - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- pointNum - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- pointNum - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- PointOnAssBorder(CDVector, CDVector, CDVector, CDVector, CDVector, CDVector, CDVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Calculates the point to curve error between two shapes.
- pointOrig - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- pointRadio - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Point light radio button.
- pointRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Point light radio button.
- points - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- points - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Array used to hold the initial points, final points and costs
- points - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Array used to hold the initial points, final points and costs
- points - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- points - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Array used to hold the initial points, final points and costs
- points - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- points - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- points - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- Points() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
Creates a new
ContourPlot.Points object which uses
DefaultGlyph#CIRCLE_F for displaying its points.
- Points() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Returns a vector of points
- POINTS_AND_ELLIPSES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- POINTS_AND_ELLIPSES - Static variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- POINTS_ONLY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- POINTS_ONLY - Static variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- pointsAndEllipses - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- pointsAndLinesButton - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- pointsAndLinesGroup - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- pointsButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- pointsButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- pointScale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- pointScale - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- pointsCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
- pointSetA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
Input point set A (2D or 3D)
- pointSetA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
Input point set A (2D or 3D)
- pointSetA - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- pointSetA - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- pointSetB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
Input point set B (2D or 3D)
- pointSetB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
Input point set B (2D or 3D)
- pointSetB - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- pointSetB - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- pointSetBT - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- pointSetsRequired - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- pointSetsRequired - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- pointSetsRequired - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Number of point triplets required before each ellipse find is performed
- pointSetsRequired - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Number of point triplets required before each hyperbola find is performed
- pointSetsText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
- pointSetsText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
- pointsOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- pointsOnlyButton - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- PointStack - Class in gov.nih.mipav.model.structures
-
PointStack is a structure used specifically in ViewComponentEditImage for use in the active level set generation and
was built for speed.
- PointStack(int) - Constructor for class gov.nih.mipav.model.structures.PointStack
-
PointStack.
- pointsVisiblePanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- pointThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- pointThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
- pointToContour(int, int, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Finds the minimum distance from a point to a contour.
- pointVOI - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- pointVOI - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- pointVOIChoices - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- pointWeights - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- pointx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- pointy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- poissDecay(int, double, double, double) - Method in class gov.nih.mipav.model.algorithms.RandomNumberGen
-
This code is derived from PoissDecay.cpp, PoissonDeviate, PoissonRecur, and RandomDeviate,
code accompanying Data Reduction and Error Analysis for the
Physical Sciences, Third Edition, by Philip R.
- POISSON - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Used to indicate added Poisson noise
- POISSON - Static variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- poisson_full_multigrid2D(int, double[], double[], int, int, int, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- poisson_full_multigrid3D(int, double[], double[], int, int, int, int, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- poisson_multigrid2D(double[], int, double[], double[], int, int, int, double[], int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- poisson_multigrid3D(int, double[], double[], int, int, int, double[], int, int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- PoissonPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- PoissonRun - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson
-
- PoissonRun() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.PoissonRun
-
- pol3(double) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- pol3(DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- pol4(double[], double) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- pol4(DoubleDouble[], DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- POLAK_RIBIERE - gov.nih.mipav.model.algorithms.CeresSolver.NonlinearConjugateGradientType
-
- polarity - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
if true then fill inside the VOI.
- polarity - Variable in class gov.nih.mipav.model.structures.VOI
-
Indicates if the VOI should mask ones or mask as zeros.
- polarity - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
or if the source image is to be replaced.
- PolarPoint() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.PolarPoint
-
- PolarPoint() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.PolarPoint
-
- PolarPoint(int, int, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.PolarPoint
-
- PolarPoint(int, int, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.PolarPoint
-
- PolarToCartesian2D(Vector2f, Vector2f, ModelImage) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Convert the Polar coordinate to Cartesian coordinate, point based.
- PolarToCartisian2D(ModelImage, ModelSimpleImage, ModelSimpleImage) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Whether this routine is necessary, the question will to be decided in the future.
- polevl(double, double[], int) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- POLEVL - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- POLKINGS_FIRST_ORDER - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- POLKINGS_FIRST_ORDER - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- poll() - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- pollTimer - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorPoller
-
- poly - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- poly - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- poly() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.poly
-
- poly(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.poly
-
- Poly - Class in gov.nih.mipav.model.algorithms
-
Solution of cubic, quartic, and quintic equations
Ported from code written by (c) Khashin S.I. http://math.ivanovo.ac.ru/dalgebra/Khashin/index.html
// khash2 (at) gmail.com
// Thanks to Alexandr Rakhmanin
// public domain
- Poly() - Constructor for class gov.nih.mipav.model.algorithms.Poly
-
- POLY - Static variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- POLY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- POLY_REC - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- POLY_REC() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.POLY_REC
-
- poly_to_turn_rep(poly, TURN_REP) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- polya_fit(double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- polya_fit_m(double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- polya_fit_ms(double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- polya_fit_s(double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- polya_fit_simple(double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- polya_logProb(double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- polya_moment_match(double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- polya_sample(double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- polyCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- polygon - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.PolygonShapeInfo
-
- polygon - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.PolygonShapeInfo
-
- polygon - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.PolygonShapeInfo
-
- polygon - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.PolygonShapeInfo
-
- polygon - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.PolygonShapeInfo
-
- polygon - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.PolygonShapeInfo
-
- polygon - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.PolygonShapeInfo
-
- polygon(double[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.polygon
-
- POLYGON_EXTERIOR_TO_CIRCLE - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- POLYGON_EXTERIOR_TO_CIRCLE - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- polygon_node() - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper.polygon_node
-
- POLYGON_TO_CIRCLE - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- POLYGON_TO_CIRCLE - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- POLYGON_TO_RECTANGLE - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- POLYGON_TO_RECTANGLE - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
- polygonIndexToMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Convert from the polygon mode combo-box list index to the PolygonAttributes.POLYGON_LINE,
PolygonAttributes.POLYGON_POINT, and PolygonAttributes.POLYGON_FILL values:
- polygonIndexToMode(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Convert from the polygon mode combo-box list index to the PolygonAttributes.POLYGON_LINE,
PolygonAttributes.POLYGON_POINT, and PolygonAttributes.POLYGON_FILL values:
- polygonModeCB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The combo box for the polygon mode to display.
- polygonModeCB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The combo box for the polygon mode to display.
- PolygonShapeInfo(poly, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.PolygonShapeInfo
-
- PolygonShapeInfo(poly, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.PolygonShapeInfo
-
- PolygonShapeInfo(poly, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.PolygonShapeInfo
-
- PolygonShapeInfo(poly, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.PolygonShapeInfo
-
- PolygonShapeInfo(poly, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.PolygonShapeInfo
-
- PolygonShapeInfo(poly, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.PolygonShapeInfo
-
- PolygonShapeInfo(poly, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.PolygonShapeInfo
-
- POLYLINE - Static variable in class gov.nih.mipav.model.structures.VOI
-
Indicates that the VOI is of type POLYLINE type of contour - end points NOT connected.
- POLYLINE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- POLYLINE - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in polyline VOI mode
- POLYLINE_SLICE - Static variable in class gov.nih.mipav.model.structures.VOI
-
Indicates that the VOI is of type POLYLINE that will go through more than one slice.
- POLYLINE_SLICE_VOI - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in polyline slice VOI mode
- polylineCounter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
constant polyline counter
- polylineCounterList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Polyline counter list
- polylineList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Polyline list box in the dialog for surfaces.
- Polylines - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- Polylines() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Polylines
-
- Polylines() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM.Polylines
-
- PolylineVector - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- PolylineVector() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.PolylineVector
-
- PolylineVector() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.PolylineVector
-
- PolylineVector(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.PolylineVector
-
- PolymomialConstantInterpolatingPolynomial() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Polynomial - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- Polynomial(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- Polynomial(Polynomial, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- polynomial_minimization_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
- PolynomialBothOutputArgumentsNullWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialConstantPolynomialReturnsNoRoots() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- polynomialContent - Variable in class gov.nih.mipav.model.algorithms.CVODES.DtpntMemRec
-
- PolynomialCubicInterpolatingPolynomialFromValues() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialCubicInterpolatingPolynomialFromValuesAndGradients() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialCubicInterpolatingPolynomialFromValuesAndOneGradient() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialDataMemRec() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.PolynomialDataMemRec
-
- PolynomialDeficientCubicInterpolatingPolynomial() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialDifferentiateConstantPolynomial() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialDifferentiateQuadraticPolynomial() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialInvalidPolynomialOfZeroLengthIsRejected() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialLinearInterpolatingPolynomial() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialLinearPolynomialWithNegativeRootWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialLinearPolynomialWithPositiveRootWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialMinimizeConstantPolynomial() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialMinimizeLinearPolynomial() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialMinimizeQuadraticPolynomial() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialNullPointerAsImaginaryPartWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialNullPointerAsRealPartWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialParameterization() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.PolynomialParameterization
-
- PolynomialQuadraticInterpolatingPolynomial() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialQuadraticPolynomialWithCloseRootsWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialQuadraticPolynomialWithComplexRootsWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialQuadraticPolynomialWithOneNegativeRootWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialQuadraticPolynomialWithPositiveRootsWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialQuadraticPolynomialWithTwoNegativeRootsWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialQuarticMonomialWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialQuarticPolynomialWithTwoClustersOfCloseRootsWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialQuarticPolynomialWithTwoZeroRootsWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- PolynomialQuarticPolynomialWorks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- POLYPOINT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- polys - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- pop() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Pops a VR of the list.
- pop() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.ActiveTree
-
Pops off minimum cost in tree.
- pop() - Method in class gov.nih.mipav.view.RubberbandLivewire.ActiveTree
-
Pops off minimum cost in tree.
- Pop() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- popFirstIn() - Method in class gov.nih.mipav.model.structures.IntVector
-
Pops first value off the FIFO array.
- popGroupLength - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Flag used to support processing of GroupLength tags (XXXX, 0000)
- popLastIn() - Method in class gov.nih.mipav.model.structures.IntVector
-
Pops last value off the FILO array.
- POPQF1(int[], int[], int[], double[], double[], double[], double[], double[][], int, int, int, int, int, int, int[], int[], int[], int[], double, double, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- POPQG1(int[], int[], int[], double[], double[][], double[][], int, int, int, int, int, int, int[], int[], int[], double, double, double[], double[], double[], double[], double[], double[], double[][], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- popt - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- populateAvailableObjectsLists() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptController
-
Populates image and voi lists by calling ViewUserInterface and getting all images currently open, then getting
all open VOIs associated with those images.
- populateBrushList() - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
populates the menu item showing available brushes to edit
- populateFields() - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
- populateFromProfile(ArrayList<FileDicomKey>) - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- populateFromProfile(ArrayList<FileDicomKey>, ArrayList<String>, boolean[]) - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
Method used in the anonymize dialog profile that generates the tree
structure from key information passed into the class.
- populateFromProfile(ArrayList<FileDicomKey>, ArrayList<String>, boolean[]) - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
Method used in the anonymize dialog profile that generates the tree
structure from key information passed into the class.
- populateImagesTable() - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
populate images table
Builds a list of images to operate on from the template image.
- populateInitialScriptTree(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptController
-
Creates the tree structure from the parser code.
- PopulateJacobianRowAndColumnBlockVectors(CeresSolver.Program, CeresSolver.CompressedRowSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter
-
- populateLists() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Fills the source and selected item lists with the appropriate data.
- populateLists() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
permits control over what items go in which lists.
- populateModel(Object[]) - Static method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Scroll List Code.
- populateModel(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptController
-
Calls methods to populate model and direct view to draw itself.
- populateOptionalPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
populates the options panel
- populatePreview() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Previews the currently active slice would loosely go with either min or max sliding window.
- populateRequiredPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
- populateScriptTree(String[], String[], String[], int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- populateSourceTagsList() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.MyCellRenderer
-
- populateTalairachPanel() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
popul
- populateTalairachTab() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Looks at TalairachTransformInfo saved in ModelImage and populates the talairach scrollpane with the appropriate
data.
- popup - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Menu for setting raw info
- popup - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- popup - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Popup Menu for VOIs (non-point).
- popup - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- popup - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- popup - Variable in class gov.nih.mipav.view.ViewJPopupPlugin
-
The stored popup menu
- popup - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- popup - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
DOCUMENT ME!
- popupBackground(MouseEvent) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Opens up the background popup menu.
- popupEdge(MouseEvent, Edge) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Opens the node popup menu.
- popupListener - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Listener to be added/removed depending on selection status
- popupListener - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
DOCUMENT ME!
- PopupListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptView.PopupListener
-
- PopupListener() - Constructor for class gov.nih.mipav.view.ViewToolBarBuilder.PopupListener
-
- popupMenu - Variable in class gov.nih.mipav.view.JScrollMenu
-
The popup menu portion of the menu.
- popupMenuCanceled(PopupMenuEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- popupMenuCanceled(PopupMenuEvent) - Method in class gov.nih.mipav.view.ViewJPopupPlugin
-
Popmenu canceled
- popupMenuCanceled(PopupMenuEvent) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- popupMenuCanceled(PopupMenuEvent) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
- popupMenuWillBecomeInvisible(PopupMenuEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- popupMenuWillBecomeInvisible(PopupMenuEvent) - Method in class gov.nih.mipav.view.ViewJPopupPlugin
-
Popmenu unvisible
- popupMenuWillBecomeInvisible(PopupMenuEvent) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- popupMenuWillBecomeInvisible(PopupMenuEvent) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
- popupMenuWillBecomeVisible(PopupMenuEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- popupMenuWillBecomeVisible(PopupMenuEvent) - Method in class gov.nih.mipav.view.ViewJPopupPlugin
-
Popmenu unvisible
- popupMenuWillBecomeVisible(PopupMenuEvent) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- popupMenuWillBecomeVisible(PopupMenuEvent) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
- popupNode(MouseEvent, Node) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Opens the node popup menu.
- popupPluginStaticRef - Static variable in class gov.nih.mipav.view.ViewJPopupPlugin
-
There only needs to be one ViewJPopupPlugin in MIPAV
- popupPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Popup Menu for VOIPoints.
- popupScrollBar - Variable in class gov.nih.mipav.view.JScrollPopupMenu
-
- port - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Port number used to accept data.
- port - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- portField - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- portLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- pos - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- pos - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- pos - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdnode
-
- pos - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_marker_info_t
-
position in codestream
- pos - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- pos - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- POS - gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64.ClassType
-
- POS - gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees.ClassType
-
- posclamp - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- posclamp - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- PoseDisplacement(ModelSimpleImage, CAAMShape, CDVector, CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Performs one pose regression experiment.
- PoseDispVectors(CDVector, CDVector, CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Generates a set pose displacement vectors.
- PoseVec2Param(CDVector, double[], double[], double[], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Converts a pose vector to pose parameters: scale, theta, tx, ty.
- position - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans.positionWeightItem
-
DOCUMENT ME!
- position - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Block
-
- position - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Cell
-
- position - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- position - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- position - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
76 - Patient Poisition.
- position - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- position - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
the light's position.
- position - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.TreeNode
-
Position in array seededCosts.
- position - Variable in class gov.nih.mipav.view.RubberbandLivewire.TreeNode
-
Position in array seededCosts.
- position() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- position_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- positionArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- positionItem(double, double) - Constructor for class gov.nih.mipav.model.structures.VOIContour.positionItem
-
Creates a new positionItem object.
- positionLowerComparator() - Constructor for class gov.nih.mipav.model.structures.VOIContour.positionLowerComparator
-
- positionNumber - Variable in class gov.nih.mipav.model.file.FileZVI
-
- positions - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- positionsPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- positionToDICOMString(double, double, double) - Static method in class gov.nih.mipav.model.structures.ModelImage
-
Convert the image position to the String format (decimal string) to be stored in the DICOM tag (0020,0032) image
(patient) orientation.
- positionUpperComparator() - Constructor for class gov.nih.mipav.model.structures.VOIContour.positionUpperComparator
-
- positionWeightComparator() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmKMeans.positionWeightComparator
-
- positionWeightItem(double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmKMeans.positionWeightItem
-
Creates a new positionWieghtItem object.
- positionX - Variable in class gov.nih.mipav.model.structures.VOIContour.positionItem
-
DOCUMENT ME!
- positionY - Variable in class gov.nih.mipav.model.structures.VOIContour.positionItem
-
DOCUMENT ME!
- POSITIVE_INFINITY - Static variable in class gov.nih.mipav.util.DoubleDouble
-
- positiveHysteresisFraction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- POSITRON_EMISSION_TOMOGRAPHY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality PET.
- POSITRON_EMISSION_TOMOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality PET.
- posRatios - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Ratios used to translate points in the result image to points in the source image.
- possibleInt2Values - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- possibleInt2Values - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- possibleInt2Values - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Possible intensity values for second image.
- possibleIntValues - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- possibleIntValues - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- possibleIntValues - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Possible intensity values for first image.
- possibleIntValues1 - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Initial guesses for bin values
- post - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- post_process_1pass(libjpeg.jpeg_decompress_struct, byte[][][], int[], int, byte[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- post_process_1pass(libjpeg.jpeg_decompress_struct, short[][][], int[], int, short[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- POST_PROCESS_1PASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- post_process_2pass(libjpeg.jpeg_decompress_struct, byte[][][], int[], int, byte[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- post_process_2pass(libjpeg.jpeg_decompress_struct, short[][][], int[], int, short[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- POST_PROCESS_2PASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- post_process_data - Variable in class gov.nih.mipav.model.file.libjpeg.my_post_controller
-
- post_process_prepass(libjpeg.jpeg_decompress_struct, byte[][][], int[], int, byte[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- post_process_prepass(libjpeg.jpeg_decompress_struct, short[][][], int[], int, short[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- POST_PROCESS_PREPASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- postContentLinesR - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- postContentTextR - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- POSTERIOR_MARGIN - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
AC-PC: Posterior Margin reference point.
- POSTERIOR_PT - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Talairach: Posterior reference point.
- posteriorCenter - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- posteriorMargin - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- posteriorMargin - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- posteriorMarginDicom - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- posteriorMarginPt - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- posteriorPt - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- posteriorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- posteriorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- posteriorPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- posteriorPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- posTextF - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- postImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
private ModelImage srcImage; // image before acceptor photobleaching.
- postImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- postmultiply(libdt.CovMatrix, libdt.Mat, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- postNormalSmooth - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- postprocessor_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- PostRender(Renderer, Culler) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Render the object after all other objects have been rendererd.
- PostRender(Renderer, Culler) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Render the object after all other objects have been rendererd.
- PostSolveSummarize(CeresSolver.PreprocessedProblem, CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- postSwap() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
- posX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.TracingPoint
-
- posX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.TracingPoint
-
- posX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.TracingPoint
-
- posX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.TracingPoint
-
- posX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.TracingPoint
-
- posY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.TracingPoint
-
- posY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.TracingPoint
-
- posY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.TracingPoint
-
- posY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.TracingPoint
-
- posY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.TracingPoint
-
- potential - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMarkovSegment
-
- potential - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
- pow(double) - Method in class gov.nih.mipav.util.DoubleDouble
-
- pow(int) - Method in class gov.nih.mipav.util.DoubleDouble
-
Computes the value of this number raised to an integral power.
- pow(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
- Pow(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Takes the power 'dP' of each element.
- powButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- powEIntFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- powEIntFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- powEIntFlag - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- powell(double[], double[][], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
Minimization of entropy function of nParams variables.
- POWELL - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
- POWELL - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- POWELL - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
- POWELL - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- POWELL_2_PARAMETER - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- POWELL_2_PARAMETER - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- POWELL_2_PARAMETER - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- POWELL_2_PARAMETER - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- POWELL_BADLY_SCALED - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- POWELL_BADLY_SCALED - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- POWELL_SINGULAR - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- POWELL_SINGULAR - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- POWELL_SINGULAR - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- POWELL_SINGULAR - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- PowellBadlyScaledFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellBadlyScaledFunction
-
- PowellEvaluator2(boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellEvaluator2
-
- PowellSingularFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellSingularFunction
-
- PowellSingularJacobianFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.PowellSingularJacobianFunction
-
- powellTolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
Tolerance passed to Powell's algorithm.
- power - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.FilamentArc
-
DOCUMENT ME!
- power - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser
-
- PowerButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- PowerWatershed_q2(int[][], int[], int[], int, Vector<Integer>, Vector<Short>, int, int, int, int, int, boolean, ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- powi(double, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- powi(double, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- powi(double, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- ppDenoisingAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
DOCUMENT ME!
- ppertC(libdt.Mat, libdt.Mat, double) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- PPFT(double[][][], double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ppft3(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ppft3_ref(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- PPIAcceleration - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- ppm - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
if ppm == 1 --> there was a PPM marker
- PPM - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement part-per-million.
- PPM - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement part-per-million.
- PPM - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Portable Pixmap Utilities .ppm
- ppm_buffer - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
packet header storage original buffer
- ppm_data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
packet header store there for future use in t2_decode_packet
- ppm_data_current - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
- ppm_data_first - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
pointer remaining on the first byte of the first header if ppm is
used
- ppm_data_read - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
size of the ppm_data
- ppm_data_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
Number of bytes actually stored inside the ppm_data
- ppm_len - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
size of the ppm_data
- ppm_markers - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
ppm markers data (table indexed by Zppm)
- ppm_markers_count - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
number of ppm markers (reserved size)
- ppm_previous - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
use in case of multiple marker PPM (case on non-finished previous
info)
- ppm_store - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
use in case of multiple marker PPM (number of info already store)
- PPM_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - part-per-million.
- ppnd16(double) - Method in class gov.nih.mipav.model.algorithms.Erfinv
-
- ppnd16_impl() - Constructor for class gov.nih.mipav.model.algorithms.Erfinv.ppnd16_impl
-
- ppnd7(double) - Method in class gov.nih.mipav.model.algorithms.Erfinv
-
- ppnd7_impl() - Constructor for class gov.nih.mipav.model.algorithms.Erfinv.ppnd7_impl
-
- PPolynomial - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- PPolynomial(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- PPolynomial(PPolynomial) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- pprot - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
error protection methods for packets (0,1,16,32,37-128)
- pprot_packno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
packet number of packet protection specification (>=0)
- pprot_tileno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
tile number of packet protection specification (>=0)
- PPSBI1(double[], double, int, int, double[], double[], double, double[][], double, double[], double[], int[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- PPSBI7(double, int, double, int, int, double[], double[], double, double[][], double, double[], double[], int[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ppt - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
If ppt == 1 --> there was a PPT marker for the present tile
- ppt_buffer - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
used to keep a track of the allocated memory
- ppt_data - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
packet header store there for future use in t2_decode_packet
- ppt_data_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
Number of bytes stored inside ppt_data
- ppt_len - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
size of ppt_data
- ppt_markers - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
ppt markers data (table indexed by Zppt)
- ppt_markers_count - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
number of ppt markers (reserved size)
- PQ_min() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PQbucket(delaunay.Halfedge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PQcount - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PQdelete(delaunay.Halfedge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PQempty() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PQextractmin() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PQhash - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PQhashsize - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PQinitialize() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PQinsert(delaunay.Halfedge, delaunay.Site, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PQmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- PQnext - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Halfedge
-
- pqueue - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- prc_t - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Temporary values for Tile parts, initialised in pi_create_encode
- prcE - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
End value, initialised in pi_initialise_encode
- prch - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
precinct height
- prch - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
precinct height
- prcS - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start value, initialised in pi_initialise_encode
- prcw - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
precinct width
- prcw - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
precinct width
- pre_and_fullData - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
DOCUMENT ME!
- PRE_PROCESS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- PRE_PROCESS_CONTEXT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- PRE_PROCESS_DATA - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- pre_zero - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- pre_zero - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- preal - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- PREAMBLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegReader
-
- PREAMBLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JfifReader
-
- PREAMBLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JfxxReader
-
- preambleBuffer - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
DICOM part 10 preample buffer.
- preBlur() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Extends the m_abMask so all the voxels in the neighborhood are blurred.
- prec - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_cmptparm_t
-
precision
- prec - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
precision
- prec - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_precision
-
- prec - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- precedence(String) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
method that determines precedence
- precincts - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_band_t
-
- precincts_data_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_band_t
-
- precis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- precision - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
- precision - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Number of digits after decimal place to allow.
- precisionBox - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
User can choose the precision to display.
- precno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
precinct that identify the packet
- precno0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Layer num start,Precinct num start, Precinct num end
- precno1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Layer num start,Precinct num start, Precinct num end
- preCodeImage() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- precompute_BM(ModelImage, int, int, int, double, int[][]) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- PRECOMPUTED - Static variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- PRECOMPUTED - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- PrecondAdjPPFT(double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- precondadjppft3(double[][][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- precondadjppft3_ref(double[][][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- PreconditionedConjugateGradient - Class in gov.nih.mipav.model.algorithms
-
MIT License
Copyright (c) 2018 Komahan Boopathy
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
- PreconditionedConjugateGradient(double[][], double[][], double[], int, double, double[], int[], double[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
- preconditioner - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverPerSolveOptions
-
- Preconditioner() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Preconditioner
-
- preconditioner_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CgnrSolver
-
- preconditioner_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterativeSchurComplementSolver
-
- preconditioner_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- preconditioner_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- preconditioner_type_given - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- preconditioner_type_used - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- PreconditionerForZeroEBlocks(CeresSolver.PreconditionerType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- PreconditionerOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- PreconditionerType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerType
-
- PreconditionerTypeToString(CeresSolver.PreconditionerType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- preContentLinesR - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- preContentTextR - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- pred - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- PRED - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGDCInputStream
-
- PRED - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGDCInputStream
-
- predb - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- predb - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- PREDEFINED_THICKNESSES - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- predict() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- predict(StochasticForests.Data, boolean) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- predict(Model, FeatureNode[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- predict(BufferedReader, DataOutputStream, LIBSVM.svm_model, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- predict(BufferedReader, DataOutputStream, svm_model, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_predict
-
- Predict - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- Predict() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Predict
-
- PREDICT_AGAIN - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- predict_all - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- predict_all - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- predict_exit_with_help() - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- predict_one_class_probability(LIBSVM.svm_model, double) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- predictInternal(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- predictInternal(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- predictInternal(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- predictInternal(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- predictInternal(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- predictInternalInThread(int) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictInternalInThread
-
- prediction_data - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictTreesInThread
-
- prediction_mode - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- prediction_terminal_nodeIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- prediction_type - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- prediction_type - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- predictions - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- PredictionType() - Constructor for enum gov.nih.mipav.model.algorithms.StochasticForests.PredictionType
-
- predictor - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- predictor - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- predictor - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- predictor - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- PREDICTOR - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- PREDICTOR - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- PREDICTOR - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- PREDICTOR - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- predictProbability(Model, FeatureNode[], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- predictTreesInThread(int, StochasticForests.Data, boolean) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictTreesInThread
-
- predictValues(Model, FeatureNode[], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- PREF_ACTIVE_IMAGE_COLOR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the active image color.
- PREF_ACTIVE_IMAGE_COLOR_BORDERSIZE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the active image color border size
- PREF_AFNI_ORDER_LOAD - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether DICOM ordering should be used by default for loading AFNI images
- PREF_ALWAYS_SAVE_IMG_AS_ANALYZE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether .hdr/.img files should always be written in analyze format (as opposed to asking
whether to save as interfile or nifti).
- PREF_ALWAYS_SAVE_IMG_AS_INTERFILE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether .hdr/.img files should always be written in interfile format (as opposed to
asking whether to save as analyze or nifti).
- PREF_ALWAYS_SAVE_IMG_AS_NIFTI - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether .hdr/.img files should always be written in nifti format (as opposed to asking
whether to save as analyze or interfile).
- PREF_ALWAYS_SAVE_MNC_AS_MINC1 - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether .mnc files should always be written in minc1 CDF format (as opposed to asking
whether to save as minc1 or minc2).
- PREF_ALWAYS_SAVE_MNC_AS_MINC2 - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether .mnc files should always be written in minc2 HDF5 format (as opposed to asking
whether to save as minc1 or minc2).
- PREF_APP_ICON - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the application icon.
- PREF_APP_TITLE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the application title.
- PREF_ASK_DICOM_RECEIVER - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether to ask about starting dicom receiver on startup.
- PREF_AUTOSTART_DICOM_RECEIVER - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether to enable the dicom receiver on startup.
- PREF_BRICS_CONFLICT_RESOLUTION - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_BRICS_PLUGIN_BIDS_DIR - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_BRICS_PLUGIN_CSV_DIR - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_BRICS_PLUGIN_OUTPUT_DIR - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_BUG_REPORT_EMAIL - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_BUG_REPORT_NAME - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_BUG_REPORT_URGENCY - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_CLOSE_FRAME_CHECK - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if user should be prompted on closing a frame.
- PREF_COMPLEX_DISPLAY - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates method used to display complex data values on MIPAV toolbar (MIPAV visually always shows
magnitude or log magnitude).
- PREF_CONTINUOUS_VOI_CONTOUR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether [SHIFT] must be held down to draw continuous contours (false = hold-shift).
- PREF_CROSSHAIR_CURSOR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the crosshair cursor to be used.
- PREF_CROSSHAIR_PIXEL_GAP - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the pixel gap away from the center of the crosshair (in one direction) actual gap is 2x.
- PREF_DATA_PROVENANCE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if data provenance is turned on.
- PREF_DATA_PROVENANCE_FILENAME - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the path where the system data provenance should be stored
- PREF_DATA_PROVENANCE_MODE - Static variable in class gov.nih.mipav.view.Preferences
-
constant for logging.
- PREF_DEBUG - Static variable in class gov.nih.mipav.view.Preferences
-
Constant for debug string.
- PREF_DEBUG_ALGORITHM - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_DEBUG_COMMS - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_DEBUG_FILEIO - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_DEBUG_MINOR - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_DEBUG_SCRIPTING - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_DEFAULT_DISPLAY - Static variable in class gov.nih.mipav.view.Preferences
-
Constant to indicate default brightness and color display to screen
- PREF_DEFAULT_FRAME_RATE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the default frame rate
- PREF_DEFAULT_IMAGE_BROWSER_DIR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the initial directory in which to open the file chooser of the image browser.
- PREF_DICOM_BROWSER_CONFIG - Static variable in class gov.nih.mipav.view.Preferences
-
Constant indicating the DICOM browser configuration.
- PREF_DICOM_SAVE_DICTIONARY - Static variable in class gov.nih.mipav.view.Preferences
-
constant that indicates the dicom save dictionary.
- PREF_DICOM_STORAGE_DIR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the default dicom storage directory.
- PREF_FAST_TRIPLANAR_REPAINT - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether the triplanar frame should wait for a mouse released event before repainting all
9 tri-planar images.
- PREF_FILE_LUT_DISPLAY - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether image will display using a stored LUT (from image file or generic to image type)
- PREF_FILE_TEMP_DIR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the file temp directory.
- PREF_FILENAME_FILTER - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the filename filter.
- PREF_FLIP_NIFTI_READ - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_FORCE_HISTO_UBYTE - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_GPU_COMP_ENABLED - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if computing on the GPU is enabled
- PREF_HISTOGRAM_DISPLAY - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether image is updated in real-time on histogram changes
- PREF_IMAGE_DIR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the current image directory.
- PREF_IMAGE_LEVEL_DATA_PROVENANCE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if data provenance is turned on for individual images (and saved on image-save).
- PREF_IMAGE_TOOLBAR_ON - Static variable in class gov.nih.mipav.view.Preferences
-
Constant identifying if the miscellaneous toolbar is on by default.
- PREF_INTENSITY_LABEL_BACKGROUND_COLOR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the intensity label background color.
- PREF_INTENSITY_LABEL_COLOR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the intensity label color.
- PREF_INTERPOLATE_MODE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the mode of image interpolation used for display
- PREF_LAST_PAINT_BRUSH - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the last used paint brush so that it will be set as the default when new images are
opened or mipav is restarted.
- PREF_LAST_SCRIPT - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the last script that was run.
- PREF_LAST_STACK_FLAG - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the last stack flag.
- PREF_LAST_X_IMAGES - Static variable in class gov.nih.mipav.view.Preferences
-
constant for the names of the last X number of images used to be shown in quicklist.
- PREF_LAX_CHECK - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if lax file should be checked on mipav start.
- PREF_LB_BORDER_COLOR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox border color variable.
- PREF_LB_BORDER_SIZE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox border size variable.
- PREF_LB_CUPDATE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates continuous update of LightBox
- PREF_LB_GRID_COL - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox grid column variable.
- PREF_LB_GRID_COLOR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox grid color variable.
- PREF_LB_GRID_ROW - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox grid row variable.
- PREF_LB_GRID_SIZE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox grid size variable.
- PREF_LB_INCREMENT - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the increment between displayed lightbox slices
- PREF_LB_LOCATION - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox location variable.
- PREF_LB_MAG - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox magnification variable.
- PREF_LB_ROW_DEPENDENT - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox row dependant variable.
- PREF_LB_SELECTED_BORDER_COLOR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox selected border color variable.
- PREF_LB_SELECTED_BORDER_SIZE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox selected border size variable.
- PREF_LB_TSLICE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the LightBox individual t-slice variable.
- PREF_LEVEL - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_LOG_FILENAME - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the pathname of the log file.
- PREF_LOGGING_ENABLED - Static variable in class gov.nih.mipav.view.Preferences
-
Constant for whether logging is enabled
- PREF_LOGMAG_DISPLAY - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether the log of the magnitude of an image is used for image display
- PREF_MAX - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_MAX_DEBUG_LINES - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_MAX_HEAP_SIZE - Static variable in class gov.nih.mipav.view.Preferences
-
The maximum heap size.
- PREF_MENU_FONT - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the menu font.
- PREF_MENU_FONT_COLOR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the menu font color.
- PREF_MENU_FONT_SIZE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the menu font size.
- PREF_MIN - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_MULTI_THREADING_ENABLED - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicated if the multi-theading is enabled
- PREF_NDAR_PLUGIN_CSV_DIR - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_NDAR_PLUGIN_DATASTRUCT_NAME - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_NDAR_PLUGIN_OUTPUT_DIR - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_NDAR_PLUGIN_SERVER - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_NINDS_ANON_PLUGIN_CSVDIR - Static variable in class gov.nih.mipav.view.Preferences
-
?
- PREF_NINDS_ANON_PLUGIN_INPUTDIR - Static variable in class gov.nih.mipav.view.Preferences
-
?
- PREF_NINDS_ANON_PLUGIN_OUTPUTDIR - Static variable in class gov.nih.mipav.view.Preferences
-
?
- PREF_NUMBER_OF_THREADS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that specifies how many system threads user would like MIPAV to use
- PREF_OPEN_IMAGES_IN_TILED_FORMAT - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if images are to be open im tiled format
- PREF_OVERWRITE_STATISTICS - Static variable in class gov.nih.mipav.view.Preferences
-
constant on whether to overwrite the voi statistics file automatically
- PREF_OVERWRITE_VOI_STATS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant indicating if VOI statistics file should be overwritten.
- PREF_PAINT_OPACITY - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_PAINT_TO_MASK_NEW - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if the Paint-to-Mask operation should output to a new image
- PREF_PAINT_TOOLBAR_ON - Static variable in class gov.nih.mipav.view.Preferences
-
Constant indicating if the Paint Toolbar is on by default.
- PREF_PLUGIN_ALGORITHM - Static variable in class gov.nih.mipav.view.Preferences
-
plugin of algorithm type.
- PREF_PLUGIN_FILE - Static variable in class gov.nih.mipav.view.Preferences
-
plugin of file type.
- PREF_PLUGIN_INSTALL_DIR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the current directory where plugins can be installed from.
- PREF_PLUGIN_VIEW - Static variable in class gov.nih.mipav.view.Preferences
-
plugin of view type.
- PREF_QUICK_MASK_NEW - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if the Quick Mask operation should output to a new image
- PREF_QUICKLIST_NUMBER - Static variable in class gov.nih.mipav.view.Preferences
-
number of recently used images to store in quicklist.
- PREF_RAW_BIG_ENDIAN - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the default raw image big endian.
- PREF_RAW_DATA_OFFSET - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the default raw image data offset.
- PREF_RAW_EXTENTS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the default raw image extents.
- PREF_RAW_RESOLUTIONS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the default raw image resolutions.
- PREF_RAW_TYPE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the default raw image type.
- PREF_RAW_UNITS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the default raw image units.
- PREF_RELATIVE_WINDOW_LEVEL - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if window/level changes should be relative to the current transfer function values
- PREF_RGB_PAINT_COMPONENTS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant indicating which channels should be used for applying paint to a RGB image
- PREF_SAVE_ALL_ON_SAVE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates use of saving images, vois, and transfer functions.
- PREF_SAVE_DEFAULTS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if the last used parameters for algorithm dialogs should be used when they are opened.
- PREF_SAVE_PROMPT_OVERWRITE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if a prompt should be shown before an image file is overwritten.
- PREF_SAVE_XML_THUMBNAIL - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the saving of the xml thumbnail during a save.
- PREF_SCRIPT_DIR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the script directory.
- PREF_SCRIPTING_TOOLBAR_ON - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if the Scripting toolbar should be shown by default.
- PREF_SHORTCUTS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant indicating the application shortcuts (user defined).
- PREF_SHOW_DICOM_OVERLAYS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if the DICOM overlay should be shown.
- PREF_SHOW_IMAGE_OVERLAYS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if the image overlay should be shown.
- PREF_SHOW_INTENSITY_ON_LEFT_CLICK - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if left mouse click inside image should cause intensity value to display
- PREF_SHOW_LINE_ANGLE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether the angle of line VOIs should be shown on screen.
- PREF_SHOW_OUTPUT - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether to show output.
- PREF_SHOW_OVERLAYS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether to show image overlays.
- PREF_SHOW_PAINT_BORDER - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if the paint border shown.
- PREF_SHOW_PRIVATE_TAGS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if the private DICOM tags are to be shown
- PREF_SHOW_SPLASH - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if the splash graphic should be shown when mipav starts.
- PREF_SHOW_UI_LF - Static variable in class gov.nih.mipav.view.Preferences
-
Class name for selected look and feel type, can also be "None" (default selection)
- PREF_SHOW_VOI_NAME - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether to show the VOI name.
- PREF_SHOW_WINLEV_ON_RIGHT_CLICK - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if right mouse click inside image should cause window/level changes
- PREF_STARTING_HEAP_SIZE - Static variable in class gov.nih.mipav.view.Preferences
-
The starting heap size.
- PREF_TRIM_FLAG - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the VOI Trim flag for trimming adjacent points.
- PREF_TRIM_MASK - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the mask trim level variable.
- PREF_TRIM_VOI - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the VOI Trim level variable.
- PREF_TRIPLANAR_2X2_LAYOUT - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates whether the triplanar frame should use the old 2x2 layout or the newer 3x1 layout.
- PREF_TRIPLANAR_SCROLL_ORIGINAL - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if the triplanar should scroll the original image
- PREF_TRIPLANAR_SNAP90 - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if triplanar protractor should snap to nearest multiple of 90 degrees.
- PREF_USE_INCORRECT_ACPC_XDIM - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_USER_FILETYPE_ASSOC - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the user defined file type associations.
- PREF_USER_FILETYPES - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the user defined file types.
- PREF_USER_FILETYPES_TEXTFIELDS - Static variable in class gov.nih.mipav.view.Preferences
-
?
- PREF_VOI_DRAW_COLOR - Static variable in class gov.nih.mipav.view.Preferences
-
the voi draw color constant.
- PREF_VOI_LPS_SAVE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant indicating if VOIs should be saved as LPS or file coordinates
- PREF_VOI_POINT_DRAW_TYPE - Static variable in class gov.nih.mipav.view.Preferences
-
Constant indicating the look of VOI Points drawn on an image.
- PREF_VOI_START_COLOR - Static variable in class gov.nih.mipav.view.Preferences
-
the starting color for VOIs (first drawn).
- PREF_VOI_TEXT_BACKGROUND_COLOR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the last used VOI text background color.
- PREF_VOI_TEXT_COLOR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates the last used VOI text color.
- PREF_VOI_THICKNESS - Static variable in class gov.nih.mipav.view.Preferences
-
Constant indicating the VOI Thickness.
- PREF_VOI_TOOLBAR_ON - Static variable in class gov.nih.mipav.view.Preferences
-
Constant indicating if the VOI Toolbar is on by default.
- PREF_WARN_AUDIO_AVI - Static variable in class gov.nih.mipav.view.Preferences
-
constant for warning the user when audio will be discarded from opened AVIs.
- PREF_WINDOW - Static variable in class gov.nih.mipav.view.Preferences
-
- PREF_ZOOM_LINEAR - Static variable in class gov.nih.mipav.view.Preferences
-
Constant that indicates if the zoom should be linear (otherwise geometric)
- Preferences - Class in gov.nih.mipav.view
-
This class reads the MIPAV preference file.
- Preferences() - Constructor for class gov.nih.mipav.view.Preferences
-
- Preferences.ComplexDisplay - Enum in gov.nih.mipav.view
-
Defines options for displaying pixel values of complex images.
- Preferences.DefaultDisplay - Enum in gov.nih.mipav.view
-
Defines options for defining color and brightness display based on pixel values.
- Preferences.InterpolateDisplay - Enum in gov.nih.mipav.view
-
Defines options for interpolating displayed image slices.
- Preferences.LogConfig - Class in gov.nih.mipav.view
-
- Preferences.LogLevel - Enum in gov.nih.mipav.view
-
- Preferences.OperatingSystem - Enum in gov.nih.mipav.view
-
Defines operating system on which MIPAV is running.
- Preferences.SystemArchitecture - Enum in gov.nih.mipav.view
-
Defines system architecture on which MIPAV is running.
- preferencesDir - Static variable in class gov.nih.mipav.view.Preferences
-
The place where user-individual mipav files should be put.
- PreferencesDir - gov.nih.mipav.view.Argument.StaticArgument
-
- preferencesFile - Static variable in class gov.nih.mipav.view.Preferences
-
The MIPAV preferences file path and name.
- preferencesFileName - Static variable in class gov.nih.mipav.view.Preferences
-
The MIPAV preferences file name (without path).
- preferencesFileTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
This array is the list of file extensions that is pulled from the Preferences.
- PreferencesName - gov.nih.mipav.view.Argument.StaticArgument
-
- preferredActiveColor - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- preferredCrosshair - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- preferredLayoutSize(Container) - Method in class gov.nih.mipav.view.JScrollPopupMenu.ScrollPopupMenuLayout
-
- prefImageName - Variable in class gov.nih.mipav.model.file.FileBRUKER
-
The preferred image name, used if inversion time exists.
- prefix - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel.AnnotationSplineControlPts
-
- preformOrientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- pregn(double[], int, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- pregn(DoubleDouble[], int, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- prekm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
scalar containing the predicted reduction in the objective if pseudoRank from previous step is used.
- prekm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
scalar containing the predicted reduction in the objective if pseudoRank from previous step is used.
- Prepare(CeresSolver.ResidualBlock, int, CeresSolver.SparseMatrix, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ScratchEvaluatePreparer
-
- Prepare(CeresSolver.ResidualBlock, int, CeresSolver.SparseMatrix, double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockEvaluatePreparer
-
- prepare_for_output_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_decomp_master
-
- prepare_for_output_pass(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- PREPARE_FOR_OUTPUT_PASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- prepare_new_evaluation_point - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- prepare_num_calls - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- prepare_parameter_hash - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- prepare_range_limit_table8(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- prepare_range_limit_table9to12(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- prepare_requested_jacobians - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- PrepareForEvaluation(boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluationCallback
-
- PrepareForEvaluation(boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.NoOpEvaluationCallback
-
- PrepareForEvaluation(boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback.InnerClass
-
- prepareForNextLevel() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- PrepareNextRun(CVODES.CVodeMemRec, int, int, CVODES.NVector, double[][], int, int, CVODES.SUNLinearSolver) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- preParserHandler - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
- prepConstC(double[][][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- prepConstD(double[][][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- prepopulateField(JTextField) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
prepopulates fields
- prepPulse - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
644 Prepartory pulse option.
- Preprocess(CeresSolver.SolverOptions, CeresSolver.ProblemImpl, CeresSolver.PreprocessedProblem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchPreprocessor
-
- Preprocess(CeresSolver.SolverOptions, CeresSolver.ProblemImpl, CeresSolver.PreprocessedProblem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Preprocessor
-
- Preprocess(CeresSolver.SolverOptions, CeresSolver.ProblemImpl, CeresSolver.PreprocessedProblem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionPreprocessor
-
- PreprocessedProblem() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- PreprocessForGivenLinearSolverAndVerify(CeresSolver.LinearSolverType, CeresSolver.ProblemImpl, String) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- preprocessInputImages(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- preprocessInputImages2D(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- Preprocessor() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Preprocessor
-
- preprocessor_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- preProsLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- preProsText - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- PreRender(Renderer, Culler) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
PreRender renders the proxy geometry into the PBuffer texture.
- prescan_quantize(libjpeg.jpeg_decompress_struct, byte[][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- prescan_quantize(libjpeg.jpeg_decompress_struct, short[][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- PRESCAN_QUANTIZE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- prescan_r1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
288 PreScan R1-Analog.
- prescan_r2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
290 PreScan R2-DIgital.
- preScanOpts - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
816 bitmap of prescan options.
- prescanReceiveAttenuation1 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- prescanReceiveAttenuation1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- prescanReceiveAttenuation2 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- prescanReceiveAttenuation2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- presContexts - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateAC
-
DOCUMENT ME!
- presContexts - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
A list of presentation context objects.
- prescribedImageNumbers - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- prescribedImageNumbers - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- prescribedSeriesNumbers - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- prescribedSeriesNumbers - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- present - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
DOCUMENT ME!
- presentation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- presentation - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- presentationContextID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContext
-
The ID for the presentation context.
- presentationContextID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContextAccept
-
Presentation Context ID.
- PresentationContexts - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
A list of Presentation contexts.
- presentNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- presentNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- presentNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- presentOrientBoxX - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- presentOrientBoxY - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- presentOrientBoxZ - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- presentOrientLabel2 - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- presentViewType - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- presentvoiIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- presentvoiIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- PRESERVE_ZERO - Static variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
Scale type:
max > -min: d' = d/max in [min/max,1]
max < -min: d' = -d/min in [-1,-max/min]
- preserveBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- preserved - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
check whether the mask can be affected by new paint or not.
- preserveFOV - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- preserveFOV2Button - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- preserveFOVButton - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- preserveOutputDimsButton - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- presetHue - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- presetHue - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- presetHue - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- PreSolveSummarize(CeresSolver.SolverOptions, CeresSolver.ProblemImpl, CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- pressed - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
If any of the mouse move button pressed.
- pressed - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
If any of the mouse move button pressed.
- pressed - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
If any of the mouse move button pressed.
- pressed - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
If any of the mouse move button pressed.
- pressed - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Flag to indicate mouse pressed or not.
- pressed - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
If any of the mouse move button pressed.
- pressed - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- pressed - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- pressedBorder - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Panel Border view.
- pressedBorder - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- pressedBorder - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- pressedBorder - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- pressedBorder - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- pressedBorder - Static variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
A border to use for pressed buttons.
- pressedCheckEven - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- pressedCheckOdd - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- pressedOK - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- pressedOK - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
DOCUMENT ME!
- pressedOK - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- pressedStart - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- presub(double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- presub(DoubleDouble[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- prev - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- prev - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Cache.head_t
-
- prev - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- prev - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.st_node
-
- prev - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- prev - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- prev - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache.head_t
-
- Prev(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- PREV_CONV_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- PREV_ERR_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- PREV_INDEX(int, int) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- PREV_OFF - Static variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- PREV_ON - Static variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- PreValidate(float, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- PreValidate(OctNode, float, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- prevContourCost - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- prevDeltaWeight - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- preventUpdateFlag - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PointerUpdater
-
- prevertex - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- preverticesButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- prevEventTime - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Previous mouse press event time stamp.
- prevEventTime - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
current and previous key press time.
- prevEventTime - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Previous mouse press event time stamp.
- prevEventTime - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
current and previous key press time.
- prevEventTime - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
current and previous key press time.
- prevHeight - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- PREVIEW - Static variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- previewFilename - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- PreviewImageContainer - Interface in gov.nih.mipav.view
-
Title: PreviewImageContainer
- previewMode - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- previewMode - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- previewMode - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- previewMode - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- previewPanel - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- previous - Variable in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
DOCUMENT ME!
- previous - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
internal objects.
- previous - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FrontEdge
-
- previousLine - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
- previousPaintBrush - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
The previous paint brush we were using when the user temporarily changes the paint brush size using keyboard
shortcuts (by pressing 1, 2, 3, 4).
- previousRecognizedCode - Variable in class gov.nih.mipav.model.file.FileSVS
-
- previousRecognizedCode - Variable in class gov.nih.mipav.model.file.FileTiff
-
- prevPageButton - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- prevPageMenuItem - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- prevXPoints - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- prevYPoints - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- prFileDir - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
par rec file dir
- prFileDir - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
par/rec file directory
- prFileName - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
par rec file name
- prFileName - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
par/rec file name
- prfinl - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- prg - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Progression order enum
- prg - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
progression order
- prg - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_info_v2_t
-
progression order
- prg1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Progression order enum
- Prim - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- Prim - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- primaryEditorHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
- primaryEditorHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
- primaryModel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- primaryModel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
model associated with primary image information.
- primaryModel - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- primaryTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- primaryTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
primary image information table.
- primaryTable - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- primaryTypeHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
tpe holds the type of editor to be used; editor holds the editor dialog.
- primaryTypeHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
Type holds the type of editor, editor holds the actual editor dialog.
- PrimButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- primitiveType() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Glyph
-
- principalAxis(int, int) - Method in class gov.nih.mipav.model.structures.VOIContour
-
From statics it is known that any planar shape or closed curve possesses two principal axes 90 degrees
apart intersecting at the centroid of the area.
- print() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Prints basic image parameters to the System.out.
- print() - Static method in class gov.nih.mipav.view.Preferences
-
Prints mipav.preferences to System.out.
- print() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Statistics
-
Print the statistics information to System.out.
- print() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
Print out the matrix.
- print() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- print() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- print() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- print() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- print() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- print() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- print() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Prints the current graph being displayed to the printer.
- print(double[]) - Static method in class gov.nih.mipav.util.ArrayUtil
-
A utility function to print out a double array.
- print(double[], String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
The utility function used to print information.
- print(float[]) - Static method in class gov.nih.mipav.util.ArrayUtil
-
A utility function to print out a double array.
- print(MatrixListItem, String) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- print(MatrixListItem, String) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- print(PrintWriter) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
Internal support for 'void print (String)' and 'void print (String, ModelTriangleMesh[])'.
- print(PrintWriter) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelCollapseRecord
-
Support for saving the collapse records to a text file.
- print(PrintWriter) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Internal support for 'void print (String)' and 'void print (String, ModelTriangleMesh[])'.
- print(PrintWriter) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Internal support for 'void print (String)' and 'void print (String, ModelTriangleMesh[])'.
- print(String) - Method in interface gov.nih.mipav.model.algorithms.LIBSVM.svm_print_interface
-
- print(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
Save the triangle mesh to a text file.
- print(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Save the quad mesh to a text file.
- print(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Print the vertex-edge-triangle table to a text file.
- print(String) - Method in interface gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_print_interface
-
- print(String, ModelClodMesh[]) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
Save an array of triangle meshes to a text file.
- print(String, ModelTriangleMesh[]) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Save an array of quad meshes to a text file.
- print(Vector, String) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- print(Vector, String) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- Print() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- Print() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- printAllWeights() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- printAscii(PrintWriter, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Print the contents of the TriMesh in ascii format.
- printData - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- printDisp - Variable in enum gov.nih.mipav.model.file.FileInfoBase.Modality
-
The way this modality will be displayed to the user.
- printExitStatus(int) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- printExitStatus(int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- printf(Formatter, String, Object...) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- PrintFinalStats(CVODES.CVodeMemRec) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- PrintFinalStats(CVODES.CVodeMemRec, boolean) - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- PrintFinalStats(CVODES.CVodeMemRec, boolean) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- PrintFinalStats(CVODES.CVodeMemRec, int, double) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- printflags - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
Bits ored to show where to output diagnostics
- PrintFullHelp() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsole
-
Print full help info
- printHeader() - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- printHeader() - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- printHeader() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- PrintHelp() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsole
-
Print short help info
- printhisto(int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
a debug tool.
- printhisto(int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
a debug tool.
- printImage() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Method to send an image to the printer.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
debuger for file names read.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
Debugger for test the image and VOis reading.
- printImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
Debugger for test the image and VOis reading.
- printImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- printImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- printImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- PrintIMDescriptor(MetadataExtractor.PrintIMDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PrintIMDescriptor
-
- PrintIMDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PrintIMDirectory
-
- printMap(int[][], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.PatternDetection
-
- printMapOnBottom(int[][], int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- printMapOnLeft(int[][], int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- printMapOnRight(int[][], int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- printMapOnTop(int[][], int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- printNIItable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- printNIItable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- printNIItable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- printParamInfo(MsgLogger, String[][]) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Prints the parameters in 'pinfo' to the provided output, 'out', showing
the existing defaults.
- printParamInfo(MsgLogger, String[][]) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Prints the parameters in 'pinfo' to the provided output, 'out', showing
the existing defaults.
- printParamInfo(MsgLogger, String[][]) - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Prints the parameters in 'pinfo' to the provided output, 'out', showing
the existing defaults.
- printParamInfo(MsgLogger, String[][]) - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Prints the parameters in 'pinfo' to the provided output, 'out', showing
the existing defaults.
- printProgram() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- printProgram() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- printProgram() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- printProgram() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- printProstateSTLAscii(PrintWriter, ModelImage, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Print the contents of the TriMesh in STL ascii format.
- printRange() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- printResults() - Method in class gov.nih.mipav.model.algorithms.libdt
-
- printResults(GaussianMixtureModelsIncompleteSamples.GMM, String) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- printSMFAscii(PrintWriter) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- printSpaceNavData() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- printStackTrace() - Method in exception gov.nih.mipav.model.file.MetadataExtractor.CompoundException
-
- printStackTrace(PrintStream) - Method in exception gov.nih.mipav.model.file.MetadataExtractor.CompoundException
-
- printStackTrace(PrintWriter) - Method in exception gov.nih.mipav.model.file.MetadataExtractor.CompoundException
-
- PrintStatistics() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvaluationResults
-
Print statistics
- PrintStatistics() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
print statistics
- PrintStatistics(PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvaluationResults
-
Prints all results and some statistics to either file or screen
- PrintStatistics(PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
print statistics to the output file
- PrintStatistics(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMEvaluationResults
-
Prints all results to a file.
- PrintStatistics(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLowerBounds
-
print statistics
- printSTLAscii(PrintWriter) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Print the STL file format in ASCII.
- printSTLAscii(PrintWriter, int, int[][], Vector3f[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- printSTLAscii(PrintWriter, ModelImage, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Print the contents of the TriMesh in STL ascii format.
- printSTLBinary(RandomAccessFile) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Print the STL file format in binary ( little endian ).
- printSTLBinary(RandomAccessFile, int, int[][], Vector3f[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- printsvHeader() - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- printsvHeader() - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- printTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- printTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- printTable() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- printTarget(String, Texture) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- printTotals(AlgorithmVOIProps.Calc34D.ContourStats[], VOIStatisticalProperties, String, String, String, float, float, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
- printTotals(Vector<AlgorithmVOIProps.Calc34D.ContourStats>, VOIStatisticalProperties, String, String, String, float, float, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
- printTotalsRGB(AlgorithmVOIProps.Calc34D.ContourStats[], VOIStatisticalProperties, String, String, String, float, float, float, float, float, float, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
- printTotalsRGB(Vector<AlgorithmVOIProps.Calc34D.ContourStats>, VOIStatisticalProperties, String, String, String, float, float, float, float, float, float, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
Sums the statistics for a group of contours, where the statistics are first calculated per-contour.
- printTree() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- printTree(TreeModel, Object) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- printTree(TreeModel, Object) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- printTree(TreeModel, Object) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- printUsage() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Prints the usage information to stdout.
- printUsage() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Prints the usage information to stdout.
- printUsage() - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Prints the usage information to stdout.
- printUsage() - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Prints the usage information to stdout.
- PrintUsage() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsole
-
Print usage
- PrintUsage() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
print console mode usage.
- printUsageAndExit() - Static method in class gov.nih.mipav.view.ViewUserInterface
-
Displays command line help information on usage of all commands and then exits.
- printUsageAndExit(Argument) - Static method in class gov.nih.mipav.view.ViewUserInterface
-
Displays command line help information on usage to standard out and then into an informational dialog box then
exits the MIPAV application.
- printVector(Vector<JDialogFemurTraceSectionsNetherland.TracingPoint>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- printVector(Vector<JDialogFemurTraceSectionsNIH.TracingPoint>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- printVector(Vector<JDialogFemurTraceSectionsSeparateNetherland.TracingPoint>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- printVector(Vector<JDialogPatellaTraceSectionsNetherland.TracingPoint>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- printVector(Vector<JDialogPatellaTraceSectionsNIH.TracingPoint>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- printVersionAndCopyright() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Prints version and copyright information to the logging facility
returned by FacilityManager.getMsgLogger()
- printVersionAndCopyright() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Prints version and copyright information to the logging facility
returned by FacilityManager.getMsgLogger()
- printVersionAndCopyright() - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Prints version and copyright information to stdout, using the
MsgPrinter.
- printVersionAndCopyright() - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Prints version and copyright information to stdout, using the
MsgPrinter.
- printVisitedMap(boolean[][], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.PatternDetection
-
- printVisitedMapOnBottom(boolean[][], int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- printVisitedMapOnLeft(boolean[][], int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- printVisitedMapOnRight(boolean[][], int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- printVisitedMapOnTop(boolean[][], int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- printVolume(ModelImage, VOIVector, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Print out the three VOIs volume in system console out.
- printVolume(ModelImage, VOIVector, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Print out the three VOIs volume in system console out.
- printWeights(Backpropagation.Neuron) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- priority - Variable in class gov.nih.mipav.model.structures.TableSorter.Arrow
-
DOCUMENT ME!
- PriorityQueue(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- PRIVATE - Static variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Indicates tag is a private tag
- PRIVATE_TAB - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
- PrivateDicomDictionary - Class in gov.nih.mipav.model.file
-
Note does not use hashtable since two Private keys can have same hashcode.
- PrivateDicomDictionary() - Constructor for class gov.nih.mipav.model.file.PrivateDicomDictionary
-
- privateDictionaryProcessed - Static variable in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
- PrivateFileDicomKey - Class in gov.nih.mipav.model.file
-
Associates a FileDicomKey with a particular publisher to denote the source of the FileDicomKey.
- PrivateFileDicomKey(int, int) - Constructor for class gov.nih.mipav.model.file.PrivateFileDicomKey
-
- PrivateFileDicomKey(String) - Constructor for class gov.nih.mipav.model.file.PrivateFileDicomKey
-
- PrivateFileDicomKey(String, int, int) - Constructor for class gov.nih.mipav.model.file.PrivateFileDicomKey
-
- PrivateFileDicomKey(String, String) - Constructor for class gov.nih.mipav.model.file.PrivateFileDicomKey
-
- privateKeySearch(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
- privatePublisher - Variable in class gov.nih.mipav.model.file.FileDicom
-
Private tag for current publisher name
- privateTagsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
- privateTagsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
- prn1lb(int, int, double[], double[], double[], int, RandomAccessFile, double) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- prn2lb(int, double[], double, double[], int, RandomAccessFile, int, int, int, double, int, String[], int, int, double, double) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- prn3lb(int, double[], double, String, int, int, RandomAccessFile, int, int, int, int, int, double, double, int, String, int, double, double, int, double, double, double) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- PRNFO(String, SIFT.VlFileMeta) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- PRNSA - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- prob - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- prob - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- prob - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- prob - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_LrFunction
-
- prob - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- prob - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- prob - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- prob_density_marks - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- prob_max - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- probA - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- probA - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_model
-
- probability - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- probability - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- probability - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- probabilityHistogram - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
DOCUMENT ME!
- probB - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- probB - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_model
-
- probDouble - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- probe - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- probe - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- probe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Probe reference.
- probe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The probe's root transform group, which holds the red target sign, guide line, and the actual probe geometry
shape.
- Probe - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Title: Probe
- Probe(SurfaceRender) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The probe contructor.
- Probe(Vector<double[]>, double, CeresSolver.ProbeResults) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientChecker
-
- PROBE - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- probeBehaviorBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The probe mouse behavior branchgroup root.
- probeCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- probeList - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Probes list.
- PROBEMOVE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
cursor probe nevigation mode.
- probePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
JPanelProbe reference.
- probePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- probePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Dialog for loading and displaying probes.
- probePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Dialog for loading and displaying probes.
- probePanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- probeResetButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Reset probe nevigation mode.
- ProbeResults() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ProbeResults
-
- probeRootBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The root branch group of the probe.
- probeRootParentBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Branch group for all the probes.
- probeRootParentTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Transform group for all the probes.
- probeRotate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The probe mouse rotation behavior.
- probeShapeBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Parent of each light bulb.
- probesRootBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Parent of all the light bulbs.
- probeTargetButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Control the tri-planar probe nevigation mode.
- probeTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The current tranform positioning the probe in java3d space.
- probeTranslate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The probe translation behavior.
- probeType - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Initialize the probe type to default probe type.
- probeZoom - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The probe zoom behavior.
- probjxOld(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- problem - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- problem - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- problem - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- problem - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- Problem - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- Problem() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Problem
-
- problem_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- problem_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceImpl
-
- problem_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.LinearSolverAndEvaluatorCreationTest
-
- problem_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- problem_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
- ProblemAddingParametersAndResidualsResultsInExpectedProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemAddParameterIgnoresDuplicateCalls() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemAddParameterWithDifferentSizesOnTheSameVariableDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemAddResidualAddsDuplicatedParametersOnlyOnce() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemAddResidualWithDifferentSizesOnTheSameVariableDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemAddResidualWithDuplicateParametersDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemAddResidualWithIncorrectNumberOfParameterBlocksDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemAddResidualWithIncorrectSizesOfParameterBlockDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemAddResidualWithNullCostFunctionDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemCostFunctionsAreDeletedEvenWithRemovals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemGetCostFunctionForResidualBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemGetLossFunctionForResidualBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemGetParameterization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemImpl() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- ProblemImpl(CeresSolver.ProblemOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- ProblemIsParameterBlockConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemIsParameterBlockConstantWithUnknownPtrDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ProblemOptions
-
- ProblemParameterBlockQueryTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemRemoveParameterBlockWithUnknownPtrDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemReusedCostFunctionsAreOnlyDeletedOnce() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemSetLocalParameterizationWithUnknownPtrDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemSetParameterBlockConstantWithUnknownPtrDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProblemSetParameterBlockVariableWithUnknownPtrDies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- probOld - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- probX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- probXj(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- probXjOld(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- probXOld - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- process - Variable in class gov.nih.mipav.model.structures.VOI
-
If true this flag indicates that the VOI should be included (applied) when processing the image.
- process - Variable in class gov.nih.mipav.model.structures.VOIBase
-
If true this flag indicates that the shape should be included (applied) when processing the image.
- process - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Process id used by the save AVI.
- process - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Process id used by the save AVI.
- process(MetadataExtractor.Metadata, InputStream) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegMetadataReader
-
- process(MetadataExtractor.Metadata, InputStream, Iterable<MetadataExtractor.JpegSegmentMetadataReader>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegMetadataReader
-
- process_APPn - Variable in class gov.nih.mipav.model.file.libjpeg.my_marker_reader
-
- process_COM - Variable in class gov.nih.mipav.model.file.libjpeg.my_marker_reader
-
- process_data - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- process_data_context_main(libjpeg.jpeg_decompress_struct, byte[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- process_data_context_main(libjpeg.jpeg_decompress_struct, short[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- PROCESS_DATA_CONTEXT_MAIN - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- process_data_crank_post(libjpeg.jpeg_decompress_struct, byte[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- process_data_crank_post(libjpeg.jpeg_decompress_struct, short[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- PROCESS_DATA_CRANK_POST - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- process_data_simple_main(libjpeg.jpeg_decompress_struct, byte[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- process_data_simple_main(libjpeg.jpeg_decompress_struct, short[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- PROCESS_DATA_SIMPLE_MAIN - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- process_file(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
Read the base directory for images and vois png files.
- PROCESS_PER_CONTOUR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Algorithm maintains separate statistics per contour
- PROCESS_PER_SLICE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Algorithm sums all statistics from each contour on the same slice
- PROCESS_PER_SLICE_AND_CONTOUR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Algorithm maintains separate statistics per contour and denotes the slice of each contour
- PROCESS_PER_VOI - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Algorithm sums all statistics for the entire VOI
- process_restart(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- process_restart_huff(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- processAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- processAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- processAppleRunTime(MetadataExtractor.AppleRunTimeMakernoteDirectory, byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeReader
-
Process the BPLIST containing the RUN_TIME tag.
- processAWTEvents(AWTEvent[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Processes an array of AWT events by calling processMouseEvent; or, if the user pressed ESC, disables certain
behaviors.
- processAWTEvents(AWTEvent[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Processes an array of AWT events by calling processMouseEvent; or, if the user pressed ESC, disables certain
behaviors.
- processBinary(MetadataExtractor.Directory, int, MetadataExtractor.RandomAccessReader, int, Boolean, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- processBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- processBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
intermediate processing buffer, same size with imgBuffer.
- processBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
intermediate processing buffer, same size with imgBuffer.
- processBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- processBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
intermediate processing buffer, same size with imgBuffer.
- processBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
intermediate processing buffer, same size with imgBuffer.
- processBytes(String) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.AdobeJpegReaderTest
-
- processBytes(String) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.BmpReaderTest
-
- processBytes(String) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- processBytes(String) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.GifReaderTest
-
- processBytes(String) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcReaderTest
-
- processBytes(String) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDhtReaderTest
-
- processBytes(String) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegReaderTest
-
- processBytes(String) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PsdReaderTest
-
- processBytes(String, Class<T>) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- processCameraSettings(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- ProcessChoiceListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreT1.ProcessChoiceListener
-
- processChunk(MetadataExtractor.Metadata, MetadataExtractor.PngChunk) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngMetadataReader
-
- processCoordinatePoints(int[], int[], float[], float[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Process point info from the in stream line
- processDataThreads - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- processDefaultMouseDrag(MouseEvent, int, int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
processDefaultMouseDrag performs the mouseDrag operations when in DEFAULT mode.
- processDir(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- processDir(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Process the dir, read image and corresponding VOI file names.
- processDir(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- processDir(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- processDir(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- processDir(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Process directory, save the image names and voi names.
- processDir(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Process the directory.
- processDir(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- processDir(File, Vector<JDialogAAMClassification.ModelString>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Process dir, read AAM model and pivot images.
- processDir(File, Vector<JDialogAAMClassificationExt.ModelString>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Process dir, read AAM model and pivot images.
- processDir(File, Vector<JDialogAAMplusSVM.ModelString>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Processing the AAM dir with AAM model string and pivot sample image name.
- processDir(String, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Process directory.
- processDir_100(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- processDir_100(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- processDir_80(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- processDir_80(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- processDir_80(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- processDir_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
- processDir_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
- processDir_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
- processDir_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
- processDir_folder(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
Traverse the each fold directory
- processDir_folder(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- processDir_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- processDir_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- processDir_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- processDir_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- processDir_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- processDir_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- processDir_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- processDir_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- processDir_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- processDir_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- processDir_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- processDir_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- processDir_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- processDir_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- processDir_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- processDir_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- processDir_folder_5(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- processDir_folder_5(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- processDir_folder_5(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- processDir_folder_5(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- processDir_folder_5(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- processDir_folder_knees(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- processDir_folder_last(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- processDir_folder_last(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- processDir_folder_last(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- processDir_folder_map(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- processDir_folder_map(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
HNN generates multi-scaled prediction output.
- processDir_folder_map(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
HNN generates multi-scaled prediction output.
- processDir_folder_map(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- processDir_folder_org_img(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- processDir_orientation(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
Under each fold, traverse the orientation directories, i.e. axial, coronal, sagittal directories.
- processDirLevel1(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- processDirLevel1(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- processDirLevel1(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- processDirLevel1(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- processDirSingleImage(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Process the dir, read image and corresponding VOI file names.
- processDirSingleImage(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Process the dir, read image and corresponding VOI file names.
- processDirSingleImage(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Process the dir, read image and corresponding VOI file names.
- processDirSingleImage(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Process the dir, read image and corresponding VOI file names.
- processDirSingleImage(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Process the dir, read image and corresponding VOI file names.
- processDTI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Processes the Diffusion Tensor Image.
- processDWI() - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Calls AlgorithmDWI2DTI to create the diffusion tensor image.
- processDWI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
Calls AlgorithmDWI2DTI to create the diffusion tensor image.
- processed - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- processedIndicies - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- processedIndicies - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- processFile(File) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- processFile(String) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkReaderTest
-
- processFile(String) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngMetadataReaderTest
-
- processFileMenu(String) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Called when the FileMenu is activated.
- ProcessFixedDepthNodeAdjacentNodes(int, int, int, OctNode, int, OctNode, int, int, int, NodeAdjacencyFunction, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- ProcessFixedDepthNodeAdjacentNodes(int, OctNode, int, OctNode, int, int, NodeAdjacencyFunction, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- processIfd(MetadataExtractor.TiffHandler, MetadataExtractor.RandomAccessReader, Set<Integer>, int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TiffReader
-
Processes a TIFF IFD.
- processImageData(int[], int, int) - Method in class gov.nih.mipav.model.file.FileDicom
-
Processes image data from the defined image tag location.
- processImageName(String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Process image file.
- processIndep - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
DOCUMENT ME!
- processIndep - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- processIndep - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- processIndepBox - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- processIndepBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- processingData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Process AAM atlas directory.
- processingData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Process AAM atlas directory.
- processingData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Process AAM model directory.
- processingEndSliceData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Process the ending slice atlas directory.
- processingEndSliceData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
Process the ending slice atlas directory.
- processingEndSliceData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Process the ending slice atlas directory.
- processingEndSliceData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
Process the ending slice atlas directory.
- processingEndSliceData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
Process the ending slice atlas directory.
- processingEndSliceData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Process the ending slice atlas directory.
- processingEndSliceData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Process the ending slice atlas directory.
- processingEndSliceData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Process the ending slice atlas directory.
- processJpegSegmentData(MetadataExtractor.Metadata, Iterable<MetadataExtractor.JpegSegmentMetadataReader>, MetadataExtractor.JpegSegmentData) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegMetadataReader
-
- processJson(String, boolean) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
- processKodakMakernote(MetadataExtractor.KodakMakernoteDirectory, int, MetadataExtractor.RandomAccessReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- processLeftMouseDrag(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Dragging the mouse with the left-mouse button held down changes the
positions of the X and Y cross bars, and therefor the ZSlice positions
of the associated PlaneRender objects and the TriPlanar Surface.
- processLeftMouseDrag(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Dragging the mouse with the left-mouse button held down changes the
positions of the X and Y cross bars, and therefore the ZSlice positions
of the associated PlaneRenderWM objects and the TriPlanar Surface.
- processLeftMouseDrag(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Dragging the mouse with the left-mouse button held down changes the positions of the X and Y cross bars, and
therefore the ZSlice positions of the associated PlaneRenderWM objects and the TriPlanar Surface.
- processLeftMouseDrag(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- processList - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- processList - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- processList - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- processList - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
List of VOI sets that will have statistics calculated
- processListIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Current set of VOIs that are being processed
- processMainDirectory(File, File) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
opens top-level image directory. anonymizes the images in the top directory, when the class has been set to
dig in recursively, anonymizes the top directories and calls openSubDirectory(...) to anonymize the files
below.
- processMakernote(int, Set<Integer>, int, MetadataExtractor.RandomAccessReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- ProcessMaxDepthNodeAdjacentNodes(int, int, int, OctNode, int, OctNode, int, int, int, NodeAdjacencyFunction, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- ProcessMaxDepthNodeAdjacentNodes(int, OctNode, int, OctNode, int, int, NodeAdjacencyFunction, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- processMode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
- processMode - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- processMouse(MouseEvent) - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
handles the toggling function of the grid (on/off)
- processMouseDrag(int, int, int, MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
- processMouseDrag(int, int, int, MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
- processMouseDrag(int, int, int, MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
- processMouseDrag(int, int, int, MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
- processMouseEvent(MouseEvent) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- processMouseEvent(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.FlyBehavior
-
Processes the mouse event, setting yaw, pitch, roll, and velocity depending on mouse button and position.
- processMouseEvent(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.FlyBehaviorRenderer
-
Processes the mouse event, setting yaw, pitch, roll, and velocity depending on mouse button and position.
- processMouseEvent(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseRotateExt
-
DOCUMENT ME!
- processMouseEvent(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Process the mouse event.
- processMouseEvent(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Process the mouse event.
- processMouseEvent(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.PointerBehaviorRenderer
-
Processes mouse event.
- processMouseEvent(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
Handles mouse events.
- processMouseEvent(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- processMousePress(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Process mouse prese when adding annotation point
- processMouseReleased(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Called when the left mouse button is released, indicating that the sculpt outline is complete, or when the
outline is being drawn and the mouse is fragged outside the canvas area.
- processMouseReleased(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Called when the left mouse button is released, indicating that the sculpt outline is complete, or when the
outline is being drawn and the mouse is dragged outside the canvas area.
- processMouseReleased(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
When a mouse button is released, the application is finishing a drag operation to rotate the virtual track ball.
- processNextPatch(libdt.PatchExtractor) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- processNextTag(FileDicomTagTable, FileDicomKey, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
- ProcessNodeAdjacentNodes(int, int, int, OctNode, int, OctNode, int, int, NodeAdjacencyFunction, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- ProcessNodeAdjacentNodes(int, OctNode, int, OctNode, int, NodeAdjacencyFunction, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- processNodeCorners(OctNode, NodeAdjacencyFunction, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- processNodeEdges(OctNode, NodeAdjacencyFunction, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- processNodeFaces(OctNode, NodeAdjacencyFunction, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- processNodeNodes(OctNode, NodeAdjacencyFunction, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- processor - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Video processor reference.
- processorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- processors - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- processors - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- processPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
- ProcessPointAdjacentNodes(int, int[], OctNode, int, PointAdjacencyFunction, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- ProcessPointAdjacentNodes(int, int, int, OctNode, int, int, PointAdjacencyFunction, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- processPrintIM(MetadataExtractor.PrintIMDirectory, int, MetadataExtractor.RandomAccessReader, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
Process PrintIM IFD
Converted from Exiftool version 10.33 created by Phil Harvey
http://www.sno.phy.queensu.ca/~phil/exiftool/
lib\Image\ExifTool\PrintIM.pm
- processRay(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorComposite
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorLighting
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorMIP
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorReflection
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityDRR
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityDRRBresenham
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityMIP
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(Point3f, Point3f, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorComposite
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(Point3f, Point3f, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(Point3f, Point3f, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorLighting
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(Point3f, Point3f, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorMIP
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(Point3f, Point3f, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorReflection
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(Point3f, Point3f, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityDRR
-
- processRay(Point3f, Point3f, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityMIP
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRay(Point3f, Point3f, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processRaySlower(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityMIP
-
Process a ray that has intersected the oriented bounding box of the 3D image.
- processReconyxHyperFire2Makernote(MetadataExtractor.ReconyxHyperFire2MakernoteDirectory, int, MetadataExtractor.RandomAccessReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- processReconyxHyperFireMakernote(MetadataExtractor.ReconyxHyperFireMakernoteDirectory, int, MetadataExtractor.RandomAccessReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- processReconyxUltraFireMakernote(MetadataExtractor.ReconyxUltraFireMakernoteDirectory, int, MetadataExtractor.RandomAccessReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- processRegionButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- processRegionIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- processRegionIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- processRestart(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Check for a restart marker & resynchronize decoder.
- processRightMouseDrag(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
If the right mouse button is pressed and dragged. processRightMouseDrag
updates the HistoLUT window and level (contrast and brightness)
- processRightMouseDrag(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
If the right mouse button is pressed and dragged. processRightMouseDrag
updates the HistoLUT window and level (contrast and brightness)
- processRightMouseDrag(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
If the right mouse button is pressed and dragged. processRightMouseDrag updates the HistoLUT window and level
(contrast and brightness)
- processRightMouseDrag(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
If the right mouse button is pressed and dragged. processRightMouseDrag
updates the HistoLUT window and level (contrast and brightness)
- processSequence(FileDicomTagTable, FileDicomKey, String, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
- processSlice(File) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- processSpaceNavEvent() - Method in interface gov.nih.mipav.view.input.spacenav.SpaceNavigatorListener
-
Processes a polled event from the space navigator
- processSpaceNavEvent() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- processSpaceNavEvent(SpaceNavigatorEvent) - Method in interface gov.nih.mipav.view.input.spacenav.SpaceNavigatorListener
-
- processSpaceNavEvent(SpaceNavigatorEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- processStatus - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Implementation of the Behavior abstract method.
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Required to be a ViewPlatformBehavior.
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Required to be a ViewPlatformBehavior.
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
All mouse manipulators must implement this.
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
DOCUMENT ME!
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
DOCUMENT ME!
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
DOCUMENT ME!
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
DOCUMENT ME!
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
DOCUMENT ME!
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
DOCUMENT ME!
- processStimulus(Enumeration) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
DOCUMENT ME!
- processSubDirectory(File, File) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
traverses the directory, anonymizing as it goes. the child directories are named after the source
child-directory, and attempted to traverse (by calling processSubDirectory(File dest, File src)).
- processTables(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Process the header markers.
- processTag(MetadataExtractor.SequentialReader, MetadataExtractor.Directory, int, int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcReader
-
- processTag(MetadataExtractor.TiffHandler, int, int, int, int, MetadataExtractor.RandomAccessReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TiffReader
-
- ProcessTerminatingNodeAdjacentNodes(int, int, int, OctNode, int, OctNode, int, int, TerminatingNodeAdjacencyFunction, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- ProcessTerminatingNodeAdjacentNodes(int, OctNode, int, OctNode, int, TerminatingNodeAdjacencyFunction, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- processTiff(MetadataExtractor.RandomAccessReader, MetadataExtractor.TiffHandler, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.TiffReader
-
Processes a TIFF data sequence.
- processTransferSyntax(String) - Method in class gov.nih.mipav.model.file.FileDicom
-
- processType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
How the VOI calculations should be performed (entire, contour, slice).
- processType - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
DOCUMENT ME!
- processUnknownVR(FileDicomTagTable, String, FileDicomKey, int, String) - Method in class gov.nih.mipav.model.file.FileDicom
-
- processUtilitiesMenu(ActionEvent, String) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Called when the Utilities Menu is activated.
- processVideoTesting(libdt.Dytex, libdt.Mat, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- processVideoTraining(libdt.Dytex, libdt.Mat, libdt.Mat, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- procPixel(int, float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
process pixel at pixel pix using data from the srcBuffer. builds a list of monochromatic image
values of the neighboring pixels image values (using a map generated by the kernelMask), builds the histogram of
those values, clamps when necessary, then scales the cumulative histogram, getting the brightness back out.
- prod2(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- produceProbaImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- product - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- PRODUCT - Static variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ProductParameterization(CeresSolver.LocalParameterization, CeresSolver.LocalParameterization) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- ProductParameterization(CeresSolver.LocalParameterization, CeresSolver.LocalParameterization, CeresSolver.LocalParameterization) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- ProductParameterization(CeresSolver.LocalParameterization, CeresSolver.LocalParameterization, CeresSolver.LocalParameterization, CeresSolver.LocalParameterization) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ProductParameterization
-
- ProductParameterizationTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- ProductParameterizationTestComputeJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- ProductParameterizationTestComputeJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProductParameterizationTestLocalAndGlobalSize2() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- ProductParameterizationTestLocalAndGlobalSize2() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProductParameterizationTestLocalAndGlobalSize3() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- ProductParameterizationTestLocalAndGlobalSize3() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProductParameterizationTestLocalAndGlobalSize4() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- ProductParameterizationTestLocalAndGlobalSize4() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProductParameterizationTestPlus() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- ProductParameterizationTestPlus() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- profile - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- PROFILE_EMBEDDED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorSpaceType
-
"MBED" = Embedded Profile
- PROFILE_LINKED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorSpaceType
-
"LINK" = Linked Profile
- profiles - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
List of existing default profiles for this dialog
- progorder - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Progression order string - 5 characters
- program - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- program() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- Program() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- program_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobianWriter
-
- program_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter
-
- program_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DenseJacobianWriter
-
- program_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DynamicCompressedRowJacobianWriter
-
- program_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- program_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- program_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.StateUpdatingCallback
-
- programAuthor - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- ProgramCreateJacobianBlockSparsityTranspose() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- programDate - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- ProgramEvaluator(JacobianWriter, CeresSolver.EvaluatorOptions, CeresSolver.Program) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- ProgramInfeasibleConstantParameterBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProgramInfeasibleParameterBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- programName - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- ProgramProblemHasNanParameterBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProgramReallocationInCreateJacobianBlockSparsityTranspose() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProgramRemoveFixedBlocksAllParameterBlocksConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProgramRemoveFixedBlocksFixedCost() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProgramRemoveFixedBlocksNoResidualBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProgramRemoveFixedBlocksNothingConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProgramRemoveFixedBlocksNumEliminateBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ProgramRemoveFixedBlocksOneParameterBlockConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- programVersion - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- progress - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Store the progress being made.
- progress - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- progress - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- progress - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- progress - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- PROGRESS - Static variable in class gov.nih.mipav.view.DICOMDisplayer
-
A progress type message is the image number that is saved.
- progress_monitor - Variable in class gov.nih.mipav.model.file.libjpeg.cdjpeg_progress_mgr
-
- progress_monitor(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- PROGRESS_VALUE_UNCHANGED - Static variable in class gov.nih.mipav.view.ViewJProgressBar
-
DOCUMENT ME!
- PROGRESS_WINDOW_CLOSING - Static variable in class gov.nih.mipav.view.ViewJProgressBar
-
DOCUMENT ME!
- progressBar - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
- progressBar - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- progressBar - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- progressBar - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Progress bar to show when reading in image file.
- progressBar - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- progressBar - Variable in class gov.nih.mipav.model.file.FileIO
-
DOCUMENT ME!
- progressBar - Variable in class gov.nih.mipav.model.file.FileJP2
-
- progressBar - Variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- progressBar - Variable in class gov.nih.mipav.model.file.FilePGM
-
DOCUMENT ME!
- progressBar - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Progress bar that will listen to a dialog's algorithm (and reflect current progress)
- progressBar - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
Progress bar.
- progressBar - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Progress bar object.
- progressBar - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
Progress bar that will listen to a dialog's algorithm (and reflect current progress)
- progressBar - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- progressBar - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
currently running.
- progressBar - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
currently running.
- progressBar - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Reference to progress bar.
- ProgressBarInterface - Interface in gov.nih.mipav.view
-
Title: ProgressBarInterface
- progressBarLocation - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Progress bar default location.
- progressBarPrefix - Variable in class gov.nih.mipav.view.ViewUserInterface
-
The current progress bar prefix to use.
- progressBegin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Where progress is when sent in.
- progressBegin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Where progress is when sent in.
- ProgressChangeEvent - Class in gov.nih.mipav.view
-
ProgressChangeEvent is used to notify interested parties that progress
state has changed in the event source
- ProgressChangeEvent(Object, int, String, String) - Constructor for class gov.nih.mipav.view.ProgressChangeEvent
-
The only constructor to create an instance of this ProgressChangeEvent
- ProgressChangeListener - Interface in gov.nih.mipav.view
-
Defines an object which listens for the ProgressChangeEvent.
- progressive_mode - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- progressMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
The max the progress can go to.
- progressMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
The max the progress can go to.
- progressMode - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Progress mode - either standard, no cancel, or no progress bar.
- progressModulus - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- progressStateChanged(ProgressChangeEvent) - Method in interface gov.nih.mipav.view.ProgressChangeListener
-
Invoked when the target of the listener has changed its state
- progressStateChanged(ProgressChangeEvent) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Implementation of the ProgressChangeListener interface.
- progressStateChanged(ProgressChangeEvent) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
Handle any progress changes by updating the correct progress bar
attached to the throwing algorithm
- progressStep - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- progressValue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- proj_alg - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
596 Projection Algorithm.
- proj_name - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
598 13 characters Projection Algorithm Name.
- project() - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- Project(String, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Project
-
Creates a new Project object.
- Project(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Projects an observation into the PCA space.
- projectAngle - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
498 Projection Angle.
- projected_gradient_step_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- projectID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Project
-
- projectID - Variable in class gov.nih.mipav.model.file.FileInfoOME.ProjectRef
-
- projection - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
When true output the X,Y,Z projections.
- projectionAngle - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- projectionAngle - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- projectionDataAlreadyOnCBR - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- projectionDirection - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Default Projection is along the z-Axis.
- projectionNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- projectionTime - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- projectionUSize - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- projectionVSize - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- ProjectRef(Integer, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.ProjectRef
-
Creates a new ProjectRef object.
- projectRefs - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
DOCUMENT ME!
- projects - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- projgr(int, double[], double[], int[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- ProjPointOnLine(double, double, double, double, double, double, double[], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Find the projection dProj of the point dP on the line through dL1 and dL2.
- promenance - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate the cluster promenance Sum over i,j of ((i + j - x mean - y mean)**4) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j of ((i + j - 2 * glcm mean)**4) * Probability(i,j)
- promenance - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate the cluster promenance Sum over i,j of ((i + j - x mean - y mean)**4) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j of ((i + j - 2 * glcm mean)**4) * Probability(i,j)
- promenance - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
- promenance - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- promenanceCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
- promenanceCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- PROMOTE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- PROMOTE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- PROMOTE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- promoteType(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
DOCUMENT ME!
- promoteType(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- promoteType(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- PROP_ALL - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Propagate the source VOI to slices above and below its current slice.
- PROP_ALL - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Propagate the source VOI to slices above and below its current slice.
- PROP_NEXT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Propagate the source VOI to slices above its current slice in the volume.
- PROP_NEXT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Propagate the source VOI to slices above its current slice in the volume.
- PROP_PREV - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Propagate the source VOI to slices below its current slice in the volume.
- PROP_PREV - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Propagate the source VOI to slices below its current slice in the volume.
- PROP_SINGLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Do not propagate the source VOI to any slices (2D).
- PROP_SINGLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Do not propagate the VOI to any slices (2D).
- PROP_THRESHOLD - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
The maximum ratio of change in the energy under the VOI after propagation.
- PROP_THRESHOLD - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
The maximum ratio of change in the energy under the VOI after propagation.
- propagate - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- propagate - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- propagate - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- propagate - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- propagate(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- propagate(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- propagateAll() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
propagate to all slices.
- propagateDown() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
propagate to the next slice.
- propagatePaintToAllSlices() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- propagatePaintToNextSlice() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- propagatePaintToPreviousSlice() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- propagateUp() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
propagate to the next slice.
- propagateVOI(VOIBase, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from VOIManagerInterface.
- propagation() - Method in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- propagationFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
If true propagate the contour to an adjacent slice.
- propagationFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
If true propagate the contour to an adjacent slice.
- propagationFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- propagationFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- propagationType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
The VOI propagation mode to use.
- propagationType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
The VOI propagation mode to use.
- propagationType - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- propagationType - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- propDown(VOIContour, VOI, float, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
- propDown(VOIContour, VOI, float, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
- PropDown(int) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- PropDown(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- PropDown(int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- PropDown(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- PropDown(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- PropDown(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- properties - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Properties per track
- PROPERTIES - Static variable in interface gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehaviorCallback
-
DOCUMENT ME!
- propertiesDialog - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- PropertiesDialog(JDialogHyperGraph, MipavGraphPanel, boolean) - Constructor for class gov.nih.mipav.view.graphVisualization.MipavGraphPanel.PropertiesDialog
-
- propertyChange(PropertyChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
This method gets called when a bound property is changed.
- propertyChange(PropertyChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
- propertyChange(PropertyChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- propertyChangeInSelectA() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Here to allow subclasses to select the action to occur when a property change occurs in the select A panel.
- propertyChangeInSelectB() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Here to allow subclasses to select the action to occur when a property change occurs in the select B panel.
- propertyChangeInSelectB() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Here to allow subclasses to select the action to occur when a property change occurs in the select B panel.
- propertyLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
When a tag value exists, this label displays the text "Tag value:"
- propertyList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Vector to hold all properties calculated within the algorithm for later access.
- PropertyListResults(List<Object>, MetadataExtractor.BplistReader.Trailer) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.PropertyListResults
-
- propertyName - Variable in class gov.nih.mipav.view.JPanelEdit
-
A changable property name for firing PropertyChangeEvents.
- PropertyUpdate() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- propertyValue - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- propertyValueSeq - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Name and property labels that describe a DICOM tag for a particular file
- propNames - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Scalar names and property names
- proposedAbstractSyntaxs - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
A hash table of proposed abstract syntaxes where: value = AbstractSyntaxes; key = UID.
- propPane - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
When a tag value exists, this panel displays the value
- propSubMenu - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- propSubMenu - Variable in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- propSubMenu - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- propUp(VOIContour, VOI, float, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
- propUp(VOIContour, VOI, float, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
- PropUp(int) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- PropUp(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- PropUp(int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- PropUp(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- PropUp(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- PropUp(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- propVOI(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- propVOI(int, boolean) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Deprecated.
- propVOIAll() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- propVOIAll() - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Deprecated.
- prostateAAMClassification - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
- prostateML - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
- prostateSemiAutoBSpline() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- prostateSemiAutoBSplineFuzzyC() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- protocol - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlFileMeta
-
< File name pattern
- protocol - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- protocolField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- protocolFlag - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
332 Non-zero indicates protocol exam.
- protocolName - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
par/rec protocolName
- protocolName - Variable in class gov.nih.mipav.model.file.FilePARREC
-
protocol name
- protocolVersion - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Protocol version identifier.
- PROTOCOLVERSION - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DICOM Protocol Version - Default = 1.
- PROTRACTOR - Static variable in class gov.nih.mipav.model.structures.VOI
-
Indicates that the VOI is of type PROTRACTOR used to measure angles.
- PROTRACTOR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- PROTRACTOR - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
This mode is an active VOI mode used by the VOI Handler
- protractorAnnotations(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Creates the protractor annotations.
- protractorCommonVertexButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
- ProvenanceChangeEvent - Class in gov.nih.mipav.model.provenance
-
Provenance Change event for listeners to update (jtable provenance viewing)
- ProvenanceChangeEvent(Object, ProvenanceEntry) - Constructor for class gov.nih.mipav.model.provenance.ProvenanceChangeEvent
-
default constructor
- ProvenanceChangeListener - Interface in gov.nih.mipav.model.provenance
-
Used by JDialogDataProvenance to display changes in the provenanceholder (when entries are added)
- provenanceCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- ProvenanceEntry - Class in gov.nih.mipav.model.provenance
-
- ProvenanceEntry() - Constructor for class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- ProvenanceEntry(String) - Constructor for class gov.nih.mipav.model.provenance.ProvenanceEntry
-
Constructor created when an action happens
- provenanceFileButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- provenanceFilename - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- provenanceHolder - Variable in class gov.nih.mipav.model.structures.ModelImage
-
Holds the data provenance (image history) The transient keyword is used to indicate that the provenanceHolder
should not be cloned when the image is cloned.
- ProvenanceHolder - Class in gov.nih.mipav.model.provenance
-
Class that stores matrices (owned by ModelImage) with accessor functions to the matrix map/adding and changing
matrices.
- ProvenanceHolder() - Constructor for class gov.nih.mipav.model.provenance.ProvenanceHolder
-
Default constructor.
- provenanceImageCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- ProvenanceRecorder - Class in gov.nih.mipav.model.provenance
-
Singleton class modelled after ScriptRecorder that is turned on when Mipav starts if
DATA_PROVENANCE boolean is set to true in preferences (set through Mipav-Options)
Records data provenance line by line (after running algorithms or doing other important actions (Change name) etc
images are placed in registers (similar to the script recorder) but there are also Vectors of input and output images
so that the data provenance is placed into the correct place(s)
- ProvenanceRecorder() - Constructor for class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Creates a new ProvenanceRecorder object.
- provenanceStateChanged(ProvenanceChangeEvent) - Method in interface gov.nih.mipav.model.provenance.ProvenanceChangeListener
-
- provenanceStateChanged(ProvenanceChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
Update the dialog with the new provenance entry
- ProvenanceXMLHandler(ProvenanceHolder) - Constructor for class gov.nih.mipav.model.file.FileDataProvenance.ProvenanceXMLHandler
-
Default constructor
- providedOutputDir - Static variable in class gov.nih.mipav.view.ViewUserInterface
-
This boolean tells if the user has provided an ouputDir parameter as a command line argument when running a
script
- providedUserDefaultDir - Static variable in class gov.nih.mipav.view.ViewUserInterface
-
This boolean tells if the user has provided an inputDir parameter as a command line argument when running a
script
- proxy - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.polygon_node
-
- prprel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- prSysID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
50 - 9 bytes - Primary Receiver Suite and Host.
- prune() - Method in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- prune(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- prune(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
This method is to be applied on skeletonized images: it removes all branches which are iter or less pixels in
length.
- prune(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
This method is to be applied on skeletonized images: it removes all branches which are iter or less pixels in
length.
- prune(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
This method is to be applied on skeletonized images: it removes all branches which are iter or less pixels in
length.
- pruneAuto(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
This method is to be applied on skeletonized images: it skeletonized each branches into a point.
- prunedmodes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- prunedModesImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- prunedModesImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- pruneModes(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- pruneSeeds - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Vector that hold the prune seeding pixels.
- pry - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- pS - Variable in class gov.nih.mipav.view.ColorWheel
-
sat vs theta
- pS - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
saturation vs theta *
- pS - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
saturation vs theta *
- pS - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
sat vs theta *
- ps_flag - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
580 Auto/Manual Prescan flag.
- ps_status - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
582 Bitmap of changed values.
- Psd - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- PSD - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .psd.
- psd_dateTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
342 PSD Creation Date and Time.
- psd_iname - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
346 13 characters.
- psdDay - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- psdDay - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- psdFileName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- psdFileName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- PsdHeaderDescriptor(MetadataExtractor.PsdHeaderDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDescriptor
-
- PsdHeaderDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDirectory
-
- psdHour - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- psdHour - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- psdMinute - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- psdMinute - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- psdMonth - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- psdMonth - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- psdName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- psdName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- PsdReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.PsdReader
-
- PsdReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.PsdReaderTest
-
- psdSeconds - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- psdSeconds - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- psdYear - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- psdYear - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- psel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- pSeq - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
304 Pulse sequence.
- pseries(double, double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- pSeries2 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- pSeries2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- psetDesc - Variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- PSetDisplay(String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay
-
Creates a parameter set display with the given description that will be used as the key.
- pSetsHashMap - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
- PseudoInv(CDMatrix, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
Calculates the pseudo inverse of a matrix.
- PseudoPolarFourierTransform - Class in gov.nih.mipav.model.algorithms.filters
-
- PseudoPolarFourierTransform() - Constructor for class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- PseudoPolarFourierTransform.indexValueComparator - Class in gov.nih.mipav.model.algorithms.filters
-
- PseudoPolarFourierTransform.indexValueItem - Class in gov.nih.mipav.model.algorithms.filters
-
- psfFFT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- psfIFFT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- psfImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- psfImageSpectrum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- psfReals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- psfSpectrumImags - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- psfSpectrumReals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- psi - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- psi - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- psi(double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- psi(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- Psi - Class in gov.nih.mipav.model.algorithms
-
This code calculates the psi function of an input argument x.
- Psi() - Constructor for class gov.nih.mipav.model.algorithms.Psi
-
- Psi(double, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Psi
-
- Psi(double, double, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.Psi
-
- PSI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- Psij - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- psiLattice - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- psiLattice - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- psnr() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- psnr_b - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- psnrb() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- pSpline - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- pstdnorm(double) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- pt - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- pt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
- pt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
-
- pt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- pt - Variable in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
temp point storage.
- pt - Variable in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
temp point storage.
- pt - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeyPoint
-
- pt - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- pt - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.poly
-
- pt() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.pt
-
- Pt - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Shift by this when putting into int buffer.
- PT - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- PT1 - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- pTable - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- ptArray - Variable in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- ptCoord - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- ptCoord - Variable in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Temporary buffer used when extracting points from a VOI.
- pText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- PTFUN1(int, double[][], double[], int, String[], int, String, String, String, RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- PTFUN2(int, double[][], double[], int, String[], int, String[], int, String, String, String, boolean, String, RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ptHessian2D() - Method in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- ptHessian3D() - Method in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- ptIDText - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- ptNameText - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- PToIP(Point3, Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- PtP(double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- PtP3(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- PtP3_ref(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- ptPopup - Variable in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- ptr - Variable in class gov.nih.mipav.model.structures.HQueue
-
DOCUMENT ME!
- ptr - Variable in class gov.nih.mipav.model.structures.IntVector
-
The index of the last valid data element in the vector.
- ptr - Variable in class gov.nih.mipav.model.structures.PointStack
-
DOCUMENT ME!
- PTR_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Pointer viewing mode.
- ptrButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Point behavior button.
- ptrCmprsnHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
72 - pointer to.
- ptrDBHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
104 - pointer to.
- ptrExamHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
132 - pointer to.
- ptrGraphics - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
96 - pointer to.
- ptrHistoHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
80 - pointer to.
- ptrImage - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
4 - byte displacement to pixel data.
- ptrImageHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
148 - pointer to.
- ptrSeriesHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
140 - pointer to.
- ptrSuiteHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
124 - pointer to.
- ptrTextPlane - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
88 - pointer to.
- ptrUID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
56 - pointer to unique image identifier (UID).
- ptrUnpackHdr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
64 - pointer to.
- ptrUsrDefData - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
116 - pointer to.
- pts - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
Integration limits and the break points of the interval in ascending sequence.
- pts - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Integration limits and the break points of the interval in ascending sequence.
- pts - Variable in class gov.nih.mipav.model.structures.TransferFunction
-
The array of 2D points that define the line.
- Pts - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
- pttemp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- pttemp - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- PTX - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- pub - Variable in class gov.nih.mipav.model.file.libjpeg.d_derived_tbl
-
- PUBLIC_TAB - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
- publicTagsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
- publicTagsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
- publisher - Variable in class gov.nih.mipav.model.file.PrivateFileDicomKey
-
The publisher for this tag.
- PUBLISHER - Static variable in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
- pulse - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser
-
- pulseRepTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
194 pulse repetition time (usec).
- pulseSeqMode - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
306.
- pulseSeqName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
308 33 characters.
- pulseSequence - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- pulseSequence - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- pulseSequenceMode - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- pulseSequenceMode - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- pulseSequenceSubtype - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- pulseSequenceSubtype - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- pump - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser
-
elements.
- Pump(Integer, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser.Pump
-
Creates a new Pump object.
- PURE_1D - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- PURE_1D - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- purple - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- purpleColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- Purpose() - Constructor for enum gov.nih.mipav.view.GetPath.Purpose
-
- push(int) - Method in class gov.nih.mipav.model.structures.IntVector
-
Pushes a new value onto the array.
- push(DICOM_VR) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Adds DICOM_VR to this list (object).
- push_back(AlgorithmMeanShiftClustering.famsPoint) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_res_cont
-
- pushAppleMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushCanonMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushCasioType1MakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushCasioType2MakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushDirectory(Class<? extends MetadataExtractor.Directory>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushErrorDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushExifIFD0Directory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushExifImageDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushExifInteropDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushExifThumbnailDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushFujifilmMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushGpsDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushKyoceraMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushLeicaMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushLeicaType5MakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushNikonType1MakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushNikonType2MakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushOlympusCameraSettingsMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushOlympusEquipmentMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushOlympusFocusInfoMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushOlympusImageProcessingMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushOlympusMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushOlympusRawDevelopment2MakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushOlympusRawDevelopmentMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushOlympusRawInfoMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushPanasonicMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushPanasonicRawIFD0Directory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushPentaxMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushRicohMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushSamsungType2MakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushSanyoMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushSigmaMakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushSonyType1MakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushSonyType6MakernoteDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- pushSubExifIFDDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- put(FileDicomTag) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Adds a tag to the tag table, overwriting if a value is already in the table under this tag's key.
- put(Parameter) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Add a parameter to a table.
- put(String, Parameter) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Add a parameter to the table.
- Put(int, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- PutColumn(double[], int, int, double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- putdata(int, int, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- putInFrame - Variable in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- putInQuicklist - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
Tells FileIO whether or not to insert the saved image into the Quicklist (recently used image list) after
successful saving
- putPrivateTagInfo(FileDicomTagTable, FileDicomKey, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
- putPrivateTagValue(FileDicomTagInfo) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Adds a private tag to the tag table using some dicom info.
- PutRow(double[], int, int, double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- PutVertical(double[], int, int, double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- pvalue - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- pValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- PValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- PValue - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
statistic giving the portion of images generated with randomly scrambled blocks of pixels having a linear
correlation coefficient less than that of the actual image.
- pVertex - Variable in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- pw - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_resolution_t
-
- pw - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_resolution_t
-
- PW_qis2 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- PW_qis2 - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- pwAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
DOCUMENT ME!
- pwt(float[], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- PWT - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- PWT - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- px - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- px - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator
-
- px - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- px - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgIterator
-
- px - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator
-
- px - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- Px - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Joint probability table
- PXM_DFMT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- pxmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- pxmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- pymax - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- pymin - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- pyramid - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- Pyramid() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Pyramid
-
- pyramid_filter() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- pyramidLevels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
pyramidLevels is only used with gain correction.
- pyramidLevels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
pyramidLevels is only used with gain correction.
- pyramidLevels - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
pyramidLevels is only used with gain correction.
- PyramidToolbox - Class in gov.nih.mipav.model.algorithms
-
- PyramidToolbox() - Constructor for class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- PYTHAG(double, double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- PyWavelets - Class in gov.nih.mipav.model.algorithms.filters
-
Copyright (c) 2006-2012 Filip Wasilewski
Copyright (c) 2012-2017 The PyWavelets Developers
Permission is hereby granted, free of charge, to any person obtaining a copy of
this software and associated documentation files (the "Software"), to deal in
the Software without restriction, including without limitation the rights to
use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies
of the Software, and to permit persons to whom the Software is furnished to do
so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
- PyWavelets() - Constructor for class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- PyWavelets(ModelImage, double[]) - Constructor for class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- PyWavelets(ModelImage, ModelImage, int, PyWavelets.WAVELET_NAME[], int[], PyWavelets.MODE[], int[], int[], double[], double[], boolean, boolean, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- PyWavelets.ArrayInfo - Class in gov.nih.mipav.model.algorithms.filters
-
- PyWavelets.BaseWavelet - Class in gov.nih.mipav.model.algorithms.filters
-
- PyWavelets.Coefficient - Enum in gov.nih.mipav.model.algorithms.filters
-
- PyWavelets.ContinuousWavelet - Class in gov.nih.mipav.model.algorithms.filters
-
- PyWavelets.DiscreteTransformType - Enum in gov.nih.mipav.model.algorithms.filters
-
- PyWavelets.DiscreteWavelet - Class in gov.nih.mipav.model.algorithms.filters
-
- PyWavelets.MODE - Enum in gov.nih.mipav.model.algorithms.filters
-
- PyWavelets.SYMMETRY - Enum in gov.nih.mipav.model.algorithms.filters
-
- PyWavelets.WAVELET_NAME - Enum in gov.nih.mipav.model.algorithms.filters
-
- PZETAC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
Q
- q - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- q - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- q - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- q - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_VertAux
-
- q - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- Q - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- Q - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
preference-decreasing ordered set of nice increments
- Q - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< observation noise covariance
- Q - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- Q - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.crpfun
-
- Q - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- Q - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- Q - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- Q() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- q_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- Q_MAX - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- Q_THRESHOLD - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- q_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverPerSolveOptions
-
- Q0 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- Q01_POS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- Q02_POS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- Q1 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- Q10_POS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- Q11_POS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- Q2 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- Q20_POS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- q2dcm(double[][]) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- qapply(int, int, int, double[][], double[], int) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- qaws(double, double, int, double, double, int, double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.SymmsIntegralMapping.qaws
-
- qbdd_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- QCOMW - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- QCOMX - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- qcond_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- qconj(double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- qcvq(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- QD - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.ONE_CLASS_Q
-
- QD - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- QD - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.SVC_Q
-
- QD - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.SVR_Q
-
- QD - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.ONE_CLASS_Q
-
- QD - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- QD - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVC_Q
-
- QD - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVR_Q
-
- qdat - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.crpfun
-
- qdat - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.depfun
-
- qdat - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.dpfun
-
- qdat - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
- qdat - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.hppfun
-
- qdat - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
- qdat - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- qdat - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
- qdat - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
- qdata - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- qdecomp(double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- qdum1_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- qdum2_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- QELLPE - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- QELLPK - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- qeval - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_state_t
-
the probability of the Least Probable Symbol (0.75->0x8000,
1.5->0xffff)
- qfac - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
The scaling factor qfac is either 1 or -1.
- QFORM(int, int, double[][], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- qform_code - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
When qform_code > 0 the (x,y,z) coordinates are given by:
[ x ] [ R11 R12 R13 ] [ pixdim[1] * i ] [ qoffset_x ]
[ y ] = [ R21 R22 R23 ] [ pixdim[2] * j ] + [ qoffset_y ]
[ z ] [ R31 R32 R33 ] [ qfac * pixdim[3] * k ] [ qoffset_z ]
where the R rotation parameters are calculated from the
quaternion parameters.
- Qg() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The texture part of the combined PCA eigenvectors.
- QGAMMA - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- qgraph - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- qincr_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- QINIT(int, int, double[], double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- QKSort2(float[]) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- QLag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- qledge - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.qlgraph
-
- qlgraph() - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.qlgraph
-
- qlim_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- qlvert - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.qlgraph
-
- QMatrix - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- QMatrix() - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.QMatrix
-
- QMatrix() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.QMatrix
-
- qMesh - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Quad mesh.
- qmfbid - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
discrete wavelet transform identifier
- qmfbid - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
discrete wavelet transform identifier
- qMinrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- qMinrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- qmult(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- qnorm(double[][]) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- qntsty - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
quantisation style
- qntsty - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
quantisation style
- qoffset_x - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Quaternion x shift
- qoffset_y - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Quaternion y shift
- qoffset_z - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Quaternion z shift
- Qopt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
- qr_a - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- qr_b - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- qr_enable - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- qr_r - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- QRFAC(int, int, double[][], int, boolean, int[], int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- qrfact(int, int, int, double[][], double[], int[], int[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- QRHSFUNC_RECVR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- qrzero_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- Qs() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
The shape part of the combined PCA eigenvectors.
- qsort(int[], int, int, Comparator) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortUtil
-
- qsort(Covdet.VlCovDetFeatureOrientation[], int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- qsort(Object[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.QuickSort
-
This is a generic version of C.A.R Hoare's Quick Sort
algorithm.
- qsort(Object[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.QuickSort
-
This is a generic version of C.A.R Hoare's Quick Sort
algorithm.
- qsort(Object[], int, int, Comparator) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.QuickSort
-
- qsort(Object[], int, int, Comparator) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.QuickSort
-
- qsort(Object[], int, int, Comparator) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortUtil
-
Quick sorts the supplied array using the specified comparator.
- qsort(Object[], Comparator) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortUtil
-
Quick sorts the supplied array using the specified comparator.
- qsort_recursive(Covdet.VlCovDetFeatureOrientation[], int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- QSORT_STACK_SIZE - Static variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- qsort_swap(Covdet.VlCovDetFeatureOrientation[], int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- qSort3(int, int, int) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- QSRHSFUNC_RECVR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- qt - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGACInputStream
-
- qt - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- qt - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGACInputStream
-
- qt - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- QT - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Quicktime file type. extension: .mov, .qt
- qtf - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
qtf is an OUTPUT array of length n which contains
the first n elements of the vector (q transpose)*fvec.
- qts - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- qts - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- QUAD - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHeightFunction
-
DOCUMENT ME!
- quad_roots(double[], double[], double, double, double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- quadImagePanel - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- quadImagePanel - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- quadrant - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- QUADRATIC - gov.nih.mipav.model.algorithms.CeresSolver.LineSearchInterpolationType
-
- QuadraticCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticCostFunction
-
- QuadraticFirstOrderFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticFirstOrderFunction
-
- QuadraticFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticFunction
-
- QuadraticTestFunction(boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.QuadraticTestFunction
-
- Quadric() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- Quadric(double, double, double, double, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- Quadric(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- Quadric(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Vertices
-
- quality - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- quality - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDICOMtoAVI
-
DOCUMENT ME!
- qualityField - Variable in class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
Text Field for M-JPEG quality.
- qualityField - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
DOCUMENT ME!
- qualityField - Variable in class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Text Field for M-JPEG quality.
- qualityLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
DOCUMENT ME!
- qualityLayers - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- quamin(double, double, double, double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- quamin(DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- quant_table - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- quant_tbl_no - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- quant_tbl_ptrs - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- quantificationUnits - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- quantityDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- quantize(double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- quantize_colors - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- quantize_fs_dither(libjpeg.jpeg_decompress_struct, byte[][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- quantize_fs_dither(libjpeg.jpeg_decompress_struct, short[][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- QUANTIZE_FS_DITHER - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- quantize_ord_dither(libjpeg.jpeg_decompress_struct, byte[][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- quantize_ord_dither(libjpeg.jpeg_decompress_struct, short[][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- QUANTIZE_ORD_DITHER - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- quantize3_ord_dither(libjpeg.jpeg_decompress_struct, byte[][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- quantize3_ord_dither(libjpeg.jpeg_decompress_struct, short[][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- QUANTIZE3_ORD_DITHER - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- quantizer_1pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_decomp_master
-
- quantizer_2pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_decomp_master
-
- quantval - Variable in class gov.nih.mipav.model.file.libjpeg.JQUANT_TBL
-
- QuarticEquation - Class in gov.nih.mipav.model.algorithms
-
Copyright Yair Chuchem 2011.
- QuarticEquation() - Constructor for class gov.nih.mipav.model.algorithms.QuarticEquation
-
- QuarticEquation(int, double, double, double, double, double, double, double, double, double, double, int[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.QuarticEquation
-
- QuarticEquation(int, double, double, double, double, double, int[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.QuarticEquation
-
- QuarticEquation.complex_t - Class in gov.nih.mipav.model.algorithms
-
- QuarticEquationEP - Class in gov.nih.mipav.model.algorithms
-
Copyright Yair Chuchem 2011.
- QuarticEquationEP() - Constructor for class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- QuarticEquationEP(int, double, double, double, double, double, double, double, double, double, double, int[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- QuarticEquationEP(int, double, double, double, double, double, int[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- QuarticEquationEP.complex_t - Class in gov.nih.mipav.model.algorithms
-
- quatern_a - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
The orientation of the (x,y,z) axes relative to the (i,j,k) axes
in 3D space is specified using a unit quaternion [a,b,c,d], where
a*a+b*b+c*c+d*d=1.
- quatern_b - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Quaternion b parameter
- quatern_c - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Quaternion c parameter
- quatern_d - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Quaternion d parameter
- QuaternionMultiplicationIsAssociative() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- QuaternionParameterization() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.QuaternionParameterization
-
- QuaternionParameterizationAwayFromZeroTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- QuaternionParameterizationNearZeroTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- QuaternionParameterizationTestHelper(double[], double[], double[], String) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- QuaternionParameterizationZeroTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- QuaternionProduct(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- QuaternionRotatePointGivesSameAnswerAsRotationByMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- QuaternionRotatePointGivesSameAnswerAsRotationByMatrixCanned() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Quaternions - Class in gov.nih.mipav.model.algorithms
-
Copyright (c) 2000-2009, Jay St.
- Quaternions() - Constructor for class gov.nih.mipav.model.algorithms.Quaternions
-
- QuaternionToAngleAxis(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- QuaternionToRotation(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- QuaternionToScaledRotation(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- QuatToEuler(Quat4d, Vector3d) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Transform a quaternion to euler.
- queryBooleanProperty(String) - Method in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Query the boolean state of the specified property in a Canvas3D.
- queryForDicomAutostart() - Method in class gov.nih.mipav.view.ViewJFrameImage.DicomQueryListener
-
Ask user whether the dicom receiver should be enabled on startup.
- queryForDicomAutostart() - Method in class gov.nih.mipav.view.ViewUserInterface.DicomQueryListener
-
Ask user whether the dicom receiver should be enabled on startup.
- queryFrame - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
The GUI frame to starting queries.
- queryIdx - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatch
-
- queryIntegerProperty(String) - Method in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Query the integer state of the specified property in a Canvas3D.
- queryLev - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- queryLevel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- queryMsgID - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- queryPDU - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- queryResultTable - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- queryTableModel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- queryType - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Indicates the type of query (i.e.
- queues - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.CL_data
-
- QUICK_LUT - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
This mode is used by the VOI Handler to determine whether VOIs will be drawn.
- quick_select(double[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
- quickList - Variable in class gov.nih.mipav.view.ViewMenuBuilder
-
List that holds the last X number of recently opened images.
- QuickList(ActionListener) - Constructor for class gov.nih.mipav.view.ViewMenuBuilder.QuickList
-
Creates a new QuickList object.
- quicklistIndex - Variable in class gov.nih.mipav.view.ViewMenuBuilder
-
Index for rebuilding quicklist.
- quickListItems - Variable in class gov.nih.mipav.view.ViewMenuBuilder.QuickList
-
DOCUMENT ME!
- quickListLevel - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- quickLUT(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called from the VOIManager class when a user has drawn the QuickLUT rectangle.
- quickLUT(Vector3f[], ModelImage, ModelLUT) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
method that performs the quick LUT operation
- quickLUTcursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
Custom cursor: quick LUT.
- quickPaintBrushIndex - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- quickPaintBrushIndex - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
int used for quick-key painting for speedier paint brush access.
- quickRGB(Vector3f[], ModelImage, ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
DOCUMENT ME!
- quickSegmentation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
After the first time the dialog is invoked, when user select the AAM
segmentation from the menu item, the quick segmentation function is
called to do the AAM classification.
- quickSegmentation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
After the first time the dialog is invoked, when user select the AAM
segmentation from the menu item, the quick segmentation function is
called to do the AAM classification.
- QuickSort - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
This is the local implementation of quicksort for delaunay triangulation.
- QuickSort - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- QuickSort(Comparator) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.QuickSort
-
- QuickSort(Comparator) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.QuickSort
-
- quickSwitchBrush() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Backups up ( and swaps if not null) the current and previously used paintBrush.
- QuickTime - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- quickTimeButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Apple quick time player button to play quick time movie.
- quiet - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- quiet - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
- quiet - Variable in class gov.nih.mipav.model.file.FileDicom
-
If the file is quiet no user-interaction is performed.
- quiet - Variable in class gov.nih.mipav.model.file.FileIO
-
Refers to whether or not the FileIO reports progress or errors.
- quiet - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- QUIET - gov.nih.mipav.model.algorithms.libdt.Verbose_mode
-
- QUINTIC_LAGRANGIAN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Quintic lagrangian interpolation.
- QUINTIC_LAGRANGIAN - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Quintic lagrangian interpolation.
- quinticLagrangian2D(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
2D quintic Lagrangian function.
- quinticLagrangian2DC(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
2D quintic Lagrangian function for color.
- quinticLagrangian3D(double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
3D quintic Lagrangian function.
- quinticLagrangian3DC(double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
3D quintic Lagrangian function for color (3 channel images).
- qup_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- QUPTC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- QUPTS - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- QUWTC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- QUWTS - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- qVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- Qval - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
< Regularization method for S.
- qValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- qValue - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- qvqc(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- qvrot(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- qvxform(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- QWORK2 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- qxmon(double, double, double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- Qxp - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- QZETAC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
R
- r - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- r - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- r - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- r - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ParameterIgnoringCostFunction
-
- r - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
-
- r - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- r - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- r - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- r - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver.SolutionInfo
-
- r - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- r - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- r - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_VertAux
-
- r - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.PolarPoint
-
- r - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.PolarPoint
-
- r - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver.SolutionInfo
-
- r() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- r(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- r(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- r(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- r(int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- R - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SubSig
-
- R - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- R - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< initial state mean
- R - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint
-
- R - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- R - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- R - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- R - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
DOCUMENT ME!
- R - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- R() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- r_asDouble() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- r_asDouble() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Returns the red value of this pixel at its current position.
- r_data - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint
-
- r_normalized(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- r_normalized(int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- R_SCALE - Variable in class gov.nih.mipav.model.file.libjpeg
-
- r_tolerance - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverPerSolveOptions
-
- R_Y_OFF - Variable in class gov.nih.mipav.model.file.libjpeg
-
- r00 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
The (proper) 3x3 rotation matrix that
corresponds to quaternion [a,b,c,d] is
[ a*a+b*b-c*c-d*d 2*b*c-2*a*d 2*b*d+2*a*c ]
R = [ 2*b*c+2*a*d a*a+c*c-b*b-d*d 2*c*d-2*a*b ]
[ 2*b*d-2*a*c 2*c*d+2*a*b a*a+d*d-c*c-b*b ]
- r01 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
The (proper) 3x3 rotation matrix that
corresponds to quaternion [a,b,c,d] is
[ a*a+b*b-c*c-d*d 2*b*c-2*a*d 2*b*d+2*a*c ]
R = [ 2*b*c+2*a*d a*a+c*c-b*b-d*d 2*c*d-2*a*b ]
[ 2*b*d-2*a*c 2*c*d+2*a*b a*a+d*d-c*c-b*b ]
- r02 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
The (proper) 3x3 rotation matrix that
corresponds to quaternion [a,b,c,d] is
[ a*a+b*b-c*c-d*d 2*b*c-2*a*d 2*b*d+2*a*c ]
R = [ 2*b*c+2*a*d a*a+c*c-b*b-d*d 2*c*d-2*a*b ]
[ 2*b*d-2*a*c 2*c*d+2*a*b a*a+d*d-c*c-b*b ]
- r1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
Contrast relaxivity rate in 1/(mMol*sec) (0.0 - 1000.0)
- r1 - Variable in class gov.nih.mipav.view.ColorWheel
-
radii of all the circles...r6 is the outermost radius
- r1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- r1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- r1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- R1 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- R1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- r10 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- r11 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- r12 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- r1i - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
non-uniform tissue intrinsic relaxivity map from input 3d + t = 4D image
- r1i - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- r1m5 - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
D1MACH(5) = log10(2).
- r1m5 - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
D1MACH(5) = log10(2). = log10(e) * loge(2.0)
- r1Max - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- r1Min - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- R1MPYQ(int, int, double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- r1pt0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- r1ptj - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
- r1ptj - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- r1ptj - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task
-
- r1ResultData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- r1ResultStack - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- r1ResultWindow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- r1t0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- r1tj - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- R1UPDT(int, int, double[], int, double[], double[], double[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- r2 - Variable in class gov.nih.mipav.view.ColorWheel
-
radii of all the circles...r6 is the outermost radius
- r2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- r2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- R2 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- R2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- r20 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- r21 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- r22 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- r2ResultStack - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- r2ResultWindow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- r2strip(double[][], double[][], double[][], double[][], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- r3 - Variable in class gov.nih.mipav.view.ColorWheel
-
radii of all the circles...r6 is the outermost radius
- r4 - Variable in class gov.nih.mipav.view.ColorWheel
-
radii of all the circles...r6 is the outermost radius
- r5 - Variable in class gov.nih.mipav.view.ColorWheel
-
radii of all the circles...r6 is the outermost radius
- R5 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Ripple 5
- r6 - Variable in class gov.nih.mipav.view.ColorWheel
-
radii of all the circles...r6 is the outermost radius
- R7 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Ripple 7
- rabs - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- rabs - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- race - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- raceBox - Variable in class gov.nih.mipav.view.JPanelEditRace
-
DOCUMENT ME!
- rad - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughCircle
-
- rad - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
- Rad2Deg(double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Convert from radians to degrees.
- radArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
- radCTZ - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Radio button for CTZ sequence
- radCZT - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Radio button for CZT sequence
- radi() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront.AdvancingTest
-
- radi() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- radi() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- RADIANS - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
used for setting rotation
- RADIANS - Static variable in class gov.nih.mipav.model.structures.TransMatrix
-
used for setting rotation
- RADIANS - Static variable in class gov.nih.mipav.model.structures.TransMatrixd
-
used for setting rotation
- radicalRatio - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Arbitrary clipping plane expanding ratio.
- RADIO_FLUOROSCOPY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality radio fluoroscopy.
- RADIO_FLUOROSCOPY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality radio fluoroscopy.
- radio3D - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- radio4D - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- radioAbdomen - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
Preset radio buttons.
- radioAbdomen - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Preset radio buttons.
- radioAbdomen - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Preset radio buttons.
- radioARGB - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
- radioARGB - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioARGB - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioARGB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
- radioARGB_FLOAT - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
DOCUMENT ME!
- radioARGB_FLOAT - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioARGB_FLOAT - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- radioARGB_USHORT - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
DOCUMENT ME!
- radioARGB_USHORT - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioARGB_USHORT - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioARGB_USHORT - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- radioBackground2D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- radioBackground3D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- radioBackgrounds2D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- radioBackgrounds3D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- radioBinary - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- radioBool - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioBool - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- radioBool - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioBrainSurfaceFlattenerR - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Radio button of the brainsurface flattener render mode in the right panel.
- radioBSpline - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- radioBSpline - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- radioButtonGroupFlyMode - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
radio check button for fly-thru mode.
- radioButtonGroupProjections - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Button group for projections.
- radioButtonGroupProjections - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Button group for projections.
- radioButtonGroupProjections - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Button group for projections.
- radioButtonGroupProjections - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Button group for projections.
- radioButtonGroupProjections - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Button group for projections.
- radioButtonOrthographic - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Radio Button for Orthographic rendering.
- radioButtonOrthographic - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Radio Button for Orthographic rendering.
- radioButtonOrthographic - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Radio Button for Orthographic rendering.
- radioButtonOrthographic - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Radio Button for Orthographic rendering.
- radioButtonOrthographic - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Radio Button for Orthographic rendering.
- radioButtonPerspective - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Radio Button for Perspective rendering.
- radioButtonPerspective - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Radio Button for Perspective rendering.
- radioButtonPerspective - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Radio Button for Perspective rendering.
- radioButtonPerspective - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Radio Button for Perspective rendering.
- radioButtonPerspective - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Radio Button for Perspective rendering.
- radioButtonSVMBinary - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- radioButtonSVMBinary - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- radioButtonSVMBinary - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
SVM option button.
- radioButtonSVMMulticlass - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- radioButtonSVMMulticlass - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- radioButtonSVMMulticlass - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- radioByte - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioByte - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- radioByte - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioClip - Variable in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
clip or promote radio button options
- radioClip - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- radioClip - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- radioClip - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- radioColumn - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- radioColumn - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- radioCommon - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
- radioCommon - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
- radioComplex - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
- radioCOMPOSITE - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Radio button of the COMPOSITE mode option.
- radioCOMPOSITE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Radio button of the COMPOSITE mode option.
- radioCOMPOSITEShear - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Radio button of the COMPOSITE mode option.
- radioCustom - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Radio button of the Custom blend mode option.
- radioDComplex - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
- radioDouble - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioDouble - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- radioDouble - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioEntireImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
- radioEntireImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
- radioEntireImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- radioFloat - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioFloat - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- radioFloat - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- radioFloat - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioFlythruL - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Radio button of the fly througth mode in the left panel.
- radioGaussian - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- radioGradient - Variable in class gov.nih.mipav.view.dialogs.JDialogLivewire
-
Radio button for Gradient magnitude and direction
- radioGradientAll - Variable in class gov.nih.mipav.view.dialogs.JDialogLivewire
-
Radio button for Gradient, Medialness and Intensity
- radioGradientInt - Variable in class gov.nih.mipav.view.dialogs.JDialogLivewire
-
Radio button for Gradient and Intensity
- radioGradientMed - Variable in class gov.nih.mipav.view.dialogs.JDialogLivewire
-
Radio button for Gradient and Medialness
- RADIOGRAPHIC_IMAGING - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality radiographic imaging.
- RADIOGRAPHIC_IMAGING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality radiographic imaging.
- radioGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
button group for radio buttons
- radioGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- radioGrowRegion2D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- radioGrowRegion3D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- radioHead - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- radioHead - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- radioHead - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- radioImageA - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- radioImageA - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Radio button for selecting image A as active.
- radioImageB - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- radioImageB - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Radio button for selecting image B as active.
- radioImageBoth - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Radio button for selecting both images as active.
- radioInt - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioInt - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- radioInt - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioIntensity - Variable in class gov.nih.mipav.view.dialogs.JDialogLivewire
-
Radio button for Intensity
- Radiological - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- radiologicalView - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
- radioLong - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioLong - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- radioLong - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioLung - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- radioLung - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- radioLung - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- radioMean - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- radioMedial - Variable in class gov.nih.mipav.view.dialogs.JDialogLivewire
-
Radio button for Laplacian medialness
- radioMedian - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- radioMediastinum - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- radioMediastinum - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- radioMediastinum - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- radioMIP - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Radio button of the MIP mode option.
- radioMIP - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Radio button of the MIP mode option.
- radioMIPShear - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Radio button of the MIP mode option.
- radioMULTIHISTO - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Checkbox for the Multi-histo mode option.
- radioNew - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- radioNoneR - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Radio button of the none mode in the right panel.
- radioOAR - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- radioOAR - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- radioObject2D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- radioObject3D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- radioObjects2D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- radioObjects3D - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- radiopharmaceutical - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- radioPoisson - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- radioPromote - Variable in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
clip or promote radio button options
- radioPromote - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- radioPromote - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- radioPromote - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- radioRange - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- radioRaycastR - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Radio button of the raycast render mode in the right panel.
- radioRayleigh - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- radioReplace - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- radioRician - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- radioRow - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- radioRow - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- radioSeparate - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
- radioSeparate - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
- radioShearwarpR - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Radio button of the shearwarp render mode in the right panel.
- radioShort - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioShort - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- radioShort - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioSpine - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- radioSpine - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- radioSpine - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- radioSURFACE - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Radio button of the SURFACE mode option.
- radioSURFACE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Radio button of the SURFACE mode option.
- radioSURFACEFAST - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Radio button of the SURFACE mode option.
- radioSURFACEFAST - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Radio button of the SURFACE mode option.
- radioSurfaceL - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Radio button of the surface render mode int the left panel.
- radioSurfaceR - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Radio button of the surface render mode in the right panel.
- radioSURFACEShear - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Radio button of the SURFACE mode option.
- radioSurfaceView - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Radio button of the surface view mode in the left panel.
- radioSurrenderCOMPOSITE - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Radio button of the surface render composite mode.
- radioSurrenderCOMPOSITE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Radio button of the surface render composite mode.
- radioSurrenderLIGHT - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Radio button of the surface render lighting mode.
- RADIOTHERAPY_DOSE - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality radiotherapy dose.
- RADIOTHERAPY_DOSE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality radiotherapy dose.
- RADIOTHERAPY_IMAGE - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality radiotherapy image.
- RADIOTHERAPY_IMAGE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality radiotherapy image.
- RADIOTHERAPY_PLAN - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality radiotherapy plan.
- RADIOTHERAPY_PLAN - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality radiotherapy plan.
- RADIOTHERAPY_RECORD - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality radiotherapy record.
- RADIOTHERAPY_RECORD - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality radiotherapy record.
- RADIOTHERAPY_STRUCTURE_SET - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality radiotherapy structure set.
- RADIOTHERAPY_STRUCTURE_SET - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality radiotherapy structure set.
- radioThresh - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- radioTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogBlankImage
-
The Radio buttons for selecting the new data type of the image
- radioUByte - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioUByte - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- radioUByte - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioUInt - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioUInt - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- radioUInt - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioUniform - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- radioUShort - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- radioUShort - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- radioUShort - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- radioVertebrae - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- radioVertebrae - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- radioVertebrae - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- radioVOIRegion - Variable in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
- radioVOIRegion - Variable in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
- radioVOIRegion - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- radioX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Radio button of the X_AXIS mode option.
- radioXRAY - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Radio button of the XRAY mode option.
- radioXRAY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Radio button of the XRAY mode option.
- radioXRAYShear - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Radio button of the XRAY mode option.
- radioY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Radio button of the Y_AXIS mode option.
- radioZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Radio button of the Z_AXIS mode option.
- radius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- radius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
Radius of bleach spot in um.
- radius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- radius - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNonMaxSuppts
-
- radius - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- radius - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- radius - Variable in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
- radius - Variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Radius of zoom circle
- radius - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
burn diameter.
- radius - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
image space burning point radius.
- radius - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- radius - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- radius - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- radius - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- radius - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RestrictedLaplacianMatrixFunction
-
- Radius - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Transfer function radius:
- Radius() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- Radius() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- Radius() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategy
-
- radius_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- radius_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- radiusButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Button for setting radius value.
- radiusConstraint - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
Default cell radius (pixels).
- radiusDistribution - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- radiusDistribution - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- radiusGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- radiusLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- radiusLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point diameter label.
- radiusList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- radiusList - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- radiusPt - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Burning sphere radius, semiX, Y, Z in point format.
- radiusText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
DOCUMENT ME!
- radiusText - Variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Text fields for zoom circle.
- radiusText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
DOCUMENT ME!
- Radon(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- Radon3(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- RADS - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Radians per second.
- RADS - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Radians per second.
- RADS_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - radians per second.
- radSeparateVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- radTCZ - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Radio button for TCZ sequence
- radText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
DOCUMENT ME!
- radTotalVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- radTZC - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Radio button for TZC sequence
- radWholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- radZCT - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Radio button for ZCT sequence
- radZTC - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Radio button for ZTC sequence
- Raf - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
FujiFilm camera raw.
- raFile - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- raFile - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- raFile - Variable in class gov.nih.mipav.model.algorithms.libdt
-
- raFile - Variable in class gov.nih.mipav.model.file.FileBase
-
Pointer to file to read or write from.
- raFile - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
Pointer to file to read or write from.
- raFileW - Variable in class gov.nih.mipav.model.file.FileAvi
-
- raImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- RAImageName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- Rainbow - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- Rainbow2 - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- Rainbow3 - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- raisedbevel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Panel Border view.
- raisedbevel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Panel Border view.
- raisedBorder - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- raisedBorder - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- rAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
DOCUMENT ME!
- raList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- RAList() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RAList
-
- Ram - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- ramp1Max - Variable in class gov.nih.mipav.model.file.FileBioRad
-
- ramp1Min - Variable in class gov.nih.mipav.model.file.FileBioRad
-
- ramp2Max - Variable in class gov.nih.mipav.model.file.FileBioRad
-
LUT2 ramp max.
- ramp2Min - Variable in class gov.nih.mipav.model.file.FileBioRad
-
LUT2 ramp min.
- ran - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- ran - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
- rand - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- rand - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- rand - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
To generate wierd, unrecoverable names for anon images.
- rand - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- rand(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.WishartVariateGenerator
-
- Rand() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- Rand() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Uniformly distributed random numbers.
- Rand() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Uniformly distributed random numbers.
- Rand(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Uniformly distributed integer random numbers.
- RAND_MAX - Static variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- RAND_MAX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
- RAND_MAX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
- RAND_MAX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
- RAND_MAX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- RAND_PART_A_STATE - Static variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- RAND_PART_B_STATE - Static variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- RAND_PART_C_STATE - Static variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- randcantor2D(double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- randcantor3D(double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- randChildButton - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- RandDouble() - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- RandDouble(long) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- RandN() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- RandN_previous - Static variable in class gov.nih.mipav.model.algorithms.Fastfit
-
- RandN_usePrevious - Static variable in class gov.nih.mipav.model.algorithms.Fastfit
-
- RandNormal() - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- random - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.RandomizedFunctor
-
- random - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- random - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- random - Variable in class gov.nih.mipav.model.algorithms.WishartVariateGenerator
-
- random - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- random() - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- random() - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- Random() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- RANDOM - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- RANDOM - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- RANDOM - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- RANDOM(int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- RANDOM_DIRECTORY_NAME - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- random_generator(long) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- RANDOM_INIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- RANDOM_INIT - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- random_seed_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.RandomizedFunctor
-
- RANDOM_SUBDIRECTORY_NAME - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- RandomAccessFileReader(RandomAccessFile) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- RandomAccessFileReader(RandomAccessFile, int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- RandomAccessFileReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessFileReaderTest
-
- RandomAccessReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
- RandomAccessStreamReader(InputStream) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- RandomAccessStreamReader(InputStream, int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- RandomAccessStreamReader(InputStream, int, long) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- RandomAccessStreamReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessStreamReaderTest
-
- RandomAccessTestBase() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- randomAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- RandomBallPoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- randomButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- randomButton - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- randomButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- randomData - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- randomGen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
- randomGen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- randomGen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- randomGen - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Reference to the random number generator.
- randomInit - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- randomiseBlock() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- randomize(int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- randomize(ModelImage, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Randomizes voxel cubes with similar average intensities.
- RANDOMIZED_COST_FUNCTION - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- RANDOMIZED_FUNCTOR - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- RandomizedCostFunction(double, long) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.RandomizedCostFunction
-
- RandomizedFunctor(double, long) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.RandomizedFunctor
-
- randomizeTopLevelDir - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- RandomMatrix(Matrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- randomMatrixOptions - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- randomMatrixOptions - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- RandomNumberGen - Class in gov.nih.mipav.model.algorithms
-
Algorithm that produces a random number (Gaussian or uniform) in a specific user/programmer defined range.
- RandomNumberGen() - Constructor for class gov.nih.mipav.model.algorithms.RandomNumberGen
-
RandomNumberGen - constructor.
- randomOrder - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRandSliceOrder
-
DOCUMENT ME!
- RandomSeed() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
flag for random seed in random walk.
- RandomSpherePoint() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- RandomVector(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RandomWalker(int[][], int, int[], int[], int, int[], float[][], int, int, float[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RandOrthMat(int, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- randTopButton - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- randwishart(double, int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- range - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- range - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- range - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- range - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.BoundingBoxEffect
-
- range - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- Range() - Constructor for class gov.nih.mipav.model.algorithms.libdt.Range
-
- Range(int, int) - Constructor for class gov.nih.mipav.model.algorithms.libdt.Range
-
- Range(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.Range
-
- Range(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.Range
-
- Range(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.Range
-
- Range(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.Range
-
- Range(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.Range
-
- Range(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.Range
-
- Range(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.Range
-
- Range(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.Range
-
- Range(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Returns a sub range of a vector.
- RANGE_BITS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- RANGE_CENTER - Variable in class gov.nih.mipav.model.file.libjpeg
-
- RANGE_MASK - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- RANGE_SUBSET - Variable in class gov.nih.mipav.model.file.libjpeg_IDCT
-
- rangeB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- rangeBandwidth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- rangeBandwidth - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- rangeField - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- rangeField - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- rangeFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Specifies how a range of pixels is excluded from VOI calculations.
- rangeFlag - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
The range type that this pixel exclusion selector covers.
- rangeG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- rangeGaussianButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- rangeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- rangeKernelType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- rangeKernelType - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- rangeMaximum - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
DOCUMENT ME!
- rangeMaximum - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- rangeMaximumB - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- rangeMaximumB - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- rangeMaximumG - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- rangeMaximumG - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- rangeMaximumR - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- rangeMaximumR - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- rangeMinimum - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
DOCUMENT ME!
- rangeMinimum - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- rangeMinimumB - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- rangeMinimumB - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- rangeMinimumG - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- rangeMinimumG - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- rangeMinimumR - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- rangeMinimumR - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- rangePanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- rangeR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- RANGES - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- RANGES - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- rangeString - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- rangesVector - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- rangeText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- rangeText - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
X range text field in the imageA, B histogram dialog.
- rangeText - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
X range text field in the imageA, B histogram dialog.
- rangeText - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
X range text field in the imageA, B histogram dialog.
- rangeText - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
X range text field in the imageA, B histogram dialog.
- rangeTextB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
X range text field in the imageA, B histogram dialog.
- rangeTextB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
X range text field in the imageA, B histogram dialog.
- rangeTextB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
X range text field in the imageA, B histogram dialog.
- rangeTextB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
X range text field in the imageA, B histogram dialog.
- rangeTextGM_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
X range text field in the Gradient Magnitude imageA, B histogram dialog.
- rangeTextGM_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
X range text field in the Gradient Magnitude imageA, B histogram dialog.
- rangeTextGM_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
X range text field in the Gradient Magnitude imageA, B histogram dialog.
- rangeTextGM_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
X range text field in the Gradient Magnitude imageA, B histogram dialog.
- RangeType() - Constructor for enum gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector.RangeType
-
- rangeUniformButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- rangeX - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- rangeX - Variable in class gov.nih.mipav.view.JPanelHistogram
-
X range value of the imageA, B and GM imageA, B.
- rangeX - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
X range value of the imageA, B and GM imageA, B.
- rangeX - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
X range value of the imageA, B and GM imageA, B.
- rangeXB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
X range value of the imageA, B and GM imageA, B.
- rangeXB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
X range value of the imageA, B and GM imageA, B.
- rangeY - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- rank - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.uni_elt
-
- rank() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Effective numerical matrix rank
- rank(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Sample ranks starting from 1.
- RANK_H - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- RANK_H - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- RANK_L - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- RANK_L - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- RANK_NMX - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- RANK_NMX - Static variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- RankDeficientCovarianceTestAutomaticTruncation() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- rankTr_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- ransac(SIFT3D.Mat_rm, SIFT3D.Mat_rm, SIFT3D.Ransac, SIFT3D.Affine, int[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- Ransac() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Ransac
-
- raPool - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- rase() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- rase_mean - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- raster - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- raster - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- Rat42CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Rat42CostFunction
-
- Rat42Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Rat42Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Rat43CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Rat43CostFunction
-
- Rat43Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Rat43Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- rate - Variable in class gov.nih.mipav.model.file.FileAvi
-
- rate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Frame rate per second.
- rate - Variable in class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Frame rate.
- rateBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Text field for the frame rate per second.
- rateBox - Variable in class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Frame rate textbox.
- rateGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- rates - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
rates of layers
- rating - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- ratio - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- Ratio - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- ratioLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- Rational(long, long) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Creates a new instance of Rational.
- RATIONAL - gov.nih.mipav.model.file.FileSVS.Type
-
2 longs 1st numerator
- RATIONAL - gov.nih.mipav.model.file.FileTiff.Type
-
2 longs 1st numerator
- RATIONAL - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RATIONAL - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- RationalTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.RationalTest
-
- ratioText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- rAvg - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- rAvg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- rAvg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- raw - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
RAW component
- RAW - Static variable in class gov.nih.mipav.model.file.FileUtility
-
RAW image data, no header. extension: .raw
- raw_data_out - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- RAW_DFMT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- RAW_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
RAW MULTIFLE image data, no header.
- rawDataStudyNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- rawDataStudyNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- rawDataSystemID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- rawDataSystemID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- rawExtension - Variable in class gov.nih.mipav.model.file.FileImageXML
-
The extension to give to the RAW file associated with the XML header.
- rawFile - Variable in class gov.nih.mipav.model.file.FileDicom
-
DOCUMENT ME!
- RawImage - gov.nih.mipav.view.Argument.InstanceArgument
-
- rawImageFormatString - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
raw image format...hardcoded to float since we will be outputting par/rec slices in float format
- RawImageInfo - Class in gov.nih.mipav.model.file
-
Class designed to hold pre-loaded information for opening RAW images.
- RawImageInfo(int, int[], float[], int[], int, boolean) - Constructor for class gov.nih.mipav.model.file.RawImageInfo
-
Constructor used when running scripts from the GUI
- RawImageInfo(String) - Constructor for class gov.nih.mipav.model.file.RawImageInfo
-
Constructor used when running from command line.
- rawInfo - Variable in class gov.nih.mipav.model.file.FileIO
-
DOCUMENT ME!
- rawInfo - Variable in class gov.nih.mipav.view.dialogs.ScriptImage
-
- rawInfo - Variable in class gov.nih.mipav.view.ViewOpenFileUI
-
- rawInfo - Variable in class gov.nih.mipav.view.ViewUserInterface.OpenFileInfo
-
Instructions for opening raw images.
- RAWJP2Header - Class in gov.nih.mipav.model.file.rawjp2
-
3D JP2 image header reader/writer.
- RAWJP2Header() - Constructor for class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- RAWL_DFMT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- rawRunNum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
384 RawData Run Number.
- Ray - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- Ray2f() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive.Ray2f
-
- rayBasedRender - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelRendererJ3D
-
Raycast based renderer reference, raycast renderer or shear warp renderer.
- rayBasedRender - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Raycast based renderer reference, raycast renderer or shear warp renderer.
- rayBasedRenderWM - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
Raycast based renderer reference, raycast renderer or shear warp renderer.
- RAYCAST - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- raycastCameraPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- RayCastColor - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A ray tracer for 3D color images.
- RayCastColor(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
The constructor for the ray tracer.
- RayCastColorComposite - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Ray traced rendering of the volume using composition of colors and alpha values at each voxel.
- RayCastColorComposite(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorComposite
-
The constructor for the ray tracer.
- RayCastColorDRR - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A ray tracer for 3D images.
- RayCastColorDRR(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
The constructor for the ray tracer.
- RayCastColorLighting - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Ray traced rendering of the level surface within the voxel for the fixed level value of 0.0.
- RayCastColorLighting(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorLighting
-
The constructor for the ray tracer.
- RayCastColorMIP - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Maximum intensity projection volume rendering for color-based volumes.
- RayCastColorMIP(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorMIP
-
The constructor for the ray tracer.
- RayCastColorReflection - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Ray traced rendering of the level surface within the voxel for the fixed level value of 0.0.
- RayCastColorReflection(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorReflection
-
The constructor for the ray tracer.
- RayCastIntensity - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A ray tracer for 3D intensity images.
- RayCastIntensity(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensity
-
The constructor for the ray tracer.
- RayCastIntensityDRR - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A ray tracer for 3D images.
- RayCastIntensityDRR(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityDRR
-
The constructor for the ray tracer.
- RayCastIntensityDRRBresenham - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A sample ray tracer that extends RayTrace.
- RayCastIntensityDRRBresenham(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityDRRBresenham
-
The constructor for the ray tracer.
- RayCastIntensityMIP - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A sample ray tracer that extends RayTrace.
- RayCastIntensityMIP(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityMIP
-
The constructor for the ray tracer.
- raycastOptionsPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Control panels for the raycast render.
- raycastRender - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- RayCastRenderer - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A ray tracer for 3D images.
- RayCastRenderer(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
The constructor for the ray tracer.
- raycastRenderWM - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Volume/Slice/Surface renderer.
- raycastTabVector - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- rayCastToolBar - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Raycast toolbar.
- RAYLEIGH - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
- RAYLEIGH - Static variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- RAYLEIGH_FIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- RAYLEIGH_FIT - Static variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- rayleighFit - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- rayleighmode(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- raySpaceSize - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Default ray tracing space size.
- rayStepSize - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Default ray tracing step size.
- rayTracerA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- rayTracerB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- rb - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
The number of bits that determine the nominal dynamic range
- rb - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
The number of bits that determine the nominal dynamic range
- rbceAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
DOCUMENT ME!
- rbf - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- RBF - Static variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- RBF - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- RBF(float) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- RBF3D(int, int, int, int, int, int, float) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- RBIO - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- rbpm - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
832 respiratory rate, breaths per minute.
- Rbt() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- RBT_Black - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RBT_Red - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtCopy(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.Rbt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtDelete(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtDeleteAux(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtDeleteFixup(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtElt() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- RbtInsert(AlgorithmPowerWatershed.Rbt, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtInsertAux(AlgorithmPowerWatershed.Rbt, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtInsertSimple(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- rbtInteractiveTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtMaximum(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtMinimum(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtPopMin(AlgorithmPowerWatershed.Rbt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtPrint(AlgorithmPowerWatershed.Rbt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtPrintRec(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.RbtElt, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- rbtRandomTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtReAlloc(AlgorithmPowerWatershed.Rbt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtSearch(AlgorithmPowerWatershed.Rbt, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtSuccessor(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtTermine(AlgorithmPowerWatershed.Rbt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtTransRec(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- RbtVide(AlgorithmPowerWatershed.Rbt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- Rc() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Texture parameter update prediction matrix.
- rCenter - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- rCenter - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- rcGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- rChannel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
If true filter the red channel.
- rChannel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
if T, filter the red channel.
- rChannel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
DOCUMENT ME!
- rChannel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
when true, indicates whether to process the colour channel.
- rChannel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- rChannel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
// if T, filter the red channel.
- rcIndex(int, int, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.WishartVariateGenerator
-
- RCOPY - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- rcorners(double[][], double[], double[][], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- RCr - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- RCr - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- rcText - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- rcvGain1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
250 Actual receive gain analog (.1db).
- rcvGain2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
252 Actual receive gain digital (.1db).
- rcvType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
836 type of receiver used.
- rd(Random) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- rderiv(double[][], double[][], double[], double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- rdi - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- RDIV - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- rdr - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- re - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- read() - Method in class gov.nih.mipav.model.algorithms.LSCM.EdgeTrait
-
- read() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.BitSwapInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGACInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGDCInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.ModREADInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.RLEBitInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.BitSwapInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGACInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGDCInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.ModREADInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.RLEBitInputStream
-
- read() - Method in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- read() - Static method in class gov.nih.mipav.view.Preferences
-
Reads the "mipav.preferences" file from the user's 'home' directory.
- read(byte[]) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Simple method that take a byte array and call read with two parameters: byte array and array length.
- read(byte[]) - Method in interface gov.nih.mipav.model.file.DicomType
-
- read(byte[]) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Reads into the supplied buffer data from the DICOM tag buffer.
- read(byte[]) - Method in enum gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
- read(byte[]) - Method in enum gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
- read(byte[]) - Method in class gov.nih.mipav.model.file.FileSVS.BitSwapInputStream
-
- read(byte[]) - Method in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- read(byte[]) - Method in class gov.nih.mipav.model.file.FileTiff.BitSwapInputStream
-
- read(byte[]) - Method in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- read(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- read(byte[], int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Reads a specified number of bytes into the byte data buffer.
- read(byte[], int, int) - Method in class gov.nih.mipav.model.file.FileSVS.BitSwapInputStream
-
- read(byte[], int, int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- read(byte[], int, int) - Method in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- read(byte[], int, int) - Method in class gov.nih.mipav.model.file.FileSVS.RLEBitInputStream
-
- read(byte[], int, int) - Method in class gov.nih.mipav.model.file.FileTiff.BitSwapInputStream
-
- read(byte[], int, int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- read(byte[], int, int) - Method in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- read(byte[], int, int) - Method in class gov.nih.mipav.model.file.FileTiff.RLEBitInputStream
-
- read(byte[], int, int, int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- read(byte[], int, int, int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- read(int[]) - Method in class gov.nih.mipav.model.file.FileSVS.IntFilterInputStream
-
- read(int[]) - Method in class gov.nih.mipav.model.file.FileTiff.IntFilterInputStream
-
- read(int[][], int, int[][], int) - Method in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- read(int[][], int, int[][], int) - Method in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- read(int[], int, int) - Method in class gov.nih.mipav.model.file.FileSVS.IntFilterInputStream
-
- read(int[], int, int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- read(int[], int, int) - Method in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- read(int[], int, int) - Method in class gov.nih.mipav.model.file.FileTiff.IntFilterInputStream
-
- read(int[], int, int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- read(int[], int, int) - Method in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- read(int[], int, int, int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- read(int[], int, int, int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- read(libdt.CovMatrix) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- read(libdt.Dytex) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- read(libdt.DytexMix) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- read(libdt.DytexOptions) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- read(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
Reads the header and body of the PDU message from the connection.
- read(DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
A simplified read if no info is necessary.
- read(DICOM_Object, DICOM_PDUService, DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CResponse
-
Reads a DIMSE-C message.
- read(DICOM_PDUService, DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
Reads the verification request and responds with (write) a ECHO_SUCESS.
- read(DICOM_PDUService, DICOM_Object, DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
Reads a DIMSE-C message.
- read(DICOM_PDUService, DICOM_Object, DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_StdStorage
-
Does not have functionality yet.
- read(DICOM_PDUService, DICOM_Object, DICOM_PDUService) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_StdRetrieve
-
Read a C-MOVE request - this is used when acting like server and responding to a move request.
- read(File, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.FileSystemMetadataReader
-
- read(String[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLinePoint3D
-
- read(String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- read(String, byte[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- read(String, double[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- read(String, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineFloat
-
- read(String, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineInt
-
- read(String, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineReadable
-
- read(String, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineString
-
- read(String, int[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- read(String, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- read(String, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- read(Buffer) - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
This is called from the Processor to read a frame worth of video data.
- read(Buffer) - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
This is called from the Processor to read a frame worth of video data.
- read(Buffer) - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
This is called from the Processor to read a frame worth of video data.
- read(Point3i) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- READ - Static variable in class gov.nih.mipav.model.file.FileBase
-
Read only access.
- READ - Static variable in class gov.nih.mipav.model.file.FileDicomBase
-
Read only access.
- read_backing_store_byte(libjpeg.jpeg_decompress_struct, libjpeg.backing_store_info, byte[][], long, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- read_backing_store_short(libjpeg.jpeg_decompress_struct, libjpeg.backing_store_info, short[][], long, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- read_framesarg - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- read_framesarg - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- read_gt_image_name(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- read_image_name(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- read_image_name(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- read_image_name(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- read_image_name(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Grab the test image in mipav .xml file format.
- read_image_name(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Grab the test image in mipav .xml file format.
- read_image_name(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
Read image full path for SKI10 dataset.
- read_image_name(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Read image full path for SKI10 dataset.
- read_image_name(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- read_JPEG_buffer(byte[], String, String) - Method in class gov.nih.mipav.model.file.libjpeg
-
- read_JPEG_buffer(String) - Method in class gov.nih.mipav.model.file.libjpeg
-
- read_markers(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- read_model_header(BufferedReader, LIBSVM.svm_model) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- read_name(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- read_name(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- read_name_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- read_name_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- read_name_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- read_name_patella(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- read_obj(String) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- read_poly(poly) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- read_problem() - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- read_problem() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- read_restart_marker(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- READ_SIZE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- READ_WRITE - Static variable in class gov.nih.mipav.model.file.FileBase
-
Read-write access.
- READ_WRITE - Static variable in class gov.nih.mipav.model.file.FileDicomBase
-
Read-write access.
- read_XY(double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- read1D() - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- read1D() - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- read2D() - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- read2D() - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- ReadACF(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Reads and parses an ACF file.
- readACPC - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- readacqp() - Method in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- readAfni(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads an AFNI file by calling the read method of the file.
- readAfniMatrix(RandomAccessFile) - Static method in class gov.nih.mipav.model.structures.TransMatrix
-
Reads AFNI-style matrix and does processing to generate TransMatrix result
- readAgain - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- readAllBytes(InputStream) - Method in class gov.nih.mipav.model.file.MetadataExtractor.StreamUtil
-
- readAnalyze(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads an analyze file by calling the read method of the file.
- readAnalyzeMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a multi Analyze file.
- readAnnotationsCSV(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Read a list of annotations from a CSV file: name,x,y,z,radius (optional)
- readAnnotationXML(VOIVector) - Method in class gov.nih.mipav.model.file.FileVOI
-
Reads in an annotation xml (.lbl) file and puts all VOITexts into a VOIVector (to be added to the image)
- readApplicationExtensionBlock(MetadataExtractor.SequentialReader, int, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- readArray() - Method in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- readArrayTypes() - Method in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- readAscii(File) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Read a TriMesh from an ascii file.
- readAsciiDouble(RandomAccessFile, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- readAsciiInt(RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- ReadASF(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Reads an ver. 0.90 .asf into relative coordinates.
- ReadASF0_90(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Reads an ver. 0.90 .asf into relative coordinates.
- ReadASFfromVOI(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Generate ASF shape from given VOI
- ReadASFfromVOI_init(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
- readAvi(String, String, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads an AVI file by calling the read method of the file.
- ReadBandedFile(String) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Temporary function to handle AAM image file IO for AAM own testing cases.
- readBBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- readBFLOAT(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a BFLOAT file by calling the read method of the file.
- readBinary(byte[], int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Dummy method and should be overloaded by DICOMPDUService.
- readBinary(byte[], int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CommsLink
-
Copies data from the port buffer into the a new buffer used typically in pDataTF.
- readBinary(byte[], int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_FileIO
-
Read file stream data into buffer.
- readBinary(byte[], int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Actual binary data from the port.
- readBinary(byte[], int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Low level socket read.
- readBioRad(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a BioRad PIC file by calling the read method of the file.
- readBit() - Method in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- readBit() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGBitInputStream
-
- readBit() - Method in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- readBit() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGBitInputStream
-
- readBitmapHeader(MetadataExtractor.SequentialReader, MetadataExtractor.BmpHeaderDirectory, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpReader
-
- readBits(int) - Method in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- readBits(int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGBitInputStream
-
- readBits(int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- readBits(int) - Method in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- readBits(int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGBitInputStream
-
- readBits(int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- readBits(int, int) - Method in class gov.nih.mipav.model.file.FileSVS.RLEBitInputStream
-
- readBits(int, int) - Method in class gov.nih.mipav.model.file.FileTiff.RLEBitInputStream
-
- readBlock(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
This is the method that actually reads in the data from the socket or IO stream.
- readBMatrixFile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Loads the BMatrix file.
- readBMP(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a BMP file by calling the read method of the file.
- readBMPMulti(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAbortRQ
-
Reads the connection.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateAC
-
Reads the body of an association accept.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRJ
-
Reads the body of an association rejection.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Reads the body of an association request.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AReleaseRQ
-
Reads the body of an association release request.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AReleaseRSP
-
Reads the body of an association release response.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AsyncOpWindowSubItem
-
Reads the body of the sub item.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_MaximumSubLength
-
Reads the maximum sublength out the connection (port).
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Reads the connection.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUItemType
-
Reads the body (i.e.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContext
-
Reads the body of the presentation context.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContextAccept
-
Reads the body of an accepted presentation context.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_SCPSCURoleSelect
-
Reads the body of the SCP/SCU.
- readBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_UserInformation
-
Reads the body of the user information packet.
- readBRUKER(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a BRUKER file by first reading in the d3proc header file, second the reco header file, third the acqp file,
and finally the 2dseq binary file.
- readBuffer(float[]) - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(float[]) - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileBFLOAT
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileBioRad
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileBRUKER
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileDM3
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileICS
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileInterfile
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileLSM
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileMRC
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileSTK
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileSVS
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileTiff
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileTMG
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[], float, float) - Method in class gov.nih.mipav.model.file.FileFits
-
Reads a slice of data at a time and stores the results in the buffer.
- readBuffer(int, float[], float, int) - Method in class gov.nih.mipav.model.file.FileAfni
-
Reads a slice of data at a time and stores the results in the buffer.
- readBValGradientFile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
reads the bval/gradient file...both dti studio format and fsl format are accepted
- readBVector1D(Vector<Boolean>, BufferedReader) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Read a 1d vector written by saveVector1D() from filestream.
- readBVGradBMatfile(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
reads the bval/gradient file...dti studio format, BRUKER method, and fsl format are accepted
- readByte() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Reads a single byte from the data stream.
- readByte() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- readByte() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileReader
-
Read byte.
- readBytes(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Allocates and.
- readBytes(File) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.FileUtil
-
Reads the contents of a File into a byte[].
- readBytes(String) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.FileUtil
-
Reads the contents of a File into a byte[].
- readChar(String, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
reads char
- readCheshire(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a Cheshire file by calling the read method of the file.
- readColorMapA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- readColorMapB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- readColorMapRGBA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- readColorMapRGBB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- readCommentBlock(MetadataExtractor.SequentialReader, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- readComplexBuffer(int, float[], float[]) - Method in class gov.nih.mipav.model.file.FileDM3
-
Reads a slice of data at a time and stores the results in the buffer.
- readComplexBuffer(int, float[], float[]) - Method in class gov.nih.mipav.model.file.FileICS
-
Reads a slice of data at a time and stores the results in the buffer.
- readComplexBuffer(int, float[], float[]) - Method in class gov.nih.mipav.model.file.FileMRC
-
Reads a slice of data at a time and stores the results in the buffer.
- readCompressed() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGBitInputStream
-
- readCompressed() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGBitInputStream
-
- readConfigFile(File) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- readContours(ModelImage, String, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- readContourVOI() - Method in class gov.nih.mipav.model.file.FileVOI
-
This method read a VOI file that has been saved in the MIPAV VOI format.
- readControlBlock(MetadataExtractor.SequentialReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- readCoordXML(VOI, boolean) - Method in class gov.nih.mipav.model.file.FileVOI
-
Reads in a VOI from a file using the new VOI schema based on Scanner coordinates rather than pixel space
- readCOR(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a COR file by first reading the header file then reading in each separate slice file.
- readCResponseAlias(DICOM_PDUService, DICOM_Object, DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
Reads a DIMSE-C message.
- readCString() - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
- readCString() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- readCString() - Method in class gov.nih.mipav.model.file.FileBMP
-
- readCString() - Method in class gov.nih.mipav.model.file.FileCZI
-
- readCString() - Method in class gov.nih.mipav.model.file.FileLIFF
-
- readCString() - Method in class gov.nih.mipav.model.file.FileMATLAB
-
- readCSV(String, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- readCZI(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a Zeiss ZISRAW (CZI) file by calling the read method of the file.
- readCZPrivateTag() - Method in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- readd3proc() - Method in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- readData(int, int, int, DICOM_Comms) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Reads a VR from a Buffer (network socket).
- readDBuffer(int, double[]) - Method in class gov.nih.mipav.model.file.FileDM3
-
Reads a slice of data at a time and stores the results in the buffer.
- readDBuffer(int, double[]) - Method in class gov.nih.mipav.model.file.FileICS
-
Reads a slice of data at a time and stores the results in the buffer.
- readDBuffer(int, double[]) - Method in class gov.nih.mipav.model.file.FileInterfile
-
Reads a slice of data at a time and stores the results in the buffer.
- readDBuffer(int, double[], double, double) - Method in class gov.nih.mipav.model.file.FileFits
-
Reads a slice of data at a time and stores the results in the buffer.
- readDComplexBuffer(int, double[], double[]) - Method in class gov.nih.mipav.model.file.FileDM3
-
Reads a slice of data at a time and stores the results in the buffer.
- readDComplexBuffer(int, double[], double[]) - Method in class gov.nih.mipav.model.file.FileICS
-
Reads a slice of data at a time and stores the results in the buffer.
- readDelimitedBytes() - Method in class gov.nih.mipav.model.file.DelimitedRandomAccessFile
-
Reads a string from the file up to the current delimiter.
- readDelimitedBytes(char) - Method in class gov.nih.mipav.model.file.DelimitedRandomAccessFile
-
This method retrieves a String consisting of all characters from
the current pointer location in the random access file and the
temporary delimiter.
- readDicom(String, String[], boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a list of DICOM files.
- readDICOMDataObjectFromFile(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Loads a DICOM image from a file.
- readDicomImage(String) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- readDicomWeight(int, int) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Get the slice data for the image with the given slice and weight.
- readDM3(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a Dm3 file by calling the read method of the file.
- readDouble() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- readDouble(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
reads double value
- readDoubleBuffer(int, double[]) - Method in class gov.nih.mipav.model.file.FileSVS
-
Reads a slice of data at a time and stores the results in the buffer.
- readDoubleBuffer(int, double[]) - Method in class gov.nih.mipav.model.file.FileTiff
-
Reads a slice of data at a time and stores the results in the buffer.
- readDrawingElement() - Method in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- readDVector1D(Vector<Double>, BufferedReader) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Read a 1d vector written by saveVector1D() from filestream.
- readDVector2D(Vector<Vector<Double>>, BufferedReader) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Read a 2d vector written by saveVector2D() from filestream.
- readEndingSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
update the ending slices.
- readEndingSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
update the ending slices.
- readEndingSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Read the end slices and update the segmentation processing range.
- readEndingSlicesDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Read the ending slice index to guide the segmentation towards apex and
base.
- readEndingSlicesDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
Read the ending slice index to guide the segmentation towards apex and
base.
- readEndingSlicesDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Read the ending slice index to guide the segmentation towards apex and
base.
- readEndingSlicesDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
Read the ending slice index to guide the segmentation towards apex and
base.
- readEndingSlicesDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
Read the ending slice index to guide the segmentation towards apex and
base.
- readEndingSlicesDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Read the ending slice index to guide the segmentation towards apex and
base.
- readEndingSlicesDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Read the ending slice index to guide the segmentation towards apex and
base.
- readEndingSlicesDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Read the ending slice index to guide the segmentation towards apex and
base.
- readEOL() - Method in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- readEOL() - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- readEOL() - Method in class gov.nih.mipav.model.file.FileSVS.ModREADInputStream
-
- readEOL() - Method in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- readEOL() - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- readEOL() - Method in class gov.nih.mipav.model.file.FileTiff.ModREADInputStream
-
- reader - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
- reader - Variable in class gov.nih.mipav.view.graphVisualization.MipavSAXReader
-
- reader - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
File reader
- reader - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ReadExample(ModelImage, ModelSimpleImage, CAAMShape, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Read example from target image, scale down if necessary.
- ReadExample(String, ModelSimpleImage, CAAMShape) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Wrapper to read image and VOIs
- ReadExample(String, ModelSimpleImage, CAAMShape, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
- ReadExample_init(ModelImage, ModelSimpleImage, CAAMShape, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Read example from target image, scale down if necessary.
- readFacetB(ByteBuffer, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Method that reads a face in binary files All binary versions of the methods
end by 'B' As in binary files we can read the number of faces, we don't need
to use coordArray and normArray (reading binary files should be faster)
- readFATCEDImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
File chooser to select target image directory.
- readFATCEDImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
File chooser to select target image directory.
- readFATCEDImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
read target image.
- readFATCEDImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
read target image.
- readFATImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
File chooser to select target image directory.
- readFATImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
File chooser to select target image directory.
- readFATImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
File chooser to select target image directory.
- readFATImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
File chooser to select target image directory.
- readFATImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
File chooser to select target image directory.
- readFATImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
read target image.
- readFATImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
read target image.
- readFATImagesAndVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
read target image.
- readFATImagesAndVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
read target image.
- readFATImagesAndVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
read target image.
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Read testing images and the HNN predcited probability maps.
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Read testing images and the HNN predcited probability maps.
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
Read the SKI10 dataset ( .MHD image and .MHD ground truth labels ).
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Read the SKI10 dataset ( .MHD image and .MHD ground truth labels ).
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- readFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- readFile(double[][][][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- ReadFile(String) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Temporary function to handle AAM image file IO for AAM own testing cases.
- readFileContents(File) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- readFileHeader(MetadataExtractor.SequentialReader, MetadataExtractor.Metadata, boolean) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpReader
-
- readFilename - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileReader
-
The read filename.
- readFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Read image and VOIs file names.
- readFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Read image and VOIs file names.
- readFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Read image and VOIs file names.
- readFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Read image and VOIs file names.
- readFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Read image and VOIs file names.
- readFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- readFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Read image and VOIs file names.
- readFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Read image and VOIs file names.
- readFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
read 2D slices directory.
- readFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Read image and VOIs file names.
- readFiles() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Read image and VOIs file names.
- readFileType(boolean, boolean, String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
- readFill(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Reads in a nBytes and puts them in a ByteBuffer and puts the byte buffer in the vector of incomingBuffers.
- readFill(DICOM_Comms, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CommsLink
-
Sets linkToComms to connection and fills(read) the connection buffer via readBinary.
- readFinalLattice() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- readFinalLattice(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- readFinalLattice(String, boolean, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- readFits(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a FITS file by calling the read method of the file.
- readFloat() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- readFloat() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileReader
-
Read float.
- readFloat(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
reads float value
- readFloat(byte[], int) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Translates the byte[] into float values at the given indes iIndex.
- readFloatImage(ModelImage, int, float[], float[], long) - Method in class gov.nih.mipav.model.file.FileRaw
-
This method reads a raw image file (1D - 5D).
- readFloatWeight(int, int) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Get the slice data for the image with the given slice and weight.
- readFrames - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- readFrames - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- readFramesCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- readFreesurferBinaryPatch(String, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- ReadFromDisk(String, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Reads an image from disk.
- readFromFile(File, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Problem
-
- readFromFile(String) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Reads transform info file
- readFully(byte[], int, int) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- readFunctions() - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
This method reads the transfer and RGB functions associated with a LUT.
- readFunctions(ModelLUT) - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
This method reads the transfer for a grayscale image and the RGB functions that define the LUT.
- readFunctions(ModelRGB) - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
This method reads the transfers for a RGB image.
- readGEGenesis5X(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads in a single GE Genesis type file.
- readGEGenesis5XMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads in multiple GE Genesis 5x type files.
- readGESigna4X(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads in a single GE Signa 4x type file.
- readGESigna4XMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads in multiple GE Signa 4x type files.
- readGifExtensionBlock(MetadataExtractor.SequentialReader, MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- readGifHeader(MetadataExtractor.SequentialReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- readGradientFileDICOM() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method reads in the gradient file gradient file can be in 2 differetn ways....for eDTI, there will be a
number on first line followed by correct number of gradients if it is DTI, there will be no number and just 7
linies of gradients....this needs to be duplicated as many times as there are series.
- readGradientFileParRec() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
this method reads the gradient file
- readGREImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
File chooser to select target image directory.
- readGREImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
File chooser to select target image directory.
- readGREImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
read target image.
- readGREImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
read target image.
- readGTFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- readGTFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- readGtruthFile(String, Vector<String>, Vector<Vector<String>>, Vector<String>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- readHeader() - Method in class gov.nih.mipav.model.file.FileAfni
-
Reads AFNI header (.HEAD file)
- readHeader() - Method in class gov.nih.mipav.model.file.FileAvi
-
Reads the image header.
- readHeader() - Method in class gov.nih.mipav.model.file.FileICS
-
Reads the image header.
- readHeader() - Method in class gov.nih.mipav.model.file.FileMagnetomVision
-
Reads the Magnetom file header and data.
- readHeader() - Method in class gov.nih.mipav.model.file.FileMicroCat
-
DOCUMENT ME!
- readHeader() - Method in class gov.nih.mipav.model.file.FileMinc
-
Reads in all the tags available in the file and stores them in FileInfoMinc.
- readHeader() - Method in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- readHeader() - Method in class gov.nih.mipav.model.file.FileTrackVis
-
Reads TrackVis header, first 1000 bytes of TRK file.
- readHeader() - Method in class gov.nih.mipav.model.file.FileZVI
-
- readHeader(boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads in all the tags available in the file and stores them in the Hashtable in FileInfoDicom.
- readHeader(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUItemType
-
Reads the PDU item header.
- readHeader(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUType
-
Reads the PDU type header.
- readHeader(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- readHeader(String) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- readHeader(String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads generic file from an absolute filename.
- readHeader(String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads generic file from an absolute filename.
- readHeader(String, String) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Reads the analyze header and stores the information in fileInfo.
- readHeader(String, String) - Method in class gov.nih.mipav.model.file.FileCheshire
-
Reads the header and stores the information in fileInfo.
- readHeader(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads file, determines file type, and calls a read function specific to the file.
- readHeader(String, String) - Method in class gov.nih.mipav.model.file.FileMGH
-
Reads the MGH header and stores the information in fileInfo.
- readHeader(String, String) - Method in class gov.nih.mipav.model.file.FileNRRD
-
Reads the NRRD header and stores the information in fileInfo.
- readHeader(String, String) - Method in class gov.nih.mipav.model.file.FileOME
-
Read the image XML header.
- readHeader(String, String) - Method in class gov.nih.mipav.model.file.FilePARREC
-
Reads the analyze header and stores the information in fileInfo.
- readHeader(String, String) - Method in class gov.nih.mipav.model.file.FileSiemensText
-
Reads the SiemensText header and stores the information in fileInfo.
- readHeader(String, String) - Method in class gov.nih.mipav.model.file.FileSpar
-
Reads the spar header and stores the information in fileInfo.
- readHeader(String, String) - Method in class gov.nih.mipav.model.file.FileVista
-
reads the header
- readHeader(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads file, determines file type, and calls a read function specific to the file.
- readHeader(String, String, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Reads the NIFTI header and stores the information in fileInfo.
- readHeader(String, String, TalairachTransformInfo) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Reads and parses an XML header.
- readHeader(String, String, String) - Method in class gov.nih.mipav.model.file.FileXML
-
readHeader parses the input XML file based on the input XSD file, kFileXSD:
- readHeader(DefaultMutableTreeNode) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
- readHeaderInt() - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Returns an int read from the header of the PGM file.
- readHeapMax(File) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- readHorizontalMode1() - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- readHorizontalMode1() - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- readHorizontalMode2() - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- readHorizontalMode2() - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- readICS(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads an ICS file by calling the read method of the file.
- readImage() - Method in class gov.nih.mipav.model.file.FileAfni
-
readImage.
- readImage() - Method in class gov.nih.mipav.model.file.FileCheshire
-
Reads an Cheshire image file by reading the header then making a FileRaw to read the image for all filenames in
the file list.
- readImage() - Method in class gov.nih.mipav.model.file.FileICS
-
readImage.
- readImage() - Method in class gov.nih.mipav.model.file.FileJSON
-
reads the JSON file header and data.
- readImage() - Method in class gov.nih.mipav.model.file.FileMedVision
-
readImage - reads a MedVision file in MAC format (i.e., decodes resource info).
- readImage() - Method in class gov.nih.mipav.model.file.FileMRC
-
reads the MRC file header and data.
- readImage() - Method in class gov.nih.mipav.model.file.FileOME
-
Reads an XML image file by reading the XML header then making a FileRaw to read the image for all filenames in
the file list.
- readImage() - Method in class gov.nih.mipav.model.file.FilePGM
-
- readImage() - Method in class gov.nih.mipav.model.file.FilePPM
-
- readImage() - Method in class gov.nih.mipav.model.file.FileTMG
-
reads the TMG file header and data.
- readImage() - Method in class gov.nih.mipav.model.file.FileTrackVis
-
Reads TrackVis series of tracks and creates masks from them, based on stored fileInfo.
- readImage() - Method in class gov.nih.mipav.model.file.FileVista
-
reads the image
- readImage() - Method in interface gov.nih.mipav.plugins.PlugInFile
-
Read an image of the type handled by this plugin.
- readImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Reads an analyze image file by reading the header then making a FileRaw to read the image for all filenames in
the file list.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileAvi
-
Reads the AVI file header and data.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileBFLOAT
-
Reads the image.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileBioRad
-
reads the BioRad pic file header and data.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileBRUKER
-
This method reads one slice from the file into byteBuffer and then transfers into the float array imgBuffer.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileDM3
-
reads the DM3 file header and data.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileFits
-
reads the FITS file header and data.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Reads an XML image file by reading the XML header then making a FileRaw to read the image for all filenames in
the file list.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileMetaImage
-
reads the MetaImatge file header and data.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileMGH
-
Reads a MGH image file by reading the header then making a FileRaw to read the image for all filenames in the
file list.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileMicroCat
-
Reads the image as a full 3D dataset.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
Reads a MINC 2.0 HDF-5 file
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FilePARREC
-
Reads an PAR/REC image file by reading the header then making a FileRaw to read the image for all filenames in
the file list.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileSiemensText
-
Reads an SiemensText image file by reading the header then making a FileRaw to read the image for all filenames in
the file list.
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileSpar
-
Constructs a SPAR image mask based on the parameters defined in FileInfoSPAR
- readImage(boolean) - Method in class gov.nih.mipav.model.file.FileSPM
-
Reads an SPM image file by reading the header then making a FileRaw to read the image for all filenames in the
file list.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Reads the MATLAB header.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileBMP
-
Reads the BMP header which indicates endianess, the TIFF magic number, and the offset in bytes of the first IFD.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileCZI
-
Reads the CZI header.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileInterfile
-
Reads the image.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileJP2
-
Reads the JP2 header which indicates the number of slices and each slice's size.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileLIFF
-
Reads the LIFF header which indicates endianess, the TIFF magic number, and the offset in bytes of the first IFD.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileLSM
-
Reads the Tiff header which indicates endianess, the TIFF magic number, and the offset in bytes of the first IFD.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileMATLAB
-
Reads the MATLAB header.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileMinc
-
Reads a MINC image file and stores the data in file info.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileNRRD
-
Reads a NRRD image file by reading the header then making a FileRaw to read the image for all filenames in the
file list.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileSTK
-
Reads the Tiff header which indicates endianess, the TIFF magic number, and the offset in bytes of the first IFD.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileSVS
-
Reads the Tiff header which indicates endianess, the TIFF magic number, and the offset in bytes of the first IFD.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileTiff
-
Reads the Tiff header which indicates endianess, the TIFF magic number, and the offset in bytes of the first IFD.
- readImage(boolean, boolean) - Method in class gov.nih.mipav.model.file.FileZVI
-
Reads the LIFF header which indicates endianess, the TIFF magic number, and the offset in bytes of the first IFD.
- readImage(boolean, boolean, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Reads a NIFTI image file by reading the header then making a FileRaw to read the image for all filenames in the
file list.
- readImage(boolean, boolean, String) - Method in class gov.nih.mipav.model.file.FileMicroCat
-
Reads the image.
- readImage(double[], int, int) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a DICOM image file and stores the data into the given double buffer.
- readImage(double[], long) - Method in class gov.nih.mipav.model.file.FileRaw
-
This method reads a file and puts the data in the buffer.
- readImage(float[]) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Reads an analyze image file by reading the header then making a FileRaw to read the file.
- readImage(float[]) - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
reads the Signa 4X file header and data.
- readImage(float[]) - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
reads the Signa 5X file header and data.
- readImage(float[]) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Reads an XML image file by reading the header then making a FileRaw to read the file.
- readImage(float[]) - Method in class gov.nih.mipav.model.file.FileMGH
-
Reads a MGH image file by reading the header then making a FileRaw to read the file.
- readImage(float[]) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Reads a NIFTI image file by reading the header then making a FileRaw to read the file.
- readImage(float[]) - Method in class gov.nih.mipav.model.file.FilePARREC
-
Reads in a PAR/REC image (first the header file, then the raw file)
- readImage(float[]) - Method in class gov.nih.mipav.model.file.FileSiemensText
-
Reads an SiemensText image file by reading the header then making a FileRaw to read the file.
- readImage(float[]) - Method in class gov.nih.mipav.model.file.FileSPM
-
Reads an SPM image file by reading the header then making a FileRaw to read the file.
- readImage(float[], int, int) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a DICOM image file and stores the data into the given float buffer.
- readImage(float[], long) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Reads a NIFTI image file by reading the header then making a FileRaw to read the file.
- readImage(float[], long, int) - Method in class gov.nih.mipav.model.file.FileRaw
-
This method reads a file and puts the data in the buffer.
- readImage(int) - Method in class gov.nih.mipav.model.file.FileCOR
-
This method reads one slice from the file into byteBuffer and then transfers into the float array imgBuffer.
- readImage(int[], int, int) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a DICOM image file and stores the data into the given short buffer.
- readImage(int[], long, int) - Method in class gov.nih.mipav.model.file.FileRaw
-
This method reads a file and puts the data in the buffer.
- readImage(int, long, int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method reads a raw chunk from a file.
- readImage(short[]) - Method in class gov.nih.mipav.model.file.FileMagnetomVision
-
Reads a slice of data at a time and stores the results in the buffer.
- readImage(short[], int, int) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a DICOM image file and stores the data into the given short buffer.
- readImage(short[], long, int) - Method in class gov.nih.mipav.model.file.FileRaw
-
This method reads a file and puts the data in the buffer.
- readImage(ModelImage, int) - Method in class gov.nih.mipav.model.file.FileMap
-
readImage - This method reads a raw chunk from a file.
- readImage(ModelImage, long) - Method in class gov.nih.mipav.model.file.FileRaw
-
This method reads a raw image file (1D - 5D).
- readImage(String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads generic file from an absolute filename.
- readImage(String) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Read the splash screen image from disk.
- readImage(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads file, determines file type, and calls a read function specific to the file.
- readImage(String, String, boolean, FileInfoBase) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads file, determines file type, and calls a read function specific to the file.
- readImage(String, String, boolean, FileInfoBase, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads file, determines file type, and calls a read function specific to the file.
- readImage(String, String, boolean, FileInfoBase, int) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads file, determines file type, and calls a read function specific to the file.
- readImage(String, String, boolean, FileInfoBase, int, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads file, determines file type, and calls a read function specific to the file.
- readImage2() - Method in class gov.nih.mipav.model.file.FileAfni
-
Reads AFNI image (.BRIK file)
- readImageA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- readImageB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- readImageBlock(MetadataExtractor.SequentialReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- readImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- readImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- readImageColorA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- readImageColorB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- readImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- readImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- readImageFileData() - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
DOCUMENT ME!
- readImageFileData() - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- readImageJ(String, String, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- readImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- readImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- readImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- readImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- readImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- readImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- readImages(File) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- readImages(File) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- ReadImages(Vector<ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Wrapper to read shape from given image and VOIs vector
- ReadImages(Vector<ModelImage>, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Reads a set of shapes in the order given in the vector of strings.
- readImagesAndVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
read target image.
- readImagesAndVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
read target image.
- readImagesAndVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Read target image
- readImagesAndVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Read image and corresponding VOI.
- readImagesAndVOIsFromMid() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Read image and VOIs start from the mid slice.
- readImagesAndVOIsInReverse() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Read image and VOI in reverse order.
- readImagesExra() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- readImagesExra() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- readImagesExra() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- readIn() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGBitInputStream
-
- readIn() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGBitInputStream
-
- readIn(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- readIn(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- readInfoImage() - Method in class gov.nih.mipav.model.file.FileCOR
-
DOCUMENT ME!
- readInObject(DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
The main method for reading incoming DICOM messages. true: complete PData unit received, socket still open false:
release request received, then close the socket
- readInt() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- readInt() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileReader
-
Read int.
- readInt(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Reads int value
- readInt32() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Reads a 4 byte integer (otherwise known as an int).
- readInteger(byte[], int) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Translates the byte[] into integer values at the given indes iIndex.
- readIntegerWeight(int, int) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Get the slice data for the image with the given slice and weight.
- readInterfile(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads an Interfile file by calling the read method of the file.
- readInterfileMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a multi Interfile file.
- readJimi(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a JIMI file by calling the read method of the file.
- readJpeg2000(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a JPEG2000 file by calling the read method of the file.
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegReader
-
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DuckyReader
-
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifReader
-
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccReader
-
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IptcReader
-
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfifReader
-
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JfxxReader
-
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegCommentReader
-
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDhtReader
-
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegDnlReader
-
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegReader
-
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentMetadataReader
-
Extracts metadata from all instances of a particular JPEG segment type.
- readJpegSegments(Iterable<byte[]>, MetadataExtractor.Metadata, MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopReader
-
- readKernelFile(String) - Static method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Helper function which reads the file with the given name and returns
the contents of this file as a String.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
Read 3D images directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Parsing 3D images directory and the HNN generated probablity maps directory
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Parsing 3D images directory and the HNN generated probablity maps directory
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
Read 3D images directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Read 3D images directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
Read the 10-fold cross-validataion training folds
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Read the AAM atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Read the AAM atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Read AAM model atlas.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Read 2D slices.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Read the key image director and generate image name and voi name vectors.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
Read 3D images atlas directory.
- readKeyImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- readKsData() - Method in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- readLabelsFromFile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Reads the 'labels' file from disk.
- readLatticeCSV(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- readLatticeCSV(String, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- readLaxFileHeapMax(File) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
Reads the InstallAnywhere startup file and returns the start up heap memory string.
- readLBuffer(int, long[]) - Method in class gov.nih.mipav.model.file.FileDM3
-
Reads a slice of data at a time and stores the results in the buffer.
- readLBuffer(int, long[]) - Method in class gov.nih.mipav.model.file.FileICS
-
Reads a slice of data at a time and stores the results in the buffer.
- readLBuffer(int, long[]) - Method in class gov.nih.mipav.model.file.FileInterfile
-
Reads a slice of data at a time and stores the results in the buffer.
- readLegacyLattice(String, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- readLeicaSeries(JDialogLoadLeica.LeicaSeries) - Method in class gov.nih.mipav.model.file.FileSVS
-
Passed in a LeicaSeries object, this function builds a 2d or 3d reconstruction using the Vector of filenames
within the series The vector has been presorted so that all files (whether red - green and then blue, or just
grayscale) are read in sequentially to build the ModelImage.
- readLeicaSeries(JDialogLoadLeica.LeicaSeries) - Method in class gov.nih.mipav.model.file.FileTiff
-
Passed in a LeicaSeries object, this function builds a 2d or 3d reconstruction using the Vector of filenames
within the series The vector has been presorted so that all files (whether red - green and then blue, or just
grayscale) are read in sequentially to build the ModelImage.
- readLIFF(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a Improvision OpenLab LIFF file by calling the read method of the file.
- readline(BufferedReader) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- readline(BufferedReader) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- readLine() - Method in class gov.nih.mipav.model.file.FileAfni
-
readLine() - reads a line of the file and strips comments indicated by the # symbol.
- readLine() - Method in class gov.nih.mipav.model.file.FileBFLOAT
-
Reads lines of the file and strips comments indicated by the ; symbol until a nonnull String results or the end
of the file is reached.
- readLine() - Method in class gov.nih.mipav.model.file.FileBRUKER
-
Reads lines of the file until a nonnull String results or the end of the file is reached.
- readLine() - Method in class gov.nih.mipav.model.file.FileCOR
-
Reads lines of the file until a nonnull String results or the end of the file is reached.
- readLine() - Method in class gov.nih.mipav.model.file.FileICS
-
readLine() - reads a line of the file header separate into category, subcategory, and values.
- readLine() - Method in class gov.nih.mipav.model.file.FileInterfile
-
Reads lines of the file and strips comments indicated by the ; symbol until a nonnull String results or the end
of the file is reached.
- readLine() - Method in class gov.nih.mipav.model.file.FileJSON
-
readLine() - reads a line of the file and strips comments indicated by the # symbol.
- readLine() - Method in class gov.nih.mipav.model.file.FileMetaImage
-
readLine() - reads a line of the file header separate into category, subcategory, and values.
- readLine() - Method in class gov.nih.mipav.model.file.FileMicroCat
-
Reads lines of the file and strips comments indicated by the : symbol until a nonnull String results or the end
of the file is reached.
- readLine() - Method in class gov.nih.mipav.model.file.FileNRRD
-
Reads lines of the file and strips comments indicated by the # symbol until a nonnull String results or the end
of the file is reached or a blank line containing end of header with zero characters is reached.
- readLine() - Method in class gov.nih.mipav.model.file.FilePGM
-
readLine() - reads a line of the file and strips comments indicated by the # symbol.
- readLine() - Method in class gov.nih.mipav.model.file.FilePPM
-
readLine() - reads a line of the file and strips comments indicated by the # symbol.
- readLine() - Method in class gov.nih.mipav.model.file.FileVOI
-
Reads a line of the file and strips comments indicated by the # symbol.
- readLine(InputStream) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PlyReader
-
Read a line of ASCII text from the input stream.
- readLine(InputStream) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Read a line of ASCII text from the input stream.
- readLine(InputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- readLine(InputStream) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
Read a line of ASCII text from the input stream.
- readLine(RandomAccessFile) - Static method in class gov.nih.mipav.model.file.FileHistoLUT
-
Reads a line of the file and strips comments indicated by the # symbol.
- readLine(RandomAccessFile, boolean[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
Reads lines of the file until a nonnull String results or the end of the file is reached.
- ReadLines(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Reads a file into an array of lines.
- readLinkedImage() - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- readListFile() - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
read list file
- readLong() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- readLong(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
reads long value
- readLSM(String, String, int, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a LSM file by calling the read method of the file.
- readLSMMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a multi LSM file by first reading the headers then reading in each separate file.
- readLut() - Method in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- readLUTandTFunctFrom(String, String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
This method reads a LUT and Transfer function from a file diretory specified.
- readLUTandTransferFunction(boolean) - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
This method reads a LUT file and its associated transfer function.
- readLUTandTransferFunction(ModelLUT, boolean) - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
This method reads a LUT file and its associated transfer function.
- readMagnetomVision(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a Magnetom Vision file by calling the read method of the file.
- readMagnetomVisionMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads multiple Magnetom Vision files by calling the read method of the file.
- readMap(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a Map file by calling the read method of the file.
- readMarkedSegment() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGBitInputStream
-
- readMarkedSegment() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGBitInputStream
-
- readMarkerHandler(int, FileJPEG2000.opj_j2k_t, byte[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- readMaskfile(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- readMATLAB(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a NATLAB file by calling the read method of the file.
- readMatrix(RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
Reads:
1.)
- readMatrix(RandomAccessFile, boolean) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Reads transformation matrix to a text file.
- readMatrix(RandomAccessFile, boolean) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Reads transformation matrix to a text file.
- readMatrix(RandomAccessFile, int[], float[], float[], float[], int[], int[], int[], boolean[], boolean[], boolean[], boolean) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Reads transformation matrix to a text file.
- readMedVision(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a MedVision file by calling the read method of the file.
- readMeshContoursCSV() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- readMessageStatus - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Flag used to identify read message status.
- readMetadata(File) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpMetadataReader
-
- readMetadata(File) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegMetadataReader
-
- readMetadata(File) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngMetadataReader
-
- readMetadata(File, Iterable<MetadataExtractor.JpegSegmentMetadataReader>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegMetadataReader
-
- readMetadata(InputStream) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpMetadataReader
-
- readMetadata(InputStream) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegMetadataReader
-
- readMetadata(InputStream) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngMetadataReader
-
- readMetadata(InputStream, Iterable<MetadataExtractor.JpegSegmentMetadataReader>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegMetadataReader
-
- readMetaImage(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a MetaImage file by calling the read method of the file. if so, calls that method instead.
- readMethod() - Method in class gov.nih.mipav.model.file.FileBRUKER
-
Reads the optional method file that may be part of the Bruker scan.
- readMGH(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a MGH file by calling the read method of the file. if so, calls that method instead.
- readMH(byte[], int, InputStream, int) - Method in class gov.nih.mipav.model.file.FileSVS
-
- readMH(byte[], int, InputStream, int) - Method in class gov.nih.mipav.model.file.FileTiff
-
- readMicroCat(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads an Micro Cat file by calling the read method of the file.
- readMinc(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a MINC file by calling the read method of the file.
- readMincHDF(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
- readMincMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a multi Minc file.
- ReadModel(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Reads the complete AAMModel from disk.
- ReadModel(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Reads the complete AAMModel from disk.
- readModels() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Read SVM model atlas.
- ReadModels(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Reads the complete AAMModel from disk.
- readMRC(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a MRC file by calling the read method of the file.
- readMultiMatrix(RandomAccessFile) - Static method in class gov.nih.mipav.model.structures.TransMatrix
-
Reads a file containing a list of multiple TransMatrix values.
- readMultiTransformMatrix(JTextField) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Reads the multiple-matrix file from disk.
- readMultlmodalImages() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
File chooser to select target image directory.
- readMultlmodalImages() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
File chooser to select target image directory.
- readNaugeVOI(String) - Method in class gov.nih.mipav.model.file.FileVOI
-
This method read a VOI file that has been saved in the Nauge VOI format.
- readNewXML() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- readNIFTI(String, String, boolean, boolean, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a NIFTI file by calling the read method of the file. if so, calls that method instead.
- readNIFTIMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a multi NIFTI file.
- readNRRD(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a NRRD file by calling the read method of the file. if so, calls that method instead.
- readNRRDMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a multi NRRD file.
- readObject(ObjectInputStream) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Called by some native invokeMethod.
- readObject(ObjectInputStream) - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Called by some native invokeMethod.
- readObject(ObjectInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- readObject(ObjectInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
Read a new CircleClassificationWidget from the input stream.
- readObject(ObjectInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Read this object from disk:
- readObject(ObjectInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Read this object from disk.
- readObject(ObjectInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
Read this object from disk:
- readObject(ObjectInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Read this object from disk.
- readObject(ObjectInputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- readOffsetAcquisitionParameters() - Method in class gov.nih.mipav.model.file.FileLSM
-
- readOffsetChannelFactors() - Method in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- readOffsetCharacteristics() - Method in class gov.nih.mipav.model.file.FileLSM
-
- readOffsetPalette() - Method in class gov.nih.mipav.model.file.FileLSM
-
- readOffsetPositions() - Method in class gov.nih.mipav.model.file.FileLSM
-
- readOffsetTilePositions() - Method in class gov.nih.mipav.model.file.FileLSM
-
- readOffsetUnmixParameters() - Method in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- readone() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- readOneImage(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads file, determines file type, and calls a read function specific to the file.
- readOrderedARGB(File[], int, int[], boolean, Dimension, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
This method examines parameter fileList and loads TIFF files according to the order in the list.
- readOrderedGrayscale(File[], boolean, Dimension, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
This method will load a group of files in the order of fileList.
- readOrderedGrayscale(File[], boolean, Dimension, boolean, int, int) - Method in class gov.nih.mipav.model.file.FileIO
-
This method will load a group of files in the order of fileList.
- readOrderedGrayscale2(File[], boolean, Dimension, boolean, int, int) - Method in class gov.nih.mipav.model.file.FileIO
-
- readOtherOrientationVOI() - Method in class gov.nih.mipav.model.file.FileVOI
-
This method read a VOI file that has been saved in the MIPAV VOI format (MIPAV *.voi, Nuages, and MIPAV *.xml).
- readPaintBitmap() - Method in class gov.nih.mipav.model.file.FilePaintBitmap
-
- readPARREC(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a PARREC file by calling the read method of the file.
- readPARRECMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a multi PARREC file.
- readPassMode() - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- readPassMode() - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- readPathFile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
Loads the .path file.
- readPGM(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a PGM file by calling the read method of the file.
- readPlainTextBlock(MetadataExtractor.SequentialReader, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- readPlistFileHeapMax(File) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
Reads the InstallAnywhere startup file and returns the start up heap memory string.
- readPlyAscii(FileInputStream, ModelImage, int, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- readPlyAsciiMesh(TriMesh, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PlyReader
-
- readPoint(StreamTokenizer, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Find the given label in the tokenizer stream and then return the next three
numbers as a point.
- readPointVOI() - Method in class gov.nih.mipav.model.file.FileVOI
-
This method read a VOI.POINT file that has been saved in the MIPAV PTS format.
- readPPM(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a PPM file by calling the read method of the file.
- readProblem(File, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
reads a problem from LibSVM format
- readProblem(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- readQT - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- readQT(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a QT file by calling the read method of the file.
- readRaw(String, String, FileInfoBase) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a RAW file by calling the read method of the file.
- readRawJP2Header(String) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- readRawMulti(String, String, FileInfoBase) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a RAW file by calling the read method of the file.
- readreco() - Method in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- readSampleImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
When read the AAM model atlas, read corresponding pivot images from atlas
direction.
- readSampleImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
When read the AAM model atlas, read corresponding pivot images from atlas
direction.
- readSampleImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Read the AAM model.
- readScanInformation() - Method in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- readSegFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- readSegFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- readSegments(MetadataExtractor.SequentialReader, Iterable<MetadataExtractor.JpegSegmentType>) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentReader
-
- readSegments(File, Iterable<MetadataExtractor.JpegSegmentType>) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentReader
-
- ReadShapes(Vector<String>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Wrapper to read shapes from asf files
- ReadShapes(Vector<String>, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Reads a set of shapes in the order given in the vector of strings.
- readShort() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- readShort() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileReader
-
Read short.
- readShort(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
reads short value
- readShort16() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Reads a 2 byte integer (otherwise known as a short).
- readShortToFloatImage(float[], int, int) - Method in class gov.nih.mipav.model.file.FileDicom
-
Reads a DICOM image file and stores the data into the given short buffer.
- readSiemensText(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads an siemenstext file by calling the read method of the file.
- readSimpleData(int, int) - Method in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- readsites() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- readSites(double[], double[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- readSliceWeight(int, int) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Get the slice data for the image with the given slice and weight.
- readSpar(FileInfoBase, String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a Spar file by calling the read method of the file.
- readSPM(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads an SPM file by calling the read method of the file.
- readSTK(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a STK file by calling the read method of the file.
- readSTLAscii(StreamTokenizer, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Read the STL ASCII file as a single stream tokenizer.
- readSTLBinary(FileInputStream, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Method for reading binary files Execution is completly different It uses
ByteBuffer for reading data and ByteOrder for retrieving the machine's endian
(Needs JDK 1.4)
TO-DO: 1.
- readSTLBinary(FileInputStream, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- readSTLBinary(FileInputStream, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- readSTLBinary(FileInputStream, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- readSTLBinary(FileInputStream, ModelImage, int, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
This method read the STL surface file, convert the 3D surface into VOI contours.
- readSTLBinary(FileInputStream, ModelImage, int, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- readSTLBinary(FileInputStream, ModelImage, int, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- readStr() - Method in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- readStraightLattice(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- readString() - Method in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- readString(int) - Method in class gov.nih.mipav.model.file.FileBase
-
Reads the length of the characters from the file.
- readStruct() - Method in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- readStructTypes() - Method in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- readSurface(ModelImage, File, Color4f) - Static method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
Load a triangle mesh from the specified file and assign to it the specified color.
- readSurface(ModelImage, File, MaterialState) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Load a triangle mesh from the specified file and assign to it the
MaterialState.
- readSurface(ModelImage, File, MaterialState, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Load a triangle mesh from the specified file and assign to it the
MaterialState.
- readSurface(String, File, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Adding the surface with specific directory, file name, and surfaceOpacity.
- readSurfaceXML(String, String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D
-
Reads and parses a SurfaceRef.XML header.
- readSurfaceXML(String, String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D
-
Reads and parses a Surface.XML header.
- readSurfaceXML(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Reads and parses a Gifti XML file.
- readSurfaceXML(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM
-
Reads and parses a SurfaceRef.XML header.
- readSVMModelDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Read SVM model atlas.
- readSVS(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a SVS file by calling the read method of the file.
- readTableData(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- readTableData(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- readTagEntry(int) - Method in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- readTagGroup() - Method in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- readTagType(int) - Method in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- readTar(InputStream, String) - Static method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
DOCUMENT ME!
- readTar(InputStream, String) - Static method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
DOCUMENT ME!
- readTargetImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
File chooser to select target image directory.
- readTargetImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
File chooser to select target image directory.
- readTargetImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Read target image.
- readTargetImageFeature() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
We pre-processing target image with coherence enhance diffusion (CED)
filter, then extract SVM features from it and save it to the
corresponding target image directory.
- readTestImage - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- readTiff(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a TIFF file by calling the read method of the file.
- readTiffMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a multi TIFF file by first reading the headers then reading in each separate file.
- readTileBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileLSM
-
Reads a slice of data at a time and stores the results in the buffer.
- readTileBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileSTK
-
Reads a slice of data at a time and stores the results in the buffer.
- readTileBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileSVS
-
Reads a slice of data at a time and stores the results in the buffer.
- readTileBuffer(int, float[]) - Method in class gov.nih.mipav.model.file.FileTiff
-
Reads a slice of data at a time and stores the results in the buffer.
- readTLRC - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- readTMG(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a TMG file by calling the read method of the file.
- readTrackVis(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads in a single TrackVis file.
- readTrailer(byte[]) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader
-
Given a full byte array containing the BPLIST, read the trailer object from the end
of the array. 5 unused bytes and 1 sort version are skipped.
- readTransferFunction(RandomAccessFile, TransferFunction, String) - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
Reads in a transfer function from a file.
- readTransformMatrix(boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Read matrix from a file.
- readTransformMatrix(JTextField) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Reads a single matrix file from disk.
- readTransformMatrixFile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Reads a matrix from a file.
- readTransformMatrixFile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Reads a matrix from a file.
- readTrialInfo(String, Vector<Vector<Integer>>, Vector<Vector<Integer>>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- readUnknownData() - Method in class gov.nih.mipav.model.file.FileDicom
-
Gets private tags or other tags where the type is unknown; does not change the data, so it may be written out
correctly.
- readUnsignedByte() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- readUnsignedInt() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- readUnsignedShort() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- readUnsignedShort(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
reads unsigned short value
- readVecDouble(String, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- readVector1D(Vector<Integer>, BufferedReader) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Read a 1d vector written by saveVector1D() from filestream.
- readVector2D(Vector<Vector<Integer>>, BufferedReader) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Read a 2d vector written by saveVector2D() from filestream.
- readVectorString(String, Vector<String>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- readVecVecDouble(String, Vector<Vector<Double>>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- readVerticalMode() - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- readVerticalMode() - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- readVista(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
- readvisu_pars() - Method in class gov.nih.mipav.model.file.FileBRUKER
-
DOCUMENT ME!
- readVMOptionsFileHeapMax(File) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- readVOI() - Method in class gov.nih.mipav.model.file.FileCheshireVOI
-
readVOI - reads an Cheshire overlay file by reading the overlay information for each different VOI into a
different bitmap.
- readVOI(boolean) - Method in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
This method read a VOI file that has been saved in the MIPAV VOI format.
- readVOI(boolean) - Method in class gov.nih.mipav.model.file.FileVOI
-
This method read a VOI file that has been saved in the MIPAV VOI format (MIPAV *.voi, Nuages, and MIPAV *.xml).
- readWriteImage() - Method in class gov.nih.mipav.model.file.FileAvi
-
- readXML() - Method in class gov.nih.mipav.view.dialogs.InstanceVOI
-
Reads in the older VOI XML schema (using pixel coordinates)
- readXML() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
Reads in the older VOI XML schema (using pixel coordinates)
- readXML(VOI) - Method in class gov.nih.mipav.model.file.FileVOI
-
Reads in the older VOI XML schema (using pixel coordinates)
- readXML(File) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- readXML(String) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- readXML(String, String, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads an XML file by calling the read method of the file.
- readXML(Vector<Vector3f>) - Method in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
- readXMLMulti(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a multi XML file.
- readXMLPolylines_WM(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceVTKXML_WM
-
- readXMLSurface(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceVTKXML_J3D
-
Parses vtk xml
- readXMLSurface_WM(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceVTKXML_WM
-
Parses vtk xml
- readXMLThumbnail(String, String) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a thumbnail image from an XML file. if thumbnail is empty, will returned FileImageXML will be null.
- readXYZBuffer(int, float[], float[], float) - Method in class gov.nih.mipav.model.file.FileAfni
-
Reads a slice of data at a time and stores the results in the buffer.
- readyToDispose - Variable in class gov.nih.mipav.view.ViewJProgressBar
-
For users wanting to override the automatic closing option when progress reaches 100.
- readZVI(String, String, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Reads a Zeiss ZVI file by calling the read method of the file.
- real - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets.realImaginaryItem
-
DOCUMENT ME!
- real - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation.complex_t
-
- real - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP.complex_t
-
- real_num_passes - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_seg_t
-
- real_num_segs - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- REAL_VERSION - Static variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- REAL_VERSION - Static variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
- REAL_VERSION - Static variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- REAL_VERSION - Static variable in class gov.nih.mipav.model.algorithms.Psi
-
- realA - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Input parameter
- realArgument() - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
This is a port of subroutine HYGFX from Computation of Special Functions by Shanjie Zhang and Jianming Jin, pp.
376-379.
- realArgument() - Method in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
This is a port of subroutine JELP from Computation of Special Functions by Shanjie Zhang and Jianming Jin, pp.
671-672.
- realB - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Input parameter
- realData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Real data.
- realData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Real data.
- realData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- realData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- realData - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
Real data.
- realImaginaryComparator() - Constructor for class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets.realImaginaryComparator
-
- realImaginaryItem(double, double) - Constructor for class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets.realImaginaryItem
-
Creates a new realImaginaryItem object.
- realize_virt_arrays(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- realKernelData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- realKernelData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- reallocate(int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Reallocates ModelImage with new type and all image data lost.
- reallocate(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Disposes of old data and constructs a new buffer of the user specific type if the image in NOT locked.
- reallocate(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Disposes of old data and constructs a new buffer of the user specific type if the image in NOT locked.
- reallocate(int, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Reallocates ModelImage with new type and all image data lost.
- reallocate(int, int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Disposes of old data and constructs a new buffer of the user specific type if the image in NOT locked.
- reallocate(ModelImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Reallocate destImage so that fileInfo and buffer equal required length
- realmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- REALPARAM_COMPLEXARG_VERSION - Static variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- RealPolynomial - Class in gov.nih.mipav.model.structures
-
- RealPolynomial(double) - Constructor for class gov.nih.mipav.model.structures.RealPolynomial
-
- RealPolynomial(double[]) - Constructor for class gov.nih.mipav.model.structures.RealPolynomial
-
- RealPolynomial(RealPolynomial) - Constructor for class gov.nih.mipav.model.structures.RealPolynomial
-
- realPsi() - Method in class gov.nih.mipav.model.algorithms.Psi
-
This code is a port of the FORTRAN routine PSI from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 58-59.
- realResult - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
outputted result
- realResult - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
Real part of outputted result
- realResult - Variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
outputted result
- realResult - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
outputted result
- realResult - Variable in class gov.nih.mipav.model.algorithms.Psi
-
Real part of output result
- reals() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- reals() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- REALS - Static variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- REALS - Static variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- realt() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- realt() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- REALT - Static variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- REALT - Static variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- realTestFirstKind() - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- realTestSecondKind() - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- realValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
- realValue - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- realX - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
Real part of input argument
- realX - Variable in class gov.nih.mipav.model.algorithms.Psi
-
Real part of input argument
- realZ - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Input argument
- realZ - Variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
Input argument
- realZ - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
Input argument
- reason - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAbortRQ
-
DOCUMENT ME!
- reason - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRJ
-
DOCUMENT ME!
- reavuc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- reavuc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- rebuild() - Method in class gov.nih.mipav.view.ViewMenuBuilder.QuickList
-
Rebuilds the QuickList by calling Preferences.getLastXImages().
- rec_a(double[], int, PyWavelets.DiscreteWavelet, double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- rec_d(double[], int, PyWavelets.DiscreteWavelet, double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- rec_hi - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteWavelet
-
- rec_len - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteWavelet
-
- rec_lo - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteWavelet
-
- rec_outbuf_height - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- RecalcMeanTexture() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Recalculates the mean texture vector 'm_vMeanTexture'.
- recalculateInstanceNumber - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
recalculate the Instance Number (0020,0013).
- reCalculateJunctionNeighbours() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- recalculateSlopes() - Method in class gov.nih.mipav.model.structures.TransferFunction
-
DOCUMENT ME!
- receiveAttenuatorSetting - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- receiveAttenuatorSetting - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- receiverClient(Socket) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Routine to Process a DICOM Store Request.
- receiverMaximumLikelihood(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
For an input signal value this routine returns the log of the maximimum likelihood function.
- ReceivingCoil - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- recenter_kernel - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- recentSamples - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- reciprocal() - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns a DoubleDouble whose value is 1 / this.
- recoInpSize - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- recommendedReceiveAttenuation - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- recommendedReceiveAttenuation - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- recommendedReceiveFrequency - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- recommendedReceiveFrequency - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- recommendedTransmitAttenuation - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- recommendedTransmitAttenuation - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- recommendedTransmitFrequency - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- recommendedTransmitFrequency - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- recomputeDataSize() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Recomputes the datasize based on the type of buffer.
- RECON(int, boolean, int, int, int[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- reconAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- reconAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- reconAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- reConfigureVolumeFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Constructs main frame structures for 3 image planes.
- reConfigureVolumeFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Constructs main frame structures for 3 image planes.
- Reconstruct(double[][][], int) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- reconstruct_gradient() - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- reconstruct_gradient() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- reconstruct_laplacian_pyramid(Vector<double[][]>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- reconstructedImage - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- reconstructedImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- reconstruction_buffer_length(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- reconstructionByDilationButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- reconstructionByErosionButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- reconstructionMethod - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- reconstructSurface() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- reconstructSurface() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- reconstructSurface() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- reconstructSurfaceFromVOIs() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Reconstruct the prostate surface from the coarse VOIs cloudy points.
- reconstructTracts() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Constructs the Fiber Bundle Tracts from the DTI and the
EigenVectorImage parameters.
- ReconyxHyperFire2MakernoteDescriptor(MetadataExtractor.ReconyxHyperFire2MakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDescriptor
-
- ReconyxHyperFire2MakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- ReconyxHyperFireMakernoteDescriptor(MetadataExtractor.ReconyxHyperFireMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDescriptor
-
- ReconyxHyperFireMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- ReconyxUltraFireMakernoteDescriptor(MetadataExtractor.ReconyxUltraFireMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDescriptor
-
- ReconyxUltraFireMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- record(boolean) - Method in interface gov.nih.mipav.view.renderer.flythroughview.FlyThroughRenderInterface
-
Turn recording frames on/off.
- record(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- record(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- Record() - Constructor for class gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
-
Creates a new heap record.
- RECORD_MODE - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Recorder/Player is recording.
- RECORD_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Recorder/Player is recording.
- RECORD_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Recorder/Player is recording.
- recordButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Recorder button.
- recordButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Recorder button.
- recordButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Recorder button.
- recordButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- recordButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- recorderStatus - Variable in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
The current status of the recorder, either PAUSED, RECORDING, or STOPPED.
- recorderStatus - Variable in class gov.nih.mipav.model.scripting.ScriptRecorder
-
The current status of the recorder, either PAUSED, RECORDING, or STOPPED.
- recorderToAVI - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Reference to RecordMouse object class.
- recorderToAVI - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Reference to RecordMouse object class.
- recordEventName - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Flag indicates whether to record the clip event name.
- RECORDING - Static variable in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Status indicating that the script recorder is currently recording.
- RECORDING - Static variable in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Status indicating that the script recorder is currently recording.
- RECORDING_ENTRY_CAMERA_BINNING - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_CAMERA_FRAME_HEIGHT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_CAMERA_FRAME_WIDTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_CAMERA_OFFSETX - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_CAMERA_OFFSETY - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_CAMERA_SUPERSAMPLING - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_DESCRIPTION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_IMAGES_HEIGHT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_IMAGES_NUMBER_CHANNELS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_IMAGES_NUMBER_PLANES - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_IMAGES_NUMBER_STACKS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_IMAGES_WIDTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_INTERPOLATIONY - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_LINE_SPACING - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_LINES_PER_PLANE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_LINSCAN_XY_SIZE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_NOTES - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_NUMBER_OF_STACKS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_NUTATION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_OBJECTIVE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_ORIGINAL_SCAN_DATA - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_PLANE_HEIGHT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_PLANE_SPACING - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_PLANE_WIDTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_PLANES_PER_VOLUME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_POSITION_BCCORRECTION1 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_POSITION_BCCORRECTION2 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_PRECESSION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_PRESCAN - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- RECORDING_ENTRY_PROCESSING_SUMMARY - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_ROTATION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_RT_BINNING - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- RECORDING_ENTRY_RT_FRAME_HEIGHT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- RECORDING_ENTRY_RT_FRAME_WIDTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- RECORDING_ENTRY_RT_LINEPERIOD - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- RECORDING_ENTRY_RT_OFFSETX - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- RECORDING_ENTRY_RT_OFFSETY - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- RECORDING_ENTRY_RT_REGION_HEIGHT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- RECORDING_ENTRY_RT_REGION_WIDTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- RECORDING_ENTRY_RT_ZOOM - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- RECORDING_ENTRY_SAMPLE_0TIME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_SAMPLE_0X - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_SAMPLE_0Y - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_SAMPLE_0Z - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_SAMPLE_SPACING - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_SAMPLES_PER_LINE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_SCAN_DIRECTION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_SCAN_DIRECTIONZ - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- RECORDING_ENTRY_SCAN_TYPE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_SPECIAL_SCAN_MODE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_START_SCAN_EVENT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_START_SCAN_TIME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_START_SCAN_TRIGGER_IN - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_START_SCAN_TRIGGER_OUT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_STOP_SCAN_EVENT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_STOP_SCAN_TIME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_STOP_SCAN_TRIGGER_IN - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_STOP_SCAN_TRIGGER_OUT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_TIME_SERIES - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_USE_BCCORRECTION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_USE_REDUCED_MEMORY_ROIS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_USE_ROIS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_USER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_VOLUME_DEPTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_ZOOM_X - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_ZOOM_Y - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RECORDING_ENTRY_ZOOM_Z - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- recordingInputImage - Variable in class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
The image whose processing should be recorded in the script.
- recordingListeners - Variable in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
A list of listeners who want to know about lines added to the script.
- recordingListeners - Variable in class gov.nih.mipav.model.scripting.ScriptRecorder
-
A list of listeners who want to know about lines added to the script.
- recordingMaskType - Variable in class gov.nih.mipav.model.scripting.actions.ActionPaintToMask
-
The type of mask extracted from the paint (which should now be recorded).
- recordingMaskType - Variable in class gov.nih.mipav.model.scripting.actions.ActionVOIToMask
-
The type of mask extracted from the VOIs (which should now be recorded).
- recordingNewImageName - Variable in class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
The new name given to the image.
- recordingOldImageName - Variable in class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
The old image name.
- recordingOptions - Variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
The file saving options used to save the image, which should be recording in the script.
- recordingResultImage - Variable in class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
The image generated by processing the input image, if any.
- recordingTabName - Variable in class gov.nih.mipav.model.scripting.actions.ActionSaveTab
-
The name of the tab to record the saving of.
- recordingTargetDir - Variable in class gov.nih.mipav.model.scripting.actions.ActionSaveAllVOIs
-
The directory where the VOIs were saved to, which should be recorded in the script.
- recordingTargetDir - Variable in class gov.nih.mipav.model.scripting.actions.ActionSaveVOIIntensities
-
The directory where the VOI intensities were saved to, which should be recorded in the script.
- recordLineMeasure() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- recordMouse(String, JPanelMouse, int) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Unchanged.
- RecordMouse(int, double, FileAvi) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
Constructor that sets up the variables needed for the screen capture and allocates the buffers appropriately.
- RecordMouse(int, double, FileAvi) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
Constructor that sets up the variables needed for the screen capture and allocates the buffers appropriately.
- recordPanning() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- recordRate - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- Records - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationPicker
-
Picking records along the mouse click point.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
Let user specify the saved 2D slices, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
Let user specify the saved 2D slices, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Let user specify the saved 2D slices, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Record the save 2D slice features directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordSaveImageDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
Let user specify the saved 2D slices atlas, record the save directory.
- recordScriptButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder.JScriptToolBar
-
The recording button.
- recordZoom(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- recoSize - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
The size of the reconstruction
- recover(double[][], double[][], int, int, double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- reCreateBoundingBox() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- reCreateBox(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- reCreateClipPlanes() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- reCreateLabels() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- reCreateScene(VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- reCreateScene(VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- reCreateScene(VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Called by the init() function.
- reCreateScene(VolumeImage, VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- reCreateScene(VolumeImage, VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- reCreateScene(VolumeImage, Vector3f, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
- reCreateScene(VolumeImage, Vector3f, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- recreateShaderEffect(Renderer, Texture) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- recSocket - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Socket manager.
- rect - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdtree
-
- RECT - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- RECT() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.RECT
-
- RECT(int, int, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.RECT
-
- rectAccuracy(SchwarzChristoffelMapping.scmap) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- rectaffine - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- rectangle(SchwarzChristoffelMapping.scmap) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- RECTANGLE - Static variable in class gov.nih.mipav.model.file.FileInfoLSM
-
Bleached ROI shapes.
- RECTANGLE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
Bleached ROI shapes.
- RECTANGLE - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
Bleached ROI shapes.
- RECTANGLE - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- RECTANGLE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
rectangle sculpt
- RECTANGLE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- RECTANGLE - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in slice rectangle VOI mode
- RECTANGLE3D - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- RECTANGLE3D - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in volume rectangle VOI mode
- rectButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Rectangle shape button.
- rectButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Rectangle shape button.
- rectCursor - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- rectevalinv(SchwarzChristoffelMapping.scmap, double[][], double[][], double[][], int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- rectIntersectsOrIsContainedInTri(Rectangle2D, double, double, double, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
tests intersection or containment of rectangle and triangle.
- rectmap(double[][], int[], double, double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- rectplot(SchwarzChristoffelMapping.scmap, int, int, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- rectpolygon - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- rectproject(double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- rectqdata - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- RECURSION_SIZE_LIMIT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- recursiveCalc(int, int) - Method in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
Starts the Gaussian calculation.
- recursiveCalc(int, int) - Method in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
Starts the Gaussian calculation.
- recursiveCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
private JButton srcBrowse;.
- recvDecodingTables() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- red - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- red - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- red - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Flags to indicate which color channels to process.
- red - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Flags indicate which color channel to process.
- red - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
Flags indicate which color channel to process.
- red - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Flags indicate which color channel to process.
- red - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
Flags indicate which color channel to process.
- red - Variable in class gov.nih.mipav.model.file.FileImageXML.LUValue
-
DOCUMENT ME!
- red - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- red - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- red - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- red - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Define colors.
- red - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Basic color scheme.
- red - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Thermal probe colors.
- red - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- red - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
Border color, red, green, and blue components:
- red - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- red - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- red - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- red - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- red - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Red channel value of the paint color.
- RED - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- RED - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Sets up the transfer function colors to be monochrome-red.
- RED - Static variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Red channel.
- RED - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Component tag indicator.
- RED - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Component tag indicator.
- RED - Static variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
The red channel transfer function.
- RED - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The red channel transfer function.
- RED_CHANNEL - Static variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
RED CHANNEL String
- RED_FREE - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality Red Free.
- RED_FREE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality Red Free.
- RED_OFFSET - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Red channel.
- RED_OFFSET - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
Red channel.
- red_on - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
enables writing of RED, in case of activated JPWL
- RED_WEIGHT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- red1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmColorEdge
-
- red1 - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- red1Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- red2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmColorEdge
-
- red2 - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- red2Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- RedA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- redArray - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- redArray - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RedB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- redBlackLevel - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- redBorder - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Panel Border view.
- redBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
- redBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- redBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- redBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- redBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- redBuffer - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- redBuffer - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- redButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- redButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- redButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- redButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- redButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- redButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- redButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
DOCUMENT ME!
- redButton - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityHistogram
-
- redButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- redButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
DOCUMENT ME!
- redButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- redChannel - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- redChannel - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- redChannelNumber - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
either RGB channels or Grey Channel... for RGB:
- redCheckbox - Variable in class gov.nih.mipav.view.components.JPanelColorChannels
-
DOCUMENT ME!
- redCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- redCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- redCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Checkbox to select Red image.
- redCheckBox - Variable in class gov.nih.mipav.view.JPanelHistogram
-
checkbox for turning on / off the red component of the color look-up table.
- redCheckBoxA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Update Red channel histogram check box A, B.
- redCheckBoxA - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- redCheckBoxB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Update Red channel histogram check box A, B.
- redCheckBoxB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- redGamma - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- redirectSystemOut - Static variable in class gov.nih.mipav.view.LogStdStreams
-
True if System.Out is being redirected.
- redistributePoints(ArrayList<Point>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- redLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- redLine - Variable in class gov.nih.mipav.model.structures.ModelLUT
-
Function that maps the red function of the LUT.
- redLine - Variable in class gov.nih.mipav.model.structures.ModelRGB
-
Function that maps the red function of the LUT.
- redMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- redMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- redMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- redMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- redMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- redMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- redMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- redMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- redNorm - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
- redo - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- redo() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
VOI operation redo
- redOffset - Variable in class gov.nih.mipav.model.file.FileLSM
-
Default ordering is red, green, blue.
- redoImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- RedOnA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- RedOnB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- redoVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- redoVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- redoVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- redrawFrames() - Method in class gov.nih.mipav.view.JFrameHistogram
-
Redraws the histogram interface for the currently selected image.
- redrawGraph(Rectangle) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Redraws the graph based on the new bounds.
- redrawSurfaceTexture() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Causes the texture representation of all the surface meshes to be
recalculated.
- redRequested - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- redRGBButton - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
R, G, B channel control buttons.
- redRGBButton - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- redShiftColors - Variable in class gov.nih.mipav.view.ColorWheel
-
array of r,g,b values after red shifting
- redShiftColors - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
array of r,g,b values after red shifting *
- redText - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- reduc(double[], double[], double, double, double, double, double[], double[], int[], double[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- reduc(DoubleDouble[], DoubleDouble[], DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], int[], DoubleDouble[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- reduce(libdt.Mat[], libdt.Mat, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- reduce(libdt.Mat, libdt.Mat, int, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- reduce(cl_command_queue) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Calls the reduction kernel to calculate the maximum of the estimateBuffer in OpenCL.
- reduce_order(AlgorithmGaussianMixtureModelEM.ClassSig, int, int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- reduce_order_first - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- reduce_order_S - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- reduce_order_Sig3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- reduce_order_SubSig3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- reduceB0Field(double[][], double, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- reduced_linear_system_solution_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterativeSchurComplementSolver
-
- reduced_parameters - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- reduced_program - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- ReducedLinearSystemAndSolution(double[], Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- ReduceDualA(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- reduceFactor - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- reduceStringLengthTo16(String) - Method in class gov.nih.mipav.model.file.FileDicom
-
- reduceStringLengthTo16(String) - Method in class gov.nih.mipav.model.file.FileIO
-
- reduceWithSplitting(libdt.DytexMix, libdt.HEMOptions) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- ReductionFactor() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the reduction factor of the training set that this model was
- reductionKernel - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
OpenCL reduction kernel, calculates the max of and OpenCL buffer.
- reductionKernel(cl_command_queue, long, cl_mem) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
- redundant - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- redundant - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- redundantButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- redValue - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Weighting values for the red, green, and blue channels.
- redValue - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Weighting values for the red, green, and blue channels.
- redValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- redValue - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
set the values to the defaults -- based on a default of equal values.
- redVector - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- redWhiteLevel - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- reestimate(AlgorithmGaussianMixtureModelEM.ClassSig, int, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- ref(delaunay.Site) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ref_cgau(double, double, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- ref_cmor(double, double, int, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- ref_fbsp(double, double, int, double, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- ref_gaus(double, double, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- ref_mexh(double, double, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- ref_morl(double, double, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- ref_shan(double, double, int, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- ref_units - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
- refcnt - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Site
-
- refcount - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- reference - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- REFERENCE_BLACK_WHITE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- REFERENCE_BLACK_WHITE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- reference_cost_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
- referenceBlueBuffer - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- referenceBuffer - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ReferenceFrame() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the reference frame of the model.
- referenceFrameNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- referenceGreenBuffer - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- referenceImage - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- referenceRedBuffer - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ReferenceShape() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the reference shape where all texture sampling and comparison
should be done.
- ReferenceShape(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Calcs the mean shape of all aligned shapes and size it to mean size.
- referenceSlice - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
- referenceSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
- referenceTagTable - Variable in class gov.nih.mipav.model.file.FileDicomTagTable
-
The reference table to check when a tag is not found in this table.
- referenceYBuffer - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- referringPhys - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- referringPhysician - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- referringPhysician - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- refImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- refImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- refImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
reference image.
- refImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
model images
- refImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
The inputImage will be registered to this reference image.
- refImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
The inputImage will be registered to this reference image.
- refImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
The inputImage will be registered to this reference image.
- refImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
The inputImage will be registered to this reference image.
- refImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
The inputImage will be registered to this reference image.
- refImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
The inputImage will be registered to this reference image.
- refImage - Variable in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
The inputImage will be registered to this reference image.
- refImage - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
The inputImage will be registered to this reference image.
- refImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- refImage - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- refImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- refImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- RefImageHeight() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Returns the height of the reference image.
- refImageNo - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Indicates the first slice used as a reference slice, if regToAdjImage is true.
- refImageNo - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Indicates the first volume used as a reference volume, if mode == ADJACENT.
- refImageNo - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Indicates the first slice used as a reference slice, if regToAdjImage is true.
- refImageNo - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Indicates the first volume used as a reference volume, if mode == ADJACENT.
- refImageNum - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- refImageNum - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- refImageNum - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIGradTableCorrectionAfterTrans
-
- refImageNum - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- refImageNumText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- refImageNumText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- refImageNumText - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
user-input for the B0 sub-volume number in the 4D DWI image
- refImageNumText - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Text fields for entering the input images:
- refImageRButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- refImageRButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- RefImageWidth() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Returns the width of the reference image.
- refImg - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
650 Reference image field.
- refine_clusters(AlgorithmGaussianMixtureModelEM.ClassSig, int, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- refine_Hist(SIFT3D.Hist) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- refine1D(double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- refine1D_1(double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- refine1D_2(double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- refine3D(int, int, int, double[], double[], double[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- refineCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- refineControlPointLattice() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- refineControlPointLattice(int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- refinedLatticeCoefficients - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- refinedLatticeCoefficients - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- RefineFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- RefineFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RefineFunction
-
- refLabel1 - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- refLabel1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- refLabel2 - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- refLabel2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- refLabel3 - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
labels *
- refLabel3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
labels *
- ReflectCornerIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Square
-
- ReflectEdgeIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Square
-
- reflectedLightHalogenLampMode - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectedLightHalogenLampVoltage - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectedLightShutter - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflection - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- reflection - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- reflector - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- reflector - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectorID - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectorMagnification - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectorPosition0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectorPosition1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectorPosition2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectorPosition3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectorPositionChannel0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectorPositionChannel1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectorPositionChannel2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- reflectorPositionChannel3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- refline - Variable in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- refline - Variable in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- REFLN - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- refMark - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
number of VOIs for reference slice
- refMark - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- refMark - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- REFMARK - Static variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- REFMARK - Static variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- REFMARK - Static variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
reference marker type.
- refMarkButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- refMarkButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- refMarkMinusButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- refMarkMinusButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- RefMesh() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Returns the reference mesh.
- refocusingPulseType - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- refPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- refPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- refparams_vecgsm(double[][][], double[][], Vector<double[][]>) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- refPhy - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
212 - 33 bytes Referring Physician.
- refPtsLocation - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- refractiveIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
The index of refraction of the sample:
- refresh() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- refresh() - Method in class gov.nih.mipav.plugins.ManifestFile
-
Rereads the manifest to load any changes, whether or not any changes have been made.
- refresh() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- refreshButton - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- refreshCc() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- refreshControlPanel() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Refresh the light control panel.
- refreshControlPanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Refresh the light control panel.
- refreshImagePaint(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Refreshes the displayed paint mask.
- refreshImagePaint(ModelImage, BitSet) - Method in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
Refreshes the displayed paint mask.
- refreshImagePaint(ModelImage, BitSet) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Refreshes the displayed paint mask.
- refreshImagePaint(ModelImage, BitSet) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
refresh the displayed mask.
- refreshLabelDisplay() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Reinstantiates the labels for redisplay.
- refreshLighting() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Repaints the parent frame with the correct lighting.
- refreshLighting() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Repaints the parent frame with the correct lighting.
- refreshLighting() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- refreshPaintBox(boolean, int) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
DOCUMENT ME!
- refreshText() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Refreshes the text display.
- refreshVOIList(VOIVector) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Refreshes the list of available and selected VOIs.
- refrInxLensMedium - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- refrInxLensMedium - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- refrInxMedium - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- refrInxMedium - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- RefShape() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Returns the reference shape.
- RefShapeHeight() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Returns the height of the reference shape.
- RefShapeWidth() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Returns the width of the reference shape.
- refSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- refSliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- refVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- refWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
- refWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
- refWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
- refWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
- refWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
- refWeight - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
This gives weights for the reference image - higher weights mean a greater impact in that area on the
registration.
- refWeightImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- refWeightImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- refWeightImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- refWgtImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- refWgtImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- reg - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- reg - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Edge
-
- Reg_SIFT3D() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
- reg2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- reg25 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- reg25E - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
- reg2E - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- reg3 - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
handle to AlgorithmRegOAR3D
- reg3 - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- reg3 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- reg3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- reg35 - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
handle to AlgorithmRegOAR35D
- reg35 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- reg35 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- reg35E - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
- reg3D - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Algorithm to run from this dialog.
- reg3E - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- reg3E - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- regButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- regButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The button used to enable the showing of a small portion of image b near the mouse cursor.
- regCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- regCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- regCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- regCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- regCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- regCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- regComponent - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
false = apply algorithm only to VOI regions.
- regComponent - Variable in class gov.nih.mipav.view.JFrameHistogram
-
false = apply algorithm only to VOI regions.
- regComponent - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Not used now.
- regComponent - Variable in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
DOCUMENT ME!
- regComponent - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- reGenerateEllipsoidMesh(int, float, boolean, Point3f, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Tessellate a unit sphere centered at the origin.
- reGenerateSphereMesh(int, Point3f, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Tessellate a unit sphere centered at the origin.
- regFrame(Frame) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Method that registers an image frame by putting it in the image frame vector and does NOT loads controls.
- regImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- regint - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- region - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- region - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.REGION
-
- REGION - gov.nih.mipav.view.dialogs.JDialogCaptureScreen.WindowProperties
-
Selected region of the window
- REGION() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.REGION
-
- regionadjacency(int[][], int) - Method in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- regionAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
DOCUMENT ME!
- regionButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Button for selecting region mode.
- regionCount - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- regionFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
or if the source image is to be replaced.
- regionFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
or if the source image is to be replaced.
- regionFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
DOCUMENT ME!
- regionFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- regionFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
DOCUMENT ME!
- regionFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- regionFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- regionFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- regionFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
true means apply algorithm to whole image, false means to just the VOI.
- regionFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
or if the source image is to be replaced.
- regionFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
or if the source image is to be replaced.
- regionFlag - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- regionGrow(short, short, short, float, float, float, ModelImage, String, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Grows a region based on a starting supplied.
- regionGrow(short, short, short, float, float, float, String, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Grows a region based on a starting supplied.
- regionGrow(short, short, short, float, ModelImage, String, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Grows a region based on a starting supplied.
- regionGrow(short, short, short, float, String, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Grows a region based on a starting supplied.
- regionGrow(ModelImage, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Grows a region based on a starting point supplied.
- regionGrow(ModelImage, Vector3f, ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Grows a region based on a starting point supplied.
- regionGrow(String) - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Grows a region based on a starting supplied.
- regionGrow(String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Grows a region based on a starting supplied.
- regionGrow2D(BitSet, Point, float, boolean, boolean, RegionGrowDialog, float, float, float, float, float, float, int, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
2D flood fill for color images that forms a bitset(boolean) mask.
- regionGrow2D(BitSet, Point, float, boolean, boolean, RegionGrowDialog, float, float, int, float, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
2D flood fill that forms a bitset(boolean) mask.
- regionGrow3D(BitSet, Point3D, float, boolean, boolean, RegionGrowDialog, float, float, float, float, float, float, int, float, int, CubeBounds) - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
3D flood fill for color images that forms a bitset(boolean) mask.
- regionGrow3D(BitSet, Point3D, float, boolean, boolean, RegionGrowDialog, float, float, int, float, boolean, int, CubeBounds) - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
3D flood fill that forms a bitset(boolean) mask.
- regionGrowAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- regionGrowColor(String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Grows a region based on a starting supplied.
- RegionGrowDialog - Interface in gov.nih.mipav.view.dialogs
-
Interface for dialogs which gather region grow information and then update a list of listeners who want to know about
the region grow.
- regionGrowDim - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
parameters.
- regionIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- regionLinesDisplay - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- regionLinesDisplay - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- regionLinesDisplayButton - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- regionList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- regionList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RegionList
-
- RegionList(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.RegionList
-
- regionPattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- regionPattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- regionPattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- regionPattern - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- RegionPattern - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- RegionPattern() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- regionPointStack - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The stack of voxels in the image that we should try to grow to.
- regionPointStackRatio - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Used to initialize the stack size when finding the largest segmented region (i.e. the brain).
- regionQueryM(DBSCANClusteringSegment.SP, DBSCANClusteringSegment.AmAl, int, double) - Method in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- regionsAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
DOCUMENT ME!
- regIsoDiffusionAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- regisotropicDiffusionAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- regisotropicDiffusionAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- regisotropicDiffusionAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- regisotropicDiffusionFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- regisotropicDiffusionFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- regisotropicDiffusionFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- regisotropicDiffusionFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Anisotropic Diffusion filter.
- regisotropicDiffusionFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- regisotropicDiffusionFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- regisotropicDiffusionImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- regisotropicDiffusionImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- regisotropicDiffusionImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- register - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAnyTwoImagesSNR
-
DOCUMENT ME!
- register - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- register - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- register - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- register - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
DOCUMENT ME!
- register - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTwoMRIImagesSNR
-
DOCUMENT ME!
- register - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- register - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- register - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- register - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- register - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- register - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- register() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- register() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
- register_SIFT3D(SIFT3D.Reg_SIFT3D, SIFT3D.Affine) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- register25D - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
DOCUMENT ME!
- register2Dor3D - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
DOCUMENT ME!
- registerAndSaveVolumes(File) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
- registerAtCurrentLevel(int[]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- registerChanges() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Connects the file selection of each file selection panel to the appropriate list and ensures that it has the
correct property name. if a list doesn't exist (if a subclass calls this method, when it didn't get created), the
action will be ignored.
- registeredB0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
B0 volume extracted from the DWI series.
- registeredBaseImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- registeredDicomB0VolumePathParentFolder - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registered B0 parent folder
- registeredDWI - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
DWI image series that has been registered within series to the B0 volume.
- RegisteredDWIPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- registeredDWIText - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- registeredNames - Variable in class gov.nih.mipav.view.ImageRegistryMonitor
-
DOCUMENT ME!
- registeredResults - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraAlgorithm
-
- registeredSourceImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
registered atlas image
- registeredSrcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- registeredStudyName - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
study name for registered data set
- registerFrame(Frame) - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Registers the image Frame.
- registerFrame(Frame) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Method that registers an image frame by adding it to the vector and loads controls.
- registerImage(ModelImage) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Register image model by adding it to the image hashtable.
- registerImage(String, ModelImage) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Register image model by adding it to the image hashtable.
- registerImages() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- registerImages() - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
registerImages - Registers the reference and tile images based on the how the user positions the images with the
mouse.
- registerImages(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Registers the atlas image to the input target image:
- registerImageToTarget(int, int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
compute the image position given the target
for a given level l
performs only one iteration
- registerImageToTarget2D(int, int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
compute the image position given the target
for a given level l
performs only one iteration
- registerListener(SpaceNavigatorListener) - Static method in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorPoller
-
- registerSlice(int, int, int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
- registerTo - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- registerTo - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- registerTo - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- registerTo - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- registerTrueTypeFont(URL) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
Loads a true type font (ttf) from the specified source
and registers it with the local GraphicsEnvironment.
- registerVOI(VOI) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method that register an VOI to this image.
- RegistrationDateDD - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- RegistrationDateMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- RegistrationDateYYYY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- RegistrationMeasure - Class in gov.nih.mipav.model.algorithms.registration
-
This is an abstract class used to compute the measure of registration between the specified target image and a
registered source image.
- RegistrationMeasure() - Constructor for class gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
Constructor.
- RegistrationMeasureCorrelationRatio - Class in gov.nih.mipav.model.algorithms.registration
-
Concrete implementation of the RegistrationMeasure class based on the correlation ratio computed as follows:
- RegistrationMeasureCorrelationRatio() - Constructor for class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Constructor which sets up for a default number of bins.
- RegistrationMeasureCorrelationRatio(int) - Constructor for class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Constructor.
- RegistrationMeasureLeastSquares - Class in gov.nih.mipav.model.algorithms.registration
-
Concrete implementation of the RegistrationMeasure class based on sum of the squared differences between the target
image and the registered source image.
- RegistrationMeasureLeastSquares() - Constructor for class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureLeastSquares
-
Constructor.
- RegistrationMeasureNormalizedMutualInformation - Class in gov.nih.mipav.model.algorithms.registration
-
Concrete implementation of the RegistrationMeasure class based on the normalized mutual information computed as
follows:
- RegistrationMeasureNormalizedMutualInformation() - Constructor for class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Constructor which sets up for a default number of bins.
- RegistrationMeasureNormalizedMutualInformation(int) - Constructor for class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Constructor.
- RegistrationMovie(String, String, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Writes a movie file containing all shapes from a directory warped to their mean shape.
- RegistrationMovie(String, String, boolean, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Writes a movie file containing all shapes from a directory warped to their mean shape.
- RegistrationMovie(String, Vector<CDVector>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
Generates a movie of the registered training set.
- RegistrationMovie(String, Vector<CDVector>, CAAMReferenceFrame) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Writes a movie file containing a set of textures warped to their mean shape.
- registrationSettingsButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
button to launch the registration settings
- RegistrationTimeHH - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- RegistrationTimeMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- RegistrationTimeSS - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- registrationToolBar - Variable in class gov.nih.mipav.view.ViewControlsImage
-
Registration toolbar.
- RegistrationUtilities - Class in gov.nih.mipav.model.algorithms.registration.vabra
-
- RegistrationUtilities() - Constructor for class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- RegistrationUtilities.IndexedFloat - Class in gov.nih.mipav.model.algorithms.registration.vabra
-
- RegistrationUtilities.InterpolationType - Class in gov.nih.mipav.model.algorithms.registration.vabra
-
- regopt - Variable in class gov.nih.mipav.model.algorithms.libdt.CovMatrix
-
< type of covariance matrix
- regopt - Variable in class gov.nih.mipav.model.algorithms.libdt.EMOptions
-
- regopt - Variable in class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- regOptions - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
handle to JDialogDTICreateListFileRegOAR35DOptions
- RegPatPos - Variable in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
DOCUMENT ME!
- regroup(AlgorithmGaussianMixtureModelEM.ClassSig, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- regSampled2Classic - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- regToAdjImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
If true use adjacent image for registration.
- regToAdjImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
If true use adjacent image for registration.
- regToAdjImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
If true use adjacent image for registration.
- regToAdjImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
If true use adjacent image for registration.
- regType - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- regType - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- regType - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- regTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- regular - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
I think it means data has uniform spacing (resolutions).
- regular - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
I think it means data has uniform spacing (resolutions).
- regular - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- REGULAR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- REGULAR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- REGULAR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- REGULAR_PROBE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The regular type probe, which is in gray color.
- regularBurn - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Regular burning point reference that represents the regular probe ablation type.
- REGULARBURN - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Define the regular burn type value.
- regularButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- regularButton - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- regularButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- RegularEdgePattern - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- RegularEdgePattern() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.RegularEdgePattern
-
- RegularEdgePatternTest - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- RegularEdgePatternTest() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.RegularEdgePatternTest
-
- regularization - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- regularization - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- RegularizationCheckingLinearSolver(int, double[], String, boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.RegularizationCheckingLinearSolver
-
- regularize(libdt.CovMatrix) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- regularize(libdt.Dytex, boolean) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- regularizedGammaP - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
- regularizer - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
< Objective function value.
- REGULARLY_SAMPLED_SECOND_ORDER_CLASSIC - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- regularProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Reference to the regular probe geometry structures.
- regularProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
The root transform group the the regular probe.
- RegularProbe - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Title: RegualorProbe
- RegularProbe() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Constructor to build the regular probe geometry shape.
- regularProbeBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Regular probe branch group.
- regV - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- regval - Variable in class gov.nih.mipav.model.algorithms.libdt.CovMatrix
-
< type of regularization to be used
- reinit_interval(TURN_REP, TURN_REP) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- reinit_vals(TURN_REP, TURN_REP, int, int, double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- reinitialization(double[], double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- reInitialize(VolumeImage, VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- reIntialize() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Reinitialize when secondStageErosion has been performed so that the mask will match the eroded image.
- REITHETA - gov.nih.mipav.view.Preferences.ComplexDisplay
-
Displays complex images in r*e^(i*theta) format
- REJECT - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- Rel2Abs() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Convert shape from relative coordinates to abs coordinates
- Rel2Abs(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Converts all shapes with relative coordinates to absolute.
- Rel2Abs(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Converts shape coordinates from relative to absolute.
- Rel2Abs(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
- RELATIVE_AVERAGE_SPECTRAL_ERROR - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- relative_decrease - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- relative_precision_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingCostFunction
-
- relative_step_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffOptions
-
- relativeConvergence - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
relative convergence constant Used to test for convergence by reduction in objective function being less than
relativeConvergence squared.
- relativeConvergence - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
relative convergence constant Used to test for convergence by reduction in objective function being less than
relativeConvergence squared.
- relativeImageSlicesDirPath - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
relative path for slices dir for outputting to path file
- relativeWindowLevelButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- relaxEdges(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
This function determines the shortest path from the start vertex through the input vertex to the vertices that
neighbor the input vertex.
- relaxEdges(TriMesh, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
This function determines the shortest path from the start vertex through the input vertex to the vertices that
neighbor the input vertex.
- reldst(int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- release() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
Release system resources.
- release() - Method in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- Release() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- ReleasedSamples - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- releaseLock() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Releases the lock so that other proceses can read or write the data.
- releaseRQ - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Release request.
- releaseRSP - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Release response.
- releaseShaderEffect(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- releaseShared() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- ReleaseVolume() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Release the Textures containing the volume data.
- releps() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- releps() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- relEps - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
DOCUMENT ME!
- relEps - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
relative accuracy requested.
- relerr - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- relerr - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- relFocusPosition1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- relFocusPosition2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- rell - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- Reload(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Reload the current shader programs from disk, compile and parse and
send to the GPU.
- reloadComplexImages(String, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Evaluates whether the user preferences which control complex image loading have changed in a way that requires
reloading of all complex images
- reloadInputData() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Accessor that returns whether or not to reload the volume data.
- reloadInputData(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
set the m_bReloadInput member variable. this is used to force the renderer to use new volume data.
- reloadPoints() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Reloads points in this array for speed purposes.
- reloadPoints(float[], float[]) - Method in class gov.nih.mipav.model.structures.VOIContour
-
Reloads points in this array for speed purposes.
- reloadRows() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
reloadRows.
- reloadRows(String, String) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
The purpose of this method is to re-parse the DICOM files to refresh the table data.
- reloadShaders() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Called by the ApplicationGUI.
- ReloadVolumeShader(Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Reloads the VolumeShaderEffect current shader program.
- relstp - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- reltol - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- remains - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
- remains - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.AllocatorState
-
- reMap - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Flag indicating whether of not to remap the data.
- reMap - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Flag indicating whether of not to remap the data.
- remapCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
re-map checkbox
- remapConstA - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- remapGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
- remapGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
- remapHighestValue - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
- remapHighestValue - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
- remapHighestValue - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
- remapHighestValue - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
- remapMode - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
boolean for remap *
- remapMode - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
boolean for remap
- remapMode - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- remapMode - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
boolean for remap *
- remappedLUT - Variable in class gov.nih.mipav.model.structures.ModelLUT
-
DOCUMENT ME!
- reMappedSrc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
When true the source image was remapped
- reMappedTargetAtlas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
When true the target image was remapped (used for the target image when an atlas image is present)
- REMEMBER - Static variable in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- RememberingCallback(double[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.RememberingCallback
-
- rememberPaintBrushSize() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Remembers the current paint brush size so that it can be reset later.
- ReminderThread - Class in gov.nih.mipav.model.structures
-
DOCUMENT ME!
- ReminderThread(long) - Constructor for class gov.nih.mipav.model.structures.ReminderThread
-
Creates a new ReminderThread object.
- remoteAETitle - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
The remote Application Entity Title.
- remoteAETitle - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
The remote servers AE title.
- remove - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting.mergeItem
-
DOCUMENT ME!
- remove - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
when true, remove the output
- remove - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
List of slices to remove from source image.
- remove - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveTSlices
-
List of slices to remove from source image.
- remove - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
- remove() - Method in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap
-
Remove the root of the heap.
- remove() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
The only remove operation from a heap occurs at the root of the heap.
- remove(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Remove the specified element from the set.
- remove(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Remove the specified element from the set.
- remove(int) - Method in class gov.nih.mipav.model.structures.VOIBaseVector
-
- remove(int) - Method in class gov.nih.mipav.model.structures.VOIVector
-
Overides Vector.remove().
- remove(int) - Method in class gov.nih.mipav.view.JScrollMenu
-
- remove(int) - Method in class gov.nih.mipav.view.JScrollPopupMenu
-
- remove(int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Remove the specified element from the set.
- remove(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Remove the specified element from the set.
- remove(int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.ActiveTree
-
Removes node of given position and cost.
- remove(int, float) - Method in class gov.nih.mipav.view.RubberbandLivewire.ActiveTree
-
Removes node of given position and cost.
- remove(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea.JTextFieldFilter
-
DOCUMENT ME!
- remove(VOIBase) - Method in class gov.nih.mipav.model.structures.VOIBaseVector
-
- remove(Component) - Method in class gov.nih.mipav.view.JScrollMenu
-
- remove(Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- remove(String) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- remove(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Remove a parameter from the table.
- remove(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- remove(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- remove(JMenuItem) - Method in class gov.nih.mipav.view.JScrollMenu
-
- Remove(LODMesh.Neighbor) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- Remove(LODMesh.NEList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- Remove(Vector<T>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- Remove(T) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- REMOVE - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- REMOVE - Static variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- remove_blanks(RandomAccessFile, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- remove_line(RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- REMOVE_T - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubset
-
Remove t dimension.
- REMOVE_X - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubset
-
Remove x dimension.
- REMOVE_Y - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubset
-
Remove y dimension.
- REMOVE_Z - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubset
-
Remove z dimension.
- remove3DVOI(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- removeActionListener(ContourPlot.CoordinateViewListener) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- removeActionListener(ActionListener) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
DOCUMENT ME!
- removeActiveImageControl() - Method in class gov.nih.mipav.view.ViewControlsImage
-
Removes the controls to the display of which image is "active" in the frame when imageB is not available.
- removeActivePt() - Method in class gov.nih.mipav.model.structures.VOIContour
-
Forget about the last clicked (active) point in the contour.
- removeAlgorithm(Runnable) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
Method for removing the algorithm from the frame displayed
as well as removing the listener attached to it
- removeAll() - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Removes all points from the funcitons.
- removeAll() - Method in class gov.nih.mipav.view.JScrollMenu
-
- removeAll(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- REMOVEALL - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- removeAllBurn() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Remove all the burning point geometry shapes in the volume.
- removeAllBurnCenters() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Remove all the burning point centers.
- removeAllBurns() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Remove all the burns in the treatment list.
- removeAllButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Remove all items in the item list.
- removeAllButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Remove all items in the item list.
- removeAllElements() - Method in class gov.nih.mipav.model.structures.IntVector
-
Removes all elements of the array.
- removeAllElements() - Method in class gov.nih.mipav.model.structures.VOIVector
-
DOCUMENT ME!
- removeAllFromList() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Removes all of the parameters from the list.
- removeAllGeodesic(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Removes all geodesic curves for the given surface.
- removeAllGeodesic(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Removes all geodesic curves for the given surface.
- removeAllGeodesic(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Removes all geodesic components from the given surface.
- RemoveAllGeodesic() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Removes all geodesic components from the given surface.
- removeAllItems() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Removes all the items on the recording list.
- removeAllItems() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Removes all the items on the recording list.
- removeAllObjects(int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
object removal algorithm.
- removeAllPaths() - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- removeAllPaths() - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- removeAllRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for removing the face / skull.
- removeAllRows() - Method in class gov.nih.mipav.model.structures.SortingTableModel
-
DOCUMENT ME!
- removeAllSegments() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
Removes all segments of this object.
- removeAllSurfaces() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- removeAllTriangles() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
Removes all TriangleDetails from this collection.
- removeAllVectorListeners() - Method in class gov.nih.mipav.model.structures.VOIVector
-
- removeAllVOIListeners() - Method in class gov.nih.mipav.model.structures.VOI
-
- removeAloneMenu(JMenuBar) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Removes the stand-alone menu from the user interface.
- removeAt(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Remove the element from the set in the specified location.
- removeAt(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Remove the element from the set in the specified location.
- removeAt(int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Remove the element from the set in the specified location.
- removeAt(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Remove the element from the set in the specified location.
- removeBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
- removeBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
- removeBoxSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Detaches the slice frame on the slice for the given orientation.
- removeBranch(BranchGroup, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Removes a BranchGroup to the display.
- removeBranch(BranchGroup, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Updates the surRender -- removes a BranchGroup to the main Display.
- removeBurn() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
The action taken when the Remove button is clicked in the list box.
- removeBurn(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Remove a burn from the treatment list.
- removeBurn(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Remove a burn from the treatment list.
- removeBurnCenter(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Remove the burning center element.
- removeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- removeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- removeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- removeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- removeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- removeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- removeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- removeButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Remove the selected item in the item list.
- removeButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Remove the selected item in the item list.
- removeButton2 - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- removeButton2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- removeButton2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- removeCellEditorListener(CellEditorListener) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- removeChars(String) - Static method in class gov.nih.mipav.model.file.FileInterfile
-
Removes white space and exclamation marks.
- removeClickedFunctionPoint() - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Remove the point of the LUT transfer function which the mouse is hovering over (determined by
mouseMotion).
- removeClickedFunctionPoint() - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
DOCUMENT ME!
- removeClickedFunctionPoint() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Remove the point of the LUT transfer function which the mouse is hovering over (determined by
mouseMotion).
- removeClipSlice() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Removes the clip slices.
- removeClipSliceA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Detaches the slice frame on arbitrary clipping plane slice.
- removeClipSliceStatic() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
remove the static clipping plane box frame.
- removeClipSliceStaticInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
remove the static inverse clipping plane box frame.
- removeClipSliceX() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Detaches the slice frame on clipping plane slice x.
- removeClipSliceXInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Detaches the slice frame on clipping plane slice -x.
- removeClipSliceY() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Detaches the slice frame on clipping plane slice y.
- removeClipSliceYInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Detaches the slice frame on clipping plane slice -y.
- removeClipSliceZ() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Detaches the slice frame on clipping plane slice z.
- removeClipSliceZInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Detaches the slice frame on clipping plane slice -z.
- removeClipVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
- removeClipVOICheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
- removeComment(String) - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- removeComponent(int, int[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Extract a connected component from the mesh and remove all the triangles of the component from the mesh.
- removeComponentListener() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
- removeComponentListener() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- removeContourFromOtherOrientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
User central gland contours projection to remove the extra interpolated
VOIs contours at the apex and base.
- removeContourFromOtherOrientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
User central gland contours projection to remove the extra interpolated
VOIs contours at the apex and base.
- removeControls() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
remove controls
- removeControls() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- removeControls() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Removes the menu and controls of the main frame so that a new frame can load the main frame with the proper
controls.
- removeControls() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Required by the parent super class, do nothing.
- removeControls() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
remove controls
- removeControls() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Removes the menu and controls of the main frame so that a new frame can load the main frame with the proper
controls.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Removes the menu and controls of the main frame so that a new frame can load the main frame with the proper
controls.Abstract and must be extended.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Removes the menu and controls of the main frame so that a new frame can load the main frame with the proper
controls.Abstract and must be extended.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Removes the menu and controls of the main frame so that a new frame can load the main frame with the proper
controls.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Removes the menu and controls of the main frame so that a new frame can load the main frame with the proper
controls.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Placeholder.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Removes the menu and controls of the main frame so that a new frame can load the main frame with the proper
controls.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Removes the menu and controls of the main frame so that a new frame can load the main frame with the proper
controls.
- removeControls() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Removes the menu and controls of the main frame so that a new frame can load the main frame with the proper
controls.
- removeCoordinateChangeListener(CoordinateChangeListener) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Remove a coordinate change listener from this frame's list.
- removeCubicControl() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Detach cubic control branch group.
- removeCubicControl() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Detach cubic control branch group.
- removeCurrentTab - Variable in class gov.nih.mipav.view.ViewJFrameMessage
-
DOCUMENT ME!
- removeCurve(VOIBase) - Method in class gov.nih.mipav.model.structures.VOI
-
Clears VOI of all curves at a slice.
- removeCurves() - Method in class gov.nih.mipav.model.structures.VOI
-
Clears VOI of all curves.
- removeCurves(int) - Method in class gov.nih.mipav.model.structures.VOI
-
Deprecated.
- REMOVED_INTENSITY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Eventually won't be necessary.
- removed_parameter_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- removedCurve(VOIEvent) - Method in interface gov.nih.mipav.model.structures.event.VOIListener
-
handles to the VOI being removed from the Vector.
- removedCurve(VOIEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.VOIHighlighter
-
We are not interested in removing Curves, so this method is empty.
- removedCurve(VOIEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.VOIHighlighter
-
We are not interested in removing Curves, so this method is empty.
- removedCurve(VOIEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.VOIHighlighter
-
We are not interested in removing Curves, so this method is empty.
- removedCurve(VOIEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- RemoveDiagonal() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- removeDim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubset
-
Dimension to be removed.
- removeDim - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- removedSlices - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
every false value in the array corresponds to a slice within the movie passed in. true values represent removed
slices
- removeDuplicateKeypoints(Vector<SIFTImageSimilarity.KeyPoint>) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- removedVOI(VOIVectorEvent) - Method in interface gov.nih.mipav.model.structures.event.VOIVectorListener
-
handles to the VOI being removed from the Vector.
- removedVOI(VOIVectorEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
resets the volumes list to the current VOIVector. removes the highlighter from the removed VOI.
- removedVOI(VOIVectorEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
resets the volumes list to the current VOIVector. removes the highlighter from the removed VOI.
- removedVOI(VOIVectorEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
resets the volumes list to the current VOIVector. removes the highlighter from the removed VOI.
- removedVOI(VOIVectorEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- removeElement(VOIBase) - Method in class gov.nih.mipav.model.structures.VOIBaseVector
-
- removeElementAt(int) - Method in class gov.nih.mipav.model.structures.IntVector
-
Removes element at index.
- removeElementAt(int) - Method in class gov.nih.mipav.model.structures.VOIBaseVector
-
- removeElementAt(int) - Method in class gov.nih.mipav.model.structures.VOIVector
-
Overides Vector.remove().
- removeEmptyDirs() - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
- removeEnhancedDicomInfo(FileInfoDicom, FileInfoBase[]) - Method in class gov.nih.mipav.model.file.FileIO
-
- removeEntry(Class) - Method in class gov.nih.mipav.plugins.ManifestFile
-
Removes class c and its dependents from the manifest, does in fact write to the file.
- RemoveExt(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Removes the extension of a file name.
- removeFaceRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for removing just the face.
- removeFiles(ArrayList<File>) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
- RemoveFixedBlocks(Vector<double[]>, double[], String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- removeFromBeginning() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
DOCUMENT ME!
- removeFromFile(Class) - Method in class gov.nih.mipav.plugins.ManifestFile
-
Helper method for removing c from the manifest file on the file system.
- removeFromImageList(String, String[]) - Method in class gov.nih.mipav.model.file.FileIO
-
- removeFromModelClip(BranchGroup) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Remove the branch group passed in.
- removeFromPane() - Method in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
Removes the components from this given container from
the frame
- removeGeodesic(TriMesh, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Remove the specific geodesic curves from the given surface.
- removeGeodesic(TriMesh, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Remove the specific geodesic curves from the given surface.
- removeGeodesic(TriMesh, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Removes the specific geodesic component from the given surface.
- RemoveGeodesic(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Removes the specific geodesic component from the given surface.
- removeGM() - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Add the gradient magnitude hitogram to the opacity control panel.
- removeGM() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Add the gradient magnitude hitogram to the opacity control panel.
- removeGM() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
- removeGM() - Method in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Add the gradient magnitude hitogram to the opacity control panel.
- RemoveGPU() - Static method in class gov.nih.mipav.util.MipavInitGPU
-
- removeHistoLUTb() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Removes the tabbed pane for the histogram of image B.
- removeHistoLUTb() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Removes the tabbed pane for the histogram of image B.
- removeHistoLUTb() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Removes the tabbed pane for the histogram of image B.
- removeHistoRGBb() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Removes the tabbed pane for the histogram of image B.
- removeHistoRGBb() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Removes the tabbed pane for the histogram of image B.
- removeImageDisplayListener(ViewImageUpdateInterface) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Remove a listener from the class.
- removeImageRegistryChangeListener(ChangeListener) - Method in class gov.nih.mipav.view.ImageRegistryMonitor
-
removes the change listener.
- removeImageVariable(String) - Method in class gov.nih.mipav.model.scripting.ImageVariableTable
-
Removes an image variable and its image name from the table.
- removeIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- removeIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- removeIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- removeIndicator() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Detach all the detection sphere branches.
- removeIntensityLock(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Removes an intensity value from the intensityLockVector.
- removeItem(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList
-
Remove the specified annotation item from the list.
- removeItem(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM
-
Remove the specified annotation item from the list.
- removeItemToRender(T) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.GenericRenderer
-
- removeJarContext(String) - Method in class gov.nih.mipav.plugins.JarClassLoader
-
- removeKeyListener() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- removeLastElement() - Method in class gov.nih.mipav.model.structures.IntVector
-
Removes last element is array.
- removeLayoutComponent(Component) - Method in class gov.nih.mipav.view.JScrollPopupMenu.ScrollPopupMenuLayout
-
- RemoveLeadingZeros(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- removeLineArray(BranchGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Called from the JDialogDTIInput.
- removeLines(DocumentEvent) - Method in class gov.nih.mipav.view.MaximumLinesDocumentListener
-
- removeList - Variable in class gov.nih.mipav.view.JPanelChecklist
-
notice that for the next two lists, ith entry on one corresponds to the ith entry on the other. the entire list
of choices possible.
- removeListener(AlgorithmInterface) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Remove a listener from the class.
- removeListeners() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- removeListeners() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- removeMatrix(Object) - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Safe method for removing matrices from the image
- removeMemoryChangeListener(ChangeListener) - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
removes the change listener.
- removeModelDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- removeMouseListener() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- removeMouseMotionListener() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- RemoveNeighbor(LODMesh.Triangle, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- removeNode(int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- removeNode(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- RemoveNode(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- removeObject(int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
object removal algorithm.
- removeOriginal - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- removeOriginal - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
DOCUMENT ME!
- removeOriginal - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- removeOriginal - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- removeOriginal - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- removeOriginal - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- removeOriginal - Variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
DOCUMENT ME!
- removeOriginal - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- removeOriginal - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- removeOriginalCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- removeOriginalCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
DOCUMENT ME!
- removeOriginalCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- removeOriginalCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- removeOriginalCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- removeOriginalCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- removeOriginalCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
DOCUMENT ME!
- removeOriginalCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- removeOriginalCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- removePadding(ModelImage) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Remove the padding slices from the beginning and end of an image.
- removeParam - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
button for removing parameters.
- removeParameter(String) - Method in class gov.nih.mipav.model.file.XMLPSet
-
Removes the parameter with the given name from the hashtable.
- RemoveParameterBlock(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- removePoint(int) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Removes a point in the function at the specified index.
- RemovePoint(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Removes the i-th point from the shape.
- removePointCursor - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- removePoints() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Remove all points drawn on the mesh, sphere, and plane:
- removePoints() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Remove all points drawn on the mesh, sphere, and plane:
- removePolyline() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Removes the fiber bundle from the GPUVolumeRender and JPanelSurface.
- removePolyline() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Remove polyline from the render
- removePolyline(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Removes the specified polyline tract group.
- removePolyline(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Remove the polyline from the volume DTI display.
- removePolyline(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Removes the specified polyline tract group.
- removePrivateSequenceTags(FileDicomKey[], Vector<FileDicomSQItem>) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Method to anonymize private tags that may appear in
sequence tags.
- removePrivateSequenceTags(FileDicomKey[], Vector<FileDicomSQItem>) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method to anonymize private tags that may appear in
sequence tags.
- removePrivateSequenceTagsWhite(FileDicomKey[], Vector<FileDicomSQItem>) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
- removePrivateSequenceTagsWhite(FileDicomKey[], Vector<FileDicomSQItem>) - Method in class gov.nih.mipav.model.structures.ModelImage
-
- removePrivateTags(FileDicomKey[]) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Method to remove private tags from the file.
- removePrivateTags(FileDicomKey[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method to remove private tags from the file.
- removePrivateTagsWhite(FileDicomKey[]) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
- removePrivateTagsWhite(FileDicomKey[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
- removeProbeLine() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Remove the red line showing where the probe will pass through.
- removeProbingPath() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
During mouse release, remove the probing path and clear the probe color mask.
- removeProgressChangeListener(ProgressChangeListener) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Removes the ChangeListener from the FileBase object.
- removeProgressChangeListener(ProgressChangeListener) - Method in class gov.nih.mipav.model.file.FileBase
-
Removes the ChangeListener from the FileBase object.
- removeProperty(String) - Static method in class gov.nih.mipav.view.Preferences
-
Removes the property key from the MIPAV property list.
- removePSet(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Removes a specific Parameter Set using it's description.
- removeRange(int, int) - Method in class gov.nih.mipav.model.structures.VOIVector
-
Overides Vector.removeRange().
- removeReference(String) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Remove a talairach / ACPC reference point.
- removeRepeatedElements(JList) - Method in class gov.nih.mipav.view.JPanelListController
-
Removes all repeated elements in the given list.
- RemoveResidualBlock(CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- RemoveResidualBlock(CeresSolver.ResidualBlock) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- removeScriptRecordingListener(ScriptRecordingListener) - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Removes a listener from the recorder.
- removeSegment(byte) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Removes all segments from the collection having the specified type.
- removeSegment(MetadataExtractor.JpegSegmentType) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Removes all segments from the collection having the specified type.
- removeSegmentOccurrence(byte, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Removes a specified instance of a segment's data from the collection.
- removeSegmentOccurrence(MetadataExtractor.JpegSegmentType, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
Removes a specified instance of a segment's data from the collection.
- removeSelected() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
Method removed selected items from the file list.
- removeSelectedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
remove button
- removeSelectedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
remove button
- removeSelectedImagesLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
label for removing selected images
- removeSelectedImagesLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
label for removing selected images
- removeSelectionPaths(TreePath[]) - Method in class gov.nih.mipav.view.CheckTreeManager.CheckTreeSelectionModel
-
- removeShortcut - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
button for removing shortcuts.
- removeShortcut(String) - Static method in class gov.nih.mipav.view.Preferences
-
Removes a shortcut from the table.
- removeSlicesAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- removeSmallRegions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- removeSmallRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- removeSmallRegionsCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- removeStampSecondaryCapture() - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
In anonymization cases it may be necessary to hide the fact that MIPAV has processed this image
(to remove any NIH affiliation).
- removeSubjectVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
- removeSubjectVOICheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
- removeSubscriber(Object) - Method in class gov.nih.mipav.model.structures.ReminderThread
-
DOCUMENT ME!
- removeSubscriber(Object) - Method in class gov.nih.mipav.model.structures.TimeoutThread
-
DOCUMENT ME!
- removeSurface - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
button for removing surfaces.
- removeSurface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Remove the surface from the volume render.
- removeSurface() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Remove the selected surfaces.
- removeSurface(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Removes a surface from the image's surface list.
- removeSurface(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- removeSurface(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Remove the given surface from the render display list.
- removeSurface(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets blending between imageA and imageB.
- removeSurface(BranchGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Remove the specified surface subtree from the scene graph.
- removeSurfaceMask(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Removes the surface mask from this image.
- removeSurfaceMask(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Delete the surface mask, using the name of the mask as reference.
- removeSurfaceMasks() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Returns the array of BitSet masks for backup.
- removeSurfaces(SurfaceAttributes[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The action taken when the Remove button is clicked in the list box.
- removeTab(String) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Removes the Tab associated with the given title (will not allow the removal of DEBUG or DATA tabs.
- removeTag(FileDicomKey) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Remove a tag from this tag table (does not affect reference table, if this is a non-reference table).
- removeTag(String) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Remove a tag from this tag table (does not affect reference table, if this is a non-reference table).
- removeTriangle(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Remove triangle from the mesh.
- removeTriangle(ModelSurfaceTopology.Triangle) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
An override of the ModelSurfaceTopology member function.
- removeTriangle(ModelSurfaceTopology.Triangle) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Convenience function for removing triangles from the mesh.
- removeTSlicesAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- removeUnusedVertices(TriMesh) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
- removeUnusedVertices(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- removeUpdate(DocumentEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.TagInputListener
-
- removeUpdate(DocumentEvent) - Method in class gov.nih.mipav.view.MaximumLinesDocumentListener
-
- removeUpdate(DocumentEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- removeVariable(String) - Method in class gov.nih.mipav.model.scripting.VariableTable
-
Removes a variable and its value from the variable table.
- removeVectorListener(VOIVectorListener) - Method in class gov.nih.mipav.model.structures.VOIVector
-
removes the update listener.
- RemoveVertex(Vertex) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Graph
-
- RemoveVertex(Vertex) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- removeVOI(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Removes a voi from the image's VOI list.
- removeVOIListener(VOIListener) - Method in class gov.nih.mipav.model.structures.VOI
-
removes the update listener.
- removeVOIManager(VOIManager) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- removeVOIsInDicomSpace(int, float, ModelImage, Vector<Vector3f>, Vector<Vector3f>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Remove the extra VOIs contours in Dicom space.
- removeVOIsInDicomSpace(int, float, ModelImage, Vector<Vector3f>, Vector<Vector3f>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Remove the extra VOIs contours in Dicom space.
- removeVOIUpdateListener() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- removeVOIUpdateListener(UpdateVOISelectionListener) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- removeVOIUpdateListener(UpdateVOISelectionListener) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Removes the UpdateVOISelectionListener from the list.
- removeWall(AlgorithmNetworkSnake.SnakeInitialiser.Node, AlgorithmNetworkSnake.SnakeInitialiser.Node) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- RemoveWalls(AlgorithmNetworkSnake.SnakeInitialiser.Node) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- removeWhiteSpace(String) - Method in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- removeWindowListener() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- renameLattice(boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- renameLatticeOnLoad(ModelImage, VOIVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- renBufferA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Buffer used to store ARGB images of the image presently being displayed.
- renBufferB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- render() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- render(Graphics2D, Graphics2D, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- Render() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Render the scene.
- Render() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Render the scene-graph.
- Render(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Render the display list objects without the raycast volume.
- Render(Renderer, Culler, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeBoundingBox
-
- Render(Renderer, Culler, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Render the object.
- Render(Renderer, Culler, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Render the object.
- Render(Renderer, Culler, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeNode
-
- Render(Renderer, Culler, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Render the object.
- Render(Renderer, Culler, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeOrientationCube
-
- Render(Renderer, Culler, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Render the object.
- Render(Renderer, Culler, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- Render(Renderer, Culler, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- Render(Renderer, Culler, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- Render(Renderer, Culler, SurfaceClipEffect[], int, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Render the object.
- renderAnnotationToTexture(VOIText) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- renderBase - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelRendererJ3D
-
Render base.
- renderCheckBox(JCheckBox, GridBagLayout, GridBagConstraints, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
This method renders the checkbox
- renderer - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- renderer - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- Renderer - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A ray tracer for 3D images.
- Renderer(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
The constructor for the renderer.
- rendererConfigured(VolumeTriPlanarRenderBase) - Method in interface gov.nih.mipav.view.renderer.WildMagic.RendererListener
-
- rendererGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Renderer mode user-interface panel
- RendererImageData - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Storage of values for a 3D volume used by the volume renderers.
- RendererImageData(ModelImage) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Constructor to setup renderer image data associated with specified 3D volume.
- RendererInterfaceColor - Interface in gov.nih.mipav.view.renderer.J3D.volumeview
-
An interface to be used to color-based Renderer implementations.
- RendererInterfaceIntensity - Interface in gov.nih.mipav.view.renderer.J3D.volumeview
-
An interface to be used to intensity-based Renderer implementations.
- RendererListener - Interface in gov.nih.mipav.view.renderer.WildMagic
-
- rendererLUT - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- RendererMapColor - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A helper class to map RGB color image values to an intensity value.
- RendererMapColor() - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapColor
-
Constructor.
- RendererMapIntensity - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A helper class to map image values to RBB colors.
- RendererMapIntensity(ModelLUT) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapIntensity
-
Constructor.
- rendererProgressBar - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
A reference to the volume renderer frame's progress bar.
- rendererProgressBar - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
A local reference to the volume renderer frame's progress bar.
- rendererProgressBar - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The small bar on the top right corner the volume view frame.
- rendererProgressBar - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
A reference to the volume renderer frame's progress bar.
- rendererProgressBar - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
The small bar on the top right corner the volume view frame.
- renderFallback(Graphics2D, Graphics2D, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- renderFallback(Graphics2D, Graphics2D, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- renderFallback(Graphics2D, Graphics2D, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- renderFallback(Graphics2D, Graphics2D, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.LinesRenderer
-
- renderFallback(Graphics2D, Graphics2D, int, int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Renderer
-
- renderFallback(Graphics2D, Graphics2D, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TextRenderer
-
- renderFallback(Graphics2D, Graphics2D, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TrianglesRenderer
-
- renderFallbackLinesCT(Graphics2D, Graphics2D, ContourPlot.Lines, double, double, double, double, Rectangle2D, float) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.LinesRenderer
-
- renderFallbackLinesVT(Graphics2D, Graphics2D, ContourPlot.Lines, double, double, double, double, Rectangle2D, float[][]) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.LinesRenderer
-
- RenderFrameRate(GLAutoDrawable) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Renders the frame rate to the screen.
- RenderingHalftoningAlgorithm(int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingHalftoningAlgorithm
-
- renderingHint - Variable in enum gov.nih.mipav.view.Preferences.InterpolateDisplay
-
The rendering hint provided to Graphics2D in creating this interpolation.
- RenderingIntent(int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingIntent
-
- renderingMode - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Default rending mode, MIP mode.
- RenderMode - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- renderOrder - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- renderPDF(PDDocument, PDPage, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- renderPDF(PDDocument, PDPage, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- renderPDF(PDDocument, PDPage, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- renderPDF(PDDocument, PDPage, int, int, int, int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PDFRenderer
-
Renders this PDFRenderers contents, that is creating
pdf elements and appending them to the specified page
within the corresponding document.
- RenderSculpt() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Render the sculpt image.
- RenderViewBase - Class in gov.nih.mipav.view.renderer.J3D
-
This is an abstract class.
- RenderViewBase(ModelImage, ModelImage, GraphicsConfiguration) - Constructor for class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Calls the constructor for ViewJFrameBase with the same parameters.
- RenderViewBase.Matrix - Class in gov.nih.mipav.view.renderer.J3D
-
This matrix class is used for 3D object rotate along a specifid axis.
- RenderWithTransparency(boolean, Vector2d[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Rendering multiple translucent surfaces is accomplished with the
following steps: 1.
- reNew(int, int, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- Renum() - Constructor for class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.Renum
-
- renumberregions(int[][]) - Method in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- reorder - Variable in class gov.nih.mipav.model.file.FileNRRD
-
The orientation information in some NRRD files cannot be applied to MIPAV without dimension reordering.
- reorder() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
After edge collapses are finished, the actual vertex locations, the triangle connectivity array, and the collapse
record information must be reordered to support fast dynamic change in level of detail.
- reorderAfni(ModelImage, int[], int[]) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Reorders the AFNI image based on the axis orientations.
- reorderedList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- ReorderProgram(CeresSolver.PreprocessedProblem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionPreprocessor
-
- ReorderProgramForSchurTypeLinearSolver(CeresSolver.LinearSolverType, CeresSolver.SparseLinearAlgebraLibraryType, HashMap<double[], CeresSolver.ParameterBlock>, CeresSolver.OrderedGroups<double[]>, CeresSolver.Program, String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- reOrgInfo(ModelImage, FileInfoAnalyze) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Takes the image and sets it to analyze defaults, using the specified info.
- reOrgInfo(ModelImage, FileInfoSPM) - Method in class gov.nih.mipav.model.file.FileSPM
-
Takes the image and sets it to SPM defaults, using the specified info.
- reOrient() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
Reorient ImageB so that directions will coincide with ImageA.
- reorientCoordSystem(TransMatrix) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Re-orient the matrix to world and left-hand coordinate systems if required.
- reorientCoordSystem(TransMatrix) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Re-orient the matrix to world and left-hand coordinate systems if required.
- reorientCoordSystem(TransMatrix, ModelImage, ModelImage, boolean, boolean) - Static method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Re-orient the matrix to world and left-hand coordinate systems if required.
- repaint() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- repaint() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
Deprecated.
- repaintButton - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- repaintButtons() - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
- repaintFrame() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Updating image for each componentImage vector element.
- repaintImageIntensityLabelFast(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Repaints the image intensity label.
- repaintIsSheduled - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- repaintPaintBrushCursorFast(Graphics2D) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Repaints the paint brush cursor without repainting the entire image.
- repArray - Variable in class gov.nih.mipav.model.file.FilePackBit
-
Temporary buffer.
- repeat - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- repeat(libdt.Mat, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- repeat(libdt.Mat, int, int, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- repetition_timeField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- repetitionTime - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- repetitionTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- repetitionTime - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- RepetitionTime - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- REPLACE - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
REPLACE indicates the current image is replaced after algorithm is run.
- REPLACE - Static variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
REPLACE indicates the current image is replaced after algorithm is run.
- replaceBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- replaceEscapedSpecialCharacters(String) - Static method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Removes backslashes escaping any special list characters.
- replaceFunction(float[], float[]) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Replaces the function used with a line image.
- replaceFunction(float[], float[], int[][], VOI, int) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Replaces the function used with a line image.
- replaceGeodesic(TriMesh, TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
When the Geodesic object cuts the mesh along an open curve, the old mesh changes, but does not need to be deleted
and no new mesh needs to be added.
- replaceGeodesic(TriMesh, TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
When the Geodesic object cuts the mesh along an open curve, the old mesh
changes, but does not need to be deleted and no new mesh needs to be
added.
- ReplaceGeodesic(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
When the Geodesic object cuts the mesh along an open curve, the old mesh changes, but does not need to be deleted
and no new mesh needs to be added.
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
use later.
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Select replacing the current image
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Radio buttons for alg output options.
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- replaceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- replaceImageRadio - Variable in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
DOCUMENT ME!
- replaceMatrices(Vector<TransMatrix>) - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Helper function for XML type images which may have several associated matrices.
- replaceMatrix(String, TransMatrix) - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
Replaces the matrix at the given key (or inserts if that key is not present, which should not happen).
- replaceMesh(ModelTriangleMesh, ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
ReplaceMesh is used by the Geodesic when a mesh is cut.
- replaceMesh(ModelTriangleMesh, ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
When the Geodesic object cuts the mesh along an open curve, the old mesh changes, but does not need to be deleted
and no new mesh needs to be added.
- replaceMesh(ModelTriangleMesh, ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
ReplaceMesh is used by the Geodesic when a mesh is cut along either an open or closed geodesic curve, the
original mesh is changed, but not deleted and no new mesh is added.
- replaceMesh(TriMesh, TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
When the Geodesic object cuts the mesh along an open curve, the old mesh changes, but does not need to be deleted
and no new mesh needs to be added.
- replacePatternMultiline(String, String, String) - Static method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- replacePoint(float, float, int) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Replaces the point at param index with point of params x and y.
- replacePoint(Vector2f, int) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Replaces the point at param index with point of pt.
- ReplacePoints(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Replaces the points in the mesh with the one given by a shape.
- replaceSlicesAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- replaceTag(RandomAccessFile, FileDicomKey, FileDicomTag, int) - Method in class gov.nih.mipav.model.file.FileDicom
-
newTag is written to raFile to replace old tag of tagElementLength
- replicateBorder3d(double[][][], int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- repnField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- rePopulateLists() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- ReportBugBuilder - Class in gov.nih.mipav.view.dialogs.reportbug
-
- ReportBugBuilder() - Constructor for class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Initializes the GUI and then deletes the created files once the program has finished running
- ReportBugBuilder.BugType - Enum in gov.nih.mipav.view.dialogs.reportbug
-
- reportResult(String, boolean, double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- reportResult(String, int, boolean, double, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- reposMarker(int) - Method in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- repTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
242 Cardiac repertition time.
- reqnum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
195 - 13 bytes Requisition Number.
- request_virt_barray(libjpeg.jpeg_decompress_struct, int, boolean, int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- request_virt_sarray(libjpeg.jpeg_decompress_struct, int, boolean, int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- requestedLinearSolverType - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- requestedNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- requestedNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- requestStop() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.PlayMouse
-
Ask for this thread to stop playback of the events.
- requireAreaInImageBounds(int, int, int, int, ContourPlot.ImgBase<?>) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Throws an IllegalArgumentException when the specified area
is not within the bounds of the specified image, or if the area
is not positive.
- requiredPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- requiredPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
panels
- rer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- RERR - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- res - Variable in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- res - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Original resolutioin arrray.
- res - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- res - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- res - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Original resolutioin arrray.
- res - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- res - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Reordered resolutions according to orientation.
- res_node() - Constructor for class gov.nih.mipav.model.algorithms.KDTree.res_node
-
- res_t - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Temporary values for Tile parts, initialised in pi_create_encode
- res2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- res2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueAndNormalFunction
-
- res2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueFunction
-
- res3 - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- res3la - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
DOCUMENT ME!
- res4 - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- resabs - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
- resabs - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
- resample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
true if resolutions unequal, false if resolutions equal.
- resample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
true if resolutions unequal, false if resolutions equal.
- resample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
true if resolutions unequal, false if resolutions equal.
- resample - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
true if resolutions unequal, false if resolutions equal.
- resample(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Resamples and creates a new quad mesh, detaching the parent branch group and readding the surface.
- resample(int, double, double) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ColorMap
-
Returns a uniformly sampled version of this map with the specified
number of samples within the specified interval.
- resample(ModelImage, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
- resample(String) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Call by the plotter render frame to resample.
- resample_lanczos2(SIFT3D.Image, double, double, double, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- resample_linear(SIFT3D.Image, double, double, double, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- resample255(float[], float, float) - Static method in class gov.nih.mipav.model.file.FileIO
-
The purpose of this method is to take a buffer of float and resample the values to proper UBYTE values.
- resampleAll(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
Resample all the slices for the current permuted volume data.
- resampleAll(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorComposite
-
Resample all the slices for the current permuted volume data.
- resampleAll(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorLighting
-
Resample all the slices for the current permuted volume data.
- resampleAll(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
Resample all the slices for the current permuted volume data.
- resampleAll(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Resample all the slices for the current permuted volume data.
- resampleDialog - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Reference to resample dialog, use to null out the resample dialog in this frame.
- resampledImage - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Temp Model image.
- resampledImageFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
DOCUMENT ME!
- resampledT2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Structural T2 image, resampled to match the DWI image series.
- resampledT2Text - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- resampleGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- resampleImage - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- resampleImage - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- resampleImage() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Ressample images to Power of 2.
- resampleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- resampleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- resampleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- resampleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- resampleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- resampleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- resamplePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- resampleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- resampleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- resampleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- resampleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- resampleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- resampleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- resampleSingle() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorComposite
-
Resample a single slice of the permuted volume data.
- resampleSingle() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorDRR
-
Resample a single slice of the permuted volume data.
- resampleSingle() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorLighting
-
Resample a single slice of the permuted volume data.
- resampleSingle() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorMIP
-
Resample a single slice of the permuted volume data.
- resampleSingle() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensityDRR
-
Resample a single slice of the permuted volume data.
- resampleSingle() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensityMIP
-
Resample a single slice of the permuted volume data.
- resampleSingle() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Resample a single slice of the permuted volume data.
- resampleSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- resampleT2(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
Resamples the input ModelImage to match the extents and resolutions of the second ModelImage.
- resampletoImage - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- resampletoUser - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- resampleW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
true if weight image must be resampled.
- resampleW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
true if weight image is resampled.
- resampleW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
true if weight image must be resampled.
- resampleW - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
true if weight image is resampled.
- resamplingConstraint - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
default sampling constraint contribution:.
- resasc - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
- resasc - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
- resB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
private double dimA[], resA[];.
- RESCAL(int, int, int[], int[], int[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ReScale(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- rescale_wavelet_filterbank(PyWavelets.DiscreteWavelet, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- rescaleIntercept - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
DICOM images have a rescale y-intercept value that we have also kept in the base.
- rescaleIntercept - Variable in class gov.nih.mipav.model.file.FilePARREC
-
floating point value = raw value/scaleSlope + rescaleIntercept/(rescaleSlope*scaleSlope)
- rescaleSlope - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
DICOM images have a rescale slope value that we have also kept in the base.
- rescaleSlope - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- rescaleToBins() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- rescaleToComplex(ModelImage, ModelImage, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- resCount - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- resDimGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- resE - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
End value, initialised in pi_initialise_encode
- researchMode - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- researchMode - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- Reserve(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- reserved - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAbortRQ
-
DOCUMENT ME!
- reserved - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Reserved for future TrackVis use
- reserved - Variable in class gov.nih.mipav.model.file.FileLSM
-
- RESERVED - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- reserved1 - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- reserved2 - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Reserved by array.
- reserved2 - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AReleaseRQ
-
DOCUMENT ME!
- reserved2 - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AReleaseRSP
-
DOCUMENT ME!
- reserved2 - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- reserved3 - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Reserved by array.
- reserved3 - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- reserved4 - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- reservedBytes() - Method in enum gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
Returns whether tags with the VR use two reserved bytes in its encoding
- reserveMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- reserveMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataChar
-
- reserveMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataDouble
-
- reserveMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataFloat
-
- reserveMemory() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataSparse
-
- reset - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- reset() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Reset the unordered set to its initial state.
- reset() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Reset the unordered set to its initial state.
- reset() - Method in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
- reset() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexEdgeIterator
-
- reset() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexFaceIterator
-
- reset() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexVertexIterator
-
- reset() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Remove all of the tags from this table (does not affect reference table, if this is a non-reference table).
- reset() - Method in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- reset() - Method in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- reset() - Method in class gov.nih.mipav.model.structures.PointStack
-
Removes all elements in array by setting data pointer to zero.
- reset() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Reset the unordered set to its initial state.
- reset() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
Identity matrix setup.
- reset() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Reset the unordered set to its initial state.
- reset() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
This method is the allocators destructor.
- reset() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.ActiveTree
-
Sets root to null.
- reset() - Method in class gov.nih.mipav.view.RubberbandLivewire.ActiveTree
-
Sets root to null.
- reset(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- reset(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Reset the unordered set to the specified state.
- reset(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Reset the unordered set to the specified state.
- reset(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Reset the unordered set to the specified state.
- reset(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Reset the unordered set to the specified state.
- Reset(CeresSolver.LossFunction, CeresSolver.Ownership) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LossFunctionWrapper
-
- reset_error_mgr(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- reset_input_controller - Variable in class gov.nih.mipav.model.file.libjpeg.my_input_controller
-
- reset_input_controller(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- RESET_INPUT_CONTROLLER - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- reset_it(GenericPolygonClipper.it_node[]) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- reset_lmt(GenericPolygonClipper.lmt_node) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- reset_marker_reader(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- resetAdditionalPluginDirectories() - Static method in class gov.nih.mipav.plugins.PluginUtil
-
- resetAdjustableVOIs(double[][], double[][]) - Method in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Resets all of the VOIPoint's by moving them from pointSet A to point set B.
- resetAlphaLine() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Resets the alpha function to be linear.
- resetAxis() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Reset the z-axis.
- resetAxisX() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Reset the image volume to the original position.
- resetAxisX() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Overrides the parent resetImage method.
- resetAxisX() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Overrides the parent resetImage method.
- resetAxisX() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Reset image volume orieint along X axis.
- resetAxisX() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Override the parent resetImage method to update image volume in the MIP volume renderer.
- resetAxisX() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Reset x-axis.
- resetAxisX() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Reset image volume orientation along X axis.
- resetAxisXInv() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- resetAxisXInv() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Reset image volume orientation along X axis.
- resetAxisY() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Reset the image volume to the original position.
- resetAxisY() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Overrides the parent resetImage method.
- resetAxisY() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Overrides the parent resetImage method.
- resetAxisY() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Reset image volume orieint along Y axis.
- resetAxisY() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Override the parent resetImage method to update image volume in the MIP volume renderer.
- resetAxisY() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Reset y-axis.
- resetAxisY() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Reset image volume orientation along Y axis.
- resetBounds(Rectangle) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Sets the bounds of the component.
- resetBspline() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
Resets parameters used by the Bsplines.
- resetButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
Reset button to reset the default preset values.
- resetButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Reset button to reset the default preset values.
- resetButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Reset button to reset the default preset values.
- resetButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- resetButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Button used to reset all preferences to default state.
- resetButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Reset button.
- ResetClip() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
Reset the axis-aligned clip planes, eye, inverse-eye and arbitrary clip
planes to neutral.
- resetColorChange() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Reset the color changes for the Before sphere and the original surface,
based on the original surface material properties, also update the
user-interface buttons to the original values.
- resetColorChange() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Reset the color changes for the Before sphere and the original surface,
based on the original surface material properties, also update the
user-interface buttons to the original values.
- resetCounter() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- resetCurrentHistograms() - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- resetData() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- resetDialogs() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Sets the reference to this dialog for all of the images listening to it to null.
- resetDialogs() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Sets the reference to this dialog for all of the images listening to it to null.
- resetDialogs() - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Sets the reference to this dialog for all of the images listening to it to null.
- resetDomainButton - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- resetDrawGeodesic() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Remove all the geodesic lines and reset to draw the new geodesic lines.
- resetDrawGeodesic() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Remove all the geodesic lines and reset to draw the new geodesic lines.
- resetFrame() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- resetHistoLUT() - Method in class gov.nih.mipav.view.JPanelHistogram
-
Resets the histogram and histogram panel.
- resetImage() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Reset the image volume to the original position.
- resetImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Overrides the parent resetImage method.
- resetImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Overrides the parent resetImage method.
- resetImage() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Reset image volume orieint along Z axis.
- resetImage() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Override the parent resetImage method to update image volume in the MIP volume renderer.
- resetImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Reset image volume orientation along Z axis.
- resetIndex() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- ResetIteNumber(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeCG
-
reset every n iterations
- resetIterator() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredMeshData
-
- resetIterator() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- resetLabelList(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Used to reset the button labels to their default setting.
- resetLivewire() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- resetLivewire() - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Resets the current livewire VOI.
- resetLUT(ModelLUT, ModelImage) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- resetLUTMinMax(ModelImage, ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Calculate the LUT from the resampled image.
- resetLUTs() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Resets the LUTs.
- resetMouseDialog() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Reset mouseDialog box.
- resetNeighbourLink(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- resetPaintBrushSize() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Resets the paint brush size to the remembered value.
- resetParser() - Method in class gov.nih.mipav.model.scripting.ParserEngine
-
Resets the parser to the beginning of the script.
- resetPicked() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Resets the colors of the picked nodes to the original colors.
- resetPort(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Resets the port and changes where the receiver is listening.
- resetPresentationContext() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateAC
-
Removes all presentation contextes from the list (vector).
- resetProbeTransform() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Resets the probe navigation (rotation, translation, zoom) to the
origin.
- resetRandom() - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
resets the PRNG
this is i.a. needed for regression testing (eg. the Weka wrapper)
- resetRangeButton - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- resetRecorder() - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Erases the current script.
- resetRenderAnnotateList() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- resetRenderBranchConnect() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Called any time a change has been made to a new branch so that the connection between the branch and its parent
can be rendered.
- resetRenderBranchConnect() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Called any time a change has been made to a new branch so that the connection between the branch and its parent
can be rendered.
- resetRenderBranchPath() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Called any time the position along the current curve changes and the color of the curve needs to change to show
what has been visited.
- resetRenderBranchPath() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Called any time the position along the current curve changes and the color of the curve needs to change to show
what has been visited.
- resetRenderScene() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Called any time the scene needs to be regenerated.
- resetRenderSurface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Called whenever any of the rendering properties of the surface are modified.
- resetRenderSurfaceColors() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
If the color LUT defined for mean curvature pseudocolor mapping is defined, then use it to reset the colors.
- resetRenderSurfaceConnectivity() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Resets the portion of the surface to be rendered based on the current triangle connectivity information.
- resetRGB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- resetScript() - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Erases the current script.
- ResetSeed() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- resetSize(JTextField) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Resizes the text field so that all characters are displayed.
- resetSliceToZero(double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- resetStart - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- resetStart() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Resets all retrace variables and allows it to start anewA
- resetThresholdChannels() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
resets boolean for threshold channels.
- ResetTime() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Resets time
- ResetTime() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Resets time
- ResetTimeStatistics() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- Resetting() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeCG
-
resetting function
- resetToDefaults() - Static method in class gov.nih.mipav.view.Preferences
-
Resets the current MIPAV properties to the defaults and saves the preferences file.
- resetToStartCodeWord() - Method in class gov.nih.mipav.model.file.FileSVS.RLEBitInputStream
-
- resetToStartCodeWord() - Method in class gov.nih.mipav.model.file.FileTiff.RLEBitInputStream
-
- resetTransferLine(float, float) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Resets the transfer function to be linear.
- resetTransferLine(float, float, float, float) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Resets the transfer function to be linear.
- resetTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Current transform3D object.
- resetTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Current transform3D object.
- resetValues() - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
Resets the values to match the current lightbox.
- resetView() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- resetVOIs() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Resets VOI vector for new VOIs.
- resetVolumeData(ModelImage, int, GraphicsImage, Texture, String, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- reshape(GLAutoDrawable, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Part of the GLEventListener interface.
- reshape(GLAutoDrawable, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- reshape(GLAutoDrawable, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- reshape(GLAutoDrawable, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- reshape(GLAutoDrawable, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- reshape(GLAutoDrawable, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- reshape(GLAutoDrawable, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- reshape(GLAutoDrawable, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- residu(int, boolean, double[], double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- residual_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.Fixture
-
- residual_block_evaluate_scratch - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateScratch
-
- residual_block_residuals - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateScratch
-
- residual_block_set() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- residual_block_set_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- residual_blocks - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EvaluateOptions
-
- residual_blocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- residual_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CoordinateDescentMinimizer
-
- residual_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- residual_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- residual_evaluation_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- residual_J_params_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearCostFunction
-
- residual_layout_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProgramEvaluator
-
- residual_norm - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverSummary
-
- residual_norm - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategySummary
-
- residual_parameters_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- residual_reset_period - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- residual_scaling_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Corrector
-
- ResidualBlock(CeresSolver.CostFunction, CeresSolver.LossFunction, Vector<CeresSolver.ParameterBlock>, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- ResidualBlockUtilsCheckAllCombinationsOfBadness() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- residuals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- residuals - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProbeResults
-
- residuals - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ExpectedEvaluation
-
- residuals - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- residuals - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
1D array of doubles of dimension nPts containing the value of the residuals at the termination point a;.
- residuals - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
1D array of doubles of dimension nPts containing the value of the residuals at the termination point a;.
- residuals - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- residuals_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- residuals_ellipse(double[], double[][], Vector<Vector3f>, double, double, double, double, double) - Method in class gov.nih.mipav.model.structures.VOIContour
-
This is a port of the MATLAB file Reisduals_ellipse written by Hui Ma on May 24, 2010.
- residuals_offset_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearCostFunction
-
- residueBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- resIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- resInfoCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- resInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
The voxel resolutions of the image to be registered to the reference image.
- resInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
The voxel resolutions of the image to be registered to the reference image.
- resInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
The voxel resolutions of the image to be registered to the reference image.
- resInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
The voxel resolutions of the image to be registered to the reference image.
- resInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
The voxel resolutions of the image to be registered to the reference image.
- resInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
The voxel resolutions of the image to be registered to the reference image.
- resize() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Method that resizes the frame and adjusts the rows, columns as needed.
- resize(Vector<libdt.Mat>, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- Resize(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- Resize(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- Resize(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- Resize(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- Resize(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- Resize(int, double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Change number of shape points in the shape.
- Resize(int, double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- Resize(int, double[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- Resize(int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- Resize(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- Resize(int, int, double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- resize_Keypoint_store(SIFT3D.Keypoint_store, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- resize_Mat_rm(SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- resize_Pyramid(SIFT3D.Image, int, int, int, int, int, SIFT3D.Pyramid) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- resize_SIFT3D(SIFT3D.SIFT3DC, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- resize_SIFT3D_Descriptor_store(SIFT3D.SIFT3D_Descriptor_store, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- resizeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
resize button.
- resizeCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
A resizing cursor.
- resizeCursor - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Component resize mouse cursor.
- resizeDouble(Vector<Double>, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- resizeImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- resizeOnClose - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
- resizePanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Method that resizes the frame and adjusts the rows, columns as needed.
- resizePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
Method that resizes the frame and adjusts the rows, columns as needed.
- resizePanel() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Method that resizes the frame and adjusts the rows, columns as needed.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Resize the control panel when mouse drag expanding or minimizing the frame.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Resize the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Resize the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Resizie the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Resize the control panel when mouse drag expanding or minimizing the frame.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Resizing the control panel.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Resize the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Resizig the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizePanel(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelVolume4D
-
Resizing the control panel with ViewJFrameVolumeView's frame width and height.
- resizeSlider() - Method in class gov.nih.mipav.view.ViewJSlider
-
Resize slider
The max number of major ticks and max number of minor ticks are determined using width/height of dialog.
- resliceAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Reslice algorithm.
- resno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
resolution that identify the packet
- resno_decoded - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
number of decoded resolution
- resno0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Resolution num start, Component num start, given by POC
- resno1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Layer num end,Resolution num end, Component num end, given by POC
- resol3 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert3Dto4D
-
resolution of the 3rd dimension.
- resol4 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert3Dto4D
-
resolution of the 4rd dimension.
- resols - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- resols - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Storage of the image voxel resolutions.
- resols - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- resols - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Resolutions of image A.
- resols - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Resolutions of image A.
- resols - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Resolutions of image A.
- resols - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Storage of the image voxel resolutions.
- resols - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Storage of the image voxel resolutions.
- resols - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Storage of the image voxel resolutions.
- resols - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Resolutions of image.
- resolUnit3 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert3Dto4D
-
units of measure for the 3rd dimension.
- resolUnit4 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert3Dto4D
-
units of measure for the 4th dimension.
- RESOLUTION - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
This is the actual resolution of progress bar which we will be using regardless of the actual range specified.
- RESOLUTION_UNIT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- RESOLUTION_UNIT - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- RESOLUTION_UNIT - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- RESOLUTION_UNIT - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- resolutionBox - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- resolutionCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
difference between x,y resolutions (in plane) and z resolution (between planes).
- resolutionCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- resolutionCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- resolutionCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- resolutionCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
difference between x,y resolutions (in plane) and z resolution (between planes).
- resolutionIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- resolutions - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- resolutions - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- resolutions - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- resolutions - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- resolutions - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_comp_t
-
- resolutions - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- resolutions - Variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- resolutions - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- resolutions - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- resolutions - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
NIFTI pixdim information is converted into MIPAV resolutions information
Only those pixdim[i] for which the niftiExtents[i] > 1 are passed into
a resolutions[j] value.
- resolutions - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Voxel resolutions (typically x,y,z(slice spacing),t).
- resolutions - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- resolutions - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- resolutions - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- resolutions - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- resolutions - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
- RESOLUTIONS_ALL - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeResolutions
-
The label to use for the parameter indicating whether to change all slices.
- resolutions_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- resolutions3D - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- resolutions4D - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- resolutionsCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- resolutionSwitches - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- resolutionSwitchPoints - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- resolutionTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- resolutionX - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
resolutionX and Y are used to correct difference in intra and inter
plane voxel resolution These represent the aspect ratio of the image
These are NOT to be confused with the pixel resolutions.
- resolutionX - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- resolutionY - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- resolutionY - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- resolve(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- resolveFileList(File[]) - Method in class gov.nih.mipav.view.ViewUserInterface.ImageTransferHandler
-
- resp_params - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- respfn - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- respfn_canon - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- respfn_default - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- respfn_linear - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- response - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
- response - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeyPoint
-
- RESPONSE - gov.nih.mipav.model.algorithms.StochasticForests.PredictionType
-
- response_classIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- response_classIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- response_classIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- response_classIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- response_timepointIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- response_timepointIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- resRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
The voxel resolutions of the reference image.
- resRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
The voxel resolutions of the reference image.
- resRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
The voxel resolutions of the reference image.
- resRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
The voxel resolutions of the reference image.
- resRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
The voxel resolutions of the reference image.
- resRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
The voxel resolutions of the reference image.
- resS - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start value, initialised in pi_initialise_encode
- restart - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- restart - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- restart - Variable in class gov.nih.mipav.model.file.FileSVS
-
- restart - Variable in class gov.nih.mipav.model.file.FileTiff
-
- restart() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGACInputStream
-
- restart() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- restart() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGDCInputStream
-
- restart() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGDCTInputStream
-
- restart() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- restart() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGACInputStream
-
- restart() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- restart() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGDCInputStream
-
- restart() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGDCTInputStream
-
- restart() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- restart_interval - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- restartCheckerboardAnimateThread() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- restartInRows - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Numbers needed for restart.
- restartInterval - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Restart interval.
- restartIntervalTermination(int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- restartIntervalTermination(int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- restartRowsToGo - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Numbers needed for restart.
- restarts_to_go - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- restarts_to_go - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- RESTORE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- RESTORE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- RESTORE_TO_BACKGROUND_COLOR - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory.DisposalMethod
-
- RESTORE_TO_PREVIOUS - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory.DisposalMethod
-
- restoreBackFromColMajorRef(Matrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- restoreDefaults() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
restore default parameters
- restoreDefaults() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
restore default parameters
- restoreDefaultsButton - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
buttons *
- restoreDefaultsButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
buttons *
- restoreDefaultsPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- restoreDefaultsPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- restoreFinalData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- restoreFinalData(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- RestoreGlobalState(int, Renderer, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- restorePerVertexColor(Material, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Restores the per-vertex colors for the surface at the index parameter.
- restorePerVertexColors(Material) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Restores the ModelTriangleMesh per-vertex colors to the saved per-vertex colors.
- restorePreferredColumnConfiguration() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- restoreSavedExecuter(Node) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Called when a script is loaded from disk.
- RestoreState(VolumeRenderState) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- restoreSurfaceMasks(BitSet[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Restores the mask list from the array.
- RestoreTabs(VolumeRenderState) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- restoreTriColor() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Resets the previously picked triangle to it's orginal color:
- restoreTriColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Resets the previously picked triangle to it's original color:
- restoreVertexColors() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Restores the vertex colors for the surfaces.
- restoreVertexColors() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Restores the ModelTriangleMesh per-vertex colors to the surface
color.
- restoreVOIs(VOIVector) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets VOI vector for with new VOIs.
- RestrictedLaplacianMatrixFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- RestrictedLaplacianMatrixFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RestrictedLaplacianMatrixFunction
-
- restrictNoFutureDates() - Method in class gov.nih.mipav.view.JPanelEditDate
-
accessor to find out whether the panel is set to restrict the panel-display from displaying dates in the future.
- restrictNoFutureDates(boolean) - Method in class gov.nih.mipav.view.JPanelEditDate
-
sets the panel use the restriction that it is to allow no dates after today.
- restrictPastDates() - Method in class gov.nih.mipav.view.JPanelEditDate
-
accessor to find out whether the panel is set to restrict the panel-display from displaying dates in the past.
- restrictPastDates(boolean) - Method in class gov.nih.mipav.view.JPanelEditDate
-
sets the panel use the restriction that it is to allow no dates prior to today.
- result - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- result - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
DOCUMENT ME!
- result - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
DOCUMENT ME!
- result - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel3
-
DOCUMENT ME!
- result - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- result - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Outputted result
- result - Variable in class gov.nih.mipav.model.algorithms.CubicEquation
-
- result - Variable in class gov.nih.mipav.model.algorithms.DAgostinosKsquaredTest
-
output result
- result - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
output result
- result - Variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
Outputted result
- result - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
Approximation to the integral.
- result - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
Approximation to the integral.
- result - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
The routine tries to satisfy the least stringent of both accuracy requirements.
- result - Variable in class gov.nih.mipav.model.algorithms.Psi
-
output result
- result - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAbortRQ
-
DOCUMENT ME!
- result - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRJ
-
DOCUMENT ME!
- result - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContextAccept
-
Result default to 2.
- result - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
DOCUMENT ME!
- result - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- result - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- result - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
- RESULT_IMAGE - Static variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Label used in ActionDiscovery system for main result image of an algorithm.
- RESULT_MASK_CONNECTED - Static variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
DOCUMENT ME!
- RESULT_MASK_FLAGGED - Static variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
DOCUMENT ME!
- RESULT_MASK_INSIDE - Static variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
These are bit masks used in the result volume which identifies how samples were classified at different steps
during the processing.
- RESULT_MASK_NONUNIFORM_GRADIENT - Static variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
DOCUMENT ME!
- RESULT_MASK_SKELETON - Static variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
DOCUMENT ME!
- RESULT_MASK_SKELETON_NEIGHBOR - Static variable in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
DOCUMENT ME!
- result35RegImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- resultCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Checkbox to display the log of result image.
- resultExtents - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Extents the resultImage should have.
- resultImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The result image.
- resultImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToRectangle
-
- resultImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
src image, result image
- resultImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
result image *
- resultImage - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
model images
- resultImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- resultImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- resultImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Result Image.
- resultImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- resultImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
result image *
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
The result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
result image
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
result image
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Temp Model image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Image where the result is stored.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
result image
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
image create if new image button is selected.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
result image
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
a cloned version of importImage that will be inserted into the source images's B slot.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
result image
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
result image
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
result image
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Result image - image returned from registration algorithm.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Result image - image returned from registration algorithm.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogReslice
-
resliced image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Result image after algorithm has completed.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSobel
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
result image
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
src image, result image
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Result image.
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
result image
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- resultImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
result image *
- resultImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
result image *
- resultImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- resultImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- resultImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- resultImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- resultImageA - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- resultImageA - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- resultImageB - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- resultImageB - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- resultImageB - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- resultImageB - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
DOCUMENT ME!
- resultImageB - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- resultImageB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
DOCUMENT ME!
- resultImageB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
DOCUMENT ME!
- resultImageG - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- resultImageG - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- resultImageG - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
DOCUMENT ME!
- resultImageH - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
DOCUMENT ME!
- resultImageName - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- resultImagePanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- resultImagePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- resultImageR - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- resultImageR - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- resultImageR - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
DOCUMENT ME!
- resultImages - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Array of Result Images
- resultImageS - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
DOCUMENT ME!
- resultImageSlider - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
various sliders in dialog *
- resultImageSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
various sliders in dialog *
- resultImageSliderPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- resultImageSliderPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- resultImg - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- resultLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
result label to show the bone, vasculature detection information message.
- resultMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
DOCUMENT ME!
- resultMesh - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
- resultNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- resultNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
DOCUMENT ME!
- resultNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- resultNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- resultNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- resultNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- resultPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- resultPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- resultPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- results - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- results_root - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- resultScrollPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
scroll pane for result image *
- resultScrollPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
scroll pane for result image *
- resultsFileName - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
- resultsFileName - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- resultsFileName - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- resultsFileName - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- resultsFileName - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- resultsFileName - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- resultsFileNameLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- resultsFileNameLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- resultsFileNameLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- resultsFileNameText - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- resultsFileNameText - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- resultsFileNameText - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- resultString - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- resultVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
The resultant polygon and the evolution has completed.
- resultVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
The resultant polygon and the evolution has completed.
- resultVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
The resultant polygon and the evolution has completed.
- resultVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- resultVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
The resultant polygon and the evolution has completed.
- resultVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
The resultant polygon and the evolution has completed.
- resultVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMinimumPerimeterPolygon
-
The resultant polygon and the evolution has completed.
- resultVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
The resultant polygon and the evolution has completed.
- resultVOI - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
result VOI
- resX - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- resX - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- resX - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- resX - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- resX - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- resXUnit - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- resXUnit - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- resXUnit - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- resXUnit - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- resY - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- resY - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- resY - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- resY - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- resY - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- resYUnit - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- resYUnit - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- resYUnit - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- resYUnit - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- resZUnit - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- resZUnit - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- resZUnit - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- RETRACE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- RETRACE - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- retraceContour(VOIBase, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- retriangulate(Vector<Vector3f>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Generates the new VertexBuffer and IndexBuffer for the retriangulated faces of the cube
based on how the cube intersects with the clipping plane.
- retrieveImage(String) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Returns an image with a particular parameter name.
- retrieveInputImage() - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Returns the first input image for the algorithm.
- retrieveInputImage(int) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Returns one of the algorithm's input images.
- retrieveValues(String) - Method in class gov.nih.mipav.model.file.FilePGM
-
DOCUMENT ME!
- retrieveValues(String) - Method in class gov.nih.mipav.model.file.FilePPM
-
DOCUMENT ME!
- retrieveValues(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- return_value - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ProbeResults
-
- return_value_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GoodTestTerm
-
- returnDeformedCopy(float[]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- returnImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDicomOrder
-
Returns the dicom-ordered image.
- returnImage() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Returns the rotated image.
- returnKey(String) - Static method in class gov.nih.mipav.model.file.FileInterfile
-
Returns the key found in the string.
- returnTag() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
returns the value of the edited tag.
- returnTag() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
returns the value of the edited tag.
- returnTag() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
returns the value of the edited tag.
- returnValue(String) - Method in class gov.nih.mipav.model.file.FileInterfile
-
Returns the value found in the string.
- retwist - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- retwist() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- retwist(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- retwistAnnotation(VOIWormAnnotation) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- retwistAnnotations(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- retwistAnnotations(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- retwistLattice(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- retwistLattice(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- reuse_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- reuse_diagonal_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- rev_angCorrGT - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- REV_MIN(GenericPolygonClipper.edge_node[], int, int) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- revbin_permute(double[]) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- Reverse() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimate.Reverse
-
Creates a new Reverse object.
- Reverse() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimateClip.Reverse
-
Creates a new Reverse object.
- Reverse() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.OrderedGroups
-
- Reverse() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Reverses the vector.
- reverseButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- reverseButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- reverseButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- reversedMergesort(double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.ArraySorter
-
Sorts the specified array of doubles into descending order.
- reversedMergesort(double[], int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.ArraySorter
-
- reverseIdxGrid - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- ReversePointOrder() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Reverses the point point ordering.
- revertImage() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
revert to previous mask.
- rewind(BufferedReader, String) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- rewind(BufferedReader, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- rex - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
DOCUMENT ME!
- rexp(double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- rfaButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Button for RFA.
- RFARC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- RFARG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- rfaSeparator - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
RFA separator.
- rfastFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The main RFAST frame.
- RfBCb - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- RfBCb - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- RfBCr - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- RfBCr - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- RfBY - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- RfBY - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- rfft(double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- rfi - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- rfr - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- rfrac - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- rfrd(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Ported from Tohru Morita article.
- rfrdb(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Ported from Tohru Morita article.
- rftbsub(int, double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- rftfsub(int, double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- RfWCb - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- RfWCb - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- RfWCr - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- RfWCr - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- RfWY - Variable in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- RfWY - Variable in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- rfx - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- rfy - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- rfz - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- RGAM - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- rgamma(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- RGAMMA - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- rgb - Variable in class gov.nih.mipav.model.file.FileHistoLUT
-
The color image histogram data to save.
- rgb(int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
- RGB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- RGB - Static variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- RGB - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorEncoding
-
- RGB_BETWEEN_SPACEANDTIME - Static variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- RGB_BLUE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- rgb_bounded(int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
- rgb_bounded(int, int, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
- rgb_convert(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- rgb_convert(libjpeg.jpeg_decompress_struct, short[][][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- RGB_CONVERT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- rgb_fast(int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
- rgb_fast(int, int, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Packs 8bit RGB color components into a single 32bit ARGB integer value
with alpha=255 (opaque).
- RGB_FIRST - Static variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- rgb_fromNormalized(double, double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value with alpha=255 (opaque).
- rgb_fromNormalized(double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot
-
Packs normalized ARGB color components (values in [0.0 .. 1.0]) into a
single 32bit integer value with alpha=255 (opaque).
- rgb_gray_convert(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- rgb_gray_convert(libjpeg.jpeg_decompress_struct, short[][][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- RGB_GRAY_CONVERT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- RGB_GREEN - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- RGB_LAST - Static variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- RGB_LUT - Static variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Indicates a RGB LUT.
- RGB_PIXELSIZE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- RGB_RED - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- rgb_y_tab - Variable in class gov.nih.mipav.model.file.libjpeg.my_color_deconverter
-
- rgb1_gray_convert(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- rgb1_gray_convert(libjpeg.jpeg_decompress_struct, short[][][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- RGB1_GRAY_CONVERT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- rgb1_rgb_convert(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- rgb1_rgb_convert(libjpeg.jpeg_decompress_struct, short[][][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- RGB1_RGB_CONVERT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- RGB2Lab(double[][][], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- rgbA - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- RGBa - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
DOCUMENT ME!
- RGBa - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- RGBa - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- RGBAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- RGBAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
DOCUMENT ME!
- RGBAOrder - Variable in class gov.nih.mipav.model.file.FileNRRD
-
If true, data is a specialized form of 4-color with red, green, blue, and alpha, in that order.
- RGBAOrder - Variable in class gov.nih.mipav.model.file.FileRaw
-
Allow reading from 4 color files with RGBA order
- RGBAOrder - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
- rgbAverageIntensities - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
DOCUMENT ME!
- rgbAverageIntensities - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- rgbB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- RGBb - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
DOCUMENT ME!
- RGBb - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- RGBb - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- RGBButton - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
- RGBButton - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- RGBExtents - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
RGB extents.
- RGBExtents - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- rgbImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- RGBImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Flag for color or noncolor image.
- RGBOffset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCumulativeHistogram
-
Indicates which channel of the RGB image the histogram should be calculated. 1=Red 2=Green 3=Blue
- RGBOffset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Indicates which channel of the RGB image the histogram should be calculated. 1 = Red channel 2 = Green channel 3
= Blue channel
- RGBOffset - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
- RGBOffset - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
- RGBOffset - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
- RGBOffset - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- RGBOffset - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
- RGBOffset - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- RGBOffset - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
DOCUMENT ME!
- RGBOffset - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
DOCUMENT ME!
- RGBOffset - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- RGBOffset - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
DOCUMENT ME!
- RGBOffset - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- RGBOffset - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- rgbPos - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- RGBSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- rgbString - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
String representing RGB components used in applied paint
- RGBT - Variable in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
DOCUMENT ME!
- RGBT - Variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
The RGB lookup table.
- RGBTa - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- RGBTa - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
RGB tables for imageA and imageB
- RGBTA - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- RGBTA - Variable in class gov.nih.mipav.view.PatientSlice
-
ModelRGB lookup table for color ModelImages: imageA rgb table.
- RGBTA - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
RGB table for image A.
- RGBTA - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Lookup table of the color imageA, B.
- RGBTA - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Lookup table of the color imageA, B.
- RGBTA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Model RGB table A reference.
- RGBTA - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Tagged for deletion - Matt, Ruida, Lee, ModelRGB table for imageA, B.
- RGBTA - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
true if selected red, green, blue components present in RGB image.
- RGBTA - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
true if selected red, green, blue components present in RGB image.
- RGBTA - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- RGBTA - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- RGBTA - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- RGBTA - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
set to give 6 digits to the right of the decimal.
- RGBTA - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- RGBTA_GM - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Tagged for deletion - Matt, Ruida, Lee, RGB table reference of the image A, B.
- RGBTb - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- RGBTb - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
RGB tables for imageA and imageB
- RGBTB - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- RGBTB - Variable in class gov.nih.mipav.view.PatientSlice
-
ModelRGB lookup table for color ModelImages: imageB rgb table.
- RGBTB - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
RGB table for image B.
- RGBTB - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Lookup table of the color imageA, B.
- RGBTB - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Lookup table of the color imageA, B.
- RGBTB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Model RGB table B reference.
- RGBTB - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
DOCUMENT ME!
- RGBTB - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- RGBTB - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- RGBTB - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- RGBTB - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- RGBTB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- RGBTB_GM - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
DOCUMENT ME!
- RGBtoLUV(float[], int, double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- RGBValue - Variable in class gov.nih.mipav.view.dialogs.JDialogCumulativeHistogram
-
int vlaue indicating RGB channel.
- RGEOM - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- RGM - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- rh - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- rh - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- rho - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- rho - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.decision_function
-
- rho - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver.SolutionInfo
-
- rho - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- rho - Variable in class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- rho - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver.SolutionInfo
-
- rho - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_model
-
- rho - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm.decision_function
-
- RHO - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- rho_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LossFunctionWrapper
-
- rho_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ScaledLoss
-
- rhoArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
- RHOFN(int[], double[][], double[], double[], double, double, double[], int, double, double, double, boolean, double, int, int, double, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- rhoOld - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- rhs() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- rhs() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- rhs_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DenseQRSolver
-
- rhs_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- rhs_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- rhs_expected - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- rhs_locks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- RHSFUNC_RECVR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- Ri - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- Ri - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- rib - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
blood intrinsic relaxivity rate in 1/(mMol * sec)
input as reciprocal, in seconds (0.001 - 10000.0)
- rib - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- ribMax - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- ribMin - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- RICIAN - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
- RICIAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- RicohMakernoteDescriptor(MetadataExtractor.RicohMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.RicohMakernoteDescriptor
-
- RicohMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.RicohMakernoteDirectory
-
- RIDDERS - gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffMethodType
-
- ridders_epsilon - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffOptions
-
- ridders_relative_initial_step_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffOptions
-
- ridders_step_shrink_factor - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffOptions
-
- Riff - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- right - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- right - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdnode
-
- right - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.dpfun
-
- right - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
- right - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.hppfun
-
- right - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
- right - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- right - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
- right - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
- right - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- right - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- right - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.TreeNode
-
Node to the right in the tree.
- right - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- right - Variable in class gov.nih.mipav.view.RubberbandLivewire.TreeNode
-
Node to the right in the tree.
- Right() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- RIGHT - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- RIGHT - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
The right arrow key.
- RIGHT - Static variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- RIGHT_EDGE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Right bounding edge of the canvas in world coordinates.
- RIGHT_EXP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- RIGHT_LEG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- RIGHT_LEG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- RIGHT_LEG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- RIGHT_MIDDLE - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
- right_of(delaunay.Halfedge, delaunay.Point) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- RIGHT_PT - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Talairach: Right reference point.
- rightButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- rightButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- RightButton(String) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.RightButton
-
Creates new button with correct icon and given tool tip.
- RightButton(String) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelCamera.RightButton
-
Creates new button with correct icon and given tool tip.
- RightButton(String) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.RightButton
-
Creates new button with correct icon and given tool tip.
- rightContour - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- rightDown - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- rightDownButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- rightDownButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Right panel down button.
- rightDownButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
DOCUMENT ME!
- rightFace - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- rightLeftButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- rightLeftButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Right panel left button.
- rightLeftButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
DOCUMENT ME!
- rightLegRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- rightLegRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- rightLegRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- rightLine - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- RightLine - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Transfer function right line:
- rightMarker - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- RightMouse(MouseEvent) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouse
-
Creates new thread and sets up mouse event variables appropriately.
- RightMouse(MouseEvent) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouse
-
Creates new thread and sets up mouse event variables appropriately.
- RightMouse(MouseEvent) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.RightMouse
-
Creates new thread and sets up mouse event variables appropriately.
- RightMouseDragged(MouseEvent, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouseDragged
-
Creates new thread and sets up mouse event variables appropriately.
- RightMouseDragged(MouseEvent, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouseDragged
-
Creates new thread and sets up mouse event variables appropriately.
- rightMousePressed - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobiPreconditioner
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CgnrLinearOperator
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearOperator
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Preconditioner
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurJacobiPreconditioner
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrixPreconditionerWrapper
-
- RightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- RightMultiply(Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- RightMultiply(Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- RightMultiplyE(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- RightMultiplyF(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- rightPad - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- rightPad - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- rightPad - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- rightPad - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- rightPad - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- rightPad - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- rightPad - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- rightPad - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- rightPaddingFactor - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- rightPane - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The view pane that contains the image view and tri-planar view panels.
- rightPane - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
The view pane that contains the image view and tri-planar view panels.
- rightPane - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- rightPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Left panel and right panels corresponding to original and expected extents.
- rightPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- rightPanel - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- rightPanelRenderMode - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The right panel renderer mode.
- rightPanelRenderMode - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
The right panel renderer mode.
- rightParButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- rightPositions - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- rightPt - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- rightPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- rightPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- rightPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- rightPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- rightreg(delaunay.Halfedge) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- rightRightButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- rightRightButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Right panel right button.
- rightRightButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
DOCUMENT ME!
- RightRotate(AlgorithmPowerWatershed.Rbt, AlgorithmPowerWatershed.RbtElt) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- rightRotateButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- RightRotateButton(String) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.RightRotateButton
-
Creates new button with correct icon and given tool tip.
- rightSide - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- rightSide - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- rightSideInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- rightSideInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- rightSideInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- rightTable - Variable in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
DOCUMENT ME!
- rightTable - Variable in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- rightTableModel - Variable in class gov.nih.mipav.view.ViewDICOMDoubleListPanel
-
DOCUMENT ME!
- rightTableSorter - Variable in class gov.nih.mipav.view.ViewDICOMDoubleListPanel
-
DOCUMENT ME!
- rightUp - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- rightUpButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
JButton group.
- rightUpButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Right panel up button.
- rightUpButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
DOCUMENT ME!
- rightVectors - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- rigid - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Flag indicating this is a rigid transformation.
- rigid - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt2D
-
Flag indicating this is a rigid transformation.
- rigidFlag - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Flag used to indicate if the registration is ridgid (rotation and translation - DOF = 3.
- rigidFlag - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Flag used to indicate if the registration is rigid (rotation and translation only; DOF = 3.
- rigidFlag - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Flag used to indicate if the registration is ridgid (rotation and translation - DOF = 3.
- rigidFlag - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Flag used to indicate if the registration is rigid (rotation and translation only; DOF = 3.
- RIGLL - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- rint() - Method in class gov.nih.mipav.util.DoubleDouble
-
Rounds this value to the nearest integer.
- Rinv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SubSig
-
- rinvmap(double[][], double[][], double[], double[][], double[], double[], double[][], double[][], boolean, boolean, double, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- rit - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
tissue intrinsic relaxivity rate in 1/(mMol * sec)
specified as reciprocal, in seconds (0.001 - 10000.0)
- rit - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- riter - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdres
-
- ritMax - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- ritMin - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- rix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- rix - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- riy - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- riy - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- riz - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- riz - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- rktol_qrfact - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- rl - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- rl - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- rl - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- rl - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- rlCenter - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- rlCenter - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- RLE - Variable in class gov.nih.mipav.model.file.FileDicom
-
- RLEBitInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileSVS.RLEBitInputStream
-
- RLEBitInputStream(InputStream) - Constructor for class gov.nih.mipav.model.file.FileTiff.RLEBitInputStream
-
- RLEData - Variable in class gov.nih.mipav.model.file.FileDicom
-
- RLEImageData(int) - Method in class gov.nih.mipav.model.file.FileDicom
-
- rlen - Variable in class gov.nih.mipav.model.file.FileSVS.RLEBitInputStream
-
- rlen - Variable in class gov.nih.mipav.model.file.FileTiff.RLEBitInputStream
-
- rlenb - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- rlenb - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- RLETAMARencapsulatedOffset - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
- rlInvert - Variable in class gov.nih.mipav.model.file.FileNRRD
-
True for RAS.
- rlist - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
The integral approximations of the subintervals.
- rlist - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
The integral approximations of the subintervals.
- rlist - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdres
-
- rlist_insert(KDTree.res_node, KDTree.kdnode, double) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- rlog1(double) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- rmap(double[][], double[][], double[][], double[], double[][], double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- rmax - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Number of digits required to represent the numbers with the required accuracy
- rmax - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- rmer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- rmin - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- rmin - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- rmin - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- rmObjDim - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- rmObjsDim - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- rms - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- rms(double[], double[], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- rms(DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], int) - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- rmse() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- rmse_blue_map - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- rmse_green_map - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- rmse_map - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- rmse_red_map - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- rmse_sw() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- RMSE_SW - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- rmse_sw_mean - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- RmSmRg(int[][], int[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- rmx - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- rmy - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- rmz - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- rn - Variable in class gov.nih.mipav.model.structures.jama.LUSOL
-
- rn - Variable in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- RN2J02 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- rnd - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- RND() - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- rNearest - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- rNearest - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- rNearest - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- rngkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
The suffices km2 and km1 in the names of the variables represent time step k-2 and k-1 respectively.
- rngkm1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
The suffices km2 and km1 in the names of the variables represent time step k-2 and k-1 respectively.
- rNormal - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- rNormal - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- rNToGo - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- rNums - Static variable in interface gov.nih.mipav.model.file.BZip2Constants
-
- robot - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- robustMaximum(float[], float, int, int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
Robust maximum estimation
- RobustMaxThresh - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- robustMinimum(float[], float, int, int, int, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
Robust maximum estimation
- RobustMinThresh - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- ROI - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- ROI - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- ROI - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- ROI(Integer, Integer, Integer, Integer, Integer, Integer, String, String) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions.ROI
-
Creates a new ROI object.
- RoiPredicate(double, double, double, double, AlgorithmBRISK.KeyPoint) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- rois - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- roishift - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
Region Of Interest shift
- roishift - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
Region Of Interest shift
- rollBack() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
This method rolls back the allocator so that it makes all of the memory previously
allocated available for re-allocation.
- rollBack(AllocatorState) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
This method rolls back the allocator to the previous memory state and makes all of the memory previously
allocated available for re-allocation.
- rollbackToCenter() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Roll back the image back to center, reset the camera view close to
original view.
- rollbackToImageCenter() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
When the mouse tranlation moves the object out of the Viewing bounding box, click the
home button to bring the image back to center.
- rollIcon - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- rom - Variable in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
DOCUMENT ME!
- ROn - Variable in class gov.nih.mipav.model.structures.ModelRGB
-
Flag indicating whether the red channel should be displayed.
- root - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- root - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdtree
-
- root - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- root - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
A reference in the voiTree to the currently selected image
- root - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.ActiveTree
-
Pointer to root of tree.
- root - Variable in class gov.nih.mipav.view.RubberbandLivewire.ActiveTree
-
Pointer to root of tree.
- root() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- Root - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- ROOT_MEAN_SQUARED_ERROR - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ROOT_TWO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotographicConversions
-
- root3(double) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- rootfile - Variable in class gov.nih.mipav.view.ViewFileTreeNode
-
DOCUMENT ME!
- RootInfo - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- RootInfo() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RootInfo
-
- rootMeanSquareError - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- rootMSELabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- rootNameCache - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreePanel.JFileTreeCellRenderer
-
cache for speeding up loading of files, cleared when select occurs*
- ROOTNODE - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Root node type.
- rootQueryPanel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- roots(double[]) - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- rootsDegree3(float[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
afRoot should have length 3 which is used to return the real roots found; returns 0 if no root can be found,
otherwise returns the number of real roots found (1 or 3);
- rootsp - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- rootsp - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- Ropt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexOptions
-
< dimension of the observation space, y_t.
- Ropt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
- Rosenbrock() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.Rosenbrock
-
- ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- ROSENBROCK - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- Rosenbrock2() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.Rosenbrock2
-
- Roszman1CostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.Roszman1CostFunction
-
- Roszman1Data - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- Roszman1Observations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- rot - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
- rot - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Arrays used for producing graphs for DOF == 3 and register to reference image.
- rot - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Arrays used for producing graphs for DOF == 6 and register to average or reference image.
- rot - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Arrays used for producing graphs for DOF == 3 and register to reference image.
- rot - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Arrays used for producing graphs for DOF == 6 and register to average or reference image.
- rot180(double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- rotate(double[], double[], double, double) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- rotate(double, LSCM.Point) - Method in class gov.nih.mipav.model.algorithms.LSCM.Point
-
- rotate(Vector3f, Vector3f, int) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
rotate along a given axis, point and rotation angle.
- Rotate(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
rotate shape with given theta angle
- Rotate(double, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Rotates the shape.
- ROTATE - Static variable in interface gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehaviorCallback
-
DOCUMENT ME!
- ROTATE - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the VOI cursor is in translate mode
- ROTATE_LEFTBUTTON - Static variable in interface gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehaviorCallback
-
Added so that Probe Rotation with the left and right mouse buttons could be distinguised.
- rotate_turn_rep(TURN_REP, int, TURN_REP) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- rotate180 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- rotate180 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- rotateAboutXAxis() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- rotateAboutYAxis() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- rotateAboutZAxis() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- rotateAlgo - Variable in class gov.nih.mipav.model.file.FileSVS
-
- rotateAlgo - Variable in class gov.nih.mipav.model.file.FileTiff
-
- rotateAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogRotate
-
DOCUMENT ME!
- rotateAxis - Variable in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Rotation axis.
- rotateBegin - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- rotateBegin - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Coarse and fine sampling parameters.
- rotateBegin - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Coarse and fine sampling parameters.
- rotateBegin - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Coarse and fine sampling parameters.
- rotateBegin - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Coarse and fine sampling parameters.
- rotateBegin - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Coarse and fine sampling parameters.
- rotateBegin - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Coarse and fine sampling parameters.
- rotateBegin - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateBegin - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- rotateBegin - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- rotateBegin - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- rotateBeginText - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateBeginText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- rotateBeginText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- rotateBeginText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- rotateBeginTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateBeginTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateBeginTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateBeginTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateBeginTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateBeginTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateBeginTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateBeginTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateBeginTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateBeginX - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- rotateBeginX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Coarse and fine sampling parameters.
- rotateBeginX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Coarse and fine sampling parameters.
- rotateBeginX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Coarse and fine sampling parameters.
- rotateBeginX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Coarse and fine sampling parameters.
- rotateBeginX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
private JTextField fineRateTextX, fineRateTextY, fineRateTextZ;.
- rotateBeginX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateBeginX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateBeginX - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- rotateBeginY - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- rotateBeginY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- rotateBeginY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- rotateBeginY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- rotateBeginY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- rotateBeginY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateBeginY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateBeginY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateBeginY - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- rotateBeginZ - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- rotateBeginZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- rotateBeginZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- rotateBeginZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- rotateBeginZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- rotateBeginZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateBeginZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateBeginZ - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateBeginZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- rotateButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- rotateButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- rotateBy(AxisAngle4f) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Rotate the oriented bounding box of the 3D image about the specified axis with the specified angle.
- rotateBy(AxisAngle4f) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- rotateBy(AxisAngle4f) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Rotate the oriented bounding box of the 3D image about the specified axis with the specified angle.
- rotatedPoints - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- rotateEnd - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- rotateEnd - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Coarse and fine sampling parameters.
- rotateEnd - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Coarse and fine sampling parameters.
- rotateEnd - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Coarse and fine sampling parameters.
- rotateEnd - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Coarse and fine sampling parameters.
- rotateEnd - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Coarse and fine sampling parameters.
- rotateEnd - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Coarse and fine sampling parameters.
- rotateEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- rotateEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- rotateEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- rotateEndText - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateEndText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- rotateEndText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- rotateEndText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- rotateEndTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateEndTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateEndTextX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateEndTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateEndTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateEndTextY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateEndTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateEndTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateEndTextZ - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateEndX - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- rotateEndX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Coarse and fine sampling parameters.
- rotateEndX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Coarse and fine sampling parameters.
- rotateEndX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
private JTextField fineRateTextX, fineRateTextY, fineRateTextZ;.
- rotateEndX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateEndX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateEndX - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- rotateEndY - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- rotateEndY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- rotateEndY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- rotateEndY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateEndY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateEndY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateEndY - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- rotateEndZ - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
registration option parameters
- rotateEndZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- rotateEndZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- rotateEndZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateEndZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateEndZ - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateEndZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- rotateFrameBy(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Rotate the oriented bounding box of the 3D image about the specified axis with the specified angle.
- rotateFrameBy(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
DOCUMENT ME!
- rotateFrameBy(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Rotate the oriented bounding box of the 3D image about the specified axis with the specified angle.
- rotateImage() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Rotates the image volume when the camera manually takes snapshot.
- rotateImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Override the parent rotateImage method to rotate the MIP image volume.
- rotateImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Overrides the rotateImage to rotate the surface volume.
- rotateImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Overrides the rotateImage to rotate the surface volume.
- rotateImage() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Override the parent rotateImage method to rotate the MIP image volume.
- rotateMinus90 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- rotateMinus90 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- rotatePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Variables for Rotation and Translation bounds.
- rotatePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- rotatePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotatePlus90 - Variable in class gov.nih.mipav.model.file.FileSVS
-
- rotatePlus90 - Variable in class gov.nih.mipav.model.file.FileTiff
-
- rotateRangePanelX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateRangePanelX - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateRangePanelX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateRangePanelY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateRangePanelY - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateRangePanelY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateRangePanelZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateRangePanelZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- rotateRangePanelZ - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- rotateRangeX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Coarse and fine sampling parameters.
- rotateRangeX - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Coarse and fine sampling parameters.
- rotateRangeX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
private JTextField fineRateTextX, fineRateTextY, fineRateTextZ;.
- rotateRangeY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- rotateRangeY - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- rotateRangeY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateRangeZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- rotateRangeZ - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- rotateRangeZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- rotateToStartingPoint_leftMost(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Re-oriented the starting and ending VOIs.
- rotateToStartingPoint_yMid(float[], float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Re-oriented the starting and ending VOIs.
- rotatex(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
rotate along x axis with given sin, cos value of the rotatino angle.
- rotatex(int) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
rotate along x axis with given rotation angle in degree.
- rotatey(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
Rotate along the y axis with given sin, cos value of the rotation angle.
- rotatey(int) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
rotate along y axis with given rotation angle in degree.
- rotatez(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
Rotate along the z axis with given sin, cos value of the rotation angle.
- rotatez(int) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
rotate along z axis with given rotation angle in degree.
- rotationAlpha - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
- rotationalSymm(int, float[]) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
rotationsl symmetry
- rotationAngle - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Rotation angle when the camera takes snapshot.
- RotationAngleAxisToQuaterionAndBack() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationAngleAxisToRotationMatrixAndBack() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationAngleAxisToRotationMatrixAndBackNearZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationAtPiAngleAxisRoundTrip() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- rotationAxis - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Rotation axis to sync up the action for both ModelClip arbitrary clipping plane and the clipSliceA frame box
transformGroup.
- rotationAxis - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Rotation axis when the camera takes snapshot.
- rotationAxisGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- rotationBF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- ROTATIONCENTER - Static variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
The 3 types of markers - rotation center, reference slice, and adjusted slice.
- ROTATIONCENTER - Static variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
The 3 types of markers - rotation center, reference slice, and adjusted slice.
- ROTATIONCENTER - Static variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
The 3 types of markers - rotation center, reference slice, and adjusted slice.
- rotationCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- rotationControlPanel - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Camera control dialog box.
- rotationCount - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Counters show the event number in the mouse recorder.
- rotationCount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
fix one bug from threading.
- rotationCount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
fix one bug from threading.
- rotationCutoff - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
used as cutoffs for making space navigator mouse less sensitive to the low range values that may not be intentional user input
- rotationCutoffTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Text fields that display the sensitivity number next to the sliders.
- rotationDirection - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- rotationEvent - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
mouse rotation event vector for the arbitrary clipping plane.
- rotationExtent - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- rotationInvariant - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- rotationInvariant - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- RotationMatrixToAngleAxis(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- RotationMatrixToAngleAxisExhaustiveRoundTrip() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationMatrixToAngleAxisNearPiExampleOneFromTobiasStrauss() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationMatrixToQuaternion(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- RotationNearPiAngleAxisRoundTrip() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationNearZeroAngleAxisToRotationMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationQuaterionToAngleAxisAndBack() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationQuaternionToAngleAxisAngleIsLessThanPi() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- rotationRedlineBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Entry point rotation redline branch group.
- rotationRedLineshape - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
roation red guide line shape.
- RotationSamples - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- rotationScaleFactor - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
used for slowing down the rate that the 3D mouse moves the image
- RotationSmallAngleAxisToQuaternion() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationSmallQuaternionToAngleAxis() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- rotationText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Brute-force registration parameters:.
- rotationTimes - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Number of rotation during the camera auto snapshotting.
- RotationTinyAngleAxisToQuaternion() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationTinyQuaternionToAngleAxis() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- rotationTotal - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
The total rotation degree, fixing one bug.
- RotationUnitQuaternionToAngleAxis() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationXRotationToQuaternion() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationXRotationToRotationMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationYRotationQuaternionToAngleAxis() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationYRotationToRotationMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationZeroAngleAxisToQuaternion() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationZeroAngleAxisToRotationMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationZRotationQuaternionToAngleAxis() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RotationZRotationToRotationMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- rotCenter - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- rotCenterMark - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
number of VOIs for rotation center
- rotOrigin - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- rotPower - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- rotScalar - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- round - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.tImage
-
- round - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- round - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- round(double) - Static method in class gov.nih.mipav.util.MipavMath
-
Round the value of type double to the closest integer.
- round(float) - Static method in class gov.nih.mipav.util.MipavMath
-
Round the value of type float to the closest integer.
- round(Double, int) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- Round() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Takes round() of each element.
- ROUND_EPS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- roundness - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ShapeFactor
-
- roundness - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ShapeFactor
-
- roundness - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ShapeFactor
-
- roundness - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ShapeFactor
-
- roundness - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ShapeFactor
-
- roundness - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ShapeFactor
-
- roundness - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ShapeFactor
-
- roundness - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ShapeFactor
-
- roundToNextMultiple(int, int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- roundUp(long, long) - Static method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- routine - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- routine - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel3
-
DOCUMENT ME!
- routine - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
DOCUMENT ME!
- routine - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
DOCUMENT ME!
- routine - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- routineTagEntry - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- routineTagGroup - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- row - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.indexRowColItem
-
- row - Variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- row - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- row - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- row - Static variable in class gov.nih.mipav.view.DICOMDisplayer
-
DOCUMENT ME!
- Row(int) - Constructor for class gov.nih.mipav.model.structures.TableSorter.Row
-
Creates a new Row object.
- Row(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- Row(int, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Return the i-th row of the matrix.
- row_begin - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.indexIntegerdoubleArrayItem
-
- row_begin_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- row_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- row_block_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- row_blocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- row_blocks_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- row_dependent - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- row_dependent - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
indicates which--row or column--should be dependent on the other.
- row_dependent - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Indicates which--row or column--should be dependent on the other.
- row_end_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Grid2D
-
- row_index - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- row_sum(double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- rowBFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
each z slice in 4D images.
- rowBFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
values obtained from settings.
- rowButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- RowColLessThanComparator() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.RowColLessThanComparator
-
- rowComparator() - Constructor for class gov.nih.mipav.model.algorithms.NoiseLevel.rowComparator
-
- rowCopy(boolean[], int, boolean[], int, int, int, int) - Static method in class gov.nih.mipav.util.ArrayUtil
-
Copy a row in x, y or z direction to an array.
- rowCopy(double[], int, double[], int, int, int, int) - Static method in class gov.nih.mipav.util.ArrayUtil
-
Copy a row in x, y or z direction to an array.
- RowData(boolean, String, String, String) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- RowData(boolean, String, String, String, Collection<String>) - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- rowDerivativeMask5By5(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- rowDerivativeMask7By7(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- rowElements - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- rowElements - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RestrictedLaplacianMatrixFunction
-
- rowgroup_ctr - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- rowgroup_height - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- rowgroups_avail - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- rowLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- rowNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- rowNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- rowNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- rowNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- rowNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- rowNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- rowNumber - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.PatternDetection
-
- rowPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- rows - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowBlockStructure
-
- rows - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CRSMatrix
-
- rows - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- rows - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
- rows - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
Slice Header data structure format.
- rows - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- rows - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- rows() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- Rows() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- rows_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- rows_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- rows_in_array - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- rows_in_array - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- rows_in_mem - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- rows_in_mem - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- ROWS_PER_STRIP - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- ROWS_PER_STRIP - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- ROWS_PER_STRIP - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- ROWS_PER_STRIP - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- rows_to_go - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- rows_to_go - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- rowSizes - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- rowsperchunk - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_barray_control
-
- rowsperchunk - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- rowsPerStrip - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- rowsPerStrip - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- rowsPerStrip - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- rowSpliterator() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Creates a Spliterator that guarantees that each split will
at least cover an entire row of the Img.
- RowSpliterator(int, int, int, int, Supplier<P>) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
Creates a new RowSpliterator for iterating the pixels in the specified area.
- rowText - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- RowVectorX - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- RowVectorY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- RowVectorZ - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- rp - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- rparam(double[][], double[], double[], double[][], double[][], double[], int[], double[][], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- RPCPortNum - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- rpfun(double[], int, double[], double[][], int[], int[], boolean[], double[][], int[]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.rpfun
-
- rplot(double[][], double[], double[][], double[], double[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- rpn - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
- rptmul(int, int[], double[][], int, int, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- rptrnsfm(double[][], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- RQUPH - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- rr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- rr - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
rr is the dicom ordered original image Talairach center location.
- rR2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- rrArray - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- RRCycles - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- RRCyclesIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- RRHistogram - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- RRHistogramIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- RRRGGGBBB - Static variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- rRun - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
currently running.
- rRun - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
currently running.
- rs - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- rs - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- rs - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- rs - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
- rs - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- rs - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- rs - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- rs - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- rs - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- rs - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- rs - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- rs - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- rsiz - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
Rsiz
- rSliceAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
DOCUMENT ME!
- rslst - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
In dqawfe vector of dimension at least limlst. rslst[k-1] contains the integral contribution over the interval
(a+(k-1)c, a+kc), where c = (2*int(abs(omega))+1)*pi/abs(omega), k = 1, 2, ..., lst.
- rslst - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
In dqawfe vector of dimension at least limlst. rslst[k-1] contains the integral contribution over the interval
(a+(k-1)c, a+kc), where c = (2*int(abs(omega))+1)*pi/abs(omega), k = 1, 2, ..., lst.
- RSLT71(int[], double, double[], int, int[], int[], double[], int, int[], int[], int, boolean, double, double, double[], int[], int[], int, double[], int[], double[], double, int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- RSLT72(int[], double, double, int, int[], int[], int[], int, boolean, double, double, int[], int[], int, int[], double[], double, int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- RSLT80(double, double, double, boolean, int, int, int, boolean, int, int, double, double[], double[], boolean[], int, int, int[], int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- RSLT83(double[], int, double, double[], int, int[], int[], int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- RSLT84(double[], int, double, double[], int, int[], int[], int[], int[], int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- RSNCA - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- rSquared - Variable in class gov.nih.mipav.model.algorithms.FitGaussian
-
R squared
- RST0 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- RST0 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- RST1 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- RST1 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- RST2 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- RST2 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- RST3 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- RST3 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- RST4 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- RST4 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- RST5 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- RST5 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- RST6 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- RST6 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- RST7 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- RST7 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- rStop() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimate.rStop
-
Creates a new rStop object.
- rStop() - Constructor for class gov.nih.mipav.view.ViewJFrameAnimateClip.rStop
-
Creates a new rStop object.
- Rt() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Pose parameter update prediction matrix.
- RT2INV - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- RTABLE - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
R-table (*.rtb)
- RTCEntry - Class in gov.nih.mipav.model.dicomcomm
-
DOCUMENT ME!
- RTCEntry(int, int, int, String, int) - Constructor for class gov.nih.mipav.model.dicomcomm.RTCEntry
-
Loads the inputted variabels straight into the class.
- rtcList - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
array of RTC Entries:.
- Rtf - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- RTF_FORMAT - Static variable in class gov.nih.mipav.view.dialogs.JDialogText
-
Specifies the output display of the text-box to be formatted using the RTF rules.
- RTFOUND - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- rThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
fitted line to secondBuffer = a*buffer + b;.
- rThreshold - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- rThreshold - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
The linear correlation coefficients for all pixels with values either below color1 for buffer or below a*color1 +
b for secondBuffer.
- rtPoint - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
834 repiratory trigger point as percent of max.
- rTPos - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- rtrw1(int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- rtrw1(int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- rtx - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- rtx - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- rty - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- rty - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- rtz - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- rtz - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- Rubberband - Class in gov.nih.mipav.view
-
An abstract base class for rubberbands.
- Rubberband() - Constructor for class gov.nih.mipav.view.Rubberband
-
Default constructor, does nothing.
- Rubberband(Component) - Constructor for class gov.nih.mipav.view.Rubberband
-
Sets the parent component that the rubberband is for.
- RubberbandEllipse - Class in gov.nih.mipav.view
-
A Rubberband that does ellipses.
- RubberbandEllipse(Component) - Constructor for class gov.nih.mipav.view.RubberbandEllipse
-
Constructs rubberbandEllipse.
- RubberbandLine - Class in gov.nih.mipav.view
-
A Rubberband that does lines.
- RubberbandLine(Component) - Constructor for class gov.nih.mipav.view.RubberbandLine
-
Constructs a rubberbanded line and dds mouse listeners.
- RubberbandLivewire - Class in gov.nih.mipav.view
-
A Livewire rubberband.
- RubberbandLivewire(Component, float[], float[], float, float, boolean) - Constructor for class gov.nih.mipav.view.RubberbandLivewire
-
Sets up local costs graph by calling AlgorithmGradientMagnitudeSep and AlgorithmEdgeLaplacianSep.
- RubberbandLivewire(Component, int) - Constructor for class gov.nih.mipav.view.RubberbandLivewire
-
Sets up local costs graph by calling AlgorithmGradientMagnitude and AlgorithmEdgeLaplacianSep.
- RubberbandLivewire.ActiveTree - Class in gov.nih.mipav.view
-
Binary search tree, modified so it will work with elements that have the same cost.
- RubberbandLivewire.TreeNode - Class in gov.nih.mipav.view
-
Tree node.
- RubberbandPolyline - Class in gov.nih.mipav.view
-
A Rubberband that does polylines and polygons.
- RubberbandPolyline(Component) - Constructor for class gov.nih.mipav.view.RubberbandPolyline
-
Constructs the object and adds mouse listeners.
- RubberbandProtractor - Class in gov.nih.mipav.view
-
A Rubberband that does protractors.
- RubberbandProtractor(Component) - Constructor for class gov.nih.mipav.view.RubberbandProtractor
-
Creates a new RubberbandProtractor object.
- rubberbandRect - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- RubberbandRectangle - Class in gov.nih.mipav.view
-
A Rubberband that does rectangles.
- RubberbandRectangle() - Constructor for class gov.nih.mipav.view.RubberbandRectangle
-
Constructor.
- RubberbandRectangle(Component) - Constructor for class gov.nih.mipav.view.RubberbandRectangle
-
Creates a new RubberbandRectangle object.
- RubberbandRectangleVOI - Class in gov.nih.mipav.view
-
A Rubberband that does rectangles.
- RubberbandRectangleVOI(Component) - Constructor for class gov.nih.mipav.view.RubberbandRectangleVOI
-
Creates a new RubberbandRectangleVOI object.
- run() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Performs start-up and tear-down operations that should be done by all algorithms (timing, history log).
- run() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task
-
- run() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask
-
- run() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1.CalculateT1UsingConventionalTreT1Inner
-
- run() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1.CalculteT1UsingTreT1HIFIInner
-
- run() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D
-
- run() - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- run() - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
- run() - Method in class gov.nih.mipav.model.algorithms.ConjugateGradient
-
- run() - Method in class gov.nih.mipav.model.algorithms.CubicEquation
-
- run() - Method in class gov.nih.mipav.model.algorithms.curev
-
- run() - Method in class gov.nih.mipav.model.algorithms.curfit
-
- run() - Method in class gov.nih.mipav.model.algorithms.DAgostinosKsquaredTest
-
- run() - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cftrec1_th
-
- run() - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cftrec2_th
-
- run() - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
- run() - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
- run() - Method in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- run() - Method in class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- run() - Method in class gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
- run() - Method in class gov.nih.mipav.model.algorithms.Psi
-
- run() - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- run() - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- run() - Method in class gov.nih.mipav.model.algorithms.splev
-
- run() - Method in class gov.nih.mipav.model.algorithms.sproot
-
- run() - Method in class gov.nih.mipav.model.algorithms.Statistics
-
- run() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.computeTreePermutationImportanceInThread
-
- run() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.growTreesInThread
-
- run() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictInternalInThread
-
- run() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictTreesInThread
-
- run() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.showProgress
-
- run() - Method in class gov.nih.mipav.model.algorithms.WishartVariateGenerator
-
- run() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Runs this move request in a separate thread.
- run() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Runs this query in a separate thread.
- run() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Run method so that this receiver can execute in its own thread.
- run() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
Runs this move request in a separate thread.
- run() - Method in class gov.nih.mipav.model.file.FileDeleter
-
Run method: if the file exists, try deleting it. if the delete fails, then sleep for 2 seconds and start again.
- run() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Runs the decoder.
- run() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Runs the decoder.
- run() - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Runs the encoder.
- run() - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Runs the encoder.
- run() - Method in class gov.nih.mipav.model.scripting.ScriptRunner.ScriptThread
-
Start execution of the script.
- run() - Method in class gov.nih.mipav.model.structures.ReminderThread
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.model.structures.TimeoutThread
-
DOCUMENT ME!
- run() - Method in interface gov.nih.mipav.plugins.PlugInGeneric
-
The main method used to start the generic plugin.
- run() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
Specified by Thread. processes each directory selected directory, pausing after processing each selected
directory to allow other threads run.
- run() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard.Animate
-
- run() - Method in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
- run() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- run() - Method in class gov.nih.mipav.view.dialogs.MultiPaintAutoSave
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.dialogs.PaintAutoSave
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ImageRegistryMonitor
-
when the thread wakes up, it collects information from the runtime on current memory status.
- run() - Method in class gov.nih.mipav.view.LineMeter
-
when the thread wakes up, if the panel is showing, it will repaint panel, scrolling the graph.
- run() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.PlayMouse
-
Runs the thread and plays according to the established parameters.
- run() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.StandardMouse
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.StandardMouse
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.StandardKey
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseWheel
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouse
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouseDragged
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.PlayMouse
-
Runs the thread and plays according to the established parameters.
- run() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
Runs the mouse recorder.
- run() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.StandardMouse
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.PlayMouse
-
Runs the thread and plays according to the established parameters.
- run() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
Runs the mouse recorder.
- run() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Item
-
- run() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouse
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouseDragged
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.KeyPressedEvent
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.RightMouse
-
Runs the thread.
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimate.CBackForward
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimate.cbfStop
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimate.CForward
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimate.cfStop
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimate.CReverse
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimate.crStop
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimate.Forward
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimate.fStop
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimate.Reverse
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimate.rStop
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip.CBackForward
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip.cbfStop
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip.CForward
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip.cfStop
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip.CReverse
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip.crStop
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip.Forward
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip.fStop
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip.Reverse
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip.rStop
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameFastMarching2
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameFastMarching3
-
DOCUMENT ME!
- run() - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
when the thread wakes up, it collects information from the runtime on current memory status.
- run(boolean) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- run(int) - Method in class gov.nih.mipav.plugins.PlugInBundle
-
Runs the plugin whose name is given by the location in the vector returned by getBundledPlugIns().
- run(int, double) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- run(Features[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- run(Frame, ModelImage) - Method in interface gov.nih.mipav.plugins.PlugInAlgorithm
-
Run the plugin algorithm.
- run(Frame, ModelImage) - Method in interface gov.nih.mipav.plugins.PlugInView
-
run.
- run(String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Predict
-
- run(String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- run(String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- run(String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- run(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- run(String, String, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_predict
-
- run(List<Double>, List<svm_node[]>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- run(List<Integer>, List<FeatureNode[]>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- run_svm_predict(String[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- run_svm_scale(String[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- run_svm_toy(String[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- run_svm_train(double[][], double[], String[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- run_svm_train(String[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- run1Slice(ImgReaderRAWColorSlice) - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Runs the encoder.
- run1Slice(ImgReaderRAWSlice) - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Runs the encoder.
- run1Slice(RandomAccessIO) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
- run1Slice(RandomAccessIO) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
- run2D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
- run2D - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- run2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
Begins the execution of the 2D convolver.
- run2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
Begins the execution of the 2D convolver.
- run2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- run2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- run2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed
-
- run2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
DOCUMENT ME!
- run2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- run2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLowerCompletion
-
- run2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindComponentLabelling
-
- run2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalVariance
-
- run2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
- run2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSobel
-
- run2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Starts the algorithm for 2D images.
- run2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Iterates the Regularized Isotropic Nonlinear Diffusion algorithm for 2D and 2.5D images.
- run2Da2m2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- run2DC(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Starts the algorithm for 2D images.
- run2DC(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Iterates the Regularized Isotropic Nonlinear Diffusion algorithm for 2D and 2.5D color images.
- run2Dm2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- run2Dm3() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- run2DRician() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
- run2DSelfTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- run3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
Begins the execution of the 3D convolver.
- run3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
Begins the execution of the 3D convolver.
- run3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- run3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- run3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed
-
- run3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
DOCUMENT ME!
- run3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLowerCompletion
-
- run3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindComponentLabelling
-
- run3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Starts the algorithm for 3D images.
- run3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalVariance
-
- run3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
- run3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Iterates the Regularized Isotropic Nonlinear Diffusion algorithm for 3D images.
- run3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSobel
-
- run3Da2m2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- run3DC() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Starts the algorithm for 3D color images.
- run3DC() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Iterates the Regularized Isotropic Nonlinear Diffusion algorithm for 3D color images.
- run3Dm2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- run3Dm3() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- run3DRician() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
- run3DSelfTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- run4D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- run4D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- RUNA - Static variable in interface gov.nih.mipav.model.file.BZip2Constants
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGCIE
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
starts the snake algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAINDANE
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAnyTwoImagesSNR
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
DOCUMENT ME!
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBarrelDistortion
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Actually runs the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBoxCount
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Starts the smooth algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Starts the snake algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
Default method that is not really appropriate for this class but must be defined because this class extends
AlgorithmBase.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCannyEdgeDetection
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmColorSaturation
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Runs ELSUNC along one dimension at a time as long as the costFunction improves during one cycle of runs along
every dimension.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Runs Powell's method.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvergenceField
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
Begins execution of the convolver.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
default method that is not really appropiate for this class but must be defined because this class extends
AlgorithmBase.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCumulativeHistogram
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
Begins execution of the convolver.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToRectangle
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
Starts the smooth algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropicEdgeDetection
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Run the de-facing algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRETBleedThrough
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Starts the snake algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHeightFunction
-
Runs the algorithm; calls either calcQuadSurface or calcTriangleSurface, depending on the mesh parameter set in
the constructor.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
run - default method that is not really appropiate for this class but must be defined because this class extends
AlgorithmBase.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Should not be used for this algorithm -- just a placeholder.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Calculates the histogram.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogramSliceMatch
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughCardioid
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughCircle
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughLine
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIAGCWD
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Start algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
DOCUMENT ME!
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
Start algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLLE
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLogSlopeMapping
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLowerCompletion
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmLuminanceAdaptation
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMarkovSegment
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMatchForReference
-
algorithm's run function....
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMinimumPerimeterPolygon
-
Starts the smooth algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMRIShadingCorrection
-
DOCUMENT ME!
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
Start algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
Start algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNearlyCircleToCircle
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNonMaxSuppts
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNonparametricSegmentation
-
DOCUMENT ME!
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
DOCUMENT ME!
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Runs Powell's method.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
Start algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuantify
-
Starts the program
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
run - default method that is not really appropiate for this class but must be defined because this class extends
AlgorithmBase.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionsFromPartialBorders
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSCDSegmentation
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Starts the convolution of the source image with the provided kernel.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Run the de-facing algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
run - starts the snake algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
run algorithm
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThinning2D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
run - starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransformBSpline
-
starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTwoMRIImagesSNR
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindComponentLabelling
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIHausdorffDistance
-
run algorithm
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
run algorithm
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Begins execution of the software.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
run algorithm
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Run the algorithm on a polygon already specified through the constructor.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
Default method that is not really appropiate for this class but must be defined because this class extends
AlgorithmBase.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.Backpropagation
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTI2EGFA
-
Run the DTI -> EigenVector Functional Anisotropy algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
run algorithm *
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Run the DTI -> EigenVector Functional Anisotropy algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
Calculate the DTI image.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmAdaptiveKuwaharaFilter
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
Start the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmColorEdge
-
Standard algorithm run method.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmDistanceFilter
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEdgePreservingSmoothing
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFIREEdgeExtraction
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzyMinimization
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientInverseWeightedSmoothing
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHilbertTransform
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
Starts the nonlocal means filter algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
Standard algorithm run method.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalVariance
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMarkovSmooth
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
Starts the nonlocal means filter algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRuleBasedContrastEnhancement
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSliceAveraging
-
Start algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSobel
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSymmetricNearestNeighbor
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTamuraTexture
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeNormals
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.libdt
-
#include #include #include #include
#include #include #include
#include "opencv/cv.h" #include "opencv/cxcore.h" #include "opencv/highgui.h"
#include "options.h" #include "utils/libutils.h" #include "stats/libstats.h"
#include "video/libvideo.h" #include "dytex/libdytex.h" #include
"platInd/platInd.hpp" #include "bufferer/Bufferer.hpp"
using namespace cv; using namespace std;
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
Accessor that returns the number of image slices saved.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.NoiseLevel
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.PyramidToolbox
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Runs the image registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Runs the image registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline25D
-
AlgorithmBase abstract method implementation which performs the registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline2D
-
AlgorithmBase abstract method implementation which performs the registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline3D
-
AlgorithmBase abstract method implementation which performs the registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Runs the image registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Runs the image registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Runs the image registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Runs the image registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Runs the image registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Runs the image registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Runs the image registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Runs the image registration.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.SlantTransform
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.SVM
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
Run algorithm
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
Runs the add image margins algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
Start algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult2Dto3D
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult3Dto3D
-
run algorithm
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult3Dto4D
-
run algorithm
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert3Dto4D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert4Dto3D
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Runs algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCyclicPermutation
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDicomOrder
-
Starts the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDICOMtoAVI
-
DOCUMENT ME!
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlices
-
Calculates the final output.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
Calculates the final output.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Runs the flip algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Runs algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Runs algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMask
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Runs the Intensity Projection algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMosaicToSlices
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Starts algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmQuantifyMask
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRandSliceOrder
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Calculates the final output.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveTSlices
-
Where algorithm calculates the final output.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceBlankSlicesWithAverages
-
Actually runs the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceRemovedSlices
-
Function called by thread to run the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceSlice
-
Actually runs the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceValue
-
Actually runs the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReslice
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGrays
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoHSB
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Runs the rotation algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Subsample the image.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubset
-
Runs the algorithm.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwap34
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapDims
-
Starts the program.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Calculates the final output.
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmTiltCorrection
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform2
-
- runAlgorithm() - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- runAlgorithm() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage.AlgorithmLoadB
-
DOCUMENT ME!
- runAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
run algorithm *
- runAlgorithm() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIGradTableCorrectionAfterTrans
-
Runs algorithm.
- runAlgorithm25D() - Method in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
- runAlgorithm2D() - Method in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
- runAlgorithm3D() - Method in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
- runAlgorithmDICOM() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
run algorithm for dicom
- runAlgorithmPARREC() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
run algorithm for par/rec
- runAlgorithmPrevious() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
Starts the program.
- runAlgorithmTest() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
- runAllSlices() - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
- runAllSlices(int, int, boolean, ViewJProgressBar, FileWriteOptions, int) - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Now see what happens.
- runAllSlices(int, int, boolean, ViewJProgressBar, FileWriteOptions, int) - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Now see what happens.
- runAnonymization() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizePresets
-
- runAutoDiffCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RUNB - Static variable in interface gov.nih.mipav.model.file.BZip2Constants
-
- RunBallPivoting - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- RunBallPivoting() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.RunBallPivoting
-
- runBardFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runBatch2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
Algorithm is given a scale range and scale increment and computed the 1) hessian, 2) eigenvalues, 3) eigenvectors
of the hessian.
- runBatch3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
DOCUMENT ME!
- runBatchButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- runBealeFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runBennett5CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runBIGGS_EXP6Function() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runBox3DFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runBoxBODCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runBrownAndDennisFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runBrownBadlyScaledFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runBW() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- RunCallbacks(CeresSolver.MinimizerOptions, CeresSolver.IterationSummary, CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Minimizer
-
- RunCallbacks(CeresSolver.MinimizerOptions, CeresSolver.IterationSummary, CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Run Coherance Enhanced Diffusion (CED) filter on all the MRI axial, sagittal
and coronal images.
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- runCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- runCED(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- runCED(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- runCED(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- runCED(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- runCED(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- runCED_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- runCED_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- runCED_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- runCED_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- runCED_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- runcel12 - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- runChiwrut1CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runChiwrut2CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runCmdLine(String, Vector<ViewUserInterface.OpenFileInfo>, Vector<Vector<String>>) - Method in class gov.nih.mipav.view.ViewUserInterface
-
This method is used when running MIPAV from the command line.
- runColor() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- runColorImage() - Method in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- runcomelp - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- runComplex() - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- runComplex() - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- runConversion(String) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDICOMtoAVI
-
Opens a dicom image, checks to see if it is 3d, adds margins if the image dimensions are not multiples of 4, and
saves the image as an AVI with MP42 compression**note - the directory structure is intact with the only
difference being that the name of the top level directory now has "_AVI" appended.
- runCostFunctions(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
calls the various cost functions
- runCrop() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- runCrop() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- runCrop_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- runCrop_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- runCrop_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- runCrop_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- runCrop_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- runCrossRatioPolygonToCircle() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- runCrossRatioPolygonToRectangle() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- runCubicAlgorithm() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
- runCurrentScript() - Method in class gov.nih.mipav.view.ViewControlsImage
-
Invokes the toolbar builder to run the currently selected script.
- runCurrentScript() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Method to run the script currently selected in the scripting toolbar.
- runCurveFittingNumericDiffCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runCurveFittingSizedCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runcvsAdvDiff_FSA_non() - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- runcvsDirectDemo_Problem_1() - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- runcvsRoberts_ASAi_dns() - Method in class gov.nih.mipav.model.algorithms.CVODES_ASA
-
- runcvsRoberts_dns() - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- runcvsRoberts_dns_uw() - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- runcvsRoberts_dnsL() - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- runcvsRoberts_FSA_dns() - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- runDanwoodCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runData(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Calculates the histogram and outputs the number of counts per bin and area/volume information.
- runDeconvolution(ModelImage, ModelImage, ModelImage, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMaximumLikelihoodIteratedBlindDeconvolution
-
Runs the deconvolution algorithm.
- runEckerle4CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runelit - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- runEllipticFourierDescriptors(float[], float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
- runEllipticFourierDescriptorsOpenCurve(float[], float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
- runELSUNC() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Runs ELSUNC along one dimension at a time as long as the costFunction improves during one cycle
of runs along every dimension.
- runELSUNC() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Runs ELSUNC along one dimension at a time as long as the costFunction improves during one cycle
of runs along every dimension.
- runEM(libdt.DytexMix, Vector<libdt.Mat[]>, libdt.EMOptions) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- runENSOCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runFORTRAN - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- runFORTRAN() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
Starts the program.
- runFreudensteinAndRothFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runFreudensteinAndRothJacobianFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runFromLUTFrame(ModelImage, float[], float[], float[], float[], boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Function to run the threshold algorithm from the ViewJFrameHistoRGB.
- runFromLUTFrame(ModelImage, float, float, float, int, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Function for setting up/running the threshold algorithm from the ViewJFrameHistoLUT.
- runFullModelTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- runGauss1CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runGauss2CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runGauss3CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runGaussianFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runGaussianPyramid() - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
runs the gaussian pyramid algorithm
- runGeodesicDilationTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- runGeodesicErosionTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- runGrayImage() - Method in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- runGulfResearchAndDevelopmentFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runHahn1CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runHelicalValleyFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runHEM(libdt.DytexMix, libdt.DytexMix, libdt.HEMOptions, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- runiFFTonKCenter(ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- runInDest3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
DOCUMENT ME!
- runInPlace3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmImageHessian
-
DOCUMENT ME!
- runInSeparateThread - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Flag indicating if the algorithm should run in a separate thread.
- runInSeparateThread - Variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Flag indicating if the algorithm should run in a separate thread.
- runIntegrationTest2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
private void runIntegrationTest2() { IntModel2 imod; double lower = 0.0;
double upper = 1.0; int routine = Integration2.DQAGPE; double
breakPoints[] = new double[4]; breakPoints[0] = 1.0/7.0; breakPoints[1] =
2.0/3.0; double epsabs = 0.0; double epsrel = 1.0E-4; int limit = 100;
double numInt; int errorStatus; double absError; int neval; double eps =
5.0e-7; int steps; imod = new IntModel2(lower, upper, routine,
breakPoints, epsabs, epsrel, limit); imod.driver(); numInt =
imod.getIntegral(); errorStatus = imod.getErrorStatus(); absError =
imod.getAbserr(); neval = imod.getNeval();
Preferences.debug("Numerical Integral = " + numInt + " after " + neval
+" integrand evaluations used\n", Preferences.DEBUG_ALGORITHM);
Preferences.debug("Error status = " + errorStatus
+" with absolute error = " + absError + "\n",
Preferences.DEBUG_ALGORITHM);
- runItAllButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- runItButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- runJama() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.TestRun
-
- runJennrichAndSampsonFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runJTEM() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.TestRun
-
- runKirby2CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runKowalikAndOsborneFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runLanczos1CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runLanczos2CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runLanczos3CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runLapack() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.TestRun
-
- runLapTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- runLapTest2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- runLapTestqd() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- runLength - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- runLevelSet(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- runLevelSet(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- runLevelSet(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- runLevelSet(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- runLevelSet(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- runLM() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Runs Levneberg-Marqaurdt along one dimension at a time as long as the costFunction improves during one cycle
of runs along every dimension.
- runLM() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Runs Levneberg-Marqaurdt along one dimension at a time as long as the costFunction improves during one cycle
of runs along every dimension.
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Generated the prostate boundary binary mask images.
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- runMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- runMask_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- runMask_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- runMask_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- runMask_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- runMask_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- runMATLABVersion() - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- runMethod - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- runMeyerFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runMisralaCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runMisralbCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runMisralcCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runMisraldCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runMorphologicalReconstructionByDilationTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
- runNelsonCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runner - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Thread object manager for running receiver.
- RunnerThread(Runnable) - Constructor for class gov.nih.mipav.model.dicomcomm.DICOM_Receiver.RunnerThread
-
Creates a new RunnerThread object.
- runningInSeparateThread - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Should be set to true if NOT in a single thread - will NOT force a graphics update of the progress bar.
- runningInSeparateThread - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- runningScriptFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Whether we are using this dialog as part of a script.
- runNL2sol() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- runNL2sol() - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- runNonLinear() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
- runNumericDiffCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runOneIter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
If true run one iteration so that one can observe initial surface location.
- runOsborne1Function() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runOsborne2Function() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runPass(ModelSimpleImage, ModelSimpleImage, AlgorithmRegBSpline.Options, BSplineRegistration2Df) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline25D
-
Perform a "pass" of BSpline based registration.
- runPass(ModelSimpleImage, ModelSimpleImage, AlgorithmRegBSpline.Options, BSplineRegistration2Df, String) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline2D
-
Perform a "pass" of BSpline based registration.
- runPass(ModelSimpleImage, ModelSimpleImage, AlgorithmRegBSpline.Options, BSplineRegistration3Df, String) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline3D
-
Perform a "pass" of BSpline based registration.
- runPolygonExteriorToCircle() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- runPolygonToCircle() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- runPolygonToRectangle() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- RunPolynomialInterpolationTest(int, double, double, double, double, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RunPolynomialInterpolationTest(int, Matrix, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- RunPolynomialTestRealRoots(double[], boolean, boolean, double, String) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runPowellBadlyScaledFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runPowellSingularFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runPowellSingularJacobianFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runPythonVersion() - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- runQuiet - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Whether algorithm is running in quiet mode (such as part of a script, in headless environment, within other algorithm )
- runRat42CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runRat43CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runReal() - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- runReal() - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- runRosenbrockExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runRoszman1CostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runScaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- runScaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- runScaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- runScaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- runScaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- runScaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- runScaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- runScaleIntensity_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- runScaleIntensity_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- runScaleIntensity_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- runScaleIntensity_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- runScaleIntensity_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- runScript() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptController
-
DOCUMENT ME!
- runScript(String) - Static method in class gov.nih.mipav.model.scripting.Parser
-
Parses and runs the commands contained within a given script file.
- runScript(String, Vector<String>, Vector<String>) - Method in class gov.nih.mipav.model.scripting.ScriptRunner
-
Execute a script, using a set of images.
- runSizedCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- runSmooth(float[], float[], float[], VOIBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Actual function that smooths the voi with bsplines.
- runSmooth2(float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Actual function that smooths the voi with bsplines.
- runSnake(float[], float[], float[], float[], float[], VOIBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Actual function that evolves the boundary.
- runSnake(float[], float[], float[], float[], float[], VOIBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Actual function that evolves the boundary.
- runSnake(float[], float[], float[], float[], VOIBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Actual function that evolves the boundary.
- runSnake(float[], float[], float[], float[], VOIBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
- runSnake(float[], float[], float[], float[], Polygon) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Actual function that evolves the boundary.
- runSnake(float[], float[], float[], float[], Polygon) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCellTrackingAGVF
-
Actual function that evolves the boundary.
- runSnake(float[], float[], float[], float[], Polygon) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Actual function that evolves the boundary.
- runSnake(float[], float[], float[], Polygon) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Actual function that evolves the boundary.
- runSnake(float[], float[], float[], Polygon) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Actual function that evolves the boundary by moving normal to the boundary.
- runTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- runTest() - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- runTest() - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- runTest() - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- runTest() - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- runTest() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- runTest() - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Test
-
- runTest(double[][][][], double, int, double[][][], String, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- runTest(double[][][], double[][][], double, int, double[][], String, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- runTest(int, double[][][][][], double, int, double[][][][], boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- runTest24D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- runThurberCostFunctionExample() - Method in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- runTraditionalAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
Starts the program.
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- runTransform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- runTransform_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- runTransform_ext() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- runVabra() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Run the VABRA registration.
- runWoodFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- Rval - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
< Regularization method for S.
- rvalue - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- RW_LOCKED - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the buffer is locked from reading.
- Rw2 - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
Panasonic camera raw.
- rX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- rX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
holds the current value of the space navigator. normalized on a -100 to 100 scale for cross platform/calculating convenience
- rxAxisIdx - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Actual button indices
- rY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- rY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
holds the current value of the space navigator. normalized on a -100 to 100 scale for cross platform/calculating convenience
- ryAxisIdx - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Actual button indices
- rZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- rZ - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
holds the current value of the space navigator. normalized on a -100 to 100 scale for cross platform/calculating convenience
- rzAxisIdx - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Actual button indices
- RZETAC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
S
- s - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- s - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- s - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftKeypoint
-
< y coordinate.
- s - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- s - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint
-
- s - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- s - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Array for internal storage of singular values.
- s - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.LEG
-
- S - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.LandData
-
- S - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- S - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- S - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< number of octaves.
- S - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- S - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- s_adIntLog - Static variable in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Table with precalculated logarithms.
- S_CLIPSLICE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an s clip slice.
- S_CLIPSLICE_NEG - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an s clip slice.
- S_COPPER - gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
- s_derivatives(double[], double[], double[], double[], double[], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- s_derivatives_c(double[], double[], double[], double[], double[], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- s_fVerboseOutput - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- s_kBlack - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
A black sphere is off.
- s_max - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< minimum level index.
- S_METRIC - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- S_METRIC - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- s_min - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< minimum octave index.
- s_offset0 - Variable in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- s_offset0 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset1 - Variable in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- s_offset1 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset10 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset11 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset12 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset13 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset14 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset15 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset2 - Variable in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- s_offset2 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset3 - Variable in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- s_offset3 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset4 - Variable in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- s_offset4 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset5 - Variable in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- s_offset5 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset6 - Variable in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- s_offset6 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset7 - Variable in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- s_offset7 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset8 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- s_offset9 - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- S_STAR_METRIC - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- S0 - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< state noise covariance
- S0_nSamplesMax - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- S0_nSamplesMin - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- S0_thresh - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- S0map - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- S16BIT - Static variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- S1SHI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- s2pi - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- S2SHI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- S3 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Spot 3
- S5 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Spot 5
- S7 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Spot 7
- S8BIT - Static variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- SA - Variable in class gov.nih.mipav.model.algorithms.WishartVariateGenerator
-
- safeThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- safetyFactor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- safmin - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
DOCUMENT ME!
- safmin - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- safmn2 - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
DOCUMENT ME!
- safmn2 - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- safmx2 - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
DOCUMENT ME!
- safmx2 - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- Saggital - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- Sagittal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Sagittal image type
- Sagittal - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Sagittal image type
- SAGITTAL - gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- SAGITTAL - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Sagittal orientation.
- SAGITTAL_A - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- SAGITTAL_AB - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- SAGITTAL_B - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- SAGITTAL_FLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- SAGITTAL_FLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- sagittal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- sagittal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- sagittal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- sagittal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- sagittal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- sagittal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- sagittal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- sagittal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- sagittal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- sagittal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- sagittal_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- SAGITTAL_INDEX - Static variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- SAGITTAL_INDEX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- SAGITTAL_UNFLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- SAGITTAL_UNFLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- sagittalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- sagittalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- sagittalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- sagittalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- sagittalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- sagittalList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- sagittalMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- sagittalMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- sagittalMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- sagittalMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- sagittalMaskList - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- sagittalSinusButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- sagittalSinusIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- sagittalSinusIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- SagittalVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Sagittal VOI instance
- sakTypeName - Static variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Light constant types array.
- sAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
DOCUMENT ME!
- sAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
DOCUMENT ME!
- sAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
DOCUMENT ME!
- sAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- sAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
DOCUMENT ME!
- saliency - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- saliencyText - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- sam() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- sam_mean - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- SAME_INPUT - Static variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- sameAxis(int, int) - Static method in class gov.nih.mipav.model.file.FileInfoBase
-
Helper method to determine if axis A and axis B are the same axis: that is, if both are the patient x-axis, they
will be either R2L or L2R.
- sameButton - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- sameflag - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- sameImage - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- sameSliceScalings - Variable in class gov.nih.mipav.model.file.FilePARREC
-
True if the 3 values are the same for all slices
- sameZPosition - Variable in class gov.nih.mipav.model.file.FileInfoSTK
-
DOCUMENT ME!
- SAMP_AND_ACC(SIFT3D.Image, SIFT3D.Image, double, double[], int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SAMPLE_FORMAT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SAMPLE_FORMAT - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- SAMPLE_FORMAT - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- SAMPLE_FORMAT - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- sample_fraction - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- sample_fraction - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- sample_fraction - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- sample_hist(double[][], int[]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- sample_range_limit8 - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- sample_range_limit9to12 - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- sample_with_replacement - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- sample_with_replacement - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- sample_with_replacement - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- sampleCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- sampleCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- sampleCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- sampleCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- sampleCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- sampleCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- sampleExternRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
elements.
- sampleIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- sampleIDs_per_class - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- sampleIDs_per_class - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- sampleIDs_per_class - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- sampleIDs_per_class - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- sampleImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- sampleImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- sampleImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- SampleLimit - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- sampleNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.userWeightFunct
-
- sampleNumber - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
- sampleRate - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- sampleRate - Variable in class gov.nih.mipav.view.ViewJFrameMemory
-
DOCUMENT ME!
- sampleRate - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
The rate at which to update imageList
- SAMPLES_PER_PIXEL - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SAMPLES_PER_PIXEL - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- SAMPLES_PER_PIXEL - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- SAMPLES_PER_PIXEL - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- SampleShape(ModelSimpleImage, CAAMShape, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Wrapper to build a texture vector from an image and a shape.
- SampleShape(ModelSimpleImage, CAAMShape, CDVector, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Wrapper to build a texture vector from an image and a shape.
- SampleShape(ModelSimpleImage, CAAMShape, CDVector, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Wrapper to build a texture vector from an image and a shape.
- SampleShape(ModelSimpleImage, CAAMShape, CDVector, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Builds a texture vector from an image and a shape.
- sampleSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHeightFunction
-
DOCUMENT ME!
- sampleSize - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Sample size.
- samplesPerPixel - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- samplesPerPixel - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
- samplesPerPixel - Variable in class gov.nih.mipav.model.file.FileLSM
-
private short nDirEntries;.
- samplesPerPixel - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- samplesPerPixel - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- samplesPerPixel - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- samplesPerPixel - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- samplesperrow - Variable in class gov.nih.mipav.model.file.libjpeg.jvirt_sarray_control
-
- samplesPerUpdate - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- SamplesToCoefficients(double[][][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- SamplesToCoefficients2D(double[][][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
- SampleTextures(CAAMShapeCollection, Vector<CDVector>, CAAMReferenceFrame, int, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Samples a set of texture vectors given a set of shape in absolute (i.e. image) coordinates.
- SampleTextures(CAAMShapeCollection, Vector<CDVector>, CAAMReferenceFrame, int, boolean, boolean, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Samples a set of texture vectors given a set of shape in absolute (i.e. image) coordinates.
- samplingPlanes - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- SamsungType2MakernoteDescriptor(MetadataExtractor.SamsungType2MakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDescriptor
-
- SamsungType2MakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- SanyoMakernoteDescriptor(MetadataExtractor.SanyoMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDescriptor
-
- SanyoMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- SAR - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- sarAvg - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
230 Average SAR.
- sarAvgHead - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
854 Avg head SAR.
- SARMonitored - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- SARMonitored - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- sarPeak - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
234 Peak SAR.
- sat - Variable in class gov.nih.mipav.model.file.FileZVI
-
- SAT_COR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Indicates that the image is in Sagittal or Coronal orientation.
- sat_thresh - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- satbits - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
552 Bitmap of SAT selections.
- satBluePanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- satBluePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- satBlueSlider - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
various sliders in dialog *
- satBlueSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
various sliders in dialog *
- satBlueTextField - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
textfields *
- satBlueTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
textfields *
- satSelections - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- satSelections - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- satSelectionsString - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- saturation - Variable in class gov.nih.mipav.model.file.FileSVS
-
- saturation - Variable in class gov.nih.mipav.model.file.FileTiff
-
- satVsThetaPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- satVsThetaPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- satVsThetaSlider - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
various sliders in dialog *
- satVsThetaSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
various sliders in dialog *
- satVsThetaTextField - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
textfields *
- satVsThetaTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
textfields *
- satxloc1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
556 R-side pulse rel to lndmrk.
- satXLoc1 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- satXLoc1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- satxloc2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
558 L-side pulse rel to lndmrk.
- satXLoc2 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- satXLoc2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- satxthick - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
568 Thickness of X-axis SAT pulse.
- satXThick - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- satXThick - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- satyloc1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
560 A-side SAT pulse rel to lndmrk.
- satYLoc1 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- satYLoc1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- satyloc2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
562 P-side SAT pulse rel to lndmrk.
- satYLoc2 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- satYLoc2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- satythick - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
570 Thickness of Y-axis SAT pulse.
- satYThick - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- satYThick - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- satzloc1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
564 S-side SAT pulse rel to lndmrk.
- satZLoc1 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- satZLoc1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- satzloc2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
566 I-side SAT pulse rel to lndmrk.
- satZLoc2 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- satZLoc2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- satzthick - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
572 Thickness of Z-axis SAT pulse.
- satZThick - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- satZThick - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- savable_state() - Constructor for class gov.nih.mipav.model.file.libjpeg.savable_state
-
- save - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- save - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Flag that indicates whether to save capture as file.
- save - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- save - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- save() - Method in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
- save() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Saves the script as a text file; calls the appropriate save dialogs to do so.
- save() - Static method in class gov.nih.mipav.view.Preferences
-
Saves preference file to the user's 'home' directory.
- save() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Saves the mouse actions as an object file.
- save() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Saves the mouse actions as an object file.
- save() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Calls a file chooser then writes the quad mesh to that file.
- save() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Saves this graph as Excel data so that Excel can read in the data and graph it as an Excel file.
- save(FileWriteOptions, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.TextureSculptor
-
Creates save dialog so that the image can be saved // This should be moved to imageModel.save();
- save(FileWriteOptions, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
Creates save dialog so that the image can be saved // This should be moved to imageModel.save();
- save(FileWriteOptions, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Creates save dialog so that the image can be saved // This should be moved to imageModel.save();
- save(FileWriteOptions, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Save the sculpted volume.
- save(FileWriteOptions, int) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Creates save dialog so that the image can be saved // This should be moved to imageModel.save();
- save(ModelImage, FileWriteOptions, int) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Creates save dialog so that the image can be saved // This should be moved to imageModel.save();
- save(ModelImage, FileWriteOptions, int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Creates save dialog so that the image can be saved // This should be moved to imageModel.save();
- save(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- save(RandomAccessFile) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelCollapseRecord
-
Support for saving the collapse records to a binary file.
- save(RandomAccessFile, boolean, int[], float[], float[], TransMatrix) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
Internal support for 'void save (String)' and 'void save (String, ModelTriangleMesh[])'.
- save(RandomAccessFile, boolean, int[], float[], float[], TransMatrix, Color4f[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Internal support for 'void save (String)' and 'void save (String, ModelTriangleMesh[])'.
- save(RandomAccessFile, ViewJProgressBar, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Internal support for 'void save (String)' and 'void save (String, ModelQuadMesh[])'.
- save(Writer) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- save(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- save(String) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Saves this graph as Excel data so that Excel can read in the data and graph it as an Excel file.
- save(String) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Saves the tab's text to a file "Tabname_currenttimems.txt"
- save(String, boolean, int[], float[], float[], TransMatrix) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Save the triangle mesh to a binary file.
- save(String, ModelClodMesh[], boolean, int[], float[], float[], TransMatrix) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
Save an array of triangle meshes to a binary file.
- save(String, ModelQuadMesh[], ViewJProgressBar) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Save an array of quad meshes to a binary file.
- save(String, ModelTriangleMesh[], boolean, int[], float[], float[], TransMatrix, Color4f[][]) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Save an array of triangle meshes to a binary file.
- save(String, ViewJProgressBar, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Save the quad mesh to a binary file.
- save(String, String) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Saves the tab's text to a file "Tabname_currenttimems.txt"
- save(String, TriMesh, int, VertexBuffer, boolean, int[], float[], float[], TransMatrix) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Save a TriMesh to disk
- save(String, TriMesh, ModelImage, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
- SAVE - Static variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- save_ClassSig(AlgorithmGaussianMixtureModelEM.ClassSig, AlgorithmGaussianMixtureModelEM.SigSet, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- SAVE_DEFAULT - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Saves default for this dialog
- SAVE_DICOM_TAGS - Static variable in class gov.nih.mipav.view.Preferences
-
Dicom tags to be saved
- SAVE_FILE_NAME - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the file name parameter (overrides the file_type parameter).
- SAVE_FILE_TYPE - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the file type (extension, generally) parameter.
- save_gss(SIFT.VlSiftFilt, SIFT.VlFileMeta, String, boolean) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- save_intermediate_images - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- save_intermediate_pyramids - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- save_mat - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- save_MRI_CED_2Dslice() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- save_MRI_CED_2Dslice_test() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- SAVE_PREFIX - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the file name prefix parameter.
- SAVE_PROFILE - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Saves profile for this dialog
- SAVE_SUFFIX - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the file name suffix parameter.
- SAVE_VOI_INTENSITIES_TO_DIR - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveVOIIntensities
-
The label to use for the VOI Intensities save destination directory parameter (leave empty for the default directory).
- SAVE_VOIS_TO_DIR - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveAllVOIs
-
The label to use for the VOI-save destination directory parameter (leave empty for the default directory).
- saveAllCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- saveAllVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
This method saves all VOIs for the active image to the default VOI directory for that image.
- saveAllVOIs() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method saves all VOIs for the active image to the default VOI directory for that image.
- saveAllVOIsTo(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
This method saves all VOIs for the active image to a given directory.
- saveAllVOIsTo(String) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method saves all VOIs for the active image to a given directory.
- saveAllVOIsTo(String, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Saves all VOIs to the specified file.
- saveAnnotationsAsCSV(String, String, VOI) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveAnnotationsAsCSV(String, String, VOI, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Saves the input annotations to the CSV file in the following format:
name,x,y,z
- saveAnnotationStatistics(String, ModelImage, ModelImage, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Saves the annotation statistics to a file.
- saveAs - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- saveAs - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- saveAs3DMaskRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
radio buttons for commmiting masks as 3d or 4d if image is 4d
- saveAs4DMaskRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
radio buttons for commmiting masks as 3d or 4d if image is 4d
- saveAsEncapJP2 - Variable in class gov.nih.mipav.model.file.FileIO
-
- saveAsEncapJP2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Whether DICOM files should be saved as an encapsulated JPEG2000
- saveAsGiftiXML(String, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Save the TriMesh in Gifti format.
- saveAsPlyFile(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- saveAsPortableVRML(PrintWriter, boolean, int[], float[], float[], Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Saves the triangle mesh in VRML97 (VRML 2.0) format.
- saveAsPortableVRML(PrintWriter, boolean, int, int[], float[], float[], Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Saves the triangle mesh in VRML97 (VRML 2.0) format (text format).
- saveAsPortableVRML(PrintWriter, ModelTriangleMesh[], boolean, int[], float[], float[], Color3f) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Saves the triangle mesh in VRML97 (VRML 2.0) format (text format).
- saveAsSMFAsciiFile(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Sate the SMF ACII file format.
- saveAsSTLAsciiFile(int, int[][], Vector3f[], ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
Sate the STIL ACII file format.
- saveAsSTLAsciiFile(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Sate the STIL ACII file format.
- saveAsSTLBinaryFile(int, int[][], Vector3f[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- saveAsSTLBinaryFile(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Sate the STIL Binary file format.
- saveAsTextFile(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Save the triangle mesh to a text file.
- saveAsTextFile(String, ModelTriangleMesh[]) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Save an array of triangle meshes to a text file.
- saveAsTextFile(String, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Save the TriMesh as an ascii text file.
- saveAsVRML(PrintWriter, boolean, int[], float[], float[], Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Saves the triangle mesh in VRML97 (VRML 2.0) format.
- saveAsVRML(PrintWriter, TriMesh, VertexBuffer, boolean, int[], float[], float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Saves the triangle mesh in VRML97 (VRML 2.0) format.
- saveAsVRML(String, boolean, int, int[], float[], float[], Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Saves the triangle mesh in VRML97 (VRML 2.0) format (text format).
- saveAsVRML(String, ModelTriangleMesh[], boolean, int[], float[], float[], Color3f) - Static method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Saves the triangle mesh in VRML97 (VRML 2.0) format (text format).
- saveAsVRML(String, TriMesh, VertexBuffer, boolean, int[], float[], float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Saves the triangle mesh in VRML97 (VRML 2.0) format (text format).
- saveAsVTKLegacy(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Saves the triangle mesh to VTK Legacy format
- saveAsVTKLegacy(String, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Save the TriMesh in VTK legacy format.
- saveAsVTKXML(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
saves thr triangle mesh to VTK XML format
- saveAsVTKXML(String, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Save the TriMesh in VTK format.
- saveAsXML(String, int[], float[], float[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Internal support for 'void save (String)' and 'void save (String, ModelTriangleMesh[])'.
- saveAVI() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Saves the mouse actions as an AVI file.
- saveAVI() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Saves screen graps to the animation frame and uses the animation frame to save the images to AVI format.
- saveAVIMovie() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Save quick time movie.
- saveAVIMovie() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Save quick time movie.
- saveBandwidths(String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- saveBasisVectorsAsCSV(ModelImage, String, String, VOIContour, Vector<Vector3f>, Vector<Vector3f>, Vector<Vector3f>) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveBrainMesh - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
If true, the surface representing the brain (mesh) is saved.
- saveBrush() - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
saves the drawn paintbrush to a .png
- saveButton - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
buttons *
- saveButton - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- saveButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- saveButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- saveButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
buttons *
- saveButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Save the current multi-histogram widgets to file.
- saveBvalGradButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- saveBVector1D(Vector<Boolean>, BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Write a 1d vector to filestream.
- saveBytes(File, byte[]) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.FileUtil
-
Saves the contents of a byte[] to the specified File.
- saveCache() - Method in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- saveCheck - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Button for selecting save to computer.
- saveCheckedAppendButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
buttons for toolbar *
- saveCheckedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
buttons for toolbar *
- saveClodMesh(String, ClodMesh[], boolean, int[], float[], float[], TransMatrix) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Save ClodMesh to disk
- saveCollapseRecord(RandomAccessFile, CollapseRecord) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Support for saving the collapse records to a binary file.
- saveComponents(Component, String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
- saveContourAsCSV(ModelImage, String, String, VOIContour) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveContours(ModelImage, Box3f[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveCounter - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- saveCropImage() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Save the cropped image.
- saveCroppedImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Copies the volume data from the texture representation into the
ModelImage and writes it to disk.
- saveCropVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Save crop region with the clipped volume.
- saveCropVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Save crop region with the clipped volume.
- saved - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- saved - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- SAVED_COEFS - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- SAVED_COEFS - Variable in class gov.nih.mipav.model.file.libjpeg
-
- savedbLength - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- saveDefaults() - Method in interface gov.nih.mipav.view.DialogDefaultsInterface
-
Method for loading dialog defaults.
- saveDefaults() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Saves the defaults of profile 0.
- saveDefaults(String) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Saves the defaults of the dialog base to the mipav preferences file, assigning it to the given profile name.
- saveDefaultsCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- savedFileDirAbs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- savedFileDirAbs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- savedFileDirAbs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- savedFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- savedFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- savedFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- savedFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- savedFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- savedFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- saveDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- saveDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- saveDiameters(Vector<Float>, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- savedImageDir - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- savedImageDir - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- SavedImageName - gov.nih.mipav.view.Argument.InstanceArgument
-
- saveDimensions() - Method in class gov.nih.mipav.view.ViewFileChooserSubsample
-
DOCUMENT ME!
- savedJ - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- savedStartPoint - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
The different searches change the number of variables in the transformation matrix that change.
- saveDVector1D(Vector<Double>, BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Write a 1d vector to filestream.
- saveDVector2D(Vector<Vector<Double>>, BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Write a 2d vector to filestream.
- saveEnhancedDicom - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Whether 3D or higher dimensionality dicom images should be saved as a single file
- saveExit - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- saveFeatureSpaceValue(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- saveFeatureSpaceValue(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- saveFeatureSpaceValue(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- saveFeatureSpaceValue(ModelImage, ModelImage, ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Save CE features to user specified directory.
- saveFieldDefaults() - Method in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Saves the last-entered bug report field text for loading the next time the dialog is used.
- saveFile() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
- saveFileActionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Handles the action event generated by the "Save label file" dialog.
- saveFileActionPerformed(ActionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- saveFileFormat - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- saveFileSize - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- saveGradchooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
chooser for save gradBval text dialog
- saveGraphButton - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- saveGroundTruth() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- saveGroundTruth() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- saveGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Restores the current VOI after QuickLUT.
- saveGVF - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- saveGVF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- saveGVFCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- saveHED2DsliceCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- saveHED2DsliceCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- saveHED2DsliceCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- saveHED2DsliceCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- saveHED2DsliceCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- saveHED2DsliceCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- saveHED2DsliceCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- saveHED2DsliceCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- saveHED2DsliceCED() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- saveHED2DsliceMRI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- saveImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- saveImage(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- saveImage(float[], int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- saveImage(float[], int, boolean) - Method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- saveImage(float[], int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- saveImage(ModelImage) - Static method in class gov.nih.mipav.model.structures.ModelImage
-
- saveImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Ask the user for a name to save an image as and then write it out to disk.
- saveImage(ModelImage, ModelImage, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- saveImage(ModelImage, ModelImage, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- saveImage(ModelImage, ModelImage, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- saveImage(ModelImage, ModelImage, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- saveImage(ModelImage, ModelImage, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- saveImage(ModelImage, ModelImage, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- saveImage(ModelImage, ModelImage, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- saveImage(ModelImage, ModelImage, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- saveImage(ModelImage, ModelImage, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
Save 3D image into 2D slice png files.
- saveImage(ModelImage, ModelImage, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- saveImage(ModelImage, ModelImage, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- saveImage(ModelImage, ModelImage, String, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveImage(ModelImage, String, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- saveImage(ModelImage, String, ModelImage, String, String, String, String, PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- saveImage(ModelImage, String, ModelImage, String, String, String, String, PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- saveImage(ModelImage, String, String) - Static method in class gov.nih.mipav.model.structures.ModelImage
-
Save the gradient magnitude image into the MIPAV default dir.
- saveImage(ModelImage, String, String, boolean) - Static method in class gov.nih.mipav.model.structures.ModelImage
-
- saveImage(Image, File) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
-
- saveImage(Image, File, String) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
-
- saveImage(Image, OutputStream, String) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
-
Saves specified Image to file of specified img file format.
- saveImage(Image, String) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
-
- saveImage(Image, String, String) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver
-
- saveImage(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Save the dicom matrix header info.
- saveImage(String, ModelImage, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveImage(String, String, int, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Save the image to a file.
- saveImage(String, String, int, boolean, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Save the image to a file.
- saveImage(String, String, int, boolean, boolean, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Save the image to a file.
- SaveImage(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Saved features directory.
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- saveImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- saveImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
- saveImageDirectory_test - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- saveImageDirectory_test - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- saveImageDirectory_train - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- saveImageDirectory_train - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- saveImageFFT(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- saveImageFFT(float[], int) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- saveImageFile(ModelImage, String, String, int) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- saveImageFile(ModelImage, String, String, int, boolean) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- saveImageInfo() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Saves the image info; need to do before saving image.
- saveImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Save the 2D slices and VOIs to user specified dir.
- saveImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- saveImages(int, int[], String, Hashtable<Integer, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- saveImages(int, int[], String, Hashtable<Integer, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- saveImages(ModelImage, int[], String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- saveImages(ModelImage, int[], String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- saveImages(ModelImage, int[], String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- saveImages(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- saveImages(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- saveImages(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- saveImages(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- saveImages(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- saveImages(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- saveImages(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- saveImages(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- saveImages(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- saveImages(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- saveImages(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- saveImages(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- saveImages(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- saveImages(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- saveImages_ext(int, int[], String, Hashtable<Integer, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- saveImages_ext(int, int[], String, Hashtable<Integer, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- saveImages_ext(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- saveImages_ext(String, int[], String, Hashtable<String, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- saveImagesCED(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- saveImageSlice_test(ModelImage, String, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- saveImageSlice_test(ModelImage, String, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- saveImagesTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- saveImagesTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- saveImagesTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- saveImagesTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- saveImagesTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- saveImagesTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- saveImagesTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- saveImagesTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- saveImagesTest() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- saveImagesTest(int, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- saveImagesTest(int, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- saveImagesTest(int, int[], String, Hashtable<Integer, ModelImage>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- saveImagesTest(ModelImage, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- saveImagesTest(ModelImage, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- saveImagesTest(String, int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- saveImagesTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
Save the 2D slices and VOIs to user specified dir.
- saveImagesTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Save the 2D slices and VOIs to user specified dir.
- saveImagesTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
Save the 2D slices and VOIs to user specified dir.
- saveImagesTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
Save the 2D slices and VOIs to user specified dir.
- saveImagesTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
Save the 2D slices and VOIs to user specified dir.
- saveImagesTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Save the 2D slices and VOIs to user specified dir.
- saveImagesTrain() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Save the 2D slices and VOIs to user specified dir.
- saveImageToFile(DICOM_Comms.ByteBuffer, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Saves the DDO to the file name supplied as a method parameter.
- saveInSubdirectory - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
To save the image file in a subdirectory of image-name (without extension) when true.
- saveIntegratedMarkerAnnotations(String, VOI) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- saveIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- saveIntermResults - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- saveLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Label before comboBoxSaveMethod
- saveLabels(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- saveLabels(boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
DOCUMENT ME!
- saveLabelsButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
save labels button.
- saveLattice() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Enables the user to save the lattice to a user-selected file.
- saveLattice(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- saveLattice(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Saves the lattice to the specified file and directory.
- saveLattice(String, String, VOIVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveLattice(String, String, String, VOIVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveLatticeStatistics() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveLatticeStatistics(String, float, VOI, VOI, float[], float[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Saves the lattice statistics to a file.
- saveLIST2Size - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- saveListB() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Method to save the items in List B.
- saveListB() - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Method to save the items in List B.
- saveLoadPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- saveLoadPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- saveLUT(boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method saves the LUT for the active image.
- saveLUTandTransferFunction(boolean, String, String) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This method saves the LUT for the active image.
- saveLUTandTransferFunction(ModelImage, ModelLUT, String, String) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Saves the ModelLUT and transfer function.
- saveLUTandTransferFunction(String, String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
This method saves the LUT for the active image.
- saveLUTandTransferFunction(String, String) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method saves the LUT for the active image.
- saveLUTAs(boolean, String, String) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This method saves the LUT for the active image.
- saveLUTAs(boolean, String, String) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
This method saves the LUT for the active image.
- saveLUTAs(boolean, String, String) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method saves the LUT for the active image.
- saveLUTAs(ModelImage, ModelStorageBase, boolean) - Static method in class gov.nih.mipav.view.ViewJFrameBase
-
Saves the LUT associated with the input image (either a ModelLUT or ModelRGB).
- saveMaskButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
save mask button.
- saveMasksAs4D - Variable in class gov.nih.mipav.view.dialogs.JDialogMask3D4D
-
- saveMasksAs4D - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
this boolean is needed for commiting masks for a 4d image
- saveMatrix(RandomAccessFile) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Saves transformation matrix to a text file MIPAV format
- saveMatrix(RandomAccessFile) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Saves transformation matrix to a text file MIPAV format
- saveMatrix(RandomAccessFile, int, float, float, float, int, int, int, boolean, boolean, boolean, String) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Saves transformation matrix to a text file MIPAV format
- saveMatrix(RandomAccessFile, String) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Saves transformation matrix to a text file MIPAV format
- saveMatrix(RandomAccessFile, String) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Saves transformation matrix to a text file MIPAV format
- saveMatrix(String) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Saves transformation matrix to a text file MIPAV format
- saveMatrix(String) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Saves transformation matrix to a text file MIPAV format
- saveMatrix(String, int, float, float, float, int, int, int, boolean, boolean, boolean, String) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Saves transformation matrix to a text file MIPAV format
- saveMatrix(String, String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
Saves:
1.)
- saveMatrix(String, String) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Saves transformation matrix to a text file MIPAV format
- saveMatrix(String, String) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Saves transformation matrix to a text file MIPAV format
- saveMergedVOIs() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
This method merges the 3 axial, sagittal, coronal VOIs and save them into one cloudy points file.
- saveMesh(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Internal support to write vertices, normals, and connectivity indices to the file.
- saveMesh(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Internal support to write vertices, normals, and connectivity indices to the file.
- saveMesh(Vector<Vector3f>, int[], boolean, String) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
- saveMeshContoursCSV() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveModel(File, Model) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
Writes the model to the file with ISO-8859-1 charset.
- saveModel(Writer, Model) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
Writes the model to the modelOutput.
- saveModes(String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- saveMosaic() - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
saveMosaic -- Opens a save dialog and saves the mosaic image in the selected file format.
- savemovi - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- saveMovie() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Save the movie into both AVI and QuickTime files.
- saveMRI2Dslice() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- saveMRI2Dslice_test() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- saveMultiHistograms(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- saveMultiMesh(ModelImage, SurfaceAttributes[]) - Static method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
Writes multiple surfaces to one file.
- savename - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- saveNeuriteCurves() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- saveNeuriteCurves() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveNewFunction(float[][], float[][], int) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Replaces the first three functions (used with RGB images).
- saveNewFunction(float[], float[], int) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Saves the current function and adds a blank new function.
- saveNiiImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- saveOrthogonalCEDImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- saveOrthogonalCEDImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
To save memory, save intermediated axial, sagittal, coronal original MRI image, generated CED image
and the gruond truth label to MIPAV readable .xml image format.
- saveOrthogonalCEDImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- saveOrthogonalCEDImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- savePaint() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- savePaintAs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
This method allows the user to choose how to save the paint bitmap.
- saveParameters() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Save camera and object viewing parameters.
- saveParams() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
save heuristic parameters
- saveParams() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
save heuristic parameters
- savepath - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- savePLYSurfaceButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Save .PLY surface button.
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- savePNGfile(String, String, ModelImage, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- savePNGfile(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- savePNGfile_test(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- savePNGfile_test(String, String, ModelImage, float, float, int, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- savePolyline() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- savePortableMesh(ModelImage, ModelTriangleMesh[], PrintWriter, Color3f) - Static method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
Saves a single level of detail to a mesh file.
- savePositions(VOIContour, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveppftfilter(int, double[][][][], String) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- savePreferences() - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Saves the global graph properties (background color, text sizes) to the
default mipav graph preferences file in the Preferences.getPreferencesDir directory.
- savePreferences() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Saves the global graph properties (background color, text sizes) to the
default mipav graph preferences file in the Preferences.getPreferencesDir directory.
- saveProfile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Saves off a profile into the preferences.
- saveProfile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
Saves off a profile into the preferences.
- savePromptOverwriteBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- saveProstateBoundaryFeature() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- saveProstateFeatures() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- saveProstateFeatures2D() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- saveProstatePlyMesh(String, ModelImage, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Saves a single level of detail to a STL mesh file.
- saveProstateSTLMesh(String, ModelImage, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Saves a single level of detail to a STL ascii mesh file.
- saveProstateSurface(String, TriMesh, ModelImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Save a TriMesh to disk
- saveProstateSurfaces(int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Save the selected surfaces.
- savePrunedModes(String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- saveQuickTimeMovie() - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Save AVI movie.
- saveQuickTimeMovie() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Save AVI movie.
- saver - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- saver - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- sAveraging() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmSliceAveraging
-
Averages image slices together.
- sAverAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- saveSamplePlanes(VOI, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveSeamAnnotations(String, VOI, boolean, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- saveShortcuts() - Static method in class gov.nih.mipav.view.Preferences
-
Sets the property for shortcuts by building string from ViewUserInterface's Shortcut Hashtable.
- saveShortcuts() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
Saves the shortcuts list to a file in user's home directory.
- saveSingleMesh(ModelImage, boolean, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Saves a single level of detail to a mesh file.
- saveSingleMesh(ModelImage, ModelTriangleMesh[], boolean, Color4f, SurfaceAttributes) - Static method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
Saves a single level of detail to a mesh file.
- saveSingleMesh(String, ModelImage, boolean, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Saves a single level of detail to a mesh file.
- saveSingleMesh(String, ModelImage, ModelTriangleMesh[], boolean, Color4f, Color4f[][]) - Static method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
Saves a single level of detail to a mesh file.
- saveSinglePlyMesh(String, ModelImage, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Saves a single level of detail to a STL mesh file.
- saveSingleSTLMesh(String, ModelImage, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Saves a single level of detail to a STL mesh file.
- saveSpline(String, VOI, Vector3f, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveStartEnd() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
In livewire mode the endpoints of each path segment along Dijkstra's curve -- between each of the user-selected
points -- are stored so that the smoothed geodesic may be calculated and displayed later.
- saveStartEnd() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
In livewire mode the endpoints of each path segment along Dijkstra's curve -- between each of the user-selected
points -- are stored so that the smoothed geodesic may be calculated and displayed later.
- SaveState() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- saveSTLSurfaceButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Save .STL surface button.
- SaveStrings(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- SaveStrings(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePreRenderEffect
-
- SaveStrings(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Write this object into a StringTree for the scene-graph visualization.
- saveSubsampleDimensions(Dimension) - Static method in class gov.nih.mipav.view.Preferences
-
Used by ViewOpenImageSequence to save its subsample dimensions for the next time it is opened.
- saveSur(String, TriMesh, int, VertexBuffer, boolean, int[], float[], float[], TransMatrix) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Write the TriMesh to disk in the .sur format.
- saveSurfaceButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Save surface button.
- saveSurfaces(int[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Save the selected surfaces.
- saveSurfaces(ModelImage, SurfaceAttributes[], String) - Static method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
The action taken when the one of the save surface buttons is pressed in the JPanelSurface class.
- saveSurfaces(ModelImage, TriMesh[], String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
The action taken when the one of the save surface buttons is pressed in the
JPanelSurface class.
- SaveTabs(VolumeRenderState) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- saveTags() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Save tags to a file in ASCII format.
- saveTensor - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- saveTestedImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- saveThumbnailCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- saveToFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- saveToFileInternal(BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- saveToFileInternal(BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- saveToFileInternal(BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- saveToFileInternal(BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- saveToFileInternal(BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- saveTransformMatrix(TransMatrix) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Saves the transformation matrix to file.
- saveTransformMatrix(String, TransMatrix) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Save the images transformation matrix in the working directory with the supplied fileName.
- saveTransformMatrix(String, TransMatrix[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
This method creates the Trans Matrices Array file for DTI Preprocessing
- saveTriMesh(ModelImage, String, String, String, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- saveUDLUT() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Save user defined LUT table.
- saveValue - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Used with commitMask(int imagesDone), to save the value.
- saveValueB - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- saveValueG - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- saveValueR - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- saveVector1D(Vector<Integer>, BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Write a 1d vector to filestream.
- saveVector2D(Vector<Vector<Integer>>, BufferedWriter) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
Write a 2d vector to filestream.
- saveVisualizationButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Save button for the opacity tranform function.
- saveVisualizationDataAs(boolean, String, String) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
This method saves the LUT and opacity function for the active image.
- saveVOI(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
This method saves a selected VOI
- saveVOI(boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method saves a selected VOI - should this be in VOI structure ??!!!
- saveVOI(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- saveVOIAs() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
DOCUMENT ME!
- saveVOIAs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
This method allows the user to choose how to save the VOI.
- saveVOIAs(boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This method allows the user to choose how to save the VOI.
- saveVOIIntensities() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Save intensities in VOI to a text file of format x,y,z,intensity on each line if not color or complex.
- saveVOIIntensities() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Save intensities in VOI to a text file of format x,y,z,intensity on each line if not color or complex.
- saveVOIIntensitiesTo(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Save intensities in VOI to a text file of format x,y,z,intensity on each line if not color or complex.
- saveVOIIntensitiesTo(String) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Save intensities in VOI to a text file of format x,y,z,intensity on each line if not color or complex.
- saveVOILPSButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- saveVOIs(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Save the current VOIState to the undo/re-do list.
- saveVOIVoxelButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- saveVolume(String, int, short[]) - Method in class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Write the specified volume to the file of the specified name.
- saveX - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Used with commitMask(int imagesDone), to save positions.
- saveXFMMatrix(RandomAccessFile) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Saves transformation matrix to McGill XFM format
- saveXFMMatrix(RandomAccessFile) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Saves transformation matrix to McGill XFM format
- saveXMLHeader(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- saveY - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Used with commitMask(int imagesDone), to save positions.
- saveZ - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Used with commitMask(int imagesDone), to save positions.
- savgol(double[][], double[][], int, int, double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- savgolButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- savingAsEncJP2 - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
- saw_Adobe_marker - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- saw_JFIF_marker - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- saw_SOF - Variable in class gov.nih.mipav.model.file.libjpeg.my_marker_reader
-
- saw_SOI - Variable in class gov.nih.mipav.model.file.libjpeg.my_marker_reader
-
- SB - Variable in class gov.nih.mipav.model.algorithms.WishartVariateGenerator
-
- sb_tree() - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper.sb_tree
-
- sBIT - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- sBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Buffer for sampled image.
- sBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Buffer that stores the s value in calcInPlace2DBuffer that contributed to resultBuffer.
- sBuffer - Variable in class gov.nih.mipav.model.file.FileTMG
-
DOCUMENT ME!
- SButton - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- SBYTE - gov.nih.mipav.model.file.FileSVS.Type
-
8 bit signed
- SBYTE - gov.nih.mipav.model.file.FileTiff.Type
-
8 bit signed
- SBYTE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
2nd denom.
- SBYTE - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- scad - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- SCAD - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
- SCAD - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- scaddvtx(double[][], double[], double[][], double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- scalarImage - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- ScalarMatrixToBlockMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- scalarNames - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Scalar names and property names
- ScalarVector(Vector3f, double, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- scale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAnyTwoImagesSNR
-
- scale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- scale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.erfcModel
-
- scale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration.erfcModel2
-
- scale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- scale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- scale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- scale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- scale - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
- scale - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeatureLaplacianScale
-
- scale - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- scale - Variable in class gov.nih.mipav.model.algorithms.NMSimplex
-
- scale - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- scale - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraRBF
-
- scale - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEExtModel
-
- scale - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEModel
-
- scale - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODERectModel
-
- scale - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODEHPModel
-
- scale - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODESTModel
-
- scale - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
Reference: Statistical Distributions Fourth Edition, Catherine Forbes,
Merran Evans, Nicholas Hastings, and Brian Peacock, Chqapter 46,
Weibull Distribution, pp. 193-201.
- scale - Variable in class gov.nih.mipav.model.file.FileAvi
-
- scale - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- scale - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
a floating point scale factor used during memory mapping.
- scale - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
- scale - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- scale - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- scale - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- scale - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- scale - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.BoundingBoxEffect
-
- scale(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- scale(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- scale(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.StartingPolynomial
-
- scale(float) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
Scale the matrix along the diagonal.
- scale(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
sets this instance to the scalar product with itself.
- scale(float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- scale(ModelImage) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Scales image.
- scale(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- scale(cl_command_queue, long) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Calls the scale kernel which computes estimateBuffer *= max(estimateBuffer) in OpenCL
should be called after a call to reduce( commandQueue )
- scale(VertexBuffer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- Scale(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Scale the shape
- Scale(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Wrapper to scale all shape
- Scale(double, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Scales the shape.
- Scale(double, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Scale the shapes.
- Scale(float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- Scale(float, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceClipEffect
-
Scale the surface to fit the mask texture.
- Scale(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- Scale(Polynomial, double, Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- SCALE - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- SCALE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.PoissonRun
-
- SCALE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.test
-
- scale_A - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- scale_component(FileJPEG2000.opj_image_comp_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- scale_component_up(FileJPEG2000.opj_image_comp_t, int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- scale_denom - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- scale_exit_with_help() - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- scale_I - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- scale_L - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- scale_M - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- scale_num - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- scale_P - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- scale_R - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- scale_ratio_i - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- scale_ratio_k - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- scale_S - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- scale1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- scale1 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- scale1 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- scale1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
bin1 is generated from Math.round(scale1*(buffer[i]-min1)) and bin2 is generated from
Math.round(scale2*(secondBuffer[i]-min2)).
- scale1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
bin1 is generated from Math.round(scale1*(buffer[i]-min1)) and bin2 is generated from
Math.round(scale2*(secondBuffer[i]-min2)).
- scale2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- scale2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- scale2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- scale2 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- scale2 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- scale2 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
bin1 is generated from Math.round(scale1*(buffer[i]-min1)) and bin2 is generated from
Math.round(scale2*(secondBuffer[i]-min2)).
- scale2 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
bin1 is generated from Math.round(scale1*(buffer[i]-min1)) and bin2 is generated from
Math.round(scale2*(secondBuffer[i]-min2)).
- scale2frequency(PyWavelets.ContinuousWavelet, double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- scale2frequency(PyWavelets.DiscreteWavelet, double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- SCALEBITS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- scaleCedTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- scaleCedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- scaleCedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- scaleCedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- scaleCedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- scaleCedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- scaleCedTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- scaleCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
- scaleCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- scaleCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
- scaleCircle(Vector2f, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
Scale the circle based on the current center and the difference between
the current center and the mouse position.
- ScaleCircle(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
scale the circle based on the mouse position.
- scaleCircleVOI(VOIBase, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- scaleColorAlpha(int, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ColorOperations
-
Scales the alpha value of a specified integer packed ARGB color by a
specified scaling factor m.
- scaleColorAlpha(int, float) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- ScaleColumns(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- ScaleColumns(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- ScaleColumns(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- ScaleColumns(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- ScaleColumns(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- ScaleColumns(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- scaled_direction_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- SCALED_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.Bessel
-
multiplied by exp(-abs(Real(z))).
- SCALED_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.BesselEP
-
multiplied by exp(-abs(Real(z))).
- ScaledLoss(CeresSolver.LossFunction, double, CeresSolver.Ownership) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ScaledLoss
-
- scaleDown(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- scaleDown(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- scaleDown(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- scaleDown(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- scaleDown(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- ScaledTextureEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- ScaledTextureEffect(String, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.ScaledTextureEffect
-
Creates a new TextureEffect with the texture specified.
- ScaledUp(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- scaleFactor - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- scaleHeight - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- scaleImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- scaleImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- scaleImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- scaleImageTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- scaleImageTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- scaleImageTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- scaleImageTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- scaleImageTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- scaleImageTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- scaleIncrement - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- scaleIncrement - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- scaleIndex - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- scaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- scaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- scaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- scaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- scaleIntensity() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
Scale the image intensity between 0 and 1000
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Normalize the image intensity between 25% and 75% intensity range value,
then scale by a factor of 1000.
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- scaleIntensity(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- scaleIntensityTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- scaleIntensityTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- scaleIntensityTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- scaleIntensityTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- scaleIntensityTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- scaleIntensityTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- scaleIntensityTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- scaleIntensityTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- scaleIntensityTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- scaleIntensityTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- scaleIntensityTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- scaleIntensityTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- scaleIntensityTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- scaleIntensityTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- scaleInvariant - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- scaleInvariant - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- scaleKernel - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
OpenCL scale kernel, multiplies the image by buffer1[0] / buffer2[0],
where all buffers are OpenCL buffers on the GPU / CPU.
- scaleList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- scaleMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
- scaleMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- scaleMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- scaleMax - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- scaleMax - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- scaleMax - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- scaleMax - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- scaleMaxCIELab - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
- scaleMaxValue - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- scaleMesh(float, HashSet[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- scaleMesh(TriMesh) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Scales the input mesh based on the offset parameter set in the constructor.
- scaleOnImage - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- scaleOnLocal - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- scaleOnSlice - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
DOCUMENT ME!
- scalePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- scalePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- scalePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- scalePoint(double[], double) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Scale the point by scale parameter and store it into another vector.
- scalePoint(double[], double) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Scale the point by scale parameter and store it into another vector.
- scalePoint(int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Obtain the transformation vector and make a copy, then scale it by scale parameter.
- scalePoint(int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Obtain the transformation vector and make a copy, then scale it by scale parameter.
- scalePolygon(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- scaler - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- scaler - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- scaleRange - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- scaleRange - Variable in class gov.nih.mipav.view.JPanelHistogram
-
- scaleRangeA - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Scale range value according to the image min and max.
- scaleRangeA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Scale range value according to the image min and max.
- scaleRangeA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Scale range value according to the image min and max.
- scaleRangeA - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Scale range value according to the image min and max.
- scaleRangeB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Scale range value according to the image min and max.
- scaleRangeB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Scale range value according to the image min and max.
- scaleRangeB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Scale range value according to the image min and max.
- scaleRangeB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Scale range value according to the image min and max.
- scaleRangeGM_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Scale range value according to the image min and max.
- scaleRangeGM_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Scale range value according to the image min and max.
- scaleRangeGM_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Scale range value according to the image min and max.
- scaleRangeGM_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Scale range value according to the image min and max.
- ScaleRectangle(MouseEvent, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
Scale the rectangle, based on the control points
- scaleRows(libdt.Mat, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- scales - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- scales - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- ScaleShape2Final(int, CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Scale a shape defined in 'model' coordinates to 'FinalModel'
coordinates.
- ScaleShape2Model(int, CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Scale a shape defined in 'FinalModel' coordinates to 'model'
coordinates .
- scaleSlope - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- scaleSlope - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- scaleSquareVOI(VOIBase, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- scaleStepsBF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- scaleStepsText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Brute-force registration parameters:.
- scaleText - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- scaleToCube() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
uniformly scale points to [-1,1]^3, originally in [min,max]^3 returns 2D vector with (min,max) as the elements
public Vector2f scaleToCube ().
- ScaleTriangle(MouseEvent, int, TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Resizes the triangle using the lower-control point:
- ScaleUp(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- scaleVariablesToUnitVariance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- scaleVariablesToUnitVariance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- scaleVariablesToUnitVariance - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- scaleVariablesToUnitVariance - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- scaleVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Creates the scene graph for displaying the VOIBase object.
- scaleVOI(VOIBase, MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- scaleVoiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- scaleVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- scaleVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- scaleVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- scaleVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- scaleVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- scaleVoiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- scaleWidth - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- scaleX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- scaleX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMRIShadingCorrection
-
x and y standard deviations of Gaussians used to convolve normalized forces.
- scaleX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- scaleX - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- scaleX - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
- scaleX - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- scaleX - Variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
DOCUMENT ME!
- scaleX - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- scaleX - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- scaleX - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- scaleX - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- scaleX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- scaleX - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- scaleX - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- scaleY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- scaleY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMRIShadingCorrection
-
DOCUMENT ME!
- scaleY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- scaleY - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- scaleY - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
- scaleY - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- scaleY - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- scaleY - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- scaleY - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- scaleY - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- scaleY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- scaleY - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- scaleY - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- scaleZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- scaleZ - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- scaleZ - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- scaleZ - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- scaleZ - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- scaleZ - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- scaleZ - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- scaleZ - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- SCALING_WITH_SCALE - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- SCALING_WITHOUT_SCALE - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- scalingFactor1 - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- scalingFactor1 - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- scalingFactor1Index - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- scalingFactor2 - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- scalingFactor2 - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- scalingFactor2Index - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- scalingFactor3 - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- scalingFactor4 - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- scalingFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- scalingOption - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
UNSCALED_FUNCTION returns cy[j-1] = besselFunction(initialOrder+j-1,z), j = 1,...
- scalingOption - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
UNSCALED_FUNCTION returns cy[j-1] = besselFunction(initialOrder+j-1,z), j = 1,...
- scalv(double[], double, int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- scalv(DoubleDouble[], DoubleDouble, int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- scanAcqNum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
728 Scan Acquisition Number.
- scanAcquisitionNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- scanAcquisitionNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- scanARRs - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- scanARRs - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- scanAttributesStr - Static variable in class gov.nih.mipav.model.file.FileImageXML
-
array of strings representing the tags under in the xml schema.
- scanDate - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- scanEditorHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
- scangle(double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- scanID - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- scanins - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- scanins - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- ScanlineParts() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Direct access to the scanline parts (not commonly used)
- scanMatrixX - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- scanMatrixX - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- scanMatrixY - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- scanMatrixY - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- scanModel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
model associated with scan information.
- SCANNER_XYZ - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
A scanner-based right-handed coordinate frame, used in ACR/NEMA 2.0.
- SCANNER_XYZ_TIME - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
Like SCANNER_XYZ, but with time along the fourth axis.
- ScannerChoiceListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreT1.ScannerChoiceListener
-
- scannerCombo - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- scannerLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Labels for the current scanner position:.
- scannerLabelVals - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Labels for the current scanner position values:.
- scannerLPS_APLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
scanner lps goto components*
- scannerLPS_APTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- scannerLPS_GoToButton - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- scannerLPS_GoToPanel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- scannerLPS_ISLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
scanner lps goto components*
- scannerLPS_ISTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- scannerLPS_RLLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
scanner lps goto components*
- scannerLPS_RLTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- scannerLPSGoTo() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Method that goes to the lps coordinate that is entered
- scannerLPSLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Labels for the current scanner position:.
- scannerLPSLabelVals - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Labels for the current scanner position values:.
- scannerLPSPanel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
JPanel containing the scanner position labels:.
- scannerPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
JPanel containing the scanner position labels:.
- scannerQuantificationFactor - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- scannerRAS_APLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
scanner ras goto components*
- scannerRAS_APTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- scannerRAS_GoToButton - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- scannerRAS_GoToPanel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- scannerRAS_ISLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
scanner ras goto components*
- scannerRAS_ISTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- scannerRAS_RLLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
scanner ras goto components*
- scannerRAS_RLTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- scannerRASGoTo() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Method that goes to the ras coordinate that is entered
- scannerRASLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Labels for the current scanner position:.
- scannerRASLabelVals - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Labels for the current scanner position values:.
- scannerRASPanel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
JPanel containing the scanner position labels:.
- scannerTabbedPane - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
The tabbed pane to hold teh LPS, RAS and absolution coordinate panels.
- scannerToFile(Vector3f, Vector3f, ModelImage) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Translates the input point into FileCoordinates, based on the input image, kImage.
- scannerToFile(Vector3f, Vector3f, Vector3f, ModelImage) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Translates the input point into FileCoordinates, based on the input image, kImage.
- scannerType - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- ScannerType() - Constructor for enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.ScannerType
-
- scanningSequence - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- scanningSequence - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- scanningSequence - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- scanningSequenceIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- scanningSequencePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- scannum - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Scan ID Length of 10.
- scannum - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Scan ID Length of 10.
- scannum - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- scanOptions - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- scanPercentage - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- scanPercentage - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- scanPercentageIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- scanPercentagePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- scanPos - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- scanProtocolName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- scanProtocolName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- scanProtocolName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
92 - 25 bytes - Scan Protocol Name.
- ScanSortDir(String, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Scans and sorts a directory for files with a specific extension.
- scanSpacing - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
116 Spacing between scans (mm?).
- scanTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
scan infomation table.
- scanTime - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- scanTime - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- scanType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
74 - Scout or Axial (for CT).
- scanType - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- scanTypeHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
- scatterCorrected - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- scatterCorrectionMethod - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- scaunc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- scaunc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- scc() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- sccheck(String, double[][], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- scdAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
DOCUMENT ME!
- sceneCaptureType - Variable in class gov.nih.mipav.model.file.FileSVS
-
- sceneCaptureType - Variable in class gov.nih.mipav.model.file.FileTiff
-
- sceneRootTG - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
A TransformGroup object to which all the scene objects are attached, including 3D images, surface, behavior, and
lights.
- SceneState - Class in gov.nih.mipav.view.renderer
-
Collectiing the current virtualization toolbox values for both volume and slices render dialogs.
- SceneState(int, int, int, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer.SceneState
-
Creates a new SceneState object.
- SceneState(int, int, int, int, int, int, boolean, boolean, boolean, int, int, int, int, int, int, int, int, boolean, boolean, boolean, boolean, boolean, boolean, boolean, int, TransferFunction, boolean, boolean, boolean, float, float, float, float, boolean) - Constructor for class gov.nih.mipav.view.renderer.SceneState
-
Construct the SceneState object associate with the current visualization toobox values.
- SceneStatePlotter - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
DOCUMENT ME!
- SceneStatePlotter(int, boolean) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SceneStatePlotter
-
Creates a new SceneStatePlotter object.
- sceneType - Variable in class gov.nih.mipav.model.file.FileSVS
-
- sceneType - Variable in class gov.nih.mipav.model.file.FileTiff
-
- sCenter - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- sCenter - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- sCentroids - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- sCentroids - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- scfix(double[][], double[], int[], int[], String, double[][], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- schdc(int, int[], int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- schdc(int, int[], int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- sched - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexSplitParams
-
- scheduleRepaint() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- scheduleRepaint() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
Schedules a repaint call on the AWT event dispatch thread.
- scheme - Variable in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorScheme
-
- schur_complement_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterativeSchurComplementSolver
-
- SCHUR_JACOBI - gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerType
-
- schur_structure_given - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- schur_structure_used - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- SchurComplementSolver(CeresSolver.LinearSolverOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- SchurEliminator(int, int, int, CeresSolver.LinearSolverOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- SchurEliminatorBase() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminatorBase
-
- SchurEliminatorTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- SchurEliminatorTestScalarProblemNoRegularization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- SchurEliminatorTestScalarProblemNoRegularization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SchurEliminatorTestScalarProblemWithRegularization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- SchurEliminatorTestScalarProblemWithRegularization() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SchurEliminatorTestVaryingFBlockSizeWithoutStaticStructure() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- SchurEliminatorTestVaryingFBlockSizeWithoutStaticStructure() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SchurEliminatorTestVaryingFBlockSizeWithStaticStructure() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- SchurEliminatorTestVaryingFBlockSizeWithStaticStructure() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SchurJacobiPreconditioner(CeresSolver.CompressedRowBlockStructure, CeresSolver.PreconditionerOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SchurJacobiPreconditioner
-
- SchurOrderingTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
- SchurOrderingTestAllFixed() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
- SchurOrderingTestAllFixed() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SchurOrderingTestNoFixed() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
- SchurOrderingTestNoFixed() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SchurOrderingTestOneFixed() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
- SchurOrderingTestOneFixed() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SchurStructureToString(int, int, int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- SchwarzChristoffelMapping - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping() - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- SchwarzChristoffelMapping(ModelImage, ModelImage, double[][]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- SchwarzChristoffelMapping(ModelImage, ModelImage, double[], double[], int[], int) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- SchwarzChristoffelMapping(ModelImage, ModelImage, double[], double[], int, boolean, double, double) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- SchwarzChristoffelMapping.crpfun - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping.depfun - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping.dpfun - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping.indexValueComparator - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping.indexValueItem - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping.ODEExtModel - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping.ODEModel - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping.ODERectModel - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping.polygon - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping.qlgraph - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping.rpfun - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping.scmap - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping2 - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping2() - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- SchwarzChristoffelMapping2(ModelImage, ModelImage, double[][]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- SchwarzChristoffelMapping2.hppfun - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping2.ODEHPModel - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping2.ODESTModel - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping2.stpfun - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping2.stpfun2 - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping2.stpfun3 - Class in gov.nih.mipav.model.algorithms
-
- SchwarzChristoffelMapping2.stpfunEP - Class in gov.nih.mipav.model.algorithms
-
- SCI_NOT_EXPONENT_CHAR - Static variable in class gov.nih.mipav.util.DoubleDouble
-
- SCI_NOT_ZERO - Static variable in class gov.nih.mipav.util.DoubleDouble
-
- scic - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
554 Surface Coil Intensity Correction Flag.
- scilType - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- scilType - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- scIma - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- scIma - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- scimapz0(double[][], double[][], String, double[][], double[][], double[], double[][], double[], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- scl_inter - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- scl_inter - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- scl_slope - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
If the scl_slope field is nonzero, then each voxel value in the dataset should be scaled as y = scl_slope * x +
scl_inter where x = voxel value stored y = "true" voxel value Normally, we would expect this scaling to be used
to store "true" floating values in a smaller integer datatype, but that is not required.
- scl_slope - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
If the scl_slope field is nonzero, then each voxel value in the dataset
should be scaled as
y = scl_slope * x + scl_inter
where x = voxel value stored
y = "true" voxel value
Normally, we would expect this scaling to be used to store "true" floating
values in a smaller integer datatype, but that is not required.
- sclAdd(float, Vector3f, float, Vector3f) - Method in class gov.nih.mipav.model.file.FileAfni
-
scale and add two vectors.
- sclAdd(float, Vector3f, float, Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Scale and add two vectors.
- scm - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- scm - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- scmap() - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- scomp(delaunay.Point, delaunay.Point) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- ScopedExecutionTimer(String, CeresSolver.ExecutionSummary) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ScopedExecutionTimer
-
- score - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeatureLaplacianScale
-
- score - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeatureOrientation
-
- score - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map.curvePair
-
- score - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale.curvePair
-
- score(double[], double, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- scores - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- scores - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Statistcs.
- scoresVariation - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
< Duality gap = objective - dualObjective.
- scoutType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
122 Scout Type (AP or lateral).
- scpadapt(Vector<Double>, Vector<Double>, Vector<Double>, Vector<Double>, Vector<Boolean>, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- scpadapt2(Vector<Double>, Vector<Double>, Vector<Double>[], Vector<Double>[], Vector<Boolean>, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- SCPRole - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_SCPSCURoleSelect
-
Indicates the Serivce Class Provider (SCP) (i.e.
- SCPSCURoleVector - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_UserInformation
-
public DICOM_SCPSCURoleSelect SCPSCURole = null; //new DICOM_SCPSCURoleSelect();.
- scqdata(double[][], double[], int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- SCRAMB(double[], int) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- scratch - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- scratch - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianProjectionFunction
-
- scratch - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.RestrictedLaplacianMatrixFunction
-
- scratch_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblem
-
- scratch_evaluate_preparer_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockEvaluatePreparer
-
- scratch0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.DivergenceFunction
-
- scratch1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.DivergenceFunction
-
- scratch2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.DivergenceFunction
-
- ScratchEvaluatePreparer() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.ScratchEvaluatePreparer
-
- Screen(Integer, String, String) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Screen
-
Creates a new Screen object.
- screenCap - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Button to launch the create new image dialog
- screenCapture - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Dialog used for taking screen captures
- ScreenCoordinateListener - Interface in gov.nih.mipav.view.renderer.WildMagic.VOI
-
ScreenCoordinateListener
This interface defines functions that convert mouse coordinates to image file coordinates.
- screenFormat - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
112 - (8ቬ) bits.
- screenHeight - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Screen width, screen height.
- screenHeight - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Screen width, screen height.
- screenHeight - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Current frame width and height.
- screenID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Plate.ScreenRef
-
- screenID - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Screen
-
Attributes.
- ScreenRef(Integer, Integer) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Plate.ScreenRef
-
Creates a new ScreenRef object.
- screenRefs - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Plate
-
Elements.
- screens - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME
-
DOCUMENT ME!
- screenShotRotateCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- screenShots - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- screenToFile(int, int, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- screenToFile(int, int, int, Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- screenToFile(int, int, int, Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
- screenToFile(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- screenToFile(Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- screenToFile(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- screenToFile(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- screenToFile(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
- screenToFileVOI(int, int, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- screenToFileVOI(int, int, int, Vector3f) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Converts local screen coordinates, usually from a MouseEvent, into image file coordinates.
- screenToFileVOI(int, int, int, Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- screenToFileVOI(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- screenToFileVOI(Vector3f) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Converts local screen coordinates, usually from a MouseEvent, into image file coordinates.
- screenToFileVOI(Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- screenToFileVOI(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- screenToFileVOI(Vector3f, Vector3f) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Converts local screen coordinates, usually from a MouseEvent, into image file coordinates.
- screenToFileVOI(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- ScreenToLocal(int, int, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Calculate the position of the mouse in the Local Coordinates, taking
into account zoom and translate:
- ScreenToLocal(int, int, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Calculate the position of the mouse in the Local Coordinates, taking into account zoom and translate:
- ScreenToLocal(int, int, Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Calculate the position of the mouse in the Local Coordinates, taking
into account zoom and translate:
- ScreenToLocal(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
ScreenToLocal converts a point from screen coordinates to local coordinates.
- ScreenToModel(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Translate from normalized plane coordinates to Model coordinates:
- ScreenToModel(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Translate from normalized plane coordinates to Model coordinates:
- screenWidth - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Screen width, screen height.
- screenWidth - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Screen width, screen height.
- screenWidth - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Current frame width and height.
- script - Variable in class gov.nih.mipav.model.scripting.ScriptRecorder
-
The contents of the current script being recorded.
- Script - gov.nih.mipav.view.Argument.InstanceArgument
-
- SCRIPT - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Script Files (*.sct).
- SCRIPT_ACTION_LOCATIONS - Static variable in class gov.nih.mipav.model.scripting.ScriptableActionLoader
-
Try MIPAV dialogs, then special script actions, then plugins (which are in the default package).
- ScriptableActionInterface - Interface in gov.nih.mipav.model.scripting
-
An interface for classes which want to allow themselves to be scripted.
- ScriptableActionLoader - Class in gov.nih.mipav.model.scripting
-
Given the name of a script action, this class searches a number of locations for a class to load with that name and
returns a new instance of that class.
- ScriptableActionLoader() - Constructor for class gov.nih.mipav.model.scripting.ScriptableActionLoader
-
- scriptFail - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
boolean telling if script failed
- scriptFile - Variable in class gov.nih.mipav.model.scripting.ParserEngine
-
The path to the script file to be parsed ('-' if the script is already in memory and has no related file).
- scriptFile - Variable in class gov.nih.mipav.model.scripting.ScriptRunner
-
The path to the script we want to execute.
- scriptFile - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- scriptIcon - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeRenderer
-
DOCUMENT ME!
- ScriptImage - Class in gov.nih.mipav.view.dialogs
-
- ScriptImage(ModelImage) - Constructor for class gov.nih.mipav.view.dialogs.ScriptImage
-
- ScriptImage(String, String, boolean) - Constructor for class gov.nih.mipav.view.dialogs.ScriptImage
-
- scriptImageActions - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- scriptImageLabels - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- scriptImageVars - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- scriptLineRegex - Static variable in class gov.nih.mipav.model.scripting.ParserEngine
-
This regular expression pattern breaks apart a line in a script into two groups: the script action and the string containing all the action's parameters.
- SCRIPTNODE - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Script node type (Script)... only one and is only child of root
- scriptNodeChildCount - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
child count for script node
- scriptParameters - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Contains parameters used to run or record the dialog action, along with some common helper methods.
- scriptRange - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
When running as a script, holds the pixel exclusion range.
- scriptRange - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
When running as a script, holds the pixel exclusion range.
- scriptReader - Variable in class gov.nih.mipav.model.scripting.ParserEngine
-
The reader used to read in each line of the script.
- scriptRecorder - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
A reference to the global MIPAV script recorder.
- ScriptRecorder - Class in gov.nih.mipav.model.scripting
-
A singleton class used to add lines to the script currently being recorded (if one is being recorded at all).
- ScriptRecorder() - Constructor for class gov.nih.mipav.model.scripting.ScriptRecorder
-
Creates a new ScriptRecorder object.
- ScriptRecordingListener - Interface in gov.nih.mipav.model.scripting
-
An interface for classes which want to be notified of changes to the script currently being recorded by MIPAV.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.provenance.actions.ActionOpenImage
-
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.provenance.actions.ActionStartMipav
-
unused
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.provenance.actions.ActionStopMipav
-
unused
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionBase
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeEndianess
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeModality
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeOrientations
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeOrigin
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeResolutions
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeTalairachInfo
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeTransformInfo
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeUnits
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionClone
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionCloseFrame
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionCollectGarbage
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionCreateBlankImage
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionExit
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionExtractImageB
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionMaskToPaint
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionMaskToVOI
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionOpenAllVOIs
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionOpenVOI
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionPaintToMask
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionPaintToVOI
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveAllVOIs
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveImage
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveImageAs
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveTab
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveVOIIntensities
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionSelectAllVOIs
-
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.model.scripting.actions.ActionVOIToMask
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in interface gov.nih.mipav.model.scripting.ScriptableActionInterface
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in interface gov.nih.mipav.view.dialogs.ActionDiscovery
-
Starts execution of the action.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.view.dialogs.BlankJistHook
-
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Sets up the action dialog state and then executes it.
- scriptRun(ParameterTable) - Method in class gov.nih.mipav.view.dialogs.MTryJistHook
-
- ScriptRunner - Class in gov.nih.mipav.model.scripting
-
Executes a script with a set of images.
- ScriptRunner() - Constructor for class gov.nih.mipav.model.scripting.ScriptRunner
-
Creates a new ScriptRunner object.
- ScriptRunner.ScriptThread - Class in gov.nih.mipav.model.scripting
-
A separate thread used to execute a given script (the image and voi table should already be set up before the
thread is started).
- scriptStringParams - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
- scriptTable - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
DOCUMENT ME!
- scriptTextArea - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
DOCUMENT ME!
- ScriptThread(String) - Constructor for class gov.nih.mipav.model.scripting.ScriptRunner.ScriptThread
-
Creates a new ScriptThread object.
- scriptToolBar - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- ScriptTreeNode - Class in gov.nih.mipav.view.dialogs
-
Class used as a DefaultMutableTreeNode, except it stores a default name that can be recalled at any time if the
users deletes the image/voi.
- ScriptTreeNode(Object, int) - Constructor for class gov.nih.mipav.view.dialogs.ScriptTreeNode
-
- ScriptVariable - gov.nih.mipav.view.Argument.InstanceArgument
-
- ScriptVOI - Class in gov.nih.mipav.view.dialogs
-
- ScriptVOI(VOI, String, String) - Constructor for class gov.nih.mipav.view.dialogs.ScriptVOI
-
- ScriptVOI(String, String) - Constructor for class gov.nih.mipav.view.dialogs.ScriptVOI
-
- scriptVOIs - Variable in class gov.nih.mipav.view.dialogs.ScriptImage
-
- SCROLL_PANE_SIZE - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Min/max size of all text boxes contained in scroll panes.
- scroll_size - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- scrollButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
The button that indicates whether this triframe is linked with tri-frames of similar dimensionality.
- scrollButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
- ScrollCorrector - Class in gov.nih.mipav.view
-
Corrects a strange behaviour with JScrollPane when lines are appended from another thread.
- ScrollCorrector() - Constructor for class gov.nih.mipav.view.ScrollCorrector
-
Does nothing.
- scroller - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Scroll pane.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Scroll pane.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Scroll pane.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Scroll pane.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Scroll pane that control the resizing of the panel.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Scroll pane.
- scroller - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Scroll pane.
- scroller - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Scroll pane.
- scroller - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Scroll pane.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Scroll pane.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
Scroll pane.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Scroll pane.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The scroll pane holding the panel content.
- scroller - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelVolume4D
-
The scroll pane holding the panel content.
- scrollingBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
Box to hold table information.
- scrollingBox - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
Box to hold table information.
- scrollOriginalCrosshair - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Flag telling the crosshair movement to update slice in original image frame.
- scrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
Scroll Pane for the Text Area
- scrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
This is the scroll pane for the label list panel
- scrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.dialogs.JDialogText
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- scrollPane - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
The scrollPane where the image is displayed.
- scrollPane - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
The scrollPane where the image is displayed.
- scrollPane - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
The scroll pane containing the image list
- scrollPane - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- scrollPane - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- scrollPaneDicom - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
DOCUMENT ME!
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Scroll panel that holding all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Scroll the control panel when the frame changes size.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Scroll panel that holding all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Scroll panel that holding all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Scroll panel that holding all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Scroll the control panel when the frame changes size.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Scroll panel that holding the all the control components.
- scrollPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Scroll panel that holding the all the control components.
- scrollPaneSeparateA - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- scrollPaneSeparateB - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- scrollPaneSize - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- scrollPaneSize - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- scrollPaneSize - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- scrollPaneSize - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- scrollPaneSize - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- scrollPaneSize - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- ScrollPopupMenuLayout() - Constructor for class gov.nih.mipav.view.JScrollPopupMenu.ScrollPopupMenuLayout
-
- ScrollTextArea() - Constructor for class gov.nih.mipav.view.ViewJFrameMessage.ScrollTextArea
-
Creates a new ScrollTextArea object.
- ScrollTextArea(Color) - Constructor for class gov.nih.mipav.view.components.WidgetFactory.ScrollTextArea
-
Creates a new ScrollTextArea object.
- scselect(double[][], double[], int, String, String[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- scSer - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- scSer - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- scTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
22 scan duration in seconds.
- sculptData(ModelImage, int, int, byte[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Sculpt the ModelImage and Textures at the index.
- SculptDrawn - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- sculptGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sculpting user-interface panel:
- sculptHeight - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Sculpt region height.
- sculptImage(ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Called by the TextureSculptor or VolumeSculptor objects.
- SculptImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- Sculptor - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Volume Sculpturing allows the user to draw a region on the screen in the volume render view, and to remove the parts
of the volume covered by that region.
- Sculptor() - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
- Sculptor_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
Volume Sculpturing allows the user to draw a region on the screen in the volume render view, and to remove the parts
of the volume covered by that region.
- Sculptor_WM(GLCanvas) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Constructor.
- sculptorPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sculptor panel.
- SculptShape - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- sculptWidth - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Sculpt region width.
- SCURole - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_SCPSCURoleSelect
-
Indicates the Serivce Class User (SCU) (i.e.
- scv0v1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- scv0v1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- scv0v2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- scv0v2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- scv1v2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- scv1v2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- sd - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- sd - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint
-
- sd - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor
-
- SD - Static variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- sd_weighting(double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- sData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- sData - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- SData() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmASM.SData
-
- sdChars - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- SDIAG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- SDSI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- sdviH - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- se - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- se - Variable in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
- Se - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- se_beta - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- se_eta - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- se2xy - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- se2xz - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- se2yz - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- se3 - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- seActualDT - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
16 - Actual Series Date/Time Stamp.
- seAllocKey - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
154 - 13 bytes - Process that allocated this record.
- seamCellIDs - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- search() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Find the best fit for the VOI polygon we have loaded into this algorithm.
- search() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
Search.
- search(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Search.
- Search(double, double, double, CeresSolver.LineSearchSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearch
-
- search_direction - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer.State
-
- searchAlgorithm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- searchAlgorithm - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- searchAlgorithm - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
- searchAlgorithm - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- searchAlgorithm - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
- searchAlgorithm - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- searchAlgorithm - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
- searchAlgorithm - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- searchAlgorithm - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
- searchAlgorithm - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- searchAngle - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMidsagittal
-
The search angles to use in each dimension (from -searchAngle to searchAngle) when
registering the original image against the flipped image.
- searchChildDir(File) - Method in class gov.nih.mipav.model.file.FileBRUKER
-
Utility method for searching for the d3proc file that indicates a BRUKER file has been found,
note method is recursive to a maximum level of 3.
- searchEdge(int[][], int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.GrowingPlatePattern
-
- searchEdge(int[][], int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegularEdgePattern
-
- searchField - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- searchFieldSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- searchForDicom(File) - Static method in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- searchForImageTag(byte[], byte[], int) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Performs internal search for the image tag in a dicom file, given an appropriate endianess.
- SearchI(int, IDList, IDList) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- searchIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- searchOnBottom(int[][], int, int, int, int, int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- searchOnLeft(int[][], int, int, int, int, int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- searchOnRight(int[][], int, int, int, int, int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- searchOnTop(int[][], int, int, int, int, int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- searchOptimalPath() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- searchOptimalPath() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- searchRegion(int[][], int, int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- searchSingleIsLandOnLeft(int[][], int, int, int, int, int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternHorizontal
-
- searchSingleIsLandOnRight(int[][], int, int, int, int, int[], int[], int[], int[], int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternHorizontal
-
- searchText() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- searchWindowSide - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
Side of the learning window of pixels which will be averaged.
- searchWindowSide - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- secCheckBox - Variable in class gov.nih.mipav.view.JPanelEditTime
-
permits whether or not to set this field.
- secComboBox - Variable in class gov.nih.mipav.view.JPanelEditTime
-
value to add to this time field.
- secFraction - Variable in class gov.nih.mipav.view.JPanelEditTime
-
DOCUMENT ME!
- seChecksum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
188 - (internal use) Series Record checksum.
- secind - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- secind - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- seComplete - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
192 - (internal use) Series Complete Flag.
- second - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur.Pair
-
- second - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Pair
-
- second - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Triplet
-
- second - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Pair
-
- second - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- second - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Pair
-
- second - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Pair
-
- secondAddress - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- secondAllowed - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
The method of Newton is allowed at the end of the iteration in some situations (large residuals).
- secondAllowed - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
The method of Newton is allowed at the end of the iteration in some situations (large residuals).
- secondaryEditorHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
- secondaryFields - Variable in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
- secondaryModel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- secondaryModel - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- secondarySort(Vector<Vector<String>>) - Static method in class gov.nih.mipav.model.file.FilenameSorter
-
This method takes a sorted Vector of Vectors as a parameter.
- secondaryTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- secondaryTable - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- secondaryTypeHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- secondBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- secondBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- secondButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- secondColor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- secondEval - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
integer scalar containing the number of function evaluations caused by using second derivatives in the method of
Newton.
- secondEval - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
integer scalar containing the number of function evaluations caused by using second derivatives in the method of
Newton.
- secondGaussianAmplitude - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- secondGaussianMean - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- secondGaussianMeanBin - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- secondGaussianStandardDeviation - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- secondi - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- secondImage - Variable in class gov.nih.mipav.model.file.FileIO
-
Address of second image in file.
- secondImage - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- secondImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- secondImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- secondImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Second image (Base image).
- secondImage - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
The registered image as specified by user through gui
- secondImage - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- secondImage - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- secondIndex - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- secondIterationCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- secondKindRealArgument() - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
This code is a port of the FORTRAN routine CHGU from the book Computation of Special Functions by Shanjie Zhang
and Jianming Jin, John Wiley & Sons, Inc., 1996, pp. 403-405.
- secondMaxV - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- secondMinV - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- secondName - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- secondName - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- secondOrderAttributes(ModelImage, float[], float[], float[], float[]) - Method in class gov.nih.mipav.model.structures.VOIContour
-
Find the least squares fit of the points in the contour to an ellipsoid.
- secondOrderAttributeslsq(float, float, int, int, double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.VOIContour
-
Finds the second order attributes.
- secondParamGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- secondPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- secondr - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- seconds - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
DOCUMENT ME!
- SECONDS - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement seconds.
- SECONDS - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement seconds.
- SECONDS_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - seconds.
- secondStageCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Initially unchecked, determined whether this algorithm performs secondStageErosion
- secondStageErosion - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Tells whether second stage which erodes edge values exceeding median by a factor >= aboveMedian occurs.
- secondStageErosion - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
When true, sets edge values which are greater than the median intensity by a user-defined factor of aboveMedian to zero.
- secondVal - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue.Values
-
DOCUMENT ME!
- seContrast - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
118 - greater than zero if image used contrast (L/S).
- secs2date(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
DOCUMENT ME!
- Secs2Mins(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Converts seconds to a MM:SS string.
- Secs2Mins(double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Converts seconds to a MM:SS string.
- section1_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section1_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section1_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section1_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section1_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section1_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section1_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section1_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section1_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section1_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section2_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section2_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section2_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section2_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section2_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section2_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section2_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section2_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section2_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section2_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section3_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section3_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section3_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section3_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section3_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section3_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section3_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section3_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section3_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section3_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section4_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section4_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section4_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section4_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section4_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section4_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section4_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section4_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section4_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section4_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section5_degree_lowerHalf_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section5_degree_lowerHalf_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section5_degree_lowerHalf_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section5_degree_lowerHalf_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section5_degree_lowerHalf_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section5_degree_lowerHalf_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section5_degree_lowerHalf_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section5_degree_lowerHalf_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section5_degree_lowerHalf_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section5_degree_lowerHalf_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section5_degree_upperHalf_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section5_degree_upperHalf_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section5_degree_upperHalf_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section5_degree_upperHalf_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section5_degree_upperHalf_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section5_degree_upperHalf_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section5_degree_upperHalf_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section5_degree_upperHalf_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section5_degree_upperHalf_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section5_degree_upperHalf_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section6_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section6_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section6_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section6_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section6_degree_end - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- section6_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- section6_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- section6_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- section6_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- section6_degree_start - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- sectionThickness - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- sectorSize - Variable in class gov.nih.mipav.model.file.FileZVI
-
- secuc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- secuc() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- seDateTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
12 - Allocation series Date/Time Stamp.
- seDeltaCnt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
168 - (internal use) number of updates to header.
- seDesc - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
20 - 30 bytes - Series Description.
- seDiskID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
6 - Disk ID for this series - GE internal.
- seed - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- seed - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- seed - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- seed - Variable in class gov.nih.mipav.model.structures.jama.LUSOL
-
- seed - Variable in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- seed(int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront.AdvancingTest
-
- seed(int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- seed(int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- seed(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Sets up directed graph from the seed point.
- seed(AlgorithmGaussianMixtureModelEM.ClassSig, int, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- seed(Point) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Sets up directed graph from the seed point.
- Seed(Vector3f, short) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmWatershed.Seed
-
Creates a new Seed object.
- seed2DPt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Seed point for 2D datasets.
- seed3DPt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Seed point for 3D datasets.
- seededCosts - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- seededCosts - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- seedFace() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.AdvancingFront
-
- seedPaintBitmap - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Buffer used to remember the area painted around the last seed point for region growing.
- seedPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- seedPoint - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- seedPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
List of points where we have grown a region from.
- seedPoints - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
VOI containing the possible seed points.
- seedVal - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Seed value to start the region grow.
- seedValB - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- seedValG - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- seedValR - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- seedValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWatershed.Seed
-
DOCUMENT ME!
- seedValue - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
The seed value last entered by the user
- seedValueTF - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Watershed seed value
- seedVector - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
DOCUMENT ME!
- seek(int) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Seeks to a point in the buffer.
- seek(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- seek(int) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- seek(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileReader
-
Seek.
- seek(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
Seek.
- seekToEndOfGroupTwoTags() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Strips preamble and group 2 tags from ioBuffer if present.
- seExamNo - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
8 - Exam number.
- sefAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
DOCUMENT ME!
- seg_nameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- seg_nameTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- seg_nameVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- seg_nameVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- segAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
DOCUMENT ME!
- segBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- segBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- segBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- segImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
Displays classes to which pixels belong.
- segImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Class segmentation shown.
- segKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- segKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- segm_mask(libdt.PatchBatchExtractor, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- segm_mask(libdt.VidSegm) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- segMaskImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- segMaskImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- segment() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- segment_graph(int, int, ArrayList<AlgorithmGraphBasedSegmentation.edge>, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation
-
- SEGMENT_IDENTIFIER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentReader
-
The 0xFF byte that signals the start of a segment.
- SEGMENT_SOS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentReader
-
Private, because this segment crashes my algorithm, and searching for it doesn't work (yet).
- segment2Colors() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNonparametricSegmentation
-
DOCUMENT ME!
- Segment2f() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPrimitive.Segment2f
-
- segment3Colors() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNonparametricSegmentation
-
DOCUMENT ME!
- segmentation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- segmentation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- segmentation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- segmentation - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- segmentation - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- segmentation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- segmentationAuto() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Driver to do the auto segmentation with AAM model.
- segmentationAuto() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
Driver to do the auto segmentation with AAM model.
- segmentationAuto() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Driver to do the auto segmentation with AAM model.
- segmentationAuto() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
Driver to do the auto segmentation with AAM model.
- segmentationAuto() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
Driver to do the auto segmentation with AAM model.
- segmentationAuto() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Driver to do the auto segmenation with AAM model.
- segmentationAuto() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Driver to do the auto segmenation with AAM model.
- segmentationBoundaries - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- segmentationContour - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- segmentationCurve - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- segmentationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- segmentationGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- segmentationGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- segmentationImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Image with areas marked with values indicating that they are special tissue types (vessels, etc).
- segmentationImage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Image with areas marked with values indicating that they are special tissue types (vessels, etc).
- segmentationImage - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
An image with areas designated as special (vessels, etc).
- segmentationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- segmentationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- segmentationPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- segmentBW() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNonparametricSegmentation
-
DOCUMENT ME!
- segmentCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- segmentCurvesByTangent() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
segmentCurvesByTangent produces a segmentation of the curves stored in the m_akCurvePosition data member.
- SegmentDetails(Point2D, Point2D) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- segmentedImage - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- segmentFromFuzzyC(Vector<Vector<ModelImage>>, int, ModelImage, ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Apply the Fuzzy-C means segmentation to CED image stack.
- segmentIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- segmentLattice(ModelImage, boolean, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- segmentLattice(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- segmentMesh(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ModelTriangleMeshCurveSegments
-
DOCUMENT ME!
- segmentNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- segmentNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- segmentNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- segments - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- segmentVideo(libdt.VidSegm, libdt.Mat[], int, int, int, int, libdt.Mat[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- segmentVideoSequence(libdt.VidSegm, Vector<String>, int, int, int, int, String) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- segs - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- seImageCt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
200 - (internal use) Last Image Number Used.
- seLandmarkCnt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
136 - Landmark counter.
- seLastMod - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
150 - Date/Time of last change.
- SELECT - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- select_colors(libjpeg.jpeg_decompress_struct, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- select_ncolors(libjpeg.jpeg_decompress_struct, int[]) - Method in class gov.nih.mipav.model.file.libjpeg
-
- SELECT_ON_JUMP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- SELECT_ON_JUMP - Static variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- SELECT_PERCENT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- SELECT_PERCENT - Static variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- select_working_set(int[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver_NU
-
- select_working_set(int[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- select_working_set(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver_NU
-
- select_working_set(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- select3DMarker(Vector3f, Vector3f, Vector3f, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- select3DMarker(Vector3f, Vector3f, Vector3f, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- selectAll() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Method to select all the slices in an image.
- selectAll() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Method to select all the slices in an image.
- selectAllVOIs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- selectAllVOIs(boolean) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Deprecated.
- selectAnnotation(Vector3f, Vector3f, Vector3f, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- selectAnnotations(Vector3f, Vector3f, Vector3f, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- selected - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- selected - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
id for the selected paint mask.
- selected - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel.AnnotationSplineControlPts
-
- selected - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- SELECTED - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- SELECTED - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- selectedArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
- selectedArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
- selectedArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- selectedArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- selectedArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
- selectedArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- selectedBorderColor - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
color for the line border surrounding each selected image in the light-box.
- selectedBorderColor - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Color for the line border surrounding each selected image in the light-box.
- selectedBorderSize - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
spacing for the selected line border surrounding each image in the light-box.
- selectedBorderSize - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Spacing for the selected line border surrounding each image in the light-box.
- selectedCardioid - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
- selectedCircle - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
- selectedDirectory - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- SelectedEigenvalue - Class in gov.nih.mipav.model.structures.jama
-
- SelectedEigenvalue() - Constructor for class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
Creates a new SelectedEigenvalue object.
- SelectedEigenvalue2 - Class in gov.nih.mipav.model.structures.jama
-
- SelectedEigenvalue2() - Constructor for class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
Creates a new SelectedEigenvalue object.
- selectedEllipse - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- selectedFile - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
Currently used file
- selectedFileName - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- selectedHyperbola - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- selectedImages - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
the selectedImages contains the *real* slice numbers -- not the index of a slice on a page.
- selectedImages - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
The selectedImages contains the *real* slice numbers -- not the index of a slice on a page.
- selectedLine - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
- selectedList - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
All directory-tree selected directories are listed for user-consumption in this whitespace.
- selectedList - Variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
List of selected VOIs.
- selectedList - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
List of selected VOIs.
- selectedListIndicies - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- selectedMaskToPaint(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Converts the selected mask to paint.
- selectedName - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- selectedNameA - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- selectedNameB - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- selectedNode - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeMouseAdapter
-
DOCUMENT ME!
- selectedNodeName - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeMouseAdapter
-
DOCUMENT ME!
- selectedOrientation - Variable in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
selected orientation
- selectedParabola - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- selectedPrefix - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- selectedRoot - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- selectedRoot - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- selectedRow - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
indices of selcted rows to remove
- selectedRow - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
indices of selcted rows to remove
- selectedRow - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
indices of selcted rows to remove
- selectedRowDicom - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- selectedRows - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
indices of selcted rows to remove
- selectedRows - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
indices of selcted rows to remove
- SelectedSurface - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- SelectedTab - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- selectedTimeSlices - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
The selected Time Slices vector contains the real slice number and time slice number in the format (slice
#).
- selectedToEnd - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.PlayMouse
-
DOCUMENT ME!
- selectedToEnd - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.PlayMouse
-
DOCUMENT ME!
- selectedToEnd - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.PlayMouse
-
DOCUMENT ME!
- selectedVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- selectedVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- selectedVOI - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
- selectedVOI(VOIEvent) - Method in interface gov.nih.mipav.model.structures.event.VOIListener
-
handles the VOI being selected. -- a state-change.
- selectedVOI(VOIEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.VOIHighlighter
-
Handles the VOI being selected. -- a state-change.
- selectedVOI(VOIEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.VOIHighlighter
-
Handles the VOI being selected. -- a state-change.
- selectedVOI(VOIEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.VOIHighlighter
-
Handles the VOI being selected. -- a state-change.
- selectedVOI(VOIEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- selectedVOIModel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
The tree of VOIs, composed of an image with children VOIs
- selectedVOIModel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
The tree of VOIs, composed of an image with children VOIs
- selectedVOIset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIHausdorffDistance
-
Vector of all VOIs that will have calculations performed.
- selectedVOIset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
Vector of all VOIs that will have calculations performed.
- selectedVOIset - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Vector of all VOIs that will have calculations performed.
- selectedVoiTree - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- selectedVoiTree - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- selectFile() - Method in class gov.nih.mipav.view.dialogs.InstanceVOI
-
Select either VOI file or Ply file.
- selectFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
Select either VOI file or Ply file.
- selectFileA - Variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Indicates the source file for list A.
- selectFileB - Variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Indicates the source file for list B.
- selectFileInput() - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
Select input .ply file.
- selectFileInput() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
Select input .ply file.
- selectFileName() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
Open an image based on the suffix of the file.
- selectFileOutput() - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
Select input .ply file.
- selectFileOutput() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
Select input .ply file.
- selectGroupDir() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Let user choose the Group trained model directory to save.
- selectIndividualTSlices - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- selection - Variable in class gov.nih.mipav.view.dialogs.JDialogLivewire
-
DOCUMENT ME!
- selection - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- SELECTION - Static variable in interface gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehaviorCallback
-
DOCUMENT ME!
- selectionChanged(UpdateVOIEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
responds to the volume of interest (VOI) change events.
- selectionChanged(UpdateVOIEvent) - Method in interface gov.nih.mipav.model.structures.UpdateVOISelectionListener
-
handles an UpdateVOIEvent as a selection change.
- selectionChanged(UpdateVOIEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
responds to the volume of interest (VOI) change events.
- SelectionListener(JTable, JTextArea) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDataProvenance.SelectionListener
-
- selectionMenu - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- selectionModel - Variable in class gov.nih.mipav.view.CheckTreeManager.CheckTreeCellRenderer
-
- selectionModel - Variable in class gov.nih.mipav.view.CheckTreeManager
-
- selectionOffset - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- selectLattice(Vector3f, Vector3f, Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- selectLattice(Vector3f, Vector3f, Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- selectLUTa() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Forces the panel to display the LUTB panel.
- selectLUTb() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Forces the panel to display the LUTB panel.
- selectMSPoints(double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- selectNone() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Method to select none of the slices in an image.
- selectNone() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Method to select none of the slices in an image.
- selector - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- selector - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- selector - Variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Allows the user to modify listB based on either the file provided in selectFileA or selectFileB.
- selectOrientationText(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Selection of text for the table and the editpanel.
- selectOrientationText(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
selection of text for the table and the editpanel.
- selectorMtf - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- selectorMtf - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- selectorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
The sub-gui *
- selectRangeInput() - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Sets the fields' value and accessability based on the state of the drop-down.
- selectSlices(int, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Select along which axis and in which direction slicing in the volume is to be performed.
- selectVOI(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- selectVOI(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- selectVOI(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- self_destruct(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- self_test - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- SELF_TEST - Static variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- SELF_TEST - Static variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- selfAdd(RealPolynomial) - Method in class gov.nih.mipav.model.structures.RealPolynomial
-
- selfAdd(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
Adds the argument to the value of this.
- selfMultiply(RealPolynomial) - Method in class gov.nih.mipav.model.structures.RealPolynomial
-
- selfMultiply(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
Multiplies this by the argument, returning this.
- selfShadow(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enables/Disables self-shadowing in the Surface mode.
- SelfShadow(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Enables/Disables self-shadowing in the Surface mode.
- SelfShadow(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Enables/Disables self-shadowing for the Surface mode.
- selfTest - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- selfTest - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- selfTest - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
- selfTest - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToRectangle
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNearlyCircleToCircle
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.CubicEquation
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.DAgostinosKsquaredTest
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- selfTest() - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- selfTest() - Method in class gov.nih.mipav.model.algorithms.Poly
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- selfTest() - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- selfTest() - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- selfTest() - Method in class gov.nih.mipav.model.structures.BSplineKernelFunction
-
- selfTest() - Method in class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- selfTest(int) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- selfTest2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
- selfTest2() - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- selfTest3() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
- semiMajorAxis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- semiMajorAxis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- semiMajorAxis - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- semiMajorAxis - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- semiMajorAxisLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- semiMajorAxisText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- semiMajorAxisText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
DOCUMENT ME!
- semiMinorAxis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- semiMinorAxis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseGeneration
-
- semiMinorAxis - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- semiMinorAxis - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- semiMinorAxisLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- semiMinorAxisText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- semiMinorAxisText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- semiXLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point semi axis X label.
- semiXText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point semi axis X text field.
- semiYLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point semi axis Y label.
- semiYText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point semi axis Y text field.
- semiZLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point semi axis Z label.
- semiZText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point semi axis Z text field.
- seNacq - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
140 - Number of acquisitions.
- send - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- sendActionOnStart(String) - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Sets a command that should be sent to the renderer after it is started.
- sendAllToListA - Variable in class gov.nih.mipav.view.JPanelListController
-
DOCUMENT ME!
- sendAllToListB - Variable in class gov.nih.mipav.view.JPanelListController
-
DOCUMENT ME!
- sendAllToTreeA - Variable in class gov.nih.mipav.view.JPanelTreeController
-
DOCUMENT ME!
- sendAllToTreeB - Variable in class gov.nih.mipav.view.JPanelTreeController
-
DOCUMENT ME!
- sendBinary(byte[], int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_FileIO
-
Writes bytes from the data buffer into the file stream.
- sendBinary(byte[], int, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Dummy method and should be overloaded by DICOMPDUService.
- sendBinary(byte[], int, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CommsLink
-
Actual binary data to be sent.
- sendBinary(byte[], int, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Actual binary data to be sent.
- sendButton - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- sendCancelRQ(int, DICOM_PDUService) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Sends a C-CANCEL-MOVE-RQ to the Service Class Provider; ie.
- sendDestCBox - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- sendFindCancelRQ(int, DICOM_PDUService) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Send a C-CANCEL-FIND-RQ to the Service Class Provider;ie.
- sendImages(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
Recursily desends the directory tree to send the images.
- sendModel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- sendMoveRequest(int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sends a move request at the current level, setting up the data objects appropriately.
- sendMoveRQ(DICOM_PDUService, DICOM_Object, byte[]) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Sends a move request.
- sendMTFValues() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- sendPanel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
- sendQuery(int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
This method sets up the information for the DICOM query depending on the type, sends the query, and parses the
information that the server sends back.
- sendQuery(DICOM_PDUService, DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Sends patient root query to remote DICOM Q/R server.
- sendQueryThread - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- sendReportWeb(String, String, String, String, String, String, String, ReportBugBuilder.BugType, ArrayList<String>, ArrayList<String>) - Static method in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
- sendSelectionToListA - Variable in class gov.nih.mipav.view.JPanelListController
-
left arrow or up arrow.
- sendSelectionToListB - Variable in class gov.nih.mipav.view.JPanelListController
-
right arrow or down arrow.
- sendSelectionToTreeA - Variable in class gov.nih.mipav.view.JPanelTreeController
-
left arrow or up arrow.
- sendSelectionToTreeB - Variable in class gov.nih.mipav.view.JPanelTreeController
-
right arrow or down arrow.
- sendStatusClearButton - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- sendStatusTArea - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- sendStoreRQ(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
Reads in the DICOM image file from disk, composes a DICOM C-Store request and sends the request.
- sendTable - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- sens_addr - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
sensitivity addressing size (0=auto/2/4 bytes)
- sens_MH - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
sensitivity method for MH (-1,0-7)
- sens_range - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
sensitivity range (0-3)
- sens_size - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
enables writing of ESD, (0/2/4 bytes)
- sens_TPH - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
sensitivity methods for TPHs (-1,0-7)
- sens_TPH_tileno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
tile number of sensitivity specification (>=0)
- sensi - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- sensi_meth - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- sensingMethod - Variable in class gov.nih.mipav.model.file.FileSVS
-
- sensingMethod - Variable in class gov.nih.mipav.model.file.FileTiff
-
- sensitivityArray - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- sensorModel - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- sensorModel - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- sensorType - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- sensorType - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- sent_table - Variable in class gov.nih.mipav.model.file.libjpeg.JHUFF_TBL
-
- sent_table - Variable in class gov.nih.mipav.model.file.libjpeg.JQUANT_TBL
-
- seNumArch - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
196 - (internal use) Number of Images Archived.
- seNumImages - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
204 - (internal use) Number of Images Existing.
- senw - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true southeast-northwest direction calculated.
- senw - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true southeast-northwest direction calculated.
- senw - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- senw - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- senwCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- senwCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- sep - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- Sep_FIR_filter() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Sep_FIR_filter
-
- sep_upsample(libjpeg.jpeg_decompress_struct, byte[][][], int[], int, byte[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- sep_upsample(libjpeg.jpeg_decompress_struct, short[][][], int[], int, short[][], int[], int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- SEP_UPSAMPLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- sePadding - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
432 - 588 bytes.
- separable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
If true convolution kernels are separable.
- separable - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
DOCUMENT ME!
- separable - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
DOCUMENT ME!
- separable - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- separable - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- separableConvolution(float[], int, int, float[][], int, int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
convolution with a separable kernel (the kernel is 3x{kx,ky,kz})
- separableConvolution(float[], int, int, int, float[][], int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
convolution with a separable kernel (the kernel is 3x{kx,ky,kz})
- separableGaussianKernel(float, float) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- separableGaussianKernel(float, float, float) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- SEPARATE_COMPONENT - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
- SEPARATE_COMPONENT - Static variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- SEPARATE_VOIS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
- SEPARATE_VOIS - Static variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- SEPARATE_VOLUME_TISSUE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- SEPARATE_VOLUME_TISSUE - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- separateButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- separateDimResButton - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- separatePanel - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- separateThread - Variable in class gov.nih.mipav.view.ViewJProgressBar
-
DOCUMENT ME!
- separateValues(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
DOCUMENT ME!
- separateValues(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
Divides space separate strings into an array of strings.
- separateVectorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- separateVolumeTissueRadioButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- separator - Static variable in class gov.nih.mipav.view.ViewMenuBar
-
Separator that can be added in between menu items.
- sepCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
DOCUMENT ME!
- sepCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- sepCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- sepCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
DOCUMENT ME!
- sepcualarColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- sepcualarColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
DOCUMENT ME!
- sepcualarColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
DOCUMENT ME!
- sepcualarColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
DOCUMENT ME!
- sepcualarColor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- sePdsA - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
176 - Pixel data size - as stored.
- sePdsC - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
180 - Pixel data size - Compressed.
- sePdsU - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
184 - Pixel data size - Uncompressed.
- sepFound - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- sePlane - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
72 - Most-like Plane (for L/S).
- sePseq - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
132 - Last Pulse Sequence Used (L/S).
- SEQ_ITEM_BEGIN - Static variable in class gov.nih.mipav.model.file.FileDicom
-
The tag marking the beginning of a dicom sequence.
- SEQ_ITEM_END - Static variable in class gov.nih.mipav.model.file.FileDicom
-
The tag marking the end of a dicom sequence.
- SEQ_ITEM_UNDEF_END - Static variable in class gov.nih.mipav.model.file.FileDicom
-
The tag marking the end of an undefined length dicom sequence.
- seqNo - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
Bug fix from Forums - next one line.
- seqNo - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
Bug fix from Forums - next one line.
- seqTags - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
- seqToUnseq - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- seqToUnseq - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- sequence - Variable in class gov.nih.mipav.model.file.FileDicomSQ
-
Sequences are composed of items (DICOM items) and store in a vector object.
- sequence - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- SEQUENCE - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
A sequence is encoded in the tag's value
- SEQUENCE - Static variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Indicates tag value is a sequence tag
- SequenceAuthor - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- sequenceField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- sequenceFinish - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- sequenceInformationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Panels used by this dialog box
- sequenceName - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- SequenceName - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- sequenceNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- sequenceNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- sequenceNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- sequenceNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- sequenceNumber - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
number of members of the sequence.
- sequenceNumber - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
number of members of the sequence.
- SequencePrgName - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- sequenceStart - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- sequenceStart - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- sequenceStart - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Used as part of the image name; represents beginning of sequence for all processed image sets.
- sequenceStep - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- sequenceText - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- SequenceType - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- sequenceVariant - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- SequenceWkcName - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- SEQUENCY - Static variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- SEQUENCY - Static variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
Use serialVersionUID for interoperability.
- sequencyButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- SequentialAccessTestBase() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- SequentialByteArrayReader(byte[]) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SequentialByteArrayReader
-
- SequentialByteArrayReader(byte[], int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SequentialByteArrayReader
-
- SequentialByteArrayReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialByteArrayReaderTest
-
- SequentialReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
- seRadius - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment
-
- seRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- serialArrayListFlavor - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler
-
DOCUMENT ME!
- serialNumber - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Detector
-
- serialNumber - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource
-
DOCUMENT ME!
- serialNumber - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Microscope
-
- serialNumber - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Objective
-
- serialVersionUID - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- serialVersionUID - Static variable in exception gov.nih.mipav.model.algorithms.ContourPlot.ImageSaver.ImageSaverException
-
- serialVersionUID - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.ParallelForEachExecutor
-
- serialVersionUID - Static variable in class gov.nih.mipav.model.algorithms.levelset.AlgorithmFastMarching
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.algorithms.RandomNumberGen
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in exception gov.nih.mipav.model.dicomcomm.DICOM_Exception
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Object.GroupElements
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_ObjectList
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.DicomDictionary
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileDicomKey
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileDicomSQ
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileDicomTag
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileDicomTagTable
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoAfni
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoAvi
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoBioRad
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoCheshire
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoCOR
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoDicom
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoDM3
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoFits
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoICS
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoImageXML.SurfaceLink
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoImageXML.VOILink
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoLattice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoLSM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoMinc
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoMincHDF
-
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoMRC
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoOME
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoRaw
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoSTK
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoTiff
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoTMG
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileInfoXML
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileMincAttElem
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileMincDimElem
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileMincHDF.HDFNode
-
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.FileMincVarElem
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in exception gov.nih.mipav.model.file.MetadataExtractor.BufferBoundsException
-
- serialVersionUID - Static variable in exception gov.nih.mipav.model.file.MetadataExtractor.CompoundException
-
- serialVersionUID - Static variable in exception gov.nih.mipav.model.file.MetadataExtractor.ImageProcessingException
-
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegComponent
-
- serialVersionUID - Static variable in exception gov.nih.mipav.model.file.MetadataExtractor.JpegProcessingException
-
- serialVersionUID - Static variable in exception gov.nih.mipav.model.file.MetadataExtractor.MetadataException
-
- serialVersionUID - Static variable in exception gov.nih.mipav.model.file.MetadataExtractor.PngProcessingException
-
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
- serialVersionUID - Static variable in exception gov.nih.mipav.model.file.MetadataExtractor.TiffProcessingException
-
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.XMLParameter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.file.XMLPSet
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.scripting.ImageVariableTable
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in exception gov.nih.mipav.model.scripting.ParserException
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.scripting.VariableTable
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.BufferBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.BufferBoolean
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.BufferByte
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.BufferDouble
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.BufferFloat
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.BufferInt
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.BufferLong
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.BufferShort
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.BufferUByte
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.BufferUInt
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.BufferUShort
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.CustomHashtable
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.event.VOIEvent
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.event.VOIVectorEvent
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.MatrixHolder
-
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.ModelHistogram
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.ModelImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.ModelRGB
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.ModelSerialCloneable
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.Point3D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.SortingTableModel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.TableSorter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in exception gov.nih.mipav.model.structures.TokenizerException
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.TransferFunction
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.TransMatrix
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.UneditableTableModel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.UpdateVOIEvent
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.VOI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.VOIBaseVector
-
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.VOIContour
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.VOILine
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.VOIPoint
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.VOIProtractor
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.VOIText
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.model.structures.VOIVector
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.AlternatingTableCellRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.BarMeter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.BorderedButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.CheckTreeManager.CheckTreeCellRenderer
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.CheckTreeManager.CheckTreeSelectionModel
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.components.JPanelColorChannels
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.components.JPanelSigmas
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.components.WidgetFactory.ScrollTextArea
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation.UpdateTextAction
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizePresets
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogAVIChoice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase.CancelAction
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase.HelpAction
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase.OKAction
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogBlankImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreens
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass.CheckValueAction
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogCumulativeHistogram
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFileInfo
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoMinc
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFilterChoice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogIntensityPaint
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogIntensityThreshold
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.JPanelListSelection
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogLivewire
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMask3D4D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions.ComboBoxRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions.ComboBoxRenderer2
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions.FontBoxRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogNColors
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogNIFTIChoice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogOrder
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogOrientMatrix
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPaintRGBComponents
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPointArea.JTextFieldFilter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPointArea.UpdateYSpaceAction
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRemovePlugin
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.CustomCellRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.DropJListTarget
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.DropJTreeTarget
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSelectChannelSequence
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSelectDICOMColumnHeaders
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogText
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogTextGE
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogThreshold.CheckValueAction
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVABRA
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIExtraction
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.JPanelAddRemoveVOI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.VOITreeRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.JPanelAddRemoveVOI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.JPanelLogicalOptions
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.VOITreeRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelAddRemoveVOI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticFileFormatOptions
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreeRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.DICOMDisplayer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.graphVisualization.JDialogAddNode
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
generated serial id
- serialVersionUID - Static variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
generated serial id
- serialVersionUID - Static variable in class gov.nih.mipav.view.graphVisualization.MipavNodeRenderer
-
generated serial id
- serialVersionUID - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorEvent
-
this is here because eclipse stated to so I used generate a UID option
- serialVersionUID - Static variable in class gov.nih.mipav.view.JFrameHistogram
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelAnonymizeImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelChecklist
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEdit
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditAxisOrientation
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditBoolean
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditChar
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditDate
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditDefault
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditImageOrientation
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditModality
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditOrientation
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditRace
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditSetOrParam
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditSex
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditTime
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelEditValueType
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelFileSelection
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelHistogram
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelListController
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelProgressBar
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelStatisticsList
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.JTreeDICOM
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.LineMeter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.MIPAVTableCellRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.MipavUtil
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.DownButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.EmptyButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.LeftButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.LeftRotateButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.RightButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.RightRotateButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.UpButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.DownButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.EmptyButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.LeftButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.RightButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.UpButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacity
-
Deprecated.
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector2f
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector3f
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSimpleText
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.ChangeNameDialog
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.DownButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.LeftButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.RightButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.UpButton
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.ChangeNameDialog
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SceneStatePlotter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe.DrawingPane
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererRayCast
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererShearWarp
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.JPanelAVIChoice
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT.DrawingPanel
-
Deprecated.
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB.DrawingPanel
-
Deprecated.
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.MouseEventVector
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.SceneState
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityRGB
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogVolumeAnnotation
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase.DrawingPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
eclipse generated this
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelVolume4D
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationPicker
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
- serialVersionUID - Static variable in exception gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.InvalidInputDataException
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOIVector
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.PolylineVector
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.BoundingBoxEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageReduceEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MipavLightingEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.OrderIndpTransparencyEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.PolylineVector
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.ScaledTextureEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceClipEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceExtractImage
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageCrop
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePreRenderEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOIEffect
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface.IntVector
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.Rubberband
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.RubberbandEllipse
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.RubberbandLine
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.RubberbandLivewire
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.RubberbandPolyline
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.RubberbandProtractor
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.RubberbandRectangle
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.RubberbandRectangleVOI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewControlsImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewDICOMDoubleListPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewFileChooserSubsample
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewFileTreeNode
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewImageDirectory
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJColorChooser
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentFunct
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentGraph
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentLUT
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameBase
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameFastMarching2
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameFastMarching3
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameGraph
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameMemory
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameMessage.ScrollTextArea
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameMessage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages.ImageCellRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameRegistration.JDialogIncrement
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool.JDialogIncrement
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage.PaintBoxRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJPopupPt
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJPopupVOI
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJProgressBar
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewMenuBuilder.QuickList
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewSplashScreen
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewTableModel
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewToolBarBuilder.JScriptToolBar
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewToolBarBuilder.PaintBoxRenderer
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.ViewVOIVector
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.VOIContourNode
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.VOIFrameNode
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.VOIGroupNode
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.VOIGroupTree
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.VOIOrientationNode
-
Use serialVersionUID for interoperability.
- serialVersionUID - Static variable in class gov.nih.mipav.view.VolumePositionFrame
-
Use serialVersionUID for interoperability.
- series - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- series - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- SERIES_LEVEL - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- seriesBody - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesDate - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesDate - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesDate - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesDescrip - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesDescription - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesDescription - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesExists(JDialogLoadLeica.LeicaSeries) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
DOCUMENT ME!
- seriesFileInfoTreeMap - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This is an ordered map of series number and seriesFileInfoTreeSet
- seriesFileInfoTreeSet - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This is an ordered list of files per series number
- seriesHeaderBlocks - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesHeaderBlocks - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesHeaderID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesHeaderID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesHeaderRevisionNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesHeaderRevisionNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesInstanceUID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
String representing the Series Instance UID
- seriesInstanceUID - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- seriesLarge - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesList - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
DOCUMENT ME!
- seriesMod - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesName - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaFileComparator
-
DOCUMENT ME!
- seriesName - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- seriesNo - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesNum - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
10 - series number.
- seriesNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesNumber - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- seriesNumberCounters - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
This is a hashmasp of series numbers and corresponding counter for the number of images in each series
- seriesNumberEqual(String, FileInfoDicom) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- seriesOp - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesOptionBox - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- seriesPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesPerfPhy - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesPos - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesProcessName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesProcessName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesProtocol - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesPSDName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesPSDName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesRawDataSystemID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesRawDataSystemID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesRevisionSubnumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesSmall - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesStepDate - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesStepDescrip - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesStepID - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesStepTime - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesSystemGenerationID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesSystemGenerationID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesTable - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- seriesTableModel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- seriesTableSorter - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- seriesTaskID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesTaskID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesTime - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- seriesTime - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- seriesType - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- seriesType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- seriesUID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
336 - 32 bytes.
- seriesUID - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- serif12 - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12 - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- serif12 - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12 - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12 - Variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12 - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Fonts, same as MipavUtil.font12 and
MipavUtil.font12B.
- serif12 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- serif12 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- serif12 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- serif12 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- serif12 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12 - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- serif12 - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- serif12 - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- serif12 - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- serif12B - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12B - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- serif12B - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12B - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12B - Variable in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12B - Variable in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
Fonts, same as MipavUtil.font12 and
MipavUtil.font12B.
- serif12B - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- serif12B - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12B - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12B - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Fonts, same as MipavUtil.font12 and MipavUtil.font12B.
- serif12B - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- serif12B - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- serrx - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
108 - series from which prescribed.
- server - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- serverModel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- serverTable - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- serviceID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
454 - 16 bytes.
- seSortOrder - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
134 - (internal use) Image Sort Order (L/S).
- seSource - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
70 - Series from which prescribed.
- session_error - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- session_error - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- session_error - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- seSuid - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
0 - 4 bytes - Suite ID for this Series.
- set - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- set - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- set - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineReadable
-
- set - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Buttons used for the host tab
- set(int) - Method in class gov.nih.mipav.model.file.FileInfoDicom.LengthStorageUnit
-
Sets the stored value of this storage unit to i.
- set(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Allocator
-
This method initiallizes the constructor and the blockSize variable specifies the
the number of objects that should be pre-allocated at a time.
- set(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NeighborKey
-
- set(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NeighborKey2
-
- set(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- set(int[], boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD set data fuction where bounds checking is NOT performed.
- set(int[], byte) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD set data fuction where bounds checking is NOT performed.
- set(int[], double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD set data fuction where bounds checking is NOT performed.
- set(int[], float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD set data fuction where bounds checking is NOT performed.
- set(int[], int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD set data fuction where bounds checking is NOT performed.
- set(int[], long) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD set data fuction where bounds checking is NOT performed.
- set(int[], short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD set data fuction where bounds checking is NOT performed.
- set(int[], Number) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
nD set data fuction where bounds checking is performed.
- set(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in byte format.
- set(int, boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of set that does NOT perform bounds checking
- set(int, byte) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Sets the value in byte format.
- set(int, byte) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the value in byte format.
- set(int, byte) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of set that does NOT perform bounds checking.
- set(int, double) - Method in class gov.nih.mipav.model.algorithms.Vectornd
-
- set(int, double) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the double data.
- set(int, double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of set that does NOT perform bounds checking.
- set(int, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- set(int, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- set(int, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.DoubleArrayPointer
-
- set(int, float) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the data in float format.
- set(int, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of set that does NOT perform bounds checking.
- set(int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- set(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Assign the specified element to array location i.
- set(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Assign the specified element to array location i.
- set(int, int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the int data in int format.
- set(int, int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the value in unsigned int format.
- set(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Version of set that does NOT perform bounds checking.
- set(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Assign the specified element to array location i.
- set(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Assign the specified element to array location i.
- set(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.IntArrayPointer
-
- set(int, int, boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D fast version of set that does NOT perform bounds checking.
- set(int, int, byte) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D fast version of set that does NOT perform bounds checking.
- set(int, int, double) - Method in class gov.nih.mipav.model.structures.jama.JamaMatrix
-
Set a single element.
- set(int, int, double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D fast version of set that does NOT perform bounds checking.
- set(int, int, double) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
- set(int, int, double, boolean[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- set(int, int, double, boolean[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataChar
-
- set(int, int, double, boolean[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataDouble
-
- set(int, int, double, boolean[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataFloat
-
- set(int, int, double, boolean[]) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.DataSparse
-
- set(int, int, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D fast version of set that does NOT perform bounds checking.
- set(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D fast version of set that does NOT perform bounds checking.
- set(int, int, int, boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D fast version of set that does NOT perform bounds checking.
- set(int, int, int, byte) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D fast version of set that does NOT perform bounds checking.
- set(int, int, int, double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D fast version of set that does NOT perform bounds checking.
- set(int, int, int, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D fast version of set that does NOT perform bounds checking.
- set(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D fast version of set that does NOT perform bounds checking.
- set(int, int, int, int, boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D fast version of set that does NOT perform bounds checking.
- set(int, int, int, int, byte) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D fast version of set that does NOT perform bounds checking.
- set(int, int, int, int, double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D fast version of set that does NOT perform bounds checking.
- set(int, int, int, int, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D fast version of set that does NOT perform bounds checking.
- set(int, int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D fast version of set that does NOT perform bounds checking.
- set(int, int, int, int, long) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D fast version of set that does NOT perform bounds checking.
- set(int, int, int, int, short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D fast version of set that does NOT perform bounds checking.
- set(int, int, int, int, Number) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
4D get data fuction where bounds checking is performed.
- set(int, int, int, long) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D fast version of set that does NOT perform bounds checking.
- set(int, int, int, short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D fast version of set that does NOT perform bounds checking.
- set(int, int, int, Number) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D set data fuction where bounds checking is performed.
- set(int, int, long) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D fast version of set that does NOT perform bounds checking.
- set(int, int, Number) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D get data fuction where bounds checking is performed.
- set(int, long) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the value in long format.
- set(int, long) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
version of set that does NOT perform bounds checking.
- set(int, short) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the value in short format.
- set(int, short) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the value in unsigned short format.
- set(int, PPolynomial, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- set(int, Number) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Sets the data array at the specified index to the specified value.
- set(int, Number) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in boolean format.
- set(int, Number) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Sets the value in byte format.
- set(int, Number) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the Number data in byte format.
- set(int, Number) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the data in float format.
- set(int, Number) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the Number data in int format.
- set(int, Number) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the Number object in long format.
- set(int, Number) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the Number object in short format.
- set(int, Number) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the Number object in byte format.
- set(int, Number) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the value in unsigned int format.
- set(int, Number) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the value in unsigned short format.
- set(int, Number) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Set that does perform bounds checking.
- set(int, Vector3f) - Method in class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
- set(MjPolynomial1f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
set this polynomial to have the same coefficients as those in the specified polynomial.
- set(Box3, Vector<Vertex>) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.StaticGrid
-
- set(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- set(NVectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- set(OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- set(OctNode, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortedTreeNodes
-
- set(Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- set(PPolynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- set(SparseMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- set(StartingPolynomial[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- set(VectorD) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- set(VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- set(Vector<Vertex>, Box3, Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.StaticGrid
-
- Set(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- Set(Face, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags.EdgeSorter
-
- set_axial_orientation() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
For prostate and knees projects, setting the axail orientation.
- set_axial_orientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- set_bottom_pointers8(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- set_bottom_pointers9to12(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- set_coefficients() - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- set_col_blocks(Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- set_corner_thresh_SIFT3D(SIFT3D.SIFT3DC, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- set_coronal_orientation() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
For prostate and knees projects, setting the coronal orientation.
- set_coronal_orientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- set_default_parameters(FileJPEG2000.opj_decompress_parameters) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- set_delta_offset(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- set_file_name(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- set_im_Reg_SIFT3D(SIFT3D.Reg_SIFT3D, SIFT3D.Image, double[], SIFT3D.SIFT3D_Descriptor_store) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- set_im_SIFT3D(SIFT3D.SIFT3DC, SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- set_imgdir - Variable in class gov.nih.mipav.model.file.FileJPEG2000.img_fol_t
-
Enable option
- set_index(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- set_lhs(CeresSolver.BlockRandomAccessMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- set_num_cols(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- set_num_kp_levels_SIFT3D(SIFT3D.SIFT3DC, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- set_num_nonzeros(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- set_num_residuals(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- set_num_rows(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- set_out_format - Variable in class gov.nih.mipav.model.file.FileJPEG2000.img_fol_t
-
Enable Cod Format for output
- set_parameter_block_sizes(Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- set_peak_thresh_SIFT3D(SIFT3D.SIFT3DC, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- set_ref_Reg_SIFT3D(SIFT3D.Reg_SIFT3D, SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- set_rhs(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- set_row_blocks(Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- set_sagittal_orientation() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
For prostate and knees projects, setting the sagittal orientation.
- set_sagittal_orientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- set_scales_Pyramid(double, double, SIFT3D.Pyramid) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- set_scales_SIFT3D(SIFT3D.SIFT3DC, double, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- set_sigma_n_SIFT3D(SIFT3D.SIFT3DC, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- set_sigma0_SIFT3D(SIFT3D.SIFT3DC, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- set_src_Reg_SIFT3D(SIFT3D.Reg_SIFT3D, SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- set_state_offset(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- set_storage_type(CeresSolver2.StorageType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- set_wraparound_pointers8(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- set_wraparound_pointers9to12(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- set2(PPolynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- set3DModelPosition(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Sets the 3DModel position label.
- set3DModelPosition(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Sets the 3DModel position label.
- set4ByteString(MetadataExtractor.Directory, int, MetadataExtractor.RandomAccessReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccReader
-
- set4DSpecs(int, int, int) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Specifications that are only relevant to 4D images.
- set4DSpecs(int, int, int) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Specifications that are only relevant to 4D images.
- seta(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
-
- setA(float) - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Accessor that sets a.
- setA(float) - Method in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Accessor that sets a.
- setA(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets alpha channel value of this Pixel.
- SetA(byte) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- setA_fromDouble(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- setA_fromDouble(double) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Sets the alpha value of this pixel at its current position with 0.0 as fully transparent and 1.0 as fully opaque.
- seta1(double) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Accessor that sets parameter a1 for tanh function
- setABBlend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
Sets the blend factor shader parameter between imageA and imageB.
- setABBlend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Sets blending between imageA and imageB.
- setABBlend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Sets the blend factor shader parameter between imageA and imageB.
- setABBlend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
Sets the blend factor shader parameter between imageA and imageB.
- setABBlend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- setABBlend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- setABBlend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets blending between imageA and imageB.
- setABCD(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- setAboveMedian(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
sets the aboveMedian ratio for second stage erosion Edge values >= median * aboveMedian are taken to zero.
- setAboveMedian(float) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Set the factor above the median at which second stage erosion occurs.
- setAbsPositionLabels(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Sets the Absolute position label.
- setAbsPositionLabels(Vector3f) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Sets the Absolute position label.
- setAbstractSyntax(DICOM_PDUItemType) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContext
-
Sets the abstract syntax of this class.
- setAcceptorRun(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- setAccessionNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setACenter(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setACF() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMBuilder
-
Reads and parses an ACF file.
- setACPCButton - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- setAcpcMax(Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets acpc max extent.
- setAcpcMin(Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets acpc min extent.
- setAcpcPC(Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets acpc posterior comissure.
- setAcpcRes(float) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets acps resolution.
- setAcqGradMat(double[][][]) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setAcquiredCardiacCycles(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setAcquiredStudyDuration(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setAcquisitionBitDepth(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAcquisitionDateDD(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setAcquisitionDateMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setAcquisitionDuration(float) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets acquisition duration.
- setAcquisitionMatrix(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setAcquisitionMode(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setAcquisitionNumber(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setAcquisitionTime(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setAcquisitionTime(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setAcquisitionTimeHH(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setAcquisitionTimeMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setAcquisitionTimeSS(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setAcqusitionDateYYYY(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setAction(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- setActive(boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Sets whether or not the VOI is active.
- setActive(boolean) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets flag to indicate whether or not VOI is active.
- setActive(boolean) - Method in class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
- setActive(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Programmatically sets whether the GUI should be in a state to draw VOIs.
- setActive(boolean) - Method in class gov.nih.mipav.view.Rubberband
-
Sets the rubberband to active or not active.
- setActive(VOIManager, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called from the VOIManager.
- setActiveFrame(Frame) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Method sets the parameter frame to top and active.
- setActiveImage(int) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
set active image
- setActiveImage(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- setActiveImage(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the active image for drawing VOIs.
- setActiveImage(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Required by the parent super class, do nothing.
- setActiveImage(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Does nothing but must instantiate for this to be a subclass of ViewJFrameBase.
- setActiveImage(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
set active image
- setActiveImage(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Sets the current active image.
- setActiveImage(int) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- setActiveImage(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewControlsImage
-
Sets the active image to either A or B and updates the paint spinner values.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the active image for drawing VOIs.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Sets the active image (image that should be processed for drawing VOIs and applying algorithms.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Sets the active image for drawing VOIs.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Sets the active image for drawing VOIs.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the active image for drawing VOIs.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the active image for drawing VOIs.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Set the active image for drawing VOIs.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Set the active image for drawing VOIs.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Deprecated.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Sets the active image for drawing VOIs.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Sets the active image for drawing VOIs.
- setActiveImage(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Set the active image for drawing VOIs.
- setActiveImage(ModelImage) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Sets which image is currently active and makes the corresponding tabbed pane visible.
- setActiveImage(ModelImage) - Method in class gov.nih.mipav.view.PatientSlice
-
Sets which image is currently active.
- setActiveImage(ModelImage) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- setActiveImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setActiveImage(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- setActiveImage(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- setActiveImage(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- setActiveImage(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- setActiveReceivers(String[]) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setActiveRenderer(VolumeTriPlanarRenderBase) - Method in interface gov.nih.mipav.view.renderer.WildMagic.RendererListener
-
- setActualReceiveFrequency(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setActualTransmitFrequency(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setAdaptiveNeighbourHood(double[][], double, int, double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- setAdditionalSets(Enumeration<XMLPSet>) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Method to replace the enumerated list of additional sets to be written into the header file.
- setAddress(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setAddSchwarzChristoffelLines(boolean) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setAdjMark(boolean) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Sets the adjusted mark flag.
- setAdjustersEnabled(boolean) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
This method will enable or disable the opacity panel's slider component and input text fields, based on the value
of the boolean parameter passed into it.
- setAdjustersEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
This method will enable or disable the opacity panel's slider component and input text fields, based on the value
of the boolean parameter passed into it.
- setAdjustersEnabled(boolean) - Method in interface gov.nih.mipav.view.renderer.ViewJComponentVolOpacityListener
-
- setAdOpString(String) - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Accessor that sets the advanced function string.
- setAdvancedSettings(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the advanced settings.
- setAdvancedSettings(int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the advanced settings.
- setAdvectionWeight(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Set the advection weight 'a'.
- setAffiliation(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Sets affiliation.
- setAffiliation(String, int) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set the investigator's affiliation using an index.
- setAfniGroup(String[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets array of afni group xml inclusions
- setAFNIOrigExtents(int[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the dimensions of the dicom ordered +orig image.
- setAFNIOrigResolutions(float[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the resolutions of the dicom ordered +orig image.
- setAFNITypeString(int) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the AFNITypeString to HEAD_ANAT_TYPE, HEAD_FUNC_TYPE, GEN_ANAT_TYPE, or GEN_FUNC_TYPE.
- setAFNIViewType(int) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the AFNIViewType to AFNI_ORIG, AFNI_APCPC, or AFNI_TLRC.
- setAFPintoDFP(float) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- setAFPintoFRET(float) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- setAirPressure(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setAlgo(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- setAlgo(int) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- setAlgorithm(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Sets the algorithm type (i.e. erode, dilate)
- setAlgorithm(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Sets the algorithm type (i.e. erode, dilate)
- setAlgorithm(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Sets the algorithm type (i.e. erode, dilate)
- setAlgorithm(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Sets the algorithm type (i.e. erode, dilate)
- setAlgorithm(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Sets the algorithm type (i.e. erode, dilate)
- setAlgorithm(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Sets the algorithm type (i.e. erode, dilate)
- setAlias() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
Creates/edits/deletes an alias for a shortcut.
- setAlias(String) - Method in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- setAll(byte) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the entire buffer to value passed to this method.
- setAll(double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the entire buffer to value passed to this method.
- setAll(float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the entire buffer to value passed to this method.
- setAll(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the entire buffer to value passed to this method.
- setAll(short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the entire buffer to value passed to this method.
- setAllActive(boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Sets all contours in the VOI as active or inactive.
- setAllLights(Light[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
- SetAllocator(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- SetAllocator(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- setAllOff() - Method in interface gov.nih.mipav.view.HistoLUTParent
-
Accessor to disable the all RGB color channels button if one of the lines has moved.
- setAllOff() - Method in class gov.nih.mipav.view.JPanelHistogram
-
- setAllOff() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Placeholder.
- setAllOff() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Accessor to disable the all RGB color channels button if one of the lines has moved.
- setAllOff() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Accessor to disable the all RGB color channels button if one of the lines has moved.
- setAllOff() - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Accessor to disable the all RGB color channels button if one of the lines has moved.
- setAllOff() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Placeholder.
- setAllowDataWindow(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
- setAllSelected(boolean) - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
- setAllSlices(boolean) - Method in class gov.nih.mipav.model.structures.VOIProtractor
-
Sets the all-slice flag.
- setAllUByte(short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the entire buffer to value passed to this method.
- setAllUShort(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the entire buffer to value passed to this method.
- setAllVOIs(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- setAlpha(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- setAlpha(double) - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
- setAlpha(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- setAlpha(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- setAlpha(float) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setAlpha(float) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setAlpha(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Sets the alpha value of the widget.
- setAlpha(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- setAlpha(float) - Method in class gov.nih.mipav.view.WindowLevel
-
Sets alpha for the notifyWindowDisplayListeners call
- setAlpha(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- setAlpha(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets T00, T01, and T02 in the transformation matrix.
- SetAlpha(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Sets the alpha value of the widget.
- setAlphaArray(Vector3f[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets array of T00, T01, and T02 in the transformation matrix.
- setAlphaBlend(float) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
set alpha blend
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Does nothing but must instantiate for this to be a subclass of RenderViewBase.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets the alpha blending of parameter for two image displays.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Sets the alpha blending of parameter for two image displays.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Required by the parent super class, do nothing.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Sets the alpha blending of parameter for two image displays.Do I need this ??
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
set alpha blend
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Sets the alpha blending parameter for two image display.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Deprecated.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the alpha blending of parameter for two image displaying.
- setAlphaBlendSliderValue(int) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Sets the blendSlider value.
- setAlphaBlendSliderValue(int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Sets the blendSlider value.
- setAlphaBright(double) - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- setAlphaDim(double) - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- setAlphaSlider(int) - Method in class gov.nih.mipav.view.ViewControlsImage
-
- setAlphaSliderEnabled(boolean) - Method in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- setAlternateRowCount(int) - Method in class gov.nih.mipav.view.AlternatingTableCellRenderer
-
This method sets the alternating interval.
- setAlwaysSaveImgAsAnalyze(boolean) - Static method in class gov.nih.mipav.view.Preferences
-
Sets whether all imgs should be saved in analyze format (i.e., don't ask about whether to save as
analyze/interfile/nifti).
- setAlwaysSaveImgAsInterfile(boolean) - Static method in class gov.nih.mipav.view.Preferences
-
Sets whether all imgs should be saved in interfile format (i.e., don't ask about whether to save as
analyze/interfile/nifti).
- setAlwaysSaveImgAsNifti(boolean) - Static method in class gov.nih.mipav.view.Preferences
-
Sets whether all imgs should be saved in nifti format (i.e., don't ask about whether to save as
analyze/interfile/nifti).
- setAlwaysSaveMncAsMinc1(boolean) - Static method in class gov.nih.mipav.view.Preferences
-
Sets whether all mncs should be saved in minc1 cdf format (i.e., don't ask about whether to save as minc1/minc2).
- setAlwaysSaveMncAsMinc2(boolean) - Static method in class gov.nih.mipav.view.Preferences
-
Sets whether all mncs should be saved in minc2 hdf5 format (i.e., don't ask about whether to save as
minc1/minc2).
- setAlwaysSplitVariables(Vector<String>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- setAmbient(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceRefXML_J3D
-
Sets the ambient color of the surface:
- setAmbient(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Sets the ambient color of the surface:
- setAmbient(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Sets the ambient color of the surface:.
- setAmbient(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
Sets the ambient color of the surface:.
- setAmpFactor(float) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Accessor that sets the amplication factor.
- setAmplificationIndex(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAmplitude(float) - Method in class gov.nih.mipav.view.LineMeter
-
Sets the most recent point on the history buffer.
- setAmplitude(int) - Method in class gov.nih.mipav.view.BarMeter
-
sets the height of the of the bar reading.
- SetAnalyzeImage(ModelSimpleImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
Set the analyzed image
- SetAnalyzeImage(ModelSimpleImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
Sets the image to be analyzed.
- setAnchor() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets the anchor point.
- setAnchor(AlgorithmNetworkSnake.AnchorPosition) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- setAndLoad(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- setAndLoad(ModelImage, boolean, boolean, double, double, double, double) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- setAngioFlag(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setAngle(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
- setAngle(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
Sets the rotation angle in radian by which this text object is rotated around its origin.
- setAngle(float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Set the spot cone angle.
- setAngle(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Change the field of view angle.
- setAngulation(double[]) - Method in class gov.nih.mipav.model.file.FileInfoSPAR
-
Sets slice angulation field.
- setAnimateTime(long) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- setAnimating(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- setAnimationSpeed(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setAnimationSpeed(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setAnimationSpeed(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- SetAnimator(Animator) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- setAnnimationSlider(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- setAnnotation(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setAnnotationDiameter(String, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- setAnnotationMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Set the annotation mode
- setAnnotationMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Set the annotation mode
- setAnnotationMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- setAnnotationPrefix(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setAnnotationPrefix(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- setAnnotations(VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setAnnotations(VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Called when new annotations are loaded from file, replaces current annotations.
- setAnnotations(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setAnnotationVOIColor(String, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- setAnnotationVOIColor(String, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setANormal(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setAnotherPt(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets another mid-sag point marker for orig to ACPC transformation in dataset ordering.
- setAnotherPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Sets another label based on the point.
- setAnteriorPt(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the most anterior point marker for +acpc to +tlrc transformation in dicom ordering.
- setAnteriorPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
Sets anterior label based on the point.
- setAnteriorPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
Sets anterior label based on the point.
- setAPCenter(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setApotomeAutoShutterUsed(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeAveragingCount(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeCamFilterHarmonics(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeCamGenericCameraName(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeCamNormalize(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeCamPhaseAngles(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeFilterName(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeFilterStrength(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeFullPhaseShift(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeGratingPeriod(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeGridName(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeGridPosition0(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeGridPosition1(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeGridPosition2(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeGridPosition3(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setApotomeProcessingMode(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAppFrameVisible(boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Tells the application to show the MIPAV UI or suppress it (progress bars, image frames, etc).
- setApplicationContext(DICOM_PDUItemType) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Sets the application context.
- setApplicationContext(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Sets the application context UID.
- setApplicationContextUID(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Sets the application context's UID.
- setAppliedCorrections(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setApplyWindowLevel(boolean) - Method in class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Accessor that sets if the window and level slider settings are applied to the saved image.
- setArbColor(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Sets the arbitrary clip plane color.
- setArbColor(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the arbitrary clip plane color.
- setArbiPlanePickable(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
setGUI setup the flag of the arbitary clipping frame box.
- setArbitraryClipPlane(float, boolean, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enables the arbitrary clip plane position.
- setArbitratyClip(Matrix3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setArbitratyClip(Matrix3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- SetArbPlane(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Set the position of the arbitrary clipping plane, before rotation.
- setArc(String, Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource
-
DOCUMENT ME!
- setArchitecture(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- setArea(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Sets the value of the surface area of the ModelTriangleMesh objects.
- setARGB(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets an ARGB value at the position currently referenced by this Pixel.
- setARGB_fromDouble(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets an ARGB value at the position currently referenced by this Pixel.
- setARGB_fromDouble(double, double, double, double) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Sets the alpha, red, green and blue value of this pixel.
- setArguments(int, int, int, double, double, double, double, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
% Arguments:
% Default values Description
%
% nscale 4 - Number of wavelet scales, try values 3-6
% norient 6 - Number of filter orientations
- setArrayName(String) - Method in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- setArrythmiaRejectionRatio(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setAsciiText(String[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets ascii text fields of header extension
- setASliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the arbitray clip slider and the labels. state given by flag.
- setASM(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if asm operator is calculated.
- setASM(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if asm operator is calculated.
- setAttenuation(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Set the coefficients for inverse quadratic attenuation, attenuation = 1/(a0+a1*d+a2*d^2) where d is the distance
from the light's position to the vertex.
- setAttenuationCorrection(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setAuthor(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setAuthor(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setAutoCenterFrequency(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setAutoContrast(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setAutoFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Accessor that sets the auto threshold flag.
- setAutoFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Accessor that sets the auto threshold flag.
- setAutoManualPrescan(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setAutoStartCBREngine(String) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set autoStartCBREngine.
- setAutoThreshold(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Accessor that sets the autoThreshold value
- setAuxdata(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- setAuxFile(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Supplies auxiliary-file string; permits no more than 24 characters.
- setAuxFile(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
supplies auxiliary-file string; permits no more than 24 characters.
- setAuxFile(String) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Supplies auxiliary-file string; permits no more than 24 characters.
- setAuxFile(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
supplies auxiliary-file string; permits no more than 24 characters.
- setAverageMode(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Accessor that sets the average mode.
- setAverageSAR(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setAveragesNumber(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setAveragingNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Accessor that sets the number of slice that will be averaged together.
- setAVICompression(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the AVI compression.
- setAVIWrite(ModelImage, int, int, int) - Method in class gov.nih.mipav.model.file.FileAvi
-
This method sets up for an AVI image write.
- setAxioCamAnalogGainEnable(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamBlackReference(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamColorModel(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamDelayTime(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamEnhanceColor(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamMicroScanning(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamNIRMode(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamResolution(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamSaturation(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamSelector(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamShutterControl(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamShutterSignal(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxioCamType(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setAxis(int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Set the axis toward which the face points.
- setAxis(int, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Change an axis of the oriented bounding box of the 3D image.
- setAxis(int, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Change an axis of the oriented bounding box of the 3D image.
- setAxisOrientation(int[]) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets orientation of each axis.
- setAxisOrientation(int[]) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets (copies) orientation of each axis.
- setAxisOrientation(int[]) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets orientation of each axis.
- setAxisOrientation(int[]) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
Sets orientation of each axis.
- setAxisOrientation(int[]) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the orientations of the 3 axes.
- setAxisOrientation(int, int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets the image orientation in the specified axis.
- setAxisOrientation(int, int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the image orientation in the specified axis.
- setAzimuth(float[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets azimuthal angle array for spherical direction
- setb(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
-
- setB() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- setB(float) - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Accessor that sets b.
- setB(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets blue channel value of this Pixel.
- SetB(byte) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- SetB(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setB_fromDouble(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- setB_fromDouble(double) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Sets the blue value of this pixel at its current position with 0.0 as no blue contribution and 1.0 as full blue contribution.
- setB0toT2Matrix(TransMatrix, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Sets the B0 to T2 matrix.
- setB1() - Method in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- setB1() - Method in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- setBack(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Accessor that sets the back value.
- setBack(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Accessor that sets the back value.
- setBackArrowEnabled(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
A convenience method to set the to-list-A buttons (both selected and all) to the given enabled status.
- setBackArrowEnabled(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
A convenience method to set the to-tree-A buttons (both selected and all) to the given enabled status.
- setBackArrowVisble(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
A convenience method to set the to-list-A buttons (both selected and all) to the given visible status.
- setBackArrowVisble(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
A convenience method to set the to-tree-A buttons (both selected and all) to the given visible status.
- setBackface(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Turn backface culling on/off for the selected surfaces.
- setBackface(SurfaceAttributes[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Turns BackFace Culling on/off for the selected surfaces.
- setBackface(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Enables backface culling for the given surface.
- setBackface(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Turn backface culling on/off for the given surface.
- SetBackface(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Set back-face culling on/off.
- setBackground(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
Sets the background color of the text, per default this is
transparent black (0x00000000) which wont be visible.
- setBackground(Color) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
Sets the background color of the text, per default this is
transparent black (0x00000000) which wont be visible.
- setBackground(ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.BoundingBoxEffect
-
- setBackground1(float) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setBackground2(float) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setBackgroundColor(Color) - Method in class gov.nih.mipav.model.structures.VOIText
-
Sets background color
- setBackgroundColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Sets the background color for the frame and rendered image.
- setBackgroundColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Sets the color of the background.
- setBackgroundColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Set the background color for the rendered image.
- setBackgroundColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Sets the background color for the frame and rendered image.
- setBackgroundColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Sets the background color for the frame and rendered image.
- setBackgroundColor(Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- setBackgroundColor(Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sets the background color.
- setBackgroundColor(Color) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that sets the background color to paint.
- setBackgroundColor(ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Sets the background color for the frame and rendered image.
- setBackgroundColor(ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Sets the background color for the frame and rendered image.
- setBackgroundColor(ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the background color.
- SetBackgroundColor(ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeBoundingBox
-
Sets the background color.
- SetBackgroundColor(ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Sets the background color.
- SetBackgroundColor(ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Sets the background color.
- setBands(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.AAMdef
-
Set the bands for the AAM model.
- setBandSpacing(int[]) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- setBandSpacingCounter(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- setBaseImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Accessor to set the baseImage.
- setBaseNameforReconstructedSlices(String) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set baseNameforReconstructedSlices.
- setBeginSlice(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the slice to begin writing at (3D).
- setBeginTime(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the time slice to begin writing at (4D).
- setBestWeight(double) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- setBeta(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- setBeta(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- setBeta(float) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setBeta(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets T10, T11, and T12 in the transformation matrix.
- setBetaArray(Vector3f[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets array of T10, T11, and T12 in the transformation matrix.
- setBetaHalflife(String, String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setBETParameters(boolean, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Changes the BET algorithm parameters from their defaults (which we choose).
- setBGImageShowing(boolean) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- setBigendian(boolean) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- setBigEndian(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
sets big endian
- setBigEndian(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Marks the checkmark when true.
- SetBillboardPosition(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- setBin1(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setBin1(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setBin1(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Accessor that sets bin1.
- setBin1(int) - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Accessor that sets bin1.
- setBin1Default(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
DOCUMENT ME!
- setBin2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setBin2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setBin2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Accessor that sets bin2.
- setBin2Default(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
DOCUMENT ME!
- setBinExternal(String, String, Integer, URI) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Data
-
DOCUMENT ME!
- setBinExternal(String, String, Integer, URI) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF
-
DOCUMENT ME!
- setBinImage(AlgorithmEmbeddedConfidenceEdgeDetection.BgImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeList
-
- setBinning(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setBinNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- setBinNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- setBinNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- setBinNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- setBinNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- setBinNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- setBinNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- setBinNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- setBitDepth(short) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setBitPix(short) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets bitpix; any value other than 1, 8, 16, 32, 64, or 24 gets set to the dissalowed trap value, -1.
- setBitPix(short) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
sets bitpix; any value other than 1, 8, 16, 32, 64, 128, or 24 gets set to the dissalowed trap value, -1.
- setBitPix(short) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets bitpix; any value other than 1, 8, 16, 32, 64, or 24 gets set to the dissalowed trap value, -1.
- setBitPix(short) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets bitpix; any value other than 1, 8, 16, 32, 64, or 24 gets set to the dissalowed trap value, -1.
- setBitsAllocated(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setBitsAllocated(int) - Method in class gov.nih.mipav.model.file.FileRaw
-
- setBitsAllocated(int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
- setBitSetMask(BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Sets this classes BitSet mask to new mask.
- setBitsPerPixel(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setBitsPerSample(int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- setBitsPerSample(int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- setBitsStored(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setBitsStored(int) - Method in class gov.nih.mipav.model.file.FileRaw
-
- setBitsStored(int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
- setBlackEnd(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
- setBlackValue0(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setBlackValue1(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setBlackValue2(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setBlackValue3(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setBleachedROIShape(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setBlend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Sets the transparency.
- setBlendSliderValue(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Get the blender slider value
- setBlendValue(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sets the blend value between images A and B.
- setBlockSide(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- setBlue(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- setBlue(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- setBlue(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Sets the flag for the blue channel.
- setBlue(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
Sets the flag for the blue channel.
- setBlue(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Sets the flag for the blue channel.
- setBlue(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
Sets the flag for the blue channel.
- setBlue(boolean) - Method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Sets the flag for the blue channel.
- setBlue(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- setBlue(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- setBlue(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Accessor that sets the color flag.
- setBlue(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Accessor that sets the color flag.
- setBlue(double) - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Accessor that sets the blue value.
- setBlue(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setBlue1(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- setBlue2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- setBlueArray(int[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setBlueBlackLevel(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setBlueChannelNumber(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setBlueFunction(TransferFunction) - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Accessor that returns the blue transfer function.
- setBlueGamma(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setBlueImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
Accessor that sets the Blue Image Source.
- setBlueImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Accessor that sets the Blue Image Source.
- setBlueOn(boolean) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Sets the blue checkbox on/off.
- setBlueOn(boolean, boolean) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Sets the blue flag to be on or off.
- setBlueOn(boolean, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
- setBlueProcessingRequested(boolean) - Method in class gov.nih.mipav.view.components.JPanelColorChannels
-
Changes whether the blue channel of the input image should be processed.
- setBlueValue(double) - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
- setBlueVector(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- setBlueWhiteLevel(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setBlur() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Called when the Blur Face button is pressed. the algorithm computes the blurred face and sets the displayed image
to be the blurred region.
- setBlur(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Sets the blur factor in number of voxels.
- setBlurFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Accessor that sets the blurring flag (if the surface is generated from a VOI or mask the surface image will need
to be blurred by the Extraction algo before the surface mesh is extracted.
- setBlurFlag(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Blur the resulting image or not.
- setBlurFlag(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImageRayCast
-
Blur the result ray traced image or not.
- setBlurFlag(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererRayCast
-
Blur the result ray traced image or not.
- setBlurringDiameter(int) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Accessor that sets the blurring diameter value.
- setBlurringFreq(float) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Accessor that sets the blurring frequency value.
- setBlurValue(float) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Accessor that sets the blurring amount.
- setbMatrixVals(double[][]) - Method in class gov.nih.mipav.model.file.DTIParameters
-
- setBmtxtPath(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
- setBodyPart(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set the subject's body part.
- setBOn(boolean) - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Sets if the blue channel to the boolean value.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a boolean value for the specified tag.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Sets the data array at the specified index to the specified value.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in boolean format.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Sets the data in float format.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the data in float format.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the data in float format.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the data in int format.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the long in byte format.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the value in short format.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the data in byte format.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the data in float format.
- setBoolean(int, boolean) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the data in float format.
- setBorder(String) - Method in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- setBorderCol(Color) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Sets color of the border surrounding each z slice in 4D images.
- setBorderColor(Color) - Method in class gov.nih.mipav.view.BorderedButton
-
DOCUMENT ME!
- setBorderColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the color of the image borders.
- setBorderColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the color of the image borders.
- setBorderName(String) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Set the name of the titled border
- setBorderOn(boolean) - Method in class gov.nih.mipav.view.BorderedButton
-
DOCUMENT ME!
- setBorderSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
Accessor that sets the borderSize.
- setBorderSize(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the image border size.
- setBorderSize(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the image border size.
- setBottom(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Accessor that sets the bottom side value.
- setBottom(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Accessor that sets the bottom side value.
- SetBottom(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- setBottomPad(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setBottomPad(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setBotX(int[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets array of the bottom x bounding box boundaries in Talairach conversion.
- setBotY(int[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets array of the bottom y bounding box boundaries in Talairach conversion.
- setBotZ(int[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets array of the bottom z bounding box boundaries in Talairach conversion.
- setboundary(boolean) - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- setBoundary(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Sets the contribution of the 2nd derivative on the volume rendering for this widget.
- setBoundary(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Sets the contribution of the 2nd derivative to the volume rendering.
- setBoundary(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Sets the contribution of the 2nd derivative on the volume rendering for this widget.
- SetBoundaryMCRootPositions(int, float, HashMap<Long, Integer>, HashMap<Long, Pair<Float, Point3D>>, CoredMeshData, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- SetBoundaryStrips() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- setBoundingBox(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- setBoundingBoxColor(int, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the color for the input slice frame.
- setBoundingBoxColor(Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- setBoundingBoxColor(Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sets the volume bounding box color.
- setBoundingBoxColor(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Called from JPanelDisplay.
- SetBoundingBoxColor(int, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Sets the bounding box color for the given plane.
- SetBoundingBoxColor(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeBoundingBox
-
Called from JPanelDisplay.
- setBoundingBoxFlag(boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the flag to the parameter.
- setBoxColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Sets the color of the box frame.
- setBoxColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Calls the appropriate method in the parent frame.
- setBoxColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Calls the appropriate method in the parent frame.
- setBoxColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Calls the appropriate method in the parent frame.
- setBoxColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Calls the appropriate method in the parent frame.
- setBoxColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Calls the appropriate method in the parent frame.
- setBoxColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Calls the appropriate method in the parent frame.
- setBracketBound(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set bracketBound.
- setBrainSelection(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the brain selection term, as described in BrainExtraction.pdf, that is part of the image term in the surface
evolution.
- setBranch(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Make the specified branch be the current state for following.
- setBranch(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Make the specified branch be the current state for following.
- setBranch(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- setBranch(FlyPathBehavior.BranchState) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Make the specified branch be the current state for following.
- setBranch(FlyPathBehavior_WM.BranchState) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Make the specified branch be the current state for following.
- setBranch(NavigationBehavior.BranchState) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- setBranch(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Make the specified branch be the current state for following.
- setBranch(Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Make the specified branch be the current state for following.
- setBranch(BranchGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
sets the BranchGroup in the scene graph that renders the surface.
- setBranchInfo(int, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Update the display to show the current branch and path direction (forward or reverse) for moving along the length
of the path.
- setBranchInfo(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Update the display to show the current branch and path direction (forward or reverse) for moving along the length
of the path.
- setBranchingFactor(String, String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setBrickLabsString(String[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
- setBrickStatAux(float[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets brickStatAux The BRICK_STATAUX attribute allows you to attach statistical distribution information to
arbitrary sub-bricks of a bucket dataset.
- setBrightness(int, float) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Method to set the brightness and contrast of the animate images.
- setBrightness(int, float) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Method to set the brightness and contrast of the animate images.
- setBrightness(int, float) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Method to set the brightness and contrast of the animate images.
- setBrightness(int, float) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Sets the brightness and contrast of the component image.
- setBrightness(int, float) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Sets the brightness and contrast of the component image.
- setBrightness(int, float) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Sets the brightness and contrast of the component image.
- setBrightnessContrast(int, float) - Method in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
Sets the brightness and contrast levels for the image.
- setBrowseForFiles(boolean) - Method in class gov.nih.mipav.view.JPanelFileSelection
-
determines how the file chooser will search.
- setBrowserFileFilter(FileFilter) - Method in class gov.nih.mipav.view.JPanelFileSelection
-
sets the file filter for the file chooser.
- setBrowserTitle(String) - Method in class gov.nih.mipav.view.JPanelFileSelection
-
Sets the file chooser title independantly of the panel title.
- setBruteForce(boolean, float, float, float, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
setBruteForce.
- setBruteForce(boolean, float, float, float, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
setBruteForce.
- setBt(double) - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Accessor that sets the brightness threshold.
- setBufferFloat(byte[], float, int, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Sets byte buffer with int.
- setBufferFloat(byte[], float, int, boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Sets byte buffer with int.
- setBufferInt(byte[], int, int, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Sets byte buffer with int.
- setBufferInt(byte[], int, int, boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Sets byte buffer with int.
- setBufferLong(byte[], long, int, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Sets byte buffer with long.
- setBufferLong(byte[], long, int, boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Sets byte buffer with long.
- setBuffers(float[], float[]) - Method in class gov.nih.mipav.view.PatientSlice
-
The frame in which the image(s) is displayed, allocates the memory and uses this method to pass the references to
the buffers.
- setBuffers(float[], float[]) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Sets the buffers for the actual data, the displayable image, and the paint.
- setBuffers(float[], float[]) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Sets the buffers for the actual data, the displayable image, and the paint.
- setBuffers(float[], float[], int[], int[]) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
The frame in which the image(s) is displayed, allocates the memory and uses this method to pass the references to
the buffers.
- setBuffers(float[], float[], int[], int[]) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
The frame in which the image(s) is displayed, allocates the memory and uses this method to pass the references to
the buffers.
- setBufferShort(byte[], short, int, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Sets byte buffer with int.
- setBufferShort(byte[], short, int, boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Sets byte buffer with int.
- setBufferString(byte[], String, int) - Method in class gov.nih.mipav.model.file.FileBase
-
Sets byte buffer with int.
- setBufferString(byte[], String, int) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Sets byte buffer with int.
- setBUNIT(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setButterworthOrder(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Accessor that sets the butterworth order.
- setButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
When user change the window, level values, setButton sets the min, max of the window values.
- setButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
When user change the window, level values, setButton sets the min, max of the window values.
- setButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
When user change the window, level values, setButton sets the min, max of the window values.
- setButton(JButton) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
sets the button that will have its name updated when OK is clicked.
- setButtonColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
Set the color of the button.
- setButtonColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- setButtonColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- setButtonColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- setButtonColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- setButtonColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
- setButtonColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- setButtonColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
- setButtonColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- setButtonColor(JButton, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Set the color of the button.
- setButtonFeatures(JButton, String, String) - Method in class gov.nih.mipav.view.JPanelListController
-
adds the tooltip, and the action label to the buttoin, as well as setting the action listener, font, borderpaint,
and the enable.
- setButtonFeatures(JButton, String, String) - Method in class gov.nih.mipav.view.JPanelTreeController
-
adds the tooltip, and the action label to the buttoin, as well as setting the action treeener, font, borderpaint,
and the enable.
- setButtonProps(JButton, String) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Sets the button properties for all the arrow buttons.
- setButtonProps(JButton, String) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Sets the button properties for all the arrow buttons.
- setButtonProps(JButton, String) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Sets the button properties for all the arrow buttons.
- setButtonStatus() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Method to set the status of the delete and extract menuItems and Buttons based on the selectedImages vector.
- setButtonStatus() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Method to set the status of the delete and extract menuItems and Buttons based on the selectedImages vector.
- setBValue(float[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets floating point array with diffusion-weighting b-values in units of s/mm-squared.
- setbValues(double[]) - Method in class gov.nih.mipav.model.file.DTIParameters
-
- setBValuesPerDirection(int[]) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setByArea(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize.perShapeCost
-
- setByContour(boolean) - Method in class gov.nih.mipav.view.JPanelStatisticsList
-
- setBySliceEnabled(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
Method to set the selected value for slice-only calculation.
- setByte(int, byte) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Sets the data array at the specified index to the specified value.
- setByte(int, byte) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in boolean format.
- setByte(int, byte) - Method in class gov.nih.mipav.model.structures.BufferByte
-
sSets the value in byte format.
- setByte(int, byte) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the byte data in double format.
- setByte(int, byte) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the data in float format.
- setByte(int, byte) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the value in int format.
- setByte(int, byte) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the value in long format.
- setByte(int, byte) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the value in short format.
- setByte(int, byte) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the value in byte format.
- setByte(int, byte) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the byte value in unsigned short format.
- setByte(int, byte) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the byte value in unsigned short format.
- setByteArray(int, byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a byte[] (array) for the specified tag.
- setByteArray(int, byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setByteArray(int, byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- setByteArray(int, byte[]) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setBytesPerPixel(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setBz2zip(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
- setC(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
C is the cost of constraints violation.
- setC(float) - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Accessor that sets c.
- setC(int, int, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
color version of setC that does NOT perform bounds checking.
- setC(int, int, int, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D fast color version of set that does NOT perform bounds checking.
- setC(int, int, int, int, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D fast color version of set that does NOT perform bounds checking.
- setC(int, int, int, int, Number) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
3D color set data fuction where bounds checking is performed.
- setC(int, int, Number) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the entire buffer to value passed to this method.
- setc_s(LSCM.HalfEdge, LSCM.Point) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- setC1(double) - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
- setC2(double) - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Accessor that sets c2.
- setC3(double) - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
- setCalcCOG(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the whether or not to calculate the center of gravity (mass).
- setCalcCOG(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the whether or not to calculate the center of gravity (mass).
- setCalibrationDateDD(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setCalibrationDateMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setCalibrationDateYYYY(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setCalibrationTimeHH(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setCalibrationTimeMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setCalibrationTimeSS(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setCalledAppTitle(byte[]) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Sets the called application entity title.
- setCallingAppTitle(byte[]) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Sets the calling application entity title.
- setCalMax(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
sets cal-max. if supplied value is less than cal-min, the cal-min gets reset to the supplied value as well, so
that cal-min is still no greater than cal-max.
- setCalMax(float) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
sets cal-max. if supplied value is less than cal-min, the cal-min gets reset to the supplied value as well, so
that cal-min is still no greater than cal-max.
- setCalMax(float) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
sets cal-max. if supplied value is less than cal-min, the cal-min gets reset to the supplied value as well, so
that cal-min is still no greater than cal-max.
- setCalMax(float) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets cal-max. if supplied value is less than cal-min, the cal-min gets reset to the supplied value as well, so
that cal-min is still no greater than cal-max.
- setCalMin(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
sets cal-min. if supplied value is greater than cal-max, the cal-max gets reset to the supplied value as well, so
that cal-max is still no less than cal-min.
- setCalMin(float) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets cal-min. if supplied value is greater than cal-max, the cal-max gets reset to the supplied value as well, so
that cal-max is still no less than cal-min.
- setCalMin(float) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets cal-min. if supplied value is greater than cal-max, the cal-max gets reset to the supplied value as well, so
that cal-max is still no less than cal-min.
- setCalMin(float) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets cal-min. if supplied value is greater than cal-max, the cal-max gets reset to the supplied value as well, so
that cal-max is still no less than cal-min.
- setCalUnits(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Allows no more than 8 characters for the string describing the cal units.
- setCalUnits(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
allows no more than 8 characters for the string describing the cal units.
- setCamera(String) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setCamera(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCamera(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
When the mouse move in bottom three planar view, need to update the camera view location to the
indicated image center.
- setCameraAdapterMagnification(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraBinning(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraBitDepth(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Update the camera in 3D view window.
- setCameraFrameHeight(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraFrameImageOrientation(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraFramePixelDistance(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraFrameScalingFactor(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraFrameStartLeft(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraFrameStartTop(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraFrameWidth(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraImageAcquisitionTime0(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraImageAcquisitionTime1(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraImageAcquisitionTime2(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraImageAcquisitionTime3(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraLiveScalingFactor(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraLocation(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Set the camera location.
- setCameraMake(String) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- setCameraModel(String) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- setCameraNearPlane(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- setCameraNearPlane(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setCameraParameters() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Display the camera parameters in the user-interface.
- setCameraShadingCorrection(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraShutterLiveEnable(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCameraViewRotationDegree(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Set camera view rotation degree
- setCamerViewRotationDegree(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- setCancel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Called when the dialog Cancel button is pressed. this sets up the Algorithm state to revert to the original copy
of the image and to tell the dialog to cleanup and delete this algorithm.
- setCancelled(boolean) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Turns the cancelled flag on or off.
- setCanvas(Component) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- setCapacity(int) - Method in class gov.nih.mipav.model.structures.IntVector
-
Sets the capacity of the array.
- setCaptureTime(float) - Method in class gov.nih.mipav.model.file.FileAvi
-
- setCaptureVersion(String) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setCardiacFrequency(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setCardiacHeartRate(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setCardiacPhaseNumber(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setCardiacPhaseNumber(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setCardiacRepTime(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setCaret(String[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets caret array for extension header
- setCATFileName(String) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set CATFileName.
- setCBRHostName(String) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set CBRHostName.
- setCBRImageDirectory(String) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set CBRImageDirectory.
- setCBRProjectionDirectory(String) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set CBRProjectionDirectory.
- setCc(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- setCellData(double[][]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- setCenter - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- setCenter - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- setCenter(boolean) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Sets the center point used in transformations.
- setCenter(float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- setCenter(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- setCenter(int, int, int) - Method in class gov.nih.mipav.view.PatientSlice
-
DOCUMENT ME!
- setCenter(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Sets the three slider positions, based on the position of the
three orthogonal planes: AXIAL, CORONAL, and SAGITTAL.
- setCenter(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
setCenter sets the PatientSlice center:
- setCenter(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Sets the three slider positions, based on the position of the
three orthogonal planes: AXIAL, CORONAL, and SAGITTAL.
- setCenter(int, int, int) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
setCenter, sets the crosshairPt and the local copies of the volumePosition (in FileCoordinates and
PatientCoordinates).
- setCenter(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
sets the crosshair positions and slices for each of the triImages.
- setCenter(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
sets the crosshair positions and slices for each of the triImages.
- setCenter(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
sets the crosshair positions and slices for each of the triImages.
- setCenter(int, int, int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
sets the crosshair positions and slices for each of the triImages.
- setCenter(int, int, int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
sets the crosshair positions and slices for each of the triImages.
- setCenter(int, int, int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
sets the crosshair positions and slices for each of the triImages.
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets the values for JPanelSlices, based on the positions in the PlaneRender class for the AXIAL, CORONAL, and
SAGITTAL views.
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Sets the values for JPanelSlices, based on the positions in the PlaneRender class for the AXIAL, CORONAL, and
SAGITTAL views.
- setCenter(Vector3f) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
setCenter sets the cursor and slice position for this PlaneRender
object, based on the 3D location of the three intersecting ModelImage
planes.
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
setCenter sets the cursor and slice position for this PlaneRenderWM
object, based on the 3D location of the three intersecting ModelImage
planes.
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
setCenter sets the cursor and slice position for this PlaneRenderWM object, based on the 3D location of the three
intersecting ModelImage planes.
- setCenter(Vector3f) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.ScreenCoordinateListener
-
Sets the currently displayed image slice.
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- setCenter(Vector3f) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the position of the 3D slices.
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- setCenter(Vector3f) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- setCenter(Vector3f) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Deprecated.
- setCenter(Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- setCenter(Vector3f, boolean) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Sets the current displayed slice for 3D images.
- SetCenter(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Sets the Center of the widget for the GLSL program.
- SetCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Sets the positions of the three orthogonal planes.
- setCenterCenter(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setCenterCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- setCenterOfRotation(double[]) - Method in class gov.nih.mipav.model.file.FileInfoMetaImage
-
- setCenterPointX(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setCenterPointY(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setCenterPointZ(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setCenterPtLocation(int) - Method in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Sets the center point of rotation to this location.
- setCentroids(float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
Accessor to set the centroids.
- setCentroids(float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- setCentroids(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Accessor that sets the centroids.
- setCentroids(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Accessor that sets the centroids.
- setcFFp(int, Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setChanged() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
- setChanged() - Method in interface gov.nih.mipav.model.util.Observable
-
Marks this object as having been changed.
- setChangedValues(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setChannel0(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setChannel1(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setChannel2(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setChannel3(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setChannelArray(String[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setChannelDataTypes(int[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setChannelDescription(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setChannelID(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setChannelName(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setChannelName0(int, String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setChannelName1(int, String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setChannelName2(int, String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setChannelName3(int, String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setChannelNames(String[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setChannels(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setChannels(int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- setChannels(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setChannelsFound(int) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setChannelWeight(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setCheckboardButtonEnabled(boolean) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Accessor that enables or disables the checkerboard button.
- setCheckbox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- setCheckBox(JCheckBox) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea.JTextFieldFilter
-
DOCUMENT ME!
- setCheckBoxA(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Set the slider arbitrary checkBox with the passed in value.
- setCheckboxBoundingBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- setCheckBoxesDisabled() - Method in class gov.nih.mipav.view.JPanelStatisticsList
-
DOCUMENT ME!
- setCheckBoxesEnabled() - Method in class gov.nih.mipav.view.JPanelChecklist
-
Set the checkboxes to be clickable.
- setCheckBoxesEnabled() - Method in class gov.nih.mipav.view.JPanelStatisticsList
-
sets the enabled status of the checkboxes, after first finding the visible ones (ie., setting the visible status
of them), by using the super-class' implementation of setCheckBoxesEnabled.
- setCheckBoxesEnabled(int, boolean) - Method in class gov.nih.mipav.view.JPanelChecklist
-
Set the checkboxes to be clickable.
- setCheckBoxesEnabled(String, boolean) - Method in class gov.nih.mipav.view.JPanelChecklist
-
Set the checkboxes to be clickable.
- setCheckBoxStatic(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Set the slider Static checkBox with the passed in value.
- setCheckBoxStaticInv(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Set the slider Static inverse checkBox with the passed in value.
- setCheckBoxX(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Set the slider X checkBox with the passed in value.
- setCheckBoxXInv(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Set the slider X inverse checkBox with the passed in value.
- setCheckBoxY(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Set the slider Y checkBox with the passed in value.
- setCheckBoxYInv(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Set the slider Y inverse checkBox with the passed in value.
- setCheckBoxZ(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Set the slider Z checkBox with the passed in value.
- setCheckBoxZInv(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Set the slider Z inverse checkBox with the passed in value.
- setCheckChildren(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
tells the anonymizer to check and anonymize the child directories of the selected source directories.
- setCheckerboard(int, int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the image to display in "Checkerboard" mode with the given numbers of rows and columns.
- setCheckerboardAnimate(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- setCheckerboardApplied(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- setCheckListRemove(boolean[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Accessor that sets the which slices to remove according to the boolean array paramater.
- setCheckListRemove(boolean[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
Accessor that sets the which slices to remove according to the boolean array paramater.
- setCheckListRemove(Vector<String>) - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Accessor that sets the which slices to remove according to the vector of strings.
- setCheckListRemoveEven() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Sets up so that only even slices will be removed.
- setCheckListRemoveOdd() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Sets up so that only odd slices will be removed.
- setChildProcess(boolean) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Set isChildProcess variable.
- setChildProcess(boolean) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Set isChildProcess variable.
- setChoiceBox - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- setChoiceButton - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- setChooserFromTag(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Sets the value for one of the choosers based on a dicom tag and value.
- setChunk(int) - Method in class gov.nih.mipav.model.structures.IntVector
-
Sets the chunk size when adding memory to the array.
- setCity(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setClampFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Accessor that sets the clamp flag.
- setClampFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Accessor that sets the clamp flag.
- setClampingValue(int) - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Accessor that sets the clamping value.
- setClampingValue(int) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Accessor that sets the clamping value.
- setClassicStepSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setClassNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Accessor that sets the class number.
- setClassWeights(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- setClassWeights(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- setClearInflectionPoints(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
- setClickCountToStart(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- setClip(Vector3f, Vector3f, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- SetClip(int, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
Enable and set the axis-aligned clip plane.
- SetClip(int, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Sets axis-aligned clipping for the VolumeShaderEffect.
- SetClip(int, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SetClip(int, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Sets axis-aligned clipping for the VolumeShaderEffect.
- SetClip(int, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Sets axis-aligned clipping for the VolumeShaderEffect.
- SetClip(int, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- SetClipArb(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
Enable and set the arbitrary clip plane.
- SetClipArb(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Sets arbitrary clipping for the VolumeShaderEffect.
- SetClipArb(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SetClipArb(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Sets arbitrary clipping for the VolumeShaderEffect.
- SetClipArb(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- SetClipArb(float[], float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- SetClipArbInv(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
Enable and set the arbitrary clip plane.
- SetClipArbInv(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Sets arbitrary clipping for the VolumeShaderEffect.
- SetClipArbInv(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Sets arbitrary clipping for the VolumeShaderEffect.
- setClipColor(int, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- setClipColors(Color[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- setClipDisplayed(boolean[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- setClipEnabled(boolean[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- SetClipEye(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
Enable and set the eye clip plane.
- SetClipEye(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Sets eye clipping for the VolumeShaderEffect.
- SetClipEye(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SetClipEye(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Sets eye clipping for the VolumeShaderEffect.
- SetClipEye(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- SetClipEye(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- setClipEyeArb(Vector4f, Vector4f, Vector4f, float[]) - Method in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- SetClipEyeInv(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
Enable and set the inverse-eye clip plane.
- SetClipEyeInv(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Sets inverse-eye clipping for the VolumeShaderEffect.
- SetClipEyeInv(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SetClipEyeInv(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Sets inverse-eye clipping for the VolumeShaderEffect.
- SetClipEyeInv(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- SetClipEyeInv(float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- setClipFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the clip flag.
- setClipLevel(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
the Clip Level is a percentage of the maximum number of pixels in any particular brightness level.
- setClipLevel(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
The Clip Level is a percentage of the maximum number of pixels in any particular brightness level.
- setClipMode(int) - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
set clip mode.
- setClipMode(int) - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Accessor that sets the clip mode.
- setClipMode(int) - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Accessor that sets the clip mode.
- setClipMode(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Accessor that sets the clip mode.
- SetClipOBB(Vector3f, Vector3f, Vector3f[], float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- SetClipOBB(Vector3f, Vector3f, Vector3f[], float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- SetClipOBB(Vector3f, Vector3f, Vector3f[], float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SetClipOBB(Vector3f, Vector3f, Vector3f[], float[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- setClippedMatrix(TransMatrix) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets the clipped matrix for copy/paste actions.
- setClipping(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Turns Clipping on/off for the selected surfaces.
- setClipping(SurfaceAttributes[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Turns Clipping on/off for the selected surfaces.
- setClipping(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Enable clipping for the given surface.
- setClipping(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enable clipping for the given surface.
- SetClipping(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Enables/disables surface clipping for the per-pixel shader.
- SetClipping(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Enables/disables surface clipping for the per-pixel shader.
- setClipPlane(int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Sets the axis-aligned clip plane clipping position.
- setClipPlane(int, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Called from JPanelClip.
- setClipPlaneColor(int, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Sets the axis-aligned clip plane color.
- setClipPlaneColor(int, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the axis-aligned clip plane color.
- setClipSliceAColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the color of the arbitrary clipping plane slice frame.
- setClipSliceAwithRotate(float, float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
During mouse recorder diaplay, setup the rotatino axis for both arbiTG and mcArbiTG.
- setClipSliceSColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the color of the static clipping plane slice frame.
- setClipSliceSInvColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the color of the static inverse clipping plane slice frame.
- setClipSliceXColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the color of the x clipping plane slice frame.
- setClipSliceXInvColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the color of the -x clipping plane slice frame.
- setClipSliceYColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the color of the y cliping plane slice frame.
- setClipSliceYInvColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the color of the -y cliping plane slice frame.
- setClipSliceZColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the color of the z clipping plane slice frame.
- setClipSliceZInvColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the color of the -z clipping plane slice frame.
- SetClipSphere(Vector3f, Vector3f, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- SetClipSphere(Vector3f, Vector3f, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- SetClipSphere(Vector3f, Vector3f, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SetClipSphere(Vector3f, Vector3f, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- setClipValues() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Sets clipMin and clipMax.
- setClipValues() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Sets the minimum and maximum clipping values.
- setClipValues() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Sets clipMin and clipMax.
- setClipValues(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- setClonedImageName(String) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that sets the name of the image without registering the image.
- setClosed(boolean) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets this contour as open or closed.
- SetClosed() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Set the point to closed point.
- SetClosed(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Sets whether the point belongs to a closed or opened path.
- SetClosedPathConnectivity() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Sets all point to be connected in one closed path.
- setClosestChoiceBranch() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Loop through all of the possible branch choices and select the one that is the closest to the current view
direction vector.
- setClosestChoiceBranch() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Loop through all of the possible branch choices and select the one that is the closest to the current view
direction vector.
- setCmdlines(String[]) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setCNum(int) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Accessor that sets the number of terms.
- setCO2Percent(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setCoarseBegin(float) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set the coarse sample begin.
- setCoarseBegin(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set the coarse sample begin.
- setCoarseBegin(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the coarse sample begin.
- setCoarseBegin(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set the coarse sample begin.
- setCoarseBeginX(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the coarse sample beginX.
- setCoarseBeginX(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the coarse sample beginX.
- setCoarseBeginY(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the coarse sample beginY.
- setCoarseBeginY(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the coarse sample beginY.
- setCoarseBeginZ(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the coarse sample beginZ.
- setCoarseBeginZ(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the coarse sample beginZ.
- setCoarseEnd(float) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set the coarse sample end.
- setCoarseEnd(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set the coarse sample end.
- setCoarseEnd(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the coarse sample end.
- setCoarseEnd(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set the coarse sample end.
- setCoarseEndX(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the coarse sample endX.
- setCoarseEndX(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the coarse sample endX.
- setCoarseEndY(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the coarse sample endY.
- setCoarseEndY(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the coarse sample endY.
- setCoarseEndZ(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the coarse sample endZ.
- setCoarseEndZ(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the coarse sample endZ.
- setCoarsenessThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Accessor that sets coarseness threshold
- setCoarseRate(float) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set the coarse sample rate.
- setCoarseRate(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set the coarse sample rate.
- setCoarseRate(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the coarse sample rate.
- setCoarseRate(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set the coarse sample rate.
- setCoarseRateX(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the coarse sample rateX.
- setCoarseRateY(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the coarse sample rateY.
- setCoarseRateZ(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the coarse sample rateZ.
- setCoeff(int, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
DOCUMENT ME!
- setCoilName(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setCoilType(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setCollapseImage(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setColocalizationEMFrame(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
if true parentFrame is a ViewJFrameColocalizationEM.
- setColocalizationEMFrame(ViewJFrameColocalizationEM) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Called from ViewJFrameColocalizationEM.
- setColocalizationRegFrame(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
if true parentFrame is a ViewJFrameColocalizationRegression.
- setColocalizationRegFrame(ViewJFrameColocalizationRegression) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Called from ViewJFrameColocalizationRegression.
- setColor(byte) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- setColor(float) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the color to the parameter.
- setColor(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
Sets this point's color
- setColor(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
Sets the color of the segment (start and end point)
- setColor(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
Sets the color of this text in integer packed ARGB format.
- setColor(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color of the triangle (all vertices)
- setColor(int) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setColor - sets the color of the line on the graph.
- setColor(int, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
- setColor(int, int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Sets a specific index of the LUT with the given color and updates the compressed LUT.
- setColor(int, Color) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Sets a specific index of the LUT with the given color.
- setColor(int, Color) - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Sets a specific index of the RGB table with the given color.
- setColor(int, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
- setColor(int, Color4f) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Sets the color and stores the color update information in a local copy.
- setColor(Color) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
Sets this point's color
- setColor(Color) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
Sets the color of the segment (start and end point)
- setColor(Color) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
Sets the color of this text
- setColor(Color) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color the triangle (all vertices)
- setColor(Color) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the color to the parameter.
- setColor(Color) - Method in class gov.nih.mipav.model.structures.VOIText
-
Sets the color of the font.
- setColor(Color) - Method in class gov.nih.mipav.view.ColorIcon
-
setColor - sets the color of the icon.
- setColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the base color for the light.
- setColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
When the surface panel change the surface color, endoscopy view changes the color accordingly.
- setColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxFrame
-
Sets color of frame.
- setColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
Sets color of slice.
- setColor(Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
This is called when the user chooses a new color for the fiber bundle.
- setColor(Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- setColor(Color) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setColor - sets the color of the line on the graph.
- setColor(String) - Method in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- setColor(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setColor(String, ColorRGB, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Set the color for the given surface.
- setColor(String, ColorRGB, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setColor(IntSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
Sets this point's color
- setColor(IntSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
Sets the color of the segment (start and end point)
- setColor(IntSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color of the triangle (all vertices)
- setColor(Color4f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Sets the surface color.
- setColor(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.BoundingBoxEffect
-
- setColor(ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Sets the color of the color transfer function for this widget.
- setColor(ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Sets the color of the color transfer function for this widget.
- SetColor(float, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Sets the color of the widget color transfer function.
- SetColor(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOIEffect
-
- SetColor(ColorRGB, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Set the object color.
- SetColor(ColorRGB, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- SetColor(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePreRenderEffect
-
- setColor0(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
Sets the color at the starting point of the segment
- setColor0(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color of vertex 0
- setColor0(Color) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
Sets the color at the starting point of the segment
- setColor0(Color) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color of vertex 0
- setColor0(IntSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
Sets the color at the starting point of the segment
- setColor0(IntSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color for vertex 0
- setColor1(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
Sets the color at the starting point of the segment
- setColor1(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color of vertex 1
- setColor1(Color) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
Sets the color at the end point of the segment
- setColor1(Color) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color of vertex 1
- setColor1(Color) - Method in class gov.nih.mipav.view.AlternatingTableCellRenderer
-
This method sets the first alternating background color.
- setColor1(IntSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
Sets the color at the end point of the segment
- setColor1(IntSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color for vertex 1
- setColor2(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color of vertex 2
- setColor2(Color) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color of vertex 2
- setColor2(Color) - Method in class gov.nih.mipav.view.AlternatingTableCellRenderer
-
This method sets the second alternating background color.
- setColor2(IntSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the color for vertex 2
- setColorButton(Color) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Set the color for the color button.
- setColorButton(Color) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- setColorChannels(boolean, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- setColorChannels(boolean, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- setColorChannels(boolean, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Sets what color channels to convolve and tells the convolver that it is working on a color image.
- setColorDelay(int, Color4f) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Used for fast color update while painting the triangle mesh, stores the
color update information for later loading into the surface.
- setColorFilterType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Accessor that sets if all colors are component filtered, vector magnitude filtered, vector direction filtered,
or adaptive truncated vector median filtered.
- SetColorImage(Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Sets the IsColor shader parameter values.
- SetColorImage(Program) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Sets the IsColor shader parameter values.
- setColorization(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setColorOptionsGUI(JPanelColorChannels) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Sets the color channel GUI panel, based on the script action's parameters.
- setColors(float, float, float[], int, Color4f[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- setColorScheme(ContourPlot.ColorScheme) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- setColorsLUT() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Update the colormap based on the LUT:
- setColorsLUT() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Update the colormap based on the LUT:
- setColorTable(Color[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- setColorUpdate() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Used for fast color update while painting.
- setColorWeighting(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- setColourCoefficients(double, double, double) - Method in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- setColourCoefficients(double, double, double) - Method in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- SetColumn(int, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- setColumnClass(Class<?>, int) - Method in class gov.nih.mipav.model.structures.SortingTableModel
-
DOCUMENT ME!
- setColumnComparator(Class, Comparator) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- setColumnName(int, Object) - Method in class gov.nih.mipav.view.ViewTableModel
-
Sets the column name to the new name and fires the table event.
- setColumns() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sets the columns of the query table to certain values.
- setColumns(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setColumns(int) - Method in class gov.nih.mipav.view.JPanelEditDefault
-
- setColumns(int) - Method in class gov.nih.mipav.view.JPanelEditSetOrParam
-
- setColumnVectorX(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setColumnVectorY(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setColumnVectorZ(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setColumnWidths() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
This method calculates the width needed to encompass the table data for each column.
- setComboBox(JComboBox) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Sets combo box choices that match resolution units listed in FileInfoBase and in the same order.
- setComboBox(JComboBox) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Sets combo box choices that match resolution units listed in FileInfoBase and in the same order.
- setComboBox(JComboBox) - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Sets combo box choices that match resolution units listed in FileInfoBase in the same order.
- setComment(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setComments(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setComments(String) - Method in class gov.nih.mipav.model.structures.VOI
-
- setComments(String) - Method in class gov.nih.mipav.model.structures.VOIText
-
- setCommentStr(String) - Method in class gov.nih.mipav.model.file.FileInfoTMG
-
DOCUMENT ME!
- setCommonMapping(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
- setCommonMapping(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
- setCompareType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.TagComparator
-
DOCUMENT ME!
- setComplete(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Accessor to tell the glass pane that the rectangle drawing is complete.
- setComplete(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Sets the flag to indicate whether the algorithm completed successfully.
- setCompleted(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets completed to flag indicating if algorithm has sucessfully completed.
- setComplex(int, int, int, int, float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- setComplexInverse(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- setComponent(Component) - Method in class gov.nih.mipav.view.Rubberband
-
Sets the component to the parameter.
- setComponentOrientation(ComponentOrientation) - Method in class gov.nih.mipav.view.JScrollMenu
-
- setComponentsEnabled(Container, boolean) - Static method in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- setCompositeMode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Set the texture renderer to render in composite mode.
- setCompositeMode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Set the texture renderer to render in composite mode.
- setCompressed(float) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
sets the compressed variable.
- setCompressed(float) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
sets the compressed variable.
- setCompressed(float) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets the compressed variable.
- setCompressionQuality(float) - Method in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- setCompressionType(int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the compression type.
- setComputeMax(int, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Turns computing the maximum projection on for X, Y, or Z processing.
- setComputeMaximum(boolean) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- setComputeMin(int, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Turns computing the minimum projection on for X, Y, or Z processing.
- setComputeMinimum(boolean) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- setConcatenate(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if there is only 1 result image with the original
source concatenated with the calculated features
- setConcatenatedSATSelection(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setCondenserContrast(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setCondenserContrast(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setCondenserNumericalAperture(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setConf(double) - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- setConnectivity(Vector<Integer>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Set the default connectivity vector.
- setConsecutiveNegativeNeeded(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- SetConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- setContactEmail(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
DOCUMENT ME!
- setContactExperimenterRef(Integer, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
DOCUMENT ME!
- setContactFirstName(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
DOCUMENT ME!
- setContactInstitution(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
DOCUMENT ME!
- setContactLastName(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
DOCUMENT ME!
- setContactPerson(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setContent(ContourPlot.Renderer) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Sets the content renderer that will draw into the area of the coordinate system.
- setContent(String) - Method in class gov.nih.mipav.model.file.FileInfoNRRD
-
Accessor setting contentString giving textual description of information in the array
- setContent(String, File) - Method in class gov.nih.mipav.view.dialogs.JDialogText
-
Attempts to read the given file, place its contents into the dialog's display area and format it using the
specified MIME-type (or with PLAIN_FORMAT if it can not determine how to display the content).
- setContent(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogText
-
Uses the input string as the text to display in the dialog's text area, formats it with the specified MIME-type
(or with PLAIN_FORMAT if it can't determine the how to display the content).
- setContentTime(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setContiguousSlices(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setContourGraph(ViewJFrameGraph) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the contourGraph to the parameter.
- setContourStatistic(String, String, Object) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
Stores the statistic for a particular contour of a VOI without reference to the slice
a contour may exist on.
- setContrast(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if the contrast operator is calculated.
- setContrast(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if the contrast operator is calculated.
- setContrast(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Accessor that sets the contrast.
- setContrastAgent(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setContrastAmount(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setContrastBolusAgent(String[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setContrastBolusIngredient(String[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setContrastBolusIngredientConcentration(float[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setContrastBolusRoute(float[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setContrastBolusStartTime(String[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setContrastBolusTotalDose(float[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setContrastBolusVolume(String[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setContrastDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setContrastLimited(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
Redistribute from brightnesses with at a least a specified percentage of the brightness with the maximum number
of pixels.
- setContrastLimited(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Redistribute from brightnesses with at a least a specified percentage of the brightness with the maximum number
of pixels.
- setContrastManagerMode(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setContrastMethod(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setContrastType(String[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setContrastUsed(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setContributor(String) - Method in class gov.nih.mipav.model.file.FileInfoJSON
-
- setControlPoint(int, int, int, Vector3f) - Method in class gov.nih.mipav.model.structures.BSplineLattice3Df
-
Set the position of the specified control point.
- setControlPoint(int, int, Vector2f) - Method in class gov.nih.mipav.model.structures.BSplineLattice2Df
-
Set the position of the specified control point.
- setControlPoints(int) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
- setControls() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
set controls
- setControls() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- setControls() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the menu and controls (i.e. toolbars) of the main frame!
- setControls() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Required by the parent super class, do nothing.
- setControls() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
set controls
- setControls() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Sets the menu and controls (i.e. toolbars) of the main frame!
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Sets the menu and controls (i.e. toolbars) of the main frame!
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Sets the menu and controls (i.e. toolbars) of the main frame!
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the menu and controls (i.e. toolbars) of the main frame!
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the menu and controls (i.e. toolbars) of the main frame!
- setControls() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Placeholder.
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Sets the menu and controls (i.e. toolbars) of the main frame!
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Sets the menu and controls (i.e. toolbars) of the main frame!
- setControls() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the menu and controls (i.e. toolbars) of the main frame!
- setControls() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets the menu for the main frame.
- setConversionProgram(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setConvert4Dto3D(boolean) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlices
-
DOCUMENT ME!
- setConvert4Dto3D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
DOCUMENT ME!
- setConvolve(boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor method for the m_bConvolve data memeber.
- setCooling(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setCoordCode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets type of xyz coordinates.
- setCoordCode2(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets type of xyz coordinates 2.
- setCoordinate(Vector<Vector3f>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Set the default coordinate vector.
- setCoordinateView(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Sets the coordinate view.
- setCoordinateView(Rectangle2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Sets the coordinate view.
- setCoordinateViewRect(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- setCopyColorText(String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
If the progress bar is visible, sets the text to:
Copying all color values ...
- setCopyColorText(String) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
If the progress bar is visible, sets the text to:
Copying all color values ...
- setCorrelation(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if gray level coordinate matrix correlation is calculated.
- setCorrelation(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if gray level coordinate matrix correlation is
calculated.
- setCorrelationRatioSmoothed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
- setCost(double) - Method in class gov.nih.mipav.model.algorithms.Vectornd
-
- setCost(int) - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- setCost(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setCost(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setCost(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- setCost(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- setCost(int) - Method in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- setCostChoice(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the choice of cost function.
- setCostChoice(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set the choice of cost function.
- setCostChoice(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set the choice of cost function.
- setCostChoice(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the choice of cost function.
- setCostChoice(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set the choice of cost function.
- setCostChoice(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the choice of cost function.
- setCostVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
- setCountry(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setCovariance(double) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Accessor that sets the Gaussian noise covariance.
- setCPhase(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setCreateEfficiencyImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- setCreateFDivAImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- setCreateFDivDImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- setCreateField(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Accessor that sets the create field flag.
- setCreateField(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Accessor that sets the create field flag.
- setCreateGabor(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Accessor that determines whether or not a Gabor filter image is created.
- setCreateMaskImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- setCreateWatershedLines(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- setCreationDate(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setCreationDate(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setCreatorID(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setCRIRGBFilter(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setCrop(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Accessor that sets the crop background flag.
- setCrop(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Accessor that sets the crop background flag.
- setCrop(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Sets the crop volume.
- setCrop(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the new crop volume in the ViewJComponentTriImage frames and sets the volumeBounds.
- setCrosshairCursor(Cursor) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Changes the Crosshair cursor to be either the default crosshair or a pre-existing gif.
- setCrosshairPixelGap(int) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Sets the pixel gap to be used by the crosshair (in one direction away from the center)
- setCrossoverValue(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Accessor that sets the crossover value at which the membership function = 0.5
- setCsaImageAcquisitionMatrixText(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageBandwidthPerPixelPhaseEncode(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageEchoColumnPosition(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageEchoLinePosition(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageEchoPartitionPosition(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageGSWDDataType(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageICE_Dims(String[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageImaAbsTablePosition(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageImaCoilString(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageImaPATModeText(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageImaRelTablePosition(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageMeasuredFourierLines(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageMosaicRefAcqTimes(double[][]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageMultistepIndex(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageNonPlanarImage(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageNumberOfImagesInMosaic(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImagePhaseEncodingDirectionPositive(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageProtocolSliceNumber(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageRealDwellTime(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageRFSWDDataType(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageSequenceMask(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageSliceMeasurementDuration(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageSliceNormalVector(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageSlicePosition_PCS(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageTimeAfterStart(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaImageUsedChannelMask(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesAbsTablePosition(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesB1rms(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesB1rmsSupervision(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesCoilForGradient(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesCoilForGradient2(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesCoilId(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesCoilString(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesdBdt_limit(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesdBdt_max(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesdBdt_thresh(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesFlowCompensation(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesGradientDelayTime(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesGradientMode(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesIsocentered(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesLongModelName(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMiscSequenceParam(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolacFlowComp0(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocoladFlipAngleDegree0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolalTE0(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolalTR0(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0aFFT_SCALEnbValid(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0aFFT_SCALEnflFactor(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0aFFT_SCALEnlRxChannel(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnlElementSelected(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnlRxChannelConnected(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnsCoilElementIDlCoilCopy(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnsCoilElementIDtCoilID(String[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0asListnsCoilElementIDtElement(String[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0iUsedRFactor(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0sCOILPLUGSauiNmbrOfNibbles(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0sCOILPLUGSaulPlugId(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolasCoilSelectMeas0tNucleus(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocoldAveragesDouble(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocoldRefSNR(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocoldRefSNR_VOI(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocollAverages(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocollCombinedEchoes(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocollContrasts(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocollParadigmPeriodicity(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocollProtID(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocollRepetitions(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocollScanTimeSec(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocollTOM(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocollTotalScanTimeSec(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedInPlaneRot(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedPhaseFOV(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedReadoutFOV(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumedThickness(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesNormaldCor(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesNormaldSag(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesNormaldTra(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesPositiondCor(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesPositiondSag(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatasAdjVolumesPositiondTra(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatauiAdjFreMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatauiAdjFreProtRelated(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatauiAdjMDSMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatauiAdjProtID(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatauiAdjRFMapMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatauiAdjShimMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatauiAdjTableTolerance(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatauiAdjVolumeValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAdjDatauiAdjWatSupMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAngiolDynamicReconMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAngiolTemporalInterpolation(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAngioucPCFlowMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAngioucTOFInflow(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAslulMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsAutoAligndAAMatrix(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsBladeParadBladeCoverage(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsBladeParaucMotionCorr(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsDiffusionulMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsDistortionCorrFilterucMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsEFISPECbEFIDataValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsFastImaginglEchoTrainDuration(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsFastImaginglEPIFactor(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsFastImaginglSegments(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsFastImaginglShots(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsFastImaginglSliceTurboFactor(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsFastImaginglTurboFactor(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsFastImagingucSegmentationMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent0(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent1(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent2(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent3(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECalShimCurrent4(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECbB0CompensationValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECbCrossTermCompensationValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECbDelayValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECbEddyCompensationValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECbOffsetValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECbSensitivityValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECbShimCurrentValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECflGSWDMinRiseTime(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECflSensitivityX(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECflSensitivityY(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECflSensitivityZ(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPEClDelayX(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPEClDelayY(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPEClDelayZ(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPEClOffsetX(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPEClOffsetY(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPEClOffsetZ(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflAmplitude1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflAmplitude2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflTimeConstant1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationXaflTimeConstant2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflAmplitude1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflAmplitude2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflTimeConstant1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationYaflTimeConstant2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflAmplitude1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflAmplitude2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflTimeConstant1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsB0CompensationZaflTimeConstant2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXYaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXYaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXZaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationXZaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYXaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYXaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYZaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationYZaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZXaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZXaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZYaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsCrossTermCompensationZYaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude3(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflAmplitude4(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant3(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationXaflTimeConstant4(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude3(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflAmplitude4(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant3(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationYaflTimeConstant4(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude3(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflAmplitude4(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant3(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECsEddyCompensationZaflTimeConstant4(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGRADSPECucMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGroupArrayanMember(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGroupArrayasGroup0nSize(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGroupArraylSize(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGroupArraysPSatdGap(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsGroupArraysPSatdThickness(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacedAngioDynCentralRegionA(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacedAngioDynSamplingDensityB(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacedPhaseResolution(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacedSeqPhasePartialFourierForSNR(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacedSliceResolution(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacelBaseResolution(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacelImagesPerSlab(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacelLinesPerShot(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacelPartitions(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacelPhaseEncodingLines(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacelRadialInterleavesPerImage(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpacelRadialViews(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpaceucAsymmetricEchoMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpaceucAveragingMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpaceucDimension(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpaceucMultiSliceMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpaceucPhasePartialFourier(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpaceucPOCS(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpaceucSlicePartialFourier(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpaceucTrajectory(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpaceucViewSharing(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsKSpaceunReordering(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsMDSdMdsRangeExtension(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsMDSlmdsLinesPerSegment(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsMDSlTableSpeedNumerator(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsMDSsMdsEndPosSBCS_mmdTra(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsMDSulMdsModeMask(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsMDSulMdsReconMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsMDSulMdsVariableResolution(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsNavigatorParalBreathHoldMeas(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsNavigatorParalRespComp(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsParametricMappingucParametricMap(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPatlAccelFact3D(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPatlAccelFactPE(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPatlRefLinesPE(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPatucPATMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPatucRefScanMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPatucTPatAverageAllFrames(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImaginglMethod1(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImaginglMethod2(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImaginglPhases(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImaginglRetroGatedImages(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImaginglSignal1(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImaginglSignal2(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlArrhythmiaDetection(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlCardiacGateOffThreshold(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlCardiacGateOnThreshold(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlTriggerIntervals(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlTriggerPulses(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioECGlTriggerWindow(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlArrhythmiaDetection(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlCardiacGateOffThreshold(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlCardiacGateOnThreshold(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlTriggerIntervals(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlTriggerPulses(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioExtlTriggerWindow(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioNativeucFlowSenMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioNativeucMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselArrhythmiaDetection(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselCardiacGateOffThreshold(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselCardiacGateOnThreshold(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselTriggerIntervals(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselTriggerPulses(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioPulselTriggerWindow(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioRespdGatingRatio(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioResplRespGatePhase(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPhysioImagingsPhysioResplRespGateThreshold(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPrepPulsesdDarkBloodFlipAngle(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPrepPulsesdDarkBloodThickness(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPrepPulsesdIRPulseThicknessFactor(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPrepPulsesdT2PrepDuration(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPrepPulsesucFatSat(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPrepPulsesucFatSatMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPrepPulsesucInversion(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPrepPulsesucSatRecovery(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPrepPulsesucT2Prep(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPrepPulsesucTIScout(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsPrepPulsesucWaterSat(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsProtConsistencyInfoflGMax(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsProtConsistencyInfoflNominalB0(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsProtConsistencyInfoflRiseTime(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsProtConsistencyInfolMaximumNofRxReceiverChannels(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsProtConsistencyInfotBaselineString(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsProtConsistencyInfotSystemType(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRawFilterlSlope_256(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRawFilterucMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRawFilterucOn(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRSatArrayasElm0dThickness(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sNormaldCor(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sNormaldSag(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sNormaldTra(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sPositiondCor(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sPositiondSag(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRSatArrayasElm0sPositiondTra(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRSatArraylSize(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRXSPECalDwellTime0(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRXSPECbGainValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsRXSPEClGain(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayanAsc(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayanPos(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdInPlaneRot(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdPhaseFOV(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdReadoutFOV(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezdThickness(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsNormaldCor(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsNormaldSag(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsNormaldTra(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsPositiondCor(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsPositiondSag(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayasSlicezsPositiondTra(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArraylConc(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArraylSize(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArraysTSatdThickness(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSliceArrayucMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSpecParalAutoRefScanNo(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSpecParalDecouplingType(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSpecParalExcitationType(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSpecParalNOEType(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSpecParalPhaseCyclingType(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSpecParalPhaseEncodingType(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSpecParalRFExcitationBandwidth(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSpecParalSpecAppl(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSpecParalSpectralSuppression(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsSpecParaucRemoveOversampling(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECaRFPULSEnbAmplitudeValid(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECaRFPULSEnflAmplitude(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECaRFPULSEntName(String[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bAmplitudeCorrectionValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bFrequencyValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bReferenceAmplitudeValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0bRFPAIndexValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0flAmplitudeCorrection(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0flReferenceAmplitude(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0lFrequency(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo0tNucleus(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bAmplitudeCorrectionValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bFrequencyValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bReferenceAmplitudeValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1bRFPAIndexValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1flAmplitudeCorrection(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECasNucleusInfo1lRFPAIndex(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECbKDynValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeClipHigh(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeClipLow(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeMax(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECflKDynMagnitudeMin(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECflKDynPhaseClip(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECflKDynPhaseMax(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPEClBCExcitationMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPEClBCSeqExcitationMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPEClNoOfTraPulses(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECucBCExcitationModeValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECucExcitMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECucRFPulseType(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsTXSPECucSimultaneousExcitation(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsWiPMemBlockadFree(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsWiPMemBlockalFree(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolsWiPMemBlocktFree(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocoltdefaultEVAProt(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocoltProtocolName(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocoltReferenceImage0(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocoltReferenceImage1(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocoltReferenceImage2(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocoltSequenceFileName(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucAAMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucAARefMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucAARegionMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucAutoAlignInit(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucBold3dPace(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucBOLDParadigmArray(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucCineMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucCoilCombineMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucDisableChangeStoreImages(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucDixon(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucDixonSaveOriginal(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucEnableIntro(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucEnableNoiseAdjust(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucFlipAngleMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucForcePositioningOnNDIS(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucInteractiveRealtime(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucInternalTablePosValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucOneSeriesForAllMeas(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucPHAPSMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucReadOutMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucReconstructionMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucScanRegionPosValid(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucSequenceType(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucTablePositioningMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolucWaitForPrepareCompletion(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolulVersion(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrPhoenixProtocolWaitForUserStart(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesMrProtocolVersion(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesNumberOfPrescans(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesOperation_mode_flag(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesPATModeText(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesPatReinPattern(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesPhaseGradientAmplitude(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesPositivePCSDirections(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesProtocolChangeHistory(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesReadoutGradientAmplitude(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesReadoutOS(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesRelTablePosition(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesRFSWDMostCriticalAspect(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesRFSWDOperationMode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesRfWatchdogMask(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesSARMostCriticalAspect(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesSed(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesSelectionGradientAmplitude(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesSequenceFileOwner(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesSliceArrayConcatenations(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesSliceResolution(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesStim_faktor(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesStim_lim(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesStim_max_ges_norm_online(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesStim_max_online(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesStim_mon_mode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesSW_korr_faktor(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriest_puls_max(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesTablePositionOrigin(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesTalesReferencePower(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCsaSeriesTransmitterCalibration(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setCSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Accessor that sets size of neighborhood window for pixel contrast calculations
- setCTButtonEnabled(boolean) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Accessor that enables or disables the CT button.
- setCTMode(int, int) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This method is used to set Computed Tomography (CT) presets for CT images.
- setCTMode(int, int) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
This method is used to set Computed Tomography (CT) presets for CT images.
- setCTYPE1(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setCTYPE2(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setCTYPE3(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setCTYPE4(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setCTYPE5(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setCUNIT1(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setCUNIT2(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setCUNIT3(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setCUNIT4(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setCUNIT5(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setCurrentColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- setCurrentDirectory(File) - Method in class gov.nih.mipav.view.JPanelFileSelection
-
sets the file chooser and the text field to point to a different file.
- setCurrentLabels(String, String, String, String) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- setCurrentOrientation(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- setCurrentShader() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- setCurrentShortcut(KeyStroke) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the current keystroke shortcut for assignment once a command has been passed in.
- setCurrentSlice(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Specify the slice containing the VOI to optimize.
- setCurrentState(Object) - Method in interface gov.nih.mipav.view.renderer.flythroughview.FlyThroughRenderInterface
-
Set the BranchState in the FlyPathBehavior.
- setCurrentState(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Set the current traversing branch.
- setCurrentState(Object) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- setCursor(Cursor) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called from VOIManager to change the mouse cursor.
- setCursor(Cursor) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- setCursor(Cursor) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- setCursor(Cursor) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- setCursor(Cursor) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- setCursor(Cursor) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- setCursor(Cursor) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- setCursorMode(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Switches modes based on the variable mode.
- setCursorMode(int) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Switches modes based on the variable mode.
- setCursorMode(int) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
DOCUMENT ME!
- setCurvatureWeight(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Set the curvature weight 'c'.
- setCurveAnnotation(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- setCurveName(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setCurveName(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- setCurvePathAnnotateItem(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Set the annotation point along the path.
- setCurvePathAnnotateItem(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Set the annotation point along the path.
- setCurves(VOIBaseVector) - Method in class gov.nih.mipav.model.structures.VOI
-
Sets the list of contours in this VOI to a new list.
- setCurveSelected(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setCurveSelected(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- setCurveType(int) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the curveType to the parameter.
- setCurveVisible(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setCurveVisible(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- SetCustomBlend(int, int, int, int, ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- SetCustomBlend(int, int, int, int, ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- SetCustomBlend(int, int, int, int, ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SetCustomBlend(int, int, int, int, ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- SetCustomBlend(int, int, int, int, ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setCylinderReconstruction(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set cylinderReconstruction.
- setD() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- setD(float) - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Accessor that sets d.
- SetD() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setDarkObjectOnWhiteBackground(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
- setData(double[]) - Method in class gov.nih.mipav.model.algorithms.CVODES.NVector
-
- setData(float[][]) - Method in class gov.nih.mipav.model.GaussianKernel
-
- setData(float[][]) - Method in interface gov.nih.mipav.model.Kernel
-
- setData(int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
-
- setData(AlgorithmNetworkSnake.Metadata) - Method in interface gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.IMetadataProvider
-
- setData(AlgorithmNetworkSnake.Metadata) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- setData(ModelSurfaceTopology.Edge, Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Set the attribute data associated with the specified edge.
- setData(ModelSurfaceTopology.Triangle, Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Set the attribute data associated with the specified triangle.
- setData(ModelSurfaceTopology.Vertex, Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology
-
Set the attribute data associated with the specified vertex.
- setData(String, String, Boolean) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- SetData(ByteBuffer, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceExtractImage
-
- setDataCompression(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setDataDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setDataEncode(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setDataOffset(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Method to preset the image data offset.
- setDataSetFileName(String) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setDatasetName(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets datasetName.
- setDataText(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to set text of data FRAME.
- setDataType(int) - Method in class gov.nih.mipav.model.file.FileBase
-
DOCUMENT ME!
- setDataType(int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets format of image data.
- setDataType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
Accessor that sets whether color image type is ARGB, ARGB_USHORT, or ARGB_FLOAT
- setDataType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Accessor that sets the data type for what the converted image is to be.
- setDataType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Accessor that sets the data type for what the converted image is to be.
- setDataType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
Accessor that sets the appropriate radio button as given by the image-data type.
- setDataType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Accessor that sets whether color image type is ARGB, ARGB_USHORT, or ARGB_FLOAT
- setDataType(short) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Accessor to supply coded datatype.
- setDataType(short) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Accessor to supply coded datatype.
- setDataType(short) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
accessor to supply coded datatype.
- setDataType(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Permits 10 charactar large string for data-type.
- setDataType(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
permits 10 charactar large string for data-type.
- setDate(int, Date) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a java.util.Date value for the specified tag.
- setDate(MetadataExtractor.IccDirectory, int, MetadataExtractor.RandomAccessReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccReader
-
- setDate(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setDate(String) - Method in class gov.nih.mipav.model.file.XMLParameter
-
Sets the date for the parameter.
- setDate_created(String) - Method in class gov.nih.mipav.model.file.FileInfoJSON
-
- setDateAcquired(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setDateProcessed(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setDateTime(String) - Method in class gov.nih.mipav.model.file.XMLParameter
-
Sets the date + T + time for the parameter.
- setDateWritten(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setDazzleProtection(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setDBdt(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setDBname(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Set the database name - limit 18 character max to set the DB_NAME value.
- setDBname(String) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Set the database name - limit 18 character max to set the DB_NAME value.
- setDBname(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
18 character max to set the DB_NAME value.
- setDcmmeta_affine(double[][]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setDcmmeta_reorient_transform(double[][]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setDcmmeta_shape(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setDcmmeta_slice_dim(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setDcmmeta_version(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setDebugLevels(Map<Integer, String>) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the debug levels
- setDebugOutput(PrintStream) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- setDecayCorrected(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- SetDecFac(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
decrease factor in the temperature scheme.
- setDecim(int) - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Accessor that sets decim.
- setDecimationFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Accessor that sets the decimation flag.
- setDecompressStructureSizes(int) - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- setDefault() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets modes in all images to ViewJComponentBase.DEFAULT.
- setDefault(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the "default" flag.
- setDefault(double) - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Accessor that sets the default value.
- SetDefaultAlphaState() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- setDefaultCursor() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called from VOIManager to set the default mouse cursor.
- setDefaultCursor() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setDefaultCursor() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- setDefaultDirectory(String) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Accessor that sets the default directory.
- setDefaultDirectory(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets directory location of last file access.
- setDefaultDisplay(Preferences.DefaultDisplay) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the default display mode for 2D/3D image display.
- setDefaultLevel(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setDefaultLighting() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- setDefaultMode() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
setDefaultMode.
- setDefaultMode() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
setDefaultMode.
- setDefaultRangeDomain() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Sets range and domain to defaults.
- setDefaultRanges() - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Sets the default values for the input and output range.
- setDefaultRanges() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Sets the default values for the input and output range.
- setDefaultResampleToUser() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- setDefaults() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Set the default values for the parameters.
- setDefaults() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Set the default values for the parameters.
- setDefaults() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Set the default values for the parameters.
- setDefaults() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Set the default values for the parameters.
- setDefaults() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Set the default values for the parameters.
- setDefaults() - Method in class gov.nih.mipav.view.ViewJSlider
-
Sets defaults
- setDefaults() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
The purpose of this method is to load the previous values in from the preferences file.
- setDefaultScriptDirectory(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets directory location of the script files.
- setDefaultShape(Shape3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList
-
Set the default shape for rendering all subsequent annotated items to that specified.
- setDefaultValue(T) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie
-
- setDefaultWindow(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setDegree(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Set the image rotation angle.
- setDegree(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets degree array for set of spherical harmonic basis functions
- setDegreeOfFiltering(float) - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Accessor that sets degree of filtering
- setDelayBetweenVolumes(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDelete() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- setDeleteEnabled(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
A method to set the delete button to the given enabled status.
- setDeleteEnabled(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
A method to set the delete button to the given enabled status.
- setDeleteVisble(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
A method to set the delete button to the given enabled status.
- setDeleteVisble(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
A method to set the delete button to the given enabled status.
- setDelimiter(char) - Method in class gov.nih.mipav.model.file.DelimitedRandomAccessFile
-
- setDelta(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- setDeltaWeight(double) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- setDerivativeOrder(int) - Method in class gov.nih.mipav.model.GaussianKernelFactory
-
- setDerivativeScale(float) - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Accessor that sets the derivativeScale.
- setDerivedImage(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setDeriveGains(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDescforAddParam - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
string holding set description when adding a parameter.
- setDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Allows no more than 80 characters to fill in the analyze-image description.
- setDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoJSON
-
- setDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
allows no more than 80 characters to fill in the analyze-image description.
- setDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
DOCUMENT ME!
- setDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Experiment
-
DOCUMENT ME!
- setDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Project
-
DOCUMENT ME!
- setDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Screen
-
DOCUMENT ME!
- setDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Allows no more than 80 characters to fill in the SiemensText-image description.
- setDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
allows no more than 80 characters to fill in the SPM-image description.
- setDescription(String) - Method in class gov.nih.mipav.model.file.XMLParameter
-
Sets the description for the parameter.
- setDescription(String) - Method in class gov.nih.mipav.model.file.XMLPSet
-
- setDescription(String) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- setDescription(String) - Method in class gov.nih.mipav.view.renderer.flythroughview.FileFilterExt
-
Set the description of this filter as it should be returned by the getDescription override method.
- setDescription(String) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set description associated with this light.
- setDescription(String) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
Set the description associated with the annotated point.
- setDescription(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathAnnotateList_WM.Item
-
Set the description associated with the annotated point.
- setDescriptor(MetadataExtractor.TagDescriptor<?>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets the descriptor used to interpret tag values.
- setDestination(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- SetDestShape(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Sets the shape to warp to.
- SetDestShape(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarpLinear
-
Sets the shape to warp to.
- setDetectionWavelength(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDetectorBinning(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDetectorDigitalGain(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDetectorEMGain(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDetectorGain(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDetectorHeadNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setDetectorOffset(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDetectorReadOutRate(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDetectorRefDetectorID(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DOCUMENT ME!
- setDetectorRefDocumentRef(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DOCUMENT ME!
- setDetectorRefGain(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DOCUMENT ME!
- setDetectorRefOffset(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DOCUMENT ME!
- setDetectorUseBrightnessContrastCorrection(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDetectorVoltage(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDeviceScalingName(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setDFPintoAFP(float) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- setDFPintoFRET(float) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- setDiagnosis(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the subject's diagonosis.
- setDiagonalVerts(Vector3f[]) - Method in class gov.nih.mipav.view.PatientSlice
-
Sets the four corners of the bounding box for this slice in FileCoordinates so that the volume data can be
exported along a diagonal slice, based on the positions of the input bounding box.
- setDialogVisible(boolean) - Method in class gov.nih.mipav.view.ViewJColorChooser
-
DOCUMENT ME!
- setDialogWidthAdd() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
Specifies an addendum to the preferred size of the dialog equal to the length of the longest image.
- setDiameter(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- setDiameter(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets the kernel diameter.
- setDiameter(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Accessor that sets the kernel diameter.
- setDichroic(String, String, String, String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter
-
DOCUMENT ME!
- setDICOMBrowserTableConfiguration(Vector<String>) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the user-configured columns that indicate the DICOM tags that are displayed in the DICOM browser table.
- setDICOMCatcher(DICOM_Receiver) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to set the DICOM receiver.
- setDicomInfo(FileInfoDicom) - Method in class gov.nih.mipav.view.JPanelAnonymizeImage
-
allows the checkboxes to be disabled by testing the file info for the tags present.
- setDICOMMessageDisplayer(DICOMDisplayer) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Sets the display viewer.
- setDICOMQueryFrame(ViewJFrameDICOMQuery) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to set the DICOM query frame.
- setDicomTable(Hashtable<String, String>) - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Sets the dicom converted tag hashtable
- setdiff(Vector<Integer>, Vector<Integer>, Vector<Integer>, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- setDiffuse(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Set the diffuse color for the vertex.
- setDiffuse(Color) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Set vertex material diffuse color.
- setDiffuse(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceRefXML_J3D
-
Sets the diffuse color of the surface:
- setDiffuse(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Sets the diffuse color of the surface:
- setDiffuse(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Set the diffuse color for the vertex.
- setDiffuse(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Sets the diffuse color of the surface:.
- setDiffuse(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
Sets the diffuse color of the surface:.
- setDiffusion(float[][]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setDiffusionAnisotropyType(String[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setDiffusionBFactor(float[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setDiffusionBValueNumber(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setDiffusionExperimentsPerDirection(int) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDiffusionGradientAmplitude(double[]) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDiffusionGradientDuration(double[]) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDiffusionGradientSeparation(double[]) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDiffusionGradientSwitchingScheme(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDiffusionIterations(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
- setDiffusionIterations(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
- setDiffusionIterations(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
- setDiffusionIterations(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
- setDiffusionIterations(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
- setDiffusionIterations(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
- setDiffusionIterations(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Set the number of iterations to use in the nonlinear diffusion
(curvature flow filter) applied to the input image.
- setDiffusionMeasurementMode(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDiffusionModuleDuration(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDiffusionModuleEchoDelay(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDiffusionPreparation(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDiffusitivityDenom(float) - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Accessor that sets the diffusitivityDenom.
- setDiffVolume(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Set the diff volume of the current treatment.
- setDigitalGain(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setDigitNumber(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
/** Accessor that sets the number of digits to use when appending to the multi file save (i.e., if you want
test00.tif to be the first file, 0 is the start number and 2 is the digit number).
- setDijkstra(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Displays the Geodesic (dijkstra's along the mesh) distance between the last two points picked in the Geodesic
class, as well as the running total for the current curve.
- setDijkstra(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Displays the Geodesic (dijkstra's along the mesh) distance between the last two points picked in the Geodesic
class, as well as the running total for the current curve.
- setDilationSize(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the dilation size for dilating the voxelized brain surface obtained by rasterizing the triangle mesh.
- setDilationSize(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Set the dilation size for dilating the voxelized object surface obtained by rasterizing the triangle mesh.
- setDim(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- setDim(short) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- setDim(short) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
DOCUMENT ME!
- setDim(short) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- setDimAndResXYZ() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Resets the dimension and resolution fields for resampling panel.
- setDimB(int) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDimensionM(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
- setDimensionNode(DefaultMutableTreeNode) - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Sets the dimension node (xspace, yspace and optional zspace nodes)
- setDimensionNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setDimensionP(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
- setDimensions(int, int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- setDimensions(int, int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- setDimH(int) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDimI(int) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDimM(int) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDimR(int) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDimS(int) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDimV(int) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDiognostician(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setDirection(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- setDirection(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- setDirection(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current direction of the light.
- setDirection(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
Set the light direction.
- setDirection(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Set the light direction.
- setDirection(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current direction of the light.
- setDirection(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
Set the light direction.
- setDirection(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Set the light direction.
- setDirection(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- setDirectionNeeded(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- setDirectScaledSwitching(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setDirty() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- setDirty() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- setDirty() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- setDirty() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- setDirty() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- setDisplay(boolean) - Method in class gov.nih.mipav.model.file.FileInfoImageXML.SurfaceLink
-
Sets whether the surface should be displayed.
- setDisplay(boolean) - Method in class gov.nih.mipav.model.file.FileInfoImageXML.VOILink
-
Sets whether or not the VOI should be displayed.
- SetDisplay(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Set the object display to on/off.
- setDisplayAllGlyphs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Turns on/off displaying all the glyphs.
- setDisplayAllGlyphs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Turns on/off displaying all the glyphs.
- setDisplayAndAsk(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- setDisplayAnnotation(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- setDisplayAnnotationLabel(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- setDisplayArrows(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Turns on/off displaying the fiber bundle tracts with 3d arrows.
- setDisplayArrows(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Turns on/off displaying the fiber bundle tracts with 3D arrows.
- setDisplayAspectTime(double) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setDisplayAspectX(double) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setDisplayAspectY(double) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setDisplayAspectZ(double) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setDisplayCylinders(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Turns on/off displaying the fiber bundle tracts with cylinders.
- setDisplayCylinders(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Turns on/off displaying the fiber bundle tracts with ellipsoids.
- setDisplayEllipsoids(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Turns on/off displaying the fiber bundle tracts with ellipsoids.
- setDisplayEllipsoids(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Turns on/off displaying the fiber bundle tracts with ellipsoids.
- setDisplayFuzzy(boolean) - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Sets whether a fuzzy image is displayed.
- setDisplayFuzzy(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets whether a fuzzy image is displayed.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocNew() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Accessor that sets the display loc variable to new, so that a new image is created once the algorithm completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayLocReplace() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Accessor that sets the display loc variable to replace, so the current image is replaced once the algorithm
completes.
- setDisplayMatrixSize(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setDisplayMode(int) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the display mode to the parameter.
- setDisplayMode(int) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Change the image display mode.
- setDisplayMode3D(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Hack.
- setDisplayMode3D(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Hack.
- setDisplayName(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDisplayOptions(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setDisplayProgressBar(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Set the display progress bar flag.
- setDisplayProgressBar(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Set the display progress bar flag.
- setDisplayProgressBar(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Set the display progress bar flag.
- setDisplayRangeOfSlicesDialog(boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
- setDisplaySlicesCheck(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Set the tri-planar slices check box to true of false
- setDisplaySurfaceCheck(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Set the surface check box to true of false
- setDisplayTransform(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the display transform flag.
- setDisplayTransform(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the display transform flag.
- setDisplayTransform(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the display transform flag.
- setDisplayTubes(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Turns on/off displaying the fiber bundle tracts with tubes.
- setDisplayTubes(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Turns on/off displaying the fiber bundle tracts with tubes.
- setDisplayVOICheck(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Set the VOI check box to true of false
- setDisplayVolumeCheck(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
Set the volume check box to true of false
- setDisposeImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- setDissimilarity(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if dissimilarity operator is calculated.
- setDissimilarity(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if dissimilarity operator is calculated.
- setDistance(float) - Method in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
Accessor that sets the the maximum threshold distance to remove objects at.
- setDistanceDecline(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- setDistanceFlag(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Sets whether the largest distance is calculated.
- setDistanceFromIsocenter(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setDivisions(int) - Method in class gov.nih.mipav.view.BarMeter
-
applies the given int to the total number of bars on the display.
- setDo25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Accessor that sets if slice by slice processing occurs.
- setDo25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Accessor that sets if slice by slice processing occurs.
- setDoAdjacent(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set doAdjacent.
- setDoAveraging(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- setDOB(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set subject's date of birth.
- setDOBDD(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setDOBMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setDOBYYYY(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setDoCenter(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- setDoCenter(boolean) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Sets whether the center of rotation point should be displayed and the user should be allowed to change it.
- setDoCoarseness(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Accessor that sets if coarseness is calculated
- setDoColocWithThresholds(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setDoContrast(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Accessor that sets if contrast is calculated
- setDocumentSize(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogText
-
Attempts to set the size of the text display area to the supplied number of text-columns and rows.
- setDocumentSubtype(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setDocumentType(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setDoDirectionality(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Accessor that sets if directionality is calculated
- setDOF(int) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setDOF(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the degrees of freedom.
- setDOF(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set the degrees of freedom.
- setDOF(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set the degrees of freedom.
- setDOF(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the degrees of freedom.
- setDOF(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set the degrees of freedom.
- setDOF(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the degrees of freedom.
- setDoFilter(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- setDoGeometricCenterLabel(boolean) - Method in class gov.nih.mipav.model.structures.VOIBase
-
If doGeometricCenterLabel = true and active == false and closed = true,
execute drawGeometricCenterLabel when in drawSelf
- setDoGraph(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set if a graph should be brought up of rotations & translations.
- setDoInvMat(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the boolean for invert matrix.
- setDoLinearRescale(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Accessor that sets whether or not linear rescaling occurs.
- setDoLogResult(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Accessor that sets whether or not log of result image is displayed.
- setDoLogX(boolean) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setDoLogY(boolean) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setDomain(float, float) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Sets the domain of the graph according to the min and max parmaters.
- setDoMultiThread(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
- setDontOpenFrame(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- setDoOnlyActiveContours(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Sets the flag for calculating totals ONLY for active contours
- setDoOr(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setDoRician(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Accessor that sets doRician
- setDoSecondIteration(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setDoTalairach(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the boolean for doing a Talairach type transformation.
- setDotTables(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- setDouble(int, double) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a double value for the specified tag.
- setDouble(int, double) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setDouble(int, double) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setDouble(int, double) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Sets the data array at the specified index to the specified value.
- setDouble(int, double) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in boolean format.
- setDouble(int, double) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Sets the value in byte format.
- setDouble(int, double) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the data in double format.
- setDouble(int, double) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the double data in float format.
- setDouble(int, double) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the value in int format.
- setDouble(int, double) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the value in long format.
- setDouble(int, double) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the value in short format.
- setDouble(int, double) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the value in byte format.
- setDouble(int, double) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the double value in unsigned short format.
- setDouble(int, double) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the double value in unsigned short format.
- setDoubleArray(int, double[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a double[] (array) for the specified tag.
- setDoubleArray(int, double[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setDoubleArray(int, double[]) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setDoubleDataFields(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
Sets the dialog to use/not use double data entry (re-type each field)
- setDoVOI(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Accessor that tells whether VOIs are transformed.
- setDoVOIImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- setDoVOISubtraction(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setDoWaveletImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Accessor that sets whether or not the wavelet images are displayed.
- setDoWaveletImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Accessor that sets whether or not the wavelet image is displayed.
- setDownSampleResolutions(ArrayList<Integer>) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- setDrawingContext(ScreenCoordinateListener) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- setDrawingShape(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Set the shape of the drawing sculptor.
- setDrawingShape(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Set the shape of the drawing sculptor.
- setDrawingShape(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the sculpt drawing shape.
- setDrawVOIs(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- setDropperColor(ColorRGBA, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Set the paint can color.
- setDropperColor(ColorRGBA, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Sets the dropper color.
- setDropperColor(ColorRGBA, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Passes the picked dropper color to the surface interface.
- setDTComponent(int[][]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets dt component array
- setDTIColorImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Set the DTI Color image
- setDTIimage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- setDTIImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Set the DTI image
- setDTIImage(ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the DTI Image for displaying the tensors as ellipsoids.
- setDTIImage(ModelImage, ModelImage, ModelImage, Renderer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Sets the DTI Image for displaying the tensors as ellipsoids.
- setDTIParameters(DTIParameters) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets the DTIParamters object
- setDWMRI_B_VALUE(String) - Method in class gov.nih.mipav.model.file.FileInfoNRRD
-
Accessor setting DWMRI_B_VALUE
- setDwmriGradient(String[][]) - Method in class gov.nih.mipav.model.file.FileInfoNRRD
-
Accessor setting dwmriGradient
- setdx(double) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- setdy(double) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- setDyeDatabaseID(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDyeID(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setDynamicScanBeginTime(float[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setDynamicScanNumber(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setDynamicStudyGeneral(boolean) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setdz(double) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- sete_l(LSCM.Edge, double) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- sete_mark(LSCM.Edge, int) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- sete_sharp(LSCM.Edge, boolean) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- setEast(AlgorithmNetworkSnake.PixelGrid.PixelGridNode) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- setEchoNumber(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setEchoNumber(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setEchoNumbers(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setEchoTime(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setEchoTime(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setEchoTime(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setEchoTime(float[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setEchoTrainLength(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setEchoTrainLength(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setEcode(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets ecode array, the data format of the header field in the header extension
- setedge(LSCM.Edge) - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- setEdgeKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Accessor to set the edge detection kernel size.
- setEdgeN() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- setEdgeOptions(float, float) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Call from dialog if you wish to produce edge image.
- setEdgeOptions(float, float) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
Call from dialog if you wish to produce edge image.
- setEdgingType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Accessor that sets the Edging Type.
- setEffectiveSpectralBandwidth(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setElapsedStudyDuration(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setElement(int) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Sets the Element of this DICOM tag as read in by FileDicom.
- setElement(int, int, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
Set the element value at the specified row,col.
- setElementsEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Sets the surface options GUI panel to enabled or disabled.
- setElementsEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Sets the surface options GUI panel to enabled or disabled.
- setEllipseMod(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Set the m_iEllipsoidMod value.
- setEllipseMod(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Set the m_iEllipsoidMod value.
- setElts(int, AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- setElts(AlgorithmPowerWatershed.RbtElt[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- setEmail(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setEmail(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Sets email.
- setEmail(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
DOCUMENT ME!
- setEmail(String, int) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set the investigator's email using an index.
- setEmbeddedDimensions(int) - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Accessor that sets the number of embedded dimensions.
- setEmFilter(String, String, String, String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter
-
DOCUMENT ME!
- setEmissionFilterChangerArray(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setEmissionWavelength(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setEmissionWavelength0(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setEmissionWavelength1(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setEmissionWavelength2(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setEmissionWavelength3(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setEmissive(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceRefXML_J3D
-
Sets the emissive color of the surface:
- setEmissive(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Sets the emissive color of the surface:
- setEmissive(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Sets the emissive color of the surface:.
- setEmissive(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
Sets the emissive color of the surface:.
- setEnable(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Enables picking with the mouse and drawing the curve on the mesh.
- setEnable(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Set the radio button for view volume aligned enable or not.
- setEnable(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- setEnable(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Enables picking with the mouse and drawing the curve on the mesh.
- setEnableCloseImageBAfterLoad(boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Sets whether the close image B option should appear after loading.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
set enabled
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Since geodesic line only apply to the texture render surface, all the buttons are enabled only if the suface
vector size is greater than 0.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Enables or disables the interface.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Does nothing but must instantiate for this to be a subclass of RenderViewBase.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Enables/disables the user-interface
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Do nothing methods, just extend the ViewJframeBase.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
set enabled
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Since geodesic line only apply to the texture render surface, all the buttons are enabled only if the suface
vector size is greater than 0.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Enables or disables the interface.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Enables/disables the user-interface
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Currently not used.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Enables or disables the component for modification.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Controls whether or not the images/VOIs of the frame can be modified.
- setEnabled(JButton, boolean) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sets the specified button to enabled or disabled, depending on the boolean parameter.
- setEnabledGraph(boolean) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
Enables or disables the show graph menu item accordingly.
- setEnabledList(boolean) - Method in class gov.nih.mipav.view.JPanelChecklist
-
Sets whether or not all checkboxes are enabled.
- setEnabledList(boolean[]) - Method in class gov.nih.mipav.view.JPanelChecklist
-
Sets the boxes which are enabled.
- setEnabledList(int, boolean) - Method in class gov.nih.mipav.view.JPanelChecklist
-
Sets a particular box which to be visible.
- setEnabledList(String, boolean) - Method in class gov.nih.mipav.view.JPanelChecklist
-
Sets a particular box which to be visible by specifying the name of the label.
- setEnabledMenuItems(int, int) - Method in class gov.nih.mipav.view.ViewMenuBar
-
Enable or disable items in a menubar based on the image dimensionality
and storage type.
- setEnabledOrder(boolean) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- setEnabledProp(boolean) - Method in class gov.nih.mipav.view.ViewJPopupPt
-
Enables or disables the propSub menu item accordingly.
- setEnabledPropagate(boolean) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- setEnabledProps(boolean) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- setEnableMouseBehaviors(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
set the MouseBehavior enabled states. this is used to turn on and off the mouse behavior
- setEnableStepSize(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set enableStepSize.
- setEncoding(String) - Method in class gov.nih.mipav.model.file.FileInfoNRRD
-
Accessor setting encoding string telling data compression method
- setEndCalendar(Calendar) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Set the end calendar.
- setEndDay(int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sets the end day.
- setEndianess(boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
DOCUMENT ME!
- setEndianess(boolean) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Describes file endianess.
- setEndianess(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Accessor that sets the endianess.
- setEndianess(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Accessor that sets the endianess.
- setEndIndex(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator
-
- setEndIndex(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Set the index of the vertex in the triangle mesh where the Geodesic curve is to end.
- setEndIndex(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Set the index of the vertex in the triangle mesh where the Geodesic curve is to end.
- setEndIndices(int[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Sets the indices of the triangle that the end point is located in.
- setEndIndices(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Sets the indices of the triangle that the end point is located in.
- setEndMonth(int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sets the end month.
- setEndPoint(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Sets the end point of the geodesic curve on the mesh.
- setEndPoint(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Sets the end point of the geodesic curve on the mesh.
- setEndRange(int) - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Sets the ending range of histogram.
- setEndSlice(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the slice to stop writing at (3D).
- setEndSlice(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the end slice for X, Y, or Z processing.
- setEndSurface(ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
The start and end surfaces ensure that the points on the geodesic curve all fall on one mesh, and that the
algorithm isn't trying to find a path between two unconnected meshes.
- setEndSurface(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The start and end surfaces ensure that the points on the geodesic curve all fall on one mesh, and that the
algorithm isn't trying to find a path between two unconnected meshes.
- setEndTime(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the time slice to stop writing at (4D).
- setEndTol(double) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Accessor that sets the end tol.
- setEndTol(double) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Accessor that sets the end tol.
- setEndTol(float) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Accessor that sets the end tol.
- setEndTol(float) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Accessor that sets the end tol.
- setEndTol(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Accessor that sets the end tol.
- setEndX(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setEndY(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setEndYear(int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sets the end year.
- setEndZ(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setEnergy(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if energy operator is calculated.
- setEnergy(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if energy operator is calculated.
- setEnergyImage(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
This image is typically the gradient magnitude.
- setEnergyWindow(String, String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setEnergyWindowLowerLevel(String, String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setEnergyWindowsNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setEnergyWindowUpperLevel(String, String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setEnhancedThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Accessor that sets the enahncedThreshold value
- setEntireImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setEntireImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setEntropy(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if entropy operator is calculated.
- setEntropy(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if entropy operator is calculated.
- setEps(double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- setEps(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
eps is the stopping criterion.
- setEpsilon() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Determines an appropriate epsilon, based on the size of the triangles in the mesh.
- setEpsilon(double) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- setEpsilon(double) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- setEpsilon(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- setEpsilon(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- setEpsilon(double) - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- setEqualRange(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- setEqualValue(double) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setEquation(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- setEquipmentName(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set the scan Equipment Model Name associated with image.
- setErosionIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Accessor to set the number of erosions / dialations.
- setEsize(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets esize array, the number of bytes in each header field in the header extension
- setEuclidian(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Displays the Euclidian distance between the last two points picked in the Geodesic class, as well as the running
total for the current curve.
- setEuclidian(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Displays the Euclidian distance between the last two points picked in the Geodesic class, as well as the running
total for the current curve.
- setEValueimage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- setEValueImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Set the eigen value image
- setEventDescription(String[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setEventTime(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setEventType(int[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setEVimage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- setEVImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Set the eigen vector image
- setEW(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if east west offset direction is calculated.
- setEW(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if east west offset direction is calculated.
- setExamName(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setExamType(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setExcitationArray(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setExcitationsNumber(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setExcitationWavelength(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setExcitationWavelength0(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setExcitationWavelength1(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setExcitationWavelength2(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setExcitationWavelength3(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setExFilter(String, String, String, String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter
-
DOCUMENT ME!
- setExitCmdLineOnError(boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets MIPAV to exit (true) or not (false) on an error when running from the command line
- setExperimentDate(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Allows a maximum of 10 characters to set the experiment date string.
- setExperimentDate(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
allows a maximum of 10 characters to set the experiment date string.
- setExperimentDateandTime(String) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Allows a maximum of 10 characters to set the experiment date string.
- setExperimenterName(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setExperimenterRef(Integer, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
DOCUMENT ME!
- setExperimenterRef(Integer, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Experiment
-
DOCUMENT ME!
- setExperimenterRef(Integer, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Project
-
DOCUMENT ME!
- setExperimentRef(Integer, String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setExperimentTime(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Allows a maximum of 10 characters to set the experiment time string.
- setExperimentTime(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
allows a maximum of 10 characters to set the experiment time string.
- setExpFuzzifier(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Accessor that sets the exponential fuzzifier.
- setExPhotonCnt(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setExponent(float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Set the spot cone exponent.
- setExposureArray(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setExposureTime(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- setExposureTime(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setExposureTime0(int, double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setExposureTime1(int, double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setExposureTime2(int, double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setExposureTime3(int, double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setExtension(String) - Method in class gov.nih.mipav.model.structures.VOI
-
Sets the VOI extenstion of voi file name of voi was read in through file
- setExtents(int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- setExtents(int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- setExtents(int[]) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets dimensionality of the images.
- setExtents(int[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
- setExtents(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the dimExtents for this structure.
- setExtents(int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- setExtents(int, int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets dimensionality for image, on a per dimension basis.
- setExtentScale(int) - Method in class gov.nih.mipav.model.GaussianKernelFactory
-
- setExternalNodes(ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- setExternalShutter1(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setExtractPaint(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Sets whether to extract the brain to a paint mask instead of removing non-brain image data.
- setExtractPaint(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Accessor to set the extract to paint parameter.
- setExtractToPaint(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Sets whether or not to stop segmentation at paint.
- setExtreme(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Change the view port extreme value e.
- setExtremityCoil(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setEyeClipPlane(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Sets the eye clip plane position.
- setEyeClipPlane(float, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the eye clip plane position.
- setEyeColor(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the eye clip plane color.
- setEyeDist(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Change the z value of the eye point (0,0,z).
- setEyeInvClipPlane(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Sets the eye clip plane position.
- setEyeInvClipPlane(float, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the inverse-eye clip plane position.
- setEyeInvColor(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the inverse-eye clip plane color.
- setEyetrackerRecordingMode(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Set the eye tracking recording mode type
- setEyetrackerRecordMode(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- setEyeTrackingEnabled(boolean, String) - Static method in class gov.nih.mipav.view.MipavUtil
-
When the plug-in eye tracker record button is clicked, it re-initial the eye tracker csv file recording stream.
- setEyeTrackingEnabled(boolean, String, ViewJComponentEditImage) - Static method in class gov.nih.mipav.view.MipavUtil
-
When the plug-in eye tracker record button is clicked, it re-initial the eye tracker csv file recording stream.
- setf_touched(LSCM.Face, boolean) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- setF1(double) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
Accessor that sets the frequency 1 variable.
- setF1(double) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
Accessor that sets the frequency 1 variable.
- setF1(double) - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
Accessor that sets the frequency 1 variable.
- setF2(double) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
Accessor that sets the frequency 2 variable.
- setF2(double) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
Accessor that sets the frequency 2 variable.
- setF2(double) - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
Accessor that sets the frequency 2 variable.
- setface(LSCM.Face) - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- setFactor(double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
Set the x-axis amd y-axis movement multipler with factor.
- setFactor(double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
Set the x-axis amd y-axis movement multipler with factor.
- setFactor(double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
Set the x-axis amd y-axis movement multipler with factor.
- setFactor(double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
Set the x-axis amd y-axis movement multipler with factor.
- setFactor(double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
Set the x-axis amd y-axis movement multipler with factor.
- setFactor(double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
Set the x-axis amd y-axis movement multipler with factor.
- setFactor(double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
Set the y-axis movement multipler with factor.
- setFactor(double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
Set the y-axis movement multipler with factor.
- setFactor(double, double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
Set the x-axis amd y-axis movement multipler with xFactor and yFactor respectively.
- setFactor(double, double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
Set the x-axis amd y-axis movement multipler with xFactor and yFactor respectively.
- setFactor(double, double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
Set the x-axis amd y-axis movement multipler with xFactor and yFactor respectively.
- setFactor(double, double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
Set the x-axis amd y-axis movement multipler with xFactor and yFactor respectively.
- setFactor(double, double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
Set the x-axis amd y-axis movement multipler with xFactor and yFactor respectively.
- setFactor(double, double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
Set the x-axis amd y-axis movement multipler with xFactor and yFactor respectively.
- setFAimage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- setFAImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Set the functional anisotropy image
- setFastMode(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set whether or not to execute the fast mode (skip sub sample and goto last final optimization).
- setFastMode(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set whether or not to execute the fast mode (skip sub sample and goto last final optimization).
- setFastMode(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set whether or not to execute the fast mode (skip sub sample and goto last final optimization).
- setFastMode(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set whether or not to execute the fast mode (skip sub sample and goto last final optimization).
- setFAValues() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.FlipAngleChangeListener
-
- setFax(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- SetFF(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setFFi(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setFFp(int, Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setFFp1(int, Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setFFp2(int, Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setFieldDistance(float) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Accessor that sets the field distance.
- setFieldDistance(float) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Accessor that sets the field distance.
- setFieldNames(String[]) - Method in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- setFieldOfView(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setFieldSkip(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Supplies the submitted value to the field_sip variable.
- setFieldSkip(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Supplies the submitted value to the field_sip variable.
- setFieldSkip(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
supplies the submitted value to the field_sip variable.
- setFieldStrength(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setFilament(String, Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource
-
DOCUMENT ME!
- setFileBlocks(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setFileDate(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setFileDir(String) - Method in class gov.nih.mipav.model.file.FileBRUKER
-
Accessor to set the file directory (used for reading BRUKER files).
- setFileDir(String) - Method in class gov.nih.mipav.model.file.FileIO
-
Sets the directory where the file will be saved or opened.
- setFileDir(String) - Method in class gov.nih.mipav.model.file.FileJP2
-
Accessor to set the file dir (used when reading TIFF multiFile).
- setFileDir(String) - Method in class gov.nih.mipav.model.file.FileSVS
-
Accessor to set the file dir (used when reading TIFF multiFile).
- setFileDir(String) - Method in class gov.nih.mipav.model.file.FileTiff
-
Accessor to set the file dir (used when reading TIFF multiFile).
- setFileDirectory(String) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
DOCUMENT ME!
- setFileDirectory(String) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the file directory.
- setFileExtents(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- setFileExtents(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
DOCUMENT ME!
- setFileExtents(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- setFileFilter(int) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the current used file filter as the latest used file filter.
- setFileFilter(FileFilter) - Method in interface gov.nih.mipav.view.FileSelector
-
Sets the file filter to the FileSelector.
- setFileFilter(FileFilter) - Method in class gov.nih.mipav.view.FileSelectorImpl
-
- setFileFormat(int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the file format.
- setFileFormat(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setFileID(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setFileInfo(FileInfoBase[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the entire fileInfo array of the image.
- setFileInfo(FileInfoBase, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the fileInfo class for the image.
- setFileInfo(FileInfoDicom) - Method in class gov.nih.mipav.model.file.FileDicom
-
Sets the file info and sets the hasHeaderBeenRead to true.
- setFileInfo(FileInfoNRRD) - Method in class gov.nih.mipav.model.file.FileNRRD
-
- setFileInfo(FileInfoNRRD, ModelImage) - Method in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- setFileInfo(FileInfoTrackVis) - Method in class gov.nih.mipav.model.file.FileTrackVis
-
- setFileInput(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- setFileLink(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setFileLocation(String) - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- setFilename(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setFileName() - Method in class gov.nih.mipav.view.dialogs.InstanceVOI
-
- setFileName(File, FileInfoDicom) - Method in class gov.nih.mipav.model.file.FileDicom
-
Accessor that sets the file name and allocates new FileInfo, File and RandomAccess file objects based on the new
image file based on the new filename and the new directory.
- setFileName(String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
Accessor to set the file name (used for reading COR multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileAfni
-
setFileName - accessor to set the file name (used when reading TIFF multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileBMP
-
Accessor to set the file name (used for reading COR multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileBRUKER
-
Accessor to set the file name (used for reading BRUKER files).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileCOR
-
Accessor to set the file name (used for reading COR multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
Accessor that sets the file name and allocates new FileInfo, File and RandomAccess file objects.
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
Accessor that sets the file name and allocates new FileInfo, File and RandomAccess file objects.
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Accessor to set the file name (used when reading XML multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the file name.
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileInterfile
-
Sets the file name (used when reading TIFF multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileJP2
-
Accessor to set the file name (used when reading TIFF multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileLIFF
-
Accessor to set the file name (used for reading COR multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileLSM
-
Accessor to set the file name (used when reading TIFF multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileMagnetomVision
-
Accessor that sets the file name and allocates new FileInfo, File and RandomAccess file objects.
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileMATLAB
-
Accessor to set the file name (used for reading COR multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileMicroCat
-
Sets the file name.
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileSTK
-
Accessor to set the file name (used when reading TIFF multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileSVS
-
Accessor to set the file name (used when reading TIFF multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileTiff
-
Accessor to set the file name (used when reading TIFF multiFile).
- setFileName(String) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the file name to write out.
- setFileName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Accessor that sets the file name.
- setFileName(String, FileInfoDicom) - Method in class gov.nih.mipav.model.file.FileDicom
-
Accessor that sets the file name and allocates new FileInfo, File and RandomAccess file objects based on the new
image file based on the new filename and the old directory.
- setFileName(String, String, FileInfoDicom) - Method in class gov.nih.mipav.model.file.FileDicom
-
Accessor that sets the file name and allocates new FileInfo, File and RandomAccess file objects based on the new
image file based on the new filename and the new directory.
- setFileNames(Vector<String>) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- setFileOutput(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- setFilePath(String) - Method in class gov.nih.mipav.view.dialogs.ScriptTreeNode
-
- setFileSize(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setFileSuffix(String) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the file suffix.
- setFileTempDir(String) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the temporary directory which is used for files which will be deleted.
- setFileType(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the file type (analyze, raw, TIFF, DICOM, etc.).
- setFileXDim(int) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- setFillHoles(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Accessor to set the fill holes parameter.
- setFillValue(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Set value for out of bounds transformation values.
- setFillValue(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set intensity value for out of bounds data
- setFillValue(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Accessor to set intensity value for out of bounds data
- setFillValue(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set intensity value for out of bounds data
- setFillValue(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set intensity value for out of bounds data
- setFillValue(float) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the fillValue.
- setFillValue(float) - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Accessor that sets the fill value.
- setFillValues(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Accessor that sets the fill value.
- setFilterExposureTimeX(String) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setFilterFluorophoreX(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setFilterGaussianStdDev(float) - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Accessor to set the filter's gaussian standard deviation.
- setFilterIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Accessor to set the number of filter iterations.
- setFilterLength(int) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Accessor that sets the filter length.
- setFilterName(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setfilterOrder(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
Accessor that sets the butterworth order.
- setfilterOrder(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
Accessor that sets the butterworth order.
- setfilterOrder(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets the butterworth order.
- setfilterOrder(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Accessor that sets the butterworth order.
- setfilterOrder(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
Accessor that sets the butterworth order.
- setFilterRefDocumentRef(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DOCUMENT ME!
- setFilterRefFilterID(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DOCUMENT ME!
- setFilterSet(String, String, String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter
-
DOCUMENT ME!
- setFilterTurretArray(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setFilterType(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setFilterType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
Accessor that sets the filter type (LOWPASS, HIGHPASS, BANDPASS, BANDSTOP).
- setFilterType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
Accessor that sets the filter type (LOWPASS, HIGHPASS, BANDPASS, BANDSTOP).
- setFilterType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets the filter type (LOWPASS, HIGHPASS, BANDPASS, BANDSTOP).
- setFilterType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Accessor that sets the filter type (LOWPASS, HIGHPASS, BANDPASS, BANDSTOP).
- setFilterType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
Accessor that sets the filter type (LOWPASS, HIGHPASS, BANDPASS, BANDSTOP).
- setFilterType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- setFilterType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- setFilterType(int) - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
Set the current filter type to the given parameter.
- setFilterType(String) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set filterType.
- setFind() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Called when the Find Face button is pressed. the algorithm computes the face region of the volume and sets the
displayed image to be that region.
- setFineRate(float) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set the fine sample rate.
- setFineRate(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set the fine sample rate.
- setFineRate(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the fine sample rate.
- setFineRate(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set the fine sample rate.
- setFineRateX(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the fine sample rateX.
- setFineRateY(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the fine sample rateY.
- setFineRateZ(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the fine sample rateZ.
- setFinishNotification(JDialogAnonymizeDirectory) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
no real need for complete listener capabilities, so this is to take its place.
- setFirstName(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setFirstName(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
DOCUMENT ME!
- setFirstPoint(boolean, boolean, String, String) - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Parameters for drawing each point in the PolyLineSlice object.
- setFirstPoint(boolean, boolean, String, String, int) - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Parameters for drawing each point in the PolyLineSlice object.
- setFirstPt(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the first mid-sag marker for orig to ACPC transformation in dataset ordering.
- setFirstPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Sets first label based on the point.
- setFirstSliceAfterBleach(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setfirstSliceNum(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
Accessor to set firstSliceNum.
- setFitFunctionVisible(boolean) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setFitFunctionVisible - accessor that tells whether to show the fitted function.
- setFittedFunctionsVisible(boolean) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that tells whether to show the gridlines.
- setFittedFuncts(ViewJComponentFunct[]) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that sets the fitted functions for this graph.
- setFittingLevels(int) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
- setFixed(boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Sets whether or not the VOI is fixed.
- setFixed(boolean) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets flag to indicate whether or not VOI is fixed.
- setFlags(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- SetFlags(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setFlipAngle(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setFlipAngle(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setFlipAngle(float) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setFlipAngle(float[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setFlipAngle(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setFloat(int, float) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a float value for the specified tag.
- setFloat(int, float) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setFloat(int, float) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setFloat(int, float) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Sets the data array at the specified index to the specified value.
- setFloat(int, float) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in boolean format.
- setFloat(int, float) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Sets the value in byte format.
- setFloat(int, float) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the data in double format.
- setFloat(int, float) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the float data in float format.
- setFloat(int, float) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the value in int format.
- setFloat(int, float) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the value in long format.
- setFloat(int, float) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the value in short format.
- setFloat(int, float) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the value in byte format.
- setFloat(int, float) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the float value in unsigned short format.
- setFloat(int, float) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the float value in unsigned short format.
- setFloatArray(int, float[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a float[] (array) for the specified tag.
- setFloatArray(int, float[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setFloatArray(int, float[]) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setFloatToShort(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
- setFloodCorrected(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setFloodValue(short) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Sets the value to be placed in the flood region.
- setFluor(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setFlyEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Enable manual snapshot buttons.
- setFlyEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Sets the elements associated with "fly" behavior to be enabled or disabled, depending on flag.
- setFlythruColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Set the flythru surface color.
- setFlythruRender(FlythruRender) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Set the flythru render reference.
- setFmriStatusIndication(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setFNumber(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- setFocalLength(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- setFocalLength35(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- setFocalRatio(float) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setFocusCalibrated(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setFocusDepth(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setFocusPosition(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setFocusPosition(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setFocusPosition(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setFont(String, Font) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Method to append text to an attached JTextArea (not DEBUG or DATA areas).
- setFontDescriptors(int) - Method in class gov.nih.mipav.model.structures.VOIText
-
Sets the font's descriptors.
- setFontName(String) - Method in class gov.nih.mipav.model.structures.VOIText
-
Sets the name (type) of the font.
- setFonts(Component[]) - Static method in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- setFontSize(int) - Method in class gov.nih.mipav.model.structures.VOIText
-
Sets the size of the font.
- setForceInPlace(boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets the dialogs to only replace the image (no new frame)
- setForceQuiet(boolean) - Static method in class gov.nih.mipav.view.MipavUtil
-
Sets whether all MIPAV error/warning/info messages should be suppressed (used to skip vm heap max size/plist warning on
startup).
- setFormat(String) - Method in class gov.nih.mipav.view.dialogs.JDialogText
-
Sets the editor kit that renders the dialog's text area to the type given.
- setForwardArrowEnabled(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
A convenience method to set the to-list-B buttons (both selected and all) to the given enabled status.
- setForwardArrowEnabled(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
A convenience method to set the to-tree-B buttons (both selected and all) to the given enabled status.
- setForwardArrowVisible(boolean) - Method in class gov.nih.mipav.view.JPanelListController
-
A convenience method to set the to-list-B buttons (both selected and all) to the given visible status.
- setForwardArrowVisible(boolean) - Method in class gov.nih.mipav.view.JPanelTreeController
-
A convenience method to set the to-tree-B buttons (both selected and all) to the given visible status.
- setFOV(float) - Method in class gov.nih.mipav.model.file.FileInfoCOR
-
Accessor to set the field of vision.
- setFOV(float) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setFOVCOlumn(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setFOVRow(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setFractionalEffectiveEcho(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- SetFrame(Frame) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- SetFrame(JFrame) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- setFrameControls(ViewControlsImage) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the frameControls.
- setFrameGroupImages(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setFrameGroupNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setFrameRate(double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Accessor that sets the frame rate.
- setFrameRate(double) - Method in class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Accessor that sets the frame rate.
- setFrameSize(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Initialize the sculpt region size.
- setFrameSize(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Initialize the sculpt region size.
- setFramesPerSecond(int) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Sets the slider value (for invoking save image from dialog).
- setFramesPerSecond(int) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Sets the slider value (for invoking save image from dialog).
- setFramingMethod(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setFreeRangeMode(boolean) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Accessor that sets freeRangeMode.
- setFreq1(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets the frequency 1 variable.
- setFreq1(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Accessor that sets the frequency 1 variable.
- setFreq1(float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setFreq1(float) - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Accessor that sets the frequency 1 variable.
- setFreq2(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets the frequency 2 variable.
- setFreq2(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Accessor that sets the frequency 2 variable.
- setFreq2(float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setFreqDim(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- setFreqU(float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setFreqU(float) - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Accessor that sets the prerotation horizontal frequency variable.
- setFrequencyMHz(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setFreqV(float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setFreqV(float) - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Accessor that sets the prerotation vertical frequency variable.
- setFromOrigin(TransMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- setFromString(String, String) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline.Options
-
DOCUMENT ME!
- setFront(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Accessor that sets the front value.
- setFront(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Accessor that sets the front value.
- SetFrontface(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Sets front-face culling on/off.
- setFullDepth(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- setFullScreenModeLocation(String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- SetFuncEvalBase(CDOptimizeFuncBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
set point to func eval. base.
- setFunctionData(PPolynomial, int, int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- setFunctionsVisible(boolean) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that tells whether to show the functions.
- setFunctionVisible(boolean) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setFunctionVisible - accessor that tells whether to show the function.
- setFunctName(int) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setFunctName - sets the names of the functions to default names (function + number).
- setFunctName(String) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setFunctName - sets the names of the functons.
- setFuncts(ViewJComponentFunct[]) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that sets the function for this graph.
- setFuncType(int) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the function type.
- setFunused1(float) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets the start locations in the x-axis in fileInfoBase.
- setFunused1(float) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets the start locations in the x-axis in fileInfoBase.
- setFunused2(float) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets the start locations in the y-axis in fileInfoBase.
- setFunused2(float) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets the start locations in the y-axis in fileInfoBase.
- setFunused3(float) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets the start locations in the z-axis in fileInfoBase.
- setFunused3(float) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets the start locations in the z-axis in fileInfoBase.
- setFuzzyThreshold(float) - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Set the fuzzy threshold value.
- setFuzzyThreshold(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets whether fuzzy connectedness is used and the fuzzy threshold.
- setG(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets green channel value of this Pixel.
- SetG(byte) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- setG_fromDouble(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- setG_fromDouble(double) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Sets the green value of this pixel at its current position with 0.0 as no green contribution and 1.0 as full green contribution.
- setGain(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setGain(double) - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- setGamma(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- setGamma(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- setGamma(float) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setGamma(float) - Method in class gov.nih.mipav.view.ColorWheel
-
- setGamma(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Set the gamma correction.
- setGamma(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setGamma(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets T20, T21, and T22 in the transformation matrix.
- setGammaArray(Vector3f[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets array of T20, T21, and T22 in the transformation matrix.
- setGammaHalflife(String, String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setGammaValue(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setGapArray(int[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets array of gap values for plane gap not equal to -1.
- setGatedFrameMode(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- setGatedStudyGeneral(boolean) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setGatingType(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setGatingType2(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setGaussians(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setGaussianScale(float) - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Accessor that sets the gaussian scale.
- setGaussianSigma(float) - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- setGaussianStdDev(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
- setGBC(int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
A helper method for adding a component using GridBagLayout, so we don't have to set up the x, y, width, and
height over and over again.
- setGBC(int, int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
A helper method for adding a component using GridBagLayout, so we don't have to set up the x, y, width, and
height over and over again.
- setGBC(GridBagConstraints, int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
A helper method for adding a component using GridBagLayout, so we don't have to set up the x, y, width, and
height over and over again.
- setGeneralData(boolean) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setGeneralImageData(boolean) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setGeneralInfoList(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setGenerated(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Allows a maximum of 10 characters to set the generated string.
- setGenerated(String) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Allows a maximum of 10 characters to set the generated string.
- setGenerated(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
allows a maximum of 10 characters to set the generated string.
- setGenerateOutputImage(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- setGenerator(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
-
Set the generator for the heap record.
- setGenerator(Object) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Support for regenerating an ModelTriangleMesh from an ModelClodMesh whenever the level of detail is changed for
the ModelClodMesh.
- setGenericName(String, int) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
sets the genericname, and the start sequence to use when generating the anonymousname.
- setGeod(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- setGeodesic(TriMesh, PickRecord) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Passes the picked point to the Geodesic object for calculating the geodesic curve on the TriMesh surface.
- setGeodesicGroup(Group) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Access function to set the Group object m_kGeodesicGroup.
- setGeodesicSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- setGeodesicSmooth(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Displays the Geodesic (smoothed) distance between the last two points picked in the Geodesic class, as well as
the running total for the current curve.
- setGeodesicSmooth(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Displays the Geodesic (smoothed) distance between the last two points picked in the Geodesic class, as well as
the running total for the current curve.
- setGLmax(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets glmax. if supplied value is less than glmin, the glmin gets reset to the supplied value as well, so that
glmin is still no greater than glmax.
- setGLmax(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets glmax. if supplied value is less than glmin, the glmin gets reset to the supplied value as well, so that
glmin is still no greater than glmax.
- setGLmax(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets glmax. if supplied value is less than glmin, the glmin gets reset to the supplied value as well, so that
glmin is still no greater than glmax.
- setGLmin(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets glmin. if supplied value is greater than glmax, the glmax gets reset to the supplied value as well, so that
glmax is still no less than glmin.
- setGLmin(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets glmin. if supplied value is greater than glmax, the glmax gets reset to the supplied value as well, so that
glmax is still no less than glmin.
- setGLmin(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets glmin. if supplied value is greater than glmax, the glmax gets reset to the supplied value as well, so that
glmax is still no less than glmin.
- setGlobalAlphaMultiplier(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- setGlobalAlphaMultiplier(DoubleSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- setGlobalCRC(int) - Method in class gov.nih.mipav.model.file.CRC
-
- setGlobalDataText(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to set text of global data FRAME.
- SetGlobalState(int, Renderer, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- setGlobalThicknessMultiplier(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- setGlobalThicknessMultiplier(DoubleSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- setgmax(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- setgmax(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- setgmid(double) - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Accessor that sets the gmid.
- setgmin(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- setgmin(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- setGOn(boolean) - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Sets if the green channel to the boolean value.
- setGPUCost(ImageRegistrationGPU) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- setGPUCost(ImageRegistrationGPU) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
- setGradientDirectionThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- setGradientEpsilon(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Set the gradient magnitude epsilon value.
- SetGradientErrorDetected(String) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientCheckingIterationCallback
-
- setGradientMagnitude(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Turn the gradient magnitude filter on/off for volume shaders.
- setGradientMagnitude(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enables/Disables Gradient Magnitude filter.
- SetGradientMagnitude(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Enables/Disables Gradient Magnitude filter.
- SetGradientMagnitude(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Enables/Disables gradient magnitude filter.
- SetGradientMagnitude(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SetGradientMagnitude(ModelImage, boolean, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Called when the user selects the Gradient Magnitude option or the Multi-Histogram option
in the Volume Renderer.
- setGradientMagnitudeOpacityEnabled(boolean) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Return whether or not the opacity mapping based on gradient magnitude is enabled.
- setGradientMagnitudeOpacityEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Return whether or not the opacity mapping based on gradient magnitude is enabled.
- setGradientMagnitudeScale(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
- setGradientMagnitudeScale(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
- setGradientMagnitudeScale(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
- setGradientMagnitudeScale(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
- setGradientMagnitudeScale(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
- setGradientMagnitudeScale(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
- setGradientMagnitudeScale(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Set the scale to use in computing the blurred gradient magnitude
of the curvature flow image.
- setGradientOrientationNumber(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setGradientPath(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
- setGradients(double[][]) - Method in class gov.nih.mipav.model.file.DTIParameters
-
- setGradientWeight(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- setGraph(Graph) - Method in class gov.nih.mipav.view.graphVisualization.MipavSAXReader
-
Sets the Graph.
- setGraphCheckBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set graphCheckBox.
- setGraphCheckBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set graphCheckBox.
- setGraphicallyPrescribed(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setGraphVisible() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- setGreaterEqualValue(double) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setGreen(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- setGreen(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- setGreen(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Sets the flag for the green channel.
- setGreen(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
Sets the flag for the green channel.
- setGreen(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Sets the flag for the green channel.
- setGreen(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
Sets the flag for the green channel.
- setGreen(boolean) - Method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Sets the flag for the green channel.
- setGreen(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- setGreen(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- setGreen(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Accessor that sets the color flag.
- setGreen(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Accessor that sets the color flag.
- setGreen(double) - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Accessor that sets the green value.
- setGreen(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setGreen1(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- setGreen2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- setGreenArray(int[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setGreenBlackLevel(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setGreenChannelNumber(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setGreenFunction(TransferFunction) - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Accessor that returns the green transfer function.
- setGreenGamma(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setGreenImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
Accessor that sets the Green Image Source.
- setGreenImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Accessor that sets the Green Image Source.
- setGreenOn(boolean) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Sets the green checkbox on/off.
- setGreenOn(boolean, boolean) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Sets the green flag to be on or off.
- setGreenOn(boolean, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
- setGreenProcessingRequested(boolean) - Method in class gov.nih.mipav.view.components.JPanelColorChannels
-
Changes whether the green channel of the input image should be processed.
- setGreenVector(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- setGreenWhiteLevel(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setGreyBlackLevel(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setGreyChannelNumber(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setGreyColorMap(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setGreyGamma(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setGreyLevels(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets the number of grey levels if rescaling used
- setGreyLevels(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets the number of grey levels if rescaling used
- setGreyWhiteLevel(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setGridColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the background color of the panel that is in the scrollpane.
- setGridColor(Color) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
set the color of the grid.
- setGridColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the background color of the panel that is in the scrollpane.
- setGridColumn(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
This method is called when there is a change to the light box column number--in the limiting case.
- setGridColumn(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This method is called when there is a change to the light box column number--in the limiting case.
- setGridLabelingOn(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Tells the grid overlay (if on) to show abc/123 labeling.
- setGridLabelOrientation(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the axis orientation of abc and 123 labeling of the grid overlay.
- setGridlinesVisible(boolean) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that tells whether to show the gridlines.
- setGridOverlay(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets whether or not to show the NEI grid overlay.
- setGridRow(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This method is called when there is a change to the light box row number--in the limiting case.
- setGridSpacing(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the distance between adjacent images. verifies that the width value is within bounds.
- setGridSpacing(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the distance between adjacent images. verifies that the width value is within bounds.
- setGridSpacingX(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
sets the grid spacing (horizontal) in terms of resolution.
- setGridSpacingY(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
sets the grid spacing (horizontal) in terms of resolution.
- setGroup(int) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Sets the Group of this DICOM tag as read in by FileDicom.
- setGroup(VOI) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets the VOI object that contains this contour.
- setGrouping(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- setGroupRef(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Dataset
-
DOCUMENT ME!
- setGroupRef(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setGroupRef(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Project
-
DOCUMENT ME!
- setGrowDialog(RegionGrowDialog) - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Sets the JDialogPaintGrow for this class (usually used to set it to null).
- setGrowDialog(RegionGrowDialog) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the RegionGrowDialog for this class (usually used to set it to null).
- setGUI() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
Creates GUI for this accessory.
- setGUI(Object) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Used by the JPanelMouse the redisplay the recorded actions.
- setGUI(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Used by the JPanelMouse the redisplay the recorded actions.
- setGUI(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Sets the GUI components to their proper state before the action is dispatched from the player.
- setGUI(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets the GUI components to their proper state before the action is dispatched from the player.
- setGUI(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Sets the GUI components to their proper state before the action is dispatched from the player.
- setGUI(Object) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Sets the GUI components to their proper state before the action is dispatched from the player.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
set gui
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
set GUI from params
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
set gui
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
set gui
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoMultiple3D
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
set GUI...for scripting
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
set gui from parameters
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
set GUI from params
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
set GUI from params
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
set GUI from params
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
set GUI from params
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMSER
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogQuantifyMask
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
set GUI from params
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
set gui from params
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
Used in turning the plugin into a script
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
set GUI from params
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Set up the dialog GUI based on the parameters before running the algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGUIFromParams() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- setGUIFromParams() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Set the dialog GUI using the script parameters while running this algorithm as part of a script.
- setGzip(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
- setH(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Accessor to set the height value of the painted rectangle.
- sethalfedge(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- sethalfedge(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- sethalfedge0(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- sethalfedge1(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- setHardThresholdUI(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- setHasEqual(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setHasGreaterEqual(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setHashtable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
hash table holding set information.
- setHasImageMinMaxDimOrder(boolean) - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
- setHasInfinity(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setHasLesserEqual(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setHasNaN(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setHasThreshold1(boolean) - Method in class gov.nih.mipav.view.PatientSlice
-
Sets the hasThreshold1 for setPaintBuffers.
- setHasThreshold1(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the hasThreshold1 for setPaintBuffers.
- setHasThreshold2(boolean) - Method in class gov.nih.mipav.view.PatientSlice
-
Sets the hasThreshold2 for setPaintBuffers.
- setHasThreshold2(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the hasThreshold2 for setPaintBuffers.
- setHaveDcmMeta(boolean) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setHaveWindowed(boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setHaveZResol(boolean) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
Accessor to set the flag for having a z resolution.
- setHdrSize(int) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- sethe_next(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- sethe_prev(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- setHeaderConfiguration(JTable) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- setHeaderFileName(String) - Method in class gov.nih.mipav.model.file.FileInfoOME
-
Sets the name of the header file.
- setHeaderOnlyRead(boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Sets whether this Dicom read is only interested in the header tags and not the image data (if it exists).
- setHeaderTextField(String) - Method in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- setHeapMaxField() - Method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- setHeight(int) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the subject's height.
- setHeightDivisions(int) - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Accessor that sets the height divisions.
- setHeightText(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
- setHigh(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setHighBit(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setHighBit(int) - Method in class gov.nih.mipav.model.file.FileRaw
-
- setHighBit(int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
- setHighGain(float) - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Accessor that sets highGain variable.
- setHighlightColor(Color) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Changes the color used to highlight the currently on-top image.
- setHighlightColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the color of all the images highlight to the specified color.
- setHighThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
- setHighTruncated(float) - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Acceessor that sets highTruncated variable.
- setHighXmm(float) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the value of the highest x location in millimeters.
- setHighYmm(float) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the value of the highest y location in millimeters.
- setHighZmm(float) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the value of the highest z location in millimeters.
- setHist(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- setHist(String) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
DOCUMENT ME!
- setHist(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- setHistogramBins(int) - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Accessor that sets number of histogram bins used in slice directionality calculation
- setHistogramInfo(ModelImage, ModelHistogram) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Set up the image, LUT and histogram information.
- setHistogramInfo(ModelImage, ModelHistogram) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Set up the image, LUT and histogram information.
- setHistogramPresent(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setHistogramScaleRule(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
permit the user to select the scale on which the algorithm forms the brightness pattern of the histogram.
- setHistogramThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Accessor that sets the gradient magnitude threshold reuqired for putting a gradient direction
into a histogram bin in the slice directionality calculation
- setHistoLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Change the histogram component LUT.
- setHistoLUTb(ModelLUT) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Change the histogram component LUT.
- setHistory(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setHistory(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the history string.
- setHistory(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setHistoryInfo(ArrayList<String>) - Method in class gov.nih.mipav.model.file.FileInfoVista
-
- setHkey(char) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- setHkey(char) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
DOCUMENT ME!
- setHkey(char) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- SetHole() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Sets the point to represent a hole
- SetHole(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Sets whether the point belongs to an hole in the model.
- setHomogeneity(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if homogeneity operator is calculated.
- setHomogeneity(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if homogeneity operator is calculated.
- setHorizontalLandmark(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setHospitalName(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- SetHostImage(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Returns the host image (if any).
- setHostName(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- setHuffmanTables(FileSVS.JPEGHuffmanInputStream, FileSVS.JPEGHuffmanInputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- setHuffmanTables(FileTiff.JPEGHuffmanInputStream, FileTiff.JPEGHuffmanInputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- setHumidity(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setHyperStack(VolumeImage[], Texture) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- setHyperStack(VolumeImage[], Texture) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setI(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- setI(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskShortPair
-
- setICAlgorithm(int) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Accessor that sets the icAlgorithm type (SYMMETRIC_ORTHOGONALIZATION, DEFLATIONARY_ORTHOGONALIZATION,
or MAXIMUM_LIKELIHOOD_ESTIMATION).
- setICNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Accessor that sets the number of independent components.
- setIcon(Object, boolean) - Method in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Sets the pressed or unpressed icon for the button, depending on which type it is.
- setIcon(Object, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Sets the pressed or unpressed icon for the button, depending on which type it is.
- setIcon(Object, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Sets the pressed or unpressed icon for the button, depending on which type it is.
- setIconHeight(int) - Method in class gov.nih.mipav.view.ColorIcon
-
setIconHeight - sets the height of the icon.
- setIconWidth(int) - Method in class gov.nih.mipav.view.ColorIcon
-
setIconWidth - sets the width of the icon.
- setid(int) - Method in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- setid(int) - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- setID(int) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Set the unique id for the surface:
- setID(int) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Set the unique id for the surface:
- setID(short) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the ID to the parameter.
- setID(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setIDCodeDate(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets IDCodeDate.
- setIDCodeString(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets IDCodeString.
- SetIdentity() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- setIdentityViewOrientation() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Reset the view orientation transformation to the identity.
- setIdentityViewOrientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Reset the view orientation transformation to the identity.
- setIdentityViewOrientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Reset the view orientation transformation to the identity.
- setIDType(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- SETIGL(double[], int[], int[], int[], int, double[], int) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- setIlluminationType(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setIlluminationWavelength(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setImage(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Sets the algorithm to new image of boolean type.
- setImage(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Sets the algorithm to new image of boolean type.
- setImage(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Sets new source image.
- setImage(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Sets the algorithm to new image of boolean type.
- setImage(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Sets the algorithm to new image of boolean type.
- setImage(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Sets new source image.
- setImage(ModelImage) - Method in class gov.nih.mipav.model.file.FilePARREC
-
- setImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Accessor that sets the image where the surface is to be extracted.
- setImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
- setImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Accessor that sets image A.
- setImage(ModelImage) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- setImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
Set the input diffusion-weighted image (4D image series).
- setImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
- setImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Change the underlying image for the latticeModel.
- setImage(ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- setImage(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Set the ModelImage data
- setImage(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
Set the new imageA and imageB for creating VOIs.
- setImage(ModelImage, ModelImage, ModelLUT, ModelLUT, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Changes the underlying images displayed in the VolumeTriPlanarInteface.
- setImage(VolumeImage, VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- setImage2(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- setImage2(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- setImage25D(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets a flag to indicate the image has dimensions of (i.e. spacial, spacial, time) and image processing routines
should apply 2.5D algorithm.
- setImage25D(boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the boolean telling if 3D images are processed one slice at a time.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets image25D for single slice processing.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Accessor that sets image25D for single slice processing.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Accessor that sets image25D for single slice processing.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Accessor that sets whether 3D images are 3D or 2.5D filtered.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Accessor that sets whether 3D images are 3D or 2.5D filtered.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the slicing flag.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Process the image in 2.5D.
- setImage25D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Accessor that sets the slicing flag.
- setImageA(ModelImage) - Method in class gov.nih.mipav.model.file.FileIO
-
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Accessor that sets image A.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Accessor to set imageA.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.PatientSlice
-
Sets imageA.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Sets component's image A.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Sets component's Image A.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Sets component's Image A.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Accessor that sets the reference to imageA.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Sets component's ImageA.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Accessor that sets the imageA.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Accessor that sets the imageA.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets component's ImageA. assumes dimensionality same as image B's for now.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Sets component's image A.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that sets the imageA.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Accessor that sets the reference to imageA.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Changes imageA to a new model image reference.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Changes imageA to a new model image reference.
- setImageA(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Changes imageA to a new model image reference.
- setImageActiveInTriComponents(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- setImageAngulation(float[][]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setImageB(ModelImage) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
set image b
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Accessor that sets imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Accessor that sets image B.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Accessor that sets image B.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.PatientSlice
-
Sets imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Sets component's Image B.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Sets component's Image B.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Accessor that sets the reference to imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Required by the parent super class, do nothing.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Sets component's ImageB !!!!!!
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Accessor that sets the imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Accessor that sets the imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
set image b
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Sets a new imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets component's ImageB. !!!!!!
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that sets the imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Accessor that sets the imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Accessor that sets the imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the reference to imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Accessor that sets the reference to imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Accessor that sets the reference to imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Accessor that sets the reference to imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Deprecated.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Sets the reference to imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Sets the reference to imageB.
- setImageB(ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Accessor that sets the reference to imageB.
- setImageB(ModelImage, boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Accessor that sets the reference to imageB.
- setImageB(ModelImage, boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Accessor that sets the reference to imageB.
- setImageB(ModelImage, boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Accessor that sets the reference to imageB.
- setImageB(ModelImage, ModelStorageBase) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Sets the imageB for the LUT interface.
- setImageB(VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
- setImageB(VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setImageBAfni(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Sets image B to an AFNI image, performing the appropriate transformations.
- setImageBufferB(float[]) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Sets component's Image B data buffer.
- setImageBufferB(float[]) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Sets component's Image B data buffer.
- setImageBufferB(float[]) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets component's ImageB buffer.
- setImageColocalize(ModelImage) - Method in class gov.nih.mipav.view.PatientSlice
-
Sets the colocalize image.
- setImageColocalize(ModelImage) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the colocalize image.
- setImageComponent(int) - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Sets the image component3D to import changed slice data.
- setImageCreationDate(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageCreationTime(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageCrop(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets the image crop flag.
- setImageCrop(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Accessor that sets the image crop flag.
- setImageDataDescription(boolean) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setImageDataFileName(String) - Method in class gov.nih.mipav.model.file.FileInfoXML
-
Sets the name of the image data file (not the xml header).
- setImageDateDD(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setImageDateMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setImageDateYYYY(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setImageDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoBioRad
-
DOCUMENT ME!
- setImageDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoJP2
-
DOCUMENT ME!
- setImageDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setImageDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoSTK
-
DOCUMENT ME!
- setImageDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoSVS
-
DOCUMENT ME!
- setImageDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoTiff
-
DOCUMENT ME!
- setImageDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoXML
-
Sets the image description.
- setImageDestinationDirectory(String) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set imageDestinationDirectory.
- setImageDirectory(File) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the image directory as the latest used image directory.
- setImageDirectory(String) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets the image directory.
- setImagedNucleus(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setImagedNucleus(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setImageDuration(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setImageDuration(String, String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setImageExtents() - Method in class gov.nih.mipav.view.PatientSlice
-
- setImageExtents(int[]) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- setImageFieldStrength(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageFile(RandomAccessFile) - Method in class gov.nih.mipav.model.file.FilePackBit
-
Sets the image file.
- setImageFile(RandomAccessFile, FileInfoBase) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Sets the classes file handle to the past in the method.
- setImageFile(String, String, FileInfoBase, int) - Method in class gov.nih.mipav.model.file.FileRaw
-
Sets the name and directory to new values opens the file.
- setImageFileName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- setImageHeaderBlocks(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageHeaderCreatorProcess(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageHeaderCreatorTask(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageHeaderDisclaimer(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageHeaderID(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageHeaderRevisionNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageInfoList(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setImageLocation(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageMatrix(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageMemoryUsage(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setImageModality(int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets the image type (MRI, CT, ...).
- setImageMode(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageName(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setImageName(String) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that sets the name of the image.
- setImageName(String) - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- setImageName(String, boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that sets the name of the image.
- setImageNameArray(String[]) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accesor to set imageNameArray
- setImageNamePrivate(String) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that sets the name of the image.
- setImageNew(String, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the ModelImage to use as an alternative to the volume ModelImage for
surface texturing.
- SetImageNew(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Set the user-specified ModelImage to use as the surface texture.
- SetImageNew(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Sets alternate volume data for texture mapping.
- SetImageNew(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Sets the ModelImage to use as an alternative to the volume ModelImage for surface texturing.
- SetImageNew(String, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sets the ModelImage to use as an alternative to the volume ModelImage for surface texturing.
- setImageNode(DefaultMutableTreeNode) - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Sets the image node (includes image info and data)
- setImageNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageOffcentre(float[][]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setImageOffset(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageOn(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- setImageOn(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- SetImageOn(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
- setImageOrder(int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
For multiple image viewers this indicates order of the image.
- setImageOrientation(int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the image orientation.
- setImageOrientation(int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets the image orientation (sagittal, axial, ...).
- setImageOrientationPatient(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setImageOriginal(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Set the reference to the original image we passed into the renderer from MIPAV (non-cloned).
- setImagePositionPatient(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setImageRatio(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Sets the number of iterations.
- setImageRatio(float) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Sets the image influence ratio.
- setImageRawDataSystemID(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageRelativeStartTime(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setImageRelativeStartTime(String, String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setImageRelativeTime0(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setImageRelativeTime1(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setImageRelativeTime2(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setImageRelativeTime3(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setImages(ModelImage, ModelImage, ModelImage, ModelImage, boolean) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
- setImages(ModelImage, ModelImage, ModelStorageBase, ModelStorageBase) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- setImages(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
Setup the measure to use information from the target image and the original source image.
- setImages(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Setup the measure to use information from the target image and the original source image.
- setImages(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureLeastSquares
-
Setup the measure to use information from the target image and the original source image.
- setImages(ModelSimpleImage, ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Setup the measure to use information from the target image and the original source image.
- setImages(VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setImagesAllocated(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageSelectorPanelVisible(boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
this method either shows or hides the image selector panel, based on the value of the parameter.
- setImageShape(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImagesInfo(ArrayList<HashMap<String, String>>) - Method in class gov.nih.mipav.model.file.FileInfoVista
-
- SetImageSize(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- SetImageSize(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- setImageSlice(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Set the image slice number, and recording the action as slider changes on single eye tracker viewer.
- setImageSpacing(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImagesPerCardiacCycle(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImagesPerEWindow(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setImagesPerEWindowBrief(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setImageStartTime(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setImageSystemGenerationID(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageTable(ImageVariableTable) - Method in class gov.nih.mipav.model.scripting.ScriptRunner
-
Changes the image variable table for the current script execution.
- setImageTimeHH(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setImageTimeMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setImageTimeSS(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setImageType(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImageType(String[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setImageTypeEDES(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setImageTypeMR(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setImaginaryValue(double) - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Accessor that sets the imaginaryValue or green value to be used when performing the algorithm.
- setImagingFrequency(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setImagingModality(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setImg(ModelImage) - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
- setImgBLHC_A(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImgBLHC_R(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImgBLHC_S(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImgExtents(int[]) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- setImgModality(int) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- setImgOrientation(int) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- setImgResolution(float[]) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- setImgSize(int, int) - Method in class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
Sets the image size based on the panel that is displaying it (its parent).
- setImgSize(int, int) - Method in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Sets the size of the image to be painted.
- setImgTLHC_A(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImgTLHC_R(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImgTLHC_S(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImgTRHC_A(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImgTRHC_R(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImgTRHC_S(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setImgType(int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
- setImgType(int) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- setImportantImageInfo() - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Sets necessary image information.
- setIn(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.IntFilterInputStream
-
- setIn(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.IntFilterInputStream
-
- setIncludeString(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Include
-
DOCUMENT ME!
- setIncomingEndianess(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Sets the endianess for the incoming data.
- setIncrement(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the increment between displayed slices
- setIndeterminate(boolean) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Enable or disable the progress bar indeterminate mode.
- setIndex(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets the index of the Img value this Pixel references.
- setIndex(int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Sets the index of this pixel and thus its position.
- setIndex(int) - Method in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
-
Set the index of the heap record within the records array.
- setIndex(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG.HuffTable
-
Sets index to parameter.
- setIndex(int) - Method in class gov.nih.mipav.model.structures.PointStack
-
Sets the pointer to specific location return -1 if index exceeds location of valid data.
- setIndexNestingLevel(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setIndexStructure(StaticGrid) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- setIndices(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- setInferiorEdge(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the PC superior edge marker for orig to ACPC transformation in dataset ordering.
- setInferiorEdge(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Sets inferior label based on the point.
- setInferiorPt(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the most inferior point marker for +acpc to +tlrc transformation in dicom ordering.
- setInferiorPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
Sets inferior label based on the point.
- setInferiorPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
Sets inferior label based on the point.
- setInfoFromTag(FileDicomTag) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Sets fields in this file info based on a given tag's key and value.
- setInfoFromTags() - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Public method for populating ModelImage data fields.
- setInfoFromTags(FileDicomTagTable, boolean) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
After the tag table is filled, check for a number of tags to set up some fields in this file info object.
- setInfoNode(DefaultMutableTreeNode) - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Sets the information node (includes dicom tags and patient info
- setInitialGlobalSmoothing(float) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setInitialInfo() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
this method sets initial info about the study.
- setInitialKernelSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setInitialPoint(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Sets the initial point to the value passed in.
- setInitialPoint(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Sets the initial point to the value passed in.
- setInitialPoint(double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Sets the initial point to the value passed in.
- setInMenu(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- setInPlanePhaseEncodingDirection(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setInput(byte[], byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensity
-
Specify the input volume to use for rendering.
- setInput(byte[], byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityDRR
-
Specify the input volume to use for rendering.
- setInput(byte[], byte[]) - Method in interface gov.nih.mipav.view.renderer.J3D.volumeview.RendererInterfaceIntensity
-
Specify the input volume to use for rendering.
- setInput(byte[], byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
Specify the input volume to use for rendering.
- setInput(byte[], byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensityDRR
-
Specify the input volume to use for rendering.
- setInput(byte[], byte[], byte[], byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
Specify the input volume to use for rendering.
- setInput(byte[], byte[], byte[], byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
Specify the input volume to use for rendering.
- setInput(byte[], byte[], byte[], byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorMIP
-
Specify the input volume to use for rendering.
- setInput(byte[], byte[], byte[], byte[]) - Method in interface gov.nih.mipav.view.renderer.J3D.volumeview.RendererInterfaceColor
-
Specify the input volume to use for rendering.
- setInput(byte[], byte[], byte[], byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
Specify the input volume to use for rendering.
- setInput(byte[], byte[], byte[], byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorDRR
-
Specify the input volume to use for rendering.
- setInput(byte[], byte[], byte[], byte[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorMIP
-
Specify the input volume to use for rendering.
- setInput(ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- setInput(Double[]) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- setInputImage(ModelImage) - Method in class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
Changes the image whose processing should be recorded in the script.
- setInputImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- setInputImage2(ModelImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
inputImage2 is not used to determine the registration, but each slice of inputImage2 undergoes the same
transformation as inputImage.
- setInputImage2(ModelImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
inputImage2 is not used to determine the registration, but each slice of inputImage2 undergoes the same
transformation as inputImage.
- setInputImage3(ModelImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
inputImage3 is not used to determine the registration, but each slice of inputImage3 undergoes the same
transformation as inputImage.
- setInputImage3(ModelImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
inputImage3 is not used to determine the registration, but each slice of inputImage3 undergoes the same
transformation as inputImage.
- setInputMap(RendererMapColor) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColor
-
Specify the lookup table to use for mapping input RGB colors to intensity.
- setInputMap(RendererMapColor) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
Specify the lookup table to use for mapping input RGB colors to intensity.
- setInputMap(RendererMapColor) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorMIP
-
Specify the lookup table to use for mapping input RGB colors to intensity.
- setInputMap(RendererMapColor) - Method in interface gov.nih.mipav.view.renderer.J3D.volumeview.RendererInterfaceColor
-
Specify the lookup table to use for mapping input RGB colors to intensity.
- setInputMap(RendererMapColor) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
Specify the lookup table to use for mapping input RGB colors to intensity.
- setInputMap(RendererMapColor) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorMIP
-
Specify the lookup table to use for mapping input RGB colors to intensity.
- setInputMap(RendererMapIntensity) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensity
-
Specify the lookup table to use for mapping input intensity values to colors.
- setInputMap(RendererMapIntensity) - Method in interface gov.nih.mipav.view.renderer.J3D.volumeview.RendererInterfaceIntensity
-
Specify the lookup table to use for mapping input intensity values to colors.
- setInputMap(RendererMapIntensity) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
Specify the lookup table to use for mapping input intensity values to colors.
- setInputRangeMax(double) - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Accessor that sets the maximum input range to the parameter.
- setInputRangeMax(double) - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Accessor that sets the maximum input range to the parameter.
- setInputRangeMin(double) - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Accessor that sets the minimum input range to the parameter.
- setInputRangeMin(double) - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Accessor that sets the minimum input range to the parameter.
- setInputStream(FileSVS.JPEGBitInputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- setInputStream(FileTiff.JPEGBitInputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- setInputWeightImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the input weight image.
- setInputWeightImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set the input weight image.
- setInputWeightImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the input weight image.
- setInputWeightImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set the input weight image.
- setInputWeightImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the input weight image.
- setInputWgtImage(ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Sets the input weight image.
- setInputWgtImage(ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Sets the input weight image.
- setInsertBlank(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Accessor which lets you change the type of slice to be inserted.
- setInsertedImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Accessor to specify the 2D image used as an inserted slice for ORGINAL_SLICE.
- setInsertedImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Accessor to specify the 2D image used as an inserted volume for ORGINAL_VOLUME.
- setInsertSliceNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Accessor which lets you change where to insert the slice.
- setInsertVolumeNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Accessor which lets you change where to insert the volume.
- setInstanceCreationTime(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setInstanceNumber(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setInstanceTitle(String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
- setInstitution(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setInstitution(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
DOCUMENT ME!
- setInstitutionName(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setInstrument(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setInstrumentRef(Integer, Integer, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setInt(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets an int value for the specified tag.
- setInt(int, int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Sets the data array at the specified index to the specified value.
- setInt(int, int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in boolean format.
- setInt(int, int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Sets the value in byte format.
- setInt(int, int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the data in double format.
- setInt(int, int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the int data in float format.
- setInt(int, int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the value in int format.
- setInt(int, int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the value in long format.
- setInt(int, int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the value in short format.
- setInt(int, int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the value in byte format.
- setInt(int, int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the int value in unsigned short format.
- setInt(int, int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the int value in unsigned short format.
- setInt16(int, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Sets an integer (16 bit) value in a DICOM object.
- setInt16s(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt16s(int, int) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setInt16sArray(int, short[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt16sArray(int, short[]) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setInt16u(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt16u(int, int) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setInt16uArray(int, int[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt16uArray(int, int[]) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setInt32(MetadataExtractor.Directory, int, MetadataExtractor.RandomAccessReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccReader
-
- setInt32s(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt32s(int, int) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setInt32sArray(int, int[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt32sArray(int, int[]) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setInt32u(int, long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt32u(int, long) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setInt32uArray(int, long[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt32uArray(int, long[]) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setInt64(MetadataExtractor.Directory, int, MetadataExtractor.RandomAccessReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.IccReader
-
- setInt8s(int, byte) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt8s(int, byte) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setInt8sArray(int, byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt8sArray(int, byte[]) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setInt8u(int, short) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt8u(int, short) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setInt8uArray(int, short[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setInt8uArray(int, short[]) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setIntArray(int, int[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets an int[] (array) for the specified tag.
- setIntegerDistanceRound(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
If true, the rounding of the Euclidean distance is taken as the distance
If false, the Euclidean distance is taken as the distance
- setIntensity(float) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the intensity of the light which sets the actual color of the light to this factor times the base color of
the light.
- setIntensityAverage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Sets whether intensity averaging is performed to determine which which channels should be used in calculating the
gray.
- setIntensityDropper(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the intensityDropper intensity.
- setIntensityDropper(float) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets paint intensity in axial image.
- setIntensityLevel(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- setIntensityPaintName(float) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets integer value on intensityPaintButton.
- setIntensityPaintName(String) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Accessor that sets the intensity paint name (that is, the text of the intensity spinner).
- setIntenstityLevel(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Set intensity level for GPU-based surface extraction.
- setIntentCode(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Accessor that sets the stat code.
- setIntentName(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- setIntentP1(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Accessor that sets first statistical parameter.
- setIntentP2(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Accessor that sets second statistical parameter.
- setIntentP3(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Accessor that sets third statistical parameter.
- setInterface(VOILatticeManagerInterface) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- SetInterface(JInterfaceBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Sets the parent container panel:
- setInterfileDataType(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setInterImageDelay(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setInterleaved(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
- setInternalNodes(ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- setInterp() - Method in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Document ME.
- setInterp(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the initial interpolation.
- setInterp(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set the initial interpolation.
- setInterp(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set the initial interpolation.
- setInterp(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the initial interpolation.
- setInterp(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set the initial interpolation.
- setInterp(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the initial interpolation.
- setInterp(int) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the interpolation method.
- setInterp2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the final interpolation.
- setInterp2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set the final interpolation.
- setInterp2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set the final interpolation.
- setInterp2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the final interpolation.
- setInterp2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set the final interpolation.
- setInterp2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the final interpolation.
- setInterpMode(int) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Sets the interpolation mode.
- setInterpolate(boolean) - Method in class gov.nih.mipav.view.PatientSlice
-
Sets the export flag for displaying diagonal to use TriLinear interpolation of the volume data.
- setInterpolationMode(int) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Sets the interpolation mode.
- setInterpolationMode(Preferences.InterpolateDisplay) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the display interpolation mode for 2D image display.
- setInvariant(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if spatially invariant offset direction is performed.
- setInvariant(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if spatially invariant offset direction is performed.
- setInverseOrder1(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if the inverse difference moment of order 1 operator is called.
- setInverseOrder1(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if the inverse difference moment of order 1 operator
is called.
- setInversionDelay(float[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setInversionTime(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
Accessor to set the inversion time of the scan
- setInvert(boolean) - Method in class gov.nih.mipav.model.file.FileSVS.RLEBitInputStream
-
- setInvert(boolean) - Method in class gov.nih.mipav.model.file.FileTiff.RLEBitInputStream
-
- setInvertXStr(String) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setInvertYStr(String) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setInvertZStr(String) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setInvestigatorName(String, int) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Create a new investigator using his/her name.
- setInvestigators(FileInfoImageXML.Investigator[]) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the array (3) of Investigator data.
- setInvestigatorsComplete(boolean[]) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the array (3) of booleans that tell whether the investigator data for that index is complete.
- setIPD(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sets the inter-pupillary distance for stereo rendering.
- setIPD(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the inter-pupillary distance for stereo rendering.
- setIs2D(boolean) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- setIsAVI(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setIsClodMesh(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Sets the clod mesh flag.
- setIsEnhancedDicom(boolean) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
- setIsNIFTI(boolean) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Accessor that sets whether or not the matrix is a NIFTI matrix.
- setIsNIFTI(boolean) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Accessor that sets whether or not the matrix is a NIFTI matrix.
- setIsOrderedVariable(Vector<Boolean>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- setIsOrderedVariableString(Vector<String>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- setISOSpeedRating(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- SetIsoSurfaceCorners(float, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- setIsotopeName(String, String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setIsotopeNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- SetIsoVal(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
- setIspg(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setIsQform(boolean) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Accessor that sets whether a nifti matrix is a qform matrix or a
sform matrix.
- setIsQform(boolean) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Accessor that sets whether a nifti matrix is a qform matrix or a
sform matrix.
- setIsScript(boolean) - Method in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- setIsScript(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the options to be run in a script.
- setIsScript(boolean) - Method in class gov.nih.mipav.model.scripting.actions.ActionBase
-
- setItemListeners() - Method in class gov.nih.mipav.view.JPanelEditTime
-
gets the internal components to listen to themselves for panel self-verification.
- setIterations(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Sets the number of iterations.
- setIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Accessor that sets the iterations variable.
- setIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Sets the number of iterations.
- setIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Accessor that sets the iterations variable.
- setIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
- setIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
- setIterations(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Sets number of iterations for closing or opening.
- setIterations(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Sets number of iterations for closing or opening.
- setIterations(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Sets number of iterations for closing or opening.
- setIterations(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Sets number of iterations for closing or opening.
- SetIterations1stPass(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Sets the number of iterations in the coarse search.
- setIterations2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- SetIterations2ndPass(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Sets the number of iterations in the refinement search.
- setIterativeGlobalSmoothing(float) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setIterativeGlobalSmoothing2(float) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setIterativeKernelSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setIters(int) - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Accessor that sets the number of iterations.
- setIters(int) - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Accessor that sets the number of iterations.
- setIters(int) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
Accessor that sets the number of iterations.
- setIters(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Accessor that sets the number of iterations.
- setIters(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Accessor that sets the number of iterations.
- setIters(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Accessor that sets the number of iterations.
- setIters(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
Accessor that sets the number of iterations.
- setItr(int) - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- setJ(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- setJ(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskShortPair
-
- SetJacobianOffset(int, Matrix, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearCostFunction
-
- setJarClassLoader(JarClassLoader) - Method in class gov.nih.mipav.view.ViewUserInterface
-
- setJavaVersion(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- setJobName(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setJPEGQuality(Player, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
Setting the encoding quality to the specified value on the JPEG encoder. 0.5 is a good default.
- setJTEM(boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- setJTEM(boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- setJTEM(boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Turns the full version of Powell's algorithm on/off.
- setJTEM(boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Turns the full version of Powell's algorithm on/off.
- setJunctionNeighbours(ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- setJustEllipse(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Accessor that sets whether of not initial ellipsoid result is displayed.
- setJustIntial(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Indicates if surface evolution should be skipped.
- setJustIntialEllipsoid(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Indicates if surface evolution should be skipped.
- setK(float) - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Accessor that sets the k value.
- setKernel() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Fill in the mask for which pixels are used in filtering.
- setKernel() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Fill in the mask for which pixels are used in filtering.
- setKernel(double) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Accessor that sets the kernel.
- setKernel(float) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Accessor that sets the kernel.
- setKernel(BitSet, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
Sets user defined square kernels.
- setKernel(BitSet, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Sets user defined square kernels.
- setKernel(BitSet, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Sets user defined square kernels.
- setKernel(BitSet, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Sets user defined square kernels.
- setKernel(BitSet, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Sets user defined square kernels.
- setKernel(BitSet, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Sets user defined square kernels.
- setKernelMask() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
Fill in the mask for which pixels are used in filtering.
- setKernelShape(int) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Accessor that sets the kernel shape.
- setKernelShape(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Accessor that sets the kernel shape.
- setKernelShape(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Accessor that sets the kernel shape.
- setKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Accessor that sets the kernel size.
- setKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Accessor that sets the kernel size.
- setKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Accessor that sets the kernel size.
- setKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Accessor that sets the kernel size.
- setKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Accessor that sets the kernel size.
- setKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Accessor that sets the kernel size.
- setKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Accessor that sets the kernel size.
- setKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Accessor that sets the kernel size.
- setKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Accessor that sets the kernel size.
- setKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Accessor that sets the kernel size.
- setKernelSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Accessor that sets the kernel size.
- setKernelSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Accessor that sets the kernel size.
- setKernelSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
- setKernelSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Accessor that sets the kernel size.
- setKernelSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Accessor that sets the kernel size.
- setKernelSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Accessor that sets the kernel size.
- setKernelSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Accessor that sets the kernel size.
- setKernelSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Accessor that sets the kernel size.
- setKernelType(int) - Method in class gov.nih.mipav.model.GaussianKernelFactory
-
- setKernelType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Accessor that sets the kernel type to use.
- setKernelType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Accessor that sets the kernel type to use.
- setKernelType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Accessor that sets the kernel type to use.
- setKernelType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Accessor that sets the kernel type to use.
- setKernelType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Accessor that sets the kernel type to use.
- setKernelType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Accessor that sets the kernel type to use.
- setKernelType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Accessor that sets the kernel type to use.
- setKernelType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Accessor that sets the kernel type to use.
- setKernelType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Accessor that sets the kernel type to use.
- setKernelType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Accessor that sets the kernel type to use.
- setKernelType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Accessor that sets the kernel type to use.
- setKey(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- setKey(FileDicomKey) - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Sets the dicom tag's key.
- setKey(Object) - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- setKey(String) - Method in class gov.nih.mipav.model.file.FileDicomKey
-
Sets the unique identifier.
- setKeysDate(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setKeysVersion(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setKeywords(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setKnotX(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setKnotY(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setKSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Accessor that sets the Neighbor window size.
- setL(double) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Accessor that sets neighborhood size for the directional gradient averaging.
- setL1Distance(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- setLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay
-
DOCUMENT ME!
- setLabel(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setLabel(String) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets the label of the VOI.
- setLabel(String[]) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setLabel1(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets label1.
- setLabel2(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets label2.
- setLabels(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setLabels(String[]) - Method in class gov.nih.mipav.model.file.FileInfoNRRD
-
Accessor setting labelString for axis names
- setLabels(String, String) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Sets the labels for the x and y axis to these strings.
- setLabels(String, String) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Sets the axis labels.
- setLabelType(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setLabelVisible(boolean) - Method in class gov.nih.mipav.view.graphVisualization.MipavEdgeRenderer
-
- setLabelXY() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
For 4D sets the numbering string of each z slice and its x and y positions.
- setLabelXY() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
For 4D sets the numbering string of each z slice and its x and y positions.
- setLabelY(String) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Sets the y axis label to yStr
- setLabelY(String) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
- setLabelZ() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
setlabelZ - For 3D sets the numbering string of each frame.
- setLabelZ() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
setlabelZ - For 3D sets the numbering string of each frame.
- setLambda(float) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setLambdaEm(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setLambdaEx(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setLandmarkCounter(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setLaplacianWeight(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Set the Laplacian weight 'd'.
- SetLaplacianWeights() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- setLargestImagePixelValue(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setLaser(String, String, Integer, Boolean, Boolean, String, Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource
-
DOCUMENT ME!
- setLastImage(boolean) - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
Indicates whether or not to put the image file path into the list of recently opened images.
- setLastImage(String, boolean, int) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the last image loaded in the Preferences file.
- setLastImageFlag - Variable in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- setLastModifiedBy(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setLastMoveDateDD(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setLastMoveDateMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setLastMoveDateYYYY(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setLastMoveTimeHH(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setLastMoveTimeMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setLastMoveTimeSS(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setLastName(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setLastName(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
DOCUMENT ME!
- setLastOpenSequenceParams(String, String, String, String) - Static method in class gov.nih.mipav.view.Preferences
-
Used by ViewOpenImageSequence to save the user's most recent slices, channels, time points, and ordering that
were specified in the component.
- setLastOpenSequencePath(String) - Static method in class gov.nih.mipav.view.Preferences
-
Used by ViewOpenImageSequence to save the path used when opening an image sequence.
- setLastScript(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets last used script files in preferences.
- setLastSliceBeforeBleach(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setLastStackFlag(boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets the last value for opened multi-files (or single).
- setLastState(int) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
setLastState.
- setLastState(int) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Sets the display state of the Frame to be either Frame.NORMAL or Frame.ICONIFIED.
- setLattice(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setLattice(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Called when a new lattice is loaded from file, replaces the current lattice.
- setLatticeClip(boolean, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setLatticeClip(boolean, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- setLatticeClip(boolean, Vector3f, Vector3f[], float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setLatticeSegment(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- setLayerString(String[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setLayoutConstraints(Component) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- setLeaderEmail(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
DOCUMENT ME!
- setLeaderExperimenterRef(Integer, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
DOCUMENT ME!
- setLeaderFirstName(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
DOCUMENT ME!
- setLeaderInstitution(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
DOCUMENT ME!
- setLeaderLastName(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Group
-
DOCUMENT ME!
- setLeft(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Accessor that sets the left side value.
- setLeft(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Accessor that sets the left side value.
- setLeft(AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- SetLeft(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- setLeftCenter(float) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setLeftHandSystem(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Sets the left-hand coordinate flag.
- setLeftHandSystem(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Sets the left-hand coordinate flag.
- setLeftHandSystem(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Sets the left-hand coordinate flag.
- setLeftHandSystem(boolean) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Sets the left-hand coordinate flag.
- SetLeftLine(float, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Sets the left-line parameter to the GLSL Shader Program.
- setLeftList(JList) - Method in class gov.nih.mipav.view.JPanelListController
-
Convience method to set list A.
- setLeftPad(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Accessor to set if padded with extra column on left.
- setLeftPad(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setLeftPad(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setLeftPt(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the most left point marker for +acpc to +tlrc transformation in dicom ordering.
- setLeftPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
Sets left label based on the point.
- setLeftPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
Sets left label based on the point.
- setLeftTable(JTable) - Method in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- setLeftTree(JTree) - Method in class gov.nih.mipav.view.JPanelTreeController
-
Convenience method to set tree A.
- setLegendRight(ContourPlot.Renderer) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Sets the renderer that will draw the legend to the right of the coordinate system.
- setLegendRightWidth(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Sets the width of the legend area right to the coordinate system.
- setLegendVisible(boolean) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that tells whether to show the legend.
- setLeicaCondenserTurret(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setLeicaFilterCubeArray(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setLeicaFIMArray(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setLeicaICTurret(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setLeicaMagnificationChanger(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setLength(int) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Sets the length of this DICOM tag as read in by FileDicom.
- setLength(FileDicomKey, int) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Sets the length of the tag.
- setLength(String, int) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Sets the length of the tag.
- setLens(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setLensNA(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Objective
-
DOCUMENT ME!
- setLess(float) - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Determines the lower bound of what values we will grow into (lowThreshold = seedValue - val).
- setLess(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets less for regionGrow.
- setLessB(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets lessB for regionGrow.
- setLesserEqualValue(double) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setLessG(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets lessG for regionGrow.
- setLessR(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets lessR for regionGrow.
- setLevel(int) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Accessor that sets the intensity level that defines the surface that is to be extracted.
- setLevel1Factor(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- setLevel1Factor(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- setLevel1FactorXY(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- setLevel1FactorXY(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- setLevel1FactorZ(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- setLevel1FactorZ(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- setLevel2Factor(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- setLevel2Factor(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- setLevel2FactorXY(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- setLevel2FactorXY(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- setLevel2FactorZ(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- setLevel2FactorZ(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- setLevel4Factor(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- setLevel4Factor(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- setLevel4FactorXY(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- setLevel4FactorXY(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- setLevel4FactorZ(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
- setLevel4FactorZ(float) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
- setLevel5Format(boolean) - Method in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- setLevelDetail(int) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
set the surface level of detail keyword:
- setLevelDetail(int) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
set the surface level of detail keyword:
- setLevelDetail(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
sets the level of detail for the ClodMesh
- setLevels(ArrayList<Integer>) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- setLibre(AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- SetLight(String, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MipavLightingEffect
-
Sets the light type for the given light.
- SetLight(String, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Sets the light type for the given light.
- SetLight(String, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Sets the light for the EllipsoidsShader.
- SetLight(String, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Sets the light for the EllipsoidsShader.
- SetLight(String, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Sets lighting in the VolumeShaderEffect.
- SetLight(String, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Sets the light type for the given light.
- SetLight(String, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SetLight(String, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- setLightAttributes(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Update the properties of the specified light bulb.
- setLightAttributes(int, GeneralLight) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Update the properties of the specified light bulb.
- setLightBulbsVisible(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Sets the light bulbs to visible or invisible.
- setLightColor(int, Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Set the light color.
- setLightDirection(int, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
The the light direction.
- setLightDirectional(int, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Enable the light direction arrow.
- setLighting(SoftwareLightSet, float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorLighting
-
Setup the specified set of lights to use for rendering.
- setLighting(SoftwareLightSet, float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorReflection
-
Setup the specified set of lights to use for rendering.
- setLighting(SoftwareLightSet, SoftwareMaterial) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Setup the specified set of lights to use for rendering.
- setLightingMode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Set the texture render to render in lighting mode.
- setLightingMode() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Set the texture render to render in lighting mode.
- setLightManagerEnabled(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setLightManagerMode(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setLightMode(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setLightPosition(int, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
The the light move positions.
- setLightSourceAttenuation(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setLightSourceIntensity(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setLightSourceWavelength(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setLimitBins(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- setLimitBins(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- setLimitBins(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- setLimitBins(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- setLimitBins(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- setLimitBins(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- setLimitBins(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- setLimitBins(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- setLimits(float[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Sets the limits on rotation and translation.
- setLimits(float[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Sets the limits on rotation and translation.
- setLimits(float[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Sets the limits on rotation and translation.
- setLinearIndex(float, float) - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Checks boundaries for new dragged point in LUT.
- setLinearLUT() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This method sets the histogram to Linear Transfer Function Mode.
- setLinearLUT() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
This method sets the histogram to Linear Transfer Function Mode.
- setLineChartColor(Color) - Method in class gov.nih.mipav.view.LineMeter
-
applies the given color to bars which are "lit" and are up to the set amplitude.
- setLineNumber(int) - Method in exception gov.nih.mipav.model.scripting.ParserException
-
Changes the line number in the script where the problem happened.
- setLink(Runnable, Runnable, int, int) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
Create a link between two algorithms.
- setLinkButtonSelected(boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets whether the linking button should be set for this image, implies
that this image will be linked to another tri-frame when true
- setLinkButtonSelected(boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets whether the linking button should be set for this image, implies
that this image will be linked to another tri-frame when true
- setLinkButtonSelected(boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets whether the linking button should be set for this image, implies that this image will be linked to another
tri-frame when true
- setLinkedFrame(ViewJFrameImage) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that sets the link Frame.
- setLinkedImagePath(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the path for the linked image.
- setLinkedProgressValues(int, AlgorithmBase) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Sets convolver progress values so that linked algorithm will show at least a 1% change.
- setLinkedTriFrame(ViewJFrameTriImage) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that sets the link Frame.
- setLinkingNodes(ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- setListA(JList) - Method in class gov.nih.mipav.view.JPanelListController
-
there is no programmatic way to determine which arrow is pointing where.
- setListB(JList) - Method in class gov.nih.mipav.view.JPanelListController
-
there is no programmatic way to determine which arrow is pointing where.
- setListLength() - Method in class gov.nih.mipav.view.JPanelAnonymizeImage
-
made to ensure the listLength gets set.
- setListLength() - Method in class gov.nih.mipav.view.JPanelChecklist
-
Abstract to ensure the variable listLength has a value.
- setListLength() - Method in class gov.nih.mipav.view.JPanelStatisticsList
-
DOCUMENT ME!
- setListType(int) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Changes the type of the elements in the list.
- setLoad(boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Tells the progress bar to say "Loading" rather than "Opening" for images being loaded if true.
- setLocalAddress(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Sets the local address of the calling application entity.
- setLocation(double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointeredPoint2D
-
- setLocation(double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TranslatedPoint2D
-
- setLocation(int, int) - Method in interface gov.nih.mipav.view.ProgressBarInterface
-
DOCUMENT ME!
- setLocator(MediaLocator) - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
DOCUMENT ME!
- setLocator(MediaLocator) - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
DOCUMENT ME!
- setLock() - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the lockFlag to protect data.
- setLock(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the lockFlag to protect data.
- setLOD(int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
Set the current level of detail to C with 0 <= C <= getMaximumLOD().
- setLogAlgorithm(String) - Method in class gov.nih.mipav.view.Preferences.LogConfig
-
- setLogComms(String) - Method in class gov.nih.mipav.view.Preferences.LogConfig
-
- setLogFileIO(String) - Method in class gov.nih.mipav.view.Preferences.LogConfig
-
- setLogFlag(boolean) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
This flag indicates if the histogram should be displayed using a log10 scale.
- setLogFlag(boolean) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
This flag indicates if the histogram should be displayed using a log10 scale.
- setLogicalOperation(int) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- setLogLevel(int, Preferences.LogLevel) - Method in class gov.nih.mipav.view.Preferences.LogConfig
-
- setLogLevel(int, String) - Method in class gov.nih.mipav.view.Preferences.LogConfig
-
- setLogLevelAlgorithm(Preferences.LogLevel) - Method in class gov.nih.mipav.view.Preferences
-
- setLogLevelComms(Preferences.LogLevel) - Method in class gov.nih.mipav.view.Preferences
-
- setLogLevelFileIO(Preferences.LogLevel) - Method in class gov.nih.mipav.view.Preferences
-
- setLogLevelMinor(Preferences.LogLevel) - Method in class gov.nih.mipav.view.Preferences
-
- setLogLevelScripting(Preferences.LogLevel) - Method in class gov.nih.mipav.view.Preferences
-
- setLogMagDisplay(boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the boolean telling if log magnitude display is used in a complex image.
- setLogMagDisplay(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that turns log mag display on or off.
- setLogMagDisplay(boolean) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- setLogMagDisplay(boolean) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- setLogMagDisplay(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the log magnitude display flag.
- setLogMagDisplay(boolean) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Sets the log magnitude display flag.
- setLogMinor(String) - Method in class gov.nih.mipav.view.Preferences.LogConfig
-
- setLogo(Image) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- setLogScale(float) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set logScale.
- setLogScripting(String) - Method in class gov.nih.mipav.view.Preferences.LogConfig
-
- setLong(int, long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a long value for the specified tag.
- setLong(int, long) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Sets the data array at the specified index to the specified value.
- setLong(int, long) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in boolean format.
- setLong(int, long) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Sets the value in byte format.
- setLong(int, long) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the data in double format.
- setLong(int, long) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the long data in float format.
- setLong(int, long) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the value in int format.
- setLong(int, long) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the value in long format.
- setLong(int, long) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the value in short format.
- setLong(int, long) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the value in byte format.
- setLong(int, long) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the long value in unsigned short format.
- setLong(int, long) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the long value in unsigned short format.
- setLongitudinalAnatomicalReference(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setLow(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setLowerBound(String) - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Set the lower bound from the script dialog.
- SetLowerBound(int, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- setLowerBoundB(String) - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Set the lower blue bound from the script dialog.
- setLowerBoundG(String) - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Set the lower green bound from the script dialog.
- setLowerBoundR(String) - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Set the lower red bound from the script dialog.
- setLowerExtents(int) - Method in class gov.nih.mipav.model.file.FileSpar
-
- setLowerList(JList) - Method in class gov.nih.mipav.view.JPanelListController
-
Convience method to set list B.
- setLowerTree(JTree) - Method in class gov.nih.mipav.view.JPanelTreeController
-
Convience method to set tree B.
- setLowGain(float) - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Accessor that sets lowGain variable.
- setLowThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Accessor that sets the lowThreshold.
- setLowTruncated(float) - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Accessor that sets lowTruncated variable.
- setLowXmm(float) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the value of the lowest x location in millimeters.
- setLowYmm(float) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the value of the lowest y location in millimeters.
- setLowZmm(float) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the value of the lowest z location in millimeters.
- setLSMDataType(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setLSMDataType2(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setLudlAuxWheel1(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setLudlMainWheel1Array(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setLUT() - Method in class gov.nih.mipav.model.file.FileImageXML
-
Sets up the LUT based on the values read into the lutVector.
- setLUT(float[][]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
I don't think both are needed in the new Model LUT design. /** Accessor that sets the LUT for the colors of the
indices.
- setLUT(ModelLUT) - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
Accessor to set the LUT.
- setLUT(ModelLUT) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the model lut
- setLUT(ModelLUT) - Method in interface gov.nih.mipav.view.HistoLUTParent
-
Replaces the LUT and builds a new LUT component.
- setLUT(ModelLUT) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- setLUT(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
- setLUT(ModelLUT) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Replaces the LUT and builds a new LUT component.
- setLUT(ModelLUT) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Placeholder.
- setLUT(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Change the panel's LUT.
- setLUT(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Placeholder.
- setLUT(ModelLUT) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Replaces the LUT and builds a new LUT component.
- setLUT(ModelLUT) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Replaces the LUT and builds a new LUT component.
- setLUT(ModelStorageBase) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Sets the LUT and updates the histogram panel.
- setLUT(ModelStorageBase) - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Change the lookup table associated with the image and histogram.
- setLUT(ModelStorageBase) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Change the lookup table associated with the image and histogram.
- setLUT(ModelStorageBase) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
- setLUT(JPanelHistogram, ModelStorageBase) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Sets the LUT for the input panel.
- setLUT(Texture, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Set the color look-up table for the widget.
- SetLUT(Texture, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.PatientSlice
-
Accessor that sets the LUT for image A.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Accessor that sets the LUT for image A.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Accessor that sets the LUT.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Accessor that sets the model LUT for the image A.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Accessor that sets the LUT.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Accessor that sets the LUT for image A.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Accessor that sets the LUT for image A.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that sets the model lut for the image A.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Accessor that sets the model lut for the image A.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Accessor that sets the LUT.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Accessor that sets the model LUT for the imageA.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Accessor that sets the LUT for image A.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Set imageA lookup table.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
accessor that sets the model LUT for the imageA.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Sets the model LUT for the imageA.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that sets LUTa.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the LUT for image A.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Accessor that sets the LUT.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Accessor that sets the LUT.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Sets the LUT for image A.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Sets the model LUT for the imageA.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Sets the model LUT for the imageA.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Accessor that sets the LUT.
- setLUTa(ModelLUT) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Change the histogram component LUT.
- setLUTA(ModelLUT) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Replaces the LUT A component.
- setLUTA(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Replaces the LUT A component.
- setLUTA(ModelStorageBase) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Set LUTa
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.PatientSlice
-
Accessor that sets the LUT for image B.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Accessor that sets the LUT for image B.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Accessor that sets the LUT for image B.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Accessor that sets the LUT for image B.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Accessor that sets the model lut for the image B.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Accessor that sets the model lut for the image B.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Accessor that sets the LUT.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Accessor that sets the model LUTb for the imageB.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Accessor that sets the LUT for image B.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Set imageB lookup table.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the model LUTb for the imageB.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Sets the model LUTb for the imageB.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor that sets LUTb.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the LUT for image B.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Accessor that sets the LUT.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Accessor that sets the LUT.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
setLUTb - accessor that sets the model LUTb for the imageB.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
setLUTb - accessor that sets the model LUTb for the imageB.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Accessor that sets the LUT.
- setLUTb(ModelLUT) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Change the histogram component LUT.
- setLUTB(ModelLUT) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Replaces the LUT B component.
- setLUTB(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Replaces the LUT B component.
- setLUTB(ModelStorageBase) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Set LUTb
- setLUTBufferRemapped(int[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Set.
- setLUTConvexity(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- setLUTConvexity(ModelLUT) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Update the colormap based on the LUT:
- setLUTCurvature(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Update the colormap based on the LUT:
- setLUTCurvature(ModelLUT) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Update the colormap based on the LUT:
- setLUTdest(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- setLUTdest(ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- setLUTNew(String, ModelStorageBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the LUT to use as an alternative to the volume lut for surface
texturing.
- SetLUTNew(ModelStorageBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Set the user-specified LUT for surface texture.
- SetLUTNew(ModelStorageBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Sets the alternate LUT for surface texture mapping.
- SetLUTNew(ModelStorageBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Sets the LUT to use as an alternative to the volume lut for surface texturing.
- SetLUTNew(String, ModelStorageBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sets the LUT to use as an alternative to the volume lut for surface texturing.
- setLUTs(ModelLUT, ModelLUT) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Set the gray scale image LUT tables.
- setLUTs(ModelLUT, ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Sets LUTa and LUTb.
- SetMachineEps() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
----------------------------[ MachineEps ]----------------------------
Calculate machine epsilon
Algorithm A1.3.1 - p. 303 Dennis and Schnabel, Numerical Methods for
Unconstrained Optimization and Nonlinear Equations 1983, Prentice-Hall
- setMagMax() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the maximum magnification to the image. will ensure that the current magnification is not larger than the
maximum.
- setMagMax() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the maximum magnification to the image. will ensure that the current magnification is not larger than the
maximum.
- setMagMin() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the minimum magnification to the image. will ensure that the current magnification is not smaller than the
minimum.
- setMagMin() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the minimum magnification to the image. will ensure that the current magnification is not smaller than the
minimum.
- setMagneticFieldStrength(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setMagneticFieldStrength(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setMagnification(float) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the magnification of the images will ensure that the current magnification is not smaller than the minimum.
- setMagnification(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the magnification of the images will ensure that the current magnification is not larger than the maximum.
- setMagnification(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Objective
-
DOCUMENT ME!
- setMakingCheckerboard(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- setManufacturer(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setManufacturer(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setManufacturerModelName(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setMapC(int) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setMapchannel(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setMapR(int) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setMapS(int) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setMarker(VertTmark) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- setMarkers(VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- setMarksFlag(int) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- setMarksFlags(int) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- setMask(BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets the mask (BitSet object).
- setMask(BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSeparableConvolver
-
Sets the mask to convolve within.
- setMask(BitSet) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets the mask which indicate which pixels/voxels to process.
- setMask(BitSet) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Sets the volume mask data -- the intersection of the triangle mesh with
the volume data.
- setMask(BitSet, int, int, boolean, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- SETMASK - Static variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- setMaskBU(BitSet) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets the mask which indicate which pixels/voxels to process.
- setMaskBurnVector(Vector<MaskBurnAttribute>) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Initialize the mask burning vector.
- setMaskExtents(int[]) - Method in class gov.nih.mipav.model.file.FileInfoSPAR
-
- setMaskImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Accessor to set the directory.
- setMaskSD(float) - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Accessor that sets the mask standard deviation (in the same units as the image).
- setMaskSlice(BitSet, int, boolean, int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- setMaskType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Accessor that sets the mask type
- setMaskType(String) - Method in class gov.nih.mipav.model.scripting.actions.ActionPaintToMask
-
Changes the data type of the paint extraction we want to record.
- setMaskType(String) - Method in class gov.nih.mipav.model.scripting.actions.ActionVOIToMask
-
Changes the data type of the VOI extraction we want to record.
- setmat(int, int, int, double[][], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- setmat(int, int, int, DoubleDouble[][], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- setMatchFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Accessor that sets the matchOrigin flag.
- setMaterial(String, MaterialState, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sets the material for the given surface.
- setMaterial(String, MaterialState, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the material for the given surface.
- setMaterial(Material) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceRefXML_J3D
-
Sets the material properties for the surface:
- setMaterial(Material) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Sets the material properties for the surface:
- setMaterial(Material) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Sets the material properties of the mesh.
- setMaterial(Material) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
sets the surface Material. the Material diffuse color is used to set
the color value as well.
- setMaterial(Material, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Called from the JPanelSurfaceMAterialProperties.java dialog when the dialog is used to change the material
properties of a surface.
- setMaterial(MaterialState) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Sets the material properties for the surface:.
- setMaterial(MaterialState) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
Sets the material properties for the surface:.
- setMaterial(MaterialState) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
Set the material.
- setMaterial(MaterialState, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Called from the JPanelSurfaceMAterialProperties.java dialog when the dialog is used to change the material
properties of a surface.
- SetMaterial(MaterialState, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Set the surface material properties
- setMaterialShininess(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Set the texture material shininess value.
- setMaterialShininess(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Set the texture material shininess value.
- setMaterialShininess(float) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Set material ( texture or voxels ) shininess value.
- setMaterialShininess(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Set the texture material shininess value.
- setMaterialShininess(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Set the texture material shininess value.
- SetMaterialState(MaterialState) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Called from the AdvancedMaterialProperties dialog.
- setMatrix(double[][]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Set a submatrix.
- setMatrix(double[][]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Set a submatrix.
- setMatrix(int, int, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- setMatrix(int, int, int, int, double[][]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Set a submatrix.
- setMatrix(int, int, int, int, double[][]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Set a submatrix.
- setMatrix(TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the matrix associated with the FileInfo.
- setMatrix(TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
DOCUMENT ME!
- setMatrix(TransMatrix) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that adds a matrix to the matrix holder.
- setMatrix(TransMatrix) - Method in class gov.nih.mipav.model.structures.VOIPoint
-
- setMatrix(TransMatrix) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
update matrix and text matrix
- setMatrix(TransMatrix) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the transformation matrix.
- setMatrixDirectory(String) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set directory in which the matrix file is stored
- setMatrixDirectory(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Accessor to set directory in which the matrix file is stored
- setMatrixDirectory(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set directory in which the matrix file is stored
- setMatrixDirectory(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set directory in which the matrix file is stored
- setMatrixDirectory(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Accessor to set directory in which the matrix file is stored
- setMatrixQ(TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setMatrixS(TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setMatrixSize1(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setMatrixSize2(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setMax(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets max pixel value of image.
- setMax(double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the maximum value in the dataArray.
- setMax(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Sets the maximum voxel value for the skin.
- setMax(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
- setMax(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- setMax(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the maximum value for X, Y, or Z processing.
- setMaxAdvectionChange(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Set the maximum advection change allowed in the PDE solver update.
- setMaxAdvPropTimeStep(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Set the maximum advection-propagation time step.
- setMaxB(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets max blue pixel value of image.
- setMaxB(double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the maximum value in the dataArray.
- setMaxB(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- setMaxB(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the maximumBlue value for X, Y, or Z processing.
- setMaxCurvatureChange(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Set the maximum curvature change allowed in the PDE solver update.
- setMaxCurvatureTimeStep(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Set the maximum curvature time step.
- setMaxDebugLines(int) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the maximum number of debug lines that are output
- setMaxDepth(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the maximum depth, as described in BrainExtraction.pdf, that is part of the image term in the surface
evolution.
- setMaxDepth(int) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Set the maximum depth that is part of the image term in the surface evolution.
- setMaxDiff(double) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Accessor that sets the maximum contribution to the potential
of the difference between two neighboring pixel values.
- setMaxDim(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
- setMaxDim(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
- setMaxDistance(double) - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- setMaxDistance(int) - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Set the maximum distance for the region grow.
- setMaxDistance(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets maxDistance for regionGrow.
- setMaxEMIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- setMaxEntropyThreshold(int) - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Sets maximum entropy threshold.
- setMaxExtent(int, int[], int[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Updates the BufferedImage, Dimension, and render buffers when the render target image size changes so that the
image can be redisplayed at the new target resolution.
- SetMaxFuncEval(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
set limit for the number of function evaluations
- setMaxG(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets max green pixel value of image.
- setMaxG(double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the maximum value in the dataArray.
- setMaxG(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- setMaxG(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the maximum Green value for X, Y, or Z processing.
- setMaximumAngle(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Sets the maximum angle of the mouse movement.
- setMaximumAngle(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Sets the maximum angle of the mouse movement.
- setmaximumDistance(double) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Accessor that sets the maximumDistance.
- setMaximumIgnore(float) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the maximum of the range of intensities to ignore.
- setMaximumIgnoreB(float) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the maximum of the range of blue intensities to ignore.
- setMaximumIgnoreG(float) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the maximum of the range of green intensities to ignore.
- setMaximumIgnoreR(float) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the maximum of the range of red intensities to ignore.
- setMaximumLevel(int) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- setMaximumLines(int) - Method in class gov.nih.mipav.view.ViewJFrameMessage.ScrollTextArea
-
- setMaximumLines(int, int) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Sets the maximum number of lines for the specified text area.
- setMaximumPixelCount(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setMaximumPixelCountInGroup(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setMaximumPossibleBValue(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setMaximumRRInterval(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setMaximumSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Accessor that sets the maximum size for objects to delete.
- setMaximumSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Accessor that sets the maximum size the kernel mask can be increased to when adaptive median filtering is used.
- setMaximumVelocity(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Sets the maximum velocity of the mouse movement.
- setMaximumVelocity(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Sets the maximum velocity of the mouse movement.
- setMaxIntensity(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- setMaxIter(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Accessor that sets the max iterations.
- setMaxIter(int) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Accessor that sets the max iterations.
- setMaxIter(int) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Accessor that sets the max iterations.
- setMaxIter(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Accessor that sets the max iterations.
- setMaxIter(int) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Accessor that sets the max iterations.
- setMaxIterations(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Sets the maximum number of iterations.
- setMaxIterations(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Sets the maximum number of iterations.
- setMaxIterations(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Accessor that sets the maximum number of iterations.
- setMaxIterations(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Accessor that sets the maximum number of iterations.
- setMaxIterations(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Accessor that sets the maximum number of iterations.
- setMaxIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set maxIterations.
- setMaxIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set maxIterations.
- setMaxIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set maxIterations.
- SetMaxIterations(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
set limit for the number of iterations
- setMaxLength(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- setMaxLength(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_MaximumSubLength
-
Sets the maximum sublength.
- setMaxLength(int) - Method in class gov.nih.mipav.view.JPanelEditDefault
-
sets the system bell to ring whenever the string is larger than the specified value. attempting to reset to value
larger than a previous setting results in an undefinable behaviour
- setMaxLength(int) - Method in class gov.nih.mipav.view.JPanelEditSetOrParam
-
sets the system bell to ring whenever the string is larger than the specified value. attempting to reset to value
larger than a previous setting results in an undefinable behaviour
- setMaxLines(int) - Method in class gov.nih.mipav.view.MaximumLinesDocumentListener
-
- setMaxMAPIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- SetMaxNumNonZeros(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- setMaxOfMinResol(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the maximum resolutions flag.
- setMaxOfMinResol(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the maximum resolutions flag.
- setMaxProbability(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if maximum probability operator is calculated.
- setMaxProbability(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if maximum probability operator is calculated.
- setMaxProgressValue(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets the max progress value.
- setMaxPropagationChange(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Set the maximum propagation change allowed in the PDE solver update.
- setMaxR(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets max red pixel value of image.
- setMaxR(double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the maximum value in the dataArray.
- setMaxR(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- setMaxR(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the maximum Red value for X, Y, or Z processing.
- setMaxRenExtent(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
setMaxRenExtent changes the render target image by changing the pixBufferA_XY size and by changing the render
target image of the componentImageXY member variable. createTexturedImage (local) is called to reinitialize the
size of the texture displayed on the texture-mapped polygon.
- setMaxSamplingRate(int, int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- setMaxSamplingRate(int, int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- setMaxThresholdCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
checkbox for inverse threshold
- setMaxThresholdCheckBoxB - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
checkbox for inverse threshold
- setMaxThresholdCheckBoxG - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
checkbox for inverse threshold
- setMaxThresholdCheckBoxR - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
checkbox for inverse threshold
- setMaxTx(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the maximum X translation.
- setMaxTy(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the maximum Y translation.
- setMaxTz(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the maximum Z translation.
- setMaxutil(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- SetMCRootPositions(OctNode, int, float, HashMap<Long, Integer>, HashMap<Long, Integer>, HashMap<Long, Pair<Float, Point3D>>, HashMap<Long, Pair<Float, Point3D>>, Vector<Point3D>, CoredMeshData, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- setMean(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that set if the gray level coordinate matrix mean is calculated.
- setMean(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that set if the gray level coordinate matrix mean is calculated.
- setMean(double) - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Sets mean intensity of histogram.
- setMean(double) - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Accessor that sets destination image mean.
- setMean(double) - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- setMeanCurvaturesLUT(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Use the specified pseudocolors to render the computed mean curvatures for the previously specified mesh surface.
- setMenuActionListeners(Component, ActionListener) - Method in class gov.nih.mipav.view.ViewUserInterface
-
- setMenuItemEnabled(String, boolean) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Provides a method of setting the state of specified menu.
- setMenuItemSelected(String, boolean) - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Provides a method for changing the status of a checkbox menu item.
- setMenuLocation(int, int) - Method in class gov.nih.mipav.view.JScrollMenu
-
- setMerge(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- setMerge(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- setMerge(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- setMerge(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- setMerge(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- setMerge(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- setMergeThreshold(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- setMergeThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- setMergeThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- setMergeThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- setMergeThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- setMergeThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- setMergeThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- setMesh(ModelTriangleMesh[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Sets the ModelTriangleMesh representing the surface:
- setMesh(ModelTriangleMesh[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
sets the array of ModelTriangleMesh objects:
- setMesh(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FaceTmark
-
- setMesh(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.VertTmark
-
- setMesh(Point3f[], Vector3f[], Color4f[], int[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Creates the ModelTriangleMesh for the surface:
- setMessage(int, String) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
Updates the displayed message above a given progress bar
- setMessage(String) - Method in class gov.nih.mipav.view.dialogs.JDialogText
-
Sets the text area to the message, erasing what was there earlier.
- setMessage(String) - Method in class gov.nih.mipav.view.JPanelProgressBar
-
DOCUMENT ME!
- setMessage(String) - Method in interface gov.nih.mipav.view.ProgressBarInterface
-
public void updateValueImmed( int value );
- setMessage(String) - Method in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
Sets the text area to the message, erasing what was there earlier.
- setMessage(String) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Sets the message area of the progress bar.
- setMessage(String, int) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Sets the text area to the message, erasing what was there earlier.
- setMessageFrame(ViewJFrameMessage) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the message frame.
- setMessageText(String) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Accessor to set the text of the main frame's text field.
- setMessageText(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Accessor to set text of message field.
- setMessageType(int, int) - Static method in class gov.nih.mipav.view.DICOMDisplayer
-
Sets the type of message so it will be displayed in the appropriate column.
- setMethod(int) - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Accessor that sets the method (chan, vector, twophase).
- setMethod(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
Accessor that sets the construction method (WINDOW, GAUSSIAN, BUTTERWORTH).
- setMethod(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
Accessor that sets the construction method (WINDOW, GAUSSIAN, BUTTERWORTH).
- setMethod(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets the construction method (WINDOW, GAUSSIAN, BUTTERWORTH).
- setMethod(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Accessor that sets the construction method (WINDOW, GAUSSIAN, BUTTERWORTH).
- setMethod(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
Accessor that sets the construction method (WINDOW, GAUSSIAN, BUTTERWORTH).
- setMethod(int) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setMethod(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
- setMethod(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- SetMethodPar(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
set numerical gradient function
- setMicrofocusPosition(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setMicroscope(String) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setMicroscope(String, String, String, String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument
-
DOCUMENT ME!
- setMicroscopeIllumination(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setMicroscopeMagnification(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setMicroscopeName(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setMicroscopePort(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setMicroscopeSystem(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setMicroscopeType(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setMicroscopeType(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setMicroSecPerFrame(int) - Method in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- setMicroSecPerFrame(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setMiddleName(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- SetMidLine(float, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Sets the mid-line parameter to the GLSL Shader Program.
- setMIMEType(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setMin(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets min pixel value of image.
- setMin(double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the minimum value in the dataArray.
- setMin(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Sets the minimum voxel value for the skin.
- setMin(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the minimum value for X, Y, or Z processing.
- setMinAllowableMajorTickSpacing(double) - Method in class gov.nih.mipav.view.ViewJSlider
-
- setMinAllowableMinorTickSpacing(double) - Method in class gov.nih.mipav.view.ViewJSlider
-
- setMinB(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets min blue pixel value of image.
- setMinB(double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the minimum value in the dataArray.
- setMinB(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- setMinB(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the minimum Blue value for X, Y, or Z processing.
- setMincInfo(FileInfoMinc) - Method in class gov.nih.mipav.view.JPanelAnonymizeImage
-
allows the checkboxes to be disabled by testing the file info for the tags present.
- setMindIdent(String[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets mindIdent array, character data which serve to identify the type of DWI data structure represented by the
MIND extended header fields which follow
- setMinDist(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- setMinDistance(double) - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- setMinG(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets min green pixel value of image.
- setMinG(double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the minimum value in the dataArray.
- setMinG(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- setMinG(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the minimum Green value for X, Y, or Z processing.
- setMinimumBitsMinus1(int) - Method in class gov.nih.mipav.model.file.FileRaw
-
Used in reading and writing boolean
- setMinimumBitsMinus1(int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Used in reading and writing boolean
- setMinimumDelay(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setMinimumIgnore(float) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the minimum of the range of intensities to ignore.
- setMinimumIgnoreB(float) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the minimum of the range of blue intensities to ignore.
- setMinimumIgnoreG(float) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the minimum of the range of green intensities to ignore.
- setMinimumIgnoreR(float) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the minimum of the range of red intensities to ignore.
- setMinimumLevel(int) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- setMinimumRRInterval(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setMinimumSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Accessor that sets the minimum size for objects to delete.
- setMinimumThreshold(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
sets minimum threshold values.
- setMinIntensity(double[]) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- setMinMax() - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Sets the min max values based on image type.
- setMinMax(double, double, double) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- setMinMax(float, float) - Method in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- setMinMax(float, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Sets the minimum and maximum values of the ModelImage and the Gradient Magnitude image
for displaying the graph axes of the 2D Histogram.
- setMinMax(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Sets bounds of object size used to delete objects.
- setMinMax(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Sets the bounds of object size used to delete objects.
- setMinMax(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Sets bounds of object size used to delete objects.
- setMinMax(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Sets the bounds of object size used to delete objects.
- setMinorTickMarksVisible(boolean) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that tells whether to show the minor tick marks.
- setMinProgressValue(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets the min progress value.
- setMinR(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets min red pixel value of image.
- setMinR(double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the minimum value in the dataArray.
- setMinR(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- setMinR(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the minimum Red value for X, Y, or Z processing.
- setMinSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Accessor that sets the minSize.
- setMinThresholdCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
checkbox for inverse threshold
- setMinThresholdCheckBoxB - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
checkbox for inverse threshold
- setMinThresholdCheckBoxG - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
checkbox for inverse threshold
- setMinThresholdCheckBoxR - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
checkbox for inverse threshold
- setMinTx(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the minimum X translation.
- setMinTy(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the minimum Y translation.
- setMinTz(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the minimum Z translation.
- setMipavOrigin(float[]) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
- setMJPEGQuality(float) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setModality() - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Sets the image modality based on the.
- setModality(int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the modality.
- setModality(String) - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Sets the image modality based on the string
- setModality(String) - Method in class gov.nih.mipav.model.file.FileInfoNRRD
-
Accessor setting modalityString
- setModalityChooser(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Sets the modality chooser box based on the file info modality (the modality indexes should match up with the
ordering of the chooser).
- setModalityFromDicomStr(String) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Uses the DICOM tag value to set the Image modality field.
- setModalityString(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setMode(int) - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Sets the mode intensity of histogram.
- setMode(int) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Accessor that sets the mode (VOI_MODE, MASK_MODE, or LEVEL_MODE).
- setMode(int) - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Accessor that sets the mode: linear, cubic, or cubic bspline.
- setMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Set the mode at the beginning of the vector array.
- setMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Accessor that sets the mode.
- setMode(int) - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Set the mode at the beginning of the vector array.
- setMode(int) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Accessor that sets the mode.
- setMode(int) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Accessor that sets the mode.
- setMode(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
sets mode.
- setMode(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
sets mode.
- setMode(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setModel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay
-
DOCUMENT ME!
- setModelLights(SoftwareLight[]) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Specify a set of software lights defined in model coordinates.
- setModelLUT(ModelLUT) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Sets the model LUT.
- setModelLUT(ModelLUT) - Method in class gov.nih.mipav.model.file.FileIO
-
Sets the LUT.
- setModelName(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- SetModelParameterSteps(Vector<CDVector>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Sets the number of model parameter steps.
- setModelRGB(ModelRGB) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Sets the model RGB.
- setModelRGB(ModelRGB) - Method in class gov.nih.mipav.model.file.FileIO
-
Sets the RGB.
- setModified() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- setModified() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Causes the bottom three panels to re-display.
- setModified() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- setModified() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- setModified() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- setModified() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- SetModified(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Causes re-display.
- setModifyFlag(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- setMono(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setMore(float) - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Determines the upper bound of what values we will grow into (highThreshold = seedValue + val).
- setMore(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets more for regionGrow.
- setMoreB(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets moreB for regionGrow.
- setMoreG(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets moreG for regionGrow.
- setMoreR(float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets moreR for regionGrow.
- setMotorolaByteOrder(boolean) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Sets the endianness of this reader.
- setMotorolaByteOrder(boolean) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Sets the endianness of this reader.
- setMouseActive(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- setMouseControlFlythru(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- setMouseDrag(boolean) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
doDrag true enables the adjusted slice to respond to mouse press and
drag events doDrag false restricts the adjusted slice to responding to
mouse press and release events.
- setMouseFlythruMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- setMouseFlythruMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Set the mouse flythru mode
- setMouseFlythruMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Set the flythru mode
- setMouseMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Accessor that sets the current mouse mode of the dialog.
- setMouseMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Sets the mouse pointer mode - standard or fly - in the view dialog.
- setMouseMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets the mouse pointer mode - standard or fly - in the view dialog.
- setMouseMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Sets the mouse pointer mode - standard or fly - in the view dialog.
- setMouseRotateEnable(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Allow disabling or enabling mouse rotation:
- setMouseRotateEnable(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Allow disabling or enabling mouse rotation:
- setMouseRotationSpeed(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Set the mouse rotation speed from the rotation control slider
- setMouseSpeedModifier() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- setMouseTranslationSpeed(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Set the mouse translation speed from the translation control slider
- setMouseVectorFlag - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
flag to indicate the first time mouse tranform event happpened.
- setMouseVectorFlag - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
flag to indicate the first time mouse tranform event happpened.
- setMouseZoomSpeed(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Set the mouse zoom speed from the zoom control slider
- setMove(float, float, float, float) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
If doDrag == false, this routine processes movements generated by mouse presses and releases.
- setMove(float, float, float, float) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
If doDrag == false, this routine processes movements generated by mouse presses and releases.
- setMoveImageData(String, String, String, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Sets up the data object (IOD) for a patient root image level C-Move request given patID, study instance UID,
series instance UID, and SOP Instance UID.
- setMoveParameters(DICOM_PDUService, DICOM_Object, byte[]) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Sets up the neccessary parameters for sending a move request.
- setMovePatientData(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Sets up the data object (IOD) for a patient root patient level C-Move request given patID.
- setMoveSeriesData(String, String, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Set up the data object (IOD) for a patient root series level C-Move request given patID, study instance UID, and
series instance UID.
- setMoveStudyData(String, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Sets up the data object (IOD) for a patient root study level C-Move request given patID and study instance UID.
- setMovingSliderValue(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- setMRAcquisitionType(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setMRIProcessName(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setMsgID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Move
-
Sets the msgID for the outgoing C-Move Request.
- setMsgID() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
This sets the unique msgID for the outgoing C-Move Request.
- setMsgID(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
Sets the message ID to the value given.
- setMsgID(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_StdRetrieve
-
Sets the msgID for the outgoing C-Move Request.
- setMu(double) - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Accessor that sets the length parameter mu.
- setMulti(boolean) - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- setMultichannelColor0(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setMultichannelColor1(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setMultichannelColor2(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setMultichannelColor3(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setMultichannelWeight(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setMultiFile(boolean) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the flag for multiple files.
- setMultiFile(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets whether or not to write the image as multiple files, one 2D slice per file.
- setMultiFrame(boolean) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Sets whether the DICOM image is a multiFrame image.
- setMultiHistoEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- setMultiThread(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set if multithreading is used
- setMultiThread(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set whether or not powell's algorithm uses multithreading
- setMultiThread(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set whether or not powell's algorithm uses multithreading
- setMultiThreadingEnabled(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- setMutualInfoSmoothed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
- setN(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setN(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- setNACondenser(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setName(String) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the VOI's name to the parameter.
- setName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- setName(String) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- setName(String) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Set the current vector title name.
- setName(String) - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Set the current vector title name.
- setName(JTextField) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
DOCUMENT ME!
- SetName(String) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Set the simple image name
- SetName(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- setNameStr(String) - Method in class gov.nih.mipav.model.file.FileInfoTMG
-
DOCUMENT ME!
- setNameTable(String[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- setNaviMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- SetNBands(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- SetNCandidates(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Set the number of candidates
- setNClasses(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Accessor that sets the number of classes.
- setNClasses(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Accessor that sets the number of classes.
- setNColors(int) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Change the text field showing the number of colors.
- setNColors(int) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Change the text field showing the number of colors.
- setNcomp(int) - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
- setND1(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setND2(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setNDARData(NDARWriteData) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Sets the NDAR Data that will be used to populate XML header fields
- setNDFilter(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setNear(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Change the distance from the eye point to the view plane.
- setNearAndAngle(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Change the near distance and the field of view angle.
- setNearBoundPoint(int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets the near boundary point.
- setNearPoint(int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets the near point.
- setNegativeCurvatureNeeded(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- setNegativeHysteresisFraction(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- setNegativeSpeed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- setNeighbors(OctNode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NeighborKey
-
- setNeighbourLink(ArrayList<Boolean>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- setNeighbourLink(ArrayList<Boolean>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- setNeighbours(ArrayList) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- setNeighbours(ArrayList<AlgorithmNetworkSnake.SnakeInitialiser.Node>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- setNeighbours(ArrayList<AlgorithmNetworkSnake.SnakeNode>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- setNESW(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if northeast-southest offset direction is calculated.
- setNESW(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if northeast-southest offset direction is calculated.
- setNeuriteColor(String, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- setNewAlphaBlend(int) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Sets the alpha blending of parameter for two image displaying.
- setNewImageName(String) - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
Changes the image name which should be recorded as given to the input image.
- setNewPosition(int, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- setNewPosition(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- setNewThreshold(float, PaintGrowListener, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- setNewVar(float, float, boolean[], float[], float[], float[], float[], double, double, double, double, double, double, double, double, double, double, boolean, float) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Modifies component after mouseReleased in contour VOI indicating that the VOI has been moved.
- setNewVar(float, float, float, float, boolean[], float[], float[], float[], float[], double, double, double, double, double, double, double, double, double, double, boolean) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Modifies a frame of the colocalization histogram after mouseRelased has indicated the contour VOI in the source
image has been moved.
- setNewXs(int[], int) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setNewXs - accessor that sets the integer array of x coordinates to be plotted; used by the graphics for the
actual plotting of the graph.
- setNewYs(int[], int) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setNewYs - accessor that sets the integer array of y coordinates to be plotted; used by the graphics for the
actual plotting of the graph.
- setNext(int) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setNextByteMoreSignificant(boolean) - Method in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- setNextByteMoreSignificant(boolean) - Method in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- setNIFTIExtension(String) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets whether or not nifti should be written as a combined .nii file or
as separate .hdr and .img files.
- setNil(AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- setNint(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setNodeColor(int, Color) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Sets the node color for all the nodes at the given level of the Graph.
- setNodeColor(Node, int, int, Color) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
Uses recursion to set the node color for all the nodes at a given level of the Graph.
- setNodeIndices(OctNode, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- setNodeList(TreeMap<AlgorithmNetworkSnake.tuple2i, AlgorithmNetworkSnake.SnakeInitialiser.Node>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- setNodes(ArrayList<AlgorithmNetworkSnake.ContractingSnakeNode>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnake
-
- setNodes(ArrayList<AlgorithmNetworkSnake.SnakeNode>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- setNodeType(int) - Method in class gov.nih.mipav.view.dialogs.ScriptTreeNode
-
- setNoise(double) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Accessor that sets the noise.
- setNoise(float) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Accessor that sets the noise.
- setNoise_std(double) - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Accessor that sets the noise standard deviation.
- setNoiseLevel(double) - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Accessor that sets the noise level.
- setNoiseStandardDeviation(int) - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Accessor that sets the noise standard deviation.
- setNoiseType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Accessor that sets noiseType variable.
- setNoiseType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Accessor that sets the noise type.
- setNonHelical(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
- setNonLinear(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
- setNonlinearFunction(int) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Accessor that sets the nonlinear function type(tanh(a1*y), y*exp(-y*y/2), or y*y*y)
- setNorm(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Accessor that sets the normalization constant.
- setnormal(LSCM.Point) - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- setNormal(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Set the normal vector for the vertex.
- setNormal(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Set the normal vector for the vertex.
- setNormal(Vector3f, int, int, Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- setNormalized(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- setNormals(Vector3f[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Specify the array of normal vectors for each voxel in the volume.
- setNormalVectorX(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setNormalVectorY(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setNormalVectorZ(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setNormMutualInfoSmoothed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
- setNormXCorr(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
- setNorth(AlgorithmNetworkSnake.PixelGrid.PixelGridNode) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- setNoScalingD(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Accessor that sets whether or not d is read in from the text or
calculated from d = 1 - a - b - c.
- setNote(String) - Method in class gov.nih.mipav.model.structures.VOIText
-
Sets the contained note.
- setNoteDate001(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets noteDate001.
- setNoteDate002(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets noteDate002.
- setNoteDate003(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets noteDate003.
- setNoteDate004(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets noteDate004.
- setNoteDate005(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets noteDate005.
- setNoteNumber001(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets noteNumber001.
- setNoteNumber002(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets noteNumber002.
- setNoteNumber003(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets noteNumber003.
- setNoteNumber004(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets noteNumber004.
- setNoteNumber005(String) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets noteNumber005.
- setNPts(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
- setNreal(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setNS(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if north south offset direction is calculated.
- setNS(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if north south offset direction is calculated.
- setNSymbt(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setNull() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- setNumAperture(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setNumberClusters(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- setNumberFormat(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setNumberOfA0Images(int) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setNumberOfAverages(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setNumberOfAverages(int) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setNumberOfAverages(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setNumberOfControlPoints(int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- setNumberOfDiffusionDirections(int) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setNumberOfEchos(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setNumberOfLevels(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- setNumberOfLevels(int) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- setNumberOfLevels(int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- setNumberOfLevels(int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- setNumberOfNieghbors(int) - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
- setNumberOfObjects(int) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setNumberOfPhaseEncodingSteps(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setNumberOfProjections(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set numberOfProjections.
- setNumberOfRepetitions(int) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setNumberOfRequiredVOIsForScriptImages(int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- setNumberOfSegments(int) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setNumberOfThreads(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- setNumberOfXGridLines(int) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that sets the number of gridlines for paint.
- setNumberOfYGridLines(int) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that sets the number of gridlines for paint.
- setNumberTriangles(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Sets the number of triangles of the ModelTriangleMesh objects.
- setNumChannels(int) - Method in class gov.nih.mipav.model.file.FileRaw
-
Sets the number of channels used in RGB files
- setNumChannels(int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Sets the number of channels used in RGB files.
- setNumCoarseX(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the coarse sample rateX.
- setNumCoarseY(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the coarse sample rateY.
- setNumCoarseZ(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the coarse sample rateZ.
- setNumDilations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Accessor that sets the number of dilations to perform.
- setNumDilations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Accessor that sets the number of dilations to perform.
- setNumDilations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Accessor that sets the number of dilations to perform.
- setNumDilations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Accessor that sets the number of dilations to perform.
- setNumDilations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Accessor that sets the number of dilations to perform.
- setNumDilations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Accessor that sets the number of dilations to perform.
- setNumErode(int) - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Accessor that sets the number of dilations to perform.
- setNumErosions(int) - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Accessor that sets the number of erosions to perform.
- setNumErosions(int) - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Accessor that sets the number of erosions to perform.
- setNumErosions(int) - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Accessor that sets the number of erosions to perform.
- setNumErosions(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Accessor that sets the number of erosions to perform.
- setNumErosions(int) - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Accessor that sets the number of erosions to perform.
- setNumErosions(int) - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Accessor that sets the number of erosions to perform.
- setNumFrames(int) - Method in class gov.nih.mipav.model.file.FileInfoAvi
-
DOCUMENT ME!
- setNumImages(int) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- setNumIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Accessor that sets the number of iterations.
- setNumIterations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Accessor that sets the number of iterations.
- setNumMinima(int) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set numMinima.
- setNumMinima(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set numMinima.
- setNumMinima(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set numMinima.
- setNumNeighbor(int) - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Accessor that sets numNeighbor.
- setNumNeighbor(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Accessor that sets numNeighbor.
- setNumNeighbor(int) - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Accessor that sets numNeighbor.
- setNumNeighbor(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Accessor that sets numNeighbor.
- setNumNeighbor(int) - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Accessor that sets numNeighbor.
- setNumNeighbor(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Accessor that sets numNeighbor.
- setNumNeighbor(int) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Accessor that sets numNeighbor.
- setNumNeighbor(int) - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Accessor that sets numNeighbor.
- setNumOfSlices(int) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- setNumOpens(int) - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Accessor that sets the number of dilations to perform.
- setNumOrientations(int) - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- setNumProp(int) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setNumPruningPixels(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Accessor that sets the number of pixels to prune.
- SetNumResiduals(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CostFunction
-
- setNumScalar(int) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setNumSlices(int) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setNumTracks(int) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setNumVertices(int) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_vertex_list
-
- setNumVolumes(int) - Method in class gov.nih.mipav.model.file.DTIParameters
-
- setNumVolumes(int) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setNWave(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setny(int) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- setnz(int) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- setObject(int, Object) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a Object for the specified tag.
- setObject(int, Object) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ErrorDirectory
-
- setObject(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setObjectArray(int, Object) - Method in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- setObjectArray(int, Object) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets an array Object for the specified tag.
- setObjectiveContrastMethod(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setObjectiveID(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setObjectiveImmersionType(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setObjectiveMagnification(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setObjectiveNA(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setObjectiveName(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setObjectiveName(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setObjectivePosition(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setObjectiveSphereCorrection(double) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setObjectiveTurretPosition(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setObjectiveWorkingDistance(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setObjectParameters() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Set the object rotation parameters for displaying.
- setObjectRotation(Matrix3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Set the object rotation matrix
- setObjectType(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setObliquePlane(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setObliqueReconstruction(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setObservedCardiacCycles(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setObserver(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setOcularTotalMagnification(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setOffCentre(double[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setOffCentre(double[]) - Method in class gov.nih.mipav.model.file.FileInfoSPAR
-
Sets off-centre field.
- setOffset(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setOffset(double) - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- setOffset(int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the header offset.
- setOffset(int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
- setOffset(int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- setOffset(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.DoubleArrayPointer
-
- setOffset(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.IntArrayPointer
-
- setOffSet(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Set the boundary offset parameter in mm.
- setOffsetDistance(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets the offset distance.
- setOffsetDistance(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets the offset distance.
- setOK() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Called when the dialog OK button is pressed. this sets up the Algorithm state to commit the changes in the image
and to tell the dialog to cleanup and delete this algorithm.
- setOldImageName(String) - Method in class gov.nih.mipav.model.scripting.actions.ActionChangeName
-
Changes the old name of the input image.
- setOldLayout(boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Transition between the 2x2 window layout and 3x1 window layout:
- setOmax(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets omax.
- setOmax(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets omax.
- setOmax(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets omax. if supplied value is less than omin, the omin gets reset to the supplied value as well, so that omin
is still no greater than omax.
- setOME(FileInfoOME.OME) - Method in class gov.nih.mipav.model.file.FileInfoOME
-
DOCUMENT ME!
- setOMEName(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Experimenter
-
DOCUMENT ME!
- setOmin(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets omin. if supplied value is greater than omax, the omax gets reset to the supplied value as well, so that
omax is still no less than omin.
- setOmin(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets omin. if supplied value is greater than omax, the omax gets reset to the supplied value as well, so that
omax is still no less than omin.
- setOmin(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets omin. if supplied value is greater than omax, the omax gets reset to the supplied value as well, so that
omax is still no less than omin.
- setOnlyID(short) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the ID to the parameter.
- setOpacity(float) - Method in class gov.nih.mipav.model.file.FileInfoImageXML.SurfaceLink
-
Sets the opacity for the surface.
- setOpacity(float) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
set the surface opacity keyword:
- setOpacity(float) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
set the surface opacity keyword:
- setOpacity(float) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setOpacity(float) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the opacity to the parameter.
- setOpacity(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
sets the surface Opacity.
- setOpacity(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Sets the opacity of the paint.
- setOpacity(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Sets the opacity of the paint.
- setOpacity(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called from JDialogOpacityControls.
- setOpacity(float) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Accessor that sets the opacity of the paint.
- setOpacity(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
- SetOpacity(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Set the surface opacity properties
- setOpacityFunction(TransferFunction) - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
Sets the opacity function, which indicates that we want it to be saved / read in with the rest of the transfer
functions.
- setOpacityFunctions(ModelLUT, ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Add here.
- setOpacityInfo(float, float) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Sets RGB Information.
- setOpacitySliderXEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Set the opacity slider X with given boolean value.
- setOpacitySliderXEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Set the opacity slider X with given boolean value.
- setOpacitySliderYEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Set the opacity slider Y with given boolean value.
- setOpacitySliderYEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Set the opacity slider Y with given boolean value.
- setOpacitySliderZEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Set the opacity slider Z with given boolean value.
- setOpacitySliderZEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Set the opacity slider Z with given boolean value.
- setOperator(int) - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
set operator.
- setOperator(int) - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Accessor that sets the operator type.
- setOperator(int) - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Accessor that sets the operator type.
- setOperator(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setOptional(boolean) - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Sets whether this parameter needs to be set by the user when using the ActionDiscovery system.
- setOptions() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Sets up the options depending on what the user entered in the dialog.
- setOptionsDefault() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Sets up the options to the default values as determined by the file info in setSpace and returns the new options.
- setOptionsSet(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets whether all of the options have been previously set (usually by the script parser).
- setOptovar(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setOrder(int[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets order array for set of spherical harmonic basis functions
- setOrgan(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- setOrient() - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Gets the orientation from the combo boxes and checks if it's consistent.
- setOrientation() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Based on the orientaion of the ModelImage, sets up the index
parameters, m_aiLocalImageExtents[0], m_aiLocalImageExtents[1], and
m_aiLocalImageExtents[2], the drawing colors for the z box, x and y
bars, and the invert flags.
- setOrientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Based on the orientation of the ModelImage, sets up the index
parameters, m_aiLocalImageExtents[0], m_aiLocalImageExtents[1], and
m_aiLocalImageExtents[2], the drawing colors for the z box, x and y
bars, and the invert flags.
- setOrientation() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Based on the orientation of the ModelImage, sets up the index parameters, m_aiLocalImageExtents[0],
m_aiLocalImageExtents[1], and m_aiLocalImageExtents[2], the drawing colors for the z box, x and y bars, and the
invert flags.
- setOrientation(byte) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets the image orientation converting from analyze specific orientation to general orientation.
- setOrientation(byte) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets the image orientation converting from SiemensText specific orientation to general orientation.
- setOrientation(byte) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
Sets the image orientation converting from SPM specific orientation to general orientation.
- setOrientation(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Indicates the orientation of the image for use in the ellipsoid estimation.
- setOrientation(int) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Accessor that sets the orientation flag.
- setOrientation(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Accessor that sets the orientation of the component either
FileInfoBase.AXIAL, FileInfoBase.CORONAL, FileInfoBase.SAGITTAL, or
FileInfoBase.UNKNOWN_ORIENT
- setOrientation(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- setOrientation(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setOrientationButton - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- setOrientationSet1Back(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setOrientationSet1Left(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setOrientationSet1Top(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setOrientationSet2Down(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setOrientationSet2Front(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setOrientationSet2Right(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setOrientType(String, boolean) - Static method in class gov.nih.mipav.model.file.FileInfoMinc
-
Helper method to set the axis orientations.
- setOrigAC(Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets the anterior comissure in original space.
- setOrigDicom(boolean) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets origDicom.
- setOrigDim(int[]) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets dims in original space.
- setOrigin(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- setOrigin(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- setOrigin(float[]) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets start locations of each axis.
- setOrigin(float[]) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the origin.
- setOrigin(float[]) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets start locations of each axis.
- setOrigin(float, int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets the start location of the specified axis.
- setOrigin(float, int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the start location in the specified axis. creates the startLocations if the arrray has not yet been created.
- setOrigin(float, int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets the start location of the specified axis.
- setOrigin(int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
Sets the origin of this text object, i.e. the bottom left corner of the rectangle enclosing the text,
the text's location so to say
- setOrigin(short[]) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- setOrigin(Point2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
Sets the origin of this text object, i.e. the bottom left corner of the rectangle enclosing the text,
the text's location so to say
- setOrigin(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- SetOrigin(Matrix4f, Matrix4f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- SetOriginal() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Set original point.
- SetOriginal(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Sets whether the point is an original model point or an artificial
generated point.
- setOriginalCropCheckbox(boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setOriginalDataType(int) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setOriginalDoCrop(boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setOriginalEnd(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setOriginalEndianess(boolean) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- setOriginalEpsilon(double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- setOriginalExtents(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets original dimensionality of the images.
- setOriginalFilterConstruction(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setOriginalFilterOrder(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setOriginalInstitution(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setOriginalKernelDimension(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setOriginalPosteriorMargin(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the AC posterior margin marker for orig to ACPC transformation in dicom ordering using numbers not adjusted
for origin and resolution.
- setOriginalRs(double) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
- setOriginalScanData(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setOriginalSeriesNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setOriginalStagePositionX(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setOriginalStagePositionY(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setOriginalStart(int[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setOriginalSuperiorEdge(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the AC superior edge marker for orig to ACPC transformation in dicom ordering using numbers not adjusted for
origin and resolution.
- setOriginalXs(float[]) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setOriginalXs - accessor that sets the array of x coordinates to be plotted; used by the zoom to reset the graph.
- setOriginalYs(float[]) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setOriginalYs - accessor that sets the array of y coordinates to be plotted; used by the zoom for reseting the
graph.
- setOriginatingSystem(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setOriginator(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Allows a maximum of 10 characters to set the originator string.
- setOriginator(String) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Allows a maximum of 10 characters to set the originator string.
- setOriginX(double) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
- setOriginY(double) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
- setOrigOrient(float[][]) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets orienatationsin origianl space.
- setOrigOrigin(float[]) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets origin in original space.
- setOrigPC(Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets posterior comissure in original space.
- setOrigRes(float[]) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets resolution in original space.
- setOrthographicProjection() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Changes the projection to Orthographic Projection.
- setOTFRefDocumentRef(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DOCUMENT ME!
- setOTFRefOTFID(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo
-
DOCUMENT ME!
- setOther(int, int, int) - Method in class gov.nih.mipav.model.file.FileMincVarElem
-
Sets the information in the variable that comes after the attribute array.
- setOtsuThreshold(int) - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Sets the Otsu threshold.
- setOutDimensions(int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor to set the output image's dimensions.
- SetOuterEdge() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Set outer edge.
- SetOuterEdge(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Sets whether the point belongs to an outer edge or not.
- setOutgoingBlockSize(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Sets the outgoing block size based the the Max.
- setOutgoingEndianess(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Sets the endianess for the outgoing data.
- setOutMinAndMax(int) - Method in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
sets out min and max...used in scripting
- setOutOfBoundsIndex(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
tells how to select fill value for out of bounds data
0 for image minimum
1 for NaN for float, zero otherwise.
2 for user defined
3 for image max
- setOutOfBoundsIndex(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
tells how to select fill value for out of bounds data
0 for image minimum
1 for NaN for float, zero otherwise.
2 for user defined
3 for image max
- setOutOfBoundsIndex(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
tells how to select fill value for out of bounds data
0 for image minimum
1 for NaN for float, zero otherwise.
2 for user defined
3 for image max
- setOutOfBoundsIndex(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
tells how to select fill value for out of bounds data 0 for image minimum 1 for NaN for float, zero otherwise. 2
for user defined 3 for image max
- setOutput(double) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- setOutputDir(String) - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- setOutputDirectory(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
Sets the default output directory for the images generated by this panel.
- setOutputFileName(String) - Method in class gov.nih.mipav.model.file.FileAvi
-
- setOutputImageOptionsEnabled(boolean) - Method in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
Enables/disables the new/replace image output radio buttons.
- setOutputNewImage(boolean) - Method in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
Changes whether a new image should be generated by the algorithm.
- setOutputNewImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Changes whether a new image should be generated by the algorithm.
- setOutputNewImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Changes whether a new image should be generated by the algorithm.
- setOutputNewImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Changes whether a new image should be generated by the algorithm.
- setOutputNewImageType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
- setOutputOption(boolean, boolean, boolean, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Set the output options
- setOutputOptionsGUI(JPanelAlgorithmOutputOptions) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Sets up the algorithm output options panel components (whole image vs.
- setOutputRangeMax(double) - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Accessor that sets the maximum output range to the parameter.
- setOutputRangeMax(double) - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Accessor that sets the maximum output range to the parameter.
- setOutputRangeMin(double) - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Accessor that sets the minimum output range to the parameter.
- setOutputRangeMin(double) - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Accessor that sets the minimum output range to the parameter.
- setOutputType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Accessor that sets the output type.
- setOutputWindowBox(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Updates the checkbox to show whether or not the output window is currently displayed.
- setOutResolutions(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor to set the output image's resolutions.
- setOutsideReferenceSlice(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
allows user to use an outside reference slice for registering.
- setOutsideReferenceVolume(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
allows user to use an outside reference volume for registering.
- setOverlay(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets whether or not to show the overlay.
- setOverlayButtons() - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
Sets the text for the overlay buttons (dicom or image attrib).
- setOverlayNames(boolean, String[]) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the labels for each overlay position.
- setOverlays(boolean, String[]) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the overlay tag identifiers in the preference file.
- setP(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- setP1(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Accessor that sets the p1 value
- setP2(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Accessor that sets the p2 value
- setPAAIGraphVisible() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- setPackBitEnabled(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets whether it is possible to write with packed bits compression.
- setPad1(String) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setPad2(String) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setPaddingFactor(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setPaddingFactor(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- setPadFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the padding flag.
- setPadMode(int) - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Accessor to set padMode.
- setPadValue(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Deprecated.
- setPadValue(float) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Sets the pad value for single-channel images.
- setPadValue(float[]) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
Sets the value for the added margins, for either grayscale or color images.
- setPadValue(float, float, float) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
Sets the pad value for color images
- setPageToCurrentSlice() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the current page so that the current image slice is displayed.
- setPageToSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the page so that the given image slice is displayed.
- setpaintBitmap(BitSet) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Sets the paint Bitmap.
- setPaintBitmap(BitSet) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
set paint bitmap switch
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
When switching the active image, copy the paintBitmap of the previous active image into the paintBitmap of the
new active image.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Required by the parent super class, do nothing.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
set paint bitmap switch
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
If true do not getMask on a setActiveImage command so as to keep the mask from the old active image.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
If true do not getMask on a setActiveImage command so as to keep the mask from the old active image.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
DOCUMENT ME!
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
When switching the active image, copy the paintBitmap of the previous active image into the paintBitmap of the
new active image.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
When switching the active image, copy the paintBitmap of the previous active image into the paintBitmap of the
new active image.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
When switching the active image, take the paintBitmap of the previous
active image as the paintBitmap of the new active image Currenlty unused.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
When switching the active image, take the paintBitmap of the previous
active image as the paintBitmap of the new active image Currenlty unused.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Deprecated.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
When switching the active image, take the paintBitmap of the previous active image as the paintBitmap of the new
active image.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
When switching the active image, take the paintBitmap of the previous active image as the paintBitmap of the new
active image.
- setPaintBitmapSwitch(boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
When switching the active image, take the paintBitmap of the previous active image as the paintBitmap of the new
active image Currenlty unused.
- setPaintBrush(int) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Sets the index of the paintBox (to select a different paint brush).
- setPaintBrushButtonSelected() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Accessor that sets the paint brush button to selected.
- setPaintBrushSize(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Switches modes based on the variable mode.
- setPaintColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the color of the paint.
- setPaintColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the color of the paint.
- setPaintColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the color of the paint.
- setPaintColor(Color) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Accessor that sets the color of the paint.
- setPaintGrowMode(int) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Change the method for determining the points to paint grow from.
- setPaintMask() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Sets the paintBitmap to produce colored borders for 4D images.
- setPaintMask(BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
Changes the paint mask that we look for borders in.
- setPaintMask(BitSet) - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- setPaintMask(BitSet) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setPaintMask(BitSet) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Accessor that sets the paint mask.
- setPaintMask(BitSet) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the paint mask.
- setPaintMask(BitSet) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- setPaintMask(BitSet) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- setPaintMask(BitSet) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- setPaintMask(BitSet) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- setPaintMaskDest(BitSet) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Accessor that sets the paint mask.
- setPaintMaskDest(BitSet) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Accessor that sets the paint mask.
- setPaintMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Sets the type of paint, either vertex-color or texture value:
- setPanel(JPanelGeodesic) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Access to the JPanelGeodesic interface object.
- setPanel(JPanelGeodesic_WM) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Access to the JPanelGeodesic interface object.
- setPanel(JPanel) - Method in class gov.nih.mipav.view.components.PanelManager
-
Changes the panel which is managed by this class.
- setPanelTitle(String) - Method in class gov.nih.mipav.view.JPanelFileSelection
-
Sets the panel title independant of the file chooser title.
- setPannedAxes(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
Sets the axes to which this panning is applied.
- setPaperColor(Color) - Method in class gov.nih.mipav.view.LineMeter
-
applies the given color to the background.
- setParallel(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Change the camera model.
- setParallel(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Change the camera model.
- setParallel(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Change the camera model.
- setParallel(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Change the camera model.
- setParallelPowell(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- setParallelRotation(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Set the parallel rotation flag from the viewJFrameVolumeView.
- setParallelRotation(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Set the parallel rotation flag from the viewJFrameVolumeView.
- setParallelRotation(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Set the parallel rotation flag from the viewJFrameVolumeView.
- setParam(Vector<Integer>) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Test
-
- SetParameterBlockConstant(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- SetParameterBlockStatePtrsToUserStatePtrs() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- SetParameterBlockVariable(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- SetParameterization(double[], CeresSolver.LocalParameterization) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- SetParameterization(CeresSolver.LocalParameterization) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- setParameterLabel(String) - Method in exception gov.nih.mipav.model.scripting.parameters.ParameterException
-
Change the parameter label which caused this parameter exception.
- SetParameterLowerBound(double[], int, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- SetParameterOffsetsAndIndex() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- setParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Accessor that sets the parameters
- setParameters() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
Accessor that sets the parameters
- setParameters() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- setParameters() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- setParameters(DICOM_PDUService, DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Sets up the neccessary parameters for sending a query.
- SetParameterUpperBound(double[], int, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ProblemImpl
-
- setParent(AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- setParent(MetadataExtractor.Directory) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
- setParent(Parameter) - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Sets the reference to another Parameter who this parameter relies on.
- setParentCondition(Parameter, String) - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Changes the parent Parameter and parent Parameter condition value to test against when deciding whether to ask
for a value for this Parameter when using the ActionDiscovery interface.
- setParentConditionValue(String) - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Changes the parent Parameter condition value to test against when deciding whether to ask for a value for this
Parameter when using the ActionDiscovery interface.
- setParentDialog(DicomTagSelectorImpl) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- setParentDir(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- setParentTags(Collection<String>) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- setParfocalCorrection(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setPARRECMatrix(TransMatrix) - Method in class gov.nih.mipav.model.file.FileInfoSPAR
-
- setParsedFileName(String) - Method in exception gov.nih.mipav.model.scripting.ParserException
-
Changes the file from which the script was read in ('-' if no file on disk).
- setPatchSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- setPathDist(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Update the camera position along the path based on the specified distance from the beginning.
- setPathDist(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Update the camera position along the path based on the specified distance from the beginning.
- setPathDist(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Update the camera position along the path based on the specified distance
from the beginning.
- setPathDistance(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Update the display to show the current distance along the length of the path.
- setPathDistance(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Update the display to show the current distance along the length of the path.
- setPathFlythruMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- setPathFlythruMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Set the path flythru mode
- setPathFlythruMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setPathPlanningFlythru(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- setPathPosition(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Update the display to show the coordinates of the current position along the path.
- setPathPosition(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Updates the position of the flythru view point along the flythru path.
- setPathPosition(Point3f, Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Called when the view position changes in the FlyThruRenderer, updates the position representation in the Slice
views:
- setPathPosition(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Update the display to show the coordinates of the current position along the path.
- setPathRecorded(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- setPathRecorded(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- setPatientAge(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPatientAge(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setPatientAgeUnits(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setPatientDOB(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setPatientID(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Allows a maximum of 10 characters to set the patient ID string.
- setPatientID(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPatientID(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setPatientID(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setPatientID(String) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Allows a maximum of 10 characters to set the patient ID string.
- setPatientID(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
allows a maximum of 10 characters to set the patient ID string.
- setPatientName(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPatientName(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setPatientName(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setPatientName(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setPatientOrientation(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setPatientOrientationString(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Set String put in DICOM 0020, 0037
- setPatientPosition(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setPatientPosition(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setPatientRootQuery() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
setPatientRootQuery - sets query to Patient Root.
- setPatientRotation(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setPatientSex(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPatientSex(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setPatientSlicePosition(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Sets the PatientSlice position label.
- setPatientSlicePosition(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Sets the PatientSlice position label.
- setPatientStatus(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPatientStudyOnlyQuery() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
setPatientStudyOnlyQuery - sets query to Patient Study Only.
- setPatientWeight(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPauseBetweenFrameGroups(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setPauseBetweenImages(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setPauseInterval(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPauseTime(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPB(float) - Method in class gov.nih.mipav.view.ColorWheel
-
- setPBar(ProgressBarInterface) - Method in class gov.nih.mipav.model.file.FileIO
-
Sets the progress bar (either panel or frame) to be used in image opening to update status.
- setPBar(ProgressBarInterface) - Method in class gov.nih.mipav.model.file.FileXML
-
Sets the progress bar to be used for loading/saving image (JProgressBar or JPanel).
- setPC(float) - Method in class gov.nih.mipav.view.ColorWheel
-
- setpcie(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the posterior commissure inferior edge for +acpc to +tlrc transformation in dicom ordering.
- setPCVelocityEncoding(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPDEParameters(float, int, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
Parameters for the feature image creation.
- setPDEParameters(float, int, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
Parameters for the feature image creation.
- setPDEParameters(float, int, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Parameters for the feature image creation.
- setPDEParameters(float, int, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
Parameters for the feature image creation.
- setPDEParameters(float, int, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
Parameters for the feature image creation.
- setPDEParameters(float, int, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Parameters for the feature image creation.
- setPDEParameters(float, int, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Parameters for the feature image creation.
- setPeakSAR(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPenColor(Color) - Method in class gov.nih.mipav.view.LineMeter
-
applies the given color to bars which are not lit and are above the set amplitude.
- setPercentPhaseFieldOfView(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setPercentSampling(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setPerformedProcedureStepStartTime(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- SetPerPixelLighting(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Sets the lighting shader to be per-pixel or per-vertex.
- SetPerPixelLighting(Renderer, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Sets the lighting shader to be per-pixel or per-vertex.
- setPerspective(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- setPerspectiveProjection() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Changes the projection to Perspective Projection.
- setPerVertexColorArray(Color4f[], int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Set the per-vertex color array.
- setPETDataType(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setPETStudyGeneral(boolean) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setPETStudyImageData(boolean) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setPFSwapped(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPG(float) - Method in class gov.nih.mipav.view.ColorWheel
-
- setPhaseContrastFlowAxis(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPhaseDim(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- setPhiLatticeParametricDomainParameters() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- setPhone(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setPhone(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Sets phone number.
- setPhone(String, int) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set the investigators phone # using an index.
- setPhotometric(short) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets photometric interpretation.
- setPhotometricInterpretation(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setPickable(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Turn picking culling on/off for the selected surfaces.
- setPickable(SurfaceAttributes[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Turns picking on/off for the selected surfaces.
- setPickable(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Turn picking on/off for the given surface.
- setPickable(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enable surface picking for the given surface.
- SetPickable(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Enables/disables picking for this object.
- setPickCanvas(PickCanvas) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Access function to set the pickCanvas.
- setPickCanvas(PickCanvas) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Access function to set the pickCanvas.
- setPickColor(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
Sets the picking color.
- setPickColor(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
Sets the picking color.
- setPickColor(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- setPickColor(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
Sets the picking color.
- setPicked(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Clears or sets the current picked object, sets the outline color to red when picked, blue when not selected.
- setPicked(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
Clears or sets the current picked object, sets the outline color to red when picked, blue when not selected.
- setPicked(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Clears or sets the current picked object, sets the outline color to red when picked, blue when not selected.
- setPicked(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Sets the current picked ID.
- setPicked(Renderer, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
Clears or sets the current picked object, sets the outline color to red when picked, blue when not selected.
- setPickedPoint(PickRecord, TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Set the picked point.
- setPickedPoint(PickRecord, TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
- setPImage2(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPinholeGeometry(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setPinholeRadius(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setPinholeSize(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setPinholeSizeAiry(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setPixDistance(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Used in the ultimate erode function to remove all eroded points less than the distance specified in pixel units.
- setPixDistance(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Used in the ultimate erode function to remove all eroded points less than the distance specified in pixel units.
- setPixDistance(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Used in the ultimate erode function to remove all eroded points less than the distance specified in pixel units.
- setPixDistance(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Used in the ultimate erode function to remove all eroded points less than the distance specified in pixel units.
- setPixel(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- setPixelBandwidth(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setPixelInformationAtLocation(int, int, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Prints ModelImage information at the mouse location.
- setPixelPadValue(Short) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets pixel pad value: used in some Dicom images.
- setPixelRepresentation(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setPixels(AlgorithmNetworkSnake.PixelGrid.PixelGridNode[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- setPixelSize(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPixelSpacing(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setPlanarConfig(int) - Method in class gov.nih.mipav.model.file.FileRaw
-
Sets the planar configuration for RGB images.
- setPlanarConfig(int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Sets the planar configuration for RGB images.
- setPlane(int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- setPlane(int) - Method in class gov.nih.mipav.model.structures.VOIPoint
-
- setPlaneConstant(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Set the front the clipping plane constant
- setPlaneConstant(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setPlaneConstant(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Set the VolumeRayCast front clipping plane constant
- setPlaneGap(int) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets planeGap to -1 for no gap, 0 = x gap, 1 = y gap, 2 = z gap.
- setPlaneName(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPlaneType(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPlateChamberID(String) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setPlateInfo(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setPlateVesselID(String) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setPlatform(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- setPlatformVersion(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- setPLogP(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Precalculates information and allocates buffers used in the calculation of mutual information statistics.
- setPLogP(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Precalculates information and allocates buffers used in the calculation of mutual information statistics.
- setPlugInFrameVisible(boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Tells the UI that a standalone plugin frame is visible
- setPluginInstallDirectory(File) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the plugin install directory.
- setPlugInMenu(JMenu) - Method in class gov.nih.mipav.view.ViewMenuBar
-
Sets the menu containing the list of installed plugins.
- setPNumber(int) - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- setPockelCellSetting(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setpoint(LSCM.Point) - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- setPoint(double[]) - Method in class gov.nih.mipav.model.algorithms.Vectornd
-
- setPoint(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.Line
-
- setPoint(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.Line
-
- setPoint(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.Line
-
- setPoint(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.Line
-
- setPoint(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.Line
-
- setPoint(int, double) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Knot
-
Add an individual coordinate value (x or y) to
points array (6 points per knot)
- SetPoint(int, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Overwrites the i'th point.
- SetPoint(int, CAAMPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Overwrites the i'th point.
- setPoint1(float) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setPoint2(float) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setPointAux(int, CAAMPointInfo) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Set specific point info
- setPointAux(Vector<CAAMPointInfo>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
set point info vector
- setPointCalculation(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setPointData(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- setPointerButton(JToggleButton) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called when the Default Pointer Button is not part of the default VOI Toolbar.
- setPointerButton(JToggleButton) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
- setPointerSelected() - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Accessor that sets the pointer button to selected.
- SetPointInfoFlagsInPath(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Sets all flags in one path to the same value.
- setPointLocation(Vector<Vector4d>) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- setPoints(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
Sets the controls points of the Bspline and calculates the total arc-length.
- setPoints(float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
Sets the controls points of the Bspline and calculates the total arc-length.
- setPoints(float[], float[], float[], VOIBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Takes the polygon and forms two special arrarys for use in runSnake.
- setPoints(float[], float[], float[], VOIBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Takes the polygon and forms two special arrays for use in the Bspline.
- setPoints(float[], float[], float[], VOIBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Takes the polygon and forms two special arrays for use in the Bspline.
- setPoints(float[], float[], float[], VOIBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Takes the polygon and forms two special arrays for use in the Bspline.
- setPoints(float[], float[], float[], VOIBase) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
- setPoints(float[], float[], Polygon) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Takes the polygon and forms two special arrarys for use in runSnake.
- setPoints(float[], float[], Polygon) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Takes the polygon and forms two special arrays for use in the Bspline.
- setPoints(float[], float[], Polygon) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Takes the polygon and forms two special arrarys for use in the Bspline.
- setPoints(float[], float[], Polygon) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Takes the polygon and forms two special arrays for use in runSnake.
- setPoints(float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdge
-
- setPoints(Vectornd[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Sets the transformation vectors.
- setPoints(Vectornd[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Sets the transformation vectors.
- setPoints(Vectornd[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Sets the transformation vectors.
- setPoints(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setPoints2(float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Takes the polygon and forms two special arrays for use in the Bspline.
- setPointsAndLinesDisplay(int) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Accessor that sets whether to display lines only, points and lines, or points only
- setPointThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Accessor that sets the pointThreshold.
- setPointVOI(VOI) - Method in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
All VOIPoints are stored in one VOI contained in this class.
- setPointWeights(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- setPolarity(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Accessor that sets the polarity flag.
- setPolarity(int) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the polarity to the parameter.
- setPolygon(VOIContour) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Spefify the VOI polygon to optimize.
- setPolygonMode(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Set the polygonal render mode.
- setPolygonMode(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Sets the polygon mode, if it has changed.
- setPolygonMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Sets the surface polygon mode.
- setPolygonMode(String, WireframeState.FillMode) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Set the polygon mode (FILL, LINE, POINT) for the given surface.
- setPolygonMode(String, WireframeState.FillMode) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Set the polygon mode (FILL, LINE, POINT) for the given surface.
- SetPolygonMode(boolean, WireframeState.FillMode) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Enables/disables wireframe and sets the mode: FILL, LINE, POINT.
- setPolylineColor(int, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Sets the polyline color for the specified fiber bundle tract group.
- setPolylineColor(int, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the polyline color for the specified fiber bundle tract group.
- setPopupPt(ViewJPopupPt) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from VOIManagerInterface.
- setPopupVOI(ViewJPopupVOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from VOIManagerInterface.
- SetPoseParameterUpdateConstraints(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Sets constraints on the pose parameter updates.
- setPosition(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current position of the light.
- setPosition(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Set the light source position.
- setPosition(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Set the position of the vertex.
- setPosition(int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets the position of the Img value this Pixel references.
- setPosition(int, int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Sets the position of this pixel to the specified coordinates.
- setPosition(int, int) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- setPosition(VOIBase, int, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- setPosition(VOIBase, int, float, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- setPosition(VOIBase, int, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- setPosition(VOIBase, int, Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- setPosition(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPosition(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current position of the light.
- setPosition(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Set the light source position.
- setPosition(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Set the position of the vertex.
- SetPosition(int, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- setPositionLabels(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the labels which show the absolute position within the image volume
and the patient position.
- setPositionLabels(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the labels which show the absolute position within the image volume
and the patient position.
- setPositionLabels(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the labels which show the absolute position within the image volume and the patient position.
- setPositionLabels(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Sets the position labels.
- setPositionLabels(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Sets the position labels.
- setPositionLabels(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sets the position labels.
- setPositionText(String) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Sets text in positionPanel.
- setPositionText(String) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Placeholder.
- setPositionText(String) - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Sets text in positionPanel.
- setPositiveHysteresisFraction(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- setPosteriorCenter(float) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setPosteriorMargin(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the AC posterior margin marker for orig to ACPC transformation in dataset ordering.
- setPosteriorMargin(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Sets posterior label based on the point.
- setPosteriorPt(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the most posterior point marker for +acpc to +tlrc transformation in dicom ordering.
- setPosteriorPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
Sets posterior label based on the point.
- setPosteriorPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
Sets posterior label based on the point.
- setPostImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- setPotential(double) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Accessor that sets the potential
- setPPIAcceleration(int) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
\
- setPrecisionDisplay(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Sets the String float formatter to trim to numDecimal number of decimals.
- setPreferencesFileDirectory(String) - Static method in class gov.nih.mipav.view.Preferences
-
Change the file directory of the preferences file.
- setPreferencesFileName(String) - Static method in class gov.nih.mipav.view.Preferences
-
Change the file name of the preferences file we should use (without any path).
- setPreparationDirection(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setPrescanReceiveAttenuation1(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPrescanReceiveAttenuation2(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPrescribedImageNumbers(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPrescribedSeriesNumbers(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPreserveFOV(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets value for the preserveFOV boolean
- setPresetHue(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- setPresetHue(float) - Method in class gov.nih.mipav.view.Rubberband
-
Sets the presetHue.
- setPresetHue(float) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Sets the presetHue.
- setPresetHue(float) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Sets the hue that will be used to draw the new VOI.
- setPressedStart(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- setPreviewMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- setPreviewMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- setPreviewMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- setPreviewMode(boolean, VOIVector, VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setPreviewMode(boolean, VOIVector, VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- setPreviousStartIndices(int[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Sets the indices of the triangle that the previous start point is located in.
- setPreviousStartIndices(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Sets the indices of the triangle that the previous start point is located in.
- setPreviousStartPoint(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Sets the previous start point of the geodesic curve on the mesh.
- setPreviousStartPoint(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Sets the previous start point of the geodesic curve on the mesh.
- setProbe(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setProbeCoordinate(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Set the probe translation in the local coordinate system.
- setProbeCoordinate(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Set the probe translation in the local coordinate system.
- setProbeCoordinate(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Set the probe translation in its local coordinate.
- setProbeCoordinate(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Set the probe translation in the local coordinate system.
- setProbeCoordinate(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Set the probe translation in the local coordinate system.
- setProbeGreenColor(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Switch the default probe between color cyan and color green.
- setProbeGreenColor(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Switch the default probe between color cyan and color green.
- setProbeGreenColor(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
When the probe is picked, switch the probe geometry appearance to green.
- setProbeGreenColor(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
When the probe is picked, change the probe geometry shape color to green to indicate picked.
- setProbeGreenColor(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Switch the default probe between color cyan and color green.
- setProbeGreenColor(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Switch the default probe between thermal probe and the indicator probe.
- setProbeTG(Transform3D, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets the Transform3D for the slices based on the Probe Transform.
- setProbeTG(Transform3D, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Sets the Transform3D for the slices based on the Probe Transform.
- setProcess(boolean) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the flag to the parameter.
- setProcess(boolean) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets whether the shape is included in processing.
- setProcessConvUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- setProcessHifiUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- setProcessIndep(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Accessor that sets whether slices are processed independently.
- setProcessMode(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- setProcessStatus(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setProcessType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
Set the output calculation by type.
- setProcessWholeImage(boolean) - Method in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
Changes whether a whole image should be processed (as opposed to just VOI regions).
- setProgram(String, String) - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- setProgramArguments(String, String) - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- setProgramAuthor(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setProgramDate(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setProgramName(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- setProgramVersion(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setProgress(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- setProgressBar(ProgressBarInterface) - Method in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- setProgressBar(ViewJProgressBar, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Accessor that sets the progress bar so it can be updated from here.
- setProgressBar(ViewJProgressBar, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOpt3D
-
Accessor that sets the progress bar so it can be updated from here.
- setProgressBarInitLocation(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- setProgressBarVisible(boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Sets whether or not the progress bar should be visible.
- setProgressBarVisible(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets Progress Bar visibility.
- setProgressModulus(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- setProgressStep(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
- setProgressValues(int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets the min and max progress values from an array of two ints.
- setProgressValues(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets both the min and max progress values.
- setProjectionAngle(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setProjectionDataAlreadyOnCBR(String) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set projectionDataAlreadyOnCBR.
- setProjectionDirection(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- setProjectionNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setProjectionTime(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setProjectionUSize(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set projectionUSize.
- setProjectionVSize(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set projectionVSize.
- setPromenance(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if the cluster promenance is calculated
- setPropagation(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Sets the propagation flag.
- setPropagation(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Sets the propagation flag.
- setPropagation(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Sets the propagation type.
- setPropagation(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Sets the propagation type.
- setPropagationWeight(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseParameters
-
Set the propagation weight 'b'.
- setProperties() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- setProperties(float[][]) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setProperty(String, Object) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
- setProperty(String, Object) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the property key in the MIPAV property list and saves it to a file.
- setPropertyName(String) - Method in class gov.nih.mipav.view.JPanelEdit
-
Sets the propertyName to allow the PropertyChangeEvent to send out a unique name when
PropertyChangeEvents are fired.
- setPropNames(String[]) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setProtocol(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets scan Protocol for equipment associated with image.
- setProtocolName(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setProvidedOutputDir(boolean) - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- setProvidedUserDefaultDir(boolean) - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- setPS(float) - Method in class gov.nih.mipav.view.ColorWheel
-
- setPSDDay(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPSDFileName(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPSDHour(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPSDMinute(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPSDMonth(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPSDName(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPSDSeconds(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPSDYear(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPSeries2(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPSetDescription(String) - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- setPSetHashtable(Hashtable<String, XMLPSet>) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the hashtable that holds all sets of parameters.
- setPSetsHashMap(HashMap<?, ?>) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
sets the pset hasmap
- setPt(float[], float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- setPt(AlgorithmMeanShiftClustering.famsPoint) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
-
- setPts(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
- setPublisher(String) - Method in class gov.nih.mipav.model.file.PrivateFileDicomKey
-
- setPulseSequence(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPulseSequenceMode(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPulseSequenceSubtype(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setPump(Integer, Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser
-
DOCUMENT ME!
- setPunctureTriangle(int[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh
-
Set the index of the triangle used to "puncture" the mesh before the conformal mapping is computed.
- setPunctureTriangle(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
Set the index of the triangle used to "puncture" the mesh before the conformal mapping is computed.
- setPutInFrame(boolean) - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
Indicates whether or not the new image should be put into a frame.
- setQ(float) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Accessor that sets the q variable.
- setQ(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Accessor that sets the q variable.
- setQMesh(ModelQuadMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Sets the quad mesh by detaching the parent branch group and readding the surface.
- setQuality(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- setQuality(float) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmDICOMtoAVI
-
DOCUMENT ME!
- setQuantificationUnits(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setQuantizationTable(int[]) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- setQuantizationTable(int[]) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- setQueryImagesData(String, String, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Sets up the data object (IOD) for a patient root image level C-Find request on key patient ID.
- setQueryPatientData(String, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Sets up the data object (IOD) for a patient root patient level C-Find request on key patient name.
- setQuerySeriesData(String, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Sets up the data object (IOD) for a patient root series level C-Find request on key patient ID.
- setQueryStudyData(String, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Sets up the data object (IOD) for a patient root study level C-Find request on key patient ID.
- setQueryStudyData(String, String, String, String, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Sets up the data object (IOD) for a patient root study level C-Find request on key patient ID.
- setQuickLUT(boolean) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets the QuickLUT flag.
- setQuiet(boolean) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- setQuiet(boolean) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
- setQuiet(boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
sets the quiet option on the class.
- setQuiet(boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Refers to whether or not the FileIO will send alerts to the user about progress or errors.
- setQuiet(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- setQuietRunning(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
- setR() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- setR(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets red channel value of this Pixel.
- SetR() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- SetR(byte) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- setR_fromDouble(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- setR_fromDouble(double) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Sets the red value of this pixel at its current position with 0.0 as no red contribution and 1.0 as full red contribution.
- setR1(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setR2(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setRace(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the subject's race.
- setRadioBoth - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- setRadiological(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
- setRadiological(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Toggles between radiological and neurological views of the data.
- setRadiologicalView(boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the radiological view flag.
- setRadiologicalView(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Sets the view to Radiological (true) or Neurological (false) view.
- setRadiologicalView(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Sets the view to Radiological (true) or Neurological (false) view.
- setRadiopharmaceutical(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setRadius(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Set the radius of the spheres used to mark the start and end points on the geodesic curve.
- setRadius(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Set the radius of the spheres used to mark the start and end points on the geodesic curve.
- setRadius(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
- SetRadius(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
- SetRandomSeed(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
get random seeding flag.
- setRange() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Sets the range of the destination image.
- setRange(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
Change the range of floating point values for the progress bar.
- setRange(float, float) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Sets the range of the graph according to the min and max parmaters.
- setRange(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Sets the thickness in number of voxels value for the skin.
- setRange(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
Change the range of integral values for the progress bar.
- SetRange(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOIEffect
-
- setRangeSymmetric() - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- setRangeText(float, float, int) - Method in interface gov.nih.mipav.view.HistoLUTParent
-
Set the range value of the text field.
- setRangeText(float, float, int) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- setRangeText(float, float, int) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Set the range value of the text field.
- setRangeText(float, float, int) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Placeholder.
- setRangeText(float, float, int) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Placeholder.
- setRangeText(float, float, int) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Set the range value of the text field.
- setRangeText(float, float, int) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Set the range value of the text field.
- setRating(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setRatio(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setRational(int, MetadataExtractor.Rational) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a Rational value for the specified tag.
- setRational(int, MetadataExtractor.Rational) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setRational(int, MetadataExtractor.Rational) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setRationalArray(int, MetadataExtractor.Rational[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a Rational[] (array) for the specified tag.
- setRationalArray(int, MetadataExtractor.Rational[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setRationalArray(int, MetadataExtractor.Rational[]) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setRawDataStudyNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setRawDataSystemID(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setRawExtension(String) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Changes the extension of the image data file associated with this XML header.
- setRawImageInfo(RawImageInfo) - Method in class gov.nih.mipav.model.file.FileIO
-
DOCUMENT ME!
- setRawImageInfo(RawImageInfo) - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- setRawImageInfo(RawImageInfo) - Method in class gov.nih.mipav.view.ViewOpenFileUI
-
- setRawImageInfo(RawImageInfo) - Method in class gov.nih.mipav.view.ViewUserInterface.OpenFileInfo
-
DOCUMENT ME!
- setRayBasedRender(VolumeRenderer) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelRendererJ3D
-
Set the reference to ray based renderer, raycast renderer or shear warp renderer.
- setRayBasedRender(VolumeRenderer) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Set the reference to ray based renderer, raycast renderer or shear warp renderer.
- setRayBasedRender(VolumeRenderer) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Set the reference to ray based renderer, raycast renderer or shear warp renderer.
- setRayDelta(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution.
- setRayDelta(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Set the spacing along the vertex normal rays, as described in BrainExtraction.pdf, that is part of the image term
in the surface evolution.
- setRCenter(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setReader(MipavSAXReader) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
Sets the MipavSAXReader.
- setReadQT(boolean) - Method in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- setReadyToDispose(boolean) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
accessor to allow user to override the automatic closing (until they set this flag to true);
- setRealValue(double) - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Accessor that sets the realValue to be used when performing the algorithm.
- setRecalculateInstanceNumber(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets whether or not the Instance Number (0020,0013) should be recalculated before saving.
- setReceiveAttenuatorSetting(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setReceivingCoil(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setRecoInpSize(int) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setRecommendedReceiveAttenuation(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setRecommendedReceiveFrequency(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setRecommendedTransmitAttenuation(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setRecommendedTransmitFrequency(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setReconstructionMethod(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setRecordButton(JButton) - Method in class gov.nih.mipav.view.ViewToolBarBuilder.JScriptToolBar
-
Sets the button used to start/stop recording.
- setRecorderStatus(int) - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Changes the current status of the script recorder and notifies any recorder listeners of the change.
- setRecorderStatus(int) - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Changes the current status of the script recorder and notifies any recorder listeners of the change.
- setRecording(boolean) - Method in class gov.nih.mipav.view.ViewControlsImage
-
Used to set the state for the script recorder.
- setRecording(boolean) - Method in class gov.nih.mipav.view.ViewToolBarBuilder.JScriptToolBar
-
Sets whether a script is being recorded and changes the appearance of the button accordingly.
- setRecordingMode() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- setRecordRate(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- setRecoSize(int) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
Accessor to set the reco size.
- setRed(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- setRed(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- setRed(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Sets the flag for the red channel.
- setRed(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
Sets the flag for the red channel.
- setRed(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Sets the flag for the red channel.
- setRed(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
Sets the flag for the red channel.
- setRed(boolean) - Method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
Sets the flag for the red channel.
- setRed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- setRed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- setRed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Accessor that sets the color flag.
- setRed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Accessor that sets the color flag.
- setRed(double) - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Accessor that sets the red value.
- setRed(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setRed1(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- setRed2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- setRedArray(int[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setRedBlackLevel(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setRedChannelNumber(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setRedFunction(TransferFunction) - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Accessor that returns the red transfer function.
- setRedGamma(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setRedImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
Accessor that sets the Green Image Source.
- setRedOn(boolean) - Method in class gov.nih.mipav.view.JPanelHistogram
-
Sets the red checkbox on/off.
- setRedOn(boolean, boolean) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Sets the red flag to be on or off.
- setRedOn(boolean, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
- setRedProcessingRequested(boolean) - Method in class gov.nih.mipav.view.components.JPanelColorChannels
-
Changes whether the red channel of the input image should be processed.
- setReductionX(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- setReductionX(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- setReductionY(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- setReductionY(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- setReductionZ(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- setReductionZ(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Set the reduction factor for estimating the initial ellipsoid, as described in BrainExtraction.pdf.
- setRedVector(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- setRedWhiteLevel(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setReference(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setReferenceFrameNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setReferenceImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the reference image.
- setReferenceImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the reference image.
- setReferenceImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the reference image.
- setReferenceSlice(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Accessor which lets you specify the reference slice.
- setReferenceSlice(ModelImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
allows the user to pass in an OUTSIDE reference slice.
- setReferenceSlice(ModelImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
allows the user to pass in an OUTSIDE reference slice.
- setReferenceVolume(ModelImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
allows the user to pass in an OUTSIDE reference volume.
- setReferenceVolume(ModelImage) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
allows the user to pass in an OUTSIDE reference volume.
- setReferenceWeightImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the reference weight image.
- setReferenceWeightImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the reference weight image.
- setReferenceWeightImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the reference weight image.
- setReferenceXY(int, Vector3f) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Set a talairach / ACPC reference point.
- setReferringPhysician(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setRefImageNum(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set refImageNum.
- setRefImageNum(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set refImageNum.
- setReflectedLightHalogenLampMode(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setReflectedLightHalogenLampVoltage(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setReflectedLightShutter(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setReflector(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setReflector(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setReflectorID(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setReflectorMagnification(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setReflectorPosition0(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setReflectorPosition1(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setReflectorPosition2(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setReflectorPosition3(int, int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setRefMark(boolean) - Method in class gov.nih.mipav.view.ViewJComponentRegistration
-
Sets the reference mark flag.
- setRefocusingPulseType(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setRefrInxLensMedium(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setRefrInxMedium(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setRefWgtImage(ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
Sets the reference weight image.
- setRefWgtImage(ModelSimpleImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
Sets the reference weight image.
- setRegButtonEnabled(boolean) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Accessor that enables or disables the window region button.
- setRegionFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
Accessor that sets the region flag.
- setRegionFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Accessor that sets the region flag.
- setRegionFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Accessor that sets the region flag.
- setRegionFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Accessor that sets the region flag.
- setRegionFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Accessor that sets the region flag.
- setRegionFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Accessor that sets the region flag.
- setRegionFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Accessor that sets the region flag.
- setRegionFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Accessor that sets the region flag.
- setRegionGrowAlgo(AlgorithmRegionGrow) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- setRegionGrowAlgo(AlgorithmRegionGrow) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Placeholder.
- setRegionGrowAlgo(AlgorithmRegionGrow) - Method in interface gov.nih.mipav.view.dialogs.RegionGrowDialog
-
Sets the region grow algo associated with this dialog.
- setRegionGrowVars(short, short, short, float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the variables used to remember the point where the last region grow was started from.
- setRegionLinesDisplay(boolean) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- setRegionMask(int, int, short) - Method in class gov.nih.mipav.model.file.FileCheshireVOI
-
setRegionMask set the mask of all points in the 4 connected region with a gray scale value of objectValue.
- setRegionMaskAll() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
Sets the mask of all points in the 4 connected region with a gray scale value.
- setRegionMaskAll() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
Sets the mask of all points in the 4 connected region with a gray scale value.
- setRegionMaskAll() - Method in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- setRegionMaskI(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue Uses iteration.
- setRegionMaskI(int, int, short) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue Uses iteration.
- setRegionMaskIFalse(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue.
- setRegionOutMaskI(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
Sets the mask of all points in the 4 connected region with a srcPaintMask equal to false Uses iteration.
- setRegionOutMaskI(int, int, short) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
Sets the mask of all points in the 4 connected region with a gray scale value of objectValue Uses iteration.
- setRegister(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- setRegister(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setRegister(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setRegister(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- setRegister(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- setRegister(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- setRegisteredDWIImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Sets the with-in volume registered 4D DWI image.
- setRegisteredMatrices(TransMatrix[], String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Sets the within-volume array of matrices.
- setRegisterTo(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set registerTo.
- setRegistrationDateDD(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setRegistrationDateMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setRegistrationDateYYYY(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setRegistrationTimeHH(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setRegistrationTimeMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setRegistrationTimeSS(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setRegular(char) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Supply the value of regular character.
- setRegular(char) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Supply the value of regular character.
- setRegular(char) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
supply the value of regular character.
- setRegularizer(libdt.CovMatrix, libdt.cov_reg_type, double) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- setRegularizer(libdt.Dytex, libdt.DytexRegOptions) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- setReleasedSliderValue(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- setRelFocusPosition1(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setRelFocusPosition2(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setRemapHighestValue(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
- setRemapHighestValue(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
- setRemapMode(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
Accessor that sets the remap mode.
- setRemapMode(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Accessor that sets the remap mode.
- setRemoveDim(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Accessor that sets the Dimension to remove according to the parameter.
- setRenderer(ContourPlot.Renderer) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- setRenderer(ContourPlot.Renderer) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
Sets the renderer of this canvas.
- setRenderer(VolumeTriPlanarRender) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- setRenderer(VolumeTriPlanarRenderBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- setRenderer(VolumeTriPlanarRender, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- setRenderMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Change the camera model.
- setRenderMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImageRayCast
-
Change the camera model.
- setRenderMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImageShearWarp
-
Change the camera model.
- setRenderMode(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Change the camera model.
- setRenderMode(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- setRenderPerspective(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Enable perspective projection rendering; otherwise use orthographic projection.
- setRenderPerspective(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Enable perspective projection rendering; otherwise use orthographic projection.
- setRenderPerspective(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Enable perspective projection rendering; otherwise use orthographic projection.
- setRenderPerspective(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
- setRenderPerspective(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Enable perspective projection rendering; otherwise use orthographic projection.
- setRenderPerspective(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Enable perspective projection rendering; otherwise use orthographic projection.
- setRenderPerspective(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Switches between orthographic and perspective projection.
- setRenderSurfaceColors(Color) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
If the color LUT defined for mean curvature pseudocolor mapping is defined, then use it to reset the colors.
- setRepetitionTime(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setRepetitionTime(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setRepetitionTime(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setRepetitionTime(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setRequestedNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setResampledT2Image(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
Sets the resampled T2 structural image, from the DTIPipeline pre-processing panel,
or by the user loading the file disk.
- setRescaleIntercept(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the rescale intercept.
- setRescaleSlope(double) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the rescale slope.
- setResearchMode(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- setReserved(String) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setResetEnabled(boolean) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Accessor that enables or disables the reset item.
- SetResetIteNumber() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeCG
-
- SetResetting(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeCG
-
- setResidualBlocks(Vector<CeresSolver.ResidualBlock>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- setResolution(float) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- setResolution3Dim(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Accessor that sets the resolution for the 3rd dimension.
- setResolution4Dim(float) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Accessor that sets the resolution for the 4th dimension.
- setResolutions(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- setResolutions(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- setResolutions(float[]) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the resolutions of the image.
- setResolutions(float[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the resolutions to the specific value for a specific slice indicated by the index parameter.
- setResolutions(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- setResolutions(float, float) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Sets the resolution correction factor in both x and y directions.
- setResolutions(float, int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the resolutions of the image, on a per dimension basis.
- setResolutions(int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Sets the resolutions from the variable array based on the orientation of the image.
- setResolutions(int, float[]) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the resolutions to the specific value for a specific slice indicated by the index parameter.
- setResolutionSwitches(ArrayList<Integer>) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- setResolutionTag() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Set the resolution tag in front view.
- setResolutionUnit3Dim(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Accessor that sets the resolution unit for the 3rd dimension.
- setResolutionUnit4Dim(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Accessor that sets the resolution unit for the 4th dimension.
- setResultImage(ModelImage) - Method in class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
Changes the image generated by the action we are recording.
- SetReturnValue(boolean) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GoodTestTerm
-
- SetReverseFace(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Flag to reverse the direction of the triangle faces inside the vertex shader.
- setRFAToolbarVisible(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Set the RFA button visible or not.
- setRfBWCb(double, double) - Method in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- setRfBWCb(double, double) - Method in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- setRfBWCr(double, double) - Method in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- setRfBWCr(double, double) - Method in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- setRfBWY(double, double) - Method in class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- setRfBWY(double, double) - Method in class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- setRGB() - Method in class gov.nih.mipav.model.file.FileImageXML
-
sets up the model RGB while parsing XML header after all LUValues have been saved in the LUT vector.
- setRGB(int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets an opaque RGB value at the position currently referenced by this Pixel.
- setRGB(ModelRGB) - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
Accessor to set the RGB.
- SetRGB(byte, byte, byte) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- setRGB_fromDouble(double, double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets an opaque RGB value at the position currently referenced by this Pixel.
- setRGB_fromDouble(double, double, double) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Sets the red, green and blue value of this pixel.
- setRGB_fromDouble_preserveAlpha(double, double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets an RGB value at the position currently referenced by this Pixel.
- setRGB_fromDouble_preserveAlpha(double, double, double) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.PixelBase
-
Sets the red, green and blue value of this pixel.
- setRGB_preserveAlpha(int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets an RGB value at the position currently referenced by this Pixel.
- SetRGBA(byte, byte, byte, byte) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- setRGBAOrder(boolean) - Method in class gov.nih.mipav.model.file.FileRaw
-
- setRGBAOrder(boolean) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- setRGBChannelFilter(boolean, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
RGB images are histogram equalized by 'channel.'
- setRGBChannelFilter(boolean, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
RGB images are histogram equalized by 'channel.'
- setRGBChannelFilter(boolean, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
RGB images are local-normalized by 'channel.'
- setRGBChannelFilter(int, boolean, boolean, boolean, float) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
RGB images are median filtered by 'channel.'
- setRGBChannelFilter(int, boolean, boolean, boolean, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
If filterType == SEPARATE_COMPONENT, RGB images are mean filtered by 'channel.'
- setRGBEqual() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Sets the red, green, and blue values to equal values.
- setRGBGraphics() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Sets the red, green, and blue values to computer graphic values.
- setRGBOffset(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets the RGBOffset.
- setRGBOffset(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Accessor that sets the RGBOffset.
- setRGBOffset(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Accessor that sets the RGBOffset.
- setRGBOffset(int) - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Accessor that sets the RGBOffset.
- setRGBOffset(int) - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Accessor that sets the RGBOffset.
- setRGBOffset(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets the RGBOffset.
- setRGBPaintComponents(String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- setRGBs(ModelRGB, ModelRGB) - Method in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
Sets the RGB LUT table for ARGB image A and image B.
- setRGBT(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
- SetRGBT(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Sets the ModelRGB for the iImage.
- setRGBTa(ModelRGB) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Sets the RGB LUT table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.PatientSlice
-
Causes the data to be redrawn with new RGBTA values:
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Accessor that sets the RGB lookup table for image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Set the RGB table of imageA.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
setRGBTA.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Update the ModelRGB associated with the separate texture, and regenerate the ImageComponente3D volume texture.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Does nothing but must instantiate for this to be a subclass of RenderViewBase.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Sets the RGB table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets the RGB table for image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Sets the RGB table for image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Sets the RGB table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Sets the RGB table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
The following 2 functions set the RGB tables for ARGB images A and B.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Sets the RGB table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
The following 2 functions set the RGB tables for ARGB images A and B.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Sets the RGB table for image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
The following 2 functions set the RGB tables for images A and B.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Sets the RGB LUT table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Update the ModelRGB associated with the separate texture, and regenerate the ImageComponente3D volume texture.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Sets the RGB table for the ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Sets the RGB table for the ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Sets the RGB table for the ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the RGB table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Sets the RGB LUT table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Sets the RGB LUT table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Set the RGB table for image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Sets the RGB LUT table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Sets the RGB LUT table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
The following 2 functions set the RGB tables for images A and B.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
The following 2 functions set the RGB tables for images A and B.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the RGB LUT table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
The following 2 functions set the RGB tables for ARGB images A and B.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the RGB table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the RGB table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Sets the RGB LUT table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Sets the RGB LUT table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Sets the RGB LUT table for ARGB image A.
- setRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the RGB table for ARGB image A.
- setRGBTb(ModelRGB) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
set rgbtb
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.PatientSlice
-
Causes the data to be redrawn with new RGBTB values:
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Accessor that sets the RGB lookup table for image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Get the RGB table of imageB.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
setRGBTB.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Update the ModelRGB associated with the ModelImage texture, and regenerate the ImageComponente3D volume texture.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Does nothing but must instantiate for this to be a subclass of RenderViewBase.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets the RGB table for image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Sets the RGB table for image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Sets the RGB table for ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Sets the RGB table for ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Sets the RGB table for image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Sets the RGB table for ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Sets the RGB table for image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
DOCUMENT ME!
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
set rgbtb
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Sets the RGB table for the ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Sets the RGB table for the ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Sets the RGB table for the ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the RGB table for ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Sets the RGB LUT table for ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Sets the RGB LUT table for ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Set the RGB table for image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Sets the RGB LUT table for ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Sets the RGB LUT table for ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
DOCUMENT ME!
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the RGB LUT table for ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the RGB table for image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the RGB table for image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Deprecated.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Sets the RGB LUT table for ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Sets the RGB LUT table for ARGB image B.
- setRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the RGB table for image B.
- setRGBValues(float, float, float) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Sets the red, green, and blue values to the given parameters.
- setRight(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Accessor that sets the right side value.
- setRight(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Accessor that sets the right side value.
- setRight(AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.RbtElt
-
- SetRight(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- SetRightLine(float, float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Sets the right-line parameter to the GLSL Shader Program.
- setRightList(JList) - Method in class gov.nih.mipav.view.JPanelListController
-
Convience method to set list B.
- setRightPad(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setRightPad(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setRightPanelCanvas() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Update the right panel when finish loading Endoscopy images.
- setRightPt(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the most right point marker for +acpc to +tlrc transformation in dicom ordering.
- setRightPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
Sets right label based on the point.
- setRightPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
Sets right label based on the point.
- setRightTable(JTable) - Method in class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
DOCUMENT ME!
- setRightTree(JTree) - Method in class gov.nih.mipav.view.JPanelTreeController
-
Convience method to set tree B.
- setRightVector(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- setRigid(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- setRLCenter(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setRLETAMARencapsulatedOffset(int) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
- setRMS(float) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setRNormal(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setROn(boolean) - Method in class gov.nih.mipav.model.structures.ModelRGB
-
Sets if the red channel to the boolean value.
- setRoot(AlgorithmPowerWatershed.RbtElt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- setRootDir(File) - Method in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreePanel
-
- setRotate(double) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets the rotation (2D) of transformation matrix.
- setRotate(double) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets the rotation (2D) of transformation matrix.
- setRotate(double, double, double, int) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets rotation (3D) of transformation matrix.
- setRotate(double, double, double, int) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets rotation (3D) of transformation matrix.
- setRotate(TransMatrix) - Method in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Sets the TransMatrix for the set of VOIPoints contained in this class.
- setRotate(Vector3d, Vector3d, Vector3d) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets rotation (3D) of transformation matrix.
- setRotate(Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets rotation (3D) of transformation matrix.
- setRotation(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
Sets the rotation of the glyph for this point
- setRotation(DoubleSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
Sets the rotation of the glyph for this point
- setRotationAngle(int) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Set the rotation angle with the camera takes snapshot.
- setRotationAngle(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Set the rotation angel for the camera control.
- setRotationAngle(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Set the rotation angle for the camera control.
- setRotationAxis(int) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Set the roation axis ( X, Y, Z Axis ) when the camera takes snapshot.
- setRotationAxis(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Set the rotation axis for the camera control.
- setRotationAxis(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Set the rotation axis for the camera control.
- setRotationCenter(float, float) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Sets the coordinates of the point the will be the new image rotation center.
- setRotationCenter(float, float) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Sets the coordinates of the point the will be the new image rotation center.
- setRotationCutoffValue(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- setRotationDirection(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set rotationDirection.
- setRotationExtent(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setRotationScaleFactor(float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
the rotationScaleFactor is used to change how fast the camera moves around the object
ranging from 1%, the slowest, to 100%, the fastest
- SetRotationSteps(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Sets the number of rotation steps.
- setRound(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setRoutine(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- setRow(int) - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- SetRow(int, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- setRowDependent(boolean) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
setRowDependent -- sets the row dependent flag.
- setRows(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- SetRowSize(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- setRowVectorX(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setRowVectorY(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setRowVectorZ(double) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setRPCPortNum(String) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set RPCPortNum.
- setrr(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the Talairach center voxel inidces in the dicom ordered original image.
- setrrArray(Vector3f[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets array of the Talairach center voxel inidces in the dicom ordered original image.
- setRRCycles(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setRRHistogram(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setRs(double) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- setRs(double) - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- setRs(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- setRs(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- setRs(double) - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- setRunning(boolean) - Method in class gov.nih.mipav.model.scripting.ScriptRunner
-
Changes the flag indicating whether a script is currently being run.
- setRunningInSeparateThread(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets the running in separate thread flag which controls how the progress bar is updated.
- setRunningInSeparateThread(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- setS() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- SetS() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setSafmin(double) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
- setSameZPosition(boolean) - Method in class gov.nih.mipav.model.file.FileInfoSTK
-
DOCUMENT ME!
- setSampleExternRef(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
DOCUMENT ME!
- setSampleNumber(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
DOCUMENT ME!
- setSampleRate(int) - Method in class gov.nih.mipav.view.LineMeter
-
adjusts the number of samples to be sent to the history in milliseconds.
- setSamplesPerPixel(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setSamplingRate(int, int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- setSamplingRate(int, int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- setSAR(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setSARMonitored(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSATSelections(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSATXLoc1(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSATXLoc2(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSATXThick(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSATYLoc1(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSATYLoc2(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSATYThick(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSATZLoc1(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSATZLoc2(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSATZThick(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSaveAs() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- setSaveAs(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the "save as" flag.
- setSaveBrainMesh(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Sets whether to save a surface mesh of the extracted brain.
- setSaveInSubdirectory(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the "save as" flag.
- setSaveOptions(FileWriteOptions) - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Changes the set of options used to save the image.
- setScalarNames(String[]) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setScale(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
- setScale(float) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- setScale(float, float, float) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraRBF
-
- setScaleHeight(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setScaleImage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
- setScaleMaxValue(int) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Accessor that sets the max scale value (from the combo box).
- setScales(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererMapColor
-
Specify the non-negative weights to apply to the RGB channels.
- setScaleSlope(float) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- SetScaleSteps(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Sets the number of scale steps.
- setScaleWidth(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setScaleX(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Accessor that sets the x scale.
- setScaleY(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Accessor that sets the y scale.
- setScaling(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
Sets the scaling of this point's glyph
- setScaling(DoubleSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointDetails
-
Sets the scaling of this point's glyph
- setScalingFactor1(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setScalingFactor2(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setScanAcquisitionNumber(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setScanARRs(int) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setScanDate(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set the scan date.
- setScanDateTime(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set the date & time (date + T + time).
- setScanID(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the scan ID.
- setScanMatrixX(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setScanMatrixY(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setScannerPosition(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelPositions
-
Sets the Scanner position label.
- setScannerPosition(Vector3f) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Sets the Scanner position label.
- setScannerQuantificationFactor(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setScanningSequence(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setScanningSequence(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setScanNum(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Allows a maximum of 10 characters to set the scannum string.
- setScanNum(String) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Allows a maximum of 10 characters to set the scannum string.
- setScanNum(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
allows a maximum of 10 characters to set the scannum string.
- setScanOptions(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setScanPercentage(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setScanProtocolName(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setScanTime(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setScanTime(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set the scan time.
- setScanType(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setScatterCorrected(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setScatterCorrectionMethod(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- SetSceneRotation(Matrix3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- setSceneState(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Sets the scene state appropriately, so that the slices that are
supposed to be visible are showing, the ones that aren't are hidden,
and the sliders are starting at the appropriate value.
- setSceneState(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Sets the scene state appropriately.
- setSceneState(Object) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Sets the scene state appropriately, so that the slices that are supposed to be visible are showing, the ones that
aren't are hidden, and the sliders are starting at the appropriate value.
- setSCenter(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setScilType(String) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setScIma(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSclInter(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets the data additive factor.
- setSclSlope(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets the data scaling multiplicative factor.
- setScreenImageResolutions(float[], float) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Sets the correct resolutions for the image that is created by captureImage.
- setScript(String) - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Changes the script being recorded by this class.
- setScriptFile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- setScriptFile(String) - Static method in class gov.nih.mipav.view.Preferences
-
DOCUMENT ME!
- setScriptImageVarActions(String[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- setScriptImageVarLabels(String[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- setScriptImageVars(String[]) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptModel
-
DOCUMENT ME!
- setScriptRunning(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Sets whether the dialog is being run by a script.
- setScriptsDirectory(String) - Static method in class gov.nih.mipav.view.Preferences
-
Sets the scripts directory to the new scripts directory.
- setScriptVOIs(ScriptVOI[]) - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- setScrollPaneTop() - Method in class gov.nih.mipav.view.dialogs.JDialogText
-
Sets the caret to the top of the scroll pane.
- setScSer(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSculpt(int, int, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Set the sculpt image
- setSculptDrawn(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
- setSculptImage(byte[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
- setSculptShape(int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Set the sculpt shape, either lines or rectangle.
- setSculptShape(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Set the sculpt shape, either lines or rectangle.
- setSeamCell(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- setSearchAlgorithm(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
- setSearchAlgorithm(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- setSearchAlgorithm(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
- setSearchAlgorithm(int) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- setSearchWindowSide(int) - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Accessor that sets the search window side.
- setSecondaryCaptureTags(boolean, int) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
Changes a few dicom tags associated with a secondary capture image (marking it as having been created with
mipav).
- setSecondaryPluginsDir(File) - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- setSecondImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setSecondImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setSecondImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Accessor to set the secondImage.
- setSecondImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Accessor to set the secondImage.
- setSecondStageErosion(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Sets whether or not second stage erosion occurs taking edge values exceeding median by a factor >= aboveMedian to
zero.
- setSecondStageErosion(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Sets whether or not the second stage performing edge erosion occurs.
- setSectionThickness(String[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- SetSeed(long, long, long) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- setSeed2DPt(Point) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Sets the seed point for the flood fill for a 2D image region grow.
- setSeed3DPt(Point3D) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Sets the point at which a the flood filling begins.
- setSeedVector(Vector3f[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
Sets the seed vector.
- setSegmentationImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Set the image which we can check to see if the probe is hitting anything important (such as vessels, etc).
- setSegmentationImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Set the image which we can check to see if the probe is hitting anything important (such as vessels, etc).
- setSegmentationImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Set the image which we can check to see if the probe is hitting anything important (such as vessels, etc).
- setSegmentationImage(ModelImage) - Method in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Set the image which we can check to see if the probe is hitting anything important (such as vessels, etc).
- setSegmentationType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Accessor that sets the segmentation type (BOTH_FUZZY_HARD, FUZZY, or HARD).
- setSegmentationType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Accessor that sets the segmentation type (BOTH_FUZZY_HARD, FUZZY, or HARD).
- setSelected(boolean) - Method in class gov.nih.mipav.view.BorderedButton
-
DOCUMENT ME!
- setSelected(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- setSelected(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- setSelectedBorderColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the color of the selected image borders.
- setSelectedBorderColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the color of the selected image borders.
- setSelectedBorderSize(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the selected image border size.
- setSelectedBorderSize(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the selected image border size.
- setSelectedFonts() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- setSelectedIndex(int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Sets the light to selected.
- setSelectedIndex(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Sets the light to selected.
- setSelectedKeys(ArrayList<FileDicomKey>) - Method in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
Method used for loading profiles into the panel.
- setSelectedKeys(ArrayList<FileDicomKey>) - Method in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- setSelectedLight(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Set the light for the given light index.
- setSelectedList(boolean) - Method in class gov.nih.mipav.view.JPanelChecklist
-
Sets whether or not aall checkboxes have been selected.
- setSelectedList(boolean[]) - Method in class gov.nih.mipav.view.JPanelChecklist
-
Set the the checkbox list from the script dialog.
- setSelectedPoint(int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets the selected point.
- setSelectedStatistics(boolean[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Sets the list of selected statistics to calculate.
- setSelectedTabIndex(int) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Sets the tabbed pane selected panel based on the input index.
- setSelectedTabIndex(int) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
- setSelectedVOI(VOI) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
DOCUMENT ME!
- setSelectedVOI(VOIBase) - Method in class gov.nih.mipav.view.ViewJPopupVOI
-
Called from the VOIManager class.
- setSelectedVOI(VOI, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called from the VOIManager when a new VOI is selected by the mouse.
- setSelectionOffset(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- setSelectionPaths(TreePath[]) - Method in class gov.nih.mipav.view.CheckTreeManager.CheckTreeSelectionModel
-
- setSensitivityArray(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setSensorModel(String) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setSensorType(String) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setSENW(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if southeast-northwest offset direction is calculated.
- setSENW(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if southeast-northwest offset direction is calculated.
- setSeparable(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Accessor that sets whether or not the separable convolution kernel is used.
- setSeparable(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Accessor that sets whether or not the separable convolution kernel is used.
- setSeparable(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Accessor that sets whether or not the separable convolution kernel is used.
- setSeparable(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
- setSeparateLUT(ModelStorageBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- setSeparateThread(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Accessor that sets the separate thread flag.
- setSeparateThread(boolean) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Changes whether the algorithm which is using this progress bar is running in its own thread.
- setSequenceAuthor(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setSequenceName(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setSequenceName(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setSequencePrgName(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setSequenceType(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setSequenceVariant(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setSequenceWkcName(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setSeries(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesDate(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesHeaderBlocks(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesHeaderID(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesHeaderRevisionNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesInstanceUID(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
Sets Series Instance UID.
- setSeriesNumber(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setSeriesNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesProcessName(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesPSDName(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesRawDataSystemID(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesSystemGenerationID(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesTableMinMax() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Sets the series table's min and max column widths.
- setSeriesTaskID(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesTime(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSeriesTime(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setSeriesType(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSessionErr(short) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Supply the value of session error.
- setSessionErr(short) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Supply the value of session error.
- setSessionErr(short) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
supply the value of session error.
- setSex(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set subject's sex.
- setShade(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if the cluster shade is calculated
- setShade(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if the cluster shade is calculated
- setShape(Shape3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathAnnotateList.Item
-
Set the shape for rendering the annotated point to that specified.
- setShape(Shape3D[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
sets the array of Shape3D objects:
- SetShapeParameterUpdateConstraints(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Sets user-specified shape parameter update constraints.
- setSharedAnnotationPanel(JPanelAnnotations) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- setSharedDirectory(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setSharedDirectory(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- setShift(int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- setShift(int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- SetShift(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
- setShiftDown(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME
- setShiftT(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Accessor that sets the shiftT value.
- setShiftToDivide(int) - Method in class gov.nih.mipav.model.file.FileRaw
-
Used in reading and writing boolean
- setShiftToDivide(int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
Used in reading and writing boolean
- setShiftX(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Accessor that sets the shiftX value.
- setShiftY(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Accessor that sets the shiftY value.
- setShiftZ(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Accessor that sets the shiftZ value.
- setShininess(float) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceRefXML_J3D
-
Sets the surface shininess:
- setShininess(float) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Sets the surface shininess:
- setShininess(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Sets the surface shininess:.
- setShininess(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
Sets the surface shininess:.
- setShort(int, int, short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
2D fast version of set that does NOT perform bounds checking.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Sets the data array at the specified index to the specified value.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in boolean format.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Sets the value in byte format.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the short data in double format.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the to set short data in float format.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the value in int format.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the value in long format.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the value in short format.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the value in byte format.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the short value in unsigned short format.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the short value in unsigned short format.
- setShort(int, short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value.
- setShortcutRecording(boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets the UI to either be/not be recording action command.
- setShortMask(short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
Sets this classes short mask to the new mask.
- setShowAllParameters(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setShowBound(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
- setShowBoundingRect(boolean) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Sets whether the bounding rectangle should be drawn.
- setShowBoxFrame(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Turn the volume bounding box frame on/off.
- setShowDiagonal(boolean) - Method in class gov.nih.mipav.view.PatientSlice
-
Sets the export for this Slice to be along a diagonal.
- setShowDICOMOverlays(boolean) - Static method in class gov.nih.mipav.view.Preferences
-
Sets whether to show the DICOM overlays.
- setShowFrame(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- setShowFrame(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- setShowGraph(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Accessor to set showGraph.
- setShowImageOverlays(boolean) - Static method in class gov.nih.mipav.view.Preferences
-
Sets whether to show the Image overlays.
- setShowIntermediateImages(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Accessor to set whether intermediate images will be produced.
- setShowMagIntensity(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets whether to show intensity in mag. box
- setShowMAPplot(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- setShowOrientationCube(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- setShowOrientationCube(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Turn the orientation cube on/off.
- setShowProgress(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
- setShowProgress(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
- setShowSlice(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
- setShowSliceNum(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets whether the slice number will be shown in the lower left hand corner of the image.
- setShowSliceNumber(boolean) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
In 3D whether to show number for complete frame.
- setShowSliceNumber(boolean) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Sets whether the slice number is shown.
- setShowTotals(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
tells the algorithm to total the property calculations.
- setShowTotals(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
Set the showTotal calculation flag.
- setShrink(float) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Accessor that sets the shrink.
- setShrink(float) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Accessor that sets the shrink.
- setSICenter(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSiemensStudyDateDD(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setSiemensStudyDateMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setSiemensStudyDateYYYY(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setSiemensStudyTimeHH(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setSiemensStudyTimeMM(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setSiemensStudyTimeSS(int) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setSigma(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
-
- setSigma(double) - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- setSigma(float) - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
- setSigma(float) - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
- setSigma(float) - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
- setsigma1(double) - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
- setsigma2(double) - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Accessor that sets sigma2.
- setsigma3(double) - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
- setSigmasGUI(JPanelSigmas) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Sets up the GUI containing the sigmas used in an algorithm (usually Gaussian sigmas), based on the script
action's parameters.
- setSigmaU(float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setSigmaU(float) - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Accessor that sets the prerotation horizontal standard deviation variable.
- setSigmaV(float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setSigmaV(float) - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Accessor that sets the prerotation vertical standard deviation variable.
- setSigmaX(double) - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Accessor that sets X dimension Gaussian scale.
- setSigmaX(float) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Changes the sigma value in the x direction.
- setSigmaY(double) - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Accessor that sets Y dimension Gaussian scale.
- setSigmaY(float) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Changes the sigma value in the y direction.
- setSigmaZ(float) - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Changes the un-normalized sigma value in the z direction.
- setSigmoidFilter(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour2
-
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- setSigmoidFilter(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegGeodesicActiveContour3
-
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- setSigmoidFilter(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegmenter
-
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- setSigmoidFilter(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection2
-
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- setSigmoidFilter(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegShapeDetection3
-
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- setSigmoidFilter(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- setSigmoidFilter(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
Set the parameters for the sigmoid function through which the
blurred gradient magnitude image is processed.
- setSimilarityWindowSide(int) - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Accessor that sets the similarity window side.
- setSize(int, int) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- setSize(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- setSize(Dimension) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- SetSize(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- SetSize(int, double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- SetSize(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- SetSize(int, int, double[][]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- setSizeArray(int[]) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- setSizeLimit(int) - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Set a bound on the size of the region we are growing.
- setSizeLimit(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets sizeLimit for regionGrow.
- setSizeOfHeader(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets the size of the header which is always 348.
- setSizeOfHeader(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- setSizeOfHeader(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets the size of the header which is always 348.
- setSizeOfHeader(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- setSizeX(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Accessor that sets the x size.
- setSizeY(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Accessor that sets the y size.
- setSizeZ(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Accessor that sets the z size.
- setSkew(double, double) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets skew part of 2D matrix.
- setSkew(double, double) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets skew part of 2D matrix.
- setSkew(double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets the skew parts of 3D matrix (4D Homogenous).
- setSkew(double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets the skew parts of 3D matrix (4D Homogenous).
- setSkipTime(float) - Method in class gov.nih.mipav.model.file.FileAvi
-
- setSlice(boolean, int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Sets the slice information for the shader.
- setSlice(float) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Changes the displayed texture based on the new value for m_iSlice.
- setSlice(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Sets the local slice value.
- setSlice(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Sets the local slice value.
- setSlice(int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark.CostFunction
-
DOCUMENT ME!
- setSlice(int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets the slice in all frames displaying this image.
- setSlice(int) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
set slice
- setSlice(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- setSlice(int) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
setSlice.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
setSlice.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
ViewImageUpdateInterface, unused here.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Does nothing but must instantiate for this to be a subclass of RenderViewBase.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
sets the slice/frame # for display.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Funcions do nothing, but extends ViewJFrameBase.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Does nothing but must instantiate for this to implements ViewImageUpdateInterface.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Does nothing but must instantiate for this to implements ViewImageUpdateInterface.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Accessor that sets the slice of the image component.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Used in ViewImageUpdateInterface.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Required by the parent super class, do nothing.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Does nothing but must instantiate for this to be a subclass of ViewJFrameBase.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Does nothing in this.
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
set slice
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- setSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setSlice(int) - Method in interface gov.nih.mipav.view.ViewImageUpdateInterface
-
setSlice.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Accessor that sets the slice of the image.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Accessor that sets the slice of the image.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the slice of the image.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Sets the slice to be displayed and updates title frame.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Sets the slice to be displayed and updates title frame.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Does nothing in this class.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Does nothing in this class.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the slice to be displayed and updates title frame.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Used in ViewImageUpdateInterface.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Does nothing.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Does nothing.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Deprecated.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Sets the slice to be displayed and updates title frame.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Not used.
- setSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Does nothing.
- setSlice(int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- setSlice(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Update the title bar and resolution information.
- SetSlice(boolean, int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOIEffect
-
- setSliceAngulation(double[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setSliceBrightness(int, float) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Method to set the brightness and contrast of the animate slice.
- setSliceBrightness(int, float) - Method in class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Method to set the brightness and contrast of the animate slice.
- setSliceCode(byte) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- setSliceColor(Color, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets the color of the x slice frame.
- setSliceColor(Color, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Sets the color of the x slice frame.
- setSliceContourStatistic(String, int, String, Object) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
Stores the statistic for a particular contour on a particular slice of a VOI.
- setSliceCount(int) - Method in class gov.nih.mipav.view.JPanelStatisticsList
-
Controls how many slices are being used for statistics calculations.
- setSliceDim(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- setSliceDistanceFlag(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Sets whether the largest slice distance is calculated.
- setSliceDuration(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
sets the sliceDuration variable.
- setSliceEnd(long) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- setSliceFromPlane(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Sets the position of the slices in the SurfaceRender and PlaneRender objects.
- setSliceFromPlane(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sets the position of the slices in the SurfaceRender and PlaneRender objects.
- setSliceFromSurface(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Sets the position of the slices in the PlaneRender.
- setSliceFromSurface(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sets the position of the slices in the PlaneRender.
- setSliceGradient(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setSliceGradientDuration(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setSliceGradientLimit(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setSliceHairColor(int, Color) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Sets the color for the PlaneRender iView (AXIAL, SAGITTAL, CORONAL) slice.
- setSliceHairColor(int, Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Sets the color for the PlaneRender iView (AXIAL, SAGITTAL, CORONAL) slice.
- setSliceHairColor(int, Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Sets the default color for the SliceHairColor.
- setSliceHairColor(int, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Sets the color for the PlaneRender iView (AXIAL, SAGITTAL, CORONAL) slice.
- setSliceHairColor(int, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Sets the color for the PlaneRender iView (AXIAL, SAGITTAL, CORONAL) slice.
- setSliceIndex(int, boolean) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- setSliceIndex(int, boolean) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
- setSliceIndex(int, int, boolean) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- setSliceIndex(int, int, boolean) - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
- setSliceInfo(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setSliceLocation(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setSliceMultiplier(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSliceNum(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Accessor that sets the slice number to be used to the parameter.
- setSliceNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setSliceOpacity(int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Set the transparency value for the slice.
- setSliceOpacity(int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Set the transparency value for the slice.
- SetSliceOpacity(float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- SetSliceOpacity(int, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Sets the opacity for the given plane.
- setSliceOrient(int) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setSliceOrientation(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- setSliceQuantity(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSlices(float, float, float, int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
Sets verticies based on dimensions and mode.
- setSlices(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the slice index for each plane in the frame and components.
- setSlices(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the slice index for each plane in the frame and components.
- setSlices(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the slice index for each plane in the frame and components.
- setSliceSeparationMode(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
Accessor to set the slice separation mode.
- setSlicesFromFrame(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Called from the "normal" image component, sets the slices for
the tri planar view to display.
- setSlicesFromFrame(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Called from the "normal" image component, sets the slices for
the tri planar view to display.
- setSlicesFromFrame(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Called from the "normal" image component, sets the slices for the tri planar view to display.
- setSliceSpacingCoarse(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Set the desired "coarse" spacing between slices.
- setSliceSpacingCoarse(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Set the desired "coarse" spacing between slices.
- setSliceSpacingFine(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Set the desired "fine" spacing between slices.
- setSliceSpacingFine(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Set the desired "fine" spacing between slices.
- setSliceStart(long) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
DOCUMENT ME!
- setSliceStatistic(String, int, Object) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
Stores the statistic for all the contours of a VOI that exist on a particular
slice.
- setSliceString(String) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Sets the string painted on the lower left.
- setSlicesWithTimeOffsets(int) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets slicesWithTimeOffsets.
- setSliceThickness(float) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets the thickness of the image slices.
- setSliceThickness(float) - Method in class gov.nih.mipav.model.file.FileInfoNRRD
-
Accessor setting sliceThickness
- setSliceThicknessDisclaimer(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSliceType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Accessor which lets you change the type of slice to be inserted.
- setSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Sets the slider, the label "Z (1-100)" and the labels underneath the slider to enabled or disabled, depending on
flag.
- setSliderEnabled(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Sets the x slider and the labels beside and beneath it to the state given by flag.
- setSliderFlag - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Flag to indicate the first time slider name changes.
- setSliderFlag - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Flag to indicate the first time slider name changes.
- setSmallestImagePixelValue(int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setSmartThresholdUI(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- setSmax(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets smax.
- setSmax(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets smax.
- setSmax(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets smax. if supplied value is less than smin, the smin gets reset to the supplied value as well, so that smin
is still no greater than smax.
- setSmin(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets smin.
- setSmin(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets smin.
- setSmin(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets smin. if supplied value is greater than smax, the smax gets reset to the supplied value as well, so that
smax is still no less than smin.
- setSmoothCurvature(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- setSNormal(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSoftwareVersions(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setSolverType(SolverType) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
- setSOPInstanceUID(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
Sets SOP Instance UID.
- setSortingStatus(int, int) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- setSource(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- setSourceBitPix(short) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
sets sourceBitPix; any value other than 1, 8, 16, 32, 64, 128, or 24 gets set to the disallowed trap value, -1.
- setSourceFile(String) - Method in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- setSourceImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Accessor that sets the source image.
- setSourceImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Accessor that sets the source image.
- setSourceImage(ModelImage[]) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Accessor that sets the array of source images.
- setSourceImage(ModelImage[]) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Accessor that sets the array of source images.
- setSourceType(short) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
accessor to supply coded datatype.
- setSouth(AlgorithmNetworkSnake.PixelGrid.PixelGridNode) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- setSp(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
- setSpace() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Initializes the text fields for the dialog.
- setSpace(String) - Method in class gov.nih.mipav.model.file.FileInfoNRRD
-
Accessor setting spaceString
- setSpaceSize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Enable perspective projection rendering; otherwise use orthographic projection.
- setSpaceSize(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Set the raytrace region space size.
- setSpaceSize(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Get the ray trace space size.
- setSpacingBetweenSlices(double) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- SetSparseMatrixConstant(CeresSolver.SparseMatrix, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- setSpecificCharacterSet(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setSpecimen(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setSpecimenSpecies(String[]) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setSpectralScan(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setSpectStudyGeneral(boolean) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setSpectStudyReconstructedData(boolean) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setSpecular(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Set the specular color for the vertex.
- setSpecular(Color) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Set vertex material specular color.
- setSpecular(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceRefXML_J3D
-
Sets the specular color of the surface:
- setSpecular(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Sets the specular color of the surface:
- setSpecular(Color3f) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Set the specular color for the vertex.
- setSpecular(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Sets the specular color of the surface:.
- setSpecular(ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
Sets the specular color of the surface:.
- setSpinnerValues(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the spinner values based on image type.
- setSpinnerValues(int) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Sets the spinner values based on image type.
- setSplineOrder(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- setSplineOrder(int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- setSplineOrder(int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- setSplit(boolean) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Sets the split flag.
- setSplit(boolean) - Method in class gov.nih.mipav.view.RubberbandLine
-
- setSpliteratorMinimumSplitSize(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Sets the minimum number of elements in a split of a Spliterator
of this Img.
- setSplitWeightVector(Vector<Vector<Double>>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- setSprings(Component, Component, Component, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
***************************************************************************************************** Setting
layout constraints.**********************************************************************************************
*******
- setSrc(BlkImgDataSrc) - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
- setSrc(BlkImgDataSrc) - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- setSrcImage(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets the source image of the algorithm
- setSrcImage(ModelImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- SetSrcShape(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Sets the shape to warp from.
- SetSrcShape(CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarpLinear
-
Sets the shape to warp from.
- setSrcThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Accessor that sets the srcThreshold value
- setSSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Accessor that sets the search window size.
- setStageCalibrated(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setStageLabel(String, Float, Float, Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setStagePositionX(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setStagePositionY(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setStageXPosition(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setStageYPosition(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setStandardDeviation(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if gray level coordinate matrix standard deviation is calculated.
- setStandardDeviation(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if gray level coordinate matrix standard deviation is
calculated.
- setStartAngle(float) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set startAngle.
- setStartCalendar(Calendar) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sets the start calender to the calendar given.
- setStartDay(int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Displays the starting day in the startDayBox combobox.
- setStartField(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Supplies the submitted value to the start_field variable.
- setStartField(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Supplies the submitted value to the start_field variable.
- setStartField(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
supplies the submitted value to the start_field variable.
- setStartHorizontalBedPosition(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setStartIndex(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Set the index of the vertex in the triangle mesh where the Geodesic curve is to start.
- setStartIndex(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Set the index of the vertex in the triangle mesh where the Geodesic curve is to start.
- setStartIndices(int[], boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Sets the indices of the triangle that the start point is located in.
- setStartIndices(int[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Sets the indices of the triangle that the start point is located in.
- setStartLocation(double, int) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Sets the start location of the specified axis.
- setStartLocations(double[]) - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Sets start locations of each axis.
- setStartLocations(double[]) - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Sets start locations of each axis.
- setStartMonth(int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Displays the starting month in the startMonthBox combobox.
- setStartNumber(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the number to append to the multi file save (i.e., if you want test00.tif to be the first
file, 0 is the start number and 2 is the digit number).
- setStartPoint(float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- setStartPoint(Point3f, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Sets the start point of the geodesic curve on the mesh.
- setStartPoint(Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Sets the start point of the geodesic curve on the mesh.
- setStartPosition(long) - Method in class gov.nih.mipav.model.file.FileRaw
-
DOCUMENT ME!
- setStartRange(int) - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Sets the starting range of histogram.
- setStartSlice(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- setStartSlice(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the start slice for X, Y, or Z processing.
- setStartSurface(ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
The start and end surfaces ensure that the points on the geodesic curve all fall on one mesh, and that the
algorithm isn't trying to find a path between two unconnected meshes.
- setStartSurface(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
The start and end surfaces ensure that the points on the geodesic curve all fall on one mesh, and that the
algorithm isn't trying to find a path between two unconnected meshes.
- SetStartTemperature(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
start temperature.
- setStartTime() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets the start time to the current time.
- setStartTime() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
Sets the start time to the current time.
- setStartX(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setStartY(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setStartYear(int) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Displays the starting year in the startYearBox combobox.
- setStartZ(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setStatAux(float[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets statAux.
- setState(ClassificationWidgetState) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Sets the ClassificationWidgetState of the widget.
- setState(ClassificationWidgetState) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Sets the ClassificationWidgetState, representing the GLSL shader program parameters.
- setState(Object) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Set the state at the beginning of vector array.
- setState(Object) - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Set the state at the beginning of vector array.
- setState(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- SetState(double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- setStaticInvSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the static inverse slider and the labels beside and beneath it to the state given by flag.
- setStaticSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the static slider and the labels beside and beneath it to the state given by flag.
- setStaticStudyGeneral(boolean) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setStation(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setStdDev(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Accessor that sets the standard deviation.
- setStdDev(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Accessor that sets the standard deviastion.
- setStdEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Enable auto snapshot buttons.
- setSteeringStepSize(float) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setStepGazeDist(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Update the display to show the current gaze distance for looking ahead down the path.
- setStepGazeDist(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Update the display to show the current gaze distance for looking ahead down the path.
- setStepSize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Enable perspective projection rendering; otherwise use orthographic projection.
- setStepSize() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Enable perspective projection rendering; otherwise use orthographic projection.
- setStepSize(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Set the raytrace step size.
- setStepSize(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Change the camera model.
- SetStepSize(float, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
Sets the step size shader parameter.
- SetStepSize(VolumeImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
Sets the step size shader parameter.
- setStepSizeFile(String) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set stepSizeFile.
- setStereo(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- setStereo(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Enable/disable stereo rendering.
- setStevensBeta(float) - Method in class gov.nih.mipav.view.ColorWheel
-
- setStiffness(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution.
- setStiffness(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Set the stiffness of the mesh, as described in BrainExtraction.pdf, that is part of the surface normal term in
the surface evolution.
- setStiffness(float) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Set the stiffness of the mesh that is part of the surface normal term in the surface evolution.
- setStop() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Tells the thread to stop (does not call thread.stop(): unsafe).
- setStop() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver.RunnerThread
-
DOCUMENT ME!
- setStop() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Stops the receiver thread.
- setStopSlice(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- setStore - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Buttons used for the host tab
- setStr - Static variable in class gov.nih.mipav.model.file.FileImageXML
-
array of strings representing the tags under in the xml schema.
- setStr(int, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Sets a string value in a DICOM object.
- setstring(String) - Method in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- setstring(String) - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- setString(int, MetadataExtractor.StringValue) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- setString(int, MetadataExtractor.StringValue) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- setString(int, String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a String value for the specified tag.
- setString(String, int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Verifies string is not larger than length; strings larger than length, are clipped before being returned.
- setString(String, int) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
verifies string is not larger than len length; strings larger than len, are clipped before being returned.
- setString(String, int) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
verifies string is not larger than len length; strings larger than len, are clipped before being returned.
- setString(String, int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Verifies string is not larger than length; strings larger than length, are clipped before being returned.
- setString(String, int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
verifies string is not larger than len length; strings larger than len, are clipped before being returned.
- setStringArray(int, String[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a String[] (array) for the specified tag.
- setStringOverride(String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the string painted on the lower left.
- setStringValue(int, MetadataExtractor.StringValue) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a StringValue value for the specified tag.
- setStringValueArray(int, MetadataExtractor.StringValue[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Sets a StringValue[] (array) for the specified tag.
- setStruckOkayButton(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
- setStruckOkayButton(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- setStruckOkayButton(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
- setStudyDate(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setStudyDate(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setStudyDescription(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setStudyDuration(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setStudyHeaderBlocks(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setStudyHeaderID(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setStudyHeaderRevisionNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setStudyID(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setStudyInstanceUID(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
Sets Study Instance UID.
- setStudyNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setStudyPath(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
- setStudyRootQuery() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Sets query to Study Root.
- setStudyTableMinMax() - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Sets the study table's min and max column widths.
- setStudyTaskID(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setStudyTime(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setStudyTime(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setStudyTime(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setSubBrickNumber(int) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
- setSubjectID(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set the subject's ID.
- setSubjectName(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the subject's name.
- setSubsample(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set whether or not subsampling occurs.
- setSubsample(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Accessor to set whether or not subsampling occurs.
- setSubsample(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Accessor that sets the subsample variable.
- setSubsample(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set whether or not subsampling occurs.
- setSubsample(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set whether or not subsampling occurs.
- setSubsample(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set whether or not subsampling occurs.
- setSubsample(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set whether or not subsampling occurs.
- setSubSample(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Accessor that sets the subsample size.
- setSubsamplingRate(int) - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Accessor that programatically sets the subsampling amount
- setSubsystemSpecificDataOffset(long) - Method in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- setSubtype(int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- setSubType(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setSucceeded(boolean) - Method in class gov.nih.mipav.view.DICOMDisplayer
-
Sets the success flag.
- SetSummaryFinalCost(CeresSolver.GradientProblemSolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- SetSummaryFinalCost(CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- setSuperiorCenter(float) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setSuperiorEdge(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the AC superior edge marker for orig to ACPC transformation in dataset ordering.
- setSuperiorEdge(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Sets superior label based on the point.
- setSuperiorPt(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the most superior point marker for +acpc to +tlrc transformation in dicom ordering.
- setSuperiorPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
Sets superior label based on the point.
- setSuperiorPt(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
Sets superior label based on the point.
- setSuppressionTechnique(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSuppressProgressBar(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
- setSuppressProgressBar(boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
- setSuppressProgressBar(boolean) - Method in class gov.nih.mipav.model.file.FileSVS
-
- setSuppressProgressBar(boolean) - Method in class gov.nih.mipav.model.file.FileTiff
-
- setSurface(ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Add the specified surface to the rendering.
- setSurface(ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Access function to set the triangle mesh that the geodesic curve is calculated on.
- setSurface(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Access function to set the triangle mesh that the geodesic curve is calculated on.
- setSurfaceCoilIntensityCorrection(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSurfaceCoilsCorrectionType(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSurfaceCoilType(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSurfaceFileName(String) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Set the surface file name.
- setSurfaceMask(String, ColorRGB, BitSet) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Add a new surface mask.
- setSurfaceMaskColor(String, ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Delete the surface mask, using the name of the mask as reference.
- setSurfaceOpacityFlag - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Indicator for the opacity slider moves.
- setSurfacePanel(JPanelSurface_WM) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Set the surface panel.
- setSurfacePanel(JPanelSurface_WM) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
Sets the surface panel.
- setSurfaceRender(RenderViewBase) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelRendererJ3D
-
Accessor to set the render base object This reference used to update volumes according to the render view base
instance type.
- setSurfaces(Hashtable<String, FileInfoImageXML.SurfaceLink>) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the Surface hashtable for this image.
- setSurfaceStates(Vector<SurfaceState>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- setSurfaceTexture(String, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Turns on surface texture display for the given surface.
- setSurfaceTexture(String, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Turns on surface texture display for the given surface.
- SetSurfaceTexture(boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Sets the surface texture on/off.
- SetSurfaceTexture(boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Sets the surface texture on/off.
- setSutterDG4Filter(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setSutterL10Filter1Array(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setSutterL10Filter2Array(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setSwapPF(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSwapXY(String) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setSwapYZ(String) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setSwapZX(String) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setSystemConfigHospitalName(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSystemGenerationID(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setSystemID(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setTable - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
Hashtable for holding sets of parameters.
- setTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.PSetDisplay
-
DOCUMENT ME!
- setTable(Hashtable<?, ?>, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- setTable(Hashtable<?, ?>, boolean) - Method in class gov.nih.mipav.view.JPanelEditSetOrParam
-
DOCUMENT ME!
- setTableHeader(JTableHeader) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- setTableLocation(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setTableModel(TableModel) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- setTablePosition(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setTabName(String) - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveTab
-
Changes the name of the tab being saved.
- setTag(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- setTagBuffer(byte[]) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
DOCUMENT ME!
- setTagDescription(Vector<String>) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- setTagList(Hashtable<FileDicomKey, FileDicomTag>) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- setTagName(Vector<String>) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
- setTagTable(FileDicomTagTable) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
- setTalairachButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- setTalairachButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- setTalairachCenter(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets the Talairach center point for +acpc to +tlrc transformation in dicom ordering.
- setTalairachHeader(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
add the Talairach Transform to the image header
- setTalairachHeader(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- setTalairachHeader(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
add the Talairach Transform to the image header
- setTalairachPositionLabels(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the labels that refer to Talairach position within the image.
- setTalairachTransformInfo(TalairachTransformInfo) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Accessor that sets the talairach transform information.
- setTarget(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current target of the light.
- setTarget(TransformGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Sets the TransformGroup on which this behavior acts.
- setTarget(TransformGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Sets the TransformGroup on which this behavior acts.
- setTarget(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current target of the light.
- setTargetDirectory(String) - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveAllVOIs
-
Changes the target directory where the VOIs were saved, which should be recorded in the script.
- setTargetDirectory(String) - Method in class gov.nih.mipav.model.scripting.actions.ActionSaveVOIIntensities
-
Changes the target directory where the VOI intensities were saved, which should be recorded in the script.
- setTau(double) - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- setTaut(double) - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Accessor that sets Taut.
- setTAxisOffsets(float[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets time axis offsets.
- setTE(float) - Method in class gov.nih.mipav.model.file.FileInfoCOR
-
Accessor to set the TE.
- setTE(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setTE(float) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setTE2(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setTemperature(Float) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setTESliceSpoilerGradientsAmplitude(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setTESliceSpoilerGradientsDuration(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setTESliceSpoilerGradientsLimit(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- SetTestFrameRate(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
- SetTestFrameRate(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
- setTestImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Accessor to set the reference image.
- setTestImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Accessor to set the reference image.
- setText(String) - Method in class gov.nih.mipav.model.structures.VOIText
-
Sets the displayed text.
- setTextAcquisitionMatrixFreq(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextAcquisitionMatrixFreqO(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextAcquisitionMatrixFreqS(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextAcquisitionMatrixPhase(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextAcquisitionMatrixPhaseAxis(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextAcquisitionTimeMM(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextAcquisitionTimeSS(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextAngle(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextAngleFlag1(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextAngleFlag2(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextAngleFlag3(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextAnnotation(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextColor(Color) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Sets the text to the desired color.
- setTextDateDD(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextDateMM(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextDateYYYY(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextDOBDD(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextDOBMM(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextDOBYYYY(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextEchoNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextEchoTime(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Enable the the fine or coarse labels and text fields with given flag value.
- setTextEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
DOCUMENT ME!
- setTextField(String, Container, int, int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
Makes a text field and adds it to the panel.
- setTextField(String, GridBagLayout, GridBagConstraints, JPanel) - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
Makes a text field and adds it to the panel.
- setTextFlipAngle(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextFont(Font) - Method in class gov.nih.mipav.model.structures.VOIText
-
Sets Font.
- setTextFOVH(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextFOVV(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextImageNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextImageNumber2(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextModelName(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextOrganization(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextPatientAge(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextPatientAgeUnits(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextPatientID(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextPatientName(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextPatientPosition(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextPatientSex(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextRepetitionTime(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextScanNumberA(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextScanNumberB(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextScanStartTimeHH(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextScanStartTimeMM(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextScanStartTimeSS(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextSequence(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextSlicePosition(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextSliceThickness(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextStation(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextString(String) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
Sets the string of this text.
- setTextStudyImageNumber3(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextStudyNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextStudyNumber2(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextTablePosition(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextTimeHH(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTextTimeMM(String) - Method in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- setTexture(Texture) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
- setTexture(Texture) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Sets the histogram Texture map for the widget shader effect.
- setTexture(Texture) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
- setTexture(Texture) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
- setTextureImage(String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- setTextureImageDataA(byte[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Set the texture data byte[] for ModelImage A
- setTextureImageDataB(byte[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Set the texture data byte[] for ModelImage B
- setTextureImageOn(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- setTextureLUTOn(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- setTextureOn(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- setTextWidth(Vector3f) - Method in class gov.nih.mipav.model.structures.VOIText
-
- setTheta(float) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- setTheta(float) - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Accessor that sets the rotation angle in degrees.
- setTheta1(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Accessor that sets the theta1 value
- setTheta2(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Accessor that sets the theta2 value
- setThickness(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- setThickness(double, double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- setThickness(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setThickness(int) - Method in class gov.nih.mipav.model.structures.VOI
-
Sets the thickness of the VOI
- setThickness(DoubleSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- setThickness(DoubleSupplier, DoubleSupplier) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- setThreadStopped(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets the thread stopped to flag indicating if algorithm has stopped.
- setThreadStopped(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- setThreeByteInteger(boolean) - Method in class gov.nih.mipav.model.file.FileRaw
-
- setThreeByteInteger(boolean) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
- setThres1(float) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
Accessor that sets the first threshold.
- setThres1(float) - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Accessor that sets the first threshold.
- setThres2(float) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
Accessor that sets the second threshold.
- setThres2(float) - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Accessor that sets the second threshold.
- setthreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
- setThreshold(double) - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- setThreshold(float) - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Accessor that sets the threshold.
- setThreshold(float) - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
- setThreshold(float) - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Accessor that sets the threshold.
- setThreshold(float) - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Accessor that sets the threshold.
- setThreshold(float) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Accessor to set threshold.
- setThreshold(float) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Sets the threshold for threshold average.
- setThreshold(float) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Accessor that sets the threshold.
- setThreshold(float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- setThreshold(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Accessor that sets the threshold.
- setThreshold(int) - Method in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- setThreshold(int) - Method in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- setthreshold1(double) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
- setThreshold1(float) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setthreshold2(double) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
- setThreshold2(float) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setthreshold3(double) - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
- setThresholdAverage(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Sets whether threshold averaging is performed - Only include those components greater than threshold.
- setThresholdB(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Sets the blue threshold.
- setThresholdB(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Sets the blue threshold.
- setThresholdColors(boolean, boolean, boolean) - Method in class gov.nih.mipav.view.PatientSlice
-
Sets the booleans for using thresholds in showUsingOrientation.
- setThresholdColors(boolean, boolean, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the booleans for using thresholds in setColorPaintBuffers.
- setThresholdFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Accessor that sets the threshold flag.
- setThresholdG(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Sets the green threshold.
- setThresholdG(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Sets the green threshold.
- setThresholdImage(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
If useThreshold true only copy when both the source pixel and its local neighborhoold are are less than
minThreshold.
- setThresholdLevel(float) - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Accessor that sets the thresholdLevel variable.
- setThresholdLevel(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Accessor that sets the thresholdLevel variable.
- setThresholdR(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Sets the red threshold (float[2]... 1st is lower, 2nd is upper)
- setThresholdR(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Sets the red threshold (float[2]... 1st is lower, 2nd is upper)
- setThresholds(float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold2
-
The lower and upper thresholds must be set before calling
beginEvolution.
- setThresholds(float, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseSegThreshold3
-
The lower and upper thresholds must be set before calling
beginEvolution.
- setThresholds(float, float) - Method in class gov.nih.mipav.view.PatientSlice
-
Sets the thresholds.
- setThresholds(float, float) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the thresholds.
- setThresholdSelected(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Accessor that sets the thresholdSelected variable.
- setThresholdSelected(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Accessor that sets the thresholdSelected variable.
- setThresholdStatistics() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
- setThresholdStatistics() - Method in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
- setThresholdType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Accessor that sets whether soft or hard thresholding is used.
- setThresholdValue(float) - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Accessor that sets the minThreshold value.
- setThumbnail(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setThumbnail(URI) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- setThumbnailData(int, int, int[]) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Sets the thumbnail data (array of shorts).
- setTI(float) - Method in class gov.nih.mipav.model.file.FileInfoCOR
-
Accessor to set the TI.
- setTI(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setTI(float) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setTiffMarker(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- setTiffMarker(int) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
Receives the 2-byte marker found in the TIFF header.
- setTIFFOrientation(boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
- setTIFFOrientation(boolean) - Method in class gov.nih.mipav.model.file.FileSVS
-
- setTIFFOrientation(boolean) - Method in class gov.nih.mipav.model.file.FileTiff
-
- setTiltAngle(double) - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
- setTiltAngles(float[]) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setTime(int) - Method in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- setTime(int, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseFastMarch
-
Set the time of visitation for an image element.
- setTime(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setTime(String) - Method in class gov.nih.mipav.model.file.XMLParameter
-
Sets the time for the parameter.
- setTimeAcquired(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setTimeDifferenceX(double) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
- setTimeDifferenceY(double) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
- setTimeDifferenceZ(double) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
- setTimeDim(int) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setTimeFrames(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setTimeInterval(double) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setTimeOrigin(float) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets timeOrigin.
- setTimeoutBetweenProjectionTransfers(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set timeoutBetweenProjectionTransfers.
- setTimeProcessed(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setTimeSl(int) - Method in class gov.nih.mipav.view.ViewControlsImage
-
Directs the image to display a particular time slice.
- setTimeSlice(int) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the time slice to record (4D TIFF).
- setTimeSlice(int) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets the time slice in all frames displaying this image.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
set time slice
- setTimeSlice(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- setTimeSlice(int) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
setTimeSlice.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
setTimeSlice.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
ViewImageUpdateInterface, unused here.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Does nothing but must instantiate for this to be a subclass of RenderViewBase.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets the time slice to be displayed and changes the image planes displayed.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Sets the time slice to be displayed and changes the image planes displayed.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the time slice if the image has 4 dimensions and updates the image and title.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Required by the parent super class, do nothing.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Sets the time slice to be displayed and changes the image planes displayed.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Does nothing in this class.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
set time slice
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelVolume4D
-
- setTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setTimeSlice(int) - Method in interface gov.nih.mipav.view.ViewImageUpdateInterface
-
setTimeSlice.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets the time slice of the image.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Does nothing in this class.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Does nothing in this class.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the slice to be displayed and updates title frame.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the time slice if the image has 4 dimensions and updates the image and title.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the slice to be displayed and updates title frame.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the slice to be displayed and updates title frame.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Deprecated.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Sets the slice to be displayed and updates title frame.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Not used.
- setTimeSlice(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the slice to be displayed and updates title frame.
- setTimeSlice(int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the slice to be displayed and updates title frame.
- setTimeSlice(int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the slice to be displayed and updates title frame.
- setTimeSlice(int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the slice to be displayed and updates title frame.
- setTimeSlice(int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the slice to be displayed and updates title frame.
- SetTimeSlice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Sets the time slices for 4D data.
- setTimeStamp(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setTimeStamp(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- setTimeStamps(double[]) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setTimeStep(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
Set the time step for the PDE solver.
- setTimeStep(float) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets timeStep.
- setTimeStr(String) - Method in class gov.nih.mipav.model.file.FileInfoTMG
-
DOCUMENT ME!
- setTimeWindowImages(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setTimeWindowLowerLimit(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setTimeWindows(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setTimeWindowUpperLimit(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setTimeWritten(String) - Method in class gov.nih.mipav.model.file.FileInfoFits
-
- setTitle() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
set title
- setTitle() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- setTitle() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Sets the title of the frame with the image name of slice location.
- setTitle() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Set the title of the frame with the image name of slice location.
- setTitle() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
set title
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Set the title of the frame with the image name and magnification.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Set the title of the frame with the image name and magnification.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Sets the Title bar of the frame.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Set the title of the frame with the image name and magnification.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Set the title of the frame with the image name and magnification.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
setTitle.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
setTitle.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the title of the frame with the image name and the slice location.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the title of the frame with the image name of slice location.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the title bar for the tri-image frame.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the title bar for the tri-image frame.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Sets the title of the frame with the image name of slice location.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
sets the title of the frame with the image name and magnification.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
sets the title of the frame with the image name and magnification.
- setTitle() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the title bar for the tri-image frame.
- setTitle(String) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
- setTitle(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setTitle(String) - Method in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Sets title.
- setTitle(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setTitle(String) - Method in class gov.nih.mipav.view.JPanelProgressBar
-
DOCUMENT ME!
- setTitle(String) - Method in interface gov.nih.mipav.view.ProgressBarInterface
-
DOCUMENT ME!
- setTitle(String) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Sets the title to this string.
- setTitle(String) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Sets the title of the frame of the progress bar.
- setTitle(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Gets the application title from the preference file and prepends to the string passed into the method and
displays the resultant string in the title of the main frame.
- setTitle(String, int) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Set the investigator's title using an index.
- setTitleStr(String) - Method in class gov.nih.mipav.model.file.FileInfoTMG
-
DOCUMENT ME!
- setTlrcRes(float[]) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets resolution in tlrc space
- setTMargins(int[]) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
Adds or removes margins in the 4th dimensions.
- setTNormal(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- setToCurrent() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
Sets the variables to the current system
- setToggleButtonSelected(String) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Sets the correct Toggle button to be selected (based on action command).
- setTol(double) - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
- setToOrigin(TransMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- setTop(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Accessor that sets the top side value.
- setTop(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Accessor that sets the top side value.
- SetTop(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- setTopPad(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Accessor to set if padded with extra row on top.
- setTopPad(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setTopPad(int) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setTopX(int[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets array of the top x bounding box boundaries in Talairach conversion.
- setTopY(int[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets array of the top y bounding box boundaries in Talairach conversion.
- setTopZ(int[]) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets array of the top z bounding box boundaries in Talairach conversion.
- setTotalCounts(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setTotalFrames(int) - Method in class gov.nih.mipav.model.file.FileInfoAvi
-
DOCUMENT ME!
- setTotalImageNumber(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setTotalNumberOfDiffusionExperiments(int) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setTotalPixels(int) - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Sets total number of pixels of histogram.
- setTotalPostTriggerDelayTime(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setTotalStatistic(String, Object) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
Stores the total statistics for all elements of the VOIs that are included in this properties object.
- setTotalVolume(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Set the total volume of all the burns.
- setTR(float) - Method in class gov.nih.mipav.model.file.FileInfoCOR
-
Accessor to set the TR.
- setTR(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setTR(float) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setTractFile(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
- settrait(LSCM.Trait) - Method in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- settrait(LSCM.Trait) - Method in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- settrait(LSCM.Trait) - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- settrait(LSCM.Trait) - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- setTransferFunction(TransferFunction) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Sets the LUTs transfer function.
- setTransferFunctionA(TransferFunction) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Set the transfer function for imageA.
- setTransferFunctionB(TransferFunction) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Set the transfer function for imageA.
- setTransferSyntax(DICOM_PDUItemType) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContextAccept
-
Sets the transfer syntax for this object.
- setTransform(double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets 2D transformation matrix.
- setTransform(double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets 2D transformation matrix.
- setTransform(double, double, double, double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets the 3D transformation matrix [4x4].
- setTransform(double, double, double, double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets the 3D transformation matrix [4x4].
- setTransform(double, double, double, double, double, double, double, double, double, double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets the 3D transformation matrix [4x4].
- setTransform(double, double, double, double, double, double, double, double, double, double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets the 3D transformation matrix [4x4].
- setTransform(TransMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- setTransform(TransMatrixd) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- setTransform(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Apply the specified transform to the axis aligned texture.
- SetTransform(Matrix4d) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- SetTransform(Matrix4f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- setTransformBtoA(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
Set transform from point set A to point set B.
- setTransformBtoA(TransMatrix) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
Set transform from point set A to point set B.
- setTransformDir(int) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets the transform direction.
- setTransformFileName(String) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setTransformGroup(TransformGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
Swap a new transformGroup replacing the old one.
- setTransformGroups(TransformGroup, TransformGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- setTransformID(int) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets the transform ID for the matrix.
- setTransformID(int) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets the transform ID for the matrix.
- setTransformType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the type of Talairach transformation.
- setTransformVOIs(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set whether or not VOIs should be transformed.
- setTranslate(double, double) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets translation parts of 2D matrix.
- setTranslate(double, double) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets translation parts of 2D matrix.
- setTranslate(double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets the translation parts of 3D matrix (4D Homogenous).
- setTranslate(double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets the translation parts of 3D matrix (4D Homogenous).
- SetTranslate(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Copy translation vector.
- SetTranslate(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- SetTranslateVolumeCoords(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- SetTranslateVolumeCoords(Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- setTranslation(float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- setTranslation(Vector3f) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets T03, T13 and T23 in the transformation matrix.
- setTranslationCutoffValue(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- setTranslationScaleFactor(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
the translationScaleFactor is used to change how fast the camera moves around the object
ranging from 1, the fastest, to 10, the slowest
- setTransmitAttenuatorSetting(short) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setTransmitCoilName(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setTransmittedLightHalogenLampMode(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setTransmittedLightHalogenLampVoltage(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setTransmittedLightShutter(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setTransparency(float) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Sets the mesh transparency.
- setTransparency(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Turns Transparency on/off for the selected surfaces.
- setTransparency(SurfaceAttributes[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Turns Transparency on/off for the selected surfaces.
- setTransparency(String, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Set the transparency for the given surface.
- setTraverseButton() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the traverse button to selected.
- setTraverseButton() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the traverse button to selected.
- setTraverseButton() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the traverse button to selected.
- setTree(String, int, int, int, float, float, Point3D, float[], int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- setTreeA(JTree) - Method in class gov.nih.mipav.view.JPanelTreeController
-
there is no programmatic way to determine which arrow is pointing where.
- setTreeB(JTree) - Method in class gov.nih.mipav.view.JPanelTreeController
-
there is no programmatic way to determine which arrow is pointing where.
- setTriggerTime(float[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setTS(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setTSlider(int) - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
method to set the time (4th dimension) slider if it exists.
- setTSlider(int) - Method in class gov.nih.mipav.view.ViewControlsImage
-
Places the pointer on the (time) slider bar to a location corresponding to the given slice value (within the
set).
- setTSpace(float) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets t space (used for MINC images).
- setTStart(float) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets t start (used for MINC images).
- setTStart(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setTStop(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setTt(double) - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- settTalVoxLabelText(String) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- setTurboFactor(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setType(int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the type of data.
- setType(ModelStorageBase.DataType) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the type of data.
- setType(String) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
set the surface type keyword:
- setType(String) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
set the surface type keyword:
- setType(String) - Method in class gov.nih.mipav.view.ColorWheel
-
- setTypeAmbient() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current light type to ambient.
- setTypeDirectional() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current light type to directional.
- setTypePoint() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current light type to point.
- setTypeSpot() - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current light type to spot.
- setUByte(int[], short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. nD set data fuction where bounds checking
is NOT performed.
- setUByte(int, int, int, int, short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. 4D fast version of set that does NOT
perform bounds checking.
- setUByte(int, int, int, short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. 3D fast version of set that does NOT
perform bounds checking.
- setUByte(int, int, short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. 2D fast version of set that does NOT
perform bounds checking.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Sets the data array at the specified index to the specified value.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in unsigned byte format.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Sets the value in unsigned byte format.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the short data in double format.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the data in float format.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the value in int format.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the value in long format.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the value in short format.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the value in byte format.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the unsigned byte value in unsigned short format.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the unsigned byte value in unsigned short format.
- setUByte(int, short) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value.
- setUCenterOffset(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set UCenterOffset.
- setUdefDescription(String) - Static method in class gov.nih.mipav.view.ViewImageFileFilter
-
This sets the udef description becasue as the user edits the file extensions, the description changes
- setUI(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
Sets UI variables for either saving between processing steps or later reuse.
- setUID(int) - Method in class gov.nih.mipav.model.structures.VOI
-
Sets the unique ID (for saving/retreiving treatment details).
- setUID(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
Sets the UID for a simple PDU type.
- setUInt(int[], long) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. nD set data fuction where bounds checking
is NOT performed.
- setUInt(int, int, int, int, long) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. 4D fast version of set that does NOT
perform bounds checking.
- setUInt(int, int, int, long) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. 3D fast version of set that does NOT
perform bounds checking.
- setUInt(int, int, long) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. 2D fast version of set that does NOT
perform bounds checking.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Sets the data array at the specified index to the specified value.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in boolean format.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Sets the int value in unsigned short format.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the data in double format.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the int value in unsigned short format.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the value in int format.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the int value in unsigned short format.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the short (unsigned) value in unsigned short format.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the int value in unsigned short format.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the int value in unsigned short format.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the int value in unsigned short format.
- setUInt(int, long) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. version of set that does NOT perform
bounds checking.
- setulb(int, int, double[], double[], double[], int[], double[], double[], double, double, String[], int, String[], boolean[], int[], double[], RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- setUnequalDim(boolean) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Accessor that sets the boolean telling if unequal dimesnions are allowed in a complex image.
- setUnequalDim(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets whether or not the picture dimension can be unequal.
- setUnitDirections(float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- setUnits() - Method in class gov.nih.mipav.model.file.FileInfoMinc
-
Sets the units of the dimensions, as in millimeters, inches, etc.
- setUnits(int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- setUnits(int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the units.
- setUnitsInLabel(String) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Sets the units in the default axis labels.
- setUnitsOfMeasure(int[]) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets (copies) units of measure for image.
- setUnitsOfMeasure(int, int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets units of measure for image, on a per dimension basis.
- setUnitsOfMeasure(FileInfoBase.Unit[]) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets (copies) units of measure for image.
- setUnitsOfMeasure(FileInfoBase.Unit, int) - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Sets units of measure for image, on a per dimension basis.
- setUnsharp(float[]) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Accessor that sets the unsharp array.
- setUnsharp(float, float) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Accessor that sets the unsharp array values.
- setUnsharpWeight(double) - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Accessor that sets the unsharp weight value.
- setUnused1(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets unused 1.
- setUnused2(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets unused 2.
- setUnused3(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets unused 3.
- setUnusedColor(Color) - Method in class gov.nih.mipav.view.BarMeter
-
applies the given color to bars which are not lit and are above the set amplitude.
- setup() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline.ColorInterpolation
-
- setup() - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- setup() - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- setup() - Method in class gov.nih.mipav.model.algorithms.SVM
-
- setup() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- setup() - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
Sets up the GUI components of the dialog.
- setup() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Sets up variables for recorder.
- setup() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Sets up variables for recorder.
- setup(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- setup(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- setup(ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Perform all initialization prior to executing.
- setup(Vector2f[], Vector2f[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- setup(Vector2f[], Vector2f[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- setup(Vector3f[], Vector3f[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- setup(Vector3f[], Vector3f[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
Checks if pointSetA is same dimension as pointSetB sets pointSetA and pointSetB.
- setup(TriMesh, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Perform all initialization prior to executing.
- setUp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDescriptorTest
-
- setUp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDirectoryTest
-
- setUp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcDirectoryTest
-
- setUp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDescriptorTest
-
- setUp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDhtReaderTest
-
- setUp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDirectoryTest
-
- setUp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegReaderTest
-
- setUp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType1MakernoteTest
-
- setUp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest1
-
- setUp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest2
-
- setUp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PanasonicMakernoteDescriptorTest
-
- Setup(CAAMShape, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Sets up the class with the reference shape and information about how to
determine the extent of the shape.
- SetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockSparseMatrixTest
-
- SetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- SetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureEllipse
-
- SetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.DoglegStrategyFixtureValley
-
- SetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- SetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.LinearSolverAndEvaluatorCreationTest
-
- SetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.PartitionedMatrixViewTest
-
- SetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ProductParameterizationTest
-
- SetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
- SetUp() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- setup2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline.ColorInterpolation
-
- setup2DBSpline(double[], int[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
Allocates memory and constructs arrays needed for BSpline.
- setup2DBSplineC(double[], int[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
Allocates memory and constructs arrays needed for BSpline.
- setup2DCubicLagrangian(double[], int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
Setup 2D cubicLagrangian.
- setup2DCubicLagrangianC(double[], int[], float, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
Setup 2D cubicLagrangian for color.
- setup2DHepticLagrangian(double[], int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
Setup 2D hepticLagrangian.
- setup2DHepticLagrangianC(double[], int[], float, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
Setup 2D hepticLagrangian for color.
- setup2DQuinticLagrangian(double[], int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
Setup 2D quinticLagrangian.
- setup2DQuinticLagrangianC(double[], int[], float, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
Setup 2D quinticLagrangian for color.
- setup2DWSinc(double[], int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
Setup 2D wSinc.
- setup2DWSinc(double[], int[], int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
Setup 2D wSinc.
- setup2DWSincC(double[], int[], float, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
Setup 2D wSinc for coor image.
- setup3DBSpline(double[], int[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
setup3DBSpline - setup 3D Bspline for black and white.
- setup3DBSplineC(double[], int[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
Allocates memory and constructs arrays needed for BSpline.
- setup3DCubicLagrangian(double[], int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
Setup 3D cubic Lagrangian.
- setup3DCubicLagrangianC(double[], int[], float, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
Setup 3D cubic Lagrangian for color.
- setup3DHepticLagrangian(double[], int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
Setup 3D heptic Lagrangian.
- setup3DHepticLagrangianC(double[], int[], float, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
Setup 3D heptic Lagrangian for color.
- setup3DQuinticLagrangian(double[], int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
Setup 3D quintic Lagrangian.
- setup3DQuinticLagrangianC(double[], int[], float, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
Setup 3D quintic Lagrangian for color.
- setup3DWSinc(double[], int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
Setup 3D wSinc.
- setup3DWSinc(double[], int[], int[], boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
Setup 3D wSinc.
- setup3DWSincC(double[], int[], float, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
Setup 3D wSinc for color.
- setupAndLayout() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Sets up pretty much everything.
- setupBlock() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- setupBranchChoices(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Create the array of branch choices and set the mode which forces the user to select from among the branch
choices.
- setupBranchChoices(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Create the array of branch choices and set the mode which forces the user to select from among the branch
choices.
- setupBranchChoices(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Create the array of branch choices and set the mode which forces the user to select from among the branch
choices.
- setupBrightness() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
The SUSAN brightness function is implemented as a LUT (Look-Up-Table) for speed.
- setupCallback(MouseBehaviorCallback) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Sets who the behavior calls back to.
- setupCallback(MouseBehaviorCallback) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Sets who the behavior calls back to.
- setupCallback(MouseBehaviorCallback) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseRotateExt
-
The transformChanged method in the callback class will be called every time the transform is updated.
- setupCallback(FlyPathBehavior.Callback) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Identify the instance which implements the Callback interface.
- setupCallback(MouseBehaviorCallback) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
The transformChanged method in the callback class will be called every time the transform is updated.
- setupCallback(MouseBehaviorCallback) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
The transformChanged method in the callback class will be called every time the transform is updated.
- setupCallback(MouseBehaviorCallback) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
The transformChanged method in the callback class will be called every time the transform is updated.
- setupCallback(MouseBehaviorCallback) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
The transformChanged method in the callback class will be called every time the transform is updated.
- setupCallback(MouseBehaviorCallback) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
The transformChanged method in the callback class will be called every time the transform is updated.
- setupCallback(MouseBehaviorCallback) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
The transformChanged method in the callback class will be called every time the transform is updated.
- setupCallback(MouseBehaviorCallback) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
The transformChanged method in the callback class will be called every time the transform is updated.
- setupCallback(FlyPathBehavior_WM.Callback) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Identify the instance which implements the Callback interface.
- setupCallback(NavigationBehavior.Callback) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
Identify the instance which implements the Callback interface.
- setupCameraStorage() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Setup the light box view.
- setupComboBoxLayout() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sets up the gridbag layout of the combo boxes.
- SetupCommonMinimizerOptions(CeresSolver.PreprocessedProblem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- setupCoordSysRenderer() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Helper method to setup the CoordSysRenderer
- setupData() - Method in class gov.nih.mipav.model.algorithms.FitLine
-
Sets up data to test fitting of exponential.
- setupData() - Method in class gov.nih.mipav.model.algorithms.FitRayleigh
-
Sets up data to test fitting of Rayleigh distribution.
- setUpdate(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- setUpdateOrigin(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the update origin flag.
- setUpdateOriginFlag(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Sets the origin flag used indicated that origin should be changed based using the supplied transformation matrix.
- SetupEvaluator(CeresSolver.PreprocessedProblem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchPreprocessor
-
- SetupEvaluator(CeresSolver.PreprocessedProblem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionPreprocessor
-
- setupEye() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Set up the center point of the red line boxframe.
- setupEye() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Set up the center point of the red line boxframe.
- setupEye() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Set up the center point of the red line boxframe.
- SetUpFromId(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- SetUpFromProblemId(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockJacobiPreconditionerTest
-
- SetupHelper(CeresSolver.LinearLeastSquaresProblem) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- SetupInnerIterationMinimizer(CeresSolver.PreprocessedProblem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionPreprocessor
-
- setupInterface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Sets up the user interface.
- setupInterface() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Sets up the user interface.
- setupInterface() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Sets up the user interface.
- setupKernel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- setupKFB(libdt.DytexMix, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- setupLabelLayout() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sets up the gridBagLayout of the textField label.
- setupLatLon(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Called when the mesh is created, or when the number of latitude or longitude lines is changed by the user.
- setupLatLon(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Called when the mesh is created, or when the number of latitude or longitude lines is changed by the user.
- setupLight() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Sets up a direction lightsource for the scene.
- setupLightBox(ModelLUT, ModelLUT) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Setup the light box view.
- setupLights() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Create and initialize the eight lights in the scene graph.
- setupLights(TransformGroup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Create and initialize the nine lights in the scene graph.
- SetupLinearSolver(CeresSolver.PreprocessedProblem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionPreprocessor
-
- setupMask() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setupMaskImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setupMaterials(Material) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Reads the current color values from the Material and sets the values for the two spheres displayed in the
interface.
- setupMaterials(MaterialState) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Reads the current color values from the Material and sets the values for the two spheres displayed in the
interface.
- SetupMinimizerOptions(CeresSolver.PreprocessedProblem) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionPreprocessor
-
- setupMinMax() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Set the min max values for the opacity histogram.
- setupMinMax() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityRGB
-
Set the image min, max values.
- setupNavigationScenegraph() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Setup the Navigation scene graph view for debugging purpose
- setupNew(File) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
makes the submitted directory as given by the inputted File, or the text as given in the given given textField.
- setupNoRandPartA() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- setupNoRandPartB() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- setupNoRandPartC() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- SetupOptions() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.SetupOptions
-
- SetupOptions() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.SetupOptions
-
- setupPath(FlyPathGraphCurve) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- setUpperBound(String) - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Set the upper bound from the script dialog.
- SetUpperBound(int, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- setUpperBoundB(String) - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Set the upper blue bound from the script dialog.
- setUpperBoundG(String) - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Set the upper green bound from the script dialog.
- setUpperBoundR(String) - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Set the upper red bound from the script dialog.
- setUpperExtents(int) - Method in class gov.nih.mipav.model.file.FileSpar
-
- setUpperList(JList) - Method in class gov.nih.mipav.view.JPanelListController
-
Convience method to set list A.
- setUpperTree(JTree) - Method in class gov.nih.mipav.view.JPanelTreeController
-
Convience method to set tree A.
- SetUpProblem(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- setupRandPartA() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- setupRandPartB() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- setupRandPartC() - Method in class gov.nih.mipav.model.file.CBZip2InputStream
-
- setupRender(ModelImage, FlythruRender.SetupOptions) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Setup flythru renderer.
- setupRender(ModelImage, FlyThroughRender.SetupOptions) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Setup flythru renderer.
- setupRenderControl(JPanelVirtualEndoscopySetup) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
DOCUMENT ME!
- setupRenderControl(JPanelVirtualEndoscopySetup_WM) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Set the JPanelVirtualEndoscopySetup user-interface.
- setupRequired - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
- setUpscale(int) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setupScene(float, GeneralLight[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Sets up the rendered scenes.
- setupScene(Light[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Sets up the rendered scenes.
- setupSendFileListing(String) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sets ups the send file listing.
- setupSendTab() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Update Send tab to reflect any changes in hosts.
- setupTextFieldLayout() - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sets up the gridbaglayout of the textField.
- setupTPSpline2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
setupTPSpline2D - computes the thin plate spline coefficients.
- setupTPSpline2D(double[], double[], double[], double[], float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
setupTPSpline2D computes the thin plate spline coefficients.
- setupTPSpline2D(float[], float[], float[], float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
setupTPSpline2D computes the thin plate spline coefficients.
- setupTPSpline3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
setupTPSpline3D - computes the thin plate spline coefficients.
- setupTPSpline3D(double[], double[], double[], double[], double[], double[], float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
setupTPSpline3D computes the thin plate spline coefficients.
- setupTPSpline3D(float[], float[], float[], float[], float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
setupTPSpline3D computes the thin plate spline coefficients.
- setUpVector(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- setURL(String) - Method in class gov.nih.mipav.model.file.FileInfoJSON
-
- setUse3D(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
- setUseBlue(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setUseBlue(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setUseBlue(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- setUseBlue(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- setUseBlue(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Accessor that setes if the blue channel is used.
- setUsedColor(Color) - Method in class gov.nih.mipav.view.BarMeter
-
applies the given color to bars which are "lit" and are up to the set amplitude.
- setUseDefaultRanges(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Accessor that sets the useDefaultRanges to the parameter.
- setUsedFlag(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
-
- setUsedSliceThickness(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setUseELSUNC(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set whether to use Powell's algorithm calling Brent's method or ELSUNC for search algorithm
- setUseGreen(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setUseGreen(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setUseGreen(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- setUseGreen(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- setUseGreen(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Accessor that sets if the green channel is used.
- setUseIncorrectAcpcXDim(boolean) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Sets whether the TalairachTransform acpcDim x value should be set up (incorrectly) like it was in previous
versions (for Pierpaoli's group).
- setUseJTEM(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
- setUseMarker(boolean) - Method in class gov.nih.mipav.model.structures.VOIText
-
Sets the arrow to be on or off
- setUseMedian(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Accessor that sets the useMedian flag.
- setUseMouseRotationCutoffs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- setUseMouseTranslationCutoffs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- setUseMultipleReceivers(String) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setUseOCL(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Accessor that sets whether to use OpenCL processing (may still not be set if it is not supported on the system).
- setUseOCL(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Accessor that sets whether to use OpenCL processing (may still not be set if it is not supported on the system).
- setUseOCL(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Accessor that sets whether to use OpenCL processing (may still not be set if it is not supported on the system).
- setUseOCL(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Accessor that sets whether to use OpenCL processing (may still not be set if it is not supported on the system).
- setUseOCL(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Accessor that sets whether to use OpenCL processing (may still not be set if it is not supported on the system).
- setUser(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
- setUser0(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setUser1(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
- setUser2(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setUser3(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setUser4(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setUser5(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setUser6(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setUser7(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setUser8(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setUser9(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setUserAddress(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setUserBit(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- SetUserBit(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setUserCity(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setUserCompany(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setUserCompanyLogo(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setUserCountry(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setUserDefaultDir(String) - Static method in class gov.nih.mipav.view.ViewUserInterface
-
- setUserDefinedExtensions() - Static method in class gov.nih.mipav.view.ViewImageFileFilter
-
This sets the user defined Exts String as well as the Arraay of exts from the Preferences
- setUserDefinedFileTypes_textFieldPref(String) - Method in class gov.nih.mipav.model.file.FileIO
-
This method sets the userDefinedFileTypes_textField preference.
- setUserDefinedFileTypesPref(String) - Method in class gov.nih.mipav.model.file.FileIO
-
This method sets the userDefinedFileTypes preference.
- setUseRed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- setUseRed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- setUseRed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- setUseRed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- setUseRed(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Accessor that sets if the red channel is used.
- setUserFax(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setUserID(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setUserInformation(DICOM_UserInformation) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Sets the user information.
- setUserInstructions(String) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Sets the instruction label to the message.
- setUserInterface(ViewUserInterface) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets user interface.
- setUserLimits(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
If true, use userMin to userMax instead of image.getMin() to image.getMax() as histogram limits
- setUserMax(float) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- setUserMin(float) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- setUserName(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setUserName(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setUserPhone(String) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setUserXGrid(boolean) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setUserYGrid(boolean) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setUseScannerAnatomical(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Sets the tranform to set orientation to AXIAL (this is a scanner anatomical transform).
- setUseSeparable(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Accessor to set whether to use the separable convolver for edge detection.
- setUseSphere(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Don't try estimating ellipse as initial surface use sphere estimate.
- setUseSphere(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Sets whether or not to use only an estimate of sphere to nitialize the boundary evolution.
- setUseThreshold(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Accessor to set if threshold is used.
- setUseVOI(boolean) - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Sets whether to only grow within the currently selected VOI.
- setUseVOI(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets whether a selected VOI is used to calculate the initial variance.
- setUseVOIName(boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Sets the Preference to use VOI Names instead of labels, then updates all frames to reflect this change with their
VOIs.
- setUShort(int[], int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. nD set data fuction where bounds checking
is NOT performed.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.BufferBase
-
Sets the data array at the specified index to the specified value.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.BufferBoolean
-
Sets the value in byte format.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.BufferByte
-
Sets the value in byte format.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.BufferDouble
-
Sets the data in double format.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.BufferFloat
-
Sets the unsigned data in float format.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.BufferInt
-
Sets the value in int format.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.BufferLong
-
Sets the value in long format.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.BufferShort
-
Sets the value in short format.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.BufferUByte
-
Sets the value in byte format.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.BufferUInt
-
Sets the short (unsigned) value in unsigned short format.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.BufferUShort
-
Sets the short (unsigned) value in unsigned short format.
- setUShort(int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value.
- setUShort(int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. 2D fast version of set that does NOT
perform bounds checking.
- setUShort(int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. 3D fast version of set that does NOT
perform bounds checking.
- setUShort(int, int, int, int, int) - Method in class gov.nih.mipav.model.structures.ModelStorageBase
-
Sets the image voxel at the specified position to the specified value. 4D fast version of set that does NOT
perform bounds checking.
- setUtil(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- setV() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- setV(int, Vertex) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setv_father(LSCM.Vertex, LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- setv_idx(LSCM.Vertex, int) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- setV_index(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setv_touched(LSCM.Vertex, boolean) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- setv_uv(LSCM.Vertex, LSCM.Point2) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- setv_valence(LSCM.Vertex, int) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- setVal(float, float[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Sets the value in a 2D image buffer at location row, col.
- setVal(float, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Sets the value in a 3D image buffer at location row, col.
- setValidBitsPerPixel(int) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setValidBitsPerPixel(String) - Method in class gov.nih.mipav.model.file.FileInfoCZI
-
- setValidRange(double[]) - Method in class gov.nih.mipav.model.file.FileInfoMincHDF
-
Sets the valid range for the image data
- setValue(boolean) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterBoolean
-
Changes the parameter's current value.
- setValue(double) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterDouble
-
Changes the parameter's current value.
- setValue(float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap.Record
-
Set the numeric value for the heap record.
- setValue(float) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterFloat
-
Changes the parameter's current value.
- setValue(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Accessor that sets the mask value or mask red value.
- setValue(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
Called to set the current progress bar indicator position.
- setValue(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
Sets the value of the Img at the position currently referenced by
this Pixel.
- setValue(int) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterInt
-
Changes the parameter's current value.
- setValue(int) - Method in class gov.nih.mipav.view.JPanelProgressBar
-
Used to set the present value of the progress bar.
- setValue(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
Called to set the current progress bar indicator position.
- setValue(int) - Method in class gov.nih.mipav.view.ViewJSlider
-
- setValue(int, boolean) - Method in class gov.nih.mipav.view.JPanelProgressBar
-
DOCUMENT ME!
- setValue(int, int, float) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Set the value at the x, y position of the data array.
- setValue(int, int, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
Sets value at the specified position.
- setValue(long) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterLong
-
Changes the parameter's current value.
- setValue(short) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterShort
-
Changes the parameter's current value.
- setValue(short) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
Changes the parameter's current value.
- setValue(FileDicomKey, FileDicomTag, Object, int) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Sets the value of the DicomTag in the tagsList Hashtable with the same hexadecimal tag name.
- setValue(FileDicomKey, Object) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Sets the value of the DicomTag in the tagsList Hashtable with the same hexadecimal tag name.
- setValue(FileDicomKey, Object, int) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Sets the value of the DicomTag in the tagsList Hashtable with the same hexadecimal tag name.
- setValue(Point3) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Test
-
- setValue(Object) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Sets the value and length attributes of the DicomTag.
- setValue(Object) - Method in class gov.nih.mipav.model.file.FileMincVarElem
-
Adds value to values vector.
- setValue(Object, int) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Sets the value attribute of the DicomTag.
- setValue(Object, int) - Method in class gov.nih.mipav.model.file.FileMincAttElem
-
Sets the attribute's value array to the value at the indicated index.
- setValue(String) - Method in class gov.nih.mipav.model.file.XMLParameter
-
Sets the value for the parameter.
- setValue(String) - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Changes this parameter's value.
- setValue(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterBoolean
-
Changes the parameter's current value.
- setValue(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterDouble
-
Changes the parameter's current value.
- setValue(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterFloat
-
Changes the parameter's current value.
- setValue(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterInt
-
Changes the parameter's current value.
- setValue(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Sets the list of parameters based on a comma delimited String containing parameter values.
- setValue(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterLong
-
Changes the parameter's current value.
- setValue(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterShort
-
Changes the parameter's current value.
- setValue(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterString
-
Changes the parameter's current value.
- setValue(String) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
Changes the parameter's current value.
- setValue(String) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- setValue(String, Object) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Sets the value of the DicomTag in the tagsList Hashtable with the same hexadecimal tag name.
- setValue(String, Object, int) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Sets the value of the DicomTag in the tagsList Hashtable with the same hexadecimal tag name.
- setValue(Vector<Parameter>) - Method in class gov.nih.mipav.model.scripting.parameters.ParameterList
-
Changes the parameter list elements.
- setValue(T) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie.ByteTrieNode
-
- setValueAssigned(boolean) - Method in class gov.nih.mipav.model.scripting.parameters.Parameter
-
Sets whether a value has been set for this parameter.
- setValueAt(Object, int, int) - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- setValueAt(Object, int, int) - Method in class gov.nih.mipav.view.ViewTableModel
-
Sets the value at the given row and column of the table.
- setValueB(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Accessor that sets the mask blue value.
- setValueG(float) - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Accessor that sets the mask green value.
- setValueImmed(int) - Method in class gov.nih.mipav.view.JPanelProgressBar
-
Used to set the present value of the progress bar.
- setValueRepresentation(FileDicomTagInfo.VR) - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Sets the value representation (vr) of this tag.
- setValueRepresentation(FileDicomTagInfo.VR) - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Sets the value representation; used only for explicit vr.
- setValues(boolean, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
method to set the row, col, and row_dependent values.
- setValues(AlgorithmRegBSpline.Options) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
Set the state of the controls based on the specified values.
- setValues(String[]) - Method in class gov.nih.mipav.view.dialogs.JDialogServer
-
Sets the current values in the text fields to the values in the array.
- setValueTables(int, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- setValueTables(int, double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- setValueType(String) - Method in class gov.nih.mipav.model.file.XMLParameter
-
Sets the value type for the parameter.
- setVariableBandwidth(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setVariableFlipAngleFlag(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
makes sure the dialog is ready after (OKAY) is pressed.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Sets the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Sets the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
Sets the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Sets the variables needed to call the registration algorithm based on the values entered in the dialog.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
set variables
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
Set up the variables before calling the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
Sets the variables needed to call the registration algorithm based on the values entered in the dialog.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Sets the variables needed for calling the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Sets the variables needed for calling the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Set the variable when the OK button is clicked.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
Check width and height for validity.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
Check width and height for validity.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogGUIDClient
-
Checks the fields to see they are properly formed/entered
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Sets the variables appropriately from the GUI.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Gets the user-determined parameters for the algorithm from the
user-interface components.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMSER
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
Sets variables required to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Sets the variables needed for calling the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Sets the variables needed to call the registration algorithm based on the values entered in the dialog.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Sets the variables needed to call the registration algorithm based on the values entered in the dialog.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Sets the variables needed to call the registration algorithm based on the values entered in the dialog.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Sets the variables needed to call the registration algorithm based on the values entered in the dialog.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Sets the variables needed to call the registration algorithm based on the values entered in the dialog.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
DOCUMENT ME!
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Sets up the algorithm's parameters.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Sets the mode variable based on what was selected in the GUI.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Sets the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
DOCUMENT ME!
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
sets the variables based on user-input.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Sets the variables based on the user's dialog input.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
This method could ensure everything in your dialog box has been set correctly
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Sets up the variables needed for the algorithm from the GUI components.
- setVariables() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- setVariables() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Sets up the variables needed for the algorithm from the GUI components.
- setVariables() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogVolumeAnnotation
-
makes sure the dialog is ready after (OKAY) is pressed.
- setVariables() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariables() - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- setVariablesDirection() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Use the GUI results to set up the variables needed to run the algorithm.
- setVariablesForOAR35D() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
Sets the variables needed to call the registration algorithm based on the values entered in the dialog.
- setVariableThresholds(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
If true varies thresholds with region growth.
- setVariance(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets if the gray level coordinate matrix variance is calculated.
- setVariance(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets if the gray level coordinate matrix variance is
calculated.
- SetVarying() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- setVascularImagingFlags(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setVasMode(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setVCenterOffset(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set VCenterOffset.
- setVD1(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setVD2(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setVencScalingFactor(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setVerified(float) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Supply the value to verified.
- setVerified(float) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Supply the value to verified.
- setVerified(float) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
supply the value to verified.
- setVersion(int) - Method in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- setVersion(int) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
- setVersion(int) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setVersion(String) - Method in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- setVersion(String) - Method in class gov.nih.mipav.model.file.FileInfoJSON
-
- setVersion(String) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setVersionNumber(float) - Method in class gov.nih.mipav.model.file.FileInfoNRRD
-
Accessor setting versionNumber, version of NRRD file format being used.
- setvertex(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- setVertex(GenericPolygonClipper.gpc_vertex[]) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_vertex_list
-
- setVertex(Vector<Point3>) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- SetVertex(int, double[], double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- SetVertex(int, double[], double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingSquares
-
- SetVertex(int, float[], float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- setVertexData(double[][]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- setVertexData(int, double) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- setVertexData(int, double[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- setVertexData(int, int, double) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
- setVertexDiffuse(Color) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererRayCast
-
Set the vertex diffuse color.
- setVertexDiffuseColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImageRayCast
-
Set the vertex material diffuse color.
- setVertexRoundingEnabled(boolean) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
En/Disables vertex rounding for this Lines object.
- setVertexSpecular(Color) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererRayCast
-
Set the vertex specular color.
- setVertexSpecularColor(Color) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImageRayCast
-
Set the vertex material specular color.
- setVerticalAnatomicalReference(String) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setVerticalLandmark(float) - Method in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- setVerticies(Point3f[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
Accessor to reset the verticies associated with this clod.
- setVerticies(Point3f[]) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Replace the verticies with a new set.
- setVFp(int, Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setView(double[]) - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Set the current vector view - transform3D object.
- setView(Rectangle2D) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.AdaptableView
-
Sets the view rectangle that is the range of coordinates to be
projected onto the view port.
- setView(Rectangle2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
Sets the view matrix for each of the renderers
- setView(Rectangle2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.GenericRenderer
-
- setView(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Set the current vector view - transform3D object.
- setView(Point3d, Vector3d) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior
-
Set the camera to the specified be located at the specified view point and looking in the specified direction.
- setView(Vector3f[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setView(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM
-
Set the camera to the specified be located at the specified view point and looking in the specified direction.
- setView(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
????????????????????????????????????????????????????
- setViewDirection(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Update the display to show the current base viewing direction at the current point along the path.
- setViewDirection(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Update the display to show the current base viewing direction at the current point along the path.
- setViewOrientation(Matrix3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Update the display to show the current viewing orientation which is always relative to the base viewing
direction.
- setViewOrientation(Matrix3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Update the display to show the current viewing orientation which is always relative to the base viewing
direction.
- setViewPoint(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- setViews(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Sets the views variable.
- setViews(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Sets the views variable.
- setViews(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets the views variable.
- setViewTextureAligned(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Switch between the volume texture mode and the regular volume texture mode.
- setVisible() - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Makes the dialog visible in center of screen.
- setVisible(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Makes the dialog visible in center of screen.
- setVisible(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline.Controls
-
Makes the controls visible or invisible.
- setVisible(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- setVisible(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Overides the super.setVisible(boolean b) (which also locates a panel in the center of the screen), to use the
super.setVisibleStandard(boolean b) which merely displays the Swing object onscreen.
- setVisible(boolean) - Method in class gov.nih.mipav.view.JPanelProgressBar
-
DOCUMENT ME!
- setVisible(boolean) - Method in interface gov.nih.mipav.view.ProgressBarInterface
-
DOCUMENT ME!
- setVisible(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Makes the dialog visible next to the parent frame.
- setVisible(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Makes the dialog visible next to the parent frame.
- setVisible(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Makes the dialog visible next to the parent frame.
- setVisible(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Makes the dialog visible next to the parent frame.
- setVisible(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Makes the dialog visible next to the parent frame.
- setVisible(boolean) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Makes the dialog visible in center of screen.
- setVisible(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Sets the currently visible flag.
- setVisible(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- setVisible(boolean) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Makes the dialog visible in center of screen.
- setVisible(boolean) - Method in class gov.nih.mipav.view.ViewJFrameMemory
-
Shows the frame with the memory.
- setVisible(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Shows the frame with the memory.
- setVisible(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistration.JDialogIncrement
-
Sets the dialog visible in the same location as the parent frame.
- setVisible(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool.JDialogIncrement
-
Sets the dialog visible in the same location as the parent frame.
- setVisible(boolean) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
DOCUMENT ME!
- setVisible(boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Change whether the GUI should be visible.
- setVisibleMenuBar(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
- setVisibleNoLocChange(boolean) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Makes the dialog visible without setting position.
- setVisibleStandard(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Makes the dialog visible by calling super method.
- setVisibleStandard(boolean) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Makes the dialog visible by calling super method.
- setVOI(VOI) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Accessor that sets the VOI ViewJFrameGraph was made from.
- setVOI(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Sets and updates the VOIBase displayed by this VolumeVOI.
- setVOI(VOIBase, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Sets and updates the VOIBase displayed by this VolumeVOI.
- setVOI_IDs(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- setVOI_IDs(int, int) - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Deprecated.
- setVOIActive(VOI) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Internal method for setting all relevant parts of the GUI and the MIPAV interface to reflect the active VOI.
- setVOIColor(int) - Method in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- setVOIColor(int) - Method in class gov.nih.mipav.view.ViewToolBarBuilder.VOIColorButton
-
- setVOIColor(Color) - Method in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- setVOIColor(Color) - Method in class gov.nih.mipav.view.ViewToolBarBuilder.VOIColorButton
-
Sets the buttons background and foreground to a specified color.
- setVoiFileLocation(String) - Method in class gov.nih.mipav.view.dialogs.ScriptVOI
-
- setVOIFlag(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Accessor that sets the voi flag.
- setVOIGroup(ButtonGroup) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
- setVOILatticeManager(VOILatticeManagerInterface) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- setVOIList(ViewVOIVector) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
sets the selected VOIset and the data set data storage sizes based on the number of curves in the Vector.
- setVOIList(ListModel) - Method in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
DOCUMENT ME!
- setVOIManager(VOIManager) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- setVOIManager(VOIManagerInterface) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Sets the VOIManagerInterface
- setVoiName(String) - Method in class gov.nih.mipav.view.dialogs.ScriptVOI
-
- setVOIs(VOIVector) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Sets VOI vector for with new VOIs.
- setVOIs(Hashtable<String, FileInfoImageXML.VOILink>) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the VOI hashtable for this image.
- setVoisOnly(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the VOIs only flag.
- setVoisOnly(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set the VOIs only flag.
- setVoisOnly(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the VOIs only flag.
- setVoisOnly(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set the VOIs only flag.
- setVoisOnly(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the VOIs only flag.
- setVOIState(VOISaveState) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- setVOIStatistic(String, Object) - Method in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
Stores the statistic for the whole VOI.
- setVOITools(JMenu, ViewMenuBuilder) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- setVol1Channel(String) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
set vol1Channel
- setVol2Channel(String) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
set vol2Channel
- setVol3Channel(String) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
set vol3Channel
- setVolParameters(HashMap<String, String>) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setVolsAdded(int) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Supplies a value to the vols_added valiable.
- setVolsAdded(int) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Supplies a value to the vols_added valiable.
- setVolsAdded(int) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
supplies a value to the vols_added valiable.
- setVolume(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Sets the value of the surface volume.
- setVolumeBlend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Sets the blend factor for displaying the ray-cast volume with other objects in the scene.
- setVolumeBlend(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Sets the blend factor for displaying the ray-cast volume with other
objects in the scene.
- setVolumeBounds(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the CubeBounds data member volumeBounds to the crop volume defined by the lower and upper volume points.
- setVolumeCenter(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the x coordinate of the point to be the center of the transformed
image.
- setVolumeCenter(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the x coordinate of the point to be the center of the transformed
image.
- setVolumeCenter(int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the x coordinate of the point to be the center of the transformed image.
- setVolumeCenter(Point3D) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets the x coordinate of the point to be the center of the transformed
image.
- setVolumeCenter(Point3D) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets the x coordinate of the point to be the center of the transformed
image.
- setVolumeCenter(Point3D) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the x coordinate of the point to be the center of the transformed image.
- setVolumeClip(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- setVolumeClipRadius(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- setVolumeColor(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Set the flag to using volume color or not
- setVolumeColor(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- setVolumeDisplayMode(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Accessor that sets the volumeDisplayMode flag.
- setVolumeDisplayMode(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Accessor that sets the volumeDisplayMode flag.
- setVolumeDisplayRange(float) - Method in class gov.nih.mipav.model.structures.VOIBase
-
- SetVolumeIndex(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
- setVolumeLength(int) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Accessor that sets the length (number of slices) for the 3rd dimension.
- setVolumeMask(BitSet) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Initial the volume mask from burnBase.
- setVolumeMatrix(float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- setVolumeOriginX(float) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set volumeOriginX.
- setVolumeOriginY(float) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set volumeOriginY.
- setVolumeOriginZ(float) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set volumeOriginZ.
- setVolumeSamples(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- setVolumeSamples(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- setVolumeSamplesMouseDragged(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Set the sampling rate when the mouse is Dragged.
- setVolumeSamplesMouseReleased(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Set the sampling rate when the mouse is released.
- setVolumeSculptor(VolumeRenderer) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Initialize the raycast based volume render with the sculptor.
- setVolumeSizeX(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set volumeSizeX.
- setVolumeSizeY(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set volumeSizeY.
- setVolumeSizeZ(int) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set volumeSizeZ.
- setVolumeType(int) - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
Accessor which lets you change the type of volume to be inserted.
- setVolView(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Set the volume view mode to true from the ViewJFrameVolumeView During mouse recorder displaying, the flag control
the updating of the opacity histogram.
- setVoxelOrder(String) - Method in class gov.nih.mipav.model.file.FileInfoTrackVis
-
- setVoxelSize() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- setVoxelSizeX(float) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set voxelSizeX.
- setVoxelSizeY(float) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set voxelSizeY.
- setVoxelSizeZ(float) - Method in class gov.nih.mipav.model.file.FileInfoMicroCat
-
Accessor to set voxelSizeZ.
- setVoxOffset(float) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
sets vox offset value.
- setVoxOffset(long) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
sets vox offset value.
- setVoxUnits(String) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Allows no more than 4 characters for the string describing the vox units.
- setVoxUnits(String) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Allows no more than 4 characters for the string describing the vox units.
- setVoxUnits(String) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
allows no more than 4 characters for the string describing the vox units.
- setVr_type(FileInfoDicom.VRtype) - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
- setVr_type(FileInfoDicom.VRtype) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
- setw(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
-
- setW() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- setW(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Accessor to set the width value of the painted rectangle.
- SetW() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- setWallPositions(ArrayList<ArrayList<Point>>) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- setWatershedID(short) - Method in class gov.nih.mipav.model.structures.VOI
-
Accessor that sets the ID to the parameter.
- setWave1(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setWave2(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setWave3(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setWave4(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setWave5(short) - Method in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- setWavelengthArray(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setWavelengths(double[]) - Method in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- setWCSystem(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Sets the world coordinate flag.
- setWCSystem(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Sets the world coordinate flag.
- setWCSystem(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Sets the world coordinate flag.
- setWCSystem(boolean) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Sets the world coordinate flag.
- setWeight(double) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- setWeight(double) - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Accessor that sets the weight.
- setWeight(int) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Sets the subject's weight.
- setWeightAsBest() - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- setWeightDiff(double) - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Accessor that sets the weighting attached to the component of the potential
due to the difference between two neighboring pixel values.
- setWeighted(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Accessor to set the weighted images flag.
- setWeighted(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Accessor to set the weighted images flag.
- setWeighted(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Accessor to set the weighted images flag.
- setWeighted(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Accessor to set the weighted images flag.
- setWeighted(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Accessor to set the weighted images flag.
- setWeighted_dx(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- setWeighted_dy(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- setWeightPrevious(float) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
DOCUMENT ME!
- setWeights(double[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
nr_weight, weight_label, and weight are used to change the penalty
for some classes (If the weight for a class is not changed, it is
set to 1).
- setWellAddress(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
DOCUMENT ME!
- setWellExternRef(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
DOCUMENT ME!
- setWellString(String) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
DOCUMENT ME!
- setWest(AlgorithmNetworkSnake.PixelGrid.PixelGridNode) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- setWhere(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_cut
-
- setWhich(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_cut
-
- setWhich2(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
-
- setWhichCut(short) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
-
- setWhiteStart(double) - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Accessor that sets the white start.
- setWhiteValue0(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setWhiteValue1(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setWhiteValue2(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setWhiteValue3(double) - Method in class gov.nih.mipav.model.file.FileInfoZVI
-
- setWidget(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Sets the widget type for new widgets.
- setWidgets(Vector<ClassificationWidget>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Sets the list of Widgets.
- setWidthDivisions(int) - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Accessor that sets the width divisions.
- setWidthText(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
- setWindLevel(int, int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Set the window level value from the eye tracker
- setWindlevelUpdate(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Set the update win-level flag from the plane render mouse drag, release events.
- setWindow(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
-
- setWindow(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
- setWindow(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Sets the window size for X, Y, or Z processing.
- setWindowA(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- setWindowB(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- setWindowC(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
- setWindowCenter(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setWindowCenter(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setWindowCenterWidthExplanation(String) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setWindowLevel(float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- setWindowSettings() - Method in class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Sets the necessary plug-in window setting to get it to close correctly and have the correct icon.
- setWindowSettings() - Method in class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Sets the necessary plug-in window setting to get it to close correctly and have the correct icon.
- setWindowSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Accessor that sets the window size.
- setWindowSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- setWindowSize(int) - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Accessor that sets the window size.
- setWindowSize(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Accessor that sets the window size.
- setWindowWidth(double[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- setWindowWidth(int[]) - Method in class gov.nih.mipav.model.file.FileInfoPARREC
-
- setWinLevel(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- setWorldLights(SoftwareLight[]) - Method in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Specify a set of software lights defined in world coordinates.
- setWriteAsUnknownLength(boolean) - Method in class gov.nih.mipav.model.file.FileDicomSQ
-
Whether the sequence should be written using an unknown length, this includes adding
a sequence delimitation item to the sequence.
- setWriteAsUnknownLength(boolean) - Method in class gov.nih.mipav.model.file.FileDicomSQItem
-
Whether the sequence should be written using an unknown length, this includes adding
a sequence delimitation item to the sequence.
- setWriteHeaderOnly(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Sets the options to write only the .xml header if true
- setWritePackBit(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets whether to write with packed bits compression.
- setWriteQT(boolean) - Method in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- setWVPMatrix(Matrix4f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Set the World-view-projection matrix from the renderer.
- setX(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
-
- setX(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- setX(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- setX(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- setX(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- setX(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Accessor to set the x value of the painted rectangle.
- setX1Vector(Vector<Double>) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setX2Vector(Vector<Double>) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setXBar(float) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Sets the new location of the XBar.
- setXBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Setup the X Negative clipping plane position.
- setXBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Setup the X Negative clipping plane position.
- setXBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Setup the X Negative clipping plane position.
- setXBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Setup the X Negative clipping plane position.
- setXBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Setup the X positive clipping plane position.
- setXBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Setup the X positive clipping plane position.
- setXBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Setup the X positive clipping plane position.
- setXBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Setup the X positive clipping plane position.
- setXBounds(int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
Accessor that set xBounds.
- setXGridUserPositions(int[]) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setXLoc(int) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Accessor to set x point location.
- setXMLLinkedFilename(String) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets the xml linked filename (for XML files).
- setXPoint(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
- setXPosition(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setXProbePos(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Set probe x coordinate.
- setXProbePos(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Set probe x coordinate.
- setXs(float[]) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setXs - accessor that sets the array of x coordinates to be plotted.
- setxSep(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- setXSliceHairColor(Color) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Change the color for the x crosshair.
- setXSliceHairColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the color of the X slice crosshairs.
- setXSlicePos(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Set the current x slider move position.
- setXSlicePos(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Set the current x slider move position.
- setXSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the x slider and the labels beside and beneath it to the state given by flag.
- setXSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Sets the x slider and the labels beside and beneath it to the state
given by flag.
- setXSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Sets the x slider and the labels beside and beneath it to the state
given by flag.
- setXSliderInvEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the x slider and the labels beside and beneath it to the state given by flag.
- setXSpace(float) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets x space (used for MINC images).
- setXSpacing(int) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Accessor to set x spacing around point.
- setXStart(float) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets x start (used for MINC images).
- setXTranslate(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Set the x translation.
- setXY(double, double) - Method in class gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_vertex
-
- setXYDim(int, int) - Method in class gov.nih.mipav.model.structures.VOI
-
Deprecated.
- SetXYSpacing(double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann
-
Sets the spacing of the search grid in x and y.
- setY(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
-
- setY(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- setY(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- setY(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- setY(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- setY(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Accessor to set the y value of the painted rectangle.
- setY1Vector(Vector<Double>) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setY2Vector(Vector<Double>) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setYBar(float) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Sets the new location of the YBar.
- setYBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Setup the Y Negative clipping plane position.
- setYBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Setup the Y Negative clipping plane position.
- setYBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Setup the Y Negative clipping plane position.
- setYBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Setup the Y Negative clipping plane position.
- setYBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Setup the Y positive clipping plane position.
- setYBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Setup the Y positive clipping plane position.
- setYBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Setup the Y positive clipping plane position.
- setYBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Setup the Y positive clipping plane position.
- setYBounds(int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
Accessor that set yBounds.
- setYBR_FULL_422(boolean) - Method in class gov.nih.mipav.model.file.FileRaw
-
- setYear(String) - Method in class gov.nih.mipav.model.file.FileInfoJSON
-
- setYGridUserPositions(int[]) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setYInvert(int) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
- setYLoc(int) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Accessor to set y point location.
- seType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
68 - Series Type.
- setYPoint(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
- setYPosition(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setYProbePos(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Set probe y coordinate.
- setYProbePos(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Set probe y coordinate.
- setYs(float[]) - Method in class gov.nih.mipav.view.ViewJComponentFunct
-
setYs - accessor that sets the array of y coordinates to be plotted.
- setySep(int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- setYSliceHairColor(Color) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Change the color for the y crosshair.
- setYSliceHairColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the color of the Y slice crosshairs.
- setYSlicePos(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Set the current y slider move position.
- setYSlicePos(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Set the current y slider move position.
- setYSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the y slider and the labels beside and beneath it to the state given by flag.
- setYSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Sets the y slider and the labels beside and beneath it to the state
given by flag.
- setYSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Sets the y slider and the labels beside and beneath it to the state
given by flag.
- setYSliderInvEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the y slider and the labels beside and beneath it to the state given by flag.
- setYSpace(float) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets y space (used for MINC images).
- setYSpacing(int) - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Accessor to set y spacing around point.
- setYStart(float) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets y start (used for MINC images).
- setYTranslate(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Set the y translation.
- setZAxisFilter(String) - Method in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- setZAxisOffset(float) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets z axis offset.
- setZAxisStep(float) - Method in class gov.nih.mipav.model.file.FileInfoAfni
-
Sets z axis step.
- setZBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Setup the Z negative clipping plane position.
- setZBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Setup the Z negative clipping plane position.
- setZBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Setup the Z negative clipping plane position.
- setZBoundNeg(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Setup the Z negative clipping plane position.
- setZBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Setup the Z positive clipping plane position.
- setZBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Setup the Z positive clipping plane position.
- setZBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Setup the Z positive clipping plane position.
- setZBoundPos(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Setup the Z positive clipping plane position.
- setZBounds(int[]) - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
Accessor that set zBounds.
- setZCompare(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Turns the ZBufferState compare mode on or off.
- setZenith(float[]) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Sets zenith angle array for spherical direction
- setZero() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- SetZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDenseMatrix
-
- SetZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- SetZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessMatrix
-
- SetZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- SetZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- SetZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- SetZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- SetZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- SetZero() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- SetZero() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- SetZero() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- SetZero() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- SetZero() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- setZeroDetectionType(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Changes the type of zero crossing detection method used.
- setZeroDetectionType(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Changes the type of zero crossing detection method used.
- setZeroFillFactorRead(double) - Method in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- setZerofunused(boolean) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
- setZeroLengthFlag(boolean) - Method in class gov.nih.mipav.model.file.FileRaw
-
setZeroLengthFlag
- setZeroToOneLUTAdj(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
- setZip(boolean) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
- setZoom(double, double) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets the zoom parts of 2D matrix.
- setZoom(double, double) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets the zoom parts of 2D matrix.
- setZoom(double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Sets the zoom parts of 3D matrix.
- setZoom(double, double, double) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Sets the zoom parts of 3D matrix.
- setZoom(float) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Set the zoom factor.
- setZoom(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- setZoom(float, float) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Sets the magnification in both x and y directions.
- setZoom(float, float) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Sets the magnification in both x and y directions.
- setZoom(float, float) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Sets the magnification in both x and y directions.
- setZoom(float, float) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Sets the magnification in both x and y directions.
- setZoom(float, float) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Sets the magnification in both x and y directions.
- setZoom(float, float) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
sets the screen scale variable when setZoom is called:
- setZoom(float, float) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the scales that defines the magnification of the image.
- setZoomB() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the magnification of Image B.
- setZoomDialogNull() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Sets the magnification dialog to null.
- setZoomedAxes(int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
Sets the axes to which this scroll zoom is applied.
- setZoomExact(float, float) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Sets the magnification to exactly the zoom specified values in both x and y directions.
- setZoomFactor(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
- setZPoint(int) - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
- setZPosition(double) - Method in class gov.nih.mipav.model.file.FileInfoLIFF
-
- setZProbePos(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Set probe z coordinate.
- setZProbePos(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Set probe z coordinate.
- setZscore(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
- setZSliceHairColor(Color) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Change the color for the z crosshair.
- setZSliceHairColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets the color of the Z slice crosshairs.
- setZSlicePos(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Set the current z slider move position.
- setZSlicePos(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Set the current z slider move position.
- setZSlider(int) - Method in class gov.nih.mipav.view.ViewControlsImage
-
Places the pointer on the (slice) slider bar to a location corresponding to the given slice value (within the
set) without notifying the listeners.
- setZSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the z slider and the labels beside and beneath it to the state given by flag.
- setZSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Sets the z slider and the labels beside and beneath it to the state
given by flag.
- setZSliderEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Sets the z slider and the labels beside and beneath it to the state
given by flag.
- setZSliderInvEnabled(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets the z slider and the labels beside and beneath it to the state given by flag.
- setZSpace(float) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets z space (used for MINC images).
- setZStart(float) - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Accessor that sets z start (used for MINC images).
- setZStart(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- setZStop(Integer) - Method in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
DOCUMENT ME!
- seUniq - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
4 - The make-unique flag - GE internal.
- sevenButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- sevenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
- sevenButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- SEVERE - gov.nih.mipav.view.Preferences.LogLevel
-
- seVersCre - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
172 - 2 bytes - Genesis Version - Created.
- seVersCur - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
174 - 2 bytes - Genesis Version - Now.
- sex - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- sex - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- sexComboBox - Variable in class gov.nih.mipav.view.JPanelEditSex
-
DOCUMENT ME!
- sexes - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- sexField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- sfde - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- sfmin - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- sfmin - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
- sform_code - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
When sform_code > 0,
The (x,y,z) coordinates are given by a general affine transformation
of the (i,j,k) indexes:
x = srow_x[0] * i + srow_x[1] * j + srow_x[2] * k + srow_x[3]
y = srow_y[0] * i + srow_y[1] * j + srow_y[2] * k + srow_y[3]
z = srow_z[0] * i + srow_z[1] * j + srow_z[2] * k + srow_z[3]
sform_code has values for "Arbitrary X,Y,Z coordinate system", "Scanner based anatomical coordinates",
"Coordinates aligned to another file's or to anatomical truth", "Talairach X,Y,Z coordinate system", and
"MNI 152 normalized X,Y,Z coordinates".
- SGILog24Compression - Variable in class gov.nih.mipav.model.file.FileSVS
-
- SGILog24Compression - Variable in class gov.nih.mipav.model.file.FileTiff
-
- SGILogCompression - Variable in class gov.nih.mipav.model.file.FileSVS
-
- SGILogCompression - Variable in class gov.nih.mipav.model.file.FileTiff
-
- sgnck - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- sgnd - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_cmptparm_t
-
signed (1) / unsigned (0)
- sgnd - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
signed (1) / unsigned (0)
- sgngam - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- SH - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- sha1 - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Data.BinExternal
-
- SHA1 - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Include
-
- SHA1 - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF.BinExternal
-
- shade - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate the cluster shade Sum over i,j of ((i + j - x mean - y mean)**3) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j over ((i + j - 2 * glcm mean)**3) * Probability(i,j)
It is a measure of the degree to which the outliers in the histogram favor one side or another
of the statistical mean.
- shade - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate the cluster shade Sum over i,j of ((i + j - x mean - y mean)**3) * Probability(i,j)
For the symmetrical glcm x mean = y mean = glcm mean
Sum over i,j over ((i + j - 2 * glcm mean)**3) * Probability(i,j)
It is a measure of the degree to which the outliers in the histogram favor one side or another
of the statistical mean.
- shade - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
- shade - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- shadeCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
- shadeCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- SHAMPINES_BALL_OF_FLAME - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- SHAMPINES_BALL_OF_FLAME - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- shan(double[], double[], double[], int, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- SHAN - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- shape - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.ArrayInfo
-
- shape - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- shape - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptState
-
shape.
- Shape() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMInitializeStegmann.CAAMInitEntry
-
Returns the corresponding shape.
- Shape2Combined(CAAMShape, ModelSimpleImage, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Projects a shape into a set of c parameters.
- Shape2Param(CAAMShape, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Projects a shape into a set of shape parameters,
- Shape2PixelWeights() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Return shape to pixel weight.
- ShapeBasis() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the shape PCA.
- shapeBG - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
DOCUMENT ME!
- shapeConstraint - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
default shape constraint contribution:.
- shapeDescriptor - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- shapeDescriptor - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- shapeDescriptor - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
shape descriptor vector of VOI contours after AAM segmentation.
- ShapeFactor(float, float, float, float, float, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ShapeFactor
-
- ShapeFactor(float, float, float, float, float, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ShapeFactor
-
- ShapeFactor(float, float, float, float, float, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ShapeFactor
-
- ShapeFactor(float, float, float, float, float, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ShapeFactor
-
- ShapeFactor(float, float, float, float, float, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ShapeFactor
-
- ShapeFactor(float, float, float, float, float, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ShapeFactor
-
- ShapeFactor(float, float, float, float, float, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ShapeFactor
-
- ShapeFactor(float, float, float, float, float, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ShapeFactor
-
- ShapeFreeImage(CDVector, ModelSimpleImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Wrapper to generates a shape free image using a vector of texture
samples.
- ShapeFreeImage(CDVector, ModelSimpleImage, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Generates a shape free image (that is; a mean shape image) using a vector
of texture samples.
- ShapeFreeImage(CDVector, CDMatrix, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Generates a shape free image (that is; a mean shape image) using a vector
of texture samples.
- ShapeHolder() - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
-
Creates a new ShapeHolder object.
- ShapeHolder(Object[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
-
Creates a new ShapeHolder object.
- ShapeInsideImage(CAAMShape, ModelSimpleImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Tests if a shape is fully inside an image.
- ShapeInsideImage(CAAMShape, ModelSimpleImage) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Tests if a shape is fully inside an image.
- ShapeInstance(CDVector, CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Generates a shape based on a set of model parameters.
- shapeList - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
-
DOCUMENT ME!
- ShapeMovie(String, int, double, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
Generates movies files showing each mode of shape variation by adjusting
the each mode of variation to
+/- 'range' times
in 2*'step'+1 steps.
- ShapeOverlap(CAAMShape, CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Calculates the overlap between two shapes as specified in "Active Shape Model Segmentation With Optimal Features"
Bram van Ginneken et al., IEEE TMI 21(8) Aug. 2002.
- ShapeOverlap(CAAMShape, CAAMShape) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Calculates the overlap between two shapes as specified in "Active Shape Model Segmentation With Optimal Features"
Bram van Ginneken et al., IEEE TMI 21(8) Aug. 2002.
- ShapePCA() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the shape PCA.
- ShapePCAInstance(CDVector, CAAMShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Generates a shape based on a set of shape b-parameters.
- ShapeSimilarity - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- ShapeSimilarity() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- ShapeSize() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Returns the 2-norm of this shape centralized.
- shapeSliceBG - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
DOCUMENT ME!
- ShapeStill(ModelSimpleImage, CAAMShape, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
Plots a shape into an image and save it to disk.
- ShapeTex2Combined(CAAMShape, CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Projects the shape and texture into c-space i.e. the combined model
parameters.
- ShapeTex2Param(CAAMShape, CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Extract the b-parameters from a shape and corresponding texture by
inverting the shape and texture pca projection.
- ShapeTexParam2Combined(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Transforms the concatenated b-parameters into combined model parameters.
- ShapeTexParam2Combined(CDVector, CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Projects shape and texture parameters into the combined eigenspace.
- ShapeTexParam2Combined(Vector<CDVector>, Vector<CDVector>) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Converts a set of b-vectors to combined model parameters (c-vectors).
- shapeVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- shapeVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- sharedAnnotationPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- sharedDrawable - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- sharedOutputDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- sharedRenderer - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- sharpen(double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- sharpness - Variable in class gov.nih.mipav.model.file.FileSVS
-
- sharpness - Variable in class gov.nih.mipav.model.file.FileTiff
-
- SHcomp(double[][][], int, double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- SHEARWARP - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- shearwarpCameraPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- ShearWarpColor - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
The base class renderer to support shear-warp rendering of color images.
- ShearWarpColor(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColor
-
Create a color renderer.
- ShearWarpColorComposite - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A renderer for composition of voxel RGB color values with alpha blending and no lighting.
- ShearWarpColorComposite(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorComposite
-
Create an RGBA+lighting color renderer.
- ShearWarpColorDRR - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A renderer for color volume data.
- ShearWarpColorDRR(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorDRR
-
Create an summed intensity renderer.
- ShearWarpColorLighting - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A renderer for RGBA+lighting volume data.
- ShearWarpColorLighting(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorLighting
-
Create an RGBA+lighting color renderer.
- ShearWarpColorMIP - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A renderer for color volume data.
- ShearWarpColorMIP(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorMIP
-
Create an summed intensity renderer.
- ShearWarpIntensity - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
The base class renderer to support shear-warp rendering of intensity images (gray scale).
- ShearWarpIntensity(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensity
-
Create an intensity renderer.
- ShearWarpIntensityDRR - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A renderer for intensity volume data.
- ShearWarpIntensityDRR(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensityDRR
-
Create an summed intensity renderer.
- ShearWarpIntensityMIP - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
A renderer for intensity volume data.
- ShearWarpIntensityMIP(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensityMIP
-
Create an summed intensity renderer.
- shearwarpOptionsPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Control panels for the shearwarp render.
- shearwarpRender - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- ShearWarpRenderer - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
The base class renderer to support shear-warp rendering.
- ShearWarpRenderer(ModelImage, int, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Create a renderer.
- shearwarpTabVector - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- shearWarpToolBar - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Shearwarp toolbar.
- SHedge_ls(double[][], int, int, double[][][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- shi - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- shichi(double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- SHICHI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- shift - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- shift - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- shift(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- shift(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- shift(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.StartingPolynomial
-
- Shift - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Transfer function shift:
- shiftBack(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
Shifts the FFT data back from the center for processing purposes and inverse FFT.
- shiftBack(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
Shifts the FFT data back from the center for processing purposes and inverse FFT.
- shiftBlue(float, float, float) - Method in class gov.nih.mipav.view.ColorWheel
-
blue shift
- shiftBlue(float, float, float) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
blue shift
- shiftBox - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
DOCUMENT ME!
- shiftCircle(Vector2f, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
Translate the circle based on the current center and the difference between
the current center and the mouse position.
- ShiftCircle(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
Translate the circle in the 2D Histogram panel.
- shiftDown - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Flag used to indicate if the shift key is depressed.
- shiftedChebyshev(double, int) - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- shiftedChebyshev(double, int) - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- shiftedChebyshev(double, int) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- shiftedChebyshev(double, int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- shiftedChebyshevDerivative(double, int) - Method in class gov.nih.mipav.model.algorithms.LsqFit
-
- shiftedChebyshevDerivative(double, int) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- shiftedChebyshevDerivative(double, int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- shiftedImgB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- ShiftMid(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
Moves the mid-line control-point.
- ShiftMid(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
Moves the mid-line control-point.
- ShiftMidTriangle(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Move the middle-control point which controls the transfer function in the triangle:
- shiftPressed - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- shiftRed(float, float, float) - Method in class gov.nih.mipav.view.ColorWheel
-
red shift
- shiftRed(float, float, float) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
red shift
- ShiftSquare(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
Translate the square in the 2D Histogram panel.
- shiftT - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCyclicPermutation
-
- shiftT - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- shiftTInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- shiftToDivide - Variable in class gov.nih.mipav.model.file.FileRaw
-
Used in reading and writing boolean
- shiftToDivide - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
Used in reading and writing boolean
- ShiftTriangle(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Shifts the triangle along the bottom edge of the 2D Histogram, using the bottom control-point.
- shiftX - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCyclicPermutation
-
- shiftX - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- shiftXInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- shiftY - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCyclicPermutation
-
- shiftY - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- shiftYInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- shiftZ - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCyclicPermutation
-
- shiftZ - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- shiftZInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- shininess - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareMaterial
-
Disable specular lighting effects.
- shininessPanel - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Shininess panel.
- shininessSlider - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Shininess slider.
- shock_dt0 - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- shock_iters - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- SHORT - gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
A signed or unsigned short in 2's complement is stored in the tag's value.
- SHORT - gov.nih.mipav.model.file.FileSVS.Type
-
16 bit unsigned
- SHORT - gov.nih.mipav.model.file.FileTiff.Type
-
16 bit unsigned
- SHORT - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type signed short (16 bits per voxel).
- SHORT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFloodFill
-
DOCUMENT ME!
- SHORT - Static variable in class gov.nih.mipav.model.file.FileDM3
-
Different encoded data types used in DM3 files.
- SHORT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SHORT - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- SHORT - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type signed short (16 bits per voxel).
- SHORT_FLOAT - Static variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- short_name - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.BaseWavelet
-
- SHORT_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type signed short.
- shortcut - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserExtrReg
-
- shortcut - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserReg
-
- ShortcutDialog() - Constructor for class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.ShortcutDialog
-
Creates a new ShortcutDialog object.
- shortcutEd - Static variable in class gov.nih.mipav.view.ViewUserInterface
-
Key shortcut editor dialog.
- shortcutRecording - Variable in class gov.nih.mipav.view.ViewUserInterface
-
Indicates whether the user is currently recording a new keyboard shortcut using the shortcut editor dialog.
- shortcutsChanged - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- ShortCutted - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ShortCutted(String, String, String) - Constructor for class gov.nih.mipav.view.ShortCutted
-
Creates a new ShortCutted object.
- shortDescriptions - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
short description strings for each filterType.
- shortMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- shortOp - Variable in enum gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- shortPairs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- shortSectorSize - Variable in class gov.nih.mipav.model.file.FileZVI
-
- shortSectorTable - Variable in class gov.nih.mipav.model.file.FileZVI
-
- shortStreamStartSect - Variable in class gov.nih.mipav.model.file.FileZVI
-
- shortToBytes(short, boolean, byte[]) - Static method in class gov.nih.mipav.model.file.FileBase
-
converts from short to bytes
- shortValue() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Returns the value of the specified number as a short.
- ShotInfo() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- shouldSelectCell(EventObject) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- shouldWeAcceptAbstractSyntax(DICOM_PDUItemType) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Should MIPAV accept the abstract syntax.
- shouldWeAcceptApplicationContext(DICOM_PDUItemType) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
As it turn out we accept all application contexts.
- shouldWeAcceptLocalAppTitle(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Accept all.
- shouldWeAcceptRemoteAppTitle(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Accept only AETitles listed in the server host table (remote) *** We accept all AETitles at this time!
- show - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- show() - Method in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
Display the hidden progress bar and text
- show(double[], int) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- show(int, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
For generating the display of 1 or 2 RGB images.
- show(int, int, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
For generating the display of 1 or 2 images.
- show(int, int, boolean, String, float, float, float, float, float, float, float, float, float, boolean) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
For generating the display of 1 or 2 images.
- show(int, int, ModelLUT, ModelLUT, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Shows the image and the VOI(s).
- show(int, int, ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
Shows the image and the VOI(s).
- show(int, int, ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Shows the image and the VOI(s).
- show(int, int, ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
Shows the image and the VOI(s).
- show(int, int, ModelLUT, ModelLUT, boolean, int, String) - Method in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
Shows the image and the VOI(s).
- show(int, int, ModelLUT, ModelLUT, boolean, Vector3f[]) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Shows the image.
- show(int, ModelLUT, ModelLUT, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Shows the gray scale image(s).
- show(int, ModelLUT, ModelLUT, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
shows the image and the VOI(s).
- show(int, ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
DOCUMENT ME!
- show(ModelLUT) - Method in class gov.nih.mipav.view.ViewJComponentLUT
-
Filters the model LUT through the LUT and produces an int array (aRGB) that can be convert to a java image for
display purposes.
- show(ModelLUT) - Method in class gov.nih.mipav.view.ViewJComponentLUTTable
-
Filters the model LUT through the LUT and produces an int array (aRGB) that can be convert to a java image for
display purposes.
- show(ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Shows the surface, using the LUT to color the indices.
- show(Component, int, int) - Method in class gov.nih.mipav.view.JScrollPopupMenu
-
- SHOW_INTENSITY_GRAPH - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
used in the popup menu when the user right-clicks over a voi intensity line.
- SHOW_LINE_ENDPOINTS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
used in the popup menu when the user right-clicks over a voi intensity line.
- SHOW_LINES_ONLY - Static variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- SHOW_POINTS_AND_LINES - Static variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- SHOW_POINTS_ONLY - Static variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- show_trace - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- Show4D - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- showAB(int, ModelLUT, ModelLUT, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
- showAllParameters - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- showAllSegmentationRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for displaying the full segmentation.
- showAxes - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
If true, show XY, XZ, or ZY orientation axes in a corner of the component.
- showAxes(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Turns displaying the Axis labes on or off:
- showAxes(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Turns displaying the Axis labels on or off:
- showAxes(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Turns displaying the Axis labels on or off:
- ShowAxes - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- showB1Check - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- showB1Map - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- showB1Map - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- showBlank() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Resets the buffer to 0s and displays a blank image.
- showBoundingBox(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Turns showing the slice bounding box on/off.
- showBoundingBox(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Turns on/off displaying the bounding box for the given plane.
- ShowBoundingBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- ShowBoundingBox(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Turns on/off displaying the bounding box for the given plane.
- showBoundingRect - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Specifies whether the user wants to show the cropping / paint bounds rectangle.
- showBoxFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Makes the box frame visible.
- showBoxFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Makes the box frame visible.
- showBoxFrame() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Makes the box frame visible.
- showBoxSlice(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Makes the box slice for the given orientation visible.
- showBurnLabels - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Flag indicates the show burning text label or not.
- showBurnLabelsCB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Show the burning text label checkbox.
- showColorChooser() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- showColorDialog() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- showColorDialog() - Method in interface gov.nih.mipav.view.VOIHandlerInterface
-
Opens the color dialog for changing the selected VOI color.
- showCrosshairs - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
If true, show crosshairs indicating the currently position within the component.
- ShowCrossHairs - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- showCurvatureInfo(VOIBase, int, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called from the VOIManager.
- showDataBuffer(byte[], int, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Utility method to dump hex and ASCII to the MIPAV debug frame.
- showDebug - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- showDecInf - Variable in class gov.nih.mipav.model.file.FileJP2
-
- showDialog(Component, String, String) - Method in class gov.nih.mipav.view.FileSelectorImpl
-
Sets up the parameters and show the dialog to let user make selection.
- showEditImageInfo() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- showFaceSegmentation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
when true, display the face segmentation
- showFaceSegmentation - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
- showFaceSegmentationRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Button for displaying the face segmentation.
- showFilteredTransform - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- showFilteredTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- showFitFunction - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- showFittedFunctions - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- showFrame - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
Flag to show frame during each algorithm method call.
- showFrame - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Flag to show frame during each algorithm method call.
- showFrame - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Not used now.
- showFrame - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- showFrameBorder - Variable in class gov.nih.mipav.view.dialogs.JDialogAnimate
-
DOCUMENT ME!
- showFrameBorder - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- showFunction - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- showFunctions - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- showGraph - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- showGridBox - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- showGridLines - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- showGridOverlay(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Draws a grid on top of the image according to the gridSpacingX and
gridSpacingY.
- showHistogram() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Filters the histogram through the LUT and produces an int array (aRGB) that can be converted to a java image of
the histogram for display purposes.
- showHistogram() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Show the histogram without filtering it through a LUT.
- showHistogram() - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Show the histogram without filtering it through a LUT.
- showHistogram(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Filters the histogram through the LUT and produces an int array (aRGB) that can be converted to a java image of
the histogram for display purposes.
- showHistogram(ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Placeholder.
- showHistogram(ModelLUT) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Filters the histogram through the LUT and produces an int array (aRGB) that can be converted to a java image of
the histogram for display purposes.
- showHistogram(ModelLUT) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityRGB
-
Filters the histogram through the LUT and produces an int array (aRGB) that can be converted to a java image of
the histogram for display purposes.
- showHistogram(ModelLUT) - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Filters the histogram through the LUT and produces an int array (aRGB) that can be converted to a java image of
the histogram for display purposes.
- showHistogram(ModelLUT) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Filters the histogram through the LUT and produces an int array (aRGB) that can be converted to a java image of
the histogram for display purposes.
- showHistogram(ModelLUT) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Filters the histogram through the LUT and produces an int array (aRGB) that can be converted to a java image of
the histogram for display purposes.
- showIntensityGraph() - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Shows a graph of the average intensities through a volume (calculated from AlgorithmPointArea).
- showIntensityInfo(VOIBase, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called from the VOIManager.
- showInterImages - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
Whether intermediate images should be displayed during pipeline processing
- showInterImages - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- showInterImagesBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- showIntermediateImages - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
Whether to show the intermediate images generated during the BSE algorithm.
- showIntermediateImages - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Whether to show images from intermediate steps of the BSE algorithm.
- showIntermediateImagesCB - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Checkbox to show images which can help in paramater tweaking.
- showKernel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
display kernel as 1 or 0 in the debug window.
- showKernel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
display kernel as 1 or 0 in the debug window.
- showKernel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
Display kernel as 1 or 0 in the debug window.
- showKernel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
display kernel as 1 or 0 in the debug window.
- showKernel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
display kernel as 1 or 0 in the debug window.
- showKernel() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Display kernel as 1 or 0 in the debug window.
- showLabels - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Flag to show the burning point label.
- showLattice(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- showLattice(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Turns on/off lattice display:
- showLatticeLabels(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- showLatticeLabels(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- showLegend - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- showLicense() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Displays the MIPAV Software Transfer Agreement in a JDialogText window.
- showLicense(String, String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Displays the MIPAV Software Transfer Agreement in a JDialogText window.
- showLineEndPoints(VOIBase, Graphics) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- showLineVOIAngleBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- showLUTRecorder() - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Show the LUT recorder dialog.
- showM0Map - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- showMagIntensity - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Flag used to indicate that the intensity values of the image should be displayed in the magnified portion of the
image.
- showMAPplot - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHMRF_EM
-
- showMAPplot - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- showMAPplotCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- showMarker(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- showMessage(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Shows a message in the GUI message panel.
- showMessage(String) - Method in class gov.nih.mipav.view.DICOMDisplayer
-
Displays the message in the appropriate column.
- showMinorTickMarks - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- showModel(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- showModel(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- showNumbers - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
whether to number each z slice for 4D
- showNumbers - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- showNumbers - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
equals zDim of original 4D before 4D to 3D conversion.
- showNumbers - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
equals zDim of original 4D before 4D to 3D conversion.
- showOpenDialog(Component) - Method in interface gov.nih.mipav.view.FileSelector
-
Shows the open dialog to retrieve the user's input, the approve button
will be "Open", and title will be "Open Image", only files are displayed,
multi selection will be allowed.
- showOpenDialog(Component) - Method in class gov.nih.mipav.view.FileSelectorImpl
-
- ShowOrientationCube - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- showOutputWindow - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- showOverlay(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Displays Image overlays (DICOM or image attributes).
- showOverlayBox - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
- showPane(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
Displays the panel with the given name.
- showPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- showPointsAndLines - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- showPrivate - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- showPrivateButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
- showProgress - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
- showProgress - Variable in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
- showProgress - Variable in class gov.nih.mipav.model.file.FileOME
-
Whether to show a progress bar while processing the file.
- showProgress - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Display the deconvolved image every X images to show progress:
- showProgress(String, int) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.Forest.showProgress
-
- showR1Map - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- showRegionInfo(int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuantify
-
Display statistics about the grown region.
- showRegionInfo(int[], double[][], double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmQuantify
-
Display statistics about the grown region.
- showRegionInfo(int, double[], double[], double[], String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Display statistics about the grown region.
- showRegionInfo(int, float[], float[], float[], String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Display statistics about the grown region.
- showRegionInfo(int, String) - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Display statistics about the grown region.
- showRegionInfo(int, String) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Display statistics about the grown region.
- showResultCB - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- showRGB() - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityRGB
-
Show RGB histogram.
- showRGB(int[], int) - Method in class gov.nih.mipav.view.ViewJComponentHistoRGB
-
DOCUMENT ME!
- showSaveAsDialog(Component) - Method in interface gov.nih.mipav.view.FileSelector
-
Shows the save as dialog to retrieve the user's input, the approve button
will be "Save", and title will be "Save Image As", only file are displayed,
multi selection is not allowed.
- showSaveAsDialog(Component) - Method in class gov.nih.mipav.view.FileSelectorImpl
-
- showSaveDialog(Component) - Method in interface gov.nih.mipav.view.FileSelector
-
Shows the open dialog to retrieve the user's input, the approve button
will be "Save", and title will be "Save Image", only directory are displayed,
multi selection is not allowed.
- showSaveDialog(Component) - Method in class gov.nih.mipav.view.FileSelectorImpl
-
- showSegmentedImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- showSegmentedImage - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- showSelected - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- showSelected - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- showSelectedVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- showSelectedVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- showSelectedVOI(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- showSelectedVOI(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
- showSelectedVOI(MouseEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- showShortcutEditor(boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Opens a dialog for viewing/modifying shortcuts.
- showSkullSegmentation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
when true, display the skull segmentation
- showSkullSegmentation - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
- showSlice(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Turns showing the slice on/off.
- showSlice(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Turns on/off displaying the given plane.
- ShowSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- ShowSlice(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Turns on/off displaying the given plane.
- ShowSliceBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- showSliceNumber - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- showSliceNumber - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- showSplashGraphics() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Shows the MIPAV splash screen for a few seconds, or until the user clicks it.
- showStatisticsCalculator() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Opens a JDialogStatistics to allow computation ofROI statistics.
- showStatisticsCalculator() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Opens a JDialogStatistics to allow computation ofROI statistics.
- ShowSurface(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
Turns rendering the planes with the surface mask on/off.
- ShowSurface(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Turns rendering the planes with the surface mask on/off.
- showT1Map - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- showTags(ViewTableModel, FileDicomTagTable, boolean) - Static method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Shows the "Other Image Information", with or without private tags.
- showTags(ViewTableModel, FileInfoDicom, boolean) - Static method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Shows the "Other Image Information", with or without private tags.
- showTagsNoCheckbox(ViewTableModel, FileInfoDicom, boolean) - Static method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Shows the "Other Image Information", with or without private tags.
- showTalairachGrid - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Whether to show the talairach grid on the component.
- showTalairachGrid - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Flag for showing the Talairach grid on the component images.
- showTalairachGrid(boolean) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Sets whether or not lines dividing the Talairach regions are shown.
- showTalairachGridmarkers - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Whether to show the talairach gridmarkers on the component.
- showTalairachGridmarkers(boolean) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Sets whether the talairach grid markers will be displayed.
- showTalairachPosition - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Flag for showing the Talairach position on the component images.
- showTextBox(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Turns displaying the text on or off.
- showTotals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Whether or not to show totals for each calculation.
- showTotals - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions
-
A check box to opt for VOI totals.
- showTotals - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
DOCUMENT ME!
- showTransform - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- showTransform - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- ShowUsage(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.PoissonRun
-
- ShowUsage(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.test
-
- showUsingOrientation(int, int[], int[], boolean, boolean) - Method in class gov.nih.mipav.view.PatientSlice
-
For generating the display of one or two ModelImages (imageA and imageB).
- showUsingOrientation(int, int[], int[], boolean, boolean, float, boolean) - Method in class gov.nih.mipav.view.PatientSlice
-
For generating the display of one or two ModelImages (imageA and imageB).
- showUsingOrientation(int, ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
For generating the display of 1 or 2 RGB images.
- ShowVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- showVOIProperties() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- showVOIs - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- showWebHelp(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Pops up the MIPAV help for a given wiki help page.
- showX() - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- showX() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- showX() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- showXHairs(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Turns displaying the X and Y bars on or off:
- showXHairs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Turns displaying the X and Y bars on or off:
- showXHairs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Turns displaying the X and Y bars on or off:
- showXMLThumbnail - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- showXYZLegends() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- showY() - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- showY() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- showY() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- showZ() - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- showZ() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- showZ() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- shrink - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
The factor by which the data is subsampled to a lower resolution in estimating the slowly varying non-uniformity
field.
- shrink - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- shrink - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- shrink - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- shrink - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- shrinking - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- shrinking - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- shuffle(Vector<Integer>, Random) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- Shuffle() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Shuffles (randomizes) the vector.
- shuffleAndSplit(Vector<Integer>, Vector<Integer>, int, int, Random) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- shuffleAndSplitAppend(Vector<Integer>, Vector<Integer>, int, int, Vector<Integer>, Random) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- ShuffleData() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Shuffle each dimension in all data items over all observations.
- shuffleList() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
Read 3D images atlas directory.
- shutdown() - Method in class gov.nih.mipav.model.structures.ReminderThread
-
DOCUMENT ME!
- shutdown() - Method in class gov.nih.mipav.model.structures.TimeoutThread
-
DOCUMENT ME!
- shutterSpeed - Variable in class gov.nih.mipav.model.file.FileSVS
-
- shutterSpeed - Variable in class gov.nih.mipav.model.file.FileTiff
-
- shutterSpeedToExposureTime(double) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.PhotographicConversions
-
Converts a shutter speed to an exposure time.
- si - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- si - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver_NU
-
- si - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver_NU
-
- Si - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- Si() - Method in class gov.nih.mipav.util.DoubleDouble
-
- siCenter - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- siCenter - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- sici(double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- SICI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- sideLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- sidePointsForCurvature - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughCardioid
-
- sidePointsForCurvature - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
Maximum number of points to take from each side of a point on a curve in determining a curvature
- sidePointsForTangent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- sidePointsForTangent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- sidePointsForTangent - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
- sidePointsForTangent - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
Maximum number of points to take from each side of a point on a curve in determining a tangent
- sidePointsForTangent - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Maximum number of points to take from each side of a point on a curve in determining a tangent
- sidePointsForTangent - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Maximum number of points to take from each side of a point on a curve in determining a tangent
- sidePointsForTangent - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
Maximum number of points to take from each side of a point on a curve in determining a tangent
- sideText - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
- sideText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
- sideText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
- sideText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
- sideText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- SIEMENS - gov.nih.mipav.view.dialogs.AlgorithmTreParams.ScannerType
-
- siemensScanner - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- siemensScanner - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- SiemensStudyDateDD - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- SiemensStudyDateMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- SiemensStudyDateYYYY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- SiemensStudyTimeHH - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- SiemensStudyTimeMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- SiemensStudyTimeSS - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- SIEMENSTEXT - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Extension: .hdr for header, .img for data
- SIFT - Class in gov.nih.mipav.model.algorithms
-
Copyright (C) 2007-11, Andrea Vedaldi and Brian Fulkerson
Copyright (C) 2012-13, The VLFeat Team
All rights reserved.
- SIFT() - Constructor for class gov.nih.mipav.model.algorithms.SIFT
-
SIFT - default constructor.
- SIFT(String[], String[], boolean, boolean, String, String, String, String, String, String, int, int, int, double, double, double, double, double, boolean, boolean, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.SIFT
-
- SIFT_cl_kernels() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.SIFT_cl_kernels
-
- SIFT.FitMosaicModel - Class in gov.nih.mipav.model.algorithms
-
- SIFT.ikeysComparator - Class in gov.nih.mipav.model.algorithms
-
- SIFT.VlFileMeta - Class in gov.nih.mipav.model.algorithms
-
- SIFT.VlPgmImage - Class in gov.nih.mipav.model.algorithms
-
- SIFT.VlSiftFilt - Class in gov.nih.mipav.model.algorithms
-
------------------------------------------------------------------
- SIFT.VlSiftKeypoint - Class in gov.nih.mipav.model.algorithms
-
- sift3d - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
- SIFT3D - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D
-
SIFT3D - default constructor.
- SIFT3D(ModelImage, ModelImage, double, double, int, boolean, double, double, boolean, boolean, boolean, boolean) - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_AZ_MAX_F - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_CVEC_CROSS(SIFT3D.Cvec, SIFT3D.Cvec, SIFT3D.Cvec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_CVEC_DOT(SIFT3D.Cvec, SIFT3D.Cvec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_CVEC_L2_NORM(SIFT3D.Cvec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_CVEC_L2_NORM_SQ(SIFT3D.Cvec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_CVEC_MINUS(SIFT3D.Cvec, SIFT3D.Cvec, SIFT3D.Cvec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_CVEC_PLUS(SIFT3D.Cvec, SIFT3D.Cvec, SIFT3D.Cvec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_CVEC_SCALE(SIFT3D.Cvec, double) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_CVEC_TO_SVEC(SIFT3D.Cvec, SIFT3D.Svec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_desc_acc_interp(SIFT3D.SIFT3DC, SIFT3D.Cvec, SIFT3D.Cvec, SIFT3D.SIFT3D_Descriptor) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_Descriptor() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor
-
- SIFT3D_Descriptor_store() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor_store
-
- SIFT3D_detect_keypoints(SIFT3D.SIFT3DC, SIFT3D.Image, SIFT3D.Keypoint_store) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_DOUBLE - gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm_type
-
- SIFT3D_DUPLICATE_SLICES - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_err_thresh_default - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_err_thresh_default - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- SIFT3D_extract_descriptors(SIFT3D.SIFT3DC, SIFT3D.Keypoint_store, SIFT3D.SIFT3D_Descriptor_store) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_FAILURE - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_FALSE - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_FILE_DOES_NOT_EXIST - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_FLOAT - gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm_type
-
- SIFT3D_GAUSS_GET(SIFT3D.GSS_filters, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_GAUSS_WIDTH_FCTR - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_GAUSS_WIDTH_FCTR - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- SIFT3D_have_gpyr(SIFT3D.SIFT3DC) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_HELP - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_IM_CONTAINS_CVEC(SIFT3D.Image, SIFT3D.Cvec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_IM_GET_GRAD(SIFT3D.Image, int, int, int, int, SIFT3D.Cvec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_INCONSISTENT_AXES - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_INT - gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm_type
-
- SIFT3D_MATCH_MAX_DIST - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_MATCH_MAX_DIST - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- SIFT3D_matches_to_Mat_rm(SIFT3D.SIFT3D_Descriptor_store, SIFT3D.SIFT3D_Descriptor_store, int[], SIFT3D.Mat_rm, SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_MUL_MAT_RM_CVEC(SIFT3D.Mat_rm, SIFT3D.Cvec, SIFT3D.Cvec) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_nn_match(SIFT3D.SIFT3D_Descriptor_store, SIFT3D.SIFT3D_Descriptor_store, double, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_nn_thresh_default - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_nn_thresh_default - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- SIFT3D_num_iter_default - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_num_iter_default - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- SIFT3D_ORI_SOLID_ANGLE_WEIGHT - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_ORI_SOLID_ANGLE_WEIGHT - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- SIFT3D_PO_MAX_F - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_PYR_IM_GET(SIFT3D.Pyramid, int, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_PYR_LAST_LEVEL(SIFT3D.Pyramid) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_PYR_LAST_OCTAVE(SIFT3D.Pyramid) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_RANSAC_REFINE - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_RANSAC_REFINE - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- SIFT3D_RESIZE_SLAB(SIFT3D.Slab, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_SINGULAR - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_SUCCESS - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_TRUE - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_UNEVEN_SPACING - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_UNSUPPORTED_FILE_TYPE - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_VERSION - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D_WRAPPER_NOT_COMPILED - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- SIFT3D.Affine - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.CL_data - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Cvec - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Gauss_filter - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.GSS_filters - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Hist - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.im_format - Enum in gov.nih.mipav.model.algorithms
-
- SIFT3D.Image - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.interp_type - Enum in gov.nih.mipav.model.algorithms
-
- SIFT3D.Kernels - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Keypoint - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Keypoint_store - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Mat_rm - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Mat_rm_type - Enum in gov.nih.mipav.model.algorithms
-
- SIFT3D.Mesh - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Pyramid - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Ransac - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Reg_SIFT3D - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Sep_FIR_filter - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.SIFT_cl_kernels - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.SIFT3D_Descriptor - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.SIFT3D_Descriptor_store - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.SIFT3DC - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Slab - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Svec - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Tform - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.tform_type - Enum in gov.nih.mipav.model.algorithms
-
- SIFT3D.Tps - Class in gov.nih.mipav.model.algorithms
-
- SIFT3D.Tri - Class in gov.nih.mipav.model.algorithms
-
- SIFT3DC() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3DC
-
- SIFTAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- SIFTImageSimilarity - Class in gov.nih.mipav.model.algorithms
-
- SIFTImageSimilarity() - Constructor for class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- SIFTImageSimilarity(ModelImage, ModelImage, double, int, double, int, String) - Constructor for class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- SIFTImageSimilarity.DMatch - Class in gov.nih.mipav.model.algorithms
-
- SIFTImageSimilarity.DMatchComparator - Class in gov.nih.mipav.model.algorithms
-
- SIFTImageSimilarity.KeyPoint - Class in gov.nih.mipav.model.algorithms
-
- SIFTImageSimilarity.KeypointComparator - Class in gov.nih.mipav.model.algorithms
-
- sig - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- sig - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCannyEdgeDetection
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation
-
The C++ source code for the port was downloaded from Pedro F.
- sigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameDisc
-
< center y-coordinate
- sigma - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedDisc
-
< center y-coordinate
- sigma - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.FitGaussian
-
Sigma parameter
- sigma - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftKeypoint
-
< s coordinate.
- sigma - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Gauss_filter
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
- sigma - Variable in class gov.nih.mipav.model.algorithms.WishartVariateGenerator
-
- sigma - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- sigma - Variable in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
- sigma - Variable in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
- sigma - Variable in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
- sigma - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- sigma - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- sigma - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
DOCUMENT ME!
- sigma - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- sigma - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- Sigma - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM.model
-
- SIGMA - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- SIGMA_DO_Z_RES_CORRECTION - Static variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Label used for the parameter indicating whether to correct the gaussian's standard deviation Z dimension using
the ratio of the X and Z resolutions.
- sigma_n - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Pyramid
-
- sigma_n_default - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- sigma_nsq - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- sigma0 - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< nominal image smoothing.
- sigma0 - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Pyramid
-
- sigma0_default - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- sigma1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLuminanceAdaptation
-
Reference: Retinex-Based Perceptual Contrast Enhancement in Images
Using Luminance Adaptation by Qingtao Fu, Cheolkon Jung, and
Kaiqiang Xu, IEEE Access, current version November 9, 2018,
Digital Object Identifier 10.1109/ACCESS.2018.2870638.
- sigma1 - Variable in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
- sigma16Button - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- sigma1Button - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- sigma2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLuminanceAdaptation
-
- sigma2 - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- sigma2 - Variable in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
DOCUMENT ME!
- sigma2Button - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- sigma3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLuminanceAdaptation
-
- sigma3 - Variable in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
- sigma4Button - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- sigma8Button - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- sigmaC - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- sigmaColor - Variable in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- sigmaColor - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- sigmaGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- sigmak - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< smoothing of pyramid base.
- sigmaLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- SigmaMakernoteDescriptor(MetadataExtractor.SigmaMakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDescriptor
-
- SigmaMakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- sigmaMaxX - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- sigmaMaxY - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- sigmaMaxZ - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- sigmaMinX - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- sigmaMinY - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- sigmaMinZ - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- sigman - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
- sigmanbinsText - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- sigmaonf - Variable in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- sigmaonf - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- sigmaOnf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- sigmap - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- sigmaPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
- sigmaPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
DOCUMENT ME!
- sigmaPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
DOCUMENT ME!
- sigmaPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
DOCUMENT ME!
- sigmaPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
DOCUMENT ME!
- sigmaPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- sigmaPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
DOCUMENT ME!
- sigmaPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- sigmaPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
DOCUMENT ME!
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Standard deviations of the Gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDualContourSearch
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFastMarching
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLapMedianess
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSetDiffusion
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
the kernel size to use in calculating the gradient magnitude image.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
DOCUMENT ME!
- sigmas - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmAnisotropicDiffusion
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlur
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGaussianBlurSep
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitude
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
UnsharpMask sigmas, for blurring.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
DOCUMENT ME!
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
Standard deviations of the Gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGaussianBlur
-
Standard deviations of the Gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmGradientMagnitude
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmLaplacian
-
Standard deviations of the gaussian used to calculate the kernels.
- sigmas - Variable in class gov.nih.mipav.model.algorithms.GenerateDGaussian
-
standard dev. in each direction
- sigmas - Variable in class gov.nih.mipav.model.algorithms.GenerateGaussian
-
standard dev. in each direction
- sigmas - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
- sigmas - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Std deviation of the Gaussian function.
- sigmas - Variable in class gov.nih.mipav.model.GaussianKernelFactory
-
- sigmas - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- sigmas - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- sigmas - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- SIGMAS - Static variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Label used for the parameter indicating the unnormalized/uncorrected gaussian standard deviation to be used.
- sigmasB - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
second sigma values for dual-deconvolution
- sigmaSpace - Variable in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- sigmaSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- sigmaSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- sigmasPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
DOCUMENT ME!
- sigmasPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- sigmaText - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- sigmaText - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- sigmaU - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- sigmaU - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- sigmaU - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- sigmaU - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- sigmaU - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- sigmaU - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- sigmaV - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- sigmaV - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- sigmaV - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- sigmaV - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- sigmaV - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- sigmaV - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- sigmaX - Variable in class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
- sigmaX - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- sigmaY - Variable in class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
- sigmaY - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- sigmoid(double) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.Neuron
-
- SIGMOID - Static variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- SIGMOID - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- sigmoid_predict(double, double, double) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- sigmoid_predict(double, double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- sigmoid_train(int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- sigmoid_train(int, double[], double[], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- sigmoidNormalizedAlpha - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- sigmoidNormalizedBeta - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- sign - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.SVR_Q
-
- sign - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- sign - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVR_Q
-
- sign(double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- sign(double) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- sign(double) - Method in class gov.nih.mipav.model.algorithms.NESolve
-
- sign(double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- sign(double, double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- sign(double, double) - Method in class gov.nih.mipav.model.algorithms.sproot
-
- sign(double, double, double, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
- sign(DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- sign2Axial - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- sign2ImgA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- signal2Button - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- signal2Button - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- signal2Image - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- signal2Index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
The index of a second optional signal VOI.
- signal2Index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTwoMRIImagesSNR
-
DOCUMENT ME!
- signal2Index - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- signal2Index - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- signalBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
DOCUMENT ME!
- signalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- signalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- signalButton - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- signalImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTwoMRIImagesSNR
-
DOCUMENT ME!
- signalImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- signalIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
DOCUMENT ME!
- signalIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
The index of a required signal VOI.
- signalIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTwoMRIImagesSNR
-
DOCUMENT ME!
- signalIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- signalIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- signalIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- signalResiduals(double, double[], double[], double, int, int, double[], double, double[], double[], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- signalTest() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- SIGNATURE_TYPE_MIXED - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- SIGNED - Static variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- SIGNED_INTEGER - Static variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- SIGNED_PIXEL_REP - Static variable in class gov.nih.mipav.model.file.FileInfoDicom
-
(0028,0103) Pixel Representations
- SignedDistanceCharacters() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.SignedDistanceCharacters
-
- significant_bits - Variable in class gov.nih.mipav.model.file.FileICS
-
- signtype - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- signum() - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns an integer indicating the sign of this value.
- SigSet() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SigSet
-
- sigyy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- SILENT - gov.nih.mipav.model.algorithms.CeresSolver.LoggingType
-
- silver - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- similarity_penalty_weight - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClusteringOptions
-
- similarityAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
Use serialVersionUID for interoperability.
- SimilarityMeasure() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptRes
-
Returns the similarity measure.
- similarityWindowSide - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNonlocalMeansFilter
-
Comparsion window.
- similarityWindowSide - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- simple - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- simple_convolve(double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- simple_hrf_estimation() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- simple_retro_convolve(double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- SimpleColorMap(int...) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.SimpleColorMap
-
- SimpleColorMap(int[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.SimpleColorMap
-
- simpleEigenvalue(double[][], int, String, double[], int, double[], double[][]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
Calculate requested eigenvalues and eigenvectors of a matrix
- simpleEigenvalueTest1() - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- simpleImg1 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
SimpleImages to describe ModelImage data, simpleImg2 is always registered image
- simpleImg1 - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Holds extents, other info about firstImage and SecondImage
- simpleImg1 - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
Holds extents, other info about firstImage and SecondImage
- simpleImg1 - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Holds extents, other info about firstImage and SecondImage
- simpleImg2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
SimpleImages to describe ModelImage data, simpleImg2 is always registered image
- simpleImg2 - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Holds extents, other info about firstImage and SecondImage
- simpleImg2 - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
Holds extents, other info about firstImage and SecondImage
- simpleImg2 - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Holds extents, other info about firstImage and SecondImage
- simpleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of input image.
- simpleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of input image.
- simpleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of input image.
- simpleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of input image.
- simpleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of input image.
- simpleInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of input image.
- simpleInput_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of an image slice of the input image.
- simpleInput_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of an image volume of the input image.
- simpleInput_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of an image slice of the input image.
- simpleInput_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of an image volume of the input image.
- simpleInputSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of an image slice of the input image, subsampled by 16.
- simpleInputSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of an image volume of the input image, subsampled by 16.
- simpleInputSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of an image slice of the input image, subsampled by 16.
- simpleInputSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of an image volume of the input image, subsampled by 16.
- simpleInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of input image, subsampled by 2.
- simpleInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of input image, subsampled by 2.
- simpleInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of input image, subsampled by 2.
- simpleInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of input image, subsampled by 2.
- simpleInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of input image, subsampled by 2.
- simpleInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of input image, subsampled by 2.
- simpleInputSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of an image slice of the input image, subsampled by 2.
- simpleInputSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of an image volume of the input image, subsampled by 2.
- simpleInputSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of an image slice of the input image, subsampled by 2.
- simpleInputSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of an image volume of the input image, subsampled by 2.
- simpleInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of input image, subsampled by 4.
- simpleInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of input image, subsampled by 4.
- simpleInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of input image, subsampled by 4.
- simpleInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of input image, subsampled by 4.
- simpleInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of input image, subsampled by 4.
- simpleInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of input image, subsampled by 4.
- simpleInputSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of an image slice of the input image, subsampled by 4.
- simpleInputSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of an image volume of the input image, subsampled by 4.
- simpleInputSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of an image slice of the input image, subsampled by 4.
- simpleInputSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of an image volume of the input image, subsampled by 4.
- simpleInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of input image, subsampled by 8.
- simpleInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of input image, subsampled by 8.
- simpleInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of input image, subsampled by 8.
- simpleInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of input image, subsampled by 8.
- simpleInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of input image, subsampled by 8.
- simpleInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of input image, subsampled by 8.
- simpleInputSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of an image slice of the input image, subsampled by 8.
- simpleInputSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of an image volume of the input image, subsampled by 8.
- simpleInputSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of an image slice of the input image, subsampled by 8.
- simpleInputSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of an image volume of the input image, subsampled by 8.
- simpleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of reference image.
- simpleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of reference image.
- simpleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of reference image.
- simpleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of reference image.
- simpleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of reference image.
- simpleRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of reference image.
- simpleRef_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of input image.
- simpleRef_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of input image.
- simpleRef_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of input image.
- simpleRef_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of input image.
- simpleRefSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of input image, subsampled by 16.
- simpleRefSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of input image, subsampled by 16.
- simpleRefSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of input image, subsampled by 16.
- simpleRefSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of input image, subsampled by 16.
- simpleRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of reference image, subsampled by 2.
- simpleRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of reference image, subsampled by 2.
- simpleRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of reference image, subsampled by 2.
- simpleRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of reference image, subsampled by 2.
- simpleRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of reference image, subsampled by 2.
- simpleRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of reference image, subsampled by 2.
- simpleRefSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of input image, subsampled by 2.
- simpleRefSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of input image, subsampled by 2.
- simpleRefSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of input image, subsampled by 2.
- simpleRefSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of input image, subsampled by 2.
- simpleRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of reference image, subsampled by 4.
- simpleRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of reference image, subsampled by 4.
- simpleRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of reference image, subsampled by 4.
- simpleRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of reference image, subsampled by 4.
- simpleRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of reference image, subsampled by 4.
- simpleRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of reference image, subsampled by 4.
- simpleRefSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of input image, subsampled by 4.
- simpleRefSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of input image, subsampled by 4.
- simpleRefSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of input image, subsampled by 4.
- simpleRefSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of input image, subsampled by 4.
- simpleRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of reference image, subsampled by 8.
- simpleRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of reference image, subsampled by 8.
- simpleRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of reference image, subsampled by 8.
- simpleRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of reference image, subsampled by 8.
- simpleRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of reference image, subsampled by 8.
- simpleRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of reference image, subsampled by 8.
- simpleRefSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of input image, subsampled by 8.
- simpleRefSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of input image, subsampled by 8.
- simpleRefSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of input image, subsampled by 8.
- simpleRefSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of input image, subsampled by 8.
- simpleSort(int, int, int) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- simpleWeightI_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- simpleWeightI_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- simpleWeightI_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- simpleWeightI_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- simpleWeightInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of weighted input image.
- simpleWeightInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of weighted input image.
- simpleWeightInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of weighted input image.
- simpleWeightInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of weighted input image.
- simpleWeightInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of weighted input image.
- simpleWeightInput - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of weighted input image.
- simpleWeightInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of weighted input image, subsampled by 2.
- simpleWeightInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of weighted input image, subsampled by 2.
- simpleWeightInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of weighted input image, subsampled by 2.
- simpleWeightInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of weighted input image, subsampled by 2.
- simpleWeightInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of weighted input image, subsampled by 2.
- simpleWeightInputSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of weighted input image, subsampled by 2.
- simpleWeightInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of weighted input image, subsampled by 4.
- simpleWeightInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of weighted input image, subsampled by 4.
- simpleWeightInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of weighted input image, subsampled by 4.
- simpleWeightInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of weighted input image, subsampled by 4.
- simpleWeightInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of weighted input image, subsampled by 4.
- simpleWeightInputSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of weighted input image, subsampled by 4.
- simpleWeightInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of weighted input image, subsampled by 8.
- simpleWeightInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of weighted input image, subsampled by 8.
- simpleWeightInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of weighted input image, subsampled by 8.
- simpleWeightInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of weighted input image, subsampled by 8.
- simpleWeightInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of weighted input image, subsampled by 8.
- simpleWeightInputSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of weighted input image, subsampled by 8.
- simpleWeightISub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- simpleWeightISub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- simpleWeightISub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- simpleWeightISub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- simpleWeightISub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- simpleWeightISub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- simpleWeightISub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- simpleWeightISub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- simpleWeightISub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- simpleWeightISub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- simpleWeightISub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- simpleWeightISub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- simpleWeightISub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- simpleWeightISub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- simpleWeightISub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- simpleWeightISub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- simpleWeightR_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of weighted input image.
- simpleWeightR_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of weighted input image.
- simpleWeightR_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of weighted input image.
- simpleWeightR_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of weighted input image.
- simpleWeightRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of weighted reference image.
- simpleWeightRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of weighted reference image.
- simpleWeightRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of weighted reference image.
- simpleWeightRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of weighted reference image.
- simpleWeightRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of weighted reference image.
- simpleWeightRef - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of weighted reference image.
- simpleWeightRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of weighted reference image, subsampled by 2.
- simpleWeightRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of weighted reference image, subsampled by 2.
- simpleWeightRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of weighted reference image, subsampled by 2.
- simpleWeightRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of weighted reference image, subsampled by 2.
- simpleWeightRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of weighted reference image, subsampled by 2.
- simpleWeightRefSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of weighted reference image, subsampled by 2.
- simpleWeightRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of weighted reference image, subsampled by 4.
- simpleWeightRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of weighted reference image, subsampled by 4.
- simpleWeightRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of weighted reference image, subsampled by 4.
- simpleWeightRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of weighted reference image, subsampled by 4.
- simpleWeightRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of weighted reference image, subsampled by 4.
- simpleWeightRefSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of weighted reference image, subsampled by 4.
- simpleWeightRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Simple version of weighted reference image, subsampled by 8.
- simpleWeightRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Simple version of weighted reference image, subsampled by 8.
- simpleWeightRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Simple version of weighted reference image, subsampled by 8.
- simpleWeightRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Simple version of weighted reference image, subsampled by 8.
- simpleWeightRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Simple version of weighted reference image, subsampled by 8.
- simpleWeightRefSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Simple version of weighted reference image, subsampled by 8.
- simpleWeightRSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of weighted input image, subsampled by 16.
- simpleWeightRSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of weighted input image, subsampled by 16.
- simpleWeightRSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of weighted input image, subsampled by 16.
- simpleWeightRSub16_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of weighted input image, subsampled by 16.
- simpleWeightRSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of weighted input image, subsampled by 2.
- simpleWeightRSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of weighted input image, subsampled by 2.
- simpleWeightRSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of weighted input image, subsampled by 2.
- simpleWeightRSub2_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of weighted input image, subsampled by 2.
- simpleWeightRSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of weighted input image, subsampled by 4.
- simpleWeightRSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of weighted input image, subsampled by 4.
- simpleWeightRSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of weighted input image, subsampled by 4.
- simpleWeightRSub4_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of weighted input image, subsampled by 4.
- simpleWeightRSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Simple version of weighted input image, subsampled by 8.
- simpleWeightRSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Simple version of weighted input image, subsampled by 8.
- simpleWeightRSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Simple version of weighted input image, subsampled by 8.
- simpleWeightRSub8_1 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Simple version of weighted input image, subsampled by 8.
- simplex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- simplex - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- simplex_sort(NelderMead.simplex_t) - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- simplex_t() - Constructor for class gov.nih.mipav.model.algorithms.NelderMead.simplex_t
-
- simplexCentre - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- simplexCentre - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- simplexDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
Size of the simplex vertex array (5 == tx, ty, rot, zoomx, zoomy).
- simplexDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- simplexDim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- simplexLineValues - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- simplexLineValues - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- simplexNumber() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- SIMPLEXOPT - Static variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- simplexResiduals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- simplexResiduals - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- simplicity(double, double[], double, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- simplicity_max(double, double[], int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
- simplifiedInstances() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RationalTest
-
- sin() - Method in class gov.nih.mipav.util.DoubleDouble
-
For all real x, sin(x) = x - x**3/3!
- sin(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- sin(double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- sin22 - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- sinButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- sinc(double) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- sinc(double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- sinc2(double[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sincKernel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- sincWidth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- sincx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- sincy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- sincz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- SINGLE - gov.nih.mipav.view.dialogs.AlgorithmTreParams.InversionType
-
- SINGLE_EXPONENTIAL - Static variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- SINGLE_LEVEL_DWT - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- SINGLE_LEVEL_DWT - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- SINGLE_LINKAGE - gov.nih.mipav.model.algorithms.CeresSolver.VisibilityClusteringType
-
- SINGLE_PHOTON_EMISSION_COMPUTED_TOMOGRAPHY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality SPECT.
- SINGLE_PHOTON_EMISSION_COMPUTED_TOMOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality SPECT.
- singleButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- singleExpButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- SingleFrameEyetrackerMode - Static variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- singleInversion - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- singleInvRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- singleLevelDWTButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- singleLevelSet(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Creates a single level set.
- singleLevelSet2(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Creates a single level set.
- SingleLinkageClusteringComponentWithWeakLink() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SingleLinkageClusteringComponentWithWeakLinkAndStrongLink() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SingleLinkageClusteringGraphHasTwoComponents() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SingleLinkageClusteringOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.SingleLinkageClusteringOptions
-
- singleSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- singleSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- singleSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- singleSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- singleSlice - Variable in class gov.nih.mipav.view.JPanelStatisticsList
-
Whether this list is dealing with lists of 2D contours.
- singletonReference - Static variable in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
The reference to the only occurrance of this class.
- singletonReference - Static variable in class gov.nih.mipav.model.scripting.ScriptRecorder
-
The reference to the only occurrance of this class.
- singletonReference - Static variable in class gov.nih.mipav.model.scripting.ScriptRunner
-
The reference to the only occurrance of this class.
- singletonReference - Static variable in class gov.nih.mipav.model.scripting.VariableTable
-
The reference to the only VariableTable which should ever be instantiated.
- singleTSlice - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- SinglyEvenMagicSquare(int[][], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- SingularValueDecomposition - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
Singular Value Decomposition.
- SingularValueDecomposition(CVisDMatrix) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Construct the singular value decomposition
- sinh() - Method in class gov.nih.mipav.util.DoubleDouble
-
For all real x, sinh(x) = x + x**3/3!
- sinh(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
- sinh(double) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- sinusoidalData - Static variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- Sinv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.LandData
-
- Sit - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- Site() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Site
-
- siteidx - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- sitenbr - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Site
-
- sites - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- Sitx - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- sixButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- sixButton - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- sixButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- sixButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- sixButton - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- sixItems(int, int, int, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItems
-
- sixItemsComparator() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency.sixItemsComparator
-
- siz - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- size - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.KeyPoint
-
- size - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.uni_elt
-
- size - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D.intObject
-
- size - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D.intObject
-
DOCUMENT ME!
- size - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D.intObject
-
DOCUMENT ME!
- size - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Block
-
- size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Chunk
-
- size - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- size - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- size - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdres
-
- size - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- size - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Cache
-
- size - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- size - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm
-
- size - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.KeyPoint
-
- size - Variable in class gov.nih.mipav.model.structures.TableSorter.Arrow
-
DOCUMENT ME!
- size - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- size - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_TristripAux
-
- size - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache
-
- size() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- size() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Subpath
-
Gets size of knots list
- size() - Method in class gov.nih.mipav.model.scripting.parameters.ParameterTable
-
Returns the number of parameters contained in the table.
- size() - Method in class gov.nih.mipav.model.structures.PointStack
-
Returns the number of points.
- size() - Method in class gov.nih.mipav.model.structures.TransferFunction
-
Indicated the number of points in the function.
- size() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSet
-
DOCUMENT ME!
- size() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
return number of non-zero entries in the matrix.
- size() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- size() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- size() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- size() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- Size() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- Size(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- SIZE - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- SIZE() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.SIZE
-
- SIZE(int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.SIZE
-
- SIZE(POINT) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.SIZE
-
- SIZE(SIZE) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.SIZE
-
- size_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.HomogeneousVectorParameterization
-
- size_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IdentityParameterization
-
- size_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- size_log2(int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- SIZE_MAX_PLATEAU - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- size_penalty_weight - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClusteringOptions
-
- SIZE_TESTING_COST_FUNCTION - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- sizeArray - Variable in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- sizeC - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- sizeCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- sizeConstraint - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
default size constraint contribution:.
- SIZED_CIRCLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- SIZED_CIRCLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- SIZED_CIRCLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- SIZED_CIRCLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- SIZED_SPHERE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- SIZED_SPHERE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- SizedCostFunction(int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SizedCostFunction
-
- SizedCostFunction(int, int, int, int, int, int, int, int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SizedCostFunction
-
- sizeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
- sizeI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- sizeLimit - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- sizeList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- sizeof() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Gets the data size in bytes of the units held in this class.
- sizeof_hdr - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Always of length 348.
- sizeof_hdr - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Should always be a length of 348.
- sizeof_hdr - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Always of length 348.
- sizeof_hdr - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- sizePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- sizes - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
Kernel dimensionality.
- sizes - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- SizeTestingCostFunction(int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SizeTestingCostFunction
-
- sizeTextField - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- sizeX - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- sizeX - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF
-
- sizeX - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- sizeY - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- sizeY - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.OTF
-
- sizeY - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- sizeZ - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- sizeZ - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- Skeleton3D - Class in gov.nih.mipav.view.renderer.flythroughview
-
Implementation of the 3D skeletonization of a binary volume based on the paper "Penalized-distance volumetric
skeleton algorithm"; I.
- Skeleton3D(ModelImage, ModelImage3DLayout) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.Skeleton3D
-
Create a 3D skeletonization of the specified binary volume of data.
- skeletonize(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
Skeletonizes the image by using a lookup table to repeatedly remove pixels from the edges of objects in a binary
image, reducing them to single pixel wide skeletons.
- skeletonize(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Skeletonizes the image by using a lookup table to repeatedly remove pixels from the edges of objects in a binary
image, reducing them to single pixel wide skeletons.
- skeletonize(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Skeletonizes the image by using a lookup table to repeatedly remove pixels from the edges of objects in a binary
image, reducing them to single pixel wide skeletons.
- SKELETONIZE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- SKELETONIZE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- SKELETONIZE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- SKELETONIZE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- SKELETONIZE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- SKELETONIZE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- skeletonizeAlgo25D - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- skeletonizeAlgo2D - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- skeletonizeAlgo3D - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- skernelX - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Kernels for the Smoothing kernel.
- skernelY - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- skernelZ - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- skewness - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- Skewness() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the skewness the vector.
- skewnessB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- skewnessDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- skewnessG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- skewnessR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- SKIN - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Sets up the transfer function colors to be skin-colors.
- skinPresetButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Skin segmentation preset opacity transform function control button.
- skip - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- skip(long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialByteArrayReader
-
- skip(long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Skips forward in the sequence.
- skip(long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.StreamReader
-
- skip_blank() - Method in class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- skip_input_data(libjpeg.jpeg_decompress_struct, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- skip_variable(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- SKIP_VARIABLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- skipBlocks(MetadataExtractor.SequentialReader) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifReader
-
- skipBytes(byte[], int) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.TestHelper
-
- skipBytes(int) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Skips to a new point in the buffer.
- skipBytes(int) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- skipCommentAndWhiteSpace() - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Skips any line in the header starting with '#' and any space, tab, line
feed or carriage return.
- skipInternal(long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.StreamReader
-
- SkipLines() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Skip comment line or empty line
- skipPadding(int) - Method in class gov.nih.mipav.model.file.FileSVS.BitInputStream
-
- skipPadding(int) - Method in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- skipPadding(int) - Method in class gov.nih.mipav.model.file.FileTiff.BitInputStream
-
- skipPadding(int) - Method in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- skippedBytes - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Number of bytes to skip
- skippedEntity(String) - Method in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
Do nothing but show the entity we skipped.
- skippedEntity(String) - Method in class gov.nih.mipav.model.file.FileOME.MyXMLHandler
-
Handle any skipped entities by writing them out to the debug window.
- skippedEntity(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D.SurfaceRefXMLHandler
-
Do nothing but show the entity we skipped.
- skippedEntity(String) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Do nothing but show the entity we skipped.
- skippedEntity(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Do nothing but show the entity we skipped.
- skippedEntity(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM.SurfaceRefXMLHandler
-
Do nothing but show the entity we skipped.
- skippedLines - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Number of lines to skip
- skipPreCheckbox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- skipTime - Variable in class gov.nih.mipav.model.file.FileAvi
-
- skipToNonopaque(int, short[]) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
An array is maintained that keeps track of opaque intermediate pixels during the resampling phase.
- skipVariable(int) - Method in class gov.nih.mipav.model.file.FileDicomJPEG
-
Skip this variable.
- skr2Irregular() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- skr2IrregularCIELab() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- skr2L1Regular() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- skr2Regular(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- skr2RegularCIELab(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- skRadius - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
Width of the smoothing buffer.
- skullRemoval() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Main algorithm implementation, skull segmentation and removal.
- SL - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- slab - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint_store
-
- Slab() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Slab
-
- SlantTransform - Class in gov.nih.mipav.model.algorithms
-
One dimensional forward and inverse slant transforms are ported from FORATRAN programs in Appendix A
of AD-767 758 Technical Report Slant Transform Image Coding by Wen-Hsiung Cheng of the University of
Southern California, prepared for the Advanced Research Projects Agency, Air Force Eastern Test Range, May 1973.
- SlantTransform() - Constructor for class gov.nih.mipav.model.algorithms.SlantTransform
-
- SlantTransform(ModelImage, ModelImage, ModelImage, int, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.SlantTransform
-
- sleepAmount - Variable in class gov.nih.mipav.view.ImageRegistryMonitor
-
DOCUMENT ME!
- sleepAmount - Variable in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
DOCUMENT ME!
- sleeptime - Variable in class gov.nih.mipav.model.structures.ReminderThread
-
DOCUMENT ME!
- sleeptime - Variable in class gov.nih.mipav.model.structures.TimeoutThread
-
DOCUMENT ME!
- slice - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHeightFunction
-
DOCUMENT ME!
- slice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark.CostFunction
-
DOCUMENT ME!
- slice - Variable in class gov.nih.mipav.model.file.FileUtility.nameSliceItem
-
- slice - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Current slice of image
- slice - Variable in class gov.nih.mipav.view.dialogs.JDialogTextGE
-
DOCUMENT ME!
- slice - Variable in class gov.nih.mipav.view.dialogs.JDialogTextGE4X
-
DOCUMENT ME!
- slice - Variable in class gov.nih.mipav.view.PatientSlice
-
The 2D slice to extract from the ModelImage:.
- slice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Current slice of 3D image, used to figure out XY plane to plot.
- slice - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- slice - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
current slice for 3D images:
- slice - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- slice - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- slice() - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the slice value of the contour on every plane.
- slice(int) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Returns the point value the contour has in common if it lies in the given plane.
- slice(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- SLICE - gov.nih.mipav.view.ViewJSlider.SliderType
-
- SLICE - Static variable in class gov.nih.mipav.view.ViewJSlider
-
- slice_dim - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Bits 4 and 5 of the dim_info character contain the slice_dim information. 0 for
"No slice acquisition direction is present", 1 for "Slice acquisition in the x direction", 2 for
"Slice acquisition in the y direction", and 3 for "Slice acquisition in the z direction".
- slice_dim - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Bits 4 and 5 of the dim_info character contain the slice_dim information.
0 for "No slice acquisition direction is present", 1 for "Slice acquisition in the x direction",
2 for "Slice acquisition in the y direction", and 3 for "Slice acquisition in the z direction".
- SLICE_GROUPING - Static variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- SLICE_INDEX - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeResolutions
-
The label to use for the parameter indicating the index of the slice from which to set/retrieve the resolutions.
- SLICE_THICKNESS - Static variable in class gov.nih.mipav.model.file.FileDicom
-
- SLICE_THICKNESS - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeResolutions
-
The label to use for the parameter indicating the slice thickness.
- slice_timeField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- SLICE_XY - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Constants for xy plane, yz plane and zx plane.
- SLICE_XY - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Constants for xy plane, yz plane and zx plane.
- SLICE_XY - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
Constants for xy plane, yz plane and zx plane.
- SLICE_YZ - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
- SLICE_YZ - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
- SLICE_YZ - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- SLICE_ZX - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
- SLICE_ZX - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
- SLICE_ZX - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- sliceAdaptiveTruncatedVectorMedianFilter(float[], float[], int, String) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Allows a single slice to be filtered.
- sliceAdaptiveVectorFilter(float[], float[], int, String) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Allows a single slice to be filtered.
- sliceAng - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
par/rec slice Angulation
- sliceAng - Variable in class gov.nih.mipav.model.file.FileInfoSPAR
-
par/rec slice Angulation
- sliceAng0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- sliceAng1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- sliceAng2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- sliceArea - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Area of a slice (Xdim * Ydim).
- sliceArea - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlices
-
Area of a slice (Xdim * Ydim).
- sliceArea - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
Area of a slice (Xdim * Ydim).
- sliceArea - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Area of a slice (Xdim * Ydim).
- sliceArea - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Area of a slice (Xdim * Ydim).
- sliceArea - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Area of a slice (Xdim * Ydim).
- sliceBox - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
DOCUMENT ME!
- sliceBuf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
The image slice that holds the VOI we are working on.
- sliceBufferDouble - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- sliceBufferDouble - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- sliceBufferFloat - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- sliceBufferFloat - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- sliceButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- sliceCode - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
If this is nonzero, AND if slice_dim is nonzero, AND if slice_duration is positive, indicates the timing pattern
of the slice acquisition.
- sliceCode - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
If this is nonzero, AND if slice_dim is nonzero, AND
if slice_duration is positive, indicates the timing
pattern of the slice acquisition.
- SliceColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- sliceCosts - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- sliceCosts - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- sliceDialog - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Dialog to turn the slices control box on and off.
- sliceDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- sliceDistanceFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
Whether or not to calculate largest slice distance, true by default
- sliceDuration - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Time used to acquire 1 slice.
- sliceDuration - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Time used to acquire 1 slice.
- sliceEnd - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Slice timing pattern ends with slice = (sliceEnd + 1)
- sliceEnd - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Slice timing pattern ends with slice = (sliceEnd + 1)
- sliceField - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
DOCUMENT ME!
- sliceFilter(float[], float[], int, String) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Allows a single slice to be filtered.
- sliceFilter(float[], float[], int, String) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Allows a single slice to be filtered.
- sliceFilterBorder(float[], float[], int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Allows a single slice to be filtered.
- sliceFilterBorder(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Performs mode filtering on a single slice with a 2D or 3D buffer.
- sliceFiltering - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- sliceFiltering - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
do all filtering slice-by-slice, rather than as a volume.
- sliceFiltering - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
do all filtering slice-by-slice, rather than as a volume.
- sliceGapString - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
slice gap String
- sliceGradient - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- sliceGradientDuration - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- sliceGradientLimit - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- sliceGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
3D Slice-view user-interface panel:
- sliceHdrSize - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- sliceIDs - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- sliceImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceSlice
-
DOCUMENT ME!
- sliceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
DOCUMENT ME!
- sliceImageComponent2D - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Each Texture2D adds a ImageComponent2D:
- sliceImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
image vector.
- sliceIndex - Variable in class gov.nih.mipav.model.scripting.actions.ActionChangeResolutions
-
index of the slice from which to retrieve the resolutions.
- sliceIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
slice index for which fileInfo is saved *
- sliceIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.SliceSet
-
- sliceIndex1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
slice index for voi1
- sliceIndex2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
slice index for voi2
- sliceInfo - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
slice specific info
- sliceLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- sliceLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- sliceList - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip.ShapeHolder
-
DOCUMENT ME!
- sliceLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Used for construction of the preview.
- sliceLocation - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
DICOM slice location.
- sliceLocation - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- SliceMap - Variable in class gov.nih.mipav.model.file.FilePARREC
-
slice map
- sliceModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageModel
-
- sliceModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageModelSVM
-
- sliceMultiplier - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- sliceMultiplier - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- sliceNum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- sliceNum - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- sliceNum - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmReplaceSlice
-
DOCUMENT ME!
- sliceNum - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubset
-
Slice value for removed dimension.
- sliceNum - Variable in class gov.nih.mipav.model.file.FilePaintBitmap
-
File directory where the VOI is to read or written.
- sliceNum - Variable in class gov.nih.mipav.model.file.FileVOI
-
File directory where the VOI is to read or written.
- sliceNum - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
DOCUMENT ME!
- sliceNum - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- sliceNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- sliceNumber - Variable in class gov.nih.mipav.model.file.FileVOI.MyXMLHandler
-
The slice the VOI contour should be on.
- sliceNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- sliceNumber - Variable in class gov.nih.mipav.view.dialogs.MyXMLHandler
-
The slice the VOI contour should be on.
- sliceNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.SliceSetString
-
- sliceNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
The slice the VOI contour should be on.
- sliceNumCache - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- sliceOffset - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWColorSlice
-
- sliceOldNumber - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
red, green, and blue origContrast remains constant until applyButton is pressed, restores contrast if
cancelButton is pressed.
- sliceOldNumber - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- sliceOrientation - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
- sliceOrientIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- sliceOrientPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- slicePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- slicePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Dialog to turn the slices control box on and off.
- slicePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Dialog to turn the slices control box on and off.
- slicePanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- sliceParallelVectorFilter(float[], float[], int, String) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Allows a single slice to be filtered.
- SliceParameters - Variable in class gov.nih.mipav.model.file.FilePARREC
-
slice parameters
- slicePosition - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- slicePosition - Variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- slicePosition - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
- sliceQuantity - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- sliceQuantity - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- sliceRefNum - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- sliceRenum - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Reordering of slices/volumes.
- sliceRenum - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Reordering of slices/volumes
- sliceResolutions - Variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- slices - Variable in class gov.nih.mipav.model.file.FileTiff
-
- Slices - Variable in class gov.nih.mipav.model.file.FilePARREC
-
slices
- SLICES_COARSE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
DOCUMENT ME!
- SLICES_FINE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Used to select which nodes in the switch is selected.
- sliceSeparationMode - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
The slice inversion time of the scan
- SliceSet - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- SliceSet(int, int, int, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.SliceSet
-
- SliceSetString(int, Vector<String>, Vector<String>) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.SliceSetString
-
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The size, in voxels, of a slice of the volume.
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
xDim * yDim.
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Computed as xDim*yDim
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Number of pixels used by a slice/volume, includes colorFactor.
- sliceSize - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- sliceSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Used for construction of the preview.
- slicesPts - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- slicesPts - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- slicesPts - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- slicesPts - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- slicesPts - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- sliceStart - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Slice timing pattern starts with slice = (sliceStart + 1)
- sliceStart - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Slice timing pattern starts with slice = (sliceStart + 1)
- slicesTextField - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- sliceString - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- sliceStructure - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ImageAttribute
-
- slicesVector - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
slices *
- slicesWithTimeOffsets - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- slicesWithTimeOffsets - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- sliceTextures - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
ViewJComponentTriSliceImages -> Texture2D to display the image slices:
- sliceThickness - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
The thickness of individual slices in the image volume.
- sliceThickness - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
26 in mm.
- sliceThickness - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- sliceThickness - Variable in class gov.nih.mipav.model.file.FileInfoNRRD
-
- sliceThickness - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- sliceThickness - Variable in class gov.nih.mipav.model.scripting.actions.ActionChangeResolutions
-
the slice thickness.
- sliceThickness - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- sliceThicknessDisclaimer - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- sliceThicknessDisclaimer - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- sliceThicknessString - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
sliec thickness
- sliceThicknessTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- sliceTime - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- sliceTouched - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Slices that have been examined in recursive structure for swapping slices.
- SliceTransferable(int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter.SliceTransferable
-
- sliceTransparency - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
ViewJComponentTriSliceImages -> Texture2D transparency values:
- sliceType - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Insert an AVERAGE or BLANK image slice.
- sliceType - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- sliceVectorDirectionFilter(float[], float[], int, String) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Allows a single slice to be filtered.
- sliceVectorMagnitudeFilter(float[], float[], int, String) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Allows a single slice to be filtered.
- sliceVisible - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Flags indicating if the image slices are on or off.
- sliceVisible - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Flags indicating if the image slices are on or off.
- SLIDE_MICROSCOPY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality slide microscopy.
- SLIDE_MICROSCOPY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality slide microscopy.
- slider - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- slider - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- slider - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- slider - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- slider2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- slider2 - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- sliderA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static, static inverse and arbitrary clipping plane boundary box.
- sliderControlPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- sliderCount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Slider moves event counter.
- sliderCount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Slider moves event counter.
- sliderEvents - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Slider events used by the mouse recorder.
- sliderEvents - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Slider events used by the mouse recorder.
- sliderFrame - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Slider for frame/slice of image.
- sliderLevMax - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- sliderLevMin - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- sliderMax - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- sliderMaxMax - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
labels at top and bottom of sliders indicating slider bounds *
- sliderMaxMin - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
labels at top and bottom of sliders indicating slider bounds *
- sliderMinMax - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
labels at top and bottom of sliders indicating slider bounds *
- sliderMinMin - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
labels at top and bottom of sliders indicating slider bounds *
- sliderPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- sliderPanel - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- sliderPanel - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- sliderT - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Sliders for the image planes.
- sliderT - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Sliders for the image planes.
- sliderT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Sliders for the image planes.
- SliderType(String) - Constructor for enum gov.nih.mipav.view.ViewJSlider.SliderType
-
- sliderWinMax - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- sliderWinMin - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- sliderX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Sliders for the image planes.
- sliderX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
The probe X slider that control the probe push and pull movements.
- sliderX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Sliders for the image planes.
- sliderXInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders for the image planes.
- sliderY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Sliders for the image planes.
- sliderY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Sliders for the image planes.
- sliderYInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders for the image planes.
- sliderZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Sliders for the image planes.
- sliderZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
3, 1-100%, dictating where the image in the surface should be displayed.
- sliderZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Sliders for the image planes.
- sliderZInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sliders for the image planes.
- sln - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- slocfov - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
274 Slice offsets on frequency axis.
- SLONG - gov.nih.mipav.model.file.FileSVS.Type
-
32 bit signed, again only 4 bytes
- SLONG - gov.nih.mipav.model.file.FileTiff.Type
-
32 bit signed, again only 4 bytes
- SLONG - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SLONG - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- slop_float_1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
676 Float Slop Field 1.
- slop_float_2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
680 Float Slop Field 2.
- slop_float_3 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
684 Float Slop Field 3.
- slop_float_4 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
688 Float Slop Field 4.
- slop_float_5 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
692 Float Slop Field 5.
- slop_int_1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
656 Integer Slop Field 1.
- slop_int_2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
660 Integer Slop Field 2.
- slop_int_3 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
664 Integer Slop Field 3.
- slop_int_4 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
668 Integer Slop Field 4.
- slop_int_5 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
672 Integer Slop Field 5.
- slop_int_6 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
974 Integer Slop Field 6.
- slop_int_7 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
978 Integer Slop Field 7.
- slop_int_8 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
982 Integer Slop Field 8.
- slop_int_9 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
986 Integer Slop Field 9.
- slop_str_1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
696 16 characters String Slop Field 1.
- slop_str_2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
712 16 characters String Slop Field 2.
- slope - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- slope - Variable in class gov.nih.mipav.model.structures.HQueue
-
DOCUMENT ME!
- slope - Variable in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- slope - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
The slope and offset of the total least squares line.
- slopes - Variable in class gov.nih.mipav.model.structures.TransferFunction
-
The array of pre-calculated slope values.
- slow - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- slow - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- slow_decision_map(double[][][], double[][][], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- slow_di_pochhammer(double, int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- slow_majority_filter(boolean[][][], int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- slow_pochhammer(double, int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- slow_tri_pochhammer(double, int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- SLOW2DFCT(double[], int, int) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- SLOW2DIFCT(double[], int, int) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- slowButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- slowChirp(double[][], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- SLOWFCT(double[], int) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- SLOWIFCT(double[], int) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- slowPPFT(double[][][], double[][][], double[][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- slowppft3(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- slowRadon(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- slowradon3(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- slquant - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
398 Number of slices in this scan group.
- slupdt(double[], double, int, double, double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- slvmul(int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- sm - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.SparseMatrix
-
- sm2Algo - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
DOCUMENT ME!
- sm2Task(int, int, int, double[], double[], double[], double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task
-
- small - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- small - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- small - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- small_dlatb4 - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
- small_list - Variable in class gov.nih.mipav.model.file.libjpeg.my_memory_mgr
-
- SMALL_NEF - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SMALL_NST - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- small_pool_struct() - Constructor for class gov.nih.mipav.model.file.libjpeg.small_pool_struct
-
- SMALL_THRESH - Static variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- small_zlatb4 - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- smallCircularButton - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- smallestElement() - Method in class gov.nih.mipav.model.structures.IntVector
-
Gets the smallest in value element of array without removing it.
- smallestImagePixelValue - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- smallestMagnitudeNegative - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
smallest magnitude negative and positive.
- smallestMagnitudeNegativeB - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
smallest magnitude negative and positive.
- smallestMagnitudeNegativeG - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
smallest magnitude negative and positive.
- smallestMagnitudeNegativeR - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
smallest magnitude negative and positive.
- smallestMagnitudePositive - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
smallest magnitude negative and positive.
- smallestMagnitudePositiveB - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
smallest magnitude negative and positive.
- smallestMagnitudePositiveG - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
smallest magnitude negative and positive.
- smallestMagnitudePositiveR - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
smallest magnitude negative and positive.
- smallestToLargestAxisRatio - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- smallestToLargestMajorAxisRatio - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleGeneration
-
- smallLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
xDim * yDim.
- smallN - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- smallPointerCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
Custom cursor: small pointer.
- smallPos - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- smallPos - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- smallPos3D - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- smallSliceSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- smallX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- smallX - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- smallY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- smallY - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- SMART - gov.nih.mipav.view.dialogs.AlgorithmTreParams.Threshold
-
- smartCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- smartNoiseField - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- sMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Mask for shrunken buffer.
- smax - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- smax - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- smax - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- smax - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- smax - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- sMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Maximum value of shrunken buffer.
- smin - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- smin - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- smin - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- sMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Minimum value of shrunken buffer.
- Smin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- smirnov(int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- SMIRNOV - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- smirnovi(int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- SMIRNOVI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- SMNAB(int, double, double, double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- smofil_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- smooth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- smooth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- smooth - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- SMOOTH - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- SMOOTH_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Use smoothing model to perform triangle consistency.
- smooth1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
smooth1 and smooth2 are only used with gain field correction.
- smooth1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
smooth1 and smooth2 are only used with gain field correction.
- smooth1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
smooth1 and smooth2 are only used with gain field correction.
- SMOOTH1 - Static variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Smooth type: SMOOTH1 corresponds to ModelTriangleMesh.smoothMesh()
- smooth1Button - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Smooth button.
- smooth1Button - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Smooth button.
- smooth2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
- smooth2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
- smooth2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- SMOOTH2 - Static variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Smooth type: SMOOTH2 corresponds to ModelTriangleMesh.smoothTwo()
- smooth2Button - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Smooth button.
- smooth2Button - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Smooth button.
- SMOOTH3 - Static variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Smooth type: SMOOTH3 corresponds to ModelTriangleMesh.smoothThree()
- smooth3Button - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Smooth button.
- smooth3Button - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Smooth button.
- smoothAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- smoothAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- smoothAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- smoothB1Box - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- smoothB1Field - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- smoothB1Field - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- smoothCurvature - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- smoothCurve(VOIContour, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- smoothCurve(VOIContour, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Generates the Natural Spline for the lattice center-line curve.
- smoothCurve(Vector<VOIWormAnnotation>) - Static method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- smoothedIntensity(ModelImage, ModelImage, double, double, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- smoothFace(BitSet) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Connects near neighbors of set values in removeRegion.
- smoothField(double[][], float[][], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- smoothFieldB(double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- smoothGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
- smoothGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- smoothing - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- smoothing - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- smoothing_ok(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- smoothing2D(int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
Performs 2D and 2.5 nonlinear smoothing.
- smoothing3D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
Performs 3D nonlinear smoothing.
- smoothingKernel - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- smoothMesh(int, float, boolean, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Smooth mesh.
- smoothMesh(int, float, boolean, float, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Smooth mesh.
- smoothMesh(String, int, float, boolean, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Smooth the given surface.
- smoothMesh(String, int, float, boolean, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Smooth the given surface.
- smoothness - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- smoothness - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
The maximum angle we want to have between points in the result VOI.
- smoothness - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- smoothness - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- smoothPath(int, LinkedList, LinkedList, LinkedList, LinkedList, LinkedList, LinkedList) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Smooth the path.
- smoothPath(TriMesh, int, LinkedList<Integer>, LinkedList<Integer>, LinkedList<Integer>, LinkedList<Integer>, LinkedList<Integer>, LinkedList<Vector4f>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Smooth the path.
- smoothSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- smoothSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- smoothSize - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Optional smooth parameter for both cost functions
- smoothSurface(int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Smoothes the selected surfaces.
- smoothSurface(SurfaceAttributes[], int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Smoothes the selected surfaces.
- smoothThree(int, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Smooth mesh.
- smoothThree(int, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Smooth mesh.
- smoothThree(String, int, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Smooth the given surface.
- smoothThree(String, int, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Smooth the given surface.
- smoothTwo(int, float, boolean, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Derived from the first 2 of the 3 components of AlgorithmBrainExtraction Note that m_fStiffness does not increase
and then decrease as in AlgorithmBrainExtraction but instead remains constant.
- smoothTwo(int, float, boolean, float, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Derived from the first 2 of the 3 components of AlgorithmBrainExtraction Note that m_fStiffness does not increase
and then decrease as in AlgorithmBrainExtraction but instead remains constant.
- smoothTwo(String, int, float, boolean, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Smooth the given surface.
- smoothTwo(String, int, float, boolean, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Smooth the given surface.
- smoothVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- smoothVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- smoothVOI(ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- smoothVOI120(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Convert the mask image to VOI with 120 points.
- smoothVOI120(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Convert the mask image to VOI with 120 points.
- smoothVOI120Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- smoothVOI120Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- smoothVOI120Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- smoothVOI120Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- smoothVOI120Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- smoothVOI128(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- smoothVOI128(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- smoothVOI128(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- smoothVOI128(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- smoothVOI128(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- smoothVOI128(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- smoothVOI128double(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- smoothVOI128single(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- smoothVOI128single(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- smoothVOI150Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- smoothVOI150Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- smoothVOI150Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- smoothVOI150Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- smoothVOI150Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
Smooth the AAM initial generated contour with 30 landmark points.
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Smooth generated VOI contours by 30 points.
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Smooth VOI with 30 points.
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- smoothVOI30(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- smoothVOI30Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- smoothVOI30Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- smoothVOI30Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- smoothVOI32(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- smoothVOI50(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Convert the mask image to VOI with 50 points
- smoothVOI50(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Convert the mask image to VOI with 50 points
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
Smooth VOIs to 60 points.
- smoothVOI60(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
Smooth VOIs to 60 points.
- smoothVOI60DualContour(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- smoothVOI60DualContour(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- smoothVOI60DualContour(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- smoothVOI60DualContour(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- smoothVOI60DualContour(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- smoothVOI60DualContour(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- smoothVOI60Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- smoothVOI60Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- smoothVOI60Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- smoothVOI60Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- smoothVOI60Single(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- smoothVOI60Special(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- smoothVOI60Special(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- smoothVOI60Special(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- smoothVOI60Special(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- smoothVOI60Special(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- smoothVOI60Special(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- smoothVOIFlag - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- smoothVOISingle(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- smoothVOISingle(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- smoothVOISingle(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- smoothVOISingle(ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- smoothVOISingle(ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- smoothVOISingle(ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- smoothVOISingle(ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- smoothVOISingle(ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- smoothVolumeLookup2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- smoothVolumeLookup3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- sn - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- sn - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- sn - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- sn - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dwt_t
-
- sn - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_v4dwt_t
-
- SN - Static variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- snakeAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- snakeAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- SnakeInitialiser() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- SnakeNode() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- snapButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Camera button.
- snapToTarget - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Whether to snap to center of a target surface when it is selected; defaults to true.
- snapToTargetCB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Checkbox indicating whether to snap to center of a target surface when it is selected.
- snnAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- sNormal - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- sNormal - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- snp_data - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- snrAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
DOCUMENT ME!
- snrAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- snrAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- SNSI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- sobelAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSobel
-
DOCUMENT ME!
- socket - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
socket used to connect to server.
- socket - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Socket object.
- SOF0 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (0) segment identifier for Baseline DCT.
- SOF0 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF0 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF1 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (1) segment identifier for Extended sequential DCT.
- SOF1 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF1 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF10 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (10) segment identifier for Progressive DCT.
- SOF10 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF10 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF11 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (11) segment identifier for Lossless (sequential).
- SOF11 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF11 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF13 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (13) segment identifier for Differential sequential DCT.
- SOF13 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF13 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF14 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (14) segment identifier for Differential progressive DCT.
- SOF14 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF14 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF15 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (15) segment identifier for Differential lossless (sequential).
- SOF15 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF15 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF2 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (2) segment identifier for Progressive DCT.
- SOF2 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF2 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF3 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (3) segment identifier for Lossless (sequential).
- SOF3 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF3 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF5 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (5) segment identifier for Differential sequential DCT.
- SOF5 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF5 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF6 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (6) segment identifier for Differential progressive DCT.
- SOF6 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF6 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF7 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (7) segment identifier for Differential lossless (sequential).
- SOF7 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF7 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- SOF9 - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start-of-Frame (9) segment identifier for Extended sequential DCT.
- SOF9 - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOF9 - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- soft - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- soft(double[][], double[][], double, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- soft(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- soft(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- soft(double[][], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- soft(double[], double[], double, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- soft(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- soft(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- soft(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.SlantTransform
-
- soft(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- soft(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- SOFT - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- SOFT - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- SOFT_THRESHOLDING - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- SOFT_THRESHOLDING - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- softButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- softButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- softButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- SoftLineSearch(CDVector, double, CDVector, CDVector, CDVector, double[], boolean[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
Perform line search
Given g'p < 0 and alpha < 1/2 (alpha = 1e-4 is used), find plus = xc +
lambda p,lambda in [0;1], such that f(xplus) <= f(xc) + alpha * lambda *
g'p, using backtracking line search
Algorithm A6.3.1 p. 325 Dennis and Schnabel, Numerical Methods for
Unconstrained Optimization and Nonlinear Equations 1983, Prentice-Hall
Input: xc: parameter fc: function value at xc g: gradient at xc sn:
search direction
Output: xplus: new parameter fplus: function value for new parameter
maxtaken: max taken in line search return termination code
- SoftLOneLoss(double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SoftLOneLoss
-
- softness - Variable in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- softness - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- software - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- software - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- software - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- software - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- SOFTWARE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SOFTWARE - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- SOFTWARE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- SOFTWARE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- SoftwareLight - Class in gov.nih.mipav.view.renderer.J3D
-
The base class for lights in a general lighting system to calculate colors at a point in space.
- SoftwareLight() - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Construct a light.
- SoftwareLight(SoftwareLight) - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
Copy (deep) constructor.
- SoftwareLightAmbient - Class in gov.nih.mipav.view.renderer.J3D
-
The class for ambient lights in a general lighting system to calculate ambient colors at a point in space.
- SoftwareLightAmbient() - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareLightAmbient
-
Construct an ambient light.
- SoftwareLightAmbient(SoftwareLightAmbient) - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareLightAmbient
-
Copy (deep) constructor.
- SoftwareLightDirectional - Class in gov.nih.mipav.view.renderer.J3D
-
The class for directional lights in a general lighting system to calculate diffuse and specular colors at a point in
space.
- SoftwareLightDirectional() - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
Construct a directional light.
- SoftwareLightDirectional(SoftwareLightDirectional) - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
Copy (deep) constructor.
- SoftwareLightPoint - Class in gov.nih.mipav.view.renderer.J3D
-
The class for point lights in a general lighting system to calculate diffuse and specular colors at a point in space.
- SoftwareLightPoint() - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Construct a point light.
- SoftwareLightPoint(SoftwareLightPoint) - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
Copy (deep) constructor.
- SoftwareLightSet - Class in gov.nih.mipav.view.renderer.J3D
-
This class maintains a set of SoftwareLight instances where each light can be of type ambient, directional, point, or
spot.
- SoftwareLightSet() - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareLightSet
-
Default constructor.
- SoftwareLightSpot - Class in gov.nih.mipav.view.renderer.J3D
-
The class for spot lights in a general lighting system to calculate diffuse and specular colors at a point in space.
- SoftwareLightSpot() - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Construct a spot light.
- SoftwareLightSpot(SoftwareLightSpot) - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
Copy (deep) constructor.
- SoftwareMaterial - Class in gov.nih.mipav.view.renderer.J3D
-
This class maintains the following material properties:
- SoftwareMaterial() - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareMaterial
-
Default constructor.
- softwareVersions - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- SoftwareVertexProperty - Class in gov.nih.mipav.view.renderer.J3D
-
This class maintains the following properties for a vertex.
- SoftwareVertexProperty() - Constructor for class gov.nih.mipav.view.renderer.J3D.SoftwareVertexProperty
-
Default constructor.
- SOI - gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Start Of Image segment identifier.
- SOI - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOI - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- sol_b - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- sol_eta - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- sol_expected - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- SOLID - Static variable in class gov.nih.mipav.model.structures.VOI
-
Indicates that the VOI should be displayed as a solid and not just a boundary.
- solidCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- solidity - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- solidityDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- soliuc(double, int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- soliuc(DoubleDouble, int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- SOLNC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- solsimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solsimag - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solsreal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solsreal - Variable in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- SOLUN - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- solution - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- SolutionInfo() - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.Solver.SolutionInfo
-
- SolutionInfo() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver.SolutionInfo
-
- solve(double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- solve(JamaMatrix) - Method in class gov.nih.mipav.model.structures.jama.JamaMatrix
-
- solve(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraAlgorithm
-
- solve(Matrix, Matrix) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDWI2DTI
-
- Solve(double[], double[], double[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- Solve(int, LIBSVM.QMatrix, double[], byte[], double[], double, double, double, LIBSVM.Solver.SolutionInfo, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver_NU
-
- Solve(int, LIBSVM.QMatrix, double[], byte[], double[], double, double, double, LIBSVM.Solver.SolutionInfo, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- Solve(int, QMatrix, double[], byte[], double[], double, double, double, Solver.SolutionInfo, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver_NU
-
- Solve(int, QMatrix, double[], byte[], double[], double, double, double, Solver.SolutionInfo, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- Solve(CeresSolver.GradientProblemSolverOptions, CeresSolver.GradientProblem, double[], CeresSolver.GradientProblemSolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Solve(CeresSolver.LinearOperator, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CgnrSolver
-
- Solve(CeresSolver.LinearOperator, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ConjugateGradientsSolver
-
- Solve(CeresSolver.LinearOperator, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseNormalCholeskySolver
-
- Solve(CeresSolver.LinearOperator, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseQRSolver
-
- Solve(CeresSolver.LinearOperator, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolver
-
- Solve(CeresSolver.LinearOperator, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TypedLinearSolver
-
- Solve(CeresSolver.LinearOperator, Vector<Double>, CeresSolver.LinearSolverPerSolveOptions, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ConjugateGradientsSolver
-
- Solve(CeresSolver.Program, CeresSolver.LinearSolver, double[], int, CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CoordinateDescentMinimizer
-
- Solve(CeresSolver.SolverOptions, CeresSolver.ProblemImpl, CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Solve(SparseMatrix, VectorF, int, VectorF, float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- Solve(SparseSymmetricMatrix, VectorD, int, VectorD, double, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseSymmetricMatrix
-
- Solve(SparseSymmetricMatrix, VectorD, int, VectorD, double, int, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseSymmetricMatrix
-
- Solve(SparseSymmetricMatrix, VectorF, VectorF, int, VectorF, float, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseSymmetricMatrix
-
- solve_c_svc(LIBSVM.svm_problem, LIBSVM.svm_parameter, double[], LIBSVM.Solver.SolutionInfo, double, double) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- solve_c_svc(svm_problem, svm_parameter, double[], Solver.SolutionInfo, double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- solve_depressed_cubic(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_depressed_cubic(QuarticEquation.complex_t[], QuarticEquation.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_depressed_cubic(QuarticEquationEP.complex_t[], QuarticEquationEP.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_depressed_cubic(DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_depressed_poly(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_depressed_poly(int, QuarticEquation.complex_t[], QuarticEquation.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_depressed_poly(int, QuarticEquationEP.complex_t[], QuarticEquationEP.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_depressed_poly(int, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_depressed_quadratic(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_depressed_quadratic(QuarticEquation.complex_t[], QuarticEquation.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_depressed_quadratic(QuarticEquationEP.complex_t[], QuarticEquationEP.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_depressed_quadratic(DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_depressed_quartic(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_depressed_quartic(QuarticEquation.complex_t[], QuarticEquation.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_depressed_quartic(QuarticEquationEP.complex_t[], QuarticEquationEP.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_depressed_quartic(DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_directly2D(double[], double[], double[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- solve_directly3D(double[], double[], double[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- solve_epsilon_svr(LIBSVM.svm_problem, LIBSVM.svm_parameter, double[], LIBSVM.Solver.SolutionInfo) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- solve_epsilon_svr(svm_problem, svm_parameter, double[], Solver.SolutionInfo) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- solve_l1r_l2_svc(Problem, double[], double, double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
A coordinate descent algorithm for
L1-regularized L2-loss support vector classification
- solve_l1r_lr(Problem, double[], double, double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
A coordinate descent algorithm for
L1-regularized logistic regression problems
- solve_l2r_l1l2_svc(Problem, double[], double, double, double, SolverType) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
A coordinate descent algorithm for
L1-loss and L2-loss SVM dual problems
- solve_Mat_rm(SIFT3D.Mat_rm, SIFT3D.Mat_rm, double, SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- solve_Mat_rm_ls(SIFT3D.Mat_rm, SIFT3D.Mat_rm, SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- solve_normalized_poly(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_normalized_poly(int, QuarticEquation.complex_t[], QuarticEquation.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_normalized_poly(int, QuarticEquationEP.complex_t[], QuarticEquationEP.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_normalized_poly(int, DoubleDouble[], double[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_normalized_poly(int, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_nu_svc(LIBSVM.svm_problem, LIBSVM.svm_parameter, double[], LIBSVM.Solver.SolutionInfo) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- solve_nu_svc(svm_problem, svm_parameter, double[], Solver.SolutionInfo) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- solve_nu_svr(LIBSVM.svm_problem, LIBSVM.svm_parameter, double[], LIBSVM.Solver.SolutionInfo) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- solve_nu_svr(svm_problem, svm_parameter, double[], Solver.SolutionInfo) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- solve_one_class(LIBSVM.svm_problem, LIBSVM.svm_parameter, double[], LIBSVM.Solver.SolutionInfo) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- solve_one_class(svm_problem, svm_parameter, double[], Solver.SolutionInfo) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- solve_poly(int, QuarticEquation.complex_t[], QuarticEquation.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_poly(int, QuarticEquationEP.complex_t[], QuarticEquationEP.complex_t[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_real_poly(int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- solve_real_poly(int, DoubleDouble[], double[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_real_poly(int, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- solve_sub_problem(double, int, double, int, double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- solve_system(SIFT3D.Mat_rm, SIFT3D.Mat_rm, SIFT3D.Affine) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- solve_tril(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- solve_tril2(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- solve_triu(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- solve_triu2(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- SolveFixedDepthMatrix(int, int, SortedTreeNodes) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- SolveFixedDepthMatrix(int, SortedTreeNodes) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- SolveImpl(CeresSolver.BlockSparseMatrix, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CgnrSolver
-
- SolveImpl(CeresSolver.BlockSparseMatrix, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.IterativeSchurComplementSolver
-
- SolveImpl(CeresSolver.BlockSparseMatrix, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- SolveImpl(CeresSolver.DenseSparseMatrix, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseNormalCholeskySolver
-
- SolveImpl(CeresSolver.DenseSparseMatrix, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseQRSolver
-
- SolveImpl(CeresSolver.DenseSparseMatrix, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.RegularizationCheckingLinearSolver
-
- SolveImpl(MatrixType, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TypedLinearSolver
-
- SolveInPlaceUsingCholesky(int, double[][], double[], String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- SolveInPlaceUsingQR(int, int, double[][], int, double[], double[], String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- solveLinearEquation(double[][], double[][], double[][], double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- SolveP2(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- SolveP3(double[], double, double, double) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- SolveP4(double[], double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- SolveP4Bi(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- SolveP4De(double[], double, double, double) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- SolveP5(double[], double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- SolveP5_1(double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- solver - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- Solver - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- Solver() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.Solver
-
- Solver() - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- Solver() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- SOLVER_ABORT - gov.nih.mipav.model.algorithms.CeresSolver.CallbackReturnType
-
- SOLVER_CONTINUE - gov.nih.mipav.model.algorithms.CeresSolver.CallbackReturnType
-
- Solver_NU - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- Solver_NU() - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.Solver_NU
-
- Solver_NU() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver_NU
-
- solver_summary_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- SOLVER_TERMINATE_SUCCESSFULLY - gov.nih.mipav.model.algorithms.CeresSolver.CallbackReturnType
-
- Solver.SolutionInfo - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- SolverCantMixEvaluationCallbackWithInnerIterations() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolveReducedLinearSystem(CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSchurComplementSolver
-
- SolveReducedLinearSystem(CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurComplementSolver
-
- SolverFixedCostForConstantProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolverIterativeLinearSolverForDogleg() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolverLinearSolverTypeNormalOperation() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolverLineSearchProblemHasNoParameterBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolverLineSearchProblemHasZeroResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolverLineSearchProblemIsConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolverMCSVM_CS - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- SolverMCSVM_CS(Problem, int, double[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- SolverMCSVM_CS(Problem, int, double[], double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- SolverMCSVM_CS(Problem, int, double[], double, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- SolverOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- SolverOptionsDefaultLineSearchOptionsAreValid() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolverOptionsDefaultTrustRegionOptionsAreValid() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolverSummary() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- SolverTrustRegionProblemHasNoParameterBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolverTrustRegionProblemHasZeroResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolverTrustRegionProblemIsConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolveRTRWithSparseRHS(int, int[], int[], double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- solverType - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- solverType - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
- SolverType - Enum in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- SolverType() - Constructor for enum gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverType
-
- SolverUpdateStateEveryIterationOption() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolveSymmetric(SparseMatrix, VectorF, int, VectorF, float, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- solveSymmetricCG(int, float[], float[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
Conjugate gradient method for sparse, symmetric matrices.
- SolveUpperTriangularInPlace(int, int[], int[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- SolveUpperTriangularTestRTRSolveWithSparseRHS() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolveUpperTriangularTestSolveInPlace() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolveUpperTriangularTestTransposeSolveInPlace() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- SolveUpperTriangularTransposeInPlace(int, int[], int[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- SolveUsingEigen(CeresSolver.DenseSparseMatrix, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseNormalCholeskySolver
-
- SolveUsingEigen(CeresSolver.DenseSparseMatrix, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseQRSolver
-
- SolveUsingLAPACK(CeresSolver.DenseSparseMatrix, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseNormalCholeskySolver
-
- SolveUsingLAPACK(CeresSolver.DenseSparseMatrix, double[], CeresSolver.LinearSolverPerSolveOptions, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseQRSolver
-
- SonyEncodedDataDirectoryBase() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SonyEncodedDataDirectoryBase
-
- SonyTag9050bDescriptor(MetadataExtractor.SonyTag9050bDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDescriptor
-
- SonyTag9050bDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- SonyType1MakernoteDescriptor(MetadataExtractor.SonyType1MakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDescriptor
-
- SonyType1MakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- SonyType1MakernoteTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.SonyType1MakernoteTest
-
- SonyType6MakernoteDescriptor(MetadataExtractor.SonyType6MakernoteDirectory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SonyType6MakernoteDescriptor
-
- SonyType6MakernoteDirectory() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.SonyType6MakernoteDirectory
-
- SonyType6MakernoteTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.SonyType6MakernoteTest
-
- sop_uid - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
778 32 characters Service Obj Clas Unique ID.
- SOPInstanceUID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
String representing the SOP Instance UID
- SOPInstanceUID - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- Sopt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexOptions
-
< covariance type for R (usually COV_IID).
- Sopt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
- sorh - Variable in class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
- sort() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- sort() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
After the heap is initialized, it must be sorted.
- sort(float[], int[], int) - Static method in class gov.nih.mipav.model.file.FileIO
-
Sorts an array of floats (using Arrays.sort), turns into array of ints used to sort images by A; thus, the final
value of B[i] is for the ith image read in, put that image at location B[i] in the image buffer.
- sort(int[], int[], int) - Static method in class gov.nih.mipav.model.file.FileIO
-
Sorts an array of ints (using insertion sort), turns into array of ints used to sort images by image number;
thus, the final value of B[i] is for the ith image read in, put that image at location B[i] in the image buffer.
- sort(ViewTableModel, int, boolean) - Static method in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
Sort the tag column or name column of the table model.
- sort(ViewTableModel, int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Sorts the column of the table model.
- sort(ViewTableModel, int, boolean, boolean) - Static method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
Sort the tag column or name column of the table model.
- sort(ViewTableModel, int, boolean, boolean) - Static method in class gov.nih.mipav.view.dialogs.JDialogFileInfoMincHDF
-
Sort the tag column or name column of the table model.
- sort(Object[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.QuickSort
-
- sort(Object[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.QuickSort
-
- sort(Object[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.QuickSort
-
- sort(Object[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.QuickSort
-
- Sort() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
- Sort(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Sorts the vector in either ascending (default) or descending order.
- SortableHeaderRenderer(TableCellRenderer) - Constructor for class gov.nih.mipav.model.structures.TableSorter.SortableHeaderRenderer
-
Creates a new SortableHeaderRenderer object.
- sortAll() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
Sort the full path tables for images and vois.
- sortBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
DOCUMENT ME!
- sortBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
here for memory/speed concerns.
- sortCEDImageVOIs(ModelImage, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Sort the CED image VOIs
- sortCEDImageVOIs(ModelImage, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Sort the CED image VOIs
- sortCrossingPoints(float[], int) - Static method in class gov.nih.mipav.model.structures.VOIBase
-
Sorts the edge crossing points in place.
- sortCrossingPoints(int[], int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Sorts the edge crossing points in place.
- sortCrossingPoints(int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Sorts the edge crossing points in place.
- sortCrossingPoints(int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Sorts the edge crossing points in place.
- sortDtiDicomData(String, String, String, FileDicomTagTable, FileInfoDicom[], int[], int, int[]) - Method in class gov.nih.mipav.model.file.FileIO
-
- sorted - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- SortedTreeNodes - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- SortedTreeNodes() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortedTreeNodes
-
- sorter - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
- sortg(double[], int, double[]) - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtility
-
DOCUMENT ME!
- sortg(DoubleDouble[], int, DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.filters.FFTUtilityEP
-
DOCUMENT ME!
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Sort the testing image directory in accending order.
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Sort the testing image directory in accending order.
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- sortImageTable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- sortImageVectorString(Vector<String>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Sort image vector in ascending order.
- sortImageVOIs(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Sorting image VOI
- sortImageVOIs(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Sorting image VOI
- sortImageVOIsInit(ModelImage, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Sort the original MR image's specified VOIs
- sortImageVOIsInit(ModelImage, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Sort the original MR image's specified VOIs
- sortingColumns - Variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- sortingStatusChanged() - Method in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- SortingTableModel - Class in gov.nih.mipav.model.structures
-
DOCUMENT ME!
- SortingTableModel() - Constructor for class gov.nih.mipav.model.structures.SortingTableModel
-
Creates a new SortingTableModel object.
- sortKeyImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- sortKeyImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- sortKeyImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
- sortKeyImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
- sortKeyImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
- sortKeyImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- sortKeyImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- sortKeyImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- sortKeyImage_1() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- sortKeyImage_2() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- sortKeyImage_3() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- sortKeyImage_4() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- sortKeyImage_5() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- sortKeyImage_Map() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- sortKeyImage_OrigImg() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- sortLeicaFiles(JDialogLoadLeica.LeicaSeries) - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
DOCUMENT ME!
- sortModelStructure - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
SVM model vector after sorted by name.
- sortTagKeys(Hashtable<FileDicomKey, FileDicomTagInfo>) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Sorts the list of tags and returns it as an array in order of FileDicomKeys.
- sortTags(FileDicomKey[], Object[]) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- sortTagsList(Collection<FileDicomTag>) - Static method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Sorts the list of tags and returns it as an array in order.
- sortTagsList(Dictionary<FileDicomKey, FileDicomTag>) - Static method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Sorts the list of tags and returns it as an array in order.
- sortTriIndex(Point3i, Point3f[], Vector3f[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Used when new triangles are added to the mesh, either when the mesh is triangulated along the smoothed geodesic
curve, or when the mesh is cut. sortTriIndex sorts the triangle indices so that the triangle is always
front-facing and that the normals are correct for rendering
- sortTriIndex(Vector3f, VertexBuffer) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Used when new triangles are added to the mesh, either when the mesh is triangulated along the smoothed geodesic
curve, or when the mesh is cut. sortTriIndex sorts the triangle indices so that the triangle is always
front-facing and that the normals are correct for rendering
- SortUtil - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
Quick and merge sort implementations that create no garbage, unlike Arrays.sort(int[]).
- SortUtil() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortUtil
-
- SortVector(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- sortVOITable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- sortVOITable() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- sortVOIVectorString(Vector<String>) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
Sort VOI name vector in ascending order.
- SOS - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- SOS - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- source - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAbortRQ
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRJ
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.model.structures.UpdateVOIEvent
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.ArrayListTransferHandler
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.StandardMouse
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.StandardMouse
-
Event source
- source - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.StandardKey
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseWheel
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouse
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouseDragged
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.StandardMouse
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouse
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouseDragged
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.KeyPressedEvent
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
DOCUMENT ME!
- source - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.RightMouse
-
DOCUMENT ME!
- source() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- SOURCE - Static variable in class gov.nih.mipav.view.DICOMDisplayer
-
A source type message is the server from which the images are coming.
- sourceBitPix - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Source bits per pixel : 1,8,16,32,64,128 24(rgb).
- sourceBitPix - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Source bits per pixel = sourceBitPix
- SourceBlend - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- sourceFile - Variable in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- sourceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- sourceImage - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- sourceInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
FileInfoDicom for source image
- sourceList - Variable in class gov.nih.mipav.view.dialogs.JDialogListSaveSelection
-
List of available VOIs.
- sourceMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- sourceMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- sourcePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- sourceRoot - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
DOCUMENT ME!
- sourceRoot - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
DOCUMENT ME!
- sourceTagsAL - Variable in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.MyCellRenderer
-
- sourceTextF - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- sourceType - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- sourceType - Variable in class gov.nih.mipav.model.file.FileFits
-
DOCUMENT ME!
- sourceType - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Original unscaled source data type
- sourceType - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Original unscaled source data type
- sourceVoiModel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
The tree of VOIs, composed of an image with children VOIs
- sourceVoiModel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
The tree of VOIs, composed of an image with children VOIs
- sourceVoiTree - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
The graphical representation of voiModel
- sourceVoiTree - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
The graphical representation of voiModel
- south - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- South - gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.AnchorPosition
-
- Sp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Lifo
-
- SP(int) - Constructor for class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
-
- space - Variable in class gov.nih.mipav.model.file.FileNRRD
-
RAS, LAS, LPS, RAST, LAST, LPST, SCANNER_XYZ, SCANNER_XYZ_TIME, THREED_RIGHT_HANDED, THREED_LEFT_HANDED,
THREED_RIGHT_HANDED_TIME, or THREED_LEFT_HANDED_TIME
- space - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- space - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- spaceDirections - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Second index of spaceDirections specifies row of matrix to set.
- spaceField - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- spaceField - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- spaceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- spaceLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- SpaceNavigatorController - Class in gov.nih.mipav.view.input.spacenav
-
Allows for controlling a SpaceNavigator, could also be generalized for any joystick-type device.
- SpaceNavigatorController() - Constructor for class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- SpaceNavigatorEvent - Class in gov.nih.mipav.view.input.spacenav
-
Allows events to originate from GPURenderBase
- SpaceNavigatorEvent(GPURenderBase) - Constructor for class gov.nih.mipav.view.input.spacenav.SpaceNavigatorEvent
-
- SpaceNavigatorListener - Interface in gov.nih.mipav.view.input.spacenav
-
Interface for receiving space navigator events.
- SpaceNavigatorPoller - Class in gov.nih.mipav.view.input.spacenav
-
Polls the space navigator.
- SpaceNavigatorPoller() - Constructor for class gov.nih.mipav.view.input.spacenav.SpaceNavigatorPoller
-
- spaceNavMax - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
actual min and max values for the 3D mouse (the space navigator)
- spaceNavMin - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
actual min and max values for the 3D mouse (the space navigator)
- spaceOrigin - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Used to set origin values.
- spaceRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- spaceRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- spaceString - Variable in class gov.nih.mipav.model.file.FileInfoNRRD
-
Possible values are "right-anterior-superior", "left-anterior-superior", "left-posterior-superior",
"right-anterior-superior-time", "left-anterior-superior-time", "left-posterior-superior-time",
"scanner-xyz", "scanner-xyz-time", "3d-right-handed", "3d-left-handed",
"3d-right-handed-time", "3d-left-handed-time"
- spaceText - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Text field of the ray trace space size.
- spaceUnits - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Bits 0, 1, and 2 of xyzt_units specify the units of pixdim[1..3],
that is the spatial units of the nifti x, y, and z axes.
0 means "Spatial units are unknown",
1 means "Spatial units are meters",
2 means "Spatial units are millimeters",
3 means "Spatial units are micrometers".
- spaceUnitsString - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- spacing - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.NetworkSnake
-
- SPACING_BETWEEN_SLICES - Static variable in class gov.nih.mipav.model.file.FileDicom
-
- spacingBetweenSlices - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- spacings - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Resolutions values for nrrd axes
- SPAR - Static variable in class gov.nih.mipav.model.file.FileUtility
-
SPAR file format for use with PARREC images
- spare_full - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- spare_row8 - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- spare_row9to12 - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- sparse_linear_algebra_library_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- sparse_linear_algebra_library_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- sparse_linear_algebra_library_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- sparse_linear_algebra_library_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- sparse_linear_algebra_library_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CovarianceOptions
-
- SPARSE_NORMAL_CHOLESKY - gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverType
-
- SPARSE_QR - gov.nih.mipav.model.algorithms.CeresSolver.CovarianceAlgorithmType
-
- SPARSE_SCHUR - gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverType
-
- SparseEigenvalue - Class in gov.nih.mipav.model.structures.jama
-
These sparse symmetric eigenvalue and eigenvector routines are ported from the FORTRAN ARPACK package.
- SparseEigenvalue() - Constructor for class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
Creates a new SparseEigenvalue object.
- SparseLinearAlgebraLibraryType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.SparseLinearAlgebraLibraryType
-
- SparseMatrix - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- SparseMatrix() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- SparseMatrix() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.SparseMatrix
-
- SparseMatrix() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- SparseMatrix(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- SparseMatrix(int, int) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.SparseMatrix
-
- SparseMatrix(SparseMatrix) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- SparseMatrixPreconditionerWrapper(CeresSolver.SparseMatrix) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrixPreconditionerWrapper
-
- SparseSymmetricMatrix - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- SparseSymmetricMatrix() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseSymmetricMatrix
-
- SPATIAL_CORRELATION_COEFFICIENT - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- spatialBandwidth - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- spatialBandwidth - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- spatialCorrelationCoefficient - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- spatialGaussianButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- spatialGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- spatialKernelType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- spatialKernelType - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- spatialScale - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- spatialText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- spatialUniformButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- special_case(double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- specificCharacterSet - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- specimen - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- specimen - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- specimenSpecies - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- specimenSpecies - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- specsum - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- SPECTRAL_ANGLE_MAPPER - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- spectral_conv - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.ConvAndLinear
-
- spectral_convolve(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- spectral_deconvolve(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- spectral_radius_est(fMRIBlindDeconvolution.ConvAndLinear, int, int, double, boolean) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- spectral_retro_convolve(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- spectral_retro_deconvolve(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- spectralScan - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- spectraNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- SPECTROSCOPY - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
- SPECTROSCOPY_DATA - Static variable in class gov.nih.mipav.model.file.FileDicom
-
- Spectrum - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- SPECTRUM - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Sets up the transfer function colors to be colours of .
- spectrumNumber - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- spectStudyGeneral - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- spectStudyReconstructedData - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- specular - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLight
-
DOCUMENT ME!
- specular - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareMaterial
-
DOCUMENT ME!
- SPECULAR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
- specularButton - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Specular color button for vertex material.
- specularColor - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
DOCUMENT ME!
- specularColor - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- specularVector - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- speed - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
double scalar containing an estimate of the linear convergence factor.
- speed - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
double scalar containing an estimate of the linear convergence factor.
- speed(float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
Calculates the speed at some point q.
- speedInt - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- speedLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- speedLabelTable - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- speedSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- speedThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- speedThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- speedThresholdLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- speedThresholdText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- speedupCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- speedUpGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- speedUpLevel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- speedUpLevel - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- SpeedUpLevel() - Constructor for enum gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.SpeedUpLevel
-
- spence(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- SPENCE - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- spgrData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- spgrData - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- spgrImageComboBoxAr - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- spgrImageIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- spgrImageIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- spgrNumFA - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- spgrPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- spgrRepTime - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- sphere - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Sphere showing where the user clicked in the surface.
- SPHERE - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
DOCUMENT ME!
- SPHERE_RADIUS - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Radius of the sphere control points of the widget in world coordinates.
- sphereBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Default burning point array.
- sphereBranch - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Branch group parent of the sphere.
- sphereClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- sphereColorButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- sphereDiameter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
kernel diameter.
- sphereDiameter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
kernel diameter.
- sphereDiameter - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- sphereRadius - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- spheres - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Burning point sphere.
- SPHERES_DIFFERENT_SIZES - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- SPHERES_DIFFERENT_SIZES - Static variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- sphereScale - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- sphereShowing - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Flag indicating if the sphere is currently showing.
- sphereTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Transform group parent of the sphere.
- spinAngle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Rotation row angle.
- spinAngle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Rotation row angle.
- spineLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- spineLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- spineLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- spineMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- spineMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- spineMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- spineMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- spineMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- spineMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- spinIcon - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- spinLower - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
handling of intensity threshold.
- spinnerDefaultValue - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Used to setup the paint spinner.
- spinnerMax - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Used to setup the paint spinner.
- spinnerMin - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Used to setup the paint spinner.
- spinnerStep - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Used to setup the paint spinner.
- spinTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Row transform.
- spinTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Row transform.
- spinUpper - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- splev - Class in gov.nih.mipav.model.algorithms
-
- splev(double[], int, double[], int, double[], double[], int, int, int[]) - Constructor for class gov.nih.mipav.model.algorithms.splev
-
- spline - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- spline - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- spline - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- spline_lambda - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- spline_subsample - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- spline_type - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- spline_type - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- splineButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- splineControlPtsList - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- splineDegree - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- splineModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- splineModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- splineOrder - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- splineOrder - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- splineOrder - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- splineOrder - Variable in class gov.nih.mipav.model.structures.BSplineKernelFunction
-
- splineOrder - Variable in class gov.nih.mipav.model.structures.CoxDeBoorBSplineKernelFunction
-
- splineRangeIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- SplineSmooth(VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Bspline smoothing
- SplineWavelets() - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- split(VOIBase, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- SPLIT - Static variable in class gov.nih.mipav.util.DoubleDouble
-
The value to split a double-precision value on during multiplication
- Split_crit() - Constructor for enum gov.nih.mipav.model.algorithms.libdt.Split_crit
-
- Split_mode() - Constructor for enum gov.nih.mipav.model.algorithms.libdt.Split_mode
-
- split_pnm - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
- split_select_varIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- split_select_varIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- split_select_weights - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- split_select_weights - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- split_select_weights_file - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- split_values - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- split_varIDs - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- Split_vars() - Constructor for enum gov.nih.mipav.model.algorithms.libdt.Split_vars
-
- SPLIT_VOI - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the MIPAV cursor is in split VOI mode
- splitClasses() - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- SplitComplexFormat - gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDataFormat
-
- spliterator - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.ParallelForEachExecutor
-
- spliterator() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Returns a Spliterator over the pixels of this image.
- spliterator(int, int, int, int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Creates a Spliterator over the pixels within the specified area.
- spliteratorMinimumSplitSize - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
minimum number of elements this Img's Spliterators can be split to.
- SPLITLINE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- splitNode(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- splitNodeInternal(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- splitNodeInternal(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- splitNodeInternal(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- splitNodeInternal(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- splitNodeInternal(int, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- splitOpt - Variable in class gov.nih.mipav.model.algorithms.libdt.EMOptions
-
- splitOpt - Variable in class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- SPLITP - gov.nih.mipav.model.algorithms.libdt.Split_crit
-
- splitPane - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
- splitPaneCenter - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- splitPaneLower - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- splitPaneUpper - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- splitPNM - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- SPLITQ - gov.nih.mipav.model.algorithms.libdt.Split_crit
-
- splitrule - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- splitrule - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- splitrule - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- SplitRule() - Constructor for enum gov.nih.mipav.model.algorithms.StochasticForests.SplitRule
-
- splitString(Vector<String>, String, String) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- splitVOI() - Method in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
Splits the VOI
- splitVOIs(boolean, boolean, VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- sPLT - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- SPM - Static variable in class gov.nih.mipav.model.file.FileUtility
-
SPM file format.
- spm_hrf(double[], double[], double, double, double, boolean, double, double, double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- spmpar(int) - Method in class gov.nih.mipav.model.algorithms.CDFLIB
-
- sposl(int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- sposl(int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- spotRadio - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Spot light radio button.
- spotRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Spot light radio button.
- spp - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- spp - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- sproot - Class in gov.nih.mipav.model.algorithms
-
- sproot() - Constructor for class gov.nih.mipav.model.algorithms.sproot
-
- sproot(double[], int, double[], double[], int, int[], int[]) - Constructor for class gov.nih.mipav.model.algorithms.sproot
-
- SQ - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- SQ(double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- SQ(double) - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- sqdist(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- sqDistance(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- sqr() - Method in class gov.nih.mipav.util.DoubleDouble
-
Computes the square of this value.
- sqr(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- Sqr() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Takes the power of two of each element.
- Sqr() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Squares each element.
- SQR(double) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
SQR = x^2.
- SQR(double) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
SQR = x^2.
- SQR(double) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
SQR = x^2.
- SQR(double) - Static method in class gov.nih.mipav.view.ViewJFrameRegistration
-
SQR = x^2.
- SQR(double) - Static method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
SQR = x^2.
- sqrdc(double[][], int, int, double[], int[], int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- sqrdc(DoubleDouble[][], int, int, DoubleDouble[], int[], int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- sqrsl(double[][], int, int, double[], double[], double[], double[], double[], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- sqrsl(DoubleDouble[][], int, int, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- sqrt() - Method in class gov.nih.mipav.util.DoubleDouble
-
Computes the positive square root of this value.
- Sqrt() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Takes the square root of each element.
- Sqrt() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Takes the square root of each element.
- Sqrt(double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- SQRT_3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- sqrt_nsites - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- sqrt_rho1_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Corrector
-
- sqrt10 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- sqrt10 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- sqrt2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- sqrt2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- sqrt2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- sqrt2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- sqrt2 - Static variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- SQRT2 - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- sqrt2_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sqrt3 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- sqrt5 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- sqrt5 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- sqrt6 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
- sqrtc(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
Performs square root of complex argument.
- sqrtc(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
- sqrtc(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Ported from Tohru Morita article Performs square root of complex argument.
- sqrtem5 - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- sqrtem5 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- SQRTH - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- sqrtNum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- sqrtw - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- sqrtXY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- sqrtXY - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- sqrtXYZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConvolver
-
- sqrtXYZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDConvolver
-
- sqteta_dotprd - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- sqteta_v2norm - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- SQTPI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- Square - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes
-
- Square - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- Square - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
- Square() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.Square
-
- SQUARE - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- SQUARE - gov.nih.mipav.view.dialogs.JDialogZoom.ZoomMode
-
- SQUARE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- SQUARE - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
- SQUARE(double) - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- SQUARE_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
square kernel.
- SQUARE_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
square kernel (2D only).
- SQUARE_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
square kernel (2D only).
- SQUARE_ROOT - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- SQUARE_ROOT - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- squareButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Buttons for selecting magnifying shape.
- squareCellLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMinimumPerimeterPolygon
-
Square cell length.
- SquareClassificationWidget - Class in gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer
-
This class implements a 2D Square-shaped ClassficiationWidget.
- SquareClassificationWidget(int, int, Vector2f, Vector2f, Texture, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
- squareComp(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- SquaredColumnNorm(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- SquaredColumnNorm(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- SquaredColumnNorm(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- SquaredColumnNorm(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- SquaredColumnNorm(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- SquaredColumnNorm(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- squaredDiag() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- squaredDistance(Point3, Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- SquareDistance(Point3D, Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- squaredNorm() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- SquaredNorm() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- squareEval(float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- SquareLength(Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- SquareLength(Point3D) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- sr - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Reference to ViewJFrameSurfaceRenderer.
- srand - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- SRATIONAL - gov.nih.mipav.model.file.FileSVS.Type
-
signed rational with two longs, 1st numerator
- SRATIONAL - gov.nih.mipav.model.file.FileTiff.Type
-
signed rational with two longs, 1st numerator
- SRATIONAL - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SRATIONAL - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- src - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- src_units - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
- srcArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- srcBufferDepth - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Source buffer number of slices.
- srcBufferDepth - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Source buffer number of slices.
- srcBufferHeight - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Source buffer number of rows.
- srcBufferHeight - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Source buffer number of rows.
- srcBufferWidth - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Source buffer number of columns.
- srcBufferWidth - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Source buffer number of columns.
- srcButton - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
this is a ref to the source button so that the text on the button can be changed
- srcBvalGradTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- srcBvalGradTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- srcByteArray - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Source byte array allocated ONCE used in reading from the stream.
- srcDicomInfo - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMosaicToSlices
-
- srcDirs - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- srcExtents - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Original extents array
- srcFileInfos - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Original FileInfoBase array.
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Source image.
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Source image.
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
Source image.
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipticFourierDescriptors
-
Source image.
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHessian
-
Image to convolve with hessian.
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMinimumPerimeterPolygon
-
Source image.
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
Source image.
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
src image, result image
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
src image
- srcImage - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- srcImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- srcImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- srcImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
target image
- srcImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- srcImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMosaicToSlices
-
Source image
- srcImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGrays
-
Source image RGB type image.
- srcImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoHSB
-
Source image RGB type image.
- srcImage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Image to subsample from.
- srcImage - Variable in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.view.components.JPanelColorChannels
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.view.components.JPanelSigmas
-
the input image which will be processed
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
The image to attenuate.
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
Use serialVersionUID for interoperability.
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
src image *
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
The image that face anonymization will be performed on.
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
The image that face anonymization will be performed on.
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
The source image must be either an image with donor dye only taken with a donor fluorescent peak filter or an
image with acceptor dye only taken with a acceptor fluorescent peak filter.
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
The source image must be the image taken with the donor fluorescent peak filter.
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
Use serialVersionUID for interoperability.
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
src image, result image
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
srcImage for keeping track of slices
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- srcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- srcImage - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Reference to imageA.
- srcImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- srcImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- srcImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- srcImage - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- srcImage1 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
Source image 1.
- srcImage2 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcat
-
Source image 2.
- srcImageA - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Source image A.
- srcImageArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- srcImageB - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
second ModelImage for dual-deconvolution
- srcImageB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Source gray scale image to be stored in the BLUE channel.
- srcImageB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Source image B.
- srcImageB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
srcImageB: image to match to srcImage
- srcImageB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Source gray scale image to be stored in the BLUE channel.
- srcImageG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Source gray scale image to be stored in the GREEN channel.
- srcImageG - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Source gray scale image to be stored in the GREEN channel.
- srcImageR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexConcat
-
Source gray scale image to be stored in the RED channel.
- srcImageR - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBConcat
-
Source gray scale image to be stored in the RED channel.
- srcImages - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLogSlopeMapping
-
- srcImages - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
when performing bulk operations via Image Calculator (Bulk Images) dialog, this array is populated
- srcImagesList - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
list of images to send to algorithm
- srcImagesList - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
list of images to send to algorithm
- srcImagesTable - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
table to display the src image names.
- srcImagesTable - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
table
- srcImagesTable - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
table
- srcImagesTable - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
table
- srcImagesTable - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
table to display the src image names.
- srcImagesTable - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
table to display the src image names.
- srcImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- srcImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- srcImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- srcImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- srcImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- srcImageTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- srcMax - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- SrcMaxX() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Get the shape max x coordinate
- SrcMaxY() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Get the shape max x coordinate
- srcMin - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- SrcMinX() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Get the shape min x coordinate
- SrcMinY() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Get the shape min x coordinate
- srcNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- srcNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- srcNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- srcPaintMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- srcPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- srcTableModel - Variable in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
table model for the srcimages.
- srcTableModel - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
table model
- srcTableModel - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
table model
- srcTableModel - Variable in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
table model
- srcTableModel - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
table model for the srcimages.
- srcTableModel - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
table model for the srcimages.
- srcTableModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
table model for the srcimages.
- srcThreshold - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
Original image threshold
- srcThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Original image threshold
- srcToDet - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
58 Distance from source to detector.
- srcToIso - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
62 Distance from source to iso.
- srcValue - Variable in class gov.nih.mipav.view.dialogs.JDialogChangeMaskNumber
-
src button text number
- srcVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
The initial VOI to initialize the evolution process.
- srcVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSnake
-
The initial VOI to initialize the evolution process.
- srcVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
The initial VOI to initialize the evolution process.
- srcVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSnake
-
The initial VOI to initialize the evolution process.
- srcVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- srcVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
DOCUMENT ME!
- srcVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- srcVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
DOCUMENT ME!
- srcVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- srcVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- srcVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- srcVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
src VOI used for thresholding ME!
- srcVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- srcVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- srcVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- srcVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- srcVOITable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- srelpr - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
single relative precision.
- srelpr - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
single relative precision.
- sRGB - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- srgb2linear(double) - Method in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- SRHSFUNC_RECVR - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- srow_x - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
1st row affine transform
- srow_y - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
2nd row affine transform
- srow_z - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
3rd row affine transform
- Ss - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Byte indicating which location to use as the predictor.
- Ss - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- SS - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- ssa - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- sScanLinePart() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame.sScanLinePart
-
- ssfpImageIndex_phase0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- ssfpImageIndex_phase180 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- ssfpImageNames_phase0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- ssfpImageNames_phase180 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- SSFPq - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- SSFPTRField - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- SSHORT - gov.nih.mipav.model.file.FileSVS.Type
-
16 bit signed
- SSHORT - gov.nih.mipav.model.file.FileTiff.Type
-
16 bit signed
- SSHORT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SSHORT - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- sSig - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassSig
-
- ssim(boolean) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- SSIM_WITH_AUTOMATIC_DOWNSAMPLING - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- ssize - Variable in class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
- ssize - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- sSlice - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Record the current static clipping slice number.
- sSliceInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Record the current static clipping slice number.
- ST - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- st_node() - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper.st_node
-
- stable - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- StableIndependentSetBreakTies() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- StableIndependentSetOrdering(CeresSolver.Graph<Vertex>, Vector<Vertex>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- stableness_score(double, double) - Method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- stableness_score(QuarticEquation.complex_t, QuarticEquation.complex_t) - Static method in class gov.nih.mipav.model.algorithms.QuarticEquation
-
- stableness_score(QuarticEquationEP.complex_t, QuarticEquationEP.complex_t) - Static method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- stableness_score(DoubleDouble, DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.QuarticEquationEP
-
- stack - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- stack - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Used to calculate the levelset contour.
- stack(GaussianMixtureModelsIncompleteSamples.GMM[], double[]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- stack_fit(GaussianMixtureModelsIncompleteSamples.GMM[], double[][], double[][][], String, double, double, String, String, GaussianMixtureModelsIncompleteSamples.Background, int, double, Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- StackElem() - Constructor for class gov.nih.mipav.model.file.CBZip2OutputStream.StackElem
-
- stageCalibrated - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- stageLabel - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- StageLabel(String, Float, Float, Float) - Constructor for class gov.nih.mipav.model.file.FileInfoOME.OME.Image.StageLabel
-
Creates a new StageLabel object.
- stagePositionX - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- stagePositionY - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- stageXPosition - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- stageYPosition - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- STAIRCASE - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Staircase transfer function.
- stampSecondary - Variable in class gov.nih.mipav.model.file.FileDicom
-
Whether MIPAV should be written to this dicom file as the secondary stamp *
- stampSecondary - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Whether to stamp DICOM files with the MIPAV secondary stamp
- stampSecondaryCapture(FileInfoDicom) - Method in class gov.nih.mipav.model.file.FileDicom
-
Writing a file to disk likely indicates that it was changed in some way.
- stampSecondaryCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
Check box for specifying whether DICOM files should be stamped with MIPAV information
- standard - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEdgePreservingSmoothing
-
- standard - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
- STANDARD - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
- STANDARD - Static variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- STANDARD - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Show standard progress bar with cancel.
- standardButton - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
- standardButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- standardCols - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- standardDeviation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate glcm standard deviation glcm standard deviation = square root(glcm variance).
- standardDeviation - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate glcm standard deviation glcm standard deviation = square root(glcm variance).
- standardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- standardDeviation - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- standardDeviation(float[], float) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Finds the standard deviation of the values in the input list (defined as: s = [(1/(N-1))*SUM (from 0 to N-1)[ (Xi
- X)^2]]^(1/2)).
- standardDeviationCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- standardDeviationCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- standardGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
- standardizeExtensionFormat(String) - Static method in class gov.nih.mipav.model.file.FileTypeTable
-
Standardizes an file extension string to conform with how they should be stored in the file type table.
- StandardKey(KeyEvent) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.StandardKey
-
Creates new thread and sets up mouse event variables appropriately.
- StandardMouse(MouseEvent) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.StandardMouse
-
Creates new thread and sets up mouse event variables appropriately.
- StandardMouse(MouseEvent) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelCamera.StandardMouse
-
Creates new thread and sets up mouse event variables appropriately.
- StandardMouse(MouseEvent) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.StandardMouse
-
Creates new thread and sets up mouse event variables appropriately.
- standardOS - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Text field for the user inputed operating system.
- standardRows - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- standardUrgency - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Text field for the user inputed urgency of the bug
- standardVersion - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Text field for the user inputed mipav version.
- STAPT - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- start - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Point that was initially passed into function.
- start - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Point that was initially passed into function.
- start - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
Point that was initially passed into function.
- start - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
Point that was initially passed into function.
- start - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- start - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task
-
- start - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask
-
- start - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Chunk
-
- start - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- start - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- start - Variable in class gov.nih.mipav.model.algorithms.libdt.Range
-
- start - Variable in class gov.nih.mipav.model.algorithms.NMSimplex
-
- start - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- start - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- start - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- start - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- start - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_bio_t
-
pointer to the start of the buffer
- start - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_mqc_t
-
- start - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_raw_t
-
pointer to the start of the buffer
- start - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- start - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.StartingPolynomial
-
- start - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear.GroupClassesReturn
-
- start() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGBitInputStream
-
- start() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGBitInputStream
-
- start() - Method in class gov.nih.mipav.view.ImageRegistryMonitor
-
Start the thread as a minimum priority thread.
- start() - Method in class gov.nih.mipav.view.LineMeter
-
sets the animation/redraw thread up, then runs it.
- start() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
DOCUMENT ME!
- start() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
DOCUMENT ME!
- start() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Reset parameters to start at the beginning of the path moving in the forward direction.
- start() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Reset parameters to start at the beginning of the path moving in the forward direction.
- start() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Reset parameters to start at the beginning of the path moving in the
forward direction.
- start() - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
Start the thread as a minimum priority thread.
- start(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Checks to see if a thread is already running on this object, and if not starts it.
- START_BLOCK_STATE - Static variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- start_field - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- start_field - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- start_field - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- start_iMCU_row(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- start_input_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- start_input_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_input_controller
-
- start_input_pass(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- START_INPUT_PASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_input_pass_coef(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- START_INPUT_PASS_COEF - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_level - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- start_level - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- start_of_file - Variable in class gov.nih.mipav.model.file.libjpeg.my_source_mgr
-
- start_output_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- start_output_pass(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- START_OUTPUT_PASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_pass - Variable in class gov.nih.mipav.model.file.libjpeg.arith_entropy_decoder
-
- start_pass - Variable in class gov.nih.mipav.model.file.libjpeg.huff_entropy_decoder
-
- start_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_color_deconverter
-
- start_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- start_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- start_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_idct_controller
-
- start_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- start_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_post_controller
-
- start_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- start_pass - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- START_PASS - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_pass_1_quant(libjpeg.jpeg_decompress_struct, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- START_PASS_1_QUANT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_pass_2_quant(libjpeg.jpeg_decompress_struct, boolean) - Method in class gov.nih.mipav.model.file.libjpeg
-
- START_PASS_2_QUANT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_pass_arith_decoder(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- start_pass_dcolor(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- START_PASS_DCOLOR - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_pass_dpost(libjpeg.jpeg_decompress_struct, libjpeg.J_BUF_MODE) - Method in class gov.nih.mipav.model.file.libjpeg
-
- START_PASS_DPOST - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_pass_huff_decoder(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- START_PASS_HUFF_DECODER - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_pass_idct_controller(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- start_pass_main(libjpeg.jpeg_decompress_struct, libjpeg.J_BUF_MODE) - Method in class gov.nih.mipav.model.file.libjpeg
-
- START_PASS_MAIN - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_pass_merged_upsample(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- START_PASS_MERGED_UPSAMPLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_pass_upsample(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- START_PASS_UPSAMPLE - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- start_pos - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_packet_info_t
-
packet start position (including SOP marker if it exists)
- start_pos - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tp_index_t
-
start position
- START_SLICE - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for first slice to save from an image parameter.
- START_TIME - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the parameter indicating the first time slice to save.
- start_time_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.EventLogger
-
- start_time_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ScopedExecutionTimer
-
- start_time_in_secs_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- startAdjust - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- startAdjust - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
- startAngle - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- startAngle - Variable in class gov.nih.mipav.view.RubberbandEllipse
-
DOCUMENT ME!
- startAnimator(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- startBlank - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- startBurn() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
When the burn button is clicked, invoked the start burn method to show the burnning process.
- startBurn(float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Show the the burning procedure.
- startBurn(float, float, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Start burning.
- startBurn(float, float, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnCoolTipView
-
Start burning.
- startBurn(float, float, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnHeatView
-
Start burning.
- startBurn(float, float, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnRegularView
-
Start burning.
- startBurnPacking() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Start to try to choose an optimal ablation plan for the current target surface.
- startButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Start button to auto snapshooting.
- startCalendar - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- startCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- startDayBox - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.model.file.FileDataProvenance.ProvenanceXMLHandler
-
Parser calls this for each element in a document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
Parser calls this for the beginning of each element in the document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.model.file.FileOME.MyXMLHandler
-
Parser calls this for each element in a document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.model.file.FilePolylineVOIXML.MyXMLHandler
-
Parser calls this for each element in a document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.model.file.FileVOI.MyXMLHandler
-
Parser calls this for each element in a document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
Parser calls this for each element in a document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.model.file.FileVOI.XMLCoordHandler
-
Parser calls this for each element in a document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.view.dialogs.MyXMLHandler
-
Parser calls this for each element in a document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D.SurfaceRefXMLHandler
-
Parser calls this for the beginning of each element in the document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Parser calls this for the beginning of each element in the document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Parser calls this for the beginning of each element in the document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM.SurfaceRefXMLHandler
-
Parser calls this for the beginning of each element in the document.
- startElement(String, String, String, Attributes) - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.MyXMLHandler
-
Parser calls this for each element in a document.
- startElementEdge(Attributes) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
Called when the Edge start element is found.
- startElementGraph(Attributes) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
Called when the Graph start element is found.
- startElementLabel(Attributes) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
Called when the start of the Label element is found.
- startElementNode(Attributes) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLContentHandler
-
Called when the start of a Node Element is found.
- startFirstImage - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- startHorizontalBedPosition - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- startIndex - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Comms.ByteBuffer
-
Points the start of data in the buffer.
- startIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- startIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- startIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- startIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- starting_row - Variable in class gov.nih.mipav.model.file.libjpeg.my_post_controller
-
- StartingPolynomial - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- StartingPolynomial(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.StartingPolynomial
-
- startInput - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
JTextfield for start slice of the computation.
- startK - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- startLoc - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
122 - First scan location (L/S).
- startLocation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Origin of the image.
- startLocation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- startLocation - Static variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelClodMesh
-
DOCUMENT ME!
- startLocation - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceExtractor
-
DOCUMENT ME!
- startLocation - Static variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
DOCUMENT ME!
- startLocation - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FilePolyline_WM
-
DOCUMENT ME!
- startLocation - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
image start location.
- startLocation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractor
-
Surface 3D location
- startLocations - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- startMethod(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Checks to see if a thread is already running on this object.
- startMonthBox - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- startOfFrame(InputStream, int) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- startOfFrame(InputStream, int) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- startOfImage() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- startOfImage() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- startOfScan(InputStream) - Method in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- startOfScan(InputStream) - Method in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- startPoint - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysPanning
-
- startPointTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Probe detection starting point transform group that represents the probe guide line starting point.
- startPos - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- startPos - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- startPosition - Variable in class gov.nih.mipav.model.file.FileRaw
-
DOCUMENT ME!
- startPt - Variable in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- startPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- startPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- startPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- startPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- startPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- startPtTransVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Start point ( invisible ) coordinate vector in world coordinate system.
- startQuote - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- startRAS - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
120 - 1 byte - RAS letter for first scan location (L/S).
- startRecording() - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Starts the recording of a new script (if one isn't already being recorded).
- startRecording() - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Starts the recording of a new script (if one isn't already being recorded).
- startRecording() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- startRecording() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- startRecording() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- startScale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- startSecondImage - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- startSectorArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- startSlice - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
- startSlice - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
The first slice in the intensity projection calculation:
- startSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- startSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Value of the start slice for the calculation (X,Y,Z).
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.Range
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.Range
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.Range
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.Range
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.Range
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.Range
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.Range
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.Range
-
- startSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Current segmentation processing slice range, which is between silce 3 and
20.
- startStopVOIAnimation() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- startsWithJpegExifPreamble(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifReader
-
Indicates whether 'bytes' starts with 'JpegSegmentPreamble'.
- StartTemperature() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeSA
-
get start tempature.
- startTime - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Start time (in milliseconds) to be used to compute elapsed time.
- startTime - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
- startTime - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
- startTime - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- startTime - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
= localTime2 - localTime.
- startTime - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
= localTime2 - localTime.
- startTrain(ArrayList<Double[]>) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- startupCommand - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
The action command to send to the volume renderer after we start it (can be used to open a tab).
- startupFile - Variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
Contains all java properties of the MIPAV app (used at least when loading!)
- startVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- startVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- startVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- startVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- startVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- startVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- startX - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- startX - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- startX - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- startX - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- startX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.Line
-
- startX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.Line
-
- startX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.Line
-
- startX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.Line
-
- startX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.Line
-
- startY - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- startY - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- startY - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- startY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.Line
-
- startY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.Line
-
- startY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.Line
-
- startY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.Line
-
- startY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.Line
-
- startYearBox - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- startZ - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- startZ - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- STAT_TAB - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Statistics Tab.
- statAux - Variable in class gov.nih.mipav.model.file.FileAfni
-
# orts are nuisance parameters whose number is >= 1.
- statAux - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- statCode - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- statData - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- statData - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- statData - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
statistic data corresponding to marked VOI vector.
- state - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- state - Variable in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- state - Variable in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- state - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
State being recorded.
- state - Variable in class gov.nih.mipav.view.renderer.MouseEventVector
-
State being recorded.
- state() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- State(int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer.State
-
- state_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- state_offset() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- state_offset_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- state_start - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- state_start() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- state_updating_callback - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreprocessedProblem
-
- stateChanged(Vector) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
.
- stateChanged(Vector) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Updates the fileinfo with changes made within the JDialogs.
- stateChanged(Vector) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
.
- stateChanged(Vector) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
.
- stateChanged(Vector) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
state changed
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBrightness
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Updates the image based on thumbnails
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Handle events from the intensity bounds sliders.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
state change listener for the sliders.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel.PropertiesDialog
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
ChangeListener for opacity slider changes.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets how the image plane should be displayed depending on value of slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Slider move event handler.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
ChangeListener for opacity slider changes.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
stateChanged.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
Called when the slider values have changed.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Sets how the image plane should be displayed depending on value of slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Sets how the image plane should be displayed depending on value of
slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The override necessary to be a ChangeListener for a JSlider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Listens for changes in the velocity slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Called when the slider values have changed.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Sets how the image plane should be displayed depending on value of slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Sets where image is in scene based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
State change event, invokded by the sliders moves.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets how the image plane should be displayed depending on value of slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Sets how the image plane should be displayed depending on value of slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Switch between slices control button and surface render button of the surface toolbar.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Sets how the image plane should be displayed depending on value of slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererRayCast
-
Sets how the image plane should be displayed depending on value of slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererShearWarp
-
Sets how the image plane should be displayed depending on value of slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Resets the buttons depending on which tab was selected.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
state changed
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Called when the slider values have changed.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Sets how the image plane should be displayed depending on value of slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Slider move event handler.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelNavigation
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelRenderMode_WM
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Sets how the image plane should be displayed depending on value of
slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelVolume4D
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Does nothing.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewControlsImage
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Does nothing.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
ChangeListener************************************************************************* /** Sets values based on
knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
ChangeListener************************************************************************* /** Sets values based on
knob along slider
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Resets the buttons depending on which tab was selected.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameMemory
-
Calls various methods based on the changes in the memory panel.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameMessage
-
Watches for tab index changes.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Sets values based on knob along time slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Sets values based on knob along time slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Calls various methods based on the changes in the memory panel.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
sets values based on knob along slider and catches the tabbed pane switching events.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Sets values based on knob along time slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Sets values based on knob along slider.
- stateChanged(ChangeEvent) - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- states - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dec_memory_marker_handler_t
-
value of the state when the marker can appear
- stateTransitionOK - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- stateTransitionOK - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
DOCUMENT ME!
- stateTransitionOK - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
DOCUMENT ME!
- StateUpdatingCallback(CeresSolver.Program, Vector<Double>) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.StateUpdatingCallback
-
- stateVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Vector to record state changes.
- stateVector - Variable in class gov.nih.mipav.view.renderer.MouseEventVector
-
Vector to record state changes.
- StateVectorToParameterBlocks(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- StateVectorToParameterBlocks(Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Program
-
- static_mem - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm
-
- StaticArgument(String, String, String...) - Constructor for enum gov.nih.mipav.view.Argument.StaticArgument
-
- StaticGrid - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- StaticGrid() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.StaticGrid
-
- staticLightBehaviorBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Static light hehavior branch group.
- staticLightBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The branch group that holds the static light bulb.
- staticLightBulb - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The structure for the static light bulb.
- staticLightTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The transform group that holds the static light branch group.
- staticLightTranslate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Static light translate behavior.
- staticLightZoom - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Static light zoom behavior.
- staticRef - Static variable in class gov.nih.mipav.plugins.ManifestFile
-
- staticStudyGeneral - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- Station - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- statisticDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
strings to test for when checking on statistics to calculate.
- statistics - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Stopping threshold.
- statistics() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ExecutionSummary
-
- Statistics - Class in gov.nih.mipav.model.algorithms
-
- Statistics() - Constructor for class gov.nih.mipav.model.algorithms.Statistics
-
- Statistics(int, double, double, double[]) - Constructor for class gov.nih.mipav.model.algorithms.Statistics
-
- Statistics(ModelSurfaceTopology) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Statistics
-
The constructor and only member function for the class.
- Statistics() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Evaluator
-
- Statistics() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemEvaluator
-
- Statistics() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolver
-
- Statistics() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TypedLinearSolver
-
- statistics_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ExecutionSummary
-
- StatisticsOptionsActionListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticsOptions.StatisticsOptionsActionListener
-
- StatisticsTable - Class in gov.nih.mipav.model.algorithms
-
- StatisticsTable() - Constructor for class gov.nih.mipav.model.algorithms.StatisticsTable
-
- statisticType - Variable in class gov.nih.mipav.model.algorithms.Statistics
-
- stats - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- STATS1(double[], int, double[], double[], double[], double[][], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- statsList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps
-
- statsToCalculate - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- statsToCalculate - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- statsToCalculate - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- statsToCalculate - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- statsToCalculate - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- statsToCalculate - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- statsToCalculate - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- statsToCalculate - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
MIPAV VOI properties parameters.
- status - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
- status - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- status - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- status - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- status - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
- STATUS - Static variable in class gov.nih.mipav.view.DICOMDisplayer
-
A status type message is "Sending query", "Moving images", etc.
- STATUS_CANCELLED - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_ECHO_SUCCESS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_ERRORFIRST - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_ERRORLAST - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_FIND_OBJECTNOTFOUND - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_FIND_PENDING - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_FIND_PENDINGWARNING - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_FIND_SUCCESS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_FIND_SUCCESSNORESULTS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_INTERVAL - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- STATUS_MOVE_CANCELLED - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_MOVE_NOCONTACTDEST - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_MOVE_NODESTINATION - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_MOVE_NULLDESTINATION - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_MOVE_OBJECTNOTFOUND - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_MOVE_PENDING - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_MOVE_SUCCESS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_MOVE_UNKNOWNDESTINATION - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_MOVE_WARNING - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_OK - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_PENDING - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_STORE_FAILED - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- STATUS_STORE_SUCCESS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- status_variable_name - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- status_varID - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- status_varID - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- STATUS_WARNING - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- statusMessage(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- statusMessage(int) - Method in class gov.nih.mipav.model.algorithms.Lmmin
-
- statusMessage(int) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- statusMessageNL2sol(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- statusMessageNL2sol(int, int) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- statusPanel - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- statusStrings - Static variable in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Strings describing the various recorder statuses.
- statusStrings - Static variable in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Strings describing the various recorder statuses.
- std - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- std(double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- Std() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Calc the standard diviation of the matrix.
- Std() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the standard deviation the vector.
- STD - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- STD - Static variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- STD_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Stardard mode of the camera auto snapshooting.
- STD_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Stardard viewing mode.
- stda - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
-
- stdb - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
-
- stdBehavior - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Standard behavior reference.
- stdButton - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Auto snapshot button.
- stdButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Standard behavior button.
- STDButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- StdCol(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Calc the standard deviation of each column into a vector.
- stddev - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- stdDev - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- stdDev - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Standard deviation used for the Gaussians.
- stdDev - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- stdDev - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- stdDev - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
standard deviations in VOI
- STDDEV - Static variable in class gov.nih.mipav.model.algorithms.utilities.Algorithm4DImageCalculator
-
std dev
- stdDevB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- stdDevB - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
standard deviations in VOI
- stdDevCurvature - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- stdDevCurvatureDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- stdDevG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- stdDevG - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
standard deviations in VOI
- stdDeviation - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- stdDeviationB - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- stdDeviationG - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- stdDeviationR - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- stdDevLimit - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
only filter pixels with a value further than stdDevLimit from the mean.
- stdDevR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- stdDevR - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
standard deviations in VOI
- stdDevTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
text fields
- stdDevTextFieldB - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
text fields
- stdDevTextFieldG - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
text fields
- stdDevTextFieldR - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
text fields
- stderiv(double[][], double[][], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- stderivEP(DoubleDouble[][], DoubleDouble[][], DoubleDouble[], DoubleDouble[], int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- stdL - Variable in class gov.nih.mipav.model.algorithms.DBSCANClusteringSegment.SP
-
- stdOld - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- stdSystemErr - Static variable in class gov.nih.mipav.view.LogStdStreams
-
DOCUMENT ME!
- stdSystemOut - Static variable in class gov.nih.mipav.view.LogStdStreams
-
DOCUMENT ME!
- stdText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
User message explain how the mouse moves in stardard mode.
- stdtr(int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- STDTR - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- stdtri(int, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- STDTRI - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- stdv - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- stdv - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- STEEPEST_DESCENT - gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionType
-
- SteepestDescent() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SteepestDescent
-
- steering() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
Compute steering matrices
- STEERING_KERNEL_SECOND_ORDER_L1_NORM - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- steering2L1Norm - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- steeringStepSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- steeringStepSize - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- step - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- step - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceOctaveGeometry
-
< Height (number of pixels)
- step - Variable in class gov.nih.mipav.model.algorithms.CVODES_ASA.CVadjCheckPointRec
-
- step - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- step - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchOptions
-
< patch size (x, y, z).
- step - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- step - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
MINC resolution (can be negative)
- step - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
in zspace, step == slice gap, not necessarily slice thickness
- step(double[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.ODE
-
- step(DoubleDouble[], boolean[]) - Method in class gov.nih.mipav.model.algorithms.ODEEP
-
- step_addsub(double[], int) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- step_addsub4(double[]) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- step_addsub8(double[]) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- step_c - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
component step used to localize the packet in the include vector
- step_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- step_evaluator_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- step_is_nonmonotonic - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- step_is_successful - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- step_is_valid - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- step_l - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
layer step used to localize the packet in the include vector
- step_norm - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- step_p - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
precinct step used to localize the packet in the include vector
- step_r - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
resolution step used to localize the packet in the include vector
- step_rotate(double[], int) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- step_rotate8(double[]) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- step_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- step_size - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchMinimizer.State
-
- step_size - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- STEP_SIZE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- step_solver_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- StepAccepted(double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- StepAccepted(double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- StepAccepted(double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategy
-
- StepAccepted(double, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
- stepb - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- stepb - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- stepButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Next step button.
- stepButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Next step button.
- stepButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Next step button.
- stepDecreaseButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- stepIncrButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
DOCUMENT ME!
- StepIsInvalid() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- StepIsInvalid() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- StepIsInvalid() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategy
-
- StepQuality(double, double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
- StepRejected(double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- StepRejected(double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LevenbergMarquardtStrategy
-
- StepRejected(double) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategy
-
- stepReordered - Variable in class gov.nih.mipav.model.file.FileMincHDF
-
- stepsize - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_band_t
-
- stepSizeFile - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- stepsizes - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_t
-
stepsizes used for quantization
- stepsizes_expn - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
stepsizes used for quantization
- stepsizes_mant - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tccp_info_t
-
stepsizes used for quantization
- stepText - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsRayCast
-
Text field of the ray trace step size.
- stepText - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.JPanelRenderOptionsShearWarp
-
Text field of the ray trace step size.
- stepuc(int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- stepuc(int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- stepxy - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- stepxy2 - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- stepz - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- stepz2 - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- StereoType - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- Stern - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- stevensBeta - Variable in class gov.nih.mipav.view.ColorWheel
-
Stevens Beta
- stevensBeta - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
steven's beta *
- stevensBeta - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
steven's beta *
- stevensBeta - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
Stevens Beta *
- stevensBetaPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- stevensBetaPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- stevensBetaSlider - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
various sliders in dialog *
- stevensBetaSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
various sliders in dialog *
- stevensBetaTextField - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
textfields *
- stevensBetaTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
textfields *
- STICKS - Static variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- stiffness - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Allows for variable motion of the mesh in the surface normal direction, default value of .15
- stiffness - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
stiffness.
- stiffnessBET - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Parameter for brain extraction by default set to .15
- stiffnessBET - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Controls the stiffness of the brain approximation mesh.
- stiffnessField - Variable in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
The text field corresponding to stiffnessBET.
- stiffnessText - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Text field for getting stiffness for smoothing.
- stiffnessTF - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Field for specifing stiffness of the mesh.
- stinvmap(double[][], double[][], double[], double[][], double[], double[][], double[][], boolean, boolean, double, int) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- STIR - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- stirf(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- STIRF - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- STK - Static variable in class gov.nih.mipav.model.file.FileUtility
-
MetaMorph Stack (STK) file type. extension: .stk
- stmap(double[][], double[][], double[][], double[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- stmap(double[][], double[][], double[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- StochasticForests - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests
-
- StochasticForests(StochasticForests.TreeType, boolean, boolean, String, StochasticForests.MemoryMode, String, int, String, int, long, int, String, StochasticForests.ImportanceMode, int, String, Vector<String>, String, boolean, Vector<String>, boolean, StochasticForests.SplitRule, String, boolean, double, double, double, boolean, StochasticForests.PredictionType, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests
-
- StochasticForests.Data - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.DataChar - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.DataDouble - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.DataFloat - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.DataSparse - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.Forest - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.Forest.computeTreePermutationImportanceInThread - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.Forest.growTreesInThread - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.Forest.predictInternalInThread - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.Forest.predictTreesInThread - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.Forest.showProgress - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.ForestClassification - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.ForestProbability - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.ForestRegression - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.ForestSurvival - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.ImportanceMode - Enum in gov.nih.mipav.model.algorithms
-
- StochasticForests.indexValueComparator - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.indexValueDescendingComparator - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.indexValueItem - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.MemoryMode - Enum in gov.nih.mipav.model.algorithms
-
- StochasticForests.PredictionType - Enum in gov.nih.mipav.model.algorithms
-
- StochasticForests.SparseMatrix - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.SplitRule - Enum in gov.nih.mipav.model.algorithms
-
- StochasticForests.Tree - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.TreeClassification - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.TreeProbability - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.TreeRegression - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.TreeSurvival - Class in gov.nih.mipav.model.algorithms
-
- StochasticForests.TreeType - Enum in gov.nih.mipav.model.algorithms
-
- StochasticForests.ValuePair<K,V> - Class in gov.nih.mipav.model.algorithms
-
- STONITS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
Sample value to Nits, where Nits is the photometric unit for luminance, also written candelas/meter**2.
- STONITS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
Sample value to Nits, where Nits is the photometric unit for luminance, also written candelas/meter**2.
- stop - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- stop - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
containing only 5 msec. sleep commands.
- stop - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
containing only 5 msec. sleep commands.
- stop() - Method in class gov.nih.mipav.view.ImageRegistryMonitor
-
kill the thread.
- stop() - Method in class gov.nih.mipav.view.LineMeter
-
shuts the animation thread off.
- stop() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
DOCUMENT ME!
- stop() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
DOCUMENT ME!
- stop() - Method in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
kill the thread.
- STOP_MODE - Static variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Recorder/Player is stopped.
- STOP_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Recorder/Player is stopped.
- STOP_MODE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Recorder/Player is stopped.
- stopButton - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
stops the thread from continuing its processing. on same panel as OK and Cancel.
- stopButton - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Stop button.
- stopButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Stop button.
- stopButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Stop button.
- stopButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- stopButton - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- stopCellEditing() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.CheckBoxEditor
-
- stopInput - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
JTextfield for end slice of the computation.
- STOPPED - Static variable in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Status indicating that the script recorder is currently stopped (either never started, or recording is over).
- STOPPED - Static variable in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Status indicating that the script recorder is currently stopped (either never started, or recording is over).
- stopProcess() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
stopping a thread prematurely is a co-operative process where the Thread checks for a stop-flag periodically,
and stops itself by coming to the end of its run() method early.
- stopRecording() - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Stops script recording.
- stopRecording() - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Stops script recording.
- stopRecording() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- stopRecording() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- stopScale - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- stopSlice - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
The last slice in the intensity projection calculation:
- stopThreadRequest - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- stopTime - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
= localTime2 - localTime.
- stopTime - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
= localTime2 - localTime.
- stopx(int[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- storage - Variable in class gov.nih.mipav.model.file.FileSiemensText
-
- storage_type() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- storage_type_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- storageModel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- storageProperty - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
A semicolon delimited list of the storage properties to use for this receiver
- storageTable - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- StorageType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver2.StorageType
-
- store(double) - Method in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
This function forces its argument x to be stored in a memory location, thus providing a means of determining
floating point number characteristics (such as the machine precision) when it is necessary to avoid computation
in high precision registers.
- storeColorOptions(boolean, boolean, boolean) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Stores the values of color channel processing options in the parameter table.
- storeColorOptions(JPanelColorChannels) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Stores the values from the color channel panel in the parameter table.
- storedBlockCRC - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- storedCombinedCRC - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- storedMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- storedMatrixBox - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- storeImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
storeImage - creates a BufferedImage from the ModelImage data where the BufferedImage's size is the next-largest
power of two from the ModelImage size.
- storeImage(ModelImage, String) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Stores an input image in the list of parameters for the algorithm.
- storeImage(ModelImage, String) - Method in class gov.nih.mipav.view.dialogs.DataProvenanceParameters
-
Stores an input image in the list of parameters for the algorithm.
- storeImage(String) - Method in class gov.nih.mipav.model.provenance.ProvenanceRecorder
-
Convenience method used to store the name of an image in the image table being recorded/used in the current script.
- storeImage(String) - Method in class gov.nih.mipav.model.scripting.ScriptRecorder
-
Convenience method used to store the name of an image in the image table being recorded/used in the current script.
- storeImage(String) - Method in class gov.nih.mipav.model.scripting.ScriptRunner
-
Convenience method used to store the name of an image in the image table being used by the current script.
- storeImageInRecorder(ModelImage) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Store an image in the script recorder image variable table.
- storeImageInRecorder(ModelImage) - Method in class gov.nih.mipav.view.dialogs.DataProvenanceParameters
-
Store an image in the script recorder image variable table.
- storeImageInRecorder(ModelImage, boolean) - Static method in class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
Store an image in the script recorder image variable table.
- storeImageInRunner(ModelImage) - Static method in class gov.nih.mipav.model.scripting.actions.ActionImageProcessorBase
-
Store an image in the script runner image variable table.
- storeImageInRunner(ModelImage) - Static method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Store an image in the script runner image variable table.
- storeImageName(String) - Method in class gov.nih.mipav.model.scripting.ImageVariableTable
-
Stores a new image name in the variable table, giving it the next available image placeholder variable name.
- storeImageVariable(String, String) - Method in class gov.nih.mipav.model.scripting.ImageVariableTable
-
Associates an image (through its name) with an image placholder variable.
- storeInputImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Stores an input image in the list of parameters for the algorithm.
- storeInputImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.DataProvenanceParameters
-
Stores an input image in the list of parameters for the algorithm.
- storeLimitValues() - Method in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
Tries to store the values held in the text areas to temporary storage.
- storeNumIterations(int) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
DOCUMENT ME!
- storeNumIterations(int) - Method in class gov.nih.mipav.view.dialogs.DataProvenanceParameters
-
DOCUMENT ME!
- storeOutputImageParams(ModelImage, boolean) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Stores information about the output of images for this algorithm in the parameter table.
- storeOutputImageParams(ModelImage, boolean) - Method in class gov.nih.mipav.view.dialogs.DataProvenanceParameters
-
Stores information about the output of images for this algorithm in the parameter table.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialog4DImageCalculator
-
store params
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAdaptiveKuwaharaFilter
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAGCIE
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAHE
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeImage
-
Stores all the keys that were selected, but in string
form so that it is easier to pull up later (although
it is not a pretty sight to see in the recorder)
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBarrelDistortion
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBoxCount
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
store params from gui
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogClose
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogColorSaturation
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogConcat
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult2Dto3D
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto3D
-
store params
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogConcatMult3Dto4D
-
store params
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogConvergenceField
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoMultiple3D
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
store params...for scripting
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogCrop
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDilate
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeLaplacian
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgeNMSuppression
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropicEdgeDetection
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogErode
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlices
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymize
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFaceAnonymizerBET
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
store parameters from gui
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFlip
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHarrisLaplace
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
store params from gui
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogInvert
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
store params from gui
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogLLE
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
store params from gui
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMask
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMean
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
store params from gui
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMedian
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMidsagittal
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMode
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMSER
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogNoise
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogOpen
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogQuantifyMask
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogReorient
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogReslice
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoGrays
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRGBtoHSB
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRotate
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableBase
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSIFTImageSimilarity
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSobel
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
store params from gui
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
store params
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSubset
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSWI
-
Used in turning the plugin into a script
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
store params from gui
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Store the parameters from the dialog to record the execution of this algorithm.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
Record the parameters just used to run this algorithm in a script.
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- storeParamsFromGUI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
Record the parameters just used to run this algorithm in a script.
- storeProcess3DAs25D(boolean) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
- storeProcessingOptions(boolean, boolean) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Stores options for how an algorithm should process images in the parameter table.
- storeProcessSeparable(boolean) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Stores options for an algorithm using a kernel that can process dimensions separately.
- storeProcessWholeImage(boolean) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Stores whether the whole image or just VOI regions should be processed in the parameter table.
- storeSigmas(float[], boolean) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Stores an algorithm's sigmas in the parameter table.
- storeSigmas(JPanelSigmas) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Stores an algorithm's sigmas in the parameter table.
- StoreState() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- storeTabbedPaneIndex - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Previoius tab index recorder.
- storeToDefaults() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Stores the current light box display properties.
- storeVariable(String, String) - Method in class gov.nih.mipav.model.scripting.VariableTable
-
Stores a variable name and its value in the variable table.
- storeWaterShed(float[], boolean) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Stores an algorithm's sigmas in the parameter table.
- stparam(double[][], double[], double[][], double[][], double[], int[], double[][], double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- stpfun(double[], int, int, double[], double[][], int[], int[], boolean[], double[][]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun
-
- stpfun2(double[], int, int[], double[], boolean, int, double[], double[][], int[], int[], boolean[], double[][]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- stpfun3(boolean, double[], double[], boolean, double[][], Vector<Double>, double[], int, int, int, double, double, double, double, int, int, int, double[], double[][], int[], int[], boolean[], double[][]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun3
-
- stpfunEP(DoubleDouble[], int, int, DoubleDouble[], DoubleDouble[][], int[], int[], boolean[], DoubleDouble[][]) - Constructor for class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfunEP
-
- stplot(double[][], double[], double[][], double[], double[], double[], int, boolean, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- stpmul - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- stquad(double[][], double[][], int[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- stquadEP(DoubleDouble[][], DoubleDouble[][], int[], DoubleDouble[][], DoubleDouble[], DoubleDouble[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- stquadh(double[][], double[][], int[], double[][], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- stquadhEP(DoubleDouble[][], DoubleDouble[][], int[], DoubleDouble[][], DoubleDouble[], DoubleDouble[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- str - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- str - Variable in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- str - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- str - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- str - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- str - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- str - Variable in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.FieldStrength
-
- str - Variable in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.InversionType
-
- str - Variable in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.Threshold
-
- str - Variable in enum gov.nih.mipav.view.Preferences.ComplexDisplay
-
The format of complex display
- str - Variable in enum gov.nih.mipav.view.Preferences.DefaultDisplay
-
The format of default display
- str - Variable in enum gov.nih.mipav.view.Preferences.InterpolateDisplay
-
The format of complex display
- str - Variable in enum gov.nih.mipav.view.ViewJSlider.SliderType
-
- straightenedAnnotations - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- straightenedLattice - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- straightenFrame(ModelImage, int, int[], Vector3f[], Vector3f, Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- straightenLineVOI(Vector3f, VOIBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Modifies kPos to form an angle with its origin point that is a multiple of 15 degrees.
- straightPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- strain() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- strain() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- strain() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- strain() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- strain() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- strain1() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- strain1() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- strain1() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- strain1() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- strain1() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- stRange - Variable in class gov.nih.mipav.model.structures.ModelHistogram
-
DOCUMENT ME!
- stRange - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- stRange - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- stRange1 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
The starting range value of the input image.
- stRange2 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmChangeType
-
The starting range value of the output image.
- strategy_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- strConfEstim(float[], float[], float[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- stream() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Returns a sequential Stream of pixels of this image.
- stream(boolean) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Returns a Stream of pixels of this image.
- stream(boolean, int, int, int, int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
- stream(int, int, int, int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
- stream(ContourPlot.PixelConvertingSpliterator.PixelConverter<? super P, T>, boolean) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
- stream(ContourPlot.PixelConvertingSpliterator.PixelConverter<? super P, T>, boolean, int, int, int, int) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
- stream(Spliterator<Px>, boolean) - Static method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Returns a Stream<Pixel> for the specified Spliterator<Pixel>.
- streamEnd - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- StreamReader(InputStream) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.StreamReader
-
- StreamReaderTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.StreamReaderTest
-
- streams - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- streams - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageDataSource
-
DOCUMENT ME!
- streams - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.ImageDataSource
-
DOCUMENT ME!
- StreamUtil() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.StreamUtil
-
- strength(float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- stretch(Point) - Method in class gov.nih.mipav.view.Rubberband
-
Stretch the rubberband to this point.
- stretchedPt - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- strides - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- strides - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.ArrayInfo
-
- string - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- string() - Method in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- string() - Method in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- string() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- string() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- STRING - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
A character string that may be possibly have further format specifications is stored in the tag's value
- STRING - Static variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- STRING - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- STRING_ATTRIBUTE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- stringBvalueArray - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
par/rec Bvalues
- stringGradientArray - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
par/rec gradients
- stringOfChar(char, int) - Static method in class gov.nih.mipav.util.DoubleDouble
-
Creates a string of a given length containing the given character
- StringOutput() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- stringOverride - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
String used to override the slice number in the lower left corner.
- strings - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- stringTable - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- StringType(String, FileDicomTagInfo.VR...) - Constructor for enum gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
- StringUtil() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.StringUtil
-
- StringUtilTest() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.StringUtilTest
-
- StringValue(byte[], Charset) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.StringValue
-
- StringVecComparator() - Constructor for class gov.nih.mipav.view.dialogs.JDialogShortcutEditor.StringVecComparator
-
- STRIP_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- STRIP_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- STRIP_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- STRIP_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- strip_height - Variable in class gov.nih.mipav.model.file.libjpeg.my_post_controller
-
- STRIP_OFFSETS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- STRIP_OFFSETS - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- STRIP_OFFSETS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- STRIP_OFFSETS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- stripAccuracy(SchwarzChristoffelMapping.scmap) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- stripCounts - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
- STRIPED - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
Sets up the transfer function colors to be striped.
- stripeval(SchwarzChristoffelMapping.scmap, double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- stripevalinv(SchwarzChristoffelMapping.scmap, double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- stripExtension(String) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Helper method to strip the image name of the extension, so when we save we don't have double extensions (like
genormcor.img.tif).
- stripL - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.scmap
-
- stripmap(SchwarzChristoffelMapping.polygon, int[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- stripplot(SchwarzChristoffelMapping.scmap, double[], double[], int, boolean, double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- strokeLength - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- strokePattern - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.LineLabel
-
- strokePattern - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- strokePattern2dashPattern(short, float) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.LinesRenderer
-
- strsl(int[], double[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- strsl(int[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- strtok2(String, String) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- struckOkayButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
DOCUMENT ME!
- struckOkayButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
DOCUMENT ME!
- struckOkayButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
DOCUMENT ME!
- STRUCT - Static variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- STRUCT_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.Trailer
-
- structOptPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- STRUCTURAL_SIMILARITY_INDEX - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- structuralSimilarityIndex - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- structureSize - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- structureType - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- structureTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- structureY - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- structureY - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- structureY - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- structureY - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- struve(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- STRUVE - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- stSlice - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- stSlice - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
Starting slice to evolve contour.
- STUDENTS_T_DISTRIBUTION_CUMULATIVE_DISTRIBUTION_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.Statistics
-
- STUDENTS_T_DISTRIBUTION_PROBABILITY_DENSITY_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.Statistics
-
- STUDENTS_T_INVERSE_CUMULATIVE_DISTRIBUTION_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.Statistics
-
- STUDY_LEVEL - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- studyAccNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyAge - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyDate - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- studyDate - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- studyDate - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- studyDate - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- studyDate - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyDescrip - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyDescription - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- studyDescription - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- studyDiag - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyDuration - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- studyHeaderBlocks - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- studyHeaderBlocks - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- studyHeaderID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- studyHeaderID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- studyHeaderRevisionNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- studyHeaderRevisionNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- studyHist - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyID - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- studyID - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyInstanceUID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_UID
-
String representing the Study Instance UID
- studyInstanceUID - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- studyName - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This is the dir name of the study
- studyName - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- studyName - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
study name string
- studyNOText - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- studyNumber - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- studyNumber - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- studyOcc - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyPath - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This is the full path of the study
- studyPath - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
study path
- studyPhyRead - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyPhyRec - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyRefPhy - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studySize - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyStatus - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
506 Indicates if study has complete info (DICOM/genesis).
- studyTable - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- studyTableModel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- studyTableSorter - Variable in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
DOCUMENT ME!
- studyTaskID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- studyTaskID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- studyTime - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- studyTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- studyTime - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- studyTime - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- studyTime - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- studyTime - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyUID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
474 - 32 bytes.
- studyUID - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- studyWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- style - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- style - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- sub(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- sub(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- sub(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- sub(MjPolynomial1f, MjPolynomial1f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjPolynomial1f
-
sets this instance to the difference of two polynomial instances.
- sub(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- sub(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Minus operator.
- sub(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- sub(CVisRGBA, CVisRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- sub(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- sub(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- sub(NVectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- sub(Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- sub(PPolynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- sub(VectorD) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- sub(VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- sub(Vector3f, Vector3f) - Method in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- sub(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Subtracts one vector from another and returns result. result = pt1 - pt2.
- sub_into(byte) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- sub_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- sub_into(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PPolynomial
-
- sub_into(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- sub_into(CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- sub_into(CVisRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRGBA
-
- sub_into(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- sub_into(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- sub_into(NVectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- sub_into(Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- sub_into(VectorD) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- sub_into(VectorF) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- subbands - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- SUBBLOCK_BEAM_SPLITTER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_BEAM_SPLITTERS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_DATA_CHANNEL - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_DATA_CHANNELS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_DETECTION_CHANNEL - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_DETECTION_CHANNELS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_END - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_ILLUMINATION_CHANNEL - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_ILLUMINATION_CHANNELS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_LASER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_LASERS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_MARKER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_MARKERS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_RECORDING - Static variable in class gov.nih.mipav.model.file.FileLSM
-
Values for entries in scan information.
- SUBBLOCK_TIMER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_TIMERS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_TRACK - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- SUBBLOCK_TRACKS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- subBrickIndex - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- subBrickNumber - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- subBrickNumber - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
Specifies sub-brick that this file-info belongs to
- subButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- subcategory - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- subcluster(AlgorithmGaussianMixtureModelEM.SigSet, int, int, int, double, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM
-
- subdim - Variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- Subdivide(OctNode, float, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- subdivideTriangles - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Smooth button.
- subDivideTriangles(int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- subdivision - Variable in class gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
- subFace - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- SUBFILE_TYPE - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- SUBFILE_TYPE - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- subFilePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.ClassSelectorPanel
-
- SUBIFDS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- SUBIFDS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- SUBIN7(double[][], int, double, int, int, double[], double[], double, double[], double, double[], double[], int[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- SUBJ - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- subjContributingStatus - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- subject - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- subjectEditorHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
- subjectID - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- subjectInformationStr - Static variable in class gov.nih.mipav.model.file.FileImageXML
-
array of strings representing the tags under in the xml schema.
- subjectModel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
model associated with subject information.
- subjectName - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
Subject's information.
- subjectTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
subject information table.
- subjectTypeHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
- subjectVOIButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- subjectVOIIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- subLength - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- Submatrix(int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- Submatrix(int, int, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- Submatrix(int, int, CVisDMatrix, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- Subpath() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Subpath
-
- Subpath(String) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Subpath
-
- subpixel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNonMaxSuppts
-
- subpixel2D(int, int, int, int, int, int, int, int, int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- subpoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- subQueryPanel - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- subs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- subsample - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
If true, subsample image for histogram formation.
- subsample - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- subsample(float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
scale down by a factor
- subsample(float[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
scale down by a factor
- subsample(ModelImage, Dimension) - Static method in class gov.nih.mipav.model.file.FileIO
-
The purpose of this method is to subsample a ModelImage to the dimensions specified by the subsampleDimension
parameter.
- subSample - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Subsample flag.
- subsample2D(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Subsample a 2D image.
- subSample2dBy2() - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Takes a simple image and subsamples it by 2.
- subSample2dBy2(boolean) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Takes a simple image and subsamples it by 2.
- subSample2dBy2(ModelSimpleImage) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Takes a simple image and subsamples it by 2.
- subSample2dBy2(ModelSimpleImage, boolean) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Takes a simple image and subsamples it by 2.
- subSample2DimBy2(ModelSimpleImage, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- subSample2DimBy2(ModelSimpleImage, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- subsample3D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Perform the subsampling.
- subsample3dBy2() - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Takes a simple image and subsamples it by 2.
- subsample3dBy2(boolean) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Takes a simple 3D image and subsamples it by 2.
- subsample3dBy2XY() - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Takes a simple 3D image and subsamples each image plane (XY) by 2.
- subsample3dBy2XY(boolean) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Takes a simple 3D image and subsamples each image plane (XY) by 2.
- subSample3dBy2XY(ModelSimpleImage) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- subSample3dBy2XY(ModelSimpleImage, boolean) - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- subsample4D() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Perform the subsampling.
- subsampleBy2(ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- subsampleBy2(ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- subsampleBy2(ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- subsampleBy2(ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- subsampleBy2(ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- subsampleBy2(ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- subSampleBy2(ModelSimpleImage, ModelSimpleImage, boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- subSampleBy2(ModelSimpleImage, ModelSimpleImage, boolean) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Takes a simple image and subsamples it by 2, interpolating so that the new values are averages.
- subsampleBy2XY(ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- subsampleBy2XY(ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- subsampleBy2XY(ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- subsampleBy2XY(ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- subSampleBy2XY(ModelSimpleImage, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- subSampleBy2XY(ModelSimpleImage, ModelSimpleImage, boolean) - Static method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Takes a simple image and subsamples XY by 2, interpolating so that the new XY values are averages.
- subSampleCBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JDialogSurfaceAVI
-
Sub sampel combo box.
- subsampleCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- subsamplingSanityCheck() - Method in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- subscribersHashtable - Variable in class gov.nih.mipav.model.structures.ReminderThread
-
DOCUMENT ME!
- subscribersHashtable - Variable in class gov.nih.mipav.model.structures.TimeoutThread
-
DOCUMENT ME!
- SUBSET_DICTIONARY - Static variable in class gov.nih.mipav.model.file.DicomDictionary
-
DOCUMENT ME!
- SUBSET_DICTIONARY - Static variable in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
DOCUMENT ME!
- SUBSET_DICTIONARY_FILENAME - Static variable in class gov.nih.mipav.model.file.DicomDictionary
-
subset dictionary file name, "dicomsave.dictionary".
- SUBSET_DICTIONARY_FILENAME - Static variable in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
subset dictionary file name, "dicomsave.dictionary".
- subset_preconditioner_start_row_block - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- subsetAlgo - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTIColorDisplay
-
handle for Algorithm Subset *
- subsetAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
ref to AlgorithmSubset
- subsetAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- subsetAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- subsetAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- subsetAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.AlgorithmDTIColorDisplay
-
handle for Algorithm Subset *
- subsetHashtable - Static variable in class gov.nih.mipav.model.file.DicomDictionary
-
Hashtable filled with DICOM tags which are a subset (not necessarily a proper subset) of dicom tags in the master
table.
- subsetImage - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- subsetImage - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- SubsetParameterization(int, Vector<Integer>) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.SubsetParameterization
-
- subSetsToArray(Vector<Vector<String>>) - Static method in class gov.nih.mipav.model.file.FilenameSorter
-
Method will convert a Vector of Vectors of String into a String array.
- subsetTreeMap - Static variable in class gov.nih.mipav.model.file.PrivateDicomDictionary
-
TreeMap filled with DICOM tags which are a subset (not necessarily a proper subset) of dicom tags in the master
table.
- SubSig() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SubSig
-
- subsm(int, int, int, int[], double[], double[], int[], double[], double[], double[], double[][], double[][], double, double[], double[], int, int, int[], double[], double[][], int, int[]) - Method in class gov.nih.mipav.model.algorithms.L_BFGS_B
-
- subspace - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.userWeightFunct
-
- subspace_B() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- subspace_B_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- subspace_basis() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- subspace_basis_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- SUBSPACE_DOGLEG - gov.nih.mipav.model.algorithms.CeresSolver.DoglegType
-
- subspace_g() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- subspace_g_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- subspace_is_one_dimensional_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DoglegStrategy
-
- subspaceEstim(float[], float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- subsystemSpecificDataOffset - Variable in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- subTDim - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
- subtract(DoubleDouble) - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns a DoubleDouble whose value is (this - y).
- Subtract(double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Factor
-
- Subtract(Polynomial, Polynomial, Polynomial) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Polynomial
-
- SUBTRACT - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- SUBTRACT - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- SUBTRACT - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- subtractedBaseImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- subtractedSrcImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- subtractionMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- subtractionMask2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- SUBTRACTIVE - Static variable in class gov.nih.mipav.model.structures.VOI
-
Mask as zeros - i.e. put zeros to indicate where the VOI is located
- subtractMask(ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
Removes portions of the image that are masked.
- SubtractScaled(NVectorF, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.NVectorF
-
- SubtractScaled(VectorD, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- SubtractScaled(VectorF, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- subTriangles(ModelImage, float, float, float, float, float, float, float, float, float) - Static method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
Subdivide the triangle.
- subtype - Variable in class gov.nih.mipav.model.structures.VOIBase
-
initialize subtype to unknown
- subType - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- subuc(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- subuc(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- subvid(libdt.Mat[], int, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- subvid(libdt.Mat[], int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- subvid(libdt.Mat[], libdt.Range, libdt.Range, libdt.Range) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- subVOIAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- subXDim - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
- subXDim - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
- subXTv(double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- subXv(double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- subYDim - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
- subYDim - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
- subZDim - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
- succ - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- succeeded - Static variable in class gov.nih.mipav.view.DICOMDisplayer
-
DOCUMENT ME!
- SucceedingIterationCallback() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.SucceedingIterationCallback
-
- success - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Indicates whether the ELSUNC algorithm succeeded in finding a minimum.
- success - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Indicates whether the Powell algorithm succeeded in finding a minimum.
- success - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
- success - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
flag indicating if method was successful
- SUCCESS - Static variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- successful - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica
-
DOCUMENT ME!
- successful - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- sufficient_curvature_decrease - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
- sufficient_decrease - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchOptions
-
- suffix - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- suffix - Variable in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
DOCUMENT ME!
- SUITE_SPARSE - gov.nih.mipav.model.algorithms.CeresSolver.SparseLinearAlgebraLibraryType
-
- suiteID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
0 - 4 bytes.
- SUITESPARSE_VERSION - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- sum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- sum - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
- sum(libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- Sum() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Calc the total sum of the matrix.
- Sum() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the sum of the vector.
- SUM - gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- SUM - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- sum2Value - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- sumB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- sumBuffer - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
buffer for storing the current max of an OpenCL buffer
- SumCol(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Calc the sum of each column into a vector.
- sumG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- sumImg - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
651 Summary image field.
- sumIntensities - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- sumIntensities - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statics to calculate.
- sumIntensitiesB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- sumIntensitiesG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- sumIntensitiesR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- SummarizeGivenProgram(CeresSolver.Program, CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- SummarizeReducedProgram(CeresSolver.Program, CeresSolver.SolverSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- summary - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolver
-
- summary - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolver
-
- summary - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Solver
-
- summary - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategy
-
- summary_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ScopedExecutionTimer
-
- summaryBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
Used to indicate the number of histogram bins when using the constructors that do NOT pass in the histogram
object.
- summaryBins - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- summaryField - Variable in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Text area for user inputed bug title
- SummedWeights - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassData
-
- sumPixelInten - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- sumPixelInten - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
- sumPixelIntenB - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- sumPixelIntenB - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
- sumPixelIntenG - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- sumPixelIntenG - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
- sumPixelIntenR - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
- sumPixelIntenR - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
- sumR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- sums - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- sumValue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- sumwt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- sumwty - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- SUNDenseLinearLapackSolver(CVODES.NVector, double[][]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNDenseLinearSolver(CVODES.NVector, double[][]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- sUnits - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Deprecated.
- SUNLINEARLAPACKSOLVER_DIRECT - gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver_Type
-
- SUNLinearSolver() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver
-
- SUNLINEARSOLVER_CUSTOM - gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver_Type
-
- SUNLINEARSOLVER_DIRECT - gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver_Type
-
- SUNLINEARSOLVER_ITERATIVE - gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver_Type
-
- SUNLinearSolver_Type() - Constructor for enum gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver_Type
-
- SUNLinSolFree_Dense(CVODES.SUNLinearSolver) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLinSolInitialize_Dense(CVODES.SUNLinearSolver) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLinSolSetup_Dense(CVODES.SUNLinearSolver, double[][]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLinSolSetup_LapackDense(CVODES.SUNLinearSolver, double[][]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLinSolSolve_Dense(CVODES.SUNLinearSolver, double[][], CVODES.NVector, CVODES.NVector, double) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLinSolSolve_LapackDense(CVODES.SUNLinearSolver, double[][], CVODES.NVector, CVODES.NVector, double) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_ATIMES_FAIL_REC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_ATIMES_FAIL_UNREC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_CONV_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_GS_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_ILL_INPUT - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_LUFACT_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_MEM_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_MEM_NULL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_PACKAGE_FAIL_REC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_PACKAGE_FAIL_UNREC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_PSET_FAIL_REC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_PSET_FAIL_UNREC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_PSOLVE_FAIL_REC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_PSOLVE_FAIL_UNREC - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_QRFACT_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_QRSOL_FAIL - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_RES_REDUCED - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNLS_SUCCESS - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNMatCopy(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNMatScaleAddI(double, double[][]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- SUNMatZero(double[][]) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- sup4thick(double) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- SUPER_CIRCLE - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingHalftoningAlgorithm
-
Super-circle Halftoning
- SUPERIOR_EDGE - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
AC-PC: Superior Edge reference point.
- SUPERIOR_PT - Static variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
Talairach: Superior reference point.
- superiorCenter - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- superiorEdge - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
markers used for +orig to +ACPC transformation.
- superiorEdge - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- superiorEdgeDicom - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- superiorEdgePt - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- superiorPt - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- superiorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- superiorPt - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- superiorPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
DOCUMENT ME!
- superiorPt3Df - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- superKey - Variable in class gov.nih.mipav.model.file.FileOME.MyXMLHandler
-
The parent XML tag of the element we are currently parsing.
- supp_tech - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
392 SAT fat/water/none.
- support_width - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.BaseWavelet
-
- supportsRemoteBufferedImage() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
- supportsRemoteBufferedImage() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
- supportsTexture3D() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Check to see if 3D textures are supported by the graphics card.
- suppressionConfidenceText - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- suppressionRankText - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- suppressionTechnique - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- suppressionTechnique - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- suppressProgressBar - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
- suppressProgressBar - Variable in class gov.nih.mipav.model.file.FileIO
-
- suppressProgressBar - Variable in class gov.nih.mipav.model.file.FileSVS
-
- suppressProgressBar - Variable in class gov.nih.mipav.model.file.FileTiff
-
- suppTags - Variable in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- SUR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
View Mode Surface Constant:
- surf - Variable in class gov.nih.mipav.view.ViewJFrameMemory
-
thread.
- surf - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
thread to watch image registry.
- Surface - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel.VOIParams
-
- Surface - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- SURFACE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- SURFACE - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Surface Files (*.sur).
- SURFACE_XML - Static variable in class gov.nih.mipav.model.file.FileUtility
-
MIPAV Surface XML file format. extension: .xml
- surfaceAdded() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Returns true if a surface exists in the Renderer.
- surfaceAmbient - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- surfaceArea - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
- surfaceArea - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- surfaceAreaDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
- SurfaceAttributes - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Class that holds the information about each surface displayed in the
SurfaceRenderer.
- SurfaceAttributes(ModelTriangleMesh[], String, String) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceAttributes
-
Constructor.
- surfaceBackFaceCB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Check Box for surface back face culling.
- surfaceBackFaceCB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Check Box for surface back face culling.
- surfaceBoxPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- surfaceClipCB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Check Box for surface clpping of the volume render.
- surfaceClipCB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Check Box for surface clpping of the volume render.
- SurfaceClipEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
Surface clipping.
- SurfaceClipEffect() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceClipEffect
-
Create a surface clip effect.
- surfaceCoilIntensityCorrection - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- surfaceCoilIntensityCorrection - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- surfaceCoilsCorrectionType - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- surfaceCoilsCorrectionType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- surfaceCoilType - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- surfaceCoilType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- surfaceCoilType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
380.
- surfaceColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
A vector of BitSet masks, one for each surface loaded into the viewer.
- SurfaceColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- surfaceColumnNames - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
array of strings for surface column names.
- surfaceCompositeInit - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- surfaceDir - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Loaded mask surface image directory.
- surfaceDirectional - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- surfaceDirectionalStatic - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- surfaceDirectoryName - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The directory where a surface file was last loaded/saved.
- SurfaceDisplay() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay
-
Creates surface display table.
- SurfaceExtractImage - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- SurfaceExtractImage(GraphicsImage.FormatMode, int, int, int, byte[], String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceExtractImage
-
Construct a 3D image (byte)
- SurfaceExtractor - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
A level surface extractor that is based on decomposing voxels into tetrahedra, assuming a linear interpolation on the
tetrahedra, and extracting triangular level sets for those tetrahedra.
- SurfaceExtractor(int, int, int, int[], float, float, float, int[], float[], TransMatrix) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractor
-
Create a level surface extractor for a 3D image.
- SurfaceExtractorCubes - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
A level surface extractor that is based on decomposing voxels into cubes, assuming a linear interpolation on the
cubes, and extracting triangular level sets for those cubes.
- SurfaceExtractorCubes(int, int, int, int[], float, float, float, int[], float[], TransMatrix) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceExtractorCubes
-
Create a level surface extractor for a 3D image.
- surfaceFileName - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Path and name of extracted surface file. ".sur" will be appended if necessary.
- surfaceFileName - Variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Path and name of extracted surface file. ".sur" will be appended if necessary.
- surfaceFileName - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHeightFunction
-
DOCUMENT ME!
- surfaceFileName - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
Path and name of extracted surface file. ".sur" will be appended if necessary.
- surfaceFinish - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- surfaceGeodesic - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Geodesic reference.
- surfaceGeodesic - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Geodesic reference.
- SurfaceGifitXMLHandler(FileInfoSurfaceGiftiXML_WM) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM.SurfaceGifitXMLHandler
-
Creates a new SurfaceXMLHandler object.
- surfaceGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
3D Surface user-interface panel:
- surfaceInit - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- surfaceInitColorA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- surfaceInitColorB - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SurfaceLightingEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
Surface lighting uses the lights defined in the Volume/Surface/Tri-Planar view in the vertex and pixel shaders.
- SurfaceLightingEffect(VolumeImage[], Texture) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
- SurfaceLightingEffect(VolumeImage, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceLightingEffect
-
Creates a LightingEffect
- SurfaceLink(String) - Constructor for class gov.nih.mipav.model.file.FileInfoImageXML.SurfaceLink
-
Create a new surface link with the given path.
- surfaceList - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The list box in the dialog for surfaces.
- surfaceList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- surfaceList - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The list box in the dialog for surfaces.
- SurfaceList - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- SurfaceLoaderSUR - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Class used to load a surface stored in an file using the SUR format.
- SurfaceLoaderSUR(String) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.SurfaceLoaderSUR
-
Open the specified file and load the surface data, stored in the SUR surface format, from it.
- surfaceMask - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
A vector of BitSet masks, one for each surface loaded into the viewer.
- SurfaceMask - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
SurfaceMask.
- SurfaceMask() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
Default Constructor:
- SurfaceMaterialDisplay - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
Display component in the dialog that displays the material parameters for the surface.
- SurfaceMaterialDisplay(MaterialState, Light[], boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
Constructor.
- surfaceNames - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
A vector of the mask names, so they can be accessed by name:
- surfaceOpacity - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Surface opacity slider value of the surface dialog.
- surfaceOpacityEvents - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Surface opacity changes event queue.
- surfaceOpacitySlice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Surface volume opacity.
- surfacePaint - Variable in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
SurfacePaint reference
- surfacePaint - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
SurfacePaint reference
- SurfacePaint - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
- SurfacePaint(JPanelSurface, SurfaceRender) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Default Constructor
- surfacePaint_WM - Variable in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
SurfacePaint reference
- surfacePaint_WM - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
SurfacePaint reference
- SurfacePaint_WM - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- SurfacePaint_WM(JPanelSurface_WM, VolumeTriPlanarInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Constructor.
- surfacePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Dialog for loading and displaying surfaces.
- surfacePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Dialog for loading and displaying surfaces.
- surfacePanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- surfacePickableCB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Check Box for surface pickable.
- surfacePickableCB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Check Box for surface picking.
- SurfacePlotter - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
Frame that holds the surface plotter.
- SurfacePlotter(ModelImage, ModelLUT, int, GraphicsConfiguration) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Makes a frame and puts the image and the plotted quad mesh into it.
- surfacePoint - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- surfacePointStatic - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- surfaceReconstructionTBI() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- SURFACEREF_XML - Static variable in class gov.nih.mipav.model.file.FileUtility
-
MIPAV Surface XML file format. extension: .xml
- SurfaceRefXMLHandler(FileInfoSurfaceRefXML_J3D) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D.SurfaceRefXMLHandler
-
Creates a new SurfaceXMLHandler object.
- SurfaceRefXMLHandler(FileInfoSurfaceRefXML_WM) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM.SurfaceRefXMLHandler
-
Creates a new SurfaceXMLHandler object.
- surfaceRender - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
Surface renderer reference.
- surfaceRender - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Surface Render reference.
- surfaceRender - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The surface render reference.
- surfaceRender - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Surface renderer reference.
- SurfaceRender - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Frame that holds the surface renderer.
- SurfaceRender(ModelImage, ModelImage, GraphicsConfiguration) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Constructor called by the VirtualEndoscopyView.
- SurfaceRender(ModelImage, ModelLUT, ModelImage, ModelLUT, ViewJFrameBase, GraphicsConfiguration, ViewJProgressBar) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Makes a frame and puts the three image planes into it.
- surfaceRootBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The branch group that holds all the surfaces together.
- surfaceRootTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The transform group to which the model lights are attached.
- surfaces - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
List of files which describe surfaces attached to this image.
- surfaces - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
for displaying surfaces.
- surfaceSliderCount - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Counter for surface opacity slider moves.
- surfaceSpot - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- surfaceSpotStatic - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SurfaceState - Class in gov.nih.mipav.view.renderer.WildMagic.Interface
-
- SurfaceState() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- SurfaceState(TriMesh, String) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- surfaceStr - Static variable in class gov.nih.mipav.model.file.FileImageXML
-
array of strings representing the tags under in the xml schema.
- surfaceTextureGUI - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Surface Texture user-interface panel:
- surfaceTexturePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Panel for displaying the SurfaceTexture interface:
- surfaceTexturePanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Panel for displaying the SurfaceTexture interface:
- surfaceTransparencyCB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Check Box for surface transparency.
- surfaceTransparencyCB - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Check Box for surface transparency.
- surfaceVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
A list of the surfaces.
- SurfaceView - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Frame that holds the surface renderer.
- SurfaceView(ModelImage, ModelImage, GraphicsConfiguration) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Constructor called by the VirtualEndoscopyView.
- SurfaceView(ModelImage, ModelLUT, ModelImage, ModelLUT, ViewJFrameBase, GraphicsConfiguration, ViewJProgressBar) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Makes a frame and puts the three image planes into it.
- SURFACEVIEW - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- SurfaceXMLHandler(FileInfoSurfaceXML_J3D) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D.SurfaceXMLHandler
-
Creates a new SurfaceXMLHandler object.
- surfacState - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- SURFASTMode() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Invoke the SURFACEFAST rendering mode.
- SURFASTMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Display the volume in Surface mode.
- SURFASTMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Change to the Surface mode pixel shader program.
- SURFASTMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SURFASTMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Display the volume in Surface mode.
- surfcext - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
382 Extremity Coil Flag.
- surLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay
-
DOCUMENT ME!
- SURMode() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Invoke the SURFACE rendering mode.
- SURMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Display the volume in Composite Surface mode.
- SURMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Change to the Composite Surface mode pixel shader program.
- SURMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- SURMode() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Display the volume in Composite Surface mode.
- SURMode(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- surModel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay
-
DOCUMENT ME!
- surName - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- surPickLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Label to indicate that enable Surface pickable before drawing geodesic line.
- surPickLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Label to indicate that enable Surface pickable before drawing geodesic line.
- surRender - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
SurfaceRender reference.
- surRender - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
SurfaceRender reference.
- surRender - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Three types of renderer.
- surTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML.SurfaceDisplay
-
DOCUMENT ME!
- surTabVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- surTabVector - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
For each render, use the vector to store the currently active tabs.
- surView - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Surface View reference
- suspensions - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- SutterDG4Filter - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- SutterL10Filter1Array - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- SutterL10Filter2Array - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- SV - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- SV - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- SV - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_model
-
- sv_actual - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- sv_coef - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- sv_coef - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_model
-
- sv_colormap8 - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- sv_colormap8 - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- sv_colormap9to12 - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer
-
- sv_colormap9to12 - Variable in class gov.nih.mipav.model.file.libjpeg.my_cquantizer2
-
- sv_indices - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- Sval - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexRegOptions
-
< Regularization method for S.
- SVC_Q - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- SVC_Q(LIBSVM.svm_problem, LIBSVM.svm_parameter, byte[]) - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.SVC_Q
-
- SVC_Q(svm_problem, svm_parameter, byte[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVC_Q
-
- svd - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- SVD - Class in gov.nih.mipav.model.structures.jama
-
- SVD() - Constructor for class gov.nih.mipav.model.structures.jama.SVD
-
- svdCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- svdLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- svdMethodsSelected - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- Svec() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Svec
-
- svm - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- svm() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- SVM - Class in gov.nih.mipav.model.algorithms
- SVM() - Constructor for class gov.nih.mipav.model.algorithms.SVM
-
- svm_binary_svc_probability(LIBSVM.svm_problem, LIBSVM.svm_parameter, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_binary_svc_probability(svm_problem, svm_parameter, double, double, double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_check_parameter(LIBSVM.svm_problem, LIBSVM.svm_parameter) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_check_parameter(svm_problem, svm_parameter) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_check_probability_model(LIBSVM.svm_model) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_check_probability_model(svm_model) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_cross_validation(LIBSVM.svm_problem, LIBSVM.svm_parameter, int, double[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_cross_validation(svm_problem, svm_parameter, int, double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_get_labels(LIBSVM.svm_model, int[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_get_labels(svm_model, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_get_nr_class(LIBSVM.svm_model) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_get_nr_class(svm_model) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_get_nr_sv(LIBSVM.svm_model) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_get_sv_indices(LIBSVM.svm_model, int[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_get_svm_type(LIBSVM.svm_model) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_get_svm_type(svm_model) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_get_svr_probability(LIBSVM.svm_model) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_get_svr_probability(svm_model) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_group_classes(LIBSVM.svm_problem, int[], int[][], int[][], int[][], int[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_group_classes(svm_problem, int[], int[][], int[][], int[][], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_load_model(BufferedReader) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_load_model(BufferedReader) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_load_model(String) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_load_model(String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_model - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
Copyright (c) 2000-2014 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
- svm_model() - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.svm_model
-
- svm_model() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_model
-
- svm_node - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
Copyright (c) 2000-2014 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
- svm_node() - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.svm_node
-
- svm_node() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_node
-
- svm_node(int, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_node
-
- svm_one_class_probability(LIBSVM.svm_problem, LIBSVM.svm_model, double[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_parameter - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
Copyright (c) 2000-2014 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
- svm_parameter() - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- svm_parameter() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- svm_predict - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Copyright (c) 2000-2014 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
- svm_predict() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_predict
-
- svm_predict(LIBSVM.svm_model, LIBSVM.svm_node[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_predict(svm_model, svm_node[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_predict_probability(LIBSVM.svm_model, LIBSVM.svm_node[], double[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_predict_probability(svm_model, svm_node[], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_predict_values(LIBSVM.svm_model, LIBSVM.svm_node[], double[]) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_predict_values(svm_model, svm_node[], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_print_interface - Interface in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
Copyright (c) 2000-2014 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
- svm_print_null - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_print_null - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- svm_print_stdout - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_print_stdout - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_print_string - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_print_string - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_problem - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
Copyright (c) 2000-2014 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
- svm_problem() - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.svm_problem
-
- svm_problem() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_problem
-
- svm_save_model(String, LIBSVM.svm_model) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_save_model(String, svm_model) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_scale - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Copyright (c) 2000-2014 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
- svm_scale() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- svm_set_print_string_function(LIBSVM.svm_print_interface) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_set_print_string_function(svm_print_interface) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_svr_probability(LIBSVM.svm_problem, LIBSVM.svm_parameter) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_svr_probability(svm_problem, svm_parameter) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_toy - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Copyright (c) 2000-2014 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
- svm_toy() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- svm_toy_frame(String, int, int) - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- svm_toy.point - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- svm_train - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
Copyright (c) 2000-2014 Chih-Chung Chang and Chih-Jen Lin
All rights reserved.
- svm_train() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_train
-
- svm_train(LIBSVM.svm_problem, LIBSVM.svm_parameter) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_train(svm_problem, svm_parameter) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_train_one(LIBSVM.svm_problem, LIBSVM.svm_parameter, double, double) - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_train_one(svm_problem, svm_parameter, double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm_type - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- svm_type - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- svm_type_table - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- svm_type_table - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm
-
- svm.decision_function - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- SVM.svmtest - Class in gov.nih.mipav.model.algorithms
-
- SVM.VlHomogeneousKernelMap - Class in gov.nih.mipav.model.algorithms
-
- SVM.VlHomogeneousKernelMapWindowType - Enum in gov.nih.mipav.model.algorithms
-
- SVM.VlHomogeneousKernelType - Enum in gov.nih.mipav.model.algorithms
-
- SVM.VlSvm - Class in gov.nih.mipav.model.algorithms
-
- SVM.VlSvmDataset - Class in gov.nih.mipav.model.algorithms
-
- SVM.VlSvmLossType - Enum in gov.nih.mipav.model.algorithms
-
- SVM.VlSvmSolverStatus - Enum in gov.nih.mipav.model.algorithms
-
- SVM.VlSvmSolverType - Enum in gov.nih.mipav.model.algorithms
-
- SVM.VlSvmStatistics - Class in gov.nih.mipav.model.algorithms
-
- svmModelChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
SVM model panel.
- svmModelDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- svmModelName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- svmOptionsPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- svmOptionsPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- svmSortModelStructure() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
sort SVM model with names.
- svmtest() - Constructor for class gov.nih.mipav.model.algorithms.SVM.svmtest
-
- svmTrainingBinary - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- svmTrainingBinary - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
flag to indicate is SVM training with binary class or multi-class.
- svmTraverseDir(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Processing SVM model atlas.
- SVR_Q - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm
-
- SVR_Q(LIBSVM.svm_problem, LIBSVM.svm_parameter) - Constructor for class gov.nih.mipav.model.algorithms.LIBSVM.SVR_Q
-
- SVR_Q(svm_problem, svm_parameter) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVR_Q
-
- SVS - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Aperio TIFF based .svs
- swap(double[], int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.ArraySorter
-
Swaps x[a] with x[b].
- swap(double[], int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- swap(int[], int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- swap(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- swap(IntArrayPointer, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- swap(Object[], int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.QuickSort
-
- swap(Object[], int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.QuickSort
-
- swap(T, T) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Swap(int[], int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Swap values
- SWAP(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- SWAP_DOUBLE_ARRAY(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- swap_index(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Cache
-
- swap_index(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- swap_index(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.ONE_CLASS_Q
-
- swap_index(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.QMatrix
-
- swap_index(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- swap_index(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.SVC_Q
-
- swap_index(int, int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.SVR_Q
-
- swap_index(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Cache
-
- swap_index(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- swap_index(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.ONE_CLASS_Q
-
- swap_index(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.QMatrix
-
- swap_index(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- swap_index(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVC_Q
-
- swap_index(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVR_Q
-
- swap_points(int, NelderMead.point_t, NelderMead.point_t) - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- swap14() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapDims
-
Swaps the image first and fourth dimensions and replaces the source image with the swapped dimension image.
- SWAP14 - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapDims
-
- swap34() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwap34
-
Swaps the image third and fourth dimensions and replaces the source image with the swapped dimension image.
- swap34() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapDims
-
Swaps the image third and fourth dimensions and replaces the source image with the swapped dimension image.
- SWAP34 - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapDims
-
- swap34Algo - Variable in class gov.nih.mipav.view.dialogs.JDialogSwap34
-
DOCUMENT ME!
- swapAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Running algorithm
- swapDimsAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
DOCUMENT ME!
- swapMatrixForVector(double[][], float[][], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- swapMatrixForVectorB(double[][], float[][], int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- SwapMode(String, int) - Constructor for enum gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.SwapMode
-
- swapModelClipBG(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Swap ModelClip Branch group between the 6 clipping plane and the arbitray clipping plane.
- swapPF - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- swapPF - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- swapPF - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
262 Swap phase-frequency axis.
- swapSlices() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Calculates the final output and stores it in the source image.
- swapSlices(double[], double[], int, int, int, int) - Static method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Swap slices in order to apply FFT algorithm.
- swapSlices(float[], float[], int, int, int, int) - Static method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Swap slices in order to apply FFT algorithm.
- swapType - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapDims
-
- swapType - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapDims
-
- swapVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Result image
- swapXY - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Internal TrackVis use
- swapXZ - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Internal TrackVis use
- swapYAxis(P, int) - Static method in class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
Swaps between GL and AWT coordinates, AWT coordinate system
has its origin in the top left corner of a component and downwards pointing
y axis, whereas GL has its origin in the bottom left corner of the viewport
(at least in JPlotter) and upwards pointing y axis.
- swapYZ - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Internal TrackVis use
- sWarpEntry() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware.sWarpEntry
-
- Swf - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- swiAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
This is the SWIs algorithm
- switchGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
The switch group that switch between CoolTip probe and indicator probe.
- switchGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Switch group used to switch between cyan and green probes.
- switchGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
The switch group that switch between regular probe and indicator probe.
- switchGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Switch group to switch between thermal branch group and the indicator branch group.
- switchGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Tri planar view and the 3D texture volume view switch group.
- switchGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Tri planar view and the 3D texture volume view switch group.
- switchPaintAndMask(int, int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Converts paint to a mask, then mask to paint.
- switchTabList(String) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Update the tabbed pane when switch view buttons in the View toolbar.
- switchToSliceView(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Perform some actions required when switching to the slice renderer.
- switchToSliceView(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Perform some actions required when switching to the slice renderer.
- switchToVolView(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Perform some actions required when switching to the volume renderer.
- switchToVolView(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Perform some actions required when switching to the volume renderer.
- swt(double[], int, double[], int, double[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- swt(double[], PyWavelets.DiscreteWavelet, int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- SWT - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- SWT - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- swt_a(double[], int, PyWavelets.DiscreteWavelet, double[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- swt_axis(double[][][], PyWavelets.DiscreteWavelet, int, int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- swt_axis(double[][], PyWavelets.DiscreteWavelet, int, int, int, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- swt_buffer_length(int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- swt_d(double[], int, PyWavelets.DiscreteWavelet, double[], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- swt_max_level(int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- SWT_TRANSFORM - gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteTransformType
-
- swt1D(double[][][], PyWavelets.DiscreteWavelet, int, int, int, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- swt1D(double[][], PyWavelets.DiscreteWavelet, int, int, int, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- swt1D(double[], PyWavelets.DiscreteWavelet, int, int, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- swt2(double[][], PyWavelets.DiscreteWavelet[], int, int, int[], boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- SWTButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- swtn(double[][][], PyWavelets.DiscreteWavelet[], int, int, int[], boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- swtn(double[][], PyWavelets.DiscreteWavelet[], int, int, int[], boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- Sx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- Sx - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- Sy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- Sy - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- sycc_to_rgb(int, int, int[], int, int[], int, int[], int, int[], int, int[], int, int[], int) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- sycc420_to_rgb(FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- sycc422_to_rgb(FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- sycc444_to_rgb(FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- SYINF1(int[], int[], double[], double[], boolean, double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- SYM - gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- sym_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym10_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym11_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym12_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym13_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym14_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym15_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym16_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym17_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym18_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym19_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym2_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym20_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym3_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym4_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym5_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym6_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym7_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym8_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- sym9_double - Static variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- symetrize(ModelImage, int) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- symmetric - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Sep_FIR_filter
-
- SYMMETRIC - gov.nih.mipav.model.algorithms.filters.PyWavelets.SYMMETRY
-
- SYMMETRIC - Static variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
Scale type: d' = -1 + 2*(d-min)/(max-min) in [-1,1]
- SYMMETRIC_ORTHOGONALIZATION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- SYMMETRICAL_TRIANGULAR_FUZZY_TRUNCATED_MEDIAN - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
- SYMMETRICAL_TRIANGULAR_FUZZY_TRUNCATED_MEDIAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- SymmetricIndex(int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- SymmetricIndex(int, int, int[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- symmetricOrthogonalization - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- SymmetricPtCrv(CAAMShape, CAAMShape) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
A symmetric poin- to-curve measure, i.e.
- SymmetricRankUpdate(int, int, double[], boolean, double, double, double[][]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- SymmetricRightMultiply(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- symmetry - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.BaseWavelet
-
- SYMMETRY(int) - Constructor for enum gov.nih.mipav.model.algorithms.filters.PyWavelets.SYMMETRY
-
- SymmsIntegralMapping - Class in gov.nih.mipav.model.algorithms
-
- SymmsIntegralMapping() - Constructor for class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- SymmsIntegralMapping(ModelImage, ModelImage, String, boolean, boolean, double[], int, boolean[], int[], double[][], int[], double[], int[], int[], String[]) - Constructor for class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- SymmsIntegralMapping.qaws - Class in gov.nih.mipav.model.algorithms
-
- SYMTY - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- Sync() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPropsReader
-
Sync to read number.
- syncImagesIcon - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
- syncWithEOL() - Method in class gov.nih.mipav.model.file.FileSVS.ModHuffmanInputStream
-
- syncWithEOL() - Method in class gov.nih.mipav.model.file.FileTiff.ModHuffmanInputStream
-
- Synthesize(CAAMShape, CDVector, ModelSimpleImage, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
Image synthesize.
- Synthesize(CAAMShape, CDVector, ModelSimpleImage, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware
-
Renders a texture vector into a shape.
- synthetic - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- SYNTHETIC_BLUR_SIZE - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- SYNTHETIC_NOISE_STD - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- SystemArchitecture() - Constructor for enum gov.nih.mipav.view.Preferences.SystemArchitecture
-
- systemConfigHospitalName - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- systemConfigHospitalName - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- systemDPHolder - Variable in class gov.nih.mipav.view.ViewUserInterface
-
System DP holder (separate from images data provenance...this has everything).
- systemGenerationID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- systemGenerationID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- systemID - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- systemID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
Use serialVersionUID for interoperability.
- Sz - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- Sz - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- SZETAC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- szptr - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
T
- t - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.P
-
- t - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- t - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- t - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess.CalculateT
-
- t - Variable in class gov.nih.mipav.model.algorithms.curev
-
- t - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- t - Variable in class gov.nih.mipav.model.algorithms.CVODES.DtpntMemRec
-
- t - Variable in class gov.nih.mipav.model.algorithms.InverseLaplaceTest
-
- t - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- t - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- t - Variable in class gov.nih.mipav.model.algorithms.splev
-
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
- t - Variable in class gov.nih.mipav.model.algorithms.sproot
-
Copyright (c) 2001-2002 Enthought, Inc. 2003-2022, SciPy Developers.
- t - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- t - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
DOCUMENT ME!
- t - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Link
-
- t - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.EVENT_REC
-
- t - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.EVENT
-
- t(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- T - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- T - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSFTA
-
- T - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- T - Static variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- T - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Edge
-
DOCUMENT ME!
- T - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Triangle
-
DOCUMENT ME!
- T - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Vertex
-
DOCUMENT ME!
- t_bounds_from_pars(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- t_cut_res - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- t_hjump - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- t_m - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- t_m2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- t_method - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- t_old_cut_res - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- t_old_m - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- t_r - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.Tracker
-
- t_x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- t_x - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- t_y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- t_y - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- t_z - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- t_z - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- t0 - Variable in class gov.nih.mipav.model.algorithms.CVODES_ASA.CVadjCheckPointRec
-
- t0 - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions.ROI
-
- t0 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- t0_init - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- t1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
thresholds used in linear correlation calculations if doSecondIteration is true.
- t1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting
-
- t1 - Variable in class gov.nih.mipav.model.algorithms.CVODES_ASA.CVadjCheckPointRec
-
- t1 - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions.ROI
-
- t1 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- T1_CTXNO_AGG - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_CTXNO_MAG - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_CTXNO_SC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_CTXNO_UNI - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_CTXNO_ZC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_NUMCTXS_AGG - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_NUMCTXS_MAG - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_NUMCTXS_SC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_NUMCTXS_ZC - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< No encoding the information is store under raw format in codestream
(mode switch RAW)
- T1_REFINE - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_responses(double[][], double[][], double[], double[], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[], int[], int, int, double, double, double, int, int, String, String[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- T1_SGN - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_SGN_E - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_SGN_N - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_SGN_S - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_SGN_W - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_SIG - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_SIG_E - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Context orientation : North direction
- T1_SIG_N - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Context orientation : North-West direction
- T1_SIG_NE - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_SIG_NW - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Context orientation : South-West direction
- T1_SIG_OTH - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Context orientation : West direction
- T1_SIG_PRIM - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_SIG_S - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Context orientation : East direction
- T1_SIG_SE - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Context orientation : North-East direction
- T1_SIG_SW - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Context orientation : South-East direction
- T1_SIG_W - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Context orientation : South direction
- T1_TYPE_MQ - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- T1_TYPE_RAW - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
< Normal coding using entropy coder
- T1_VISIT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- t15Radio - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- T1Combo - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2.DialogThree
-
- t1ImageIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- t1ImageName - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- t1ResultData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- t1ResultStack - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- t1ResultWindow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
The frames for result images (if null at end of algorithm src ModelImage is destroyed)
- T1z2_get_filter_struct(double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[], double[], double, double, String, double[][], double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- T1z2a_convert_filter(double[], double[], double[], double[], double[], double, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- T1z2b_time_resp(double[], double[], double[], double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- t2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
thresholds used in linear correlation calculations if doSecondIteration is true.
- t2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting
-
- t2 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- t2FileLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- t2frame - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- T2frame - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- T2Image - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
Structural image as reference space (T2 image):
- T2loadPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelEPIDistortionCorrection
-
- t2OpenPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- t2ResultStack - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- t2ResultWindow - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
The frames for result images (if null at end of algorithm src ModelImage is destroyed)
- T2z0_projection_terms(double[][][][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], int[], int, int, String[], ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- T2z0a_invert_design(double[][], double[][], double[][], double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- T2z1_filter(double[][], double[][], double[][], double[][], int[][], double[][], double[][], double[][], double[][], double[], double[], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], int[], String[], int[], int, ModelImage, double[][][][][], String, String, double[], double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- T2z1a_make_image_structure(double[], double[], double[], double[], double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- T2z1b_get_responses_freq(double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[], double[], int, double[], double[], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- T2z1b_get_responses_time(double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- T2z1d_esa2D(double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], int, double[], double[], double, double, double, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- T2z1dI_get_responses_freq_gabor(double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[], double[], double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- t3 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting
-
- t3 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- t30Radio - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- t3d_XY_t - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Actual transform of the image.
- t4 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- T4OPTIONS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- T4OPTIONS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- t5 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- T6OPTIONS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- T6OPTIONS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- tab - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- TAB - Static variable in class gov.nih.mipav.model.file.FileXML
-
TAB string.
- TAB_NAME_LABEL - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveTab
-
The label to use for the tab name parameter.
- TabbedItem(String, JPanel) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView.TabbedItem
-
Creates a new TabbedItem object.
- TabbedItem(String, JPanel) - Constructor for class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView.TabbedItem
-
Creates a new TabbedItem object.
- TabbedItem(String, JPanel) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface.TabbedItem
-
Creates a new TabbedItem object.
- TabbedList - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- tabbedPane - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- tabbedPane - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
The tabbed pane that holds each dimension
- tabbedPane - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- tabbedPane - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- tabbedPane - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Tabbed pane
- tabbedPane - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
tabbed pane
- tabbedPane - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Tabbed pane
- tabbedPane - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- tabbedPane - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
tabbed pane for w/L and min/max *
- tabbedPane - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel.PropertiesDialog
-
- tabbedPane - Variable in class gov.nih.mipav.view.JFrameHistogram
-
tabbed pane, each separate tab contains the interface for imageA and imageB
- tabbedPane - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Tabbed pane that contains the list of opacity functions.
- tabbedPane - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Tabbed Panel that hold the each clipping planes control box.
- tabbedPane - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Tabbed pane that contains the list of opacity functions.
- tabbedPane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
The main tabbed pane in the volume view frame.
- tabbedPane - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
The main tabbed pane in the volume view frame.
- tabbedPane - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
The main tabbed control panel.
- tabbedPane - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
The Tabbed control panel.
- tabbedPane - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
DOCUMENT ME!
- tabbedPane - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Tabbed Panel that hold the each clipping planes control box.
- tabbedPane - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
The main tabbed pane in the volume view frame.
- tabbedPane - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
The main tabbed pane in the volume view frame.
- tabbedPane - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- tabbedPane - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- tabbedPane - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- tabbedPane - Variable in class gov.nih.mipav.view.ViewJFrameMessage
-
DOCUMENT ME!
- tabbedPane - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- tabbedPane - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- tabDelimited - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticFileFormatOptions
-
Radio button to choose a tab-delimited file.
- table - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- table - Variable in class gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
- table - Variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance.SelectionListener
-
- table - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
DOCUMENT ME!
- table - Variable in class gov.nih.mipav.view.JPanelEditSetOrParam
-
DOCUMENT ME!
- table - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- table - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- table - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- TABLE_SIZE - Variable in class gov.nih.mipav.model.file.libjpeg
-
- table1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- table1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- table1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- table1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- table2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- table2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- table2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- table2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- table3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- table3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- table3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- table3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- table4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- table4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- table4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- table4 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- table5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- table5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- table5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- table5 - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- tableCellRenderer - Variable in class gov.nih.mipav.model.structures.TableSorter.SortableHeaderRenderer
-
DOCUMENT ME!
- tableChanged(TableModelEvent) - Method in class gov.nih.mipav.model.structures.TableSorter.TableModelHandler
-
DOCUMENT ME!
- tableChanged(TableModelEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- tableChanged(TableModelEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- tableChanged(TableModelEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- tableDelta - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
214.
- tableDestination - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Log file destination.
- tableDestinationUsage - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Indicates options for OVERWRITE, APPEND for the xlat file.
- tableHeader - Variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- tableIndex - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- TableListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TableListener
-
- TableListener() - Constructor for class gov.nih.mipav.view.ViewJFrameDICOMParser.TableListener
-
- tableLocation - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- tableLocation - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- tableModel - Variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- tableModel - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- TableModelHandler() - Constructor for class gov.nih.mipav.model.structures.TableSorter.TableModelHandler
-
- tableModelListener - Variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- tableNo - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Table number - always 0 for non-color images.
- tableOutput() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
- tablePane - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- tablePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Panel contains JTable for storing dicom tags.
- tablePosition - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- tablePosition - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- tables - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- TableSorter - Class in gov.nih.mipav.model.structures
-
TableSorter is a decorator for TableModels; adding sorting functionality to a supplied TableModel.
- TableSorter() - Constructor for class gov.nih.mipav.model.structures.TableSorter
-
Creates a new TableSorter object.
- TableSorter(TableModel) - Constructor for class gov.nih.mipav.model.structures.TableSorter
-
Creates a new TableSorter object.
- TableSorter(TableModel, JTableHeader) - Constructor for class gov.nih.mipav.model.structures.TableSorter
-
Creates a new TableSorter object.
- TableSorter.Arrow - Class in gov.nih.mipav.model.structures
-
DOCUMENT ME!
- TableSorter.Directive - Class in gov.nih.mipav.model.structures
-
DOCUMENT ME!
- TableSorter.MouseHandler - Class in gov.nih.mipav.model.structures
-
DOCUMENT ME!
- TableSorter.Row - Class in gov.nih.mipav.model.structures
-
Helper classes.
- TableSorter.SortableHeaderRenderer - Class in gov.nih.mipav.model.structures
-
DOCUMENT ME!
- TableSorter.TableModelHandler - Class in gov.nih.mipav.model.structures
-
DOCUMENT ME!
- tableStream - Variable in class gov.nih.mipav.model.file.FileSVS
-
- tableStream - Variable in class gov.nih.mipav.model.file.FileTiff
-
- TableTransferImporter(JTable) - Constructor for class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.TableTransferImporter
-
- tabLevel - Variable in class gov.nih.mipav.model.file.FileXML
-
tab level counter for writing xml header.
- tabPane - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- tabPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
The main tab contrl panel.
- tabVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
For each render, use the vector to store the currently active tabs.
- tag - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.Feature
-
- tag - Variable in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.DicomTagIdentifier
-
The Dicom Tag, held here to return the name of the tag, and when we need the value when processing.
- tag - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- Tag(int, MetadataExtractor.Directory) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.Tag
-
- TAG - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
A dicom tag is stored in the tag's value
- TAG_35MM_FILM_EQUIV_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates the equivalent focal length assuming a 35mm film camera,
in mm.
- TAG_9050A - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_9050B - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_9050C - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_ACCELERATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_ACCELERATION_VECTOR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDirectory
-
- TAG_ACCELEROMETER_X - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_ACCELEROMETER_Y - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_ACCELEROMETER_Z - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_ACCESSORY_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_ACCESSORY_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_ACTION_ADVISED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_ACTIVE_D_LIGHTING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The active D-Lighting setting.
- TAG_ADAPTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
A description of any auxiliary lens, as a string.
- TAG_ADJUSTMENT_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_ADVANCED_SCENE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Normal
2 = Outdoor/Illuminations/Flower/HDR Art
3 = Indoor/Architecture/Objects/HDR B&W
4 = Creative
5 = Auto
7 = Expressive
8 = Retro
9 = Pure
10 = Elegant
12 = Monochrome
13 = Dynamic Art
14 = Silhouette
- TAG_AE_BRACKET_COMPENSATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The AE bracket compensation, as a rational number.
- TAG_AE_SETTING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_AEB_BRACKET_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.FocalLength
-
- TAG_AEB_BRACKET_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_AF_AREA_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_AF_AREA_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
2 bytes
(DMC-FZ10)
'0 1' = Spot Mode On
'0 16' = Spot Mode Off
'(other models)
16 = Normal?
- TAG_AF_AREA_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_AF_AREA_X_POSITIONS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_AF_AREA_Y_POSITIONS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_AF_ASSIST_LAMP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Fired
2 = Enabled nut not used
3 = Disabled but required
4 = Disabled and not required
- TAG_AF_FOCUS_POSITION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The position of the autofocus target.
- TAG_AF_ILLUMINATOR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_AF_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_AF_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_AF_INFO_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_AF_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_AF_INFO_ARRAY_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_AF_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_AF_POINT_POSITION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_AF_POINT_SELECTED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
12288 = None (Manual Focus)
12289 = Auto Selected
12290 = Right
12291 = Centre
12292 = Left
- TAG_AF_POINT_SELECTED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_AF_POINT_USED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.FocalLength
-
- TAG_AF_POINTS_IN_FOCUS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_AF_POINTS_IN_FOCUS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_AF_POINTS_IN_FOCUS_1D - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_AF_RESPONSE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's digital vari-program setting, as a string.
- TAG_AF_RESULT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_AF_TUNE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_AF_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's auto-focus mode, as an uppercase string.
- TAG_ALPHA_CHANNELS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_ALPHA_IDENTIFIERS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_ALPHA_MASK - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_ALTERNATE_DUOTONE_COLORS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_ALTERNATE_SPOT_COLORS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_ALTITUDE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Altitude GPSAltitude 6 6 RATIONAL 1
- TAG_ALTITUDE_REF - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Altitude reference GPSAltitudeRef 5 5 BYTE 1
- TAG_AMBIANCE_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_AMBIENT_INFRARED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_AMBIENT_LIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_AMBIENT_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_AMBIENT_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_AMBIENT_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_AMBIENT_TEMPERATURE_FAHRENHEIT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_AMBIENT_TEMPERATURE_FAHRENHEIT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_AMBIENT_TEMPERATURE_FAHRENHEIT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_ANTI_BLUR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_APERTURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The actual aperture value of lens when the image was taken.
- TAG_APERTURE_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_APEX_APERTURE_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_APEX_BRIGHTNESS_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_APEX_FILM_SPEED_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_APEX_SHUTTER_SPEED_TIME_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_APP14_FLAGS0 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDirectory
-
The convention for TAG_APP14_FLAGS0 and TAG_APP14_FLAGS1 is that 0 bits are benign.
1 bits in TAG_APP14_FLAGS0 pass information that is possibly useful but not essential for decoding.
- TAG_APP14_FLAGS1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDirectory
-
The convention for TAG_APP14_FLAGS0 and TAG_APP14_FLAGS1 is that 0 bits are benign.
1 bits in TAG_APP14_FLAGS1 pass information essential for decoding.
- TAG_APPLE_MULTI_LANGUAGE_PROFILE_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_APPLICATION_NOTES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_APPLICATION_RECORD_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_APPROXIMATE_F_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_APS_C_SIZE_CAPTURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_AREA_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Name of the GPS area GPSAreaInformation 28 1C UNDEFINED Any
- TAG_ARM_IDENTIFIER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_ARM_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_ARTIST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_ASPECT_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_AUDIO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Yes
2 = No
- TAG_AUDIO_DURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_AUDIO_OUTCUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_AUDIO_SAMPLING_RATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_AUDIO_SAMPLING_RESOLUTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_AUDIO_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_AUTO_BRACKET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_AUTO_BRACKETING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_AUTO_DYNAMIC_RANGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_AUTO_EXPOSURE_BRACKETING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.FocalLength
-
- TAG_AUTO_EXPOSURE_BRACKETING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_AUTO_EXPOSURE_WARNING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_AUTO_FLASH_COMPENSATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The flash compensation, as an array of four integers.
- TAG_AUTO_FLASH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The type of flash used in the photograph, as a string.
- TAG_AUTO_FOCUS_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_AUTO_ISO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_AUTO_PORTRAIT_FRAMED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_AUTO_ROTATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_AUTO_SAVE_FILE_PATH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_AUTO_SAVE_FORMAT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_BABY_AGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_BABY_AGE_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_BABY_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_BACKGROUND_COLOR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_BACKGROUND_COLOR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_BACKGROUND_COLOR_INDEX - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- TAG_BASE_ISO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_BATTERY_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_BATTERY_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_BATTERY_VOLTAGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_BATTERY_VOLTAGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_BATTERY_VOLTAGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_BATTERY_VOLTAGE_AVG - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_BESTSHOT_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
- TAG_BITMAP_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_BITS_PER_CHANNEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDirectory
-
The number of bits per channel.
- TAG_BITS_PER_PIXEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_BITS_PER_PIXEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- TAG_BITS_PER_SAMPLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
When image format is no compression, this value shows the number of bits
per component for each pixel.
- TAG_BITS_PER_SAMPLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_BLACK_AND_WHITE_FILTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_BLACK_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_BLACK_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_BLUE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_BLUE_MASK - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_BLUE_X - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- TAG_BLUE_Y - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- TAG_BLUR_WARNING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_BODY_FIRMWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_BODY_FIRMWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_BODY_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
String.
- TAG_BORDER_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_BRACKET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_BRACKET_SETTINGS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_BRACKET_STEP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_BRIGHTNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_BRIGHTNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_BRIGHTNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_BRIGHTNESS_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_BRIGHTNESS_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_BTL_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_BULB_DURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_BURST_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_BURST_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
0 = Off
1 = On
2 = Infinite
4 = Unlimited
- TAG_BURST_MODE_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_BURST_SPEED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_BURST_UUID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDirectory
-
- TAG_BW_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
0 = Off, 1 = On
- TAG_BY_LINE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_BY_LINE_TITLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_CAMERA_COLOR_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The color space as set in the camera, as a string.
- TAG_CAMERA_ELEVATION_ANGLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_CAMERA_HUE_ADJUSTMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The hue adjustment as set in the camera.
- TAG_CAMERA_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_CAMERA_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_CAMERA_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_CAMERA_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CAMERA_MODEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_CAMERA_ORIENTATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_CAMERA_OWNER_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
String.
- TAG_CAMERA_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's serial number, as a string.
- TAG_CAMERA_SERIAL_NUMBER_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera serial number, as a string.
- TAG_CAMERA_SETTINGS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_CAMERA_SETTINGS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_CAMERA_SETTINGS_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Used by Konica / Minolta cameras.
- TAG_CAMERA_SETTINGS_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Alternate Camera Settings Tag.
- TAG_CAMERA_SETTINGS_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CAMERA_SHARPENING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's sharpening setting, as an uppercase string.
- TAG_CAMERA_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_CAMERA_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_CAMERA_TONE_COMPENSATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's tone compensation setting, as a string.
- TAG_CAMERA_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_CAMERA_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_CAMERA_TYPE_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_CAMERA_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_CAMERA_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's white balance setting, as an uppercase string.
- TAG_CAMERA_WHITE_BALANCE_FINE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's white balance bias setting, as an uint16 array having either one or two elements.
- TAG_CAMERA_WHITE_BALANCE_RB_COEFF - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The first two numbers are coefficients to multiply red and blue channels according to white balance as set in the
camera.
- TAG_CANON_CUSTOM_FUNCTIONS_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CANON_FILE_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CANON_FIRMWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CANON_FLAGS_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CANON_IMAGE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CANON_IMAGE_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CANON_OWNER_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CANON_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CAPTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_CAPTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_CAPTION_DIGEST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_CAPTION_WRITER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_CAPTURE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
0 = Auto
1 = Night-scene
2 = Manual
4 = Multiple
- TAG_CATEGORIES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CATEGORY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_CCD_BOARD_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_CCD_ISO_SENSITIVITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
0 = Off
1 = On?
- TAG_CCD_SCAN_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_CCD_SENSITIVITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_CCD_SENSITIVITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- TAG_CCD_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_CFA_PATTERN - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_CFA_PATTERN_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
There are two definitions for CFA pattern, I don't know the difference...
- TAG_CFA_REPEAT_PATTERN_DIM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_CHANNEL_COUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDirectory
-
The number of channels in the image, including any alpha channels.
- TAG_CHANNELS_ROWS_COLUMNS_DEPTH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_CITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_CITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_CITY2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_CLEAR_RETOUCH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_CLEAR_RETOUCH_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_CLIPPING_PATH_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_CMDLINE - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- TAG_CMM_FLAGS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_CMM_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_CODED_CHARACTER_SET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_COLOR_ADJUSTMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_COLOR_ADJUSTMENT_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_COLOR_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_COLOR_BALANCE_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_COLOR_COMPENSATION_FILTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_COLOR_DATA_ARRAY_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_COLOR_EFFECT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Off
2 = Warm
3 = Cool
4 = Black & White
5 = Sepia
- TAG_COLOR_ENCODING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_COLOR_FILTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_COLOR_HALFTONING_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_COLOR_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_COLOR_INFO_ARRAY_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_COLOR_MATRIX_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_COLOR_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_COLOR_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- TAG_COLOR_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's color mode, as an uppercase string.
- TAG_COLOR_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_COLOR_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
0 = Normal
1 = Natural
2 = Vivid
- TAG_COLOR_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDirectory
-
The color mode of the file.
- TAG_COLOR_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_COLOR_MODE_SETTING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_COLOR_SAMPLERS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_COLOR_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_COLOR_SPACE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_COLOR_SPACE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Defines Color Space.
- TAG_COLOR_SPACE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_COLOR_SPACE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's color space setting.
- TAG_COLOR_SPACE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_COLOR_SPACE_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_COLOR_TABLE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- TAG_COLOR_TEMP_KELVIN - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_COLOR_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_COLOR_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_COLOR_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_COLOR_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_COLOR_TEMPERATURE_BG - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_COLOR_TEMPERATURE_RG - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_COLOR_TONE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_COLOR_TRANSFER_FUNCTIONS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_COLOR_TRANSFORM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDirectory
-
- TAG_COLOR_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_COLOUR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
1 = Normal
2 = Black & White
3 = Sepia
- TAG_COLOUR_CONTROL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_COLOUR_MATRIX - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_COLOUR_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
0 = Off
- TAG_COLOUR_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Used by Konica / Minolta cameras
0 = Natural Colour
1 = Black & White
2 = Vivid colour
3 = Solarization
4 = AdobeRGB
- TAG_COLOUR_PLANES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_COMMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.DuckyDirectory
-
- TAG_COMMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifCommentDirectory
-
- TAG_COMMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegCommentDirectory
-
This value does not apply to a particular standard.
- TAG_COMPONENT_DATA_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
the first of a possible 4 color components.
- TAG_COMPONENT_DATA_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
the first of a possible 4 color components.
- TAG_COMPONENT_DATA_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
the second of a possible 4 color components.
- TAG_COMPONENT_DATA_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
the second of a possible 4 color components.
- TAG_COMPONENT_DATA_3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
the third of a possible 4 color components.
- TAG_COMPONENT_DATA_3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
the third of a possible 4 color components.
- TAG_COMPONENT_DATA_4 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
the fourth of a possible 4 color components.
- TAG_COMPONENT_DATA_4 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
the fourth of a possible 4 color components.
- TAG_COMPONENTS_CONFIGURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_COMPRESSED_AVERAGE_BITS_PER_PIXEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Average (rough estimate) compression level in JPEG bits per pixel.
- TAG_COMPRESSED_IMAGE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Used by Konica / Minolta cameras.
- TAG_COMPRESSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_COMPRESSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_COMPRESSION_RATIO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_COMPRESSION_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
- TAG_COMPRESSION_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
- TAG_COMPRESSION_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_CONTACT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_CONTENT_IDENTIFIER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDirectory
-
- TAG_CONTENT_LOCATION_CODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_CONTENT_LOCATION_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_CONTINUOUS_DRIVE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Single Frame or Timer Mode
1 = Continuous
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Normal
1 = High
65535 = Low
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
0 = -1
1 = Normal
2 = +1
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates the direction of contrast processing applied by the camera
when the image was shot.
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
0 = Normal
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
0 = Normal
1 = Low
2 = High
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_CONTRAST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_CONTRAST_CURVE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_CONTRAST_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
(this decoding seems to work for some models such as the LC1, LX2, FZ7, FZ8, FZ18 and FZ50, but may not be correct for other models such as the FX10, G1, L1, L10 and LC80)
0x0 = Normal
0x1 = Low
0x2 = High
0x6 = Medium Low
0x7 = Medium High
0x100 = Low
0x110 = Normal
0x120 = High
(these values are used by the GF1)
0 = -2
1 = -1
2 = Normal
3 = +1
4 = +2
7 = Nature (Color Film)
12 = Smooth (Color Film) or Pure (My Color)
17 = Dynamic (B&W Film)
22 = Smooth (B&W Film)
27 = Dynamic (Color Film)
32 = Vibrant (Color Film) or Expressive (My Color)
33 = Elegant (My Color)
37 = Nostalgic (Color Film)
41 = Dynamic Art (My Color)
42 = Retro (My Color)
- TAG_CONTROL_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_CONTROLLER_BOARD_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_CONVERSION_LENS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_CONVERSION_LENS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Off
2 = Wide
3 = Telephoto
4 = Macro
- TAG_CONVERTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- TAG_COPYRIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.DuckyDirectory
-
- TAG_COPYRIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_COPYRIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_COPYRIGHT_NOTICE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_CORING_FILTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_COUNT_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_COUNTRY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_COUNTRY_OR_PRIMARY_LOCATION_CODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_COUNTRY_OR_PRIMARY_LOCATION_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_CREDIT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_CROP_HIGH_SPEED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_CROP_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CRW_PARAM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CUSTOM_FUNCTIONS_1D_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CUSTOM_FUNCTIONS_ARRAY_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CUSTOM_PICTURE_STYLE_FILE_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_CUSTOM_RENDERED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates the use of special processing on image data, such as rendering
geared to output.
- TAG_DATA_DUMP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Added during merge of Type2 & Type3.
- TAG_DATA_DUMP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_DATA_DUMP_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_DATA_DUMP_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_DATA_PRECISION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
This is in bits/sample, usually 8 (12 and 16 not supported by most software).
- TAG_DATA_PRECISION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
This is in bits/sample, usually 8 (12 and 16 not supported by most software).
- TAG_DATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_DATE_CREATED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_DATE_SENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_DATE_STAMP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Date and time GPSDateStamp 29 1D ASCII 11
- TAG_DATE_STAMP_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_DATE_TIME_ORIGINAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_DATE_TIME_ORIGINAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_DATE_TIME_ORIGINAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_DATE_TIME_STAMP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_DATETIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_DATETIME_DIGITIZED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_DATETIME_ORIGINAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_DAY_OF_WEEK - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_DAY_OF_WEEK - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_DAYLIGHT_SAVINGS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
(String).
- TAG_DCT_ENCODE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDirectory
-
- TAG_DEC_SWITCH_POSITION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_DELAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory
-
- TAG_DELETED_IMAGE_COUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_DEST_BEARING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Bearing of destination GPSDestBearing 24 18 RATIONAL 1
- TAG_DEST_BEARING_REF - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Reference for bearing of destination GPSDestBearingRef 23 17 ASCII 2
- TAG_DEST_DISTANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Distance to destination GPSDestDistance 26 1A RATIONAL 1
- TAG_DEST_DISTANCE_REF - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Reference for distance to destination GPSDestDistanceRef 25 19 ASCII 2
- TAG_DEST_LATITUDE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Latitude of destination GPSDestLatitude 20 14 RATIONAL 3
- TAG_DEST_LATITUDE_REF - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Reference for latitude of destination GPSDestLatitudeRef 19 13 ASCII 2
- TAG_DEST_LONGITUDE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Longitude of destination GPSDestLongitude 22 16 RATIONAL 3
- TAG_DEST_LONGITUDE_REF - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Reference for longitude of destination GPSDestLongitudeRef 21 15 ASCII 2
- TAG_DESTINATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_DEVELOPMENT_DYNAMIC_RANGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_DEVICE_ATTR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_DEVICE_MAKE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_DEVICE_MODEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_DEVICE_SETTING_DESCRIPTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates information on the picture-taking conditions of a particular
camera model.
- TAG_DIFFERENTIAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Whether differential correction is applied GPSDifferential 30 1E SHORT 1
- TAG_DIGITAL_DATE_CREATED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_DIGITAL_TIME_CREATED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_DIGITAL_VARI_PROGRAM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's digital vari-program setting, as a string.
- TAG_DIGITAL_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = No Digital Zoom
1 = 2x
2 = 4x
- TAG_DIGITAL_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_DIGITAL_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_DIGITAL_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- TAG_DIGITAL_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The amount of digital zoom used.
- TAG_DIGITAL_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_DIGITAL_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Zoom Factor (0 or 1 = normal)
- TAG_DIGITAL_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
(0 = Off)
- TAG_DIGITAL_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_DIGITAL_ZOOM_ON - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_DIGITAL_ZOOM_RATIO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates the digital zoom ratio when the image was shot.
- TAG_DIRECTORY_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_DISPLAY_APERTURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_DISPLAY_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_DISPLAY_INFO_OBSOLETE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_DISPOSAL_METHOD - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory
-
- TAG_DISTORTION_CORR_PARAMS_PRESENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_DISTORTION_CORRECTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_DOCUMENT_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_DOP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Measurement precision GPSDOP 11 B RATIONAL 1
- TAG_DRIVE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_DUOTONE_HALFTONING_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_DUOTONE_IMAGE_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_DUOTONE_TRANSFER_FUNCTIONS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_DUST_REMOVAL_DATA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_DYNAMIC_RANGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_DYNAMIC_RANGE_OPTIMISER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_DYNAMIC_RANGE_OPTIMIZER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_DYNAMIC_RANGE_SETTING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_EASY_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_EASY_SHOOTING_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Full Auto
1 = Manual
2 = Landscape
3 = Fast Shutter
4 = Slow Shutter
5 = Night
6 = Black & White
7 = Sepia
8 = Portrait
9 = Sports
10 = Macro / Close-Up
11 = Pan Focus
- TAG_EDIT_STATUS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_EDITORIAL_UPDATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_EFFECTIVE_BLACK_AND_WHITE_VALUES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_EFFECTS_VISIBLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_ENHANCEMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
0 = Off
- TAG_ENVELOPE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_ENVELOPE_PRIORITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_ENVELOPE_RECORD_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_EPS_OPTIONS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_EQUIPMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_EQUIPMENT_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_EVENT_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_EVENT_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_EVENT_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_EVENT_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_EXIF_DATA_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_EXIF_DATA_3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_EXIF_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_EXIF_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_EXIF_SUB_IFD_OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifIFD0Directory
-
This tag is a pointer to the Exif SubIFD.
- TAG_EXIF_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_EXIF_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
Panasonic Exif Version
- TAG_EXPIRATION_DATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_EXPIRATION_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_EXPOSURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_EXPOSURE_BIAS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_EXPOSURE_COMPENSATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_EXPOSURE_COMPENSATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_EXPOSURE_COMPENSATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_EXPOSURE_DIFFERENCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The exposure difference, as an array of four integers.
- TAG_EXPOSURE_INDEX - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_EXPOSURE_INDEX_TIFF_EP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_EXPOSURE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Easy Shooting (See Easy Shooting Mode)
1 = Program
2 = Tv-Priority
3 = Av-Priority
4 = Manual
5 = A-DEP
- TAG_EXPOSURE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates the exposure mode set when the image was shot.
- TAG_EXPOSURE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_EXPOSURE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_EXPOSURE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_EXPOSURE_PROGRAM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Exposure program that the camera used when image was taken. '1' means
manual control, '2' program normal, '3' aperture priority, '4' shutter
priority, '5' program creative (slow program), '6' program action
(high-speed program), '7' portrait mode, '8' landscape mode.
- TAG_EXPOSURE_SEQUENCE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The number of total shutter releases.
- TAG_EXPOSURE_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_EXPOSURE_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Exposure time (reciprocal of shutter speed).
- TAG_EXPOSURE_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_EXPOSURE_TUNING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_EXR_AUTO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_EXR_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_EXTENDER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_EXTENDER_FIRMWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_EXTENDER_MODEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_EXTENDER_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_EXTENSION_CODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JfxxDirectory
-
- TAG_EXTERNAL_FLASH_AE1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_EXTERNAL_FLASH_AE1_0 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_EXTERNAL_FLASH_AE2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_EXTERNAL_FLASH_AE2_0 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_EXTERNAL_FLASH_BOUNCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_EXTERNAL_FLASH_G_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_EXTERNAL_FLASH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_EXTERNAL_FLASH_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_EXTERNAL_SENSOR_BRIGHTNESS_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_EXTRA_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_EXTRA_SAMPLES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_F_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_F_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_FACE_DETECT_ARRAY_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_FACE_DETECT_ARRAY_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_FACE_DETECTION_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
Integer (16Bit) Indexes:
0 Number Face Positions (maybe less than Faces Detected)
1-4 Face Position 1
5-8 Face Position 2
and so on
The four Integers are interpreted as follows:
(XYWH) X,Y Center of Face, (W,H) Width and Height
All values are in respect to double the size of the thumbnail image
- TAG_FACE_POSITIONS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
Left, top, right and bottom coordinates in full-sized image for each face detected.
- TAG_FACE_REC_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_FACE_RECOGNITION_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
Byte Indexes:
0 Int (2 Byte) Number of Recognized Faces
4 String(20 Byte) Recognized Face 1 Name
24 4 Int (8 Byte) Recognized Face 1 Position (Same Format as Face Detection)
32 String(20 Byte) Recognized Face 1 Age
52 String(20 Byte) Recognized Face 2 Name
72 4 Int (8 Byte) Recognized Face 2 Position (Same Format as Face Detection)
80 String(20 Byte) Recognized Face 2 Age
And so on
The four Integers are interpreted as follows:
(XYWH) X,Y Center of Face, (W,H) Width and Height
All values are in respect to double the size of the thumbnail image
- TAG_FACES_DETECTED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_FACES_DETECTED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_FIELD_COUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_FILE_FORMAT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_FILE_FORMAT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_FILE_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_FILE_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_FILE_MODIFIED_DATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FileSystemDirectory
-
- TAG_FILE_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FileSystemDirectory
-
- TAG_FILE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_FILE_NUMBER_MEMORY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_FILE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FileSystemDescriptor
-
- TAG_FILE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FileSystemDirectory
-
- TAG_FILE_SOURCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_FILE_SOURCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_FILE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_FILL_LIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_FILL_ORDER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
1 = Normal
2 = Reversed
- TAG_FILM_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_FILM_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_FILTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
0 = Off
- TAG_FILTER_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_FILTER_METHOD - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_FINE_PIX_COLOR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_FIRMWARE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_FIRMWARE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_FIRMWARE_DATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_FIRMWARE_REVISION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_FIRMWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Values observed
- 0200 (D70)
- 0200 (D1X)
- TAG_FIRMWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_FIRMWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_FIRMWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_FIXTURE_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_FLASH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
0x0 = 0000000 = No Flash
0x1 = 0000001 = Fired
0x5 = 0000101 = Fired, Return not detected
0x7 = 0000111 = Fired, Return detected
0x9 = 0001001 = On
0xd = 0001101 = On, Return not detected
0xf = 0001111 = On, Return detected
0x10 = 0010000 = Off
0x18 = 0011000 = Auto, Did not fire
0x19 = 0011001 = Auto, Fired
0x1d = 0011101 = Auto, Fired, Return not detected
0x1f = 0011111 = Auto, Fired, Return detected
0x20 = 0100000 = No flash function
0x41 = 1000001 = Fired, Red-eye reduction
0x45 = 1000101 = Fired, Red-eye reduction, Return not detected
0x47 = 1000111 = Fired, Red-eye reduction, Return detected
0x49 = 1001001 = On, Red-eye reduction
0x4d = 1001101 = On, Red-eye reduction, Return not detected
0x4f = 1001111 = On, Red-eye reduction, Return detected
0x59 = 1011001 = Auto, Fired, Red-eye reduction
0x5d = 1011101 = Auto, Fired, Red-eye reduction, Return not detected
0x5f = 1011111 = Auto, Fired, Red-eye reduction, Return detected
6543210 (positions)
This is a bitmask.
0 = flash fired
1 = return detected
2 = return able to be detected
3 = unknown
4 = auto used
5 = unknown
6 = red eye reduction used
- TAG_FLASH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_FLASH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_FLASH_ACTIVITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Flash Did Not Fire
1 = Flash Fired
- TAG_FLASH_BIAS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.FocalLength
-
The value of this tag may be translated into a flash bias value, in EV.
0xffc0 = -2 EV
0xffcc = -1.67 EV
0xffd0 = -1.5 EV
0xffd4 = -1.33 EV
0xffe0 = -1 EV
0xffec = -0.67 EV
0xfff0 = -0.5 EV
0xfff4 = -0.33 EV
0x0000 = 0 EV
0x000c = 0.33 EV
0x0010 = 0.5 EV
0x0014 = 0.67 EV
0x0020 = 1 EV
0x002c = 1.33 EV
0x0030 = 1.5 EV
0x0034 = 1.67 EV
0x0040 = 2 EV
- TAG_FLASH_BIAS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_FLASH_BIAS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_FLASH_BRACKET_COMPENSATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The flash bracket compensation, as an array of four integers.
- TAG_FLASH_CHARGE_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_FLASH_COMPENSATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_FLASH_CURTAIN - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_FLASH_DETAILS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_FLASH_DEVICE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_FLASH_DISTANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
0 = Off
- TAG_FLASH_ENERGY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_FLASH_ENERGY_TIFF_EP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_FLASH_EV - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_FLASH_EXPOSURE_BRACKETING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_FLASH_EXPOSURE_COMP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_FLASH_EXPOSURE_COMPENSATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The flash exposure compensation, as an array of four integers.
- TAG_FLASH_FIRED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_FLASH_FIRED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_FLASH_FIRED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_FLASH_FIRMWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_FLASH_GUIDE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_FLASH_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_FLASH_INTENSITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_FLASH_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_FLASH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Flash Not Fired
1 = Auto
2 = On
3 = Red Eye Reduction
4 = Slow Synchro
5 = Auto + Red Eye Reduction
6 = On + Red Eye Reduction
16 = External Flash
- TAG_FLASH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_FLASH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_FLASH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_FLASH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Flash mode, as a string.
- TAG_FLASH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_FLASH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_FLASH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
1 = Auto
2 = Flash on
4 = Flash off
6 = Red-eye Reduction
- TAG_FLASH_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_FLASH_MODEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_FLASH_OUTPUT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_FLASH_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_FLASH_STATUS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_FLASH_SYNC_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's flash setting, as an uppercase string.
- TAG_FLASH_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_FLASH_USED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Whether the flash was used in this image.
- TAG_FLASH_WARNING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
0 = No
1 = Yes
- TAG_FLASHPIX_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_FLICKER_REDUCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_FNUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The actual F-number(F-stop) of lens when the image was taken.
- TAG_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
Units are tenths of a millimetre
- TAG_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Focal length of lens used to take image.
- TAG_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_FOCAL_LENGTH_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_FOCAL_PLANE_DIAGONAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_FOCAL_PLANE_DIAGONAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_FOCAL_PLANE_RESOLUTION_UNIT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Unit of FocalPlaneXResolution/FocalPlaneYResolution. '1' means no-unit,
'2' inch, '3' centimeter.
- TAG_FOCAL_PLANE_X_RESOLUTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_FOCAL_PLANE_X_RESOLUTION_TIFF_EP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_FOCAL_PLANE_Y_RESOLUTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_FOCAL_PLANE_Y_RESOLUTION_TIFF_EP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_FOCAL_UNITS_PER_MM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_FOCUS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- TAG_FOCUS_AREA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_FOCUS_CONTINUOUS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_FOCUS_DISTANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_FOCUS_DISTANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_FOCUS_DISTANCE_LOWER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_FOCUS_DISTANCE_UPPER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_FOCUS_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_FOCUS_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_FOCUS_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_FOCUS_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_FOCUS_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_FOCUS_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_FOCUS_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Auto
2 = Manual
4 = Auto, Focus Button
5 = Auto, Continuous
- TAG_FOCUS_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
2 = Custom
3 = Auto
- TAG_FOCUS_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_FOCUS_MODE_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = One-Shot
1 = AI Servo
2 = AI Focus
3 = Manual Focus
4 = Single
5 = Continuous
6 = Manual Focus
- TAG_FOCUS_MODE_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
0 = Normal
1 = Macro
- TAG_FOCUS_MODE_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Focus Mode: Single
1 = Focus Mode: Continuous
- TAG_FOCUS_MODE_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
1 = Fixation
6 = Multi-Area Auto Focus
- TAG_FOCUS_MODE_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_FOCUS_PIXEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_FOCUS_RANGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_FOCUS_SETTING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_FOCUS_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Manual
1 = Auto
3 = Close-up (Macro)
8 = Locked (Pan Mode)
- TAG_FOCUS_WARNING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_FOCUSING_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_FOLDER_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_FRAME_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_FULL_IMAGE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_GAIN_CONTROL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates the degree of overall image gain adjustment.
- TAG_GAMMA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Rational64u.
- TAG_GAMMA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_GAMMA_BLUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_GAMMA_GREEN - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_GAMMA_RED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_GE_IMAGE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_GIF_FORMAT_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- TAG_GLOBAL_ALTITUDE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_GLOBAL_ANGLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_GPS_INFO_OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifIFD0Directory
-
This tag is a pointer to the Exif GPS IFD.
- TAG_GRAYSCALE_AND_MULTICHANNEL_HALFTONING_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_GRAYSCALE_AND_MULTICHANNEL_TRANSFER_FUNCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_GREEN_MASK - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_GREEN_X - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- TAG_GREEN_Y - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- TAG_GRID_AND_GUIDES_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_H_POSITIONING_ERROR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Horizontal positioning errors GPSHPositioningError 31 1F RATIONAL 1
- TAG_HAS_GLOBAL_COLOR_TABLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- TAG_HAS_LOCAL_COLOUR_TABLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- TAG_HDR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_HDR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_HDR_IMAGE_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDirectory
-
- TAG_HDR_TONING_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_HEADER_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_HEADLINE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- TAG_HIGH_ISO_NOISE_REDUCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_HIGH_ISO_NOISE_REDUCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's high ISO noise reduction setting, as an integer.
- TAG_HIGH_ISO_NOISE_REDUCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_HIGH_ISO_NOISE_REDUCTION_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_HIGHLIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_HOST_COMPUTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_HUMIDITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_ICC_PROFILE_BYTES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_ICC_PROFILE_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_ICC_UNTAGGED_PROFILE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_IMAGE_ADJUSTMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- TAG_IMAGE_ADJUSTMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's image adjustment setting, as a string.
- TAG_IMAGE_AUTHENTICATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_IMAGE_BOUNDARY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Defines the photo corner coordinates, in 8 bytes.
- TAG_IMAGE_COUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_IMAGE_DATA_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_IMAGE_DESCRIPTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- TAG_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
The image's height.
- TAG_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
The image's height.
- TAG_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Used by Epson cameras
Units = pixels
- TAG_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDirectory
-
The height of the image in pixels.
- TAG_IMAGE_HISTORY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_IMAGE_ID_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_IMAGE_MODE_FOR_RAW_FORMAT_FILES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_IMAGE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_IMAGE_OPTIMISATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's image optimisation, as a string.
- TAG_IMAGE_ORIENTATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_IMAGE_PROCESSING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_IMAGE_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_IMAGE_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_IMAGE_QUALITY_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Used by Konica / Minolta cameras.
0 = Raw
1 = Super Fine
2 = Fine
3 = Standard
4 = Extra Fine
- TAG_IMAGE_QUALITY_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Not 100% sure about this tag.
- TAG_IMAGE_READY_7_ROLLOVER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_IMAGE_READY_DATA_SETS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_IMAGE_READY_ROLLOVER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_IMAGE_READY_SAVE_LAYER_SETTINGS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_IMAGE_READY_SELECTED_STATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_IMAGE_READY_VARIABLES_XML - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_IMAGE_READY_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_IMAGE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Large
1 = Medium
2 = Small
- TAG_IMAGE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
0 = 640 x 480 pixels
4 = 1600 x 1200 pixels
5 = 2048 x 1536 pixels
20 = 2288 x 1712 pixels
21 = 2592 x 1944 pixels
22 = 2304 x 1728 pixels
36 = 3008 x 2008 pixels
- TAG_IMAGE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_IMAGE_STABILISATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's digital vari-program setting, as a string.
- TAG_IMAGE_STABILISATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_IMAGE_STABILIZATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
2 = On, Mode 1
3 = Off
4 = On, Mode 2
- TAG_IMAGE_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_IMAGE_UNIQUE_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDirectory
-
- TAG_IMAGE_UNIQUE_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_IMAGE_UNIQUE_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates an identifier assigned uniquely to each image.
- TAG_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- TAG_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDescriptor
-
The image's width.
- TAG_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
The image's width.
- TAG_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Used by Epson cameras
Units = pixels
- TAG_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDirectory
-
The width of the image in pixels.
- TAG_IMG_DIRECTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Direction of image GPSImgDirection 17 11 RATIONAL 1
- TAG_IMG_DIRECTION_REF - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Reference for direction of image GPSImgDirectionRef 16 10 ASCII 2
- TAG_IMPORTANT_COLOUR_COUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_INDEXED_COLOR_TABLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_INDEXED_COLOR_TABLE_COUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_INFINITY_LENS_STEP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_INFRARED_ILLUMINATOR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_INTELLIGENT_AUTO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_INTELLIGENT_D_RANGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_INTELLIGENT_EXPOSURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
0 = Off
1 = Low
2 = Standard
3 = High
- TAG_INTELLIGENT_RESOLUTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
0 = Off
2 = Auto
3 = On
- TAG_INTENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_INTER_COLOR_PROFILE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_INTERLACE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_INTERLACE_METHOD - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_INTERNAL_FLASH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_INTERNAL_FLASH_AE1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_INTERNAL_FLASH_AE1_0 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_INTERNAL_FLASH_AE2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_INTERNAL_FLASH_AE2_0 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_INTERNAL_FLASH_TABLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_INTERNAL_ND_FILTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_INTERNAL_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_INTERNAL_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
this number is unique, and contains the date of manufacture,
but is not the same as the number printed on the camera body
- TAG_INTERNAL_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_INTEROP_INDEX - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_INTEROP_OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
This tag is a pointer to the Exif Interop IFD.
- TAG_INTEROP_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_INTERVAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_INTERVAL_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_INTERVAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_IPTC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_IPTC_NAA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_IS_COLOR_TABLE_SORTED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- TAG_IS_COLOR_TABLE_SORTED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- TAG_IS_INTERLACED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- TAG_ISO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Check ISOSpeedRatings EXIF tag for ISO Speed
15 = Auto ISO
16 = ISO 50
17 = ISO 100
18 = ISO 200
19 = ISO 400
- TAG_ISO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_ISO_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Values observed
- 0 250
- 0 400
- TAG_ISO_EQUIVALENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_ISO_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_ISO_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's ISO mode, as an uppercase string.
- TAG_ISO_REQUESTED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The requested ISO value, as an array of two integers.
- TAG_ISO_SENSITIVITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
3 = 50
4 = 64
6 = 100
9 = 200
- TAG_ISO_SETTING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_ISO_SETTING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_ISO_SPEED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_ISO_SPEED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
10 = ISO 100
16 = ISO 200
100 = ISO 100
200 = ISO 200
- TAG_ISO_SPEED_LATITUDE_YYY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_ISO_SPEED_LATITUDE_ZZZ - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_ISO_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_ITERATION_COUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifAnimationDirectory
-
- TAG_JOB_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_JPEG_AC_TABLES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_JPEG_DC_TABLES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_JPEG_LOSSLESS_PREDICTORS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_JPEG_POINT_TRANSFORMS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_JPEG_PROC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_JPEG_Q_TABLES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_JPEG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
1 = Standard Quality
2 = High Quality
3 = Super High Quality
- TAG_JPEG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_JPEG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_JPEG_RESTART_INTERVAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_JPEG_TABLES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_JUMP_TO_XPEP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_KEYWORDS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_KODAK_MODEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_LABEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_LANDMARK - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_LANGUAGE_IDENTIFIER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_LAST_FILE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_LAST_MODIFICATION_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_LATERAL_CHROMATIC_ABERRATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_LATITUDE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Latitude GPSLatitude 2 2 RATIONAL 3
- TAG_LATITUDE_REF - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
North or South Latitude GPSLatitudeRef 1 1 ASCII 2
- TAG_LAYER_COMPS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_LAYER_GROUPS_ENABLED_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_LAYER_SELECTION_IDS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_LAYER_STATE_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_LAYERS_GROUP_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_LEFT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- TAG_LENS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_LENS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
A pair of focal/max-fstop values that describe the lens used.
- TAG_LENS_DATA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_LENS_DISTORTION_PARAMETERS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_LENS_FIRMWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_LENS_FIRMWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_LENS_FORMAT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_LENS_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_LENS_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_LENS_MAKE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
String.
- TAG_LENS_MODEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_LENS_MODEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
String.
- TAG_LENS_MODEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_LENS_MOUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_LENS_PROPERTIES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_LENS_RANGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_LENS_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
String.
- TAG_LENS_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_LENS_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_LENS_SPEC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_LENS_SPEC_FEATURES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_LENS_SPECIFICATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
An array of four Rational64u numbers giving focal and aperture ranges.
- TAG_LENS_STOPS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Lens stops, as an array of four integers.
- TAG_LENS_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_LENS_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_LENS_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_LENS_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The type of lens used, as a byte.
- TAG_LENS_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_LENS_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_LENS_TYPE_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_LIGHT_CONDITION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_LIGHT_SOURCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Deprecated.
- TAG_LIGHT_SOURCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The lighting type, as a string.
- TAG_LIGHT_SOURCE_SPECIAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_LIGHT_VALUE_CENTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_LIGHT_VALUE_PERIPHERY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_LIGHTING_OPTIMIZER_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_LIGHTROOM_WORKFLOW - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_LINEARIZATION_TABLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_LINKED_PROFILE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_LIVE_PHOTO_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDirectory
-
- TAG_LOCAL_CAPTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_LOCAL_COLOUR_TABLE_BITS_PER_PIXEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- TAG_LOCATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_LONG_EXPOSURE_NOISE_REDUCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_LONG_EXPOSURE_NOISE_REDUCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_LONG_EXPOSURE_NOISE_REDUCTION_OR_FOCUS_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
(FocusMode for RX100)
0 = Manual
2 = AF-S
3 = AF-C
5 = Semi-manual
6 = Direct Manual Focus
(LongExposureNoiseReduction for other models)
0 = Off
1 = On
2 = On 2
65535 = n/a
- TAG_LONG_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_LONGITUDE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Longitude GPSLongitude 4 4 RATIONAL 3
- TAG_LONGITUDE_REF - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
East or West Longitude GPSLongitudeRef 3 3 ASCII 2
- TAG_M16_C_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_MAC_NSPRINTINFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_MAC_PRINT_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_MACRO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_MACRO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_MACRO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_MACRO_FOCUS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_MACRO_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
1 = Macro
2 = Normal
- TAG_MACRO_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_MACRO_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
0 = Normal (Not Macro)
1 = Macro
- TAG_MACRO_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = On
2 = Off
- TAG_MAIN_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_MAKE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_MAKERNOTE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag holds the Exif Makernote.
- TAG_MAKERNOTE_DATA_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.RicohMakernoteDirectory
-
- TAG_MAKERNOTE_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_MAKERNOTE_OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_MAKERNOTE_PUBLIC_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_MAKERNOTE_PUBLIC_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_MAKERNOTE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_MAKERNOTE_THUMB_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType6MakernoteDirectory
-
- TAG_MAKERNOTE_THUMB_OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType6MakernoteDirectory
-
- TAG_MAKERNOTE_THUMB_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType6MakernoteDirectory
-
- TAG_MAKERNOTE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_MAKERNOTE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Used by Konica / Minolta cameras.
- TAG_MAKERNOTE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_MAKERNOTE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_MANUAL_FLASH_OUTPUT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_MANUAL_FOCUS_DISTANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Added during merge of Type2 & Type3.
- TAG_MANUAL_FOCUS_DISTANCE_OR_FACE_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_MAP_DATUM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Geodetic survey data used GPSMapDatum 18 12 ASCII Any
- TAG_MASTER_DOCUMENT_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_MAX_APERTURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_MAX_APERTURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Maximum aperture value of lens.
- TAG_MAX_APERTURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_MAX_APERTURE_AT_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_MAX_APERTURE_AT_MAX_FOCAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_MAX_APERTURE_AT_MAX_FOCAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_MAX_APERTURE_AT_MIN_FOCAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_MAX_APERTURE_AT_MIN_FOCAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_MAX_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_MAX_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_MAX_SAMPLE_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_MEASURE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
GPS measurement mode GPSMeasureMode 10 A ASCII 2
- TAG_MEASURED_COLOR_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_MEASURED_EV - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_MEASURED_EV_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_MEASURED_LV - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_MEASUREMENT_SCALE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_METERING_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
3 = Evaluative
4 = Partial
5 = Centre Weighted
- TAG_METERING_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Exposure metering method. '0' means unknown, '1' average, '2' center
weighted average, '3' spot, '4' multi-spot, '5' multi-segment, '6' partial,
'255' other.
- TAG_METERING_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_METERING_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_METERING_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_MGH_XFORM - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- TAG_MIN_APERTURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_MIN_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_MIN_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_MIN_SAMPLE_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_MINOLTA_MAKERNOTE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_MINOLTA_THUMBNAIL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Length of thumbnail in bytes.
- TAG_MINOLTA_THUMBNAIL_OFFSET_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Used by Konica / Minolta cameras.
- TAG_MINOLTA_THUMBNAIL_OFFSET_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Alternate Thumbnail Offset.
- TAG_MODEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_MODEL_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_MODIFIED_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_MONTH_DAY_CREATED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_MOON_PHASE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_MOON_PHASE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_MOON_PHASE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_MOTION_SENSITIVITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_MOTION_SENSITIVITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_MOVIE_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_MULTI_BURST_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_MULTI_BURST_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_MULTI_BURST_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_MULTI_EXPOSURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_MULTI_FRAME_NOISE_REDUCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_MY_COLORS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_ND_FILTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_NEAR_LENS_STEP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_NEF_BIT_DEPTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_NEF_COMPRESSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The NEF (RAW) compression.
- TAG_NEF_THUMBNAIL_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The NEF (RAW) thumbnail size, as an integer array with two items representing [width,height].
- TAG_NEW_SUBFILE_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The new subfile type tag.
0 = Full-resolution Image
1 = Reduced-resolution image
2 = Single page of multi-page image
3 = Single page of multi-page reduced-resolution image
4 = Transparency mask
5 = Transparency mask of reduced-resolution image
6 = Transparency mask of multi-page image
7 = Transparency mask of reduced-resolution multi-page image
- TAG_NIKON_CAPTURE_DATA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Data about changes set by Nikon Capture Editor.
- TAG_NIKON_CAPTURE_OFFSETS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_NIKON_CAPTURE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_NIKON_SCAN - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_NO_PRINT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_NOISE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_NOISE_REDUCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_NOISE_REDUCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The type of noise reduction, as a string.
- TAG_NOISE_REDUCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_NOISE_REDUCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
0 = Standard
1 = Low (-1)
2 = High (+1)
3 = Lowest (-2)
4 = Highest (+2)
- TAG_NUM_AF_POINTS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_NUMBER_OF_COMPONENTS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
Usually 1 = grey scaled, 3 = color YcbCr or YIQ, 4 = color CMYK
Each component TAG_COMPONENT_DATA_[1-4], has the following meaning:
component Id(1byte)(1 = Y, 2 = Cb, 3 = Cr, 4 = I, 5 = Q),
sampling factors (1byte) (bit 0-3 vertical., 4-7 horizontal.),
quantization table number (1 byte).
- TAG_NUMBER_OF_TABLES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- TAG_OBJECT_ATTRIBUTE_REFERENCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_OBJECT_CYCLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_OBJECT_DISTANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_OBJECT_DISTANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
Units are millimetres
- TAG_OBJECT_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_OBJECT_PREVIEW_DATA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_OBJECT_PREVIEW_FILE_FORMAT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_OBJECT_PREVIEW_FILE_FORMAT_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_OBJECT_TYPE_REFERENCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_OLD_COLORTABLE - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- TAG_OLD_MGH_XFORM - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- TAG_OLD_SURF_GEOM - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- TAG_OLD_USEREALRAS - Static variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- TAG_OLYMPUS_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_OLYMPUS_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_ONE_TOUCH_WB - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_ONION_SKINS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_OPTICAL_ZOOM_CODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_OPTICAL_ZOOM_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Standard
2 = Extended
- TAG_OPTICAL_ZOOM_ON - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_OPTO_ELECTRIC_CONVERSION_FUNCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Indicates the Opto-Electric Conversion Function (OECF) specified in ISO 14524.
- TAG_ORDER_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_ORIENTATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_ORIGIN_PATH_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_ORIGINAL_DECISION_DATA_OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_ORIGINAL_MANUFACTURER_MODEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
A string.
- TAG_ORIGINAL_TRANSMISSION_REFERENCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_ORIGINATING_PROGRAM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_OWNER_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_PADDING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_PAGE_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_PAGE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_PALETTE_COLOUR_COUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_PALETTE_HAS_TRANSPARENCY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_PALETTE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_PANASONIC_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_PANASONIC_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_PANASONIC_TITLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_PANASONIC_TITLE_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_PANORAMA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_PANORAMA_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_PANORAMA_DIRECTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.Panorama
-
- TAG_PANORAMA_FRAME_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.Panorama
-
- TAG_PARALLAX - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_PATH_SELECTION_STATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_PERSONAL_FUNCTION_VALUES_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_PERSONAL_FUNCTIONS_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_PEX_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_PHOTO_EFFECT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_PHOTO_STYLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_PHOTOMETRIC_INTERPRETATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Shows the color space of the image data components.
0 = WhiteIsZero
1 = BlackIsZero
2 = RGB
3 = RGB Palette
4 = Transparency Mask
5 = CMYK
6 = YCbCr
8 = CIELab
9 = ICCLab
10 = ITULab
32803 = Color Filter Array
32844 = Pixar LogL
32845 = Pixar LogLuv
34892 = Linear Raw
- TAG_PHOTOSHOP_SETTINGS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_PICT_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_PICT_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_PICTURE_CONTROL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_PICTURE_EFFECT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_PICTURE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_PITCH_ANGLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_PIXEL_ASPECT_RATIO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- TAG_PIXEL_ASPECT_RATIO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_PIXELS_PER_UNIT_X - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_PIXELS_PER_UNIT_Y - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_PLANAR_CONFIGURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
When image format is no compression YCbCr, this value shows byte aligns of
YCbCr data.
- TAG_PLATFORM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_POWER_UP_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_PRE_CAPTURE_FRAMES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_PREDICTOR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_PRESSURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_PREVIEW_IFD - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Preview to another IFD (?)
- TAG_PREVIEW_IMAGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_PREVIEW_IMAGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_PREVIEW_IMAGE_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_PREVIEW_IMAGE_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_PREVIEW_IMAGE_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_PREVIEW_IMAGE_START - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_PREVIEW_IMAGE_VALID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_PREVIEW_THUMBNAIL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
Alternate thumbnail offset
- TAG_PRIMARY_AF_POINT_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_PRIMARY_AF_POINT_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_PRIMARY_CHROMATICITIES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_PRINT_FLAGS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_PRINT_FLAGS_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_PRINT_IMAGE_MATCHING_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
See PIM specification here: http://www.ozhiker.com/electronics/pjmt/jpeg_info/pim.html
- TAG_PRINT_IMAGE_MATCHING_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_PRINT_IMAGE_MATCHING_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KyoceraMakernoteDirectory
-
- TAG_PRINT_IMAGE_MATCHING_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_PRINT_IMAGE_MATCHING_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
See the PIM specification here:
http://www.ozhiker.com/electronics/pjmt/jpeg_info/pim.html
- TAG_PRINT_IMAGE_MATCHING_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
Info at http://www.ozhiker.com/electronics/pjmt/jpeg_info/pim.html
- TAG_PRINT_IMAGE_MATCHING_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
See Print Image Matching for specification.
- TAG_PRINT_IMAGE_MATCHING_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.RicohMakernoteDirectory
-
- TAG_PRINT_IMAGE_MATCHING_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_PRINT_IMAGE_MATCHING_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_PRINT_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_PRINT_INFO_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_PRINT_SCALE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_PRINT_STYLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_PROCESSING_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_PROCESSING_METHOD - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Name of the method used for location finding GPSProcessingMethod 27 1B UNDEFINED Any
- TAG_PRODUCT_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_PROFILE_BYTE_COUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_PROFILE_CLASS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_PROFILE_CONNECTION_SPACE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_PROFILE_CREATOR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_PROFILE_DATETIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_PROFILE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_PROGRAM_ISO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_PROGRAM_SHIFT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's program shift setting, as an array of four integers.
- TAG_PROGRAM_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_PROPRIETARY_THUMBNAIL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KyoceraMakernoteDirectory
-
- TAG_PROVINCE_OR_STATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
2 = Normal
3 = Fine
5 = Superfine
- TAG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
3 = Fine
- TAG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.DuckyDirectory
-
- TAG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- TAG_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_QUALITY_AND_FILE_FORMAT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's quality setting, as an uppercase string.
- TAG_QUALITY_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
0 = Good
1 = Better
2 = Best
- TAG_QUALITY_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
1 = Fine
2 = Super Fine
- TAG_QUALITY_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
2 = High
3 = Normal
6 = Very High
7 = Raw
9 = Motion Picture
- TAG_QUICK_MASK_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_QUICK_SHOT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_RASTERIZED_CAPTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_RATING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_RATING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_RATING_PERCENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_RAW_DATA_OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_RAW_DEVELOPMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_RAW_DEVELOPMENT_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_RAW_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_RECOGNIZED_FACE_FLAGS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_RECOMMENDED_EXPOSURE_INDEX - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_RECORD_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_RECORD_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
2 = Normal Mode
- TAG_RECORD_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Normal
2 = Portrait
3 = Scenery
4 = Sports
5 = Night Portrait
6 = Program
7 = Aperture Priority
8 = Shutter Priority
9 = Macro
10= Spot
11= Manual
12= Movie Preview
13= Panning
14= Simple
15= Color Effects
16= Self Portrait
17= Economy
18= Fireworks
19= Party
20= Snow
21= Night Scenery
22= Food
23= Baby
24= Soft Skin
25= Candlelight
26= Starry Night
27= High Sensitivity
28= Panorama Assist
29= Underwater
30= Beach
31= Aerial Photo
32= Sunset
33= Pet
34= Intelligent ISO
35= Clipboard
36= High Speed Continuous Shooting
37= Intelligent Auto
39= Multi-aspect
41= Transform
42= Flash Burst
43= Pin Hole
44= Film Grain
45= My Color
46= Photo Frame
51= HDR
- TAG_RECORD_SHUTTER_RELEASE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_RECORDING_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_RED_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_RED_MASK - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_RED_X - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- TAG_RED_Y - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- TAG_REFERENCE_BLACK_WHITE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_REFERENCE_DATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_REFERENCE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_REFERENCE_SERVICE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_RELATED_IMAGE_FILE_FORMAT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_RELATED_IMAGE_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_RELATED_IMAGE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_RELATED_SOUND_FILE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_RELEASE_DATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_RELEASE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_RELEASE_MODE_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_RELEASE_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_RENDERING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_RENDERING_INTENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_RESAVED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_RESOLUTION_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_RESOLUTION_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_RESOLUTION_UNIT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_RESX - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- TAG_RESY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- TAG_RETOUCH_HISTORY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_RICOH_CAMERA_INFO_MAKERNOTE_SUB_IFD_POINTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.RicohMakernoteDirectory
-
- TAG_ROLL_ANGLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_ROTATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = 0 DG
3 = 180 DG
6 = 90 DG
8 = 270 DG
- TAG_ROWS_PER_STRIP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The raster is codified by a single block of data holding this many rows.
- TAG_RUN_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDirectory
-
- TAG_SAMPLE_FORMAT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SAMPLES_PER_PIXEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Each pixel is composed of this many samples.
- TAG_SANYO_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_SANYO_THUMBNAIL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_SATELLITES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
GPS satellites used for measurement GPSSatellites 8 8 ASCII Any
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Normal
1 = High
65535 = Low
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
0 = -1
1 = Normal
2 = +1
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates the direction of saturation processing applied by the camera
when the image was shot.
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The saturation level, as a signed integer.
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
0 = Normal
1 = Low
2 = High
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_SATURATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_SATURATION_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's saturation level, as a string.
- TAG_SCENE_AREA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_SCENE_ASSIST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_SCENE_CAPTURE_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates the type of scene that was shot.
- TAG_SCENE_DETECT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_SCENE_DETECT_DATA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_SCENE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's scene mode, as a string.
- TAG_SCENE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_SCENE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_SCENE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_SCENE_SELECT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_SCENE_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SECURITY_CLASSIFICATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SEED_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_SELF_TIMER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
1 = Off?
- TAG_SELF_TIMER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Off
2 = 10 s
3 = 2 s
- TAG_SELF_TIMER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_SELF_TIMER_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_SELF_TIMER_DELAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_SELF_TIMER_MODE_TIFF_EP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SENSING_METHOD - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SENSITIVITY_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Applies to ISO tag.
0 = Unknown
1 = Standard Output Sensitivity
2 = Recommended Exposure Index
3 = ISO Speed
4 = Standard Output Sensitivity and Recommended Exposure Index
5 = Standard Output Sensitivity and ISO Speed
6 = Recommended Exposure Index and ISO Speed
7 = Standard Output Sensitivity, Recommended Exposure Index and ISO Speed
- TAG_SENSOR_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_SENSOR_PIXEL_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The sensor pixel size, as a pair of rational numbers.
- TAG_SENSOR_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_SEQUENCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_SEQUENCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_SEQUENCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_SEQUENCE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.FocalLength
-
- TAG_SEQUENCE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_SEQUENCE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_SEQUENCE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_SEQUENCE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_SEQUENCE_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_SEQUENCE_SHOT_INTERVAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_SEQUENTIAL_SHOT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_SERIAL_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- TAG_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_SERIAL_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_SERIAL_NUMBER_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_SERIAL_NUMBER_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_SERIAL_NUMBER_FORMAT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_SERVICE_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_SHADING_COMPENSATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_SHADOW - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
0 = Normal
1 = High
65535 = Low
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
0 = -1
1 = Normal
2 = +1
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates the direction of sharpness processing applied by the camera
when the image was shot.
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
0 = Normal
1 = Soft
2 = Hard
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_SHARPNESS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_SHARPNESS_FACTOR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_SHARPNESS_FREQ_TABLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_SHARPNESS_TABLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_SHEET_DISCLOSURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_SHOOTING_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's shooting mode.
- TAG_SHOOTING_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_SHORT_DOCUMENT_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_SHORT_FOCAL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_SHOT_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Advertised as ASCII, but actually isn't.
- TAG_SHOT_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_SHOT_INFO_ARRAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_SHUTTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_SHUTTER_COUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_SHUTTER_COUNT_3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_SHUTTER_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_SHUTTER_SPEED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Shutter speed by APEX value.
- TAG_SHUTTER_SPEED_VALUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_SHUTTER_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_SIGNATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_SIGNIFICANT_BITS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_SLICES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_SLOW_SHUTTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_SLOW_SYNC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_SOFT_SKIN_EFFECT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_SOFTWARE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SOFTWARE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_SOFTWARE_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_SONY_EXPOSURE_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_SONY_F_NUMBER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- TAG_SONY_MODEL_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_SOURCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_SPATIAL_FREQ_RESPONSE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SPATIAL_FREQ_RESPONSE_TIFF_EP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SPECIAL_INSTRUCTIONS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_SPECIAL_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
Three values:
Value 1: 0=Normal, 2=Fast, 3=Panorama
Value 2: Sequence Number Value 3:
1 = Panorama Direction: Left to Right
2 = Panorama Direction: Right to Left
3 = Panorama Direction: Bottom to Top
4 = Panorama Direction: Top to Bottom
- TAG_SPECIAL_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_SPECTRAL_SENSITIVITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SPEED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Speed of GPS receiver GPSSpeed 13 D RATIONAL 1
- TAG_SPEED_REF - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Speed unit GPSSpeedRef 12 C ASCII 2
- TAG_SPOT_FOCUS_POINT_X_COORDINATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_SPOT_FOCUS_POINT_Y_COORDINATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_SPOT_HALFTONE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_SPOT_METERING_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_SRAW_QUALITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_SRGB_RENDERING_INTENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_STANDARD_ID_TIFF_EP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_STANDARD_OUTPUT_SENSITIVITY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_STATE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_STATUS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
GPS receiver status GPSStatus 9 9 ASCII 2
- TAG_STRIP_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The size of the raster data in bytes.
- TAG_STRIP_OFFSETS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The position in the file of raster data.
- TAG_STRIP_ROW_COUNTS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SUB_IFD_OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Tag is a pointer to one or more sub-IFDs
- TAG_SUB_LOCATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_SUBFILE_TYPE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The old subfile type tag.
1 = Full-resolution image (Main image)
2 = Reduced-resolution image (Thumbnail)
3 = Single page of multi-page image
- TAG_SUBJECT_DISTANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.FocalLength
-
- TAG_SUBJECT_DISTANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
Indicates the distance the autofocus camera is focused to.
- TAG_SUBJECT_DISTANCE_RANGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates the distance to the subject.
- TAG_SUBJECT_LOCATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SUBJECT_LOCATION_TIFF_EP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SUBJECT_PROGRAM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_SUBJECT_REFERENCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_SUBSECOND_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SUBSECOND_TIME_DIGITIZED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SUBSECOND_TIME_ORIGINAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_SUPER_MACRO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_SUPPLEMENTAL_CATEGORIES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_SWEEP_PANORAMA_DIRECTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_SWEEP_PANORAMA_FIELD_OF_VIEW - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_TAG_A2B0 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_A2B1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_A2B2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_aabg - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_aagg - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_aarg - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_B2A0 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_B2A1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_B2A2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_bfd - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_bkpt - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_bTRC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_bXYZ - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_calt - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_chad - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_chrm - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_COUNT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_cprt - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_crdi - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_desc - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_devs - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_dmdd - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_dmnd - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_gamt - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_gTRC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_gXYZ - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_kTRC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_lumi - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_meas - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_mmod - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_ncl2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_ncol - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_ndin - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_pre0 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_pre1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_pre2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_ps2i - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_ps2s - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_psd0 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_psd1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_psd2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_psd3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_pseq - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_resp - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_rTRC - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_rXYZ - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_scrd - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_scrn - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_targ - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_tech - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_vcgt - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_view - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_vued - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TAG_wtpt - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_TARGET_APERTURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_TARGET_EXPOSURE_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_TELECONVERTER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_TEMPERATURE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_TEXT_STAMP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Off
2 = On
- TAG_TEXT_STAMP_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Off
2 = On
- TAG_TEXT_STAMP_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_TEXT_STAMP_3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_TEXTUAL_DATA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_THRESHOLDING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
1 = No dithering or halftoning
2 = Ordered dither or halftone
3 = Randomized dither
- TAG_THUMB_HEIGHT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- TAG_THUMB_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- TAG_THUMBNAIL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_THUMBNAIL_COMPRESSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifThumbnailDirectory
-
Deprecated.
- TAG_THUMBNAIL_DIMENSIONS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
2 values - x,y dimensions in pixels.
- TAG_THUMBNAIL_IMAGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_THUMBNAIL_IMAGE_VALID_AREA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_THUMBNAIL_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifThumbnailDirectory
-
The size of the thumbnail image data in bytes.
- TAG_THUMBNAIL_OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
Offset of Preview Thumbnail
- TAG_THUMBNAIL_OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifThumbnailDirectory
-
The offset to thumbnail image bytes.
- TAG_THUMBNAIL_OLD - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_THUMBNAIL_SIZE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
Size in bytes
- TAG_TILE_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_TILE_LENGTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_TILE_OFFSETS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_TILE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_TIME_CREATED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_TIME_CREATED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_TIME_SENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_TIME_STAMP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
GPS time (atomic clock) GPSTimeStamp 7 7 RATIONAL 3
- TAG_TIME_ZONE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
(string)
- TAG_TIME_ZONE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_TIME_ZONE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
(String).
- TAG_TIME_ZONE_DIGITIZED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_TIME_ZONE_OFFSET_TIFF_EP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_TIME_ZONE_ORIGINAL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_TIMELINE_INFORMATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_TIMER_RECORDING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_TITLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_TONE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_TONE_CURVE_MATCHING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_TONE_CURVE_TABLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_TOP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- TAG_TOTAL_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_TOUCH_AE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_TRACK - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Direction of movement GPSTrack 15 F RATIONAL 1
- TAG_TRACK_REF - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
Reference for direction of movement GPSTrackRef 14 E ASCII 2
- TAG_TRANSFER_FUNCTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_TRANSFER_RANGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_TRANSFORM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
(decoded as two 16-bit signed integers)
'-1 1' = Slim Low
'-3 2' = Slim High
'0 0' = Off
'1 1' = Stretch Low
'3 2' = Stretch High
- TAG_TRANSFORM_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
(decoded as two 16-bit signed integers)
'-1 1' = Slim Low
'-3 2' = Slim High
'0 0' = Off
'1 1' = Stretch Low
'3 2' = Stretch High
- TAG_TRANSPARENCY_INDEX - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_TRANSPARENT_COLOR_FLAG - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory
-
- TAG_TRANSPARENT_COLOR_INDEX - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory
-
- TAG_TRANSPARENT_COLOR_INDEX - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
Deprecated.
- TAG_TRAVEL_DAY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_TRIGGER_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_TRIGGER_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_UIB_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_UNICODE_ALPHA_NAMES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_UNIQUE_DOCUMENT_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_UNIQUE_OBJECT_NAME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_UNIT_SPECIFIER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- TAG_UNITS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
Units for pixel density fields.
- TAG_UNKNOWN_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_UNKNOWN_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- TAG_UNKNOWN_10 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_11 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_12 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_UNKNOWN_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_UNKNOWN_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- TAG_UNKNOWN_20 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_27 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_28 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_29 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_UNKNOWN_3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_UNKNOWN_3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- TAG_UNKNOWN_30 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_31 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_32 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_33 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_34 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
An unknown tag, as a rational.
- TAG_UNKNOWN_35 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_36 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_37 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_38 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_39 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_4 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_UNKNOWN_40 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_41 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_42 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_43 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_44 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_45 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_46 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_47 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_48 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_49 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_5 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_UNKNOWN_50 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_51 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_52 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_53 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_54 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_55 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_UNKNOWN_6 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_UNKNOWN_7 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_UNKNOWN_7 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_UNKNOWN_8 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_UNKNOWN_DATA_DUMP - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
No idea, what this is
- TAG_UPTIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
4 Bytes
Time in 1/100 s from when the camera was powered on to when the
image is written to memory card
- TAG_URGENCY - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- TAG_URL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_URL_LIST - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_USER_COMMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_USER_INPUT_FLAG - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory
-
- TAG_USER_LABEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- TAG_USER_LABEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- TAG_USER_LABEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- TAG_USER_PROFILE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_VALID_AF_POINTS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.AFInfo
-
- TAG_VALID_BITS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- TAG_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_VERSION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.RicohMakernoteDirectory
-
- TAG_VERSION_ID - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
GPS tag version GPSVersionID 0 0 BYTE 4
- TAG_VIGNETTE_CONTROL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
The camera's vignette control setting.
- TAG_VIGNETTING_CORRECTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_VIGNETTING_CORRECTION_ARRAY_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_VIGNETTING_CORRECTION_ARRAY_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_VOICE_MEMO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_VR_INFO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_VRD_OFFSET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_WATER_DEPTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_WATERMARK - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_WB_ADJUST_AB - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
WB adjust AB.
- TAG_WB_ADJUST_GM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
WB adjust GM.
- TAG_WB_BLUE_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_WB_BLUE_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_WB_GREEN_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_WB_GREEN_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_WB_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_WB_RED_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_WB_RED_LEVEL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_WB_SHIFT_AMBER_MAGENTA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.FocalLength
-
0 = Auto
1 = Sunny
2 = Cloudy
3 = Tungsten
4 = Florescent
5 = Flash
6 = Custom
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.ShotInfo
-
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
White balance (aka light source). '0' means unknown, '1' daylight,
'2' fluorescent, '3' tungsten, '10' flash, '17' standard light A,
'18' standard light B, '19' standard light C, '20' D55, '21' D65,
'22' D75, '255' other.
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Auto
2 = Daylight
3 = Cloudy
4 = Incandescent
5 = Manual
8 = Flash
10 = Black & White
11 = Manual
12 = Shade
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
0 = Auto
1 = Daylight
2 = Shade
3 = Tungsten
4 = Fluorescent
5 = Manual
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- TAG_WHITE_BALANCE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_WHITE_BALANCE_1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
0 = Auto
1 = Daylight
2 = Shade
3 = Tungsten
4 = Fluorescent
5 = Manual
- TAG_WHITE_BALANCE_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
12 = Flash
0 = Manual
1 = Auto?
- TAG_WHITE_BALANCE_2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_WHITE_BALANCE_BIAS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
- TAG_WHITE_BALANCE_BIAS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_WHITE_BALANCE_BIAS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- TAG_WHITE_BALANCE_BLUE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_WHITE_BALANCE_BRACKET - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_WHITE_BALANCE_FINE_TUNE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- TAG_WHITE_BALANCE_FINE_TUNE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_WHITE_BALANCE_GREEN - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_WHITE_BALANCE_MATCHING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_WHITE_BALANCE_MODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
This tag indicates the white balance mode set when the image was shot.
- TAG_WHITE_BALANCE_RED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_WHITE_BALANCE_TABLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- TAG_WHITE_BOARD - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_WHITE_POINT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_WHITE_POINT_X - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- TAG_WHITE_POINT_Y - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- TAG_WIDE_FOCUS_ZONE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory.CameraSettings
-
- TAG_WIDE_RANGE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- TAG_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- TAG_WIN_AUTHOR - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The image author, as used by Windows XP (called Artist in the Windows shell).
- TAG_WIN_COMMENT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The image comment, as used by Windows XP.
- TAG_WIN_DEVMODE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_WIN_KEYWORDS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The image keywords, as used by Windows XP.
- TAG_WIN_SUBJECT - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The image subject, as used by Windows XP.
- TAG_WIN_TITLE - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
The image title, as used by Windows XP.
- TAG_WORKFLOW_URL - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_WORLD_TIME - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- TAG_WORLD_TIME_LOCATION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
1 = Home
2 = Destination
- TAG_X_PIXELS_PER_METER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_X_RESOLUTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_XML - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_XMP_DATA - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- TAG_XYZ_VALUES - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- TAG_Y_PIXELS_PER_METER - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- TAG_Y_RESOLUTION - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_YCBCR_COEFFICIENTS - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_YCBCR_POSITIONING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_YCBCR_SUBSAMPLING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDirectoryBase
-
- TAG_YEAR_CREATED - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- TAG_ZONE_MATCHING - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- TAG_ZOOM - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- TAG_ZOOM_SOURCE_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TAG_ZOOM_TARGET_WIDTH - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory.CameraSettings
-
- TagAeLock - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagAfAreas - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagAfFineTune - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagAfFineTuneAdj - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagAfInfo - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagAfPoint - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagAfPointSelected - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagAfSearch - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- tagAlignMatvec - Variable in class gov.nih.mipav.model.file.FileAfni
-
The "p-values" for fico, fitt, and fizt datasets are 2-sided: that is, the value displayed by AFNI (below the
slider) is the probability that the absolute value of such a deviate will exceed the threshold value on the
slider.
- tagArray - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagMultiEditor
-
- TagArtFilter - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagArtFilterEffect - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagAspectFrame - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagAspectRatio - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagAutoFocus - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagBlackLevel1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagBlackLevel2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagBlackLevel2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagBlackLevel2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagBlackLevel3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagBlackLevelBlue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagBlackLevelGreen - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagBlackLevelRed - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagBlueBalance - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- tagBuffer - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
The buffer that holds the tags of the DICOM image.
- TagCameraSettingsVersion - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagCameraTemperature - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagCameraTemperature - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagCmContrast - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCmExposureCompensation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCmHue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCmSaturation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCmSharpness - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCmWhiteBalance - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCmWhiteBalanceComp - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCmWhiteBalanceGrayPoint - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCodeRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TagCodeRenderer
-
- TagColorCreatorEffect - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagColorMatrix - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagColorMatrix2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagColorSpace - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagColorSpace - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagComparator(int) - Constructor for class gov.nih.mipav.view.dialogs.JDialogListSaveSelection.TagComparator
-
Creates a new TagComparator object.
- TagCompressionFactor - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagContrastSetting - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagContrastSetting - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCoringFilter - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagCoringFilter - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCoringValues - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagCoringValues - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCropBottom - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagCropHeight - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagCropHeight - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCropLeft - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagCropLeft - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCropLeft - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagCropRight - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagCropTop - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagCropTop - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCropTop - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagCropWidth - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagCropWidth - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagCustomSaturation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagDateTimeUtc - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- tagDescription - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
- TagDescriptor(T) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- TagDeviceType - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- tagDialog - Variable in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
DOCUMENT ME!
- TagDistortionCorrection - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagDistortionCorrection - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- TagDistortionCorrection2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagDistortionInfo - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagDistortionN - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- TagDistortionParam02 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- TagDistortionParam04 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- TagDistortionParam08 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- TagDistortionParam09 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- TagDistortionParam11 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- TagDistortionScale - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- TagDriveMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagEncryptionKey - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagEnhancer - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagEnhancerValues - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- tagExistsInField(String) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- TagExposureCompensation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagExposureMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDirectory
-
- TagExposureMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagExposureShift - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagExposureTime - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagExtendedWBDetect - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagExternalFlash - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagExternalFlashBounce - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagExternalFlashGuideNumber - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagExternalFlashZoom - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagFaceDetect - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagFaceDetectArea - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagFaceDetectFrameCrop - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagFaceDetectFrameSize - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagFaceName - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagFaceRecognition - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagFacesDetected - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagFilmMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDirectory
-
- TagFirmwareName - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagFlashControlMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagFlashExposureComp - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagFlashIntensity - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagFlashMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagFlashRemoteControl - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagFNumber - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagFocalLengthIn35mmFormat - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagFocusDistance - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagFocusInfoVersion - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagFocusMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagFocusProcess - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagFocusStepCount - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagFocusStepInfinity - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagFocusStepNear - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagGainBase - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagGradation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagHighIsoMultiplierBlue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagHighIsoMultiplierGreen - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagHighIsoMultiplierRed - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagHueSetting - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagImageProcessingVersion - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagImageQuality2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagImageStabilization - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagImageStabilization - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- tagInfo - Variable in class gov.nih.mipav.model.file.FileDicomTag
-
Pointer to more information about this tag, read in and contained within the dicom dictionary.
- tagInformationPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Panels used by this dialog box
- TagInputListener(JTextField, JList, JDialogDicomTagSelector) - Constructor for class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.TagInputListener
-
- TagInternalFlash - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagInternalLensSerialNumber - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagIso - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagISO - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagJpgFromRaw - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- tagKey - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
DOCUMENT ME!
- tagKey - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
DOCUMENT ME!
- tagKey - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
DOCUMENT ME!
- TagKeystoneCompensation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagKeystoneDirection - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagKeystoneValue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- tagLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
- TagLensFirmware - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagLensModel - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDirectory
-
- TagLensType - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagLightSource - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagLinearityLimitBlue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagLinearityLimitGreen - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagLinearityLimitRed - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- tagList - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Original list of available DICOM tags
- tagList - Variable in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
The list of private tags that map to the
keys in the previous list
- tagList - Variable in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- TagLocalLocationName - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagMacroLed - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagMacroMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagMagicFilter - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagMake - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagMakerNoteVersion - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagManometerPressure - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagManometerReading - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagManualFlash - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagManualFlashStrength - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagMaxFaces - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagMeteringMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- tagModel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
model associated with tag information.
- TagModel - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagModifiedSaturation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagMultipleExposureMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- tagName - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
- tagName - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- TagNdFilter - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagNoiseFilter - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagNoiseReduction - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagNoiseReduction2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- tagNumber - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- TagNumWbEntries - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagNumWbEntries - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagOrientation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagOrientationInfo - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagOriginalDirectory - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDirectory
-
- TagOriginalFileName - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDirectory
-
- TagPanasonicRawVersion - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagPanoramaMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPictureMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPictureModeBWFilter - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPictureModeContrast - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPictureModeEffect - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPictureModeHue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPictureModeSaturation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPictureModeSharpness - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPictureModeTone - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPictureWizard - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagPitchAngle - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPreviewIfd - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagPreviewImageLength - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPreviewImageStart - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPreviewImageValid - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagPrintImVersion - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PrintIMDirectory
-
- TagRawDataByteOrder - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagRawDataCFAPattern - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagRawDataOffset - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagRawDevArtFilter - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevAutoGradation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevColorSpace - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevColorSpace - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevContrastValue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevContrastValue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevEditStatus - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevEngine - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevEngine - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevExposureBiasValue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevExposureBiasValue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevGradation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevGrayPoint - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevGrayPoint - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevMemoryColorEmphasis - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevMemoryColorEmphasis - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevNoiseReduction - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevNoiseReduction - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevPictureMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevPmBwFilter - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevPmContrast - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevPmNoiseFilter - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevPmPictureTone - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevPmSaturation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevPmSharpness - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevSaturation3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevSaturationEmphasis - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevSaturationEmphasis - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevSettings - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevSharpnessValue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevSharpnessValue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevVersion - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevVersion - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevWbFineAdjustment - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevWbFineAdjustment - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawDevWhiteBalance - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevWhiteBalanceValue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- TagRawDevWhiteBalanceValue - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- TagRawInfoVersion - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagRedBalance - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagReferenceRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.TagReferenceRenderer
-
- TagRollAngle - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagRowsPerStrip - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagSamsungModelId - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagSaturationSetting - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagSceneArea - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagSceneDetect - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagSceneDetectData - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagSceneMode - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- tagSelector - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.TagInputListener
-
- tagSelectorPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Panels used by this dialog box
- TagSensorAreas - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagSensorBottomBorder - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagSensorCalibration - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagSensorHeight - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagSensorLeftBorder - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagSensorRightBorder - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagSensorTemperature - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TagSensorTopBorder - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagSensorWidth - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagSerialNumber - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- tagsetFloats - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- tagsetLabelsString - Variable in class gov.nih.mipav.model.file.FileAfni
-
2560 characters giving the help strings for the markers (256 chars per marker, EXACTLY, including the NULS).
- TagShadingCompensation - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagShadingCompensation2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagSharpnessSetting - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagSharpnessSetting - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagShotInfo - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDirectory
-
- tagsImportedFromNonDicomImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DICOM tags extracted from the image we want to save.
- tagsList - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
The additional tags list is a list of tags the DTI group has requested.
- TagSmartAlbumColor - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagSmartRange - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- tagsModel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- tagsTable - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Option table where dicom tags are reported to.
- tagsTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- TagStackedImage - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagStripByteCounts - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagStripOffsets - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- tagTable - Variable in class gov.nih.mipav.model.file.FileDicom
-
The tag table for the base FileInfoDicom.
- tagTable - Variable in class gov.nih.mipav.model.file.FileDicomTagTable
-
Tags unique to this slice, or all of the tags for this slice if this is a reference tag table.
- tagTable - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
Stores all the information about the DICOM tags.
- tagTable - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
A reference to the tag table containing the tag we will be editing.
- tagTable - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
A reference to the tag table containing the tag we will be editing.
- tagTable - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
A reference to the tag table containing the tag we will be editing.
- tagTable - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
- TagToneLevel - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- tagTypeHolder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoXML
-
- TagUnknownBlock1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagUnknownBlock2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagUnknownBlock3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagUnknownBlock4 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagValidBits - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagValidPixelDepth - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- tagValue - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- tagViewer - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
The table model
- TagWbBlueLevel - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagWbGLevel - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel3000K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel3300K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel3600K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel3900K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel4000K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel4300K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel4500K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel4800K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel5300K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel6000K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel6600K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGLevel7500K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbGreenLevel - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagWbInfo - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagWbInfo2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagWbRbLevels - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbRbLevels2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbRbLevels3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbRbLevels3000K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels3300K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels3600K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels3900K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels4 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbRbLevels4000K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels4300K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels4500K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels4800K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels5 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbRbLevels5300K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels6 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbRbLevels6000K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels6600K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevels7 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbRbLevels7500K - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevelsAuto - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWbRbLevelsCloudy - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWbRbLevelsCoolWhiteFluor - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWbRbLevelsCwB1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevelsCwB2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevelsCwB3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevelsCwB4 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- TagWbRbLevelsDaylightFluor - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWbRbLevelsDayWhiteFluor - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWbRbLevelsEveningSunlight - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWbRbLevelsFineWeather - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWbRbLevelsShade - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWbRbLevelsTungsten - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWbRbLevelsUsed - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWbRbLevelsWhiteFluorescent - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWbRedLevel - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- TagWbRgbLevels - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDirectory
-
- TagWbRgbLevels1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbRgbLevels2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbRgbLevels3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbRgbLevels4 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbRgbLevels5 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbRgbLevels6 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbRgbLevels7 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbType1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbType1 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbType2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbType2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbType3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbType3 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbType4 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbType4 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbType5 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbType5 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbType6 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbType6 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWbType7 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- TagWbType7 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- TagWhiteBalance2 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagWhiteBalanceBracket - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagWhiteBalanceComp - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagWhiteBalanceSetup - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- TagWhiteBalanceTemperature - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- TagYCbCrCoefficients - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- TagZoomStepCount - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- TAKE_OWNERSHIP - gov.nih.mipav.model.algorithms.CeresSolver.Ownership
-
- takeScreenShot - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- talairach - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- talairach - Variable in class gov.nih.mipav.model.structures.ModelImage
-
Reference to talairach transform information.
- TalairachCenter - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- talairachField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- talairachGoTo() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Method that goes to the talairach coordinate that is entered
- talairachImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- talairachMajorLineColor - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
DOCUMENT ME!
- talairachMinorLineColor - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
DOCUMENT ME!
- talairachPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
panels
- talairachPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- talairachPanel - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Panel for Talairach position display.
- TalairachTransformInfo - Class in gov.nih.mipav.model.structures
-
This is the structure to store information needed to compute ACPC and Talairach normalization.
- TalairachTransformInfo() - Constructor for class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Creates a new TalairachTransformInfo object.
- talGoToButton - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- talGoToPanel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- talXLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
talairach goto components*
- talXTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- talYLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
talairach goto components*
- talYTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- talZLabel - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
talairach goto components*
- talZTextField - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
- TAMAR - Variable in class gov.nih.mipav.model.file.FileDicomBase
-
- TAMAR_COMPRESSED_PIXEL_DATA - Static variable in class gov.nih.mipav.model.file.FileDicom
-
- TAMARData - Variable in class gov.nih.mipav.model.file.FileDicom
-
- TAMARImageData() - Method in class gov.nih.mipav.model.file.FileDicom
-
- tan() - Method in class gov.nih.mipav.util.DoubleDouble
-
For -PI/2 < x < PI/2, tan(x) = x + (x**3)/3 + 2*(x**5)/15 + 17*(x**7)/315 + 62*(x**9)/2835 + ... +
(2**(2*n))*((2**(2*n)) - 1)*Bn*(x**(2*n-1))/((2*n)!)
- tanButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- TANH_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
- tanhButton - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
- tao_init - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- tArea - Variable in class gov.nih.mipav.view.components.WidgetFactory.ScrollTextArea
-
accessible JTextArea
- tArea - Variable in class gov.nih.mipav.view.ViewJFrameMessage.ScrollTextArea
-
DOCUMENT ME!
- target - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexSplitParams
-
- target - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- target - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- target - Variable in class gov.nih.mipav.model.file.FileDeleter
-
DOCUMENT ME!
- target() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- target_length_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.CurveCostFunction
-
- targetAxis - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
the orientation the images are remapped to before processing:
- targetBinned - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- targetImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- targetImage - Variable in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- targetImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmDemonsLite
-
- targetImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- targetImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- targetImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- targetImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
target image references.
- targetImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
target image variables.
- targetImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
target image variables.
- targetImageChooser - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
target image variables.
- targetImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- targetImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- targetImageDirectory - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- targetImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- targetImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- targetImageName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- targetList - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Surface target list (tumors).
- targetTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Target transform group.
- targetTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Target transform group.
- targetTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Target transform.
- targetTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Target transform.
- targetVolumeText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Label containing the volume of the current target surface.
- targetXText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
X label for the center coordinate of the current target surface.
- targetYText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Y label for the center coordinate of the current target surface.
- targetZText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Z label for the center coordinate of the current target surface.
- tArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- tau - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- tau - Variable in class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- tau - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- Tau - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIAGCWD
-
- Tau - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- tau_2D_H - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- tau_2D_H - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- tau_2D_W - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- tau_2D_W - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- tauMatch_H - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- tauMatch_W - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- Taut - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIAGCWD
-
- Taut - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- tAxisOffsets - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- tAxisOffsets - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
If TAXIS_NUMS[1] > 0, then this array gives the time offsets of the
- TAYLOR - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate Taylor series interpolation.
- tBar - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Frame ToolBar.
- tBar - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- tBar - Variable in class gov.nih.mipav.view.ViewJFrameMessage
-
DOCUMENT ME!
- tBar - Variable in class gov.nih.mipav.view.ViewJFrameMessageGraph
-
DOCUMENT ME!
- tBarPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Panel to hold the toolbar.
- TBSplineVolume() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- tButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- tc_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- TC_DIST_FACTOR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- tc_Index - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- tccp_info - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_info_v2_t
-
information concerning tile component parameters
- tccps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcp_t
-
tile-component coding parameters
- tcd_image - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
info on each image tile
- tcd_tileno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
current encoded/decoded tile
- tCoord - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
coordinate used to transform data point from image coordinate to dicom
coordinate.
- tcp - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
coding/decoding parameters common to all tiles
- tcps - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
tile coding parameters
- tCumulativeDistributionFunction() - Method in class gov.nih.mipav.model.algorithms.Statistics
-
- tcustx_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- tcusty_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- TCZ - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Int denoting TCZ sequence
- td_init - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- tdata - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- TData() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmASM.TData
-
- tDel - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
226 Delay time after trigger (msec).
- tdim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- tDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- tDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
- tDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task
-
- tDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- tDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask
-
- tDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- tDim - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
tDim of 4d image
- tDim - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- tDim - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- tDim - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- tDim - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- tDim - Variable in class gov.nih.mipav.model.file.FileZVI
-
- tDim - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Number of volumes in the dataset.
- tDim - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
- tDim - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- tDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
x, y, z and time dimension values.
- tDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Dimensions of image A.
- tDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Dimensions of image A.
- tDim - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Dimensions of image A.
- tDim - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
x, y, z and time dimension values.
- tDim - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Note that xDim and yDim refer to destImage, while zDim and tDim refer to imageA.
- tDim - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Time dimension of the original image.
- Tdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Time dimension of the image.
- Tdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Original T dimension of the image.
- tdx - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
XTsiz
- tdy - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
YTsiz
- te - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- te - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- te - Variable in class gov.nih.mipav.model.file.FileInfoCOR
-
DOCUMENT ME!
- te - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- te - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- te - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- te - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- te_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- te2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
206 second echo echo (usec).
- TE2 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- TE2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- TECH - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
Medical Formats(*.dcm; *.ima; *.img; *.mnc; *.sig; *.xml; *.head; *.nii, *.rec, *.frec, *.nrrd, *.gz, *.bz2, *.zip).
- TED - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- teensy_parchk - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- teLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- TEM - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- TEM - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- temp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- temp - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< current octave.
- temp - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.ImageConverter
-
- temp - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
The temp.
- temp_buffer_needed - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- temp_file - Variable in class gov.nih.mipav.model.file.libjpeg.backing_store_info
-
- temp_name - Variable in class gov.nih.mipav.model.file.libjpeg.backing_store_info
-
- temp2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- tempA - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
temp image
- tempB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
temp image
- tempDirList - Static variable in class gov.nih.mipav.view.ViewUserInterface
-
- temperature - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
For Imaging Environment.
- tempFileDir - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- tempFileName - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- tempImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
a temporary image array.
- tempImage - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- tempImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- tempImage - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- template - Variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- tempMaskImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
Model Images
- tempmemobj - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- tempmemobj_imag - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- tempmemobj_real - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- tempPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- tempPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- TEN - Static variable in class gov.nih.mipav.util.DoubleDouble
-
- tend - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- tenPercent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- tenPercent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- TENSOR_ESTIMATION - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- tensorImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
Diffusion tensor image:
- tensorImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
Diffusion tensor image:
- tensorImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- term_source(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- termBlack - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModHuffmanTable
-
- termBlack - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModHuffmanTable
-
- termcode - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- terminal_class_counts - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- TERMINALNODES - gov.nih.mipav.model.algorithms.StochasticForests.PredictionType
-
- terminate() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
- terminate() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
- terminate() - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
- TerminatingNodeAdjacencyFunction - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- TerminatingNodeAdjacencyFunction() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.TerminatingNodeAdjacencyFunction
-
- termination_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- termination_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverSummary
-
- termination_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- termination_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategySummary
-
- TerminationType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.TerminationType
-
- TerminationTypeToString(CeresSolver.TerminationType) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- termuc(int[], double) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- termuc(int[], DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- termvalBest - Variable in class gov.nih.mipav.model.algorithms.libdt.EMOptions
-
- termvalBest - Variable in class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- termvalue - Variable in class gov.nih.mipav.model.algorithms.libdt.EMOptions
-
- termvalue - Variable in class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- termWhite - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModHuffmanTable
-
- termWhite - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModHuffmanTable
-
- TernaryCostFunction(int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.TernaryCostFunction
-
- TernaryCostFunction2(int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.TernaryCostFunction2
-
- TernaryCostFunction3() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.TernaryCostFunction3
-
- TernaryCostFunction4(int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.TernaryCostFunction4
-
- TESliceSpoilerGradientsAmplitude - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- TEsliceSpoilerGradientsDuration - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- TESliceSpoilerGradientsLimit - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- TESMD9(double[], double[][], double[], int, int, int, int, int, int[], int[], int[], int[], int[], int[], int[], int[], int[], double, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[][], boolean, boolean[], double[], int[], double[], double[], double[], double[], double, double, double[], double[], double[], double[], int[], double[], double[], int, boolean) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- test - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson
-
- test - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- test - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- test() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.test
-
- test() - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- test() - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- test() - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform2
-
- test() - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- test() - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- test() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- test() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.GrowingPlatePattern
-
- test() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.HolesPattern
-
- test() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- test() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- test() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegularEdgePattern
-
- test() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternHorizontal
-
- test() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- test() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- test(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.EstimateTensorLLMSE
-
- test(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- test(String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- test(ArrayList<Double[]>, int, double) - Method in class gov.nih.mipav.model.algorithms.Backpropagation.NeuralNetwork
-
- Test - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- Test - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework
-
- Test() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.Test
-
- Test() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Test
-
- test_3D() - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- test_3D_reconstruct() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_basic() - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- test_basic() - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- test_basic_call() - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- test_bilinear_operations() - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- test_blob() - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- test_BoSClassification() - Method in class gov.nih.mipav.model.algorithms.libdt
-
- test_centrfreq() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_cgau() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_cholproj() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_cluster_null() - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- test_cmor() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_compare_different_czt_methods() - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
Starts the program.
- test_compare_downcoef_coeffs() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_conv() - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- test_cwt_method_fft() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_cwt_small_scales() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_data_gen() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_dcm2q() - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- test_denoise_2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_actual_thresh() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_default() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_hard() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_levels() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_std() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_thresh_multiplier() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_threshold_low() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_udwt() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_udwt_2d() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_udwt_actual_thresh() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_udwt_levels() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_udwt_soft() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_udwt_std() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_udwt_thresh_multiplier() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_denoise_udwt_threshold_low() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_digamma() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_dirichlet_fit() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_dirichlet_sample() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_dirichletRnd() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- test_discreteRnd() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- test_downcoef_multilevel() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_dwdtn_idwtn_allwavelets() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_dwt_coeff_len() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_dwt_idwt_allmodes() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_dwt_idwt_basic() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_dwt_idwt_basic_complex() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_dwt_idwt_partial_complex() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_dwt_max_level() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_dwt_short_input_allmodes() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_dwt_wavelet_kwd() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_dwt2() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_erfinv() - Method in class gov.nih.mipav.model.algorithms.Erfinv
-
- test_fbsp() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_fourier_adj_convolution_kernel_hrf_on_ai_s() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_fourier_adj_convolution_kernel_hrf_on_dirac() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_fourier_convolution_kernel_hrf_on_ai_s() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_fourier_convolution_kernel_hrf_on_dirac() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_gamma_fit() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_gammaln() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_gamrnd() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- test_gaus() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_gaussian_elimination() - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- test_gaussRnd() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- test_gaussRnd2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- test_HEM() - Method in class gov.nih.mipav.model.algorithms.libdt
-
- test_HEMDTM() - Method in class gov.nih.mipav.model.algorithms.libdt
-
- test_homkermap() - Method in class gov.nih.mipav.model.algorithms.SVM
-
- test_idwt_none_input() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_idwt2() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_inf_norm() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_integ_adj() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_integ_op() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_intwave_orthogonal() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_inv_posdef() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_isnormq() - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- test_isq() - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- test_logmulexp() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_logsumexp() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_mdwt_1D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_mdwt_2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_mexh() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_midwt_1D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_midwt_2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_mirdwt_1() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_mirdwt_2D() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_mle() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
Maximum likelihood estimation (MLE):**
```python
from predictr import Analysis
prototype_a = Analysis(...) # create an instance
prototype_a.mle() # use instance methods
```
Median Rank Regression (MRR)**
```python
from predictr import Analysis
prototype_a = Analysis(...) # create an instance
prototype_a.mrr() # use instance methods
```
### Bias-correction methods
Since parameter estimation methods are only asymptotically unbiased (sample sizes -> "infinity"), bias-correction methods
are useful when you have only a few failures.
- test_modchol() - Method in class gov.nih.mipav.model.algorithms.ModifiedCholeskyFactorization
-
- test_morl() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_mrdwt_1() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_mrdwt_2() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_mrdwt_2L2() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- test_mrr() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- test_multiple() - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- test_neighbors() - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- test_nonnegative_garotte() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_normcdf() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_per_axis_wavelets() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_perfect_reconstruction() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_pochhammer() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_polar() - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- test_polya_fit() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_power_2_padding_length() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_ppnd16() - Method in class gov.nih.mipav.model.algorithms.Erfinv
-
- test_ppnd7() - Method in class gov.nih.mipav.model.algorithms.Erfinv
-
- test_q2dcm() - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- test_qconj() - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- test_qcvq() - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- test_qdecomp() - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- test_qmult() - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- test_qnorm() - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- test_qsort() - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- test_qvqc() - Method in class gov.nih.mipav.model.algorithms.Quaternions
-
- test_randgamma() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_randwishart() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_scal2frq_scale() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_sdca_basic() - Method in class gov.nih.mipav.model.algorithms.SVM
-
- test_sgd_basic() - Method in class gov.nih.mipav.model.algorithms.SVM
-
- test_shan() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_smooth() - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- test_solve_tri() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- TEST_SOURCE - Static variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Compare outputs of different modules for self-testing.
- test_sproot() - Method in class gov.nih.mipav.model.algorithms.sproot
-
- test_svd2() - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- test_swt_axis() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swt_decomposition() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swt_default_level_by_axis() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swt_iswt_integration() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swt_max_level() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swt_variance_and_energy_preservation() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swt2_axes() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swt2_iswt2_integration() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swt2_iswt2_non_square() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swt2_variance_and_energy_preservation() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swtn_axes() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swtn_decomposition() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swtn_iswtn_integration() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swtn_iswtn2_integration() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_swtn_variance_and_energy_preservation() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_T2z0a_invert_design() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- TEST_TERM_EXAMPLE - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- test_threshold() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_threshold_firm() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_toeplitz_adj_convolution_kernel_hrf_on_ai_s() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_toeplitz_adj_convolution_kernel_hrf_on_dirac() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_toeplitz_adj_convolution_kernel_signal_on_ai_s() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_toeplitz_adj_convolution_kernel_signal_on_dirac() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_toeplitz_convolution_kernel_hrf_on_ai_s() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_toeplitz_convolution_kernel_hrf_on_dirac() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_toeplitz_convolution_kernel_signal_on_ai_s() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_toeplitz_convolution_kernel_signal_on_dirac() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_trigamma() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_upcoef_multilevel() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_upcoef_reconstruct() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_variants_and_flipping() - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- test_videoSegm(String) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- test_wavedec() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_wavedec2_many_levels() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_wavefun_bior13() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_wavefun_sym3() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_wavelet_coefficients() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_wavelet_properties() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverec_accuracies() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverec_all_wavelets_modes() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverec_axes_subsets() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverec_axis_db2() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverec_odd_length() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverec2_accuracies() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverec2_all_wavelets_modes() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverec2_axes_subsets() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverec2_odd_length() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverec3_accuracies() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverecn2() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_waverecn3() - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- test_weights() - Method in class gov.nih.mipav.model.algorithms.SVM
-
- test_wishpdf() - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- test_zero_mirror_zero_padd_unpadd() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test_zero_padd_unpadd() - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- test1() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- test1() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.GrowingPlatePattern
-
- test1() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.HolesPattern
-
- test1() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegionPattern
-
- test1() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.RegularEdgePattern
-
- test1() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternHorizontal
-
- test10x12x16bitCMYK() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PsdReaderTest
-
- test1D() - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- test2() - Method in class gov.nih.mipav.model.algorithms.KDTree
-
- test2() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.CornerEdgePattern
-
- test2PerfectGaussians - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- test3() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.HolesPattern
-
- test8x8x8bitGrayscale() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PsdReaderTest
-
- testAddAndGetSegment() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentDataTest
-
- testAddingMultipleSegments() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentDataTest
-
- testAdj() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- testAlgorithm() - Method in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
DOCUMENT ME!
- TESTApplyOrderingNormal() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTApplyOrderingOrderingTooSmall() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- testAreMultipleAllowed() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkTypeTest
-
- testArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
DOCUMENT ME!
- testBasics() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ByteTrieTest
-
- testBivariateCubicCoefficients5By5() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- TESTBlockRandomAccessDenseMatrixGetCell() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTBlockRandomAccessDenseMatrixWriteCell() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- testBlueBuffer - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testBottom - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
- testBounds3D(double[], String) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- testBounds3D(double[], String) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- testBuffer - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testButton - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- testCase - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- testCase - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
- testCase - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
- testCase - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- testCase - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- testCase - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- testCase - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- testCase - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- testCase - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- testCase - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- testCDF() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
- testCephes() - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- testCfft() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- testcgamma() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
- testChirp() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- testChiSquaredInverseCumulativeDistributionFunction() - Method in class gov.nih.mipav.model.algorithms.Statistics
-
- testCompare() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RationalTest
-
- testcomplexArgument() - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
- testcomplexPsi() - Method in class gov.nih.mipav.model.algorithms.Psi
-
- testComponent(JComponent, int) - Method in class gov.nih.mipav.view.ViewMenuBuilder.MenuDragOp
-
- testComponentData1() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegReaderTest
-
- testComponentData2() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegReaderTest
-
- testComponentData3() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegReaderTest
-
- testCompression() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testComputeJ1() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- testConstructorInvalidBytes() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkTypeTest
-
- testConstructorTooLong() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkTypeTest
-
- testConstructorTooShort() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkTypeTest
-
- testConstructorValidBytes() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkTypeTest
-
- testConstructWithNullBufferThrows() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ByteArrayReaderTest
-
- testConstructWithNullBufferThrows() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessFileReaderTest
-
- testConstructWithNullBufferThrows() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessStreamReaderTest
-
- testConstructWithNullStreamThrows() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialByteArrayReaderTest
-
- testConstructWithNullStreamThrows() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.StreamReaderTest
-
- testContainsSegment() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentDataTest
-
- testContainsTag() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- testContourPlot() - Method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- testconv2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- testConvertISO2022CharsetToJavaCharset() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.Iso2022ConverterTest
-
- testCrashRegressionTest() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testCRDiskmap1() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testCRDiskmap2() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testCRDiskmap3() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testCRDiskmap5() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testCRDiskmap7() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testCreateNullOutputStream() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NullOutputStreamTest
-
- testCreateRational() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RationalTest
-
- testCRRectmap1() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testCRRectmap2() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testCRRectmap3() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testData - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- testData() - Method in class gov.nih.mipav.model.algorithms.FitExponential
-
Test data to test fitting of exponential.
- testData() - Method in class gov.nih.mipav.model.algorithms.FitGaussian
-
Test data to test fitting of gaussian.
- testData() - Method in class gov.nih.mipav.model.algorithms.FitLaplace
-
Test data to test fitting of gaussian.
- testData() - Method in class gov.nih.mipav.model.algorithms.FitMultiExponential
-
Test data to test fitting of exponential.
- testDataType - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- testDateTime() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifDirectoryTest
-
- testDateTime() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testddst(int) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- testDecimalToDegreesMinutesSeconds() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.GeoLocationTest
-
- testDefaultEndianness() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testDefaultEndianness() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- TestDetectStructure() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- testDifferenceImageAndThumbnailOrientations() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testDisallowsAddingEmptyPath() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ByteTrieTest
-
- testDiskmap1() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testDiskmap2() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testDiskmap3() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testDiskmap4() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testDiskmap5() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testDiskmap6() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testDiskmap7() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testDistance(int, int, int, int, int, int, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
Tests the distance for closeness; finds the length of the normal from (x,y) to the line (x1,y1) (x2,y2).
- testDouble - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
True when double precision testing should be performed, default is float.
- testEquality() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkTypeTest
-
- testEqualsAndHashCode() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.AgeTest
-
- testErgas() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testExifDirectory_MatchesKnownValues() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType1MakernoteTest
-
- testExifDirectory_MatchesKnownValues() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest2
-
- testExifThumbnailDirectory_MatchesKnownValues() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest2
-
- testExtensions() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.FileTypeTest
-
- testExtermap1() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testExtermap2() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testExtract_DataPrecision() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegReaderTest
-
- testExtract_Height() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegReaderTest
-
- testExtract_InvalidData() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IccReaderTest
-
- testExtract_NumberOfComponents() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegReaderTest
-
- testExtract_NumberOfTables() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDhtReaderTest
-
- testExtract_ProfileDateTime() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IccReaderTest
-
- testExtract_Tables() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDhtReaderTest
-
- testExtract_Width() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegReaderTest
-
- testExtractMetadata() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegMetadataReaderTest
-
- testExtractMetadataUsingInputStream() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegMetadataReaderTest
-
- testExtractMspaint() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkReaderTest
-
- testExtractPhotoshop() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkReaderTest
-
- testExtractWithNullDataThrows() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testflat() - Method in class gov.nih.mipav.model.structures.jama.LUSOL
-
- testflat() - Method in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- testFrame - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- testfreqz2() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- testgamma() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
- testGeoLocation() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifDirectoryTest
-
- testGetAutoFlashCompensationDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest1
-
- testGetBackgroundColorDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- testGetBytes() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetBytesEOF() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetBytesEOF() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetColorModeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest1
-
- testGetColorTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- testGetComponent() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDirectoryTest
-
- testGetComponent_NotAdded() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDirectoryTest
-
- testGetComponent_NotAdded() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDirectoryTest
-
- testGetComponentCharacter() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegComponentTest
-
- testGetComponentDataDescription_InvalidComponentNumber() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDescriptorTest
-
- testGetComponentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDescriptorTest
-
- testGetCompressionTypeDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- testGetDataPrecisionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDescriptorTest
-
- testGetDateCreated() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcDirectoryTest
-
- testGetDateSent() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcDirectoryTest
-
- testGetDetectedFaces() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PanasonicMakernoteDescriptorTest
-
- testGetDigitalDateCreated() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcDirectoryTest
-
- testGetDirectoryName() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifDirectoryTest
-
- testGetDirectoryWhenNotExists() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.MetadataTest
-
- testGetExpirationDate() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcDirectoryTest
-
- testGetFilterMethodDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- testGetFlashBiasDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.CanonMakernoteDescriptorTest
-
- testGetFloat32() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetFloat32() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetFloat64() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetFloat64() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetHueAdjustmentDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest1
-
- testGetImageHeight() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDirectoryTest
-
- testGetImageHeightDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDescriptorTest
-
- testGetImageWidth() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDirectoryTest
-
- testGetImageWidthDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDescriptorTest
-
- testGetInt16() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ByteUtilTest
-
- testGetInt16() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetInt16() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetInt32() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ByteUtilTest
-
- testGetInt32() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetInt32() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetInt32_OutOfBounds() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetInt32_OutOfBounds() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetInt64() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ByteUtilTest
-
- testGetInt64() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetInt64() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetInt64_OutOfBounds() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetInt64_OutOfBounds() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetInt8() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetInt8() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetInt8EOF() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetInt8EOF() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetInterlaceMethodDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- testGetInteropIndexDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifInteropDescriptorTest
-
- testGetInteropVersionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifInteropDescriptorTest
-
- testGetIsSrgbColorSpaceDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- testGetLensDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest1
-
- testGetMessage_Nested() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.CompoundExceptionTest
-
- testGetMessage_NonNested() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.CompoundExceptionTest
-
- testGetNonExistentTagIsNullForAllTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- testGetNullTerminatedString() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetNullTerminatedString() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetNumberOfComponents() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDirectoryTest
-
- testGetNumberOfTables() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDirectoryTest
-
- testGetNumberOfTablesDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDescriptorTest
-
- testGetPaletteHasTransparencyDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- testGetReciprocal() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RationalTest
-
- testGetRecognizedFaces() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PanasonicMakernoteDescriptorTest
-
- testGetReleaseDate() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcDirectoryTest
-
- testGetString() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetString() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetTextualDataDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- testGetUInt16() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetUInt16() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetUInt16_OutOfBounds() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetUInt16_OutOfBounds() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetUInt32() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetUInt32() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetUInt8() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetUInt8() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetUInt8_OutOfBounds() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testGetUInt8_OutOfBounds() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testGetUnitSpecifierDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- testGetYCbCrSubsamplingDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifThumbnailDescriptorTest
-
- testGimpGreyscaleWithManyChunks() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngMetadataReaderTest
-
- testGpsDate() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifDirectoryTest
-
- testGreenBuffer - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- TestH5WriteFloats(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- testHartley() - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- testHartley() - Method in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- testHasErrors() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.MetadataTest
-
- TestHelper() - Constructor for class gov.nih.mipav.model.file.MetadataExtractorTest.TestHelper
-
- testHplmap1() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- testHplmap2() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- testHplmap3() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- testID - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
DOCUMENT ME!
- TESTIdentityParameterizationEverythingTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- testImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- testImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
DOCUMENT ME!
- testImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
DOCUMENT ME!
- testImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughCardioid
-
- testImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughCircle
-
- testImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughEllipse
-
- testImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughHyperbola
-
- testImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughLine
-
- testImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
- testImage - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
DOCUMENT ME!
- testImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
DOCUMENT ME!
- testImageDir - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- TestImplicitSchurComplement(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ImplicitSchurComplementTest
-
- testincog() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
- testIndexPlusCountExceedsIntMaxValue() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testIndic - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- testingDataLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- testingPatches(ModelImage, int, int, int, float, float, boolean, BufferedWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- testingPatches(ModelImage, int, int, int, float, float, boolean, BufferedWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- testingPatches(ModelImage, int, int, int, float, float, boolean, BufferedWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- testingPatches(ModelImage, int, int, int, float, float, boolean, BufferedWriter, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- testingPatches(ModelImage, int, int, int, float, float, boolean, BufferedWriter, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- testingRateLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- testingValue - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- testInitialThreeParameterApproximation() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- testIntersection(Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Test if the input point is inside the triangle mesh.
- testIntersection(Vector3f, Vector3f, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Tests if the line segment specified by the two input points intersects the mesh.
- testIntersectionMask(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- testIntersections(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Tests if the line segment determined by the two input end-points intersects the mesh.
- testIntersections(TriMesh, Vector3f, Line3f[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Test if the input point is inside the mesh.
- testInverseCDF() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
- TESTInvertPSDMatrixFullRank5x5() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTInvertPSDMatrixIdentity3x3() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTInvertPSDMatrixRankDeficient5x5() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- testippft() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- testippft3() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- testIptc1BytesFromFile() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcReaderTest
-
- testIptc2Photoshop6BytesFromFile() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcReaderTest
-
- testIptcEncodingUndefinedIso() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcReaderTest
-
- testIptcEncodingUnknown() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcReaderTest
-
- testIptcEncodingUnknown2() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcReaderTest
-
- testIptcEncodingUtf8() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcReaderTest
-
- testIRadon() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- testiRadon3() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- testIsAncillary() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkTypeTest
-
- testIsCritical() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkTypeTest
-
- testIsolinesViz() - Method in class gov.nih.mipav.model.algorithms.ContourPlot
-
- testIsPrivate() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkTypeTest
-
- testIsSafeToCopy() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.PngChunkTypeTest
-
- testIsTypical() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDirectoryTest
-
- testIters - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLevelSet
-
If testIters > 0, check if the boundary is unchanged every testIters iterations.
- testIters - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- testJoinArray() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.StringUtilTest
-
- testJoinIterable() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.StringUtilTest
-
- testJYZO() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- testLatticeMeshIntersection() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- testLeft - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
- testLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
DOCUMENT ME!
- testLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
DOCUMENT ME!
- testLevelArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
DOCUMENT ME!
- testLevels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
DOCUMENT ME!
- TESTLevenbergMarquardtStrategyAcceptRejectStepRadiusScaling() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTLevenbergMarquardtStrategyCorrectDiagonalToLinearSolver() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- testlgamma() - Method in class gov.nih.mipav.model.algorithms.Gamma
-
- testLifo - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- testLoadFujifilmJpeg() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testLoadJpegWithoutExifDataReturnsNull() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentReaderTest
-
- testMain - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- TESTMatrixMatrixMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTMatrixTransposeMatrixMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTMatrixTransposeVectorMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTMatrixVectorMultiply() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- testMaxParameter(String, float) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Tests that the entered parameter is above maxValue.
- testMinParameter(String, float) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Tests that the entered parameter is below minValue.
- testMode - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- testMode - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- testMode - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- testMode - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- testMode - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
module LsqFit
export curve_fit,
standard_error,
margin_error,
confidence_interval,
estimate_covar,
make_hessian,
Avv,
# StatsBase reexports
dof, coef, nobs, mse, rss,
stderror, weights, residuals
using Distributions
using OptimBase
using LinearAlgebra
using ForwardDiff
import NLSolversBase: value, jacobian
import StatsBase
import StatsBase: coef, dof, nobs, rss, stderror, weights, residuals
import Base.summary
include("geodesic.jl")
include("levenberg_marquardt.jl")
include("curve_fit.jl")
end
- testMode - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- testMode - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- testMode - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- testMode - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- testMode - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- testMode - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- testMove(Vector3f, Vector3f[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Called from VOIManagerInterface when several VOIs are selected and moved as a group.
- testMse() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testMsPaint16color() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.BmpReaderTest
-
- testMsPaint24bpp() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.BmpReaderTest
-
- testMsPaintGif() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.GifReaderTest
-
- testMsssim() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testName - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- testName - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- testName - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.RegularizationCheckingLinearSolver
-
- testName - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurEliminatorTest
-
- testName - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- testNikonMakernote_MatchesKnownValues() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType1MakernoteTest
-
- testNikonMakernote_MatchesKnownValues() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest1
-
- testNikonMakernote_MatchesKnownValues() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest2
-
- testNoInnerException() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.CompoundExceptionTest
-
- testNQM() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testOptimizedAdjPPFT() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- TESTOrderedGroupsAddAndRemoveEveryThingFromOneGroup() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTOrderedGroupsBulkRemove() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTOrderedGroupsBulkRemoveWithNoElements() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTOrderedGroupsEverythingInOneGroup() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTOrderedGroupsMinNonZeroGroup() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTOrderedGroupsReverseOrdering() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTOrderedGroupsReverseOrderingWithEmptyOrderedGroups() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTOrderedGroupsStartInOneGroupAndThenSplit() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- testOrderOfDifferentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.MetadataTest
-
- testOrderOfSameType() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.MetadataTest
-
- testOrientation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
- testOverflowBoundsCalculation() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessTestBase
-
- testOverflowBoundsCalculation() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testParameter(String, double, double) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Tests that the entered parameter is in range from [minValue, maxValue].
- testParameter(String, double, double) - Static method in class gov.nih.mipav.view.MipavUtil
-
Tests that the entered parameter is in range.
- testParameter(String, double, double) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Tests that the entered parameter is in range.
- testParameter(String, double, double) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Tests that the entered parameter is in range.
- testParameter(String, double, double) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Tests that the entered parameter is in range.
- testParameter(String, double, double) - Method in class gov.nih.mipav.view.renderer.JPanelRendererBase
-
Tests that the entered parameter is in range.
- testParameter(String, double, double) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Tests that the entered parameter is in range.
- testParameter(String, double, double) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Tests that the entered parameter is in range.
- testParameter(String, double, double) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Tests that the entered parameter is in range.
- testParameter(String, double, double) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Tests that the entered parameter is in range.
- testParameter(String, double, double) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Tests that the entered parameter is in range.
- testParameter(String, double, double) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Tests that the entered parameter is in range.
- testParameter(String, int, int) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Tests that the entered parameter is in range.
- TestParameterization() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.TestParameterization
-
- testParameterMin(String, double) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Tests that the entered parameter is larger than the specified value.
- testParameterMin(String, double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Tests that the entered parameter is larger than the specified value.
- testParameterMin(String, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Tests that the entered parameter is larger than the specified value.
- testParse() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.AgeTest
-
- testPhotoshopGif() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.GifReaderTest
-
- testPoint(Point) - Method in class gov.nih.mipav.view.Rubberband
-
Tests the point for validity within the image.
- testPos - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
x + y*xDim.
- testPos - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- TestPosePrediction(CAAMModel, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTest
-
Tests the prediction matrices ability to predict pose displacements.
- testppft3() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- testppft3_ref() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- testprecondAdjPPFT3(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- testProstateBoundaryFeatureTrain() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- testProstateFeatures() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- testProstateFeatures2D() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- testProstateFeaturesClassification() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- testProstateFeaturesTrain() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- testPsnr() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testPSNRB() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testRadon() - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- testRandomWeibull() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- testRase() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testRbtInteractive - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- testRbtRandom - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- testRead() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JfifReaderTest
-
- testReadAdobeJpegMetadata1() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.AdobeJpegReaderTest
-
- testReadAllSegments() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentReaderTest
-
- testReadDhtSegment() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentReaderTest
-
- testReadJpegSegments_InvalidData() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.IccReaderTest
-
- testReadJpegSegmentWithNoExifData() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testReadSpecificSegments() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentReaderTest
-
- testrealArgument() - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
- testrealArgument() - Method in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
- testrealPsi() - Method in class gov.nih.mipav.model.algorithms.Psi
-
- testRectmap1() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testRectmap2() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testRectmap3() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testRedBuffer - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testRemoveSegment() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentDataTest
-
- testRemoveSegmentOccurrence() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentDataTest
-
- TESTReorderResidualBlockNormalFunction() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTResidualBlockEvaluteWithLocalParameterizations() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTResidualBlockEvaluteWithNoLossFunctionOrLocalParameterizations() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- testResolution() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifDirectoryTest
-
- testRight - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
- TEString - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- testRmse() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testRND(int) - Method in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- testRoutine - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- testRoutine - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- testRoutine - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- TestRun - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
- TestRun - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- TestRun() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.TestRun
-
- TestRun() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.TestRun
-
- testSam() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testSample - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- testSample - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- testSample - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- testSample() - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- testScc() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testSegmentTypes() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.AdobeJpegReaderTest
-
- testSegmentWithMultipleOccurrences() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentDataTest
-
- testSequentialWeibull2param() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- testSequentialWeibull3param() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- testSetAndGetIntArray() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- testSetAndGetMultipleTagsInSingleDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- testSetAndGetValue() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDirectoryTest
-
- testSetAndGetValue() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDirectoryTest
-
- testSetIntArrayGetByteArray() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- testSetSameTagMultipleTimesOverwritesValue() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- testSetStringAndGetDate() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- testSetStringGetInt() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- testSigmaValues() - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Tests the un-normalized sigma values against pre-determined okay values.
- testSkipEOF() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- TestSolver(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.IterativeSchurComplementSolverTest
-
- testSonyType1Makernote() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SonyType1MakernoteTest
-
- testSonyType6Makernote() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SonyType6MakernoteTest
-
- testSsim() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testSsimDownload() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testStackOverflowOnRevisitationOfSameDirectory() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testStripmap1() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- testStripmap2() - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- TESTSubsetParameterizationDuplicateParametersDeathTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTSubsetParameterizationGreaterThanSizeParameterIndexDeathTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTSubsetParameterizationNegativeParameterIndexDeathTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTSubsetParameterizationNormalFunctionTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTSubsetParameterizationProductParameterizationWithZeroLocalSizeSubsetParameterization1() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTSubsetParameterizationProductParameterizationWithZeroLocalSizeSubsetParameterization2() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- testTable - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- testTableModel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- testTableScrollPane - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- TestTerm(int, int, int, int[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TestTerm
-
- testThumbnailLength() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testThumbnailOffset() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testThumbnailXResolution() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testThumbnailYResolution() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifReaderTest
-
- testTop - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
- testToSimpleString() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RationalTest
-
- testToString() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- testToString() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.MetadataTest
-
- testToString() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RationalTest
-
- testTrack(VOIContour) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- testTrack(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- testTrack(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- TESTTripletSparseMatrixAppendCols() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTTripletSparseMatrixAppendRows() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTTripletSparseMatrixAssignmentOperator() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTTripletSparseMatrixCopyConstructor() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTTripletSparseMatrixCreateDiagonalMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTTripletSparseMatrixDefaultConstructorReturnsEmptyObject() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTTripletSparseMatrixResize() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TESTTripletSparseMatrixSimpleConstructorAndBasicOperations() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- testTrySkipEOF() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.SequentialAccessTestBase
-
- testType(int, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSubtractVOI
-
Determine if the min and max values are in the image types range.
- testType(int, double, double) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
Determine if the min and max values are in the image types range.
- testType(int, double, double) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
Determine if the min and max values are in the image types range.
- testType(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
Determine if the value is in the image type range and
within the float range since AlgorithmTransform does
not use double buffers.
- testType(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Determine if the value is in the image type range and
within the float range since AlgorithmTransform does
not use double buffers.
- testType(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Determine if the value is in the image type range and
within the float range since AlgorithmTransform does
not use double buffers.
- testType(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
Determine if the value is in the image type range and within the float range since AlgorithmTransform does not
use double buffers.
- testType(int, float) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
Determine if the value is in the image type range and within the float range since AlgorithmTransform does not
use double buffers.
- testTypicalHuffman() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegMetadataReaderTest
-
- testUnderlyingInt() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- testUnicodeComment_ActualBytes() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifSubIFDDescriptorTest
-
- testUnicodeComment_Ascii() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifSubIFDDescriptorTest
-
- testUqi() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testUserCommentDescription_AsciiHeaderAsciiEncoding() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifSubIFDDescriptorTest
-
- testUserCommentDescription_BlankAscii() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifSubIFDDescriptorTest
-
- testUserCommentDescription_EmptyEncoding() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifSubIFDDescriptorTest
-
- testUserCommentDescription_ZeroLengthAscii1() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifSubIFDDescriptorTest
-
- testUserCommentDescription_ZeroLengthAscii2() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifSubIFDDescriptorTest
-
- testUtility - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- testVIF() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testVIFP() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testVOIs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
DOCUMENT ME!
- testVSNR() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testWindowsXpFields() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifIFD0DescriptorTest
-
- testWithNonJpegFile() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegSegmentReaderTest
-
- testXResolutionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifIFD0DescriptorTest
-
- testYBuffer - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- testYResolutionDescription() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ExifIFD0DescriptorTest
-
- testZeroOverZero() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.RationalTest
-
- teText - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- tetragamma(double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- texcoord - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- texcoordind - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- texID - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- text - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- text - Variable in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- tEXt - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- Text(String, int, int) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
Creates a new Text object with the specified string and font configuration.
- Text(String, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
Creates a new Text object with the specified string and font configuration.
- Text(String, int, int, Color) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
Creates a new Text object with the specified string and font configuration.
- TEXT - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- TEXT_HEADER - Static variable in class gov.nih.mipav.model.file.FileVOI
-
- textA - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- textA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static and arbitrary text field.
- texta0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- texta1 - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
- texta1 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- texta2 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- texta3 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- texta4 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- texta5 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- texta6 - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- TextAcquisitionMatrixFreq - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextAcquisitionMatrixFreqO - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextAcquisitionMatrixFreqS - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextAcquisitionMatrixPhase - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextAcquisitionMatrixPhaseAxis - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextAcquisitionTimeMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextAcquisitionTimeSS - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textActualPerSecond - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- textActualPerSecond - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- textAdjustedSlice - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- textAdvectionWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Advection weight parameter
- textAFPintoDFP - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- textAFPintoFRET - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- textAlpha - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- textAlpha - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- textAlpha - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textAlpha - Variable in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
- textAlpha - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- textAlpha - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- textAlphaBright - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- textAlphaDim - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- textAmpFact - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- textAngle - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- TextAngle - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextAngleFlag1 - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextAngleFlag2 - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextAngleFlag3 - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textAnimationFrame - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
Note that an attempt to have DocumentListener for textAnimationFrame set the slider value was unsuccessful.
- textAnimationFrame - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Note that an attempt to have DocumentListener for textAnimationFrame set the slider value was unsuccessful.
- TextAnnotation - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textAnnotations(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Creates the text annotations (arrow)
- textArea - Variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance.SelectionListener
-
- textArea - Variable in class gov.nih.mipav.view.dialogs.JDialogDataProvenance
-
DOCUMENT ME!
- textArea - Variable in class gov.nih.mipav.view.dialogs.JDialogText
-
DOCUMENT ME!
- textArea - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- textB - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- textB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- textBeta - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- textBeta - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- textBeta - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- textBins - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- textBins - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- textBins - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- textBins - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- textBins - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- textBins - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- textBins - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- textBins - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- textBlackEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
- textBloodIntrinsicRelaxivityRate - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- textBorderSize - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- textBoundaryIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textBoundaryIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- textBoundaryIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- textBoundaryIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- textBoxB - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- textBoxG - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- textBoxR - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- textBvalGradFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- textC - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- textcdfTruncation - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- textChanged - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.ChangeNameDialog
-
DOCUMENT ME!
- textChanged - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.ChangeNameDialog
-
DOCUMENT ME!
- textChangeX - Variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
- textClassicStep - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textClassNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
DOCUMENT ME!
- textClusters - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- textClusters - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- textClusters - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- textCoarseMax - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Max coarse iterations.
- textCoarsenessThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- textColor - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- textColor - Variable in class gov.nih.mipav.model.structures.VOIText
-
This must be kept separate (but parallel) to the VOI color.
- textColor - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- textColor - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- textColumnNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- textColumns - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- textConf - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- textContourPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- textContract - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- textContrast - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- textContrastRelaxivityRate - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- textControlPoints - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
- textCovariance - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- textCross - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- textCSize - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- textCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
Cursor for doing annotations.
- textCurvatureWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Curvature weight parameter
- TextDateDD - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextDateMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextDateYYYY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textDecim - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
DOCUMENT ME!
- textDegree - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
- textDelta - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- textDelta - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- textDeltaT - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- textDepth - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- textDepth - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- textDerivative - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- textDestinationMean - Variable in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
DOCUMENT ME!
- textDFPintoAFP - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- textDFPintoFRET - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- textDiffusion - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- textDiffusitivity - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- textDigitNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- textDilation - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textDim1 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- textDim2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- textDim3 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- textDim4 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- textDim5 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- textDimX - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textDimY - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textDimZ - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- textDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- textDistortionThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
DOCUMENT ME!
- TextDOBDD - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextDOBMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextDOBYYYY - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textDtheta - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- textDTIColorImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Text boxes for the tensor, color image, eigen vector, eigen value, and functional anisotropy files:
- textDTIimage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- textDTIimage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Text boxes for the tensor, color image, eigen vector, eigen value, and functional anisotropy files:
- textDWIDataimage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- textdx - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- textDx - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textdy - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- textDy - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textdz - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- textEc - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- TextEchoNumber - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextEchoTime - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textEdgeAttract - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- textEdgeThresh - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- textEditable - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
- textEmbeddedDimensions - Variable in class gov.nih.mipav.view.dialogs.JDialogLLE
-
DOCUMENT ME!
- textEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- textEndTol - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- textEndTol - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- textEndTol - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- textEndTol - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- textEndTol - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- textEndTol - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textEnhancedThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- textEps - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- textEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- textEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- textEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- textEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- textEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- textEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- textEpsilon - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- textEqual - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textErode - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- textErrorThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- textEValueImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Text boxes for the tensor, color image, eigen vector, eigen value, and functional anisotropy files:
- textEVimage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Text boxes for the tensor, color image, eigen vector, eigen value, and functional anisotropy files:
- textExpand - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- textExpected - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- textExpectedExtentX - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
User-Interface for entering the expected extent X
- textExpectedExtentY - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
User-Interface for entering the expected extent Y
- textExpectedExtentZ - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
User-Interface for entering the expected extent Z
- textExpFuzzifier - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
DOCUMENT ME!
- textExpo - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- textExpo - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- textExpo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- textF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- textF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- textF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- textF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- textF1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- textF2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- textF2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- textF2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- textF2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- textF2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- textFAimage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Text boxes for the tensor, color image, eigen vector, eigen value, and functional anisotropy files:
- textField - Variable in class gov.nih.mipav.view.dialogs.InstanceVOI
-
- textField - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.ChangeNameDialog
-
DOCUMENT ME!
- textField - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.ChangeNameDialog
-
DOCUMENT ME!
- textField - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.KeyPressedEvent
-
- textField - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
- textFieldAngleThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- textFieldAngleThreshold - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- textFieldAxialVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Text field for each VOI and ply file.
- textFieldBallRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- textFieldBallRadius - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- textFieldClusteringRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- textFieldClusteringRadius - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- textFieldCoronalVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Text field for each VOI and ply file.
- textFieldCoronalVOI - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Text field for each VOI and ply file.
- textFieldEndVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- textFieldEndVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- textFieldEndVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- textFieldEndVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- textFieldEndVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- textFieldEndVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- textFieldGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- textFieldImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- textFieldImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- textFieldImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- textFieldImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- textFieldImageFAT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- textFieldImageFATCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- textFieldImageFATCED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- textFieldImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- textFieldImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- textFieldImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- textFieldImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- textFieldImageGRE - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- textFieldImageGRECED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- textFieldImageGRECED - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- textFieldImageTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- textFieldImageTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- textFieldImageTarget - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- textFieldInputFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- textFieldInputFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- textFieldKeyImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
- textFieldMidVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- textFieldMidVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- textFieldMidVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- textFieldMidVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- textFieldMidVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- textFieldMidVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- textFieldModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- textFieldModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- textFieldModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- textFieldModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- textFieldModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- textFieldModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- textFieldModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- textFieldModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- textFieldOutputFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- textFieldOutputFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- textFieldPlyFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Text field for each VOI and ply file.
- textFieldPlyFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Text field for each VOI and ply file.
- textFieldSagittalVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Text field for each VOI and ply file.
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
saved 2D slices atlas dir.
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
saved 2D slices atlas dir.
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- textFieldSaveImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
saved 2D slices atlas dir.
- textFieldStartVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- textFieldStartVOIAxial - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- textFieldStartVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- textFieldStartVOICoronal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- textFieldStartVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
- textFieldStartVOISagittal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
- textFieldSVMModel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- textFile - Variable in class gov.nih.mipav.view.dialogs.JDialogQuantify
-
DOCUMENT ME!
- TEXTFILE - gov.nih.mipav.model.algorithms.CeresSolver.DumpFormatType
-
- textFill - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- textFill - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- textFills - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- textFilterLength - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
DOCUMENT ME!
- textFirstOctave - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- textFirstSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- textFirstTimePeriod - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- textFittingLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
- textFlipAngle - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- TextFlipAngle - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textFont - Variable in class gov.nih.mipav.model.structures.VOIText
-
The font is stored here so that it does not have to be reallocated on each redraw.
- TextFOVH - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextFOVV - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textFramesPerSecond - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- textFramesPerSecond - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- textFU - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- textFU - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textFV - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- textFV - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textG - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- textGamma - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- textGauss - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- textGaussian - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- textGaussian - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- textGaussianStdDev - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
- textGaussianWidth - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- textGaussScale - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- textGaussX - Variable in class gov.nih.mipav.view.components.JPanelSigmas
-
gui, sigma value
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
gui, sigma value
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- textGaussX - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- textGaussY - Variable in class gov.nih.mipav.view.components.JPanelSigmas
-
gui, sigma value
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
gui, sigma value
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- textGaussY - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- textGaussZ - Variable in class gov.nih.mipav.view.components.JPanelSigmas
-
gui, sigma value
- textGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- textGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
gui, sigma value
- textGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- textGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- textGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- textGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- textGaussZ - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- textgmax - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- textgmax - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- textgmax - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
- textgmid - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
DOCUMENT ME!
- textgmin - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- textgmin - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
- textgmin - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
- textGMScale - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Gradient Magnitude Scale factor
- textGreaterEqual - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textGVFIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textGVFIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- textHammingDistanceThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- textHardCoefficient - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- textHardSearchSize - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- textHardSimilar - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- textHardStep - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- textHeight - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- textHematocrit - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textHighGain - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- textHighThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
- textHighTruncated - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- textHistogramBins - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- textHistogramThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
- textICNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- textImage - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- textImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- textImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- textImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- TextImageNumber - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextImageNumber2 - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textInEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- textInitial0 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textInitial1 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textInitial2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textInitialGlobal - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textInitialKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textInput - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- textInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- textInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- textInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- textInput - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- textInStart - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- textIntensity - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light intensity textfield.
- textIntensity - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Light intensity textfield.
- textInterpNPts - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- textInterpNPts - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- textIter - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- textIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- textIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
- textIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
- textIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
- textIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
- textIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- textIterations2 - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textIterativeGlobal - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textIterativeGlobal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textIterativeKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textIters - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
DOCUMENT ME!
- textIters - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Number of Iterations
- textIters - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- textIters - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
difference between x,y resolutions (in plane) and z resolution (between planes).
- textIters - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- textItr - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- textk - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
DOCUMENT ME!
- textK - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textK - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
DOCUMENT ME!
- textK - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- textK - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- textK - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- textK - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- textKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- textKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- textKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- textKernel - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- textKernelDiameter - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- textKernelDiameter - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- textKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- textKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- textKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- textKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- textKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- textKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- textKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- textKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- textKernelSize - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- textKernelSizeClose - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- textKernelSizeErode - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- textKernelSizeOpen - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- textKSize - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- textL - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
DOCUMENT ME!
- textLabelBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Burning point label array.
- textLambda - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textLambda - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- textLaplacianWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Laplacian weight parameter
- textLastSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- textLastTimePeriod - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- textLesserEqual - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- textLinePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- textListFile - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
DWI .list location:
- textLocX - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- textLocY - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- textLocZ - Variable in class gov.nih.mipav.view.dialogs.JDialogHessian
-
DOCUMENT ME!
- textLowerXmm - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- textLowerYmm - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- textLowerZmm - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- textLowGain - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- textLowThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
DOCUMENT ME!
- textLowTruncated - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- textm - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- textM - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- textMagnification - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- textMaskimage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
mask image location:
- textMaskSD - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
discriminate between noise and the underlying image.
- textMatch - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- textMatchFile - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
- textMatchingThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- textMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- textMax - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
DOCUMENT ME!
- textMax - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- textMax - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- textMaxArea - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- textMaxB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- textMaxConstr0 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- textMaxConstr0 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textMaxConstr1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- textMaxConstr1 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textMaxConstr2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- textMaxConstr2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textMaxDiff - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
- textMaxDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Max Distance parameter
- textMaxDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- textMaxEMIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- textMaxEvolution - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Maximum Evolution steps
- textMaxG - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- textMaximum - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- textMaximumDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
DOCUMENT ME!
- textMaxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- textMaxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- textMaxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- textMaxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- textMaxIter - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- textMaxIter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textMaxMAPIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogHMRF_EM
-
- textMaxNoise - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- textMaxNoise2 - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
- textMaxR - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- textmaxRz - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- textmaxTx - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- textmaxTy - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- textMaxVariation - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- textMed - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- textMin - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
DOCUMENT ME!
- textMin - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- textMin - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- textMinArea - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- textMinB - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- textMinConstr0 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- textMinConstr0 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textMinConstr1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- textMinConstr1 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textMinConstr2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- textMinConstr2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textMinDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- textMinDiversity - Variable in class gov.nih.mipav.view.dialogs.JDialogMSER
-
- textMinG - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- textMinimum - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- textMinR - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- textminRz - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- textMinSize - Variable in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
DOCUMENT ME!
- textminTx - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- textminTy - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- textMinwave - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- textModelFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- textModelFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- textModelFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- TextModelName - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textMu - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- textMu - Variable in class gov.nih.mipav.view.dialogs.JDialogContrastEnhancementUsingExposureFusion
-
- textMult - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- textMult - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- textmw1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- textmw2 - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- textNClasses - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- textNClasses - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- textNClasses - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textNeighbors - Variable in class gov.nih.mipav.view.dialogs.JDialogLLE
-
- textNFirst - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- textNIter - Variable in class gov.nih.mipav.view.dialogs.JDialogAntigradient2
-
DOCUMENT ME!
- textNIter - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- textNIter - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
DOCUMENT ME!
- textNIter - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- textNIterClose - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- textNIterD - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- textNIterD - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- textNIterD - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- textNIterD - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- textNIterD - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- textNIterE - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- textNIterE - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- textNIterE - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- textNIterE - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- textNIterE - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- textNIterErode - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- textNIterOpen - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- textNLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- textNOctaves - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- textNoise - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- textNoise - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- textNoise - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- textNoiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- textNoiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- textNoiseStandardDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- textNorm - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- textNormThresh - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- textNPix - Variable in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
DOCUMENT ME!
- textNPyramid - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textNScales - Variable in class gov.nih.mipav.view.dialogs.JDialogSimulatedExposureFusion
-
- textNScales - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- textNumber - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
DOCUMENT ME!
- textNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
DOCUMENT ME!
- textNumberImages - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
- textNumberIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogCoherenceEnhancingDiffusion
-
DOCUMENT ME!
- textNumberIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
User-Interface for entering the number of deconvolution iterations:
- textNumberIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- textNumberIterations - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- textnx - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- textny - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- textnz - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- textObjectiveNumericalAperature - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
User-Interface for entering the objective numerical aperature:
- textOctaves - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- textOctreeDepth - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- textOffset - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- textOffsetDistance - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- textOffsetDistance - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textOneJacobiIter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textOneSmooth - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textOperator - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- textOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- textOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- textOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- textOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- textOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- textOrder - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- TextOrganization - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textOrient - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- textOrientations - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- textOriginalExtentX - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
User-Interface for displaying the original extent X
- textOriginalExtentY - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
User-Interface for displaying the original extent Y
- textOriginalExtentZ - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
User-Interface for displaying the original extent Z
- textOutEnd - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- textOutputFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- textOutStart - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- textP1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- textP2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- textPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.ChangeNameDialog
-
DOCUMENT ME!
- textPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.ChangeNameDialog
-
DOCUMENT ME!
- textPatchSize - Variable in class gov.nih.mipav.view.dialogs.JDialogNoiseLevel
-
- TextPatientAge - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextPatientAgeUnits - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextPatientID - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextPatientName - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextPatientPosition - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextPatientSex - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textPeakThresh - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- textPercent - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- textPointsFile - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- textPointsFile - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- textPointsFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- textPointThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
DOCUMENT ME!
- textPotential - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSegment
-
- textPropagationWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Propagation weight parameter
- textPrune - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- textR - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- textRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- textRadius - Variable in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
- textReceiver - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- textRef - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- textRef - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- textRef - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- textReferenceSlice - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- textRefractiveIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
User-Interface for entering the index of refraction:
- textRegIter - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- textRegLevels - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- textRegularization - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- textRemap - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
- textRemap - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBConcat
-
- TextRenderer() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.TextRenderer
-
- TextRepetitionTime - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textRes1 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- textRes1 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- textRes2 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- textRes2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- textRes3 - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- textRes3 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- textRes3 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- textRes4 - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- textRes4 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- textRes4 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- textRes5 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- textRes5 - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- textResampling - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textRescaling - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
- textRescaling - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- textResX - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textResY - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textResZ - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textRowNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
DOCUMENT ME!
- textRows - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- textRs - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- textRs - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- textRs - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
- textRs - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
- textRs - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- textRx - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textRx - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- textRy - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textRy - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- textRz - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textRz - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- texts - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- textSamplePerNode - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- textSave - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- textSavedFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- textSavedFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
- textSavedFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- textScale - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- textScale - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- textScale1 - Variable in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
- textScale1 - Variable in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
- textScale2 - Variable in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
DOCUMENT ME!
- textScale2 - Variable in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
DOCUMENT ME!
- textScale3 - Variable in class gov.nih.mipav.view.dialogs.JDialogAINDANE
-
- textScale3 - Variable in class gov.nih.mipav.view.dialogs.JDialogLuminanceAdaptation
-
- TextScanNumberA - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextScanNumberB - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextScanStartTimeHH - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextScanStartTimeMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextScanStartTimeSS - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textse - Variable in class gov.nih.mipav.view.dialogs.JDialogDBSCANClusteringSegment
-
- textSearchWindowSide - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- textSegmentNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- TextSequence - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textShape - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textShininess - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Light shinness textfield.
- textShowProgress - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
User-Interface for entering the number of intermediate images to show:
- textShrink - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- textShrink - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- textSigma - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- textSigma - Variable in class gov.nih.mipav.view.dialogs.JDialogCannyEdgeDetection
-
- textSigma - Variable in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
- textSigma - Variable in class gov.nih.mipav.view.dialogs.JDialogHarrisCornerDetector
-
- textSigma - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- textSigmaMaxX - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- textSigmaMaxY - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- textSigmaMaxZ - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- textSigmaMinX - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- textSigmaMinY - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- textSigmaMinZ - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- textSigmaon - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- textSigmaX - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- textSigmaY - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- textSigmoiBeta - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Sigmoid Beta parameter
- textSigmoidAlpha - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Sigmoid Alpha parameter
- textSigmoidMax - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Sigmoid Max parameter
- textSigmoidMin - Variable in class gov.nih.mipav.view.dialogs.JDialogFastMarching
-
Sigmoid Min parameter
- textSignal - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- textSignal - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- textSignal - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- textSignal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textSimilarityWindowSide - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- textSize - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- textSize - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textSizeX - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- textSizeY - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- textSizeZ - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- textSKx - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textSKx - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- textSKy - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textSKy - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- textSKz - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textSKz - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- textSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
- textSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- textSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- TextSlicePosition - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textSliceThickness - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- TextSliceThickness - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textSmoothing - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- textSmoothness - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- textSmoothness - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- textSoft - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- textSolverDivide - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- textSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- textSrcThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- textSSize - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- textSt1 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- textSt2 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- textSt3 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- textSt4 - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- textStart - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- textStartNumber - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- textStatic - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static and arbitrary text field.
- textStaticInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Static and arbitrary text field.
- TextStation - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textSTDDeviation - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- textSteeringStep - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textStep - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- textString - Variable in class gov.nih.mipav.model.structures.VOIText
-
The String to be displayed.
- textString - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- textStructuring - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- TextStudyImageNumber3 - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextStudyNumber - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextStudyNumber2 - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textSU - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- textSU - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textSV - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- textSV - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textSx - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textSx - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- textSy - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textSy - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- textSz - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textSz - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- textT - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Text fields that display the slice number next to the sliders.
- textT - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Text fields that display the slice number next to the sliders.
- textT - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Text fields that display the slice number next to the sliders.
- textT2image - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- textT2image - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIVisualization
-
Text boxes for the tensor, color image, eigen vector, eigen value, and functional anisotropy files:
- TextTablePosition - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textTagElement - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- textTagGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
DOCUMENT ME!
- textTagName - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- textTagValue - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
- texttd2Image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- texttd3Image - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
- textTDim - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
- textTestIters - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- textTheta - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- textTheta - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textTheta1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- textTheta2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
- textThickness - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- textThres1 - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- textThres1 - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- textThres2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- textThres2 - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- textThresh - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
- textThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- textThreshold1 - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
Text fields for lower & upper thresholds and fill values.
- textThreshold1 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
- textThreshold1 - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
Text fields for lower & upper thresholds and fill values.
- textThreshold2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- textThreshold2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
- textThreshold2 - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- textThreshold3 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
- textTimeBetweenShots - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- TextTimeHH - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- TextTimeMM - Variable in class gov.nih.mipav.model.file.FileInfoMagnetomVision
-
DOCUMENT ME!
- textTimesFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textTissueFile - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- textTissueFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textTissueIntrinsicRelaxivityRate - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- textTol - Variable in class gov.nih.mipav.view.dialogs.JDialogLLE
-
- textTrainFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- textTrainFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- textTrainFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- textTwoJacobiIter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textTwoSmooth - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textTx - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textTx - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- textTy - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textTy - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- textTz - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- textTz - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- textUpscale - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- texture - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Reference to 3D texture node for the volume.
- texture - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Texture mapped image.
- TEXTURE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Displays the ModelImage with 3D Texture-mapping :.
- TEXTURE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Paint into the 3D texture map:
- TEXTURE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Paint into the 3D texture map:
- textureAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- textureAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- textureAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogTamuraTexture
-
DOCUMENT ME!
- textureAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureAnalysis
-
- textureAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Algorithm to save Hurst index and Haralick features.
- textureAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- textureAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textureAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- TextureBasis() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the texture PCA.
- TextureEnabled - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- TextureInstance(CDVector, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Generates a texture based on a set of model parameters.
- TextureMovie(String, int, double, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
Generates movies files showing each mode of texture variation by
adjusting the each mode of variation to
+/- 'range' times
in 2*'step'+1 steps.
- TextureOn - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- TexturePCA() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Returns the texture PCA.
- TextureSculptor - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Volume Sculpting for the VolumeTexture Rendering.
- TextureSculptor(SurfaceRender) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.TextureSculptor
-
Constructor:
- textureSegAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
DOCUMENT ME!
- TextureTF() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Return texture transfer function.
- textVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- textVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- textVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- textVal1 - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- textVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- textVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- textVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- textVal2 - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- textValue - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Used for single value, real part of complex, and red part of color
- textValue - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- textValueB - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Used for blue part of color
- textValueB - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- textValueG - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- textValueI - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
Use for imaginary part of complex and green part of color
- textVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
the VOI that contains the VOIText.
- textVOIFile - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textVOIFile - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- textVOIFile2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- textVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- textVolumeLength - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- textVoxelLength - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- textWavelength - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
User-Interface for entering the sample wavelength:
- textWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
DOCUMENT ME!
- textWeightDiff - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
- textWhiteStart - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
DOCUMENT ME!
- textWidth - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- textWienerSearchSize - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- textWienerSimilar - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- textWienerStep - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- textWindow - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- textWindowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- textWindowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
- textWindowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- textWindowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- textWindowSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- textX - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Text fields that display the slice number when slider moves.
- textX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Text fields that display the slice number next to the sliders.
- textX - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Text fields that display the slice number next to the sliders.
- textXDim - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
- textXDim - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
- textXInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X, Y, Z inverse text field.
- textXmin - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- textY - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Text fields that display the slice number when slider moves.
- textY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Text fields that display the slice number next to the sliders.
- textY - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Text fields that display the slice number next to the sliders.
- textYDim - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
- textYDim - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
- textYInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X, Y, Z inverse text field.
- textYmin - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- textZ - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Text fields that display the slice number when slider moves.
- textZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Text fields that display the slice number next to the sliders.
- textZ - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Text field displaying the percentage of the slider.
- textZ - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Text fields that display the slice number next to the sliders.
- textZDim - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
- textZInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
X, Y, Z inverse text field.
- textZmin - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- texUnitStateBXY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Texture creating appearance for the "back" of the image.
- texUnitStateFXY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Texture creating appearance for the "front" of the image.
- tf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
Time between frames (volumes) in seconds (0.1 - 30.0)
- tfActiveIndex - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- tfAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- tfBase - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
- tfIdentity - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
- tfLookUp - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
- tform - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.ASMData
-
- tform - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Affine
-
- tform - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Tps
-
- Tform() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Tform
-
- tform_err_sq(SIFT3D.Affine, SIFT3D.Mat_rm, SIFT3D.Mat_rm, int) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- tform_type() - Constructor for enum gov.nih.mipav.model.algorithms.SIFT3D.tform_type
-
- tFrame - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- tfUniformStretch - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
- tfWavelet - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
- tg - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- TG - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- TG - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- tg_ghost - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- TGA - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .tga.
- TGA_DFMT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- tga_writeheader(RandomAccessFile, int, int, int, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- tgButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- tgetv0 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- tgmo(double[][][], double[], int[][], int, double, int, double[][], String, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
Compute the texture gradient at a single scale and multiple orientations
- tGrid - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- tgs_z_factor - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- tgso(double[][], int[][], int, double, double, String, double, double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
Compute the texture graident at a single orientation and scale
- th - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
number of tiles in heigth
- TH - Static variable in class gov.nih.mipav.model.structures.GenericPolygonClipper
-
- THDATA(double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- THead - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- THERMAL_HEAT_PROBE - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The thermal heat type probe, which is in blue color.
- thermalProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Reference to the thermal heat probe geometry structures.
- thermalProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
The root transform group of the thermal probe.
- ThermalProbe - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Title: ThermalProbe
- ThermalProbe() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Constructor to initialize the thermal probe geometry.
- thermalProbeBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
The root branch group of the theraml probe.
- THERMOGRAPHY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality thermography.
- THERMOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality thermography.
- theta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- theta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
Flip angle in degrees (0.0 - 90.0)
- theta - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
- theta - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- theta - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- theta - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- theta - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- theta - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
DOCUMENT ME!
- theta - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- theta - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- theta - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- theta - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- theta - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- theta - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.PolarPoint
-
- theta - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.PolarPoint
-
- theta - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.LEG
-
- theta - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- theta - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- theta_pre - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- theta0Array - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
- theta0Num - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughCardioid
-
- theta0Num - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
DOCUMENT ME!
- theta0Text - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
DOCUMENT ME!
- theta1 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
Angular equivalence of black band, 0 <= theta1 <= PI/2
- theta1 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Angular equivalence of black band, 0 <= theta1 <= PI/2
- theta2 - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFuzzMinDeAndChatterji
-
Angular equivalence of white band, 0 <= theta2 <= PI/2
- theta2 - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
Angular equivalence of white band, 0 <= theta2 <= PI/2
- thetaArray - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLineChoice
-
- thetaMax - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- thetaMAX - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- thetaMin - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- thetaXY - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
DOCUMENT ME!
- thetaXZ - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
DOCUMENT ME!
- thetaZY - Variable in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
DOCUMENT ME!
- thick - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- thickness - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.LineLabel
-
- thickness - Variable in class gov.nih.mipav.model.algorithms.LightboxGenerator
-
- thickness - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- thickness - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- thickness - Variable in class gov.nih.mipav.model.structures.VOI
-
The thickness of the VOI lines
- thickness - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- thickness0 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- thickness1 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.SegmentDetails
-
- thicknesses - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Used to obtain MIPAV sliceThickness value
- thicknessSlider - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
- thin(int, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
This a thinning algorithm used to do half of one layer of thinning (which layer is dictated by whether pass is
even or odd).
- thin(int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
This a thinning algorithm used to do half of one layer of thinning (which layer is dictated by whether pass is
even or odd).
- thin(int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
This a thinning algorithm used to do half of one layer of thinning (which layer is dictated by whether pass is
even or odd).
- thinAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogThinning2D
-
DOCUMENT ME!
- third - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.Triplet
-
- third - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- thirdColor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- thirdValue - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
This value equal one third (0.3333333).
- thirdValue - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
This value equal one third (0.3333333).
- THIRTY - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- thisFrame - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- thisFrame - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- thisFrame - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- thisOrientation - Variable in class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
- thk_disclmr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
578 Slice Thickness.
- thread - Variable in class gov.nih.mipav.view.ImageRegistryMonitor
-
DOCUMENT ME!
- thread - Variable in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
DOCUMENT ME!
- thread_idx - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.computeTreePermutationImportanceInThread
-
- thread_idx - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.growTreesInThread
-
- thread_idx - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictInternalInThread
-
- thread_idx - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.predictTreesInThread
-
- thread_ranges - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- threadedGenerateData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- threadedGenerateData() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- threadedGenerateDataForFitting() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- threadedGenerateDataForReconstruction() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- threads - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
- threadStopped - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Flag indicating whether or not the thread is stopped.
- ThreadUtil - Class in gov.nih.mipav.util
-
- ThreadUtil() - Constructor for class gov.nih.mipav.util.ThreadUtil
-
- THREE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- threeButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- threeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
- threeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- threeByteInteger - Variable in class gov.nih.mipav.model.file.FileRaw
-
- threeByteInteger - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
- threeByThree - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- threeD - Variable in class gov.nih.mipav.view.dialogs.JDialogMask3D4D
-
Radio button indicating that the image should only be masked in 3D
- ThreeD - gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.SwapMode
-
- THREED_LEFT_HANDED - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
Any left-handed three-dimensional space.
- THREED_LEFT_HANDED_TIME - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
Like THREEE_LEFT_HANDED, but with time along the fourth axis.
- THREED_RIGHT_HANDED - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
Any right-handed three-dimensional space.
- THREED_RIGHT_HANDED_TIME - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
Like THREED_RIGHT_HANDED, but with time along the fourth axis.
- threeDButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
- threef0(double, double, double, double, double[]) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- ThreeParameterCostFunctorTest() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- ThreeParameterCostFunctorTestTestThreeParameterJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- ThreeParameterCostFunctorTestTestThreeParameterJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ThreeParameterCostFunctorTestTestThreeParameterResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- ThreeParameterCostFunctorTestTestThreeParameterResiduals() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ThreeParameterCostFunctorTestThreeParameterJacobianWithFirstAndLastParameterBlockConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- ThreeParameterCostFunctorTestThreeParameterJacobianWithFirstAndLastParameterBlockConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- ThreeParameterCostFunctorTestThreeParameterJacobianWithSecondParameterBlockConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- ThreeParameterCostFunctorTestThreeParameterJacobianWithSecondParameterBlockConstant() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- threeParameterFittingCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.WeibullDistribution.threeParameterFittingCostFunction
-
- threePDownHillSimplex(double[], double[], double, double, double[], double[], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- threeTField - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- thres1 - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- thres1 - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- thres2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- thres2 - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- THRESH - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- threshAtRobustMaxAndMin(VabraVolumeCollection) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- threshField - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityThreshold
-
DOCUMENT ME!
- threshFillBF - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- threshFillBF - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- threshFillF - Variable in class gov.nih.mipav.view.JPanelHistogram
-
displays the threshold fill-value
- threshFillF - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
threshold related.
- threshFillF - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
threshold related.
- threshholding - Variable in class gov.nih.mipav.model.file.FileSVS
-
- threshholding - Variable in class gov.nih.mipav.model.file.FileTiff
-
- THRESHHOLDING - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- THRESHHOLDING - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- threshLowerBF - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- threshLowerBF - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- threshLowerF - Variable in class gov.nih.mipav.view.JPanelHistogram
-
displays the threshold lower-value
- threshLowerF - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
threshold related.
- threshLowerF - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
threshold related.
- threshLowerF - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
threshold related.
- threshMax1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
628 Upper range of pixels 1.
- threshMax2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
636 Upper range of pixels 2.
- threshMin1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
624 Lower range of pixels 1.
- threshMin2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
632 Lower range of pixels 2.
- threshold - Variable in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
Array of two thresholds. threshold[0] = Minimum threshold, threshold[1] = Maximum threshold.
- threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeDetection3D
-
- threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
This is a fast implementation of the marching squares algorithm for finding isolines (lines of equal color) in an image.
- threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Values at less than threshold are treated as part of the background.
- threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNonMaxSuppts
-
- threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionsFromPartialBorders
-
- threshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
Array of two thresholds. threshold[0] = Minimum threshold, threshold[1] = Maximum threshold.
- threshold - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- threshold - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- threshold - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
Only average values above threshold.
- threshold - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
Only average values above threshold.
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgeDetection3D
-
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateIsolines
-
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogGraphBasedSegmentation
-
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- threshold - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- threshold - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- threshold() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- threshold() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
- threshold(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Convert the mask image specified theshold values.
- Threshold(String) - Constructor for enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.Threshold
-
- THRESHOLD - Static variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Thresholded transfer function mode (grayscale).
- threshold_firm(double[], double[], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- threshold_firm(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- threshold_firm(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.HaarTransform
-
- threshold_firm(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.SlantTransform
-
- threshold_firm(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- threshold_firm(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- threshold_GT() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- threshold_kernel - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- threshold1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
The minimum values that are considered as data values.
- threshold1 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- threshold1 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
- threshold1 - Variable in class gov.nih.mipav.view.PatientSlice
-
Threshold value:.
- threshold1Label - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- threshold1Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- threshold2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- threshold2 - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- threshold2 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
- threshold2 - Variable in class gov.nih.mipav.view.PatientSlice
-
Threshold value:.
- threshold2Label - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- threshold2Text - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- threshold3 - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionMergingViaBoundaryMelting
-
- thresholdAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- thresholdAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- thresholdAlgo - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
DOCUMENT ME!
- thresholdAlgoRGB - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- thresholdAverage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmComplexToReal
-
If true only average values above threshold.
- thresholdAverage - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRGBtoGray
-
If true only average values above threshold.
- thresholdAverage - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- thresholdB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
DOCUMENT ME!
- thresholdB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
DOCUMENT ME!
- thresholdB - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- thresholdB - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- thresholdBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- thresholdButton - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Toggle buttons for transfer, threshold and threshold inverse.
- thresholdCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- thresholdCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- thresholdCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- thresholdCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- ThresholdChoiceListener() - Constructor for class gov.nih.mipav.view.dialogs.JDialogTreMethod.ThresholdChoiceListener
-
- thresholdField - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- thresholdG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
DOCUMENT ME!
- thresholdG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
DOCUMENT ME!
- thresholdG - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- thresholdG - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- ThresholdGamma - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- thresholdGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- thresholdGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- thresholdGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- thresholdGT() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- thresholdImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- thresholdingIsNecessary - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
threshold the image while processing.
- thresholdingType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- thresholdingType - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- thresholdingTypeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- thresholdingTypeLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- thresholdLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- thresholdLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- thresholdLabels1 - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- thresholdLabels1 - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- thresholdLabels2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- thresholdLabels2 - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- thresholdLevel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- thresholdLevel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMRIShadingCorrection
-
DOCUMENT ME!
- thresholdLevel - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- thresholdLevel - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- thresholdLowPass - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- thresholdLowPass - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- thresholdLowPassCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- thresholdMax - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- thresholdMethod - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- thresholdMin - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- thresholdMode - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
The current threshold mode (dual or dual inverse) or NO_THRESHOLD if not in theshold mode.
- thresholdMultiplier - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- thresholdMultiplier - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- thresholdMultiplierLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- thresholdMultiplierText - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- thresholdOn1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- thresholdOn1 - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- thresholdOn1 - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
If true, the matrix of linear correlation coefficients is taken along color 1 at unity spacings.
- thresholdPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
panels
- thresholdParametersLeftPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
panels
- thresholdParametersPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
panels
- thresholdParametersRightPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
panels
- thresholdProcPixel(int, float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
process pixel at pixel pix using data from the srcBuffer. builds a list of monochromatic image
values of the neighboring pixels image values (using a map generated by the kernelMask), builds the histogram of
those values, clamps when necessary, then scales the cumulative histogram, getting the brightness back out.
- thresholdR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMassRGB
-
Three arrays (R,G,B) containing minimum and maximum threshold for each channel.
- thresholdR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Three arrays (R,G,B) containing minimum and maximum threshold for each channel.
- thresholdR - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
lower [0] and upper [1] thresholds for RGB.
- thresholdR - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
lower [0] and upper [1] thresholds for RGB.
- thresholdRadioGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
radio groups
- thresholdSelected - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
If true don't use pixels below thresholdLevel that are 4 or 6 neighbor connected to boundary pixels below
thresholdLevel.
- thresholdSelected - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMRIShadingCorrection
-
If true, don't use periphery pixels below threshold or pixels below threshold connected to periphery pixels below
threshold thru a 4 neighbor chain of below threshold pixels.
- thresholdSelected - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- thresholdSelected - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- thresholdText - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- thresholdText - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- thresholdTextField - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- thresholdType - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- thresholdType - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- thresholdType - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- thresholdValueInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- threshUpperBF - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- threshUpperBF - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- threshUpperF - Variable in class gov.nih.mipav.view.JPanelHistogram
-
displays the threshold upper-value
- threshUpperF - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
threshold related.
- threshUpperF - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
threshold related.
- threshUpperF - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
threshold related.
- thrLength - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- thumbnail - Variable in class gov.nih.mipav.model.file.FileImageXML
-
Thumbnail data and AWT Image.
- thumbnail - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- thumbnail - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- thumbnail - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
DOCUMENT ME!
- thumbnail - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- thumbNail - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- Thumbnail(int, int, int[]) - Constructor for class gov.nih.mipav.model.file.FileImageXML.Thumbnail
-
Default constructor for the Thumbnail.
- thumbnailBuffer - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- thumbnailBufferIndex - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- thumbnailOffset - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- thumbnailOption - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- thumbNailX - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- thumbnailXDim - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- thumbNailY - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- thumbnailYDim - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- ThunderScanCompression - Variable in class gov.nih.mipav.model.file.FileSVS
-
- ThunderScanCompression - Variable in class gov.nih.mipav.model.file.FileTiff
-
- ThunderScanDecompresser(byte[], byte[], int, int) - Method in class gov.nih.mipav.model.file.FileSVS
-
- ThunderScanDecompresser(byte[], byte[], int, int) - Method in class gov.nih.mipav.model.file.FileTiff
-
- ThurberCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverNISTTest.ThurberCostFunction
-
- ThurberData - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- ThurberObservations - Variable in class gov.nih.mipav.model.algorithms.CeresSolverNISTTest
-
- ti - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- ti - Variable in class gov.nih.mipav.model.file.FileInfoCOR
-
DOCUMENT ME!
- ti - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- ti - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- ti - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- tickColor - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- ticklabels - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.ColormapLabel
-
- tickMarkGenerator - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- tickMarkLabels - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- ticks - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- ticks - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.ColormapLabel
-
- TIF_DFMT - Static variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- Tiff - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- TIFF - Static variable in class gov.nih.mipav.model.file.FileUtility
-
TIFF file; tagged header. extension: .tif, .tiff
- TIFF - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
- TIFF_DIGIT_NUMBER - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the parameter indicating the number of digits to use in tiff image file naming.
- TIFF_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Multiple files of TIFF images.
- TIFF_SET_WRITE_PACK_BIT - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the tiff set write pack bit parameter.
- TIFF_START_NUMBER - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the tiff initial image number parameter.
- TiffDataFormat() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- TiffDataFormat(String, int, int) - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- tiffEnabled - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- TIFFLZWDecoder - Class in gov.nih.mipav.model.file
-
A class for performing LZW decoding.
- TIFFLZWDecoder(int, int, int) - Constructor for class gov.nih.mipav.model.file.TIFFLZWDecoder
-
Creates a new TIFFLZWDecoder object.
- tiffPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- TiffProcessingException(String) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.TiffProcessingException
-
- TiffProcessingException(String, Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.TiffProcessingException
-
- TiffProcessingException(Throwable) - Constructor for exception gov.nih.mipav.model.file.MetadataExtractor.TiffProcessingException
-
- TiffReader() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.TiffReader
-
- TIFFYCbCrInputStream(FileSVS.IntFilterInputStream) - Constructor for class gov.nih.mipav.model.file.FileSVS.TIFFYCbCrInputStream
-
- TIFFYCbCrInputStream(FileTiff.IntFilterInputStream) - Constructor for class gov.nih.mipav.model.file.FileTiff.TIFFYCbCrInputStream
-
- tiflat - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- tiindex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- tildeLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- tile - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Tile number
- TILE_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TILE_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- TILE_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- TILE_BYTE_COUNTS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tile_index - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_codestream_index_t
-
- tile_index - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
tile number ot the decoded tile
- tile_index - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_dparameters_t
-
tile number ot the decoded tile
- TILE_LENGTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TILE_LENGTH - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- TILE_LENGTH - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- TILE_LENGTH - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- TILE_OFFSETS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TILE_OFFSETS - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- TILE_OFFSETS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- TILE_OFFSETS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- TILE_WIDTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TILE_WIDTH - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- TILE_WIDTH - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- TILE_WIDTH - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tileByteCounts - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tileByteCounts - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tileByteCounts - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tileByteCounts - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tileByteNumber - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tileByteNumber - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tileByteNumber - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tileByteNumber - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tileIndex - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- tileLength - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tileLength - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tileLength - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tileLength - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tileMaxByteCount - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tileMaxByteCount - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tileMaxByteCount - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tileno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_index_t
-
tile index
- tileno - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_info_v2_t
-
number (index) of tile
- tileOffsetNumber - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tileOffsetNumber - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tileOffsetNumber - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tileOffsetNumber - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tileOffsets - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tileOffsets - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tileOffsets - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tileOffsets - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tiles - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_image_t
-
- tilesAcross - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tilesAcross - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tilesAcross - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tilesAcross - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tilesDown - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tilesDown - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tilesDown - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tilesDown - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tilesPerImage - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tilesPerImage - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tilesPerImage - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tilesPerImage - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tilesPerSlice - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tilesPerSlice - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tilesPerSlice - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tilesPerSlice - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tileTemp - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tileTemp - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tileTemp - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tileTemp - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tileWidth - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- tileWidth - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tileWidth - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tileWidth - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tiltAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- tiltAngle - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmTiltCorrection
-
- tiltAngle - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
- tiltAngles - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- tilticon - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- tImage() - Constructor for class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.tImage
-
- tImageSlider - Variable in class gov.nih.mipav.view.ViewControlsImage
-
tImageSlider
- tImageSlider - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Slider for 4D images, time dimension.
- time - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel
-
DOCUMENT ME!
- time - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2i
-
DOCUMENT ME!
- time - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2p
-
DOCUMENT ME!
- time - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullIntModel2s
-
DOCUMENT ME!
- time - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CallStatistics
-
- time - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- time - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace
-
DOCUMENT ME!
- time - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace2
-
Independent variable for which the inverse Laplace transform has to be computed. time value should be greater
than zero.
- time - Variable in class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
resulting vector of times.
- time - Variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- time - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- time - Variable in class gov.nih.mipav.model.file.XMLParameter
-
Parameter time.
- time - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Time to wait for the next mouse event.
- time - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera
-
Time to wait for the next mouse event.
- time - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Time to wait for the next mouse event.
- time - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Standard mouse tread waiting time.
- time - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- time - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- time - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- tIME - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- TIME - gov.nih.mipav.model.file.FileInfoBase.UnitType
-
- TIME - gov.nih.mipav.view.ViewJSlider.SliderType
-
- TIME - Static variable in class gov.nih.mipav.view.ViewJSlider
-
- TIME_SLICE - Static variable in class gov.nih.mipav.model.scripting.actions.ActionSaveBase
-
Label for the parameter indicating which time slice to save when saving 4D images in a format which only supports
3D image writing.
- timeAcquired - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- timeDifferenceX - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
- timeDifferenceX - Variable in class gov.nih.mipav.model.file.FileLSM
-
- timeDifferenceY - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
- timeDifferenceY - Variable in class gov.nih.mipav.model.file.FileLSM
-
- timeDifferenceZ - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
- timeDifferenceZ - Variable in class gov.nih.mipav.model.file.FileLSM
-
- timeDim - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- timeElapsed - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- timeElapsed - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- timeElapsed - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- timeElapsed - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- timeEnabled - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- timeField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- timeField - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- timeFrame - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- timeFrameNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- timeFrames - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- timeFunction - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace
-
resulting vector of real-space values.
- timeFunction - Variable in class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
resulting vector of real-space values.
- timeIncrement - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
DOCUMENT ME!
- timeInterval - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- timeInterval - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- timeLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- timeLater - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- timeLater - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- timeLater - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- timeLater - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- timeLoaded - Variable in class gov.nih.mipav.plugins.ManifestFile
-
- timeNow - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- timeNow - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- timeNow - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- timeNow - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- timeOrigin - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- timeOrigin - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- timeout - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
DOCUMENT ME!
- timeoutBetweenProjectionTransfers - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- TimeoutThread - Class in gov.nih.mipav.model.structures
-
Thread which sleeps for a pre-determined amount of time, then calls a method (if the thread hasn't had its shutdown
method called).
- TimeoutThread(long) - Constructor for class gov.nih.mipav.model.structures.TimeoutThread
-
Creates a new ReminderThread object.
- timePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveSlices
-
DOCUMENT ME!
- timeProcessed - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- TIMER_ENTRY_ACTIVATION_NUMBER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TIMER_ENTRY_ACTIVATION_TIME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TIMER_ENTRY_DESCRIPTION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TIMER_ENTRY_INTERVAL - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TIMER_ENTRY_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TIMER_ENTRY_TRIGGER_IN - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TIMER_ENTRY_TRIGGER_OUT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- times(libdt.Mat[], double) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- times(libdt.Mat, double) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- times(libdt.Mat, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- timeSlice - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- timeSlice - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Current time slice being displayed.
- timeSlice - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Time sliders value.
- timeSlice - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- timeSlice - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- timeSliceA - Variable in class gov.nih.mipav.view.PatientSlice
-
For 4D data, the timeSlice multiplier for imageA:.
- timeSliceA - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- timeSliceB - Variable in class gov.nih.mipav.view.PatientSlice
-
For 4D data, the timeSlice multiplier for imageB:.
- timeSliceB - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
DOCUMENT ME!
- timestamp() - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- timeStamp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- timeStamp - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- timeStamp - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- timeStamp - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
The timestamp
- timeStamper() - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Creates a string in the form of the time determined when this method is called.
- timeStamps - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- TimeStatistics(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchFunction
-
- timeStep - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
The time parameter step size, called tau in the algorithm description In 2D for stability the time step should be
<= 0.25.
- timeStep - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
The time parameter step size, called tau in the algorithm description In 2D for stability the time step should be
<= 0.25.
- timeStep - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- timeStep - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- timeStepUnit - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- timeStr - Variable in class gov.nih.mipav.model.file.FileInfoTMG
-
DOCUMENT ME!
- timesValue - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- timeUnits - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
Bits 3, 4, and 5 of xyzt_units specify the units of pixdim[4],
that is the temporal units of the nifti time axis.
- timeVals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
- timeVals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task
-
- timeVals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
A vector of center times for each volume
- timeVals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask
-
- timeVals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
A vector of center times for each volume
- timeVals - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- timeWindowImages - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- timeWindowImagesIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- timeWindowLowerLimit - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- timeWindowLowerLimitIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- timeWindows - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- timeWindowsNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- timeWindowUpperLimit - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- timeWindowUpperLimitIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- timeWritten - Variable in class gov.nih.mipav.model.file.FileInfoFits
-
- tIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.TriangulationEdge
-
- tInfo - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- tInfo - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- tInfo - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- tInverseCumulativeDistributionFunction() - Method in class gov.nih.mipav.model.algorithms.Statistics
-
- tiny - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
2**-1022 = D1MACH(1).
- tiny - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
2**-1022 = D1MACH(1).
- tiny - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
2**-1022 = D1MACH(1).
- TINY - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Used to prevent division by zero.
- TINY - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- TINY - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- TINYd - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- tipLen - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.MaskBurnAttribute
-
Burning probe tip length.
- tipLengthCB - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Combo box for indicating the length of the probe tip.
- tips - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- tissueGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- tissueImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- tissueImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- tissueImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- tissueImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- tissueSource - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- tissueSource - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- tistep - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- title - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassSig
-
- title - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SigSet
-
- title - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Metadata
-
- title - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- title - Variable in class gov.nih.mipav.model.file.FileInfoImageXML.Investigator
-
Title of investigator.
- title - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- title - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Reference to the TitleUpdater instance.
- title - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Reference to the TitleUpdater instance.
- title - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
dialog title and version *
- title - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- title - Variable in enum gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.SwapMode
-
- title - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- title - Static variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- title - Static variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- title - Variable in class gov.nih.mipav.view.ProgressChangeEvent
-
The title of the progress dialog
- title - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
dialog title and version *
- title - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- title - Variable in class gov.nih.mipav.view.ViewJProgressBar
-
Title of the frame for the progress bar.
- title - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
Base title string inputted at instantiation
- titledBorder - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
titled border for certain components *
- titledBorder - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
titled border for certain components *
- titleField - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- titleField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- titleLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogServer
-
DOCUMENT ME!
- titleLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- titleLabel - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
Actual displayed label: also includes the message
- titles - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
locks the frame title
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
locks the frame title
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Used to lock and unlock images.
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Used to lock and unlock images.
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
String titles for the new windows.
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
or if the source image is to be replaced.
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
or if the source image is to be replaced.
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
Used for setting image to locked and unlocked.
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Used to lock and unlock images.
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
locks the frame title
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
The GUI list of images
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- titles - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- titleStr - Variable in class gov.nih.mipav.model.file.FileInfoTMG
-
DOCUMENT ME!
- titref - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- tjflat - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- tjindex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- tjstep - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- tl_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- tliop() - Constructor for class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.tliop
-
- TLRC_AC_TO_LAT - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
acpc constants.
- TLRC_AC_TO_PC - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
acpc constants.
- TLRC_AC_TO_TOP - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
acpc constants.
- TLRC_BOT_TO_AC - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
acpc constants. most inferior to AC.
- TLRC_FRONT_TO_AC - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
acpc constants.
- TLRC_PC_TO_BACK - Static variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
acpc constants.
- TLRC_TO_ACPC - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- TLRC_TO_ACPC - Static variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- TLRC_TO_ORIG - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- TLRC_TO_ORIG - Static variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- tlrcAC - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Anterior Comissure in Talairach space.
- tlrcACFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- tlrcDim - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Image dimensions.
- tlrcDimFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- tlrcImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- tlrcPC - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Posterior Comissure in Talairach space.
- tlrcPCFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- tlrcRes - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- tlrcRes - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- tlrcRes - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Voxel resolutions for the sub-boxes.
- tlrcRes - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- tlrcResCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- tlrcResFields - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- tlrcToAcpc(int, int, int, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from tlrc to acpc...matrix is implicitly inverted in code.
- tlrcToAcpc(Vector3f, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from tlrc to acpc...matrix is implicitly inverted in code.
- tlrcToOrig(int, int, int, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from tlrc to orig...matrix is implicitly inverted in code.
- tlrcToOrig(Vector3f, Vector3f) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Transforms point from tlrc to orig...matrix is implicitly inverted in code.
- tm - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- TM - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- tm_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- tMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Mask that meets threshold and sMask requirements for shrunken volume.
- TmatchPts - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- tMatrix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- tMatrix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- tMatrix - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- tMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationValidation
-
Initial transmatrix for cost functions
- tMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
Identity matrix for testing cost
- tMatrix - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
Identity matrix for testing cost
- tMatrix - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Identity matrix for testing cost
- tMatrixMatchtoBase - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- tmax - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- Tmax - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- tmax_plot - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- tmesh - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
triangle mesh for decimation.
- TMG - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Optical coherence tomography. extension: .tmg
- tmin - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- Tmin - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- tmin_plot - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- tmp_e_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- tmp_e_cols_2_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- tmp_f_cols_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- tmp_rows_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- tmpArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIteratedBlindDeconvolution
-
DOCUMENT ME!
- tmpImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- tmpIntensity - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- tmppoint3d1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- tmppoint3d1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- tmppoint3d2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- tmppoint3d2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- tmpPosition - Variable in class gov.nih.mipav.view.dialogs.JDialogRegVOILandmark
-
DOCUMENT ME!
- tmpPt - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- tmpPt - Variable in class gov.nih.mipav.view.RubberbandPolyline
-
DOCUMENT ME!
- tmpStr - Variable in class gov.nih.mipav.view.dialogs.JDialogCentroidThreshold
-
DOCUMENT ME!
- tmpStr - Variable in class gov.nih.mipav.view.dialogs.JDialogInitialCentroids
-
DOCUMENT ME!
- tmpXfrm - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- tmvbx - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- tmvopx - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- TNGQP - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- TO_BE_DEFINED - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory.DisposalMethod
-
- to_explore - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- toAbridgedString() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
-
Creates string of this object with just first 6DOF and cost.
- toAbridgedString() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D.MatrixListItem
-
Creates string of this object with just first 6DOF and cost.
- toAbridgedString() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D.MatrixListItem
-
Creates string of this object with just first 6DOF and cost.
- toAbridgedString() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D.MatrixListItem
-
Creates string of this object with just first 6DOF and cost.
- toAbridgedString() - Method in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Creates string of this object with just first 6DOF and cost.
- toArchiveCnt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
228 - (internal use) number of Unarchived images.
- toArchiveData - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
236.
- toArchiveLen - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
232 - (internal use) Unarchived images keys in Series.
- toArray(Boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- toBufferedImage() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
- toBufferedImage(BufferedImage) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
- toBufferedImage(BufferedImage) - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.ImgBase
-
Copies this image's data to the specified BufferedImage.
- ToCRSMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- ToCRSMatrix(CeresSolver.CRSMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- todayCalendar - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- ToDebugString() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- ToDegrees(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- ToDenseMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- ToDenseMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- ToDenseMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- ToDenseMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- ToDenseMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- toDialogString() - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Produces a string of the matrix values, rows separated by tabs.
- toDialogString() - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Produces a string of the matrix values, rows separated by tabs.
- toDMSString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
- toDouble(byte[], int, boolean) - Static method in class gov.nih.mipav.model.file.FileDicomTag
-
Converts a little-endian byte array into an array of Doubles with length equal to the tag vm.
- toeplitz(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- toeplitz_from_kernel(double[], int, int) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- tOffset - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
The toffset field can be used to indicate a nonzero start point for
the time axis.
- ToFile(DataOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesize
-
Write an object to disk.
- ToFile(DataOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Writes a PCA object to a binary file.
- ToFile(DataOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPointInfo
-
Write point info to a file
- ToFile(DataOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Writes the class data to disk.
- ToFile(DataOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Write the shape to a binary file.
- ToFile(DataOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFLookUp
-
Writes the class info to file.
- ToFile(DataOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
Not used
- ToFile(DataOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Writes the matrix to disk in binary format.
- ToFile(DataOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Writes the vector to disk in binary format.
- ToFile(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMObject
-
- ToFile(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Writes the matrix to disk in binary format.
- ToFile(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Writes the vector to disk in binary format.
- toFloat(byte) - Static method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Convert a 'byte' that represents an unsigned 8-bit integer (uint8) to a 32-bit float.
- toFloat(byte[], int, boolean) - Static method in class gov.nih.mipav.model.file.FileDicomTag
-
Converts a little-endian byte array into an array of Floats with length equal to the tag vm.
- toFriendlyString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- toFullMatrix(libdt.CovMatrix) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- toggleArray - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
elements of tBar.
- toggleArray - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- toggleArray - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- toggleArray - Static variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Elements of tBar.
- toggleArray - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- toggleArray - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- toggleDisplay(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Called by the JPanelGeodesic interface to switch between displaying the Smoothed Geodesic, Dijkstra's path, or
the Euclidian path.
- toggleDisplaySurface() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Toggle Surface display on/off.
- toggleDisplayVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Toggle 3D VOI display on/off.
- toggleDisplayVolume() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Toggle 3D Volume display on/off.
- toggleDisplayVolumeSlices() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Toggle 3D Slice display on/off.
- toggleGeodesicPathDisplay(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Causes the Geodesic class to switch between displaying the Smoothed Geodesic, Dijkst'ra path along the mesh, or
the straight-line Euclidian path between the selected endpoints.
- toggleGeodesicPathDisplay(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Toggle which type of Geodesic is displayed on the surface (Euclidian, Dijkstra, Geodesic).
- toggleGeodesicPathDisplay(String, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Switches between different ways of displaying the geodesic path (Euclidean, Geodesic, or Mesh).
- toggleGeodesicPathDisplay(String, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Switches between different ways of displaying the geodesic path
(Euclidean, Geodesic, or Mesh).
- ToggleGeodesicPathDisplay(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Switches between different ways of displaying the geodesic path (Euclidean, Geodesic, or Mesh).
- toggleLatLonLines() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Toggle between displaying the latitude and longitude lines:
- toggleLatLonLines(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Toggle between displaying the latitude and longitude lines:
- toggleLivewire() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Toggle between livewire mode and point & click mode.
- toggleLivewire() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Toggles between live wire mode and point and click mode for drawing geodesics on the surfaces.
- toggleLivewire() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Toggles between live wire mode and point and click mode for drawing geodesics on the surfaces.
- toggleLivewire() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Toggle between livewire mode and point & click mode.
- toggleNavigation(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Toggle Navigation mode.
- toggleNavigation(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Toggle navigation fly-thru tracking mode
- toggleNode(Node, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Toggle the display on/off for the given Node.
- togglePathDisplay(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Causes the Geodesic class to switch between displaying the Smoothed Geodesic, Dijkst'ra path along the mesh, or
the straight-line Euclidian path between the selected endpoints.
- togglePickCorrespondence() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Enables picking with the mouse and drawing the curve on the mesh.
- togglePickCorrespondence() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Enables picking with the mouse and drawing the curve on the mesh.
- togglePickPuncture() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
Enables picking with the mouse and drawing the curve on the mesh.
- togglePickPuncture() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Enables picking with the mouse and drawing the curve on the mesh.
- toggleRemoveSelection(TreePath) - Method in class gov.nih.mipav.view.CheckTreeManager.CheckTreeSelectionModel
-
- toggleSelectedImage() - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
toggleSelectedImage - Toggles which image is currently selected.
- toggleSlider() - Method in class gov.nih.mipav.view.ViewControlsImage
-
This method toggles between the intensities
between Image A and Image B
- toggleWireframe() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Toggle between wireframe and filled polygon mode:
- toggleWireframe() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelGeodesic
-
Toggles between wireframe and filled polygon drawing for the surfaces.
- toggleWireframe() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Toggle between wireframe and filled polygon mode.
- toggleWireframe() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelGeodesic_WM
-
Toggles between wireframe and filled polygon drawing for the surfaces.
- toHexString(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Converts an integer to a hex string of length 4 with leading zeros.
- toHexString2(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Converts an integer to a hex string of length 2 with leading zeros.
- toImg() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.BlankCanvasFallback
-
- toImg() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.JPlotterCanvas
-
Fetches the current contents of the framebuffer and returns them as an
ContourPlot.Img.
- toInt(byte) - Static method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
Convert a 'byte' that represents an unsigned 8-bit integer (uint8) to a signed 32-bit integer (int32).
- toInt(byte[], int, boolean) - Static method in class gov.nih.mipav.model.file.FileDicomTag
-
Converts a little-endian byte array into an array of Integers with length equal to the tag vm.
- toInt32BigEndian() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ByteConvertTest
-
- toInt32BigEndian(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteConvert
-
- toInt32LittleEndian() - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.ByteConvertTest
-
- toInt32LittleEndian(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteConvert
-
- Token() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Token
-
- tokenize(String, Vector<String>) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
method that tokenizes the expression
- TokenizerException - Exception in gov.nih.mipav.model.structures
-
Exception to indicate that a problem was encountered parsing a string.
- TokenizerException() - Constructor for exception gov.nih.mipav.model.structures.TokenizerException
-
Create a new exception.
- TokenizerException(String) - Constructor for exception gov.nih.mipav.model.structures.TokenizerException
-
Create a new exception with a specific message.
- tokens() - Method in class gov.nih.mipav.model.algorithms.LSCM.Parser
-
- tol - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLLE
-
- tol - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- tol - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- tol - Variable in class gov.nih.mipav.model.algorithms.ConjugateGradient
-
- tol - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace
-
numerical tolerance of approaching pole (default 1.0e-9).
- tol - Variable in class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
numerical tolerance of approaching pole (default 1.0e-9).
- tol - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- tol - Variable in class gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
- tol - Variable in class gov.nih.mipav.view.dialogs.JDialogLLE
-
- tol - Variable in class gov.nih.mipav.view.dialogs.JDialogVOISplitter
-
- TOL - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- TOL - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- tol_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- TOL_E - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- toLabelX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- toLabelY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- toLabelZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- told - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- told - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- tolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Array of tolerances for each dimension.
- tolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- tolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- tolerance - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Array of tolerances for each dimension.
- tolerance - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
DOCUMENT ME!
- tolerance - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
pseudo rank tolerance constant used to determine the pseudo rank of the Jacobian J.
- tolerance - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
pseudo rank tolerance constant used to determine the pseudo rank of the Jacobian J.
- tolerance - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- tolerance - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- tolerance - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- tolerance - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- toleranceText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
- toleranceText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
- TolerantLoss(double, double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TolerantLoss
-
- tolf - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- toList(Iterable<E>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Iterables
-
- TOLOU - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- toLPS(ModelImage, int[], boolean[]) - Static method in class gov.nih.mipav.util.MipavCoordinateSystems
-
Returns the axisOrder and axisFlip mapping of the input image to LPS coordinates.
- tolText - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- tolx - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- ToMatlab(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Writes mesh structure to a matlab file containing three vectors:
xTri X-points. yTri Y-points.
- ToMatlab(String, String, String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShapeCollection
-
Writes the shapes in a (NShapes x 2*NPoints) matrix in Matlab (*.m)
format.
- ToMatlab(String, String, String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Writes the matrix to disk in MatLab (.m) format.
- ToMatlab(String, String, String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Writes the vector to disk in MatLab (.m) format.
- ToMatrix(int, int, CDMatrix, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Converts this vector to a matrix, either by row (default) or column.
- toolBar - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
tool bar *
- toolBar - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Toolbar.
- toolBar - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Toolbar.
- toolBar - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove
-
Tool bar of the mouse recorder.
- toolBar - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Tool bar of the mouse recorder.
- toolBar - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Tool bar of the mouse recorder.
- toolBar - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Tool bar.
- toolBar - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
ToolBar that hold the linear, horizontal mode etc.
- toolBar - Variable in class gov.nih.mipav.view.renderer.JPanelVolOpacityRGB
-
Deprecated.
ToolBar that hold the linear, horizontal mode etc.
- toolBar - Variable in class gov.nih.mipav.view.ViewControlsImage
-
Main toolbar .
- toolBar - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- toolBar - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- toolBar - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- toolBar - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- toolBar - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- toolBar - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- toolBar - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- toolBar2 - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- toolBar2 - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- toolBarBottom - Variable in class gov.nih.mipav.view.JPanelHistogram
-
bottom tool bar
- toolBarBottom - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Bottom toolbar.
- toolBarBottom - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- toolbarBuilder - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
ViewToolBarBuilder *
- toolbarBuilder - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME !
- toolbarBuilder - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- toolbarBuilder - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
Toolbar builder reference.
- toolbarBuilder - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Toolbar builder reference.
- toolbarBuilder - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
ViewToolBarBuilder *
- toolbarBuilder - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
Toolbar builder reference.
- toolbarBuilder - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
The toolbar builder that constructs the VOI toolbar -- it stores the VOI color button.
- toolbarBuilder - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Toolbar builder reference.
- toolbarBuilder - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Toolbar builder reference.
- toolBarCenter - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
center toolbar
- toolBarCenter - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
center toolbar
- toolbarFlags - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- toolBarObj - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Toolbar that hold the linear, horizontal mode control buttons.
- toolBarObj - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Object which generates the toolbar.
- toolBarObj - Variable in class gov.nih.mipav.view.ViewControlsImage
-
Object builds and controls the toolbars.
- toolBarObj - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Object which generates the toolbar.
- toolBarObj - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- toolbarPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- toolbarPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
DOCUMENT ME!
- toolbarPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
The dialog's toolbar panel.
- toolbarPanel - Variable in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
- toolbarPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
variables for the toolbar.
- toolbarPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- toolbarPanel - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
Variables for the toolbar.
- toolBarSep - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- toolBarThreshold - Variable in class gov.nih.mipav.view.JPanelHistogram
-
threshold tool bar
- toolBarThreshold - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- toolBarTop - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Top toolbar
- toolBarTop - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- toolFrame - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
Frame where component image is displayed (only for new RegistrationTool).
- tooltip - Variable in class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- toolTip - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- TOOLTIP_DISMISS_DELAY - Static variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- TOOLTIP_INITIAL_DELAY - Static variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- toOrigin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
The transformation matrix to the origin of the input image.
- toOrigin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
The transformation matrix to the origin of the input image.
- toOrigin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
The transformation matrix to the origin of the input image.
- toOrigin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
The transformation matrix to the origin of the input image.
- toOrigin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
The transformation matrix to the origin of the input image.
- toOriginal(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
to convert frame coordinates into the original image ones
- toOriginal(Vector3f) - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
to convert frame coordinates into the original image ones
- top - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- top - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- Top() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- TOP - Static variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- TOP_EDGE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Top bounding edge of the canvas in world coordinates.
- TOP_HAT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
- TOP_HAT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
- TOP_HAT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
- topFace - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- topInput - Variable in class gov.nih.mipav.view.dialogs.JDialogAddMargins
-
DOCUMENT ME!
- topInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- topInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- topinv(double[][], double[][], double[][], double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- topinvmul(double[][], double[][], double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- topLeftBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- toplevelOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- topmul(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- topObject - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.Trailer
-
- TOPOLSOLINE_OVERLAY - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TOPOPROFILE_OVERLAY - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- topPad - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- topPad - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- topPad - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- topPad - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- topPad - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- topPad - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- topPad - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- topPad - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- topPad - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- topPadBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- topPaddingFactor - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.CharacterAtlas
-
- topPanel - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Toolbar panel.
- topPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- topPanel - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
and innerPanel placed in scrollPane.
- topPanel - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
and innerPanel placed in scrollPane.
- topPanel - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
and innerPanel placed in scrollPane.
- topPanel - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
and innerPanel placed in scrollPane.
- topPanel - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- topPanel - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- topPanel - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- toppedColor - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- topprep(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- topprepinv(double[][], double[][], double[][], double[][], double[][], double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- topRightBox - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- topSide - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- topSide - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- topsol(double[][], double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- topSpace - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
if y is an even number, use the extra space on the top half (otherwise bottom).
- topX - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- topY - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- topZ - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- ToRad(float) - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- ToRad(float) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.RunBallPivoting
-
- ToRad(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- toSciNotation() - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns the string representation of this value in scientific notation.
- toSet(Iterable<E>) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Iterables
-
- toShort(byte[], int, boolean) - Static method in class gov.nih.mipav.model.file.FileDicomTag
-
Converts a little-endian byte array into an array of Integers with length equal to the tag vm.
- toSimpleString(boolean) - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
- toStandardNotation() - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns the string representation of this value in standard notation.
- toString() - Method in class gov.nih.mipav.model.algorithms.AlgorithmHistogram.GrayLevelClass
-
DOCUMENT ME!
- toString() - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Pixel
-
- toString() - Method in class gov.nih.mipav.model.algorithms.BlindDeblur.Pair
-
- toString() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Pair
-
- toString() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ResidualBlock
-
- toString() - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.Triplet
-
- toString() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pair
-
- toString() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Pixel
-
- toString() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PointeredPoint2D
-
- toString() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.TranslatedPoint2D
-
- toString() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D.MatrixListItem
-
Creates readable string of this object, including cost, matrix, and point with its meanings.
- toString() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D.MatrixListItem
-
Creates readable string of this object, including cost, matrix, and point with its meanings.
- toString() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D.MatrixListItem
-
Creates readable string of this object, including cost, matrix, and point with its meanings.
- toString() - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D.MatrixListItem
-
Creates readable string of this object, including cost, matrix, and point with its meanings.
- toString() - Method in class gov.nih.mipav.model.algorithms.registration.MatrixListItem
-
Creates readable string of this object, including cost, matrix, and point
with its meanings.
- toString() - Method in enum gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
- toString() - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Pair
-
- toString() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Used for DICOM data objects.
- toString() - Method in class gov.nih.mipav.model.file.FileDicomKey
-
Returns the unique identifier.
- toString() - Method in class gov.nih.mipav.model.file.FileDicomSQ
-
Returns the word 'Sequence'.
- toString() - Method in class gov.nih.mipav.model.file.FileDicomTag
-
Used for debugging so that the information contained in the tag can be converted to a readable form.
- toString() - Method in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Return information about the tag, in string form.
- toString() - Method in class gov.nih.mipav.model.file.FileDicomTagTable
-
Returns a string containing information about this tag table.
- toString() - Method in enum gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
- toString() - Method in enum gov.nih.mipav.model.file.FileInfoBase.Modality
-
- toString() - Method in class gov.nih.mipav.model.file.FileInfoBase
-
Gives the information contained in FileInfo in a string.
- toString() - Method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- toString() - Method in class gov.nih.mipav.model.file.FileInfoDicom.LengthStorageUnit
-
- toString() - Method in class gov.nih.mipav.model.file.FileMincAttElem
-
Method that converts this attribute to a readable string.
- toString() - Method in class gov.nih.mipav.model.file.FileMincDimElem
-
Creates a readable version of this element; used in displayAboutInfo.
- toString() - Method in class gov.nih.mipav.model.file.FileMincVarElem
-
Converts information contained in variable to a readable form.
- toString() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- toString() - Method in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- toString() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- toString() - Method in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- toString() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Shows these options as a string, useful for debugging.
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- toString() - Method in exception gov.nih.mipav.model.file.MetadataExtractor.CompoundException
-
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.JpegComponent
-
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.KeyValuePair
-
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Returns a string representation of the object of form numerator/denominator.
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.StringValue
-
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.Tag
-
A basic representation of the tag's type and value.
- toString() - Method in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- toString() - Method in class gov.nih.mipav.model.file.PrivateFileDicomKey
-
Returns the unique identifier.
- toString() - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAW
-
Returns a string of information about the object, more than 1 line
long.
- toString() - Method in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
Returns a string of information about the object, more than 1 line
long.
- toString() - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Returns a string of information about the object, more than 1 line
long.
- toString() - Method in class gov.nih.mipav.model.file.XMLParameter
-
String representation of parameter.
- toString() - Method in class gov.nih.mipav.model.file.XMLPSet
-
Returns a String representation of the Set.
- toString() - Method in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
prints out a few things (not done)
- toString() - Method in exception gov.nih.mipav.model.scripting.parameters.ParameterException
-
Returns a string representing the information contained in this exception.
- toString() - Method in exception gov.nih.mipav.model.scripting.ParserException
-
Converts the information contained in this exception to a String suitable for display to the user.
- toString() - Method in class gov.nih.mipav.model.structures.CubeBounds
-
DOCUMENT ME!
- toString() - Method in class gov.nih.mipav.model.structures.MatrixHolder
-
- toString() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Gives a readable representation of the ModelImage, including file name and extents.
- toString() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
displays the LUT colours and alpha values in hex.
- toString() - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Returns a readable representation of this simple image.
- toString() - Method in enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
- toString() - Method in class gov.nih.mipav.model.structures.Point3D
-
Prints out this point object in a user readable form.
- toString() - Method in class gov.nih.mipav.model.structures.TransferFunction
-
- toString() - Method in class gov.nih.mipav.model.structures.TransMatrix
-
ToString method that includes the matrix printout as well as the
transform ID of the transmatrix
- toString() - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
ToString method that includes the matrix printout as well as the
transform ID of the transmatrixd
- toString() - Method in class gov.nih.mipav.model.structures.UpdateVOIEvent
-
DOCUMENT ME!
- toString() - Method in class gov.nih.mipav.model.structures.VOI
-
- toString() - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns a string representation of this number, in either standard or scientific notation.
- toString() - Method in enum gov.nih.mipav.view.Argument.InstanceArgument
-
- toString() - Method in enum gov.nih.mipav.view.Argument.StaticArgument
-
- toString() - Method in interface gov.nih.mipav.view.dialogs.ActionMetadata
-
- toString() - Method in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.FieldStrength
-
- toString() - Method in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.InversionType
-
- toString() - Method in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.Threshold
-
- toString() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection.DicomTagIdentifier
-
Returns the group and element in parenthesis as displayed by the FileDicomKey and the name of the DICOM tag.
- toString() - Method in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- toString() - Method in class gov.nih.mipav.view.dialogs.MipavActionMetadata
-
- toString() - Method in class gov.nih.mipav.view.dialogs.ScriptImage
-
- toString() - Method in class gov.nih.mipav.view.dialogs.ScriptVOI
-
- toString() - Method in enum gov.nih.mipav.view.Preferences.ComplexDisplay
-
- toString() - Method in enum gov.nih.mipav.view.Preferences.DefaultDisplay
-
- toString() - Method in enum gov.nih.mipav.view.Preferences.InterpolateDisplay
-
- toString() - Method in enum gov.nih.mipav.view.Preferences.LogLevel
-
- toString() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SceneStatePlotter
-
DOCUMENT ME!
- toString() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer.SceneState
-
DOCUMENT ME!
- toString() - Method in class gov.nih.mipav.view.renderer.SceneState
-
Print out the present screen state.
- toString() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel.VOIParams
-
- toString() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Pair
-
- toString() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.FeatureNode
-
- toString() - Method in exception gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.InvalidInputDataException
-
- toString() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
- toString() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_node
-
- toString() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.TreeNode
-
Returns readable representation of this node.
- toString() - Method in class gov.nih.mipav.view.RubberbandLivewire.TreeNode
-
Returns readable representation of this node.
- toString() - Method in class gov.nih.mipav.view.ShortCutted
-
DOCUMENT ME!
- toString() - Method in class gov.nih.mipav.view.ViewFileTreeNode
-
Gets the name of the File.
- toString() - Method in enum gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
- toString() - Method in enum gov.nih.mipav.view.ViewJSlider.SliderType
-
- toString() - Method in class gov.nih.mipav.view.VOIContourNode
-
the string returned is the name of the VOI returns the name of the VOI if it exists, or null if it
doesn't.
- toString() - Method in class gov.nih.mipav.view.VOIFrameNode
-
the string returned is the name of the VOI returns the name of the VOI if it exists, or null if it
doesn't.
- toString() - Method in class gov.nih.mipav.view.VOIGroupNode
-
the string returned is the name of the VOI returns the name of the VOI if it exists, or null if it
doesn't.
- toString() - Method in class gov.nih.mipav.view.VOIGroupTree
-
nothing really important to say here....
- toString() - Method in class gov.nih.mipav.view.VOIOrientationNode
-
the string returned is the name of the VOI returns the name of the VOI if it exists, or null if it
doesn't.
- toString(boolean, boolean) - Method in class gov.nih.mipav.model.structures.ModelLUT
-
Presents the Lookuptable by.
- toString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.BitmapType
-
- toString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingHalftoningAlgorithm
-
- toString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingIntent
-
- toString(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory.DisposalMethod
-
- toString(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
- toString(long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorSpaceType
-
- toString(String) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline.Options
-
Convert the options to a delimeted text string.
- toString(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Object
-
Creates a description of the entire DICOM_VR list.
- toString(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_ObjectList
-
Converts object to string
- toString(String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Creates a string representation of this VR.
- toString(Charset) - Method in class gov.nih.mipav.model.file.MetadataExtractor.StringValue
-
- ToString() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- ToString() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Returns a string representing the matrix.
- ToString(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Returns a string representing the vector.
- toStringArray() - Static method in enum gov.nih.mipav.view.Preferences.LogLevel
-
- total - Variable in class gov.nih.mipav.view.ViewJFrameMemory
-
DOCUMENT ME!
- total(libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- total(libdt.Mat[]) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- TOTAL - Static variable in class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
- total_extra_passes - Variable in class gov.nih.mipav.model.file.libjpeg.cdjpeg_progress_mgr
-
- total_iMCU_rows - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- total_len - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.TURN_REP_REC
-
- total_len - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.turnrep
-
- total_passes - Variable in class gov.nih.mipav.model.file.libjpeg.cdjpeg_progress_mgr
-
- total_passes - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_progress_mgr
-
- total_space_allocated - Variable in class gov.nih.mipav.model.file.libjpeg.my_memory_mgr
-
- total_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverSummary
-
- total_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchSummary
-
- total_time_in_seconds - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- TOTAL_VOIS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
- TOTAL_VOIS - Static variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- totalArea - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- totalAreaB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- totalAreaG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- totalAreaR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- totalBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
number of histogram and histomap values actually used.
- totalBlankFrames - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- totalCounts - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- totalCountsIndex - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- totalDataFrames - Variable in class gov.nih.mipav.model.file.FileAvi
-
These are used for writing the AVI frame by frame from the surface renderer.
- totalDeformField - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- totalDeformFieldSplit - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- totalDistanceString - Variable in class gov.nih.mipav.model.structures.VOIPoint
-
Distance is calculated and passed in by VOI for polyline_slices
- totalDistanceString() - Method in class gov.nih.mipav.model.structures.VOIPoint
-
Returns the totalDistance string.
- totalFrames - Variable in class gov.nih.mipav.model.file.FileInfoAvi
-
DOCUMENT ME!
- totalHaralickFilters - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- totalHaralickFilters - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- totalHaralickFilters - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- totalImageNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- totalImageNumber - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- totalImageSlices - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
total image slices
- totalLen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
DOCUMENT ME!
- totalMemory - Variable in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
DOCUMENT ME!
- totalNumberOfDiffusionExperiments - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- totalNumVolumes - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
total num of volumes in study
- totalPixels - Variable in class gov.nih.mipav.model.structures.ModelHistogram
-
DOCUMENT ME!
- totalPostTriggerDelayTime - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- totalPostTriggerDelayTime - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- totalsearch - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- totalShortStreamSize - Variable in class gov.nih.mipav.model.file.FileZVI
-
- totalSize - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- totalSlices - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- totalSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertMissingSlices
-
Number of slices that will be present in the 3D image after the missing slices have been inserted.
- totalThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- totalvids - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- totalVolume - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- totalVolume - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
The total volume of the burns in this treatment set (if it has been calculated and the number of burns hasn't
changed).
- totalVolumeB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- totalVolumeG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- totalVolumeLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Burning points total volume label.
- totalVolumeR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
total volume in threshold
- totalVolumeText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Burning point total volume text.
- totalWeight - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- totalWeight - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- ToTextFile(File) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- ToTextFile(File) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- ToTextFile(File) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- ToTextFile(File) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- ToTextFile(File) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- ToTripletSparseMatrix(CeresSolver.TripletSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- toUInt(byte[], int, boolean) - Static method in class gov.nih.mipav.model.file.FileDicomTag
-
Converts a little-endian byte array into an array of Longs with length equal to the tag vm.
- toUnaliasedCoord(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- toUnaliasedIdx(int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- toUnshiftedOffset(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteArrayReader
-
- toUnshiftedOffset(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- toUnshiftedOffset(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
- toUnshiftedOffset(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- toUpdate() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- toUShort(byte[], int, boolean) - Static method in class gov.nih.mipav.model.file.FileDicomTag
-
Converts a little-endian byte array into an array of Integers with length equal to the tag vm.
- tout - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- tout - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- ToVector(CDVector, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Converts this matrix to a vector, either by row (default) or column.
- toXML() - Method in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.PropertyListResults
-
Returns this result object in XML format.
- tp(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- tp_index - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tile_index_t
-
information concerning tile parts
- tp_num - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
Tile part number
- tp_on - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
Enabling Tile part generation
- tp_pos - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_t
-
Position of the tilepart flag in Progression order
- tPos - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- tPos - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- TPPQF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- tProbabilityFunction() - Method in class gov.nih.mipav.model.algorithms.Statistics
-
- Tps() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Tps
-
- TPS - gov.nih.mipav.model.algorithms.SIFT3D.tform_type
-
- tpSpline() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Thin-plate registration method.
- tpSpline() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Thin-plate registration method.
- tpSpline2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- tpSpline2D(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- tpSpline3D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- tpSplineButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- tPts - Variable in class gov.nih.mipav.model.algorithms.InverseLaplace
-
DOCUMENT ME!
- tPts - Variable in class gov.nih.mipav.model.algorithms.InverseLaplaceqd
-
DOCUMENT ME!
- tpvf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
positive volume fraction.
- tpvf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
positive volume fraction.
- tql2() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
- TQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Vertex
-
DOCUMENT ME!
- tr - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
Time between shots in seconds (0.0 - 10000.0)
- tr - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- tr - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- tr - Variable in class gov.nih.mipav.model.file.FileInfoCOR
-
DOCUMENT ME!
- tr - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- tr - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- tr - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- tr - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- tr - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- TR - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- tr_i(TURN_REP, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- tr_len(TURN_REP, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- tr_n(TURN_REP) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- tr_s(TURN_REP, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- tr_smt(TURN_REP, int, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- tr_theta(TURN_REP, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- trace(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Ray trace the 3D image in its current orientation as determined by the oriented bounding box.
- trace(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Ray trace by step size.
- trace(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImageRayCast
-
Ray trace by step size.
- trace(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImageShearWarp
-
Ray trace image volume by the step size and the space size.
- trace(libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- Trace() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Calculates the trace - i.e. the sum of diagonal elements.
- trace_level - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_error_mgr
-
- trace_to_root(LSCM.Vertex, Vector<LSCM.Vertex>) - Method in class gov.nih.mipav.model.algorithms.LSCM.Graph
-
- traceBackLeftLegGroup4(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceBackLeftLegGroup4(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceBackLeftLegGroup4(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceBackLeftLegGroup7to6(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceBackLeftLegGroup7to6(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceBackLeftLegGroup7to6(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceBackRightLegGroup4(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceBackRightLegGroup4(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceBackRightLegGroup4(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceBackRightLegGroup7to6(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceBackRightLegGroup7to6(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceBackRightLegGroup7to6(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceBlockRays(int, int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
- traceContour() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
- traceImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- TraceImageName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- traceInit() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorComposite
-
Called at the beginning of the trace methods.
- traceInit() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
Called at the beginning of the trace methods.
- traceInit() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorLighting
-
Called at the beginning of the trace methods.
- traceInit() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorMIP
-
Called at the beginning of the trace methods.
- traceInit() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorReflection
-
Called at the beginning of the trace methods.
- traceInit() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Called at the beginning of the trace methods.
- traceInit() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorComposite
-
Called at the beginning of the trace methods.
- traceInit() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorDRR
-
Called at the beginning of the trace methods.
- traceInit() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorLighting
-
Called at the beginning of the trace methods.
- traceInit() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorMIP
-
Called at the beginning of the trace methods.
- traceSection1(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection1(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection1(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection1(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- traceSection1(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- traceSection1_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection1_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection1_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection2(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection2(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection2(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection2(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- traceSection2(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- traceSection2_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection2_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection2_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection3(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection3(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection3(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection3(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- traceSection3(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- traceSection3_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection3_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection3_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection4(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection4(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection4(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection4(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- traceSection4(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- traceSection4_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection4_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection4_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection4Backward(float, float, float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection4Backward(float, float, float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection4Backward(float, float, float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection5(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- traceSection5(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- traceSection5_lower(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection5_lower(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection5_lower(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection5_lower_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection5_lower_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection5_lower_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection5_upper(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection5_upper(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection5_upper(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection5_upper_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection5_upper_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection5_upper_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection6(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection6(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection6(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceSection6(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- traceSection6(float, float, float, float, Vector3f, float, int, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- traceSection6_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceSection6_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceSection6_condyle(float, float, float, float, Vector3f, float, int, float, float, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceTract2(VOIContour, Vector3f, Vector3f, ModelImage, ModelImage, ModelImage, ModelImage, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- traceTract2(Vector<Integer>, Vector3f, Vector3f, ModelImage, ModelImage, ModelImage, boolean) - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTITract
-
Traces a single fiber bundle tract starting at the input
position and following the input direction.
- traceTwoIslands(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceTwoIslands(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceTwoIslands(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceTwoIslandsOnLeft(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceTwoIslandsOnLeft(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceTwoIslandsOnLeft(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- traceTwoIslandsOnRight(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- traceTwoIslandsOnRight(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- traceTwoIslandsOnRight(FileInfoImageXML[], FileInfoImageXML[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- tracingDFS(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, VOI, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- tracingDFS(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, VOI) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- tracingDFS(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, VOI, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- tracingDFS(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, VOI, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- tracingDFS(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, VOI, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- tracingDFS_condyle(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, VOI, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- tracingDFS_condyle(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, VOI, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- tracingDFS_condyle(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, VOI, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- tracingDFS_mid(ModelImage, ModelImage, VOI, VOI, VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- tracingDFS_mid(ModelImage, ModelImage, VOI, VOI, VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- tracingDFS_mid(ModelImage, ModelImage, VOI, VOI, VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- tracingDFS_mid(ModelImage, ModelImage, VOI, VOI, VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- tracingDFS_mid(ModelImage, ModelImage, VOI, VOI, VOI, boolean, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- tracingDFS_mid_cutoffLine(ModelImage, ModelImage, VOI, VOI, VOI, boolean, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- tracingDFS_mid_cutoffLine(ModelImage, ModelImage, VOI, VOI, VOI, boolean, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- tracingDFS_mid_cutoffLine(ModelImage, ModelImage, VOI, VOI, VOI, boolean, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- tracingDFS_shaftCondyle(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, VOI, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- tracingDFS_shaftCondyle(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, VOI, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- tracingDFS_shaftCondyle(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, VOI, VOILine, VOILine) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- tracingDFSBackward(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- tracingDFSBackward(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- tracingDFSBackward(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, VOI, VOI, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- TracingPoint(double, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.TracingPoint
-
- TracingPoint(double, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.TracingPoint
-
- TracingPoint(double, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.TracingPoint
-
- TracingPoint(double, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.TracingPoint
-
- TracingPoint(double, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.TracingPoint
-
- tracingSliceNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- tracingSliceNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- tracingSliceNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
number of slices to trace, start from the apex and base VOIs
- tracingSliceNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
number of slices to trace, start from the apex and base VOIs
- TRACK_BLEACH_PIXEL_TIME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- TRACK_ENTRY_ACQUIRE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_BLEACH_COUNT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_BLEACH_POSITION_Z - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_BLEACH_SCAN_NUMBER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_COLLIMATOR1_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_COLLIMATOR1_POSITION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_COLLIMATOR2_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_COLLIMATOR2_POSITION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_CONDENSOR_APERTURE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_CONDENSOR_FILTER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_CONDENSOR_FRONTLENS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_ENABLE_SPOT_BLEACH_POS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_FIELD_STOP_VALUE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_ID_CONDENSOR_APERTURE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_ID_CONDENSOR_FRONTLENS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_ID_CONDENSOR_REVOLVER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_ID_FIELD_STOP - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_ID_TRANSMISSION_FILTER1 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_ID_TRANSMISSION_FILTER2 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_ID_TRANSMISSION1 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_ID_TRANSMISSION2 - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_ID_TUBELENS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- TRACK_ENTRY_ID_TUBELENS_POSITION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- TRACK_ENTRY_IS_BLEACH_AFTER_SCAN_NUMBER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_IS_BLEACH_TRACK - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_IS_RATIO_TRACK - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_MULTIPLEX_ORDER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_MULTIPLEX_TYPE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_NAME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_PIXEL_TIME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_REPEAT_BLEACH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_SAMPLE_OBSERVATION_TIME - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_SAMPLING_METHOD - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_SAMPLING_MODE - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_SAMPLING_NUMBER - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_SPI_CENTER_WAVELENGTH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_SPOT_BLEACH_POSX - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_SPOT_BLEACH_POSY - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_TIME_BETWEEN_STACKS - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_TRIGGER_IN - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_ENTRY_TRIGGER_OUT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRACK_REFLECTED_LIGHT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- TRACK_SIMULTAN_GRAB_AND_BLEACH - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- TRACK_TRANSMITTED_LIGHT - Static variable in class gov.nih.mipav.model.file.FileLSM
-
- Tracker(Vector<Double>, double[], double[], double, double, int) - Constructor for class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.Tracker
-
- TrackFileName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- trackingBackward - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- trackingForward - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- trackingPointLocation - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- TRACKVIS - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Extension: .trk, TrackVis track data
- TRADITIONAL_DOGLEG - gov.nih.mipav.model.algorithms.CeresSolver.DoglegType
-
- traditionalInput - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- trailer - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.PropertyListResults
-
- Trailer() - Constructor for class gov.nih.mipav.model.file.MetadataExtractor.BplistReader.Trailer
-
- train() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- train() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- train() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- train() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- train(Problem, Parameter) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- Train - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- Train() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Train
-
- train_exit_with_help() - Method in class gov.nih.mipav.model.algorithms.LIBSVM
-
- train_one(Problem, Parameter, double[], double, double) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- trainByAllDataButton - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- trainData - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- trainFileDirAbs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- trainFileDirAbs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- trainFileDirAbs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- trainFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- trainFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- trainFileName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- trainFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateBoundaryFeatureTrain
-
- trainFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesClassification
-
- trainFilePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateFeaturesTrain
-
- trainGroupPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- trainGroupTextfield - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- trainIdx - Variable in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity.DMatch
-
- training - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64
-
- training - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees
-
- trainingDataLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- trainingPatches(ModelImage, int, int, int, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- trainingPatches(ModelImage, int, int, int, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
- trainingPatches(ModelImage, int, int, int, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- trainingPatches(ModelImage, int, int, int, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- trainingPatches(ModelImage, int, int, int, float, float, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- trainingRateLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- trainingValue - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- trainTable - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- trainTableModel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- trainTableScrollPane - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- trainvidnum - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.Edge
-
- trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.Face
-
- trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- trait() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- Trait() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Trait
-
- trans - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- trans - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- trans - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- trans - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- trans - Variable in class gov.nih.mipav.model.file.FileTrackVis
-
Transformation matrix for image
- transCEDImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- transCEDImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- transCEDImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- transCEDImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- transCEDImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- TRANSCENDENTAL_COST_FUNCTION - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- TRANSCENDENTAL_FUNCTOR - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- TranscendentalCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TranscendentalCostFunction
-
- TranscendentalFunctor() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TranscendentalFunctor
-
- TRANSCODE_8_BIT_RLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_CVID - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_DIVX - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_DX50 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_GEOV - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_IV32 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_IV41 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_IV50 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_MJPG - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_MP42 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_MPG4 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_QT - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TRANSCODE_RGB - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- TransferA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- TransferB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- transferBits(short, int[]) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.LinesRenderer
-
- transferButton - Variable in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Toggle buttons for transfer, threshold and threshold inverse.
- transferFiles() - Method in interface gov.nih.mipav.plugins.PlugInFileTransfer
-
Transfers the files from one file system to the other file system.
- transferFunction - Variable in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
DOCUMENT ME!
- TransferFunction - Class in gov.nih.mipav.model.structures
-
Title: TransferFunction
- TransferFunction() - Constructor for class gov.nih.mipav.model.structures.TransferFunction
-
Simple class to hold an array of points that describe a transfer function.
- TransferFunction(TransferFunction) - Constructor for class gov.nih.mipav.model.structures.TransferFunction
-
Copies the object that extends this class.
- transferIn(int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Starts method of file/image transferring
- transferIn(FileInfoBase[], Number[], int, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSwapSlicesVolume
-
Transfers the given buffer into the given location.
- transferLine - Variable in class gov.nih.mipav.model.structures.ModelLUT
-
Function that maps image values into the LUT.
- transferSyntax - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Store
-
The transfer syntax used when storing images.
- transferSyntaxInSequence - Variable in class gov.nih.mipav.model.file.FileDicom
-
- transferSyntaxLocation - Variable in class gov.nih.mipav.model.file.FileDicom
-
- transferSyntaxValue - Variable in class gov.nih.mipav.model.file.FileDicom
-
- TransferValue(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- transform - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
handle to AlgorithmTransform
- transform - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Transformation algorithm for creating an isotropic reference image.
- transform - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Transformation algorithm for creating an isotropic reference image.
- transform - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Transformation algorithm for creating an isotropic reference image.
- transform - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Transformation algorithm for creating an isotropic reference image.
- transform - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Transformation algorithm for creating an isotropic reference image.
- transform - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Transformation algorithm for creating an isotropic reference image.
- transform - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- transform - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- transform - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- transform - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- transform - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- transform - Variable in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
- transform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SceneStatePlotter
-
Current sceneRoot transform.
- transform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
probe transform.
- transform - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Current sceneRoot transform.
- transform() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Creates buffer for new image, prepares transformation matrix, and calls transform function for interpolation
specified.
- transform() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- transform() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Convert the MRI image and corresponding image mask to isotropic image.
- transform() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- transform() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- transform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- transform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- transform() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- transform() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Transforms the image.
- transform() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Transforms the image.
- transform(double[], boolean) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- transform(double[], double[]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Takes a 3D or 2D point (as a double array) and premultiplies it by the
3D transformation matrix.
- transform(double[], double[]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Takes a 3D or 2D point (as a double array) and premultiplies it by the
3D transformation matrix.
- transform(double, double, double[]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Takes double components of a 2D point and premultiplies it by the 2d
transformation matrix.
- transform(double, double, double[]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Takes double components of a 2D point and premultiplies it by the 2d
transformation matrix.
- transform(double, double, double, double[]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Takes the double components of a 3D point and premultiplies it by the
3D transformation matrix.
- transform(double, double, double, double[]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Takes the double components of a 3D point and premultiplies it by the
3D transformation matrix.
- transform(float[], float[]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Takes a 3D point, as a float array, and premultiplies it by the 3D
transformation matrix.
- transform(float[], float[]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Takes a 3D point, as a float array, and premultiplies it by the 3D
transformation matrix.
- transform(float, float, float[]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Takes float components of a 2D point and premultiplies it by the 2d
transformation matrix.
- transform(float, float, float[]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Takes float components of a 2D point and premultiplies it by the 2d
transformation matrix.
- transform(float, float, float, float[]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Takes the float components of a 3D point and premultiplies it by the 3D
transformation matrix.
- transform(float, float, float, float[]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Takes the float components of a 3D point and premultiplies it by the 3D
transformation matrix.
- transform(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogTriImageTransformation
-
Sets the transformation matrix and sends the image data to the appropriate interpolation routine.
- transform(TransMatrix) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Copies the input VOIBase, transformed by the input TransMatrix.
- transform(Polygon) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Tranforms a Polygon (2D).
- transform(Polygon) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Tranforms a Polygon (2D).
- transform(Vector4f) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Transform a point rotation inverse to the volume rotation.
- TRANSFORM_ANOTHER_DATASET - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Another Dataset transform ID.
- TRANSFORM_ANOTHER_DATASET - Static variable in class gov.nih.mipav.model.structures.TransMatrix
-
Another Dataset transform ID.
- TRANSFORM_ANOTHER_DATASET - Static variable in class gov.nih.mipav.model.structures.TransMatrixd
-
Another Dataset transform ID.
- TRANSFORM_COLUMNS - Static variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- TRANSFORM_COLUMNS - Static variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
Use serialVersionUID for interoperability.
- TRANSFORM_COMPOSITE - Static variable in class gov.nih.mipav.model.structures.TransMatrix
-
Composite, dynamically generated matrix type
- TRANSFORM_COMPOSITE - Static variable in class gov.nih.mipav.model.structures.TransMatrixd
-
Composite, dynamically generated matrix type
- TRANSFORM_ID - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeTransformInfo
-
The label to use for the parameter indicating the transform ID
- TRANSFORM_ID_STR - Static variable in class gov.nih.mipav.model.structures.TransMatrix
-
Array of transform ID strings.
- TRANSFORM_ID_STR - Static variable in class gov.nih.mipav.model.structures.TransMatrixd
-
Array of transform ID strings.
- TRANSFORM_MATRIX - Static variable in class gov.nih.mipav.model.scripting.actions.ActionChangeTransformInfo
-
The label to use for the parameter indicating the transform matrix
- TRANSFORM_MNI_152 - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
MNI 152 transform ID.
- TRANSFORM_MNI_152 - Static variable in class gov.nih.mipav.model.structures.TransMatrix
-
MNI 152 transform ID.
- TRANSFORM_MNI_152 - Static variable in class gov.nih.mipav.model.structures.TransMatrixd
-
MNI 152 transform ID.
- TRANSFORM_NIFTI_SCANNER_ANATOMICAL - Static variable in class gov.nih.mipav.model.structures.TransMatrix
-
Scanner anatomical matrix associated with NIFTI type
- TRANSFORM_NIFTI_SCANNER_ANATOMICAL - Static variable in class gov.nih.mipav.model.structures.TransMatrixd
-
Scanner anatomical matrix associated with NIFTI type
- TRANSFORM_ROWS - Static variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- TRANSFORM_ROWS - Static variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- TRANSFORM_SCANNER_ANATOMICAL - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Scanner Anatomical transform ID.
- TRANSFORM_SCANNER_ANATOMICAL - Static variable in class gov.nih.mipav.model.structures.TransMatrix
-
Scanner Anatomical transform ID.
- TRANSFORM_SCANNER_ANATOMICAL - Static variable in class gov.nih.mipav.model.structures.TransMatrixd
-
Scanner Anatomical transform ID.
- TRANSFORM_TALAIRACH_TOURNOUX - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Talairach Tournoux transform ID.
- TRANSFORM_TALAIRACH_TOURNOUX - Static variable in class gov.nih.mipav.model.structures.TransMatrix
-
Talairach Tournoux transform ID.
- TRANSFORM_TALAIRACH_TOURNOUX - Static variable in class gov.nih.mipav.model.structures.TransMatrixd
-
Talairach Tournoux transform ID.
- TRANSFORM_UNKNOWN - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unknown transform ID.
- TRANSFORM_UNKNOWN - Static variable in class gov.nih.mipav.model.structures.TransMatrix
-
Composite transform ID.
- TRANSFORM_UNKNOWN - Static variable in class gov.nih.mipav.model.structures.TransMatrixd
-
Composite transform ID.
- transform2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Transformation algorithm for creating an isotropic input image.
- transform2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Transformation algorithm for creating an isotropic input image.
- transform2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Transformation algorithm for creating an isotropic input image.
- transform2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Transformation algorithm for creating an isotropic input image.
- transform2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Transformation algorithm for creating an isotropic input image.
- transform2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Transformation algorithm for creating an isotropic input image.
- transform25DMatchSlice(int, TransMatrix, float[], float[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
Transforms 2.5 D match slice.
- transform25DVOI(ModelImage, double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples a 3D VOI using nearest neighbor interpolation.
- transform25DVOI(ModelImage, float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Transforms and resamples a 2D or 25D VOI using nearest neighbor interpolation.
- transform25DVOI(ModelImage, ModelImage, float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
- transform2DVOI(ModelImage, double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples a 2D VOI using nearest neighbor interpolation.
- transform2DVOI(ModelImage, ModelImage, float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline2D
-
Transforms and resamples a 2D VOI using nearest neighbor interpolation.
- transform2DVOI(ModelImage, ModelImage, float[], float[], float[], int, int) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline25D
-
- transform2DVOI(ModelImage, ModelImage, float[], TransMatrix) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- transform3DVOI(ModelImage, double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples a 3D VOI using nearest neighbor interpolation.
- transform3DVOI(ModelImage, float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Transforms and resamples a 3D VOI using nearest neighbor interpolation.
- transform3DVOI(ModelImage, ModelImage, float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
- transform3DVOI(ModelImage, ModelImage, float[], float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline3D
-
- transform3DVOI(ModelImage, ModelImage, float[], TransMatrix) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- transform3DVOIByte(ModelImage, byte[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples a 3D VOI using nearest neighbor interpolation.
- transformACPC(ModelImage, float[], TransMatrix, float, float, float, int, int, int, int, int, int[], boolean, float, float, float, int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This routine is designed to transform AFNI functional images which have already been transformed to match AFNI
original images to match AFNI +acpc images.
- transformACPCTrilinear(float[], TransMatrix, float, float, float, int, int, int, float, float, float, int, int, int) - Method in class gov.nih.mipav.model.file.FileAfni
-
transformACPCTrilinear - transforms and resamples volume using trilinear interpolation.
- transformACPCTrilinear(ModelImage, float[], double[][], float, float, float, int, int, int, float, float, float, int, int, int, ViewJProgressBar) - Method in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Transforms and resamples volume using trilinear interpolation
- transformAFNI(ModelImage, float[], float, float, float, int, int, int, int, float, float, float, float, float, float, int, int[], boolean, float, float, float, int, int, int, float, float, float, float, float, float) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This routine is designed to transform AFNI functional images and AFNI 3D + time anatomical images to match AFNI
original 3D anatomical images.
- transformAlgorithmBspline2D(double[], TransMatrix, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using Bspline interpolation.
- transformAlgorithmBspline2DC(double[], TransMatrix, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using Bspline interpolation.
- transformAlgorithmBspline3D(double[], TransMatrix, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using Bspline interpolation.
- transformAlgorithmBspline3DC(double[], TransMatrix, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using Bspline interpolation.
- transformAlgorithmBspline4D(double[], TransMatrix, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using Bspline interpolation.
- transformAlgorithmBspline4DC(double[], TransMatrix, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples color volume using Bspline interpolation.
- transformAsPoint2Dd(Vector2d[], Vector2d[]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Takes an array of Point2Dd 2D vectors and multiplies them with the 2d
transformation matrix.
- transformAsPoint2Df(Vector2f[], Vector2f[]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Takes an array of Point2Df 2D vectors and multiplies them with the 2d
transformation matrix.
- transformAsPoint3Dd(Vector3d, Vector3d) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Takes a Point3Dd 3D point and multiplies it by the 3D transformation
matrix.
- transformAsPoint3Df(Vector3f, Vector3f) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Takes a Point3Df 3D point and multiplies it by the 3D transformation
matrix.
- transformAsVector3Dd(VOIBase, Vector3d[]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Takes an array of Vector3Dd 2D vectors and multiplies them with the 2d
transformation matrix.
- transformAsVector3Dd(Vector3d[], Vector3d[]) - Method in class gov.nih.mipav.model.structures.TransMatrixd
-
Takes an array of Vector3Dd 2D vectors and multiplies them with the 2d
transformation matrix.
- transformAsVector3Df(VOIBase, Vector3f[]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Takes an array of Vector3Df 2D vectors and multiplies them with the 2d
transformation matrix.
- transformAsVector3Df(Vector3f[], Vector3f[]) - Method in class gov.nih.mipav.model.structures.TransMatrix
-
Takes an array of Vector3Df 2D vectors and multiplies them with the 2d
transformation matrix.
- transformAWT2CoordSys(Point2D, int) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Transforms a location in AWT coordinates (y axis extends to bottom)
on this renderer to the corresponding coordinates in the coordinate
system view (in GL coords).
- transformB0Checkbox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- transformB0label - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- transformB0MatCheckbox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- transformBilinear(double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using bilinear interpolation.
- transformBilinear(float[], float[], TransMatrix, int, int, float, float, int, int, float, float, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms using bilinear interpolation.
- transformBilinear(float[], float[], TransMatrix, int, int, float, float, int, int, float, float, ViewJProgressBar, boolean) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms using bilinear interpolation.
- transformBilinear(float[], ModelImage, TransMatrix, int, int, float, float, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms using bilinear interpolation.
- transformBilinear(float[], ModelImage, TransMatrix, int, int, float, float, ViewJProgressBar, boolean) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms using bilinear interpolation.
- transformBilinear(float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Transforms and resamples volume using bilinear interpolation.
- transformBilinear(ModelImage, ModelImage, TransMatrix, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms using bilinear interpolation.
- transformBilinear(ModelImage, ModelImage, TransMatrix, ViewJProgressBar, boolean) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms using bilinear interpolation.
- transformBilinear(ModelImage, ModelImage, TransMatrix, ViewJProgressBar, boolean, float) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms using bilinear interpolation.
- transformBilinear3D(double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using bilinear interpolation.
- transformBilinear3DC(double[], float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using bilinear interpolation (2.5D) This version used with color images.
- transformBilinear4D(double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using bilinear interpolation (2.5D) Used as a slice only algorithm on 3D images.
- transformBilinear4DC(double[], float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using bilinear interpolation This version used with color images This alogorithm
used on a slice by slice basis on 4D images.
- transformBilinearC(double[], float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using bilinear interpolation.
- transformBilinearC(ModelImage, ModelImage, TransMatrix, int, int, float, float) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Used on color images.
- transformBilinearC(ModelImage, ModelImage, TransMatrix, int, int, float, float, float) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Used on color images.
- transformBoxSlices(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
transform the points used to render the triSliceImages textures.
- transformBoxSlices(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
transform the points used to render the triSliceImages textures.
- transformBU - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Current updated transform.
- transformC() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Transforms color image.
- transformC() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Transforms color image.
- transformCenter - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- transformChange - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Flag indicates that a transform changed event is invoked.
- transformChange - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
DOCUMENT ME!
- transformChanged(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Needed for this to implement MouseBehaviorCallback.
- transformChanged(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Tells the mouse dialog that the transform has changed.
- transformChanged(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
transformChanged.
- transformChanged(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
MouseBehaviorCallback override.
- transformChanged(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
Accessor that lets the dialog know that the canvas transform has changed.
- transformChanged(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Accessor that lets the dialog know that the canvas transform has changed.
- transformChanged(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Does nothing but must instantiate for this to be a subclass of ViewJFrameSurface.
- transformChanged(int, Transform3D) - Method in interface gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehaviorCallback
-
Classes implementing this interface that are registered with one of the MouseBehaviors will be called every time
the behavior updates the Transform.
- transformChanged(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
When the probe is picked and rotated by mouse, detecting the probing tissue along the probing path.
- transformChanged(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Tells the mouse dialog that the transform has changed.
- transformChanged(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Tells the mouse dialog that the transform has changed.
- transformChanged(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Tells the mouse dialog that the transform has changed.
- transformChanged(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
Users can overload this method which is called every time the Behavior updates the transform.
- transformChanged(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
Users can overload this method which is called every time the Behavior updates the transform.
- transformChanged(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
Users can overload this method which is called every time the Behavior updates the transform.
- transformChanged(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
Users can overload this method which is called every time the Behavior updates the transform.
- transformChanged(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
Users can overload this method which is called every time the Behavior updates the transform.
- transformChanged(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
Users can overload this method which is called every time the Behavior updates the transform.
- transformChanged(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
Users can overload this method which is called every time the Behavior updates the transform.
- transformChanged(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
Users can overload this method which is called every time the Behavior updates the transform.
- transformCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- transformCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- transformCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- transformCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- transformContour(TransMatrix, boolean) - Method in class gov.nih.mipav.model.structures.VOIContour
-
Transforms self.
- transformCounter - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Transform counter, used to reduce the rendering frequency.
- transformCubic - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Cubic tansform3D.
- transformCubic - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Cubic tansform3D.
- transformCubicLagrangian2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using cubic Lagrangian interpolation.
- transformCubicLagrangian2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using cubic Lagrangian interpolation.
- transformCubicLagrangian3D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using cubic Lagrangian interpolation.
- transformCubicLagrangian3DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using cubic Lagrangian interpolation.
- transformCubicLagrangian3Dim2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using cubic Lagrangian interpolation Does a slice by slice cubic Lagrangian
interpolation on a 3 dimensional object.
- transformCubicLagrangian3Dim2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using cubic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
- transformCubicLagrangian4D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples 4 dimensional object using 3D cubic Lagrangian interpolation.
- transformCubicLagrangian4DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples 4 dimensional object using 3D cubic Lagrangian interpolation.
- transformCubicLagrangian4Dim2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using cubic Lagrangian interpolation Does a slice by slice cubic Lagrangian
interpolation on a 4 dimensional object.
- transformCubicLagrangian4Dim2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using cubic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
- transformDimPowerOf2(int) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
Calculate the dimension value to power of 2.
- transformDir - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
FORWARD or INVERSE for FFT.
- transformDir - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Transform direction.
- transformDir - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Transform direction.
- transformDir - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- transformDir - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- transformDir - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- transformDir - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
Transform direction.
- transformDir - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- transformDWICheckbox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
DOCUMENT ME!
- transformedOrigin - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- TransformedSpaceStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under in the Gifti xml schema.
- transformFileName - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
- transformFunc - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Currrent tranform function of the volume render look up table.
- transformGL2CoordSys(Point2D) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Transforms a location in GL coordinates on this renderer to the
corresponding coordinates in the coordinate system view.
- transformGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- transformHepticLagrangian2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using heptic Lagrangian interpolation.
- transformHepticLagrangian2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images.
- transformHepticLagrangian3D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using heptic Lagrangian interpolation.
- transformHepticLagrangian3DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images.
- transformHepticLagrangian3Dim2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using heptic Lagrangian interpolation Does a slice by slice heptic Lagrangian
interpolation on a 3 dimensional object.
- transformHepticLagrangian3Dim2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
- transformHepticLagrangian4D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
transforms and resamples 4 dimensional object using 3D heptic Lagrangian interpolation.
- transformHepticLagrangian4DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
transforms and resamples 4 dimensional object using 3D heptic Lagrangian interpolation.
- transformHepticLagrangian4Dim2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using heptic Lagrangian interpolation Does a slice by slice heptic Lagrangian
interpolation on a 4 dimensional object.
- transformHepticLagrangian4Dim2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using heptic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
- transformIDBox - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- transformImage - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- transformImage - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- transformImage - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- transformImage - Variable in class gov.nih.mipav.model.algorithms.HaarTransform
-
- transformImage - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform
-
- transformImage - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- transformImage - Variable in class gov.nih.mipav.model.algorithms.SlantTransform
-
- transformImage - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- transformImage - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform2
-
- transformImage - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- transformImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- transformImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteCosineTransform
-
- transformImage - Variable in class gov.nih.mipav.view.dialogs.JDialogDiscreteSineTransform
-
- transformImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHaarTransform
-
- transformImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHartleyTransform
-
- transformImage - Variable in class gov.nih.mipav.view.dialogs.JDialogSlantTransform
-
- transformImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- transformImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- transformLength - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- transformMatDWICheckbox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIPreprocessing
-
- transformNearestNeighbor2D(double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using nearest neighbor interpolation.
- transformNearestNeighbor2D(float[], float[], TransMatrix, int, int) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms using Nearest neighbor interpolation.
- transformNearestNeighbor2D(float[], float[], TransMatrix, int, int, float, float, int, int, float, float) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms using Nearest neighbor interpolation.
- transformNearestNeighbor2D(float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Transforms and resamples volume using nearest neighbor interpolation.
- transformNearestNeighbor2DC(double[], float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using nearest neighbor interpolation.
- transformNearestNeighbor3D(double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using nearest neighbor interpolation.
- transformNearestNeighbor3D(float[], ModelImage, int, int, int, TransMatrix) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using nearest neighbor interpolation.
- transformNearestNeighbor3D(float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Transforms and resamples volume using nearest neighbor interpolation.
- transformNearestNeighbor3DC(double[], float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using nearest neighbor interpolation.
- transformNearestNeighbor3Dim2D(double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using nearest neighbor interpolation.
- transformNearestNeighbor3Dim2DC(double[], float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using nearest neighbor interpolation.
- transformNearestNeighbor4D(double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples 4 dimensional object using 3D algorithm using nearest neighbor interpolation.
- transformNearestNeighbor4DC(double[], float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples 4 dimensional object using 3D algorithm using nearest neighbor interpolation.
- transformNearestNeighbor4Dim2D(double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using nearest neighbor interpolation.
- transformNearestNeighbor4Dim2DC(double[], float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using nearest neighbor interpolation.
- transformNode3d - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Setup the initial position of the image, added to ScenerootTG transform group.
- transformNode3d - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Setup the initial position of the image, added to ScenerootTG transform group.
- transformPtVolumeToImage(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Transform a java3d point [-1,1] to the image volume space.
- transformQuinticLagrangian2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using quintic Lagrangian interpolation.
- transformQuinticLagrangian2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images.
- transformQuinticLagrangian3D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using quintic Lagrangian interpolation.
- transformQuinticLagrangian3DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images.
- transformQuinticLagrangian3Dim2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using quintic Lagrangian interpolation Does a slice by slice quintic Lagrangian
interpolation on a 3 dimensional object.
- transformQuinticLagrangian3Dim2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
- transformQuinticLagrangian4D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples 4 dimensional object using 3D quintic Lagrangian interpolation.
- transformQuinticLagrangian4DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples 4 dimensional color object using 3D quintic Lagrangian interpolation.
- transformQuinticLagrangian4Dim2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using quintic Lagrangian interpolation Does a slice by slice quintic Lagrangian
interpolation on a 4 dimensional object.
- transformQuinticLagrangian4Dim2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using quintic Lagrangian interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
- transformSlice(int, TransMatrix, float[], float[], Vector3f) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
Transforms a slice.
- transformTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- transformTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- transformTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- transformTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- transformTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- transformTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- transformTalairach(ModelImage, float[], TransMatrix, float, float, float, int, int, int, int, int, int[], boolean, float, float, float, int, int, int, int, int, int, int, int, int) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
This routine is designed to transform AFNI functional images which have already been transformed to match AFNI
original images to match AFNI +tlrc images.
- transformTalairachTrilinear(float[], double[][], float, int, int, int, float, float, float, int, int, int, int, int, int, int, int, int, ViewJProgressBar, ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogTLRC
-
Transforms and resamples volume using trilinear interpolation
- transformTalairachTrilinear(float[], TransMatrix, float, float, float, int, int, int, float, float, float, int, int, int, int, int, int, int) - Method in class gov.nih.mipav.model.file.FileAfni
-
transformTalairachTrilinear - transforms and resamples volume using trilinear interpolation.
- transformTalairachTrilinear(float[], TransMatrix, float, int, int, int, float, float, float, int, int, int, int, int, int, int, int, int, ViewJProgressBar, ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogTalairach
-
Transforms and resamples volume using trilinear interpolation.
- transformTalairachVolume(double[], float[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
computes the selected Talairach transform.
- transformToACPC() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- transformToTLRC() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- transformTrilinear(double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples a 3D volume using trilinear interpolation.
- transformTrilinear(float[], float[], TransMatrix, int, int, int, float, float, float, int, int, int, float, float, float, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using trilinear interpolation.
- transformTrilinear(float[], float[], TransMatrix, int, int, int, float, float, float, int, int, int, float, float, float, ViewJProgressBar, boolean) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using trilinear interpolation.
- transformTrilinear(float[], ModelImage, TransMatrix, int, int, int, float, float, float, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using trilinear interpolation.
- transformTrilinear(float[], ModelImage, TransMatrix, int, int, int, float, float, float, ViewJProgressBar, boolean) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using trilinear interpolation.
- transformTrilinear(float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Transforms and resamples volume using trilinear interpolation.
- transformTrilinear(ModelImage, ModelImage, TransMatrix, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using trilinear interpolation.
- transformTrilinear(ModelImage, ModelImage, TransMatrix, ViewJProgressBar, boolean) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using trilinear interpolation.
- transformTrilinear(ModelImage, ModelImage, TransMatrix, ViewJProgressBar, boolean, float) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using trilinear interpolation.
- transformTrilinear4D(double[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples 4 dimensional object using trilinear interpolation.
- transformTrilinear4D(ModelImage, ModelImage, TransMatrix, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Performs trilinear interpolation on black and white image data in a 4D image.
- transformTrilinear4DByteC(byte[], byte[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples 4 dimensional color ARGB object using trilinear interpolation.
- transformTrilinear4DC(double[], float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples 4 dimensional color object using trilinear interpolation.
- transformTrilinearByteC(byte[], byte[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using trilinear interpolation This version is used with ARGB color images.
- transformTrilinearC(double[], float[], TransMatrix) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using trilinear interpolation This version is used with color images.
- transformTrilinearC(ModelImage, ModelImage, float[], TransMatrix, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Performs trilinear interpolation on color image data.
- transformTrilinearC(ModelImage, ModelImage, TransMatrix, int, int, int, float, float, float) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using trilinear interpolation Use on color images USE THIS IF OUTPUT IMAGE HAS
DIFFERENT DIM/RES THAN INPUT IMAGE.
- transformTrilinearC(ModelImage, ModelImage, TransMatrix, int, int, int, float, float, float, float) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using trilinear interpolation Use on color images USE THIS IF OUTPUT IMAGE HAS
DIFFERENT DIM/RES THAN INPUT IMAGE.
- transformTrilinearC4D(ModelImage, ModelImage, TransMatrix, ViewJProgressBar) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Performs trilinear interpolation on color image data in a 4D image.
- transformType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- transformType - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- transformType - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- transformTypeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- transformTypeName - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- transformUpdate(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
The raybased renderer invokes this method when a mouse release event occurs.
- transformUpdate(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
The raybased renderer invokes this method when a mouse release event occurs.
- transformUpdate(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Tells the mouse dialog that the transform has changed.
- transformVOI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- transformVOI - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
DOCUMENT ME!
- transformVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
BSpline smooth the final auto segmentation VOI contours.
- transformVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
BSpline smooth the final auto segmentation VOI contours.
- transformVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
BSpline smooth the final auto segmentation VOI contours.
- transformVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
BSpline smooth the final auto segmentation VOI contours.
- transformVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
BSpline smooth the final auto segmentation VOI contours.
- transformVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
BSpline smooth the final auto segmentation VOI contours.
- transformVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
BSpline smooth the final auto segmentation VOI contours.
- transformVOI(ModelImage, ModelImage, int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Transform the the resulting VOI from cropped image to oringal MR image.
- transformVOI(ModelImage, ModelImage, ModelImage, ModelImage, int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Transform the the resulting VOI from cropped image to oringal MR image.
- transformVOIAAM() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
BSpline to smooth the final segmented VOIs.
- transformVOIs - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
if true transform VOIs.
- transformVOIs - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
if true transform VOIs.
- transformVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- transformVOIsBox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- transformWSinc2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using windowed sinc interpolation.
- transformWSinc2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using windowed sinc interpolation This version used with color images.
- transformWSinc3D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using windowed sinc interpolation.
- transformWSinc3DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using windowed sinc interpolation This version used with color images.
- transformWSinc3Dim2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using windowed sinc interpolation Does a slice by slice windowed sinc
interpolation on a 3 dimensional object.
- transformWSinc3Dim2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using windowed sinc interpolation This version used with color images This
version performs a slice by slice algorithm on a 3 dimensional object.
- transformWSinc4D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples 4 dimensional object using 3D windowed sinc interpolation.
- transformWSinc4DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples 4 dimensional object using 3D windowed sinc interpolation.
- transformWSinc4Dim2D(double[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using windowed sinc interpolation Does a slice by slice windowed sinc
interpolation on a 4 dimensional object.
- transformWSinc4Dim2DC(double[], float[], TransMatrix, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Transforms and resamples volume using windowed sinc interpolation This version used with color images This
version performs a slice by slice algorithm on a 4 dimensional object.
- transformX - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- transformY - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- transitiveClosure() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- transKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- transKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- transKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- transKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- transKeyImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- translate - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Burning point center.
- translate(float, float) - Method in class gov.nih.mipav.model.structures.VOILine
-
Translate both points of the VOI.
- translate(float, float) - Method in class gov.nih.mipav.model.structures.VOIProtractor
-
Translates 3 points of the protractor VOI.
- translate(float, float, float) - Method in class gov.nih.mipav.model.structures.VOIContour
-
Translates a VOI by some amount in x and y.
- translate(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
Translate the matrix to the specified x, y, z postion.
- translate(Point3) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- translate(Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase.Matrix
-
Translate the matrix to the given vector postion.
- Translate(double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Translates the shape.
- Translate(CAAMPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Translates the shape.
- Translate(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeNode
-
- Translate(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Add to the object translation vector.
- TRANSLATE - Static variable in interface gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehaviorCallback
-
DOCUMENT ME!
- TRANSLATE - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the VOI cursor is in translate mode
- translateButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- translateButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- TranslatedPoint2D(Point2D, double, double) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.TranslatedPoint2D
-
- translateEvent(MouseEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
Translates the mouse event received from the mouse control buttons to its equivalent on the canvas.
- translateImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
DOCUMENT ME!
- translatePanel - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- translateRangePanelX - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
private JPanel finePanelX, finePanelY, finePanelZ;.
- translateRangePanelY - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
private JPanel finePanelX, finePanelY, finePanelZ;.
- translateRangePanelZ - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
private JPanel finePanelX, finePanelY, finePanelZ;.
- translateSurface(String, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Changes the translation vector for the surface with the given name.
- translateSurface(String, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Changes the translation vector for the surface with the given name.
- translation - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- translation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
DOCUMENT ME!
- translation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
DOCUMENT ME!
- translation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
DOCUMENT ME!
- translation - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
DOCUMENT ME!
- translation_2d_mat(double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- translationBF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- translationCutoff - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
used as cutoffs for making space navigator mouse less sensitive to the low range values that may not be intentional user input
- translationCutoffTextField - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
- translationScaleFactor - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- translationText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Brute-force registration parameters:.
- transLimits - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- transMatrix - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- transMatrix - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
DOCUMENT ME!
- transMatrix - Variable in class gov.nih.mipav.model.scripting.actions.ActionChangeTransformInfo
-
- TransMatrix - Class in gov.nih.mipav.model.structures
-
Transformation matrix class is an affine homogeneous class that can be used
to rotate objects like images and VOIs.
- TransMatrix(int) - Constructor for class gov.nih.mipav.model.structures.TransMatrix
-
Construct a transformation matrix.
- TransMatrix(int, int) - Constructor for class gov.nih.mipav.model.structures.TransMatrix
-
- TransMatrix(int, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.structures.TransMatrix
-
- TransMatrix(TransMatrix) - Constructor for class gov.nih.mipav.model.structures.TransMatrix
-
copy constructor.
- TransMatrixd - Class in gov.nih.mipav.model.structures
-
Transformation matrix class is an affine homogeneous class that can be used
to rotate objects like images and VOIs.
- TransMatrixd(int) - Constructor for class gov.nih.mipav.model.structures.TransMatrixd
-
Construct a transformation matrix.
- TransMatrixd(int, int) - Constructor for class gov.nih.mipav.model.structures.TransMatrixd
-
- TransMatrixd(int, int, boolean, boolean) - Constructor for class gov.nih.mipav.model.structures.TransMatrixd
-
- TransMatrixd(TransMatrixd) - Constructor for class gov.nih.mipav.model.structures.TransMatrixd
-
copy constructor.
- TransMatsInumber - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
- TransMatsInumber - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
- transmitAttenuatorSetting - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- transmitAttenuatorSetting - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- transmitCoilName - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- transmittedLightHalogenLampMode - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- transmittedLightHalogenLampVoltage - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- transmittedLightShutter - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- transp2(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- transPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- TransparencyOn - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- TRANSPARENT - Static variable in class gov.nih.mipav.view.ColorIcon
-
- transpose(libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- transpose(Problem) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Linear
-
- Transpose() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- Transpose() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- Transpose() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- transpose_Mat_rm(SIFT3D.Mat_rm, SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- Transpose3x3(double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- transposed - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- transposed - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- Transposed() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- TransposeForCompressedRowSparseStructure(int, int, int, int[], int[], double[], int[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- transPower - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- transRotation - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
transform rotation of the volume image during camera snapshot.
- transRotationMatrix - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Rotation matrix.
- transScalar - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- TRANSVERSE_FLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- TRANSVERSE_FLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- TRANSVERSE_UNFLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
DOCUMENT ME!
- TRANSVERSE_UNFLIPPED - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- transVOIImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- transVOIImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- transVOIImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- transVOIImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- transVOIImages - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- trapezoidConstant - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
- trapezoidConstant - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task
-
- trapezoidConstant - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- trapezoidMidpoint - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- trapezoidSlope - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
- trapezoidSlope - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.sm2Task
-
- trapezoidSlope - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- trapz(double[]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- trapz(double[][][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- trauma - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
132 Trauma Flag.
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Recursively traverse the image directory.
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Recursively traverse the image directory.
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Recursivly traverse the AAM atlas directory.
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Recursivly traverse the AAM atlas directory.
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Recursively read AAM dir, and update the AAM model structure.
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Recursively traverse the image directory.
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Recursively traverse the image directory.
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Recursively traverse the image directory.
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Traverse the 2D slices directory.
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Recursively traverse the image directory.
- traverse(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Recursively traverse the image directory.
- traverse(File) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- traverse(File) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- traverse_100(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- traverse_100(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
- traverse_80(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- traverse_80(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
- traverse_80(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Recursively traverse the image directory.
- traverse_date(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- traverse_date(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_date(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- traverse_dicom(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- traverse_dicom(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_dicom(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- traverse_DicomLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- traverse_file(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- traverse_file(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- traverse_firstLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- traverse_firstLayer_DS(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- traverse_firstLayer_ForNathan(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_firstLayer_noCoil(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- traverse_firstLayer_noCoil(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- traverse_firstLayer_noCoil(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- traverse_firstLayer_noCoil(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- traverse_firstLayer_noCoil(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- traverse_fold(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- traverse_fold(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- traverse_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- traverse_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
Traverse the folder
- traverse_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
Traverse the folder
- traverse_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
- traverse_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
- traverse_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
- traverse_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
- traverse_folder(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
- traverse_folder(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
- traverse_folder(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- traverse_folder(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- traverse_folder_1(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- traverse_folder_2(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- traverse_folder_2(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
- traverse_folder_2(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
- traverse_folder_2(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- traverse_folder_3(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- traverse_folder_4(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- traverse_folder_5(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- traverse_folder_5(File, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_folder_5(File, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- traverse_folder_5(File, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- traverse_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- traverse_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- traverse_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- traverse_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- traverse_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- traverse_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- traverse_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- traverse_folder_5(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- traverse_folder_5(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- traverse_folder_5(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- traverse_folder_5(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- traverse_folder_5(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- traverse_folder_5(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- traverse_folder_5_old(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_folder_5_old(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
- traverse_folder_5_old(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_folder_femur(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- traverse_folder_knees(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
- traverse_folder_map(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- traverse_folder_map(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
- traverse_folder_map(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
- traverse_folder_map(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- traverse_folder_map(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- traverse_folder_map(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Traverse the HNN subdirectories.
- traverse_folder_map(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Traverse the HNN subdirectories.
- traverse_folder_map(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- traverse_folder_org_img(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- traverse_folder_patella(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
- traverse_gt_folder(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- traverse_id(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- traverse_id(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- traverse_image_folder(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- traverse_image_folder(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
Traverse the test image folder
- traverse_image_folder(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
Traverse the test image folder
- traverse_image_folder(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- traverse_Layer(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- traverse_Layer_DS(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- traverse_Layer_extra(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- traverse_Layer_extra(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_Layer_extra(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- traverse_Layer_ForNathan(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_layer_modified(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- traverse_layer_modified(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- traverse_Layer_noCoil(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- traverse_Layer_noCoil(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- traverse_Layer_noCoil(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- traverse_Layer_noCoil(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- traverse_Layer_noCoil(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- traverse_nii(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
- traverse_nii(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- traverse_nii(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- traverse_orientation(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- traverse_orientation(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_orientation(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- traverse_patientID(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- traverse_patientID(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_patientID(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- traverse_scanLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- traverse_secondLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- traverse_secondLayer_DS(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- traverse_secondLayer_ForNathan(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_secondLayer_noCoil(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- traverse_secondLayer_noCoil(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- traverse_secondLayer_noCoil(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- traverse_secondLayer_noCoil(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- traverse_secondLayer_noCoil(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- traverse_secondLayer_noCoil_ext(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- traverse_secondLayer_noCoil_ext(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- traverse_serial(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
- traverse_serial(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_serial(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- traverse_special(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_T2Layer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_T2Layer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- traverse_T2Layer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- traverse_T2Layer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- traverse_T2Layer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- traverse_T2Layer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_T2Layer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- traverse_T2Layer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- traverse_T2Layer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- traverse_T2Layer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- traverse_T2Layer(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- traverse_T2Layer(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- traverse_T2Layer(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_T2Layer_deeper(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- traverse_T2Layer_deeper(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- traverse_T2Layer_deeper(File, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_thirdLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_thirdLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_thirdLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- traverse_thirdLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- traverse_thirdLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- traverse_thirdLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- traverse_thirdLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_thirdLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- traverse_thirdLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- traverse_thirdLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- traverse_thirdLayer_ForNathan(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_train_folds(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
Traverse the specified 10-fold training directory
- traverse_voi_folder(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- traverse_voiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- traverse_VoiLayer(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- traverse_voiLayer_ForNathan(File, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- traverseButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Control the tri-planar default view nevigation mode.
- traverseButton - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Button for traversing the images.
- traverseCurrent(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- traverseCurrent(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- traverseCurrent(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- traverseCurrent(File) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- traverseDeeper(File) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- traverseDicom(File, String) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- traverseLevel1(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
- traverseLevel1(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
- traverseLevel1(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
- traverseLevel1(File, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
- traverseWall(AlgorithmNetworkSnake.PixelGrid.PixelGridNode, AlgorithmNetworkSnake.PixelGrid.PixelGridNode, int, boolean[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid
-
- trbase - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- trcg(double, double[], double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Tron
-
- TreatmentInformation - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview
-
Information about a set of burns attempting to treat one of the target surfaces from the target list.
- TreatmentInformation() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.TreatmentInformation
-
Create a new treatment set information object.
- treatmentVector - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
List of treatment sets.
- tred2() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
- tree - Variable in class gov.nih.mipav.model.algorithms.KDTree.kdres
-
- tree - Variable in class gov.nih.mipav.view.CheckTreeManager
-
- tree - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- tree - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin.JFileTreePanel
-
The file tree.
- tree - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- tree - Variable in class gov.nih.mipav.view.JPanelAnonymizePrivateTags
-
The tree used to keep track of keys.
- tree - Variable in class gov.nih.mipav.view.JPanelAnonymizePublicTags
-
- tree - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- Tree() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- Tree(Vector<Vector<Integer>>, Vector<Integer>, Vector<Double>) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- TREE_CLASSIFICATION - gov.nih.mipav.model.algorithms.StochasticForests.TreeType
-
- TREE_PROBABILITY - gov.nih.mipav.model.algorithms.StochasticForests.TreeType
-
- TREE_REGRESSION - gov.nih.mipav.model.algorithms.StochasticForests.TreeType
-
- tree_size - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
private Dimension initial_frame_size = new Dimension(725,800);.
- TREE_SURVIVAL - gov.nih.mipav.model.algorithms.StochasticForests.TreeType
-
- treeA - Variable in class gov.nih.mipav.view.JPanelTreeController
-
upper or left-most tree.
- TREEA - Static variable in class gov.nih.mipav.view.JPanelTreeController
-
- treeB - Variable in class gov.nih.mipav.view.JPanelTreeController
-
lower or right-most tree.
- TREEB - Static variable in class gov.nih.mipav.view.JPanelTreeController
-
- treeCheckBox - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
- TreeClassification(Vector<Double>, Vector<Integer>, Vector<Vector<Integer>>, Vector<Double>) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- TreeClassification(Vector<Vector<Integer>>, Vector<Integer>, Vector<Double>, Vector<Double>, Vector<Integer>) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.TreeClassification
-
- treeCollapsed(TreeExpansionEvent) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Unchanged.
- treeExpanded(TreeExpansionEvent) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Expands tree node in file tree.
- treeLayout - Variable in class gov.nih.mipav.view.JPanelTreeController
-
DOCUMENT ME!
- treeLevelColorChooser - Variable in class gov.nih.mipav.view.graphVisualization.MipavGraphPanel
-
ColorChooser for changing graph colors.
- TreeMouseAdapter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeMouseAdapter
-
- TreeMouseDragAdapter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeMouseDragAdapter
-
- TreeNode(int, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager.TreeNode
-
Creates a new tree node with the given data.
- TreeNode(int, float) - Constructor for class gov.nih.mipav.view.RubberbandLivewire.TreeNode
-
Creates a new tree node with the given data.
- TreeNodeData - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- TreeNodeData() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.TreeNodeData
-
- treeNodes - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortedTreeNodes
-
- treeNodesTemp - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SortedTreeNodes
-
- treePanel - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- TreeProbability(Vector<Double>, Vector<Integer>, Vector<Vector<Integer>>, Vector<Double>) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- TreeProbability(Vector<Vector<Integer>>, Vector<Integer>, Vector<Double>, Vector<Double>, Vector<Integer>, Vector<Vector<Double>>) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.TreeProbability
-
- TreeRegression() - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- TreeRegression(Vector<Vector<Integer>>, Vector<Integer>, Vector<Double>) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.TreeRegression
-
- TreeRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeRenderer
-
Creates a new TreeRenderer object.
- trees - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- treeScroll - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- treeSelectionChange - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- treeSelectionChange - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- treeSelectionChange - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- TreeSurvival(Vector<Double>, int, Vector<Integer>) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- TreeSurvival(Vector<Vector<Integer>>, Vector<Integer>, Vector<Double>, Vector<Vector<Double>>, Vector<Double>, Vector<Integer>) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- treetype - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- TreeType() - Constructor for enum gov.nih.mipav.model.algorithms.StochasticForests.TreeType
-
- treFA - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- treFA - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- treFA_phase0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- treFA_phase0 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- treFA_phase180 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- treFA_phase180 - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- treLong - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- tRes - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- tRes - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- tRes - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- tRes - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- tRes - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Resolution in the time dimension.
- TRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- TRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- TRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- treTR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- treTR - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- treTR - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- TRfine - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- trgWindow - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
240 Trigger window (% of R-R interval).
- tri - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Mesh
-
- Tri() - Constructor for class gov.nih.mipav.model.algorithms.SIFT3D.Tri
-
- TRI - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- tri_pochhammer(double, double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- tri_pochhammer(double, int) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- triangle - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMAnalyzeSynthesizeSoftware.sWarpEntry
-
- Triangle - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- Triangle - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- Triangle - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
- Triangle() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Triangle
-
Creates a new Triangle object.
- Triangle() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- Triangle() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangle
-
- Triangle(int, int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Triangle
-
Constructs a triangle in the table.
- Triangle(int, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Triangle
-
- Triangle(LODMesh.Vertices, LODMesh.Vertices, LODMesh.Vertices) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- TRIANGLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHeightFunction
-
DOCUMENT ME!
- TriangleAttribute() - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.TriangleAttribute
-
Construct an attribute for a triangle.
- TriangleClassificationWidget - Class in gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer
-
This class implements a 2D Triangle-shaped ClassficiationWidget.
- TriangleClassificationWidget(int, int, Vector2f, Vector2f, Texture, int, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
- TriangleCollapse(float, Vector<TriangleIndex>, Vector<Point3D>, Vector<Point3D>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Geometry
-
- triangleCount() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredMeshData
-
- triangleCount() - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- TriangleDetails(double, double, double, double, double, double) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
- TriangleDetails(Point2D, Point2D, Point2D) - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.TriangleDetails
-
- triangleEdge(int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
if the two of the first three triangle indices equal the second two indices, then the third index is returned.
- triangleEdge(int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
if the two of the first three triangle indices equal the second two indices, then the third index is returned.
- triangleEquals(int, int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Returns true if the first three triangle indices equal the second three indices.
- triangleEquals(int, int, int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Returns true if the first three triangle indices equal the second three indices.
- triangleExists(Point3i) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
Check to see if the triangle specified in the triangle list.
- triangleExists(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
Check to see if the triangle specified in the triangle list.
- triangleIndex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- TriangleIndex - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- TriangleIndex() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.TriangleIndex
-
- triangleLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The number of triangles label.
- triangleLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The number of triangles label.
- TriangleMesh - Class in gov.nih.mipav.view.renderer.WildMagic.Decimate
-
- TriangleMesh(VertexBuffer, IndexBuffer) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- triangles - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- triangles - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- triangles - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- triangles - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- triangles - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.CoredVectorMeshData
-
- triangles - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- triangles - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- Triangles() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- Triangles() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMesh
-
Returns a vector of triangles
- TrianglesRenderer() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.TrianglesRenderer
-
- triangleText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Displays the number of triangles.
- triangleText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Displays the number of triangles.
- triangulate - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- triangulate(ModelTriangleMesh, LinkedList, LinkedList, LinkedList, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
triangulates the mesh along a single geodesic.
- triangulate(TriMesh, LinkedList, LinkedList, LinkedList, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
triangulates the mesh along a single geodesic.
- triangulateMeshPath() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
re-triangulates the mesh along the Smoothed Geodesic.
- triangulateMeshPath() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
re-triangulates the mesh along the Smoothed Geodesic.
- Triangulation - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- Triangulation() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.Triangulation
-
- TriangulationEdge - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- TriangulationEdge() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.TriangulationEdge
-
- TriangulationTriangle - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry
-
- TriangulationTriangle() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Geometry.TriangulationTriangle
-
- TriEdges(int[][], int, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- trigamma(double) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- triggerPopup(MouseEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.PopupListener
-
DOCUMENT ME!
- triggerPopup(MouseEvent) - Method in class gov.nih.mipav.view.ViewToolBarBuilder.PopupListener
-
DOCUMENT ME!
- triggerTime - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- triggerTime - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- triggerTimeIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- triggerTimePos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- TRIGONOMETRIC - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- TRIGONOMETRIC - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- TRIGONOMETRIC - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- trigPoly(double[][][][], double, double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- trigPoly(double[][][], double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- triImage - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- triImageFrame - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
The tri image frame of which this object is a component.
- triImagePanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Tri image planar render panels.
- triImagePanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Tri image planar render panels.
- triImagePanel - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- TriL(CDMatrix, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Extract lower triangular part of matrix.
- trilateralFilterAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
DOCUMENT ME!
- TRILINEAR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Trilinear interpolation.
- TRILINEAR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Trilinear interpolation.
- TRILINEAR - Static variable in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities.InterpolationType
-
- trilinearFlag - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmSubsample
-
Whether to perform trilinear filtering when getting intensities of points on the source image.
- TrilinearInterpolateDefField(ModelImage, int, int, int, double, double, double, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- TrilinearInterpolation(float[], int, int, int, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- TrilinearInterpolation(float[], int, int, int, double, double, double, int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- TrilinearInterpolation(ModelImage, int, int, int, double, double, double) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- trim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSmooth
-
Trim out nearly collinear points.
- trim - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- trim - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- trim - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
DOCUMENT ME!
- trim() - Method in class gov.nih.mipav.model.structures.VOI
-
Trims all active contours in the VOI based on the Preferences getTrim and getTrimAdjacent values.
- trim(String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- Trim(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Removes the extreme 'percentage' part of the vector.
- trimCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Checkbox for whether adjacent points are trimmed
- trimCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- trimCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- trimCOR(String) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Trims the numbers or file extension from COR file names.
- triMesh - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- triMesh - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- TriMesh - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- TriMesh() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- trimIgnorableChar(String) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Trims the numbers and special character from the file name.
- trimIntensityThreshold(ModelImage, BitSet, BitSet) - Method in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
trim the mask using the intensity
- trimmedFileName - Variable in class gov.nih.mipav.model.file.FilePaintBitmap
-
File name without the extension.
- trimmedFileName - Variable in class gov.nih.mipav.model.file.FileVOI
-
File name without the extension.
- TrimmedMean(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the trimmed mean.
- TrimmedStd(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the trimmed standard deviation.
- TrimmedVar(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the trimmed variance.
- trimmer(String) - Static method in class gov.nih.mipav.model.file.FileMicroCat
-
Trims the numbers(numerics and some special characters [-, _, .) off the end of a string (file name).
- trimNumbersAndSpecial(String) - Static method in class gov.nih.mipav.model.file.FileUtility
-
Trims the numbers and special character from the file name.
- trimPoints(double, boolean) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Trims a contour and then removes collinear points in the resulting contour.
- trimVOIs() - Method in class gov.nih.mipav.model.structures.ModelImage
-
- trimVOIsInSingleImage(ModelImage, int, int, Vector<Vector3f>, Vector<Vector3f>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
In Dicom space, central contours projections to eliminate the extra
contours at the apex and base.
- trimVOIsInSingleImage(ModelImage, int, int, Vector<Vector3f>, Vector<Vector3f>, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
In Dicom space, central contours projections to eliminate the extra
contours at the apex and base.
- triPlanarAlphaBlend - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
DOCUMENT ME!
- triPlanarClosing() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
DOCUMENT ME!
- triPlanarViewBG - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Triplanar view branch group, which hold the three plane view and the slice box frame view.
- Triplet() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Triplet
-
- Triplet(int, int, double) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Triplet
-
- Triplet(T, U, V) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.Triplet
-
- TripletSparseMatrix() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- TripletSparseMatrix(int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- TripletSparseMatrix(int, int, Vector<Integer>, Vector<Integer>, Vector<Double>) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- TripletSparseMatrix(CeresSolver.TripletSparseMatrix) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- TripletSparseMatrixRandomMatrixOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrixRandomMatrixOptions
-
- TriRapideStochastique(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- TriRapideStochastique_dec(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- TriRapideStochastique_inc(int[], int[], int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- triSliceGeometry - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
- triSliceImages - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
ImageRenderers for the AXIAL, CORONAL, SAGITTAL slices:
- triTable - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
- TriTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceExtractImage
-
- TriU(CDMatrix, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Extract upper triangular part of matrix.
- triunc(double, int, int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- triunc(DoubleDouble, int, int[]) - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- TrivialLoss() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TrivialLoss
-
- trLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- trLimits - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstELSUNCOpt3D
-
Array of translation and rotation limits for each dimension.
- trLimits - Variable in class gov.nih.mipav.model.algorithms.AlgorithmConstPowellOptBase
-
Array of translation and rotation limits for each dimension.
- trMax - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- trMin - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- tRNS - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- trnSyntax - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContext
-
List of transfer syntaxes approiate for the abstract syntax.
- trnSyntax - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContextAccept
-
PDU item type transfer syntax.
- tron(double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Tron
-
- Tron - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm
-
Copyright (c) 2007-2014 The LIBLINEAR Project.
- Tron(Function) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Tron
-
- Tron(Function, double) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Tron
-
- Tron(Function, double, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Tron
-
- TRRAD - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- TRString - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- trText - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- true_gamma(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- TRUE_GAMMA - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- trueArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
DOCUMENT ME!
- trueBoundingVOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
DOCUMENT ME!
- trueFound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
in the true image.
- trueFound - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
number of the absoluteTrue found in the test image.
- trueID - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
DOCUMENT ME!
- trueID - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
DOCUMENT ME!
- trueImage - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- trueImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
DOCUMENT ME!
- trueImage - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
DOCUMENT ME!
- trueImageExtension - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- trueImageFileDirectory - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- trueImageFileName - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- trueLevelArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
DOCUMENT ME!
- trueLevels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateMaskSegmentation
-
DOCUMENT ME!
- trueStart - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- trueVOIs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEvaluateSegmentation
-
DOCUMENT ME!
- trunc() - Method in class gov.nih.mipav.util.DoubleDouble
-
Returns the integer which is largest in absolute value and not further
from zero than this value.
- trunc_thresh - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- truncate(String, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Trims string to length.
- Truncate(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- Truncate(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Truncate eigenvectors and eigenvalues to retain the 'n' largest.
- truncateArray(double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletFuse
-
- TRUNCATED_MEDIAN - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
- TRUNCATED_MEDIAN - Static variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- truncatedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- TruncateParallel() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- TruncateParallel() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Truncate eigenvectors and eigenvalues using parallel analysis.
- truncateRGB(float, float, float, float) - Method in class gov.nih.mipav.view.ViewJComponentDTIImage
-
truncat RGB based on heuristic parameters
- TruncateVar(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeform
-
- TruncateVar(double) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Truncate eigenvectors and eigenvalues to retain 'retained_variance'.
- truncMultColors - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
arry of r,g,b after scaling/truncating *
- truncMultPanel - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
panels *
- truncMultPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
panels *
- truncMultRadioGroup - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
radio group for truncate/multiply *
- truncMultRadioGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
radio group for truncate/multiply *
- truncRadio - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
radio buttons for truncate/multiply *
- truncRadio - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
radio buttons for truncate/multiply *
- TRUST_REGION - gov.nih.mipav.model.algorithms.CeresSolver.MinimizerType
-
- TRUST_REGION - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- trust_region_minimizer_iterations_to_dump - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- trust_region_minimizer_iterations_to_dump - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- trust_region_problem_dump_directory - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- trust_region_problem_dump_directory - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- trust_region_problem_dump_format_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- trust_region_problem_dump_format_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- trust_region_radius - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.IterationSummary
-
- trust_region_step_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- trust_region_strategy - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- trust_region_strategy_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- trust_region_strategy_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- trust_region_strategy_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyOptions
-
- TrustRegionMinimizer() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- TrustRegionMinimizerGradientToleranceConvergenceUpdatesStep() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TrustRegionMinimizerJacobiScalingTest() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TrustRegionMinimizerPowellsSingularFunctionUsingDogleg() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TrustRegionMinimizerPowellsSingularFunctionUsingLevenbergMarquardt() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TrustRegionOptionsAreValid(String[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- TrustRegionPreprocessor() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionPreprocessor
-
- TrustRegionPreprocessorParameterBlockBoundsAreInvalid() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TrustRegionPreprocessorParamterBlockIsInfeasible() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TrustRegionPreprocessorProblemWithInvalidParameterBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TrustRegionPreprocessorRemoveParameterBlocksFailed() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TrustRegionPreprocessorRemoveParameterBlocksSucceeds() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TrustRegionPreprocessorTestInnerIterationsWithOneParameterBlock() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TrustRegionPreprocessorZeroProblem() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- TrustRegionStepEvaluator(double, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStepEvaluator
-
- TrustRegionStrategy() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategy
-
- TrustRegionStrategyOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyOptions
-
- TrustRegionStrategyPerSolveOptions() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyPerSolveOptions
-
- TrustRegionStrategySummary() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategySummary
-
- TrustRegionStrategyType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyType
-
- TRY_AGAIN - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- tryAdvance(Consumer<? super P>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- tryAdvance(Consumer<? super P>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- tryAdvance(Consumer<? super P>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator
-
- tryAdvance(Consumer<? super P>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- tryAdvance(Consumer<? super T>) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
- tryCustomProcessFormat(int, int, long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- tryCustomProcessFormat(int, int, long) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- tryEnterSubIfd(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ExifTiffHandler
-
- tryEnterSubIfd(int) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- tryPartitionByMediaUID(FileInfoDicom[]) - Method in class gov.nih.mipav.model.file.FileIO
-
partition into image subsets using media instance uids
- trySkip(long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialByteArrayReader
-
- trySkip(long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
Skips forward in the sequence, returning a boolean indicating whether the skip succeeded, or whether the sequence ended.
- trySkip(long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.StreamReader
-
- trySplit() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- trySplit() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- trySplit() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgSpliterator
-
- trySplit() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- trySplit() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.PixelConvertingSpliterator
-
- tryToStoreResultImageInRunner(ModelImage) - Method in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
DOCUMENT ME!
- ts - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- ts - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- tsaitr - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- Tsallis_Sqrt(double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEntropicEdgeDetection
-
- tsapps - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- tsaup2 - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- tsaupd - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- tsconv - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- tseigt - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- tsgets - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- TSJAC3(int[], int[], double[], double[][], int, int[], int, int, int, int[], int[], int[], double[], double[], double[], double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- tSlice - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Image time sequence number of image that is displayed.
- tSlice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Which time slice is currently displayed.
- tSlice - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Which time slice is currently displayed.
- tSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Image time sequence number of image that is displayed.
- tSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Which time slice is currently displayed.
- tSlice - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Time slice that this image is on.
- tSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- tSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- tSliderDictionary - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- tSliderPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
DOCUMENT ME!
- tsm - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DenseSparseMatrixTest
-
- tsm - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- tsm_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDiagonalMatrix
-
- tsm_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.BlockRandomAccessSparseMatrix
-
- tsmooth(double[][], double, int, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion
-
- tSpace - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- tSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
- tstart - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- tStart - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
Time.
- tStart - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- tStart - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
- TSTNG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- tStop - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- TSTPLT(double[], double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- TSTPLT(double[], double[], double[], double, double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- tt - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- Tt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIAGCWD
-
Reference: Gang Cao, Lihui Huang, Huawei Tian, Xianglin Huang, Yongbin Wang, Ruicong Zhi.
- Tt - Variable in class gov.nih.mipav.view.dialogs.JDialogIAGCWD
-
- tt1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- tTable - Static variable in class gov.nih.mipav.model.algorithms.StatisticsTable
-
t-statistics table
- TTail - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- tTalVoxLabel - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
talairach voxel label *
- TTest(int, int, double[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Student's T-test.
- ttp - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- tType - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- tType - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- Tubes - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- tubeType - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
66.
- TukeyLoss(double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TukeyLoss
-
- TUMOR_SEG - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Value which indicates a voxel in the segmenation image that is part of the tumor.
- TUMOR_SEG - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Value which indicates a voxel in the segmenation image that is part of the tumor.
- tunable - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser
-
- tUnits - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Deprecated.
- tuple2i(int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.tuple2i
-
- turboFactor - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- turboFactor - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- turboFactorIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- turboFactorPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- turn(double, double) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.ShapeSimilarity
-
- TURN_REP - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- TURN_REP() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.TURN_REP
-
- TURN_REP_REC - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- TURN_REP_REC() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.TURN_REP_REC
-
- turnOffLogging() - Static method in class gov.nih.mipav.view.LogStdStreams
-
DOCUMENT ME!
- turnrep - Class in gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity
-
Ported to Java from C code from
http://www8.cs.umu.se/kurser/TDBAfl/VT06/algorithms/WEBSITE/IMPLEMEN/TURN/IMPLEMEN.HTM
May only be used for non-commercial purposes.
- turnrep() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.turnrep
-
- tv(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- tVal - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- tvsimp(int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- tw - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
number of tiles in width
- TWELVE - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- twentyPercent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- twentyPercent - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- twentySixButton - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
- twentySixButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
- twentySixButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLowerCompletion
-
- twentySixButton - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
- twist(float, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Called when the JPanelProbe twist slider is changed.
- twist_kernel - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- twistKernelInterleaved - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- twistKernelPlannar - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan
-
- TWO - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- TWO - Static variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- TWO - Static variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- two_pass_quantize - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- TWO_PI - Static variable in class gov.nih.mipav.util.DoubleDouble
-
The value nearest to the constant 2 * Pi.
- TWOALPHA - Static variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- TWOBETA - Static variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- twoButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- twoButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- twoDButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
- twoDButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- TWODELTA - Static variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- twoFiles - Variable in class gov.nih.mipav.view.dialogs.JDialogMetaImageChoice
-
DOCUMENT ME!
- twoFiles - Variable in class gov.nih.mipav.view.dialogs.JDialogNIFTIChoice
-
DOCUMENT ME!
- TWOGAMMA - Static variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- twoJacobiIter - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- twoJacobiIter - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- twoJacobiIter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- TWOMM - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- TWOMM - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- TWOMM2 - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- TWOMM2 - Static variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- twoMM2Button - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- twoMMButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPbBoundaryDetection
-
- twoParameterFittingCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.WeibullDistribution.twoParameterFittingCostFunction
-
- twoPContraction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- twoPContraction - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- twoPDownHillSimplex(double[], double[], double, double, double, double[], double[], double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- twoPExpansion - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- twoPExpansion - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- twophase - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- twophase - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- twoPhaseButton - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- twoPi - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
two pi *
- TwoPi - Variable in class gov.nih.mipav.model.algorithms.Poly
-
- twoPReflection - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- twoPReflection - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- twoPShrink - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- twoPShrink - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- twoPSimplex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- twoPSimplex - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- twoPSimplexCentre - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- twoPSimplexCentre - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- twoPSimplexLineValues - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- twoPSimplexLineValues - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- twoPSimplexResiduals - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT2
-
- twoPSimplexResiduals - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- twor() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- twor() - Method in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- twoSmooth - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- twoSmooth - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- twoSmooth - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- TWOTHIRDSAMPLE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- twou - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- twou - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- tx - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.TranslatedPoint2D
-
- tX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
holds the current value of the space navigator. normalized on a -100 to 100 scale for cross platform/calculating convenience
- tx0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
XTOsiz
- tx0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
FIXME DOC
- tx0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start and end values for Tile width and height
- tx0_t - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Temporary values for Tile parts, initialised in pi_create_encode
- tx1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
FIXME DOC
- tx1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start and end values for Tile width and height
- txE - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start and end values of Tile width and height, initialised in
pi_initialise_encode
- TxFont - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- txS - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start and end values of Tile width and height, initialised in
pi_initialise_encode
- TxSize - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- TXT - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.CompleteRenderer
-
- txtChannels - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- txtDirectory - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- txtHeight - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- txtResampleHeight - Variable in class gov.nih.mipav.view.ViewFileChooserSubsample
-
DOCUMENT ME!
- txtResampleWidth - Variable in class gov.nih.mipav.view.ViewFileChooserSubsample
-
DOCUMENT ME!
- txtSlices - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- txtStr - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Text
-
- txtTimePoints - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- txtWidth - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
DOCUMENT ME!
- ty - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.TranslatedPoint2D
-
- tY - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
holds the current value of the space navigator. normalized on a -100 to 100 scale for cross platform/calculating convenience
- ty0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_cp_t
-
YTOsiz
- ty0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
FIXME DOC
- ty0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start and end values for Tile width and height
- ty0_t - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Temporary values for Tile parts, initialised in pi_create_encode
- ty1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
FIXME DOC
- ty1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start and end values for Tile width and height
- tyE - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start and end values of Tile width and height, initialised in
pi_initialise_encode
- type - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassSig
-
- type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionOptions
-
- type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- type - Variable in class gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver
-
- type - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- type - Variable in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.Coefficient
-
- type - Variable in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteTransformType
-
- type - Variable in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- type - Variable in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.SYMMETRY
-
- type - Variable in class gov.nih.mipav.model.algorithms.libdt.Mat
-
- type - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm
-
- type - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Tform
-
- type - Variable in class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- type - Variable in enum gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- type - Variable in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- type - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Detector
-
- type - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Filter.FilterType
-
- type - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.FilamentArc
-
Attributes.
- type - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser
-
attributes.
- type - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Microscope
-
- type - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- type - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_marker_info_t
-
marker type
- type - Variable in class gov.nih.mipav.model.file.FilePackBit
-
Image type ID.
- type - Variable in class gov.nih.mipav.model.file.FileRawChunk
-
DOCUMENT ME!
- type - Variable in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- type - Variable in class gov.nih.mipav.model.scripting.parameters.Parameter
-
The parameter value data type.
- type - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- type - Variable in class gov.nih.mipav.model.structures.ModelLUT
-
DOCUMENT ME!
- type - Variable in class gov.nih.mipav.view.ColorWheel
-
type of color wheel ABSVAL, NOSYMM, ROTATIONALSYMM, MIRRORSYMM
- type - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
type of color wheel ABSVAL, NOSYMM, ROTATIONALSYMM, MIRRORSYMM *
- type - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- type - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- type - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- type - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- type - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
type of color wheel ABSVAL, NOSYMM, ROTATIONALSYMM, MIRRORSYMM *
- type - Variable in class gov.nih.mipav.view.ViewJComponentDTIImage
-
type of color wheel ABSVAL, NOSYMM, ROTATIONALSYMM, MIRRORSYMM *
- type - Variable in class gov.nih.mipav.view.ViewJSlider
-
Refers to the type of slider being used by MIPAV
- type() - Method in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
- Type - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
- Type(int) - Constructor for enum gov.nih.mipav.model.file.FileSVS.Type
-
- Type(int) - Constructor for enum gov.nih.mipav.model.file.FileTiff.Type
-
- Type() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
Get transfer function id.
- TYPE - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- type_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.NonlinearConjugateGradient
-
- TYPE_AE - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_AMBIENT - Static variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Ambient light constant.
- TYPE_AS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_ASCII - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TYPE_AT - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_CS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_DA - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_DIRECTIONAL - Static variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Directinal light constant.
- TYPE_DS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_DT - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_FAST - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- TYPE_FAST - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- TYPE_FD - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_FL - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_IS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_LO - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_LONG - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TYPE_LT - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_LUT - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- TYPE_LUT - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- TYPE_NONE - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_OB - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_OW - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_PN - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_POINT - Static variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Point light constant.
- TYPE_RATIONAL - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- TYPE_SH - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_SL - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_SPOT - Static variable in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Spot light constant.
- TYPE_SQ - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_SS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_ST - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_SUBBLOCK - Static variable in class gov.nih.mipav.model.file.FileLSM
-
Values for types in scan information.
- TYPE_TM - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_UI - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_UL - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_UNKNOWN - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_US - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- TYPE_UT - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- typeCode - Variable in class gov.nih.mipav.model.dicomcomm.RTCEntry
-
DOCUMENT ME!
- typeCodeNames - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- typeCodeNamesFilled - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
DOCUMENT ME!
- typeDefaultExtensions - Static variable in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
DOCUMENT ME!
- typeDescriptions - Static variable in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
DOCUMENT ME!
- TypedLinearSolver() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TypedLinearSolver
-
- TypedPreconditioner() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.TypedPreconditioner
-
- typeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- typeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
- typeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
- typeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- typeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- TypeInfo() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
Get type info
- typeInts - Static variable in class gov.nih.mipav.view.dialogs.JDialogUnknownIO
-
DOCUMENT ME!
- typeMax - Variable in enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Max value allowed of the type
- typeMin - Variable in enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Min value allowed of the type
- TypeName() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFIdentity
-
Get the transfer function identity name
- TypeName() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFLookUp
-
Returns the clear-text type name
- TypeName() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTFUniformStretch
-
Returns the clear-text type name.
- TypeName() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTransferFunction
-
Type name.
- typeOf(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.BitmapType
-
- typeOf(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorEncoding
-
- typeOf(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingHalftoningAlgorithm
-
- typeOf(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingIntent
-
- typeOf(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory.DisposalMethod
-
- typeOf(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
- typeOf(long) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorSpaceType
-
- typeOf(MetadataExtractor.BmpHeaderDirectory) - Method in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
- typeString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- typeStringType - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- TYPICAL_CHROMINANCE_AC_LENGTHS - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- TYPICAL_CHROMINANCE_AC_VALUES - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- TYPICAL_CHROMINANCE_DC_LENGTHS - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- TYPICAL_CHROMINANCE_DC_VALUES - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- TYPICAL_LUMINANCE_AC_LENGTHS - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- TYPICAL_LUMINANCE_AC_VALUES - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- TYPICAL_LUMINANCE_DC_LENGTHS - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- TYPICAL_LUMINANCE_DC_VALUES - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- tyS - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_poc_t
-
Start and end values of Tile width and height, initialised in
pi_initialise_encode
- tZ - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
holds the current value of the space navigator. normalized on a -100 to 100 scale for cross platform/calculating convenience
- TZC - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Int denoting TZC sequence
- Tzz_freq_resp(double[][], double[][], double[][], double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureAnalysis
-
U
- u - Variable in class gov.nih.mipav.model.algorithms.curev
-
- u - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
Input argument
- u - Variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- U - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- U - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Arrays for internal storage of U and V.
- U16BIT - Static variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- U2 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- U8BIT - Static variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- UARY - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- UberFlags() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- UberV(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- UBUNTU_MONO_BOLD - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
- UBUNTU_MONO_BOLD_RESOURCE - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
- UBUNTU_MONO_BOLDITALIC - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
- UBUNTU_MONO_BOLDITALIC_RESOURCE - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
- UBUNTU_MONO_ITALIC - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
- UBUNTU_MONO_ITALIC_RESOURCE - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
- UBUNTU_MONO_PLAIN - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
- UBUNTU_MONO_PLAIN_RESOURCE - Static variable in class gov.nih.mipav.model.algorithms.ContourPlot.FontProvider
-
- UBYTE - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type unsigned byte (8 bits per voxel).
- UBYTE - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type unsigned byte (8 bits per voxel).
- UBYTE_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type unsigned byte.
- ubyteImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
Usigned byte image, the actual image to do the morphology calculation.
- UC - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- UCenterOffset - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- UCLA - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- UDEF - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
User defined
- udefExtsString - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
This is the user defined file extensions String
- ufclAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindComponentLabelling
-
DOCUMENT ME!
- ufeta_qrfact - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- uflow - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
DOCUMENT ME!
- uflow - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
For doubles uflow = 2**-1022, but a double has 53 bits of precision while a DoubleDouble has 106 bits of
precision, so uflow = 2**-(1022 - 53) = 2**-969
- uftolg_calcjTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- uftolg_calcrTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- ui - Variable in class gov.nih.mipav.view.dialogs.JDialogInstallPlugin
-
The default user interface
- ui - Variable in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
The main user interface
- ui - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
- UI - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- UI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAnyTwoImagesSNR
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- UI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETBleedThrough
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyConnectednessSegmentation
-
- UI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation
-
- UI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTwoMRIImagesSNR
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- UI - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- UI - Variable in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- UI - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- UI - Variable in class gov.nih.mipav.model.algorithms.Quaternions
-
- UI - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- UI - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.model.file.FileIO
-
Reference to the user interface.
- UI - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.model.file.FileSVS
-
- UI - Variable in class gov.nih.mipav.model.file.FileTiff
-
- UI - Variable in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- UI - Variable in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
Common variables in testing routines.
- UI - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations
-
- UI - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
- UI - Variable in class gov.nih.mipav.model.structures.jama.LinearEquations3
-
- UI - Variable in class gov.nih.mipav.model.structures.jama.LUSOL
-
- UI - Variable in class gov.nih.mipav.model.structures.jama.LUSOLEP
-
- UI - Variable in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue
-
Common variables in testing routines.
- UI - Variable in class gov.nih.mipav.model.structures.jama.SelectedEigenvalue2
-
Common variables in testing routines.
- UI - Variable in class gov.nih.mipav.model.structures.jama.SparseEigenvalue
-
- UI - Variable in class gov.nih.mipav.model.structures.jama.SVD
-
Common variables in testing routines.
- UI - Variable in class gov.nih.mipav.model.structures.ModelImage
-
The user interface has a vector of all image models loaded into MIPAV.
- UI - Variable in class gov.nih.mipav.view.dialogs.InstanceVOI
-
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCorrelation
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoCovariance
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyConnectednessSegmentation
-
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogPrincipalComponents
-
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogRegPatientPos
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveDicom
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogShowCosts
-
The MIPAV user interface
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
handle to UI
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- UI - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFiles
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateHEDpngFilesTest
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees2DSlicesAtlasPngConverter
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_CED_map_pre
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSK10_MRI_map_nopre
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_2D_axial_no_pre
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI_10_3D_orthogonal_pre
-
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_no_pre
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_mhg_to_nii
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertMask
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTest
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12ConvertRestoOnePointFiveTrain
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTest
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12CropAndNormalizeTrain
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12NIHDataToNii
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMap
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEdgeMapGT
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate3DReconstruction
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation_jmi
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateEvaluationSegmentation
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceConvertNII
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceEvalSeg
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
global user interface to get the three active images.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
global user interface to get the three active images.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTestPatches
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstateTrainPatches
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogRenameDirs
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
- UI - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogSurfaceReconstructionTBI
-
- UI - Variable in class gov.nih.mipav.view.ViewDirectoryChooser
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.ViewFileChooserBase
-
DOCUMENT ME!
- UI - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
The current user interface
- UI - Variable in class gov.nih.mipav.view.ViewOpenPaintUI
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.ViewOpenVOIUI
-
The main user interface.
- UI - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
The class which wants to listen to changes made to this components of the toolbars.
- UIC1Tag - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- UIC2Tag - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- UIC3Tag - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- UIC4Tag - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- UID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- UID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_SOP
-
Unique identifier.
- UID - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
Unique identifier.
- UID - Variable in class gov.nih.mipav.model.structures.VOI
-
Unique ID for saving & retrieving.
- UID_ApplicationContext - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Application context UID = 1.2.840.10008.3.1.1.1
- UID_CRStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
CR Storage UID = 1.2.840.10008.5.1.4.1.1.1
- UID_CTStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
CT Storage UID = 1.2.840.10008.5.1.4.1.1.2
- UID_EnhancedCTStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Enhanced CT Storage UID = 1.2.840.10008.5.1.4.1.1.4.1
- UID_EnhancedMRStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Enhanced MR Storage UID = 1.2.840.10008.5.1.4.1.1.4.1
- UID_EnhancedXAStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Enhanced XRAY Storage UID = 1.2.840.10008.5.1.4.1.1.12.1.1
- UID_GECTStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_GEMRStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_MRStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
MR Storage UID = 1.2.840.10008.5.1.4.1.1.4
- UID_NMStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
NM (Nuclear med) Storage UID = 1.2.840.10008.5.1.4.1.1.20
- UID_OldNMStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Old NM Storage UID = 1.2.840.10008.5.1.4.1.1.5
- UID_OldUSMultiframeStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Old US MultiframeStorage UID = 1.2.840.10008.5.1.4.1.1.3.
- UID_OldUSStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Old US Storage UID = 1.2.840.10008.5.1.4.1.1.6.
- UID_PatientRootQuery - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_PatientRootRetrieve - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_PatientStudyOnlyQuery - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_PatientStudyOnlyRetrieve - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_PetStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Pet Storage UID = 1.2.840.10008.5.1.4.1.1.128
- UID_RLE_Compression - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_RTBeamsTreatmentRecordStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_RTBrachyTreatmentRecordStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_RTDoseStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_RTImageStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_RTPlanStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_RTStructureSetStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_RTTreatmentSummaryRecordStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_SCStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
SC (Secondary Capture) Storage UID = 1.2.840.10008.5.1.4.1.1.7
- UID_StandaloneCurveStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Standalone Curve Storage UID = 1.2.840.10008.5.1.4.1.1.9
- UID_StandaloneModalityLUTStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Standalone Modality LUT Storage UID = 1.2.840.10008.5.1.4.1.1.10
- UID_StandaloneOverlayStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Standalone Overlay Storage UID = 1.2.840.10008.5.1.4.1.1.8
- UID_StandalonePetCurve - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_StandaloneVOILUTStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Standalone VOI LUT Storage UID = 1.2.840.10008.5.1.4.1.1.11
- UID_StudyRootQuery - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_StudyRootRetrieve - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferBIGENDIANEXPLICIT - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEG2000 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
- UID_TransferJPEG2000LOSSLESS - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
- UID_TransferJPEGBASELINEPROCESS1 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGEXTENDEDPROC16AND18 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGEXTENDEDPROC17AND19 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGEXTENDEDPROC2AND4 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGEXTENDEDPROC3AND5 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGFULLPROGRESSPROC10AND12 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGFULLPROGRESSPROC11AND13 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGFULLPROGRESSPROC24AND26 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGFULLPROGRESSPROC25AND27 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGLOSSLESSPROC14 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGLOSSLESSPROC15 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGLOSSLESSPROC28 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGLOSSLESSPROC29 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGLOSSLESSPROCFIRSTORDERREDICT - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGSPECTRALPROC20AND22 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGSPECTRALPROC21AND23 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGSPECTRALPROC6AND8 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferJPEGSPECTRALPROC7AND9 - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferLITTLEENDIAN - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_TransferLITTLEENDIANEXPLICIT - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
DOCUMENT ME!
- UID_USMultiframeStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
US Multiframe Storage UID = 1.2.840.10008.5.1.4.1.1.3.1.
- UID_USStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
US Storage UID = 1.2.840.10008.5.1.4.1.1.6.1
- UID_Verification - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
Verification UID = 1.2.840.10008.1.1
- UID_XRayAngioStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
XRayAngioStorage UID = 1.2.840.10008.5.1.4.1.1.12.1
- UID_XRayFluoroStorage - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Constants
-
XRay Fluoro Storage UID = 1.2.840.10008.5.1.4.1.1.12.2
- UIDfield - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
uid of the selected voi
- uids - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- UINTEGER - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type unsigned integer (32 bits per voxel).
- UINTEGER - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type unsigned integer (32 bits per voxel).
- UINTEGER_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type unsigned integer.
- uintToString(int) - Method in class gov.nih.mipav.model.algorithms.StochasticForests
-
- UIParams(String, int, String, String) - Constructor for class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- UIParams(String, String, int, String, String) - Constructor for class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- UIParams(String, String, int, String, String, boolean) - Constructor for class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- UIParams(String, String, String) - Constructor for class gov.nih.mipav.view.CustomUIBuilder.UIParams
-
- uiparm - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- ukow_calcjTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- ukow_calcrTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- UL - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- ULONG - Static variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- ultErodeObjects - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- ultErodeObjects - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- ultErodeObjects - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- ULTIMATE_ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology25D
-
DOCUMENT ME!
- ULTIMATE_ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology2D
-
DOCUMENT ME!
- ULTIMATE_ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmGrayScaleMorphology3D
-
DOCUMENT ME!
- ULTIMATE_ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology25D
-
DOCUMENT ME!
- ULTIMATE_ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
DOCUMENT ME!
- ULTIMATE_ERODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
DOCUMENT ME!
- ultimateErode(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology2D
-
Ultimate erodes objects down to a single pixel (almost).
- ultimateErode(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMorphology3D
-
Erodes to a single point.
- ULTRASOUND - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality ultrasound.
- ULTRASOUND - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality ultrasound.
- UmStop(CDVector, CDVector, double, double, CDVector, int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
Decide wether to terminate minimization
Modified version of Algorithm A7.2.1 p. 347 Dennis and Schnabel,
Numerical Methods for Unconstrained Optimization and Nonlinear Equations
1983, Prentice-Hall
Input: x: parameter xplus: new parameter fplus: function value for new
parameter g: gradient at x retcode: return code from line search
maxtaken: max taken in line search
Output: return termination code
- UmStop0(CDVector, double, CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeBase
-
- UN - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- Un_prime - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- UnaryCostFunction(int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryCostFunction
-
- UnaryCostFunction2() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryCostFunction2
-
- UnaryCostFunction3(int, int, double[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryCostFunction3
-
- UnaryCostFunction4(int, int) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryCostFunction4
-
- UnaryIdentityCostFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.UnaryIdentityCostFunction
-
- UNBUNDLED - gov.nih.mipav.model.structures.GenericPolygonClipper.bundle_state
-
- uncaughtException(Thread, Throwable) - Method in class gov.nih.mipav.util.MipavExceptionHandler
-
- uncheckAllButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM
-
buttons for toolbar *
- unCheckButton - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- unCheckButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- unCheckButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- unCheckButton - Variable in class gov.nih.mipav.view.JPanelChecklist
-
DOCUMENT ME!
- uncompData - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- Uncompressed - Static variable in class gov.nih.mipav.model.file.FileCZI
-
- UNDEFINED - gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64.ClassType
-
- UNDEFINED - gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees.ClassType
-
- UNDEFINED - gov.nih.mipav.model.file.FileSVS.Type
-
8 bit undefined
- UNDEFINED - gov.nih.mipav.model.file.FileTiff.Type
-
8 bit undefined
- UNDEFINED - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- UNDEFINED - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- UNDEFINED - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Undefined file type.
- UNDEFINED_LENGTH - Variable in class gov.nih.mipav.model.file.FileDicom
-
Undefined element length.
- UNDEFINED_PIXEL_REP - Static variable in class gov.nih.mipav.model.file.FileInfoDicom
-
(0028,0103) Pixel Representations
- undo() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
VOI operation undo.
- undoButton - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Button to undo the last region grow change (either a click of the grow button, or an adjustment of the threshold
sliders).
- undoCrop() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Undo the crop of the volume.
- undoCropVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Undo crop region with the clipped volume.
- undoCropVolume() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Undo crop region with the clipped volume.
- undoFace() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
Cancel Button has been pressed: Copy the unaltered original data into the ModelImage.
- undoImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- undoLastPaint() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Undoes the last paint.
- undoModel - Variable in class gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes
-
Model to restore last model of JTable
- undoMosaic() - Method in class gov.nih.mipav.view.dialogs.JFrameRegistrationMosaic
-
undoMosaic -- Restores the backed-up ImageTransforms, PolygonShapes, BorderShapes, and ModelImages after an undo
button press:
- undoSculpt() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
undoSculpt: abstract function, implementation depends on whether the instance is VolumeTextureSculptor or
VolumeSculptor.
- undoSculpt() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.TextureSculptor
-
undoSculpt: called by the ViewJFrameVolumeView object when the user presses the "Undo Sculpt" button.
- undoSculpt() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
undoSculpt: called by the ViewJFrameVolumeView object when the user presses the "Undo Sculpt" button.
- undoSculpt(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Undo applying the sculpt region to the volume.
- undoSculpt(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Undo applying the sculpt region to the volume.
- undoSculpt(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Sculptor_WM
-
Undo the sculpt.
- undoSculpt(ModelImage, ModelImage) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
Called by the TextureSculptor or VolumeSculptor objects.
- undoSculptRegion() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelSculptor
-
undoSculptRegion: called when the "Undo Sculpt" Button is pressed.
- undoSculptRegion(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSculptor_WM
-
undoSculptRegion: called when the "Undo Sculpt" Button is pressed.
- undoVOI() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- undoVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- undoVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- UneditableTableModel - Class in gov.nih.mipav.model.structures
-
Title: UneditableTableModel
- UneditableTableModel() - Constructor for class gov.nih.mipav.model.structures.UneditableTableModel
-
Creates a new UneditableTableModel object.
- uneliminated_row_begins_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- unequalDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
If true allow unequal FFT dimensions.
- unequalDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
If true allow unequal FFT dimensions.
- unequalDim - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmFFT
-
If true allow unequal FFT dimensions.
- unequalDim - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Boolean telling if unequal dimensions are allowed in the FFT image.
- unequalDim - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Whether FFT algorithm can return non-equal x,y dimensions
- unequalDimCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Indicates whether user wants FFT to return non-equal x,y dimensions
- unequalRangeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
- UNEXPECTED_OUTPUT - gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder.BugType
-
- ungroupVOIs() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Forms separate VOIs from all the VOI structures presently loaded in the imageModel.
- uni_elt() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.uni_elt
-
- UNIFIED2D - Static variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- Uniform - gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.kernelType
-
- Uniform(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- UNIFORM - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmNoise
-
Used to indicate Uniform distribution of noise.
- UNIFORM - Static variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- uniform_data - Variable in class gov.nih.mipav.model.algorithms.Erfinv
-
Original C++ code by Lakshay Garg ported to Java by William Gandler
Implementation of the inverse error function based on the rational
approximation of percentage points of normal distribution available from
https://www.jstor.org/stable/2347330.
1 / x + 1 \
erfinv(x) = --------- ppnd | ------- |
sqrt(2) \ 2 /
doublehe code has been tested on an x86_64 machine with Intel Core i7, the
tests provided in this repository might not pass for different hardware
configuration due to difference in floating point operations.
- UNIFORM_RADIUS - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration
-
- uniformAngleSpacing - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- uniformAngleSpacing - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- uniformButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- uniformFilter(double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- unImagesData - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
224.
- unImagesLen - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
220 - (internal use) Unstored Image keys in Series.
- UNINSTALL - Static variable in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
- UNINSTALL - Static variable in class gov.nih.mipav.view.ViewJPopupPlugin
-
- uninstallPlugins() - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
- unionButton - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- UnionedWith(CVisShape) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- UnionedWith(RECT) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisShape
-
- uniq - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
4 - (internal use) Make-Unique Flag.
- uniqSysID - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
438 - 16 bytes.
- unique_data_values - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- unique_timepoints - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- unique_timepoints - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.TreeSurvival
-
- uniqueID - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
- Unit(int, String, String, FileInfoBase.UnitType) - Constructor for enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- Unit(int, String, String, FileInfoBase.UnitType, double) - Constructor for enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
- UNIT - Static variable in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
Scale type: d' = (d-min)/(max-min) in [0,1]
- UNIT_ROUNDOFF - Variable in class gov.nih.mipav.model.algorithms.CVODES
-
- UnitQuaternionRotatePoint(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2
-
- units - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- units - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- units - Variable in class gov.nih.mipav.model.file.RawImageInfo
-
DOCUMENT ME!
- units - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Storage of the resolution units of measure.
- units - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadLeica.LeicaSeries
-
DOCUMENT ME!
- units - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- units - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Units of measure of imageA.
- units - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Storage of the resolution units of measure.
- units - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- units - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Storage of the resolution units of measure.
- units - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Storage of the resolution units of measure.
- units - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Units of image - mm, inches, etc.
- UNITS_HZ_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- UNITS_MSEC_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
time step units.
- UNITS_SEC_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- units3D - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- units4D - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- unitsCount - Variable in class gov.nih.mipav.model.file.FileImageXML.MyXMLHandler
-
DOCUMENT ME!
- unitsIndex - Variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- unitSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
one unit is one totalBin-th of the distance between max & min brightness.
- unitsOfMeasure - Variable in class gov.nih.mipav.model.file.FileBMP
-
- unitsOfMeasure - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- unitsOfMeasure - Variable in class gov.nih.mipav.model.file.FileInfoBase
-
Describes the units of measure for the dataset.
- unitsOfMeasure - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- unitsOfMeasure - Variable in class gov.nih.mipav.view.dialogs.JDialogRawIO
-
DOCUMENT ME!
- unitsStr - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- unitsStr - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- unitsStr - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- unitsString - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- unitsString - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- UnitType() - Constructor for enum gov.nih.mipav.model.file.FileInfoBase.UnitType
-
- unitVarianceCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- unitVarianceCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- UNIVERSAL_QUALITY_IMAGE_INDEX - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- universalCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- universalCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- universalImageQualityIndex - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- universalRotationCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- universalTranslationCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- universe - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
The SimpleUniverse object which is the parent of everything else in the scene.
- universe(int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.universe
-
- Unknown - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- UNKNOWN - gov.nih.mipav.model.algorithms.filters.PyWavelets.SYMMETRY
-
- UNKNOWN - gov.nih.mipav.model.algorithms.SIFT3D.im_format
-
- UNKNOWN - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
Data with VR "UN"
- UNKNOWN - gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- UNKNOWN - Static variable in class gov.nih.mipav.model.dicomcomm.DICOM_TransferSyntaxUtil
-
Static that defines UNKNOWN.
- UNKNOWN - Static variable in class gov.nih.mipav.model.file.FileLIFF
-
- UNKNOWN - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
DOCUMENT ME!
- UNKNOWN - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable.HuffmanTableClass
-
- UNKNOWN - Static variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
Indicates tag value may exist but cannot be understood by the dialog.
- UNKNOWN_MEASURE - gov.nih.mipav.model.file.FileInfoBase.Unit
-
Unit of measurement unknown.
- UNKNOWN_MEASURE - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unit of measurement unknown.
- UNKNOWN_MODALITY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality unknown.
- UNKNOWN_MODALITY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality unknown.
- UNKNOWN_ORIENT - Static variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
The data_history substructure is not required, but the orient element is used to indicate individual slice
orientation and determines whetther the Analyze Movie program will attempt to flip the images before displaying a
movie sequence. 0 - transverse unflipped 1 - coronal unflipped 2 - sagitttal unflipped 3 - transverse flipped 4 -
coronal flipped 5 - sagitttal flipped
- UNKNOWN_ORIENT - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Unknown orientation.
- UNKNOWN_ORIENT - Static variable in class gov.nih.mipav.model.file.FileInfoSPM
-
The data_history substructure is not required, but the orient element is used to indicate individual slice
orientation and determines whetther the SPM Movie program will attempt to flip the images before displaying a
movie sequence. 0 - transverse unflipped 1 - coronal unflipped 2 - sagitttal unflipped 3 - transverse flipped 4 -
coronal flipped 5 - sagitttal flipped
- UNKNOWN_STRING - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
String version of units of measurement - unknown.
- UNKNOWN_SUBTYPE - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
available subtypes for VOI
- unknownDDType(int, int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC
-
hash a group, element pair that is not already present in our list.
- unknownIODialog - Variable in class gov.nih.mipav.model.file.FileIO
-
Dialog to prompt the user to determine the correct file type.
- unLinkNodes(AlgorithmNetworkSnake.SnakeInitialiser.Node, AlgorithmNetworkSnake.SnakeInitialiser.Node) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- UNLOCK_PROGRESS_MESSAGE - Static variable in class gov.nih.mipav.view.ViewJProgressBar
-
With the above variable, unlocks the message updating
- unlockAll() - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
unlocks all masks
- unlockAllButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
unlock all masks checkbox *
- UNLOCKED - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the buffer is unlocked and can be writen to or read from.
- unMagButton - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
buttons *
- unMagButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
buttons *
- unMagImage() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
un-magnifies image
- unMagImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
un-magnifies image
- unmagnifyCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- unMarkAll() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FaceTmark
-
- unMarkAll() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- unMarkAll() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.VertTmark
-
- UnoptimizedDeepCopy - Class in gov.nih.mipav.view.renderer.WildMagic.AAM
-
Utility for making deep copies (vs. clone()'s shallow copies) of
objects.
- UnoptimizedDeepCopy() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.AAM.UnoptimizedDeepCopy
-
- unordered_variable_names - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- UnorderedSetInt() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Construct an empty unordered set.
- UnorderedSetInt() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Construct an empty unordered set.
- UnorderedSetInt() - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Construct an empty unordered set.
- UnorderedSetInt() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Construct an empty unordered set.
- UnorderedSetInt(int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Construct an empty unordered set with the specified maximum quantity and growth values.
- UnorderedSetInt(int, int) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Construct an empty unordered set with the specified maximum quantity and growth values.
- UnorderedSetInt(int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Construct an empty unordered set with the specified maximum quantity and growth values.
- UnorderedSetInt(int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Construct an empty unordered set with the specified maximum quantity and growth values.
- UnorderedSetInt(AlgorithmBrainExtractor.UnorderedSetInt) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor.UnorderedSetInt
-
Create an unordered set that is a deep copy of the input set.
- UnorderedSetInt(AlgorithmObjectExtractor.UnorderedSetInt) - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor.UnorderedSetInt
-
Create an unordered set that is a deep copy of the input set.
- UnorderedSetInt(ModelTriangleMesh.UnorderedSetInt) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh.UnorderedSetInt
-
Create an unordered set that is a deep copy of the input set.
- UnorderedSetInt(BurnBaseView.UnorderedSetInt) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView.UnorderedSetInt
-
Create an unordered set that is a deep copy of the input set.
- unOriginal - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
824 identifies image as original or unoriginal.
- unpackOctave(int[], int[], double[], SIFTImageSimilarity.KeyPoint) - Method in class gov.nih.mipav.model.algorithms.SIFTImageSimilarity
-
- unpadStringVal(byte[]) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Unpads a DICOM ASCII string.
- unparallelButton - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Rendering unparallel rotaion button.
- unread_marker - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- unregisterAllVOIs() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Unregisters all VOIs from this image model.
- unregisterFrame(Frame) - Method in class gov.nih.mipav.model.structures.ModelHistogram
-
Unregisters the image Frame.
- unregisterFrame(Frame) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Method that unregisters an image frame by removing it from the image frame vector.
- unregisterFrame(Frame, boolean) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Method that unregisters an image frame by removing it from the image frame vector.
- unRegisterImage() - Method in class gov.nih.mipav.model.structures.ModelImage
-
Unregisters the image from the user interface.
- unRegisterImage(ModelImage) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Unregister image model by removing it from the image hashtable.
- unRegisterImage(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Unregister image model by removing it from the image hashtable given the key to the hashtable.
- unregisterVOI(VOI) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Method that unregisters an VOI.
- unrel - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- unrel_func(double[], double, double) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- UNSCALED_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- UNSCALED_FUNCTION - Static variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- unselectedBorderColor - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- unselectedBorderColor - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- unseqToSeq - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- unseqToSeq - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- UnSet(int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- UnSetAll(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed
-
- unsharp - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
user-selectable variables used in the unsharping operation. used as interim variables in starting the algorithm
op.
- UNSHARP_MAX - Static variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
maximum value for unsharpening variables, at 5.0.
- UNSHARP_MIN - Static variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
minimum value for unsharpening variables, at 0.5.
- UNSHARP_WEIGHT_MAX - Static variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
maximum value for unsharpening weighting, at 1.0.
- UNSHARP_WEIGHT_MIN - Static variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
minimum value for unsharpening weighting, at 0.0.
- unsharper - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
the UnsharpMask algorithm, to hi-pass filter the image.
- unsharpMaskAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
DOCUMENT ME!
- unsharpWeight - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- unsharpWeightText - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- unsharpXtext - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- unsharpYtext - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- unsharpZtext - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- unshrink - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- unshrink - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- UNSIGNED - Static variable in class gov.nih.mipav.model.file.FileMedVision
-
DOCUMENT ME!
- UNSIGNED_BYTE_TYPE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDual
-
DOCUMENT ME!
- UNSIGNED_INTEGER - Static variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- UNSIGNED_PIXEL_REP - Static variable in class gov.nih.mipav.model.file.FileInfoDicom
-
(0028,0103) Pixel Representations
- unsignedInt(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Converts value to an unsigned integer and returns it as a long.
- unsignedShort(int) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Converts value to an unsigned short and returns it as an integer.
- unsortedPathsArrayList - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
arraylist of unsorted path strings to image slices
- UNSUPPORTED - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
Data not supported by MIPAV is stored in the tag's value
- UnsupportedUnitConversion(String) - Constructor for exception gov.nih.mipav.model.file.FileInfoBase.Unit.UnsupportedUnitConversion
-
- UNSYMMETRIC - gov.nih.mipav.model.algorithms.CeresSolver2.StorageType
-
- untwist(ModelImage, int[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Straightens the worm image based on the input lattice positions.
- untwistAnnotations(String, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- untwistAnnotations(String, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- untwistImage(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Entry point in the lattice-based straightening algorithm.
- untwistLattice(ModelImage, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Untwists the lattice and lattice interpolation curves, writing the
straightened data to spreadsheet format .csv files and the straightened lattice
to a VOI file.
- untwistMarkers(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Entry point in the lattice-based straightening algorithm.
- untwistMarkers(ModelImage, int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- untwistNeuriteCurves(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- untwistPt - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- untwistSampleCount(ModelImage, int[], boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- untwistTest(VolumeImage[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
Untwists the worm image quickly for the preview mode - without saving any images or statistics
- untwistTest(VolumeImage[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Untwists the worm image quickly for the preview mode - without saving any images or statistics
- untwistTest(VolumeImage[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Untwists the worm image quickly for the preview mode - without saving any images or statistics
Straightens the worm image based on the input lattice positions.
- untwistTest(Vector3f, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- untwistTestNoBounds(Vector3f, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- unused1 - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
MIPAV uses this variable to define the X-axis orientation.
- unused2 - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
MIPAV uses this variable to define the Y-axis orientation.
- unused3 - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
MIPAV uses this variable to define the Z-axis orientation.
- unusedCentroids - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- unusedCentroids - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- unusedColor - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- unusedRect - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- unzftab - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- unZip(ModelTriangleMesh, LinkedList, int, boolean, LinkedList) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.Geodesic
-
unZip cuts along the smoothed geodesic path by creating new vertices for each point on the path, and updating the
triangles that are connected to the path and that fall on the right of the path to contain the new path vertices.
- unZip(TriMesh, LinkedList<Vector4f>, int, boolean, LinkedList<Integer>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.Geodesic_WM
-
unZip cuts along the smoothed geodesic path by creating new vertices for each point on the path, and updating the
triangles that are connected to the path and that fall on the right of the path to contain the new path vertices.
- up - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- UP - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- UP - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
The up arrow key.
- UP_EXP - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET.BitSetUtility
-
- upButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- upButton - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- UpButton(String) - Constructor for class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.UpButton
-
Creates new button with correct icon and given tool tip.
- UpButton(String) - Constructor for class gov.nih.mipav.view.renderer.J3D.JPanelCamera.UpButton
-
Creates new button with correct icon and given tool tip.
- UpButton(String) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.UpButton
-
Creates new button with correct icon and given tool tip.
- upcoef(boolean, double[], PyWavelets.DiscreteWavelet, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- upcoef(char, double[], PyWavelets.DiscreteWavelet, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- UPCOQ1(int, int, int, int, int, double, double[], double[], double[], double[], double[], double[], double[], double[], double[], int[], int[], double[], double[], int, double[], double[], double[], double[][], double[], int, boolean[], boolean[], int[], int[], boolean[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- update() - Method in class gov.nih.mipav.model.algorithms.levelset.LsePdeFilter
-
The entry point to updating the PDE solver.
- update() - Method in class gov.nih.mipav.model.structures.VOI
-
- update() - Method in class gov.nih.mipav.model.structures.VOIBase
-
The contour has changed, set the update flags so statistics are recalculated when needed.
- update() - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- update() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
- update() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Causes the labels to be redrawn:.
- update() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Sculptor
-
DOCUMENT ME!
- update() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.TextureSculptor
-
Update the underlying volume and rerender.
- update() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
Update the underlying volume and rerender.
- update() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Redisplay histoLUT.
- update() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Update the representation of the current viewpoint in the Volume Tri-Planar renderer.
- update() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
Calls update display on the 2D Histogram class.
- update() - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Method to call paint without erasing background this reduces flicker!
- update() - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Method to call paint without erasing background this reduces flicker!
- update() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Method to call paint without erasing background this reduces flicker!
- update() - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Method to call paint without erasing background this reduces flicker!
- update() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Redisplays histoLUT.
- update() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Redisplay histoLUT.
- update(boolean) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
- update(boolean) - Method in interface gov.nih.mipav.view.renderer.ViewJComponentVolOpacityListener
-
- update(float[][], float[][], int) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Updates the graph by changing the plot to the desired new 3 functions (RGB).
- update(float[], float[], int) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Updates the graph by changing the plot to the desired new function / intensity plot.
- update(float, float, int, int) - Method in class gov.nih.mipav.model.structures.DijkstraCostItem
-
Mark this node as being visited along the minimum cost path if not already done so, but only if the point has not
been marked as having its distance finalized.
- update(int, float) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
If an edge weight changes for an edge whose heap element is interior to the heap tree, the heap must be updated.
- update(int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
- update(LseMinHeap.Record, float) - Method in class gov.nih.mipav.model.algorithms.levelset.LseMinHeap
-
The value of a heap record must be modified through this function call.
- update(Observable, Object) - Method in interface gov.nih.mipav.model.util.Observer
-
This method was called whenever the observed object is changed.
- update(Face) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PointerUpdater
-
- update(Graphics) - Method in class gov.nih.mipav.view.ColorWheel
-
Calls paint without erasing background - this reduces flicker!
- update(Graphics) - Method in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Override for Canvas3D method which uses the paint callback to track when it is possible to render into the canvas
but makes sure that the default Toolkit's graphics state is synchronized just in case the window system has
buffered graphics events.
- update(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentAnimate
-
Method to call paint without erasing background this reduces flicker!
- update(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Method to call paint without erasing background this reduces flicker!
- update(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentBase
-
Calls paint without erasing background - this reduces flicker!
- update(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Method to call paint without erasing background this reduces flicker!
- update(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Method to call paint without erasing background this reduces flicker!
- update(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentGraph
-
Calls paint.
- update(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
Calls paint.
- update(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentLUT
-
Calls paintComponent - reduces flicker.
- update(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentLUTTable
-
Calls paintComponent - reduces flicker.
- update(Graphics) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Calls paintComponent - reduces flicker.
- update(Graphics) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Calls paint instead of erasing.
- update(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
- update(ColorRGBA) - Method in class gov.nih.mipav.model.structures.VOIBase
-
Set the color of this contour.
- update(ColorRGBA) - Method in class gov.nih.mipav.model.structures.VOIText
-
- update(ColorRGBA) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Set the color of the VolumeVOI object.
- update(Vector3f) - Method in class gov.nih.mipav.model.structures.VOIBase
-
The contour has been translated, this function translates the
geometric center and bounding-box so they don't need to be recalculated.
- Update() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- Update(CeresSolver.LinearOperator, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Preconditioner
-
- Update(CeresSolver.LinearOperator, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TypedPreconditioner
-
- Update(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMOptimize
-
function used to update e.g. interface
- Update(CDVector) - Method in interface gov.nih.mipav.view.renderer.WildMagic.AAM.CDOptimizeFuncBase
-
function used to update e.g. interface
- Update(Vector<Double>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- Update(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- update_alpha_status(int) - Method in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- update_alpha_status(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- update_box(libjpeg.jpeg_decompress_struct, libjpeg.box) - Method in class gov.nih.mipav.model.file.libjpeg
-
- update_gradient(SIFT.VlSiftFilt) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- update_point(NelderMead.simplex_t, NelderMead.point_t, double, NelderMead.point_t) - Method in class gov.nih.mipav.model.algorithms.NelderMead
-
- update_saturation_mask - Variable in class gov.nih.mipav.model.algorithms.BlindDeblur
-
- update_state_every_iteration - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- update_state_every_iteration - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- update2(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Compute the coefficient of the surface normal for the update of the mesh vertex V[i] in the SNormal[i] direction.
- update2(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Compute the coefficient of the surface normal for the update of the mesh vertex V[i] in the SNormal[i] direction.
- update2(int) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Compute the coefficient of the surface normal for the update of the mesh vertex V[i] in the SNormal[i] direction.
- update2(int, float[], float, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Compute the coefficient of the surface normal for the update of the mesh vertex V[i] in the SNormal[i] direction.
- update3(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
Compute the coefficient of the vertex normal for the update of the mesh vertex V[i] in the VNormal[i] direction.
- update3(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
Compute the coefficient of the vertex normal for the update of the mesh vertex V[i] in the VNormal[i] direction.
- update3DTriplanar(ModelLUT, ModelLUT, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
This methods calls the componentImage's update method to redraw the screen.
- update4D() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Go to the next 3D volume sub-image for the 4D animation.
- update4D(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Updates the current time slice.
- update4D(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- update4D(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- update4DVOIs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- update4DVOIs(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- updateABBlend() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
update blending between images A/B.
- updateActive() - Method in class gov.nih.mipav.model.structures.VOI
-
- updateAnnotation(VOIText) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- updateAnnotation(VOIWormAnnotation) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- updateAnnotationListeners() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Updates the list of listeners that the annotations have
changed.
- updateBiasFieldEstimate(double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- UpdateBlockDiagonalEtE(CeresSolver.BlockSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- UpdateBlockDiagonalFtF(CeresSolver.BlockSparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.PartitionedMatrixView
-
- updateBoneBG(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Update the yellow sphere's tranlation component with the given x, y, z coordinates.
- updateBorderColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the color of the image borders.
- updateBorderSize(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the image border size and then updates light box.
- updateBoundingCube - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- updateBox - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.TagInputListener
-
- updateBoxInput() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.TagInputListener
-
- updateBoxSlicePos(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Update the X, Y, Z box frame positions.
- updateBoxSlices() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Sets new frame around slice x based on the new position.
- updateBulbs(int) - Method in class gov.nih.mipav.view.ViewTableModel
-
Updates the bulbs.
- updateBurnList(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Updates the burn name list's selected element.
- updateButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
continue update button.
- updateButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
continue update button.
- updateCamera() - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
Update the camera location and view direction.
- UpdateCanonicalViewAssignments(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
-
- updateCenter(Vector3f) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
- updateCenterOnDisplay() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- updateCenterXY(float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
- updateCheckBox - Variable in class gov.nih.mipav.view.JPanelHistogram
-
enables the user to set updating the display in real-time or only on mouse-release
- updateCheckBoxA - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- updateCheckBoxA - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- updateCheckBoxB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- updateCheckBoxB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
DOCUMENT ME!
- updateClipPlanesEqn() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Upadate six clipping planes' plane equation.
- updateClipSlice() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Update clipping planes.
- updateClipSliceA() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets new frame around arbitrary clip plane slice based on the new position.
- updateClipSliceAwithRotate(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Update arbitrary clip plane's transform.
- updateClipSliceStatic() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets new frame around clip plane slice -z based on the new position.
- updateClipSliceStaticInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets new frame around clip plane slice -z based on the new position.
- updateClipSliceX() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets new frame around clip plane slice x based on the new position.
- updateClipSliceXInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets new frame around clip plane slice -x based on the new position.
- updateClipSliceY() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets new frame around clip plane slice y based on the new position.
- updateClipSliceYInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets new frame around clip plane slice -y based on the new position.
- updateClipSliceZ() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets new frame around clip plane slice z based on the new position.
- updateClipSliceZInv() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Sets new frame around clip plane slice -z based on the new position.
- UpdateColor() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Updates the color in the GLSL shader program used to render the ClassificationWidget.
- updateColorButton(float[], float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JInterfaceBase
-
- updateColorButton(float[], float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- updateColors() - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
Helper method to update the colors if the color scheme is changed.
- updateComboBoxImage() - Method in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- updateComponentLUT() - Method in interface gov.nih.mipav.view.HistoLUTParent
-
Redraw the componentLUT.
- updateComponentLUT() - Method in class gov.nih.mipav.view.JPanelHistogram
-
- updateComponentLUT() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
update the LUT and images.
- updateComponentLUT() - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Placeholder.
- updateComponentLUT() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Placeholder.
- updateComponentLUT() - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Redraw the componentLUT.
- updateComponentLUT() - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Placeholder.
- updateContour(VOIContour, VOI, String[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- updateContourPane(VOIBase) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- updateControlPointSamples(int, int) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Update the registered source image and the computed error as a result of making changes to a single control
point.
- updateControlPointSamples(int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Update the registered source image and the computed error as a result of making changes to a single control
point.
- updateCRC(int) - Method in class gov.nih.mipav.model.file.CRC
-
- updateCrop(int, Vector2f) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Updates the crop bounding volume when a point on the crop bounding box is dragged with the mouse.
- updateCrosshairPosition(int, int) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Changes the crosshair coordinate (screen coordinate) that this component should display.
- updateCrossSection(boolean, boolean, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- updateCrossSection(boolean, boolean, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- updateCubicTransform(double[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Update the transform3D for the cubic.
- updateCubicTransform(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Update the transform3D for the cubic.
- updateCubicTransform(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Update the transform3D for the cubic.
- updateCurrentColorWheel() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
update current color wheel
- updateCurrentColorWheel() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
update current color wheel
- updateCurrentGroup() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
Updates the number of fiber bundle tract groups.
- updateCursor(float, float, int) - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Update the cursor position when mouse slider is moved.
- updateCursorXPos(float) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Update the cursor position when mouse slider is moved.
- updateCursorXPos(float, float, int) - Method in class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Update the cursor position when mouse slider is moved.
- updateCurveListeners() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- updateData() - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Causes new data to be loaded from the ModelImage into the textures and
redisplayed on the texture-mapped polygon:
- updateData() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Called when the underlying data has changed, due to sculpting.
- updateData() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Called when the underlying data has changed, due to sculpting.
- updateData() - Method in interface gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterfaceListener
-
- updateData() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Causes the PlaneRender objects to update the texture maps when the underlying ModelImage changes.
- updateData() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Causes the VolumeShader to update the copy of the ModelImage on the GPU.
- updateData() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
- updateData() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
- updateData() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- updateData() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- updateData(Geometry) - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
This method is required for an implementor of the GeometryUpdater interface.
- UpdateData(ModelImage, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Update the image data.
- UpdateData(ModelImage, int, ModelImage, GraphicsImage, Texture, String, boolean, boolean) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
When a ModelImage changes on the CPU, this function is used to update the ModelImage
data on the CPU.
- UpdateData(ModelImage, ModelLUT, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Changes the underlying image data and LUT.
- UpdateData(ModelSimpleImage, String) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Creates a new GraphicsImage for the input ModelSimpleImage.
- updateDefField(int[]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- updateDialog() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Method for updating the GUI after the algorithm has completed, should not be called when scripting.
- updateDialogRow(VOI, Vector<VOIBase>[], VOIStatisticalProperties, ListModel, int, String[], String[]) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Writes the statistic data for contours
- updateDICOM() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Update special case DICOM format tags.
- updateDirection(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current direction of the light.
- updateDisplay() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
Causes re-display.
- updateDisplay() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
- updateDisplay() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Updates the ShaderEffect parameters for this widget.
- updateDisplay() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
- updateDisplay() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
- updateDisplay() - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called from VOIManager.
- updateDistUnvisited(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.BranchState
-
Update the range of normalized path distances that have not been visited.
- updateDistUnvisited(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.BranchState
-
Update the range of normalized path distances that have not been visited.
- updateDistUnvisited(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.BranchState
-
Update the range of normalized path distances that have not been
visited.
- updateDualThreshold(float, float) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Updates the corresponding points for the threshold (transfer line).
- updateEllipseModel(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- updateEndianess() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Updates the image endianess.
- updateEntryPointBG(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Update the green sphere's translation component with the given x, y, z coordinate.
- updateFFTFileInfo(ModelImage, ModelImage, int) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Copy important file information to resultant image structure.
- updateField - Variable in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector.TagInputListener
-
- updateFileInfo() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
Copy important file information to resultant image structure.
- updateFileInfo(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
Copy important file information to resultant image structure.
- updateFileInfo(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
Copy important file information to resultant image structure.
- updateFileInfo(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
Copy important file information to resultant image structure.
- updateFileInfo(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmIndependentComponents
-
Copy important file information to resultant image structure.
- updateFileInfo(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPrincipalComponents
-
Copy important file information to resultant image structure.
- updateFileInfo(ModelImage, ModelImage) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmAddMargins
-
Updates the fileInfo values for the kWrite image, uses the fileInfo values from kRead.
- updateFileInfo(ModelImage, ModelImage) - Static method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Copy important file information to resultant image structure.
- updateFileInfo(ModelImage, ModelImage) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Copy important file information to resultant image structure.
- updateFileInfo(ModelImage, ModelImage, float[], int[], TransMatrix, boolean, AlgorithmBase) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Copy important file information to resultant image structure.
- updateFileInfo(ModelImage, ModelImage, int) - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
Copy important file information to resultant image structure.
- updateFileInfo(ModelImage, ModelImage, int[], boolean[], ViewJProgressBar, int, int) - Static method in class gov.nih.mipav.model.structures.ModelImage
-
- updateFileInfoData() - Method in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Updates important image attributes (start locations, orientation ) for the new cropped file by modifing the
fileinfo fo the new ( destination ) image.
- updateFileInfoOtherModality(ModelImage, ModelImage) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Copy important file information to resultant image structure.
- updateFileInfos(FileInfoAnalyze) - Method in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Propogates the current file info to another FileInfoAnalyze except for the 3 start locations kept in funused1,
funused2, funused3.
- updateFileInfos(FileInfoMGH) - Method in class gov.nih.mipav.model.file.FileInfoMGH
-
Propogates the current file info to another FileInfoMGH.
- updateFileInfos(FileInfoNIFTI) - Method in class gov.nih.mipav.model.file.FileInfoNIFTI
-
Propogates the current file info to another FileInfoNIFTI.
- updateFileInfos(FileInfoSiemensText) - Method in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Propogates the current file info to another FileInfoSiemensText except for the 3 start locations kept in funused1,
funused2, funused3.
- updateFileInfos(FileInfoSPM) - Method in class gov.nih.mipav.model.file.FileInfoSPM
-
Propogates the current file info to another FileInfoSPM except for the 3 start locations kept in funused1,
funused2, funused3.
- updateFileInfos(FileInfoXML) - Method in class gov.nih.mipav.model.file.FileInfoImageXML
-
Used to propogate all fileInfoXML private variables to other fileinfos.
- updateFileInfos(FileInfoXML) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceRefXML
-
Used to propogate all FileInfoSurfaceRefXML private variables to other FileInfosSurfaceRefXML.
- updateFileInfos(FileInfoXML) - Method in class gov.nih.mipav.model.file.FileInfoSurfaceXML
-
Used to propogate all FileInfoSurfaceXML private variables to other FileInfosSurfaceXML.
- updateFileInfos(FileInfoXML) - Method in class gov.nih.mipav.model.file.FileInfoXML
-
Used to propogate all fileInfoXML private variables to other fileinfos.
- updateFileInfos(FileInfoXML) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceRefXML_J3D
-
Used to propogate all FileInfoSurfaceRefXML private variables to other FileInfosSurfaceRefXML.
- updateFileInfos(FileInfoXML) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileInfoSurfaceXML_J3D
-
Used to propogate all FileInfoSurfaceXML private variables to other FileInfosSurfaceXML.
- updateFileInfos(FileInfoXML) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceGiftiXML_WM
-
Used to propagate all FileInfoSurfaceRefXML private variables to other FileInfosSurfaceRefXML.
- updateFileInfos(FileInfoXML) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileInfoSurfaceRefXML_WM
-
Used to propagate all FileInfoSurfaceRefXML private variables to other FileInfosSurfaceRefXML.
- updateFileInfoStatic(FileInfoBase, ModelImage) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Copy important file information between ModelImage structures,
assuming all slices have same properties (uses only the first slice from
the source).
- updateFileInfoStatic(ModelImage, ModelImage) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Copy important file information to resultant image structure.
- updateFileName(String) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Give the image a new image name, updates frame (if not null), and file infos.
- updateFileTypeInfo(ModelImage, int) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Copy important file information to resultant image structure, including data type.
- updateFileTypeInfo(ModelImage, ModelImage, int) - Static method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Copy important file information to resultant image structure, including data type.
- updateFittedFunctions() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Deprecated.
- UpdateFlags - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- UpdateFlags() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags
-
- UpdateFlags.EdgeSorter - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- updateFonts(VOIText) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- updateFrame(float, float) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- updateFrame(float, float) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- updateFrame(float, float) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- updateFrame(float, float) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- updateFrame(float, float) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Updates the this frame's size the components sizes.
- updateFrame(float, float) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Updates the this frame's size the compnents sizes.
- updateFrame(float, float) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- updateFrame(float, float) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- updateFrame(float, float, int, int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
public void updateFrame(float xZoom, float yZoom, int x, int y) This method is called when the user is zooming in
or out.
- UpdateFrameCount() - Method in class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Update frame count
- UpdateFrameCount() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Update frame count
- updateFrames(boolean) - Method in interface gov.nih.mipav.view.HistoLUTParent
-
Update all of the image frames that display the image this histo lut is for.
- updateFrames(boolean) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- updateFrames(boolean) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- updateFrames(boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Update all of the image frames that display the image this histo lut is for.
- updateFrames(boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Update all of the image frames that display the image this histo lut is for.
- updateFrames(boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Update registration frames.
- updateFrames(boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Update all of the image frames that display the image this histo lut is for.
- updateFrames(boolean) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Update all of the image frames that display the image this histo lut is for.
- updateFrames(boolean) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Update all of the image frames that display the image this histo lut is for.
- updateFrames(boolean, int) - Method in class gov.nih.mipav.view.ViewControlsImage
-
Calls ModelImage's updateFrames method.
- updateFromCoarseOptimization(double) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- updateFromFile(String) - Method in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- updateGpuUsage() - Method in class gov.nih.mipav.view.ViewUserInterface
-
This method updates the "whether algorithms will use the GPU" when the relevant button has been pushed in either
the preferences pane.
- updateGraph(VOIBase, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Called from the VOIManager when the VOIBase that is currently being graphed has changed.
- updateGridColor(Color) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the background color of the panel that is in the scrollpane.
- updateGridColumn(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This method is called when there is a change to the light box column number verifies that the width value is
within bounds.
- updateGridRow(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This method is called when there is a change to the light box row number and then updates light box.
- updateGridSpacing(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Set the distance between adjacent images and updates light box. verifies that the width value is within bounds.
- updateHelp(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelMultiDimensionalTransfer
-
- updateHistograms(VabraVolumeCollection, VabraVolumeCollection, int[]) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- updateHistoLUT(ModelImage, ModelLUT, ModelImage, ModelLUT, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This method is called to update the histogram(s) displayed in each tabbed pane of the frame.
- updateHistoLUT(ModelImage, ModelLUT, ModelImage, ModelLUT, boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
This method is called to update the histogram(s) displayed in each tabbed pane of the frame.
- updateHistoLUT(ModelImage, ModelLUT, ModelImage, ModelLUT, boolean) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
This method is called to update the histogram(s) displayed in each tabbed pane of the frame.
- updateHistoLUTFrame() - Method in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Displays histoLUT frame for a gray scale image.
- updateHistoLUTFrame() - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Displays histoLUT frame for a gray scale image.
- updateHistoLUTFrame(int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Deprecated.
- updateHistoLUTFrame(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Deprecated.
- updateHistoLUTFrame(int, ViewJComponentEditImage) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Deprecated.
- updateHistoLUTPanels(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Creates or updates the histogram / LUT panel and opacity panels when a new image is loaded.
- updateHistoRGB(ModelImage, ModelImage, boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
This method is called to update the histogram(s) displayed in each tabbed pane of the frame.
- updateHistoRGB(ModelImage, ModelImage, boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
This method is called to update the histogram(s) displayed in each tabbed pane of the frame.
- updateHistoRGBFrame(int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Deprecated.
- updateHistoRGBFrame(int, ViewJComponentEditImage) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Deprecated.
- updateImage - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- updateImage() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
This methods calls the componentImage's update method to redraw the screen.
- updateImage(int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- updateImage(int, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
This methods calls the componentImage's update method to repaint the screen.
- updateImage(int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This methods calls the componentImage's update method to repaint the screen.
- upDateImage(float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- upDateImage3D(float[], float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
DOCUMENT ME!
- updateImageBorder(int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
This methods updates the image border for a single slice.
- updateImageBorder(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This methods updates the image border for a single slice.
- updateImageBorders() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
This method updates all the image borders for a page.
- updateImageBorders() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This method updates all the image borders for a page.
- updateImageExtents() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
update image extents
- updateImageExtents() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- updateImageExtents() - Method in class gov.nih.mipav.view.JFrameHistogram
-
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
updateImageExtents.
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
updateImageExtents.
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
ViewImageUpdateInterface, unused here.
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
DOCUMENT ME!
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
(Part of ViewImageUpdateInterface) This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Update image extends from the ModelImage.
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
update image extents
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- updateImageExtents() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- updateImageExtents() - Method in interface gov.nih.mipav.view.ViewImageUpdateInterface
-
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameBase
-
The extents on this image have changed, so the extents need to be read in again and menus, panes and slide bars
adjusted accordingly.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
(Part of ViewImageUpdateInterface) This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Do nothing - required by ViewJFrameBase.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Do nothing - required by ViewJFrameBase.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImageExtents() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Do nothing - required by ViewJFrameBase.
- updateImageFromRotation() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Build a image with the current rotational transformation matrix.
- updateImageFromRotation() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Build a image with the current rotational transformation matrix.
- updateImageFromRotation() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Build a image with the current rotational transformation matrix.
- updateImageModality() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Updates the image modality.
- updateImageOrientation() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Updates the image orientation.
- updateImageOrigin(TransMatrix) - Method in class gov.nih.mipav.model.structures.ModelImage
-
Updates the images origin.
- updateImages() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
update images
- updateImages() - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- updateImages() - Method in class gov.nih.mipav.view.JFrameHistogram
-
- updateImages() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
updateImages.
- updateImages() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
updateImages.
- updateImages() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
ViewImageUpdateInterface, unused here.
- updateImages() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
This methods calls the componentImage's update method to redraw the screen - fastest of the three update methods.
- updateImages() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Update images in surface render, raycast render and shearwarp render.
- updateImages() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
This methods calls the componentImage's update method to redraw the screen - fastest of the three update methods.
- updateImages() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
This methods calls the componentImage's update method to redraw the screen - fastest of the three update methods.
- updateImages() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
This methods calls the componentImage's update method to repaint the screen.
- updateImages() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Update images in surface render, raycast render and shearwarp render.
- updateImages() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
This methods calls the componentImage's update method to redraw the screen - fastest of the three update methods.
- updateImages() - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
- updateImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
update images
- updateImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- updateImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- updateImages() - Method in interface gov.nih.mipav.view.ViewImageUpdateInterface
-
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
This methods calls the componentImage's REPAINT method to redraw the screen.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
This methods calls the componentImage's update method to redraw the screen - fastest of the three update methods.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This methods calls the componentImage's update method to repaint the screen.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
This methods calls the componentImage's update method to redraw the
screen.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
This methods calls the componentImage's update method to redraw the
screen.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
This methods calls the componentImage's update method to redraw the screen - fastest of the three update methods.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
update images
- updateImages(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- updateImages(boolean) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
updateImages.
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
updateImages.
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
ViewImageUpdateInterface, unused here.
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
This methods calls corresponding render to update images without LUT changes.
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
This methods calls corresponding render to update images without LUT changes.
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
update images
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- updateImages(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- updateImages(boolean) - Method in interface gov.nih.mipav.view.ViewImageUpdateInterface
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
This methods calls the componentImage's update method to redraw the
screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
This methods calls the componentImage's update method to redraw the
screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Calls the componentImage's update method to redraw the screen.
- updateImages(boolean) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
This methods calls the componentImage's update method to redraw the
screen.
- updateImages(boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
This methods calls the componentImage's update method to redraw the
screen.
- updateImages(boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
update images
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.JPanelBrainSurfaceFlattener
-
updateImages.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalAnalysis
-
updateImages.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
updateImages, called when the ModelLUT changes.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
This methods calls corresponding render to update images with LUT changes.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
This methods calls corresponding render to update images with LUT changes.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.JPanelBrainSurfaceFlattener_WM
-
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
update images
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurfaceTexture_WM
-
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
This methods calls corresponding render to update images with LUT changes.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in interface gov.nih.mipav.view.ViewImageUpdateInterface
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
This methods calls the componentImage's update method to redraw the
screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
This methods calls the componentImage's update method to redraw the
screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
This methods calls the componentImage's update method to redraw the screen.
- updateImages(ModelLUT, ModelLUT, boolean, int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
This methods calls the componentImage's update method to redraw the screen.
- UpdateImages(ModelImage, Texture, GraphicsImage, TransferFunction) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Called when the opacity transfer function changes.
- UpdateImages(ModelLUT) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Update the LUT for the ModelImage.
- UpdateImages(ModelStorageBase) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Update the LUT for the ModelImage.
- UpdateImages(TransferFunction, int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Update the transfer function for the image iImage.
- UpdateImages(Texture, GraphicsImage, ModelLUT) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
When the LUT changes, this function updates the LUT data on the GPU.
- UpdateImages2(ModelImage, Texture, GraphicsImage, TransferFunction) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Update the opacity transfer function.
- updateImageSelection(int, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Updates the image selection list by toggling the selection of the Z(3rd dimension) plane and the time (4th
dimesion) volume.
- updateImageSelection(int, boolean) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Updates the image selection list by toggling the selection of the Z(3rd dimension) plane and the time (4th
dimesion) volume.
- updateImageSlice(int, int) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Updates the Z(3rd dimension) plane and the time (4th dimesion) volume.
- updateImageSlice(int, int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Updates the Z(3rd dimension) plane and the time (4th dimesion) volume.
- updateImageSubset(ViewJComponentTriImage) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
DOCUMENT ME!
- updateImageSubset(ViewJComponentTriImage) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
DOCUMENT ME!
- updateImageSubset(ViewJComponentTriImage) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
DOCUMENT ME!
- UpdateImpl(CeresSolver.BlockSparseMatrix, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobiPreconditioner
-
- UpdateImpl(CeresSolver.BlockSparseMatrix, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurJacobiPreconditioner
-
- UpdateImpl(CeresSolver.SparseMatrix, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrixPreconditionerWrapper
-
- UpdateImpl(MatrixType, double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TypedPreconditioner
-
- updateIncrement(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the increment between displayed slices and updates the light box.
- updateInterpolation() - Method in class gov.nih.mipav.view.JFrameHistogram
-
updates the interpolation mode for the images.
- updateLattice(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Updates the lattice data structures for rendering whenever the user changes the lattice.
- updateLattice(boolean, VOIWormAnnotation, VOIWormAnnotation) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- updateLattice(boolean, VOIWormAnnotation, VOIWormAnnotation) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- updateLatticeListeners() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- updateLayout() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Changes the layout of the light box (i.e. row or col) 1. reset the layout 2. reset the size of panel and pane 3.
- updateLayout() - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
This method should be called whenever the layout of the tri-images has changed.
- updateLegendColorScheme(ContourPlot.Renderer) - Method in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- updateLengthTags(HashMap<Integer, FileInfoDicom.LengthStorageUnit>) - Method in class gov.nih.mipav.model.file.FileInfoDicom
-
- updateLev() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Updates the scene graph after a new list of widgets is added.
- updateLevWidgetState() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- updateLevWidgetState(Vector<ClassificationWidget>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
- updateLevWidgetState(Vector<ClassificationWidget>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
- updateLevWidgetState(Vector<ClassificationWidget>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- updateLevWidgetState(Vector<ClassificationWidget>) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- updateLevWidgetState(Vector<ClassificationWidget>) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- updateLightBoxLocation(String) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Gets the string from the preferences and verifies the upper-left-hand verifies the upper-left-hand corner is
within the screen boundaries.
- updateLighting() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
This method is normally called by JPanelLights when a light bulb property changes.
- updateLighting() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
This method is normally called by JPanelLights when a light bulb property changes.
- updateLighting() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Setup the specified set of lights to use for rendering.
- updateLighting(SoftwareLightSet, SoftwareMaterial) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Setup the specified set of lights to use for rendering.
- updateLighting(Light[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.CorticalAnalysisRender
-
Called from JPanelLight.
- updateLighting(Light[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- updateLighting(Light[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Called from JPanelLight.
- updateLighting(Light[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.SurfaceMaterialDisplay
-
Called from JPanelLight.
- updateLighting(Light[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- updateLinks() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Updates the lattice data structures on undo/redo.
- UpdateLocalParameterizationJacobian() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- updateLowerSliderValues() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Update the lower threshold slider labels and values.
- updateLut(ModelLUT, ModelLUT) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Causes the data to be redrawn with new LUT values:
- updateLUT(ModelLUT) - Method in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Switching the different types of LUT view invoke this method to update the the LUT view.
- updateLUTPositionString(String) - Method in interface gov.nih.mipav.view.HistoLUTParent
-
Sets the position string in the LUT text field.
- updateLUTPositionString(String) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- updateLUTPositionString(String) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Sets the position string in the LUT text field.
- updateLUTPositionString(String) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Placeholder.
- updateLUTPositionString(String) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
- updateLUTPositionString(String) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Placeholder.
- updateLUTPositionString(String) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Sets the position string in the LUT text field.
- updateLUTPositionString(String) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Placeholder.
- updateLUTRecorder() - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Update the LUT recorder table transfer function.
- updateLUTRecorder(ModelLUT) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Update the LUT table of LUTRecorder.
- updateMagnification(int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Sets the magnification of the images and then updates light box.
- updateManager(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- updateMask() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- updateMatrixBox(boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Refreshes the matrix combo box with the list of available matrices within the image.
- updateMatrixFields(TransMatrix) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Updates the matrix fields (transform ID, jtextfields).
- updateMatrixInfo() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Updates the image with the new Matrix information (for matrix replacement).
- updateMemoryUsage() - Method in class gov.nih.mipav.view.ViewUserInterface
-
This method is a callback method.
- updateMenubar() - Method in class gov.nih.mipav.view.ViewJFrameImage
-
This method updates the menubar; ie: after an image has been opened.
- updateMenuBar() - Method in class gov.nih.mipav.view.dialogs.JDialogUninstallPlugin
-
- updateMesh() - Method in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
The heart of the segmentation.
- updateMesh() - Method in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
The heart of the segmentation.
- updateMesh() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
The heart of the segmentation.
- updateMesh(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.brainflattenerview_WM.MjCorticalMesh_WM
-
- updateMesh(HashMap, Vector3f[], Vector3f[], UnorderedSetInt[], Vector3f[], Vector3f[], float[], float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
The heart of the segmentation.
- updateMessage(String) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
- updateModifyDialog() - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Updates fields of the Modify Graph Dialog which may have changed due to things such as adding/deleting functions.
- updateMultiCoreUsage() - Method in class gov.nih.mipav.view.ViewUserInterface
-
This method updates the "whether multi-core should be used" button when the relevant button has been pushed in
either the preferences pane.
- updateMultihistoTab(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Update the multi-histogram tab when the MultiHistogram checkbox is checked in the renderMode panel.
- updateNeurite(String, String[], ColorRGB) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- updateNeurites() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- updateNode(ScriptTreeNode, String) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
***************************************************************************************************** Methods to
handle tree behavior*********************************************************************************************
******** updateNode, called when a node text needs to be changed.
- updateOpacity(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Not used at the moment.
- updateOpacity(int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Not used at the moment.
- updateOpacityOfOthrogPlanes(int, int, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Updates the 3 orthogonal 2D texture maps' opacities.
- updateOrientation(FlyPathBehavior) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Update the appropriate controls based on the current settings of the orientation-based information in the
FlyPathBehavior instance.
- updateOrientation(Matrix3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Update the appropriate controls based on the current settings of the orientation-based information in the
FlyPathBehavior instance.
- updateOrigin - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
DOCUMENT ME!
- updateOrigin() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Translate the image origin from image space to patient space (scanner space).
- updateOrigin(TransMatrix) - Static method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Update origin.
- updateOriginCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- updateOriginInfo() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Updates the origin.
- updateOriginInfo(FileInfoImageXML[]) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Updates the start locations.
- updateOriginMargins() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Update origin to reflect padding.
- updateOriginMargins2D() - Method in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Update origin to reflect padding.
- updateorigins(FileInfoBase[]) - Method in class gov.nih.mipav.model.file.FileMetaImage
-
Updates the start locations.
- updateorigins(FileInfoBase[]) - Method in class gov.nih.mipav.model.file.FileMGH
-
Updates the start locations.
- updateorigins(FileInfoBase[]) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Updates the start locations.
- updateorigins(FileInfoBase[]) - Method in class gov.nih.mipav.model.file.FileNRRD
-
Updates the start locations.
- updateP(int, float[], float, float[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
DOCUMENT ME!
- updatePagePanel() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Refill the page panel with imagePanelVector.
- updatePagingToolbar() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Enable or disable the buttons on the paging toolbar and the view menu items based on the current page and the
number of pages.
- updatePaint - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- updatePaint(BitSet) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
The purpose of this method is to set the paint bitmap so that it is the same for all 9 images.
- updatePaint(BitSet, boolean, boolean) - Method in interface gov.nih.mipav.view.PaintGrowListener
-
Causes the image to update its paint bit mask and redisplay itself.
- updatePaint(BitSet, boolean, boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Causes the image to update its paint bit mask and redisplay itself.
- updatePaintBitmap(boolean, int, int) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Updates the image volume's paint bitmap based on the current position of the mouse in the component, called after
a mouse action indicates the user wants part of the image either painted or erased.
- updatePaintBrushCursor() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Updates the Paint Cursor's BufferedImage with the correct color/opacity.
- updatePanel(int, int, int) - Method in class gov.nih.mipav.view.JPanelEditDate
-
self-verification of panel values, prior to requesting for checkFields.
- updatePanelLayout() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Updating frame panel layout.
- updateParameters(Matrix4f, Matrix4f, float, float, float[], float[], float, float[], float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.LineMinimizationEffect
-
- updateParent() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
- updateParent() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
- updatePlanes() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Causes the texture representation of all the surface meshes to be recalculated.
- updatePoint(double[], double, Vectornd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D
-
- updatePoint(double[], double, Vectornd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D
-
- updatePoint(double[], double, Vectornd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt2D
-
- updatePoint(double[], double, Vectornd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOpt3D
-
- updatePoint(double[], double, Vectornd) - Method in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
Store the optimal point and cost to v
- updatePointSet() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- UpdatePolygon() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- UpdatePolyStructure() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- UpdatePolyStructureToOrig() - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- updatePosition(FlyPathBehavior) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.JPanelVirtualEndoscopySetup
-
Update the appropriate controls based on the current settings of the position-based information in the
FlyPathBehavior instance.
- updatePosition(FlyPathBehavior_WM) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.JPanelVirtualEndoscopySetup_WM
-
Update the appropriate controls based on the current settings of the position-based information in the
FlyPathBehavior instance.
- updatePosition(Point3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Set the probe's translation.
- updateProbe(boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Updates the slice textures based on the Probe position and rotation angle.
- updateProbe(boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Updates the slice textures based on the Probe position and rotation angle.
- updateProbeList() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Update probe list.
- updateProbePos() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Not used now.
- updateProbePos() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Not used now.
- updateProbePos() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The navigation mode update the probe position in 3D texture volume.
- updateProbePos(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Updates the probe world coordinate from the tri-planar view's mouse drag event.
- UpdateQuadric(LODMesh.Quadric, LODMesh.Quadric) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Quadric
-
- updateQuickList() - Method in class gov.nih.mipav.view.ViewMenuBuilder
-
Updates the most recently opened images list (called when images are opened etc).
- updateR(int, float[], float, float[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
DOCUMENT ME!
- updateRaycastRender() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Update the raycast based renderer.
- updateRaycastRender() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Update the raycast based renderer.
- updateRealTime(boolean) - Method in class gov.nih.mipav.view.JFrameHistogram
-
Updates the interface behavior when the user choses to update
in real-time or on mouse release.
- updateRealTime(boolean) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- updateRectangle(int, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- updateRegistration(int, float) - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasure
-
Update the specified value in the registered source image.
- updateRegistration(int, float) - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureCorrelationRatio
-
Update the specified value in the registered source image.
- updateRegistration(int, float) - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureLeastSquares
-
Update the specified value in the registered source image.
- updateRegistration(int, float) - Method in class gov.nih.mipav.model.algorithms.registration.RegistrationMeasureNormalizedMutualInformation
-
Update the specified value in the registered source image.
- updateRenderedVolume(ViewJComponentRenderImage) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
This sequence causes the m_kVolumeRenderer to rerender the volume data, from the current ModelImage, not the data
that is stored in the Renderer.
- updateRenderer(Renderer, ModelLUT, TransferFunction, ViewJComponentVolOpacity, int, boolean, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Update the data for the intensity-based color mapped image.
- updateRenderer(Renderer, ModelRGB, JPanelVolumeOpacity, int, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
- updateRenderer(Renderer, ModelRGB, JPanelVolOpacityRGB, int, boolean, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RendererImageData
-
Deprecated.
- updateResolInfo() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Gives the image new resolutions.
- updateResolutionCorrection() - Method in class gov.nih.mipav.view.components.JPanelSigmas
-
Updates the resolution-corrected z-direction sigma label.
- updateResultImage(int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
After the target image with final segmented VOI.
- updateRGBIndex - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- updateRGBTA(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Causes the data to be redrawn with new RGBTA values:
- updateRGBTB(ModelRGB) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Causes the data to be redrawn with new RGBTA values:
- UpdateRhs() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ImplicitSchurComplement
-
- UpdateRhs(CeresSolver.Chunk, CeresSolver.BlockSparseMatrix, double[], int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SchurEliminator
-
- updateRotationRedline(Vector3f, Vector3f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Update the shape of the entry point rotation red line.
- updateRow() - Method in class gov.nih.mipav.view.DICOMDisplayer
-
Makes the row that's written into the next row available.
- updateRowsColumns(boolean, int, int) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
This method is called when there is a change to the light box setting for rows, columns, or row_dependency.
- updateRowStatistics(VOI, VOIStatisticalProperties, String[], String[], String, int) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Writes general statistics data for any VOI structure given a valid "end" modifier to specify
the property being fetched.
- updateSamples(int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration2Df
-
Update the registered source image and the computed error but only for the specified range of samples.
- updateSamplesMT(int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
- updateSamplesST(int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.registration.BSplineRegistration3Df
-
Update the registered source image and the computed error but only for the specified range of samples.
- updateScale(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Called by the volume surface render to update the mouse zoom transform.
- updateScene(Matrix3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- updateSceneNodePoint(String, Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Currently only being used to update the picking point
- UpdateSceneRotation() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Updates the displayed objects based on any user mouse rotation.
- UpdateSceneRotation() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- UpdateSceneRotation() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- updateScript(String) - Method in interface gov.nih.mipav.model.scripting.ScriptRecordingListener
-
Alerts the listener to a change in the text of the script currently being recorded.
- updateScript(String) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Alerts the listener to a change in the text of the script currently being recorded.
- updateScript(String) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Do nothing - required by ScriptRecordingListener interface.
- updateScripts(String) - Method in class gov.nih.mipav.view.ViewControlsImage
-
Invokes the toolbar builder to update the scripts combo box based on the new script directory.
- updateScripts(String) - Method in class gov.nih.mipav.view.ViewToolBarBuilder
-
Method to update the list of scripts in the scripting toolbar based on the directory name provided.
- updateSeamCount() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- updateSelected() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
Updates the VOI displaying which point (lattice or annotation) is currently selected when the selection changes.
- updateSelected(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- updateSelected(ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- updateSelectedPoint(Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- updateSelectedPoint(Color) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- updateShininess(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Update the shininess from the JPanelLights.
- updateShininess(float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Update the shininess from the JPanelLights.
- updateSkip() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpRenderer
-
After the compositing step in resampleSingle, the intensity (for gray scale) or alpha value (for color) might
become its maximum value.
- updateSlice(int) - Method in class gov.nih.mipav.view.PatientSlice
-
updates the slice value when the wheel is moved or the page_up, page_down keys are pressed.
- updateSlice(int) - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
updates the slice value when the wheel is moved or the page_up, page_down keys are pressed.
- UpdateSlice(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- updateSliceCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior
-
- updateSliceData() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Causes the PlaneRender objects to update the texture maps when the underlying ModelImage changes.
- updateSlicesCenter(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Update the bottom 3 planar view center
- updateSlicing(Vector3d) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Automatically call selectSlices with the correct axis (X, Y, or Z) and increasing/decreasing coordinate order
flag based on the specified view direction vector such that the slices are rendered back to front for the plane
which is most parallel to the view plane.
- updateSlider() - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- updateSlider(ViewJComponentVolOpacityBase) - Method in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Adjust the opacity slider for the minor opacity changes.
- updateSlider(ViewJComponentVolOpacityBase) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Adjust the opacity slider for the minor opacity changes.
- updateSlider(ViewJComponentVolOpacityBase) - Method in interface gov.nih.mipav.view.renderer.ViewJComponentVolOpacityListener
-
- updateSliders(int, int) - Method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Update the window, level sliders from CTPreset dialog.
- updateSliderValues() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Update the slider labels around the current intensityValue.
- updateSoftwareLights() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Get the current SoftwareLight instances from each of the GeneralLight instances -- for the world- and model-based
lights.
- updateSphere(TriMesh, float, float, float, ColorRGBA) - Static method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- updateSplineControlPoints() - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- updateStartLocations(FileInfoBase[]) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Updates the start locations.
- updateStartLocations(FileInfoBase[]) - Method in class gov.nih.mipav.model.file.FilePARREC
-
Updates the start locations.
- updateStatLog() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Method for updating the table after the algorithm has completed.
- updateStereo() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
Reads the left and right-eye buffers from the left and right-eye canvases and blends them into the Red-Cyan
Anaglyph stereo buffer, which is then texture-mapped on the a polygon and rendered in the stereo canvas.
- updateSurfaceNameList(int[]) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Called when surfaces are added or removed from the surfaceVector SurfaceAttributes list.
- updateSurfaceRender(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Updates the SurfaceRenderer.
- updateSurfaceTextureImage(BitSet, Color4f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
updateSurfaceTextureImage.
- updateSurRenderWinlevel(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Hack.
- updateTable() - Method in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
Refreshes the table by loading all shortcuts from ViewUserInterface's shortcut hashtable.
- updateTableSelection(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- updateTableSelection(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- updateTableSelection(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- updateTalairachInfo() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
updates the talairach transform info.
- updateTarget(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.GeneralLight
-
Set the current target of the light.
- updateTargetImage(int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
After auto segmentation, update the target image with corresponding
segmented VOIs.
- updateTargetImage(int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
After auto segmentation, update the target image with corresponding
segmented VOIs.
- updateTargetImage(int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
After auto segmentation, update the target image with corresponding
segmented VOIs.
- updateTargetImage(int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
After auto segmentation, update the target image with corresponding
segmented VOIs.
- updateTargetImage(int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
After auto segmentation, update the target image with corresponding
segmented VOIs.
- updateTargetImage(int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
After auto segmentation, update the target image with corresponding
segmented VOIs.
- updateTargetImage(int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
After auto segmentation, update the target image with corresponding
segmented VOIs.
- updateTargetImage(int, ModelImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
Copy the 2D slice segmented VOI to target image silce.
- updateTargetLabels() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Update the labels which show info about the current target surface.
- updateTargetList() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Update target surface list from the JPanelSurface control dialog.
- updateText() - Method in class gov.nih.mipav.model.structures.VOIText
-
- updateText() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- UpdateTextAction() - Constructor for class gov.nih.mipav.view.dialogs.JDialogAnnotation.UpdateTextAction
-
- updateTexture() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Updaes the ImageComponent3D data if the texture display is turned on.
- updateTextureVolumeRender() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Determine the current viewing transformation and pass it to the texture volume renderer so that it can update
itself.
- updateTextureVolumeRender() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Determine the current viewing transformation and pass it to the texture volume renderer so that it can update
itself.
- updateThresholdFields(float, float) - Method in interface gov.nih.mipav.view.HistoLUTParent
-
Method to update the threshold text fields when the lower or upper threshold changes.
- updateThresholdFields(float, float) - Method in class gov.nih.mipav.view.JPanelHistogram
-
- updateThresholdFields(float, float) - Method in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Method to update the threshold text fields when the lower or upper threshold changes.
- updateThresholdFields(float, float) - Method in class gov.nih.mipav.view.renderer.JPanelHistoRGB
-
Deprecated.
Placeholder.
- updateThresholdFields(float, float) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Method to update the threshold text fields when the lower or upper threshold changes.
- updateThresholdFields(float, float) - Method in class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Method to update the threshold text fields when the lower or upper threshold changes.
- updateThresholdFields(float, float) - Method in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Method to update the threshold text fields when the lower or upper threshold changes.
- updateTitle() - Method in class gov.nih.mipav.view.ViewFileChooserBase
-
Displays the current directory path in the title bar of JFileChooser.
- updateToolbarLayout() - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Updates the toolbar panel's layout based on the row dependcies.
- updateTransform() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Tells the mouse dialog that the transform has changed.
- updateTransform(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Tells the mouse dialog that the transform has changed.
- updateTransform(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Update transform from the surface volume render.
- updateTransformInfo(TransMatrix) - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
Applies the values in the JTabbedPane "Transform" to the transform matrix in the image.
- updateTransformMatrix(FileInfoPARREC, ModelImage) - Method in class gov.nih.mipav.model.file.FilePARREC
-
- updateTransformMatrix(ModelImage) - Method in class gov.nih.mipav.model.file.FileSpar
-
- updateTransFunc(TransferFunction) - Method in class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Load preset transfer function for the image.
- updateTransFunc(VOIContour) - Method in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- updateTranslate(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Called by the surface volume render to update the tranlation behavior.
- updateTreatmentPanel(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Update the treatment panel components to correpsond to the currently selected target surface.
- updateTree - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- updateTree - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- updateTree - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- updateTree() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- updateTree() - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- updateTree() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- updateUI() - Method in class gov.nih.mipav.view.JScrollMenu
-
- updateUnitsOfMeasure(FileInfoAnalyze, ModelImage) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Updates the units of Measure in the file info based on the voxUnits from an Analyze Header.
- updateUnitsOfMeasure(FileInfoPARREC, ModelImage) - Method in class gov.nih.mipav.model.file.FilePARREC
-
Updates the units of Measure in the file info based on the voxUnits from an Analyze Header.
- updateUnitsOfMeasure(FileInfoSPM) - Method in class gov.nih.mipav.model.file.FileSPM
-
updates the units of Measure in the file info based on the voxUnits from an SPM Header.
- updateUnitsOfMeasure(FileInfoSPM, ModelImage) - Method in class gov.nih.mipav.model.file.FileSPM
-
updates the units of Measure in the file info based on the voxUnits from an SPM Header.
- updateUpperSliderValues() - Method in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Update the upper threshold slider labels and values.
- updateValImmed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- updateValue(int) - Method in class gov.nih.mipav.view.JPanelProgressBar
-
Used to set the present value of the progress bar.
- updateValue(int) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Use this method if you are not running in a separate thread, or, you have already set the value of separateThread
through the setSeparateThread method.
- updateValue(int) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti.AlgoContainer
-
Updates this containers components based on the input value
- updateValue(int, boolean) - Method in class gov.nih.mipav.view.JPanelProgressBar
-
DOCUMENT ME!
- updateValue(int, boolean) - Method in interface gov.nih.mipav.view.ProgressBarInterface
-
public void updateValue( int value );
- updateValue(int, boolean) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Used to set the present value of the progress bar.
- updateValue(int, int) - Method in class gov.nih.mipav.view.ViewJProgressBarMulti
-
Update the specific algorithm's progress display
- updateValueImmed(int) - Method in class gov.nih.mipav.view.JPanelProgressBar
-
Used to set the present value of the progress bar.
- updateValueImmed(int) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Used to set the present value of the progress bar.
- updateVasculatureBG(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Update the blue sphere's translation component with the given x, y, z coordinate.
- updateView(int, Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
Call by the surface volume render to update transform changes.
- updateView(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Automatically call selectSlices with the correct axis (X, Y, or Z) and increasing/decreasing coordinate order
flag based on the specified view direction vector such that the slices are rendered back to front for the plane
which is most parallel to the view plane.
- updateView(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeVolumeTextureRender
-
Automatically call selectSlices with the correct axis (X, Y, or Z) and increasing/decreasing coordinate order
flag based on the specified view direction vector such that the slices are rendered back to front for the plane
which is most parallel to the view plane.
- updateViewScreenScale(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
This function calculates the scale factor for zooming in parallel
projection.
- updateViewScreenScale(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
This function calculates the scale factor for zooming in parallel projection.
- updateViewScreenScale(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
This function calculates the scale factor for zooming in parallel projection.
- updateViewScreenScale(Transform3D) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
This function calculates the scale factor for zooming in parallel projection.
- updateVOI(VOI, ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
Updates the dialog based on the VOI passed in.
- updateVOI(VOI, ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
Updates the dialog based on the VOI passed in.
- UpdateVOIEvent - Class in gov.nih.mipav.model.structures
-
presents an event to regard a changed VOI.
- UpdateVOIEvent(Object) - Constructor for class gov.nih.mipav.model.structures.UpdateVOIEvent
-
A basic updateVOIevent.
- UpdateVOIEvent(Object, VOI) - Constructor for class gov.nih.mipav.model.structures.UpdateVOIEvent
-
Creates a new UpdateVOIEvent object.
- UpdateVOIEvent(Object, VOI, VOIBase) - Constructor for class gov.nih.mipav.model.structures.UpdateVOIEvent
-
Creates a new UpdateVOIEvent object.
- updateVOIPanel(VOI, ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Updates the dialog based on the VOI passed in.
- updateVOIs() - Method in class gov.nih.mipav.model.structures.ModelImage
-
- updateVOIs() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- updateVOIs(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- updateVOIs(VOIVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- UpdateVOISelectionListener - Interface in gov.nih.mipav.model.structures
-
UpdateVOISelectionListener permits objects to listen for updates to a VOI.
- updateVolume(ModelLUT, ModelLUT, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
This methods calls the componentImage's update method to redraw the screen.
- updateVolume(ModelLUT, ModelLUT, boolean) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
This methods calls the componentImage's update method to redraw the screen.
- updateVolumeRenderClipPlane() - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Update the volume render's clip plane with all new positions.
- updateVolumeRenderer() - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelCustomBlend
-
- updateVolumeTexture(BitSet, Color4f) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Called from SurfacePaint.
- updateVoxelSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- updateWinlevel - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Update the window level flag, call by the plane renderer.
- updateWinLevel(float, float, boolean, ModelStorageBase, ModelImage) - Method in class gov.nih.mipav.view.WindowLevel
-
updateWinLevel updates the window-level for the input lookup table
based on two normalized parameters (fX, fY).
- updateWinLevel(int, int) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Update the window level sliders from the CT preset dialog.
- updateWinLevelGray(ModelLUT, ModelImage, float[], float[]) - Method in class gov.nih.mipav.view.WindowLevel
-
updateWinLevelGray, updates the ModelLUT with the new transfer
function.
- updateWinLevelRGB(ModelRGB, ModelImage, float[], float[]) - Method in class gov.nih.mipav.view.WindowLevel
-
updateWinLevelRGB, updates the ModelRGB with the new transfer
functions.
- updateX(int, float[], float, float[]) - Static method in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjSparseMatrix
-
DOCUMENT ME!
- updateXMLLinkedFile() - Method in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
method to update the xml file infos with a new linked image path.
- UpdateYSpaceAction() - Constructor for class gov.nih.mipav.view.dialogs.JDialogPointArea.UpdateYSpaceAction
-
- updatingFiberTrack - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
- upDirButton - Variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
DOCUMENT ME!
- upheap(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue
-
- UPJAC1(int, int, int, int[], int[], int[], double[], double[], double[], double[], int, int, int[], int[], int[], int[], double[], double[], double[], double[][], boolean[], boolean[], double, int[], double[], double[], double[], int[], boolean[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- uplo - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- upmethod - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- upper - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
DOCUMENT ME!
- upper - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel3
-
DOCUMENT ME!
- upper - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- upper - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.IntModel
-
- upper - Variable in class gov.nih.mipav.model.algorithms.Integration2
-
DOCUMENT ME!
- upper - Variable in class gov.nih.mipav.model.algorithms.Integration2EP
-
DOCUMENT ME!
- upper - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- upper - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- upper - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- upper_bound - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.ContinuousWavelet
-
- UPPER_BOUND - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- UPPER_BOUND - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- upper_bound_n - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver.SolutionInfo
-
- upper_bound_n - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver.SolutionInfo
-
- upper_bound_p - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver.SolutionInfo
-
- upper_bound_p - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver.SolutionInfo
-
- upper_bounds_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- UPPER_LEFT - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
- UPPER_MIDDLE - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
- UPPER_RIGHT - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
- UPPER_TRIANGULAR - gov.nih.mipav.model.algorithms.CeresSolver2.StorageType
-
- UpperBoundForParameter(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- upperDeltaSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Slider which adjusts the upper bound of the region grow.
- upperDeltaTF - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintVasculature
-
Text field containing the upper bound of the region grow.
- upperIncompleteGamma - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
- upperLeftCorner - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- upperLeftCorner - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
Whether, during "smart-thresholding", noise should be calculated from a given corner
- upperLeftCorner - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- upperLevel - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- upperLimit - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
held for switching between states of the exclusion.
- upperLimitB - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
- upperLimitG - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
- upperLimitR - Variable in class gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector
-
- upperMid - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upperMidB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upperMidG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upperMidR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upperRightCorner - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- upperRightCorner - Variable in class gov.nih.mipav.view.dialogs.JDialogTreMethod
-
- upperRightCorner - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- upperThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
handling of intensity threshold.
- upperThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdLUT
-
DOCUMENT ME!
- UpperTriangularSetUp(Vector<Integer>, Vector<Integer>, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- upsample - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_decompress_parameters
-
- upsample - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- upsample - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdmerge
-
- upsample - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- upsample(double[][], int[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmSimulatedExposureFusion
-
- upsample_image_components(FileJPEG2000.opj_image_t) - Method in class gov.nih.mipav.model.file.FileJPEG2000
-
- upsample_jdmerge - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- upsample_jdsample - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- upsample2D(int, int, double[], int, int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- upsample3D(int, int, int, double[], int, int, int, double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- upsampling_convolution_full(double[], int, double[], int, double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- upsampling_convolution_valid_sf(double[], int, double[], int, double[], int, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- upsampling_convolution_valid_sf_periodization(double[], int, double[], int, double[], int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- upscale - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- upscale - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Upscaling factor
- upSetFromField - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upSetFromFieldB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upSetFromFieldG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upSetFromFieldR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- upSlice() - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Increments the current slice in local coordinates and returns
the new position in the view-independent file coordinates.
- upSlice() - Method in class gov.nih.mipav.view.ViewJComponentTriImage
-
Increments the current slice in local coordinates and returns the new position in the view-independent file
coordinates.
- upSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upSliderB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upSliderField - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upSliderFieldB - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upSliderFieldG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upSliderFieldR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upSliderG - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upSliderR - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- upVectors - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- uqi() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- UR - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- url - Variable in class gov.nih.mipav.model.file.FileInfoJSON
-
- urlEncode(String) - Static method in class gov.nih.mipav.model.file.MetadataExtractor.StringUtil
-
- urparm - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- US - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- usableComponent - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- Usage() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMConsoleMode
-
Get the console mode usage
- USCRAM(double[], int) - Method in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- use_approximate_eigenvalue_bfgs_scaling - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverOptions
-
- use_approximate_eigenvalue_bfgs_scaling - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionOptions
-
- use_approximate_eigenvalue_bfgs_scaling - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- use_approximate_eigenvalue_bfgs_scaling - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- use_approximate_eigenvalue_scaling_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BFGS
-
- use_approximate_eigenvalue_scaling_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LowRankInverseHessian
-
- use_explicit_schur_complement - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- use_explicit_schur_complement - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- use_inner_iterations - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- use_merged_upsample(libjpeg.jpeg_decompress_struct) - Method in class gov.nih.mipav.model.file.libjpeg
-
- use_nonmonotonic_steps - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.MinimizerOptions
-
- use_nonmonotonic_steps - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- USE_OPENCL - Static variable in class gov.nih.mipav.view.dialogs.AlgorithmParameters
-
Label used for boolean param indicating whether the algorithm should try to use OpenCL.
- use_postordering - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- use_postordering - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- use_postordering - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- use3D - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
- useAAinFallback - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- UseAlloc - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- UseAlloc - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- UseAllocator() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- UseAllocator() - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.SparseMatrix
-
- useAltTime - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- useAltTimeTag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- useAnalyticJacobian - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
- useAnalyticJacobian - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
- useAnalyticJacobian - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- useB1Map - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- useBBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintRGBComponents
-
- useBComp - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- useBilinearOrientationAssigment - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- useBlue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETBleedThrough
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
For color images only.
- useBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
- useBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- useBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
If true, blue image is selected as of the two images for calculating histogram.
- useBlue - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- useBlue - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- useBlueOnly - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- useBlueThreshold - Variable in class gov.nih.mipav.view.PatientSlice
-
Flag indicating whether to threshold the blue color channel:.
- useBounds - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.fittingTask
-
- useBounds - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- useBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- useBSpline - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D
-
Flag to indicate to use B-Spline registration or OAR registration
- useBSpline - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast
-
Flag to indicate to use B-Spline registration or OAR registration
- useCenterOfMass - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
By default true, parameter indicates that the center position of the brain should be calculated
using JDialogExtractBrain.computeCenter(ModelImage, int, boolean)
- useCenterOfMassCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
By default checked, yields a true value for useCenterOfMass
- useChannel - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
tells whether or not to use the channels (red=0, green=1, blue=2).
- useChannels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmThresholdDualRGB
-
Which channels to use (0 = red, 1 = green, 2 = blue).
- useCIELab - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
- useCIELab - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
- useCIELab - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
- useCIELab - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- useColorHistogram - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- useColorHistogram - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- useColorHistogram - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- UseColorMap - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
turns the widget color map on/off in the GLSL shader code.
- useComplex - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
DOCUMENT ME!
- useComplex - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- useContours - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- useConversion - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmDeconvolution
-
when true, the sigma values are multiplied by: 1.0 / (2*Math.sqrt(2*Math.log(2)))
before the gaussian is generated.
- UseConvexHull() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Returns true of the convex hull determines the shape extent.
- UseConvexHull(boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Allows warping inside the convex hull (default=off).
- useCrispEdgesForSVG - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Triangles
-
- used - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassSig
-
- used - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.SubSig
-
- used - Variable in class gov.nih.mipav.view.ViewJFrameMemory
-
test notification of memory used.
- usedBit - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BallPivoting
-
- usedColor - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- usedCurve - Variable in class gov.nih.mipav.model.structures.UpdateVOIEvent
-
DOCUMENT ME!
- useDefaultRanges - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- usedFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
-
- usedMemory - Variable in class gov.nih.mipav.view.ViewJFrameMemory.MemoryMonitor
-
DOCUMENT ME!
- useDotRatios - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- usedRect - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- usedSliceThickness - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- useElementsDrawCall() - Method in interface gov.nih.mipav.model.algorithms.ContourPlot.Glyph
-
- useELSUNC - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- useGBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintRGBComponents
-
- useGComp - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- useGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETBleedThrough
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
For color images only.
- useGreen - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNonparametricSegmentation
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
- useGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- useGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
If true, green image is selected as of the two images for calculating histogram.
- useGreen - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- useGreen - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- useGreenOnly - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- useGreenThreshold - Variable in class gov.nih.mipav.view.PatientSlice
-
Flag indicating whether to threshold the green color channel:.
- useGZIP - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- useHardThresholding - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- useHardThresholding - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- useHighlight(boolean) - Method in class gov.nih.mipav.view.ViewJComponentEditImage
-
Sets this component to paint the "on top" high-light.
- UseIdentityTransformation() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Makes the object use an identity basis instead of PCA basis, i.e.
- useImageA() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- useImageB() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- useIncorrectAcpcXDim - Variable in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
Whether to use the old, incorrect ACPC X dim calculation, which overcounted by one (used in backwards
compatibility for Dr.
- useIncorrectAcpcXDim - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
Flag used to force acpc x dim to old (incorrect) value of 192 instead of fixed value calculation (which results
in x dim of 191).
- UseIndex - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.TreeNodeData
-
- useInfNew - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
if true use cerebellum-adjusted static variable.
- useJPWL - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- useJTEM - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowellOptBase
-
When true, JTEM Powell.search is used, otherwise, JTEM BrentOnline.search is used.
- useLatticeMarkers - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- useLog - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- useLog - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- useLUT - Variable in class gov.nih.mipav.model.file.FileHistoLUT
-
Whether to use the LUT or the RGB model.
- useMarker - Variable in class gov.nih.mipav.model.structures.VOIText
-
If this is set to true, a draggable arrow will be displayed
- useMarker() - Method in class gov.nih.mipav.model.structures.VOIText
-
gets whether or not the arrow should be drawn
- useMarkerBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnnotation
-
DOCUMENT ME!
- useMask - Variable in class gov.nih.mipav.model.structures.ModelImage
-
- useMask() - Method in class gov.nih.mipav.model.structures.ModelImage
-
- useMask(boolean) - Method in class gov.nih.mipav.model.structures.ModelImage
-
- useMaxLikelihood - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSingleMRIImageSNR
-
DOCUMENT ME!
- useMedian - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- useMedian - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- useMicroscopeSettings - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
When true the lens NA, wavelength, and refractive index are used in the
deconvolution process
- useMJ2 - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- useModImg - Variable in class gov.nih.mipav.model.file.rawjp2.ImgReaderRAWSlice
-
- useMouseRotationCutoffs - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- useMouseTranslationCutoffs - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- useMultipleReceivers - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- useNewCompression - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- useNoiseStdConstructor - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- useNoiseStdConstructor - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- useNumerical - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- useOCL - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
- useOCL - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
- useOCL - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- useOCL - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- useOCL - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Flag indicating whether to use OpenCL processing.
- useOCL - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Flag indicating whether to use OpenCL processing.
- useOCL - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Flag indicating whether to use OpenCL processing.
- useOCL - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Flag indicating whether to use OpenCL processing.
- useOCL - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
- useOCL(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
Turns on/off using OpenCL to compute the FFT.
- useOCL(boolean) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
Turns on/off using OpenCL to compute the FFT.
- useOCLCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
- useOCLCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
Indicates whether user wants openCL for processing.
- useOCLCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
Indicates whether user wants openCL for processing.
- useOCLCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
Indicates whether user wants openCL for processing.
- useOCLCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
Indicates whether user wants openCL for processing.
- useOCLCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogRegularizedIsotropicDiffusion
-
- UseOtherImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- UseOtherLUT - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- useOutsideReferenceSlice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- useOutsideReferenceSlice - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- useOutsideReferenceSlice - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- useOutsideReferenceVolume - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- useOutsideReferenceVolume - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- useOutsideReferenceVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- usePoints - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- usePointWeights - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineScatteredDataPointSetToImageFilter
-
- usePreferencesButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
DOCUMENT ME!
- useProgressBar - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBilateralFilter
-
- useProgressBar - Variable in class gov.nih.mipav.model.algorithms.filters.PhasePreservingDenoising
-
- useProgressBar - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
- useProgressBar - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- user - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
Copyright (c) 2009, Yue Wu
All rights reserved.
- user - Variable in class gov.nih.mipav.model.provenance.ProvenanceEntry
-
the user name
- user - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- user_bitmap - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
292 Bitmap defining user Cvs.
- USER_BRUSHES - Static variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
DOCUMENT ME!
- USER_DEFINED - Static variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- USER_FAILURE - gov.nih.mipav.model.algorithms.CeresSolver.TerminationType
-
- USER_INDEX - Static variable in class gov.nih.mipav.view.dialogs.JDialogReorient
-
- USER_INDEX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ImageReorientation
-
- user_parameter_block - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- user_parameters_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.GradientProblemSolverStateUpdatingCallback
-
- user_state() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- user_state_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.ParameterBlock
-
- USER_SUCCESS - gov.nih.mipav.model.algorithms.CeresSolver.TerminationType
-
- user0 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- user0 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- user0 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
406 User Variable 0.
- USER0 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- USER0 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- user1 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- user1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- user1 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
410 User Variable 1.
- USER1 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- user10 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
446 User Variable 10.
- user11 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
450 User Variable 11.
- user12 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
454 User Variable 12.
- user13 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
458 User Variable 13.
- user14 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
462 User Variable 14.
- user15 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
466 User Variable 15.
- user16 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
470 User Variable 16.
- user17 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
474 User Variable 17.
- user18 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
478 User Variable 18.
- user19 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
482 User Variable 19.
- user2 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- user2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- user2 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
414 User Variable 2.
- USER2 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- user20 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
486 User Variable 20.
- user21 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
490 User Variable 21.
- user22 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
494 User Variable 22.
- user23n - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
588 User Variable 23.
- user24 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
502 Concat Sat Type Flag.
- user24n - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
592 User Variable 24.
- user25 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
878 User Variable 25.
- user26 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
882 User Variable 26.
- user27 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
886 User Variable 27.
- user28 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
890 User Variable 28.
- user29 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
894 User Variable 29.
- user3 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- user3 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- user3 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
418 User Variable 3.
- USER3 - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- user30 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
898 User Variable 30.
- user31 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
902 User Variable 31.
- user32 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
906 User Variable 32.
- user33 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
910 User Variable 33.
- user34 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
914 User Variable 34.
- user35 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
918 User Variable 35.
- user36 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
922 User Variable 36.
- user37 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
926 User Variable 37.
- user38 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
930 User Variable 38.
- user39 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
934 User Variable 39.
- user4 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- user4 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- user4 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
422 User Variable 4.
- user40 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
938 User Variable 40.
- user41 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
942 User Variable 41.
- user42 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
946 User Variable 42.
- user43 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
950 User Variable 43.
- user44 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
954 User Variable 44.
- user45 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
958 User Variable 45.
- user46 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
962 User Variable 46.
- user47 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
966 User Variable 47.
- user48 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
970 User variable 48.
- user5 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- user5 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- user5 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
426 User Variable 5.
- user6 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- user6 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- user6 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
430 User Variable 6.
- user7 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- user7 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- user7 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
434 User Variable 7.
- user8 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- user8 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- user8 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
438 User Variable 8.
- user9 - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- user9 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- user9 - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
442 User Variable 9.
- userAddress - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- useRange - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSlicesVolumes
-
DOCUMENT ME!
- useRange - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- userBitmap - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- userBloodRadioButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- useRBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintRGBComponents
-
- userButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRGBtoGray
-
DOCUMENT ME!
- userCity - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- userComment - Variable in class gov.nih.mipav.model.file.FileSVS
-
- userComment - Variable in class gov.nih.mipav.model.file.FileTiff
-
- useRComp - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- userCompany - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- userCompanyLogo - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- userCountry - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- UserData() - Constructor for class gov.nih.mipav.model.algorithms.CVODES.UserData
-
- userDefaultDir - Static variable in class gov.nih.mipav.view.ViewUserInterface
-
This is the inputDir path that the user entered as a command line argument when running a script *
- UserDefined - gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.kernelType
-
- userDefinedButton - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- userDefinedExtensions - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
array of user defined extensions
- userDefinedField - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceValue
-
DOCUMENT ME!
- userDefinedMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- userDefinedMatrix - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- userDefinedShortcutModel - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
DOCUMENT ME!
- userDefinedShortcutTable - Variable in class gov.nih.mipav.view.dialogs.JDialogShortcutEditor
-
DOCUMENT ME!
- userDirectoryLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- userDirectoryLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- userDirectoryLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- userDirectoryLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- userDirectoryLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
- userDirectoryText - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- userDirectoryText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- userDirectoryText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- userDirectoryText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- userDirectoryText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
- useRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETAcceptorPhotobleach
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETBleedThrough
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRETEfficiency
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram2Dim
-
For color images only.
- useRed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNonparametricSegmentation
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
- useRed - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
- useRed - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
If true, red image is selected as of the two images for calculating histogram.
- useRed - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- useRed - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- useRedOnly - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
- useRedThreshold - Variable in class gov.nih.mipav.view.PatientSlice
-
Flag indicating whether to threshold the red color channel:.
- useReferenceResolutions - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMatchImages
-
When true resolution matching defaults to the reference image.
- userFax - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- UserField(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Returns the reference of the user defined field vector number 'field_nb'.
- userFillMapLSW - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
874 Describes what process fills in the user CVs, ifcc or TIR.
- userFillMapMSW - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
870 Describes what process fills in the user CVs, ifcc or TIR.
- userID - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- userInfo - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
User information structure.
- userInfoSize - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_UserInformation
-
DOCUMENT ME!
- userInput - Variable in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
This is the user input for additional file extensions
- userInputFileTypes - Variable in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
This array is the list of additional file extensions that user typed in that is populated when user hits apply
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialog3DMosaicTo4DSlices
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogAHElocal
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogAnisotropicDiffusion
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogBGAndFGDistanceMap
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogBGDistanceMap
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogBilateralFilter
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogBorderClearing
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogBottomHat
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundaryAttenuation
-
The MIPAV user interface.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Reference to the main user interface.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Pointer to the user interface.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogClose
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogColorEdge
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogConcat
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4Dto3D
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoMultiple3D
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogCyclicPermutation
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogDeconvolution
-
locking the image
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogDeleteObjects
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogDemonsLite
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogDICOMtoAVI
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogDilate
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Parent ui.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogDistanceMap
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogDSC_MRI_toolbox
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogEdgePreservingSmoothing
-
locking the image
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogEntropyMinimization
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogErode
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateMaskSegmentation
-
Reference to userface.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogEvaluateSegmentation
-
Reference to userface.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
The user interface for this dialog box.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
user interface renference.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogFindEdges
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogFlip
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzMinDeAndChatterji
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyMinimization
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogGaborFilter
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogGaussianBlur
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientInverseWeightedSmoothing
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogGradientMagnitude
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogGuidedFilter
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogram2Dim
-
Keeps record of the present structure of the application.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramMatch
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSliceMatch
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogHomomorphicFilter
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogIDObjects
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogImageCalculator
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogImageMath
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogImRegPOC
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertSlice
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogInvert
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogIsophoteCurvature
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogLaplacian
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSet
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogLevelSetDiffusion
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImage
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogLoadImageForRegistration
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalNormalization
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMatchImages
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
ui must be set to access the list of images to set image-specfic options (ie,. log mode)
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalFilter
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalGradient
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalLaplacian
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMorphologicalReconstruction
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMosaicToSlices
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMRIShadingCorrection
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
private int destExtents[];.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogNLMeans_filt2D
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogNLNoiseReduction
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogNMSuppression
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogNoise
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogNonlocalMeansFilter
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogOpen
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogPadImages
-
Reference to the main user interface
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogParticleAnalysisNew
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogPhasePreservingDenoising
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogPowerWatershed
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogRandomizeSliceOrder
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Reference to userface.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationSIFT3D
-
Reference to userface.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveSlices
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogRemoveTSlices
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceBlankSlicesWithAverages
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogReplaceSlice
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogRuleBasedContrastEnhancement
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogSCDSegmentation
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogSkeletonize
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogSliceAveraging
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogSubtractVOI
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
locking the image
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogTalairachTransform
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogTiltCorrection
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogTopHat
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogTrilateralFilter
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogUltErode
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Icon and log access.
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
- userInterface - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Reference to the user interface.
- userInterface - Variable in class gov.nih.mipav.view.ViewImageDirectory
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
Reference to the user interface.
- userInterface - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- userInterface - Static variable in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
- userInterface - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- userInterface - Variable in class gov.nih.mipav.view.ViewMenuBar
-
The user interface for MIPAV.
- userInterfaceReference - Static variable in class gov.nih.mipav.view.ViewUserInterface
-
A reference to the only ViewUserInterface object in MIPAV.
- userLevelsButton - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- userLimits - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
- userLimits - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- userLimitsCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- userMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
- userMax - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- userMax - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- userMaxLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- userMaxText - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- userMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
- userMin - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- userMin - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- userMinLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- userMinText - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- userName - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- userName - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- userPhone - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- userRangeRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogConvertType
-
DOCUMENT ME!
- userSetCostFunction() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Called to create the RegistrationMeasure-derived class associated with the current selection in the combo box of
possible registration measures.
- userSetDefaults() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Called to reset all of the controls to their default values.
- userSetMultiPassControls() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Called to setup controls passed on the current state of the check box for selecting single- or two-pass
registration.
- userSetRefImage(ModelImage) - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Accessor to set the target image.
- userSetTargetSlice() - Method in class gov.nih.mipav.view.dialogs.JDialogRegistrationBSpline
-
Called whenever the user changes the selection of the target slice for 2.5D image registration.
- userShortcutTable - Static variable in class gov.nih.mipav.view.Preferences
-
Hashtable that holds all user-defined shortcuts
- userSpecifiedBlood - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
If true, user specifed rib, otherwise, voi specified rib
- userSpecifiedBlood - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- userUsageTag - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
866 Defines how following user CVs are to be filled in.
- userVOIButton - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- userWeightFunct() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.userWeightFunct
-
- USERWNDLEVELS - Static variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- userXGrid - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- userYGrid - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- useSACenter - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- useSACenterBox - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
checkbox telling the algorithm to use the scanner coordinate center rather than the image center
- useScript - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
If true, the program is run from a script.
- useScript - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- useScript - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- useSD_H - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- useSD_H - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- useSD_W - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- useSD_W - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- useSeparable - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Whether to use a separable convolver during edge detection.
- useSeparableCB - Variable in class gov.nih.mipav.view.dialogs.JDialogBrainSurfaceExtractor
-
Checkbox to elect to use the separable convolver in the edge detection algorithm.
- useSeparateFrame - Variable in class gov.nih.mipav.view.JFrameHistogram
-
Whether this panel is contained in another frame or forms its own frame
- useSliceSpacingCoarse() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Select the "coarse" slice sampling for rendering.
- useSliceSpacingCoarse() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Select the "coarse" slice sampling for rendering.
- useSliceSpacingFine() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.NodeAlignedVolumeTextureRender
-
Select the "fine" slice sampling for rendering.
- useSliceSpacingFine() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Retrieves whether the "fine" slice sampling is currently selected.
- usesLUT - Variable in class gov.nih.mipav.model.file.FileOME
-
Whether the image has a lut already.
- useSmartThresholding - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess
-
- useSmartThresholding - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorComposite
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorDRR
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorLighting
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorMIP
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastColorReflection
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityDRR
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityDRRBresenham
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastIntensityMIP
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.Renderer
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorComposite
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorDRR
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorLighting
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpColorMIP
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensityDRR
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- usesNormals() - Method in class gov.nih.mipav.view.renderer.J3D.volumeview.ShearWarpIntensityMIP
-
Return indication as to whether or not the particular renderer uses normal vectors as part of its implementation.
- useSphere - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainExtractor
-
If true initialize surface as a sphere.
- useSphere - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
When true estimates that boundary of the VOI by a sphere.
- useSphereCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractBrain
-
Initially not checked, estimates the boundary by a sphere rather than an ellipse.
- useStandardMethod - Variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- useT2CheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIImportData
-
DOCUMENT ME!
- useTestData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- useThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
DOCUMENT ME!
- useThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- useThresholdChannelA - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- useThresholdChannelB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- useVe - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
If false, second parameter is back-transfer rate (k_ep)
If true, Second parameter is external celluar volume fraction (ve)
- useVe - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- useVertexRounding - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Lines
-
- useVertexRounding - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Points
-
- useVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
- useVOI - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- useVOI - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
This flag is used by the fuzzy connectedness to indicate that a VOI should be used to calculate certain values to
initialize the process.
- useWeights - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- useWeights - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- UseWidget - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
turns the widget on/off in the GLSL shader code.
- useYmean - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- UseZSlice() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- USHORT - gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Data buffer is of type unsigned short (16 bits per voxal).
- USHORT - Static variable in class gov.nih.mipav.model.file.FileDM3
-
DOCUMENT ME!
- USHORT - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the data buffer is of type unsigned short (16 bits per voxal).
- USHORT_STRING - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate, as a String, that the data buffer is of type unsigned short.
- using_merged_upsample - Variable in class gov.nih.mipav.model.file.libjpeg.my_decomp_master
-
- UT - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- UTF_16 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Charsets
-
- UTF_16BE - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Charsets
-
- UTF_16LE - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Charsets
-
- UTF_8 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Charsets
-
- UTF_8 - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.Iso2022Converter
-
- util - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPowerWatershed.Rbt
-
- Utils() - Constructor for class gov.nih.mipav.model.algorithms.ContourPlot.Utils
-
- uv() - Method in class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- UV - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- uVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- uVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- uVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- ux - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- uy - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- uz - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
V
- v - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
- v - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
- v - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel
-
- v - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DNoWholeModel
-
- v - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialNoWholeModel
-
- v - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
- v - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solModel
-
- v - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2nl2solModel
-
- v - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- v - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
1D array of length nPts containing the orthogonal projection of residuals onto space spanned by the first
pseudoRank linear independent columns of the Jacobian.
- v - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
1D array of length nPts containing the orthogonal projection of residuals onto space spanned by the first
pseudoRank linear independent columns of the Jacobian.
- v - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- v - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- v - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- v - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Tri
-
- v - Variable in class gov.nih.mipav.model.algorithms.Statistics
-
- v - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
- v - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.polygon_node
-
- v - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- v - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_FaceAux
-
- v - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.LoadPly_TristripAux
-
- v - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags.EdgeSorter
-
- v - Static variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- v - Static variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- v - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- V - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightDirectional
-
DOCUMENT ME!
- V - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- V - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- V - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Edge
-
DOCUMENT ME!
- V - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Triangle
-
DOCUMENT ME!
- V - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Vertex
-
DOCUMENT ME!
- V - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjEdgeKey
-
DOCUMENT ME!
- V - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.EigenvalueDecomposition
-
Array for internal storage of eigenvectors.
- V - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.SingularValueDecomposition
-
Arrays for internal storage of U and V.
- V() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- V() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- V(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- V(int, int, int, int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- v_expand - Variable in class gov.nih.mipav.model.file.libjpeg.my_upsampler_jdsample
-
- v_father(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- v_idx(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- v_index - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- v_samp_factor - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- v_touched(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- v_uv(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- v_valence(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM
-
- v0 - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FrontEdge
-
- V0 - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- V0 - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- V0(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
Return the pointer to the ((j+1)%3)-th vertex of the face.
- v0norm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- v0norm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- v0Text - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
- v1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FrontEdge
-
- v1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- V1() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Returns index to point 1.
- V1(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- v1norm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- v1norm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- v1Text - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
- v1v3d - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- v2 - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
- v2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.FrontEdge
-
- v2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- V2() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Returns index to point 2.
- V2(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- v2norm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- v2norm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- v2norm(int, double[]) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- v2Text - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
- v2v3d - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- v3 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Triangle
-
- V3() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMTriangle
-
Returns index to point 3.
- v3Text - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
- v6Num - Variable in enum gov.nih.mipav.model.file.FileSVS.Type
-
Number of type as specified by TIFF 6 format
- v6Num - Variable in enum gov.nih.mipav.model.file.FileTiff.Type
-
Number of type as specified by TIFF 6 format
- VA - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- VabraAlgorithm - Class in gov.nih.mipav.model.algorithms.registration.vabra
-
- VabraAlgorithm() - Constructor for class gov.nih.mipav.model.algorithms.registration.vabra.VabraAlgorithm
-
- VabraConfiguration - Class in gov.nih.mipav.model.algorithms.registration.vabra
-
- VabraConfiguration(File) - Constructor for class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- VabraRBF - Class in gov.nih.mipav.model.algorithms.registration.vabra
-
- VabraRBF() - Constructor for class gov.nih.mipav.model.algorithms.registration.vabra.VabraRBF
-
- VabraSolver - Class in gov.nih.mipav.model.algorithms.registration.vabra
-
- VabraSolver(VabraSubjectTargetPairs, File, File, boolean) - Constructor for class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- VabraSubjectTargetPairs - Class in gov.nih.mipav.model.algorithms.registration.vabra
-
- VabraSubjectTargetPairs(ModelImage, ModelImage, float, float, int, int, boolean, double[], int) - Constructor for class gov.nih.mipav.model.algorithms.registration.vabra.VabraSubjectTargetPairs
-
- VabraVolumeCollection - Class in gov.nih.mipav.model.algorithms.registration.vabra
-
- VabraVolumeCollection(int, int, int, int, int) - Constructor for class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- VabraVolumeCollection(ModelImage, int, int, boolean) - Constructor for class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- val - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities.IndexedFloat
-
- val - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.ValuePair
-
- VAL_BITS - Static variable in class gov.nih.mipav.model.file.FileSVS.JPEGFastDCTInputStream
-
- VAL_BITS - Static variable in class gov.nih.mipav.model.file.FileTiff.JPEGFastDCTInputStream
-
- valid - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.CL_data
-
- VALID_INPUT - Static variable in class gov.nih.mipav.view.dialogs.JDialogLightBox
-
definitions indicating that user input has been validated.
- validate() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceDecimator
-
DEBUGGING.
- validate(MetadataExtractor.Metadata) - Method in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegMetadataReaderTest
-
- Validate(OctNode, float, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- Validate(OctNode, float, int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- validateBytes(byte[]) - Method in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- validateCurrentNum(String, float, float) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
validate current number
- validateCurrentNum(String, float, float) - Static method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
validate current number
- validateCurrentNum(String, float, float) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
validate current number
- validateData() - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
validate data
- validateData() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- validateFilePaths() - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
valdiates the file paths for the study path and gradient file path
- validateIndex(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.ByteArrayReader
-
- validateIndex(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- validateIndex(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
Ensures that the buffered bytes extend to cover the specified index.
- validateIndex(int, int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
Ensures that the buffered bytes extend to cover the specified index.
- validateMinMaxNums(ModelImage, String, String) - Static method in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
- validateParams() - Method in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
validate params
- validateRequiredParams() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
- validateUI() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
- validateUserInputString(String) - Method in class gov.nih.mipav.view.dialogs.JDialogEditUserDefinedFileTypes
-
This method validates the user input file extensions.
- validBitsPerPixel - Variable in class gov.nih.mipav.model.file.FileInfoCZI
-
- validBitsPerPixel - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- validBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
True for source input locations not having image min or image max values.
- validGUID - Variable in class gov.nih.mipav.model.file.NDARWriteData
-
- validLine(String) - Method in class gov.nih.mipav.model.algorithms.libdt.ConfigFile
-
- validRange - Variable in class gov.nih.mipav.model.file.FileInfoMincHDF
-
The valid range for image pixel values
- validValues - Variable in class gov.nih.mipav.model.algorithms.AlgorithmContrastEnhancementUsingExposureFusion.kFitting
-
- validVoxels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- validVoxels - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- valoffset - Variable in class gov.nih.mipav.model.file.libjpeg.d_derived_tbl
-
- valptr - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
valptr[index] = pointer to where legal code values start.
- VALPTR - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGHuffmanInputStream
-
- VALPTR - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGHuffmanInputStream
-
- value - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed.indexValueItem
-
- value - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHillClimbingWatershed.indexValueItem
-
- value - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- value - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserExtrReg
-
- value - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.KeyValuePair
-
- value - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed.indexValueItem
-
- value - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed.indexValueItem
-
- value - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed.indexValueItem
-
- value - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed.indexValueItem
-
- value - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- value - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.indexValueItem
-
- value - Variable in class gov.nih.mipav.model.algorithms.filters.BM3D.indexValueItem
-
- value - Variable in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform.indexValueItem
-
- value - Variable in class gov.nih.mipav.model.algorithms.indexValue
-
- value - Variable in class gov.nih.mipav.model.algorithms.libdt.indexValueItem
-
- value - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_node
-
- value - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame.point
-
- value - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.indexValueItem
-
- value - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.indexValueItem
-
DOCUMENT ME!
- value - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
the value to modify the image with.
- value - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
huffman value for code.
- value - Variable in class gov.nih.mipav.model.file.FileDicomTag
-
Actual value of the tag (may be an array of elements).
- value - Variable in class gov.nih.mipav.model.file.FileInfoDicom.LengthStorageUnit
-
Internal integer value stored by this unit.
- value - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tgt_node_t
-
- value - Variable in class gov.nih.mipav.model.file.FileSVS
-
- value - Variable in class gov.nih.mipav.model.file.FileTiff
-
- value - Variable in class gov.nih.mipav.model.file.FileXML.XMLAttributes
-
- value - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.BitmapType
-
- value - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorEncoding
-
- value - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.ColorSpaceType
-
- value - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.Compression
-
- value - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingHalftoningAlgorithm
-
- value - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory.RenderingIntent
-
- value - Variable in class gov.nih.mipav.model.file.XMLParameter
-
Parameter value.
- value - Variable in class gov.nih.mipav.model.scripting.parameters.ParameterBoolean
-
The parameter's value.
- value - Variable in class gov.nih.mipav.model.scripting.parameters.ParameterDouble
-
The parameter's value.
- value - Variable in class gov.nih.mipav.model.scripting.parameters.ParameterFloat
-
The parameter's value.
- value - Variable in class gov.nih.mipav.model.scripting.parameters.ParameterInt
-
The parameter's value.
- value - Variable in class gov.nih.mipav.model.scripting.parameters.ParameterLong
-
The parameter's value.
- value - Variable in class gov.nih.mipav.model.scripting.parameters.ParameterShort
-
The parameter's value.
- value - Variable in class gov.nih.mipav.model.scripting.parameters.ParameterString
-
The parameter's value.
- value - Variable in class gov.nih.mipav.model.scripting.parameters.ParameterUShort
-
The parameter's value.
- value - Variable in class gov.nih.mipav.view.dialogs.JDialogFileInfoDICOM.RowData
-
- value - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- value - Variable in class gov.nih.mipav.view.ProgressChangeEvent
-
The value of the progress bar, the range is from 0~100
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineFloat
-
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineInt
-
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLinePoint3D
-
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.CmdLine.cmdLineString
-
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianProjectionFunction
-
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueAndNormalFunction
-
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueFunction
-
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.TreeNodeData
-
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.Feature
-
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.FeatureNode
-
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_node
-
- value - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy.point
-
- value() - Method in enum gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDirection
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceEdgeIterator
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceHalfedgeIterator
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.FaceVertexIterator
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshEdgeIterator
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshFaceIterator
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshHalfEdgeIterator
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.MeshVertexIterator
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexEdgeIterator
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexFaceIterator
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexInHalfedgeIterator
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexOutHalfedgeIterator
-
- value() - Method in class gov.nih.mipav.model.algorithms.LSCM.VertexVertexIterator
-
- value() - Method in annotation type gov.nih.mipav.model.file.MetadataExtractor.SuppressWarnings
-
The name of the warning to be suppressed.
- value(int[][], double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- Value - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.MatrixEntry
-
- Value - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.NMatrixEntry
-
- VALUE_FLAG - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- value_is_valid - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- value_k - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- value1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- value2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- valueB - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
- valueB - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- valueB - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- valueBg - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
32 - background value of non image locations.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDataProvenance.SelectionListener
-
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomTagSelector
-
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogExtractObject
-
Sets the remove index based on the selected index in the list.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
Sets the remove index based on the selected index in the list.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
Sets the remove index based on the selected index in the list.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogIndependentComponents
-
Sets the remove index based on the selected index in the list.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
Sets the remove index based on the selected index in the list.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
Sets the remove index based on the selected index in the list.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTransformBSpline
-
Sets the remove index based on the selected index in the list.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.VOIHighlighter
-
Goes through the list selection event's JList source to find selected VOI list items.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.VOIHighlighter
-
Goes through the list selection event's JList source to find selected VOI list items.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.VOIHighlighter
-
Goes through the list selection event's JList source to find selected VOI list items.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.JPanelListController
-
handles list change events made when selecting from either left or right list.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
Sets values of sliders and intensities appropriately based on which light was chosen in the list.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The override necessary to be a ListSelectionListener.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Value changed event, which invoked by probe name list, burn name list, surface name list, burn param name list.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel
-
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JDialogDTIInput
-
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelAnnotationAnimation
-
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
Sets values of sliders and intensities appropriately based on which light was chosen in the list.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
A List Selection Listener event for changes in the tables.
- valueChanged(ListSelectionEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Whenever the list changes, the valueChanged is called.
- valueChanged(TreeSelectionEvent) - Method in class gov.nih.mipav.view.CheckTreeManager
-
- valueChanged(TreeSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
Updates the table based on tree selection
- valueChanged(TreeSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
Updates the ViewJFrameImage when a VOI/contour is selected.
- valueChanged(TreeSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
Updates the ViewJFrameImage when a VOI/contour is selected.
- valueChanged(TreeSelectionEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Updates the ViewJFrameImage when a VOI/contour is selected.
- valueChanged(TreeSelectionEvent) - Method in class gov.nih.mipav.view.JPanelTreeController
-
handles tree change events made when selecting from either left or right tree.
- valueChanged(TreeSelectionEvent) - Method in class gov.nih.mipav.view.ViewImageDirectory
-
Re-create the image and header info by reacting to each selection on the tree.
- valueG - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- valueG - Variable in class gov.nih.mipav.view.dialogs.JDialogMask
-
DOCUMENT ME!
- valueI - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath
-
imaginary part of value to modify complex or dcomplex image with or green color of color image.
- valueLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- valueLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- valueLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- valueLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- valueLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- valueMultiplicity - Variable in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Allowed value multiplicity (vm) for this tag.
- valueOf(double) - Static method in class gov.nih.mipav.util.DoubleDouble
-
Converts the double argument to a DoubleDouble number.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.kernelType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.SpeedUpLevel
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.AnchorPosition
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.CallbackReturnType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.CovarianceAlgorithmType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.DenseLinearAlgebraLibraryType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.DoglegType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.DumpFormatType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverTerminationType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LineSearchInterpolationType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LineSearchType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LoggingType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.MinimizerType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.NonlinearConjugateGradientType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffMethodType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.Ownership
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.SparseLinearAlgebraLibraryType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.TerminationType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.VisibilityClusteringType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver2.StorageType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorScheme
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.Covdet.vlCovDetDescriptorType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.Covdet.VlCovDetMethod
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.Covdet.VlFrameType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver_Type
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64.ClassType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees.ClassType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDataFormat
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDirection
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelDir
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.Coefficient
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteTransformType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.SYMMETRY
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHogVariant
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.libdt.cov_reg_type
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.libdt.cov_type
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.libdt.fill_type
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.libdt.kf_mode
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.libdt.norm_type
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.libdt.Split_crit
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.libdt.Split_mode
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.libdt.Split_vars
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.libdt.Verbose_mode
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.libdt.Ymean_type
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.SIFT3D.im_format
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.SIFT3D.interp_type
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm_type
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.SIFT3D.tform_type
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.StochasticForests.ImportanceMode
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.StochasticForests.MemoryMode
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.StochasticForests.PredictionType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.StochasticForests.SplitRule
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.StochasticForests.TreeType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMapWindowType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.SVM.VlSvmLossType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.SVM.VlSvmSolverStatus
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.SVM.VlSvmSolverType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.FileInfoBase.Modality
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.FileInfoBase.UnitType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.FileInfoDicom.VRtype
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.FileSVS.Type
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.FileTiff.Type
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.libjpeg.J_BUF_MODE
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.libjpeg.J_COLOR_SPACE
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.libjpeg.J_COLOR_TRANSFORM
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.libjpeg.J_DCT_METHOD
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.libjpeg.J_DITHER_MODE
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.structures.GenericPolygonClipper.bundle_state
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_op
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in class gov.nih.mipav.util.DoubleDouble
-
Converts the string argument to a DoubleDouble number.
- valueOf(String) - Static method in enum gov.nih.mipav.view.Argument.InstanceArgument
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.Argument.StaticArgument
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.FieldStrength
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.InversionType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.ScannerType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.Threshold
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.ExitStatus
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.JDialogCaptureScreen.WindowProperties
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.JDialogMemoryAllocation.VMConfigType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.SwapMode
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.JDialogZoom.ZoomMode
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector.RangeType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder.BugType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.GetPath.Purpose
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.Preferences.ComplexDisplay
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.Preferences.DefaultDisplay
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.Preferences.InterpolateDisplay
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.Preferences.LogLevel
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.Preferences.OperatingSystem
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.Preferences.SystemArchitecture
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverType
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
Returns the enum constant of this type with the specified name.
- valueOf(String) - Static method in enum gov.nih.mipav.view.ViewJSlider.SliderType
-
Returns the enum constant of this type with the specified name.
- ValuePair(K, V) - Constructor for class gov.nih.mipav.model.algorithms.StochasticForests.ValuePair
-
- valueR - Variable in class gov.nih.mipav.view.dialogs.JDialogLightboxGen
-
- valueRepresentation - Variable in class gov.nih.mipav.model.file.FileDicomTag
-
Value representation for this tag, if the tags in this dicom file have explicit VRs.
- valueRepresentation - Variable in class gov.nih.mipav.model.file.FileDicomTagInfo
-
DICOM value representation (vr) for this tag.
- values - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- values - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- values - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CellInfo
-
- values - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CRSMatrix
-
- values - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraRBF
-
- values - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- values - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- values - Variable in class gov.nih.mipav.model.file.FileMincAttElem
-
DOCUMENT ME!
- values - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- values() - Static method in enum gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.kernelType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.SpeedUpLevel
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.AnchorPosition
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDenseMatrix
-
- values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.CallbackReturnType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.CovarianceAlgorithmType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.DenseLinearAlgebraLibraryType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseSparseMatrix
-
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.DoglegType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.DumpFormatType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverTerminationType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LineSearchDirectionType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LineSearchInterpolationType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LineSearchType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.LoggingType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.MinimizerType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.NonlinearConjugateGradientType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.NumericDiffMethodType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.Ownership
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.SparseLinearAlgebraLibraryType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.SparseMatrix
-
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.TerminationType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionStrategyType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver.VisibilityClusteringType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CeresSolver2.StorageType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorMap
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.ContourPlot.DefaultColorScheme
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.Covdet.vlCovDetDescriptorType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.Covdet.VlCovDetMethod
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.Covdet.VlFrameType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.CVODES.SUNLinearSolver_Type
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64.ClassType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.filters.AlgorithmLearnFromFailure64Knees.ClassType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDataFormat
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDirection
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelDir
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.Coefficient
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteTransformType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.MODE
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.SYMMETRY
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHogVariant
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.libdt.cov_reg_type
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.libdt.cov_type
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.libdt.fill_type
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.libdt.kf_mode
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.libdt.norm_type
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.libdt.Split_crit
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.libdt.Split_mode
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.libdt.Split_vars
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.libdt.Verbose_mode
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.libdt.Ymean_type
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.SIFT3D.im_format
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.SIFT3D.interp_type
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.SIFT3D.Mat_rm_type
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.SIFT3D.tform_type
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.StochasticForests.ImportanceMode
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.StochasticForests.MemoryMode
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.StochasticForests.PredictionType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.StochasticForests.SplitRule
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.StochasticForests.TreeType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMapWindowType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.SVM.VlSvmLossType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.SVM.VlSvmSolverStatus
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.SVM.VlSvmSolverType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.algorithms.utilities.AlgorithmImageMath.Operator
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.FileInfoBase.AxisOrientation
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.FileInfoBase.Modality
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.FileInfoBase.Unit
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.FileInfoBase.UnitType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.FileInfoDicom.VRtype
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.FileSVS.Type
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.FileTiff.Type
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.libjpeg.J_BUF_MODE
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.libjpeg.J_COLOR_SPACE
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.libjpeg.J_COLOR_TRANSFORM
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.libjpeg.J_DCT_METHOD
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.libjpeg.J_DITHER_MODE
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.libjpeg.J_MESSAGE_CODE
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.structures.GenericPolygonClipper.bundle_state
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_op
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.model.structures.ModelStorageBase.DataType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.Argument.InstanceArgument
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.Argument.StaticArgument
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.ActionMetadata.ImageRequirements
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.FieldStrength
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.InversionType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.ScannerType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.AlgorithmTreParams.Threshold
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.ExitStatus
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.JDialogCaptureScreen.WindowProperties
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.JDialogMemoryAllocation.VMConfigType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.JDialogSwapSlicesVolumes.SwapMode
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.JDialogZoom.ZoomMode
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.JPanelPixelExclusionSelector.RangeType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder.BugType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.GetPath.Purpose
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.Preferences.ComplexDisplay
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.Preferences.DefaultDisplay
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.Preferences.InterpolateDisplay
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.Preferences.LogLevel
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.Preferences.OperatingSystem
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.Preferences.SystemArchitecture
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.ViewJFrameGraph.FitMode
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- values() - Static method in enum gov.nih.mipav.view.ViewJSlider.SliderType
-
Returns an array containing the constants of this enum type, in
the order they are declared.
- Values(double) - Constructor for class gov.nih.mipav.view.dialogs.JDialogReplaceValue.Values
-
Creates a new Values object.
- Values(double, double) - Constructor for class gov.nih.mipav.view.dialogs.JDialogReplaceValue.Values
-
Creates a new Values object.
- values_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockRandomAccessDenseMatrix
-
- values_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.BlockSparseMatrix
-
- values_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowSparseMatrix
-
- values_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TripletSparseMatrix
-
- values_index - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CellInfo
-
- valuesOutside - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
values outside intensities for threshold
- valuesOutside - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
intensity values to be used in thresholding
- valuesOutsideB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
values outside intensities for threshold
- valuesOutsideB - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
intensity values to be used in thresholding
- valuesOutsideG - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
values outside intensities for threshold
- valuesOutsideG - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
intensity values to be used in thresholding
- valuesOutsideR - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
values outside intensities for threshold
- valuesOutsideR - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
intensity values to be used in thresholding
- valuesOutsideTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
text fields
- valuesOutsideTextFieldB - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
text fields
- valuesOutsideTextFieldG - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
text fields
- valuesOutsideTextFieldR - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
text fields
- valuesPerPixel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
Number of elements in a pixel.
- valuesPerPixel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHElocal
-
number of elements in a pixel.
- valuesPerPixel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogramMatch
-
DOCUMENT ME!
- valuesPerPixel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
DOCUMENT ME!
- valuesPerPixel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
number of elements in a pixel.
- valuesRGB - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- ValueStr - Static variable in class gov.nih.mipav.model.file.FileSurfaceGiftiXML
-
array of strings representing the tags under in the Gifti xml schema.
- valueTables - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FunctionData
-
- valueTables - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueAndNormalFunction
-
- valueTables - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.PointIndexValueFunction
-
- valueText - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
- valueText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
- valueText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
- valueText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
- valueText - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
- valueType - Variable in class gov.nih.mipav.model.file.XMLParameter
-
Parameter value type.
- valueTypeBox - Variable in class gov.nih.mipav.view.JPanelEditValueType
-
DOCUMENT ME!
- VAN_DER_POL - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- VAN_DER_POL - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- vanishing_moments_phi - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteWavelet
-
- vanishing_moments_psi - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets.DiscreteWavelet
-
- var - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- Var() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Calc the variance of the matrix.
- Var() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
- Var(double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Calculates the variance the vector.
- var_I - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- varAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
DOCUMENT ME!
- varArray - Variable in class gov.nih.mipav.model.file.FileInfoMinc
-
DOCUMENT ME!
- VARC - gov.nih.mipav.model.algorithms.libdt.Split_vars
-
- VarCol(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDMatrix
-
Calc the variance of each column into a vector.
- varEcho - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
648 Variable echo flag.
- varf(double[], int, double[], boolean, boolean[], double[], int, double, int, boolean, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- varfCalled - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- VARGC - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- vari - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- variable_importance - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.growTreesInThread
-
- variable_importance - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- variable_importance - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Tree
-
- variable_names - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Data
-
- variableBandwidth - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- variableBandwidth - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- variableDeltasCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- variableFlipAngleFlag - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- VariableTable - Class in gov.nih.mipav.model.scripting
-
A table used to store variables and their values.
- VariableTable() - Constructor for class gov.nih.mipav.model.scripting.VariableTable
-
Creates a new VariableTable object.
- variableThresholds - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- variableThresholds - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
DOCUMENT ME!
- VARIABLY_DIMENSIONED_FUNCTION - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- VARIABLY_DIMENSIONED_FUNCTION - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- variance - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true calculate glcm variance Sum over i,j of Probability(i,j) * (i - glcm mean) * (i - glcm mean) = Sum over
i,j of Probability(i,j) * (j - glcm mean) * (j - glcm mean).
- variance - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
If true calculate glcm variance Sum over i,j of Probability(i,j) * (i - glcm mean) * (i - glcm mean) = Sum over
i,j of Probability(i,j) * (j - glcm mean) * (j - glcm mean).
- variance - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest.computeTreePermutationImportanceInThread
-
- variance - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- variance - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- varianceCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- varianceCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- varianceEstimator - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- varianceEstimator - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- varianceEstimatorLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- varianceGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- variant - Variable in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- variation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserExtrReg
-
- varInverse - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionGrow
-
DOCUMENT ME!
- varMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- varmin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- varphij - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- vars - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexSplitParams
-
- varSet() - Method in class gov.nih.mipav.view.dialogs.JDialogTreMethod.ThresholdChoiceListener
-
- varSet() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.ProcessChoiceListener
-
- varSet() - Method in class gov.nih.mipav.view.dialogs.JDialogTreT1.ScannerChoiceListener
-
- VARY - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- vas_collapse - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
586 Collapse image.
- vascularImagingFlags - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- vascularImagingFlags - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- VASCULATURE_SEG - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Value which indicates a voxel in the segmenation image that is part of the vasculature (arterial or veinous).
- VASCULATURE_SEG - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Value which indicates a voxel in the segmenation image that is part of the vasculature (arterial or veinous).
- vasculatureBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The root branch group of the vasculatureBG.
- vasMode - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- vasMode - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- vasMode - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
744 Vascular Mode.
- vattArray - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- Vaxpy_Serial(double, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- vBase - Variable in class gov.nih.mipav.model.file.FileVOI.VOISortItem
-
DOCUMENT ME!
- vbuf - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< all y-locations on step grid.
- vbuf_zm - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< video buffer to store current frames [vrows,vcols,patopt.win.z]
type=OPT_MAT_TYPE.
- vbw - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
394 Variable Bandwidth (Hz).
- VCenterOffset - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- vcols - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< initial state covariance
- vcols - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< options for extracting patches.
- VCopy_Serial(CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- vd1 - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- vd2 - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- VDiff_Serial(CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- ve - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.IntModel
-
- veButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- vec - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_res_cont
-
- VecCat(CDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
Concatenates a vector to the end of this vector.
- VecCat3(CDVector, CDVector, CDVector, CDVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
Concatenates three vectors.
- vecswap(double[], int, int, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.ArraySorter
-
Swaps x[a ..
- vector - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmActiveContoursWithoutEdges
-
- vector - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
- VECTOR_DIRECTION_FILTER - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
- VECTOR_DIRECTION_FILTER - Static variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- vector_gradient - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- vector_gradient_is_valid - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- VECTOR_MAGNITUDE_FILTER - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
- VECTOR_MAGNITUDE_FILTER - Static variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- VECTOR_OVERLAY - Static variable in class gov.nih.mipav.model.file.FileLSM
-
Types of drawing elements.
- vector_x - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- vector_x_is_valid - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- Vector2Image(CDVector, ModelSimpleImage) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Conversion from a texture vector to a shape-free image.
- Vector2Matrix(CDVector, CDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame
-
Conversion from a texture vector to a shape-free matrix.
- vectorButton - Variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- vectorCopyFunct - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- vectorCrossProduct(double[], double[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
Returns orgthogonal vector.
- VectorD - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- VectorD() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- VectorD(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- VectorD(int, double[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- VectorD(VectorD) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorD
-
- vectorDeleteFunct - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- vectorDirectionButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- vectorDirectionMedian(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Only used with color images in vector filtering.
- VectorF - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- VectorF() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- VectorF(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- VectorF(int, float[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- VectorF(VectorF) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VectorF
-
- vectorGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- vectorize(libdt.Mat, boolean) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- vectorMagnitudeButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- vectorMagnitudeMedian(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Only used with color images in vector filtering.
- Vectornd - Class in gov.nih.mipav.model.algorithms
-
N dimension vector class with the cost value.
- Vectornd() - Constructor for class gov.nih.mipav.model.algorithms.Vectornd
-
- Vectornd(double[]) - Constructor for class gov.nih.mipav.model.algorithms.Vectornd
-
- Vectornd(double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.Vectornd
-
- Vectornd(double[], double) - Constructor for class gov.nih.mipav.model.algorithms.Vectornd
-
- Vectornd(double[], double, boolean) - Constructor for class gov.nih.mipav.model.algorithms.Vectornd
-
- VectorNormalization(double[], int) - Static method in class gov.nih.mipav.model.algorithms.registration.vabra.RegistrationUtilities
-
- vectorSelected(VOIVectorEvent) - Method in interface gov.nih.mipav.model.structures.event.VOIVectorListener
-
handles the VOI being selected.
- vectorSelected(VOIVectorEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
un-implemented.
- vectorSelected(VOIVectorEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
un-implemented.
- vectorSelected(VOIVectorEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
un-implemented.
- vectorSelected(VOIVectorEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- VEINOUS_SEG - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Value which indicates a voxel in the segmenation image that is part of the veinous vasculature tree.
- VEINOUS_SEG - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Value which indicates a voxel in the segmenation image that is part of the veinous vasculature tree.
- velocity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Velocity vector.
- velocity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Velocity vector.
- VELOCITY - gov.nih.mipav.model.file.FileInfoBase.UnitType
-
- velocityDx - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
default initial velocity (dx):.
- velocityDy - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
default initial velocity (dx):.
- velocitySlider - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView
-
fly Speed control slider.
- velocityTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Transfrom velocity.
- velocityTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Transfrom velocity.
- venc - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
576 Phase contrast velocity encoding (mm/sec).
- vencScale - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
732 Scale Weighting Venc (Velocity Encoding/PI).
- vencScalingFactor - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- vencScalingFactor - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- verbose - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- verbose - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.Options
-
- verbose - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.Tracker
-
- verbose - Variable in class gov.nih.mipav.model.algorithms.libdt.EMOptions
-
- verbose - Variable in class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- verbose - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- verbose - Static variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- verbose - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- verbose - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Reg_SIFT3D
-
- verbose - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- VERBOSE - gov.nih.mipav.model.algorithms.libdt.Verbose_mode
-
- Verbose_mode() - Constructor for enum gov.nih.mipav.model.algorithms.libdt.Verbose_mode
-
- verbose_out - Variable in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- verbose_out - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- verboseCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- verbosity - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Cost of each merge
- verification - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_Receiver
-
Reference to the DICOM verification object.
- verified - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- verified - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- verified - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- verify() - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
Initiate verification of connection between client and server (i.e. ping).
- verify(String) - Static method in class gov.nih.mipav.model.file.FileDicomKey
-
Checks that the String s indeed refers to a String that is a valid key, two comma-separated hexidecimal numbers
in the format of "[four digit Group number],[four digit element number]".
- verify_keys(SIFT3D.Keypoint_store, SIFT3D.Image) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- VerifyDiagonalBlocks(int) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest.BlockJacobiPreconditionerTest
-
- verifyImage(double[][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- verifyPP(double[][][][][]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
- verifySOPClass(DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_SOP
-
Verifies the SOP class UID.
- verifySOPClass(DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
Verifies the SOP class UID.
- version - Variable in class gov.nih.mipav.model.algorithms.Cephes
-
- version - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Tells whether real number of complex number version
- version - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
GAMMA, LGAMMA, CGAMMA, or INCOG
- version - Variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
Tells whether real number or complex number version
- version - Variable in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
Tells whether real number or complex number version
- version - Variable in class gov.nih.mipav.model.algorithms.Psi
-
REAL_VERSION or COMPLEX_VERSION
- version - Variable in class gov.nih.mipav.model.file.FileDicomTagInfo
-
Version of the tag.
- version - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- version - Variable in class gov.nih.mipav.model.file.FileInfoICS
-
DOCUMENT ME!
- version - Variable in class gov.nih.mipav.model.file.FileInfoJSON
-
- version - Variable in class gov.nih.mipav.model.file.FileInfoMATLAB
-
- version - Variable in class gov.nih.mipav.model.file.FileInfoMedVision
-
DOCUMENT ME!
- version - Variable in class gov.nih.mipav.model.file.FileInfoMGH
-
Currently version number is 1
- version - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
par/rec version
- version - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Version number, current is 2
- version - Variable in class gov.nih.mipav.model.file.FileMGH
-
Present version number is 1.
- version - Variable in class gov.nih.mipav.model.file.FilePARREC
-
version
- version - Static variable in class gov.nih.mipav.view.MipavUtil
-
The current version number, coded as a String, read and then cached by getVersion().
- versionNumber - Variable in class gov.nih.mipav.model.file.FileInfoNRRD
-
Version of the NRRD file format being used.
- versionNumber - Variable in class gov.nih.mipav.model.file.FileNRRD
-
Version of the NRRD file format being used.
- vert - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- VERT_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
vertical (2D only).
- VERT_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
vertical (2D only).
- vertebraeLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- vertebraeLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- vertebraeLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- vertebraeMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- vertebraeMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- vertebraeMax - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- vertebraeMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCT
-
DOCUMENT ME!
- vertebraeMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTHistoLUT
-
DOCUMENT ME!
- vertebraeMin - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- vertex - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.polygon
-
- vertex - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- vertex - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_vertex_list
-
- vertex - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelQuadMesh
-
Holds vertices in the mesh.
- vertex - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Halfedge
-
- vertex() - Method in class gov.nih.mipav.model.algorithms.LSCM.HalfEdge
-
- Vertex - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- Vertex() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.Vertex
-
- Vertex() - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Vertex
-
Creates a new Vertex object.
- Vertex() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- Vertex(int) - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.Vertex
-
Constructs a vertex in the table.
- VERTEX - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfacePaint
-
Paint the ModelTriangleMesh vertex color:
- VERTEX - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfacePaint_WM
-
Paint the TriMesh vertex color:
- VERTEX_COLOR - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurfaceTexture
-
Displays the ModelImage with per-vertex colors:.
- vertex_edge(LSCM.Vertex, LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- vertex_halfedge(LSCM.Vertex, LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- vertex_id(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- vertex_node() - Constructor for class gov.nih.mipav.model.structures.GenericPolygonClipper.vertex_node
-
- vertex_weights_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- vertex1 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesItem
-
- vertex2 - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesItem
-
- VertexAttribute() - Constructor for class gov.nih.mipav.view.renderer.J3D.model.structures.ModelSurfaceTopology.VertexAttribute
-
Construct an attribute for a vertex.
- vertexBorderFromFace(TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags
-
- vertexClear(TriMesh, int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags
-
- vertexClearB(TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags
-
- vertexClearV(TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags
-
- vertexCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Coordinate vertex point counter.
- vertexCount - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.FaceEdgesFunction
-
- vertexData - Variable in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
support for vtk
- VertexData - Class in gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree
-
- VertexData() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.VertexData
-
- VertexDegreeLessThan(CeresSolver.Graph<Vertex>) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.VertexDegreeLessThan
-
- vertexDiffuse - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightPoint
-
DOCUMENT ME!
- vertexDiffuse - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- vertexDiffuse - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Vertex material diffuse color.
- VertexEdgeIterator(LSCM.Vertex) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.VertexEdgeIterator
-
- VertexFaceIterator(LSCM.Vertex) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.VertexFaceIterator
-
- VertexInHalfedgeIterator(LSCM.Mesh, LSCM.Vertex) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.VertexInHalfedgeIterator
-
- vertexList - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingCubes
-
- vertexList - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.MarchingCubes.MarchingSquares
-
- vertexMostCcwInHalfEdge(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- vertexMostCcwOutHalfEdge(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- vertexMostClwInHalfEdge(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- vertexMostClwOutHalfEdge(LSCM.Vertex) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- vertexNextCcwInHalfEdge(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- vertexNextCcwOutHalfEdge(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- vertexNextClwInHalfEdge(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- vertexNextClwOutHalfEdge(LSCM.HalfEdge) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- vertexNumber() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- VertexOutHalfedgeIterator(LSCM.Mesh, LSCM.Vertex) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.VertexOutHalfedgeIterator
-
- vertexSpecular - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- vertexSpecular - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Vertex material specular color.
- VertexTotalOrdering(CeresSolver.Graph<Vertex>) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.VertexTotalOrdering
-
- VertexTotalOrderingInteger(CeresSolver.Graph<Integer>) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.VertexTotalOrderingInteger
-
- VertexTotalOrderingTotalOrdering() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- VertexTrait() - Constructor for class gov.nih.mipav.model.algorithms.LSCM.VertexTrait
-
- VertexVertexIterator(LSCM.Vertex) - Constructor for class gov.nih.mipav.model.algorithms.LSCM.VertexVertexIterator
-
- VertexWeight(Vertex) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- vertical - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend.ColormapLabel
-
- VERTICAL - Static variable in class gov.nih.mipav.view.ViewJComponentLUT
-
Create vertical LUT.
- VERTICAL - Static variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
Create vertical LUT.
- verticalAnatomicalReference - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- verticalAnatomicalReference - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- verticalFOVString - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
vertical FOV
- verticalGradient - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- verticalLandmark - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- verticalLandmark - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- verticalLineComp(float, float, float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- verticalLineEval(float, float) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- verticalSpacing - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- verticalTalGridPts - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
DOCUMENT ME!
- vertices() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.Graph
-
- vertices() - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- vertices() - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- Vertices - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.ASMData
-
- Vertices - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM
-
- Vertices() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Vertices
-
- Vertices(int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Vertices
-
- vertices_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.Graph
-
- vertices_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- VERTICES_METHOD - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- VERTICES_METHOD - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- VERTICES_METHOD - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- verticesButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- verticesButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- verts - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxFrame
-
Stores the 8 vertices of the bounding box.
- verts - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
Verticies - can change if user slides slice.
- verts - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.Mesh
-
- VertTmark - Class in gov.nih.mipav.view.renderer.WildMagic.BallPivoting
-
- VertTmark() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.VertTmark
-
- VERY_LONG - gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
A signed or unsigned integer in 2's complement is stored in the tag's value.
- VERY_LONG_STRING - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
A string with VR "OV" is stored in the tag's value.
- vesselAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
DOCUMENT ME!
- vesselnessv2d() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- vesselnessv3d() - Method in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- veTotal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- Vf - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- Vf - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- VFi() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- vFilenames - Static variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMUtil
-
File name vector
- vFOVTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- VFp() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- VFp(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- vFrame2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
- vFrame2 - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- vgrid2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- VHead - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- VHead - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- videoFormat - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
DOCUMENT ME!
- videoFormat - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
DOCUMENT ME!
- vidpath - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- VidSegm(int, int, int, int, libdt.norm_type, double, int, int, double, int, int) - Constructor for class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- VidSeqSegmParams() - Constructor for class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- vidsize - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchBatchExtractor
-
< bounding box (z) for patch locations.
- vidsize - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSegm
-
- view - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.GenericRenderer
-
- view - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptController
-
DOCUMENT ME!
- view - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Parent frame transform3D view.
- view - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
View object in rendering a three dimensional scene from one viewpoint.
- view - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
View object in rendering a three dimensional scene from one viewpoint.
- view - Variable in class gov.nih.mipav.view.renderer.MouseEventVector
-
Parent frame transform3D view.
- view_score_weight - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClusteringOptions
-
- view_to_canonical_view_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
-
- view_to_canonical_view_similarity_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.CanonicalViewsClustering
-
- viewAlignedButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Radio Button for Perspective rendering.
- viewAlignedButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Radio Button for Perspective rendering.
- viewAlignedButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Radio Button for Perspective rendering.
- viewButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Radio Button for Orthographic rendering.
- viewButton - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Radio Button for Orthographic rendering.
- viewButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Radio Button for Orthographic rendering.
- viewChanged(FlyPathBehavior, int) - Method in interface gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.Callback
-
DOCUMENT ME!
- viewChanged(FlyPathBehavior, int) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
Implementation of the FlyPathBehavior.Callback interface.
- viewChanged(FlyPathBehavior_WM, int) - Method in interface gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyPathBehavior_WM.Callback
-
ViewChanged callback for flythrough renderers.
- viewChanged(FlyPathBehavior_WM, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender
-
- viewChanged(NavigationBehavior, int) - Method in interface gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.Callback
-
ViewChanged callback for flythrough renderers.
- viewChanged(NavigationBehavior, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Navigation behavior callback handler
- ViewControlsImage - Class in gov.nih.mipav.view
-
This class builds the control panel used in ViewJFrameImage frames.
- ViewControlsImage(ViewJFrameBase) - Constructor for class gov.nih.mipav.view.ViewControlsImage
-
Constructs new control panel.
- ViewDICOMDoubleListPanel - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewDICOMDoubleListPanel(JTable, JTable) - Constructor for class gov.nih.mipav.view.ViewDICOMDoubleListPanel
-
Creates a new ViewDICOMDoubleListPanel object.
- viewDirection - Variable in class gov.nih.mipav.view.renderer.J3D.SoftwareLightSpot
-
DOCUMENT ME!
- viewDirection - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouseDragged
-
camera viewding direction.
- viewDirection - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouseDragged
-
camera viewding direction.
- ViewDirectoryChooser - Class in gov.nih.mipav.view
-
THIS CLASS IS MOST LIKELY TO BE DESTROYED!!!!!!!!!!
- ViewDirectoryChooser() - Constructor for class gov.nih.mipav.view.ViewDirectoryChooser
-
Creates a dialog for choosing a directory.
- ViewDirectoryChooser(Component) - Constructor for class gov.nih.mipav.view.ViewDirectoryChooser
-
Creates a dialog for choosing a directory with a parent frame.
- ViewerTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- ViewFileChooserBase - Class in gov.nih.mipav.view
-
Encapsulates a JFileChooser with MIPAV related components.
- ViewFileChooserBase(boolean, boolean) - Constructor for class gov.nih.mipav.view.ViewFileChooserBase
-
Creates a new ViewFileChooserBase object.
- ViewFileChooserSubsample - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewFileChooserSubsample() - Constructor for class gov.nih.mipav.view.ViewFileChooserSubsample
-
Creates a new ViewFileChooserSubsample object.
- ViewFileChooserSubsample(String) - Constructor for class gov.nih.mipav.view.ViewFileChooserSubsample
-
Creates a new ViewFileChooserSubsample object.
- ViewFileTreeNode - Class in gov.nih.mipav.view
-
This class is used to represent a file system in a tree.
- ViewFileTreeNode(File) - Constructor for class gov.nih.mipav.view.ViewFileTreeNode
-
Loads a File into the tree-leaf.
- ViewFileTreeNode(File, boolean) - Constructor for class gov.nih.mipav.view.ViewFileTreeNode
-
Loads a File into a tree-leaf.
- ViewImageDirectory - Class in gov.nih.mipav.view
-
Tree of images beneath the given directory.
- ViewImageDirectory(String, ViewImageFileFilter) - Constructor for class gov.nih.mipav.view.ViewImageDirectory
-
Creates new tree of images and sets up file filter.
- ViewImageDirectory.ImageNameComparator - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewImageFileFilter - Class in gov.nih.mipav.view
-
A simple file filter to display only files with the appropriate extension in the file dialog.
- ViewImageFileFilter(int) - Constructor for class gov.nih.mipav.view.ViewImageFileFilter
-
Constructs new filter of given type.
- ViewImageFileFilter(String[]) - Constructor for class gov.nih.mipav.view.ViewImageFileFilter
-
Constructs a dynamic filter, with the given extensions.
- ViewImageUpdateInterface - Interface in gov.nih.mipav.view
-
Interface to update display of an image.
- ViewJColorChooser - Class in gov.nih.mipav.view
-
This is a color chooser designed so that the preview panel is not shown.
- ViewJColorChooser(Component, String, ActionListener, ActionListener) - Constructor for class gov.nih.mipav.view.ViewJColorChooser
-
Constructor Constructs the color chooser panel and dialog.
- ViewJColorChooser(Component, String, ActionListener, ActionListener, boolean) - Constructor for class gov.nih.mipav.view.ViewJColorChooser
-
Constructor Constructs the color chooser panel and dialog.
- ViewJComponentAnimate - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJComponentAnimate(ViewJFrameBase, ModelImage, ModelLUT, float[], ModelImage, ModelLUT, float[], int[], float, int[], boolean, float, boolean) - Constructor for class gov.nih.mipav.view.ViewJComponentAnimate
-
Constructor: ImageA and ImageB are expected to be of the same dimensionality !!
- ViewJComponentAnimateClip - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJComponentAnimateClip(float, int, int, int) - Constructor for class gov.nih.mipav.view.ViewJComponentAnimateClip
-
Constructor: ImageA and ImageB are expected to be of the same dimensionality !!
- ViewJComponentBase - Class in gov.nih.mipav.view
-
Abstract class used for displaying images in the program MIPAV.
- ViewJComponentBase(int, int, ModelImage) - Constructor for class gov.nih.mipav.view.ViewJComponentBase
-
creates object of size defined by width & height.
- ViewJComponentBase(Dimension) - Constructor for class gov.nih.mipav.view.ViewJComponentBase
-
creates object of size defined by width & height.
- ViewJComponentBoxFrame - Class in gov.nih.mipav.view.renderer.J3D
-
The red bounding box of the surface renderer.
- ViewJComponentBoxFrame(float, float, float) - Constructor for class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxFrame
-
Creates 8 verticies with 12 edges, a rectangular cube, that represents the bounding box frame of the surface
renderer.
- ViewJComponentBoxSlice - Class in gov.nih.mipav.view.renderer.J3D
-
Four lines that are the border of a slice in the surface renderer.
- ViewJComponentBoxSlice(float, float, float, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
Creates new frame around slice.
- ViewJComponentColocalizationEM - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJComponentColocalizationEM(ViewJFrameBase, ModelImage, ModelImage, ModelImage, ModelLUT, float[], boolean, boolean, boolean, double, double, double, double, double, double, int[], int[], float, int[], boolean, int, int, int, int, double[][], double[], double[], double[]) - Constructor for class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
Constructor: ImageA and ImageB are expected to be of the same dimensionality !!
- ViewJComponentColocalizationRegression - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJComponentColocalizationRegression(AlgorithmColocalizationRegression, ViewJFrameBase, ViewJFrameColocalizationRegression, ModelImage, ModelImage, ModelImage, ModelLUT, float[], boolean, boolean, boolean, float, float, boolean[], float[], float[], float[], float[], double, double, double, double, double, double, double, double, double, double, boolean, int[], int[], float, int[], boolean, boolean, int, int, int, int, boolean, float, ViewUserInterface) - Constructor for class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Constructor: ImageA and ImageB are expected to be of the same dimensionality !!
- ViewJComponentDTIImage - Class in gov.nih.mipav.view
-
ViewJComponent DTI Image
- ViewJComponentDTIImage(ViewJFrameBase, ModelImage, ModelLUT, float[], int[], float, int[], boolean, int, float[]) - Constructor for class gov.nih.mipav.view.ViewJComponentDTIImage
-
constructor
- ViewJComponentEditImage - Class in gov.nih.mipav.view
-
Basic displayable image object in MIPAV.
- ViewJComponentEditImage(ViewJFrameBase, ModelImage, ModelLUT, float[], ModelImage, ModelLUT, float[], int[], float, int[], boolean, int) - Constructor for class gov.nih.mipav.view.ViewJComponentEditImage
-
Constructor: ImageA and ImageB are expected to be of the same dimensionality !!
- ViewJComponentFunct - Class in gov.nih.mipav.view
-
This is a custom made Swing component.
- ViewJComponentFunct() - Constructor for class gov.nih.mipav.view.ViewJComponentFunct
-
Constructor - creates empty function.
- ViewJComponentFunct(float[], float[], int, VOI, int[][]) - Constructor for class gov.nih.mipav.view.ViewJComponentFunct
-
Constructor - creates functions with specified coordinates, and number for name.
- ViewJComponentFunct(float[], float[], Color, int, VOI, int[][]) - Constructor for class gov.nih.mipav.view.ViewJComponentFunct
-
Constructor - creates functions with specified coordinates, color, and number for name.
- ViewJComponentFunct(float[], float[], Color, VOI, int[][]) - Constructor for class gov.nih.mipav.view.ViewJComponentFunct
-
Constructor - creates functions with specified coordinates and color.
- ViewJComponentFunct(float[], float[], Color, String, VOI) - Constructor for class gov.nih.mipav.view.ViewJComponentFunct
-
Constructor - creates functions with specified coordinates, color, and name string.
- ViewJComponentGraph - Class in gov.nih.mipav.view
-
This is a custom made Swing component.
- ViewJComponentGraph(JFrame, int, int) - Constructor for class gov.nih.mipav.view.ViewJComponentGraph
-
Constructor - creates graph within the JPanel using graphics.
- ViewJComponentGraphAxes - Class in gov.nih.mipav.view
-
- ViewJComponentGraphAxes(int, int, int, int, String, int) - Constructor for class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- ViewJComponentHistoLUT - Class in gov.nih.mipav.view
-
This class extends the ViewJComponentHLUTBase class and used to coordinate how a histogram and LUT for an image are
to be displayed to the screen.
- ViewJComponentHistoLUT(HistoLUTParent, ModelHistogram, ModelLUT, ModelImage) - Constructor for class gov.nih.mipav.view.ViewJComponentHistoLUT
-
Creates new component histogram LUT.
- ViewJComponentHistoRGB - Class in gov.nih.mipav.view
-
This class extends the ViewJComponentHLUTBase class and used to coordinate how a histogram and LUT for an image are
to be displayed to the screen.
- ViewJComponentHistoRGB(HistoLUTParent, ModelHistogram, ModelRGB, ModelImage) - Constructor for class gov.nih.mipav.view.ViewJComponentHistoRGB
-
Creates a Histogram RGB component.
- ViewJComponentHLUTBase - Class in gov.nih.mipav.view
-
Abstract class used for generating custom components, especially within images.
- ViewJComponentHLUTBase(HistoLUTParent, ModelHistogram, ModelImage, Dimension) - Constructor for class gov.nih.mipav.view.ViewJComponentHLUTBase
-
Creates object of size defined by width & height.
- ViewJComponentLightBulbs - Class in gov.nih.mipav.view.renderer.J3D.surfaceview
-
Holds parent BranchGroup and an array of 8 spheres that represent the lights on the surface.
- ViewJComponentLightBulbs(int, PickCanvas) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.ViewJComponentLightBulbs
-
Create an array of light bulb objects that can be rendered or picked.
- ViewJComponentLUT - Class in gov.nih.mipav.view
-
Component LUT - the vertical or horizontal bar that gives a visual representation of the lookup table.
- ViewJComponentLUT(ModelLUT, Dimension, int) - Constructor for class gov.nih.mipav.view.ViewJComponentLUT
-
Creates new component LUT.
- ViewJComponentLUTTable - Class in gov.nih.mipav.view
-
Component LUT - the vertical or horizontal bar that gives a visual representation of the lookup table.
- ViewJComponentLUTTable(ModelImage, ModelLUT, Dimension, int) - Constructor for class gov.nih.mipav.view.ViewJComponentLUTTable
-
Creates new component LUT.
- ViewJComponentPedsAtlasIconImage - Class in gov.nih.mipav.view
-
- ViewJComponentPedsAtlasIconImage(ViewJFrameBase, ModelImage, ModelLUT, float[], int[], float, int[], boolean, int, String) - Constructor for class gov.nih.mipav.view.ViewJComponentPedsAtlasIconImage
-
- ViewJComponentPreviewImage - Class in gov.nih.mipav.view
-
Preview image displayed when the user clicks on an image file in the directory tree.
- ViewJComponentPreviewImage(ModelImage, int[], PreviewImageContainer) - Constructor for class gov.nih.mipav.view.ViewJComponentPreviewImage
-
Creates new preview image from the model image.
- ViewJComponentRegistration - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJComponentRegistration(ViewJFrameRegistration, ModelImage, ModelLUT, float[], ModelImage, ModelLUT, float[], int[], float, int[], boolean, int, float) - Constructor for class gov.nih.mipav.view.ViewJComponentRegistration
-
Constructor: ImageA and ImageB are expected to be of the same dimensionality !!
- ViewJComponentRegistration(ViewJFrameRegistrationTool, ModelImage, ModelLUT, float[], ModelImage, ModelLUT, float[], int[], float, int[], boolean, int, float) - Constructor for class gov.nih.mipav.view.ViewJComponentRegistration
-
Constructor: ImageA and ImageB are expected to be of the same dimensionality !!
- ViewJComponentRenderImage - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Abstract class used for displaying images in the program MIPAV.
- ViewJComponentRenderImage(VolumeRenderer, ModelImage, ModelLUT, ModelImage, ModelLUT, int[], int[], int[], int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImage
-
ImageA and ImageB are expected to be of the same dimensionality !!
- ViewJComponentRenderImageRayCast - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Need to add.
- ViewJComponentRenderImageRayCast(VolumeRenderer, ModelImage, ModelLUT, ModelImage, ModelLUT, int[], int[], int[], int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImageRayCast
-
ImageA and ImageB are expected to be of the same dimensionality !!
- ViewJComponentRenderImageShearWarp - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Need to add.
- ViewJComponentRenderImageShearWarp(VolumeRenderer, ModelImage, ModelLUT, ModelImage, ModelLUT, int[], int[], int[], int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.ViewJComponentRenderImageShearWarp
-
Constructor: ImageA and ImageB are expected to be of the same dimensionality !!
- ViewJComponentSingleRegistration - Class in gov.nih.mipav.view
-
Extended version of ViewJComponentEditImage, used ONLY within the ViewJFrameRegistrationTool This class is tailored
to support Reference and Adjusted markers for use with Least Squares and Thin Plate Splines registration operations.
- ViewJComponentSingleRegistration(ViewJFrameBase, ModelImage, ModelLUT, float[], int[], float, int[], boolean, int, boolean) - Constructor for class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Constructor: ImageA and ImageB are expected to be of the same dimensionality !!
- ViewJComponentSurface - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
Component surface created from a 2D image.
- ViewJComponentSurface(RenderViewBase, ModelImage, ModelLUT, int[], int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
Constructs a new component and sets up the variables.
- ViewJComponentSurfaceVolume - Class in gov.nih.mipav.view.renderer.J3D
-
Texture mapped image volume displayed in the surface renderer. .
- ViewJComponentSurfaceVolume(RenderViewBase, ModelImage, ModelLUT, float[], ModelImage, ModelLUT, float[], VolumeTexture, int[]) - Constructor for class gov.nih.mipav.view.renderer.J3D.ViewJComponentSurfaceVolume
-
Constructs new component image plane with the appropriate arrays.
- ViewJComponentTriImage - Class in gov.nih.mipav.view
-
One of the component images that make up the triplanar view (AXIAL, SAGITTAL, and CORONAL views).
- ViewJComponentTriImage(ViewJFrameBase, ModelImage, ModelLUT, float[], ModelImage, ModelLUT, float[], int[], float, int[], boolean, int) - Constructor for class gov.nih.mipav.view.ViewJComponentTriImage
-
The TriImage component constructor.
- ViewJComponentTriSliceImage - Class in gov.nih.mipav.view.renderer.J3D
-
Image plane displayed in the surface renderer.
- ViewJComponentTriSliceImage(SurfaceRender, ModelImage, ModelImage, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.ViewJComponentTriSliceImage
-
Constructs new component image plane with the appropriate arrays.
- ViewJComponentVolOpacity - Class in gov.nih.mipav.view.renderer.J3D
-
This class is used to coordinate how a histogram and LUT for an image are to be displayed to the screen.
- ViewJComponentVolOpacity(JPanelVolOpacity, ModelHistogram, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Deprecated.
- ViewJComponentVolOpacity(ViewJComponentVolOpacityListener, ModelHistogram, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.J3D.ViewJComponentVolOpacity
-
Creates new component histogram LUT.
- ViewJComponentVolOpacityBase - Class in gov.nih.mipav.view.renderer
-
Abstract class used for generating custom components, especially within images.
- ViewJComponentVolOpacityBase(JPanelVolOpacityBase, ModelHistogram, ModelImage, Dimension) - Constructor for class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
Creates object of size defined by width & height.
- ViewJComponentVolOpacityBase(ViewJComponentVolOpacityListener, ModelHistogram, ModelImage, Dimension) - Constructor for class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityBase
-
- ViewJComponentVolOpacityListener - Interface in gov.nih.mipav.view.renderer
-
Created so the JPanelVolOpacity can be used in more generic container classes.
- ViewJComponentVolOpacityRGB - Class in gov.nih.mipav.view.renderer
-
This class extends the ViewJComponentVolOpacityBase class and used to coordinate how a histogram and LUT for an image
are to be displayed to the screen.
- ViewJComponentVolOpacityRGB(JPanelVolOpacityRGB, ModelHistogram, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityRGB
-
Creates a Histogram RGB component.
- ViewJComponentVolOpacityRGB(ViewJComponentVolOpacityListener, ModelHistogram, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.ViewJComponentVolOpacityRGB
-
Creates new component histogram LUT.
- ViewJFilterAnimate - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJFilterAnimate(int, float) - Constructor for class gov.nih.mipav.view.ViewJFilterAnimate
-
Creates a new ViewJFilterAnimate object.
- ViewJFrameAnimate - Class in gov.nih.mipav.view
-
This class produces a frame surrounding an image whose slices are animated.
- ViewJFrameAnimate(ModelImage, ModelLUT, ModelImage, ModelLUT, ModelRGB, ModelRGB, ViewJFrameBase, int, int, int, boolean, Color, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameAnimate
-
Makes a frame of the animated image.
- ViewJFrameAnimate.CBackForward - Class in gov.nih.mipav.view
-
continuous backward and forward - continuously cycles from first to last slice unless a pause suspends the loop
in 5 millisecond sleep functions or a stop causes the loop to exit.
- ViewJFrameAnimate.cbfStop - Class in gov.nih.mipav.view
-
Continuous back and forth has been selected.
- ViewJFrameAnimate.CForward - Class in gov.nih.mipav.view
-
continuous forward continuously cycles from first to last slice unless a pause suspends the loop in 5 millisecond
sleep functions or a stop causes the loop to exit.
- ViewJFrameAnimate.cfStop - Class in gov.nih.mipav.view
-
Threads are used because they are required by the sleep function. cf , fStop, crStop, and rStop set stop to true
and keep sleeping for 5 millisecond intervals until the other 3 animation modes have ended.
- ViewJFrameAnimate.CReverse - Class in gov.nih.mipav.view
-
continuous reverse continuously cycles from last to frist slice unless a pause suspends the loop in 5 millisecond
sleep functions or a stop causes the loop to exit.
- ViewJFrameAnimate.crStop - Class in gov.nih.mipav.view
-
Continuous reverse has been selected.
- ViewJFrameAnimate.Forward - Class in gov.nih.mipav.view
-
forward cycles a single time from first to last slice unless a pause suspends the loop in 5 millisecond sleep
functions or a stop causes the loop to exit.
- ViewJFrameAnimate.fStop - Class in gov.nih.mipav.view
-
Forward has been selected.
- ViewJFrameAnimate.Reverse - Class in gov.nih.mipav.view
-
reverse cycles a single time from last to first slice unless a pause suspends the loop in 5 millisecond sleep
functions or a stop causes the loop to exit.
- ViewJFrameAnimate.rStop - Class in gov.nih.mipav.view
-
Reverse has been selected.
- ViewJFrameAnimateClip - Class in gov.nih.mipav.view
-
This class produces a frame surrounding an image whose slices are animated.
- ViewJFrameAnimateClip(ModelImage, int, int, int) - Constructor for class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Makes a frame of the animated image.
- ViewJFrameAnimateClip.CBackForward - Class in gov.nih.mipav.view
-
continuous backward and forward - continuously cycles from first to last slice unless a pause suspends the loop
in 5 millisecond sleep functions or a stop causes the loop to exit.
- ViewJFrameAnimateClip.cbfStop - Class in gov.nih.mipav.view
-
Continuous back and forth has been selected.
- ViewJFrameAnimateClip.CForward - Class in gov.nih.mipav.view
-
continuous forward continuously cycles from first to last slice unless a pause suspends the loop in 5 millisecond
sleep functions or a stop causes the loop to exit.
- ViewJFrameAnimateClip.cfStop - Class in gov.nih.mipav.view
-
Threads are used because they are required by the sleep function. cf , fStop, crStop, and rStop set stop to true
and keep sleeping for 5 millisecond intervals until the other 3 animation modes have ended.
- ViewJFrameAnimateClip.CReverse - Class in gov.nih.mipav.view
-
continuous reverse continuously cycles from last to frist slice unless a pause suspends the loop in 5 millisecond
sleep functions or a stop causes the loop to exit.
- ViewJFrameAnimateClip.crStop - Class in gov.nih.mipav.view
-
Continuous reverse has been selected.
- ViewJFrameAnimateClip.Forward - Class in gov.nih.mipav.view
-
forward cycles a single time from first to last slice unless a pause suspends the loop in 5 millisecond sleep
functions or a stop causes the loop to exit.
- ViewJFrameAnimateClip.fStop - Class in gov.nih.mipav.view
-
Forward has been selected.
- ViewJFrameAnimateClip.Reverse - Class in gov.nih.mipav.view
-
reverse cycles a single time from last to first slice unless a pause suspends the loop in 5 millisecond sleep
functions or a stop causes the loop to exit.
- ViewJFrameAnimateClip.rStop - Class in gov.nih.mipav.view
-
Reverse has been selected.
- ViewJFrameBase - Class in gov.nih.mipav.view
-
This is an abstract class used to display images in a 2D planar format.
- ViewJFrameBase(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.ViewJFrameBase
-
Makes an image frame.
- ViewJFrameColocalizationEM - Class in gov.nih.mipav.view
-
This class produces a frame surrounding a 2D histogram with ellipses surrounding the most prominent clusters.
- ViewJFrameColocalizationEM(ModelImage, ModelLUT, ModelImage, ModelLUT, ModelRGB, ModelImage, ViewJFrameBase, boolean, boolean, boolean, double, double, double, double, double, double, int, int, int, int, double[][], double[], double[], double[]) - Constructor for class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Makes a frame of the animated image.
- ViewJFrameColocalizationRegression - Class in gov.nih.mipav.view
-
This class produces a frame surrounding a 2D histogram with a orthogonal least squares regression line and a
threshold point that slides along the line.
- ViewJFrameColocalizationRegression(AlgorithmColocalizationRegression, ModelImage, ModelLUT, ModelImage, ModelLUT, ModelRGB, ModelImage, ViewJFrameBase, boolean, boolean, boolean, float, float, float, float, boolean[], float[], float[], float[], float[], double, double, double, double, double, double, double, double, double, double, boolean, int, int, int, int, boolean, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Makes a frame of the colocalization histogram.
- ViewJFrameCreatePaint - Class in gov.nih.mipav.view
-
Frame that allows the creation of custom paint brushes.
- ViewJFrameCreatePaint() - Constructor for class gov.nih.mipav.view.ViewJFrameCreatePaint
-
Main constructor.
- ViewJFrameCreatePaint.JDialogGridSize - Class in gov.nih.mipav.view
-
Simple dialog to prompt user for grid size
- ViewJFrameDICOMParser - Class in gov.nih.mipav.view
-
DICOM parser - shows pertinent DICOM tags, allows user to sort on specific values in the tags and open the proper
images.
- ViewJFrameDICOMParser(String) - Constructor for class gov.nih.mipav.view.ViewJFrameDICOMParser
-
Creates new frame.
- ViewJFrameDICOMParser.TableListener - Class in gov.nih.mipav.view
-
Table listener - listens for clicks on any of the three table headers or clicks within each table.
- ViewJFrameDICOMQuery - Class in gov.nih.mipav.view
-
GUI for DICOM Query and retreival from DICOM compliant servers.
- ViewJFrameDICOMQuery() - Constructor for class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Constructs three tabbed panels - DICOM Query, Host and Help panels.
- ViewJFrameDICOMQuery.MoveRequestInfo - Class in gov.nih.mipav.view
-
Simple class to support move requests.
- ViewJFrameFastMarching2 - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJFrameFastMarching2(ModelImage, ModelLUT) - Constructor for class gov.nih.mipav.view.ViewJFrameFastMarching2
-
Creates a new ViewJFrameFastMarching2 object.
- ViewJFrameFastMarching3 - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJFrameFastMarching3(ModelImage, ModelLUT) - Constructor for class gov.nih.mipav.view.ViewJFrameFastMarching3
-
Creates a new ViewJFrameFastMarching3 object.
- ViewJFrameGraph - Class in gov.nih.mipav.view
-
This is a frame which holds a graph in one panel and a set of user buttons in the other.
- ViewJFrameGraph(float[][], float[][], String) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(float[][], float[][], String, VOI) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(float[][], float[][], String, VOI, String) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(float[][], float[][], String, String, String) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(float[][], float[][], String, String, String, Color[]) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(float[], float[], String, int[][]) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(float[], float[], String, VOI) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(float[], float[], String, VOI, String, int[][]) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(float[], float[], String, String, String) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(float[], float[], String, String, String, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(float[], float[], String, String, String, Color) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(ModelImage, int, boolean, int, double, double, float[], float[], String, String, String) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph(String, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameGraph
-
Constructor Constructs the frame, with the graph component in one panel and the user options in the other.
- ViewJFrameGraph.bColorListener - Class in gov.nih.mipav.view
-
This class is called by the color chooser when the user selects a a color from the background color chooser
dialog box.
- ViewJFrameGraph.CancelListener - Class in gov.nih.mipav.view
-
This class is called by the color chooser when the user cancels.
- ViewJFrameGraph.ColorListener - Class in gov.nih.mipav.view
-
This class is called by the color chooser when the user selects a a color from the function line color chooser
dialog.
- ViewJFrameGraph.FitMode - Enum in gov.nih.mipav.view
-
- ViewJFrameHistoLUT - Class in gov.nih.mipav.view
-
Deprecated.
- ViewJFrameHistoLUT(ModelImage, ModelImage, ModelLUT, ModelLUT, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
- ViewJFrameHistoLUT(ModelImage, ModelImage, ModelLUT, ModelLUT, boolean, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
- ViewJFrameHistoLUT(ViewJComponentRegistration, ModelImage, ModelImage, ModelLUT, ModelLUT, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
- ViewJFrameHistoLUT(ViewJFrameColocalizationEM, ModelImage, ModelImage, ModelLUT, ModelLUT, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
- ViewJFrameHistoLUT(ViewJFrameColocalizationRegression, ModelImage, ModelImage, ModelLUT, ModelLUT, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
- ViewJFrameHistoLUT(Frame, ModelImage, ModelImage, ModelLUT, ModelLUT, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
- ViewJFrameHistoRGB - Class in gov.nih.mipav.view
-
Deprecated.
- ViewJFrameHistoRGB(ModelImage, ModelImage, ModelRGB, ModelRGB, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
- ViewJFrameHistoRGB(ViewJComponentRegistration, ModelImage, ModelImage, ModelRGB, ModelRGB, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
- ViewJFrameImage - Class in gov.nih.mipav.view
-
Makes a frame and put a single image component into it.
- ViewJFrameImage(ModelImage) - Constructor for class gov.nih.mipav.view.ViewJFrameImage
-
Makes a frame and puts an image into it.
- ViewJFrameImage(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.ViewJFrameImage
-
Makes a frame and puts an image component into it, does not display the frame through ViewJFrameImage's init()
method.
- ViewJFrameImage(ModelImage, ModelLUT) - Constructor for class gov.nih.mipav.view.ViewJFrameImage
-
Makes a frame and puts an image into it.
- ViewJFrameImage(ModelImage, ModelLUT, Dimension) - Constructor for class gov.nih.mipav.view.ViewJFrameImage
-
Makes a frame and puts an image component into it.
- ViewJFrameImage(ModelImage, ModelLUT, Dimension, boolean) - Constructor for class gov.nih.mipav.view.ViewJFrameImage
-
Makes a frame and puts an image component into it.
- ViewJFrameImage(ModelSimpleImage, String) - Constructor for class gov.nih.mipav.view.ViewJFrameImage
-
Constructs a ModelSimpleImage VJF
- ViewJFrameImage.DicomQueryListener - Class in gov.nih.mipav.view
-
- ViewJFrameImage.OkColorListener - Class in gov.nih.mipav.view
-
Pick up the selected color and call method to change the VOI color.
- ViewJFrameLightBox - Class in gov.nih.mipav.view
-
This class builds a "light box" view of a 3D or 4D dataset.
- ViewJFrameLightBox(ViewJFrameImage, String, ModelImage, ModelLUT, ModelImage, ModelLUT, float, float, Dimension, ViewControlsImage, VOIManagerInterface) - Constructor for class gov.nih.mipav.view.ViewJFrameLightBox
-
Builds the initial lightbox view.
- ViewJFrameMemory - Class in gov.nih.mipav.view
-
Contains a seperatly running thread which checks the currently used and available memory.
- ViewJFrameMemory() - Constructor for class gov.nih.mipav.view.ViewJFrameMemory
-
Constructor.
- ViewJFrameMemory.MemoryMonitor - Class in gov.nih.mipav.view
-
Tracks Memory allocated & used, and notifies anybody who is interested in finding out about it.
- ViewJFrameMessage - Class in gov.nih.mipav.view
-
This class produces a message frame where user data, logging and debug information can be displayed.
- ViewJFrameMessage(String) - Constructor for class gov.nih.mipav.view.ViewJFrameMessage
-
Creates new frame.
- ViewJFrameMessage.ScrollTextArea - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJFrameMessageGraph - Class in gov.nih.mipav.view
-
This class produces a message frame where user data and program can be displayed.
- ViewJFrameMessageGraph(String) - Constructor for class gov.nih.mipav.view.ViewJFrameMessageGraph
-
Constructor.
- ViewJFrameMultimodalitySingleViewer - Class in gov.nih.mipav.view
-
- ViewJFrameMultimodalitySingleViewer(ModelImage, ViewJFrameImage) - Constructor for class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- ViewJFrameMultimodalitySingleViewer.MousePopupListener - Class in gov.nih.mipav.view
-
- ViewJFrameMultimodalityViewer - Class in gov.nih.mipav.view
-
- ViewJFrameMultimodalityViewer(ModelImage, ViewJFrameImage) - Constructor for class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- ViewJFrameMultimodalityViewer.MousePopupListener - Class in gov.nih.mipav.view
-
- ViewJFramePaintVasculature - Class in gov.nih.mipav.view
-
Generates a MIP image from a 3D volume.
- ViewJFramePaintVasculature(ModelImage, ModelLUT, Dimension, ViewJFrameBase) - Constructor for class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Constructs the MIP frame and pops up the region grow dialog.
- ViewJFramePlotterView - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
Title: ViewJFramePlotterView
- ViewJFramePlotterView(ModelImage, ModelLUT, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
The frame the rendering the plotter view of images.
- ViewJFramePlotterView.TabbedItem - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview
-
Item to hold tab name and corresponding panel.
- ViewJFrameRegisteredImages - Class in gov.nih.mipav.view
-
Contains a seperatly running thread which checks the list of registered images.
- ViewJFrameRegisteredImages() - Constructor for class gov.nih.mipav.view.ViewJFrameRegisteredImages
-
Constructor.
- ViewJFrameRegisteredImages.ImageCellRenderer - Class in gov.nih.mipav.view
-
Identifies components that can be used as "rubber stamps" to paint the cells in a JList.
- ViewJFrameRegisteredImages.MouseClickAdapter - Class in gov.nih.mipav.view
-
As an extension of MouseAdapter, this class merely responds on clicked list events.
- ViewJFrameRegistration - Class in gov.nih.mipav.view
-
ViewJFrameRegistration is called in ViewJFrameImage.
- ViewJFrameRegistration(ModelImage, ModelImage, ModelLUT, ModelLUT) - Constructor for class gov.nih.mipav.view.ViewJFrameRegistration
-
Makes a frame of the manually registered image.
- ViewJFrameRegistration(ModelImage, ModelLUT) - Constructor for class gov.nih.mipav.view.ViewJFrameRegistration
-
Makes a frame of the manually registered image.
- ViewJFrameRegistration.JDialogIncrement - Class in gov.nih.mipav.view
-
Class for the two dialogs for incrementing - the pixel increment dialog and the degree increment dialog.
- ViewJFrameRegistrationTool - Class in gov.nih.mipav.view
-
ViewJFrameRegistrationTool is called in ViewJFrameImage.
- ViewJFrameRegistrationTool(ModelImage, ModelImage, ModelStorageBase, ModelStorageBase) - Constructor for class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Makes a frame of the manually registered image.
- ViewJFrameRegistrationTool.JDialogIncrement - Class in gov.nih.mipav.view
-
Class for the two dialogs for incrementing - the pixel increment dialog and the degree increment dialog.
- ViewJFrameRenderCamera - Class in gov.nih.mipav.view.renderer.J3D
-
This class builds a "light box" view of a 3D or 4D dataset.
- ViewJFrameRenderCamera(ModelImage, RenderViewBase) - Constructor for class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Builds the initial lightbox view.
- ViewJFrameTriImage - Class in gov.nih.mipav.view
-
This program works with 3D and 4D images.
- ViewJFrameTriImage(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.ViewJFrameTriImage
-
Creates a JFrameBase without calling gui initialization, init() must
be called after pre-processing has completed.
- ViewJFrameTriImage(ModelImage, ModelLUT, ModelImage, ModelLUT, ViewControlsImage, ViewJFrameImage) - Constructor for class gov.nih.mipav.view.ViewJFrameTriImage
-
Make a frame and puts an image component into it.
- ViewJFrameTriImage(ModelImage, ModelLUT, ModelRGB, ModelImage, ModelLUT, ModelRGB, ViewControlsImage, ViewJFrameImage) - Constructor for class gov.nih.mipav.view.ViewJFrameTriImage
-
- ViewJFrameTriImage.OkColorListener - Class in gov.nih.mipav.view
-
Listener to pass to JColorChooser when user wants to change the color of the paint.
- ViewJFrameTriImage.PaintBoxRenderer - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJFrameVolumeView - Class in gov.nih.mipav.view.renderer.J3D
-
The volume view frame of the visualization.
- ViewJFrameVolumeView(ModelImage, ModelLUT, ModelRGB, ModelImage, ModelLUT, ModelRGB, int, int, JDialogVolViewResample) - Constructor for class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Make a volume rendering frame, which contains the toolbars on the top, control panel on the left, the volume
rendering panel on the right, and the three orthogonal view ( axial, sagittal, coronal, views) on the bottom
right.
- ViewJFrameVolumeView.TabbedItem - Class in gov.nih.mipav.view.renderer.J3D
-
Item to hold tab name and corresponding panel.
- ViewJPanelHistoLUT - Class in gov.nih.mipav.view
-
Panel containing the histogram component (the graph) and the lut component (the gradient vertical bar).
- ViewJPanelHistoLUT(HistoLUTParent, ModelImage, ModelLUT, ModelHistogram) - Constructor for class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Deprecated.
- ViewJPanelHistoLUT(HistoLUTParent, ModelImage, ModelRGB, ModelHistogram) - Constructor for class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Deprecated.
- ViewJPanelHistoLUT(HistoLUTParent, ModelImage, ModelStorageBase, ModelHistogram) - Constructor for class gov.nih.mipav.view.ViewJPanelHistoLUT
-
Create this panel.
- ViewJPanelHistoLUT.CancelColorListener - Class in gov.nih.mipav.view
-
Notice when the user cancels the color chooser dialog.
- ViewJPanelHistoLUT.OkColorListener - Class in gov.nih.mipav.view
-
Pick up the selected color and change the image border color.
- ViewJPanelLUT - Class in gov.nih.mipav.view
-
Deprecated.
- ViewJPanelLUT(ViewJFrameHistoLUT) - Constructor for class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
- ViewJPopupPlugin - Class in gov.nih.mipav.view
-
Pop-up menu for uninstalling a plugin.
- ViewJPopupPlugin() - Constructor for class gov.nih.mipav.view.ViewJPopupPlugin
-
Creates a new ViewJPopupVOI object.
- ViewJPopupPt - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJPopupPt(VOIHandlerInterface) - Constructor for class gov.nih.mipav.view.ViewJPopupPt
-
Creates a new ViewJPopupPt object.
- ViewJPopupVOI - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewJPopupVOI(VOIHandlerInterface) - Constructor for class gov.nih.mipav.view.ViewJPopupVOI
-
Creates a new ViewJPopupVOI object.
- ViewJPopupVOI(VOIHandlerInterface, JFrame, VOIBase) - Constructor for class gov.nih.mipav.view.ViewJPopupVOI
-
Creates a new ViewJPopupVOI object.
- ViewJProgressBar - Class in gov.nih.mipav.view
-
Progress bar used everywhere for displaying to the user how long the current process is going to take.
- ViewJProgressBar(String, String, int, int, boolean) - Constructor for class gov.nih.mipav.view.ViewJProgressBar
-
Creates a new ViewJProgressBar object.
- ViewJProgressBar(String, String, int, int, boolean, ActionListener, WindowListener) - Constructor for class gov.nih.mipav.view.ViewJProgressBar
-
Creates a new progress bar with the given title, message, and min and max.
- ViewJProgressBar(String, String, int, int, boolean, ActionListener, WindowListener, boolean) - Constructor for class gov.nih.mipav.view.ViewJProgressBar
-
Creates a new progress bar with the given title, message, and min and max.
- ViewJProgressBarMulti - Class in gov.nih.mipav.view
-
Extension of ViewJProgressBar, ViewJProgressBarMulti is used to keep track of multiple
algorithms or threads at a single time.
- ViewJProgressBarMulti(String, boolean, ActionListener, WindowListener) - Constructor for class gov.nih.mipav.view.ViewJProgressBarMulti
-
Constructor to start building the frame.
- ViewJProgressBarMulti.AlgoContainer - Class in gov.nih.mipav.view
-
A container class that holds all the information to correctly
draw each progress bar.
- ViewJProgressBarMulti.Linking - Class in gov.nih.mipav.view
-
Very basic structure to update determine which algorithm is linked, and
over what range.
- ViewJSimpleProgressBar - Class in gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview
-
Wraps the ViewJProgressBar instance which allows an arbitrary minimum and maximum value to be specified for the ends
of the progress bar.
- ViewJSimpleProgressBar(String, String) - Constructor for class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.ViewJSimpleProgressBar
-
Create a collection of controls for displaying progress.
- ViewJSlider - Class in gov.nih.mipav.view
-
This class extends Java's JSlider to give basic solutions to common slider needs in
image processing tasks.
- ViewJSlider() - Constructor for class gov.nih.mipav.view.ViewJSlider
-
Default constructor
- ViewJSlider(String) - Constructor for class gov.nih.mipav.view.ViewJSlider
-
Creates a horizontal slider with the range and initial
value specified by type.
- ViewJSlider(String, int) - Constructor for class gov.nih.mipav.view.ViewJSlider
-
Creates a horizontal slider with the range and initial
value specified by type, but the orientation is explicitly specified.
- ViewJSlider(String, int, int) - Constructor for class gov.nih.mipav.view.ViewJSlider
-
Creates a horizontal slider with the range and initial
value specified by type, but the min and max are explicitly to create
a Boundary Range model.
- ViewJSlider(String, int, int, int) - Constructor for class gov.nih.mipav.view.ViewJSlider
-
Creates a horizontal slider with the range and initial
value specified by type, but the min and max are explicitly to create
a Boundary Range model.
- ViewJSlider(String, int, int, int, int) - Constructor for class gov.nih.mipav.view.ViewJSlider
-
Creates a horizontal slider with the range and initial
value specified by type, but the min and max are explicitly to create
a Boundary Range model.
- ViewJSlider(String, BoundedRangeModel) - Constructor for class gov.nih.mipav.view.ViewJSlider
-
Creates a horizontal slider with the range and initial
value specified by type, but the range model is explicitly specified.
- ViewJSlider.SliderType - Enum in gov.nih.mipav.view
-
- ViewJSlider.ViewJSliderResizeTool - Class in gov.nih.mipav.view
-
This class watches for GUI events that require slider marks to be reset.
- ViewJSliderResizeTool() - Constructor for class gov.nih.mipav.view.ViewJSlider.ViewJSliderResizeTool
-
- viewList - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse
-
View list of the mouse recorder display list.
- viewList - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
View list of the mouse recorder display list.
- viewMenu - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- ViewMenuBar - Class in gov.nih.mipav.view
-
Build the menus for an image loaded into MIPAV.
- ViewMenuBar(ViewMenuBuilder) - Constructor for class gov.nih.mipav.view.ViewMenuBar
-
Set up the menu bar builder.
- ViewMenuBuilder - Class in gov.nih.mipav.view
-
This class provides a number of helper methods for building and manipulating menus.
- ViewMenuBuilder(ActionListener) - Constructor for class gov.nih.mipav.view.ViewMenuBuilder
-
Sets frame to add menus to, and initializes menu item vector.
- ViewMenuBuilder.MenuDragOp - Class in gov.nih.mipav.view
-
Class for listening to dragging events within a menu.
- ViewMenuBuilder.MenuDragOp.MenuMouse - Class in gov.nih.mipav.view
-
Class for listening to mouse events after a candidate menu is being dragged.
- ViewMenuBuilder.MipavMenuItem - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewMenuBuilder.QuickList - Class in gov.nih.mipav.view
-
QuickList class uses Preferences to build a list of the most recently opened images. the frame is passed in for
purposes of ActionListener The QuickList is stored as JMenuItems in a Vector that can be retrieved.
- ViewOpenFileUI - Class in gov.nih.mipav.view
-
Opens an image file by calling FileIO.readImage and puts it into an image frame.
- ViewOpenFileUI(boolean) - Constructor for class gov.nih.mipav.view.ViewOpenFileUI
-
Creates the way to open and verify files before they are loaded by the FileIO.
- ViewOpenFrameInterface - Interface in gov.nih.mipav.view
-
Simple interface to allow JDialogs to open up a new frame of the same type as was used to create the dialog
This allows stand-alone plugins that extend ViewJFrameImage to instantiate a new frame of the same type.
- ViewOpenImageSequence - Class in gov.nih.mipav.view
-
The purpose of this class is to present the user with a window enabling him/her to open a sequence of TIFF files
based on timepoint-channel-slice ordering.
- ViewOpenImageSequence() - Constructor for class gov.nih.mipav.view.ViewOpenImageSequence
-
Creates a new ViewOpenImageSequence object.
- ViewOpenPaintUI - Class in gov.nih.mipav.view
-
- ViewOpenPaintUI() - Constructor for class gov.nih.mipav.view.ViewOpenPaintUI
-
Constructor to allow user to open a file.
- ViewOpenVOIUI - Class in gov.nih.mipav.view
-
User interface to open a VOI.
- ViewOpenVOIUI() - Constructor for class gov.nih.mipav.view.ViewOpenVOIUI
-
Constructor to allow user to open a file.
- viewPanel - Variable in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
View dialog associated with surface plotter or renderer.
- viewPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Control panel for the surface renderer.
- viewPanel - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
DOCUMENT ME!
- viewPanel - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Panel for switching between radiological and neurological viewing conventions.
- viewPoint - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- viewportheight - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- viewPortHeight - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- viewportwidth - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- viewPortWidth - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Legend
-
- views - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- views - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- views - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- ViewSelectableDoubleListPanel - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewSelectableDoubleListPanel(JTable, JTable) - Constructor for class gov.nih.mipav.view.ViewSelectableDoubleListPanel
-
Creates a new ViewSelectableDoubleListPanel object.
- viewsPerSeg - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
830 views per segment.
- ViewSplashScreen - Class in gov.nih.mipav.view
-
Shows the MIPAV splash screen until the user clicks the image or a few seconds (4 currently).
- ViewSplashScreen() - Constructor for class gov.nih.mipav.view.ViewSplashScreen
-
Setup and display the splash screen.
- ViewTableModel - Class in gov.nih.mipav.view
-
This is a simple class that creates a DefaultTableModel with uneditable cells.
- ViewTableModel() - Constructor for class gov.nih.mipav.view.ViewTableModel
-
Calls super constructor.
- ViewTableModel(Object[], int) - Constructor for class gov.nih.mipav.view.ViewTableModel
-
Constructs a new table model with the given column names and row count.
- viewTextureButtonGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelDisplay
-
Button group for projections.
- viewTextureButtonGroup - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelSurfaceBox
-
Button group for projections.
- viewTextureButtonGroup - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Button group for projections.
- viewToModel - Variable in class gov.nih.mipav.model.structures.TableSorter
-
DOCUMENT ME!
- viewToolBar - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
The top one render view switch toolbar.
- viewToolBar - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
The top one render view switch toolbar.
- ViewToolBarBuilder - Class in gov.nih.mipav.view
-
Builds the GUI toolbars for the user interface.
- ViewToolBarBuilder(Object) - Constructor for class gov.nih.mipav.view.ViewToolBarBuilder
-
Sets the UI.
- ViewToolBarBuilder.JScriptToolBar - Class in gov.nih.mipav.view
-
Class used to indicate on the toolbar whether a script is being recorded.
- ViewToolBarBuilder.PaintBoxRenderer - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewToolBarBuilder.PopupListener - Class in gov.nih.mipav.view
-
DOCUMENT ME!
- ViewToolBarBuilder.VOIColorButton - Class in gov.nih.mipav.view
-
- viewType - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- ViewUserInterface - Class in gov.nih.mipav.view
-
This class is the _glue_ keeps a record of the present structure of the application.
- ViewUserInterface() - Constructor for class gov.nih.mipav.view.ViewUserInterface
-
Constructs main UI frame.
- ViewUserInterface(boolean) - Constructor for class gov.nih.mipav.view.ViewUserInterface
-
Constructs main UI frame.
- ViewUserInterface.DicomQueryListener - Class in gov.nih.mipav.view
-
- ViewUserInterface.ImageTransferHandler - Class in gov.nih.mipav.view
-
Handles drag and drop events to the main mipav gui.
- ViewUserInterface.OpenFileInfo - Class in gov.nih.mipav.view
-
Stores file name and switch for multifile.
- ViewVOIVector - Class in gov.nih.mipav.view
-
A simple class that extends Vector mostly to clean-up syntax access to VOI info. in ViewComponentEditImage
((VOI)(VOIs.elementAt(i))).isActive() would be a good example can be re-written as as:
VOIs.VOIAt(i).isActive()
- ViewVOIVector() - Constructor for class gov.nih.mipav.view.ViewVOIVector
-
Constructs an empty vector so that its internal data array has size 10 and its standard capacity increment is
zero.
- ViewVOIVector(int) - Constructor for class gov.nih.mipav.view.ViewVOIVector
-
Constructs an empty vector with the specified initial capacity and with its capacity increment equal to zero.
- vif - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vifp() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vifp_mean - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vifsub_est_M(Vector<double[][]>, Vector<double[][]>, Vector<double[][]>, Vector<double[][]>) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vifvec() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vIndex - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
- virt_barray_list - Variable in class gov.nih.mipav.model.file.libjpeg.my_memory_mgr
-
- virt_sarray_list - Variable in class gov.nih.mipav.model.file.libjpeg.my_memory_mgr
-
- VisCrossProduct(CVisDVector, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisCrossProduct(CVisDVector, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- VisCrossProduct(CVisDVector, CVisDVector, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisCrossProduct(CVisDVector, CVisDVector, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDVector
-
- VisDMatrixLeastSquares(CVisDMatrix, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixLeastSquares(CVisDMatrix, CVisDMatrix, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixLeastSquares(CVisDMatrix, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixLeastSquares(CVisDMatrix, CVisDVector, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixLLS(CVisDMatrix, CVisDMatrix, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixSolve(CVisDMatrix, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixSolve(CVisDMatrix, CVisDVector, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixSolveSPD(CVisDMatrix, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixSolveSPD(CVisDMatrix, CVisDVector, CVisDVector, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixSqrtInverse(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixSqrtInverse(CVisDMatrix, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixSVD(CVisDMatrix, CVisDVector, CVisDMatrix, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixSVD(CVisDMatrix, CVisDVector, CVisDMatrix, CVisDMatrix, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisDMatrixSymmetricEigen(CVisDMatrix, CVisDVector, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMDeformPCA
-
Perform symmetric eigen analysis.
- VisDMatrixSymmetricEigen(CVisDMatrix, CVisDVector, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMLinearReg
-
Symmetric eigen analysis
- VisDMatrixSymmetricEigen(CVisDMatrix, CVisDVector, CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- VisGaussJordanSolveDMatrix(CVisDMatrix) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- visibility_clustering_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearSolverOptions
-
- visibility_clustering_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.PreconditionerOptions
-
- visibility_clustering_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverOptions
-
- visibility_clustering_type - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.SolverSummary
-
- VisibilityClusteringType() - Constructor for enum gov.nih.mipav.model.algorithms.CeresSolver.VisibilityClusteringType
-
- VisibilityTestNoEBlocks() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- VisibilityTestSimpleMatrix() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- visible - Variable in class gov.nih.mipav.model.structures.VOI
-
If true the VOI is visible.
- visibleBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Check box for whether or not the image should be visible.
- visited - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- visited - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- visited - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- VISITED - Static variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- VisOuterProduct(CVisDVector, CVisDVector) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisDMatrix
-
- visRect - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Visible rectangle to draw topped.
- VISTA - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Vista file extension .v
- vistaParamTextfields - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
array list of text fields
- VISUAL_INFORMATION_FIDELITY - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- visualization - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- visualization - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- VISUALIZATION - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- vl_aib(int[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- vl_aib_calculate_information(AgglomerativeInformationBottleneck.VlAIB, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_delete(AgglomerativeInformationBottleneck.VlAIB) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_get_costs(AgglomerativeInformationBottleneck.VlAIB) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_get_parents(AgglomerativeInformationBottleneck.VlAIB) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_get_verbosity(AgglomerativeInformationBottleneck.VlAIB) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- vl_aib_merge_nodes(AgglomerativeInformationBottleneck.VlAIB, int, int, int) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_min_beta(AgglomerativeInformationBottleneck.VlAIB, int[], int[], double[]) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_new(double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_new_nodelist(int) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_new_Pc(double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_new_Px(double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_normalize_P(double[][]) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_process(AgglomerativeInformationBottleneck.VlAIB) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aib_set_verbosity(AgglomerativeInformationBottleneck.VlAIB, int) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- vl_aib_update_beta(AgglomerativeInformationBottleneck.VlAIB) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
------------------------------------------------------------------
- vl_aibcut(int[], int[], Vector<Integer>, int[], int) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- vl_aibcuthist(int[], int[], String) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- vl_aibcutpush(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
function y = vl_aibcutpush(map, x)
% VL_AIBCUTPUSH Quantize based on VL_AIB cut
% Y = VL_AIBCUTPUSH(MAP, X) maps the data X to elements of the AIB
% cut specified by MAP
- vl_aibhist(int[], double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
% VL_AIBHIST Compute histogram over VL_AIB tree
% H = VL_AIBHIST(PARENTS, DATA) computes the histogram of the data
% points DATA on the VL_AIB tree defined by PARENTS.
- VL_COVDET_AA_ACCURATE_SMOOTHING - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_AA_CONVERGENCE_THRESHOLD - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_AA_MAX_ANISOTROPY - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_AA_MAX_NUM_ITERATIONS - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_AA_PATCH_EXTENT - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_AA_PATCH_RESOLUTION - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_AA_RELATIVE_DERIVATIVE_SIGMA - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_AA_RELATIVE_INTEGRATION_SIGMA - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_append_feature(Covdet.VlCovDet, Covdet.VlCovDetFeature) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_delete(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_DESC_LIOP - gov.nih.mipav.model.algorithms.Covdet.vlCovDetDescriptorType
-
- VL_COVDET_DESC_NONE - gov.nih.mipav.model.algorithms.Covdet.vlCovDetDescriptorType
-
- VL_COVDET_DESC_PATCH - gov.nih.mipav.model.algorithms.Covdet.vlCovDetDescriptorType
-
- VL_COVDET_DESC_SIFT - gov.nih.mipav.model.algorithms.Covdet.vlCovDetDescriptorType
-
- vl_covdet_detect(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_DOG_DEF_EDGE_THRESHOLD - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_DOG_DEF_PEAK_THRESHOLD - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_drop_features_outside(Covdet.VlCovDet, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_extract_affine_shape(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_extract_affine_shape_for_frame(Covdet.VlCovDet, Covdet.VlFrameOrientedEllipse, Covdet.VlFrameOrientedEllipse) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_extract_laplacian_scales(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_extract_laplacian_scales_for_frame(Covdet.VlCovDet, int[], Covdet.VlFrameOrientedEllipse) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_extract_orientations(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_extract_orientations_for_frame(Covdet.VlCovDet, int[], Covdet.VlFrameOrientedEllipse) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_extract_patch_for_frame(Covdet.VlCovDet, float[], int, double, double, Covdet.VlFrameOrientedEllipse) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_extract_patch_helper(Covdet.VlCovDet, double[], double[], float[], int, double, double, double[], double[], double, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_aa_accurate_smoothing(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_allow_padded_warping(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_base_scale(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_css(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_edge_threshold(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_features(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_first_octave(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_gss(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_laplacian_peak_threshold(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_laplacian_scales_statistics(Covdet.VlCovDet, int[]) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_max_num_orientations(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_non_extrema_suppression_threshold(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_num_features(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_num_non_extrema_suppressed(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_num_octaves(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_octave_resolution(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_peak_threshold(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_get_transposed(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_GSS_BASE_SCALE - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_HARRIS_DEF_EDGE_THRESHOLD - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_HARRIS_DEF_PEAK_THRESHOLD - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_HESSIAN_DEF_EDGE_THRESHOLD - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_HESSIAN_DEF_PEAK_THRESHOLD - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_LAP_DEF_PEAK_THRESHOLD - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_LAP_NUM_LEVELS - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_LAP_PATCH_RESOLUTION - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_MAX_NUM_LAPLACIAN_SCALES - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_MAX_NUM_ORIENTATIONS - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_METHOD_DOG - gov.nih.mipav.model.algorithms.Covdet.VlCovDetMethod
-
- VL_COVDET_METHOD_HARRIS_LAPLACE - gov.nih.mipav.model.algorithms.Covdet.VlCovDetMethod
-
- VL_COVDET_METHOD_HESSIAN - gov.nih.mipav.model.algorithms.Covdet.VlCovDetMethod
-
- VL_COVDET_METHOD_HESSIAN_LAPLACE - gov.nih.mipav.model.algorithms.Covdet.VlCovDetMethod
-
- VL_COVDET_METHOD_MULTISCALE_HARRIS - gov.nih.mipav.model.algorithms.Covdet.VlCovDetMethod
-
- VL_COVDET_METHOD_MULTISCALE_HESSIAN - gov.nih.mipav.model.algorithms.Covdet.VlCovDetMethod
-
- vl_covdet_new(Covdet.VlCovDetMethod) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_OR_ADDITIONAL_PEAKS_RELATIVE_SIZE - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_COVDET_OR_NUM_ORIENTATION_HISTOGAM_BINS - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_put_image(Covdet.VlCovDet, float[], int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_reset(Covdet.VlCovDet) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_aa_accurate_smoothing(Covdet.VlCovDet, boolean) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_allow_padded_warping(Covdet.VlCovDet, boolean) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_base_scale(Covdet.VlCovDet, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_edge_threshold(Covdet.VlCovDet, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_first_octave(Covdet.VlCovDet, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_laplacian_peak_threshold(Covdet.VlCovDet, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_max_num_orientations(Covdet.VlCovDet, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_non_extrema_suppression_threshold(Covdet.VlCovDet, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_num_octaves(Covdet.VlCovDet, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_octave_resolution(Covdet.VlCovDet, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_peak_threshold(Covdet.VlCovDet, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_covdet_set_transposed(Covdet.VlCovDet, boolean) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_demo_aib() - Method in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck
-
- vl_demo_hog() - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- VL_EPSILON_D - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_EPSILON_D - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- VL_EPSILON_D - Variable in class gov.nih.mipav.model.algorithms.SVM
-
- VL_EPSILON_F - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< @brief Transpose result.
- VL_ERR_ALLOC - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
< Buffer overflow error
- VL_ERR_ALLOC - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< Buffer overflow error
- VL_ERR_BAD_ARG - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
< Resource allocation error
- VL_ERR_BAD_ARG - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< Resource allocation error
- VL_ERR_EOF - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
< Input/output error
- VL_ERR_EOF - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< Input/output error
- VL_ERR_IO - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
< Bad argument or illegal data error
- VL_ERR_IO - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< Bad argument or illegal data error
- VL_ERR_OK - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
------------------------------------------------------------------
- VL_ERR_OK - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- VL_ERR_OVERFLOW - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
< No error
- VL_ERR_OVERFLOW - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< No error
- VL_ERR_PGM_INV_DATA - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< Invalid PGM meta section.
- VL_ERR_PGM_INV_HEAD - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< Binary protocol
- VL_ERR_PGM_INV_META - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< Invalid PGM header section.
- VL_ERR_PGM_IO - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< Invalid PGM data section.
- vl_file_meta_close(SIFT.VlFileMeta) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_file_meta_get_double(int, RandomAccessFile, double[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_file_meta_open(SIFT.VlFileMeta, String, String, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_file_meta_parse(SIFT.VlFileMeta, String) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_file_meta_put_double(int, RandomAccessFile, double) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_file_meta_put_uint8(int, RandomAccessFile, byte) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_find_local_extrema_2(int[], int[], int[], float[], int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_find_local_extrema_3(int[], int[], int[], float[], int, int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_FRAMETYPE_DISC - gov.nih.mipav.model.algorithms.Covdet.VlFrameType
-
- VL_FRAMETYPE_ELLIPSE - gov.nih.mipav.model.algorithms.Covdet.VlFrameType
-
< An oriented disc.
- VL_FRAMETYPE_NUM - gov.nih.mipav.model.algorithms.Covdet.VlFrameType
-
< An oriented ellipse.
- VL_FRAMETYPE_ORIENTED_DISC - gov.nih.mipav.model.algorithms.Covdet.VlFrameType
-
< A disc.
- VL_FRAMETYPE_ORIENTED_ELLIPSE - gov.nih.mipav.model.algorithms.Covdet.VlFrameType
-
< An ellipse.
- vl_gaussian_elimination(double[], int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_get_frame_size(Covdet.VlFrameType) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_get_frame_type(boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_hog(float[][][], int, boolean, HistogramOfOrientedGradients.VlHogVariant, int, boolean, boolean) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog(float[][], int, boolean, HistogramOfOrientedGradients.VlHogVariant, int) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_delete(HistogramOfOrientedGradients.VlHog) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_extract(HistogramOfOrientedGradients.VlHog, float[]) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_get_dimension(HistogramOfOrientedGradients.VlHog) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_get_glyph_size(HistogramOfOrientedGradients.VlHog) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_get_height(HistogramOfOrientedGradients.VlHog) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_get_permutation(HistogramOfOrientedGradients.VlHog) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_get_use_bilinear_orientation_assignments(HistogramOfOrientedGradients.VlHog) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_get_width(HistogramOfOrientedGradients.VlHog) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_new(HistogramOfOrientedGradients.VlHogVariant, int, boolean) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_permutation(HistogramOfOrientedGradients.VlHogVariant, int) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_prepare_buffers(HistogramOfOrientedGradients.VlHog, int, int, int) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_put_image(HistogramOfOrientedGradients.VlHog, float[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_put_polar_field(HistogramOfOrientedGradients.VlHog, float[], float[], boolean, int, int, int) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_render(float[][][], HistogramOfOrientedGradients.VlHogVariant, int) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_render(HistogramOfOrientedGradients.VlHog, float[], float[], int, int) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_hog_set_use_bilinear_orientation_assignments(HistogramOfOrientedGradients.VlHog, boolean) - Method in class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients
-
- vl_homogeneouskernelmap_delete(SVM.VlHomogeneousKernelMap) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_homogeneouskernelmap_evaluate(SVM.VlHomogeneousKernelMap, double[], int, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_homogeneouskernelmap_get_dimension(SVM.VlHomogeneousKernelMap) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_homogeneouskernelmap_get_smooth_spectrum(SVM.VlHomogeneousKernelMap, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_homogeneouskernelmap_get_spectrum(SVM.VlHomogeneousKernelMap, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_homogeneouskernelmap_new(SVM.VlHomogeneousKernelType, double, int, double, SVM.VlHomogeneousKernelMapWindowType) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_imconvcol_vf(float[], int, int, float[], int, int, int, int, float[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_imconvcol_vf(float[], int, int, float[], int, int, int, int, float[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_imgradient_f(float[], float[], int, int, float[], int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_imgradient_polar_f(float[], float[], int, int, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_imsmooth_f(float[], int, int, float[], int, int, int, int, double, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_imwbackwardmx(int[], int[], double[], double[][], double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_imwbackwardmx(int[], int[], float[], double[][], double[][], int, int) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_lapack_dlasv2(double[], double[], double[], double[], double[], double[], double, double, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_liop(float[][][], int, int, float, float) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_liop(float[][], int, int, float, float) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_liopdesc_delete(LocalIntensityOrderPattern.VlLiopDesc) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_liopdesc_get_dimension(LocalIntensityOrderPattern.VlLiopDesc) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_liopdesc_get_intensity_threshold(LocalIntensityOrderPattern.VlLiopDesc) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_liopdesc_get_neighbourhood_radius(LocalIntensityOrderPattern.VlLiopDesc) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_liopdesc_get_num_neighbours(LocalIntensityOrderPattern.VlLiopDesc) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_liopdesc_get_num_spatial_bins(LocalIntensityOrderPattern.VlLiopDesc) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_liopdesc_new(int, int, float, int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_liopdesc_new_basic(int) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_liopdesc_process(LocalIntensityOrderPattern.VlLiopDesc, float[], float[]) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_liopdesc_set_intensity_threshold(LocalIntensityOrderPattern.VlLiopDesc, float) - Method in class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern
-
- vl_mod_2pi(double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_mod_2pi_f(float) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_mser_delete(AlgorithmMSER.VlMserFilt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
Delete MSER filter
This function releases the MSER filter and all its resources
- vl_mser_ell_fit(AlgorithmMSER.VlMserFilt) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- vl_mser_new(int, int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- VL_MSER_PIX_MAXVAL - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- vl_mser_process(AlgorithmMSER.VlMserFilt, short[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- VL_MSER_VOID_NODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmMSER
-
- VL_PAD_BY_CONTINUITY - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
< @brief Pad with zeroes.
- VL_PAD_BY_CONTINUITY - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< @brief Pad with zeroes.
- VL_PAD_BY_ZERO - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_PAD_BY_ZERO - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< ::fast_expn table
/** @name Image convolution flags
- VL_PAD_MASK - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
< @brief Pad by continuity.
- VL_PAD_MASK - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< @brief Pad by continuity.
- vl_pgm_extract_data(RandomAccessFile, SIFT.VlPgmImage, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_pgm_extract_head(RandomAccessFile, SIFT.VlPgmImage) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_pgm_get_bpp(SIFT.VlPgmImage) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_pgm_get_npixels(SIFT.VlPgmImage) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_pgm_insert(RandomAccessFile, SIFT.VlPgmImage, byte[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- VL_PROT_ASCII - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< no protocol
- VL_PROT_BINARY - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< ASCII protocol
- VL_PROT_NONE - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< unknown protocol
- VL_PROT_UNKNOWN - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< End-of-file or end-of-sequence error
- vl_rand_permute_indexes(Random, int[], int) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_refine_local_extreum_2(Covdet.VlCovDetExtremum2, float[], int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_refine_local_extreum_3(Covdet.VlCovDetExtremum3, float[], int, int, int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_scalespace_delete(Covdet.VlScaleSpace) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_scalespace_get_default_geometry(int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_scalespace_get_geometry(Covdet.VlScaleSpace) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_scalespace_get_level(Covdet.VlScaleSpace, int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_scalespace_get_level_sigma(Covdet.VlScaleSpace, int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
------------------------------------------------------------------
- vl_scalespace_get_octave_geometry(Covdet.VlScaleSpace, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_scalespace_new_with_geometry(Covdet.VlScaleSpaceGeometry) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
------------------------------------------------------------------
- vl_scalespace_put_image(Covdet.VlScaleSpace, float[]) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_scalespacegeometry_is_equal(Covdet.VlScaleSpaceGeometry, Covdet.VlScaleSpaceGeometry) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_SHIFT_LEFT(int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- VL_SHIFT_LEFT(int, int) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- VL_SIFT_BILINEAR_ORIENTATIONS - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_sift_calc_keypoint_descriptor(SIFT.VlSiftFilt, float[], SIFT.VlSiftKeypoint, double) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_sift_calc_keypoint_orientations(SIFT.VlSiftFilt, double[], SIFT.VlSiftKeypoint) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_sift_delete(SIFT.VlSiftFilt) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_sift_detect(SIFT.VlSiftFilt) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_sift_get_octave(SIFT.VlSiftFilt, int, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_sift_keypoint_init(SIFT.VlSiftFilt, SIFT.VlSiftKeypoint, double, double, double) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_sift_new(int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_sift_process_first_octave(SIFT.VlSiftFilt, float[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
- vl_sift_process_next_octave(SIFT.VlSiftFilt) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_solve_linear_system_2(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_solve_linear_system_3(double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_string_basename(String, int, String, int, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_string_copy_sub(String, int, String, int, int, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_string_parse_protocol(String, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_string_protocol_name(int) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_string_replace_wildcard(String, int, String, String, String, String, int[]) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- vl_svd2(double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- vl_svm_delete(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_bias(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_bias_learning_rate(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_bias_multiplier(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_diagnostic_frequency(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_dimension(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_epsilon(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_lambda(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_max_num_iterations(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_model(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_num_data(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_scores(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_solver(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_get_statistics(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_hinge_conjugate_loss(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_hinge_dca_update(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_hinge_loss(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_hinge_loss_derivative(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_hinge2_conjugate_loss(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_hinge2_dca_update(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_hinge2_loss(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_hinge2_loss_derivative(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_l1_conjugate_loss(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_l1_dca_update(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_l1_loss(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_l1_loss_derivative(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_l2_conjugate_loss(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_l2_dca_update(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_l2_loss(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_l2_loss_derivative(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_logistic_conjugate_loss(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_logistic_dca_update(double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_logistic_loss(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_logistic_loss_derivative(double, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_new_with_abstract_data(SVM.VlSvmSolverType, SVM.VlSvmDataset, int, int, double[], double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_new_with_dataset(SVM.VlSvmSolverType, SVM.VlSvmDataset, double[], double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_bias(SVM.VlSvm, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_bias_learning_rate(SVM.VlSvm, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_bias_multiplier(SVM.VlSvm, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_conjugate_loss_function(SVM.VlSvm, int) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_data_functions(SVM.VlSvm, int, int) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_dca_update_function(SVM.VlSvm, int) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_diagnostic_frequency(SVM.VlSvm, int) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_epsilon(SVM.VlSvm, double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_iteration_number(SVM.VlSvm, int) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_loss(SVM.VlSvm, SVM.VlSvmLossType) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_loss_derivative_function(SVM.VlSvm, int) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_loss_function(SVM.VlSvm, int) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_max_num_iterations(SVM.VlSvm, int) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_model(SVM.VlSvm, double[]) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_set_weights(SVM.VlSvm, double[]) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svm_train(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_accumulate(SVM.VlSvmDataset, int, double[], double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_accumulate_hom(SVM.VlSvmDataset, int, double[], double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_delete(SVM.VlSvmDataset) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_get_accumulate_function(SVM.VlSvmDataset) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_get_dimension(SVM.VlSvmDataset) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_get_homogeneous_kernel_map(SVM.VlSvmDataset) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_get_inner_product_function(SVM.VlSvmDataset) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_get_num_data(SVM.VlSvmDataset) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_inner_product(SVM.VlSvmDataset, int, double[]) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_inner_product_hom(SVM.VlSvmDataset, int, double[]) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_new(double[], int, int) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_new(double[], int, int, SVM.VlHomogeneousKernelMap) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmdataset_set_homogeneous_kernel_map(SVM.VlSvmDataset, SVM.VlHomogeneousKernelMap) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- vl_svmtrain(double[], double[], double[], double[][], SVM.VlSvmDataset, double[], double, SVM.VlSvmSolverType, double, double, int, double, SVM.VlSvmLossType, boolean, double[], double, double[], int, int) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- VL_TRANSPOSE - Variable in class gov.nih.mipav.model.algorithms.Covdet
-
< @brief Padding field selector.
- VL_TRANSPOSE - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
< @brief Padding field selector.
- VL1 - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- VL1 - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- VL2 - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- VL2 - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- VL3 - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- VL3 - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- VlAIB() - Constructor for class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
- VlCovDet() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlCovDet
-
- vlCovDetDescriptorType() - Constructor for enum gov.nih.mipav.model.algorithms.Covdet.vlCovDetDescriptorType
-
- VlCovDetExtremum2() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum2
-
- VlCovDetExtremum3() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum3
-
- VlCovDetFeature() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeature
-
- VlCovDetFeatureLaplacianScale() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeatureLaplacianScale
-
- VlCovDetFeatureOrientation() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlCovDetFeatureOrientation
-
- VlCovDetMethod() - Constructor for enum gov.nih.mipav.model.algorithms.Covdet.VlCovDetMethod
-
- VlFileMeta(boolean, String, int[], String, File) - Constructor for class gov.nih.mipav.model.algorithms.SIFT.VlFileMeta
-
< Current file stream
- VlFrameDisc() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlFrameDisc
-
- VlFrameEllipse() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlFrameEllipse
-
- VlFrameOrientedDisc() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedDisc
-
- VlFrameOrientedEllipse() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedEllipse
-
- VlFrameType() - Constructor for enum gov.nih.mipav.model.algorithms.Covdet.VlFrameType
-
- VlHog() - Constructor for class gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHog
-
- VlHogVariant() - Constructor for enum gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHogVariant
-
- VlHogVariantDalalTriggs - gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHogVariant
-
- VlHogVariantUoctti - gov.nih.mipav.model.algorithms.HistogramOfOrientedGradients.VlHogVariant
-
- VlHomogeneousKernelChi2 - gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelType
-
< intersection kernel
- VlHomogeneousKernelIntersection - gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelType
-
- VlHomogeneousKernelJS - gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelType
-
< Chi2 kernel
- VlHomogeneousKernelMap() - Constructor for class gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
- VlHomogeneousKernelMapWindowRectangular - gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMapWindowType
-
< uniform window
- VlHomogeneousKernelMapWindowType() - Constructor for enum gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMapWindowType
-
- VlHomogeneousKernelMapWindowUniform - gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMapWindowType
-
- VlHomogeneousKernelType() - Constructor for enum gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelType
-
- VLin1_Serial(double, CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- VLin2_Serial(double, CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- VlLiopDesc() - Constructor for class gov.nih.mipav.model.algorithms.LocalIntensityOrderPattern.VlLiopDesc
-
- VlMserExtrReg() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserExtrReg
-
- VlMserFilt() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserFilt
-
- VlMserReg() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserReg
-
- VlMserStats() - Constructor for class gov.nih.mipav.model.algorithms.AlgorithmMSER.VlMserStats
-
- VlPgmImage() - Constructor for class gov.nih.mipav.model.algorithms.SIFT.VlPgmImage
-
< is RAW format?
- VlScaleSpace() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpace
-
- VlScaleSpaceGeometry() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
-
- VlScaleSpaceOctaveGeometry() - Constructor for class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceOctaveGeometry
-
- VlSiftFilt() - Constructor for class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< GSS gradient data octave.
- VlSiftKeypoint() - Constructor for class gov.nih.mipav.model.algorithms.SIFT.VlSiftKeypoint
-
< scale.
- VlSvm() - Constructor for class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
- VlSvmDataset() - Constructor for class gov.nih.mipav.model.algorithms.SVM.VlSvmDataset
-
- VlSvmLossHinge - gov.nih.mipav.model.algorithms.SVM.VlSvmLossType
-
- VlSvmLossHinge2 - gov.nih.mipav.model.algorithms.SVM.VlSvmLossType
-
< Standard hinge loss.
- VlSvmLossL1 - gov.nih.mipav.model.algorithms.SVM.VlSvmLossType
-
< Hinge loss squared.
- VlSvmLossL2 - gov.nih.mipav.model.algorithms.SVM.VlSvmLossType
-
< L1 loss.
- VlSvmLossLogistic - gov.nih.mipav.model.algorithms.SVM.VlSvmLossType
-
< L2 loss.
- VlSvmLossType() - Constructor for enum gov.nih.mipav.model.algorithms.SVM.VlSvmLossType
-
- VlSvmSolverNone - gov.nih.mipav.model.algorithms.SVM.VlSvmSolverType
-
- VlSvmSolverSdca - gov.nih.mipav.model.algorithms.SVM.VlSvmSolverType
-
< SGD algorithm (@ref svm-sgd).
- VlSvmSolverSgd - gov.nih.mipav.model.algorithms.SVM.VlSvmSolverType
-
< No solver (used to evaluate an SVM).
- VlSvmSolverStatus() - Constructor for enum gov.nih.mipav.model.algorithms.SVM.VlSvmSolverStatus
-
- VlSvmSolverType() - Constructor for enum gov.nih.mipav.model.algorithms.SVM.VlSvmSolverType
-
- VlSvmStatistics() - Constructor for class gov.nih.mipav.model.algorithms.SVM.VlSvmStatistics
-
- VlSvmStatusConverged - gov.nih.mipav.model.algorithms.SVM.VlSvmSolverStatus
-
< Optimization in progress.
- VlSvmStatusMaxNumIterationsReached - gov.nih.mipav.model.algorithms.SVM.VlSvmSolverStatus
-
< Optimization finished because the convergence criterion was met.
- VlSvmStatusTraining - gov.nih.mipav.model.algorithms.SVM.VlSvmSolverStatus
-
- vmax - Variable in class gov.nih.mipav.model.file.FileInfoMinc
-
Valid image maximum value.
- vmax - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- VMax - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- VMax - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- VMConfigType(String) - Constructor for enum gov.nih.mipav.view.dialogs.JDialogMemoryAllocation.VMConfigType
-
- vmFrame - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
- vmFrame - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- vmFrame2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
- vmFrame2 - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- vmin - Variable in class gov.nih.mipav.model.file.FileInfoMinc
-
Valid image minimum value.
- vmin - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- VMOPTIONS - gov.nih.mipav.view.dialogs.JDialogMemoryAllocation.VMConfigType
-
- vmoptionsExt - Static variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- vmType - Static variable in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- vn - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.TriMesh
-
- VN() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- Vn_prime - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- VNeg_Serial(CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- Vob - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- voi - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- voi - Variable in class gov.nih.mipav.model.file.FileVOI.MyXMLHandler
-
The VOI that we are building from the XML.
- voi - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
The VOI that we are building from the XML.
- voi - Variable in class gov.nih.mipav.model.file.FileVOI.XMLCoordHandler
-
The VOI that we are building from the XML.
- voi - Variable in class gov.nih.mipav.model.structures.UpdateVOIEvent
-
DOCUMENT ME!
- voi - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- voi - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- voi - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- voi - Variable in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
- voi - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
The selected VOI when the VOIStats dialogue was created
- voi - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- voi - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- voi - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- Voi - gov.nih.mipav.view.Argument.InstanceArgument
-
- VOI - Class in gov.nih.mipav.model.structures
-
This the Volume Of Interest (VOI) structure.
- VOI - Static variable in class gov.nih.mipav.view.ViewImageFileFilter
-
VOI Files (*.voi).
- VOI(short, String) - Constructor for class gov.nih.mipav.model.structures.VOI
-
Create a VOI with the given id and name.
- VOI(short, String, int, float) - Constructor for class gov.nih.mipav.model.structures.VOI
-
Constructs a Volume of Interest (VOI).
- VOI(short, String, int, float, int) - Constructor for class gov.nih.mipav.model.structures.VOI
-
Constructs a Volume of Interest (VOI).
- VOI(VOI) - Constructor for class gov.nih.mipav.model.structures.VOI
-
Copies the VOI into a new VOI object.
- VOI_3D - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the cursor is in 3D voi drawing mode while in tri-planar view
- VOI_DROP - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- VOI_EMPTY - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
DOCUMENT ME!
- VOI_FILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
VOI file, used to read VOIs. extension: .voi
- VOI_GROUPING - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHurstIndex
-
- VOI_GROUPING - Static variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- VOI_HEADER - Static variable in class gov.nih.mipav.model.file.FileVOI
-
The MIPAV XML header comment.
- VOI_METHOD - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- VOI_METHOD - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- VOI_METHOD - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- VOI_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurface
-
Extract surface from VOI.
- VOI_MODE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmExtractSurfaceCubes
-
Extract surface from VOI.
- VOI_TAB - Static variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
VOI Tab.
- VOI_TOOLBAR - Static variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- VOI_TYPE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Denotes selected VOI should be flipped.
- VOI1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
voi1
- voi2 - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- VOI2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
voi2
- VOIAt(int) - Method in class gov.nih.mipav.view.ViewVOIVector
-
Returns the VOI at the index.
- VOIBase - Class in gov.nih.mipav.model.structures
-
Base which holds the functions common to both Contour, Line and Point type VOI.
- VOIBase() - Constructor for class gov.nih.mipav.model.structures.VOIBase
-
Default Constructor.
- VOIBase(boolean, boolean) - Constructor for class gov.nih.mipav.model.structures.VOIBase
-
Constructor sets the fixed and closed flags.
- VOIBase(boolean, boolean, Vector<Vector3f>) - Constructor for class gov.nih.mipav.model.structures.VOIBase
-
Constructor, sets the fixed and closed flags and positions.
- VOIBase(boolean, boolean, Vector3f) - Constructor for class gov.nih.mipav.model.structures.VOIBase
-
- VOIBase(VOIBase) - Constructor for class gov.nih.mipav.model.structures.VOIBase
-
Copies the input VOIBase into a new VOIBase object.
- VOIBase(VOIBase, int) - Constructor for class gov.nih.mipav.model.structures.VOIBase
-
Copies the input contour and changes it's slice +/-
- VOIBase(VOIBase, TransMatrix) - Constructor for class gov.nih.mipav.model.structures.VOIBase
-
Copies the input VOIBase, transformed by the input TransMatrix.
- VOIBaseVector - Class in gov.nih.mipav.model.structures
-
- VOIBaseVector() - Constructor for class gov.nih.mipav.model.structures.VOIBaseVector
-
- VOIBaseVector(VOI) - Constructor for class gov.nih.mipav.model.structures.VOIBaseVector
-
- VOIBaseVector(VOI, int) - Constructor for class gov.nih.mipav.model.structures.VOIBaseVector
-
- voiBloodRadioButton - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- voiButton - Variable in class gov.nih.mipav.view.dialogs.JDialogHurstIndex
-
- VOIButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- VOICENTER - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransformVOI
-
- voiCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- voiCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- voiCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- VOICheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- voiColor - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- voiColor - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
DOCUMENT ME!
- voiColor - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- voiColor - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- voiColor - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- voiColor - Variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
DOCUMENT ME!
- voiColor - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- voiColor - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- voiColor - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
DOCUMENT ME!
- voiColorButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
- VOIColorButton(int) - Constructor for class gov.nih.mipav.view.ViewToolBarBuilder.VOIColorButton
-
- voiColorChoices - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- voiColorNames - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- voiColors - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- VOIComparator() - Constructor for class gov.nih.mipav.model.file.FileVOI.VOIComparator
-
- VOIContour - Class in gov.nih.mipav.model.structures
-
This class is fundamental to the VOI class in which points are stored that
describe a curve of an VOI.
- VOIContour(boolean) - Constructor for class gov.nih.mipav.model.structures.VOIContour
-
Construct a new closed or open VOI.
- VOIContour(boolean, boolean) - Constructor for class gov.nih.mipav.model.structures.VOIContour
-
Construct a new VOIContour.
- VOIContour(boolean, boolean, Vector<Vector3f>) - Constructor for class gov.nih.mipav.model.structures.VOIContour
-
Construct a new VOIContour.
- VOIContour(VOIContour) - Constructor for class gov.nih.mipav.model.structures.VOIContour
-
Copy Constructor.
- VOIContour(VOIContour, int) - Constructor for class gov.nih.mipav.model.structures.VOIContour
-
Copies the input contour and changes it's slice +/-
- VOIContour(VOIContour, TransMatrix) - Constructor for class gov.nih.mipav.model.structures.VOIContour
-
Copies the input VOIBase, transformed by the input TransMatrix.
- VOIContour.positionItem - Class in gov.nih.mipav.model.structures
-
- VOIContour.positionLowerComparator - Class in gov.nih.mipav.model.structures
-
- VOIContour.positionUpperComparator - Class in gov.nih.mipav.model.structures
-
- VOIContourNode - Class in gov.nih.mipav.view
-
This class is used to represent a contour node in a tree.
- VOIContourNode(VOIBase) - Constructor for class gov.nih.mipav.view.VOIContourNode
-
Creates a new VOINode object.
- voiContourPane - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
DOCUMENT ME!
- voiCurrent - Variable in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Labels for values of the voi trim points property
- voiDialog - Variable in class gov.nih.mipav.view.JFrameHistogram
-
Dialog that enables the user to choose to apply the lut to the entire image, or voi regions.
- voiDrawButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- voiDrawColor - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
DOCUMENT ME!
- VOIEvent - Class in gov.nih.mipav.model.structures.event
-
An event from a VOI.
- VOIEvent(VOI) - Constructor for class gov.nih.mipav.model.structures.event.VOIEvent
-
creates an event with no VOI as reference.
- VOIEvent(VOI, VOIBase) - Constructor for class gov.nih.mipav.model.structures.event.VOIEvent
-
creates an event using the supplied VOI as reference.
- VOIExtractionAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIExtraction
-
DOCUMENT ME!
- voiFileLocation - Variable in class gov.nih.mipav.view.dialogs.ScriptVOI
-
- VOIFrameNode - Class in gov.nih.mipav.view
-
This class is used to represent a frame, such as a slice number.
- VOIFrameNode(Vector, int) - Constructor for class gov.nih.mipav.view.VOIFrameNode
-
Creates a new VOIFrameNode object.
- voiGroup - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Reference to the containing VOI object.
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- VOIGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- VOIGroup - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
- VOIGroup - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- VOIGroup - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
A button group for all toggle buttons which change the effect of mouse usage in the image.
- VOIGroupNode - Class in gov.nih.mipav.view
-
This class is used to represent a VOI in a tree.
- VOIGroupNode(VOI) - Constructor for class gov.nih.mipav.view.VOIGroupNode
-
Loads a File into the tree-leaf.
- VOIGroupNode(VOI, int[]) - Constructor for class gov.nih.mipav.view.VOIGroupNode
-
Loads a File into the tree-leaf.
- VOIGroupNode(Object) - Constructor for class gov.nih.mipav.view.VOIGroupNode
-
Creates a new VOIGroupNode object.
- VOIGroupTree - Class in gov.nih.mipav.view
-
wrapper class for JTree.
- VOIGroupTree() - Constructor for class gov.nih.mipav.view.VOIGroupTree
-
creates a new JTree as a VOIGroupTree.
- VOIGroupTree(VOIGroupNode) - Constructor for class gov.nih.mipav.view.VOIGroupTree
-
creates a new JTree as a VOIGroupTree with a DefaultMutableTreeNode.
- VOIHandle - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIShapeInterpolation
-
handle to src image's VOI
- voiHandler - Variable in class gov.nih.mipav.view.dialogs.JDialogIntensityThreshold
-
- voiHandler - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- voiHandler - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- voiHandler - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
- voiHandler - Variable in class gov.nih.mipav.view.ViewJPopupPt
-
DOCUMENT ME!
- voiHandler - Variable in class gov.nih.mipav.view.ViewJPopupVOI
-
DOCUMENT ME!
- VOIHandlerInterface - Interface in gov.nih.mipav.view
-
VOIHandlerInterface.
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesMapFromMRIandCED
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_ced_scale
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI_conversion
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapMICCAI
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapSPIE_2017
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_HEDmap
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateJMI_2017_VOI_converter
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_image_alone
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_HEDmap_mri_ced
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- voiHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- voiHashtableCg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- voiHashtableWp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- VOIHighlighter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.VOIHighlighter
-
- VOIHighlighter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.VOIHighlighter
-
- VOIHighlighter() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.VOIHighlighter
-
- voiIcon - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView.TreeRenderer
-
DOCUMENT ME!
- voiID - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- voiIDnum - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- VOIIndexArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- voiIntensity1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- voiIntensity2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- VOILatticeManager - Class in gov.nih.mipav.view.renderer.WildMagic.VOI
-
- VOILatticeManager(VOIManagerInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManager
-
Constructor.
- VOILatticeManagerInterface - Class in gov.nih.mipav.view.renderer.WildMagic.VOI
-
- VOILatticeManagerInterface(VOIManagerInterfaceListener, ModelImage, ModelImage, int, boolean, ButtonGroup) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
Creates a VOIManagerInterface object.
- VOIlength - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- VOILine - Class in gov.nih.mipav.model.structures
-
Class for line, a simple extension of VOIBase.
- VOILine() - Constructor for class gov.nih.mipav.model.structures.VOILine
-
Default Constructor.
- VOILine(VOILine) - Constructor for class gov.nih.mipav.model.structures.VOILine
-
Copy Constructor.
- VOILine(Vector<Vector3f>) - Constructor for class gov.nih.mipav.model.structures.VOILine
-
Constructor, sets the position of the line.
- VOILink(String) - Constructor for class gov.nih.mipav.model.file.FileInfoImageXML.VOILink
-
Create a new VOILink with the given path.
- voiList - Variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
Keep a reference to the VOI List to turn on and off if multiple images are selected.
- VOIListener - Interface in gov.nih.mipav.model.structures.event
-
VOIListener permits objects to listen for updates to a VOI.
- voiManager - Variable in class gov.nih.mipav.view.dialogs.JDialogBase
-
- voiManager - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
- voiManager - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
- voiManager - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- voiManager - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- voiManager - Variable in class gov.nih.mipav.view.dialogs.JDialogOpacityControls
-
- voiManager - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- voiManager - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- voiManager - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- voiManager - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- voiManager - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
- voiManager - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
- voiManager - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
- voiManager - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
- voiManager - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
The VOI managers for each triComponent
- VOIManager - Class in gov.nih.mipav.view.renderer.WildMagic.VOI
-
VOIManager class performs all direct user-manipulation of VOIs.
- VOIManager(VOIManagerInterface) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
Constructor.
- VOIManager.ActiveTree - Class in gov.nih.mipav.view.renderer.WildMagic.VOI
-
Binary search tree, modified so it will work with elements that have the same cost.
- VOIManager.TreeNode - Class in gov.nih.mipav.view.renderer.WildMagic.VOI
-
Tree node.
- VOIManagerInterface - Class in gov.nih.mipav.view.renderer.WildMagic.VOI
-
VOIManagerInterface manages all the VOI user-interaction for classes that display the ModelImage.
- VOIManagerInterface(VOIManagerInterfaceListener, ModelImage, ModelImage, int, boolean, ButtonGroup) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
Creates a VOIManagerInterface object.
- VOIManagerInterface.OkColorListener - Class in gov.nih.mipav.view.renderer.WildMagic.VOI
-
Pick up the selected color and call method to change the color.
- VOIManagerInterfaceListener - Interface in gov.nih.mipav.view.renderer.WildMagic.VOI
-
VOIManagerInterfaceListener interface.
- voiMaximum - Variable in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Labels for values of the voi trim points property
- voiMenu - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- voiMenu - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- voiMenu - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
- voiMenu - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Menu displaying VOI options
- voiMenu - Variable in class gov.nih.mipav.view.ViewMenuBar
-
The menu listing voi commands.
- voiMenuBuilder - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
- voiMinimum - Variable in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Labels for values of the voi trim points property
- voiModel - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
The tree of VOIs, composed of an image with children VOIs
- voiName - Variable in class gov.nih.mipav.view.dialogs.ScriptVOI
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland.ModelString
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH.ModelString
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland.ModelString
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase.ImageAttributes
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland.ModelString
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH.ModelString
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification.ModelString
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt.ModelString
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.ModelString
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile.ImageAttributes
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase.ImageAttributes
-
- voiName - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase.ImageAttributes
-
- voiName - Variable in class gov.nih.mipav.view.VOIOrientationNode
-
Name of parent voi
- VOIName - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Name of the currently selected voi
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_3DReconstrucion
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogSKI10_femur_eval_pre
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasCopyGTstl
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTrainAndTest
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge_noCED
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
- voiNameHashtable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- voiNameHashtableCg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- voiNameHashtableCg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- voiNameHashtableCg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- voiNameHashtableCg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- voiNameHashtableCg - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- voiNameHashtableCg_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- voiNameHashtableCg_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- voiNameHashtableCg_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- voiNameHashtableNathan - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
- voiNameHashtableWp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- voiNameHashtableWp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- voiNameHashtableWp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- voiNameHashtableWp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- voiNameHashtableWp - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- voiNameHashtableWp_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- voiNameHashtableWp_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- voiNameHashtableWp_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- voiNewFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- voiNewFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- voiNewFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- voiNewFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- voiNewFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- voiNewFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- VOINODE - Static variable in class gov.nih.mipav.view.dialogs.JDialogRunScriptView
-
VOI node type, begins with VOI_EMPTY string and must be set if present before running of the script.
- VOIOrientationNode - Class in gov.nih.mipav.view
-
This class is used to represent the orientation of a set of VOI curves.
- VOIOrientationNode(String, String, Vector<VOIBase>[]) - Constructor for class gov.nih.mipav.view.VOIOrientationNode
-
Creates a new VOIFrameNode object.
- VOIParams() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIParametersPanel.VOIParams
-
- voiPathRequestCountTable - Variable in class gov.nih.mipav.model.scripting.VOITable
-
A table containing counts of the number of VOIs which have been retrieved and registered for each image, keyed by the image placeholder variables used in the script.
- voiPathTable - Variable in class gov.nih.mipav.model.scripting.VOITable
-
The table containing vectors of VOI path strings, keyed by the image placeholder variables used in the script.
- VOIPoint - Class in gov.nih.mipav.model.structures
-
Class for a point VOI, a simple extension of CurveBase.
- VOIPoint() - Constructor for class gov.nih.mipav.model.structures.VOIPoint
-
Default constructor
- VOIPoint(int) - Constructor for class gov.nih.mipav.model.structures.VOIPoint
-
Sets the type.
- VOIPoint(int, Vector<Vector3f>) - Constructor for class gov.nih.mipav.model.structures.VOIPoint
-
Sets the type and position.
- VOIPoint(int, Vector3f) - Constructor for class gov.nih.mipav.model.structures.VOIPoint
-
Sets the type and position.
- VOIPoint(VOIPoint) - Constructor for class gov.nih.mipav.model.structures.VOIPoint
-
Copy Constructor.
- VOIPoints - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- VOIPolyLineSlice - Class in gov.nih.mipav.model.structures
-
PolyLineSlice is implemented as a list of
Each VOIPoint in the list may be on a different slice of the image.
- VOIPolyLineSlice() - Constructor for class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
Default Constructor.
- VOIPolyLineSlice(VOIPoint) - Constructor for class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
Constructor sets the first VOIPoint in the polyline.
- VOIPolyLineSlice(VOIPolyLineSlice) - Constructor for class gov.nih.mipav.model.structures.VOIPolyLineSlice
-
Copy constructor.
- voiPopup - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
DOCUMENT ME!
- VOIposition - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
positions (x,y) of VOI in first slice
- voiProtractor - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
The protractor VOI.
- VOIProtractor - Class in gov.nih.mipav.model.structures
-
This class is fundamental to the VOI class in which points are stored that describe a Protractor VOI.
- VOIProtractor() - Constructor for class gov.nih.mipav.model.structures.VOIProtractor
-
Default constructor.
- VOIProtractor(VOIProtractor) - Constructor for class gov.nih.mipav.model.structures.VOIProtractor
-
Copy constructor.
- VOIProtractor(Vector<Vector3f>) - Constructor for class gov.nih.mipav.model.structures.VOIProtractor
-
Constructor, sets the position of the protractor.
- voiRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- voiRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- voiRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- voiRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- voiRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- voiRedoButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
- voiRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- VOIRegions - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- voiRegionsRadio - Variable in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
DOCUMENT ME!
- voiRegionsRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
radio buttons
- VOIRegionsRB - Variable in class gov.nih.mipav.view.dialogs.JDialogExtractSurfaceCubes
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNonMaxSuppts
-
Non-maximal suppression for features/corners
Non maxima suppression and thresholding for points generated by a feature
or corner detector.
- VOIs - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmDistanceFilter
-
- VOIs - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt
-
VOIs
- VOIs - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- VOIs - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- VOIs - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- VOIs - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
source imag VOIs.
- VOIs - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
List of files which describe VOIs attached to this image.
- VOIs - Variable in class gov.nih.mipav.model.file.FileSVS
-
- VOIs - Variable in class gov.nih.mipav.model.file.FileTiff
-
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogAGVF
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogBoundingVOIs
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogBSmooth
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogBSnake
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogConvexHull2D
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogEvolveBoundaryManual
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETBleedThrough
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogFRETEfficiency
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogGVF
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogSM2
-
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogSnake
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
vois in image
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogLoadProstateMask
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- VOIs - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
red, green, and blue origContrast remains constant until applyButton is pressed, restores contrast if
cancelButton is pressed.
- VOIs2 - Variable in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
DOCUMENT ME!
- voiSavedFileName - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
DOCUMENT ME!
- VOISaveState - Class in gov.nih.mipav.view.renderer.WildMagic.VOI
-
- VOISaveState() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VOI.VOISaveState
-
- voiSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationRegression
-
DOCUMENT ME!
- voisOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- voisOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- voisOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- voisOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- voisOnly - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- VOISortItem(VOIBase, int) - Constructor for class gov.nih.mipav.model.file.FileVOI.VOISortItem
-
Creates a new VOISortItem object.
- VOIsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
- VOIsPanel - Variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
- VOIStatisticalProperties - Class in gov.nih.mipav.model.structures
-
$Logfile: /mipav/src/gov/nih/mipav/model/structures/VOIStatisticalProperties.java $ $Revision: 4 $ $Date: 7/27/04
1:42p $
- VOIStatisticalProperties() - Constructor for class gov.nih.mipav.model.structures.VOIStatisticalProperties
-
Creates a new VOIStatisticalProperties object.
- VOIStatisticList - Interface in gov.nih.mipav.model.structures
-
interface to carry statistic list information. all users of VOI statistics ought to implement this interface.
- voiStatsLeftPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
panels
- voiStatsPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
panels
- voiStatsRightPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
panels
- voiStr - Static variable in class gov.nih.mipav.model.file.FileImageXML
-
array of strings representing the tags under in the xml schema.
- voiTable - Variable in class gov.nih.mipav.model.scripting.ScriptRunner
-
The table containing VOIs to be used in the script.
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurface
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceEnergyMap
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_test
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_boundary_train
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_test
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale_train
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesReconstrucion
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateISBIfinalSurfaceCompare
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_boundary_train
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train
-
- voiTable - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- VOITable - Class in gov.nih.mipav.model.scripting
-
A table which manages paths to VOIs which should be used for specific images used within a script.
- VOITable(String, Vector) - Constructor for class gov.nih.mipav.model.scripting.VOITable
-
Create a new VOI path table.
- voiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
- voiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest_JMI
-
- voiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
- voiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext_wp
-
- voiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallengeNIH_train_ced_ext
-
- voiTable_ext - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateXReRunWholeProstate
-
- voiText - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
a temporary VOIText holder which will be added to the VOIVector
- VOIText - Class in gov.nih.mipav.model.structures
-
Title: VOI Text
- VOIText() - Constructor for class gov.nih.mipav.model.structures.VOIText
-
default constructor.
- VOIText(VOIText) - Constructor for class gov.nih.mipav.model.structures.VOIText
-
Copy contructor.
- VOIText(Vector<Vector3f>) - Constructor for class gov.nih.mipav.model.structures.VOIText
-
Constructor, sets positions of the annotation.
- VOIText(Vector3f) - Constructor for class gov.nih.mipav.model.structures.VOIText
-
- VOIThicknessField - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Thickness of the currently selected voi
- VOIToFileCoordinates(Vector3f, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- voiTree - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
The graphical representation of voiModel
- voiTreePane - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
Displays the orthoganal list of VOIs in the selected ModelImage
- VOITreePopup() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreePopup
-
Creates a new VOITreePopup object.
- VOITreeRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance.VOITreeRenderer
-
- VOITreeRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations.VOITreeRenderer
-
- VOITreeRenderer() - Constructor for class gov.nih.mipav.view.dialogs.JDialogVOIStats.VOITreeRenderer
-
- voiTrimSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogTrim
-
Sliders for setting the mask and voi trim parameters
- voiUID - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManagerInterface
-
VOI ID used to set the VOI color button on a call to newVOI()
- voiUndoButton - Variable in class gov.nih.mipav.view.ViewToolBarBuilder
-
- voiUpdate - Variable in class gov.nih.mipav.model.structures.VOIVector
-
an instnace of the VOI update event.
- voiVector - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
Holds all the VOITexts read in
- voiVector - Variable in class gov.nih.mipav.model.structures.ModelImage
-
List of VOIs that are displayed with this image.
- voiVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM.SliceSetString
-
- voiVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateImageCategorize
-
- VOIVector - Class in gov.nih.mipav.model.structures
-
Class extends ViewVOIVector to finish cleaning up access syntax to the volumes of interest vector.
- VOIVector() - Constructor for class gov.nih.mipav.model.structures.VOIVector
-
Constructs an empty vector so that its internal data array has size 10 and its standard capacity increment is
zero.
- VOIVector(int) - Constructor for class gov.nih.mipav.model.structures.VOIVector
-
Constructs an empty vector with the specified initial capacity and with its capacity increment equal to zero.
- VOIVector(VOIVector) - Constructor for class gov.nih.mipav.model.structures.VOIVector
-
- voiVectorA - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOISaveState
-
- voiVectorB - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOISaveState
-
- VOIVectorEvent - Class in gov.nih.mipav.model.structures.event
-
An event from a VOIVector.
- VOIVectorEvent(ViewVOIVector) - Constructor for class gov.nih.mipav.model.structures.event.VOIVectorEvent
-
creates an event with no VOI as reference.
- VOIVectorEvent(ViewVOIVector, VOI) - Constructor for class gov.nih.mipav.model.structures.event.VOIVectorEvent
-
creates an event using the supplied VOI as reference.
- voiVectorFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- voiVectorFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- voiVectorFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- voiVectorFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- voiVectorFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- VOIVectorListener - Interface in gov.nih.mipav.model.structures.event
-
VOISelectionListener permits objects to listen for updates to a VOI.
- voiVectorNewFinal - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- VOIWormAnnotation - Class in gov.nih.mipav.view.renderer.WildMagic.WormUntwisting
-
- VOIWormAnnotation() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- VOIWormAnnotation(VOIText) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- VOIWormAnnotation(VOIWormAnnotation) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- VOIWormAnnotation(Vector<Vector3f>) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- VOIWormAnnotation(Vector3f) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.VOIWormAnnotation
-
- vol1Channel - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
vol 1 channel for scripting
- vol2Channel - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
vol 2 channel for scripting
- vol2mat(double[][][][], byte[][][]) - Method in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- vol3Channel - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
vol 3 channel for scriptin
- volBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Volume branch group.
- volBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Volume branch group.
- volExtents - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Resampled dimension value in Power of 2.
- volExtents - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Resampled dimension value in Power of 2.
- volLength - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- volLength - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- VolMap - Variable in class gov.nih.mipav.model.file.FilePARREC
-
vol map
- volOpacityPanel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Volume opacity control dialog.
- volParameters - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
vol parameters
- VolParameters - Static variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
vol parameters
- VolParameters - Variable in class gov.nih.mipav.model.file.FilePARREC
-
vol parameters
- volregBaseIdcodeString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregBaseNameString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregCenterBase - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregCenterOld - Variable in class gov.nih.mipav.model.file.FileAfni
-
For sub-brick #xxxxxx (so a max of 999,999 sub-bricks can be used), this stores 12 numbers for the matrix-vector
of transformation from 3dvolreg.
- volregGridparentIdcodeString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregGridparentNameString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregInputIdcodeString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregInputNameString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregMatvec000000 - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregMatvec000001 - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregMatvec000002 - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregMatvec000003 - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregMatvec000004 - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregMatvec000005 - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregMatvec000006 - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregMatvec000007 - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregMatvec000008 - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregMatvec000009 - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregRotcomNum - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregRotparentIdcodeString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volregRotparentNameString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- volRenderBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Volume render branch group.
- volRenderBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Volume render branch group.
- volRenderNode - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Add here.
- volRenderOG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Volume render order group, specify the rendering order.
- volRenderOG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Volume render order group, specify the rendering order.
- vols_added - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
Unknown use.
- vols_added - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
Unknown use.
- vols_added - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
DOCUMENT ME!
- volSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- volSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- volSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- volSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- volSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- volSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- volSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- volSize - Variable in class gov.nih.mipav.view.dialogs.JDialogDirectResample
-
Volume size X*Y*Z.
- volSize - Variable in class gov.nih.mipav.view.renderer.JDialogVolViewResample
-
Volume size X*Y*Z.
- voltage - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.Detector
-
- voltage - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- voltageField - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- volToolBar - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Surface Render toolbar.
- volume - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- volume - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- volume - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- volume - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- volume - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- volume - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
Global variables.
- volume - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- volume - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- volume - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveTSlices
-
Area of a slice (Xdim * Ydim * Zdim).
- volume - Variable in class gov.nih.mipav.model.file.libjpeg.box
-
- volume - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnAttributes
-
Volume of triangle mesh displayed associated with the burn.
- volume - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JDialogBurnParameter
-
DOCUMENT ME!
- volume() - Method in class gov.nih.mipav.view.renderer.J3D.model.structures.ModelTriangleMesh
-
Calculates volume of triangle mesh.
- volume() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Box3
-
- Volume - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate.LocalVolumeVOI
-
- volume25D - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- volumeAdaptiveTruncatedVectorMedianColorFilter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Filter a Color 3D image with a 3D kernel with adaptive truncated vector median filtering.
- volumeAdaptiveVectorFilter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Filter a Color 3D image with a 3D kernel.
- VolumeBlend - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- VolumeBoundingBox - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
Displays the BoundingBox frame around the volume data in the VolumeViewer.
- VolumeBoundingBox(VolumeImage, Vector3f, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeBoundingBox
-
Creates a new bounding box object.
- volumeBounds - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Volume Boundary may be changed for cropping the volume.
- VolumeCalcEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
ShaderEffect class for calculating the volume normals on the GPU.
- VolumeCalcEffect(VolumeImage, VolumeClipEffect) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
For creating the surface mask texture.
- VolumeCalcEffect(VolumeImage, VolumeClipEffect, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
For creating the surface mask texture.
- VolumeCalcEffect(VolumeImage, Texture) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeCalcEffect
-
Create a new VolumeCalcEffect shader with the VolumeImage data.
- VolumeCanvas3D - Class in gov.nih.mipav.view.renderer.J3D
-
Extension of Canvas3D to allow for customization as needed.
- VolumeCanvas3D(GraphicsConfiguration) - Constructor for class gov.nih.mipav.view.renderer.J3D.VolumeCanvas3D
-
Create extension of Canvas3D.
- volumeCenter - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
The point to become center of transformed image.
- volumeClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- volumeClip - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- VolumeClip - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
Displays the Clipping frames in the VolumeViewer.
- VolumeClip(VolumeImage, Vector3f, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClip
-
Creates a new VolumeClip object.
- VolumeClipEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
Clipping effect for Volume Objects.
- VolumeClipEffect() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeClipEffect
-
- volumeClipRadius - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
- volumeColorFilter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Filter a Color 3D image with a 3D kernel.
- volumeColorFilter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Filter a Color 3D image with a 3D kernel.
- volumeCoordsCheck - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
loads mesh files in basic volume coordinates
- volumeDescription - Static variable in interface gov.nih.mipav.model.structures.VOIStatisticList
-
string to test for when checking on statistics to calculate.
- volumeDisplayMode3D - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
If true display 3D volume as a 3D texture map or 2D array of texture maps.
- volumeDisplayMode3D - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
If true display 3D volume as a 3D texture map or 2D array of texture maps.
- volumeDisplayRange - Variable in class gov.nih.mipav.model.structures.VOIBase
-
Used to display 3D VOIs in the three orthogonal views of the data in the volume renderer
- volumeDomain() - Method in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Allocates and initializes important buffers.
- VolumeDTI - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
Displays the Diffusion Tensor tracts in the VolumeViewer.
- VolumeDTI(VolumeImage, Vector3f, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeDTI
-
Creates a new VolumeDTI object.
- volumeFactor - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
Factor by which to shrink volume.
- volumeFilter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Filter a 3D image with a 3D kernel.
- volumeFilter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Filter a 3D image with a 3D kernel.
- volumeFilterBorder(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Method performs median filtering on a volume that has been centerend in a border buffer and places the result in
the destination buffer.
- volumeFilterBorder(int[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
Assumes a monochrome image of type BYTE, SHORT, INTEGER, UBYTE, USHORT, UINTEGER.
- volumeFraction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquato95ModelMean
-
- volumeFraction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquato95ModelMean2
-
- volumeFraction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquatoModelMean
-
- volumeFraction - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSphereGeneration.IntTorquatoModelMean2
-
- VolumeHistogramEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
The VolumePlaneEffect ShaderEffect creates shaders for mapping the volume
data onto the planes for the 3-orthogonal planes displayed in the
VolumeViewer and for the PlaneRender objects.
- VolumeHistogramEffect(Texture, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- VolumeHistogramEffect(Texture, Matrix4f) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- VolumeHistogramEffect(Texture, Texture, float, float, float, float, int, int, Matrix4f) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- VolumeImage - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
The VolumeImage class provides an interface between the MIPAV ModelImage and the 2D and 3D Textures used to render
the ModelImage on the GPU.
- VolumeImage() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- VolumeImage(boolean, ModelImage, String, ViewJProgressBar, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
Create a Volume image with the input ModelImage.
- VolumeImage(boolean, ModelImage, String, ViewJProgressBar, int, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- VolumeImageCrop - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- VolumeImageCrop(GLCanvas, VolumeTriPlanarInterface, VolumeImage, VolumeClipEffect, float[]) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageCrop
-
- VolumeImageExtract - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- VolumeImageExtract(GLCanvas, VolumeTriPlanarInterface, VolumeImage, VolumeClipEffect, int) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageExtract
-
- VolumeImageMultiDimensionalTransfer - Class in gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer
-
This class implements the 2D Histogram display and user-interaction widget in the JPanelMultiDimensionalTransfer class.
- VolumeImageMultiDimensionalTransfer(Animator, GLCanvas, VolumeTriPlanarInterface, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.VolumeImageMultiDimensionalTransfer
-
Create a new VolumeImageMultiDimensionalTranfer display.
- VolumeImageSurfaceMask - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- VolumeImageSurfaceMask(GLCanvas, VolumeTriPlanarInterface, VolumeImage, Vector<VolumeObject>, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageSurfaceMask
-
- VolumeImageViewer - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- VolumeImageViewer(GLCanvas, VolumeTriPlanarInterface, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- VolumeImageViewer(VolumeTriPlanarInterface, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- volumeLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
The volume label.
- volumeLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
buring point volume label.
- volumeLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
The volume label.
- volumeLength - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConvert3Dto4D
-
number of slices in the 3rd dimension. 4th dim length = sourceImage.3rd_dim / volumeLength
- volumeLength - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert3Dto4D
-
DOCUMENT ME!
- volumeLimit - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
flag indicates volume is greater than or equal to volumePercent.
- volumeMask - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBase
-
burning point volume mask.
- volumeMask - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Reference to burning point voluem mask.
- VolumeNode - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- VolumeNode(VolumeImage, Vector3f, float, float, float, Node) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeNode
-
Create a new VolumeNode with the VolumeImage parameter.
- VolumeObject - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
VolumeObect: abstract base class for all rendered objects in the Volume
Tri-Planar view.
- VolumeObject(VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Create a new VolumeObject with the VolumeImage parameter.
- VolumeObject(VolumeImage, VolumeImage, Vector3f, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Create a new VolumeObject with the VolumeImage parameter.
- VolumeObject(VolumeImage, Vector3f, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Create a new VolumeObject with the VolumeImage parameter.
- VolumeOrientationCube - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
Displays the Orientation Cube in the VolumeViewer.
- VolumeOrientationCube(VolumeImage, Vector3f, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeOrientationCube
-
Creates a new VolumeOrientationCube object.
- volumeOriginX - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- volumeOriginY - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- volumeOriginZ - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- volumeParallelVectorFilter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMean
-
Filter a Color 3D image with a 3D kernel.
- volumePercent - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Volume percentage.
- VolumePlaneEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
The VolumePlaneEffect ShaderEffect creates shaders for mapping the volume
data onto the planes for the 3-orthogonal planes displayed in the
VolumeViewer and for the PlaneRender objects.
- VolumePlaneEffect(VolumeImage, VolumeImage, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePlaneEffect
-
Creates a new VolumeShaderEffect object.
- volumePositionFrame - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Reference to the volume coordinate frame.
- VolumePositionFrame - Class in gov.nih.mipav.view
-
VolumePositionFrame, used by the ViewJFrameTriImage class to display the volume position data.
- VolumePositionFrame(ViewJFrameTriImage, JTabbedPane) - Constructor for class gov.nih.mipav.view.VolumePositionFrame
-
Creates a new VolumePositionFrame object.
- volumePositionPanel - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Reference to the volume coordinate panel when it is in the plug-in position.
- VolumePreRenderEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- VolumePreRenderEffect() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePreRenderEffect
-
- VolumePreRenderEffect(boolean, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumePreRenderEffect
-
Creates an new VolumePreRenderEffect
- volumeRadius - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- VolumeRayCast - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- VolumeRayCast(VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeRayCast
-
Creates a new VolumeRayCast object.
- volumeRenderer - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelAnnotations
-
- volumeRenderer - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelCurves
-
- VolumeRenderer - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Common interface for all volume renderers.
- VolumeRenderer(ModelImage, ModelImage, GraphicsConfiguration) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Creates a new VolumeRenderer object.
- VolumeRenderer(ModelImage, ModelLUT, ModelImage, ModelLUT, SurfaceRender, GraphicsConfiguration, ViewJProgressBar) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Makes a frame and puts the three image planes into it.
- VolumeRenderer.SceneState - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Ray cast Scene State.
- VolumeRendererRayCast - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Frame that holds the surface renderer.
- VolumeRendererRayCast(ModelImage, ModelLUT, ModelImage, ModelLUT, SurfaceRender, GraphicsConfiguration, ViewJProgressBar) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererRayCast
-
Makes a frame and puts the three image planes into it.
- VolumeRendererShearWarp - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Frame that holds the surface renderer.
- VolumeRendererShearWarp(ModelImage, ModelLUT, ModelImage, ModelLUT, SurfaceRender, GraphicsConfiguration, ViewJProgressBar) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRendererShearWarp
-
Makes a frame and puts the three image planes into it.
- VolumeRenderState - Class in gov.nih.mipav.view.renderer.WildMagic
-
- VolumeRenderState() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- volumeRepaint() - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Repaint the volume.
- volumes - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- VolumeSculptor - Class in gov.nih.mipav.view.renderer.J3D.volumeview
-
Implementation of Volume Sculpting for the RayCast and ShearWarp Volume Renderers.
- VolumeSculptor(VolumeRenderer, int, int) - Constructor for class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeSculptor
-
Constructor:
- VolumeShaderEffectMultiPass - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
VolumeShaderEffect is the workhorse of the GPU-based rendering in MIPAV.
- VolumeShaderEffectMultiPass(VolumeImage, VolumeImage, Texture) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPass
-
Creates a new VolumeShaderEffect object.
- VolumeShaderEffectMultiPassDynamic - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- VolumeShaderEffectMultiPassDynamic(VolumeImage, VolumeImage, Texture) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeShaderEffectMultiPassDynamic
-
Creates a new VolumeShaderEffect object.
- volumeSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Computed as xDim*yDim*zDim
- volumeSizeX - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- volumeSizeY - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- volumeSizeZ - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- VolumeSlices - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
Displays the three orthogonal planes with the volume data.
- VolumeSlices(Renderer, VolumeImage, VolumeImage, Vector3f, float, float, float) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
Create a new VolumeObject with the VolumeImage parameter.
- volumesList - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
List of available VOIs.
- volumeSpaceRadius - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
Default volume space burning point radius.
- VolumesToReferenceTransformations - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
- VolumesToReferenceTransformations - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
- VolumeSurface - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- VolumeSurface(VolumeImage[], Texture, Vector3f, float, float, float, SurfaceState, boolean, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- VolumeSurface(VolumeImage, VolumeImage, Vector3f, float, float, float, SurfaceState) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
Create a new VolumeSurface with the VolumeImage parameter.
- VolumeSurface(VolumeImage, VolumeImage, Vector3f, float, float, float, SurfaceState, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- VolumeSurface(VolumeImage, VolumeImage, Vector3f, float, float, float, SurfaceState, boolean, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSurface
-
- volumeText - Variable in class gov.nih.mipav.view.dialogs.JDialogSmoothMesh
-
Volume text field.
- volumeText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Displays the volume of triangle.
- volumeText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning pont volume text box.
- volumeText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSurface_WM
-
Displays the volume of triangle.
- VolumeTexture - Class in gov.nih.mipav.view.renderer.J3D
-
Defines 3D texture node for a volume of data.
- VolumeTexture(ModelImage) - Constructor for class gov.nih.mipav.view.renderer.J3D.VolumeTexture
-
Create texture(s) and automatic texture coordinate generation parameters for each slicing of the specified volume
along each of the three axes.
- volumeToLocalCoords(Vector3f) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeObject
-
Converts the input point from volume-index coordinates into local coordinates used to display the object in the volume renderer.
- VolumeTriPlanarInterface - Class in gov.nih.mipav.view.renderer.WildMagic
-
- VolumeTriPlanarInterface() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Specific constructor call from the VolumeViewerDTI.
- VolumeTriPlanarInterface(ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- VolumeTriPlanarInterface(ModelImage, ModelImage, boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- VolumeTriPlanarInterface.IntVector - Class in gov.nih.mipav.view.renderer.WildMagic
-
- VolumeTriPlanarInterface.TabbedItem - Class in gov.nih.mipav.view.renderer.WildMagic
-
Item to hold tab name and corresponding panel.
- VolumeTriPlanarInterfaceDTI - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- VolumeTriPlanarInterfaceDTI(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanarInterfaceDTI
-
- VolumeTriPlanarRender - Class in gov.nih.mipav.view.renderer.WildMagic
-
- VolumeTriPlanarRender() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Default Constructor.
- VolumeTriPlanarRender(VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- VolumeTriPlanarRender(VolumeImage[], Texture) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- VolumeTriPlanarRender(VolumeTriPlanarInterface, Animator, VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Construct the Volume/Surface/Tri-Planar renderer.
- VolumeTriPlanarRender(VolumeTriPlanarInterface, VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Construct the Volume/Surface/Tri-Planar renderer.
- VolumeTriPlanarRender(VolumeTriPlanarRender, GLCanvas, VolumeTriPlanarInterface, VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
Construct the Volume/Surface/Tri-Planar renderer.
- VolumeTriPlanarRenderBase - Class in gov.nih.mipav.view.renderer.WildMagic
-
- VolumeTriPlanarRenderBase() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Default Constructor.
- VolumeTriPlanarRenderBase(Animator, VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Construct the Volume/Surface/Tri-Planar renderer.
- VolumeTriPlanarRenderBase(VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Construct a stand-alone renderer
- VolumeTriPlanarRenderBase(VolumeTriPlanarRenderBase, GLCanvas, VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
Construct the Volume/Surface/Tri-Planar renderer.
- VolumeTriPlanarRenderBase.JPanelGPU - Class in gov.nih.mipav.view.renderer.WildMagic
-
- VolumeTriPlanerRenderDTI - Class in gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork
-
- VolumeTriPlanerRenderDTI(VolumeTriPlanarInterface, VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
- VolumeTriPlanerRenderDTI(VolumeTriPlanarRender, GLCanvas, VolumeTriPlanarInterfaceDTI, VolumeImage, VolumeImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.VolumeTriPlanerRenderDTI
-
Construct the Volume/Surface/Tri-Planar renderer.
- volumeType - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
- volumeType - Variable in class gov.nih.mipav.view.dialogs.JDialogInsertVolume
-
DOCUMENT ME!
- volumeVectorDirectionColorFilter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Filter a Color 3D image with a 3D kernel with vector direction filtering.
- volumeVectorMagnitudeColorFilter(float[], float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
Filter a Color 3D image with a 3D kernel with vector magnitude filtering.
- VolumeVOI - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
Displays the VOIBase in the GPU-based VolumeRenderer.
- VolumeVOI(VolumeImage, Vector3f, VOIBase, ColorRGBA) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOI
-
Constructor for the VolumeVOI object.
- VolumeVOIEffect - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- VolumeVOIEffect(boolean) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeVOIEffect
-
- voronoi(int, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- vox_offset - Variable in class gov.nih.mipav.model.file.FileAnalyze
-
Voxel offset tag used to read in the image.
- vox_offset - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
If the magic field is "n+1", then the voxel data is stored in the same file as the header.
- vox_offset - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
public float pixdim = new float[8]; // image resolutions info mm or ms stored in FileInfoBase pixdim[0] = number
of dimensions pixdim[1] = voxel width pixdim[2] = voxel height pixdim[3] = voxel thickness pixdim[4] = time.
- vox_offset - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
If the magic field is "n+1", then the voxel data is stored in the same file as the header.
- vox_offset - Variable in class gov.nih.mipav.model.file.FilePARREC
-
Voxel offset tag used to read in the image.
- vox_offset2 - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- vox_units - Variable in class gov.nih.mipav.model.file.FileInfoAnalyze
-
specifies the spatial units of measure for a voxel.
- vox_units - Variable in class gov.nih.mipav.model.file.FileInfoSiemensText
-
specifies the spatial units of measure for a voxel.
- vox_units - Variable in class gov.nih.mipav.model.file.FileInfoSPM
-
public short dim[] = new short[8]; // image dimension data stored in FileInfoBase dim[0] = number of dimensions;
usally 4 dim[1] = image width dim[2] = image height dim[3] = image depth (# of slices) dim[4] = volumes in image
--- must be one for 3D image.
- voxel - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.BasicGrid
-
- voxelField - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveVistaParams
-
textfields
- voxelLength - Variable in class gov.nih.mipav.view.dialogs.JDialogACPC
-
- voxelOrder - Variable in class gov.nih.mipav.model.file.FileInfoTrackVis
-
Storing order of image data
- VoxelSize - Static variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOILatticeManagerInterface
-
- VoxelSize - Static variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- voxelSizeX - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- voxelSizeX - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- voxelSizeY - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- voxelSizeY - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- voxelSizeZ - Variable in class gov.nih.mipav.model.file.FileInfoMicroCat
-
DOCUMENT ME!
- voxelSizeZ - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- voxelsProcessed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- voxelsProcessed - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- voxelVolumeLabel - Variable in class gov.nih.mipav.view.JPanelHistogram
-
volume threshold vaue
- voxelVolumeLabel - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- voxelVolumeLabel - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Used to display the volume or area of the voxels/pixels between the upper and lower bounds.
- voxelVolumeLabelB - Variable in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
DOCUMENT ME!
- vp1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Edge
-
- vp2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.Edge
-
- vprfxs - Static variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
The valid list of options prefixes
- vprfxs - Static variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
The valid list of options prefixes
- vprfxs - Static variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
The valid list of options prefixes
- vprfxs - Static variable in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
The valid list of options prefixes
- VPTG_ghost - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- VPTG_ghost_T3D - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- vpTotal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- VQuantity - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjCorticalMesh.Vertex
-
DOCUMENT ME!
- VR(String, DicomType) - Constructor for enum gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- VR_Bones - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- VR_Muscles_Bones - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- VR_Red_Vessels - Static variable in class gov.nih.mipav.model.structures.ModelLUT
-
- vr_type - Variable in class gov.nih.mipav.model.file.FileDicomTagTable
-
VR_type to indicate explicit/implicit nature of tags contained in tag table
- vr_type - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
VR type can be IMPLICIT or EXPLICIT.
- VR1 - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- VR1 - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- VR2 - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- VR2 - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- VR3 - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModREADTable
-
- VR3 - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModREADTable
-
- vrBytes - Variable in class gov.nih.mipav.model.file.FileDicom
-
Value Representation - see FileDicomTagInfo.
- vrImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- VRImageName - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- vrLinkedBuffer - Variable in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Reference to the link buffer communication link.
- vrows - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< initial state covariance
- vrows - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchExtractor
-
< options for extracting patches.
- VRtype(boolean) - Constructor for enum gov.nih.mipav.model.file.FileInfoDicom.VRtype
-
- vSampFactor - Variable in class gov.nih.mipav.model.file.FileDicomJPEG
-
Vertical sample factor.
- VScaleBy_Serial(double, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- VScaleDiff_Serial(double, CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- VScaleSum_Serial(double, CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- VSEMD_MultipleImages - Class in gov.nih.mipav.view.renderer.WildMagic.Render
-
- VSEMD_MultipleImages(VolumeImage[], Texture, Texture) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Render.VSEMD_MultipleImages
-
Creates a new VolumeShaderEffect object.
- vsize - Variable in class gov.nih.mipav.model.file.FileMincVarElem
-
DOCUMENT ME!
- vsnr() - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- VSNR - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_b - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_Ce - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_Ci - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_Cis - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_CTe - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_filter_gains - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_fs - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_g - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_k - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_mL - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_mX - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_num_levels - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_pix2lum_table - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_r - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_v - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_data_zeta - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vsnr_value - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- vSpaceLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- VSum_Serial(CVODES.NVector, CVODES.NVector, CVODES.NVector) - Method in class gov.nih.mipav.model.algorithms.CVODES
-
- vswap(int, int, int) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- VT_BLOB - Static variable in class gov.nih.mipav.model.file.FileZVI
-
- VT_BOOL - Static variable in class gov.nih.mipav.model.file.FileZVI
-
- VT_BSTR - Static variable in class gov.nih.mipav.model.file.FileZVI
-
- VT_DATE - Static variable in class gov.nih.mipav.model.file.FileZVI
-
- VT_DISPATCH - Static variable in class gov.nih.mipav.model.file.FileZVI
-
- VT_EMPTY - Static variable in class gov.nih.mipav.model.file.FileZVI
-
- VT_I2 - Static variable in class gov.nih.mipav.model.file.FileZVI
-
- VT_I4 - Static variable in class gov.nih.mipav.model.file.FileZVI
-
- VT_R8 - Static variable in class gov.nih.mipav.model.file.FileZVI
-
- VT_STORED_OBJECT - Static variable in class gov.nih.mipav.model.file.FileZVI
-
- VTail - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- VTail - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- VTARG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- vVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- vVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- vVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- vx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- vxBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
- vy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- vyBins - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughParabola
-
W
- w - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassData
-
- w - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation.edge
-
- w - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation.userWeightFunct
-
- w - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- w - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM.model
-
- w - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- w - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.ExtendedWilkinson
-
weights for simplicity, coverage, density and legibility
- w - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- w - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform.cdft_arg_t
-
- w - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- w - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- w - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- w - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
- w - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- w - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_cmptparm_t
-
data width
- w - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
data width
- w - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_t1_t
-
- w - Variable in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
DOCUMENT ME!
- w - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- w - Variable in class gov.nih.mipav.view.ColorIcon
-
DOCUMENT ME!
- w - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Model
-
feature weight array
- W - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- W - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- w_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
- w_dzror - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- W_LOCKED - Static variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Used to indicate that the buffer is locked from writing.
- w_size - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.SolverMCSVM_CS
-
- w0 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- w0 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- W02 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- w1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- w1 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- W12 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- w2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- w2 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- w3 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- w3 - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- W3C_XML_SCHEMA - Static variable in class gov.nih.mipav.model.file.FileOME
-
The W3C XML schema.
- W3C_XML_SCHEMA - Static variable in class gov.nih.mipav.model.file.FilePolylineVOIXML
-
The W3C XML schema.
- W3C_XML_SCHEMA - Static variable in class gov.nih.mipav.model.file.FileVOI
-
The W3C XML schema.
- W3C_XML_SCHEMA - Static variable in class gov.nih.mipav.model.file.FileXML
-
XML schema string.
- W3C_XML_SCHEMA - Static variable in class gov.nih.mipav.view.dialogs.InstanceVOI
-
The W3C XML schema.
- W3C_XML_SCHEMA - Static variable in class gov.nih.mipav.view.renderer.WildMagic.TBI.InstanceVOI
-
The W3C XML schema.
- W5 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Wave 5
- W7 - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Wave 7
- wa1 - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
wa1, wa2, and wa3 are work arrays of length n.
- wa2 - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- wa3 - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- wa4 - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
wa4 is a work array of length m, used among others to hold
residuals from evaluate.
- waitbar - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- waitCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
Standard cursor: wait.
- waitCursor - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- waitCursor - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- waitFileSync - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- waitFileSync - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
File write synchronization variables.
- waitFileSync - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
DOCUMENT ME!
- waitForFileDone() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
Block until file writing is done.
- waitForFileDone() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Block until file writing is done.
- waitForFileDone(int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
Block until file writing is done.
- waitForState(Processor, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
Block until the processor has transitioned to the given state.
- waitForState(Processor, int) - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
Block until the processor has transitioned to the given state.
- waitForState(Processor, int) - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Block until the processor has transitioned to the given state.
- waitIntervalMillis - Variable in class gov.nih.mipav.view.MaximumLinesDocumentListener
-
- waitSync - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTranscode
-
DOCUMENT ME!
- waitSync - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie
-
DOCUMENT ME!
- waitSync - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker
-
Synchonization control variables.
- wakeup() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
Manually wake up the behavior.
- wakeUp - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- wallPositions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser
-
- WalshHadamardTransform - Class in gov.nih.mipav.model.algorithms
-
Copyright (c) 2016, suresh
All rights reserved.
- WalshHadamardTransform(ModelImage, ModelImage, ModelImage, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.WalshHadamardTransform
-
- WalshHadamardTransform2 - Class in gov.nih.mipav.model.algorithms
-
- WalshHadamardTransform2() - Constructor for class gov.nih.mipav.model.algorithms.WalshHadamardTransform2
-
- WalshHadamardTransform2(ModelImage, ModelImage, ModelImage) - Constructor for class gov.nih.mipav.model.algorithms.WalshHadamardTransform2
-
- WalshHadamardTransform3 - Class in gov.nih.mipav.model.algorithms
-
- WalshHadamardTransform3() - Constructor for class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- WalshHadamardTransform3(ModelImage, ModelImage, ModelImage, int, int, double, double) - Constructor for class gov.nih.mipav.model.algorithms.WalshHadamardTransform3
-
- WAND - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- wandCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
Standard cursor: wand (hand).
- wandCursor - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- warn(String) - Method in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- warn(String) - Method in interface gov.nih.mipav.model.file.MetadataExtractor.TiffHandler
-
- WARN - gov.nih.mipav.view.Preferences.LogLevel
-
- warning(String) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Prints the warning message 'msg' to standard err, prepending "WARNING"
to it.
- warning(String) - Method in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Prints the warning message 'msg' to standard err, prepending "WARNING"
to it.
- warning(String) - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAW
-
Prints the warning message 'msg' to standard err, prepending "WARNING"
to it.
- warning(String) - Method in class gov.nih.mipav.model.file.rawjp2.EncoderRAWColor
-
Prints the warning message 'msg' to standard err, prepending "WARNING"
to it.
- warning(SAXParseException) - Method in class gov.nih.mipav.model.file.XMLErrorHandler
-
Handles parse exception warnings by outputting them to the debug window.
- warning(SAXParseException) - Method in class gov.nih.mipav.view.dialogs.XMLErrorHandler
-
Handles parse exception warnings by outputting them to the debug window.
- warning(SAXParseException) - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.XMLErrorHandler
-
Handles parse exception warnings by outputting them to the debug window.
- WARNING - Variable in class gov.nih.mipav.model.algorithms.CeresSolver
-
- Warp(CAAMPoint, CAAMPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarp
-
Warps the point 'in' to the point 'out' using the two shapes as irregular
point clouds defining a 2D warp function.
- Warp(CAAMPoint, CAAMPoint) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMWarpLinear
-
Warps point 'in' to point 'out' (if possible).
- Warp_4dof(double[], double, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- WARP_AFFINE_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
warp types.
- WARP_TALAIRACH_12_TYPE - Static variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- warpData - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- warpedImage - Variable in class gov.nih.mipav.model.algorithms.SIFT3D
-
- warpParentnameString - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- warpType - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- wasCancelled - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- wasCancelled() - Method in class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- wasDialogOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMDeleteTagEditor
-
check the dialog that dialog's OKAY button was struck, and it closed without problems.
- wasDialogOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMNewTagEditor
-
check the dialog that dialog's OKAY button was struck, and it closed without problems.
- wasDialogOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogDICOMTagEditor
-
check the dialog that dialog's OKAY button was struck, and it closed without problems.
- wasDialogOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogEditor
-
dialog is closed, but can its value be accepted now?
- wasDragging - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Boolean to determine if the mouse had been dragging before mouse release (for moving and setting active).
- wasLoaded - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
switch that tells the save-dialog that this brush was opened from disk, so brush will be re-written on save
- wasOCLChecked - Static variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- wasOkay - Variable in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Boolean that determines if the window was closed (hitting the X) wasOkay = true means the [x] was not clicked.
- wasOkay() - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Returns true if the window was not closed using the 'X' and was instead closed after the user clicked the 'Save'
button.
- wasSuccess() - Method in class gov.nih.mipav.view.dialogs.JDialogDicomDir
-
- watershedAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogEfficientWatershed
-
DOCUMENT ME!
- watershedAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogHillClimbingWatershed
-
DOCUMENT ME!
- watershedAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSequentialScanningWatershed
-
DOCUMENT ME!
- watershedAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogShortestPathWatershed
-
DOCUMENT ME!
- watershedAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogSplitAndMergeWatershed
-
DOCUMENT ME!
- watershedAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogUnionFindWatershed
-
DOCUMENT ME!
- watershedAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogWatershed
-
DOCUMENT ME!
- watershedID - Variable in class gov.nih.mipav.model.structures.VOI
-
Used to objects a label or ID inconjuction with the watershed algorithm.
- watershedSegment() - Method in class gov.nih.mipav.model.algorithms.AlgorithmAutoSeedWatershed
-
- WATSON - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- WATSON - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- WATSON - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- WATSON - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
- Wav - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- wave1 - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- wave2 - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- wave3 - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- wave4 - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- wave5 - Variable in class gov.nih.mipav.model.file.FileInfoMRC
-
DOCUMENT ME!
- wavedec(double[][][], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- wavedec(double[][], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- wavedec(double[], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- wavedec2(double[][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- wavedec2(double[][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- wavedec3(double[][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- wavedecn(double[][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- wavedecn(double[][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int, int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- wavefun(PyWavelets.ContinuousWavelet, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- wavefun(PyWavelets.DiscreteWavelet, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- waveIncrement - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- wavelength - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.ChannelInfo.LightSourceRef
-
- wavelength - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Instrument.LightSource.Laser
-
- wavelength - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumLikelihoodIteratedBlindDeconvolution
-
The reflected or fluorescence wavelength of the sample:
- wavelengthArray - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- wavelengthNumber - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- wavelengths - Variable in class gov.nih.mipav.model.file.FileInfoLSM
-
DOCUMENT ME!
- wavelengths - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- wavelet - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_v4dwt_t
-
- Wavelet(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- wavelet_levels - Variable in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- wavelet_levels - Variable in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- wavelet_levels - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- wavelet_levels - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- wavelet_name - Variable in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- wavelet_name - Variable in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- wavelet_name - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- wavelet_name - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- WAVELET_NAME() - Constructor for enum gov.nih.mipav.model.algorithms.filters.PyWavelets.WAVELET_NAME
-
- wavelet_order - Variable in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- wavelet_order - Variable in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- wavelet_order - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionBilateralFilter
-
- wavelet_order - Variable in class gov.nih.mipav.view.dialogs.JDialogMultiResolutionGuidedFilter
-
- waveletAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- waveletAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- waveletAlgo - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- waveletAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
Use serialVersionUID for interoperability.
- waveletAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
DOCUMENT ME!
- waveletAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- waveletCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
DOCUMENT ME!
- waveletCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- waveletFeatureNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
wavelet feature number.
- waveletFeatureNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- waveletFeatureNumber - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- waveletFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- waveletFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- waveletFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- waveletFilter - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- waveletFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
Wavelet filter.
- waveletFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveBoundaryFeature2D
-
- waveletFilter - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures2D
-
- waveletFuseAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletFuse
-
DOCUMENT ME!
- waveletImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- waveletImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- waveletImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- waveletImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- waveletImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- waveletImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
DOCUMENT ME!
- waveletImage - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletThreshold
-
DOCUMENT ME!
- WaveletMatrix(int, double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- waveletMatrix_method - Variable in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
- waveletMatrix_method - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- waveletMatrixButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBiorthogonalWavelets
-
- waveletPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- wavelets - Variable in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- waverec(double[][][][], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- waverec(double[][][], PyWavelets.DiscreteWavelet, PyWavelets.MODE, int) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- waverec(double[][], PyWavelets.DiscreteWavelet, PyWavelets.MODE) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- waverec2(double[][][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- waverec2(double[][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- waverec3(double[][][][], PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- waverecn2(Vector<HashMap<String, double[][]>>, PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- waverecn3(Vector<HashMap<String, double[][][]>>, PyWavelets.DiscreteWavelet[], PyWavelets.MODE[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- waveStart - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image
-
- wb - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVesselEnhancement
-
- wb - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- wbCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogVesselEnhancement
-
- wcSystem - Variable in class gov.nih.mipav.view.dialogs.JDialogImageInfo
-
If true change matrix to the world coordinate system.
- wcSystem - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
If true change matrix to the world coordinate system.
- wDivisions - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAHE
-
number of divisions to make in the width.
- WDSC(double[], int, int, double, double[], double[][], double[][], double[][], double[][], double[], double[], double[], double[], int, double[], double, int) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- wdx_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- wdy_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- weak - Variable in class gov.nih.mipav.model.algorithms.AlgorithmRegionMergingViaBoundaryMelting.mergeItem
-
- WeakConnectedEdgePatternHorizontal - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- WeakConnectedEdgePatternHorizontal() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternHorizontal
-
- WeakConnectedEdgePatternHorizontalTest - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- WeakConnectedEdgePatternHorizontalTest() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternHorizontalTest
-
- WeakConnectedEdgePatternVertical - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- WeakConnectedEdgePatternVertical() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVertical
-
- WeakConnectedEdgePatternVerticalTest - Class in gov.nih.mipav.view.renderer.WildMagic.Knees
-
- WeakConnectedEdgePatternVerticalTest() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.Knees.WeakConnectedEdgePatternVerticalTest
-
- weakEdgePatternHorizontal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- weakEdgePatternHorizontal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- weakEdgePatternHorizontal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- weakEdgePatternHorizontal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- weakEdgePatternHorizontal - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- weakEdgePatternVertical - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- weakEdgePatternVertical - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- weakEdgePatternVertical - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- weakEdgePatternVertical - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- weakEdgePatternVertical - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- WebP - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- weibull_prob_paper(double[]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- WeibullCostFunction2param(double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.WeibullDistribution.WeibullCostFunction2param
-
- WeibullCostFunction3param(double[], boolean) - Constructor for class gov.nih.mipav.model.algorithms.WeibullDistribution.WeibullCostFunction3param
-
- WeibullDistribution - Class in gov.nih.mipav.model.algorithms
-
- WeibullDistribution() - Constructor for class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- WeibullDistribution(double, double, double, double[], double[]) - Constructor for class gov.nih.mipav.model.algorithms.WeibullDistribution
-
- WeibullDistribution.Analysis - Class in gov.nih.mipav.model.algorithms
-
- WeibullDistribution.ll_weib_beta_cen_r - Class in gov.nih.mipav.model.algorithms
-
- WeibullDistribution.ll_weib_beta_uncen - Class in gov.nih.mipav.model.algorithms
-
- WeibullDistribution.Pair<T,U> - Class in gov.nih.mipav.model.algorithms
-
- WeibullDistribution.threeParameterFittingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- WeibullDistribution.twoParameterFittingCostFunction - Class in gov.nih.mipav.model.algorithms
-
- WeibullDistribution.WeibullCostFunction2param - Class in gov.nih.mipav.model.algorithms
-
- WeibullDistribution.WeibullCostFunction3param - Class in gov.nih.mipav.model.algorithms
-
- weight - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans.positionWeightItem
-
DOCUMENT ME!
- weight - Variable in class gov.nih.mipav.model.algorithms.AlgorithmKMeans
-
- weight - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.Connection
-
- weight - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesItem
-
- weight - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.Edge
-
- weight - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- weight - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- weight - Variable in class gov.nih.mipav.model.file.FileInfoImageXML
-
DOCUMENT ME!
- weight - Variable in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
- weight - Variable in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
- weight - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
- weight - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh.PriorityQueue.HeapNode
-
- weight - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.Edge
-
- weight - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.Edge
-
- weight - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
- weight - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- weight(boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- weight_diff - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMarkovSmooth
-
The weighting attached to the component of the potential due to the difference between two
neighboring pixel values.
- weight_diff - Variable in class gov.nih.mipav.view.dialogs.JDialogMarkovSmooth
-
The weighting attached to the component of the potential due to the difference between two
neighboring pixel values.
- weight_label - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_parameter
-
- weight_label - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_parameter
-
- weightA - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmUnsharpMask
-
- weightdp2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
-
- weighted - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
Flag to determine if there are weighted images or not.
- weighted - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
Flag to determine if there are weighted images or not.
- weighted - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
Flag to determine if there are weighted images or not.
- weighted - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
Flag to determine if there are weighted images or not.
- weighted - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
Flag to determine if there are weighted images or not.
- weighted - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
Flag to determine if there are weighted images or not.
- weighted - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
Flag to determine if there are weighted images or not.
- weighted - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
Flag to determine if there are weighted images or not.
- weighted - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
Flag to determine if there are weighted images or not.
- weighted - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
Flag to determine if there are weighted images or not.
- weighted - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- weighted - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- weighted - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- weighted - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- weighted - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- WEIGHTED_AVERAGE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Weighted average slice type.
- WEIGHTED_AVERAGE - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Weighted average slice type.
- weighted_dx - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- weighted_dy - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLongPair
-
- weighted_edgesComparator() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesComparator
-
- weighted_edgesItem(int, int, int, double) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver2.weighted_edgesItem
-
- WEIGHTED_LINEAR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIPipeline
-
- WEIGHTED_LINEAR - Static variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIEstimateTensor
-
- WeightedCOG(double[][]) - Method in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- WeightedGraph() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.WeightedGraph
-
- WeightedGraphAddVertexAndEdge() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- WeightedGraphAddVertexIdempotence() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- WeightedGraphDieOnNonExistentVertex() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- WeightedGraphEmptyGraph() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- WeightedGraphNonExistentEdge() - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- weightedInputPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- weightedInputPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- weightedInputPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- weightedInputPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- weightedInputPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- weightedInputPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- weightedInputPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- weightedInputPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- weightedInputPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- weightedInputPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- weightedInputPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- weightedInputPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- weightedInputPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- weightedRefPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- weightedRefPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- weightedRefPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- weightedRefPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- weightedRefPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- weightedRefPixels - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- weightedRefPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- weightedRefPixelsSub2 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- weightedRefPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- weightedRefPixelsSub4 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedELSUNCOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmConstrainedOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR2D
-
DOCUMENT ME!
- weightedRefPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR3D
-
DOCUMENT ME!
- weightedRefPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR2D
-
DOCUMENT ME!
- weightedRefPixelsSub8 - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR3D
-
DOCUMENT ME!
- weightingFactor - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLocalNormalization
-
UnsharpMask weighting factor.
- weightLabel - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Parameter
-
- weightMap - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- weightMap - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- weightMapDefined - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- weightMapDefined - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftSegmentation
-
- weightPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogUnsharpMask
-
- weightPrevious - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
For weighted averaging.
- weightPrevious - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
For weighted averaging.
- weightRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- weightRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR25D
-
DOCUMENT ME!
- weightRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- weightRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR35D
-
DOCUMENT ME!
- weightRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- weights - Variable in class gov.nih.mipav.model.algorithms.SVM.VlSvm
-
< Data labels.
- weights_peak1 - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- weights_peak2 - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- weightSliceImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR25D
-
DOCUMENT ME!
- weightSliceImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR25D2
-
DOCUMENT ME!
- weightVolumeImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegELSUNCOAR35D
-
DOCUMENT ME!
- weightVolumeImage - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegOAR35D
-
DOCUMENT ME!
- wellAddress - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
- wellExternRef - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
- wellString - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.PlateInfo
-
- west - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- West - gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.AnchorPosition
-
- wfilename - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
The wfilename.
- wh3Algo - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- whAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogWalshHadamardTransform
-
- when - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.StandardMouse
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.StandardMouse
-
Event time stamp.
- when - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.StandardKey
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseWheel
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouse
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouseDragged
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.StandardMouse
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouse
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouseDragged
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.KeyPressedEvent
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
DOCUMENT ME!
- when - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.RightMouse
-
DOCUMENT ME!
- where - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_cut
-
- which - Variable in class gov.nih.mipav.model.algorithms.AgglomerativeInformationBottleneck.VlAIB
-
< Closest entry
- which - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_cut
-
- which2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
-
- whichClass(int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryFeature2D
-
- whichClass(int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures2D
-
- whichClass(int, int, int, int, int) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeaturesSaveAutoTrain
-
- whichComp - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Current active volume opacity control of the volume render.
- whichCut - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry
-
- whichCut - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.fams_hash_entry2
-
- whichEnd(int) - Method in class gov.nih.mipav.model.structures.TransferFunction
-
returns -1 if not an endpoint
returns 0 if starting point
returns 1 if end point
- whichLeg - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- whichLeg - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- whichLeg - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- whichPlane(TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeSlices
-
- whichptr - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- whichTissue(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Check the given voxel belong to which segmentation.
- whichTissue(float, float, float) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Check the given voxel belong to which segmentation.
- WHITE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- WHITE - Static variable in interface gov.nih.mipav.model.file.FileSVS.ModHuffmanTable
-
- WHITE - Static variable in interface gov.nih.mipav.model.file.FileTiff.ModHuffmanTable
-
- whiteBalance - Variable in class gov.nih.mipav.model.file.FileSVS
-
- whiteBalance - Variable in class gov.nih.mipav.model.file.FileTiff
-
- whiteImage - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint
-
used to create the "unselected" state of the buttons
- whiteObjectButton - Variable in class gov.nih.mipav.view.dialogs.JDialogRegionsFromPartialBorders
-
- whitespaceH - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- whitespaceH - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- whitespaceW - Variable in class gov.nih.mipav.view.BarMeter
-
DOCUMENT ME!
- whitespaceW - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- whiteStart - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFIREEdgeExtraction
-
Gray scale value at which the white membership function begins the linear transition from 0 to 1
at the highest intensity value
- whiteStart - Variable in class gov.nih.mipav.view.dialogs.JDialogFIREEdgeExtraction
-
DOCUMENT ME!
- whiteValue0 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- whiteValue1 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- whiteValue2 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- whiteValue3 - Variable in class gov.nih.mipav.model.file.FileInfoZVI
-
- whole_image - Variable in class gov.nih.mipav.model.file.libjpeg.my_coef_controller
-
- whole_image - Variable in class gov.nih.mipav.model.file.libjpeg.my_post_controller
-
- WHOLE_IMAGE - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHistogram
-
- WHOLE_IMAGE - Static variable in class gov.nih.mipav.view.dialogs.JDialogHistogramSummary
-
- wholeImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
wholeImage is constrained to be true if background cropping is selected.
- wholeImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
wholeImage is constrained to be true.
- wholeImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- wholeImage - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- wholeImage - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMass
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogCenterOfMassRGB
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFillObjects
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogFuzzyCMeans
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogIHN3Correction
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogMSFuzzyCMeans
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogN4MRIBiasFieldCorrection
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationChamfer
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogThreshold
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogThresholdRGB
-
DOCUMENT ME!
- wholeImage - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStats
-
VOI used for whole image processing
- wholeImage - Variable in class gov.nih.mipav.view.JFrameHistogram
-
true = apply algorithm to the whole image
- wholeImage - Variable in class gov.nih.mipav.view.JPanelHistogram
-
true = apply algorithm to the whole image
- wholeImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- wholeImageFlag - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK
-
- wholeImageFlag - Variable in class gov.nih.mipav.view.dialogs.JDialogBRISK
-
- wholeImageRadio - Variable in class gov.nih.mipav.view.components.JPanelAlgorithmOutputOptions
-
DOCUMENT ME!
- wholeImageRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
radio buttons
- wholeImageThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
flags for destination, threshold, inverse, and color image
- wholeImageThreshold - Variable in class gov.nih.mipav.view.dialogs.JDialogStandardDeviationThreshold
-
flags for destination and threshold
- wholeOrganButton - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- wholeOrganCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- wholeOrganIndex - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP
-
DOCUMENT ME!
- wholeOrganIndex - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- wholeOrganNormalize - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- wholeVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogLocalVariance
-
DOCUMENT ME!
- wholeVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogMean
-
DOCUMENT ME!
- wholeVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogMedian
-
DOCUMENT ME!
- wholeVolume - Variable in class gov.nih.mipav.view.dialogs.JDialogMode
-
DOCUMENT ME!
- widenButtonSize - Static variable in class gov.nih.mipav.view.MipavUtil
-
The horizontally widen size that all buttons should be.
- WidgetFactory - Class in gov.nih.mipav.view.components
-
This class is a collection of GUI widget generation methods.
- WidgetFactory() - Constructor for class gov.nih.mipav.view.components.WidgetFactory
-
- WidgetFactory.ScrollTextArea - Class in gov.nih.mipav.view.components
-
ScrollPane with an accessible JTextArea
- WidgetSelected - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- width - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- width - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
- width - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- width - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPhaseCongruency
-
- width - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTProcess.CalculateT
-
- width - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Img
-
width and height of this image
- width - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator
-
- width - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceGeometry
-
- width - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlScaleSpaceOctaveGeometry
-
- width - Variable in class gov.nih.mipav.model.algorithms.OpenCLAlgorithmBase
-
- width - Variable in class gov.nih.mipav.model.algorithms.registration.ImRegPOC
-
- width - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlPgmImage
-
- width - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< delta-smoothing.
- width - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Sep_FIR_filter
-
- width - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- width - Variable in class gov.nih.mipav.model.file.FileGESigna4X
-
- width - Variable in class gov.nih.mipav.model.file.FileGESigna5X
-
DOCUMENT ME!
- width - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
8 - width of image.
- width - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- width - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- width - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGInputStream
-
- width - Variable in class gov.nih.mipav.model.file.FileSVS.ModModREADInputStream
-
- width - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- width - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGInputStream
-
- width - Variable in class gov.nih.mipav.model.file.FileTiff.ModModREADInputStream
-
- width - Variable in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
Image width
- width - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Dimensions of rectangle to draw.
- width - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- width - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- width - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- width - Variable in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
DOCUMENT ME!
- width - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
DOCUMENT ME!
- width - Variable in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
DOCUMENT ME!
- width - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.Octree
-
- width - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- width(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- Width() - Method in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Used by AAM appearance model to get dimension
- Width() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Shape width.
- Width() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CVisRect
-
- Width(int) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.BinaryNode
-
- width_in_blocks - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_component_info
-
- widthButton - Variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Buttons for width, height values
- widthDivisions - Variable in class gov.nih.mipav.view.dialogs.JDialogAHE
-
DOCUMENT ME!
- widthField - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- widthField - Variable in class gov.nih.mipav.view.dialogs.JDialogGridOptions
-
DOCUMENT ME!
- widthField - Variable in class gov.nih.mipav.view.ViewJFrameCreatePaint.JDialogGridSize
-
- widthLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- widthResFactor - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
Storage for correction parameters where datasets have non isotropic values.
- widthResFactor - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
Storage for correction parameters where datasets have non isotropic values.
- widthResFactor - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Storage for correction parameters where datasets have non isotropic values.
- widthResFactor - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Storage for correction parameters where datasets have non isotropic values.
- widthString - Variable in class gov.nih.mipav.view.dialogs.JDialogEditCircleDiameter
-
- widthString - Variable in class gov.nih.mipav.view.dialogs.JDialogEditSquareLength
-
- widthText - Variable in class gov.nih.mipav.view.dialogs.JDialogMagnificationControls
-
Text fields for zoom box
- widthText - Variable in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
- wiener_filtering_hadamard(double[][][], double[][][], double, boolean, double[]) - Method in class gov.nih.mipav.model.algorithms.filters.BM3D
-
- WienerBIORButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- WienerDCTButton - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- WienerFilterNoise - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- WienerTransformGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogBM3D
-
- WigglyBowlCostFunctionAndEvaluationCallback(double[], String, boolean[]) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.WigglyBowlCostFunctionAndEvaluationCallback
-
- WillBeNonManifold(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Decimate.LODMesh
-
- willReadBlock() - Method in class gov.nih.mipav.view.renderer.flythroughview.JpegImagesToMovie.ImageSourceStream
-
We should never need to block assuming data are read from files.
- willReadBlock() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.AWTImageSourceStream
-
We should never need to block assuming data are read from files.
- willReadBlock() - Method in class gov.nih.mipav.view.renderer.flythroughview.MovieMaker.JpegSourceStream
-
We should never need to block assuming data are read from files.
- win - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- win - Variable in class gov.nih.mipav.model.algorithms.libdt.PatchOptions
-
- win - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAW
-
Frame used to display decoded image
- win - Variable in class gov.nih.mipav.model.file.rawjp2.DecoderRAWColor
-
Frame used to display decoded image
- WIN_REGION - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- window - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering.famsPoint
-
- window - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
The number of slices used in the intensity projection, represents a sliding window.
- window - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Value of the window size for the calculation (X,Y,Z).
- window - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
The size of the window.
- WINDOW - gov.nih.mipav.view.dialogs.JDialogCaptureScreen.WindowProperties
-
The entire image window
- WINDOW - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- WINDOW - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- WINDOW - Static variable in class gov.nih.mipav.view.dialogs.JDialogActiveContoursWithoutEdges
-
DOCUMENT ME!
- WINDOW - Static variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- WINDOW - Static variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- window_size - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftFilt
-
< magnification factor.
- window_size - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- window_size - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- windowA - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Do nothing.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Do nothing.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Do nothing.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Unchanged.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
If in Window mode, captures the content pane of the window activated and sets the current rectangle to the bounds
of the content pane.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
Unchanged.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Do nothing.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Unchanged.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
windowActivated.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
windowActivated.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Over loaded so that it doesn't do anything.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Unchanged.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Tells the UI that this frame is the currently active one.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
windowActivated - unchanged.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Unchanged.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Unchanged.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Unchanged.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Over loaded so that it doesn't do anything.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
unchanged.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
unchanged.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Do nothing.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Do nothing.
- windowActivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Do nothing.
- windowB - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
- windowButton - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Button for selecting window mode.
- windowC - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
- windowCenter - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- windowCenter - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- WindowCenter - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- windowCenterIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- windowCenterPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- windowCenterWidthExplanation - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Do nothing.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Do nothing.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Do nothing.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Unchanged.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
Unchanged.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Do nothing.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Unchanged.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.reportbug.ReportBugBuilder
-
Performs the following actions based on the command:
OK - creates a file using the currently selected image and the given file name and then attaches it to email
Insert - inserts the image into the description area and if a name is provided, attaches the image as a file
as well
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
windowClosed.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
windowClosed.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Unchanged.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Does nothing.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
windowClosed - unchanged.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Unchanged.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Unchanged.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Unchanged.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
unchanged.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
unchanged.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Do nothing.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Do nothing.
- windowClosed(WindowEvent) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Do nothing.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Sets completed to false, disposes the progress bar and notifies all listeners that the algorithm is stopped.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Confirms if the user really wants to exit, then closes the application (if running without the rest of the MIPAV
GUI).
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Confirms if the user really wants to exit, then closes the application (if running without the rest of the MIPAV
GUI).
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
window closing
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogAnyTwoImagesSNR
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBulkImageCalculator
-
windoe closing
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
window closing
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
Cleans up the frame before closing.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
window closing
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDEMRI3
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDicom2XMLSelection
-
Closes window and disposes of frame and component.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFile
-
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
window closing
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogDualContourSearch
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFrameLinker
-
windowClosing - calls close.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogFRET
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCardioid
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughEllipse
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbola
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogKMeans
-
window closing
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
windoe closing
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMeanShiftClustering
-
window closing
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
windowclosing...override of WindowListener interface.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay.JDialogChooseOverlay
-
Do nothing on window close so we dont have to rebuild the dicom list.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogOverlay
-
cleanup on closing.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPaintGrow
-
DOCUMENT ME!
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPhaseCongruency
-
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Closes the dialog and stop the script recorder.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSingleMRIImageSNR
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSM2
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSpectralClustering
-
windoe closing
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTimeFitting
-
window closing
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTriFrameLinker
-
windowClosing - calls close.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogTwoMRIImagesSNR
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIBoolean
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOIHausdorffDistance
-
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Calls dispose.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Accessor that closing the mouse recorder window frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
windowClosing Catch the windowClosing event so that the local data memebrs can be destroyed.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSurface
-
Overrides method in JDialogBase so dialog isn't disposed, just hidden.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
windowClosing Catch the windowClosing event so that the local data memebrs can be destroyed.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter
-
Accessor that closing the mouse recorder window frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJFramePlotterView
-
Closes window and disposes of frame and component.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Ask user if really wishes to close the image frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.ViewJFrameVolumeView
-
Closes window and disposes of frame and component.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
window closing
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.JPanelDTIFiberTracking
-
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
windowClosing Catch the windowClosing event so that the local data memebrs can be destroyed.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelClip_WM
-
Closing the mouse recorder window frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Sets completed to false, disposes the progress bar and notifies all listeners that the algorithm is stopped.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Stops thread, calls close.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Stops thread, calls close.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Cleans up the frame before closing.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Stops thread, calls close.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Stops thread, calls close.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
windowClosing - calls close.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Closes frame is requested.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Disposes of error dialog, then frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Calls close.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Calls close.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameImage
-
Closes window and disposes of frame and component.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameLightBox
-
Ask user if really wishes to close the image frame.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
Closes window and disposes of frame and component.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
Closes window and disposes of frame and component.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Closes window and disposes of frame and component.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Calls dispose.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Calls dispose.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
Closes window and disposes of frame and component.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Dispose the progress window.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Wakes up the VUI thread on the user's closing of the splash screen window if it is sleeping while waiting for the
splash screen to be displayed.
- windowClosing(WindowEvent) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Confirms if the user really wants to exit, then closes the application.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Do nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Do nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Do nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Unchanged.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
Unchanged.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Do nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Unchanged.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
windowDeactivated.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
windowDeactivated.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
Does nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Unchanged.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Does nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
windowDeactivated - unchanged.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Unchanged.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Unchanged.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Unchanged.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
unchanged.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
unchanged.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Do nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Do nothing.
- windowDeactivated(WindowEvent) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Do nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Do nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Do nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Do nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Unchanged.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
Unchanged.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Do nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Unchanged.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
windowDeiconified.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
windowDeiconified.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Unchanged.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Does nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
windowDeiconified - unchanged.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Unchanged.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Unchanged.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Unchanged.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
unchanged.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
unchanged.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Do nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Do nothing.
- windowDeiconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Deiconify only the other frames who's last state was normal (ie- restore other frames to their lastState).
- windowedRegionSize - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
The window region size of used when two images are displayed in the same frame.
- windowFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFFT
-
DOCUMENT ME!
- windowFilter - Variable in class gov.nih.mipav.view.dialogs.JDialogFrequencyFilter
-
DOCUMENT ME!
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Do nothing.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Do nothing.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Do nothing.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Unchanged.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
Unchanged.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Do nothing.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Unchanged.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
windowIconified.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
windowIconified.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Unchanged.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Does nothing.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
windowIconified - unchanged.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Unchanged.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Unchanged.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Unchanged.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
unchanged.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
unchanged.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Do nothing.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Do nothing.
- windowIconified(WindowEvent) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Iconify all other frames associateed with MIPAV.
- windowLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Label displays the number of slices in the sliding window.
- windowLevel - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Reference to the two window and level dialogs where [0] is for imageA, [1] for imageB.
- WindowLevel - Class in gov.nih.mipav.view
-
The WindowLevel class provides mouse-driven window-level controls for the
ModelLUT or ModelRGB lookup tables.
- WindowLevel - gov.nih.mipav.view.Preferences.DefaultDisplay
-
Window and level settings (will also be reflected as transfer function
- WindowLevel() - Constructor for class gov.nih.mipav.view.WindowLevel
-
Default constructor.
- windowLevelCheckBox - Variable in class gov.nih.mipav.view.renderer.JDialogRendererAVI
-
Window level check box.
- WindowLevelGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMipavOptions
-
- windowLevelPanel - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- windowListener - Variable in class gov.nih.mipav.view.ViewJProgressBarMulti
-
- windowNumber - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.model.algorithms.AlgorithmBase
-
Do nothing.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandalonePlugin
-
Do nothing.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.plugins.JDialogStandaloneScriptablePlugin
-
Do nothing.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogBase
-
Unchanged.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogHistogramLUT
-
Deprecated.
Unchanged.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogScriptRecorder
-
Do nothing.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.dialogs.JDialogZoom
-
Unchanged.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.JFrameHistogram
-
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JFrameSurfaceMaterialProperties
-
windowOpened.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.JStereoWindow
-
windowOpened.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.JFrameSurfaceMaterialProperties_WM
-
Starts Animator on windowOpened.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarInterface
-
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.RubberbandLivewire
-
Unchanged.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimate
-
Does nothing.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
Does nothing.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameBase
-
Does nothing.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
Does nothing.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
Does nothing.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMParser
-
windowOpened - unchanged.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameDICOMQuery
-
Unchanged.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameGraph
-
Unchanged.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoLUT
-
Deprecated.
Unchanged.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameHistoRGB
-
Deprecated.
Unchanged.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistration
-
Unchanged.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
Unchanged.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewJProgressBar
-
Do nothing.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewSplashScreen
-
Do nothing.
- windowOpened(WindowEvent) - Method in class gov.nih.mipav.view.ViewUserInterface
-
Do nothing.
- WindowProperties() - Constructor for enum gov.nih.mipav.view.dialogs.JDialogCaptureScreen.WindowProperties
-
- WINDOWS_1252 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Charsets
-
- windowSize - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- windowSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
Size of square window used in calculating each glcm matrix - must be an odd number.
- windowSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
The size of the local orientation analysis window
- windowSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLawsTexture
-
Size of square window must be 3, 5, or 7
- windowSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateFeatures
-
Size of square window used in calculating each glcm matrix - must be an odd number.
- windowSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSymmetricNearestNeighbor
-
- windowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
DOCUMENT ME!
- windowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogKernelRegression
-
Size of local orientation analysis window
- windowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogLawsTexture
-
DOCUMENT ME!
- windowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogSymmetricNearestNeighbor
-
- windowSize - Variable in class gov.nih.mipav.view.dialogs.JDialogTextureSegmentation
-
- windowSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSaveFeatures
-
DOCUMENT ME!
- WindowSize - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- windowSizeText - Variable in class gov.nih.mipav.view.dialogs.JDialogEmbeddedConfidenceEdgeDetection
-
- windowSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogMaximumIntensityProjection
-
Slider enables user to change the size of the sliding window.
- windowSlider - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- windowSliderMax - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Stores the minimum slider value.
- windowType - Variable in class gov.nih.mipav.model.algorithms.SVM.VlHomogeneousKernelMap
-
- windowWidth - Variable in class gov.nih.mipav.model.file.FileInfoPARREC
-
- windowWidth - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- WindowWidth - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- windowWidthIndex - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- windowWidthPos - Variable in class gov.nih.mipav.model.file.FilePARREC
-
- WindowX - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- WindowY - Variable in class gov.nih.mipav.view.renderer.WildMagic.VolumeRenderState
-
- winLevel - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- winLevelCursor - Static variable in class gov.nih.mipav.view.MipavUtil
-
DOCUMENT ME!
- winLevelGray(ModelLUT, ModelImage) - Method in class gov.nih.mipav.view.WindowLevel
-
winLevelGray finds old_fWindow and old_fLevel
- winLevelRGB(ModelRGB, ModelImage) - Method in class gov.nih.mipav.view.WindowLevel
-
winLevelRGB finds old_fWindow and old_fLevel.
- winLevelSet - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
User invokes window and level adjustment with right mouse drag in DEFAULT mode.
- winMaxFloat - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
the maxes and mins for window and level *
- winMinFloat - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
the maxes and mins for window and level *
- winValTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
textfield inputs for window and level *
- winxy - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- winz - Variable in class gov.nih.mipav.model.algorithms.libdt.VidSeqSegmParams
-
- WishartVariateGenerator - Class in gov.nih.mipav.model.algorithms
-
Ported from original FORTRAN code Algorithm AS 53: Wishart Variate Generator
Authors: W.
- WishartVariateGenerator(double[][], int, double[][], double[][]) - Constructor for class gov.nih.mipav.model.algorithms.WishartVariateGenerator
-
- wishpdf(double[][], double, double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- wishpdf(double, double, double, boolean) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- wishpdfln(double[][], double, double[][], boolean) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- wishpdfln(double, double, double, boolean) - Method in class gov.nih.mipav.model.algorithms.Fastfit
-
- withinDistance(float, float, float, float, float, float, double) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Check to see if the given voxel is within the sphere radius from the center point.
- WithLineSearchMinimizerImpl(CeresSolver.LineSearchType, CeresSolver.LineSearchDirectionType, CeresSolver.LineSearchInterpolationType, String, boolean[]) - Method in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- wKernel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- wKernel - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- WL_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- wList - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTreT1
-
- wList - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT1
-
The ordered list of images that the algorithm is dependent on.
- wList - Variable in class gov.nih.mipav.view.dialogs.JDialogTreT2
-
- wmThreshold - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSkullRemoval
-
White Matter threshold :
- WN(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- wname - Variable in class gov.nih.mipav.model.algorithms.NLMeans_filt2D
-
- wNumber - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- WOLFE - gov.nih.mipav.model.algorithms.CeresSolver.LineSearchType
-
- WolfeLineSearch(CeresSolver.LineSearchOptions) - Constructor for class gov.nih.mipav.model.algorithms.CeresSolver.WolfeLineSearch
-
- WOOD - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- WOOD - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- WOOD - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
- WoodFunction() - Constructor for class gov.nih.mipav.model.algorithms.CeresSolverTest.WoodFunction
-
- WORD_STRING - gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
A string with VR "OW" is stored in the tag's value.
- work - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- WORK - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- work_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.DenseQRSolver
-
- WORK2 - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- WorkDimensions(int, long, long) - Constructor for class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.WorkDimensions
-
- workDone - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- workFactor - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- workingBuffer - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- workLimit - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- WORKQ - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- WORKT - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- worldCoordCheckbox - Variable in class gov.nih.mipav.view.dialogs.JDialogOrientMatrix
-
DOCUMENT ME!
- wormData - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.JPanelLattice
-
- WormData - Class in gov.nih.mipav.view.renderer.WildMagic.WormUntwisting
-
- WormData(ModelImage) - Constructor for class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- wormDiameters - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- wormImage - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.WormData
-
- wormOrigin - Variable in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- WPPQF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- WPPQG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- WPROD(double[], int, int, double, double[][], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- WQSUM(double[], double, int, int, double[], double, double, int, int, double, double[][], double[][], double[], double[], int, double[], int) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- WQUAD(double[], double, int, int, double[], double, int, int, double, int, int, double, double[][], double[][], double[], double[], int, double[], int, int) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- WQUAD1(double[], double, int, int, double[], double, double, int, int, double, double[][], double[][], double[], double[], int, double[], int) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- wRangeMaxValue - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- wRangeMinValue - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- wrap(int, int, int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- wrapped_cost_function_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver2.ConditionedCostFunction
-
- WRFUN1(int, double[][], int[], int[], double[], int[], int[], String[], int, String, String, String, String, RandomAccessFile, boolean) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- WRFUN2(int, int, double[][], int[], int[], double[], int[], int[], String[], int, String, String, String, boolean[], String, RandomAccessFile, boolean) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- WRHEAD(int, int, RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- write - Variable in class gov.nih.mipav.model.algorithms.StochasticForests
-
- write() - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
Writes the default ModelLUT or ModelRGB to a file.
- write() - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Writes the source's current tile to the output.
- write(byte[]) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Writes a byte arrary to the outgoing buffers.
- write(byte[], int, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Writes a specified number of bytes from the byte buffer into outGoing ByteBuffer list of byte buffers.
- write(int) - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
modified by Oliver Merkel, 010128
- write(int) - Method in class gov.nih.mipav.model.file.MetadataExtractor.NullOutputStream
-
- write(int) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- write(int, int, int, int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
Writes the data of the specified area to the file, coordinates are
relative to the current tile of the source.
- write(libdt.CovMatrix) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- write(libdt.Dytex) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- write(libdt.DytexMix) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- write(libdt.DytexOptions) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- write(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
Writes the header and body of the PDU messages.
- write(DICOM_Object, String, byte) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Writes the DICOMObj out through the socket.
- write(DICOM_PDUService) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Verification
-
Writes the UID_Verification via the PDU service.
- write(DICOM_PDUService, byte, byte) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Writes P-DATA-TF Messages.
- write(DICOM_PDUService, DICOM_Object) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Query
-
Writes a query.
- write(DICOM_PDUService, DICOM_Object, byte[], DICOM_Move) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_StdRetrieve
-
Transfers a C-MOVE request to a SCP.
- write(DICOM_PDUService, DICOM_Object, String, int, String, DICOM_Object, int, int, int, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CResponse
-
Writes a DIMSE-C message.
- write(DICOM_PDUService, DICOM_Object, String, String, String) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_StdStorage
-
Provides Storage SOP write capability.
- write(DICOM_PDUService, String, String, String, DICOM_Object, byte[]) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_CRequest
-
Writes a DIMSE-C message.
- write(Object) - Method in interface gov.nih.mipav.model.file.DicomType
-
- write(Object) - Method in enum gov.nih.mipav.model.file.FileDicomTagInfo.NumType
-
- write(Object) - Method in enum gov.nih.mipav.model.file.FileDicomTagInfo.StringType
-
- write(String, boolean) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- write(String, byte) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- write(String, double) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- write(String, int) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- write(String, libdt.Mat) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- write(String, DICOM_Object, String, byte) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUService
-
Writes the image (loaded into ioBuffer from file) out the port.
- write(String, Vector<Integer>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- write(Point3i) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- Write(int, int, double[][], CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.BlockJacobianWriter
-
- Write(int, int, double[][], CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.CompressedRowJacobianWriter
-
- Write(int, int, double[][], CeresSolver.SparseMatrix) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.DenseJacobianWriter
-
- WRITE - Static variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- write_Affine(String, SIFT3D.Affine) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- write_backing_store_byte(libjpeg.jpeg_decompress_struct, libjpeg.backing_store_info, byte[][], long, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- write_backing_store_short(libjpeg.jpeg_decompress_struct, libjpeg.backing_store_info, short[][], long, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- write_Mat_rm(String, SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- write_obj(String) - Method in class gov.nih.mipav.model.algorithms.LSCM.Mesh
-
- writeAfni(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes an AFNI file to store the image.
- writeAll() - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
Writes the default ModelLUT or ModelRGB to a file.
- writeAnalyze(ModelImage, FileWriteOptions, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes an analyze file to store the image.
- writeAnalyze(ModelImage, ModelImage, int, int, int, int, PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- writeAnalyze(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, int, PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- writeAnalyze(ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, ModelImage, int, int, int, int, PrintWriter) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- writeAnnotationInVoiAsXML(String, boolean) - Method in class gov.nih.mipav.model.file.FileVOI
-
Writes VOIText(s) to a .lbl file (XML based)
- writeAnnotationXML(boolean) - Method in class gov.nih.mipav.model.file.FileVOI
-
Writes VOIText(s) to a .lbl file (XML based)
- WriteArrayToFileOrDie(String, double[], int) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- WriteASF(String, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
Writes the shape to a ASF file.
- WriteASF0_90(String, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMShape
-
ASF writer version 0.90.
- writeAsUnknownLength - Variable in class gov.nih.mipav.model.file.FileDicomSQ
-
Whether the sequence should be written using an unknown length
- writeAsUnknownLength - Variable in class gov.nih.mipav.model.file.FileDicomSQItem
-
Whether the sequence should be written using an unknown length
- writeAvi(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes an AVI file to store the image.
- writeAVITriplet(int, int, ModelLUT, int, int, int, float, float, BitSet) - Method in class gov.nih.mipav.model.file.FileAvi
-
Writes the AVI BGR triplet.
- writeAVITripletC(int, int, ModelRGB, ModelRGB, int, int, int, float, float, BitSet) - Method in class gov.nih.mipav.model.file.FileAvi
-
Write BGR AVI triplet for color image.
- writeAVITripletCFrames() - Method in class gov.nih.mipav.model.file.FileAvi
-
Write BGR AVI triplet for color image.
- writeBinary(byte[], int, int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Socket
-
Low level socket write.
- writeBlankFrame() - Method in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAbortRQ
-
Writes the PDU type header.
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateAC
-
Writes the body of the association accept.
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRJ
-
Writes the body of the association rejection.
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AAssociateRQ
-
Writes the body of the association request.
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AReleaseRQ
-
Writes the body of the association release request.
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AReleaseRSP
-
Writes the body of the association release response.
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_AsyncOpWindowSubItem
-
Writes the body of the sub item.
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_MaximumSubLength
-
Writes the maximum sublength out the connection (port).
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDataTF
-
Filler because it extends DICOM_PDUType which is an abstract class
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUItemType
-
Writes the body of the item type.
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContext
-
Writes the body of the presentation context.
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PresentationContextAccept
-
Writes the body of an accepted presentation context.
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_SCPSCURoleSelect
-
Writes the body of the SCP/SCU.
- writeBody(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_UserInformation
-
Writes the body of the user information.
- writeBufferByte(byte[], int, int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes a raw byte buffer to a file.
- writeBufferDouble(double[], int, int, boolean) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes a double buffer to a file.
- writeBufferFloat(float[], int, int, boolean) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes a float buffer to a file.
- writeBufferInt(int[], int, int, boolean) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes a int buffer to a file.
- writeBufferLong(long[], int, int, boolean) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes a int buffer to a file.
- writeBufferRGB(int[], int, int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes a RGB buffer to a file.
- writeBufferRGB_USHORT(int[], int, int, boolean) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes a RGB_USHORT buffer to a file.
- writeBufferShort(short[], int, int, boolean) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes a raw short buffer to a file.
- writeBufferUByte(short[], int, int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes a raw unsigned byte buffer to a file.
- writeBufferUInt(long[], int, int, boolean) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes an unisgned int buffer to a file.
- writeBufferUShort(int[], int, int, boolean) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes a raw unsigned short buffer to a file.
- writeByte(byte) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Writes a byte to the outgoing buffers.
- writeByte(byte) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Writes a byte to a file.
- writeByte(int) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- writeByte(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
Write byte.
- writeByteIn(byte, DICOM_FileIO) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Writes a byte to the incoming buffers.
- writeBytes(String) - Method in class gov.nih.mipav.model.file.FileBase
-
- writeBytes(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
Write bytes.
- writeChar(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
Write char.
- writeColorMap(int) - Method in class gov.nih.mipav.model.file.FileSTK
-
Writes color map to the TIFF file.
- writeColorMap(int) - Method in class gov.nih.mipav.model.file.FileSVS
-
Writes color map to the TIFF file.
- writeColorMap(int) - Method in class gov.nih.mipav.model.file.FileTiff
-
Writes color map to the TIFF file.
- writeColourSpecificationBox() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
This method writes the Colour Specification box
- writeConfusionFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- writeConfusionFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- writeConfusionFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- writeConfusionFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- writeConfusionFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- writeContiguousCodeStreamBox(byte[]) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
This method writes the Contiguous codestream box
- writeCOR(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a Freesurfer COR file to store the image.
- writeData(DICOM_VR, DICOM_Comms) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Writes a VR to a DICOM_Comms (network socket).
- writeData(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRenderBase
-
- writeDataFrame(ModelImage) - Method in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- writeDataIn(DICOM_VR, DICOM_Comms, DICOM_FileIO) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_VR
-
Writes a VR to a DICOM_Comms (network socket).
- writeDataProvenance() - Method in class gov.nih.mipav.view.ViewUserInterface
-
Writes Mipav's data provenance to the default location.
- writeDelimitedBytes(String) - Method in class gov.nih.mipav.model.file.DelimitedRandomAccessFile
-
Writes a string terminated by the current delimiter.
- writeDelimitedBytes(String, char) - Method in class gov.nih.mipav.model.file.DelimitedRandomAccessFile
-
Allows for writing with a temporary delimiter.
- writeDescriptor - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- writeDescriptor - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- writeDescriptorCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- writeDiagonal(ModelImage, int, int[], Vector3f[], Vector3f, float[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- writeDiagonal(ModelImage, ModelImage, int, int, int[], Vector3f[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- writeDiagonalSampleCount(ModelImage, ModelImage, int, int, int[], Vector3f[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- writeDiagonalTest(ModelImage, ModelImage, int, int, int[], Vector3f[], float) - Method in class gov.nih.mipav.view.renderer.WildMagic.WormUntwisting.LatticeModel
-
- writeDicom(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a DICOM file to store the image.
- writeDicomSlice(ModelImage, int, FileWriteOptions, FileInfoDicom, FileInfoBase, int, TransMatrix, double, double, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a DICOM file on a slice basis.
- writeDicomTagsToHeader(Hashtable<String, Hashtable<String, String>>, int) - Method in class gov.nih.mipav.model.file.FileMinc
-
Writes the dicom-extracted tags contained in tagTable to disk.
- writeDouble(double) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- writeDouble(double, boolean) - Method in class gov.nih.mipav.model.algorithms.libdt
-
Writes a double as eight bytes to a file.
- writeDouble(double, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Writes a double as eight bytes to a file.
- writeDouble(double, boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Writes a double as eight bytes to a file.
- writeDTIStudioPolyline(String, Vector<VOIContour>, int[], float[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileFiberTrack
-
- WriteEigenImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
Writes the texture eigen modes as shape-free images.
- writeEyeTrackingLog(String) - Static method in class gov.nih.mipav.view.MipavUtil
-
Record the eye tracking log message.
- writeEyeTrackingLog(String, ViewJComponentEditImage) - Static method in class gov.nih.mipav.view.MipavUtil
-
Record the eye tracking log message.
- writeFile(File, Hashtable<FileDicomKey, FileDicomTagInfo>) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Writes the DICOMHashtable given to the file that the CreateDicomFiles points to.
- writeFile(File, Hashtable<FileDicomKey, FileDicomTagInfo>, String) - Static method in class gov.nih.mipav.model.file.DicomDictionary
-
Writes the DICOMHashtable given to the file that the CreateDicomFiles points to.
- writeFileFormat() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
This method reads the codestream and writes the file format wrapper and
the codestream to the same file
- writeFileTypeBox() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
This method writes the File Type box
- writeFits(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a Fits file to store the image.
- writeFloat(float) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- writeFloat(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
Write float.
- writeFloat(float, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
Writes a float as four bytes to a file.
- writeFloat(float, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Writes a float as four bytes to a file.
- writeFloat(float, boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Writes a float as four bytes to a file.
- writeFooter() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLWriter
-
- writeFrames - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- writeFrames - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- writeFramesCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- writeFunctions() - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
Writes the transfer and RGB functions to a file.
- writeGEGenesis5X(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a GESigna5X file to store the image.
- writeGESigna4X(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a GESigna4X file to store the image.
- writeGraph(HashSet<Node>, FileWriter, Node, int) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Recursively writes a graph to the text file.
- writeGraph(HashSet<Node>, PDDocument, PDPageContentStream[], float[], Node, int) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Recursively writes a graph to the pdf file.
- writeGraphJPG(String, String) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Writes the current HyperGraph as a JPG image.
- writeGraphPDF(String, String) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Writes the current HyperGraph as a PDF.
- writeGraphTIF(String, String) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Writes the current HyperGraph as a TIF image.
- writeGraphTXT(String, String) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Writes the current HyperGraph as a text file.
- writeGraphXML(String, String) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Writes the current HyperGraph as a xml file.
- writeGridOverlay() - Method in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- writeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogMetaImageChoice
-
DOCUMENT ME!
- writeGroup - Variable in class gov.nih.mipav.view.dialogs.JDialogNIFTIChoice
-
DOCUMENT ME!
- writeGss - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- writeGss - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- writeGssCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- writeHeader() - Method in class gov.nih.mipav.model.file.FileJP2
-
This function is not used.
- writeHeader() - Method in class gov.nih.mipav.model.file.FileSTK
-
Writes TIFF starting file header.
- writeHeader() - Method in class gov.nih.mipav.model.file.FileSVS
-
Writes TIFF starting file header.
- writeHeader() - Method in class gov.nih.mipav.model.file.FileTiff
-
Writes TIFF starting file header.
- writeHeader() - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLWriter
-
- writeHeader(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUItemType
-
Writes the header of the item type.
- writeHeader(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUType
-
Writes the PDU type header.
- writeHeader(DICOM_Comms) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_PDUTypeBase
-
DOCUMENT ME!
- writeHeader(FileInfoBase, FileWriteOptions, int, int) - Method in class gov.nih.mipav.model.file.FileMinc
-
Writes the header for non-MINC to MINC.
- writeHeader(FileInfoMinc) - Method in class gov.nih.mipav.model.file.FileMinc
-
Writes a header for MINC to MINC.
- writeHeader(ModelImage, int, int, String, String) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Writes an Analyze header to a separate file.
- writeHeader(ModelImage, int, int, String, String) - Method in class gov.nih.mipav.model.file.FileSPM
-
Writes an SPM header to a separate file.
- writeHeader(ModelImage, int, int, String, String, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Writes a NIFTI header to a separate file.
- writeHeader(ModelImage, int, int, String, String, boolean, int, long[]) - Method in class gov.nih.mipav.model.file.FileMetaImage
-
Writes a MetaImage header to a separate file.
- writeHeader(ModelImage, FileRaw, ArrayList<JTextField>) - Method in class gov.nih.mipav.model.file.FileVista
-
writes the header
- writeHeader(ModelImage, FileWriteOptions, String, String, boolean) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Writes the XML header information out to the given filename and path.
- writeHeader(ModelImage, String, int, int, int, int, boolean) - Method in class gov.nih.mipav.model.file.FilePARREC
-
- writeHeader(ModelImage, String, String, int, int, int, int) - Method in class gov.nih.mipav.model.file.FileNRRD
-
write NRRD header
- writeHeader(RandomAccessFile, FileInfoDicom, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Writes the tags of the DICOM header.
- writeHeader(String) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- writeHeader(String, String, ModelTriangleMesh[], Material, float, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D
-
Writes the XML header information, including the ModelTriangleMesh surface out to the given filename and path:
- writeHeader(String, String, Material, float, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D
-
Writes the XML header information, including the ModelTriangleMesh surface out to the given filename and path:
- writeHeader3DTo2D(ModelImage, String, String, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
This method is used when saving a 3D image in an array of 2D files.
- writeHeader3DTo2D(ModelImage, String, String, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Method to save off the header from a 4D image into 3D header files sequentially named (similar to the method in
FileRaw).
- writeHeader3DTo2D(ModelImage, String, String, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileNRRD
-
Method to save off the header from a 3D image into 2D header files sequentially named (similar to the method in
FileRaw).
- writeHeader3DTo2D(ModelImage, String, String, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- writeHeader3DTo2D(ModelImage, String, String, FileWriteOptions, boolean) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
This method is used when saving a 3D image in an array of 2D files.
- writeHeader3DTo2D(ModelImage, String, String, FileWriteOptions, boolean, long[]) - Method in class gov.nih.mipav.model.file.FileMetaImage
-
This method is used when saving a 3D image in an array of 2D files.
- writeHeader4DTo3D(ModelImage, String, String, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
This method is used when saving a 4D image in an array of 3D files.
- writeHeader4DTo3D(ModelImage, String, String, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Method to save off the header from a 4D image into 3D header files sequentially named (similar to the method in
FileRaw).
- writeHeader4DTo3D(ModelImage, String, String, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileNRRD
-
This method is used when saving a 4D image in an array of 3D files.
- writeHeader4DTo3D(ModelImage, String, String, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileSPM
-
DOCUMENT ME!
- writeHeader4DTo3D(ModelImage, String, String, FileWriteOptions, boolean) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
This method is used when saving a 4D image in an array of 3D files.
- writeHeader4DTo3D(ModelImage, String, String, FileWriteOptions, boolean, long[]) - Method in class gov.nih.mipav.model.file.FileMetaImage
-
This method is used when saving a 4D image in an array of 3D files.
- writeHeaderOnly - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
Tells the FileBase (FileImageXML only now) to write only the header (.xml) if true
- writeHeaderOnly() - Method in class gov.nih.mipav.model.file.FileWriteOptions
-
Determines whether to write only the header (for now, .xml files) and no raw file...for NDAR SRB transfer
- writeICS(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes an ICS file to store the image.
- writeidx1CHUNK() - Method in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- writeIFD(int, int, int, int, int) - Method in class gov.nih.mipav.model.file.FileSTK
-
Writes one 12 byte IFD entry.
- writeIFD(int, FileSVS.Type, int, int, int) - Method in class gov.nih.mipav.model.file.FileSVS
-
Writes one 12 byte IFD entry.
- writeIFD(int, FileTiff.Type, int, int, int) - Method in class gov.nih.mipav.model.file.FileTiff
-
Writes one 12 byte IFD entry.
- writeIFDs(int, int, int, int, boolean) - Method in class gov.nih.mipav.model.file.FileSTK
-
Writes one IFD (Image File Directory).
- writeIFDs(ModelImage, int, int, int, int, boolean) - Method in class gov.nih.mipav.model.file.FileSVS
-
Writes one IFD (Image File Directory).
- writeIFDs(ModelImage, int, int, int, int, boolean) - Method in class gov.nih.mipav.model.file.FileTiff
-
Writes one IFD (Image File Directory).
- writeImage() - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen
-
Writes the image captured from the screen, using currentRectangle as the bounding box of the capture.
- writeImage() - Method in class gov.nih.mipav.view.dialogs.JDialogCaptureScreens
-
Scrolls through all z slices of a 3d/4d image and captures them into a new ARGB ModelImage, then puts the
ModelImage in a ViewJFrameImage.
- writeImage() - Method in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
Writes the image captured from the screen, using currentRectangle as the bounding box of the capture.
- writeImage() - Method in interface gov.nih.mipav.view.renderer.flythroughview.FlyThroughRenderInterface
-
Write the current frame to disk.
- writeImage() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Write the image from the rendering frame into the camera capture frame.
- writeImage() - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender
-
- writeImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
Writes a the frame buffer as a .jpg image to disk.
- writeImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.ImageRegistrationGPU
-
- writeImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImageViewer
-
- writeImage() - Method in class gov.nih.mipav.view.renderer.WildMagic.VolumeTriPlanarRender
-
- writeImage(ModelImage) - Method in interface gov.nih.mipav.plugins.PlugInFile
-
Write an image out to the file type handled by this plugin.
- writeImage(ModelImage, int, int) - Method in class gov.nih.mipav.model.file.FileRawChunk
-
This method writes a raw image file (1D-5D).
- writeImage(ModelImage, int, int, int, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Writes a dicom format type image.
- writeImage(ModelImage, int, int, int, int) - Method in class gov.nih.mipav.model.file.FileRaw
-
This method writes a raw image file.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileAfni
-
Writes a AFNI format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileAnalyze
-
Writes an analyze format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileCOR
-
Writes a COR format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileFits
-
Writes a FITS format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileGESigna4X
-
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileGESigna5X
-
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileICS
-
Writes an ICS format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileImageXML
-
Writes an XML image with the given options.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileInterfile
-
Writes an Interfile format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Determines file type from the file name and calls different write functions based on the file type.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileJP2
-
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileMATLAB
-
Writes a MATLAB format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileMetaImage
-
Writes an MetaImage format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileMGH
-
Writes a MGH or MGZ format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileMinc
-
Writes a MINC format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileMincHDF
-
Writes a MINC format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileMRC
-
Writes a MRC format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileNIFTI
-
Writes an NIFTI format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileNRRD
-
Writes a NRRD format type image.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FilePARREC
-
Writes a PAR/REC format image and header.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileRaw
-
This method writes a raw image file.
- writeImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileSPM
-
Writes an SPM format type image.
- writeImage(ModelImage, FileWriteOptions, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Determines file type from the file name and calls different write functions based on the file type.
- writeImage(ModelImage, FileWriteOptions, ArrayList<JTextField>) - Method in class gov.nih.mipav.model.file.FileVista
-
writes the image
- writeImage(ModelImage, ModelImage, ModelLUT, ModelLUT, ModelRGB, ModelRGB, int, int, int, float, float, BitSet, int) - Method in class gov.nih.mipav.model.file.FileAvi
-
This method writes an AVI image file.
- writeImage(ModelImage, ModelLUT, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileSTK
-
This method writes a STK image file.
- writeImage(ModelImage, ModelLUT, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileSVS
-
This method writes a tiff image file.
- writeImage(ModelImage, ModelLUT, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileTiff
-
This method writes a tiff image file.
- writeImage(String, String, String, String, float) - Method in class gov.nih.mipav.view.graphVisualization.JDialogHyperGraph
-
Writes the HyperGraph graph panel display as an image file.
- writeImage3DTo2D(ModelImage, FileWriteOptions, String) - Method in class gov.nih.mipav.model.file.FileRaw
-
Method to save 3D images to an array of 2D images.
- writeImage3DTo2D(ModelImage, FileWriteOptions, String, long[]) - Method in class gov.nih.mipav.model.file.FileRaw
-
Method to save 3D images to an array of 2D images.
- writeImage4DTo3D(ModelImage, FileWriteOptions, String) - Method in class gov.nih.mipav.model.file.FileRaw
-
Method to write 4D images to an array of 3D image files. the files will be named sequentially with the given # of
digits and given starting #.
- writeImage4DTo3D(ModelImage, FileWriteOptions, String, long[]) - Method in class gov.nih.mipav.model.file.FileRaw
-
Method to write 4D images to an array of 3D image files. the files will be named sequentially with the given # of
digits and given starting #.
- writeImageAuto() - Method in class gov.nih.mipav.view.renderer.J3D.RenderViewBase
-
Called when the camera button is clicked.
- writeImageHeaderBox() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
This method writes the Image Header box
- writeImageSlicesParRec() - Method in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
This method writes out the image slices as raw float
- writeImportanceFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- writeIn(byte[], int, int, DICOM_FileIO) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Writes a specified number of bytes from the byte buffer into incomming ByteBuffer list of byte buffers.
- writeInt(int) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- writeInt(int) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
- writeInt(int) - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.LEFileWriter
-
Write int.
- writeInt(int, boolean) - Method in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftClustering
-
Writes an int as four bytes to a file.
- writeInt(int, boolean) - Method in class gov.nih.mipav.model.algorithms.libdt
-
Writes an int as four bytes to a file.
- writeInt(int, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Writes an int as four bytes to a file.
- writeInt(int, boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Writes an int as four bytes to a file.
- writeInt32(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Writes a 32 (4 byte) integer to the outgoing buffers.
- writeInt32In(int, DICOM_FileIO) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Writes a 32 (4 byte) integer to the incoming buffers.
- writeInterfile(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes an Interfile file to store the image.
- writeIntW(int, boolean) - Method in class gov.nih.mipav.model.file.FileAvi
-
Writes an int as four bytes to a file.
- writeJimi(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a JIMI file to store the image.
- writeJP2HeaderBox() - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
This method writes the JP2Header box
- writeJpeg2000(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a JPEG2000 file to store the image.
- writeKeyFile() - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
creates a keyFile named "patient.key.doc" in the destination directory as specified by the user. the keyFile
contains a tab-delimited table of original filenames and the anonymous filename which replaced it; it flushes the
keyLog into the keyFile.
- writeLabelsToFile(String) - Method in class gov.nih.mipav.view.dialogs.JDialogMultiPaint
-
Writes the 'labels' file to disk.
- writeLaxOptionsFile() - Method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
write startup options file which is used during InstallAnywhere to run the executable.
- writeLockCount - Variable in class gov.nih.mipav.model.structures.ModelStorageBase
-
Locking write count.
- writeLogHeader() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Writes the column titles of selected statistics calculations to the logModel.
- writeLogModelToString() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Converts the current logModel into either a tab-delimited text file or an XML file.
- writeLong(long) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- writeLong(long, boolean) - Method in class gov.nih.mipav.model.algorithms.libdt
-
Writes a long as eight bytes to a file.
- writeLong(long, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Writes a long as eight bytes to a file.
- writeLong(long, boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Writes a long as eight bytes to a file.
- writeLUT(ModelLUT) - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
Writes a ModelLUT to a file.
- writeLUTandTransferFunction() - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
Writes the default ModelLUT or ModelRGB to a file.
- writeMATLAB(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a MATLAB file to store the image.
- writeMeta - Variable in class gov.nih.mipav.model.algorithms.SIFT
-
- writeMeta - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- writeMetaCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogSIFT
-
- writeMetaImage(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a MetaImage file to store the image.
- writeMGH(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a MGH or MGZ file to store the image.
- writeMinc(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a Minc file to store the image.
- writeMincHDF(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes out a MINC 2.0 HDF5 formatted file
- WriteModel(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Write the AAM model to text file or binary file.
- WriteModel(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Writes the complete AAMModel to disk as a .txt and an .amf file.
- WriteModel(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelMS
-
Writes the complete multi-scale AAMModel to disk as a set of .txt and an
.amf files.
- WriteModels(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Wrapper to write the sequence AAM to disk
- WriteModels(String, boolean) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModelSeq
-
Writes the sequence AAM to disk as a set of .txt and .amf files.
- writeModImg() - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
- writeModImg(int, int) - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- writeMRC(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a MRC file to store the image.
- writeMultiFrameImage(ModelImage, int, int, int, int) - Method in class gov.nih.mipav.model.file.FileDicom
-
Writes a dicom format type image.
- writeName(String, int, boolean) - Method in class gov.nih.mipav.model.file.FileMinc
-
Write a string name by writing the length of the string plus padding length, writing the string, and writing the
padding.
- writeNaugeVOI(VOI) - Method in class gov.nih.mipav.model.file.FileVOI
-
Writes a single VOI to a file in Nauge format.
- writeNextElem(Object, int, boolean) - Method in class gov.nih.mipav.model.file.FileMinc
-
Writes the next element, switching on the type.
- writeNextTag(FileDicomTag, RandomAccessFile, int[]) - Method in class gov.nih.mipav.model.file.FileDicom
-
Writes a dicom tag to the provided output file.
- writeNIFTI(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a NIFTI file to store the image.
- writeNode(Node) - Method in class gov.nih.mipav.view.graphVisualization.MipavGraphXMLWriter
-
- writeNRRD(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a NRRD file to store the image.
- writeObject(ObjectOutputStream) - Method in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.MouseEventVectorPlotter
-
Called by some native invokeMethod.
- writeObject(ObjectOutputStream) - Method in class gov.nih.mipav.view.renderer.MouseEventVector
-
Called by some native invokeMethod.
- writeObject(ObjectOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.SurfaceState
-
- writeObject(ObjectOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.CircleClassificationWidget
-
Stream this object to disk.
- writeObject(ObjectOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidget
-
Stream this object to disk.
- writeObject(ObjectOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetEffect
-
Stream this object to disk.
- writeObject(ObjectOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.SquareClassificationWidget
-
Stream this object to disk.
- writeObject(ObjectOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.TriangleClassificationWidget
-
Stream this object to disk.
- writeObject(ObjectOutputStream) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeImage
-
- writeOpts - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
DOCUMENT ME!
- writeOutput() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- writeOutputInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- writeOutputInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- writeOutputInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- writeOutputInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- writeOutputInternal() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- writePackBit - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
TIFF options.
- writePackBitImage(ModelImage, int, int) - Method in class gov.nih.mipav.model.file.FilePackBit
-
This method writes a packed bit image file (1D-5D).
- writePadding() - Method in class gov.nih.mipav.model.file.FileMinc
-
Pads to the nearest 4 byte boundary.
- writePaintBitmap(BitSet) - Method in class gov.nih.mipav.model.file.FilePaintBitmap
-
- writePARREC(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a PAR/REC file to store the image.
- writePlistOptionsFile() - Method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
write startup options file which is used during InstallAnywhere to run the executable.
- writePlyAsciiMesh(TriMesh, String, String) - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.PlyWriter
-
- writePlyFile() - Method in class gov.nih.mipav.view.dialogs.JDialogSaveMergedVOIs
-
Write the cloud points from the 3 VOIs into one .ply file.
- writePlyFile() - Method in class gov.nih.mipav.view.dialogs.JDialogSurfaceReconstruction
-
Write the cloud points from the 3 VOIs into one .ply file.
- writePlyFile() - Method in class gov.nih.mipav.view.renderer.WildMagic.TBI.JDialogConvertVOITBI
-
Write the cloud points from the 3 VOIs into one .ply file.
- writePngPair() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverter
-
- writePngPair() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterCentralGland
-
- writePngPair() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterMICCAI
-
- writePngPair() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTest
-
- writePngPair() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesPngTextFileConverterTestCentralGland
-
- writePngPair() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DVolumetricHEDMiccaiProstate12
-
- writePngPairAll() - Method in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogTrainingListGenerator
-
Write the axial.lst, sagittal.lst and coronal.lst for each fold and each orientation.
- writePointVOI(VOI) - Method in class gov.nih.mipav.model.file.FileVOI
-
Writes a single VOI.POINT to a file MIPAV format.
- writePredictionFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.Forest
-
- writePredictionFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestClassification
-
- writePredictionFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestProbability
-
- writePredictionFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestRegression
-
- writePredictionFile() - Method in class gov.nih.mipav.model.algorithms.StochasticForests.ForestSurvival
-
- WritePredictionImages() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMVisualizer
-
Writes the parameter update matrix as shape-free images.
- writeQT - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- writeRaw(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a raw file to store the image.
- writeRawJP2Header(BEBufferedRandomAccessFile) - Method in class gov.nih.mipav.model.file.rawjp2.RAWJP2Header
-
- writeResults(BSplineRegistration2Df) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline2D
-
Save the registration information to a file.
- writeResults(BSplineRegistration2Df[]) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline25D
-
Save the registration information to a file.
- writeResults(BSplineRegistration3Df) - Method in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegBSpline3D
-
Save the registration information to a file.
- writeRLE8(int, int, byte[], byte[], byte[]) - Method in class gov.nih.mipav.model.file.FileAvi
-
Writes the RLE8 encoded LUT index.
- writeRTCfile(File) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_RTC_Generator
-
DOCUMENT ME!
- writeRun() - Method in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- writeSequence(RandomAccessFile, FileInfoDicom.VRtype, FileDicomSQ, boolean) - Method in class gov.nih.mipav.model.file.FileDicom
-
Writes out a sequence tag and its data.
- writeSet(BufferedWriter, Enumeration<XMLPSet>) - Method in class gov.nih.mipav.model.file.FileImageXML
-
writeSet is a helper method, to allow writing set data out to the BufferedWriter
with any enumeration.
- writeShort(int) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayInputStream
-
- writeShort(short, boolean) - Method in class gov.nih.mipav.model.file.FileBase
-
Writes a short as two bytes to a file.
- writeShort(short, boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Writes a short as two bytes to a file.
- writeShort16(int) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Writes a 16 (2 byte) integer to the outgoing buffers.
- writeShort16In(int, DICOM_FileIO) - Method in class gov.nih.mipav.model.dicomcomm.DICOM_Comms
-
Writes a 16 (2 byte) integer to the incomming buffers.
- writeShortInt(int) - Method in class gov.nih.mipav.model.file.rawjp2.BEByteArrayOutputStream
-
- writeShortW(short, boolean) - Method in class gov.nih.mipav.model.file.FileAvi
-
Writes a short as two bytes to a file.
- writeSize(long) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- writeSlice() - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAW
-
- writeSlice() - Method in class gov.nih.mipav.model.file.rawjp2.ImgWriterRAWColor
-
- writeSpace(double, double, String, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileMinc
-
Writes the "space", as in xspace, yspace, zspace.
- writeSPM(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a SPM file to store the image.
- writeStartOptionsFile() - Method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
- writeStatisticFile() - Method in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
Writes out the statistics file based on the current logModel
- writeSTK(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a STK file to store the image.
- writeString(byte[]) - Method in class gov.nih.mipav.model.file.TIFFLZWDecoder
-
Write out the string just uncompressed.
- WriteStringToFileOrDie(String, String) - Method in class gov.nih.mipav.model.algorithms.CeresSolver
-
- writeTags(RandomAccessFile, FileInfoDicom, FileDicomKey[], FileDicomTag[]) - Method in class gov.nih.mipav.model.file.FileDicom
-
Writes selected tag values (location specified by editKeys, value specified by editTags), to existing dicom file
specified by outputFile.
- writeTexture(boolean) - Method in class gov.nih.mipav.view.renderer.J3D.PlaneRender
-
Stores the ModelImage data as an array of texture maps, with LUT or
RGBA color lookup:.
- writeTiff(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes a TIFF file to store the image.
- writeTmpToManifest(File) - Method in class gov.nih.mipav.plugins.ManifestFile
-
- writeToFile(String) - Method in class gov.nih.mipav.model.structures.TalairachTransformInfo
-
writes transform information to file
- writeToKey(String, String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
appends the original string, then two tabs then the newKey, followed by a newline to the keylog. old keylog
is not overwritten.
- writeToLog(String) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
appends the name string, in between parens trailed by a colon.
- writeToLog(String, boolean) - Method in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory.AnonymizeDicomDirectories
-
Method to append the string to the log, adding a newline to the end, if requested, and appending a colon when
not adding a newline.
- writeTransferFunction(RandomAccessFile, TransferFunction, String) - Method in class gov.nih.mipav.model.file.FileHistoLUT
-
Write out a transfer function to a file.
- writeTriangleMeshXML(ModelImage, ModelTriangleMesh[], SurfaceAttributes, Color4f) - Static method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurface_J3D
-
Writes a ModelTriangleMesh and Material to disk in the xml format, based on surface.xsd.
- writeTriangleMeshXML(String, ModelImage, TriMesh) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurface_WM
-
Writes a TriMesh to disk in the xml format, based on surface.xsd.
- writeUnsignedShort(short, boolean) - Method in class gov.nih.mipav.model.file.FileDicomBase
-
Writes an unsigned short as two bytes to a file.
- writeValuesArray(Object[], int, boolean) - Method in class gov.nih.mipav.model.file.FileMinc
-
Writes the array, switching on the type.
- WriteVarianceMap(String) - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMModel
-
Plots the variance of each pixel in the model over the training set into
the mean shape and saves the image.
- writeVecDouble(String, Vector<Double>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- writeVecVecDouble(String, Vector<Vector<Double>>) - Method in class gov.nih.mipav.model.algorithms.libdt
-
- writeVersionNumber - Static variable in class gov.nih.mipav.model.file.FileNRRD
-
version number of NRRD for writing
- writeVista(ModelImage, FileWriteOptions) - Method in class gov.nih.mipav.model.file.FileIO
-
writes Vista format files
- writeVMOptionsFile(File) - Method in class gov.nih.mipav.view.dialogs.JDialogMemoryAllocation
-
Write out changes to the vmoptions file used to set the VM max heap size.
- writeVOI(VOI, boolean) - Method in class gov.nih.mipav.model.file.FileVOI
-
Writes a single VOI to a file MIPAV format.
- writeVTKLegacyPolyline(String, Vector<VOIContour>) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileFiberTrack
-
- writeXML() - Method in class gov.nih.mipav.model.file.FileDataProvenance
-
Writes the data provenance into xml formatted file
- writeXML(ModelImage, FileWriteOptions, boolean) - Method in class gov.nih.mipav.model.file.FileIO
-
Writes the image in our MIPAV XML format.
- writeXML(VOI, boolean) - Method in class gov.nih.mipav.model.file.FileVOI
-
- writeXML(VOI, boolean, boolean) - Method in class gov.nih.mipav.model.file.FileVOI
-
Writes VOI to an XML formatted file.
- writeXML(File) - Method in class gov.nih.mipav.model.algorithms.registration.vabra.VabraConfiguration
-
- writeXMLpolylines(String, Vector<VOIContour>) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceVTKXML_WM
-
Output a collection of polylines as vtk xml
- writeXMLsurface(String, ModelTriangleMesh) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceVTKXML_J3D
-
Saves as vtk xml
- writeXMLsurface(String, ModelTriangleMesh, Material, float, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceXML_J3D
-
Writes the XML file information, including the ModelTriangleMesh surface out to the given filename and path:
- writeXMLsurface(String, Material, float, int) - Method in class gov.nih.mipav.view.renderer.J3D.model.file.FileSurfaceRefXML_J3D
-
Writes the XML file information, including the ModelTriangleMesh surface out to the given filename and path:
- writeXMLsurface(String, TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceGiftiXML_WM
-
Writes the XML file information, including the surface out to the given filename and path:
- writeXMLsurface(String, TriMesh) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceVTKXML_WM
-
Output TriMesh as vtk xml
- writeXMLsurface_WM(String, MaterialState, float, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Interface.FileSurfaceRefXML_WM
-
Writes the XML file information, including the surface out to the given filename and path:
- wrk - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- WRSYM1(int, int, int, double[], double[], double[], boolean, boolean, String, int, RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- WRSYM2(int, int, double[], boolean, int, RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- WRSYM3(int, int, boolean, int, RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- WRTAIL(int, int, int, RandomAccessFile) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ws - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- wsAlgo - Variable in class gov.nih.mipav.view.dialogs.JDialogAutoSeedWatershed
-
DOCUMENT ME!
- WSHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEfficientWatershed
-
- WSHED - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- WSHED - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- WSHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmSplitAndMergeWatershed
-
- WSHED - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- WSHED - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmWatershed
-
DOCUMENT ME!
- WSinc - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
DOCUMENT ME!
- WSINC - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTalairachTransform
-
Windowed sinc interpolation.
- WSINC - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmTransform
-
Windowed sinc interpolation.
- wSinc2D(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
2D windowed sinc function.
- wSinc2DC(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
2D windowed sinc function for color.
- wSinc3D(double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
3D windowed sinc function.
- wSinc3DC(double, double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
3D windowed sinc function for color (3 channel images).
- wSincXT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- wSincYT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- wSincZT - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- wt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- wt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- wt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- wt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- wt - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- wt - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- wt - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- wt1(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- WTD_SUM - Static variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- wted - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- WTHETA(double, double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- wtn(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- wVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- wVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- wVal - Variable in class gov.nih.mipav.model.algorithms.AlgorithmObjectExtractor
-
DOCUMENT ME!
- Wvex - Variable in class gov.nih.mipav.view.renderer.WildMagic.Decimate.TriangleMesh
-
- WVPMatrix - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmVolumeCrop
-
- WW_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
X
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.P
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.SData
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt2D.FitOAR2DNL2solModel
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmELSUNCOpt3D.FitOAR3DNL2solModel
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DNoWholeModel
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialNoWholeModel
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solModel
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGaussianMixtureModelEM.ClassData
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Pixel
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2nl2solModel
-
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
current x position.
- x - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.FunctionSample
-
- x - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearLeastSquaresProblem
-
- x - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- x - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.RememberingCallback
-
- x - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- x - Variable in class gov.nih.mipav.model.algorithms.ConfluentHypergeometric
-
Input argument
- x - Variable in class gov.nih.mipav.model.algorithms.ConjugateGradient
-
- x - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- x - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator
-
- x - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- x - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- x - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.PointeredPoint2D
-
'pointer' to x coordinate
- x - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum2
-
- x - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum3
-
- x - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameDisc
-
- x - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameEllipse
-
- x - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedDisc
-
- x - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedEllipse
-
- x - Variable in class gov.nih.mipav.model.algorithms.curev
-
- x - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- x - Variable in class gov.nih.mipav.model.algorithms.CVODES.CVDlsMemRec
-
- x - Variable in class gov.nih.mipav.model.algorithms.DAgostinosKsquaredTest
-
- x - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- x - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- x - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDim3
-
- x - Variable in class gov.nih.mipav.model.algorithms.Gamma
-
input argument Note that the gamma function is not defined for x equal to zero or a negative integer
- x - Variable in class gov.nih.mipav.model.algorithms.Hypergeometric
-
Input argument
- x - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- x - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_problem
-
- x - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame.point
-
- x - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
x is an array of length n.
- x - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- x - Variable in class gov.nih.mipav.model.algorithms.NelderMead.point_t
-
- x - Variable in class gov.nih.mipav.model.algorithms.NelderMead
-
- x - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- x - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- x - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- x - Variable in class gov.nih.mipav.model.algorithms.PreconditionedConjugateGradient
-
- x - Variable in class gov.nih.mipav.model.algorithms.Psi
-
input argument
- x - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.stpfun2
-
- x - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftKeypoint
-
< Integer s coordinate.
- x - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Cvec
-
- x - Variable in class gov.nih.mipav.model.algorithms.splev
-
- x - Variable in class gov.nih.mipav.model.algorithms.Statistics
-
- x - Variable in class gov.nih.mipav.model.algorithms.SVM.svmtest
-
- x - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Storage for VOI.
- x - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.StageLabel
-
- x - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
FIXME DOC
- x - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_vertex
-
- x - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.vertex_node
-
- x - Variable in class gov.nih.mipav.model.structures.ModelLUT
-
The X coordinates of the transfer functions.
- x - Variable in class gov.nih.mipav.model.structures.ModelRGB
-
The X coordinates of the transfer functions.
- x - Variable in class gov.nih.mipav.model.structures.Point3D
-
X coordinate of point.
- x - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.GlassPaneListener
-
X and Y coordinates where drawing started.
- x - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Dimensions of rectangle to draw.
- x - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
Three arrays to save the coordinates of the LUT's transfer fucntion. z[] not used.
- x - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
control points coordinate of LUT transfer function .
- x - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
Three arrays to save the coordinates of the LUT's transfer fucntion. z[] not used.
- x - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.StandardMouse
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.StandardMouse
-
Canvas center x and y.
- x - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.StandardKey
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseWheel
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouse
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouseDragged
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.StandardMouse
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer.SceneState
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.SceneState
-
x, y, z triplanar slider values.
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPoint
-
x-position.
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Point
-
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.Item
-
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.POINT
-
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.SIZE
-
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouse
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouseDragged
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.KeyPressedEvent
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.RightMouse
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.PolarPoint
-
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.PolarPoint
-
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Problem
-
array of sparse feature nodes
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_problem
-
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.pt
-
- x - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy.point
-
- x - Variable in class gov.nih.mipav.view.RubberbandLine
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.RubberbandProtractor
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- x - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
control points coordinate of LUT transfer function .
- x() - Method in class gov.nih.mipav.model.algorithms.LSCM.Point
-
- x() - Method in class gov.nih.mipav.model.algorithms.LSCM.Point2
-
- X - gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelDir
-
- X - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMixGaussEM
-
- X - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- X - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- X - Static variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.OpenCLAlgorithmMarchingCubes
-
- X - Static variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- X - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- X() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- X() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- x_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- x_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgImage
-
- x_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- x_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.Fixture
-
- x_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.LinearSolverAndEvaluatorCreationTest
-
- x_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
- x_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- x_angle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- x_angle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
DOCUMENT ME!
- x_angle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
DOCUMENT ME!
- x_angle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
DOCUMENT ME!
- X_AXIS - Static variable in interface gov.nih.mipav.model.algorithms.ContourPlot.InteractionConstants
-
- X_AXIS - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Flip along X axis.
- X_AXIS - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
X axis constant.
- X_AXIS - Static variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- X_AXIS_180 - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Rotate about the x axis 180 degrees.
- X_AXIS_MINUS - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Rotate about the x axis -90 degrees (or 270 degrees).
- X_AXIS_PLUS - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Rotate about the x axis 90 degrees.
- X_CLIPSLICE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an x clip slice.
- X_CLIPSLICE_NEG - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an -x clip slice.
- x_cost_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- x_D - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.LinearLeastSquaresProblem
-
- X_density - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- X_DERIVATIVE_KERNEL - Static variable in class gov.nih.mipav.model.GaussianKernelFactory
-
- x_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- x_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
DOCUMENT ME!
- x_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
DOCUMENT ME!
- x_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
DOCUMENT ME!
- x_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
DOCUMENT ME!
- x_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
DOCUMENT ME!
- X_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMedian
-
X-shaped kernel, from 1 corner to opposite corner.
- X_KERNEL - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMode
-
X-shaped kernel, from 1 corner to opposite corner.
- x_label - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- x_last - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- x_loc - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- x_mean - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.SData
-
- x_norm_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.TrustRegionMinimizer
-
- x_out - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- X_PROJECTION - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Project along the X-Axis.
- X_SLICE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an x slice.
- x_square - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Kernel
-
- x_square - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Kernel
-
- x_tol - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- x_values - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.RememberingCallback
-
- x0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughCircle
-
- x0 - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- x0 - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions.ROI
-
- x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_cmptparm_t
-
x component offset compared to the whole image
- x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
x component offset compared to the whole image
- x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_t
-
XOsiz: horizontal offset from the origin of the reference grid to the
left side of the image area
- x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_band_t
-
- x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_precinct_t
-
- x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_resolution_t
-
- x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tile_t
-
- x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- x0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- x0 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
DOCUMENT ME!
- x0Array - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
- x0Array - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
- x0Text - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
DOCUMENT ME!
- x1 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- x1 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- x1 - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions.ROI
-
- x1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_t
-
Xsiz: width of the reference grid
- x1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_band_t
-
- x1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- x1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_precinct_t
-
- x1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_resolution_t
-
- x1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tile_t
-
- x1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- x1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- x1 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- x1 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- x1 - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame.sScanLinePart
-
- X1 - Variable in class gov.nih.mipav.model.algorithms.SIFT.FitMosaicModel
-
- x13 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- x1Minrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- x1Minrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- x1real - Variable in class gov.nih.mipav.model.algorithms.CubicEquation
-
- x1Vector - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- x2 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- x2 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- x2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- x2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- x2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame.sScanLinePart
-
- x2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- X2 - Variable in class gov.nih.mipav.model.algorithms.SIFT.FitMosaicModel
-
- x23 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- x2dist(double[], double[], int) - Method in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- x2imag - Variable in class gov.nih.mipav.model.algorithms.CubicEquation
-
- x2Minrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- x2Minrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- x2real - Variable in class gov.nih.mipav.model.algorithms.CubicEquation
-
- x2Vector - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- x3 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- x3 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- x3 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- x3 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- x3imag - Variable in class gov.nih.mipav.model.algorithms.CubicEquation
-
- x3Minrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- x3Minrm - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- x3real - Variable in class gov.nih.mipav.model.algorithms.CubicEquation
-
- x4 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- x4 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- x4 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- x5 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- x5 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- x6 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- x6 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- x7 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- x7 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- x8 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- x8 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- xa - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- xArray - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- xAxis - Variable in enum gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- XAXIS - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- xAxisCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- xAxisIdx - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Actual button indices
- xAxisLabel - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- xAxisLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- xAxisLabelField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- xAxisLabelText - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- xAxisRot - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
612 X axis rotation.
- xb - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- xb - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- xb - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.st_node
-
- xBaseEnd - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
144 - Ending number for baselines.
- xBaseSt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
142 - Starting number for baselines.
- XBM - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .xbm.
- xBounds - Variable in class gov.nih.mipav.model.structures.VOI
-
The x - dimension bounds: xBounds [0] = min and xBounds[1] = max.
- xBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- xBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- xBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
Cropped region bounding.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
Cropped region bounding.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
Cropped region bounding.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
Cropped region bounding.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
Cropped region bounding.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
Cropped region bounding.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
Cropped region bounding.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
DOCUMENT ME!
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
x dimension bounds
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
X cropped region bounds.
- xBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
X cropped region bounds.
- xBox - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
xBox, yBox, zBox from the parent scene.
- xBox - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
x, y, z box size.
- xBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
xBox, yBox and zBox values from the parent frame.
- xBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Parent frame box value.
- xBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- xBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- xBox - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- xBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
x, y, z box size.
- xBuffer - Variable in class gov.nih.mipav.model.structures.PointStack
-
DOCUMENT ME!
- xbuffer8 - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- xbuffer9to12 - Variable in class gov.nih.mipav.model.file.libjpeg.my_main_controller
-
- xButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- xCameraMove - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter values.
- xCameraMoveText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter text-field.
- xCameraTurn - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter values
- xCameraTurnText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter text-field
- xCenter - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- xCenter - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- xCenter - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- xCenter - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- xCenterLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- xCenterText - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- xClick - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- xClipVisible - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean visibility values for x, y, z, arbitrary clipping slider frames.
- xColor - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
color of the crosshairs.
- xCOM - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
x coordinate for center of mass, normalized by image resolution
- xCoords - Variable in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Buffers used to save the X coordinates for the points that make up a VOI.
- xCoords - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- xCor(int, double) - Static method in class gov.nih.mipav.model.structures.VOIText
-
- xCursorAdjustment - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
- xd - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint
-
- xd - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor
-
- xD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- xD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- xD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- xD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation.FitCorrelationModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance.FitCovarianceModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit24DModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit25HModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.FitDEMRI3ConstrainedModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.Fit24DModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeConstrainedModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitIntensityProfile
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DNoWholeModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialNoWholeModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel3
-
- xData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModelqd
-
- xDataRound - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Storage location for the 1D gaussian kernels.
- xDerivativeDirections - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- xdiff - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- xdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- xdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- xdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- xdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- xdim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The image size in the x dimension.
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Length of the x dimension in pixels.
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGraphBasedSegmentation
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
dimensions and length
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
The slice size in the x dimension.
- xDim - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
xDIm of 4d image
- xDim - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The image's x dimension.
- xDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
image dimensions.
- xDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Image dimensions.
- xDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
X dimension length
- xDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- xDim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult
-
x and y dimensions of image
- xDim - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Number of pixels in x dimension.
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- xDim - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Image X, Y, Z dimension.
- xDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
x, y, z and time dimension values.
- xDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
ModelImage image array dimensions:
- xDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Dimensions of image A.
- xDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Dimensions of image A.
- xDim - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Dimensions of image A.
- xDim - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
x, y, z and time dimension values.
- xDim - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
image x, y, z dimensions in FileCoordinates
- xDim - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Note that xDim and yDim refer to destImage, while zDim and tDim refer to imageA.
- xDim - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- xDim - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- Xdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
X dimension of the image.
- Xdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlices
-
X dimension of the image.
- Xdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
X dimension of the image.
- Xdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
X dimension of the image.
- Xdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
X dimension of the image.
- Xdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
X dimension of the image.
- Xdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveTSlices
-
X dimension of the image.
- xDim2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- xDim4 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- xdimA - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
parameter for AlgorithmTransform
- xdimA - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Dimensions of match image and base image.
- xDimA - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
- xdimB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- xDimDest - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToRectangle
-
- xDimE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- xDimE - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- xdimM - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- xDimSource - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
- xDimSource - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- xDimSource - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- xDimText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
DOCUMENT ME!
- xDimText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
DOCUMENT ME!
- xDimText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
DOCUMENT ME!
- xdimTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- xDirections - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- xDirections - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- xe - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- xEnd - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- xEnd - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- xEnd2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- xEnd2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- xenhEnd - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
148 - Ending number for enhanced scans.
- xenhSt - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
146 - Starting number for enhanced scans.
- XENPT - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- xf - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- xf - Variable in class gov.nih.mipav.model.algorithms.NESolve
-
- Xf - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- Xf - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- xFilterSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- xFilterSize - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- xFilterSizeField - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- xFilterTopLeft - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- xFinish - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
values obtained when mouseReleased
- xfrm - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- xfrm - Variable in class gov.nih.mipav.view.dialogs.JDialogSubsample
-
DOCUMENT ME!
- xfrm - Variable in class gov.nih.mipav.view.dialogs.JDialogTransformVOI
-
- xfrm - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- xfrm - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- xfrmBA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegLeastSquares
-
The transformation matrix that describes the transform from point set B to point set A.
- xfrmBA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegValidation
-
The transformation matrix that describes the transform from point set B to point set A.
- xfrmBA - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- xfrmBA - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- xfrmD - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- xfrmD - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- xfrmH - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- xfrmH - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- xGridButtonGroup - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- xGridCheckBoxList - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- xGridCheckBoxPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- xGridEvenSpacedButton - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- xGridLineField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- xGridLineLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- xGridLines - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- xGridScrollPane - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- xGridUserPositions - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- xGridUserSpacedButton - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- xhi_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- xi - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum2
-
- xi - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum3
-
- XIDST - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- xij - Variable in class gov.nih.mipav.model.algorithms.libdt.Estats
-
- xinit(int, double[], int) - Method in class gov.nih.mipav.model.algorithms.NL2sol
-
- xInit - Variable in class gov.nih.mipav.model.algorithms.FitGaussian
-
Center parameter
- xInvRange - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- XIVAL - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- xLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point X, Y, Z coordinate label.
- xLabel - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
in 4D x location of slice numbering string
- xLabel - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- xLabel - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- xLabelEntry - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
entry point X, Y, Z coordinate label.
- xlaenv(int, int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.1 LAPACK auxiliary routine XLAENV.
- xlaenv(int, int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue
-
This is a port of version 3.1 LAPACK auxiliary routine XLAENV.
- xlaenv(int, int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedEigenvalue2
-
This is a port of version 3.1 LAPACK auxiliary routine XLAENV.
- xlaenv(int, int) - Method in class gov.nih.mipav.model.structures.jama.GeneralizedInverse2
-
This is a port of version 3.1 LAPACK auxiliary routine XLAENV.
- xlaenv(int, int) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations
-
This is a port of version 3.1 LAPACK auxiliary routine XLAENV.
- xlaenv(int, int) - Method in class gov.nih.mipav.model.structures.jama.LinearEquations2
-
This is a port of version 3.1 LAPACK auxiliary routine XLAENV.
- xlaenv(int, int) - Method in class gov.nih.mipav.model.structures.jama.SVD
-
This is a port of version 3.1 LAPACK auxiliary routine XLAENV.
- xlatDestBrowse - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- xlatDestDirectory - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- xlatDestDirText - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
DOCUMENT ME!
- xlatDestinationUsage - Variable in class gov.nih.mipav.view.dialogs.JDialogAnonymizeDirectory
-
Defines options for WRITE, OVERWRITE, APPEND for the xlat file.
- xlb_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- XLEN - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- XLEN - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- xlo_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- xLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- xLocation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
x value of the origin.
- xLocation - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
DICOM x coordianate of the slice location.
- xlogx(double) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- xLUTa - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
Used to store the transfer function points for remapping to the LUT.
- xLUTb - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- xMaskMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- xMaskMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- xMaskSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- xMass - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- xmax - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.bbox
-
- xmax - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- xMax - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- xMedian - Variable in class gov.nih.mipav.model.algorithms.FitLorentz
-
Statistical median
- xmin - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.bbox
-
- xmin - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- xMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- xml - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics.JPanelStatisticFileFormatOptions
-
Radio button to choose a XML file.
- xml - Variable in class gov.nih.mipav.view.JPanelEditDate
-
DOCUMENT ME!
- xml - Variable in class gov.nih.mipav.view.JPanelEditTime
-
DOCUMENT ME!
- XML - Static variable in class gov.nih.mipav.model.file.FileUtility
-
MIPAV XML file format. mipav xml image format. extension: .xml
- XML_DATE - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- XML_DOB - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- XML_ENCODING - Static variable in class gov.nih.mipav.model.file.FileDataProvenance
-
The charset the XML file is written in.
- XML_ENCODING - Static variable in class gov.nih.mipav.model.file.FileVOI
-
The charset the XML file is written in.
- XML_ENCODING - Static variable in class gov.nih.mipav.model.file.FileXML
-
XML encoding string.
- XML_HEADER - Static variable in class gov.nih.mipav.model.file.FileDataProvenance
-
The XML version description header.
- XML_HEADER - Static variable in class gov.nih.mipav.model.file.FileVOI
-
The XML version description header.
- XML_HEADER - Static variable in class gov.nih.mipav.model.file.FileXML
-
XML header string.
- XML_LINKEDIMAGE - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- XML_MODALITY - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- XML_MULTIFILE - Static variable in class gov.nih.mipav.model.file.FileUtility
-
MIPAV XML file format.
- XML_RACE - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- XML_SETORPARAM - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- XML_SEX - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- XML_TIME - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- XML_VALUETYPE - Static variable in class gov.nih.mipav.view.dialogs.JDialogEditor
-
DOCUMENT ME!
- XMLAnnotationHandler(VOIVector) - Constructor for class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
Construct our custom XML data handler.
- XMLAttributes(String, String) - Constructor for class gov.nih.mipav.model.file.FileXML.XMLAttributes
-
- XMLCoordHandler(VOI) - Constructor for class gov.nih.mipav.model.file.FileVOI.XMLCoordHandler
-
Construct our custom XML data handler.
- XMLCoordHandler(VOI, boolean) - Constructor for class gov.nih.mipav.model.file.FileVOI.XMLCoordHandler
-
Construct our custom XML data handler.
- XMLErrorHandler - Class in gov.nih.mipav.model.file
-
Error handler to report errors and warnings from the XML parser.
- XMLErrorHandler - Class in gov.nih.mipav.view.dialogs
-
Error handler to report errors and warnings from the XML parser.
- XMLErrorHandler - Class in gov.nih.mipav.view.renderer.WildMagic.TBI
-
Error handler to report errors and warnings from the XML parser.
- XMLErrorHandler() - Constructor for class gov.nih.mipav.model.file.XMLErrorHandler
-
- XMLErrorHandler() - Constructor for class gov.nih.mipav.view.dialogs.XMLErrorHandler
-
- XMLErrorHandler() - Constructor for class gov.nih.mipav.view.renderer.WildMagic.TBI.XMLErrorHandler
-
- xmlLinked - Variable in class gov.nih.mipav.view.ViewOpenFileUI
-
DOCUMENT ME!
- xmlLinkedFilename - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
XML option.
- XMLParameter - Class in gov.nih.mipav.model.file
-
Title: Parameter
- XMLParameter(String) - Constructor for class gov.nih.mipav.model.file.XMLParameter
-
Creates a new parameter by name.
- XMLPSet - Class in gov.nih.mipav.model.file
-
Title: PSet
- XMLPSet(String) - Constructor for class gov.nih.mipav.model.file.XMLPSet
-
Create a new parameter set with the given description.
- xMod - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- xMod - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- XMP - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- XMP - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- xmtFreq - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
278 Center Frequency (0.1 Hz).
- xmtGain - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
248 Actual transmit gain (.1 db).
- xN - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
DOCUMENT ME!
- xN - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- xN - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- XN - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- xNegClipVisible - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean visibility values for x, y, z negative clipping slider frames.
- xo - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- xObjectRotate - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Object rotation angle parameter values.
- xObjectRotateText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Object rotation parameter text-field.
- xold_tbase - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- xOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
- xOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- xOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- xOp - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- xOp - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
- xOpacity - Variable in class gov.nih.mipav.view.renderer.SceneState
-
x, y, z triplanar opacity slider values.
- xOpacitySlice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
x, y, z opacity slider values.
- xOpacitySlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
x, y, z opacity slider values.
- xor - Variable in class gov.nih.mipav.view.dialogs.JDialogVOILogicalOperations
-
radio button
- XOR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmVOILogicalOperations
-
operation constants
- XOR - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- xOrg - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- xOrg - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- xOrg - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- xOrientA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- xOrientB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- xp - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox.diffGaussians
-
- xPad - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- xPG - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
X coord of seed point.
- XPLANE - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
Used in determining if all points on the contour have the same x-value
- XPM - Static variable in class gov.nih.mipav.model.file.FileUtility
-
extension: .xpm.
- xPoint - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
- xPointInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
- xPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
DOCUMENT ME!
- xPoints - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- xPointsDraw - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- xPos - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- xPos - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- xPosition - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- xPosition - Variable in class gov.nih.mipav.model.file.FileSVS
-
- xPosition - Variable in class gov.nih.mipav.model.file.FileTiff
-
- XPOSITION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- XPOSITION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- xPres - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- xPres - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- xProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Probe x, y, z position.
- xProbe - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Probe x, y, z position.
- xPts - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- xPts - Variable in class gov.nih.mipav.model.structures.VOIBase
-
- xr - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- xRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- xRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- xRandom - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnns
-
- xRandom - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12Train3DCnnsSmall
-
- xRandom - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogShuffleList
-
- xRangeText - Variable in class gov.nih.mipav.view.JPanelHistogram
-
- xRangeTextA - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
X range text field in the imageA, B and GM image A, B histogram dialog.
- xRangeTextA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
X range text field in the imageA, B and GM image A, B histogram dialog.
- xRangeTextA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
X range text field in the imageA, B and GM image A, B histogram dialog.
- xRangeTextA - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
X range text field in the imageA, B and GM image A, B histogram dialog.
- xRangeTextB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
X range text field in the imageA, B and GM image A, B histogram dialog.
- xRangeTextB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
X range text field in the imageA, B and GM image A, B histogram dialog.
- xRangeTextB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
X range text field in the imageA, B and GM image A, B histogram dialog.
- xRangeTextB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
X range text field in the imageA, B and GM image A, B histogram dialog.
- xRangeTextGM_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
X range text field in the imageA, B and GM image A, B histogram dialog.
- xRangeTextGM_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
X range text field in the imageA, B and GM image A, B histogram dialog.
- xRangeTextGM_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
X range text field in the imageA, B and GM image A, B histogram dialog.
- xRangeTextGM_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
X range text field in the imageA, B and GM image A, B histogram dialog.
- XRatio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Transfer function y-ratios:
- XRAY_ANGIOGRAPHY - gov.nih.mipav.model.file.FileInfoBase.Modality
-
Image modality X ray angiography.
- XRAY_ANGIOGRAPHY - Static variable in class gov.nih.mipav.model.file.FileInfoBase
-
Image modality X ray angiography.
- xRes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The image resolution in the x dimension.
- xRes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
resolutions
- xRes - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The image's x resolution.
- xRes - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- xRes - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
X pixel resolution.
- xRes - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
X and Y resolution.
- xRes - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
The resolutions of the (possibly respampled) image (the one shown in the renderer).
- xRes - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- xRes - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- xresA - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
parameter for AlgorithmTransform
- xresA - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Resolutions of match image and base image.
- xresB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- xresB - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Resolutions of match image and base image.
- xresM - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- xResol - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- XRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- XRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- XRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- XRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- Xroot(double, double) - Method in class gov.nih.mipav.model.algorithms.CubicEquation
-
- xRotation - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- xRotation - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- xRotation - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- XROTATION - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- xRRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- xRSelected - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- xs - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- xs - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- xS - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- xsave_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- xScale - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- xScale - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- xScale - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- xscaleBF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- xscaleText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Brute-force registration parameters:.
- xScreen - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- xScreen - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- xScreen - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- xScreen - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- xScreen - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- xScreen - Static variable in class gov.nih.mipav.view.ViewJFrameImage
-
Width of the display screen.
- xScreen - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- xScreen - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Width of the display screen.
- xScreen - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- xScreen - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- xSelected - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- xSelected - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- xSep - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- xSep - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- xSeries - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- xSeries - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- xSeries - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- xSeries - Variable in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
Original xData
- xsize - Variable in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- xsize - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- xSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- xSlice - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Which slice is currently displayed in the ZY plane.
- xSlice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Which slice is currently displayed in the ZY plane.
- xSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Which slice is currently displayed in the ZY plane.
- xSliceInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Which slice is currently displayed in the ZY plane.
- xSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
num x slices of src image
- xSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- xSliderS - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
slider that controls the probe moves along the x direction.
- xSource - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- xSource - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
DOCUMENT ME!
- xSource - Variable in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
DOCUMENT ME!
- xSource - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
DOCUMENT ME!
- xSource - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
DOCUMENT ME!
- xSource - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- xSpace - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
number of pixels in x direction.
- xSpace - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- xSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- xSpaceField - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- xSpacing - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- xStart - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- xStart - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
- xStart - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator
-
- xStart - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- xStart - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- xStart - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- xStart - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
values obtained when mousePressed
- xStdDev - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- xsubp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNonMaxSuppts
-
- xt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- xt - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- xt - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.edge_node
-
- xt - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.st_node
-
- xTalLabel - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- xTar - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- xTar - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- xText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
DOCUMENT ME!
- xText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
DOCUMENT ME!
- xText - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- xText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
DOCUMENT ME!
- xText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
DOCUMENT ME!
- xText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
DOCUMENT ME!
- xText - Variable in class gov.nih.mipav.view.dialogs.JDialogNearlyCircleToCircle
-
DOCUMENT ME!
- xText - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
DOCUMENT ME!
- xText - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
DOCUMENT ME!
- xText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point X, Y, Z coordinate text box.
- xTextEntry - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
entry point X, Y, Z coordinate text box.
- xTick - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- xticks - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- xtol - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
xtol is a nonnegative input variable.
- XTv(double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_LrFunction
-
- xub_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- xUnits - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
The units printed to the logModel, set in createNewLogile
- xv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- Xv(double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- Xv(double[], double[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_LrFunction
-
- xValue - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
- xValueArray - Variable in class gov.nih.mipav.model.algorithms.AlgorithmLogSlopeMapping
-
- xValueButton - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
- xValuesAdded - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
- xValuesList - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
list of x values to send to algorithm
- xValueText - Variable in class gov.nih.mipav.view.dialogs.JDialogLogSlopeMapping
-
- xvBins - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
DOCUMENT ME!
- xVisible - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer.SceneState
-
DOCUMENT ME!
- xVisible - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean visibility values for x, y, z triplanar.
- xvTable - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- xvText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
DOCUMENT ME!
- XWTRAN(int, int, double[], double[], double[], double[][], double[][], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- xX - Variable in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- XX - gov.nih.mipav.model.file.FileDicomTagInfo.VR
-
- xxhi - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- xxlo - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- xxOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- xxOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- xxOp - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- xy - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- XY - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- xyAspectRatio - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- xyCoords - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
this is a list of the x,y coords of the voi's boundary
- XYCoords - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
xy coordinates of voi boundar
- xyo - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- xyold_tbase - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBSpline
-
DOCUMENT ME!
- xyOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- xyOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- xyOp - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- xyv - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- XYZ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- xyzAspectRatio - Variable in class gov.nih.mipav.view.dialogs.JDialogScriptableTransform
-
DOCUMENT ME!
- xyzExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBSplineControlPointImageFilter
-
- xyzExtents - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmPointSetToImageFilter
-
- xyzSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmN4MRIBiasFieldCorrectionFilter
-
- XZ - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
Y
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.P
-
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskPatternPoint
-
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCircularSectorToRectangle
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.ContractingSnakeNode
-
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.Pixel
-
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.PixelGrid.PixelGridNode
-
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeInitialiser.Node
-
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNetworkSnake.SnakeNode
-
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
current y position.
- y - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- y - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- y - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- y - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ColSpliterator
-
- y - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator
-
- y - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaSpliterator
-
- y - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.RowSpliterator
-
- y - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.PointeredPoint2D
-
'pointer' to y coordinate
- y - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum2
-
- y - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum3
-
- y - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameDisc
-
< center x-coordinate
- y - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameEllipse
-
< center x-coordinate
- y - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedDisc
-
< center x-coordinate
- y - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlFrameOrientedEllipse
-
< center x-coordinate
- y - Variable in class gov.nih.mipav.model.algorithms.curfit
-
- y - Variable in class gov.nih.mipav.model.algorithms.CVODES.HermiteDataMemRec
-
- y - Variable in class gov.nih.mipav.model.algorithms.CVODES.PolynomialDataMemRec
-
- y - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmProstateBoundaryExt.PointAttribute
-
- y - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- y - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDim3
-
- y - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.Tracker
-
- y - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.Solver
-
- y - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.SVC_Q
-
- y - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_problem
-
- y - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame.point
-
- y - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- y - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- y - Variable in class gov.nih.mipav.model.algorithms.SIFT.VlSiftKeypoint
-
< x coordinate.
- y - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Cvec
-
- y - Variable in class gov.nih.mipav.model.algorithms.splev
-
- y - Variable in class gov.nih.mipav.model.algorithms.SVM.svmtest
-
- y - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Storage for VOI.
- y - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.StageLabel
-
- y - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_pi_iterator_t
-
FIXME DOC
- y - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.gpc_vertex
-
- y - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.lmt_node
-
- y - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.sb_tree
-
- y - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.vertex_node
-
- y - Variable in class gov.nih.mipav.model.structures.Point3D
-
Y coordinate of point.
- y - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.GlassPaneListener
-
X and Y coordinates where drawing started.
- y - Variable in class gov.nih.mipav.view.dialogs.JDialogCaptureScreen.MyGlassPane
-
Dimensions of rectangle to draw.
- y - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.flythroughview.JPanelFlythruMove.StandardMouse
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelCamera.StandardMouse
-
Canvas center x and y.
- y - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlyPathBehavior.StandardKey
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.MouseWheel
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouse
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.flythruview.FlythruRender.RightMouseDragged
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelView.StandardMouse
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer.SceneState
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.SceneState
-
x, y, z triplanar slider values.
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMPoint
-
y position.
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMReferenceFrame.sScanLinePart
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Point
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.POINT
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.SIZE
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.MouseWheel
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouse
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.flythroughview.FlyThroughRender.RightMouseDragged
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.KeyPressedEvent
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelMouseControl
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.MouseWheelPathPlanning
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.Navigation.NavigationBehavior.RightMouse
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3D.PolarPoint
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSegmentationRegBSpline3DFast.PolarPoint
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.Problem
-
an array containing the target values
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.Solver
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.SVC_Q
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.libsvm.svm_problem
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.ShapeSimilarity.pt
-
- y - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy.point
-
- y - Variable in class gov.nih.mipav.view.RubberbandLine
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.RubberbandProtractor
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- y - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- y() - Method in class gov.nih.mipav.model.algorithms.LSCM.Point
-
- y() - Method in class gov.nih.mipav.model.algorithms.LSCM.Point2
-
- Y - gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelDir
-
- Y - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSpectralClustering
-
- Y - Static variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- Y - Variable in class gov.nih.mipav.view.ViewJComponentFunct
-
DOCUMENT ME!
- Y() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- Y() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- y_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgEdgeDetect
-
- y_ - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection.BgImage
-
- y_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.LinearSolverAndEvaluatorCreationTest
-
- y_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
- y_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- y_angle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- y_angle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
DOCUMENT ME!
- y_angle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
DOCUMENT ME!
- y_angle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
DOCUMENT ME!
- Y_AXIS - Static variable in interface gov.nih.mipav.model.algorithms.ContourPlot.InteractionConstants
-
- Y_AXIS - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Flip along Y axis.
- Y_AXIS - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Y axis constant.
- Y_AXIS - Static variable in class gov.nih.mipav.view.ViewJComponentGraphAxes
-
- Y_AXIS_180 - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Rotate about the y axis 180 degrees.
- Y_AXIS_MINUS - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Rotate about the y axis -90 degrees (or 270 degrees).
- Y_AXIS_PLUS - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Rotate about the y axis 90 degrees.
- Y_CLIPSLICE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an y clip slice.
- Y_CLIPSLICE_NEG - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an -y clip slice.
- Y_density - Variable in class gov.nih.mipav.model.file.libjpeg.jpeg_decompress_struct
-
- Y_DERIVATIVE_KERNEL - Static variable in class gov.nih.mipav.model.GaussianKernelFactory
-
- y_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseOrbit
-
DOCUMENT ME!
- y_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseProperties
-
DOCUMENT ME!
- y_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseRotate
-
DOCUMENT ME!
- y_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseSelection
-
DOCUMENT ME!
- y_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslate
-
DOCUMENT ME!
- y_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseTranslation
-
DOCUMENT ME!
- y_label - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- y_last - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehavior
-
DOCUMENT ME!
- y_loc - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- y_lower - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- y_lower - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- y_max - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- y_max - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- y_min - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- y_min - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- y_out - Variable in class gov.nih.mipav.model.algorithms.DSC_MRI_toolbox
-
- Y_PROJECTION - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Project along the Y-Axis.
- y_scaling - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- y_scaling - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- Y_SLICE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an y slice.
- y_upper - Variable in class gov.nih.mipav.model.algorithms.LIBSVM
-
- y_upper - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_scale
-
- y0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHoughCircle
-
- y0 - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions.ROI
-
- y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_cmptparm_t
-
y component offset compared to the whole image
- y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_comp_t
-
y component offset compared to the whole image
- y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_t
-
YOsiz: vertical offset from the origin of the reference grid to the
top side of the image area
- y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_band_t
-
- y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_precinct_t
-
- y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_resolution_t
-
- y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tile_t
-
- y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- y0 - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- y0 - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
DOCUMENT ME!
- y0Array - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
- y0Array - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
- y0Text - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircle
-
- y1 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- y1 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- y1 - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions.ROI
-
- y1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_image_t
-
Ysiz: height of the reference grid
- y1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_band_t
-
- y1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_cblk_dec_t
-
- y1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_precinct_t
-
- y1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_resolution_t
-
- y1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tile_t
-
- y1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000.opj_tcd_tilecomp_t
-
- y1 - Variable in class gov.nih.mipav.model.file.FileJPEG2000
-
- y1 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- y1 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- y13 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- y1Vector - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- y2 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- y2 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- y2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- y2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- y2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- y23 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- y2Vector - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- y3 - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.BarycentricGradientPaintContext
-
- y3 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- y3 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- y3 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- y4 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- y4 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- y4 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedRectangle
-
- y5 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- y5 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- y6 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- y6 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- y7 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- y7 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- y8 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- y8 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- ya - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- yanlyz() - Method in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- yArray - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- yawAngle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Rotation yaw angle.
- yawAngle - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Rotation yaw angle.
- yawTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehavior
-
Yaw transform.
- yawTransform - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.MouseBehaviorRenderer
-
Yaw transform.
- yAxis - Variable in enum gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- YAXIS - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- yAxisCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- yAxisIdx - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Actual button indices
- yAxisLabel - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- yAxisLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- yAxisLabelField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- yAxisLabelText - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- yAxisRot - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
616 Yaxis rotation.
- ybard_calcrTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- yBounds - Variable in class gov.nih.mipav.model.structures.VOI
-
The y - dimension bounds: yBounds [0] = min and yBounds[1] = max.
- yBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- yBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- yBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
DOCUMENT ME!
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
y dimension bound
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Y cropped region bounds.
- yBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Y cropped region bounds.
- yBox - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
xBox, yBox, zBox from the parent scene.
- yBox - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
x, y, z box size.
- yBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
xBox, yBox and zBox values from the parent frame.
- yBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Parent frame box value.
- yBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- yBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- yBox - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- yBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
x, y, z box size.
- YBR_FULL_422 - Variable in class gov.nih.mipav.model.file.FileRaw
-
- yBuffer - Variable in class gov.nih.mipav.model.structures.PointStack
-
DOCUMENT ME!
- yButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- yCameraMove - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter values.
- yCameraMoveText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter text-field.
- yCameraTurn - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter values
- yCameraTurnText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter text-field
- YCBCR_COEFFICIENTS - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- YCBCR_COEFFICIENTS - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- YCBCR_POSITIONING - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- YCBCR_POSITIONING - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- YCBCR_SUBSAMPLING - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- YCBCR_SUBSAMPLING - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- YCbCrPositioning - Variable in class gov.nih.mipav.model.file.FileSVS
-
- YCbCrPositioning - Variable in class gov.nih.mipav.model.file.FileTiff
-
- YCbCrSubsampleHoriz - Variable in class gov.nih.mipav.model.file.FileSVS
-
- YCbCrSubsampleHoriz - Variable in class gov.nih.mipav.model.file.FileTiff
-
- YCbCrSubsampleVert - Variable in class gov.nih.mipav.model.file.FileSVS
-
- YCbCrSubsampleVert - Variable in class gov.nih.mipav.model.file.FileTiff
-
- YCbCrtoRGB(float[], int[], int[], int[]) - Method in class gov.nih.mipav.model.file.FileSVS
-
- YCbCrtoRGB(float[], int[], int[], int[]) - Method in class gov.nih.mipav.model.file.FileTiff
-
- ycc_rgb_convert(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- ycc_rgb_convert(libjpeg.jpeg_decompress_struct, short[][][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- YCC_RGB_CONVERT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- ycck_cmyk_convert(libjpeg.jpeg_decompress_struct, byte[][][], int, byte[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- ycck_cmyk_convert(libjpeg.jpeg_decompress_struct, short[][][], int, short[][], int, int) - Method in class gov.nih.mipav.model.file.libjpeg
-
- YCCK_CMYK_CONVERT - Static variable in class gov.nih.mipav.model.file.libjpeg
-
- yCenter - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- yCenter - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- yCenter - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- yCenter - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- yCenterLabel - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- yCenterText - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
- yClick - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- yClipVisible - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean visibility values for x, y, z, arbitrary clipping slider frames.
- yColor - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
DOCUMENT ME!
- yCOM - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
y coordinate for center of mass, normalized by image resolution
- yCoords - Variable in class gov.nih.mipav.view.ViewJComponentSingleRegistration
-
Buffers used to save the Y coordinates for the points that make up a VOI.
- yCoords - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- yCor(int, double) - Static method in class gov.nih.mipav.model.structures.VOIText
-
- YCrCbRequired - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- yCursorAdjustment - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
- yd - Variable in class gov.nih.mipav.model.algorithms.CVODES.HermiteDataMemRec
-
- yd - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint
-
- yd - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor
-
- yD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- yD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- yD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- yD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- ydata - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitExponential
-
- ydata - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitGaussian
-
- ydata - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLaplace
-
- ydata - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLine
-
- ydata - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitLorentz
-
- ydata - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitMultiExponential
-
- ydata - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting.FitRayleigh
-
- ydata - Variable in class gov.nih.mipav.model.algorithms.LsqFit
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCorrelation.FitCorrelationModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAutoCovariance.FitCovarianceModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit24DModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.Fit25HModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3.FitDEMRI3ConstrainedModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.Fit24DModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeConstrainedModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitDoubleExponentialNoWholeNL2solModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitIntensityProfile
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitPure1DNoWholeModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitSingleExponentialNoWholeModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solInt2
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNL2solModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConInt2
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel2
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModel3
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitWholeNLConModelqd
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModel
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
- yData - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2nl2solModel
-
- yDataFitted - Variable in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
Fitted y-data, based on original x points.
- yDataRound - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Storage location for the 1D gaussian kernels.
- yDerivativeDirections - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- ydiff - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- ydim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- ydim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- ydim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- ydim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- ydim - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegVOILandmark
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The image size in the y dimension.
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBRISK.BriskLayer
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Length of the y dimension in pixels.
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGenerateIsolines
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPbBoundaryDetection
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSequentialScanningWatershed
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmShortestPathWatershed
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
dimensions and length
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTextureSegmentation
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmUnionFindWatershed
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOISimplexOpt
-
The slice size in the y dimension.
- yDim - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
yDim of 4d image
- yDim - Variable in class gov.nih.mipav.model.algorithms.DiscreteCosineTransform
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.DiscreteSineTransform
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The image's y dimension.
- yDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
image dimensions.
- yDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGuidedFilter
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Image dimensions.
- yDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
Y dimension length
- yDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmTrilateralFilter
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.algorithms.HartleyTransform2
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.ImageQuality
-
- yDim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmConcatMult
-
x and y dimensions of image
- yDim - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Number of pixels in y dimension.
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCardioidChoice
-
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.dialogs.JDialogWaveletMultiscaleProducts
-
- yDim - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Image X, Y, Z dimension.
- yDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
x, y, z and time dimension values.
- yDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
ModelImage image array dimensions:
- yDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Dimensions of image A.
- yDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Dimensions of image A.
- yDim - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Dimensions of image A.
- yDim - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
x, y, z and time dimension values.
- yDim - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
image x, y, z dimensions in FileCoordinates
- yDim - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Note that xDim and yDim refer to destImage, while zDim and tDim refer to imageA.
- yDim - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- yDim - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- Ydim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCorrectSpacing
-
Y dimension of the image.
- Ydim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlices
-
Y dimension of the image.
- Ydim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmExtractSlicesVolumes
-
Y dimension of the image.
- Ydim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertSlice
-
Y dimension of the image.
- Ydim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Y dimension of the image.
- Ydim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveSlices
-
Y dimension of the image.
- Ydim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveTSlices
-
Y dimension of the image.
- yDim2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- ydimA - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
parameter for AlgorithmTransform
- ydimA - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Dimensions of match image and base image.
- yDimA - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
- ydimB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- yDimE - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtraction
-
DOCUMENT ME!
- yDimE - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- ydimM - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- yDimSource - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughCircleChoice
-
- yDimSource - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughEllipseChoice
-
- yDimSource - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughHyperbolaChoice
-
- yDimText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleGeneration
-
- yDimText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseGeneration
-
- yDimText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- ydimTextField - Variable in class gov.nih.mipav.view.dialogs.JDialogDTIEstimateTensor
-
textfields *
- yDirections - Variable in class gov.nih.mipav.view.renderer.WildMagic.VOI.VOIManager
-
- yDirections - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- year - Variable in class gov.nih.mipav.model.file.FileInfoGESigna4X
-
DOCUMENT ME!
- year - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
DOCUMENT ME!
- year - Variable in class gov.nih.mipav.model.file.FileInfoJSON
-
- yearTextField - Variable in class gov.nih.mipav.view.JPanelEditDate
-
DOCUMENT ME!
- yellow - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.BurnBaseView
-
DOCUMENT ME!
- yellow - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
The CoolTip probe's gray color.
- yellow - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
DOCUMENT ME!
- yellow - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
The regular probe's gray color.
- yellow - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
DOCUMENT ME!
- yellowBG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The yellow sphere branch group that branches underneath the boneBG, and repreents the yellow sphere branch group.
- yellowSphere - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
The geometry group of the yellow sphere.
- yellowSphereTG - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Yellow sphere transform group that set up the translation.
- yEnd - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- yEnd - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- yEnd2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- yEnd2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
DOCUMENT ME!
- YES - gov.nih.mipav.view.dialogs.ExitStatus
-
Yes button pressed
- Yf - Variable in class gov.nih.mipav.model.file.FileSVS.JPEGComponentInputStream
-
- Yf - Variable in class gov.nih.mipav.model.file.FileTiff.JPEGComponentInputStream
-
- yFilterSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- yFilterSize - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- yFilterSizeField - Variable in class gov.nih.mipav.view.dialogs.JDialogSWI
-
- yFilterTopLeft - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
- yFinish - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
values obtained when mouseReleased
- yGridButtonGroup - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- yGridCheckBoxList - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- yGridCheckBoxPanel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- yGridEvenSpacedButton - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- yGridLineField - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- yGridLineLabel - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
DOCUMENT ME!
- yGridLines - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- yGridScrollPane - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- yGridUserPositions - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- yGridUserSpacedButton - Variable in class gov.nih.mipav.view.ViewJFrameGraph
-
- yi - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum2
-
- yi - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum3
-
- yield_blocks_signal(double[][], double[][], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- yield_diracs_signal(double[][], double[][], double[][], double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- yInvert - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- yInvRange - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- ykow_calcrTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- yl - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- yLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point X, Y, Z coordinate label.
- yLabel - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
in 4D y location of slice numbering string
- yLabel - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- yLabel - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- yLabelEntry - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
entry point X, Y, Z coordinate label.
- YLEN - Variable in class gov.nih.mipav.model.algorithms.LIBSVM.svm_toy_frame
-
- YLEN - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.svm_toy
-
- yLoc - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- yLocation - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
y value of the origin.
- yLocation - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
DICOM y coordianate of the slice location.
- yLocHistory - Variable in class gov.nih.mipav.view.LineMeter
-
DOCUMENT ME!
- yLUTa - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- yLUTb - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.RayCastRenderer
-
DOCUMENT ME!
- ylyfit - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- yMaskMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- yMaskMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- yMaskSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- yMass - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- yMat - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- ymax - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.bbox
-
- ymax - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- yMax - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- Ymean - Variable in class gov.nih.mipav.model.algorithms.libdt.Dytex
-
< options for the Dytex
- Ymean - Variable in class gov.nih.mipav.model.algorithms.libdt.HEMOptions
-
- Ymean_code - Variable in enum gov.nih.mipav.model.algorithms.libdt.Ymean_type
-
- Ymean_type(int) - Constructor for enum gov.nih.mipav.model.algorithms.libdt.Ymean_type
-
- ymeyer_calcrTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- ymin - Variable in class gov.nih.mipav.model.structures.GenericPolygonClipper.bbox
-
- ymin - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay
-
- yMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- yMod - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- yMod - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- ymodel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- ymodel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2.FitSM2ConstrainedModelC
-
- ymodel - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- yN - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
DOCUMENT ME!
- yN - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- yN - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- Yn - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- YN - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- yNegClipVisible - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean visibility values for x, y, z negative clipping slider frames.
- yObjectRotate - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Object rotation angle parameter values.
- yObjectRotateText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Object rotation parameter text-field.
- yOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
- yOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- yOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- yOp - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- yOp - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
- yOpacity - Variable in class gov.nih.mipav.view.renderer.SceneState
-
x, y, z triplanar opacity slider values.
- yOpacitySlice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
x, y, z opacity slider values.
- yOpacitySlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
x, y, z opacity slider values.
- Yopt - Variable in class gov.nih.mipav.model.algorithms.libdt.DytexOptions
-
< covariance type for S (usually COV_DIAG).
- yOrg - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- yOrg - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- yOrg - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- yOrientA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- yOrientB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- yOrigin - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.CoolTipProbe
-
Y original coordinate value.
- yOrigin - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.DefaultProbe
-
Y original coordinate value.
- yOrigin - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.Probe
-
Y original coordinate value.
- yOrigin - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.RegularProbe
-
Y original coordinate value.
- yOrigin - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.ThermalProbe
-
Y original coordinate value.
- yosb1_calcrTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- yosb2_calcrTest - Variable in class gov.nih.mipav.model.algorithms.NL2sol
-
- yp - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- yp - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- yPG - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Y coord of seed point.
- YPLANE - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
Used in determining if all points on the contour have the same y-value
- yPoint - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
- yPointInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
- yPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
DOCUMENT ME!
- yPoints - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- yPointsDraw - Variable in class gov.nih.mipav.view.RubberbandLivewire
-
DOCUMENT ME!
- yPos - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- yPos - Variable in class gov.nih.mipav.view.dialogs.JDialogFRAP
-
DOCUMENT ME!
- yPos - Variable in class gov.nih.mipav.view.dialogs.JDialogFRET
-
DOCUMENT ME!
- yPosition - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- yPosition - Variable in class gov.nih.mipav.model.file.FileSVS
-
- yPosition - Variable in class gov.nih.mipav.model.file.FileTiff
-
- YPOSITION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
- YPOSITION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
- ypout - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- ypout - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- yPres - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- yPres - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- yProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Probe x, y, z position.
- yProbe - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Probe x, y, z position.
- yPts - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- yPts - Variable in class gov.nih.mipav.model.structures.VOIBase
-
- yr - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- yRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- yRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- yRangeText - Variable in class gov.nih.mipav.view.JPanelHistogram
-
- yRangeTextA - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Y range text field in the imageA, B and GM image A, B histogram dialog.
- yRangeTextA - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Y range text field in the imageA, B and GM image A, B histogram dialog.
- yRangeTextA - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Y range text field in the imageA, B and GM image A, B histogram dialog.
- yRangeTextA - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Y range text field in the imageA, B and GM image A, B histogram dialog.
- yRangeTextB - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Y range text field in the imageA, B and GM image A, B histogram dialog.
- yRangeTextB - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Y range text field in the imageA, B and GM image A, B histogram dialog.
- yRangeTextB - Variable in class gov.nih.mipav.view.renderer.JPanelHistoLUT
-
Deprecated.
Y range text field in the imageA, B and GM image A, B histogram dialog.
- yRangeTextB - Variable in class gov.nih.mipav.view.ViewJPanelLUT
-
Deprecated.
Y range text field in the imageA, B and GM image A, B histogram dialog.
- yRangeTextGM_A - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Y range text field in the imageA, B and GM image A, B histogram dialog.
- yRangeTextGM_A - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Y range text field in the imageA, B and GM image A, B histogram dialog.
- yRangeTextGM_B - Variable in class gov.nih.mipav.view.JPanelVolumeOpacity
-
Y range text field in the imageA, B and GM image A, B histogram dialog.
- yRangeTextGM_B - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelVolOpacityBase
-
Deprecated.
Y range text field in the imageA, B and GM image A, B histogram dialog.
- YRatio - Variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Transfer function y-ratios:
- YReferenceBlack - Variable in class gov.nih.mipav.model.file.FileSVS
-
- YReferenceBlack - Variable in class gov.nih.mipav.model.file.FileTiff
-
- YReferenceWhite - Variable in class gov.nih.mipav.model.file.FileSVS
-
- YReferenceWhite - Variable in class gov.nih.mipav.model.file.FileTiff
-
- yRes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The image resolution in the y dimension.
- yRes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
resolutions
- yRes - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- yRes - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Y pixel resolution.
- yRes - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
X and Y resolution.
- yRes - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
The resolutions of the (possibly respampled) image (the one shown in the renderer).
- yRes - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- yRes - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- yresA - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
parameter for AlgorithmTransform
- yresA - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Resolutions of match image and base image.
- yresB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- yresB - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Resolutions of match image and base image.
- yResol - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- YRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- YRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- YRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- YRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- yRotation - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
DOCUMENT ME!
- yRotation - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- yRotation - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- YROTATION - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- yRRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- yRSelected - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- ys - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- ys - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- ys - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- yS - Variable in class gov.nih.mipav.model.algorithms.CVODES.HermiteDataMemRec
-
- yS - Variable in class gov.nih.mipav.model.algorithms.CVODES.PolynomialDataMemRec
-
- yS - Variable in class gov.nih.mipav.view.Rubberband
-
DOCUMENT ME!
- yScale - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- yScale - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- yScale - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- yscaleBF - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
DOCUMENT ME!
- yscaleText - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR2D
-
Brute-force registration parameters:.
- yScreen - Variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
DOCUMENT ME!
- yScreen - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- yScreen - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- yScreen - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- yScreen - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- yScreen - Static variable in class gov.nih.mipav.view.ViewJFrameImage
-
Height of the display screen.
- yScreen - Variable in class gov.nih.mipav.view.ViewJFrameLightBox
-
DOCUMENT ME!
- yScreen - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Height of the display screen.
- yScreen - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- yScreen - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- ySd - Variable in class gov.nih.mipav.model.algorithms.CVODES.HermiteDataMemRec
-
- ySelected - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- ySelected - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- ySep - Variable in class gov.nih.mipav.view.dialogs.JDialogCheckerBoard
-
- ySep - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- ySeries - Variable in class gov.nih.mipav.model.algorithms.Lmmin
-
- ySeries - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngine
-
DOCUMENT ME!
- ySeries - Variable in class gov.nih.mipav.model.algorithms.NLConstrainedEngineEP
-
DOCUMENT ME!
- ySeries - Variable in class gov.nih.mipav.model.algorithms.NLFittedFunction
-
Original y data
- ysize - Variable in class gov.nih.mipav.model.algorithms.AgastDetector5_8
-
- ysize - Variable in class gov.nih.mipav.model.algorithms.OastDetector9_16
-
- ySize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- ySlice - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Which slice is currently displayed in the XZ plane.
- ySlice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Which slice is currently displayed in the XZ plane.
- ySlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Which slice is currently displayed in the XZ plane.
- ySliceInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Which slice is currently displayed in the XZ plane.
- ySlices - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
num y slices of src image
- ySlices - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- ySliderS - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
slider that controls the probe moves along the y direction.
- ySource - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
- ySource - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
DOCUMENT ME!
- ySource - Variable in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
DOCUMENT ME!
- ySource - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToCircle
-
DOCUMENT ME!
- ySource - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
DOCUMENT ME!
- ySource - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- ySpace - Variable in class gov.nih.mipav.model.algorithms.AlgorithmPointArea
-
number of pixels in y direction.
- ySpace - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- ySpace - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- ySpaceField - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- ySpacing - Variable in class gov.nih.mipav.view.dialogs.JDialogPointArea
-
DOCUMENT ME!
- ystar - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.delaunay.Halfedge
-
- yStart - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- yStart - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions2D
-
- yStart - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.Iterators.ImgAreaIterator
-
- yStart - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- yStart - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- yStart - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
- yStart - Variable in class gov.nih.mipav.view.ViewJComponentRegistration
-
values obtained when mousePressed
- yStdDev - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- ysubp - Variable in class gov.nih.mipav.model.algorithms.AlgorithmNonMaxSuppts
-
- yt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmScaleSaliency
-
- yt - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
DOCUMENT ME!
- yt - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- yt - Variable in class gov.nih.mipav.view.dialogs.JDialogScaleSaliency
-
- yTalLabel - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- yTar - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- yTar - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- yText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircleToRectangle
-
DOCUMENT ME!
- yText - Variable in class gov.nih.mipav.view.dialogs.JDialogCircularSectorToRectangle
-
DOCUMENT ME!
- yText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToCircle
-
DOCUMENT ME!
- yText - Variable in class gov.nih.mipav.view.dialogs.JDialogEllipseToRectangle
-
DOCUMENT ME!
- yText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughLine
-
DOCUMENT ME!
- yText - Variable in class gov.nih.mipav.view.dialogs.JDialogPolygonToRectangle
-
DOCUMENT ME!
- yText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point X, Y, Z coordinate text box.
- yTextEntry - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
entry point X, Y, Z coordinate text box.
- yTick - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
DOCUMENT ME!
- yticks - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysRenderer
-
- yUnits - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
The units printed to the logModel, set in createNewLogile
- yvBins - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
DOCUMENT ME!
- yVisible - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer.SceneState
-
DOCUMENT ME!
- yVisible - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean visibility values for x, y, z triplanar.
- yvTable - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabolaChoice
-
- yvText - Variable in class gov.nih.mipav.view.dialogs.JDialogHoughParabola
-
- yy - Variable in class gov.nih.mipav.model.algorithms.ODE
-
- yy - Variable in class gov.nih.mipav.model.algorithms.ODEEP
-
- yy_dinvr - Variable in class gov.nih.mipav.model.algorithms.CDFLIB
-
- yyOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisCornerDetector
-
- yyOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmHarrisLaplace
-
- yyOp - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
Z
- z - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- z - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- z - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
current z slice.
- z - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.DynamicProblem
-
- z - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.EvaluatorTest
-
- z - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest
-
- z - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum3
-
- z - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHilbertTransform
-
The Hilbert tramsform and the other needed supporting routines are ported from the file transform.c written by
Scott Paine of the Smithsonian Astrophysical Observatory, Submillimeter Receiver Laboratory on February 2, 2010.
- z - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- z - Variable in class gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTDim3
-
- z - Variable in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.Tracker
-
- z - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEExtModel
-
- z - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODEModel
-
- z - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODERectModel
-
- z - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODEHPModel
-
- z - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2.ODESTModel
-
- z - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Cvec
-
- z - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCrop
-
Storage for VOI.
- z - Variable in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- z - Variable in class gov.nih.mipav.model.file.CBZip2InputStream
-
- z - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.StageLabel
-
- z - Variable in class gov.nih.mipav.model.structures.Point3D
-
Z coordinate of point.
- z - Variable in class gov.nih.mipav.view.dialogs.JDialogCTPreset
-
DOCUMENT ME!
- z - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
DOCUMENT ME!
- z - Variable in class gov.nih.mipav.view.dialogs.JDialogWinLevel
-
DOCUMENT ME!
- z - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SceneStatePlotter
-
DOCUMENT ME!
- z - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer.SceneState
-
DOCUMENT ME!
- z - Variable in class gov.nih.mipav.view.renderer.SceneState
-
x, y, z triplanar slider values.
- z - Variable in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- z - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- z - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.UpdateFlags.EdgeSorter
-
- z - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_L2_SvcFunction
-
- z - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.L2R_LrFunction
-
- z - Variable in class gov.nih.mipav.view.RubberbandLine
-
DOCUMENT ME!
- z - Variable in class gov.nih.mipav.view.RubberbandProtractor
-
DOCUMENT ME!
- z - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- z - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- z() - Method in class gov.nih.mipav.model.algorithms.LSCM.Point
-
- Z - gov.nih.mipav.model.algorithms.filters.OpenCL.filters.CLFFTPlan.CLFFTKernelDir
-
- Z - Static variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- Z() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- Z() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- z_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolver.CgnrLinearOperator
-
- z_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.LinearSolverAndEvaluatorCreationTest
-
- z_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.SchurOrderingTest
-
- z_ - Variable in class gov.nih.mipav.model.algorithms.CeresSolverTest.ThreeParameterCostFunctorTest
-
- Z_AXIS - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmFlip
-
Flip along Z axis.
- Z_AXIS - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJFrameRenderCamera
-
Z axis constant.
- Z_AXIS_180 - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Rotate about the z axis 180 degrees.
- Z_AXIS_MINUS - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Rotate about the z axis -90 degrees (or 270 degrees).
- Z_AXIS_PLUS - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRotate
-
Rotate about the z axis 90 degrees.
- Z_CLIPSLICE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an z clip slice.
- Z_CLIPSLICE_NEG - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an -z clip slice.
- Z_DERIVATIVE_KERNEL - Static variable in class gov.nih.mipav.model.GaussianKernelFactory
-
- z_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoom
-
DOCUMENT ME!
- z_factor - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseZoomBehavior
-
DOCUMENT ME!
- Z_PROJECTION - Static variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmMaximumIntensityProjection
-
Project along the Z-Axis.
- Z_SLICE - Static variable in class gov.nih.mipav.view.renderer.J3D.ViewJComponentBoxSlice
-
This is an z slice.
- z0 - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions.ROI
-
- Z0 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- Z0 - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- Z02 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- z1 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- z1 - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions.ROI
-
- z1 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- Z1 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- Z1 - Variable in class gov.nih.mipav.view.dialogs.JDialogDoublyConnectedSC
-
- Z12 - Variable in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- z2 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- z2 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- z2 - Variable in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.LaplacianMatrixFunction
-
- z3 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- z3 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- z4 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- z4 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- z5 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- z5 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- z6 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- z6 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- z7 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- z7 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- z8 - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmCropTilted
-
- z8 - Variable in class gov.nih.mipav.view.dialogs.JDialogCropTiltedCuboid
-
- za - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModel2
-
zabs computes the absolute value or magnitude of a double precision
complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModelqd
-
zabs computes the absolute value or magnitude of a double precision
complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.BiorthogonalWavelets
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.HartleyTransform
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.libdt
-
zabs computes the absolute value or magnitude of a double precision complex
variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
zabs computes the absolute value or magnitude of a double precision
complex variable zr + j*zi.
- zabs(double, double) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
zabs computes the absolute value or magnitude of a double precision complex variable zr + j*zi.
- zabs(DoubleDouble, DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
zabs computes the absolute value or magnitude of a DoubleDouble precision complex variable zr + j*zi.
- zabs(DoubleDouble, DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
zabs computes the absolute value or magnitude of a DoubleDouble precision complex variable zr + j*zi.
- zacai(double, double, double, int, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZACAI APPLIES THE ANALYTIC CONTINUATION FORMULA.
- zacai(DoubleDouble, DoubleDouble, DoubleDouble, int, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZACAI APPLIES THE ANALYTIC CONTINUATION FORMULA.
- zacon(double, double, double, int, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZACON APPLIES THE ANALYTIC CONTINUATION FORMULA.
- zacon(DoubleDouble, DoubleDouble, DoubleDouble, int, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZACON APPLIES THE ANALYTIC CONTINUATION FORMULA.
- zairy(double, double, int, int, double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ON KODE=1, ZAIRY COMPUTES THE COMPLEX AIRY FUNCTION AI(Z) OR ITS DERIVATIVE DAI(Z)/DZ ON ID=0 OR ID=1
RESPECTIVELY.
- zairy(DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ON KODE=1, ZAIRY COMPUTES THE COMPLEX AIRY FUNCTION AI(Z) OR ITS DERIVATIVE DAI(Z)/DZ ON ID=0 OR ID=1
RESPECTIVELY.
- zArray - Variable in class gov.nih.mipav.model.file.FileZVI
-
- zArray - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- zasyi(double, double, double, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZASYI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE ASYMPTOTIC EXPANSION FOR LARGE CABS(Z) IN
THE REGION CABS(Z).GT.MAX(RL,fnu*fnu/2).
- zasyi(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZASYI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE ASYMPTOTIC EXPANSION FOR LARGE CABS(Z) IN
THE REGION CABS(Z).GT.MAX(RL,fnu*fnu/2).
- zAxis - Variable in enum gov.nih.mipav.model.file.FileInfoBase.ImageOrientation
-
- ZAXIS - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Default button indices
- zAxisCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogPyWavelets
-
- zAxisFilter - Variable in class gov.nih.mipav.model.file.FileInfoInterfile
-
DOCUMENT ME!
- zAxisIdx - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
Actual button indices
- zAxisOffset - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- zAxisOffset - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- zAxisRot - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
620 Z axis rotation.
- zAxisStep - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- zAxisStep - Variable in class gov.nih.mipav.model.file.FileInfoAfni
-
DOCUMENT ME!
- zaxpy(int, double[], double[][], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
BLAS level1 routine version 3.7.0 December, 2016
Port of 12/3/93 linpack routine zaxpy Original version written by Jack Dongarra vector dy = vector dy + da *
vector dx.
- zbesh(double, double, double, int, int, int, double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zbesh(DoubleDouble, DoubleDouble, DoubleDouble, int, int, int, DoubleDouble[], DoubleDouble[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zbesi(double, double, double, int, int, double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zbesi(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zbesj(double, double, double, int, int, double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zbesj(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zbesk(double, double, double, int, int, double[], double[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zbesk(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zbesy(double, double, double, int, int, double[], double[], int[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zbesy(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[], DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zbesyh(double, double, double, int, int, double[], double[], int[], double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
An older version of zbesy used by the ZQCBY quick check routine.
- zbesyh(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[], DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
An older version of zbesy used by the ZQCBY quick check routine.
- zbinu(double, double, double, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
zbinu calculates the I function in the right half z plane.
- zbinu(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
zbinu calculates the I function in the right half z plane.
- zbiry(double, double, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zbiry(DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zbknu(double, double, double, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
zbknu computes the k Bessel function in the right half z plane.
- zbknu(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
zbknu computes the k Bessel function in the right half z plane.
- zBounds - Variable in class gov.nih.mipav.model.structures.VOI
-
The z - dimension bounds: zBounds [0] = min and zBounds[1] = max.
- zBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogCrop
-
DOCUMENT ME!
- zBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogCropBoundaryParam
-
DOCUMENT ME!
- zBounds - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
DOCUMENT ME!
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogCreateProbMap
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNetherland
-
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsNIH
-
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogFemurTraceSectionsSeparateNetherland
-
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKnees_90_data_train_extraction
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogKneesLearnFromFailure64TestCase
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogLearnFromFailure64Knees
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNetherland
-
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.JDialogPatellaTraceSectionsNIH
-
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.Knees.Knees_90_data_train_extraction
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassification
-
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMClassificationExt
-
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogAAMplusSVM
-
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCopyFiles
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMap64
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogCreateProbMapConvert
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogGenerateEndingSlices
-
DOCUMENT ME!
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogPromise12_2DVolumetrieHED_map
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmap
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DHEDmapCg
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasConverter
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter_JMI
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverter3DSurfaceTest
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_CED_scale
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterCentralGland_miccai
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale_test
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_boundary_ced_scale
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_test
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale_train
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_ced_scale
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI_conversion
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterMICCAI
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTest
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain_JMI
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstate2DSlicesAtlasPngConverterTrain
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateCheckPngFile
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateExtractCEFeature
-
z dimension bound
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TestCase
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateLearnFromFailure64TrainingCase
-
Z cropped region bound.
- zBounds - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.JDialogProstateSPIEcancerChallenge
-
Z cropped region bound.
- zBox - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
xBox, yBox, zBox from the parent scene.
- zBox - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelLights
-
x, y, z box size.
- zBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.ViewJComponentSurface
-
xBox, yBox and zBox values from the parent frame.
- zBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
Parent frame box value.
- zBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- zBox - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- zBox - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Numbers dicatating the sizes of the planes based on the extents and resolutions of the image.
- zBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelLights_WM
-
x, y, z box size.
- zbuni(double, double, double, int, int, double[], double[], int[], int, int[], double) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZBUNI COMPUTES THE I BESSEL FUNCTION FOR LARGE CABS(Z).GT.
- zbuni(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[], int, int[], DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZBUNI COMPUTES THE I BESSEL FUNCTION FOR LARGE CABS(Z).GT.
- zbunk(double, double, double, int, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZBUNK COMPUTES THE K BESSEL FUNCTION FOR FNU.GT.FNUL.
- zbunk(DoubleDouble, DoubleDouble, DoubleDouble, int, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZBUNK COMPUTES THE K BESSEL FUNCTION FOR FNU.GT.FNUL.
- zButton - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- zCameraMove - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter values.
- zCameraMoveText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Camera move parameter text-field.
- zchkaa() - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zchkge(boolean[], int, int[], int, int[], int, int[], int, int[], double, int, double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zClipVisible - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean visibility values for x, y, z, arbitrary clipping slider frames.
- ZCOLL - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- zColor - Variable in class gov.nih.mipav.view.ViewJComponentTriImage
-
DOCUMENT ME!
- zCOM - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCenterOfMass
-
z coordinate for center of mass, normalized by image resolution, if srcImage is 2D = 0
- zcos(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- ZCT - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Int denoting ZCT sequence
- zd - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Keypoint
-
- zd - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.SIFT3D_Descriptor
-
- zD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- zD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- zD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- zD - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- zD - Static variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
used for fine movement checkbox in 3D mouse options
- zDataRound - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Storage location for the 1D gaussian kernels.
- zdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCubicLagrangian
-
DOCUMENT ME!
- zdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmHepticLagrangian
-
DOCUMENT ME!
- zdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmQuinticLagrangian
-
DOCUMENT ME!
- zdim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmWSinc
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAGVF
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmAntigradient2
-
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The image size in the z dimension.
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmColocalizationEM
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmDEMRI3
-
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizerBET
-
Length of the z dimension in pixels.
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFuzzyCMeans
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmGVF
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMeanShiftSegmentation
-
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMSpectralFuzzyCMeans
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmSM2
-
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
dimensions and length
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTimeFitting
-
- zDim - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIExtractionPaint
-
extent of z dimension in the in the source image.
- zDim - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
zDim of 4d image
- zDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The image's z dimension.
- zDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmCoherenceEnhancingDiffusion
-
image dimensions.
- zDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- zDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmMorphologicalFilter
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRegularizedIsotropicDiffusion
-
Image dimensions.
- zDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmRiceWaveletTools
-
- zDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmSWI
-
Z dimension length
- zDim - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmWaveletThreshold
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.file.FileAvi
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.file.FileBFLOAT
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.file.FileBioRad
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.file.FileCheshireVOI
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.file.FileLSM
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.model.file.FileVOI.XMLAnnotationHandler
-
the Z dimension of the image
- zDim - Variable in class gov.nih.mipav.model.file.FileZVI
-
- zDim - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Number of pixels in z dimension.
- zDim - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationEM
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.view.dialogs.JDialogColocalizationRegression
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.view.dialogs.JDialogGenerateGrid
-
- zDim - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- zDim - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Image X, Y, Z dimension.
- zDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelMouse.RecordMouse
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
x, y, z and time dimension values.
- zDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.JPanelMousePlotter.RecordMouse
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceMask
-
ModelImage image array dimensions:
- zDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceRender
-
Dimensions of image A.
- zDim - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.SurfaceView
-
Dimensions of image A.
- zDim - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Dimensions of image A.
- zDim - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
x, y, z and time dimension values.
- zDim - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
image x, y, z dimensions in FileCoordinates
- zDim - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- zDim - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
Note that xDim and yDim refer to destImage, while zDim and tDim refer to imageA.
- zDim - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- zDim - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- Zdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmInsertVolume
-
Z dimension of the image.
- Zdim - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmRemoveTSlices
-
Z dimension of the image.
- zdimA - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
parameter for AlgorithmTransform
- zdimA - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Dimensions of match image and base image.
- zDimA - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
- zdimB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- zdimM - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- zDimText - Variable in class gov.nih.mipav.view.dialogs.JDialogSphereGeneration
-
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmCircleToRectangle
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.JacobianElliptic
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
complex divide c = a/b.
- zdiv(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
complex divide c = a/b.
- zdiv(DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
complex divide c = a/b.
- zdiv(DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
complex divide c = a/b.
- zdotc(int, double[][], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
BLAS level1 routine version 3.7.0 December, 2016
Port of 12/3/93 linpack zdotc routine Original version created by Jack Dongarra Forms the dot product of two
complex vectors x**H * Y.
- zdotu(int, double[][], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a a port of BLAS level1 routine ZDOTU version 3.7.0.
- ZDPARF(int, double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- zdrscl(int, double, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of LAPACK version auxiliary routine 3.7.0 December, 2016 ZDRSCL.
- zdrvge(boolean[], int, int[], int, double, int, double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[][][], double[], double[][][], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- ZDSC(double[], int, int, int, int, double, double[], double[][], double[][], double[][], double[][], double[], double[], double[], double[], int, double[], int) - Method in class gov.nih.mipav.model.algorithms.DoublyConnectedSC
-
- zdscal(int, double, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of the BLAS level1 routine ZDSCAL version 3.7.0 December, 2016.
- zEnd - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- zEnd - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmGradientMagnitudeSep
-
- zEnd2 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
DOCUMENT ME!
- zenith - Variable in class gov.nih.mipav.model.file.FileInfoNIFTI
-
- zenithArray - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- zero - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- zero - Variable in class gov.nih.mipav.model.algorithms.AlgorithmMultiExponentialFitting
-
- zero - Variable in class gov.nih.mipav.model.algorithms.sproot
-
- zero() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Point3
-
- Zero() - Method in class gov.nih.mipav.view.renderer.WildMagic.AAM.Point3
-
- ZERO - Static variable in class gov.nih.mipav.model.algorithms.CVODES
-
- ZERO - Static variable in class gov.nih.mipav.model.algorithms.registration.DemonsRegistrationLite
-
- ZERO - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector2f
-
Special vectors.
- ZERO - Static variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.brainflattenerview.MjVector3f
-
Special vectors.
- ZERO_CROSSING_EDGE_DETECTOR - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- ZERO_CROSSING_EDGE_DETECTOR - Static variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- zero_Mat_rm(SIFT3D.Mat_rm) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- ZERO_STATE - Static variable in class gov.nih.mipav.view.renderer.WildMagic.Render.MultiDimensionalTransfer.ClassificationWidgetState
-
Default, unused state.
- ZERO_TRESH - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEmbeddedConfidenceEdgeDetection
-
- ZERO_YMEAN - gov.nih.mipav.model.algorithms.libdt.Ymean_type
-
- zeroAround() - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
If a cropping operation was performed, shift the data back to the center and put zeros around the edges.
- zeroAround(float[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
If a cropping operation was performed, shift the data back to the center and put zeros around the edges.
- zeroButton - Variable in class gov.nih.mipav.model.algorithms.utilities.AlgorithmImageCalculator
-
DOCUMENT ME!
- zeroByteArray(byte[]) - Static method in class gov.nih.mipav.model.dicomcomm.DICOM_Util
-
Fills a byte array with some zeros.
- zeroCell - Variable in class gov.nih.mipav.model.file.FileInfoGESigna5X
-
50 Cell number at theta.
- zeroCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
Checkbox to zero funused fields at 112, 116, and 120.
- zeroCrossingEdgeDetector() - Method in class gov.nih.mipav.model.algorithms.AlgorithmFacetModel
-
- zeroDetectionType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
The type of zero crossing detection to use.
- zeroDetectionType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
The type of zero crossing detection to use.
- zeroDetectionType - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
The type of zero crossing detection to use.
- zeroDetector - Variable in class gov.nih.mipav.view.dialogs.JDialogFacetModel
-
- zeroFillFactorRead - Variable in class gov.nih.mipav.model.file.FileInfoBRUKER
-
- zerofinder(Vector<Double>, Vector<Double>, double[], double[], double[][]) - Method in class gov.nih.mipav.model.algorithms.WeibullDistribution.Analysis
-
- zerofunused - Variable in class gov.nih.mipav.model.file.FileAnalyze
-
If true, zero funused fields
- zerofunused() - Method in class gov.nih.mipav.view.dialogs.JDialogAnalyzeNIFTIChoice
-
- zeroLengthFlag - Variable in class gov.nih.mipav.model.file.FileRaw
-
flag that indicates if raFile should first be set to length of 0
- ZeroMeanUnitLength(CDVector) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CAAMMathUtil
-
Normalises a vector to zero mean and unit length.
- zeroMoment0 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- zeroMoment1 - Variable in class gov.nih.mipav.model.algorithms.AlgorithmIHN3Correction
-
DOCUMENT ME!
- zeroPad - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT
-
True if zero padding actually performed.
- zeroPad - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFFT2
-
True if zero padding actually performed.
- zeroPad - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilter
-
DOCUMENT ME!
- zeroPad - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmFrequencyFilterColor
-
DOCUMENT ME!
- zeroPad - Variable in class gov.nih.mipav.model.file.FileAfni
-
DOCUMENT ME!
- zeroToOneLUTAdj - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
flag indicating whether there is 0 to 1 LUT Adjustment *
- zeroToOneLUTAdjust() - Method in class gov.nih.mipav.model.structures.ModelLUT
-
The purpose of this method is to adjust the zero index of the LUT from (0, 0, 0) to (1, 1, 1) The reason is so
image A and image B are blended throughout by default.
- zeroXMin - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- zeroYMin - Variable in class gov.nih.mipav.view.ViewJComponentGraph
-
- zeta(double, double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- ZETA - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- zetac(double) - Method in class gov.nih.mipav.model.algorithms.Cephes
-
- ZETAC - Static variable in class gov.nih.mipav.model.algorithms.Cephes
-
- zexp(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
complex exponential function b = exp(a).
- zexp(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
complex exponential function b = exp(a).
- zexp(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
complex exponential function b = exp(a).
- zexp(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
complex exponential function b = exp(a).
- zexp(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest
-
complex exponential function b = exp(a).
- zexp(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
complex exponential function b = exp(a).
- zgecon(char, int, double[][][], int, double, double[], double[][], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zgeequ(int, int, double[][][], int, double[], double[], double[], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zgemm(char, char, int, int, int, double[], double[][][], int, double[][][], int, double[], double[][][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of the 2/8/89 Blas routine Original version written by: Jack Dongarra, Argonne National Laboratory
Iain Duff, AERE Harwell.
- zgemv(char, int, int, double[], double[][][], int, double[][], int, double[], double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
From LAPACK 3.7.0 December 2106
Routine ported from 10/22/86 blas zgemv subroutine Original version written by: Jack Dongarra, Argonne National
Lab.
- zgerc(int, int, double[], double[][], int, double[][], int, double[][][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of the 10/22/86 Blas routine ZGERC Original version written by: Jack Dongarra, Argonne National
Lab.
- zgerfs(char, int, int, double[][][], int, double[][][], int, int[], double[][][], int, double[][][], int, double[], double[], double[][], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zgesv(int, int, double[][][], int, int[], double[][][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zgesvx(char, char, int, int, double[][][], int, double[][][], int, int[], char[], double[], double[], double[][][], int, double[][][], int, double[], double[], double[], double[][], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zget01(int, int, double[][][], int, double[][][], int, int[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zget02(char, int, int, int, double[][][], int, double[][][], int, double[][][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 LAPACK test routine ZGET02.
- zget03(int, double[][][], int, double[][][], int, double[][][], int, double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zget04(int, int, double[][][], int, double[][][], int, double, double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of LAPACK version test routine 3.7.0 ZGET04.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., December 2016.
- zget07(char, int, int, double[][][], int, double[][][], int, double[][][], int, double[][][], int, double[], boolean, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zgetrf(int, int, double[][][], int, int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zgetrf2(int, int, double[][][], int, int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zgetri(int, double[][][], int, int[], double[][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zgetrs(char, int, int, double[][][], int, int[], double[][][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- ZHANG_SOURCE - Static variable in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
Real arguments for first and second complete and incomplete elliptic integrals.
- zhemv(char, int, double[], double[][][], int, double[][], int, double[], double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 BLAS level2 routine ZHEMV proivded by Univ. of Tennessee, Univ. of California
Berkeley, University of Colorado Denver and NAG Ltd., December, 2016 Originally written 22-October-1986 by
Jack Dongarra, Argonne National Lab, Jeremy Du Croz, Nag Central Office, Sven Hammarling, Nag Central Office,
and Richard Hanson, Sandia National Labs.
- zher2(char, int, double[], double[][], int, double[][], int, double[][][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 BLAS level2 routine ZHER2 proivded by Univ. of Tennessee, Univ. of California
Berkeley, University of Colorado Denver and NAG Ltd., December, 2016 Originally written 22-October-1986 by
Jack Dongarra, Argonne National Lab, Jeremy Du Croz, Nag Central Office, Sven Hammarling, Nag Central Office,
and Richard Hanson, Sandia National Labs.
- zi - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zi - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zi - Variable in class gov.nih.mipav.model.algorithms.Covdet.VlCovDetExtremum3
-
- ZigZagTable - Static variable in interface gov.nih.mipav.model.file.FileSVS.JPEGConstants
-
- ZigZagTable - Static variable in interface gov.nih.mipav.model.file.FileTiff.JPEGConstants
-
- zimag - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
- zImageSlider - Variable in class gov.nih.mipav.view.ViewControlsImage
-
DOCUMENT ME!
- zImageSlider - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
- zin - Variable in class gov.nih.mipav.model.file.FileNIFTI
-
- zInit - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmKernelRegression
-
- zInvertCheckBox - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanel3DMouse_WM
-
Invert movement checkbox
- zInvRange - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- Zip - gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- zipFileName - Variable in class gov.nih.mipav.model.file.NDARWriteData
-
- zkscl(double, double, double, int, double[], double[], int[], double, double, double) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
Set K functions to zero on underflow, continue recurrence on scaled functions until two members come on scale,
then return with min(zn[0]+2,n) values scaled by 1/tol.
- zkscl(DoubleDouble, DoubleDouble, DoubleDouble, int, DoubleDouble[], DoubleDouble[], int[], DoubleDouble, DoubleDouble, DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
Set K functions to zero on underflow, continue recurrence on scaled functions until two members come on scale,
then return with min(zn[0]+2,n) values scaled by 1/tol.
- zLabel - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point X, Y, Z coordinate label.
- zLabelEntry - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
entry point X, Y, Z coordinate label.
- zlacn2(int, double[][], double[][], double[], int[], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of LAPACK version auxiliary routine 3.7.0 ZLACN2.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., December 2016.
- zlacpy(char, int, int, double[][][], int, double[][][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of LAPACK version 3.7.0 auxiliary routine DLACPY.
- zlagge(int, int, int, int, double[], double[][][], int, int[], double[][], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 LAPACK auxiliary test routine ZLAGGE Original ZLAGGE created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., December, 2016 zlagge generates a complex general m by n matrix A, by
pre- and post- multiplying a real diagonal matrix D with random unitary matrices: A = U*D*V.
- zlaghe(int, int, double[], double[][][], int, int[], double[][], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of LAPACK auxiliary routine ZLAGHE version 3.7.0.
- zlagsy(int, int, double[], double[][][], int, int[], double[][], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 LAPACK auxiliary test routine zlagsy Original ZLAGSY created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., December, 2016 zlagsy generates a complex symmetric matrix A, by pre-
and post- multiplying a real diagonal matrix D with a random unitary matrix: A = U*D*U**T.
- zlange(char, int, int, double[][][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of the version 3.7.0 LAPACK auxiliary routine ZLANGE Original ZLANGE created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., December, 2016 zlange returns the value of
the one norm, or the Frobenius norm, or the infinity norm, or the largest absolute value of any element of a
complex rectangular matrix.
- zlantr(char, char, char, int, int, double[][][], int, double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zlaqge(int, int, double[][][], int, double[], double[], double, double, double, char[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zlarnd(int, int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of the LAPACK routine ZLARND.f version 3.7.0
LAPACK is a software package provided by University of Tennessee, University of California Berkeley,
University of Colorado Denver, and NAG Ltd., December, 2016
zlarnd returns a random complex number from a uniform or normal distribution.
- zlarnv(int, int[], int, double[][]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 LAPACK auxiliary routine ZLARNV Original ZLARNV created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., December, 2016 zlarnv returns a vector of n
random complex numbers from a uniform or normal distribution
- zlarot(boolean, boolean, boolean, int, double[], double[], double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 LAPACK auxiliary test routine ZLAROT Original ZLAROT created by Univ. of Tennessee,
Univ. of California Berkeley, and NAG Ltd., December, 2016 zlarot applies a (Givens) rotation to two adjacent
rows or columns, where one element of the first and/or last collumn/row for use on matrices stored in some format
other than GE, so that elements of the matrix may be used or modified for which no array element is provided.
- zlartg(double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 LAPACK auxiliary routine ZLARTG Original ZLARTG created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., December, 2016
zlartg generates a plane rotation with real cosine and complex sine.
- zlaset(char, int, int, double[], double[], double[][][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 auxiliary routine ZLASET.
- zlassq(int, double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 LAPACK auxiliary routine ZLASSQ Original ZLASSQ created by Univ. of Tennessee,
Univ. of California Berkeley, Univ. of Colorado Denver, and NAG Ltd., December, 2016 zlassq returns the values
scl and smsq such that (scl**2)*smsq = x[0]**2 + x[incx]**2 + ... + x[(n-1)*incx]**2 + (scale**2)*sumsq The value
of sumsq is assumed to be non-negative and scl returns the value
scl = max(scale,abs(real(x[i])),abs(imag(x[i))). scale and sumsq
refer to the original supplied values in scale[] and sumsq[]. scl and smsq are the returned values in scale[] and
sumsq[] that overwrite the orginal values.
- zLastSlice - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- zLastSlice2 - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- zlaswp(int, double[][][], int, int, int, int[], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
- zlatb4(String, int, int, int, char[], int[], int[], double[], int[], double[], char[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 LAPACK test routine DLATB4.
- zlatms(int, int, char, int[], char, double[], int, double, double, int, int, char, double[][][], int, double[][], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of version 3.7.0 LAPACK test routine ZLATMS Original ZLATMS created by Univ. of Tennessee, Univ. of
California Berkeley, and NAG Ltd., December, 2016 zlatms generates random matrices with specified singular values
(or hermitian with specified eigenvalues) for testing LAPACK programs.
- zlatrs(char, char, char, char, int, double[][][], int, double[][], double[], double[], int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of LAPACK version auxiliary routine 3.7.0 ZLATRS.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., December 2016.
- zlibCompression - Variable in class gov.nih.mipav.model.file.FileSVS
-
TIFF files.
- zlibCompression - Variable in class gov.nih.mipav.model.file.FileTiff
-
TIFF files.
- zlibDecompresser - Variable in class gov.nih.mipav.model.algorithms.AlgorithmASM.FileMATLAB
-
- zlibDecompresser - Variable in class gov.nih.mipav.model.file.FileMATLAB
-
- zlibDecompresser - Variable in class gov.nih.mipav.model.file.FileMetaImage
-
- zlibDecompresser - Variable in class gov.nih.mipav.model.file.FileSVS
-
- zlibDecompresser - Variable in class gov.nih.mipav.model.file.FileTiff
-
- zLocation - Variable in class gov.nih.mipav.model.file.FileInfoDicom
-
DICOM z coordianate of the slice location.
- zlog(double, double, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
complex logarithm b = clog(a).
- zlog(double, double, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
complex logarithm b = clog(a).
- zlog(double, double, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
complex logarithm b = clog(a).
- zlog(double, double, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
complex logarithm b = clog(a).
- zlog(double, double, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
complex logarithm b = clog(a).
- zlog(double, double, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest
-
complex logarithm b = clog(a).
- zlog(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
complex logarithm b = clog(a).
- zMaskMax - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- zMaskMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmFaceAnonymizer
-
DOCUMENT ME!
- zMaskSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- zMass - Variable in class gov.nih.mipav.model.algorithms.AlgorithmVOIProps.Calc34D.ContourStats
-
- zMin - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- zmlri(double, double, double, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
zmlri computes the I Bessel function for the Real(z) >= 0.0 by the Miller Algorithm normalized by a Neumann
series.
- zmlri(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
zmlri computes the I Bessel function for the Real(z) >= 0.0 by the Miller Algorithm normalized by a Neumann
series.
- zmlt(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
complex multiply c = a * b.
- zmlt(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmNearlyCircleToCircle
-
complex multiply c = a * b.
- zmlt(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
complex multiply c = a * b.
- zmlt(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
complex multiply c = a * b.
- zmlt(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.AlgorithmEllipticFilter
-
complex multiply c = a * b.
- zmlt(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
complex multiply c = a * b.
- zmlt(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
complex multiply c = a * b.
- zmlt(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest
-
complex multiply c = a * b.
- zmlt(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping
-
complex multiply c = a * b.
- zmlt(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
complex multiply c = a * b.
- zmlt(double, double, double, double, double[], double[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
complex multiply c = a * b.
- zmlt(DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
complex multiply c = a * b.
- zmlt(DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping2
-
complex multiply c = a * b.
- zN - Variable in class gov.nih.mipav.view.dialogs.JDialogRecordLUT
-
DOCUMENT ME!
- zN - Variable in class gov.nih.mipav.view.ViewJComponentHLUTBase
-
DOCUMENT ME!
- zN - Variable in class gov.nih.mipav.view.ViewJComponentLUTTable
-
DOCUMENT ME!
- ZN - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraVolumeCollection
-
- zNegClipVisible - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean visibility values for x, y, z negative clipping slider frames.
- zObjectRotate - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Object rotation angle parameter values.
- zObjectRotateText - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelDisplay_WM
-
Object rotation parameter text-field.
- zOffset - Variable in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
- zoom - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- zoom - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
current zoom for result image *
- zoom - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
current zoom for result image *
- zoom - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- zoom - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- zoom - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationEM
-
DOCUMENT ME!
- zoom - Variable in class gov.nih.mipav.view.ViewJFrameColocalizationRegression
-
DOCUMENT ME!
- zoom - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Defaults magnification of image to 1.
- zoom - Variable in class gov.nih.mipav.view.ViewJFramePaintVasculature
-
Defaults magnification of image to 1.
- zoom - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- zoom - Variable in class gov.nih.mipav.view.ViewJFrameRegistrationTool
-
DOCUMENT ME!
- zoom - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
Magnification for image.
- zoom() - Method in class gov.nih.mipav.view.renderer.WildMagic.PlaneRender_WM
-
- zoom() - Method in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.PlaneRenderProstate
-
- ZOOM - Static variable in interface gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.mouse.MouseBehaviorCallback
-
DOCUMENT ME!
- zoomDialog - Variable in class gov.nih.mipav.view.ViewJFrameImage
-
Reference to the magnification tool.
- zoomerLabel - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- zoomerSlider - Variable in class gov.nih.mipav.model.algorithms.Backpropagation.MainFrame
-
- zoomFactor - Variable in class gov.nih.mipav.model.algorithms.ContourPlot.CoordSysScrollZoom
-
- zoomInFrame(int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
this method will zoom in a particular frame.
- zoomInFrame(int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
this method will zoom in a particular frame.
- zoomInFrame(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
this method will zoom in a particular frame.
- ZOOMING_IN - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the cursor is in zoom in mode
- ZOOMING_OUT - Static variable in class gov.nih.mipav.view.ViewJComponentBase
-
Indicates the cursor is in zoom out mode
- zoomMode - Variable in class gov.nih.mipav.view.ViewJFrameBase
-
DOCUMENT ME!
- ZoomMode() - Constructor for enum gov.nih.mipav.view.dialogs.JDialogZoom.ZoomMode
-
- zoomOne() - Method in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
sets image zoom to 1
- zoomOne() - Method in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
sets image zoom to 1
- zoomOneButton - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
buttons *
- zoomOneButton - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
buttons *
- zoomOutFrame(int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalitySingleViewer
-
this method will zoom out a particular frame.
- zoomOutFrame(int) - Method in class gov.nih.mipav.view.ViewJFrameMultimodalityViewer
-
this method will zoom out a particular frame.
- zoomOutFrame(int) - Method in class gov.nih.mipav.view.ViewJFrameTriImage
-
this method will zoom out a particular frame.
- ZoomPhase(CeresSolver.FunctionSample, CeresSolver.FunctionSample, CeresSolver.FunctionSample, CeresSolver.FunctionSample, CeresSolver.LineSearchSummary) - Method in class gov.nih.mipav.model.algorithms.CeresSolver.WolfeLineSearch
-
- zoomX - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- zoomX - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- zoomX - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- zoomX - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- zoomY - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- zoomY - Variable in class gov.nih.mipav.view.ViewJComponentBase
-
DOCUMENT ME!
- zoomY - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationEM
-
DOCUMENT ME!
- zoomY - Variable in class gov.nih.mipav.view.ViewJComponentColocalizationRegression
-
DOCUMENT ME!
- zOp - Static variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
- zOp - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmIsophoteCurvature
-
- zOp - Static variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
- zOpacity - Variable in class gov.nih.mipav.view.renderer.SceneState
-
x, y, z triplanar opacity slider values.
- zOpacitySlice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
x, y, z opacity slider values.
- zOpacitySlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
x, y, z opacity slider values.
- zOrientA - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- zOrientB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegPatientPos
-
DOCUMENT ME!
- zPG - Variable in class gov.nih.mipav.view.ViewJComponentEditImage
-
Z coord of seed point.
- zPixelIncrement - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEntropyMinimization
-
Handle case where zDim is far less than xDim and yDim
- ZPLANE - Static variable in class gov.nih.mipav.model.structures.VOIBase
-
Used in determining if all points on the contour have the same z-value
- zPoint - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
- zPointInput - Variable in class gov.nih.mipav.view.dialogs.JDialogCropPointParam
-
- zPoints - Variable in class gov.nih.mipav.model.algorithms.AlgorithmArcLength
-
DOCUMENT ME!
- zPos - Variable in class gov.nih.mipav.model.file.FileICS
-
DOCUMENT ME!
- zPosition - Variable in class gov.nih.mipav.model.file.FileInfoLIFF
-
- zpow(double, double, double, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
b = z**a = exp(a*log(z))
- zpow(double, double, double, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.filters.PseudoPolarFourierTransform
-
b = z**a = exp(a*log(z))
- zpow(double, double, double, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
b = z**a = exp(a*log(z))
- ZPPQF - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ZPPQG - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- zProbe - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Probe x, y, z position.
- zProbe - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Probe x, y, z position.
- zptr - Variable in class gov.nih.mipav.model.file.CBZip2OutputStream
-
- zPts - Variable in class gov.nih.mipav.model.algorithms.registration.vabra.VabraSolver
-
- zPts - Variable in class gov.nih.mipav.model.structures.VOIBase
-
- zqcai(int) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zqcai(int) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zqcbh(int) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zqcbh(int) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zqcbi(int) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zqcbi(int) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zqcbj(int) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zqcbj(int) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zqcbk(int) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zqcbk(int) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- zqcby(int) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
DOCUMENT ME!
- zqcby(int) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
DOCUMENT ME!
- ZQUCA - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- zr - Variable in class gov.nih.mipav.model.algorithms.Bessel
-
zr and zi are the real and imaginary parts of the complex argument.
- zr - Variable in class gov.nih.mipav.model.algorithms.BesselEP
-
zr and zi are the real and imaginary parts of the complex argument.
- zr - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- zRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogDTICreateListFileRegOAR35DOptions
-
DOCUMENT ME!
- zRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationOAR3D
-
DOCUMENT ME!
- zrati(double, double, double, int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZRATI COMPUTES RATIOS OF I BESSEL FUNCTIONS BY BACKWARD RECURRENCE.
- zrati(DoubleDouble, DoubleDouble, DoubleDouble, int, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZRATI COMPUTES RATIOS OF I BESSEL FUNCTIONS BY BACKWARD RECURRENCE.
- zRes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmBrainSurfaceExtractor
-
The image resolution in the z dimension.
- zRes - Variable in class gov.nih.mipav.model.algorithms.AlgorithmStandardDeviationThreshold
-
resolutions
- zRes - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmBoundaryAttenuation
-
The image's z resolution.
- zRes - Variable in class gov.nih.mipav.model.file.FileCheshire
-
DOCUMENT ME!
- zRes - Variable in class gov.nih.mipav.model.file.FileSTK
-
DOCUMENT ME!
- zRes - Variable in class gov.nih.mipav.model.file.FileSVS
-
DOCUMENT ME!
- zRes - Variable in class gov.nih.mipav.model.file.FileTiff
-
DOCUMENT ME!
- zRes - Variable in class gov.nih.mipav.model.structures.ModelSimpleImage
-
Z voxel resolution.
- zRes - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
The resolutions of the (possibly respampled) image (the one shown in the renderer).
- zresA - Variable in class gov.nih.mipav.model.algorithms.DiffusionTensorImaging.AlgorithmDTICreateListFile
-
parameter for AlgorithmTransform
- zresA - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Resolutions of match image and base image.
- zresB - Variable in class gov.nih.mipav.model.algorithms.registration.AlgorithmRegChamfer
-
DOCUMENT ME!
- zresB - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationLeastSquares
-
Resolutions of match image and base image.
- zResol - Variable in class gov.nih.mipav.model.file.FileInterfile
-
DOCUMENT ME!
- ZRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileLSM
-
EchoTech Tiff TAGS.
- ZRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileSTK
-
EchoTech Tiff TAGS.
- ZRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileSVS
-
EchoTech Tiff TAGS.
- ZRESOLUTION - Static variable in class gov.nih.mipav.model.file.FileTiff
-
EchoTech Tiff TAGS.
- ZROTATION - Static variable in class gov.nih.mipav.view.input.spacenav.SpaceNavigatorController
-
- zRRadio - Variable in class gov.nih.mipav.view.dialogs.JDialogConstrainedOAR3D
-
DOCUMENT ME!
- zs - Variable in class gov.nih.mipav.model.algorithms.SchwarzChristoffelMapping.ODERectModel
-
- zs - Variable in class gov.nih.mipav.model.algorithms.SIFT3D.Image
-
- zs - Variable in class gov.nih.mipav.model.file.FileMGH
-
DOCUMENT ME!
- zs - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- zs1s2(double, double, double[], double[], double[], double[], int[], double, int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZS1S2 TESTS FOR A POSSIBLE UNDERFLOW RESULTING FROM THE ADDITION OF THE I AND K FUNCTIONS IN THE ANALYTIC CON-
TINUATION FORMULA WHERE S1=K FUNCTION AND S2=I FUNCTION.
- zs1s2(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], int[], DoubleDouble, int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZS1S2 TESTS FOR A POSSIBLE UNDERFLOW RESULTING FROM THE ADDITION OF THE I AND K FUNCTIONS IN THE ANALYTIC CON-
TINUATION FORMULA WHERE S1=K FUNCTION AND S2=I FUNCTION.
- zscal(int, double[], double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
Routine ported from 12/3/93 linpack dscal Original version written by Jack Dongarra Scales a vector by a
constant zscal scales a vector by a constant.
- zscore - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmHaralickTexture
-
If true, produce zscore output.
- zscore - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
If true, produce z score = (value - mean)/(standard deviation) output of Haralick features
- zscoreCheckBox - Variable in class gov.nih.mipav.view.dialogs.JDialogHaralickTexture
-
- zseri(double, double, double, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZSERI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE POWER SERIES FOR LARGE CABS(Z) IN THE
REGION CABS(Z).LE.2*SQRT(fnu+1).
- zseri(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZSERI COMPUTES THE I BESSEL FUNCTION FOR REAL(Z).GE.0.0 BY MEANS OF THE POWER SERIES FOR LARGE CABS(Z) IN THE
REGION CABS(Z).LE.2*SQRT(fnu+1).
- zshch(double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
zshch computes the complex hyperbolic functions csh = sinh(x+i*y) and cch = cosh(x+i*y).
- zshch(double, double, double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
zshch computes the complex hyperbolic functions csh = sinh(x+i*y) and cch = cosh(x+i*y).
- zshch(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
zshch computes the complex hyperbolic functions csh = sinh(x+i*y) and cch = cosh(x+i*y).
- zShow - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- zShow - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- zsin(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmEllipseToCircle
-
- zsin(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.EllipticIntegral
-
DOCUMENT ME!
- zSize - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- zSlice - Variable in class gov.nih.mipav.view.dialogs.DialogDTIColorDisplay
-
current z slice *
- zSlice - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Which slice is currently displayed in the XY plane.
- zSlice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.JPanelSlices
-
Which slice is currently displayed in the XY plane.
- zSlice - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SurfacePlotter
-
Z slice, which image of 1-100 are we showing.
- zSlice - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer
-
Which slice is currently displayed in the XY plane.
- zSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.DTI_FrameWork.DTIColorDisplay
-
current z slice *
- zSlice - Variable in class gov.nih.mipav.view.renderer.WildMagic.Interface.JPanelSlices_WM
-
Which slice is currently displayed in the XY plane.
- zSlice - Variable in class gov.nih.mipav.view.ViewJFrameAnimate
-
DOCUMENT ME!
- zSlice - Variable in class gov.nih.mipav.view.ViewJFrameAnimateClip
-
DOCUMENT ME!
- zSlice - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- ZSlice(float) - Method in class gov.nih.mipav.view.renderer.WildMagic.Render.VolumeHistogramEffect
-
- zSlice2 - Variable in class gov.nih.mipav.view.ViewJFrameRegistration
-
DOCUMENT ME!
- zSliceInv - Variable in class gov.nih.mipav.view.renderer.J3D.JPanelClip
-
Which slice is currently displayed in the XY plane.
- zSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogConvert4DtoRGB
-
num z slices for src image
- zSlices - Variable in class gov.nih.mipav.view.dialogs.JDialogSubset
-
DOCUMENT ME!
- zSliderS - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
slider that controls the probe moves along the z direction.
- ZSNCA - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- zSource - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- zSpace - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- zSpace - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- zsqrt(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModel2
-
complex square root b = csqrt(a).
- zsqrt(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.AlgorithmFRAP.FitFullModelqd
-
complex square root b = csqrt(a).
- zsqrt(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
complex square root b = csqrt(a).
- zsqrt(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Hypergeometric
-
complex square root b = csqrt(a).
- zsqrt(double, double, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.InverseLaplaceTest
-
complex square root b = csqrt(a).
- zsqrt(DoubleDouble, DoubleDouble, DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
complex square root b = csqrt(a).
- zStart - Variable in class gov.nih.mipav.model.algorithms.AlgorithmCostFunctions
-
- zStart - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
for Projection.
- zStart - Variable in class gov.nih.mipav.model.file.FileWriteOptions
-
DOCUMENT ME!
- zStart - Variable in class gov.nih.mipav.view.dialogs.JDialogCorrectSpacing
-
DOCUMENT ME!
- zStart - Variable in class gov.nih.mipav.view.dialogs.JDialogSaveMinc
-
DOCUMENT ME!
- zStdDev - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNLNoiseReduction
-
DOCUMENT ME!
- zStop - Variable in class gov.nih.mipav.model.file.FileInfoOME.OME.Image.DisplayOptions
-
- zString - Variable in class gov.nih.mipav.view.ViewJComponentAnimate
-
string for displaying slice number
- zString - Variable in class gov.nih.mipav.view.ViewJComponentAnimateClip
-
DOCUMENT ME!
- zsymv(char, int, double[], double[][][], int, double[][], int, double[], double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
LAPACK auxiliary routine version 3.7.0 December, 2016
This is a port of the 10/22/86 Blas routine ZSYMV Original code written by: Jack Dongarra, Argonne Nationa Lab.
- zTalLabel - Variable in class gov.nih.mipav.view.ViewJFrameTriImage
-
- zTar - Variable in class gov.nih.mipav.model.algorithms.AlgorithmTPSpline
-
DOCUMENT ME!
- zTar - Variable in class gov.nih.mipav.view.dialogs.JDialogRegistrationTPSpline
-
DOCUMENT ME!
- ZTC - Variable in class gov.nih.mipav.view.ViewOpenImageSequence
-
Int denoting ZTC sequence
- zText - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
burning point X, Y, Z coordinate text box.
- zTextEntry - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.rfaview.JPanelProbe
-
entry point X, Y, Z coordinate text box.
- ZTOB1(double[], double, int, boolean) - Method in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
- ztrmm(char, char, char, char, int, int, double[], double[][][], int, double[][][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of the 2/8/89 Blas level 3 routine ZTRMM Original code written by: Jack Dongarra, Argonne National
Laboratory Iain Duff, AERE Harwell.
- ztrmv(char, char, char, int, double[][][], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of the 10/22/86 blas routine ZTRMV Original version written by: Jack Dongarra, Argonne National
Lab.
- ztrsm(char, char, char, char, int, int, double[], double[][][], int, double[][][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of the 2/8/89 Blas routine ZTRSM Original code written by: Jack Dongarra, Argonne National
Laboratory Iain Duff, AERE Harwell.
- ztrsv(char, char, char, int, double[][][], int, double[][], int) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of the 10/22/86 Blas routine ZTRSV Original version written by: Jack Dongarra, Argonne National
Lab.
- ztrti2(char, char, int, double[][][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of LAPACK version routine 3.7.0 ZTRTI2.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., December 2016.
- ztrtri(char, char, int, double[][][], int, int[]) - Method in class gov.nih.mipav.model.structures.jama.ComplexLinearEquations
-
This is a port of LAPACK version routine 3.7.0 ZTRTRI.F created by the University of Tennessee, University
of California Berkeley, University of Colorado Denver, and NAG Ltd., December 2016.
- zTXt - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- zuchk(double, double, int[], double) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
Y ENTERS AS A SCALED QUANTITY WHOSE MAGNITUDE IS GREATER THAN EXP(-ALIM)=ASCLE=1.0E+3*D1MACH(1)/TOL.
- zuchk(DoubleDouble, DoubleDouble, int[], DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
Y ENTERS AS A SCALED QUANTITY WHOSE MAGNITUDE IS GREATER THAN EXP(-ALIM)=ASCLE=1.0E+3*D1MACH(1)/TOL.
- zunhj(double, double, double, int, double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
REFERENCES HANDBOOK OF MATHEMATICAL FUNCTIONS BY M.
- zunhj(DoubleDouble, DoubleDouble, DoubleDouble, int, DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
REFERENCES HANDBOOK OF MATHEMATICAL FUNCTIONS BY M.
- zuni1(double, double, double, int, int, double[], double[], int[], int[], double) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZUNI1 COMPUTES I(FNU,Z) BY MEANS OF THE UNIFORM ASYMPTOTIC EXPANSION FOR I(FNU,Z) IN -PI/3.LE.ARG Z.LE.PI/3.
- zuni1(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[], int[], DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZUNI1 COMPUTES I(FNU,Z) BY MEANS OF THE UNIFORM ASYMPTOTIC EXPANSION FOR I(FNU,Z) IN -PI/3.LE.ARG Z.LE.PI/3.
- zuni2(double, double, double, int, int, double[], double[], int[], int[], double) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZUNI2 COMPUTES I(FNU,Z) IN THE RIGHT HALF PLANE BY MEANS OF UNIFORM ASYMPTOTIC EXPANSION FOR J(FNU,ZN) WHERE ZN
IS Z*I OR -Z*I AND ZN IS IN THE RIGHT HALF PLANE ALSO.
- zuni2(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[], int[], DoubleDouble) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZUNI2 COMPUTES I(FNU,Z) IN THE RIGHT HALF PLANE BY MEANS OF UNIFORM ASYMPTOTIC EXPANSION FOR J(FNU,ZN) WHERE ZN
IS Z*I OR -Z*I AND ZN IS IN THE RIGHT HALF PLANE ALSO.
- zunik(double, double, double, int, int, int[], double[], double[], double[], double[], double[], double[], double[], double[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZUNIK COMPUTES PARAMETERS FOR THE UNIFORM ASYMPTOTIC EXPANSIONS OF THE I AND K FUNCTIONS ON IKFLG= 1 OR 2
RESPECTIVELY BY.
- zunik(DoubleDouble, DoubleDouble, DoubleDouble, int, int, int[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZUNIK COMPUTES PARAMETERS FOR THE UNIFORM ASYMPTOTIC EXPANSIONS OF THE I AND K FUNCTIONS ON IKFLG= 1 OR 2
RESPECTIVELY BY.
- zUnits - Variable in class gov.nih.mipav.view.dialogs.JDialogVOIStatistics
-
The units printed to the logModel, set in createNewLogile
- zunk1(double, double, double, int, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZUNK1 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSION.
- zunk1(DoubleDouble, DoubleDouble, DoubleDouble, int, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZUNK1 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSION.
- zunk2(double, double, double, int, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZUNK2 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR H(KIND,FNU,ZN) AND J(FNU,ZN) WHERE ZN IS IN THE RIGHT HALF PLANE,
KIND=(3-MR)/2, MR=+1 OR -1.
- zunk2(DoubleDouble, DoubleDouble, DoubleDouble, int, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZUNK2 COMPUTES K(FNU,Z) AND ITS ANALYTIC CONTINUATION FROM THE RIGHT HALF PLANE TO THE LEFT HALF PLANE BY MEANS
OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR H(KIND,FNU,ZN) AND J(FNU,ZN) WHERE ZN IS IN THE RIGHT HALF PLANE,
KIND=(3-MR)/2, MR=+1 OR -1.
- zuoik(double, double, double, int, int, int, double[], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
ZUOIK COMPUTES THE LEADING TERMS OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR THE I AND K FUNCTIONS AND COMPARES THEM
(IN LOGARITHMIC FORM) TO ALIM AND ELIM FOR OVER AND UNDERFLOW WHERE ALIM.LT.ELIM.
- zuoik(DoubleDouble, DoubleDouble, DoubleDouble, int, int, int, DoubleDouble[], DoubleDouble[], int[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
ZUOIK COMPUTES THE LEADING TERMS OF THE UNIFORM ASYMPTOTIC EXPANSIONS FOR THE I AND K FUNCTIONS AND COMPARES THEM
(IN LOGARITHMIC FORM) TO ALIM AND ELIM FOR OVER AND UNDERFLOW WHERE ALIM.LT.ELIM.
- zVector - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- ZVI - Static variable in class gov.nih.mipav.model.file.FileUtility
-
Zeiss ZVI has extension .zvi
- zVisible - Variable in class gov.nih.mipav.view.renderer.J3D.surfaceview.plotterview.SceneStatePlotter
-
DOCUMENT ME!
- zVisible - Variable in class gov.nih.mipav.view.renderer.J3D.volumeview.VolumeRenderer.SceneState
-
DOCUMENT ME!
- zVisible - Variable in class gov.nih.mipav.view.renderer.SceneState
-
Boolean visibility values for x, y, z triplanar.
- zviToMipavMeasurementUnits(int) - Method in class gov.nih.mipav.model.file.FileZVI
-
- zwrsk(double, double, double, int, int, double[], double[], int[], double[], double[]) - Method in class gov.nih.mipav.model.algorithms.Bessel
-
zwrsk computes the I Bessel function for Real(z) >- 0.0 by normalizing the I function ratios from zrati by the
Wronskian.
- zwrsk(DoubleDouble, DoubleDouble, DoubleDouble, int, int, DoubleDouble[], DoubleDouble[], int[], DoubleDouble[], DoubleDouble[]) - Method in class gov.nih.mipav.model.algorithms.BesselEP
-
zwrsk computes the I Bessel function for Real(z) >- 0.0 by normalizing the I function ratios from zrati by the
Wronskian.
- ZXDistanceStep - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- zXMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacian
-
Mask(unsigned byte) of the zero-crossings of the Laplacian of the gaussian.
- zXMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeLaplacianSep
-
Mask(unsigned byte) of the zero-crossings of the Laplacian of the gaussian.
- zXMask - Variable in class gov.nih.mipav.model.algorithms.AlgorithmEdgeNMSuppression
-
DOCUMENT ME!
- zXMask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmLaplacian
-
Mask(unsigned byte) of the zero-crossings of the Laplacian of the gaussian.
- zXMask - Variable in class gov.nih.mipav.model.algorithms.filters.AlgorithmNMSuppression
-
DOCUMENT ME!
- ZY - Static variable in class gov.nih.mipav.view.dialogs.JDialogPowerPaint
-
DOCUMENT ME!
- ZYDistanceStep - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- ZZDistanceStep - Variable in class gov.nih.mipav.view.renderer.WildMagic.GPURenderBase
-
- zzset - Variable in class gov.nih.mipav.model.algorithms.SymmsIntegralMapping
-
_
- __call__(double) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution.Tracker
-
- __dbl_cmp_asc(double[], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
static compare functions for the Sort() function
- __dbl_cmp_des(double[], double[]) - Static method in class gov.nih.mipav.view.renderer.WildMagic.AAM.CDVector
-
- __edgeNeighbor(int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- __edgeNeighbor(int[], int[], int[], int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- __faceNeighbor(int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- __faceNeighbor(int, int, int) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- __inf_norm(double[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- __inf_norm(double[][][]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- __ProcessFixedDepthNodeAdjacentNodes(int, int, int, OctNode, int, OctNode, int, int, int, NodeAdjacencyFunction) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- __ProcessMaxDepthNodeAdjacentNodes(int, int, int, OctNode, int, OctNode, int, int, int, NodeAdjacencyFunction) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- __ProcessNodeAdjacentNodes(int, int, int, OctNode, int, OctNode, int, int, NodeAdjacencyFunction) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- __processNodeEdges(OctNode, NodeAdjacencyFunction, int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- __processNodeFaces(OctNode, NodeAdjacencyFunction, int[], int[], int[], int[]) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- __processNodeNodes(OctNode, NodeAdjacencyFunction) - Method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- __ProcessPointAdjacentNodes(int, int, int, OctNode, int, int, PointAdjacencyFunction) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- __ProcessTerminatingNodeAdjacentNodes(int, int, int, OctNode, int, OctNode, int, int, TerminatingNodeAdjacencyFunction) - Static method in class gov.nih.mipav.view.renderer.WildMagic.Poisson.Octree.OctNode
-
- _age - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- _allowDecimalRepresentationOfRationals - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifDescriptorBase
-
Dictates whether rational values will be represented in decimal format in instances
where decimal notation is elegant (such as 1/2 -> 0.5, but not 1/3).
- _allowedBitDepths - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngColorType
-
- _array - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.DoubleArrayPointer
-
- _array - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.IntArrayPointer
-
- _baseOffset - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ByteArrayReader
-
- _baseOffset - Variable in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- _bayes_thresh(double[][], double) - Method in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- _bayes_thresh(double[][], double) - Method in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- _bitsPerSample - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- _blueX - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- _blueY - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- _buffer - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ByteArrayReader
-
- _bytes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunk
-
- _bytes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- _bytes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.SequentialByteArrayReader
-
- _bytes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.StringValue
-
- _call_(double[][], double[][][], boolean) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples.GMM
-
- _charset - Variable in class gov.nih.mipav.model.file.MetadataExtractor.StringValue
-
- _children - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie.ByteTrieNode
-
- _chunkLength - Variable in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- _chunks - Variable in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- _chunkType - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunk
-
- _circulant_multiply(double[][], double[][], String) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- _colorType - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- _componentId - Variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegComponent
-
- _componentSizeBytes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- _compressionType - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- _compute_bef(double[], int) - Method in class gov.nih.mipav.model.algorithms.ImageQuality
-
- _currentDirectory - Variable in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- _currentIndex - Variable in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- _custom_padd(int[], double[], int, int, double) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _czt(double[][], double[][], int, double[], double[]) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- _days - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- _daysInMonth365 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.DateUtil
-
- _decTable1 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
Nikon decryption tables used in exiftool
- _decTable2 - Variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- _definedTagList - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
A convenient list holding tag values in the order in which they were stored.
- _denominator - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Holds the denominator.
- _description - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngColorType
-
- _descriptor - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
The descriptor used to interpret tag values.
- _descriptor - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDescriptorTest
-
- _descriptor - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDescriptorTest
-
- _descriptor - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest1
-
- _desiredChunkTypes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngMetadataReader
-
- _directories - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Metadata
-
- _directory - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Tag
-
- _directory - Variable in class gov.nih.mipav.model.file.MetadataExtractor.TagDescriptor
-
- _directory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.DirectoryTest
-
- _directory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDescriptorTest
-
- _directory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.HuffmanTablesDirectoryTest
-
- _directory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.IptcDirectoryTest
-
- _directory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDescriptorTest
-
- _directory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDhtReaderTest
-
- _directory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegDirectoryTest
-
- _directory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.JpegReaderTest
-
- _directoryStack - Variable in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- _drawGMM_BG(Vector<double[][]>, Vector<double[][][]>, GaussianMixtureModelsIncompleteSamples.GMM, double, String, GaussianMixtureModelsIncompleteSamples.Background, Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- _EM(double[], int[], double[], GaussianMixtureModelsIncompleteSamples.GMM, double[][], int[][], double[][][][], double[], double[][], double[][][], double[][][], String, int, String, GaussianMixtureModelsIncompleteSamples.Background, double[][], double, double, int, int, double, String, boolean[], boolean[], boolean[], Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- _EMstep(double[], int[], double[], double[], GaussianMixtureModelsIncompleteSamples.GMM, double[][], int[][], double[][][][], double[], double, double[][], double[][][], double[][][], String, double[], int, String, GaussianMixtureModelsIncompleteSamples.Background, double[][], double, double, double, boolean[], boolean[], boolean[], int, Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- _endGrid() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- _errorList - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
- _Estep(GaussianMixtureModelsIncompleteSamples.GMM, double[][], int[][], double[][][][], double[], double[][], double[][][], double[][][], double[], GaussianMixtureModelsIncompleteSamples.Background, double[][], double, int, Random) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- _Esum(double[][], double[][][][], int, int[][], GaussianMixtureModelsIncompleteSamples.GMM, double[][], double[][][], double[][][], double) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- _exifIFD0Directory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType1MakernoteTest
-
- _exifIFD0Directory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest2
-
- _exifSubIFDDirectory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType1MakernoteTest
-
- _exifSubIFDDirectory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest2
-
- _extensions - Variable in enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- _ffi - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- _ffp - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- _fft(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- _file - Variable in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- _file - Variable in exception gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.InvalidInputDataException
-
- _filterMethod - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- _filters - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- _filters - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDescriptor
-
- _findSNMComponents(int[], boolean[], GaussianMixtureModelsIncompleteSamples.GMM, int[][], double[][], double[], double) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- _flags - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- _flags - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- _floatFormatPattern - Static variable in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
- _fvi - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- _fvp - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- _greenX - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- _greenY - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- _height - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- _hours - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- _identifiersAllowingMultiples - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- _ifft(double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- _imageHeight - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- _imageWidth - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- _index - Variable in class gov.nih.mipav.model.file.MetadataExtractor.SequentialByteArrayReader
-
- _inf_norm(double[][][], int) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _inf_norm(double[][], int) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _innerException - Variable in exception gov.nih.mipav.model.file.MetadataExtractor.CompoundException
-
- _integrate(double[], double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- _interlaceMethod - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngHeader
-
- _isMotorolaByteOrder - Variable in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessReader
-
- _isMotorolaByteOrder - Variable in class gov.nih.mipav.model.file.MetadataExtractor.SequentialReader
-
- _isStreamFinished - Variable in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- _JS(int, GaussianMixtureModelsIncompleteSamples.GMM, double[][], double[], int[][], double[]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- _key - Variable in class gov.nih.mipav.model.file.MetadataExtractor.KeyValuePair
-
- _knots - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Subpath
-
- _latin1Encoding - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngMetadataReader
-
- _latin1Encoding - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.PngDescriptorTest
-
- _latitude - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
- _length - Variable in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessFileReader
-
- _lengthBytes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- _lensTypeById - Variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDescriptor
-
Map from to string descriptions.
- _line - Variable in exception gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.InvalidInputDataException
-
- _longitude - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GeoLocation
-
- _longName - Variable in enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- _loops_deconv(double[], double[], double[][], double, long, boolean, long, double) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _maxDepth - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie
-
- _metadata - Variable in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- _metadata - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest2
-
- _mimeType - Variable in enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- _minutes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- _months - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- _Mstep(double[], double[][], double[][][], double[], GaussianMixtureModelsIncompleteSamples.GMM, int[][], double[][], double[][][][], double[], double[][], double[][][], double[][][], double[][]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- _Msums(double[], double[][], double[][][], int, int[][], double[][], double[][][][], GaussianMixtureModelsIncompleteSamples.GMM, double[][], double[][][], double[]) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- _multipleAllowed - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChunkType
-
- _n - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- _name - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- _name - Variable in enum gov.nih.mipav.model.file.MetadataExtractor.FileType
-
- _name - Variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- _nextShell() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- _nikonDirectory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType1MakernoteTest
-
- _nikonDirectory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest1
-
- _nikonDirectory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest2
-
- _numerator - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Rational
-
Holds the numerator.
- _numericValue - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngColorType
-
- _offset - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.DoubleArrayPointer
-
- _offset - Variable in class gov.nih.mipav.view.renderer.WildMagic.ProstateFramework.liblinearsvm.IntArrayPointer
-
- _olympusExtenderTypes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- _olympusLensTypes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDescriptor
-
- _p - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- _padd_assymetric(double[][], int[], double, String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _padd_assymetric(double[], int[], double, String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _padd_symetric(double[][], int, double, String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _padd_symetric(double[], int, double, String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _panasonicDirectory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.PanasonicMakernoteDescriptorTest
-
- _parent - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
- _pngChunkType - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- _points - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Knot
-
- _pos - Variable in class gov.nih.mipav.model.file.MetadataExtractor.StreamReader
-
- _primes - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.RationalTest
-
- _q - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- _quantizationTableNumber - Variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegComponent
-
- _randomAccessFile - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessFileReaderTest
-
- _redX - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- _redY - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- _root - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie
-
- _root3(double) - Method in class gov.nih.mipav.model.algorithms.Poly
-
- _rootParentDirectory - Variable in class gov.nih.mipav.model.file.MetadataExtractor.DirectoryTiffHandler
-
- _samplingFactorByte - Variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegComponent
-
- _sceneModes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDescriptor
-
- _seconds - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- _segmentDataMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegSegmentData
-
- _SIFT3D_extract_descriptors(SIFT3D.SIFT3DC, SIFT3D.Pyramid, SIFT3D.Keypoint_store, SIFT3D.SIFT3D_Descriptor_store) - Method in class gov.nih.mipav.model.algorithms.SIFT3D
-
- _sigma_est_dwt(double[][], String) - Method in class gov.nih.mipav.model.algorithms.filters.MultiGuidedFilter
-
- _sigma_est_dwt(double[][], String) - Method in class gov.nih.mipav.model.algorithms.filters.MultiResolutionBilateralFilter
-
- _sign(double[][], double[][]) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- _signal_model(double[]) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- _skew_circulant_multiply(double[][], double[][], String) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- _soft(double[][], double[][], double) - Method in class gov.nih.mipav.model.algorithms.filters.PyWavelets
-
- _stream - Variable in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- _stream - Variable in class gov.nih.mipav.model.file.MetadataExtractor.StreamReader
-
- _streamLength - Variable in class gov.nih.mipav.model.file.MetadataExtractor.RandomAccessStreamReader
-
- _substitution - Variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyEncodedDataDirectoryBase
-
- _tableClass - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- _tableDestinationId - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- _tableLength - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- _tagMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Directory
-
Map of values hashed by type identifiers.
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.AdobeJpegDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.AppleRunTimeMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.BmpHeaderDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.CanonMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType1MakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.CasioType2MakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.DuckyDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifIFD0Directory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifImageDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifInteropDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifSubIFDDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ExifThumbnailDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.FileSystemDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.FujifilmMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GifAnimationDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GifCommentDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GifControlDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GifHeaderDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GifImageDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.GpsDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.IccDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.IptcDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.JfifDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.JfxxDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegCommentDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.JpegDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.KodakMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.KyoceraMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.LeicaType5MakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType1MakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.NikonType2MakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusEquipmentMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusFocusInfoMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusImageProcessingMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopment2MakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawDevelopmentMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusRawInfoMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawDistortionDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawIFD0Directory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfo2Directory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PanasonicRawWbInfoDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PentaxMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PhotoshopDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticitiesDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PrintIMDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PsdHeaderDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFire2MakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxHyperFireMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ReconyxUltraFireMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.RicohMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.SamsungType2MakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.SanyoMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.SigmaMakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyTag9050bDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType1MakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractor.SonyType6MakernoteDirectory
-
- _tagNameMap - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.MockDirectory
-
- _tagType - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Tag
-
- _tempFile - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.RandomAccessFileReaderTest
-
- _test_conv_adj_fourier_hrf(double[], double[], String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _test_conv_adj_toeplitz_kernel_hrf(double[], double[], String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _test_conv_adj_toeplitz_kernel_signal(double[], double[], String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _test_conv_fourier_kernel_hrf(double[], double[], String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _test_conv_toeplitz_kernel_hrf(double[], double[], String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _test_conv_toeplitz_kernel_signal(double[], double[], String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _test_data(double[], double[], double[], double[], double[], double[], double, int, String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _thumbDirectory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType1MakernoteTest
-
- _thumbDirectory - Variable in class gov.nih.mipav.model.file.MetadataExtractorTest.NikonType2MakernoteTest2
-
- _tiffFormatCode - Variable in class gov.nih.mipav.model.file.MetadataExtractor.TiffDataFormat
-
- _toeplitz_mult_ce(double[][], double[][], double[][], String) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- _toeplitz_mult_pd(double[][], double[][], double[][], String) - Method in class gov.nih.mipav.model.algorithms.filters.ChirpZTransform
-
- _toneLevelType - Variable in class gov.nih.mipav.model.file.MetadataExtractor.OlympusCameraSettingsMakernoteDescriptor
-
- _type - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Knot
-
- _type - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Subpath
-
- _unpadd_assymetric(double[][], int[], String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _unpadd_assymetric(double[], int[], String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _unpadd_symetric(double[][], int, String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _unpadd_symetric(double[], int, String) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
- _update(GaussianMixtureModelsIncompleteSamples.GMM, double[], double[][], double[][][], int[], double[], double[], double[][], double[][][], double[], double[], double, boolean[], boolean[], boolean[], GaussianMixtureModelsIncompleteSamples.Background) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- _update_snm(GaussianMixtureModelsIncompleteSamples.GMM, int[], int[][], double, boolean) - Method in class gov.nih.mipav.model.algorithms.GaussianMixtureModelsIncompleteSamples
-
- _UpdateRadius() - Method in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.ClosestIterator
-
- _value - Variable in class gov.nih.mipav.model.file.MetadataExtractor.ByteTrie.ByteTrieNode
-
- _value - Variable in class gov.nih.mipav.model.file.MetadataExtractor.KeyValuePair
-
- _valueBytes - Variable in class gov.nih.mipav.model.file.MetadataExtractor.HuffmanTablesDirectory.HuffmanTable
-
- _vfb - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- _vfi - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Vertex
-
- _vl_covdet_check_frame_inside(Covdet.VlCovDet, Covdet.VlFrameOrientedEllipse, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- _vl_covdet_compare_orientations_descending(Covdet.VlCovDetFeatureOrientation, Covdet.VlCovDetFeatureOrientation) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- _vl_det_hessian_response(float[], int, float[], int, int, int, double, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- _vl_dog_response(float[], int, float[], int, float[], int, int, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- _vl_harris_response(float[], int, float[], int, int, int, double, double, double, double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- _vl_new_gaussian_fitler_f(int[], double) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- _vl_scalespace_fill_octave(Covdet.VlScaleSpace, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- _vl_scalespace_start_octave_from_image(Covdet.VlScaleSpace, float[], int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
------------------------------------------------------------------
- _vl_scalespace_start_octave_from_previous_octave(Covdet.VlScaleSpace, int) - Method in class gov.nih.mipav.model.algorithms.Covdet
-
- _vl_sift_smooth(SIFT.VlSiftFilt, float[], int, float[], float[], int, int, int, double) - Method in class gov.nih.mipav.model.algorithms.SIFT
-
------------------------------------------------------------------
- _vl_svm_evaluate(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- _vl_svm_sdca_train(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- _vl_svm_sgd_train(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- _vl_svm_update_statistics(SVM.VlSvm) - Method in class gov.nih.mipav.model.algorithms.SVM
-
- _whitePointX - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- _whitePointY - Variable in class gov.nih.mipav.model.file.MetadataExtractor.PngChromaticities
-
- _width - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- _wn - Variable in class gov.nih.mipav.view.renderer.WildMagic.BallPivoting.Face
-
- _x - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- _y - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Face
-
- _years - Variable in class gov.nih.mipav.model.file.MetadataExtractor.Age
-
- _yield_data(double[][], double[][], double[][], double[][], double[][], double[][], double[], int[]) - Method in class gov.nih.mipav.model.algorithms.fMRIBlindDeconvolution
-
A B C D E F G H I J K L M N O P Q R S T U V W X Y Z _ All Classes All Packages
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������index.html������������������������������������������������������������������������������������������0000775�4231163�4231163�00000047026�14537076136�013273� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
Overview (MIPAV API Documentation)
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������jquery/���������������������������������������������������������������������������������������������0002775�4231163�4231163�00000000000�14537076137�012604� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������jquery/jszip-utils/���������������������������������������������������������������������������������0002775�4231163�4231163�00000000000�14537076137�015101� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������jquery/jszip-utils/dist/����������������������������������������������������������������������������0002775�4231163�4231163�00000000000�14537076137�016044� 5����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������jquery/jszip-utils/dist/jszip-utils-ie.min.js�������������������������������������������������������0000775�4231163�4231163�00000003112�14537076137�022052� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/*!
JSZipUtils - A collection of cross-browser utilities to go along with JSZip.
(c) 2014 Stuart Knightley, David Duponchel
Dual licenced under the MIT license or GPLv3. See https://raw.github.com/Stuk/jszip-utils/master/LICENSE.markdown.
*/
!function a(b,c,d){function e(g,h){if(!c[g]){if(!b[g]){var i="function"==typeof require&&require;if(!h&&i)return i(g,!0);if(f)return f(g,!0);throw new Error("Cannot find module '"+g+"'")}var j=c[g]={exports:{}};b[g][0].call(j.exports,function(a){var c=b[g][1][a];return e(c?c:a)},j,j.exports,a,b,c,d)}return c[g].exports}for(var f="function"==typeof require&&require,g=0;g\r\n";document.write(b),a.JSZipUtils._getBinaryFromXHR=function(a){for(var b=a.responseBody,c={},d=0;256>d;d++)for(var e=0;256>e;e++)c[String.fromCharCode(d+(e<<8))]=String.fromCharCode(d)+String.fromCharCode(e);var f=IEBinaryToArray_ByteStr(b),g=IEBinaryToArray_ByteStr_Last(b);return f.replace(/[\s\S]/g,function(a){return c[a]})+g}},{}]},{},[1]);
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������jquery/jszip-utils/dist/jszip-utils.js��������������������������������������������������������������0000775�4231163�4231163�00000010603�14537076137�020700� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/*!
JSZipUtils - A collection of cross-browser utilities to go along with JSZip.
(c) 2014 Stuart Knightley, David Duponchel
Dual licenced under the MIT license or GPLv3. See https://raw.github.com/Stuk/jszip-utils/master/LICENSE.markdown.
*/
!function(e){"object"==typeof exports?module.exports=e():"function"==typeof define&&define.amd?define(e):"undefined"!=typeof window?window.JSZipUtils=e():"undefined"!=typeof global?global.JSZipUtils=e():"undefined"!=typeof self&&(self.JSZipUtils=e())}(function(){var define,module,exports;return (function e(t,n,r){function s(o,u){if(!n[o]){if(!t[o]){var a=typeof require=="function"&&require;if(!u&&a)return a(o,!0);if(i)return i(o,!0);throw new Error("Cannot find module '"+o+"'")}var f=n[o]={exports:{}};t[o][0].call(f.exports,function(e){var n=t[o][1][e];return s(n?n:e)},f,f.exports,e,t,n,r)}return n[o].exports}var i=typeof require=="function"&&require;for(var o=0;o
(c) 2014 Stuart Knightley, David Duponchel
Dual licenced under the MIT license or GPLv3. See https://raw.github.com/Stuk/jszip-utils/master/LICENSE.markdown.
*/
!function(a){"object"==typeof exports?module.exports=a():"function"==typeof define&&define.amd?define(a):"undefined"!=typeof window?window.JSZipUtils=a():"undefined"!=typeof global?global.JSZipUtils=a():"undefined"!=typeof self&&(self.JSZipUtils=a())}(function(){return function a(b,c,d){function e(g,h){if(!c[g]){if(!b[g]){var i="function"==typeof require&&require;if(!h&&i)return i(g,!0);if(f)return f(g,!0);throw new Error("Cannot find module '"+g+"'")}var j=c[g]={exports:{}};b[g][0].call(j.exports,function(a){var c=b[g][1][a];return e(c?c:a)},j,j.exports,a,b,c,d)}return c[g].exports}for(var f="function"==typeof require&&require,g=0;g
(c) 2014 Stuart Knightley, David Duponchel
Dual licenced under the MIT license or GPLv3. See https://raw.github.com/Stuk/jszip-utils/master/LICENSE.markdown.
*/
;(function e(t,n,r){function s(o,u){if(!n[o]){if(!t[o]){var a=typeof require=="function"&&require;if(!u&&a)return a(o,!0);if(i)return i(o,!0);throw new Error("Cannot find module '"+o+"'")}var f=n[o]={exports:{}};t[o][0].call(f.exports,function(e){var n=t[o][1][e];return s(n?n:e)},f,f.exports,e,t,n,r)}return n[o].exports}var i=typeof require=="function"&&require;for(var o=0;o\r\n"+
"Function IEBinaryToArray_ByteStr(Binary)\r\n"+
" IEBinaryToArray_ByteStr = CStr(Binary)\r\n"+
"End Function\r\n"+
"Function IEBinaryToArray_ByteStr_Last(Binary)\r\n"+
" Dim lastIndex\r\n"+
" lastIndex = LenB(Binary)\r\n"+
" if lastIndex mod 2 Then\r\n"+
" IEBinaryToArray_ByteStr_Last = Chr( AscB( MidB( Binary, lastIndex, 1 ) ) )\r\n"+
" Else\r\n"+
" IEBinaryToArray_ByteStr_Last = "+'""'+"\r\n"+
" End If\r\n"+
"End Function\r\n"+
"\r\n";
// inject VBScript
document.write(IEBinaryToArray_ByteStr_Script);
global.JSZipUtils._getBinaryFromXHR = function (xhr) {
var binary = xhr.responseBody;
var byteMapping = {};
for ( var i = 0; i < 256; i++ ) {
for ( var j = 0; j < 256; j++ ) {
byteMapping[ String.fromCharCode( i + (j << 8) ) ] =
String.fromCharCode(i) + String.fromCharCode(j);
}
}
var rawBytes = IEBinaryToArray_ByteStr(binary);
var lastChr = IEBinaryToArray_ByteStr_Last(binary);
return rawBytes.replace(/[\s\S]/g, function( match ) {
return byteMapping[match];
}) + lastChr;
};
// enforcing Stuk's coding style
// vim: set shiftwidth=4 softtabstop=4:
},{}]},{},[1])
;
��������������������������������������������������������������������������������������������������������������������jquery/jquery-ui.min.css����������������������������������������������������������������������������0000775�4231163�4231163�00000003462�14537076137�016040� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/*! jQuery UI - v1.13.2 - 2023-02-27
* http://jqueryui.com
* Includes: core.css, autocomplete.css, menu.css
* Copyright jQuery Foundation and other contributors; Licensed MIT */
.ui-helper-hidden{display:none}.ui-helper-hidden-accessible{border:0;clip:rect(0 0 0 0);height:1px;margin:-1px;overflow:hidden;padding:0;position:absolute;width:1px}.ui-helper-reset{margin:0;padding:0;border:0;outline:0;line-height:1.3;text-decoration:none;font-size:100%;list-style:none}.ui-helper-clearfix:before,.ui-helper-clearfix:after{content:"";display:table;border-collapse:collapse}.ui-helper-clearfix:after{clear:both}.ui-helper-zfix{width:100%;height:100%;top:0;left:0;position:absolute;opacity:0;-ms-filter:"alpha(opacity=0)"}.ui-front{z-index:100}.ui-state-disabled{cursor:default!important;pointer-events:none}.ui-icon{display:inline-block;vertical-align:middle;margin-top:-.25em;position:relative;text-indent:-99999px;overflow:hidden;background-repeat:no-repeat}.ui-widget-icon-block{left:50%;margin-left:-8px;display:block}.ui-widget-overlay{position:fixed;top:0;left:0;width:100%;height:100%}.ui-autocomplete{position:absolute;top:0;left:0;cursor:default}.ui-menu{list-style:none;padding:0;margin:0;display:block;outline:0}.ui-menu .ui-menu{position:absolute}.ui-menu .ui-menu-item{margin:0;cursor:pointer;list-style-image:url("data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7")}.ui-menu .ui-menu-item-wrapper{position:relative;padding:3px 1em 3px .4em}.ui-menu .ui-menu-divider{margin:5px 0;height:0;font-size:0;line-height:0;border-width:1px 0 0 0}.ui-menu .ui-state-focus,.ui-menu .ui-state-active{margin:-1px}.ui-menu-icons{position:relative}.ui-menu-icons .ui-menu-item-wrapper{padding-left:2em}.ui-menu .ui-icon{position:absolute;top:0;bottom:0;left:.2em;margin:auto 0}.ui-menu .ui-menu-icon{left:auto;right:0}��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������jquery/jquery-3.6.1.min.js��������������������������������������������������������������������������0000775�4231163�4231163�00000257100�14537076137�015714� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/*! jQuery v3.6.1 | (c) OpenJS Foundation and other contributors | jquery.org/license */
!function(e,t){"use strict";"object"==typeof module&&"object"==typeof module.exports?module.exports=e.document?t(e,!0):function(e){if(!e.document)throw new Error("jQuery requires a window with a document");return t(e)}:t(e)}("undefined"!=typeof window?window:this,function(C,e){"use strict";var t=[],r=Object.getPrototypeOf,s=t.slice,g=t.flat?function(e){return t.flat.call(e)}:function(e){return t.concat.apply([],e)},u=t.push,i=t.indexOf,n={},o=n.toString,y=n.hasOwnProperty,a=y.toString,l=a.call(Object),v={},m=function(e){return"function"==typeof e&&"number"!=typeof e.nodeType&&"function"!=typeof e.item},x=function(e){return null!=e&&e===e.window},E=C.document,c={type:!0,src:!0,nonce:!0,noModule:!0};function b(e,t,n){var r,i,o=(n=n||E).createElement("script");if(o.text=e,t)for(r in c)(i=t[r]||t.getAttribute&&t.getAttribute(r))&&o.setAttribute(r,i);n.head.appendChild(o).parentNode.removeChild(o)}function w(e){return null==e?e+"":"object"==typeof e||"function"==typeof e?n[o.call(e)]||"object":typeof e}var f="3.6.1",S=function(e,t){return new S.fn.init(e,t)};function p(e){var t=!!e&&"length"in e&&e.length,n=w(e);return!m(e)&&!x(e)&&("array"===n||0===t||"number"==typeof t&&0+~]|"+M+")"+M+"*"),U=new RegExp(M+"|>"),X=new RegExp(F),V=new RegExp("^"+I+"$"),G={ID:new RegExp("^#("+I+")"),CLASS:new RegExp("^\\.("+I+")"),TAG:new RegExp("^("+I+"|[*])"),ATTR:new RegExp("^"+W),PSEUDO:new RegExp("^"+F),CHILD:new RegExp("^:(only|first|last|nth|nth-last)-(child|of-type)(?:\\("+M+"*(even|odd|(([+-]|)(\\d*)n|)"+M+"*(?:([+-]|)"+M+"*(\\d+)|))"+M+"*\\)|)","i"),bool:new RegExp("^(?:"+R+")$","i"),needsContext:new RegExp("^"+M+"*[>+~]|:(even|odd|eq|gt|lt|nth|first|last)(?:\\("+M+"*((?:-\\d)?\\d*)"+M+"*\\)|)(?=[^-]|$)","i")},Y=/HTML$/i,Q=/^(?:input|select|textarea|button)$/i,J=/^h\d$/i,K=/^[^{]+\{\s*\[native \w/,Z=/^(?:#([\w-]+)|(\w+)|\.([\w-]+))$/,ee=/[+~]/,te=new RegExp("\\\\[\\da-fA-F]{1,6}"+M+"?|\\\\([^\\r\\n\\f])","g"),ne=function(e,t){var n="0x"+e.slice(1)-65536;return t||(n<0?String.fromCharCode(n+65536):String.fromCharCode(n>>10|55296,1023&n|56320))},re=/([\0-\x1f\x7f]|^-?\d)|^-$|[^\0-\x1f\x7f-\uFFFF\w-]/g,ie=function(e,t){return t?"\0"===e?"\ufffd":e.slice(0,-1)+"\\"+e.charCodeAt(e.length-1).toString(16)+" ":"\\"+e},oe=function(){T()},ae=be(function(e){return!0===e.disabled&&"fieldset"===e.nodeName.toLowerCase()},{dir:"parentNode",next:"legend"});try{H.apply(t=O.call(p.childNodes),p.childNodes),t[p.childNodes.length].nodeType}catch(e){H={apply:t.length?function(e,t){L.apply(e,O.call(t))}:function(e,t){var n=e.length,r=0;while(e[n++]=t[r++]);e.length=n-1}}}function se(t,e,n,r){var i,o,a,s,u,l,c,f=e&&e.ownerDocument,p=e?e.nodeType:9;if(n=n||[],"string"!=typeof t||!t||1!==p&&9!==p&&11!==p)return n;if(!r&&(T(e),e=e||C,E)){if(11!==p&&(u=Z.exec(t)))if(i=u[1]){if(9===p){if(!(a=e.getElementById(i)))return n;if(a.id===i)return n.push(a),n}else if(f&&(a=f.getElementById(i))&&v(e,a)&&a.id===i)return n.push(a),n}else{if(u[2])return H.apply(n,e.getElementsByTagName(t)),n;if((i=u[3])&&d.getElementsByClassName&&e.getElementsByClassName)return H.apply(n,e.getElementsByClassName(i)),n}if(d.qsa&&!N[t+" "]&&(!y||!y.test(t))&&(1!==p||"object"!==e.nodeName.toLowerCase())){if(c=t,f=e,1===p&&(U.test(t)||z.test(t))){(f=ee.test(t)&&ve(e.parentNode)||e)===e&&d.scope||((s=e.getAttribute("id"))?s=s.replace(re,ie):e.setAttribute("id",s=S)),o=(l=h(t)).length;while(o--)l[o]=(s?"#"+s:":scope")+" "+xe(l[o]);c=l.join(",")}try{return H.apply(n,f.querySelectorAll(c)),n}catch(e){N(t,!0)}finally{s===S&&e.removeAttribute("id")}}}return g(t.replace(B,"$1"),e,n,r)}function ue(){var r=[];return function e(t,n){return r.push(t+" ")>b.cacheLength&&delete e[r.shift()],e[t+" "]=n}}function le(e){return e[S]=!0,e}function ce(e){var t=C.createElement("fieldset");try{return!!e(t)}catch(e){return!1}finally{t.parentNode&&t.parentNode.removeChild(t),t=null}}function fe(e,t){var n=e.split("|"),r=n.length;while(r--)b.attrHandle[n[r]]=t}function pe(e,t){var n=t&&e,r=n&&1===e.nodeType&&1===t.nodeType&&e.sourceIndex-t.sourceIndex;if(r)return r;if(n)while(n=n.nextSibling)if(n===t)return-1;return e?1:-1}function de(t){return function(e){return"input"===e.nodeName.toLowerCase()&&e.type===t}}function he(n){return function(e){var t=e.nodeName.toLowerCase();return("input"===t||"button"===t)&&e.type===n}}function ge(t){return function(e){return"form"in e?e.parentNode&&!1===e.disabled?"label"in e?"label"in e.parentNode?e.parentNode.disabled===t:e.disabled===t:e.isDisabled===t||e.isDisabled!==!t&&ae(e)===t:e.disabled===t:"label"in e&&e.disabled===t}}function ye(a){return le(function(o){return o=+o,le(function(e,t){var n,r=a([],e.length,o),i=r.length;while(i--)e[n=r[i]]&&(e[n]=!(t[n]=e[n]))})})}function ve(e){return e&&"undefined"!=typeof e.getElementsByTagName&&e}for(e in d=se.support={},i=se.isXML=function(e){var t=e&&e.namespaceURI,n=e&&(e.ownerDocument||e).documentElement;return!Y.test(t||n&&n.nodeName||"HTML")},T=se.setDocument=function(e){var t,n,r=e?e.ownerDocument||e:p;return r!=C&&9===r.nodeType&&r.documentElement&&(a=(C=r).documentElement,E=!i(C),p!=C&&(n=C.defaultView)&&n.top!==n&&(n.addEventListener?n.addEventListener("unload",oe,!1):n.attachEvent&&n.attachEvent("onunload",oe)),d.scope=ce(function(e){return a.appendChild(e).appendChild(C.createElement("div")),"undefined"!=typeof e.querySelectorAll&&!e.querySelectorAll(":scope fieldset div").length}),d.attributes=ce(function(e){return e.className="i",!e.getAttribute("className")}),d.getElementsByTagName=ce(function(e){return e.appendChild(C.createComment("")),!e.getElementsByTagName("*").length}),d.getElementsByClassName=K.test(C.getElementsByClassName),d.getById=ce(function(e){return a.appendChild(e).id=S,!C.getElementsByName||!C.getElementsByName(S).length}),d.getById?(b.filter.ID=function(e){var t=e.replace(te,ne);return function(e){return e.getAttribute("id")===t}},b.find.ID=function(e,t){if("undefined"!=typeof t.getElementById&&E){var n=t.getElementById(e);return n?[n]:[]}}):(b.filter.ID=function(e){var n=e.replace(te,ne);return function(e){var t="undefined"!=typeof e.getAttributeNode&&e.getAttributeNode("id");return t&&t.value===n}},b.find.ID=function(e,t){if("undefined"!=typeof t.getElementById&&E){var n,r,i,o=t.getElementById(e);if(o){if((n=o.getAttributeNode("id"))&&n.value===e)return[o];i=t.getElementsByName(e),r=0;while(o=i[r++])if((n=o.getAttributeNode("id"))&&n.value===e)return[o]}return[]}}),b.find.TAG=d.getElementsByTagName?function(e,t){return"undefined"!=typeof t.getElementsByTagName?t.getElementsByTagName(e):d.qsa?t.querySelectorAll(e):void 0}:function(e,t){var n,r=[],i=0,o=t.getElementsByTagName(e);if("*"===e){while(n=o[i++])1===n.nodeType&&r.push(n);return r}return o},b.find.CLASS=d.getElementsByClassName&&function(e,t){if("undefined"!=typeof t.getElementsByClassName&&E)return t.getElementsByClassName(e)},s=[],y=[],(d.qsa=K.test(C.querySelectorAll))&&(ce(function(e){var t;a.appendChild(e).innerHTML="",e.querySelectorAll("[msallowcapture^='']").length&&y.push("[*^$]="+M+"*(?:''|\"\")"),e.querySelectorAll("[selected]").length||y.push("\\["+M+"*(?:value|"+R+")"),e.querySelectorAll("[id~="+S+"-]").length||y.push("~="),(t=C.createElement("input")).setAttribute("name",""),e.appendChild(t),e.querySelectorAll("[name='']").length||y.push("\\["+M+"*name"+M+"*="+M+"*(?:''|\"\")"),e.querySelectorAll(":checked").length||y.push(":checked"),e.querySelectorAll("a#"+S+"+*").length||y.push(".#.+[+~]"),e.querySelectorAll("\\\f"),y.push("[\\r\\n\\f]")}),ce(function(e){e.innerHTML="";var t=C.createElement("input");t.setAttribute("type","hidden"),e.appendChild(t).setAttribute("name","D"),e.querySelectorAll("[name=d]").length&&y.push("name"+M+"*[*^$|!~]?="),2!==e.querySelectorAll(":enabled").length&&y.push(":enabled",":disabled"),a.appendChild(e).disabled=!0,2!==e.querySelectorAll(":disabled").length&&y.push(":enabled",":disabled"),e.querySelectorAll("*,:x"),y.push(",.*:")})),(d.matchesSelector=K.test(c=a.matches||a.webkitMatchesSelector||a.mozMatchesSelector||a.oMatchesSelector||a.msMatchesSelector))&&ce(function(e){d.disconnectedMatch=c.call(e,"*"),c.call(e,"[s!='']:x"),s.push("!=",F)}),y=y.length&&new RegExp(y.join("|")),s=s.length&&new RegExp(s.join("|")),t=K.test(a.compareDocumentPosition),v=t||K.test(a.contains)?function(e,t){var n=9===e.nodeType?e.documentElement:e,r=t&&t.parentNode;return e===r||!(!r||1!==r.nodeType||!(n.contains?n.contains(r):e.compareDocumentPosition&&16&e.compareDocumentPosition(r)))}:function(e,t){if(t)while(t=t.parentNode)if(t===e)return!0;return!1},j=t?function(e,t){if(e===t)return l=!0,0;var n=!e.compareDocumentPosition-!t.compareDocumentPosition;return n||(1&(n=(e.ownerDocument||e)==(t.ownerDocument||t)?e.compareDocumentPosition(t):1)||!d.sortDetached&&t.compareDocumentPosition(e)===n?e==C||e.ownerDocument==p&&v(p,e)?-1:t==C||t.ownerDocument==p&&v(p,t)?1:u?P(u,e)-P(u,t):0:4&n?-1:1)}:function(e,t){if(e===t)return l=!0,0;var n,r=0,i=e.parentNode,o=t.parentNode,a=[e],s=[t];if(!i||!o)return e==C?-1:t==C?1:i?-1:o?1:u?P(u,e)-P(u,t):0;if(i===o)return pe(e,t);n=e;while(n=n.parentNode)a.unshift(n);n=t;while(n=n.parentNode)s.unshift(n);while(a[r]===s[r])r++;return r?pe(a[r],s[r]):a[r]==p?-1:s[r]==p?1:0}),C},se.matches=function(e,t){return se(e,null,null,t)},se.matchesSelector=function(e,t){if(T(e),d.matchesSelector&&E&&!N[t+" "]&&(!s||!s.test(t))&&(!y||!y.test(t)))try{var n=c.call(e,t);if(n||d.disconnectedMatch||e.document&&11!==e.document.nodeType)return n}catch(e){N(t,!0)}return 0":{dir:"parentNode",first:!0}," ":{dir:"parentNode"},"+":{dir:"previousSibling",first:!0},"~":{dir:"previousSibling"}},preFilter:{ATTR:function(e){return e[1]=e[1].replace(te,ne),e[3]=(e[3]||e[4]||e[5]||"").replace(te,ne),"~="===e[2]&&(e[3]=" "+e[3]+" "),e.slice(0,4)},CHILD:function(e){return e[1]=e[1].toLowerCase(),"nth"===e[1].slice(0,3)?(e[3]||se.error(e[0]),e[4]=+(e[4]?e[5]+(e[6]||1):2*("even"===e[3]||"odd"===e[3])),e[5]=+(e[7]+e[8]||"odd"===e[3])):e[3]&&se.error(e[0]),e},PSEUDO:function(e){var t,n=!e[6]&&e[2];return G.CHILD.test(e[0])?null:(e[3]?e[2]=e[4]||e[5]||"":n&&X.test(n)&&(t=h(n,!0))&&(t=n.indexOf(")",n.length-t)-n.length)&&(e[0]=e[0].slice(0,t),e[2]=n.slice(0,t)),e.slice(0,3))}},filter:{TAG:function(e){var t=e.replace(te,ne).toLowerCase();return"*"===e?function(){return!0}:function(e){return e.nodeName&&e.nodeName.toLowerCase()===t}},CLASS:function(e){var t=m[e+" "];return t||(t=new RegExp("(^|"+M+")"+e+"("+M+"|$)"))&&m(e,function(e){return t.test("string"==typeof e.className&&e.className||"undefined"!=typeof e.getAttribute&&e.getAttribute("class")||"")})},ATTR:function(n,r,i){return function(e){var t=se.attr(e,n);return null==t?"!="===r:!r||(t+="","="===r?t===i:"!="===r?t!==i:"^="===r?i&&0===t.indexOf(i):"*="===r?i&&-1:\x20\t\r\n\f]*)[\x20\t\r\n\f]*\/?>(?:<\/\1>|)$/i;function j(e,n,r){return m(n)?S.grep(e,function(e,t){return!!n.call(e,t,e)!==r}):n.nodeType?S.grep(e,function(e){return e===n!==r}):"string"!=typeof n?S.grep(e,function(e){return-1)[^>]*|#([\w-]+))$/;(S.fn.init=function(e,t,n){var r,i;if(!e)return this;if(n=n||D,"string"==typeof e){if(!(r="<"===e[0]&&">"===e[e.length-1]&&3<=e.length?[null,e,null]:q.exec(e))||!r[1]&&t)return!t||t.jquery?(t||n).find(e):this.constructor(t).find(e);if(r[1]){if(t=t instanceof S?t[0]:t,S.merge(this,S.parseHTML(r[1],t&&t.nodeType?t.ownerDocument||t:E,!0)),N.test(r[1])&&S.isPlainObject(t))for(r in t)m(this[r])?this[r](t[r]):this.attr(r,t[r]);return this}return(i=E.getElementById(r[2]))&&(this[0]=i,this.length=1),this}return e.nodeType?(this[0]=e,this.length=1,this):m(e)?void 0!==n.ready?n.ready(e):e(S):S.makeArray(e,this)}).prototype=S.fn,D=S(E);var L=/^(?:parents|prev(?:Until|All))/,H={children:!0,contents:!0,next:!0,prev:!0};function O(e,t){while((e=e[t])&&1!==e.nodeType);return e}S.fn.extend({has:function(e){var t=S(e,this),n=t.length;return this.filter(function(){for(var e=0;e\x20\t\r\n\f]*)/i,he=/^$|^module$|\/(?:java|ecma)script/i;ce=E.createDocumentFragment().appendChild(E.createElement("div")),(fe=E.createElement("input")).setAttribute("type","radio"),fe.setAttribute("checked","checked"),fe.setAttribute("name","t"),ce.appendChild(fe),v.checkClone=ce.cloneNode(!0).cloneNode(!0).lastChild.checked,ce.innerHTML="",v.noCloneChecked=!!ce.cloneNode(!0).lastChild.defaultValue,ce.innerHTML="",v.option=!!ce.lastChild;var ge={thead:[1,""],col:[2,""],tr:[2,""],td:[3,""],_default:[0,"",""]};function ye(e,t){var n;return n="undefined"!=typeof e.getElementsByTagName?e.getElementsByTagName(t||"*"):"undefined"!=typeof e.querySelectorAll?e.querySelectorAll(t||"*"):[],void 0===t||t&&A(e,t)?S.merge([e],n):n}function ve(e,t){for(var n=0,r=e.length;n",""]);var me=/<|&#?\w+;/;function xe(e,t,n,r,i){for(var o,a,s,u,l,c,f=t.createDocumentFragment(),p=[],d=0,h=e.length;d\s*$/g;function je(e,t){return A(e,"table")&&A(11!==t.nodeType?t:t.firstChild,"tr")&&S(e).children("tbody")[0]||e}function De(e){return e.type=(null!==e.getAttribute("type"))+"/"+e.type,e}function qe(e){return"true/"===(e.type||"").slice(0,5)?e.type=e.type.slice(5):e.removeAttribute("type"),e}function Le(e,t){var n,r,i,o,a,s;if(1===t.nodeType){if(Y.hasData(e)&&(s=Y.get(e).events))for(i in Y.remove(t,"handle events"),s)for(n=0,r=s[i].length;n").attr(n.scriptAttrs||{}).prop({charset:n.scriptCharset,src:n.url}).on("load error",i=function(e){r.remove(),i=null,e&&t("error"===e.type?404:200,e.type)}),E.head.appendChild(r[0])},abort:function(){i&&i()}}});var Ut,Xt=[],Vt=/(=)\?(?=&|$)|\?\?/;S.ajaxSetup({jsonp:"callback",jsonpCallback:function(){var e=Xt.pop()||S.expando+"_"+Ct.guid++;return this[e]=!0,e}}),S.ajaxPrefilter("json jsonp",function(e,t,n){var r,i,o,a=!1!==e.jsonp&&(Vt.test(e.url)?"url":"string"==typeof e.data&&0===(e.contentType||"").indexOf("application/x-www-form-urlencoded")&&Vt.test(e.data)&&"data");if(a||"jsonp"===e.dataTypes[0])return r=e.jsonpCallback=m(e.jsonpCallback)?e.jsonpCallback():e.jsonpCallback,a?e[a]=e[a].replace(Vt,"$1"+r):!1!==e.jsonp&&(e.url+=(Et.test(e.url)?"&":"?")+e.jsonp+"="+r),e.converters["script json"]=function(){return o||S.error(r+" was not called"),o[0]},e.dataTypes[0]="json",i=C[r],C[r]=function(){o=arguments},n.always(function(){void 0===i?S(C).removeProp(r):C[r]=i,e[r]&&(e.jsonpCallback=t.jsonpCallback,Xt.push(r)),o&&m(i)&&i(o[0]),o=i=void 0}),"script"}),v.createHTMLDocument=((Ut=E.implementation.createHTMLDocument("").body).innerHTML="",2===Ut.childNodes.length),S.parseHTML=function(e,t,n){return"string"!=typeof e?[]:("boolean"==typeof t&&(n=t,t=!1),t||(v.createHTMLDocument?((r=(t=E.implementation.createHTMLDocument("")).createElement("base")).href=E.location.href,t.head.appendChild(r)):t=E),o=!n&&[],(i=N.exec(e))?[t.createElement(i[1])]:(i=xe([e],t,o),o&&o.length&&S(o).remove(),S.merge([],i.childNodes)));var r,i,o},S.fn.load=function(e,t,n){var r,i,o,a=this,s=e.indexOf(" ");return-1").append(S.parseHTML(e)).find(r):e)}).always(n&&function(e,t){a.each(function(){n.apply(this,o||[e.responseText,t,e])})}),this},S.expr.pseudos.animated=function(t){return S.grep(S.timers,function(e){return t===e.elem}).length},S.offset={setOffset:function(e,t,n){var r,i,o,a,s,u,l=S.css(e,"position"),c=S(e),f={};"static"===l&&(e.style.position="relative"),s=c.offset(),o=S.css(e,"top"),u=S.css(e,"left"),("absolute"===l||"fixed"===l)&&-1<(o+u).indexOf("auto")?(a=(r=c.position()).top,i=r.left):(a=parseFloat(o)||0,i=parseFloat(u)||0),m(t)&&(t=t.call(e,n,S.extend({},s))),null!=t.top&&(f.top=t.top-s.top+a),null!=t.left&&(f.left=t.left-s.left+i),"using"in t?t.using.call(e,f):c.css(f)}},S.fn.extend({offset:function(t){if(arguments.length)return void 0===t?this:this.each(function(e){S.offset.setOffset(this,t,e)});var e,n,r=this[0];return r?r.getClientRects().length?(e=r.getBoundingClientRect(),n=r.ownerDocument.defaultView,{top:e.top+n.pageYOffset,left:e.left+n.pageXOffset}):{top:0,left:0}:void 0},position:function(){if(this[0]){var e,t,n,r=this[0],i={top:0,left:0};if("fixed"===S.css(r,"position"))t=r.getBoundingClientRect();else{t=this.offset(),n=r.ownerDocument,e=r.offsetParent||n.documentElement;while(e&&(e===n.body||e===n.documentElement)&&"static"===S.css(e,"position"))e=e.parentNode;e&&e!==r&&1===e.nodeType&&((i=S(e).offset()).top+=S.css(e,"borderTopWidth",!0),i.left+=S.css(e,"borderLeftWidth",!0))}return{top:t.top-i.top-S.css(r,"marginTop",!0),left:t.left-i.left-S.css(r,"marginLeft",!0)}}},offsetParent:function(){return this.map(function(){var e=this.offsetParent;while(e&&"static"===S.css(e,"position"))e=e.offsetParent;return e||re})}}),S.each({scrollLeft:"pageXOffset",scrollTop:"pageYOffset"},function(t,i){var o="pageYOffset"===i;S.fn[t]=function(e){return B(this,function(e,t,n){var r;if(x(e)?r=e:9===e.nodeType&&(r=e.defaultView),void 0===n)return r?r[i]:e[t];r?r.scrollTo(o?r.pageXOffset:n,o?n:r.pageYOffset):e[t]=n},t,e,arguments.length)}}),S.each(["top","left"],function(e,n){S.cssHooks[n]=_e(v.pixelPosition,function(e,t){if(t)return t=Be(e,n),Pe.test(t)?S(e).position()[n]+"px":t})}),S.each({Height:"height",Width:"width"},function(a,s){S.each({padding:"inner"+a,content:s,"":"outer"+a},function(r,o){S.fn[o]=function(e,t){var n=arguments.length&&(r||"boolean"!=typeof e),i=r||(!0===e||!0===t?"margin":"border");return B(this,function(e,t,n){var r;return x(e)?0===o.indexOf("outer")?e["inner"+a]:e.document.documentElement["client"+a]:9===e.nodeType?(r=e.documentElement,Math.max(e.body["scroll"+a],r["scroll"+a],e.body["offset"+a],r["offset"+a],r["client"+a])):void 0===n?S.css(e,t,i):S.style(e,t,n,i)},s,n?e:void 0,n)}})}),S.each(["ajaxStart","ajaxStop","ajaxComplete","ajaxError","ajaxSuccess","ajaxSend"],function(e,t){S.fn[t]=function(e){return this.on(t,e)}}),S.fn.extend({bind:function(e,t,n){return this.on(e,null,t,n)},unbind:function(e,t){return this.off(e,null,t)},delegate:function(e,t,n,r){return this.on(t,e,n,r)},undelegate:function(e,t,n){return 1===arguments.length?this.off(e,"**"):this.off(t,e||"**",n)},hover:function(e,t){return this.mouseenter(e).mouseleave(t||e)}}),S.each("blur focus focusin focusout resize scroll click dblclick mousedown mouseup mousemove mouseover mouseout mouseenter mouseleave change select submit keydown keypress keyup contextmenu".split(" "),function(e,n){S.fn[n]=function(e,t){return 0
(c) 2009-2016 Stuart Knightley
Dual licenced under the MIT license or GPLv3. See https://raw.github.com/Stuk/jszip/master/LICENSE.markdown.
JSZip uses the library pako released under the MIT license :
https://github.com/nodeca/pako/blob/master/LICENSE
*/
!function(t){if("object"==typeof exports&&"undefined"!=typeof module)module.exports=t();else if("function"==typeof define&&define.amd)define([],t);else{("undefined"!=typeof window?window:"undefined"!=typeof global?global:"undefined"!=typeof self?self:this).JSZip=t()}}(function(){return function s(a,o,h){function u(r,t){if(!o[r]){if(!a[r]){var e="function"==typeof require&&require;if(!t&&e)return e(r,!0);if(l)return l(r,!0);var i=new Error("Cannot find module '"+r+"'");throw i.code="MODULE_NOT_FOUND",i}var n=o[r]={exports:{}};a[r][0].call(n.exports,function(t){var e=a[r][1][t];return u(e||t)},n,n.exports,s,a,o,h)}return o[r].exports}for(var l="function"==typeof require&&require,t=0;t>2,s=(3&e)<<4|r>>4,a=1>6:64,o=2>4,r=(15&n)<<4|(s=p.indexOf(t.charAt(o++)))>>2,i=(3&s)<<6|(a=p.indexOf(t.charAt(o++))),l[h++]=e,64!==s&&(l[h++]=r),64!==a&&(l[h++]=i);return l}},{"./support":30,"./utils":32}],2:[function(t,e,r){"use strict";var i=t("./external"),n=t("./stream/DataWorker"),s=t("./stream/Crc32Probe"),a=t("./stream/DataLengthProbe");function o(t,e,r,i,n){this.compressedSize=t,this.uncompressedSize=e,this.crc32=r,this.compression=i,this.compressedContent=n}o.prototype={getContentWorker:function(){var t=new n(i.Promise.resolve(this.compressedContent)).pipe(this.compression.uncompressWorker()).pipe(new a("data_length")),e=this;return t.on("end",function(){if(this.streamInfo.data_length!==e.uncompressedSize)throw new Error("Bug : uncompressed data size mismatch")}),t},getCompressedWorker:function(){return new n(i.Promise.resolve(this.compressedContent)).withStreamInfo("compressedSize",this.compressedSize).withStreamInfo("uncompressedSize",this.uncompressedSize).withStreamInfo("crc32",this.crc32).withStreamInfo("compression",this.compression)}},o.createWorkerFrom=function(t,e,r){return t.pipe(new s).pipe(new a("uncompressedSize")).pipe(e.compressWorker(r)).pipe(new a("compressedSize")).withStreamInfo("compression",e)},e.exports=o},{"./external":6,"./stream/Crc32Probe":25,"./stream/DataLengthProbe":26,"./stream/DataWorker":27}],3:[function(t,e,r){"use strict";var i=t("./stream/GenericWorker");r.STORE={magic:"\0\0",compressWorker:function(t){return new i("STORE compression")},uncompressWorker:function(){return new i("STORE decompression")}},r.DEFLATE=t("./flate")},{"./flate":7,"./stream/GenericWorker":28}],4:[function(t,e,r){"use strict";var i=t("./utils");var o=function(){for(var t,e=[],r=0;r<256;r++){t=r;for(var i=0;i<8;i++)t=1&t?3988292384^t>>>1:t>>>1;e[r]=t}return e}();e.exports=function(t,e){return void 0!==t&&t.length?"string"!==i.getTypeOf(t)?function(t,e,r,i){var n=o,s=i+r;t^=-1;for(var a=i;a>>8^n[255&(t^e[a])];return-1^t}(0|e,t,t.length,0):function(t,e,r,i){var n=o,s=i+r;t^=-1;for(var a=i;a>>8^n[255&(t^e.charCodeAt(a))];return-1^t}(0|e,t,t.length,0):0}},{"./utils":32}],5:[function(t,e,r){"use strict";r.base64=!1,r.binary=!1,r.dir=!1,r.createFolders=!0,r.date=null,r.compression=null,r.compressionOptions=null,r.comment=null,r.unixPermissions=null,r.dosPermissions=null},{}],6:[function(t,e,r){"use strict";var i=null;i="undefined"!=typeof Promise?Promise:t("lie"),e.exports={Promise:i}},{lie:37}],7:[function(t,e,r){"use strict";var i="undefined"!=typeof Uint8Array&&"undefined"!=typeof Uint16Array&&"undefined"!=typeof Uint32Array,n=t("pako"),s=t("./utils"),a=t("./stream/GenericWorker"),o=i?"uint8array":"array";function h(t,e){a.call(this,"FlateWorker/"+t),this._pako=null,this._pakoAction=t,this._pakoOptions=e,this.meta={}}r.magic="\b\0",s.inherits(h,a),h.prototype.processChunk=function(t){this.meta=t.meta,null===this._pako&&this._createPako(),this._pako.push(s.transformTo(o,t.data),!1)},h.prototype.flush=function(){a.prototype.flush.call(this),null===this._pako&&this._createPako(),this._pako.push([],!0)},h.prototype.cleanUp=function(){a.prototype.cleanUp.call(this),this._pako=null},h.prototype._createPako=function(){this._pako=new n[this._pakoAction]({raw:!0,level:this._pakoOptions.level||-1});var e=this;this._pako.onData=function(t){e.push({data:t,meta:e.meta})}},r.compressWorker=function(t){return new h("Deflate",t)},r.uncompressWorker=function(){return new h("Inflate",{})}},{"./stream/GenericWorker":28,"./utils":32,pako:38}],8:[function(t,e,r){"use strict";function A(t,e){var r,i="";for(r=0;r>>=8;return i}function i(t,e,r,i,n,s){var a,o,h=t.file,u=t.compression,l=s!==O.utf8encode,f=I.transformTo("string",s(h.name)),d=I.transformTo("string",O.utf8encode(h.name)),c=h.comment,p=I.transformTo("string",s(c)),m=I.transformTo("string",O.utf8encode(c)),_=d.length!==h.name.length,g=m.length!==c.length,b="",v="",y="",w=h.dir,k=h.date,x={crc32:0,compressedSize:0,uncompressedSize:0};e&&!r||(x.crc32=t.crc32,x.compressedSize=t.compressedSize,x.uncompressedSize=t.uncompressedSize);var S=0;e&&(S|=8),l||!_&&!g||(S|=2048);var z=0,C=0;w&&(z|=16),"UNIX"===n?(C=798,z|=function(t,e){var r=t;return t||(r=e?16893:33204),(65535&r)<<16}(h.unixPermissions,w)):(C=20,z|=function(t){return 63&(t||0)}(h.dosPermissions)),a=k.getUTCHours(),a<<=6,a|=k.getUTCMinutes(),a<<=5,a|=k.getUTCSeconds()/2,o=k.getUTCFullYear()-1980,o<<=4,o|=k.getUTCMonth()+1,o<<=5,o|=k.getUTCDate(),_&&(v=A(1,1)+A(B(f),4)+d,b+="up"+A(v.length,2)+v),g&&(y=A(1,1)+A(B(p),4)+m,b+="uc"+A(y.length,2)+y);var E="";return E+="\n\0",E+=A(S,2),E+=u.magic,E+=A(a,2),E+=A(o,2),E+=A(x.crc32,4),E+=A(x.compressedSize,4),E+=A(x.uncompressedSize,4),E+=A(f.length,2),E+=A(b.length,2),{fileRecord:R.LOCAL_FILE_HEADER+E+f+b,dirRecord:R.CENTRAL_FILE_HEADER+A(C,2)+E+A(p.length,2)+"\0\0\0\0"+A(z,4)+A(i,4)+f+b+p}}var I=t("../utils"),n=t("../stream/GenericWorker"),O=t("../utf8"),B=t("../crc32"),R=t("../signature");function s(t,e,r,i){n.call(this,"ZipFileWorker"),this.bytesWritten=0,this.zipComment=e,this.zipPlatform=r,this.encodeFileName=i,this.streamFiles=t,this.accumulate=!1,this.contentBuffer=[],this.dirRecords=[],this.currentSourceOffset=0,this.entriesCount=0,this.currentFile=null,this._sources=[]}I.inherits(s,n),s.prototype.push=function(t){var e=t.meta.percent||0,r=this.entriesCount,i=this._sources.length;this.accumulate?this.contentBuffer.push(t):(this.bytesWritten+=t.data.length,n.prototype.push.call(this,{data:t.data,meta:{currentFile:this.currentFile,percent:r?(e+100*(r-i-1))/r:100}}))},s.prototype.openedSource=function(t){this.currentSourceOffset=this.bytesWritten,this.currentFile=t.file.name;var e=this.streamFiles&&!t.file.dir;if(e){var r=i(t,e,!1,this.currentSourceOffset,this.zipPlatform,this.encodeFileName);this.push({data:r.fileRecord,meta:{percent:0}})}else this.accumulate=!0},s.prototype.closedSource=function(t){this.accumulate=!1;var e=this.streamFiles&&!t.file.dir,r=i(t,e,!0,this.currentSourceOffset,this.zipPlatform,this.encodeFileName);if(this.dirRecords.push(r.dirRecord),e)this.push({data:function(t){return R.DATA_DESCRIPTOR+A(t.crc32,4)+A(t.compressedSize,4)+A(t.uncompressedSize,4)}(t),meta:{percent:100}});else for(this.push({data:r.fileRecord,meta:{percent:0}});this.contentBuffer.length;)this.push(this.contentBuffer.shift());this.currentFile=null},s.prototype.flush=function(){for(var t=this.bytesWritten,e=0;e=this.index;e--)r=(r<<8)+this.byteAt(e);return this.index+=t,r},readString:function(t){return i.transformTo("string",this.readData(t))},readData:function(t){},lastIndexOfSignature:function(t){},readAndCheckSignature:function(t){},readDate:function(){var t=this.readInt(4);return new Date(Date.UTC(1980+(t>>25&127),(t>>21&15)-1,t>>16&31,t>>11&31,t>>5&63,(31&t)<<1))}},e.exports=n},{"../utils":32}],19:[function(t,e,r){"use strict";var i=t("./Uint8ArrayReader");function n(t){i.call(this,t)}t("../utils").inherits(n,i),n.prototype.readData=function(t){this.checkOffset(t);var e=this.data.slice(this.zero+this.index,this.zero+this.index+t);return this.index+=t,e},e.exports=n},{"../utils":32,"./Uint8ArrayReader":21}],20:[function(t,e,r){"use strict";var i=t("./DataReader");function n(t){i.call(this,t)}t("../utils").inherits(n,i),n.prototype.byteAt=function(t){return this.data.charCodeAt(this.zero+t)},n.prototype.lastIndexOfSignature=function(t){return this.data.lastIndexOf(t)-this.zero},n.prototype.readAndCheckSignature=function(t){return t===this.readData(4)},n.prototype.readData=function(t){this.checkOffset(t);var e=this.data.slice(this.zero+this.index,this.zero+this.index+t);return this.index+=t,e},e.exports=n},{"../utils":32,"./DataReader":18}],21:[function(t,e,r){"use strict";var i=t("./ArrayReader");function n(t){i.call(this,t)}t("../utils").inherits(n,i),n.prototype.readData=function(t){if(this.checkOffset(t),0===t)return new Uint8Array(0);var e=this.data.subarray(this.zero+this.index,this.zero+this.index+t);return this.index+=t,e},e.exports=n},{"../utils":32,"./ArrayReader":17}],22:[function(t,e,r){"use strict";var i=t("../utils"),n=t("../support"),s=t("./ArrayReader"),a=t("./StringReader"),o=t("./NodeBufferReader"),h=t("./Uint8ArrayReader");e.exports=function(t){var e=i.getTypeOf(t);return i.checkSupport(e),"string"!==e||n.uint8array?"nodebuffer"===e?new o(t):n.uint8array?new h(i.transformTo("uint8array",t)):new s(i.transformTo("array",t)):new a(t)}},{"../support":30,"../utils":32,"./ArrayReader":17,"./NodeBufferReader":19,"./StringReader":20,"./Uint8ArrayReader":21}],23:[function(t,e,r){"use strict";r.LOCAL_FILE_HEADER="PK��",r.CENTRAL_FILE_HEADER="PK��",r.CENTRAL_DIRECTORY_END="PK��",r.ZIP64_CENTRAL_DIRECTORY_LOCATOR="PK��",r.ZIP64_CENTRAL_DIRECTORY_END="PK��",r.DATA_DESCRIPTOR="PK�\b"},{}],24:[function(t,e,r){"use strict";var i=t("./GenericWorker"),n=t("../utils");function s(t){i.call(this,"ConvertWorker to "+t),this.destType=t}n.inherits(s,i),s.prototype.processChunk=function(t){this.push({data:n.transformTo(this.destType,t.data),meta:t.meta})},e.exports=s},{"../utils":32,"./GenericWorker":28}],25:[function(t,e,r){"use strict";var i=t("./GenericWorker"),n=t("../crc32");function s(){i.call(this,"Crc32Probe"),this.withStreamInfo("crc32",0)}t("../utils").inherits(s,i),s.prototype.processChunk=function(t){this.streamInfo.crc32=n(t.data,this.streamInfo.crc32||0),this.push(t)},e.exports=s},{"../crc32":4,"../utils":32,"./GenericWorker":28}],26:[function(t,e,r){"use strict";var i=t("../utils"),n=t("./GenericWorker");function s(t){n.call(this,"DataLengthProbe for "+t),this.propName=t,this.withStreamInfo(t,0)}i.inherits(s,n),s.prototype.processChunk=function(t){if(t){var e=this.streamInfo[this.propName]||0;this.streamInfo[this.propName]=e+t.data.length}n.prototype.processChunk.call(this,t)},e.exports=s},{"../utils":32,"./GenericWorker":28}],27:[function(t,e,r){"use strict";var i=t("../utils"),n=t("./GenericWorker");function s(t){n.call(this,"DataWorker");var e=this;this.dataIsReady=!1,this.index=0,this.max=0,this.data=null,this.type="",this._tickScheduled=!1,t.then(function(t){e.dataIsReady=!0,e.data=t,e.max=t&&t.length||0,e.type=i.getTypeOf(t),e.isPaused||e._tickAndRepeat()},function(t){e.error(t)})}i.inherits(s,n),s.prototype.cleanUp=function(){n.prototype.cleanUp.call(this),this.data=null},s.prototype.resume=function(){return!!n.prototype.resume.call(this)&&(!this._tickScheduled&&this.dataIsReady&&(this._tickScheduled=!0,i.delay(this._tickAndRepeat,[],this)),!0)},s.prototype._tickAndRepeat=function(){this._tickScheduled=!1,this.isPaused||this.isFinished||(this._tick(),this.isFinished||(i.delay(this._tickAndRepeat,[],this),this._tickScheduled=!0))},s.prototype._tick=function(){if(this.isPaused||this.isFinished)return!1;var t=null,e=Math.min(this.max,this.index+16384);if(this.index>=this.max)return this.end();switch(this.type){case"string":t=this.data.substring(this.index,e);break;case"uint8array":t=this.data.subarray(this.index,e);break;case"array":case"nodebuffer":t=this.data.slice(this.index,e)}return this.index=e,this.push({data:t,meta:{percent:this.max?this.index/this.max*100:0}})},e.exports=s},{"../utils":32,"./GenericWorker":28}],28:[function(t,e,r){"use strict";function i(t){this.name=t||"default",this.streamInfo={},this.generatedError=null,this.extraStreamInfo={},this.isPaused=!0,this.isFinished=!1,this.isLocked=!1,this._listeners={data:[],end:[],error:[]},this.previous=null}i.prototype={push:function(t){this.emit("data",t)},end:function(){if(this.isFinished)return!1;this.flush();try{this.emit("end"),this.cleanUp(),this.isFinished=!0}catch(t){this.emit("error",t)}return!0},error:function(t){return!this.isFinished&&(this.isPaused?this.generatedError=t:(this.isFinished=!0,this.emit("error",t),this.previous&&this.previous.error(t),this.cleanUp()),!0)},on:function(t,e){return this._listeners[t].push(e),this},cleanUp:function(){this.streamInfo=this.generatedError=this.extraStreamInfo=null,this._listeners=[]},emit:function(t,e){if(this._listeners[t])for(var r=0;r "+t:t}},e.exports=i},{}],29:[function(t,e,r){"use strict";var h=t("../utils"),n=t("./ConvertWorker"),s=t("./GenericWorker"),u=t("../base64"),i=t("../support"),a=t("../external"),o=null;if(i.nodestream)try{o=t("../nodejs/NodejsStreamOutputAdapter")}catch(t){}function l(t,o){return new a.Promise(function(e,r){var i=[],n=t._internalType,s=t._outputType,a=t._mimeType;t.on("data",function(t,e){i.push(t),o&&o(e)}).on("error",function(t){i=[],r(t)}).on("end",function(){try{var t=function(t,e,r){switch(t){case"blob":return h.newBlob(h.transformTo("arraybuffer",e),r);case"base64":return u.encode(e);default:return h.transformTo(t,e)}}(s,function(t,e){var r,i=0,n=null,s=0;for(r=0;r>>6:(r<65536?e[s++]=224|r>>>12:(e[s++]=240|r>>>18,e[s++]=128|r>>>12&63),e[s++]=128|r>>>6&63),e[s++]=128|63&r);return e}(t)},s.utf8decode=function(t){return h.nodebuffer?o.transformTo("nodebuffer",t).toString("utf-8"):function(t){var e,r,i,n,s=t.length,a=new Array(2*s);for(e=r=0;e>10&1023,a[r++]=56320|1023&i)}return a.length!==r&&(a.subarray?a=a.subarray(0,r):a.length=r),o.applyFromCharCode(a)}(t=o.transformTo(h.uint8array?"uint8array":"array",t))},o.inherits(a,i),a.prototype.processChunk=function(t){var e=o.transformTo(h.uint8array?"uint8array":"array",t.data);if(this.leftOver&&this.leftOver.length){if(h.uint8array){var r=e;(e=new Uint8Array(r.length+this.leftOver.length)).set(this.leftOver,0),e.set(r,this.leftOver.length)}else e=this.leftOver.concat(e);this.leftOver=null}var i=function(t,e){var r;for((e=e||t.length)>t.length&&(e=t.length),r=e-1;0<=r&&128==(192&t[r]);)r--;return r<0?e:0===r?e:r+u[t[r]]>e?r:e}(e),n=e;i!==e.length&&(h.uint8array?(n=e.subarray(0,i),this.leftOver=e.subarray(i,e.length)):(n=e.slice(0,i),this.leftOver=e.slice(i,e.length))),this.push({data:s.utf8decode(n),meta:t.meta})},a.prototype.flush=function(){this.leftOver&&this.leftOver.length&&(this.push({data:s.utf8decode(this.leftOver),meta:{}}),this.leftOver=null)},s.Utf8DecodeWorker=a,o.inherits(l,i),l.prototype.processChunk=function(t){this.push({data:s.utf8encode(t.data),meta:t.meta})},s.Utf8EncodeWorker=l},{"./nodejsUtils":14,"./stream/GenericWorker":28,"./support":30,"./utils":32}],32:[function(t,e,a){"use strict";var o=t("./support"),h=t("./base64"),r=t("./nodejsUtils"),i=t("set-immediate-shim"),u=t("./external");function n(t){return t}function l(t,e){for(var r=0;r>8;this.dir=!!(16&this.externalFileAttributes),0==t&&(this.dosPermissions=63&this.externalFileAttributes),3==t&&(this.unixPermissions=this.externalFileAttributes>>16&65535),this.dir||"/"!==this.fileNameStr.slice(-1)||(this.dir=!0)},parseZIP64ExtraField:function(t){if(this.extraFields[1]){var e=i(this.extraFields[1].value);this.uncompressedSize===s.MAX_VALUE_32BITS&&(this.uncompressedSize=e.readInt(8)),this.compressedSize===s.MAX_VALUE_32BITS&&(this.compressedSize=e.readInt(8)),this.localHeaderOffset===s.MAX_VALUE_32BITS&&(this.localHeaderOffset=e.readInt(8)),this.diskNumberStart===s.MAX_VALUE_32BITS&&(this.diskNumberStart=e.readInt(4))}},readExtraFields:function(t){var e,r,i,n=t.index+this.extraFieldsLength;for(this.extraFields||(this.extraFields={});t.index+4>>6:(r<65536?e[s++]=224|r>>>12:(e[s++]=240|r>>>18,e[s++]=128|r>>>12&63),e[s++]=128|r>>>6&63),e[s++]=128|63&r);return e},r.buf2binstring=function(t){return l(t,t.length)},r.binstring2buf=function(t){for(var e=new h.Buf8(t.length),r=0,i=e.length;r>10&1023,o[i++]=56320|1023&n)}return l(o,i)},r.utf8border=function(t,e){var r;for((e=e||t.length)>t.length&&(e=t.length),r=e-1;0<=r&&128==(192&t[r]);)r--;return r<0?e:0===r?e:r+u[t[r]]>e?r:e}},{"./common":41}],43:[function(t,e,r){"use strict";e.exports=function(t,e,r,i){for(var n=65535&t|0,s=t>>>16&65535|0,a=0;0!==r;){for(r-=a=2e3>>1:t>>>1;e[r]=t}return e}();e.exports=function(t,e,r,i){var n=o,s=i+r;t^=-1;for(var a=i;a>>8^n[255&(t^e[a])];return-1^t}},{}],46:[function(t,e,r){"use strict";var h,d=t("../utils/common"),u=t("./trees"),c=t("./adler32"),p=t("./crc32"),i=t("./messages"),l=0,f=4,m=0,_=-2,g=-1,b=4,n=2,v=8,y=9,s=286,a=30,o=19,w=2*s+1,k=15,x=3,S=258,z=S+x+1,C=42,E=113,A=1,I=2,O=3,B=4;function R(t,e){return t.msg=i[e],e}function T(t){return(t<<1)-(4t.avail_out&&(r=t.avail_out),0!==r&&(d.arraySet(t.output,e.pending_buf,e.pending_out,r,t.next_out),t.next_out+=r,e.pending_out+=r,t.total_out+=r,t.avail_out-=r,e.pending-=r,0===e.pending&&(e.pending_out=0))}function N(t,e){u._tr_flush_block(t,0<=t.block_start?t.block_start:-1,t.strstart-t.block_start,e),t.block_start=t.strstart,F(t.strm)}function U(t,e){t.pending_buf[t.pending++]=e}function P(t,e){t.pending_buf[t.pending++]=e>>>8&255,t.pending_buf[t.pending++]=255&e}function L(t,e){var r,i,n=t.max_chain_length,s=t.strstart,a=t.prev_length,o=t.nice_match,h=t.strstart>t.w_size-z?t.strstart-(t.w_size-z):0,u=t.window,l=t.w_mask,f=t.prev,d=t.strstart+S,c=u[s+a-1],p=u[s+a];t.prev_length>=t.good_match&&(n>>=2),o>t.lookahead&&(o=t.lookahead);do{if(u[(r=e)+a]===p&&u[r+a-1]===c&&u[r]===u[s]&&u[++r]===u[s+1]){s+=2,r++;do{}while(u[++s]===u[++r]&&u[++s]===u[++r]&&u[++s]===u[++r]&&u[++s]===u[++r]&&u[++s]===u[++r]&&u[++s]===u[++r]&&u[++s]===u[++r]&&u[++s]===u[++r]&&sh&&0!=--n);return a<=t.lookahead?a:t.lookahead}function j(t){var e,r,i,n,s,a,o,h,u,l,f=t.w_size;do{if(n=t.window_size-t.lookahead-t.strstart,t.strstart>=f+(f-z)){for(d.arraySet(t.window,t.window,f,f,0),t.match_start-=f,t.strstart-=f,t.block_start-=f,e=r=t.hash_size;i=t.head[--e],t.head[e]=f<=i?i-f:0,--r;);for(e=r=f;i=t.prev[--e],t.prev[e]=f<=i?i-f:0,--r;);n+=f}if(0===t.strm.avail_in)break;if(a=t.strm,o=t.window,h=t.strstart+t.lookahead,u=n,l=void 0,l=a.avail_in,u=x)for(s=t.strstart-t.insert,t.ins_h=t.window[s],t.ins_h=(t.ins_h<=x&&(t.ins_h=(t.ins_h<=x)if(i=u._tr_tally(t,t.strstart-t.match_start,t.match_length-x),t.lookahead-=t.match_length,t.match_length<=t.max_lazy_match&&t.lookahead>=x){for(t.match_length--;t.strstart++,t.ins_h=(t.ins_h<=x&&(t.ins_h=(t.ins_h<=x&&t.match_length<=t.prev_length){for(n=t.strstart+t.lookahead-x,i=u._tr_tally(t,t.strstart-1-t.prev_match,t.prev_length-x),t.lookahead-=t.prev_length-1,t.prev_length-=2;++t.strstart<=n&&(t.ins_h=(t.ins_h<t.pending_buf_size-5&&(r=t.pending_buf_size-5);;){if(t.lookahead<=1){if(j(t),0===t.lookahead&&e===l)return A;if(0===t.lookahead)break}t.strstart+=t.lookahead,t.lookahead=0;var i=t.block_start+r;if((0===t.strstart||t.strstart>=i)&&(t.lookahead=t.strstart-i,t.strstart=i,N(t,!1),0===t.strm.avail_out))return A;if(t.strstart-t.block_start>=t.w_size-z&&(N(t,!1),0===t.strm.avail_out))return A}return t.insert=0,e===f?(N(t,!0),0===t.strm.avail_out?O:B):(t.strstart>t.block_start&&(N(t,!1),t.strm.avail_out),A)}),new M(4,4,8,4,Z),new M(4,5,16,8,Z),new M(4,6,32,32,Z),new M(4,4,16,16,W),new M(8,16,32,32,W),new M(8,16,128,128,W),new M(8,32,128,256,W),new M(32,128,258,1024,W),new M(32,258,258,4096,W)],r.deflateInit=function(t,e){return Y(t,e,v,15,8,0)},r.deflateInit2=Y,r.deflateReset=K,r.deflateResetKeep=G,r.deflateSetHeader=function(t,e){return t&&t.state?2!==t.state.wrap?_:(t.state.gzhead=e,m):_},r.deflate=function(t,e){var r,i,n,s;if(!t||!t.state||5>8&255),U(i,i.gzhead.time>>16&255),U(i,i.gzhead.time>>24&255),U(i,9===i.level?2:2<=i.strategy||i.level<2?4:0),U(i,255&i.gzhead.os),i.gzhead.extra&&i.gzhead.extra.length&&(U(i,255&i.gzhead.extra.length),U(i,i.gzhead.extra.length>>8&255)),i.gzhead.hcrc&&(t.adler=p(t.adler,i.pending_buf,i.pending,0)),i.gzindex=0,i.status=69):(U(i,0),U(i,0),U(i,0),U(i,0),U(i,0),U(i,9===i.level?2:2<=i.strategy||i.level<2?4:0),U(i,3),i.status=E);else{var a=v+(i.w_bits-8<<4)<<8;a|=(2<=i.strategy||i.level<2?0:i.level<6?1:6===i.level?2:3)<<6,0!==i.strstart&&(a|=32),a+=31-a%31,i.status=E,P(i,a),0!==i.strstart&&(P(i,t.adler>>>16),P(i,65535&t.adler)),t.adler=1}if(69===i.status)if(i.gzhead.extra){for(n=i.pending;i.gzindex<(65535&i.gzhead.extra.length)&&(i.pending!==i.pending_buf_size||(i.gzhead.hcrc&&i.pending>n&&(t.adler=p(t.adler,i.pending_buf,i.pending-n,n)),F(t),n=i.pending,i.pending!==i.pending_buf_size));)U(i,255&i.gzhead.extra[i.gzindex]),i.gzindex++;i.gzhead.hcrc&&i.pending>n&&(t.adler=p(t.adler,i.pending_buf,i.pending-n,n)),i.gzindex===i.gzhead.extra.length&&(i.gzindex=0,i.status=73)}else i.status=73;if(73===i.status)if(i.gzhead.name){n=i.pending;do{if(i.pending===i.pending_buf_size&&(i.gzhead.hcrc&&i.pending>n&&(t.adler=p(t.adler,i.pending_buf,i.pending-n,n)),F(t),n=i.pending,i.pending===i.pending_buf_size)){s=1;break}s=i.gzindexn&&(t.adler=p(t.adler,i.pending_buf,i.pending-n,n)),0===s&&(i.gzindex=0,i.status=91)}else i.status=91;if(91===i.status)if(i.gzhead.comment){n=i.pending;do{if(i.pending===i.pending_buf_size&&(i.gzhead.hcrc&&i.pending>n&&(t.adler=p(t.adler,i.pending_buf,i.pending-n,n)),F(t),n=i.pending,i.pending===i.pending_buf_size)){s=1;break}s=i.gzindexn&&(t.adler=p(t.adler,i.pending_buf,i.pending-n,n)),0===s&&(i.status=103)}else i.status=103;if(103===i.status&&(i.gzhead.hcrc?(i.pending+2>i.pending_buf_size&&F(t),i.pending+2<=i.pending_buf_size&&(U(i,255&t.adler),U(i,t.adler>>8&255),t.adler=0,i.status=E)):i.status=E),0!==i.pending){if(F(t),0===t.avail_out)return i.last_flush=-1,m}else if(0===t.avail_in&&T(e)<=T(r)&&e!==f)return R(t,-5);if(666===i.status&&0!==t.avail_in)return R(t,-5);if(0!==t.avail_in||0!==i.lookahead||e!==l&&666!==i.status){var o=2===i.strategy?function(t,e){for(var r;;){if(0===t.lookahead&&(j(t),0===t.lookahead)){if(e===l)return A;break}if(t.match_length=0,r=u._tr_tally(t,0,t.window[t.strstart]),t.lookahead--,t.strstart++,r&&(N(t,!1),0===t.strm.avail_out))return A}return t.insert=0,e===f?(N(t,!0),0===t.strm.avail_out?O:B):t.last_lit&&(N(t,!1),0===t.strm.avail_out)?A:I}(i,e):3===i.strategy?function(t,e){for(var r,i,n,s,a=t.window;;){if(t.lookahead<=S){if(j(t),t.lookahead<=S&&e===l)return A;if(0===t.lookahead)break}if(t.match_length=0,t.lookahead>=x&&0t.lookahead&&(t.match_length=t.lookahead)}if(t.match_length>=x?(r=u._tr_tally(t,1,t.match_length-x),t.lookahead-=t.match_length,t.strstart+=t.match_length,t.match_length=0):(r=u._tr_tally(t,0,t.window[t.strstart]),t.lookahead--,t.strstart++),r&&(N(t,!1),0===t.strm.avail_out))return A}return t.insert=0,e===f?(N(t,!0),0===t.strm.avail_out?O:B):t.last_lit&&(N(t,!1),0===t.strm.avail_out)?A:I}(i,e):h[i.level].func(i,e);if(o!==O&&o!==B||(i.status=666),o===A||o===O)return 0===t.avail_out&&(i.last_flush=-1),m;if(o===I&&(1===e?u._tr_align(i):5!==e&&(u._tr_stored_block(i,0,0,!1),3===e&&(D(i.head),0===i.lookahead&&(i.strstart=0,i.block_start=0,i.insert=0))),F(t),0===t.avail_out))return i.last_flush=-1,m}return e!==f?m:i.wrap<=0?1:(2===i.wrap?(U(i,255&t.adler),U(i,t.adler>>8&255),U(i,t.adler>>16&255),U(i,t.adler>>24&255),U(i,255&t.total_in),U(i,t.total_in>>8&255),U(i,t.total_in>>16&255),U(i,t.total_in>>24&255)):(P(i,t.adler>>>16),P(i,65535&t.adler)),F(t),0=r.w_size&&(0===s&&(D(r.head),r.strstart=0,r.block_start=0,r.insert=0),u=new d.Buf8(r.w_size),d.arraySet(u,e,l-r.w_size,r.w_size,0),e=u,l=r.w_size),a=t.avail_in,o=t.next_in,h=t.input,t.avail_in=l,t.next_in=0,t.input=e,j(r);r.lookahead>=x;){for(i=r.strstart,n=r.lookahead-(x-1);r.ins_h=(r.ins_h<>>=y=v>>>24,p-=y,0===(y=v>>>16&255))C[s++]=65535&v;else{if(!(16&y)){if(0==(64&y)){v=m[(65535&v)+(c&(1<>>=y,p-=y),p<15&&(c+=z[i++]<>>=y=v>>>24,p-=y,!(16&(y=v>>>16&255))){if(0==(64&y)){v=_[(65535&v)+(c&(1<>>=y,p-=y,(y=s-a)>3,c&=(1<<(p-=w<<3))-1,t.next_in=i,t.next_out=s,t.avail_in=i>>24&255)+(t>>>8&65280)+((65280&t)<<8)+((255&t)<<24)}function s(){this.mode=0,this.last=!1,this.wrap=0,this.havedict=!1,this.flags=0,this.dmax=0,this.check=0,this.total=0,this.head=null,this.wbits=0,this.wsize=0,this.whave=0,this.wnext=0,this.window=null,this.hold=0,this.bits=0,this.length=0,this.offset=0,this.extra=0,this.lencode=null,this.distcode=null,this.lenbits=0,this.distbits=0,this.ncode=0,this.nlen=0,this.ndist=0,this.have=0,this.next=null,this.lens=new I.Buf16(320),this.work=new I.Buf16(288),this.lendyn=null,this.distdyn=null,this.sane=0,this.back=0,this.was=0}function a(t){var e;return t&&t.state?(e=t.state,t.total_in=t.total_out=e.total=0,t.msg="",e.wrap&&(t.adler=1&e.wrap),e.mode=P,e.last=0,e.havedict=0,e.dmax=32768,e.head=null,e.hold=0,e.bits=0,e.lencode=e.lendyn=new I.Buf32(i),e.distcode=e.distdyn=new I.Buf32(n),e.sane=1,e.back=-1,N):U}function o(t){var e;return t&&t.state?((e=t.state).wsize=0,e.whave=0,e.wnext=0,a(t)):U}function h(t,e){var r,i;return t&&t.state?(i=t.state,e<0?(r=0,e=-e):(r=1+(e>>4),e<48&&(e&=15)),e&&(e<8||15=s.wsize?(I.arraySet(s.window,e,r-s.wsize,s.wsize,0),s.wnext=0,s.whave=s.wsize):(i<(n=s.wsize-s.wnext)&&(n=i),I.arraySet(s.window,e,r-i,n,s.wnext),(i-=n)?(I.arraySet(s.window,e,r-i,i,0),s.wnext=i,s.whave=s.wsize):(s.wnext+=n,s.wnext===s.wsize&&(s.wnext=0),s.whave>>8&255,r.check=B(r.check,E,2,0),l=u=0,r.mode=2;break}if(r.flags=0,r.head&&(r.head.done=!1),!(1&r.wrap)||(((255&u)<<8)+(u>>8))%31){t.msg="incorrect header check",r.mode=30;break}if(8!=(15&u)){t.msg="unknown compression method",r.mode=30;break}if(l-=4,k=8+(15&(u>>>=4)),0===r.wbits)r.wbits=k;else if(k>r.wbits){t.msg="invalid window size",r.mode=30;break}r.dmax=1<>8&1),512&r.flags&&(E[0]=255&u,E[1]=u>>>8&255,r.check=B(r.check,E,2,0)),l=u=0,r.mode=3;case 3:for(;l<32;){if(0===o)break t;o--,u+=i[s++]<>>8&255,E[2]=u>>>16&255,E[3]=u>>>24&255,r.check=B(r.check,E,4,0)),l=u=0,r.mode=4;case 4:for(;l<16;){if(0===o)break t;o--,u+=i[s++]<>8),512&r.flags&&(E[0]=255&u,E[1]=u>>>8&255,r.check=B(r.check,E,2,0)),l=u=0,r.mode=5;case 5:if(1024&r.flags){for(;l<16;){if(0===o)break t;o--,u+=i[s++]<>>8&255,r.check=B(r.check,E,2,0)),l=u=0}else r.head&&(r.head.extra=null);r.mode=6;case 6:if(1024&r.flags&&(o<(c=r.length)&&(c=o),c&&(r.head&&(k=r.head.extra_len-r.length,r.head.extra||(r.head.extra=new Array(r.head.extra_len)),I.arraySet(r.head.extra,i,s,c,k)),512&r.flags&&(r.check=B(r.check,i,c,s)),o-=c,s+=c,r.length-=c),r.length))break t;r.length=0,r.mode=7;case 7:if(2048&r.flags){if(0===o)break t;for(c=0;k=i[s+c++],r.head&&k&&r.length<65536&&(r.head.name+=String.fromCharCode(k)),k&&c>9&1,r.head.done=!0),t.adler=r.check=0,r.mode=12;break;case 10:for(;l<32;){if(0===o)break t;o--,u+=i[s++]<>>=7&l,l-=7&l,r.mode=27;break}for(;l<3;){if(0===o)break t;o--,u+=i[s++]<>>=1)){case 0:r.mode=14;break;case 1:if(j(r),r.mode=20,6!==e)break;u>>>=2,l-=2;break t;case 2:r.mode=17;break;case 3:t.msg="invalid block type",r.mode=30}u>>>=2,l-=2;break;case 14:for(u>>>=7&l,l-=7&l;l<32;){if(0===o)break t;o--,u+=i[s++]<>>16^65535)){t.msg="invalid stored block lengths",r.mode=30;break}if(r.length=65535&u,l=u=0,r.mode=15,6===e)break t;case 15:r.mode=16;case 16:if(c=r.length){if(o>>=5,l-=5,r.ndist=1+(31&u),u>>>=5,l-=5,r.ncode=4+(15&u),u>>>=4,l-=4,286>>=3,l-=3}for(;r.have<19;)r.lens[A[r.have++]]=0;if(r.lencode=r.lendyn,r.lenbits=7,S={bits:r.lenbits},x=T(0,r.lens,0,19,r.lencode,0,r.work,S),r.lenbits=S.bits,x){t.msg="invalid code lengths set",r.mode=30;break}r.have=0,r.mode=19;case 19:for(;r.have>>16&255,b=65535&C,!((_=C>>>24)<=l);){if(0===o)break t;o--,u+=i[s++]<>>=_,l-=_,r.lens[r.have++]=b;else{if(16===b){for(z=_+2;l>>=_,l-=_,0===r.have){t.msg="invalid bit length repeat",r.mode=30;break}k=r.lens[r.have-1],c=3+(3&u),u>>>=2,l-=2}else if(17===b){for(z=_+3;l>>=_)),u>>>=3,l-=3}else{for(z=_+7;l>>=_)),u>>>=7,l-=7}if(r.have+c>r.nlen+r.ndist){t.msg="invalid bit length repeat",r.mode=30;break}for(;c--;)r.lens[r.have++]=k}}if(30===r.mode)break;if(0===r.lens[256]){t.msg="invalid code -- missing end-of-block",r.mode=30;break}if(r.lenbits=9,S={bits:r.lenbits},x=T(D,r.lens,0,r.nlen,r.lencode,0,r.work,S),r.lenbits=S.bits,x){t.msg="invalid literal/lengths set",r.mode=30;break}if(r.distbits=6,r.distcode=r.distdyn,S={bits:r.distbits},x=T(F,r.lens,r.nlen,r.ndist,r.distcode,0,r.work,S),r.distbits=S.bits,x){t.msg="invalid distances set",r.mode=30;break}if(r.mode=20,6===e)break t;case 20:r.mode=21;case 21:if(6<=o&&258<=h){t.next_out=a,t.avail_out=h,t.next_in=s,t.avail_in=o,r.hold=u,r.bits=l,R(t,d),a=t.next_out,n=t.output,h=t.avail_out,s=t.next_in,i=t.input,o=t.avail_in,u=r.hold,l=r.bits,12===r.mode&&(r.back=-1);break}for(r.back=0;g=(C=r.lencode[u&(1<>>16&255,b=65535&C,!((_=C>>>24)<=l);){if(0===o)break t;o--,u+=i[s++]<>v)])>>>16&255,b=65535&C,!(v+(_=C>>>24)<=l);){if(0===o)break t;o--,u+=i[s++]<>>=v,l-=v,r.back+=v}if(u>>>=_,l-=_,r.back+=_,r.length=b,0===g){r.mode=26;break}if(32&g){r.back=-1,r.mode=12;break}if(64&g){t.msg="invalid literal/length code",r.mode=30;break}r.extra=15&g,r.mode=22;case 22:if(r.extra){for(z=r.extra;l>>=r.extra,l-=r.extra,r.back+=r.extra}r.was=r.length,r.mode=23;case 23:for(;g=(C=r.distcode[u&(1<>>16&255,b=65535&C,!((_=C>>>24)<=l);){if(0===o)break t;o--,u+=i[s++]<>v)])>>>16&255,b=65535&C,!(v+(_=C>>>24)<=l);){if(0===o)break t;o--,u+=i[s++]<>>=v,l-=v,r.back+=v}if(u>>>=_,l-=_,r.back+=_,64&g){t.msg="invalid distance code",r.mode=30;break}r.offset=b,r.extra=15&g,r.mode=24;case 24:if(r.extra){for(z=r.extra;l>>=r.extra,l-=r.extra,r.back+=r.extra}if(r.offset>r.dmax){t.msg="invalid distance too far back",r.mode=30;break}r.mode=25;case 25:if(0===h)break t;if(c=d-h,r.offset>c){if((c=r.offset-c)>r.whave&&r.sane){t.msg="invalid distance too far back",r.mode=30;break}p=c>r.wnext?(c-=r.wnext,r.wsize-c):r.wnext-c,c>r.length&&(c=r.length),m=r.window}else m=n,p=a-r.offset,c=r.length;for(hc?(m=R[T+a[v]],A[I+a[v]]):(m=96,0),h=1<>S)+(u-=h)]=p<<24|m<<16|_|0,0!==u;);for(h=1<>=1;if(0!==h?(E&=h-1,E+=h):E=0,v++,0==--O[b]){if(b===w)break;b=e[r+a[v]]}if(k>>7)]}function U(t,e){t.pending_buf[t.pending++]=255&e,t.pending_buf[t.pending++]=e>>>8&255}function P(t,e,r){t.bi_valid>c-r?(t.bi_buf|=e<>c-t.bi_valid,t.bi_valid+=r-c):(t.bi_buf|=e<>>=1,r<<=1,0<--e;);return r>>>1}function Z(t,e,r){var i,n,s=new Array(g+1),a=0;for(i=1;i<=g;i++)s[i]=a=a+r[i-1]<<1;for(n=0;n<=e;n++){var o=t[2*n+1];0!==o&&(t[2*n]=j(s[o]++,o))}}function W(t){var e;for(e=0;e>1;1<=r;r--)G(t,s,r);for(n=h;r=t.heap[1],t.heap[1]=t.heap[t.heap_len--],G(t,s,1),i=t.heap[1],t.heap[--t.heap_max]=r,t.heap[--t.heap_max]=i,s[2*n]=s[2*r]+s[2*i],t.depth[n]=(t.depth[r]>=t.depth[i]?t.depth[r]:t.depth[i])+1,s[2*r+1]=s[2*i+1]=n,t.heap[1]=n++,G(t,s,1),2<=t.heap_len;);t.heap[--t.heap_max]=t.heap[1],function(t,e){var r,i,n,s,a,o,h=e.dyn_tree,u=e.max_code,l=e.stat_desc.static_tree,f=e.stat_desc.has_stree,d=e.stat_desc.extra_bits,c=e.stat_desc.extra_base,p=e.stat_desc.max_length,m=0;for(s=0;s<=g;s++)t.bl_count[s]=0;for(h[2*t.heap[t.heap_max]+1]=0,r=t.heap_max+1;r<_;r++)p<(s=h[2*h[2*(i=t.heap[r])+1]+1]+1)&&(s=p,m++),h[2*i+1]=s,u>=7;i>>=1)if(1&r&&0!==t.dyn_ltree[2*e])return o;if(0!==t.dyn_ltree[18]||0!==t.dyn_ltree[20]||0!==t.dyn_ltree[26])return h;for(e=32;e>>3,(s=t.static_len+3+7>>>3)<=n&&(n=s)):n=s=r+5,r+4<=n&&-1!==e?J(t,e,r,i):4===t.strategy||s===n?(P(t,2+(i?1:0),3),K(t,z,C)):(P(t,4+(i?1:0),3),function(t,e,r,i){var n;for(P(t,e-257,5),P(t,r-1,5),P(t,i-4,4),n=0;n>>8&255,t.pending_buf[t.d_buf+2*t.last_lit+1]=255&e,t.pending_buf[t.l_buf+t.last_lit]=255&r,t.last_lit++,0===e?t.dyn_ltree[2*r]++:(t.matches++,e--,t.dyn_ltree[2*(A[r]+u+1)]++,t.dyn_dtree[2*N(e)]++),t.last_lit===t.lit_bufsize-1},r._tr_align=function(t){P(t,2,3),L(t,m,z),function(t){16===t.bi_valid?(U(t,t.bi_buf),t.bi_buf=0,t.bi_valid=0):8<=t.bi_valid&&(t.pending_buf[t.pending++]=255&t.bi_buf,t.bi_buf>>=8,t.bi_valid-=8)}(t)}},{"../utils/common":41}],53:[function(t,e,r){"use strict";e.exports=function(){this.input=null,this.next_in=0,this.avail_in=0,this.total_in=0,this.output=null,this.next_out=0,this.avail_out=0,this.total_out=0,this.msg="",this.state=null,this.data_type=2,this.adler=0}},{}],54:[function(t,e,r){"use strict";e.exports="function"==typeof setImmediate?setImmediate:function(){var t=[].slice.apply(arguments);t.splice(1,0,0),setTimeout.apply(null,t)}},{}]},{},[10])(10)});����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������jquery/jszip/dist/jszip.js��������������������������������������������������������������������������0000775�4231163�4231163�00001314071�14537076137�016413� 0����������������������������������������������������������������������������������������������������ustar �mccreedy������������������������mccreedy���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������/*!
JSZip v3.7.1 - A JavaScript class for generating and reading zip files
(c) 2009-2016 Stuart Knightley
Dual licenced under the MIT license or GPLv3. See https://raw.github.com/Stuk/jszip/master/LICENSE.markdown.
JSZip uses the library pako released under the MIT license :
https://github.com/nodeca/pako/blob/master/LICENSE
*/
(function(f){if(typeof exports==="object"&&typeof module!=="undefined"){module.exports=f()}else if(typeof define==="function"&&define.amd){define([],f)}else{var g;if(typeof window!=="undefined"){g=window}else if(typeof global!=="undefined"){g=global}else if(typeof self!=="undefined"){g=self}else{g=this}g.JSZip = f()}})(function(){var define,module,exports;return (function e(t,n,r){function s(o,u){if(!n[o]){if(!t[o]){var a=typeof require=="function"&&require;if(!u&&a)return a(o,!0);if(i)return i(o,!0);var f=new Error("Cannot find module '"+o+"'");throw f.code="MODULE_NOT_FOUND",f}var l=n[o]={exports:{}};t[o][0].call(l.exports,function(e){var n=t[o][1][e];return s(n?n:e)},l,l.exports,e,t,n,r)}return n[o].exports}var i=typeof require=="function"&&require;for(var o=0;o> 2;
enc2 = ((chr1 & 3) << 4) | (chr2 >> 4);
enc3 = remainingBytes > 1 ? (((chr2 & 15) << 2) | (chr3 >> 6)) : 64;
enc4 = remainingBytes > 2 ? (chr3 & 63) : 64;
output.push(_keyStr.charAt(enc1) + _keyStr.charAt(enc2) + _keyStr.charAt(enc3) + _keyStr.charAt(enc4));
}
return output.join("");
};
// public method for decoding
exports.decode = function(input) {
var chr1, chr2, chr3;
var enc1, enc2, enc3, enc4;
var i = 0, resultIndex = 0;
var dataUrlPrefix = "data:";
if (input.substr(0, dataUrlPrefix.length) === dataUrlPrefix) {
// This is a common error: people give a data url
// (data:image/png;base64,iVBOR...) with a {base64: true} and
// wonders why things don't work.
// We can detect that the string input looks like a data url but we
// *can't* be sure it is one: removing everything up to the comma would
// be too dangerous.
throw new Error("Invalid base64 input, it looks like a data url.");
}
input = input.replace(/[^A-Za-z0-9\+\/\=]/g, "");
var totalLength = input.length * 3 / 4;
if(input.charAt(input.length - 1) === _keyStr.charAt(64)) {
totalLength--;
}
if(input.charAt(input.length - 2) === _keyStr.charAt(64)) {
totalLength--;
}
if (totalLength % 1 !== 0) {
// totalLength is not an integer, the length does not match a valid
// base64 content. That can happen if:
// - the input is not a base64 content
// - the input is *almost* a base64 content, with a extra chars at the
// beginning or at the end
// - the input uses a base64 variant (base64url for example)
throw new Error("Invalid base64 input, bad content length.");
}
var output;
if (support.uint8array) {
output = new Uint8Array(totalLength|0);
} else {
output = new Array(totalLength|0);
}
while (i < input.length) {
enc1 = _keyStr.indexOf(input.charAt(i++));
enc2 = _keyStr.indexOf(input.charAt(i++));
enc3 = _keyStr.indexOf(input.charAt(i++));
enc4 = _keyStr.indexOf(input.charAt(i++));
chr1 = (enc1 << 2) | (enc2 >> 4);
chr2 = ((enc2 & 15) << 4) | (enc3 >> 2);
chr3 = ((enc3 & 3) << 6) | enc4;
output[resultIndex++] = chr1;
if (enc3 !== 64) {
output[resultIndex++] = chr2;
}
if (enc4 !== 64) {
output[resultIndex++] = chr3;
}
}
return output;
};
},{"./support":30,"./utils":32}],2:[function(require,module,exports){
'use strict';
var external = require("./external");
var DataWorker = require('./stream/DataWorker');
var Crc32Probe = require('./stream/Crc32Probe');
var DataLengthProbe = require('./stream/DataLengthProbe');
/**
* Represent a compressed object, with everything needed to decompress it.
* @constructor
* @param {number} compressedSize the size of the data compressed.
* @param {number} uncompressedSize the size of the data after decompression.
* @param {number} crc32 the crc32 of the decompressed file.
* @param {object} compression the type of compression, see lib/compressions.js.
* @param {String|ArrayBuffer|Uint8Array|Buffer} data the compressed data.
*/
function CompressedObject(compressedSize, uncompressedSize, crc32, compression, data) {
this.compressedSize = compressedSize;
this.uncompressedSize = uncompressedSize;
this.crc32 = crc32;
this.compression = compression;
this.compressedContent = data;
}
CompressedObject.prototype = {
/**
* Create a worker to get the uncompressed content.
* @return {GenericWorker} the worker.
*/
getContentWorker: function () {
var worker = new DataWorker(external.Promise.resolve(this.compressedContent))
.pipe(this.compression.uncompressWorker())
.pipe(new DataLengthProbe("data_length"));
var that = this;
worker.on("end", function () {
if (this.streamInfo['data_length'] !== that.uncompressedSize) {
throw new Error("Bug : uncompressed data size mismatch");
}
});
return worker;
},
/**
* Create a worker to get the compressed content.
* @return {GenericWorker} the worker.
*/
getCompressedWorker: function () {
return new DataWorker(external.Promise.resolve(this.compressedContent))
.withStreamInfo("compressedSize", this.compressedSize)
.withStreamInfo("uncompressedSize", this.uncompressedSize)
.withStreamInfo("crc32", this.crc32)
.withStreamInfo("compression", this.compression)
;
}
};
/**
* Chain the given worker with other workers to compress the content with the
* given compression.
* @param {GenericWorker} uncompressedWorker the worker to pipe.
* @param {Object} compression the compression object.
* @param {Object} compressionOptions the options to use when compressing.
* @return {GenericWorker} the new worker compressing the content.
*/
CompressedObject.createWorkerFrom = function (uncompressedWorker, compression, compressionOptions) {
return uncompressedWorker
.pipe(new Crc32Probe())
.pipe(new DataLengthProbe("uncompressedSize"))
.pipe(compression.compressWorker(compressionOptions))
.pipe(new DataLengthProbe("compressedSize"))
.withStreamInfo("compression", compression);
};
module.exports = CompressedObject;
},{"./external":6,"./stream/Crc32Probe":25,"./stream/DataLengthProbe":26,"./stream/DataWorker":27}],3:[function(require,module,exports){
'use strict';
var GenericWorker = require("./stream/GenericWorker");
exports.STORE = {
magic: "\x00\x00",
compressWorker : function (compressionOptions) {
return new GenericWorker("STORE compression");
},
uncompressWorker : function () {
return new GenericWorker("STORE decompression");
}
};
exports.DEFLATE = require('./flate');
},{"./flate":7,"./stream/GenericWorker":28}],4:[function(require,module,exports){
'use strict';
var utils = require('./utils');
/**
* The following functions come from pako, from pako/lib/zlib/crc32.js
* released under the MIT license, see pako https://github.com/nodeca/pako/
*/
// Use ordinary array, since untyped makes no boost here
function makeTable() {
var c, table = [];
for(var n =0; n < 256; n++){
c = n;
for(var k =0; k < 8; k++){
c = ((c&1) ? (0xEDB88320 ^ (c >>> 1)) : (c >>> 1));
}
table[n] = c;
}
return table;
}
// Create table on load. Just 255 signed longs. Not a problem.
var crcTable = makeTable();
function crc32(crc, buf, len, pos) {
var t = crcTable, end = pos + len;
crc = crc ^ (-1);
for (var i = pos; i < end; i++ ) {
crc = (crc >>> 8) ^ t[(crc ^ buf[i]) & 0xFF];
}
return (crc ^ (-1)); // >>> 0;
}
// That's all for the pako functions.
/**
* Compute the crc32 of a string.
* This is almost the same as the function crc32, but for strings. Using the
* same function for the two use cases leads to horrible performances.
* @param {Number} crc the starting value of the crc.
* @param {String} str the string to use.
* @param {Number} len the length of the string.
* @param {Number} pos the starting position for the crc32 computation.
* @return {Number} the computed crc32.
*/
function crc32str(crc, str, len, pos) {
var t = crcTable, end = pos + len;
crc = crc ^ (-1);
for (var i = pos; i < end; i++ ) {
crc = (crc >>> 8) ^ t[(crc ^ str.charCodeAt(i)) & 0xFF];
}
return (crc ^ (-1)); // >>> 0;
}
module.exports = function crc32wrapper(input, crc) {
if (typeof input === "undefined" || !input.length) {
return 0;
}
var isArray = utils.getTypeOf(input) !== "string";
if(isArray) {
return crc32(crc|0, input, input.length, 0);
} else {
return crc32str(crc|0, input, input.length, 0);
}
};
},{"./utils":32}],5:[function(require,module,exports){
'use strict';
exports.base64 = false;
exports.binary = false;
exports.dir = false;
exports.createFolders = true;
exports.date = null;
exports.compression = null;
exports.compressionOptions = null;
exports.comment = null;
exports.unixPermissions = null;
exports.dosPermissions = null;
},{}],6:[function(require,module,exports){
/* global Promise */
'use strict';
// load the global object first:
// - it should be better integrated in the system (unhandledRejection in node)
// - the environment may have a custom Promise implementation (see zone.js)
var ES6Promise = null;
if (typeof Promise !== "undefined") {
ES6Promise = Promise;
} else {
ES6Promise = require("lie");
}
/**
* Let the user use/change some implementations.
*/
module.exports = {
Promise: ES6Promise
};
},{"lie":37}],7:[function(require,module,exports){
'use strict';
var USE_TYPEDARRAY = (typeof Uint8Array !== 'undefined') && (typeof Uint16Array !== 'undefined') && (typeof Uint32Array !== 'undefined');
var pako = require("pako");
var utils = require("./utils");
var GenericWorker = require("./stream/GenericWorker");
var ARRAY_TYPE = USE_TYPEDARRAY ? "uint8array" : "array";
exports.magic = "\x08\x00";
/**
* Create a worker that uses pako to inflate/deflate.
* @constructor
* @param {String} action the name of the pako function to call : either "Deflate" or "Inflate".
* @param {Object} options the options to use when (de)compressing.
*/
function FlateWorker(action, options) {
GenericWorker.call(this, "FlateWorker/" + action);
this._pako = null;
this._pakoAction = action;
this._pakoOptions = options;
// the `meta` object from the last chunk received
// this allow this worker to pass around metadata
this.meta = {};
}
utils.inherits(FlateWorker, GenericWorker);
/**
* @see GenericWorker.processChunk
*/
FlateWorker.prototype.processChunk = function (chunk) {
this.meta = chunk.meta;
if (this._pako === null) {
this._createPako();
}
this._pako.push(utils.transformTo(ARRAY_TYPE, chunk.data), false);
};
/**
* @see GenericWorker.flush
*/
FlateWorker.prototype.flush = function () {
GenericWorker.prototype.flush.call(this);
if (this._pako === null) {
this._createPako();
}
this._pako.push([], true);
};
/**
* @see GenericWorker.cleanUp
*/
FlateWorker.prototype.cleanUp = function () {
GenericWorker.prototype.cleanUp.call(this);
this._pako = null;
};
/**
* Create the _pako object.
* TODO: lazy-loading this object isn't the best solution but it's the
* quickest. The best solution is to lazy-load the worker list. See also the
* issue #446.
*/
FlateWorker.prototype._createPako = function () {
this._pako = new pako[this._pakoAction]({
raw: true,
level: this._pakoOptions.level || -1 // default compression
});
var self = this;
this._pako.onData = function(data) {
self.push({
data : data,
meta : self.meta
});
};
};
exports.compressWorker = function (compressionOptions) {
return new FlateWorker("Deflate", compressionOptions);
};
exports.uncompressWorker = function () {
return new FlateWorker("Inflate", {});
};
},{"./stream/GenericWorker":28,"./utils":32,"pako":38}],8:[function(require,module,exports){
'use strict';
var utils = require('../utils');
var GenericWorker = require('../stream/GenericWorker');
var utf8 = require('../utf8');
var crc32 = require('../crc32');
var signature = require('../signature');
/**
* Transform an integer into a string in hexadecimal.
* @private
* @param {number} dec the number to convert.
* @param {number} bytes the number of bytes to generate.
* @returns {string} the result.
*/
var decToHex = function(dec, bytes) {
var hex = "", i;
for (i = 0; i < bytes; i++) {
hex += String.fromCharCode(dec & 0xff);
dec = dec >>> 8;
}
return hex;
};
/**
* Generate the UNIX part of the external file attributes.
* @param {Object} unixPermissions the unix permissions or null.
* @param {Boolean} isDir true if the entry is a directory, false otherwise.
* @return {Number} a 32 bit integer.
*
* adapted from http://unix.stackexchange.com/questions/14705/the-zip-formats-external-file-attribute :
*
* TTTTsstrwxrwxrwx0000000000ADVSHR
* ^^^^____________________________ file type, see zipinfo.c (UNX_*)
* ^^^_________________________ setuid, setgid, sticky
* ^^^^^^^^^________________ permissions
* ^^^^^^^^^^______ not used ?
* ^^^^^^ DOS attribute bits : Archive, Directory, Volume label, System file, Hidden, Read only
*/
var generateUnixExternalFileAttr = function (unixPermissions, isDir) {
var result = unixPermissions;
if (!unixPermissions) {
// I can't use octal values in strict mode, hence the hexa.
// 040775 => 0x41fd
// 0100664 => 0x81b4
result = isDir ? 0x41fd : 0x81b4;
}
return (result & 0xFFFF) << 16;
};
/**
* Generate the DOS part of the external file attributes.
* @param {Object} dosPermissions the dos permissions or null.
* @param {Boolean} isDir true if the entry is a directory, false otherwise.
* @return {Number} a 32 bit integer.
*
* Bit 0 Read-Only
* Bit 1 Hidden
* Bit 2 System
* Bit 3 Volume Label
* Bit 4 Directory
* Bit 5 Archive
*/
var generateDosExternalFileAttr = function (dosPermissions, isDir) {
// the dir flag is already set for compatibility
return (dosPermissions || 0) & 0x3F;
};
/**
* Generate the various parts used in the construction of the final zip file.
* @param {Object} streamInfo the hash with information about the compressed file.
* @param {Boolean} streamedContent is the content streamed ?
* @param {Boolean} streamingEnded is the stream finished ?
* @param {number} offset the current offset from the start of the zip file.
* @param {String} platform let's pretend we are this platform (change platform dependents fields)
* @param {Function} encodeFileName the function to encode the file name / comment.
* @return {Object} the zip parts.
*/
var generateZipParts = function(streamInfo, streamedContent, streamingEnded, offset, platform, encodeFileName) {
var file = streamInfo['file'],
compression = streamInfo['compression'],
useCustomEncoding = encodeFileName !== utf8.utf8encode,
encodedFileName = utils.transformTo("string", encodeFileName(file.name)),
utfEncodedFileName = utils.transformTo("string", utf8.utf8encode(file.name)),
comment = file.comment,
encodedComment = utils.transformTo("string", encodeFileName(comment)),
utfEncodedComment = utils.transformTo("string", utf8.utf8encode(comment)),
useUTF8ForFileName = utfEncodedFileName.length !== file.name.length,
useUTF8ForComment = utfEncodedComment.length !== comment.length,
dosTime,
dosDate,
extraFields = "",
unicodePathExtraField = "",
unicodeCommentExtraField = "",
dir = file.dir,
date = file.date;
var dataInfo = {
crc32 : 0,
compressedSize : 0,
uncompressedSize : 0
};
// if the content is streamed, the sizes/crc32 are only available AFTER
// the end of the stream.
if (!streamedContent || streamingEnded) {
dataInfo.crc32 = streamInfo['crc32'];
dataInfo.compressedSize = streamInfo['compressedSize'];
dataInfo.uncompressedSize = streamInfo['uncompressedSize'];
}
var bitflag = 0;
if (streamedContent) {
// Bit 3: the sizes/crc32 are set to zero in the local header.
// The correct values are put in the data descriptor immediately
// following the compressed data.
bitflag |= 0x0008;
}
if (!useCustomEncoding && (useUTF8ForFileName || useUTF8ForComment)) {
// Bit 11: Language encoding flag (EFS).
bitflag |= 0x0800;
}
var extFileAttr = 0;
var versionMadeBy = 0;
if (dir) {
// dos or unix, we set the dos dir flag
extFileAttr |= 0x00010;
}
if(platform === "UNIX") {
versionMadeBy = 0x031E; // UNIX, version 3.0
extFileAttr |= generateUnixExternalFileAttr(file.unixPermissions, dir);
} else { // DOS or other, fallback to DOS
versionMadeBy = 0x0014; // DOS, version 2.0
extFileAttr |= generateDosExternalFileAttr(file.dosPermissions, dir);
}
// date
// @see http://www.delorie.com/djgpp/doc/rbinter/it/52/13.html
// @see http://www.delorie.com/djgpp/doc/rbinter/it/65/16.html
// @see http://www.delorie.com/djgpp/doc/rbinter/it/66/16.html
dosTime = date.getUTCHours();
dosTime = dosTime << 6;
dosTime = dosTime | date.getUTCMinutes();
dosTime = dosTime << 5;
dosTime = dosTime | date.getUTCSeconds() / 2;
dosDate = date.getUTCFullYear() - 1980;
dosDate = dosDate << 4;
dosDate = dosDate | (date.getUTCMonth() + 1);
dosDate = dosDate << 5;
dosDate = dosDate | date.getUTCDate();
if (useUTF8ForFileName) {
// set the unicode path extra field. unzip needs at least one extra
// field to correctly handle unicode path, so using the path is as good
// as any other information. This could improve the situation with
// other archive managers too.
// This field is usually used without the utf8 flag, with a non
// unicode path in the header (winrar, winzip). This helps (a bit)
// with the messy Windows' default compressed folders feature but
// breaks on p7zip which doesn't seek the unicode path extra field.
// So for now, UTF-8 everywhere !
unicodePathExtraField =
// Version
decToHex(1, 1) +
// NameCRC32
decToHex(crc32(encodedFileName), 4) +
// UnicodeName
utfEncodedFileName;
extraFields +=
// Info-ZIP Unicode Path Extra Field
"\x75\x70" +
// size
decToHex(unicodePathExtraField.length, 2) +
// content
unicodePathExtraField;
}
if(useUTF8ForComment) {
unicodeCommentExtraField =
// Version
decToHex(1, 1) +
// CommentCRC32
decToHex(crc32(encodedComment), 4) +
// UnicodeName
utfEncodedComment;
extraFields +=
// Info-ZIP Unicode Path Extra Field
"\x75\x63" +
// size
decToHex(unicodeCommentExtraField.length, 2) +
// content
unicodeCommentExtraField;
}
var header = "";
// version needed to extract
header += "\x0A\x00";
// general purpose bit flag
header += decToHex(bitflag, 2);
// compression method
header += compression.magic;
// last mod file time
header += decToHex(dosTime, 2);
// last mod file date
header += decToHex(dosDate, 2);
// crc-32
header += decToHex(dataInfo.crc32, 4);
// compressed size
header += decToHex(dataInfo.compressedSize, 4);
// uncompressed size
header += decToHex(dataInfo.uncompressedSize, 4);
// file name length
header += decToHex(encodedFileName.length, 2);
// extra field length
header += decToHex(extraFields.length, 2);
var fileRecord = signature.LOCAL_FILE_HEADER + header + encodedFileName + extraFields;
var dirRecord = signature.CENTRAL_FILE_HEADER +
// version made by (00: DOS)
decToHex(versionMadeBy, 2) +
// file header (common to file and central directory)
header +
// file comment length
decToHex(encodedComment.length, 2) +
// disk number start
"\x00\x00" +
// internal file attributes TODO
"\x00\x00" +
// external file attributes
decToHex(extFileAttr, 4) +
// relative offset of local header
decToHex(offset, 4) +
// file name
encodedFileName +
// extra field
extraFields +
// file comment
encodedComment;
return {
fileRecord: fileRecord,
dirRecord: dirRecord
};
};
/**
* Generate the EOCD record.
* @param {Number} entriesCount the number of entries in the zip file.
* @param {Number} centralDirLength the length (in bytes) of the central dir.
* @param {Number} localDirLength the length (in bytes) of the local dir.
* @param {String} comment the zip file comment as a binary string.
* @param {Function} encodeFileName the function to encode the comment.
* @return {String} the EOCD record.
*/
var generateCentralDirectoryEnd = function (entriesCount, centralDirLength, localDirLength, comment, encodeFileName) {
var dirEnd = "";
var encodedComment = utils.transformTo("string", encodeFileName(comment));
// end of central dir signature
dirEnd = signature.CENTRAL_DIRECTORY_END +
// number of this disk
"\x00\x00" +
// number of the disk with the start of the central directory
"\x00\x00" +
// total number of entries in the central directory on this disk
decToHex(entriesCount, 2) +
// total number of entries in the central directory
decToHex(entriesCount, 2) +
// size of the central directory 4 bytes
decToHex(centralDirLength, 4) +
// offset of start of central directory with respect to the starting disk number
decToHex(localDirLength, 4) +
// .ZIP file comment length
decToHex(encodedComment.length, 2) +
// .ZIP file comment
encodedComment;
return dirEnd;
};
/**
* Generate data descriptors for a file entry.
* @param {Object} streamInfo the hash generated by a worker, containing information
* on the file entry.
* @return {String} the data descriptors.
*/
var generateDataDescriptors = function (streamInfo) {
var descriptor = "";
descriptor = signature.DATA_DESCRIPTOR +
// crc-32 4 bytes
decToHex(streamInfo['crc32'], 4) +
// compressed size 4 bytes
decToHex(streamInfo['compressedSize'], 4) +
// uncompressed size 4 bytes
decToHex(streamInfo['uncompressedSize'], 4);
return descriptor;
};
/**
* A worker to concatenate other workers to create a zip file.
* @param {Boolean} streamFiles `true` to stream the content of the files,
* `false` to accumulate it.
* @param {String} comment the comment to use.
* @param {String} platform the platform to use, "UNIX" or "DOS".
* @param {Function} encodeFileName the function to encode file names and comments.
*/
function ZipFileWorker(streamFiles, comment, platform, encodeFileName) {
GenericWorker.call(this, "ZipFileWorker");
// The number of bytes written so far. This doesn't count accumulated chunks.
this.bytesWritten = 0;
// The comment of the zip file
this.zipComment = comment;
// The platform "generating" the zip file.
this.zipPlatform = platform;
// the function to encode file names and comments.
this.encodeFileName = encodeFileName;
// Should we stream the content of the files ?
this.streamFiles = streamFiles;
// If `streamFiles` is false, we will need to accumulate the content of the
// files to calculate sizes / crc32 (and write them *before* the content).
// This boolean indicates if we are accumulating chunks (it will change a lot
// during the lifetime of this worker).
this.accumulate = false;
// The buffer receiving chunks when accumulating content.
this.contentBuffer = [];
// The list of generated directory records.
this.dirRecords = [];
// The offset (in bytes) from the beginning of the zip file for the current source.
this.currentSourceOffset = 0;
// The total number of entries in this zip file.
this.entriesCount = 0;
// the name of the file currently being added, null when handling the end of the zip file.
// Used for the emitted metadata.
this.currentFile = null;
this._sources = [];
}
utils.inherits(ZipFileWorker, GenericWorker);
/**
* @see GenericWorker.push
*/
ZipFileWorker.prototype.push = function (chunk) {
var currentFilePercent = chunk.meta.percent || 0;
var entriesCount = this.entriesCount;
var remainingFiles = this._sources.length;
if(this.accumulate) {
this.contentBuffer.push(chunk);
} else {
this.bytesWritten += chunk.data.length;
GenericWorker.prototype.push.call(this, {
data : chunk.data,
meta : {
currentFile : this.currentFile,
percent : entriesCount ? (currentFilePercent + 100 * (entriesCount - remainingFiles - 1)) / entriesCount : 100
}
});
}
};
/**
* The worker started a new source (an other worker).
* @param {Object} streamInfo the streamInfo object from the new source.
*/
ZipFileWorker.prototype.openedSource = function (streamInfo) {
this.currentSourceOffset = this.bytesWritten;
this.currentFile = streamInfo['file'].name;
var streamedContent = this.streamFiles && !streamInfo['file'].dir;
// don't stream folders (because they don't have any content)
if(streamedContent) {
var record = generateZipParts(streamInfo, streamedContent, false, this.currentSourceOffset, this.zipPlatform, this.encodeFileName);
this.push({
data : record.fileRecord,
meta : {percent:0}
});
} else {
// we need to wait for the whole file before pushing anything
this.accumulate = true;
}
};
/**
* The worker finished a source (an other worker).
* @param {Object} streamInfo the streamInfo object from the finished source.
*/
ZipFileWorker.prototype.closedSource = function (streamInfo) {
this.accumulate = false;
var streamedContent = this.streamFiles && !streamInfo['file'].dir;
var record = generateZipParts(streamInfo, streamedContent, true, this.currentSourceOffset, this.zipPlatform, this.encodeFileName);
this.dirRecords.push(record.dirRecord);
if(streamedContent) {
// after the streamed file, we put data descriptors
this.push({
data : generateDataDescriptors(streamInfo),
meta : {percent:100}
});
} else {
// the content wasn't streamed, we need to push everything now
// first the file record, then the content
this.push({
data : record.fileRecord,
meta : {percent:0}
});
while(this.contentBuffer.length) {
this.push(this.contentBuffer.shift());
}
}
this.currentFile = null;
};
/**
* @see GenericWorker.flush
*/
ZipFileWorker.prototype.flush = function () {
var localDirLength = this.bytesWritten;
for(var i = 0; i < this.dirRecords.length; i++) {
this.push({
data : this.dirRecords[i],
meta : {percent:100}
});
}
var centralDirLength = this.bytesWritten - localDirLength;
var dirEnd = generateCentralDirectoryEnd(this.dirRecords.length, centralDirLength, localDirLength, this.zipComment, this.encodeFileName);
this.push({
data : dirEnd,
meta : {percent:100}
});
};
/**
* Prepare the next source to be read.
*/
ZipFileWorker.prototype.prepareNextSource = function () {
this.previous = this._sources.shift();
this.openedSource(this.previous.streamInfo);
if (this.isPaused) {
this.previous.pause();
} else {
this.previous.resume();
}
};
/**
* @see GenericWorker.registerPrevious
*/
ZipFileWorker.prototype.registerPrevious = function (previous) {
this._sources.push(previous);
var self = this;
previous.on('data', function (chunk) {
self.processChunk(chunk);
});
previous.on('end', function () {
self.closedSource(self.previous.streamInfo);
if(self._sources.length) {
self.prepareNextSource();
} else {
self.end();
}
});
previous.on('error', function (e) {
self.error(e);
});
return this;
};
/**
* @see GenericWorker.resume
*/
ZipFileWorker.prototype.resume = function () {
if(!GenericWorker.prototype.resume.call(this)) {
return false;
}
if (!this.previous && this._sources.length) {
this.prepareNextSource();
return true;
}
if (!this.previous && !this._sources.length && !this.generatedError) {
this.end();
return true;
}
};
/**
* @see GenericWorker.error
*/
ZipFileWorker.prototype.error = function (e) {
var sources = this._sources;
if(!GenericWorker.prototype.error.call(this, e)) {
return false;
}
for(var i = 0; i < sources.length; i++) {
try {
sources[i].error(e);
} catch(e) {
// the `error` exploded, nothing to do
}
}
return true;
};
/**
* @see GenericWorker.lock
*/
ZipFileWorker.prototype.lock = function () {
GenericWorker.prototype.lock.call(this);
var sources = this._sources;
for(var i = 0; i < sources.length; i++) {
sources[i].lock();
}
};
module.exports = ZipFileWorker;
},{"../crc32":4,"../signature":23,"../stream/GenericWorker":28,"../utf8":31,"../utils":32}],9:[function(require,module,exports){
'use strict';
var compressions = require('../compressions');
var ZipFileWorker = require('./ZipFileWorker');
/**
* Find the compression to use.
* @param {String} fileCompression the compression defined at the file level, if any.
* @param {String} zipCompression the compression defined at the load() level.
* @return {Object} the compression object to use.
*/
var getCompression = function (fileCompression, zipCompression) {
var compressionName = fileCompression || zipCompression;
var compression = compressions[compressionName];
if (!compression) {
throw new Error(compressionName + " is not a valid compression method !");
}
return compression;
};
/**
* Create a worker to generate a zip file.
* @param {JSZip} zip the JSZip instance at the right root level.
* @param {Object} options to generate the zip file.
* @param {String} comment the comment to use.
*/
exports.generateWorker = function (zip, options, comment) {
var zipFileWorker = new ZipFileWorker(options.streamFiles, comment, options.platform, options.encodeFileName);
var entriesCount = 0;
try {
zip.forEach(function (relativePath, file) {
entriesCount++;
var compression = getCompression(file.options.compression, options.compression);
var compressionOptions = file.options.compressionOptions || options.compressionOptions || {};
var dir = file.dir, date = file.date;
file._compressWorker(compression, compressionOptions)
.withStreamInfo("file", {
name : relativePath,
dir : dir,
date : date,
comment : file.comment || "",
unixPermissions : file.unixPermissions,
dosPermissions : file.dosPermissions
})
.pipe(zipFileWorker);
});
zipFileWorker.entriesCount = entriesCount;
} catch (e) {
zipFileWorker.error(e);
}
return zipFileWorker;
};
},{"../compressions":3,"./ZipFileWorker":8}],10:[function(require,module,exports){
'use strict';
/**
* Representation a of zip file in js
* @constructor
*/
function JSZip() {
// if this constructor is used without `new`, it adds `new` before itself:
if(!(this instanceof JSZip)) {
return new JSZip();
}
if(arguments.length) {
throw new Error("The constructor with parameters has been removed in JSZip 3.0, please check the upgrade guide.");
}
// object containing the files :
// {
// "folder/" : {...},
// "folder/data.txt" : {...}
// }
// NOTE: we use a null prototype because we do not
// want filenames like "toString" coming from a zip file
// to overwrite methods and attributes in a normal Object.
this.files = Object.create(null);
this.comment = null;
// Where we are in the hierarchy
this.root = "";
this.clone = function() {
var newObj = new JSZip();
for (var i in this) {
if (typeof this[i] !== "function") {
newObj[i] = this[i];
}
}
return newObj;
};
}
JSZip.prototype = require('./object');
JSZip.prototype.loadAsync = require('./load');
JSZip.support = require('./support');
JSZip.defaults = require('./defaults');
// TODO find a better way to handle this version,
// a require('package.json').version doesn't work with webpack, see #327
JSZip.version = "3.7.1";
JSZip.loadAsync = function (content, options) {
return new JSZip().loadAsync(content, options);
};
JSZip.external = require("./external");
module.exports = JSZip;
},{"./defaults":5,"./external":6,"./load":11,"./object":15,"./support":30}],11:[function(require,module,exports){
'use strict';
var utils = require('./utils');
var external = require("./external");
var utf8 = require('./utf8');
var ZipEntries = require('./zipEntries');
var Crc32Probe = require('./stream/Crc32Probe');
var nodejsUtils = require("./nodejsUtils");
/**
* Check the CRC32 of an entry.
* @param {ZipEntry} zipEntry the zip entry to check.
* @return {Promise} the result.
*/
function checkEntryCRC32(zipEntry) {
return new external.Promise(function (resolve, reject) {
var worker = zipEntry.decompressed.getContentWorker().pipe(new Crc32Probe());
worker.on("error", function (e) {
reject(e);
})
.on("end", function () {
if (worker.streamInfo.crc32 !== zipEntry.decompressed.crc32) {
reject(new Error("Corrupted zip : CRC32 mismatch"));
} else {
resolve();
}
})
.resume();
});
}
module.exports = function (data, options) {
var zip = this;
options = utils.extend(options || {}, {
base64: false,
checkCRC32: false,
optimizedBinaryString: false,
createFolders: false,
decodeFileName: utf8.utf8decode
});
if (nodejsUtils.isNode && nodejsUtils.isStream(data)) {
return external.Promise.reject(new Error("JSZip can't accept a stream when loading a zip file."));
}
return utils.prepareContent("the loaded zip file", data, true, options.optimizedBinaryString, options.base64)
.then(function (data) {
var zipEntries = new ZipEntries(options);
zipEntries.load(data);
return zipEntries;
}).then(function checkCRC32(zipEntries) {
var promises = [external.Promise.resolve(zipEntries)];
var files = zipEntries.files;
if (options.checkCRC32) {
for (var i = 0; i < files.length; i++) {
promises.push(checkEntryCRC32(files[i]));
}
}
return external.Promise.all(promises);
}).then(function addFiles(results) {
var zipEntries = results.shift();
var files = zipEntries.files;
for (var i = 0; i < files.length; i++) {
var input = files[i];
zip.file(input.fileNameStr, input.decompressed, {
binary: true,
optimizedBinaryString: true,
date: input.date,
dir: input.dir,
comment: input.fileCommentStr.length ? input.fileCommentStr : null,
unixPermissions: input.unixPermissions,
dosPermissions: input.dosPermissions,
createFolders: options.createFolders
});
}
if (zipEntries.zipComment.length) {
zip.comment = zipEntries.zipComment;
}
return zip;
});
};
},{"./external":6,"./nodejsUtils":14,"./stream/Crc32Probe":25,"./utf8":31,"./utils":32,"./zipEntries":33}],12:[function(require,module,exports){
"use strict";
var utils = require('../utils');
var GenericWorker = require('../stream/GenericWorker');
/**
* A worker that use a nodejs stream as source.
* @constructor
* @param {String} filename the name of the file entry for this stream.
* @param {Readable} stream the nodejs stream.
*/
function NodejsStreamInputAdapter(filename, stream) {
GenericWorker.call(this, "Nodejs stream input adapter for " + filename);
this._upstreamEnded = false;
this._bindStream(stream);
}
utils.inherits(NodejsStreamInputAdapter, GenericWorker);
/**
* Prepare the stream and bind the callbacks on it.
* Do this ASAP on node 0.10 ! A lazy binding doesn't always work.
* @param {Stream} stream the nodejs stream to use.
*/
NodejsStreamInputAdapter.prototype._bindStream = function (stream) {
var self = this;
this._stream = stream;
stream.pause();
stream
.on("data", function (chunk) {
self.push({
data: chunk,
meta : {
percent : 0
}
});
})
.on("error", function (e) {
if(self.isPaused) {
this.generatedError = e;
} else {
self.error(e);
}
})
.on("end", function () {
if(self.isPaused) {
self._upstreamEnded = true;
} else {
self.end();
}
});
};
NodejsStreamInputAdapter.prototype.pause = function () {
if(!GenericWorker.prototype.pause.call(this)) {
return false;
}
this._stream.pause();
return true;
};
NodejsStreamInputAdapter.prototype.resume = function () {
if(!GenericWorker.prototype.resume.call(this)) {
return false;
}
if(this._upstreamEnded) {
this.end();
} else {
this._stream.resume();
}
return true;
};
module.exports = NodejsStreamInputAdapter;
},{"../stream/GenericWorker":28,"../utils":32}],13:[function(require,module,exports){
'use strict';
var Readable = require('readable-stream').Readable;
var utils = require('../utils');
utils.inherits(NodejsStreamOutputAdapter, Readable);
/**
* A nodejs stream using a worker as source.
* @see the SourceWrapper in http://nodejs.org/api/stream.html
* @constructor
* @param {StreamHelper} helper the helper wrapping the worker
* @param {Object} options the nodejs stream options
* @param {Function} updateCb the update callback.
*/
function NodejsStreamOutputAdapter(helper, options, updateCb) {
Readable.call(this, options);
this._helper = helper;
var self = this;
helper.on("data", function (data, meta) {
if (!self.push(data)) {
self._helper.pause();
}
if(updateCb) {
updateCb(meta);
}
})
.on("error", function(e) {
self.emit('error', e);
})
.on("end", function () {
self.push(null);
});
}
NodejsStreamOutputAdapter.prototype._read = function() {
this._helper.resume();
};
module.exports = NodejsStreamOutputAdapter;
},{"../utils":32,"readable-stream":16}],14:[function(require,module,exports){
'use strict';
module.exports = {
/**
* True if this is running in Nodejs, will be undefined in a browser.
* In a browser, browserify won't include this file and the whole module
* will be resolved an empty object.
*/
isNode : typeof Buffer !== "undefined",
/**
* Create a new nodejs Buffer from an existing content.
* @param {Object} data the data to pass to the constructor.
* @param {String} encoding the encoding to use.
* @return {Buffer} a new Buffer.
*/
newBufferFrom: function(data, encoding) {
if (Buffer.from && Buffer.from !== Uint8Array.from) {
return Buffer.from(data, encoding);
} else {
if (typeof data === "number") {
// Safeguard for old Node.js versions. On newer versions,
// Buffer.from(number) / Buffer(number, encoding) already throw.
throw new Error("The \"data\" argument must not be a number");
}
return new Buffer(data, encoding);
}
},
/**
* Create a new nodejs Buffer with the specified size.
* @param {Integer} size the size of the buffer.
* @return {Buffer} a new Buffer.
*/
allocBuffer: function (size) {
if (Buffer.alloc) {
return Buffer.alloc(size);
} else {
var buf = new Buffer(size);
buf.fill(0);
return buf;
}
},
/**
* Find out if an object is a Buffer.
* @param {Object} b the object to test.
* @return {Boolean} true if the object is a Buffer, false otherwise.
*/
isBuffer : function(b){
return Buffer.isBuffer(b);
},
isStream : function (obj) {
return obj &&
typeof obj.on === "function" &&
typeof obj.pause === "function" &&
typeof obj.resume === "function";
}
};
},{}],15:[function(require,module,exports){
'use strict';
var utf8 = require('./utf8');
var utils = require('./utils');
var GenericWorker = require('./stream/GenericWorker');
var StreamHelper = require('./stream/StreamHelper');
var defaults = require('./defaults');
var CompressedObject = require('./compressedObject');
var ZipObject = require('./zipObject');
var generate = require("./generate");
var nodejsUtils = require("./nodejsUtils");
var NodejsStreamInputAdapter = require("./nodejs/NodejsStreamInputAdapter");
/**
* Add a file in the current folder.
* @private
* @param {string} name the name of the file
* @param {String|ArrayBuffer|Uint8Array|Buffer} data the data of the file
* @param {Object} originalOptions the options of the file
* @return {Object} the new file.
*/
var fileAdd = function(name, data, originalOptions) {
// be sure sub folders exist
var dataType = utils.getTypeOf(data),
parent;
/*
* Correct options.
*/
var o = utils.extend(originalOptions || {}, defaults);
o.date = o.date || new Date();
if (o.compression !== null) {
o.compression = o.compression.toUpperCase();
}
if (typeof o.unixPermissions === "string") {
o.unixPermissions = parseInt(o.unixPermissions, 8);
}
// UNX_IFDIR 0040000 see zipinfo.c
if (o.unixPermissions && (o.unixPermissions & 0x4000)) {
o.dir = true;
}
// Bit 4 Directory
if (o.dosPermissions && (o.dosPermissions & 0x0010)) {
o.dir = true;
}
if (o.dir) {
name = forceTrailingSlash(name);
}
if (o.createFolders && (parent = parentFolder(name))) {
folderAdd.call(this, parent, true);
}
var isUnicodeString = dataType === "string" && o.binary === false && o.base64 === false;
if (!originalOptions || typeof originalOptions.binary === "undefined") {
o.binary = !isUnicodeString;
}
var isCompressedEmpty = (data instanceof CompressedObject) && data.uncompressedSize === 0;
if (isCompressedEmpty || o.dir || !data || data.length === 0) {
o.base64 = false;
o.binary = true;
data = "";
o.compression = "STORE";
dataType = "string";
}
/*
* Convert content to fit.
*/
var zipObjectContent = null;
if (data instanceof CompressedObject || data instanceof GenericWorker) {
zipObjectContent = data;
} else if (nodejsUtils.isNode && nodejsUtils.isStream(data)) {
zipObjectContent = new NodejsStreamInputAdapter(name, data);
} else {
zipObjectContent = utils.prepareContent(name, data, o.binary, o.optimizedBinaryString, o.base64);
}
var object = new ZipObject(name, zipObjectContent, o);
this.files[name] = object;
/*
TODO: we can't throw an exception because we have async promises
(we can have a promise of a Date() for example) but returning a
promise is useless because file(name, data) returns the JSZip
object for chaining. Should we break that to allow the user
to catch the error ?
return external.Promise.resolve(zipObjectContent)
.then(function () {
return object;
});
*/
};
/**
* Find the parent folder of the path.
* @private
* @param {string} path the path to use
* @return {string} the parent folder, or ""
*/
var parentFolder = function (path) {
if (path.slice(-1) === '/') {
path = path.substring(0, path.length - 1);
}
var lastSlash = path.lastIndexOf('/');
return (lastSlash > 0) ? path.substring(0, lastSlash) : "";
};
/**
* Returns the path with a slash at the end.
* @private
* @param {String} path the path to check.
* @return {String} the path with a trailing slash.
*/
var forceTrailingSlash = function(path) {
// Check the name ends with a /
if (path.slice(-1) !== "/") {
path += "/"; // IE doesn't like substr(-1)
}
return path;
};
/**
* Add a (sub) folder in the current folder.
* @private
* @param {string} name the folder's name
* @param {boolean=} [createFolders] If true, automatically create sub
* folders. Defaults to false.
* @return {Object} the new folder.
*/
var folderAdd = function(name, createFolders) {
createFolders = (typeof createFolders !== 'undefined') ? createFolders : defaults.createFolders;
name = forceTrailingSlash(name);
// Does this folder already exist?
if (!this.files[name]) {
fileAdd.call(this, name, null, {
dir: true,
createFolders: createFolders
});
}
return this.files[name];
};
/**
* Cross-window, cross-Node-context regular expression detection
* @param {Object} object Anything
* @return {Boolean} true if the object is a regular expression,
* false otherwise
*/
function isRegExp(object) {
return Object.prototype.toString.call(object) === "[object RegExp]";
}
// return the actual prototype of JSZip
var out = {
/**
* @see loadAsync
*/
load: function() {
throw new Error("This method has been removed in JSZip 3.0, please check the upgrade guide.");
},
/**
* Call a callback function for each entry at this folder level.
* @param {Function} cb the callback function:
* function (relativePath, file) {...}
* It takes 2 arguments : the relative path and the file.
*/
forEach: function(cb) {
var filename, relativePath, file;
/* jshint ignore:start */
// ignore warning about unwanted properties because this.files is a null prototype object
for (filename in this.files) {
file = this.files[filename];
relativePath = filename.slice(this.root.length, filename.length);
if (relativePath && filename.slice(0, this.root.length) === this.root) { // the file is in the current root
cb(relativePath, file); // TODO reverse the parameters ? need to be clean AND consistent with the filter search fn...
}
}
/* jshint ignore:end */
},
/**
* Filter nested files/folders with the specified function.
* @param {Function} search the predicate to use :
* function (relativePath, file) {...}
* It takes 2 arguments : the relative path and the file.
* @return {Array} An array of matching elements.
*/
filter: function(search) {
var result = [];
this.forEach(function (relativePath, entry) {
if (search(relativePath, entry)) { // the file matches the function
result.push(entry);
}
});
return result;
},
/**
* Add a file to the zip file, or search a file.
* @param {string|RegExp} name The name of the file to add (if data is defined),
* the name of the file to find (if no data) or a regex to match files.
* @param {String|ArrayBuffer|Uint8Array|Buffer} data The file data, either raw or base64 encoded
* @param {Object} o File options
* @return {JSZip|Object|Array} this JSZip object (when adding a file),
* a file (when searching by string) or an array of files (when searching by regex).
*/
file: function(name, data, o) {
if (arguments.length === 1) {
if (isRegExp(name)) {
var regexp = name;
return this.filter(function(relativePath, file) {
return !file.dir && regexp.test(relativePath);
});
}
else { // text
var obj = this.files[this.root + name];
if (obj && !obj.dir) {
return obj;
} else {
return null;
}
}
}
else { // more than one argument : we have data !
name = this.root + name;
fileAdd.call(this, name, data, o);
}
return this;
},
/**
* Add a directory to the zip file, or search.
* @param {String|RegExp} arg The name of the directory to add, or a regex to search folders.
* @return {JSZip} an object with the new directory as the root, or an array containing matching folders.
*/
folder: function(arg) {
if (!arg) {
return this;
}
if (isRegExp(arg)) {
return this.filter(function(relativePath, file) {
return file.dir && arg.test(relativePath);
});
}
// else, name is a new folder
var name = this.root + arg;
var newFolder = folderAdd.call(this, name);
// Allow chaining by returning a new object with this folder as the root
var ret = this.clone();
ret.root = newFolder.name;
return ret;
},
/**
* Delete a file, or a directory and all sub-files, from the zip
* @param {string} name the name of the file to delete
* @return {JSZip} this JSZip object
*/
remove: function(name) {
name = this.root + name;
var file = this.files[name];
if (!file) {
// Look for any folders
if (name.slice(-1) !== "/") {
name += "/";
}
file = this.files[name];
}
if (file && !file.dir) {
// file
delete this.files[name];
} else {
// maybe a folder, delete recursively
var kids = this.filter(function(relativePath, file) {
return file.name.slice(0, name.length) === name;
});
for (var i = 0; i < kids.length; i++) {
delete this.files[kids[i].name];
}
}
return this;
},
/**
* Generate the complete zip file
* @param {Object} options the options to generate the zip file :
* - compression, "STORE" by default.
* - type, "base64" by default. Values are : string, base64, uint8array, arraybuffer, blob.
* @return {String|Uint8Array|ArrayBuffer|Buffer|Blob} the zip file
*/
generate: function(options) {
throw new Error("This method has been removed in JSZip 3.0, please check the upgrade guide.");
},
/**
* Generate the complete zip file as an internal stream.
* @param {Object} options the options to generate the zip file :
* - compression, "STORE" by default.
* - type, "base64" by default. Values are : string, base64, uint8array, arraybuffer, blob.
* @return {StreamHelper} the streamed zip file.
*/
generateInternalStream: function(options) {
var worker, opts = {};
try {
opts = utils.extend(options || {}, {
streamFiles: false,
compression: "STORE",
compressionOptions : null,
type: "",
platform: "DOS",
comment: null,
mimeType: 'application/zip',
encodeFileName: utf8.utf8encode
});
opts.type = opts.type.toLowerCase();
opts.compression = opts.compression.toUpperCase();
// "binarystring" is preferred but the internals use "string".
if(opts.type === "binarystring") {
opts.type = "string";
}
if (!opts.type) {
throw new Error("No output type specified.");
}
utils.checkSupport(opts.type);
// accept nodejs `process.platform`
if(
opts.platform === 'darwin' ||
opts.platform === 'freebsd' ||
opts.platform === 'linux' ||
opts.platform === 'sunos'
) {
opts.platform = "UNIX";
}
if (opts.platform === 'win32') {
opts.platform = "DOS";
}
var comment = opts.comment || this.comment || "";
worker = generate.generateWorker(this, opts, comment);
} catch (e) {
worker = new GenericWorker("error");
worker.error(e);
}
return new StreamHelper(worker, opts.type || "string", opts.mimeType);
},
/**
* Generate the complete zip file asynchronously.
* @see generateInternalStream
*/
generateAsync: function(options, onUpdate) {
return this.generateInternalStream(options).accumulate(onUpdate);
},
/**
* Generate the complete zip file asynchronously.
* @see generateInternalStream
*/
generateNodeStream: function(options, onUpdate) {
options = options || {};
if (!options.type) {
options.type = "nodebuffer";
}
return this.generateInternalStream(options).toNodejsStream(onUpdate);
}
};
module.exports = out;
},{"./compressedObject":2,"./defaults":5,"./generate":9,"./nodejs/NodejsStreamInputAdapter":12,"./nodejsUtils":14,"./stream/GenericWorker":28,"./stream/StreamHelper":29,"./utf8":31,"./utils":32,"./zipObject":35}],16:[function(require,module,exports){
/*
* This file is used by module bundlers (browserify/webpack/etc) when
* including a stream implementation. We use "readable-stream" to get a
* consistent behavior between nodejs versions but bundlers often have a shim
* for "stream". Using this shim greatly improve the compatibility and greatly
* reduce the final size of the bundle (only one stream implementation, not
* two).
*/
module.exports = require("stream");
},{"stream":undefined}],17:[function(require,module,exports){
'use strict';
var DataReader = require('./DataReader');
var utils = require('../utils');
function ArrayReader(data) {
DataReader.call(this, data);
for(var i = 0; i < this.data.length; i++) {
data[i] = data[i] & 0xFF;
}
}
utils.inherits(ArrayReader, DataReader);
/**
* @see DataReader.byteAt
*/
ArrayReader.prototype.byteAt = function(i) {
return this.data[this.zero + i];
};
/**
* @see DataReader.lastIndexOfSignature
*/
ArrayReader.prototype.lastIndexOfSignature = function(sig) {
var sig0 = sig.charCodeAt(0),
sig1 = sig.charCodeAt(1),
sig2 = sig.charCodeAt(2),
sig3 = sig.charCodeAt(3);
for (var i = this.length - 4; i >= 0; --i) {
if (this.data[i] === sig0 && this.data[i + 1] === sig1 && this.data[i + 2] === sig2 && this.data[i + 3] === sig3) {
return i - this.zero;
}
}
return -1;
};
/**
* @see DataReader.readAndCheckSignature
*/
ArrayReader.prototype.readAndCheckSignature = function (sig) {
var sig0 = sig.charCodeAt(0),
sig1 = sig.charCodeAt(1),
sig2 = sig.charCodeAt(2),
sig3 = sig.charCodeAt(3),
data = this.readData(4);
return sig0 === data[0] && sig1 === data[1] && sig2 === data[2] && sig3 === data[3];
};
/**
* @see DataReader.readData
*/
ArrayReader.prototype.readData = function(size) {
this.checkOffset(size);
if(size === 0) {
return [];
}
var result = this.data.slice(this.zero + this.index, this.zero + this.index + size);
this.index += size;
return result;
};
module.exports = ArrayReader;
},{"../utils":32,"./DataReader":18}],18:[function(require,module,exports){
'use strict';
var utils = require('../utils');
function DataReader(data) {
this.data = data; // type : see implementation
this.length = data.length;
this.index = 0;
this.zero = 0;
}
DataReader.prototype = {
/**
* Check that the offset will not go too far.
* @param {string} offset the additional offset to check.
* @throws {Error} an Error if the offset is out of bounds.
*/
checkOffset: function(offset) {
this.checkIndex(this.index + offset);
},
/**
* Check that the specified index will not be too far.
* @param {string} newIndex the index to check.
* @throws {Error} an Error if the index is out of bounds.
*/
checkIndex: function(newIndex) {
if (this.length < this.zero + newIndex || newIndex < 0) {
throw new Error("End of data reached (data length = " + this.length + ", asked index = " + (newIndex) + "). Corrupted zip ?");
}
},
/**
* Change the index.
* @param {number} newIndex The new index.
* @throws {Error} if the new index is out of the data.
*/
setIndex: function(newIndex) {
this.checkIndex(newIndex);
this.index = newIndex;
},
/**
* Skip the next n bytes.
* @param {number} n the number of bytes to skip.
* @throws {Error} if the new index is out of the data.
*/
skip: function(n) {
this.setIndex(this.index + n);
},
/**
* Get the byte at the specified index.
* @param {number} i the index to use.
* @return {number} a byte.
*/
byteAt: function(i) {
// see implementations
},
/**
* Get the next number with a given byte size.
* @param {number} size the number of bytes to read.
* @return {number} the corresponding number.
*/
readInt: function(size) {
var result = 0,
i;
this.checkOffset(size);
for (i = this.index + size - 1; i >= this.index; i--) {
result = (result << 8) + this.byteAt(i);
}
this.index += size;
return result;
},
/**
* Get the next string with a given byte size.
* @param {number} size the number of bytes to read.
* @return {string} the corresponding string.
*/
readString: function(size) {
return utils.transformTo("string", this.readData(size));
},
/**
* Get raw data without conversion, bytes.
* @param {number} size the number of bytes to read.
* @return {Object} the raw data, implementation specific.
*/
readData: function(size) {
// see implementations
},
/**
* Find the last occurrence of a zip signature (4 bytes).
* @param {string} sig the signature to find.
* @return {number} the index of the last occurrence, -1 if not found.
*/
lastIndexOfSignature: function(sig) {
// see implementations
},
/**
* Read the signature (4 bytes) at the current position and compare it with sig.
* @param {string} sig the expected signature
* @return {boolean} true if the signature matches, false otherwise.
*/
readAndCheckSignature: function(sig) {
// see implementations
},
/**
* Get the next date.
* @return {Date} the date.
*/
readDate: function() {
var dostime = this.readInt(4);
return new Date(Date.UTC(
((dostime >> 25) & 0x7f) + 1980, // year
((dostime >> 21) & 0x0f) - 1, // month
(dostime >> 16) & 0x1f, // day
(dostime >> 11) & 0x1f, // hour
(dostime >> 5) & 0x3f, // minute
(dostime & 0x1f) << 1)); // second
}
};
module.exports = DataReader;
},{"../utils":32}],19:[function(require,module,exports){
'use strict';
var Uint8ArrayReader = require('./Uint8ArrayReader');
var utils = require('../utils');
function NodeBufferReader(data) {
Uint8ArrayReader.call(this, data);
}
utils.inherits(NodeBufferReader, Uint8ArrayReader);
/**
* @see DataReader.readData
*/
NodeBufferReader.prototype.readData = function(size) {
this.checkOffset(size);
var result = this.data.slice(this.zero + this.index, this.zero + this.index + size);
this.index += size;
return result;
};
module.exports = NodeBufferReader;
},{"../utils":32,"./Uint8ArrayReader":21}],20:[function(require,module,exports){
'use strict';
var DataReader = require('./DataReader');
var utils = require('../utils');
function StringReader(data) {
DataReader.call(this, data);
}
utils.inherits(StringReader, DataReader);
/**
* @see DataReader.byteAt
*/
StringReader.prototype.byteAt = function(i) {
return this.data.charCodeAt(this.zero + i);
};
/**
* @see DataReader.lastIndexOfSignature
*/
StringReader.prototype.lastIndexOfSignature = function(sig) {
return this.data.lastIndexOf(sig) - this.zero;
};
/**
* @see DataReader.readAndCheckSignature
*/
StringReader.prototype.readAndCheckSignature = function (sig) {
var data = this.readData(4);
return sig === data;
};
/**
* @see DataReader.readData
*/
StringReader.prototype.readData = function(size) {
this.checkOffset(size);
// this will work because the constructor applied the "& 0xff" mask.
var result = this.data.slice(this.zero + this.index, this.zero + this.index + size);
this.index += size;
return result;
};
module.exports = StringReader;
},{"../utils":32,"./DataReader":18}],21:[function(require,module,exports){
'use strict';
var ArrayReader = require('./ArrayReader');
var utils = require('../utils');
function Uint8ArrayReader(data) {
ArrayReader.call(this, data);
}
utils.inherits(Uint8ArrayReader, ArrayReader);
/**
* @see DataReader.readData
*/
Uint8ArrayReader.prototype.readData = function(size) {
this.checkOffset(size);
if(size === 0) {
// in IE10, when using subarray(idx, idx), we get the array [0x00] instead of [].
return new Uint8Array(0);
}
var result = this.data.subarray(this.zero + this.index, this.zero + this.index + size);
this.index += size;
return result;
};
module.exports = Uint8ArrayReader;
},{"../utils":32,"./ArrayReader":17}],22:[function(require,module,exports){
'use strict';
var utils = require('../utils');
var support = require('../support');
var ArrayReader = require('./ArrayReader');
var StringReader = require('./StringReader');
var NodeBufferReader = require('./NodeBufferReader');
var Uint8ArrayReader = require('./Uint8ArrayReader');
/**
* Create a reader adapted to the data.
* @param {String|ArrayBuffer|Uint8Array|Buffer} data the data to read.
* @return {DataReader} the data reader.
*/
module.exports = function (data) {
var type = utils.getTypeOf(data);
utils.checkSupport(type);
if (type === "string" && !support.uint8array) {
return new StringReader(data);
}
if (type === "nodebuffer") {
return new NodeBufferReader(data);
}
if (support.uint8array) {
return new Uint8ArrayReader(utils.transformTo("uint8array", data));
}
return new ArrayReader(utils.transformTo("array", data));
};
},{"../support":30,"../utils":32,"./ArrayReader":17,"./NodeBufferReader":19,"./StringReader":20,"./Uint8ArrayReader":21}],23:[function(require,module,exports){
'use strict';
exports.LOCAL_FILE_HEADER = "PK\x03\x04";
exports.CENTRAL_FILE_HEADER = "PK\x01\x02";
exports.CENTRAL_DIRECTORY_END = "PK\x05\x06";
exports.ZIP64_CENTRAL_DIRECTORY_LOCATOR = "PK\x06\x07";
exports.ZIP64_CENTRAL_DIRECTORY_END = "PK\x06\x06";
exports.DATA_DESCRIPTOR = "PK\x07\x08";
},{}],24:[function(require,module,exports){
'use strict';
var GenericWorker = require('./GenericWorker');
var utils = require('../utils');
/**
* A worker which convert chunks to a specified type.
* @constructor
* @param {String} destType the destination type.
*/
function ConvertWorker(destType) {
GenericWorker.call(this, "ConvertWorker to " + destType);
this.destType = destType;
}
utils.inherits(ConvertWorker, GenericWorker);
/**
* @see GenericWorker.processChunk
*/
ConvertWorker.prototype.processChunk = function (chunk) {
this.push({
data : utils.transformTo(this.destType, chunk.data),
meta : chunk.meta
});
};
module.exports = ConvertWorker;
},{"../utils":32,"./GenericWorker":28}],25:[function(require,module,exports){
'use strict';
var GenericWorker = require('./GenericWorker');
var crc32 = require('../crc32');
var utils = require('../utils');
/**
* A worker which calculate the crc32 of the data flowing through.
* @constructor
*/
function Crc32Probe() {
GenericWorker.call(this, "Crc32Probe");
this.withStreamInfo("crc32", 0);
}
utils.inherits(Crc32Probe, GenericWorker);
/**
* @see GenericWorker.processChunk
*/
Crc32Probe.prototype.processChunk = function (chunk) {
this.streamInfo.crc32 = crc32(chunk.data, this.streamInfo.crc32 || 0);
this.push(chunk);
};
module.exports = Crc32Probe;
},{"../crc32":4,"../utils":32,"./GenericWorker":28}],26:[function(require,module,exports){
'use strict';
var utils = require('../utils');
var GenericWorker = require('./GenericWorker');
/**
* A worker which calculate the total length of the data flowing through.
* @constructor
* @param {String} propName the name used to expose the length
*/
function DataLengthProbe(propName) {
GenericWorker.call(this, "DataLengthProbe for " + propName);
this.propName = propName;
this.withStreamInfo(propName, 0);
}
utils.inherits(DataLengthProbe, GenericWorker);
/**
* @see GenericWorker.processChunk
*/
DataLengthProbe.prototype.processChunk = function (chunk) {
if(chunk) {
var length = this.streamInfo[this.propName] || 0;
this.streamInfo[this.propName] = length + chunk.data.length;
}
GenericWorker.prototype.processChunk.call(this, chunk);
};
module.exports = DataLengthProbe;
},{"../utils":32,"./GenericWorker":28}],27:[function(require,module,exports){
'use strict';
var utils = require('../utils');
var GenericWorker = require('./GenericWorker');
// the size of the generated chunks
// TODO expose this as a public variable
var DEFAULT_BLOCK_SIZE = 16 * 1024;
/**
* A worker that reads a content and emits chunks.
* @constructor
* @param {Promise} dataP the promise of the data to split
*/
function DataWorker(dataP) {
GenericWorker.call(this, "DataWorker");
var self = this;
this.dataIsReady = false;
this.index = 0;
this.max = 0;
this.data = null;
this.type = "";
this._tickScheduled = false;
dataP.then(function (data) {
self.dataIsReady = true;
self.data = data;
self.max = data && data.length || 0;
self.type = utils.getTypeOf(data);
if(!self.isPaused) {
self._tickAndRepeat();
}
}, function (e) {
self.error(e);
});
}
utils.inherits(DataWorker, GenericWorker);
/**
* @see GenericWorker.cleanUp
*/
DataWorker.prototype.cleanUp = function () {
GenericWorker.prototype.cleanUp.call(this);
this.data = null;
};
/**
* @see GenericWorker.resume
*/
DataWorker.prototype.resume = function () {
if(!GenericWorker.prototype.resume.call(this)) {
return false;
}
if (!this._tickScheduled && this.dataIsReady) {
this._tickScheduled = true;
utils.delay(this._tickAndRepeat, [], this);
}
return true;
};
/**
* Trigger a tick a schedule an other call to this function.
*/
DataWorker.prototype._tickAndRepeat = function() {
this._tickScheduled = false;
if(this.isPaused || this.isFinished) {
return;
}
this._tick();
if(!this.isFinished) {
utils.delay(this._tickAndRepeat, [], this);
this._tickScheduled = true;
}
};
/**
* Read and push a chunk.
*/
DataWorker.prototype._tick = function() {
if(this.isPaused || this.isFinished) {
return false;
}
var size = DEFAULT_BLOCK_SIZE;
var data = null, nextIndex = Math.min(this.max, this.index + size);
if (this.index >= this.max) {
// EOF
return this.end();
} else {
switch(this.type) {
case "string":
data = this.data.substring(this.index, nextIndex);
break;
case "uint8array":
data = this.data.subarray(this.index, nextIndex);
break;
case "array":
case "nodebuffer":
data = this.data.slice(this.index, nextIndex);
break;
}
this.index = nextIndex;
return this.push({
data : data,
meta : {
percent : this.max ? this.index / this.max * 100 : 0
}
});
}
};
module.exports = DataWorker;
},{"../utils":32,"./GenericWorker":28}],28:[function(require,module,exports){
'use strict';
/**
* A worker that does nothing but passing chunks to the next one. This is like
* a nodejs stream but with some differences. On the good side :
* - it works on IE 6-9 without any issue / polyfill
* - it weights less than the full dependencies bundled with browserify
* - it forwards errors (no need to declare an error handler EVERYWHERE)
*
* A chunk is an object with 2 attributes : `meta` and `data`. The former is an
* object containing anything (`percent` for example), see each worker for more
* details. The latter is the real data (String, Uint8Array, etc).
*
* @constructor
* @param {String} name the name of the stream (mainly used for debugging purposes)
*/
function GenericWorker(name) {
// the name of the worker
this.name = name || "default";
// an object containing metadata about the workers chain
this.streamInfo = {};
// an error which happened when the worker was paused
this.generatedError = null;
// an object containing metadata to be merged by this worker into the general metadata
this.extraStreamInfo = {};
// true if the stream is paused (and should not do anything), false otherwise
this.isPaused = true;
// true if the stream is finished (and should not do anything), false otherwise
this.isFinished = false;
// true if the stream is locked to prevent further structure updates (pipe), false otherwise
this.isLocked = false;
// the event listeners
this._listeners = {
'data':[],
'end':[],
'error':[]
};
// the previous worker, if any
this.previous = null;
}
GenericWorker.prototype = {
/**
* Push a chunk to the next workers.
* @param {Object} chunk the chunk to push
*/
push : function (chunk) {
this.emit("data", chunk);
},
/**
* End the stream.
* @return {Boolean} true if this call ended the worker, false otherwise.
*/
end : function () {
if (this.isFinished) {
return false;
}
this.flush();
try {
this.emit("end");
this.cleanUp();
this.isFinished = true;
} catch (e) {
this.emit("error", e);
}
return true;
},
/**
* End the stream with an error.
* @param {Error} e the error which caused the premature end.
* @return {Boolean} true if this call ended the worker with an error, false otherwise.
*/
error : function (e) {
if (this.isFinished) {
return false;
}
if(this.isPaused) {
this.generatedError = e;
} else {
this.isFinished = true;
this.emit("error", e);
// in the workers chain exploded in the middle of the chain,
// the error event will go downward but we also need to notify
// workers upward that there has been an error.
if(this.previous) {
this.previous.error(e);
}
this.cleanUp();
}
return true;
},
/**
* Add a callback on an event.
* @param {String} name the name of the event (data, end, error)
* @param {Function} listener the function to call when the event is triggered
* @return {GenericWorker} the current object for chainability
*/
on : function (name, listener) {
this._listeners[name].push(listener);
return this;
},
/**
* Clean any references when a worker is ending.
*/
cleanUp : function () {
this.streamInfo = this.generatedError = this.extraStreamInfo = null;
this._listeners = [];
},
/**
* Trigger an event. This will call registered callback with the provided arg.
* @param {String} name the name of the event (data, end, error)
* @param {Object} arg the argument to call the callback with.
*/
emit : function (name, arg) {
if (this._listeners[name]) {
for(var i = 0; i < this._listeners[name].length; i++) {
this._listeners[name][i].call(this, arg);
}
}
},
/**
* Chain a worker with an other.
* @param {Worker} next the worker receiving events from the current one.
* @return {worker} the next worker for chainability
*/
pipe : function (next) {
return next.registerPrevious(this);
},
/**
* Same as `pipe` in the other direction.
* Using an API with `pipe(next)` is very easy.
* Implementing the API with the point of view of the next one registering
* a source is easier, see the ZipFileWorker.
* @param {Worker} previous the previous worker, sending events to this one
* @return {Worker} the current worker for chainability
*/
registerPrevious : function (previous) {
if (this.isLocked) {
throw new Error("The stream '" + this + "' has already been used.");
}
// sharing the streamInfo...
this.streamInfo = previous.streamInfo;
// ... and adding our own bits
this.mergeStreamInfo();
this.previous = previous;
var self = this;
previous.on('data', function (chunk) {
self.processChunk(chunk);
});
previous.on('end', function () {
self.end();
});
previous.on('error', function (e) {
self.error(e);
});
return this;
},
/**
* Pause the stream so it doesn't send events anymore.
* @return {Boolean} true if this call paused the worker, false otherwise.
*/
pause : function () {
if(this.isPaused || this.isFinished) {
return false;
}
this.isPaused = true;
if(this.previous) {
this.previous.pause();
}
return true;
},
/**
* Resume a paused stream.
* @return {Boolean} true if this call resumed the worker, false otherwise.
*/
resume : function () {
if(!this.isPaused || this.isFinished) {
return false;
}
this.isPaused = false;
// if true, the worker tried to resume but failed
var withError = false;
if(this.generatedError) {
this.error(this.generatedError);
withError = true;
}
if(this.previous) {
this.previous.resume();
}
return !withError;
},
/**
* Flush any remaining bytes as the stream is ending.
*/
flush : function () {},
/**
* Process a chunk. This is usually the method overridden.
* @param {Object} chunk the chunk to process.
*/
processChunk : function(chunk) {
this.push(chunk);
},
/**
* Add a key/value to be added in the workers chain streamInfo once activated.
* @param {String} key the key to use
* @param {Object} value the associated value
* @return {Worker} the current worker for chainability
*/
withStreamInfo : function (key, value) {
this.extraStreamInfo[key] = value;
this.mergeStreamInfo();
return this;
},
/**
* Merge this worker's streamInfo into the chain's streamInfo.
*/
mergeStreamInfo : function () {
for(var key in this.extraStreamInfo) {
if (!this.extraStreamInfo.hasOwnProperty(key)) {
continue;
}
this.streamInfo[key] = this.extraStreamInfo[key];
}
},
/**
* Lock the stream to prevent further updates on the workers chain.
* After calling this method, all calls to pipe will fail.
*/
lock: function () {
if (this.isLocked) {
throw new Error("The stream '" + this + "' has already been used.");
}
this.isLocked = true;
if (this.previous) {
this.previous.lock();
}
},
/**
*
* Pretty print the workers chain.
*/
toString : function () {
var me = "Worker " + this.name;
if (this.previous) {
return this.previous + " -> " + me;
} else {
return me;
}
}
};
module.exports = GenericWorker;
},{}],29:[function(require,module,exports){
'use strict';
var utils = require('../utils');
var ConvertWorker = require('./ConvertWorker');
var GenericWorker = require('./GenericWorker');
var base64 = require('../base64');
var support = require("../support");
var external = require("../external");
var NodejsStreamOutputAdapter = null;
if (support.nodestream) {
try {
NodejsStreamOutputAdapter = require('../nodejs/NodejsStreamOutputAdapter');
} catch(e) {}
}
/**
* Apply the final transformation of the data. If the user wants a Blob for
* example, it's easier to work with an U8intArray and finally do the
* ArrayBuffer/Blob conversion.
* @param {String} type the name of the final type
* @param {String|Uint8Array|Buffer} content the content to transform
* @param {String} mimeType the mime type of the content, if applicable.
* @return {String|Uint8Array|ArrayBuffer|Buffer|Blob} the content in the right format.
*/
function transformZipOutput(type, content, mimeType) {
switch(type) {
case "blob" :
return utils.newBlob(utils.transformTo("arraybuffer", content), mimeType);
case "base64" :
return base64.encode(content);
default :
return utils.transformTo(type, content);
}
}
/**
* Concatenate an array of data of the given type.
* @param {String} type the type of the data in the given array.
* @param {Array} dataArray the array containing the data chunks to concatenate
* @return {String|Uint8Array|Buffer} the concatenated data
* @throws Error if the asked type is unsupported
*/
function concat (type, dataArray) {
var i, index = 0, res = null, totalLength = 0;
for(i = 0; i < dataArray.length; i++) {
totalLength += dataArray[i].length;
}
switch(type) {
case "string":
return dataArray.join("");
case "array":
return Array.prototype.concat.apply([], dataArray);
case "uint8array":
res = new Uint8Array(totalLength);
for(i = 0; i < dataArray.length; i++) {
res.set(dataArray[i], index);
index += dataArray[i].length;
}
return res;
case "nodebuffer":
return Buffer.concat(dataArray);
default:
throw new Error("concat : unsupported type '" + type + "'");
}
}
/**
* Listen a StreamHelper, accumulate its content and concatenate it into a
* complete block.
* @param {StreamHelper} helper the helper to use.
* @param {Function} updateCallback a callback called on each update. Called
* with one arg :
* - the metadata linked to the update received.
* @return Promise the promise for the accumulation.
*/
function accumulate(helper, updateCallback) {
return new external.Promise(function (resolve, reject){
var dataArray = [];
var chunkType = helper._internalType,
resultType = helper._outputType,
mimeType = helper._mimeType;
helper
.on('data', function (data, meta) {
dataArray.push(data);
if(updateCallback) {
updateCallback(meta);
}
})
.on('error', function(err) {
dataArray = [];
reject(err);
})
.on('end', function (){
try {
var result = transformZipOutput(resultType, concat(chunkType, dataArray), mimeType);
resolve(result);
} catch (e) {
reject(e);
}
dataArray = [];
})
.resume();
});
}
/**
* An helper to easily use workers outside of JSZip.
* @constructor
* @param {Worker} worker the worker to wrap
* @param {String} outputType the type of data expected by the use
* @param {String} mimeType the mime type of the content, if applicable.
*/
function StreamHelper(worker, outputType, mimeType) {
var internalType = outputType;
switch(outputType) {
case "blob":
case "arraybuffer":
internalType = "uint8array";
break;
case "base64":
internalType = "string";
break;
}
try {
// the type used internally
this._internalType = internalType;
// the type used to output results
this._outputType = outputType;
// the mime type
this._mimeType = mimeType;
utils.checkSupport(internalType);
this._worker = worker.pipe(new ConvertWorker(internalType));
// the last workers can be rewired without issues but we need to
// prevent any updates on previous workers.
worker.lock();
} catch(e) {
this._worker = new GenericWorker("error");
this._worker.error(e);
}
}
StreamHelper.prototype = {
/**
* Listen a StreamHelper, accumulate its content and concatenate it into a
* complete block.
* @param {Function} updateCb the update callback.
* @return Promise the promise for the accumulation.
*/
accumulate : function (updateCb) {
return accumulate(this, updateCb);
},
/**
* Add a listener on an event triggered on a stream.
* @param {String} evt the name of the event
* @param {Function} fn the listener
* @return {StreamHelper} the current helper.
*/
on : function (evt, fn) {
var self = this;
if(evt === "data") {
this._worker.on(evt, function (chunk) {
fn.call(self, chunk.data, chunk.meta);
});
} else {
this._worker.on(evt, function () {
utils.delay(fn, arguments, self);
});
}
return this;
},
/**
* Resume the flow of chunks.
* @return {StreamHelper} the current helper.
*/
resume : function () {
utils.delay(this._worker.resume, [], this._worker);
return this;
},
/**
* Pause the flow of chunks.
* @return {StreamHelper} the current helper.
*/
pause : function () {
this._worker.pause();
return this;
},
/**
* Return a nodejs stream for this helper.
* @param {Function} updateCb the update callback.
* @return {NodejsStreamOutputAdapter} the nodejs stream.
*/
toNodejsStream : function (updateCb) {
utils.checkSupport("nodestream");
if (this._outputType !== "nodebuffer") {
// an object stream containing blob/arraybuffer/uint8array/string
// is strange and I don't know if it would be useful.
// I you find this comment and have a good usecase, please open a
// bug report !
throw new Error(this._outputType + " is not supported by this method");
}
return new NodejsStreamOutputAdapter(this, {
objectMode : this._outputType !== "nodebuffer"
}, updateCb);
}
};
module.exports = StreamHelper;
},{"../base64":1,"../external":6,"../nodejs/NodejsStreamOutputAdapter":13,"../support":30,"../utils":32,"./ConvertWorker":24,"./GenericWorker":28}],30:[function(require,module,exports){
'use strict';
exports.base64 = true;
exports.array = true;
exports.string = true;
exports.arraybuffer = typeof ArrayBuffer !== "undefined" && typeof Uint8Array !== "undefined";
exports.nodebuffer = typeof Buffer !== "undefined";
// contains true if JSZip can read/generate Uint8Array, false otherwise.
exports.uint8array = typeof Uint8Array !== "undefined";
if (typeof ArrayBuffer === "undefined") {
exports.blob = false;
}
else {
var buffer = new ArrayBuffer(0);
try {
exports.blob = new Blob([buffer], {
type: "application/zip"
}).size === 0;
}
catch (e) {
try {
var Builder = self.BlobBuilder || self.WebKitBlobBuilder || self.MozBlobBuilder || self.MSBlobBuilder;
var builder = new Builder();
builder.append(buffer);
exports.blob = builder.getBlob('application/zip').size === 0;
}
catch (e) {
exports.blob = false;
}
}
}
try {
exports.nodestream = !!require('readable-stream').Readable;
} catch(e) {
exports.nodestream = false;
}
},{"readable-stream":16}],31:[function(require,module,exports){
'use strict';
var utils = require('./utils');
var support = require('./support');
var nodejsUtils = require('./nodejsUtils');
var GenericWorker = require('./stream/GenericWorker');
/**
* The following functions come from pako, from pako/lib/utils/strings
* released under the MIT license, see pako https://github.com/nodeca/pako/
*/
// Table with utf8 lengths (calculated by first byte of sequence)
// Note, that 5 & 6-byte values and some 4-byte values can not be represented in JS,
// because max possible codepoint is 0x10ffff
var _utf8len = new Array(256);
for (var i=0; i<256; i++) {
_utf8len[i] = (i >= 252 ? 6 : i >= 248 ? 5 : i >= 240 ? 4 : i >= 224 ? 3 : i >= 192 ? 2 : 1);
}
_utf8len[254]=_utf8len[254]=1; // Invalid sequence start
// convert string to array (typed, when possible)
var string2buf = function (str) {
var buf, c, c2, m_pos, i, str_len = str.length, buf_len = 0;
// count binary size
for (m_pos = 0; m_pos < str_len; m_pos++) {
c = str.charCodeAt(m_pos);
if ((c & 0xfc00) === 0xd800 && (m_pos+1 < str_len)) {
c2 = str.charCodeAt(m_pos+1);
if ((c2 & 0xfc00) === 0xdc00) {
c = 0x10000 + ((c - 0xd800) << 10) + (c2 - 0xdc00);
m_pos++;
}
}
buf_len += c < 0x80 ? 1 : c < 0x800 ? 2 : c < 0x10000 ? 3 : 4;
}
// allocate buffer
if (support.uint8array) {
buf = new Uint8Array(buf_len);
} else {
buf = new Array(buf_len);
}
// convert
for (i=0, m_pos = 0; i < buf_len; m_pos++) {
c = str.charCodeAt(m_pos);
if ((c & 0xfc00) === 0xd800 && (m_pos+1 < str_len)) {
c2 = str.charCodeAt(m_pos+1);
if ((c2 & 0xfc00) === 0xdc00) {
c = 0x10000 + ((c - 0xd800) << 10) + (c2 - 0xdc00);
m_pos++;
}
}
if (c < 0x80) {
/* one byte */
buf[i++] = c;
} else if (c < 0x800) {
/* two bytes */
buf[i++] = 0xC0 | (c >>> 6);
buf[i++] = 0x80 | (c & 0x3f);
} else if (c < 0x10000) {
/* three bytes */
buf[i++] = 0xE0 | (c >>> 12);
buf[i++] = 0x80 | (c >>> 6 & 0x3f);
buf[i++] = 0x80 | (c & 0x3f);
} else {
/* four bytes */
buf[i++] = 0xf0 | (c >>> 18);
buf[i++] = 0x80 | (c >>> 12 & 0x3f);
buf[i++] = 0x80 | (c >>> 6 & 0x3f);
buf[i++] = 0x80 | (c & 0x3f);
}
}
return buf;
};
// Calculate max possible position in utf8 buffer,
// that will not break sequence. If that's not possible
// - (very small limits) return max size as is.
//
// buf[] - utf8 bytes array
// max - length limit (mandatory);
var utf8border = function(buf, max) {
var pos;
max = max || buf.length;
if (max > buf.length) { max = buf.length; }
// go back from last position, until start of sequence found
pos = max-1;
while (pos >= 0 && (buf[pos] & 0xC0) === 0x80) { pos--; }
// Fuckup - very small and broken sequence,
// return max, because we should return something anyway.
if (pos < 0) { return max; }
// If we came to start of buffer - that means vuffer is too small,
// return max too.
if (pos === 0) { return max; }
return (pos + _utf8len[buf[pos]] > max) ? pos : max;
};
// convert array to string
var buf2string = function (buf) {
var str, i, out, c, c_len;
var len = buf.length;
// Reserve max possible length (2 words per char)
// NB: by unknown reasons, Array is significantly faster for
// String.fromCharCode.apply than Uint16Array.
var utf16buf = new Array(len*2);
for (out=0, i=0; i 4) { utf16buf[out++] = 0xfffd; i += c_len-1; continue; }
// apply mask on first byte
c &= c_len === 2 ? 0x1f : c_len === 3 ? 0x0f : 0x07;
// join the rest
while (c_len > 1 && i < len) {
c = (c << 6) | (buf[i++] & 0x3f);
c_len--;
}
// terminated by end of string?
if (c_len > 1) { utf16buf[out++] = 0xfffd; continue; }
if (c < 0x10000) {
utf16buf[out++] = c;
} else {
c -= 0x10000;
utf16buf[out++] = 0xd800 | ((c >> 10) & 0x3ff);
utf16buf[out++] = 0xdc00 | (c & 0x3ff);
}
}
// shrinkBuf(utf16buf, out)
if (utf16buf.length !== out) {
if(utf16buf.subarray) {
utf16buf = utf16buf.subarray(0, out);
} else {
utf16buf.length = out;
}
}
// return String.fromCharCode.apply(null, utf16buf);
return utils.applyFromCharCode(utf16buf);
};
// That's all for the pako functions.
/**
* Transform a javascript string into an array (typed if possible) of bytes,
* UTF-8 encoded.
* @param {String} str the string to encode
* @return {Array|Uint8Array|Buffer} the UTF-8 encoded string.
*/
exports.utf8encode = function utf8encode(str) {
if (support.nodebuffer) {
return nodejsUtils.newBufferFrom(str, "utf-8");
}
return string2buf(str);
};
/**
* Transform a bytes array (or a representation) representing an UTF-8 encoded
* string into a javascript string.
* @param {Array|Uint8Array|Buffer} buf the data de decode
* @return {String} the decoded string.
*/
exports.utf8decode = function utf8decode(buf) {
if (support.nodebuffer) {
return utils.transformTo("nodebuffer", buf).toString("utf-8");
}
buf = utils.transformTo(support.uint8array ? "uint8array" : "array", buf);
return buf2string(buf);
};
/**
* A worker to decode utf8 encoded binary chunks into string chunks.
* @constructor
*/
function Utf8DecodeWorker() {
GenericWorker.call(this, "utf-8 decode");
// the last bytes if a chunk didn't end with a complete codepoint.
this.leftOver = null;
}
utils.inherits(Utf8DecodeWorker, GenericWorker);
/**
* @see GenericWorker.processChunk
*/
Utf8DecodeWorker.prototype.processChunk = function (chunk) {
var data = utils.transformTo(support.uint8array ? "uint8array" : "array", chunk.data);
// 1st step, re-use what's left of the previous chunk
if (this.leftOver && this.leftOver.length) {
if(support.uint8array) {
var previousData = data;
data = new Uint8Array(previousData.length + this.leftOver.length);
data.set(this.leftOver, 0);
data.set(previousData, this.leftOver.length);
} else {
data = this.leftOver.concat(data);
}
this.leftOver = null;
}
var nextBoundary = utf8border(data);
var usableData = data;
if (nextBoundary !== data.length) {
if (support.uint8array) {
usableData = data.subarray(0, nextBoundary);
this.leftOver = data.subarray(nextBoundary, data.length);
} else {
usableData = data.slice(0, nextBoundary);
this.leftOver = data.slice(nextBoundary, data.length);
}
}
this.push({
data : exports.utf8decode(usableData),
meta : chunk.meta
});
};
/**
* @see GenericWorker.flush
*/
Utf8DecodeWorker.prototype.flush = function () {
if(this.leftOver && this.leftOver.length) {
this.push({
data : exports.utf8decode(this.leftOver),
meta : {}
});
this.leftOver = null;
}
};
exports.Utf8DecodeWorker = Utf8DecodeWorker;
/**
* A worker to endcode string chunks into utf8 encoded binary chunks.
* @constructor
*/
function Utf8EncodeWorker() {
GenericWorker.call(this, "utf-8 encode");
}
utils.inherits(Utf8EncodeWorker, GenericWorker);
/**
* @see GenericWorker.processChunk
*/
Utf8EncodeWorker.prototype.processChunk = function (chunk) {
this.push({
data : exports.utf8encode(chunk.data),
meta : chunk.meta
});
};
exports.Utf8EncodeWorker = Utf8EncodeWorker;
},{"./nodejsUtils":14,"./stream/GenericWorker":28,"./support":30,"./utils":32}],32:[function(require,module,exports){
'use strict';
var support = require('./support');
var base64 = require('./base64');
var nodejsUtils = require('./nodejsUtils');
var setImmediate = require('set-immediate-shim');
var external = require("./external");
/**
* Convert a string that pass as a "binary string": it should represent a byte
* array but may have > 255 char codes. Be sure to take only the first byte
* and returns the byte array.
* @param {String} str the string to transform.
* @return {Array|Uint8Array} the string in a binary format.
*/
function string2binary(str) {
var result = null;
if (support.uint8array) {
result = new Uint8Array(str.length);
} else {
result = new Array(str.length);
}
return stringToArrayLike(str, result);
}
/**
* Create a new blob with the given content and the given type.
* @param {String|ArrayBuffer} part the content to put in the blob. DO NOT use
* an Uint8Array because the stock browser of android 4 won't accept it (it
* will be silently converted to a string, "[object Uint8Array]").
*
* Use only ONE part to build the blob to avoid a memory leak in IE11 / Edge:
* when a large amount of Array is used to create the Blob, the amount of
* memory consumed is nearly 100 times the original data amount.
*
* @param {String} type the mime type of the blob.
* @return {Blob} the created blob.
*/
exports.newBlob = function(part, type) {
exports.checkSupport("blob");
try {
// Blob constructor
return new Blob([part], {
type: type
});
}
catch (e) {
try {
// deprecated, browser only, old way
var Builder = self.BlobBuilder || self.WebKitBlobBuilder || self.MozBlobBuilder || self.MSBlobBuilder;
var builder = new Builder();
builder.append(part);
return builder.getBlob(type);
}
catch (e) {
// well, fuck ?!
throw new Error("Bug : can't construct the Blob.");
}
}
};
/**
* The identity function.
* @param {Object} input the input.
* @return {Object} the same input.
*/
function identity(input) {
return input;
}
/**
* Fill in an array with a string.
* @param {String} str the string to use.
* @param {Array|ArrayBuffer|Uint8Array|Buffer} array the array to fill in (will be mutated).
* @return {Array|ArrayBuffer|Uint8Array|Buffer} the updated array.
*/
function stringToArrayLike(str, array) {
for (var i = 0; i < str.length; ++i) {
array[i] = str.charCodeAt(i) & 0xFF;
}
return array;
}
/**
* An helper for the function arrayLikeToString.
* This contains static information and functions that
* can be optimized by the browser JIT compiler.
*/
var arrayToStringHelper = {
/**
* Transform an array of int into a string, chunk by chunk.
* See the performances notes on arrayLikeToString.
* @param {Array|ArrayBuffer|Uint8Array|Buffer} array the array to transform.
* @param {String} type the type of the array.
* @param {Integer} chunk the chunk size.
* @return {String} the resulting string.
* @throws Error if the chunk is too big for the stack.
*/
stringifyByChunk: function(array, type, chunk) {
var result = [], k = 0, len = array.length;
// shortcut
if (len <= chunk) {
return String.fromCharCode.apply(null, array);
}
while (k < len) {
if (type === "array" || type === "nodebuffer") {
result.push(String.fromCharCode.apply(null, array.slice(k, Math.min(k + chunk, len))));
}
else {
result.push(String.fromCharCode.apply(null, array.subarray(k, Math.min(k + chunk, len))));
}
k += chunk;
}
return result.join("");
},
/**
* Call String.fromCharCode on every item in the array.
* This is the naive implementation, which generate A LOT of intermediate string.
* This should be used when everything else fail.
* @param {Array|ArrayBuffer|Uint8Array|Buffer} array the array to transform.
* @return {String} the result.
*/
stringifyByChar: function(array){
var resultStr = "";
for(var i = 0; i < array.length; i++) {
resultStr += String.fromCharCode(array[i]);
}
return resultStr;
},
applyCanBeUsed : {
/**
* true if the browser accepts to use String.fromCharCode on Uint8Array
*/
uint8array : (function () {
try {
return support.uint8array && String.fromCharCode.apply(null, new Uint8Array(1)).length === 1;
} catch (e) {
return false;
}
})(),
/**
* true if the browser accepts to use String.fromCharCode on nodejs Buffer.
*/
nodebuffer : (function () {
try {
return support.nodebuffer && String.fromCharCode.apply(null, nodejsUtils.allocBuffer(1)).length === 1;
} catch (e) {
return false;
}
})()
}
};
/**
* Transform an array-like object to a string.
* @param {Array|ArrayBuffer|Uint8Array|Buffer} array the array to transform.
* @return {String} the result.
*/
function arrayLikeToString(array) {
// Performances notes :
// --------------------
// String.fromCharCode.apply(null, array) is the fastest, see
// see http://jsperf.com/converting-a-uint8array-to-a-string/2
// but the stack is limited (and we can get huge arrays !).
//
// result += String.fromCharCode(array[i]); generate too many strings !
//
// This code is inspired by http://jsperf.com/arraybuffer-to-string-apply-performance/2
// TODO : we now have workers that split the work. Do we still need that ?
var chunk = 65536,
type = exports.getTypeOf(array),
canUseApply = true;
if (type === "uint8array") {
canUseApply = arrayToStringHelper.applyCanBeUsed.uint8array;
} else if (type === "nodebuffer") {
canUseApply = arrayToStringHelper.applyCanBeUsed.nodebuffer;
}
if (canUseApply) {
while (chunk > 1) {
try {
return arrayToStringHelper.stringifyByChunk(array, type, chunk);
} catch (e) {
chunk = Math.floor(chunk / 2);
}
}
}
// no apply or chunk error : slow and painful algorithm
// default browser on android 4.*
return arrayToStringHelper.stringifyByChar(array);
}
exports.applyFromCharCode = arrayLikeToString;
/**
* Copy the data from an array-like to an other array-like.
* @param {Array|ArrayBuffer|Uint8Array|Buffer} arrayFrom the origin array.
* @param {Array|ArrayBuffer|Uint8Array|Buffer} arrayTo the destination array which will be mutated.
* @return {Array|ArrayBuffer|Uint8Array|Buffer} the updated destination array.
*/
function arrayLikeToArrayLike(arrayFrom, arrayTo) {
for (var i = 0; i < arrayFrom.length; i++) {
arrayTo[i] = arrayFrom[i];
}
return arrayTo;
}
// a matrix containing functions to transform everything into everything.
var transform = {};
// string to ?
transform["string"] = {
"string": identity,
"array": function(input) {
return stringToArrayLike(input, new Array(input.length));
},
"arraybuffer": function(input) {
return transform["string"]["uint8array"](input).buffer;
},
"uint8array": function(input) {
return stringToArrayLike(input, new Uint8Array(input.length));
},
"nodebuffer": function(input) {
return stringToArrayLike(input, nodejsUtils.allocBuffer(input.length));
}
};
// array to ?
transform["array"] = {
"string": arrayLikeToString,
"array": identity,
"arraybuffer": function(input) {
return (new Uint8Array(input)).buffer;
},
"uint8array": function(input) {
return new Uint8Array(input);
},
"nodebuffer": function(input) {
return nodejsUtils.newBufferFrom(input);
}
};
// arraybuffer to ?
transform["arraybuffer"] = {
"string": function(input) {
return arrayLikeToString(new Uint8Array(input));
},
"array": function(input) {
return arrayLikeToArrayLike(new Uint8Array(input), new Array(input.byteLength));
},
"arraybuffer": identity,
"uint8array": function(input) {
return new Uint8Array(input);
},
"nodebuffer": function(input) {
return nodejsUtils.newBufferFrom(new Uint8Array(input));
}
};
// uint8array to ?
transform["uint8array"] = {
"string": arrayLikeToString,
"array": function(input) {
return arrayLikeToArrayLike(input, new Array(input.length));
},
"arraybuffer": function(input) {
return input.buffer;
},
"uint8array": identity,
"nodebuffer": function(input) {
return nodejsUtils.newBufferFrom(input);
}
};
// nodebuffer to ?
transform["nodebuffer"] = {
"string": arrayLikeToString,
"array": function(input) {
return arrayLikeToArrayLike(input, new Array(input.length));
},
"arraybuffer": function(input) {
return transform["nodebuffer"]["uint8array"](input).buffer;
},
"uint8array": function(input) {
return arrayLikeToArrayLike(input, new Uint8Array(input.length));
},
"nodebuffer": identity
};
/**
* Transform an input into any type.
* The supported output type are : string, array, uint8array, arraybuffer, nodebuffer.
* If no output type is specified, the unmodified input will be returned.
* @param {String} outputType the output type.
* @param {String|Array|ArrayBuffer|Uint8Array|Buffer} input the input to convert.
* @throws {Error} an Error if the browser doesn't support the requested output type.
*/
exports.transformTo = function(outputType, input) {
if (!input) {
// undefined, null, etc
// an empty string won't harm.
input = "";
}
if (!outputType) {
return input;
}
exports.checkSupport(outputType);
var inputType = exports.getTypeOf(input);
var result = transform[inputType][outputType](input);
return result;
};
/**
* Return the type of the input.
* The type will be in a format valid for JSZip.utils.transformTo : string, array, uint8array, arraybuffer.
* @param {Object} input the input to identify.
* @return {String} the (lowercase) type of the input.
*/
exports.getTypeOf = function(input) {
if (typeof input === "string") {
return "string";
}
if (Object.prototype.toString.call(input) === "[object Array]") {
return "array";
}
if (support.nodebuffer && nodejsUtils.isBuffer(input)) {
return "nodebuffer";
}
if (support.uint8array && input instanceof Uint8Array) {
return "uint8array";
}
if (support.arraybuffer && input instanceof ArrayBuffer) {
return "arraybuffer";
}
};
/**
* Throw an exception if the type is not supported.
* @param {String} type the type to check.
* @throws {Error} an Error if the browser doesn't support the requested type.
*/
exports.checkSupport = function(type) {
var supported = support[type.toLowerCase()];
if (!supported) {
throw new Error(type + " is not supported by this platform");
}
};
exports.MAX_VALUE_16BITS = 65535;
exports.MAX_VALUE_32BITS = -1; // well, "\xFF\xFF\xFF\xFF\xFF\xFF\xFF\xFF" is parsed as -1
/**
* Prettify a string read as binary.
* @param {string} str the string to prettify.
* @return {string} a pretty string.
*/
exports.pretty = function(str) {
var res = '',
code, i;
for (i = 0; i < (str || "").length; i++) {
code = str.charCodeAt(i);
res += '\\x' + (code < 16 ? "0" : "") + code.toString(16).toUpperCase();
}
return res;
};
/**
* Defer the call of a function.
* @param {Function} callback the function to call asynchronously.
* @param {Array} args the arguments to give to the callback.
*/
exports.delay = function(callback, args, self) {
setImmediate(function () {
callback.apply(self || null, args || []);
});
};
/**
* Extends a prototype with an other, without calling a constructor with
* side effects. Inspired by nodejs' `utils.inherits`
* @param {Function} ctor the constructor to augment
* @param {Function} superCtor the parent constructor to use
*/
exports.inherits = function (ctor, superCtor) {
var Obj = function() {};
Obj.prototype = superCtor.prototype;
ctor.prototype = new Obj();
};
/**
* Merge the objects passed as parameters into a new one.
* @private
* @param {...Object} var_args All objects to merge.
* @return {Object} a new object with the data of the others.
*/
exports.extend = function() {
var result = {}, i, attr;
for (i = 0; i < arguments.length; i++) { // arguments is not enumerable in some browsers
for (attr in arguments[i]) {
if (arguments[i].hasOwnProperty(attr) && typeof result[attr] === "undefined") {
result[attr] = arguments[i][attr];
}
}
}
return result;
};
/**
* Transform arbitrary content into a Promise.
* @param {String} name a name for the content being processed.
* @param {Object} inputData the content to process.
* @param {Boolean} isBinary true if the content is not an unicode string
* @param {Boolean} isOptimizedBinaryString true if the string content only has one byte per character.
* @param {Boolean} isBase64 true if the string content is encoded with base64.
* @return {Promise} a promise in a format usable by JSZip.
*/
exports.prepareContent = function(name, inputData, isBinary, isOptimizedBinaryString, isBase64) {
// if inputData is already a promise, this flatten it.
var promise = external.Promise.resolve(inputData).then(function(data) {
var isBlob = support.blob && (data instanceof Blob || ['[object File]', '[object Blob]'].indexOf(Object.prototype.toString.call(data)) !== -1);
if (isBlob && typeof FileReader !== "undefined") {
return new external.Promise(function (resolve, reject) {
var reader = new FileReader();
reader.onload = function(e) {
resolve(e.target.result);
};
reader.onerror = function(e) {
reject(e.target.error);
};
reader.readAsArrayBuffer(data);
});
} else {
return data;
}
});
return promise.then(function(data) {
var dataType = exports.getTypeOf(data);
if (!dataType) {
return external.Promise.reject(
new Error("Can't read the data of '" + name + "'. Is it " +
"in a supported JavaScript type (String, Blob, ArrayBuffer, etc) ?")
);
}
// special case : it's way easier to work with Uint8Array than with ArrayBuffer
if (dataType === "arraybuffer") {
data = exports.transformTo("uint8array", data);
} else if (dataType === "string") {
if (isBase64) {
data = base64.decode(data);
}
else if (isBinary) {
// optimizedBinaryString === true means that the file has already been filtered with a 0xFF mask
if (isOptimizedBinaryString !== true) {
// this is a string, not in a base64 format.
// Be sure that this is a correct "binary string"
data = string2binary(data);
}
}
}
return data;
});
};
},{"./base64":1,"./external":6,"./nodejsUtils":14,"./support":30,"set-immediate-shim":54}],33:[function(require,module,exports){
'use strict';
var readerFor = require('./reader/readerFor');
var utils = require('./utils');
var sig = require('./signature');
var ZipEntry = require('./zipEntry');
var utf8 = require('./utf8');
var support = require('./support');
// class ZipEntries {{{
/**
* All the entries in the zip file.
* @constructor
* @param {Object} loadOptions Options for loading the stream.
*/
function ZipEntries(loadOptions) {
this.files = [];
this.loadOptions = loadOptions;
}
ZipEntries.prototype = {
/**
* Check that the reader is on the specified signature.
* @param {string} expectedSignature the expected signature.
* @throws {Error} if it is an other signature.
*/
checkSignature: function(expectedSignature) {
if (!this.reader.readAndCheckSignature(expectedSignature)) {
this.reader.index -= 4;
var signature = this.reader.readString(4);
throw new Error("Corrupted zip or bug: unexpected signature " + "(" + utils.pretty(signature) + ", expected " + utils.pretty(expectedSignature) + ")");
}
},
/**
* Check if the given signature is at the given index.
* @param {number} askedIndex the index to check.
* @param {string} expectedSignature the signature to expect.
* @return {boolean} true if the signature is here, false otherwise.
*/
isSignature: function(askedIndex, expectedSignature) {
var currentIndex = this.reader.index;
this.reader.setIndex(askedIndex);
var signature = this.reader.readString(4);
var result = signature === expectedSignature;
this.reader.setIndex(currentIndex);
return result;
},
/**
* Read the end of the central directory.
*/
readBlockEndOfCentral: function() {
this.diskNumber = this.reader.readInt(2);
this.diskWithCentralDirStart = this.reader.readInt(2);
this.centralDirRecordsOnThisDisk = this.reader.readInt(2);
this.centralDirRecords = this.reader.readInt(2);
this.centralDirSize = this.reader.readInt(4);
this.centralDirOffset = this.reader.readInt(4);
this.zipCommentLength = this.reader.readInt(2);
// warning : the encoding depends of the system locale
// On a linux machine with LANG=en_US.utf8, this field is utf8 encoded.
// On a windows machine, this field is encoded with the localized windows code page.
var zipComment = this.reader.readData(this.zipCommentLength);
var decodeParamType = support.uint8array ? "uint8array" : "array";
// To get consistent behavior with the generation part, we will assume that
// this is utf8 encoded unless specified otherwise.
var decodeContent = utils.transformTo(decodeParamType, zipComment);
this.zipComment = this.loadOptions.decodeFileName(decodeContent);
},
/**
* Read the end of the Zip 64 central directory.
* Not merged with the method readEndOfCentral :
* The end of central can coexist with its Zip64 brother,
* I don't want to read the wrong number of bytes !
*/
readBlockZip64EndOfCentral: function() {
this.zip64EndOfCentralSize = this.reader.readInt(8);
this.reader.skip(4);
// this.versionMadeBy = this.reader.readString(2);
// this.versionNeeded = this.reader.readInt(2);
this.diskNumber = this.reader.readInt(4);
this.diskWithCentralDirStart = this.reader.readInt(4);
this.centralDirRecordsOnThisDisk = this.reader.readInt(8);
this.centralDirRecords = this.reader.readInt(8);
this.centralDirSize = this.reader.readInt(8);
this.centralDirOffset = this.reader.readInt(8);
this.zip64ExtensibleData = {};
var extraDataSize = this.zip64EndOfCentralSize - 44,
index = 0,
extraFieldId,
extraFieldLength,
extraFieldValue;
while (index < extraDataSize) {
extraFieldId = this.reader.readInt(2);
extraFieldLength = this.reader.readInt(4);
extraFieldValue = this.reader.readData(extraFieldLength);
this.zip64ExtensibleData[extraFieldId] = {
id: extraFieldId,
length: extraFieldLength,
value: extraFieldValue
};
}
},
/**
* Read the end of the Zip 64 central directory locator.
*/
readBlockZip64EndOfCentralLocator: function() {
this.diskWithZip64CentralDirStart = this.reader.readInt(4);
this.relativeOffsetEndOfZip64CentralDir = this.reader.readInt(8);
this.disksCount = this.reader.readInt(4);
if (this.disksCount > 1) {
throw new Error("Multi-volumes zip are not supported");
}
},
/**
* Read the local files, based on the offset read in the central part.
*/
readLocalFiles: function() {
var i, file;
for (i = 0; i < this.files.length; i++) {
file = this.files[i];
this.reader.setIndex(file.localHeaderOffset);
this.checkSignature(sig.LOCAL_FILE_HEADER);
file.readLocalPart(this.reader);
file.handleUTF8();
file.processAttributes();
}
},
/**
* Read the central directory.
*/
readCentralDir: function() {
var file;
this.reader.setIndex(this.centralDirOffset);
while (this.reader.readAndCheckSignature(sig.CENTRAL_FILE_HEADER)) {
file = new ZipEntry({
zip64: this.zip64
}, this.loadOptions);
file.readCentralPart(this.reader);
this.files.push(file);
}
if (this.centralDirRecords !== this.files.length) {
if (this.centralDirRecords !== 0 && this.files.length === 0) {
// We expected some records but couldn't find ANY.
// This is really suspicious, as if something went wrong.
throw new Error("Corrupted zip or bug: expected " + this.centralDirRecords + " records in central dir, got " + this.files.length);
} else {
// We found some records but not all.
// Something is wrong but we got something for the user: no error here.
// console.warn("expected", this.centralDirRecords, "records in central dir, got", this.files.length);
}
}
},
/**
* Read the end of central directory.
*/
readEndOfCentral: function() {
var offset = this.reader.lastIndexOfSignature(sig.CENTRAL_DIRECTORY_END);
if (offset < 0) {
// Check if the content is a truncated zip or complete garbage.
// A "LOCAL_FILE_HEADER" is not required at the beginning (auto
// extractible zip for example) but it can give a good hint.
// If an ajax request was used without responseType, we will also
// get unreadable data.
var isGarbage = !this.isSignature(0, sig.LOCAL_FILE_HEADER);
if (isGarbage) {
throw new Error("Can't find end of central directory : is this a zip file ? " +
"If it is, see https://stuk.github.io/jszip/documentation/howto/read_zip.html");
} else {
throw new Error("Corrupted zip: can't find end of central directory");
}
}
this.reader.setIndex(offset);
var endOfCentralDirOffset = offset;
this.checkSignature(sig.CENTRAL_DIRECTORY_END);
this.readBlockEndOfCentral();
/* extract from the zip spec :
4) If one of the fields in the end of central directory
record is too small to hold required data, the field
should be set to -1 (0xFFFF or 0xFFFFFFFF) and the
ZIP64 format record should be created.
5) The end of central directory record and the
Zip64 end of central directory locator record must
reside on the same disk when splitting or spanning
an archive.
*/
if (this.diskNumber === utils.MAX_VALUE_16BITS || this.diskWithCentralDirStart === utils.MAX_VALUE_16BITS || this.centralDirRecordsOnThisDisk === utils.MAX_VALUE_16BITS || this.centralDirRecords === utils.MAX_VALUE_16BITS || this.centralDirSize === utils.MAX_VALUE_32BITS || this.centralDirOffset === utils.MAX_VALUE_32BITS) {
this.zip64 = true;
/*
Warning : the zip64 extension is supported, but ONLY if the 64bits integer read from
the zip file can fit into a 32bits integer. This cannot be solved : JavaScript represents
all numbers as 64-bit double precision IEEE 754 floating point numbers.
So, we have 53bits for integers and bitwise operations treat everything as 32bits.
see https://developer.mozilla.org/en-US/docs/JavaScript/Reference/Operators/Bitwise_Operators
and http://www.ecma-international.org/publications/files/ECMA-ST/ECMA-262.pdf section 8.5
*/
// should look for a zip64 EOCD locator
offset = this.reader.lastIndexOfSignature(sig.ZIP64_CENTRAL_DIRECTORY_LOCATOR);
if (offset < 0) {
throw new Error("Corrupted zip: can't find the ZIP64 end of central directory locator");
}
this.reader.setIndex(offset);
this.checkSignature(sig.ZIP64_CENTRAL_DIRECTORY_LOCATOR);
this.readBlockZip64EndOfCentralLocator();
// now the zip64 EOCD record
if (!this.isSignature(this.relativeOffsetEndOfZip64CentralDir, sig.ZIP64_CENTRAL_DIRECTORY_END)) {
// console.warn("ZIP64 end of central directory not where expected.");
this.relativeOffsetEndOfZip64CentralDir = this.reader.lastIndexOfSignature(sig.ZIP64_CENTRAL_DIRECTORY_END);
if (this.relativeOffsetEndOfZip64CentralDir < 0) {
throw new Error("Corrupted zip: can't find the ZIP64 end of central directory");
}
}
this.reader.setIndex(this.relativeOffsetEndOfZip64CentralDir);
this.checkSignature(sig.ZIP64_CENTRAL_DIRECTORY_END);
this.readBlockZip64EndOfCentral();
}
var expectedEndOfCentralDirOffset = this.centralDirOffset + this.centralDirSize;
if (this.zip64) {
expectedEndOfCentralDirOffset += 20; // end of central dir 64 locator
expectedEndOfCentralDirOffset += 12 /* should not include the leading 12 bytes */ + this.zip64EndOfCentralSize;
}
var extraBytes = endOfCentralDirOffset - expectedEndOfCentralDirOffset;
if (extraBytes > 0) {
// console.warn(extraBytes, "extra bytes at beginning or within zipfile");
if (this.isSignature(endOfCentralDirOffset, sig.CENTRAL_FILE_HEADER)) {
// The offsets seem wrong, but we have something at the specified offset.
// So… we keep it.
} else {
// the offset is wrong, update the "zero" of the reader
// this happens if data has been prepended (crx files for example)
this.reader.zero = extraBytes;
}
} else if (extraBytes < 0) {
throw new Error("Corrupted zip: missing " + Math.abs(extraBytes) + " bytes.");
}
},
prepareReader: function(data) {
this.reader = readerFor(data);
},
/**
* Read a zip file and create ZipEntries.
* @param {String|ArrayBuffer|Uint8Array|Buffer} data the binary string representing a zip file.
*/
load: function(data) {
this.prepareReader(data);
this.readEndOfCentral();
this.readCentralDir();
this.readLocalFiles();
}
};
// }}} end of ZipEntries
module.exports = ZipEntries;
},{"./reader/readerFor":22,"./signature":23,"./support":30,"./utf8":31,"./utils":32,"./zipEntry":34}],34:[function(require,module,exports){
'use strict';
var readerFor = require('./reader/readerFor');
var utils = require('./utils');
var CompressedObject = require('./compressedObject');
var crc32fn = require('./crc32');
var utf8 = require('./utf8');
var compressions = require('./compressions');
var support = require('./support');
var MADE_BY_DOS = 0x00;
var MADE_BY_UNIX = 0x03;
/**
* Find a compression registered in JSZip.
* @param {string} compressionMethod the method magic to find.
* @return {Object|null} the JSZip compression object, null if none found.
*/
var findCompression = function(compressionMethod) {
for (var method in compressions) {
if (!compressions.hasOwnProperty(method)) {
continue;
}
if (compressions[method].magic === compressionMethod) {
return compressions[method];
}
}
return null;
};
// class ZipEntry {{{
/**
* An entry in the zip file.
* @constructor
* @param {Object} options Options of the current file.
* @param {Object} loadOptions Options for loading the stream.
*/
function ZipEntry(options, loadOptions) {
this.options = options;
this.loadOptions = loadOptions;
}
ZipEntry.prototype = {
/**
* say if the file is encrypted.
* @return {boolean} true if the file is encrypted, false otherwise.
*/
isEncrypted: function() {
// bit 1 is set
return (this.bitFlag & 0x0001) === 0x0001;
},
/**
* say if the file has utf-8 filename/comment.
* @return {boolean} true if the filename/comment is in utf-8, false otherwise.
*/
useUTF8: function() {
// bit 11 is set
return (this.bitFlag & 0x0800) === 0x0800;
},
/**
* Read the local part of a zip file and add the info in this object.
* @param {DataReader} reader the reader to use.
*/
readLocalPart: function(reader) {
var compression, localExtraFieldsLength;
// we already know everything from the central dir !
// If the central dir data are false, we are doomed.
// On the bright side, the local part is scary : zip64, data descriptors, both, etc.
// The less data we get here, the more reliable this should be.
// Let's skip the whole header and dash to the data !
reader.skip(22);
// in some zip created on windows, the filename stored in the central dir contains \ instead of /.
// Strangely, the filename here is OK.
// I would love to treat these zip files as corrupted (see http://www.info-zip.org/FAQ.html#backslashes
// or APPNOTE#4.4.17.1, "All slashes MUST be forward slashes '/'") but there are a lot of bad zip generators...
// Search "unzip mismatching "local" filename continuing with "central" filename version" on
// the internet.
//
// I think I see the logic here : the central directory is used to display
// content and the local directory is used to extract the files. Mixing / and \
// may be used to display \ to windows users and use / when extracting the files.
// Unfortunately, this lead also to some issues : http://seclists.org/fulldisclosure/2009/Sep/394
this.fileNameLength = reader.readInt(2);
localExtraFieldsLength = reader.readInt(2); // can't be sure this will be the same as the central dir
// the fileName is stored as binary data, the handleUTF8 method will take care of the encoding.
this.fileName = reader.readData(this.fileNameLength);
reader.skip(localExtraFieldsLength);
if (this.compressedSize === -1 || this.uncompressedSize === -1) {
throw new Error("Bug or corrupted zip : didn't get enough information from the central directory " + "(compressedSize === -1 || uncompressedSize === -1)");
}
compression = findCompression(this.compressionMethod);
if (compression === null) { // no compression found
throw new Error("Corrupted zip : compression " + utils.pretty(this.compressionMethod) + " unknown (inner file : " + utils.transformTo("string", this.fileName) + ")");
}
this.decompressed = new CompressedObject(this.compressedSize, this.uncompressedSize, this.crc32, compression, reader.readData(this.compressedSize));
},
/**
* Read the central part of a zip file and add the info in this object.
* @param {DataReader} reader the reader to use.
*/
readCentralPart: function(reader) {
this.versionMadeBy = reader.readInt(2);
reader.skip(2);
// this.versionNeeded = reader.readInt(2);
this.bitFlag = reader.readInt(2);
this.compressionMethod = reader.readString(2);
this.date = reader.readDate();
this.crc32 = reader.readInt(4);
this.compressedSize = reader.readInt(4);
this.uncompressedSize = reader.readInt(4);
var fileNameLength = reader.readInt(2);
this.extraFieldsLength = reader.readInt(2);
this.fileCommentLength = reader.readInt(2);
this.diskNumberStart = reader.readInt(2);
this.internalFileAttributes = reader.readInt(2);
this.externalFileAttributes = reader.readInt(4);
this.localHeaderOffset = reader.readInt(4);
if (this.isEncrypted()) {
throw new Error("Encrypted zip are not supported");
}
// will be read in the local part, see the comments there
reader.skip(fileNameLength);
this.readExtraFields(reader);
this.parseZIP64ExtraField(reader);
this.fileComment = reader.readData(this.fileCommentLength);
},
/**
* Parse the external file attributes and get the unix/dos permissions.
*/
processAttributes: function () {
this.unixPermissions = null;
this.dosPermissions = null;
var madeBy = this.versionMadeBy >> 8;
// Check if we have the DOS directory flag set.
// We look for it in the DOS and UNIX permissions
// but some unknown platform could set it as a compatibility flag.
this.dir = this.externalFileAttributes & 0x0010 ? true : false;
if(madeBy === MADE_BY_DOS) {
// first 6 bits (0 to 5)
this.dosPermissions = this.externalFileAttributes & 0x3F;
}
if(madeBy === MADE_BY_UNIX) {
this.unixPermissions = (this.externalFileAttributes >> 16) & 0xFFFF;
// the octal permissions are in (this.unixPermissions & 0x01FF).toString(8);
}
// fail safe : if the name ends with a / it probably means a folder
if (!this.dir && this.fileNameStr.slice(-1) === '/') {
this.dir = true;
}
},
/**
* Parse the ZIP64 extra field and merge the info in the current ZipEntry.
* @param {DataReader} reader the reader to use.
*/
parseZIP64ExtraField: function(reader) {
if (!this.extraFields[0x0001]) {
return;
}
// should be something, preparing the extra reader
var extraReader = readerFor(this.extraFields[0x0001].value);
// I really hope that these 64bits integer can fit in 32 bits integer, because js
// won't let us have more.
if (this.uncompressedSize === utils.MAX_VALUE_32BITS) {
this.uncompressedSize = extraReader.readInt(8);
}
if (this.compressedSize === utils.MAX_VALUE_32BITS) {
this.compressedSize = extraReader.readInt(8);
}
if (this.localHeaderOffset === utils.MAX_VALUE_32BITS) {
this.localHeaderOffset = extraReader.readInt(8);
}
if (this.diskNumberStart === utils.MAX_VALUE_32BITS) {
this.diskNumberStart = extraReader.readInt(4);
}
},
/**
* Read the central part of a zip file and add the info in this object.
* @param {DataReader} reader the reader to use.
*/
readExtraFields: function(reader) {
var end = reader.index + this.extraFieldsLength,
extraFieldId,
extraFieldLength,
extraFieldValue;
if (!this.extraFields) {
this.extraFields = {};
}
while (reader.index + 4 < end) {
extraFieldId = reader.readInt(2);
extraFieldLength = reader.readInt(2);
extraFieldValue = reader.readData(extraFieldLength);
this.extraFields[extraFieldId] = {
id: extraFieldId,
length: extraFieldLength,
value: extraFieldValue
};
}
reader.setIndex(end);
},
/**
* Apply an UTF8 transformation if needed.
*/
handleUTF8: function() {
var decodeParamType = support.uint8array ? "uint8array" : "array";
if (this.useUTF8()) {
this.fileNameStr = utf8.utf8decode(this.fileName);
this.fileCommentStr = utf8.utf8decode(this.fileComment);
} else {
var upath = this.findExtraFieldUnicodePath();
if (upath !== null) {
this.fileNameStr = upath;
} else {
// ASCII text or unsupported code page
var fileNameByteArray = utils.transformTo(decodeParamType, this.fileName);
this.fileNameStr = this.loadOptions.decodeFileName(fileNameByteArray);
}
var ucomment = this.findExtraFieldUnicodeComment();
if (ucomment !== null) {
this.fileCommentStr = ucomment;
} else {
// ASCII text or unsupported code page
var commentByteArray = utils.transformTo(decodeParamType, this.fileComment);
this.fileCommentStr = this.loadOptions.decodeFileName(commentByteArray);
}
}
},
/**
* Find the unicode path declared in the extra field, if any.
* @return {String} the unicode path, null otherwise.
*/
findExtraFieldUnicodePath: function() {
var upathField = this.extraFields[0x7075];
if (upathField) {
var extraReader = readerFor(upathField.value);
// wrong version
if (extraReader.readInt(1) !== 1) {
return null;
}
// the crc of the filename changed, this field is out of date.
if (crc32fn(this.fileName) !== extraReader.readInt(4)) {
return null;
}
return utf8.utf8decode(extraReader.readData(upathField.length - 5));
}
return null;
},
/**
* Find the unicode comment declared in the extra field, if any.
* @return {String} the unicode comment, null otherwise.
*/
findExtraFieldUnicodeComment: function() {
var ucommentField = this.extraFields[0x6375];
if (ucommentField) {
var extraReader = readerFor(ucommentField.value);
// wrong version
if (extraReader.readInt(1) !== 1) {
return null;
}
// the crc of the comment changed, this field is out of date.
if (crc32fn(this.fileComment) !== extraReader.readInt(4)) {
return null;
}
return utf8.utf8decode(extraReader.readData(ucommentField.length - 5));
}
return null;
}
};
module.exports = ZipEntry;
},{"./compressedObject":2,"./compressions":3,"./crc32":4,"./reader/readerFor":22,"./support":30,"./utf8":31,"./utils":32}],35:[function(require,module,exports){
'use strict';
var StreamHelper = require('./stream/StreamHelper');
var DataWorker = require('./stream/DataWorker');
var utf8 = require('./utf8');
var CompressedObject = require('./compressedObject');
var GenericWorker = require('./stream/GenericWorker');
/**
* A simple object representing a file in the zip file.
* @constructor
* @param {string} name the name of the file
* @param {String|ArrayBuffer|Uint8Array|Buffer} data the data
* @param {Object} options the options of the file
*/
var ZipObject = function(name, data, options) {
this.name = name;
this.dir = options.dir;
this.date = options.date;
this.comment = options.comment;
this.unixPermissions = options.unixPermissions;
this.dosPermissions = options.dosPermissions;
this._data = data;
this._dataBinary = options.binary;
// keep only the compression
this.options = {
compression : options.compression,
compressionOptions : options.compressionOptions
};
};
ZipObject.prototype = {
/**
* Create an internal stream for the content of this object.
* @param {String} type the type of each chunk.
* @return StreamHelper the stream.
*/
internalStream: function (type) {
var result = null, outputType = "string";
try {
if (!type) {
throw new Error("No output type specified.");
}
outputType = type.toLowerCase();
var askUnicodeString = outputType === "string" || outputType === "text";
if (outputType === "binarystring" || outputType === "text") {
outputType = "string";
}
result = this._decompressWorker();
var isUnicodeString = !this._dataBinary;
if (isUnicodeString && !askUnicodeString) {
result = result.pipe(new utf8.Utf8EncodeWorker());
}
if (!isUnicodeString && askUnicodeString) {
result = result.pipe(new utf8.Utf8DecodeWorker());
}
} catch (e) {
result = new GenericWorker("error");
result.error(e);
}
return new StreamHelper(result, outputType, "");
},
/**
* Prepare the content in the asked type.
* @param {String} type the type of the result.
* @param {Function} onUpdate a function to call on each internal update.
* @return Promise the promise of the result.
*/
async: function (type, onUpdate) {
return this.internalStream(type).accumulate(onUpdate);
},
/**
* Prepare the content as a nodejs stream.
* @param {String} type the type of each chunk.
* @param {Function} onUpdate a function to call on each internal update.
* @return Stream the stream.
*/
nodeStream: function (type, onUpdate) {
return this.internalStream(type || "nodebuffer").toNodejsStream(onUpdate);
},
/**
* Return a worker for the compressed content.
* @private
* @param {Object} compression the compression object to use.
* @param {Object} compressionOptions the options to use when compressing.
* @return Worker the worker.
*/
_compressWorker: function (compression, compressionOptions) {
if (
this._data instanceof CompressedObject &&
this._data.compression.magic === compression.magic
) {
return this._data.getCompressedWorker();
} else {
var result = this._decompressWorker();
if(!this._dataBinary) {
result = result.pipe(new utf8.Utf8EncodeWorker());
}
return CompressedObject.createWorkerFrom(result, compression, compressionOptions);
}
},
/**
* Return a worker for the decompressed content.
* @private
* @return Worker the worker.
*/
_decompressWorker : function () {
if (this._data instanceof CompressedObject) {
return this._data.getContentWorker();
} else if (this._data instanceof GenericWorker) {
return this._data;
} else {
return new DataWorker(this._data);
}
}
};
var removedMethods = ["asText", "asBinary", "asNodeBuffer", "asUint8Array", "asArrayBuffer"];
var removedFn = function () {
throw new Error("This method has been removed in JSZip 3.0, please check the upgrade guide.");
};
for(var i = 0; i < removedMethods.length; i++) {
ZipObject.prototype[removedMethods[i]] = removedFn;
}
module.exports = ZipObject;
},{"./compressedObject":2,"./stream/DataWorker":27,"./stream/GenericWorker":28,"./stream/StreamHelper":29,"./utf8":31}],36:[function(require,module,exports){
(function (global){
'use strict';
var Mutation = global.MutationObserver || global.WebKitMutationObserver;
var scheduleDrain;
{
if (Mutation) {
var called = 0;
var observer = new Mutation(nextTick);
var element = global.document.createTextNode('');
observer.observe(element, {
characterData: true
});
scheduleDrain = function () {
element.data = (called = ++called % 2);
};
} else if (!global.setImmediate && typeof global.MessageChannel !== 'undefined') {
var channel = new global.MessageChannel();
channel.port1.onmessage = nextTick;
scheduleDrain = function () {
channel.port2.postMessage(0);
};
} else if ('document' in global && 'onreadystatechange' in global.document.createElement('script')) {
scheduleDrain = function () {
// Create a {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}